Laboratório de Robótica Móvel Instituto de Sistemas e Robótica Por João Filipe de Castro...
19
Laboratório de Robótica Móvel Instituto de Sistemas e Robótica Por João Filipe de Castro Ferreira Orientador: Jorge Dias Recuperação de Estruturas Tridimensionais Recuperação de Estruturas Tridimensionais Através de Projecção de Luz Estruturada Através de Projecção de Luz Estruturada
-
Upload
bernardo-barbas -
Category
Documents
-
view
218 -
download
0
Transcript of Laboratório de Robótica Móvel Instituto de Sistemas e Robótica Por João Filipe de Castro...

Laboratório de Robótica Móvel Instituto de Sistemas e Robótica
PorJoão Filipe de Castro Ferreira
Orientador: Jorge Dias
Recuperação de Estruturas TridimensionaisRecuperação de Estruturas TridimensionaisAtravés de Projecção de Luz EstruturadaAtravés de Projecção de Luz Estruturada

Construir um sistema protótipo de “scanning” tridimensional;
Usar esse sistema como “tubo de ensaio” para diversos algoritmos de recuperação e reconstrução 3D;
Realizar um sistema flexível, de forma a poder ser facilmente adaptado a outro tipo de tecnologias e algoritmos.
Objectivos

Algumas Aplicações• Projectos industriais;• “Reverse engineering”;• Simulação e análise;• Povoação de mundos virtuais;• “Faxing 3D”/“fabrico de sólidos de forma
livre” (solid free-form fabrication - SFF) .

Exposição do Problema
• Recuperação Tridimensional;Recuperação Tridimensional;
• Reconstrução TridimensionalReconstrução Tridimensional.

Método Proposto• Uso de material de baixo custo:
– uso do sistema tradicional de um feixe linear de laser;
– utilização de apenas 1 câmara;
• Uso de reconstrução tridimensional gráfica baseada em NURBS (Non-Uniform Rational B-Splines).

Matemática Subjacente• Calibração de câmaras projectivas;• Restrição imposta pela luz projectada;• Homografias;• Geometria epipolar;• Reconstrução tridimensional usando
polinómios de 3ª ordem (NURBS).

Calibração de Câmaras Projectivas
4,33
4,22
4,11
43
4,33,32,31,3
4,23,22,21,2
4,13,12,11,1
11aPaaPaaPa
ZYX
AZYX
aaaaaaaaaaaa
ssvsu
T
T
T
tRCA 3343

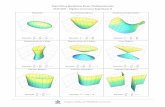
Restrições TridimensionaisProjecção de Luz Estruturada...
Plano Imagem
2
3
1
z
x
y
f
Projector
Objecto
n
p(u,v)
P(X,Y,Z)
00
0)(0)(
2
1
4,232
4,131
PΠPΠ
vaPvaauaPuaa
T
T
)()( 3231 vaauaan
’
’
00
1
3
PΠ
ZYXdcba ’
000
3
2
1
PΠPΠPΠ ’
’
’

1
11 YX
svsus
Asvsus
A
l
ll
ll
l
r
rr
rr
r
l
ll
ll
l
ll
ll
X
l
ll
ll
lr
r
rr
rr
svsus
svsus
Fsvsus
AAsvsus
3,33,21,3
2,32,21,2
1,31,21,1
331
Homografias

Geometria Epipolar
Eixos Ópticos
Centros Ópticos
Rectas Epipolares
Plano Epipolar Plano-Imagem
1
Plano-Imagem 2
Ponto-Objecto na cena

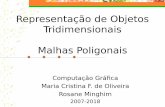
Reconstrução 3D Através de NURBS
p 0
p 1 p 2
p 3
dppp
p
bappppbpppp
cbapp
p
cpp
p
64
)0(
262)1(''22)0(''
232
)1('2
)0('
210
123
012
13
02

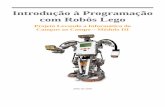
Abordagem – Módulos e Componentes
PC Controlador com Linux
: Softwarede Controlo
: Driver daMeteorFramegrabber ioctl
Pan & Tilt Unit +Laser
RS23211
Câmara
PAL Video
No caso presenteusa-se um caboRCA-RCA
1..*
1

Abordagem – Setup Experimental
laser-PTU
câmaramonitorpara testes
PCcontrolador
“cordãoumbilical”

Abordagem – Calibração
• Calibração dos planos-luz: 3 ou mais pontos representativos não-colineares são escolhidos para os definir;
• Calibração da câmara: todos os pontos (11 ou mais) usados para a estimação dos planos luz são reaproveitados para a determinação da matriz de calibração.

Abordagem – Calibração (cont.)
• Método de mínimos-quadrados – a Pseudo-Inversa;
• Consenso aleatório de amostras (adaptado) – RANSAC.

Abordagem – Algoritmos de Recuperação Tridimensional
• Recuperação usando distâncias absolutas: Geometria Projectiva;
• Recuperação usando distâncias relativas: Mapa de Disparidades.

• “A Flexible New Technique for Camera Calibration”, por Zhengyou Zhang;
• “Surface Reconstruction from Unorganized Points”, por Hugues Hoppe.
Investigação Futura – Algoritmos

Investigação Futura – Tecnologias
Laboratório de Robótica Móvel Instituto de Sistemas e Robótica

Laboratório de Robótica Móvel Instituto de Sistemas e Robótica
Recuperação de Estruturas TridimensionaisRecuperação de Estruturas TridimensionaisAtravés de Projecção de Luz EstruturadaAtravés de Projecção de Luz Estruturada