Isole Robotizzate Standard Standard Robot Systems Standard ... · Ilha Robotizada Standard ......
12
Kawasaki Robot Ilha Robotizada Standard S.P.A. Isole Robotizzate Standard Standard Robot Systems Standard Roboterschweißzellen SALDATURA AD ARCO ARC WELDING DRAHTSCHWEISSEN SOLDAGEM À FIO
Transcript of Isole Robotizzate Standard Standard Robot Systems Standard ... · Ilha Robotizada Standard ......

Kawasaki Robot
Ilha Robotizada Standard
S.P.A
.
Isole Robotizzate Standard
Standard Robot Systems
Standard Roboterschweißzellen
SALDATURA AD ARCOARC WELDING
DRAHTSCHWEISSENSOLDAGEM À FIO

Kawasaki Robot
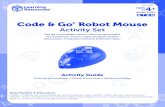
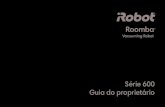
ISOLE STANDARDSTANDARD CELLS • STANDARD SCHWEISSZELLEN • ILHAS STANDART
TSO MAN
4.000 mm3.000 mm
TS2
5.000 mm4.000 mm
TS3 - TS4
5.000 mm4.000 mm
5.000 mm4.000 mm
TS6
5.000 mm4.000 mm
TS5
TS1 MAN
4.000 mm3.000 mm
TS6/CP

TS9
4.000 mm 5.000 mm
TS7 - TS8
4.000 mm 5.000 mm
TS10
5.000 mm3.500 mm
TS10/S
5.000 mm
5.000 mm
TS8/RT
3.000 mm
7.000 ÷ 8.000 mm

COMPONENTI PERIFERIEPERIPHERAL COMPONENTS • STANDARD POSITIONIERER • COMPONENTES PERIFÉRICOS
Kawasaki Robot
TS6 200 kg. INT
TS3 100 kg. PN
TS4 150 kg. INT
TS0 100 kg. MAN TS1 100 kg. MAN
TS2 100/150 kg. MOT
TS5 150 kg. INT
TS6/CP 250 kg. INT (Ø 800 mm.)
1.20
0 m
m1.
600
mm
TS6/CP 200 kg. INT (Ø 900 mm)

Aree applicative tipiche:Componentistica per autoveicoli • Macchine agricole e giardinaggio • Caldaieria • Armadi elettrici • Componentisticaper veicoli industriali • Telai per cicli e motocicli • Mobili metallici • Sedili per autoveicoli e veicoli industriali •Corpi pompe • Strutture saldate di medie dimensioni.
Typische Anwendungen:Komponenten für die Automotivindustrie • Landmaschinen und Agrarindustrie • Heizkesselbau • Schaltschränke •Nutzfahrzeugkomponenten • Fahrrad • Motorrad - und Metallmöbelrahmen • PKW - und Nutzfahrzeugsitze • Pumpengehäuse• Schweißkonstruktionen mittlerer Größe.
Typical areas of applicationAgricultural and gardening machinery • Boilers • Electric boxes • Components for industrial vehicles and cars •Frames for bicycles and motorcycles • Metal furniture • Seats for cars and industrial vehicles • Pump bodies • Weldedstructures of medium dimensions.
Áreas típicas de aplicaçãoComponentes automotivos • máquinas agrícolas e para jardins • calderaria • armários elétricos • componentes paraveículos industriais • quadros para bicicletas e motocicletas • móveis metálicos • assentos para automóveis e veículosindustriais • carcaças de bombas • estruturas de média dimensão
TS10/S 300 kg. INT (Ø 1500 mm.)
2.600 mm
TS9 300 kg. INT (Ø 1000 mm.)
2.600 mm
TS10 300 kg. INT (Ø 1100 mm.)
1.600 mm
TS7 200 kg. PN
TS8 300 kg. INT (Ø 1600 mm.)
TS10 250 kg. INT (Ø 1100 mm.) TS10 400 kg. INT (Ø 1200 mm.)
2.000 mm 2.000 mm

7) Impostazione del centro torcia: Possonoessere definite e memorizzate le geometrie dinove diverse tipologie di torcia.
7) Setting of torch centre: It is possible todefine and memorise the geometries of ninedifferent types of torch.
7) TCP Brennergeometrie: Neun verschiedeneBrennergeometrien können ausgemessen,gespeichert und beim Programmablaufbestimmt werden.
8) Funzioni di interpolazione: Il robotè dotato di funzioni di interpolazionelineare e circolare sia semplice percerchi che multipla per curvepolicentriche.
8) Interpolation functions: The robot isprovided with linear and circularinterpolation, both simple for circles andmultiple for polycentrical curves.
8) Interpolation: Die Software verfügt über mehrereInterpolationsfunktionen. Es kann zwischen der Linear- undZirkularinterpolation ausgewählt werden.Zur Kurvenprogrammierung werden die Interpolationenkombiniert und für die Zirkularinterpolation mehrereMittelpunkte ausgewählt.
9) Funzioni di comunicazione: Il robot può esserecollegato tramite una linea seriale o ethernet acomputer esterni, sia per funzioni di programmazioneOFF Line, che di trasferimento o salvataggio dati chedi connessione in rete di più robot.
9) Communication functions: The robot can beconnected to external computer by means of a serialor ethernet port, both for OFF Line programmingfunctions and transfer or data saving, and on-lineconnection of more than one robot.
9) Schnittstellen: Für die offline Programmierung,Datenübermittlung oder Vernetzung mehrererMaschinen oder Roboter stehen dem Anwenderverschiedene Schnittstellen (optional Bussysteme)zur Verfügung.
10) Sensore Laser: Un particolare sensorelaser può essere collocato a bordo torcia perpermettere l’inseguimento del giunto e ladeterminazione della sua geometria spaziale.
10) Laser Fühler: A special laser Fühler can beinstalled on the torch to allow seam trackingand the determination of its spatial geometry.
10) Lasersensor: Ein spezieller Lasersensor kann direkt an denBrenner montiert werden. Diese Kombination bietet dem Anwenderden höchsten Komfort bei der Nahterkennung und -verfolgung.
12) Limitazione area di lavoro: L’operatore può definireliberamente un cubo dimensionale di sicurezza entro cuiil robot deve lavorare.
12) Limitation of work area: The operator can at his ownwill define a dimensional safety cube within which therobot has to work.
12) Arbeitsraumbestimmung: Um Kollisionenzu verhindern, kann der Bediener einenArbeitsraum frei definieren.
11) Assi esterni: Il controllore può gestire sino a 16 assi esterni per ilcontrollo di posizionatori, rotaie di traslazione robot. Tre assi cartesianie due rotativi possono lavorare in cooperazione di posizione e velocità colrobot.
11) External axes: The System can control up to 16 external axes for thecontrol of positioners and robot traverse unit. Three Cartesian and tworotary axes can work in co-operation of position and speed with the robot.
11) Externe Achsen: An die Steuerung des Roboters können bis zu 16 externeAchsen von z.B. Positionierer angeschlossen werden. Drei Karthesische-und zwei Drehachsen sind direkt in die Koordinatentransformation desRoboters integriert.
7) Determinação do centro da tocha: Podemser definidas e memorizadas as geometriasde nove tipos de tochas.
8) Funções de interpolação: O robô é dotado de funções deinterpolações lineares e circulares, sendo estas para simplescírculos ou então múltiplas curvas (vários centros).
9) Funções de comunicações: O robô pode serinterligado através de uma porta serial o etherneta um computador externo, seja para funções deprogramação off line, transferência ou salvamentode dados, ou então conexão em rede com mais robôs.
10) Fühler Laser: Este particular Fühler pode ser colocado sobre atocha de modo a permitir o seguimento de junta e a determinação desua geometria espacial.
11) Eixos externos: O controlador pode gerenciar até 16 eixos externospara controle do posicionador e base de deslizamento do robô. Três eixoscartesianos e dois rotativos podem trabalhar em cooperação de posições evelocidade com o robô.
12) Limitação da área de trabalho: O operador podedefinir livremente um cubo de segurança, dentrodo qual o robô deverá trabalhar.
X Y
Z
yz
x
X Y
Z
Host communication
Cell control
Sensor

Kawasaki Robot
Costruiti in conformità alla Direttiva macchine89/392/CEE ed alla normativa 89/336/CEE.
Manufactured in compliancewith Machine Directive 89/392/EECand 89/336/EEC regulations.
Alle Anwendungen entsprechen derMaschinenbaurichtlinie 89/392/EWG,verbunden mit 89/336/EWG.
Construídos em conformidadea Diretiva para máquinas89/392/CEE e a norma89/336/CEE.
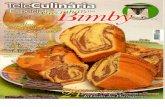
LINEA AVANZATA NEL DESIGN COMPATTO PER APPLICAZIONI DI SALDATURA AD ARCOADVANCED LINE IN COMPACT DESIGN FOR ARC-WELDING APPLICATIONSKOMPLEXE ZELLEN ZUM BAHNSCHWEIßEN IM KOMPAKTEN DESIGNLINHA AVANÇADA NO PROJETO COMPACTO PARA APLICAÇÕES DE SOLDAGEM À ARCO
JT1
JT2
JT3
JT4
JT5
JT6
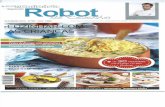
TIPO - TYPE - TYP - TIPO
Portata - PayloadMax. Traglast - Capacidade
JT4
JT5
JT6
Repetibilità - RepeatabilityWiederholgenauigkeit - Repetibilidade
Motori - Motors - Antriebe - Motores
Momenti: - Torque: - Max. Moment: - Torque:
Encoder - Wegmeßsystem
Gradi di libertà - Degrees of freedomArbeitsbereich - Graus de liberdade
Grado di protezione - Degree of ProtectionSchutzklasse - Grau de proteção
Peso - Mass - Gewicht - Peso
FA03 FA10L FA20N
6
320° (160°/s)
245° (140°/s)
520° (160°/s)
540° (330°/s)
290° (330°/s)
720° (500°/s)
12 kg.
6
320° (160°/s)
245° (140°/s)
520° (160°/s)
540° (330°/s)
290° (330°/s)
720° (500°/s)
20 kg.
21.5 Nm
21.5 Nm
9.8 Nm
± 0.1 mm
280 kg
39.3 Nm
39.3 Nm
19.6 Nm
± 0.1 mm
280 kg
IP65
Brushless
Assoluti - AbsoluteAbsolute Winkelkodierer - encoder absoluto
A B
C
D
E
F G
H
M
QR
ST
L
I
N
P OFA06E
6
320° (200°/s)
245° (140°/s)
520° (200°/s)
540° (430°/s)
290° (430°/s)
720° (600°/s)
6 kg.
12 Nm
12 Nm
6 Nm
± 0.05 mm
170 kg
6
320° (240°/s)
210° (100°/s)
210° (140°/s)
720° (360°/s)
270° (180°/s)
720° (360°/s)
3 kg.
5,8 Nm
5,8 Nm
2,9 Nm
± 0.03 mm
20 kg
IP54
620
1550
1850
1650
FA03
FA06E
FA10L
FA20N
A B C D E F G H I L M N O P Q R S T330
1350
1552
1350
750
1882
2270
2070
215
900
922
745
-
650
465
340
198
107
123
123
132
192
226
226
120
100
150
150
250
430
570
570
250
750
900
800
-
125
160
160
107
183
218
218
85
173
188
188
85
162
182
182
129
234
441
399
60°
140°
140°
140°
500
1450
1700
1500
150°
105°
105°
105°
Area di lavoro - Work Range - Arbeitsbereich - Área de trabalho (mm)

controllore “D” - “D” controller multitasking - “D“ Kontroller - Controlador “D”
Lunghezza dei cavi - Cable lengthStandard Kabellänge - Comprimento dos cabos
Pannello operativo/MFP - MFPMFP-Multifunktions Panel - Painel operativo/MFP
Alimentazione e potenza richiesta - Power requirementMittlere Anschlussleistung - Alimentação e potência pedida
Peso - Mass - Gewicht - Peso
Umidità relativa - Relative HumidityRelative Luftfeuchtigkeit - Humidade relativa
Condizioni ambientali - Ambient temperatureUmgebungstemperatur - Condições ambientais
Pulsanti virtuali programmabili / 6,5” color dislay TFTProgrammable virtual switches and buttons / 6,5” Display color TFTSchalter und Taster sind freiprogrammierbar / 6,5” Farbdisplay TFTLCD cores tipo touch screen
10 mt.
D40 - 5,4 KVAD70 - 1,5 KVA
3 Phase, 50/60 Hz, 380/400/415/440 VAC ±10%1 Phase, 50/60 Hz, 200/240 VAC ±10%
0°/45° C (32°/113° F)
35% - 85% (Senza condensa) - 35%-85% (No Dew, Nor Frost Allowed)35%-85% (nicht kondensierend) - 35% - 85% (Sem condensação)
190 kg
600 550
1200
N° Assi in simultanea - Number of Controlled axesAnzahl der angesteuerten Achsen - N° de eixos controlados
Azionamento e controllo assi - Servo Control and Drive SystemServo-und Antriebssystem - Accionamento e controle dos eixos
Tipo di movimento - MovementBewegungsart - Tipo de movimento
Metodo di programmazione - Teach MethodProgrammiermethode - Método de programação
Memoria RAM - Memory CapacityRAM Speicherkapazität - Memória RAM
Memoria esterna ausiliaria - External StorageDatensicherung - Memória externa auxiliar
Segnali generici - General purpose signalStandardmäßige Anschlüsse - Sinais Gerais
6 (16 max)
Interamente digitali - Full Digital Servo SystemVoll digitalisiertes Antriebssystem - Inteiramente digitais
Singolo asse, Lineare, Circolare - Joint, Linear, CircularPunkt zu Punkt, Linear, Zirkular - Eixo simples, interpolação
Istruzioni a blocchi o linguaggio AS - Block Teaching or AS Language ProgrammingBlock-teaching / AS programmiersprache - Autoapredizagem ou linguagem as
1 MB (inclusa la memoria del sistema) - 1 mb (Include System Memory)1MB inklusive Betriebssystem (4MB optional) - 1 MB (Incluída a memória do sistema)
PCMCIAPCMCIA
Segnali d’ingresso - Input SignalsEingagssignale - Sinals de entrada
Segnali d’uscita - Output SignalsAusgangssignale - Sinals de saída
32 canali32 Channels (Include dedicated Signals)32 inkl. fest vergebener Signale (126 optional)32 Canais (Incluindo os sinais)
Singolo asse, cartesiano, utensile - Joint, Base, Tool ModeEinzelachsen, Basis Koordinatensystem, Werkzeugkoordinatensystem - Eixo simples, cartesiano, utensílio
Interpolazione - InterpolationInterpolation - Interpolação
CPU RISC
PROGRAMMI PARALLELI - PARALLEL PROGRAMSPARALLELPROGRAMME - Programs paralelos 5
3,5” - FDD3,5” Floppy disk driver
Optional

Kawasaki Robot
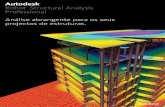
FUNZIONI STANDARD - FUNZIONI OPZIONALISTANDARD FUNCTIONS - OPTIONAL FUNCTIONS • STANDARDFUNKTIONEN - ZUSATZFUNKTIONENFUNÇÕES STANDARD - FUNÇÕES OPCIONAIS
1) Fühler de procura de peça: Permite com auxílio do fio,ou da tocha (bico) ou então de um ponto montado sobre atocha, determinar no espaço tridimensional a posição dapeça que será soldada. Tal tipo de procura permite definira posição relativa dos componentes de uma peça até 3 níveis.
5) Funções de pendulamento: O robô é dotado de funções dependulamento da tocha, harmônica singular, estando disponíveiscomo opcionais os pendulamentos na forma triangular, circular,etc. O operador pode criar trajetórias de pendulamento de tochapersonalizadas, que melhor se adaptem ao tipo de junta e de cordãoque se pretende. O robô pode pendular em interpolação com eixosexternos dos posicionadores.
6) Funções especiais: Os dados relativos a um programa podemser rotacionados ou transladados em diversos planos do espaço.
2) Sensore di ricerca giunto (Start point): Permette dideterminare l’esatta posizione del punto di partenzasaldatura di una qualsiasi tipologia di giunto, memorizzandola ricerca per i giunti di saldatura più comuni. L’operatorepuò crearsi sequenze personalizzate di ricerca.
2) Start Sensing: Enables to determine the exact position ofthe welding start point of any type of joint, and memorisesthe research for the more common welding joints. Theoperator can create customised research sequences.
2) Nahtanfang Sensor: Durch den Sensor wird exakt derNahtanfang bestimmt. Die Suchart kann für mehrereSchweißnähte gespeichert werden. Dadurch kann der Bedienereigene Suchfolgen den Anforderungen zuordnen.
3) Sensore inseguimento giunto (RTPM): Permette dicorreggere in tempo reale la traiettoria del robot adattandoil percorso alle deformazioni dimensionale del pezzo durantela saldatura.
3) Joint tracking Fühler (RTPM): In real time allows the robottrajectory to be modified, adapting the path to the dimensionaldeformations of the piece during welding.
3) Nahtverfolgungssensor (RTPM): Dieser Sensor gleicht die Roboterbahn in Echtzeit,dem Verzug oder den Ungenauigkeiten des Werkstückes während des Schweißens an.
5) Funzioni di pendolamento: Il robot è dotato di funzionidi pendolamento torcia a singola armonica, sono disponibilicome optional funzioni di pendolamento a forma triangolare,circolare etc., l’operatore può crearsi delle traiettorie dipendolamento torcia personalizzate che meglio si adattinoal tipo di giunto e di cordone da ottenere. Il robot puòpendolare in interpolazione con assi esterni deiposizionatori.
5) Weaving functions: The robot is provided with singleharmonic torch ueawing functions, available as optionalueawing in triangular, circular form, etc. The operatorcan create customised torch ueawing trajectories accordingto the type of joint and seam desired. The robot can ueawein interpolation with the external axes of the positioners.
5) Pendeln: Die Software des Roboters verfügt über einekomfortable Pendelfunktion. Der Programmierer kann untermehreren Möglichkeiten Pendel, Dreieck, Spirale usw. nachBedarfsfall auswählen. In der Interpolation der Pendelbewegungwerden auch die externen Achsen des Positionierers integriert.
6) Funzioni spaziali: I dati relativi ad un programmapossono essere rototraslati in diversi piani dello spazio.
6) Spatial functions: Data relative to a programmecan be rotated in different planes of space.
6) Spezial Funktionen: Das Programm kann in verschiedeneEbenen verschoben, gedreht oder gespiegelt werden.
1) Sensore ricerca pezzo: Permette tramite l’ausilio delfilo, o dell’ugello o di un puntale montato a bordo torciadi determinare nello spazio tridimensionale la posizionedel pezzo da saldare. Tale tipo di ricerca permette didefinire le posizioni relative dei componenti di un pezzosino a tre livelli.
1) Touchsensing: By means of the wire, the nozzle or a rodmounted on the torch, makes it possible to determine theposition of the piece to be welded in a three-dimensionalspace. This kind of research makes it possible to define therelative position of piece components up to three levels.
1) Sensor für die Werkstückslage: Mit dem Schweißdraht,der Düse oder des an dem Brenner angebrachten Tasterswird die Lage des Werkstückes vermessen.Dieses Verfahren ermöglicht die Lageerkennung bis zudrei Ebenen.
4) Dispositivo automatico reallineamento geometria torcia.
4) Automatic device fortorch tool calculation.
4) AutomatischeKorrektur derBrennerspitze.
X Y
Z
X
Y
Z
X
Y
Z
2) Fühler de procura de junta (Start point): Permite determinar aexata posição do ponto de partida da solda em qualquer tipo de junta,memorizando a procura para as juntas de soldagem mais comuns. Osoperadores podem criar seqüências personalizadas de procuras.
3) Fühler de seguimento da junta (RTPM): Permite corrigir, em tempo real, a trajetóriado robô, adaptando o percurso em relação as deformações dimensionais das peçasdurante a soldagem.
4) Dispositivo automático derealinhamento da geometriada tocha.
y
z
xxz
y

Kawasaki Robot
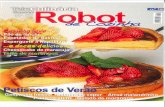
ACCESSORIACCESSORIES • ZUBEHÖR • ACESSÓRIOS
Per rispondere alle diverse esigenze di processo è disponibile unagamma di Generatori ad Inverter per i processi TIG-MIG/MAG-plasma.MIG/MAG 400/500A Arco normale e pulsatoTIG 300A pulsato
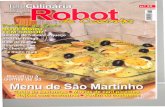
ESEMPI APPLICAZIONIAPPLICATION SAMPLE
ANWENDUNGSBEISPIELE
EXEMPLOS DE APLICAÇÕES
The following range of Inverter power source, directly managedby the robot controller, is available for different process needs.MIG/MAG 400/500A normal and pulsed arcTIG 300A pulsed
Dem Anwender stehen mehrere Stromquellen TIG-MIG/MAG zurAuswahl.
MIG / MAG 400/500A normal oder gepulst,TIG 300A gepulst.
Para responder às exigências dos processos, estão disponíveis umagama de geradores a inverter para as problemas TIG-MIG/MAG.
MIG/MAG 400/500A Arco normal e pulsadoTIG 300A pulsado

ESEMPI APPLICAZIONIAPPLICATION SAMPLE • ANWENDUNGSBEISPIELE • EXEMPLOS DE APLICAÇÕES

Kawasaki Robot
O grande know-how que a TIESSE ROBOT pode orgulhar-se na automação e na robotização de processos de solda, é fruto da evolução dos vinte e cincoanos de experiência em projetos técnicos, que no setor de soldagem robotizada, realizou cerca de 800 ilhas com várias dimensões, expandindo-se para asmais diversas áreas produtivas (da automação na soldagem de móveis e acessórios metálicos, acessórios para eletrodomésticos, componentes para ossetores automobilístico e ferroviário, particulares para grandes e pequenas máquinas para movimentação de terra, veículos industriais, para máquinasagrícolas, grandes reservatórios de gás, etc) propondo soluções aplicativas de automação de solda que vão desde ilhas especiais até simples ilhasrobotizadas com elevada flexibilidade.
10-2
004
TIESSE ROBOT: via Isorella, 32 - 25010 VISANO (Brescia) ITALYtel. + 39 0309958621 - fax + 39 0309958677www.tiesserobot.it - E-mail: [email protected]
Gm
bH
TS ROBOTIC DEUTSCHLAND GmbH: Gewerbestrasse 28 - GERMANY87600 Kaufbeuren-Neugablonztel. 0049-8341-9557610 - fax 0049-8341-9557612E-mail: [email protected] - [email protected] - [email protected] e servizio. - Sales and services.
TIESSE BRASIL L.T.D.A.: Rua Julio Prestes de Albuquerque, 331Bairro Emb Mirim - 06853-090 Itapecerica da Serra - SP - BrasilFone 0055 11 46671648 - Fax 0055 11 46671851www.tiessebrasil.com.br - E-mail: [email protected], servizio e costruzione. - Sales, services and manufacturing.
TIESSE PRAHA: Za âern˘m mostem 3/362 198 00 Praha 9 - REPUBBLICA CECATel no: 00420-2 81940727 - Ans/Tel no: 00420-2 81940863Fax no: 00420-2 81940726 - E-mail: [email protected] e servizio. - Sales and services.
Das große Know How der Firma TIESSE ROBOT bei der Automation des Schweißverfahrens rührt aus der mehr als 25 jährigen Erfahrung der Technikerdes Unternehmens. Die Projektgruppe und die Produktion hat bereits sehr viele Anlagen in den verschiedensten Größen, Schweißverfahren undProduktionsbereichen z.B. Möbel, Haushaltsgeräten, AUTOMOTIV, Nutzfahrzeuge, Bahn, Bagger, Landwirtschafts-maschinen, große Gastanks verwirklicht.TIESSE ROBOT zeigt neue Wege in der Automation.Die speziellen Anlagen aber auch einfache flexible Roboterzellen, die sich durch eine hohe Zuverlässigkeit und Langlebigkeit auszeichnen, sind unserebesten Referenzen.
Il grande know-how che TIESSE ROBOT può vantare nell’automazione e nella robotizzazione della saldatura è frutto e, al contempo, evoluzione dellaventicinquennale esperienza del suo Staff Tecnico Progettuale che, nel settore della sola saldatura robotizzata, ha realizzato oltre 800 impianti ditutte le dimensioni, espandendosi nelle più diverse aree produttive (dall’automazione della saldatura di mobili e accessori metallici per arredamento, aquella degli accessori per elettrodomestici, ai componenti per il settore automobilistico e ferroviario, ai particolari per grandi e piccole macchine dimovimento terra, per autoveicoli industriali, per macchine agricole, per grandi serbatoi del gas, ecc.) e proponendo soluzioni applicative di automazionedella saldatura che spaziano dagli impianti speciali alla semplice isola robotizzata ad elevata flessibilita. Le referenze di TIESSE ROBOT vengono dallagrande affidabilità di queste realizzazioni ma, anche e soprattutto, dal fatto che gli utilizzatori che hanno scelto automazione robotizzata ideata daTIESSE ROBOT, nel tempo, hanno continuato a privilegiare TIESSE ROBOT.
The know-how we at TIESSE ROBOT can make available is the fruit of twenty-five years experience gained by out technical staff in manufacturing overeight hundred robotized welding systems of many different sizes and for the widest range of uses (such as production of: furniture and metal furnishingaccessories, domestic appliances, components for the automotive industry, railways, large and small earth moving machines, agricultural machinery,etc.). We can offer automation ranging from special systems to simple high-flexibility robotized cells. Our systems are so reliable that our bestadvertisement is the fact that those who have once chosen TIESSE ROBOT robotized automation keep coming back for more.