Introdução
160
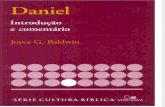
Introdução - Esforços comuns Materiais sólidos tendem a deformar-se (ou eventualmente se romper) quando submetidos a solicitações mecânicas. A Resistência dos Materiais é um ramo da Engenharia que tem como objetivo o estudo do comportamento de elementos construtivos sujeitos a esforços, de forma que eles possam ser adequadamente dimensionados para suportá- los nas condições previstas de utilização. Figura 01 A Figura 01 dá formas gráficas aproximadas dos tipos de esforços mais comuns a que são submetidos os elementos construtivos: (a) Tração: caracteriza-se pela tendência de alongamento do elemento na direção da força atuante. (b) Compressão: a tendência é uma redução do elemento na direção da força de compressão. (c) Flexão: ocorre uma deformação na direção perpendicular à da força atuante. (d) Torção: forças atuam em um plano perpendicular ao eixo e cada seção transversal tende a girar em relação às demais.
-
Upload
jas-designer -
Category
Documents
-
view
34 -
download
0
Transcript of Introdução

Introdução - Esforços comuns
Materiais sólidos tendem a deformar-se (ou eventualmente se romper) quando submetidos a solicitações mecânicas. A Resistência dos Materiais é um ramo da Engenharia que tem como objetivo o estudo do comportamento de elementos construtivos sujeitos a esforços, de forma que eles possam ser adequadamente dimensionados para suportá-los nas condições previstas de utilização.
Figura 01
A Figura 01 dá formas gráficas aproximadas dos tipos de esforços mais comuns a que são submetidos os elementos construtivos:
(a) Tração: caracteriza-se pela tendência de alongamento do elemento na direção da força atuante.
(b) Compressão: a tendência é uma redução do elemento na direção da força de compressão.
(c) Flexão: ocorre uma deformação na direção perpendicular à da força atuante.(d) Torção: forças atuam em um plano perpendicular ao eixo e cada seção transversal
tende a girar em relação às demais.(e) Flambagem: é um esforço de compressão em uma barra de seção transversal
pequena em relação ao comprimento, que tende a produzir uma curvatura na barra.(f) Cisalhamento: forças atuantes tendem a produzir um efeito de corte, isto é, um
deslocamento linear entre seções transversais.
Em muitas situações práticas ocorre uma combinação de dois ou mais tipos de esforços. Em alguns casos há um tipo predominante e os demais podem ser desprezados, mas há outros casos em que eles precisam ser considerados conjuntamente.

Tensão normal e tensão transversal Seja o exemplo de uma barra de seção transversal S submetida a uma força de tração F. É evidente que uma outra barra de seção transversal maior (por exemplo, 2 S), submetida à mesma força F, trabalha em condições menos severas do que a primeira. Isso sugere a necessidade de definição de uma grandeza que tenha relação com força e área, de forma que os esforços possam ser comparados e caracterizados para os mais diversos materiais.
Figura 01
Tensão é a grandeza física definida pela força atuante em uma superfície e a área dessa superfície. Ou seja,
tensão = força / área #1.1#
Por essa definição, a unidade de tensão tem dimensão de pressão mecânica e, no Sistema Internacional, a unidade básica é a mesma da pressão: pascal (Pa) ou newton por metro quadrado (N/m2).
A Figura 01 (a) representa uma barra tracionada por uma força F. A parte (b) da figura mostra um seccionamento transversal hipotético. Então, a tensão σ, normal ao corte, é dada por:
σ = F / S #A.1#
Onde S é a área da seção transversal da barra.

Obs: é suposto que as tensões estão uniformemente distribuídas ao longo da seção. Em vários casos, isso não pode ser considerado verdadeiro e o resultado da fórmula acima é um valor médio.
Tensões podem ter componentes de modo análogo às forças. Na Figura 01 (c), é considerada uma seção hipotética que faz um ângulo α com a vertical. E a força atuante nessa seção pode ser considerada a soma vetorial da força normal (F cos α) com a força transversal (F sen α). Portanto, a tensão nessa superfície é a soma dos componentes:
Tensão normal: em geral simbolizada pela letra grega sigma minúsculo (σ).
Tensão transversal (ou de cisalhamento): em geral simbolizada pela letra grega tau minúsculo (τ).
Resistência dos materiais I-20
Tração e compressão: generalidades
Considera-se, conforme Figura 01 deste tópico, uma barra redonda de diâmetro D e comprimento L, inicialmente na condição livre, isto é, sem aplicação de qualquer esforço.
Fig 01Se aplicada uma força de tração F, as seguintes deformações são perceptíveis:
• o comprimento aumenta de L para L1 = L + ΔL.
• o diâmetro diminui de D para D1.
Alongamento (ou deformação longitudinal) ε da barra é definido pela relação entre a variação de comprimento e o comprimento inicial
ε = ΔL / L #A.1#. É uma grandeza adimensional e também pode ser dada em termos percentuais
ε = 100 ΔL / L #A.2#.
Paralelamente ao aumento de comprimento, ocorre uma redução do diâmetro, denominada contração transversal, que é dada por
εt = (D - D1) / D #B.1#.
As grandezas anteriores são, portanto, variações relativas do comprimento tracionado e da dimensão transversal a esse comprimento. O coeficiente de Poisson (em geral, simbolizado por ν ou μ) é a relação entre essas variações
ν = εt / ε #C.1#. Valores típicos de ν para metais estão na faixa de 0,20 a 0,40.

Fig 02Os ensaios de tração determinam graficamente a relação entre a tensão aplicada e o alongamento em uma amostra (corpo de prova) de um determinado material. Mais informações podem ser vistas nas páginas de Ensaios de materiais I-10 deste site.
A Figura ao lado 02 (a) dá a curva aproximada para um aço estrutural típico
Existe um valor-limite de tensão até o qual a tensão aplicada (σ = F / S) é proporcional à deformação longitudinal ε
σ = E ε #C.1#.
Essa igualdade é conhecida como lei de Hooke e indica, portanto, a região de proporcionalidade entre tensão aplicada e deformação no mesmo sentido dessa tensão.
O coeficiente E é denominado módulo de elasticidade ou módulo de Young (homenagem ao cientista inglês Thomas Young).
Desde que ε é uma grandeza adimensional, conclui-se que o módulo de elasticidade E tem a mesma unidade da tensão (pascal, Pa, no Sistema Internacional).
Obs: para compressão, pode-se supor a mesma lei, considerando a tensão com sinal contrário. Entretanto, alguns materiais exibem valores de E diferentes para tração e compressão. Nesses casos, podem-se usar as notações Et e Ec para a distinção entre eles.
A tabela abaixo informa valores típicos de E e ν para alguns metais.
- Aços Alumínio Bronze Cobre Ferro fundido LatãoE (GPa) 206 68,6 98 118 98 64ν 0,30 0,34 0,33 0,33 0,25 0,37Voltando à Figura 02 (a), os pontos marcados têm as definições a seguir comentadas.
σp: limite de proporcionalidade do material, isto é, tensão abaixo da qual o material se comporta segundo a lei de Hooke.
σe: limite de escoamento (tensão a partir da qual as deformações são permanentes. Indica o início da região plástica do material. A região elástica do material está, portanto, à esquerda desse limite e abrange a região de proporcionalidade anterior).
σb: tensão máxima de ensaio do material.
σr: tensão de ruptura de ensaio do material.
Em materiais pouco dúcteis (frágeis) como ferro fundido, nem todos esses limites ocorrem e uma curva típica é parecida com a Figura 02 (b).

No caso de aços, o teor de carbono exerce significativa influência nas tensões máximas. Abaixo alguns valores típicos de tensões de escoamento e de ruptura para aços-carbono comerciais.
Teor C % 0,10 0,20 0,30 0,40 0,50σe (MPa) 177 206 255 284 343σr (MPa) 324 382 470 520 618
Em geral, para fins de dimensionamento no caso de materiais dúcteis, considera-se tensão admissível igual à tensão de escoamento dividida por um coeficiente de segurança. No caso de materiais frágeis, conforme visto, a tensão de escoamento não é definida e normalmente é usada a de ruptura dividida pelo coeficiente de segurança.
Resistência dos materiais I-30
Energia da deformação elástica
Com a suposição de deformação elástica de acordo com a lei de Hooke, deseja-se saber a energia gasta para deformar a barra da condição de repouso A (sem força aplicada) até B, onde uma força F mantém a barra no comprimento L + ΔL (Figura 01 deste tópico).
Deve ser notado que essa energia não é o simples produto F ΔL, uma vez que a força varia com o valor da deformação.
Fig 01Seja x uma deformação genérica entre A e B, isto é,
0 ≤ x ≤ ΔL.
De acordo com a lei de Hooke,
σ = F(x) / S = E ε = E x / L #A.1#.
Onde F(x) é a força que produz uma deformação absoluta x. Portanto,
• se x = 0, F(x) = 0 #A.2#.• se x = ΔL, F(x) = F #A.3#.
De acordo com o conceito de trabalho, dW = F(x) dx. Conforme relação #A.1#, F(x) = (E S/L) x. Substituindo e realizando a integração,
W = ∫0, ΔL F(x) dx = (E S/L) ΔL2 / 2.
Considerando #A.3# e #A.1#, ΔL = F L / (S E). Substituindo e simplificando, chega-se ao resultado final
W = L F2 / (2 E S) #B.1#.

Tensão devido à dilatação linear Topo | Fim
Se, conforme Figura 01 (a), uma barra de comprimento L a uma determinada temperatura t for submetida a uma variação (positiva neste caso) de temperatura Δt, a variação do seu comprimento é dada por
ΔL = L α Δt #A.1#.
Onde α é o coeficiente de dilatação linear do material da barra.
Uma simples análise dimensional da fórmula acima permite concluir que a unidade de α no Sistema Internacional é 1/K ou 1/°C, uma vez que variações unitárias de graus Kelvin e Celsius são idênticas.
Fig 01Se a barra for impedida de dilatar, conforme Figura 01 (b), ela será submetida a uma força e, por conseqüência, tensão de compressão.
Considerando o trabalho na região elástica conforme lei de Hooke, pode-se usar a sua formulação para determinar a tensão (neste caso, é claro, o esforço é de compressão e não de tração).
σ = E ε = E ΔL / L. Substituindo ΔL pelo valor de #A.1#, o resultado é
σ = E α Δt #B.1#.
A tabela abaixo dá valores aproximados do coeficiente de dilatação linear para alguns metais ou ligas comuns.
- Aços Alumínio Bronze Cobre Ferro fundido Latãoα 10-5 1/°C 1,2 2,3 1,9 1,7 1,2 1.9
Exemplo de questão Topo | Fim
Fonte: prova perito Polícia Federal, ano desconhecido.
Uma haste tem eixo reto e seção transversal constante, circular, com diâmetro d = 5,0 mm. O material da haste tem módulo de elasticidade E = 2100,00 tf/cm2 e segue a lei de Hooke. Se a deformação axial do material for ε = 0,001 qual a força normal atuante na haste ?
(a) 0,412 tf (b) 0,041 tf (c) 4,123 tf (d) 41,230 tf
Solução: aplicando a fórmula σ = E ε, tem-se σ = 2100 0,001 = 2,1 tf/cm2. Para diâmetro D = 5,0 mm = 0,5 cm, a área é S = π 0,52 / 4 ≈ 0,196. Portanto, F = σ S = 2,1 0,196 ≈ 0,412 tf. Resposta (a).

Resistência dos materiais 01-40
Resiliência, tenacidade, ductilidade
Em página anterior foi visto que a energia da deformação de uma barra (comprimento L, seção transversal S e módulo de elasticidade do material E), da condição livre até a situação de equilíbrio com uma força F, é dada por:
#A.1#
Multiplicando dividendo e divisor por S,
W = (F/S)2 L S / 2 E. Considerando que:
F / S = σ (tensão) e L S = V (volume da barra), chega-se ao resultado:
#A.2#
Resiliência Ur é a máxima energia de deformação que uma barra pode absorver sem sofrer deformações permanentes. Assim, na fórmula anterior, ela pode ser dada de forma aproximada com o uso da tensão de escoamento (σe):
#B.1#
Figura 01
Módulo de resiliência ur de um material é a energia de deformação por unidade de volume até o limite de proporcionalidade.
Usando essa definição e a igualdade anterior (#A.2#) e simplificando,
#B.2#
Considerando a lei de Hooke, σ = E ε, tem-se E = σ / ε. Substituindo na anterior e

simplificando,
#B.3#
No diagrama tensão-deformação segundo Figura 01 (a), ur equivale à área abaixo da parte da curva até o limite de proporcionalidade σp (tensão até a qual a lei de Hooke é válida).
A tabela abaixo dá valores aproximados do módulo de resiliência para alguns materiais.
Material Acrílico Aço alto C Aço médio C Borracha Cobre DuralumínioE (GPa) 3,4 206 206 0,001 118 72σp (MPa) 14 965 310 2 28 124
ur (MJ/m3) 0,029 2,26 0,23 2,1 0,0033 0,11
Tenacidade é a capacidade de o material absorver energia devido à deformação até a ruptura. É uma propriedade desejável para casos de peças sujeitas a choques e impactos, como engrenagens, correntes, etc. Em geral, não é definida numericamente. Pode-se considerar, de forma similar ao módulo de resiliência, a área total abaixo da curva (ut) conforme Figura 01 (b). Algumas vezes são usadas as seguintes aproximações:
• materiais dúcteis #C.1#
• materiais frágeis #C.2#
Onde σr é a tensão de ruptura e εr é o alongamento correspondente a essa tensão de ruptura.
Figura 02
A Figura 02 mostra diagramas típicos de tensão x deformação para um aço de alto teor de carbono (para molas por exemplo) e um de médio/baixo teor (para estruturas por exemplo).
Nota-se que o aço para molas tem uma resiliência maior, como seria esperado. Já o aço de médio carbono apresenta uma área sob a curva maior, isto é, uma tenacidade mais alta. Entretanto, essas comparações são aproximadas. O diagrama considera a tensão em relação à área inicial e, na região plástica, não é a tensão real no material.

Outra propriedade bastante usada no estudo de materiais é a ductilidade. Em geral, é uma característica não definida numericamente. Quanto mais dúctil um material,
maior a deformação de ruptura (εr). Isso significa que um material dúctil pode ser, por exemplo, trefilado com mais facilidade. Alguns autores consideram um valor para o alongamento de ruptura (εr):
εr > 0,05 #D.1# para material dúctil.
O contrário da ductilidade é a fragilidade. Voltando à Figura 02, pode-se notar que aços de elevado carbono são mais frágeis (ou menos dúcteis) que os de médio carbono.
Tensão admissível e coeficiente de segurança
Os gráficos da Figura 01 deste tópico já foram vistos em página anterior. São curvas típicas aproximadas de tensão x deformação para materiais dúcteis (a) e frágeis (b). A Figura 02 do tópico anterior também mostra a diferença.
Os materiais frágeis não apresentam limite definido (σe) para as regiões elástica e plástica. Assim, para efeito de dimensionamento, usa-se a tensão de ruptura (σr). Para os materiais dúcteis, usa-se a tensão de escoamento σe.
Coeficientes de segurança são empregados para prevenir incertezas quanto a propriedades dos materiais, esforços aplicados, variações, etc.
No caso de peças tracionadas, é usual o conceito da tensão admissível, que é dada por:
Figura 01
#A.1# para materiais dúcteis.
#A.2# para materiais frágeis.
Onde c é o coeficiente de segurança. A escolha do coeficiente de segurança é uma tarefa de responsabilidade. Valores muito altos significam, em geral, custos desnecessários e valores baixos podem provocar falhas de graves conseqüências. A tabela abaixo dá alguns critérios genéricos para coeficientes de segurança.
Coeficient Carregamento Tensão no material Propriedades do Ambiente

e material
1,2 - 1,5Exatamente conhecido
Exatamente conhecida
Exatamente conhecidas
Totalmente sob controle
1,5 - 2,0 Bem conhecido Bem conhecidaExatamente conhecidas
Estável
2,0 - 2,5 Bem conhecido Bem conhecidaRazoavelmente
conhecidasNormal
2,5 - 3,0Razoavelmente
conhecidoRazoavelmente
conhecidaEnsaiadas
aleatoriamenteNormal
3,0 - 4,0Razoavelmente
conhecidoRazoavelmente
conhecidaNão ensaiadas Normal
4,0 - 5,0 Pouco conhecido Pouco conhecida Não ensaiadas Variável
Observações:
• Cargas cíclicas devem ser dimensionadas pelo critério de fadiga (aqui não dado).
• Se houver possibilidade de choques, o menor coeficiente deve ser 2 multiplicado por um fator de choque (em geral, de 1,5 a 2,0).
• Os dados da tabela são genéricos e muitas vezes subjetivos. Não devem ser usados em aplicações críticas e/ou de elevada responsabilidade. Nesses casos, informações devem ser obtidas em literatura ou fontes especializadas, normas técnicas, etc.
Figura 02
Exemplo (fonte: prova PF 2004, com adaptações. Responder Certo ou Errado):
Considere a figura 02, que ilustra o esquema de um mecanismo biela/manivela usado para bombeamento de água em uma mina. Considere que a barra cilíndrica de 100 m de comprimento que aciona o êmbolo, em movimento alternado, sofre uma carga de 138 kN quando puxa o êmbolo para cima e de 13,8 kN quando o empurra para baixo. Nessa situação, sabendo que não existem problemas de flambagem, se a barra for feita de aço com peso específico de 80 kN × m−3 (8 × 10−5 N × mm−3) e tensão admissível de 100 MPa, para que o sistema opere corretamente, a seção transversal da barra não poderá ser inferior a 1.500 mm2

Solução: desde que não há flambagem, não se considera a carga de compressão (13,8 kN). Se já é dada a tensão admissível, σadm = 100 MPa (100 106 N/m2), ela supostamente inclui o coeficiente de segurança. Se S é a área da seção transversal da barra,
σadm = F / S. Portanto, S = F / 100 106. Onde F é a força máxima de tração.
Essa força deve ser a carga de tração (138 103 N) mais o peso próprio da barra, que é dado pelo pelo específico (80 103 N/m3) multiplicado pelo volume (100 S). Assim,
S = (138 103 + 80 103 100 S ) / 100 106
Resolvendo a equação, S = 0,0015 m2 = 1500 mm2. Resposta Certo.
X xxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais I-50
Reservatório cilíndrico de parede fina
Um reservatório cilíndrico de raio r e espessura t é considerado de parede fina se
r / t ≥ 10 #A.1#.
Nessa condição, pode-se supor que as tensões se distribuem de maneira uniforme ao longo da espessura do cilindro.
Fig 01Também é suposto que está sujeito a uma pressão interna uniforme p, maior que a atmosférica e relativa à mesma, isto é, pressão manométrica.
O quadrilátero pequeno da Figura 01 representa uma porção elementar da parede do cilindro, que sofre ação das tensões:
α1 ao longo da circunferência.α2 no sentido longitudinal.
Considera-se uma porção cilíndrica de largura Δx como em A da mesma figura. Se essa porção é cortada diametralmente (B da figura), a tensão σ1 atua na direção perpendicular às superfícies das extremidades S1. Para o equilíbrio estático, a força devido a essas tensões deve ser igual à força devido à pressão interna p. Assim,
2 σ1 S1 = 2 σ1 Δx t = p 2r Δx.
Notar que a força devido à pressão é igual ao valor dela multiplicado pela área frontal às extremidades das superfícies S1 (2r Δx) e não ao longo da circunferência.

Portanto, σ1 = p r / t #B.1#.
Fig 02Para a tensão σ2, considera-se um corte transversal do cilindro conforme Figura 02.
A tensão σ2 atua sobre uma coroa circular conforme indicado no lado direito da figura. Como t é pequeno em relação a r, pode-se supor sua área igual a 2 π r t. E a força para equilibrar é igual à pressão interna multiplicada pela área do círculo de raio r. Assim,
σ2 2 π r t = p π r2. Portanto, σ2 = ( 1/2 ) p r / t #C.1#.
Por essa e pela igualdade #B.1#, pode-se concluir que a tensão determinante para dimensionamento é σ1, ou seja, a tensão no sentido da circunferência do cilindro.
Outro aspecto importante: junções (soldadas ou de outros tipos) paralelas ao eixo do cilindro sofrem tensões iguais ao dobro das tensões em junções ao longo da circunferência.
Reservatório esférico de parede fina
Seja um reservatório esférico de raio r e espessura t de parede. A parede é considerada fina se
r / t ≥ 10 #A.1#, de forma similar ao cilíndrico do tópico anterior.
Fig 01Se o reservatório é preenchido por um fluido sob pressão p (relativa a atmosférica), a simetria sugere que as tensões σ são as mesmas em quaisquer direções.
Considerando-se uma semi-esfera conforme lado direito da Figura 01, a tensão σ atua perpendicularmente à área cortada (aproximadamente igual a 2 π r t).
E a força para manter a condição de equilíbrio estático é igual à pressão interna multiplicada pela área do círculo de raio r.
Assim, σ 2 π r t = p π r2. Ou σ = ( 1/2 ) p r / t #B.1#.
Observar que é igual à menor tensão calculada para o reservatório cilíndrico do tópico

anterior. Por isso, pode-se supor que o reservatório esférico é o que suporta maior pressão com a menor quantidade de material.
Algumas considerações sobre reservatórios
Além das tensões superficiais, reservatórios submetidos a pressões internas estão sujeitos a tensões radiais, que variam do valor da pressão na superfície interna até zero na superfície externa. Na suposição de paredes finas conforme tópicos anteriores, essas tensões são em geral de 5 a 10 vezes menores que as demais e podem ser desprezadas.
As fórmulas dos dois tópicos anteriores valem para reservatórios sob pressão interna. No caso de reservatórios submetidos a pressões externas (para vácuo por exemplo), falhas podem ocorrer antes da ruptura devido à deformação das superfícies.
Essas fórmulas são as mais simples para reservatórios cilíndricos e esféricos. Existem várias outras considerações a tomar no projeto dos mesmos (coeficientes de segurança, reforços em apoios e outros locais como tampas e saídas de tubos, temperatura, corrosão, etc). Consultar normas técnicas e outras fontes sobre o assunto.X xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais I-60
Deformação por cisalhamento
Se um material sofre um esforço de cisalhamento puro conforme Figura 01 (a), ele se deforma conforme (b) da mesma figura.
Fig 01Na região elástica, o ângulo de distorção γ e a tensão τ são proporcionais
τ = G γ #A.1#.
O coeficiente G é denominado módulo de elasticidade transversal ou módulo de rigidez do material.
A relação com o módulo de elasticidade (simbolizado por "E") e o módulo de Poisson (aqui simbolizado por "ν") é dada por
G = E / [ 2 (1 + ν) ] #A.2#.
Fig 02

Para uma barra de seção transversal S constante, submetida a uma força cisalhante F e sem considerar a deformação por flexão, tem-se o ângulo γ aproximadamente igual a y / L para pequenas deformações (Figura 02).
Então τ = F / S = G γ ≈ G y / L. Rearranjando a igualdade, y ≈ F L / (G S) #A.3#.
Energia da deformação por cisalhamento Topo | Fim
A equação #A.3# do tópico anterior pode ser reescrita para a força F em função do deslocamento y
F = (G S / L) y.
A energia ou trabalho de deformação é dada pela integração do produto da força pelo deslocamento
W = ∫0,y (G S / L) y dy = |0,y (G S / L) y2 / 2 = G S y2 / (2 L).
Para exibir o trabalho em função da força F, substitui-se y pelo valor da igualdade #A.3# do mesmo tópico
W = G S (F L / G S)2 / (2 L), isto é, W = F2 L / (2 G S) #A.1#.
Exemplo de cisalhamento: união soldada Topo | Fim
Seja o exemplo da Figura 01 abaixo: a uma chapa central são soldadas duas laterais totalizando 4 filetes de solda de seção triangular, de comprimento L e largura t.
Fig 01
O conjunto é tracionado por uma força F atuante conforme figura. Nessa condição, os esforços nos filetes de solda são basicamente de cisalhamento.
Considerando que a tração aplicada se distribui igualmente pelos 4 filetes, cada um suporta um esforço de cisalhamento igual a F/4.O detalhe A da figura é uma ampliação do corte do filete. A menor seção tem largura:
h = t √ 2 / 2. E, portanto, o máximo cisalhamento deve ocorrer nessa seção. A tensão de cisalhamento aplicada ao material da solda é dada por
τ = (F / 4) / (L h) = (F / 4) / (L t √ 2 / 2) = F / (2 √ 2 L t).

Valores típicos de tensões admissíveis em soldas para aços estão na faixa de 75 MPa. Consultar dados dos fabricantes.
Tensão admissível de cisalhamento: em página anterior foram dados alguns critérios para tensões admissíveis de peças tracionadas. Alguns autores sugerem, para o cisalhamento, a tensão admissível de tração multiplicada por um fator que varia de 0,5 a 0,6.
Coeficiente de Poisson - Mais informações
Em página anterior foi dada a definição básica do coeficiente de Poisson, isto é, a razão entre a deformação transversal e a deformação longitudinal. Rigorosamente, deve ser definido com sinal
ν = - (εtransversal / εlongitudinal) #A.1#. Obs: símbolos usuais são "ν" ou "μ".
Num sistema de coordenadas ortogonais, como em (a) da Figura 01, seria a relação entre a deformação ao longo do eixo y e a deformação ao longo do eixo x.
Fig 01
Se há deformação em ambas as direções, é lógico supor que pode haver tensões associadas. Considerando agora o caso genérico, isto é, as três dimensões, tem-se a forma generalizada da lei de Hooke (demonstração omitida)
εx = (1 / E) [ σx − ν (σy + σz) ]
εy = (1 / E) [ σy − ν (σx + σz) ]
εz = (1 / E) [ σz − ν (σx + σy) ] #B.1#.
Onde ε é deformação, E é módulo de elasticidade, σ é tensão e ν é módulo ou coeficiente de Poisson. Naturalmente, essas relações são válidas para materias isotrópicos (propriedades idênticas em todas as direções).
Portanto, no caso de tensões no plano em coordenadas ortogonais como em (a) da Figura 01, a igualdade anterior fica reduzida a

εx = (1 / E) ( σx − ν σy )
εy = (1 / E) ( σy − ν σx ) #C.1#.
Para coordenadas polares como em (b) da mesma figura, ocorrem as relações
εr = (1 / E) ( σr − ν σθ )
εθ = (1 / E) ( σθ − ν σr ) #C.2#.
Notar que o coeficiente de Poisson não pode ser maior que 0,5 porque, se fosse, um elemento tensionado poderia atingir volume nulo ou negativo. Valores típicos para aços estão na faixa de 0,20 a 0,40. Borracha apresenta valor perto de 0,5 e cortiça, perto de 0 (essa é uma das razões para uso da cortiça em rolhas de garrafas. Praticamente não há variação de comprimento ao ser pressionada pelos lados).
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais I-70
Deformação plástica residual
Topo | Fim
No esquema da Figura 01, a barra é considerada de seção transversal S constante. São conhecidos também os valores de:
L: comprimento inicial.E: módulo de elasticidade do material.σE: tensão de escoamento do material.ΔLmax: aumento do comprimento devido à aplicação do esforço de tração.
Fig 01Com esses dados, deseja-se saber o aumento permanente ΔLperm, que ocorre depois de retirada a força tracionante F.
Supõe-se que o material se comporta conforme o gráfico na parte direita da referida figura.
Do início da deformação (0) até o escoamento (1), há uma relação linear entre tensão σ e deformação ε. Iniciado o escoamento, a tensão permanece constante até a deformação máxima em (2).
Na remoção do esforço (2) a (3), a relação tensão e deformação volta a ser linear e, desde que o módulo de elasticidade não varia, o retorno se dá em uma reta paralela a 01, deslocada devido à deformação residual da região plástica 12. É uma aproximação dos ensaios reais de tração.
A deformação máxima (em 2) é dada por ε2 = ΔLmax/L.

