Instituto de Física Gleb aghintaW -...
92
-
Upload
phungquynh -
Category
Documents
-
view
215 -
download
0
Transcript of Instituto de Física Gleb aghintaW -...
Universidade Estadual de Campinas
Instituto de Física Gleb Wataghin
Rafael Soares Pinto
Aspectos dinâmicos de redes
Campinas, 2015
Rafael Soares Pinto
Aspectos dinâmicos de redes
Tese apresentada ao Instituto de Física
Gleb Wataghin da Universidade Estadual de
Campinas como parte dos requisitos
exigidos para a obtenção do título de
Doutor em Ciências.
Orientador: Alberto Vazquez Saa
Coorientador: Marcus Aloizio Martinez de Aguiar
Este exemplar corresponde à versão nal da
tese de doutorado defendida pelo aluno Rafael
Soares Pinto e orientada pelo Prof. Dr. Alberto
Vazquez Saa
Campinas, 2015
Agência de fomento: CapesNº processo: 2012/09357-9
Ficha catalográficaUniversidade Estadual de Campinas
Biblioteca do Instituto de Física Gleb WataghinValkíria Succi Vicente - CRB 8/5398
Pinto, Rafael Soares, 1986- P658a PinAspectos dinâmicos de redes / Rafael Soares Pinto. – Campinas, SP : [s.n.],
2015.
PinOrientador: Alberto Vazquez Saa. PinCoorientador: Marcus Aloizio Martinez de Aguiar. PinTese (doutorado) – Universidade Estadual de Campinas, Instituto de Física
Gleb Wataghin.
Pin1. Sincronização. 2. Redes complexas. 3. Modelo de Kuramoto. I. Saa,
Alberto Vazquez,1966-. II. Aguiar, Marcus Aloizio Martinez de,1960-. III.Universidade Estadual de Campinas. Instituto de Física Gleb Wataghin. IV.Título.
Informações para Biblioteca Digital
Título em outro idioma: Dynamical aspects of networksPalavras-chave em inglês:SynchronizationComplex networksKuramoto modelÁrea de concentração: FísicaTitulação: Doutor em CiênciasBanca examinadora:Alberto Vazquez Saa [Orientador]Rickson Coelho MesquitaJosé Antonio BrumRoberto Vegeneroles NascimentoLeonardo Paulo MaiaData de defesa: 25-08-2015Programa de Pós-Graduação: Física
Powered by TCPDF (www.tcpdf.org)
Agradecimentos
Quando eu comecei minha tese de doutorado, meu orientador era o Prof. Patricio Anibal Le-
telier Sotomayor, que eu já tinha tido o prazer de tê-lo como meu orientador durante o mestrado.
Infelizmente, para tristeza de todos, o Patricio faleceu pouco tempo após iniciarmos nosso trabalho.
Aqui escrevo meus agradecimentos pela sua orientação e pela companhia durante os dois anos e
meio em que trabalhamos juntos. Também não posso deixar de expressar meus agradecimentos ao
Prof. Alberto Saa, que não hesitou em me acolher como seu aluno, iniciando assim nossa jornada
pela teoria de redes complexas e sincronização.
Agradeço ao grupo de redes complexas, João, Elohim, Carolina, Luis, Rickson, Marcus, Gabriela
e Reember, pelas discussões interessantes que tivemos e ideias que trocamos. Aprendi bastante com
nossas conversas.
Agradeço também a toda minha família, a minha mãe Vera, ao meu pai Eduardo e minha irmã
Adriana, e meus amigos, Lucas, Renato, Diogo e Luís, que estiveram durante todo esse tempo
juntos.
Resumo
Pinto, R. S. Aspectos dinâmicos de redes. 2015. 90 f. Tese (Doutorado) - Instituto de Física
Gleb Wataghin, Universidade estadual de Campinas, Campinas, 2015.
Sincronização está presente em uma miríade de situações, indo desde vaga-lumes piscando em
uníssono na copa das árvores, populações de leveduras ajustando seu metabolismo para um ritmo
comum, atividades neurais ocorrendo no cérebro, chegando até as redes de distribuição de energia
elétrica, as maiores máquinas construídas pelo homem.
Neste trabalho, nós analisamos como se dá o processo de sincronização utilizando o bem conhe-
cido modelo de Kuramoto, estudado incansavelmente nas últimas décadas, quando ele se encontra
sobre uma rede complexa, que determina os padrões de interação entre os elementos que compõem
a população. A topologia dessas interações determina de maneira crucial a dinâmica do sistema,
possibilitando, ou não, a sincronização dos seus elementos.
Primeiros, nós analisamos o fenômeno da sincronização explosiva: a correlação de propriedades
da rede com a frequência natural dos osciladores altera dramaticamente a natureza da transição de
fase do estado não sincronizado para o estado sincronizado. Mostramos que sincronização explosiva
ocorre mesmo quando apenas uma pequena fração dos vértices da rede possuem tal correlação, a
saber, os vértices mais bem conectados da rede. Além do mais, ajustando o número de vértices onde
a correlação é válida, podemos controlar propriedades dessa transição de fase.
A seguir estudamos o processo de optimização de topologia para favorecer sincronização. Dado
um conjunto de vértices/osciladores com frequências naturais conhecidas e um certo número de
links, qual é a melhor topologia, ou seja, o padrão de conexões, que favorece a sincronização?
Estudamos esse problema numericamente para o modelo de Kuramoto com inércia, que serve como
um modelo simples para analisar as redes de transmissão de energia elétrica, obtendo princípios
básicos que devem ser utilizados para o design de tais sistemas.
Por m, ainda no problema de optimização de topologia para favorecer sincronização, obtivemos
pela primeira vez de forma analítica as condições para optimização para o modelo de Kuramoto, bem
como para uma generalização sua, onde há interações positivas e negativas. Esses resultados analí-
ticos ainda servem para criar algoritmos de optimização mais ecientes que os utilizados atualmente.
Palavras-chave: Sincronização, Modelo de Kuramoto, Redes Complexas.

Abstract
Pinto, R. S. Dynamical aspects of complex networks. 2015. 90 f. Tese (Doutorado) - Instituto
de Física Gleb Wataghin, Universidade estadual de Campinas, Campinas, 2015.
Synchronization is present in a myriad of situations, from the unison ashing of reies in trees,
populations of yeast adjusting their metabolism to a common rhythm, neural activities in the brain
to the largest machines ever built, the power grids.
We analysed how the process of synchronization happens using the well known Kuramoto model,
tirelessly studied in the last decades, when it is on top of a complex network, that determines the
patterns of interaction between the elements of the population. The topology of this network's
determines crucially the possible dynamics of the systems, allowing, or not, the synchronization of
its elements.
We rst discuss the phenomenon of explosive synchronization, where the correlation between
properties of the network and the oscillators changes drastically the nature of the phase transition
separating the incoherent state from the synchronized state. We show that explosive synchronization
can occur even when a small subset of the vertices are correlated. It is necessary that only the hubs,
vertices with highest degrees, show the correlation. Moreover, adjust the fraction of correlated
vertices allows us to control properties of the phase transition.
Next we study the optimization of the topology to favor synchronization. Given a set of ver-
tices/oscillators with know natural frequencies and a certain number of links, which is the best
topology, its pattern of interactions, to favor synchronization? We studied this problem to a ge-
neralized Kuramoto model (Kuramoto model with inertia) that is used as a simple tool to model
power grids, obtaining in this way simple rules that can be applied to the design of such systems
that already helps the synchronization of its elements.
In our nal contribution, still in the optimization of the topology problem, we were able, for the
rst time, to obtain analytically the conditions of optimization for the Kuramoto model, as well as
for one of its generalizations, where there can exist positive and negative interactions between the
elements. Beyond the signicant fact that the conditions can be know analytically, these results can
be used to obtain faster optimization algorithms that the current ones.
Keywords: Synchronization, Kuramoto model, Complex networks.
Sumário
1 Introdução 9
2 Conceitos básicos de redes complexas 15
3 Sincronização 21
3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Sincronização em redes complexas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Sincronização explosiva 31
5 Sincronização de redes elétricas 39
6 Redes optimizadas para o modelo de Kuramoto 49
7 Conclusões 57
A Explosive synchronization with partial degree-frequency correlation 59
B Synchrony-optimized power grids 71
C Optimal synchronization of Kuramoto oscillators: a dimensional reduction ap-
proach 81
Referências Bibliográcas 89
Capítulo 1
Introdução
No século XVII, a exploração dos mares pelos países europeus estava no seu máximo. Procurandonovas terras, navios eram mandados para lugares cada vez mais longínquos. Um problema práticomuito importante encontrado pelos marinheiros dessa época era saber onde eles se encontravam.Para poderem navegar com segurança, e chegar aonde queriam, os marinheiros tinham que medir otempo de forma muito mais precisa do que se dispunha naquela época para poderem calcular a sualongitude [1]. Nesse contexto, algumas das tentativas mais notáveis no desenvolvimento de relógiosforam feitas pelo cientista holandês Christiaan Huygens (1629 - 1695), que o possibilitou acumularum grande conhecimento nessa área.
Em 1665 Huygens caiu doente e teve de passar alguns dias de repouso em seu quarto. Enquantose recuperava, ele notou algo surpreendente: dois relógios de pêndulo que estavam ambos suspensospor uma mesma viga de madeira que se encontrava, por sua vez, apoiada nos encostos de duascadeiras, sincronizavam de maneira extremamente precisa. Até o tic-tac que eles faziam era sincro-nizado! Ele cou tão maravilhado com essa descoberta que escreveu uma carta ao seu pai contandosuas primeiras observações (uma tradução em inglês pode ser lida em [2]). Depois de alguns ex-perimentos, Huygens determinou que o processo de sincronização ocorria devido ao balanço dospêndulos causarem pequenos movimentos, quase imperceptíveis, na viga de madeira que suspendiaambos os relógios: um inuenciava o outro.
Com essa descoberta meio ao acaso, Huygens foi aparentemente a primeira pessoa a analisar oprocesso de sincronização de maneira cientica e, de certa maneira, abrir toda uma área de pesquisaque vai até os dias de hoje. Recriações modernas do experimento conrmaram a descrição dada porHuygens [3].
Vários outros casos de sincronização foram sendo catalogados ao longo do tempo, principalmenteem acústica. No início do século XX, uma nova leva de experimentos envolvendo sincronizaçãocomeçou quando alguns pioneiros da era da eletrônica, como Appleton e van der Pol, começaram aestudar o comportamento de circuitos elétricos contendo dispositivos não lineares, como os tríodos,elementos muito importantes no desenvolvimento das telecomunicações [2].
Entretanto, um dos fenômenos de sincronização que mais chamam a atenção é observado princi-palmente nos mangues do sudeste asiático: a sincronização dos vaga-lumes [4, 5]. Para quem nuncaviu com seus próprios olhos esse fenômeno, Smith [6] disse ...then, if one's imagination is suciently
vivid, he may form some conception of this amazing spectacle.1
As mais antigas observações sobre a sincronização desses insetos, ainda que de forma alegórica,parecem ter sido feitas pela tripulação da expedição comandada por Francis Drake em 1577, asegunda a circunavegar o globo, nas proximidades do que hoje é Bangkok [5].
A investigação de forma cientica só começou propriamente nas duas primeiras décadas do séculoXX, de uma forma um tanto quanto atabalhoada. Algumas dezenas de artigos foram publicadosna revista Science, alguns a favor, outros contra o fenômeno da sincronização de vaga-lumes. Ficoufamosa, por exemplo, a tentativa de explicação desenvolvida por Laurent [7] em 1917. Ele arma
1Há, junto com muitas outras coisas interessantes, um vídeo da sincronização de vagalumes na palestra de Strogatzna sua TED TALK [8].
9

10INTRODUÇÃO
que a sincronização observada é resultado, única e simplesmente, do movimento da pálpebra doobservador, visto que for such a thing to occur among insects is centainly contrary to all natural
laws. Várias outras tentativas de explicar a sincronização foram propostas, algumas mais fantásticasdo que o fenômeno em si, como colocou Smith [6] em 1935.
A relutância de Laurent de acreditar que não possa existir sincronização entre os vaga-lumesnão é totalmente inaceitável, principalmente se vista no contexto do começo do século XX. Comopoderiam simples insetos coordenarem seus ashes de luz, todos juntos em áreas tão grandes, vistoque um maestro tem tanto trabalho para sincronizar em perfeição sua orquestra para execução damelodia? Uma explicação só viria algumas décadas depois.
As observações sobre sincronização não param por aí. No coração há uma estrutura anatômicachamada de nodo sinoatrial, que é responsável por manter o ritmo de pulsação do coração. Essaregião, que é o marca passo natural do coração, mantém o ritmo a partir da sincronização dos po-tenciais de ação das células especializadas que o constituem. Há um grande interesse em neurologiaem estudar sincronização entre diferentes áreas do cérebro utilizando técnicas como eletroencefa-lograma ou então ressonância magnética funcional, tanto quando o cérebro está em algum tipo deatividade [9] quanto em repouso [10].
Dada a presença de sincronização em várias partes da natureza, começaram a surgir algunsmodelos matemáticos para tentar explicar esse fenômeno. Strogatz [4] conta de maneira muitointeressante como foram as primeiras tentativas de se entender analiticamente o processo de sincro-nização, elaboradas por cientistas como Peskin, interessado nas células do nodo sinoatrial e Wiener,tentando explicar a ocorrência das ondas α do cérebro.
Foi a partir desse momento, com base nesses modelos iniciais, que começou o desenvolvimentode um tratamento matemático robusto que pudesse mostrar e explicar a existência da sincronização.E isso foi importante porque criou um conjunto teórico que de certa forma unicou todos os fenô-menos que foram descritos acima. Tanto a sincronização dos relógios de pendulo, dos vaga-lumesou do marca passo natural do coração, puderam ser descritos por uma mesma teoria, respondendopositivamente a objeção de Laurent sobre a sincronização dos vaga-lumes.
Arthur Winfree [11] foi um dos pioneiros na construção de modelos matemáticos que descreves-sem sincronização. O modelo que hoje leva seu nome analisa a situação onde um grande númerode osciladores, um ensemble, interage cada um com todos os outros. Cada oscilador tende a manterseu próprio ritmo quando sozinho, que em geral é diferente para cada um (devido a variabilidadegenética no caso dos vaga-lumes, mínimos erros de fabricação no caso dos relógios, etc.) . Quandoos osciladores interagem entre si, essa interação, cuja intensidade é medida por um parâmetro cha-mado de força de acoplamento, tende a contrapor a tendência natural dos osciladores de manteremseu próprio ritmo e trabalha para gerar uma oscilação comum ao ensemble. Usando simulaçõesnuméricas, Winfree mostrou que existe uma transição de fase entre os estados não-sincronizado esincronizado conforme aumentamos a constante de acoplamento.
Uma diculdade com o modelo de Winfree era sua complexidade matemática. Alguns anos de-pois, em 1975, Yoshiki Kuramoto [12, 13], fascinado com o trabalho deWinfree, acabou simplicandoo problema e chegou ao modelo que hoje leva seu nome,
dθidt
= ωi +λ
N
N∑j=1
sin(θj − θi), (1.1)
onde θi é uma variável angular que dene o estado do i-ésimo oscilador e ωi é sua frequência natural.As frequências naturais são sorteadas aleatoriamente de uma distribuição de probabilidade unimodalg(ω) em torno de um máximo localizado em Ω e λ é a força de acoplamento entre os N osciladores.A desordem do sistema, que é a tendência de cada elemento se mover com seu próprio ritmo, sereete na distribuição aleatória das frequências naturais. Como Winfree, Kuramoto também assumeque cada oscilador está conectado com todos os outros osciladores.
É extraordinário que Kuramoto foi capaz de resolver2 o sistema de equações diferenciais não
2Um fato curioso é que o sucesso obtido por Kuramoto foi provavelmente o responsável pelo modelo de Winfree
11
lineares (1.1). Isso é um fato notável, visto que equações diferenciais não lineares são incrivelmentecomplicadas, e mesmo assim, aqui temos um exemplo de um modelo que descreve um fenômenoimportante e que admite uma solução. Por exemplo, Kuramoto mostrou que, como no modelo deWinfree, também existe uma transição de fase separando os estados não sincronizado e sincronizadoocorrendo no valor crítico λc da força de acoplamento, que é dado simplesmente por
λc =2
πg(Ω). (1.2)
O sucesso do modelo de Kuramoto semeou um caminho fértil para investigar várias generaliza-ções [13].
Entretanto, um ponto em comum aos vários modelos iniciais que surgiram para explicar o pro-cesso de sincronização é que todos partiam do pressuposto de que o acoplamento entre os osciladoresdo ensemble é global: cada oscilador está conectado com todos os outros. Assumir esse fato facilitavaenormemente a analise teórica. Além do mais, eram escassas as informações sobre a topologia desistemas reais. Na falta dessas informações, o que Winfree e Kuramoto estavam fazendo é suporuma primeira aproximação.
Esse quadro começou a mudar recentemente com os avanços em engenharia e biotecnologia quepermitiram obter dados sobre a topologia das mais diversas áreas, da internet ao córtex humano[15, 16], passando por redes genéticas e indo até redes de distribuição de energia elétrica [17], asmaiores máquinas construídas pelo homem. A teoria de redes complexas [18, 19] é uma abstraçãomatemática que nos permite estudar os mais diversos sistemas sob a mesma óptica. Se nós temosum sistema que é composto por várias unidades interconectadas em si, nós pensamos nos elementosconstituintes como sendo os vértices e as conexões entre esses vértices nós chamamos de links.Visualmente, redes complexas são representadas como sendo formada por um conjunto de pontosno plano, os vértices, interligadas por semi retas, os links.
De maneira intrigante, existem certas propriedades que são presentes em redes reais das maisdiferentes origens. Por exemplo, uma propriedade presente frequentemente em redes de origembiológica, técnica e social é o fato da distribuição de grau p(k), que mede a probabilidade de umvértice aleatório estar conectado com k outros vértices, ser dada por uma lei de potência, comoveremos adiante. A ideia é que essas propriedades em comum possam indicar que os mecanismosque operam por trás dessas redes são os mesmos e assim possamos desenvolver uma teoria emcomum que unique esses fenômenos.
Tome como exemplo o nematóide C. elegans [20], o único animal do qual se conhece todos osseus neurônios, bem como as suas sinapses. Nós podemos representar o seu sistema neural comouma rede complexa, onde os neurônios serão os vértices e os links representam sinapses. Essa redeestá representada gracamente na gura 1.1.
Na gura 1.1, o tamanho de cada vértice é proporcional ao seu grau, o número de outros vérticescom os quais ele mantem conexões. Veja que esse número varia consideravelmente: enquanto algunsvértices têm apenas uma única conexão, alguns poucos têm muitas. Além do mais, as conexões nãosão feitas aleatoriamente. Alguns vértices conectam-se mais densamente entre si do que com outrosvértices, formando o que se chama de comunidades (diferentes comunidades estão representadas pordiferentes cores na gura 1.1).
Para estudarmos a sincronização dos neurônios do C. elegans, nós devemos levar em conta atopologia das conexões. Ignorar que vértices diferentes possuem graus diferentes ou então outrascaracterísticas da rede (que veremos mais adiante) nos levaria a não perceber efeitos importantes[22].
O exemplo acima não é único onde se deve levar em conta a topologia da rede para estudarsincronização. Há um grande interesse em estudar a sincronização de redes elétricas e não há muitosentido em fazer isso sem se basear na sua topologia real, [23, 24, 25]. E isso pode ser feito, poisexistem dados disponíveis sobre as redes de distribuição de várias regiões, como por exemplo, darede europeia [17].
acabar quase que esquecido. Uma análise geral de uma variante do modelo de Winfree só foi surgir no ano 2001. [14]

12INTRODUÇÃO
Figura 1.1: A rede de neurônios do nematoide C. elegans, com 297 neurônios e 2148 sinapses. O tamanhode cada vértice é proporcional ao seu grau. Já a sua cor identica a qual comunidade ele pertence. Os dadosdessa rede estão disponíveis no site do Mark Newman, [21].
Outro caso de extrema importância é o cérebro. Obviamente a topologia cerebral não é global,visto que isso acarretaria um grande desperdício de energia em manter todas essas conexões, issosem contar o volume nito do crânio. Pode-se, a grosso modo, dividir o cérebro em regiões baseadasna anatomia e então determinar quais regiões estão conectas com quais através de feixes de axônios[15, 16]. Desses resultados, infere-se que a topologia das ligações do cérebro, resultado de um processoevolutivo, apresenta características únicas, que inuenciam decisivamente como se dá o processo desincronização [26]. Também há indícios de que certas patologias podem estar relacionadas comdiferenças nas conexões cerebrais [27].
Nesta tese nós estudamos então como a topologia da rede de osciladores inuencia no processode sincronização. Primeiramente nós vamos discutir o fenômeno chamado de sincronização explosiva(SE) [28], que vem recebendo bastante atenção nos últimos anos. Aqui a correlação entre proprie-dades da rede e dos osciladores transforma radicalmente a natureza da transição de fase. Nós vamosmostrar que podemos generalizar o surgimento de SE para vários tipos de rede correlacionandoapenas alguns vértices especiais da rede.
Nosso outro tópico de interesse é no estudo de redes de distribuição de energia elétrica. Asmudanças que são esperadas nos próximos anos, devido a busca de maior eciência energética, temestimulado vários trabalhos sobre a sincronização dessas redes, que podem ser descritas com ummodelo de Kuramoto generalizado. Nós vamos analisar as condições para optimização da sincro-nização em redes elétricas, bem como alguns outros detalhes dessas redes optimizadas, como seucomportamento em situações onde há um pico de consumo de energia elétrica.
Por m, nós vamos utilizar uma aproximação bem recente para o modelo de Kuramoto [29] paraderivar analiticamente as condições que a topologia de uma rede deve satisfazer para a optimizaçãoda sincronização. Embora se conheçam de maneira experimental essas condições desde 2008 [30, 31],é a primeira vez que elas são derivadas analiticamente com um arcabouço teórico.
O trabalho está dividido da seguinte forma. Primeiro vamos fazer uma introdução aos conceitosda teoria de redes no capítulo (2), onde vamos discutir alguns dos fundamentos mais básicos quesão necessários para o entendimento do que será feito nos próximos capítulos. Em seguinda vamosanalisar a teoria matemática de sincronização no capítulo (3), introduzindo o modelo de Kuramotoquando o acoplamento entre os osciladores é global e mostrando a sua solução. Depois nós discu-tiremos o modelo de Kuramoto em redes complexas, comparando diferentes aproximações para o

13
valor crítico da força de acoplamento.Nos três capítulos nais discutiremos as nossas contribuições: i) sincronização explosiva no
capítulo (4), cujos resultados foram publicados no periódico Physical Review E [32] ii) optimizaçãode redes elétricas no capítulo (5), sendo que o artigo com esses resultados foi submetido a publicaçãoe está esperando o resultado da revisão pelos pares [33], e iii) a obtenção analitica das condiçõestopológicas para optimização do modelo de Kuramoto (6), cujo artigo (apêndice C) também seencontra esperando o resultado da revisão pelos pares.
As simulações numéricas que serão apresentadas foram feitas utilizando a linguagem de progra-mação Python [34], juntamente com suas excelentes bibliotecas para análise numérica Numpy/Scipy[35] e a biblioteca para lidar com redes complexas NetworkX [36].

14INTRODUÇÃO

Capítulo 2
Conceitos básicos de redes complexas
Na natureza não há nenhum sistema isolado. Os neurônios do cérebro mantêm sinapses emmédia com outros 104 neurônios. Os animais interagem entre si no meio ambiente, seja por relaçõesde simbiose ou então através de relações presa-predador. Na sociedade, doenças e informações sepropagam através do contato entre pessoas.
Esses, e muitos outros exemplos, nos mostram que para entender tais sistemas é necessário levarem conta as interações entre os seus elementos, sejam eles neurônios, animais ou pessoas.
A teoria de redes complexas é uma abstração matemática que permite estudar diferentes sistemasusando o mesmo conjunto de ferramentas [18, 19]. Essa construção matemática nos ajuda a salientarpropriedades similares em redes de diferentes origens e assim inferir os mecanismos em comum quesão utilizados em diferentes sistemas.
Embora a análise de alguns modelos de redes já tenha algumas décadas, incialmente se estavapreocupado em propriedades combinatórias das redes. A atual abordagem é oriunda da existênciade dados sucientemente completos de sistemas variados, como a internet, redes elétricas [17] e asconexões do córtex humano [15, 16]. A análise dessas redes reais levaram as pessoas a questionar seexistem propriedades em comum entre elas, os mecanismos que as geraram e como suas estruturasdeterminam a dinâmica de diferentes processos que ocorrem sobre tais redes.
Redes geralmente são representadas de maneira gráca, como na gura 1.1. As unidades dosistema, sejam elas neurônios, animais ou pessoas, são representadas como pontos, chamados devértices (ou nós) e as relações entre as unidades são mostradas como segmentos de reta ligandodiferentes vértices, os links.
Como a representação gráca é limitada, uma maneira de organizar as informações sobre asconexões de uma rede é utilizar a matriz de adjacência A, com elementos aij denidos da seguintemaneira:
aij =
1 se os vértices i e j estão conectados
0 caso contrário(2.1)
Na denição (2.1), a matriz de adjacência contém apenas a informação binária da existênciaou não do link entre os vértices i e j. É possível adicionar mais informações, como pesos aos links,possibilitando que os elementos aij assumam valores reais. Podemos ter assim, além da matriz deadjacência A, uma outra matriz Sij que contém os valores dos pesos dos links, como sij = 7 esik = 1, indicando que a possível interação entre os vértices i e j é sete vezes maior que a interaçãoentre i e k. Ou então podemos utilizar apenas uma única matriz de adjacência Aij e denir que umelementos dessa matriz com valor nulo representa a falta de interação entre os vértices em questão.
Outro ponto importante é que tratamos os links como não tendo direção. Pela denição anterioraij = aji: a relação entre i e j é recíproca. Também, se necessário, podemos introduzir redesdirecionais, onde o fato de i inuenciar j não signica que j também inuência i: os links apontamde um vértice origem a um vértice alvo. Nesse caso, a matriz de adjacência não será mais simétrica.
Entretanto, vamos usar apenas redes sem peso e não direcionais daqui pra frente.Talvez uma das propriedades mais básicas que podemos denir é o grau ki do vértice i, que é
15
16CONCEITOS BÁSICOS DE REDES COMPLEXAS
101 102 103 104
k
10-6
10-5
10-4
10-3
10-2
10-1
p(k)
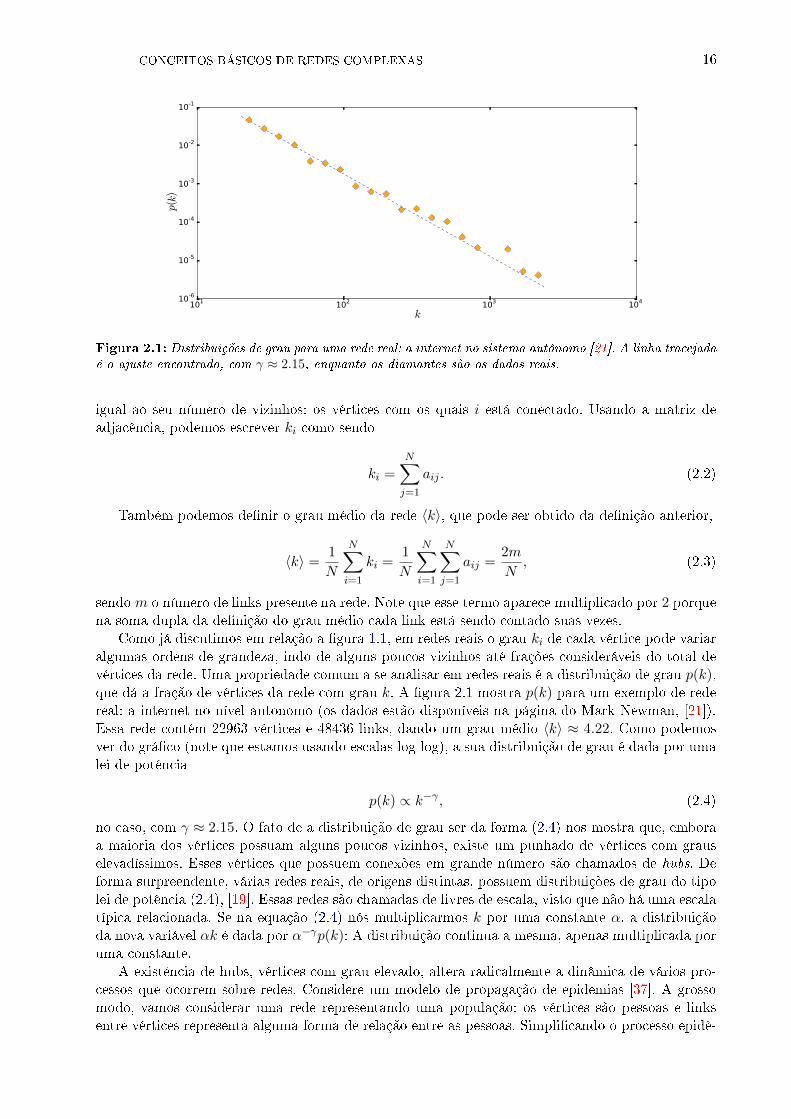
Figura 2.1: Distribuições de grau para uma rede real: a internet no sistema autônomo [21]. A linha tracejadaé o ajuste encontrado, com γ ≈ 2.15, enquanto os diamantes são os dados reais.
igual ao seu número de vizinhos: os vértices com os quais i está conectado. Usando a matriz deadjacência, podemos escrever ki como sendo
ki =
N∑j=1
aij . (2.2)
Também podemos denir o grau médio da rede 〈k〉, que pode ser obtido da denição anterior,
〈k〉 =1
N
N∑i=1
ki =1
N
N∑i=1
N∑j=1
aij =2m
N, (2.3)
sendo m o número de links presente na rede. Note que esse termo aparece multiplicado por 2 porquena soma dupla da denição do grau médio cada link está sendo contado suas vezes.
Como já discutimos em relação a gura 1.1, em redes reais o grau ki de cada vértice pode variaralgumas ordens de grandeza, indo de alguns poucos vizinhos até frações consideráveis do total devértices da rede. Uma propriedade comum a se analisar em redes reais é a distribuição de grau p(k),que dá a fração de vértices da rede com grau k. A gura 2.1 mostra p(k) para um exemplo de redereal: a internet no nível autônomo (os dados estão disponíveis na página do Mark Newman, [21]).Essa rede contém 22963 vértices e 48436 links, dando um grau médio 〈k〉 ≈ 4.22. Como podemosver do gráco (note que estamos usando escalas log-log), a sua distribuição de grau é dada por umalei de potência
p(k) ∝ k−γ , (2.4)
no caso, com γ ≈ 2.15. O fato de a distribuição de grau ser da forma (2.4) nos mostra que, emboraa maioria dos vértices possuam alguns poucos vizinhos, existe um punhado de vértices com grauselevadíssimos. Esses vértices que possuem conexões em grande número são chamados de hubs. Deforma surpreendente, várias redes reais, de origens distintas, possuem distribuições de grau do tipolei de potência (2.4), [19]. Essas redes são chamadas de livres de escala, visto que não há uma escalatípica relacionada. Se na equação (2.4) nós multiplicarmos k por uma constante α, a distribuiçãoda nova variável αk é dada por α−γp(k): A distribuição continua a mesma, apenas multiplicada poruma constante.
A existência de hubs, vértices com grau elevado, altera radicalmente a dinâmica de vários pro-cessos que ocorrem sobre redes. Considere um modelo de propagação de epidemias [37]. A grossomodo, vamos considerar uma rede representando uma população: os vértices são pessoas e linksentre vértices representa alguma forma de relação entre as pessoas. Simplicando o processo epidê-

17
mico, supomos que podemos dividir o estado das pessoas em três categorias: i) Um estado saudávele que pode contrair a doença, caso haja contato com um doente, ii) Um estado doente e que é capazde transmitir a doença para um contato saudável e iii) um estado imune, onde a pessoa já contraiu adoença e se curou, sendo incapaz de adoecer novamente. Vamos supor também que a pessoa/vérticedoente transmita com probabilidade β a doença para cada um dos seus contatos saudáveis. Pararedes que não são livres de escala, existe um valor mínimo necessário βc, tal que se β < βc a doençapermanece connada a poucos vértices e não há uma epidemia. Já para redes livres de escala, eredes reais parecem ser desse tipo [38], βc = 0! Ou seja, a doença atinge uma fração considerávelda rede mesmo com valores muito pequenos da probabilidade de infecção.
Como veremos adiante, hubs também desempenham um papel signicativo na maneira de comoa sincronização em redes de osciladores é atingida.
O fato de várias redes reais serem livres de escala levantou várias perguntas, principalmentesobre qual mecanismo está operando para que isso ocorra.
Tentando responder essa pergunta, várias redes sintéticas, isto é, redes criadas teoricamente comalgum princípio básico que tenta imitar os possíveis mecanismos reais, foram propostas. O modelosintérico mais bem conhecido, proposto por Erdos e Renyi em 1959 [39], onde links entre os vérticessão estabelecidos de maneira independente e com probabilidade p, não conseguia reproduzir o queera observado nesses casos. Qual a distribuição de grau p(k) para essa modelo? Bem, considere umarede com tamanho n, onde cada vértice pode ter no máximo n− 1 links (quando ele está conectadocom todos os outros). Como cada link tem probabilidade p de existir, a probabilidade de encontrarum vértice com grau k é dado pela distribuição binomial
p(k) =
(n− 1
k
)pk(1− p)n−1−k. (2.5)
O grau médio da rede é simplesmente 〈k〉 = p(n − 1), já que cada link ocorre de maneiraindependente. Podemos simplicar a forma da distribuição p(k) no limite termodinâmico n → ∞.Nesse caso, para que 〈k〉 continue nito, devemos ter que a probabilidade p→ 0. Nessa circunstância,podemos aproximar a equação (2.5) da seguinte maneira. O termo envolvendo (1 − p)n−1−k =(1 − 〈k〉/(n − 1))n−1−k ≈ e−〈k〉. Já para o coeciente binomial, usando a aproximação de Stirling,temos que
(n−1k
)≈ (n− 1)k/k!. Com essas aproximações, podemos escrever (2.5) como
p(k) =(n− 1)k
k!pke−〈k〉 = e−〈k〉
〈k〉k
k!, (2.6)
que é a distribuição de Poisson, que apresenta um máximo bem denido e um decaimento exponen-cial para k →∞. Portanto, deve haver outro mecanismo que gera redes livres de escala e devemosprocurar outros métodos para constuir redes mais realistas.
Uma resposta plausível, pelo menos para alguns casos, foi proposta por Réka Albert e LaszloBarabasi em 1999, baseada no conceito de ligação preferencial [40]. Esse modelo trata a formaçãoda rede como um processo de crescimento, onde a cada certo intervalo de tempo, um novo vértice éadicionado a rede e ele se conecta com aqueles vértices já existentes com probabilidade proporcionalao grau do suposto alvo. Assim, aqueles vértices com grau elevado tem maior probabilidade dereceberem links dos novos vértices, reforçando o seu papel de hub da rede, um exemplo do fenômenoconhecido como o rico ca mais rico. A distribuição de grau para uma rede de BA é dada pelafórmula
p(k) =2c(c+ 1)
k(k + 1)(k + 2), (2.7)
onde c é o número de ligações que cada novo vértice adicionado à rede irá fazer com os elementos jápresentes (e também o valor mínimo que o grau pode ter, por denição). Para k >> 1, p(k) ∝ k−3.A gura 2.2 mostra as distribuições de grau para redes de Erdos-Renyi e Barabasi-Albert, ambascom N = 104 vértices e 〈k〉 = 10. Desse resultado, pelo menos em relação à distribuição de graup(k), aparentemente a rede de Barabasi-Albert modela mais realisticamente o resultado empírico

18CONCEITOS BÁSICOS DE REDES COMPLEXAS
10-1 100 101 102
k
10-4
10-3
10-2
10-1
100
p(k
)
BA
ER
Figura 2.2: Distribuições de grau para redes de Erdos-Renyi (círculos vermelhos) e Barabasi-Albert (qua-drados azuis), ambas com N = 104 vértices e 〈k〉 = 10. As linhas contínuas são os resultados (2.6) e(2.7).
da gura 2.1.Embora hoje se conheça outros mecanismos que geram redes livres de escala, alguns bem dife-
rentes do modelo de anexação preferencial, como no caso da remoção preferencial [41], variantes domodelo proposto em [40] ainda são importantes e usados extensivamente para gerar redes livres deescala.
Existem várias outras propriedades importantes a serem medidas e que também são onipresentesem redes reais, como o fato delas serem classicadas como redes de mundo pequeno, pois a distânciamédia entre dois vértices quaisquer, o número de links que devem ser atravessados para ir de umvértice a outro, é sempre muito pequeno, da ordem de ln(N), onde N é o tamanho da rede. Noexemplo da internet no nível autônomo, com seus quase 23000 vértices, a distância média é demenos de 4 links. Outra maneira de medir distâncias é utilizando o diâmetro da rede, que é a maiordistância entre dois vértices quaisquer. No caso da internet, esse valor é de apenas 8! É fácil desenharuma rede quadrada de tamanho N × N , como a utilizada geralmente para estudar o modelo deIsing, e se deparar com o fato de que diâmetro de tais redes cresce muito rapidamente com N (naverdade, o diametro é dado por 2(N − 1)).
Em sociologia, a ideia de mundo pequeno é bem conhecida, especialmente depois dos experimen-tos realizados por Milgran na década de 60 [42]. Milgran selecionou pessoas de forma aleatória nomeio oeste americano e pediu que elas enviassem uma correspondência a uma determinada pessoa nonoroeste americano usando apenas seus próprios conhecidos como intermediários. Os participantesdeviam enviar a correspondência para algum dos seus conhecidos que elas achassem que estariammais próximas do alvo. O novo portador da correspondência deveria prosseguir da mesma forma,até que o pacote chegasse a seu destinatário.
Durante esse processo, os portadores intermediários da correspondência anotavam seus nomessendo assim possível determinar a distância percorrida pela carta. As correspondências que even-tualmente chegaram ao destinatário o zeram por um caminho que percorreu em média apenas 6pessoas.
Em redes reais, também há a tendência dos vértices formarem triângulos. Se o vértice A estáconectado com B e B com C, é muito provável que A e C também estarão conectados. Isso édescrito mais cordialmente em termos sociais como o amigo do meu amigo também é meu amigo. Éinteressante observar que os modelos de redes sintéticas falham em apresentar tal propriedade. Porexemplo, no modelo de Erdos-Renyi, os links são adicionados independentemente uns dos outros coma mesma probabilidade p. Assim, a probabilidade de que A e C estejam conectados (formando assimum triângulo) é justamente p = 〈k〉/n e conforme a rede cresce, o número de triângulos diminui.Do mesmo modo, no modelo de Barabasi-Albert o número de triângulos também é inversamenteproporcional ao número de vértices da rede. Embora existam modelos que tentem resolver esse
19
problema [43], ainda não é bem conhecido como a abundância de triângulos afeta a dinâmica queocorre sobre tais redes. Aparentemente o comportamento observado para diferentes processos emredes com abundância de triângulos pode ser descrita pela mesma teoria desenvolvida para redessem triângulos [44].
Há outra coisa interessante a se calcular, e que ainda será importante mais pra frente quandoformos estudar aproximações para o modelo de Kuramoto em redes complexas. Considere a seguintesituação: Nós sorteamos aleatoriamente um vértice da rede e seguimos um de seus links, escolhidotambém de modo aleatório, até chegar no vértice vizinho. Qual é a probabilidade q(k) de que essevizinho tenha grau k? Vamos pensar em uma rede com n vértices e m links. Podemos calcular issoexatamente para o chamado modelo de conguração [19]. Nesse modelo as redes são construídasprimeiro dando a cada um dos vértices o seu futuro grau ki, que é sorteado de uma distribuiçãop(k). Uma vez que o grau é conhecido, nós adicionamos o correspondente número de semi-links, quepodemos pensar que representa metade de um link de tal modo que quando ligamos dois semi-linksestabelecemos um link no sentido comum entre os vértices. Para a construção da rede nós escolhemosde maneira aleatória dois semi-links de dois vértices quaisquer e ligamos esses semi-links, formandoassim um link no sentido próprio, proseguindo dessa maneira até que todos os semi-links tenhamsido conectados.
A probabilidade de que se nós estamos em um vértice e um dos seus semi-links se conecta a umoutro semi-link qualquer é (2m− 1)−1 ≈ (2m)−1, já que existem 2m− 1 semi-links que podem serescolhidos aleatóriamente para se formar um link. A probabilidade de que esse semi-link pertençaa um vértice de grau k é justamente k em N , pois ele terá k oportunidades para se conectar.Multiplicando pela fração de vértices com grau k na rede, que é dada np(k), temos então
q(k) =kp(k)
〈k〉, (2.8)
onde usamos a relação (2.3) para substituir o termo n/2m por 1/〈k〉.Pelo resultado da equação (2.8), os vértices do outro lado do link geralmente possuem graus
elevados, já que a probabilidade é kp(k) e não apenas p(k) (como exemplo, no modelo de Barabasi-Albert q(k) ∝ k−2). Intuitivamente isso ocorre porque quanto maior o grau de um vértices, maior onúmero de links que conectam esse hub aos outros vértices da rede e assim a probabilidade de queeles sejam atingidos é maior, gerando um viés estatístico na distribuição q(k).
Embora esse resultado tenha sido obtido para um modelo em particular, o fato de que os vizinhosde um vértice possuem, na média, graus elevados é encontrada nas redes reais. Para a rede neuraldo C. elegans, por exemplo, enquanto o grau médio da rede é 〈k〉 ≈ 16, o grau médios dos vizinhosde um vértice é 22.
As medidas que discutimos até podem ser chamadas de locais, pois medem propriedades devértices e seus vizinhos. Redes reais também possuem propriedades globais. Uma das mais estudadasé a partição da rede em comunidades. Acontece que em redes reais, determinados grupos de vérticestendem a se conectar mais frequentemente entre si do que com outros grupos de vértices. Existemvárias explicações para isso. Voltando a gura 1.1, as diferentes comunidades de vértices estãomarcadas em diferentes cores. Nesse caso, comunidades surgem devido a especialização dos neurôniospara atuarem em determinadas áreas. Aqueles neurônios que atuam na locomoção do nematoidetendem a ser conectar a outros neurônios motores mais frequentemente do que a neurônios quedesempenham outras funções. O desenvolvimento de algoritmos ecientes e precisos para encontrarcomunidades ainda é uma área muito ativa [45].

