INTEGRAÇÃO DUPLA - pucquepariu.s3.amazonaws.com · Uma visualização geométrica do teorema de...
52
Capítulo 8 INTEGRAÇÃO DUPLA 8.1 Integração Dupla sobre Retângulos Denotemos por R =[a,b] × [c,d]= {(x,y) ∈ R 2 /a ≤ x ≤ b, c ≤ y ≤ d} um retângu- lo em R 2 . Consideremos P 1 = {x 0 ,x 1 , ....,x n } e P 2 = {y 0 ,y 1 , ....,y n } partições de ordem n de [a,b] e [c,d] respectivamente, tais que: a = x 0 <x 1 < ...... <x n = b e c = y 0 <y 1 < ...... <y n = d e x i+1 − x i = b − a n , y j +1 − y j = d − c n . a b c d x x R i i+1 y j+1 y j R ij Figura 8.1: Partição de R. O conjunto P 1 × P 2 é denominada partição do retângulo R de ordem n. Sejam os n 2 sub-retângulos R ij =[x i ,x i+1 ] × [y j ,y j +1 ] e c ij ∈ R ij arbitrário (i, j =0, ....,n − 1). Considere a função limitada f : R −→ R. A soma S n = n-1 i=0 n-1 j =0 f (c ij )Δx Δy, onde Δx = b − a n e Δy = d − c n é dita soma de Riemann de f sobre R. 203
Transcript of INTEGRAÇÃO DUPLA - pucquepariu.s3.amazonaws.com · Uma visualização geométrica do teorema de...

Capítulo 8
INTEGRAÇÃO DUPLA
8.1 Integração Dupla sobre Retângulos
Denotemos porR = [a, b] × [c, d] = {(x, y) ∈ R2/a ≤ x ≤ b, c ≤ y ≤ d} um retângu-lo em R2. Consideremos P1 = {x0, x1, ...., xn} e P2 = {y0, y1, ...., yn} partições deordem n de [a, b] e [c, d] respectivamente, tais que:
a = x0 < x1 < . . . . . . < xn = b e c = y0 < y1 < . . . . . . < yn = d
e xi+1 − xi =b− a
n, yj+1 − yj =
d− c
n.
a b
c
d
x x
R
i i+1
yj+1
yjR ij
Figura 8.1: Partição de R.
O conjunto P1×P2 é denominada partição do retânguloR de ordem n. Sejam os n2
sub-retângulos Rij = [xi, xi+1] × [yj, yj+1] e cij ∈ Rij arbitrário (i, j = 0, ...., n − 1).Considere a função limitada f : R −→ R. A soma
Sn =
n−1∑
i=0
n−1∑
j=0
f(cij)∆x∆y,
onde∆x =b− a
ne ∆y =
d− c
né dita soma de Riemann de f sobre R.
203
204 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Definição 8.1. Uma função f : R −→ R limitada é integrável sobre R se
limn→+∞
Sn,
existe independente da escolha de cij ∈ Rij e da partição; em tal caso denotamos este limitepor:
∫∫
R
f(x, y) dx dy,
que é denominada integral dupla de f sobre R.
Teorema 8.1. Toda f : R −→ R contínua é integrável.
A prova deste teorema pode ser vista em [EL].
8.2 Significado Geométrico da Integral Dupla
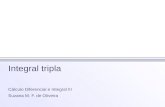
Se f é contínua e f(x, y) ≥ 0 para todo (x, y) ∈ R, a existência da integral dupla def sobre R tem um significado geométrico direto. Consideramos o sólido W ⊂ R3
definido por:
W = {(x, y, z) ∈ R3 / a ≤ x ≤ b, c ≤ y ≤ d, 0 ≤ z ≤ f(x, y)}
Figura 8.2: O sólidoW .
W é fechado e limitado superiormente pelo gráfico de z = f(x, y), inferiormentepor R e lateralmente pelos planos x = a, x = b, y = c, y = d. Se denotamos porV (W ) o volume deW , então:
V (W ) =
∫∫
R
f(x, y) dx dy
De fato, escolhendo cij como o ponto onde f atinge seu máximo sobre Rij (pois Ré fechado, limitado e f é contínua), então f(cij) × ∆x× ∆y é o volume do parale-lepípedo de base Rij e altura f(cij).

8.2. SIGNIFICADO GEOMÉTRICO DA INTEGRAL DUPLA 205
Figura 8.3: Partição e os paralelepípedos deW , respectivamente.
Sn =
n−1∑
i=0
n−1∑
j=0
f(cij)∆x∆y
é o volume do sólido circunscrito aW . Analogamente se eij é o ponto onde f atingeseu mínimo sobre Rij (pois R é fechado, limitado e f é contínua), então:
sn =
n−1∑
i=0
n−1∑
j=0
f(eij)∆x∆y
é o volume do sólido inscrito emW . Como f é integrável, os limites das somas deRiemann Sn e sn independem da escolha de cij e eij :
limn→∞
Sn = limn→∞
sn =
∫∫
R
f(x, y) dx dy.
Em outras palavras os volumes dos sólidos inscritos e circunscritos a W , tendemao mesmo limite. Portanto, é razoável chamar este limite de volume deW .
Figura 8.4: Reconstrução do sólido.
206 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Figura 8.5: Reconstrução do sólido.
Novamente notamos que é possível mostrar rigorosamente que o significado geo-métrico da integral dupla independe da escolha da partição e dos pontos cij e eij .
A integral dupla tem propriedades análogas às das integrais das funções de umavariável.
Proposição 8.1.
1. Linearidade da integral dupla. Se f e g são funções integraveis sobre R entãopara todo α, β ∈ R, α f + β g é integrável sobre R, e:
∫∫
R
(
α f(x, y) + β g(x, y))
dx dy = α
∫∫
R
f(x, y) dx dy + β
∫∫
R
g(x, y) dx dy.
2. Se f e g são integráveis sobre R e g(x, y) ≤ f(x, y), para todo (x, y) ∈ R, então:∫∫
R
g(x, y) dx dy ≤∫∫
R
f(x, y) dx dy.
3. Se R é subdividido em k retângulos e f é integrável sobre cada Ri, i = 1, ..., k entãof é integrável sobre R e,
∫∫
R
f(x, y) dx dy =
k∑
i=1
∫∫
Ri
f(x, y) dx dy.
8.3 Integrais Iteradas
Uma integral iterada de f sobre R é uma integral do tipo:∫ d
c
[∫ b
a
f(x, y) dx
]
dy.
Para calculá-la fixamos y e calculamos a integral∫ b
a
f(x, y) dx como integral de uma
veriável em x; o resultado é uma função de y que é novamente integrada em y, comlimites de integração c e d.
A integral∫ b
a
[∫ d
c
f(x, y) dy
]
dx é calculada de forma análoga.

8.3. INTEGRAIS ITERADAS 207
Exemplo 8.1.
[1] Calcule∫ 2
0
[∫ 3
1x2y dy
]
dx.
∫ 3
1x2y dy = x2
∫ 3
1y dy = 4x2 e
∫ 2
0
[∫ 3
1x2y dy
]
dx =
∫ 2
04x2 dx =
32
3.
[2] Calcule∫ π
0
[∫ π
0cos(x+ y) dx
]
dy.
∫ π
0cos(x+ y) dx = sen(x+ y)
∣
∣
x=π
x=0= sen(y + π) − sen(y),
e∫ π
0
[∫ π
0cos(x+ y) dx
]
dy =
∫ π
0(sen(y + π) − sen(y)) dy = −4.
[3] Calcule∫ 1
−1
[∫ 1
−2(x2 + y2) dx
]
dy.
∫ 1
−2(x2 + y2) dx =
(x3
3+ x y2
)
∣
∣
∣
∣
x=1
x=−2
= 3 + 3 y2
e
∫ 1
−1
[∫ 1
−2(x2 + y2) dx
]
dy =
∫ 1
−1(3 + 3 y2) dy = 8.
[4] Calcule∫ π
3
π6
[∫ 4
0ρ2 eρ
3
sen(φ) dρ
]
dφ.
∫ 4
0ρ2 eρ
3
sen(φ) dρ = sen(φ)
∫ 4
0ρ2 eρ
3
dρ = sen(φ)eρ
3
3
∣
∣
∣
∣
4
0
= sen(φ)e64 − 1
3
e
∫ π3
π6
[∫ 4
0ρ2 eρ
3
sen(φ) dρ
]
dφ =e64 − 1
3
∫ π3
π6
sen(φ) dφ =(e64 − 1) (
√3 − 1)
6.
[5] Calcule∫ 1
0
[∫
√1−y2
0
√
1 − y2 dx
]
dy.
∫
√1−y2
0
√
1 − y2 dx = 1 − y2, e∫ 1
0
[∫
√1−y2
0
√
1 − y2 dx
]
dy =
∫ 1
0(1 − y2) dy =
2
3.

208 CAPÍTULO 8. INTEGRAÇÃO DUPLA
[6] Seja a função f : [0, 1] × [0, 1] −→ R definida por:
f(x, y) =
{
1 se x ∈ Q
2 y se x /∈ Q.
Então:
∫ 1
0dy =
∫ 1
0dy = 1 se x ∈ Q
∫ 1
02 y dy = 1 se x /∈ Q.
Logo,∫ 1
0
[∫ 1
0dy
]
dx = 1.
Por outro lado∫ 1
0f(x, y) dx não existe, exceto quando y =
1
2; logo,
∫ 1
0
[∫ 1
0dx
]
dy
não existe. Em geral, nada garante a existência das integrais iteradas.
8.4 Teorema de Fubini
O seguinte teorema fundamental relaciona a integral dupla com as integrais itera-das, o que facilitará seu cálculo.
Teorema 8.2. (Fubini): Seja f : R −→ R contínua sobre R. Então:
∫∫
R
f(x, y) dx dy =
∫ d
c
[∫ b
a
f(x, y) dx
]
dy =
∫ b
a
[∫ d
c
f(x, y) dy
]
dx
Prova: Veja o apêndice.
Uma visualização geométrica do teorema de Fubini pode ser feita usando o princí-pio de Cavalieri: “ Dado um sólido, se denotamos por A(y) a área da seção trans-versal ao sólido, medida a uma distância y de um plano de referência, o volume dosólido é dado por: V =
∫ d
cA(y) dy, onde c e d são as distâncias mínima e máxima
ao plano de referência”.
Se f é uma função contínua e f(x, y) ≥ 0 em todo R, então∫∫
R
f(x, y) dx dy repre-
senta o volume do sólidoW :
W = {(x, y, z) ∈ R3 /a ≤ x ≤ b, c ≤ y ≤ d, 0 ≤ z ≤ f(x, y)}.
8.4. TEOREMA DE FUBINI 209
c
Rb
da
Figura 8.6:
Se intersectamos o sólido por um plano paralelo ao plano yz a uma distância x daorigem, obtemos uma seção plana que tem como área A(x) =
∫ d
cf(x, y) dy. Pelo
princípio de Cavalieri, o volume total do sólido é:∫∫
R
f(x, y) dx dy =
∫ b
a
A(x) dx =
∫ b
a
[∫ d
c
f(x, y) dy
]
dx.
Analogamente, se intersectamos o sólido por um plano paralelo ao plano xz a umadistância y da origem obtemos uma seção plana de área A(y) =
∫ b
af(x, y) dx e pelo
princípio de Cavalieri:∫∫
R
f(x, y) dx dy =
∫ d
c
A(y) dy =
∫ d
c
[∫ b
a
f(x, y) dx
]
dy.
Exemplo 8.2.
[1] Calcule∫∫
R
dx dy, onde R = [a, b] × [c, d].
∫∫
R
dx dy =
∫ b
a
[∫ d
c
dy
]
dx =
∫ b
a
(d− c) dx = (b− a) (d− c);
numericamente a integral dupla∫∫
R
dx dy, corresponde a área de R ou ao volume
do paralelepípedo de base R e altura 1.
[2] Calcule∫∫
R
f(x, y) dx dy, onde R = [a, b] × [c, d] e f(x, y) = h, h constante
positiva.∫∫
R
f(x, y) dx dy = h
∫∫
R
dx dy = h×A(R) = h (b− a) (d− c),
onde a última igualdade expressa o volume do paralelepípedo de base R e alturah.
[3] Calcule∫∫
R
(x y + x2) dx dy, onde R = [0, 1] × [0, 1].
∫∫
R
(x y + x2) dx dy =
∫ 1
0
[∫ 1
0(x y + x2) dx
]
dy =
∫ 1
0
[
x2 y
2+x3
3
]∣
∣
∣
∣
x=1
x=0
dy
=
∫ 1
0
[
y
2+
1
3
]
dy =7
12.