A deformação máxima na região elástica (em 1) é dada por: ε1 = σE / E (lei de Hooke).
A geometria do gráfico permite concluir que a deformação em (3) é igual à diferença entre as deformações em (2) e em (1). Assim,
ε3 = ε2 − ε1 = ΔLmax/L − σE / E.
Mas ε3 = ΔLperm/L ou ΔLperm = ε3 L.
Portanto, ΔLperm = ( ΔLmax/L − σE / E ) L #A.1#.
Ação da força centrífuga em barra girante Topo | Fim
Conforme Figura 01 deste tópico, uma barra horizontal de seção transversal constante gira, em torno de um eixo vertical que passa por uma extremidade, com velocidade angular constante. Deseja-se saber a atuação da força centrífuga ao longo do comprimento da barra bem como sua deformação. São conhecidos:
L: comprimento da barra.S: área da seção transversal.ω: velocidade angular.μ: massa específica do material da barra.E: módulo de elasticidade do material da barra.
Das relações da Dinâmica, pode ser visto que, para uma massa puntiforme m que gira com velocidade angular ω e raio r, a força centrífuga é dada por
F = m ω2 R #A.1#.
Essa igualdade vale para uma massa concentrada em um ponto. No caso da barra em questão, ela é distribuída. Mas pode ser tratada como uma massa puntiforme localizada no ponto de simetria (ponto médio) da parte considerada.
Seja um ponto P genérico situado a um raio r do centro. A força centrífuga atuante nesse ponto é equivalente à da massa do trecho PA concentrada no seu ponto médio, ou seja, distante r + PA/2 do centro O.
Fig 01Mas PA = L − r. Portanto, o raio de giro dessa massa concentrada é r + (L − r)/2. Simplificando, (L + r)/2.
A massa dessa parte é μ PA S = μ (L − r) S.
Substituindo para a força centrífuga (#A.1#),
F = μ (L − r) S ω2 (L + r) / 2.
Simplificando, F(r) = μ S ω2 (L2 − r2) / 2 #A.2#.

Observar a notação F(r), que indica a dependência com o raio r. Na extremidade A (r = L) a força é nula, atingindo o valor máximo em O (r = 0). Portanto a tensão máxima é dada por
σmax = F(0)/S = μ ω2 L2 / 2 #A.3#.
A determinação da deformação não se faz pela simples divisão da tensão pelo módulo de elasticidade. Desde que a força varia ao longo do comprimento (#A.2#), a tensão também varia, o que torna inválida a divisão mencionada.
Considera-se um comprimento infinitesimal dr distante r do centro O (isto é, dL está em P da figura). Dividindo a igualdade #A.2# pela área S, obtém-se a tensão atuante nesse ponto
σ(r) = μ ω2 (L2 − r2) / 2. Considerando dℓ a variação do comprimento dr provocada pela tensão σ, tem-se conforme a lei de Hooke
dℓ / dr = σ / E = μ ω2 (L2 − r2) / (2 E). Ou dℓ = [ μ ω2 / (2E) ] (L2 − r2) dr.
A variação total do comprimento é dada pela integração
ℓ = ∫0,L dℓ = ∫0,L [ μ ω2 / (2E) ] (L2 − r2) dr = [ μ ω2 / (2E) ] |0,L (L2 r − r3/3).
ℓ = [ μ ω2 / (2E) ] (L3 − L3/3) = [ μ ω2 / (2E) ] (2 L3 / 3) = [ μ ω2 L2 / 2 ] [2 L / (3E) ].
O primeiro termo entre colchetes é a tensão máxima dada por #A.3#. Assim,
ℓ = 2 σmax L / (3 E). Isso é a variação total de comprimento. Portanto, a divisão por L dá a deformação total da barra
ε = ℓ / L = 2 σmax / (3 E) #A.4#.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais I-80
Dilatação linear com dois materiais Topo | Fim
Problema de dilatação já foi visto em página anterior desta série. Neste caso, há duas barras de materiais diferentes, que sofrem a mesma variação de temperatura Δt e são impedidas de dilatar conforme (a) da Figura 01. As seções transversais, consideradas circulares, também são diferentes.
Fig 01

Além das dimensões geométricas (L e D) indicadas na figura, supõe-se que são conhecidos os módulos de elasticidade (E1 e E2) e os coeficientes de dilatação linear (α1 e α2) de cada material.
A condição de equilíbrio estático permite concluir que as reações dos apoios são idênticas:
RA = RB = R. Portanto, ambas as partes estão sob o mesmo esforço de compressão R.
Considera-se agora a situação (b) da figura, isto é, o aquecimento livre.
Nessa condição e segundo fórmula já vista ( ΔL = L α Δt ), os comprimentos das partes seriam:
L1' = L1 + L1 α1 Δt #A.1#.
L2' = L2 + L2 α2 Δt #A.2#.
E as variações:
ΔL1dilat = L1 α1 Δt #B.1#.
ΔL2dilat = L2 α2 Δt #B.2#.
Com a aplicação das reações dos apoios RA e RB, as barras sofrem uma deformação por compressão elástica, de forma que a soma dos comprimentos finais L1F + L2F é igual à soma dos comprimentos iniciais L1 + L2.
Notar que os comprimentos finais L1F e L2F não são necessariamente iguais aos seus comprimentos iniciais L1 e L2, como pode sugerir a figura. A igualdade está na soma de ambos.
As áreas das seções transversais de cada parte são:
S1 = π D12/ 4 #C.1#.
S2 = π D22/ 4 #C.2#.
E as tensões em cada parte são:
σ1 = R/S1 = 4 R / (π D12) #D.1#.
σ2 = R/S2 = 4 R / (π D22) #D.2#.
Conforme lei de Hooke, σ = E ε = E ΔL / L ou ΔL = σ L / E. Assim,
ΔL1compr = σ1 L1 / E1 #E.1#.
ΔL2compr = σ2 L2 / E2 #E.2#.
Para impedir a dilatação livre, a soma das reduções de comprimento devido à compressão deve ser igual à soma dos aumentos devido à dilatação:
ΔL1compr + ΔL2compr = ΔL1dilat + ΔL2dilat.
σ1 L1 / E1 + σ2 L2 / E2 = ΔL1dilat + ΔL2dilat.
R L1 / S1 E1 + R L2 / S2 E2 = L1 α1 Δt + L2 α2 Δt.

R = [ L1 α1 Δt + L2 α2 Δt ] / [ L1 / S1 E1 + L2 / S2 E2].
R = [ ΔL1dilat + ΔL2dilat ] / [ 4 L1 / (π D12 E1) + 4 L2 / (π D2
2 E2) ] #F.1#.
Com essa igualdade a reação R fica determinada em função de parâmetros supostamente conhecidos e outros dados podem ser calculados em função da mesma. Considera-se agora o exemplo numérico para Δt = 80ºC.
Seja alumínio o material da parte 1 e bronze o da parte 2. E os valores:
L1 = 0,45 m | D1 = 0,05 m | E1 = 69 GPa | α1 = 2,3 10-5 /ºC.
L2 = 0,50 m | D2 = 0,045 m | E2 = 98 GPa | α2 = 1,9 10-5 /ºC.
Conforme #B.1# e #B.2#,
ΔL1dilat = 0,45 m 2,3 10-5 /ºC 80 ºC = 0,828 mm ou 0,828 10-3 m.
ΔL2dilat = 0,50 m 1,9 10-5 /ºC 80 ºC = 0,760 mm ou 0,760 10-3 m.
Conforme #F.1#,
r = [8,28 10-4 m + 7,6 10-4 m] / [ 4 0,45 m / (π 0,052 m2 69 109 N/m2 + 4 0,50 m / (π 0,0452 m2
98 109 N/m2 ].
r ≈ 15,88 10-4 m / [ 3,32 10-9 (m/N) + 3,21 10-9 (m/N) ] ≈ 243,206 kN.
Calculam-se agora as tensões de compressão conforme #D.1# e #D.2#:
σ1 = 4 243,206 103 / (π 0,052 m2) ≈ 123,864 MPa.
α2 = 4 243,206 103 / (π 0,0452 m2) ≈ 152,918 MPa.
E as variações devido à compressão conforme #E.1# e #E.2#:
ΔL1compr = 123,864 MPa 0,45 m / 69 GPa ≈ 0,808 10-3 m ou 0,808 mm.
ΔL2compr = 152,918 MPa 0,50 m / 98 GPa ≈ 0,780 10-3 m ou 0,780 mm.
Desde que a dilatação aumenta o comprimento e a compressão diminui, a variação líquida é igual à diferença das duas. Assim,
ΔL1 = ΔL1dilat − ΔL1compr = 0,828 − 0,808 = 0,02 mm.
ΔL2 = ΔL2dilat − ΔL2compr = 0,760 − 0,780 = −0,02 mm.
Os resultados positivo e negativo indicam que o alumínio é expandido e o bronze, comprimido. À primeira vista, isso pode parecer estranho. É mais visível supor ambas as partes comprimidas. Mas os diâmetros e comprimentos são diferentes, os materiais têm módulos de elasticidade e coeficientes de dilatação distintos. A combinação desses valores pode fazer resultados desse tipo.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais III-10

Torção de peças circulares Topo | Fim
Seja, conforme Figura 01, uma barra cilíndrica fixa em uma extremidade e submetida a um esforço de torção por um conjugado de torque T na outra extremidade.
Essa solicitação é uma torção uniforme, uma vez que o material da barra é considerado homogêneo. Assim, todos os pontos de cada circunferência de qualquer seção transversal têm o mesmo deslocamento.
Fig 01Um plano que passa pelo eixo do cilindro sofre uma deformação tal que o ângulo φ sobre uma circunferência é função da distância x entre o círculo dessa circunferência e a extremidade engastada.
A simples dedução ou observação prática revelam que o ângulo φ aumenta com o aumento de x. Para determinar a relação entre ambos, importante em muitos casos práticos, é necessário em primeiro lugar um estudo das tensões em cada plano de seção transversal.
Na Figura 02 é considerada uma porção elementar da barra, de comprimento dx. O processo de torção pode ser entendido como o cisalhamento de dois planos próximos, neste caso as extremidades dessa seção elementar.
A observação prática demonstra que o ângulo de distorção γ de uma superfície elementar varia linearmente com o raio, atingindo o valor máximo γmax na borda. Assim,
γ = (r/R) γmax.
Se os ângulos são proporcionais aos raios, as tensões de cisalhamento τ também são, pois é suposto que as deformações ocorrem dentro da região elástica do material. Assim,
τ = (r/R) τmax #A.1#.
Fig 02

O torque T pode ser dado pela integração do produto das forças elementares dF devido ao cisalhamento pela distância até o centro O, isto é, pelo raio:
T = ∫ r dF. Mas dF = τ dA, onde dA são as áreas elementares. Assim,
T = ∫ r τ dA.
Substituindo τ conforme igualdade #A.1#,
T = ∫ r (r/R) τmax dA = ( τmax / R) ∫ r2 dA.
Mas ∫ r2 dA é o momento polar de inércia (Jp) da superfície (círculo neste caso) em relação ao eixo de rotação O. E fica definida a relação entre torque e tensão máxima:
Fig 03T = τmax Jp / R #B.1# para o torque.
τmax = T R / Jp #B.2# para a tensão máxima.
Voltando à proporcionalidade entre raio e tensão de cisalhamento (igualdade #A.1#), pode-se concluir que, em qualquer direção radial, a tensão varia de zero até τmax conforme (a) da Figura 03.
Para o caso de eixo vazado (ou tubo) conforme Figura 03 (b), pode-se facilmente verificar que a tensão varia radialmente de um valor mínimo até τmax.
Fig 04Outro aspecto que vale mencionar é o fato de as tensões de cisalhamento ocorrerem sempre em pares perpendiculares.
Assim, em um corte hipotético de um eixo cilíndrico conforme Figura 04, há tensões ao longo do eixo, de mesmos valores das tensões na seção transversal.
Volta-se agora à Figura 01 e à questão inicial deste tópico, isto é, o ângulo de torção da extremidade de um eixo cilíndrico na qual é aplicado um torque T, supondo a outra extremidade fixa e comprimento L.
Na Figura 02, pode-se observar que, para uma pequena porção,

dφ = γmax / R.
Em página anterior, foi visto que a relação entre ângulo de cisalhamento e a respectiva tensão é τ = G γ. Assim,
dφ = τmax / (G R). Substituindo τmax pelo valor dado em #B.2#,
dφ = T / (Jp G). Portanto, o ângulo φ é dado pela integração φ = ∫0,L [T / (Jp G)] dx.
φ = T L / ( Jp G ) #C.1#.
É evidente que essa fórmula vale apenas para eixos de seção constante e submetido à torção na extremidade. Para outros casos, ela pode ser generalizada com torque e momento polar de inércia em função de x
φ = ∫0,L [ T(x) / ( Jp(x ) G) ] dx #C.2#.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais III-20
Momento polar de resistência Topo | Fim
O momento de resistência polar Wp é definido por
Wp = Jp / R #A.1#.
Assim, a fórmula da tensão máxima de torção da página anterior fica reduzida a
τmax = T / Wp #B.1#.
Tabela de momentos polares para algumas seções Topo | Fim
Seção Nome Jp Wp Obs (ref torção)
Círculo cheioπ D4 / 32
ou≈ D4 / 10
π D3 / 16ou
≈ D3 / 5
Tensões máximas em quaisquer
pontos da circunferência
periférica.
Círculo vazado (tubo)
π (D4 - d4) / 32 π (D4 - d4) / 16 D
Tensões máximas em quaisquer
pontos da circunferência
periférica.

Tubo de parede fina
π e D3 / 4 π e D2 / 2
Tensões máximas em quaisquer
pontos da circunferência
periférica.
Elipse cheia(a/b ≥ 1)
π a3 b3
/16 (a2 + b2)
π a b2 / 16
τmax nas extremidades do eixo menor. Nas extremidades do
maior:τ = τmax / (a/b).
Tubo elípticoa/b = a'/b' ≥ 1
π (a/b)3 (b4 - b'4)/
16 [ (a/b)2 + 1]
π (a/b) (b4 - b'4)/
16 b
τmax nas extremidades do eixo menor. Nas extremidades do
maior:τ = τmax / (a/b).
Triângulo eqüilátero
≈ a4 / 46,19ou
≈ h4 / 26
a3 / 20ou
≈ h3 / 13
Tensões máximas nos centros dos
lados. Nos vértices, tensões
nulas.
Quadrado≈ 0,1406 a4
ou≈ a4 / 7,11
≈ 0,208 a3
Tensões máximas nos centros dos
lados. Nos vértices, tensões
nulas.
Retângulo (a ≥ b)
(*) ver tabela no final deste tópico
c1 a b3 (c1/c2) a b2
Tensões máximas nos centros dos lados maiores.
Nulas nos vértices. Nos centros dos
menores vale:τ = c3 τmax.
Hexágono regular ≈ 1,847 a4 ≈ 1,511 a3Tensões máximas nos centros dos
lados.
Octógono regular ≈ 1,726 a4 ≈ 1,481 a3Tensões máximas nos centros dos
lados.

(*) para retângulos conforme tabela acima, os coeficientes são dados por:
c1 = (1/3) { 1 - 0,630 / (a/b) + 0,052 / [ (a/b)5 ] }.c2 = 1 - 0,65 / [1 + (a/b)2].
A tabela abaixo dá os valores para algumas relações a/b.
a/b 1 1,5 2 3 4 6 8 10c1 0,141 0,196 0,229 0,263 0,281 0,298 0,307 0,312c2 0,675 0,852 0,928 0,977 0,990 0,997 0,999 1,000c3 1,000 0,858 0,796 0,753 0,745 0,743 0,743 0,743
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais III-30
Energia da deformação por torção Topo | Fim
Na Figura 01, uma barra cilíndrica de raio R e comprimento L com a extremidade A fixa está submetida a um torque T na extremidade B, de forma que o ângulo de torção nessa extremidade em situação de equilíbrio estático é φ.
Deseja-se saber a energia gasta para atingir tal situação a partir da condição livre, isto é, girar um ponto na posição 1 até a posição 2 da figura, de forma que ele seja mantido nessa posição com um torque T aplicado.
Fig 01Em página anterior, foi dada a equação para o ângulo em função do torque aplicado
φ = T L / (Jp G). Portanto,
T = (Jp G / L) φ = k φ, onde k = Jp G / L.
O ângulo φ é, por definição, a razão entre segmento de circunferência a e o raio R
φ = a / R.
O torque T pode ser considerado igual ao momento de uma força tangencial F em relação ao eixo da barra, isto é,
T = F R = k φ conforme igualdade anterior. Ou F = (k/R) φ.

O trabalho (ou energia da deformação) é dado pela integração do produto da força pelos deslocamentos infinitesimais
W = ∫ F da. Substituindo pelos valores de F e φ das igualdades anteriores,
W = ∫ F da = ∫ (k/R) φ da = ∫ (k/R) (a/R) da = ∫ (k/R2) a da = (k/R2) a2/2 = (k/2) (a/R)2.
Mas a/R = φ e φ = T/k conforme já visto. Assim,
W = (k/2) φ2 = (k/2) (T2/k2) = T2 / (2k).
Substituindo o valor de k (= Jp G / L), obtém-se o resultado
W = L T2 / (2 G Jp) #A.1#.
Potência transmitida, diagrama de momento e ângulo de torção Topo | Fim
A potência mecânica transmitida por um eixo está relacionada com o torque aplicado e a rotação de acordo com a seguinte fórmula:
Fig 01P = T ω #A.1#. Onde
P: potência em watts.T: torque em N m.ω: rotação em radianos por segundo.
A Figura 01 dá o exemplo de uma barra cilíndrica com aplicação de dois esforços de torção em locais distintos.
É suposto que a barra está engastada na extremidade C.
Na parte inferior da figura são dados diagramas aproximados dos esforços de torção e ângulos de distorção ao longo do comprimento da barra.
Exemplo de questãoTopo | Fim
Fonte: prova perito Polícia Federal, ano desconhecido.
A tensão cisalhante máxima τ em uma barra cilíndrica de seção circular com comprimento L

e diâmetro D, submetida a um momento torsor T, é dada pela seguinte expressão (G = módulo de elasticidade transversal; J = momento de inércia polar; I = momento de inércia):
(a) τ = TL/GJ (b) τ = TD/2J (c) τ = 32T/πD4 (d) τ = TL/GI
Solução: é a fórmula vista da tensão máxima de torção (τmax = T R / Jp), com a substituição de R por D/2. Portanto, resposta (b). Notar que a tensão máxima não depende do material e, portanto, as alternativas (a) e (d), que incluem o módulo de elasticidade transversal G, podem ser descartadas de imediato. A alternativa (c) sugere a substituição, na fórmula anterior, do valor de Jp (= π D4 / 32), mas está incorreta.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais III-40
Comentários sobre dimensionamentos Topo | Fim
Conforme visto em página anterior, a tensão máxima τmax em um eixo submetido a um torque T é dada por
τmax = T / Wp #A.1#. Onde Wp é o momento de resistência polar, isto é,
Wp = Jp / R #A.2#. Onde Jp é o momento de inércia polar e R é o raio.
E o ângulo de torção de um eixo de comprimento L submetido a um torque T é φ = T L / (Jp G). Dividindo o valor por L, resulta no ângulo de torção por unidade de comprimento:
φ / L = T / (Jp G) #B.1#.
É comum o uso de ambos os critérios, τmax e φ/L, para dimensionamento de eixos.
Para tensão máxima, τmax, que é uma tensão de cisalhamento, alguns critérios básicos podem ser vistos nas páginas Resistência dos materiais I-40 e Resistência dos materiais I-60.
Para o ângulo de torção por unidade de comprimento, φ/L, encontram-se exemplos em literatura do valor máximo de
0,25 graus por metro de comprimento, no caso de eixos de aço.
Lembrar que as fórmulas dadas usam ângulos em radianos e, portanto, esse limite corresponde a aproximadamente 0,004363 radianos por metro de comprimento.
Exemplo: barra biengastada Topo | Fim
Na Figura 01, uma barra cilíndrica engastada em ambas as extremidades está sob ação de um torque T no local da variação de diâmetro. Deseja-se saber o ângulo de torção em B e a distribuição de torque ao longo da barra.

Fig 01Para obedecer à condição de equilíbrio estático, um lado da barra deve estar sob ação de um torque T−T' e o outro lado, de T'. Assim, a soma de ambos se iguala ao torque externo T.
O diagrama de torque da figura não corresponde necessariamente ao real, pois os valores e sinais serão dados pelos cálculos.
O ponto de partida para resolver este problema é considerar a barra secionada em B, ou seja, como se fossem duas barras que, sob ação de T, apresentam o mesmo ângulo de torção. Assim, as duas seções se comportam como se fossem um corpo único.
E, desde que são engastadas, nas extremidades o ângulo é nulo.
Os ângulos de torção são os mesmos φAB = φBC = φB.
φAB = (T-T') LAB / (JpAB G) = φBC = T' LBC / (JpBC G) = φB #A.1#. Portanto,
T' LBC / (JpBC G) + T' LAB / (JpAB G) = T LAB / (JpAB G).
Dividindo tudo por LAB / (JpAB G),
T' LBC (JpAB G) / LAB (JpBC G) + T' = T.
T' = T / [ 1 + (LBC JpAB) / (LAB JpBC) ] #B.1#.
Desde que por hipótese são conhecidos T, LAB, LBC e os momentos polares JpAB e JpBC (funções dos respectivos raios), o valor de T' fica definido e o ângulo de giro φB pode ser calculado conforme igualdade anterior #A.1# (se conhecido, é claro, o valor do módulo de elasticidade transversal G, que depende do material da barra).
Esse é um exemplo de carregamento estaticamente indeterminado ou hiperestático de torção. As equações fundamentais da estática, ∑F = 0 e ∑M = 0, não são suficientes para definir todas as variáveis. Além delas, é necessário considerar o deslocamento.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IV-10
Tensões planas Topo | Fim

Seja, por exemplo, um corpo em forma de disco conforme Figura 01. A espessura (dimensão z) é pequena em relação às demais dimensões. Nessa condição, pode-se considerar que tensões normais e transversais atuantes em quaisquer partes elementares do corpo ocorrem somente no plano xy conforme A da figura. Essa situação é dita tensões planas ou estado duplo de tensões.
Fig 01Considera-se agora uma porção retangular do corpo de pequenas dimensões Δx e Δy (Figura 02).
A espessura é supostamente Δz, que é a espessura (pequena) do corpo. Portanto, as áreas dos lados dos eixos x e y são respectivamente Δx Δz e Δy Δz.
Na situação de equilíbrio estático, a soma dos momentos em relação a um ponto qualquer é nula. Seja o centro O o ponto considerado. Assim, os momentos das forças das tensões normais são nulos pois as linhas passam pelo ponto. Sobram os momentos das forças das tensões transversais. Desde que as forças correspondentes são as tensões multiplicadas pelas respectivas áreas de atuação, tem-se
τxy Δy Δz Δx / 2 + τ' xyΔy Δz Δx / 2 − τyx Δx Δz Δy / 2 − τ'yx Δx Δz Δy / 2 = 0. A igualdade pode ser dividida pelo fator comum Δx Δy Δz / 2, resultando em τxy + τ'xy − τyx − τ'yx = 0.
Sejam τ'xy = τxy + Δτxy e τ'yx = τyx + Δτyx. Assim, τxy + τxy + Δτxy − τyx − τyx − Δτyx = 0. Ou τxy − τyx = (Δτyx − Δτxy) / 2. Numa situação limite, o lado direito dessa equação tende para zero e pode-se escrever
τxy = τyx #A.1#.
Fig 02Para uma porção de seção triangular conforme Figura 03, usam-se as condições de equilíbrio estático ∑ Fx = 0 e ∑ Fy = 0.
Determinam-se então as tensões no lado BC considerando conhecidas as tensões nos eixos x e y, isto é, σx, σy e τxy (esta última e τyx são iguais conforme resultado anterior).
Chamando de ΔS (= BC Δz) a área do lado BC, a área do lado AC é ΔS sen φ e a do lado AB é ΔS cos φ.

Considera-se agora um sistema de coordenadas x'y' tal que o eixo x' é perpendicular a BC.
∑ Fx' = 0 = σ ΔS − σx ΔS sen φ sen φ − σy ΔS cos φ cos φ − τxy ΔS sen φ cos φ − τxy ΔS cos φ sen φ.
Isolando σ, ocorre σ = σx sen2 φ + σy cos2 φ + τxy sen φ cos φ + τxy 2 sen φ cos φ.
Fig 03A expressão anterior pode ser simplificada com as igualdades trigonométricas:
sen 2φ = 2 sen φ cos φ.
sen2 φ = (1 - cos 2φ) / 2.
cos2 φ = (1 + cos 2φ) / 2.
Então σ = (σy + σx) / 2 + [ (σy − σx) cos 2φ ] / 2 + τxy sen 2φ #A.2#.
∑ Fy' = 0 = τ ΔS + σx ΔS sen φ cos φ − σy ΔS cos φ sen φ − τxy ΔS sen φ sen φ + τxy ΔS cos φ cos φ.
Usando as igualdades trigonométricas anteriores, chega-se a
τ = [ (σy − σx) sen 2φ ] / 2 − τxy cos 2φ #A.3#.
Portanto, as igualdades #A.2# e #A.3# permitem determinar as tensões em uma direção qualquer a partir das tensões conhecidas em um par de eixos ortogonais x e y.
Tensões principais no plano Topo | Fim
As equações #A.2# e #A.3# do tópico anterior permitem, conforme dito, determinar as tensões normal e transversal em qualquer plano, dadas as tensões normais e transversais em dois eixos ortogonais conhecidos x e y. Entretanto, em muitos problemas de Engenharia, o que se deseja saber são as tensões máximas para fins de dimensionamento do elemento.
Para se obter a direção da tensão normal máxima, é preciso derivar #A.2# do tópico anterior em relação a φ e igualar a zero:
dσ / dφ = − [ (σy − σx) 2 sen 2φ ] / 2 + 2 τxy cos 2φ = 0. Resolvendo a equação diferencial,
tan 2φ = 2 τxy / (σy − σx) #A.1#.
Essa igualdade, por sua vez, tem duas soluções, (2φ)1 e (2φ)2, que diferem 180º entre si. Portanto, φ1 e φ2 diferem de 90° e a dualidade de soluções significa que há uma tensão máxima σ1 e uma tensão mínima σ2.

As tensões, σ1 e σ2, são denominadas tensões principais e os eixos ou planos correspondentes (ângulos φ1 e φ2) são denominados planos principais, que, conforme visto, são ortogonais entre si.
Na Figura 01 estão representados os ângulos (2φ)1 e (2φ)2. A equação #A.1# pode ser reescrita para
tan 2φ = τxy / [ (σy − σx) / 2 ]. Considera-se agora na mesma figura:
Fig 0111' = τxy
22' = − τxy
O1' = (σy − σx) / 2
O2' = − (σy − σx)/2
Por trigonometria simples, as seguintes relações são deduzidas:
sen (2φ)1 = τxy / { [(σy − σx)/2]2 + τxy2 }1/2 cos (2φ)1 = [(σy − σx)/2] / { [(σy − σx)/2]2 + τxy
2 }1/2
sen (2φ)2 = − τxy / { [(σy − σx)/2]2 + τxy
2 }1/2cos (2φ)2 = − [(σy − σx)/2] / { [(σy − σx)/2]2 +
τxy2 }1/2
Substituindo esses valores em #A.2# do primeiro tópico,
σ1,2 = (1/2) (σy + σx) ± (1/2) [ (σy − σx)2 + 4 τxy2 ]1/2 #A.2#.
Se os valores são substituídos em #A.3# do mesmo tópico, τ1,2 = 0 #A.3#.
O resultado significa que não há tensões transversais (ou de cisalhamento) nos planos principais.
Tensões (max e min) de cisalhamento no plano Topo | Fim
De forma similar à anterior, as tensões transversais máxima e mínima podem ser obtidas pela derivação de #A.3# do primeiro tópico em relação a φ
dτ/dφ = 2 [ (σy − σx) cos 2φ ] / 2 − (−2) τxy sen 2φ 0. Então
tan (2φ)t = − (σy − σx) / (2 τxy) #A.1#.
Obs: a notação (2φ)t serve para não confundir com 2φ da tensão normal do tópico anterior.
Também de forma similar à anterior, há duas soluções (2φ)t1 e (2φ)t2 que diferem 180º entre

si. Assim, φt1 e φt1 têm diferença de 90º.
Comparando #A.1# deste tópico com #A.1# do tópico anterior, nota-se que o valor absoluto de um é o inverso do outro. Assim, 2φ e (2φ)t têm diferença de 90° e, portanto, φ e φt são separados de 45°. Ou seja, o par de eixos das tensões máxima e mínima de cisalhamento está na bissetriz do ângulo reto dos planos principais (tensões normais máxima e mínima).
Formulando seno e co-seno para (2φ)t1 e (2φ)t2 de maneira similar à do tópico anterior e substituindo em #A.3# do primeiro tópico, chega-se a
τ1,2 = ± (1/2) [ (σy − σx)2 + 4 τxy2 ]1/2 #A.2#.
O resultado indica que as tensões transversais máxima e mínima têm valores absolutos idênticos, diferindo no sinal.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IV-20
Círculo de Mohr para tensões planas Topo | Fim
São repetidas abaixo as igualdades para as tensões normais e transversais conforme primeiro tópico da página anterior.
σ = (σy + σx) / 2 + [ (σy − σx) cos 2φ ] / 2 + τxy sen 2φ.
τ = [ (σy − σx) sen 2φ ] / 2 − τxy cos 2φ.
Elas podem ser rearranjadas para
σ − [ (σy + σx) / 2 ] = [ (σy − σx) / 2 ] cos 2φ + τxy sen 2φ.
τ = [ (σy − σx) / 2 ] sen 2φ − τxy cos 2φ.
Fazendo d = (σy − σx) / 2 e elevando ambas ao quadrado e somando,
{ σ − [ (σy + σx) / 2 ] }2 + τ2 =
d2 cos2 2φ + τxy2 sen2 2φ + 2 d cos 2φ τxy sen 2φ + d2 sen2 2φ + τxy
2 cos2 2φ − 2 d sen 2φτxy cos 2φ.
Portanto, { σ − [ (σx + σy) / 2 ] }2 + τ2 = d2 + τxy2 = [ (σx − σy) / 2 ]2 + τxy
2.
A tensão média é dada pela expressão σm = (σx + σy) / 2 #A.1#.
Considera-se também R2 = [ (σx − σy) / 2 ]2 + τxy2 #B.1#.
E a equação anterior fica resumida a
(σ − σm)2 + τ2 = R2 #C.1#. Onde σm e R são dados pelas expressões anteriores #A.1# e #B.1#.

