Filtro de Kalman - Mudanças Abruptas de Kalman_Iniciantes.pdf · A História da Filtragem de...
63
1 Filtro de Kalman Teoria e Aplicação para Iniciantes Prof. Dr. Marco Antonio Leonel Caetano M&V Consultoria e Treinamento www.mudancasabruptas.com.br
-
Upload
trinhduong -
Category
Documents
-
view
233 -
download
0
Transcript of Filtro de Kalman - Mudanças Abruptas de Kalman_Iniciantes.pdf · A História da Filtragem de...
1
Filtro de Kalman
Teoria e Aplicação para Iniciantes
Prof. Dr. Marco Antonio Leonel Caetano
M&V Consultoria e Treinamentowww.mudancasabruptas.com.br

A História da Filtragem de Sinais
1930 1940 1960
Filtro de Wiener
(contínuo)Filtro de Kolmogorov
(discreto)
Filtro de Kalman
(linear e estendido)

Sinal no tempo
Estatística
(variável
aleatória)
Processos Estocásticos

Probabilidade
O que caracteriza um sinal?
•Média
•Desvio Padrão ( volatilidade )
Sinal com alta volatilidade
Sinal com baixa volatilidade
Resolvendo Sistema Linear
Observar o seguinte sistema linear:
12
425
21
21
xx
xx
Para resolver seguem-se duas maneiras diferentes:
(1) Isolar x1 da primeira equação e substituir na segunda.
(2) Transformar o sistema em matrizes e vetores.

Primeira Resolução
12
425
21
21
xx
xx
5
24 21
xx
(a) Isolando x1 na primeira equação:
(b) Substituindo na segunda equação:
3
1
39
5548
15
242
2
2
22
22
x
x
xx
xx
(c) Substituindo x2 em x1 isolado em (a):3
21 x
Solução:3
21 x
3
12 x

Segunda Resolução
12
425
21
21
xx
xx
(a) Transformar o sistema em representação matricial:
1
4
12
25
2
1
x
x
A B(b) Resolve-se agora o sistema : AX = B
(c) A solução deve envolver a inversa da matriz A, ou seja, A-1
BAAXA 11
(d) Como A-1.A é matriz identidade a solução será: X = A-1B
(e) No matlab basta : x = inv(A)*B

No Matlab
B tem que ser transposto! Ou B = [ 4 ; 1]
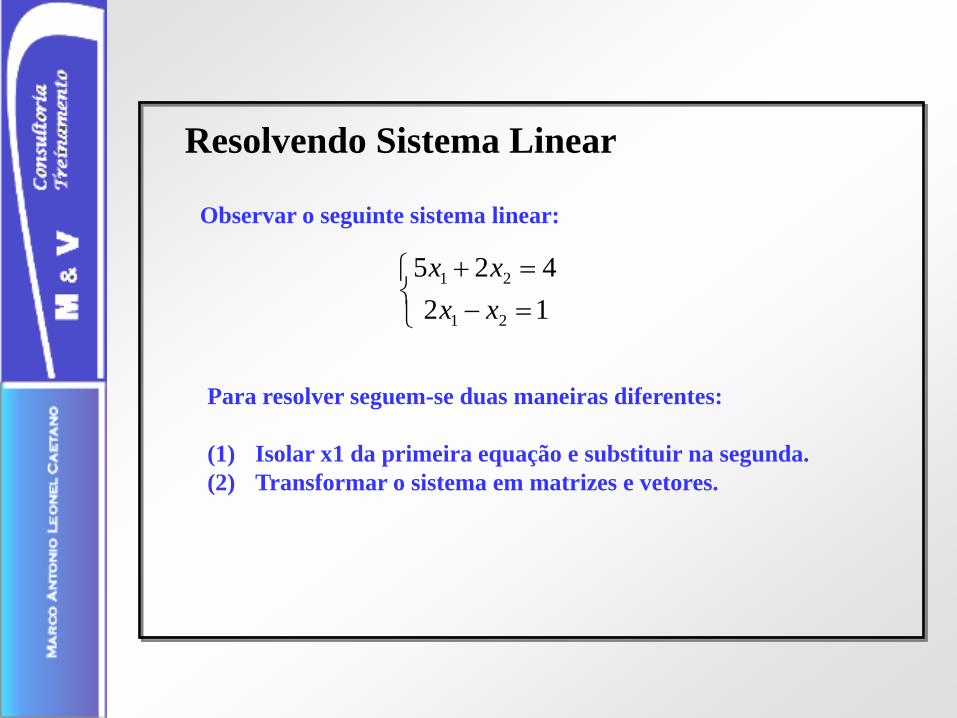
Problema com dimensão de matrizes
Resolver sistema linear com mesmo número de linhas e colunas é
fácil usando matlab. Mas quando se tem MAIS equação que incógnita
a inversa da matriz não é possível.
3
223
12
21
21
21
xx
xx
xx
3 equações
2 incógnitas (x1,x2)
????

Método dos Mínimos Quadrados
A solução para o problema anterior é encontrar o vetor x mais próximo
possível tal que o sistema AX = B seja o mais verdadeiro possível!
Deve-se encontrar o vetor x cujo erro do sistema seja o menor possível
ao quadrado. Por isso o método se chama MÍNIMOS QUADRADOS.
X
Y
reta de regressão linear
b=tangente(angulo)
a
angulo
Exemplo:
Reta que mais se
aproxima dos
pontos amostrados
Os resíduos dessa
diferença são os
menores possíveis
quando elevados ao
quadrado.

A Estimativa do Método dos Mínimos Quadrados (MMQ)
BAAAxAAAA
BAxAA
BxA
Seja
TTTT
TT
...11
identidade
Logo, para encontrar o vetor x mais próximo possível da solução:
BAAAx TT 1

Aplicação dos MMQ à medidas
Imaginar que duas variáveis foram acompanhadas por 3 dias e tiveram
seus valores relacionados na tabela a seguir:
medida1 medida 2
0,10 13
0,18 22
0,28 36
Suponha que exista a seguinte relação entre as medidas:
21 medidakmedida
Como estimar k?

