Final Presentation
22
Colin Eaton Graduate Co-op, Code 595 Mentor: Mark Woodard August 25, 2010 ARTEMIS MISSION SUPPORT 1
-
Upload
colin-eaton -
Category
Technology
-
view
389 -
download
0
description
Summarizes my work from my Summer 2010 co-op tour at NASA-Goddard. Includes work for the ARTEMIS mission and GMAT testing.
Transcript of Final Presentation

Colin Eaton
Graduate Co-op, Code 595
Mentor: Mark Woodard
August 25, 2010
ARTEMIS MISSION SUPPORT
1

OVERVIEW
• ARTEMIS
• Brief mission summary
• Related projects
• P2 z-oscillations
• P2 L1 stationkeeping analysis in STK
• STK-COM automation
• P2 L1 ODTK simulator / Tracking schedules
• Maneuver calibrations
• GMAT testing
• Testing methodology
• MATLAB scripts/functions
2

3
ARTEMIS

ARTEMIS MISSION
• Extension of the THEMIS mission, and a collaboration with UCB and JPL
• THEMIS B = ARTEMIS P1 , THEMIS C = ARTEMIS P2
• First mission to navigate to and perform stationkeeping operations around the Earth-Moon
L1 and L2 libration points
• Satellites transfer from highly-elliptical lunar orbits Lissajous Libration orbits Low
lunar orbits
• NMDB is responsible for much of the maneuver planning and calibration, with additional
emphasis on Lissajous stationkeeping operations
4

THE P2 L1 Z-COMPONENT DILEMMA
• Targeted P2 Lissajous trajectories yielded uncontrolled RLP z-component oscillations
prior to exit
• Conditions must be controlled in order to capture into lunar orbit
5
km

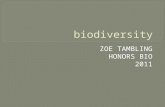
THE P2 L1 Z-COMPONENT DILEMMA
• Performed Fourier analysis to derive periodicity
• Long-term Period: ~9 months
• Attributed to the equations of motion for the CR3BP
6
km
days
ampl
itude
frequency

THE P2 L1 Z-COMPONENT DILEMMA
• Methods for controlling z-oscillations:
• DV prior to Lissajous insertion
• Required too large of a DV to make
significant alteration
• DV at inflection point
• Requires only ~1m/s down burn to
stabilize
• Maneuver at set frequency
• Box method
7

P2 L1 STATIONKEEPING ANALYSIS
8x

P2 L1 STATIONKEEPING ANALYSIS
• Stationkeeping methods
• DV at each x-axis crossing (a.k.a. half-rev)
• DV at every other x-axis crossing (a.k.a. full-rev)
• No significant advantage over half-rev
• Half-rev for first 2-3 maneuvers, then full-rev
• Methods for DC convergence
• Vx=0
• Gate method
• “Give it a push” method
• Wrote ARTEMIS procedures section
outlining the primary methodology in STK
9x

STK-COM AUTOMATION
• Had the desire to make the stationkeeping operations much more convenient
• Most tasks were very repetitive
• Became familiarized with STK-COM as per Kevin Berry’s suggestion and learned
the basics with Cassie
• Object-oriented programming using MATLAB to control the STK GUI
• Wrote various scripts to automate common tasks that did not require “eyeballing”
• Still exploring ways to add some autonomy to allow less user input
10
for i=1:3
click.m
end{

STK-COM AUTOMATION
• MATLAB scripts
• COMbase.m
• Connects to STK and stores the threads to common objects from the stkp setup (e.g.
MCS segments, DV’s, etc.) into MATLAB variables for easier manipulation
• COMTest_better.m
• Loops through all (or specific) target sequences to change settings such as:
profile action, zeroing out DV’s, applying profiles, DC step/pert sizes, etc.
• COMTest_fordave2.m
11
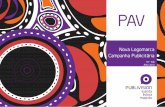
Read in GMAT ∆v
Store as STK ∆v
Correct ∆v
STOPAdd targ.
∆vTarg.
param’sApply ∆v
Differential CorrectorPass
Fail
Radial-only ∆v

