
Livro (e-book): Linearidade em Sinais e Sistemas, Ivanil S ...peres/LSS/Slides_LSS_Cap5.pdfFazendo a...
53
Cap. 5 – Equa¸ c˜oesaDiferen¸ cas Livro (e-book): Linearidade em Sinais e Sistemas, Ivanil S. Bonatti, Amauri Lopes, Pedro L. D. Peres, Cristiano M. Agulhari, Ed. Blucher, SP, 2015, 1ed., ISBN: 9788521208921. Prof. Pedro L. D. Peres Faculdade de Engenharia El´ etrica e de Computa¸ c˜ ao Universidade Estadual de Campinas Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 1/53
Transcript of Livro (e-book): Linearidade em Sinais e Sistemas, Ivanil S ...peres/LSS/Slides_LSS_Cap5.pdfFazendo a...

Cap. 5 – Equacoes a Diferencas
Livro (e-book): Linearidade em Sinais e Sistemas,Ivanil S. Bonatti, Amauri Lopes, Pedro L. D. Peres,
Cristiano M. Agulhari,Ed. Blucher, SP, 2015, 1ed., ISBN: 9788521208921.
Prof. Pedro L. D. Peres
Faculdade de Engenharia Eletrica e de ComputacaoUniversidade Estadual de Campinas
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 1/53

Cap. 5 – Equacoes a Diferencas
Equacoes a Diferencas
Definicao 1 (Equacoes a Diferencas)
Equacoes envolvendo sequencias enumeraveis e seus deslocamentos sao denominadasequacoes a diferencas.
Exemplo 1.1 (Filtro passa-alta)
y [n] =x[n]−x[n−1]
2, n ∈ Z
Para a entrada x[n] = (−1)n, a saıda e y [n] = (−1)n. Para x[n] = 1n, tem-se y [n] = 0.
Exemplo 1.2 (Filtro passa-baixa)
y [n] =x[n]+x[n−1]
2, n ∈ Z
Para x[n] = (−1)n, a saıda e y [n] = 0. Para x[n] = 1n, tem-se y [n] = 1n.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 2/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.3
Populacao anual de peixes em um lago (em termos percentuais)
y [n+1]−ay [n](1−y [n]) = x[n] , 0≤ y [0] ≤ 1
sendo a um parametro real que representa as condicoes ambientais do lago.
Equacoes a diferencas lineares descrevem sistemas lineares, isto e, sistemas para osquais vale o princıpio da superposicao. Os sistemas descritos nos exemplos 1.1 e 1.2sao lineares, enquanto que o Exemplo 1.3 descreve um sistema nao-linear.
Equacoes a diferencas lineares com coeficientes constantes e condicoes iniciais nulasdescrevem sistemas lineares invariantes no tempo.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 3/53

Cap. 5 – Equacoes a Diferencas
Exemplo – Somador
Exemplo 1.4 (Somador)
Para y [n] = ∑nk=−∞ x[k], a resposta ao impulso e
h[n] =n
∑k=−∞
δ [k] = u[n] =
1 , n ≥ 00 , n < 0
sendo u[n] a funcao degrau. Note que o somador pode ser descrito pela equacao adiferencas de primeira ordem
y [n+1] = y [n]+x[n+1] , y [0] = y0 condicao inicial
Utilizando o operador de deslocamento p, tem-se (p−1)y [n] = px[n].
Equacoes a diferencas lineares a coeficientes constantes podem ser resolvidas porsubstituicao sistematica, por meio da transformada Z ou pelo metodo dos coeficientesa determinar.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 4/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.5A equacao homogenea a diferencas de primeira ordem
y [n+1] = ρy [n] , y [0] = 1, ρ ∈ R
pode ser resolvida por substituicao sistematica, resultando em y [n] = ρn
e vale para todo n, de −∞ a +∞. Observe que a sequencia y [n] nao possuitransformada Z, pois
Z y [n]=+∞
∑k=−∞
y [k]z−k =+∞
∑k=−∞
(ρ/z)k
nao converge para nenhum z . O artifıcio utilizado para resolver essa classe deequacoes a diferencas utilizando transformada Z consiste em alterar o problemaimpondo que y [n] = 0 para n < 0, e que y [n] satisfaz a equacao para n≥ 0. Dessaforma, Z y [n]u[n] existe e e dada por
Z y [n]u[n] =+∞
∑k=−∞
y [k]u[k]z−k =+∞
∑k=0
(ρ/z)k =z
z −ρ, |z |> |ρ|
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 5/53