Solução via MMQ
3628,0
2218,0
1310,0
k
k
kSistema com 3 equações e 1 incógnita
Neste caso as matrizes A e B serão:
28,0
18,0
10,0
A
36
22
13
B
Então, lembrando que o x nesse problema é o valor de k e:
BAAAx TT 1
Qual a solução?
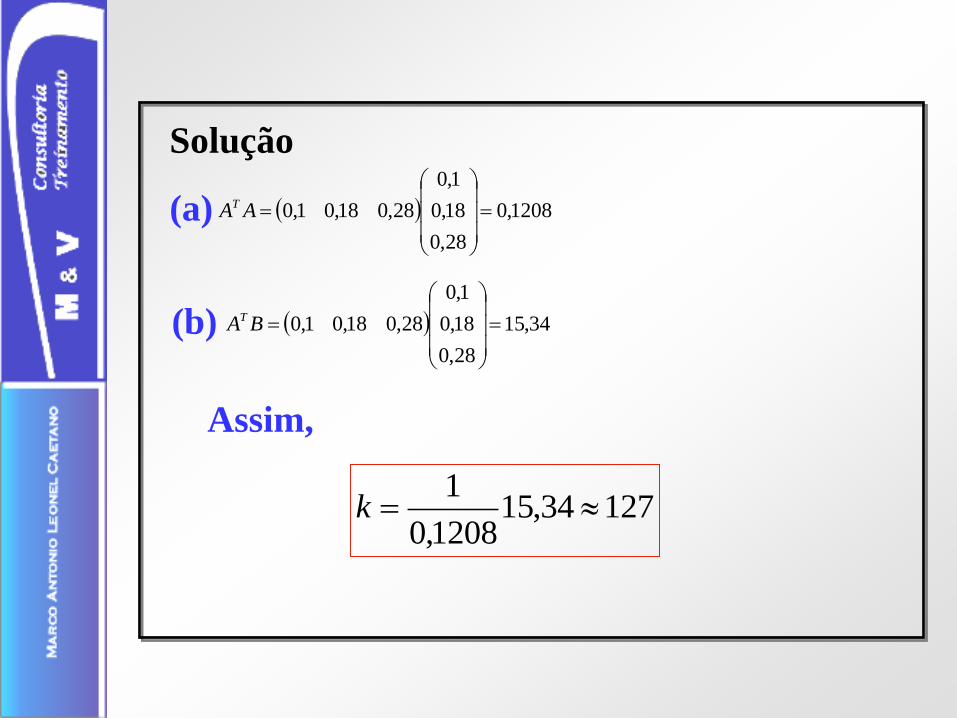
Solução
1208,0
28,0
18,0
1,0
28,018,01,0
AAT(a)
34,15
28,0
18,0
1,0
28,018,01,0
BAT(b)
Assim,
12734,151208,0
1k
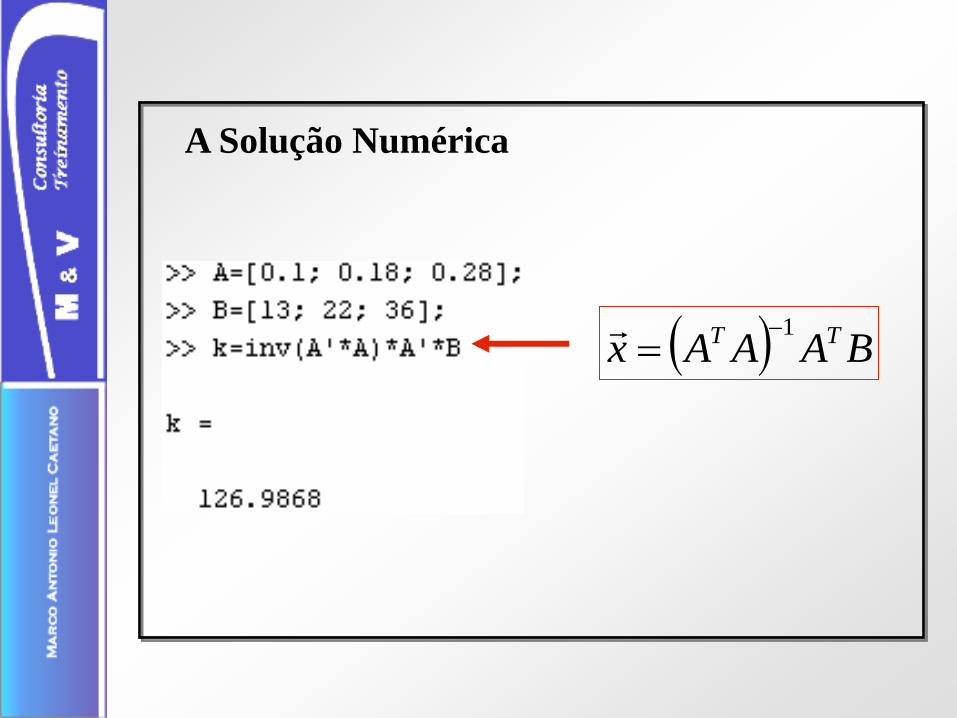
A Solução Numérica
BAAAx TT 1

Estimativa de parâmetros - Ajuste de Função
Dada uma tabela de dados
321
321
:
:
yyyY
xxxX
Deseja-se encontrar a melhor função linear que ajuste y aos valores de x:
xccy 10
Observando que os dados são inseridos na função da seguinte forma:
)()( 10 ixcciy O sistema a ser resolvido é:
nn y
y
y
c
c
x
x
x
2
1
1
02
1
.
1
1
1
A X B

Exercício
Fazer um programa para entrar com n valores de x e de y e no final
o programa deve ajustar a função linear pelo método dos mínimos
quadrados. Use como exemplo a tabela a seguir:
X 0 3 6
Y 1 4 5
Solução
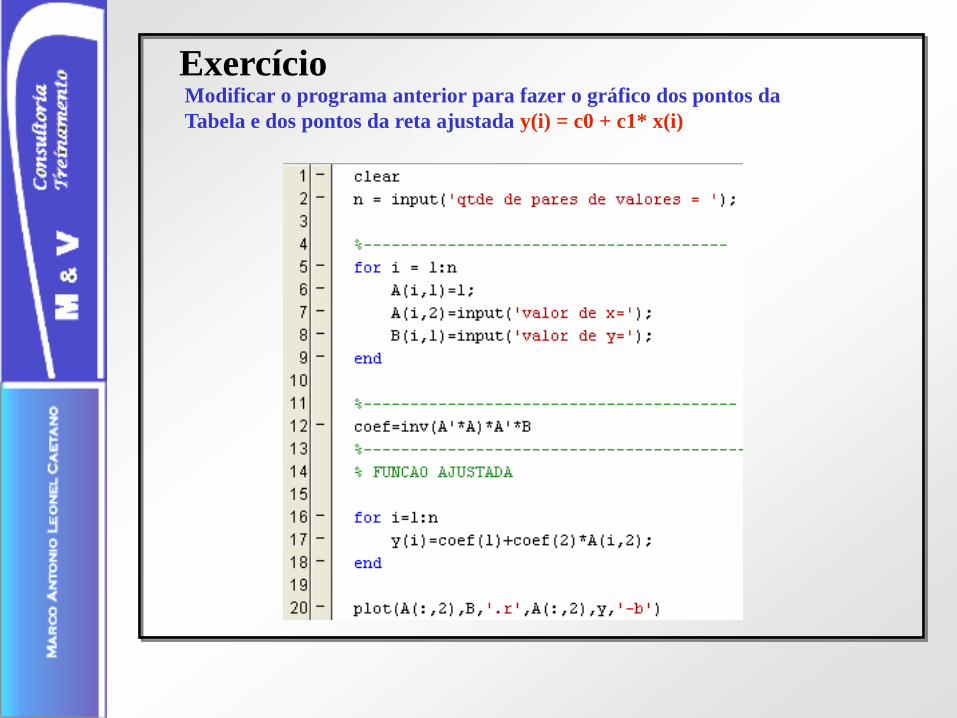
ExercícioModificar o programa anterior para fazer o gráfico dos pontos da
Tabela e dos pontos da reta ajustada y(i) = c0 + c1* x(i)
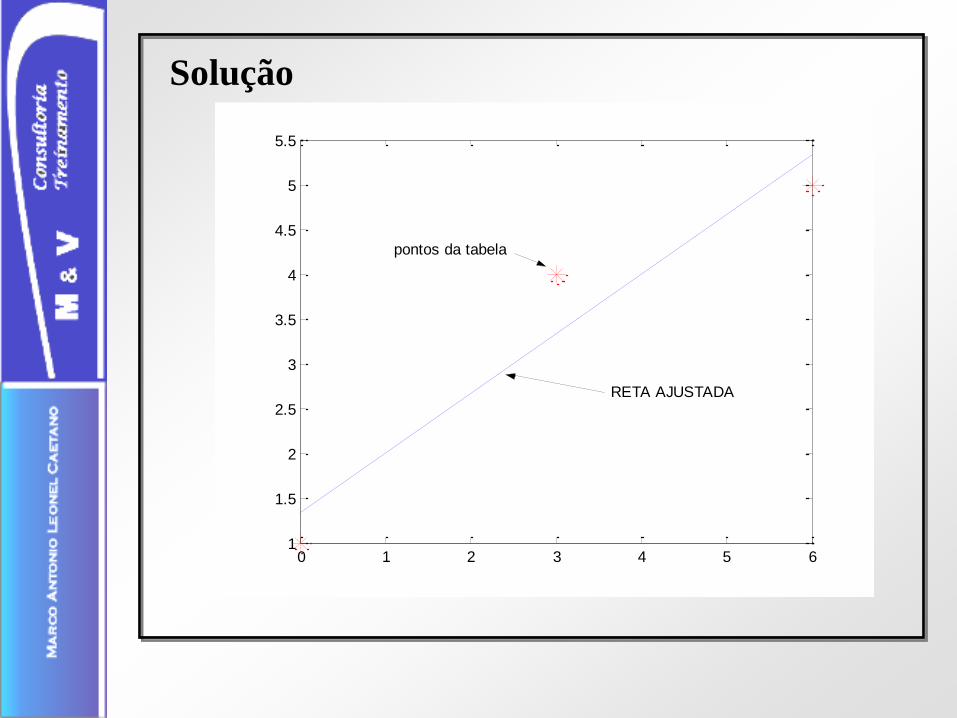
Solução
0 1 2 3 4 5 61
1.5
2
2.5
3
3.5
4
4.5
5
5.5
pontos da tabela
RETA AJUSTADA

Estimação Recursiva
Considere o problema da estimativa de uma constante escalar não
Aleatória baseada em k medidas anteriores, corrompidas por ruído:
z x vi i i = 1,2,3,...,k
onde vi é ruído branco gaussiano ( média zero e desvio padrão fixo).
Qual a melhor estimativa para x?
A média é a melhor estimativa para x!
x
z
kk
ii
k
1
Para uma medida adicional (k+1) a nova estimativa será
x
z
kk
ii
k
1
1
1
1

Deve-se manipular os termos para deixar a estimativa sempre em função
das medidas anteriores:
1
1
11
1ˆ
k
k
i
ik zzk
x
1
11
1 k
k
i
i zzk
k
k
k
kx
z
kk
k
1 1
1
média
1
11
1 k
k
i
i zzk
k
k

Somando-se e subtraindo x
k
k
1
xk
kx
kx
kz
kxk k k k k
1 11
1
1
1
1
1
1
kKk xzk
x ˆ1
1 ˆ 1

Estimação recursiva de variáveis
. x x
kz xk k k k
1 1
1
1Ganho doSistema
informação aindanão utilizada

Exemplo
Estimar a constante “a=10” com ruído de medida v (média = 0, desvio=5)
para 100 medidas de “a”.