210 CAPÍTULO 8. INTEGRAÇÃO DUPLA
O número7
12representa o volume do sólido limitado superiormente pelo gráfico
da função f(x, y) = x y + x2 e pelos planos coordenados. ((x, y) ∈ [0, 1] × [0, 1]).
0
1
0
1
Figura 8.7: Exemplo [4].
[4] Calcule∫∫
R
x y2 dx dy, onde R = [−1, 0] × [0, 1].
∫∫
R
x y2 dx dy =
∫ 1
0
[∫ 0
−1x y2 dx
]
dy = −1
2
∫ 1
0y2dy = −1
6.
[5] Calcule∫∫
R
sen(x+ y) dx dy, onde R = [0, π] × [0, 2π].
∫∫
R
sen(x+y) dx dy =
∫ 2π
0
[∫ π
0sen(x+y) dx
]
dy =
∫ 2π
0(cos(y)−cos(y+π)) dy = 0.
[6] Calcule o volume do sólido limitado superiormente por z = 1−y e inferiormentepelo retângulo definido por 0 ≤ x ≤ 1 e 0 ≤ y ≤ 1.
0.00.5
1.0
0.0
0.5
1.0
0.0
0.5
1.0
Figura 8.8: Sólido do exemplo [6].
O sólido está limitado superiormente pelo plano z = 1 − y e inferiormente peloretângulo R = [0, 1] × [0, 1]; então, o volume V é:
V =
∫∫
R
(1 − y) dx dy =
∫ 1
0
[∫ 1
0(1 − y) dx
]
dy =
∫ 1
0(1 − y) dy =
1
2u.v.
8.4. TEOREMA DE FUBINI 211
[7] Calcule o volume do sólido limitado por z = x2 +y2 e pelos planos x = 0, x = 3,y = 0 e y = 1.
Figura 8.9: Sólido do exemplo [7].
R = [0, 3] × [0, 1]. O volume é:
V =
∫∫
R
(x2 + y2) dx dy =
∫ 1
0
[∫ 3
0(x2 + y2) dx
]
dy =
∫ 1
0(9 + 3y2) dy = 10u.v.
u.v. =unidades de volume.
[8] Calcule o volume do sólido limitado por z = 1−y2 e pelos planos x = −1, x = 1,y = −1 e y = 1.
Figura 8.10: Sólido do exemplo [8].
R = [−1, 1] × [−1, 1]. O volume é:
V =
∫∫
R
(1 − y2) dx dy =
∫ 1
−1
[∫ 1
−1(1 − y2) dx
]
dy = 2
∫ 1
−1(1 − y2) dy =
8
3u.v.
8.4.1 Extensão do Teorema de Fubini
Antes de estudar a integral dupla em regiões mais gerais enunciaremos uma gene-reralização do teorema 8.1.
212 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Definição 8.2. Seja A ⊂ R, R = [a, b] × [c, d]. O conjunto A ⊂ R tem conteúdonulo se existe um número finito de sub-retângulos Ri ⊂ R, (1 ≤ i ≤ n) tais que A ⊂R1 ∪R2 ∪ . . . ∪Rn−1 ∪Rn e:
limn→+∞
n∑
i=1
|Ri| = 0;
onde |Ri| é a área de Ri.
Exemplo 8.3.
[1] Se A = {p1, p2, ......., pm}, pi ∈ R, (1 ≤ i ≤ m). O conjunto A tem conteúdo nulo.Utilizando uma partição de ordem n de R como antes, temos:
|Ri| =(b− a) (d− c)
n2,
1 ≤ i ≤ n. Como cada ponto pode estar no máximo em quatro sub-retângulos,então:
0 <
n∑
i=1
|Ri| ≤4m (b− a) (d − c)
n2.
Logo limn→+∞
n∑
i=1
|Ri| = 0.
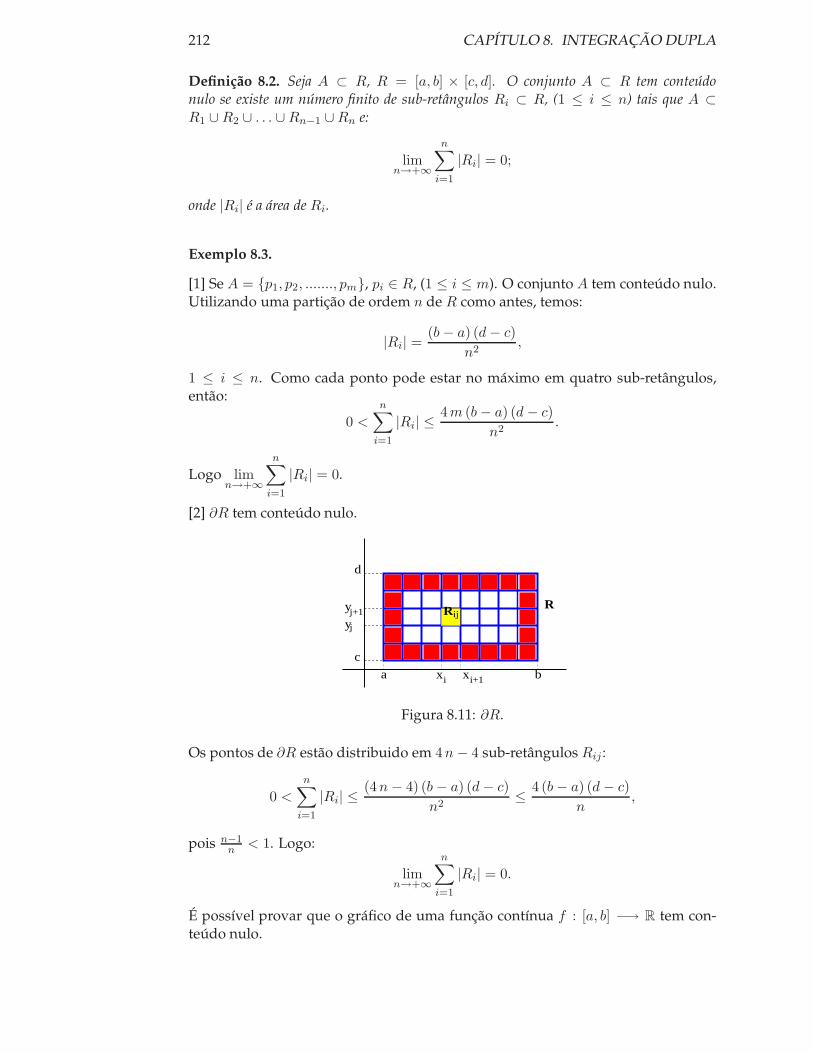
[2] ∂R tem conteúdo nulo.
b
c
d
x xa i i+1
yj+1
y
RRij
j
Figura 8.11: ∂R.
Os pontos de ∂R estão distribuido em 4n − 4 sub-retângulos Rij :
0 <
n∑
i=1
|Ri| ≤(4n − 4) (b− a) (d− c)
n2≤ 4 (b− a) (d − c)
n,
pois n−1n
< 1. Logo:
limn→+∞
n∑
i=1
|Ri| = 0.
É possível provar que o gráfico de uma função contínua f : [a, b] −→ R tem con-teúdo nulo.

8.5. INTEGRAÇÃO DUPLA SOBRE REGIÕES MAIS GERAIS 213
Figura 8.12: G(f).
Teorema 8.3. Se f : R −→ R é uma função limitada e o conjunto onde f é descontínuatem conteúdo nulo, então f é integrav́el sobre R.
Prova: Veja [EL] na bibliografia.
8.5 Integração Dupla sobre Regiões mais Gerais
Definiremos três tipos especiais de subconjuntos do plano, que serão utilizadospara estender o conceito de integral dupla sobre retângulos a regiões mais gerais
8.6 Regiões Elementares
SejaD ⊂ R2.
Regiões de tipo I
D é uma região de tipo I se pode ser descrita por:
D = {(x, y) ∈ R2/a ≤ x ≤ b, φ1(x) ≤ y ≤ φ2(x)}
sendo φi : [a, b] −→ R (i = 1, 2) funções contínuas tais que φ1(x) ≤ φ2(x) para todox ∈ [a, b].
a b
DD
ba
φφ
φ
φ
1
2
2
1
Figura 8.13: Regiões de tipo I.
214 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Regiões de tipo II
D é uma região de tipo II se pode ser descrita por:
D = {(x, y) ∈ R2/c ≤ y ≤ d, ψ1(y) ≤ x ≤ ψ2(y)}
sendo ψi : [c, d] −→ R (i = 1, 2) funções contínuas tais que ψ1(y) ≤ ψ2(y) para todoy ∈ [c, d].
D
d
c
ψ Dψ ψ
1 2
ψ1
2
Figura 8.14: Regiões de tipo II.
Regiões de tipo III
D é uma região de tipo III se pode ser descrita como região de tipo I ou de tipo II.As regiões de tipos I, II ou III são chamadas elementares. As regiões elementaressão fechadas e limitadas.
Exemplo 8.4.
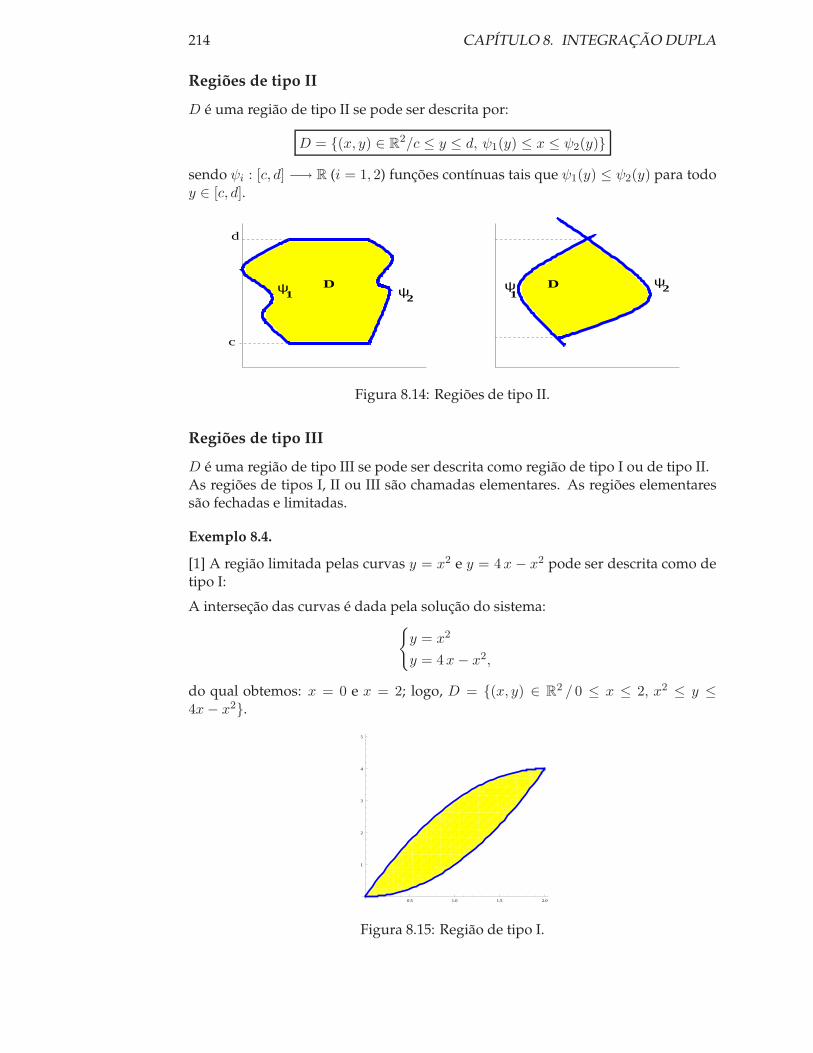
[1] A região limitada pelas curvas y = x2 e y = 4x − x2 pode ser descrita como detipo I:
A interseção das curvas é dada pela solução do sistema:{
y = x2
y = 4x− x2,
do qual obtemos: x = 0 e x = 2; logo, D = {(x, y) ∈ R2 / 0 ≤ x ≤ 2, x2 ≤ y ≤4x− x2}.
0.5 1.0 1.5 2.0
1
2
3
4
5
Figura 8.15: Região de tipo I.
8.6. REGIÕES ELEMENTARES 215
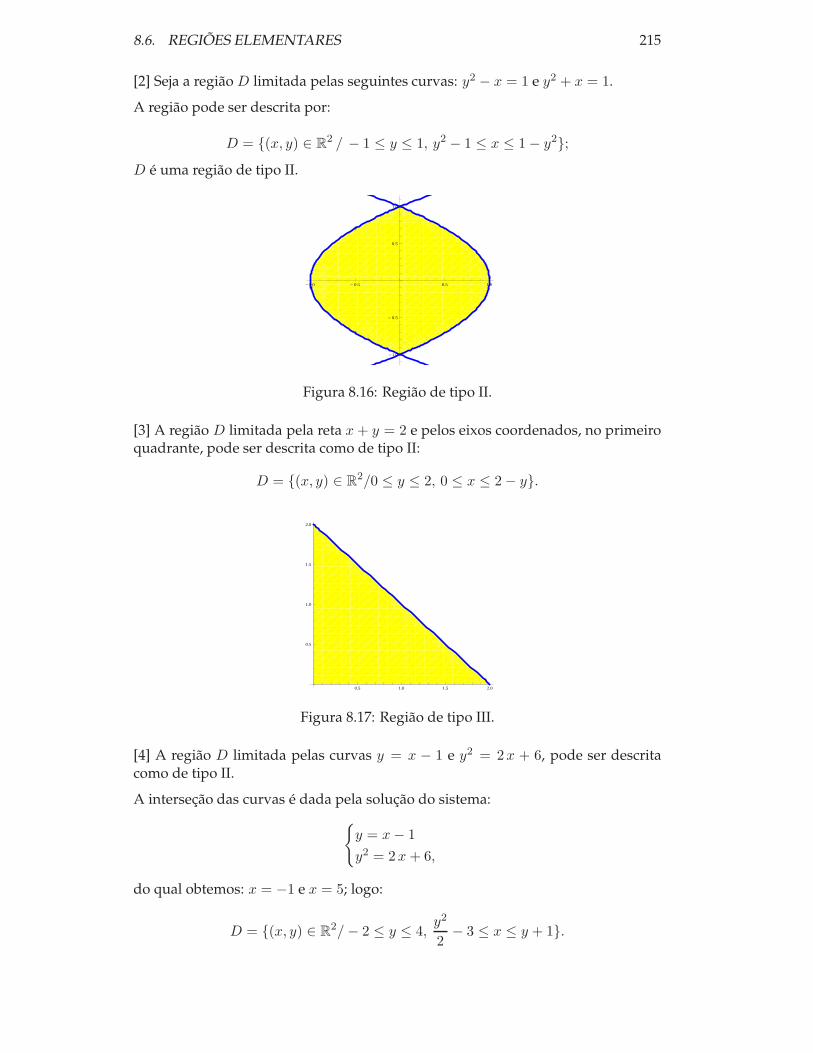
[2] Seja a regiãoD limitada pelas seguintes curvas: y2 − x = 1 e y2 + x = 1.
A região pode ser descrita por:
D = {(x, y) ∈ R2 / − 1 ≤ y ≤ 1, y2 − 1 ≤ x ≤ 1 − y2};D é uma região de tipo II.
-1.0 - 0.5 0.5 1.0
-1.0
- 0.5
0.5
1.0
Figura 8.16: Região de tipo II.
[3] A região D limitada pela reta x+ y = 2 e pelos eixos coordenados, no primeiroquadrante, pode ser descrita como de tipo II:
D = {(x, y) ∈ R2/0 ≤ y ≤ 2, 0 ≤ x ≤ 2 − y}.
0.5 1.0 1.5 2.0
0.5
1.0
1.5
2.0
Figura 8.17: Região de tipo III.
[4] A região D limitada pelas curvas y = x − 1 e y2 = 2x + 6, pode ser descritacomo de tipo II.
A interseção das curvas é dada pela solução do sistema:{
y = x− 1
y2 = 2x+ 6,
do qual obtemos: x = −1 e x = 5; logo:
D = {(x, y) ∈ R2/− 2 ≤ y ≤ 4,y2
2− 3 ≤ x ≤ y + 1}.