Cap. 5 – Equacoes a Diferencas
Resolucao por Transformada ZTres propriedades da transformada Z sao relevantes para a resolucao das equacoes adiferencas lineares com coeficientes constantes.
Propriedade 1 (Deslocamento a Esquerda (avanco))
Z x[n+m]u[n]= zmZ x[n]u[n]−m−1
∑k=0
x[k]zm−k , m ∈ Z+
Exemplo 1.6
Para y [n] = y [n]u[n] e x[n] = x[n]u[n], tem-se
y [n+2]+α1y [n+1]+α0y [n] = β1x[n+1]+β0x[n]
z2Y (z)−z2y [0]−zy [1]+α1(zY (z)−zy [0])+α0Y (z) = β1(zX (z)−zx[0])+β0X (z)
(z2+α1z+α0)Y (z) = (β1z+β0)X (z)+(z2+α1z)y [0]+ zy [1]−β1zx[0]
A funcao de transferencia H(z) e dada por (y [0] = y [1] = 0 e x[0] = 0)
H(z) =Y (z)
X (z)=
β1z+β0
z2+α1z+α0
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 6/53

Cap. 5 – Equacoes a Diferencas
Combinatoria
Propriedade 2 (Combinatoria)
Z
(
n+mm
)
anu[n]
=zm+1
(z−a)m+1, m ∈ N , |z |> |a|
Exemplo 1.7
Z
nanu[n]
=z2
(z−a)2− z
z−a=
az
(z−a)2, |z |> |a|
pois
Z
(
n0
)
anu[n]
= Z anu[n]= z
z−a
Z
(
n+11
)
anu[n]
= Z (n+1)anu[n]= z2
(z−a)2
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 7/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.8
Z
n2anu[n]
=az2+a2z
(z−a)3, |z |> |a| pois
Z
(
n+22
)
anu[n]
= Z
(n+2)(n+1)
2anu[n]
=z3
(z−a)3
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 8/53