Programando a fórmula do mínimos quadrados recursivo:

Resultado
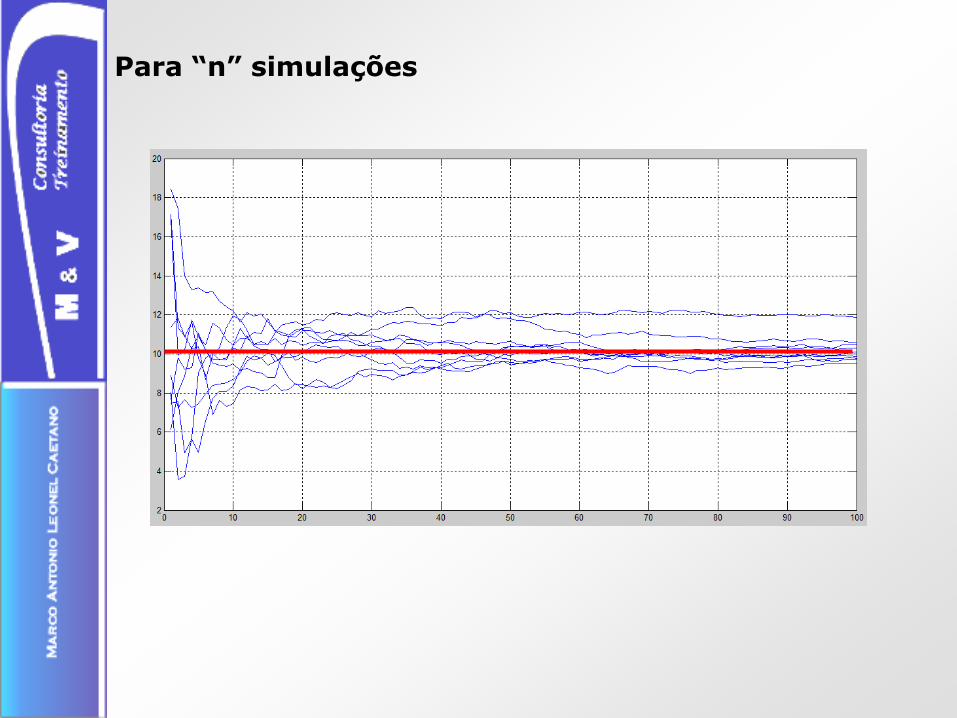
Para “n” simulações
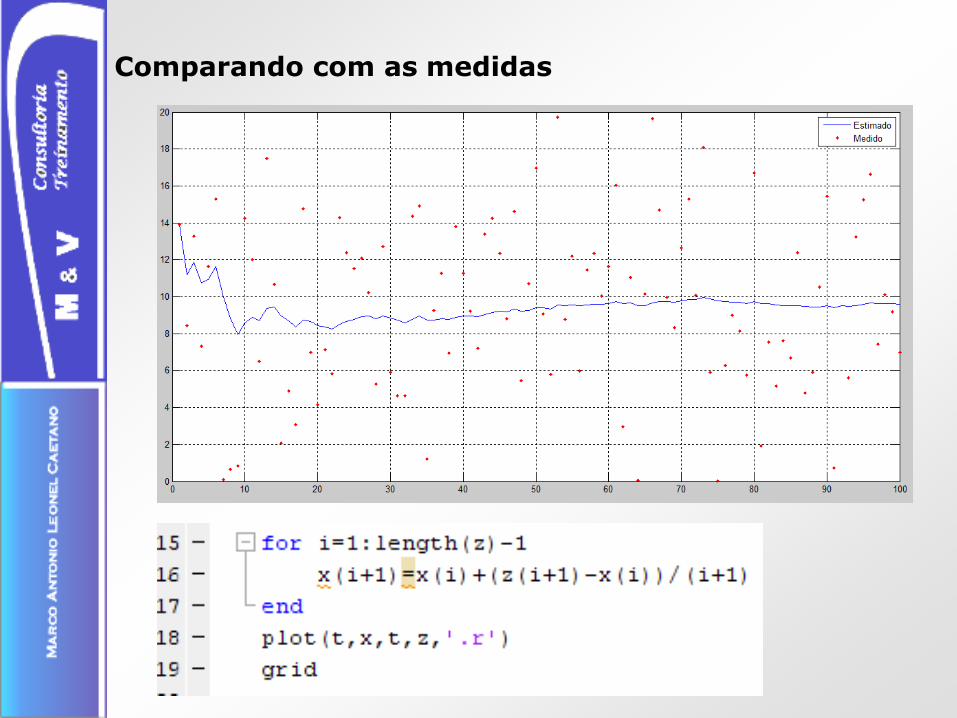
Comparando com as medidas

380
420
460
500
540
580
0.3 0.5 0.7 0.9 1.1 1.3
0
2
4
6
8
10
12
14
16
18
20
22
0
2
4
6
8
10
12
14
16
18
20
22
Teorema do Limite Central NORMALIZAÇÃO
Por que usar a distribuição gaussina?•Segundo o teorema do limite central, todas convergem para a normal
para um número grande de pontos.
-4
-3
-2
-1
0
1
2
3
4
1 3 5 7 9 11 13 15 17 19
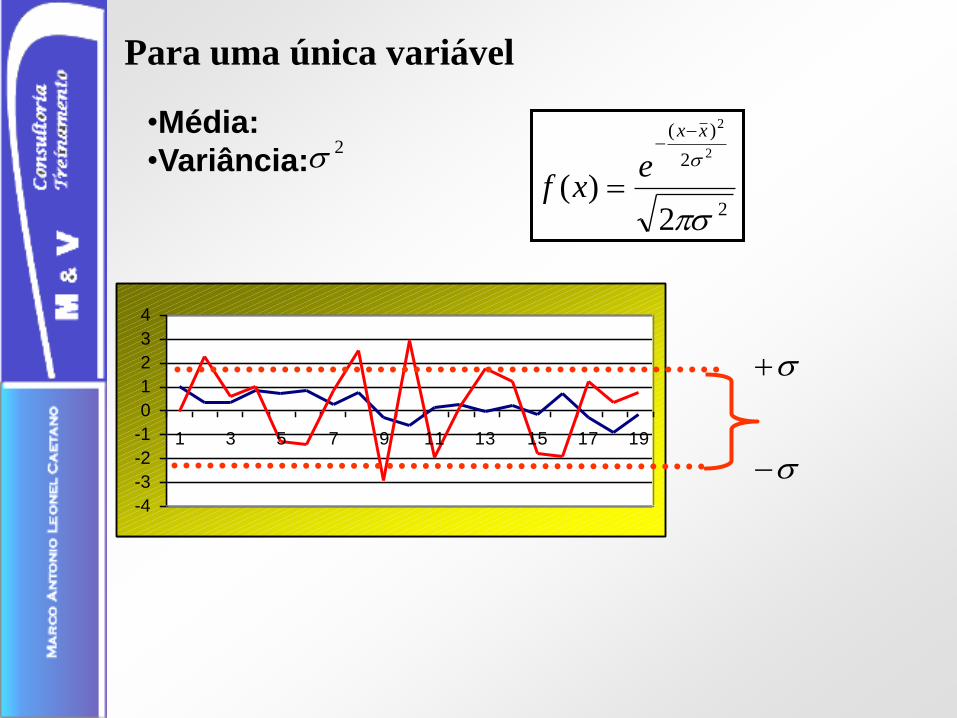
Para uma única variável
2
2
)(
2)(
2
2
xx
exf
•Média:
•Variância:2

