Ling Descritiva BCM

of 190
Transcript of Ling Descritiva BCM
-
______________________________________________________
Controladores Programveis
Linguagem Descritiva BCM
Verso:2009-1Ref.:31940092-8
-
Linguagem Descritiva BCM 2
-
Linguagem Descritiva BCM
Este documento propriedade da BCM ENGENHARIA LTDA. Seucontedo tem carter exclusivamente informativo, cabendo BCMo direito de promover alteraes necessrias, sem aviso prvio.
Linguagem Descritiva BCM 3
proibida a reproduo parcial ou total sem o expressoconsentimento da BCM Engenharia Ltda.
-
Linguagem Descritiva BCM 4
-
ATENO
Os Controladores Programveis BCM so equipamentos robustos econfiveis. O seu projeto foi feito levando em conta as condies de operaoparticulares do ambiente industrial. Porm, nunca esquea que todos oselementos de um sistema esto sujeitos a falhas. Desenvolva o projeto dosistema levando isto em considerao, obedecendo rigorosamente asrecomendaes deste manual e das normas de segurana vigentes em seu pasou regio.
Um bom projeto do sistema e uma correta instalao so elementosfundamentais para o funcionamento satisfatrio e confivel dos produtos.
Caso haja qualquer ponto duvidoso ou omisso, no hesite em consultar oDepartamento de Assistncia Tcnica da BCM, o qual ter o maior prazer de lheprestar todo o apoio necessrio.
Telefone (51) 3374.3899Fax (51) 3374.4141
E-mail: [email protected]
COMPATIBILIDADE COM O PROCP
As instrues descritas neste manual podem ser usadas com oPROCPV101.0, PROCPV201.0, PROCPV301.0 , PROCP V3k, V4k e V5k.
Existem instrues que s so compiladas usando o PROCPV301.0 ,PROCP V3k e PROCP V4k. Outras somente esto disponveis para o PROCPV5k. Estas instrues informam esta caracterstica na sua descrio.
Para dvidas a respeito da disponibilidade de instrues em verses doPROCP anteriores, consulte a BCM.
Linguagem Descritiva BCM 5
-
Linguagem Descritiva BCM 6
-
ndice
1572.5.12 - Uso dos bancos de memria.................................................1492.5.11 - Controle PID....................................................................1452.5.10 - Uso de Matrizes...............................................................1332.5.9 - Uso do Display...................................................................1312.5.8 - Controle das Sadas Analgicas........................................1272.5.7 - Leitura das Entradas Analgicas.....................................1262.5.6 - Temporizadores Associados ao Teste de Varivel...................1212.5.5 - Uso de temporizadores............................................................1182.5.4 - Uso de contadores...................................................................1162.5.3 - Atribuio de Valor para Variveis...........................................1162.5.2 - Controle das Sadas Digitais....................................................1142.5.1 - Leitura das Entradas Digitais...................................................1142.5 - EXEMPLOS TIPICOS DE PROGRAMAO....................................
582.4.2 - Intrues de programao.......................................................412.4.1 - Comandos de configurao do CP ..........................................402.4 - SINTAXE DAS INSTRUES E COMANDOS.................................
392.3 - COMO PROGRAMAR NA LINGUAGEM DESCRITIVA...................
332.2 - REGRAS DE PROGRAMAO NA LINGUAGEM DESCRITIVA
312.1 - ESTRUTURA DA LINGUAGEM DESCRITIVA BCM..........................
312 - A LINGUAGEM DESCRITIVA BCM........................................................
181.4 - TERMINOLOGIA E CONVENES USADAS.............................
171.3 - DOCUMENTAO DE PROJETOS............................................
131.2 - ABORDAGEM DO PROBLEMA E REPRESENTAO................
111.1 - DEFINIO E CARACTERISTICAS DO CP..............................
111 - CONTROLE DE PROCESSOS COM CPS .......................................
Linguagem Descritiva BCM 7
-
1862.9 - PRIORIDADE NAS OPERAES....................................................
1832.8 - COMO O PROGRAMA EXECUTADO / CICLO DE VARREDURA....
1822.7 - REGRAS ESPECIAIS DE PROCESSAMENTO ARITMTICO...........
181 - Medio do Tempo de Varredura.........................................180 - Redes de Comunicao.......................................................175 - Interfaces com Perifricos.....................................................174 - Contadores Rpidos............................................................171 - Controle de Programa..........................................................168 - Reconhecimento dos Mdulos de E/S..................................167 - Relgio...............................................................................166 - Temporizao......................................................................1652.6.3 - Variveis de atribuio Fixa.....................................................164 - Display................................................................................163 - Sadas Analgicas................................................................163 - Entradas Analgicas..........................................................162 - Entradas Digitais.................................................................1622.6.2 - Variveis de Entrada e Sadas ................................................161 - Variveis no Indexadas.......................................................161 - Variveis Indexadas.............................................................1602.6.1 - Varveis de Atribuio Livre.....................................................1592.6 - TRATAMENTO DE VARIVEIS........................................................
Linguagem Descritiva BCM 8
-
ndice Geral das Instrues e Comandos
59EAI - Programa os Valores Relativos ao Mdulo EAI................58DECREMENTA - Diminui uma unidade na Varivel..................58COPIA - Copia variveis de uma matriz para outra...................
INSTRUES DE PROGRAMAO
57TCP - Configura os Parmetros do Canal Ethernet..................56SAIDA - Associa Variveis as Sadas .....................................56RTC - Habilita a Operao do Relgio em Tempo Real.............56PAN - Habilita a Rotina para Tratamento do Mdulo PAN.........56NEST - Reserva um Espao de Memria para uma Tabela.......47INTERFACE - Define Parametros de Comunicao ................46IFT - Habilita o Uso do Mdulo IFT...........................................46FIM - Instrui o Compilador a Encerrar a Compilao................46ESA - Habilita Rotinas para Tratamento de E/S Analgicas.......45DISPLAY - Habilita a Operao dos Displays...........................44DIM - Define o Dimenso de uma Matriz.................................44CTR - Habilita as Rotinas para Tratamento de Contadores.......43CONTINUA - Divide o programa em Vrias Partes....................41CLP - Define o tipo de Controlador............................................41BCD - Tratamento das Chaves Thumbwheel............................
COMANDOS DE CONFIGURAO
88LIGA DESL - Liga e Desliga as Sadas Especificadas..............86LE - Adquire Informaes de outro Equipamento na Rede........85LEMISI - Faz a Leitura da Memria do Mdulo ISI..................84LEISI - L uma Varivel de um Equipamento em Rede.............83ISI - Especifica a Porta Serial a ser Programada ...................83INCREMENTA - Incrementa uma Unidade na varivel ..........82INCLUI - Inclui um trecho de programa em Ling. Descritiva......82IMPRIME - Imprime o conteudo da Varivel.............................79FACA - Intruo que Executa Operaes Aritmticas................70EVENTOS - Configura o mdulo EDE....................................70ESTADO - Marca o Incio das Instrues para cada Estado.....68ESCREVE - Escreve Informaes em Outro Equipamento.....67ESCMISI - Escreve na Memria do Mdulo ISI.......................66ESCISI - Escreve uma Varivel em um Equipamento da Rede.63EAN - Programa os Valores Relativos ao Mdulo EAN..............
Linguagem Descritiva BCM 9
-
88MOSTRA - Apresenta as variveis nos Displays......................88MALHA/MAQUINA - Indica o incio dos estados .....................
INSTRUES DE PROGRAMAO (continuao)
113VA PARA - Mudana Imediata de Estado................................113SET - Coloca o Valor 1 Nas Variveis Mencionadas..................113SE - Transio de Estado........................................................108ROTINA - Permite Inserir Rotinas .............................................107RESET - Coloca a Varivel Mencionada em Zero.....................106PRESET - Preseta Variveis....................................................106PLIGA/PDESL - Liga e desliga pontos no mdulo PAN..............102PID - Executa Rotina PID no Controlador ................................93MOTOR - Sistemas de Posicionamento com Mdulo MOT......
Linguagem Descritiva BCM 10
-
1 - CONTROLE DE PROCESSOS COM CPs
Criado para ser um substituto dos quadros de rels, o ControladorProgramvel (CP) ultrapassou h muito as expectativas originais. Comprocessadores de alto desempenho, variedade de modelos e capacidade decomunicao, o seu campo de aplicao hoje quase ilimitado e oconhecimento de suas potencialidades torna-se cada vez mais necessrio paratodos os envolvidos no planejamento, operao e manuteno de processosindustriais. Nos prximos anos a sua importncia dever continuar crescendo,pois as pesquisas de mercado indicam uma contnua expanso na demanda porCPs, confirmando o inexorvel avano da automao em todas as reas deatividade.
1.1 - DEFINIO E CARACTERSTICAS DO CP"O Controlador Programvel um dispositivo que, observando a arquitetura
de computadores, possui uma memria programvel pelo usurio e realiza asfunes de controle, comando e superviso de processos, com hardware esoftware compatveis com estas aplicaes."A estrutura bsica do Controlador Programvel segue uma linha similar a doscomputadores de uso geral: Dispositivos de Entrada/ Processamento/ Sada. NosCPs estas estruturas assumem uma forma particular, adequada ao ambiente decontrole de processos:
BCM Automao Linguagem Descritiva BCM 11
Verso 2009-1 Referncia: 31940092-8
-
Entradas: As entradas digitais recebem o sinal de sensores, chaves,botoeiras, eoutros equipamentos que fornecem sinais do tipo ligado/desligado. As entradasanalgicas recebem sinais de tenso ou corrente de variao contnua, dentro deuma faixa e com significado especificado. Este mdulo condiciona o sinal deentrada e torna-o disponvel para o processador.
Processador: o bloco que analisa, processa e decide. So executadas afunes de deciso, operaes matemticas, contagens, temporizao, dilogocom IHM, comunicao, etc.
Memria: A memria de programa contm as instrues armazenadas paraexecuo das tarefas previstas para a aplicao. A memria de variveiscontm os valores e parmetros correntes relacionados ao processo.
Sadas: Atravs das sadas, o CP age sobre o processo sob o seu controle. Assadas digitais fornecem comandos do tipo ligado/desligado. As sadasanalgicas fornecem um sinal de tenso ou corrente com variao contnua,para acionar vlvulas proporcionais, conversores ou outros equipamentos.
Co-processadores: Mdulos com memria local e funes especializadasexecutam tratamento sofisticado de entradas analgicas, comunicaes com altodesempenho, controle de posicionamento com alta velocidade, operaesmatemticas e outras.
Interface Homem-Mquina: Este bloco coloca o operador (usurio) em contatodireto com o CP e o processo sob controle. Podem ser passadas informaes decondies de processo, alarmes, solicitaes manuais e informaes numricas.A forma mais comum de interface Homem-Mquina no CP um displayalfanumrico com teclado.