216 CAPÍTULO 8. INTEGRAÇÃO DUPLA
1 2 3
1
2
3
1 2 3
1
2
3
Figura 8.18: Região de tipo II.
[5] SejaD a região limitada pela curva x2 + y2 = 1; esta região é do tipo III. De fato:
De tipo I:
D = {(x, y) ∈ R2/− 1 ≤ x ≤ 1, φ1(x) = −√
1 − x2 ≤ y ≤ φ2(x) =√
1 − x2}.
De tipo II:
D = {(x, y) ∈ R2/− 1 ≤ y ≤ 1, ψ1(y) = −√
1 − y2 ≤ x ≤ ψ2(y) =√
1 − y2}.
8.7 Extensão da Integral Dupla
Seja D uma região elementar tal que D ⊂ R, onde R é um retãngulo e f : D −→ R
uma função contínua (logo limitada). Definamos f∗ : R −→ R por:
f∗(x, y) =
{
f(x, y) se (x, y) ∈ D
0 se (x, y) ∈ R−D.
f∗ é limitada e contínua, exceto, possivelmente, em ∂D; mas se ∂D consiste de umaunião finita de curvas que são gráficos de funções contínuas, pelo teorema 8.1, f∗ éintegrável sobre R.
D
RR
D
Figura 8.19: Gráficos de f e f∗, respectivamente.
Definição 8.3. f : D −→ R é integrável sobre D se f∗ é integrável sobre R e em tal casodefinimos:
∫∫
D
f(x, y) dx dy =
∫∫
R
f∗(x, y) dx dy.
8.8. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 217
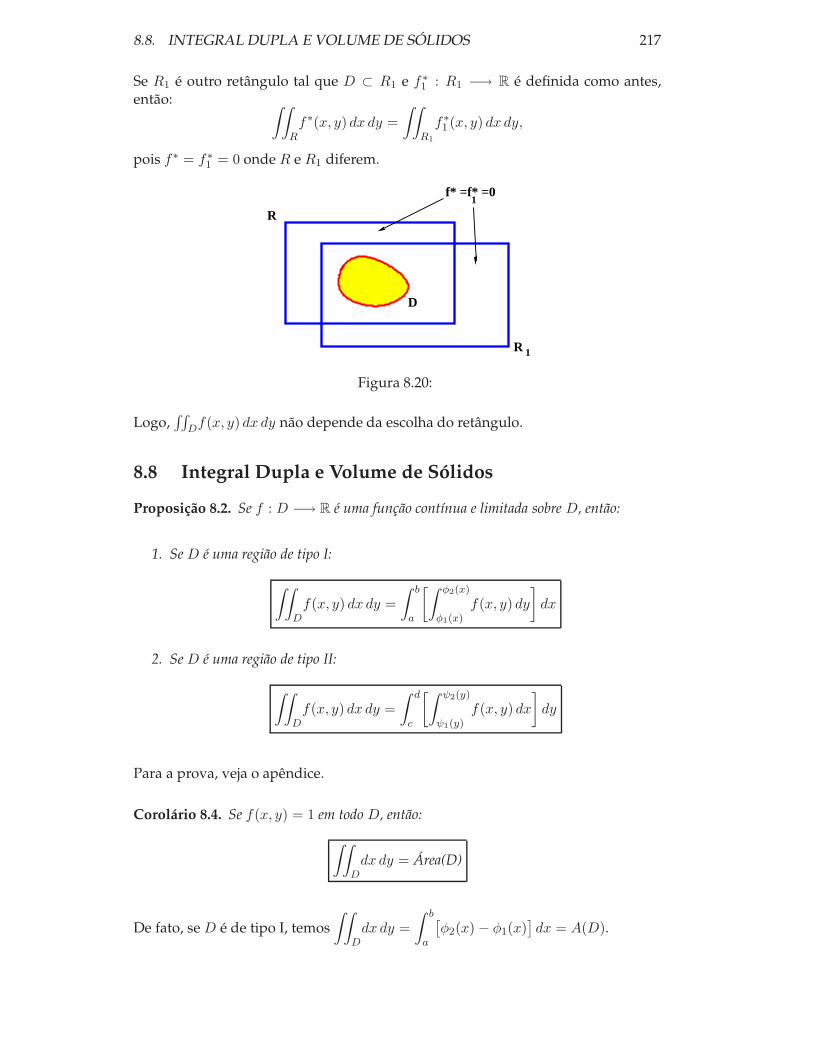
Se R1 é outro retângulo tal que D ⊂ R1 e f∗1 : R1 −→ R é definida como antes,então:
∫∫
R
f∗(x, y) dx dy =
∫∫
R1
f∗1 (x, y) dx dy,
pois f∗ = f∗1 = 0 onde R e R1 diferem.
R
D
R
f* =f* =0
1
1
Figura 8.20:
Logo,∫∫
Df(x, y) dx dy não depende da escolha do retângulo.
8.8 Integral Dupla e Volume de Sólidos
Proposição 8.2. Se f : D −→ R é uma função contínua e limitada sobre D, então:
1. Se D é uma região de tipo I:
∫∫
D
f(x, y) dx dy =
∫ b
a
[∫ φ2(x)
φ1(x)f(x, y) dy
]
dx
2. Se D é uma região de tipo II:
∫∫
D
f(x, y) dx dy =
∫ d
c
[∫ ψ2(y)
ψ1(y)f(x, y) dx
]
dy
Para a prova, veja o apêndice.
Corolário 8.4. Se f(x, y) = 1 em todo D, então:
∫∫
D
dx dy = Área(D)
De fato, seD é de tipo I, temos∫∫
D
dx dy =
∫ b
a
[
φ2(x) − φ1(x)]
dx = A(D).

218 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Se f(x, y) ≥ 0 e é contínua emD, podemos novamente interpretar a integral duplade f sobre D como o volume do sólidoW limitado superiormente pelo gráfico def e inferiormente porD.
W = {(x, y, z) ∈ R3/(x, y) ∈ D, 0 ≤ z ≤ f(x, y)}
D é a projeção deW sobre o plano xy e:
V (W ) =
∫∫
D
f(x, y) dx dy
8.8.1 Exemplos
[1] Calcule∫ 1
0
[∫ 1
y
ex2
dx
]
dy. A integral não pode ser calculada na ordem dada.
Observe que:∫∫
D
ex2
dx dy =
∫ 1
0
[∫ 1
y
ex2
dx
]
dy.
A regiãoD, onde está definida a integral, é de tipo II: 0 ≤ y ≤ 1 e y ≤ x ≤ 1.
1
1
1
1
Figura 8.21: A região D.
A região D é de tipo III; logo,D também é de tipo I. De fato: 0 ≤ x ≤ 1 e 0 ≤ y ≤ xe:
∫∫
D
ex2
dx dy =
∫ 1
0
[∫ x
0ex
2
dy
]
dx =
∫ 1
0x ex
2
dx =1
2(e− 1).
[2] Calcule∫ 1
0
[∫ 1
x
sen(y)
ydy
]
dx.
A região D, onde está definida a integral é de tipo I: 0 ≤ x ≤ 1 e x ≤ y ≤ 1. Poroutro lado,D é de tipo III, logoD também é de tipo II: 0 ≤ y ≤ 1 e 0 ≤ x ≤ y:
8.8. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 219
1
1
1
1
Figura 8.22: A região D.
∫ 1
0
[∫ 1
x
sen(y)
ydy
]
dx =
∫ 1
0
[∫ y
0
sen(y)
ydx
]
dy =
∫ 1
0sen(y) dy = 1 − cos(1).
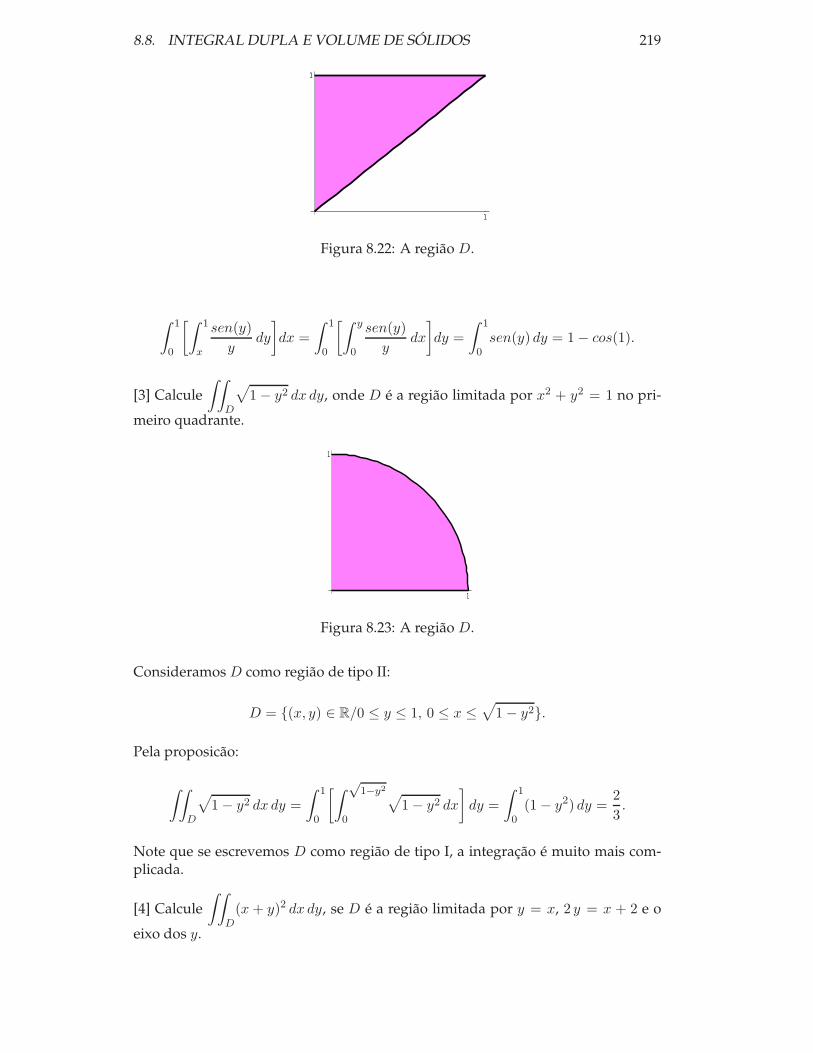
[3] Calcule∫∫
D
√
1 − y2 dx dy, onde D é a região limitada por x2 + y2 = 1 no pri-
meiro quadrante.
1
1
1
1
Figura 8.23: A região D.
ConsideramosD como região de tipo II:
D = {(x, y) ∈ R/0 ≤ y ≤ 1, 0 ≤ x ≤√
1 − y2}.
Pela proposicão:
∫∫
D
√
1 − y2 dx dy =
∫ 1
0
[∫
√1−y2
0
√
1 − y2 dx
]
dy =
∫ 1
0(1 − y2) dy =
2
3.
Note que se escrevemos D como região de tipo I, a integração é muito mais com-plicada.
[4] Calcule∫∫
D
(x+ y)2 dx dy, se D é a região limitada por y = x, 2 y = x + 2 e o
eixo dos y.
220 CAPÍTULO 8. INTEGRAÇÃO DUPLA
1 2
1
1 2
1
Figura 8.24: A região D.
As retas se intersectam no ponto (2, 2). EscrevendoD como região de tipo I:0 ≤ x ≤ 2, x ≤ y ≤ x
2+ 1.
∫∫
D
(x+ y)2 dx dy =
∫ 2
0
[∫ x
2+1
x
(x+ y)2 dy
]
dx =1
3
∫ 2
0
((3x
2+ 1
)3 − 8x3)
dx =21
6.
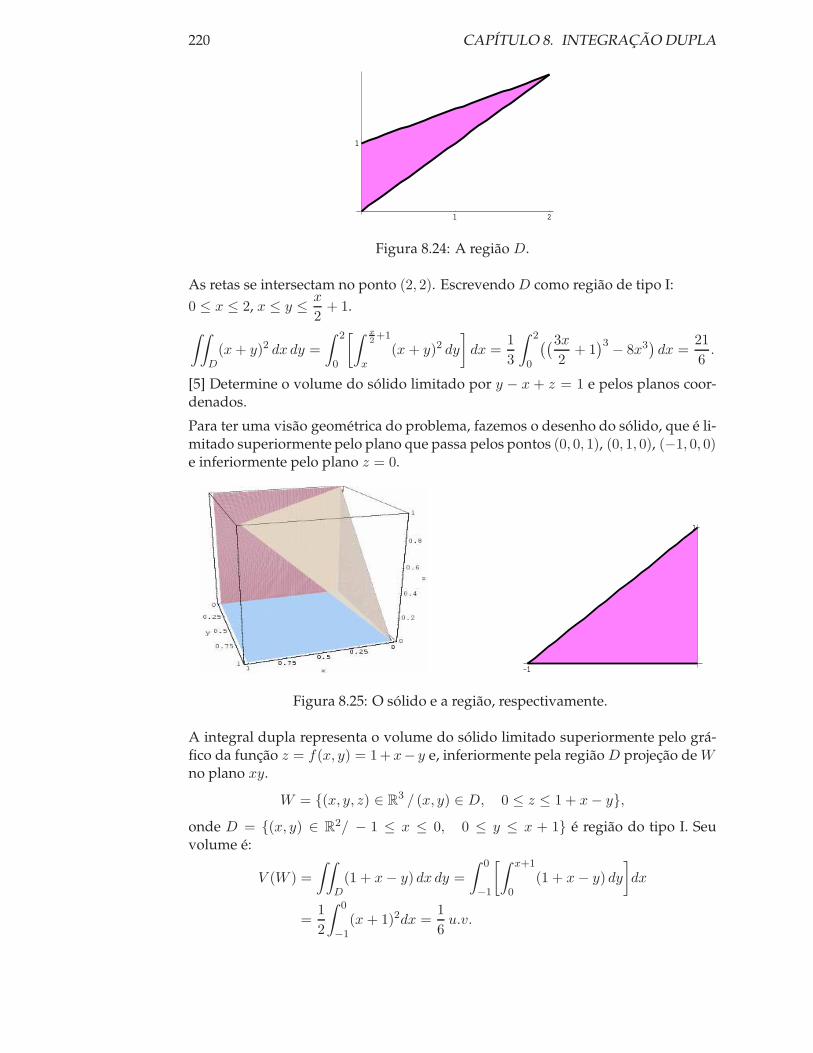
[5] Determine o volume do sólido limitado por y − x + z = 1 e pelos planos coor-denados.
Para ter uma visão geométrica do problema, fazemos o desenho do sólido, que é li-mitado superiormente pelo plano que passa pelos pontos (0, 0, 1), (0, 1, 0), (−1, 0, 0)e inferiormente pelo plano z = 0.
-1
1
-1
1
Figura 8.25: O sólido e a região, respectivamente.
A integral dupla representa o volume do sólido limitado superiormente pelo grá-fico da função z = f(x, y) = 1+x− y e, inferiormente pela regiãoD projeção deWno plano xy.
W = {(x, y, z) ∈ R3 / (x, y) ∈ D, 0 ≤ z ≤ 1 + x− y},onde D = {(x, y) ∈ R2/ − 1 ≤ x ≤ 0, 0 ≤ y ≤ x + 1} é região do tipo I. Seuvolume é:
V (W ) =
∫∫
D
(1 + x− y) dx dy =
∫ 0
−1
[∫ x+1
0(1 + x− y) dy
]
dx
=1
2
∫ 0
−1(x+ 1)2dx =
1
6u.v.
8.8. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 221
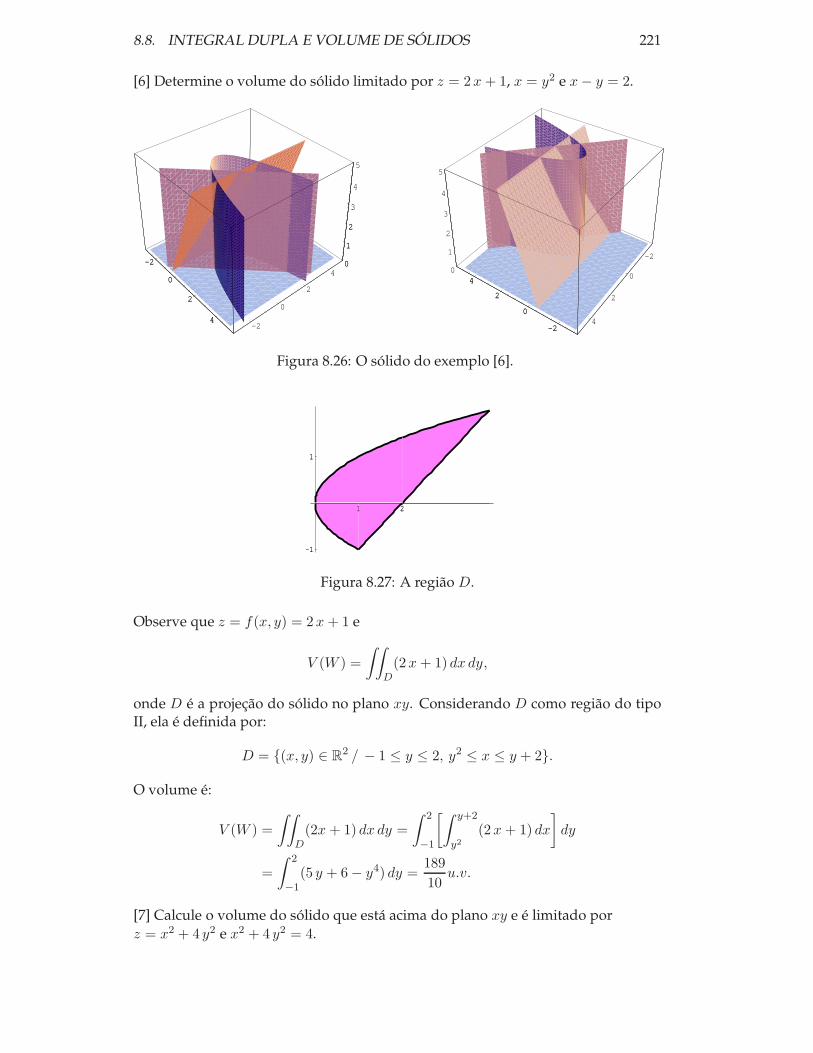
[6] Determine o volume do sólido limitado por z = 2x+ 1, x = y2 e x− y = 2.
-2
0
2
4-2
0
2
40
1
2
3
4
5
-2
0
2
4
0
1
2
3
4
-2
0
2
4
-2
0
2
4
0
1
2
3
4
5
-2
0
2
4
Figura 8.26: O sólido do exemplo [6].
1 2
-1
1
1 2
-1
1
Figura 8.27: A região D.
Observe que z = f(x, y) = 2x+ 1 e
V (W ) =
∫∫
D
(2x+ 1) dx dy,
onde D é a projeção do sólido no plano xy. Considerando D como região do tipoII, ela é definida por:
D = {(x, y) ∈ R2 / − 1 ≤ y ≤ 2, y2 ≤ x ≤ y + 2}.
O volume é:
V (W ) =
∫∫
D
(2x+ 1) dx dy =
∫ 2
−1
[∫ y+2
y2(2x+ 1) dx
]
dy
=
∫ 2
−1(5 y + 6 − y4) dy =
189
10u.v.
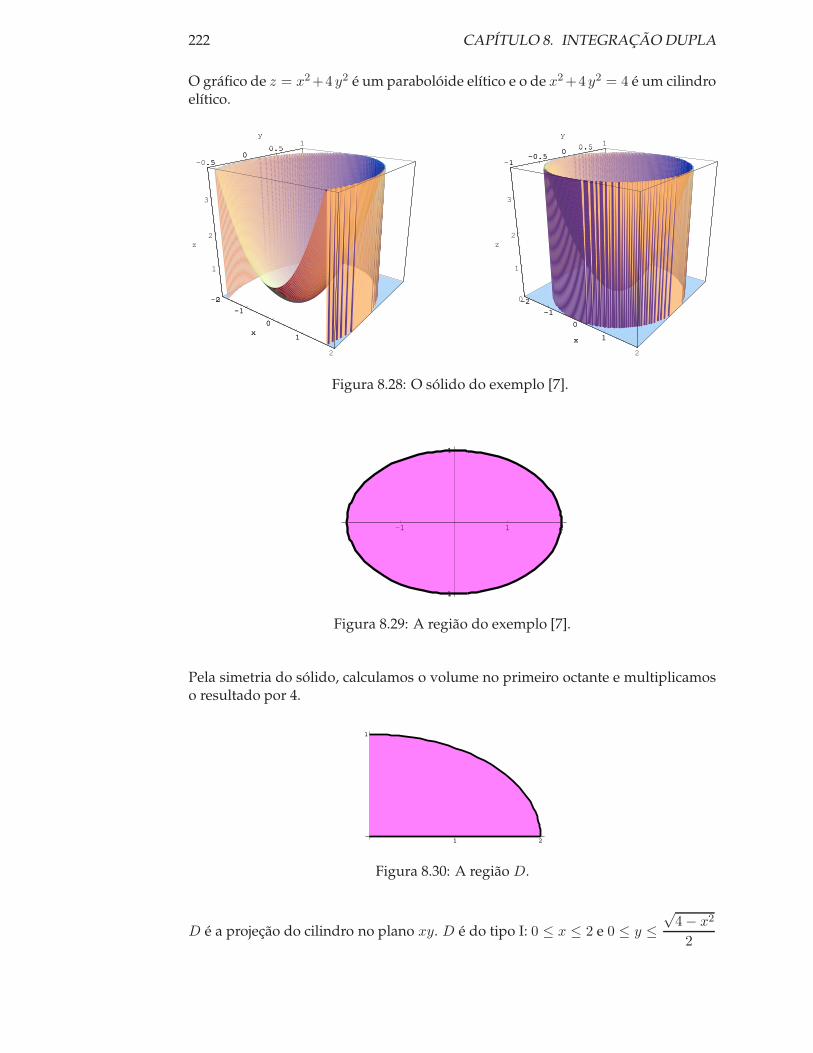
[7] Calcule o volume do sólido que está acima do plano xy e é limitado porz = x2 + 4 y2 e x2 + 4 y2 = 4.
222 CAPÍTULO 8. INTEGRAÇÃO DUPLA
O gráfico de z = x2 +4 y2 é um parabolóide elítico e o de x2 +4 y2 = 4 é um cilindroelítico.
-2
-1
0
1
2
x
-0.50
0.51
y
0
1
2
3
z
-2
-1
0
1
2
x
-0.50
0.5
-2
-1
0
1
2
x
-1-0.5
00.5 1
y
0
1
2
3
z
-2
-1
0
1x
-1-0.5
00.5
Figura 8.28: O sólido do exemplo [7].
1-1 2
-1
1
1-1 2
-1
1
Figura 8.29: A região do exemplo [7].
Pela simetria do sólido, calculamos o volume no primeiro octante e multiplicamoso resultado por 4.
1 2
1
1 2
1
Figura 8.30: A região D.
D é a projeção do cilindro no plano xy. D é do tipo I: 0 ≤ x ≤ 2 e 0 ≤ y ≤√
4 − x2
2
8.8. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 223
e,
V = 4
∫∫
D
(x2 + 4y2) dx dy = 4
∫ 2
0
[∫
√4−x2
2
0(x2 + 4 y2) dy
]
dx
= 2
∫ 2
0
(
x2√
4 − x2 +(4 − x2)
3
2
3
)
dx = 4π u.v.
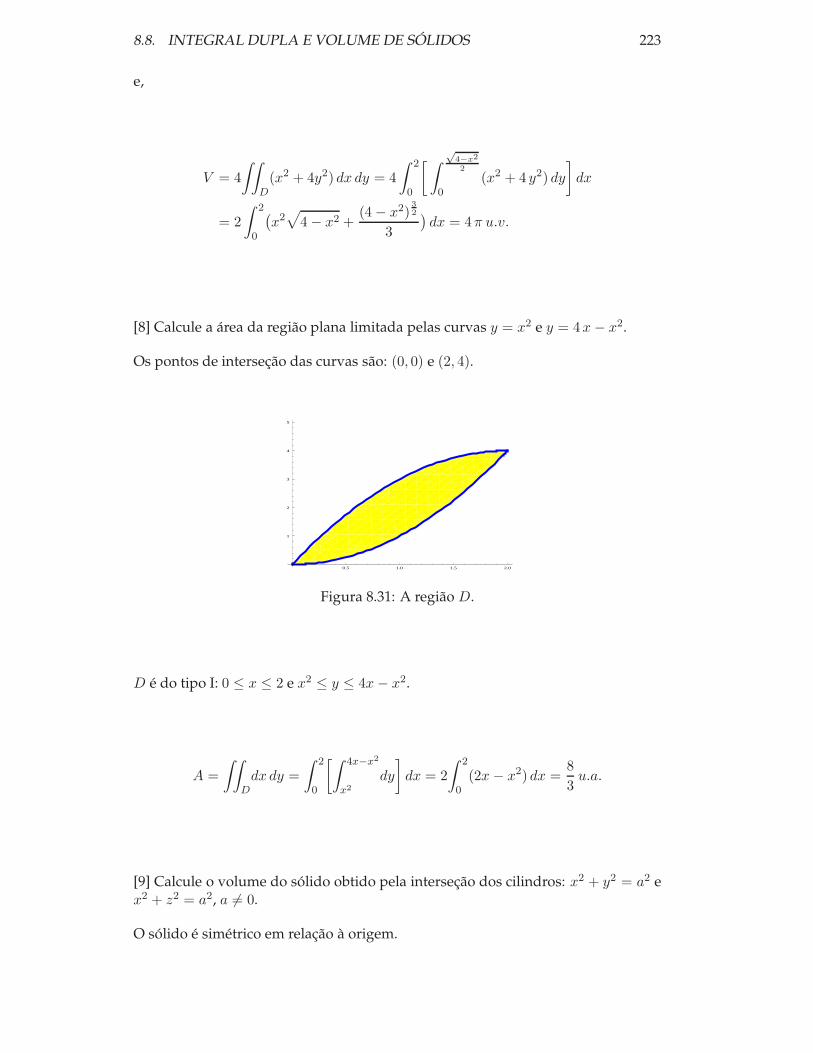
[8] Calcule a área da região plana limitada pelas curvas y = x2 e y = 4x− x2.
Os pontos de interseção das curvas são: (0, 0) e (2, 4).
0.5 1.0 1.5 2.0
1
2
3
4
5
Figura 8.31: A região D.
D é do tipo I: 0 ≤ x ≤ 2 e x2 ≤ y ≤ 4x− x2.
A =
∫∫
D
dx dy =
∫ 2
0
[∫ 4x−x2
x2
dy
]
dx = 2
∫ 2
0(2x− x2) dx =
8
3u.a.
[9] Calcule o volume do sólido obtido pela interseção dos cilindros: x2 + y2 = a2 ex2 + z2 = a2, a 6= 0.
O sólido é simétrico em relação à origem.