Para duas variáveis – Distribuição Espacial
2
2
)(
)()()()(
2),(
12
xy
yy
xxyyxx xy
eyxf
Média de x:
Média de y
Desvio Padrão de x:
Desvio padrão de y:
Covariância de x e y:
Correlação de x e y:
x
y
2
x
2
y
2
xy

Mas a Covariância é uma matriz ( P )
2
2
2
yyx
yxx
xyP
A função gaussina corrigida para duas variáveis
2/1
2
)(
)( )()(
2),(
1
P
eyxf
yy
xxPyyxx
onde | P | é o determinante da matriz de covariância
•É necessário uma correção na fórmula pois,
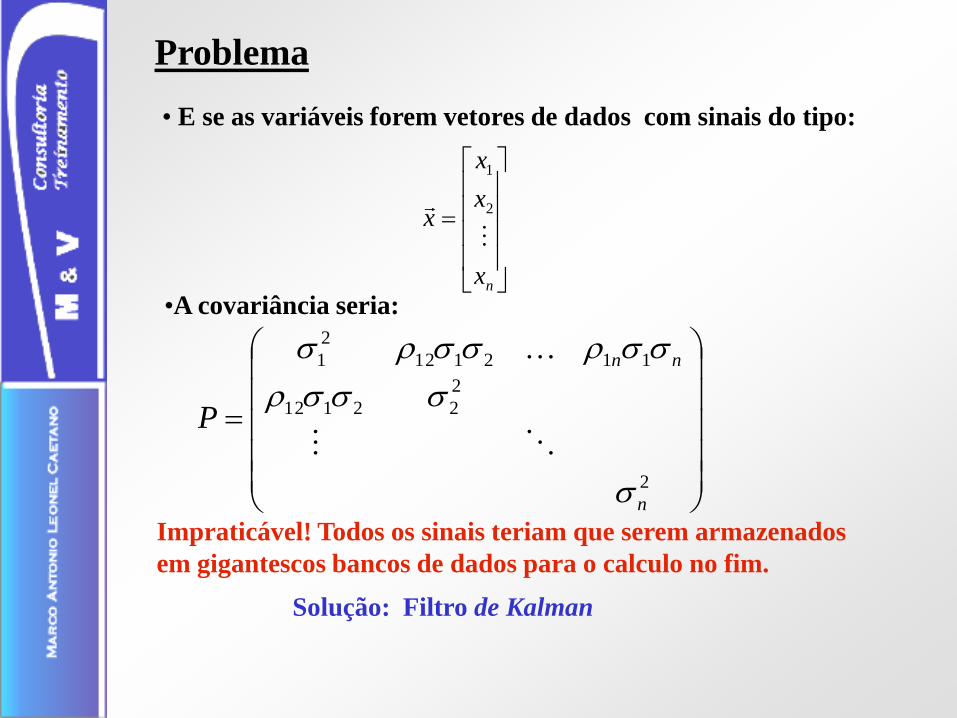
Problema
• E se as variáveis forem vetores de dados com sinais do tipo:
nx
x
x
x
2
1
•A covariância seria:
2
2
22112
112112
2
1
n
nn
P
Impraticável! Todos os sinais teriam que serem armazenados
em gigantescos bancos de dados para o calculo no fim.
Solução: Filtro de Kalman

tempo
x
nxxxf ,,, 21
x1
xn
nx
x
x
x
2
1
Como o filtro de Kalman estima variáveis?
sinal
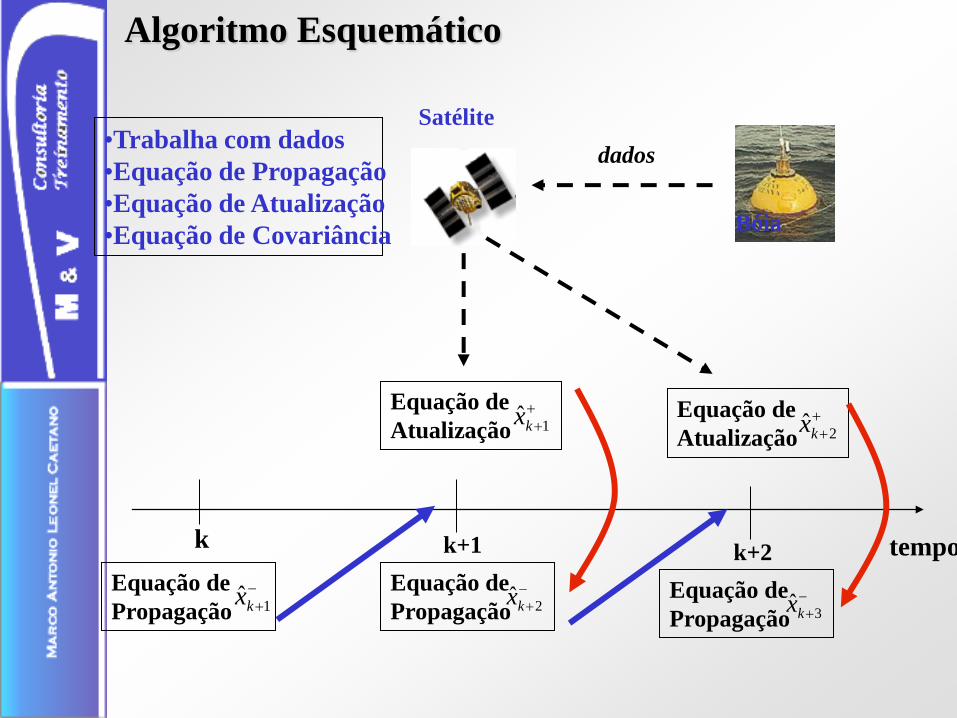
Algoritmo Esquemático
•Trabalha com dados
•Equação de Propagação
•Equação de Atualização
•Equação de Covariância
tempo
Equação de
Propagação
1ˆ
kx
k k+1
Equação de
Atualização
1ˆ
kx
Bóia
Satélite
dados
Equação de
Propagação
2ˆ
kx
k+2
Equação de
Atualização
2ˆ
kx
Equação de
Propagação
3ˆ
kx

Algumas Definições
•Variável de Estado (x)
- Representa a variável de estudo do modelo matemático para a
previsão dos dados futuros. Ex: temperatura, salinidade.
- O filtro linear usa modelo linear.
- O futuro é o presente com alguma correção e corrompido por ruído wk.
•Variável de Medida (z)
- Variável que simula a aquisição dos dados de um sensor.
- Para o filtro linear o modelo de medida é linear com ruído vk do sensor.
•Propagação ( do estado ou da covariância )
- É a simulação do que se espera de dados futuros baseados em k dados.
- Utiliza um modelo para a previsão.
•Atualização ( do estado ou da covariância )
- É a correção da previsão usando os novos dados coletados pelo sensor.
kkk CAxx 1
kkk Hxz
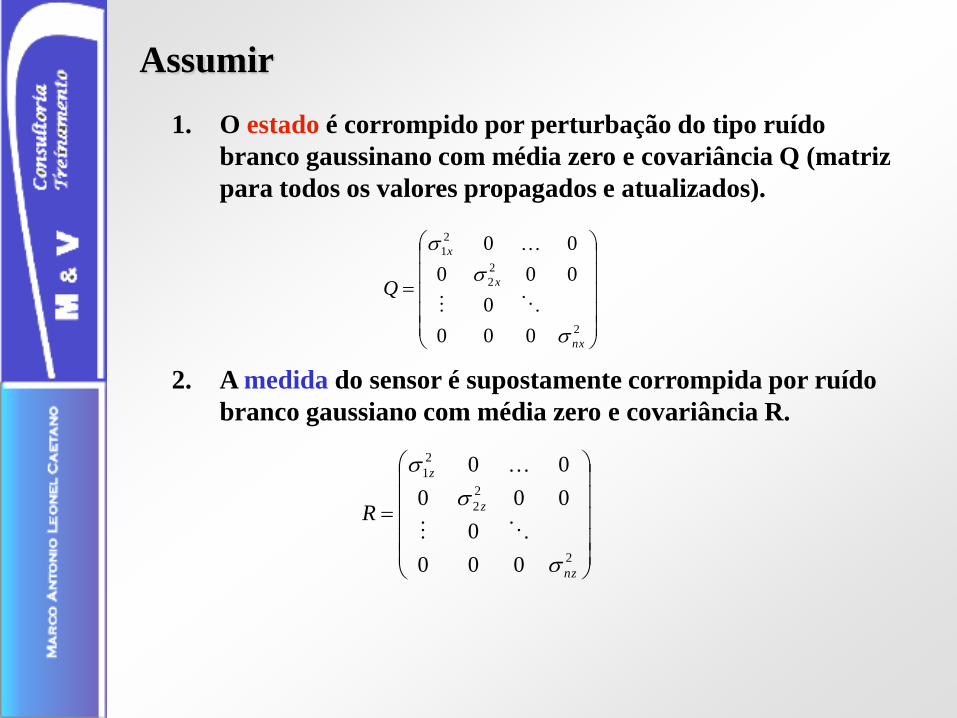
Assumir
1. O estado é corrompido por perturbação do tipo ruído
branco gaussinano com média zero e covariância Q (matriz
para todos os valores propagados e atualizados).
2. A medida do sensor é supostamente corrompida por ruído
branco gaussiano com média zero e covariância R.
2
2
2
2
1
000
0
000
00
nx
x
x
Q
2
2
2
2
1
000
0
000
00
nz
z
z
R