Comunicaes: Este bloco fornece o meio fsico e os protocolos para que o CPse comunique com outros equipamentos integrantes do sistema. Os sistemas decontrole atuais prevem a integrao de diversos dispositivos que podem incluirvrios CPs, computadores, interfaces IHM externos, sensores e atuadoresinteligentes, todos ligados em rede.
BCM Automao Linguagem Descritiva BCM 12
Verso 2009-1 Referncia: 31940092-8
-
1.2 - ABORDAGEM DO PROBLEMA E REPRESENTAO
De forma geral, o processo de desenvolvimento de uma aplicao deControlador Programvel atende uma seqncia de etapas, com objetivos bemdeterminados. O cumprimento satisfatrio de cada etapa ir garantir a seguranado trabalho e o sucesso do resultado final. Sero apresentadas em linhas geraisas caractersticas e requisitos de cada etapa.
Concepo Definio Projeto Construo Teste e Avaliao
Ciclo de Desenvolvimento de uma Aplicao
Definio - Nessa etapa ser explicitado o que o sistema ir fazer, sob quecondies, as relaes do equipamento de automao com os diferentesusurios e as caractersticas das ligaes com outros sistemas.
Projeto - Determinar uma soluo vivel e econmica para o problema a serresolvido. Dessa fase j sair uma configurao definitiva dos equipamentos aserem usados e as linhas gerais do software a ser desenvolvido.
Construo - Baseado nas especificaes geradas nas etapas anteriores, oprojeto ser convertido em um programa ou programas que atendam osrequisitos desejados. Paralelamente, os equipamentos necessrios seroconstrudos de acordo com as solicitaes do projeto.
Teste e AvaliaoEssa etapa deve responder basicamente a seguinte pergunta: O sistema atendeas necessidades e expectativas do usurio? Em caso negativo, quais asmodificaes necessrias? Para responder a essas perguntas poderemostrabalhar com simuladores do sistema, testes no sistema real em condiesnormais e anormais, etc.
BCM Automao Linguagem Descritiva BCM 13
Verso 2009-1 Referncia: 31940092-8
-
DefinioO primeiro passo na etapa de definio a elaborao do documento
denominado "Especificao do Problema", tambm chamado de "Especificaode Requisitos". Esse documento coloca claramente as necessidades do projeto eas expectativas do usurio. Somente uma redao completa e cuidadosa poderesultar em uma soluo adequada e de boa qualidade. A Especificao doProblema o instrumento fundamental para o dilogo entre o cliente do sistemae a equipe de desenvolvimento.
Em alguns casos, ao se iniciar o trabalho, a especificao pode j existir, serelaborada pelo cliente ou pelo responsvel pelo desenvolvimento.
ProjetoNa fase de projeto iremos construir uma soluo para o problema. O
resultado principal dessa fase a "Especificao da soluo" ou Especificaode Projeto. Baseado no conhecimento dos mdulos e equipamentos disponveis,o projetista ir determinar uma soluo genrica completa para o problema. Sergerado um diagrama fsico (hardware) e um diagrama lgico (software) dasoluo de automao, acompanhado de uma descrio detalhada de como osobjetivos sero atingidos. Onde for conveniente, deve-se considerar a inclusode normas universais relativas ao assunto, roteiros de teste, manuteno, etc.
O projetista nessa fase j ir sugerir uma diviso lgica para a abordagem daprogramao. No iremos aqui abordar o desenvolvimento subseqente da parteeletrnica (hardware) do projeto; iremos nos fixar na parte de software e como oprogramador ir trabalhar de aqui por diante.
BCM Automao Linguagem Descritiva BCM 14
Verso 2009-1 Referncia: 31940092-8
-
No cotidiano do trabalho de automao com Controladores Programveisnotamos que frequentemente as especificaes do problema e da soluo soreunidas em um documento nico. Tal procedimento vlido principalmente emprocessos mais simples de automao, uma vez que simplifica o trabalho doprojetista.
A principal exigncia nessa forma de abordagem que o responsvel pelaespecificao deve conhecer simultaneamente o processo (para poder redigir aEspecificao do Problema), os equipamentos disponveis e os recursos deprogramao para poder projetar uma soluo adequada. Com os equipamentospadronizados disponveis e uma linguagem de alto nvel para programao dosCPs, o prprio usurio pode frequentemente construir uma especificaocompleta e adequada sem grande dificuldade. Como podemos notar, apassagem da fase de projeto para a fase de construo do programa dependebasicamente do cuidado com que as especificaes foram elaboradas. Nalinguagem descritiva BCM existe uma preocupao fundamental em aproximar aforma de raciocnio usada na especificao com a elaborao do programa.
Quando o projetista elabora a Especificao da Soluo ele tem umanecessidade fundamental de descrever o fluxo do processo ou seja, como oseventos se sucedem no sistema, quais as causas e efeitos de cada evento e aseqncia lgica de tarefas que o controlador deve executar. Existem vriasformas de fazer isso:
F Descrevendo literalmente a seqncia de eventos:1 - Ao acionar o boto de partida PAR, as portas P01, P02, P03 e P04 devem
ser abertas.2 - Quando B01 atingir o peso programado, P01 fecha.3 - Quando B02 atingir o peso programado, P02 fecha.4 - Quando B03 atingir o peso programado, P03 fecha.5 - Quando B04 atingir o peso programado, P04 fecha.6 - Quando P01, P02, P03 e P04 estiverem novamente fechadas, VAZ
acionado, virando todos os ingredientes no recipiente grande.7 - Aps 15 segundos, MMI deve ser acionado.8 - Aps 10 minutos, MMI deve ser desligado, permanecendo em repouso.
BCM Automao Linguagem Descritiva BCM 15
Verso 2009-1 Referncia: 31940092-8
-
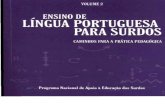
F Montando um diagrama de tempos:
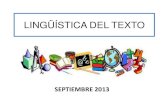
F Elaborando um diagrama de estados:No objetivo aqui discutir ou comparar os mtodos tradicionais derepresentao. A linguagem BCM prope uma forma alternativa pararepresentao que substitui os anteriores. Alm disso, elaboradaconvenientemente, essa forma de representao usada diretamente paraprogramar o controlador.A estrutura fundamental na programao em linguagem BCM o Diagrama deEstados. A passagem da especificao devidamente elaborada para o Diagramade Estados quase direta, exigindo um mnimo de elaborao adicional,qualquer que seja a forma usada anteriormente para representao:
0
1
2
3
DESL. P01,P02,P03,P04
LIGA P01
LIGA P02
LIGA P03
LIGA P04LIGA VAZ
LIGA MMI
DESL.MMI
4
5
6
7
PAR=1
B01=PESO
B02=PESO
T=10min
T=15s
B04=PESO
B03=PESO
BCM Automao Linguagem Descritiva BCM 16
Verso 2009-1 Referncia: 31940092-8
MMI
VAZ
P04
P03
P02
P01
B04
B03
B02
B01
PAP
10 min
-
1.3 - DOCUMENTAO DE PROJETOS
Ao lado da descrio de fluxo do processo, uma srie de documentos devemser gerados durante o desenvolvimento da aplicao. A lista a seguir apresentaa documentao padronizada adotada nos projetos BCM:
- Especificao do problema.- Especificao da soluo. Conceitualmente diferente, pode ser feita emconjunto com a especificao do problema em projetos simples e/ou quandoo mesmo tcnico detalha o processo e aplica o CP.- Diagrama de blocos fsico do sistema abordado.- Listagem de entradas e sadas do CP - Smbolos e funes.- Listagem de matrizes e variveis utilizadas.- Protocolos especiais de interface com outros CPs ou equipamentos(serial, paralela, via E/S, etc.)- Diviso de malhas de estado e descrio da funo de cada uma.- Diagramas de estado para cada malha, com comentrios.- Listagem BCM completa.- Descrio funcional, fluxogramas e listagem de rotinas assembler, seexistirem.
Em muitos casos, usual incluir um texto dedicado ao processo dedesenvolvimento do software, descrevendo os arquivos usados, a nomenclatura,roteiros de trabalho, etc. Isso feito para facilitar uma eventual necessidadefutura de manuteno ou adaptaes no programa.
BCM Automao Linguagem Descritiva BCM 17
Verso 2009-1 Referncia: 31940092-8
-
1.4 - TERMINOLOGIA E CONVENES USADAS
Ao longo dos manuais BCM e no cotidiano do trabalho em automao eControladores Programveis, encontramos uma srie de termos e conceitostpicos. No sentido de familiarizar o usurio com esta terminologia,apresentamos um glossrio dos termos e expresses mais usuais. Em muitoscasos, as informaes apresentadas no se atem a rgidas definies formais.Acreditamos, no entanto, que este captulo cumpre o objetivo de auxiliar acompreenso e eliminar dvidas.
lgebra Booleana - Notao matemtica abreviada que representarelaes e expresses lgicas associadas as funes bsicas e, ou, ouexclusivo e no.
Algoritmo - Conjunto de regras e operaes capazes de efetuar umatarefa previamente especificada.
Apontador - Valor numrico usado para indicar a localizao, na memriade dados ou de programa, de uma determinada informao, de um espaolivre ou do ponto inicial de execuo de uma rotina.
ASCII - Abreviatura para American Standard Code for InformationInterchange. Esse cdigo representa todos os caracteres alfanumricos esmbolos do teclado padro atravs de nmeros de 7 bits (0 a 127). Algunscdigos so ainda reservados para funo de controle (troca linha, retornacarro, troca pgina, etc).
Assembler - Linguagem de baixo nvel, orientada diretamente aomicroprocessador do sistema, que descreve o conjunto de operaesbsicas disponveis.
Barra - Um ou mais condutores que carregam coletivamente umainformao codificada, proveniente de um dispositivo fonte para um ouvrios dispositivos receptores.
Baud Rate - Taxa (velocidade) de transmisso de um sinal digitalcodificado, calculada em bits por segundo. Por exemplo: 9600 baudequivale a uma velocidade de transmisso de 9600 bits por segundo.
BCM Automao Linguagem Descritiva BCM 18
Verso 2009-1 Referncia: 31940092-8
-
BCD - Abreviatura de Binary Code Decimal. Sistema de numerao querepresenta separadamente cada dgito decimal pelo equivalente binrioem 4 bits. Por exemplo 371 equivale a 0011.0111.0001 em cdigo BCD.
Binrio - Sistema de numerao de base 2, em contraposio ao sistemadecimal, que usa a base 10. O sistema binrio requer somente dois tiposde dgito (0,1) que agrupados representam qualquer quantia desejada pelousurio.
BIT - Abreviatura de Binary Digit. Um bit a menor unidade deinformao disponvel em um sistema binrio. Representa a deciso entredois estados possveis, simbolizados normalmente 0 e 1. Pode ser usadotambm para representar os estados ligado/desligado ou verdadeiro/falso.
Buffer - rea de memria reservada para armazenar uma determinadainformao na passagem de uma fase de processamento para outra.
Byte - Grupo de 8 bits processado em um sistema como uma entidadenica.
Checksum - Resultado da soma de todos os valores de um determinadobloco de informao utilizado para verificao da integridade dainformao armazenada. Uma determinada fase do processamentocalcula o checksum e o armazena junto com o bloco. Em outro momento,o checksum recalculado e comparado com o valor armazenado.Qualquer desigualdade indica que ocorreu uma alterao indevida dosdados.
Ciclo - Uma seqncia repetitiva de operaes ou instrues dentro deum algoritmo. - Parte de uma onda que comeando por um ponto dereferncia (zero), atinge um valor mximo, volta ao nvel zero, atinge umvalor mnimo, seguido por um retorno ao ponto zero de referncia.
Clock - Circuito usado para gerar uma seqncia peridica de pulsos,usado para sincronizao de todas as operaes em um sistema digital. Afreqncia de clock est associada velocidade na qual os sinais soprocessados no sistema.
BCM Automao Linguagem Descritiva BCM 19
Verso 2009-1 Referncia: 31940092-8
-
Comando - Informao codificada enviada a um processador digital(computador ou CP), que especifica um conjunto de caractersticas defuncionamento que este deve assumir.
Compatibilidade - Propriedade que uma parte de um sistema apresentade poder ser substituda por outra parte similar, com um mnimo dealteraes no funcionamento do sistema como um todo.
Compilador - Um programa especfico, ou grupo de programas quetraduzem as instrues e comandos de uma linguagem de alto nvel emcdigos na linguagem de mquina do processador utilizado.
Controlador Programvel - Dispositivo ou equipamento que, observandoa arquitetura de computadores, possui uma memria programvel pelousurio, e realiza as funes de controle, comando e superviso deprocessos industriais; com hardware e software compatveis com estasaplicaes. Tambm denominado Controlador Lgico Programvel -abreviaturas CP ou CLP.
Controle Distribudo - Arquitetura usada em controle de processos,composta por 2 ou mais Controladores Programveis interligados a umcomputador usado como unidade central. Cada CP controla uma parte doprocesso global e est em constante comunicao com a unidade centralque supervisiona e coordena o conjunto. Estruturas de maior portepermitem ainda que essa unidade central esteja conectada a outrocomputador maior, que assume uma superviso de nvel superior.
Controle PID - Abreviatura para Controle Proporcional, Integral,Derivativo. Mtodo de controle em lao fechado que consiste em aplicarao atuador o sinal resultante da soma das funes proporcional, integral ederivativa aplicadas ao erro observado na varivel medida.
BCM Automao Linguagem Descritiva BCM 20
Verso 2009-1 Referncia: 31940092-8
-
Controle PID Adaptativo - Recurso adicional ao controle PID que utilizaum algoritmo especial para ajustar automaticamente os parmetrosproporcional, integral e derivativo do controlador, de acordo com ohistrico de desempenho do processo. Como esses parmetros dependemfundamentalmente das caractersticas fsicas do meio, esse tipo decontrolador adapta-se ao processo sem necessidade de calibraomanual.
Controle PID Feedforward - Mtodo de controle que acrescenta aocontrole PID tradicional um fator de antecipao. Basicamente, a mudanaem uma condio que ter influncia futura na varivel medida considerada na composio da varivel de sada, mesmo que a medidaainda no tenha sido afetada.
CPU - Abreviatura para Central Processing Unit. Parte de um sistemadigital que contm a memria principal, os circuitos de processamentolgico e aritmtico, alm de outros circuitos auxiliares. Em um computadorou Controlador Programvel, a CPU a responsvel pela interpretao eexecuo das instrues do usurio.
Dado - Informao codificada na forma digital, armazenada em umadeterminada posio de memria, disponvel para processamento pelaCPU.
Depurao - Processo de pesquisa e eliminao de problemas e erros emum sistema. As fontes de erro consistem em problemas de fiao, partescom funcionamento incorreto ou descalibradas, instrues de programacom sintaxe errada e algoritmos de controle inadequados ao processo ouoperao desejada.
Diagrama de Blocos - Mtodo de representao que consiste emsubdividir um sistema em vrias partes, mostrando a funo de cada blocoe apresentando graficamente a relao entre estes blocos.
BCM Automao Linguagem Descritiva BCM 21
Verso 2009-1 Referncia: 31940092-8
-
Diagrama de Estados - Mtodo de representao que apresenta asdiversas etapas de um processo em uma montagem grfica, evidenciandoas aes que sero efetuadas em cada etapa, bem como a seqnciadessas etapas (estados) e as condies que permitem que o processopasse de um estado a outro.
Documentao - Todo o conjunto de informaes relativas a umequipamento ou sistema, incluindo diagramas eltricos, de fiao, demontagem, listagens de programa, procedimentos de manuteno,instrues de instalao e operao, etc.
Edio -Trabalho de modificar um programa ou documentao no sentidode corrigir um problema, completar ou melhorar o desempenho dosistema.
Encoder - Dispositivo tico, eletrnico ou eletromecnico, usado paramedir e monitorar o movimento rotativo de uma pea. O encoder absolutofornece um sinal codificado para cada posio do seu eixo. O encoderincremental fornece um determinado nmero de pulsos para cada unidadede movimento angular no eixo.
Endereo - Cdigo que identifica a posio (localizao) de umdeterminado dado ou programa na memria de um computador ou CP.
Entrada - Dispositivo de um computador ou CP que recebe umadeterminada informao eltrica no meio ambiente e a repassa para oprocessamento na CPU.
Entrada Analgica - Dispositivo de entrada capaz de receber e interpretarum sinal eltrico varivel continuamente em uma faixa de tenso oucorrente, onde a informao significativa transportada atravs damagnitude dessa tenso ou corrente.
Entrada Digital - Dispositivo de entrada que recebe e interpreta umainformao do meio ambiente atravs de um cdigo de dois nveispredeterminados de tenso ou corrente.
BCM Automao Linguagem Descritiva BCM 22
Verso 2009-1 Referncia: 31940092-8
-
Eprom - Abreviatura de Erasable Programmable Read-Only Memory.Componente de memria capaz de ser gravada, apagada e regravadanovamente. usada normalmente para armazenar a parte fixa doprograma de um CP ou um determinado conjunto de dados que no seromodificados durante a operao.
Estado - Na linguagem descritiva BCM, o conjunto de comandos que,quando ativado, provoca aes que caracterizam uma etapa do processo.A ativao sucessiva de cada estado determina a seqncia de controledo processo.
E/S - Abreviatura para Entrada/Sada. Refere-se ao conjunto dedispositivos ou instrues de um CP responsveis pela relao docontrolador com as informaes do meio ambiente.
E/S Inteligente - Refere-se genericamente a um mdulo de entrada ousada de um CP capaz de pr-processar as informaes antes deenvi-las CPU ou as sadas. Esse recurso obtido atravs do uso de umprocessador localizado no prprio mdulo, realizando funes de escala,linearizao, clculos e funes especiais, dispensando a CPU e oprograma do usurio dessas atividades.
Flag - Varivel introduzida em um programa com o objetivo de sinalizar aexecuo ou ocorrncia de uma determinada ao ou evento. Em outroponto do programa, essa varivel ser lida e condicionar a execuo deuma instruo ou rotina.
Flash-eprom - Componente de memria capaz de ser gravada, apagadae regravada eltricamente. usada normalmente para armazenar a partefixa do programa de um CP ou um determinado conjunto de dados quepodero ser modificados durante a operao.
Fluxograma - Representao grfica que apresenta as diversas etapas daexecuo de um programa. Todas as operaes e testes do programaesto representados por blocos, onde cada um ir corresponder a umainstruo ou conjunto de instrues no processador.
Full Duplex - Modo de comunicao que permite que dois dispositivostroquem informaes, cada um transmitindo e recebendosimultaneamente.
BCM Automao Linguagem Descritiva BCM 23
Verso 2009-1 Referncia: 31940092-8
-
Half Duplex - Modo de comunicao que permite que dois dispositivostroquem informaes nas duas direes, porm no simultaneamente, isto, o dispositivo "A" transmite enquanto o dispositivo "B" somente recebe, evice versa.
Hardware - Todo o conjunto de partes, dispositivos fsicos e componentesque fazem parte de um sistema.
Hexadecimal - Sistema de numerao de base 16. So necessriosdezesseis smbolos para representao, sendo que a padronizao maisusual utiliza os algarismos "0" a "9" e as letras "A" a "F".
Hierarquia - Listagem ou classificao de um grupo de elementos deacordo com um conjunto de regras pr-determinadas. Refere-se tambm aordem de execuo ou atendimento de uma srie de operaesconcorrentes.
Instruo - Cdigo simblico que representa uma seqncia deoperaes que sero efetuadas pela CPU sobre um conjunto especfico dedados, de forma a obter resultados de acordo com regras previamentedefinidas.
Interface - rea ou dispositivo de ligao entre componentes, circuitos,meios fsicos, ou sistemas entre os quais est previsto um intercmbio dedados, comandos de operao ou energia para alimentao.
Interface Paralela - Dispositivo de interligao entre sistemas quetransfere informao de um sistema a outro atravs de duas ou maislinhas codificadas coletivamente.
Interface Srie - Dispositivo de interligao entre sistemas que transfereinformao de um sistema a outro atravs de uma nica via, codificadaatravs da seqncia temporal dos sinais significativos.
Interrupo - Bloqueio na execuo normal de um programa paraatendimento de uma outra rotina considerada mais prioritria. Aps o finaldessa rotina, o programa volta execuo normal. O momento em queesse bloqueio ocorre determinado por um sinal externo ao programa.
BCM Automao Linguagem Descritiva BCM 24
Verso 2009-1 Referncia: 31940092-8
-
LCD - Abreviatura para Liquid Cristal Display. Refere-se a um tipoespecfico de display cujos segmentos refletem a luz seletivamente,controlados por sinais eltricos para a formao dos caracteres ealgarismos.
LED - Abreviatura para Light Emitting Diode. Componente semicondutorque emite luz quando polarizado. usado basicamente como indicadorvisual em equipamentos eletrnicos.
Linguagem - Conjunto de smbolos e regras que formam um cdigocapaz de permitir a comunicao entre o usurio e um determinadoequipamento ou sistema.
LSB - Abreviatura para Least Significant Bit. Bit menos significativo emuma palavra digital.
Matriz - Arranjo de um determinado nmero de elementos com umsignificado nico. O agrupamento seqencial desses elementos em linhase/ou colunas est normalmente associado a uma regra de ocupaodeterminada.
Memria de Dados - Parte da memria de um computador ou CPreservada para armazenamento das constantes e variveis do programa,valores usados em operaes lgico-aritmticas, valores de contadores etemporizadores, estado corrente do processo, etc.
Memria de Programa - Parte da memria de um computador ou CPonde esto localizadas as instrues de operao, as quais definiro comosero manejados os dados da memria e as entradas externas parafornecer as sadas que o processo sob controle exige.
Memria Retentiva - Parte da memria de dados de um CP que mantemas informaes armazenadas independentemente da presena dealimentao no equipamento. Normalmente essa caracterstica obtidaatravs da alimentao permanente dos dispositivos de memria compilhas ou baterias.
BCM Automao Linguagem Descritiva BCM 25
Verso 2009-1 Referncia: 31940092-8
-
Mnemnico - Abreviatura ou conjunto de smbolos usado para referenciarrapidamente um dispositivo, equipamento, atividade, operao, etc.Normalmente composto por letras, nmeros ou palavras-chave retiradasda descrio do dispositivo ou operao.
Modem - Abreviatura para Modulador/Demodulador. Equipamento usadopara transmisso de dados digitais atravs de linhas telefnicas ou outrosmeios fsicos, usando princpios de modulao dos sinais em fase oufreqncia.
Mdulo - Parte ou elemento de um equipamento ou sistema capaz de serseparado do conjunto mantendo determinadas caractersticas prprias. Emhardware entende-se por mdulo, uma parte que possa ser separada doequipamento, testada ou substituda individualmente. O mesmo conceitoaplicado ao software se refere a partes de um programa que podem serdescritas, desenvolvidas, depuradas em separado e, posteriormenteintegradas ao sistema completo.
MSB - Abreviatura para Most Significant Bit. Bit mais significativo em umapalavra digital.
Multiplex - Ou multiplexao do processo que permite que dois ou maissinais distintos sejam transmitidos em um mesmo canal de comunicao.Dois processos fundamentais so utilizados: a multiplexao no tempodivide os sinais em fatias no tempo, transmitindo uma amostra de cadasinal durante um perodo e numa seqncia determinada. A multiplexaoem freqncia conseguida fazendo com que cada um dos sinais moduleuma freqncia portadora diferente no transmissor. A soma dos sinais enviada pela linha. No receptor, cada freqncia filtrada, separada e osdiversos sinais podem ser demodulados separadamente.
Nvel Lgico - Valores de tenso ou corrente que podem ser associadosaos dois estados possveis em uma linha digital: "0" ou "1".
Operando - Valor numrico sobre o qual uma operao lgico- aritmticaser efetuada.
BCM Automao Linguagem Descritiva BCM 26
Verso 2009-1 Referncia: 31940092-8
-
Palavra - Grupo de dois ou mais bytes associados, tratados como umaunidade, com significado coletivo prprio.
Paridade - Ou bit de paridade. Bit no significativo adicionado a um bytedigital, usado para detectar erros de transmisso desse byte de um meio aoutro. Para um sistema funcionar necessrio que haja um dispositivo ourotina que gere o bit de paridade correto (0 ou 1) e outro dispositivo queleia o byte completo, incluindo o bit de paridade, determinando se aparidade da palavra est correta ou no. O sistema, dito de paridade parquando o nmero de bits"1" da palavra completa for par; e dito deparidade mpar, quando o nmero de bits "1" for mpar.
Perifrico - Dispositivo ou equipamento conectado a um computador ouCP para executar uma funo especfica, sem que possa ser consideradaparte integrante do equipamento bsico.
PID - Ver Controle PID.
Pointer - Ver Apontador.
Porta - Ponto de conexo de um equipamento ou sistema paraintercmbio de informaes do sistema com o meio ou ligao deperifricos.
Preset - Valor predeterminado lanado na memria de dados como valorinicial para a partida de um processo ou rotina.
Protocolo - Conjunto de regras e convenes que especificam ascaractersticas, formatos, nveis lgicos, temporizao, etc., necessriospara viabilizar a comunicao entre sistemas ou entre partes dentro de umsistema.
PROCP - uma ferramenta usada no desenvolvimento de programaspara os CPs BCM. Possui verso para ambiente DOS e WINDOWS. Estdisponvel no mesmo ambiente ferramentas para editar, compilar, carregare monitorar programas.
BCM Automao Linguagem Descritiva BCM 27
Verso 2009-1 Referncia: 31940092-8
-
RAM - Abreviatura para Random Acess Memory. Componente dememria que permite o acesso aos dados armazenados para leitura ouescrita em um determinado tempo especificado, independentemente dalocalizao desse dado na memria.
Realimentao - Sinal enviado pelo processo sob controle ao CP,indicando a resposta deste aos comandos de atuao aplicados pelocontrolador.
Reset - Ao de fazer retornar um processo ou varivel a uma condioinicial predeterminada.
Rotina - Srie de instrues ou operaes que executam uma tarefaespecfica.
Rudo Eltrico - Sinais eltricos indesejveis em um sistema, capazes deperturbar ou modificar o funcionamento normal deste. A imunidade aorudo definida como a medida da capacidade de funcionamento dosistema na presena de um nvel determinado de rudo eltrico.
Sada - Dispositivo de um computador ou CP que transforma oscomandos enviados pela CPU em nveis eltricos adequados, capazes deatuar sobre o meio externo.
Sada Analgica - Dispositivo de um controlador programvel quetransforma o contedo de uma varivel de programa em um valor detenso ou corrente, disponvel para atuao sobre um circuito externo. Amagnitude da tenso ou corrente est associada ao valor da varivel deacordo com uma regra pr-estabelecida.
Sada Digital - Dispositivo de um controlador programvel que forneceuma tenso, corrente ou fecha um contato de acordo com o contedo deuma varivel ou um comando especfico do programa. A tenso oucorrente de sada pode assumir apenas dois nveis, correspondentes assituaes de sada ligada ou desligada.
Sistema - Arranjo de componentes, dispositivos e/ou equipamentosligados entre si como uma unidade organizada, capaz de executar umconjunto de funes e tarefas bem determinadas.
BCM Automao Linguagem Descritiva BCM 28
Verso 2009-1 Referncia: 31940092-8
-
Sistema Operacional - Programa bsico de um CP ou computador quecontrola a distribuio de memria, acesso aos perifricos, superviso dosistema e outras funes trabalhadas independentemente do programa dousurio. O sistema operacional pode incluir ainda as rotinas bsicas quedesenvolvem as instrues disponveis em um equipamento programvel.
Software - Todos os programas, rotinas, sistemas operacionais edocumentao participantes e relativos a um sistema que no possam serconsiderados como partes fsicas integrantes deste.
Sub-rotina - Parte de um programa ou rotina com uma funo especfica,armazenada em separado na memria de programa e que pode serchamada e executada em vrios pontos do programa, tantas vezes quantonecessrio.
Transio - Na linguagem descritiva BCM, a combinao de eventosque condiciona uma mudana de estado, isto , a transferncia daatividade de um estado para outro.
Varredura - Seqncia cclica de operaes dentro de um CP que englobao atendimento dos perifricos, desenvolvimento das operaes relativasaos estados correntes, inspeo das condies de transio, interface como operador, superviso do sistema, etc.
Watchdog - Tipo especial de temporizador, usado para monitorar ofuncionamento correto de um controlador. O programa do CP gera umsinal alternado permanente para o circuito Watchdog, com um perodomximo especificado. Caso haja uma falha do processador, o sinalalternado pra; nesse caso, o circuito Watchdog se encarrega de tomaruma providncia que proteja o processo, acionando um alarme,desligando ou reinicializando o controlador.
BCM Automao Linguagem Descritiva BCM 29
Verso 2009-1 Referncia: 31940092-8
-
BCM Automao Linguagem Descritiva BCM 30
Verso 2009-1 Referncia: 31940092-8
-
2 - A LINGUAGEM DESCRITIVA BCM
O Diagrama de Estados basicamente uma forma padronizada derepresentao das regras de controle de um processo. Utilizando umaestrutura similar quela adotada na eletrnica e na matemtica, conhecidacomo "Diagrama de Variveis de Estado", possvel descrever operaescombinacionais ou seqenciais, executadas dentro de um fluxo nico ou emmltiplas ramificaes paralelas e simultneas. A forma grfica adotadapermite uma fcil visualizao do conjunto, recurso fundamental na fase deprojeto e especificao, oferecendo ao mesmo tempo uma forma exata paradescrio de cada operao, viabilizando a programao do controlador apartir do Diagrama de Estados.
importante ressaltar que qualquer programa para controle deprocessos digitais ou analgicos pode ser facilmente representado por umDiagrama de Estados. Alm disso, a utilizao do Diagrama de Estadoselimina a necessidade de qualquer outro mtodo de descrio do processo.
2.1 - ESTRUTURA DA LINGUAGEM DESCRITIVA BCM
A estrutura da Linguagem Descritiva BCM formada por trs elementosbsicos: os ESTADOS, as TRANSIES e a MALHA DE CONTROLE:
O Estado o conjunto de comandos que, quando ativado, provocaaes que caracterizam uma etapa ou evento do processo. A ativaosucessiva dos estados determina a seqncia decontrole do processo. Nos diagramas, o estado representado por uma elipse. No canto esquerdoser colocado o nmero do estado. No espaoda direita sero descritas as aes efetuadas ouos comandos ativos para esse estado.
BCM Automao Linguagem Descritiva BCM 31
Verso 2009-1 Referncia: 31940092-8
-
Uma condio de Transio acombinao de eventos que determinam umamudana de estado, isto , a transferncia daatividade de um estado
para outro. No diagrama, a transio representada por uma seta orientada que liga oestado de origem com o estado para atransferncia. Sobre a seta so descritas ascondies vlidas para essa transio.
Uma Malha de controle umdiagrama de estados parcial, quecorresponde a um ramo do processo,dentro do qual apenas um estado podeestar ativo a cada momento. O diagramade estados completo do processo pode sercomposto por uma ou mais malhas. Devidoaos recursos de multiprocessamento docontrolador, todas as malhas seroatendidas simultaneamente quando daexecuo do programa em tempo real.
O Diagrama de Estados apresenta deforma grfica uma estrutura lgicacompleta atravs de um conjunto de malhas de controle. Cada malha assumeo controle de uma parcela determinada do processo. O ControladorProgramvel oferece recursos para atendimento simultneo de diversasmalhas. Este recurso de processamento multitarefas muito importante nodesenvolvimento de solues de controle para os sistemas reais e de difcilrepresentao pela maioria das outras formas de documentao.
BCM Automao Linguagem Descritiva BCM 32
Verso 2009-1 Referncia: 31940092-8
2 DESL ESTCAI
1 LIGA ESTCAIRESET NPEC
PESO=CAIXA
LIGA ESTPEC,RECPOR
4 DESL ESTPEC
3 DESL RECPOR
2 DESL ESTCAI
1 LIGA ESTCAIRESET NPEC
PESO=CAIXA
PESO=PPROG
T=5 seg
LIGA ESTPEC,RECPOR
PESO=0
-
2.2 - REGRAS DE PROGRAMAO NA LINGUAGEM DESCRITIVA
O diagrama de estados uma forma padronizada de representao dasregras de controle de um processo. Utilizando uma estrutura similar a que adotada na eletrnica e na matemtica, conhecida como "Diagrama deVariveis de Estado", possvel descrever operaes combinacionais ouseqenciais, executadas dentro de um fluxo nico ou em mltiplasramificaes paralelas e
Simultneas.A forma grfica adotada permite uma fcil visualizao do conjunto,
recurso fundamental na fase de projeto e especificao, oferecendo aomesmo tempo uma forma exata para descrio de cada operao,viabilizando a programao do controlador a partir do Diagrama de Estados.
A seguir sero apresentadas, de forma sistemtica e mais detalhada, asregras fundamentais para elaborao, anlise e execuo pelo controlador,adotadas na programao atravs de diagramas de estado:
FRegra 1O estado sempre representado por uma elipse, dividida em dois
campos: No lado menor, a esquerda, colocado o nmero de referncia doestado; no lado direito so includos todos os comandos e aes ativos paraesse estado.
FRegra 2Os estados no diagrama so referenciados por um nmero situado na
faixa entre 0 e 255. Cada malha recebe uma seqncia de numeraoindependente.
FRegra 3A numerao adotada para os estados usada apenas para referncia.
No existe nenhum sentido de seqncia ou prioridade de execuo pelo CPna numerao dos estados. A nica considerao especial que ocontrolador ao ser ligado, inicia a execuo do programa sempre pelo estado0 de cada malha.
BCM Automao Linguagem Descritiva BCM 33
Verso 2009-1 Referncia: 31940092-8
-
FRegra 4Somente um estado pode estar ativo de cada vez num mesmo
Diagrama de Estados. Apenas os comandos e operaes desse estado seroexecutadas nesse momento. Alm disso, apenas as condies de transiodo estado ativo sero consideradas pelo controlador.
FRegra 5Associado a cada estado so aceitas duas formas condicionais: As
condies para transio de estado especificam as relaes que, quandocumpridas fazem que o controlador transfira a atividade para o estado dedestino; As condies para execuo imediata fazem que as aesespecificadas sejam executadas dentro do estado ativo apenas se asrelaes lgicas mencionadas forem vlidas.
Transio de estado Execuo imediata
FRegra 6A transio representada por uma seta reta ou curva, indicando o
sentido da transferncia da atividade quando do cumprimento das condiesde transio.
FRegra 7As operaes e comandos associados condio de execuo imediata
so representados dentro de um retngulo, ligado por uma linha ao estado.
BCM Automao Linguagem Descritiva BCM 34
Verso 2009-1 Referncia: 31940092-8
1
2
INI=1 1 LIGA 1INI=1
-
FRegra 8O programa ignora todos os estados e transies executados, somente
considerando as transies com origem no estado ativo. O programa sconsidera vlidas as transies com origem no estado ativo, ignorando todasas demais. Assim, podemos dispensar a preocupao com o acionamento deentradas fora da seqncia desejada.
FRegra 9So aceitas mltiplas condies de transio de um estado para outro.
Quando duas ou mais expresses lgicas esto colocadas sobre uma mesmalinha de transio, deve-se considerar que a transio ocorrer quando todasas expresses forem vlidas (ligao "E"). Para que a transio ocorra comapenas uma das expresses vlidas (ligao "OU"), necessrio que apalavra "OU" aparea entre as expresses.
Ligao "E" Ligao "OU"
BCM Automao Linguagem Descritiva BCM 35
Verso 2009-1 Referncia: 31940092-8
-
FRegra 10So aceitas duas ou mais linhas de transio entre um estado origem e
um destino. Neste caso a transio ocorrer quando uma das expresses forvlida (corresponde a ligao "OU").
FRegra 11O nmero de transies com origem em cada estado ilimitado. No
entanto um nmero muito grande de transies pode ocasionar uma falha porWATCH DOG. O programa pode seguir diversos caminhos a partir de umestado; o caminho a seguir ser decidido pela ltima condio de transioaprovada.
FRegra 12No caso previsto pela regra anterior, importante definir o que acontece
se duas ou mais condies estiverem simultaneamente vlidas. Quando acaracterizao da ordem de prioridades for importante, ser representada naforma a seguir: - (1) para o mais prioritrio; (2) para a segunda prioridade; eassim por diante.
BCM Automao Linguagem Descritiva BCM 36
Verso 2009-1 Referncia: 31940092-8
1
2
INI=1MED=10
BAT=1 INI=0 WOO>30 WOO=0
1
32 54
1
3 2
4
-
FRegra 13Em determinadas situaes dentro de um programa necessrio ou
conveniente definir transies entre estados sem condio especificada. Nocaso do exemplo, quando o estado 3 fica ativo, a sada 3 ligada;Imediatamente a seguir, o estado ativo passa a ser o 5, provocando aexecuo imediata da operao "W00=W00+1". No programa editado, essetipo de transio tratado pela instruo "VA PARA". A figura mostra otrecho-exemplo, salientando a forma de representao grfica.
FRegra 14Outro tipo de condio de transio a chamada "Condio
Temporizada". Neste caso, ao invs de combinaes lgicas de entradas ouvariveis, a transio est condicionada a passagem de um tempo. O temponecessrio para a transio aparece ao lado da linha no diagrama. Noprograma editado, esse tipo de transio tratado pela instruo "ATRASO".
BCM Automao Linguagem Descritiva BCM 37
Verso 2009-1 Referncia: 31940092-8
WOO=WOO+15
LIGA 33
2
WOO=0
-
FRegra 15Frequentemente aparece a necessidade de combinar uma condio
temporizada com um ou mais testes de variveis. O trecho do diagrama deestados abaixo mostra esse caso. O programa vai para o estado 4 depois depassar 5 segundos e se a entrada "INI" estiver acionada. Observar que:
- Os 5 segundos so contados a partir da entrada no estado 3,independentemente da situao de "INI".
- Se a entrada "INI" for acionada 5 segundos ou mais aps aentrada no estado 3, a transio ocorrer imediatamente.
FRegra 16Cada malha componente do sistema recebe um nmero de referncia. A
primeira malha ser a 0, a segunda ser a 1 e assim por diante, at umnmero mximo de 64 malhas.
FRegra 17Cada estado sempre pertencente a uma e somente a uma malha.
Alm disso, um estado ativo com uma condio de transio vlida transferea atividade para o estado indicado na transio (estado de destino); Esseestado de destino pertencer necessariamente a mesma malha do estadoanterior.
BCM Automao Linguagem Descritiva BCM 38
Verso 2009-1 Referncia: 31940092-8
4
3
2
WOO=1
INI=15 seg.
-
FRegra 18Do ponto de vista do diagrama de estados, cada malha considerada
um processo independente. No pode haver transies de um estado de umamalha para outro em outra malha.
2.3 - COMO PROGRAMAR NA LINGUAGEM DESCRITIVA
As caixas de dilogo que aparecero ao longo do captulo servem parasituar/orientar o usurio sobre onde encontrar outras informaes arespeito de determinado tpico.
A etapa seguinte elaborao do diagrama de estados a edio doprograma do CP, propriamente dito.
A tecnologia empregada nas CPUs BCM permite a programao direta, isto, o programa do usurio transferido diretamente do microcomputadorpara a memria do CP atravs do canal serial RS 232.
Os recursos necessrios para a edio e transferncias do programa para oCP so:
Microcomputador padro IBM-PC Software WINDOWS Compilador BCM PROCP Cabo de comunicao serial RS232 (especfico para CPs BCM)
A seguir esto descritos os comandos e instrues para programao emlinguagem descritiva BCM, segundo a sua funo dentro do programa dousurio.
Sempre que for necessrio, ser apresentado um exemplo de aplicaopara facilitar a compreenso e a utilizao do(s) respectivo(s) comando(s)e/ou instruo(es).
BCM Automao Linguagem Descritiva BCM 39
Verso 2009-1 Referncia: 31940092-8
-
2.4 - SINTAXE DAS INSTRUES E COMANDOS
Para cada comando ou instruo, ser apresentada a forma sinttica, adescrio completa da operao e o conjunto de parmetros e opesdisponveis. Sempre que for conveniente, sero includos exemplosprocurando esclarecer o funcionamento da forma mais clara e precisapossvel.
Em geral, o funcionamento dos comandos e instrues idntico paratodos os modelos de Controladores Programveis BCM. Sempre quehouver diferenas, o texto chamar a ateno para todos os casospossveis. Naturalmente, a aplicabilidade de cada recurso est associada adisponibilidade fsica desse recurso no modelo ou verso do ControladorProgramvel em questo.
- Os sinais "igual", "pontos", "vrgulas" e espaos em brancos devem serseguidos rigorosamente na edio. Caso contrrio, sero interpretadosincorretamente pelo compilador.
- Os elementos representados em letras minsculas significam constantesou variveis que devem ser introduzidas nas posies citadas, de acordocom o que consta em cada descrio.
- Os elementos entre colchetes "[ ]", so opcionais na composio da linhade programa. A sua incluso ou no produz diferentes efeitos na operaodo comando ou instruo.
- Os elementos entre chaves "{ }" so alternativos na composio da linhade programa. Dentro dos colchetes aparecem dois ou mais elementosentre colchetes. Para o funcionamento adequado, um dos elementos entrecolchetes deve ser escolhido pelo programador. A incluso de cada tipo deelemento produz um determinado efeito na operao do comando ouinstruo, conforme descrito.
BCM Automao Linguagem Descritiva BCM 40
Verso 2009-1 Referncia: 31940092-8
-
2.4.1 - Comandos de Configurao do CP Estes tem a finalidade de especificar parmetros, habilitar blocos funcionais dosistema operacional e instruir o compilador em relao a determinadosprocedimentos.Com a excesso dos comandos `CONTINUA' e `FIM', os demais comandos deconfigurao devem ser sempre colocados no incio do programa, antes daprimeira definio de malha. O programador deve prestar especial ateno no momento da entrada destescomandos. A omisso da definio de um perifrico faz com que este no opere;Parmetros incorretos podem levar a erros de compilao ao longo do programaou erros de execuo no controlador.
BCD=xEste comando, vlido apenas para o controlador BCM2085 com interfaceBCD, habilita a rotina de tratamento de chaves Thumbwheel. O parmetro`x' define o nmero de chaves BCD por grupo. So aceitos os valores 2 ou4.
CLP=tipo[([ESD=X][ESA=Y][ESH=Z][ESP=1][VAF=1])]Define o tipo de controlador programvel BCM no qual o programa seraplicado. Os seguintes tipos esto disponveis:
Configura o sistema para compilao de programas que sero usados noBCM2085/CPU8. Vlido para PROCP V4K 1.2 ou superior.
CPU8
Configura o sistema para compilao de programas que sero usados noBCM2085/CPU7 -10. Vlido para PROCP V4K ou superior.
CPU7-11
Configura o sistema para compilao de programas que sero usados noBCM2085/CPU7 -10. Vlido para PROCP V4K ou superior.
CPU7-10
Configura o sistema para compilao de programas que sero usados noBCM2085/CPU7.
CPU7
Configura o sistema para compilao de programas que sero usados noBCM2085/CPU6A.
CPU6A
Configura o sistema para compilao de programas que sero usados noBCM2085/CPU6.
CPU6
Configura o sistema para compilao, gravao de EPROMs e transferncia paraflash-Eprom nos controladores BCM2085 que usem a CPU3, CPU4 ou CPU4A.
BCM2085
BCM Automao Linguagem Descritiva BCM 41
Verso 2009-1 Referncia: 31940092-8
-
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores GP3020. Vlido para o PROCPV4K 1.2 ou superior.
GP 3020
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores GP3009. Vlido para o PROCPV4K 1.2 ou superior.
GP 3009
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores GP3006. Vlido para o PROCPV4K 1.2 ou superior.
GP 3006
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores GP3005. Vlido para o PROCPV4K 1.2 ou superior.
GP 3005
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores GP3001. Vlido para o PROCPV4K 1.2 ou superior.
GP 3001
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores GP3101. Vlido para o PROCPV4K ou superior.
GP 3101
Configura o sistema para compilao e transferncia para flsh-Eprom noscontroladores GP3000 (GP3011 e GP 3020). Vlido para o PROCPV3K ousuperior.
BCM 3011
Configura o sistema para compilao e transferncia para flash-Eprom noscontroladores BCM1088.
BCM 1088
Configura o sistema para compilao, gravao de EPROMs e transfernciapara flash-Eprom nos controladores BCM1086 e BCM1086A.
BCM 1086
As opes entre parnteses so utilizadas para o BCM GP 3011 e GP3101 paradefinir a configurao de mdulos de entradas e sadas.
Declara que se ser usado o mdulo ESP. Somente ummdulo pode ser usado por controlador.
VAF
Declara que se ser usado o mdulo ESP. Somente ummdulo pode ser usado por controlador.
ESP O parmetro z (1 a 4) define o nmero de mdulos GP3ESH. ESH O parmetro y (1 a 4) define o nmero de mdulos GP3ESA. ESA O parmetro x (1 a 4) define o nmero de mdulos GP3ESD. ESD
Observao: o nmero mximo total de mdulos 4 . Se um tipo demdulo no for usado este deve ser omitido.
BCM Automao Linguagem Descritiva BCM 42
Verso 2009-1 Referncia: 31940092-8
-
CONTINUA: (Narq.BCM)Esse comando permite que um programa aplicativo BCM seja dividido em vriosarquivos.Narq.BCM deve ser o nome de um arquivo com extenso .CLP ou .BCMlocalizado no mesmo diretrio. O compilador, ao encontrar esse comando,interrompe a compilao e continua a partir do incio do novo arquivo. usado principalmente para programas longos, que excedem a capacidade dememria do PROCP. Nestes casos, divide-se o programa em vrias partes, comnomes de arquivo diferentes, usando o comando `CONTINUA' para un-los nomomento da compilao.A partir do PROCP verso V5K, a limitao de 64kbytes por arquivo fonte emlinguagem descritiva deixou de existir. A utilidade do comando CONTINUApermanece para organizar diferentes partes de um aplicativo longo.
Exemplo:
;Arquivo: "TESTE1.BCM"MAQUINA 0:ESTADO 0:FACA MIN=0 E HOR=0VA PARA 1
" " " "ESTADO 30:FACA* W00=SEC E W88=58888 E W89=HOR E W90=MINFACA* W01=AN1 E W02=AN2 E W03=AN3 E W04=AN4 E W05=AN5 E W06=AN6CONTINUA:(TESTE2.BCM)
;Arquivo: "TESTE2.BCM"MAQUINA 1:ESTADO 0:SE I01=1 OU I13=1 OU TF1=1 LIGA 1SE I01=0 E I13=0 E TF1=0 DESL 1 " " " "ESTADO 13:SE V04
-
CTR[*]=xEste comando habilita as rotinas de tratamento dos contadores rpidos noBCM2085B (mdulo CTR), no GP3000 (mdulo ESA ou CTR) ou no BCM1086A(expanso interna EI3). O parmetro `x' define o nmero de placas utilizadas nosistema. Deve ficar na faixa 1 a 5. Outro valor provocar erro na compilao. importante observar que se este comando no estiver presente, as placas no sero acessadas e as respectivas variveis assumiro valores indeterminados.O uso de CTR=5 no controlador BCM2085B s possvel se o comando PANno estiver habilitado. Esta restrio determinada pelas limitaes do espaode endereamento no BCM2085B.O sinal opcional [*] informa ao sistema operacional que todas as placas CTRdevem ser atendidas em cada Ciclo de Varredura. Sem o sinal, apenas umaplaca ser atendida em cada ciclo. Esta opo no tem efeito no BCM1086A.
DIM aaa(xxx)Define a dimenso da matriz numrica `aaa'. O nmero de elementos pode estarna faixa 2 a 65535.
DIMD[n] aaa(xxx)Define que a matriz `aaa' ser uma matriz de display, isto , a cada elemento damatriz de 0 a 99 corresponder um canal do display. O valor `n' opcionalespecifica a unidade de display e pode ser 1, 2 ou 3. Se omitido, o sistemaassume a unidade 1. O valor `xxx' no ter importncia; uma matriz de displaypossui sempre a dimenso 99.O programa do usurio pode trabalhar livremente com uma matriz de display(testes, atribuio de valores, etc.), sem prejuzo das variveis definidas comovariveis de display no menu "EDITA", as quais podem continuar a ser usadasnormalmente.
DIMM aaa(xxx)Define a dimenso da matriz numrica `aaa'. O nmero de elementos pode estarna faixa 2 a 65535. A diferena para a instruo `DIM' que `DIMM' aloca amatriz na memria RAM da placa BCM2085/MEM, verso `RIM'. Apenascontroladores com essa placa instalada aceitam esse comando.
BCM Automao Linguagem Descritiva BCM 44
Verso 2009-1 Referncia: 31940092-8
-
DISPLAY=xx.yyyHabilita a operao dos displays numricos no BCM2085 ou BCM1086. O valor[xx] indica o nmero do ltimo canal reservado para o display, na faixa 1 a 99. Ovalor [yyy] indica o mximo admissvel no campo de valor dos displays, na faixa1 a 65535.A colocao pelo programa de um valor fora da faixa configurada provoca ozeramento do valor, quando o canal correspondente for selecionado. Exemplo:DISPLAY=12.680Neste caso, se utilizaro 12 canais, possibilitando a entrada ou apresentao devalores dentro dos limites 0 a 680. O Sistema Operacional permite a instalaode at trs mdulos de display numricos programveis pelo usurio e mais umde servio. O comando DISPLAY habilita todos os mdulos, mas os limites sovlidos apenas para os mdulos do usurio.
DISPLAY=DPA [20]Habilita a operao do display alfanumrico no BCM2085, BCM1086 ouGP3000. O controle da apresentao de mensagens e valores no display totalmente feito pela instruo MOSTRA. As seguintes observaes soimportantes quando da elaborao do programa: Ao utilizar o comando DISPLAY=DPA, no podem existir variveis
definidas nas unidades de display 2 e 3. Ao aparecer uma instruo "MOSTRA" no programa, obrigatrio que
tenha sido colocado um comando DISPLAY=DPA no incio doprograma. Caso contrrio, o compilador indica erro.
A opo "DPA20" usada quando o display alfanumrico de 20colunas. Caso contrrio, o compilador assume que o display possui 16colunas.
BCM Automao Linguagem Descritiva BCM 45
Verso 2009-1 Referncia: 31940092-8
-
ESA=xEste comando habilita a rotina de tratamento de entradas e sadas analgicasnos CPs BCM. importante observar que se este comando no estiver presente,as entradas e sadas no sero acessadas e as respectivas variveis assumirovalores indeterminados.No controlador BCM2085, o parmetro `x' define o nmero de mdulos ESAutilizadas no sistema. Se houver mdulos BCM2085/EAN ou /EAI instalados, ovalor `x' pode estar na faixa 1 a 4. Se no houver mdulos EAN ou EAI, `x' podeestar na faixa 1 a 8. No controlador BCM1086, o comando ESA com `x' igual ou maior que 1 habilitao funcionamento das entradas e sadas analgicas nas expanses internas EI1,EI2 e EI4.
FIMInstrui ao compilador para encerrar a compilao nesse ponto,independentemente da continuao do programa no arquivo. usado principalmente durante a depurao, para isolar partes do programa queatrapalham o teste ou partes nas quais se suspeita haver erros.
IFT=xEste comando habilita a rotina de tratamento de entradas analgicas determopares na placa IFT. O parmetro `x' define o nmero de placas utilizadasno sistema. Deve estar na faixa 1 a 8. Outro valor provocar erro nacompilao. importante observar que se este comando no estiver presente,as placas no sero acessadas e as respectivas variveis assumiro valoresindeterminados.
BCM Automao Linguagem Descritiva BCM 46
Verso 2009-1 Referncia: 31940092-8
-
INTERFACE1 [(nnnn)]=yyy [DE zzz] [(PROTOCOLO=BCMx TEM=mTOC=n TOR=o TOF=p NSE=q PAP=S/N)]
Define os parmetros relativos comunicao entre a rede de CPs, do canalserial 1, e a unidade central ou com os outros equipamentos da rede. Ver omanual de Protocolos e Redes de comunicao para maiores informaes. O valor nnn define a velocidade. Para o protocolo BCM1 a velocidade decomunicao pode ser 1200bps ou 9600bps. Para o protocolo BCM2 asseguintes velocidades so admitidas: 1200, 9600, 19200, 38400, 48000. Nemtodas as velocidades so suportadas por todos os produtos! Consulte adocumentao especfica de cada produto para verificar as velocidades aceitas!
O valor yyy o cdigo de acesso tal como ser reconhecido pela outrosintegrantes da rede. O cdigo permitido deve estar na faixa de 1 a 254.
Apenas um dos dois canais de comunicao do CP pode fazer a passagem deficha (definido pela expresso [DE zzz]). Sobre este canal que seroexecutadas as instrues LE/ESCREVE. O valor zzz especifica o nmero totalde equipamentos ativos previstos para a rede. Na instruo INTERFACE1 estaopo s valida se o protocolo for o BCM2.
As opes disponveis em PROTOCOLO so:BCM1BCM2MODBUSESCRAVOMODBUSMESTREGPRS
Ateno: A disponibilidade de cada protocolo depende do modelo de controladorprogramvel. Consulte a documentao especfica de cada modelo para saberquais os protocolos suportados e o detalhamento da configurao para uso.
Se a opo escolhida for BCM1 os demais parmetros no devem estarpresentes (TEM, TOC, TOR, TOF, NSE e PAP). Caso PROTOCOLO sejaomitido o protocolo assumido o BCM1.
BCM Automao Linguagem Descritiva BCM 47
Verso 2009-1 Referncia: 31940092-8
-
O valor m define o tempo de espera gerado antes do envio de cadamensagem. Pode variar de 0 a 2550 em passos de 10. A unidade ms. Poromisso assumido o valor 0.
O valor n define o time-out entre caracteres para descartar uma mensagem emcurso Varia de 0 a 2550 (ms) em passos de 10. Se o valor programado for zeroas mensagens no sero descartadas por time-out entre caracteres. Por omisso assumido o valor 0.
O valor o define o time-out para resposta de uma solicitao (para considerarque o destino no respondeu). Pode variar de 10 a 2550 (ms) em passos de 10.Por omisso assumido o valor 500ms.
O valor p define o time-out para criao de ficha. Varia de 0 a 2550 (ms) empassos de 10. Se o valor for 0 no cria ficha. Por omisso, igual a(960+40*(endereo do CP))ms.
O valor q define o nmero de srie do produto. Pode variar 1 a 65535. Poromisso assume o valor prviamente gravado em Eeprom.
A opo PAP habilita ou no a autorizao de parmetros on-line. PAP=Spermite a alterao e PAP=N no permite) . Por omisso assume o valorPAP=S.
Observaes:- Caso os dois canais utilizem o protocolo BCM2, os cinco parmetrosprogramveis sero sempre iguais (TEM, TOC, TOR, TOF, NSE e PAP)para os dois canais. Se houverem definies contraditrias, valer a ltimadefinio.- As opes PROTOCOLO,TEM, TOC, TOR, TOF, NSE e PAP s podemser usadas com o PROCP V101.0, o PROCP V201.0, PROCP V301.0 e oPROCP V3K ou superiores.
Exemplos:INTERFACE1(38400)=2 DE 10 (PROTOCOLO=BCM2 TEM=100 TOC=30TOR=100 - TOF=1250 NSE=1234 PAP=N)INTERFACE1(9600)=1
BCM Automao Linguagem Descritiva BCM 48
Verso 2009-1 Referncia: 31940092-8
-
INTERFACE2 [(nnnn)]=yyy [DE zzz] [(PROTOCOLO=BCMx TEM=mTOC=n TOR=o TOF=p NSE=q PAP=S/N)] [EI]
Define os parmetros relativos comunicao do canal serial 2. Ver o manualde Protocolos e Redes de comunicao para maiores informaes. O valor nnn define a velocidade. Para o protocolo BCM1 a velocidade detransmisso vai de 1200bauds a 9600bauds. Para o protocolo BCM2 asseguintes velocidades so admitidas: 1200, 9600, 19200, 38400, 48000. Nemtodas as velocidades so suportadas por todos os produtos! Consulte adocumentao especfica de cada produto para verificar as velocidades aceitas!
O valor yyy: o cdigo de acesso tal como ser reconhecido pela outrosintegrantes da rede. O cdigo permitido deve estar na faixa de 1 a 254.
Apenas um dos dois canais de comunicao pode fazer a passagem de ficha(definido pela expresso [DE zzz]). Sobre este canal que sero executadas asinstrues LE/ESCREVE. O valor zzz especifica o nmero total deequipamentos previstos para a rede.
As opes disponveis em PROTOCOLO so:BCM1BCM2MODBUSESCRAVOMODBUSMESTRE
Ateno: A disponibilidade de cada protocolo depende do modelo de controladorprogramvel. Consulte a documentao especfica de cada modelo para saberquais os protocolos suportados e o detalhamento da configurao para uso.
Se a opo escolhida for BCM1 os demais parmetros no devem estarpresentes (TEM, TOC, TOR, TOF, NSE e PAP). Caso PROTOCOLO sejaomitido o protocolo assumido o BCM1. Da mesma forma que no caso davelocidade, nem todos os produtos suportam ambos os protocolos.
BCM Automao Linguagem Descritiva BCM 49
Verso 2009-1 Referncia: 31940092-8
-
O valor m define o tempo de espera gerado antes do envio de cadamensagem. Pode variar de 0 a 2550 (ms) em passos de 10. Por omisso assumido o valor 0.
O valor n define o time-out entre caracteres para descartar uma mensagem emcurso Varia de 0 a 2550 (ms) em passos de 10. Se o valor programado for zeroas mensagens no sero descartadas por time-out entre caracteres. Por omisso assumido o valor 0.
O valor o define o time-out para resposta de uma solicitao (para considerarque o destino no respondeu). Pode variar de 10 a 2550 (ms) em passos de 10.Por omisso assumido o valor 500ms.
O valor p define o time-out para criao de ficha. Varia de 0 a 2550 (ms) empassos de 10. Se o valor for 0 no cria ficha. Por omisso, igual a(960+40*(endereo do CP))ms
O valor q define o nmero de srie do produto. Pode variar 1 a 65535. Poromisso assume o valor prviamente gravado em Eeprom.
A opo PAP habilita ou no a autorizao do parmetros on-line. PAP=Spermite a alterao e PAP=N no permite) . Por omisso assume o valorPAP=S.
A opo EI indica que o controlador BCM1086A deve usar o canal serial daexpanso interna, ao invs do canal serial do mdulo principal.
Observaes: - Caso os dois canais utilizem o protocolo BCM2, os parmetrosprogramveis NSE e PAP sero sempre iguais para os dois canais. Sehouverem definies contraditrias, valer a ltima definio.
- As opes PROTOCOLO,TEM, TOC, TOR, TOF, NSE e PAP s podemser usadas com o PROCP V101.0, PROCP V201.0, PROCP V301.0 e oPROCP V3K ou superiores.
BCM Automao Linguagem Descritiva BCM 50
Verso 2009-1 Referncia: 31940092-8
-
Exemplos:INTERFACE2(38400)=2 DE 10 (PROTOCOLO=BCM2 TEM=100 TOC=30TOR=100 TOF=1250 - NSE=1234 PAP=N)INTERFACE2(9600)=1 DE 5INTERFACE2(1200)=1
BCM Automao Linguagem Descritiva BCM 51
Verso 2009-1 Referncia: 31940092-8
-
INTERFACE3=(PROTOCOLO=tipo {PORTA=nnn})Configura o canal de comunicao Ethernet TCP-IP do controlador GP3101.Este comando vlido apenas para o PROCP V4K ou superior. As opes de servios disponveis em "tipo" so:
Configura o canal TCP-IP para operar como gateway com ocanal RS485. O parmetro xx define a velocidade em baud docanal RS485 nesse modo. Pode ser 9600 ou 19200.
GAT485 VEL=XX
Configura o canal TCP-IP para operar como gateway com ocanal RS232. O parmetro xx define a velocidade em baud docanal RS232 nesse modo. Pode ser 9600 ou 19200.
GAT232 VEL=XX
Configura o canal TCP-IP para o protocolo MODBUSTCPMODBUSTCP
Configura o canal TCP-IP para o protocolo BCM2 (encapsulado)BCM2
Em PORTA deve ser colocado o nmero da porta lgica TCP-IP que ser usadadentro do protocolo especificado. Pode estar na faixa 1 a 65535. Se omitido,assume as seguintes portas, conforme o protocolo:
- BCM2: Porta 501- MODBUSTCP: Porta 502 - GAT232: Porta 23 - GAT485: Porta 24
Conexo ativa ModbusTCPA varivel TCPAT, disponvel somente para o GP3101, deve ser forada peloprograma do usurio para abrir uma conexo ativa ModbusTCP:
- TCPAT= 0 -> conexo passiva- TCPAT= 1 -> dispara conexo ativa- TCPAT= 2 -> tentando estabelecer conexo ativa- TCPAT= 3 -> conexo ativa estabelecida
BCM Automao Linguagem Descritiva BCM 52
Verso 2009-1 Referncia: 31940092-8
-
Os seguintes canais do Display #3 do GP3101 (SO verso 2005-3 ou superior)so utilizados para controle da comunicao ModbusTCP e portanto no podemser utilizados para outras finalidades:
Variveis de configurao (somente p/ conexo ativa):
Porta p/ conexo da comunicao Modbuscom o host
C408h4PORTA4o octeto do endereo IP do hostC406h3IP_43o octeto do endereo IP do hostC404h2IP_32o octeto do endereo IP do hostC402h1IP_2
1o octeto do endereo IP do host(Supervisrio)
C400h0IP_1DescrioEndereoCanalNome
Variveis de monitorao (conexo ativa e passiva):
Contador de pacotes recebidos descartadosC40Eh7RXPCPContador de pacotes Modbus recebidosC40Ch6RXPCM
Contador de tentativas de abertura deconexo TCP
C40Ah5CONTCDescrioEndereoCanalNome
BCM Automao Linguagem Descritiva BCM 53
Verso 2009-1 Referncia: 31940092-8
-
Conexo ativa nas funes Gateway pelos canais RS232 e RS485
Ateno: Este recurso vlido somente para o GP3101 com S.Operacionalverso 2008-1 ou superior.
As variveis de interface de Gateway RS232 ativo e Gateway RS485 ativodevem ser alocadas nos seguintes endereos do display #3:
Contador de pedidos de conexo23CNTD2Flag de disparo da conexo ativa (1) ativa; (3) encerra22DPCO2Porta para conexo no equipamento destino21PORT24o octeto do IP do equipamento destino (cliente)20IP4_23o octeto do IP do equipamento destino (cliente)19IP3_22o octeto do IP do equipamento destino (cliente)18IP2_21o octeto do IP do equipamento destino (cliente)17IP1_2
GW485
Contador de pedidos de conexo16CNTD1Flag de disparo da conexo ativa (1) ativa; (3) encerra15DPCO1Porta para conexo no equipamento destino14PORT14o octeto do IP do equipamento destino (cliente)13IP4_13o octeto do IP do equipamento destino (cliente)12IP3_12o octeto do IP do equipamento destino (cliente)11IP2_1
GW232
DescrioCanalNomeProt.
O padro Ethernet permite que dois ou at trs desses servios sejamconfigurados simultaneamente. Isto feito atravs da colocao de mais de umalinha INTERFACE3 no programa.
O compilador deve indicar erro nos casos de conflito de alocao de uma portaserial para duas finalidades - Se for includo no mesmo programa as instrues:INTERFACE1=... e INTERFACE3=(PROTOCOLO=GAT232...)ou:INTERFACE2=... e INTERFACE3=(PROTOCOLO=GAT485...)
O compilador deve indicar erro no caso de haver a mesma programao dePORTA para diferentes servios.
BCM Automao Linguagem Descritiva BCM 54
Verso 2009-1 Referncia: 31940092-8
-
Exemplos:
INTERFACE3=(PROTOCOLO=GAT485 VEL=9600) Configura o canal TCP/IP para operar como gateway com a porta serial RS485(canal 2). A porta serial ir funcionar a 9600 baud.
INTERFACE3=(PROTOCOLO=MODBUSTCP PORTA=30) Configura o canal TCP/IP para operar no protocolo MODBUS TCP, na portalgica 30, sem abrir a comunicao na rede.
INTERFACE3=(PROTOCOLO=MODBUSTCP PORTA=30)****************************FACA TCPAT=1 Configura o canal TCP/IP para operar no protocolo MODBUS TCP, na portalgica 30, tomando a iniciativa de abrir a comunicao na rede. Devem sertambm configurados os parmetros especficos para a operao ativa,conforme descrito acima.
INTERFACE3=(PROTOCOLO=GAT232 VEL=9600) INTERFACE3=(PROTOCOLO=GAT485 VEL=9600) INTERFACE3=(PROTOCOLO=MODBUSTCP PORTA=30) Configura o canal TCP/IP para executar os trs servios simultaneamente.Funciona como gateway para o canal serial RS232 atravs da porta 23, funcionacomo gateway para o canal serial RS485 atravs da porta 24 e tambm opera noprotocolo MODBUS TCP, atravs da porta lgica 30.
INTERFACE3=(PROTOCOLO=GAT232 VEL=9600 PORTA=10) INTERFACE3=(PROTOCOLO=GAT485 VEL=9600 PORTA=20) INTERFACE3=(PROTOCOLO=MODBUSTCP PORTA=30) Configura o canal TCP/IP para executar os trs servios simultaneamente.Funciona como gateway para o canal serial RS232 atravs da porta 10, funcionacomo gateway para o canal serial RS485 atravs da porta 20 e tambm opera noprotocolo MODBUS TCP, atravs da porta lgica 30.
BCM Automao Linguagem Descritiva BCM 55
Verso 2009-1 Referncia: 31940092-8
-
NEST=xxxReserva um espao de memria para a tabela de estados. Este espao deve serigual ou superior ao nmero de estados mais o nmero de testes independentesde estado de todo o programa. O valor para 'xxx' aceito na faixa 1 a 2000. Seomitido, o sistema reservar um espao de 150 estados.
PAN=xEste comando habilita a rotina de tratamento da placa BCM2085/PAN - Painelde leds. O parmetro `x' define o nmero de placas utilizadas no sistema. Podeser 1 ou 2. Outro valor provocar erro na compilao. Se este comando noestiver presente, as placas no sero acessadas. importante observar que a incluso do comando PAN influi na capacidade deinstalao de mdulos BCM2085/CTR no sistema.
RTC Habilita a operao do relgio de tempo real. Este comando usado noscontroladores BCM1086A, GP3000 e no BCM2085 com a placa `MEM' instalada.
SAIDA r1{,r2,...rn} = aaa{,bbb,...nnn}Esta instruo est disponvel para o controlador BCM2085B, com CPU7 ouCPU8.Este comando associa as saidas digitais 'r1' ... at 'rn' s variveis 'aaa' ... at'nnn'. Com isto, as sadas podero ser tratadas como variveis. A varivel 'aaa'dever ser varivel livre ou matricial (criada pelo comando DIM). As variveis'bbb' ... at 'nnn' devero ser variveis livres, no podendo ser variveisindexadas, fixas ou de entrada digital. Quando a varivel 'aaa' for matricial, nopodero ser definidas outras variveis. A ordem das sadas r1{,r2,...rn} deverser crescente e ser verificada no momento da compilao. O acionamento das sadas no declaradas por esta instruo, continuar sendofeita pelas instrues LIGA, DESL e outras do mesmo gnero. O SistemaOperacional ter um bloco de tratamento das variveis associadas s sadas.Este bloco ser executado no incio de cada ciclo. Neste bloco, cada varivelassociada que tiver o seu valor diferente de zero ser ligada, seno a sada serdesligada.
BCM Automao Linguagem Descritiva BCM 56
Verso 2009-1 Referncia: 31940092-8
-
No programa BCM, todas as sadas associadas devero ser declaradas depoisdos comandos DIM (se houver) e NEST (se houver) e antes da descrio daMALHA 0. O compilador dever gerar uma mensagem de erro, se esta ordemno for respeitada. No Compilador, as instrues LIGA n, DESL n, SE condio LIGA n e/ou SEcondio DESL n, cuja saida 'n' for associada a uma varivel, gerar umamensagem de erro.
TCP IP=x GT=y NT=z Configura os parmetros TCP/IP do canal Ethernet do GP 3101. Disponvel parao PROCP V4K ou superior. Os parmetros configurveis so os seguintes:
IP=x - Define o nmero IP do equipamento na rede. O PROCP testa pornmeros vlidos (0 a 255 e diferente de 0.0.0.0). Deve estar presente ecolocado no formato padro de quatro octetos separados por pontos.
GT=y - Define o endereo IP do gateway . Deve estar presente e colocadono formato padro de quatro octetos separados por pontos.
NT=z - Define o netmask. Deve estar presente e colocado no formatopadro de quatro octetos separados por pontos.
Exemplo:TCP IP=192.168.150.140 GT=192.168.150.255 NT=255.255.255.200
BCM Automao Linguagem Descritiva BCM 57
Verso 2009-1 Referncia: 31940092-8
-
2.4.2 - Instrues de Programao
COPIA xxx(yyy) PARA zzz(www) QUANT=kkkCopia um conjunto de elementos de uma matriz para outra, a partir dosndices especificados. Os parmetros yyy e www podem ser umaconstante ou uma varivel. O parmetro kkk indica a quantidade deelementos a copiar, podendo ser constante ou varivel no indexada.Esta instruo executada na transio, isto , somente na primeira vezem que entra no ESTADO da MALHA que contm a respectiva instruo.
Este recurso est disponvel no Controlador Programvel que use o mduloBCM2085B/CPU7-11 ou /CPU8.
DECREMENTA aaa,bbb,ccc,ddd(iii)Decrementa de uma unidade o contedo das variveis mencionadas.Qualquer tipo de varivel aceita, inclusive variveis matriciais. Equivale instruo "FACA aaa=aaa-1 E bbb=bbb-1", etc., com mais clareza naedio, economia de memria e de tempo de processamento.Podem ser usadas vrias instrues DECREMENTA em um estado. A nicaexigncia que as linhas com esta instruo devem ser adjacentes. Almdisso, todas as instrues SET, RESET, INCREMENTA e DECREMENTAde um estado devem estar agrupadas.
Exemplo:ESTADO 5: ;Este bloco de programa aciona a sada 1 por 10 vezes,FACA CONT=10 ;com um tempo ligado de 1s e desligado de 1s.VA PARA 6
ESTADO 6:LIGA 1SE ATRASO=10 ENTAO 7
ESTADO 7:DESL 1DECREMENTA CONTSE ATRASO=10 ENTAO 6SE CONT=0 ENTAO 8
BCM Automao Linguagem Descritiva BCM 58
Verso 2009-1 Referncia: 31940092-8
-
EAI Essa instruo controla o funcionamento da placa BCM2085/EAI,
permitindo que o usurio, atravs do programa em alto nvel, defina ascaractersticas de funcionamento da placa conforme a aplicao. A mesmainstruo permite adquirir os valores analgicos dos pontos de entrada e leros valores processados localmente pela placa EAI, incluindo-os no programada forma mais adequada.
A varivel "r" especifica o nmero do ponto analgico que ser atendidopelo comando. O Sistema Operacional suporta um mximo de 128 pontosde entradas analgicas, distribuidos em at 8 placas.O comando define a operao a ser feita dentro da instruo `EAI'. Cadacomando possui um conjunto prprio de parmetros com sintaxe definida.Somente um comando pode ser usado em cada linha de programa.
EAI r FILTRO [KP=www] [KI=yyy] [KD=zzz] [AI=uuu] [LIN=h] [ESC=xxx][DES=vvv] [TA=qqq] [LS=sss] [LI=ttt]Programa os valores gerais relativos ao sistema de controle do canal `r' daplaca EAI:- KP Transfere a varivel `www', relativa ao coeficiente proporcional
vezes 256, para o PID do canal `r' da placa EAI. So permitidosvalores na faixa 0 a 65534. Se omitido, o coeficienteproporcional assume o valor 1.
- KI Transfere a varivel `yyy', relativa ao coeficiente integral vezes256, para o PID do canal `r' da placa EAI. So permitidosvalores na faixa 0 a 65534. Se omitido, assume o valor 0.
- KD Transfere a varivel `zzz', relativa ao coeficiente derivativovezes 256, para o PID do canal `r' da placa EAI. Se omitido,assume o valor 0.
- AI Transfere a varivel `uuu', relativa ao acumulador integral,para o PID do canal `r' da placa EAI. Se omitido, o acumuladorintegral no ser alterado.
BCM Automao Linguagem Descritiva BCM 59
Verso 2009-1 Referncia: 31940092-8
-
- LIN O nmero `h' (sempre constante) especifica o cdigo para umafuno de linearizao. Essa funo aplicada diretamentesobre a leitura do conversor A/D. Todos os processamentosposteriores (sada VME, controle PID) tero como base o valorj passado pela funo especificada.Note que cada ponto analgico pode ter uma funo delinearizao distinta dos demais, independentemente da placaonde estiver instalada.- Funo 0: Sem linearizao (Leitura medida = Lad)- Funo 1: Linearizao para termopar tipo T - Leitura = 1000+ (10 * Temperatura)- Funo 2: Linearizao para termopar tipo S - Leitura = 1000+ (10 * Temperatura) - Funo 3: Linearizao para termopar tipo K - Leitura = 1000+ (10 * Temperatura)- Funo 4: Linearizao para termopar tipo J - Leitura = 1000 +(10 * Temperatura) Est previsto o desenvolvimento de funes de linearizaopara outros tipos de termopares e transdutores no-lineares.
- ESC O contedo da varivel `xxx' ser o fator de escala aplicado asada do conversor A/D, aps a passagem pela funo delinearizao. expresso em termos de unidades do A/D porunidade da varivel da sada, vezes 256. So permitidosvalores na faixa 0 a 65534. Se omitido, assume o valor 256.
- DES O contedo da varivel `vvv' ser o deslocamento (offset) deleitura. Especifica o valor que ser somado a sada da funode linearizao, j includo o fator de escala. So permitidosvalores na faixa 0 a 65534. Se omitido, assume o valor 0.
BCM Automao Linguagem Descritiva BCM 60
Verso 2009-1 Referncia: 31940092-8
-
- TA Transfere a varivel `qqq', relativa ao tempo de amostragempara os fatores integral e derivativo do filtro PID relativo aocanal `r' da placa EAI. expresso em dcimos de segundo; avarivel pode assumir valores entre 1 e 255 correspondendo aintervalos de amostragem entre 0,1 e 25,5 segundos. Seomitido, o mdulo assume um intervalo de amostragem de 1segundo.
- LS Transfere a varivel `sss' para o registro de limite superior dofiltro PID. O contedo dessa varivel ir ser o limitante superiorda sada do filtro PID. Ao atingir esse valor, o acumuladorintegral no aumenta mais, independentemente do valor doerro. So permitidos