224 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Figura 8.32: Interseção dos cilindros.
Calculamos o volume da porção do sólido no primeiro octante e multiplicamos oresultado por 8.
Figura 8.33: O sólido no primeiro octante.
Claramente D é região do tipo I: 0 ≤ x ≤ a e 0 ≤ y ≤√a2 − x2. A altura do sólido
W é dada por z = f(x, y) =√a2 − x2 e:
V = 8
∫∫
D
√
a2 − x2 dx dy
= 8
∫ a
0
[∫
√a2−x2
0
√
a2 − x2dy
]
dx
= 8
∫ a
0(a2 − x2) dx =
16 a3
3.

8.8. INTEGRAL DUPLA E VOLUME DE SÓLIDOS 225
[10] Calcule o volume do sólido limitado por 3x + 4 y = 10, z = x2 + y2 e situadoacima do plano xy, no primeiro octante.
0 1 2 3
0
1
230
2
4
6
8
0
2
4
6
1 2 3
1
2
1 2 3
1
2
Figura 8.34: Sólido e região do exemplo [10], respectivamente.
D é uma região do tipo II: 0 ≤ y ≤ 5
2e 0 ≤ x ≤ 10 − 4y
3; logo:
V =
∫∫
D
(x2 + y2) dx dy =
∫ 5
2
0
[∫
10−4 y
3
0(x2 + y2) dx
]
dy
= − 2
81
∫ 5
2
0[2 y − 5] [43 y2 − 80 y + 100] dy
= − 2
81
∫ 5
2
0[86 y3 − 375 y2 + 600 y − 500] dy =
15625
1296u.v.
[11] Calcule o volume do sólido limitado por z−x y = 0, z = 0, y = x2 e y2 −x = 0.
Figura 8.35: Sólido do exemplo [11].
D é uma região do tipo I: 0 ≤ x ≤ 1 e x2 ≤ y ≤ √x,

226 CAPÍTULO 8. INTEGRAÇÃO DUPLA
1
1
1
1
Figura 8.36: RegiãoD.
Logo:
V =
∫∫
D
x y dx dy =
∫ 1
0
[∫
√x
x2
x y dy
]
dx =1
2
∫ 1
0[x2 − x5] dx =
1
12u.v.
8.9 Exercícios
1. Calcule∫∫
R
f(x, y) dx dy, se:
(a) f(x, y) = x2 y3 e R = [0, 1] × [0, 1]
(b) f(x, y) = (x+ y)2 (x2 − y2) e R = [0, 1] × [0, 1]
(c) f(x, y) = x2 + 4 y e R = [0, 2] × [0, 3]
(d) f(x, y) =x2
y2 + 1e R = [−1, 1] × [−1, 1]
(e) f(x, y) = ex y (x2 + y2) e R = [−1, 3] × [−2, 1]
(f) f(x, y) = x y − y2 e R = [0, 5] × [0, 4]
(g) f(x, y) = 5x y2 e R = [1, 3] × [1, 4]
(h) f(x, y) = 2x+ c2 y e R = [−2, 2] × [−1, 1]
(i) f(x, y) = x2 − y2 e R = [1, 2] × [−1, 1].
2. Calcule o volume do sólido limitado superiormente pelo gráfico da função einferiormente pelo retângulo dado:
(a) z =√
9 − y2 e R = [0, 4] × [0, 2]
(b) z = x2 + y2 e R = [−2, 2] × [−3, 3]
(c) z = y2 − x2 e R = [−1, 1] × [1, 3]
(d) z = 2x+ 3 y + 6 e R = [−1, 2] × [2, 3]
(e) z = a cos(2 θ) + b sen(2α) e R = [0, π2 ] × [0, π2 ]
(f) z = x sen(y) e R = [0, π] × [0, π]

8.9. EXERCÍCIOS 227
3. Calcule as seguintes integrais mudando a ordem de integração:
(a)∫ 1
0
[∫ 1
y
tg(x2) dx
]
dy
(b)∫ 2
1
[∫ x
1
x2
y2dy
]
dx
(c)∫ 1
0
[∫
√1−x2
0
√
1 − y2 dy
]
dx
(d)∫ 1
0
[∫ 1
x
sen(y2) dy
]
dx
(e)∫ 1
0
[∫ y
3yex
2
dx
]
dy
(f)∫ 3
0
[∫ 9
y2y cos(x2) dx
]
dy
4. Calcule as seguintes integrais sabendo queD é limitada pelas curvas dadas:
(a)∫∫
D
y dx dy; y = 2x2 − 2, y = x2 + x
(b)∫∫
D
x y dx dy; x2
a2+ y2
b2= 1, x, y ≥ 0
(c)∫∫
D
x dx dy; x− y2 = 0, x = 1
(d)∫∫
D
dx dy
x2 + 1; y − x2 = 0, y = 1
(e)∫∫
D
(x2 + y2) dx dy; y = 0, y = x− 1 e x = 1, x = 0
(f)∫∫
D
ex+y dx dy; y = 0, y = x e x− 1 = 0
(g)∫∫
D
x cos(y) dx dy; y = 0, y = x2 e x = 1
(h)∫∫
D
4 y3 dx dy; y = x− 6 e y2 = x
(i)∫∫
D
(y2 − x) dx dy; y2 = x e x = 3 − 2 y2
(j)∫∫
D
(x2 + 2 y) dx dy; y = 2x2 e y = x2 + 1
(k)∫∫
D
(1 + 2x) dx dy; x = y2 e y + x = 2
(l)∫∫
D
dx dy; y2 = x3 e y = x