20CONCEITOS BÁSICOS DE REDES COMPLEXAS
Capítulo 3
Sincronização
3.1 Introdução
Para todos os exemplos de sincronização que vimos na introdução, há sempre uma coisa emcomum aos elementos que compõem os diferentes sistemas analisados: Cada um dos relógios deHuygens, cada um dos vaga-lumes nas folhas das árvores, cada uma das células do nodo sinoatrialpodem, sob certas condições, continuar oscilando quando postos em isolamento. Nós podemos se-parar e cultivar um neurônio vivo de modo que ele continua a exibir potenciais de ação. Todos oselementos dos sistemas que nós discutimos anteriormente funcionam independentemente um dosoutros, usando uma fonte própria de energia (mecânica no caso dos relógios, ou bioquímica no casodos neurônios) para manter suas oscilações.
Nós vamos estudar matematicamente essa ideia, analisando aqui o conceito de oscilador autosustentável (que nós vamos chamar apenas de oscilador daqui pra frente). Suponha que temos umsistema que pode ser descrito por um conjunto de equações diferenciais autônomas (que não dependeexplicitamente do tempo),
dx
dt= f(x), (3.1)
onde x = (x1, x2, ..., xN ). Esse sistema representará um oscilador se ele possuir um ciclo limite1,uma órbita periódica x(t) tal que x(t+T0) = x(t), onde T0 é o período da órbita. Não esperamos queesse tipo de oscilador represente todos os casos que existam na natureza. Entretanto, ele permiteuma análise bem detalhada e o cenário que surge, tanto de análises teóricas quanto numéricas,concorda, em grande parte, com o que é observado experimentalmente.
Ciclos limites são órbitas periódicas muito interessantes porque elas são estáveis: condiçõesiniciais nas vizinhanças do ciclo limite acabam tendendo assintoticamente ao ciclo limite.
Existem vários sistemas que apresentam ciclos limites, sendo provavelmente o mais conhecidodeles o sistema de van der Pol [2].
x = y
y = 2µy(1− βx2)− ω20x
(3.2)
Analisando as equações (3.2), temos apenas um ponto de equilíbrio em (x, y) = (0, 0) queé instável, visto que linearizando o sistema em torno da origem temos que os autovalores sãodados por µ ±
√1 + µ2 e o parâmetro µ > 0. Porém, isso não signica que todas as órbitas se
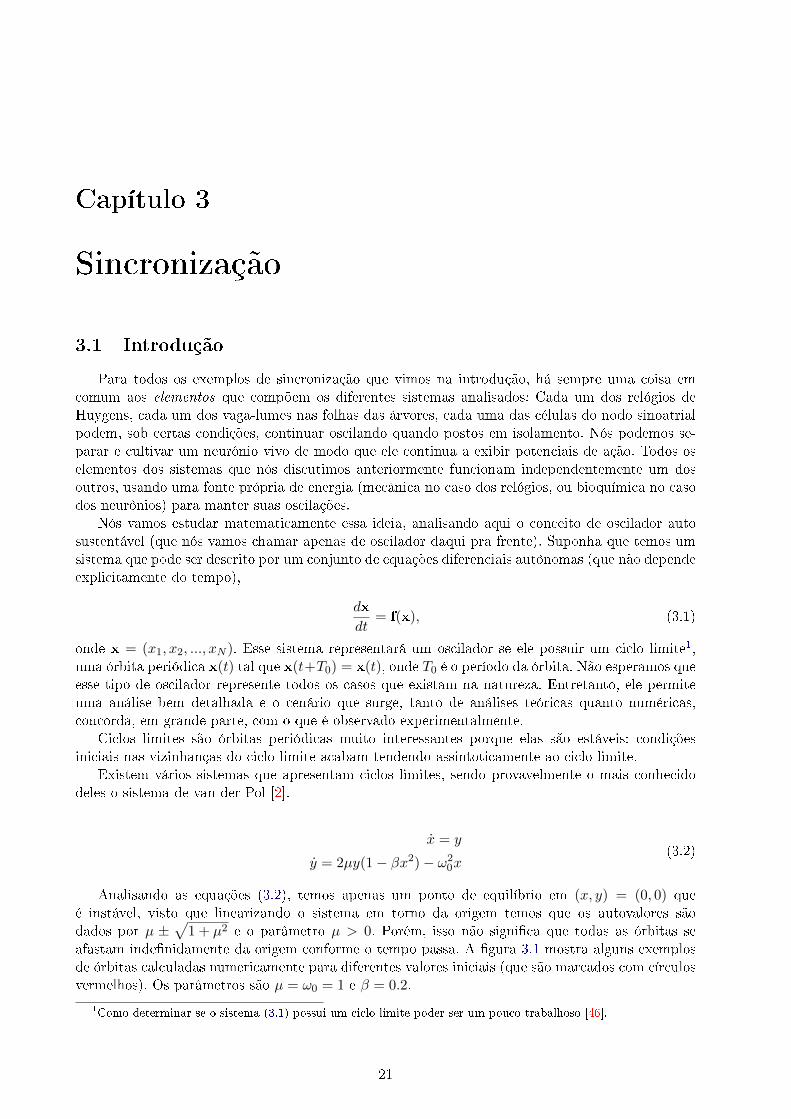
afastam indenidamente da origem conforme o tempo passa. A gura 3.1 mostra alguns exemplosde órbitas calculadas numericamente para diferentes valores iniciais (que são marcados com círculosvermelhos). Os parâmetros são µ = ω0 = 1 e β = 0.2.
1Como determinar se o sistema (3.1) possui um ciclo limite poder ser um pouco trabalhoso [46].
21
22SINCRONIZAÇÃO
6 4 2 0 2 4 6x
15
10
5
0
5
10
15
y
Figura 3.1: Exemplo de órbitas para o sistema de van der Pol (3.2) para os valores µ = ω0 = 1 e β = 0.2.As condições iniciais para cada uma das trajetórias estão marcadas por um círculo vermelho e as trajetóriasse movem no sentido horário. Note que, invariavelmente, todas elas acabam no ciclo limite.
O que nós vemos é que todas as órbitas tendem a uma trajetória periódica, independentementedas condições iniciais: o ciclo limite.
A existência de um ciclo limite na gura 3.1 não é exclusividade do sistema de van der Pol.Na verdade, eles estão presentes para vários outros sistemas, das mais diferentes áreas, e isso éfundamental para analisar o fenômeno da sincronização, pois um ponto fundamental é que umavez que o sistema esteja no ciclo limite, nós só precisamos de uma única variável para descrevero seu estado: Marcamos, arbitrariamente, um ponto do ciclo limite como sendo a origem e entãoprecisamos apenas de uma variável angular para descrever o estado do oscilador em relação a essaorigem. Além do mais, sempre podemos escolher uma variável φ(t) que tem a propriedade [2]
dφ
dt= ω0, (3.3)
ou seja, φ tem uma velocidade angular uniforme ω0 = 2π/T0, onde T0 é o período da trajetória. Aequação acima é interessante porque ela tem um comportamento diferente em relação a perturba-ções. Nós vimos que o ciclo limite é estável. Já a fase φ é neutra. Se pudéssemos, através de umaperturbação, deslocar o estado do sistema que se move na trajetória do ciclo limite por um ângulo∆φ, esse deslocamento não diminuiria nem cresceria, ele permaneceria o mesmo.
Na presença de perturbações externas, esse cenário nos leva a suspeitar que enquanto as defor-mações transversais ao ciclo limite devem ser pequenas, devido a sua estabilidade, o efeito sobre afase φ(t) pode ser bem grande, atuando para acelerar ou retardar o movimento ao longo do ciclolimite.
Vamos imaginar o seguinte sistema. Nós temos dois osciladores, não necessariamente iguais,descritos pelas equações x1 = f1(x1) e x2 = f2(x2) que possuem ciclos limites com frequênciasnaturais ω1 e ω2, respectivamente. Quando acoplados, as equações do movimento podem ser escritasda seguinte forma
dx1
dt= f1(x1) + εg1(x1,x2)
dx2
dt= f2(x2) + εg2(x1,x2)
(3.4)
O acoplamento é intermediado pelas funções gi, i = 1, 2 que são multiplicadas pela constanteε que mede a força de acoplamento. Supondo que ε << 1, os ciclos limites de cada oscilador semantem estáveis. É possível lidar com esse caso estendendo o conceito de fase para pontos queestão nas proximidades do ciclo limite, introduzindo as curvas isocronas [2]. Com isso podemos,

INTRODUÇÃO 23
ainda utilizando apenas uma variável angular para descrever cada oscilador, aproximar a evoluçãodo sistema como sendo
dφ1
dt= ω1 + εQ1(φ1, φ2)
dφ2
dt= ω2 + εQ2(φ1, φ2),
(3.5)
onde φi, i = 1, 2, são as fases de cada um dos ciclos limites dos osciladores e Q é uma funçãoperiódica com período 2π para cada um dos argumentos. Aqui é aparente uma das utilidades dese reduzir o sistema usando apenas fases. Nós temos apenas um sistema de 2 equações em (3.5).Se, por exemplo, nós estivéssemos acoplando dois sistemas com N graus de liberdade, teríamos umsistema de 2N equações caso não utilizássemos a redução por fases.
Pode-se simplicar ainda mais o sistema (3.5). Primeiro, vamos expandir ambas as funções emséries de Fourier,
Q1(φ1, φ2) =∑k,l
aklei(kφ1+lφ2)
Q2(φ1, φ2) =∑k,l
bklei(kφ1+lφ2).
(3.6)
Quando ε = 0, as soluções para (3.5) são dadas por φ1 = ω1t e φ2 = ω2t. Se substituirmos essassoluções nas equações (3.6), vários termos da série de Fourier (aqueles com k e l grandes) oscilamtão rápido que, na média, contribuem muito pouco na soma. Os termos da série com contribuiçõesmais relevantes são aqueles que satisfazem a relação
kω1 + lω2 ≈ 0. (3.7)
Supondo que ω1 ≈ ω2, os termos que satisfazem a relação de ressonância (3.7) são aqueles nasoma (3.6) onde k = −l. Esses termos são dominantes, usando essa aproximação, podemos assimsimplicar o sistema para
dφ1
dt= ω1 + εq1(φ1 − φ2)
dφ2
dt= ω2 + εq2(φ2 − φ1),
(3.8)
aonde as funções médias da força q1(φ) e q2(φ) são novas funções periódicas, com período 2π.Kuramoto, baseando-se nessa linha de raciocínio, propôs o modelo onde N osciladores quase
idênticos (as frequências naturais são próximas umas das outras) estão acoplados simetricamente,cada um com todos os outros (3.8):
dθidt
= ωi +λ
N
N∑j=1
sin(θj − θi). (3.9)
A m de modelar as diferenças intrínsecas dos osciladores, as frequências naturais ωi são sorte-adas aleatoriamente de uma distribuição g(ω) que, por hora, vamos supor ser unimodal e simetrica(ela só apresenta um máximo, como uma gaussiana, por exemplo). Note que as frequências naturaissão xadas inicialmente e mantidas constantes durante toda a simulação. A constante de acopla-mento λ é dividida pelo número de osciladores N de modo que a força sentida pelos osciladores nãodependa do tamanho do ensemble e assim não tenda a innito conforme N →∞.
O que é tão especial ao modelo de Kuramoto é que ele pode ser resolvido exatamente [47].

24SINCRONIZAÇÃO
Como dissemos na introdução, isso é um fato extraordinário, visto que temos aqui um sistema deequações diferenciais não lineares e problemas dessa natureza são conhecidos por sua complexidade.Para resolver a equação (3.9), vamos primeiro introduzir o parâmetro de ordem complexo z(t) quemede o estado global do sistema,
z(t) = r(t)eiψ(t) =1
N
N∑j=1
eiθj . (3.10)
Podemos pensar em z(t) como sendo o centroide das fases se as considerarmos como pontospercorrendo o círculo unitário e o valor de r(t) como uma medida da sincronização do sistema. Parao estado não sincronizado, cada oscilador se move quase que de forma independente dos outros,com sua velocidade angular muito próxima à sua frequência natural ωi e portanto as fases estãoespalhadas homogeneamente e r(t) ∝ N−1/2, que tende a 0 conforme o número de osciladores égrande 2. Já quando há sincronização, os osciladores se movem próximos uns dos outros, como umúnico grupo e as fases θi são todas próximas, resultando em r ≈ 1.
A partir da denição do parâmetro de ordem, equação (3.10), podemos escrever o modelo deKuramoto (3.9) de uma forma muito útil. Se multiplicarmos ambos os lados da equação (3.10) pore−iθi e tirarmos a parte imaginária de ambos os lados temos
r(t) sin (ψ(t)− θi) =1
N
N∑j=1
sin(θj − θi), (3.11)
o que nos permite escrever a equação (3.9) de uma maneira em que parece que cada oscilador estádesacoplado de todos os outros,
dθidt
= ωi + λr(t) sin(ψ(t)− θi). (3.12)
Obviamente todos os osciladores continuam acoplados na equação (3.12), nós apenas escondemoso acoplamento nos termos r(t) e ψ(t). A grande ideia de Kuramoto foi então procurar uma soluçãoonde r(r) fosse constante e ψ(t) = Ωt, onde Ω = (
∑Ni=1 ωi)/N é a frequência média dos osciladores.
Nós relacionamos ψ(t) = Ωt visto que se somarmos ambos os lados da equação (3.9) em i, elembrando que o termo sin(θj − θi) é ímpar, nós temos o resultado de que a frequência média dososciladores, em qualquer instante de tempo e para qualquer valor de λ, é sempre igual ao valormédio das frequências naturais.
Adotando essas duas hipóteses, cada oscilador está efetivamente desacoplado um dos outros,e podemos resolver a equação (3.12) para cada um dos osciladores. Mudando para um referencialque gira com a frequência Ω (já que a equação (3.9) é invariante por translação, ela só depende dadiferença de fases), temos então que
dθidt
= ωi − λr sin(θi). (3.13)
Vamos procurar por estados estacionários θi = 0 da equação (3.13), que corresponde a osciladorescom frequência Ω no referencial inicial. Para que isso ocorra é necessário que ωi satisfaça a condição
|ωi| < λr. (3.14)
Com isso, podemos dividir os osciladores em duas populações. Aqueles que estão sincroniza-dos, satisfazendo a relação (3.14), e aqueles não sincronizados, para os quais não vale a relação(3.14). Essa última população causa algum problema, pois os osciladores continuam se movendo noreferencial móvel o que, a princípio, vai contra a suposição de que r seja constante.
2Multiplicando a equação (3.10) pela sua conjugada complexa temos r2(t) = 1N2
∑Nj,l=1 e
i(θj−θl) = 1N2 (N +∑N
j 6=l ei(θj−θl)) ≈ N−1 se as fases θi estiverem todas espalhadas em torno do círculo unitário.
INTRODUÇÃO 25
Kuramoto resolveu esse problema supondo que N →∞, o que permite descrever o ensemble deosciladores como um contínuo. Não vamos mais contar individualmente os osciladores. Tomamosuma postura próxima da mecânica de uidos, introduzindo assim uma densidade ρ(θ, ω) que nosdá a fração de osciladores com frequência natural ω que se encontram entre as fases θ e θ + dθ.Kuramoto supôs que a densidade ρ dos osciladores não sincronizados no círculo fosse independentedo tempo.
Como calculamos essa densidade? Bem, a densidade na fase θ deve ser inversamente proporcionalà velocidade dos osciladores nesse ponto, já que osciladores passam mais tempo onde a velocidade émenor e menos tempo onde a velocidade é maior. Essa velocidade pode ser obtida da equação 3.13,no limite N →∞. Com esse raciocínio, podemos escrever
ρ(θ, ω) ∝ 1
v(θ, ω)=
C
|ω − λr sin(θ)|, (3.15)
com C uma constante de normalização para a distribuição (∫ 2π
0 ρdθ = 1).Tudo o que zemos até agora deve ser auto consistente. O fato de supormos que z(t) = reiΩt,
onde r é constante e Ω é a frequência natural média dos osciladores não pode contradizer as condições(3.14) e (3.15) que obtivemos acima.
Reescrevendo a equação (3.10) usando as suposições acima, é possível mostrar [47] que λ e rdevem satisfazer a condição
1 = λ
∫ π/2
−π/2g (λr sin(θ)) cos2(θ)dθ. (3.16)
A equação (3.16) sempre possui a solução trivial r = 0 para todo λ. Se tomarmos o limiter → 0+, a solução não trivial surge para valores de λ maiores que o valor crítico
λc =2
πg(0). (3.17)
Esse resultado nos diz que a sincronização só começa a ocorrer quando o acoplamento entreos osciladores é maior que o valor crítico dado pela equação (3.17). Além do mais, expandindo adistribuição g(ω) em torno do máximo g(0) até segunda ordem, temos que o parâmetro de ordemr ∝√λ− λc.
Para uma distribuição lorentziana das frequências naturais,
g(ω) =γ
π(γ2 + ω2)(3.18)
é possível integrar exatamente a equação (3.16), obtendo o parâmetro de ordem r exato
r(λ) =
√1− λc
λ(3.19)
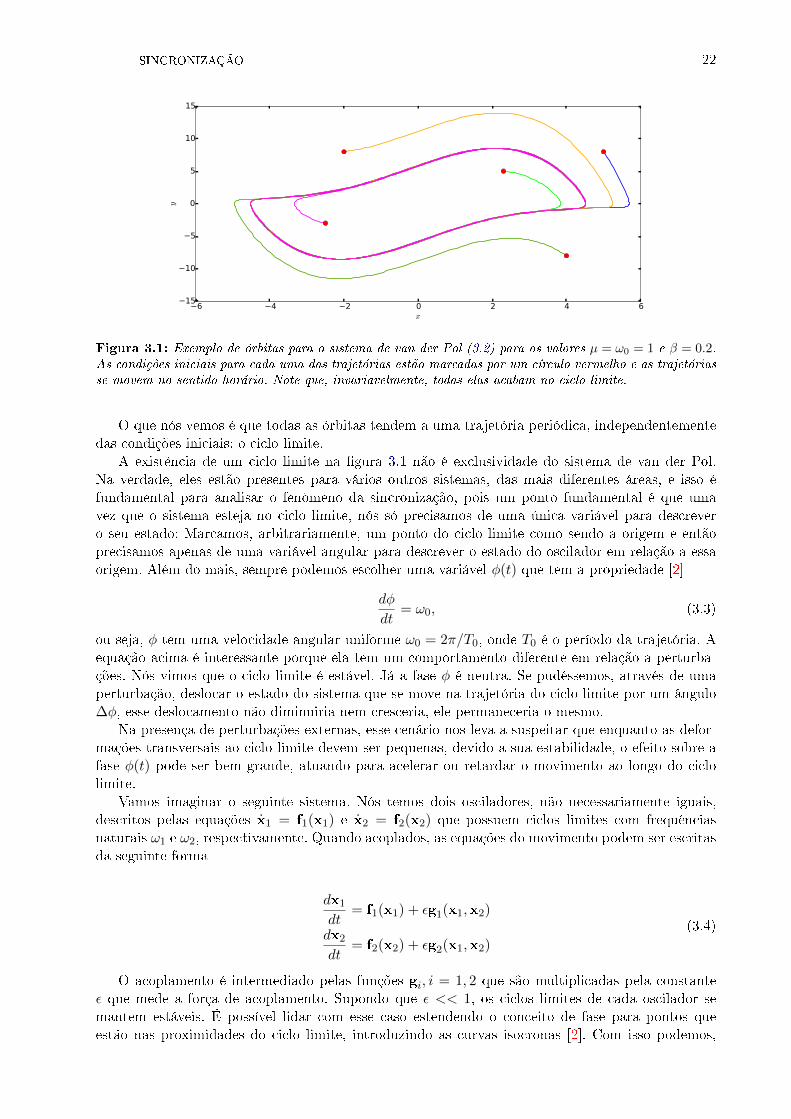
para λ > λc = 2γ.Como exemplo, a gura 3.2 mostra diagramas de sincronização r(λ) para um ensemble de 104
osciladores com distribuição lorentziana de frequências naturais para diferentes valores de γ (quemede a largura da distribuição). As equações (3.9) foram integradas usando o método de Heun compasso h = 0.25 e usamos o tempo total de integração T = 5000. Cada ponto corresponde a umamédia do parâmetro de ordem r calculada nas últimas 2500 unidades de tempo.
Para outras distribuições de frequência natural g(ω), embora não seja possível calcular explici-tamente r(λ), o comportamento é o mesmo visto na gura 3.2. Para valores de λ < λc, temos quer(λ) ≈ 0. Quando a constante de acoplamento atinge o valor λc, r começa a crescer continuamenteconforme aumentamos o valor de λ. Nesse cenário, a transição de fase para a sincronização é ditade segunda ordem.
As transições de fase que ocorrem em problemas de sincronização são classicadas ou de segundaordem, como vimos acima, ou então como sendo de primeira ordem, como veremos mais adiante.
26SINCRONIZAÇÃO
0.0 0.2 0.4 0.6 0.8 1.0λ
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
r
γ=0.25
γ=0.2
γ=0.15
Figura 3.2: Exemplos de como o parâmetro de ordem r depende da constante de acoplamento λ para umsistema de N = 104 osciladores com frequências naturais sorteadas de uma distribuição lorentziana (3.18)com diferentes valores de γ. A linha contínua corresponde a solução (3.19).
Essa classicação deriva de uma antiga proposta feita por Ehrenfest [48]. Note que no caso dagura 3.2, o parâmetro de ordem r é contínuo, ja que tanto o limite esquerdo, quanto direito, aoponto λ = λc resultam no mesmo valor, r = 0. Entretanto, pode-se mostrar que r ∝
√λ− λc [47],
causando assim uma descontinuidade na derivada de r em λ = λc. Isso é portanto, classicadocomo uma transição de fase de segunda ordem. Já para as transições de fase de primeira ordem, adescontinuidade ocorre diretamento no parâmetro de ordem. No ponto crítico, r sofre um pulo, indode um valor próximo de 0 para um valor rc > 0, como ocorre no diagrama da esquerda na gura4.1.
Nesse ponto é importante frisar que analisamos aqui o modelo original de Kuramoto. Existem,entretanto, inúmeras generalizações [13] desenvolvidas para modelar sincronização em diferentescenários.
3.2 Sincronização em redes complexas
Tudo o que foi dito acima se baseava no fato de que cada um dos osciladores estava acopladocom todos os outros e isso foi fundamental para a solução encontrada por Kuramoto. Sabemosque sistemas reais estão longe de terem essa topologia, devido principalmente ao alto preço em semanter tantas conexões. Podemos facilmente generalizar as equações (3.9) para a situação em queos osciladores estão nos vértices de uma rede complexa,
dθidt
= ωi + λN∑j=1
Aij sin(θj − θi), (3.20)
aonde Aij é a matriz de adjacência da rede em questão e as frequências naturais ωi são, comoantes, sorteadas de uma distribuição unimodal g(ω), que vamos supor tem seu máximo centradoem 0. É importante salientar que agora, exceto para topologias muito especícas, como estrelas,por exemplo, não é mais possível resolver as equações (3.20) exatamente, sendo necessário utilizaraproximações ou então apenas análises numéricas.
Existem algumas aproximações para tentar calcular o valor crítico λc, sendo a mais simplesa desenvolvida por Ichinomiya em 2004 [49] (que nós veremos em maiores detalhes nos próximoscapítulos) resultando na aproximação do valor crítico como sendo
λAc =2
πg(0)
〈k〉〈k2〉
. (3.21)
SINCRONIZAÇÃO EM REDES COMPLEXAS 27
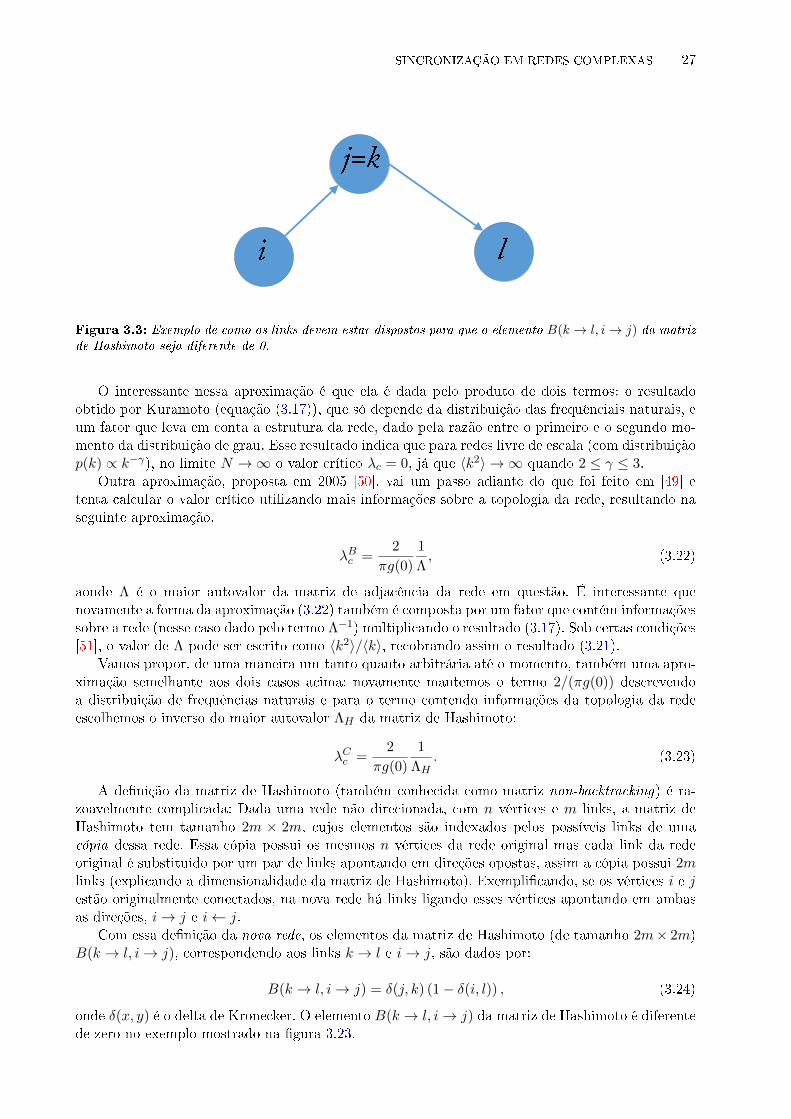
Figura 3.3: Exemplo de como os links devem estar dispostos para que o elemento B(k → l, i→ j) da matrizde Hashimoto seja diferente de 0.
O interessante nessa aproximação é que ela é dada pelo produto de dois termos: o resultadoobtido por Kuramoto (equação (3.17)), que só depende da distribuição das frequênciais naturais, eum fator que leva em conta a estrutura da rede, dado pela razão entre o primeiro e o segundo mo-mento da distribuição de grau. Esse resultado indica que para redes livre de escala (com distribuiçãop(k) ∝ k−γ), no limite N →∞ o valor crítico λc = 0, já que 〈k2〉 → ∞ quando 2 ≤ γ ≤ 3.
Outra aproximação, proposta em 2005 [50], vai um passo adiante do que foi feito em [49] etenta calcular o valor crítico utilizando mais informações sobre a topologia da rede, resultando naseguinte aproximação,
λBc =2
πg(0)
1
Λ, (3.22)
aonde Λ é o maior autovalor da matriz de adjacência da rede em questão. É interessante quenovamente a forma da aproximação (3.22) também é composta por um fator que contém informaçõessobre a rede (nesse caso dado pelo termo Λ−1) multiplicando o resultado (3.17). Sob certas condições[51], o valor de Λ pode ser escrito como 〈k2〉/〈k〉, recobrando assim o resultado (3.21).
Vamos propor, de uma maneira um tanto quanto arbitrária até o momento, também uma apro-ximação semelhante aos dois casos acima: novamente mantemos o termo 2/(πg(0)) descrevendoa distribuição de frequências naturais e para o termo contendo informações da topologia da redeescolhemos o inverso do maior autovalor ΛH da matriz de Hashimoto:
λCc =2
πg(0)
1
ΛH. (3.23)
A denição da matriz de Hashimoto (também conhecida como matriz non-backtracking) é ra-zoavelmente complicada: Dada uma rede não direcionada, com n vértices e m links, a matriz deHashimoto tem tamanho 2m × 2m, cujos elementos são indexados pelos possíveis links de umacópia dessa rede. Essa cópia possui os mesmos n vértices da rede original mas cada link da redeoriginal é substituido por um par de links apontando em direções opostas, assim a cópia possui 2mlinks (explicando a dimensionalidade da matriz de Hashimoto). Exemplicando, se os vértices i e jestão originalmente conectados, na nova rede há links ligando esses vértices apontando em ambasas direções, i→ j e i← j.
Com essa denição da nova rede, os elementos da matriz de Hashimoto (de tamanho 2m× 2m)B(k → l, i→ j), correspondendo aos links k → l e i→ j, são dados por:
B(k → l, i→ j) = δ(j, k) (1− δ(i, l)) , (3.24)
onde δ(x, y) é o delta de Kronecker. O elemento B(k → l, i→ j) da matriz de Hashimoto é diferentede zero no exemplo mostrado na gura 3.23.
28SINCRONIZAÇÃO
0.0 0.1 0.2 0.3 0.4λ
0.0
0.2
0.4
0.6
0.8
1.0
r,
λAc
λBc
λCc
0.0 0.1 0.2 0.3 0.4 0.5λ
0.0
0.2
0.4
0.6
0.8
1.0
r,20
s20
s
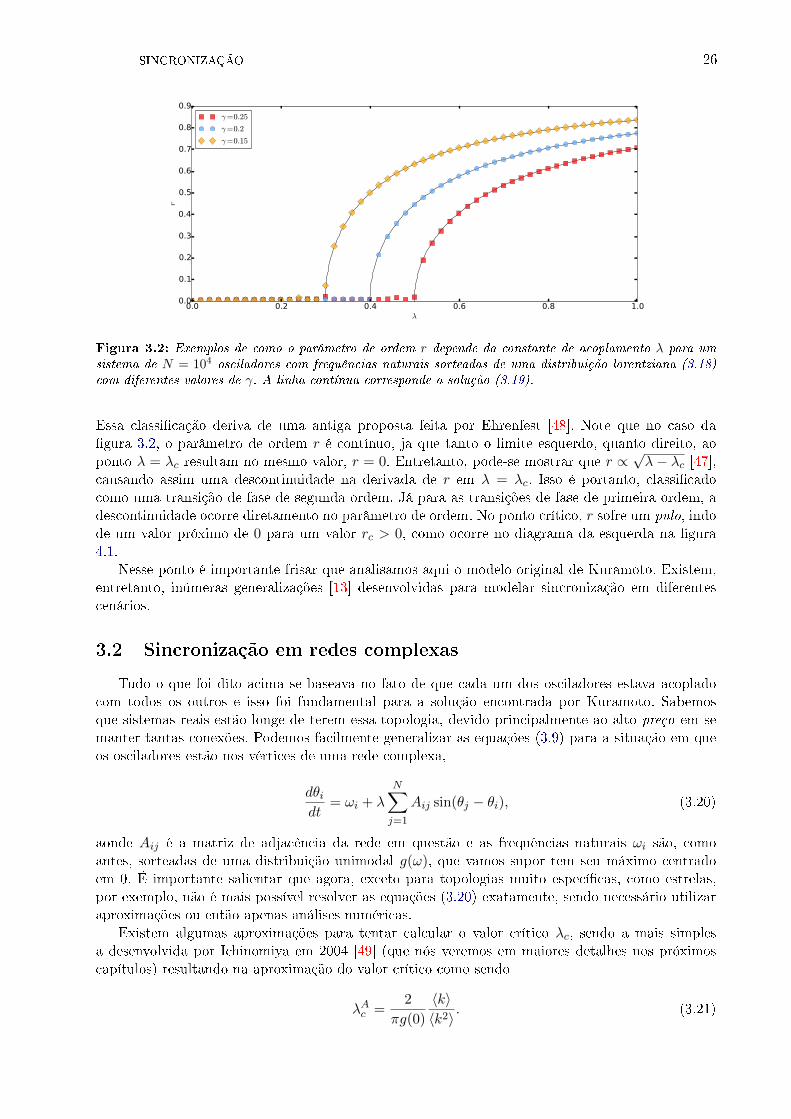
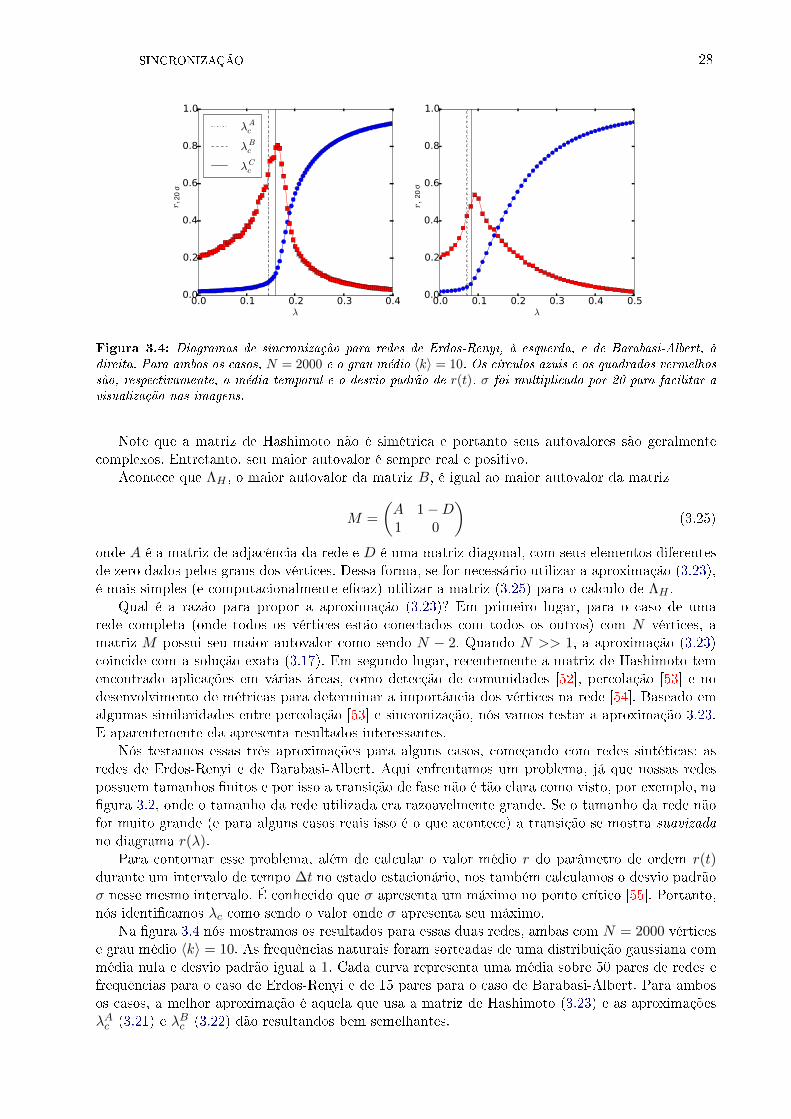
Figura 3.4: Diagramas de sincronização para redes de Erdos-Renyi, à esquerda, e de Barabasi-Albert, àdireita. Para ambos os casos, N = 2000 e o grau médio 〈k〉 = 10. Os círculos azuis e os quadrados vermelhossão, respectivamente, a média temporal e o desvio padrão de r(t). σ foi multiplicado por 20 para facilitar avisualização nas imagens.
Note que a matriz de Hashimoto não é simétrica e portanto seus autovalores são geralmentecomplexos. Entretanto, seu maior autovalor é sempre real e positivo.
Acontece que ΛH , o maior autovalor da matriz B, é igual ao maior autovalor da matriz
M =
(A 1−D1 0
)(3.25)
onde A é a matriz de adjacência da rede e D é uma matriz diagonal, com seus elementos diferentesde zero dados pelos graus dos vértices. Dessa forma, se for necessário utilizar a aproximação (3.23),é mais simples (e computacionalmente ecaz) utilizar a matriz (3.25) para o calculo de ΛH .
Qual é a razão para propor a aproximação (3.23)? Em primeiro lugar, para o caso de umarede completa (onde todos os vértices estão conectados com todos os outros) com N vértices, amatriz M possui seu maior autovalor como sendo N − 2. Quando N >> 1, a aproximação (3.23)coincide com a solução exata (3.17). Em segundo lugar, recentemente a matriz de Hashimoto temencontrado aplicações em várias áreas, como detecção de comunidades [52], percolação [53] e nodesenvolvimento de métricas para determinar a importância dos vértices na rede [54]. Baseado emalgumas similaridades entre percolação [53] e sincronização, nós vamos testar a aproximação 3.23.E aparentemente ela apresenta resultados interessantes.
Nós testamos essas três aproximações para alguns casos, começando com redes sintéticas: asredes de Erdos-Renyi e de Barabasi-Albert. Aqui enfrentamos um problema, já que nossas redespossuem tamanhos nitos e por isso a transição de fase não é tão clara como visto, por exemplo, nagura 3.2, onde o tamanho da rede utilizada era razoavelmente grande. Se o tamanho da rede nãofor muito grande (e para alguns casos reais isso é o que acontece) a transição se mostra suavizada
no diagrama r(λ).Para contornar esse problema, além de calcular o valor médio r do parâmetro de ordem r(t)
durante um intervalo de tempo ∆t no estado estacionário, nos também calculamos o desvio padrãoσ nesse mesmo intervalo. É conhecido que σ apresenta um máximo no ponto crítico [55]. Portanto,nós identicamos λc como sendo o valor onde σ apresenta seu máximo.
Na gura 3.4 nós mostramos os resultados para essas duas redes, ambas com N = 2000 vérticese grau médio 〈k〉 = 10. As frequências naturais foram sorteadas de uma distribuição gaussiana commédia nula e desvio padrão igual a 1. Cada curva representa uma média sobre 50 pares de redes efrequências para o caso de Erdos-Renyi e de 15 pares para o caso de Barabasi-Albert. Para ambosos casos, a melhor aproximação é aquela que usa a matriz de Hashimoto (3.23) e as aproximaçõesλAc (3.21) e λBc (3.22) dão resultandos bem semelhantes.
SINCRONIZAÇÃO EM REDES COMPLEXAS 29
0.0 0.1 0.2 0.3λ
0.0
0.2
0.5
0.7
0.9
r,10×σ
c. elegans neural
λAc
λBc
λCc
0.00 0.05 0.10 0.15 0.20λ
0.0
0.2
0.5
0.7
0.9
r,10×σ
macaque cortex
0.00 0.02 0.04 0.06 0.08 0.10λ
0.0
0.1
0.2
0.3
0.4
r,10×σ
us airports
0.00 0.02 0.04 0.06 0.08 0.10λ
0.0
0.1
0.2
0.3
0.4
0.5
0.6
r,10×σ
political blogs
0.0 0.1 0.2 0.3 0.4λ
0.0
0.2
0.4
0.6
0.8
r,10×σ
c. elegans metabolic
0.00 0.05 0.10 0.15 0.20 0.25λ
0.0
0.1
0.2
0.3
0.4
r,10×σ
yeast, protein
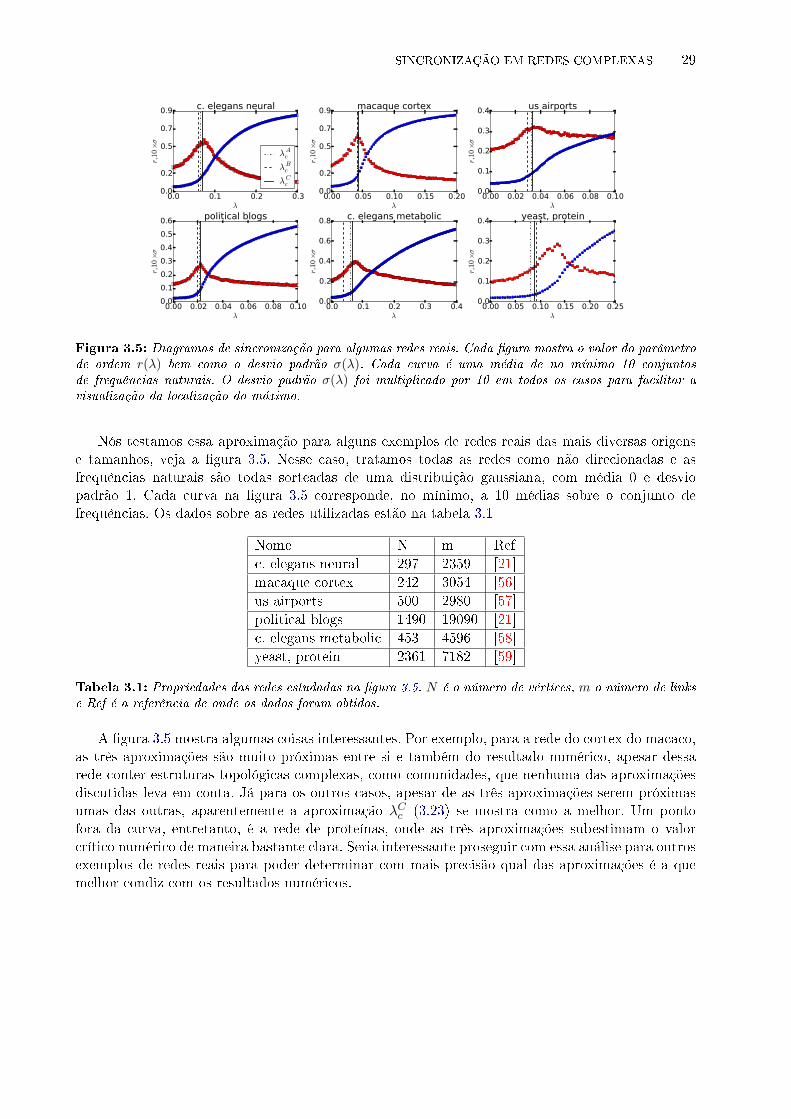
Figura 3.5: Diagramas de sincronização para algumas redes reais. Cada gura mostra o valor do parâmetrode ordem r(λ) bem como o desvio padrão σ(λ). Cada curva é uma média de no mínimo 10 conjuntosde frequências naturais. O desvio padrão σ(λ) foi multiplicado por 10 em todos os casos para facilitar avisualização da localização do máximo.
Nós testamos essa aproximação para alguns exemplos de redes reais das mais diversas origense tamanhos, veja a gura 3.5. Nesse caso, tratamos todas as redes como não direcionadas e asfrequências naturais são todas sorteadas de uma distribuição gaussiana, com média 0 e desviopadrão 1. Cada curva na gura 3.5 corresponde, no mínimo, a 10 médias sobre o conjunto defrequências. Os dados sobre as redes utilizadas estão na tabela 3.1
Nome N m Refc. elegans neural 297 2359 [21]macaque cortex 242 3054 [56]us airports 500 2980 [57]political blogs 1490 19090 [21]c. elegans metabolic 453 4596 [58]yeast, protein 2361 7182 [59]
Tabela 3.1: Propriedades das redes estudadas na gura 3.5. N é o número de vértices, m o número de linkse Ref é a referência de onde os dados foram obtidos.
A gura 3.5 mostra algumas coisas interessantes. Por exemplo, para a rede do cortex do macaco,as três aproximações são muito próximas entre si e também do resultado numérico, apesar dessarede conter estruturas topológicas complexas, como comunidades, que nenhuma das aproximaçõesdiscutidas leva em conta. Já para os outros casos, apesar de as três aproximações serem próximasumas das outras, aparentemente a aproximação λCc (3.23) se mostra como a melhor. Um pontofora da curva, entretanto, é a rede de proteínas, onde as três aproximações subestimam o valorcrítico numérico de maneira bastante clara. Seria interessante proseguir com essa análise para outrosexemplos de redes reais para poder determinar com mais precisão qual das aproximações é a quemelhor condiz com os resultados numéricos.