A igualdade acima permite concluir que, num sistema de coordenadas ortogonais (σ τ), os valores das tensões normais e transversais estão em um círculo de raio R e centro em (σm, 0). É denominado círculo de Mohr em homenagem ao engenheiro alemão Otto Mohr.
A Figura 01 dá exemplo de um círculo de Mohr traçado a partir de um determinado conjunto de valores σx, σy e τxy.
Fig 01O centro do círculo é determinado pela tensão média. Assim, OC = σm = (σy + σx)/2. E o raio é definido conforme #B.1#.
Se OI é igual a σy, IE é igual a τyx. O ponto diametralmente oposto (F) corresponde a σx e τxy (que é igual em módulo a τyx, conforme página anterior).
Observar a diferença de 180º que corresponde a 2φ, isto é, o ângulo de 90º entre os eixos x e y.
OA é a tensão mínima σ2 e OB a máxima σ1. Assim, CB e CA representam os planos principais.
Notar que a tensão de cisalhamento τ é nula em B e em A, conforme página anterior. As direções de cisalhamentos máximo e mínimo (CH e CG) estão deslocadas de 2φ = 90° ( ou φ = 45°) dos planos principais, também conforme página anterior.
O ângulo entre CB e CE (2φp) representa o ângulo φp entre o plano y e o principal 1.
Fig 02Nas direções de máximo e mínimo cisalhamento (CG e CH), as tensões normais são idênticas e iguais a σm.
Pela simetria do círculo, pode-se notar que a soma σx + σy é constante.
Alguns casos particulares para o círculo de Mohr são exibidos na Figura 02: tração simples em (a), compressão simples em (b) e cisalhamento simples em (c).
Círculo de Mohr - Resumo Topo | Fim
Este tópico procura apresentar resumidamente os conceitos e igualdades anteriores na

intenção de facilitar o uso prático do círculo de Mohr.
Em (a) da Figura 01, há um elemento submetido a um estado plano de tensão. O círculo de Mohr correspondente é traçado num sistema de coordenadas ortogonais τ σ (tensão de cisalhamento x tensão normal) com os parâmetros:
Fig 011) Centro em (σm, 0), onde σm = (σx + σy) / 2 #A.1#, ou seja, σm é a tensão normal média.
2) Raio dado por R2 = [ (σx − σy) / 2 ]2 + τxy2 #A.2#.
Portanto, o círculo de Mohr pode ser traçado com as equações acima a partir de um estado conhecido de tensões σx, σy e τxy (lembrar que τxy = τyx).
As tensões principais, σ1 e σ2, são dadas pela interseção do círculo com o eixo horizontal, conforme pontos A e B da figura. Pode-se então escrever
σ1, 2 = σm ± R #B.1#.
Em (b) da Figura 01, há indicação das tensões principais, que atuam ao longo dos respectivos eixos principais xp e yp. Conforme visto em página anterior, são as tensões normais máxima e mínima atuantes no elemento (e não há cisalhamento nas direções principais). φp é o deslocamento angular, em relação aos eixos principais, do estado de tensão (a) considerado.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IV-30
Círculo de Mohr: exemplo numérico 01 Topo | Fim
Seja o estado de tensão dado em (a) da Figura 01. Determinar o círculo de Mohr correspondente, bem como as tensões principais, a sua direção e o cisalhamento máximo. Considerar valores em kPa.

Fig 01São conhecidos os dados conforme (a) da figura: σx = 4000 kPa, σy = 3000 kPa e τxy = 1000 kPa.
Os pontos do círculo, correspondentes às tensões dos eixos X e Y, são
C(σx, +τxy) = C(4000, 1000).D(σy, −τxy) = C(3000, −1000).
Conforme página anterior, esses pontos são diametralmente opostos e, portanto, o centro O fica definido pela interseção de CD com o eixo horizontal e o círculo pode ser traçado.
O valor do raio pode ser obtido de forma mais precisa pela fórmula dada
R2 = [ (σx − σy) / 2 ]2 + τxy2 = [ (4000 − 3000) / 2 ]2 + 10002 ≈ 1118 kPa.
A tensão média é dada por σm = (σx + σy) / 2 = (4000 + 3000) / 2 = 3500 kPa. Portanto, o centro tem as coordenadas O(3500, 0). E as tensões principais são dadas pelo valor de σ em A e em B
σ1 = 3500 + 1118 = 4618 kPa e σ2 = 3500 − 1118 = 2382 kPa.
O cisalhamento máximo é dado pelo valor de τ em E, ou seja, τmax = 1118 kPa.
A direção do eixo principal (φp) é indicada graficamente pela linha BC e o valor pode ser obtido por trigonometria com o ângulo 2 φp em AOC
tan (2 φp) = τxy / (σx − σm) = 1000 / (4000 − 3500) = 2. Resolvendo, φp ≈ 31,7º.
Círculo de Mohr: rotação de eixos Topo | Fim
O círculo de Mohr pode ser usado para determinar o novo estado de tensões resultante de um deslocamento angular de um estado conhecido de tensões.

Fig 01O estado de tensões em (a) da Figura 01 é supostamente conhecido, isto é, são definidos os eixos X e Y e os valores das tensões σx, σy e τxy.
Em (b) da mesma figura, o sistema de coordenadas original é girado do ângulo φ, resultando em X'Y'. Deseja-se saber o novo estado de tensão, isto é, σ'x, σ'y e τ'xy.
Com o uso do círculo de Mohr, esses valores podem ser obtidos de forma bastante prática: em primeiro lugar, determinam-se os pontos C e D, correspondentes ao estado conhecido (a).
Com esses pontos, o círculo fica definido e pode ser traçado.
Desde que, conforme já mencionado em páginas anteriores, os deslocamentos angulares do círculo de Mohr são o dobro dos reais, as tensões nas novas coordenadas (σ'x, σ'y e τ'xy) são dadas pela reta C'D', girada de 2 φ em relação a CD.
Notar que há perfeita coerência com os conceitos já informados: se X'Y' são os eixos principais, a reta C'D' coincide com AB e as tensões são as principais.
Observar também que os deslocamentos angulares no círculo são opostos aos reais porque, conforme já visto, é usada a convenção de tensões σ e τ positivas no sentido de (a) da figura.

Fig 02O ponto C corresponde às tensões no eixo X do elemento (a) da figura. Pode ser facilmente determinado a partir dos valores das tensões e do círculo traçado.
No círculo de Mohr, os deslocamentos angulares são o dobro dos deslocamentos físicos. Assim, o eixo Y de (a) da Figura 01, que é deslocado de 90º de X, é deslocado de 180º no círculo, ou seja, é representado pelo ponto D. E o ângulo do eixo principal φp corresponde a 2 φp no círculo.
Os pontos extremos na vertical (E e F) indicam as tensões máxima e mínima de cisalhamento. Desde que, no círculo, estão deslocadas de 90º em relação aos eixos principais (A e B), conclui-se que fisicamente estão a 45º dos eixos principais, conforme deduzido em página anterior.
Considera-se agora a Figura 02. Das propriedades geométricas da circunferência, deduz-se que, se o ângulo AOC é 2 φp, o ângulo ABC é a metade desse valor, isto é, φp. Então, a direção da tensão principal pode ser graficamente determinada pela reta que passa pelos pontos B e C.
Convenções: no elemento (a) da Figura 01, ocorrem tensões normais (σx e σy) positivas (tração). O cisalhamento é também positivo com as direções indicadas. Notar que o deslocamento angular 2 φp no círculo de Mohr ocorre em direção oposta ao deslocamento físico φp. Algumas publicações usam convenção contrária para o cisalhamento e os deslocamentos angulares passam a ter a mesma direção.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IV-40
Tensões no espaço Topo | Fim
Nas páginas anteriores foram dados os princípios básicos da análise de tensões em um plano. Na prática, os corpos são sempre tridimensionais, mas em vários casos as tensões mais importantes atuam em determinado plano (ou mesmo em determinado eixo) e as

demais podem ser desprezadas. Mas pode haver situações em que as tensões nos três eixos são relevantes e não devem ser desconsideradas.
Para a análise, considera-se um volume em forma de paralelepípedo do corpo a estudar. Ver Figura 01 deste tópico. Conforme pode ser deduzido do estudo da página anterior, cada face é submetida a uma tensão normal e a uma tensão transversal.
Fig 01Uma superfície genérica (não paralela a nenhum eixo) pode ser dada pelo plano ABC que divide o paralelepípedo pela metade. Portanto, o objeto geométrico do estudo é o tetraedro OABC conforme Figura 02 (não está na mesma proporção da figura anterior).
Em cada face perpendicular a um eixo atuam as tensões normais e transversais indicadas. No centro de gravidade GABC do plano ABC atua uma tensão ρ (vetor. Usada a convenção negrito) cujos componentes são ρx, ρy e ρz conforme canto superior esquerdo da figura.
E pode-se escrever a soma vetorial ρ = ρx + ρy + ρz #A.1#.
Sejam ux, uy e uz os vetores unitários para os respectivos eixos de coordenadas. Assim,
ρ = ρx ux + ρy uy + ρz uz #A.2#.
Seja uN um vetor unitário normal à superfície ABC. Em termos de componentes
uN = uNx + uNy + uNz = cos αx ux + cos αy uy + cos αz uz #A.3#. Onde
αx, αy, αz são os ângulos da normal com os eixos de coordenadas.
Vale também observar que a condição de equilíbrio ∑M = 0 permite deduzir as igualdades em pares das tensões transversais:
Fig 02

τxy = τyx #B.1#.τxz = τzx #B.2#.τyz = τzy #B.3#.
O equilíbrio estático permite concluir:
ρx = − (σx uNx + τxy uNy + τxz uNz) #C.1#.ρy = − (τyx uNx + σy uNy + τyz uNz) #C.2#.ρz = − (τzx uNx + τzy uNy + σz uNz) #C.3#.
Em termos escalares, considerando as igualdades #C.1# a #C.3# e #A.3#, pode-se representar os componentes na forma de produto de matrizes. Ver Figura 03.
ρx
ρy
ρz
=σx τxy τxz
τyx σy τyz
τzx τzy σz
×
cos αx
cos αy
cos αz
#D.1#
Fig 03A segunda matriz (central) é denominada matriz de tensões ou tensor dos esforços no espaço.
E o módulo da tensão σ, normal à superfície ABC, é dado pelo produto escalar
σ = ρ · uN #E.1#.
Para o componente transversal τ, o módulo é dado por
τ2 = ρ · ρ − σ2 #E.2#.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IV-50
Tensões principais Topo | Fim
No tópico anterior, foram vistas relações entre tensões em um plano qualquer e tensões em planos do sistema de coordenadas. Mas isso não é tudo. Em geral, o que se deseja saber é algo similar à situação de tensões planas, ou seja, os valores máximos que ocorrem.
No caso de tensões no plano, há dois eixos principais nos quais só atuam tensões normais. Deduzindo para as tensões no espaço, é lógico supor (e realmente ocorre) que existem três planos principais, ortogonais entre si, sobre os quais só atuam tensões normais. Ou seja, as tensões de cisalhamento são nulas nesses planos.
As tensões normais atuantes nesses planos são ditas tensões principais e são designadas por σ1, σ2 e σ3.
Uma das três tensões principais é a máxima que ocorre e outra, a mínima. Para isso, é adotada a convenção

Fig 01
σ1 ≥ σ2 ≥ σ3 #A.1#.
Também de forma similar ao estado duplo, as tensões extremas de cisalhamento ocorrem nos planos bissetores dos principais. São demoninadas tensões principais de cisalhamento e são dadas por:
τ1 = (σ2 − σ3) / 2 #B.1#.τ2 = (σ1 − σ3) / 2 #B.2#.τ3 = (σ1 − σ2) / 2 #B.3#.
A determinação das tensões principais é matematicamente mais complexa do que a do estado duplo. Envolve conceitos de autovalores e autovetores. Aqui é apresentado apenas o resultado na forma de soluções para a equação abaixo.
σ3 − A σ2 + B σ − C = 0 #C.1#.
Essa equação tem 3 soluções, correspondentes às tensões principais mencionadas. Os coeficientes A, B e C são calculados por:
A = σx + σy + σz #D.1#.
B = σx σy + σy σz + σx σz − τ2xy - τ2
yz − τ2xz #D.2#.
C = σx σy σz + 2 τxy τyz τxz − σx τ2yz − σy τ2
xz − σz τ2xy #D.3#.
Demonstra-se que os coeficientes A, B e C são constantes em qualquer direção para a mesma matriz de tensões. Assim, as igualdades anteriores devem valer também para as tensões principais, caso em que são nulas as de cisalhamento conforme já dito. Portanto,
σ1 + σ2 + σ3 = A #E.1#.
σ1 σ2 + σ2 σ3 + σ1 σ3 = B #E.2#.
σ1 σ2 σ3 = C #E.3#.
Círculo de Mohr para tensões no espaço Topo | Fim
Em página anterior foi demonstrado que o estado plano de tensões pode ser graficamente representado pelo círculo de Mohr.

Fig 01Na Figura 01, é suposto que as faces do volume coincidem com os planos principais. Portanto, cada uma está sujeita somente às tensões principais σ1, σ2 e σ3.
Considera-se um eixo fixo que passa por σ3, em torno do qual o cubo gira. Nessa situação, as tensões atuantes nas faces de σ1 e σ2 se comportam como um estado duplo e podem ser representadas pelo círculo de Mohr de centro C3 (Figura 02).
A tensão σ3, perpendicular ao plano considerado, não afeta o comportamento. Usando o mesmo raciocínio para os demais eixos, chega-se ao conjunto de círculos da Figura 02.
Fig 02É possível demonstrar que, para rotações em torno de outros eixos, os pontos de tensões se localizam na área cinza da figura.
As tensões máximas de cisalhamento indicadas (τmax1, τmax2 e τmax3) são as máximas para rotações em torno de cada eixo perpendicular a um plano principal conforme já comentado.
As coordenadas dos centros são calculadas pelas expressões a seguir.
C1[ (σ2+σ3)/2, 0 ] #A.1#.
C2[ (σ1+σ3)/2, 0 ] #A.2#.
C3[ (σ1+σ2)/2, 0 ] #A.3#.
E os valores extremos são: σmax = σ1, σmin = σ3 e τmax = τmax2.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IV-60

Alguns casos particulares de tensões no espaço Topo | Fim
A Figura 01 dá exemplos do círculo de Mohr para tensões no espaço em alguns casos particulares.
Em (a), todas as tensões principais têm o mesmo valor, isto é, σ1 = σ2 = σ3, e as tensões de cisalhamento são nulas, isto é, τ1 = τ2 = τ3 = 0.
Fig 01Essa situação só pode ocorrer com um fluido submetido a uma determinada pressão. Chamado, portanto, de condição hidrostática.
Em (b) e em (c), duas das três tensões principais são iguais e ocorre uma condição semi-hidrostática.
Em (d) e em (e), as duas tensões principais nulas, representando um estado simples de tensão (tração ou compressão).
Em (f) tem-se σ2 = 0 e σ1 = − σ3, representando um estado de cisalhamento simples, similar à condição vista para tensões planas.
Exemplo numérico para tensões no espaço Topo | Fim
Seja um material sujeito às tensões nas direções das coordenadas de referência XYZ, com valores numéricos dados pela Figura 01. Deseja-se saber as tensões principais, normais e de cisalhamento.
Fig 01Conforme convenções da página anterior, os valores com sinais são

σx = 120 MPaσy = −20 MPaσz = 70 MPa
τxy = τyx = −40 MPaτyz = τzy = 50 MPaτxz = τzx = 25 MPa
Segundo igualdade vista em página anterior, as tensões normais são as soluções da seguinte equação do terceiro grau
σ3 − A σ2 + B σ − C = 0. E as fórmulas para os coeficiente A, B e C são:
A = σx + σy + σz = 120 + (−20) + 70 = 170 MPa.
B = σx σy + σy σz + σx σz − τ2xy − τ2
yz − τ2xz.
B = 120 (−20) + (−20) 70 + 120 70 − (−40)2 − 502 − 252.B = −2400 − 1400 + 8400 − 1600 − 2500 − 625 = − 125 MPa2.
C = σx σy σz + 2 τxy τyz τxz − σx τ2yz − σy τ2
xz − σz τ2xy.
C = 120 (−20) 70 + 2 (−40) 50 25 − 120 502 − (−20) 252 − 70 (−40)2.C = − 168000 + 100000 − 300000 + 12500 − 112000 = − 478750 MPa3.
E a equação anterior fica σ3 − 170 σ2 − 125 σ + 478750 = 0.
Fig 02As soluções para essa equação podem ser vistas graficamente na Figura 02 ao lado.
Em outras palavras, são os valores de σ que fazem a função
F(σ) = σ3 − 170 σ2 − 125 σ + 478750 ter valor igual a zero.
Para determinar os valores numéricos, pode-se empregar um método de aproximações sucessivas que encontre uma das soluções.
Aqui é usado o método da bisseção (ou bissecção). É simples, embora a convergência não seja tão rápida porque é um processo linear. A Figura 03 abaixo dá o princípio para uma função genérica F(x).

Fig 03Escolhem-se dois valores arbitrários x1 e x2 tais que F(x1) F(x2) < 0. Assim, pelo menos uma solução, F(x) = 0, está entre x1 e x2.
Se o produto F(x1) F(xm) é positivo, o próximo valor de x1 é xm e x2 permanece. Caso contrário, o próximo valor de x2 é xm e x1 permanece. Continuando o procedimento, os valores médios se aproximam da solução conforme indicado na figura (xm, xm', etc).
Para determinar o valor exato, precisar-se-ia da impossibilidade prática de infinitos passos. Num procedimento real, pode-se estabelecer um intervalo mínimo delta = x2 − x1, executando as iterações até esse valor. E um código em Visual Basic para o método com a equação dada para as tensões principais seria:Function func_x(x) func_x = x ^ 3 - 170 * x ^ 2 - 125 * x + 478750End Function
Sub bissec() Dim x1, x2, xm, delta delta = 0.0001 x1 = -100 x2 = 50 Do While (x2 - x1) > delta xm = (x2 + x1) / 2 If ((func_x(x1) * func_x(xm)) > 0) Then x1 = xm Else x2 = xm End If Loop Worksheets("Plan1").Cells(1, 1).Value = xmEnd SubEsse código é, na realidade, uma macro em uma planilha Excel que considera: delta = 0.0001, x1 = −100, x2 = 50. O resultado é dado na célula A1 da planilha "Plan1": A1 ≈ −47,23 MPa. Supõe-se que esse é o valor de σ3. Pode-se considerar σ1 ou σ2. Neste caso, precisa-se apenas permutar os valores finais de forma que σ1 ≥ σ2 ≥ σ3, satisfazendo à convenção adotada.
Conforme relações da página anterior (substituindo o valor de σ3 e das constantes),
σ1 + σ2 − 47,23 = 170.
σ1 σ2 + σ2 (−47,23) + σ1 (−47,23) = −125.
σ1 σ2 (−47,23) = − 478750.
Combinando a 1ª e a 2ª equação,

σ1 + 478750/(47,23 σ1) = 217,23. Ou 47,23 σ12 + 478750 = 10259,8 σ1.
Ou 47,23 σ12 − 10259,8 σ1 + 478750 = 0.
Essa é uma equação comum do segundo grau e as duas soluções devem ser entendidas como σ1 e σ2. Resolvendo e considerando a solução σ3 anterior (≈ −47,2), chega-se aos resultados
σ1 ≈ 149,4 MPa, σ2 ≈ 67,9 MPa e σ3 ≈ −47,2 MPa.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-10
Índice do grupo | Página anterior | Próxima página |
Fundamentos da flexão |
Fundamentos da flexão Topo | Fim
Flexão é um esforço comum, conforme mencionado na primeira página desta série. É também um dos mais desfavoráveis, mas não pode ser evitado em muitos casos. Elementos sujeitos à flexão podem ser vistos em edificações, estruturas, máquinas e em muitos outros lugares.
Na Figura 01 (a), uma barra de seção transversal retangular sofre esforços de flexão por forças atuantes em um plano que passa por um dos eixos centrais de inércia da seção. Essa situação é denominada flexão simples.
Se o plano não passa por um eixo central, como em (b) da mesma figura, ocorre a flexão oblíqua.
Fig 01A flexão simples acontece (ou assim pode ser considerada) em muitos casos práticos e, evidentemente, é a de formulação mais fácil. Por isso, ela será o objeto principal desta página.
A Figura 02 (a) representa uma pequena parte da vista lateral de uma barra de seção

transversal genérica conforme (b), submetida à flexão provocada por um momento M.
A geometria da deformação sugere (e realmente acontece) que uma parte (a superior neste caso) da seção transversal está sob esforços normais de compressão e outra parte (inferior), de tração. A linha que divide essas duas partes é denominada linha neutra (LN) porque, naturalmente, as tensões ao longo da mesma são nulas.
Também pode ser constatado experimentalmente que as tensões em pontos de linhas paralelas à neutra são iguais e variam linearmente com a distância vertical y. Assim, no gráfico da Figura 02 (c), as tensões variam de um máximo de compressão σ1 na extremidade superior da seção transversal (distância e1 da linha neutra) até um máximo de tração σ2 na extremidade inferior (distância e2 da linha neutra).
Com a linearidade mencionada, a tensão σ em um ponto situado a uma distância genérica y da linha neutra pode ser dada por
σ = (σ1 / e1) y #A.1#.
Aplicando a primeira condição de equilíbrio estático (∑Fx=0), tem-se
Fig 02∫ Fx = ∫ σ dS = ∫ (σ1/e1) y dS = 0.
(σ1/e1) ∫ y dS = 0.
O termo ∫ y dS é o momento estático da superfície em relação a LN. Se há flexão, σ1/e1 não é nulo e, assim, o momento estático ∫ y dS deve ser zero.
Conclui-se então que a linha neutra passa pelo centro de gravidade da seção transversal.
Por enquanto, não será considerada a segunda condição de equilíbrio estático (∑Fy=0), uma vez que isso implica a existência de tensões de cisalhamento, que realmente ocorrem e serão vistas posteriormente.
Para a terceira condição de equilíbrio (∑Mi=0), deve-se ter a soma dos momentos internos igual ao momento M aplicado externamente:
M = ∫ y σ dS = ∫ y (σ1/e1) y dS = (σ1/e1) ∫ y2 dS.
Mas o fator ∫ y2 dS é o momento de inércia J em relação à linha neutra. Portanto, σ1 J / e1 = M.
Dessa igualdade pode-se isolar o valor de σ1 e combinar com a igualdade anterior #A.1#. Usa-se procedimento similar para σ2, resultando nas equações básicas da flexão simples:
σ1 = M e1 / J #B.1#.
σ2 = M e2 / J #B.2#.

Ou seja, as tensões máximas de tração e compressão estão localizadas nas extremidades da seção transversal e são dadas em função do momento de flexão aplicado, das distâncias dessas extremidades em relação à linha neutra e do momento de inércia em relação à mesma linha.
Notar que, no caso da Figura 02, σ1 é compressão e σ2, tração. Mas será o contrário se o momento externo for invertido.
Considerando a definição de momento ou módulo de resistência W, as igualdades anteriores podem ser escritas da forma:
σ1 = M / W1 #C.1#. Onde W1 = J / e1.
σ2 = M / W2 #C.2#. Onde W2 = J / e2.
O dimensionamento é feito pela comparação com as tensões admissíveis:
σ1 ≤ σ1adm #D.1#.
σ2 ≤ σ2adm #D.2#.
Onde σ1adm e σ2adm são as tensões admissíveis para tração e compressão ou vice-versa conforme já comentado.
Se a seção transversal é simétrica em relação à linha neutra (LN), e1 = e2 = e. Por conseqüência, W1 = W1 = W. E as igualdades anteriores, #C.1# e #C.2#, ficam reduzidas a uma
σ = σ1 = σ2 = M / W #E.1#.
Nesse caso, a tensão máxima de tração é igual à máxima de compressão.Das relações acima, conclui-se que o conhecimento do momento de inércia e/ou módulos de resistência da seção transversal é fundamental no cálculo da flexão. Fórmulas para as geometrias mais comuns são dadas em página posterior.Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-20
Índice do grupo | Página anterior | Próxima página |
Forças e momentos internos em vigas |Diagramas de esforços em vigas |
Forças e momentos internos em vigas Topo | Fim
Vigas horizontais carregadas são elementos comuns na prática e o dimensionamento exige a determinação das tensões internas em função da(s) carga(s) aplicada(s).

Seja, conforme Figura 01 (a), uma viga horizontal com um carregamento genérico F(x) ao longo do seu comprimento. A simples dedução lógica permite concluir que esta viga está internamente submetida a esforços de cisalhamento e flexão.
Fig 01Considerando um corte transversal hipotético em um local qualquer A, é possível separar os esforços distintos: cisalhamento conforme (b) da figura e momento de flexão conforme (c) da mesma figura.
Algumas referências usam os termos esforço cortante para o cisalhamento e momento fletor para o momento de flexão.
Também pode ser encontrada a expressão força transversal para o cisalhamento.
Em geral adotam-se as convenções de sinais como em (b) e (c), isto é, cisalhamento positivo tende a girar cada parte no sentido horário e momento positivo tende a tracionar a parte inferior e comprimir a parte superior da viga (obs: os sinais de cisalhamento e momento da figura não têm relação com o carregamento indicado).
Diagramas de esforços em vigas Topo | Fim
A Figura 01 (a) dá exemplo de um dos carregamentos mais simples: uma viga apoiada em dois cutelos com uma única carga vertical F1. O apoio sobre cutelos garante que não há momentos nas extremidades e que não há forças longitudinais se o carregamento é vertical, pois o cutelo direito está sobre rolos.
Considerando a origem das coordenadas x = 0, um problema típico consiste em determinar os esforços ao longo da viga conhecidos os valores de F1, o seu ponto de aplicação x1 e o comprimento da viga x2.
O esquema das forças atuantes na viga é dado em (b) da figura. F0 e F2 são as reações dos apoios. Notar que é uma viga estaticamente determinada, isto é, todas as forças podem ser calculadas pela aplicação das condições de equilíbrio estático (soma das forças nulas e também dos momentos).
De ∑ Fy = 0, ocorre
F1 = − F0 − F2.
De ∑ M = 0 (em relação ao ponto 0 por exemplo),
F1 x1 = − F2 x2.