228 CAPÍTULO 8. INTEGRAÇÃO DUPLA
Capítulo 9
MUDANÇADE COORDENADAS
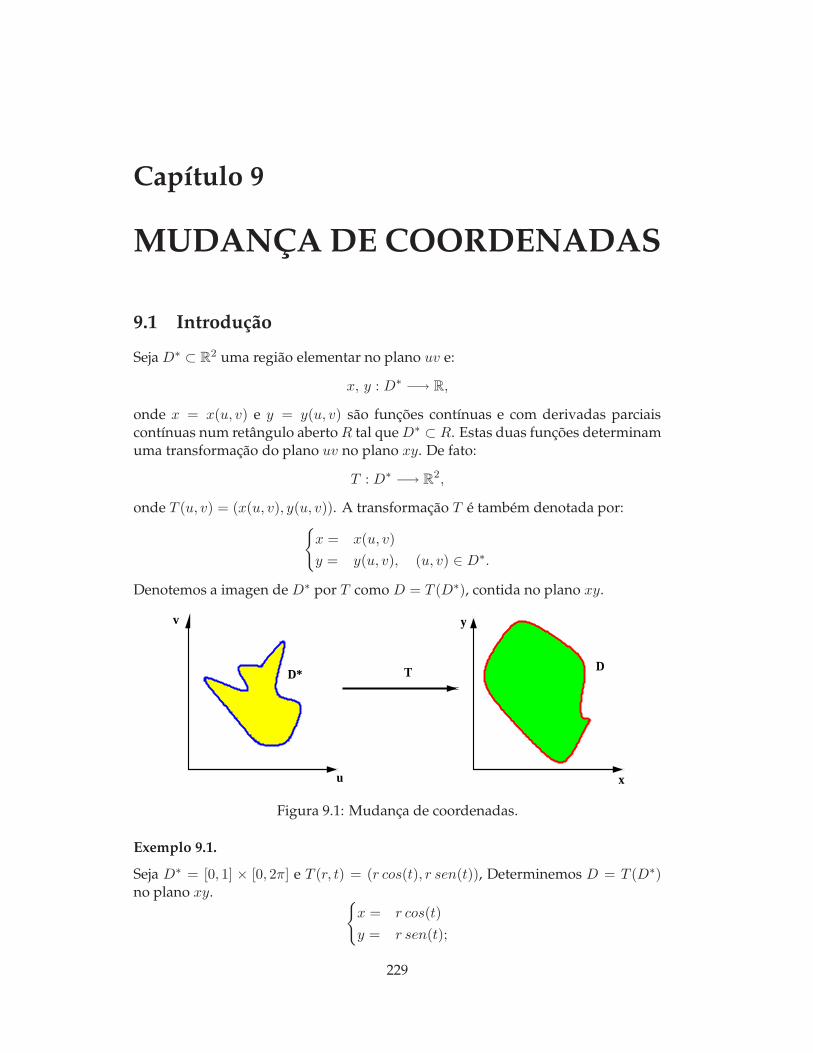
9.1 Introdução
SejaD∗ ⊂ R2 uma região elementar no plano uv e:
x, y : D∗ −→ R,
onde x = x(u, v) e y = y(u, v) são funções contínuas e com derivadas parciaiscontínuas num retângulo abertoR tal queD∗ ⊂ R. Estas duas funções determinamuma transformação do plano uv no plano xy. De fato:
T : D∗ −→ R2,
onde T (u, v) = (x(u, v), y(u, v)). A transformação T é também denotada por:{
x = x(u, v)
y = y(u, v), (u, v) ∈ D∗.
Denotemos a imagen deD∗ por T como D = T (D∗), contida no plano xy.
TD*D
y
x
v
u
Figura 9.1: Mudança de coordenadas.
Exemplo 9.1.
Seja D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t), r sen(t)), Determinemos D = T (D∗)no plano xy.
{
x = r cos(t)
y = r sen(t);
229
230 CAPÍTULO 9. MUDANÇA DE COORDENADAS
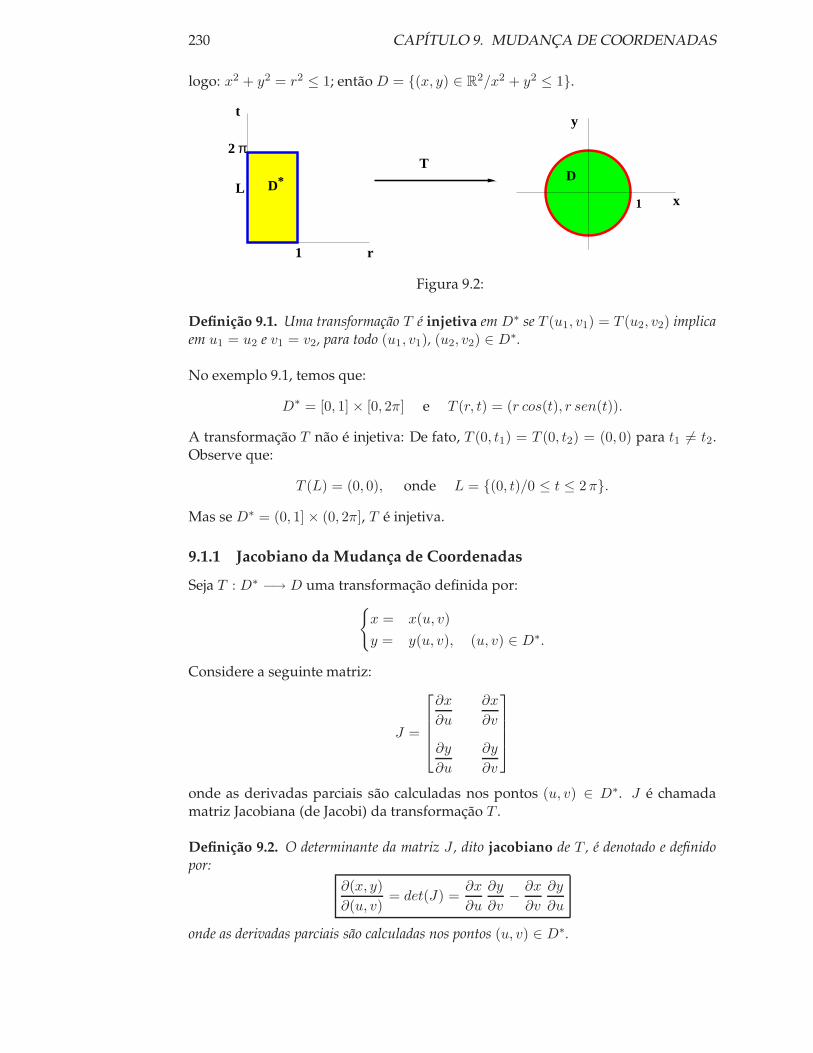
logo: x2 + y2 = r2 ≤ 1; entãoD = {(x, y) ∈ R2/x2 + y2 ≤ 1}.
π2
L D
t
1 r
* D
x
y
1
T
Figura 9.2:
Definição 9.1. Uma transformação T é injetiva emD∗ se T (u1, v1) = T (u2, v2) implicaem u1 = u2 e v1 = v2, para todo (u1, v1), (u2, v2) ∈ D∗.
No exemplo 9.1, temos que:
D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t), r sen(t)).
A transformação T não é injetiva: De fato, T (0, t1) = T (0, t2) = (0, 0) para t1 6= t2.Observe que:
T (L) = (0, 0), onde L = {(0, t)/0 ≤ t ≤ 2π}.
Mas seD∗ = (0, 1] × (0, 2π], T é injetiva.
9.1.1 Jacobiano da Mudança de Coordenadas
Seja T : D∗ −→ D uma transformação definida por:{
x = x(u, v)
y = y(u, v), (u, v) ∈ D∗.
Considere a seguinte matriz:
J =
∂x
∂u
∂x
∂v
∂y
∂u
∂y
∂v
onde as derivadas parciais são calculadas nos pontos (u, v) ∈ D∗. J é chamadamatriz Jacobiana (de Jacobi) da transformação T .
Definição 9.2. O determinante da matriz J , dito jacobiano de T , é denotado e definidopor:
∂(x, y)
∂(u, v)= det(J) =
∂x
∂u
∂y
∂v− ∂x
∂v
∂y
∂u
onde as derivadas parciais são calculadas nos pontos (u, v) ∈ D∗.

9.1. INTRODUÇÃO 231
A importância damatriz Jacobiana de uma transformação deverá ser estudada commais rigor, em disciplinas mais avançadas. Por enquanto citaremos a seguinte pro-posição, sem prova:
Proposição 9.1. Se:∂(x, y)
∂(u, v)(u0, v0) 6= 0, (u0, v0) ∈ D∗,
então existe uma vizinhança do ponto (u0, v0) tal que a restrição de T a esta vizinhança éinjetiva.
Exemplo 9.2.
[1] No exemplo 9.1, temos que D∗ = [0, 1] × [0, 2π] e T (r, t) = (r cos(t), r sen(t)).Logo,
∂(x, y)
∂(r, t)= r.
Note que para todo (r, t) ∈ L temos∂(x, y)
∂(r, t)= 0.
[2] Seja o quadradoD∗ = [0, 1] × [0, 1] e T (u, v) = (u+ v, u− v).{
x = u+ v
y = u− v.
Se u = 0, então y = −x; se v = 0, então y = x, se u = 1; então y = 2 − x e se v = 1,então y = x− 2. A região D = T (D∗) é a região do plano xy limitada pelas curvasy = x, y = −x, y = x− 2 e y = 2 − x. O jacobiano:
∂(x, y)
∂(u, v)= −2.
1
1
1 2
-1
1
Figura 9.3: RegiõesD∗ eD, respectivamente.
[3] SejaD∗ a região limitada pelas curvas u2 − v2 = 1, u2 − v2 = 9, u v = 1 e u v = 4no primeiro quadrante, sendo T (u, v) = (u2 − v2, u v). Determinemos T (D∗) = D,fazendo:
{
x = u2 − v2
y = u v;

