Fundamentos Em Reologia 3 - Equações de Conservação
69
DEFINIÇÕES
-
Upload
lucas-ferron -
Category
Documents
-
view
222 -
download
4
Transcript of Fundamentos Em Reologia 3 - Equações de Conservação
DEFINIÇÕES
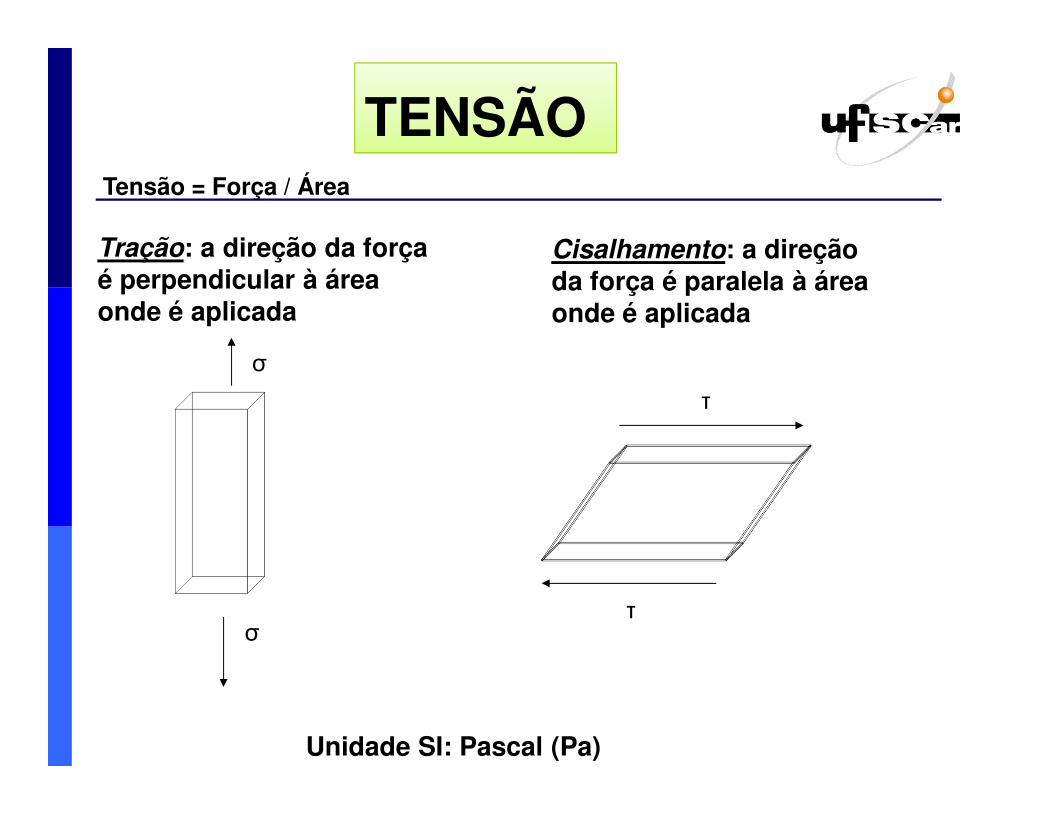
TENSÃOTensão = Força / Área
Tração: a direção da força é perpendicular à área onde é aplicada
Cisalhamento: a direção da força é paralela à área onde é aplicada
Unidade SI: Pascal (Pa)
σ
σ
τ
τ
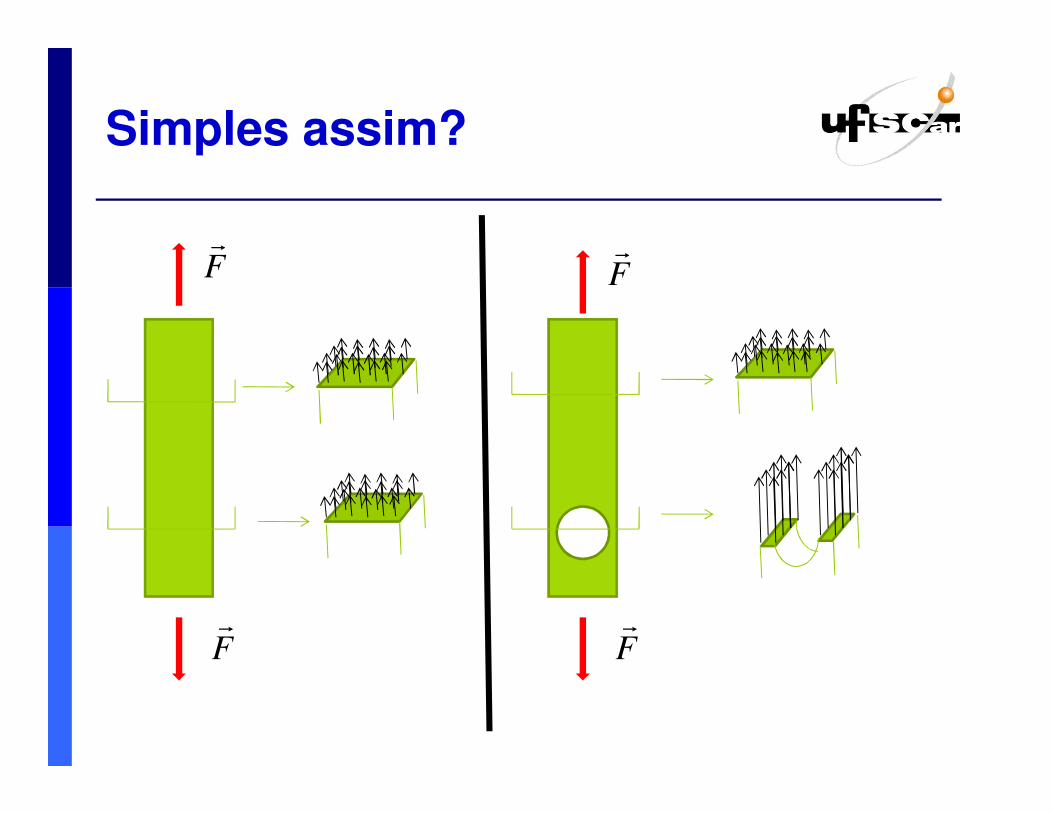
Simples assim?
Fr
Fr
Fr
Fr
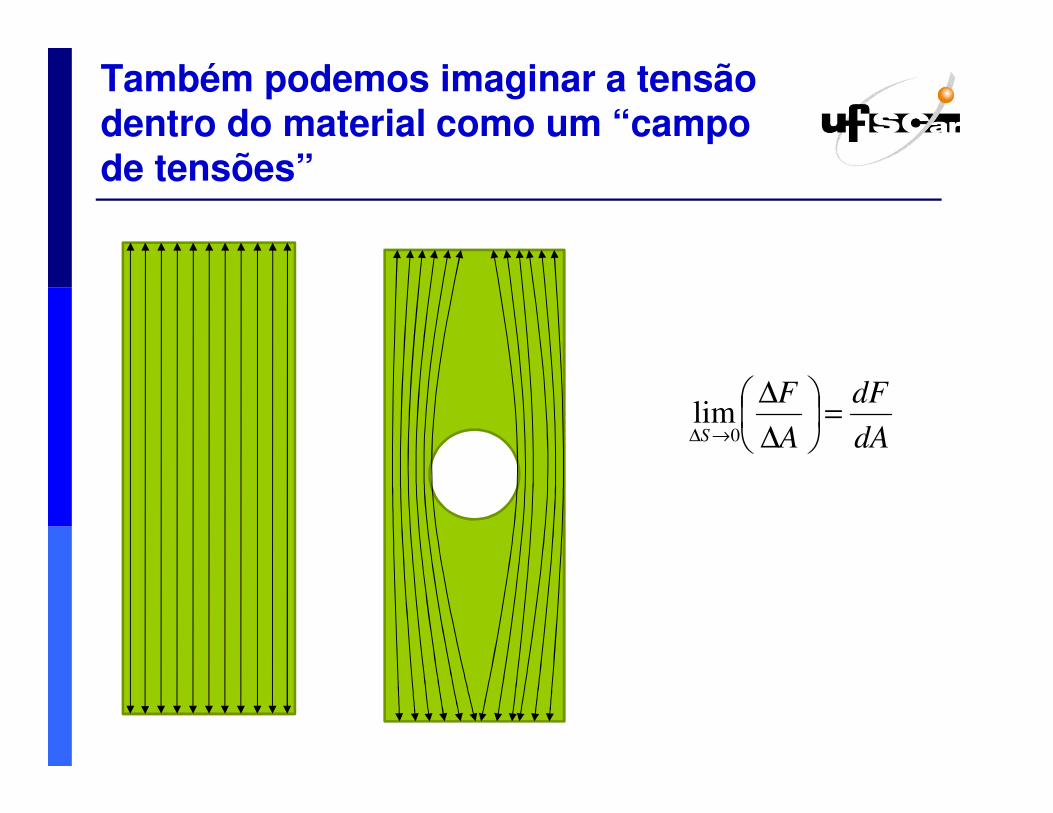
Também podemos imaginar a tensão dentro do material como um “campo de tensões”
dA
dF
A
F
S=
∆
∆→∆ 0
lim
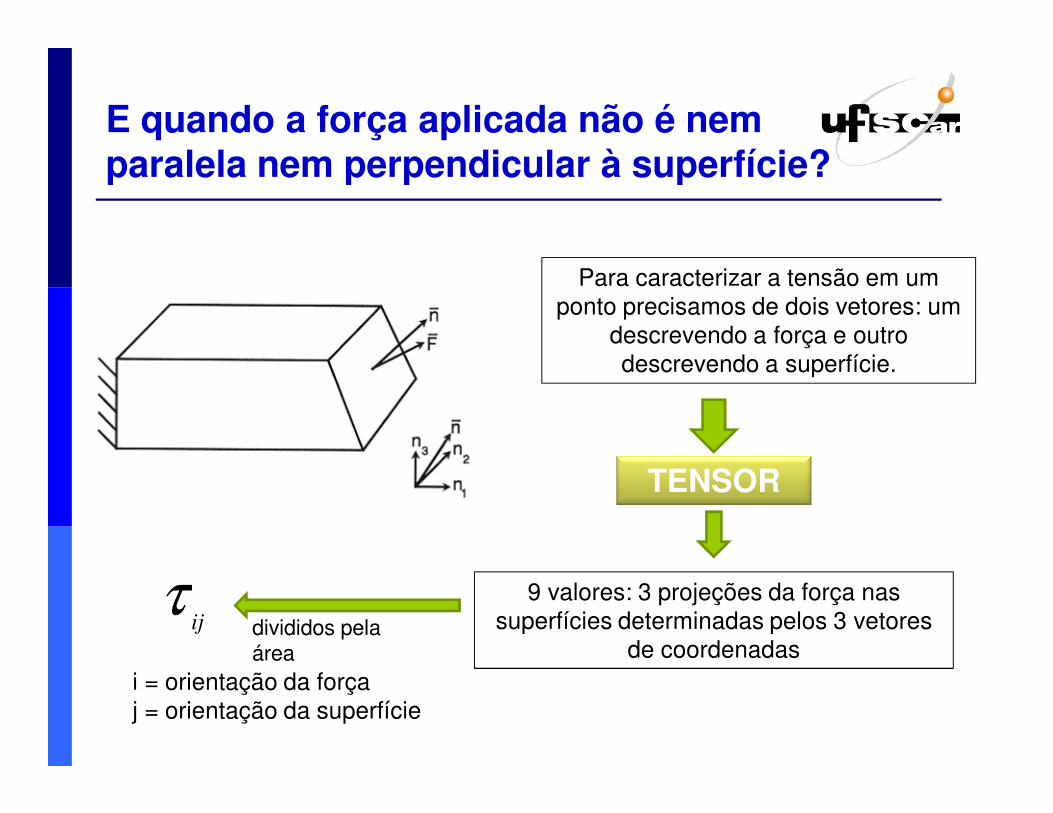
E quando a força aplicada não é nem paralela nem perpendicular à superfície?
Para caracterizar a tensão em um ponto precisamos de dois vetores: um
descrevendo a força e outro descrevendo a superfície.
TENSOR
9 valores: 3 projeções da força nas superfícies determinadas pelos 3 vetores
de coordenadasij
τdivididos pela área
i = orientação da forçaj = orientação da superfície
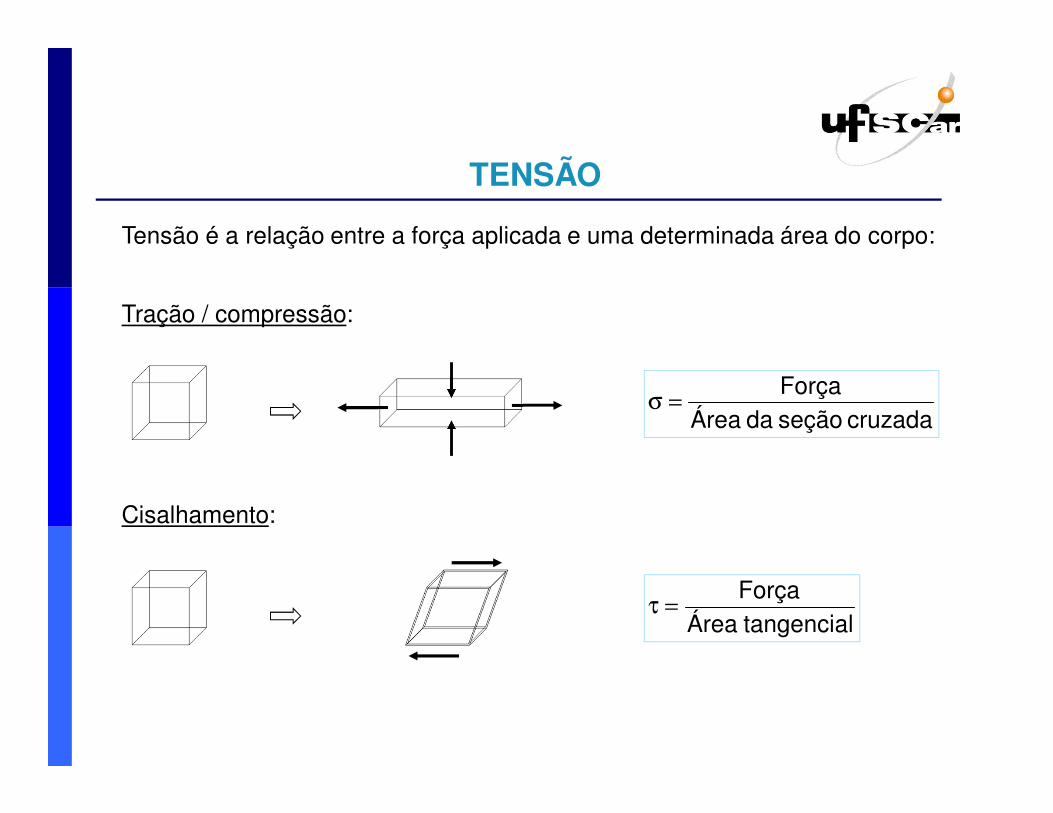
TENSÃO
Tensão é a relação entre a força aplicada e uma determinada área do corpo:
tangencial ÁreaForça
=τ
cruzada seção da ÁreaForça
=σ
Tração / compressão:
Cisalhamento:
7
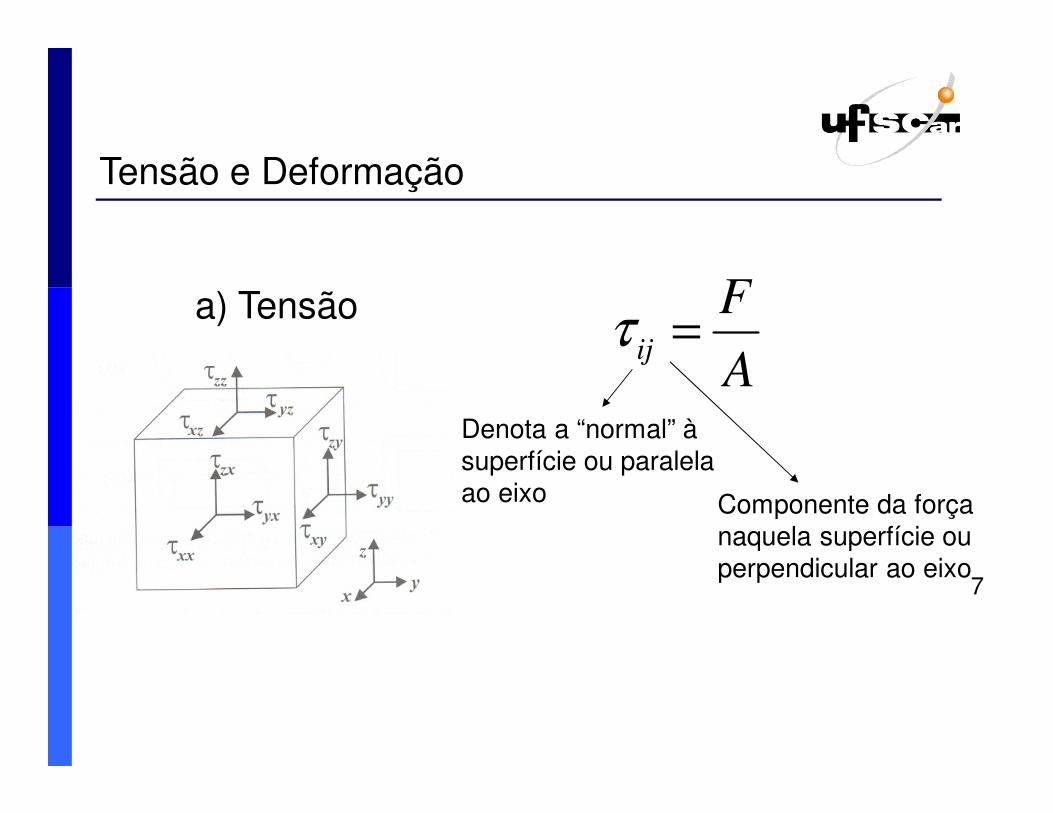
Tensão e Deformação
a) Tensão
A
Fij =τ
Denota a “normal” à superfície ou paralela ao eixo Componente da força
naquela superfície ou perpendicular ao eixo
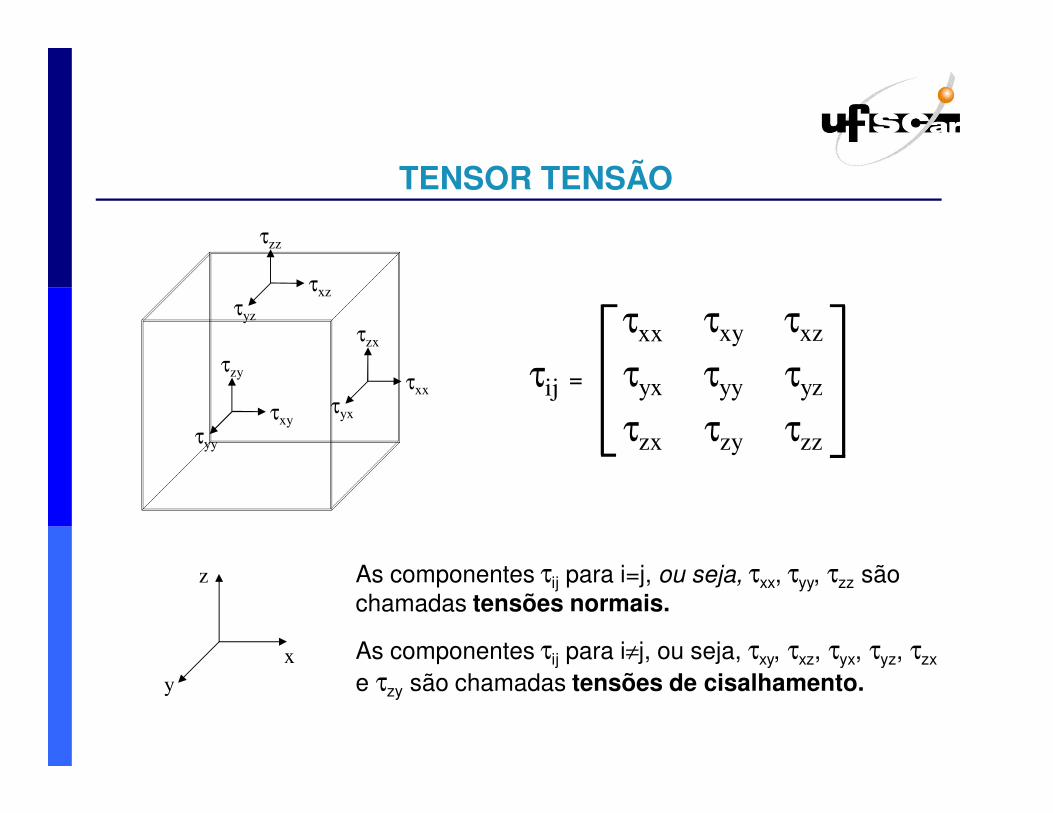
TENSOR TENSÃO
z
y
x
τyz
τxz
τzz
τyx
τxx
τzx
τyy
τxy
τzy
τxx τxy τxz
τyx τyy τyz
τzx τzy τzz
As componentes τij para i=j, ou seja, τxx, τyy, τzz são chamadas tensões normais.
As componentes τij para i≠j, ou seja, τxy, τxz, τyx, τyz, τzx
e τzy são chamadas tensões de cisalhamento.
