IDENTIFICAÇÃO DE DANOS EM PLACAS … · O dano estrutural é modelado considerando a redução da...
46
IDENTIFICAÇÃO DE DANOS EM PLACAS UTILIZANDO A MATRIZ DE FLEXIBILIDADE Leonardo Nocito Miquelino Cunha RIO DE JANEIRO FEVEREIRO DE 2014 Projeto de Graduação apresentado ao Curso de Engenharia Mecânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Prof. Daniel Alves Castello
Transcript of IDENTIFICAÇÃO DE DANOS EM PLACAS … · O dano estrutural é modelado considerando a redução da...

IDENTIFICAÇÃO DE DANOS EM PLACAS UTILIZANDO A MATRIZ DE
FLEXIBILIDADE
Leonardo Nocito Miquelino Cunha
RIO DE JANEIRO
FEVEREIRO DE 2014
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Prof. Daniel Alves Castello

IDENTIFICAÇÃO DE DANOS EM PLACAS UTILIZANDO A MATRIZ DE
FLEXIBILIDADE
Leonardo Nocito Miquelino Cunha
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO
DE ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. Daniel Alves Castello, DSc. (Orientador)
________________________________________________
Prof. Lavínia Maria Sanábio Alves Borges, DSc.
________________________________________________
Prof. Fernando Pereira Duda, DSc.
RIO DE JANEIRO, RJ - BRASIL
FEVEREIRO DE 2014

I
Cunha, Leonardo Nocito Miquelino.
Identificação de danos em placas utilizando a matriz de
flexibilidade / Leonardo Nocito Miquelino Cunha – Rio de Janeiro:
UFRJ/ Escola Politécnica, 2014.
XI, 101 p.: il.; 29,7 cm.
Orientadores: Prof. Daniel Alves Castello.
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Mecânica, 2013.
Referências bibliográficas: p.46 - 47.
1. Introdução 2. Modelo Computacional 3. Existência de um
dano no modelo 4. Identificação do dano 5. Resultados I. Castello,
Daniel Alves II. Universidade Federal do Rio de Janeiro, Escola
Politécnica, Curso de Engenharia Mecânica. III. Título.

II
Agradecimentos
Aos meus pais que se dedicaram e se dedicam assiduamente à minha saúde física
e mental. Eles que me motivaram a seguir os caminhos e oportunidades durante minha
formação, sempre ressaltando a importância do respeito e da ética em qualquer
ambiente convivial.
Ao meu irmão que, além de servir como uma referência diante dos difíceis
obstáculos da vida acadêmica, também me apoiou emocionalmente, sempre
fortalecendo valores como confiança, disciplina e persistência.
A minha família pelo suporte em todas as ocasiões, sobretudo durante
intercâmbio.
Aos meus amigos, que sempre vibraram juntos com as conquistas ao longo do
curso e também apoiaram e consolaram em momentos de derrotas.
Aos professores e funcionários da Escola Politécnica da UFRJ, sobretudo pelo
professor Daniel Alves Castello, orientador desse trabalho, por todos os conhecimentos
compartilhados, desafios propostos, orientações e serviços prestados, consolidando a
excelência da instituição de ensino.

III
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
IDENTIFICAÇÃO DE DANOS EM PLACAS UTILIZANDO A MATRIZ DE
FLEXIBILIDADE
Leonardo Nocito Miquelino Cunha
Fevereiro/2014
Orientador: Prof. Daniel Alves Castello (DSc).
Curso: Engenharia Mecânica.
Este trabalho apresenta um estudo de caso sobre identificação de danos em
placas. A placa será analisada utilizando-se o modelo clássico de placas finas e o
método de elementos finitos. O dano estrutural é modelado considerando a redução da
rigidez de alguns elementos. A estimativa do campo de dano é buscada através da
minimização de uma função de erro baseada na matriz de flexibilidade da estrutura. Os
resultados numéricos apresentados levam em conta a área afetada pelo dano, o efeito do
ruído nos dados, o posicionamento dos sensores e de incertezas na fixação da placa.
IV
Índice pg
Lista de Figuras ................................................................................................................ V
Lista de Tabelas .............................................................................................................. VI
1 Introdução.................................................................................................................. 1
1.1 Motivação .......................................................................................................... 1
1.2 Objetivo ............................................................................................................. 1
1.3 Organização do trabalho ......................................................................................... 1
2 Modelo computacional .............................................................................................. 3
2.1 Problema físico .................................................................................................. 3
2.2 Solução analítica do problema ........................................................................... 4
2.3 Solução computacional do problema ................................................................. 7
2.4 Modelo estudado e propriedades ....................................................................... 9
3 Existência de um dano no modelo........................................................................... 11
3.1 Modelagem discreta de dano ........................................................................... 11
3.2 Situações de dano analisadas ........................................................................... 11
3.3 Análise preliminar ............................................................................................ 13
4 Identificação do dano .............................................................................................. 15
4.1 Matriz de flexibilidade [2] ............................................................................... 15
4.2 Algoritmo de otimização ................................................................................. 18
5 Resultados ............................................................................................................... 20
5.1 Posicionamento dos sensores ........................................................................... 20
5.2 Casos analisados .............................................................................................. 22
5.3 Efeito da área afetada pelo dano ...................................................................... 22
5.4 Efeito da posição dos sensores ......................................................................... 26
5.5 Efeitos de ruídos experimentais ....................................................................... 29
5.6 Efeitos de incertezas na condição de contorno ................................................ 33
5.7 Refinando-se a malha ....................................................................................... 35
6 Conclusão ................................................................................................................ 37
7 Referências bibliográficas ....................................................................................... 38

V
Lista de Figuras
Figura 2.1 Placa estudada para validação do programa.................................................... 3
Figura 2.2 Forma modal analítica – 1º modo. .................................................................. 6
Figura 2.3 Forma modal analítica – 4º modo. .................................................................. 6
Figura 2.4 Forma modal analítica – 7º modo. .................................................................. 7
Figura 2.5 Malha de 25 x 25 e referencial da placa. ......................................................... 7
Figura 2.6 Comparação entre solução analítica e computacional. ................................... 8
Figura 2.7 Análise de convergência. .............................................................................. 10
Figura 3.1 Situação de dano D1...................................................................................... 12
Figura 3.2 Situação de dano D2...................................................................................... 12
Figura 3.3 Situação de dano D3...................................................................................... 12
Figura 3.4 Forma modal de estrutura danificada (7º modo 108.7 Hz) ........................... 13
Figura 3.5 Níveis de estrutura danificada (7º modo 108.7 Hz) ...................................... 14
Figura 3.6 Níveis de estrutura não danificada (7º modo 117.8 Hz) ............................... 14
Figura 4.1 Função erro calculada para todos os modos de vibração. ............................. 17
Figura 4.2 Função erro calculada para os 15 primeiros modos de vibração. ................. 18
Figura 5.1 Posicionamento de sensores S1. .................................................................... 21
Figura 5.2 Posicionamento de sensores S2. .................................................................... 21
Figura 5.3 Posicionamento de sensores S3. .................................................................... 21
Figura 5.4 Caso 1 ............................................................................................................ 23
Figura 5.5 Caso 2 ............................................................................................................ 24
Figura 5.6 Caso 3 ........................................................................................................... 25
Figura 5.7 Caso 4 ............................................................................................................ 26
Figura 5.8 Caso 5 ............................................................................................................ 27
Figura 5.9 Caso 6. ........................................................................................................... 28
Figura 5.10 Caso7 ........................................................................................................... 30
Figura 5.11 Caso 8 .......................................................................................................... 31
Figura 5.12 Caso 9 .......................................................................................................... 32
Figura 5.13 Nós liberados marcados em vermelho. ....................................................... 33
Figura 5.14 Caso 10. ....................................................................................................... 34
Figura 5.15 Caso 11. ....................................................................................................... 34
Figura 5.16 Caso 12 - Gexp 10 x 10 ................................................................................. 35
Figura 5.17 Caso 12 - Gexp 20 x 20 ................................................................................. 36