232 CAPÍTULO 9. MUDANÇA DE COORDENADAS
se u2 − v2 = 1, então x = 1; se u2 − v2 = 9, então x = 9, se u v = 1, então y = 1 e seu v = 4, então y = 4
1 2 3
1
2
1 2 3
1
2
1 5 9
1
4
Figura 9.4: RegiõesD∗ eD, respectivamente.
∂(x, y)
∂(u, v)= 2(u2 + v2), que não se anula emD∗.
9.2 Mudança de Coordenadas e Integrais Duplas
O seguinte teorema nos ensina o comportamento das integrais duplas sob mudan-ças de coordenadas.
Teorema 9.1. Sejam D e D∗ regiões elementares no plano, T uma transformação de classeC1 e injetiva emD∗. Suponha que T (D∗) = D. Então, para toda função integrável f sobreD temos:
∫∫
D
f(x, y) dx dy =
∫∫
D∗
f(u, v)
∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
du dv
onde∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
é o valor absoluto do determinante Jacobiano e f(u, v) = f(x(u, v), y(u, v)).
Em particular a área de D é:
A(D) =
∫∫
D
dx dy =
∫∫
D∗
∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
du dv
É possível mostrar que o teorema anterior é ainda válido se T não é injetiva numsubconjunto de conteúdo nulo deD∗, como no caso de L, no exemplo 1.
Observe que podemos ir do plano uv ao plano xy e vice-versa, pois T é bijetiva.
9.3 Mudança Linear de Coordenadas
Consideremos a seguinte transformação:
x = x(u, v) = a1 u+ b1 vy = y(u, v) = a2 u+ b2 v
9.3. MUDANÇA LINEAR DE COORDENADAS 233
onde a1 b2 − a2 b1 6= 0. Como:∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
= |a1b2 − a2b1|,
do teorema anterior, segue:
Corolário 9.2. Se f(u, v) = f(a1 u+ b1 v, a2 u+ b2 v), então:
∫∫
D
f(x, y) dx dy = |a1b2 − a2b1|∫∫
D∗
f(u, v) du dv
Em particular, a área de D é:
A(D) = |a1b2 − a2b1|A(D∗)
Note que:
u = u(x, y) =b2 x− b1 y
a1b2 − a2b1
v = v(x, y) =−a2 x+ a1 y
a1b2 − a2b1
,
e que∣
∣
∣
∣
∂(u, v)
∂(x, y)
∣
∣
∣
∣
=
∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
−1
.
Exemplo 9.3.
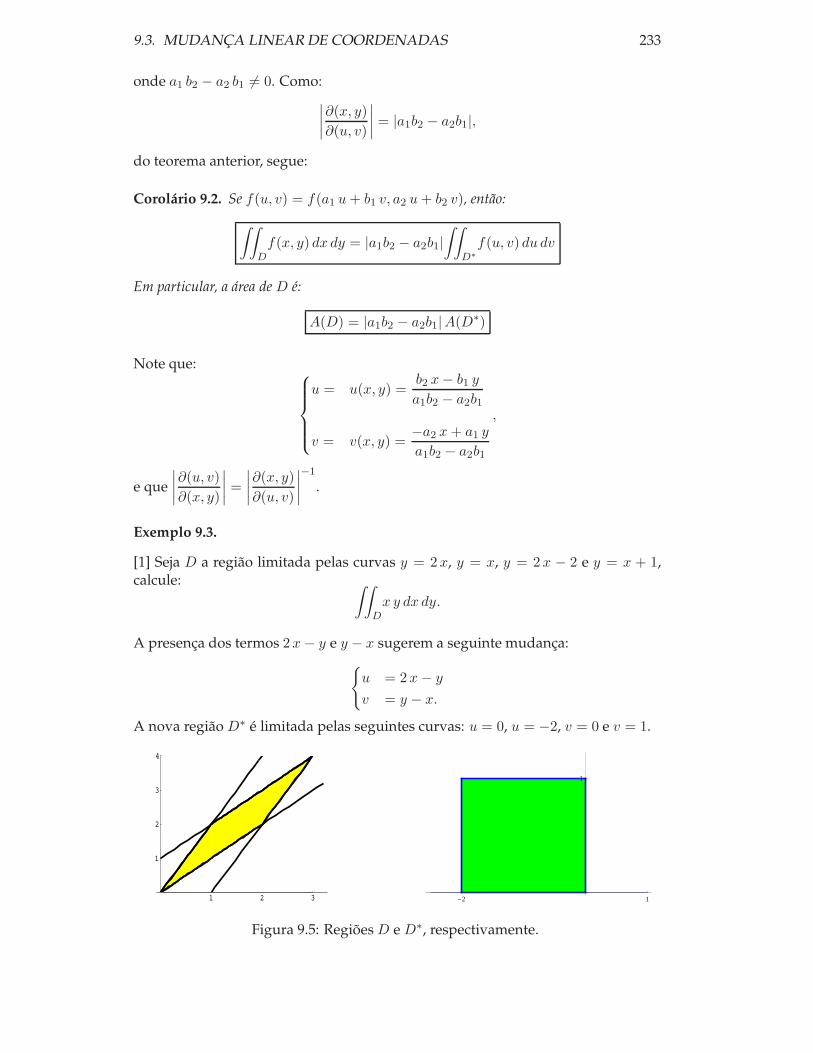
[1] Seja D a região limitada pelas curvas y = 2x, y = x, y = 2x − 2 e y = x + 1,calcule:
∫∫
D
x y dx dy.
A presença dos termos 2x− y e y − x sugerem a seguinte mudança:{
u = 2x− y
v = y − x.
A nova regiãoD∗ é limitada pelas seguintes curvas: u = 0, u = −2, v = 0 e v = 1.
1 2 3
1
2
3
4
1 2 3
1
2
3
4
-2 1
1
Figura 9.5: RegiõesD eD∗, respectivamente.
234 CAPÍTULO 9. MUDANÇA DE COORDENADAS
Note que:{
x = u+ v
y = u+ 2 v,
logo,∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
= 1 e f(u, v) = (u+ v) (u+ 2 v) = u2 + 3u v + 2 v2. Então:
∫∫
D
x y dx dy =
∫ 1
0
[∫ 0
−2(u2 + 3u v + 2 v2) du
]
dv = 1.
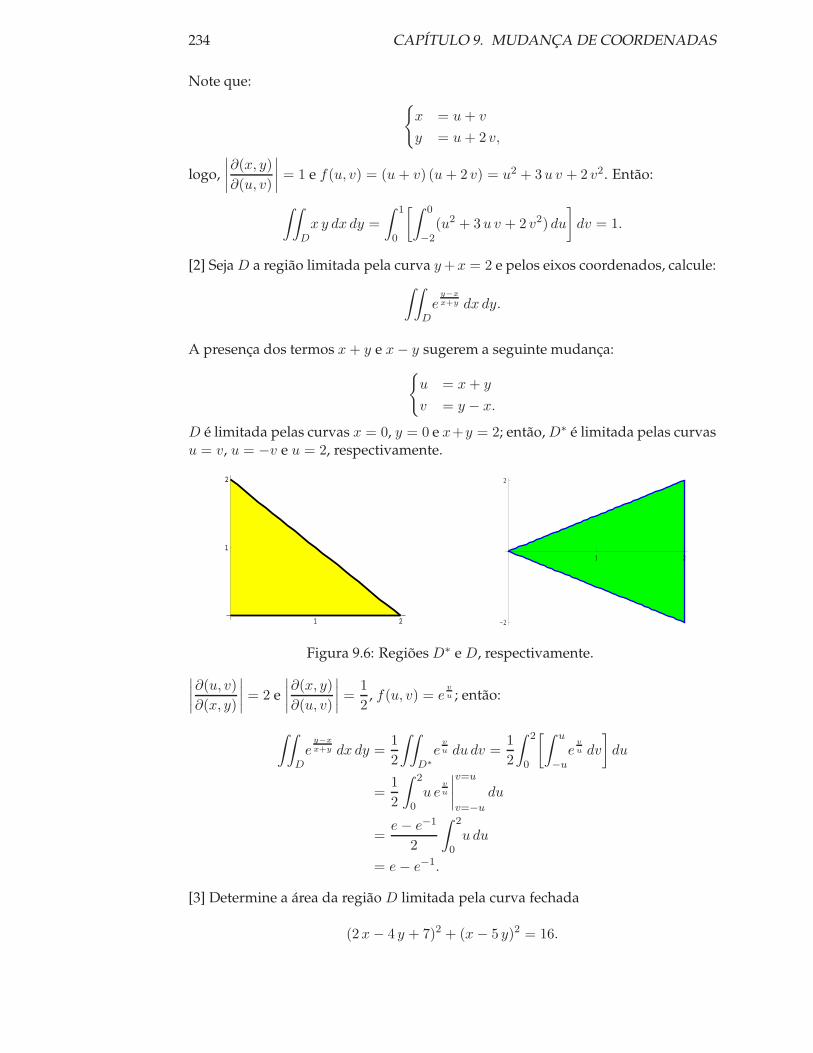
[2] SejaD a região limitada pela curva y+x = 2 e pelos eixos coordenados, calcule:∫∫
D
ey−x
x+y dx dy.
A presença dos termos x+ y e x− y sugerem a seguinte mudança:{
u = x+ y
v = y − x.
D é limitada pelas curvas x = 0, y = 0 e x+y = 2; então,D∗ é limitada pelas curvasu = v, u = −v e u = 2, respectivamente.
1 2
1
2
1 2
1
2
1 2
-2
2
Figura 9.6: RegiõesD∗ eD, respectivamente.∣
∣
∣
∣
∂(u, v)
∂(x, y)
∣
∣
∣
∣
= 2 e∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
=1
2, f(u, v) = e
vu ; então:
∫∫
D
ey−x
x+y dx dy =1
2
∫∫
D∗
evu du dv =
1
2
∫ 2
0
[∫ u
−u
evu dv
]
du
=1
2
∫ 2
0u e
vu
∣
∣
∣
∣
v=u
v=−u
du
=e− e−1
2
∫ 2
0u du
= e− e−1.
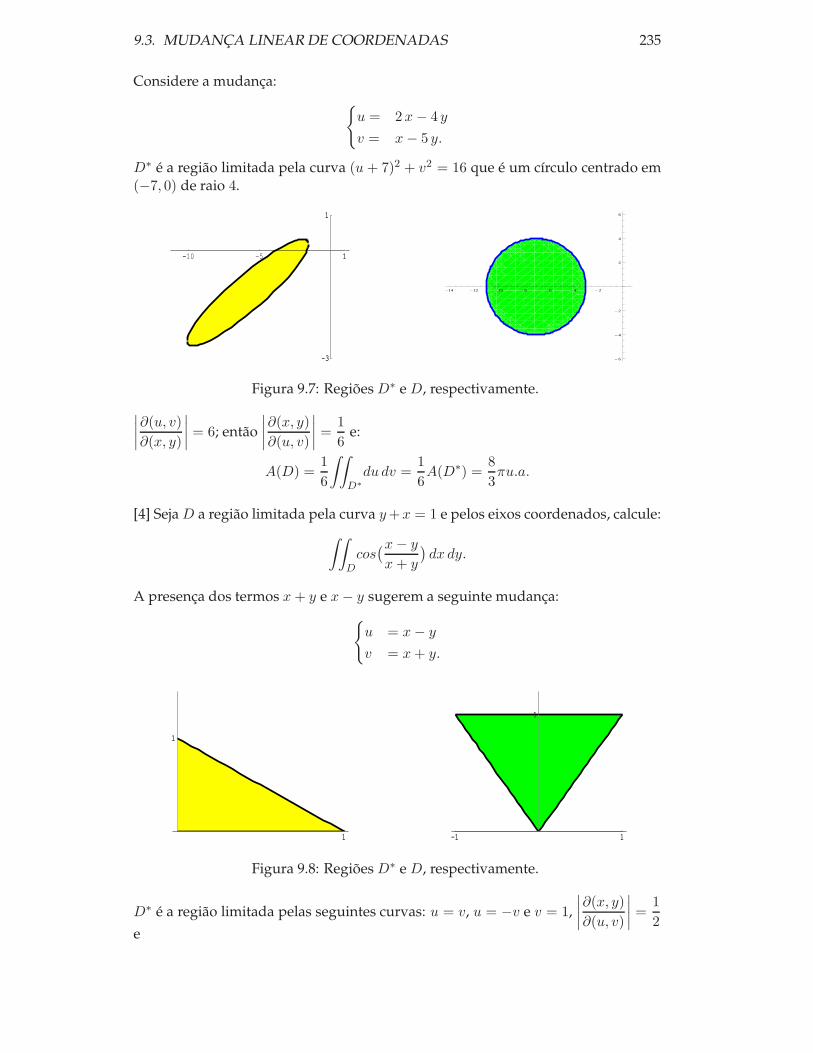
[3] Determine a área da região D limitada pela curva fechada
(2x− 4 y + 7)2 + (x− 5 y)2 = 16.
9.3. MUDANÇA LINEAR DE COORDENADAS 235
Considere a mudança:{
u = 2x− 4 y
v = x− 5 y.
D∗ é a região limitada pela curva (u+ 7)2 + v2 = 16 que é um círculo centrado em(−7, 0) de raio 4.
-10 -5 1
-3
1
-10 -5 1
-3
1
-14 -12 -10 - 8 - 6 - 4 - 2
- 6
- 4
- 2
2
4
6
Figura 9.7: RegiõesD∗ eD, respectivamente.
∣
∣
∣
∣
∂(u, v)
∂(x, y)
∣
∣
∣
∣
= 6; então∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
=1
6e:
A(D) =1
6
∫∫
D∗
du dv =1
6A(D∗) =
8
3πu.a.
[4] SejaD a região limitada pela curva y+x = 1 e pelos eixos coordenados, calcule:∫∫
D
cos(x− y
x+ y
)
dx dy.
A presença dos termos x+ y e x− y sugerem a seguinte mudança:{
u = x− y
v = x+ y.
1
1
1
1
1-1
1
1-1
1
Figura 9.8: RegiõesD∗ eD, respectivamente.
D∗ é a região limitada pelas seguintes curvas: u = v, u = −v e v = 1,∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
=1
2e

236 CAPÍTULO 9. MUDANÇA DE COORDENADAS
f(u, v) = cos(u
v
)
; então:
∫∫
D
cos
(
y − x
x+ y
)
dx dy =1
2
∫∫
D∗
cos(u
v
)
du dv
=1
2
∫ 1
0
[∫ v
−v
cos(u
v
)
du
]
dv
=1
2
∫ 1
0v
(
sen(1) − sen(−1))
dv = sen(1)
∫ 1
0v dv
=sen(1)
2.
[5] Seja D a região limitada pelas curvas y − 2x = 2, y + 2x = 2, y − 2x = 1 ey + 2x = 1, calcule:
∫∫
D
y + 2x
(y − 2x)2dx dy.
A presença dos termos y + 2x e y − 2x sugerem a seguinte mudança:
{
u = y + 2x
v = y − 2x.
D∗ é a região limitada pelas seguintes curvas: u = 1, u = 2, v = 1 e v = 2.
-0.5-1 10.5
1
2
-0.5-1 10.5
1
2
1 2
1
2
1 2
1
2
Figura 9.9: RegiõesD∗ eD, respectivamente.
∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
=1
4e f(u, v) =
u
v2; então:
∫∫
D
y + 2x
(y − 2x)2dx dy =
1
4
∫∫
D∗
u
v2du dv
=1
4
∫ 2
1
[∫ 2
1
u
v2du
]
dv
=3
16.

9.4. MUDANÇA POLAR DE COORDENADAS 237
9.4 Mudança Polar de Coordenadas
Um ponto P = (x, y) em coordenadas retangulares tem coordenadas polares (r, θ)onde r é a distância da origem a P e θ é o ângulo formado pelo eixo dos x e osegmento de reta que liga a origem a P .
r
x
y
θ
P’
r
P
Figura 9.10: Mudança polar de coordenadas.
A relação entre as coordenadas (x, y) e (r, θ) é dada por:
{
r =√
x2 + y2
θ = arctg(y
x
)
x 6= 0.
Ou, equivalentemente:
{
x = r cos(θ)
y = r sen(θ).
Esta mudança é injetiva em:
D∗ = {(r, θ)/r > 0, θ0 < θ < θ0 + 2π},
com θ0 =constante.
Note que a região circular D = {(x, y) /x2 +y2 ≤ a2} corresponde, em coordenadaspolares, à região retangular:
D∗ = {(r, θ) /0 ≤ r ≤ a, 0 ≤ θ ≤ 2π} = [0, a] × [0, 2π].
Exemplo 9.4.
[1] A cardióide é uma curva de equação cartesiana x2 + y2 =√
x2 + y2 − y; emcoordenadas polares fica r = 1 − sen(θ), r ≥ 0.

238 CAPÍTULO 9. MUDANÇA DE COORDENADAS
-1 1
-1
-2
Figura 9.11: Cardióide.
[2] A lemniscata de Bernoulli é uma curva de equação cartesiana:
(x2 + y2)2 = a2 (x2 − y2);
em coordenadas polares fica r2 = a2 cos(2θ).
Figura 9.12: Lemniscata.
[3] O cilindro circular reto de raio a, em coordenadas cartesianas é definido como oseguinte conjunto:
C = {(x, y, z) ∈ R3/x2 + y2 = a2, a ≥ 0};em coordenadas polares:
C∗ = {(r, θ, z) ∈ R3/r = a, 0 ≤ θ ≤ 2π}.
Calculemos o jacobiano da mudança de coordenadas polares:∣
∣
∣
∣
∂(x, y)
∂(u, v)
∣
∣
∣
∣
= r > 0.
Do teorema anterior, segue:
Corolário 9.3. Se f(r, θ) = f(r cos(θ), r sen(θ)), então:
∫∫
D
f(x, y) dx dy =
∫∫
D∗
r f(r, θ) dr dθ
Esta igualdade ainda é válida se D∗ = {(r, θ)/r ≥ 0, θ0 ≤ θ ≤ θ0 + 2π}.Em particular a área de D é:
A(D) =
∫∫
D
dx dy =
∫∫
D∗
r dr dθ

