Leonardo Amaral Mozelli , Armando Alves Neto CELTA ... · res adotaram uma abordagem fuzzy...
8
CONTROLE ROBUSTO DE ATITUDE EM VE ´ ICULOS DO TIPO QUADRIC ´ OPTERO Leonardo Amaral Mozelli * , Armando Alves Neto * * CELTA - Centro de Estudos em Engenharia Eletrˆonica e Automa¸ c˜ ao DETEM - Departamento das Engenharias de Telecomunica¸ c˜oes e Mecatrˆ onica UFSJ - Universidade Federal de S˜ao Jo˜ao del-Rei Rod. MG 443, km 7, Campus Alto Paraopeba – Ouro Branco, MG, Brasil – 36420-000 Emails: {mozelli, aaneto}@ufsj.edu.br Abstract— This paper presents a method for stabilizing the attitude of a quadrotor-like Unmanned Aerial Vehicle (UAV). To do so, we used robust control techniques based on linear uncertain model with only 4 vertices and well-defined stability criteria, such as D-estabilidade and H 2 performance. The calculated constant gain matrix K is used to regulate the attitude of the vehicle on the hovering operating point, an important fly-mode for this kind of robot. Experiments without and with disturbance are presented to show the stability of the vehicle at different initial conditions. Keywords— Mobile robotics, quadrotor, robust control, LMIs Resumo— Este artigo apresenta uma metodologiaparaestabiliza¸c˜ao daatitude deum Ve´ ıculo A´ ereoAutˆonomo N˜ao Tripulado (VAANT) do tipo quadric´optero. Para tal, utilizamos t´ ecnicas de controle robusto baseadas num modelo linear incerto de apenas 4 v´ ertices e em crit´ erios de estabilidade bem definidos, como D-estabilidade e desempenho H 2 . A matriz de ganhos constantes K calculada ´ e utilizada para regular a atitude do ve´ ıculo em torno do ponto de opera¸c˜ ao de voo pairado, importante para esse tipo de robˆo. Experimentos sem e com perturba¸c˜ oes s˜ao apresentados para mostrar a estabilidade ve´ ıculo a partir de diferentes condi¸c˜oes iniciais. Palavras-chave— Rob´ otica m´ovel, quadric´optero, controle robusto, LMIs 1 Introdu¸c˜ ao Atualmente o uso de Ve´ ıculos A´ ereos Autˆ onomos N˜ ao Tripulados (VAANTs) tem se difundido cada vez mais pelo mundo, dada sua grande capacidade e variabilidade de aplica¸c˜ oes. Mais especificamente, ve´ ıculos a´ ereos do tipo Pouso e Decolagem Vertical (Vertical Taking-off and Landing, ou VTOL), como helic´ opteros e quadric´ opteros, tem se mostrado efi- cazes em tarefas como mapeamento e explora¸ c˜ ao de regi˜ oes, vigilˆ ancia e gerenciamento de multi- d˜ oes, entre outras, devido a sua capacidade de voo pairado (hovering ). Sabe-se, por´ em, que ve´ ıculos sustentados por h´ elices s˜ ao bastante suscept´ ıveis a perturba¸ c˜ oes, como incertezas param´ etricas, ru´ ıdos sensoriais e influˆ encias externas. Ventos laterais, por exem- plo, provocam perda de sustenta¸c˜ ao nos rotores, levando o ve´ ıculo a uma instabilidade que pode comprometer toda a miss˜ ao. Nesses casos, o con- trole normalmente deve ser realizado a taxas de frequˆ encia extremamente altas (centenas ou mi- lhares de Hz) para que o ve´ ıculo possa responder de forma satisfat´ oria (Gurdan et al., 2007). As- sim sendo, este trabalho se concentra em projetar uma estrat´ egia de controle de atitude (orienta¸c˜ ao) para um ve´ ıculo do tipo quadric´ optero, robusta a poss´ ıveisperturba¸c˜ oes que venham a atingir o sistema. Para tal prop´ osito, inicialmente modelou-se o comportamento dinˆ amico da atitude do VAANT em termos dos ˆ angulos de Euler, relativos a um referencial inercial no plano da Terra. O modelo original foi ent˜ ao embutido em uma descri¸c˜ ao do tipo Linear com Parˆ ametros Variantes (LPV), na qual a incerteza ´ e descrita por meio de um politopo contendo 4 v´ ertices, dois para cada eixo de rota¸c˜ ao do ve´ ıculo. Por fim, a sintonia de um controlador robusto foi realizada por meio de uma metodologia baseada em Desigualdade Matricial Linear (LMI), resultando no agrupamento dos autovalores de ma- lha fechada com custo H 2 garantido, permitindo atingir um desempenho satisfat´ orio. Em Rabhi et al. (2011) e Rangajeeva e Whid- borne (2011), por exemplo, s˜ ao utilizadas estrat´ e- gias de ganho escalonado (gain-scheduling ) para estabilizar a atitude de um quadric´ optero, relativa- mente semelhante ao considerado neste trabalho, resultando em tempos de convergˆ encia de mesma ordem. Embora o modelo apresentado em Rabhi et al. (2011) seja semelhante ao deste trabalho, os auto- res adotaram uma abordagem fuzzy Takagi-Sugeno (TS) resultando num modelo com 8 regras do tipo Se-Ent˜ ao, ao passo que aqui, a aposta ´ e em algo mais simples, com apenas 4 regras. Informa¸ c˜ oes relevantes como modelos locais, fun¸c˜ oes de perti- nˆ encia, ou de escalonamento, e os ganhos obtidos s˜ ao omitidas nesta referˆ encia. J´ a em Rangajeeva e Whidborne (2011), o mo- delo ´ e bem mais complexo, envolvendo Decompo- si¸ c˜ ao de Valores Singulares de Alta Ordem, o que resulta numa representa¸c˜ ao com 100 v´ ertices lo- cais. O aumento do conservadorismo e a queda de desempenho com o crescimento no n´ umero de v´ ertices s˜ ao problemas conhecidos na literatura de ganho escalonado via LMI, veja Mozelli e Palhares (2011) e referˆ encias. Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 2105
Transcript of Leonardo Amaral Mozelli , Armando Alves Neto CELTA ... · res adotaram uma abordagem fuzzy...