Propagações
•Propagação do Estado (à priori)
Qual a melhor estimativa? A média! As barras representam a
média.
kk
kkk
xAx
CAxx
ˆˆ
estado do branco rúido o é
ˆ
1
1
•Propagação da covariância do estado (à priori)
TT
kk
T
kkkkkkk
T
kkkkk
CQCAAPP
CxxACxxAP
xxxxP
1
1
11111
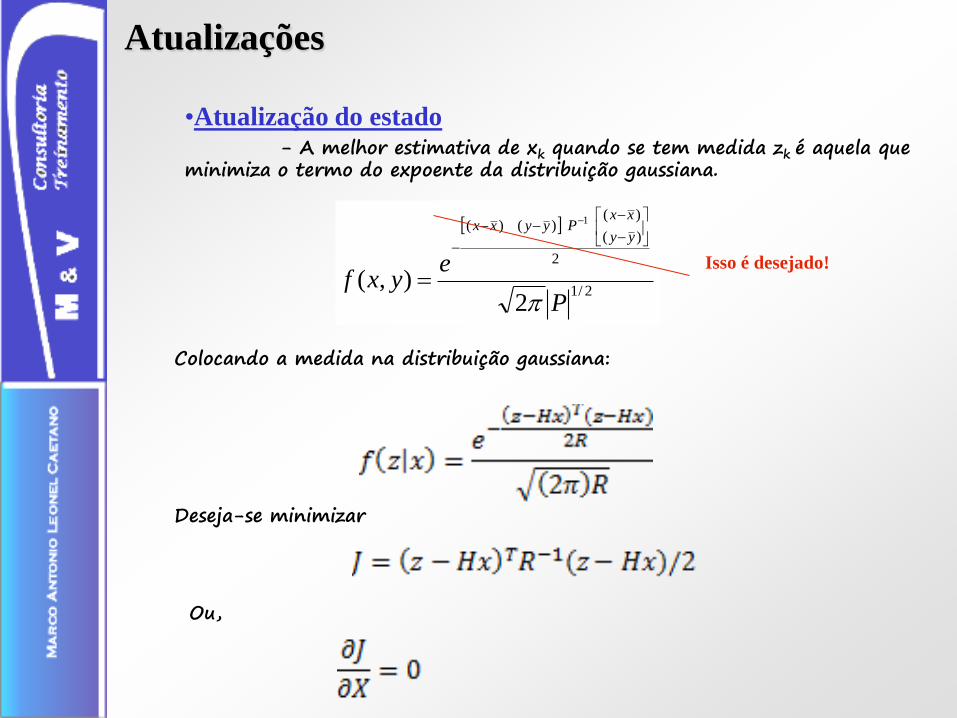
Atualizações
•Atualização do estado- A melhor estimativa de xk quando se tem medida zk é aquela que
minimiza o termo do expoente da distribuição gaussiana.
2/1
2
)(
)( )()(
2),(
1
P
eyxf
yy
xxPyyxx
Isso é desejado!
Colocando a medida na distribuição gaussiana:
Deseja-se minimizar
Ou,

priori
kk
Tpriori
priori
k
posteriori
k xHzR
HPxx ˆˆˆ
Isso leva à seguinte relação
Isolando o estado x para sua estimativa
Usando a mesma idéia do mínimos quadrados recursivos para novas medidaschega-se a seguinte equação de atualização
•Atualização da covariância
A melhor covariância P quando se tem medida zk é aquela que
zera o erro entre medida e variável:
A melhor estimativa é conseguida substituindo a relação de atualização
do estado na equação acima. A relação linear que surge é:
RHHP
HPPP
Tpriori
Tprioriprioriposteriori
A matriz R é a inversa da matriz de covariância do erro
do sensor de medida.
Cuja medida estatística está na matriz de covariância (a barra significa média):
posteriori
kx̂
. x A xk k
1
P A P A C Q Ck k
T T
. . . .1
K P H H P H Rk k
T
k
T
. . . .1
P P K H Pk k k k
. .
. . x x K z H xk k k k k
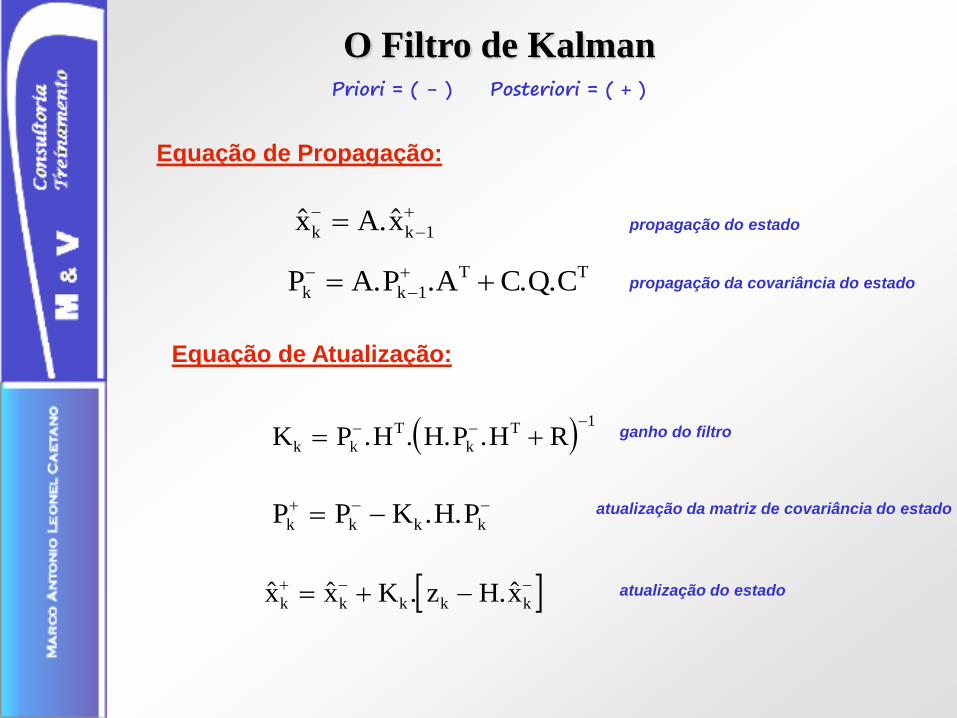
Equação de Propagação:
propagação do estado
propagação da covariância do estado
ganho do filtro
atualização da matriz de covariância do estado
atualização do estado
Equação de Atualização:
O Filtro de KalmanPriori = ( - ) Posteriori = ( + )
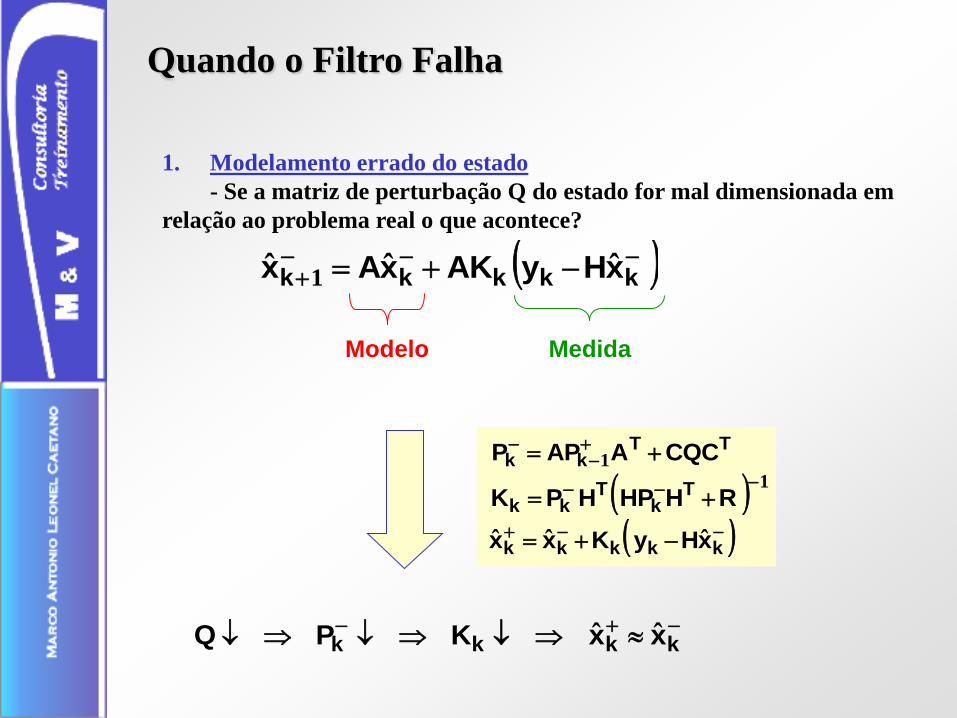
Quando o Filtro Falha
1. Modelamento errado do estado
- Se a matriz de perturbação Q do estado for mal dimensionada em
relação ao problema real o que acontece?
Modelo Medida
1 RHHPHPK Tk
Tkk
TTkk CQCAAPP
1
kkkk xxKPQ ˆˆ
kkkkk xHyKxx ˆˆˆ
kkkkk xHyAKxAx ˆˆˆ
1
0 1 2 3 4 5 6 7 8 9 10-5
0
5
y
0 1 2 3 4 5 6 7 8 9 10-2
0
2
4
x1
0 1 2 3 4 5 6 7 8 9 10-10
0
10
20
x2
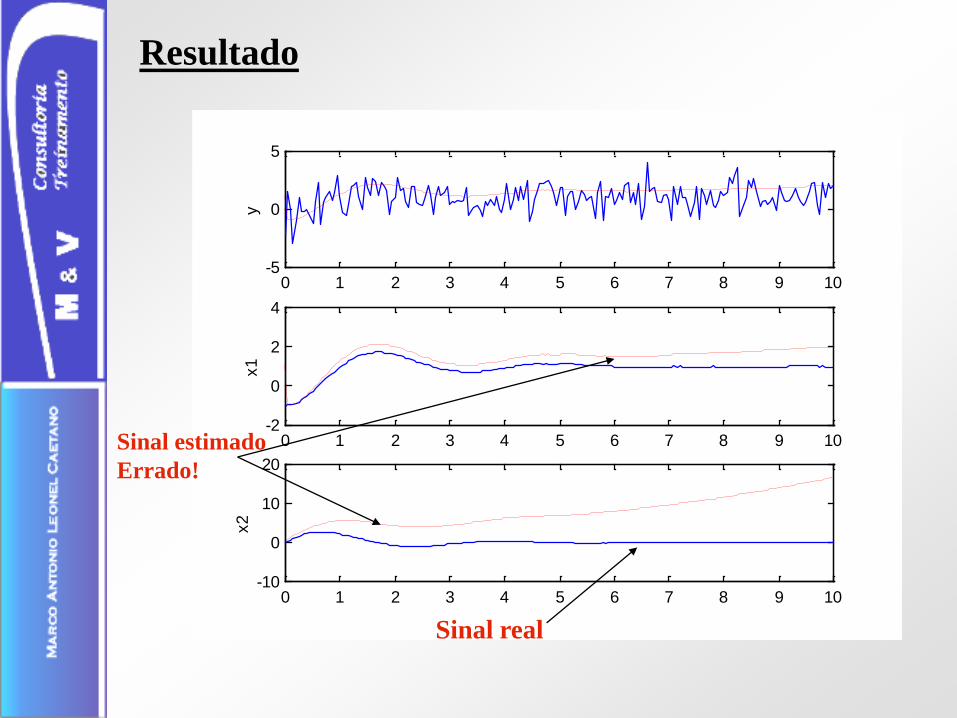
Resultado
Sinal real
Sinal estimado
Errado!