A condição ∑ Fx = 0 não se aplica por não existir força nesse sentido.
Fig 01Portanto, F2 = − F1 x1 / x2.
F0 = − F1 − F2 = − F1 + F1 x1 / x2. Ou
F0 = − F1 (x2 − x1) / x2.
Considera-se agora um trecho genérico de 0 a um ponto x, à esquerda de 1, conforme (c) da figura.
Aplicando a condição de equilíbrio ∑ Fy = 0, em módulo, Fc = F0. E o cisalhamento interno é positivo conforme critério do tópico anterior.
Assim, do ponto 0 até 1,
Fc = F0.
É fácil deduzir que do ponto 1 ao ponto 2 vale Fc = F0 + F1 = − F2.
Novamente se considera o ponto x à esquerda do ponto 1 conforme figura.
Aplicando a condição ∑ M = 0 em relação a x,
M = x F0 (positivo conforme critério do tópico anterior).
Entre os pontos 1 e 2, M = x F0 − (x − x1) F1.
Substituindo os valores de F0 e F1 conforme já calculado,
Entre 0 e 1: M = F1 (x2 − x1) x / x2. Portanto,
Para x = 0, M = 0.Para x = x1, M = F1 (x2 − x1) x1 / x2.
Entre 1 e 2: M = x F0 − (x − x1) F1 = x (F0 − F1) + x1 F1. Mas F0 − F1 = − F2. Assim,

M = − x F1 x1 / x2 + x1 F1 = F1 (x1 − x1 x / x2 ) = F1 x1 (1 − x / x2 ). Portanto,
Para x = x2, M = 0.Para x = x1, M = F1 x1 (1 − x1 / x2) = F1 x1 (x2 − x1) / x2 . Notar que é igual ao valor do trecho anterior. E o gráfico é conforme (e) da figura.
E os valores máximos são dados por:
Fc_max = max (F0, F2) com F0 = F1 (x2 − x1) / x2 e F2 = F1 x1 / x2.
Mmax = F1 (x2 − x1) x1 / x2.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-30
Índice do grupo | Página anterior | Próxima página |
Momentos de inércia e de resistência de algumas seções.
Circular cheia | Elipse cheia | Hexágono regular | Perfil C | Perfil C vazado | Perfil em
cruz | Perfil H | Perfil I | Perfil I abas desiguais | Perfil I vazado | Perfil L | Perfil T aba horizontal
| Perfil T aba vertical | Perfil U | Retângulo | Semicírculo | Trapézio | Triângulo | Tubo | Tubo de parede fina | Tubo elíptico | Tubo elíptico de parede fina | Tubo retangular |
Tabela Topo | Fim
Observações:
a) Os valores são dados em relação a um eixo de referência (x e/ou y) coincidente com a linha neutra da seção. Naturalmente, nos casos de seções circulares, o valor independe da orientação do eixo.
b) Em alguns casos o valor do momento de inércia é dado em função das distâncias acima ou abaixo da linha neutra (e1, e2) e seus valores são dados no lugar do momento de resistência W. Mas este último pode ser calculado pela simples relação W = J / e.
c) Reafirmando condições da página inicial do site, os melhores cuidados foram procurados na elaboração desta tabela. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
Seção Nome/aspecto J W

Circular cheia(início)
J = π D4 / 64ou
J ≈ D4 / 20
W = π D3 / 32ou
W ≈ D3 / 10
Tubo(início)
J = π (D4 - d4) / 64 W = π (D4 - d4) / (32 D)
Tubo de parede fina(início)
J = π t r3 [1 + (t/2r)2]
Onde r = D/2 (raio médio).
OuJ ≈ π t r3
W = J / (r + t/2)
Onde r = D/2 (raio médio).
OuW ≈ π t r2
Elipse cheia(início)
Jx = π a3 b / 4Jy = π a b3 / 4
Wx = π a2 b / 4Wy = π a b2 / 4
Tubo elíptico(início)
Jx = π (a3b - a'3b') / 4 Wx = Jx / a
Tubo elíptico de parede fina
(início)
Jx ≈ π a2 (a + 3b) t / 4 Wx ≈ π a (a + 3b) t / 4
Semicírculo(início)
Jx ≈ 0,00686 D4 Wx ≈ 0,0238 D3
Come ≈ 0,2878 D
Retângulo(início)
Jx = b a3 / 12Jy = a b3 / 12
Wx = b a2 / 6Wy = a b2 / 6

Triângulo(início)
Jx = a h3 / 36 Wx = a h2 / 24Com
e = 2 h / 3
Hexágono regular(início)
Jx = Jy ≈ 0,5413 a4 Wx = 0,625 a3
Wy ≈ 0,5413 a3
Trapézio(início)
Jx = h3 (a2 + 4ab + b2)/
36 (a +b)
Wx = h2 (a2 + 4ab + b2)/
12 (2a + b)
Come = h (2a + b) / [3 (a
+ b)]
Perfil T aba horizontal(início)
Jx = (Be23 - bh3 +
ae13) / 3
e2 = (aH2 + bd2)/
2 (aH + bd)
e1 = H - e2
Perfil L(início)
Idem Idem
Perfil U(início)
Idem Idem
Tubo retangular(início)
Jx = (BH3 - bh3) / 12 Wx = (BH3 - bh3) / (6 H)
Perfil I(início)
Idem Idem

Perfil C(início)
Idem Idem
Perfil I vazado(início)
Jx = B (H3 - h3) / 12+ f (h3 - g3) / 12
Wx = B (H3 - h3) / (6 H)
+ f (h3 - g3) / (6 H)
Perfil C vazado(início)
Idem Idem
Perfil H(início)
Jx = (BH3 + bh3) / 12 Wx = (BH3 + bh3) / (6 H)
Perfil em cruz(início)
Idem Idem
Perfil T aba vertical(início)
Idem Idem
Perfil I abas desiguais em largura(início)
Jx = (Be23 - B1h3
+ be13 - b1h1
3) / 3e2 = [aH2 + B1d2 +
b1d1 (2H - d1)]/
2 (aH + B1d + b1d1)
e1 = H - e2
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-40
Índice do grupo | Página anterior | Próxima página |
Viga apoiada com várias cargas concentradas |
Viga apoiada com carga uniformemente distribuída |
Viga apoiada com várias cargas concentradas Topo | Fim
Em página anterior, foi visto exemplo do diagrama para viga apoiada com uma carga concentrada. Isso pode ser considerado caso particular de uma situação mais genérica, ou seja, viga com mais de uma carga concentrada.
A Figura 01 (a) deste tópico dá um exemplo para três forças F1, F2 e F3, supostamente conhecidas, bem como os respectivos pontos de aplicação (x1, x3 e x3) e o comprimento total x4. As forças F0 e F4 são as reações dos apoios.
Da condição de equilíbrio ∑ Fy = 0, ocorre F0 + F4 = F1 + F2 + F3.
Da condição ∑ M = 0 (em relação a 0 por exemplo), F4x4 = F1x1 + F2x2 + F3x3.
Portanto,
F4 = (F1x1 + F2x2 + F3x3) / x4.
F0 = F1 + F2 + F3 − F4.
Ou seja, F0 e F4 são formulados em função de parâmetros conhecidos.

Fig 01Na figura 01 (b), uma parte da viga, de comprimento menor que x1. Pela condição de equilíbrio dada pela soma das forças verticais igual a zero, o cisalhamento é igual à reação do apoio esquerdo, isto é,
Fc = F0. Sendo F0 calculado conforme igualdade anterior. Ver gráfico em (c).
Para o trecho entre 1 e 2, o cisalhamento sofre a contribuição de F1, atuante em sentido contrário. Assim, Fc = F0 − F1.
De forma análoga, pode-se verificar que entre 2 e 3 vale Fc = F0 − F1 − F2. E, para o trecho entre 3 e 4, há a relação:
Fc = F0 − F1 − F2 − F3.
O sentido do cisalhamento começa positivo, de acordo com critérios já vistos.
Para os momentos de flexão, entre 0 e 1, ocorre M = F0 x. E para o trecho entre 1 e 2,
M = F0 x − F1 (x − x1) = (F0 − F1) x + F1x1.
Para a parte entre 2 e 3:
M = F0 x − F1 (x − x1) − F2 (x − x2) = (F0 − F1 − F2) x + F1x1 + F2x2.
Para o trecho 3-4, pode-se fazer a analogia direta:
M = (F0 − F1 − F2 − F3) x + F1x1 + F2x2 + F3x3. E o gráfico é algo parecido com a Figura 01 (d).
Para a última igualdade, se é feito x = x4, tem-se
M = (F0 − F1 − F2 − F3) x4 + F1x1 + F2x2 + F3x3.
Mas (F0 − F1 − F2 − F3) = − F4 conforme já visto e F4x4 = F1x1 + F2x2 + F3x3.
Ou M = −F4 x4 + F4 x4 = 0, que é um resultado esperado, pois não pode haver momento em extremidades apoiadas em cutelos.
Este exemplo foi dado para 3 forças, mas pode-se notar que é facilmente adaptável para qualquer número delas.
Viga apoiada com carga uniformemente distribuída Topo | Fim
Nos exemplos vistos até aqui, a função matemática das forças aplicadas em razão da posição F = f(x) é uma função discreta, isto é, o seu valor só é diferente de zero em determinados pontos.
Um carregamento é distribuído se as forças atuam em todos os pontos no trecho considerado. Nesse caso, o valor é especificado em termos de força por unidade de comprimento q (newton por metro, por exemplo). E o carregamento é dito uniformemente distribuído se o valor de q é constante no trecho considerado.
No carregamento da Figura 01 (a), uma carga uniformemente distribuída q atua em toda a extensão da viga. Exemplo comum para isso é o peso próprio da viga.

Fig 01A força equivalente de uma carga uniformemente distribuída é igual ao produto do seu valor q pelo comprimento considerado, com atuação no ponto médio do mesmo.
Portanto, a força no total da viga é q x1, atuando em x1/2.
A condição de equilíbrio ∑ Fy = 0 e a simetria permitem deduzir as reações dos apoios:
F0 = F1 = q x1 / 2.
Numa parte genérica de comprimento x conforme (b) da figura, a condição ∑ Fy = 0 determina o cisalhamento:
Fc = F0 − q x.
Ou Fc = q x1 / 2 − q x. Portanto, uma reta com valor F0 para x=0 e −F0 para x = x1.
Para os momentos, considerando ∑ M = 0 para o ponto x, tem-se:
M = F0 x − q x x / 2 = − (q/2) x2 + F0 x.
Isso é a equação de uma parábola e pode ser visto que tem valores nulos nos extremos (x = 0 e x = x1). E o gráfico tem a forma dada na Figura 01 (d).
Notar que as formulações para o cisalhamento e para o momento são contínuas porque a força aplicada tem atuação também contínua.
A simplicidade do caso permite deduzir que o momento máximo se encontra no ponto médio. Formalmente, pode ser encontrado com a hipótese da derivada do momento em relação a x igual a zero e posterior solução da equação diferencial:
dM/dx = − (q/2) 2 x + F0 = 0. Ou −q x = − q x1 / 2. Portanto, x = x1 / 2.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-50
Índice do grupo | Página anterior | Próxima página |
Viga engastada com uma carga na extremidade |
Viga engastada com carga distribuída |Viga apoiada com momento concentrado |
Viga engastada com uma carga na extremidade Topo | Fim
Este é um exemplo que pode ocorrer em várias situações práticas: uma viga engastada em uma extremidade suporta uma carga vertical na outra, conforme (a) da Figura 01. Também denominada viga em balanço.
Fig 01Considera-se apoio o engaste na coordenada x=0. De ∑ Fy = 0, ocorre F0 = F1 (em módulo).
De ∑ M = 0 (em relação a 0 por exemplo), tem-se
M0 = F1 x1 (também em módulo).
Notar que há necessariamente um momento no apoio, pois não há outra força para compensar a ação de F1.
Analisando uma parte de comprimento x conforme (b) da figura, para o cisalhamento ocorre Fc = F0 = F1 = constante. E o sinal é positivo, de acordo com critérios já informados.
Para o momento, M = M0 − Fc x ou M = F1 x1 − F1 x = F1 (x1 − x). E deve ser negativo de acordo com os critérios mencionados.
Portanto M = − F1 (x1 − x). A equação do momento é uma reta com valor absoluto máximo igual a F1 x1 para x = 0.

Viga engastada com carga distribuída Topo | Fim
Este problema é similar ao do tópico anterior, diferindo no carregamento, que é distribuído. A sua força equivalente é q x1. Assim, de ∑ Fy = 0, tem-se em módulo:
Fig 01F0 = q x1.
De ∑ M = 0 (em relação a 0) e considerando que a força equivalente atua em x1/2, também em módulo,
M0 = q x1 x1 / 2 = q x12 / 2.
De acordo com o trecho genérico em (b) da figura, o cisalhamento é dado por:
Fc = F0 − q x = q x1 − q x = q (x1 − x).
É uma reta de valor q x1 em x = 0 e 0 em x = x1.
De ∑ M = 0, em (b) da figura e em relação a 0, deduz-se a variação do momento:
M = M0 − q x x / 2 = q x12 / 2 − q x2 / 2. Mas deve ser negativo conforme convenção adotada.
Assim,
M = q x2 / 2 − q x12 / 2 = (q / 2) (x2 − x1
2). Para x = 0, em módulo vale M = q x12 / 2, que é o
seu valor máximo.
Viga apoiada com momento concentrado Topo | Fim
Um esforço de torção também pode ser visto como um carregamento. Veja exemplo na Figura 01 (a). A posição do apoio esquerdo foi invertida para proporcionar a correta reação.

Fig 01De ∑ Fy = 0, nota-se que as reações em cada apoio são iguais em módulo e de sinais invertidos: F0 + F2 = 0 ou F0 = − F2.
De ∑ M = 0 (em relação a 2) tem-se em módulo:
F0 x2 = M1 ou F0 = M1 / x2.
De acordo com a porção genérica em (b) da figura, ocorre para o cisalhamento:
Fc = F0 = M1 / x2 = constante (em módulo).
De acordo com as convenções estabelecidas, o cisalhamento deve ser negativo conforme indicado no gráfico.
Considerando a mesma parte genérica (b), o momento de flexão entre os pontos 0 e 1 é:
M = F0 x = (M1 / x2) x. E o sinal deve ser positivo conforme convenções.
Entre os pontos 1 e 2 precisa-se considerar a ação do momento externo M1:
M = M1 − (M1 / x2) x = M1 (1 − x / x2). E o sinal deve ser negativo pois, nessa parte, as fibras inferiores da barra são tracionadas.
O gráfico, conforme Figura 01 (b), mostra que os maiores momentos estão no ponto de aplicação do momento externo (x1). Portanto, basta verificar, entre as duas igualdades anteriores, a de maior valor absoluto nesse ponto.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-60
Índice do grupo | Página anterior | Próxima página |
Aspectos teóricos sobre carregamentos em vigas |
Distribuição de tensões transversais na flexão |
Aspectos teóricos sobre carregamentos de vigas Topo | Fim
Em páginas anteriores foram vistos alguns exemplos de diagramas de esforços transversais e momentos de flexão em vigas horizontais, com desenvolvimentos específicos para cada caso. Neste tópico é apresentada uma formulação genérica, que pode não ser diretamente aplicável no caso de cargas discretas, mas permite chegar a algumas conclusões importantes.
A Figura 01 mostra uma viga sob ação de um carregamento distribuído genérico, isto é, não uniforme, dado pela função q(x). As forças A e B são as reações dos apoios.
Desde q(x) é a força por unidade de comprimento, pode-se concluir que, em uma área infinitesimal de posição u e largura du, a força atuante é q(u) du, isto é, a área da porção de superfície da figura.
Fig 01Em um determinado ponto x, o esforço de cisalhamento Fc é igual à soma das forças atuantes à esquerda do mesmo (que, naturalmente, deve ser igual à soma das forças à direita para preservar o equilíbrio estático). Assim, pode-se escrever
Fc(x) = − ∫u=0,u=x q(u) du + A #A.1#.
Notar que essa igualdade pode ser considerada decorrente da definição:
dFc(x) / dx = − q(x) #B.1#. E o valor A pode ser visto como a constante de integração.
E o momento de flexão para um local genérico x é igual à soma dos produtos das forças à esquerda pelas distâncias a esse ponto (que, de forma análoga à anterior, deve ser igual à soma da direita para manter o equilíbrio estático). Portanto,
M(x) = − ∫u=0,u=x (x − u) q(u) du + A x.

Se se deseja diferenciar M(x) em relação a x, deve-se usar a regra geral para diferenciação de integrais
d[ ∫a,b f(x,t) dt ] / dx = ∫a,b { ∂[f(x,t)] / ∂x } dt. Aplicando na equação anterior,
dM(x) / dx = − ∫u=0,u=x q(u) du + A. Esse resultado é o esforço transversal dado em #A.1#.
Portanto, dM(x) / dx = Fc(x) #C.1#.
Essa igualdade estabelece uma relação matemática entre o momento de flexão e o esforço de cisalhamento. Lembrar que, se a derivada de uma função é nula, ela está em um ponto de valor máximo ou mínimo. Isso pode ser claramente observado nos diagramas das páginas anteriores, inclusive para alguns casos de forças discretas de carregamento.
Distribuição de tensões transversais na flexão Topo | Fim
As tensões de cisalhamento associadas à flexão não se distribuem de maneira uniforme pela seção transversal da barra. Isso não invalida os cálculos de valores a partir dos diagramas, mas eles devem ser considerados médios e, portanto, podem existir valores localizados significativamente acima da média.
Fig 01A Figura 01 representa uma barra supostamente sob ação de flexão no plano XZ.
Supõe-se agora um pequeno trecho de largura Δx conforme indicado. Este último, por sua vez, é cortado por um plano Pz, paralelo ao plano XY e situado a uma altura z do eixo X.
A Figura 02 representa em (a) o corte do plano XZ e, em (b), o corte de um plano paralelo a YZ. O eixo Y coincide com a linha neutra da seção transversal.
Conforme (a) da Figura 02, o lado esquerdo do trecho é nomeado 1 e o direito, 2. Considerando somente a parte acima da linha neutra, as tensões normais σ1 e σ2 variam linearmente de zero até um valor máximo na extremidade superior. Conforme visto em página anterior, o valor máximo é
M e / J, onde J é o momento de inércia da seção Syz em relação a Y. Portanto, para um valor qualquer de z = u,
σ1(u) = M u / J #A.1#.
Para a face direita, o momento é M + ΔM e, assim,
σ2(u) = (M + ΔM) u / J #A.2#.
Em (a) da Figura 02, σx é a tensão de cisalhamento na superfície do plano Pz (Figura 01) entre

as duas seções separadas de Δx. Portanto, essa superfície tem dimensões Δx e 2y, como pode ser visto em (a) e (b) da Figura 02.
Fig 02Para manter o equilíbrio estático, as forças correspondentes a τx, σ1(u) e σ2(u) devem anular-se:
− τx Δx 2y − ∫ σ1 dS + ∫ σ2 dS = 0. Ou
− τx Δx 2y + ∫ (σ2 − σ1) dS = 0.
Das igualdades #A.1# e #A.2#,
(σ2 − σ1) = ΔM u / J. Assim,
τx Δx 2y = (ΔM / J) ∫ u dS. Reagrupando a igualdade, τx = (ΔM / Δx) (1 / 2y J) ∫ u dS.
Desde que se considera a superfície Syz em (b) da Figura 02, essa integração vai de u = z até u = e.
A expressão ∫u=z,u=e u dS é o momento estático MY de Syz em relação ao eixo Y.
Na situação limite, ΔM / Δx = dM / dx, que, conforme tópico anterior, deve ser igual à força de cisalhamento F. E o valor final da tensão é
τx = F MY / (2 J y) #B.1#.
Desde que tensões de cisalhamento aparecem sempre aos pares, deve-se ter
τz = τx #B.2#.
Demonstra-se também que tensões nas bordas são tangentes às mesmas. Exemplo: ponto B de (b) da Figura 02. E são ainda maiores para um dado z, valendo
τB = τx / cos φ #B.3#.
Onde φ é o ângulo que ela faz com o eixo Z.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-70
Índice do grupo | Página anterior | Próxima página |
Distribuição de tensões em seções retangulares e circulares |
Energia da deformação por flexão simples |
Distribuição de tensões em seções retangulares e circulares Topo | Fim
O arranjo da Figura 01 (a) é similar ao do tópico anterior - tópico Distribuição de tensões transversais na flexão Figura 02 (b) - adaptado para uma barra de seção transversal retangular.
O momento estático da área da parte superior (que contém dS) em relação a Y (que coincide com a linha neutra da seção) é dado por:
Fig 01MY = ∫z,h/2 u b du = (b/2) |z,h/2 u2.
MY = (b/2) (h2/4 − z2) = (bh2/8) [1 − (2z/h)2].
O momento de inércia em relação a Y é
J = bh3/12, conforme propiedade da seção retangular, que pode ser vista em página anterior.
Pode-se calcular τx pela igualdade vista na página anterior, lembrando que o valor de y, neste caso, é igual a b/2.
τx = F MY / (2 J y) = F (bh2/8) [1 − (2z/h)2] / [2 (bh3/12) (b/2)].
τx = (3/2) (F / bh) [1 − (2z/h)2] #A.1#.
A expressão acima indica uma parábola. Notar que nos pontos extremos (z = h/2 e z = −h/2) o valor da tensão de cisalhamento é nulo. A Figura 01 (b) dá uma representação aproximada.
Neste caso, não cabe a verificação da tensão na borda conforme mencionado na página anterior porque a tangente é vertical (φ = 0 e cos φ = 1).
O valor máximo ocorre para z = 0. Portanto,

τx_max = (3/2) (F / bh) #A.2#.
Desde que bh é a área da seção, F / bh é a tensão média de cisalhamento. Assim, pode-se dizer que, para a seção retangular, vale
τmax = (3/2) τmed #A.3#.
A Figura 02 dá o esquema para seção transversal circular. Para determinar o momento estático da superfície superior (que contém dS), deve-se lembrar que dS = 2r cos α du. Assim,
MY = ∫u=z,u=r 2 r cos α u du.
Considerando que u = r sen α e du = r cos α dα, os valores em termos de α são (notar que para u = z, α = φ e para u = r, α = π/2):
Fig 02MY = 2 r3 ∫α=φ,α=π/2 cos2α sen α dα.
MY = (2 r3 / 3) cos3 φ.
O momento de inércia em relação a Y é
J = π D4 / 64 (ou π r4 / 4) , conforme propriedade da seção circular.
Considerando a fórmula vista τx = F MY / (2 J y) e substituindo os valores (lembrar que y = r cos φ),
τx = [4 F / (3 π r2) ] cos2φ. Lembrando que sen φ = z/r e sen2φ + cos2φ = 1,
τx = [4 F / (3 π r2) ] [1 - (z/r)2] #B.1#.
A tensão na borda τB é dada pela fórmula também mencionada na página anterior, τB = τx / cos φ:
τB = [4 F / (3 ρ r2) ] [1 - (z/r)2]1/2 #B.2#.
A primeira curva (τx) é uma parábola e a segunda (τB), uma elipse. Representação na Figura 02 (b).
Desde que z ≤ r, o valor máximo ocorre em z = 0 e é o mesmo para ambas as igualdades:
τmax = 4 F / (3 π r2) #B.3#.
Como π r2 é a área da seção, F / (π r2) é a tensão média de cisalhamento. Portanto, para a

seção circular, vale a relação
τmax = (4/3) τmed #B.4#.
Fig 03Distribuição para algumas outras seções (somente resultados)
Para tubos de parede fina, vale aproximadamente
τmax ≈ 2 F / S #C.1#.
Onde S é a área da seção transversal.
Para perfis comuns tipo Z, U, H, τmax ≈ F / (t h) #D.1#. A curva do lado direito da Figura 03 dá idéia da distribuição aproximada.
Energia da deformação por flexão simples Topo | Fim
Seja, conforme Figura 01 deste tópico, uma viga submetida a um esforço de flexão simples, não necessariamente uniforme, cujo momento é dado por M(x).
Considera-se um volume elementar, na posição genérica x, de espessura dx, isto é, ou seu volume é dado por
dV = S dx, onde S é a área da seção transversal.
Seja uma área elementar dS na face transversal desse volume. A tensão normal em dS, segundo relação básica já vista para a flexão, é
σ = M(x) z / Jy.
E a força normal é o seu produto pela área F = σ dS = M(x) z dS / Jy.
Fig 01Considera-se agora a parte da barra de seção transversal dS e comprimento dx. Ela pode ser vista como uma barra sujeita a uma força F, de tração ou compressão, dependendo do sentido do momento e da posição acima ou abaixo da linha neutra. Pode-se usar a fórmula dada em página anterior para a energia de deformação

W = F2 L / (2 E S).
Deve-se levar em conta que essa fórmula é válida para tração e compressão. Observar também que o sinal da energia deve ser o mesmo em qualquer caso, pois, tanto na tração quanto na compressão, é fornecida energia para a deformação.
Adaptando a fórmula para este caso (W = dW, L = dx, S = dS), ocorre
dW = F2 dx / (2 E dS). Substituindo o valor de F,
dW = M2(x) z2 d2S dx / (2 E dS J2y) = M2(x) z2 dS dx / (2 E J2
y). Fazendo a integração,
W(x) = ∫S dW = [ M2(x) dx / (2 E J2y) ] ∫S z2 dS.
Mas a parte ∫ z2 dS é o momento de inércia Jy em relação à linha neutra. Portanto,
W(x) = M2(x) dx / (2 Jy E) #A.1#.
Considerando o momento constante e integrando ao longo de um comprimento x = L, o resultado é
W = M2 L / (2 Jy E) #A.2#.
Notar a semelhança com as fórmulas para outros esforços:
Tração ou compressão: W = F2 L / (2 E S)
Cisalhamento: W = F2 L / (2 G S)
Torção: W = T2 L / (2 Jp
G)
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-80
Índice do grupo | Página anterior | Próxima página |
Linha elástica de vigas flexionadas |Exemplo de cálculo da linha elástica |
Viga em balanço: outras considerações |
Linha elástica de vigas flexionadas Topo | Fim
Linha elástica é a curva formada pelo eixo da viga, inicialmente retilíneo, deformado devido à aplicação de momentos de flexão.
A Figura 01 é basicamente a mesma do tópico Fundamentos da flexão simples de página anterior. A distância de dS até LN (linha neutra) é agora simbolizada por u para não confundir com o eixo y.
A experiência demonstra que as seções transversais permanecem planas para pequenas flexões. Em (a) da Figura 01 é suposto que a seção na direção do eixo Y se desviou de um comprimento dl e de um ângulo dβ.