CONTROLE ROBUSTO DE ATITUDE EM VEICULOS DO TIPO QUADRICOPTERO
Leonardo Amaral Mozelli∗, Armando Alves Neto∗
∗ CELTA - Centro de Estudos em Engenharia Eletronica e AutomacaoDETEM - Departamento das Engenharias de Telecomunicacoes e Mecatronica
UFSJ - Universidade Federal de Sao Joao del-ReiRod. MG 443, km 7, Campus Alto Paraopeba – Ouro Branco, MG, Brasil – 36420-000
Emails: mozelli, [email protected]
Abstract— This paper presents a method for stabilizing the attitude of a quadrotor-like Unmanned AerialVehicle (UAV). To do so, we used robust control techniques based on linear uncertain model with only 4 verticesand well-defined stability criteria, such as D-estabilidade and H2 performance. The calculated constant gainmatrix K is used to regulate the attitude of the vehicle on the hovering operating point, an important fly-mode forthis kind of robot. Experiments without and with disturbance are presented to show the stability of the vehicle atdifferent initial conditions.
Keywords— Mobile robotics, quadrotor, robust control, LMIs
Resumo— Este artigo apresenta uma metodologia para estabilizacao da atitude de um Veıculo Aereo AutonomoNao Tripulado (VAANT) do tipo quadricoptero. Para tal, utilizamos tecnicas de controle robusto baseadas nummodelo linear incerto de apenas 4 vertices e em criterios de estabilidade bem definidos, como D-estabilidade edesempenho H2. A matriz de ganhos constantes K calculada e utilizada para regular a atitude do veıculo em tornodo ponto de operacao de voo pairado, importante para esse tipo de robo. Experimentos sem e com perturbacoessao apresentados para mostrar a estabilidade veıculo a partir de diferentes condicoes iniciais.
Palavras-chave— Robotica movel, quadricoptero, controle robusto, LMIs
1 Introducao
Atualmente o uso de Veıculos Aereos AutonomosNao Tripulados (VAANTs) tem se difundido cadavez mais pelo mundo, dada sua grande capacidadee variabilidade de aplicacoes. Mais especificamente,veıculos aereos do tipo Pouso e Decolagem Vertical(Vertical Taking-off and Landing, ou VTOL), comohelicopteros e quadricopteros, tem se mostrado efi-cazes em tarefas como mapeamento e exploracaode regioes, vigilancia e gerenciamento de multi-does, entre outras, devido a sua capacidade de voopairado (hovering).
Sabe-se, porem, que veıculos sustentados porhelices sao bastante susceptıveis a perturbacoes,como incertezas parametricas, ruıdos sensoriais einfluencias externas. Ventos laterais, por exem-plo, provocam perda de sustentacao nos rotores,levando o veıculo a uma instabilidade que podecomprometer toda a missao. Nesses casos, o con-trole normalmente deve ser realizado a taxas defrequencia extremamente altas (centenas ou mi-lhares de Hz) para que o veıculo possa responderde forma satisfatoria (Gurdan et al., 2007). As-sim sendo, este trabalho se concentra em projetaruma estrategia de controle de atitude (orientacao)para um veıculo do tipo quadricoptero, robustaa possıveis perturbacoes que venham a atingir osistema.
Para tal proposito, inicialmente modelou-se ocomportamento dinamico da atitude do VAANTem termos dos angulos de Euler, relativos a umreferencial inercial no plano da Terra. O modelooriginal foi entao embutido em uma descricao do
tipo Linear com Parametros Variantes (LPV), naqual a incerteza e descrita por meio de um politopocontendo 4 vertices, dois para cada eixo de rotacaodo veıculo. Por fim, a sintonia de um controladorrobusto foi realizada por meio de uma metodologiabaseada em Desigualdade Matricial Linear (LMI),resultando no agrupamento dos autovalores de ma-lha fechada com custo H2 garantido, permitindoatingir um desempenho satisfatorio.