2. Se o ruído de medida é muito menor que a perturbação no estado,
ou seja, se R<<<Q.
Significa que o sensor é totalmente confiável, pois:
KR O filtro não filtra, acompanha as medidas
de perto, pois são confiávies!
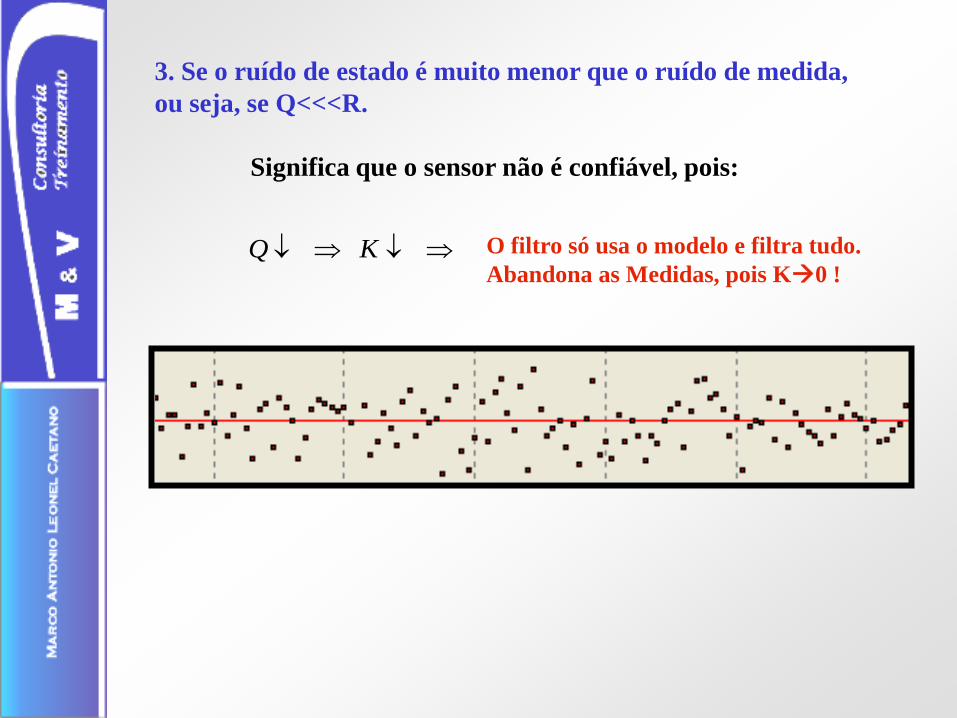
3. Se o ruído de estado é muito menor que o ruído de medida,
ou seja, se Q<<<R.
Significa que o sensor não é confiável, pois:
KQ O filtro só usa o modelo e filtra tudo.
Abandona as Medidas, pois K0 !
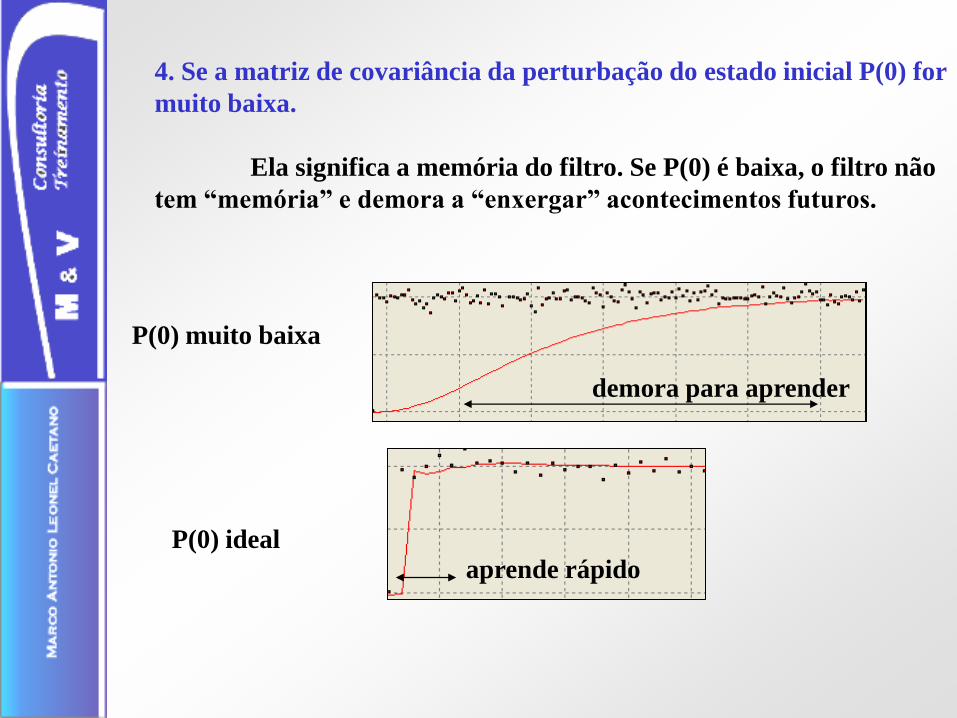
4. Se a matriz de covariância da perturbação do estado inicial P(0) for
muito baixa.
Ela significa a memória do filtro. Se P(0) é baixa, o filtro não
tem “memória” e demora a “enxergar” acontecimentos futuros.
P(0) muito baixa
P(0) ideal
demora para aprender
aprende rápido