ODTK SIMULATOR / TRACKING SCHEDULES
• Wanted to perform trade study on tracking schedules for P2 at L1 using the following tracking systems:
• DSN (Madrid, Canberra, Goldstone)
• BGS (UC Berkeley)
• MILA (GSFC/KSC)
12
• Purpose of the study was to
determine how much tracking is
adequate to yield converged
solutions of the orbit state
• Used ODTK (not to be confused
with ODTBX) to simulate
tracking data from the stations
based on custom tracking
intervals

ODTK SIMULATOR / TRACKING SCHEDULES
• First studied mathematics behind the software and spent time with Mark to
find the “things to look for”
• Ran results through the sequential filter and fixed-interval smoother to
check convergence
13

ODTK SIMULATOR / TRACKING SCHEDULES
• The first step was to create the customized tracking schedules for each station
• Requirements provided:
• DSN: Alternate between N/S hemisphere, every other day for 3.5 hours/pass
• BGS: Two 45-min passes every day
• MILA: One 1-hour pass every day
• Created random schedules by hand at first
• Decided to write MATLAB scripts to make my job easier
• checkSched.m – compares a newly generated schedule to be integrated with an existing schedule (e.g. adding my BGS passes to the DSN schedule I had to check for overlaps)
• makeSched.m – creates a new tracking schedule of multiple stations with various types of parameters and requirements
• Currently includes my DSN passes, hope to add BGS and MILA in future
14

ODTK SIMULATOR / TRACKING SCHEDULES
• Ran into various software-related and physical problems (even some that Jonathan
couldn’t fix!!!)
• Filter/smoother position/velocity uncertainties and measurement biases
sporadically explode from case to case
• SRP and transponder bias don’t have realistic physical ties when iterations
converge
15
• ODTK often doesn’t work properly on my
computer unless Jonathan touches the
keys
• Unable to make any decisive conclusions thus
far in the simulator analysis
• Also attempted P1 L2 simulation, but ran into
same problems

MANEUVER CALIBRATION
• For the majority of the summer, P1 and P2 were performing deep space and trajectory
correction maneuvers
• P1: TCM-6, TCM-7
• P2: DSM-1, DSM-2, TCM-2, TCM-3
16
• Provided parallel analysis to Dave’s GMAT
calibrations using ODTK
• Most iterations correlated quite well
• Also performed pre-maneuver analysis
• Biased the nominal DV’s to account for
maneuver execution error
• Wrote ARTEMIS procedures document for
calibration process

17
GMAT

GMAT TESTING
• Asked to help participate in GMAT testing with Steve and Joel for
December release of the software
• Responsible for various aspects of the “Save” command
• Finding all unique GUI configurations
• Creating the script and output files necessary for comparison
• Developing the comparator
• Running cases through the comparator
• Had fun learning how to utilize regexp()
• i.e. translating Joel’s native language
18

GMAT TESTING
19
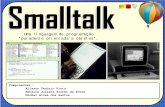
GMAT
Saved data file
Comparator
Result (P/F) Report
.script / .truth file
.tc file
.truth file
• Testing Methodology:
Test System

GMAT TESTING
• MATLAB scripts/functions:
• makeSave.m
• Runs entire comparator process requiring only the object class and setting extension
• @SaveComparator\Compare.m
• Extracts saved object properties from .script/.truth file
• Much regexp’ing…
• Searches for same data in saved/.data file
• Checks “Create” and property lines
• Yields pass/fail result
• Must match property name and property value exactly to pass
20

ACKNOWLEDGEMENTS
21
• Mark Woodard
• Dave Folta
• Jonathan Lowe
• Steve Hughes
• Joel Parker
• Kevin Berry
• Conrad Schiff
• Cassie Alberding (and the LCP)

22
Thanks for your time!
QUESTIONS?