Em Rabhi et al. (2011) e Rangajeeva e Whid-borne (2011), por exemplo, sao utilizadas estrate-gias de ganho escalonado (gain-scheduling) paraestabilizar a atitude de um quadricoptero, relativa-mente semelhante ao considerado neste trabalho,resultando em tempos de convergencia de mesmaordem.
Embora o modelo apresentado em Rabhi et al.(2011) seja semelhante ao deste trabalho, os auto-res adotaram uma abordagem fuzzy Takagi-Sugeno(TS) resultando num modelo com 8 regras do tipoSe-Entao, ao passo que aqui, a aposta e em algomais simples, com apenas 4 regras. Informacoesrelevantes como modelos locais, funcoes de perti-nencia, ou de escalonamento, e os ganhos obtidossao omitidas nesta referencia.
Ja em Rangajeeva e Whidborne (2011), o mo-delo e bem mais complexo, envolvendo Decompo-sicao de Valores Singulares de Alta Ordem, o queresulta numa representacao com 100 vertices lo-cais. O aumento do conservadorismo e a quedade desempenho com o crescimento no numero devertices sao problemas conhecidos na literatura deganho escalonado via LMI, veja Mozelli e Palhares(2011) e referencias.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2105

Em Castillo et al. (2005) e mostrado um com-parativo entre estrategia de controle LQR e con-trole nao linear por meio de saturacoes aninhadas.Embora o problema de atitude e posicao tenhasido abordado conjuntamente, a metodologia decontrole requer o ajuste empırico de diversos pa-rametros. A estrategia de controle por saturacoesaninhadas tambem e realizada em Shakev et al.(2012), porem com convergencia bem mais lenta.
Tecnicas nao lineares diretas tambem es-tao disponıveis para controle de quadricopte-ros (Bouabdallah e Siegwart, 2005; Cabecinhaset al., 2010). Uma dificuldade presente em algumasdessas tecnicas, como backstepping e linearizacaode realimentacao, consiste no fato de essas seremsensıveis a variacoes parametricas, uma vez que enecessario valer-se de transformacoes linearizantes,como cancelamento de termos nao lineares.
Comparada a literatura, a abordagem por-posta tem como vantagens: i) a inclusao de crite-rios de desempenho – alem dos casos ja menciona-dos, imposicao de D-estabilidade e custo garantidoH2 – e possıvel incluir com facilidade outros crite-rios de desempenho, como norma H∞, restricoesnas variaveis de entrada e saturacao; ii) o projetoe do tipo assistido por computador – ocorre pormeio da solucao de um problema de otimizacaoconvexa, sendo facilmente reprodutıvel para outrostipos de quadricopteros e para modificacoes nasrestricoes de projeto. Esta facilidade de reprojetodo controlador nao ocorre com metodos analıti-cos, de equacionamento laborioso, com sintoniade parametros por heurıstica ou sem garantia deum desempenho prescrito, exigindo investigacoese testes.
Na sequencia, a Secao 2 apresenta o modelooriginal nao linear e o modelo linear variante notempo que aproxima o comportamento da atitudede um VAANT do tipo quadricoptero, alem dascondicoes LMI para projeto. Uma matriz de ga-nho constante para a malha fechada foi projetada,visando estabilizar o veıculo em torno do ponto deoperacao de voo pairado. A Secao 3 exibe algunsdos experimentos realizados, demonstrando a esta-bilidade do sistema. Por fim, a Secao 4 conclui otrabalho e cita os passos futuros da pesquisa.
Notacao: Maiusculas e minusculas indicammatrizes e vetores, respectivamente; sobrescrito[·]T e usado para transposto do argumento; [·] 0([·] ≺ 0) indica que o argumento e definido positivo(negativo); (•) substitui termos transpostos emmatrizes simetricas; as funcoes trigonometricasseno, cosseno e tangente sao abreviadas por s(·),c(·) e t(·), respectivamente; os referenciais (frames)sao indicados por ·; 1m e 0(m,n) indicam matrizesidentidade e nula, de dimensoes m×m e m× n ,respectivamente.
f1
f2f3
f4m1
m2
m3
m4
mg
Wy
z
x
Bx
z y
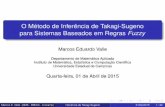
Figura 1: Referenciais do quadrirrotor: forcas emomentos atuantes na dinamica do veıculo.
2 Metodologia
2.1 Modelo Dinamico
Neste trabalho, foi utilizado o modelo matema-tico para quadrirrotores baseado no formalismo deNewton-Euler, no espaco de trabalho W ≡ R3. Omodelo foi adaptado do arcabouco apresentado emMichael et al. (2010), no qual os autores utilizama mesmo tipo de VAANT em seus experimentos.Foi considerado o vetor de estados x ∈ R6, com-posto pelas orientacoes do veıculo no Grupo de LieSE(3), e suas respectivas derivadas, tal que
x =
[ψω
],
onde ψ = [φ, θ, ψ]T
, em rad (radianos), e o vetorde angulos de Euler em SO(3), relativo ao framedo mundo W ∈ R3, e ω = [p, q, r]
T, em rad/s,
e o vetor de velocidade angulares observado juntoao referencial do corpo do veıculo B.