Fig 01Desde que a variação do ângulo é pequena (dβ), a distância b é dada por
b = u dβ. Portanto, o alongamento ε em relação a dl é
ε = b / dl = u dβ / dl.
Mas dβ/dl é a curvatura K da linha. Assim,
ε = u K.
Por definição o raio de curvatura r é o inverso da curvatura r = 1 / K.
Segundo a lei de Hooke, σ = ε E, onde E é o módulo de elasticidade do material. Substituindo o valor de ε anterior,
σ = u K E.
Da relação básica para a flexão, pode ser deduzido que σ = u M / J. Portanto, u K E = u M / J ou
r = 1 / K = E J / M #A.1#.
E, assim, o raio de curvatura da deformação é dado em função do material (módulo de elasticidade E), da geometria da viga (momento de inércia da seção J) e do momento de flexão M aplicado.
A Figura 02 dá um exemplo de corte longitudinal de uma viga deformada, sem maiores preocupações com proporcionalidade visual dos elementos. O objetivo é obter uma fórmula mais aplicável, isto é, para as coordenadas (x,y) da curva e não para o seu raio de curvatura.
Fig 02Já visto que 1/r = K = dβ / dl.
Da Figura 02 pode-se ver que tan β = dy/dx. Ou β = atan dy/dx.
Das regras de diferenciação, d(atan u) = du / (1 + u2).
dβ = d[atan(dy/dx)] = d[(dy/dx)] / [1 + (dy/dx)2].

dβ / dx = { d[(dy/dx)] / [1 + (dy/dx)2] } / dx = (d2y/dx2) / [1 + (dy/dx)2].
Pode-se considerar dβ / dl = (dβ / dx) (dx / dl).
Para a determinação do comprimento de uma curva, vale dl/dx = [1 + (dy/dx)2]1/2. Portanto,
dβ / dl = (d2y/dx2) / { [1 + (dy/dx)2] [1 + (dy/dx)2]1/2} = (d2y/dx2) / [1 + (dy/dx)2]3/2.
Para pequenas flexões, que é a situação considerada, o valor de (dy/dx)2 (= tan2 β) é pequeno em relação a 1 e pode ser desprezado. Portanto,
dβ / dl = K = (d2y/dx2) = − M / (E J), de acordo com #A.1#. O sinal negativo é posto para relacionar corretamente os sentidos das variações. E a linha elástica em coordenadas ortogonais é dada por
(d2y/dx2) = − M(x) / (E J) #B.1#.
Exemplo de cálculo da linha elástica Topo | Fim
Em página anterior, foi determinada a variação do momento de flexão para uma viga engastada em uma extremidade e submetida a uma força na outra:
M = − F1 (x1 − x).
Adaptando a igualdade para a Figura 01 abaixo (F1 = F e x1 = L),
M = − F (L − x).
Fig 01Substituindo esse valor em #B.1# do tópico anterior,
(d2y/dx2) = F (L − x) / (E J).
A derivada de 1ª ordem é obtida pela integração:
dy/dx = ∫ F (L − x) dx / (E J).
dy/dx = (F / EJ) (Lx − x2/2) + A.
Para continuar o processo, é preciso determinar a constante de integração A, o que se faz pela observação de condições em extremidades. Lembrar que dy/dx é a tangente trigonométrica do ângulo β que a tangente geométrica à curva faz com a horizontal (eixo X). Pela geometria do arranjo, Figura 01 (a),
tan β = dy/dx = 0 para x = 0. Substituindo na igualdade anterior, A = 0.
Uma segunda integração resolve o problema

y = ∫ (F / EJ) (Lx − x2/2) dx = (F / EJ) (Lx2/2 − x3/6) + B.
A constante de integração B pode ser determinada pela condição da extremidade engastada, de forma similar à anterior. Neste caso, y = 0 para x = 0 e, portanto, B = 0. E a equação da linha elástica fica
y = (F / EJ) (Lx2/2 − x3/6) #A.1#.
Viga em balanço: outras considerações Topo | Fim
Desde que as deformações aqui tratadas pressupõem o trabalho apenas na região elástica do material, vigas flexionadas podem atuar como molas em alguns casos. Seja, por exemplo, a viga em balanço do tópico anterior.
Fig 01Para considerar apenas o deslocamento da força aplicada na extremidade, considera-se x = L na igualdade #A.1# do tópico anterior:
y = (F / EJ) (LL2/2 − L3/6) = L3 F / (3 E J).
Ou F(y) = (3 E J / L3) y #A.1#.
Para uma mesma viga, os valores E, J e L são constantes. Assim, essa igualdade é a característica de uma mola, ou seja, força proporcional ao deslocamento
F(y) = k y, onde k = 3 E J / L3 #A.2#.
Naturalmente, deve valer apenas para pequenos deslocamentos e o peso próprio da viga deve ser desprezível.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-90
Índice do grupo | Página anterior | Próxima página |
Vigas de igual resistência à flexão - Introdução |
Retângulos de altura variável - carga concentrada | Retângulos de largura variável -
carga concentrada | Retângulos de altura variável em dois lados - carga concentrada |
Retângulos de altura variável - carga distribuída | Retângulos de largura variável -

carga distribuída | Retângulos de altura variável - carga distribuída e viga em dois
apoios | Coluna de igual resistência |
Vigas de igual resistência à flexão - Introdução Topo | Fim
A Figura 01 é um exemplo da página anterior, isto é, linha elástica e diagrama de momento de flexão para uma viga em balanço carregada na extremidade.
Notar que o momento de flexão é, em valores absolutos, máximo na extremidade esquerda e decresce até zero na direita.
Fig 01Se a seção transversal da viga é constante, ela deve ser dimensionada para o esforço máximo na extremidade esquerda e, no restante da viga, ela irá trabalhar com folga, isto é, estará superdimensionada.
Conforme relação básica, a tensão devido à flexão é dada por σ = M / W, onde M é o momento de flexão e W, o módulo de resistência (J/e).
Supondo o trabalho com a tensão admissível do material e considerando que o momento varia com a posição, usam-se os símbolos σadm e M(x) respectivamente.
Se se deseja maximizar o aproveitamento de material, cada seção da viga deve suportar a tensão admissível e, portanto, o módulo de resistência W deve variar com a posição, W(x), de forma que
σadm = M(x) / W(x) = const.
Nessa igualdade, em princípio, são conhecidos σadm (depende do material) e M(x) (depende do carregamento). Desde que W(x) só depende das características geométricas da seção, é fácil concluir que a área da mesma deve variar para manter a igualdade constante.
A formulação matemática é relativamente fácil e aqui não é dado exemplo. Basta escolher um formato do perfil e da viga e indicar parâmetros fixos e variáveis (exemplo: retângulo com largura fixa e altura variável, etc). A tabela do tópico seguinte dá os resultados para alguns arranjos comuns.
Em muitos casos práticos, por questões de custo, facilidade de montagem, funcionalidade, etc, essa alternativa não é usada. Afinal, os perfis precisam ser "fabricados" para cada carregamento. Mas pode ser vantajosa em alguns casos específicos, em especial para vigas em balanço.
Alguns exemplos usuais Topo | Fim
Observações:

a) Reafirmando condições da página inicial e em outras deste site, os melhores cuidados foram procurados na elaboração desta tabela. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
b) fmax significa flecha máxima.
c) Onde não implícita, é usado asterisco (*) para indicar multiplicação. Barra (/) indica divisão.
d) Os dados informados são teóricos, considerando somente o momento de flexão. Portanto, a seção mínima da viga deve suportar o cisalhamento que existir conforme diagrama de esforços.
Formato Descrição Seção maior
Função y Outros
Retângulos de altura variável - carga concentrada
(início)
h2
=(6 F L)
/(b σadm)
y2
=(6 F x)
/(b σadm)
fmax
=(8F / bE)*
(L/h)3
Retângulos de largura variável - carga concentrada
(início)
b=
(6 F L)/
(h2
σadm)
y=
(6 F x)/
(h2 σadm)
fmax
=(6F / bE)*
(L/h)3
Retângulos de altura variável em dois lados - carga concentrada
(início)
h2
=(6 F L)
/(b σadm)
y2
=(6 F x)
/(b σadm)
fmax
=(8F / bE)*
(L/h)3
Retângulos de altura variável - carga distribuída
(início)
h2
=(3 q L2)
/(b σadm)
y=
(h x) / L
fmax
=(3qL / bE)*
(L/h)3

Retângulos de largura variável - carga distribuída
(início)
b=
(3 q L2)/
(h2
σadm)
y=
b x2 / L2
fmax
=(3qL / bE)*
(L/h)3
Retângulos de altura variável - carga distribuída e viga em dois
apoios(início)
h2
=(3 q L2)
/(4 b σadm)
y2/h2
=1 −
x2/(L/2)2
fmax
=(3qL / 16bE)
*(L/h)3
Coluna de igual resistência Topo | Fim
Na Figura 01, uma coluna sofre um esforço de compressão de uma carga externa F. Considerando o peso próprio, é fácil concluir que a seção transversal deve aumentar de cima para baixo, se se deseja manter a tensão de compressão constante, ou seja, uma resistência constante à compressão. É suposto que a coluna é feita de um material homogêneo de massa específica μ.
Considera-se o ponto de aplicação de F a origem da coordenada y. Assim, a área da seção transversal é uma função S(y), que deve ser encontrada para manter a tensão constante na coluna.
Para a seção de uma altura genérica y, o volume elementar é dado por dV(y) = S(y) dy.
Fig 01A força atuante na seção genérica é a soma do peso próprio acima da mesma com F e, dividida pela área, deve ser igual à tensão (constante) na coluna:
[μ g V(y) + F] / S(y) = σ = constante. Ou
μ g V(y) + F = σ S(y). Diferenciando ambos os lados,
μ g dV(y) = σ dS(y). Mas dV(y) = S(y) dy, conforme já visto.
Assim, μ g S(y) dy = σ dS(y) ou S(y) = (σ/μg) dS(y)/dy.

A solução genérica para a equação diferencial é
S(y) = k e (μg/σ) y. Ela pode ser confirmada com dS(y)/dy = k (μg/σ) e (μg/σ) y. Ou
(σ/μg) dS(y)/dy = (σ/μg) k (μg/σ) e (μg/σ) y = k e (μg/σ) y = S(y).
A constante k pode ser determinada pela condição: para y = 0, S = S0. Ou k = S0.
Mas em y = 0 só há a ação de F. Assim, σ = F / S0 ou k = F / σ. Substituindo na anterior e considerando a tensão admissível do material,
S(y) = (F / σadm) e (μg/σadm) y #A.1#.
Notar que essa fórmula fornece a área da seção e a variação das dimensões depende da geometria escolhida. Se for retangular com um lado fixo por exemplo, o outro varia com a função dividida pelo valor do lado fixo. Mas se for circular, o raio varia com a raiz quadrada da função dividida por π.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VI-10
Índice do grupo | Página anterior | Próxima página |
Vigas de seção constante - Alguns exemplos típicos |
Biapoiada, carga concentrada no meio |Biapoiada, carga concentrada em posição
genérica |Biapoiada, carga distribuída uniforme |
Engastada apoiada, carga concentrada no meio |
Engastada apoiada, carga distribuída uniforme |
Em balanço, carga concentrada na extremidade |
Em balanço, carga distribuída uniforme |
Vigas de seção constante - Alguns exemplos típicos Topo | Fim
Este tópico contém apenas tabela com fórmulas dos principais parâmetros para cálculo de alguns arranjos comuns de carregamentos em vigas de seção constante. Oportunamente outros poderão ser incluídos.
Observações:
• Reafirmando condições da página inicial e em outras deste site, os melhores cuidados foram procurados na elaboração desta tabela. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
• Onde não implícita, é usado asterisco (*) para indicar multiplicação. Barra (/) indica divisão.

• O valor da carga distribuída (q) deve ser dado em unidade de força por unidade de comprimento (exemplo: newton por metro).
Formato Descrição Mom max Flecha f Reações
Biapoiada, carga
concentrada no meio(início)
F L / 4(F L3)
/(48 E J)
RA = F/2RB = F/2MA = 0MB = 0
y = [F L3 / (16 E J)] (x/L) [1 - (4/3) (x/L)2] p/ x ≤ L/2
Biapoiada, carga
concentrada em posição
genérica(início)
(F a b) / L(F a2 b2)
/(3 E J L)
RA = Fb/LRB = Fa/L
MA = 0MB = 0
y = [FL3/(6EJ)] (a/L) (b/L)2 (x/L) [1 + L/b - x2/ab]y' = [FL3/(6EJ)] (b/L) (a/L)2 (x'/L) [1 + L/a - x'2/ab]
Deve-se ter x ≤ a e x' ≤ b.
Biapoiada, carga
distribuída uniforme(início)
q L2 / 8(5 q L4)
/(384 E J)
RA = qL/2RB = qL/2
MA = 0MB = 0
y = [5FL3/(384 EJ)] [1 - 4(x/L)2] [1 - (4/5)(x/L)2]
Engastada apoiada, carga concentrada
no meio(início)
3 F L / 16(7 F L3)
/(768 E J)
RA = 11 F/16RB = 5 F/16
MA = 3 F L/16MB = 0
Engastada apoiada, carga
distribuída uniforme(início)
q L2 / 8(q L4)
/(185 E J)
RA = 5 qL/8RB = 3 qL/8MA = qL2/8
MB = 0
Em balanço, carga
concentrada na
extremidade(início)
F L F L3 / (3 E J)RA = F
MA = F L
Em balanço, carga
distribuída uniforme(início)
q L2 / 2 q L4 / (8 E J) RA = q LMA = q L2/2
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-20
Índice do grupo | Página anterior | Próxima página |
Forças e momentos internos em vigas |Diagramas de esforços em vigas |
Forças e momentos internos em vigas Topo | Fim
Vigas horizontais carregadas são elementos comuns na prática e o dimensionamento exige a determinação das tensões internas em função da(s) carga(s) aplicada(s).
Seja, conforme Figura 01 (a), uma viga horizontal com um carregamento genérico F(x) ao longo do seu comprimento. A simples dedução lógica permite concluir que esta viga está internamente submetida a esforços de cisalhamento e flexão.
Fig 01Considerando um corte transversal hipotético em um local qualquer A, é possível separar os esforços distintos: cisalhamento conforme (b) da figura e momento de flexão conforme (c) da mesma figura.
Algumas referências usam os termos esforço cortante para o cisalhamento e momento fletor para o momento de flexão.
Também pode ser encontrada a expressão força transversal para o cisalhamento.
Em geral adotam-se as convenções de sinais como em (b) e (c), isto é, cisalhamento positivo tende a girar cada parte no sentido horário e momento positivo tende a tracionar a parte inferior e comprimir a parte superior da viga (obs: os sinais de cisalhamento e momento da figura não têm relação com o carregamento indicado).
Diagramas de esforços em vigas Topo | Fim
A Figura 01 (a) dá exemplo de um dos carregamentos mais simples: uma viga apoiada em dois cutelos com uma única carga vertical F1. O apoio sobre cutelos garante que não há

momentos nas extremidades e que não há forças longitudinais se o carregamento é vertical, pois o cutelo direito está sobre rolos.
Considerando a origem das coordenadas x = 0, um problema típico consiste em determinar os esforços ao longo da viga conhecidos os valores de F1, o seu ponto de aplicação x1 e o comprimento da viga x2.
O esquema das forças atuantes na viga é dado em (b) da figura. F0 e F2 são as reações dos apoios. Notar que é uma viga estaticamente determinada, isto é, todas as forças podem ser calculadas pela aplicação das condições de equilíbrio estático (soma das forças nulas e também dos momentos).
De ∑ Fy = 0, ocorre
F1 = − F0 − F2.
De ∑ M = 0 (em relação ao ponto 0 por exemplo),
F1 x1 = − F2 x2.
A condição ∑ Fx = 0 não se aplica por não existir força nesse sentido.
Fig 01Portanto, F2 = − F1 x1 / x2.
F0 = − F1 − F2 = − F1 + F1 x1 / x2. Ou
F0 = − F1 (x2 − x1) / x2.
Considera-se agora um trecho genérico de 0 a um ponto x, à esquerda de 1, conforme (c) da figura.
Aplicando a condição de equilíbrio ∑ Fy = 0, em módulo, Fc = F0. E o cisalhamento interno é positivo conforme critério do tópico anterior.
Assim, do ponto 0 até 1,
Fc = F0.

É fácil deduzir que do ponto 1 ao ponto 2 vale Fc = F0 + F1 = − F2.
Novamente se considera o ponto x à esquerda do ponto 1 conforme figura.
Aplicando a condição ∑ M = 0 em relação a x,
M = x F0 (positivo conforme critério do tópico anterior).
Entre os pontos 1 e 2, M = x F0 − (x − x1) F1.
Substituindo os valores de F0 e F1 conforme já calculado,
Entre 0 e 1: M = F1 (x2 − x1) x / x2. Portanto,
Para x = 0, M = 0.Para x = x1, M = F1 (x2 − x1) x1 / x2.
Entre 1 e 2: M = x F0 − (x − x1) F1 = x (F0 − F1) + x1 F1. Mas F0 − F1 = − F2. Assim,
M = − x F1 x1 / x2 + x1 F1 = F1 (x1 − x1 x / x2 ) = F1 x1 (1 − x / x2 ). Portanto,
Para x = x2, M = 0.Para x = x1, M = F1 x1 (1 − x1 / x2) = F1 x1 (x2 − x1) / x2 . Notar que é igual ao valor do trecho anterior. E o gráfico é conforme (e) da figura.
E os valores máximos são dados por:
Fc_max = max (F0, F2) com F0 = F1 (x2 − x1) / x2 e F2 = F1 x1 / x2.
Mmax = F1 (x2 − x1) x1 / x2.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-30
Índice do grupo | Página anterior | Próxima página |
Momentos de inércia e de resistência de algumas seções.
Circular cheia | Elipse cheia | Hexágono regular | Perfil C | Perfil C vazado | Perfil em
cruz | Perfil H | Perfil I | Perfil I abas desiguais | Perfil I vazado | Perfil L | Perfil T aba horizontal
| Perfil T aba vertical | Perfil U | Retângulo | Semicírculo | Trapézio | Triângulo | Tubo | Tubo de parede fina | Tubo elíptico | Tubo elíptico de parede fina | Tubo retangular |
Tabela Topo | Fim
Observações:
a) Os valores são dados em relação a um eixo de referência (x e/ou y) coincidente com a

linha neutra da seção. Naturalmente, nos casos de seções circulares, o valor independe da orientação do eixo.
b) Em alguns casos o valor do momento de inércia é dado em função das distâncias acima ou abaixo da linha neutra (e1, e2) e seus valores são dados no lugar do momento de resistência W. Mas este último pode ser calculado pela simples relação W = J / e.
c) Reafirmando condições da página inicial do site, os melhores cuidados foram procurados na elaboração desta tabela. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
Seção Nome/aspecto J WCircular cheia
(início)J = π D4 / 64
ouJ ≈ D4 / 20
W = π D3 / 32ou
W ≈ D3 / 10
Tubo(início)
J = π (D4 - d4) / 64 W = π (D4 - d4) / (32 D)
Tubo de parede fina(início)
J = π t r3 [1 + (t/2r)2]
Onde r = D/2 (raio médio).
OuJ ≈ π t r3
W = J / (r + t/2)
Onde r = D/2 (raio médio).
OuW ≈ π t r2
Elipse cheia(início)
Jx = π a3 b / 4Jy = π a b3 / 4
Wx = π a2 b / 4Wy = π a b2 / 4
Tubo elíptico(início)
Jx = π (a3b - a'3b') / 4 Wx = Jx / a
Tubo elíptico de parede fina
(início)
Jx ≈ π a2 (a + 3b) t / 4 Wx ≈ π a (a + 3b) t / 4

Semicírculo(início)
Jx ≈ 0,00686 D4 Wx ≈ 0,0238 D3
Come ≈ 0,2878 D
Retângulo(início)
Jx = b a3 / 12Jy = a b3 / 12
Wx = b a2 / 6Wy = a b2 / 6
Triângulo(início)
Jx = a h3 / 36 Wx = a h2 / 24Com
e = 2 h / 3
Hexágono regular(início)
Jx = Jy ≈ 0,5413 a4 Wx = 0,625 a3
Wy ≈ 0,5413 a3
Trapézio(início)
Jx = h3 (a2 + 4ab + b2)/
36 (a +b)
Wx = h2 (a2 + 4ab + b2)/
12 (2a + b)
Come = h (2a + b) / [3 (a
+ b)]
Perfil T aba horizontal(início)
Jx = (Be23 - bh3 +
ae13) / 3
e2 = (aH2 + bd2)/
2 (aH + bd)
e1 = H - e2
Perfil L(início)
Idem Idem
Perfil U(início)
Idem Idem

Tubo retangular(início)
Jx = (BH3 - bh3) / 12 Wx = (BH3 - bh3) / (6 H)
Perfil I(início)
Idem Idem
Perfil C(início)
Idem Idem
Perfil I vazado(início)
Jx = B (H3 - h3) / 12+ f (h3 - g3) / 12
Wx = B (H3 - h3) / (6 H)
+ f (h3 - g3) / (6 H)
Perfil C vazado(início)
Idem Idem
Perfil H(início)
Jx = (BH3 + bh3) / 12 Wx = (BH3 + bh3) / (6 H)
Perfil em cruz(início)
Idem Idem
Perfil T aba vertical(início)
Idem Idem

Perfil I abas desiguais em largura(início)
Jx = (Be23 - B1h3
+ be13 - b1h1
3) / 3e2 = [aH2 + B1d2 +
b1d1 (2H - d1)]/
2 (aH + B1d + b1d1)
e1 = H - e2
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-40
Índice do grupo | Página anterior | Próxima página |
Viga apoiada com várias cargas concentradas |
Viga apoiada com carga uniformemente distribuída |
Viga apoiada com várias cargas concentradas Topo | Fim
Em página anterior, foi visto exemplo do diagrama para viga apoiada com uma carga concentrada. Isso pode ser considerado caso particular de uma situação mais genérica, ou seja, viga com mais de uma carga concentrada.
A Figura 01 (a) deste tópico dá um exemplo para três forças F1, F2 e F3, supostamente conhecidas, bem como os respectivos pontos de aplicação (x1, x3 e x3) e o comprimento total x4. As forças F0 e F4 são as reações dos apoios.
Da condição de equilíbrio ∑ Fy = 0, ocorre F0 + F4 = F1 + F2 + F3.
Da condição ∑ M = 0 (em relação a 0 por exemplo), F4x4 = F1x1 + F2x2 + F3x3.
Portanto,
F4 = (F1x1 + F2x2 + F3x3) / x4.
F0 = F1 + F2 + F3 − F4.
Ou seja, F0 e F4 são formulados em função de parâmetros conhecidos.

Fig 01Na figura 01 (b), uma parte da viga, de comprimento menor que x1. Pela condição de equilíbrio dada pela soma das forças verticais igual a zero, o cisalhamento é igual à reação do apoio esquerdo, isto é,
Fc = F0. Sendo F0 calculado conforme igualdade anterior. Ver gráfico em (c).
Para o trecho entre 1 e 2, o cisalhamento sofre a contribuição de F1, atuante em sentido contrário. Assim, Fc = F0 − F1.
De forma análoga, pode-se verificar que entre 2 e 3 vale Fc = F0 − F1 − F2. E, para o trecho entre 3 e 4, há a relação:
Fc = F0 − F1 − F2 − F3.
O sentido do cisalhamento começa positivo, de acordo com critérios já vistos.
Para os momentos de flexão, entre 0 e 1, ocorre M = F0 x. E para o trecho entre 1 e 2,
M = F0 x − F1 (x − x1) = (F0 − F1) x + F1x1.
Para a parte entre 2 e 3:
M = F0 x − F1 (x − x1) − F2 (x − x2) = (F0 − F1 − F2) x + F1x1 + F2x2.
Para o trecho 3-4, pode-se fazer a analogia direta:
M = (F0 − F1 − F2 − F3) x + F1x1 + F2x2 + F3x3. E o gráfico é algo parecido com a Figura 01 (d).
Para a última igualdade, se é feito x = x4, tem-se
M = (F0 − F1 − F2 − F3) x4 + F1x1 + F2x2 + F3x3.
Mas (F0 − F1 − F2 − F3) = − F4 conforme já visto e F4x4 = F1x1 + F2x2 + F3x3.
Ou M = −F4 x4 + F4 x4 = 0, que é um resultado esperado, pois não pode haver momento em extremidades apoiadas em cutelos.

Este exemplo foi dado para 3 forças, mas pode-se notar que é facilmente adaptável para qualquer número delas.
Viga apoiada com carga uniformemente distribuída Topo | Fim
Nos exemplos vistos até aqui, a função matemática das forças aplicadas em razão da posição F = f(x) é uma função discreta, isto é, o seu valor só é diferente de zero em determinados pontos.
Um carregamento é distribuído se as forças atuam em todos os pontos no trecho considerado. Nesse caso, o valor é especificado em termos de força por unidade de comprimento q (newton por metro, por exemplo). E o carregamento é dito uniformemente distribuído se o valor de q é constante no trecho considerado.
No carregamento da Figura 01 (a), uma carga uniformemente distribuída q atua em toda a extensão da viga. Exemplo comum para isso é o peso próprio da viga.
Fig 01A força equivalente de uma carga uniformemente distribuída é igual ao produto do seu valor q pelo comprimento considerado, com atuação no ponto médio do mesmo.
Portanto, a força no total da viga é q x1, atuando em x1/2.
A condição de equilíbrio ∑ Fy = 0 e a simetria permitem deduzir as reações dos apoios:
F0 = F1 = q x1 / 2.
Numa parte genérica de comprimento x conforme (b) da figura, a condição ∑ Fy = 0 determina o cisalhamento:
Fc = F0 − q x.
Ou Fc = q x1 / 2 − q x. Portanto, uma reta com valor F0 para x=0 e −F0 para x = x1.
Para os momentos, considerando ∑ M = 0 para o ponto x, tem-se:
M = F0 x − q x x / 2 = − (q/2) x2 + F0 x.

Isso é a equação de uma parábola e pode ser visto que tem valores nulos nos extremos (x = 0 e x = x1). E o gráfico tem a forma dada na Figura 01 (d).
Notar que as formulações para o cisalhamento e para o momento são contínuas porque a força aplicada tem atuação também contínua.
A simplicidade do caso permite deduzir que o momento máximo se encontra no ponto médio. Formalmente, pode ser encontrado com a hipótese da derivada do momento em relação a x igual a zero e posterior solução da equação diferencial:
dM/dx = − (q/2) 2 x + F0 = 0. Ou −q x = − q x1 / 2. Portanto, x = x1 / 2.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-50
Índice do grupo | Página anterior | Próxima página |
Viga engastada com uma carga na extremidade |
Viga engastada com carga distribuída |Viga apoiada com momento concentrado |
Viga engastada com uma carga na extremidade Topo | Fim
Este é um exemplo que pode ocorrer em várias situações práticas: uma viga engastada em uma extremidade suporta uma carga vertical na outra, conforme (a) da Figura 01. Também denominada viga em balanço.
Fig 01Considera-se apoio o engaste na coordenada x=0. De ∑ Fy = 0, ocorre F0 = F1 (em módulo).
De ∑ M = 0 (em relação a 0 por exemplo), tem-se

M0 = F1 x1 (também em módulo).
Notar que há necessariamente um momento no apoio, pois não há outra força para compensar a ação de F1.
Analisando uma parte de comprimento x conforme (b) da figura, para o cisalhamento ocorre Fc = F0 = F1 = constante. E o sinal é positivo, de acordo com critérios já informados.
Para o momento, M = M0 − Fc x ou M = F1 x1 − F1 x = F1 (x1 − x). E deve ser negativo de acordo com os critérios mencionados.
Portanto M = − F1 (x1 − x). A equação do momento é uma reta com valor absoluto máximo igual a F1 x1 para x = 0.
Viga engastada com carga distribuída Topo | Fim
Este problema é similar ao do tópico anterior, diferindo no carregamento, que é distribuído. A sua força equivalente é q x1. Assim, de ∑ Fy = 0, tem-se em módulo:
Fig 01F0 = q x1.
De ∑ M = 0 (em relação a 0) e considerando que a força equivalente atua em x1/2, também em módulo,
M0 = q x1 x1 / 2 = q x12 / 2.
De acordo com o trecho genérico em (b) da figura, o cisalhamento é dado por:
Fc = F0 − q x = q x1 − q x = q (x1 − x).
É uma reta de valor q x1 em x = 0 e 0 em x = x1.
De ∑ M = 0, em (b) da figura e em relação a 0, deduz-se a variação do momento:
M = M0 − q x x / 2 = q x12 / 2 − q x2 / 2. Mas deve ser negativo conforme convenção adotada.
Assim,
M = q x2 / 2 − q x12 / 2 = (q / 2) (x2 − x1
2). Para x = 0, em módulo vale M = q x12 / 2, que é o
seu valor máximo.