30SINCRONIZAÇÃO
Capítulo 4
Sincronização explosiva
Vimos que para o modelo de Kuramoto em uma rede completa (todos os vértices estão conec-tados com todos os outros), gura 3.2, ou então em redes reais, gura 3.5, a transição de fase é desegunda ordem. Isso signica que o parâmetro de ordem r = 0 para valores de λ ≤ λc. Quandoλ > λc, r cresce monotonicamente com λ, veja a gura 3.2.
Pouco tempo atrás notou-se [28] que uma modicação aparentemente inócua, correlacionarpositivamente em redes livres de escala as frequências naturais dos osciladores com o grau dosvértices no qual eles residem,
ωi =
N∑j=1
Aij = ki, (4.1)
modica sensivelmente a transição de fase do estado incoerente para o estado sincronizado: Atransição passa a ser de primeira ordem.
Um exemplo está mostrado na gura 4.1, no painel da esquerda, para uma rede de Barabasi-Albert com N = 1000 vértices. O diagrama de sincronização r(λ) agora é construído da seguintemaneira. Valendo-se da correlação (4.1), começamos com um valor inicial λ0 para a constante deacoplamento. Para esse valor, integramos as equações (3.20) a partir de condições iniciais aleató-rias e calculamos o valor do parâmetro de ordem r. Agora, mantendo o resultado da integração,aumentamos adiabáticamente a constante de acoplamento por δλ = 0.02 e integramos novamenteas equações do movimento, calculando outra vez no nal o valor de r. Repetimos isso, seguindo adireção da seta marcada como '1' até um valor máximo λmax. O resultado é a curva com quadradosvermelhos, chamada de forward.
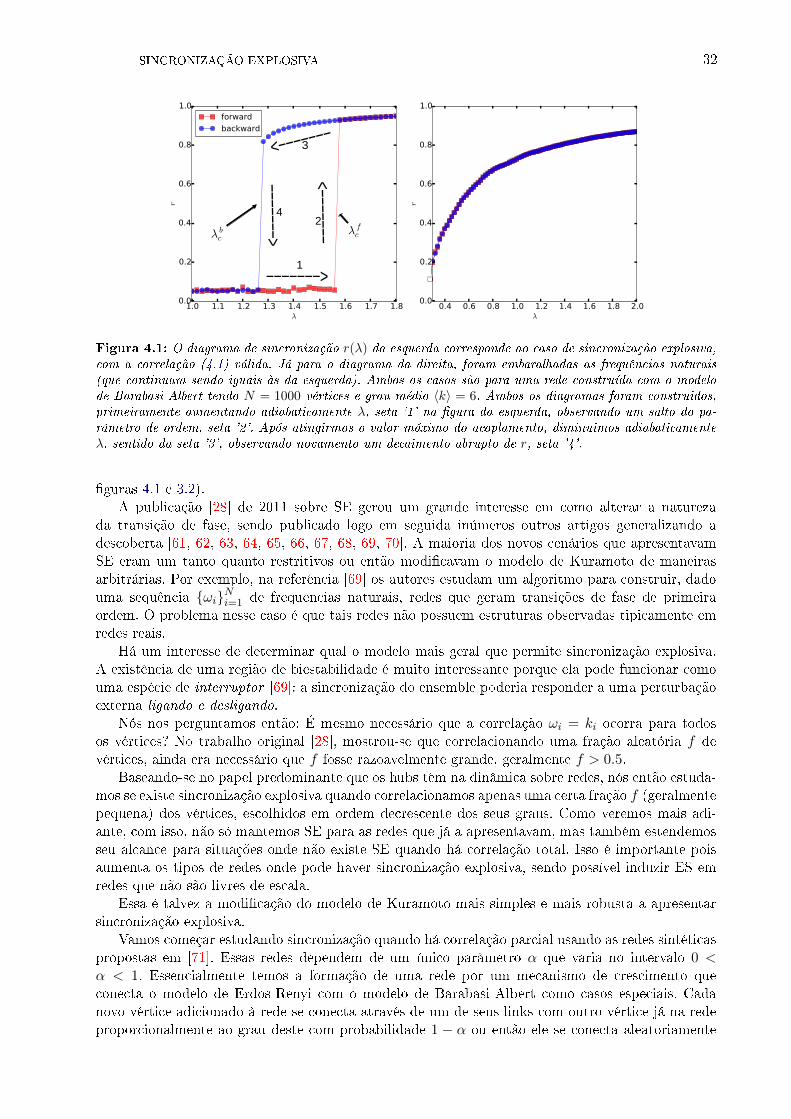
Até que λ ultrapasse o valor crítico denominado λfc , o parâmetro de ordem r é próximo de 0.Quando ele atinge o valor λfc , r sofre uma descontinuidade e pula para um valor próximo de 1 (setamarcada com '2'). Agora, se nós invertemos a direção e começamos a diminuir gradativamente aconstante de acoplamento, correspondendo a curva com círculos azuis chamada de backward, nadireção da seta marcada com '3', o parâmetro de ordem r não cai no mesmo ponto onde ele sofreua descontinuidade, mas r continua diferente de 0 até um valor menor: λbc, seta '4'. Temos entãoum loop de histerese, que é uma região de valores para o acoplamento (λbc < λ < λfc ) onde háestabilidade tanto do estado sincronizado quanto do estado incoerente. Esse fenômeno foi chamadode sincronização explosiva.
Sincronização explosiva 1 é fruto exclusivamente da correlação entre grau e frequência natural(4.1). No painel da direita na gura 4.1, as frequências naturais, e todos os outros parâmetros, sãoos mesmos do caso do painel da esquerda, só que nós embaralhamos as frequências de tal modo que(4.1) não é mais válido. Nesse caso, r cresce linearmente para os valores de λ considerados.
Note que a simples correlação muda drasticamente o comportamento do sistema (compare as
1O nome sincronização explosiva foi cunhado em referência ao fenômeno de percolação explosiva, [60], descobertoum pouco antes. Hoje em dia usa-se o nome sincronização explosiva para se referir a situações onde a correlaçãoentre propriedades da rede com propriedades do oscilador gera uma transição de fase de primeira ordem.
31
32SINCRONIZAÇÃO EXPLOSIVA
1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8λ
0.0
0.2
0.4
0.6
0.8
1.0
r
λ fcλ bc
forward
backward
0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
------->
------->
------->
------->
1
24
3
Figura 4.1: O diagrama de sincronização r(λ) da esquerda corresponde ao caso de sincronização explosiva,com a correlação (4.1) válida. Já para o diagrama da direita, foram embaralhadas as frequências naturais(que continuam sendo iguais às da esquerda). Ambos os casos são para uma rede construída com o modelode Barabasi-Albert tendo N = 1000 vértices e grau médio 〈k〉 = 6. Ambos os diagramas foram construidos,primeiramente aumentando adiabaticamente λ, seta '1' na gura da esquerda, observando um salto do pa-râmetro de ordem, seta '2'. Após atingirmos o valor máximo do acoplamento, diminuimos adiabaticamenteλ, sentido da seta '3', observando novamento um decaimento abrupto de r, seta '4'.
guras 4.1 e 3.2).A publicação [28] de 2011 sobre SE gerou um grande interesse em como alterar a natureza
da transição de fase, sendo publicado logo em seguida inúmeros outros artigos generalizando adescoberta [61, 62, 63, 64, 65, 66, 67, 68, 69, 70]. A maioria dos novos cenários que apresentavamSE eram um tanto quanto restritivos ou então modicavam o modelo de Kuramoto de maneirasarbitrárias. Por exemplo, na referência [69] os autores estudam um algoritmo para construir, dadouma sequência ωiNi=1 de frequências naturais, redes que geram transições de fase de primeiraordem. O problema nesse caso é que tais redes não possuem estruturas observadas tipicamente emredes reais.
Há um interesse de determinar qual o modelo mais geral que permite sincronização explosiva.A existência de uma região de biestabilidade é muito interessante porque ela pode funcionar comouma espécie de interruptor [69]: a sincronização do ensemble poderia responder a uma perturbaçãoexterna ligando e desligando.
Nós nos perguntamos então: É mesmo necessário que a correlação ωi = ki ocorra para todosos vértices? No trabalho original [28], mostrou-se que correlacionando uma fração aleatória f devértices, ainda era necessário que f fosse razoavelmente grande, geralmente f > 0.5.
Baseando-se no papel predominante que os hubs têm na dinâmica sobre redes, nós então estuda-mos se existe sincronização explosiva quando correlacionamos apenas uma certa fração f (geralmentepequena) dos vértices, escolhidos em ordem decrescente dos seus graus. Como veremos mais adi-ante, com isso, não só mantemos SE para as redes que já a apresentavam, mas também estendemosseu alcance para situações onde não existe SE quando há correlação total. Isso é importante poisaumenta os tipos de redes onde pode haver sincronização explosiva, sendo possível induzir ES emredes que não são livres de escala.
Essa é talvez a modicação do modelo de Kuramoto mais simples e mais robusta a apresentarsincronização explosiva.
Vamos começar estudando sincronização quando há correlação parcial usando as redes sintéticaspropostas em [71]. Essas redes dependem de um único parâmetro α que varia no intervalo 0 <α < 1. Essencialmente temos a formação de uma rede por um mecanismo de crescimento queconecta o modelo de Erdos-Renyi com o modelo de Barabasi-Albert como casos especiais. Cadanovo vértice adicionado à rede se conecta através de um de seus links com outro vértice já na redeproporcionalmente ao grau deste com probabilidade 1 − α ou então ele se conecta aleatoriamente
33
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(a)
forwardbackward
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(d)
0.8 1.0 1.2 1.4 1.6 1.8λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(b)
0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(e)
0.8 1.0 1.2 1.4 1.6 1.8λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
1.0 1.5 2.0 2.5 3.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(f)
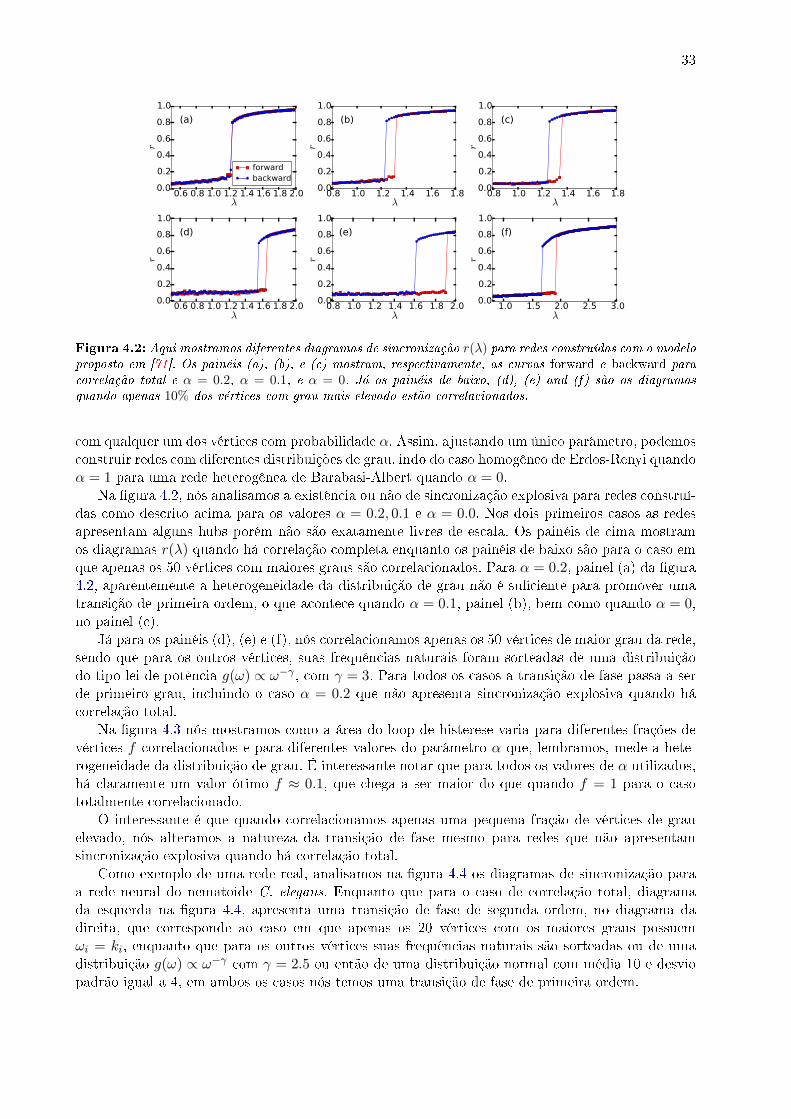
Figura 4.2: Aqui mostramos diferentes diagramas de sincronização r(λ) para redes construídas com o modeloproposto em [71]. Os painéis (a), (b), e (c) mostram, respectivamente, as curvas forward e backward paracorrelação total e α = 0.2, α = 0.1, e α = 0. Já os painéis de baixo, (d), (e) and (f) são os diagramasquando apenas 10% dos vértices com grau mais elevado estão correlacionados.
com qualquer um dos vértices com probabilidade α. Assim, ajustando um único parâmetro, podemosconstruir redes com diferentes distribuições de grau, indo do caso homogêneo de Erdos-Renyi quandoα = 1 para uma rede heterogênea de Barabasi-Albert quando α = 0.
Na gura 4.2, nós analisamos a existência ou não de sincronização explosiva para redes construí-das como descrito acima para os valores α = 0.2, 0.1 e α = 0.0. Nos dois primeiros casos as redesapresentam alguns hubs porém não são exatamente livres de escala. Os painéis de cima mostramos diagramas r(λ) quando há correlação completa enquanto os painéis de baixo são para o caso emque apenas os 50 vértices com maiores graus são correlacionados. Para α = 0.2, painel (a) da gura4.2, aparentemente a heterogeneidade da distribuição de grau não é suciente para promover umatransição de primeira ordem, o que acontece quando α = 0.1, painel (b), bem como quando α = 0,no painel (c).
Já para os painéis (d), (e) e (f), nós correlacionamos apenas os 50 vértices de maior grau da rede,sendo que para os outros vértices, suas frequências naturais foram sorteadas de uma distribuiçãodo tipo lei de potência g(ω) ∝ ω−γ , com γ = 3. Para todos os casos a transição de fase passa a serde primeiro grau, incluindo o caso α = 0.2 que não apresenta sincronização explosiva quando hácorrelação total.
Na gura 4.3 nós mostramos como a área do loop de histerese varia para diferentes frações devértices f correlacionados e para diferentes valores do parâmetro α que, lembramos, mede a hete-rogeneidade da distribuição de grau. É interessante notar que para todos os valores de α utilizados,há claramente um valor ótimo f ≈ 0.1, que chega a ser maior do que quando f = 1 para o casototalmente correlacionado.
O interessante é que quando correlacionamos apenas uma pequena fração de vértices de grauelevado, nós alteramos a natureza da transição de fase mesmo para redes que não apresentamsincronização explosiva quando há correlação total.
Como exemplo de uma rede real, analisamos na gura 4.4 os diagramas de sincronização paraa rede neural do nematoide C. elegans. Enquanto que para o caso de correlação total, diagramada esquerda na gura 4.4, apresenta uma transição de fase de segunda ordem, no diagrama dadireita, que corresponde ao caso em que apenas os 20 vértices com os maiores graus possuemωi = ki, enquanto que para os outros vértices suas frequências naturais são sorteadas ou de umadistribuição g(ω) ∝ ω−γ com γ = 2.5 ou então de uma distribuição normal com média 10 e desviopadrão igual a 4, em ambos os casos nós temos uma transição de fase de primeira ordem.

34SINCRONIZAÇÃO EXPLOSIVA
0.0 0.2 0.4 0.6 0.8 1.0f
0.00
0.05
0.10
0.15
0.20
0.25
0.30
A
α=0.0
α=0.2
α=0.3
Figura 4.3: Aqui mostramos a área do loop de histerese em função da fração f de vértices de grau elevadoque estão correlacionados para diferentes valores do parâmetro α. Cada ponto corresponde a uma médiasobre 10 realizações. As barras de erros são o desvio padrão.
1.0 1.5 2.0 2.5λ
0.0
0.2
0.4
0.6
0.8
1.0
r
forwardbackward
1.0 1.5 2.0 2.5λ
0.0
0.2
0.4
0.6
0.8
1.0
r
forward, g(ω)=N(10,4)
backward, g(ω)=N(10,4)forward, g(ω)∝ω−2.5backward, g(ω)∝ω−2.5100 101 102
k
10-4
10-3
10-2
10-1
p k
Figura 4.4: Diagramas de sincronização r (λ) para a rede neural do nematoide C. elegans. O diagramada esquerda corresponde a perfeita correlação: ωi = ki para todos os vértices. Já para a gura da direitacorresponde a correlação parcial, onde apenas os 20 vértices com maiores graus apresentam a correlação.Nesse caso, as frequências naturais para os outros vértices foram sorteadas ou de uma distribuição g(ω) ∝ω−γ , com γ = 2.5, ou de uma distribuição normal com média 10 e desvio padrão igual a 4. Para a leide potência, ainda vemos uma transição de primeira fase para outros valores de γ. Junto ao diagrama daesquerda, mostramos também a distribuição de grau para essa rede.
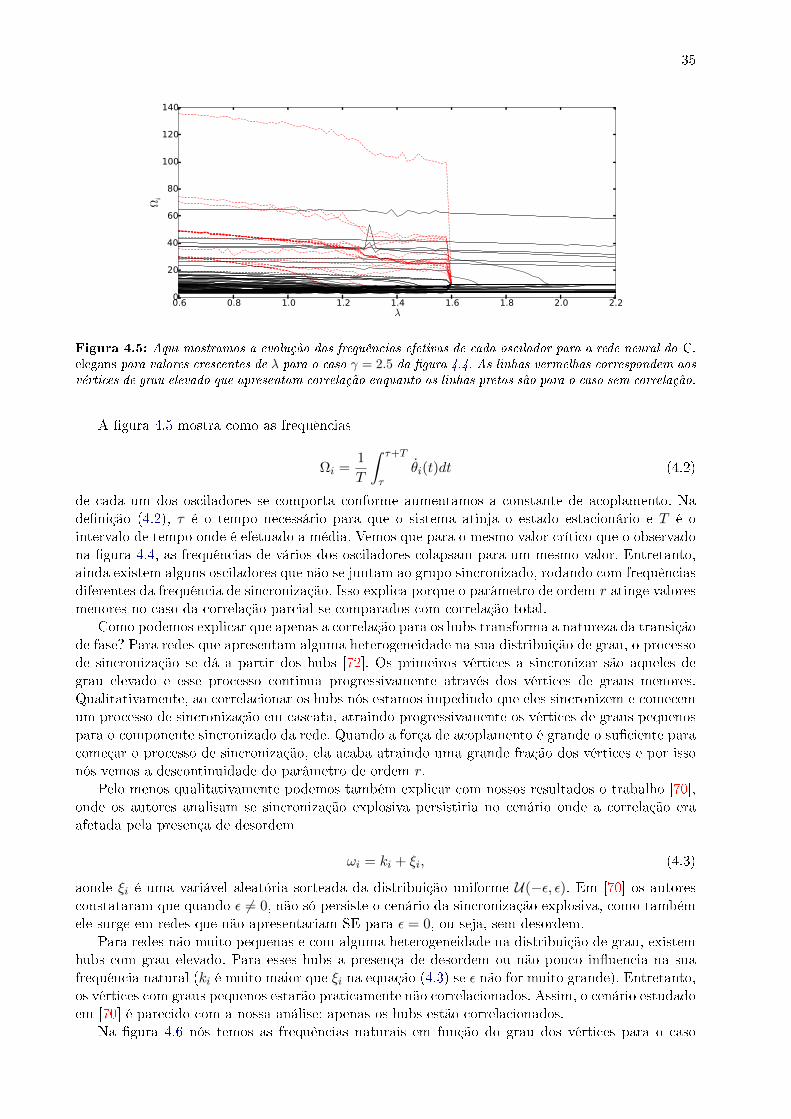
35
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2λ
0
20
40
60
80
100
120
140
Ωi
Figura 4.5: Aqui mostramos a evolução das frequências efetivas de cada oscilador para a rede neural do C.
elegans para valores crescentes de λ para o caso γ = 2.5 da gura 4.4. As linhas vermelhas correspondem aosvértices de grau elevado que apresentam correlação enquanto as linhas pretas são para o caso sem correlação.
A gura 4.5 mostra como as frequências
Ωi =1
T
∫ τ+T
τθi(t)dt (4.2)
de cada um dos osciladores se comporta conforme aumentamos a constante de acoplamento. Nadenição (4.2), τ é o tempo necessário para que o sistema atinja o estado estacionário e T é ointervalo de tempo onde é efetuado a média. Vemos que para o mesmo valor crítico que o observadona gura 4.4, as frequências de vários dos osciladores colapsam para um mesmo valor. Entretanto,ainda existem alguns osciladores que não se juntam ao grupo sincronizado, rodando com frequênciasdiferentes da frequência de sincronização. Isso explica porque o parâmetro de ordem r atinge valoresmenores no caso da correlação parcial se comparados com correlação total.
Como podemos explicar que apenas a correlação para os hubs transforma a natureza da transiçãode fase? Para redes que apresentam alguma heterogeneidade na sua distribuição de grau, o processode sincronização se dá a partir dos hubs [72]. Os primeiros vértices a sincronizar são aqueles degrau elevado e esse processo continua progressivamente através dos vértices de graus menores.Qualitativamente, ao correlacionar os hubs nós estamos impedindo que eles sincronizem e comecemum processo de sincronização em cascata, atraindo progressivamente os vértices de graus pequenospara o componente sincronizado da rede. Quando a força de acoplamento é grande o suciente paracomeçar o processo de sincronização, ela acaba atraindo uma grande fração dos vértices e por issonós vemos a descontinuidade do parâmetro de ordem r.
Pelo menos qualitativamente podemos também explicar com nossos resultados o trabalho [70],onde os autores analisam se sincronização explosiva persistiria no cenário onde a correlação eraafetada pela presença de desordem
ωi = ki + ξi, (4.3)
aonde ξi é uma variável aleatória sorteada da distribuição uniforme U(−ε, ε). Em [70] os autoresconstataram que quando ε 6= 0, não só persiste o cenário da sincronização explosiva, como tambémele surge em redes que não apresentariam SE para ε = 0, ou seja, sem desordem.
Para redes não muito pequenas e com alguma heterogeneidade na distribuição de grau, existemhubs com grau elevado. Para esses hubs a presença de desordem ou não pouco inuencia na suafrequência natural (ki é muito maior que ξi na equação (4.3) se ε não for muito grande). Entretanto,os vértices com graus pequenos estarão praticamente não correlacionados. Assim, o cenário estudadoem [70] é parecido com a nossa análise: apenas os hubs estão correlacionados.
Na gura 4.6 nós temos as frequências naturais em função do grau dos vértices para o caso
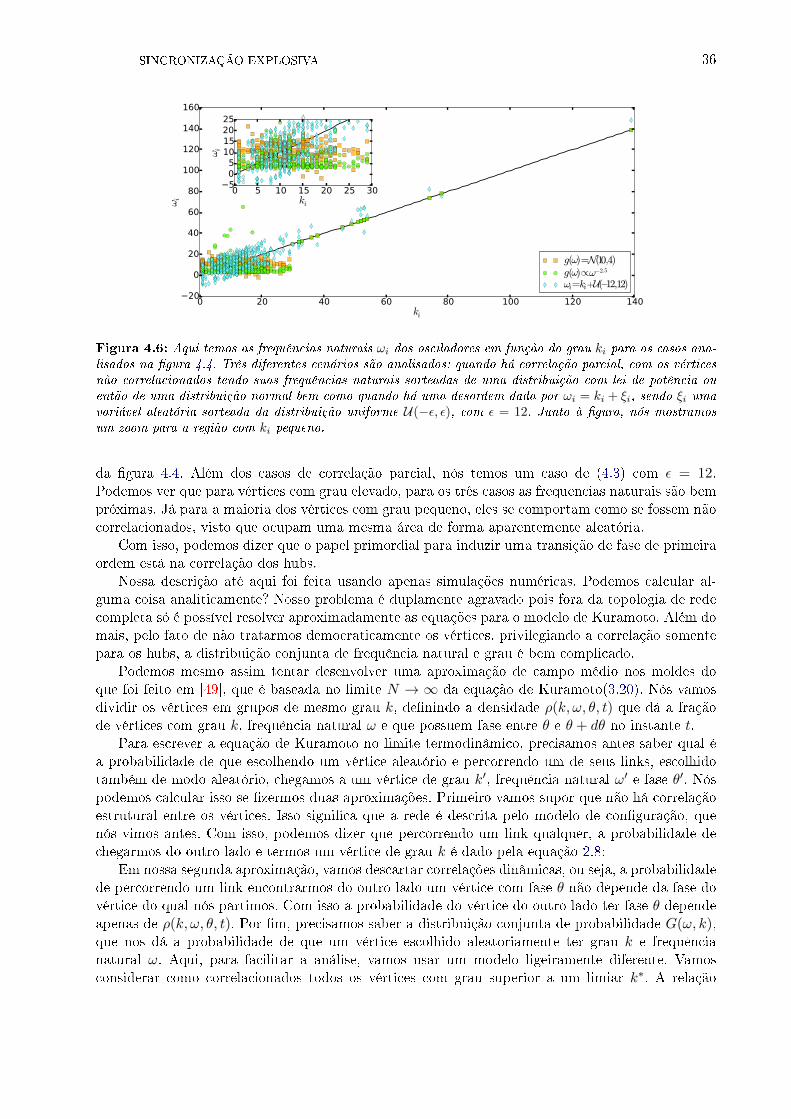
36SINCRONIZAÇÃO EXPLOSIVA
0 20 40 60 80 100 120 140ki
20
0
20
40
60
80
100
120
140
160
ωi
g(ω)=N(10,4)g(ω)∝ω−2.5
ωi=ki+U(−12,12)
0 5 10 15 20 25 30ki
505
10152025
ωi
Figura 4.6: Aqui temos as frequências naturais ωi dos osciladores em função do grau ki para os casos ana-lisados na gura 4.4. Três diferentes cenários são analisados: quando há correlação parcial, com os vérticesnão correlacionados tendo suas frequências naturais sorteadas de uma distribuição com lei de potência ouentão de uma distribuição normal bem como quando há uma desordem dada por ωi = ki + ξi, sendo ξi umavariável aleatória sorteada da distribuição uniforme U(−ε, ε), com ε = 12. Junto à gura, nós mostramosum zoom para a região com ki pequeno.
da gura 4.4. Além dos casos de correlação parcial, nós temos um caso de (4.3) com ε = 12.Podemos ver que para vértices com grau elevado, para os três casos as frequências naturais são bempróximas. Já para a maioria dos vértices com grau pequeno, eles se comportam como se fossem nãocorrelacionados, visto que ocupam uma mesma área de forma aparentemente aleatória.
Com isso, podemos dizer que o papel primordial para induzir uma transição de fase de primeiraordem está na correlação dos hubs.
Nossa descrição até aqui foi feita usando apenas simulações numéricas. Podemos calcular al-guma coisa analiticamente? Nosso problema é duplamente agravado pois fora da topologia de redecompleta só é possível resolver aproximadamente as equações para o modelo de Kuramoto. Além domais, pelo fato de não tratarmos democraticamente os vértices, privilegiando a correlação somentepara os hubs, a distribuição conjunta de frequência natural e grau é bem complicado.
Podemos mesmo assim tentar desenvolver uma aproximação de campo médio nos moldes doque foi feito em [49], que é baseada no limite N → ∞ da equação de Kuramoto(3.20). Nós vamosdividir os vértices em grupos de mesmo grau k, denindo a densidade ρ(k, ω, θ, t) que dá a fraçãode vértices com grau k, frequência natural ω e que possuem fase entre θ e θ + dθ no instante t.
Para escrever a equação de Kuramoto no limite termodinâmico, precisamos antes saber qual éa probabilidade de que escolhendo um vértice aleatório e percorrendo um de seus links, escolhidotambém de modo aleatório, chegamos a um vértice de grau k′, frequência natural ω′ e fase θ′. Nóspodemos calcular isso se zermos duas aproximações. Primeiro vamos supor que não há correlaçãoestrutural entre os vértices. Isso signica que a rede é descrita pelo modelo de conguração, quenós vimos antes. Com isso, podemos dizer que percorrendo um link qualquer, a probabilidade dechegarmos do outro lado e termos um vértice de grau k é dado pela equação 2.8:
Em nossa segunda aproximação, vamos descartar correlações dinâmicas, ou seja, a probabilidadede percorrendo um link encontrarmos do outro lado um vértice com fase θ não depende da fase dovértice do qual nós partimos. Com isso a probabilidade do vértice do outro lado ter fase θ dependeapenas de ρ(k, ω, θ, t). Por m, precisamos saber a distribuição conjunta de probabilidade G(ω, k),que nos dá a probabilidade de que um vértice escolhido aleatoriamente ter grau k e frequêncianatural ω. Aqui, para facilitar a análise, vamos usar um modelo ligeiramente diferente. Vamosconsiderar como correlacionados todos os vértices com grau superior a um limiar k∗. A relação

37
entre a fração f de vértices correlacionados e o limiar k∗ é simplesmente dado por
f =
∫ km
k∗p(k)dk, (4.4)
onde km é o maior grau da rede. Assim, podemos escrever
G(ω, k) = p(k)δ(ω − k)H(k − k∗) + p(k)g(ω) (1−H(k − k∗)) , (4.5)
aonde δ(x) é o delta de Dirac e H(x) é a função de Heaviside e p(k) é a distribuição de grau darede sendo utilizada. A ideia da equação (4.5) é que se k > k∗, então necessariamente os vérticesestão correlacionados, e por isso aparece a função delta de Dirac. Já se k < k∗, então a distribuiçãode grau e de frequência não estão correlacionadas e a probabilidade conjunta é dada pelo produtodas distribuições individuais.
Portanto, a resposta a nossa pergunta inicial é dada por:(kp(k)
〈k〉
)×G(ω, k)× ρ(k, ω, θ, t). (4.6)
Recapitulando, o primeiro termo de (4.6) dá a probabilidade de que o vértice do outro lado dolink tenha grau k. O segundo termo dá a probabilidade de que tendo o grau k a frequência naturaldo vértice seja ω. Por m, o terceiro termo dá a probabilidade da fase estar entre θ e θ + dθ dadoque o vértice tenha grau k e frequência ω.
De posse da equação (4.6), podemos reescrever a equações do modelo de Kuramoto na sua formacontínua [49], obtendo então
dθ
dt= ω + λk
∫dk′∫dω′
∫dθ′(k′p(k′)
〈k〉
)G(ω′, k′)ρ(k′, ω′, θ′, t) sin(θ′ − θ). (4.7)
Podemos trabalhar com as equações (4.7) de forma análoga ao que foi feito anteriormente parao caso original de Kuramoto, denindo um novo parâmetro de ordem
reiψ =
∫dω
∫dk
∫dθG(ω, k)kρ(k, ω, θ, t)eiθ/
∫dkp(k)k, (4.8)
que difere do parâmetro de ordem usual no sentido de que as exponenciais das fases tem pesok/〈k〉, mas que nos fornece a mesma informação, sendo que essa diferença é apenas para facilitar odesenvolvimento das contas. De posse das equações (4.7) e (4.8), podemos obter uma condição deauto consistência nos mesmos moldes do que foi feito para o modelo de Kuramoto no capítulo (3).Obviamente os detalhes do desenvolvimento analítico são mais difíceis, visto que devemos levar emconta a distribuição de graus da rede, introduzindo assim mais uma integral (envolvendo dk) noscálculos. Os detalhes dessas contas estão no apêndice A.
Para o caso da correlação parcial, não é possível obter uma condição geral, válida para quais-quer redes e funções g(ω) e p(k), mas podemos efetuar os cálculos para alguns casos especiais,como quando os vértices não correlacionados terem suas frequências naturais sorteadas de umadistribuição
g(ω) =
σ−1
0 |ω| < σ02
0 caso contrário,(4.9)
e a rede for livre de escala com expoente 3. Essas condições nos permitem simplicar várias inte-grais ou mesmo determinar quais são seus valores apenas analisando a paridade dos integrandos,facilitando o trabalho. Esse caso está mostrado na gura 4.7, painel da esquerda. Note que o valorprevisto bate apenas qualitativamente com o resultado numérico. Outro caso onde podemos en-contrar a aproximação para a força de acoplamento crítico é um pouco mais complicado e envolvecondições entre os graus da rede e sua frequência média (veja o apêndice A). Esse caso está mos-trado no painel da direita na gura 4.7. É interessante notar que para esse segundo caso, a transição

38SINCRONIZAÇÃO EXPLOSIVA
0.5 1.0 1.5 2.0 2.5 3.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
forwardbackward
0.0 0.2 0.4 0.6 0.8 1.0 1.2λ
0.0
0.2
0.4
0.6
0.8
1.0
r
Figura 4.7: Exemplos de diagramas de sincronização e o valores previstos a partir da aproximação de campomédio. Para ambos os casos, usamos redes de Barabasi-Albert com N = 500 e 〈k〉 = 6 e k∗ = 10. O painel daesquerda corresponde ao caso (4.9) com σ0 = 0.5. As previsões teóricas para a força de acoplamento críticaé a linha preta vertical.
de fase parece ser sempre de segunda ordem para todos os parâmetros.É necessário enfatizar que essa abordagem por campo médio tem algumas deciências. Podemos
até calcular o valor aproximado de λc para a transição de fase. Mas não conseguimos dizer nadasobre a natureza dessa transição: se ela é de primeira ou segunda ordem. E no caso em que for deprimeira ordem, outro fator importante é saber a medida da área do loop de histerese, algo que aaproximação não diz nada. Calcular essas propriedades é um problema em aberto (e possivelmentebem complicado).
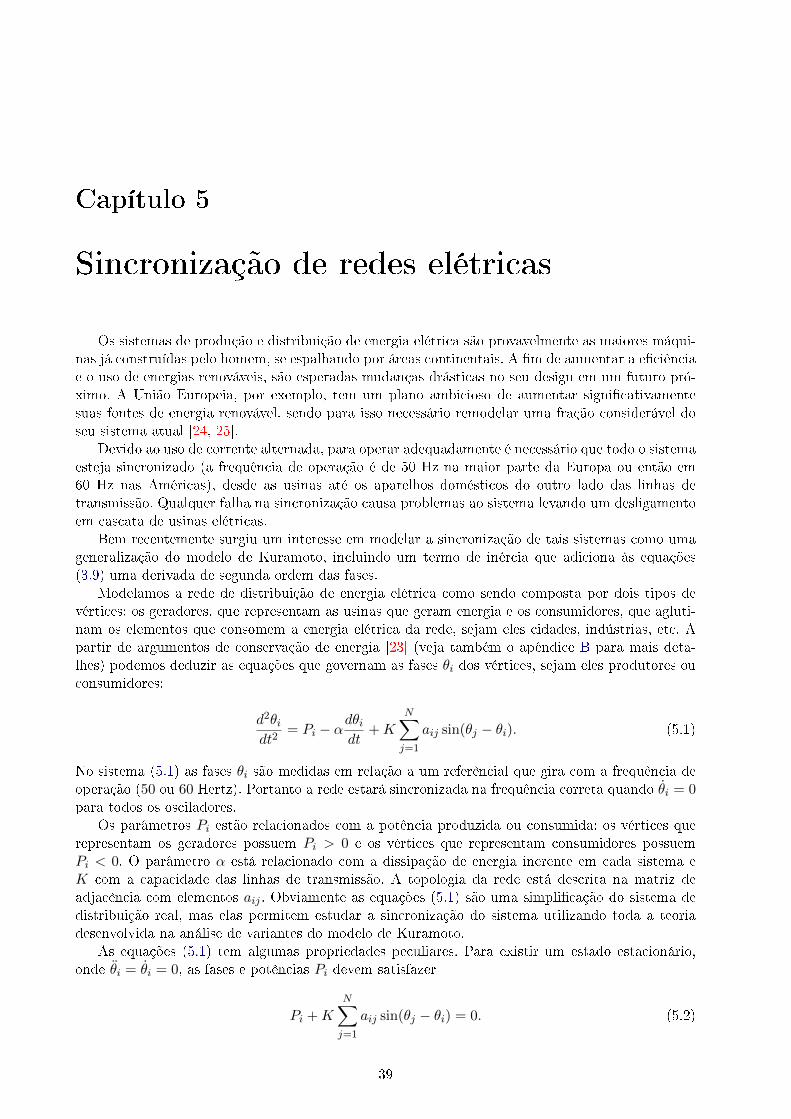
Capítulo 5
Sincronização de redes elétricas
Os sistemas de produção e distribuição de energia elétrica são provavelmente as maiores máqui-nas já construídas pelo homem, se espalhando por áreas continentais. A m de aumentar a eciênciae o uso de energias renováveis, são esperadas mudanças drásticas no seu design em um futuro pró-ximo. A União Europeia, por exemplo, tem um plano ambicioso de aumentar signicativamentesuas fontes de energia renovável, sendo para isso necessário remodelar uma fração considerável doseu sistema atual [24, 25].
Devido ao uso de corrente alternada, para operar adequadamente é necessário que todo o sistemaesteja sincronizado (a frequência de operação é de 50 Hz na maior parte da Europa ou então em60 Hz nas Américas), desde as usinas até os aparelhos domésticos do outro lado das linhas detransmissão. Qualquer falha na sincronização causa problemas ao sistema levando um desligamentoem cascata de usinas elétricas.
Bem recentemente surgiu um interesse em modelar a sincronização de tais sistemas como umageneralização do modelo de Kuramoto, incluindo um termo de inércia que adiciona às equações(3.9) uma derivada de segunda ordem das fases.
Modelamos a rede de distribuição de energia elétrica como sendo composta por dois tipos devértices: os geradores, que representam as usinas que geram energia e os consumidores, que agluti-nam os elementos que consomem a energia elétrica da rede, sejam eles cidades, indústrias, etc. Apartir de argumentos de conservação de energia [23] (veja também o apêndice B para mais deta-lhes) podemos deduzir as equações que governam as fases θi dos vértices, sejam eles produtores ouconsumidores:
d2θidt2
= Pi − αdθidt
+KN∑j=1
aij sin(θj − θi). (5.1)
No sistema (5.1) as fases θi são medidas em relação a um referêncial que gira com a frequência deoperação (50 ou 60 Hertz). Portanto a rede estará sincronizada na frequência correta quando θi = 0para todos os osciladores.
Os parâmetros Pi estão relacionados com a potência produzida ou consumida: os vértices querepresentam os geradores possuem Pi > 0 e os vértices que representam consumidores possuemPi < 0. O parâmetro α está relacionado com a dissipação de energia inerente em cada sistema eK com a capacidade das linhas de transmissão. A topologia da rede está descrita na matriz deadjacência com elementos aij . Obviamente as equações (5.1) são uma simplicação do sistema dedistribuição real, mas elas permitem estudar a sincronização do sistema utilizando toda a teoriadesenvolvida na análise de variantes do modelo de Kuramoto.
As equações (5.1) tem algumas propriedades peculiares. Para existir um estado estacionário,onde θi = θi = 0, as fases e potências Pi devem satisfazer
Pi +KN∑j=1
aij sin(θj − θi) = 0. (5.2)
39