Característica ideal da covariância do estado Pk
tempo
P(0) alto
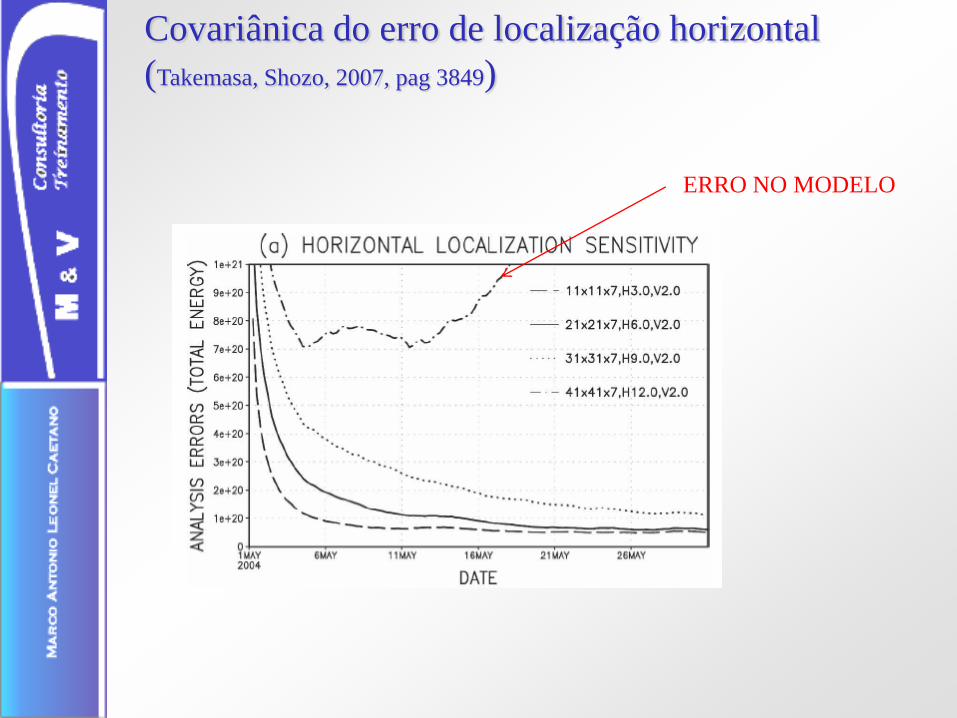
Covariânica do erro de localização horizontal
(Takemasa, Shozo, 2007, pag 3849)
ERRO NO MODELO

O problema da estimativa da temperatura SIMULAÇÃO
•Dados de temperaturas na localidade dos sensores (satélites, PCD,etc)
•Dados com ruído.
•O que se desejava?
- É possível estimar os dados em tempo real?
- É possível fazer uma previsão confiável com
boa antecedência?
•Solução: Filtro de Kalman
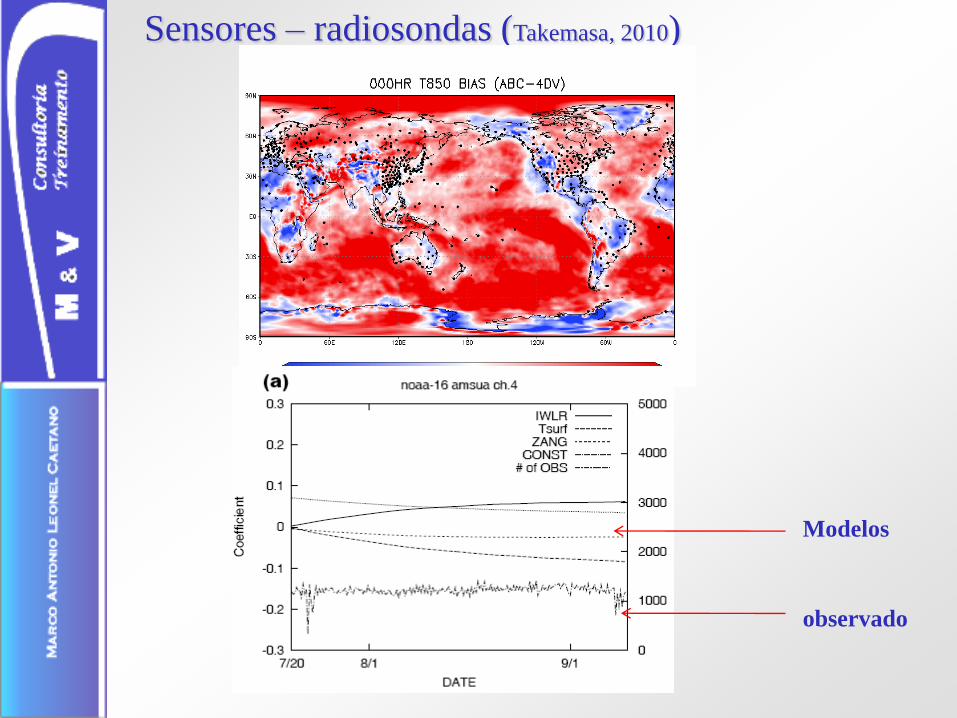
Sensores – radiosondas (Takemasa, 2010)
observado
Modelos