Viga apoiada com momento concentrado Topo | Fim
Um esforço de torção também pode ser visto como um carregamento. Veja exemplo na Figura 01 (a). A posição do apoio esquerdo foi invertida para proporcionar a correta reação.
Fig 01De ∑ Fy = 0, nota-se que as reações em cada apoio são iguais em módulo e de sinais invertidos: F0 + F2 = 0 ou F0 = − F2.
De ∑ M = 0 (em relação a 2) tem-se em módulo:
F0 x2 = M1 ou F0 = M1 / x2.
De acordo com a porção genérica em (b) da figura, ocorre para o cisalhamento:
Fc = F0 = M1 / x2 = constante (em módulo).
De acordo com as convenções estabelecidas, o cisalhamento deve ser negativo conforme indicado no gráfico.
Considerando a mesma parte genérica (b), o momento de flexão entre os pontos 0 e 1 é:
M = F0 x = (M1 / x2) x. E o sinal deve ser positivo conforme convenções.
Entre os pontos 1 e 2 precisa-se considerar a ação do momento externo M1:
M = M1 − (M1 / x2) x = M1 (1 − x / x2). E o sinal deve ser negativo pois, nessa parte, as fibras inferiores da barra são tracionadas.
O gráfico, conforme Figura 01 (b), mostra que os maiores momentos estão no ponto de aplicação do momento externo (x1). Portanto, basta verificar, entre as duas igualdades anteriores, a de maior valor absoluto nesse ponto.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-60
Índice do grupo | Página anterior | Próxima página |
Aspectos teóricos sobre carregamentos em vigas |
Distribuição de tensões transversais na flexão |
Aspectos teóricos sobre carregamentos de vigas Topo | Fim
Em páginas anteriores foram vistos alguns exemplos de diagramas de esforços transversais e momentos de flexão em vigas horizontais, com desenvolvimentos específicos para cada caso. Neste tópico é apresentada uma formulação genérica, que pode não ser diretamente aplicável no caso de cargas discretas, mas permite chegar a algumas conclusões importantes.
A Figura 01 mostra uma viga sob ação de um carregamento distribuído genérico, isto é, não uniforme, dado pela função q(x). As forças A e B são as reações dos apoios.
Desde q(x) é a força por unidade de comprimento, pode-se concluir que, em uma área infinitesimal de posição u e largura du, a força atuante é q(u) du, isto é, a área da porção de superfície da figura.
Fig 01Em um determinado ponto x, o esforço de cisalhamento Fc é igual à soma das forças atuantes à esquerda do mesmo (que, naturalmente, deve ser igual à soma das forças à direita para preservar o equilíbrio estático). Assim, pode-se escrever
Fc(x) = − ∫u=0,u=x q(u) du + A #A.1#.
Notar que essa igualdade pode ser considerada decorrente da definição:
dFc(x) / dx = − q(x) #B.1#. E o valor A pode ser visto como a constante de integração.
E o momento de flexão para um local genérico x é igual à soma dos produtos das forças à esquerda pelas distâncias a esse ponto (que, de forma análoga à anterior, deve ser igual à soma da direita para manter o equilíbrio estático). Portanto,
M(x) = − ∫u=0,u=x (x − u) q(u) du + A x.

Se se deseja diferenciar M(x) em relação a x, deve-se usar a regra geral para diferenciação de integrais
d[ ∫a,b f(x,t) dt ] / dx = ∫a,b { ∂[f(x,t)] / ∂x } dt. Aplicando na equação anterior,
dM(x) / dx = − ∫u=0,u=x q(u) du + A. Esse resultado é o esforço transversal dado em #A.1#.
Portanto, dM(x) / dx = Fc(x) #C.1#.
Essa igualdade estabelece uma relação matemática entre o momento de flexão e o esforço de cisalhamento. Lembrar que, se a derivada de uma função é nula, ela está em um ponto de valor máximo ou mínimo. Isso pode ser claramente observado nos diagramas das páginas anteriores, inclusive para alguns casos de forças discretas de carregamento.
Distribuição de tensões transversais na flexão Topo | Fim
As tensões de cisalhamento associadas à flexão não se distribuem de maneira uniforme pela seção transversal da barra. Isso não invalida os cálculos de valores a partir dos diagramas, mas eles devem ser considerados médios e, portanto, podem existir valores localizados significativamente acima da média.
Fig 01A Figura 01 representa uma barra supostamente sob ação de flexão no plano XZ.
Supõe-se agora um pequeno trecho de largura Δx conforme indicado. Este último, por sua vez, é cortado por um plano Pz, paralelo ao plano XY e situado a uma altura z do eixo X.
A Figura 02 representa em (a) o corte do plano XZ e, em (b), o corte de um plano paralelo a YZ. O eixo Y coincide com a linha neutra da seção transversal.
Conforme (a) da Figura 02, o lado esquerdo do trecho é nomeado 1 e o direito, 2. Considerando somente a parte acima da linha neutra, as tensões normais σ1 e σ2 variam linearmente de zero até um valor máximo na extremidade superior. Conforme visto em página anterior, o valor máximo é
M e / J, onde J é o momento de inércia da seção Syz em relação a Y. Portanto, para um valor qualquer de z = u,
σ1(u) = M u / J #A.1#.
Para a face direita, o momento é M + ΔM e, assim,
σ2(u) = (M + ΔM) u / J #A.2#.
Em (a) da Figura 02, σx é a tensão de cisalhamento na superfície do plano Pz (Figura 01) entre

as duas seções separadas de Δx. Portanto, essa superfície tem dimensões Δx e 2y, como pode ser visto em (a) e (b) da Figura 02.
Fig 02Para manter o equilíbrio estático, as forças correspondentes a τx, σ1(u) e σ2(u) devem anular-se:
− τx Δx 2y − ∫ σ1 dS + ∫ σ2 dS = 0. Ou
− τx Δx 2y + ∫ (σ2 − σ1) dS = 0.
Das igualdades #A.1# e #A.2#,
(σ2 − σ1) = ΔM u / J. Assim,
τx Δx 2y = (ΔM / J) ∫ u dS. Reagrupando a igualdade, τx = (ΔM / Δx) (1 / 2y J) ∫ u dS.
Desde que se considera a superfície Syz em (b) da Figura 02, essa integração vai de u = z até u = e.
A expressão ∫u=z,u=e u dS é o momento estático MY de Syz em relação ao eixo Y.
Na situação limite, ΔM / Δx = dM / dx, que, conforme tópico anterior, deve ser igual à força de cisalhamento F. E o valor final da tensão é
τx = F MY / (2 J y) #B.1#.
Desde que tensões de cisalhamento aparecem sempre aos pares, deve-se ter
τz = τx #B.2#.
Demonstra-se também que tensões nas bordas são tangentes às mesmas. Exemplo: ponto B de (b) da Figura 02. E são ainda maiores para um dado z, valendo
τB = τx / cos φ #B.3#.
Onde φ é o ângulo que ela faz com o eixo Z.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais V-70
Índice do grupo | Página anterior | Próxima página |
Distribuição de tensões em seções retangulares e circulares |
Energia da deformação por flexão simples |
Distribuição de tensões em seções retangulares e circulares Topo | Fim
O arranjo da Figura 01 (a) é similar ao do tópico anterior - tópico Distribuição de tensões transversais na flexão Figura 02 (b) - adaptado para uma barra de seção transversal retangular.
O momento estático da área da parte superior (que contém dS) em relação a Y (que coincide com a linha neutra da seção) é dado por:
Fig 01MY = ∫z,h/2 u b du = (b/2) |z,h/2 u2.
MY = (b/2) (h2/4 − z2) = (bh2/8) [1 − (2z/h)2].
O momento de inércia em relação a Y é
J = bh3/12, conforme propiedade da seção retangular, que pode ser vista em página anterior.
Pode-se calcular τx pela igualdade vista na página anterior, lembrando que o valor de y, neste caso, é igual a b/2.
τx = F MY / (2 J y) = F (bh2/8) [1 − (2z/h)2] / [2 (bh3/12) (b/2)].
τx = (3/2) (F / bh) [1 − (2z/h)2] #A.1#.
A expressão acima indica uma parábola. Notar que nos pontos extremos (z = h/2 e z = −h/2) o valor da tensão de cisalhamento é nulo. A Figura 01 (b) dá uma representação aproximada.
Neste caso, não cabe a verificação da tensão na borda conforme mencionado na página anterior porque a tangente é vertical (φ = 0 e cos φ = 1).
O valor máximo ocorre para z = 0. Portanto,

τx_max = (3/2) (F / bh) #A.2#.
Desde que bh é a área da seção, F / bh é a tensão média de cisalhamento. Assim, pode-se dizer que, para a seção retangular, vale
τmax = (3/2) τmed #A.3#.
A Figura 02 dá o esquema para seção transversal circular. Para determinar o momento estático da superfície superior (que contém dS), deve-se lembrar que dS = 2r cos α du. Assim,
MY = ∫u=z,u=r 2 r cos α u du.
Considerando que u = r sen α e du = r cos α dα, os valores em termos de α são (notar que para u = z, α = φ e para u = r, α = π/2):
Fig 02MY = 2 r3 ∫α=φ,α=π/2 cos2α sen α dα.
MY = (2 r3 / 3) cos3 φ.
O momento de inércia em relação a Y é
J = π D4 / 64 (ou π r4 / 4) , conforme propriedade da seção circular.
Considerando a fórmula vista τx = F MY / (2 J y) e substituindo os valores (lembrar que y = r cos φ),
τx = [4 F / (3 π r2) ] cos2φ. Lembrando que sen φ = z/r e sen2φ + cos2φ = 1,
τx = [4 F / (3 π r2) ] [1 - (z/r)2] #B.1#.
A tensão na borda τB é dada pela fórmula também mencionada na página anterior, τB = τx / cos φ:
τB = [4 F / (3 ρ r2) ] [1 - (z/r)2]1/2 #B.2#.
A primeira curva (τx) é uma parábola e a segunda (τB), uma elipse. Representação na Figura 02 (b).
Desde que z ≤ r, o valor máximo ocorre em z = 0 e é o mesmo para ambas as igualdades:
τmax = 4 F / (3 π r2) #B.3#.
Como π r2 é a área da seção, F / (π r2) é a tensão média de cisalhamento. Portanto, para a

seção circular, vale a relação
τmax = (4/3) τmed #B.4#.
Fig 03Distribuição para algumas outras seções (somente resultados)
Para tubos de parede fina, vale aproximadamente
τmax ≈ 2 F / S #C.1#.
Onde S é a área da seção transversal.
Para perfis comuns tipo Z, U, H, τmax ≈ F / (t h) #D.1#. A curva do lado direito da Figura 03 dá idéia da distribuição aproximada.
Energia da deformação por flexão simples Topo | Fim
Seja, conforme Figura 01 deste tópico, uma viga submetida a um esforço de flexão simples, não necessariamente uniforme, cujo momento é dado por M(x).
Considera-se um volume elementar, na posição genérica x, de espessura dx, isto é, ou seu volume é dado por
dV = S dx, onde S é a área da seção transversal.
Seja uma área elementar dS na face transversal desse volume. A tensão normal em dS, segundo relação básica já vista para a flexão, é
σ = M(x) z / Jy.
E a força normal é o seu produto pela área F = σ dS = M(x) z dS / Jy.
Fig 01Considera-se agora a parte da barra de seção transversal dS e comprimento dx. Ela pode ser vista como uma barra sujeita a uma força F, de tração ou compressão, dependendo do sentido do momento e da posição acima ou abaixo da linha neutra. Pode-se usar a fórmula dada em página anterior para a energia de deformação

W = F2 L / (2 E S).
Deve-se levar em conta que essa fórmula é válida para tração e compressão. Observar também que o sinal da energia deve ser o mesmo em qualquer caso, pois, tanto na tração quanto na compressão, é fornecida energia para a deformação.
Adaptando a fórmula para este caso (W = dW, L = dx, S = dS), ocorre
dW = F2 dx / (2 E dS). Substituindo o valor de F,
dW = M2(x) z2 d2S dx / (2 E dS J2y) = M2(x) z2 dS dx / (2 E J2
y). Fazendo a integração,
W(x) = ∫S dW = [ M2(x) dx / (2 E J2y) ] ∫S z2 dS.
Mas a parte ∫ z2 dS é o momento de inércia Jy em relação à linha neutra. Portanto,
W(x) = M2(x) dx / (2 Jy E) #A.1#.
Considerando o momento constante e integrando ao longo de um comprimento x = L, o resultado é
W = M2 L / (2 Jy E) #A.2#.
Notar a semelhança com as fórmulas para outros esforços:
Tração ou compressão: W = F2 L / (2 E S)
Cisalhamento: W = F2 L / (2 G S)
Torção: W = T2 L / (2 Jp
G)
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-80
Índice do grupo | Página anterior | Próxima página |
Linha elástica de vigas flexionadas |Exemplo de cálculo da linha elástica |
Viga em balanço: outras considerações |
Linha elástica de vigas flexionadas Topo | Fim
Linha elástica é a curva formada pelo eixo da viga, inicialmente retilíneo, deformado devido à aplicação de momentos de flexão.
A Figura 01 é basicamente a mesma do tópico Fundamentos da flexão simples de página anterior. A distância de dS até LN (linha neutra) é agora simbolizada por u para não confundir com o eixo y.

A experiência demonstra que as seções transversais permanecem planas para pequenas flexões. Em (a) da Figura 01 é suposto que a seção na direção do eixo Y se desviou de um comprimento dl e de um ângulo dβ.
Fig 01Desde que a variação do ângulo é pequena (dβ), a distância b é dada por
b = u dβ. Portanto, o alongamento ε em relação a dl é
ε = b / dl = u dβ / dl.
Mas dβ/dl é a curvatura K da linha. Assim,
ε = u K.
Por definição o raio de curvatura r é o inverso da curvatura r = 1 / K.
Segundo a lei de Hooke, σ = ε E, onde E é o módulo de elasticidade do material. Substituindo o valor de ε anterior,
σ = u K E.
Da relação básica para a flexão, pode ser deduzido que σ = u M / J. Portanto, u K E = u M / J ou
r = 1 / K = E J / M #A.1#.
E, assim, o raio de curvatura da deformação é dado em função do material (módulo de elasticidade E), da geometria da viga (momento de inércia da seção J) e do momento de flexão M aplicado.
A Figura 02 dá um exemplo de corte longitudinal de uma viga deformada, sem maiores preocupações com proporcionalidade visual dos elementos. O objetivo é obter uma fórmula mais aplicável, isto é, para as coordenadas (x,y) da curva e não para o seu raio de curvatura.
Fig 02Já visto que 1/r = K = dβ / dl.
Da Figura 02 pode-se ver que tan β = dy/dx. Ou β = atan dy/dx.

Das regras de diferenciação, d(atan u) = du / (1 + u2).
dβ = d[atan(dy/dx)] = d[(dy/dx)] / [1 + (dy/dx)2].
dβ / dx = { d[(dy/dx)] / [1 + (dy/dx)2] } / dx = (d2y/dx2) / [1 + (dy/dx)2].
Pode-se considerar dβ / dl = (dβ / dx) (dx / dl).
Para a determinação do comprimento de uma curva, vale dl/dx = [1 + (dy/dx)2]1/2. Portanto,
dβ / dl = (d2y/dx2) / { [1 + (dy/dx)2] [1 + (dy/dx)2]1/2} = (d2y/dx2) / [1 + (dy/dx)2]3/2.
Para pequenas flexões, que é a situação considerada, o valor de (dy/dx)2 (= tan2 β) é pequeno em relação a 1 e pode ser desprezado. Portanto,
dβ / dl = K = (d2y/dx2) = − M / (E J), de acordo com #A.1#. O sinal negativo é posto para relacionar corretamente os sentidos das variações. E a linha elástica em coordenadas ortogonais é dada por
(d2y/dx2) = − M(x) / (E J) #B.1#.
Exemplo de cálculo da linha elástica Topo | Fim
Em página anterior, foi determinada a variação do momento de flexão para uma viga engastada em uma extremidade e submetida a uma força na outra:
M = − F1 (x1 − x).
Adaptando a igualdade para a Figura 01 abaixo (F1 = F e x1 = L),
M = − F (L − x).
Fig 01Substituindo esse valor em #B.1# do tópico anterior,
(d2y/dx2) = F (L − x) / (E J).
A derivada de 1ª ordem é obtida pela integração:
dy/dx = ∫ F (L − x) dx / (E J).
dy/dx = (F / EJ) (Lx − x2/2) + A.
Para continuar o processo, é preciso determinar a constante de integração A, o que se faz pela observação de condições em extremidades. Lembrar que dy/dx é a tangente trigonométrica do ângulo β que a tangente geométrica à curva faz com a horizontal (eixo X). Pela geometria do arranjo, Figura 01 (a),

tan β = dy/dx = 0 para x = 0. Substituindo na igualdade anterior, A = 0.
Uma segunda integração resolve o problema
y = ∫ (F / EJ) (Lx − x2/2) dx = (F / EJ) (Lx2/2 − x3/6) + B.
A constante de integração B pode ser determinada pela condição da extremidade engastada, de forma similar à anterior. Neste caso, y = 0 para x = 0 e, portanto, B = 0. E a equação da linha elástica fica
y = (F / EJ) (Lx2/2 − x3/6) #A.1#.
Viga em balanço: outras considerações Topo | Fim
Desde que as deformações aqui tratadas pressupõem o trabalho apenas na região elástica do material, vigas flexionadas podem atuar como molas em alguns casos. Seja, por exemplo, a viga em balanço do tópico anterior.
Fig 01Para considerar apenas o deslocamento da força aplicada na extremidade, considera-se x = L na igualdade #A.1# do tópico anterior:
y = (F / EJ) (LL2/2 − L3/6) = L3 F / (3 E J).
Ou F(y) = (3 E J / L3) y #A.1#.
Para uma mesma viga, os valores E, J e L são constantes. Assim, essa igualdade é a característica de uma mola, ou seja, força proporcional ao deslocamento
F(y) = k y, onde k = 3 E J / L3 #A.2#.
Naturalmente, deve valer apenas para pequenos deslocamentos e o peso próprio da viga deve ser desprezível.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais V-90
Índice do grupo | Página anterior | Próxima página |
Vigas de igual resistência à flexão - Introdução |
Retângulos de altura variável - carga concentrada | Retângulos de largura variável -

carga concentrada | Retângulos de altura variável em dois lados - carga concentrada |
Retângulos de altura variável - carga distribuída | Retângulos de largura variável -
carga distribuída | Retângulos de altura variável - carga distribuída e viga em dois
apoios | Coluna de igual resistência |
Vigas de igual resistência à flexão - Introdução Topo | Fim
A Figura 01 é um exemplo da página anterior, isto é, linha elástica e diagrama de momento de flexão para uma viga em balanço carregada na extremidade.
Notar que o momento de flexão é, em valores absolutos, máximo na extremidade esquerda e decresce até zero na direita.
Fig 01Se a seção transversal da viga é constante, ela deve ser dimensionada para o esforço máximo na extremidade esquerda e, no restante da viga, ela irá trabalhar com folga, isto é, estará superdimensionada.
Conforme relação básica, a tensão devido à flexão é dada por σ = M / W, onde M é o momento de flexão e W, o módulo de resistência (J/e).
Supondo o trabalho com a tensão admissível do material e considerando que o momento varia com a posição, usam-se os símbolos σadm e M(x) respectivamente.
Se se deseja maximizar o aproveitamento de material, cada seção da viga deve suportar a tensão admissível e, portanto, o módulo de resistência W deve variar com a posição, W(x), de forma que
σadm = M(x) / W(x) = const.
Nessa igualdade, em princípio, são conhecidos σadm (depende do material) e M(x) (depende do carregamento). Desde que W(x) só depende das características geométricas da seção, é fácil concluir que a área da mesma deve variar para manter a igualdade constante.
A formulação matemática é relativamente fácil e aqui não é dado exemplo. Basta escolher um formato do perfil e da viga e indicar parâmetros fixos e variáveis (exemplo: retângulo com largura fixa e altura variável, etc). A tabela do tópico seguinte dá os resultados para alguns arranjos comuns.
Em muitos casos práticos, por questões de custo, facilidade de montagem, funcionalidade,

etc, essa alternativa não é usada. Afinal, os perfis precisam ser "fabricados" para cada carregamento. Mas pode ser vantajosa em alguns casos específicos, em especial para vigas em balanço.
Alguns exemplos usuais Topo | Fim
Observações:
a) Reafirmando condições da página inicial e em outras deste site, os melhores cuidados foram procurados na elaboração desta tabela. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
b) fmax significa flecha máxima.
c) Onde não implícita, é usado asterisco (*) para indicar multiplicação. Barra (/) indica divisão.
d) Os dados informados são teóricos, considerando somente o momento de flexão. Portanto, a seção mínima da viga deve suportar o cisalhamento que existir conforme diagrama de esforços.
Formato Descrição Seção maior
Função y Outros
Retângulos de altura variável - carga concentrada
(início)
h2
=(6 F L)
/(b σadm)
y2
=(6 F x)
/(b σadm)
fmax
=(8F / bE)*
(L/h)3
Retângulos de largura variável - carga concentrada
(início)
b=
(6 F L)/
(h2
σadm)
y=
(6 F x)/
(h2 σadm)
fmax
=(6F / bE)*
(L/h)3
Retângulos de altura variável em dois lados - carga concentrada
(início)
h2
=(6 F L)
/(b σadm)
y2
=(6 F x)
/(b σadm)
fmax
=(8F / bE)*
(L/h)3

Retângulos de altura variável - carga distribuída
(início)
h2
=(3 q L2)
/(b σadm)
y=
(h x) / L
fmax
=(3qL / bE)*
(L/h)3
Retângulos de largura variável - carga distribuída
(início)
b=
(3 q L2)/
(h2
σadm)
y=
b x2 / L2
fmax
=(3qL / bE)*
(L/h)3
Retângulos de altura variável - carga distribuída e viga em dois
apoios(início)
h2
=(3 q L2)
/(4 b σadm)
y2/h2
=1 −
x2/(L/2)2
fmax
=(3qL / 16bE)
*(L/h)3
Coluna de igual resistência Topo | Fim
Na Figura 01, uma coluna sofre um esforço de compressão de uma carga externa F. Considerando o peso próprio, é fácil concluir que a seção transversal deve aumentar de cima para baixo, se se deseja manter a tensão de compressão constante, ou seja, uma resistência constante à compressão. É suposto que a coluna é feita de um material homogêneo de massa específica μ.
Considera-se o ponto de aplicação de F a origem da coordenada y. Assim, a área da seção transversal é uma função S(y), que deve ser encontrada para manter a tensão constante na coluna.
Para a seção de uma altura genérica y, o volume elementar é dado por dV(y) = S(y) dy.
Fig 01A força atuante na seção genérica é a soma do peso próprio acima da mesma com F e, dividida pela área, deve ser igual à tensão (constante) na coluna:

[μ g V(y) + F] / S(y) = σ = constante. Ou
μ g V(y) + F = σ S(y). Diferenciando ambos os lados,
μ g dV(y) = σ dS(y). Mas dV(y) = S(y) dy, conforme já visto.
Assim, μ g S(y) dy = σ dS(y) ou S(y) = (σ/μg) dS(y)/dy.
A solução genérica para a equação diferencial é
S(y) = k e (μg/σ) y. Ela pode ser confirmada com dS(y)/dy = k (μg/σ) e (μg/σ) y. Ou
(σ/μg) dS(y)/dy = (σ/μg) k (μg/σ) e (μg/σ) y = k e (μg/σ) y = S(y).
A constante k pode ser determinada pela condição: para y = 0, S = S0. Ou k = S0.
Mas em y = 0 só há a ação de F. Assim, σ = F / S0 ou k = F / σ. Substituindo na anterior e considerando a tensão admissível do material,
S(y) = (F / σadm) e (μg/σadm) y #A.1#.
Notar que essa fórmula fornece a área da seção e a variação das dimensões depende da geometria escolhida. Se for retangular com um lado fixo por exemplo, o outro varia com a função dividida pelo valor do lado fixo. Mas se for circular, o raio varia com a raiz quadrada da função dividida por π.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VI-10
Índice do grupo | Página anterior | Próxima página |
Vigas de seção constante - Alguns exemplos típicos |
Biapoiada, carga concentrada no meio |Biapoiada, carga concentrada em posição
genérica |Biapoiada, carga distribuída uniforme |
Engastada apoiada, carga concentrada no meio |
Engastada apoiada, carga distribuída uniforme |
Em balanço, carga concentrada na extremidade |
Em balanço, carga distribuída uniforme |
Vigas de seção constante - Alguns exemplos típicos Topo | Fim
Este tópico contém apenas tabela com fórmulas dos principais parâmetros para cálculo de alguns arranjos comuns de carregamentos em vigas de seção constante. Oportunamente outros poderão ser incluídos.
Observações:

• Reafirmando condições da página inicial e em outras deste site, os melhores cuidados foram procurados na elaboração desta tabela. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
• Onde não implícita, é usado asterisco (*) para indicar multiplicação. Barra (/) indica divisão.
• O valor da carga distribuída (q) deve ser dado em unidade de força por unidade de comprimento (exemplo: newton por metro).
Formato Descrição Mom max Flecha f Reações
Biapoiada, carga
concentrada no meio(início)
F L / 4(F L3)
/(48 E J)
RA = F/2RB = F/2MA = 0MB = 0
y = [F L3 / (16 E J)] (x/L) [1 - (4/3) (x/L)2] p/ x ≤ L/2
Biapoiada, carga
concentrada em posição
genérica(início)
(F a b) / L(F a2 b2)
/(3 E J L)
RA = Fb/LRB = Fa/L
MA = 0MB = 0
y = [FL3/(6EJ)] (a/L) (b/L)2 (x/L) [1 + L/b - x2/ab]y' = [FL3/(6EJ)] (b/L) (a/L)2 (x'/L) [1 + L/a - x'2/ab]
Deve-se ter x ≤ a e x' ≤ b.
Biapoiada, carga
distribuída uniforme(início)
q L2 / 8(5 q L4)
/(384 E J)
RA = qL/2RB = qL/2
MA = 0MB = 0
y = [5FL3/(384 EJ)] [1 - 4(x/L)2] [1 - (4/5)(x/L)2]
Engastada apoiada, carga concentrada
no meio(início)
3 F L / 16(7 F L3)
/(768 E J)
RA = 11 F/16RB = 5 F/16
MA = 3 F L/16MB = 0
Engastada apoiada, carga
distribuída uniforme(início)
q L2 / 8(q L4)
/(185 E J)
RA = 5 qL/8RB = 3 qL/8MA = qL2/8
MB = 0
Em balanço, carga
concentrada na
extremidade(início)
F L F L3 / (3 E J)RA = F
MA = F L

Em balanço, carga
distribuída uniforme(início)
q L2 / 2 q L4 / (8 E J) RA = q LMA = q L2/2
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VI-20
Índice do grupo | Página anterior | Próxima página |
Tabelas de perfis comerciais - Introdução |Perfis I laminados |Perfis U laminados |
Tabelas de perfis comerciais - Introdução Topo | Fim
Esta página contém dados dimensionais de alguns perfilados de aço comerciais, conforme tabelas encontradas em literatura técnica e outras fontes e muitas vezes qualificadas como "padrão americano". Isso não significa que é o padrão atualmente produzido no Brasil. Não foi verificado se estão de acordo com normas ABNT. Consultar os fabricantes ou as próprias normas em caso de dúvida.
As propriedades simbolizadas por J, W e r, seguidas do eixo (x ou y) são, respectivamente, momento de inércia, momento ou módulo de resistência e raio de giração (ou raio de inércia) em relação ao eixo indicado.
Reafirmando condições da página inicial e em outras deste site, os melhores cuidados foram procurados na elaboração das tabelas. Entretanto, não há quaisquer garantias e/ou responsabilidades pelo seu uso. Dados para aplicações críticas devem sempre ser verificados em mais de uma fonte.
Perfis I laminados Topo | Fim
b - largura da mesah - altura
ta - espessura da almatm - espessura média da mesa
G - centro de gravidade da seção
Tam nom
kg/m
S (cm2)
ta
(mm)h
(mm)b
(mm)tm
(mm)Jx
(cm4)Jy
(cm4)Wx
(cm3)Wy
(cm3)rx
(cm)ry
(cm)

