INTRODUC˘A~O AO CONTROLE DE SISTEMAS NA~O … · Sistemas n~ao-holon^omicos formam uma classe com...
26
INTRODU ¸ C ˜ AO AO CONTROLE DE SISTEMAS N ˜ AO-HOLON ˆ OMICOS Luiz C. Figueiredo * [email protected] Fabio G. Jota † [email protected] * Departamento de Engenharia El´ etrica - UNILESTE-MG, Av. Tancredo Neves 3500 CEP - 35170-056, Cel. Fabriciano, MG, Brasil † Departamento de Engenharia Eletrˆ onica - UFMG, Av. Antonio Carlos 6627 CEP - 31270-901, Belo Horizonte, MG, Brasil ABSTRACT The objective of this paper is to present recent devel- opments in nonholonomic control systems, mainly mo- bile robots with Pfaffians constraints, so as to give an overview to the beginners in the area. The main tools used to model, to analyze, to make motion planning and trajectory tracking and to guarantee stabilization in an equilibrium point are presented. The development of new tools in controller analysis and design based in nonlinear, hybrid, time varying, and geometric control made possible the control of nonholonomic systems. Ap- plication examples, restricted to simulation of differen- tial driven mobile robot (unicycle) control, are given. A comparative analysis between some control techniques and perspectives to the area are also presented. KEYWORDS: Nonholonomic systems, nonlinear control, geometric control, control systems. RESUMO Este artigo tem como objetivo caracterizar e apresen- tar os recentes desenvolvimentos no controle de sistemas n˜ ao-holonˆ omicos, destacando robˆ os m´ oveis com restri- ¸ c˜ oes Pfaffianas, propiciando um panorama geral para quem esta iniciando na ´ area. As principais ferramen- tas de modelagem, an´ alise, planejamento do movimento, Artigo submetido em 23/08/01 1a. Revis˜ ao em 25/03/03, 2a. Revis˜ ao em 10/11/03 Aceito sob recomenda¸ c˜ ao do Ed. Assoc. Prof. Liu Hsu seguimento de trajet´ orias e estabiliza¸ c˜ ao num ponto de equil´ ıbrio s˜ ao apresentadas. O desenvolvimento de no- vas t´ ecnicas de an´ alise e s´ ıntese de controladores baseada em controle n˜ ao-linear, controle h´ ıbrido, controle vari- ante no tempo, e controle geom´ etrico tem possibilitado o controle de sistemas n˜ ao-holonˆ omicos. S˜ ao dados exem- plos de aplica¸ c˜ ao restritos a simula¸ c˜ ao do controle de um robˆ o m´ ovel com acionamento diferencial. S˜ ao apresen- tadas compara¸ c˜ oes entre algumas t´ ecnicas de controle e perspectivas para a ´ area. PALAVRAS-CHAVE: Sistemas n˜ ao-holonˆ omicos, controle n˜ ao-linear, controle geom´ etrico, sistemas de controle. 1 INTRODU ¸ C ˜ AO Este trabalho tem como objetivo apresentar os concei- tos b´ asicos da teoria de sistemas n˜ ao-holonˆ omicos, bem como mostrar alguns recentes desenvolvimentos e ten- dˆ encias da pesquisa sobre o tema, destacando robˆ os m´ oveis com restri¸ c˜ oes Pfaffianas, propiciando um pano- rama geral para quem esta iniciando na ´ area. Para tal ´ e necess´ ario se ter uma base matem´ atica, ferramentas de an´ alise e projeto, m´ etodos de controle em malha aberta e gera¸ c˜ ao de trajet´ orias de estado, m´ etodos de controle em malha fechada para estabiliza¸ c˜ ao em uma trajet´ oria ou em um ponto de equil´ ıbrio. Inicia-se com uma apre- senta¸ c˜ ao dos conceitos de geometria diferencial utilizada na an´ alise e classifica¸ c˜ ao de restri¸ c˜ oes, como ferramenta de transforma¸ c˜ ao de modelos, e m´ etodo de gera¸ c˜ ao de si- Revista Controle & Automa¸ c˜ ao/Vol.15 no.3/Julho, Agosto e Setembro 2004 243
Transcript of INTRODUC˘A~O AO CONTROLE DE SISTEMAS NA~O … · Sistemas n~ao-holon^omicos formam uma classe com...

INTRODUCAO AO CONTROLE DE SISTEMAS NAO-HOLONOMICOS
Luiz C. Figueiredo∗
Fabio G. Jota†
∗Departamento de Engenharia Eletrica - UNILESTE-MG, Av. Tancredo Neves 3500CEP - 35170-056, Cel. Fabriciano, MG, Brasil
†Departamento de Engenharia Eletronica - UFMG, Av. Antonio Carlos 6627CEP - 31270-901, Belo Horizonte, MG, Brasil
ABSTRACT
The objective of this paper is to present recent devel-opments in nonholonomic control systems, mainly mo-bile robots with Pfaffians constraints, so as to give anoverview to the beginners in the area. The main toolsused to model, to analyze, to make motion planningand trajectory tracking and to guarantee stabilizationin an equilibrium point are presented. The developmentof new tools in controller analysis and design based innonlinear, hybrid, time varying, and geometric controlmade possible the control of nonholonomic systems. Ap-plication examples, restricted to simulation of differen-tial driven mobile robot (unicycle) control, are given. Acomparative analysis between some control techniquesand perspectives to the area are also presented.
KEYWORDS: Nonholonomic systems, nonlinear control,geometric control, control systems.
RESUMO
Este artigo tem como objetivo caracterizar e apresen-tar os recentes desenvolvimentos no controle de sistemasnao-holonomicos, destacando robos moveis com restri-coes Pfaffianas, propiciando um panorama geral paraquem esta iniciando na area. As principais ferramen-tas de modelagem, analise, planejamento do movimento,
Artigo submetido em 23/08/011a. Revisao em 25/03/03, 2a. Revisao em 10/11/03Aceito sob recomendacao do Ed. Assoc. Prof. Liu Hsu
seguimento de trajetorias e estabilizacao num ponto deequilıbrio sao apresentadas. O desenvolvimento de no-vas tecnicas de analise e sıntese de controladores baseadaem controle nao-linear, controle hıbrido, controle vari-ante no tempo, e controle geometrico tem possibilitado ocontrole de sistemas nao-holonomicos. Sao dados exem-plos de aplicacao restritos a simulacao do controle de umrobo movel com acionamento diferencial. Sao apresen-tadas comparacoes entre algumas tecnicas de controle eperspectivas para a area.
PALAVRAS-CHAVE: Sistemas nao-holonomicos, controlenao-linear, controle geometrico, sistemas de controle.
1 INTRODUCAO
Este trabalho tem como objetivo apresentar os concei-tos basicos da teoria de sistemas nao-holonomicos, bemcomo mostrar alguns recentes desenvolvimentos e ten-dencias da pesquisa sobre o tema, destacando robosmoveis com restricoes Pfaffianas, propiciando um pano-rama geral para quem esta iniciando na area. Para tal enecessario se ter uma base matematica, ferramentas deanalise e projeto, metodos de controle em malha abertae geracao de trajetorias de estado, metodos de controleem malha fechada para estabilizacao em uma trajetoriaou em um ponto de equilıbrio. Inicia-se com uma apre-sentacao dos conceitos de geometria diferencial utilizadana analise e classificacao de restricoes, como ferramentade transformacao de modelos, e metodo de geracao de si-
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 243

nais de deslocamento (ex.: colchete de Lie). Apresenta-se uma distincao entre estabilizacao numa trajetoria enum ponto de equilıbrio, e alguns exemplos de contro-ladores utilizando tecnicas avancadas de controle. Parafacilitar o entendimento inicial, sistemas dinamicos nao-holonomicos e ferramentas de controle mais avancadas(adaptativo, robusto, etc.) nao sao descritas.
O termo holonomico e atribuido a Hertz (Arnol’d and(Eds.), 1994) e significa ”universal”, ”integral”, ”integra-vel”( literalmente: holo = o todo, conjunto, totalidade- nomia = lei). Portanto, sistemas nao-holonomicos po-dem ser interpretados como sistemas nao integraveis.
A abordagem matematica a este tipo de problema e re-alizada atraves de ferramentas da geometria diferencial.O desenvolvimento sistematico da teoria iniciou-se hamais de 150 anos, baseado numa serie de artigos classi-cos sobre a mecanica nao-holonomica de matematicos efısicos tais como: Hertz, Voss, Holder, Chaplygin, Ap-pel, Rooth, Woronets, Korteweg, Caratheodory, Horac,Voltera, dentre outros. Apesar disto, apenas recente-mente (Kolmanovsky and McClamroch, 1995) se iniciouo estudo de problemas de controle para tais sistemas.
Definem-se como nao-holonomicos sistemas com dimen-sao finita onde algum tipo de restricao e imposta a umou mais estados do sistema. Estas limitacoes podemser provocadas pela conservacao do momento angular,condicoes impostas pela impossibilidade de deslocar emuma ou mais direcoes, como resultado da imposicao derestricoes durante o projeto do sistema de controle, pelofato de o sistema nao ter atuadores em todas as dire-coes do espaco do problema, e em varias outras situ-acoes (Murray et al., 1994). Wen (Wen, 1996) indicatres classes de sistemas onde restricoes nao-holonomicasaparecem:
• Restricao de nao-deslize. A condicao de nao-deslizamento ou de rolamento puro significa quea velocidade linear no ponto de contato e zero.Esta restricao e nao-integravel, isto e, nao redu-tıvel a uma restricao de posicao, e portanto e nao-holonomica.
• Conservacao do momento angular.
• Sistemas mecanicos subatuados. Sistemas nos quaisa dimensao do espaco de configuracoes excede o es-paco das entradas de controle.
Exemplos de sistemas nao-holonomicos e da geracao detrajetorias para os mesmos, em especial, para a ana-lise do problema da queda de uma gata (sistema comcorpos rıgidos acoplados) sao abordados em (Fernandes
et al., 1994). Este problema e particularmente interes-sante porque se sabe da mecanica classica que o mo-mento angular de uma gata em queda e conservado,entao como uma gata em queda pode mudar sua ori-entacao sem violar a conservacao do momento angular?A analise deste problema utilizando a teoria de aproxi-macao de Ritz leva ao desenvolvimento de um algoritmonumerico para a determinacao de solucoes quase-otimas(Fernandes et al., 1994).
Sistemas nao-holonomicos formam uma classe com ca-racterısticas especiais: apesar de seus movimentos seremlimitados, os mesmos podem atingir qualquer configura-cao no espaco onde estao definidos (quando controlaveise atingıveis); infelizmente as leis de controle para esta-bilizacao de sistemas nao-holonomicos nao sao faceis deserem geradas; ha necessidade de emprego de ferramen-tas matematicas mais elaboradas para analise e projeto(geometria diferencial e controle nao-linear ou linear va-riante no tempo).
A consideracao de restricoes ao movimento melhora con-sideravelmente o controle de sistemas nao-holonomicospossibilitando o projeto de controladores multivariaveisexponencialmente estaveis de forma integrada. O desa-fio para analise e sıntese de controladores para sistemasdeste tipo tem propiciado o desenvolvimento da teoriade controle nao-linear. Tecnicas de otimizacao e con-trole geometrico empregando transformacoes de coorde-nadas (transformacoes lineares e nao-lineares) e sinaisvariantes no tempo ou descontınuos sao utilizadas paraa geracao de trajetorias e projeto de controladores emmalha aberta. Em malha fechada destacam-se: controleadaptativo, robusto, inteligencia artificial, linearizacaopor realimentacao de estados e das saıdas empregandosinais contınuos variantes no tempo ou descontınuos, etecnicas de controle hıbrido. As principais tecnicas decontrole empregam funcoes de Lyapunov, associada aum metodo para gerar as leis de controle: integradorde um passo atras (backstepping), metodo direto, me-todo inverso, metodos matematicos, metodos utilizandoa fısica do processo, etc. Segue uma breve revisao bibli-ografica sobre pesquisas mais significativas na area.
• Tutoriais: O trabalho que serve como tutorial parainiciantes no controle de sistemas nao-holonomicosfoi desenvolvido por Kolmanovsky and McClam-roch (1995). Apresenta de forma clara e acessıvelos estagios de desenvolvimento da teoria indicandomodelos, tecnicas de controle em malha aberta efechada e metodos de planejamento de trajetorias.Avancos no controle por realimentacao variante notempo sao apresentados por Morin and Samson(2000b). Uma visao geral sobre o problema da es-
244 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