Foi considerado ainda o vetor de entrada dosistema
u =
(Ω2)2 − (Ω4)2
(Ω3)2 − (Ω1)2
4∑i=1
(−1)i+1(Ωi)2
,onde Ωi representa a velocidade de rotacao, emrpm1, aplicada ao i-esimo motor do quadricoptero.A Figura 1 mostra uma representacao das forcase dos momentos que atuam sobre o veıculo, alemdos sistemas de coordenadas adotados.
A variacao temporal do movimento rotacionaldo quadrirotor pode ser descrita como:
ψ = Hω, (1)
Iω + Nω|ω|+ (ω×Iω) =
l(f2−f4)
l(f3−f1)
4∑i=1
(−1)i+1mi
, (2)
1Rotacoes por minuto.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2106

sendo que I representa a matriz inercial, diagonaldevido a simetria do veıculo; l e a distancia entrea posicao de cada motor e o centro de massa dosistema; e N e a matriz de coeficientes de arrasto,descrita segundo a Equacao 3,
N =
np 0 00 nq 00 0 nr
=1
2nρA, (3)
sendo n o coeficiente de arrasto medio, A umamatriz diagonal representando as areas das se-coes transversais em cada eixo do veıculo e ρ ≈1,22 kg/m3 a densidade do ar de acordo com a At-mosfera Padrao Internacional (International Stan-dard Atmosphere, ou ISA).
Foi utilizada aqui a representacao em angulosde Euler ZYX, onde φ, θ e ψ sao os angulos derolamento (roll), arfagem (pitch) e guinada (yaw),respectivamente. Com isso, a matriz de transfor-macao H de B para W pode ser descrita comosendo
H =
c(θ) 0 s(θ)
s(φ)s(θ)
c(φ)1 − s(φ)c(θ)
c(φ)
− s(θ)
c(φ)0
c(θ)
c(φ)
.
A variacao angular e controlada diretamentepor meio das forcas e dos momentos gerados pelarotacao dos motores. Assim, f representa o vetorde forcas e m o vetor de momentos (Figura 1), cal-culados segundo as Equacoes 4 e 5 respectivamente
fi = µfΩ2i , ∀i = 1...4, (4)
mi = µmΩ2i , ∀i = 1...4, (5)
onde µf e µm sao ganhos escalares de cada motor.
2.2 Modelo Linear Variante no Tempo
No controle gain-scheduling (Shamma, 2012), as-sim como em uma de suas populares vertentes, ocontrole fuzzy TS, o controlador nao linear e ob-tido por meio de controladores lineares, projetadoscom base em modelos lineares de validade local,combinados por meio das chamadas funcoes deescolanamento, ou no caso TS, as chamadas fun-coes de pertinencia (Mozelli et al., 2010; Teixeiraet al., 2003). Ja no problema de controle robusto,ao contrario, um controlador linear fixo e usadoao sistema como um todo. Em ambos os casos,o sistema assume a forma de um modelo linearincerto:
x(t) = A(∆)x(t) + B(∆)u(t) (6)
ou modelo Linear com Parametros Variantes(LPV), no qual ∆ e uma nao linearidade/parametro
variante no tempo; x ∈ Rn e o vetor de estado; eu ∈ Rm e o vetor de entrada.