3"8,45 10,8 4,32 76,2 59,2 6,6 105,1 18,9 27,6 6,41 3,12 1,339,68 12,3 6,38 76,2 61,2 6,6 113 21,3 29,6 6,95 3,02 1,3111,2 14,2 8,86 76,2 63,7 6,6 122 24,4 32,0 7,67 2,93 1,31
4"
11,4 14,5 4,83 101,6 67,6 7,4 252 31,7 49,7 9,37 4,17 1,4812,7 16,1 6,43 101,6 69,2 7,4 266 34,3 52,4 9,91 4,06 1,4614,1 18,0 8,28 101,6 71,0 7,4 283 37,6 55,6 10,6 3,96 1,4515,6 19,9 10,20 101,6 72,9 7,4 299 41,2 58,9 11,3 3,87 1,44
5"14,8 18,8 5,33 127,0 76,2 8,3 511 50,2 80,4 13,2 5,21 1,6318,2 23,2 8,81 127,0 79,7 8,3 570 58,6 89,8 14,7 4,95 1,5922,0 28,0 12,55 127,0 83,4 8,3 634 69,1 99,8 16,6 4,76 1,57
6"18,5 23,6 5,84 152,4 84,6 9,1 919 75,7 120,6 17,9 6,24 1,7922,0 28,0 8,71 152,4 87,5 9,1 1003 84,9 131,7 19,4 5,99 1,7425,7 32,7 11,80 152,4 90,6 9,1 1095 96,2 143,7 21,2 5,79 1,72
8"
27,3 34,8 6,86 203,2 101,6 10,8 2400 155 236 30,5 8,30 2,1130,5 38,9 8,86 203,2 103,6 10,8 2540 166 250 32,0 8,08 2,0734,3 43,7 11,20 203,2 105,9 10,8 2700 179 266 33,9 7,86 2,0338,0 48,3 13,51 203,2 108,3 10,8 2860 194 282 35,8 7,69 2,00
10"
37,7 48,1 7,9 254,0 118,4 12,5 5140 282 405 47,7 10,30 2,4244,7 56,9 11,4 254,0 121,8 12,5 5610 312 442 51,3 9,93 2,3452,1 66,4 15,1 254,0 125,6 12,5 6120 348 482 55,4 9,60 2,2959,6 75,9 18,8 254,0 129,3 12,5 6630 389 522 60,1 9,35 2,26
12"
60,6 77,3 11,7 304,8 133,4 16,7 11330 563 743 84,5 12,1 2,7067,0 85,4 14,4 304,8 136,0 16,7 11960 603 785 88,7 11,8 2,6674,4 94,8 17,4 304,8 139,1 16,7 12690 654 833 94,0 11,6 2,6381,9 104,3 20,6 304,8 142,2 16,7 13430 709 881 99,7 11,3 2,61
Tam nom
kg/m
S (cm2)
ta
(mm)h
(mm)b
(mm)tm
(mm)Jx
(cm4)Jy
(cm4)Wx
(cm3)Wy
(cm3)rx
(cm)ry
(cm)
Perfis U laminados Topo | Fim
b - largura da mesah - altura
ta - espessura da almatm - espessura média da mesa
G - centro de gravidade da seção
Tam nom
kg/m
S (cm2)
ta
(mm)h
(mm)b
(mm)xG
(cm)Jx
(cm4)Jy
(cm4)Wx
(cm3)Wy
(cm3)rx
(cm)ry
(cm)
3"6,11 7,78 4,32 76,2 35,8 1,11 68,9 8,2 18,1 3,32 2,98 1,037,44 9,48 6,55 76,2 38,0 1,11 77,2 10,3 20,3 3,82 2,85 1,048,93 11,4 9,04 76,2 40,5 1,16 86,3 12,7 22,7 4,39 2,75 1,06
4"7,95 10,1 4,57 101,6 40,1 1,16 159,5 13,1 31,4 4,61 3,97 1,149,30 11,9 6,27 101,6 41,8 1,15 174,4 15,5 34,3 5,10 3,84 1,1410,8 13,7 8,13 101,6 43,7 1,17 190,6 18,0 37,5 5,61 3,73 1,15
6" 12,2 15,5 5,08 152,4 48,8 1,30 546 28,8 71,7 8,06 5,94 1,3615,6 19,9 7,98 152,4 51,7 1,27 632 36,0 82,9 9,24 5,63 1,34

19,4 24,7 11,1 152,4 54,8 1,31 724 43,9 95,0 10,5 5,42 1,3323,1 29,4 14,2 152,4 57,9 1,38 815 52,4 07,0 11,9 5,27 1,33
8"
17,1 21,8 5,59 203,2 57,4 1,45 1356 54,9 133,4 12,8 7,89 1,5920,5 26,1 7,70 203,2 59,5 1,41 1503 63,6 147,9 14,0 7,60 1,5624,2 30,8 10,0 203,2 61,8 1,40 1667 72,9 164,0 15,3 7,35 1,5427,9 35,6 12,4 203,2 64,2 1,44 1830 82,5 180,1 16,6 7,17 1,5231,6 40,3 14,7 203,2 66,5 1,49 1990 92,6 196,2 17,9 7,03 1,52
10"
22,7 29,0 6,10 254,0 66,0 1,61 2800 95,1 221 19,0 9,84 1,8129,8 37,9 9,63 254,0 69,6 1,54 3290 17,0 259 21,6 9,31 1,7637,2 47,4 13,4 254,0 73,3 1,57 3800 39,7 299 24,3 8,95 1,7244,7 56,9 17,1 254,0 77,0 1,65 4310 64,2 339 27,1 8,70 1,7052,1 66,4 20,8 254,0 80,8 1,76 4820 91,7 379 30,4 8,52 1,70
12"
30,7 39,1 7,11 304,8 74,7 1,77 5370 161,1 352 28,3 11,7 2,0337,2 47,4 9,83 304,8 77,4 1,71 6010 186,1 394 30,9 11,3 1,9844,7 56,9 13,0 304,8 80,5 1,71 6750 214,0 443 33,7 10,9 1,9452,1 66,4 16,1 304,8 83,6 1,76 7480 242,0 491 36,7 10,6 1,9159,6 75,9 19,2 304,8 86,7 1,83 8210 273,0 539 39,8 10,4 1,90
15"
50,4 64,2 10,2 381,0 86,4 2,00 13100 338 688 51,0 14,3 2,3052,1 66,4 10,7 381,0 86,9 1,99 13360 347 701 51,8 14,2 2,2959,5 75,8 13,2 381,0 89,4 1,98 14510 387 762 55,2 13,8 2,2567,0 85,3 15,7 381,0 91,9 1,99 15650 421 822 58,5 13,5 2,2274,4 94,8 18,2 381,0 94,4 2,03 16800 460 882 62,0 13,3 2,2081,9 104,3 20,7 381,0 96,9 2,21 17950 498 942 66,5 13,1 2,18
Tam nom
kg/m
S (cm2)
ta
(mm)h
(mm)b
(mm)xG
(cm)Jx
(cm4)Jy
(cm4)Wx
(cm3)Wy
(cm3)rx
(cm)ry
(cm)
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VI-21
Índice do grupo | Página anterior | Próxima página |
Esta página é continuação da anterior.
Perfis L (cantoneira) de abas iguais |Perfis H laminados |Trilhos ferroviários |
Perfil L (cantoneira) de abas iguais Topo | Fim
Os eixos x e y não têm os maiores e menores momentos de inércia, mas representam a direção do carregamento mais comum na prática. Os momentos extremos (maior e menor) estão nos eixos x' e y' (eixos
principais de inércia).
G - centro de gravidade da seção.

Devido à igualdade das abas, ocorrem Jy = Jx, Wy = Wx, ry = rx e yg = xg.
Tam nom kg/m S (cm2) t (mm) h (mm) xg (cm) Jx (cm4) Wx (cm3) rx (cm)5/8" 0,75 0,96 3,2 15,9 0,51 0,20 0,18 0,453/4" 0,90 1,16 3,2 19,1 0,58 0,37 0,28 0,587/8" 1,05 1,35 3,2 22,2 0,66 0,58 0,37 0,66
1"1,15 1,48 3,2 25,4 0,76 0,83 0,49 0,761,73 2,19 4,8 25,4 0,81 1,24 0,65 0,762,21 2,83 6,4 25,4 0,86 1,66 0,98 0,73
1 1/4"1,50 1,93 3,2 31,8 0,91 1,66 0,81 0,962,16 2,77 4,8 31,8 0,96 2,49 1,14 0,962,82 3,61 6,4 31,8 1,01 3,32 1,47 0,93
1 1/2"
1,81 2,32 3,2 38,1 1,06 3,32 1,14 1,192,67 3,42 4,8 38,1 1,11 4,57 1,63 1,163,47 4.45 6,4 38,1 1,19 5,82 2,13 1,144,23 5,42 7,9 38,1 1,24 6,65 4,53 1,11
1 3/4"
2,11 2,70 3,2 44,5 1,21 5,41 1,63 1,393,11 3,99 4,8 44,5 1,29 7,49 2,29 1,374,07 5,22 6,4 44,5 1,34 9,57 3,11 1,345,03 6,45 7,9 44,5 1,39 11,23 3,77 1,325,93 7,61 9,5 44,5 1,45 12,90 4,26 1,29
2"
2,41 3,09 3,2 50,8 1,39 7,90 2,13 1,603,57 4,58 4,8 50,8 1,44 11,23 3,11 1,574,73 6,06 6,4 50,8 1,49 14,56 4,09 1,545,78 7,41 7,9 50,8 1,54 17,48 4,91 1,526,84 8,77 9,5 50,8 1,62 19,97 5,73 1,49
Tam nom kg/m S (cm2) t (mm) h (mm) xg (cm) Jx (cm4) Wx (cm3) rx (cm)
2 1/2"5,98 7,67 6,4 63,5 1,83 29 6,4 1,967,39 9,48 7,9 63,5 1,88 35 7,9 1,938,70 11,16 9,5 63,5 1,93 41 9,3 1,91
3"8,95 11,48 7,9 76,2 2,21 62 11,6 2,34
10,62 13,61 9,5 76,2 2,26 75 13,6 2,3113,85 17,74 12,7 76,2 2,36 91 18,0 2,29
4"14,4 18,45 9,5 101,6 2,90 183 24,6 3,1218,9 24,19 12,7 101,6 3,00 233 32,8 3,1023,2 29,73 15,9 101,6 3,12 279 39,4 3,05
5"
18,17 23,29 9,5 127,0 3,53 362 39,5 3,9423,90 30,64 12,7 127,0 3,63 470 52,5 3,9129,48 37,80 15,9 127,0 3,76 566 64,0 3,8634,91 44,76 19,1 127,0 3,86 653 73,8 3,81
6"
21,93 28,12 9,5 152,4 4,17 641 57,4 4,7828,86 37,00 12,7 152,4 4,27 828 75,4 4,7235,77 45,86 15,9 152,4 4,39 1007 93,5 4,6742,46 54,44 19,1 152,4 4,52 1173 109,9 4,6548,95 62,76 22,2 152,4 4,62 1327 124,0 4,60
8" 38,99 49,99 12,7 203,2 5,56 2022 137,8 6,3848,34 61,98 15,9 203,2 5,66 2471 168,9 6,3257,56 73,79 19,1 203,2 5,79 2899 200,1 6,27

66,56 85,33 22,2 203,2 5,89 3311 229,6 6,2275,46 96,75 25,4 203,2 6,02 3702 259,1 6,20
Perfis H laminados Topo | Fim
b - largura da mesah - altura
ta - espessura da almatm - espessura média da mesa
G - centro de gravidade da seção
Tam nom
kg/m
S (cm2)
ta
(mm)h
(mm)b
(mm)tm
(mm)Jx
(cm4)Jy
(cm4)Wx
(cm3)Wy
(cm3)rx
(cm)ry
(cm)4" 20,5 26,1 7,95 101,6 101,6 - 449 146 88 29 4,15 2,385" 27,9 35,6 7,95 127,0 127,0 - 997 321 157 51 5,29 3,01
6"37,1 47,3 7,95 152,4 150,8 - 1958 621 257 82 6,43 3,6340,9 52,1 11,13 152,4 154,0 - 2050 664 269 87 6,27 3,57
Trilhos ferroviários Topo | Fim
Com o uso, os trilhos se desgastam, reduzindo a altura h. Uma aproximação para o módulo de resistência Wx de trilhos desgastados é:
Wx ≈ 0,06 h3 (h em cm e resultado em cm3)
Tam nom
kg/m h (mm) b (mm) c1 (mm) c2 (mm) t (mm) e1 (mm) Jx (cm4) Wx (cm4)
T 45 44,7 142,9 130,1 65,1 - 14,3 - 1610 206T 57 56,9 168,3 139,7 69,1 - 15,9 - 2730 295T 68 67,6 185,7 152,4 74,6 - 17,5 - 3949 391
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx

Resistência dos materiais VII-10
Índice do grupo | Página anterior | Próxima página |
Exemplo de torção simples |Exemplo de flexão - Método da superposição |
Exemplo de torção simples Topo | Fim
Na Figura 01, um eixo de seção circular de comprimento L e diâmetro D transmite um torque T para uma polia na outra extremidade. Apoios (mancais) não são indicados porque não se consideram os esforços de flexão. Apenas os de torção.
Supondo o torque T equivalente à transmissão de uma potência de 4 kW com uma rotação de 1200 rpm e comprimento L de 1,2 m, determinar o diâmetro D, considerando o material aço com G = 78,5 GPa sob os seguintes critérios:
a) Tensão admissível de torção para o aço τadm = 70 MPa.
b) Ângulo de torção máximo φ = 0,25º por metro de comprimento.
Fig 01Notar que, além da tensão admissível, é especificado o máximo ângulo de torção por unidade de comprimento. Isso é comum no caso de eixos, pois uma deformação angular exagerada pode provocar problemas como vibrações.
Convertendo a rotação (ou velocidade angular) para unidades SI,
ω = 1200 rpm ≈ 125,7 rad/s.
Como pode ser visto em página anterior, a relação entre torque, potência e velocidade angular é
P = T ω. Assim, torque T = 4 000 W / (125,7 rad/s) ≈ 31,8 Nm.
Conforme já visto, para a torção vale T = τmax Jp / R.
O momento polar de inércia Jp para seção circular é π D4/32. Para dimensionamento, a tensão máxima τmax deve ser a tensão admissível do material. Portanto,
T = τadm (π D4/32) / (D/2) = τadm π D3 / 16.

D = [32 T / (π τadm)]1/3 = [16 31,8 Nm / (π 70 000 000 Pa)]1/3 ≈ 0,013 m.
Portanto, deve-se ter D ≥ 1,3 cm.
Para torção, o ângulo de torção dado por
φ = T L / (Jp G) = T L / [ (π D4/32) G ] = 32 T L / (π D4 G).
D4 = 32 T / [π G (φ/L)]. Neste caso, φ/L = 0,25º/m ≈ 0,00436 rad/m. Substituindo valores,
D4 = 32 31,8 Nm / (π 78,5 109 Pa 0,00436 rad/m) ou D ≈ 0,031.
Assim, deve-se ter D ≥ 3,1 cm. E esse critério define o dimensionamento, pois o valor é maior que o calculado com base na tensão admissível.
Exemplo de flexão - Método da superposição Topo | Fim
A Figura 01 (a) representa uma viga de uma plataforma. Na situação real, vigas de estruturas não são biapoiadas, mas sim engastadas. Mas a suposição pode ser válida e dá alguma margem de segurança.
A viga suporta uma carga distribuída uniforme q1 devido ao peso próprio, outra da mesma espécie q2 devido ao piso metálico da plataforma e uma carga concentrada F no centro devido à ação de um equipamento sobre a plataforma. Consideram-se os seguintes dados:
• comprimento L = 3,5 m.
• é usado perfil U laminado de aço, tamanho 6" x 12,2 kg/m. Assim, conforme tabelas anteriore, Jx = 546 cm4 e Wx = 71,7 cm3. Segundo valor usual para aços, o módulo de elasticidade é E = 206 GPa.
• a carga F é igual a 6900 N, q2 é 1400 N/m e q1 deve ser a carga do perfil anterior, isto é, q1 = 12,2 x 9,81 ≈ 120 N/m.
Verificar se o perfil está adequadamente dimensionado para a solicitação.
É claro que as cargas uniformemente distribuídas podem ser somadas. Portanto, o carregamento da Figura 01 (a) equivale ao (b), onde q = q1 + q2 = 1520 N/m.

Fig 01Para esse carregamento, poder-se-ia levantar matematicamente as curvas de esforços transversais e momentos conforme. Entretanto, a tarefa pode ser mais simples.
Em páginas anteriores, foram vistas as relações entre carregamentos q(x), esforços transversais Fc(x), momentos de flexão M(x) e linha elástica y(x):
dFc(x) / dx = - q(x).
dM(x) / dx = Fc(x).
d2y/dx2 = - M(x) / (E J).
São equações diferenciais lineares e, portanto, pode ser usado o método da superposição. Isso significa que o carregamento (b) da figura pode ser considerado a soma de dois carregamentos mais simples: (c), de uma carga distribuída uniforme e (d), de uma carga concentrada no meio.
Neste exemplo, a análise é ainda mais simples porque os pontos de máximo momento de flexão e máxima deformação são coincidentes (meio da viga). Se isso não ocorre, as curvas dos carregamentos devem ser somadas para obter os valores máximos.
Para os carregamentos (c) e (d), conforme fórmulas já dadas, os momentos máximos são:
M(c) = q L2 / 8 = 1520 N/m (3,5 m)2 / 8 = 2327,5 Nm.M(d) = F L / 4 = 6900 N 3,5 m / 4 = 6037,5 Nm.
Portanto, M = M(c) + M(d) = 8365 Nm.
Desde que o perfil adotado é simétrico em relação ao eixo considerado (x), usa-se igualdade do momento de resistência para a tensão de flexão
σ = M / W = 8365 Nm / 71,7 (10-2 m)3 ≈ 117 MPa.
As deformações máximas são obtidas por fórmulas já vistas:
y(c) = (5 q L4) / (384 E J) = 5 1520 N/m (3,5 m)4 / [384 206 109 Pa 546 (10-2 m)4].
y(c) ≈ 0,00264 m.

y(d) = (F L3) / (48 E J) = 6900 N (3,5 m)3 / [48 206 109 Pa 546 (10-2 m)4] ≈ 0,00548 m.
Portanto, y = y(c) + y(d) ≈ 0,00812 m.
Comentários
Considerando um aço estrutural com limite de escoamento de 240 MPa, a tensão máxima de flexão calculada (117 MPa) resulta em um coeficiente de segurança perto de 2. Pode ser insuficiente em casos de choques, redução de seção devido à corrosão, existência de furos na viga, soldas e outros.
A deformação máxima representa 1/431 do comprimento total da viga. Para a aplicação, normas indicam uma deformação máxima de 1/360. Portanto, dentro do limite. Consultar normas técnicas para mais dados sobre segurança. Não verificado quanto às tensões de cisalhamento.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VII-20
Índice do grupo | Página anterior | Próxima página |
Problemas hiperestáticos: Introdução e exemplo |
Viga horizontal com três apoios |
Problemas hiperestáticos: Introdução e exemplo Topo | Fim
Carregamentos hiperestáticos ou estaticamente indeterminados ocorrem quando as equações fundamentais da estática, ∑F = 0 (ou ∑Fx = 0 e ∑Fy = 0) e ∑M = 0, não são suficientes para determinar os esforços atuantes.
Fig 01Um exemplo para compressão, é dado pela Figura 01: uma barra vertical de seção transversal constante S, da qual se despreza o peso próprio, engastada em ambas as extremidades.

Se o engaste é feito sem qualquer deformação prévia, não há naturalmente esforços atuantes, como em (a) da figura. Se uma força vertical para baixo F é aplicada em um determinado ponto C conforme (b), é fácil concluir que a parte superior estará sob tração e a inferior sob compressão. E os esforços atuantes serão como em (c) da figura.
Se aplicadas as equações da estática,
A + B = F (considerando apenas os módulos). Desde que somente F é conhecido, não é possível determinar os esforços A e B com apenas uma equação. Notar que é inútil, neste caso, aplicar a soma dos momentos, mesmo em relação a um ponto fora do alinhamento das forças. O resultado será a mesma equação.
Para a solução - e isso sempre ocorre com problemas hiperestáticos - precisa-se considerar uma condição externa de deslocamento de forma a obter uma segunda equação. A geometria do caso mostra que o ponto de aplicação da força se desloca de uma distância d, conforme indicado na figura. Se consideradas separadamente as partes tracionada e comprimida de acordo com (d) e (e) da figura, conclui-se que elas irão sofrer a mesma deformação d.
De acordo com a lei de Hooke, σ = E ε. Ou F / S = E ΔL / L. Isolando ΔL,
ΔL = F L / (E S).
Neste caso, ΔL = d = B b / (E S) = A a / (E S) ou a A = b B. Se substituídos na equação anterior, chega-se aos valores das reações A e B em termos de parâmetros supostamente conhecidos:
A = F b / (a + b) e B = F a / (a + b) #A.1#.
Viga horizontal com três apoios Topo | Fim
A Figura 01 (a) ilustra uma viga horizontal de seção transversal constante com três apoios e submetida às forças externas conhecidas F e H em cada vão. As reações dos apoios são A, C e B. As distâncias horizontais são todas conhecidas, valendo naturalmente a + b = α + β = m+n = L.
Desde que só há forças verticais, de ∑Fy = 0 tem-se em módulo
A + C + B = F + H.
De ∑M = 0 em relação a A, por exemplo, tem-se em módulo
mC + LB = aF + αH.
Há portanto três valores desconhecidos (A, C, B) e duas equações, caracterizando um carregamento hiperestático. Pode-se resolver o problema considerando o fato de ser nulo o valor da linha elástica em C.

Fig 01Usando o método da superposição, considera-se a situação (a) igual à soma dos carregamentos listados a seguir.
(b) só com atuação da força F, que produz um deslocamento yF em C.
(c) só com atuação da força H, que produz um deslocamento yH em C.
(d) só com atuação da força de reação C, que produz um deslocamento yC em C.
Se em módulos yC = yF + yH, conclui-se que o deslocamento em C é nulo. Assim, a situação equivale ao carregamento (a) e os valores de todas as reações dos apoios podem ser determinados.
Esses três carregamentos simples são do mesmo tipo, isto é, viga biapoiada com carga concentrada em posição genérica. As fórmulas já foram dadas em páginas anteriores, Assim,
(b) yF é a flecha para x = m.
yF = [FL3/(6EJ)] (b/L) (a/L)2 (n/L) [1 + L/a - n2/ab].
(c) yH é a flecha para x = m.
yH = [HL3/(6EJ)] (α/L) (β/L)2 (m/L) [1 + L/β - m2/αβ].
(d) yC é a flecha no ponto de aplicação da força.
yC = (C m2 n2) / (3 E J L).
Para obter um fator comum com as anteriores, multiplicam-se ambos por 2L3
yC = 2 [CL3/(6EJ)] (mn/L2)2.
Voltando à igualdade anterior, yC = yF + yH, faz-se a substituição
2 [CL3/(6EJ)] (mn/L2)2 =[FL3/(6EJ)] (b/L) (a/L)2 (n/L) [1 + L/a - n2/ab] + [HL3/(6EJ)] (α/L) (β/L)2 (m/L) [1 + L/β - m2/αβ].
Resultando após simplificação:

C = [F b a2 / (2 n m2)] [1 + L/a - n2/ab] + [H α β2 / (2 m n2)] [1 + L/β - m2/αβ] #A.1#.
Com essa fórmula, a reação C é determinada e as demais (A e B) são obtidas das igualdades do início deste tópico.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais 07-30 : Esforços compostos
Índice do grupo | Página anterior | Próxima página |
Flexão com cisalhamento |Torção com flexão |
Índices
Ciência dos materiais
Eletricidade e eletromagnetismo
Eletrônica digitalEletrônica em
geralFluidos, calor, frio,
etcInformáticaMatemática
Mecânica teóricaResistência dos
materiaisTemas técnicos
diversosTemas diversos
Termodinâmica / transmissão de
calor
Flexão com cisalhamento | Topo pág | Fim pág |
Conforme já comentado, na maioria dos casos práticos, os esforços são, na realidade, composições de esforços simples. Entretanto, em muitos casos há predominância de um tipo e os demais podem ser desconsiderados.
Para vigas, conforme visto em páginas anteriores, os dimensionamentos foram baseados nas tensões devido à flexão, apesar da presença de tensões devido ao cisalhamento, que sempre aparecem com a flexão.
Ocorre que vigas têm, em geral, comprimentos muito superiores às dimensões das seções transversais. Portanto, é lógico supor que isso tem relação com as diferenças relativas das tensões.
Seja uma viga de seção circular engastada em uma extremidade e submetida a uma carga concentrada na outra conforme Figura 01 (obs: o uso de seção circular não é recomendado na prática para este carregamento. Perfis tipo I ou U são mais eficientes. A suposição serve apenas para facilitar o cálculo).
A tensão máxima de tração ocorre em a da figura (a máxima de compressão, no lado oposto) e, de acordo com fórmula já vista, é dada por:

Figura 01
σmax = M / W #A.1#
O módulo de resistência W para seção circular é
W = π D3 / 32 #A.2#
O momento máximo, localizado na extremidade engastada, é
M = F L #A.3#
Substituindo em #A.1#, obtém-se a tensão máxima de flexão:
#A.4#
O esforço de cisalhamento é F ao longo da viga e a tensão média é:
τmed = F / (π D2 / 4) = 4 F / (π D2) #B.1#
De acordo com a fórmula já vista para seção circular:
τmax = (4/3) τmed #B.2#
Substituindo,
#B.3#
Portanto,
#C.1#
Essa relação indica claramente a predominância da flexão pois, no caso de vigas, os comprimentos são grandes em relação às dimensões das seções transversais. Se a barra

for curta em relação ao diâmetro, a participação do esforço de cisalhamento será maior.
Torção com flexão | Topo pág | Fim pág |
Seja, conforme Figura 01, uma barra de seção circular, fixa em uma extremidade e, na outra, submetida a um torque T e uma força vertical F. É uma situação típica de um eixo.
Em um ponto A, na parte superior e distante a da origem, deve haver, de forma genérica, as tensões normais σx e σy e as tensões transversais τxy = τyx. Conforme relações já vistas para o estado duplo de tensões, os valores máximos (uma das tensões principais) são:
#A.1#
#A.2#
Em A, ocorre tensão normal apenas ao longo de X, devido â flexão da força F. E há apenas a tensão transversal devido à torção. Assim,
σ = σx
σy = 0τ = τxy
Substituindo nas relações anteriores,
Figura 01
#B.1#
#B.2#

O módulo de resistência da seção circular é
W = π D3 / 32 #C.1#
O momento fletor no ponto A é
M = F (L − a) #C.2#
Portanto, #C.3#
O momento de resistência polar para a seção circular é:
Wp = π D3 / 16 #D.1#
Portanto, #D.2#
Substituindo em #B.1# e em #B.2#,
#E.1#
#E.2#
Essas são as tensões principais máximas em um ponto genérico A na parte superior conforme figura. O ângulo φ da tensão normal principal é dado por:
#E.3#
Substituindo os valores e simplificando,
#E.4#
Para o ponto lateral B da figura, não há ação da flexão porque ele está na linha neutra. Assim, σx = σy = 0, significando 2φ = 90º. O eixo da tensão principal está inclinado de
45º em relação a X.

Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VII-36
Índice do grupo | Página anterior | Próxima página |
Flexão com tração |
Flexão com tração Topo | Fim
A Figura 01 (a) dá um arranjo que combina os dois esforços: uma barra vertical de seção retangular engastada no topo tem uma chapa soldada na lateral menor. Uma força F atua nessa placa na direção dada. Os pesos próprios das partes são desprezados.
Em (b) da figura, é representado um corte no plano vertical de uma porção da barra secionada um pouco acima da chapa lateral. A análise pode ser facilitada com a suposição da ação de um par de forças opostas, −F e +F, de forma similar à do tópico anterior (a resultante dessas forças é nula e, portanto, não altera o resultado).
Conclui-se então que a barra está submetida a um momento de flexão do conjugado −FF (valor F d) e a um esforço de tração dado por +F.
Fig 01O esforço de tração produz uma tensão normal, supostamente uniforme, dada por
σtrac = F / S, onde S é a área da seção transversal. Ver (c) da figura.
Conforme fórmulas básicas, a tensão (tração ou compressão) devido à flexão é dada por
σflex = M e / J, onde M é o momento (Fd neste caso), e é a distância do ponto considerado até a linha neutra (neste caso, coincide com o eixo de simetria devido à simetria da seção) e J é o momento de inércia da seção em relação à linha neutra).