tabilizacao de veıculos autonomos, indicando pro-blemas em aberto e tendencias e apresentado emAguiar and Pascoal (1999), onde se destaca a ne-cessidade do estudo de incertezas no modelo e odesenvolvimento de controladores robustos, princi-palmente para veıculos marinhos.
• Planejamento de trajetorias: Metodos de pla-nejamento de trajetorias usando geometria diferen-cial foram propostos por Sussmann (1991), Bush-nell et al. (1994), e Sussmann (1993). A utilizacaode sinais senoidais no planejamento e explorada emSekhavat and Laumond (1998), e Murray and Sas-try (1993). Metodos de deslocamento em malhaaberta usando senoides e, em alguns casos, trans-formacoes nao-lineares sao apresentados em Bush-nell et al. (1994), Tilbury et al. (1993), Tilburyand Chelouah (1993) e Hunt et al. (1996). A ex-ploracao do colchete de Lie para planejamento domovimento e apresentada em Lafferriere and Suss-mann (1991). O uso de tecnicas de controle otimosao apresentadas em Sussmann (1992). A incor-poracao da dinamica dos sensores no planejamentodo movimento e destacada em Shkel and Lumelsky(1997). Wen (1996) apresenta como principais al-goritmos de planejamento de trajetoria os metodosde deslocamento com entradas cıclicas, metodos ba-seados em controle otimo, e os metodos iterativosno espaco de trajetorias. O planejamento de tra-jetoria evitando obstaculos e tratado em Laumondet al. (1994), Latombe (1993), Divelbiss and Wen(1997) e Mirtich and Canny (1992). Um sistema deplanejamento e controle totalmente em tempo reale proposto por Lizarralde and Wen (1996). Siste-mas nao-holonomicos que nao satisfazem a condicaoideal de restricao de velocidade, isto e, podem apre-sentar deslizes laterais, sao estudados em profundi-dade em D’Andrea-Novel et al. (1995). Um modeloparticular de controle de sistemas nao-holonomicosaplicados ao controle de uma bicicleta e apresen-tado no trabalho de Getz (Getz, 1994; Getz andMarsden, 1995).
• Rastreamento de trajetorias: O rastreamentode trajetorias para sistemas nao-holonomicos temsido buscado por inumeros pesquisadores. O pro-blema da estabilizacao em uma trajetoria e maisfacil de ser resolvido do que o da estabilizacao emum ponto (Walsh et al., 1994) desde que seja pos-sıvel calcular previamente uma trajetoria que satis-faca as restricoes. Metodos simples utilizando con-troladores PID (Normey-Rico et al., 2001) e traje-torias compatıveis com a restricao nao-holonomica(Hu et al., 1997) tem sido propostos. Pode-se des-
tacar casos como: Jiang and Nijmeijer (1997) quedesenvolveram uma metodologia atraves da reali-mentacao variante no tempo associada a tecnica dointegrador de um passo atras (backstepping) pararobos moveis com acionamento diferencial. Estatecnica foi estendida para sistemas na forma enca-deada (Jiang and Nijmeijer, 1999) e com incertezas(Jiang, 2000) de forma robusta. O controle de traje-toria de um navio subatuado empregando o metododireto de Lyapunov e tratado em Jiang (2002). Oguiamento de veıculos marinhos utilizando modelosna forma polar apresentado em Aicardi, Casalino,Indiveri, Aguiar, Encarnacao and Pascoal (2001) eAicardi, Casalino and Indiveri (2001). Redes neu-rais sao empregadas em sistemas nao-holonomicostanto para localizacao (Janet et al., 1997), comopara controle (Baluja, 1996). Estrategias para ras-treamento de trajetorias por modos deslizantes parao robo movel com acionamento diferencial sao pro-postas por Yang and Kim (1999a), Yang and Kim(1999b) e Chwa et al. (2002).
• Estabilizacao num ponto: Diversas tecnicas temsido desenvolvidas para a estabilizacao num pontode equilıbrio de sistemas nao-holonomicos. Siste-mas de controle variante no tempo tem sido estu-dados em profundidade (Morin and Samson, 1996;Morin and Samson, 1995; Morin et al., 1994; Mo-rin et al., 1995; Morin et al., 1999; Morin et al.,1994; Samson and Ait-Abderrahim, 1990; Sam-son, 1992; Samson and Ait-Abderrahim, 1991; Sam-son, 1990; Morin and Samson, 1997; Morin andSamson, 1998; Samson, 1995; Morin and Sam-son, 2000a; Fujimoto and Sugie, 2001; Tian andLi, 2002; Figueiredo and Jota, 2002). A estabiliza-cao exponencial, em geral, e obtida empregando-semetodos baseados em funcoes de Lyapunov. Sor-dalen and Egeland (1995) apresentam um contro-lador variante no tempo empregando conceitos deestabilidade exponencial K, que apesar de ser umaforma de estabilidade mais fraca que a estabilidadeexponencial, possui a mesma taxa de convergencia.A abordagem da estabilizacao exponencial usandorealimentacao homogenea variante no tempo e re-alizada em M’Closkey and Murray (1997). Umatecnica para construir controladores exponencial-mente convergentes para sistemas nao-holonomicosna forma de potencia e apresentada por Luo andTsiotras (1997); baseia-se num algoritmo recursivoque utiliza uma serie de variedades invariantes paraconstruir uma sequencia de sistemas na forma depotencia de dimensao reduzida. Utilizando mudan-cas de coordenadas e uma lei de controle por reali-mentacao de estados descontınua, limitada, e invari-
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 245

ante no tempo, Astolfi (1999) propoe um sistema decontrole para estabilizar exponencialmente um robomovel de acionamento diferencial. Utilizando tec-nicas de Lyapunov, Pourboghrat (2002) estabilizaexponencialmente um robo movel de acionamentodiferencial. Uma transformacao descontınua e uti-lizada para facilitar o projeto do controlador. A es-tabilizacao de sistemas nao-holonomicos usando flu-xos isoespectrais e tratada por Bloch et al. (2000).O sistema na forma de integrador de Brockett eestabilizado usando controle hıbrido com chavea-mento discreto entre fluxos isoespectrais e normadecrescente. A estabilizacao de sistemas na formaencadeada atraves da linearizacao por realimenta-cao e mostrada em Sun et al. (2001) e Ge et al.(2001). Tayebi et al. (2001) mostram que sistemasn-dimensionais na forma encadeada podem ser es-tabilizados usando o metodo da variedade invari-ante. Primeiro deriva-se uma variedade invariantepara esta classe de sistemas e mostra-se, a seguir,que todas as trajetorias em malha fechada tendempara a origem sob uma realimentacao de estados su-ave, linear, invariante no tempo. Mostra-se, ainda,que esta variedade pode se tornar atrativa atravesde uma realimentacao de estados descontınua, in-variante no tempo. O controle de sistemas nao-holonomicos de ordem alta na forma de potenciaencadeada usando realimentacao descontınua e es-tudado por Lin et al. (2002). Esta e uma classeparticular de sistemas nao-lineares que e uma ex-tensao da forma encadeada. A lei de controle eobtida de forma recursiva, atraves da adicao de in-tegradores. A estabilizacao de sistemas descontı-nuos empregando a tecnica do integrador de umpasso atras (backstepping) e proposta por Tannerand Kyriakopoulos (2002) para robos moveis comacionamento diferencial. A estabilizacao de veıculosmarinhos subatuados e tratada por Indiveri et al.(2000) e Aicardi, Cannata, Casalino and Indiveri(2000a). Pilotos automaticos empregando esta tec-nica sao globalmente estaveis, enquanto que, pelatecnica tradicional baseada em modelos lineariza-dos, a estabilidade e local. Aguiar and Pascoal(2001) apresentam resultados para veıculos subma-rinos com incerteza parametrica usando funcoes deLyapunov. A estabilizacao de sistemas empregandocoordenadas polares e abordada por Aicardi, Casa-lino and Indiveri (2000) para o robo movel com aci-onamento diferencial e em Aicardi, Cannata, Casa-lino and Indiveri (2000b) para um veıculo aquatico.Em ambos os casos e mostrado que a mudanca decoordenadas gera um sistema holonomico de facilcontrole. A tecnica de controle por realimentacao
descontınua pode ser estendida para manipulado-res planos subatuados produzindo sistemas estaveis(Mahindrakar et al., 2001). Resultados experimen-tais de controladores sao apresentados tendo comoplataforma o robo movel com acionamento diferen-cial Khepera (Kim and Tsiotras, 2002). Neste caso,observaram-se caracterısticas e desempenho de di-versos controladores frente a dinamicas despreza-das, quantizacao, ruıdo, atrasos, etc.
• Controle hıbrido: Uma revisao da literatura, in-dicando as bases para sistemas hıbridos e seus bene-fıcios no projeto de controladores para sistemas li-neares e nao-lineares, bem como das diversas meto-dologias de analise e projeto, podem ser obtidas emAntsaklis et al. (1999), Hespanha (2001a), McClam-roch and Kolmanovsky (2000) e Hespanha (2001b).A questao da estabilidade, projeto de sistemas hı-bridos e ferramentas basicas de analise sao apre-sentadas em Liberzon and Morse (1999), McClam-roch et al. (1997), Agrachev and Liberzon (2001),Ye et al. (1998), e Decarlo et al. (2000). Estrutu-ras dinamicas de transicao de controle, aplicacao demultiplas funcoes de Lyapunov em sistemas chave-ados e hıbridos, e a utilizacao de novos conceitos deestabilidade aplicados a sistemas hıbridos sao apre-sentados em Sun and Hoo (1999), Branicky (1998),e Hespanha et al. (2001). A aplicacao da teoria decontrole hıbrido a sistemas nao-holonomicos comexemplos praticos do projeto de controladores eapresentada em Hocherman-Frommer et al. (1998),Hespanha et al. (2002), Hespanha et al. (2001), Ly-geros et al. (1996), Piccoli et al. (1998), e Blochet al. (2000).
• Controle adaptativo: O projeto de controlado-res adaptativos para rastreamento de sistemas nao-holonomicos usando o metodo do integrador de umpasso atras (backstepping) e proposto por algunspesquisadores (Fucao et al., 2000; Tayebi and Ra-chid, 2000; Pourboghrat and Karlsson, 2002; Doand Pan, 2002; Ge et al., 2003). O controle adap-tativo para o rastreamento na presenca de in-certezas quanto ao modelo e estados do sistemausando solucoes de controle robusto sao considera-dos por Colbaugh (Colbaugh et al., 1998) e Dong(Dong et al., 2000). Funcoes de Lyapunov (Aguiaret al., 2000; Sanyal et al., 2003), passividade(Dong and Xu, 2001), modelo preditivo (Lizarraldeet al., 1999; Fontes, 2002), e estrategias de inte-ligencia artificial (Chang and Chen, 2000; Syamet al., 2001; Syam et al., 2002) sao outras ferramen-tas geralmente utilizadas (veja tambem (Chang andChen, 1996; Glass and Colbaugh, 1997; Lefeber and
246 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Nijmeijer, 1999; Y-Kuc et al., 2000)). O controlepreditivo generalizado (GPC) foi usado no projetode um sistema de auxılio na conducao de um auto-movel (DAS) (Horiuchi and Sunada, 1998) o qualajuda o motorista na tarefa de controle para seguiruma faixa na pista de direcao. Este sistema tem aestrutura de um motorista virtual, atuando em pa-ralelo, projetado para agir do mesmo modo que ummotorista ideal. Os resultados relatados mostramque a execucao da tarefa foi melhorada pelo sistemade controle DAS.
Desse levantamento cronologico/tematico sobre traba-lhos desenvolvidos na area relativos a controle de siste-mas nao-holonomicos, depreende-se que esta e uma areasujeita a constantes e rapidas mudancas e que tem rece-bido contribuicoes das mais diversas correntes de pen-samento. Neste artigo, pretende-se fornecer dados atu-alizados e mostrar sinteticamente os avancos na teoria eaplicacoes apresentadas na literatura.
O trabalho esta assim dividido: nas secoes 2 e 3 saoapresentados conceitos basicos de geometria diferencialaplicada a sistemas holonomicos e nao-holonomicos, pro-piciando o reconhecimento de sistemas nao-holonomicose a verificacao de sua controlabilidade. Na secao 4apresenta-se uma aplicacao pratica destes conceitos.Exemplos de formas canonicas que facilitam o projetode controladores sao apresentados na secao 5. Tecnicasde controle em malha aberta e malha fechada e algumasaplicacoes utilizando como exemplo o robo movel comacionamento diferencial estao na secao 6. Uma brevediscussao das tecnicas apresentadas e perspectivas paraa area sao apresentadas na secao 7.
2 FUNDAMENTOS SOBRE RESTRI-COES NAO-HOLONOMICAS
O movimento de uma partıcula no espaco euclidiano edescrito pelas coordenadas da partıcula em cada ins-tante de tempo (Murray et al., 1994), relativas a umsistema de eixos ortogonais x, y, z ∈ R3. A trajeto-ria da partıcula e dada na forma parametrizada porp(t) = (x(t), y(t), z(t)) ∈ R3. Muitas vezes nao esta-mos interessados no movimento de uma partıcula, masno de um corpo (articulado ou nao) composto por di-versas partıculas. Para simplificar o estudo podemosassumir que o corpo e indeformavel (corpo rıgido), nestecaso, a distancia entre duas partıculas quaisquer destecorpo sera fixa. Logo, se p e q sao as posicoes de duaspartıculas deste corpo, entao a relacao abaixo deve sersatisfeita:
‖p(t) − q(t)‖ = ‖p(0) − q(0)‖ = constante.
Um movimento rıgido de um objeto e um movimentocontınuo de partıculas no objeto de forma tal que a dis-tancia entre duas partıculas quaisquer seja preservada.Este movimento e representado por uma famılia de ma-peamentos g(t) : O −→ R3 (onde O e o conjunto devetores-eixos ortogonais). Nota-se que a condicao depreservacao de distancia e uma condicao necessaria, masnao suficiente, para que g(t) seja o mapeamento destemovimento, pois a orientacao nao e preservada. Paraatender a este ultimo requisito, o produto vetorial entrevetores pertencentes ao corpo tambem deve ser preser-vado. Assim para rastrear o movimento de qualquerpartıcula num corpo rıgido basta rastrear o movimentode uma partıcula sobre o corpo e a rotacao do mesmoem torno deste ponto.
Esta relacao entre partıculas (limitacao do grau de li-berdade) e chamada de restricao. Cada restricao podeser representada por uma funcao gj : R3n −→ R tal que
gj(r1, ..., rn) = 0, j = 1, ...k
ou seja, como uma relacao algebrica entre as posicoesdas partıculas. Tal restricao define uma hiper-superfıcie(Dubrovin et al., 1984) ou variedade, logo, o movimentosera limitado a esta hiper-superfıcie. Tal restricao e cha-mada de holonomica, ou integravel. Uma restricao agesobre um sistema de partıculas atraves da aplicacao deforcas de restricao. Se considerarmos as restricoes comohiper-superfıcies suaves em Rn, as forcas de restricaosao normais a esta hiper-superfıcie e restringem a ve-locidade do sistema a ser tangente a esta superfıcie emqualquer instante de tempo. Uma vez que restricoes ho-lonomicas definem uma hiper-superfıcie suave no espacode configuracao, e possıvel eliminar estas restricoes pelaescolha de novas coordenadas apropriadas a esta super-fıcie (Murray et al., 1994). Estas novas coordenadas pa-rametrizam todos os movimentos permitidos do sistemae nao estao sujeitas a qualquer outra restricao.
Uma restricao de um tipo fundamentalmente diferenteocorre sempre que os movimentos permissıveis do sis-tema estao limitados por restricoes de velocidade daforma
A(q)q = 0,
onde A(q) ∈ Rk×n representa um conjunto de k res-tricoes de velocidade. Uma restricao desta forma e cha-mada de restricao Pfaffiana. Uma vez que uma restricaoPfaffiana limita as velocidades permissıveis do sistemamas nao necessariamente as configuracoes, nao se pode,em geral, representa-la como uma restricao algebricasobre o espaco de configuracao. Uma restricao Pfaffi-ana e dita ser integravel se existir uma funcao vetorial
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 247

h : Q −→ Rk tal que
A(q)q = 0 ⇐⇒ ∂h
∂qq = 0.
Assim, uma restricao Pfaffiana integravel e equivalentea uma restricao holonomica.
Uma restricao Pfaffiana que nao e integravel e umexemplo de restricao nao-holonomica. Restricoes nao-holonomicas deste tipo ocorrem quando as velocidadesinstantaneas do sistema sao limitadas a um subespacode dimensao n − k, porem o conjunto de configuracoesatingıveis nao esta restrito a uma superfıcie n − k di-mensional no espaco de configuracao.
Deseja-se descobrir como a condicao nao-holonomica dasrestricoes pode ser explorada para se obter deslocamen-tos entre configuracoes diferentes, ou seja, verificar se epossıvel deslocar por um caminho q(t) do ponto q0 aoponto qf satisfazendo as restricoes nao-holonomicas.
A determinacao se um sistema e ou nao holonomico naoe uma tarefa facil. Seja o caso no qual existe uma unicarestricao de velocidade (Murray et al., 1994):
w(q)q =
n∑
j=1
wj(q)qj = 0.
Esta restricao e integravel se existe uma funcao h :Rn −→ R tal que
w(q)q = 0 ⇐⇒ h(q) = 0.
Se a restricao Pfaffiana e holonomica, diferenciandoh(q) = 0 com relacao ao tempo, segue entao que:
n∑
j=1
wj(q)qj = 0 =⇒n
∑
j=1
∂h
∂qjqj = 0.
Por sua vez, isto implica que existe alguma funcao α(q),chamada de fator de integracao, tal que:
α(q)wj(q) =∂h
∂qj(q) j = 1, ..., n.
Logo, uma restricao Pfaffiana e holonomica se e somentese existir um fator de integracao α(q) tal que α(q)w(q)seja a derivada de alguma funcao h. Para facilitar averificacao pode-se usar o fato de que
∂2h
∂qi∂qj=
∂2h
∂qj∂qi
para obter
∂(αwj)
∂qi=∂(αwi)
∂qji, j = 1, ..., n.
que e equivalente a afirmacao de que h(q) = 0 se existiralgum fator de integracao α(q) que satisfaca a equacaoacima. A situacao se complica ainda mais para o casode multiplas restricoes Pfaffianas. Para um conjunto dek equacoes de restricao, deve-se nao apenas verificar aintegrabilidade de cada uma mas tambem a de combina-coes linearmente independentes destas. Assim, podemexistir funcoes hi para i = 1, ..., p com p ≤ k tal que
var
∂h1
∂q(q), ...,
∂hp
∂q(q)
⊂ var w1(q), ..., wk(q)
para todo q, onde o operador var. indica a varreduraou base criada pelos vetores especificados. Se for possı-vel achar estas funcoes, o movimento do sistema estararestrito a superfıcies de nıvel de h. Se p = k, entaoas restricoes sao holonomicas. Quando p < k, as res-tricoes nao sao holonomicas porem os pontos atingıveisdo sistema continuam restritos. Logo, as restricoes saoparcialmente holonomicas. Para fins de controle, esta-se interessado em situacoes nas quais as restricoes naolimitam as configuracoes atingıveis. Estes casos sao cha-mados de completamente nao-holonomicos.
3 FERRAMENTAS BASICAS PARAO ESTUDO DE SISTEMAS NAO-HOLONOMICOS
Em varios casos, e necessario converter problemas comrestricoes nao-holonomicas para uma outra forma, ouseja, ver o problema nao do ponto de vista das dire-coes onde o movimento nao e possıvel e sim o contra-rio. Isto pode ser conseguido escolhendo-se uma basepara o espaco nulo a direita das restricoes, denotadopor gj(q) ∈ Rn, j = 1, ..., n − k =: m. Por construcaoesta base satisfaz
wi(q)gj(q) = 0i = 1, ..., kj = 1, ..., n− k,
e as trajetorias permissıveis para o sistema podem serescritas como as possıveis solucoes do sistema de con-trole
q = g1(q)u1 + ...+ gm(q)um. (1)
Isto e, q(t) e uma trajetoria realizavel para o sistemase e somente se q(t) satisfaz a equacao (1) para algumvalor dos controles u(t) ∈ Rm. Neste contexto, umarestricao e completamente nao-holonomica se os estadosdo sistema correspondente podem ser deslocados de umestado inicial a outro final qualquer. Logo, o espaco deatingibilidade das configuracoes do sistema nao esta res-trito. Por outro lado, se a restricao e holonomica, entao
248 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

todos os movimentos do sistema estao confinados numasuperfıcie limitada e os estados do sistema correspon-dente so podem se mover sobre esta variedade. Assim,pode-se estudar a natureza das restricoes Pfaffianas es-tudando as propriedades de controlabilidade da equacao(1).
Para facilitar o entendimento desta abordagem seraoconsiderados sistemas de controle sem deriva (em queos estados dependem apenas das entradas corresponden-tes) em Rn. Seja TqR
n o espaco tangente a Rn no pontoq ∈ Rn. Um campo vetorial sobre Rn e um mapa su-ave que atribui a cada ponto q ∈ Rn um vetor tangentef(q) ∈ TqR
n, tal que
f(q) =
f1(q)...
fn(q)
.
Um campo vetorial sera suave se cada vetor fi(q) forsuave. Campos vetoriais podem ser imaginados como olado direito de equacoes diferenciais:
q = f(q). (2)
Associado a um campo vetorial, define-se o fluxo deum campo vetorial como a representacao da solucao daequacao diferencial (2). Especificamente φf
t (q) repre-senta o estado da equacao diferencial no instante t par-tindo de q no instante 0. Assim φf
t (q) : Rn −→ Rn
satisfazd
dtφf
t (q) = f(φft (q)) q ∈ Rn.
A taxa de variacao de uma funcao suave V : Rn −→ Rao longo do fluxo de f e dada por
V =∂V
∂qf(q) =
n∑
i=1
∂V
∂qifi.
A derivada no tempo de V ao longo do fluxo de f ereferenciada como a derivada de Lie de V ao longo de fe denotada por LfV :
LfV :=∂V
∂qf(q).
Um mapeamento T : D −→ Rn e um difeomorfismo(Khalil, 1996) sobre D se ele for invertıvel sobre D, istoe, existe uma funcao T−1(x) tal que T−1(T (x)) = xpara todo x ∈ D, e tanto T (x) quanto T−1(x) sao con-tinuamente diferenciaveis. Se a Matriz Jacobiana
[
∂T∂x
]
for nao-singular num ponto x0 ∈ D, entao segue do teo-rema da funcao inversa que existe uma vizinhanca N dex0 tal que T restrito a N e um difeomorfismo sobre N .
Um campo vetorial e dito ser completo se seu fluxo estadefinido para todo t. Pelo teorema da existencia e uni-cidade das equacoes diferenciais ordinarias, para cada tfixo, φf
t e um difeomorfismo local de Rn sobre ele pro-prio. Alem disto, ele satisfaz a propriedade de grupo:
φft φf
s (q) = φft+s,
para todo t e s, onde ””indica a composicao de doisfluxos (φf
t (φfs (q))).
Define-se a operacao denominada colchete de Lie(Dubrovin et al., 1984) como:
[., .] : V × V −→ VA,B −→ [A,B]
que satisfaz as seguintes propriedades:
1. Bilinearidade
[A+ λB,C] = [A,C] + λ[B,C][A,B + λC] = [A,B] + λ[A,C]
2. Anticomutatividade
[A,B] = −[B,A]
3. Identidade de Jacobi
[A, [B,C]] + [C, [A,B]] + [B, [C,A]] = 0
O colchete de Lie para dois campos vetoriais f e g edefinido como
[f, g](q) =∂g
∂qf(q) − ∂f
∂qg(q).
e pode ser interpretado como o movimento infinitesimalresultante do fluxo em torno de um quadrado definidopor dois campos vetoriais f e g. Se este movimentofor nulo, diz-se que os campos comutam. Isto pode sermelhor visualizado para operadores lineares (matrizes),onde o colchete de Lie e definido como produto vetorial
[A,B] = AB −BA;
se A e B comutarem, o colchete de Lie sera nulo. Ocolchete de Lie algumas vezes e chamado de comutador.
Uma distribuicao atribui um subespaco do espaco tan-gente a cada ponto em Rn de um modo suave. Sejag1, g2, ..., gk campos vetoriais sobre V ⊂ Rn. Em qual-quer ponto fixo q ∈ V , g1(q), g2(q), ..., gk(q) sao vetoresem Rn e
∆(q) = varg1(q), g2(q), ..., gk(q) ⊂ TqRn
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 249

e um subespaco de Rn. Para cada ponto q ∈ Rn,atribui-se um subespaco ∆(q), referenciado como
∆ = varg1, g2, ..., gk.
Em outras palavras, uma distribuicao ∆ e uma colecaode todos os espacos vetoriais ∆(q) para q ∈ V .
Uma distribuicao e dita ser regular se a dimensao dosubespaco ∆(q) nao varia com q. Uma distribuicao einvolutiva se ela for fechada sob o colchete de Lie, istoe,
∆ involutiva ⇐⇒ ∀f, g ∈ ∆, [f, g] ∈ ∆.
Para uma distribuicao de dimensoes finitas e suficienteverificar se os colchetes de Lie dos elementos-base estaocontidos na distribuicao. O fechamento involutivo deuma distribuicao, denotado por ∆, e o fechamento de∆ sob a operacao colchete de Lie; ou seja, ∆ e a menordistribuicao contendo ∆ tal que se f, g ∈ ∆ entao [f, g] ∈∆.
Um espaco vetorial real V onde a operacao colchetede Lie esta definida e denominado de algebra de Lie eaqui denotado por X (Rn). Seja g1, ..., gm um conjuntode campos vetoriais suaves, ∆ a distribuicao definidapor estes campos vetoriais, e ∆ o fechamento involutivode ∆, logo ∆ e uma algebra de Lie e e denotado porL(g1, ..., gm). Os elementos de L(g1, ..., gm) sao obtidostomando-se todas as combinacoes lineares dos elemen-tos de g1, ..., gm, tomando-se os colchetes de Lie destes,tomando-se todas as combinacoes lineares destes, e as-sim por diante. Define-se o posto de L(g1, ..., gm) numponto q ∈ Rn como sendo a dimensao de ∆q como umadistribuicao.
Uma distribuicao ∆ de dimensao k constante e dita serintegravel se, para todo ponto q ∈ Rn, existe um con-junto de funcoes suaves hi : Rn −→ R, i = 1, ..., n−k talque os vetores linha ∂hi
∂q sao linearmente independentesem q, e para todo f ∈ ∆
Lfhi =∂hi
∂qf(q) = 0 i = 1, ..., n− k. (3)
As hiper-superfıcies definidas pelos conjuntos nıveis
q : h1 = c1, ..., hn−k(q) = cn−k
sao chamadas variedades integrais da distribuicao.Imagina-se uma variedade integral como uma superfıciesuave em Rn, entao a equacao (3) requer que a distri-buicao seja igual ao espaco tangente desta superfıcie noponto q.
Variedades integrais estao relacionadas com distribui-coes involutivas pelo celebre teorema de Frobenius
(Arnol’d and (Eds.), 1994) que afirma que uma dis-tribuicao regular e integravel se e somente se ela forinvolutiva. Assim, se ∆ e uma distribuicao involutivak-dimensional, entao localmente existem n − k funcoeshi : Rn −→ R tal que variedades integrais de ∆ saodadas pelas superfıcies de nıvel de h = (h1, ..., hn−k).
Associado com o espaco tangente TqRn esta o espaco
dual T ∗q Rn, o conjunto de funcoes lineares sobre TqR
n.Tal como foram definidos campos vetoriais sobre Rn,define-se uma uma-forma como um mapa que atribuia cada ponto q ∈ Rn um covetor w(q) ∈ T ∗
q Rn. Emcoordenadas locais representa-se uma uma-forma suavecomo um vetor linha
w(q) = [w1(q) w2(q) ... wn(q)].
Diferenciais de funcoes suaves sao bons exemplos deuma-forma. Por exemplo, se β : Rn −→ R, entao auma-forma dβ e dada por
dβ =[
∂β∂q1
∂β∂q2
· · · ∂β∂qn
]
.
Uma uma-forma age sobre um campo vetorial para geraruma funcao real sobre Rn tomando o produto internoentre um vetor linha w e um vetor coluna f :
w · f =∑
i
wifi.
Uma codistribuicao atribui um subespaco de T ∗q R sua-
vemente a cada q ∈ Rn. Um caso especial e uma codis-tribuicao obtida como uma varredura de um conjuntode umas-forma,
Ω = varw1, ..., wn,
onde a varredura esta sobre o conjunto de funcoes su-aves. O posto da codistribuicao e a dimensao de Ωq.A codistribuicao Ω e dita ser regular se seu posto forconstante.
No planejamento de movimento para sistemas nao-holonomicos, a primeira tarefa e converter as restricoesdadas como umas-forma num sistema de controle equi-valente. Para isto, considere o problema de construirum caminho q(t) ∈ Rn entre um dado q0 e qf sujeito asrestricoes
wi(q)q = 0 i = 1, ..., k.
Os wi’s sao funcoes lineares sobre os espacos tangentesde Rn, isto e, umas-forma. Considerando que os wi’ssao suaves e linearmente independentes sobre o conjuntode funcoes suaves, a seguinte proposicao (Murray et al.,1994) e uma formalizacao da discussao da Introducao.
250 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Proposicao 1. Distribuicao aniquilando restri-coes
Dado um conjunto de umas-forma wi(q), i = 1, ..., k,existem campos vetoriais suaves, linearmente indepen-dentes gj(q), j = 1, ..., n − k tal que wi(q) · gj(q) = 0para todo i e j.
Na linguagem de distribuicoes e codistribuicoes, os re-sultados desta proposicao sao expressos definindo a co-distribuicao
Ω = varw1, ..., wke a distribuicao
∆ = varg1, ..., gn−k
e declarando que
∆ = Ω⊥.
Diz-se que a distribuicao ∆ aniquila a codistribuicao Ω.O sistema de controle associado com a distribuicao ∆ eda forma
q = g1(q)u1 + ...+ gn−k(q)un−k,
com os controles ui a serem livremente especificados.Estes resultados podem ser usados para determinar seum conjunto de restricoes sao holonomicas atraves daproposicao seguinte:
Proposicao 2. Integrabilidade de restricoes Pfaf-fianas
Um conjunto de restricoes Pfaffianas suaves e integravelse e somente se a distribuicao que aniquila as restricoese involutiva.
Considerando a proposicao 1, que produz um conjuntode campos vetoriais ortogonais a um dado conjunto deumas-forma, fica claro que o problema do planejamentode movimento e equivalente ao do deslocamento dos es-tados de um sistema de controle. Assim, restringe-se aatencao a sistemas de controle da forma
Σ : q = g1(q)u1 + ...+ gm(q)um
q ∈ Rn
u ∈ U ⊂ Rm.(4)
Este sistema e dito livre de deriva, o que significa di-zer que quando os controles sao colocados em zero osestados do sistema nao se alteram. Considerando gj
campos vetoriais suaves, linearmente independentes so-bre Rn e que seus fluxos sao definidos durante todo otempo, deseja-se determinar as condicoes sob as quaispode-se deslocar o sistema de q0 ∈ Rn para um qf ∈ Rn
arbitrario, pela escolha de um sinal u(.) adequado.
Um sistema Σ e controlavel se para qualquer q0, qf ∈ Rn
existe um T > 0 e u : [0, T ] −→ U tal que Σ sati-faz q(0) = q0 e q(T ) = qf . Um sistema e dito serlocalmente controlavel a curto tempo em q0 se pontosproximos podem ser atingidos num intervalo de tempoarbitrariamente curto e permanecer sempre proximode q0. Dado um conjunto aberto V ⊆ Rn, define-seRV (q0, T ) como sendo o conjunto de estados q tal queexista u : [0, T ] −→ U que desloca Σ de q(0) = q0 ateq(T ) = qf e satisfaz q(t) ∈ V para 0 ≤ t ≤ T . Tambemdefine-se
RV (q0, t ≤ T ) =⋃
0<τ≤T
RV (q0, τ)
como sendo os estados atingıveis ate o tempo T . Umsistema e localmente controlavel a curto tempo seRV (q0, t ≤ T ) contem uma vizinhanca de q0 para to-das as vizinhancas de V de q0 e T > 0.
O Teorema de Chow (Murray et al., 1994) afirma queum sistema de controle (4) e localmente controlavel emq ∈ Rn se ∆q = TqR
n. Este resultado comprova queum sistema sem deriva Σ e controlavel se o posto damatriz de controlabilidade da algebra de Lie for n. Acondicao do teorema de Chow consiste em verificar oposto da algebra de Lie de controlabilidade e sera aquireferenciado como condicao de posto de controlabilidade.
Em princıpio, tem-se agora uma receita para resolvero problema do planejamento de movimento para siste-mas que satisfacam a condicao de posto de controlabi-lidade. Dado um ponto inicial q0 e um ponto final qf ,encontra-se um numero finito de caminhos intermedia-rios q1, q2, ..., qp ∈ Rn e vizinhancas de Vi tal que
p⋃
i=1
RVi(qi, t ≤ T )
contenha segmentos de linha reta conectando q0 a qf .Entao existe uma lei de controle com p segmentos quedesloca o sistema de q0 ate qf . A dificuldade deste pro-cedimento (e dos teoremas aqui apresentados) e que elesnao mostram como construir o caminho juntando q0 aqf , so provam sua existencia.
4 APLICACAO A UM ROBO MOVELCOM ACIONAMENTO DIFERENCIAL
Um robo que se move com acionamento diferencial eo exemplo utilizado como base de comparacao no de-senvolvimento de estrategias de controle para sistemasnao-holonomicos. Para reduzir o espaco de configuracao,considera-se que o robo possui tres rodas, duas aciona-das individualmente e uma terceira que gira livremente,
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 251

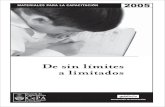
Figura 1: Robo no sistema de coordenadas
cuja funcao e apenas servir de suporte para o robo (evi-tar que ele se incline quando se move sobre um plano).Considera-se que esta terceira roda tem efeitos desprezı-veis na dinamica do veıculo. As duas rodas acionadas in-dividualmente sao responsaveis pelo movimento do roboe diferencas de velocidade entre as mesmas fazem comque o robo mude sua orientacao. No caso limite, umaroda girando em sentido contrario ao da outra com omesmo modulo de velocidade provocam a rotacao dorobo em torno do seu eixo. O corpo do robo tem umaforma simetrica e o centro de massa esta no centro geo-metrico do corpo.
Tal sistema esta representado na Figura 1, onde a posi-cao do mesmo esta representada tanto em coordenadasretangulares quanto polares. A posicao do centro geo-metrico em coordenadas retangulares e dada por (xo, yo)e φ e o angulo entre o eixo central do robo (sentido lon-gitudinal) e o eixo x do sistema de coordenadas, repre-sentando a direcao a frente. O sistema tambem podeser representado em coordenadas polares (ρ, θ). A ve-locidade linear do robo e dada por vo, e wo indica avelocidade angular.
A postura do robo, q, e definida (Yang and Kim, 1999b)como
q = [xo, yo, φ]T .
O robo movel tem restricao nao-holonomica ja que asrodas acionadas apenas giram para frente ou para trase nao deslizam lateralmente, podendo esta ser escritacomo
yo cos(φ) − xosen(φ) = 0.
Portanto o sistema tem espaco de configuracao tri-dimensional (n = 3) e uma restricao (p = 1) o que levaa um vetor de velocidade de dimensao m = n − p = 2.Escolhendo vo e wo como as variaveis de estado internastais que
z = [vo, wo]T ,
obtem-se a equacao na forma (4) como:
xo
yo
φ
=
−sen(φ) 0cos(φ) 0
0 1
.
[
vo
wo
]
. (5)
Logo, tem-se que (Victorino, 1998)
g1 =
−sen(φ)cos(φ)
0
; g2 =
001
.
O posto da matriz formada por (g1, g2) e dois e infe-rior ao espaco de configuracao, portanto, deve-se geraro colchete de Lie [g1, g2] para verificar se o sistema e ho-lonomico e a possibilidade de completar a distribuicaopara verificar se o sistema e controlavel. Logo
[g1, g2] = g3 = ∇g2g1 −∇g1g2 =
cos(φ)sen(φ)
0
,
e do teorema de Frobenius, se o sistema q = G.u e com-pletamente integravel (holonomico) entao ele e involu-tivo, ou seja
Posto(g1 g2) = Posto(g1 g2 [g1, g2])].
A verificacao leva a:
Posto
−sen(φ) 0 cos(φ)cos(φ) 0 sen(φ)
0 1 0
= 3.
Com isto conclui-se que o sistema e nao-holonomico.Pelo teorema de Chow (condicao de posto da algebrade Lie) tem-se que o posto do sistema acrescido de g3e igual ao do espaco de configuracao, logo o sistema econtrolavel.
5 FORMAS CANONICAS
Esta-se principalmente interessado na construcao de sis-temas nao-holonomicos que sejam canonicos (Murrayand Sastry, 1993) no sentido de que permitam a expan-sao maxima por colchete de Lie dos campos vetoriaisG = (g1, g2, ..., gm). Bases que sejam algebras de Liepossuem esta propriedade inerente. A base de PhilipHall (Kreyszig, 1991) e uma algebra de Lie e permitetal expansao alem de levar em consideracao as proprie-dades anti-simetrica e a identidade de Jacobi durante aexpansao (Murray et al., 1994). Classes bem conhecidasde sistemas nao-holonomicos sao aquelas na forma en-cadeada (Kolmanovsky and McClamroch, 1995) dadas
252 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

por sistemas do tipo
z1 = y1y2,z2 = z1y2,z3 = z2y2,
...zn−m = zn−m−1y2,
y1 = u1,y2 = u2.
e de sistemas na forma de potencia, dadas por
z1 = y1y2,z2 = 1
2 (y1)2y2,
...zn−m = 1
(n−m)!(y1)n−my2,
y1 = u1,y2 = u2.
Ambas as classes acima satisfazem a condicao de nao-holonomicidade completa do teorema de Chow, por-tanto, sao controlaveis. As duas formas sao equivalentesatraves de uma transformacao de estados.
A forma de integrador nao-holonomico ou sistema deHeisenberg ou integrador de Brockett e dada por:
x1 = u1
x2 = u2
x3 = x1u2 − x2u1,(6)
onde x1, u1, x2, u2, x3 ∈ R. Este sistema pode ser repre-sentado na forma compacta empregando a definicao decolchete de Lie como (Bloch et al., 2000):
x = u
Y = [u, x], (7)
onde u = (u1, u2), x = (x1, x2) e Y =
(
0 x3
−x3 0
)
.
Sistemas na forma cartesiana como o do robo movelcom acionamento diferencial podem ser convertidos paraa forma do integrador nao-holonomico (6) atraves daaplicacao da seguinte transformacao de coordenadas(Hespanha et al., 1999a):
x1 = xc cos(θ) + ycsen(θ)x2 = θx3 = 2(xcsen(θ) − yc cos(θ))−
θ(xc cos(θ) + ycsen(θ))u1 = v − w(xcsen(θ) − yc cos(θ))u2 = w
. (8)
Ao inves de representar o robo movel com acionamentodiferencial na forma cartesiana, Aicardi et al. (1995) su-gerem a representacao do mesmo em termos de coorde-nadas polares, envolvendo o erro de distancia e > 0 esua orientacao φ em relacao a origem da base < g >,desta forma obtem-se:
e = −u cos(φ− θ),
φ = u sen(φ−θ)e ,
θ = w.
Fazendo α = φ− θ como sendo o angulo medido entre oeixo principal do veıculo e o vetor distancia e, chega-sea:
e = −u cos(α),
α = −w + u sen(α)e ,
φ = u sen(α)e .
(9)
Utilizando esta ultima forma, o projeto de leis de con-trole lineares, invariantes no tempo, em malha fechadase torna direto. Entretanto, deve ser observado que asequacoes somente sao validas quando o erro do vetordistancia e diferente de zero ou que simultaneamentesen(α) tambem seja zero.
6 CONTROLE DE SISTEMAS NAO-HOLONOMICOS
O controle de sistemas nao-holonomicos pode ser agru-pado como na teoria classica de controle em: metodos demalha aberta e metodos de malha fechada. Os metodosde malha aberta sao tambem conhecidos como planeja-mento do movimento para sistemas nao-holonomicos ebuscam leis de controle em malha aberta que desloque osistema de um estado inicial ate um estado final. Ja osmetodos de malha fechada sao aqueles que possuem al-guma lei de realimentacao para estabilizar o sistema emtorno de um ponto de equilıbrio, seguir uma trajetoria,ou rejeitar disturbios.
6.1 Metodos de malha aberta
Tais metodos, em contraste com tecnicas tradicionais,devem levar em consideracao as restricoes instantaneasao movimento. As tecnicas mais difundidas sao as ba-seadas em:
• Geometria diferencial e algebra diferencial
• Fase geometrica
• Parametrizacao da entrada
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 253

• Controle otimo do movimento
• Planejamento do movimento evitando-se obstaculos
Metodos empregando geometria diferencial e al-gebra diferencial
Utilizam extensivamente o conceito de colchete e algebrade Lie para o planejamento do movimento, encontra-se entre seus maiores defensores pesquisadores comoG. Lafferriere e Hector J. Sussmann. O primeiro me-todo neste grupo utiliza entradas constantes por partepara gerar movimentos nas direcoes dos colchetes deLie e e chamado de metodo de aproximacao nilpotente(Lafferriere and Sussmann, 1991). Baseia-se no fato deque, se um sistema de controle pode ser expandido pelocolchete de Lie (e uma algebra de Lie), entao tem-seduas situacoes: se o sistema e nilpotente existe uma so-lucao unica para o problema, caso contrario, pode-seaplicar um metodo de nilpotencializacao por realimen-tacao atraves de um pre-compensador e fazer com queum algoritmo de controle produza uma solucao exatanum numero finito de passos.
O metodo de aproximacao nilpotente considera que osistema e completamente controlavel, nao possui derivae e formado por campos vetoriais reais e analıticos. Aprimeira condicao e equivalente a condicao do posto daalgebra de Lie (LARC) ou condicao de posto de contro-labilidade. Uma algebra de Lie e dita ser nilpotente seexiste um inteiro k > 0 com a propriedade de que todosos colchetes de Lie [v1, [v2, ..., [vk, vk+1] se anulam. Omenor deste k e a ordem de nilpotencia da algebra deLie, e a algebra de Lie e dita ser nilpotente de ordem k.Para ilustrar, o sistema sera de ordem um se [fi, fj ] = 0para todo i, j, ou seja, se o sistema for abeliano (co-mutativo). Lafferriere and Sussmann (1991) mostraramque, se a ordem de nilpotencia for igual ou maior que onumero de estados do sistema, pode-se entao criar umsistema estendido, achar um controle v que desloca ppara q para o sistema estendido e entao achar u quedesloca p para q no sistema original. Para facilitar a ex-pansao do sistema (evitar termos anti-simetricos e quesatisfazem a identidade de Jacobi) e utilizada a base dePhilipp Hall.
Muitos sistemas que nao sao nilpotentes podem sertransformados em sistemas nilpotentes atraves de rea-limentacao que consiste numa mudanca linear dos con-troles
ui =m
∑
j=1
βij(x)vj ,
tal que β(x) seja uma matriz nao singular para cada x,e β(x) seja suave como funcao de x.
Considerando o robo descrito anteriormente, em que oscontroles sao a velocidade de acionamento e a velocidadeangular, as equacoes para o sistema sao:
x1 = cos(x3)u1,x2 = sen(x3)u1,x3 = u2,
onde (x1, x2) sao as coordenadas cartesianas do cen-tro do robo e x3 e o angulo que seu eixo principalfaz com o eixo x1. Pode-se reescrever o sistema comox = u1f1(x) + u2f2(x) onde
f1(x) = (cos(x3), sen(x3), 0) f2(x) = (0, 0, 1).
Ve-se que os vetores f1(x), f2(x), [f1, f2](x) varrem R3
proximo de x = 0, de forma que o sistema e nilpotencia-lizavel porem o mesmo nao e nilpotente. O sistema podeser tornado nilpotente usando a seguinte realimentacao
u1 = 1cos(x3)
w1,
u2 = cos2(x3)w2.
O sistema e transformado entao em
x1 = w1,x2 = tan(x3)w1
x3 = cos2(x3)w2
o qual e nilpotente de ordem 2. Calculam-se entao os si-nais de controle desejados como segue. Primeiro aplica-se o procedimento ao sistema nilpotente para obter oscontroles wi; entao usando a realimentacao calcula-seos controles para o sistema original. A solucao para osistema estendido sera da forma
S(T ) = eαf1eβf2eγ[f1,f2].
O movimento no sentido de [f1, f2] e equivalente ao des-locamento do sistema na direcao de f1 por ∆t segundos,seguida na direcao f2 por ∆t segundos, na direcao −f1
por ∆t segundos, e finalmente na direcao −f2 por ∆tsegundos.
Sussmann and Liu (1997) propuseram um metodo queemprega entradas altamente oscilatorias. A ideia destemetodo e tomar um caminho γ : [0, T ] −→ M tal queγ(0) = p, γ(T ) = q, que nao precisa ser admissıvel, etentar-se aproximar deste caminho total atraves de umasequencia γi de caminhos admissıveis, tambem defi-nidos sobre [0, T ], e tambem satisfazendo as condicoesiniciais. Para tal, estende-se o sistema original empre-gando o colchete de Lie e entao expressa-se o caminhoγ como uma trajetoria no novo sistema correspondentea alguma entrada estendida v. Tenta-se encontrar umasequencia de entradas comuns uj cujas trajetorias con-vergem para as entradas estendidas. Usam-se entradas
254 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

de controle periodicas de alta frequencia e alta ampli-tude para gerar movimento na direcao dos novos camposvetoriais (gerados pelos colchetes de Lie). O resultadodo movimento medio do sistema, obtido no limite destasentradas de alta frequencia, e um deslocamento preciso(dentro de uma determinada tolerancia). Os sinais decontrole sao do tipo uk
i = η1(t)+√jη3(t)senjt. Deve-se
tomar cuidado para escolher frequencias e coeficientes deforma que os sinais de controle resultantes sejam reais.Este metodo tem uso limitado devido ao tipo de sinalde controle utilizado. Pode ser utilizado como aproxima-cao inicial para problemas em que seja necessario evitarobstaculos.
Metodo usando fase geometrica
Este metodo se aplica a sistemas de controle nao-holonomicos do tipo cinematico de Chaplygin. Consistena determinacao da alteracao resultante no vetor fibrabaseado na integral de linha ao longo do caminho dovetor base quando este e submetido a um movimento cı-clico. O valor desta integral de linha independe de qual-quer parametrizacao do caminho, dependendo apenasda geometria do mesmo; assim, este valor e referenciadocomo a geometria de fase (Kolmanovsky and McClam-roch, 1995). O problema entao se reduz a determinacaode um caminho base que produza a desejada geometriade fase.
O emprego do teorema de Stokes e a expansao em se-rie de Taylor permitem a expansao da integral de linhautilizando colchetes de Lie. Para um sistema nilpotenteesta serie termina apos um numero finito de termos, for-necendo desse modo uma expressao explıcita para a ge-ometria de fase.
Este metodo foi usado para resolver problemas de re-orientacao de satelites no espaco e para explicar comoos movimentos cıclicos dos cılios sobre a superfıcie doparamecium provoca o movimento do mesmo (Murrayet al., 1994).
Metodos de Parametrizacao da entrada
Brockett mostrou (Murray et al., 1994) que para sis-temas de controle descrito por equacoes como (1), ossinais de controles que levam uma funcao de energia aser otimizada da forma:
L(q, q) = (q21 + q22) + λ(q3 − q1q2 + q2q1),
onde a primeira parte do lado direito representa o qua-drado do sinal de entrada e a segunda parte corres-ponde as restricoes ao movimento; sao sinais periodi-cos, mais especificamente, senoides. O sinal otimo eobtido aplicando-se as equacoes de Euler-Lagrange para
minimizar a funcao Lagrangeana acima. A solucao dosistema indica que λ e constante e que os sinais quesatisfazem o sistema resultante (uma matriz real anti-simetrica, portanto, possuindo autovalores complexosconjugados) sao senoides de frequencia λ.
Baseados nestes resultados, Murray and Sastry (1993)propuseram um metodo de deslocamento por parame-trizacao da entrada usando senoides. Para sistemas quese tornam completamente nao-holonomicos com apenaso primeiro nıvel de colchete de Lie ([gi, gj ]) o metodoconsiste basicamente em: deslocar os xi’s ate que seusvalores finais sejam atingidos usando um sinal qualquere ignorando a evolucao dos estados xij ’s; usando senoi-des com frequencias multiplas, encontrar u0 que deslocaos estados xij ’s ate o valor objetivado. Esta ultima acaomantem os estados xi’s inalterados (sinal periodico) en-quanto gera um deslocamento nos estados xij ’s. O me-todo pode ser estendido a sistemas de segunda ordem(onde e necessario um segundo nıvel de colcheteamentopara varrer todo o espaco tangencial em q). Neste caso,os dois passos anteriores sao aplicados acrescidos de umterceiro: utilizam-se entradas senoidais uma segunda vezpara mover todos os estados previamente deslocados egerar movimento apenas nas direcoes xijk’s.
Metodo de controle otimo do movimento
Sussmann (1991) considera o controle otimo um metodonatural para problemas de busca de caminhos para sis-temas nao-holonomicos. Em muitos casos, existe umafuncao que se deseja minimizar ou quase minimizar. E,mesmo que a escolha desta funcao nao seja obvia, atransformacao artificial do problema de encontrar umcaminho em um de otimizacao e desejada.
A principal limitacao do metodo por controle otimo eque, exceto em alguns casos muito especiais, os sinaisde controle otimo sao muito difıcieis de se calcular. En-tretanto, usando metodos recentes da geometria dife-rencial, algum progresso pode ser obtido para sistemasque nao podem ser tratados pelos metodos classicos decontrole otimo.
Pode-se aplicar o metodo de controle otimo por mıni-mos quadrados para sistemas na forma da equacao (1),quando o mesmo atende a condicao de posto de contro-labilidade. A funcao de custo a ser minimizada sera dotipo
1
2
∫ 1
0
‖u(t)‖2dt.
Murray et al. (1994) apresentam uma derivacao heurıs-tica das condicoes necessarias para otimalidade usandocalculo de variacoes. Neste caso a funcao de custo deve
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 255

incorporar as restricoes usando uma funcao multiplica-dora de Lagrange p(t), obtendo
J(q, p, u) =
∫ 1
0
12u
T (t)u(t) − pT (q − ∑mi=1 gi(q)ui)
dt.
Prova-se (Murray et al., 1994) que a norma da entradaotima e constante, isto e,
‖u(t)‖2 = ‖u(0)‖2 ∀t ∈ [0, 1].
Desenvolvendo o sistema acima obtem-se
u = Ω(q, p)u
onde Ω(q, p) e uma matriz anti-simetrica dada por
Ω(q, p) =
0 pT [g1, g2] · · · pT [g1, gm]−pT [g1, g2] 0 · · · pT [g2, gm]
......
. . ....
−pT [g1, gm] −pT [g2, gm] · · · 0
.
A solucao da equacao u e da forma
u(t) = U(t)u(0)
para algum U(t) ∈ SO(m). Brockett e Dai(Kolmanovsky and McClamroch, 1995) demostraram aotimalidade de sinais de controle senoidais e elıpticosque satisfazem o sistema acima.
Metodos de planejamento do movimentoevitando-se obstaculos
Existe uma distincao entre metodo de deslocamento e deplanejamento do caminho evitando-se obstaculos. En-quanto o primeiro busca funcoes de entradas para se-guir uma trajetoria utilizando tanto metodos de malhaaberta quanto de malha fechada, o segundo preocupa-se em gerar uma trajetoria livre de obstaculos. Pode-se citar como metodos de deslocamentos aqueles quebuscam caminhos otimos, sistemas com entradas senoi-dais (Sekhavat and Laumond, 1998) e na forma enca-deada, metodos de deslocamento baseado na planici-dade para robos moveis com reboques, dentre outros(Laumond, 1998). Para o planejamento de caminhos napresenca de obstaculos, destacam os metodos: derivacaoa partir de caminhos holonomicos, probabilıstico, utili-zando tecnicas de otimizacao, espaco de caminho, multi-nıvel, empregando tecnicas de inteligencia artificial (al-goritmo A estrela), etc. Metodos desenvolvidos para sis-temas na ausencia de obstaculos podem ser estendidos
para sistemas com obstaculos dependendo de algumaspropriedades topologicas destes (Laumond et al., 1994).
A grande maioria destes metodos inicia a construcaodo caminho desprezando as restricoes nao-holonomicas,buscando apenas um caminho realizavel. Nesta fase,os metodos descritos anteriormente para deslocamentodo sistema e outros mais comuns sao empregados. En-contrada uma trajetoria realizavel, sao introduzidas asrestricoes nao-holonomicas e um caminho livre de obs-taculos sujeito a restricoes nao-holonomicas e obtido.
Para sistemas nao-holonomicos simples do tipo robo mo-vel e possıvel planejar caminhos melhores usando esque-letos (Mirtich and Canny, 1992; Kolmanovsky and Mc-Clamroch, 1995). Um esqueleto e uma colecao de ca-minhos fixos (geralmente nao realizaveis) que estao deforma maxima livres de obstaculos. O sistema e forcadoa seguir o esqueleto de um estado inicial ate um estadofinal enquanto evita obstaculos. Uma vez que o esque-leto fica de forma maxima livre de obstaculos, o caminhoresultante tende a ser de baixa complexidade.
6.2 Metodos em malha fechada
Muitas vezes e necessaria a utilizacao de controle por re-alimentacao. Dependendo do tipo de resposta desejadaexistem diversas formulacoes para o problema de con-trole. Pode-se destacar tres abordagens mais comuns(Khalil, 1996): estabilizacao, rastreamento, e rejeicao /atenuacao de disturbios (e varias combinacoes das mes-mas). No caso da estabilizacao, procura-se leis de rea-limentacao (variantes ou invariantes no tempo) que es-tabilizem um sistema para um determinado ponto deequilıbrio. Para o rastreamento, a meta basica e proje-tar um sinal de controle de forma que a saıda controladay siga um sinal de referencia yR, isto e,
e(t) = y(t) − yR(t) ≈ 0, ∀t ≥ t0
onde t0 e o instante em que o controle se inicia. Comoo valor inicial de y depende do estado inicial (x0), enecessario partir de um estado ”pre-estabelecido”.
Um postulado bem conhecido dos pesquisadores emcontrole nao-linear proposto por Brockett (1983) dizque: Um sistema nao-holonomico, embora seja comple-tamente controlavel, nao pode ser estabilizado para umaconfiguracao final de repouso atraves de leis suaves derealimentacao nos estados. Este postulado se aplica aestabilizacao em torno de um ponto de equilıbrio e leis decontrole invariantes no tempo, porem nao e valido para orastreamento de uma trajetoria (Victorino, 1998). Nesteultimo caso, pode-se usar as leis de controle conhecidasse o sistema for linearizavel por realimentacao estatica
256 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

ou dinamica de estados, e uma vez que a trajetoria dereferencia nao contenha configuracoes de repouso.
Para sistemas lineares invariantes no tempo, se os au-tovalores instaveis do sistema sao controlaveis, entao aorigem pode ser estabilizada de forma assintotica. Siste-mas nao-holonomicos apresentam caracterısticas que odiferenciam consideravelmente do caso anterior. Mesmoque linearizado em torno de um ponto de operacao, osistema nao e assintoticamente estavel, logo, as estrate-gias tradicionais nao podem ser empregadas. As princi-pais tecnicas de controle desenvolvidas para vencer estalimitacao sao:
• Estabilizacao variante no tempo;
• Estabilizacao usando sinais nao contınuos ou trans-formacoes nao-lineares;
• Leis hıbridas de realimentacao.
Restringe-se a abordagem aqui a exemplos da utiliza-cao do metodo de rastreamento de trajetoria por linea-rizacao dinamica, estabilizacao variante no tempo e naocontınua em um ponto de equilıbrio e uma lei hıbrida.
Rastreamento de trajetorias nao-singularesusando realimentacao dinamica de estados
Sera considerado aqui o robo movel com acionamentodiferencial, constituıdo por duas rodas acionadas indivi-dualmente e uma terceira de apoio com giro livre, cons-truıdo de tal forma que o mesmo possa girar em tornodo proprio eixo, conforme e mostrado na Figura 1. Oseguinte modelo cinematico descreve o comportamentodeste robo:
xy
θ
=
−senθ 0cos θ 0
0 1
.
[
η1η2
]
(10)
ϕ =
[
ϕ1
ϕ2
]
=
[
xy
]
onde ϕ e o vetor de saıda (x, y) a posicao do robo, θa orientacao do mesmo, η1 sua entrada para a veloci-dade linear associada e η2 para a respectiva velocidadeangular. Este vetor de entradas de controle ηi esta re-lacionado com as velocidades das rodas por
[
η1η2
]
=
[
r/2 r/2r/2L −r/2L
]
.
[
ϕ1
ϕ2
]
(11)
ou de forma inversa[
ϕ1
ϕ2
]
=
[
1/r L/r1/r −L/r
]
.
[
η1η2
]
(12)
O metodo de linearizacao por realimentacao estaticapode ser resumido, em poucas linhas, como a seguir(Slotine and Li, 1991).
Considere o seguinte sistema nao-linear:
x = f(x) +G(x)uxi = fi(x) +
∑mj=1 gijuj ,
onde i = 1, ..., n, f(x) e um vetor de dimensao n defuncoes suaves, G(x) e uma matriz de dimensao n ×mde funcoes suaves de elementos gij . Os vetores x e ude dimensoes n e m, respectivamente, sao os vetores deestado e de entrada de controle. O projeto de uma leide controle que linearize o sistema com realimentacaoestatica e entao estabelecido seguindo-se os passos:
• escolher uma funcao de saıda de dimensao m, y =h(x) = (y1(x)...ym(x)) que corresponda a uma ma-triz de controlabilidade desacoplada nao-singularapos a realimentacao estatica de estados;
• diferenciar as saıdas y ate que uma entrada u apa-reca;
• escolher uma entrada de controle u de modo que asnao-linearidades sejam canceladas e a convergenciaseja garantida durante o movimento de seguimento.
Aplicando este metodo ao modelo (10), deve-se diferen-ciar a saıda ϕ, obtendo:
ϕ =
[
xy
]
=
[
−senθ 0cos θ 0
]
.
[
η1η2
]
(13)
O sistema resultante e singular e independe da en-trada η2. Isto indica que a linearizacao por realimen-tacao estatica para robos nao-holonomicos nao e pos-sıvel. Prossegue-se entao aplicando a linearizacao porrealimentacao dinamica de estados. Considerando o sis-tema ϕ = EU , adiciona-se integradores ate que a matrizE seja invertıvel. Portanto, para se obter uma solucaopara o mesmo, e necessario utilizar uma expansao domodelo (Slotine and Li, 1991) da forma:
x = −η1senθ,y = η1 cos θ,
θ = η2η1 = η3.
(14)
Dando prosseguimento ao procedimento de linearizacaodo sistema atraves da realimentacao dinamica, deriva-senovamente o vetor de saıda ϕ, utilizando agora o modeloestendido, obtendo-se:
ϕ =
[
xy
]
=
[
−η1 cos θ −senθ−η1senθ cos θ
]
.
[
η2η3
]
(15)
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 257

Esta matriz sera invertıvel sempre que η1 6= 0, ou seja,sempre que a velocidade do robo for diferente de zero.Se o sistema (15) for escrito de forma reduzida comoϕ = E.U , deseja-se determinar o valor de U que linearizeo sistema, assim:
U =
[
− cos θη1
−senθη1
−senθ cos θ
]
.ϕ (16)
com ϕ = v indicando que o sistema esta linearizado.
Considerando φref como a trajetoria de referencia a serseguida pela funcao de saıda ϕ, e k1 e k2 ganhos derealimentacao escolhidos de forma que o sistema resul-tante seja estavel, entao, utiliza-se um controlador au-xiliar com a seguinte lei de controle:
v = ϕ = ϕref − k2˙ϕ− k1ϕ (17)
onde ϕ = ϕ − ϕref e o erro de convergencia; portanto,este ultimo tera a seguinte equacao caracterıstica
¨ϕ+ k2˙ϕ+ k1ϕ = 0
em que os valores de k1 e k2 implicarao na velocidadede convergencia ate a trajetoria desejada.
Compondo o modelo (10) com o vetor de entradas decontrole, para resultar num modelo dependente das ve-locidades das rodas ϕ1 e ϕ2, obtem-se o seguinte modelopara o robo movel
xy
θ
=
− r2senθ − r
2senθr2 cos θ r
2 cos θr
2L − r2L
.
[
ϕ1
ϕ2
]
(18)
O resultado da aplicacao do sistema de rastreamento porlinearizacao dinamica pode ser visto na Figura 2, ondeforam utilizados polos rapidos (-20 e -21). Ve-se queo sistema converge rapidamente para a trajetoria dese-jada. O angulo de orientacao inicial do robo foi de 3π/4.Observa-se ainda que apenas dois estados foram estabi-lizados (x, y), a orientacao do robo (θ) pode nao ser adesejada, ou seja, o robo pode estar navegando para tras.Entretanto, pode-se estender os conceitos apresentadospara o controle dos tres estados.
Estabilizacao suave variante no tempo
A tecnica apresentada no item anterior e de grande va-lia para seguir uma trajetoria, nao servindo para a es-tabilizacao numa configuracao final. Para resolver esteproblema algumas tecnicas foram desenvolvidas nos ul-timos anos, tais como: realimentacao suave variante notempo (Samson and Ait-Abderrahim, 1990) (ideia ex-plorada inicialmente por Sontag and Sussmann (1980)) e
−0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25 0.3−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35Rastreamento de trajetória
Eixo x
Eix
o y
Figura 2: Seguimento de trajetoria por linearizacao es-tatica
realimentacao contınua por partes (Bloch and McClam-roch, 1989). O que se destaca entre estas duas tecnicas eque a estrategia nao contınua proporciona uma conver-gencia exponencial e global para o ponto de equilıbrio,enquanto a primeira a convergencia e assintotica masnao exponencial (Samson and Ait-Abderrahim, 1991).A tecnica de ”Backsteping”tem sido utilizada para ob-tencao de estabilizacao exponencial para sistemas nao-holonomicos (Morin and Samson, 1996).
O metodo de realimentacao suave e variante no tempo(Pomet, 1992) consiste de dois pontos basicos:
- Escolha de uma funcao variante no tempo α(t, x) quetenha as seguintes propriedades:
1. Seja periodica
α(t+ 2π, x) = α(t, x) ∀(x, t) (19)
2. Seja par
α(−t, x) = −α(t, x) ∀(x, t) (20)
3. Se anule para x = 0
α(t, 0) = 0 ∀(x, t) (21)
- Solucao da seguinte equacao diferencial para V , ondeV e uma funcao candidata de Lyapunov:
∂
∂tV (t, x) + α(t, x)
∂
∂xV (t, x)f1(x) = 0 (22)
com condicao inicial em t = 0:
V (0, x) =1
2‖x‖2. (23)
258 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Para as condicoes impostas a α(t, x), garante-se que afuncao de Lyapunov sera decrescente para o sistema emmalha fechada que utilize o seguinte vetor de entradas:
u1(t, x) = α(t, x) − Lf1V (t, x)
u2(t, x) = −Lf2V (t, x)
...um(t, x) = −Lfm
V (t, x)
(24)
Onde Lfg = ∇gf e o operador derivada de Lie e f e gsao funcoes suaves.
Uma forma mais simples de se chegar a lei de controlee atraves do metodo simplificado (Pomet, 1992). Estee mais restrito em relacao ao caso geral, mas quandoaplicavel oferece um modo mais facil de se obter a funcaocandidata de Lyapunov V (t, x), sem a necessidade deresolver qualquer relacao diferencial, e assim obter a leide controle (u1, u2, . . . , um). Ele se baseia na suposicaode que existe um sistema de coordenadas (x1, x2, . . . , xn)tal que,
f1 =∂
∂x1=
10...0
. (25)
Se esta condicao for satisfeita para o sistema, entaoe sempre possıvel escolher uma funcao de LyapunovV (t, x) da forma:
V (t, x) = 12 [x1 + h(t, x2, . . . , xn)]2+
+ 12x
22 + . . .+ 1
2x2n.
(26)
Impoem-se algumas condicoes sobre a funcao h, tal que,ao inves de se tomar α como parametro de projeto eresolver a equacao diferencial para a funcao de LyapunovV (equacao (22)), toma-se h como parametro de projetoe calcula-se a funcao α para satisfazer (22), sendo V em(22) dada agora por (26). Para o robo em estudo, se acondicao (25) for satisfeita, entao para qualquer funcaoh(t, x2, x3, . . . , xn) satisfazendo as seguintes condicoes:
h(t+ 2π, x2, . . . , xn) ∀(t, x) (27)
h(t, 0) = 0 ∀(t, x) (28)
a funcao de Lyapunov V dada por (26) e a funcao αdada por
α(t, x) = − ∂
∂th(t, x2, . . . , xn) ∀t (29)
sao tais que as condicoes (19), (20), (21) e (22) sao ve-rificadas, e assim pode-se calcular a lei de controle (24).
Exemplo: O robo movel KHEPERA (Pomet, 1992)
O modelo reduzido deste robo e dado por
x1 = u1
x2 = x1u2
x3 = u2
. (30)
Logo:
f1 =
100
f2 =
0x1
1
∇f1 =
0 0 00 0 00 0 0
∇f2 =
0 0 01 0 00 0 0
[f1, f2] = ∇f2f1 −∇f1f2 =
010
.
[f1 f2 [f1, f2]] =
1 0 00 x1 10 1 0
.
Como o determinante deste ultimo sistema e igual a −1tem-se que o posto e igual a 3 que e igual a ordem dosistema; portanto, o sistema e controlavel. Tomando afuncao de Lyapunov da forma (26) para n = 3 e esco-lhendo a funcao h como:
h(t, x2, x3) = x2 cos t,
as condicoes (27) e (28) sao satisfeitas e V e dada por:
V (t, x) =1
2[x1 + x2 cos t]2 +
1
2x2
2 +1
2x2
3. (31)
Determina-se, entao:
Lf1V = ∇V f1 = x1 + x2 cos t
Lf2V = ∇V f2 = (x1 + x2 cos t)x1 cos t+ x1x2 + x3
e a funcao α e calculada como:
α(t, x) = − ∂
∂th(t, x2, x3) = x2sent;
logo, o vetor de controle com realimentacao de estados,suave e variante no tempo que estabiliza o sistema paraa origem sera:
u1 = α(t, h) − Lf1V (t, x)
u2 = −Lf2V (t, x)
u1 = x2sent− (x1 + x2 cos t)u2 = −(x1 + x2 cos t)x1 cos t− (x1x2 + x3)
Pomet (1992) utiliza a lei de estabilizacao que e aplicadaao robo KHEPERA , dada por:
u1 = xsen(θ) − y cos(θ)u2 = λ[xsen(t) + cos(t)sen(θ)u1]−
−(θ + λx cos(t)).
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 259

0 0.02 0.04 0.06 0.08 0.1 0.12 0.14−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3Estabilização na origem
Eixo x
Eix
o y
Figura 3: Estabilizacao suave variante no tempo
Esta lei de controle foi obtida com a utilizacao de umanova funcao de Lyapunov ligeiramente diferente da aquiproposta:
V (t, x) =1
2[ψ(θ)
λ+ x cos(t)]2 +
1
2x2 +
1
2x3
com α sendo uma constante real positiva e ψ uma funcaoreal suave com ψ′ > 0 e ψ(θ) = 0 para θ = 0.
A Figura 3 mostra resultados de simulacao utilizandoesta estrategia. Observa-se que a trajetoria e irregular eisto torna este tipo de controlador impraticavel quandoo estado inicial esta longe do estado final. Adotou-se umtempo de 50 segundos de simulacao. Mesmo com estetempo tao longo o robo nao conseguiu atingir o estadofinal. Nota-se que nos instantes finas de simulacao orobo oscila em direcao a origem.
Em Pomet et al (1992) e realizada uma analise da in-fluencia dos parametros de projeto ψ(θ) e λ. Verifica-seque para λ = 20 (um valor grande), a velocidade de con-vergencia de (x, y) para (0, 0) e maior que para o casoλ = 1, e que para o caso de ψ(θ) = θ o movimento eerratico e a trajetoria apresenta maior numero de ”pon-tas”que para o caso de, por exemplo, ψ(θ) = tan(θ/a),com a > 2.
Estabilizacao usando sinais nao contınuos outransformacoes nao-lineares
Atraves da escolha adequada de um sistema de equacoesde estado (Aicardi et al., 1995), a utilizacao de funcoesde Lyapunov na forma quadratica leva ao projeto diretode leis de controle simples e suaves para o robo movelcom acionamento diferencial. O sistema utilizado e orepresentado pela equacao (9) e a funcao candidata de
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
Tempo [s]
Est
ados
Evolucao dos estados
ealfatheta
Figura 4: Estabilizacao empregando transformacoesnao-lineares
Lyapunov e dada por:
V =1
2λe2 +
1
2(α2 + hφ2); λ, h > 0.
Considerando que a derivada de V deve ser negativa eatraves de manipulacoes algebricas chega-se as seguintesleis de controle:
u = (γ cosα)e; γ > 0w = kα + γ cos αsenα
α (α+ hφ); k > 0.
Um exemplo de veıculo localizado em (x, y, θ) =(−1, 1, 3π/4) em relacao a base de referencia e mostradona Figura 4. O objetivo e atingir a origem (x, y, θ) =(0, 0, 0). Utilizando coordenadas polares, as condicoesiniciais serao (e(0), α(0), φ(0)) = (
√2,−π,−π/4), foram
aqui utilizados γ = 3;h = 1; e k = 6.
A principal limitacao deste controlador esta na dificul-dade de estender esses resultados (principalmente a re-presentacao em coordenadas polares) para sistemas commais de tres graus de liberdade, como veıculos articula-dos, carros, etc. Entretanto o comportamento do sis-tema e bem superior ao de outras tecnicas, produzindouma resposta assintoticamente estavel com um excelentetempo de acomodacao.
Controladores hıbridos
Tipicamente, controladores hıbridos combinam caracte-rısticas de continuidade no tempo com caracterısticas aeventos discretos ou de tempo discreto. A operacao decontroladores hıbridos e baseada no chaveamento em in-tervalos de tempo discreto entre diversos controladorescontınuos no tempo. Os instantes de tempo nos quais ochaveamento pode ocorrer podem tanto ser especificadosa priori quanto determinados no processo de operacaodo controlador (Kolmanovsky and McClamroch, 1995).
260 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Para projetar um controlador hıbrido, Hespanha andMorse (1999) e Hespanha et al. (1999b) partem do prin-cıpio de que todo sistema nao-holonomico com tres va-riaveis e duas entradas pode ser transformado no duplointegrador de Brockett. Assim, sao propostos contro-ladores hıbridos empregando supervisao e chaveamentobaseado em logica discreta. Um controlador usando con-ceitos semelhantes tambem e proposto por Aguiar andPascoal (2000) e aplicado a um robo movel com acio-namento diferencial. Piccoli et al. (1998) propoem umcontrolador hıbrido empregando automatos finitos quee estavel no sentido de Lyapunov, e e projetado de ma-neira a garantir que os sinais de controle mantenham-seuniformemente limitados e tenham no maximo um nu-mero finito de descontinuidades em qualquer intervalofinito.
Um bom exemplo de controle hıbrido para o robo comacionamento diferencial e dado por Bloch et al. (2000).A partir das equacoes transformadas para a forma deintegrador de Brockett ou sistema de Heisenberg:
x = u∗py = v∗pz = xv∗p − yu∗p,
utilizam-se sinais de controle semelhantes a:
u = −αx+ βzyv = −αx− βzx,
levando o sistema a assumir a forma
x = −αx+ βzyy = −αx− βzxz = −βz(x2 + y2).
Se a funcao de energia for tomada como V = x2 + y2,entao, sua derivada sera V = −2αV . Se inicialmente forescolhidos α = 0 e β > 0, entao para x ou y diferentesde zero, z sera levado assintoticamente a zero enquantoV permanecera fixo. Se α > 0 e β = 0, entao V seralevado a zero.
O sinal de controle utilizado para estabilizar o robo mo-vel com acionamento diferencial tem a forma:
u = −αx+ β[Y, x] − γ[Y, [Y, x]] (32)
onde define-se [Y, x] = −[x, Y ] ≡ Y x.
O algoritmo de controle pode entao ser assim descrito(com λ∗ denotando o maior autovalor Y TY , x∗ deno-tando a projecao de x sobre o auto-espaco de Y TY , eYc denotando a projecao de Y sobre o espaco nulo deM(x); δ estabelece a tolerancia de erro):
inıcioenquanto ‖Y ‖ ≥ δ
1. Com r = ‖x‖, implementar a lei de controle (32)com α = λ∗κ, γ = κ e β = 0. Entao Y evoluiisoespectralmente com norma constante, enquantox converge para a constante x∗. Se x∗ 6= 0 ir parao passo 3.
2. Com z∗ denotando um autovetor fixo λ∗ e ‖z∗‖ =r(1−1/dim(m))1/2, escolher u = −α(x−z∗), ondeα > 0. Entao x converge para z∗ enquanto Y per-manece constante.
3. Implementar a lei de controle (32) com α = γ =0, βε < 0. Entao x evolui isoespectralmente comnorma constante, e Y converge para o valor cons-tante Yc.fim enquantose ‖x‖ ≥ δ, entao
4. implementar o controle (32) com α > 0, β = γ = 0.Entao x convergira para zero radialmente, enquantoY permanece em zero.
fim
O sistema descrito foi simulado a partir das condicoesiniciais x1 = 1, x2 = 1, θ = 3 ∗ pi/4 e p∗1 = p∗2 = 1.5, comos ganhos chaveados a cada 3 segundos conforme matrizabaixo:
αβγ
=
0 0 20 3 00 0 0
.
A trajetoria do sistema real obtida (x1, x2) e o compor-tamento dos estados transformados (x, y, z) podem servistos na Figura 5.
Os principais problemas de estrategias envolvendo o con-trole hıbrido sao: preservacao da estabilidade apos ochaveamento; instabilidade do chaveameamento (comu-tacao intensa); e definicao do instante onde deve ocorrero chaveamento. Algumas estrategias utilizam tempo,distancia (ou norma), regioes de operacao, e superfıcies(modos deslizantes) para determinar o instante de cha-veamento. A verificacao da estabilidade pode utilizar:funcao global de Lyapunov, multiplas funcoes de Lyapu-nov, criterio algebrico de estabilidade, passividade, etc.O desempenho do controlador dependera da metodolo-gia adotada, e as trajetorias dos estados podem nao sertao naturais quanto esperado.
7 CONCLUSAO
Sistemas nao-holonomicos constituem uma classe de sis-temas com caracterısticas especiais, impondo desafios aodesenvolvimento da teoria de controle. Nota-se que na
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 261

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2Comportamento do robô
Eixo x1
Eix
o x2
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3Evolução dos estados transformados
Tempo [s]
Dis
tânc
ia
____ x
__ __ y
. . . . z
Figura 5: Estabilizacao empregando fluxo isoespectral
fase de analise sao utilizadas ferramentas da geometriadiferencial. Isto fica transparente no projeto de con-troladores quando se empregam formas canonicas compropriedades de controlabilidade e atingibilidade ja ve-rificadas.
O projeto de leis de controle para malha fechada utilizaprincipalmente funcoes de Lyapunov. No inıcio dos anos90, os controladores sintetizados eram estaveis e assin-toticamente estaveis, porem, o tempo para a convergen-cia poderia ser estendido indefinidamente. A partir de1995, foram desenvolvidas tecnicas para a estabilizacaoexponencial.
Quanto a estabilizacao num ponto de equilıbrio, o em-prego da realimentacao suave variante no tempo gera sis-temas estaveis, mas sua trajetoria tende a ser oscilatoria.A realimentacao nao contınua tende a gerar trajetoriasmais naturais. O controle hıbrido ainda apresenta pro-blemas para sıntese de leis de controle exponencialmenteestaveis e tem sido objeto de inumeras contribuicoes nosultimos anos.
Como temas ainda em desenvolvimento e que requeremmais pesquisas, podem-se citar:
• projeto de sistemas robustos que considerem incer-tezas no modelo, sensores e na propria condicao denao-holonomicidade;
• desenvolvimento de novas tecnicas de projeto de sis-temas de controle hıbrido que gerem sistemas expo-nencialmente estaveis;
• emprego desta teoria na analise, projeto e controlede sistemas tolerantes a falhas;
• necessidade de novos avancos na teoria do controle
geometrico e em ferramentas de geometria diferen-cial, facilitando a analise e projeto de sistemas decontrole;
• desenvolvimento de sistemas de pilotagem automa-tica que considerem as restricoes nao-holonomicas,melhorando a confiabilidade e estendendo o graude automatismo de veıculos terrestres, aquaticos eaeroespaciais.
No artigo foram apresentados os desenvolvimentos maisrecentes e significativos por area e apresentada uma con-tribuicao relativa a comparacao de algumas tecnicas deestabilizacao e areas a serem desenvolvidas em futurostrabalhos assim como conceitos basicos fundamentaispara entendimento do comportamento de sistemas nao-holonomicos.
AGRADECIMENTOS
Este trabalho contou com o apoio parcial da FAPEMIGe da Fundacao Geraldo Perligeiro de Abreu. Os autoresgostariam de agradecer os revisores anonimos por seusexcelentes comentarios e sugestoes.
REFERENCIAS
Agrachev, A. A. and Liberzon, D. (2001). Lie-algebraicstability criteria for switched systems, SIAM J.Control Optim. 40(1): 253–269.
Aguiar, A. P., Atassi, A. N. and Pascoal, A. M. (2000).Regulation of a nonholonomic dynamic wheeledmobile robot with parametric modeling uncertaintyusing lyapunov functions, Proc. of CDC 2000 - 39thIEEE Conference on Decision and Control - Syd-ney - Australia .
Aguiar, A. P. and Pascoal, A. (2000). Stabilization ofthe extended nonholonomic double integrator vialogic-based hybrid control, Proc. of SYROCO-00- 6th IFAC Symposium on Robot Control - Viena,Austria .
Aguiar, A. P. and Pascoal, A. M. (2001). Regulationof a nonholonomic autonomous underwater vehiclewith parametric modeling uncertainty using lyapu-nov functions, Proceedings of 40th IEERE Confe-rence on Decision and Control pp. 1–6.
Aguiar, A. and Pascoal, A. (1999). Stabilizationof autonomous vehicles with nonholonomic cons-traints: Open problems and future directions, Proc.Workshop Future Directions in Systems and Con-trol Theory - Cascais, Portugal .
262 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Aicardi, M., Cannata, G., Casalino, G. and Indiveri,G. (2000a). Guidance of 3d underwater nonholo-nomic vehicle via projection on holonomic soluti-ons, Symposium on Underwater Robotic Techno-logy, Hawaii, USA .
Aicardi, M., Cannata, G., Casalino, G. and Indiveri, G.(2000b). On the stabilization of the unicycle modelprojecting a holonomic solution, 8th Int. Sympo-sium on Robotics with Applications ISORA 2000,Hawaii, USA .
Aicardi, M., Casalino, G., Bicchi, A. and Balestrino, A.(1995). Closed loop steering of unicycle-like vehi-cles via lyapunov techniques, IEEE Robotics andAutomation Magazine pp. 27–35.
Aicardi, M., Casalino, G. and Indiveri, G. (2000). On aclosed loop time invariant position control solutionfor an uderactuated 3d underwater vehicle: imple-mentation, stability and robustness considerations,Underwater Technology 2000, Tokio, Japan .
Aicardi, M., Casalino, G. and Indiveri, G. (2001). Newtechniques for the guidance of underactuated ma-rine vehicles, 2001 IARP Workshop - Underwa-ter Robotic for Sea Exploitation and EnvironmentalMonitoring, Rio de Janeiro, Brazil .
Aicardi, M., Casalino, G., Indiveri, G., Aguiar, A., En-carnacao, P. and Pascoal, A. (2001). A planar pathfollowing controller for underactuated marine vehi-cles, Proc. of MED 2001 - 9th IEEE MediterraneanConference on Control and Automation, Dubrov-nik, Croatia .
Antsaklis, P., Koutsoukos, X. and Zaytoon, J. (1999).On hybrid control of complex systems: a survey.Work supported by US National Science Founda-tion, US Army Research Office and French Ministryof Research and Technology.
Arnol’d, V. I. and (Eds.), S. P. N. (1994). DynamicalSystems VII - Integrable Systems, NonholonomicDynamical Systems., Vol. 16 - No.VII of Encyclo-paedia of Mathematical Sciences, translated fromthe russian edn, Springer-Verlag, New York.
Astolfi, A. (1999). Exponential stabilization of a whe-eled mobile robot via discontinuous control, Jour-nal of Dynamic Systems, Measurement and Control121: 121–126.
Baluja, S. (1996). Evolution of an artificial neuralnetwork based autonomous land vehicle controller,IEEE Transactions on Systems, Man, and Cyber-netics - Part B: Cybernetics 26(3): 450–463.
Bloch, A., Drakunov, S. and Kinyon, M. (2000). Stabi-lization of nonholonomic systems using isospectralflows, Research Report - University of Michigan .
Bloch, A. and McClamroch, N. H. (1989). Control of me-chanical systems with classical nonholonomic cons-trains, Proceeding of 28th IEEE Conf. on Decisionand Control - Tampa pp. 201–205.
Branicky, M. S. (1998). Multiple lyapunov functionsand other analysis tools for switched and hybridsystems, IEEE Transactions on Automatic Control43(4): 475–482.
Brockett, W. (1983). Asymptotic stability and feed-back stabilization, in book: Differential geometriccontrol theory - R.W. Brockett, R.S. Millman, andH.J.Sussmann pp. 181–191.
Bushnell, L. G., Tilbury, D. and Sastry, S. S. (1994).Extended goursat normal forms with applicationsto nonholonomic motion planning., Technical re-port, Electronics Research Laboratory, Universityof California at Berkeley.
Chang, Y.-C. and Chen, B.-S. (1996). Adaptive trac-king control design of nonholonomic mechanicalsystems, Proceedings of the 35th Conference on De-cision and Control pp. 4739–4744.
Chang, Y.-C. and Chen, B.-S. (2000). Robust trackingdesigns for both holonomic and nonholonomic cons-trained mechanical systems: Adaptive fuzzy appro-ach, IEEE Transactions on Fuzzy Systems 8(1): 46–66.
Chwa, D. K., Seo, J. H., Kim, P. and Choi, J. Y.(2002). Sliding mode tracking control of nonho-lonomic wheeled mobile robots, Proceedings of theAmerican Control Conference pp. 3991–3996.
Colbaugh, R., Barany, E. and Glass, K. (1998). Adap-tive control of nonholonomic robotic systems, Jour-nal of Robotic Systems 15(7): 365–393.
D’Andrea-Novel, B., Campion, G. and Bastin, G.(1995). Control of wheeled mobile robots not sa-tisfying ideal velocity constraints: A singular per-turbation approach, International Journal of Ro-bust and Nonlinear Control 5: 243–267.
Decarlo, R. A., Branicky, M. S., Pettersson, S. and Len-nartson, B. (2000). Perspectives and results on thestability and stabilizability of hybrid systems, Pro-ceedings of the IEEE 99(7): 1069–1082.
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 263

Divelbiss, A. W. and Wen, J. T. (1997). A path spaceapproach to nonholonomic motion planning in thepresence of obstacles, IEEE Trans. on Robotics andAutomation 13(3): 443–451.
Do, K. D. and Pan, J. (2002). Adaptive global stabiliza-tion of nonholonomic systems with strong nonlineardrifts, Systems & Control Letters 46: 195–205.
Dong, W. and Xu, W. L. (2001). Adaptive trac-king control of uncertain nonholonomic dynamicsystem, IEEE Transactions on Automatic Control46(3): 450–454.
Dong, W., Xu, Y. and Huo, W. (2000). On stabiliza-tion of uncertain dynamic nonholonomic systems,International Journal of Control 73(4): 349–359.
Dubrovin, B., A.T.Fomenko and S.P.Novikov (1984).Modern Geometry - Methods and Applications,Vol. 1 of Springer Series in Soviet Mathematics,first edn, Springer-Verlag, New York.
Fernandes, C., Gurvits, L. and Li, Z. (1994). Near-optimal nonholonomic motion planning for a sys-tem of coupled rigid bodies, IEEE Transactions onAutomatic Control 39(3): 450–463.
Figueiredo, L. C. and Jota, F. G. (2002). A switchingtime-varying and time invariant controller to stabi-lize nonholonomic systems, CBA2002 - XIV Con-gresso Brasileiro de Automatica pp. 2902–2907.
Fontes, F. A. C. C. (2002). Stabilizing nonholono-mic systems by model predictive control, OfficinaMathematica - Controlo 2002 - Universidade doMinho pp. 1–7.
Fucao, T., Nakagawa, H. and Adachi, N. (2000). Adap-tive tracking control of a nonholonomic mobile ro-bot, IEEE Transactions on Robotics and Automa-tion 16(5): 609–615.
Fujimoto, K. and Sugie, T. (2001). Stabilization of ha-miltonian systems with nonholonomic constraintsbased on time-varying generalized canonical trans-formations, Systems & Control Letters 44: 309–319.
Ge, S. S., Sun, Z., Lee, T. H. and Spong, M. W. (2001).Feedback linearization and discontinuous control ofsecond-order nonholonomic chained systems, Pro-ceedings of the 2001 IEEE International Confe-rence on Control Applications pp. 990–995.
Ge, S., Wang, Z. and Lee, T. H. (2003). Adaptive stabili-zation of uncertain nonholonomic systems by stateand output feedback, Automatica 39: 1451–1460.
Getz, N. H. (1994). Control of balance for a nonli-near nonholonomic non-minimum phase model of abicycle., American Control Conference, Baltimore,American Automatic Control Council pp. 148–151.
Getz, N. H. and Marsden, J. E. (1995). Control for anautonomous bicycle., IEEE International Confe-rence on Robotics an Automation - Nagoya. pp. 21–27.
Glass, K. and Colbaugh, R. (1997). Adaptive con-trol of nonholonomic robotic systems for wastemanagement applications, Technical CompletionReport WERC-1-2-20575, New Mexico Waste-management Education and Research Consortium,Department of Mathematical Sciences - New Me-xico State University.
Hespanha, J. P. (2001a). Toturial on supervisory con-trol, 40th Conference on Decision and Control - Or-lando, Florida Lecture Notes in Control usingLogic and Switching: 1–46.
Hespanha, J. P. (2001b). UNESCO Encyclopedia of LifeSupport Systems, UNESCO, chapter StabilizationThrough Hybrid Control, p. To appear.
Hespanha, J. P., Liberzon, D. and Morse, A. S. (1999a).Logic-based switching control of a nonholonomicsystem with parametric modeling uncertainty, Sys-tems and Control Letters (special issue on hybridsystems 38: 167–177.
Hespanha, J. P., Liberzon, D. and Morse, A. S. (1999b).Supervision of integral-input-to-state stabilizingcontrollers, Proc. 5th European Control Conf. .
Hespanha, J. P., Liberzon, D. and Morse, A. S. (2001).Hysteresis-based supervisory control of uncertainlinear systems.
Hespanha, J. P., Liberzon, D. and Morse, A. S. (2002).Hysteresis-based switching algorithms for supervi-sory control of uncertain systems, Submitted for pu-blication in Automatica .
Hespanha, J. P. and Morse, A. S. (1999). Stabilizationof nonholonomic integrators via logic-based swit-ching, Automatica - Special Issue on Hybrid Sys-tems 35: 385–393.
Hocherman-Frommer, J., Kulkarni, S. R. and Ramadge,P. J. (1998). Controller switching based on outputprediction erros, IEEE Transactions on AutomaticControl 43(5): 596–607.
264 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Horiuchi, S. and Sunada, K. (1998). Synthesis of driverassistance system for lane-following using genera-lized predictive control, Proceedings of AVEC 98pp. 467–472.
Hu, H., Gu, D. and M.Brady (1997). Navigation andguidance of an intelligent mobile robot., IEEETrans. .... 8/97: 104–111.
Hunt, K. J., Haas, R. and Kalkkuhl, J. C. (1996). Localcontroller network for autonomous vehicle steering,Control Eng. Practice 4(8): 1045–1051.
Indiveri, G., Aicardi, M. and Casalino, G. (2000). Non-linear time-invariant feedback control of an unde-ractuated marine vehicle along a straight course,Proc. of the IFAC Conference on Manoeuvring andControl of Marine Craft, Aalborg, Denmark .
Janet, J. A., Gutierrez, R., Chase, T. A., White, M. W.and Sutton, J. C. (1997). Autonomous mobile robotglobal self-localization using kohonen and region-feature neural networks, Journal of Robotic Sys-tems 14(4): 263–282.
Jiang, Z. and Nijmeijer, H. (1997). Tracking controlof mobile robots: A case study in backstepping,Automatica 33(7): 1393–1399.
Jiang, Z. and Nijmeijer, H. (1999). A recursive techni-que for tracking control of nonholonomic systemsin chained form., IEEE Transactions on AutomaticControl 44(2).
Jiang, Z.-P. (2000). Robust exponential regulation of no-nholonomic systems with uncertainties, Automatica36: 189–209.
Jiang, Z.-P. (2002). Global tracking control of underac-tuated ships by lyapunov’s direct method, Automa-tica 38: 301–309.
Khalil, H. K. (1996). Nonlinear Systems, second edn,Prentice Hall, Upper Saddle River, NJ.
Kim, B. and Tsiotras, P. (2002). Controllers forunicycle-type wheeled robots: Theoretical resultsand experimental validation, IEEE Transactionson Robotics and Automation 18(3): 294–307.
Kolmanovsky, I. and McClamroch, N. H. (1995). Deve-lopments in nonholonomic control problems., IEEETrans. On Control Systems pp. 20–36.
Kreyszig, E. (1991). Differential Geometry, reprint edn,Dover Publications Inc., New York.
Lafferriere, G. and Sussmann, H. J. (1991). Motion plan-ning for controllable systems without drift., Proc.Int. Conf. Robotics and Automation - Sacramento,CA. pp. 1148–1153.
Latombe, J. C. (1993). Robot Motion Planning, KluwerAcademic Publishers, Boston.
Laumond, J., Jacobs, P. E. and Murray, R. M. (1994).A motion planner for nonholonomic mobile robots.,IEEE Transactions on Robotics and Automation10(5).
Laumond, J.-P. (ed.) (1998). Robot Motion Plan-ning and Control, Laboratoire d’Analye etd’Architecture des Systemes - Centre National dela Recherche Scientifique - LAAS, chapter Guideli-nes in Nonholonomic Motion Planning for MobileRobots, pp. 1–53.
Lefeber, E. and Nijmeijer, H. (1999). Adaptive trackingcontrol of nonholonomic systems: an example, Pro-ceedings of the 38th Conference on Decision andControl pp. 2094–2099.
Liberzon, D. and Morse, A. S. (1999). Basic problemsin stability and design of switched systems, IEEEControl Systems Magazine 19: 59–70.
Lin, W., Pongvuthithum, R. and Qian, C. (2002). Con-trol of high-order nonholonomic systems in powerchained form using discontinuous feedback, IEEETransactions on Automatic Control 47(1): 108–115.
Lizarralde, F. and Wen, J. T. (1996). Feedback sta-bilization of nonholonomic systems in presence ofobstacles, IEEE Int. Conf. on Robotics and Auto-mation - Minneapolis - MN pp. 2682–2687.
Lizarralde, F., Wen, J. T. and Hsu, L. (1999). A newmodel predictive control strategy for affine nonli-near control systems, American Control Conference- San Diego - CA .
Luo, J. and Tsiotras, P. (1997). Exponentially con-vergent controllers for n-dimensional nonholonomicsystems in power form, American Control Confe-rence Albuquerque, NM .
Lygeros, J., Godbole, D. N. and Sastry, S. (1996). A ve-rified hybrid controller for automated vehicles. Re-search supported by the PATH program, Instituteof Transportation Studies, U.C. Berkeley.
Mahindrakar, A. D., Banavar, R. N. and Reyhanoglu,M. (2001). Discontinuous feedback control of a 3
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 265

link planar ppr underactuated manipulator, Pro-ceedings of the 40th IEEE Conference on Decisionand Control pp. 2424–2429.
McClamroch, N. H. and Kolmanovsky, I. (2000). Perfor-mance benefits of hybrid control design for linearand nonlinear systems, Proceedings of the IEEE88(7): 1083–1096.
McClamroch, N. H., Rui, C. and Kolmanovsky, I.(1997). Hybrid closed loop systems: A nonlinearcontrol perspective, Procedures of the 36th IEEECDC - San Diego, CA. pp. 114–119.
M’Closkey, R. T. and Murray, R. M. (1997). Expo-nential stabilization of driftless nonlinear controlsystems using homogeneous feedback, IEEE Tran-sactions on Automatic Control 42(5): 614–628.
Mirtich, B. and Canny, J. (1992). Using skeletons for no-nholonomic path planning among obstacles., Pro-ceedings of the IEEE International Conference onRobotics and Automation pp. 2533–2540.
Morin, P., Pomet, J.-B. and Samson, C. (1999). De-sign of homogeneous time-varying stabilizing con-trol laws for driftless controllable systems via oscil-latory approximation of lie brackets in closed loop,Society for Industrial and Applied Mathematics -SIAM - Control Optim. 38(1): 22–49.
Morin, P. and Samson, C. (1995). Time-varying expo-nential stabilization of the attitude of a rigid space-craft with two controls, Rapport de recherche 2493,Institut National de Recherche en Informatique eten Automatique, Sophia-Antipolis.
Morin, P. and Samson, C. (1996). Application of backs-tepping techniques to the time-varying exponentialstabilization os chained form systems, Rapport derecherche 2792, Institut National de Recherche enInformatique et en Automatique, Sophia-Antipolis.
Morin, P. and Samson, C. (1997). Application of backs-tepping techniques to the time-varying exponen-tial stabilisation of chained form systems, EuropeanJournal of Control 3: 15–36.
Morin, P. and Samson, C. (1998). Exponential stabi-lization fo nonlinear driftless systems with robust-ness to unmodeled dynamics, Rapport de recherche3477, Institut National de Recherche en Informati-que et en Automatique - INRIA, Sophia Antipolis- France.
Morin, P. and Samson, C. (2000a). A characterization ofthe lie algebra rank condition by transverse perio-dic functions, IEEE Conf. on Decision and Control(CDC) .
Morin, P. and Samson, C. (2000b). Control of non-linear chained systems: From the routh-hurwitzstability criterion to time-varying exponential sta-bilizers, IEEE Transactions on Automatic Control45(1): 141–146.
Morin, P., Samson, C., Pomet, J.-B. and Jiang, Z.-P. (1994). Time-varying feedback stabilization ofthe attitude of a rigid spacecraft with two con-trols, Rapport de recherche 2275, Institut Nationalde Recherche en Informatique et en Automatique,Sophia-Antipolis.
Morin, P., Samson, C., Pomet, J.-B. and Jiang, Z.-P.(1995). Time-varying feedback stabilization of theattitude of a rigid spacecraft with two controls, Sys-tems and Control Letters 25: 375–385.
Murray, R. M., Li, Z. and Sastry, S. S. (1994). A mathe-matical introduction to robotic manipulation, 1stedn, CRC Press LLC.
Murray, R. M. and Sastry, S. S. (1993). Nonholonomicmotion planning: Steering using sinusoids., IEEETrans. On Automatic Control 38(5): 700–716.
Normey-Rico, J. E., Alcala, I., Gomez-Ortega, J. andCamacho, E. F. (2001). Mobile robot path trackingusing a robust pid controller, Control EngineeringPractice 9: 1209–1214.
Piccoli, B., Pait, F. M. and Bittar, A. (1998). A hybridcontroller for a nonholonomic system., SBA Con-trole e Automacao 9(2).
Pomet, J. B. (1992). Explicit design of time-varyingstabilizing control law for a class of controllablesystems without drift, Systems and Control Letters18: 147–158.
Pourboghrat, F. (2002). Exponential stabilization of no-nholonomic mobile robots, Computers and Electri-cal Engineering 28: 349–359.
Pourboghrat, F. and Karlsson, M. P. (2002). Adaptivecontrol of dynamic mobile robots with nonholono-mic constraints, Computers and Electrical Engine-ering 28: 241–253.
Samson, C. (1990). Velocity and torque feedback controlof a nonholonomic cart, Advanced Robot Control -Proceedings of the International Workshop on Non-linear and Adaptive Control 162: 125–151.
266 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004

Samson, C. (1992). Path following and time-varyingfeedback stabilization of a wheeled mobile ro-bot, Proceedings Conf. ICASRCV 92 - Singaporepp. RO–13.1.1–RO–13.1.5.
Samson, C. (1995). Control of chained systems ap-plication to path following and time-vaying point-stabilization of mobile robots, IEEE Transactionson Automatic Control 40(1): 64–77.
Samson, C. and Ait-Abderrahim, K. (1990). Mobile ro-bot control part 1: Feedback control of a nonholo-nomic wheeled cart in cartesian space, Programme6 - Robotique, Image et Vision 1288, INRIA, Cen-tre de Sophia-Antipolis, Sophia.
Samson, C. and Ait-Abderrahim, K. (1991). Feedbackstabilization of a nonholonomic wheeled mobile ro-bot, IEEE Int Workshop on Intelligent Robots andSystems - IROS 91 - Osaka, Japan .
Sanyal, A. K., Chellappa, M., Valk, J. L., Ahmed,J., Shen, J. and S.Bernstein, D. (2003). Globallyconvergent adaptive tracking of angular velocitywith inertia identification and adaptive lineariza-tion, Proceedings of 13th IFAC Symposium on Sys-tem Identification pp. 971–976.
Sekhavat, S. and Laumond, J.-P. (1998). Topologi-cal property for collision-free nonholonomic motionplanning: The case of sinusoidal inputs for chainedform systems, IEEE Transactions on Robotics andAutomation 14(5): 671–680.
Shkel, A. M. and Lumelsky, V. J. (1997). The jogger’sploblem: Control of dynamics in real-time motionplanning, Automatica 33(7): 1219–1233.
Slotine, J.-J. E. and Li, W. (1991). Applied NonlinearControl, 1 st edn, Prentice Hall.
Sontag, E. D. and Sussmann, H. J. (1980). Remarks oncontinuos feedback, IEEE Conf on Decision andControl - Albuquerque .
Sordalen, O. J. and Egeland, O. (1995). Exponential sta-bilization of nonholonomic chained systems, IEEETransactions on Automatic Control 40(1): 35–49.
Sun, D. and Hoo, K. A. (1999). Dynamic transition con-trol structure for a class of siso nonlinear systems,IEEE Transactions on Control Systems Technology7(5): 622–629.
Sun, Z., Ge, S. S., Huo, W. and Lee, T. H. (2001). Stabi-lization of nonholonomic chained systems via non-regular feedback linearization, 44: 279–289.
Sussmann, H. (1993). A continuation method for nonho-lonomic path-finding problems., Proceedings of the32nd IEEE Conference on Decision and Control,held in San Antonio pp. 2718–2723.
Sussmann, H. J. (1991). Optimal control and almostanalytic feedback for some nonholonomic systems.,Technical report, SYCON -Rutgers Center for Sys-tems and Control, University of Rutgers.
Sussmann, H. J. (1992). New differential geometricmethods in nonholonomic path finding., Systems,Models, and Feedback, A. Isidori and T.J. TarnEds.Birkauser Boston, Inc. .
Sussmann, H. J. and Liu, W. (1997). Lie bracket ex-tensions and averanging: The single-bracket case.,Internal report, Department of Mathematics, Rut-gers University.
Syam, R., Watanabe, K., Izumi, K. and Kiguchi, K.(2001). Adaptive actor-critic design using predic-tive model and its application to nonholonomic mo-bile robots, Proc. of the Fifth Intl. Conf. on KES2001 pp. 1319–1324.
Syam, R., Watanabe, K., Izumi, K. and Kiguchi, K.(2002). Control of nonholonomic mobile robot byan adaptive actor-critic method with simulated ex-perience based value-functions, Technical report,Department of Advanced Systems Control Engine-ering - Saga University, Saga - Japan.
Tanner, H. G. and Kyriakopoulos, K. J. (2002). Discon-tinuous backstepping for stabilization of nonholo-nomic mobile robots, Proceedings of the 2002 IEEEInternational Conference on Robotics & Automa-tion pp. 3948–3953.
Tayebi, A. and Rachid, A. (2000). Adaptive control-ler for nonholonomic mobile robots with matcheduncertainties, Advanced Robotics 14(2): 105–118.
Tayebi, A., Tadjine, M. and Rachid, A. (2001). Invariantmanifold approach for the stabilization of nonholo-nomic chained systems: Application to a mobilerobot, Nonlinear Dynamics 24: 167–181.
Tian, Y.-P. and Li, S. (2002). Exponential stabilizationof nonholonomic dynamic systems by smooth time-varying control, Automatica 38: 1139–1146.
Tilbury, D. and Chelouah, A. (1993). Steering a three-input nonholonomic system using multi-rate con-trols., IEEE Proceedings of the European ControlConference, Groningen, The Netherlands .
Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004 267

Tilbury, D., Sordalen, O., Bushnell, L. and Sastry, S. S.(1993). A multi-steering trailer system: Conversioninto chained form using dynamic feedback., Tech-nical Report M93/55, Electronics Research Labo-ratory, University of California at Berkeley.
Victorino, A. C. (1998). Controle de trajetoria e estabi-lizacao de robos moveis nao-holonomicos, Master’sthesis, Universidade Estadual de Campinas - Facul-dade de Engenharia Mecanica, Campinas - SP.
Walsh, G., Tilbury, D., Sastry, S., Murray, R. and Lau-mond, J. P. (1994). Stabilization of trajectoriesfor systems with nonholonomic constraints, IEEETransactions On Automatic Control 39: 216–222.
Wen, J. (1996). Control of Nonholonomic Systems, inThe Control Handbook, Ed. W.S. Levine - CRCPress.
Y-Kuc, T., Baek, S. M. and Park, K. (2000). Adaptivelearning controller for autonomous mobile robots,IEE Proceedings Control Theory Appl. 148(1): 49–54.
Yang, J. and Kim, J. (1999a). Sliding mode motion con-trol of nonholonomic mobile robots., IEEE ControlSystems 19(2).
Yang, J.-M. and Kim, J.-H. (1999b). Sliding mode con-trol for trajectory tracking of nonholonomic whee-led mobile robots, IEEE Transactions on Roboticsand Automation 15(3): 578–587.
Ye, H., Michel, A. N. and Hou, L. (1998). Stabilitytheory for hybrid dynamical systems, IEEE Tran-sactions on Automatic Control 43(4): 461–474.
268 Revista Controle & Automacao/Vol.15 no.3/Julho, Agosto e Setembro 2004