Uma distincao a ser feita ocorre entre as classesde modelos Quase-LPV (QLPV) e puramente LPV,sendo o parametro variante no tempo endogenoou exogeno ao sistema, respectivamente. No casodo quadricoptero, as nao linearidades advem defuncoes trigonometricas dependentes dos estadosφ e θ do proprio sistema. Dessa forma, essas naolinearidades podem ser camufladas como parame-tros variantes no tempo (Rugh e Shamma, 2000),sendo apropriada uma representacao por modeloQLPV na qual:
A(x)=
0 0 0 c(θ) 0 s(θ)
0 0 0s(φ)s(θ)
c(φ)1 − s(φ)c(θ)
c(φ)
0 0 0 − s(θ)
c(φ)0
c(θ)
c(φ)
0 0 0 −np|p|Ix
Iy − IzIx
r 0
0 0 0 0 −nq|q|Iy
Iz − IxIy
p
0 0 0Ix − Iy
Izq 0 −nr|r|
Iz
(7)
e
B(x) =
0 0 0
0 0 0
0 0 0l µf
Ix0 0
0l µf
Iy0
0 0µm
Iz
. (8)
Neste trabalho, a incerteza do modelo (6) seratratada por meio de uma abordagem politopica,na qual modelo locais sao combinados de formaconvexa:
A(∆) =r∑
i=1
∆iAi,r∑
i=1
∆i = 1, ∆i ≥ 0 (9)
sendo que as matrizes Ai sao obtidas por meio dalinearizacao de Taylor em torno dos extremos dasnao linearidades consideradas. No caso do qua-dricoptero, assumiu-se que φ e θ ∈ [−20, 20],devido a simetria do sistema e ao fato de inclina-coes extremas promoverem perda de sustentacaoaerodinamica, comprometendo sua capacidade devoo. Como resultado, as matrizes geradas para osparametros do sistema sao:
Ai =
0 0 0 0,94 0 ai0 0 0 bi 1,00 ci0 0 0 di 0 1,000 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
(10)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2107

∀i = 1 . . . 4, a1 = a3 = −0,34; a2 = a4 = 0,34;b1 = b4 = 0,12; b2 = b3 = −0,12; c1 = c2 = 0,34;c3 = c4 = −0,34; d1 = d3 = 0,36; d2 = d4 = −0,36;sendo que as matrizes Bi sao todas iguais a:
Bi =
0 0 00 0 00 0 0
0,59 0 00 0,59 00 0 0,03
10−5. (11)
2.3 Controle Robusto
Um esquema comumente adotado para o controlecompleto do quadricoptero envolve duas malhasde controle, uma para a atitude, malha interna, eoutra para a posicao, malha externa. Dessa forma,para garantir um desacoplamento adequado entreessas malhas, e necessario que o tempo de acomo-dacao seja suficientemente rapido no controle daatitude.
Outro ponto a ser ressaltado e o fato de dis-turbios externos serem relevantes na dinamica doquadricoptero, como rajadas de vento, devendo serrejeitados pelo controle de atitude para garantircondicoes de voo.
A modelagem realizada na secao anterior per-mite que metodologias de controle robusto base-adas em LMIs sejam aplicadas ao problema docontrole de atitude. Alem de ser um arcaboucoque permite tratar diretamente sistemas linearesincertos, a abordagem via LMIs possui outras van-tagens, como a capacidade de incorporar diversosobjetivos e criterios de controle numa mesma for-mulacao, alem de ser uma tecnica numerica, emcontraposicao as tecnicas de controle nao linearesanalıticas.
Para garantir uma resposta transitoria ade-quada do quadricoptero sera considerado o conceitode D-estabilidade robusta (Chilali et al., 1999):
Definicao 1 (D-estabilidade robusta) O mo-delo incerto, definido em (6) e (9) e robustamenteD-estavel se o espectro de A(∆) e confinado naregiao D para todo o domınio de incertezas ∆, i.e.,:
λ[A(∆)] ⊃ D ⊃ C.
Mesmo frente a variacao dos parametros em(6), garante-se um desempenho transitorio mınimoao agrupar os autovalores de todas as matrizespertencentes ao politopo (9) em uma determinadaregiao D de interesse.
Diversas regioes no plano complexo podemser descritas por meio do formalismo das LMIs,segundo proposto por Gahinet et al. (1996):
Definicao 2 (Regioes LMI) Um subconjuntoD ⊃ C e denominado regiao LMI caso existam
Re
Im
d
−c −α
Figura 2: Caracterıstica da regiao LMI consideradano projeto de controle de atitude.
matrizes simetricas L e M tais que
D = s ∈ C : L + zM + zMT < 0. (12)
No projeto de controle robusto do quadricop-tero foram consideradas intersecoes de duas regioes.A primeira, do tipo faixa vertical, restringindo osautovalores ao semi-plano Re(λ[A(∆)]) < −α, limi-tando, por conseguinte, o tempo de acomodacao:
z + z < −2α,
considerando L = 2α e M = 1 em (12). A outra,uma regiao do tipo cırculo, sendo definido seucentro (c) e raio (d), para agrupar os autovalorese limitar o fator de amortecimento e frequencianatural associada:
(z + c)d−1(z + c) < d,
resultando em:
L =
[−d cc −d
], M =
[0 10 0
].
A regiao LMI resultante da intersecao entrefaixa vertical e cırculo, exemplificada na Figura 2,permite configuracoes diferentes da abordagemadotada em (Leite et al., 2004), por exemplo.
Finalmente, outro criterio apropriado para oproblema de controle de atitude foi a minimiza-cao da norma H2. Reescrevendo o modelo (6),levando-se em consideracao a presenca de vetoresde entrada exogena w ∈ Rp e de saıda virtualy ∈ Rq, conforme a seguir:
x(t) = A(∆)x(t) + B(∆)u(t) + F(∆)w(t) (13)
y(t) = C(∆)x(t) (14)
sendo a realizacao para a planta nominal
G(s) =
[Af FC 0
],
na qual Af corresponde ao sistema em malha fe-chada, o problema de controle H2 pode ser definidocomo (Zhou et al., 1995, Cap. 15):
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2108

Definicao 3 (Problema H2) O problema decontrole H2 pode ser definido como determinarum controlador K que estabiliza internamente G eminimiza a norma H2 da funcao de transferencia(ou matriz de transferencia) de w para y, i.e, quemin ||Ty,w||22.
No caso dos sistemas incertos, o objetivo e mi-nimizar a norma H2 para o elemento do domıniode incerteza de pior caso, obtendo assim o cha-mado custo garantido, um limitante superior paratodas as configuracoes possıveis. Perturbacoes dotipo rajadas de vento podem ser vistas pelo sis-tema como entradas impulsivas. Dessa forma, aose projetar o controlador que minimiza a normaH2 ter-se-a uma rejeicao deste disturbio na saıdaconsiderada, melhorando o desempenho da malhade controle de atitude.
2.4 Projeto do Controlador
Nesta secao, serao apresentadas as LMIs que garan-tem simultaneamente D-estabilidade e minimiza-cao da norma H2 para o modelo (6). Embora diver-sos avancos recentes sejam reportados no sentido demelhoria de projeto e reducao de conservadorismo,(Leite et al., 2004; Goncalves et al., 2006; Oliveiraet al., 2008) o enfoque aqui foi numa metodolo-gia padrao. Deseja-se mostrar que mesmo umaabordagem mais conservadora e capaz de garantirdesempenho satisfatorio, ressaltando os meritosda proposta de modelagem e de controle, em con-traponto a outras metodologias mais complexas(principalmente nao lineares analıticas), para oprojeto de controle de atitude em quadricopteros.
Devido a aspectos inerentes dos quadricopte-ros, em geral, todos os estados estao disponıveispara a acao de controle com boa confiabilidade.Portanto, propoe-se um controlador por realimen-tacao de estados completa:
u(t) = −Kx(t). (15)
Por sua vez, as velocidades de rotacao de cadahelice podem ser calculadas como sendo (Michaelet al., 2010)
Ω(t) =
0 −1 11 0 −10 1 1−1 0 −1
sgn(u(t))√|u(t)|. (16)
O teorema a seguir estabelece condicoes su-ficientes para a sıntese do ganho do controladorrobusto (15) que garante minimizacao da normaH2 e agrupamento dos polos na regiao mostradana Fig. 2, parametrizada segundo α, c e d:
Teorema 1 [Sıntese do Ganho Robusto] Dadosescalares α, c, d, o controlador (15) torna o sistema(2) robustamente D-estavel caso existam matrizes
X = XT , J = JT e Z que solucionem o problema aseguir ∀i = 1, . . . , 4:
minK||Ty,w||22 = min
J,X,ZTracoJ (17)
s.a.
[J •Fi X
] 0,[
−dX •XAT
i + ZT BTi + cX −dX
]≺ 0,[
AiX + XATi + BiZ + ZT BT
i •CiX −1q
]≺ 0,
AiX + XAT
i + BiZ + ZT BT
i + 2αX ≺ 0.
O ganho do controlador e obtido fazendo-se K =ZX−1 e o custo garantido para a norma H2 possuilimitante superior estimado como TracoJ.
Prova: Os detalhes da demonstracao serao omiti-dos. Detalhes sao apresentados em Chilali e Gahi-net (1996), para sistemas precisamente conhecidos,sendo que a extensao para sistemas lineares incer-tos segue ideias similares as em Chilali et al. (1999).2
Por fim, escolhendo-se os escalares α, c e dcomo sendo −1,5, −1,5 e 3 respectivamente, eC = FT =
[1 1 1 1 1 1
], o Teorema 1 produz a
seguinte matriz de ganhos:
K =
0,75 0,19 0,59 1,94 0,49 0,61
0,69 1,57 0,74 1,05 2,60 1,04
9,12 3,12 11,60 8,45 7,25 39,30
105.
A magnitude elevada dessa matriz serve para com-pensar o baixo ganho de B na Eq. 11, de tal formaque os valores dos ganhos obtidos sao condizentescom os atuadores.
3 Experimentos
Os experimentos foram realizados com base noVAANT Hummingbird, produzido pela Ascen-ding Technologies, (AscTec Hummingbird Auto-Pilot, 2011), e no modelo nao linear para atitudeapresentado em Michael et al. (2010), onde podemser encontrados todos os valores dos parametrosgeometricos e aerodinamicos usados aqui. Esseveıculo em particular permite frequencia de opera-cao de aproximadamente 1 kHz, valor consideradosuficientemente alto para um projeto de controleem tempo contınuo satisfatorio. Para simulacaodo veıculo e calculo dos ganhos de controle, utiliza-mos o software Matlab, com o LMI Control Toolboxpara solucao do problema de otimizacao.
Como primeiro teste, as Figuras 3 e 4 apre-sentam o comportamento temporal dos estadosfrente a aplicacao da acao de controle. E possıvelobservar que o controlador ajustado para o modelo
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2109

0 0.5 1 1.5 2 2.5 3
−15
−10
−5
0
5
φ(g
raus)
0 0.5 1 1.5 2 2.5 3
−15
−10
−5
0
5
θ(g
raus)
0 0.5 1 1.5 2 2.5 3
−15
−10
−5
0
5
ψ(g
raus)
tempo (s)
Figura 3: Controle de orientacao ao longo do tempopara o modelo nao linear.
0 0.5 1 1.5 2 2.5 3
−4
−2
0
2
4
6
p(g
raus/
s)
0 0.5 1 1.5 2 2.5 3
−4
−2
0
2
4
6
q(g
raus/
s)
0 0.5 1 1.5 2 2.5 3
−4
−2
0
2
4
6
r(g
raus/
s)
tempo (s)
Figura 4: Velocidades angulares ao longo do tempopara o modelo nao linear.
incerto proporciona a estabilizacao do modelo naolinear (validado para o robo real, segundo Michaelet al. (2010)), mostrando assim a viabilidade damalha fechada para o veıculo real. Partindo de va-lores iniciais extremos, como φ = 10 e θ = −20,o sistema atinge a estabilizacao em menos de 1segundo, tempo aceitavel para a malha de controlede atitude (Gurdan et al., 2007).
Ja na Figura 5, e possıvel ver o comportamentodos motores ao longo do tempo, o que correspondea acao de controle aplicada ao sistema.
No segundo teste, o veıculo parte das condi-coes iniciais φ = −20 e θ = 10. Desta vez, foiaplicada uma perturbacao impulsiva, equivalente auma rajada de vento de aproximadamente 50 km/h,ao longo do eixo X de W apos exato 1 segundode simulacao. As Figuras 6 e 7 mostram o com-
0 0.5 1 1.5 2 2.5 34000
4200
4400
Ω1
(rpm
)
0 0.5 1 1.5 2 2.5 34000
4200
4400
Ω2
(rpm
)
0 0.5 1 1.5 2 2.5 34000
4200
4400
Ω3
(rpm
)
0 0.5 1 1.5 2 2.5 34000
4200
4400
Ω4
(rpm
)
tempo (s)
Figura 5: Resposta dos motores a acao de controlepara o modelo nao linear.
0 0.5 1 1.5 2 2.5 3
−15
−10
−5
0
5
φ(g
raus)
0 0.5 1 1.5 2 2.5 3
−15
−10
−5
0
5
θ(g
raus)
0 0.5 1 1.5 2 2.5 3
−15
−10
−5
0
5
ψ(g
raus)
tempo (s)
Figura 6: Angulos de orientacao: resposta frente aperturbacao aplicada ao modelo nao linear.
portamento temporal dos estados, onde e possıvelobservar que a perturbacao e facilmente rejeitadapelo controlador empregado. Ja a Figura 8 exibea resposta dos motores para esse teste.
E possıvel notar um efeito oscilatorio nas Fi-guras 6 a 8. Uma vez que o modelo LPV adotadoe bastante simples, conjectura-se que este efeito edevido a aplicacao de uma lei de controle linear,bastante simples, no sistema simulado, cuja dina-mica e mais fidedigna ao quadricoptero real, queapresenta nao linearidades significativas. Possi-velmente o uso de uma abordagem por ganhosescalonados ou TS possa mitigar este efeito.
4 Conclusao
Neste artigo, demonstramos a viabilidade de se em-pregar tecnicas de controle robusto na estabilizacao
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2110

0 0.5 1 1.5 2 2.5 3
−4
−2
0
2
4
6
p(g
raus/
s)
0 0.5 1 1.5 2 2.5 3
−4
−2
0
2
4
6
q(g
raus/
s)
0 0.5 1 1.5 2 2.5 3
−4
−2
0
2
4
6
r(g
raus/
s)
tempo (s)
Figura 7: Velocidades angulares: resposta frente aperturbacao aplicada ao modelo nao linear.
0 0.5 1 1.5 2 2.5 34000
4200
4400
4600
Ω1
(rpm
)
0 0.5 1 1.5 2 2.5 34000
4200
4400
4600
Ω2
(rpm
)
0 0.5 1 1.5 2 2.5 34000
4200
4400
4600
Ω3
(rpm
)
0 0.5 1 1.5 2 2.5 34000
4200
4400
4600
Ω4
(rpm
)
tempo (s)
Figura 8: Rotacao dos motores: resposta frente aperturbacao aplicada ao modelo nao linear.
angular de veıculos VTOL do tipo quadricoptero.Para tal, modelamos o sistema por meio de umaabordagem LPV utilizando apenas um par de in-certezas, cada qual relacionado aos momentos derolamento, φ, e de arfagem, θ, respectivamente.
Mostramos ainda que o sistema e robusto a per-turbacoes impulsivas provocadas por ventos late-rais de ate 50 km/h, valor bastante significativo seconsiderarmos a alta susceptibilidade que veıculosde asa rotativa possuem frente a tais perturbacoes.
Como trabalho futuro, esperamos estender aabordagem nao apenas para a atitude do quadri-coptero, mas tambem para os controles de altitudee posicao do robo no espaco tridimensional. Consi-derando esse caminho, e de vital importancia levarem conta o problema de controle nao somente emcondicoes de voo pairado, mas tambem em ou-tros pontos de operacao do sistema, como voo de
cruzeiro, por exemplo.