40SINCRONIZAÇÃO DE REDES ELÉTRICAS
Se somarmos ambos os lados das equações (5.2) sobre a variável i, e lembrando que aij = aji eque o seno da diferença de fases é uma função impar com relação aos índices i e j, temos a condição
N∑i=1
Pi = 0, (5.3)
que é nada mais do que a lei de conservação de energia. A quantidade de energia produzida pelasusinas (com P > 0) deve compensar a energia necessária para o funcionamento dos consumidores(com P < 0).
Uma propriedade que o modelo de Kuramoto com inércia (5.1) tem é que o tempo necessáriopara se obter o estado estacionário (quando ele existe) depende apenas do parâmetro α, que, comovimos, está relacionado com a dissipação de energia. Para isso, somamos ambos os lados da equação(5.1) com relação ao índice i e usamos novamente o fato de que a matriz de adjacência é simétricaenquanto o seno da diferença de fase é antissimétrico, resultando na equação
N∑i=1
d2θidt2
= −αN∑i=1
dθidt. (5.4)
Se nós denirmos a frequência média Ω da rede como sendo Ω = N−1∑N
i=1 θi, da equação(5.4) vemos que ela decai exponencialmente com a escala de tempo α−1, independentemente datopologia da rede, já que a solução da equação diferencial (5.4) é simplesmente Ω(t) = Ω0e
−αt,sendo Ω0 a frequência média inicial. Assim, a frequência média cai exponencialmente até o valornulo, signicando que o sistema atingiu um estado estacionário, que não necessariamente signicaque está sincronizado, visto que as frequências podem se ajustar de tal modo que as componentespositivas anulam as componentes negativas, sem nunca atingirem um valor comum.
Esse comportamento é diferente do que acontece com o modelo de Kuramoto, onde o tempo parasincronização depende fortemente da topologia da rede [73]. Salientamos que esse resultado tambémexplica os experimentos numéricos realizados em [25] que mostravam, sem explicação quantitativa,que o tempo de relaxamento é exatamente esse e independente da topologia da rede.
Outro fato importante é que vamos utilizar dois parâmetros para quanticar o estado do sistema.Além do parâmetro de ordem de Kuramoto
z(t) =1
N
N∑j=1
eiθj , (5.5)
nós vamos também utilizar a frequência quadrática média da rede
v2(t) =⟨θj
2⟩
=1
N
N∑j=1
θj2(t). (5.6)
Nas análises, vamos utilizar a média temporal desses parâmetros de ordem, dados por:
r =
∣∣∣∣ 1
δT
∫ Tr+δT
Tr
z(t) dt
∣∣∣∣ , (5.7)
e
v2 =1
δT
∫ Tr+δT
Tr
v2(t) dt, (5.8)
aonde Tr é o tempo necessário para que o sistema entre no estado estacionário e δT é o intervalode tempo onde serão efetuadas as médias.
É de extrema importância que a rede de distribuição de energia elétrica permaneça sincronizadapara funcionar corretamente. Dado um conjunto de usinas (os vértices que produzem energia, comP > 0) e um conjunto de consumidores (que consomem a energia produzida pelas usinas, comP < 0) qual é a melhor topologia que conecta esses vértices para favorecer a sincronização? Para
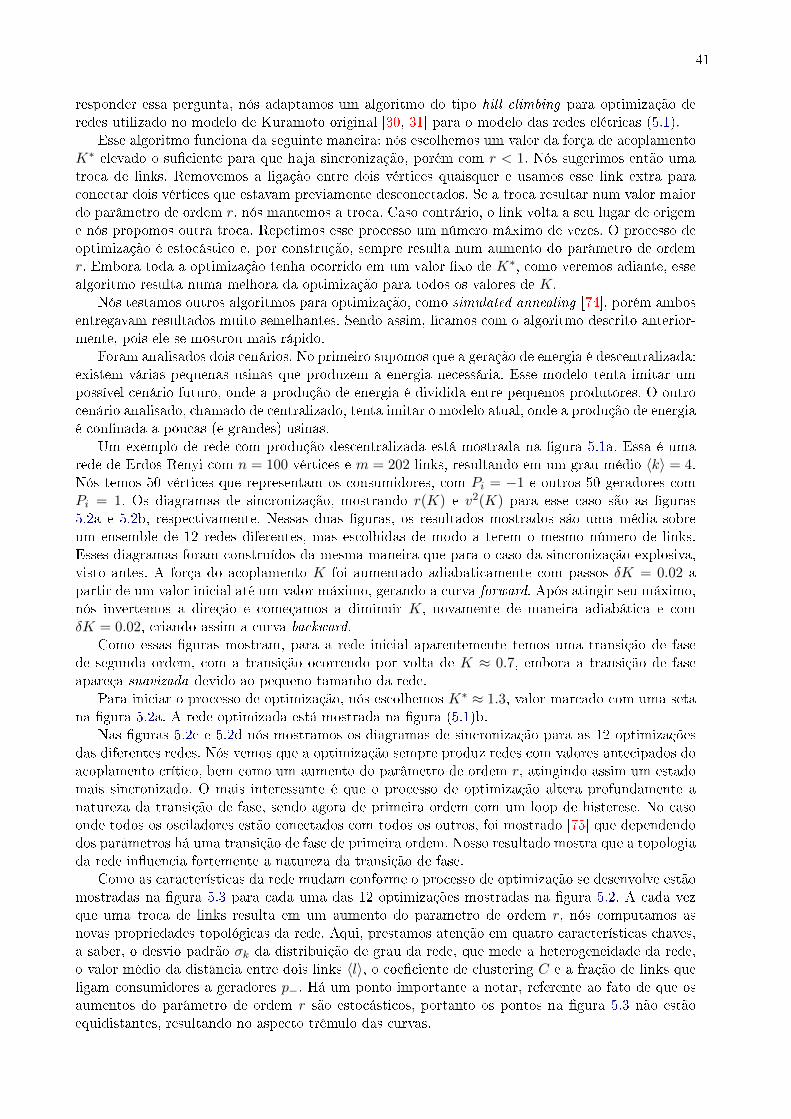
41
responder essa pergunta, nós adaptamos um algoritmo do tipo hill climbing para optimização deredes utilizado no modelo de Kuramoto original [30, 31] para o modelo das redes elétricas (5.1).
Esse algoritmo funciona da seguinte maneira: nós escolhemos um valor da força de acoplamentoK∗ elevado o suciente para que haja sincronização, porém com r < 1. Nós sugerimos então umatroca de links. Removemos a ligação entre dois vértices quaisquer e usamos esse link extra paraconectar dois vértices que estavam previamente desconectados. Se a troca resultar num valor maiordo parâmetro de ordem r, nós mantemos a troca. Caso contrário, o link volta a seu lugar de origeme nós propomos outra troca. Repetimos esse processo um número máximo de vezes. O processo deoptimização é estocástico e, por construção, sempre resulta num aumento do parâmetro de ordemr. Embora toda a optimização tenha ocorrido em um valor xo de K∗, como veremos adiante, essealgoritmo resulta numa melhora da optimização para todos os valores de K.
Nós testamos outros algoritmos para optimização, como simulated annealing [74], porém ambosentregavam resultados muito semelhantes. Sendo assim, camos com o algoritmo descrito anterior-mente, pois ele se mostrou mais rápido.
Foram analisados dois cenários. No primeiro supomos que a geração de energia é descentralizada:existem várias pequenas usinas que produzem a energia necessária. Esse modelo tenta imitar umpossível cenário futuro, onde a produção de energia é dividida entre pequenos produtores. O outrocenário analisado, chamado de centralizado, tenta imitar o modelo atual, onde a produção de energiaé connada a poucas (e grandes) usinas.
Um exemplo de rede com produção descentralizada está mostrada na gura 5.1a. Essa é umarede de Erdos-Renyi com n = 100 vértices e m = 202 links, resultando em um grau médio 〈k〉 = 4.Nós temos 50 vértices que representam os consumidores, com Pi = −1 e outros 50 geradores comPi = 1. Os diagramas de sincronização, mostrando r(K) e v2(K) para esse caso são as guras5.2a e 5.2b, respectivamente. Nessas duas guras, os resultados mostrados são uma média sobreum ensemble de 12 redes diferentes, mas escolhidas de modo a terem o mesmo número de links.Esses diagramas foram construídos da mesma maneira que para o caso da sincronização explosiva,visto antes. A força do acoplamento K foi aumentado adiabaticamente com passos δK = 0.02 apartir de um valor inicial até um valor máximo, gerando a curva forward. Após atingir seu máximo,nós invertemos a direção e começamos a diminuir K, novamente de maneira adiabática e comδK = 0.02, criando assim a curva backward.
Como essas guras mostram, para a rede inicial aparentemente temos uma transição de fasede segunda ordem, com a transição ocorrendo por volta de K ≈ 0.7, embora a transição de faseapareça suavizada devido ao pequeno tamanho da rede.
Para iniciar o processo de optimização, nós escolhemos K∗ ≈ 1.3, valor marcado com uma setana gura 5.2a. A rede optimizada está mostrada na gura (5.1)b.
Nas guras 5.2c e 5.2d nós mostramos os diagramas de sincronização para as 12 optimizaçõesdas diferentes redes. Nós vemos que a optimização sempre produz redes com valores antecipados doacoplamento crítico, bem como um aumento do parâmetro de ordem r, atingindo assim um estadomais sincronizado. O mais interessante é que o processo de optimização altera profundamente anatureza da transição de fase, sendo agora de primeira ordem com um loop de histerese. No casoonde todos os osciladores estão conectados com todos os outros, foi mostrado [75] que dependendodos parâmetros há uma transição de fase de primeira ordem. Nosso resultado mostra que a topologiada rede inuencia fortemente a natureza da transição de fase.
Como as características da rede mudam conforme o processo de optimização se desenvolve estãomostradas na gura 5.3 para cada uma das 12 optimizações mostradas na gura 5.2. A cada vezque uma troca de links resulta em um aumento do parâmetro de ordem r, nós computamos asnovas propriedades topológicas da rede. Aqui, prestamos atenção em quatro características chaves,a saber, o desvio padrão σk da distribuição de grau da rede, que mede a heterogeneidade da rede,o valor médio da distância entre dois links 〈l〉, o coeciente de clustering C e a fração de links queligam consumidores a geradores p−. Há um ponto importante a notar, referente ao fato de que osaumentos do parâmetro de ordem r são estocásticos, portanto os pontos na gura 5.3 não estãoequidistantes, resultando no aspecto trêmulo das curvas.
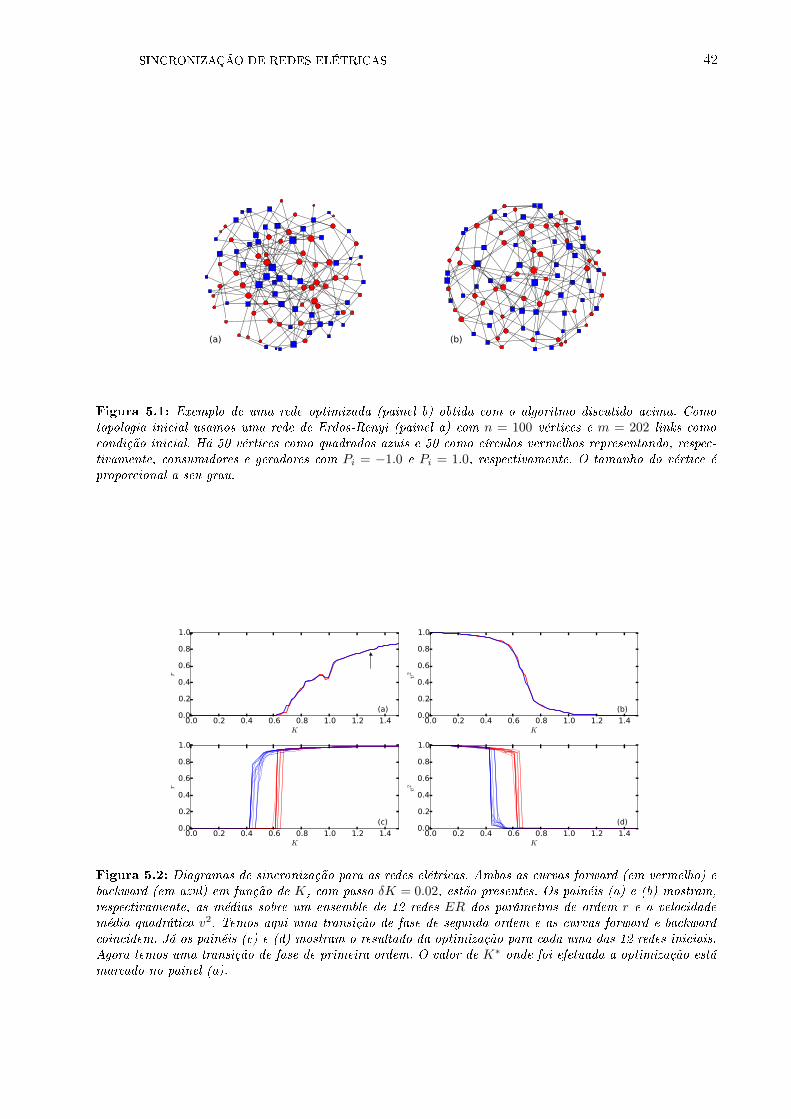
42SINCRONIZAÇÃO DE REDES ELÉTRICAS
(a) (b)
Figura 5.1: Exemplo de uma rede optimizada (painel b) obtida com o algoritmo discutido acima. Comotopologia inicial usamos uma rede de Erdos-Renyi (painel a) com n = 100 vértices e m = 202 links comocondição inicial. Há 50 vértices como quadrados azuis e 50 como círculos vermelhos representando, respec-tivamente, consumidores e geradores com Pi = −1.0 e Pi = 1.0, respectivamente. O tamanho do vértice éproporcional a seu grau.
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
r
(a)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
v2
(b)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
v2
(d)
Figura 5.2: Diagramas de sincronização para as redes elétricas. Ambas as curvas forward (em vermelho) ebackward (em azul) em função de K, com passo δK = 0.02, estão presentes. Os painéis (a) e (b) mostram,respectivamente, as médias sobre um ensemble de 12 redes ER dos parâmetros de ordem r e a velocidademédia quadrática v2. Temos aqui uma transição de fase de segunda ordem e as curvas forward e backwardcoincidem. Já os painéis (c) e (d) mostram o resultado da optimização para cada uma das 12 redes iniciais.Agora temos uma transição de fase de primeira ordem. O valor de K∗ onde foi efetuada a optimização estámarcado no painel (a).
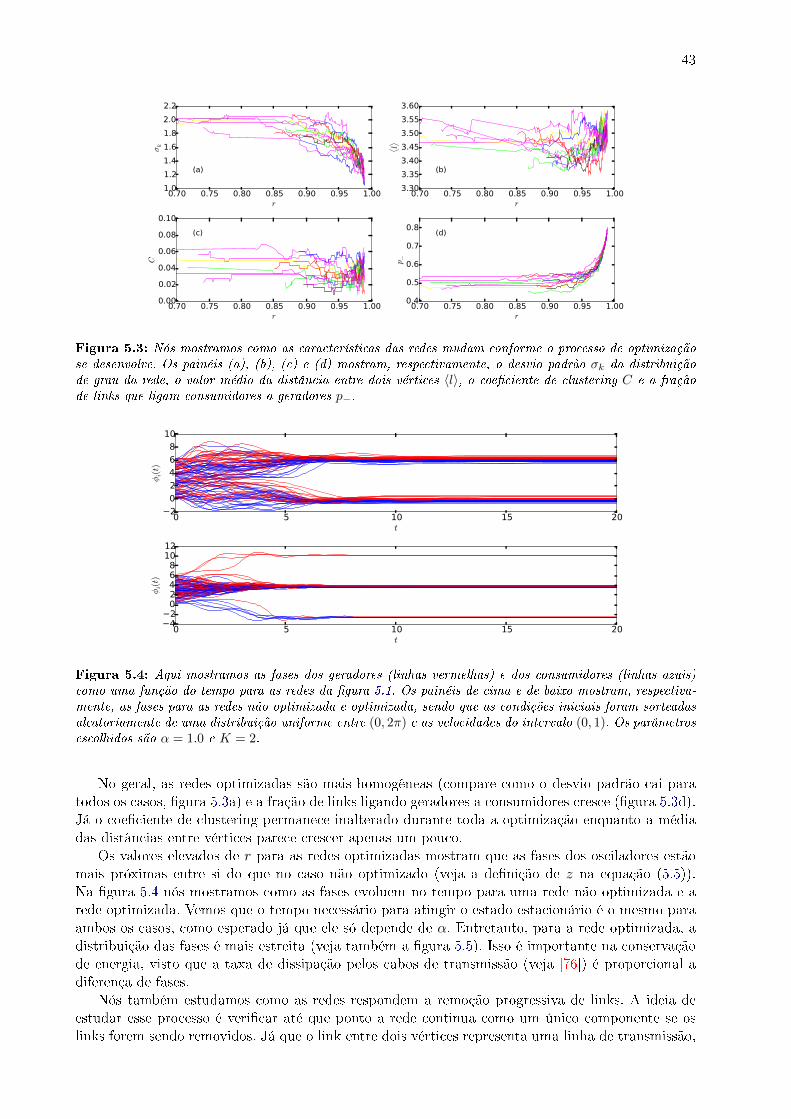
43
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
1.0
1.2
1.4
1.6
1.8
2.0
2.2
σk
(a)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
3.30
3.35
3.40
3.45
3.50
3.55
3.60
⟨ l⟩
(b)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.00
0.02
0.04
0.06
0.08
0.10
C
(c)
(c)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.4
0.5
0.6
0.7
0.8
p−
(d)
Figura 5.3: Nós mostramos como as características das redes mudam conforme o processo de optimizaçãose desenvolve. Os painéis (a), (b), (c) e (d) mostram, respectivamente, o desvio padrão σk da distribuiçãode grau da rede, o valor médio da distância entre dois vértices 〈l〉, o coeciente de clustering C e a fraçãode links que ligam consumidores a geradores p−.
0 5 10 15 20t
2
0
2
4
6
8
10
φi(t)
0 5 10 15 20t
4202468
1012
φi(t)
Figura 5.4: Aqui mostramos as fases dos geradores (linhas vermelhas) e dos consumidores (linhas azuis)como uma função do tempo para as redes da gura 5.1. Os painéis de cima e de baixo mostram, respectiva-mente, as fases para as redes não optimizada e optimizada, sendo que as condições iniciais foram sorteadasaleatoriamente de uma distribuição uniforme entre (0, 2π) e as velocidades do intervalo (0, 1). Os parâmetrosescolhidos são α = 1.0 e K = 2.
No geral, as redes optimizadas são mais homogêneas (compare como o desvio padrão cai paratodos os casos, gura 5.3a) e a fração de links ligando geradores a consumidores cresce (gura 5.3d).Já o coeciente de clustering permanece inalterado durante toda a optimização enquanto a médiadas distâncias entre vértices parece crescer apenas um pouco.
Os valores elevados de r para as redes optimizadas mostram que as fases dos osciladores estãomais próximas entre si do que no caso não optimizado (veja a denição de z na equação (5.5)).Na gura 5.4 nós mostramos como as fases evoluem no tempo para uma rede não optimizada e arede optimizada. Vemos que o tempo necessário para atingir o estado estacionário é o mesmo paraambos os casos, como esperado já que ele só depende de α. Entretanto, para a rede optimizada, adistribuição das fases é mais estreita (veja também a gura 5.5). Isso é importante na conservaçãode energia, visto que a taxa de dissipação pelos cabos de transmissão (veja [76]) é proporcional adiferença de fases.
Nós também estudamos como as redes respondem a remoção progressiva de links. A ideia deestudar esse processo é vericar até que ponto a rede continua como um único componente se oslinks forem sendo removidos. Já que o link entre dois vértices representa uma linha de transmissão,
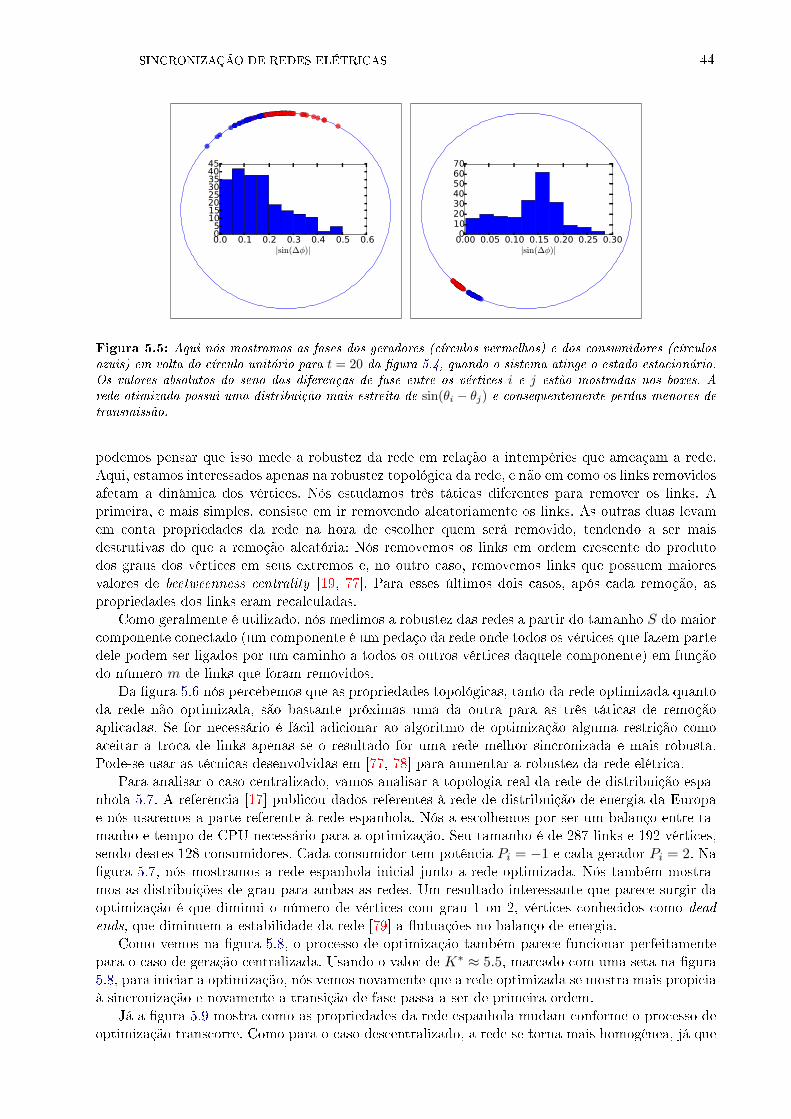
44SINCRONIZAÇÃO DE REDES ELÉTRICAS
0.0 0.1 0.2 0.3 0.4 0.5 0.6|sin(∆φ)|
05
1015202530354045
0.00 0.05 0.10 0.15 0.20 0.25 0.30|sin(∆φ)|
010203040506070
Figura 5.5: Aqui nós mostramos as fases dos geradores (círculos vermelhos) e dos consumidores (círculosazuis) em volta do círculo unitário para t = 20 da gura 5.4, quando o sistema atinge o estado estacionário.Os valores absolutos do seno das diferenças de fase entre os vértices i e j estão mostradas nos boxes. Arede otimizada possui uma distribuição mais estreita de sin(θi − θj) e consequentemente perdas menores detransmissão.
podemos pensar que isso mede a robustez da rede em relação a intempéries que ameaçam a rede.Aqui, estamos interessados apenas na robustez topológica da rede, e não em como os links removidosafetam a dinâmica dos vértices. Nós estudamos três táticas diferentes para remover os links. Aprimeira, e mais simples, consiste em ir removendo aleatoriamente os links. As outras duas levamem conta propriedades da rede na hora de escolher quem será removido, tendendo a ser maisdestrutivas do que a remoção aleatória: Nós removemos os links em ordem crescente do produtodos graus dos vértices em seus extremos e, no outro caso, removemos links que possuem maioresvalores de beetweenness centrality [19, 77]. Para esses últimos dois casos, após cada remoção, aspropriedades dos links eram recalculadas.
Como geralmente é utilizado, nós medimos a robustez das redes a partir do tamanho S do maiorcomponente conectado (um componente é um pedaço da rede onde todos os vértices que fazem partedele podem ser ligados por um caminho a todos os outros vértices daquele componente) em funçãodo número m de links que foram removidos.
Da gura 5.6 nós percebemos que as propriedades topológicas, tanto da rede optimizada quantoda rede não optimizada, são bastante próximas uma da outra para as três táticas de remoçãoaplicadas. Se for necessário é fácil adicionar ao algoritmo de optimização alguma restrição comoaceitar a troca de links apenas se o resultado for uma rede melhor sincronizada e mais robusta.Pode-se usar as técnicas desenvolvidas em [77, 78] para aumentar a robustez da rede elétrica.
Para analisar o caso centralizado, vamos analisar a topologia real da rede de distribuição espa-nhola 5.7. A referência [17] publicou dados referentes à rede de distribuição de energia da Europae nós usaremos a parte referente à rede espanhola. Nós a escolhemos por ser um balanço entre ta-manho e tempo de CPU necessário para a optimização. Seu tamanho é de 287 links e 192 vértices,sendo destes 128 consumidores. Cada consumidor tem potência Pi = −1 e cada gerador Pi = 2. Nagura 5.7, nós mostramos a rede espanhola inicial junto a rede optimizada. Nós também mostra-mos as distribuições de grau para ambas as redes. Um resultado interessante que parece surgir daoptimização é que diminui o número de vértices com grau 1 ou 2, vértices conhecidos como dead
ends, que diminuem a estabilidade da rede [79] a utuações no balanço de energia.Como vemos na gura 5.8, o processo de optimização também parece funcionar perfeitamente
para o caso de geração centralizada. Usando o valor de K∗ ≈ 5.5, marcado com uma seta na gura5.8, para iniciar a optimização, nós vemos novamente que a rede optimizada se mostra mais propiciaà sincronização e novamente a transição de fase passa a ser de primeira ordem.
Já a gura 5.9 mostra como as propriedades da rede espanhola mudam conforme o processo deoptimização transcorre. Como para o caso descentralizado, a rede se torna mais homogênea, já que
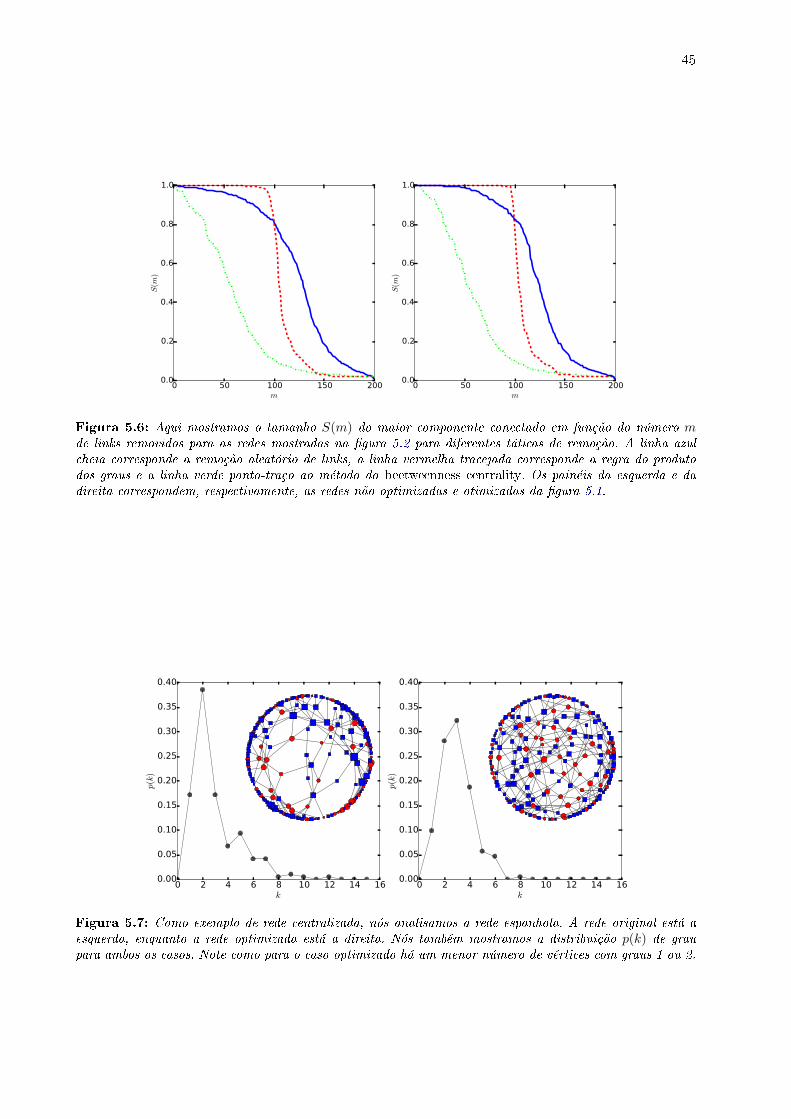
45
0 50 100 150 200m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
0 50 100 150 200m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
Figura 5.6: Aqui mostramos o tamanho S(m) do maior componente conectado em função do número mde links removidos para as redes mostradas na gura 5.2 para diferentes táticas de remoção. A linha azulcheia corresponde a remoção aleatório de links, a linha vermelha tracejada corresponde a regra do produtodos graus e a linha verde ponto-traço ao método do beetweenness centrality. Os painéis da esquerda e dadireita correspondem, respectivamente, as redes não optimizadas e otimizadas da gura 5.1.
0 2 4 6 8 10 12 14 16k
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
p(k
)
0 2 4 6 8 10 12 14 16k
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
p(k
)
Figura 5.7: Como exemplo de rede centralizada, nós analisamos a rede espanhola. A rede original está aesquerda, enquanto a rede optimizada está a direita. Nós também mostramos a distribuição p(k) de graupara ambos os casos. Note como para o caso optimizado há um menor número de vértices com graus 1 ou 2.
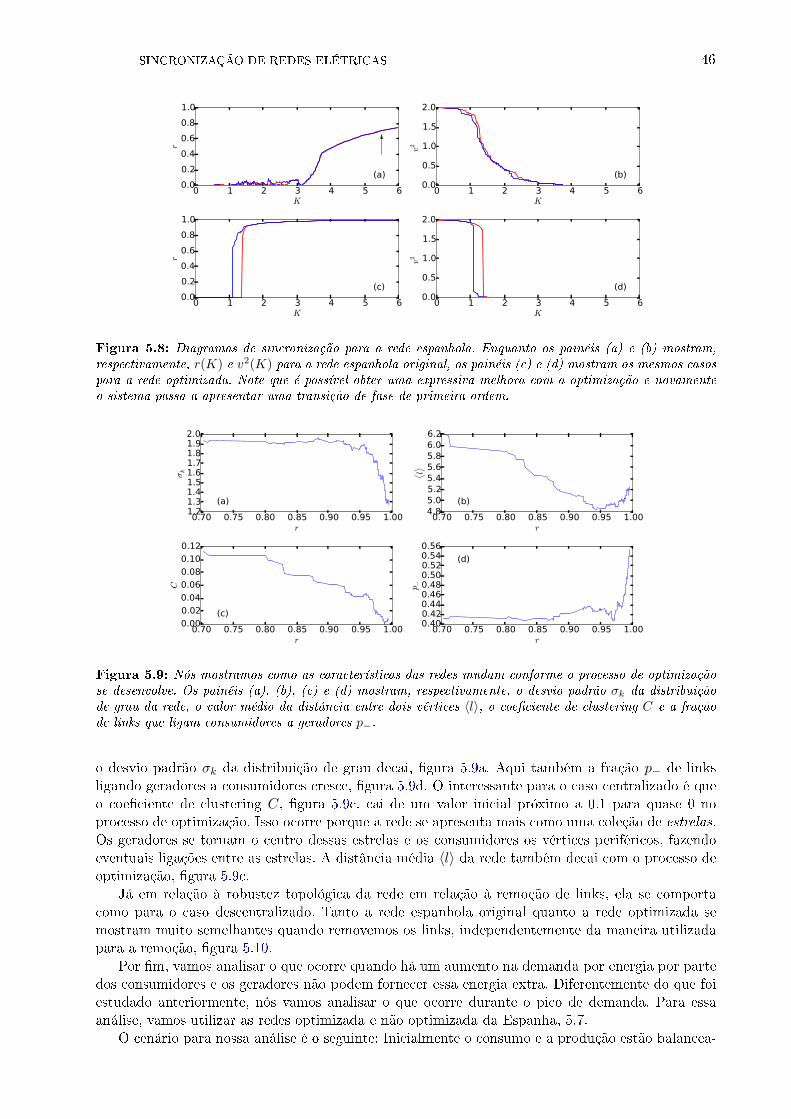
46SINCRONIZAÇÃO DE REDES ELÉTRICAS
0 1 2 3 4 5 6K
0.0
0.2
0.4
0.6
0.8
1.0
r(a)
0 1 2 3 4 5 6K
0.0
0.5
1.0
1.5
2.0
v2
(b)
0 1 2 3 4 5 6K
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
0 1 2 3 4 5 6K
0.0
0.5
1.0
1.5
2.0
v2
(d)
Figura 5.8: Diagramas de sincronização para a rede espanhola. Enquanto os painéis (a) e (b) mostram,respectivamente, r(K) e v2(K) para a rede espanhola original, os painéis (c) e (d) mostram os mesmos casospara a rede optimizada. Note que é possível obter uma expressiva melhora com a optimização e novamenteo sistema passa a apresentar uma transição de fase de primeira ordem.
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
1.21.31.41.51.61.71.81.92.0
σk
(a)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
4.85.05.25.45.65.86.06.2
⟨ l⟩
(b)
(b)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.00
0.02
0.04
0.06
0.08
0.10
0.12
C
(c) (c)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.400.420.440.460.480.500.520.540.56
p−
(d)
Figura 5.9: Nós mostramos como as características das redes mudam conforme o processo de optimizaçãose desenvolve. Os painéis (a), (b), (c) e (d) mostram, respectivamente, o desvio padrão σk da distribuiçãode grau da rede, o valor médio da distância entre dois vértices 〈l〉, o coeciente de clustering C e a fraçãode links que ligam consumidores a geradores p−.
o desvio padrão σk da distribuição de grau decai, gura 5.9a. Aqui também a fração p− de linksligando geradores a consumidores cresce, gura 5.9d. O interessante para o caso centralizado é queo coeciente de clustering C, gura 5.9c, cai de um valor inicial próximo a 0.1 para quase 0 noprocesso de optimização. Isso ocorre porque a rede se apresenta mais como uma coleção de estrelas.Os geradores se tornam o centro dessas estrelas e os consumidores os vértices periféricos, fazendoeventuais ligações entre as estrelas. A distância média 〈l〉 da rede também decai com o processo deoptimização, gura 5.9c.
Já em relação à robustez topológica da rede em relação à remoção de links, ela se comportacomo para o caso descentralizado. Tanto a rede espanhola original quanto a rede optimizada semostram muito semelhantes quando removemos os links, independentemente da maneira utilizadapara a remoção, gura 5.10.
Por m, vamos analisar o que ocorre quando há um aumento na demanda por energia por partedos consumidores e os geradores não podem fornecer essa energia extra. Diferentemente do que foiestudado anteriormente, nós vamos analisar o que ocorre durante o pico de demanda. Para essaanálise, vamos utilizar as redes optimizada e não optimizada da Espanha, 5.7.
O cenário para nossa análise é o seguinte: Inicialmente o consumo e a produção estão balancea-
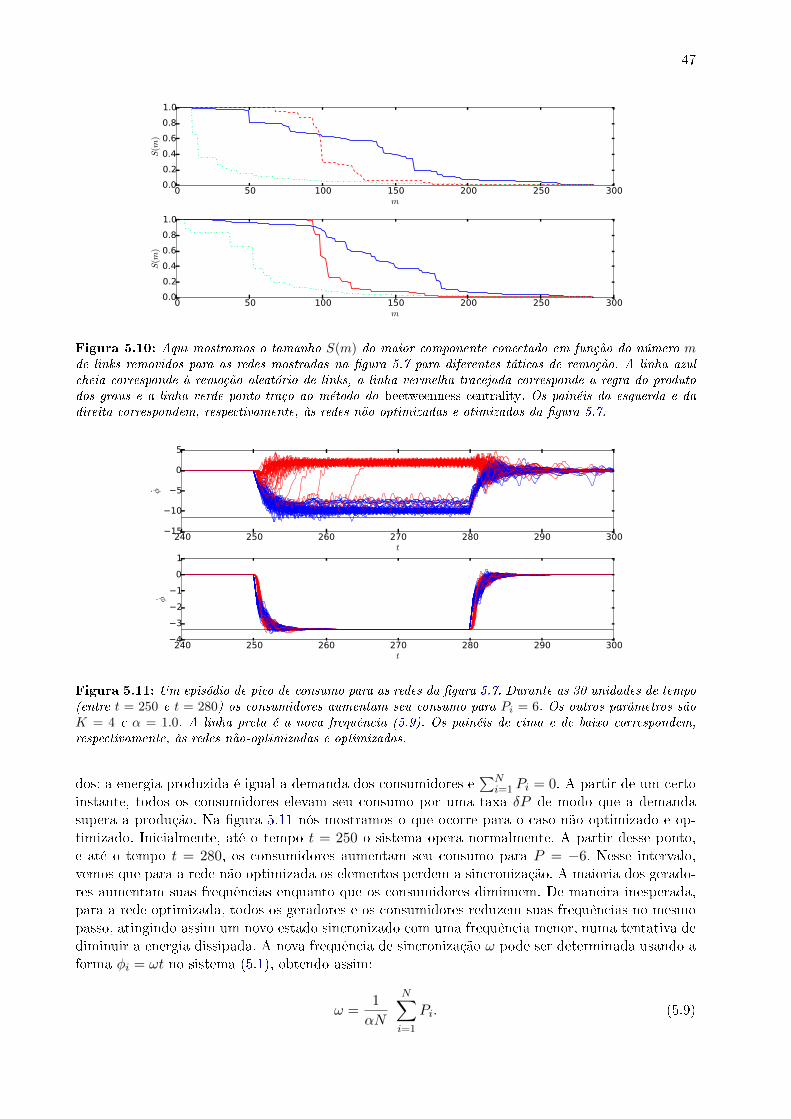
47
0 50 100 150 200 250 300m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
0 50 100 150 200 250 300m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
Figura 5.10: Aqui mostramos o tamanho S(m) do maior componente conectado em função do número mde links removidos para as redes mostradas na gura 5.7 para diferentes táticas de remoção. A linha azulcheia corresponde à remoção aleatório de links, a linha vermelha tracejada corresponde a regra do produtodos graus e a linha verde ponto-traço ao método do beetweenness centrality. Os painéis da esquerda e dadireita correspondem, respectivamente, às redes não optimizadas e otimizadas da gura 5.7.
240 250 260 270 280 290 300t
15
10
5
0
5
φ
240 250 260 270 280 290 300t
4
3
2
1
0
1
φ
Figura 5.11: Um episódio de pico de consumo para as redes da gura 5.7. Durante as 30 unidades de tempo(entre t = 250 e t = 280) os consumidores aumentam seu consumo para Pi = 6. Os outros parâmetros sãoK = 4 e α = 1.0. A linha preta é a nova frequência (5.9). Os painéis de cima e de baixo correspondem,respectivamente, às redes não-optimizadas e optimizadas.
dos: a energia produzida é igual a demanda dos consumidores e∑N
i=1 Pi = 0. A partir de um certoinstante, todos os consumidores elevam seu consumo por uma taxa δP de modo que a demandasupera a produção. Na gura 5.11 nós mostramos o que ocorre para o caso não optimizado e op-timizado. Inicialmente, até o tempo t = 250 o sistema opera normalmente. A partir desse ponto,e até o tempo t = 280, os consumidores aumentam seu consumo para P = −6. Nesse intervalo,vemos que para a rede não optimizada os elementos perdem a sincronização. A maioria dos gerado-res aumentam suas frequências enquanto que os consumidores diminuem. De maneira inesperada,para a rede optimizada, todos os geradores e os consumidores reduzem suas frequências no mesmopasso, atingindo assim um novo estado sincronizado com uma frequência menor, numa tentativa dediminuir a energia dissipada. A nova frequência de sincronização ω pode ser determinada usando aforma φi = ωt no sistema (5.1), obtendo assim:
ω =1
αN
N∑i=1
Pi. (5.9)
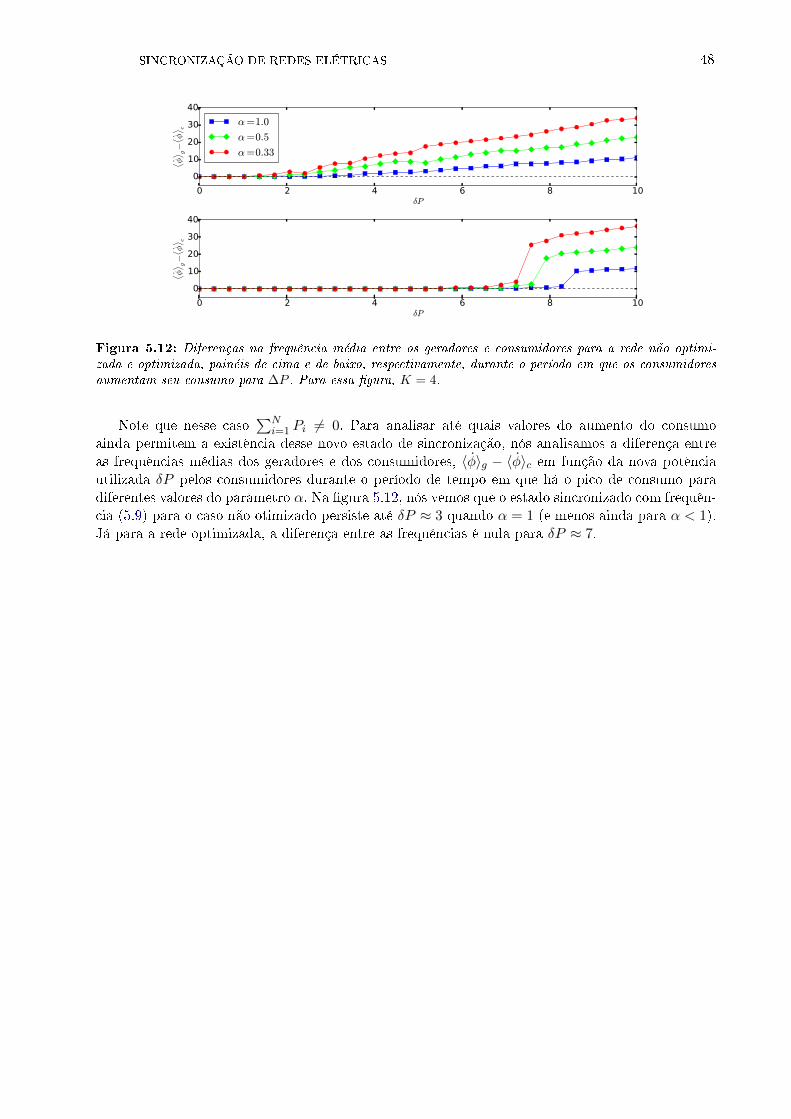
48SINCRONIZAÇÃO DE REDES ELÉTRICAS
0 2 4 6 8 10δP
0
10
20
30
40
⟨ φ⟩ g−⟨ φ⟩ c
α=1.0
α=0.5
α=0.33
0 2 4 6 8 10δP
0
10
20
30
40
⟨ φ⟩ g−⟨ φ⟩ c
Figura 5.12: Diferenças na frequência média entre os geradores e consumidores para a rede não optimi-zada e optimizada, painéis de cima e de baixo, respectivamente, durante o período em que os consumidoresaumentam seu consumo para ∆P . Para essa gura, K = 4.
Note que nesse caso∑N
i=1 Pi 6= 0. Para analisar até quais valores do aumento do consumoainda permitem a existência desse novo estado de sincronização, nós analisamos a diferença entreas frequências médias dos geradores e dos consumidores, 〈φ〉g − 〈φ〉c em função da nova potênciautilizada δP pelos consumidores durante o período de tempo em que há o pico de consumo paradiferentes valores do parâmetro α. Na gura 5.12, nós vemos que o estado sincronizado com frequên-cia (5.9) para o caso não otimizado persiste até δP ≈ 3 quando α = 1 (e menos ainda para α < 1).Já para a rede optimizada, a diferença entre as frequências é nula para δP ≈ 7.
Capítulo 6
Redes optimizadas para o modelo de
Kuramoto
Nós vimos no capítulo anterior que para o modelo de Kuramoto usado para estudar redeselétricas, as redes optimizadas para sincronização apresentam uma forte correlação negativa entreas frequências naturais de osciladores adjacentes (medida pelo parâmetro p−, que dá a fração delinks ligando geradores a consumidores).
Essa correlação negativa foi vista pela primeira vez em redes optimizadas para favorecer asincronização do modelo de Kuramoto (3.20) [30, 31]. Nesse caso, existe também uma correlaçãopositiva entre a magnitude da frequência natural |ωi| e o grau ki para o i-ésimo oscilador da rede.Essas correlações foram amplamente estudadas numericamente por outros autores e conrmadasem vários tipos de experimentos numéricos [83, 84, 85].
Usando uma aproximação bem recente [29] para o modelo de Kuramoto, que empresta ferra-mentas da teoria de ondas solitárias para descrever a fase dos osciladores sincronizados com umaparametrização única, resultando numa redução dimensional das equações de movimento, nós con-seguimos obter pela primeira vez de forma analítica as condições para a optimização de redescomplexas para favorecer a sincronização do modelo de Kuramoto. Além do mais, estendemos essemétodo para um modelo generalizado, onde há interações positivas e negativas [86]. Para esse caso,também podemos obter analiticamente as condições para otimizar a rede, tanto para favorecersincronização, quanto para suprimir sincronização, tópicos que recentemente foram abordados naliteratura [87, 88, 89].
A ideia básica proposta em [29] é que para os osciladores que estão sincronizados, podemosdescrever aproximadamente as suas fases utilizando a parametrização
θi(t) = α(t)ωi. (6.1)
Essa forma de parametrização (6.1) é obtida da análise de resultados numéricos. Mas note queela é satisfeita quando λ = 0, já que trivialmente α(t) = t. Substituindo essa forma para a variávelθ(t) na equação (3.20) e obrigando que uma certa função erro seja minimizada, a equação resultantepara a variável α(t) é dada por
α = 1 +λ
σ2
N∑i=1
ωi
N∑j=1
Aij sin(α(ωj − ωi)), (6.2)
aonde σ2 =∑N
i=1 ω2i .
A equação (6.2) é importante pois devemos observar que agora toda a dinâmica do modelo deKuramoto é descrita por apenas uma única equação diferencial não linear para a função α, que ésuciente para calcular várias outras grandezas importantes, como o parâmetro de ordem z(t), quepode ser expresso como z(t) =
∑Nj=1 exp (iα(t)ωj) /N , por exemplo.
Vamos supor que a distribuição g(ω) tenha seu máximo em ω = 0, o que pode sempre ser feito
49
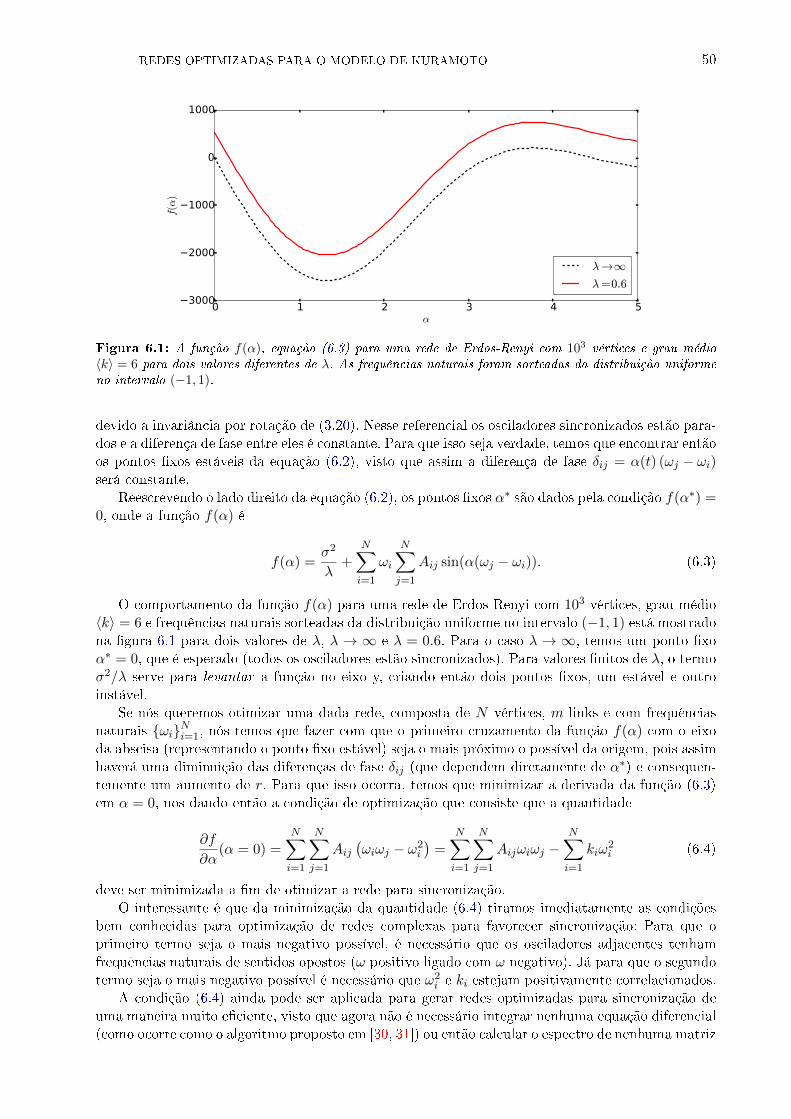
50REDES OPTIMIZADAS PARA O MODELO DE KURAMOTO
0 1 2 3 4 5α
3000
2000
1000
0
1000
f(α)
λ→∞λ=0.6
Figura 6.1: A função f(α), equação (6.3) para uma rede de Erdos-Renyi com 103 vértices e grau médio〈k〉 = 6 para dois valores diferentes de λ. As frequências naturais foram sorteadas da distribuição uniformeno intervalo (−1, 1).
devido a invariância por rotação de (3.20). Nesse referencial os osciladores sincronizados estão para-dos e a diferença de fase entre eles é constante. Para que isso seja verdade, temos que encontrar entãoos pontos xos estáveis da equação (6.2), visto que assim a diferença de fase δij = α(t) (ωj − ωi)será constante.
Reescrevendo o lado direito da equação (6.2), os pontos xos α∗ são dados pela condição f(α∗) =0, onde a função f(α) é
f(α) =σ2
λ+
N∑i=1
ωi
N∑j=1
Aij sin(α(ωj − ωi)). (6.3)
O comportamento da função f(α) para uma rede de Erdos-Renyi com 103 vértices, grau médio〈k〉 = 6 e frequências naturais sorteadas da distribuição uniforme no intervalo (−1, 1) está mostradona gura 6.1 para dois valores de λ, λ → ∞ e λ = 0.6. Para o caso λ → ∞, temos um ponto xoα∗ = 0, que é esperado (todos os osciladores estão sincronizados). Para valores nitos de λ, o termoσ2/λ serve para levantar a função no eixo y, criando então dois pontos xos, um estável e outroinstável.
Se nós queremos otimizar uma dada rede, composta de N vértices, m links e com frequênciasnaturais ωiNi=1, nós temos que fazer com que o primeiro cruzamento da função f(α) com o eixoda abscisa (representando o ponto xo estável) seja o mais próximo o possível da origem, pois assimhaverá uma diminuição das diferenças de fase δij (que dependem diretamente de α∗) e consequen-temente um aumento de r. Para que isso ocorra, temos que minimizar a derivada da função (6.3)em α = 0, nos dando então a condição de optimização que consiste que a quantidade
∂f
∂α(α = 0) =
N∑i=1
N∑j=1
Aij(ωiωj − ω2
i
)=
N∑i=1
N∑j=1
Aijωiωj −N∑i=1
kiω2i (6.4)
deve ser minimizada a m de otimizar a rede para sincronização.O interessante é que da minimização da quantidade (6.4) tiramos imediatamente as condições
bem conhecidas para optimização de redes complexas para favorecer sincronização: Para que oprimeiro termo seja o mais negativo possível, é necessário que os osciladores adjacentes tenhamfrequências naturais de sentidos opostos (ω positivo ligado com ω negativo). Já para que o segundotermo seja o mais negativo possível é necessário que ω2
i e ki estejam positivamente correlacionados.A condição (6.4) ainda pode ser aplicada para gerar redes optimizadas para sincronização de
uma maneira muito eciente, visto que agora não é necessário integrar nenhuma equação diferencial(como ocorre como o algoritmo proposto em [30, 31]) ou então calcular o espectro de nenhuma matriz
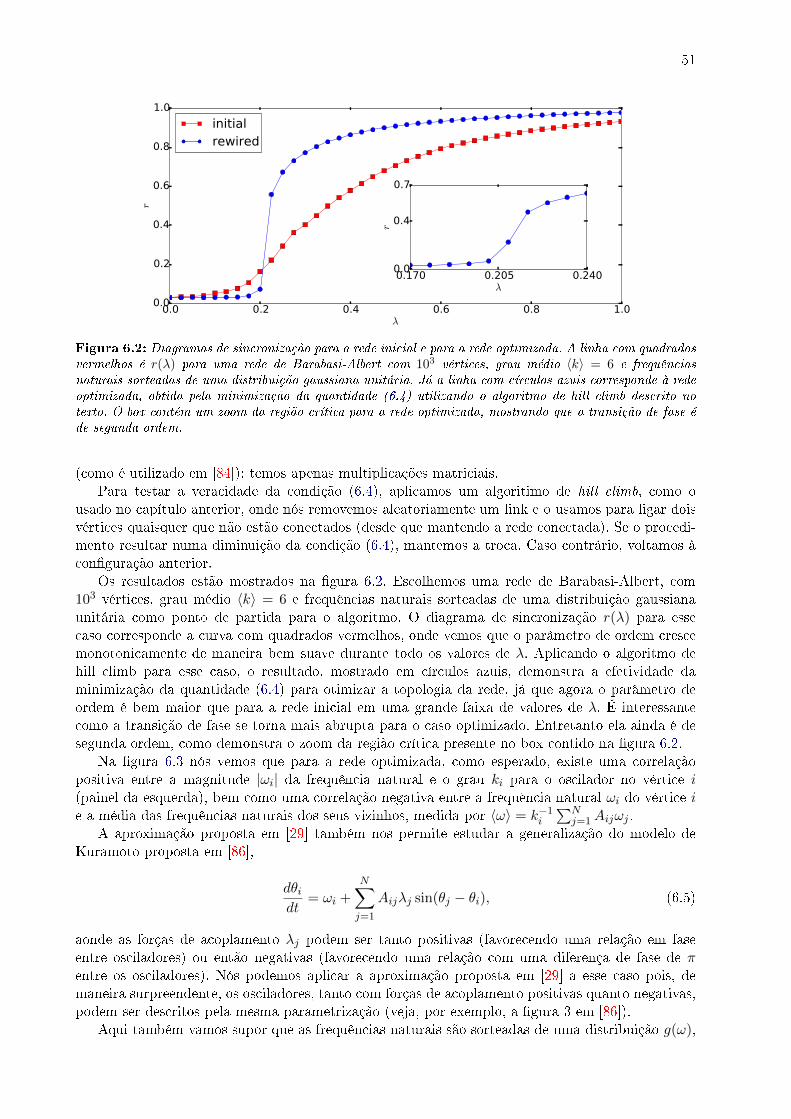
51
0.0 0.2 0.4 0.6 0.8 1.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
initialrewired
0.170 0.205 0.240λ
0.0
0.4
0.7
r
Figura 6.2: Diagramas de sincronização para a rede inicial e para a rede optimizada. A linha com quadradosvermelhos é r(λ) para uma rede de Barabasi-Albert com 103 vértices, grau médio 〈k〉 = 6 e frequênciasnaturais sorteadas de uma distribuição gaussiana unitária. Já a linha com círculos azuis corresponde à redeoptimizada, obtida pela minimização da quantidade (6.4) utilizando o algoritmo de hill climb descrito notexto. O box contém um zoom da região crítica para a rede optimizada, mostrando que a transição de fase éde segunda ordem.
(como é utilizado em [84]): temos apenas multiplicações matriciais.Para testar a veracidade da condição (6.4), aplicamos um algoritimo de hill climb, como o
usado no capítulo anterior, onde nós removemos aleatoriamente um link e o usamos para ligar doisvértices quaisquer que não estão conectados (desde que mantendo a rede conectada). Se o procedi-mento resultar numa diminuição da condição (6.4), mantemos a troca. Caso contrário, voltamos àconguração anterior.
Os resultados estão mostrados na gura 6.2. Escolhemos uma rede de Barabasi-Albert, com103 vértices, grau médio 〈k〉 = 6 e frequências naturais sorteadas de uma distribuição gaussianaunitária como ponto de partida para o algoritmo. O diagrama de sincronização r(λ) para essecaso corresponde a curva com quadrados vermelhos, onde vemos que o parâmetro de ordem crescemonotonicamente de maneira bem suave durante todo os valores de λ. Aplicando o algoritmo dehill climb para esse caso, o resultado, mostrado em círculos azuis, demonstra a efetividade daminimização da quantidade (6.4) para otimizar a topologia da rede, já que agora o parâmetro deordem é bem maior que para a rede inicial em uma grande faixa de valores de λ. É interessantecomo a transição de fase se torna mais abrupta para o caso optimizado. Entretanto ela ainda é desegunda ordem, como demonstra o zoom da região crítica presente no box contido na gura 6.2.
Na gura 6.3 nós vemos que para a rede optimizada, como esperado, existe uma correlaçãopositiva entre a magnitude |ωi| da frequência natural e o grau ki para o oscilador no vértice i(painel da esquerda), bem como uma correlação negativa entre a frequência natural ωi do vértice ie a média das frequências naturais dos seus vizinhos, medida por 〈ω〉 = k−1
i
∑Nj=1Aijωj .
A aproximação proposta em [29] também nos permite estudar a generalização do modelo deKuramoto proposta em [86],
dθidt
= ωi +N∑j=1
Aijλj sin(θj − θi), (6.5)
aonde as forças de acoplamento λj podem ser tanto positivas (favorecendo uma relação em faseentre osciladores) ou então negativas (favorecendo uma relação com uma diferença de fase de πentre os osciladores). Nós podemos aplicar a aproximação proposta em [29] a esse caso pois, demaneira surpreendente, os osciladores, tanto com forças de acoplamento positivas quanto negativas,podem ser descritos pela mesma parametrização (veja, por exemplo, a gura 3 em [86]).
Aqui também vamos supor que as frequências naturais são sorteadas de uma distribuição g(ω),