VI
Lista de Tabelas
Tabela 1 – Propriedades da placa estudada para validar o programa. .............................. 3
Tabela 2 – Frequências naturais analíticas. ...................................................................... 5
Tabela 3 – Frequências naturais computacionais. ............................................................ 7
Tabela 4 – Propriedades da placa estudada por Nichols et al.[6]. .................................... 9
Tabela 5 – Variação das frequências naturais devido ao dano D2 ................................. 13
Tabela 6 – Casos analisados. .......................................................................................... 22

1
1 Introdução
1.1 Motivação
O emprego de placas como componentes estruturais é muito frequente nas
indústrias naval, aeroespacial, civil, automotiva e mecânica. A consolidação de
estratégias de avaliação desse tipo de estrutura é de extrema importância. Inserida nesse
contexto, a identificação de danos em placas é um tópico relevante tanto para o meio
acadêmico quanto para a indústria.
Nos últimos anos, técnicas não destrutivas baseadas em vibrações foram
amplamente desenvolvidas para se estudar a identificação de danos em estruturas. Wei
Fan e Pizhong Qiao [1] realizaram uma síntese comparativa entre os principais métodos
de vibração para identificação de danos em estruturas do tipo viga ou placa. Incluído
nesse conjunto de estudos, o método da matriz de flexibilidade [2] será abordado no
presente trabalho.
1.2 Objetivo
O objetivo desse trabalho é desenvolver uma abordagem simples para realizar
um estudo de caso sobre identificação de danos em placas. Então, primeiramente, a
placa será analisada utilizando-se o modelo clássico de placas finas e o método de
elementos finitos. O dano estrutural é modelado considerando a redução da rigidez de
alguns elementos. A análise de vibração do sistema fornece informações necessárias
para calcular a matriz de flexibilidade da estrutura. A estimativa do campo de dano é
buscada através da minimização de uma função de erro baseada na matriz de
flexibilidade. Os resultados numéricos apresentados levam em conta o efeito do ruído
nos dados, do posicionamento dos sensores disponíveis e de incertezas nas condições de
contorno.
1.3 Organização do trabalho
O primeiro capítulo é a introdução, onde é apresentada a motivação, o objetivo e
a organização do trabalho.

2
No segundo capítulo, foi detalhado o programa realizado em código Matlab®
para se estudar as placas. Alguns testes e comparações foram realizados para se avaliar
a veracidade dos resultados obtidos pelo programa.
O terceiro capítulo é composto pela apresentação do modelo estudado e suas
propriedades.
No capítulo seguinte, é discutida a existência de um dano e sua aplicação no
modelo desenvolvido.
O quinto capítulo mostra o estudo de identificação do dano, bem como a matriz
de flexibilidade e o algoritmo de otimização.
O capítulo seis apresenta os cálculos e aplicações do método para outros
modelos.
O capítulo sete trata da conclusão do trabalho, onde são feitas as considerações
necessárias e observações pertinentes ao projeto.
Finalmente, no capítulo oito estão destacadas todas as referências bibliográficas
consultadas ao longo do trabalho.

3
2 Modelo computacional
O programa foi desenvolvido na plataforma Matlab®, de forma que o estudo
vibracional de uma placa plana fosse implementado. Toda a teoria de elementos finitos
de placa e o estudo de vibrações foram estudadas pelas referências [3] e [5]. O uso da
biblioteca livre de funções “Calfem” [4] para elementos finitos ajudou na montagem da
matriz de rigidez da estrutura.
O programa estabelece as propriedades do material, as dimensões da placa, a
condição de contorno, uma malha de elementos finitos e calcula as matrizes de rigidez e
de massa para a identificação da forma modal da estrutura. Para se validar o programa,
escolheu-se um sistema cuja solução analítica é conhecida.
2.1 Problema físico
A tabela 1 e a figura 2.1 abaixo apresentam as propriedades e as dimensões da
placa utilizada para validação do programa:
Tabela 1 – Propriedades da placa estudada para validar o programa.
Material (aço A36)
Módulo de elasticidade E 210000 Mpa
Coeficiente de poisson v 0.3
Densidade de área ρ 7.85E-10 Kg/mm2
Dimensões
Espessura h 2 mm
a 600 mm
b 600 mm
Condição de contorno
Simplesmente apoiada ao longo das bordas
Figura 2.1 Placa estudada para validação do programa
X
Y
Z
a b h

4
2.2 Solução analítica do problema
A placa retangular uniforme considerada é definida no domínio D, que é
formado pela região 0 < x < a e 0 < y < b. A solução analítica consiste em achar as
frequências naturais ωi e a forma modal W(x,y) da placa apresentada anteriormente. O
livro “Elements of Vibration Analysis, Leonard Meirovitch” [5] foi consultado para
chegar à solução. Portanto, as seguintes hipóteses foram consideradas:
Deflexões são pequenas em relação à espessura da placa.
As tensões normais na direção transversal à da placa podem ser ignoradas.
Não há força resultante na seção transversal de um elemento de placa. O plano
médio da placa não sofre deformação durante a flexão, e pode ser considerado
um plano neutro.
Qualquer linha normal ao plano médio antes da deformação continua
perpendicular ao plano médio durante a deformação.
A equação governante para o estudo da placa considera o deslocamento vertical w da
placa, a rigidez à flexão De, a densidade de força f e a massa específica, como
apresentada abaixo:
Para se estabelecer o problema de autovalor, foi definido f = 0 e uma solução da forma
w = WF, onde W(x,y) contém os deslocamentos verticais (eixo Z da figura 2.1) da
estrutura para cada modo de vibração e F é uma função harmônica dependente do tempo
de frequência ω. Então, a equação diferencial (2.1) é apresentada da seguinte forma:
O operador bi harmônico é definido por:

5
Para a condição de contorno analisada de simples apoio, o deslocamento e os momentos
são nulos nas bordas, como mostram as equações abaixo:
A equação (2.2) é solucionada analiticamente, portanto as frequências naturais do
sistema são escritas da seguinte forma:
((
)
(
)
)√
Os respectivos modos de vibração normalizados são:
√ (
) (
)
A Tabela 2 abaixo apresenta as primeiras frequências naturais calculadas analiticamente
para o sistema definido acima:
Tabela 2 – Frequências naturais analíticas.
Frequência [Hz] - analítica
w1 27,32
w2 68,29
w3 68,29
w4 109,3
w5 136,6
w6 136,6
w7 177,6
w8 177,6
w9 232,2
w10 232,2
w11 245,9
w12 273,2
w13 273,2
w14 341,5
w15 341,5
6
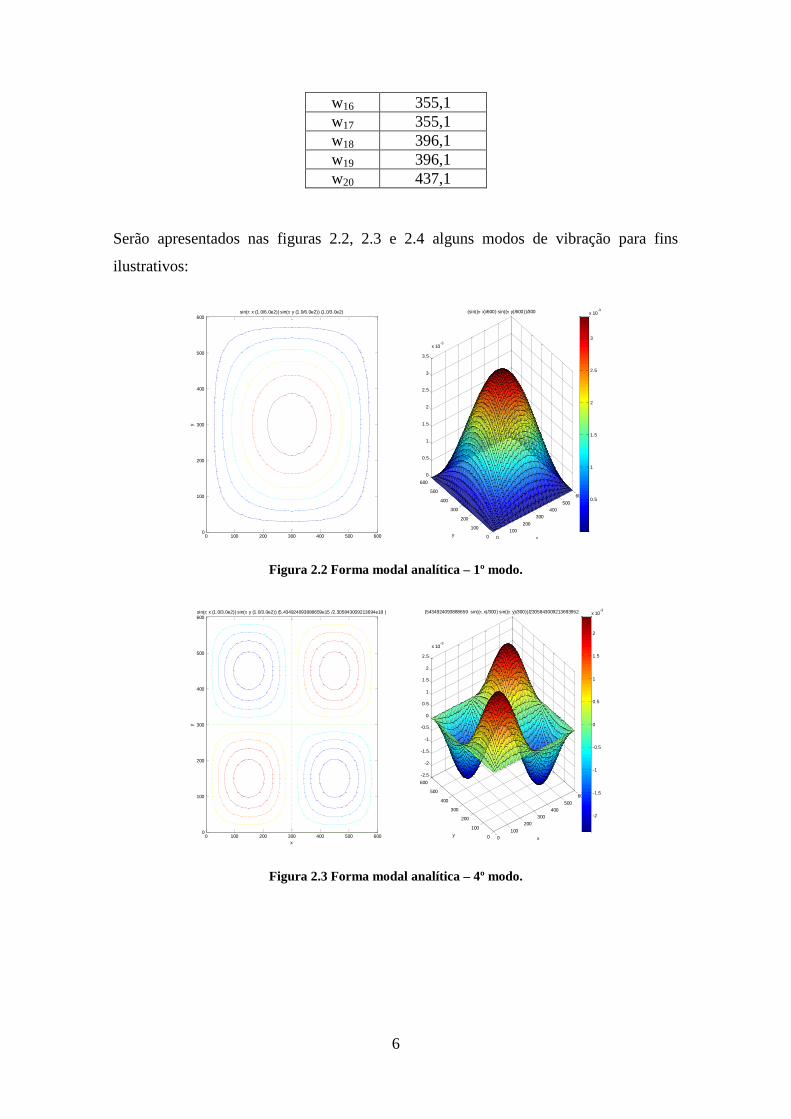
w16 355,1
w17 355,1
w18 396,1
w19 396,1
w20 437,1
Serão apresentados nas figuras 2.2, 2.3 e 2.4 alguns modos de vibração para fins
ilustrativos:
Figura 2.2 Forma modal analítica – 1º modo.
Figura 2.3 Forma modal analítica – 4º modo.
x
y
sin( x (1.0/6.0e2)) sin( y (1.0/6.0e2)) (1.0/3.0e2)
0 100 200 300 400 500 6000
100
200
300
400
500
600
0
100
200
300
400
500
600
0
100
200
300
400
500
600
0
0.5
1
1.5
2
2.5
3
3.5
x 10-3
x
(sin(( x)/600) sin(( y)/600))/300
y
0.5
1
1.5
2
2.5
3
x 10-3
x
y
sin( x (1.0/3.0e2)) sin( y (1.0/3.0e2)) (5.434924093888659e15 /2.305843009213694e18 )
0 100 200 300 400 500 6000
100
200
300
400
500
600
0
100
200
300
400
500
600
0
100
200
300
400
500
600
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
x 10-3
x
(5434924093888659 sin(( x)/300) sin(( y)/300))/2305843009213693952
y
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x 10-3

7
Figura 2.4 Forma modal analítica – 7º modo.
2.3 Solução computacional do problema
Com a finalidade de verificar o modelo computacional desenvolvido no
Matlab®, a placa descrita na seção anterior foi modelada com uma malha de 25 x 25
elementos do tipo “plate” [4], como mostra a figura 2.5. As frequências naturais
obtidas estão apresentadas na tabela 3 a seguir:
Figura 2.5 Malha de 25 x 25 e referencial da placa.
Tabela 3 – Frequências naturais computacionais.
Frequência natural [Hz] –
25x25 elementos
w1 27,34
x
y
sin( x (1.0/2.0e2)) sin( y (1.0/2.0e2)) (8.875193880523619e15 /4.611686018427388e18 )
0 100 200 300 400 500 6000
100
200
300
400
500
600
0
100
200
300
400
500
600
0
100
200
300
400
500
600
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x 10-3
x
(8875193880523619 sin(( x)/200) sin(( y)/200))/4611686018427387904
y
-1.5
-1
-0.5
0
0.5
1
1.5
x 10-3
X
Y
600 mm (25 elementos)
600 mm (25 elementos)