Cap. 5 – Equacoes a Diferencas
Propriedade 3 (Combinatoria com Deslocamento)
Z
(
nm
)
an−mu[n]
=z
(z−a)m+1, m ∈ N , |z |> |a|
O resultado pode ser demonstrado pela aplicacao da propriedade de deslocamento dem a direita na Propriedade 2 (implica na multiplicacao por z−m). Observe que
(
nm
)
u[n−m] =n(n−1) · · ·(n−m+1)
m!u[n−m] =
(
nm
)
u[n]
pois no numerador aparece a multiplicacao por zero sempre que n <m.
A propriedade e utilizada no calculo de transformada Z inversa a partir de fracoesparciais.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 9/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.9 (Progressao geometrica)
y [n+1] = ρy [n], y [0] = 1 , ρ > 0
Multiplicando por u[n] e aplicando a transformada Z, tem-se
Z y [n+1]u[n]= ρZ y [n]u[n] ⇒ Y (z) =z
z−ρ
com domınio Ω = z ∈ C, |z |> ρ (serie a direita).
Fazendo a divisao de polinomios (algoritmo de Briot-Ruffini), obtem-se a serie
z
z−ρ= 1+ρz−1+ρ2z−2+ · · ·
Comparando-se com a definicao da transformada Z de ρnu[n], obtem-se
y [n] = Z−1
z
z−ρ
= ρnu[n]
O mesmo resultado poderia ser obtido pela aplicacao da Propriedade 3 (combinatoriacom deslocamento) para m = 0.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 10/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.10 (Soma geometrica)
A soma geometrica y [n] = ∑nk=0 ρk , pode ser obtida pela resolucao da equacao a
diferencasy [n+1]−y [n] = ρn+1, y [0] = 1
Multiplicando por u[n] e aplicando a transformada Z
zY (z)−zy [0]−Y (z) =ρz
z−ρ
Para ρ 6= 1, tem-se
Y (z) =z2
(z−ρ)(z −1), |z |>max|ρ|,1
Y (z)
z=
z
(z−ρ)(z −1)=
a
z−ρ+
b
z−1
a=− ρ
1−ρ, b =
1
1−ρ
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 11/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.11 (Soma geometrica)
Usando a Propriedade 3 (combinatoria com deslocamento), tem-se
y [n] = aρnu[n]+bu[n] =1−ρn+1
1−ρu[n]
Esse resultado tambem pode ser obtido da definicao de y [n], observando-se que
y [n]−ρy [n] =n
∑k=0
ρk −ρn
∑k=0
ρk = 1−ρn+1 ⇒ y [n] =1−ρn+1
1−ρ
Para ρ = 1, tem-se
Y (z) =z2
(z−1)2⇒ Y (z)
z=
z
(z−1)2=
a
(z−1)+
b
(z−1)2⇒ a= 1 , b = 1
y [n] = (1+n)u[n] =n
∑k=0
1
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 12/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.12 (Soma aritmetica)
A soma aritmetica y [n] = ∑nk=0 k , pode ser obtida pela resolucao da equacao a
diferencas y [n+1]−y [n] = n+1, y [0] = 0.
Multiplicando por u[n], aplicando transformada Z e a Propriedade 2 com m = 1,tem-se
zY (z)−zy [0]−Y (z) = Z (n+1)u[n]= z2
(z−1)2
Y (z)
z=
z
(z−1)3=
a1z−1
+a2
(z−1)2+
a3(z−1)3
⇒ a1 = 0,a2 = 1,a3 = 1
Pela Propriedade 3,
y [n] =
(
n1
)
u[n]+
(
n2
)
u[n] =n(n+1)
2u[n]
Observe que esse resultado pode ser obtido somando-se membro a membro asequencia 0,1,2, . . . ,n nos sentidos direto e reverso e constatando-se que a somaconsiste de n+1 termos de valor constante n. Portanto a soma total produz2y [n] = n(n+1).
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 13/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.13 (Soma aritmetica-geometrica)
A soma aritmetica-geometrica y [n] = ∑nk=0 kρk , pode ser obtida pela resolucao da
equacao a diferencas y [n+1]−y [n] = (n+1)ρn+1, y [0] = 0 (multiplicando por u[n] eaplicando a transformada Z). Para ρ 6= 1, tem-se
zY (z)−zy [0]−Y (z) =ρz2
(z−ρ)2, Y (z) =
ρz2
(z−1)(z −ρ)2, |z |>max|ρ|,1
Y (z)
z=
ρz
(z−1)(z −ρ)2=
a
z−1+
b
z−ρ+
c
(z−ρ)2
cujos coeficientes sao a=ρ
(1−ρ)2, b =
−ρ
(1−ρ)2, c =
−ρ2
(1−ρ). Portanto,
y [n] = au[n]+bρnu[n]+ c
(
n1
)
ρn−1u[n] =(
a+bρn+ cnρn−1)
u[n]
=ρ
(1−ρ)2
(
1− (n+1)ρn+nρn+1)
u[n]
Para ρ = 1, o problema se reduz ao de soma aritmetica.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 14/53

Cap. 5 – Equacoes a Diferencas
Exemplo – Sequencia de Fibonacci
Exemplo 1.14 (Sequencia de Fibonacci)
A sequencia de Fibonacci e uma sequencia de numeros inteiros em que cada elementoe obtido pela soma dos dois anteriores. A equacao descreve uma populacao de casaisde coelhos, composta de casais adultos e filhotes. Cada casal adulto gera um casal defilhotes todo mes, e o casal de filhotes torna-se fertil (adulto) com dois meses de vida.No mes n, a[n] e o numero de casais adultos e f [n] e o numero de casais de filhotescom um mes de vida. Supondo que nao ocorram mortes, tem-se
a[n+1] = a[n]+ f [n] , f [n+1] = a[n]
Denominando y [n] qualquer uma das variaveis de estado, obtem-se a equacao adiferencas
y [n+2] = y [n+1]+y [n] , y [0] = 0, y [1] = 1
Usando o operador p, tem-se
D(p)y [n] = (p2−p−1)y [n] = 0
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 15/53