τij =
Exemplo:
x
y
xy
x
x
xx
A
F
A
F
=
=
τ
τ Tensão Normal i = j
Tensão de cisalhamento i ≠ j
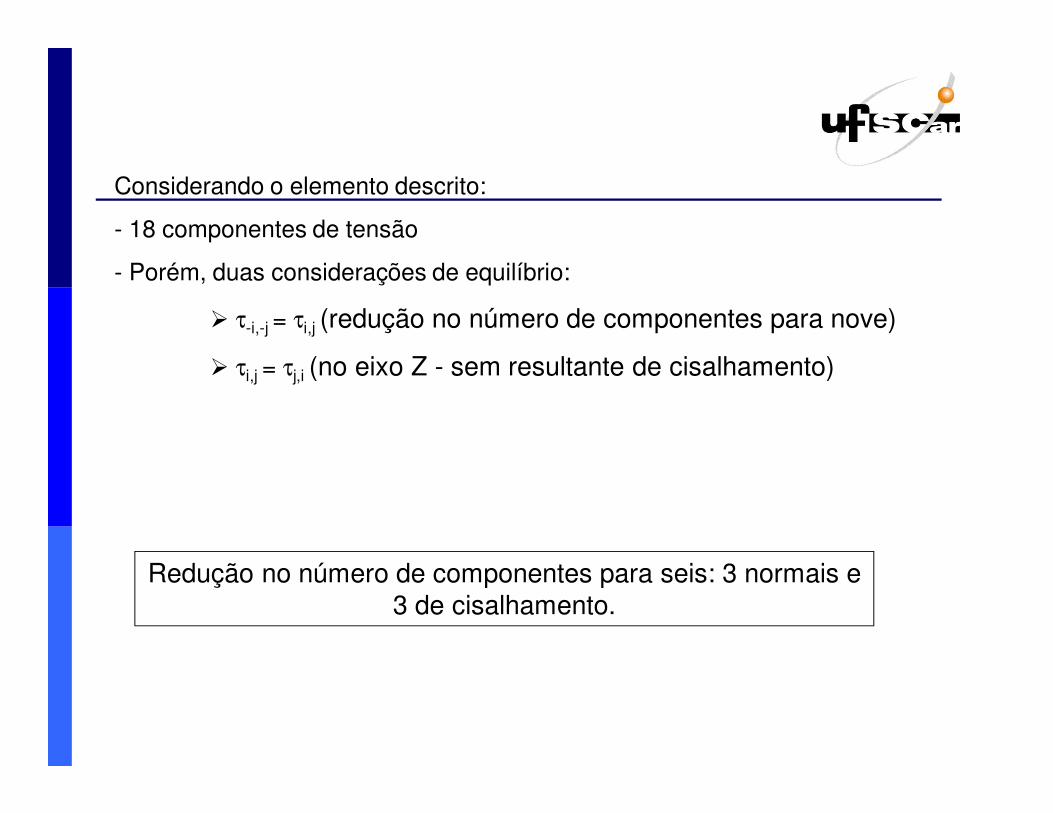
Considerando o elemento descrito:
- 18 componentes de tensão
- Porém, duas considerações de equilíbrio:
� τ-i,-j = τi,j (redução no número de componentes para nove)
� τi,j = τj,i (no eixo Z - sem resultante de cisalhamento)
Redução no número de componentes para seis: 3 normais e 3 de cisalhamento.
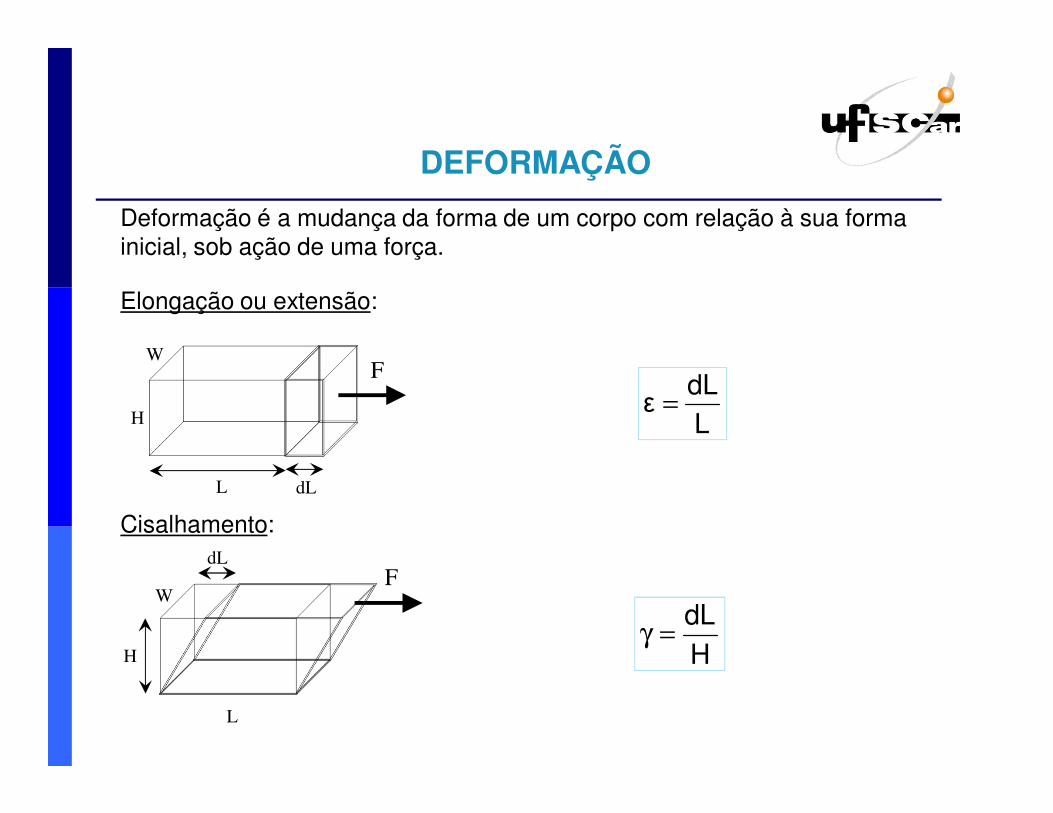
DEFORMAÇÃO
Cisalhamento:
Deformação é a mudança da forma de um corpo com relação à sua forma inicial, sob ação de uma força.
L dL
F
H
W
H
W
L
FdL
LdL
ε =
HdL
=γ
Elongação ou extensão:
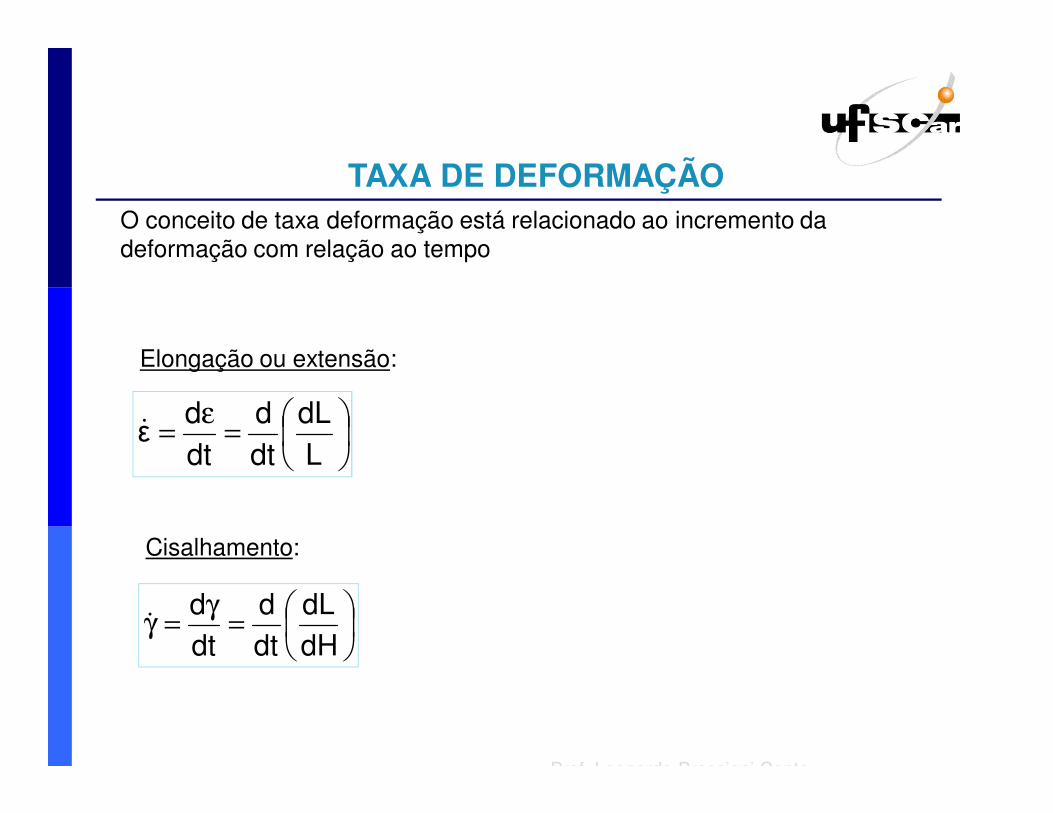
TAXA DE DEFORMAÇÃO
REOLOGIA DE POLÍMEROS FUNDIDOS – MMP 709Prof. Leonardo Bresciani Canto
Cisalhamento:
Elongação ou extensão:
=
γ=γ
dHdL
dtd
dtd
&
=
ε=
LdL
dtd
dtd
ε&
O conceito de taxa deformação está relacionado ao incremento da deformação com relação ao tempo
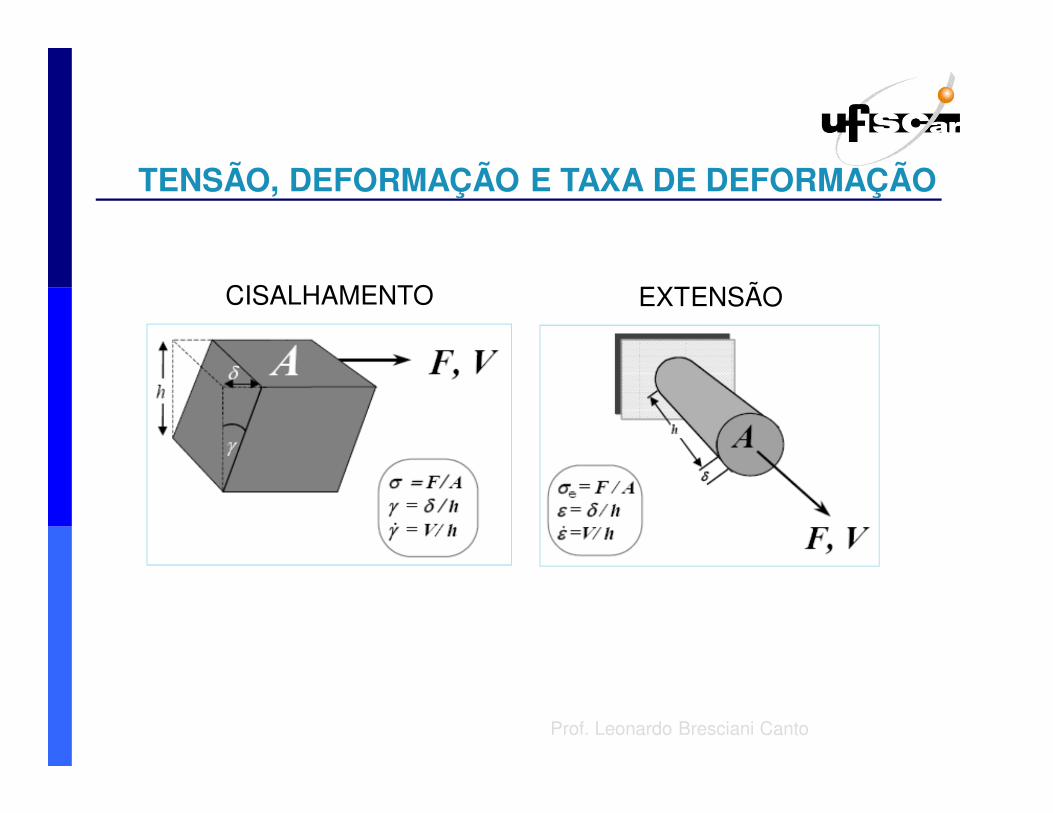
TENSÃO, DEFORMAÇÃO E TAXA DE DEFORMAÇÃO
REOLOGIA DE POLÍMEROS FUNDIDOS – MMP 709Prof. Leonardo Bresciani Canto
CISALHAMENTO EXTENSÃO
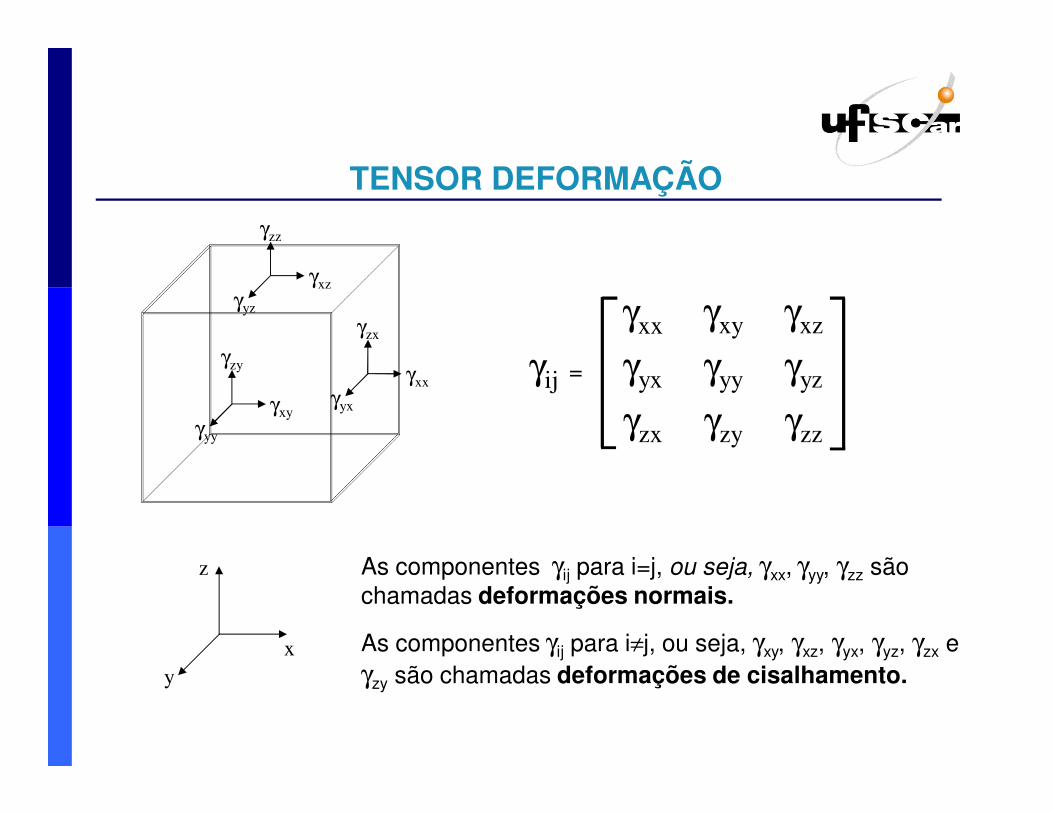
TENSOR DEFORMAÇÃO
z
y
x
γyz
γxz
γzz
γyx
γxx
γzx
γyy
γxy
γzy
γxx γxy γxz
γyx γyy γyz
γzx γzy γzz
As componentes γij para i=j, ou seja, γxx, γyy, γzz são chamadas deformações normais.
As componentes γij para i≠j, ou seja, γxy, γxz, γyx, γyz, γzx e γzy são chamadas deformações de cisalhamento.
γij =
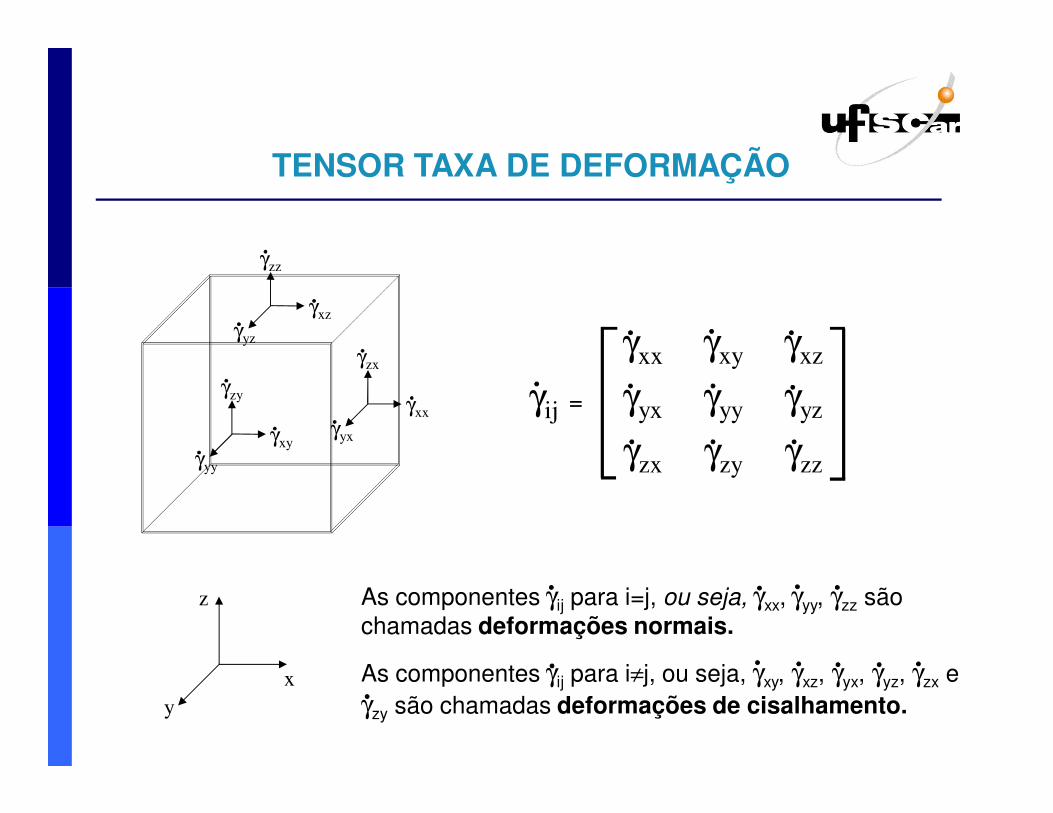
TENSOR TAXA DE DEFORMAÇÃO
z
y
x
γyz
γxz
γzz
γyx
γxx
γzx
γyy
γxy
γzy
γxx γxy γxz
γyx γyy γyz
γzx γzy γzz
As componentes γij para i=j, ou seja, γxx, γyy, γzz são chamadas deformações normais.
As componentes γij para i≠j, ou seja, γxy, γxz, γyx, γyz, γzx e γzy são chamadas deformações de cisalhamento.