Considerando b a largura do retângulo da seção, pode-se dizer que e varia de −h/2 (lado da compressão) até +h/2 (lado da tração).
Nesses pontos ocorrem os valores máximos de compressão e tração, conforme (d) da Figura 01.
Desde que as tensões atuam no mesmo alinhamento, o valor total é a soma aritmética das duas:
σtot = σtrac + σflex = F/S + F d e / J #A.1# (substituindo o valor do momento por F d).
Notar que a variação da tensão ao longo da seção ainda é linear, mas o ponto de tensão nula deixa de coincidir com a linha neutra. Ver (e) da figura.
Exemplo numérico: seja uma barra retangular de aço, com seção 100 x 25 mm e uma chapa lateral de 10 mm de espessura e largura 25 mm, conforme dados da figura. Verificar as tensões máximas de tração e compressão para uma força F igual a 30 000 N.
Em primeiro lugar, listam-se os dados, convertendo-os para unidades básicas:
h = 100 mm = 1 10−1 m.b = 25 mm = 2,5 10−2 m.S = b h = 2,5 10−3 m2.J = b h3 / 12 = 2,5 10−2 1 10−3 / 12 ≈ 2,1 10−6 m4.d = 50 mm + 10 mm / 2 = 55 mm = 5,5 10−2 m.F = 30 000 N.e2 (compressão) = −100 mm / 2 = − 5 10−2 m.e1 (tração) = 100 mm / 2 = 5 10−2 m.
Substituindo em #A.1#,
σmax_trac = 30 000/(2,5 10−3) + 30 000 5,5 10−2 5 10−2 / 2,1 10−6 ≈ 12 MPa + 39 MPa ≈ 51 MPa.
σMax_compr ≈ 12 − 39 ≈ −27 MPa.
Os valores são para a barra. Para a chapa lateral (só tração),
σ = 30 000 / (2,5 10−2 1 10−2) = 120 MPa.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VII-40
Índice do grupo | Página anterior | Próxima página |
Flexão combinada com compressão |Núcleo central de inércia |
Núcleos centrais de inércia para algumas seções |

Flexão combinada com compressão Topo | Fim
A Figura 01 (a) representa uma barra curta de seção retangular, engastada na base e submetida a uma força de compressão F deslocada d do centro de gravidade da seção.
O comprimento da barra é supostamente pequeno porque, caso contrário, pode haver deformação por flambagem (perda de estabilidade de barras esbeltas sujeitas a compressão), cujo estudo não faz parte deste tópico.
Fig 01O procedimento de cálculo é basicamente o mesmo da situação dada na página anterior e, por isso, apenas os resultados são apresentado. Evidentemente, os sentidos das tensões são invertidos em função do esforço de compressão.
O resultado é
σtot = σcomp + σflex = F/S + F d e / J #A.1#.
Exemplo numérico: sejam os seguintes valores.
F = −30 000 N (valor negativo porque é compressão).h = 100 mm (1 10−1 m).b = 25 mm (2,5 10−2 m)d = 30 mm (3 10−2 m).
Então,
S = b h = 2,5 10−3 m2.J = b h3 / 12 = 2,5 10−2 1 10−3 / 12 ≈ 2,1 10−6 m4.
e2 (tração) = −100 mm / 2 = − 5 10−2 m.e1 (compressão) = 100 mm / 2 = 5 10−2 m.
σmax_comp = −30 000/(2,5 10−3) − 30 000 3 10−2 5 10−2/2,1 10−6 ≈ −12 MPa − 21,4 MPa ≈ −33,4 MPa.
σmax_trac = −12 + 21,4 = 9,4 MPa (usando a mesma fórmula anterior, mas com e = e2 = − 5 10−2 m).
Núcleo central de inércia Topo | Fim
A equação #A.1# do tópico anterior permite concluir que, para uma mesma força de compressão F, a tensão máxima de tração diminui com a redução da distância d (do ponto de aplicação da força até o centro de gravidade da seção).

Fig 01A Figura 01 ao lado dá uma visão gráfica: (b) é a mesma força de (a), mas com uma distância d menor que de (a).
Pode-se concluir que, à medida que a distância d é reduzida, a tensão máxima de tração diminui, podendo chegar a zero e, reduzindo d ainda mais, tornar-se negativa, ou seja, é compressão e a barra não sofre esforço de tração. Em pequena escala, isso é mostrado na Figura 01 (b).
Notar que o mesmo processo ocorre de forma inversa para a flexão combinada com tração da página anterior, mas o caso em estudo (flexão com compressão) é particularmente útil para alguns materiais de construção, que pouco suportam a tração e, por isso, não devem trabalhar com esse esforço.
Também é possível deduzir que, na seção transversal da barra, deve existir, para o ponto de aplicação da força, uma região cuja borda representa a transição de um estado de compressão + tração para um estado de somente compressão. Essa região é denominada núcleo central de inércia.
Núcleos centrais de inércia para algumas seções Topo | Fim
Por enquanto, não é dada aqui a formulação matemática para o núcleo central de inércia. A tabela abaixo fornece os valores para algumas seções comuns.
Quadrado Retângulo Círculo Anel circularDn = D[1+(d/D)2]/4
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VIII-10
Índice do grupo | Página anterior | Próxima página |
Introdução - Falha por flambagem |Equação básica da flambagem elástica |

Introdução - Falha por flambagem Topo | Fim
Alguns tipos de esforços tendem a provocar instabilidades físicas nos elementos que os suportam. A Figura 01 (a) deste tópico indica uma barra reta, sem esforços externos atuantes.
Na realidade, o "reto" geométrico não existe na prática e pode-se considerar a barra ligeiramente curva, conforme representação, de forma exagerada, em (b) da mesma figura.
Se um esforço de tração é aplicado como em (c) da figura, a tendência é uma redução da curvatura, ou seja, uma aproximação com a reta ideal e, com o aumento da força, a falha ocorre devido ao escoamento (plastificação) ou à ruptura do material.
Fig 01Se a barra é comprimida como em (d) da figura, as forças atuantes tendem a aumentar a curvatura original. Isso não significa que qualquer valor da força de compressão provoca esse aumento. A prática e a teoria demonstram que existe um limite acima do qual a essa falha, denominada flambagem, ocorre.
Esse limite depende do material e das características geométricas da barra.
Em outras palavras, pode-se dizer que a flambagem de uma barra comprimida é a sua perda de estabilidade pela aplicação de um esforço de compressão acima de um valor crítico. Essa instabilidade ocorre devido a pequenas curvaturas conforme acima e também a outros desvios, como assimetrias, excentricidades, desalinhamentos, etc.
É facilmente perceptível que a flambagem fica mais crítica com o aumento da esbeltez da barra, isto é, o aumento do seu comprimento em relação à área da seção transversal.
Em muitos casos as tensões que provocam a flambagem são inferiores às tensões máximas de compressão dos materiais. Assim, a sua análise é importante no caso de elementos

esbeltos de máquinas e de estruturas. Para estas últimas, colunas são em geral as partes mais susceptíveis à flambagem.
Equação básica da flambagem elástica Topo | Fim
Conforme Figura 01, uma barra de seção transversal constante está sob flambagem provocada por um esforço de compressão F. Supõe-se que as tensões estão dentro do limite de elasticidade do material.
Se a barra é seccionada em um ponto genérico P(x,y), o momento atuante nesse ponto é M = F y.
Conforme visto em página anterior, a equação diferencial da linha elástica para uma barra sob ação de um momento é
(d2y/dx2) = − M / (E J). Substituindo o valor de M,
(d2y/dx2) = a2 y, onde a = √ (F / E J) #A.1#.
Aqui não é dado o desenvolvimento da solução dessa equação diferencial. Apenas o resultado é informado.
y = A cos ax + B sen ax.
Fig 01As constantes da solução (A e B, neste caso) devem ser obtidas a partir de condições de contorno.
Para x=0, tem-se y=0. Assim, A = 0.
Para x igual à corda OA (=M), y=0. Portanto,
B sen (a M) = 0. Para essa igualdade, conclui-se que B não pode ser nulo porque A já é nulo.
Assim, deve-se ter sen (a M) = 0. Portanto, (a M) = π ou (a M / 2) = π/2.
Para x = M/2, y é a flecha máxima f. Ou y = f = B sen a M / 2. Mas visto que (a M / 2) = π/2. Portanto, B = f e o resultado fica
y = f sen ax, onde f é a flecha máxima e a = √ (F / E J) #B.1#.
Mas a solução ainda está incompleta, pois a flecha f não é previamente conhecida. A dimensão geométrica normalmente conhecida é o comprimento da barra L.
Para pequenas deformações pode-se usar a aproximação L/2 ≈ OB (ou AB). E, do triângulo retângulo OBC,
f2 = OB2 + (M/2)2 ≈ (L/2)2 + (M/2)2.

Já visto que (a M / 2) = π/2 e a = √ (F / E J). Portanto, (M/2)2 = π2 E J / (4 F).
Substituindo, f2 = L2/4 − π2 E J / (4 F). Rearranjando a igualdade,
f/L = (1/2) √ [1 − π2 E J / (F L2)]. Essa pode ser reescrita para
f/L = (1/2) √ (1 − K/F), onde K = π2 E J / L2 #C.1#.
O fator K, que tem a dimensão de força, é denominado força de flambagem de Euler. E pode-se comparar com a forca aplicada F:
• se F ≤ K, f/L é nulo ou imaginário, isto é, não há flambagem.
• se F > K, f/L é real, significando que a flambagem ocorre.
Portanto, K representa o limite para a flambagem elástica de uma barra comprimida.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VIII-20
Índice do grupo | Página anterior | Próxima página |
Comprimento de flambagem |Coeficiente de esbeltez |
Exemplo simples de cálculo |Outro exemplo de cálculo |
Comprimento de flambagem Topo | Fim
O desenvolvimento matemático do tópico anterior (Equação básica da flambagem elástica) pressupõe que as extremidades da barra são articuladas e só podem mover-se na direção do seu eixo. Essa é a situação padrão, indicada em (d) da Figura 01.
Fig 01Obs: na figura mencionada, as retas tracejadas verticais indicam a barra no estado inicial e as curvas contínuas indicam aproximações das deformações por flambagem

Para outras fixações, como (a), (b), (c), (e) e (f) da mesma figura, usam-se comprimentos de flambagem específicos.
A tabela abaixo dá os valores teóricos e práticos para cada uma das situações mencionadas.
Desde que os cálculos são baseados na força de Euler conforme tópico anterior, outras fixações devem ter seus comprimentos convertidos.
Tipo (a) (b) (c) (d) (e) (f)
Lfl teórico 0,5 L 0,7 L
1,0 L
1,0 L
2,0 L
2,0 L
Lfl prático 0,65 L
0,8 L
1,2 L
1,0 L
2,1 L
2,0 L
Exemplo: uma coluna de 3 metros de altura está fixada como em (f) da figura.
Então, ela é equivalente a uma coluna do tipo padrão (d), com comprimento 2,0 x 3 = 6 metros.
É importante lembrar que, em casos práticos (estruturas, máquinas), extremidades de colunas ou de barras comprimidas podem ter liberdade de movimento em determinadas direções e não ter em outras. Portanto, todas as hipóteses devem ser analisadas, dimensionando-se pela mais desfavorável.
Coeficiente de esbeltez Topo | Fim
Considerando-se o conceito de comprimento de flambagem, pode-se reescrever a igualdade da força de flambagem de Euler K, dado em #C.1# do tópico Equação básica da flambagem elástica:
K = π2 E J / Lfl2 #A.1#.
Se se deseja a tensão limite, os valores são divididos pela área da seção S
σfl = K/S = π2 E J / S Lfl2 = π2 E / [Lfl / √ (J/S)]2.
O valor Lfl / √ (J/S) é denominado coeficiente de esbeltez da barra. É comum o uso da letra grega lambda minúsculo para simbolizá-lo. Assim,
λ = Lfl / √ (J/S) #B.1#.
Fig 01A expressão √ (J/S) é o raio de giração ou raio de inércia (i) da seção. E, assim, o coeficiente de esbeltez pode ser dado por

λ = Lfl / i #B.2#.
Desde que i depende do momento de inércia J e que esse varia com a orientação do eixo de referência, deve-se usar, em geral, o menor valor de J, isto é, J2 (eixo principal com menor valor).
E a fórmula anterior da tensão pode ser escrita
σfl = π2 E /λ2 #C.1#.
Essa fórmula mostra que a tensão de flambagem depende apenas do módulo de elasticidade E (característica do material) e do coeficiente de esbeltez λ (característica geométrica da barra).
Para um mesmo material, E é constante e pode-se ter a tensão em função de λ. Por exemplo: para o aço, E = 206 GPa. Assim,
σfl (MPa) = π2 206 103 / λ2. Essa curva está representada na Figura 01. É denominada hipérbole de Euler para o material (aço, no caso).
Notar, entretanto, que a curva é limitada pela região de proporcionalidade (elástica) do material (hipótese assumida no desenvolvimento da equação básica).
Nesse caso do aço, para a tensão limite de proporcionalidade, σp = 226 MPa, há o coeficiente de esbeltez correspondente, λp ≈ 96. Esses valores estão indicados na figura. Para coeficientes de esbeltez menores, a fórmula não é válida, pois não há mais proporcionalidade entre tensão e deformação e/ou há deformações residuais decorrentes da plasticidade.
Exemplo simples de cálculo Topo | Fim
Uma plataforma metálica usa colunas de perfil comercial de aço tipo I 6", 18,5 kg/m. A altura das colunas é 3,30 m e a montagem é conforme (c) da Figura 01 do tópico Comprimento de flambagem. Verificar a carga máxima que cada coluna pode suportar sem flambar.
Características do perfil I 6" 18,5 kg/m: área S = 23,6 cm2 e raio de giração r = 1,79 cm (mínimo).
Conforme tabela do mesmo tópico, a montagem (c) tem comprimento de flambagem Lfl = 1,2 L = 1,2 3,30. Portanto, Lfl = 3,96 m. E, de acordo com #B.2# do tópico Coeficiente de esbeltez,
λ = 3,96 / 1,79 10−2 = 221.
A tensão de flambagem é dada por #C.1# do mesmo tópico (considerando-se E = 206000 MPa):
σfl = π2 206000 / 2212 ≈ 42 MPa. Portanto F = σfl S = 42 103 kPa 23,6 10−4 m2 ≈ 99 kN.
O cálculo dessa carga não inclui os coeficientes de segurança, que devem ser introduzidos de acordo com as condições de utilização, conforme visto nas primeiras páginas desta série.
Esse é um cálculo simples, sem os critérios - em geral conservadores e a favor da segurança - previstos em normas. Por exemplo: o coeficiente de esbeltez está alto. A maioria das normas fixa um limite de 200 para prédios e 120 para pontes.

Outro exemplo de cálculo Topo | Fim
Uma coluna de madeira, de seção retangular 5 x 10 cm, tem altura livre de 2,5 m. A madeira tem as propriedades σe = 45 MPa e E = 13,1 GPa. A fixação das extremidades é conforme (d) da Figura 01 do tópico Comprimento de flambagem. Determinar os parâmetros para a flambagem elástica dessa coluna.
Para a seção retangular, área S = ab (= 5 10 = 50 10−4 m2), onde a e b são os lados.
O momento de inércia é J = ab3/12.
Visto que o raio de giração é r = √ (J/S) = √ [(ab3/12)/ab] = √ (b2/12). Desde que se deseja saber a condição mais crítica, deve-se usar o menor raio de giração. Assim, o lado de 5 cm deve ser considerado b.
r = √ (25 10−4 m2 / 12) ≈ 0,0144 m.
O coeficiente de esbeltez é λ = 2,5 / 0,0144 ≈ 174, segundo #B.2# do tópico Coeficiente de esbeltez.
A tensão de flambagem conforme Euler é dada pela igualdade #C.1# do mesmo tópico:
σfl = π2 E / λ2 = π2 13,1 103 MPa / 1742 = 4,27 MPa.
Notar que a tensão de flambagem é apenas uma pequena fração da tensão de escoamento considerada para o material. Outras observações conforme exemplo anterior.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais VIII-30
Índice do grupo | Página anterior | Próxima página |
Curva de flambagem |Fórmulas de Tetmajer |
Método do coeficiente de flambagem |Flambagem devido à torção |
Curva de flambagem Topo | Fim
Na página anterior foi visto que o cálculo da tensão de flambagem segundo Euler (σfl = π2 E / λ2) vale para tensões até o limite de proporcionalidade (elasticidade) do material. Isso corresponde a um coeficiente de esbeltez mínimo λp.

Fig 01Mas falhas por flambagem ocorrem com barras de coeficientes abaixo desse valor. Apenas a hipérbole de Euler não é mais válida.
A Figura 01 ao lado dá o gráfico para um determinado tipo de aço.
Pode-se notar que, na faixa de barras curtas, a tensão de flambagem é praticamente a tensão de escoamento do material.
O maior problema está na região intermediária (barras médias). O comportamento das curvas varia com os materiais e outros fatores, em especial com a ductilidade. Vários métodos empíricos foram desenvolvidos para o cálculo. Alguns são descritos nos próximos tópicos.
Fórmulas de Tetmajer Topo | Fim
São aproximações por retas para alguns materiais conforme tabela abaixo. No caso de ferro fundido, é usada uma parábola. Resultados em MPa.
Material E (MPa) λp σfl conf Euler σfl = π2E/λ2 σfl para λ < λp
Aço 0,1/0,2% C 206 103 112 2033 103 / λ2 304 − 1,118 λAço 0,3% C 216 103 105 2129 103 / λ2 328,5 − 0,608 λ
Ferro fundido 98 103 80 968 103 / λ2 761 − 11,77 λ − 0,052 λ2
Madeira pinho 9,8 103 100 96,8 103 / λ2 28,733 − 0,19 λ
Exemplo de cálculo:
Um pistão é acionado por uma haste de aço 0,2%C de comprimento 1,6 m e diâmetro 9 cm. A força máxima de compressão é 186 kN. Analisar a estabilidade quanto à flambagem.
São dados
E = 206 103 MPa (tabela anterior).L = 1,6 m.D = 0,09 m. Assim, área da seção S ≈ 6,36 10−3 m2.
Para seção circular, o momento de inércia em qualquer direção é J = π D4 / 64.
Raio de giração r = √ (J/S) = √ [π D4 / 64/ (π D2 / 4)] = D/4 = 0,0225 m.
Coeficiente de esbeltez λ = L / r = 1,6 / 0,0225 ≈ 71,1. O valor, conforme tabela acima, está

abaixo do limite para fórmula de Euler.
Aplicando a fórmula de Tetmajer, σfl = 304 − 1,118 71,1 ≈ 224,5 MPa.
Determinando a força correspondente, F = σfl S = 224,5 103 kPa 6,36 10−3 m2 ≈ 1428 kN.
Concluindo, o elemento está comprimido com um coeficiente de segurança de 1428/186 ≈ 7,7 em relação ao máximo permitido para flambagem.
Método do coeficiente de flambagem Topo | Fim
Método usado para cálculo de estruturas metálicas e similares. Em geral os valores são definidos por normas. Usa um fator de flambagem w, dado, por exemplo, pela tabela abaixo.
λ 0 10 20 30 40 50 60 70 80 90 100110120130140160180 200 220 240 250Aço 0,2C
- - 1,04
1,08
1,14
1,21
1,30
1,41
1,55
1,71
1,90
2,11
2,43
2,85
3.31
4,32
5,47
6,75 8,17 9,73 10,55
Aço 0,4C
- - 1,06
1,11
1,19
1,28
1,41
1,58
1,79
2,05
2,53
3,06
3,65
4,28
4,96
6,48
8,21
10,13
12,26
14,59
15,83
Ferro
fund
1,00
1,01
1,05
1,11
1,22
1,39
1,67
2,21
3,50
4,43
5,45 - - - - - - - - - -
O fator é definido por w = σadm / σfl_adm, ou seja, é a relação entre a tensão admissível do material e a tensão admissível para flambagem.
Fig 01Portanto, a força de compressão da coluna deve ser tal que
F ≤ σadm S / w, onde S é a área da seção transversal do elemento comprimido.
O gráfico da Figura 01 ao lado dá uma idéia aproximada da variação dos parâmetros citados com o coeficiente de esbeltez.
Notar que, para fins de dimensionamento, não há um resultado imediato, pois w depende do coeficiente λ, que depende da área S.
Mas é possível chegar a um resultado com uma estimativa preliminar e posteriores tentativas de aproximação.
Flambagem devido à torção Topo | Fim

Para eixos de seção circular, o menor momento que produz flambagem por torção é dado por
Mfl = 2 π E J / L #A.1#.
Se há ação simultânea de uma força de compressão F na direção axial,
Mfl_compr = Mfl √ (1 − F/K) #B.1#.
Onde K é a força de flambagem de Euler, dada por K = π2 E J / L2, conforme já visto em página anterior.
Desde que, na prática, se deve ter F < K, pode-se concluir que a presença da compressão axial reduz o momento crítico de flambagem por torção, isto é, a estabilidade piora.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IX-10
Índice do grupo | Página anterior | Próxima página |
Critérios de falha - Introdução |Critério da máxima tensão normal |Critério da máxima deformação |
Critérios de falha - Introdução Topo | Fim
De forma genérica, pode-se dizer que os materiais estruturais são submetidos a uma combinação espacial de esforços, ou melhor, a um estado triaxial de tensões, graficamente representado pelas tensões principais em (a) da Figura 01.
Fig 01As teorias (ou critérios) de falha (ou resistência) procuram em geral estabelecer uma tensão equivalente (ou tensão de comparação), como em (b) da mesma figura, de forma a possibilitar a comparação com os resultados de esforços uniaxiais obtidos por ensaios comuns de tração ou de compressão.
Há uma razoável variedade de critérios para a questão. Aqui são tratados apenas dos mais

comuns.
Os materiais são supostamente isotrópicos, isto é, apresentam as mesmas propriedades em todas as direções.
O tipo de critério a empregar depende em geral da natureza do material (frágil ou dúctil). Normalmente, um critério é adequado para apenas um tipo, não para ambos.
Os critérios se referem sempre a tensões principais. Portanto, se uma direção genérica for dada, ele deverá ser transformada em direções principais.
Notar que esses critérios não são necessariamente os únicos a obedecer. Outros fatores como vibrações, fadiga, rigidez, etc podem ser até mesmo predominantes. Exemplo: uma plataforma para trânsito de pessoas deve, em princípio, suportar a carga das mesmas. Entretanto, se algum deslocamento ou deformação for sentido ou observado, mesmo que dentro dos limites de segurança, ela será questionada e dificilmente será aceita.
Critério da máxima tensão normal Topo | Fim
Por esse critério, a falha ocorre quando a maior tensão normal principal alcança a tensão de ruptura de tração σt ou de compressão σc, ambas obtidas em ensaios de resistência uniaxiais.
Fig 01Tem-se então a relação no caso de tensões planas
σc < (σ1, σ2) < σt #A.1#.
Observar que σc deve ter sinal negativo por ser tensão de compressão.
Graficamente, as tensões principais devem estar dentro de um quadrado conforme Figura 01 ao lado.
O critério só pode ser aplicado no caso de materiais frágeis.
Exemplo: sejam σc = − 300 MPa, σt = 300 MPa, σ1 = 60 MPa e σ2 = 30 MPa. Os valores estão conforme #A.1# e, desde que só há tração, os fatores de segurança são σt / σ1 = 300 / 60 = 5 e σt / σ2 = 300 / 30 = 10. Naturalmente, é considerado o menor (5).
Critério da máxima deformação Topo | Fim

Considera-se agora material dúctil com tensões máximas de tração σt e de compressão σc iguais, em módulo, à tensão de escoamento σe obtida em ensaio simples de tração, ou seja, | σt | = | σc | = σe. O critério consiste em estabelecer, para o material, deformações menores que as deformações produzidas, em estado uniaxial, por essas tensões (σt e σc).
Segundo a forma generalizada da lei de Hooke, as deformações para as tensões principais são:
ε1 = (1 / E) [ σ1 − ν (σ2 + σ3) ] ε2 = (1 / E) [ σ2 − ν (σ1 + σ3) ] ε3 = (1 / E) [ σ3 − ν (σ1 + σ2) ]
Onde E é módulo de elasticidade e ν é módulo de Poisson.
Por simplicidade, consideram-se tensões no plano (σ3 = 0). Assim, as igualdades acima ficam simplificadas:
ε1 = (1 / E) [ σ1 − ν σ2 ] ε2 = (1 / E) [ σ2 − ν σ1 ] ε3 = (1 / E) [ − ν (σ1 + σ2) ]
Fig 01Considerando que as tensões de limite são σt = σe e σc = − σe (compressão), as respectivas deformações são σe / E e − σe / E.
Então os limites para as deformações anteriores são:
− σe / E < (1 / E) [ σ1 − ν σ2 ] < σe / E.
− σe / E < (1 / E) [ σ2 − ν σ1 ] < σe / E.
− σe / E < (1 / E) [ − ν (σ1 + σ2) ] < σe / E.
Simplificando as desigualdades, os resultados são
− σe < [ σ1 − ν σ2 ] < σe − σe < [ σ2 − ν σ1 ] < σe − σe < [ − ν (σ1 + σ2) ] < σe #A.1#
Dessas relações, pode-se deduzir que as tensões principais σ1 e σ2 devem estar no interior de um quadrilátero conforme Figura 01 acima, com vértices dados por
A{ σe / (1 − ν), σe / (1 − ν) } B{ − σe / (1 + ν), σe / (1 + ν) }C{ − σe / (1 − ν), − σe / (1 − ν) }D{ σe / (1 + ν), − σe / (1 + ν) } #B.1#
Onde, conforme já visto, σe é a tensão de escoamento do material e ν é o seu módulo de Poisson.

Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Resistência dos materiais IX-20
Índice do grupo | Página anterior | Próxima página |
Critério da máxima tensão de cisalhamento |Critério da máxima energia de distorção |
Critério de Coulomb-Mohr |
Critério da máxima tensão de cisalhamento Topo | Fim
Também denominado critério de Guest ou de Tresca, é fundamentado no mecanismo aparente do escoamento de materiais dúcteis, ou seja, ele ocorre devido ao deslizamento de planos ao longo de superfícies com maiores tensões de cisalhamento.
Fig 01Das relações básicas do círculo de Mohr e considerando, por simplicidade, tensões no plano, observa-se que a tensão de cisalhamento está relacionada com a diferença das duas tensões principais.
Adotando a tensão de escoamento σe como referência, o critério estabelece valores absolutos das tensões principais menores que σe, bem como a sua diferença
| σ1 | < σe
| σ2 | < σe
| σ1 − σ2 | < σe #A.1#.
Das relações acima, demonstra-se facilmente que as tensões principais devem estar dentro de um hexágono irregular conforme Figura 01.
Critério da máxima energia de distorção Topo | Fim

A teoria foi apresentada, pela primeira vez, por James Clerk Maxwell (físico e matemático escocês) em 1865, mas é usualmente atribuída a Richard Edler von Mises (matemático austríaco) em 1913.
Fig 01O critério estabelece que a falha ocorre quando a energia de distorção atinge o mesmo valor da energia que provoca o escoamento na deformação uniaxial.
A expressão matemática é dada por
(1/2) [ (σ1 − σ2)2 + (σ2 − σ3)2 + (σ3 − σ1)2 ] < σe2 #A.1#.
No caso de tensões planas (σ3 = 0), a relação é simplificada
σ12 − σ1 σ2 + σ2
2 < σe2 #A.2#.
A relação anterior permite concluir que, no caso de tensões em um plano, o limite é dado por uma elipse conforme Figura 01 deste tópico. A linha tracejada indica o polígono do critério anterior, mostrando que este último é mais conservador.
Critério de Coulomb-Mohr Topo | Fim
Fig 01É um critério usualmente aplicado a materiais frágeis em estado plano de tensão.
Supõe-se que o material apresenta, segundo resultado de ensaio uniaxial, tensão máxima de tração σt e tensão máxima de compressão σc.

Na Figura 01, o círculo de Mohr de centro Oc representa compressão simples de valor σc. De forma análoga, o círculo de centro Ot indica tração simples σt.
A teoria de Mohr sugere que a falha ocorre quando o círculo de Mohr representativo do estado de tensões ultrapassa os limites definidos por esses dois círculos. Em outros termos, o círculo de Mohr do estado plano deve estar no interior do contorno ABCDEF (o círculo tracejado indica um exemplo).
Fig 02As seguintes relações podem ser deduzidas para os casos possíveis de tensões principais:
1) σ1 tração e σ2 tração: σ1 < σt e σ2 < σt.
2) σ1 compressão e σ2 compressão: σ1 > σc e σ2 > σc.
3) σ1 tração e σ2 compressão: σ1/σt + σ2/σc < 1.
4) σ1 compressão e σ2 tração: σ1/σc + σ2/σt < 1.
#A.1#. Notar que tensão de compressão é negativa.
Graficamente, os limites das tensões principais são dados pelo polígono de fundo cinza da Figura 01. As linhas tracejadas formam o quadrado do critério da máxima tensão normal visto na página anterior, indicando que o presente critério é mais conservador.
Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx