IMPLEMENTAÇÃO DE UM TERCEIRO EIXO ROTATÓRIO EM …edsonh/Repositorio/Mecatrônica... · iii...
75
UNIVERSIDADE FEDERAL DE SANTA CATARINA CURSO DE GRADUAÇÃO EM ENGENHARIA DE MATERIAIS BRUNO GELLERT IMPLEMENTAÇÃO DE UM TERCEIRO EIXO ROTATÓRIO EM UM ESCLERÔMETRO FLORIANÓPOLIS 2010
Transcript of IMPLEMENTAÇÃO DE UM TERCEIRO EIXO ROTATÓRIO EM …edsonh/Repositorio/Mecatrônica... · iii...

UNIVERSIDADE FEDERAL DE SANTA CATARINA
CURSO DE GRADUAÇÃO EM ENGENHARIA DE MATERIAIS
BRUNO GELLERT
IMPLEMENTAÇÃO DE UM TERCEIRO EIXO ROTATÓRIO EM
UM ESCLERÔMETRO
FLORIANÓPOLIS
2010

ii
UNIVERSIDADE FEDERAL DE SANTA CATARINA
CURSO DE GRADUAÇÃO EM ENGENHARIA DE MATERIAIS
BRUNO GELLERT
IMPLEMENTAÇÃO DE UM TERCEIRO EIXO ROTATÓRIO EM UM
ESCLERÔMETRO
Trabalho de Conclusão de Curso apresentado ao
Curso de Engenharia de Materiais da UFSC -
como requisito parcial para obtenção do grau de
bacharel em Engenharia de Materiais, sob
orientação de Rodolfo César Costa Flesch,
M.Eng.; e coorientação de Márcio Celso Fredel,
Dr Ing. e Walter Lindolfo Weingaertner, Dr. Ing.
FLORIANÓPOLIS
2010

iii
UNIVERSIDADE FEDERAL DE SANTA CATARINA
CURSO DE GRADUAÇÃO EM ENGENHARIA DE MATERIAIS
BRUNO GELLERT
IMPLEMENTAÇÃO DE UM TERCEIRO EIXO ROTATÓRIO EM
UM ESCLERÔMETRO
Este Trabalho de graduação foi julgado adequado para a obtenção do título de
Engenheiro de Materiais e aprovado em sua forma final Pela Comissão examinadora e
pelo Curso de Graduação em Engenharia de Materiais da Universidade Federal de Santa
Catarina.
Professor Fernando Cabral
Coordenador do Curso
Dylton do Vale Pereira Filho
Professor disciplina
Comissão Examinadora
__________________________________
Prof. Rodolfo César Costa Flesch, M. Eng.
DAS/UFSC Orientador
__________________________________
Prof. Walter Lindolfo Weingaertner, Dr.-Ing.
EMC/UFSC Co-Orientador
__________________________________
Prof. Márcio Celso Fredel, Dr.Ing.
EMC/UFSC Co-Orientador

iv
Ficha Catalográfica
Gellert, Bruno, 1984-
Implementação de um Terceiro Eixo Rotatório em um
Esclerômetro / Bruno Gellert - 2010
75 f. : il. color. ; 30 cm
Orientador: Rodolfo César Costa Flesch. Co-orientador: Márcio
Celso Fredel. Co-orientador: Walter Weingaertner.
Trabalho de conclusão de curso (graduação) - Universidade
Federal de Santa Catarina, Curso Engenharia de Materiais, 2010.
1. Esclerômetro. 2. Ensaio de riscamento. 3. Automação Labview.
I. Flesch, Rodolfo César Costa. II. Universidade Federal de Santa
Catarina. III. Curso de Engenharia de Materiais. III. Título.

v
AGRADECIMENTOS
Agradeço à Universidade Federal de Santa Catarina, aos professores
idealizadores do Curso de Graduação em Engenharia de Materiais, aos professores
envolvidos na minha formação, em especial aos professores Berend Snoeijer, Walter
Weingaertner, Márcio Fredel, Orestes Alarcon, Rodrigo Stoeterau e Maria Luisa
Sartorelli.
Ao Rodolfo Costa Flesch, pela orientação deste trabalho e pela dedicação ao
projeto. Aos meus amigos e colegas de projeto Renato Raupp, Daniel Scalabrin,
Ahryman Seixas e Gustavo Siebert.
Aos meus pais Edgard e Noemia Gellert por me apoiarem e ao meu irmão Eric
Gellert que mesmo após partir, permanece diariamente comigo para o resto da vida.
À minha namorada Helga Ingrid Diesel, pelo apoio e pelo novo mundo à frente.
Agradeço aos meus amigos que me acompanharam desde antes e no período que
cursei a universidade, Gustavo Dias dos Santos (Gotta Go Big!!!), Vitor Cruz, Lucas
Bonfogo, Cyro Rovath, Denny Sachtleben, Alexandre Rodrigues, Severino Gonçalves
Duarte Filho, Gustavo Maehara, Afonso Alonso, Aline Manteiga, Caroline Bressan,
Rafael e Gabriel Mantovani Bottós, Gustavo Tognetta, João Vicente Scarpin, João
Paulo Martins, Willian Cruz, Kennedy Bispo Miranda, Mauricio Vieira, Rafael Raposo,
Gilmar Adada, André Girelli, Pablo Lia Fook, Carlos Fialho, Paulo Navarro, Pedro
Teixeira, Cristovam Peres, Virginia Paludo, Vitor Angarten, Sérgio Ramos, Clemente
Michels, Marcos Sokoloski, Eduardo Pansera, Vitor Balbinot, Thiago Trapp, Danilo
Rea, Thiago Medeiros, Daniel Ramos, Thales de Oliveira, Bernardo de Barba,
Guilherme Gregório, Ligia Barbosa e a todos meus amigos que são essenciais para mim.

vi
RESUMO
A máquina de ensaios de riscamento, o esclerômetro, é uma ferramenta de grande poder
para estudos de materiais. O potencial desse ensaio ainda não foi aprimorado em sua
totalidade, porém alguns desenvolvimentos já lhe garantem um papel fundamental para
os estudos em materiais. O presente trabalho tem como meta ampliar o potencial de
utilização desta técnica de caracterização de materiais, tornando o esclerômetro uma
máquina robusta e de grande aplicabilidade. A implementação do terceiro eixo rotativo
agregou uma nova possibilidade de trajetórias de riscamento, podendo ser realizados
riscamentos em trajetórias polares quaisquer, com superposição de riscos ou não. Ainda
como fruto deste trabalho, toda a programação e automação do equipamento foram
realizadas visando aprimorar a utilização do mesmo em cenários futuros, levando-se em
consideração a compatibilidade total do sistema com as tendências tecnológicas. O
ambiente de controle do equipamento criado teve como principal característica
possibilitar ensaios com quaisquer parâmetros de trajetória, força, velocidade e
comprimento de riscamento.

vii
ABSTRACT
The sclerometer, a scratch testing machine, is a profitable tool used for material studies.
The whole potential of this machine has not been improved yet, but some developments
have already guaranteed a central role for studies in materials. The present work aims to
enhance the potential of the material characterization technique, turning the sclerometer
into a robust and a wide-applicable machine. The implementation of the third rotating
axle has added a new possibility for scratching trajectories, in order to perform the
scratching in any polar trajectories with overlapping scratches or not. This work also
conducted all the programming and automation of the equipment in order to enhance its
use in future scenarios, considering the total system compatibility with technological
trends. The control of the developed equipment system performs its main characteristic,
allowing tests to be performed using any trajectory, strength, speed, and length of
scratch parameters.

viii
LISTA DE QUADROS
Quadro 1. Modelos das mesas de movimentação do esclerômetro. ......................... 13
Quadro 2. Características técnicas das mesas de movimentação. ............................ 14
Quadro 3. Características técnicas do controlador das mesas. ................................ 15
Quadro 4. Características técnicas do computador de controle do esclerômetro. . 16
Quadro 5. Características técnicas dos transdutores piezoelétricos. ....................... 17
Quadro 6. Características do Condicionador de Sinais PCB 484-B11. ................... 18
Quadro 7. Características técnicas da placa de aquisição de sinais. ........................ 21

ix
LISTA DE FIGURAS
Figura 1. Representação esquemática do ensaio de esclerometria retilínea. ............ 3
Figura 2. Mecanismos de desgaste envolvidos em desgaste abrasivo. ....................... 4
Figura 3. Esquema dos esforços atuantes no indentador piramidal do ensaio de
esclerometria (adaptado de [7]). ............................................................................ 4
Figura 4. Área efetiva indentador cônico – vista superior (dureza ao risco Hs). ..... 5
Figura 5. Área efetiva indentador cônico – vista lateral (energia especifica e) ........ 6
Figura 6. Área efetiva indentador piramidal de base quadrada – vista superior
(dureza ao risco Hs), ângulo de ataque 45°. ......................................................... 6
Figura 7. Área efetiva indentador piramidal de base quadrada – vista lateral
(energia específica e), ângulo de ataque 45°. ........................................................ 6
Figura 8. Área efetiva indentador piramidal de base quadrada – vista superior
(dureza ao risco Hs), ângulo de ataque 0°. ........................................................... 7
Figura 9. Área efetiva indentador piramidal de base quadrada – vista lateral
(energia específica e), ângulo de ataque 0°. .......................................................... 7
Figura 10. Projeção da área efetiva de ensaio, referente à figura 9. .......................... 7
Figura 11. Diagrama simplificado de um sistema de controle automático [10]. ..... 10
Figura 12. Arquitetura de rede simplificada para um sistema automatizado [10]. 10
Figura 13. Controlador Mercury ™ C-863 [3]. ......................................................... 15
Figura 14. Sensor Piezoelétrico PCB 208C01 [13]. .................................................... 17
Figura 15. Esquema atômico da teoria de transdutores piezelétricos [13].............. 18
Figura 16. Projeto do Indentador Vicker / Rockwell. ............................................... 20
Figura 17. Placa de Aquisição de Sinais “National Instruments” USB-6218. [5] ... 21
Figura 18. Modelo em três dimensões do projeto do porta-amostras..................... 23
Figura 19. Projeto do porta-amostras: vista lateral 1. ............................................. 23
Figura 20. Projeto do porta-amostras: vista lateral 2. ............................................. 24
Figura 21. Projeto do porta-amostras: furação lateral. ........................................... 24
Figura 22. Projeto do porta-amostras: vista inferior. .............................................. 24
Figura 23. Esquema de ligação dos transdutores de força normal na placa de
aquisição de sinais. ................................................................................................ 25
Figura 24. Esquema de ligação dos transdutores de força tangencial na placa de
aquisição de sinais. ................................................................................................ 26

x
Figura 25. Esquema dos Pinos de Ligação do módulo de aquisição de dados NI
USB-6218. .............................................................................................................. 26
Figura 26. Fluxograma da Rotina de Alinhamento das Mesas. ............................... 28
Figura 27. Diagrama de blocos da inicialização das mesas. ..................................... 29
Figura 28. Fluxograma de Execução do Programa - Parte 1. .................................. 32
Figura 29. Fluxograma de Funcionamento do Programa - Parte 2. ........................ 33
Figura 30. Interface de controle de força do riscamento. ......................................... 34
Figura 31. Diagrama de blocos da sub-rotina de PID. .............................................. 35
Figura 32. Interface de configuração do riscamento retilíneo. ................................ 36
Figura 33. Diagrama de blocos da sub-rotina de riscamento retilíneo. ................... 37
Figura 34. Diagrama de blocos da sub-rotina de riscamento retilíneo quando o
botão de início do teste não é pressionado. ......................................................... 37
Figura 35. Continuação do diagrama de blocos da sub-rotina de riscamento
retilíneo quando o botão de início do teste não é pressionado. ......................... 38
Figura 36. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares
com velocidade ...................................................................................................... 40
Figura 37. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares
com velocidade constante de deslocamento da mesa - continuação. ................ 40
Figura 38. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares
com velocidade constante de deslocamento da mesa - continuação. ................ 40
Figura 39. Interface da sub-rotina de riscamento em trajetória polar com
velocidade constante de deslocamento da mesa. ................................................ 41
Figura 40. Interface da sub-rotina de riscamento em trajetória polar – exemplo de
trajetória polar. ..................................................................................................... 41
Figura 41. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares
com velocidade controlada. .................................................................................. 43
Figura 42. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares
com velocidade controlada - continuação. .......................................................... 43
Figura 43. Interface da sub rotina de riscamento em trajetórias polares com
velocidade controlada. .......................................................................................... 44
Figura 44. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares
ponto a ponto. ........................................................................................................ 45
Figura 45. Interface da sub-rotina de riscamento em trajetórias polares ponto a
ponto. ..................................................................................................................... 45

xi
Figura 46. Fluxograma da Rotina de Alinhamento das Mesas. ............................... 46
Figura 47. Diagrama de blocos da sub-rotina de alinhamento das mesas. ............. 47
Figura 48. Diagrama de blocos da função de alinhamento das mesas, continuação.
................................................................................................................................ 47
Figura 49. Painel de controle de movimentação manual das mesas. ....................... 48
Figura 50. Fluxograma da Rotina de Ajuste do zero dos Transdutores
Piezoelétricos. ........................................................................................................ 49
Figura 51. Rotina de Ajuste do zero dos Transdutores Piezoelétricos. ................... 50
Figura 52. Painel de Ajuste do zero dos Transdutores Piezoelétricos. .................... 51
Figura 53. Caixa de dialogo para ativação da sub-rotina de inserção de amostra. 52
Figura 54. Diagrama de blocos da sub-rotina de inserção de amostras. ................. 52
Figura 55. Diagrama de blocos da sub-rotina de inserção de amostra caso seja
selecionada a opção “não” na caixa de diálogo. ................................................. 53
Figura 56. Interface do painel de controle - Aba da página inicial. ......................... 54
Figura 57. Interface do painel de controle - Aba de movimentação manual. ......... 55
Figura 58. Interface do painel de controle - Aba de riscos lineares. ........................ 55
Figura 59. Interface do painel de controle - Aba de riscos em trajetórias polares. 56

xii
LISTA DE SÍMBOLOS, SIGLAS E ABREVIATURAS
EMIC - Equipamento para realização de ensaios de tração e compressão.
ISA - Barramento para computadores padronizado em 1981;
PCI - Barramento para computadores desenvolvido em 1992;
PID – Controlador de processos que consiste em combinar os controladores
proporcional, integrativo e derivativo. Tal controlador é capaz de controlar grandezas de
forma mais elaborada do que o controlador ON/OFF por exemplo.
USB - Universal Serial Bus, conexão de periféricos para computadores sendo que a
versão 2.0 foi desenvolvida no ano 2000;
VI - Abreviação de Virtual Instrument;
Virtual Instrument - Instrumento virtual referente a um programa ou bloco de funções
utilizados e desenvolvidos no Labview;
VIs - Abreviação para um grupo de Instrumentos Virtuais.

xiii
SUMÁRIO
1. INTRODUÇÃO .......................................................................................................... 1
2. REVISÃO DA LITERATURA ................................................................................. 2
2.1 ESCLERÔMETRO ..................................................................................................... 2
2.2 NATIONAL INSTRUMENTS LABVIEW ...................................................................... 9
2.3 AUTOMAÇÃO DE ENSAIOS E CONTROLE DE PROCESSOS ...................................... 9
3. EQUIPAMENTOS ................................................................................................... 12
3.1 HARDWARE ........................................................................................................... 12
3.1.1 Mesas de movimentação e controladores de movimento ......................... 12
3.1.2 Transdutores Piezoelétricos ........................................................................ 16
3.1.3 Indentadores ................................................................................................ 19
3.1.4 Placa de Aquisição de Sinais ....................................................................... 20
3.2 SOFTWARE ............................................................................................................. 22
4. IMPLEMENTAÇÃO DO TERCEIRO EIXO ....................................................... 22
4.1 INTEGRAÇÃO MECÂNICA ..................................................................................... 22
4.2 PROGRAMAÇÃO E INTEGRAÇÃO .......................................................................... 25
4.2.1 Inicialização e Posicionamento das Mesas................................................. 27
4.2.2 Rotina de Realização do Ensaio de Riscamento ....................................... 31
4.2.3 Sub-Rotina de PID ....................................................................................... 33
4.2.4 Riscamento em Trajetórias Retilíneas ....................................................... 35
4.2.5 Trajetórias de Riscamento .......................................................................... 38
4.2.5.1 Riscamento em Trajetórias Polares com Velocidade Constante de
Deslocamento da Mesa ..................................................................................... 39

xiv
4.2.5.2 Riscamento em Trajetórias Polares com Velocidade Resultante
Controlada ......................................................................................................... 42
4.2.5.3 Riscamento em Trajetórias Polares Ponto a Ponto ........................... 44
4.2.6 Sub-Rotina de Movimentação Manual das Mesas ................................... 45
4.2.7 Sub-Rotina de Ajuste do zero dos Transdutores ...................................... 48
4.2.9 Interface do Programa ................................................................................ 53
5. CALIBRAÇÃO E VERIFICAÇÃO DA CONFIABILIDADE DOS
RESULTADOS ............................................................................................................. 57
6. CONCLUSÕES ......................................................................................................... 58
REFERÊNCIAS ........................................................................................................... 60

1
1. Introdução
As técnicas de caracterização de materiais popularmente utilizadas não oferecem
uma abordagem dinâmica para a medição de dureza. A dureza hoje é medida de forma
estática através de equipamentos denominados durômetros, sendo que o espaçamento
entre as medições de dureza e microdureza é definido por normas. Tal limitação
dificulta a medição da região de transição de durezas. O esclerômetro, por outro lado,
possibilita uma medição dinâmica de dureza possibilitando a determinação do regime de
variação da dureza ao longo de uma região.
O presente trabalho tem como objetivo reformar o esclerômetro do
Departamento de Engenharia Mecânica da Universidade Federal de Santa Catarina. Este
processo contempla a implementação do terceiro eixo, responsável pela movimentação
rotatória da amostra, a construção de novo sistema de programação e o novo sistema de
automação.
A implementação do eixo giratório irá possibilitar que o processo de riscamento
ocorra em diversas trajetórias definidas por uma equação polar qualquer. O processo de
riscamento em diversas trajetórias permite que processos de remoção de material como
a retífica e a usinagem sejam estudados minuciosamente.
Foi necessária a compra de novos componentes para atualizar o equipamento e a
programação da automação a ser criada deveria, além de integrar o novo sistema,
consertar falhas de operação encontradas no software anterior. O sistema de riscamento
com variação de força não funcionava corretamente no estado anterior do equipamento,
o que impossibilitava a realização de ensaios com esta característica.
A apresentação deste trabalho esta baseada na revisão bibliográfica abrangendo
o histórico do esclerômetro e a descrição do ambiente em que a programação e
automação foi executada. Posteriormente os equipamentos são descritos juntamente
com o ambiente de programação utilizado. A implementação do terceiro eixo foi
dividida na parte mecânica, em programação e em integração, que contêm os detalhes
da programação do programa controlador do esclerômetro. Um procedimento de
calibração é apresentado no capítulo 5 e as conclusões do trabalho são apresentadas no
capítulo 6, bem como as sugestões para trabalhos futuros.

2
2. Revisão da literatura
O esclerômetro é um equipamento utilizado para realização do teste de
riscamento. A construção do esclerômetro em questão é resultado de diversos projetos
científicos do Departamento de Engenharia Mecânica da Universidade Federal de Santa
Catarina.
As duas etapas anteriores de construção deste equipamento foram publicadas nos
trabalhos Design and Development of an Apparatus for Measuring the Scratch
Hardness of Ceramic Tiles [1] e Desenvolvimento da Metodologia de Ensaio e de
Avaliação de Dureza ao Risco de Pisos Cerâmicos [2].
Datadas do ano de 1999 e 2003, respectivamente, as duas etapas anteriores de
desenvolvimento do esclerômetro antecederam o projeto atual que teve início em 2009,
visando revisar os erros conceituais do equipamento e torná-lo apto a trabalhar com
trajetórias diversas.
As tecnologias utilizadas neste equipamento podem ser divididas em
equipamentos e software. Todo o conteúdo de hardware foi estudado com base na
referência bibliográfica do projeto. A parte de software foi conduzida de outra forma
pelo fato de não existirem pessoas com conhecimento de programação e de linguagem
National Instruments Labview. Para tal, o grupo contou com o apoio de Rodolfo César
Costa Flesch, certificado em National Instruments Labview, para que treinasse a equipe
do projeto e acompanhasse o desenvolvimento do software.
2.1 Esclerômetro
A descrição dos princípios e do funcionamento do esclerômetro foi definida em
trabalhos anteriores, sendo que a definição a desta seção foi adotada por Renato Raupp
em Comparação entre Medições Estáticas e Dinâmicas de Dureza de Materiais e
Influência da Velocidade de Riscamento em Ensaio de Esclerômetria [3]: “A técnica de
esclerometria consiste da aplicação de testes de riscamento com indentadores duros e de
geometria simples para simular o desgaste abrasivo” [4].
A esclerometria permite a previsão dos mecanismos de remoção de material nas
condições de abrasão e o entendimento da ação de forças na partícula abrasiva, da
morfologia do escoamento do material em volta do sulco, da interação lubrificante-
partícula abrasiva e das diferenças de comportamento dos microconstituintes. A
esclerometria pode ser retilínea, rotativa ou pendular. [5].

3
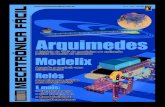
Para este trabalho foi utilizada a esclerometria retilínea que consiste basicamente
em riscar a superfície do corpo de prova em uma trajetória reta, mantendo-se constante
a carga normal aplicada ou a profundidade de penetração, monitorando-se
simultaneamente o esforço tangencial resultante desta interação. Uma noção
simplificada do ensaio é representada pela Figura 1.
Figura 1. Representação esquemática do ensaio de esclerometria retilínea.
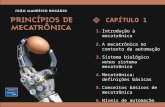
De acordo com o citado por [5], assume-se abrasão como um regime inerente ao
processo esclerométrico, sendo possível ocorrerem 3 mecanismos, descritos a seguir e
ilustrados pela Figura 2 [6]:
Micro-sulcamento: as partículas abrasivas, ou a ponta do penetrador no caso
de um ensaio, provocam deformações plásticas sem causar perda de matéria. O
material deformado flui lateralmente ou acumula-se na frente da partícula.
Micro-corte: a tensão cisalhante na frente das partículas abrasivas causa um
arrancamento de fragmentos na forma de micro-cavacos.
Micro-lascamento: neste processo, grandes fragmentos são subitamente
arrancados da superfície da amostra devido à formação e propagação de
trincas. Trata-se de um mecanismo mais encontrado nos materiais frágeis e
que ocorre quando as tensões produzidas pelas partículas abrasivas excedem
determinados valores críticos dependentes de cada material.

4
Figura 2. Mecanismos de desgaste envolvidos em desgaste abrasivo.
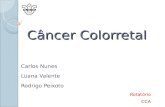
Para melhor compreensão do processo abrasivo, necessita-se conhecer as forças
atuantes sobre as partículas abrasivas. A Figura 3 mostra esquematicamente estes
esforços para uma partícula suposta piramidal.
Figura 3. Esquema dos esforços atuantes no indentador piramidal do ensaio de esclerometria
(adaptado de [7]).
A força normal (Fn) é pré-estabelecida, enquanto a força tangencial (Ft), paralela
à superfície da amostra, deriva do movimento relativo da partícula abrasiva. Dentre os
vários parâmetros esclerométricos possíveis de serem definidos a partir da figura 3,
destacam-se: a pressão média resistente à penetração, normalmente chamada de dureza
ao risco (Hs), e a energia necessária para movimentar uma unidade de volume da
matéria, ou seja, a energia específica (e) [8]. A energia específica pode ser denominada

5
também como dureza tangencial, mas por uma questão de padronização, será referida ao
longo deste trabalho apenas como energia específica.
Hs = Fn/An
Equação 1. Dureza ao risco.
e = Ft/At
Equação 2. Energia específica.
Onde,
An = área normal;
At = área tangencial.
A partir das equações 1 e 2, é possível calcular a dureza ao risco (Hs) –
relacionada à força normal – e a energia específica (e) – relacionada à força tangencial.
No entanto, este cálculo irá variar, dependendo da geometria do indentador utilizado
durante o ensaio. No ensaio esclerométrico utilizam-se geralmente dois tipos diferentes
de indentadores: piramidal (Vickers) e cônico (Rockwell C).
O indentador Rockwell C, por ser cônico, possui uma área efetiva em forma de
um semicírculo que determina a largura do risco (L) e a forma de um triângulo que
determina a energia específica durante o ensaio, conforme ilustram a Figura 4 e a Figura
5.
Figura 4. Área efetiva indentador cônico – vista superior (dureza ao risco Hs).

6
Figura 5. Área efetiva indentador cônico – vista lateral (energia especifica e)
Já o indentador Vickers, por ser uma pirâmide de base quadrada, pode ter áreas
efetivas diferentes, dependendo do seu ângulo de ataque. Por convenção, utilizando a
aresta do indentador como referência, quando o ângulo de ataque é 45°, uma de suas
faces está posicionada a 0° em relação à direção de riscamento, representando a área
efetiva durante o ensaio responsável pela remoção ou deformação do material. Possui,
portanto, uma área efetiva em forma de um retângulo que determina a largura do risco e
a forma de um triângulo que determina a energia específica durante o ensaio.
Figura 6. Área efetiva indentador piramidal de base quadrada – vista superior (dureza ao risco
Hs), ângulo de ataque 45°.
Figura 7. Área efetiva indentador piramidal de base quadrada – vista lateral (energia específica e),
ângulo de ataque 45°.

7
Quando o ângulo de ataque é 0° (zero grau), significa que uma de suas arestas
está posicionada a 0° em relação à direção de riscamento, representando a área efetiva
durante o ensaio. Esta, por sua vez, possui uma área efetiva em forma de um semi-
losango que determina a largura do risco e a forma de um triângulo que determina a
energia específica durante o ensaio. As Figuras 8, 9 e 10 ilustram o que foi descrito.
Figura 8. Área efetiva indentador piramidal de base quadrada – vista superior (dureza ao risco
Hs), ângulo de ataque 0°.
Figura 9. Área efetiva indentador piramidal de base quadrada – vista lateral (energia específica e),
ângulo de ataque 0°.
Figura 10. Projeção da área efetiva de ensaio, referente à figura 9.

8
Pode-se fazer o cálculo de dureza ao risco para este ultimo caso da seguinte
forma, considerando um indentador com ângulo entre faces 136° e entre arestas 148,7°:
a área do losango é dada pelo produto do comprimento de suas diagonais dividido por
quatro, portanto:
An = L²/4
Equação 3. Área do losango.
Sabendo que a área da impressão é determinada pela largura do risco em função
da geometria do indentador, pode-se calcular a constante relativa à geometria do
indentador Vickers (K1) atinente à força normal (Fn) com a seguinte formula:
An = L²/K1
Equação 4. Largura do risco.
Ao substituirmos na eq. 3, logo encontramos K1 = 4 e chegamos enfim à
fórmula final de dureza ao risco (Hs) para um ensaio esclerométrico nas condições
supracitadas, sendo esta equação utilizada em toda a extensão deste trabalho.
Hs = 4 Fn / (L²)
Equação 5. Dureza ao risco.
Faz-se necessário também, encontrar uma equação final para o cálculo da
energia especifica (e) referente à força tangencial (Ft) obtida durante o movimento
horizontal da amostra.
A área projetada At (Figura 10), pode ser calculada da seguinte forma:
h = 0,14007L
At = (base * altura)/2
At = (L * 0,14L)/2
At = 0,070035L²
Sabendo que e = Ft/At e At = L²/K2, então:

9
K2 = L²/0,070035L²
K2 = 14,278
onde K2 é a constate relativa à geometria do indentador e a equação final, portanto,
será:”
Equação 6. Energia especifica.
2.2 National Instruments Labview
De acordo com [9] o Labview é uma linguagem de programação gráfica que
utiliza ícones, em vez de linhas de texto, para criar aplicações. Em contraste às
linguagens de programação baseadas em texto, em que instruções determinam a
execução do programa, o Labview utiliza programação baseada em fluxo de dados,
onde o fluxo dos dados determina a execução.
2.3 Automação de Ensaios e Controle de Processos
O conceito de controle de processos está relacionado ao controle dos processos
de uma operação de um equipamento ou de uma série de equipamentos de uma linha de
produção e assim surge o conceito de automação visando minimizar ou mesmo eliminar
a intervenção humana em tais processos.
Segundo [10] os sistemas automatizados podem ser aplicados em simples
máquina ou em toda indústria, como é o caso das usinas de cana e açúcar. A diferença
está no número de elementos monitorados e controlados, denominados de “pontos”.
Estes podem ser simples válvulas ou servomotores, cuja eletrônica de controle é bem
complexa. De uma forma geral o processo sob controle tem o diagrama semelhante ao
mostrado na Figura 11, onde os citados pontos correspondem tanto aos atuadores quanto
aos sensores. O controle de processos visa, em resumo, gerar sinais para o atuador de tal
forma que o valor medido pelo sensor atinja um determinado valor de referência e dele
não se afaste mesmo na presença de perturbações no sistema.

10
Figura 11. Diagrama simplificado de um sistema de controle automático [10].
A definição segundo [11] explica que a automação industrial pode ser entendida
como uma tecnologia integradora de três áreas: a eletrônica responsável pelo hardware,
a mecânica na forma de dispositivos mecânicos (atuadores) e a informática responsável
pelo software que irá controlar todo o sistema.
Os componentes de um sistema de controle de processos podem ser divididos
em certos níveis de acordo com o aumento da complexidade do sistema, como definido
a seguir por [10]. A completa automatização de um sistema envolve o estudo dos quatro
elementos da Figura 11, seja o sistema de pequeno, médio ou grande porte. Estes
últimos podem atingir a complexidade e tamanho tais que, para o seu controle, deve-se
dividir o problema de controle em camadas, onde a comunicação e “hierarquia” dos
elementos é similar a uma estrutura organizacional do tipo funcional. A Figura 12
mostra de forma simplificada este tipo de organização
Figura 12. Arquitetura de rede simplificada para um sistema automatizado [10].
Foi utilizada a técnica de controle de processo chamada Proporcional –
Integrativo – Derivativo (PID), que calcula um sinal de controle composto por parcelas
proporcional ao erro, proporcional à integral do erro e proporcional à derivada do erro
entre a referência e o valor medido. Ela faz com que o sinal de erro seja minimizado

11
pela ação proporcional, zerado pela ação integral e obtido com uma certa parcela
antecipativa dada pela ação derivativa.

12
3. Equipamentos
Para o desenvolvimento do terceiro eixo no esclerômetro, foi necessária a
incorporação e a atualização de certos equipamentos e sistemas. Os itens que
compunham o equipamento estavam em grande parte defasados tecnologicamente, não
permitindo a aplicação de muitas das tecnologias computacionais atuais.
Inicialmente, foi realizado um estudo técnico para a aquisição de componentes
que fornecessem a vida útil mais longa possível. Foram avaliadas a compatibilidade
tecnológica em relação às tendências de evolução dos equipamentos de informática e
automação e ainda a compatibilidade com os futuros desenvolvimento do esclerômetro.
3.1 Hardware
Todo o hardware foi selecionado visando montar um sistema robusto que
combinasse velocidade de processamento e exatidão suficientes para controlar o
processo de riscamento nas mais variadas aplicações.
Durante a análise do hardware existente e que continuaria a ser utilizado, testes
de calibração para a movimentação e a medição de força foram realizados visando
certificar a qualidade e o correto funcionamento dos componentes.
Todos os equipamentos foram superdimensionados em suas necessidades para
que futuras melhorias fossem possíveis sem necessidade de atualização de hardware.
Para facilitar a comunicação entre os diversos componentes e ganhar mais agilidade em
suporte técnico, foi dado preferência para adquirir componente dos mesmos fabricantes.
3.1.1 Mesas de movimentação e controladores de movimento
As mesas de movimentação horizontal e vertical existentes foram fabricadas
pela Physik Instrumente e são denominadas como os modelos M-521 DDB e M-410 DG
respectivamente. Seus controles eram realizados por uma placa de controle duplo da
própria Physik Instrumente com suporte para barramento ISA de comunicação com o
computador. Tanto o computador quanto o software instalados davam suporte a esta
placa e o sistema funcionava corretamente.
O terceiro eixo foi integrado através da incorporação mecânica da mesa giratória
M-062.PD que possui um novo sistema de controle com tecnologia atual. O antigo
sistema de controle pertencente as mesas já existentes não possuía a opção de suporte ao

13
barramento ISA e por esse motivo foi necessário atualizar o sistema de controle das
mesas existentes para a tecnologia de barramento PCI ou USB.
Visando a compatibilidade do sistema no futuro, foi escolhida a tecnologia USB,
onde os controles das mesas são externos e se comunicam com o computador por portas
USB. A longevidade desta tecnologia aparenta ser maior em relação à previsão de vida
do barramento PCI, que já vem sendo substituído pela tecnologia PCI Express [12].
A tecnologia USB também permite que o controle das mesas seja facilmente
realizado por computadores portáteis, uma vez que nenhum hardware necessita ser
instalado em barramentos internos ao computador, geralmente não disponíveis em
computadores portáteis.
Pela tradição e qualidade do fabricante, foi escolhida a mesa rotatória M-062.PD
da Physik Instrumente, que atendeu as necessidades dimensionais e cinemáticas dos
requisitos do projeto.
Sendo todas as três mesas do mesmo fabricante, sua integração para controle no
National Instruments Labview tornou-se mais fácil, podendo ser utilizados os mesmos
VIs (Virtual Instruments) para todas as mesas.
Todas as três mesas requerem alimentação externa individual de 24 V (corrente
contínua). Foi utilizada uma fonte em comum já existente para as mesas horizontal e
vertical e uma fonte individual nova para a mesa giratória, pois a fonte comum só
disponibilizava duas saídas que já estavam ocupadas.
Movimentação da Mesa Marca Modelo
Horizontal Physik Instrumente M-521.DDB
Vertical Physik Instrumente M-410.DG
Rotacional Physik Instrumente M-062.PD
Quadro 1. Modelos das mesas de movimentação do esclerômetro.
O controle do movimento horizontal é realizado pela mesa da Physik
Instrumente do modelo M-521.DDB pelo fato deste apresentar uma capacidade de carga
de 100 kg. Tal característica possibilita o acoplamento de amostras de massa elevada, a
realização do teste de risco com forças elevadas e viabiliza uma possível instalação de
outros sistemas mecânicos superiores.

14
Quanto ao movimento vertical, a necessidade principal é a exatidão da força
aplicada às amostras pelo indentador de diamante. Devido à rugosidade variável da
superfície da amostra a ser testada, deve haver um sistema de controle automático de
força que corrija essas variações durante a realização do ensaio. Para isso, a mesa
vertical deve ser capaz de realizar movimentos bastante exatos com amplitudes
reduzidas. Com base nessas características foi mantida a mesa M-410-DG, que possui
uma resolução de 0,0035 μm, que atende aos requisitos da aplicação.
A mesa rotatória M-062.PD foi selecionada por oferecer uma velocidade de
rotação suficiente para a simulação dos processos de polimento e de outras trajetórias
convenientes. As especificações detalhadas das mesas são apresentadas no Quadro 2.
Parâmetros M-410.DG M-521.DDB M-062.PD Unidade
Condição Existente Existente Nova -
Eixo de
Movimentação Vertical Horizontal Rotatório -
Movimentação 100 mm 204 mm 360º -
Sensor Integrado Encoder Rotatório Encoder Linear Encoder Rotarório -
Resolução do
Sensor
2048 pulsos por
revolução 0,1 μm
4000 pulsos por
revolução -
Incremento
mínimo de
movimentação
0,1 μm 0,1 μm 15 μrad -
Velocidade
máxima 0,7 mm/s 50 mm/s 90 º/s -
Carga Máxima 200 1000 650 N
Torque Lateral
Máximo 40 200 7 Nm Nm
Tipo de Motor Motor DC Motor DC Active
Drive ™
Motor DC Active
Drive ™ -
Potencial Elétrico 0 a ± 24 0 a ± 24 24 V
Potência 2 2 30 W
Controle de
Limite e
Referências
Efeito Hall Efeito Hall Efeito Hall -
Material Aço e Alumínio Aço e Alumínio Alumínio -
Massa 2,00 2,00 2,76 kg
Quadro 2. Características técnicas das mesas de movimentação.
Os controladores de movimento das duas mesas já existentes foram substituídos
por controladores externos com interface USB ou RS-232, fabricados pela Physik
Instrumente, modelo Mercury™ C-863 específico para controlar mesas de
movimentação acionadas por motores de corrente contínua.

15
Figura 13. Controlador Mercury ™ C-863 [3].
Cada controlador suporta uma mesa individualmente e pode ser conectado em
série através de uma conexão serial ou individualmente diretamente em uma porta USB
do computador. Para o projeto em questão foi utilizada a ligação direta e individual de
cada controlador via porta USB. As especificações técnicas dos controladores estão
apresentadas no Quadro 3.
Controlador Mercury™ C-863 Características
Canais 1
Tipo do Controlador Servo Controlador PID
Entrada do Encoder A/B quadratura nível TTL RS-422
Referência de Entrada (origem) 1 x Sinal TTL
Potência 30 W
Interfaces de Comunicação RS-232 (bus architecture) e USB
Conector do Motor Sub-D 15
Entradas / Saídas 4 entradas analógicas/digitais, 4 saídas
digitais
Potencial Elétrico (15 a 30) V de acordo com tensão
máxima da mesa.
Massa 0,3 kg
Quadro 3. Características técnicas do controlador das mesas.
O computador onde todo o hardware é controlado pelo software possui as
características apresentadas no Quadro 4.

16
Computador de controle do
Esclerômetro Características
Processador Intel Quad Core Q8400 2.66 GHz
Placa Mãe Asus S775 P5KPL-AM Som/Rede
Disco Rígido HD500Gb Samsung Satall
Gravador DVD Samsung Dual Layer
Placa Vídeo VGA PCIEXP 1 GB DDR2 9400GF
128 Bit
Gabinete Gabinete 4 baias USB
Fonte 500W Real Thermaltake
Monitor LCD LG 19'' W1942 SM
Quadro 4. Características técnicas do computador de controle do esclerômetro.
3.1.2 Transdutores Piezoelétricos
As forças de riscamento adquiridas se constituem da força normal e da força
tangencial que por sua vez são adquiridas por transdutores piezoelétricos, fabricados
pela empresa PCB. O modelo selecionado foi o 208C01, que trabalha com medição de
força por compressão e por tração com alta resolução [15].
A escolha por transdutores piezoelétricos resulta de uma decisão realizada no
passado, com a qual pretendia-se captar a frequência de vibração da peça ensaiada pelo
próprio sensor de medição de força através da análise matemática do sinal. Assim, seria
possível caracterizar a transição dúctil frágil do material durante o riscamento pela
emissão do ruído.

17
Figura 14. Sensor Piezoelétrico PCB 208C01 [13].
Como os transdutores piezoelétricos são capazes de medir forças dentro de uma
faixa extremamente grande, poder-se-iam registrar as altas frequências de vibração
sonora. Este estudo não conseguiu ser viabilizado pela equipe de implementação
anterior do esclerômetro e foi descontinuado.
Sensor Piezoelétrico
PCB-208C01 Características
Sensibilidade 112410 mV/kN
Faixa de Medição Compressão (0 a 0,04448) kN
Faixa de Medição Tração (0 a 0,04448) kN
Máxima Força Estática 0,27 kN
Potencial Elétrico (18 a 30) Vcc
Corrente constante de Excitação (2 a 20) mA
Torque de aperto recomendado (181 a 226) N-cm
Conector Elétrico 10-32 Coaxial
Massa 22,7 g
Quadro 5. Características técnicas dos transdutores piezoelétricos.

18
Os transdutores de força vertical e tangencial estavam operando de forma correta
e foram mantidos para o novo projeto. As especificações detalhadas dos sensores estão
apresentadas no Quadro 5.
Pelo fato dos transdutores piezoelétricos gerarem um sinal extremamente baixo
quando da aplicação de carga, é necessário amplificar seu sinal. Para isto, os
transdutores contam com um amplificador tipo mosfet. Para alimentar os sensores com
24V, foram utilizados os amplificadores/condicionadores de sinal da PCB modelo
484B06 que tratam o sinal e o amplificam para que este possa ser utilizado
posteriormente por qualquer sistema de aquisição de sinais que opere na faixa de
entrada de sinal de -10 V a +10 V (corrente contínua). As especificações detalhadas são
apresentadas no Quadro 6.
Condicionador de Sinal
PCB 484B06 Características
Tipo Condicionador de baixa frequência
Canais 1
Excitação do Sensor 24 V, (2 a 20) mA
Ganho X1, X10, X100
Conectores de Entrada / Saída BNC / BNC
Massa 907 g
Quadro 6. Características do Condicionador de Sinais PCB 484-B11.
Os transdutores piezoelétricos são constituídos por cristais piezoelétricos que
acusam uma variação de corrente elétrica quando são passivos de carregamento
mecânico. Materiais piezoelétricos também podem apresentar variação dimensional de
acordo com a aplicação de uma corrente elétrica [13]. Sua utilização neste caso se
destina a movimentações de extrema precisão como os espelhos de um cabeçote
galvanométrico de um equipamento de marcação a laser ou os componentes de um
posicionamento da amostra de um microscópio eletrônico de varredura.
Figura 15. Esquema atômico da teoria de transdutores piezelétricos [13].
Devido à perda de carga do sistema de controle dos transdutores piezelétricos, o
sinal obtido a partir de um carregamento constante apresenta uma queda ao longo do
Força Força

19
tempo, sendo assim estes transdutores são ideais para adquirir valores de forças
dinâmicas.
A fixação dos transdutores na base metálica é realizada por meio de parafusos
fixados na rosca do sensor. Todavia, o torque de aperto dos parafusos resulta em um
carregamento do cristal piezoelétrico. O torque de aperto ideal pode ser encontrado
quando o parafuso oferecer uma resistência mecânica suficiente sentida na mão e ao
mesmo tempo os medidores das fontes dos transdutores não acusarem uma medição
fora da faixa admissível.
Os fatores perda de carga e torque de aperto do parafuso de fixação fazem ser
necessária a criação de um sistema de ajuste do zero dos transdutores, visto que para
cada configuração de montagem o zero localiza-se em uma posição diferente.
3.1.3 Indentadores
O processo de riscamento no esclerômetro é realizado por um indentador fixado
à mesa de movimentação vertical através do transdutor piezoelétrico. O indentador
interage com a amostra, que é acoplada na mesa giratória, que por sua vez esta acoplada
na mesa horizontal.
Os indentadores são fabricados sob medida pela empresa Dimas Ferramentas
Diamantadas de São Bernardo do Campo, São Paulo. São utilizados os padrões de
geometria Vickers e Rockwell, que atendem à maioria dos estudos usuais de riscamento
em diferentes materiais. Para a fixação dos indentadores no sensor piezoelétrico foi feita
uma rosca na parte superior da base do indentador.
Os indentadores Vickers e Rockwell possuem a mesma base metálica produzida
pela Dimas Ferramentas Diamantadas, onde somente a geometria do diamante varia
para cada modelo.

20
Figura 16. Projeto do Indentador Vicker / Rockwell.
Quando se iniciou a reforma do esclerômetro, os indentadores disponíveis
estavam severamente danificados quanto à geometria do diamante, impedindo que um
teste com qualidade fosse realizado. Para a etapa presente do projeto foi necessário
adquirir novos indentadores.
3.1.4 Placa de Aquisição de Sinais
Os sinais de força tangencial e normal que são geradas pelos dois transdutores
piezoelétricos e em seguida são amplificados e tratados pelo condicionador de sinais
para posteriormente serem adquiridos pela placa de aquisição de dados USB-6218 da
National Instruments.
Na versão anterior do esclerômetro, a aquisição de dados tratados pelo
condicionador de sinais era realizada por uma placa da National Instruments com
barramento ISA, tornando impossível a utilização da mesa em um computador atual.
A escolha de implementar a aquisição de sinais através da placa de aquisição de
dados USB-6218 da National Instruments foi baseada na sua suficiente capacidade de
processamento para futuros aprimoramentos do esclerômetro e na conexão USB,
permitindo uma maior flexibilidade de conexão.
Os controladores das mesas de movimentação possuem uma biblioteca de
rotinas que permitem o comando diretamente a partir do Labview. Cada função que a
mesa pode desempenhar é oferecida sob a forma de um VI, o que facilita o processo de
desenvolvimento. A figura 17 ilustra o equipamento.

21
Figura 17. Placa de Aquisição de Sinais “National Instruments” USB-6218. [5]
A estratégia adotada consiste em adquirir os sinais de forças tangenciais e
normais exercidas durante o ensaio de riscamento pelo hardware de aquisição de dados
e controle da National Instruments. O controle das mesas é realizado pelos
controladores da própria Physik Instrumente. O quadro 7 apresenta as características
detalhadas do equipamento.
Toda a programação de funcionamento da máquina foi realizada no Labview
controlando as mesas de movimentação através dos dados de entrada do usuário e dos
sinais adquiridos das forças de riscamento. O ajuste inicial de posição das mesas é
controlado pelo software que por sua vez trabalha com os controladores de posição das
mesas que garantem o posicionamento físico na posição desejada.
Placa de Aquisição de Dados
National Instruments USB-6218 Características
Conector Parafusos
Entradas Analógicas 32
Resolução 16 bits
Taxa máxima de aquisição analógica 250 kS/s
Saídas analógicas 2
Resolução 16 bits
Taxa máxima de atualização das saídas
analógicas 250 kS/s
Entradas / Saídas digitais 8 ED / 8 SD
Isolação 60 V, CAT I
Quadro 7. Características técnicas da placa de aquisição de sinais.

22
3.2 Software
A rotina de ensaio foi programada no ambiente National Instruments Labview
2009, que fornece um ambiente de programação gráfica de fácil entendimento e alto
potencial técnico.
A versatilidade e robustez desse ambiente de desenvolvimento possibilitam que
ele seja utilizado em diversas aplicações em laboratórios e na indústria, controlando
desde sistemas simples até sistemas altamente complexos como o ensaio de freios em
um dinamômetro [14].
Pela linguagem de programação ser gráfica e de fácil entendimento, não é
necessário o conhecimento prévio de outras linguagens de programação, porém é
evidente que conhecimentos de lógica de programação se fazem necessários. O software
desenvolvido será detalhado no capitulo 4.
4. Implementação do Terceiro Eixo
A etapa atual do projeto do esclerômetro consiste na implementação do terceiro
eixo ao equipamento, tornando-o apto a realizar testes de riscamento em trajetórias
diversas, além de trajetórias retilíneas. O planejamento do trabalho foi dividido nas
etapas de integração mecânica e programação de integração.
4.1 Integração Mecânica
A integração mecânica do sistema de mesas de movimentação vertical e
horizontal com a mesa rotativa necessitou do projeto de um acoplamento metálico para
elevar a mesa vertical.
O curso relativo à mesa vertical não suportava a instalação da mesa rotativa
acima da mesa horizontal. Para solucionar tal problema foi confeccionado um suporte
para a base da mesa vertical.
A fixação da mesa giratória na mesa horizontal foi realizada através de parafusos
para fixação nos furos específicos. As furações das duas mesas são compatíveis e bastou
selecionar os furos com maior viabilidade dimensional para realização da fixação.
Para a execução dos ensaios é necessário que as amostras sejam fixadas na mesa
giratória, porém esta não oferece suporte para isso. A solução encontrada foi

23
confeccionar um porta-amostras que, em sua face superior abrigasse a amostra e em sua
face inferior se fixasse à superfície da mesa giratória.
A Figura 18 apresenta um modelo tridimensional do projeto do porta-amostras,
com os três furos de fixação na mesa giratória, os seis furos laterais para fixação da
amostra, que deve possuir dimensões menores ou iguais a 100 mm x 100 mm. O projeto
detalhado é apresentado nas figuras 19 a 22.
Figura 18. Modelo em três dimensões do projeto do porta-amostras.
Figura 19. Projeto do porta-amostras: vista lateral 1.

24
Figura 20. Projeto do porta-amostras: vista lateral 2.
Figura 21. Projeto do porta-amostras: furação lateral.
Figura 22. Projeto do porta-amostras: vista inferior.

25
4.2 Programação e Integração
A estrutura físicas do esclerômetro é constituída de basicamente três mesas de
movimentação e dos transdutores de medição de força. As mesas de movimentação são
controladas pelos controladores de movimento da Physik Instrumente modelo
Mercury™ C-863 e conectados ao computador de controle por uma conexão USB. Os
transdutores piezoelétricos têm seus sinais tratados pela unidade de alimentação e
tratamento de sinal da PCB modelo 484B06 que tem como função principal tornar o
sinal emitido do sensor piezoelétrico no momento da aplicação de carga um sinal
constante, filtrado e sem interferências na faixa de -10 V a +10 V.
A conexão dos transdutores com o computador de controle é realizada pela placa
de aquisição de dados da National Instruments modelo USB-6218 que adquire os sinais
através de entradas analógicas e transfere o sinal digitalizado e tratado por uma conexão
USB.
Atualmente foram escolhidas as Força Normal e Força Tangencial que
correspondem aos pinos 15, 16, 17 e 18 respectivamente. A configuração de conexão
esta demonstrada para a força normal na Figura 23 e para a força tangencial na Figura
24.
Figura 23. Esquema de ligação dos transdutores de força normal na placa de aquisição de sinais.

26
Figura 24. Esquema de ligação dos transdutores de força tangencial na placa de aquisição de sinais.
As outras entradas possíveis de serem utilizadas seguem apresentadas na Figura
25. A placa de aquisição de sinais adquirida suporta mais entradas e saídas de sinais que
o necessário atualmente, deixando oportunidades para implementações de novos
dispositivos.
Figura 25. Esquema dos Pinos de Ligação do módulo de aquisição de dados NI USB-6218.
Os controladores das mesas de movimentação possuem integração total com o
Labview, tendo os seus códigos nativos de comunicação disponíveis na linguagem
própria do National Instruments Labview, os Virtual Instruments, ou VIs.
Toda a biblioteca de VIs para controle das mesas através dos controladores se
encontra no CD de instalação dos controladores, intitulado “Mercury ™ DC- Servo /
Stepper Motor Controller, Release: 2.1.0, Date: 21 Aug 2009” dentro do diretório
GCSLabView.

27
A seção 4.2 é destinada a explicação e detalhamento da construção dos módulos
do programa de controle do esclerômetro. Em primeiro lugar, são apresentadas as
rotinas de inicialização e posicionamento das mesas na seção 4.2.1 que constitui o passo
inicial para o processo de riscamento.
Em seguida é apresentada na seção 4.2.2 a rotina de riscamento que descreve as
etapas que o processo de riscamento segue. A sub rotina PID é essencial para que ocorra
o processo de riscamento, uma vez que esta é responsável pelo controle de força e por
sua vez é apresentada na seção 4.2.3.
O processo de riscamento pode ser realizado de acordo com as necessidades do
ensaio operando com trajetórias retilíneas e trajetórias polares, apresentadas nas seções
4.2.3 e 4.2.4 respectivamente, sendo que as trajetórias polares são divididas em três
categorias.
Estão disponíveis o riscamento em trajetórias polares com velocidade constante
do deslocamento da mesa, com velocidade resultante controlada e com velocidade ponto
a ponto, apresentados nas seções 4.2.5.1, 4.2.5.2 e 4.2.5.3 respectivamente.
Para auxiliar o teste, estão disponíveis as sub-rotinas de movimentação manual
das mesas, ajuste do zero dos transdutores e inserção de amostra, descritos nos itens
4.2.6, 4.2.7 e 4.2.8 respectivamente.
4.2.1 Inicialização e Posicionamento das Mesas
O software de controle do esclerômetro tem como primeira necessidade iniciar o
hardware e posicionar as mesas para que estejam em posição para inicio do ensaio. Para
que isso seja possível, é necessário adquirir os sinais de posição das mesas e comparar
com a posição correta configurada no programa.
Caso a posição não seja a especificada, um comando de movimentação é
enviado às mesas para que atinjam as posições iniciais previamente configuradas. O
fluxograma da rotina de inicialização do hardware está apresentado na Figura 26.

28
Figura 26. Fluxograma da Rotina de Alinhamento das Mesas.
A programação da inicialização das mesas é realizada por uma sub-rotina
baseada em uma estrutura Flat Sequence que ordena as inicializações em uma sequência
de eventos. Primeiramente a mesa vertical é inicializada isoladamente para evitar
possíveis colisões que podem ocorrer caso as inicializações sejam realizadas
simultaneamente. A figura 27 exibe o diagrama de blocos do processo de inicialização
das mesas.
Em casos de falhas na operação do esclerômetro, é possível que o indentador
penetre com força superior ao permitido pela mesa vertical e isso habilita a proteção
interna do sistema de movimentação, fazendo com que seja necessário reiniciar o
sistema para regularizar a situação.

29
Figura 27. Diagrama de blocos da inicialização das mesas.

30
Nesse caso o indentador ainda pode estar penetrado na amostra após a nova
inicialização do sistema. Sendo assim, é preciso mover para cima primeiramente a mesa
vertical antes da horizontal para impedir um processo de riscamento com força extrema,
podendo danificar os indentadores e as amostras.
Os VIs específicos utilizados para a inicialização da mesa vertical são o RON,
MPL e o ONT?. O VI RON é uma rotina de alto nível utilizada para que a inicialização
ocorra sem que a mesa volte à posição inicial padrão, que é definida como a metade do
curso de movimentação. Esta rotina faz com que a mesa atinja o limite vertical durante a
inicialização, tornando a realização do ensaio mais rápida e eficiente.
Complementando a rotina RON, a rotina MPL (Move to Positive Limit) fornece
o comando de movimentação vertical para o limite positivo.
Para finalizar a sequência de inicialização da mesa vertical, a rotina ONT? (On
Target?) bloqueia a execução das instruções seguintes até que a posição atual seja igual
à posição solicitada. Quando essa condição é satisfeita, o programa continua a execução
normal e dá-se sequência à inicialização as outras mesas.
Ainda dentro do mesmo campo da sequência, uma estrutura For coordena a
inicialização da mesa horizontal e da mesa rotatória. A função dentro da estrutura For é
executada duas vezes neste caso, de acordo com a matriz de entrada contendo dois
elementos, sendo estes as referências à mesa rotatória e à mesa horizontal.
A segunda etapa da estrutura de sequência de inicialização das mesas determina
as posições desejadas para as mesas horizontal e rotatória. Este comando tem o objetivo
de tornar a operação do esclerômetro mais simples e rápida, uma vez que, ao serem
iniciadas, as mesas se deslocam para o centro de seu curso. Dessa forma, é necessário
comandar uma movimentação posterior para atingir as posições necessárias para a
realização do ensaio. Após a execução desta sequência, as mesas estão automaticamente
na posição inicial para a realização do ensaio.
A mesa horizontal é configurada para se movimentar até a posição 70,21 mm
que é a posição onde a amostra se localiza perfeitamente no centro do indentador. A
referência é a posição do final do curso da mesa, denominado 0,00 mm. Analogamente,
a mesa rotativa precisa se deslocar para a posição -2º30’ para a localização perfeita da
amostra, sendo que a referência é a posição 0, indicada na própria peça.

31
4.2.2 Rotina de Realização do Ensaio de Riscamento
Após a inicialização do hardware e do posicionamento das mesas, é iniciada a
rotina de execução do ensaio de riscamento.
Primeiramente, o usuário deve definir os parâmetros necessários para a
realização do ensaio disponíveis na interface do programa. A força de indentação no
processo de riscamento deve ser configurada podendo ser constante ou variável. Caso
seja necessário o usuário deverá configurar a taxa da evolução da força de indentação.
Em seguida a trajetória do riscamento deverá ser selecionada, podendo ser
retilínea ou polar. Caso seja escolhido, o processo de riscamento em trajetória polar, a
equação polar que descreve o movimento deverá ser configurada na interface do
programa.
As velocidades de deslocamento das mesas deverão ser configuradas na
sequência de acordo com as necessidades do ensaio. Após esta etapa, o programa já
possui todas as informações que necessita para que o ensaio seja inicializado.
No inicio do processo de riscamento, o indentador se desloca para o encontro da
amostra até que a força de indentação configurada seja alcançada. Após esta etapa a
mesa horizontal e a rotatória se deslocam de acordo com as informações configuradas
pelo usuário.
Durante todo o processo de riscamento ocorre o monitoramento das forças e da
trajetória que são apresentados em tempo real para o usuário na interface do programa.
Quando a trajetória de riscamento é concluída, os dados do processo de
riscamento são gravados a partir do momento em que ocorre a validação do usuário
através de uma caixa de dialogo. Os resultados do processo de riscamento são gravados
e o equipamento retorna para a condição de inicio de ensaio.
A rotina de riscamento é apresentada em formato de fluxograma na Figura 28 e
na sua continuação na Figura 29.

32
Figura 28. Fluxograma de Execução do Programa - Parte 1.

33
Figura 29. Fluxograma de Funcionamento do Programa - Parte 2.
4.2.3 Sub-Rotina de PID
O movimento das mesas durante o processo de riscamento deve ser sincronizado
para que haja uma aplicação de força conforme solicitada pelo usuário no painel de
controle do programa quando do deslocamento da amostra através da movimentação da
mesa horizontal.
Enquanto a mesa horizontal se desloca na velocidade programada juntamente
com a mesa rotatória, a mesa vertical deve se movimentar de forma que a força normal

34
aplicada pelo indentador seja constante, crescente ou decrescente de acordo com a
solicitação do usuário do equipamento.
O controle de movimento da mesa vertical deve ser extremamente rápido e
preciso para que a força normal aplicada seja de fato igual à solicitada. Para tal
aplicação foi construída uma sub-rotina de controle com uma ação PID (Proporcional,
Integral e Derivativa em relação ao erro entre o sinal de força medido e o desejado).
Nesta aplicação foi utilizada apenas a parcela proporcional do controle.
A exatidão da posição da mesa vertical controlada por este sistema varia de
acordo com a força normal medida. Para valores de força normal distantes do valor de
força normal programado para o teste pelo operador, ocorre uma movimentação rápida
da mesa vertical visando alcançar a força solicitada.
Após o contato do indentador com a amostra, quando os valores da força normal
medida se aproximam do valor programado pelo operador, a posição da mesa vertical se
torna mais precisa visando um controle mais exato da força.
Figura 30. Interface de controle de força do riscamento.
As forças são especificadas pelo usuário do programa (figura 30) que tem
controle sobre a Força Normal de Riscamento medida em Newton, Taxa de
Crescimento da Força medida em newtons por segundo e o tempo de duração do ensaio
em segundos. A equação que relaciona estas grandezas é:
tdFFiF *
Equação 7. Composição da força normal do riscamento.
Uma estrutura Formula Node executa o cálculo da equação 7, tendo como
entrada a Força Inicial (Fi), a Taxa de Crescimento de Força (df) e o Tempo de
Riscamento (t) e tendo como resultado a Força de Riscamento (F).

35
Tal força servirá de ajuste incial para o VI de PID Advanced, posicionado dentro
da estrutura For Loop, juntamente com a informação de saída, ajuste inicial, variável de
processo, faixa de setpoint, ganho de PID, e dt(s). Como saída temos a informação de
quanto à mesa vertical deve movimentar-se. O diagrama de blocos está apresentado na
figura 31.
O sinal de força dos transdutores é adquirido pela placa de aquisição e
posteriormente uma função de média é aplicada. O sinal é duplicado, sendo enviado
para o PID Advanced e também para uma caixa de texto de visualização de força
medida.
A movimentação da mesa vertical é realizada pelo VI MVR, que tem como
entradas o sinal de saída do PID Advanced e do VI VEL, que determina a velocidade de
movimentação da mesa.
Figura 31. Diagrama de blocos da sub-rotina de PID.
4.2.4 Riscamento em Trajetórias Retilíneas
O riscamento das amostras pode ser feito de forma retilínea ou em trajetórias
polares diversas. A natureza do fenômeno a ser estudado a partir do ensaio de risco
define qual estratégia de geometria de riscamento.
Riscamentos com trajetórias polares diversas podem sofrer intersecção de riscos,
ou seja, um risco pode cruzar outro risco previamente riscado, evidenciando outro
fenômeno.

36
As trajetórias retilíneas são de mais simples execução e podem ser utilizadas, por
exemplo, para definir o perfil de dureza ao longo de uma área do material.
O operador deverá configurar o ensaio de acordo com as necessidades do teste,
levando-se em conta os parâmetros de Força Inicial de Riscamento (N), Taxa de
Crescimento de Força (N/s), Tamanho do Risco (mm) e Velocidade do Riscamento
(mm/s).
Figura 32. Interface de configuração do riscamento retilíneo.
Os parâmetros de configuração de velocidade de riscamento e comprimento do
risco são definidos e assim é calculado o tempo de riscamento através das operações de
divisão, subtração e soma na parte externa à Estrutura de Caso conforme apresentado
nas figuras 32 e 33.
Ao ser pressionado, o botão “Riscar” dá o sinal True para a Estrutura de Caso
que roda a estrutura While Loop Externa. A outra sequência While Loop é executada e
tem como função o movimento da mesa vertical até o momento do contato do
indentador com a amostra.
Esta estrutura é comandada por um VI “MVR” que controla o movimento
relativo da mesa e um VI de VEL. A movimentação da mesa vertical no sentido para
baixo ocorre até que a força medida pelo Data Aquisition seja igual à força normal
configurada inicialmente.

37
Figura 33. Diagrama de blocos da sub-rotina de riscamento retilíneo.
Quando as forças se igualam, a estrutura encerra o While Loop e emite um sinal
True para a Estrutura de Caso de Riscamento. Na Estrutura de Caso de Risco temos o
processo de riscamento em si, onde o VI PID, que corresponde ao Sub-VI PID abordado
anteriormente, controla a força normal aplicada na amostra durante o riscamento.
Caso a Estrutura de Caso responsável pelo processo de riscamento não receba
uma informação True da sequência While Loop de movimentação vertical até o
momento de indentação, nenhum comando será executado, como mostra a Figura 34.
Figura 34. Diagrama de blocos da sub-rotina de riscamento retilíneo quando o botão de início do
teste não é pressionado.

38
Caso o botão “Riscar” não seja acionado, será enviado um comando False para a
Estrutura de Caso principal, que por sua vez não irá executar nenhum comando, fazendo
com que o equipamento não execute nenhuma ação como mostrado na Figura 35.
Figura 35. Continuação do diagrama de blocos da sub-rotina de riscamento retilíneo quando o
botão de início do teste não é pressionado.
4.2.5 Trajetórias de Riscamento
O software do esclerômetro foi projetado para permitir que o processo de
riscamento seja realizado em qualquer trajetória. O programa oferece a entrada de
equações polares no formato de r(θ), onde r é o raio e θ é o ângulo.
A força de riscamento deverá ser configurada pelo operador no campo “Força
Normal de Riscamento” e é medida em newtons. A velocidade do riscamento e a
quantidade de voltas (repetições) do processo também deverão ser configuradas no
painel principal. A interface do software oferece uma janela gráfica apresentando a
Previsão da Trajetória.
As sub-rotinas de riscamento com trajetórias específicas foram divididas em três
opções de acordo com a velocidade relativa de riscamento: Riscamento Polar com
Velocidade Constante de Deslocamento da Mesa, Riscamento em Trajetórias Polares
com Velocidade Resultante Controlada e Riscamento em Trajetórias Polares definida
Ponto a Ponto.

39
4.2.5.1 Riscamento em Trajetórias Polares com Velocidade Constante
de Deslocamento da Mesa
A primeira opção para o riscamento em trajetórias polares apresenta a
velocidade da movimentação da mesa rotatória constante. A velocidade tangencial em
um certo ponto varia de acordo com o raio. Assim, quanto mais próximo do centro da
amostra estiver o indentador, mais lenta será a velocidade de riscamento relativa. A
mesa horizontal também tem seu movimento constante, sem variação de velocidade.
As Figura 36, 37 e 38 apresentam em sua parte externa às estruturas de caso, a
sequência onde ocorre a geração dos valores dos incrementos de posição para as mesas
horizontal e rotatória de acordo com a equação polar informada pelo usuário. A primeira
sequência da Estrutura de Caso esta relacionada com o movimento do indentador até o
momento do contato com a amostra e o atingimento da força configurada no ensaio.
Neste mesmo caso, uma condição False, indicando que o risco não deve ser realizado,
faz com que a trajetória seja desenhada na tela em formato de gráfico.
Posteriormente, na Estrutura de Caso da direita há a chamada à sub-rotina de
controle PID na parte inferior e uma estrutura For Loop que será executada N vezes. A
quantidade de iterações é o tamanho dos vetores que contêm os agrupamentos dos
incrementos de ângulos e raios que serão comandados às mesas. Este valor geralmente
varia em torno de quatro e cinco, dependendo da complexidade da trajetória polar
desejada.
A velocidade não é definida pelo usuário e sim pelo array de raios e ângulos
dividido por 60, implicando que os dois movimentos terminarão juntos e depois de 60
segundos. Isso se deve ao fato de o modo de indexação estar ativado. Sendo assim a
estrutura For lê um elemento do array a cada iteração.
Após a divisão, o valor resultante é tomado em módulo, pois foi convencionado
que movimentos em direção à origem serão trados como incrementos negativos e não
velocidades negativas.

40
Figura 36. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares com velocidade
constante de deslocamento de mesa.
Figura 37. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares com velocidade
constante de deslocamento da mesa - continuação.
Figura 38. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares com velocidade
constante de deslocamento da mesa - continuação.

41
A interface do programa de riscamento em trajetórias polares com velocidade
constante é apresentado nas figuras 39 e 40.
Figura 39. Interface da sub-rotina de riscamento em trajetória polar com velocidade constante de
deslocamento da mesa.
Figura 40. Interface da sub-rotina de riscamento em trajetória polar – exemplo de trajetória polar.

42
4.2.5.2 Riscamento em Trajetórias Polares com Velocidade Resultante
Controlada
O processo de riscamento pode ser realizado com uma velocidade resultante
constante de indentação, ou seja, o sistema de mesas horizontal e giratória alteram suas
velocidades de movimentação para que a interface indentador/amostra tenha sempre a
mesma velocidade resultante.
Isto ocorre devido ao fato de a velocidade de deslocamento resultante não ser
constante ao longo do raio de uma trajetória e dessa forma, como as trajetórias polares
são realizadas em sua maioria ao longo do raio da amostra, é necessário um controle da
velocidade do deslocamento das mesas.
A Figura 41 apresenta no topo do VI a geração dos pontos da trajetória que tem
como entrada os valores de Voltas, Velocidade de Riscamento e a Equação Polar a ser
executada r(x). As Voltas são ligadas a um VI que gera uma rampa com uma matriz
com os valores crescentes como apresentado nas figuras 41 e 42
Juntamente com a Equação Polar r(x), a matriz com os valores gerados pela
rampa é entrada para o VI f(x) e posteriormente são obtidos os valores de F(x) que são
função de r(x) e ângulo (x). A matriz de ângulos e a matriz de raios são divididas em
matrizes de incrementos. O motivo de realizar tal operação é criar um agrupamento
crescente dos valores evitando interrupções nos movimentos das mesas. Por exemplo, se
uma matriz de ângulos for dada por:
(1 2 3 4 5 6)
A matriz de incrementos de ângulos será:
(1 1 1 1 1 1)
A saída deste processo é o Angle Mov que servirá de entrada para a estrutura For
Loop de controle de movimentação das mesas.

43
Figura 41. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares com velocidade
controlada.
Toda a programação seguinte está inserida em uma Estrutura de Caso onde o
caso True é acionado a partir do botão Riscar com Velocidade Controlada. Dentro
temos uma Sequência do tipo Flat Sequence. O primeiro quadro desta sequência move a
mesa horizontal para um valor inicial de raio. Os controles da mesa são realizados pelos
VIs VEL, MVR e General Wait, responsáveis por configurar a velocidade de
movimentação e aguardar para que a mesa atinja seu destino, respectivamente.
Posteriormente, a próxima sequência é acionada e sua função básica é configurar
a velocidade inicial de cada mesa de movimentação. O sinal de entrada do VI VEL é
proveniente do gerador de velocidades localizado fora da estrutura do programa.
Em seguida, a próxima sequência abriga uma estrutura While Loop e uma
estrutura For Loop. A estrutura While Loop abriga uma estrutura For Loop e uma
estrutura Case Structure.
Figura 42. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares com velocidade
controlada - continuação.
A estrutura While Loop possui dois VIs POS que são responsáveis por comparar
um valor acusado com um array de valores de entrada. Para o caso de este ser maior ou
igual, a estrutura é parada e é enviado o sinal True para a estrutura Case Structure.

44
Na estrutura Case Structure a velocidade é alterada conforme o raio da amostra é
percorrido, sendo que cada posição da amostra possui uma velocidade relativa
associada. O resultado da velocidade para as mesas rotatória e horizontal é indicado em
uma tela para acompanhamento apresentado na Figura 43.
Figura 43. Interface da sub rotina de riscamento em trajetórias polares com velocidade controlada.
A movimentação das mesas é realizada a partir da estrutura For Loop na
sequência dentro da estrutura Case Structure, e é realizada através dos arrays de
ângulos e de raios agrupados.
Mesmo caso o botão Riscar com Velocidade Controlada não seja acionado, o
caso False da Estrutura de Caso apresenta a trajetória descriminada pela equação e os
parâmetros iniciais configurados pelo usuário, como pode ser visto no diagrama de
blocos da Figura 42.
4.2.5.3 Riscamento em Trajetórias Polares Ponto a Ponto
A opção de riscamento em trajetórias polares ponto a ponto executa o ensaio de
acordo com as trajetórias polares determinadas pela interface do usuário porém o
movimento é realizado de forma discreta, sendo que uma sequência de pontos é
realizada na amostra ao longo da trajetória.
Neste caso, a velocidade relativa à interface indentador/amostra não é constante.

45
Figura 44. Diagrama de blocos da sub-rotina de riscamento em trajetórias polares ponto a ponto.
Figura 45. Interface da sub-rotina de riscamento em trajetórias polares ponto a ponto.
4.2.6 Sub-Rotina de Movimentação Manual das Mesas
Foram criadas rotinas para fazer a movimentação das mesas em modo manual.
Entenda-se modo manual como aquele no qual uma posição de referência é informada
manualmente para o controlador da mesa, que se encarrega de movimentá-la para a
posição desejada. Isso é necessário em algumas situações, como, por exemplo, quando
se é necessário posicionar novas amostras, realizar alterações de ferramentas ou efetuar
reparações no sistema. Os parâmetros de entrada para esse tipo de movimentação são
qual mesa deverá ser movimentada, a velocidade de movimentação e qual a extensão do
movimento. O fluxograma do processo está apresentado na Figura 46.
A função de movimentação das mesas é realizada pelos VIs VEL e MOV que
têm por função definir a velocidade e o deslocamento para uma determinada mesa. As
seleções de mesas a serem movimentadas e os controles de distância do movimento e da

46
velocidade do movimento são realizados anteriormente à Estrutura de Caso de
movimentação.
Todo o controle da mesa é realizado por uma caixa de seleção no painel de
controle do software onde se pode selecionar quais mesas serão movimentadas, suas
velocidades e distâncias.
Figura 46. Fluxograma da Rotina de Alinhamento das Mesas.
No diagrama de blocos da Figura 47 está apresentada a função de movimentação
manual das mesas com as estruturas de seleção das mesas a se movimentarem,
configuração de velocidade e distância de deslocamento.

47
Figura 47. Diagrama de blocos da sub-rotina de alinhamento das mesas.
A Figura 48 exibe o diagrama de blocos da função de alinhamento manual das
mesas que não são apresentados na Figura 47. O caso indicado por True na parte direita
refere-se ao caso no qual o movimento é absoluto, o caso indicado como True na parte
superior refere-se ao movimento relativo e o caso indicado como False na parte inferior
refere-se à situação na qual o botão de movimento relativo não está ativado, ou seja, a
função não é ativada.
Figura 48. Diagrama de blocos da função de alinhamento das mesas, continuação.
A interface de controle é apresentada na Figura 49, contendo parâmetros para
controlar qual mesa será controlada, a velocidade de movimentação e a distância a ser
movimentada.
Um movimento relativo indicado com um sinal negativo na frente do número da
posição indica um movimento no sentido inverso ao convencionado como positivo.

48
Figura 49. Painel de controle de movimentação manual das mesas.
4.2.7 Sub-Rotina de Ajuste do zero dos Transdutores
Devido as características apresentadas na seção 3.1.2 sobre os transdutores
piezoelétricos, é necessário a realização do ajuste do zero dos mesmos ao longo da
realização de cada ensaio.
A Figura 50 apresenta um fluxograma da sub-rotina de Ajuste do zero dos
Transdutores. Os valores apresentados na tela de interface do programa devem ser
ajustados para atingir os níveis zero. Esse ajuste é feito manualmente pelo operador
diretamente no módulo amplificador dos transdutores. Há um botão para ajuste do offset
(erro inicial) da leitura, que quando é rotacionado no sentido horário aumenta a tensão e
quando é rotacionado no sentido anti-horário diminui a tensão.
Todo ajuste deverá ser realizado após vinte minutos de funcionamento dos
transdutores piezoelétricos. Este tempo é necessário para que os transdutores alcancem a
temperatura padrão de funcionamento. Antes desse tempo podem existir variações
significativas nos valores medidos.

49
Figura 50. Fluxograma da Rotina de Ajuste do zero dos Transdutores Piezoelétricos.
A programação é iniciada escrevendo-se um vetor em branco no histórico do
indicador gráfico, forçando o programa a apagar o conteúdo do gráfico indicador dos
valores de medição instantânea das forças normal e tangencial.
Toda estrutura de ajuste do zero é construída dentro de uma estrutura while loop,
que repete toda a estrutura interna até que um botão seja pressionado. O intervalo de
tempo de repetição é definido como zero para definir que a repetição seja realizada no
menor tempo possível. Nesse caso, entretanto, não há garantia de periodicidade entre
duas execuções sucessivas, visto que uma variação na carga do processador fará com
que o menor tempo possível varie de caso para caso.
A Figura 51 apresenta o diagrama de blocos da rotina de Ajuste do zero dos
Transdutores Piezoelétricos. Os sinais dos transdutores são obtidos pelo DAQ Assistant
diretamente da placa NI-USB 6218 e convertidos para uma matriz contendo todos os
dados adquiridos. Essa matriz passa por um tratamento que visa transformar o sinal
elétrico lido em força. Para tanto, efetua-se a divisão do sinal pelo inverso da
sensibilidade dos transdutores, que vale 110 mV/N. Na sequência, os dados da matriz

50
são separados em dois vetores, um para o transdutor tangencial e outro para o transdutor
normal.
Os sinais dos dois transdutores são apresentados em um gráfico. Os sinais dos
dois transdutores são submetidos a uma função Build Array para que os dois
transdutores possam ser apresentados em um mesmo gráfico ao mesmo tempo. Além
disso, uma média dos últimos 100 sinais adquiridos é apresentada em um mostrador
digital na interface da sub-rotina com o usuário.
Paralelamente, os sinais oriundos da função Index Array são enviados para a
função de gravação de dados em um arquivo em disco. Os sinais são levados para uma
Estrutura de Caso que apenas grava os dados em disco quando um botão denominado
“Gravar Dados” está ativo.
Os dados são convertidos para um tipo especial de dados chamado Dynamic
Data Type (DDT) e são agrupados antes de serem enviados para a função Write to
Measurement File, que efetivamente escreve os dados em disco. Caso o botão “Gravar
Dados” não seja acionado, uma situação False é acionada e o arquivo não é escrito,
porém os dados medidos continuam aparecendo na tela.
Figura 51. Rotina de Ajuste do zero dos Transdutores Piezoelétricos.

51
Figura 52. Painel de Ajuste do zero dos Transdutores Piezoelétricos.
A Figura 52 apresenta a interface de visualização das forças normal e tangencial
para a rotina de ajuste do zero dos transdutores piezoelétricos. A força normal é
apresentada pelos dados na cor amarelo e a força tangencial pelos dados na cor
vermelha. O resultado da força medida pelos transdutores é apresentado em tempo real
no gráfico. Adicionalmente, nas duas caixas de texto inferiores são apresentados valores
médios de Força Tangencial e de Força Normal.
Para efetuar a ajuste do zero juntamente com um teste externo como a análise de
compressão dos transdutores piezoelétricos em uma máquina universal de ensaios
(EMIC), a função “Gravar Dados” está disponível. Tal função aciona a gravação de um
arquivo no formato planilha de dados que poderá se comparado com os dados de ensaio
em outro dispositivo.

52
4.2.8 Sub Rotina para Inserção de Amostra
O procedimento de utilização do esclerômetro necessita da troca da amostra após
uma série de sequências de riscos sobre a mesma. O processo de troca de amostra foi
identificado como uma dificuldade para o operador e para isto foi criada a sub-rotina de
Inserção de Amostra. Tal sub-rotina se constituiu de movimentos programados em todas
as mesas, visando deixar livre a área da amostra padrão, facilitando a sua remoção e
substituição.
O processo tem início com uma caixa de diálogo solicitando o inicio do processo
de inserir amostra ou a desistência do comando que é apresentado na Figura 53.
Figura 53. Caixa de dialogo para ativação da sub-rotina de inserção de amostra.
A mesa horizontal é controlada pelos VIs VEL e GOH que definem a velocidade
de movimentação e a posição. A velocidade de movimentação é programada para 50
mm/s.
O controle da mesa vertical é realizado com os VIs VEL e MPL, que têm por
função, respectivamente, definir a velocidade da movimentação e a posição desejada. A
velocidade neste caso é programada para 1 mm/s, pois tal mesa possui uma exatidão
maior em seus movimentos e assim seu passo é menor.
Por fim, a mesa rotatória é controlada pelos VIs VEL e MOV, controlando a
velocidade de movimentação e o deslocamento da movimentação, respectivamente. A
velocidade é programa para 90°/s e o deslocamento para -2,5°. O diagrama da sub-
rotina de inserção de amostras é apresentado nas Figura 54 e 55.
Figura 54. Diagrama de blocos da sub-rotina de inserção de amostras.

53
Caso a caixa de diálogo de inserção de amostra tenha a opção “Não”
selecionada, um comando False é enviado para a estrutura de caso responsável pela
movimentação. Neste caso, nenhum comando é definido, portanto não existe a
movimentação das mesas.
Figura 55. Diagrama de blocos da sub-rotina de inserção de amostra caso seja selecionada a opção
“não” na caixa de diálogo.
4.2.9 Interface do Programa
A interface do programa foi construída de forma que todos os comandos e
possibilidades de riscamento fossem visíveis de forma clara e que qualquer controle
fosse de fácil alcance ao usuário.
Os sinais de força adquiridos dos transdutores piezoelétricos foram, em todas as
ocasiões, plotados em gráficos de tempo real facilitando a visualização do processo de
riscamento. A posição da mesa vertical, que está relacionada à força normal, é mostrada
no gráfico da parte inferior da interface do programa.

54
As forças normal e tangencial são relacionadas em caixas de texto, além de
serem apresentadas de forma gráfica. As caixas de texto apresentam os valores de força
médios, assim como os limites inferiores e superiores.
As posições das mesas também são apresentadas em caixas de texto na parte
inferior esquerda da interface. O sinal de posição vem diretamente do controlador de
cada mesa.
Toda interface foi estruturada dentro de uma interface principal, apresentada na
Figura 56, contendo quatro abas para agrupamento das funções.
Figura 56. Interface do painel de controle - Aba da página inicial.
Os controles de movimentação manual descritos na seção 4.2.6 estão agrupados
na interface na aba Movimentos Manuais, que é apresentada pela Figura 57.

55
Figura 57. Interface do painel de controle - Aba de movimentação manual.
Os controles para realização do ensaio de riscamento com trajetórias retilíneas
contendo parâmetros de força, distância do risco e tempo de riscamento, foram
agrupados na aba de Riscos Lineares, que é apresentada na Figura 58.
Figura 58. Interface do painel de controle - Aba de riscos lineares.

56
Por fim, a realização do ensaio de riscamento com trajetórias polares tem seus
comandos agrupados na aba Riscos Polares. A definição do tipo de ensaio com
trajetórias polares a ser realizado é escolhido dentro desta aba. A Figura 59 apresenta
esta aba.
Figura 59. Interface do painel de controle - Aba de riscos em trajetórias polares.

57
5. Calibração e Verificação da Confiabilidade dos Resultados
Ao término deste trabalho o projeto de reforma do esclerômetro ainda não estava
completamente concluído e como última etapa de melhoria estava prevista a
implementação de uma célula de carga triaxial para a medição das forças substituindo
os transdutores piezoelétricos. No entretanto, como o processo de cotação e importação
dessa célula de carga levaria mais tempo que o disponível para a conclusão deste
trabalho, a calibração final não foi realizada. Todavia, o procedimento de calibração foi
estabelecido e será descrito nesta seção para que sirva de referência para trabalhos
futuros.
Primeiramente deve-se calibrar os transdutores de força comparando sua
medição com peças padrões de peso. Uma série de peças com massas estabelecidas
deverão ser colocadas individualmente na superfícies do transdutor. A leitura do sinal
proveniente do transdutor deverá ser relacionada com o valor da massa do corpos de
prova. Desta forma deverá ser construída a curva de calibração do transdutor e os dados
obtidos também poderão ser utilizados para se determinar os níveis de incerteza da
medição que está sendo realizada.
A primeira etapa de calibração se refere a calibração estática dos transdutores de
força. Em seguida, deverá ser realizada a calibração dinâmica, que se refere a calibração
das forças medidas pelos transdutores durante o processo de riscamento.
Após a instalação do novo transdutor de medição de força, deverão ser
realizados ensaios de riscamento com trajetórias retilíneas com força de riscamento
constante e com força de riscamento variável. Complementarmente deverão ser
realizados ensaios de riscamento com trajetórias polares com força constante e com
variação de força, assim como no caso acima para trajetórias retilíneas.
As amostras ensaiadas deverão ser observadas no microscópio e avaliadas
quanto à dureza ao risco obtida de acordo com a formulação da seção 2.1 deste trabalho.
A dureza deverá ser comparada com valores de micro dureza medidos pontualmente.
Para a validação da medição dos transdutores, deverá haver uma equivalência
sobre a força aplicada no processo de riscamento registrada no arquivo de dados gerado
após o ensaio, com os dados de microdureza medidos nos locais próximos ao risco em
posições específicas.

58
6. Conclusões
O projeto de reforma do esclerômetro proposto englobou a implementação do
terceiro eixo de movimentação, a atualização do hardware e a programação do software
de controle novo. Tais aprimoramentos foram necessários para proporcionar a
realização de ensaios de riscamento com trajetórias polares definidas pelo usuário. Tal
característica é fundamental para que novos desenvolvimentos sejam realizados com
base no esclerômetro.
Os resultados atenderam os objetivos propostos para o projeto englobando a
seleção e compra dos equipamentos e materiais necessários, implementação mecânica
do conjunto e programação do software de controle do ensaio de riscamento do
esclerômetro.
O esclerômetro é capaz agora de realizar ensaios de riscamento com trajetórias
retilíneas e polares com aplicação de força normal constante ou variável, de acordo com
a configuração do ensaio, a partir das necessidades do usuário.
A única alteração que será realizada no equipamento que constava no projeto de
reforma e não foi realizada é a incorporação dos transdutores de força do tipo célula de
carga triaxial e o procedimento de calibração foi definido na seção 5 calibração e
verificação da confiabilidade dos resultados.
O ambiente de programação Labview atendeu as necessidades de programação
se destacando como um programa de alta facilidade de implementação que possibilita o
tempo reduzido de desenvolvimento quando comparado a tecnologias concorrentes de
programação.
As mesas de movimentação se adequaram as necessidades dos ensaios previstos
para o esclerômetro, tornando-o apto para simulações de diversos processos de remoção
de material.
O esclerômetro do Departamento de Engenharia Mecânica da Universidade
Federal de Santa Catarina poderá agora executar ensaios de riscamento seguindo os
requisitos para desenvolvimentos de estudos e pesquisas sobre os mais variados
processos de remoção de material e ainda poderá ser utilizado para desenvolvimento de
novas tecnologias.
Complementarmente o esclerômetro poderá ser fruto de trabalhos de
desenvolvimento com o foco de avaliar a influência de sobreposição de riscos, avaliar a
transição da zona termicamente afetada em materiais soldados.

59
Para simulação de processos de polimento poderá ser avaliada a incorporação de
uma mesa rotativa de alta velocidade.

60
REFERÊNCIAS
[1] ALARCON, O., WEINGAETNER, W., ROMAN, H., SOUSA, F.J.P., PEREIRA,
M., SPILLER, A., TRIDAPALLI, D., Design and Development of an apparatus for
measuring the scratch hardness of ceramic tiles – QUALICER 2004.
[2] PEREIRA, M., Desenvolvimento da metodologia de ensaio e de avaliação de
dureza ao risco de pisos cerâmicos, Relatório de Bolsa DTI, 2000.
[3] RAUPP, R., Comparação entre medições estáticas e dinâmicas de dureza de
materiais e influencia da velocidade de riscamento em ensaio de esclerometria,
TRABALHO DE CONCLUSÃO DE CURSO, 2010.
[4] PEREIRA, C; GUIMARÃES, G.; CORDEIRO, L.; REIMBERG, R.; UEMURA, V.
Esclerometria. São Paulo, Escola Politécnica da USP, 1999. Apostila da Disciplina de
Tribologia, do curso de Engenharia Mecânica, EPUSP.
[5] SCHUITEK, A.; MARU, M.; HIOKI, D.; SINATORA, A.; Desgaste abrasivo do
aço AISI 8640 por meio de ensaios de riscamento circular repetido. Revista ABM,
São Paulo, vol. I, p. 34-38. Julho 2004.
[6] KARL-Hein; GAHR, Z. Microstructure and wear of materials. Tribology Series
10. Elsevier Science Publishers B. V., Amsterdan – Netherlands, 1987. 560 p..
[7] FEIJÃO, J. F. M.; ALARCON, O. E.; DE MELLO, J. D. B.; ROSA, F.G.;
SILVEIRA, R; SILVEIRA, M. Estudo do Mecanismo de Abrasão de Pavimentos
Cerâmicos Utilizando a Técnica Esclerométrica, Cerâmica, Ano XLII, Vol. XLII, no
275, 1996
[8] DE MELLO, J. D. B. Introdução ao estudo do desgaste. Uberlândia, 1994. 26 f.
Notas de aula – Laboratório de Eng. de Materiais, Universidade Federal de Uberlândia.
1994.
[9] Manual de Treinamento do Labview - Básico I, Ed. Novembro de 2001. Disponível
no endereço eletrônico:
<https://dspace.ist.utl.pt/bitstream/2295/564001/1/LabView.pdf> Acessado em 10
Agosto de 2010.
[10] DA SILVA, M. E., Curso de Automação Industrial, FUMEP, EEP, COTIP,
Sorocaba, 2007.
[11] ROSÁRIO, JOÃO MAURÍCIO, - Princípios de Mecatrônica - Editora Pearson
Prentice Hall, São Paulo, 2005.
[12] BUDRUCK, R., ANDERSON, D., SHANLEY, T., PCI Express System
Architecture, 3.ed, 2004.

61
[13] PCB Technichal Data Sheet. Disponível no endereço eletrônico:
<http://www.pcb.com/spec_sheet.asp?model=208C01&item_id=8180> Acessado em 10
Agosto de 2010.
[14] RILEY, P., Building Formula 1 Caliper and Brake Test Dynamometers Using
NI Labview 7.1 and NI-DAQmx, National Instruments Labview Case Studies.
[15] General Piezoelectric Theory, PCB Piezotronics INC., Technical Support.
Disponível no endereço eletrônico: http://www.pcb.com/techsupport/tech_gen.php
Acessado em 10 de Agosto de 2010.