52REDES OPTIMIZADAS PARA O MODELO DE KURAMOTO
0 10 20 30 40 50 60k
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
ω
4 3 2 1 0 1 2 3 4ω
4
3
2
1
0
1
2
3
4
⟨ ω⟩
Figura 6.3: Nessa gura mostramos as correlações existentes para a rede optimizada. No painel da esquerda,temos a correlação positiva entre a frequência natural ωi e o grau ki do i-ésimo oscilador. Já o painelda direita mostra a correlação negativa entre as frequências naturais de osciladores adjacentes. Temos afrequência natural média 〈ω〉 = k−1
i
∑Nj=1Aijωj em função de ωi
simétrica e unimodal, e vamos supor também que temos uma fração p dos vértices com força deacoplamento positiva λ+ e outra fração 1−p com força de acoplamento negativa λ−. Por m, vamosusar λ+ = 1, o que sempre pode ser feito por meio de uma mudança da escala em que o tempo émedida.
Seguindo os mesmos passos de [29], temos que a equação diferencial para α é dada agora por
α = 1 +1
σ2
N∑i=1
ωi
N∑j=1
Aijλj sin(α(ωj − ωi)), (6.6)
Aqui temos que tomar cuidado com uma pequena complicação, pois diferentemente do modelode Kuramoto (3.20), para o modelo com interações positivas e negativas (6.5), a frequência derotação dos osciladores sincronizados não é mais dada pela frequência média 〈ω〉 =
∑Ni=1 ωi/N ,
mas ela é dada por
Ω =
∑Ni=1 λiωi∑Ni=1 λi
. (6.7)
Esse resultado pode ser obtido se multiplicarmos ambos os lados da equação (6.5) por λi edepois somarmos em relação ao índice i. Como a matriz de adjacência é par em relação aos índicesi e j (Aij = Aji) e o seno da diferença de fase é ímpar (sin(θj − θi) = − sin(θi − θj)) o termoenvolvendo a interação entre os osciladores cancela e exigindo que todos os osciladores tenham amesma frequência Ω obtém-se o resultado (6.7).
Se nós queremos que (6.6) contenha a solução sincronizada, vamos mudar para um referencialque gira com velocidade Ω, dada pela equação (6.7), o que é sempre possível, visto que o modelo(6.5) também é invariante por rotações. Nesse referencial, temos então que encontrar o valor de α∗
tal que α = 0. Da mesma maneira que para o modelo de Kuramoto, podemos reescrever o ladodireito da equação (6.6), de tal modo que o valor de α∗ procurado satisfaz h(α∗) = 0, sendo afunção h(α) dada por
h(α) = 1 +1
σ2
N∑i=1
ωi
N∑j=1
Aijλj sin(α(ωj − ωi)). (6.8)
Note que agora não temos mais α∗ = 0 como um zero da função h(α), pois h(0) = 1, o queé esperado, já que a presença de agentes com λ negativo impede que exista um consenso total na
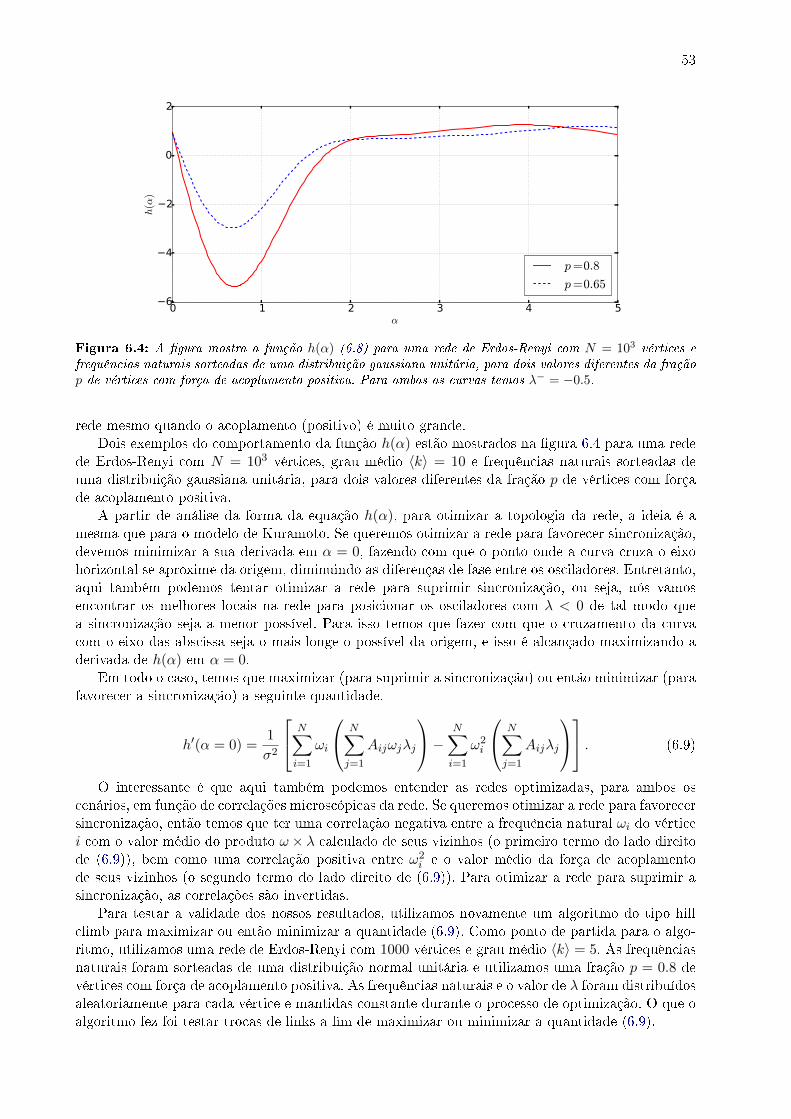
53
0 1 2 3 4 5α
6
4
2
0
2
h(α
)
p=0.8
p=0.65
Figura 6.4: A gura mostra a função h(α) (6.8) para uma rede de Erdos-Renyi com N = 103 vértices efrequências naturais sorteadas de uma distribuição gaussiana unitária, para dois valores diferentes da fraçãop de vértices com força de acoplamento positiva. Para ambas as curvas temos λ− = −0.5.
rede mesmo quando o acoplamento (positivo) é muito grande.Dois exemplos do comportamento da função h(α) estão mostrados na gura 6.4 para uma rede
de Erdos-Renyi com N = 103 vértices, grau médio 〈k〉 = 10 e frequências naturais sorteadas deuma distribuição gaussiana unitária, para dois valores diferentes da fração p de vértices com forçade acoplamento positiva.
A partir de análise da forma da equação h(α), para otimizar a topologia da rede, a ideia é amesma que para o modelo de Kuramoto. Se queremos otimizar a rede para favorecer sincronização,devemos minimizar a sua derivada em α = 0, fazendo com que o ponto onde a curva cruza o eixohorizontal se aproxime da origem, diminuindo as diferenças de fase entre os osciladores. Entretanto,aqui também podemos tentar otimizar a rede para suprimir sincronização, ou seja, nós vamosencontrar os melhores locais na rede para posicionar os osciladores com λ < 0 de tal modo quea sincronização seja a menor possível. Para isso temos que fazer com que o cruzamento da curvacom o eixo das abscissa seja o mais longe o possível da origem, e isso é alcançado maximizando aderivada de h(α) em α = 0.
Em todo o caso, temos que maximizar (para suprimir a sincronização) ou então minimizar (parafavorecer a sincronização) a seguinte quantidade.
h′(α = 0) =1
σ2
N∑i=1
ωi
N∑j=1
Aijωjλj
− N∑i=1
ω2i
N∑j=1
Aijλj
. (6.9)
O interessante é que aqui também podemos entender as redes optimizadas, para ambos oscenários, em função de correlações microscópicas da rede. Se queremos otimizar a rede para favorecersincronização, então temos que ter uma correlação negativa entre a frequência natural ωi do vérticei com o valor médio do produto ω × λ calculado de seus vizinhos (o primeiro termo do lado direitode (6.9)), bem como uma correlação positiva entre ω2
i e o valor médio da força de acoplamentode seus vizinhos (o segundo termo do lado direito de (6.9)). Para otimizar a rede para suprimir asincronização, as correlações são invertidas.
Para testar a validade dos nossos resultados, utilizamos novamente um algoritmo do tipo hillclimb para maximizar ou então minimizar a quantidade (6.9). Como ponto de partida para o algo-ritmo, utilizamos uma rede de Erdos-Renyi com 1000 vértices e grau médio 〈k〉 = 5. As frequênciasnaturais foram sorteadas de uma distribuição normal unitária e utilizamos uma fração p = 0.8 devértices com força de acoplamento positiva. As frequências naturais e o valor de λ foram distribuídosaleatoriamente para cada vértice e mantidas constante durante o processo de optimização. O que oalgoritmo fez foi testar trocas de links a m de maximizar ou minimizar a quantidade (6.9).

54REDES OPTIMIZADAS PARA O MODELO DE KURAMOTO
10-1 100 101 102
t
0.0
0.2
0.4
0.6
0.8
1.0
r(t)
(a)
initial
supress
favor
4 2 0 2 4ωi
4
2
0
2
4
⟨ ωλ⟩Ni
(c)
0 2 4 6 8 10 12 14 16ω 2i
10
0
10
20
30
40
⟨ λ⟩ Ni
(d)
0.0 0.5 1.0 1.5 2.0 2.5 3.0α
4
2
0
2
4
h(α
)
(b)
Figura 6.5: O painel (a) mostra a evolução temporal r(t) para os três casos estudados, a rede original(a linha vermelha tracejada), a rede optimizada para favorecer sincronização (linha azul continua) e a redeoptimizada para suprimir sincronização (a linha pontilhada verde). Por sua vez, o painel (b) mostra ocomportamento da função h(α) (6.8) para os três casos do painel (a). Já os painéis (c) e (d) mostram,respectivamente, a correlação negativa entre a frequência natural ωi do oscilador que se encontra no vérticei e o valor médio do produto 〈ωλ〉 calculado para os vizinhos de i e a correlação positiva entre ω2
i e o valormédio do acoplamento 〈λ〉, novamente calculado para os vizinhos de i. Ambos os painéis mostram o resultadoda rede optimizada para favorecer sincronização do painel (a).
Os resultados estão mostrados na gura 6.5. No painel (a) mostramos a evolução temporaldo parâmetro de ordem r(t) para os três casos, a rede inicial (linha vermelha tracejada), a redeoptimizada para favorecer sincronização (linha azul continua) e a rede optimizada para suprimirsincronização (linha verde pontilhada). É evidente que o algoritmo funciona para os três casos, comespecial atenção para a rede optimizada para suprimir sincronização, onde r(t) mostra agora apenasum comportamento de um ruído próximo a r = 0.
No painel (b) temos as três curvas h(α) correspondentes aos casos mostrados no painel (a). Acurva correspondente a rede optimizada para suprimir sincronização inverte o sentido, eliminandocompletamente a existência de uma solução sincronizada. Já os painéis (c) e (d) mostram, para arede optimizada para favorecer sincronização, a existência das correlações discutidas anteriormente,a saber, a correlação negativa entre ωi e o valor médio 〈λω〉 calculada para os vizinhos do vérticei, painel (c), bem como a correlação positiva entre ω2
i e o valor médio de 〈λ〉, também calculadosobre os vizinhos de i, painel (d).
Nós também encontramos uma correlação positiva entre o grau ki e a magnitude da frequêncianatural ω2
i para a rede optimizada para favorecer sincronização, painel (a) na gura 6.6, mas nãohá nenhuma correlação dessa natureza para a rede optimizada para suprimir sincronização, painel(b) na gura 6.6.
Outro fato interessante é que os osciladores com força de acoplamento negativo estão presentesem vértices com diferentes graus para a rede optimizada para favorecer sincronização. Embora amaioria se encontre nos vértices com grau pequeno, alguns deles estão nos hubs da rede, veja o boxno painel (a) na gura 6.6. Esse resultado é meio contra intuitivo, já que tenderíamos a pensar quepara esse caso temos que popular apenas os vértices de grau pequeno com osciladores de λ negativo.Já para a rede optimizada para suprimir sincronização, os osciladores com λ negativo se encontrammajoritariamente em vértices de grau elevado, como esperado.
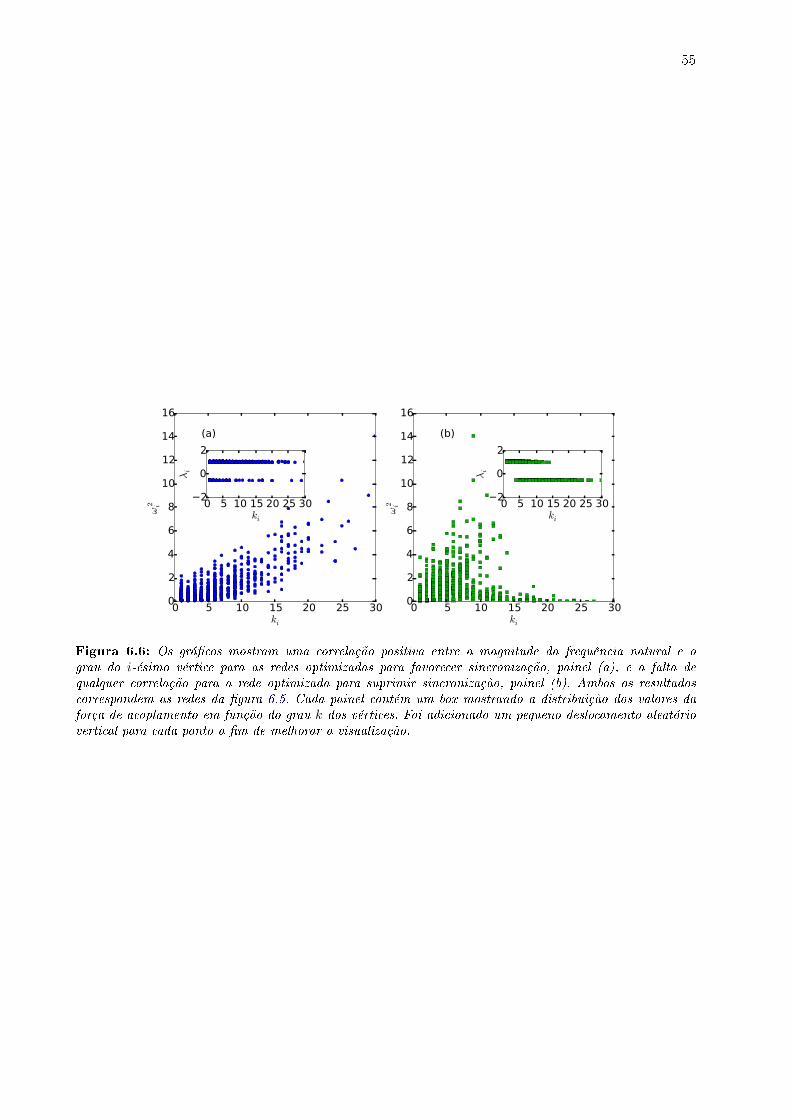
55
0 5 10 15 20 25 30ki
0
2
4
6
8
10
12
14
16
ω2 i
(a)
0 5 10 15 20 25 30ki
0
2
4
6
8
10
12
14
16
ω2 i
(b)
0 5 10 15 20 25 30ki
2
0
2
λi
0 5 10 15 20 25 30ki
2
0
2
λi
Figura 6.6: Os grácos mostram uma correlação positiva entre a magnitude da frequência natural e ograu do i-ésimo vértice para as redes optimizadas para favorecer sincronização, painel (a), e a falta dequalquer correlação para a rede optimizada para suprimir sincronização, painel (b). Ambos os resultadoscorrespondem as redes da gura 6.5. Cada painel contém um box mostrando a distribuição dos valores daforça de acoplamento em função do grau k dos vértices. Foi adicionado um pequeno deslocamento aleatóriovertical para cada ponto a m de melhorar a visualização.

56REDES OPTIMIZADAS PARA O MODELO DE KURAMOTO
Capítulo 7
Conclusões
Nesta tese nós estudamos como se dá a sincronização de um ensemble de osciladores postos emuma rede complexa. Esse é um modelo matemático que encontra aplicações em várias áreas [2, 13].Utilizando o modelo pragmático desenvolvido por Kuramoto [12] nós estudamos primeiramente ofenômeno de sincronização explosiva [28]: a correlação entre propriedades dos osciladores e da redetransforma a transição de fase de segunda ordem para primeira ordem. Isso é interessante por doisaspectos. Primeiro, temos um fenômeno interessante do ponto de vista teórico que surge de umamudança aparentemente banal. Explicar isso não é trivial e necessita do desenvolvimento de novasferramentas. Segundo, a sincronização explosiva abre caminho para criar sistemas de osciladoresque podem ser sincronizados/desincronizados a partir de uma perturbação externa, funcionandocomo um interruptor. Análises preliminares disso já estão sendo feitas [69].
Nós mostramos que não é necessário que a correlação se aplique a todos os vértices. Na verdade,correlacionando apenas alguns dos hubs, uma pequena fração do total de vértices da rede, já éo bastante para que sincronização explosiva ocorra. Além do mais, com esse tipo de correlaçãoparcial, nós também encontramos SE em redes que não apresentariam com correlação total. Nóstambém desenvolvemos um tratamento de campo médio. Porém, devido a complicações matemáticasdecorrentes do fato de tratarmos os vértices de diferentes maneiras dependendo do seu grau, só épossível encontrar o acoplamento crítico para alguns casos especiais.
Um (grande) problema em aberto é desenvolver pelo menos alguma aproximação que nos digainformações da natureza da transição de fase. Podemos prever, dada uma rede e um conjunto defrequências, se a transição é de primeira ou segunda ordem? Podemos medir ambos os valores críticosda força de acoplamento e assim ter uma noção da largura da área do loop de histerese (sem terque calcular numericamente os diagramas de sincronização)?
Recentemente, com o ansatz de Ott-Antonsen [80], é possível analisar várias generalizações domodelo de Kuramoto em redes completas, utilizando um conjunto de poucas equações diferenciaisque governam os possíveis parâmetros de ordem do sistema, possibilitando descrever completamenteos diferentes tipos de comportamento que tais modelos podem apresentar. Embora o ansatz não sejaaplicável diretamente a redes complexas, começaram alguns passos nessa direção, como por exemplo,aplicar as ideias de [80] para facilitar as equações que surgem de modelos de campo médio [81].Esses resultados parecem ser o melhor caminho para se responder as perguntas feitas anteriormente(embora isso provavelmente será um trabalho nada simples).
A grande questão é se sincronização explosiva existe em algum lugar na natureza. Nossa con-tribuição, com o fato de que apenas os hubs precisam estar correlacionados, parece aumentar aschances de encontrar ES em sistemas reais, visto que é muito mais fácil (e menos oneroso) mantercorrelacionados apenas um punhado de vértices do que frações consideráveis da rede. Até o presentemomento, podemos apenas especular se ES possui algum papel importante na natureza.
Nós também estudamos a optimização da sincronização em modelos de redes elétricas, algo queestá sendo bastante discutido [23, 24, 25, 79] ultimamente, visto as mudanças esperadas na forma naqual obtemos energia para nossas indústrias, casas, etc. Nós mostramos que um algoritmo simples eeciente é capaz de otimizar substancialmente as características relacionadas à sincronização, tanto
57
58CONCLUSÕES
em redes sintéticas, quanto em redes reais, como para a rede espanhola, que nós estudamos aqui.Além do mais, é muito interessante notar que o processo de optimização muda a característicada transição de fase para esses sistemas. Para os casos não optimizados, nós encontramos umatransição de fase de segunda ordem. Entretanto, para todos os casos estudados de optimização,as redes passaram a apresentar uma transição de fase de primeira ordem. É interessante tambémo fato de que as redes optimizadas estabilizam para uma gama de parâmetros muito maiores umnovo estado sincronizado com frequência (5.9). Se esse novo estado pode desempenhar algum papelimportante em sistemas reais (e mesmo em modelos mais realistas) é desconhecido até agora.
Usando a recente aproximação proposta em [29], obtivemos pela primeira vez as condições ne-cessárias para otimizar a topologia da rede para sincronização no modelo de Kuramoto de formaanalítica. Também mostramos que podemos estender essa técnica para um modelo onde há inte-rações positivas e negativas [86], onde também podemos obter analiticamente as condições parafavorecer ou suprimir sincronização. Aparentemente, essa técnica para obter de forma analítica acondição para optimização da topologia pode ser aplicada para qualquer sistema desde que conhe-cemos de antemão a frequência de rotação dos osciladores sincronizados e de que sua dinâmicapossa ser descrita com apenas um parâmetro (para os casos estudados, apenas de α). Se podemosestender esse método para outros modelos, ou mesmo utilizá-lo para otimizar a rede para outroscomportamentos, ainda é um problema em aberto.
Por m, embora as análises sobre aproximações para o valor crítico da força de acoplamentotenham sido bem iniciais, aqui tendo um papel apenas pedagógico para mostrar o comportamentodo modelo de Kuramoto sobre redes complexas, acreditamos que uma análise mais séria, levandoem conta um conjunto maior de redes reais, pode nos ajudar a descobrir quais são as característicasprincipais para desencadear o processo de sincronização em redes complexas. Bem recentemente,esse mesmo programa foi aplicado no processo de percolação em redes reais [82].

Apêndice A
Explosive synchronization with partial
degree-frequency correlation
59

Explosive synchronization with partial degree-frequency correlation
Rafael S. Pinto1, ∗ and Alberto Saa2, †1Instituto de Fısica “Gleb Wataghin”, UNICAMP, 13083-859 Campinas, SP, Brazil.
2Departamento de Matematica Aplicada, UNICAMP, 13083-859 Campinas, SP, Brazil.(Dated: January 5, 2015)
Networks of Kuramoto oscillators with a positive correlation between the oscillators frequencies and thedegree of their corresponding vertices exhibits the so-called explosive synchronization behavior, which is nowunder intensive investigation. Here, we study and report explosive synchronization in a situation that has notyet been considered, namely when only a part, typically small, of the vertices is subjected to a degree-frequencycorrelation. Our results show that in order to have explosive synchronization, it suffices to have degree-frequencycorrelations only for the hubs, the vertices with the highest degrees. Moreover, we show that a partial degree-frequency correlation does not only promotes but also allows explosive synchronization to happen in networksfor which a full degree-frequency correlation would not allow it. We perform a mean-field analysis and ourconclusions were corroborated by exhaustive numerical experiments for synthetic networks and also for theundirected and unweighed version of a typical benchmark biological network, namely the neural network of theworm Caenorhabditis elegans. The latter is an explicit example where partial degree-frequency correlation leadsto explosive synchronization with hysteresis, in contrast with the fully correlated case, for which no explosivesynchronization is observed.
PACS numbers: 05.45.Xt, 89.75.Hc, 89.75.Fb
I. INTRODUCTION
Synchronization phenomena [1, 2] manifest themselves inmany and diverse areas. Some examples of current interestinclude the biology of interacting fireflies [3], cellular pro-cesses in populations of yeast [4], audience clapping [5], andpower grids [6], among many others. Perhaps the most suc-cessful attempt to understand synchronization theoretically isthe Kuramoto model [7]. It has been heavily employed in thelast decades as the paradigm to study the onset of synchro-nized behavior among nonidentical interacting agents, since itis one of the few models, together with some generalizations[8], that captures the essential mechanisms of synchronizationand are still amenable to some analytical approaches [9, 10].
The so-called Kuramoto model consists in an ensemble ofN oscillators, with phases and natural frequencies given, re-spectively, by θi and ωi, placed on the vertices of a complexnetwork [11]. The network topology is described by the usualsymmetric adjacency matrix Ai j, with elements Ai j = 1 if thevertices i and j are connected by an edge, and Ai j = 0 other-wise. The oscillators interact according to the equation
dθi
dt= ωi + λ
N∑
j=1
Ai j sin(θ j − θi), (1)
where λ is the coupling constant. The global state of the os-cillators (1) can be conveniently described by using the orderparameter r defined as
reiψ =1N
N∑
j=1
eiθ j , (2)
∗ [email protected]† [email protected]
which corresponds to the centroid of the phases if they areconsidered as a swarm of points moving around the unit circle.For incoherent motion, the phases are scattered on the circlehomogeneously and r ≈ N−1/2 for large N, as a consequenceof the central limit theorem, while for a synchronized statethey should move in a single lump and, consequently, r ≈ 1.The general picture for the Kuramoto model is that, with veryfew exceptions, for small coupling strength λ there is no syn-chronization and therefore r ≈ 0 for large N. However, as oneincreases continuously the coupling constant λ, after passinga critical value λc, whose precise value depends both on thetopology of the network and on the natural frequencies ωi dis-tribution, the order parameter r starts to increase continuously.A sort of smooth second order phase transition from incoher-ence to synchronization takes place here.
Very recently, a new behavior for the Kuramoto model wasdiscovered. In [12], it was shown that in scale free networks,when there is a positive correlation between the natural fre-quencies of the oscillators and the degree of the vertices onwhich they lie, an abrupt first order transition from inco-herence to synchronization, named explosive synchronization(ES), takes place. Typically, we also have a hysteresis behav-ior, and the forward and backward continuations (r versus λdiagram) do not coincide. In the simplest case exhibiting ES,the natural frequency ωi of a given oscillator equals its vertexdegree ki,
ωi = ki =
N∑
j=1
Ai j. (3)
Explosive synchronization has also been observed in manyother systems, as the retarded Kuramoto model [13], thesecond-order Kuramoto model [14], in networks of FitzHugh-Nagumo oscillators [15], and also in a network of chaoticRosller oscillators [16], allowing, in this case, an experimentalobservation of ES in electronic circuits. A mean-field approx-imation to explosive synchronization was applied in [17]. We

2
can also mention that a relation between explosive percolation[18] and the generalized Kuramoto model proposed in [19]was discussed in [20]. We stress that there are other mech-anisms capable of inducing first order phase transitions. Forinstance, in [21], an analytical treatment for first order phasetransitions for synchronization is presented for the case of aKuramoto model with uniform distribution of the natural fre-quencies. The situation corresponding to ES is different, thefrequencies are not randomly distributed, but subjected to therestriction (3).
Many works have recently been devoted to understand andto generalize the occurrence of explosive synchronization toother settings as, for instance, for weighted networks [19, 22],where the coupling constant is no longer the same for all ver-tices, but its value varies for each pair of connected oscillatorsand may depend on the values of their natural frequencies. In[23], starting from a given natural frequencies distribution, analgorithm was described to construct a network of oscillatorexhibiting ES. However, in all these cases, rather strong con-ditions to obtain ES are assumed. A first step to overcomethis limitation was proposed in [24], where its shown that theaddition of a quenched disorder to the degree-frequency cor-relation not only could maintain the ES, but could also induceES in some kinds of networks without heterogeneous degreedistributions.
In this paper, we take another route and investigate ES ina Kuramoto model where only a few of the vertices have adegree-frequency correlation. We notice that the problem ofpartial correlation was briefly analyzed in [12] for the case ofrandom correlations. They have shown that for a scale freenetwork with exponent γ = 2.4, no ES was seen when lessthan around 50% of the vertices had degree-frequency corre-lation. By means of a mean-field analysis, corroborated byexhaustive numerical experiments, we show that, in order tohave ES, it suffices that the degree-frequency correlation holdsonly for the hubs, the vertices with highest degree. We havefound ES, for instance, in Barabasi-Albert networks with only10% of the vertices subjected to degree-frequency correlation.More interestingly, we show that by restricting the degree-frequency correlation to the hubs does not only promotes ES,but also allows it to happen in networks where the full degree-frequency correlation would not allow it. As we will see, thisis the case, for instance, of a typical benchmark biological net-work in the field: the neural network of the worm Caenorhab-ditis elegans.
II. A MEAN-FIELD APPROACH
We will follow here the approach employed, for instance,in [25]. For our networks, only vertices with degree k largerthan a threshold k∗ exhibit the degree-frequency correlation(3), whereas other vertices have random natural frequencieswith distribution g(ω). The corresponding joint probabilitydistribution for a vertex with degree k and natural frequencyω is given by
G(ω, k) =[δ(ω − k)P(k) − g(w)P(k)
]H(k − k∗) + g(w)P(k),
(4)
where δ(x), H(x), and P(k) are, respectively, the Dirac deltaand the Heaviside step functions, and the network degree dis-tribution. Notice that
∫dωG(ω, k) = P(k) (5)
and∫
dk G(ω, k) = P(ω)H(ω − k∗) + αg(w), (6)
where
α =
∫ k∗
kmin
P(k) dk, (7)
with kmin standing for the network minimal degree. Further-more, the network averages degree and frequency are given,respectively, by
〈k〉 =
∫dω
∫dk kG(ω, k) =
∫ ∞
kmin
kP(k) dk (8)
and
Ω =
∫dk
∫dωωG(ω, k) =
∫ ∞
k∗kP(k) dk + α〈ω〉, (9)
where
〈ω〉 =
∫ ∞
−∞ωg(ω) dω. (10)
Let us now consider the distribution density of oscillatorsρ(k, ω, θ, t) of vertices with phase θ at a time t, for given val-ues of the degree k and frequency ω, which is assumed to benormalized as
∫ 2π
0ρ(k, ω; θ, t) dθ = 1. (11)
The probability P of a randomly chosen edge be attached to adegree k vertex with phase θ and frequency ω at time t is givenby
P =kG(ω, k)ρ(k, ω; θ, t)
〈k〉 . (12)
The usual mean-field limit [25] for the Kuramoto networkconsists in employing (12) in the approximation of the righthanded side of (1) for the description of the network averagephase θ(t)
dθdt
= ω +λk〈k〉
∫dω′
∫dk′ k′G(ω′, k′) × (13)
∫dθ′ρ(k′, ω′; θ′, t) sin(θ − θ′).
We now introduce the order parameter
reiψ(t) =1〈k〉
∫dω′
∫dk′ k′G(ω′, k′)
∫dθ′ρ(k′, ω′; θ′, t)eiθ′ ,
(14)
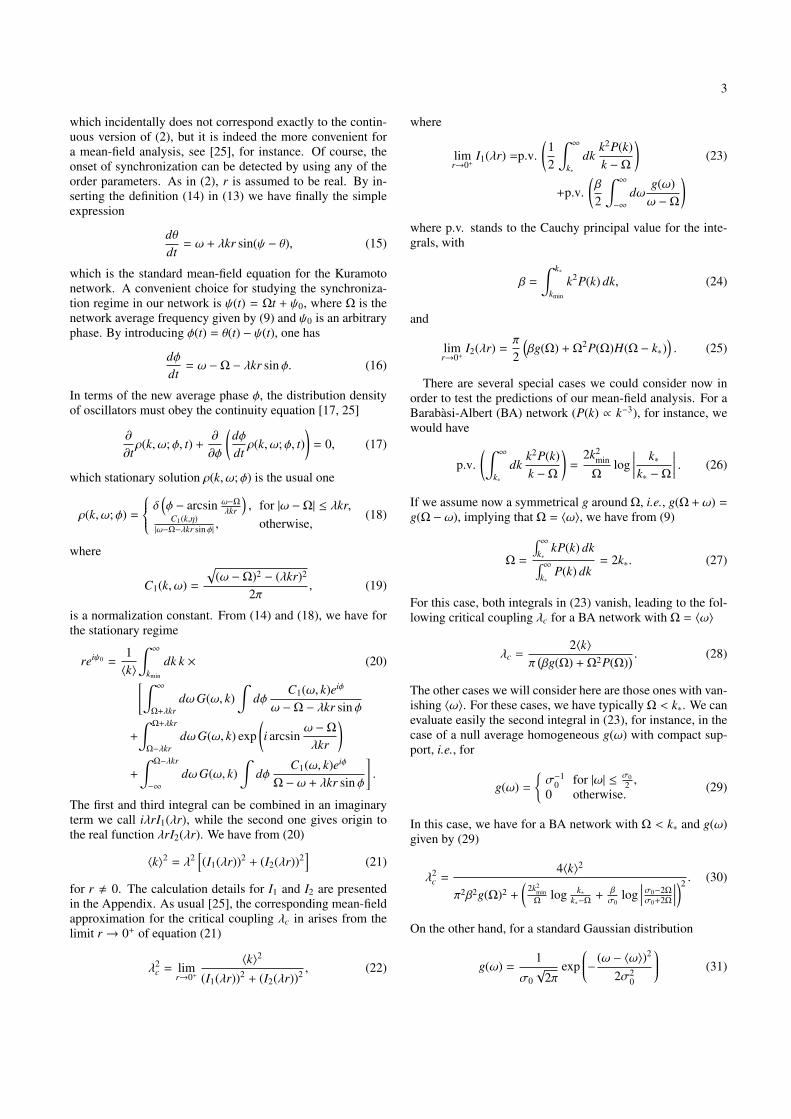
3
which incidentally does not correspond exactly to the contin-uous version of (2), but it is indeed the more convenient fora mean-field analysis, see [25], for instance. Of course, theonset of synchronization can be detected by using any of theorder parameters. As in (2), r is assumed to be real. By in-serting the definition (14) in (13) we have finally the simpleexpression
dθdt
= ω + λkr sin(ψ − θ), (15)
which is the standard mean-field equation for the Kuramotonetwork. A convenient choice for studying the synchroniza-tion regime in our network is ψ(t) = Ωt + ψ0, where Ω is thenetwork average frequency given by (9) and ψ0 is an arbitraryphase. By introducing φ(t) = θ(t) − ψ(t), one has
dφdt
= ω −Ω − λkr sin φ. (16)
In terms of the new average phase φ, the distribution densityof oscillators must obey the continuity equation [17, 25]
∂
∂tρ(k, ω; φ, t) +
∂
∂φ
(dφdtρ(k, ω; φ, t)
)= 0, (17)
which stationary solution ρ(k, ω; φ) is the usual one
ρ(k, ω; φ) =
δ(φ − arcsin ω−Ω
λkr
), for |ω −Ω| ≤ λkr,
C1(k,η)|ω−Ω−λkr sin φ| , otherwise,
(18)
where
C1(k, ω) =
√(ω −Ω)2 − (λkr)2
2π, (19)
is a normalization constant. From (14) and (18), we have forthe stationary regime
reiψ0 =1〈k〉
∫ ∞
kmin
dk k × (20)[∫ ∞
Ω+λkrdωG(ω, k)
∫dφ
C1(ω, k)eiφ
ω −Ω − λkr sin φ
+
∫ Ω+λkr
Ω−λkrdωG(ω, k) exp
(i arcsin
ω −Ω
λkr
)
+
∫ Ω−λkr
−∞dωG(ω, k)
∫dφ
C1(ω, k)eiφ
Ω − ω + λkr sin φ
].
The first and third integral can be combined in an imaginaryterm we call iλrI1(λr), while the second one gives origin tothe real function λrI2(λr). We have from (20)
〈k〉2 = λ2[(I1(λr))2 + (I2(λr))2
](21)
for r , 0. The calculation details for I1 and I2 are presentedin the Appendix. As usual [25], the corresponding mean-fieldapproximation for the critical coupling λc in arises from thelimit r → 0+ of equation (21)
λ2c = lim
r→0+
〈k〉2(I1(λr))2 + (I2(λr))2 , (22)
where
limr→0+
I1(λr) =p.v.(
12
∫ ∞
k∗dk
k2P(k)k −Ω
)(23)
+p.v.(β
2
∫ ∞
−∞dω
g(ω)ω −Ω
)
where p.v. stands to the Cauchy principal value for the inte-grals, with
β =
∫ k∗
kmin
k2P(k) dk, (24)
and
limr→0+
I2(λr) =π
2
(βg(Ω) + Ω2P(Ω)H(Ω − k∗)
). (25)
There are several special cases we could consider now inorder to test the predictions of our mean-field analysis. For aBarabasi-Albert (BA) network (P(k) ∝ k−3), for instance, wewould have
p.v.(∫ ∞
k∗dk
k2P(k)k −Ω
)=
2k2min
Ωlog
∣∣∣∣∣k∗
k∗ −Ω
∣∣∣∣∣ . (26)
If we assume now a symmetrical g around Ω, i.e., g(Ω +ω) =
g(Ω − ω), implying that Ω = 〈ω〉, we have from (9)
Ω =
∫ ∞k∗
kP(k) dk∫ ∞
k∗P(k) dk
= 2k∗. (27)
For this case, both integrals in (23) vanish, leading to the fol-lowing critical coupling λc for a BA network with Ω = 〈ω〉
λc =2〈k〉
π(βg(Ω) + Ω2P(Ω)
) . (28)
The other cases we will consider here are those ones with van-ishing 〈ω〉. For these cases, we have typically Ω < k∗. We canevaluate easily the second integral in (23), for instance, in thecase of a null average homogeneous g(ω) with compact sup-port, i.e., for
g(ω) =
σ−1
0 for |ω| ≤ σ02 ,
0 otherwise. (29)
In this case, we have for a BA network with Ω < k∗ and g(ω)given by (29)
λ2c =
4〈k〉2
π2β2g(Ω)2 +
(2k2
minΩ
log k∗k∗−Ω
+βσ0
log∣∣∣∣σ0−2Ω
σ0+2Ω
∣∣∣∣)2 . (30)
On the other hand, for a standard Gaussian distribution
g(ω) =1
σ0√
2πexp
− (ω − 〈ω〉)2
2σ20
(31)