γij =
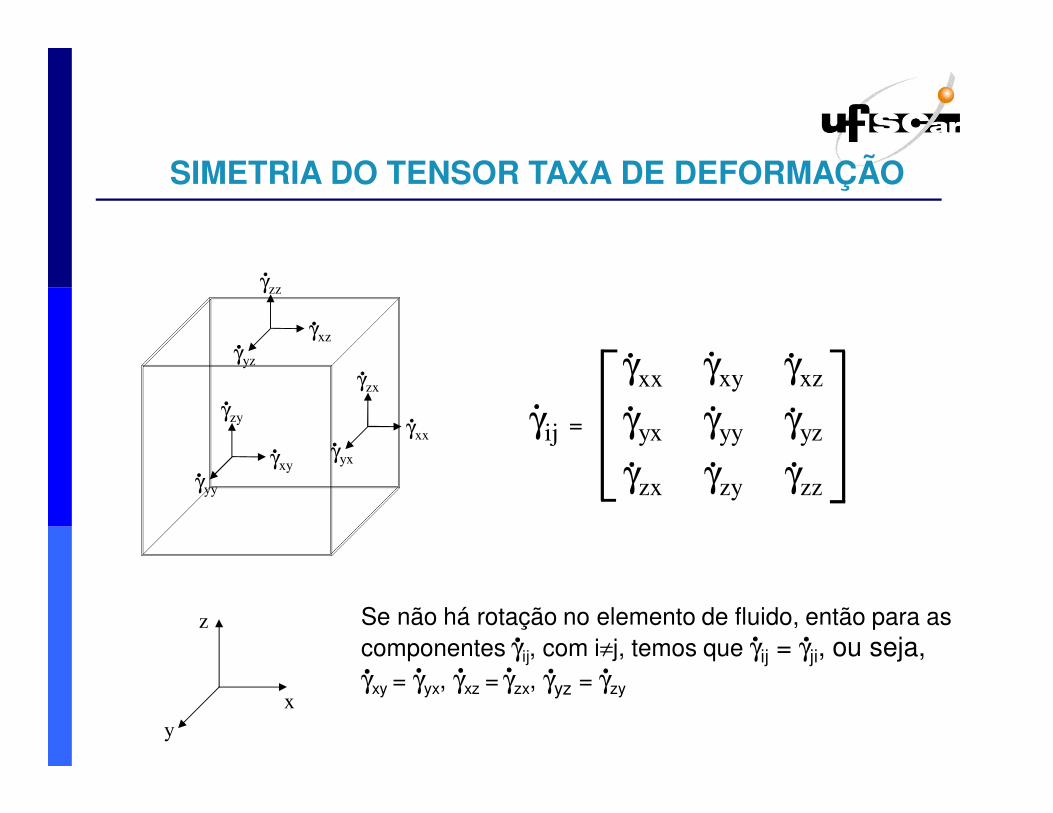
SIMETRIA DO TENSOR TAXA DE DEFORMAÇÃO
z
y
x
γyz
γxz
γzz
γyx
γxx
γzx
γyy
γxy
γzy
γxx γxy γxz
γyx γyy γyz
γzx γzy γzz
Se não há rotação no elemento de fluido, então para as componentes γij, com i≠j, temos que γij = γji, ou seja, γxy = γyx, γxz = γzx, γyz = γzy
γij =
DEFORMAÇÃO E
TAXA DE DEFORMAÇÃO
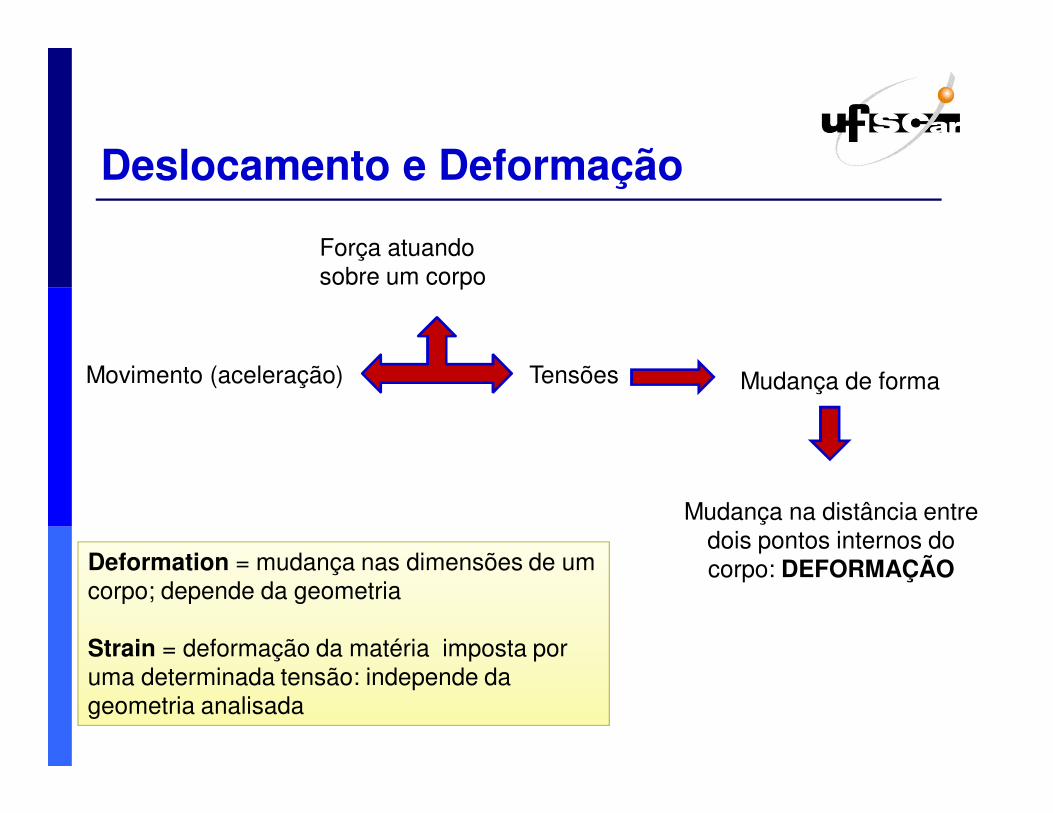
Deslocamento e Deformação
Força atuando sobre um corpo
Movimento (aceleração) Mudança de formaTensões
Mudança na distância entre dois pontos internos do corpo: DEFORMAÇÃODeformation = mudança nas dimensões de um
corpo; depende da geometria
Strain = deformação da matéria imposta por uma determinada tensão: independe da geometria analisada
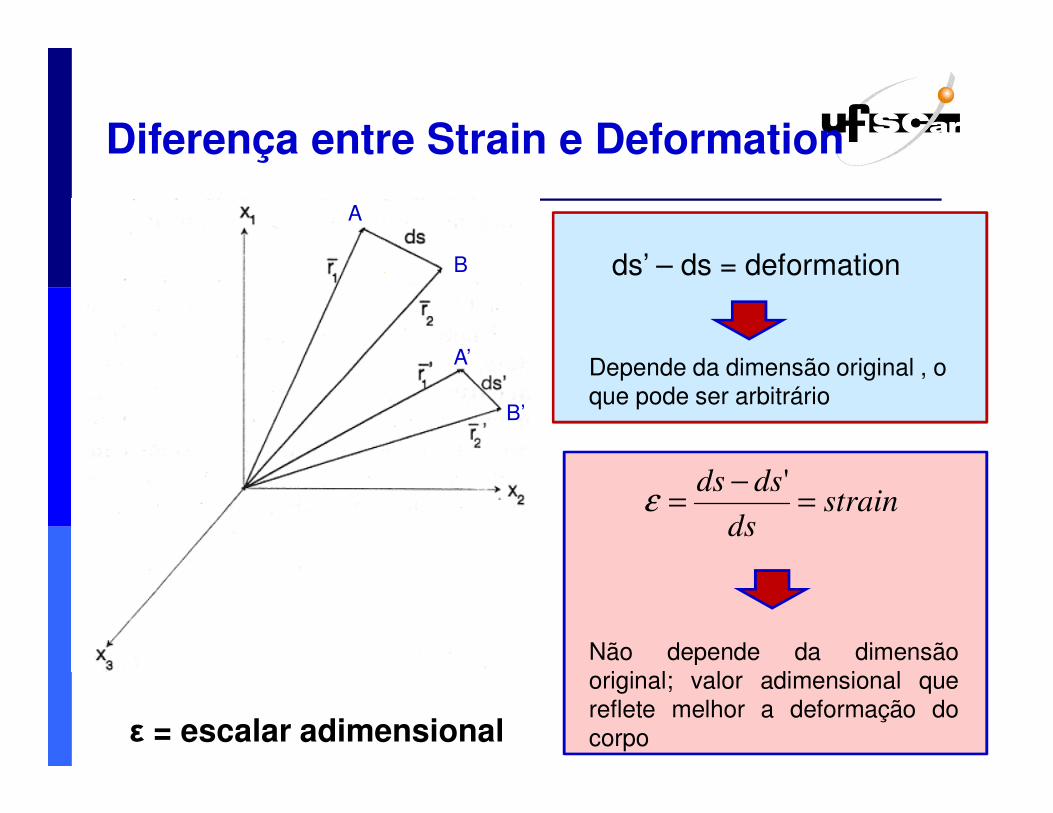
Diferença entre Strain e Deformation
ds’ – ds = deformation
strainds
dsds=
−=
'ε
Depende da dimensão original , o que pode ser arbitrário
Não depende da dimensãooriginal; valor adimensional quereflete melhor a deformação docorpoε = escalar adimensional
A
B
A’
B’
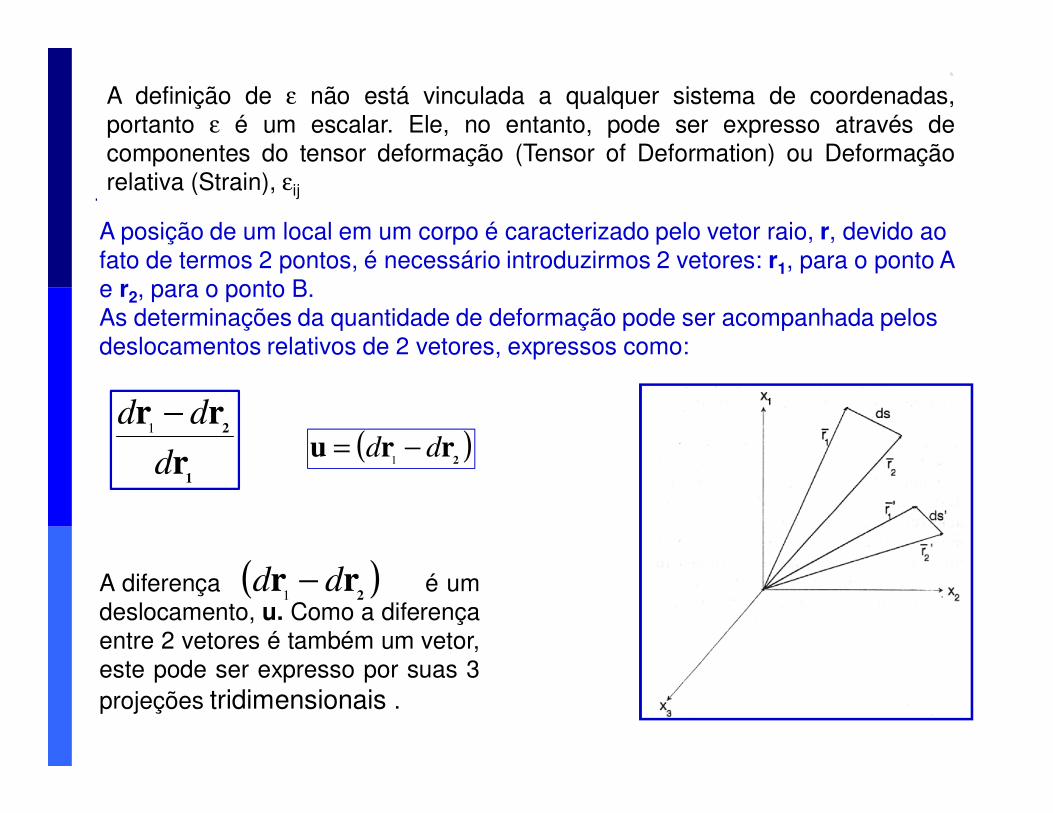
A definição de ε não está vinculada a qualquer sistema de coordenadas,portanto ε é um escalar. Ele, no entanto, pode ser expresso através decomponentes do tensor deformação (Tensor of Deformation) ou Deformaçãorelativa (Strain), εij
A posição de um local em um corpo é caracterizado pelo vetor raio, r, devido ao fato de termos 2 pontos, é necessário introduzirmos 2 vetores: r1, para o ponto A e r2, para o ponto B.As determinações da quantidade de deformação pode ser acompanhada pelos deslocamentos relativos de 2 vetores, expressos como:
1
2
r
rr
d
dd −1
A diferença é umdeslocamento, u. Como a diferençaentre 2 vetores é também um vetor,este pode ser expresso por suas 3projeções tridimensionais .
( )2
rr dd −1
( )2
rru dd −=1
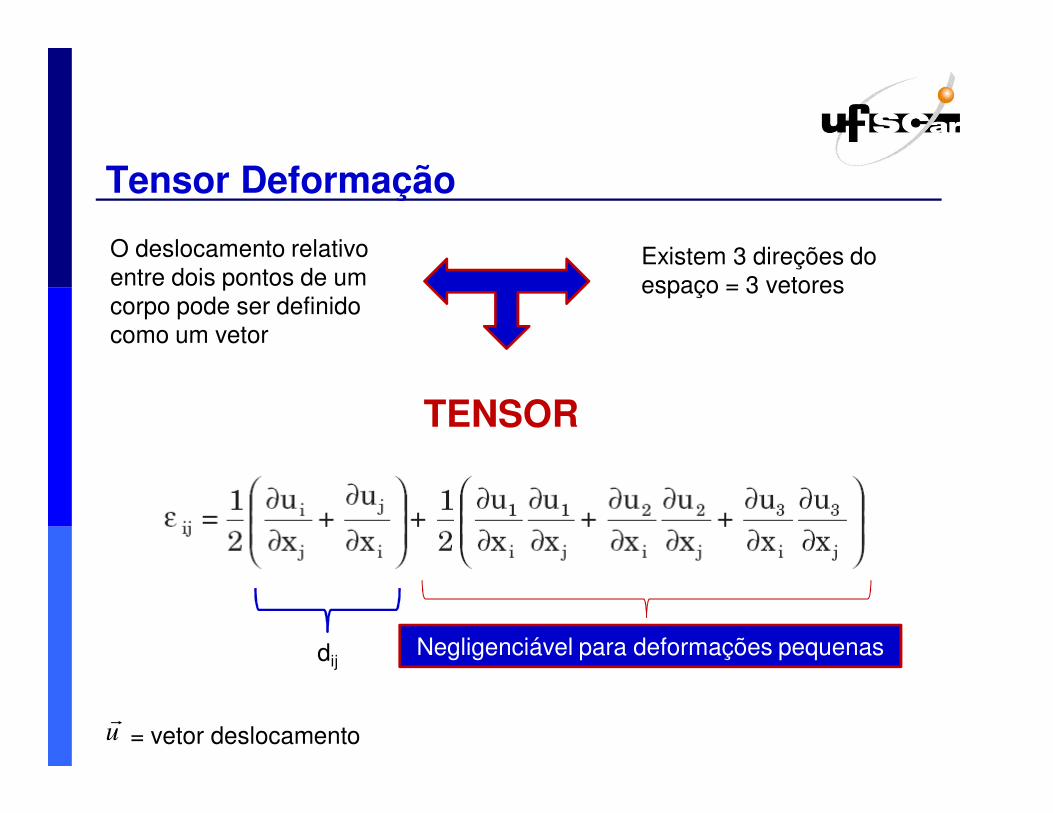
Tensor Deformação
O deslocamento relativo entre dois pontos de um corpo pode ser definido como um vetor
Existem 3 direções do espaço = 3 vetores
TENSOR
Negligenciável para deformações pequenas
= vetor deslocamentour
dij
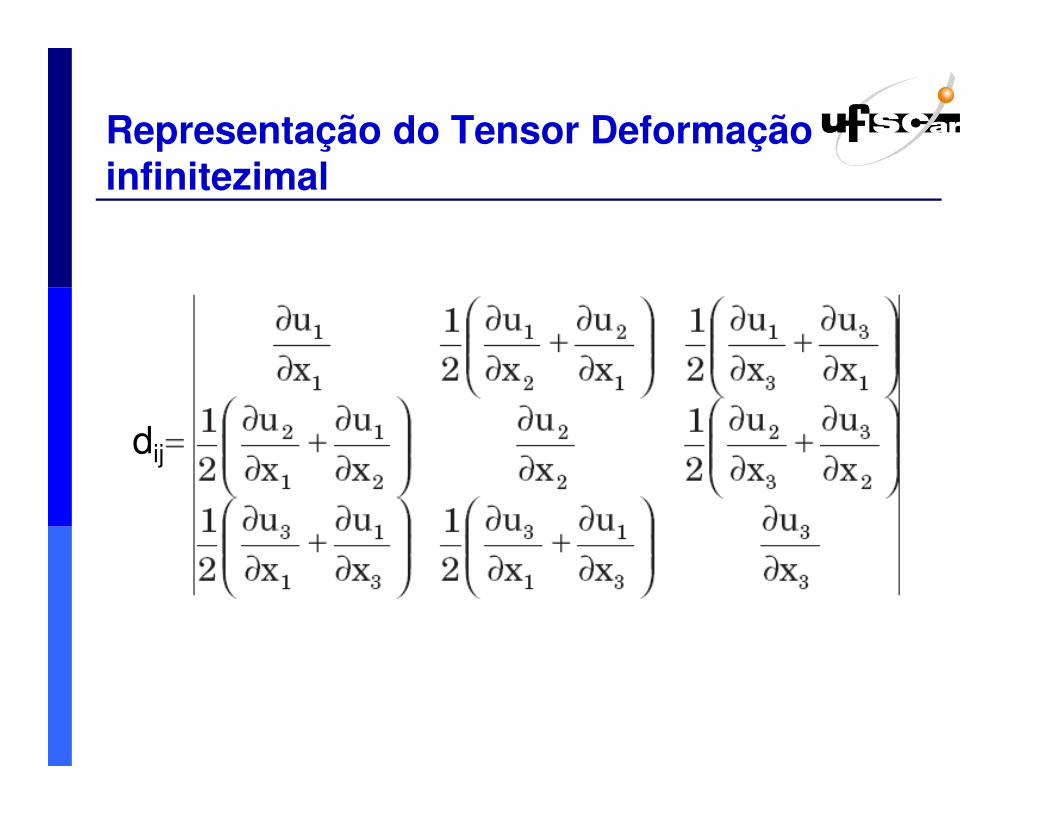
Representação do Tensor Deformação infinitezimal
dij
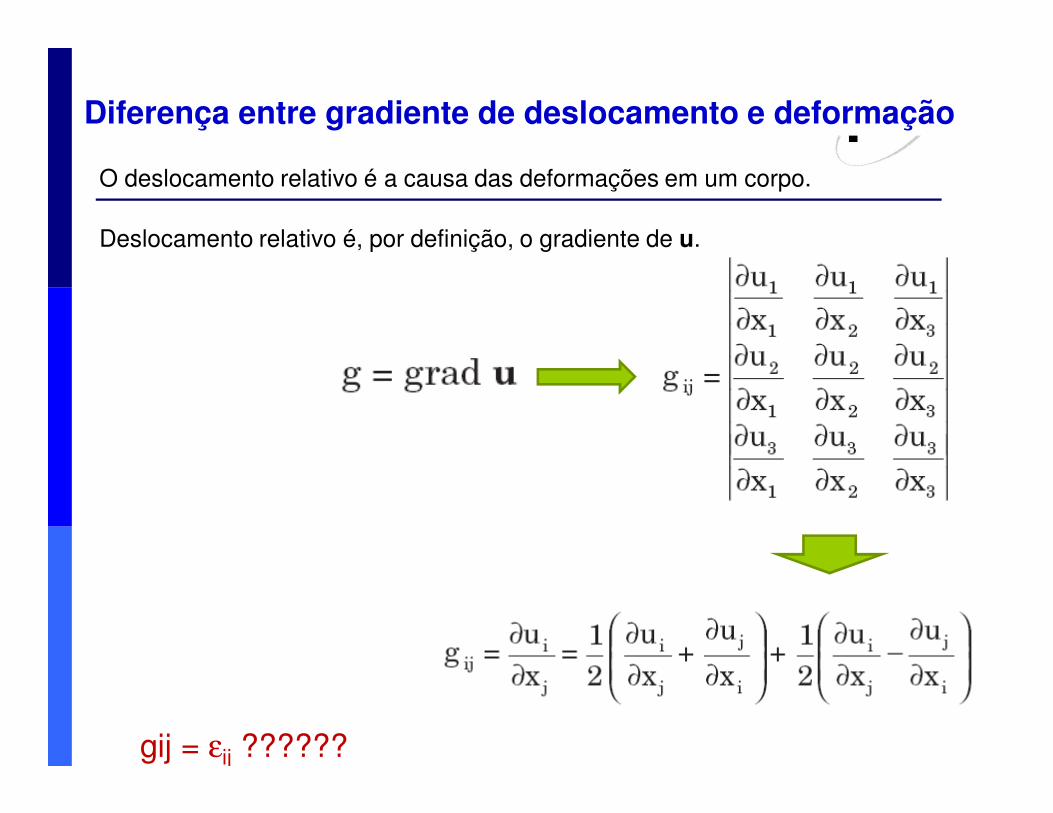
Diferença entre gradiente de deslocamento e deformação
gij = εij ??????
O deslocamento relativo é a causa das deformações em um corpo.
Deslocamento relativo é, por definição, o gradiente de u.
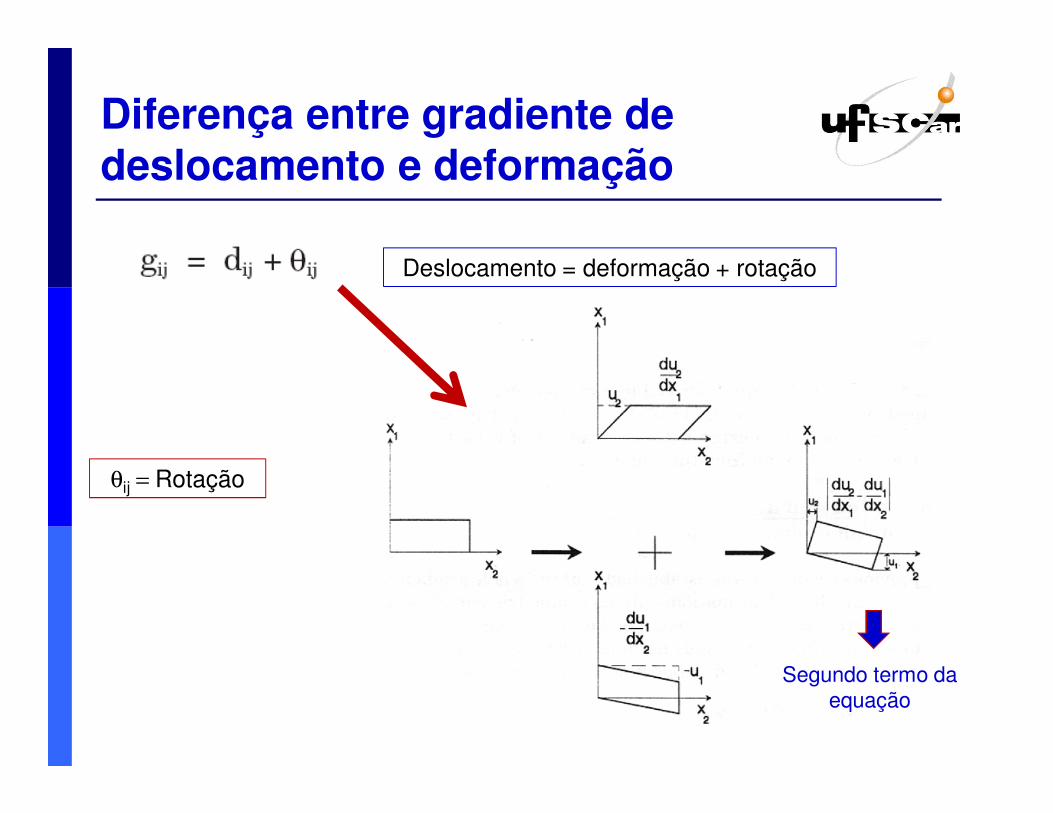
Diferença entre gradiente de deslocamento e deformação
θij = Rotação
Deslocamento = deformação + rotação
Segundo termo da equação
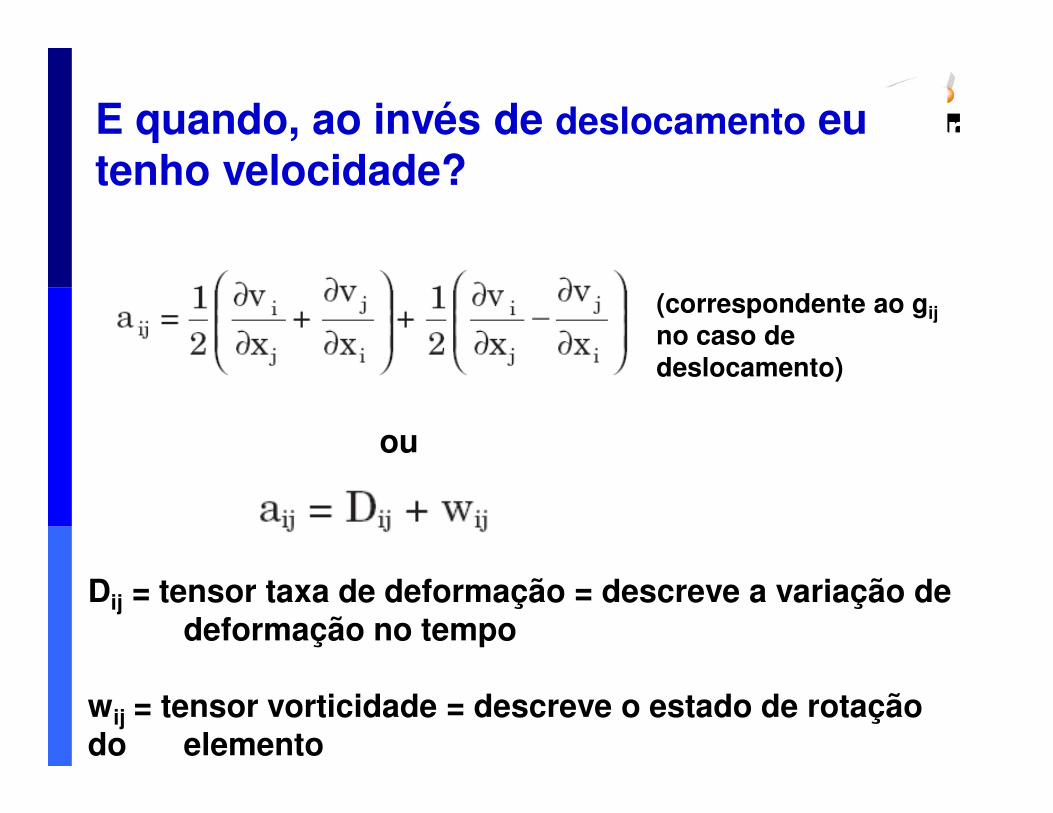
E quando, ao invés de deslocamento eu tenho velocidade?