8
w2 68,52
w3 68,52
w4 109,7
w5 137,6
w6 137,6
w7 178,9
w8 178,9
w9 235,5
w10 235,5
w11 248,1
w12 276,7
w13 276,8
w14 346,0
w15 346,0
w16 363,0
w17 363,1
w18 404,3
w19 404,4
w20 444,0
Para se comparar os resultados computacional e analítico para se analisar a
eficiência do programa, avaliou-se o erro relativo entre o resultado analítico e o
resultado computacional. Então:
‖
‖
Figura 2.6 Comparação entre solução analítica e computacional.
0,0%
0,5%
1,0%
1,5%
2,0%
2,5%
1 5 9 13 17
Δω
Nº do modo de vibração
9
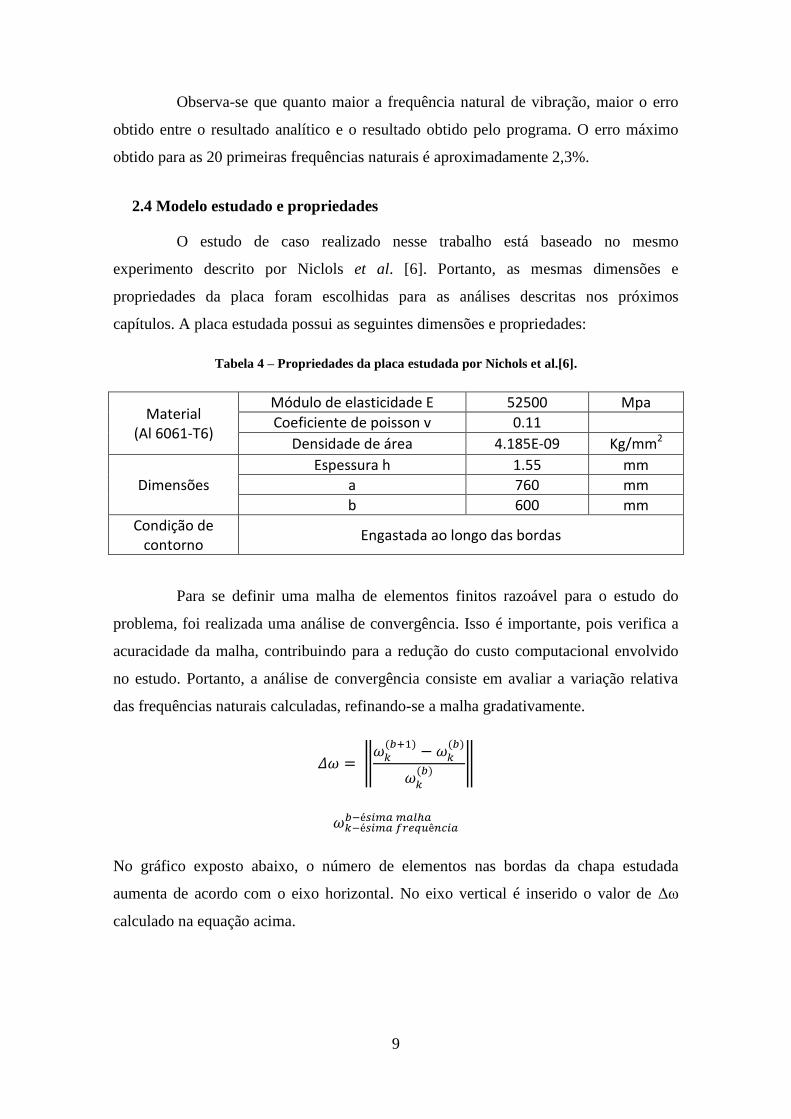
Observa-se que quanto maior a frequência natural de vibração, maior o erro
obtido entre o resultado analítico e o resultado obtido pelo programa. O erro máximo
obtido para as 20 primeiras frequências naturais é aproximadamente 2,3%.
2.4 Modelo estudado e propriedades
O estudo de caso realizado nesse trabalho está baseado no mesmo
experimento descrito por Niclols et al. [6]. Portanto, as mesmas dimensões e
propriedades da placa foram escolhidas para as análises descritas nos próximos
capítulos. A placa estudada possui as seguintes dimensões e propriedades:
Tabela 4 – Propriedades da placa estudada por Nichols et al.[6].
Material (Al 6061-T6)
Módulo de elasticidade E 52500 Mpa
Coeficiente de poisson v 0.11
Densidade de área 4.185E-09 Kg/mm2
Dimensões
Espessura h 1.55 mm
a 760 mm
b 600 mm
Condição de contorno
Engastada ao longo das bordas
Para se definir uma malha de elementos finitos razoável para o estudo do
problema, foi realizada uma análise de convergência. Isso é importante, pois verifica a
acuracidade da malha, contribuindo para a redução do custo computacional envolvido
no estudo. Portanto, a análise de convergência consiste em avaliar a variação relativa
das frequências naturais calculadas, refinando-se a malha gradativamente.
‖
‖
No gráfico exposto abaixo, o número de elementos nas bordas da chapa estudada
aumenta de acordo com o eixo horizontal. No eixo vertical é inserido o valor de Δω
calculado na equação acima.

10
Figura 2.7 Análise de convergência.
Observa-se que, na medida em que a malha fica mais refinada, a variação das
frequências naturais determinadas pelo programa também diminui. Isso revela a
convergência do método para a solução do problema.
No caso exposto acima, nota-se que a partir de uma malha de 10 x10
elementos, o resultado das frequências naturais varia menos do que 0,2%. Portanto, para
não demandar muito custo computacional, uma malha de 10x10 elementos será
suficiente para a continuação do estudo.
-1,8%
-1,6%
-1,4%
-1,2%
-1,0%
-0,8%
-0,6%
-0,4%
-0,2%
0,0%
5 6 7 8 9 10 11
Δω
Número de elementos em cada borda da estrutura
1º modo
2º modo
3º modo
4º modo

11
3 Existência de um dano no modelo
O trabalho publicado por Stutz et al. [2] aborda a modelagem do dano de forma
contínua no corpo elástico da estrutura. Desse modo, o dano está condicionado a afetar
as propriedades de rigidez dos elementos vizinhos, uma vez que está atrelado à funções
de forma do elemento.
No presente estudo de caso, uma estratégia mais simples para modelagem do
dano será utilizada.
3.1 Modelagem discreta de dano
A estratégia consiste na discretização do campo de dano para cada elemento da
placa. Dessa forma, a matriz de rigidez do elemento danificado é definida
multiplicando-se por um parâmetro βe (beta_dano) sua rigidez original :
(3.1)
O parâmetro βe pode variar de 0 (totalmente danificado) a 1 (estrutura segura).
Portanto, multiplicando-se cada matriz de rigidez Ke por um fator de dano βij ([0,1]),
define-se uma matriz de dano n x m, da mesma dimensão da malha em questão.
3.2 Situações de dano analisadas
Nesse trabalho, todos os casos analisados consideram certa região danificada, na
qual o parâmetro de dano é igual a 0.5. Isso significa que tais elementos possuem
apenas metade da rigidez original (dano grosseiro). Dessa forma, foram estudadas
placas idênticas, porém variando-se a área de atuação do dano estrutural. As imagens
abaixo ilustram as três diferentes situações de dano analisadas: a primeira contém dano
pontual em apenas dois elementos, a segunda possui grande área afetada pelo dano e a
terceira apresenta múltiplos danos. Para ilustrar a localização do dano, os elementos
coloridos em rosa indicam os elementos danificados.