4
we have (see the Appendix for the calculation details)
p.v.(∫ ∞
−∞dω
g(ω)ω −Ω
)=
1σ0
√π
2erfi
( 〈ω〉 −Ω√2σ0
)×
exp− (〈ω〉 −Ω)2
2σ20
, (32)
giving origin consequently to other expression for λc in themean-field approximation. Notice that the first integral in (23)cannot be evaluated in general in term of elementary functionsas it was done for BA networks. Generic power laws degreedistributions P(k) ∝ k−λ, with real λ > 2, for instance, areexamples of cases where the integral cannot be evaluated inclosed form. However, a series solution is indeed available,see the Appendix. For P(k) ∝ k−n with integer n > 2, we have
p.v.(∫ ∞
k∗dk
k2P(k)k −Ω
)=(n − 1)k∗
(k∗Ω
)n−2 (log
∣∣∣∣∣k∗
k∗ −Ω
∣∣∣∣∣
−n−3∑
`=1
1`
(Ω
k∗
)` , (33)
For a exponential distribution (P(k) ∝ e−γk) , on the otherhand, it is possible to evaluate the integral, leading to
p.v.(∫ ∞
k∗dk
k2P(k)k −Ω
)=
k∗ + 1γ
+Ω−γΩ2e−γΩ+k∗Ei(γ(Ω−k∗)),
(34)where
Ei(x) = −∫ ∞
−x
e−t
tdt (35)
is the standard exponential integral function.Several important conclusions arises from our predicted
value of λc. For instance, consider the case k∗ → ∞ or,in other words, the case without any degree-frequency cor-relation. Let us also assume g(ω) = g(−ω) and, henceΩ = 〈ω〉 = 0. In this case, we recover the usual result [25]
λc =2〈k〉πβg(0)
, (36)
with β = 〈k2〉. For a network such that β = 〈k2〉 → ∞ (thisis the case, for instance, of BA networks), we would haveλc → 0 as it is well known, meaning that no first-order tran-sition should be present, i.e., synchronization should appearcontinuously as λc increases starting from zero. This is acase where we should expect neither explosive synchroniza-tion nor second order transitions. Let us now consider in thissame network a partial degree-frequency correlation, i.e., letus consider the case of finite k∗. Notice that β now is finite.In fact, with only one possible exception, all the terms con-tributing to the denominator of λc in (22) will be finite in thiscase, implying that λc > 0, i.e., there must exist a sudden tran-sition from r = 0 (incoherence) to r , 0 (synchronization).In other words, a partial degree-frequency correlation sufficesto induce a phase transition in this network. As we will see,this transition can be an explosive synchronization or a second
order phase transition, depending on the value of Ω. The ex-ception quoted above corresponds to the case where Ω = k∗,which from (26) implies in I1(0+) → ∞ and, hence, the sup-pression of ES. See the Appendix for further details.
We need also to comment the case k∗ = kmin, i.e., the caseof total correlation considered, for instance, in [17]. For thiscase, β = 0 and all references to g(ω) in the critical couplingexpressions disappear, as it is indeed expected, and we have,for a BA network,
λc =2〈k〉
π〈k〉2P(〈k〉) , (37)
since Ω = 〈k〉 = 2k∗. This is the expression obtained in [17].However, it is valid only for BA networks, for which (26) van-ishes. For any other degree distribution function, one needs toinclude the term corresponding to I1(0+). This extra term isabsent in the analysis of [17]. Anyway, it does not alter theprediction of finite λc, i.e., the presence of a phase transitionin the fully correlated case for any degree distribution func-tion. For a fully correlated network with a degree distributionP(k) ∝ k−n, n > 2, we have
Ω = 〈k〉 =n − 1n − 2
kmin, (38)
and the correct expression for the critical coupling λc is
λc =2 (n−1)n−2
(n−2)n−1
√π2 +
(log(n − 2) −∑n−3
`=11`
(n−1n−2
)`)2, (39)
valid for integer n > 2.
III. NUMERICAL RESULTS
We have performed exhaustive numerical experiments notonly to test our mean-field analysis, but mainly to gain someknowledge in situations for which the mean-field approachcannot be directly employed. This is the case, for instance, ofnetworks which we do not know a priori the degree distribu-tion P(k). Another situation is the discerning of first and sec-ond order phase transitions, as we will see below. In general,the process of synchronization can be numerically analyzedby computing the forward and backward synchronization di-agrams r(λ) according to Ref. [12]. The forward continua-tion is performed by starting with an initial value λ0 of thecoupling constant. We numerically solve equations (1) withrandom initial conditions for λ = λ0 and evaluate the orderparameter r(λ) in the stationary regime. Then we increase thecoupling by a small value δλ and, using the outcome of thelast run as the initial condition, calculate the new value of thestationary order parameter r(λ + δλ). We repeat these stepsuntil a maximal value λ1 is reached. In the same way, thebackward continuation is done by decreasing the coupling bysteps of size δλ from the maximal value of λ1. In all of the re-sults presented here, we used δλ = 0.02, but our conclusions
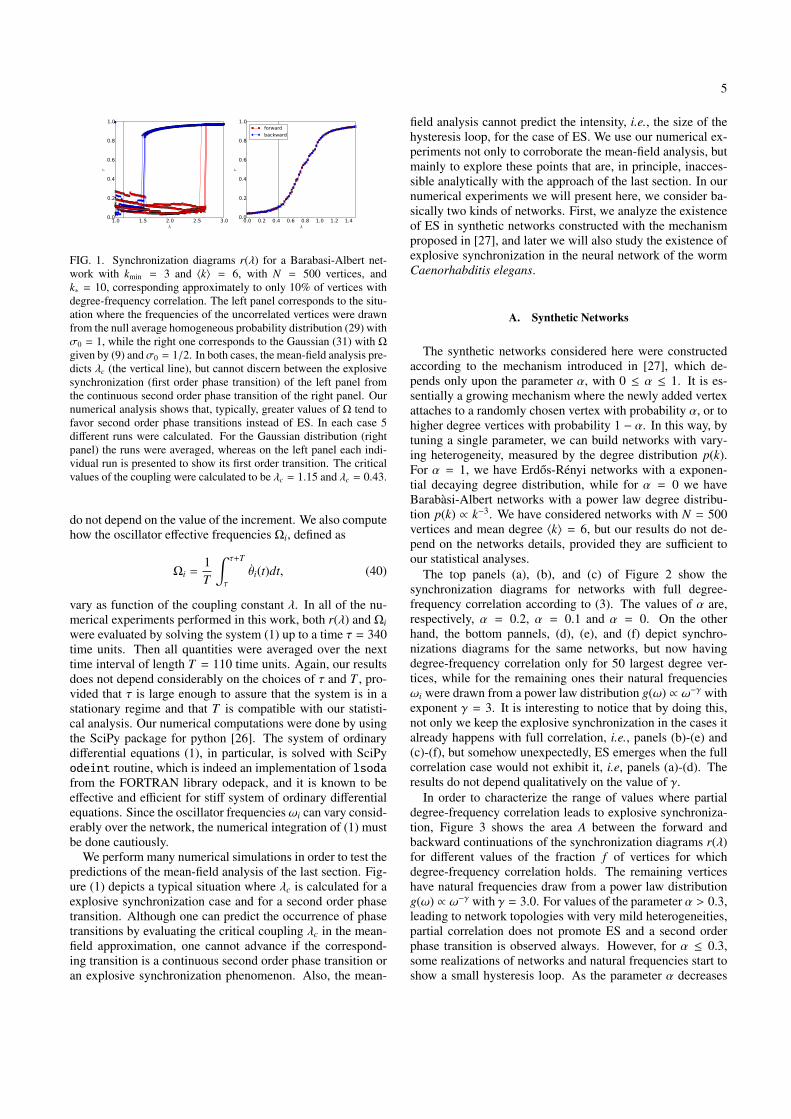
5
1.0 1.5 2.0 2.5 3.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
backward
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4λ
0.0
0.2
0.4
0.6
0.8
1.0
r
forward
backward
FIG. 1. Synchronization diagrams r(λ) for a Barabasi-Albert net-work with kmin = 3 and 〈k〉 = 6, with N = 500 vertices, andk∗ = 10, corresponding approximately to only 10% of vertices withdegree-frequency correlation. The left panel corresponds to the situ-ation where the frequencies of the uncorrelated vertices were drawnfrom the null average homogeneous probability distribution (29) withσ0 = 1, while the right one corresponds to the Gaussian (31) with Ω
given by (9) andσ0 = 1/2. In both cases, the mean-field analysis pre-dicts λc (the vertical line), but cannot discern between the explosivesynchronization (first order phase transition) of the left panel fromthe continuous second order phase transition of the right panel. Ournumerical analysis shows that, typically, greater values of Ω tend tofavor second order phase transitions instead of ES. In each case 5different runs were calculated. For the Gaussian distribution (rightpanel) the runs were averaged, whereas on the left panel each indi-vidual run is presented to show its first order transition. The criticalvalues of the coupling were calculated to be λc = 1.15 and λc = 0.43.
do not depend on the value of the increment. We also computehow the oscillator effective frequencies Ωi, defined as
Ωi =1T
∫ τ+T
τ
θi(t)dt, (40)
vary as function of the coupling constant λ. In all of the nu-merical experiments performed in this work, both r(λ) and Ωiwere evaluated by solving the system (1) up to a time τ = 340time units. Then all quantities were averaged over the nexttime interval of length T = 110 time units. Again, our resultsdoes not depend considerably on the choices of τ and T , pro-vided that τ is large enough to assure that the system is in astationary regime and that T is compatible with our statisti-cal analysis. Our numerical computations were done by usingthe SciPy package for python [26]. The system of ordinarydifferential equations (1), in particular, is solved with SciPyodeint routine, which is indeed an implementation of lsodafrom the FORTRAN library odepack, and it is known to beeffective and efficient for stiff system of ordinary differentialequations. Since the oscillator frequenciesωi can vary consid-erably over the network, the numerical integration of (1) mustbe done cautiously.
We perform many numerical simulations in order to test thepredictions of the mean-field analysis of the last section. Fig-ure (1) depicts a typical situation where λc is calculated for aexplosive synchronization case and for a second order phasetransition. Although one can predict the occurrence of phasetransitions by evaluating the critical coupling λc in the mean-field approximation, one cannot advance if the correspond-ing transition is a continuous second order phase transition oran explosive synchronization phenomenon. Also, the mean-
field analysis cannot predict the intensity, i.e., the size of thehysteresis loop, for the case of ES. We use our numerical ex-periments not only to corroborate the mean-field analysis, butmainly to explore these points that are, in principle, inacces-sible analytically with the approach of the last section. In ournumerical experiments we will present here, we consider ba-sically two kinds of networks. First, we analyze the existenceof ES in synthetic networks constructed with the mechanismproposed in [27], and later we will also study the existence ofexplosive synchronization in the neural network of the wormCaenorhabditis elegans.
A. Synthetic Networks
The synthetic networks considered here were constructedaccording to the mechanism introduced in [27], which de-pends only upon the parameter α, with 0 ≤ α ≤ 1. It is es-sentially a growing mechanism where the newly added vertexattaches to a randomly chosen vertex with probability α, or tohigher degree vertices with probability 1 − α. In this way, bytuning a single parameter, we can build networks with vary-ing heterogeneity, measured by the degree distribution p(k).For α = 1, we have Erdos-Renyi networks with a exponen-tial decaying degree distribution, while for α = 0 we haveBarabasi-Albert networks with a power law degree distribu-tion p(k) ∝ k−3. We have considered networks with N = 500vertices and mean degree 〈k〉 = 6, but our results do not de-pend on the networks details, provided they are sufficient toour statistical analyses.
The top panels (a), (b), and (c) of Figure 2 show thesynchronization diagrams for networks with full degree-frequency correlation according to (3). The values of α are,respectively, α = 0.2, α = 0.1 and α = 0. On the otherhand, the bottom pannels, (d), (e), and (f) depict synchro-nizations diagrams for the same networks, but now havingdegree-frequency correlation only for 50 largest degree ver-tices, while for the remaining ones their natural frequenciesωi were drawn from a power law distribution g(ω) ∝ ω−γ withexponent γ = 3. It is interesting to notice that by doing this,not only we keep the explosive synchronization in the cases italready happens with full correlation, i.e., panels (b)-(e) and(c)-(f), but somehow unexpectedly, ES emerges when the fullcorrelation case would not exhibit it, i.e, panels (a)-(d). Theresults do not depend qualitatively on the value of γ.
In order to characterize the range of values where partialdegree-frequency correlation leads to explosive synchroniza-tion, Figure 3 shows the area A between the forward andbackward continuations of the synchronization diagrams r(λ)for different values of the fraction f of vertices for whichdegree-frequency correlation holds. The remaining verticeshave natural frequencies draw from a power law distributiong(ω) ∝ ω−γ with γ = 3.0. For values of the parameter α > 0.3,leading to network topologies with very mild heterogeneities,partial correlation does not promote ES and a second orderphase transition is observed always. However, for α ≤ 0.3,some realizations of networks and natural frequencies start toshow a small hysteresis loop. As the parameter α decreases
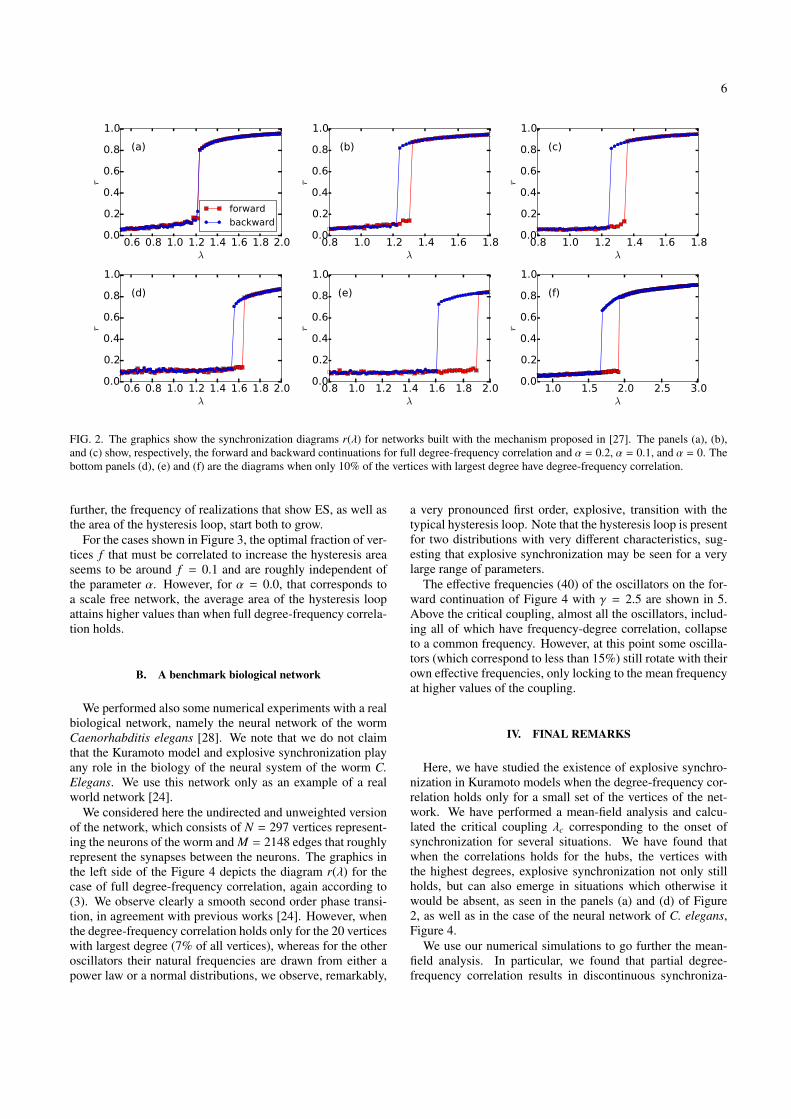
6
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(a)
forward
backward
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(d)
0.8 1.0 1.2 1.4 1.6 1.8λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(b)
0.8 1.0 1.2 1.4 1.6 1.8 2.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r(e)
0.8 1.0 1.2 1.4 1.6 1.8λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
1.0 1.5 2.0 2.5 3.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
(f)
FIG. 2. The graphics show the synchronization diagrams r(λ) for networks built with the mechanism proposed in [27]. The panels (a), (b),and (c) show, respectively, the forward and backward continuations for full degree-frequency correlation and α = 0.2, α = 0.1, and α = 0. Thebottom panels (d), (e) and (f) are the diagrams when only 10% of the vertices with largest degree have degree-frequency correlation.
further, the frequency of realizations that show ES, as well asthe area of the hysteresis loop, start both to grow.
For the cases shown in Figure 3, the optimal fraction of ver-tices f that must be correlated to increase the hysteresis areaseems to be around f = 0.1 and are roughly independent ofthe parameter α. However, for α = 0.0, that corresponds toa scale free network, the average area of the hysteresis loopattains higher values than when full degree-frequency correla-tion holds.
B. A benchmark biological network
We performed also some numerical experiments with a realbiological network, namely the neural network of the wormCaenorhabditis elegans [28]. We note that we do not claimthat the Kuramoto model and explosive synchronization playany role in the biology of the neural system of the worm C.Elegans. We use this network only as an example of a realworld network [24].
We considered here the undirected and unweighted versionof the network, which consists of N = 297 vertices represent-ing the neurons of the worm and M = 2148 edges that roughlyrepresent the synapses between the neurons. The graphics inthe left side of the Figure 4 depicts the diagram r(λ) for thecase of full degree-frequency correlation, again according to(3). We observe clearly a smooth second order phase transi-tion, in agreement with previous works [24]. However, whenthe degree-frequency correlation holds only for the 20 verticeswith largest degree (7% of all vertices), whereas for the otheroscillators their natural frequencies are drawn from either apower law or a normal distributions, we observe, remarkably,
a very pronounced first order, explosive, transition with thetypical hysteresis loop. Note that the hysteresis loop is presentfor two distributions with very different characteristics, sug-esting that explosive synchronization may be seen for a verylarge range of parameters.
The effective frequencies (40) of the oscillators on the for-ward continuation of Figure 4 with γ = 2.5 are shown in 5.Above the critical coupling, almost all the oscillators, includ-ing all of which have frequency-degree correlation, collapseto a common frequency. However, at this point some oscilla-tors (which correspond to less than 15%) still rotate with theirown effective frequencies, only locking to the mean frequencyat higher values of the coupling.
IV. FINAL REMARKS
Here, we have studied the existence of explosive synchro-nization in Kuramoto models when the degree-frequency cor-relation holds only for a small set of the vertices of the net-work. We have performed a mean-field analysis and calcu-lated the critical coupling λc corresponding to the onset ofsynchronization for several situations. We have found thatwhen the correlations holds for the hubs, the vertices withthe highest degrees, explosive synchronization not only stillholds, but can also emerge in situations which otherwise itwould be absent, as seen in the panels (a) and (d) of Figure2, as well as in the case of the neural network of C. elegans,Figure 4.
We use our numerical simulations to go further the mean-field analysis. In particular, we found that partial degree-frequency correlation results in discontinuous synchroniza-
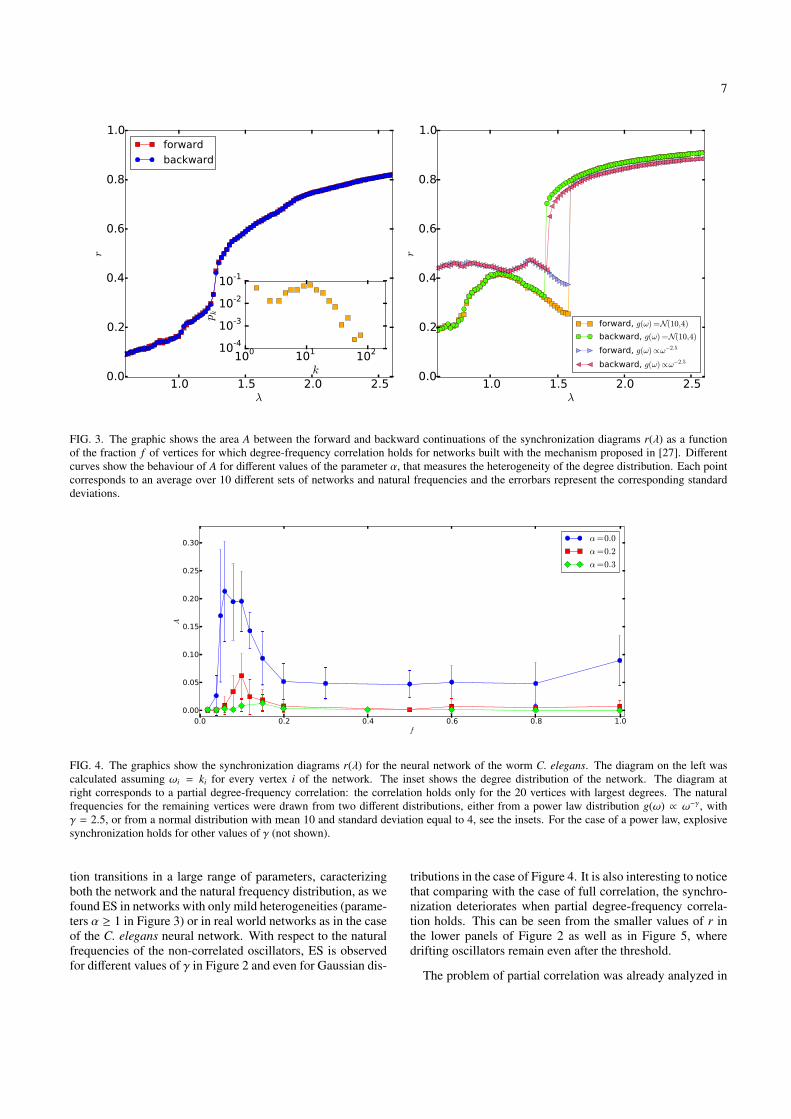
7
1.0 1.5 2.0 2.5λ
0.0
0.2
0.4
0.6
0.8
1.0
r
forward
backward
1.0 1.5 2.0 2.5λ
0.0
0.2
0.4
0.6
0.8
1.0
r
forward, g(ω) =N(10,4)
backward, g(ω) =N(10,4)
forward, g(ω)∝ω−2.5
backward, g(ω)∝ω−2.5100 101 102
k
10-4
10-3
10-2
10-1
pk
FIG. 3. The graphic shows the area A between the forward and backward continuations of the synchronization diagrams r(λ) as a functionof the fraction f of vertices for which degree-frequency correlation holds for networks built with the mechanism proposed in [27]. Differentcurves show the behaviour of A for different values of the parameter α, that measures the heterogeneity of the degree distribution. Each pointcorresponds to an average over 10 different sets of networks and natural frequencies and the errorbars represent the corresponding standarddeviations.
0.0 0.2 0.4 0.6 0.8 1.0f
0.00
0.05
0.10
0.15
0.20
0.25
0.30
A
α=0.0
α=0.2
α=0.3
FIG. 4. The graphics show the synchronization diagrams r(λ) for the neural network of the worm C. elegans. The diagram on the left wascalculated assuming ωi = ki for every vertex i of the network. The inset shows the degree distribution of the network. The diagram atright corresponds to a partial degree-frequency correlation: the correlation holds only for the 20 vertices with largest degrees. The naturalfrequencies for the remaining vertices were drawn from two different distributions, either from a power law distribution g(ω) ∝ ω−γ, withγ = 2.5, or from a normal distribution with mean 10 and standard deviation equal to 4, see the insets. For the case of a power law, explosivesynchronization holds for other values of γ (not shown).
tion transitions in a large range of parameters, caracterizingboth the network and the natural frequency distribution, as wefound ES in networks with only mild heterogeneities (parame-ters α ≥ 1 in Figure 3) or in real world networks as in the caseof the C. elegans neural network. With respect to the naturalfrequencies of the non-correlated oscillators, ES is observedfor different values of γ in Figure 2 and even for Gaussian dis-
tributions in the case of Figure 4. It is also interesting to noticethat comparing with the case of full correlation, the synchro-nization deteriorates when partial degree-frequency correla-tion holds. This can be seen from the smaller values of r inthe lower panels of Figure 2 as well as in Figure 5, wheredrifting oscillators remain even after the threshold.
The problem of partial correlation was already analyzed in
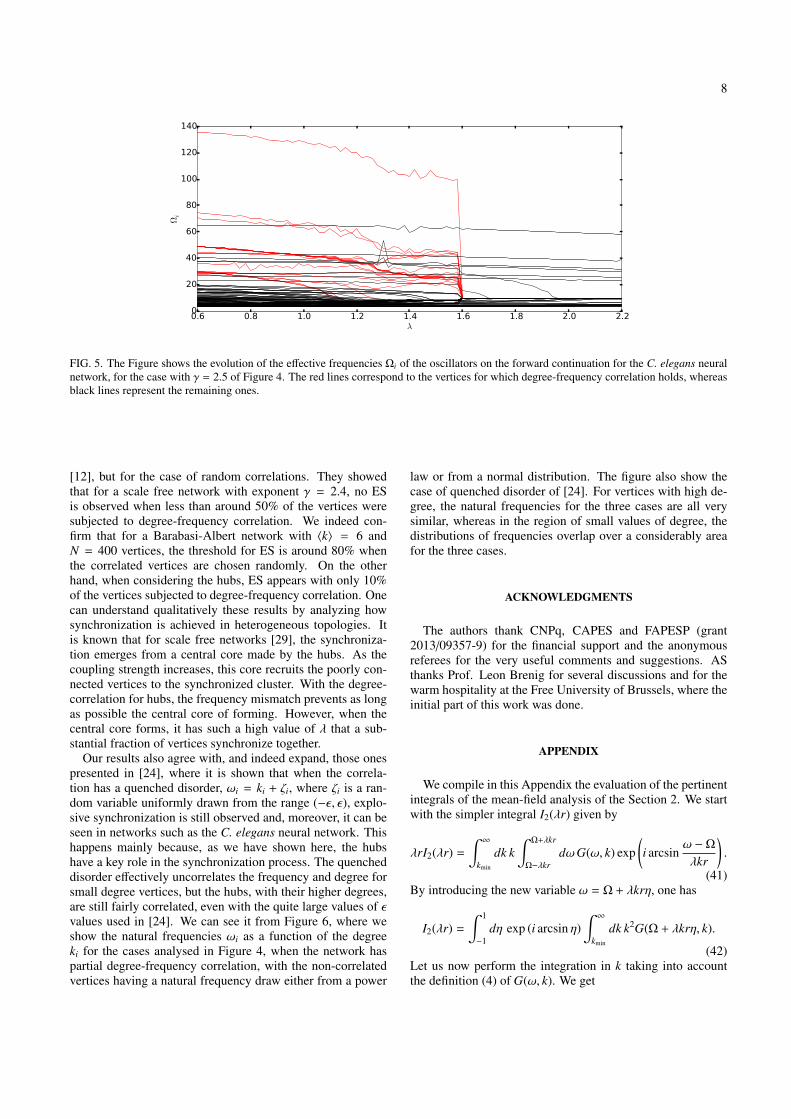
8
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2λ
0
20
40
60
80
100
120
140
Ωi
FIG. 5. The Figure shows the evolution of the effective frequencies Ωi of the oscillators on the forward continuation for the C. elegans neuralnetwork, for the case with γ = 2.5 of Figure 4. The red lines correspond to the vertices for which degree-frequency correlation holds, whereasblack lines represent the remaining ones.
[12], but for the case of random correlations. They showedthat for a scale free network with exponent γ = 2.4, no ESis observed when less than around 50% of the vertices weresubjected to degree-frequency correlation. We indeed con-firm that for a Barabasi-Albert network with 〈k〉 = 6 andN = 400 vertices, the threshold for ES is around 80% whenthe correlated vertices are chosen randomly. On the otherhand, when considering the hubs, ES appears with only 10%of the vertices subjected to degree-frequency correlation. Onecan understand qualitatively these results by analyzing howsynchronization is achieved in heterogeneous topologies. Itis known that for scale free networks [29], the synchroniza-tion emerges from a central core made by the hubs. As thecoupling strength increases, this core recruits the poorly con-nected vertices to the synchronized cluster. With the degree-correlation for hubs, the frequency mismatch prevents as longas possible the central core of forming. However, when thecentral core forms, it has such a high value of λ that a sub-stantial fraction of vertices synchronize together.
Our results also agree with, and indeed expand, those onespresented in [24], where it is shown that when the correla-tion has a quenched disorder, ωi = ki + ζi, where ζi is a ran-dom variable uniformly drawn from the range (−ε, ε), explo-sive synchronization is still observed and, moreover, it can beseen in networks such as the C. elegans neural network. Thishappens mainly because, as we have shown here, the hubshave a key role in the synchronization process. The quencheddisorder effectively uncorrelates the frequency and degree forsmall degree vertices, but the hubs, with their higher degrees,are still fairly correlated, even with the quite large values of εvalues used in [24]. We can see it from Figure 6, where weshow the natural frequencies ωi as a function of the degreeki for the cases analysed in Figure 4, when the network haspartial degree-frequency correlation, with the non-correlatedvertices having a natural frequency draw either from a power
law or from a normal distribution. The figure also show thecase of quenched disorder of [24]. For vertices with high de-gree, the natural frequencies for the three cases are all verysimilar, whereas in the region of small values of degree, thedistributions of frequencies overlap over a considerably areafor the three cases.
ACKNOWLEDGMENTS
The authors thank CNPq, CAPES and FAPESP (grant2013/09357-9) for the financial support and the anonymousreferees for the very useful comments and suggestions. ASthanks Prof. Leon Brenig for several discussions and for thewarm hospitality at the Free University of Brussels, where theinitial part of this work was done.
APPENDIX
We compile in this Appendix the evaluation of the pertinentintegrals of the mean-field analysis of the Section 2. We startwith the simpler integral I2(λr) given by
λrI2(λr) =
∫ ∞
kmin
dk k∫ Ω+λkr
Ω−λkrdωG(ω, k) exp
(i arcsin
ω −Ω
λkr
).
(41)By introducing the new variable ω = Ω + λkrη, one has
I2(λr) =
∫ 1
−1dη exp (i arcsin η)
∫ ∞
kmin
dk k2G(Ω + λkrη, k).
(42)Let us now perform the integration in k taking into accountthe definition (4) of G(ω, k). We get

9
0 20 40 60 80 100 120 140ki
20
0
20
40
60
80
100
120
140
160
ωi
g(ω) =N(10,4)
g(ω)∝ω−2.5
ωi =ki +U(−12,12)
0 5 10 15 20 25 30ki
505
10152025
ωi
FIG. 6. The Figure shows the natural frequencies ωi of the oscillators as a function of their degrees ki for the cases analysed in Figure 4. Threedifferent cases are depicted, when there is partial correlation, with the non-correlated vertices having a natural frequency draw from either apower law or a normal distribution as well as when there is a quenched disorder, ωi = ki + ζi, where ζi is a random variable drawn from theuniform distributionU(−ε, ε), with ε = 12. The inset shows the region for small degrees and frequencies.
∫ ∞
kmin
k2G(Ω + λkrη, k) dk =1
|1 − λrη|(
Ω
1 − λrη
)2
P(
Ω
1 − λrη
)H
(Ω
1 − λrη− k∗
)+
∫ k∗
kmin
k2g(Ω + λkrη)P(k) dk. (43)
Since the integration interval in η is bounded and the inte-grand is regular, one can commute the limit r → 0+ and the
integration operations to obtain easily (25).The evaluation of I1(λr) given by
iI1(λr) =1
2π
∫ ∞
kmin
dk k2∫ ∞
1dη
√η2 − 1
∫ 2π
0dφ eiφ
(G(Ω + λkrη, k)
η − sin φ+
G(Ω − λkrη, k)η + sin φ
), (44)
in the new variable ω = Ω + λkrη is quite more intricate.Notice that one can reduce the φ-integration to an integral onthe complex plane to obtain
∫ 2π
0
eiφdφη + sin φ
= −2πi|η| −
√η2 − 1
√η2 − 1
, (45)
valid for |η| ≥ 1, reducing I1(λr) to
I1(λr) =
∫ ∞
kmin
dk k2 (46)
×∫ ∞
1dη f (η) (G(Ω + λkrη, k) −G(Ω − λkrη, k))
where
f (η) = η −√η2 − 1. (47)
Due to the definition (4) of G(ω, k), this integral can separatedin two parts
I1(λr) = Ia1 (λr) + Ib
1 (λr) (48)
with
Ia1 (λr) =
∫ ∞
max(k∗ Ω1−λr )
dk kP(k)1λr
f(
k −Ω
λkr
)(49)
−∫ max(k∗ Ω
1+λr )
k∗dk kP(k)
1λr
f(Ω − kλkr
),
where we have already performed the integration in η, and
Ib1 (λr) =
∫ k∗
kmin
dk k2P(k) (50)
×∫ ∞
1dη f (η) (g(Ω + λkrη) − g(Ω − λkrη))
Since we are interested mainly in the limit r → 0+ for bothintegrals, let us consider the approximation
1λr
f( |k −Ω|λkr
)≈ 1
2k
|k −Ω| (51)
first in (49), valid for r → 0+ and k , Ω. Assuming P(k)regular at k = Ω, we have that (49) can be approximated in

10
the limit r → 0+ by
limr→0+
Ia1 (λr) = p.v.
(12
∫ ∞
k∗dk
k2P(k)k −Ω
), (52)
where p.v. stands to the Cauchy principal value for the inte-gral. Notice that a finite limit for this integral will typicallyrequire that Ω , k∗.
In order to evaluate Ib1 (λr) for r → 0+, let us restore the
original variable ω in (50)
Ib1 (λr) =
∫ k∗
kmin
dk k2P(k)[∫ ∞
Ω+λkrdω
g(ω)λkr
f(ω −Ω
λkr
)
−∫ Ω−λkr
−∞dω
g(ω)λkr
f(Ω − ωλkr
)]. (53)
Since the integration interval in k is bounded, one can take thelimit r → 0+ directly. By using essentially the same approxi-mation (51), we have
limr→0+
Ib1 (λr) = p.v.
(β
2
∫ ∞
−∞dω
g(ω)ω −Ω
), (54)
with β given by (24). Notice that, as expected, the limit (54)vanishes for symmetrical g around Ω, i.e., for g(Ω + ω) =
g(Ω − ω).The evaluation of the principal value (32) for the standard
Gaussian distribution involves the evaluation of the principalvalue of the integral
I =
∫ ∞
−∞
e−s2
s − s0ds, (55)
which one can calculate by using the trick of differentiatingunder the integral sign. Notice that I = g(1) with
g(x) = p.v.∫ ∞
−∞
e−x(s+s0)2
sds
(56)
and that
g′(x) = −s0
√π
x− s2
0g(x), (57)
which is a linear differential equation for g(x). The solutionof the homogeneous equation is simply Ae−s2
0 x and a particularsolution can be obtained easily by setting g(x) = e−s2
0 xh(x),leading to the equation
h′(x) = −s0
√π
xes2
0 x, (58)
which can be integrated forwardly. The general solution for(57) is
g(x) = e−s20 x
(A − πerfi
(s0√
x)), (59)
where
erfi(x) =2√π
∫ x
0et2
dt (60)
is the standard imaginary error function. The integration con-stant A can be determined from the requirement that g(x) = 0for s0 = 0, leading to A = 0. Taking x = 1 one gets
p.v.∫ ∞
−∞
e−s2
s − s0ds
= −πe−s20 erfi (s0) (61)
and (32) follows for the standard Gaussian distribution (31).Finally, we have the evaluation of the integral
Aγ = p.v.(∫ ∞
k∗
k2−γ
k −Ωdk
), (62)
which appears in the first term of (44) for a power law degreedistribution P(k) ∝ k−γ, with γ > 2. Let us consider first thecase of integer γ = n > 2. Since
1kn−2(k −Ω)
=1Ω
(1
kn−3(k −Ω)− 1
kn−2
), (63)
we have
An =1Ω
(An−1 − k3−n
∗n − 3
), (64)
for n > 3. This recurrence can be easily solved. Taking intoaccount that
A3 = Ω−1 log∣∣∣∣∣
k∗k∗ −Ω
∣∣∣∣∣ , (65)
we have finally
An = Ω2−n
log∣∣∣∣∣
k∗k∗ −Ω
∣∣∣∣∣ −n−3∑
`=1
1`
(Ω
k∗
)` , (66)
valid for any integer n > 2, from where (33) follows straight-forwardly. The evaluation of (62) for non integer values of γcan be done by exploiting, for instance the series representa-tion of (k −Ω)−1 for k > Ω. We have
Aγ = k2−γ∗
∞∑
`=0
(Ωk∗
)`
` + γ − 2, (67)
valid for k∗ > Ω. For 0 < k∗ < Ω we obtain analogously
Aγ = −k2−γ∗
∞∑
`=0
(k∗Ω
)`+1
` − γ + 3. (68)

11
[1] S. H. Strogatz, SYNC The Emerging Science of SpontaneousOrder, 1st ed., Hyperion, New York, 2003.
[2] A. Pikovsky, M. Rosenblum, and J. Kurths, Synchronization: Auniversal concept in nonlinear sciences, Cambridge UniversityPress, 2003.
[3] J. Buck, Q. Rev. Biol. 63, 265 (1988).[4] S. De Monte, F. Ovidio, S. Danø, and P. G. Sørensen, Proc.
Natl. Acad. Sci. U.S.A. 104, 1837 (2007).[5] Z. Neda, E. Ravasz, Y. Brechet, T. Vicsek, and A. L. Barabasi,
Nature 403, 849 (2000).[6] A. E. Motter, S. A. Myers, M. Anghel, and T. Nishikawa, Na-
ture Phys. 9, 191 (2013).[7] Y. Kuramoto, in Proceedings of the International Symposium
on Mathematical Problems in Theoretical Physics, Universityof Kyoto, Japan, Lect. Notes in Physics 30, 420 (1975), editedby H. Araki.
[8] J. A. Acebron, L. L. Bonilla, C. J. P. Vicente, F. Ritort and R.Spigler, Rev. Mod. Phys. 77, 137 (2005).
[9] S. H. Strogatz, Physica D 143, 1 (2000).[10] E. Ott and T. M. Antonsen, Chaos 18, 037113 (2008)[11] A. Arenas, A. Dıaz-Guilera, J. Kurths, Y. Moreno, and C. Zhou,
Phys. Rep. 469, 93 (2008).[12] J. Gomez-Gardenes, S. Gomez, A. Arenas, and Y. Moreno,
Phys. Rev. Lett. 106, 128701 (2011).[13] T. K. D. M Peron and F. A. Rodrigues, Phys. Rev. E 86, 016102
(2012).[14] P. Ji, T. K. D. M. Peron, P. J. Menck, F. A. Rodrigues, and J.
Kurths, Phys. Rev. Lett. 110, 218701 (2013).
[15] H. Chen, G. He, F. Huang, C. Shen, and Z. Hou, Chaos 23,033124 (2013).
[16] I. Leyva, R. Sevilla-Escoboza, J. M. Buldu, I. Sendina Nadal, J.Gomez-Gardenes, A. Arenas, Y. Moreno, S. Gomez, R. Jaimes-Reategui, and S. Boccaletti, Phys. Rev. Lett. 108, 168702(2012).
[17] T. K. D. M. Peron and F. A. Rodrigues, Phys. Rev. E 86, 056108(2012).
[18] D. Achlioptas, R. M. Souza, and J. Spencer, Science 323, 1453(2009).
[19] X. Zhang, X. Hu, J. Kurths, and Z. Liu, Phys. Rev. E 88,0108012(R) (2013).
[20] X. Zhang, Y. Zou, S. Boccaletti, and Z. Liu, Nature Sci. Rep. 4,5200 (2014).
[21] D. Pazo, Phys. Rev. E 72, 046211 (2005).[22] I. Leyva, I. Sendina-Nadal, J. A. Almendral, A. Navas, S. Olmi
and S. Boccaletti, Phys. Rev. E 88, 042808 (2013).[23] I. Leyva, A. Navas, I. Sendina-Nadal, J. A. Almendral, J. M.
Buldu, M. Zanin, D. Papo and S. Boccaletti, Nature Sci. Rep.3, 1281 (2013).
[24] P. S. Skardal and A. Arenas, Phys. Rev. E 89, 062811 (2014).[25] T. Ichinomiya, Phys. Rev. E 70, 026116 (2004).[26] E. Jones, E. Oliphant, P. Peterson P, et al., SciPy: Open Source
Scientific Tools for Python, 2001, http://www.scipy.org/ [On-line; accessed 2014-08-10].
[27] J. Gomez-Gardenes and Y. Moreno, Phys. Rev. E 73, 056124(2006).
[28] D. J. Watts and S. H. Strogatz, Nature 393, 440 (1998).[29] J. Gomez-Gardenes, Y. Moreno, and A. Arenas, Phys. Rev. Lett.
98, 034101 (2007).
Apêndice B
Synchrony-optimized power grids
71

Synchrony-optimized power grids
Rafael S. Pinto1, ∗ and Alberto Saa2, †1Instituto de Fısica “Gleb Wataghin”, UNICAMP, 13083-859 Campinas, SP, Brazil.
2Departamento de Matematica Aplicada, UNICAMP, 13083-859 Campinas, SP, Brazil.(Dated: November 21, 2014)
We investigate synchronization in power grids, which we assume to be modeled by a network of Kuramotooscillators with inertia. More specifically, we study the optimization of the power grid topology to favor thenetwork synchronization. We introduce a rewiring algorithm which consists basically in a hill climb schemewhere the edges of the network are swapped in order to enhance the main measures of synchronization. As aby-product of the optimization algorithm, we typically have also the anticipation of the synchronization onset forthe optimized network. We perform several robustness tests for the synchrony-optimized power grids, includingthe impact of consumption peaks. In our analyses, we investigate synthetic random networks, which we consideras hypothetical decentralized power generation situations, and also a network based in the actual power grid ofSpain, which corresponds to the current paradigm of centralized power grids. The synchrony-optimized powergrids obtained by our algorithm have some interesting generic properties and patterns. Typically, they havethe majority of edges connecting only consumers to generators in the decentralized case, whereas synchrony-optimized centralized power grids have a minimal number of vertices with just one or two neighbors, knowngenerically as dead ends and which have been recently identified as extremely vulnerable and responsible forcascade faults. Despite the extreme simplifications adopted in our model, our results, among others recentlyobtained in the literature, can provide interesting principles to guide future growth and development of realpower grids.
PACS numbers: 89.75.Fb, 05.45.Xt, 89.75.-k
I. INTRODUCTION
Since Thomas Edison’s Pearl Street Station in Manhattanstarted operating in 1882, the power grids have continued togrow and are today probably the largest machines ever built[1, 2]. Furthermore, their growth is still far away from beingcomplete, as the pursuit of renewable sources of energy andnew technologies drive the integration of different power gridsinto intercontinental machines. The widespread use of alter-nating current (AC) creates the necessity to keep the wholepower grid synchronized. Every generator in the power plantsand all devices connected to the other side of the transmissionlines need to operate with the same frequency (typically, 50Hz in Europe and 60 Hz in most of the Americas) to keep thegrid working correctly. A disruption in this synchronizationcauses malfunctioning, leading to power outages with possi-ble catastrophic proportions in real scenarios.
The phenomenon of synchronization, a key factor for theperfect operation of a power grid, has been the object of studyfor a long time [3–6] in different areas of knowledge. It ispresent in a myriad of situations, arising naturally in many ar-eas of biology, physics, social sciences, etc. It has been, how-ever, only recently that a complex system approach has beendevised to study the synchronization of power grids [7]. Typ-ically, a single power plant is a complicated machine, with alot of tunable parameters necessary to its correct functioning.Although power grids can be, and surely are, analyzed andstudied in all their finer details taking into account hundreds ofpower plants, substations, transmission lines, and many other
∗ [email protected]† [email protected]
devices, the idea of [7] is to focus on the complexity of the un-derlying network of connections [8, 9] and its role on the over-all synchronization process. In order to achieve such a goal,one treats the power plants as simple generators and the loadson the other side of transmission lines as passive machines.Energy conservation in this context yields a set of equationssimilar to the well know Kuramoto Model [6]. This similar-ity, in its turn, enables us to study power grid synchronizationwith the vast set of tools and ideas already developed in therecent literature. Indeed, we have witnessed recently manyworks devoted to the analysis of power grids in the context ofcomplex system as, for instance, the analysis of the Europeanpower grid [10], the effects of decentralization of energy pro-duction in the British power grid [11], the identification of pa-rameters in individual vertices that turn the synchronous statemore stable [12], the existence of Braess’s paradox [13, 14],the role of the network topology on synchronization [15] anda stability analysis of blackouts using basin-stability measures[16].
In the present paper, we study the optimization of the powergrid topology in order to favor synchronization. More specif-ically, we adapt a previous algorithm proposed in [17, 18]to optimize the synchrony of a network built from usual Ku-ramoto oscillators to the case of power grids. The applicationof this algorithm produces power grids with many interestingproperties besides the overall enhancing of the synchroniza-tion measures as, for instance, an anticipated onset of syn-chronization. We study the topological properties of these op-timized networks and their robustness for edges (transmissionlines) removal. We also discuss the impact of consumptionpeaks. Our results show that the optimized power grids ex-hibit, for considerably large increase of power consumptionand for a wide range of parameters, a stable state where the

2
whole system synchronizes with a frequency smaller than theexpected one. In contrast, for the non-optimal networks sucha state of synchronization typically exists only for very smallincreases in consumption.
The paper is organized as follows. In Sec. II, we reviewbriefly the power grid model of [7] and discuss some of itsproperties with relevance to our analysis. Sec. III is devoted tothe introduction of our optimization algorithm. In Sec. IV, weshow the numerical results obtained for both synthetic randomnetwork models and the Spanish power grid. The last sectionis left to some concluding remarks.
II. POWER GRIDS
For the sake of completeness, we will briefly present thederivation of the equations of motion for the power grid modelof Ref. [7], and also derive some simple results concerningthe synchronization of power grids which are important to ouranalysis. A power grid will be represented here by a network[8] composed of N vertices corresponding to two types of ma-chines: NG generators and NC consumers (motors). The num-bers of generators and consumers do not need to be equal.The power transmission lines correspond to m edges connect-ing the vertices. The connectivity pattern is described by theusual symmetric adjacency matrix A, with elements ai j suchthat ai j = 1 if vertices i and j are connected, and ai j = 0otherwise.
Each individual element i of the network is a synchronousmachine, generator or consumer, characterized by a powerPi, which is positive for generators and negative for the con-sumers. For each individual vertex of the network, simple en-ergy conservation implies that this power must be equal to thesum of three contributions: the rate of change of the machinekinetic energy
Pkini = Iiθiθi (1)
where Ii and θi stand for, respectively, the moment of iner-tia and the phase of the i-th generator/consumer; the rate thatenergy is dissipated trough friction
Pdissi = γiθ
2i , (2)
where γi is dissipation constant associated to the machine atvertex i; and the total power transmitted to other vertices. Inparticular, the power transmitted from vertex i to j is given by
Ptransi j = −Pmax
i j sin(θ j − θi), (3)
where Pmaxi j represent the maximum power that can be trans-
mitted along the transmission line connecting i and j vertices.Summing all the terms, one has
Pi = Iiθiθi + γiθ2i −
N∑
j=1
Pmaxi j sin(θ j − θi). (4)
From now on, we restrict ourselves to the idealization oftenassumed for power grids, namely that all elements in the grid
have the same moment of inertia I, the same dissipation con-stant γ and all transmission lines have the same capacity oftransmission Pmax. Relaxing this hypothesis does not, appar-ently, lead to new interesting dynamical behavior, but makesall the analysis much more intricate. For the proper function-ing of the power grid, all of the elements must operate withthe same frequency Ω (for instance, 50 or 60 Hz for real powergrids). In order to take into account small fluctuations aroundthis value, we write the element phases as
θi(t) = Ωt + φi(t), (5)
with φi Ω. Taking into account the above simplificationsand keeping only linear terms in the perturbation φi(t) in (4),one has the so-called Kuramoto equation with inertia
d2φi
dt2 = Pi − αdφi
dt+ K
N∑
j=1
ai j sin(φ j − φi), (6)
where Pi =(Pi − γΩ2
)/IΩ, α = 2γ/I, K = Pmax/IΩ, and
ai j is the usual adjacency matrix for the underlying network.Some useful information can be obtained even before solvingequations (6). The first point to take notice is the existence ofa synchronized stationary state with the grid frequency Ω. Ifsuch a state exists, it must obey φi = φi = 0, which means thatthe stationary phases φi of the oscillators satisfy the equation
Pi + KN∑
j=1
ai j sin(φ j − φi) = 0, (7)
where, interestingly, the dissipation parameter α takes no role.Summing both sides of (7) with respect to the index i and usingthe fact that the sine of the phase diference is antisymmetricwith respect to the indices i and j, whereas the adjacency ma-trix is symmetric, since we are treating the network as beingundirected, the terms in the double sum cancel in pairs. In thisway, a necessary condition for the existence of this stationarystate is that the powers Pi must sum to zero, what obviously isnothing else than a statement of energy conservation for thewhole network (neglecting, of course, transmission losses).
In order to calculate the network average frequency pertur-bation 〈φ〉 = 1
N∑N
i=1 φi, we sum both sides of equation (6) withrespect to the index i and use the previous trick of the parityof ai j and of sin(φ j − φi), resulting in
ddt〈φ〉 = −α〈φ〉 (8)
which can be trivially solved and leads to
〈φ〉 = 〈φ0〉e−αt. (9)
The average frequency perturbation vanishes in the limit t →∞, but this does not imply that each frequency φi convergesto zero, since they can also attain a state with symmetric dis-tribution of positive and negative frequencies with null mean.