Cap. 5 – Equacoes a Diferencas
Exemplo – Sequencia de Fibonacci
Exemplo 1.15 (Sequencia de Fibonacci)
sendo D(p) o polinomio caracterıstico da equacao a diferencas. Multiplicando por u[n]e aplicando a transformada Z, tem-se
z2(Y (z)−y [0]−y [1]z−1) = z(Y (z)−y [0])+Y (z) ⇒ Y (z) =z
z2−z −1
As raızes do denominador (ou seja, raızes de D(p) = 0) sao
λ1 =1+
√5
2≈ 1.618 , λ2 =
1−√5
2≈−0.618
Y (z)
z=
1
(z−λ1)(z−λ2)=
a1z−λ1
+a2
z −λ2
cujos coeficientes sao
a1 =1
λ1−λ2=
√5
5≈ 0.447 , a2 =
1
λ2−λ1=
−√5
5
resultando em y [n] =(
a1λn1 +a2λn
2
)
u[n] ≈ a1λn1 u[n] para n grande, pois |λ2|< 1
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 16/53

Cap. 5 – Equacoes a Diferencas
Curiosidades sobre a sequencia de FibonacciA raiz caracterıstica
ϕ =1+
√5
2≈ 1.618
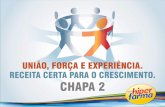
chamada na literatura de razao aurea, possui varias interpretacoes interessantes,algumas de valor estetico. A Figura 1, composta por retangulos, foi construıda apartir do retangulo do canto superior esquerdo, de base 1 e altura ϕ. Copiando,rodando de 90 graus a direita, colocando ao lado do primeiro e completando, tem-seum retangulo de base 1+ϕ e altura ϕ. Observe que e preservada a relacao
ϕ
1=
1+ϕ
ϕ⇒ ϕ2 = ϕ +1
ou seja, ϕ satisfaz a equacao caracterıstica de Fibonacci.
Essa mesma relacao aparece em varias construcoes arquitetonicas, como por exemplona Grecia antiga. A Figura 1 mostra mais uma iteracao, resultando no retangulo debase 1+ϕ e altura 1+2ϕ, que preserva a relacao, pois
1+2ϕ
1+ϕ=
ϕ
1O processo pode ser repetido indefinidamente.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 17/53

Cap. 5 – Equacoes a Diferencas
Curiosidades sobre a sequencia de Fibonacci
1
ϕ
Figura: Relacoes aureas em retangulos.Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 18/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.16 (Tabela Price)
Determine o valor mensal da dıvida y [n] de um emprestimo inicial de valor M, compagamento mensal constante igual a γ e juros mensais percentuais α para que a dıvidaseja liquidada em m meses. Esse problema e conhecido como calculo da tabela Price.
y [n+1] = y [n](1+α)− γ , y [0] =M
zY (z)−zM = Y (z)(1+α)− γz
z −1
Y (z)
z=
zM−M− γ
(z − (1+α))(z −1)=
a1z− (1+α)
+a2
z−1
cujos coeficientes sao a1 = (Mα − γ)/α, a2 = γ/α. Portanto,y [n] = (a1(1+α)n+a2)u[n]. Observe que a dıvida permanece igual a M se apenas osjuros forem pagos todo mes, ou seja, Mα = γ (situacao ideal para o credor).Obviamente, a situacao ideal para o devedor seria M = 0. A solucao do problema, istoe, o valor de γ que produz y [m] = 0, e
γ =Mα(1+α)m
(1+α)m−1Para α = 0, por l’Hopital, obtem-se γ =M/m.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 19/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.17
Considere a equacao a diferencas
y [n+2]−3y [n+1]+2y [n] = 1 y [0] = 0, y [1] = 0
Y (z)
z=
1
(z−1)2(z−2)=
1
z −2− 1
z−1− 1
(z−1)2
y [n] = (2n−1−n)u[n]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 20/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.18 (Equacao a diferencas com N(p) 6= 1)
Considere a equacao a diferencas
y [n+2]+5y [n+1]+6y [n] = 3x[n+1]+x[n] , y [0] = 1,y [1] = 2
Aplicando a transformada Z (para x[n] = x[n]u[n] e y [n] = y [n]u[n]), tem-se
(z2+5z+6)Y (z) = (3z+1)X (z)−3zx[0]+(z2 +5z)y [0]+ zy [1]
e, para x[n] = (−2)nu[n], substituindo-se as condicoes iniciais, tem-se
(z2+5z+6)Y (z) =(3z+1)z
z+2+ z2+4z ⇒ (3z+1)z
(z+2)2(z+3)+
z2+4z
(z+2)(z+3)
Decompondo Y (z)/z em fracoes parciais, tem-se
Y (z) =− 8z
z+3+
8z
z+2− 5z
(z+2)2− z
z+3+
2z
z+2
e, aplicando a transformada Z inversa e agrupando,
y [n] =(
−9(−3)n +10(−2)n−5n(−2)n−1)
u[n]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 21/53

Cap. 5 – Equacoes a Diferencas
Note que a entrada x[n] poderia ser substituıda na equacao original, levando aequacao a diferencas
y [n+2]+5y [n+1]+6y [n] =−5(−2)n , y [0] = 1,y [1] = 2
Multiplicando por u[n] e aplicando a transformada Z, tem-se
(z2+5z+6)Y (z) =−5z
z+2+ z2+7z
Isolando Y (z) e decompondo Y (z)/z em fracoes parciais, chega-se ao mesmoresultado.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 22/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.19 (Resposta ao impulso)
A resposta ao impulso do sistema (pressupoe condicoes iniciais nulas)
y [n+1]−ρy [n] = δ [n] ⇒ (p−ρ)y [n] = δ [n] , y [0] = 0
pode ser obtida pela transformada Z, isto e, obtem-se a funcao de transferencia
H(z) =1
z −ρ⇒ H(z)
z=
1
z(z−ρ)=
−1/ρ
z+
1/ρ
z−ρ
e a resposta ao impulso e dada pela transformada Z inversa de H(z)
h[n] = (−1/ρ)δ [n]+(1/ρ)ρnu[n] = ρn−1u[n−1]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 23/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.20 (Resposta ao degrau)
A resposta ao degrau do sistema, para ρ 6= 1, (pressupoe condicoes iniciais nulas)
y [n+1]−ρy [n] = u[n] ⇒ (p−ρ)y [n] = u[n] , y [0] = 0
pode ser obtida pela transformada Z, isto e,
Y (z) =z
(z−ρ)(z−1)⇒ Y (z)
z=
1
(z−ρ)(z−1)=
a
(z−ρ)+
b
z−1
com −a = b = 11−ρ , e, portanto, y [n] = (1−ρn)/(1−ρ)u[n]. Note que, como
u[n] = ∑nk=−∞ δ [k], tem-se que a solucao y [n] e a soma ate n da resposta ao impulso
do Exercıcio 1.19, isto e,
y [n] =
(
n
∑k=−∞
ρk−1u[k−1]
)
u[n] =
(
n−1
∑ℓ=0
ρℓ
)
u[n] =1−ρn
1−ρu[n]
Alem disso, como δ [n] = u[n]−u[n−1] tem-se que a solucao do Exercıcio 1.19 podeser escrita como
h[n] = y [n]−y [n−1] = ρn−1u[n−1]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 24/53

Cap. 5 – Equacoes a Diferencas
Resolucao pelo Metodo dos Coeficientes a Determinar
Equacoes a diferencas lineares com coeficientesconstantes podem ser resolvidas pelo metodo dos
coeficientes a determinar.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 25/53

Cap. 5 – Equacoes a Diferencas
Equacao homogenea
Considere a equacao a diferencas homogenea
D(p)y [n] = 0 , D(p) =m
∑k=0
αkpk (1)
com αm = 1 e condicoes iniciais conhecidas, que descreve um sistema linear autonomo.
Observe que a equacao e uma restricao linear (combinacao linear das funcoes y [n],y [n+1], . . . , y [n+m]) e portanto a solucao y [n] deve necessariamente estar em umespaco de dimensao m.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 26/53

Cap. 5 – Equacoes a Diferencas
Independencia Linear
Definicao 2 (Independencia Linear)
Um conjunto de sinais yk [n],k = 1, . . . ,m e linearmente independente se e somentese
m
∑k=1
ckyk [n] = 0 , ∀n ⇒ ck = 0 , k = 1, . . . ,m
Definicao 3 (Base)
A combinacao linear de um conjunto de m sinais yk [n], isto e,
y [n] =m
∑k=1
ckyk [n]
com escalares ck ∈ C gera um espaco linear, cuja dimensao e dada pelo numero r ≤mde sinais linearmente independentes. Qualquer conjunto de r sinais que gere o mesmoespaco e uma base para esse espaco.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 27/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.21Os sinais
y1[n] = 1, y2[n] = n, y3[n] = n2
sao linearmente independentes. De fato,
c1y1[n]+c2y2[n]+c3y3[n] = 0 ⇒ c1 = c2 = c3 = 0, pois det
1 0 01 1 11 2 4
= 2 6= 0
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 28/53

Cap. 5 – Equacoes a Diferencas
Independencia Linear
Propriedade 4 (Independencia Linear)
y1[n] = λn1 , y2[n] = λn
2
sao linearmente independentes se e somente se
λ1 6= λ2
Note que a1λn1 +a2λn
2 = 0, ∀n, implica
a1+a2 = 0a1λ1+a2λ2 = 0
⇒ a1 = a2 = 0
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 29/53

Cap. 5 – Equacoes a Diferencas
Deslocamento de auto-funcao
Propriedade 5 (Deslocamento de auto-funcao)
As funcoes
y1[n] = λn , y2[n] = y1[n+k]
sao linearmente dependentes, pois
y2[n] = λkλn
Propriedade 6 (Modo proprio)
A sequencia y [n] = λn e solucao da equacao (1) se λ e raiz de D(λ ) = 0 (equacaocaracterıstica), pois
D(p)λn =D(λ )λn = 0
Observe que a solucao e valida para todo n ∈ Z.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 30/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.22
Para D(p) = p2−p−1, tem-se
D(p)λn = (p2−p−1)λn = λn+2−λn+1−λn = (λ2−λ −1)λn
Propriedade 7 (Modos proprios)
Se as m raızes λk de D(λ ) = 0 forem distintas, entao
y [n] =m
∑k=1
akλnk
e solucao da equacao (1) pois λk satisfaz D(λk) = 0, k = 1, . . . ,m e os modos propriosλnk , k = 1, . . . ,m sao linearmente independentes.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 31/53

Cap. 5 – Equacoes a Diferencas
Raiz dupla
Propriedade 8 (Raiz dupla)
Se λ e raiz dupla da equacao caracterıstica D(λ ) = 0, entao λn e nλn sao modosproprios da equacao (1).
Prova:
D(p)(nλn) =m
∑k=0
αkpk(nλn) =
m
∑k=0
αk (n+k)λn+k =
= nλnm
∑k=0
αkλk +λn+1m
∑k=0
αkkλk−1 = nλnD(λ )+λn+1 d
dpD(p)
∣
∣
∣
p=λ= 0
pois D(λ ) = 0 ed
dpD(p)
∣
∣
∣
p=λ= 0 quando λ e raiz dupla de D(λ ).
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 32/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.23
Para D(p) = (p−λ )2, tem-se
(p−λ )2λn = 0
e, alem disso,
(p−λ )2nλn = (p2−2λp+λ2)nλn = (n+2)λn+2−2λ (n+1)λn+1+λ2nλn =
=(
λ2−2λ2+λ2)
nλn+2(λ −λ )λn+1 = 0
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 33/53