Agradecimentos
Os autores agradecem ao Conselho Nacional deDesenvolvimento Cientıfico e Tecnologico (CNPq),Coordenacao de Aperfeicoamento de Pessoal deNıvel Superior (CAPES) e Fundacao de Amparo aPesquisa do Estado de Minas Gerais (FAPEMIG).
Referencias
AscTec Hummingbird AutoPilot (2011).http://www.asctec.de/asctec-hummingbird-autopilot-5/.
Bouabdallah, S. e Siegwart, R. (2005). Backs-tepping and sliding-mode techniques appliedto an indoor micro quadrotor, Proc. of theIEEE Int. Conf. on Robotics and Automation,pp. 2247–2252.
Cabecinhas, D., Naldi, R., Marconi, L., Silvestre,C. e Cunha, R. (2010). Robust take-off andlanding for a quadrotor vehicle, Proc. of theIEEE Int. Conf. on Robotics and Automation,pp. 1630–1635.
Castillo, P., Lozano, R. e Dzul, A. (2005). Stabi-lization of a mini rotorcraft with four rotors,IEEE Control Systems Magazine 25(6): 45–55.
Chilali, M. e Gahinet, P. (1996). H∞ design withpole placement constraints: an LMI appro-ach, IEEE Transactions on Automatic Con-trol 41(3): 358–367.
Chilali, M., Gahinet, P. e Apkarian, P. (1999).Robust pole placement in lmi regions,IEEE Transactions on Automatic Control44(12): 2257–2270.
Gahinet, P., Apkarian, P. e Chilali, M. (1996). Af-fine parameter-dependent Lyapunov functionsand real parametric uncertainty, IEEE Trans.on Automatic Control 41(3): 436–442.
Goncalves, E. N., Palhares, R. M., Takahashi, R.H. C. e Mesquita, R. C. (2006). New approachto robust D-stability analysis of linear time-invariant systems with polytope-bounded un-certainty, IEEE Transactions on AutomaticControl 51(10): 1709–1714.
Gurdan, D., Stumpf, J., Achtelik, M., Doth, K.-M., Hirzinger, G. e Rus, D. (2007). Energy-efficient Autonomous Four-rotor Flying RobotControlled at 1 kHz, IEEE Int. Conf. on Ro-botics and Automation, pp. 361–366.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2111

Leite, V. J. S., Montagner, V. F. e Peres, P. L. D.(2004). Alocacao robusta de polos atraves derealimentacao de estados dependente de para-metros, SBA: Controle & Automacao 15: 127– 134.
Michael, N., Mellinger, D., Lindsey, Q. e Kumar,V. (2010). The GRASP Multiple Micro-UAVTestbed, IEEE Robotics Automation Maga-zine 17(3): 56–65.
Mozelli, L. A. e Palhares, R. M. (2011). Stabi-lity analysis of linear time-varying systems:improving conditions by adding more infor-mation about parameter variation, Systems& Control Letters 60: 338–343.
Mozelli, L. A., Palhares, R. M., Avellar, G. S. C.e dos Santos, R. F. (2010). Condicoes LMIsalternativas para sistemas Takagi-Sugeno viafuncao de Lyapunov fuzzy, SBA: Controle &Automacao 21(1): 96–107.
Oliveira, R. C. L. F., de Oliveira, M. C. e Peres,P. L. D. (2008). Convergent LMI relaxationsfor robust analysis of uncertain linear systemsusing lifted polynomial parameter-dependentLyapunov functions, Systems & Control Let-ters 57(8): 680 – 689.
Rabhi, A., Chadli, M. e Pegard, C. (2011). Robustfuzzy control for stabilization of a quadro-
tor, Int. Conf. on Advanced Robotics (ICAR),pp. 471–475.
Rangajeeva, S. L. M. D. e Whidborne, J. F. (2011).Linear parameter varying control of a quadro-tor, Proc. of IEEE Int. Conf. on Industrialand Information Systems, pp. 483–488.
Rugh, W. J. e Shamma, J. S. (2000). Researchon gain scheduling, Automatica 36(10): 1401– 1425.
Shakev, N., Topalov, A., Kaynak, O. e Shiev, K.(2012). Comparative results on stabilizationof the quad-rotor rotorcraft using boundedfeedback controllers, Journal of Intelligent &Robotic Systems 65(1-4): 389–408.
Shamma, J. S. (2012). An overview of LPV sys-tems, in M. Javad e C. W. Scherer (eds),Control of Linear Parameter Varying Systemswith Applications, Springer, pp. 3–26.
Teixeira, M. C. M., Assuncao, E. e Avellar, R. G.(2003). On relaxed LMI-based designs forfuzzy regulators and fuzzy observers, IEEETransactions on Fuzzy Systems 11(5): 613 –623.
Zhou, K., Doyle, J. C. e Glover, K. (1995). Robustand Optimal Control, Prentice Hall.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2112