(correspondente ao gijno caso de deslocamento)
ou
Dij = tensor taxa de deformação = descreve a variação de deformação no tempo
wij = tensor vorticidade = descreve o estado de rotação do elemento
Pode-se observar que a taxa de cisalhamento está associada ao gradiente de velocidades:
vou r
∇∂
∂
j
i
x
v
Vetor velocidade possui 3 componentes, que em coordenadas cartesianas são: vx, vy e vz.A variação de cada uma delas nos 3 eixos resultará em 9 componentes.
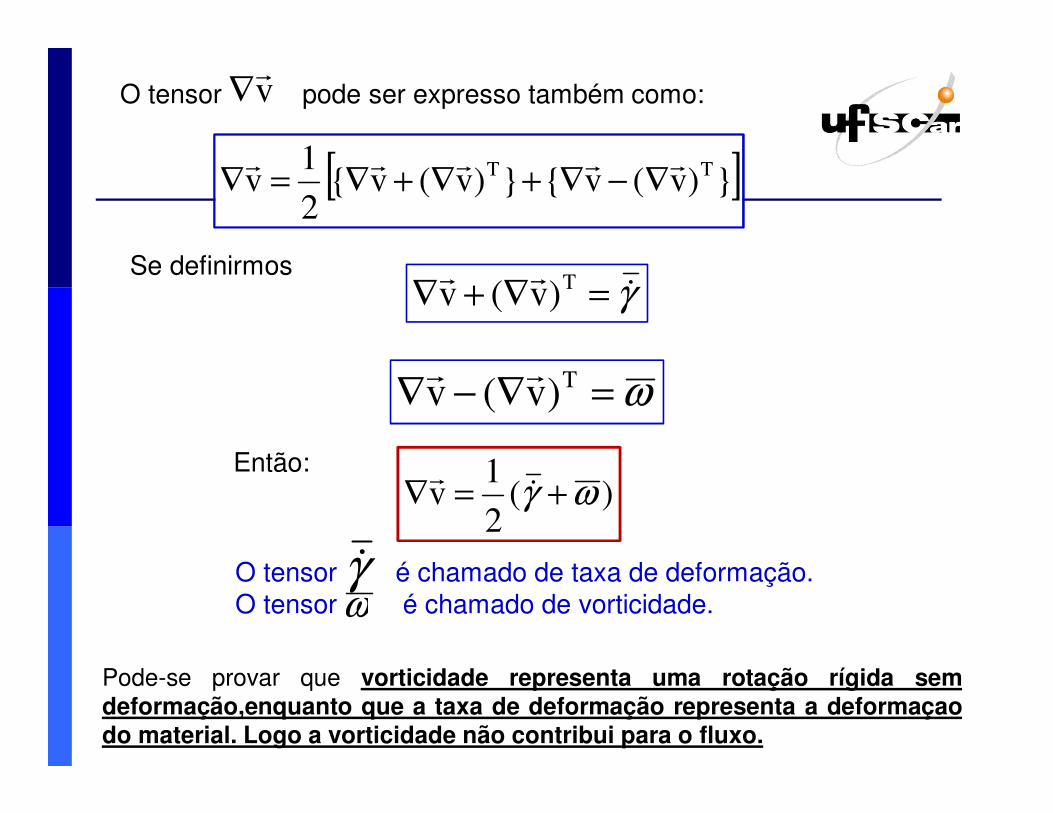
O tensor pode ser expresso também como:vr
∇
[ ]})v(v{})v(v{2
1v TT rrrrr
∇−∇+∇+∇=∇
Se definirmosγ&
rr=∇+∇ T)v(v
ω=∇−∇ T)v(vrr
Então:)(
2
1v ωγ +=∇ &r
O tensor é chamado de taxa de deformação.O tensor é chamado de vorticidade.
γ&ω
Pode-se provar que vorticidade representa uma rotação rígida semdeformação,enquanto que a taxa de deformação representa a deformaçaodo material. Logo a vorticidade não contribui para o fluxo.
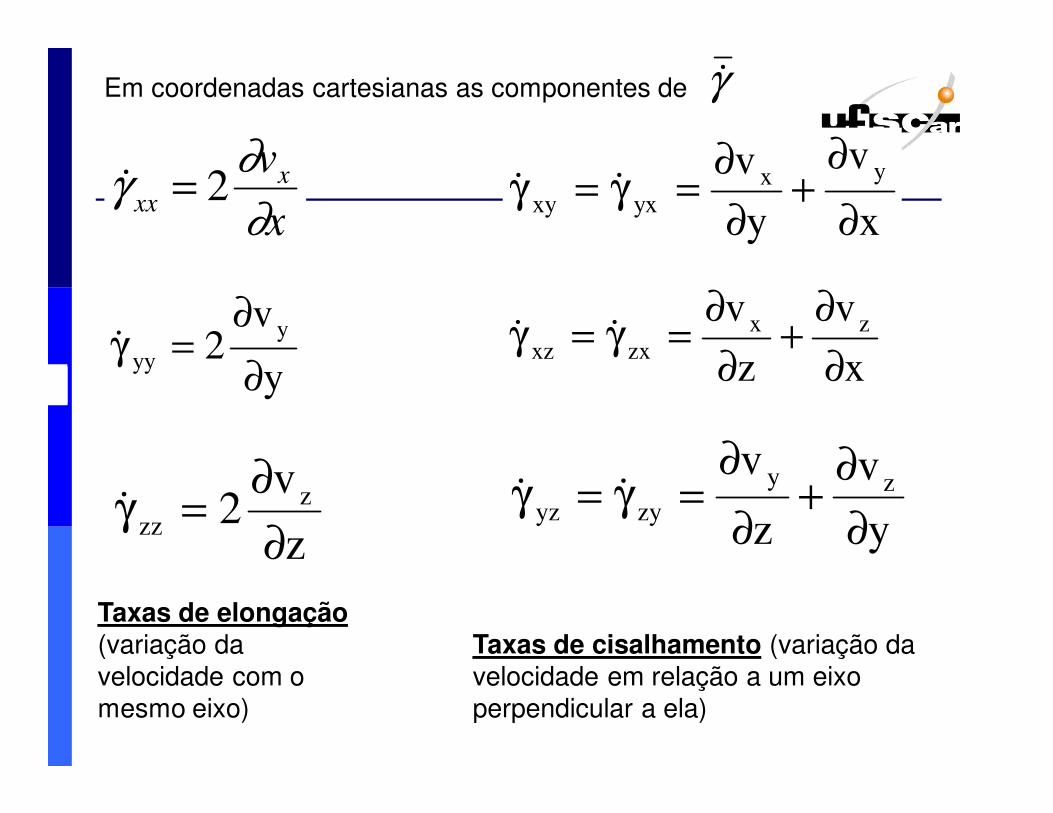
Em coordenadas cartesianas as componentes de γ&
x
vxxx
∂
∂γ 2=&
y
v2
y
yy∂
∂=γ&
z
v2 z
zz∂
∂=γ&
x
v
y
v yxyxxy
∂
∂+
∂
∂=γ=γ &&
x
v
z
v zx
zxxz∂
∂+
∂
∂=γ=γ &&
y
v
z
vzy
zyyz∂
∂+
∂
∂=γ=γ &&
Taxas de elongação(variação da velocidade com o mesmo eixo)
Taxas de cisalhamento (variação da velocidade em relação a um eixo perpendicular a ela)
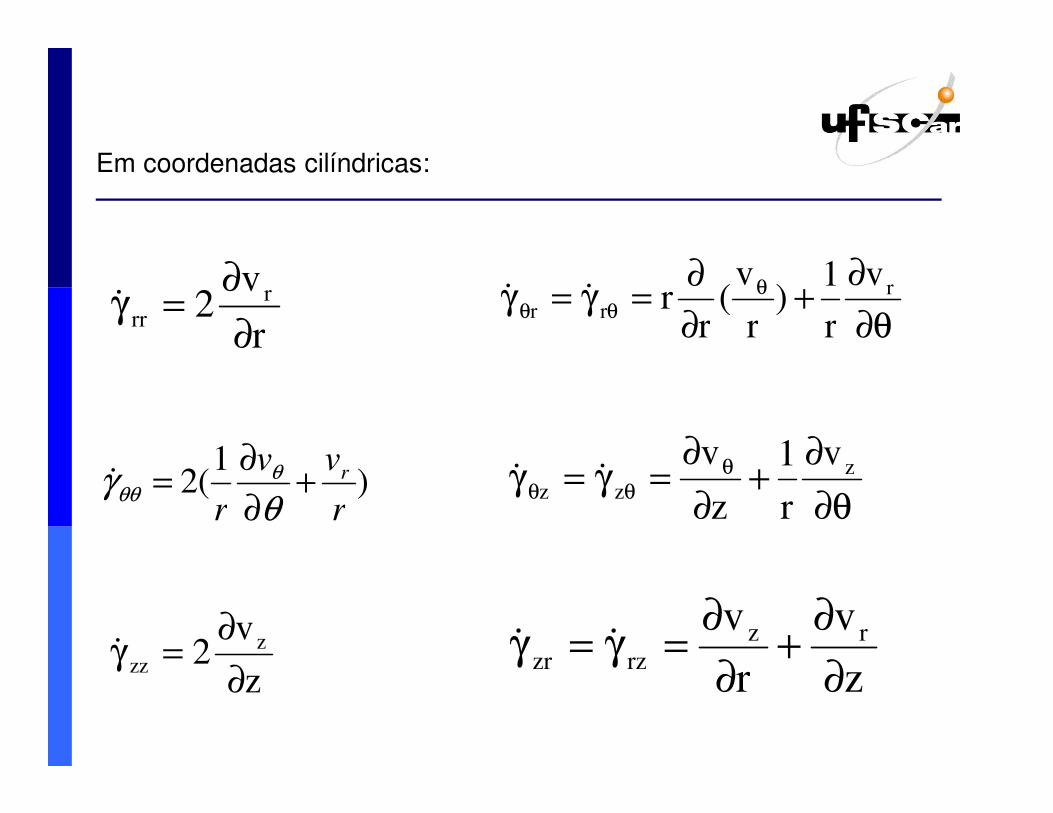
Em coordenadas cilíndricas:
r
v2 r
rr∂
∂=γ&
)1
(2r
vv
r
r+∂
∂=
θγ θ
θθ&
z
v2 z
zz∂
∂=γ&
θ∂
∂+
∂
∂=γ=γ θ
θθr
rr
v
r
1)
r
v(
rr&&
θ∂
∂+
∂
∂=γ=γ θ
θθz
zz
v
r
1
z
v&&
z
v
r
v rz
rzzr∂
∂+
∂
∂=γ=γ &&
30
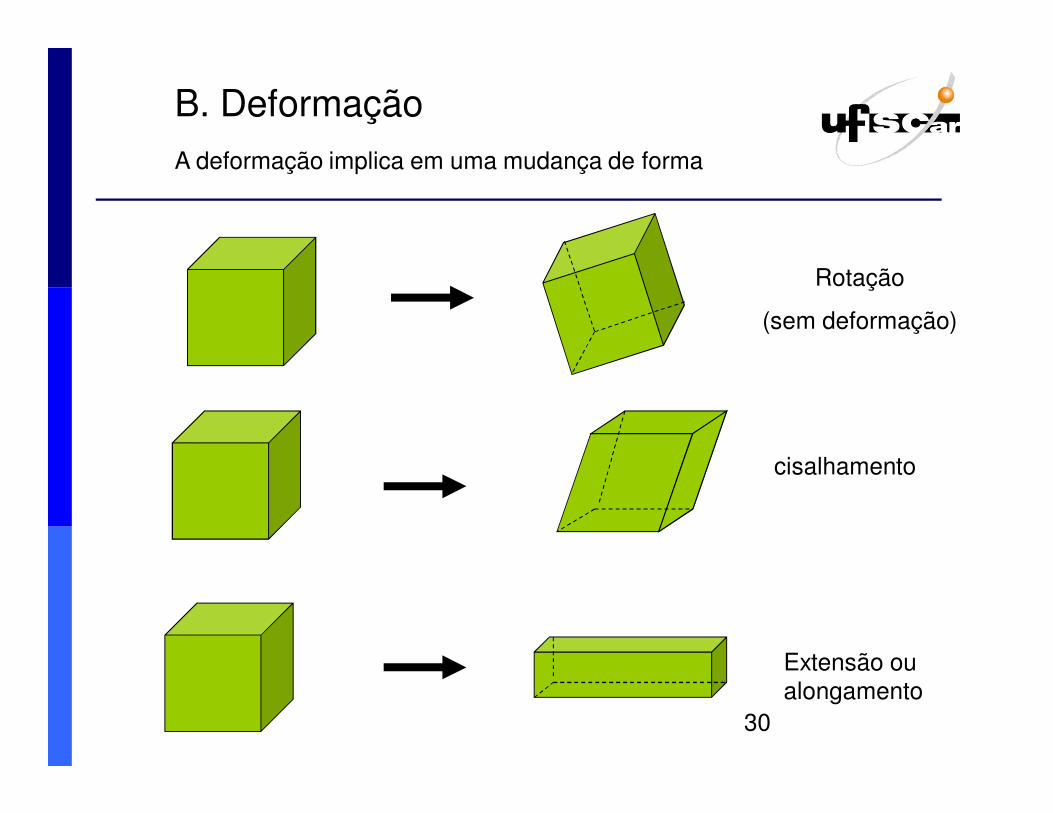
B. DeformaçãoA deformação implica em uma mudança de forma
Rotação
(sem deformação)
cisalhamento
Extensão ou alongamento
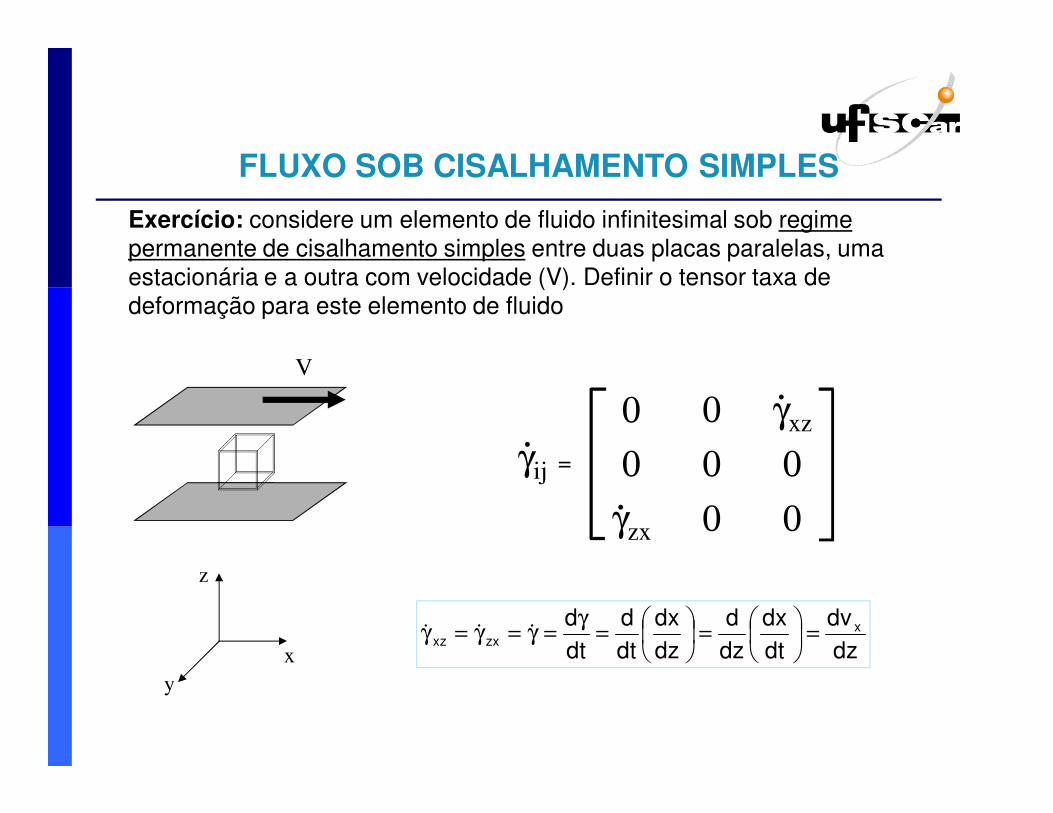
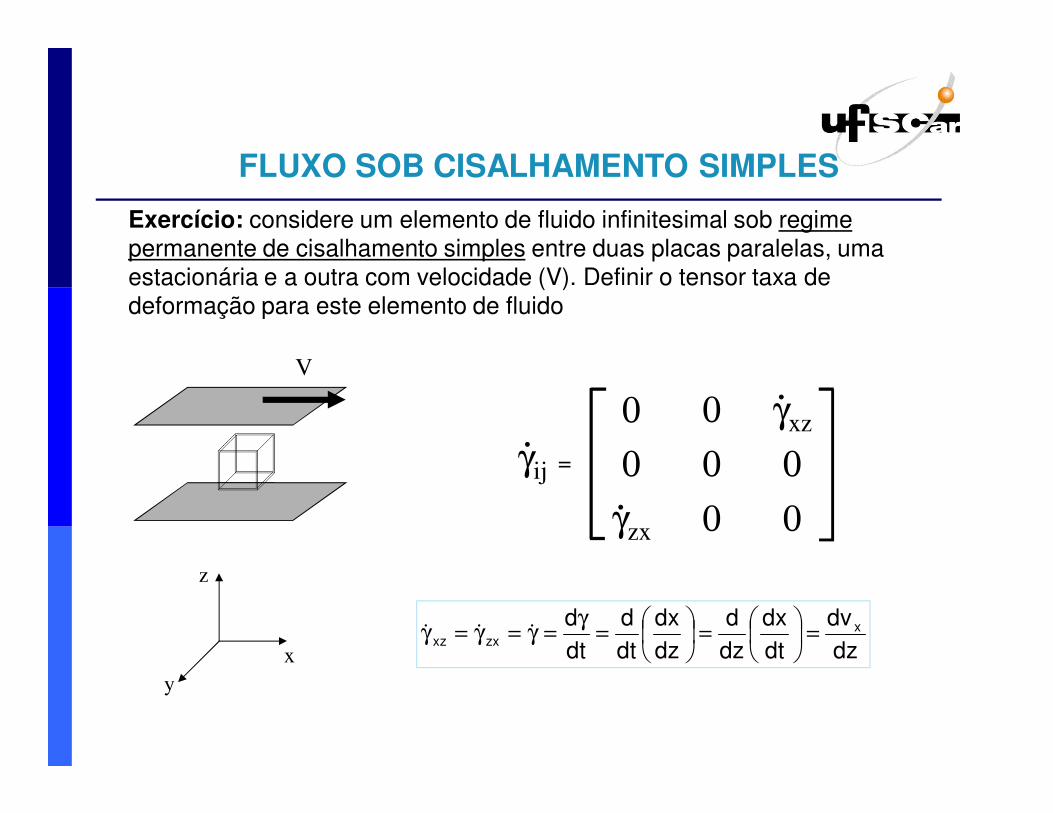
FLUXO SOB CISALHAMENTO SIMPLES
z
y
x
V
Exercício: considere um elemento de fluido infinitesimal sob regime permanente de cisalhamento simples entre duas placas paralelas, uma estacionária e a outra com velocidade (V). Definir o tensor taxa de deformação para este elemento de fluido
0 0 γxz
0 0 0
γzx 0 0
γij =
dzdv
dtdx
dzd
dzdx
dtd
dtd x
zxxz =
=
=
γ=γ=γ=γ &&&
32
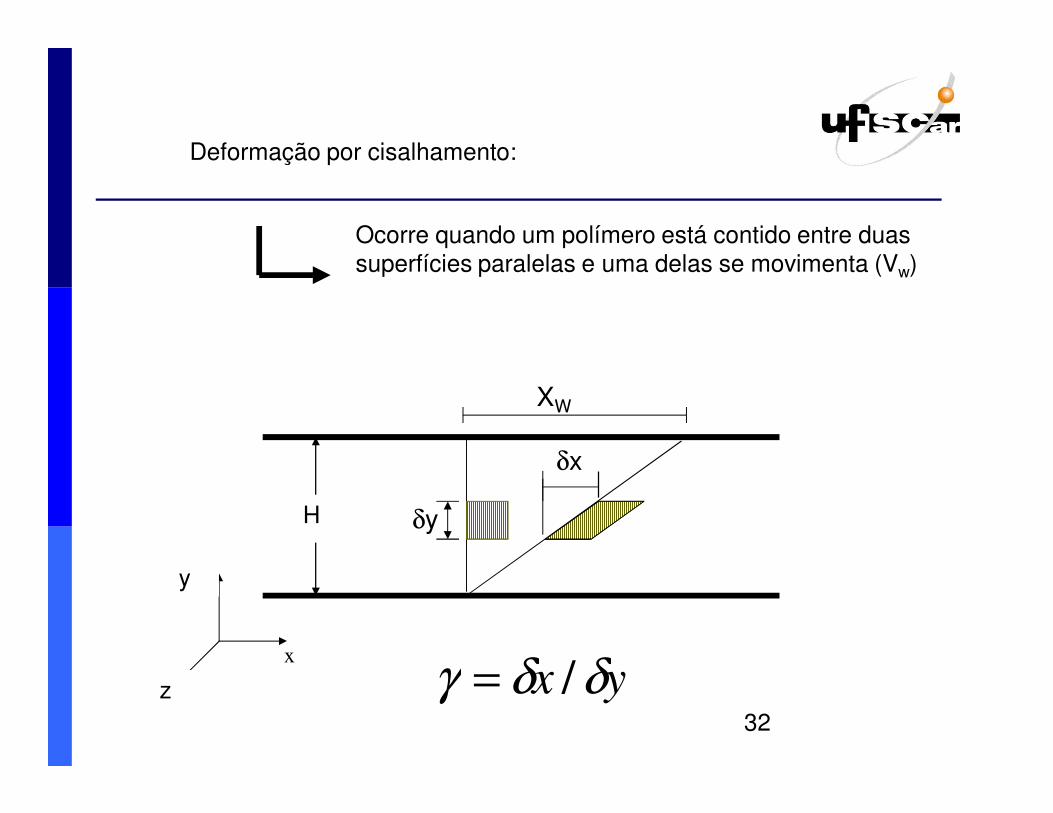
Deformação por cisalhamento:
Ocorre quando um polímero está contido entre duas superfícies paralelas e uma delas se movimenta (Vw)
yx δδγ /=
XW
H δy
δx
z
y
x
y
z
33
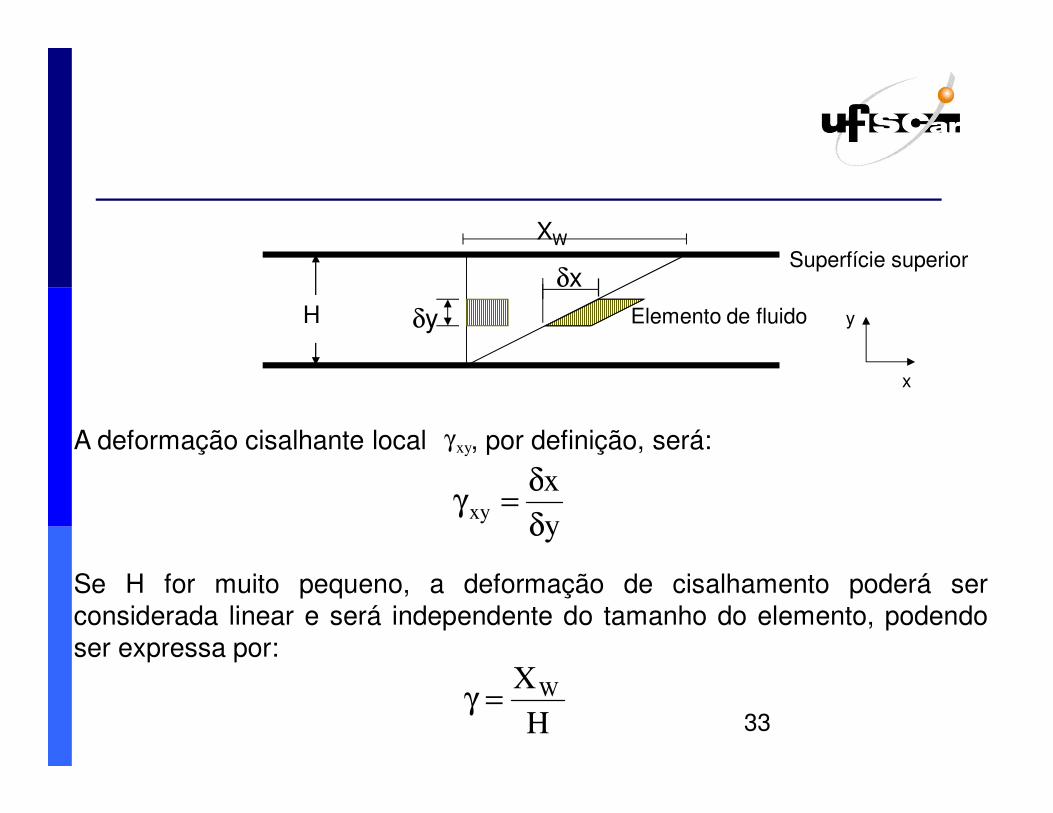
A deformação cisalhante local , por definição, será:
Se H for muito pequeno, a deformação de cisalhamento poderá serconsiderada linear e será independente do tamanho do elemento, podendoser expressa por:
y
xxy
δ
δ=γ
H
X W=γ
xyγ
XW
H δy
δxSuperfície superior
Elemento de fluido y
x
34
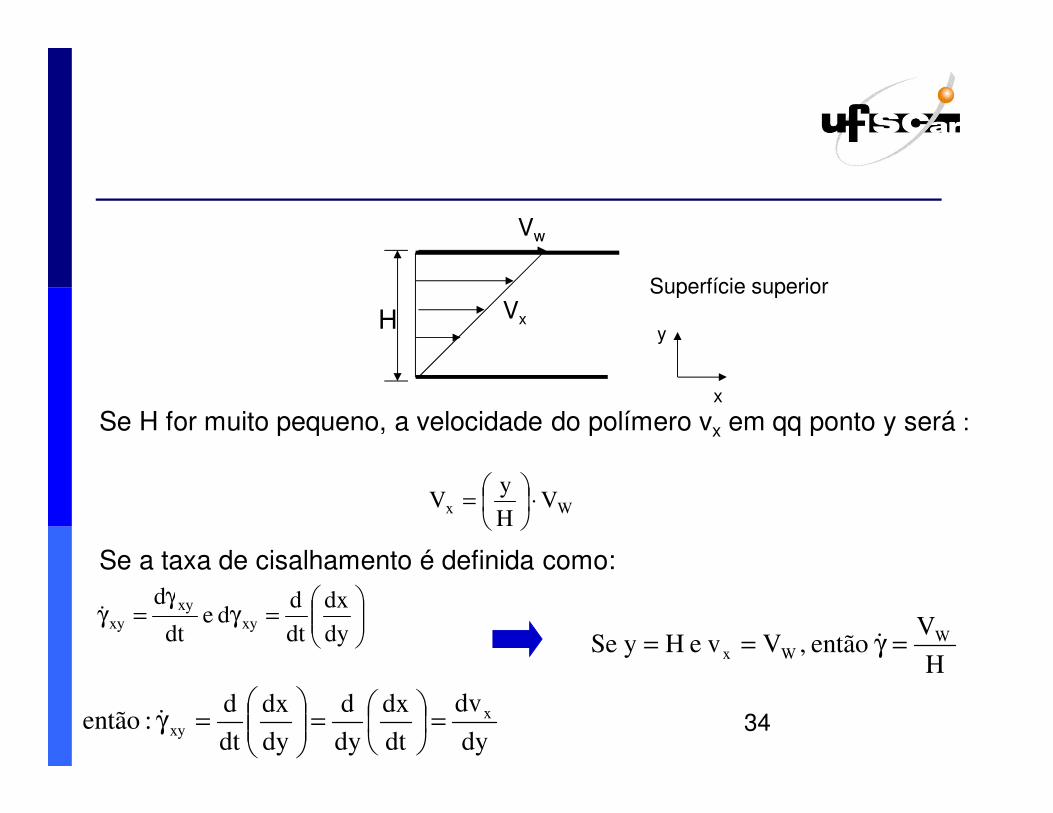
Se H for muito pequeno, a velocidade do polímero vx em qq ponto y será :
Se a taxa de cisalhamento é definida como:
=γ
γ=γ
dy
dx
dt
dd e
dt
dxy
xy
xy&
Wx VH
yV ⋅
=