12
a) Dano D1:
Figura 3.1 Situação de dano D1
b) Dano D2:
Figura 3.2 Situação de dano D2
c) Dano D3:
Figura 3.3 Situação de dano D3

13
3.3 Análise preliminar
Como análise preliminar, foi avaliado o comportamento modal da placa sem dano e com
dano D2. A tabela abaixo apresenta uma pequena variação das frequências naturais em
função do dano estrutural:
Tabela 5 – Variação das frequências naturais devido ao dano D2
Frequência natural (Hz)
Com dano D2 Sem dano
1º modo 24,9 26,2
2º modo 43,8 46,2
3º modo 58,2 61,4
4º modo 74,3 79,7
5º modo 76,8 80,5
Nas imagens abaixo é mostrada a forma modal da estrutura com dano. É notável a perda
de simetria de vibração, uma vez que o dano atinge uma extensa região da placa.
Figura 3.4 Forma modal de estrutura danificada (7º modo 108.7 Hz)
0
5
10
15
02
46
810
12
-60
-40
-20
0
20
40
60
80
-40
-20
0
20
40
60

14
Figura 3.5 Níveis da forma modal de estrutura danificada (7º modo 108.7 Hz)
Figura 3.6 Níveis da forma modal de estrutura não danificada (7º modo 117.8 Hz)
1 2 3 4 5 6 7 8 9 10 111
2
3
4
5
6
7
8
9
10
11
-40
-30
-20
-10
0
10
20
30
40
50
60
2 4 6 8 101
2
3
4
5
6
7
8
9
10
11
-50
-40
-30
-20
-10
0
10
20
30
40
50

15
4 Identificação do dano
Os principais trabalhos de identificação de dano em estruturas utilizam um
algoritmo de atualização do modelo de elementos finitos. Esses métodos procuram
determinar mudanças em propriedades físicas que minimizam uma função erro que
compara dados experimentais ao modelo de elementos finitos [5].
Frequentemente esses métodos consideram parâmetros modais (frequências, formas
modais, etc), que dependem das propriedades físicas da estrutura (massa e rigidez).
Portanto, flutuações ocorrentes das propriedades físicas devido a algum tipo de dano
acarretam em flutuações nos parâmetros modais, que podem ser medidos
experimentalmente e utilizados para inferir dano estrutural.
A apresentação do método da matriz de flexibilidade descrito abaixo foi totalmente
baseada do artigo “L.T. Stutz, D.A. Castello, F.A. Rochinha. A flexibility-based
continuum damage identification approach.” [2], para melhor entendimento do presente
relatório.
4.1 Matriz de flexibilidade [2]
Uma importante classe de métodos de identificação de danos está baseada na matriz
de flexibilidade. Visto que na prática é muito difícil excitar os modos de vibração mais
elevados da estrutura, os métodos baseados na flexibilidade são bem atraentes, uma vez
que requerem apenas medidas dos primeiros e mais baixos modos de vibração.
Além disso, a matriz de flexibilidade apresenta alta sensibilidade ao dano (matriz β).
Na seção 3.3, por exemplo, foi mostrado que mesmo em uma estrutura com grande área
danificada, as frequências naturais se alteram pouco, senso então pouco sensíveis ao
dano. Sensibilidade é um aspecto chave para identificação de dano. Portanto, a matriz
de flexibilidade é um bom indicador de dano na estrutura.
A matriz de flexibilidade G está definida abaixo como função de parâmetros modais:
∑
(5.1)
Onde é a matriz de forma modal normalizada com a matriz de
massa e
é uma matriz diagonal que contém o quadrado das
frequências naturais do sistema [2].

16
Devido a limitações experimentais, apenas algumas primeiras frequências
naturais podem ser medidas. Além disso, quanto maior a frequência natural, menor a
contribuição para a matriz de flexibilidade. Portanto, boas aproximações para a matriz
de flexibilidade experimental podem ser encontradas medindo-se apenas as primeiras
frequências naturais do sistema.
Além disso, o numero de graus de liberdade medidos experimentalmente são
muito inferiores ao numero de graus de liberdade existentes no modelo de elementos
finitos. Então, a matriz de flexibilidade determinada experimentalmente GE computa
apenas os graus de liberdade instrumentados:
∑
(5.2)
Em busca de uma relação entre a matriz de flexibilidade experimental e
informações sobre as propriedades de rigidez da estrutura, as matrizes originais do
modelo G, K e Ф foram particionadas em relação aos graus de liberdade medidos.
Então, o índice m representa os graus de liberdade medidos e o índice o representa os
graus omitidos. As matrizes particionadas encontram-se abaixo:
{
} (5.3)
[
] , [
]. (5.4)
Pode-se demonstrar que a inversa da matriz de flexibilidade analítica G referente
aos graus de liberdade medidos é igual ao sistema reduzido de Guyan para a matriz de
rigidez K em relação aos mesmos graus de liberdade [9] [10]:
. (5.5)
Consequentemente, mudanças nas propriedades físicas de rigidez K da estrutura
refletem mudanças nas propriedades modais baseadas na matriz de flexibilidade
reduzida Gmm. Essa relação reduzida será utilizada para identificação de dano.
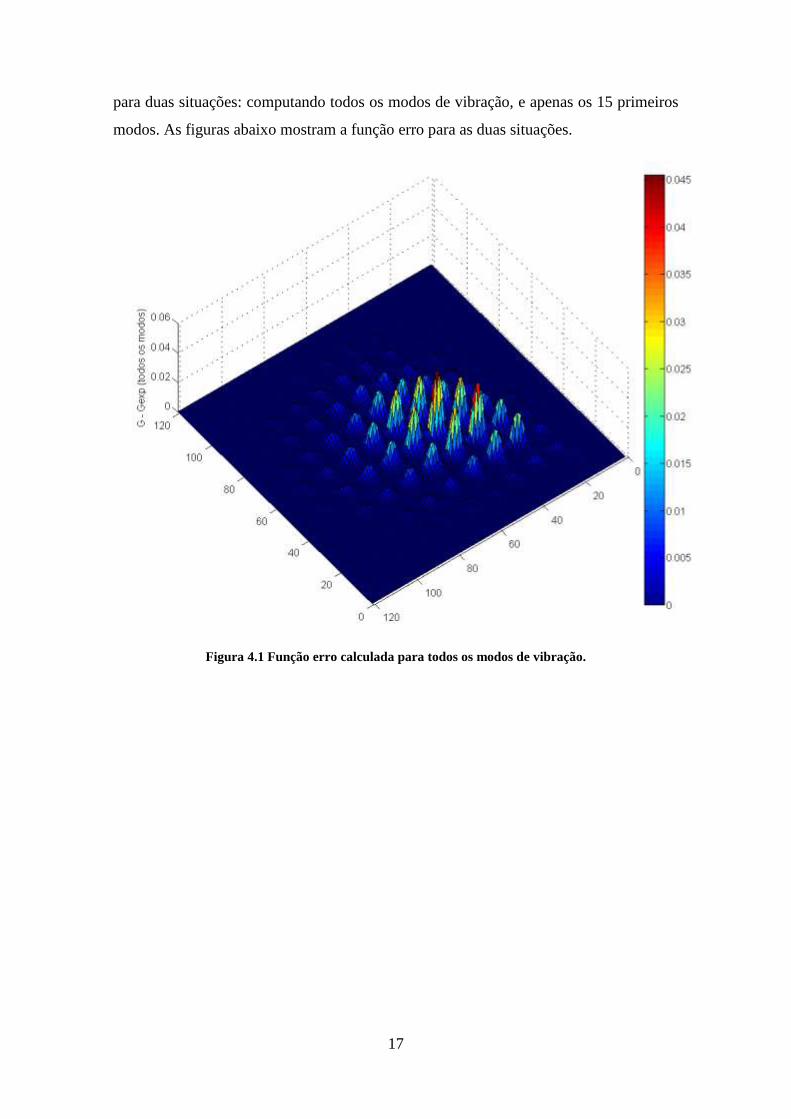
Considerando a análise preliminar da seção 3.3, a matriz de flexibilidade foi
calculada para todos os graus de liberdade verticais, obtendo-se a função erro |G – Gexp|
17
para duas situações: computando todos os modos de vibração, e apenas os 15 primeiros
modos. As figuras abaixo mostram a função erro para as duas situações.
Figura 4.1 Função erro calculada para todos os modos de vibração.