3
However, if we have synchronization, they do vanish individ-ually. Equations (9) confirm an earlier numerical result thatwas verified in [15]: the time scale to reach asymptoticallystationary states is proportional to α−1. The average phase canbe easily evaluated from 〈φ〉 = d
dt 〈φ〉,
〈φ〉 = 〈φ0〉 + 1α〈φ0〉
(1 − e−αt
), (10)
Notice also that, by virtue of equation (10), the asymptoticvalue of the average phase depends on the initial conditionsand also on the parameter α.
In order to analyze the synchronization process in our net-works, we will use the order parameter z(t) introduced origi-nally by Kuramoto,
z(t) = ρ(t)eiψ(t) =1N
N∑
j=1
eiφ j(t), (11)
which corresponds to the centroid of the phases if they areviewed as a swarm of points moving around the unit circle.For incoherent motion, the phases are scattered on the circlehomogeneously and ρ ≈ N−1/2 for large N as a consequenceof the central limit theorem, while for a synchronized statethe points should move in a single lump and, consequently,ρ ≈ 1. As our equations are of second order, we will also usethe average squared frequency,
v2(t) =⟨φ j
2⟩=
1N
N∑
j=1
φ j2(t). (12)
Synchronization for the power grid requires, of course, that allelements have the common frequency Ω, which implies thatv2(t) = 0. In our calculations, we will use extensively theaverages
r =
∣∣∣∣∣∣1δT
∫ Tr+δT
Tr
z(t) dt
∣∣∣∣∣∣ , (13)
and
v2 =1δT
∫ Tr+δT
Tr
v2(t) dt. (14)
The value of Tr must be long enough to ensure that a sta-tionary state has been reached, and δT cannot be too small toassure good statistics.
III. THE OPTIMIZATION ALGORITHM
The optimization algorithm employed here is adapted fromthat one introduced in [17] and [18] for the original Kuramotomodel, which corresponds to the model of the last sectionwithout inertia (I = 0). Here, by optimization, we mean arewiring of the edges such that the new network has highervalues of the mean order parameter r. As we will see, as a by-product of the optimization, we typically have an earlier on-set of synchronization, i.e., the power grid synchronizes with
smaller values of the transmission line capacity K. As it oc-curs typically in synchronization problems, there is a phasetransition from a non synchronized state to a synchronizedone occurring at a critical value of the capacity Kc, i.e., forK > Kc, the order parameter r is an increasing function of K,while for K < Kc we have typically r ≈ 0 (no synchroniza-tion).
The strategy of the algorithm is roughly the following. Wechoose a value of K∗ > Kc such that r(K∗) is reasonably high.Then, one considers a rewiring: a randomly selected edge con-necting two vertices is removed if it does not disconnect thenetwork, and two randomly chosen disconnected vertices areconnected; and the new value of r(K∗) is evaluated. If therewiring results in a higher value for r(K∗), one keeps themodification or, otherwise, one discharges the rewiring andreturns the network to its previous configuration. This proce-dure is repeated until r(K∗) attains a maximum value. In prac-tice, our algorithm limits the maximum number of iterationsup to 104 and also stop after a certain number of consecutiveiterations failed to achieve a higher value of r (we used 4m it-erations, with m the number of edges). These edge swaps pre-serve the average degree of the initial network (as the numberof edges is kept the same), but not the degree distribution.
We can, if necessary, include in the optimization processcontraints such as only accepting a rewire if the degrees ofthe vertices or the length of the transmission lines are lowerthan a determined value. Here, however, we consider only thesimpler case of improving the synchronization properties onlylimiting the number of and edges (transmission lines).
As for the original Kuramoto model [17, 18], considerablyearlier onset of synchronization is observed for the optimalnetworks. Moreover, the properties of the optimal networkare independent from the initial conditions and also from theprecise value of the capacity K = K∗ for which the rewiringis done, as long as it is chosen to satisfy K∗ > Kc, i.e., itcorresponds to a synchronization regime. Fulfilling our goals,we found that this kind of hill climb algorithm produces net-works that generally present the desired properties of highervalues of the order parameter r and smaller values of v2 forall the values of K higher than the new critrical value, andnot just for K = K∗, the value for which the optimization wasperformed.
For small networks, typically with the number of verticesup to N = 20, the optimized network seems to be unique,since all runs return the very same optimal network. However,for larger networks, different runs of our algorithm can leadto different optimized networks, but their properties are es-sentially the same, showing just some small fluctuations overthe average values. In this way, strictly speaking, we cannotguarantee that the results found with the algorithm are globalmaxima, and this is particularly important for large networks.Nevertheless, the returned optimized networks always showa substantial improvement of the synchronization propertieswhen compared to the original ones.
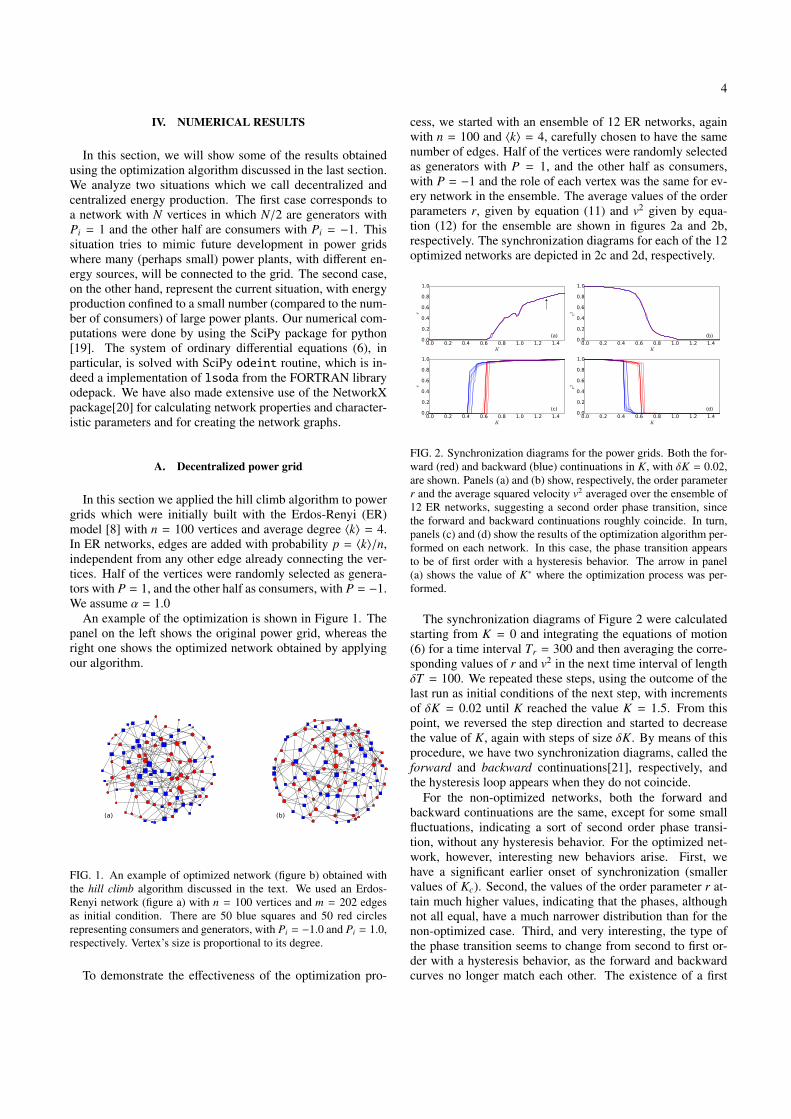
4
IV. NUMERICAL RESULTS
In this section, we will show some of the results obtainedusing the optimization algorithm discussed in the last section.We analyze two situations which we call decentralized andcentralized energy production. The first case corresponds toa network with N vertices in which N/2 are generators withPi = 1 and the other half are consumers with Pi = −1. Thissituation tries to mimic future development in power gridswhere many (perhaps small) power plants, with different en-ergy sources, will be connected to the grid. The second case,on the other hand, represent the current situation, with energyproduction confined to a small number (compared to the num-ber of consumers) of large power plants. Our numerical com-putations were done by using the SciPy package for python[19]. The system of ordinary differential equations (6), inparticular, is solved with SciPy odeint routine, which is in-deed a implementation of lsoda from the FORTRAN libraryodepack. We have also made extensive use of the NetworkXpackage[20] for calculating network properties and character-istic parameters and for creating the network graphs.
A. Decentralized power grid
In this section we applied the hill climb algorithm to powergrids which were initially built with the Erdos-Renyi (ER)model [8] with n = 100 vertices and average degree 〈k〉 = 4.In ER networks, edges are added with probability p = 〈k〉/n,independent from any other edge already connecting the ver-tices. Half of the vertices were randomly selected as genera-tors with P = 1, and the other half as consumers, with P = −1.We assume α = 1.0
An example of the optimization is shown in Figure 1. Thepanel on the left shows the original power grid, whereas theright one shows the optimized network obtained by applyingour algorithm.
(a) (b)
FIG. 1. An example of optimized network (figure b) obtained withthe hill climb algorithm discussed in the text. We used an Erdos-Renyi network (figure a) with n = 100 vertices and m = 202 edgesas initial condition. There are 50 blue squares and 50 red circlesrepresenting consumers and generators, with Pi = −1.0 and Pi = 1.0,respectively. Vertex’s size is proportional to its degree.
To demonstrate the effectiveness of the optimization pro-
cess, we started with an ensemble of 12 ER networks, againwith n = 100 and 〈k〉 = 4, carefully chosen to have the samenumber of edges. Half of the vertices were randomly selectedas generators with P = 1, and the other half as consumers,with P = −1 and the role of each vertex was the same for ev-ery network in the ensemble. The average values of the orderparameters r, given by equation (11) and v2 given by equa-tion (12) for the ensemble are shown in figures 2a and 2b,respectively. The synchronization diagrams for each of the 12optimized networks are depicted in 2c and 2d, respectively.
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
r
(a)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
v2
(b)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
v2
(d)
FIG. 2. Synchronization diagrams for the power grids. Both the for-ward (red) and backward (blue) continuations in K, with δK = 0.02,are shown. Panels (a) and (b) show, respectively, the order parameterr and the average squared velocity v2 averaged over the ensemble of12 ER networks, suggesting a second order phase transition, sincethe forward and backward continuations roughly coincide. In turn,panels (c) and (d) show the results of the optimization algorithm per-formed on each network. In this case, the phase transition appearsto be of first order with a hysteresis behavior. The arrow in panel(a) shows the value of K∗ where the optimization process was per-formed.
The synchronization diagrams of Figure 2 were calculatedstarting from K = 0 and integrating the equations of motion(6) for a time interval Tr = 300 and then averaging the corre-sponding values of r and v2 in the next time interval of lengthδT = 100. We repeated these steps, using the outcome of thelast run as initial conditions of the next step, with incrementsof δK = 0.02 until K reached the value K = 1.5. From thispoint, we reversed the step direction and started to decreasethe value of K, again with steps of size δK. By means of thisprocedure, we have two synchronization diagrams, called theforward and backward continuations[21], respectively, andthe hysteresis loop appears when they do not coincide.
For the non-optimized networks, both the forward andbackward continuations are the same, except for some smallfluctuations, indicating a sort of second order phase transi-tion, without any hysteresis behavior. For the optimized net-work, however, interesting new behaviors arise. First, wehave a significant earlier onset of synchronization (smallervalues of Kc). Second, the values of the order parameter r at-tain much higher values, indicating that the phases, althoughnot all equal, have a much narrower distribution than for thenon-optimized case. Third, and very interesting, the type ofthe phase transition seems to change from second to first or-der with a hysteresis behavior, as the forward and backwardcurves no longer match each other. The existence of a first
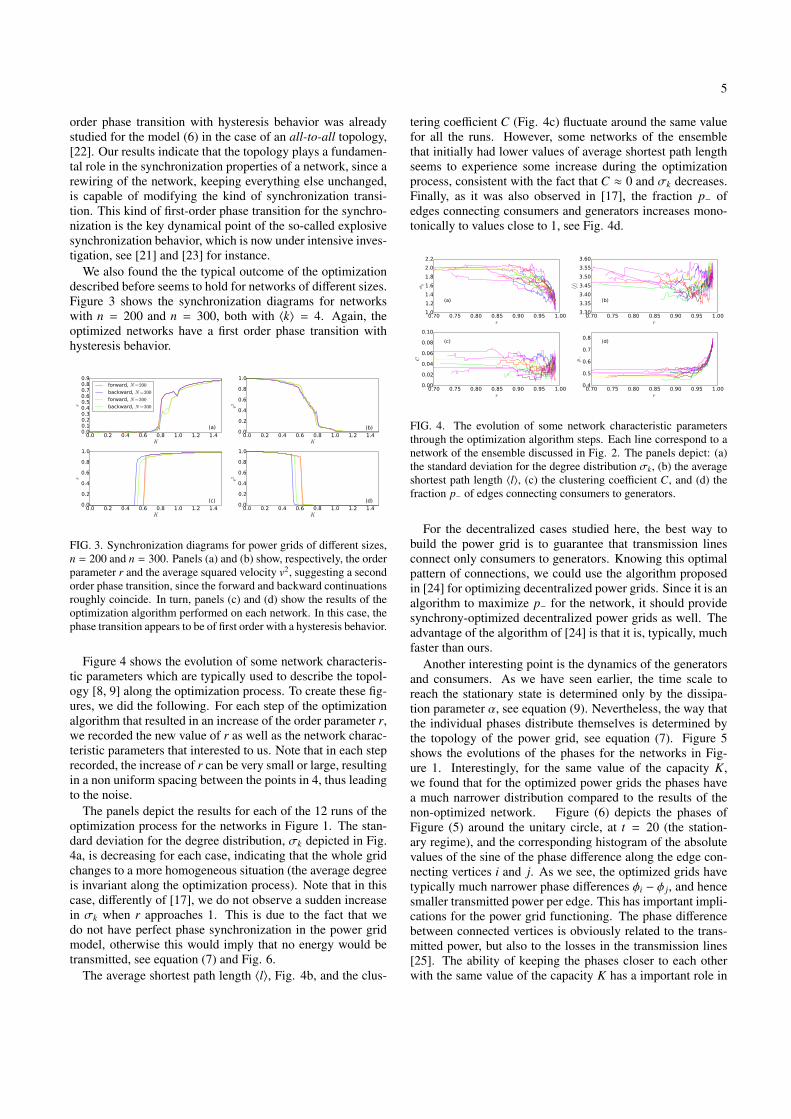
5
order phase transition with hysteresis behavior was alreadystudied for the model (6) in the case of an all-to-all topology,[22]. Our results indicate that the topology plays a fundamen-tal role in the synchronization properties of a network, since arewiring of the network, keeping everything else unchanged,is capable of modifying the kind of synchronization transi-tion. This kind of first-order phase transition for the synchro-nization is the key dynamical point of the so-called explosivesynchronization behavior, which is now under intensive inves-tigation, see [21] and [23] for instance.
We also found the the typical outcome of the optimizationdescribed before seems to hold for networks of different sizes.Figure 3 shows the synchronization diagrams for networkswith n = 200 and n = 300, both with 〈k〉 = 4. Again, theoptimized networks have a first order phase transition withhysteresis behavior.
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.00.10.20.30.40.50.60.70.80.9
r
(a)
forward, N=200
backward, N=200
forward, N=300
backward, N=300
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
v2
(b)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4K
0.0
0.2
0.4
0.6
0.8
1.0
v2
(d)
FIG. 3. Synchronization diagrams for power grids of different sizes,n = 200 and n = 300. Panels (a) and (b) show, respectively, the orderparameter r and the average squared velocity v2, suggesting a secondorder phase transition, since the forward and backward continuationsroughly coincide. In turn, panels (c) and (d) show the results of theoptimization algorithm performed on each network. In this case, thephase transition appears to be of first order with a hysteresis behavior.
Figure 4 shows the evolution of some network characteris-tic parameters which are typically used to describe the topol-ogy [8, 9] along the optimization process. To create these fig-ures, we did the following. For each step of the optimizationalgorithm that resulted in an increase of the order parameter r,we recorded the new value of r as well as the network charac-teristic parameters that interested to us. Note that in each steprecorded, the increase of r can be very small or large, resultingin a non uniform spacing between the points in 4, thus leadingto the noise.
The panels depict the results for each of the 12 runs of theoptimization process for the networks in Figure 1. The stan-dard deviation for the degree distribution, σk depicted in Fig.4a, is decreasing for each case, indicating that the whole gridchanges to a more homogeneous situation (the average degreeis invariant along the optimization process). Note that in thiscase, differently of [17], we do not observe a sudden increasein σk when r approaches 1. This is due to the fact that wedo not have perfect phase synchronization in the power gridmodel, otherwise this would imply that no energy would betransmitted, see equation (7) and Fig. 6.
The average shortest path length 〈l〉, Fig. 4b, and the clus-
tering coefficient C (Fig. 4c) fluctuate around the same valuefor all the runs. However, some networks of the ensemblethat initially had lower values of average shortest path lengthseems to experience some increase during the optimizationprocess, consistent with the fact that C ≈ 0 and σk decreases.Finally, as it was also observed in [17], the fraction p− ofedges connecting consumers and generators increases mono-tonically to values close to 1, see Fig. 4d.
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
1.0
1.2
1.4
1.6
1.8
2.0
2.2
σk
(a)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
3.30
3.35
3.40
3.45
3.50
3.55
3.60
⟨ l⟩
(b)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.00
0.02
0.04
0.06
0.08
0.10
C
(c)
(c)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.4
0.5
0.6
0.7
0.8
p−
(d)
FIG. 4. The evolution of some network characteristic parametersthrough the optimization algorithm steps. Each line correspond to anetwork of the ensemble discussed in Fig. 2. The panels depict: (a)the standard deviation for the degree distribution σk, (b) the averageshortest path length 〈l〉, (c) the clustering coefficient C, and (d) thefraction p− of edges connecting consumers to generators.
For the decentralized cases studied here, the best way tobuild the power grid is to guarantee that transmission linesconnect only consumers to generators. Knowing this optimalpattern of connections, we could use the algorithm proposedin [24] for optimizing decentralized power grids. Since it is analgorithm to maximize p− for the network, it should providesynchrony-optimized decentralized power grids as well. Theadvantage of the algorithm of [24] is that it is, typically, muchfaster than ours.
Another interesting point is the dynamics of the generatorsand consumers. As we have seen earlier, the time scale toreach the stationary state is determined only by the dissipa-tion parameter α, see equation (9). Nevertheless, the way thatthe individual phases distribute themselves is determined bythe topology of the power grid, see equation (7). Figure 5shows the evolutions of the phases for the networks in Fig-ure 1. Interestingly, for the same value of the capacity K,we found that for the optimized power grids the phases havea much narrower distribution compared to the results of thenon-optimized network. Figure (6) depicts the phases ofFigure (5) around the unitary circle, at t = 20 (the station-ary regime), and the corresponding histogram of the absolutevalues of the sine of the phase difference along the edge con-necting vertices i and j. As we see, the optimized grids havetypically much narrower phase differences φi − φ j, and hencesmaller transmitted power per edge. This has important impli-cations for the power grid functioning. The phase differencebetween connected vertices is obviously related to the trans-mitted power, but also to the losses in the transmission lines[25]. The ability of keeping the phases closer to each otherwith the same value of the capacity K has a important role in
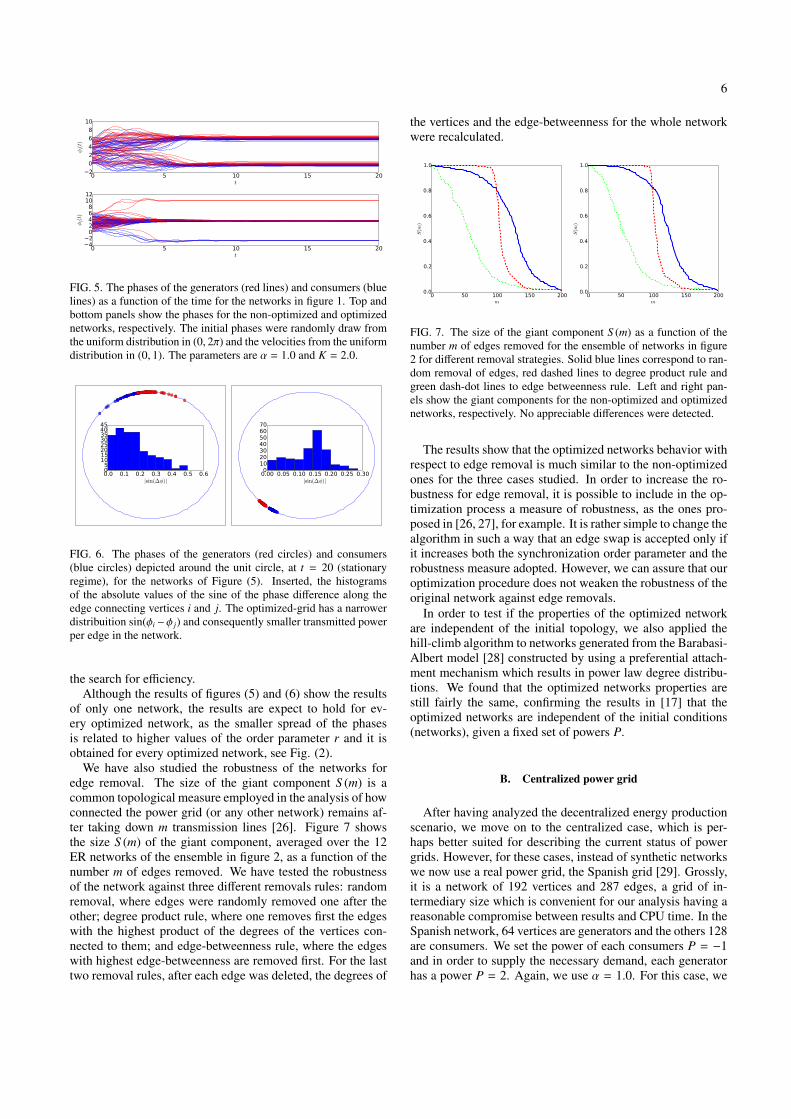
6
0 5 10 15 20t
2
0
2
4
6
8
10
φi(t)
0 5 10 15 20t
4202468
1012
φi(t)
FIG. 5. The phases of the generators (red lines) and consumers (bluelines) as a function of the time for the networks in figure 1. Top andbottom panels show the phases for the non-optimized and optimizednetworks, respectively. The initial phases were randomly draw fromthe uniform distribution in (0, 2π) and the velocities from the uniformdistribution in (0, 1). The parameters are α = 1.0 and K = 2.0.
0.0 0.1 0.2 0.3 0.4 0.5 0.6|sin(∆φ)|
05
1015202530354045
0.00 0.05 0.10 0.15 0.20 0.25 0.30|sin(∆φ)|
010203040506070
FIG. 6. The phases of the generators (red circles) and consumers(blue circles) depicted around the unit circle, at t = 20 (stationaryregime), for the networks of Figure (5). Inserted, the histogramsof the absolute values of the sine of the phase difference along theedge connecting vertices i and j. The optimized-grid has a narrowerdistribuition sin(φi −φ j) and consequently smaller transmitted powerper edge in the network.
the search for efficiency.Although the results of figures (5) and (6) show the results
of only one network, the results are expect to hold for ev-ery optimized network, as the smaller spread of the phasesis related to higher values of the order parameter r and it isobtained for every optimized network, see Fig. (2).
We have also studied the robustness of the networks foredge removal. The size of the giant component S (m) is acommon topological measure employed in the analysis of howconnected the power grid (or any other network) remains af-ter taking down m transmission lines [26]. Figure 7 showsthe size S (m) of the giant component, averaged over the 12ER networks of the ensemble in figure 2, as a function of thenumber m of edges removed. We have tested the robustnessof the network against three different removals rules: randomremoval, where edges were randomly removed one after theother; degree product rule, where one removes first the edgeswith the highest product of the degrees of the vertices con-nected to them; and edge-betweenness rule, where the edgeswith highest edge-betweenness are removed first. For the lasttwo removal rules, after each edge was deleted, the degrees of
the vertices and the edge-betweenness for the whole networkwere recalculated.
0 50 100 150 200m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
0 50 100 150 200m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
FIG. 7. The size of the giant component S (m) as a function of thenumber m of edges removed for the ensemble of networks in figure2 for different removal strategies. Solid blue lines correspond to ran-dom removal of edges, red dashed lines to degree product rule andgreen dash-dot lines to edge betweenness rule. Left and right pan-els show the giant components for the non-optimized and optimizednetworks, respectively. No appreciable differences were detected.
The results show that the optimized networks behavior withrespect to edge removal is much similar to the non-optimizedones for the three cases studied. In order to increase the ro-bustness for edge removal, it is possible to include in the op-timization process a measure of robustness, as the ones pro-posed in [26, 27], for example. It is rather simple to change thealgorithm in such a way that an edge swap is accepted only ifit increases both the synchronization order parameter and therobustness measure adopted. However, we can assure that ouroptimization procedure does not weaken the robustness of theoriginal network against edge removals.
In order to test if the properties of the optimized networkare independent of the initial topology, we also applied thehill-climb algorithm to networks generated from the Barabasi-Albert model [28] constructed by using a preferential attach-ment mechanism which results in power law degree distribu-tions. We found that the optimized networks properties arestill fairly the same, confirming the results in [17] that theoptimized networks are independent of the initial conditions(networks), given a fixed set of powers P.
B. Centralized power grid
After having analyzed the decentralized energy productionscenario, we move on to the centralized case, which is per-haps better suited for describing the current status of powergrids. However, for these cases, instead of synthetic networkswe now use a real power grid, the Spanish grid [29]. Grossly,it is a network of 192 vertices and 287 edges, a grid of in-termediary size which is convenient for our analysis having areasonable compromise between results and CPU time. In theSpanish network, 64 vertices are generators and the others 128are consumers. We set the power of each consumers P = −1and in order to supply the necessary demand, each generatorhas a power P = 2. Again, we use α = 1.0. For this case, we
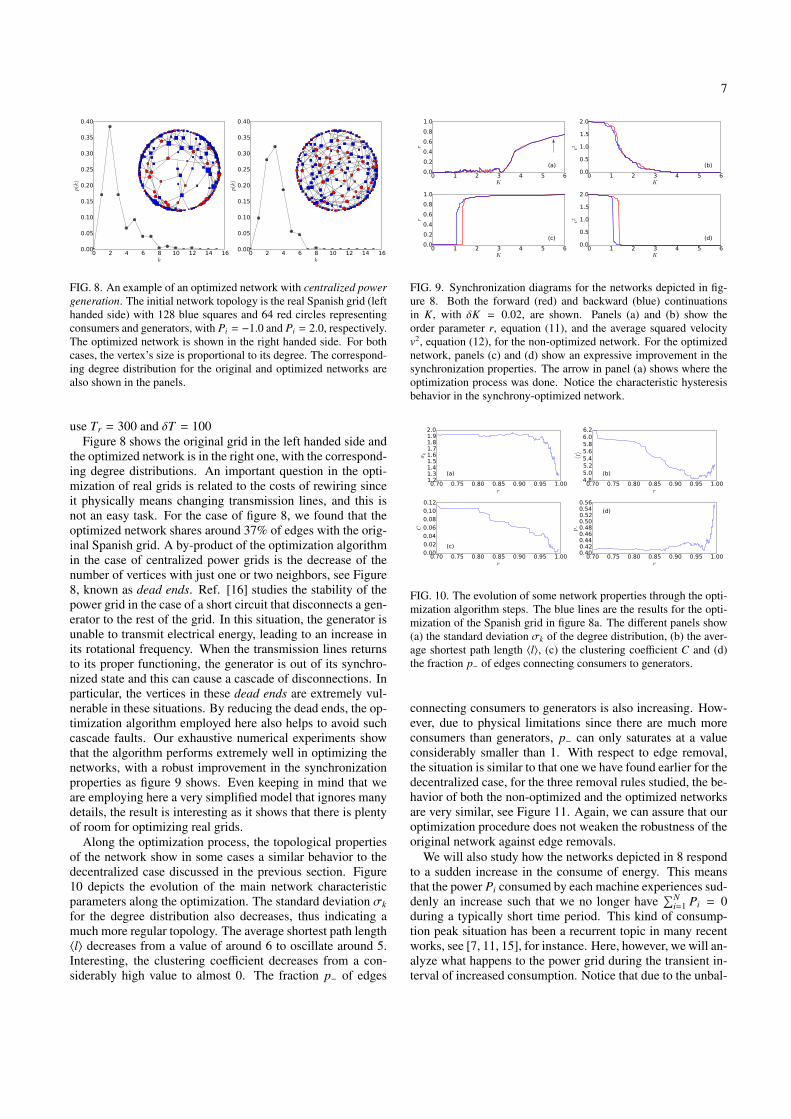
7
0 2 4 6 8 10 12 14 16k
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
p(k
)
0 2 4 6 8 10 12 14 16k
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
p(k
)
FIG. 8. An example of an optimized network with centralized powergeneration. The initial network topology is the real Spanish grid (lefthanded side) with 128 blue squares and 64 red circles representingconsumers and generators, with Pi = −1.0 and Pi = 2.0, respectively.The optimized network is shown in the right handed side. For bothcases, the vertex’s size is proportional to its degree. The correspond-ing degree distribution for the original and optimized networks arealso shown in the panels.
use Tr = 300 and δT = 100Figure 8 shows the original grid in the left handed side and
the optimized network is in the right one, with the correspond-ing degree distributions. An important question in the opti-mization of real grids is related to the costs of rewiring sinceit physically means changing transmission lines, and this isnot an easy task. For the case of figure 8, we found that theoptimized network shares around 37% of edges with the orig-inal Spanish grid. A by-product of the optimization algorithmin the case of centralized power grids is the decrease of thenumber of vertices with just one or two neighbors, see Figure8, known as dead ends. Ref. [16] studies the stability of thepower grid in the case of a short circuit that disconnects a gen-erator to the rest of the grid. In this situation, the generator isunable to transmit electrical energy, leading to an increase inits rotational frequency. When the transmission lines returnsto its proper functioning, the generator is out of its synchro-nized state and this can cause a cascade of disconnections. Inparticular, the vertices in these dead ends are extremely vul-nerable in these situations. By reducing the dead ends, the op-timization algorithm employed here also helps to avoid suchcascade faults. Our exhaustive numerical experiments showthat the algorithm performs extremely well in optimizing thenetworks, with a robust improvement in the synchronizationproperties as figure 9 shows. Even keeping in mind that weare employing here a very simplified model that ignores manydetails, the result is interesting as it shows that there is plentyof room for optimizing real grids.
Along the optimization process, the topological propertiesof the network show in some cases a similar behavior to thedecentralized case discussed in the previous section. Figure10 depicts the evolution of the main network characteristicparameters along the optimization. The standard deviation σkfor the degree distribution also decreases, thus indicating amuch more regular topology. The average shortest path length〈l〉 decreases from a value of around 6 to oscillate around 5.Interesting, the clustering coefficient decreases from a con-siderably high value to almost 0. The fraction p− of edges
0 1 2 3 4 5 6K
0.0
0.2
0.4
0.6
0.8
1.0
r
(a)
0 1 2 3 4 5 6K
0.0
0.5
1.0
1.5
2.0
v2
(b)
0 1 2 3 4 5 6K
0.0
0.2
0.4
0.6
0.8
1.0
r
(c)
0 1 2 3 4 5 6K
0.0
0.5
1.0
1.5
2.0
v2
(d)
FIG. 9. Synchronization diagrams for the networks depicted in fig-ure 8. Both the forward (red) and backward (blue) continuationsin K, with δK = 0.02, are shown. Panels (a) and (b) show theorder parameter r, equation (11), and the average squared velocityv2, equation (12), for the non-optimized network. For the optimizednetwork, panels (c) and (d) show an expressive improvement in thesynchronization properties. The arrow in panel (a) shows where theoptimization process was done. Notice the characteristic hysteresisbehavior in the synchrony-optimized network.
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
1.21.31.41.51.61.71.81.92.0
σk
(a)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
4.85.05.25.45.65.86.06.2
⟨ l⟩
(b)
(b)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.00
0.02
0.04
0.06
0.08
0.10
0.12
C
(c) (c)
0.70 0.75 0.80 0.85 0.90 0.95 1.00r
0.400.420.440.460.480.500.520.540.56
p−
(d)
FIG. 10. The evolution of some network properties through the opti-mization algorithm steps. The blue lines are the results for the opti-mization of the Spanish grid in figure 8a. The different panels show(a) the standard deviation σk of the degree distribution, (b) the aver-age shortest path length 〈l〉, (c) the clustering coefficient C and (d)the fraction p− of edges connecting consumers to generators.
connecting consumers to generators is also increasing. How-ever, due to physical limitations since there are much moreconsumers than generators, p− can only saturates at a valueconsiderably smaller than 1. With respect to edge removal,the situation is similar to that one we have found earlier for thedecentralized case, for the three removal rules studied, the be-havior of both the non-optimized and the optimized networksare very similar, see Figure 11. Again, we can assure that ouroptimization procedure does not weaken the robustness of theoriginal network against edge removals.
We will also study how the networks depicted in 8 respondto a sudden increase in the consume of energy. This meansthat the power Pi consumed by each machine experiences sud-denly an increase such that we no longer have
∑Ni=1 Pi = 0
during a typically short time period. This kind of consump-tion peak situation has been a recurrent topic in many recentworks, see [7, 11, 15], for instance. Here, however, we will an-alyze what happens to the power grid during the transient in-terval of increased consumption. Notice that due to the unbal-
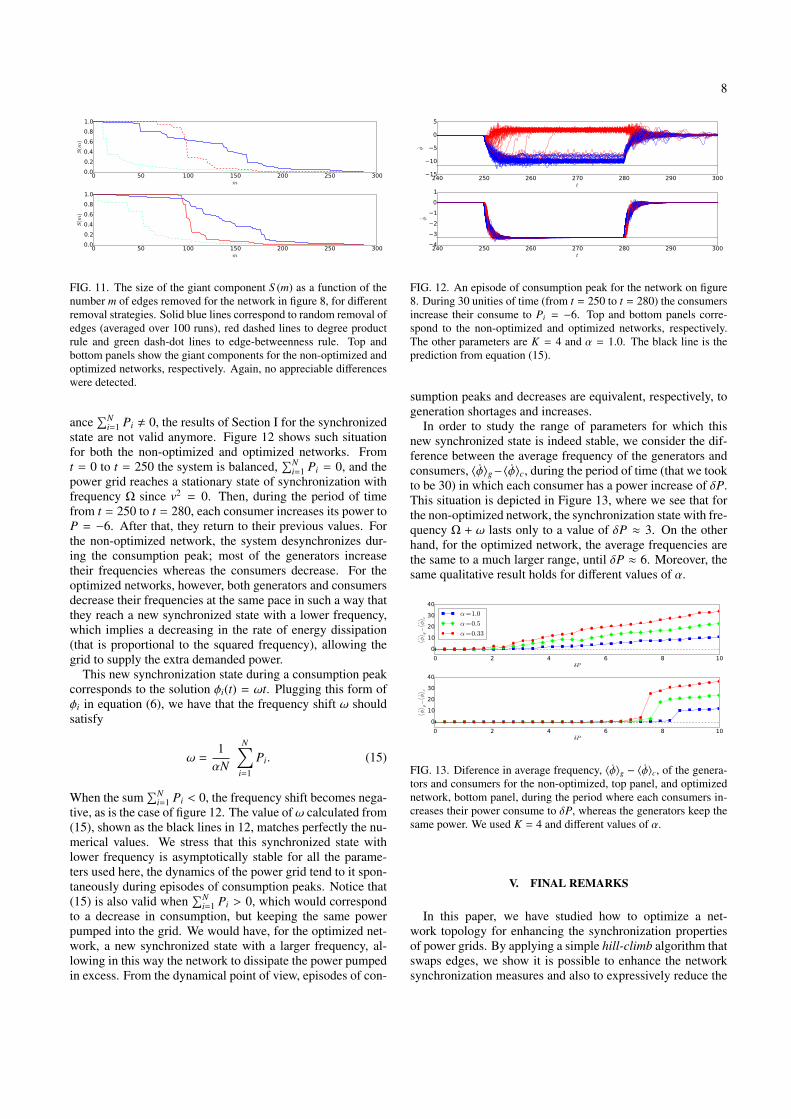
8
0 50 100 150 200 250 300m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
0 50 100 150 200 250 300m
0.0
0.2
0.4
0.6
0.8
1.0
S(m
)
FIG. 11. The size of the giant component S (m) as a function of thenumber m of edges removed for the network in figure 8, for differentremoval strategies. Solid blue lines correspond to random removal ofedges (averaged over 100 runs), red dashed lines to degree productrule and green dash-dot lines to edge-betweenness rule. Top andbottom panels show the giant components for the non-optimized andoptimized networks, respectively. Again, no appreciable differenceswere detected.
ance∑N
i=1 Pi , 0, the results of Section I for the synchronizedstate are not valid anymore. Figure 12 shows such situationfor both the non-optimized and optimized networks. Fromt = 0 to t = 250 the system is balanced,
∑Ni=1 Pi = 0, and the
power grid reaches a stationary state of synchronization withfrequency Ω since v2 = 0. Then, during the period of timefrom t = 250 to t = 280, each consumer increases its power toP = −6. After that, they return to their previous values. Forthe non-optimized network, the system desynchronizes dur-ing the consumption peak; most of the generators increasetheir frequencies whereas the consumers decrease. For theoptimized networks, however, both generators and consumersdecrease their frequencies at the same pace in such a way thatthey reach a new synchronized state with a lower frequency,which implies a decreasing in the rate of energy dissipation(that is proportional to the squared frequency), allowing thegrid to supply the extra demanded power.
This new synchronization state during a consumption peakcorresponds to the solution φi(t) = ωt. Plugging this form ofφi in equation (6), we have that the frequency shift ω shouldsatisfy
ω =1αN
N∑
i=1
Pi. (15)
When the sum∑N
i=1 Pi < 0, the frequency shift becomes nega-tive, as is the case of figure 12. The value of ω calculated from(15), shown as the black lines in 12, matches perfectly the nu-merical values. We stress that this synchronized state withlower frequency is asymptotically stable for all the parame-ters used here, the dynamics of the power grid tend to it spon-taneously during episodes of consumption peaks. Notice that(15) is also valid when
∑Ni=1 Pi > 0, which would correspond
to a decrease in consumption, but keeping the same powerpumped into the grid. We would have, for the optimized net-work, a new synchronized state with a larger frequency, al-lowing in this way the network to dissipate the power pumpedin excess. From the dynamical point of view, episodes of con-
240 250 260 270 280 290 300t
15
10
5
0
5
φ
240 250 260 270 280 290 300t
4
3
2
1
0
1
φ
FIG. 12. An episode of consumption peak for the network on figure8. During 30 unities of time (from t = 250 to t = 280) the consumersincrease their consume to Pi = −6. Top and bottom panels corre-spond to the non-optimized and optimized networks, respectively.The other parameters are K = 4 and α = 1.0. The black line is theprediction from equation (15).
sumption peaks and decreases are equivalent, respectively, togeneration shortages and increases.
In order to study the range of parameters for which thisnew synchronized state is indeed stable, we consider the dif-ference between the average frequency of the generators andconsumers, 〈φ〉g−〈φ〉c, during the period of time (that we tookto be 30) in which each consumer has a power increase of δP.This situation is depicted in Figure 13, where we see that forthe non-optimized network, the synchronization state with fre-quency Ω + ω lasts only to a value of δP ≈ 3. On the otherhand, for the optimized network, the average frequencies arethe same to a much larger range, until δP ≈ 6. Moreover, thesame qualitative result holds for different values of α.
0 2 4 6 8 10δP
0
10
20
30
40
⟨ φ⟩ g−⟨ φ⟩ c
α=1.0
α=0.5
α=0.33
0 2 4 6 8 10δP
0
10
20
30
40
⟨ φ⟩ g−⟨ φ⟩ c
FIG. 13. Diference in average frequency, 〈φ〉g − 〈φ〉c, of the genera-tors and consumers for the non-optimized, top panel, and optimizednetwork, bottom panel, during the period where each consumers in-creases their power consume to δP, whereas the generators keep thesame power. We used K = 4 and different values of α.
V. FINAL REMARKS
In this paper, we have studied how to optimize a net-work topology for enhancing the synchronization propertiesof power grids. By applying a simple hill-climb algorithm thatswaps edges, we show it is possible to enhance the networksynchronization measures and also to expressively reduce the

9
synchronization threshold Kc. We applied our proposed algo-rithm to synthetic random networks and also to network in-spired in a real world power grid, namely the Spanish grid.Having a smaller value of the threshold Kc means that thepower grid could work in a stable state with transmission lineswith smaller transmission capacities, reducing the associatedcosts. This is achieved, in the optimized grids obtained by ouralgorithm, through a better distribution of the electric flow,typically reducing the burden on the transmission lines. Theimprovement of the phase synchronization, with higher val-ues of the order parameter r and, consequently, smaller phasedifference between the vertices, also means smaller losses inthe transmission [25].
The synchrony-optimized power grids obtained by our al-gorithm have some interesting generic properties besides op-timal synchronization patterns. For the decentralized gener-ation scenarios, which try to mimic future development inpower grids where many small power plants, probably withdifferent energy sources providing the demanded power tothe grid, the optimized network typically have the major-ity of edges connecting only consumers to generators. Onthe other hand, for the cases corresponding to the contem-porary paradigm of centralized generation power grids, thesynchrony-optimized power grids have a minimal number
of vertices with just one or two neighbors, known generi-cally as dead ends and which have been recently identifiedas extremely vulnerable and responsible for cascade faults[16]. Also, during power supply unbalances, the synchrony-optimized power grids exhibit a synchronized state with fre-quency Ω + ω, with ω given by equation (15) for much largerrange of parameters than the original power grids. Obviously,the models and operations considered here are extreme sim-plifications of the real world power grids. For instance, im-plementing a rewire actually means rebuilding transmissionlines through perhaps hundreds of kilometers in places with-out a favorable geography. Nevertheless, our results, togetherwith the previous on obtained in [10–16], show that there isplenty of room for optimizing real power grids and even pro-vide interesting simple principles to guide the future growthand developments.
ACKNOWLEDGMENTS
The authors thanks CNPq, CAPES and FAPESP (grant2013/09357-9) for the financial support. AS thanks Prof.Leon Brenig for several discussions and for the warm hospi-tality at the Free University of Brussels, where the initial partof this work was done.
[1] S. H. Strogatz, SYNC The Emerging Science of SpontaneousOrder, 1st ed., Hyperion, New York, 2003.
[2] P. Kundur, Power system stability and control, McGraw-Hill,New York, 1994.
[3] S. H. Strogatz, Physica D 143, 1 (2000).[4] A. Pikovsky, M. Rosenblum, and J. Kurths, Synchronization: A
universal concept in nonlinear sciences, Cambridge UniversityPress, 2003.
[5] A. Arenas, A. Dıaz-Guilera, J. Kurths, Y. Moreno, and C. Zhou,Phys. Rep. 469, 93 (2008).
[6] J. A. Acebron, L. L. Bonilla, C. J. P. Vicente, F. Ritort and R.Spigler, Rev. Mod. Phys. 77, 137 (2005).
[7] G. Filatrella, A. H. Nielsen, N. F. Pedersen, Eur. Phys. J. B. 61,485 (2008).
[8] M. E. J. Newman, Networks, an introduction, 1st ed., OxfordUniversity Press, 2010.
[9] M. E. J. Newman, SIAM Review 45, 167 (2003).[10] S. Lozano, L. Buzna, A. Dıaz-Guilera, Eur. Phys. J. B. 85, 231
(2012).[11] M. Rohden, A. Sorge, M. Timme, D. Witthaut, Phys. Rev. Lett.
109, 064101 (2012).[12] A. E. Motter, S. A. Myers, M. Anghel, and T. Nishikawa, Na-
ture Phys. 9, 191 (2013).[13] D. Witthaut, M. Timme, New J. Phys. 14, 083036 (2012).[14] Di. Witthaut, M. Timme, Eur. Phys. J. B 86, (2013).[15] M. Rohden, A. Sorge, D. Witthaut, M. Timme, Chaos 24,
013123 (2014).[16] P. J. Menck, J. Heitzig, J. Kurths and H. J. Schellnhuber, Na-
tures Phys. 5, 3969 (2014).
[17] M. Brede, Phys. Lett. A 372, 2618 (2008).[18] M. Brede, Eur. Phys. J. B. 62, 87 (2008).[19] E. Jones, E. Oliphant, P. Peterson P, et al., SciPy: Open Source
Scientific Tools for Python, 2001, http://www.scipy.org/ [On-line; accessed 2014-08-10].
[20] Aric A. Hagberg, Daniel A. Schult and Pieter J. Swart, Ex-ploring network structure, dynamics, and function using Net-workX, in Proceedings of the 7th Python in Science Conference(SciPy2008), Gael Varoquaux, Travis Vaught, and Jarrod Mill-man (Eds), (Pasadena, CA USA), pp. 11-15, Aug 2008.
[21] J. Gomez-Gardenes, S. Gomez, A. Arenas, and Y. Moreno,Phys. Rev. Lett. 106, 128701 (2011).
[22] H. Tanaka, A. J. Lichtenberg, S. Oishi, Phys. Rev. Lett. 78, 2104(1997).
[23] I. Leyva, et al., Phys. Rev. Lett. 108, 168702 (2012); P. Ji, T. K.D. M. Peron, P. J. Menck, F. A. Rodrigues, and J. Kurths, Phys.Rev. Lett. 110, 218701 (2013);H. Chen, G. He, F. Huang, C.Shen, and Z. Hou, Chaos 23, 033124 (2013);R.S. Pinto and A.Saa, Explosive synchronization with partial degree-frequencycorrelation, [arXiv:1408.2483].
[24] D. Kelly, G. A. Gottwald, Chaos 21, 025110 (2011).[25] T. Watanabe, Physica A 392 1246-1255 (2013).[26] A. Zeng, W. Liu, Phys. Rev. E 85, 066130 (2012).[27] C. M. Schneider, A. A. Moreira, J. S. Andrade, S. Havlin,and
H. J. Herrmann, Proc. Natl. Acad. Sci. U.S.A. 108, 3838 (2011).[28] A. L. Barabasi, R. Albert, Science 286, 5439 (1999).[29] N. Hutcheon, J. W. Bialek, Updated and validated power flow
model of the main continental European transmission network,In Proceedings of the IEEE PowerTech 2013, 2013, (2013).
Apêndice C
Optimal synchronization of Kuramoto
oscillators: a dimensional reduction
approach
81