dy
dv
dt
dx
dy
d
dy
dx
dt
d :então x
xy =
=
=γ&
H
V então ,V ve Hy Se W
Wx =γ== &
H
Vw
Vxy
x
Superfície superior
FLUXO SOB CISALHAMENTO SIMPLES
z
y
x
V
Exercício: considere um elemento de fluido infinitesimal sob regime permanente de cisalhamento simples entre duas placas paralelas, uma estacionária e a outra com velocidade (V). Definir o tensor taxa de deformação para este elemento de fluido
0 0 γxz
0 0 0
γzx 0 0
γij =
dzdv
dtdx
dzd
dzdx
dtd
dtd x
zxxz =
=
=
γ=γ=γ=γ &&&
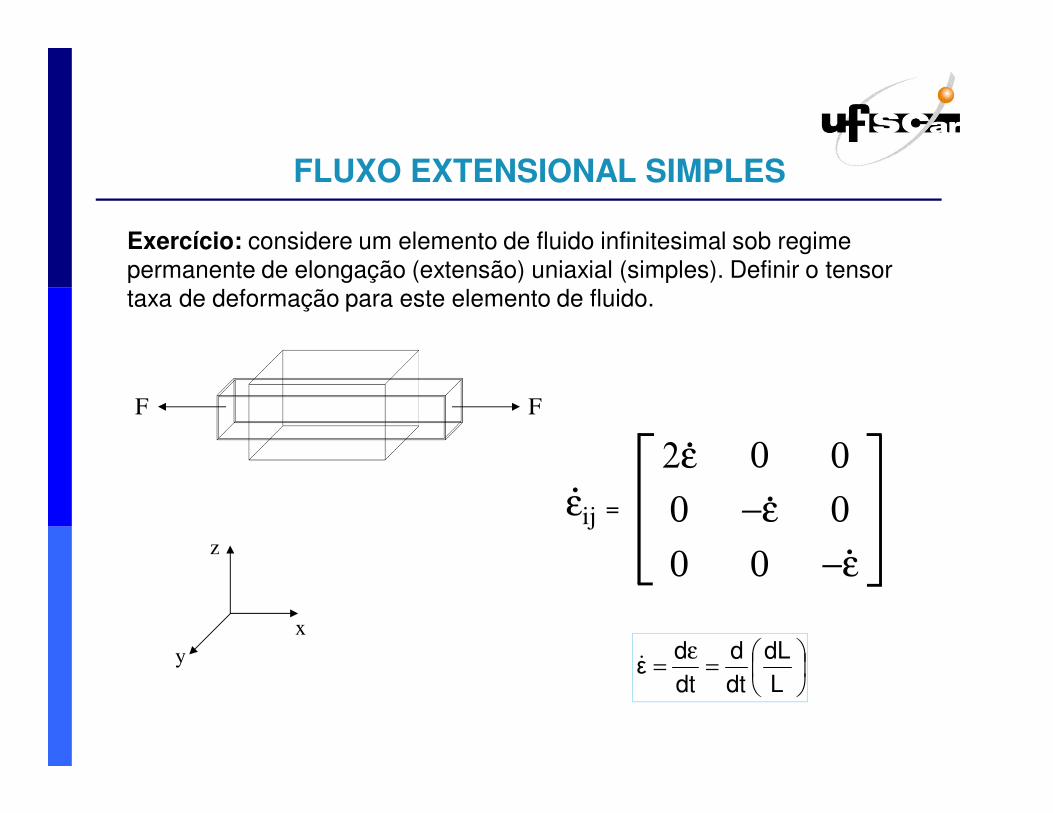
FLUXO EXTENSIONAL SIMPLES
z
y
x
Exercício: considere um elemento de fluido infinitesimal sob regime permanente de elongação (extensão) uniaxial (simples). Definir o tensor taxa de deformação para este elemento de fluido.
FF
2ε 0 0
0 −ε 0
0 0 −ε
εij =
=
ε=
LdL
dtd
dtd
ε&
EQUAÇÕES DE CONSERVAÇÃO
REOLOGIA é o estudo do fluxo e deformação da matéria.
FLUXO indica movimento. Movimento pode ser representado por velocidade.
Velocidade de que?Velocidade (Movimento) de massa, energia..
Quantificar o movimento de massa?Quantidade de movimento = massa x velocidade.
Qualquer abordagem reológica depende da descrição do movimento em umsistema de mecânica do contínuo e na suposição de muitos comportamentosintrínsecos do material.
Na prática, em ordem de determinar este comportamento, usa-se fluxosviscosimétricos, que devido a sua simplicidade, fornecem relações simplesentre componentes de tensão e história de fluxo, sob certas condições
O fato de identificarmos este conjunto como uma material simplessignifica que, em quaisquer duas partes deste volume, nós poderemosencontrar conjuntos similares de elementos de matéria.
Qual será a escala de observação que valida esta suposição?
átomos?? partículas sólidas?? moléculas??
A avaliação de um material em uma dada parte deve, portanto, levar em consideração um certo número de componentes básicos sob os quais pode-se inferir sobre a média de muitas propriedades físicas.
Há, portanto, uma escala mínima na qual pode-se observar razoavelmente o sistema e considerá-lo efetivamente como um material (i.e., o volume
mínimo de uma dada parte do sistema).
Um MATERIAL pode ser definido como um conjunto de elementos de matéria contidos em um volume.
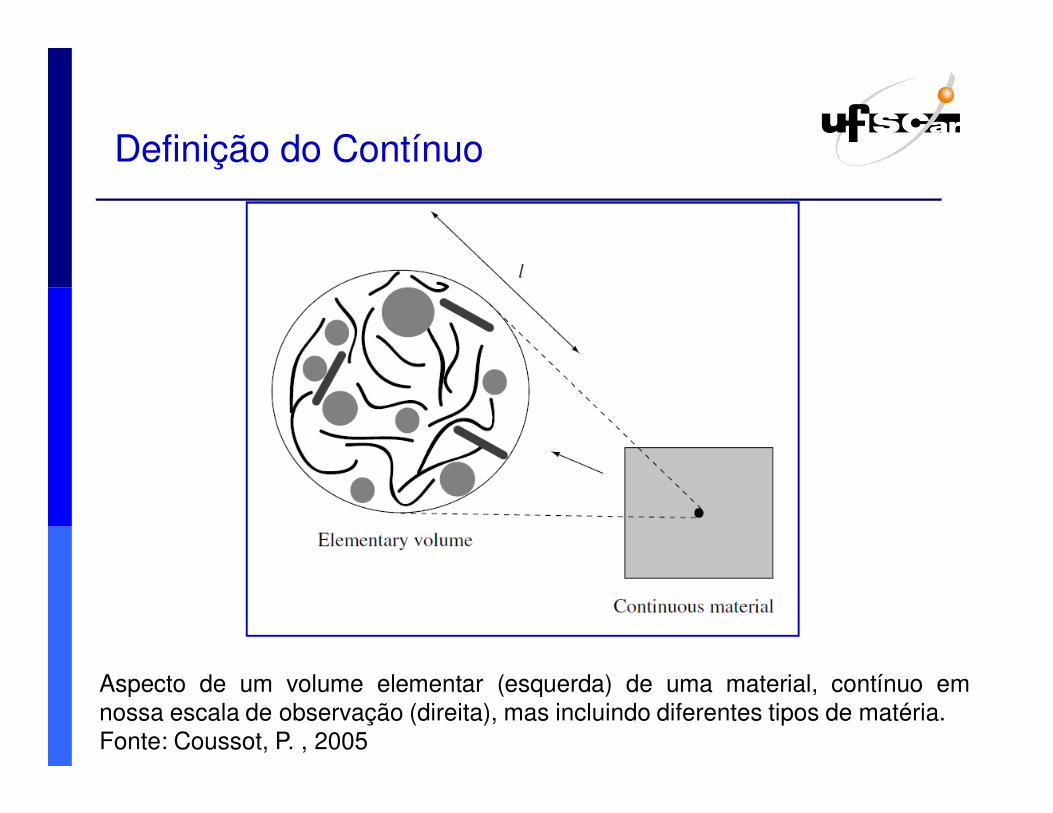
Definição do Contínuo
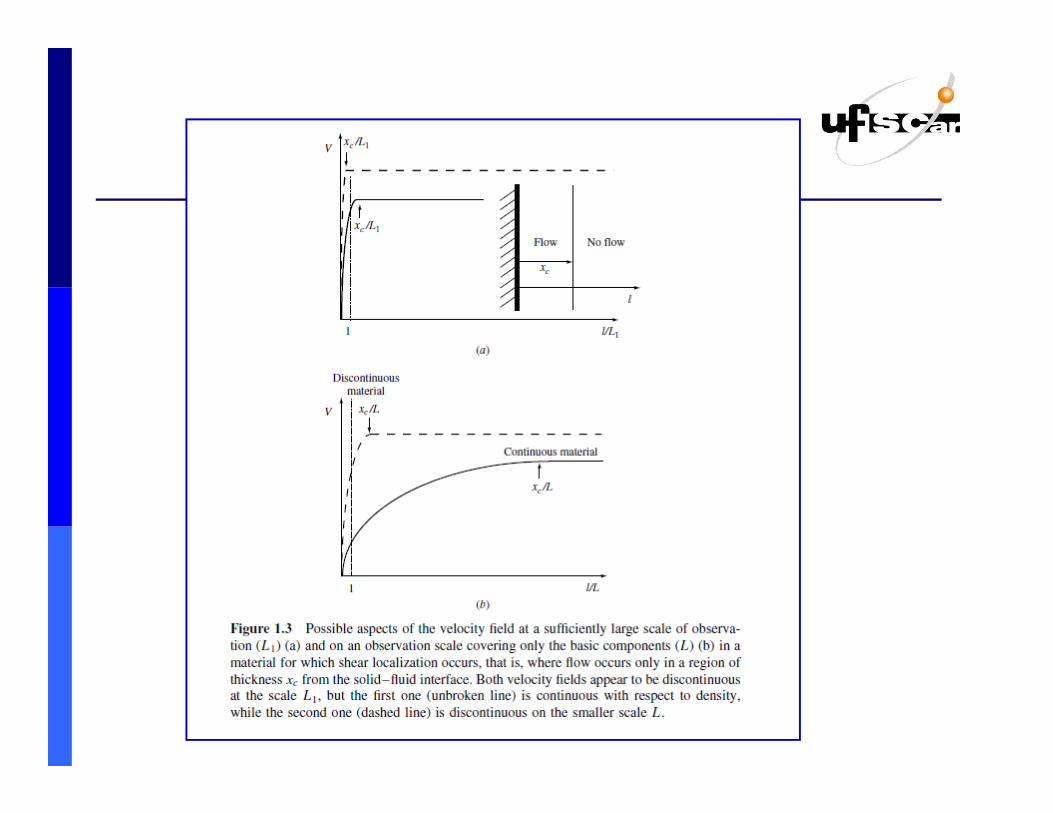
Aspecto de um volume elementar (esquerda) de uma material, contínuo emnossa escala de observação (direita), mas incluindo diferentes tipos de matéria.Fonte: Coussot, P. , 2005
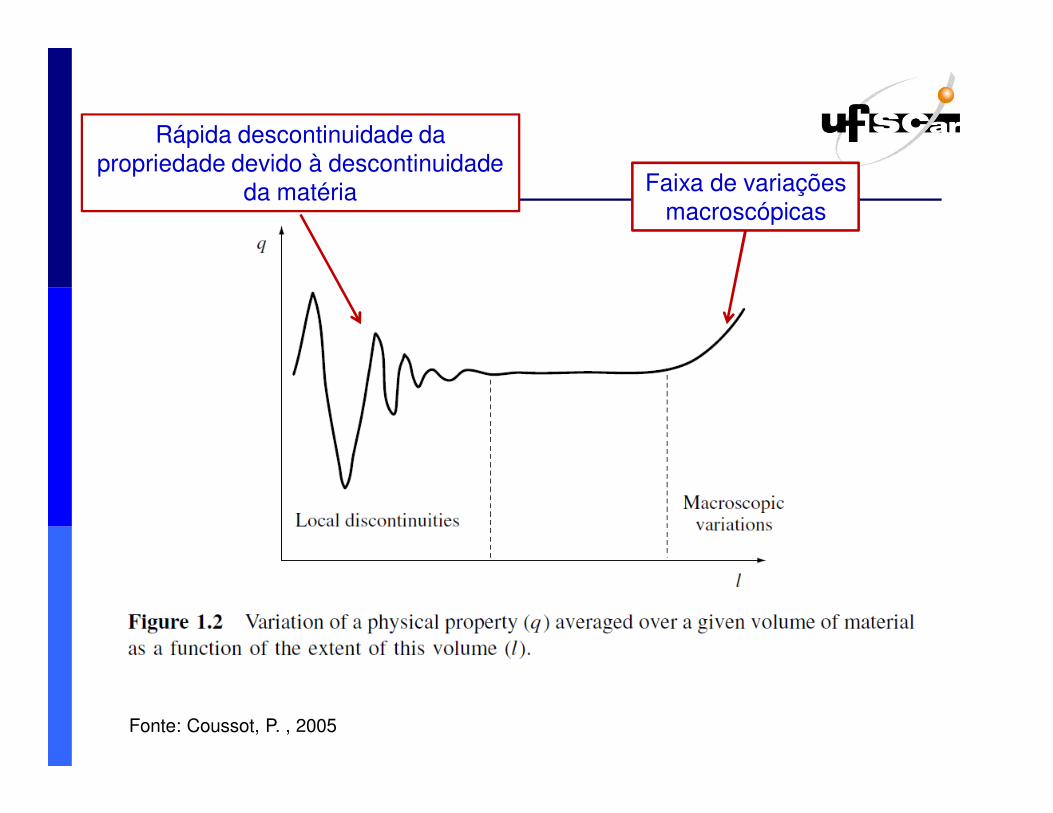
Fonte: Coussot, P. , 2005
Rápida descontinuidade da propriedade devido à descontinuidade
da matéria Faixa de variações macroscópicas
O material pode ser considerado como um CONTÍNUOquando as médias das propriedades físicas (densidade,força, velocidade, temperatura, etc), sob partes elementaresdo material variam lentamente de uma parte para outra.