18
Figura 4.2 Função erro calculada para os 15 primeiros modos de vibração.
É notável que quanto menos modos são medidos, o que na prática acontece, o resultado
é um pouco menos nítido, mas o dano ainda é identificado. Medir todos os graus de
liberdade verticais é impossível, pois necessitaria inúmeros sensores. Então, o algoritmo
de minimização do erro é importante, pois trabalha com dados limitados de apenas
algumas medições, para estimar o dano.
4.2 Algoritmo de otimização
A matriz de flexibilidade apresenta um parâmetro interno de dano (βij), por meio da
equação 3.1. O processo iterativo fundamenta-se em minimizar uma função erro J(β),
definida abaixo:
‖ ‖
(5.6)
onde βij ϵ [0,1], i,j = 1, ..., n(número de elementos).

19
Isso representa um problema de otimização não linear com restrições, que é resolvido
numericamente pelo método de Newton. O algoritmo foi implementado através da
função Lsqnonlin do Matlab®, que resolve problemas de mínimos quadrados não
lineares de ajuste de dados da forma mostrada abaixo:
Portanto, considerando-se o problema em questão, o algoritmo consiste em achar a
matriz β que minimiza a função de erro entre a matriz de flexibilidade obtida
experimentalmente e a matriz calculada pelo modelo computacional.
É importante ressaltar que o número de parâmetros ajustáveis βij é igual ao
número de elementos finitos da chapa. Para o problema analisado, o valor inicial da
matriz β deve ser definido para começar o algoritmo de otimização. Supondo-se que a
estrutura normalmente não apresenta danos visíveis e de fácil identificação, o valor
inicial definido foi βij = 1 para i,j = 1, ..., 10. Isso significa que o algoritmo começa
considerando que a estrutura não apresenta dano.

20
5 Resultados
Nesse capítulo serão apresentados os resultados para as configurações de dano
apresentadas na seção 3.2 e de sensores que serão apresentadas na seção 5.1. Portanto,
as matrizes (1-β) de parametrização de dano estrutural 10 x 10 que minimizam a função
erro descrita na seção 4.2 serão plotadas em gráficos de barra discretos e na forma de
níveis, variando-se algumas características da simulação.
É importante reforçar que o experimento citado nesse relatório foi realizado pelo
mesmo programa que gera o modelo computacional a ser comparado. Portanto, é
preciso que alguns recursos sejam inseridos no experimento, tais como incertezas nas
medições e condições de contorno, para que o método seja avaliado corretamente.
Além disso, quanto mais modos são computados no somatório envolvido no
cálculo da matriz de flexibilidade, melhor é o resultado. Entretanto, deve-se lembrar que
trabalhar com altas frequências naturais pode ter elevado custo e ainda danificar a
estrutura. Portanto, quanto mais baixas as frequências, mais aplicável será o método.
Por isso, apenas as primeiras frequências naturais foram computadas nos resultados
mostrados nesse capítulo.
Na seção 5.3 será avaliada a área afetada pelo dano e como o algoritmo reage
quando se tem um dano extenso, pontual ou múltiplo. Em seguida, será avaliado o
posicionamento dos sensores e como isso pode afetar o processo de identificação de
dano. A seção 5.5 simula o impacto das incertezas de medição, como ruídos, na matriz
de flexibilidade. O objetivo é se aproximar ao máximo da realidade de um experimento.
Em sequência, a condição de contorno “engastada” será questionada e perturbada para
avaliar a sensibilidade do processo. Para finalizar, um modelo mais refinado será
estudado para confrontar os resultados obtidos anteriormente.
5.1 Posicionamento dos sensores
Três configurações de posicionamento dos sensores foram estudadas. É
importante ressaltar que o mesmo programa em Matlab® é utilizado para simular o
experimento computacional. Os sensores representam os nós do modelo, cujos graus de
liberdade verticais serão medidos para a identificação de dano. Uma incerteza de 1% a
3% sobre essas medidas será imposta para tornar a simulação mais real. As figuras
abaixo mostram as três configurações de sensores:

21
a) Sensores S1:
Figura 5.1 Posicionamento de sensores S1.
b) Sensores S2:
Figura 5.2 Posicionamento de sensores S2.
c) Sensores S3:
Figura 5.3 Posicionamento de sensores S3.