Modelo Utilizado
kkk CAxx 1
1. Fez –se uma hipótese que A = 1.
2. Fez-se a suposição que C =1.
3. O valor de H =1 pois só tem um sensor de temperatura.
4. A perturbação aleatória no estado (temperatura) foi Q=
0,5oC.
5. O ruído no sensor foi suposto de 10oC, ou variância
R=100.
6. A matriz de covariância inicial da perturbação do estado
P(0)=40.
7. Finalmente, foi dito ao filtro que a temperatura inicial foi
x(0)=0 oC, para obrigar a ter uma alta imprecisão e fazer
um aprendizado rápido.
8. O tempo final de simulação para aprendizado e filtragem
foi de t = 100.
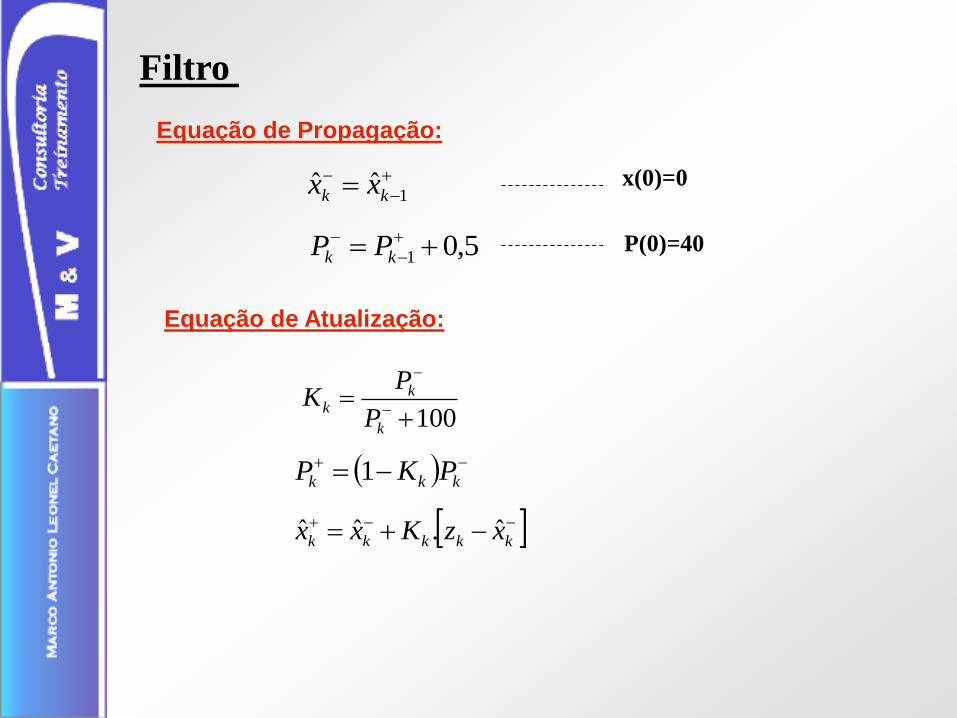
Filtro
1ˆˆ
kk xx
5,01
kk PP
100
k
kk
P
PK
kkk PKP 1
kkkkk xzKxx ˆ.ˆˆ
Equação de Atualização:
Equação de Propagação:
x(0)=0
P(0)=40
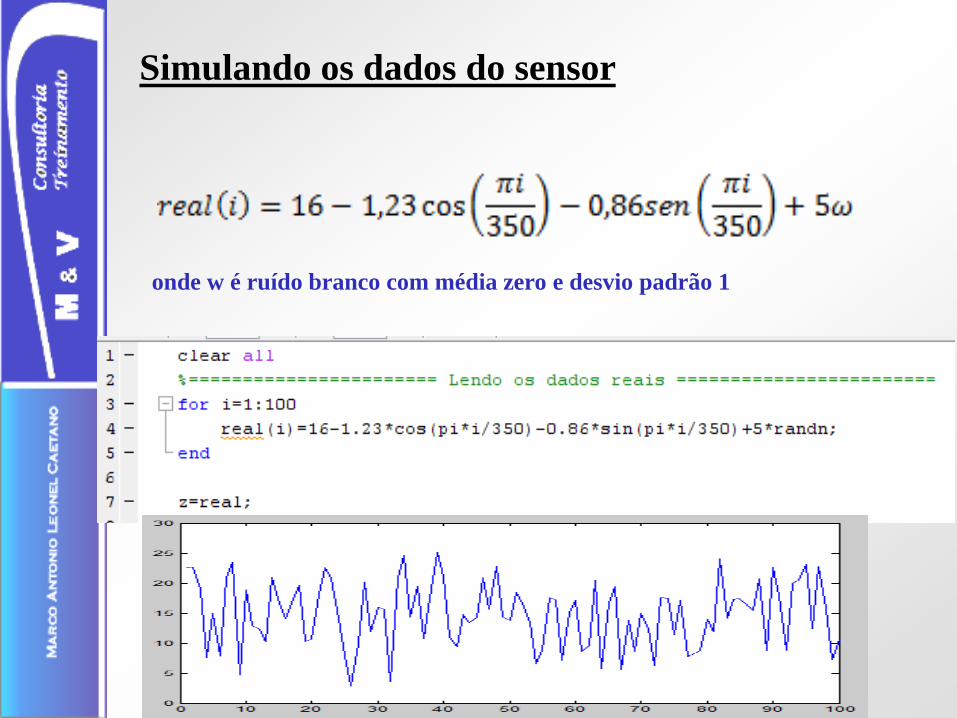
Simulando os dados do sensor
onde w é ruído branco com média zero e desvio padrão 1

Inicializando o filtro

A caixa do Filtro de Kalman
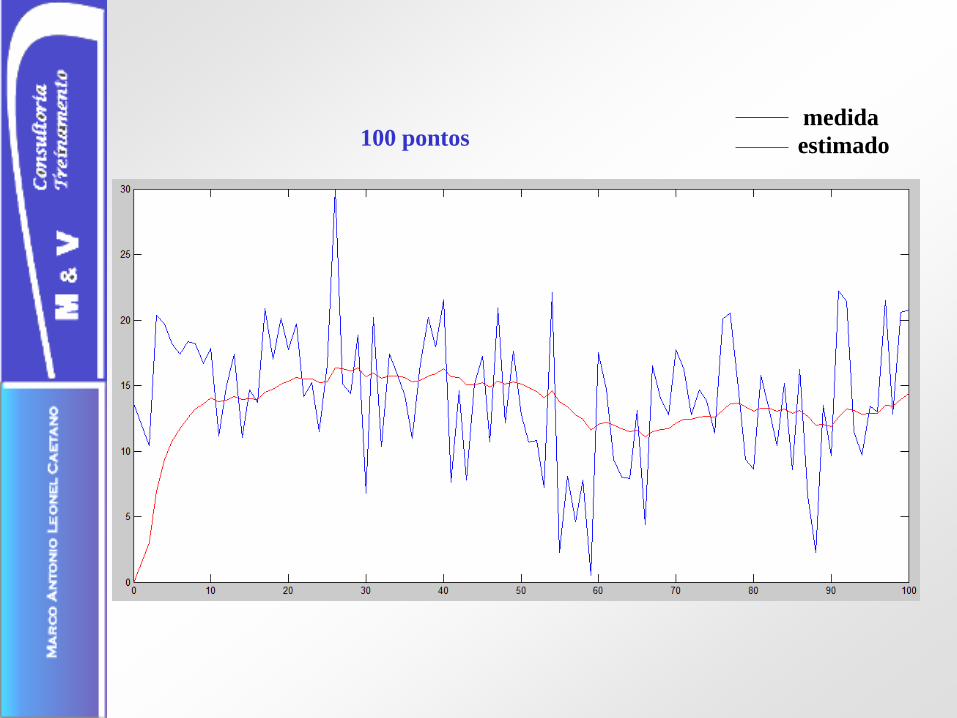
100 pontosmedida
estimado

A Covariância do estado (temperatura)
O filtro de Kalman “aprendeu” com 20 dados!!
P(k)

Cenário 2: Sensor com mais ruído – Sinal mais
filtrado
erro = 22,36oC
R=erro2 = 500
Valoriza o modelo pois
medidas menos
Confiáveis !
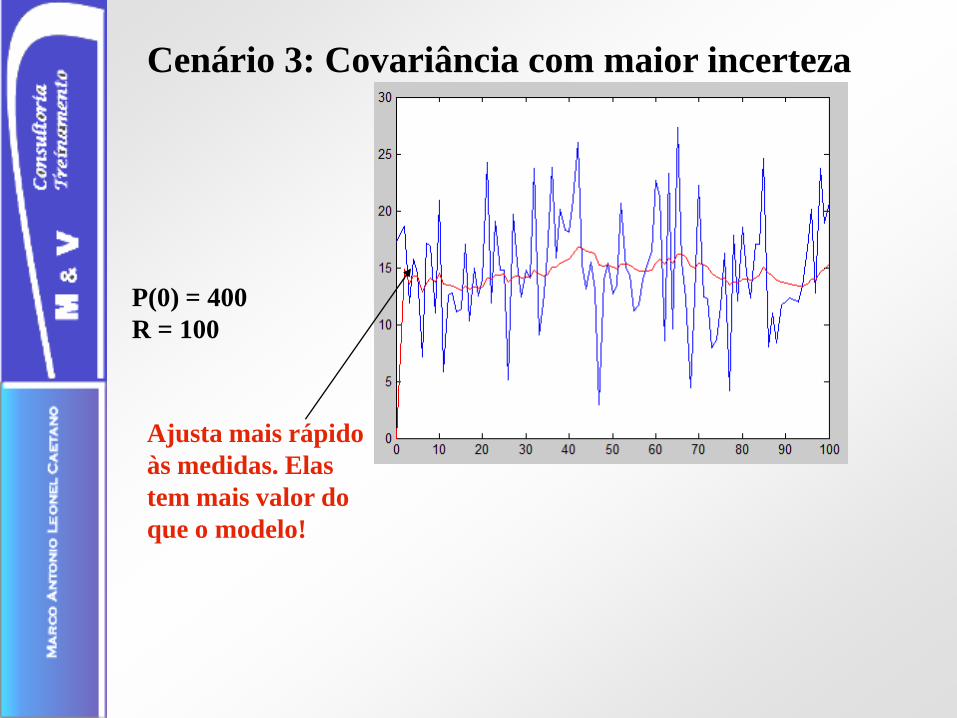
Cenário 3: Covariância com maior incerteza
P(0) = 400
R = 100
Ajusta mais rápido
às medidas. Elas
tem mais valor do
que o modelo!

Cenário 4: Ruído de sensor super-baixo
P(0) = 40
R = 1
Esquece o modelo pois
a melhor estimativa é a
medida do sensor

BIBLIOGRAFIA