A suposição do CONTÍNUO implica que as variáveis físicas,que assumem os valores das propriedades médias, podemser descritas pelo contínuo e funções derivadascontinuamente no espaço e no tempo.
Isto tornará possível a descrição da evolução do material a partir de um número de equações, relacionando um número de variáveis e suas variações no tempo e espaço.
CONTÍNUO: conceito
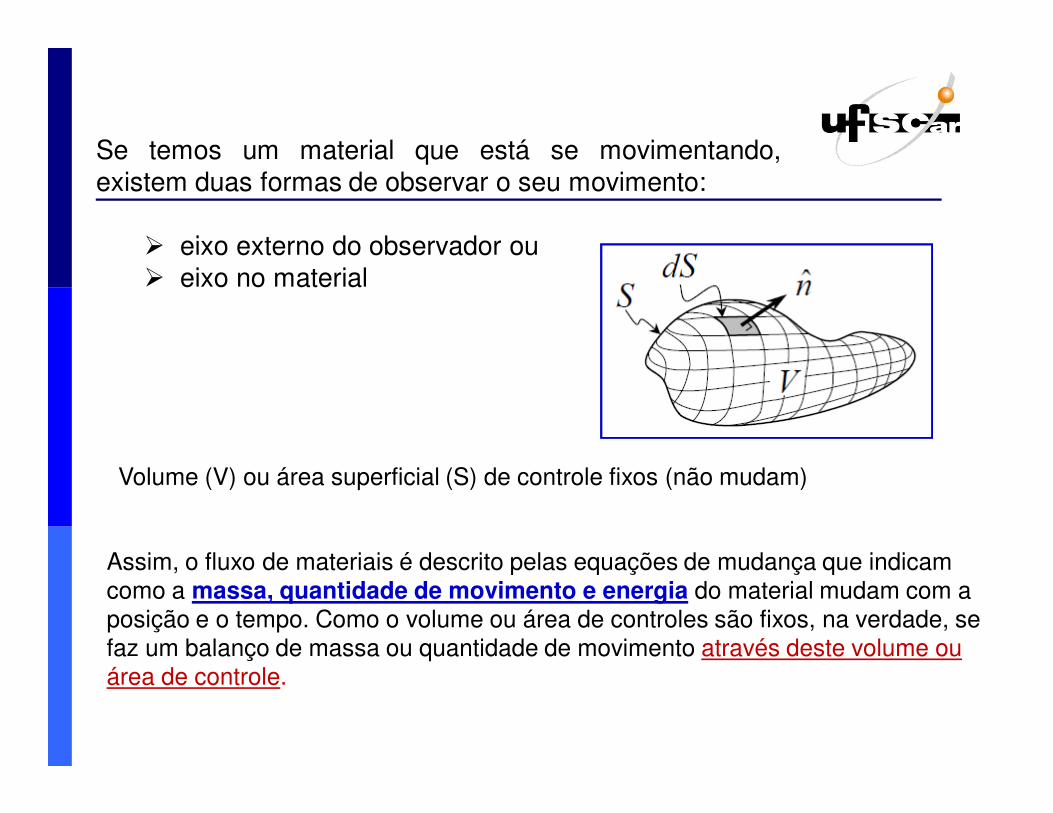
Assim, o fluxo de materiais é descrito pelas equações de mudança que indicam como a massa, quantidade de movimento e energia do material mudam com a posição e o tempo. Como o volume ou área de controles são fixos, na verdade, se faz um balanço de massa ou quantidade de movimento através deste volume ou área de controle.
Volume (V) ou área superficial (S) de controle fixos (não mudam)
Se temos um material que está se movimentando,existem duas formas de observar o seu movimento:
� eixo externo do observador ou� eixo no material
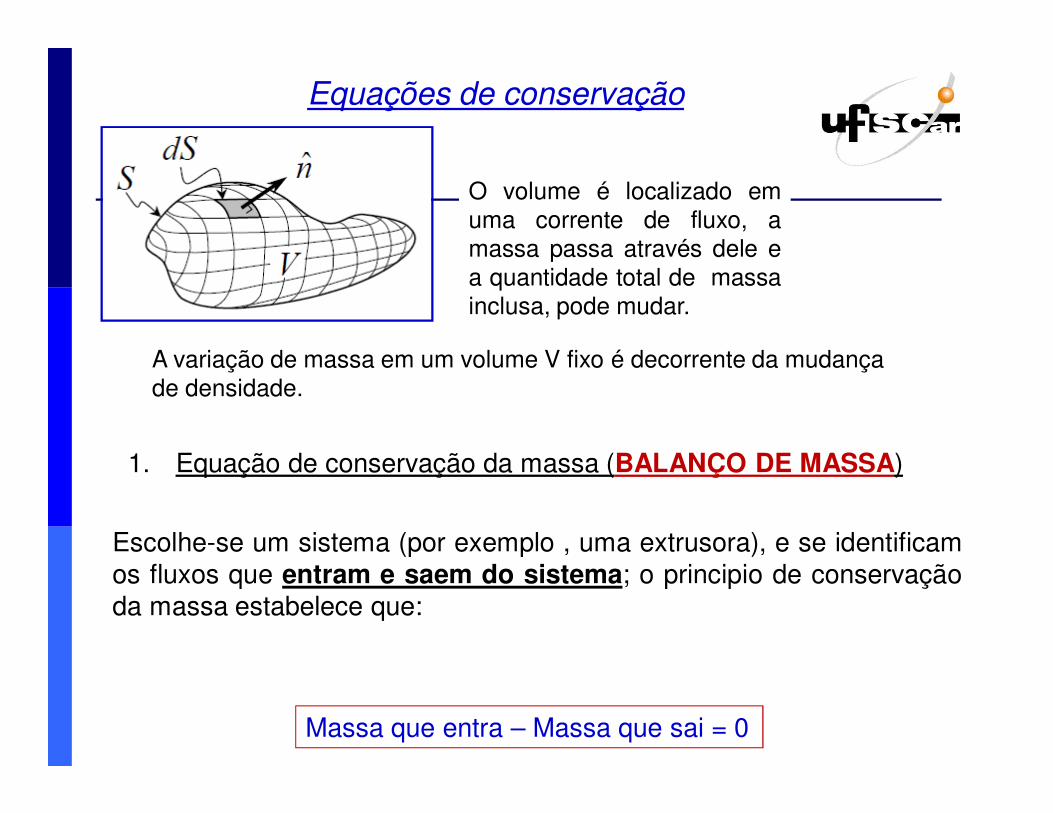
O volume é localizado emuma corrente de fluxo, amassa passa através dele ea quantidade total de massainclusa, pode mudar.
A variação de massa em um volume V fixo é decorrente da mudança de densidade.
Equações de conservação
1. Equação de conservação da massa (BALANÇO DE MASSA)
Escolhe-se um sistema (por exemplo , uma extrusora), e se identificamos fluxos que entram e saem do sistema; o principio de conservaçãoda massa estabelece que:
Massa que entra – Massa que sai = 0
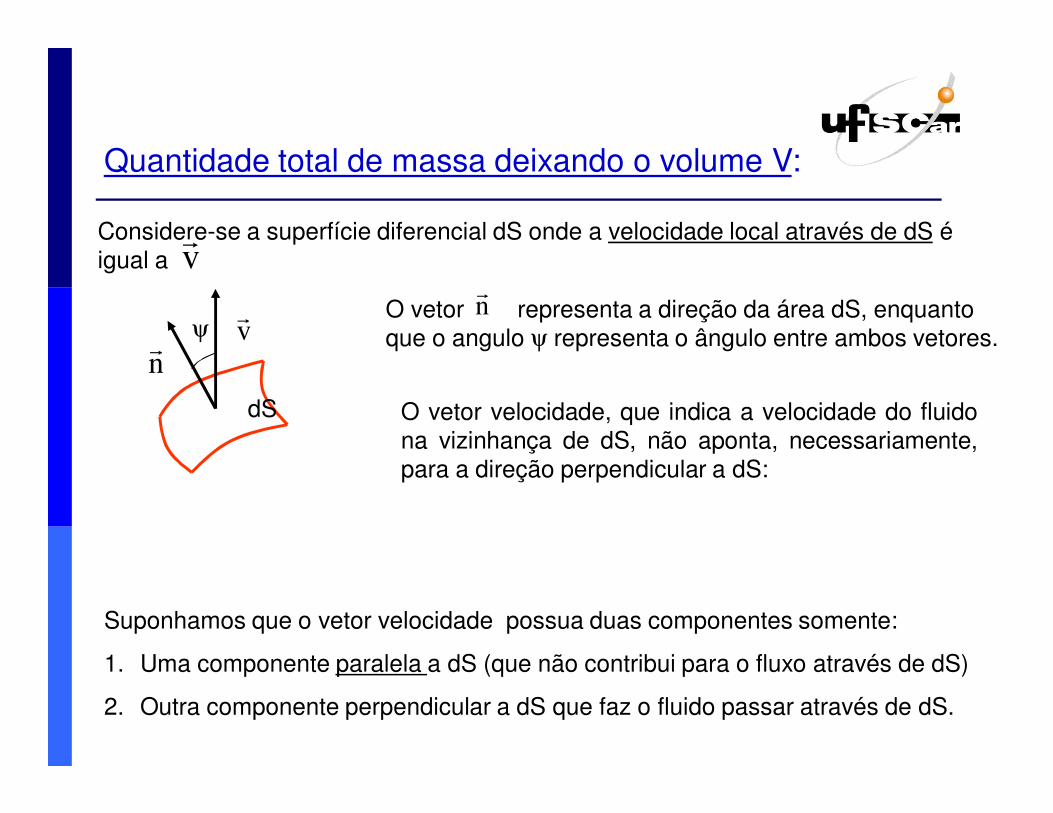
Quantidade total de massa deixando o volume V:
Considere-se a superfície diferencial dS onde a velocidade local através de dS é igual a v
r
dS
vr
nr
ψO vetor representa a direção da área dS, enquantoque o angulo ψ representa o ângulo entre ambos vetores.
nr
Suponhamos que o vetor velocidade possua duas componentes somente:
1. Uma componente paralela a dS (que não contribui para o fluxo através de dS)
2. Outra componente perpendicular a dS que faz o fluido passar através de dS.
O vetor velocidade, que indica a velocidade do fluidona vizinhança de dS, não aponta, necessariamente,para a direção perpendicular a dS:
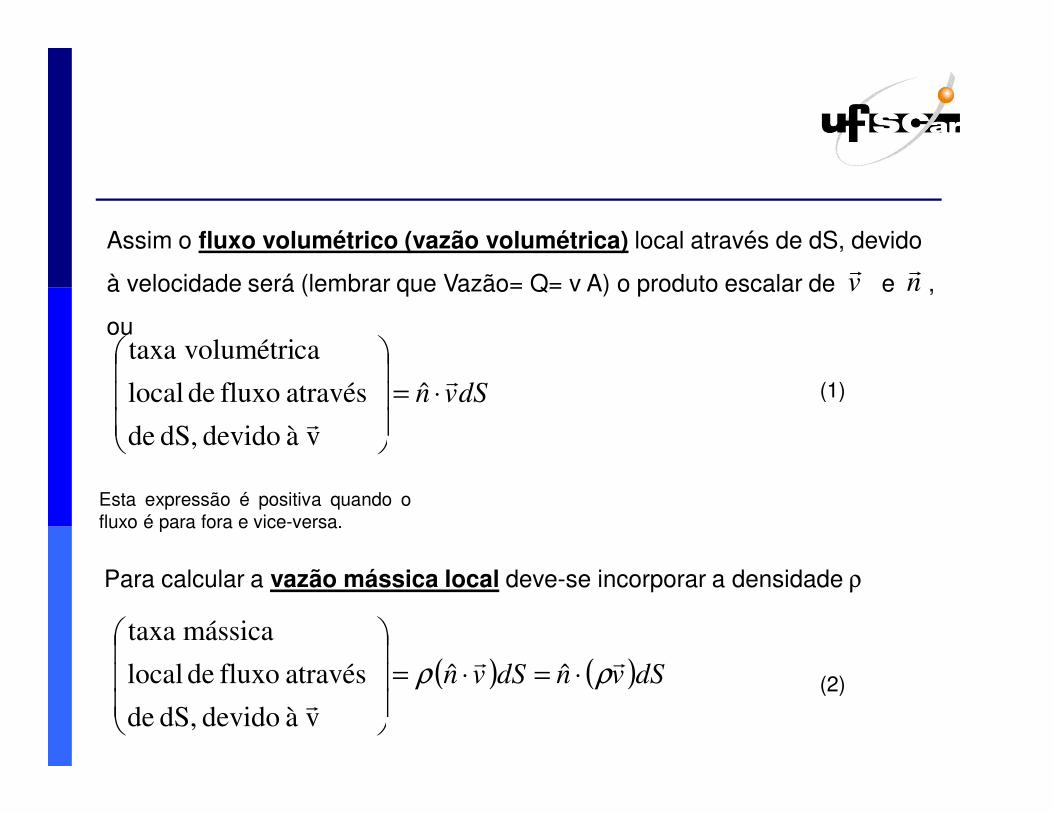
Assim o fluxo volumétrico (vazão volumétrica) local através de dS, devido
à velocidade será (lembrar que Vazão= Q= v A) o produto escalar de e ,
ou
vr
nr
dSvnr
r⋅=
ˆ
v à devido dS, de
através fluxo de local
ca volumétritaxa
Esta expressão é positiva quando ofluxo é para fora e vice-versa.
(1)
Para calcular a vazão mássica local deve-se incorporar a densidade ρ
( ) ( )dSvndSvnrr
rρρ ⋅=⋅=
ˆˆ
v à devido dS, de
através fluxo de local
mássica taxa
(2)
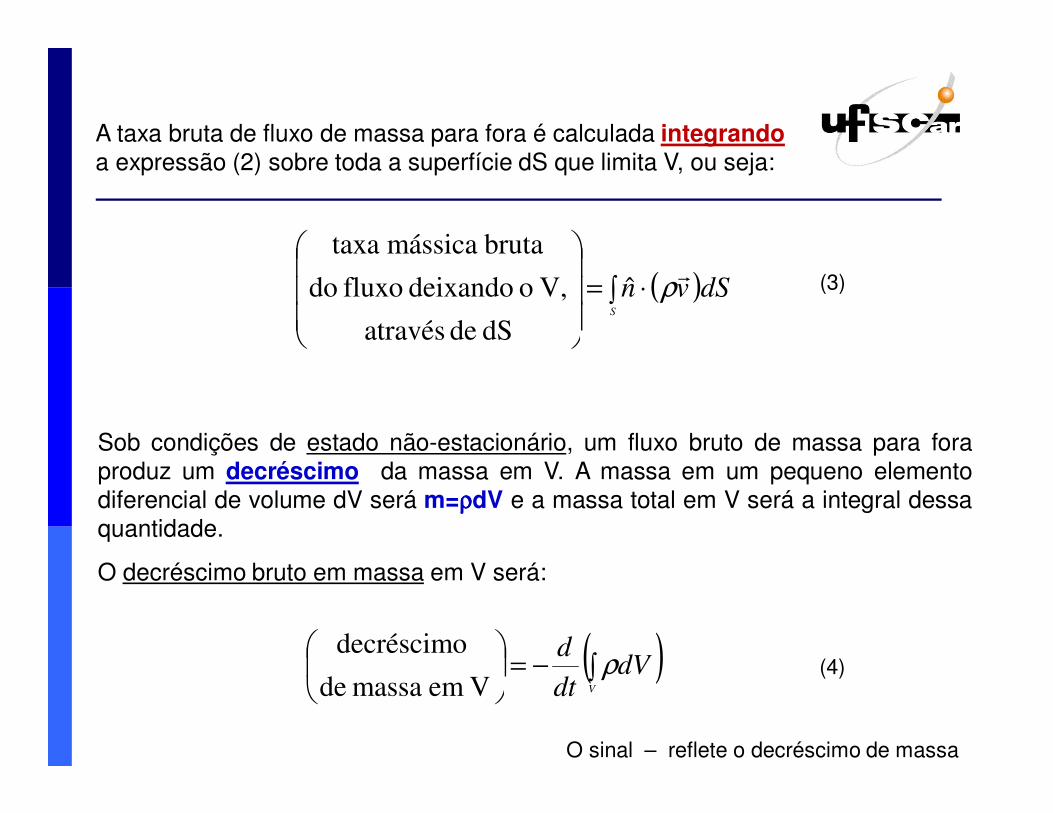
A taxa bruta de fluxo de massa para fora é calculada integrandoa expressão (2) sobre toda a superfície dS que limita V, ou seja:
Sob condições de estado não-estacionário, um fluxo bruto de massa para foraproduz um decréscimo da massa em V. A massa em um pequeno elementodiferencial de volume dV será m=ρρρρdV e a massa total em V será a integral dessaquantidade.
( )∫ ⋅=
S
dSvnr
ρˆ
dS de através
V, o deixando fluxo do
bruta mássica taxa
(3)
O decréscimo bruto em massa em V será:
( )∫−=
V
dVdt
dρ
V em massa de
decréscimo(4)
O sinal – reflete o decréscimo de massa
Se o fluxo de massa deve ser CONSERVADO, então a equação (4) deve serigual a (3):Decréscimo bruto em massa em V (massa que entra) = Taxa bruta de fluxo demassa, para fora, através de dS (massa que sai)
∫ ∫ ⋅=−
=
V S
dSvndVdt
d)()(
dS de através
V, deixando fluxo de
bruta mássica taxa
V em massa
de decréscimo
rrρρ
Equação de conservação da massa
(5)
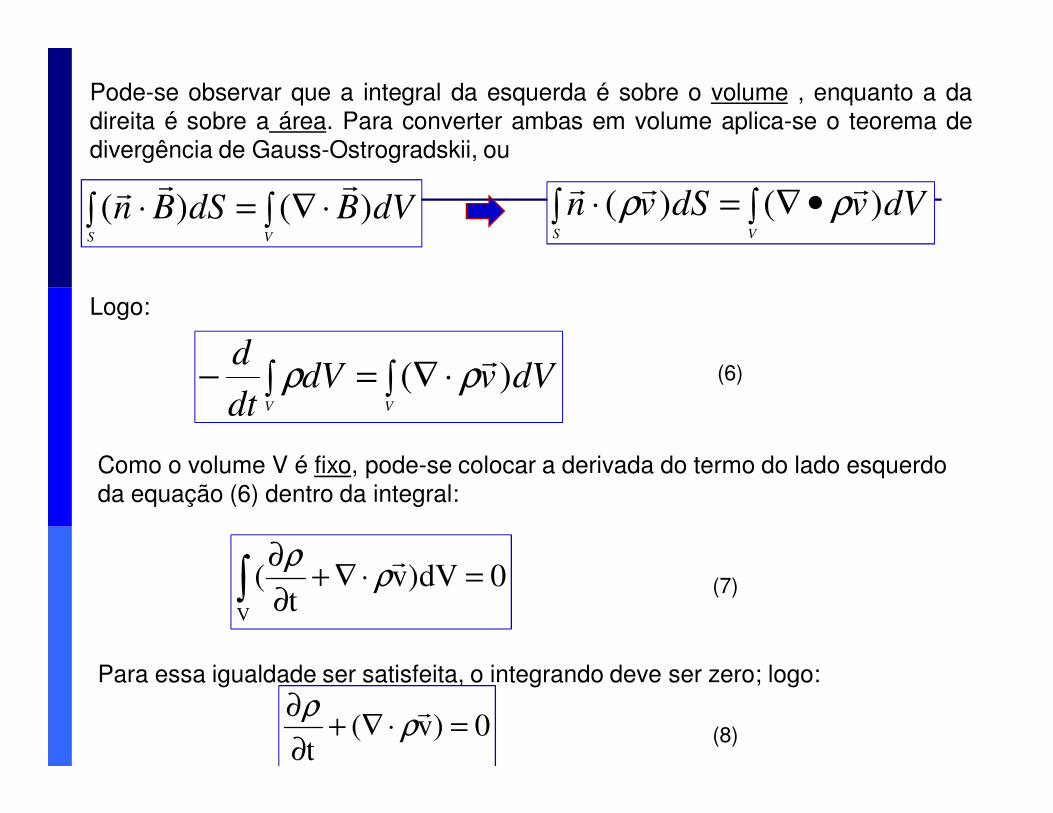
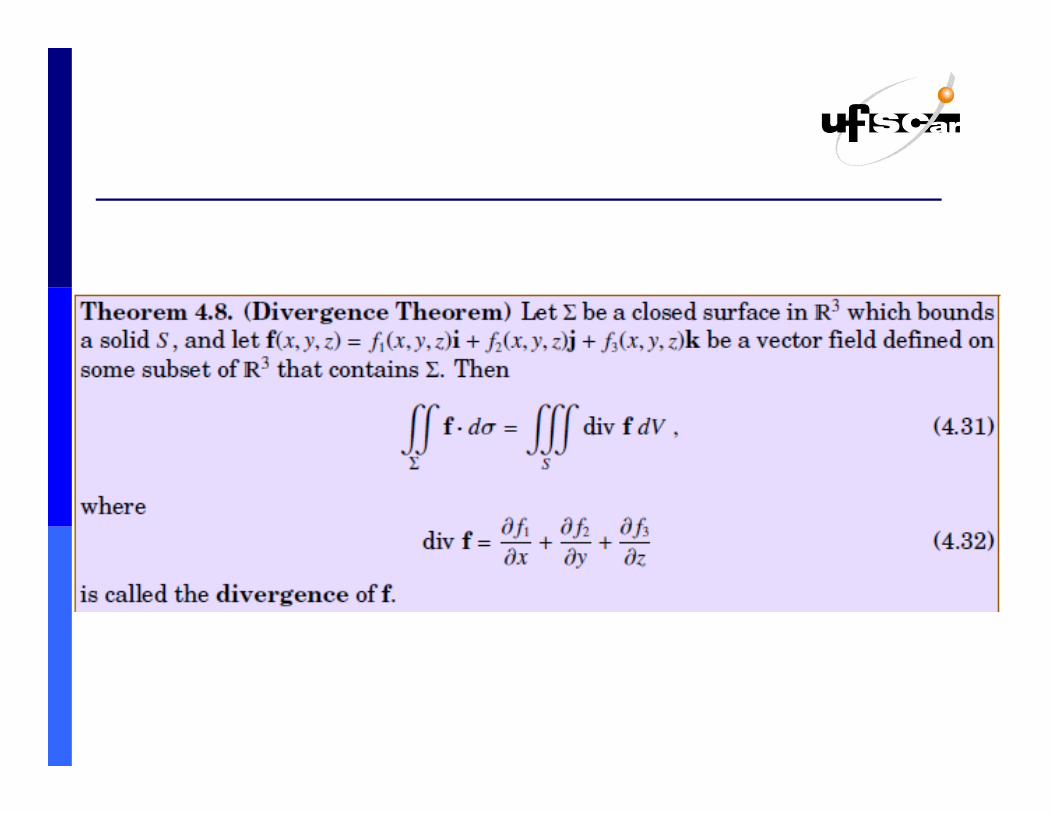
Pode-se observar que a integral da esquerda é sobre o volume , enquanto a dadireita é sobre a área. Para converter ambas em volume aplica-se o teorema dedivergência de Gauss-Ostrogradskii, ou
∫ ∫ ⋅∇=⋅S V
dVBdSBn )()(rrr
Logo:
∫ ∫ ⋅∇=−V V
dVvdVdt
d)(r
ρρ
Como o volume V é fixo, pode-se colocar a derivada do termo do lado esquerdo da equação (6) dentro da integral:
∫ =⋅∇+∂
∂
V
0dV)vt
(r
ρρ
Para essa igualdade ser satisfeita, o integrando deve ser zero; logo:
0)v(t
=⋅∇+∂
∂ rρ
ρ
∫ •∇=∫ ⋅VS
dVvdSvn )()(rrr
ρρ
(6)
(7)
(8)
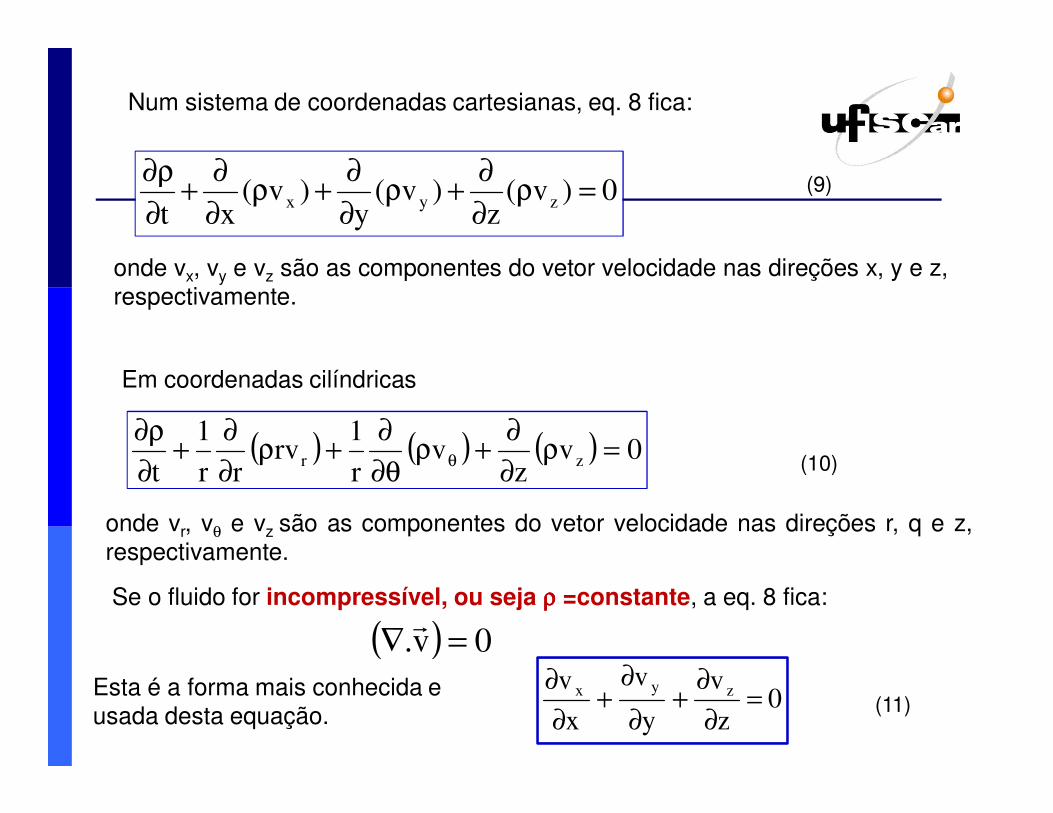
Num sistema de coordenadas cartesianas, eq. 8 fica:
0)v(z
)v(y
)v(xt
zyx =ρ∂
∂+ρ
∂
∂+ρ
∂
∂+
∂
∂ρ
onde vx, vy e vz são as componentes do vetor velocidade nas direções x, y e z,respectivamente.
Em coordenadas cilíndricas
( ) ( ) ( ) 0vz
vr
1vr
rr
1
tzr =ρ
∂
∂+ρ
∂θ
∂+ρ
∂
∂+
∂
∂ρθ
onde vr, vθ e vz são as componentes do vetor velocidade nas direções r, q e z,respectivamente.
Se o fluido for incompressível, ou seja ρρρρ =constante, a eq. 8 fica:
( ) 0v. =∇r
0z
v
y
v
x
v zyx =∂
∂+
∂
∂+
∂
∂Esta é a forma mais conhecida e usada desta equação.
(9)
(10)
(11)
2. Equação de conservação de quantidade de movimento (m )v
r
A lei da conservação de quantidade de movimento é a segunda Lei de Newton de movimento ou :
dt
dvmamf ==
rr Onde é o vetor força, m é a massa e é o vetor aceleração
fr
ar
Quando existem múltiplas forças atuando no corpo, e a massa (ou densidade) do corpo está mudando, a forma mais completa de escrever a Lei de Newton é:
∑ ==corpo no forças
as todas
0)(
dt
vmdf i
i
rr
A expressão 13 nos diz que forças produzem mudanças na quantidade de movimento.
(12)
(13)
Interpretação:
A Segunda Lei de Movimento de Newton enfatiza que a quantidade de movimento é conservada, ou seja, não há perdas nem ganhos de quantidade de movimento em um
sistema fechado, apenas mudanças na quantidade de movimento entre as diferentes partes do sistema.
Esta equação pode ser rearranjada para expressar que a quantidade demovimento é CONSERVADA; em outras palavras , que não existe PERDA ouGANHOS BRUTOS de quantidade de movimento num dado sistema fechado,somente TROCAS desta quantidade entre DIFERENTES partes do corpo ousistema, ou:
∑ =movimento de quantidade
em mudanças as Todas
0)(
dt
vmdi
r
Para aplicar este principio a um fluxo, deve-se levar em conta TODAS ASFORÇAS QUE ATUAM NO FLUXO, como QUALQUER TIPO DE FLUXO DEQUANTIDADE DE MOVIMENTO que ocorra devido à TRANSFERÊNCIA DEMASSA através dos contornos do sistema.
Desde que quantidade de movimento é CONSERVADA, o efeito bruto destesfluxos de quantidade de movimento e forças será o de mudar o estado daquantidade de movimento no sistema.
Quando um fluido está em movimento, existem vários tipos de forças atuandosobre ele. Essas forças surgem devido ao movimento do fluido (forças deconvecção), à ação gravitacional (forças de campo), aos gradientes de pressão eàs interações entre as moléculas do fluido (forças de superfície).
(14)
Equações de balanço de quantidade de movimento:Taxa de aumento de quantidade de movimentonum dado volumefixo V
=Fluxo bruto da
quantidadede movimento para
dentro
+Força bruta atuando novolume V
Taxa de decréscimo de quantidade de movimentonum dado volumefixo V
=Fluxo bruto da
quantidadede movimento para
fora
-Força bruta atuando novolume V
O princípio da conservação da quantidade de movimento estabelece que a taxa devariação da quantidade de movimento de um fluido dentro de um volume fixo earbitrário V será igual à soma do fluxo de quantidade de movimento através dasuperfície de contorno S mais (somadas às ) as forças externas atuando no fluido.O fluxo de quantidade de movimento pode ocorrer devido ao escoamento dofluido como um todo, aos seus movimentos moleculares e às interações domesmo com as outras partes do fluido.
(15)
(16)
Semelhante ao termo da taxa no balanço de massa
Semelhante ao termo de fluxo no balanço de massa
Forças: gravitacionais e moleculares
Qualquer uma dessas expressões pode ser utilizada. Utilizaremos a equação (16).
O lado esquerdo da equação (16) pode ser expresso como:
Taxa de decréscimo de quantidade de movimentonum dado volumefixo V
= ∫∫ ∂
∂−=
−
VV
dVt
)v(dVv
dt
dr
r ρρ
O lado direito da eq. 16 possui três contribuições:
a. Fluxo de quantidade de movimento para fora de V;b. Forças externas ou corporaisc. Forças moleculares
Calcularemos cada uma delas e depois combinaremos com a expressão 16 para obtermos a equação de conservação da quantidade de movimento
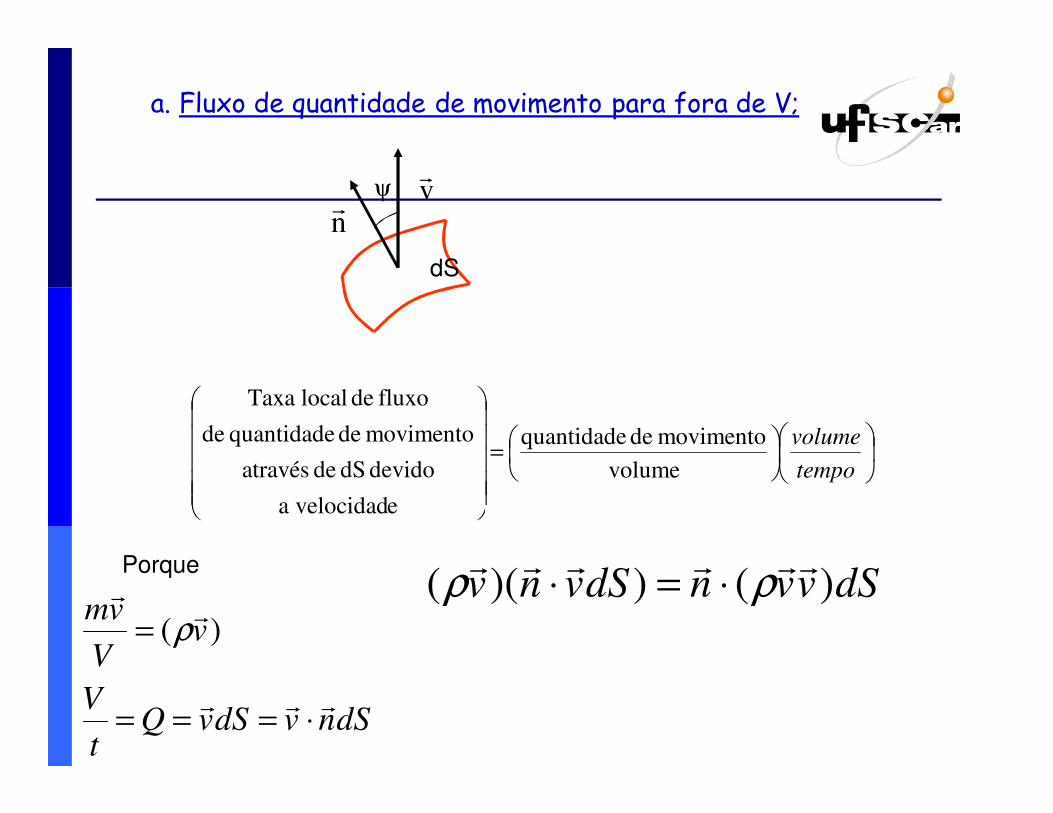
a. Fluxo de quantidade de movimento para fora de V;
dS
vr
nr
ψ
dSnvdSvQt
V
vV
vm
rrr
rr
⋅===
= )(ρ
dSvvndSvnv )())((rrrrrr
ρρ ⋅=⋅Porque
=
tempo
volume
volume
movimento de quantidade
e velocidada
devido dS de através
movimento de quantidade de
fluxo de local Taxa
Logo o fluxo bruto de quantidade de movimento para fora de V será:
Fluxo bruto de quantidadede movimento para fora de Vdevido ao fluxo através de dS
= dVvvdSvvnA v
)()(rrrrr
ρρ∫ ∫ ⋅∇=⋅
b. Forças externas ou corporais
A única força externa que será considerada será a gerada pelo campogravitacional, g, mas outros tipos de campos como campos elétricos emagnéticos podem ter influencia no fluxo de materiais, principalmentemateriais polares.
A gravidade atua sob a massa contida em dV, e assim a força devido à gravidade será (massa)(aceleração) ou:
)g)(dV(fg
rrρ=
A força total em V devido à gravidade será:
dVgfV
g
rrρ∫=
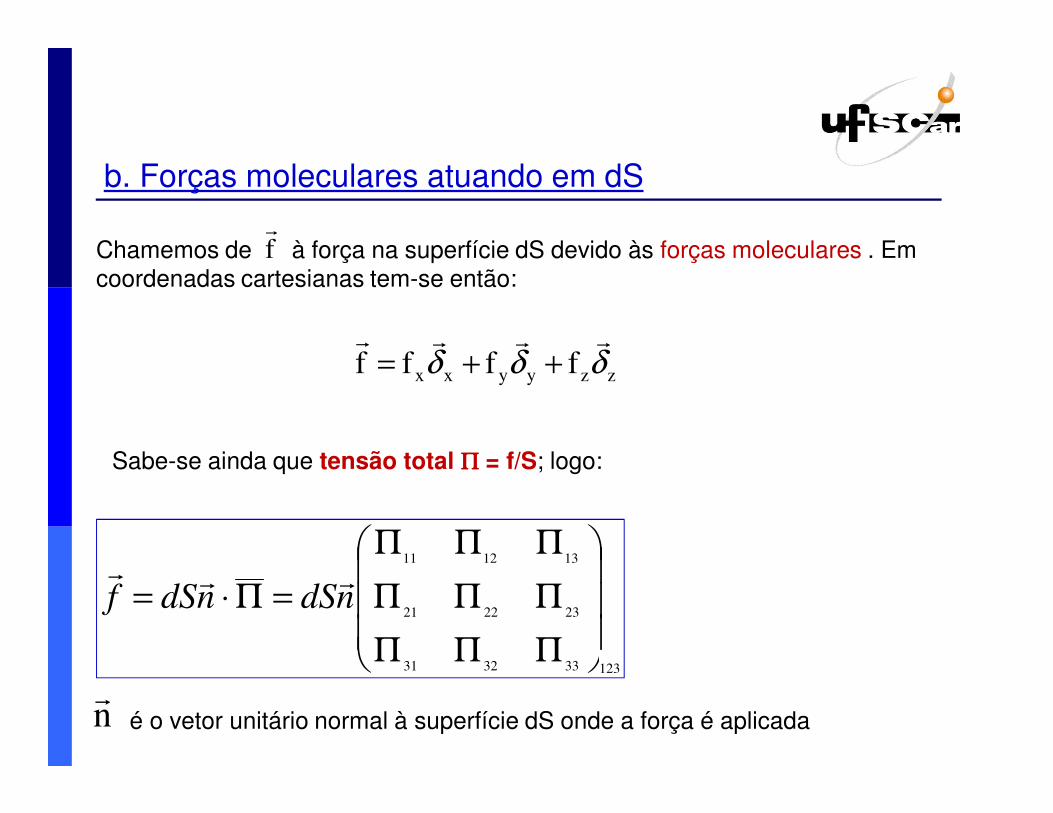
b. Forças moleculares atuando em dS
Chamemos de à força na superfície dS devido às forças moleculares . Em coordenadas cartesianas tem-se então:
fr
zzyyxx ffff δδδrrrr
++=
Sabe-se ainda que tensão total ΠΠΠΠ = f/S; logo:
123333231
232221
131211
ΠΠΠ
ΠΠΠ
ΠΠΠ
=Π⋅= ndSndSfrrr
nr
é o vetor unitário normal à superfície dS onde a força é aplicada
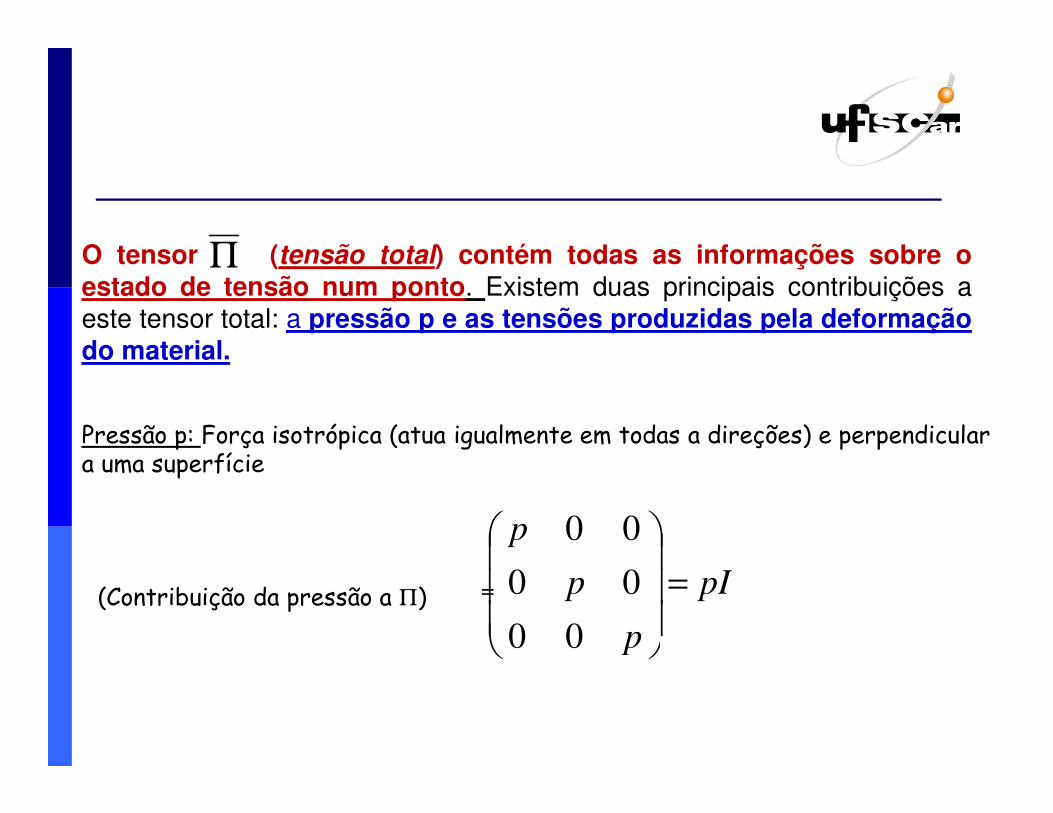
O tensor (tensão total) contém todas as informações sobre oestado de tensão num ponto. Existem duas principais contribuições aeste tensor total: a pressão p e as tensões produzidas pela deformaçãodo material.
Π
Pressão p: Força isotrópica (atua igualmente em todas a direções) e perpendicular a uma superfície
(Contribuição da pressão a Π) pI
p
p
p
=
00
00
00
=
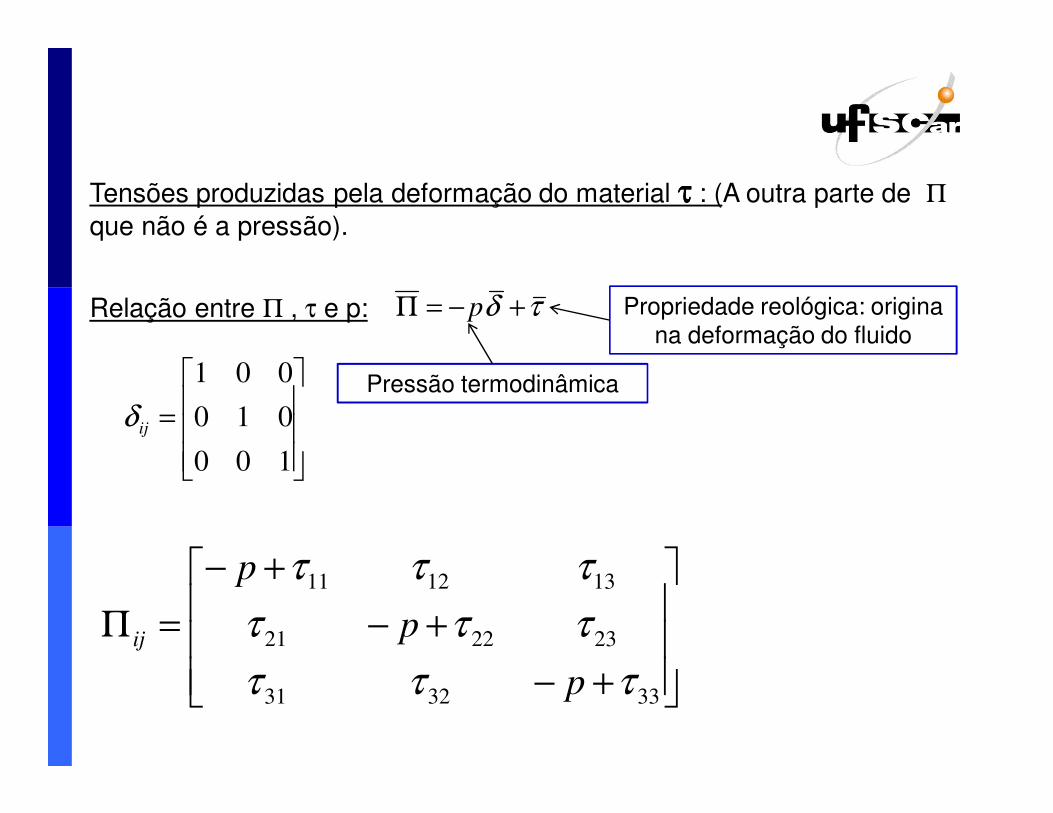
Tensões produzidas pela deformação do material ττττ : (A outra parte de Πque não é a pressão).
Relação entre Π , τ e p: τδ +−=Π p
=
100
010
001
ijδ
+−
+−
+−
=Π
333231
232221
131211
τττ
τττ
τττ
p
p
p
ij
Pressão termodinâmica
Propriedade reológica: origina na deformação do fluido
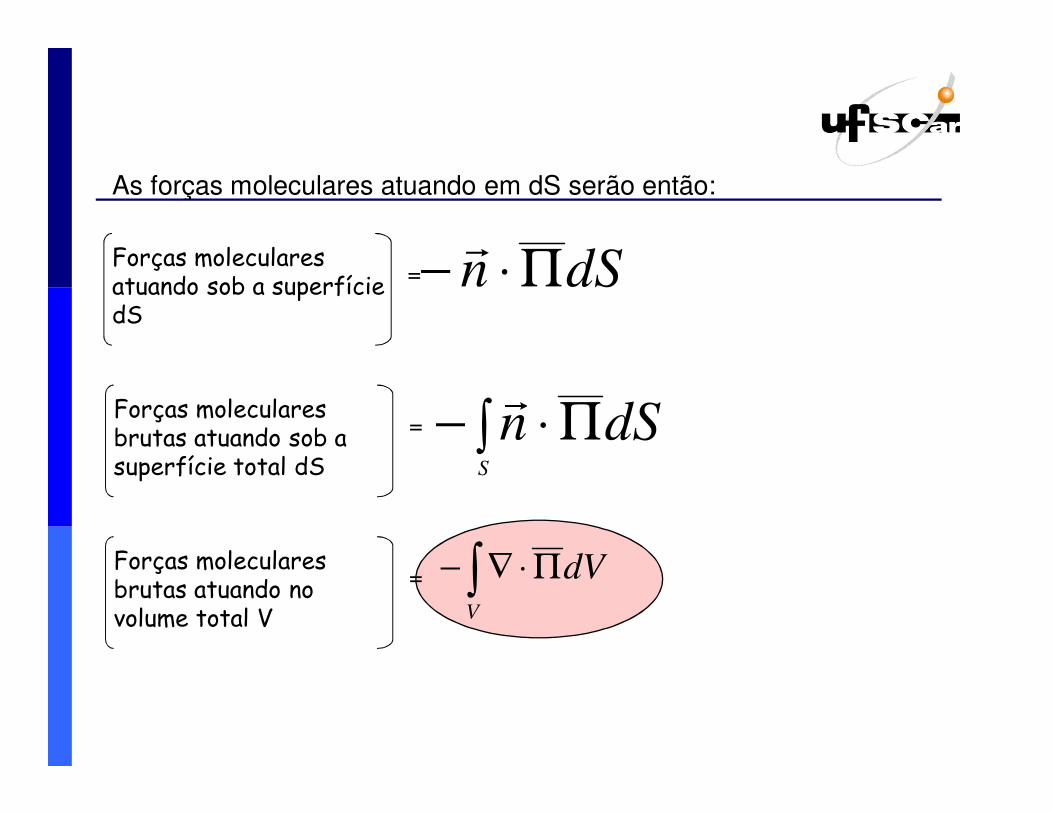
As forças moleculares atuando em dS serão então:
Forças molecularesatuando sob a superfíciedS
= dSn Π⋅−r
Forças molecularesbrutas atuando sob a superfície total dS
= ∫ Π⋅−S
dSnr
Forças molecularesbrutas atuando no volume total V
= dVV
Π⋅∇− ∫
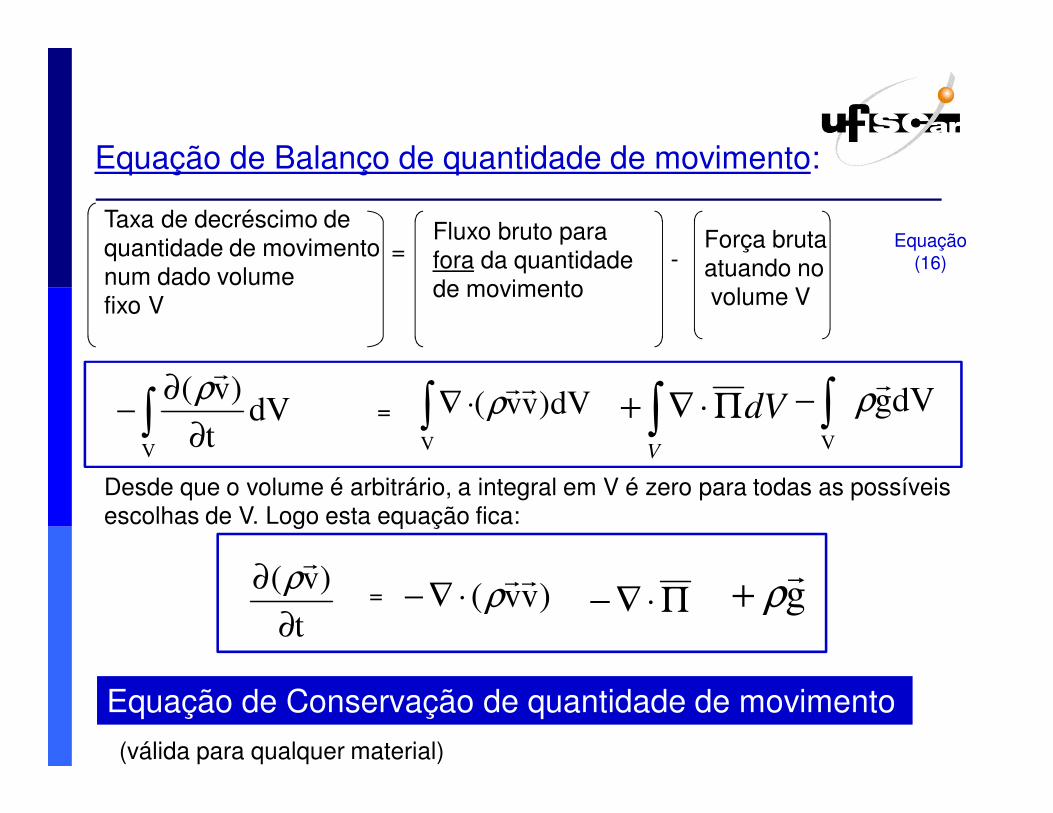
Equação de Balanço de quantidade de movimento:
Taxa de decréscimo de quantidade de movimentonum dado volumefixo V
=Fluxo bruto para fora da quantidadede movimento
-Força bruta atuando novolume V
∫ ∂
∂−
V
dVt
)v(r
ρ= dV)vv(
V
rrρ∫ ⋅∇ dV
V
Π⋅∇+ ∫ dVgV
rρ∫−
Desde que o volume é arbitrário, a integral em V é zero para todas as possíveis escolhas de V. Logo esta equação fica:
t
)v(
∂
∂r
ρ= )vv(
rrρ⋅∇− Π⋅∇− g
rρ+
Equação de Conservação de quantidade de movimento
(válida para qualquer material)
Equação (16)
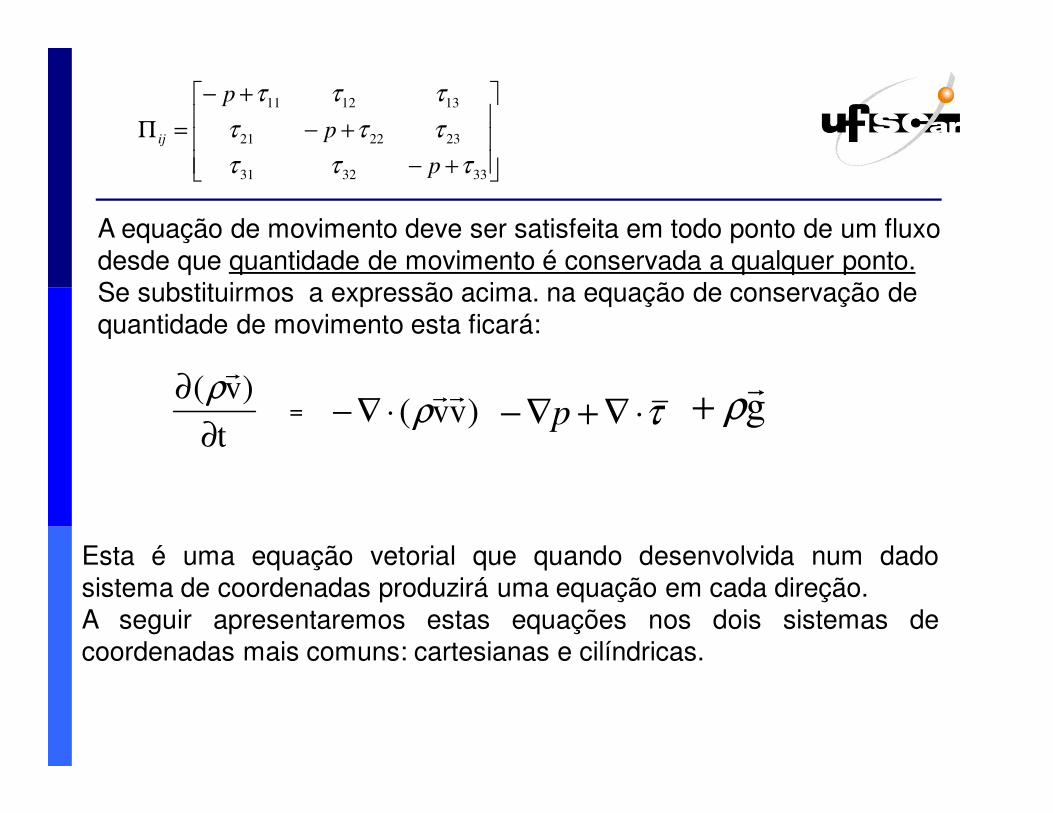
A equação de movimento deve ser satisfeita em todo ponto de um fluxo desde que quantidade de movimento é conservada a qualquer ponto. Se substituirmos a expressão acima. na equação de conservação de quantidade de movimento esta ficará:
t
)v(
∂
∂r
ρ)vv(rr
ρ⋅∇− τ⋅∇+∇− p gr
ρ+=
Esta é uma equação vetorial que quando desenvolvida num dadosistema de coordenadas produzirá uma equação em cada direção.A seguir apresentaremos estas equações nos dois sistemas decoordenadas mais comuns: cartesianas e cilíndricas.
+−
+−
+−
=Π
333231
232221
131211
τττ
τττ
τττ
p
p
p
ij
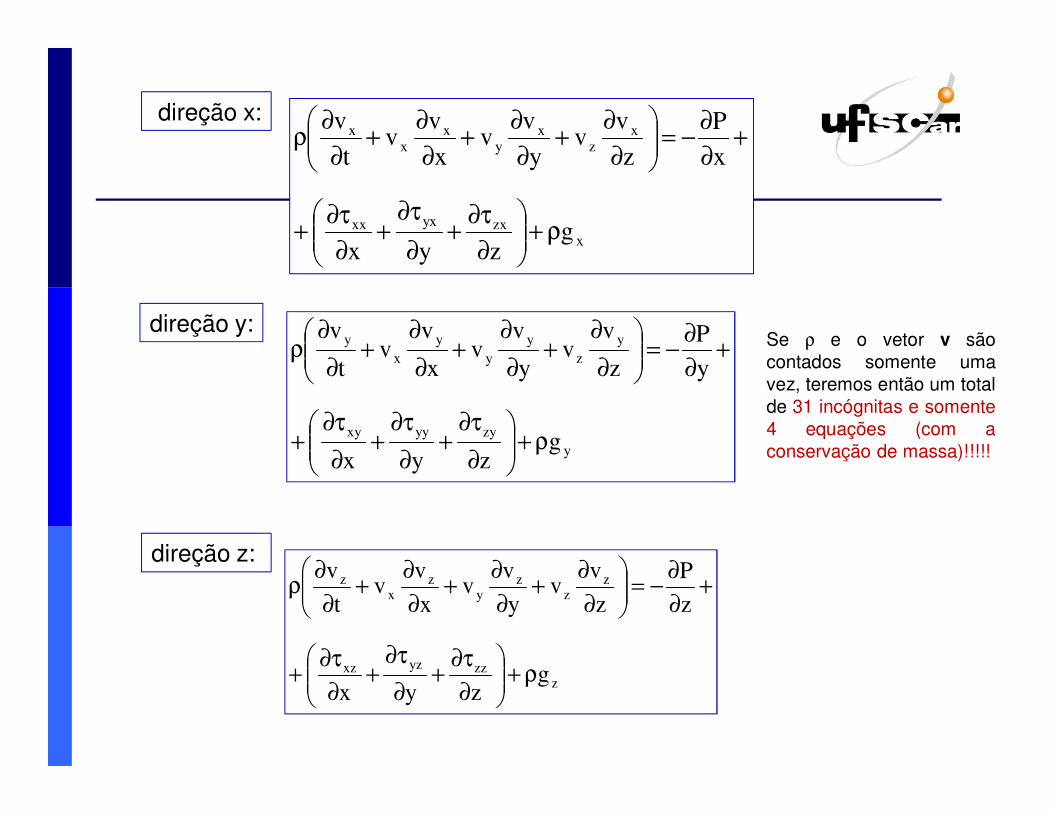
xzxyxxx
xz
xy
xx
x
gzyx
x
P
z
vv
y
vv
x
vv
t
v
ρ+
∂
τ∂+
∂
τ∂+
∂
τ∂+
+∂
∂−=
∂
∂+
∂
∂+
∂
∂+
∂
∂ρ
y
zyyyxy
y
z
y
y
y
x
y
gzyx
y
P
z
vv
y
vv
x
vv
t
v
ρ+
∂
τ∂+
∂
τ∂+
∂
τ∂+
+∂
∂−=
∂
∂+
∂
∂+
∂
∂+
∂
∂ρ
zzzyzxz
zz
zy
zx
z
gzyx
z
P
z
vv
y
vv
x
vv
t
v
ρ+
∂
∂τ+
∂
∂τ+
∂
∂τ+
+∂
∂−=
∂
∂+
∂
∂+
∂
∂+
∂
∂ρ
direção y:
direção x:
direção z:
Se ρ e o vetor v sãocontados somente umavez, teremos então um totalde 31 incógnitas e somente4 equações (com aconservação de massa)!!!!!
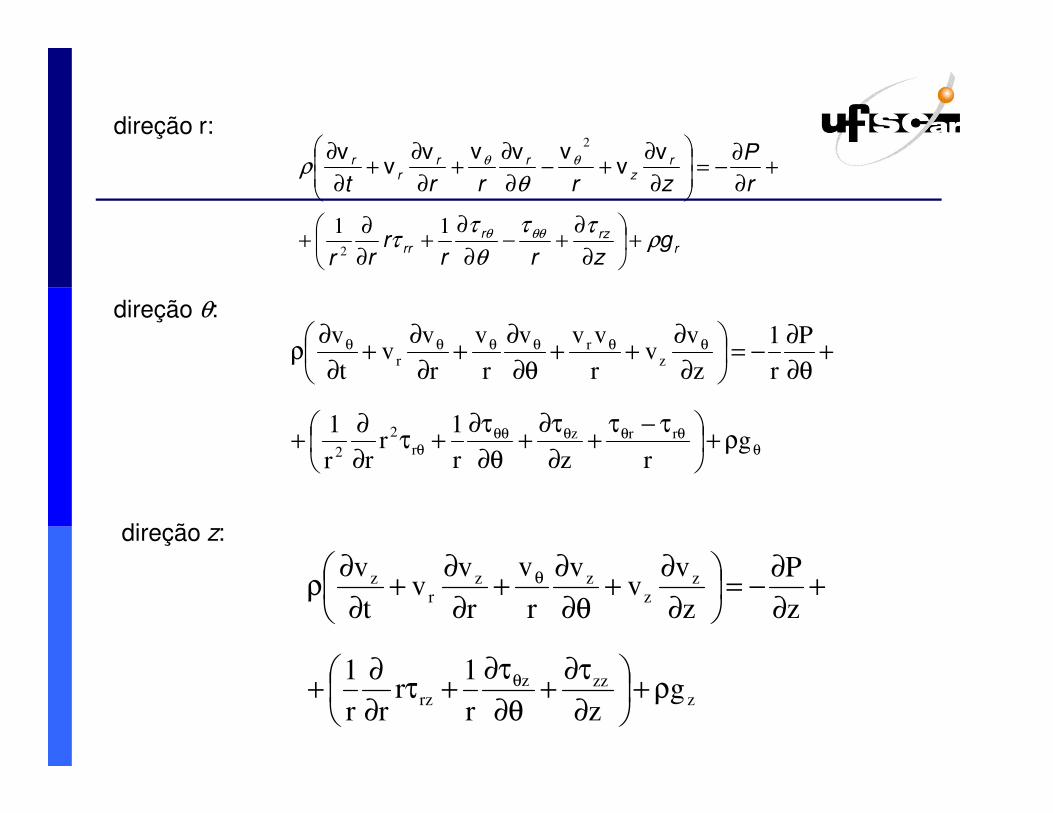
rrzr
rr
rz
rrr
r
gzrr
rrr
r
P
zrrrt
ρττ
θ
ττ
θρ
θθθ
θθ
+
∂
∂+−
∂
∂+
∂
∂+
+∂
∂−=
∂
∂+−
∂
∂+
∂
∂+
∂
∂
112
2 vv
vvvvv
v
θθθθθθ
θ
θθθθθθ
ρ+
τ−τ+
∂
τ∂+
θ∂
τ∂+τ
∂
∂+
+θ∂
∂−=
∂
∂++
θ∂
∂+
∂
∂+
∂
∂ρ
grzr
1r
rr
1
P
r
1
z
vv
r
vvv
r
v
r
vv
t
v
rrzr
2
2
zr
r
zzzz
rz
zz
zzr
z
gzr
1r
rr
1
z
P
z
vv
v
r
v
r
vv
t
v
ρ+
∂
τ∂+
θ∂
τ∂+τ
∂
∂+
+∂
∂−=
∂
∂+
θ∂
∂+
∂
∂+
∂
∂ρ
θ
θ
direção r:
direção θ:
direção z:
As equações constitutivas expressam as tensões moleculares geradas no fluxo em função de variáveis cinéticas como velocidade, deformação ou derivadas da velocidade e deformação.
Logo uma equação constitutiva pode ser expressa como
)etc,v,v(rr
∇=ττ
Uma vez se encontra esta relação para um dado material, ela é inserida nasequações de Conservação de quantidade de movimento e de massa; estasequações são então resolvidas e pode-se encontrar o campo de velocidades epressões durante o fluxo ou deformação de qualquer material.
Podemos observar que, dentre essas incógnitas, estão as componentesdo tensor tensão (9 componentes) e as componentes do vetorvelocidade (3 componentes). A relação entre ττττ e v é chamada deEQUAÇÃO CONSTITUTIVA ou equação reólogica de estado de ummaterial.
τvr
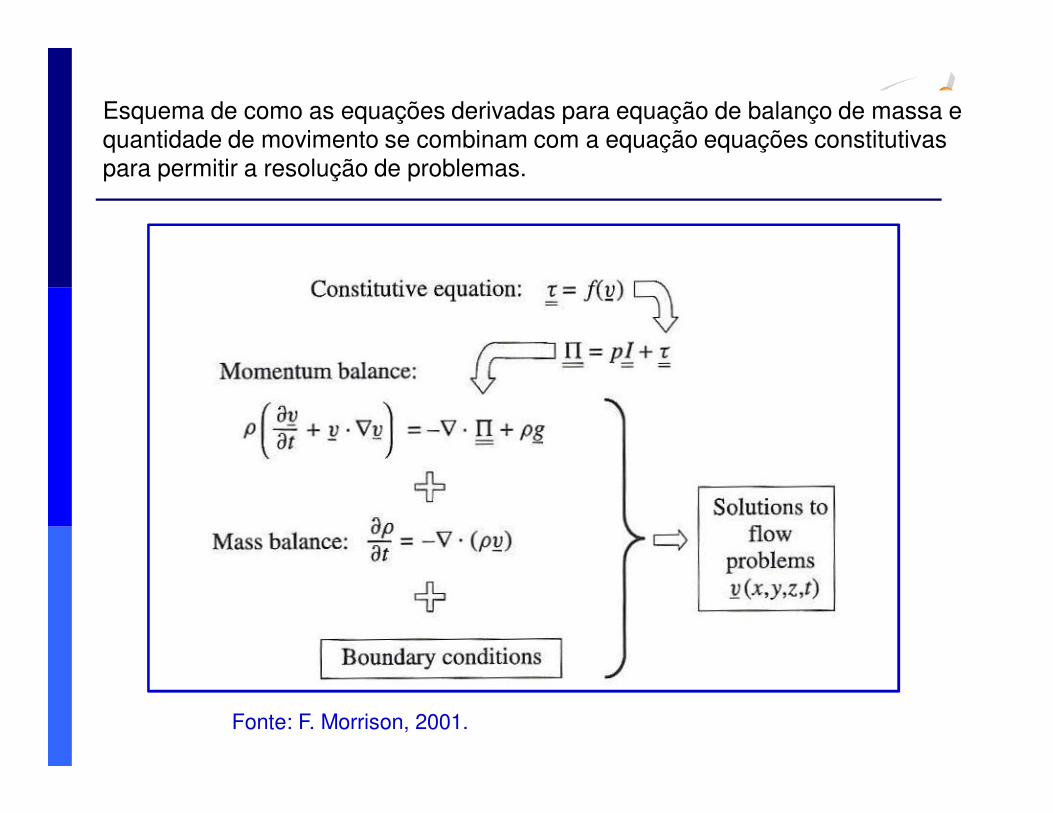
Esquema de como as equações derivadas para equação de balanço de massa e quantidade de movimento se combinam com a equação equações constitutivas para permitir a resolução de problemas.
Fonte: F. Morrison, 2001.