22
5.2 Casos analisados
Os diferentes casos apresentados na tabela abaixo serão analisados em sequência
nas próximas seções:
Tabela 6 – Casos analisados.
Caso Ruído (%) Configuração
de dano*
Posicionamento
dos sensores**
Nº de modos
computados
1 3 D1 S3 30
2 3 D2 S3 30
3 3 D3 S3 30
4 3 D1 S1 30
5 3 D1 S2 30
6 3 D1 S3 30
7 1 D1 S2 30
8 3 D1 S2 15
9 3 D2 S2 15
10 1 D1 S3 30
11 1 D2 S3 15
12 1 D1 S3 15
Efeito da área afetada pelo dano (seção 5.3)
Efeito da posição dos sensores (seção 5.4)
Efeito de incertezas de medição (seção 5.5)
Efeito da incerteza de fixação (seção 5.6)
Refinando-se a malha (seção 5.7)
* apresentados na seção 3.2.
** apresentados na seção 5.1.
5.3 Efeito da área afetada pelo dano
Para cada uma das as três diferentes configurações de dano, foram calculadas as
matrizes de flexibilidade, computando os 30 primeiros modos de vibração. O processo
de identificação de dano foi executado e a matriz de parametrização do dano (1-β)
exibida abaixo:

23
Figura 5.4 Caso 1
Dano identificado pelo algoritmo está bem próximo ao dano da estrutura, porém o valor
de β é maior do que 0.5, como definido no capítulo 3.
12
34
56
78
910
12
34
56
78
910
0
0.1
0.2
0.3
0.4
1 -
be
ta
1
2
3
4
5
6
7
8
9
102 4 6 8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35

24
Figura 5.5 Caso 2
Dano identificado pelo algoritmo está bem próximo ao dano da estrutura. O valor de β é
próximo de 0.5, como definido no capítulo 5.
12
34
56
78
910
12
34
56
78
910
0
0.2
0.4
0.6
0.8
1
1 -
be
ta
1
2
3
4
5
6
7
8
9
102 4 6 8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9

25
Figura 5.6 Caso 3
Dano identificado apenas em algumas regiões. O dano não foi identificado na região
inferior à esquerda da placa. Entretanto, a magnitude do dano identificado foi próxima
de 0.5.
12
34
56
78
910
12
34
56
78
910
0
0.1
0.2
0.3
0.41
- b
eta
1
2
3
4
5
6
7
8
9
102 4 6 8 10
0.05
0.1
0.15
0.2
0.25
0.3

26
5.4 Efeito da posição dos sensores
Para analisar o efeito da posição dos sensores no processo de identificação de
dano, foram avaliadas as três configurações de medições mostradas na seção 5.1.
Também foram computados apenas os 30 primeiros modos de vibração para cálculo da
matriz de flexibilidade experimental. O dano D1 foi considerado para essa análise e os
resultados exibidos a seguir:
Figura 5.7 Caso 4
Para esse posicionamento de sensores S1, o algoritmo de otimização não realiza
nenhuma iteração. Isso que dizer que o valor inicial da matriz β é um mínimo local, e o
gradiente da função erro é muito pequeno. Portanto, esse posicionamento não foi uma
boa opção para essa simulação, uma vez que depende de muitas frequências naturais
para convergir.
12
34
56
78
910
12
34
56
78
910
0
0.5
1
1.5
2
x 10-8

27
Figura 5.8 Caso 5
Dano identificado pelo algoritmo está bem próximo ao dano da estrutura. O valor de β,
porém não se aproxima de 0.5, como definido no capítulo 4.
12
34
56
78
910
12
34
56
78
910
0
0.05
0.1
0.15
0.2
1
2
3
4
5
6
7
8
9
102 4 6 8 10
0.02
0.04
0.06
0.08
0.1
0.12
0.14

28
Figura 5.9 Caso 6.
Dano identificado pelo algoritmo está próximo ao dano da estrutura. O valor de β,
porém, é aproximadamente metade de 0.5, como definido no capítulo 4.
12
34
56
78
910
12
34
56
78
910
0
0.1
0.2
0.3
0.4
1
2
3
4
5
6
7
8
9
102 4 6 8 10
0.05
0.1
0.15
0.2
0.25
29
O posicionamento simétrico dos sensores não foi uma boa opção para a identificação
do dano local em apenas 2 elementos. Isso aconteceu porque a matriz de flexibilidade
relacionada aos graus de liberdade medidos não é sensível suficiente ao dano estudado.
As outras configurações de sensores foram mais eficientes para a identificação do dano.
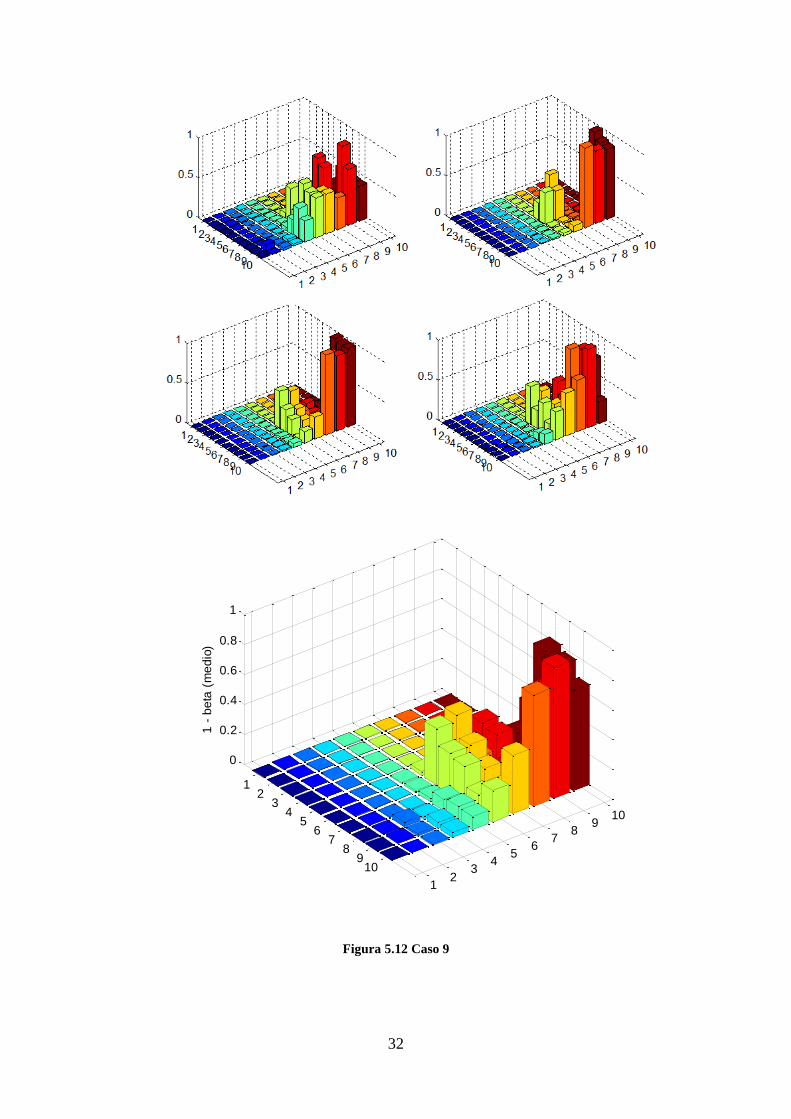
5.5 Efeitos de ruídos experimentais
A incerteza citada anteriormente representa o ruído nas medições experimentais que
aconteceriam em um experimento real. Portanto, para plotar esses resultados, foram
tomadas dez medidas. Abaixo, para ilustrar, serão apresentadas quatro medições das dez
realizadas e a média dessas matrizes (1-β) será destacada. O ruído é definido por uma
função aleatória de distribuição normal, cuja média é zero e o desvio padrão é unitário.
Essas incertezas estão incluídas nas medições de frequência natural e forma modal.
Dessa forma, três séries de medições são apresentadas em seguida.