9.4. MUDANÇA POLAR DE COORDENADAS 239
9.4.1 Regiões Limitadas por Círculos
Seja a > 0. A região D, limitada pelo círculo x2 + y2 = a2, em coordenadas polaresé dada por:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ a, 0 ≤ θ ≤ 2π}.
Figura 9.13: A região D.
Neste caso:∫∫
D
f(x, y) dx dy =
∫ 2π
0
[∫ a
0r f(r, θ) dr
]
dθ
A regiãoD, limitada pelo círculo (x− a)2 + y2 ≤ a2, em coordenadas polares é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 a cos(θ), −π2≤ θ ≤ π
2}.
Figura 9.14: A região D.
Neste caso:∫∫
D
f(x, y) dx dy =
∫ π2
−π2
[∫ 2 acos(θ)
0r f(r, θ) dr
]
dθ
A regiãoD, limitada pelo círculo x2 + (y − a)2 ≤ a2, em coordenadas polares é:
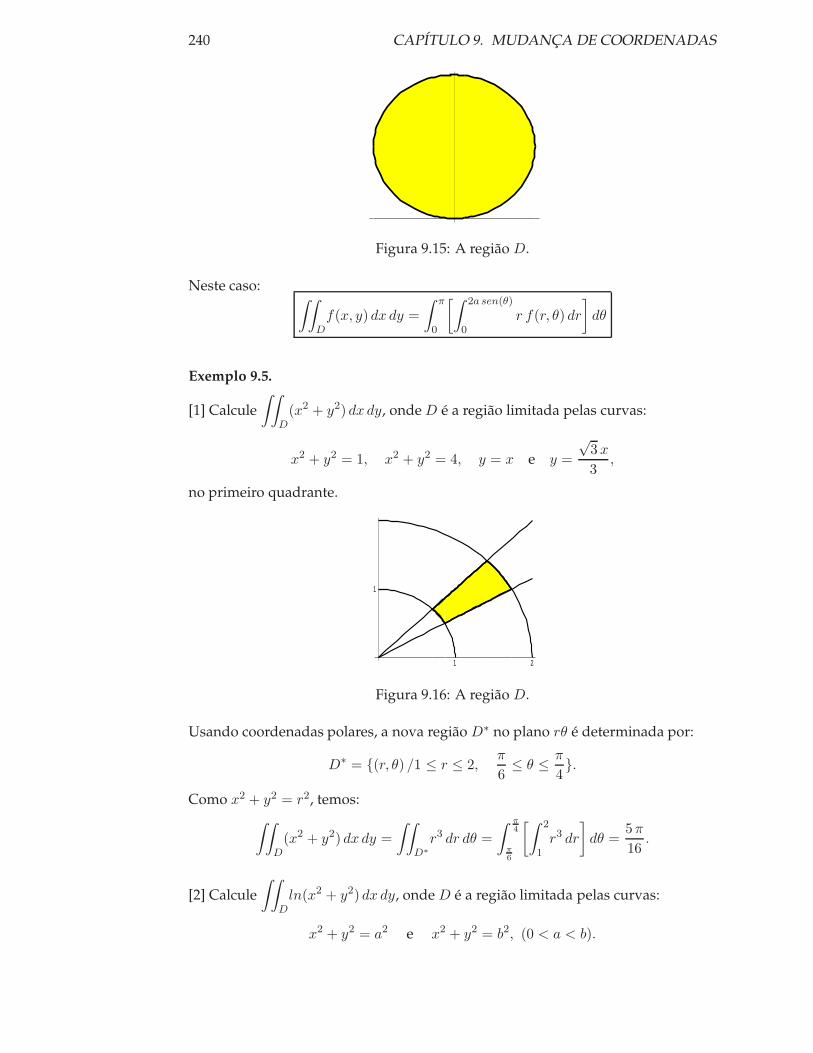
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 a sen(θ), 0 ≤ θ ≤ π}.
240 CAPÍTULO 9. MUDANÇA DE COORDENADAS
Figura 9.15: A região D.
Neste caso:∫∫
D
f(x, y) dx dy =
∫ π
0
[∫ 2a sen(θ)
0r f(r, θ) dr
]
dθ
Exemplo 9.5.
[1] Calcule∫∫
D
(x2 + y2) dx dy, ondeD é a região limitada pelas curvas:
x2 + y2 = 1, x2 + y2 = 4, y = x e y =
√3x
3,
no primeiro quadrante.
1 2
1
1 2
1
Figura 9.16: A região D.
Usando coordenadas polares, a nova regiãoD∗ no plano rθ é determinada por:
D∗ = {(r, θ) /1 ≤ r ≤ 2,π
6≤ θ ≤ π
4}.
Como x2 + y2 = r2, temos:∫∫
D
(x2 + y2) dx dy =
∫∫
D∗
r3 dr dθ =
∫ π4
π6
[∫ 2
1r3 dr
]
dθ =5π
16.
[2] Calcule∫∫
D
ln(x2 + y2) dx dy, ondeD é a região limitada pelas curvas:
x2 + y2 = a2 e x2 + y2 = b2, (0 < a < b).

9.4. MUDANÇA POLAR DE COORDENADAS 241
Usando coordenadas polares temos que D∗ está determinada por: a ≤ r ≤ b e0 ≤ θ ≤ 2π. Por outro lado, ln(x2 + y2) = 2 ln(r),
∫∫
D
ln(x2 + y2) dx dy =
∫∫
D∗
2 r ln(r) dr dθ
= 4π
∫ b
a
r ln(r) dr
= π (r2(2 ln(r) − 1))
∣
∣
∣
∣
b
a
= π (2 b2 ln(b) − 2 a2 ln(a) + a2 − b2).
[3] Determine o volume do sólido situado acima do plano xy e limitado pelos grá-ficos de z = x2 + y2 e x2 + y2 = 2 y.
O gráfico de z = x2 + y2 é um parabolóide centrado na origem e o de x2 + y2 = 2yé um cilindro circular reto centrado em (0, 1, 0) e de raio 1, pois, podemos escreverx2 + y2 − 2 y = x2 + (y − 1)2 − 1.
-2
-1
0
1
2
-2
-1
0
1
2
0
1
2
3
00.250.5
0.751
x
0
0.51
1.52
y
0
1
2
3
4
z
0.250.5
0.751
0
1
2
3
Figura 9.17: O sólido do exemplo [3].
LogoD = {(x, y) ∈ R2/x2 + (y − 1)2 ≤ 1}, em coordenadas polares é:
D∗ = {(r, θ) ∈ R2/0 ≤ r ≤ 2 sen(θ), 0 ≤ θ ≤ π}.
O sólido W é limitado superiormente pelo parabolóide. V =
∫∫
D
(x2 + y2) dx dy.
Utilizando coordenadas polares temos x2 + y2 = r2 e:
V =
∫∫
D
(x2 + y2) dx dy =
∫∫
D∗
r3 dr dθ =
∫ π
0
[∫ 2sen(θ)
0r3 dr
]
dθ = 4
∫ π
0sen4(θ) dθ
= 4
∫ π
0
[
3
8+cos(4θ
8− sen(2θ
2
]
dθ
= −sen3(θ) cos(θ) − 3
2cos(θ) sen(θ) +
3 θ
2
∣
∣
∣
∣
π
0
=3π
2u.v.
242 CAPÍTULO 9. MUDANÇA DE COORDENADAS
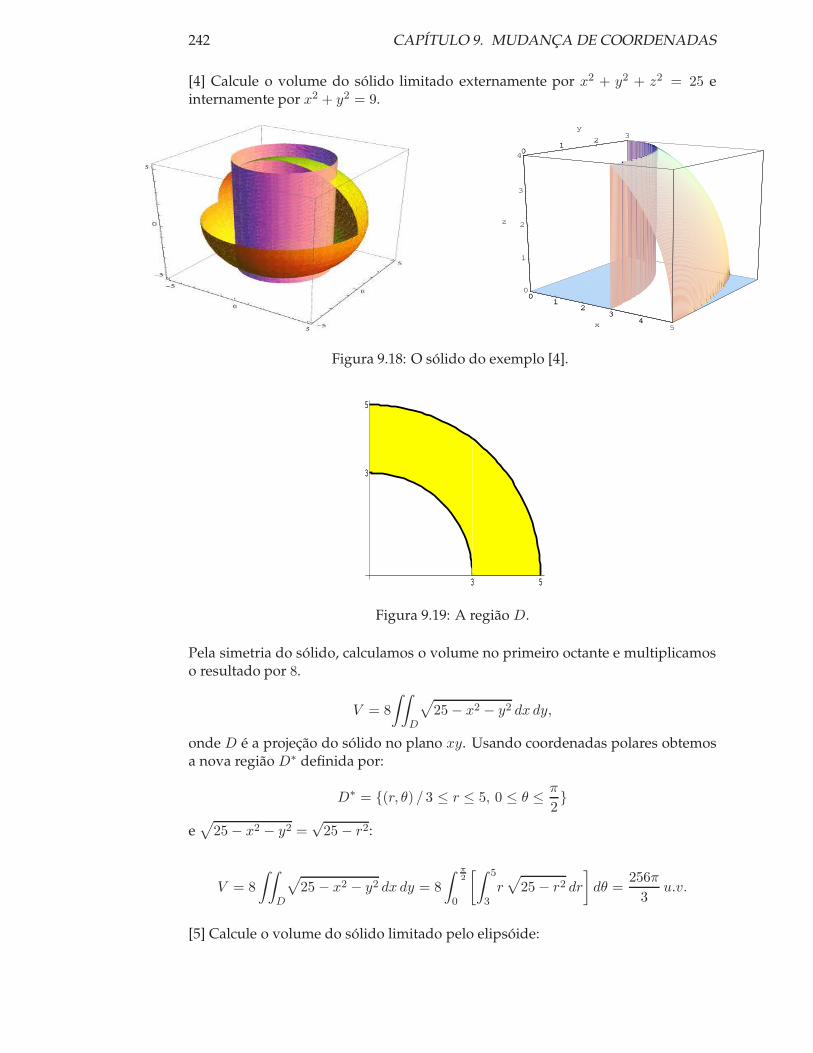
[4] Calcule o volume do sólido limitado externamente por x2 + y2 + z2 = 25 einternamente por x2 + y2 = 9.
01
23
45x
01
23
y
0
1
2
3
4
z
01
23
45x
01
2
Figura 9.18: O sólido do exemplo [4].
3 5
3
5
3 5
3
5
Figura 9.19: A região D.
Pela simetria do sólido, calculamos o volume no primeiro octante e multiplicamoso resultado por 8.
V = 8
∫∫
D
√
25 − x2 − y2 dx dy,
onde D é a projeção do sólido no plano xy. Usando coordenadas polares obtemosa nova região D∗ definida por:
D∗ = {(r, θ) / 3 ≤ r ≤ 5, 0 ≤ θ ≤ π
2}
e√
25 − x2 − y2 =√
25 − r2:
V = 8
∫∫
D
√
25 − x2 − y2 dx dy = 8
∫ π2
0
[∫ 5
3r√
25 − r2 dr
]
dθ =256π
3u.v.
[5] Calcule o volume do sólido limitado pelo elipsóide:

9.4. MUDANÇA POLAR DE COORDENADAS 243
x2
a2+y2
b2+z2
c2= 1;
onde a, b, c 6= 0.
Pela simetria do sólido calculamos o volume relativo ao primeiro octante; logo:
V = 8 c
∫∫
D
√
1 −[
x2
a2+y2
b2
]
dx dy.
A região D é limitada pela porção de elipsex2
a2+y2
b2= 1 no primeiro quadrante.
Usemos primeiramente a seguinte mudança:
{
x = au
y = b v;
o determinante Jacobiano da mudança é a b eD∗ é limitada por u2 + v2 = 1. Temos:
V = 8 c
∫∫
D
√
1 −[
x2
a2+y2
b2
]
dx dy = 8 a b c
∫∫
D∗
√
1 − u2 − v2 du dv.
Agora, usamos coordenadas polares:
{
u = r cos(θ)
v = r sen(θ).
O determinante Jacobiano é r;√
1 − u2 − v2 =√
1 − r2 e a nova região D∗∗ é defi-nida por 0 ≤ r ≤ 1 e 0 ≤ θ ≤ π
2:
V = 8 a b c
∫∫
D∗∗
r√
1 − r2 dr dθ =4 a b c π
3u.v.
Em particular, se a = b = c temos uma esfera de raio a e V =4π a3
3u.v.
[6] Calcule∫ +∞
0e−x
2
dx.
Esta integral é muito utilizada em Estatística. Seja R = [−a, a] × [−a, a]. Então:
∫∫
R
e−(x2+y2) dx dy =
∫ a
−a
[∫ a
−a
e−x2
e−y2
dy
]
dx =
[∫ a
−a
e−x2
dx
] [∫ a
−a
e−y2
dy
]
.
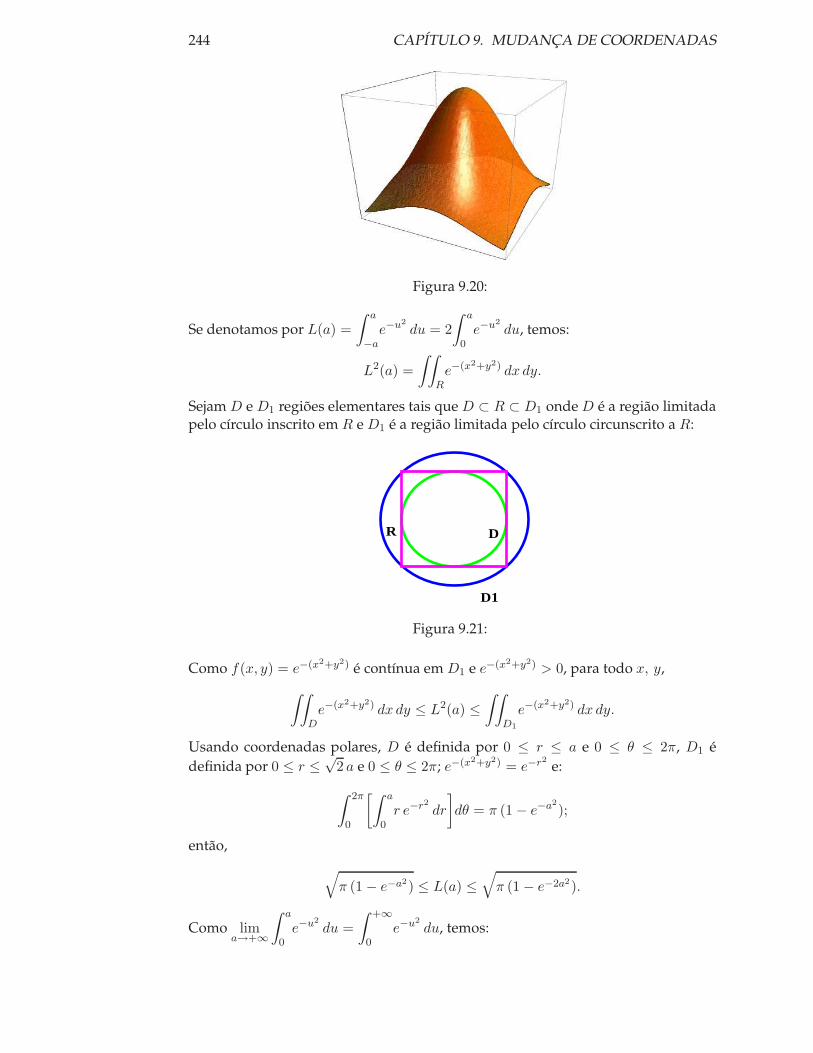
O gráfico de f(x, y) = e−(x2+y2) é:
244 CAPÍTULO 9. MUDANÇA DE COORDENADAS
Figura 9.20:
Se denotamos por L(a) =
∫ a
−a
e−u2
du = 2
∫ a
0e−u
2
du, temos:
L2(a) =
∫∫
R
e−(x2+y2) dx dy.
Sejam D e D1 regiões elementares tais queD ⊂ R ⊂ D1 ondeD é a região limitadapelo círculo inscrito em R eD1 é a região limitada pelo círculo circunscrito a R:
R
D1
D
Figura 9.21:
Como f(x, y) = e−(x2+y2) é contínua em D1 e e−(x2+y2) > 0, para todo x, y,∫∫
D
e−(x2+y2) dx dy ≤ L2(a) ≤∫∫
D1
e−(x2+y2) dx dy.
Usando coordenadas polares, D é definida por 0 ≤ r ≤ a e 0 ≤ θ ≤ 2π, D1 édefinida por 0 ≤ r ≤
√2 a e 0 ≤ θ ≤ 2π; e−(x2+y2) = e−r
2
e:
∫ 2π
0
[∫ a
0r e−r
2
dr
]
dθ = π (1 − e−a2
);
então,
√
π (1 − e−a2) ≤ L(a) ≤√
π (1 − e−2a2).
Como lima→+∞
∫ a
0e−u
2
du =
∫ +∞
0e−u
2
du, temos:

9.4. MUDANÇA POLAR DE COORDENADAS 245
∫ +∞
0e−u
2
du =
√π
2.
[7] SeD = {(x, y) ∈ R2/1 ≤ (x− y)2 + (x+ y)2 ≤ 4, y ≤ 0, x+ y ≥ 0}, calcule:
∫∫
D
ex+y
x−y
(x− y)2dx dy.
Usamos mudança linear:
{
u = x− y
v = x+ y.
Logo, a nova região D∗ é limitada pelas curvas u2 + v2 = 1, u2 + v2 = 4, v ≤ u e0 ≤ v:
1 2
1
2
1 2
1
2
Figura 9.22: RegiãoD.
∂(u, v)
∂(x, y)= 2 então
∂(x, y)
∂(u, v)=
1
2e
∫∫
D
ex+y
x−y
(x− y)2dx dy =
1
2
∫∫
D∗
evu
u2du dv.
Usando coordenadas polares obtemos a região D∗∗ definida por: 1 ≤ r ≤ 2 e0 ≤ θ ≤ π
4:
1
2
∫∫
D∗
evu
u2du dv =
1
2
∫∫
D∗∗
r etg(θ)
r2 cos2(θ)dr dθ =
ln(2)
2(e− 1).
9.4.2 Aplicação
SejaD região do tipo II, limitada por curvas de equações (em forma polar): r = g(θ)e r = h(θ) e definida por:
D = {(r, θ)/g(θ) ≤ r ≤ h(θ), θ1 ≤ θ ≤ θ2},
onde g, h : [θ1, θ2] −→ R são funções contínuas tais que 0 ≤ g(θ) ≤ h(θ).