Optimal synchronization of Kuramoto oscillators: a dimensional reduction approach
Rafael S. Pinto1, ∗ and Alberto Saa2, †1Instituto de Fısica “Gleb Wataghin”, UNICAMP, 13083-859 Campinas, SP, Brazil.
2Departamento de Matematica Aplicada, UNICAMP, 13083-859 Campinas, SP, Brazil.(Dated: August 1, 2015)
A recently proposed dimensional reduction approach for studying synchronization in the Kuramoto modelis employed to build optimal network topologies to favor or to suppress synchronization. The approach isbased in the introduction of a collective coordinate for the time evolution of the phase locked oscillators, inthe spirit of the Ott-Antonsen ansatz. We show that the optimal synchronization of a network demands theminimization of a simple quadratic function involving the natural frequencies of the oscillators and the networkadjacency matrix. Many recently obtained numerical results can be re-obtained analytically and in a simplerway from our minimization condition. A computationally efficient hill climb rewiring algorithm is proposed togenerate networks with optimal synchronization properties. Our approach can be easily adapted to the case ofthe Kuramoto models with both attractive and repulsive interactions, and again many recent numerical resultscan be rederived in a simpler and clearer analytical manner.
PACS numbers: 89.75.Fb, 05.45.Xt, 89.75.Hc
I. INTRODUCTION
Synchronization [1] is present in a myriad of natural andsynthetic systems, ranging from metabolic processes in popu-lations of yeast [2] to power grids [3], and its abundant pres-ence has stimulated in the last decades a very active area ofresearch. The Kuramoto model [4–6] and its generalizations[7] have been used as one of the most versatile tools to under-stand the different scenarios where a population of heteroge-neous unities can develop a common rhythm through mutualinteraction, despite the intrinsic tendency of each element tooscillate with its own natural frequency when uncoupled fromthe others. In general, the unities of the population in questionare located on the vertices of a complex network [8], whichis described by its adjacency matrix Ai j, with binary entriesAi j = 1 if there is an edge between vertices i and j and Ai j = 0otherwise. The Kuramoto model is then defined by the non-linear system of differential equations [9]
dθi
dt= ωi + λ
N∑
j=1
Ai j sin(θ j − θi), (1)
where the phase θi(t) corresponds to the state of the ith unity,which would oscillate with its natural frequency ωi if uncou-pled from the network. The interaction between connectedunities is governed by the sine of their phase difference, andthe strength of the coupling is determined by λ. Typically, inorder to mimic the inherent differences between the elementsof real systems, the natural frequencies ωi are assumed to berandom variables with a distribution g(ω), which we will con-sider here to be symmetric and unimodal.
A convenient way to describe the global state of the Ku-
∗ [email protected]† [email protected]
ramoto oscillators (1) is to use the order parameter defined as
reiψ =1N
N∑
j=1
eiθ j , (2)
where r is assumed to be real, which corresponds to thecentroid of the phases if they are considered as a swarm ofpoints moving around the unit circle. For incoherent mo-tion, the phases are scattered on the circle homogeneously andr ≈ N−1/2, while for a synchronized state they should move ina single lump and, consequently, r ≈ 1. The Kuramoto modelit is known to exhibit a second order phase transition from in-coherent to synchronized regime at a critical value λc of thecoupling strength. For λ ≥ λc, the order parameter r is anincreasing function of λ. A very natural question to set forthhere is: given N vertices with natural frequencies ωiNi=1 andm edges, what is the best way to connect the vertices (form-ing a connected network) in order to optimize synchronization(maximize r)? In the last years, it has become clear [10–13]that optimal (in the synchronization sense) networks of Ku-ramoto oscillators typically have a strong negative correlationbetween the natural frequencies of adjacent oscillators, and apositive correlation between the frequency magnitude |ωi| andthe degree ki =
∑Nj=1 Ai j of the vertex where the i oscillator
lies. This situation favors some heterogeneity in the degreedistribution: vertices with large positive (negative) natural fre-quencies tend to have higher degrees and to be surrounded byvertices with negative (positive) natural frequencies. Theseproperties are also observed [14] in the optimized networksfor the Kuramoto model with inertia [15], although in thiscase the optimization has more severe consequences, as it alsochanges the nature of the phase transition: optimized networkstypically possess a first order transition instead of the usualsecond order one.
In this paper, we revisit the issue of synchronization op-timization of networks of Kuramoto oscillators, but employ-ing the recently proposed dimensional reduction approach byGottwald [16], which explores some tools of the theory ofsolitary waves by using a collective coordinate for the time
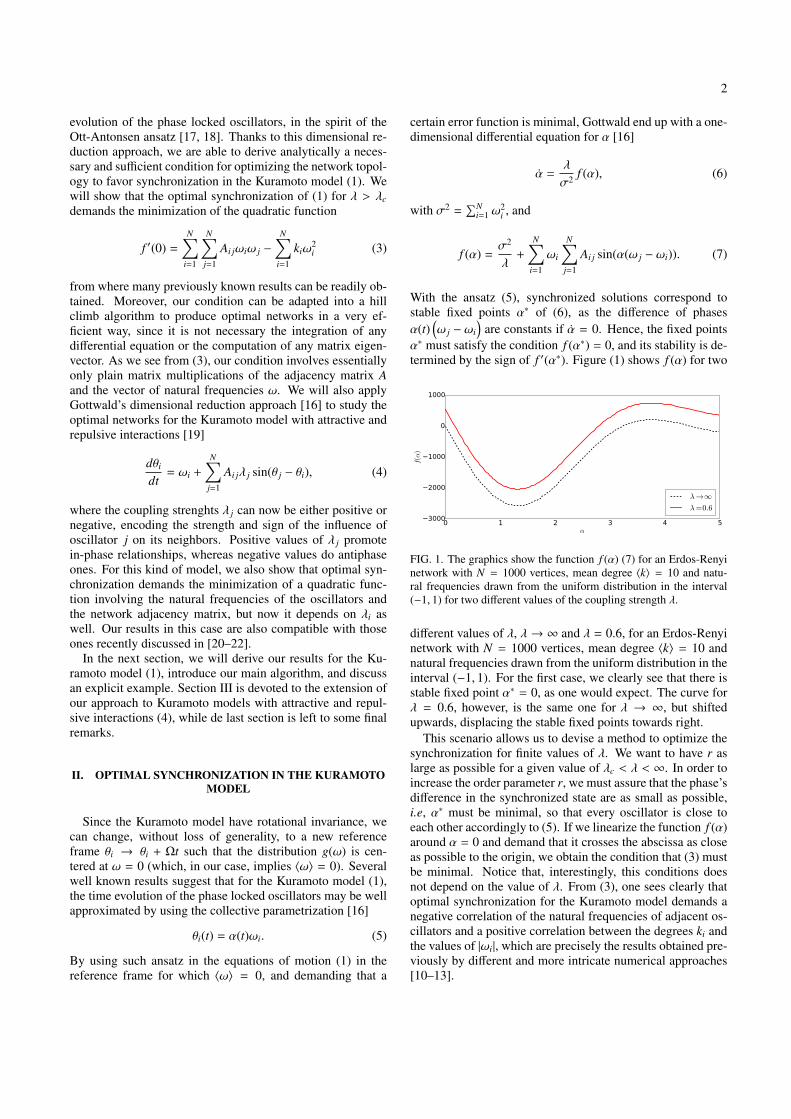
2
evolution of the phase locked oscillators, in the spirit of theOtt-Antonsen ansatz [17, 18]. Thanks to this dimensional re-duction approach, we are able to derive analytically a neces-sary and sufficient condition for optimizing the network topol-ogy to favor synchronization in the Kuramoto model (1). Wewill show that the optimal synchronization of (1) for λ > λcdemands the minimization of the quadratic function
f ′(0) =
N∑
i=1
N∑
j=1
Ai jωiω j −N∑
i=1
kiω2i (3)
from where many previously known results can be readily ob-tained. Moreover, our condition can be adapted into a hillclimb algorithm to produce optimal networks in a very ef-ficient way, since it is not necessary the integration of anydifferential equation or the computation of any matrix eigen-vector. As we see from (3), our condition involves essentiallyonly plain matrix multiplications of the adjacency matrix Aand the vector of natural frequencies ω. We will also applyGottwald’s dimensional reduction approach [16] to study theoptimal networks for the Kuramoto model with attractive andrepulsive interactions [19]
dθi
dt= ωi +
N∑
j=1
Ai jλ j sin(θ j − θi), (4)
where the coupling strenghts λ j can now be either positive ornegative, encoding the strength and sign of the influence ofoscillator j on its neighbors. Positive values of λ j promotein-phase relationships, whereas negative values do antiphaseones. For this kind of model, we also show that optimal syn-chronization demands the minimization of a quadratic func-tion involving the natural frequencies of the oscillators andthe network adjacency matrix, but now it depends on λi aswell. Our results in this case are also compatible with thoseones recently discussed in [20–22].
In the next section, we will derive our results for the Ku-ramoto model (1), introduce our main algorithm, and discussan explicit example. Section III is devoted to the extension ofour approach to Kuramoto models with attractive and repul-sive interactions (4), while de last section is left to some finalremarks.
II. OPTIMAL SYNCHRONIZATION IN THE KURAMOTOMODEL
Since the Kuramoto model have rotational invariance, wecan change, without loss of generality, to a new referenceframe θi → θi + Ωt such that the distribution g(ω) is cen-tered at ω = 0 (which, in our case, implies 〈ω〉 = 0). Severalwell known results suggest that for the Kuramoto model (1),the time evolution of the phase locked oscillators may be wellapproximated by using the collective parametrization [16]
θi(t) = α(t)ωi. (5)
By using such ansatz in the equations of motion (1) in thereference frame for which 〈ω〉 = 0, and demanding that a
certain error function is minimal, Gottwald end up with a one-dimensional differential equation for α [16]
α =λ
σ2 f (α), (6)
with σ2 =∑N
i=1 ω2i , and
f (α) =σ2
λ+
N∑
i=1
ωi
N∑
j=1
Ai j sin(α(ω j − ωi)). (7)
With the ansatz (5), synchronized solutions correspond tostable fixed points α∗ of (6), as the difference of phasesα(t)
(ω j − ωi
)are constants if α = 0. Hence, the fixed points
α∗ must satisfy the condition f (α∗) = 0, and its stability is de-termined by the sign of f ′(α∗). Figure (1) shows f (α) for two
0 1 2 3 4 5α
3000
2000
1000
0
1000
f(α)
λ→∞λ=0.6
FIG. 1. The graphics show the function f (α) (7) for an Erdos-Renyinetwork with N = 1000 vertices, mean degree 〈k〉 = 10 and natu-ral frequencies drawn from the uniform distribution in the interval(−1, 1) for two different values of the coupling strength λ.
different values of λ, λ → ∞ and λ = 0.6, for an Erdos-Renyinetwork with N = 1000 vertices, mean degree 〈k〉 = 10 andnatural frequencies drawn from the uniform distribution in theinterval (−1, 1). For the first case, we clearly see that there isstable fixed point α∗ = 0, as one would expect. The curve forλ = 0.6, however, is the same one for λ → ∞, but shiftedupwards, displacing the stable fixed points towards right.
This scenario allows us to devise a method to optimize thesynchronization for finite values of λ. We want to have r aslarge as possible for a given value of λc < λ < ∞. In order toincrease the order parameter r, we must assure that the phase’sdifference in the synchronized state are as small as possible,i.e, α∗ must be minimal, so that every oscillator is close toeach other accordingly to (5). If we linearize the function f (α)around α = 0 and demand that it crosses the abscissa as closeas possible to the origin, we obtain the condition that (3) mustbe minimal. Notice that, interestingly, this conditions doesnot depend on the value of λ. From (3), one sees clearly thatoptimal synchronization for the Kuramoto model demands anegative correlation of the natural frequencies of adjacent os-cillators and a positive correlation between the degrees ki andthe values of |ωi|, which are precisely the results obtained pre-viously by different and more intricate numerical approaches[10–13].
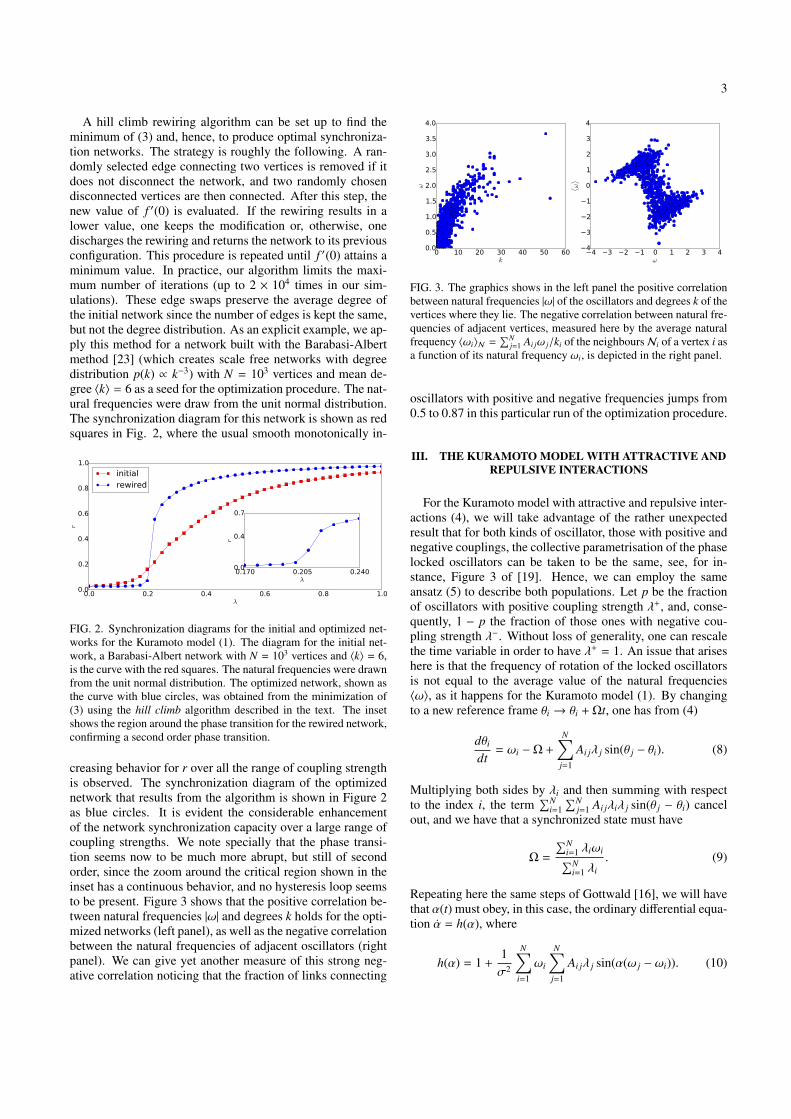
3
A hill climb rewiring algorithm can be set up to find theminimum of (3) and, hence, to produce optimal synchroniza-tion networks. The strategy is roughly the following. A ran-domly selected edge connecting two vertices is removed if itdoes not disconnect the network, and two randomly chosendisconnected vertices are then connected. After this step, thenew value of f ′(0) is evaluated. If the rewiring results in alower value, one keeps the modification or, otherwise, onedischarges the rewiring and returns the network to its previousconfiguration. This procedure is repeated until f ′(0) attains aminimum value. In practice, our algorithm limits the maxi-mum number of iterations (up to 2 × 104 times in our sim-ulations). These edge swaps preserve the average degree ofthe initial network since the number of edges is kept the same,but not the degree distribution. As an explicit example, we ap-ply this method for a network built with the Barabasi-Albertmethod [23] (which creates scale free networks with degreedistribution p(k) ∝ k−3) with N = 103 vertices and mean de-gree 〈k〉 = 6 as a seed for the optimization procedure. The nat-ural frequencies were draw from the unit normal distribution.The synchronization diagram for this network is shown as redsquares in Fig. 2, where the usual smooth monotonically in-
0.0 0.2 0.4 0.6 0.8 1.0λ
0.0
0.2
0.4
0.6
0.8
1.0
r
initialrewired
0.170 0.205 0.240λ
0.0
0.4
0.7
r
FIG. 2. Synchronization diagrams for the initial and optimized net-works for the Kuramoto model (1). The diagram for the initial net-work, a Barabasi-Albert network with N = 103 vertices and 〈k〉 = 6,is the curve with the red squares. The natural frequencies were drawnfrom the unit normal distribution. The optimized network, shown asthe curve with blue circles, was obtained from the minimization of(3) using the hill climb algorithm described in the text. The insetshows the region around the phase transition for the rewired network,confirming a second order phase transition.
creasing behavior for r over all the range of coupling strengthis observed. The synchronization diagram of the optimizednetwork that results from the algorithm is shown in Figure 2as blue circles. It is evident the considerable enhancementof the network synchronization capacity over a large range ofcoupling strengths. We note specially that the phase transi-tion seems now to be much more abrupt, but still of secondorder, since the zoom around the critical region shown in theinset has a continuous behavior, and no hysteresis loop seemsto be present. Figure 3 shows that the positive correlation be-tween natural frequencies |ω| and degrees k holds for the opti-mized networks (left panel), as well as the negative correlationbetween the natural frequencies of adjacent oscillators (rightpanel). We can give yet another measure of this strong neg-ative correlation noticing that the fraction of links connecting
0 10 20 30 40 50 60k
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
ω
4 3 2 1 0 1 2 3 4ω
4
3
2
1
0
1
2
3
4
⟨ ω⟩
FIG. 3. The graphics shows in the left panel the positive correlationbetween natural frequencies |ω| of the oscillators and degrees k of thevertices where they lie. The negative correlation between natural fre-quencies of adjacent vertices, measured here by the average naturalfrequency 〈ωi〉N =
∑Nj=1 Ai jω j/ki of the neighboursNi of a vertex i as
a function of its natural frequency ωi, is depicted in the right panel.
oscillators with positive and negative frequencies jumps from0.5 to 0.87 in this particular run of the optimization procedure.
III. THE KURAMOTO MODEL WITH ATTRACTIVE ANDREPULSIVE INTERACTIONS
For the Kuramoto model with attractive and repulsive inter-actions (4), we will take advantage of the rather unexpectedresult that for both kinds of oscillator, those with positive andnegative couplings, the collective parametrisation of the phaselocked oscillators can be taken to be the same, see, for in-stance, Figure 3 of [19]. Hence, we can employ the sameansatz (5) to describe both populations. Let p be the fractionof oscillators with positive coupling strength λ+, and, conse-quently, 1 − p the fraction of those ones with negative cou-pling strength λ−. Without loss of generality, one can rescalethe time variable in order to have λ+ = 1. An issue that ariseshere is that the frequency of rotation of the locked oscillatorsis not equal to the average value of the natural frequencies〈ω〉, as it happens for the Kuramoto model (1). By changingto a new reference frame θi → θi + Ωt, one has from (4)
dθi
dt= ωi −Ω +
N∑
j=1
Ai jλ j sin(θ j − θi). (8)
Multiplying both sides by λi and then summing with respectto the index i, the term
∑Ni=1
∑Nj=1 Ai jλiλ j sin(θ j − θi) cancel
out, and we have that a synchronized state must have
Ω =
∑Ni=1 λiωi∑N
i=1 λi. (9)
Repeating here the same steps of Gottwald [16], we will havethat α(t) must obey, in this case, the ordinary differential equa-tion α = h(α), where
h(α) = 1 +1σ2
N∑
i=1
ωi
N∑
j=1
Ai jλ j sin(α(ω j − ωi)). (10)
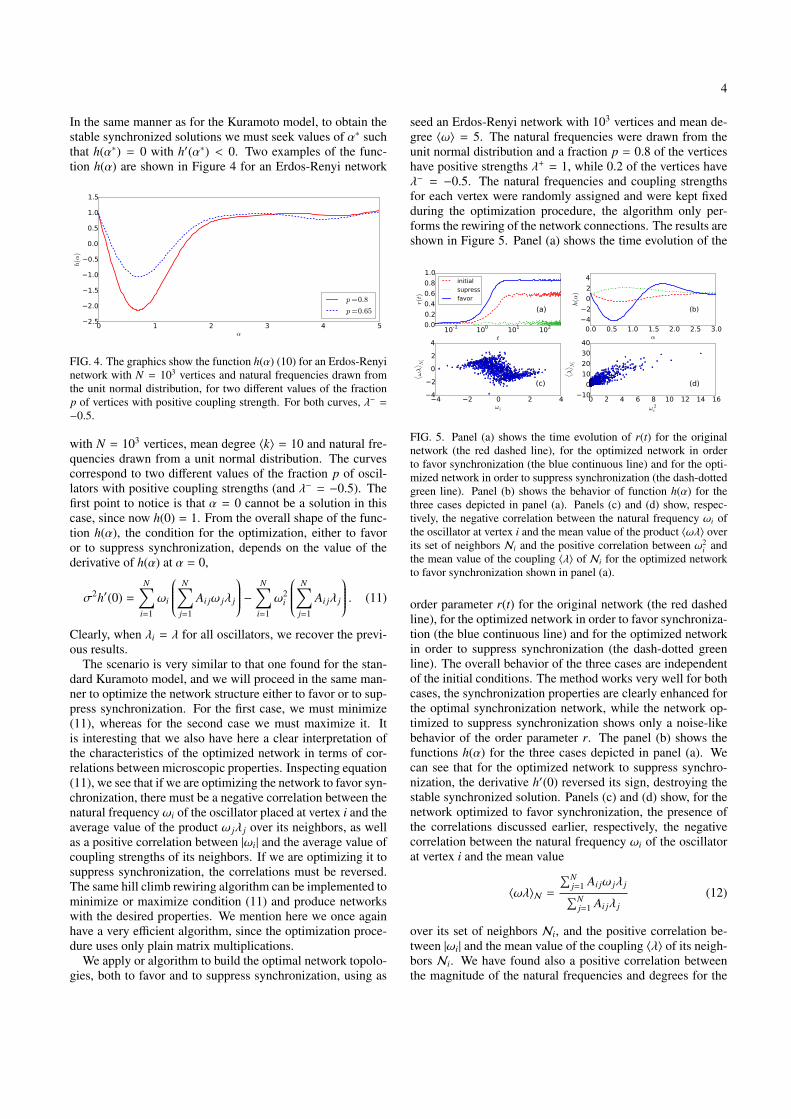
4
In the same manner as for the Kuramoto model, to obtain thestable synchronized solutions we must seek values of α∗ suchthat h(α∗) = 0 with h′(α∗) < 0. Two examples of the func-tion h(α) are shown in Figure 4 for an Erdos-Renyi network
0 1 2 3 4 5α
2.5
2.0
1.5
1.0
0.5
0.0
0.5
1.0
1.5
h(α
)
p=0.8
p=0.65
FIG. 4. The graphics show the function h(α) (10) for an Erdos-Renyinetwork with N = 103 vertices and natural frequencies drawn fromthe unit normal distribution, for two different values of the fractionp of vertices with positive coupling strength. For both curves, λ− =
−0.5.
with N = 103 vertices, mean degree 〈k〉 = 10 and natural fre-quencies drawn from a unit normal distribution. The curvescorrespond to two different values of the fraction p of oscil-lators with positive coupling strengths (and λ− = −0.5). Thefirst point to notice is that α = 0 cannot be a solution in thiscase, since now h(0) = 1. From the overall shape of the func-tion h(α), the condition for the optimization, either to favoror to suppress synchronization, depends on the value of thederivative of h(α) at α = 0,
σ2h′(0) =
N∑
i=1
ωi
N∑
j=1
Ai jω jλ j
−N∑
i=1
ω2i
N∑
j=1
Ai jλ j
. (11)
Clearly, when λi = λ for all oscillators, we recover the previ-ous results.
The scenario is very similar to that one found for the stan-dard Kuramoto model, and we will proceed in the same man-ner to optimize the network structure either to favor or to sup-press synchronization. For the first case, we must minimize(11), whereas for the second case we must maximize it. Itis interesting that we also have here a clear interpretation ofthe characteristics of the optimized network in terms of cor-relations between microscopic properties. Inspecting equation(11), we see that if we are optimizing the network to favor syn-chronization, there must be a negative correlation between thenatural frequency ωi of the oscillator placed at vertex i and theaverage value of the product ω jλ j over its neighbors, as wellas a positive correlation between |ωi| and the average value ofcoupling strengths of its neighbors. If we are optimizing it tosuppress synchronization, the correlations must be reversed.The same hill climb rewiring algorithm can be implemented tominimize or maximize condition (11) and produce networkswith the desired properties. We mention here we once againhave a very efficient algorithm, since the optimization proce-dure uses only plain matrix multiplications.
We apply or algorithm to build the optimal network topolo-gies, both to favor and to suppress synchronization, using as
seed an Erdos-Renyi network with 103 vertices and mean de-gree 〈ω〉 = 5. The natural frequencies were drawn from theunit normal distribution and a fraction p = 0.8 of the verticeshave positive strengths λ+ = 1, while 0.2 of the vertices haveλ− = −0.5. The natural frequencies and coupling strengthsfor each vertex were randomly assigned and were kept fixedduring the optimization procedure, the algorithm only per-forms the rewiring of the network connections. The results areshown in Figure 5. Panel (a) shows the time evolution of the
10-1 100 101 102
t
0.0
0.2
0.4
0.6
0.8
1.0
r(t)
(a)
initial
supress
favor
4 2 0 2 4ωi
4
2
0
2
4
⟨ ωλ⟩Ni
(c)
0 2 4 6 8 10 12 14 16ω 2i
10
0
10
20
30
40
⟨ λ⟩ Ni
(d)
0.0 0.5 1.0 1.5 2.0 2.5 3.0α
4
2
0
2
4
h(α
)
(b)
FIG. 5. Panel (a) shows the time evolution of r(t) for the originalnetwork (the red dashed line), for the optimized network in orderto favor synchronization (the blue continuous line) and for the opti-mized network in order to suppress synchronization (the dash-dottedgreen line). Panel (b) shows the behavior of function h(α) for thethree cases depicted in panel (a). Panels (c) and (d) show, respec-tively, the negative correlation between the natural frequency ωi ofthe oscillator at vertex i and the mean value of the product 〈ωλ〉 overits set of neighbors Ni and the positive correlation between ω2
i andthe mean value of the coupling 〈λ〉 of Ni for the optimized networkto favor synchronization shown in panel (a).
order parameter r(t) for the original network (the red dashedline), for the optimized network in order to favor synchroniza-tion (the blue continuous line) and for the optimized networkin order to suppress synchronization (the dash-dotted greenline). The overall behavior of the three cases are independentof the initial conditions. The method works very well for bothcases, the synchronization properties are clearly enhanced forthe optimal synchronization network, while the network op-timized to suppress synchronization shows only a noise-likebehavior of the order parameter r. The panel (b) shows thefunctions h(α) for the three cases depicted in panel (a). Wecan see that for the optimized network to suppress synchro-nization, the derivative h′(0) reversed its sign, destroying thestable synchronized solution. Panels (c) and (d) show, for thenetwork optimized to favor synchronization, the presence ofthe correlations discussed earlier, respectively, the negativecorrelation between the natural frequency ωi of the oscillatorat vertex i and the mean value
〈ωλ〉N =
∑Nj=1 Ai jω jλ j
∑Nj=1 Ai jλ j
(12)
over its set of neighbors Ni, and the positive correlation be-tween |ωi| and the mean value of the coupling 〈λ〉 of its neigh-bors Ni. We have found also a positive correlation betweenthe magnitude of the natural frequencies and degrees for the

5
optimized network to favor synchronization, see Figure 6,whereas no correlation (either positive or negative) is seem
0 5 10 15 20 25 30ki
0
2
4
6
8
10
12
14
16
ω2 i
(a)
0 5 10 15 20 25 30ki
0
2
4
6
8
10
12
14
16
ω2 i
(b)
0 5 10 15 20 25 30ki
2
0
2
λi
0 5 10 15 20 25 30ki
2
0
2
λi
FIG. 6. The graphics show the positive correlation between the mag-nitude of the natural frequencies and degrees for the optimized net-work to favor synchronization, panel (a), whereas there is no corre-lation for the network optimized to suppress synchronization, panel(b). Both results correspond to the networks depicted in figure 5.The insets show, for both cases, the distribution of the couplings asfunction of the degrees.
for the optimized network to suppress synchronization. An-other interesting result is that for the optimal synchronizationcase, the positive and negative coupling strengths are equallydistributed in a large range of degrees, while for the case ofoptimized network to suppress synchronization, most of theoscillators with negative coupling are located at large degreevertices (see the insets of Figure 6). Notice that the optimizednetwork to favor synchronization does not show r ≈ 1, insteadit saturates at the lower value r ≈ 0.9, due to the constrainth(0) = 1.
IV. CONCLUSIONS
We have shown that the recently proposed dimensional re-duction by Gottwald [16] for the Kuramoto model can be
adapted to obtain the a necessary and sufficient condition tooptimize the network topology to favor or to suppress syn-chronization. We obtained explicit analytical conditions thatmatch the previous results [10–13] obtained numerically. Ourapproach was also extended to the Kuramoto model with at-tractive and repulsive interactions, leading also to a explicitnecessary and sufficient condition to optimize the networks.Our results complement some previous works [20–22] whichconsidered the synchronization optimization in these modelsnumerically. The optimal synchronization condition is re-duced to some relations between microscopic properties of thenetwork, enlightening in this way the correlations observednumerically for optimal synchronization networks. Our op-timization condition, in both cases, was used to set up a hillclimb rewiring algorithm to produce optimized networks ina very efficient way, since it is not necessary the integrationof any differential equation or the computation of any matrixeigenvector. Only plain matrix multiplications of the adja-cency matrix A and the vector of natural frequencies ω areused in each step. As common for this kind of algorithm, onecannot assure in principle that the procedure will stop effec-tively in a global minimum. However, since the algorithm iscomputationally simple, on can run the procedure for severalinitial networks in order to seek for a global minimum. Inall tests we have performed, our algorithm returned, with lit-tle computational effort, networks with greatly enhanced syn-chronization properties.
ACKNOWLEDGEMENTS
AS thanks FAPESP (grant 2013/09357-9) and CNPq for thefinancial support. RSP thanks CAPES for the financial sup-port and G. Gotwald for helpful conversations. Our numeri-cal computations were done by using the SciPy package forpython [24] and the NetworkX package [25].
[1] S. H. Strogatz, SYNC The Emerging Science of SpontaneousOrder, 1st ed., Hyperion, New York, 2003.
[2] S. De Monte, F. Ovidio, S. Danø, and P. G. Sørensen, Proc.Natl. Acad. Sci. U.S.A. 104, 1837 (2007).
[3] A. E. Motter, S. A. Myers, M. Anghel, and T. Nishikawa, Na-ture Phys. 9, 191 (2013).
[4] Y. Kuramoto, in Proceedings of the International Symposiumon Mathematical Problems in Theoretical Physics, Universityof Kyoto, Japan, Lect. Notes in Physics 30, 420 (1975), editedby H. Araki.
[5] S. H. Strogatz, Physica D 143, 1 (2000).[6] A. Pikovsky, M. Rosenblum, and J. Kurths, Synchronization: A
universal concept in nonlinear sciences, Cambridge UniversityPress, 2003.
[7] J. A. Acebron, L. L. Bonilla, C. J. P. Vicente, F. Ritort and R.Spigler, Rev. Mod. Phys. 77, 137 (2005).
[8] M. E. J. Newman, Networks, an introduction, 1st ed., OxfordUniversity Press, 2010.
[9] A. Arenas, A. Dıaz-Guilera, J. Kurths, Y. Moreno, and C. Zhou,Phys. Rep. 469, 93 (2008).
[10] M. Brede, Phys. Lett. A 372, 2618 (2008).[11] L. Buzna, S. Lozano and A. Dıaz-Guilera, Phys. Rev. E 80,
066120 (2009).[12] D. Kelly, G. A. Gottwald, Chaos 21, 025110 (2011).[13] P. S. Skardal, D. Taylor, and J. Sun, Phys. Rev. Lett. 113,
144101 (2014).[14] R.S. Pinto and A. Saa, Synchrony-optimized power grids,
[arXiv:1408.2483][15] G. Filatrella, A. H. Nielsen, N. F. Pedersen, Eur. Phys. J. B. 61,
485 (2008).[16] G. Gotwald, Chaos 25, 053111 (2015).[17] E. Ott and T. M. Antonsen, Chaos 18, 037113 (2008).[18] E. Ott and T. M. Antonsen, Chaos 19, 023117 (2009).[19] H. Hong and S. H. Strogatz Phys. Rev. E 85, 056210 (2012).[20] V. H. P. Louzada, N. A. M. Araujo, J. S. Andrade, Jr. and H. J.
Herrmann, Sci. Rep. 2, 658 (2012).

6
[21] P. Li, X. Sun, K. Zhang, J. Zhang and M. Small, Phys. Rev. E88, 022817 (2013).
[22] X. Zhang, Z. Ruan and Z. Liu, Chaos 23, 033135 (2013).[23] A. L. Barabasi, R. Albert, Science 286, 5439 (1999).[24] E. Jones, E. Oliphant, P. Peterson P, et al., SciPy: Open Source
Scientific Tools for Python, 2001, http://www.scipy.org/ [On-
line; accessed 2014-08-10].[25] Aric A. Hagberg, Daniel A. Schult and Pieter J. Swart, Ex-
ploring network structure, dynamics, and function using Net-workX, in Proceedings of the 7th Python in Science Conference(SciPy2008), Gael Varoquaux, Travis Vaught, and Jarrod Mill-man (Eds), (Pasadena, CA USA), pp. 11-15, Aug 2008.

88 OPTIMAL SYNCHRONIZATION OF KURAMOTO OSCILLATORS: A DIMENSIONAL REDUCTIONAPPROACH C.0
Referências Bibliográcas
[1] D. Sobel, Longitude: The True Story of a Lone Genius Who Solved the Greatest Scientic
Problem of His Time, Walker, 1995. 9
[2] A. Pikovsky, M. Rosenblum e J. Kurths, Synchronization: A universal concept in nonlinear
sciences, Cambridge University Press, 2003. 9, 21, 22, 57
[3] M. Bennett, M. F. Schatz, H. Rockwood e K. Wiesenfeld, Proc. R. Soc. Lond. A 458, 563-579(2002). 9
[4] S. H. Strogatz, SYNC The Emerging Science of Spontaneous Order, 1st ed., Hyperion, NewYork, 2003.u 9, 10
[5] J. Buck, Q. Rev. Biol. 63, 265 (1988). 9
[6] H. M. Smith, Science, 82 (1935). 9, 10
[7] P. Laurent, Science 45 (1917). 9
[8] https://www.ted.com/talks/steven_strogatz_on_sync. 9
[9] U. Hasson, Y. Nir, I. Levy, G. Fuhrmann e R. Malach, Science 303 (2004). 10
[10] J. Cabral, E. Hugues, O. Sporns e G. Deco NeuroImage 57 130-139 (2011). 10
[11] A. T. Winfree, J. Theor. Biol. 16, 15 (1967). 10
[12] Y. Kuramoto, in Proceedings of the International Symposium on Mathematical Problems in
Theoretical Physics, University of Kyoto, Japan, Lect. Notes in Physics 30, 420 (1975), editedby H. Araki. 10, 57
[13] J. A. Acebrón, L. L. Bonilla, C. J. P. Vicente, F. Ritort e R. Spigler, Rev. Mod. Phys. 77,137 (2005). 10, 11, 26, 57
[14] J. T. Ariaratnam e S. H. Strogatz, Phys. Rev. Lett. 86, 4278 (2001). 11
[15] P. Hagmann et al., PLoS Biol. 6 (2008). 11, 12, 15
[16] C. J. Honey, O. Sporns, L. Cammoun, X. Gigandet, J. P. Thiran, R. Meuli e P. Hagmann,Proc. Natl. Acad. Sci. U. S. A. 106, 2035-2040 (2009). 11, 12, 15
[17] N. Hutcheon, J. W. Bialek, Updated and validated power ow model of the main continental
European transmission network, In Proceedings of the IEEE PowerTech 2013, 2013, (2013).11, 15, 44
[18] M. E. J. Newman, SIAM Review 45, 167 (2003). 11, 15
[19] M. E. J. Newman, Networks, an introduction, 1st ed., Oxford University Press, 2010. 11, 15,16, 19, 44
[20] worm atlas: http://www.wormatlas.org/. 11
89

90 REFERÊNCIAS BIBLIOGRÁFICAS C.0
[21] A página do Mark Newman, http://www-personal.umich.edu/~mejn/netdata/, contém osdados de algumas redes reais. 12, 16, 29
[22] A. Arenas, A. Díaz-Guilera, J. Kurths, Y. Moreno e C. Zhou, Phys. Rep. 469, 93 (2008). 11
[23] G. Filatrella, A. H. Nielsen e N. F. Pedersen, Eur. Phys. J. B. 61, 485 (2008). 11, 39, 57
[24] S. Lozano, L. Buzna e A. Díaz-Guilera, Eur. Phys. J. B. 85, 231 (2012). 11, 39, 57
[25] M. Rohden, A. Sorge e M. Timme, D. Witthaut, Phys. Rev. Lett. 109, 064101 (2012). 11,39, 40, 57
[26] P. Villegas, P. Moretti e M. A. Muñoz, Nature Sci. Rep. 4, 5990 (2014). 12
[27] P. E. Vértes, A. F. Alexander-Blocha, N. Gogtayb, J. N. Gieddb, J. L. Rapoportb e E. T.Bullmore, Proc. Natl. Acad. Sci. U.S.A. 109 5868 (2012). 12
[28] J. Gómez-Gardeñes, S. Gómez, A. Arenas e Y. Moreno, Phys. Rev. Lett. 106, 128701 (2011).12, 31, 32, 57
[29] G. Gottwald, Chaos 25, 053111 (2015). 12, 49, 51, 52, 58
[30] M. Brede, Phys. Lett. A 372, 2618 (2008). 12, 41, 49, 50
[31] M. Brede, Eur. Phys. J. B. 62, 87 (2008). 12, 41, 49, 50
[32] R. S. Pinto e A. Saa, Phys. Rev. E 912 022818 (2015). 13
[33] R. S. Pinto e A. Saa, Synchrony-optimized power grids, http://arxiv.org/abs/1408.6702 13
[34] Python software foundation: http://www.python.org 13
[35] E. Jones, E. Oliphant, P. Peterson, et al., SciPy: Open Source Scientic Tools for Python,2001, http://www.scipy.org/ [Online; accessed 2015-03-02]. 13
[36] Aric A. Hagberg, Daniel A. Schult e Pieter J. Swart, Exploring network structure, dyna-
mics, and function using NetworkX, in Proceedings of the 7th Python in Science Conference(SciPy2008), Gäel Varoquaux, Travis Vaught, and Jarrod Millman (Eds), (Pasadena, CAUSA), pp. 11-15, Aug 2008. 13
[37] R. Pastor-Satorras, C. Castellano e P. Mieghem, A. Vespignanihttp://arxiv.org/abs/1408.2701 16
[38] F. R. Liljeros, C. R. Edling, L. A. N. Amaral, H. E. Stanley e Y. Aberg, Nature 411 (2001).17
[39] P. Erdos e A. Rényi, Publicationes Mathematicae 6 (1959). 17
[40] A. L. Barabasi e R. Albert, Science 286, 5439 (1999). 17, 18
[41] C. M. Schneider, L. de Arcangelis e H. J. Herrmann, EPL 95 (2011) 18
[42] S. Milgram, Psychol. Today 1, 1 (1967) 18
[43] M. E. J. Newman, Phys. Rev. Lett. 103, 058701 (2009). 19
[44] S. Melnik, A. Hackett, M. Porter, P. Mucha e J. Gleeson, Physical Review E 83, 036112(2011). 19
[45] S Fortunato, Phys. Rep. 486 (2010). 19

C.0 REFERÊNCIAS BIBLIOGRÁFICAS 91
[46] W.E. Boyce e R.C. DiPrima, Elementary dierential equations and boundary value problems,Wiley Interscience U.S.A. (1965). 21
[47] S. H. Strogatz, Physica D 143, 1 (2000). 23, 25, 26
[48] S. J. Blundell, K. M. Blundell, Concepts in Thermal Physics, Oxford University Press (2008).26
[49] T. Ichinomiya, Phys. Rev. E 70, 026116 (2004). 26, 27, 36, 37
[50] J. G. Restrepo, E. Ott e B. R. Hunt, Phys. Rev. E 71, 036151 (2005). 27
[51] F. Chung, L. Lu e V. Vu, Proc. Natl. Acad. Sci. U.S.A. 100, 6313 (2003). 27
[52] F. Krzakala, C. Moore, E. Mossel, J. Neeman, A. Sly, L. Zdeborova e P. Zhang, Proc. Natl.Acad. Sci. USA 110, 20935-20940 (2013). 28
[53] B. Karrer e M. E. J. Newman e L. Zdeborov Phys. Rev. Lett. 113, 208702 28
[54] T. Martin, X. Zhang e M. E. J. Newman, Phys. Rev. E 90 052808 (2014). 28
[55] H. Daido, Progr. Theoret. Phys. 81 727 (1989). 28
[56] L. Harriger, M. P. van den Heuvel e O. Sporns, PLoS ONE 7 (9) (2012). 29
[57] Tore Opsahl datasets: http://toreopsahl.com/datasets/ 29
[58] Koblenz datset: http://konect.uni-koblenz.de/networks/arenas-meta 29
[59] Pajek datasets: http://vlado.fmf.uni-lj.si/pub/networks/data/bio/Yeast/Yeast.htm 29
[60] D. Achlioptas, R. M. Souza, and J. Spencer, Science 323, 1453 (2009). 31
[61] T. K. D. M Peron e F. A. Rodrigues, Phys. Rev. E 86, 016102 (2012). 32
[62] P. Ji, T. K. D. M. Peron, P. J. Menck, F. A. Rodrigues e J. Kurths, Phys. Rev. Lett. 110,218701 (2013). 32
[63] H. Chen, G. He, F. Huang, C. Shen e Z. Hou, Chaos 23, 033124 (2013). 32
[64] I. Leyva, R. Sevilla-Escoboza, J. M. Buldú, I. Sendiña Nadal, J. Gómez-Gardeñes, A. Arenas,Y. Moreno, S. Gómez, R. Jaimes-Réategui e S. Boccaletti, Phys. Rev. Lett. 108, 168702(2012). 32
[65] T. K. D. M. Peron e F. A. Rodrigues, Phys. Rev. E 86, 056108 (2012). 32
[66] X. Zhang, X. Hu, J. Kurths e Z. Liu, Phys. Rev. E 88, 0108012(R) (2013). 32
[67] X. Zhang, Y. Zou, S. Boccaletti e Z. Liu, Nature Sci. Rep. 4, 5200 (2014). 32
[68] I. Leyva, I. Sendiña-Nadal, J. A. Almendral, A. Navas, S. Olmi e S. Boccaletti, Phys. Rev. E88, 042808 (2013). 32
[69] I. Leyva, A. Navas, I. Sendiña-Nadal, J. A. Almendral, J. M. Buldú, M. Zanin, D. Papo e S.Boccaletti, Nature Sci. Rep. 3, 1281 (2013). 32, 57
[70] P. S. Skardal e A. Arenas, Phys. Rev. E 89, 062811 (2014). 32, 35
[71] J. Gómez-Gardeñes e Y. Moreno, Phys. Rev. E 73, 056124 (2006). 32, 33
[72] J. Gómez-Gardeñes, Y. Moreno e A. Arenas, Phys. Rev. Lett. 98, 034101 (2007) 35
92 REFERÊNCIAS BIBLIOGRÁFICAS C.0
[73] C. Grabow, S. Hill, S. Grosskinsky e M. Timm, EPL (2010). 40
[74] S. Kirkpatrick, C. D. Gelatt Jr e M. P. Vecchi, Science 220 (1983). 41
[75] H. Tanaka, A. J. Lichtenberg e S. Oishi, Phys. Rev. Lett. 78, 2104 (1997). 41
[76] T. Watanabe, Physica A 392 1246-1255 (2013). 43
[77] A. Zeng e W. Liu, Phys. Rev. E 85, 066130 (2012). 44
[78] C. M. Schneider, A. A. Moreira, J. S. Andrade, S. Havlin e H. J. Herrmann, Proc. Natl. Acad.Sci. U.S.A. 108, 3838 (2011). 44
[79] P. J. Menck, J. Heitzig, J. Kurths e H. J. Schellnhuber, Natures Phys. 5, 3969 (2014). 44, 57
[80] E. Ott e T. M. Antonsen, Chaos 18, 037113 (2008) 57
[81] J. G. Restrepo e E. Ott, EPL, 107 60006 (2014). 57
[82] F. Radicchi, Phys. Rev. E 91, 010801(R) (2015). 58
[83] D. Kelly, G. A. Gottwald, Chaos 21, 025110 (2011). 49
[84] P. S. Skardal, D. Taylor, and J. Sun, Phys. Rev. Lett. 113, 144101 (2014). 49, 51
[85] L. Buzna, S. Lozano and A. Díaz-Guilera, Phys. Rev. E 80, 066120 (2009). 49
[86] H. Hong and S. H. Strogatz Phys. Rev. E 85, 056210 (2012). 49, 51, 58
[87] V. H. P. Louzada, N. A. M. Araujo, J. S. Andrade, Jr. and H. J. Herrmann, Sci. Rep. 2, 658(2012). 49
[88] P. Li, X. Sun, K. Zhang, J. Zhang and M. Small, Phys. Rev. E 88, 022817 (2013). 49
[89] X. Zhang, Z. Ruan and Z. Liu, Chaos 23, 033135 (2013). 49