30
Figura 5.10 Caso7
12
34
56
78
910
12
34
56
78
910
0
0.1
0.2
0.3
0.4
0.5
1 -
be
ta (
mé
dio
)

31
Figura 5.11 Caso 8
12
34
56
78
910
12
34
56
78
910
0
0.2
0.4
0.6
0.8
1
1 -
be
ta (
mé
dio
)
32
Figura 5.12 Caso 9
12
34
56
78
910
12
34
56
78
910
0
0.2
0.4
0.6
0.8
1
1 -
be
ta (
me
dio
)

33
Para os resultados apresentados acima, é notável a alta sensibilidade da matriz de
flexibilidade. Mesmo variando-se 1% nas medidas de frequência natural e forma modal,
verifica-se grande variação na matriz de parametrização de dano β. A média das 10
medidas apresenta um bom resultado tanto para a localização do dano como para
determinar sua magnitude. Quando apenas as 15 primeiras frequências naturais são
analisadas, o resultado é pouco preciso. Entretanto, considerando-se que nada se sabe
sobre a estrutura, pelo menos uma previsão coerente da região de dano pode ser
realizada por esse método.
5.6 Efeitos de incertezas na condição de contorno
Pode-se também testar se a identificação do dano é satisfatória para incertezas na
condição de contorno. Portanto, os casos 10 e 11 foram estudados, de forma que três
nós em cada extremidade tivessem seus respectivos graus de liberdade liberados,
simulando um possível desprendimento da placa. As figuras 5.13, 5.14 e 5.15
apresentam os nós liberados, o resultado para o caso 10 e o resultado para o caso 11,
respectivamente:
Figura 5.13 Nós liberados marcados em vermelho.

34
Figura 5.14 Caso 10.
Figura 5.15 Caso 11.
12
34
56
78
910
12
34
56
78
910
0
0.2
0.4
0.6
0.8
11
-be
ta
12
34
56
78
910
12
34
56
78
910
0
0.2
0.4
0.6
0.8
1
1-b
eta

35
A identificação do dano apresentou alguns falsos danos na borda da estrutura.
Entretanto, é possível verificar que a região danificada ainda foi identificada.
5.7 Refinando-se a malha
Para estudar o problema exposto abaixo, com dano atuando em apenas dois elementos,
faremos comparações entre uma malha de 10x10, que vem sendo utilizada até agora e
uma malha de 20x20 elementos. Sabe-se que para esse problema, medindo-se apenas os
15 primeiros modos de vibração o resultado obtido não é muito satisfatório, uma vez
que o dano identificado não é posicionado na parte central da chapa.
Figura 5.16 Caso 12 - Gexp 10 x 10
Quando a malha é refinada para 20x20 elementos, o resultado obtido é razoável, uma
vez que permite a localização do dano, mesmo que não verifique precisamente a
gravidade do dano de 50% da rigidez.
12
34
56
78
910
12
34
56
78
910
0
0.1
0.2
0.3
0.4
0.5
1 -
be
ta

36
Figura 5.17 Caso 12 - Gexp 20 x 20
12
34
56
78
910
12
34
56
78
910
0
0.1
0.2
0.3
0.4
0.5

37
6 Conclusão
Este trabalho procurou apresentar um estudo de caso de identificação de dano
em placas, utilizando-se o método de elementos finitos de placas finas e análise modal
para se calcular a matriz de flexibilidade experimental e analítica. Um parâmetro β que
representa o dano é inserido nas propriedades físicas do material (matriz de rigidez) e,
por meio de um algoritmo de otimização, a diferença entre a matriz de flexibilidade
experimental e computacional é minimizada, estimando-se, assim, o parâmetro de dano.
Considerando-se o total desconhecimento da integridade da estrutura, os
resultados obtidos já representam uma estimativa razoável do dano localizado. A malha
utilizada de 10 x 10 elementos poderia ser refinada nos locais próximos ao primeiro
resultado obtido e todo o processo repetido. Uma vez finalizado o projeto, o próximo
passo é realizar um experimento em laboratório e aperfeiçoar o algoritmo de
otimização. Uma opção seria implementar no programa o algoritmo “enxame de
partículas” para se ter uma melhor estimativa do valor inicial do parâmetro de dano.
Além disso, reduzir ao máximo o número de graus de liberdade verticais medidos pelos
sensores, obtendo-se ainda um resultado razoável. Outra melhoria seria estudar o
melhor posicionamento dos sensores, para se obter o melhor resultado; e também
considerar incertezas nas propriedades físicas do material, tais como módulo de
elasticidade, coeficiente de Poisson e densidade de área.
Para finalizar, é importante ressaltar que esse projeto possibilitou grande
aprendizado na engenharia mecânica, uma vez que exigiu a implementação de códigos
Matlab® para o estudo vibracional de placas, de elementos finitos e de otimização. Para
adaptar ou criar esses códigos, muitas vezes do zero, foi preciso muita compreensão
sobre o assunto e muita pesquisa a artigos publicados.

38
7 Referências bibliográficas
[1] FAN W, QIAO P. “Vibration-based damage identification methods: a review and
comparative study.” Struct Health Monit (2011);10:83–129.
[2] L L.T. STUTZ, D.A. CASTELLO, F.A. ROCHINHA, A flexibility-based
continuum damage identification approach, J. Sound Vib. 279 (2005) 641–667.
[3] VENTSEL. E., KRAUTHAMMER.T., 2001, Thin plates and shells – 1 ed. New
York, CRC Press, pp 150 – 300.
[4] P-E AUSTRELL, O DAHLBLOM, J LINDEMANN, A OLSSON, K-G OLSSON,
K PERSSON, H PETERSSON, M RISTINMAA, G SANDBERG, P-A WERNBERG:
Calfem – A Finite Element Toolbox, version 3.4.
[5] MEIROVITCH,L., 1975, Elements of Vibration Analysis – 1 ed. McGraw-Hill, pp
442 – 643.
[6] E.Z.MOORE, J.M.NICHOLS, K.D.MURPHY , “Model-based SHM: Demonstration
of identification of a crack in a thin plate using free vibration data”. Mechanical
Systems and Signal Processing 29(2012)284–295
[7] Kyongchan Song, Thesis submitted to the Faculty of Virginia Polytechnic Institute
and State University.
[8] Q.W. YANG , B.X. SUN, “Structural damage identification based on best
achievable flexibility change”. Applied Mathematical Modelling 35 (2011) 5217–
5224
[9] R.J. GUYAN, “Reduction of stiffness and mass matrices”. AIAA Journal 3 (2)
(1965) 380.