246 CAPÍTULO 9. MUDANÇA DE COORDENADAS
D
h
g
y
xθ1
θ2
r
θ
D*
θ2
θ1
Figura 9.23:
Então:∫∫
D
f(x, y) dx dy =
∫ θ2
θ1
[∫ h(θ2)
g(θ1)r f(r, θ) dr
]
dθ
Em particular, a área deD é:
A(D) =
∫∫
D
dx dy =1
2
∫ θ2
θ1
[
(h(θ))2 − (g(θ))2]
dθ
Exemplo 9.6.
[1] Calcule o volume do sólido limitado pelo cone z =√
x2 + y2 e pelo cilindror = 4 sen(θ), no primeiro octante.
Usando coordenadas polares temos que o cone escreve-se z = r; no plano r θ ocilindro projeta-se no círculo r = 4 sen(θ); logo 0 ≤ r ≤ 4 sen(θ) e 0 ≤ θ ≤ π
2.
-2 -1 1 2
1
2
3
4
-2 -1 1 2
1
2
3
4
00.5
11.5
2x
0 1 2 3 4y
0
1
2
3
4
z
00.5
11.5
2
0 1 2 3
Figura 9.24:
V =
∫∫
D∗
r2 dr dθ =
∫ π2
0
[∫ 4 sen(θ)
0r2dr
]
dθ =128
9u.v.
[2] Calcule a área da região limitada pelo interior do círculo r = 4 sen(θ) e peloexterior do círculo r = 2.

9.4. MUDANÇA POLAR DE COORDENADAS 247
-2 2
-2
2
-2 2
-2
2
Figura 9.25:
Os círculos se intersectam em: θ = π6 e θ = 5π
6 e:
A(D) =1
2
∫ 5π6
π6
(16 sen2(θ) − 4) dθ =(2π
3+ 2
√3)
u.a.
[3] Calcule a área da região limitada por r = 2(1 + sen(θ)).
-2 -1 1 2
1
2
3
4
Figura 9.26:
0 ≤ θ ≤ 2π. Logo:
A(D) = 2
∫ 2π
0(1 + sen(θ))2dθ = 6πu.a.
[4] Calcule a área da região limitada por r = sen(3θ).
Figura 9.27:

248 CAPÍTULO 9. MUDANÇA DE COORDENADAS
0 ≤ θ ≤ 2π. Logo:
A(D) =1
2
∫ 2π
0sen2(3θ) dθ =
π
2u.a.
9.5 Outras Aplicações da Integral Dupla
Como em uma variável, outras aplicações, além do cálculo de volumes, podemser definidas através de integrais duplas, tais como, massa total, centro de massa emomento de inércia.
9.5.1 Massa Total
Suponha que uma lâmina fina tem a forma de uma região elementar D e conside-remos que a massa está distribuida sobreD com densidade conhecida, isto é, existeuma função z = f(x, y) > 0 em D que representa a massa por unidade de área emcada ponto (x, y) ∈ D. Se a lâmina é feita de material homogêneo, a densidade éconstante. Neste caso a massa total da lâmina é o produto da densidade pela áreada lâmina. Quando a densidade f varia de ponto a ponto em D e f é uma funçãointegrável sobreD, a massa totalM(D) deD é dada por:
M(D) =
∫∫
D
f(x, y) dx dy
9.5.2 Momento de Massa
O momento de massa de uma partícula em torno de um eixo é o produto de suamassa pela distância (na perpendicular) ao eixo. Então, os momentos de massa dalâmina D em relação ao eixo dos x e dos y são respectivamente:
Mx =
∫∫
D
y f(x, y) dx dy, My =
∫∫
D
x f(x, y) dx dy
x
y (x,y) D
Figura 9.28:
9.5.3 Centro de Massa
O centro de massa da lâmina é definido por (x, y), onde:
x =My
M(D), y =
Mx
M(D)

9.5. OUTRAS APLICAÇÕES DA INTEGRAL DUPLA 249
Fisicamente (x, y) é o ponto em que a massa total da lâmina poderia estar concen-trada sem alterar seu momento em relação a qualquer dos eixos. Se f(x, y) = k,(k > 0) em todoD, (x, y) é chamado centróide de D. Neste caso o centro de massaé o centro geométrico da região D.
Exemplo 9.7.
[1] Calcule o centro de massa do retângulo [0, 1] × [0, 1] se a densidade é dada pelafunção: f(x, y) = ex+y.
A massa total deD = [0, 1] × [0, 1] é:
M(D) =
∫ 1
0
[∫ 1
0ex+y dx
]
dy = e2 − 2e+ 1.
Os momentos de massa respectivos são:
Mx =
∫ 1
0
[∫ 1
0y ex+y dx
]
dy = e− 1 e My =
∫ 1
0
[∫ 1
0x ex+y dx
]
dy = e− 1
e o centro de massa deD é (1
e− 1,
1
e− 1).
[2] Determine o centro de massa da região limitada por um semicírculo D de raioa centrado na origem, sabendo que sua densidade em cada ponto é proporcional àdistância do ponto à origem.
Figura 9.29:
f(x, y) = k√
x2 + y2. Calculamos a massa total usando coordenadas polares. Anova região D∗ é definida por: 0 ≤ r ≤ a e 0 ≤ θ ≤ π;
√
x2 + y2 = r:
M(D) = k
∫ π
0
[∫ a
0r2 dr
]
dθ =k π a3
3.
Os momentos de massa respectivos são:
Mx =
∫ a
0
[∫ π
0r3 cos(θ) dθ
]
dr = 0 e My =
∫ a
0
[∫ π
0r3 sen(θ) dθ
]
dr =a4
2;
o centro de massa deD é (0,3 a
2 k π).

250 CAPÍTULO 9. MUDANÇA DE COORDENADAS
[3] Determine o centróide da região limitada pelas curvas y = x2 e y = 4x− x2.
1 2
4
2
1 2
4
2
Figura 9.30:
Neste caso f(x, y) = 1 para todo (x, y) ∈ D, onde:
D = {(x, y) ∈ R2/0 ≤ x ≤ 2, x2 ≤ y ≤ 4x− x2}
eM(D) = A(D) =8
3. Esta área já foi calculada anteriormente.
Mx =
∫ 2
0
[∫ 4x−x2
x2
y dy
]
dx =16
3e My =
∫ 2
0
[∫ 4x−x2
x2
x dy
]
dx =8
3;
o centróide deD é (2, 1).
[4] Determine o centro de massa da região limitada pelas curvas y = x+ x2, y = 0e x = 2 se a densidade em cada ponto é f(x, y) = y
1+x .
M(D) =
∫ 2
0
[∫ x(x+1)
0
y
1 + xdy
]
dx =1
2
∫ 2
0(x3 + x2) dx =
10
3,
Mx =
∫ 2
0
[∫ x(x+1)
0
y2
1 + xdy
]
dx =1
2
∫ 2
0(x4 + x3) dx =
412
45,
My =
∫ 2
0
[∫ x(x+1)
0
x y
1 + xdy
]
dx =1
3
∫ 2
0(x5 + 2x4 + x3) dx =
26
5;
o centro de massa deD é (39
25,206
75).
9.5.4 Momento de Inércia
Sejam L uma reta no plano,D uma lâmina como antes e δ(x, y) = d((x, y), L), onded é a distância no plano e (x, y) ∈ D.

9.5. OUTRAS APLICAÇÕES DA INTEGRAL DUPLA 251
D
L(x,y)
δ
Figura 9.31:
Se f(x, y) é a densidade em cada ponto de D, o momento de inércia da lâmina emrelação à reta L é:
IL =
∫∫
D
δ2(x, y) f(x, y) dx dy
Em particular, se L é o eixo dos x:
Ix =
∫∫
D
y2 f(x, y) dx dy
Se L é o eixo dos y:
Iy =
∫∫
D
x2 f(x, y) dx dy
Omomento de inércia polar em relação à origem é:
I0 = Ix + Iy =
∫∫
D
(x2 + y2) f(x, y) dx dy
O momento de inércia de um corpo em relação a um eixo é sua capacidade deresistir à aceleração angular em torno desse eixo.
Exemplo 9.8.
[1] Determine o momento de inércia polar da região limitada pelas curvas y = ex,x = 1, y = 0 e x = 0, se a densidade em cada ponto é f(x, y) = x y.
Ix =
∫∫
D
xy3 dx dy =
∫ 1
0
[∫ ex
0x y3 dy
]
dx =1
64(3 e4 + 1),
Iy =
∫∫
D
yx3 dx dy =
∫ 1
0
[∫ ex
0y x3 dy
]
dx =1
16(e2 + 3);
logo, o momento de inércia polar é:
I0 = Ix + Iy =1
64(3 e4 + 4 e2 + 13).
[2] Uma lâmina fina com densidade constante k é limitada por x2 + y2 = a2 ex2 + y2 = b2, (0 < a < b). Calcule o momento de inércia polar da lâmina.

252 CAPÍTULO 9. MUDANÇA DE COORDENADAS
Usando coordenadas polares, a nova região é definida por: a ≤ r ≤ b e 0 ≤ θ ≤ 2πe o momento de inércia polar é:
I0 = k
∫ 2π
0
[∫ b
a
r3 dr
]
dθ =k (b4 − a4)π
2.
9.6 Exercícios
1. Determine o volume dos seguintes sólidos:
(a) Limitado superiormente por z = x2 + y2 e inferiormente pela regiãolimitada por y = x2 e x = y2.
(b) Limitado superiormente por z = 3x2 + y2 e inferiormente pela regiãolimitada por y = x e x = y2 − y.
(c) Limitado por y2 + z2 = 4 , x = 2 y, x = 0 e z = 0, no primeiro octante.
(d) Limitado por z = x2 + y2 + 4 , x = 0, y = 0, z = 0 e x+ y = 1.
(e) Limitado por x2 + y2 = 1 , y = z, x = 0 e z = 0, no primeiro octante.
2. Calcule a área da região limitada pelo eixo dos y e as curvas y = sen(x) ey = cos(x).
3. Calcule a área das regiões limitadas pelas seguintes curvas:
(a) y = x2, y = 2x+ 54
(b) y = −x2 − 4, y = −8
(c) y = 5 − x2, y = x+ 3
(d) x = y2, y = x+ 3, y = −2, y = 3
(e) y3 = x, y = x
(f) y = −x2 − 1, y = −2x− 4
(g) x = y2 + 1, y + x = 7
(h) y = 4 − x2, y = x2 − 14
4. Determine o centro de massa da lâmina plana R, no plano xy e densidadedada f :
(a) R é limitado por x2 + y2 = 1 no primeiro quadrante e f(x, y) = x y
(b) R é limitado por y = x e y = x2 e f(x, y) = x2 + y2
5. Definimos o valor médio de f sobre a regiãoD por:
VM =1
A
∫∫
D
f(x, y) dx dy,
onde A é a área deD. Calcule VM se:

9.6. EXERCÍCIOS 253
(a) f(x, y) = x2, eD do retângulo de vértices (0, 0), (4, 0), (4, 2) e (0, 2)
(b) f(x, y) = x2 y2 e D do retângulo de vértices (0, 0), (4, 0), (4, 2) e (0, 2)
(c) f(x, y) = x2 y2 e D do triângulo de vértices (0, 0), (4, 0), e (0, 2)
(d) f(x, y) = x2 y2 e D do triângulo de vértices (−1, 0), (1, 0), e (0, 1)
Mudanças de Variáveis
1. Utilizando a mudança de variáveis: x = u+ v e y = u− v, calcule:∫ 1
0
[∫ 1
0
(
x2 + y2)
dx
]
dy.
2. Utilizando a mudança de variáveis: x+ y = u e x− y = v, calcule:∫∫
D
(
x+ y)2
(x− y)2 dx dy,
ondeD é limitado pelo quadrado de vértices (1, 0), (2, 1) e (0, 1).
3. Utilizando a mudança de variáveis: u = x− y e v = x+ y, calcule:∫∫
D
(
x2 − y2)
sen2(x+ y) dx dy,
ondeD = {(x, y)/ − π ≤ x+ y ≤ π, −π ≤ x− y ≤ π}.
4. Utilizando coordenadas polares, calcule as seguintes integrais duplas:
(a)∫∫
D
ex2+y2 dx dy, sendoD = {(x, y)/x2 + y2 ≤ 1}
(b)∫∫
D
ln(x2 + y2) dx dy, sendo D = {(x, y)/x ≥ 0, y ≥ 0, a2 ≤ x2 + y2 ≤b2}
(c)∫∫
D
sen(√
x2 + y2)√
x2 + y2dx dy, sendoD limitadas por x2+y2 = π2
4 e x2+y2 =
π2
5. Calcule a área da região limitada pelas seguintes curvas: x = 4−y2 e x+2 y−4 = 0.
6. Utilizando coordenadas polares, calcule a área da região limitada pelas cur-vas:
(a) r = 1 e r = 2cos(θ)√
3(fora a circunferência r = 1).
(b) r = 2 (1 + cos(θ)) e r = 2 cos(θ).(c) r = 2 (1 − cos(θ)) e r = 2.
7. Calcule∫∫
D
sen(x2 +y2) dx dy, sendoD o disco unitário centrado na origem.
8. Sendo dadas a parábola y2 = x+ 1 e a reta x + y = 1, calcule o momento deinércia em relação a cada eixo e o momento de inércia polar.

254 CAPÍTULO 9. MUDANÇA DE COORDENADAS