Cap. 5 – Equacoes a Diferencas
Propriedade 9 (Raiz multipla)
Se λ e raiz de multiplicidade r de D(λ ), entao λn, nλn, . . . , nr−1λn sao modosproprios da equacao (1).
Propriedade 10 (Solucao da Homogenea)
A solucao da equacao homogenea (1) de ordem m e dada pela combinacao linear dosseus m modos proprios, considerando as eventuais multiplicidades das raızescaracterısticas.
Exemplo 1.24Considere a equacao a diferencas
D(p)y [n] = (p−ρ)y [n] = 0 , y [0] = 1
A raiz da equacao caracterıstica e λ = ρ, e portanto
y [n] = aρn
sendo a o coeficiente a determinar. Das condicoes iniciais, a= y [0] = 1.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 34/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.25
Considere a equacao a diferencas do Exemplo 1.14 (Fibonacci)
D(p)y [n] = (p2−p−1)y [n] = 0 = (p−λ1)(p−λ2)y [n] = 0 , y [0] = 0 , y [1] = 1
λ1 =1+
√5
2, λ2 =
1−√5
2
A equacao caracterıstica e D(λ ) = (λ −λ1)(λ −λ2) = 0. A solucao e dada por
y [n] = a1λn1 +a2λn
2
Das condicoes iniciais, a1 =
√5
5, a2 =
−√5
5
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 35/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.26
Considere a equacao a diferencas, com ρ 6= 1,
D(p)y [n] = (p−1)(p−ρ)y [n] = 0 , y [0] = 1 , y [1] = 1+ρ
A solucao e
y [n] = a1(1)n+a2ρn =
1−ρn+1
1−ρ
Exemplo 1.27
Considere a equacao a diferencas
D(p)y [n] = (p−1)3y [n] = 0 , y [0] = 0 , y [1] = 1 , y [2] = 3
com λ = 1 raiz tripla da equacao caracterıstica. A solucao e
y [n] = a1(1)n+a2n(1)
n+a3n2(1)n =
n(n+1)
2
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 36/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.28
Considere a equacao a diferencas, com ρ 6= 1,
D(p)y [n] = (p−1)(p−ρ)2y [n] = 0 , y [0] = 0 , y [1] = ρ , y [2] = ρ +2ρ2
A solucao e
y [n] = a1(1)n+a2ρn+a3nρn =
ρ
(1−ρ)2(1−ρn)− ρ
1−ρnρn
Exemplo 1.29
Considere a equacao a diferencas, com α 6= 0,
D(p)y [n] = (p−1)(p− (1+α))y [n] = 0 , y [0] =M , y [1] =M(1+α)− γ
A solucao e
y [n] = a1(1)n+a2(1+α)n =
γ
α+(
M− γ
α
)
(1+α)n
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 37/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.30
Considere o sistema modal descrito pelas equacoes a diferencas
v1[n+1] = αv1[n]−βv2[n] , v2[n+1] = αv2[n]+βv1[n] , α > 0 , β > 0
O polinomio caracterıstico de segunda ordem (associado a v1[n] ou a v2[n]) e
D(p) = p2−2αp+α2+β2 ⇒ λ ∗2 = λ1 = ρ exp(jθ ) = α + jβ , ρ > 0
e a solucao e dada por
a1λn1 +a2λn
2 , a∗2 = a1 =A
2exp(jφ)
com a1, a2 (ou A e φ) determinados pelas condicoes iniciais. Note que a solucao podeser reescrita como
Aρn cos(θn+φ)
e, portanto, diverge para ρ > 1 (comportamento instavel). Pode ser tambemobservado que, mesmo para α < 1 (subsistemas desacoplados estaveis), o valor de βpode instabilizar o sistema.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 38/53

Cap. 5 – Equacoes a Diferencas
Equacao nao homogeneaConsidere a equacao a diferencas nao homogenea
D(p)y [n] = N(p)x[n] , D(p) =m
∑k=0
αkpk , N(p) =
ℓ
∑k=0
βkpk (2)
com αm = 1 e condicoes iniciais conhecidas, que descreve um sistema linear naoautonomo.
A equacao (2) pode ser resolvida pelo metodo dos coeficientes a determinar sempreque x[n] for solucao de uma equacao a diferencas homogenea dada por
D(p)x[n] = 0
O polinomio D(p) define os modos do espaco que contem x[n]. Portanto,multiplicando a equacao (2) dos dois lados por D(p), tem-se a equacao homogenea
D(p)D(p)y [n] = N(p)D(p)x[n] = 0
que contem os modos proprios de D(p) e os modos forcados de D(p).
As condicoes iniciais que permitem a solucao desse sistema aumentado sao as originaisacrescidas de tantas quanto for o grau de D(p), obtidas por substituicao sistematicana equacao (2).
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 39/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.31Considere a equacao a diferencas da soma geometrica
y [n+1]−y [n] = ρn+1 , y [0] = 1
Neste caso
D(p) = p−1 e D(p) = p−ρ , y [0] = 1 , y [1] = 1+ρ
pois a entrada x[n] = ρρn esta no espaco de dimensao 1 descrito por um modoproprio associado a raiz ρ. A condicao y [1] = 1+ρ foi obtida substituindo-se y [0] naequacao original.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 40/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.32Considere a equacao a diferencas da soma aritmetica
y [n+1]−y [n] = n+1 , y [0] = 0
Neste caso
D(p) = (p−1) e D(p) = (p−1)2 , y [0] = 0 , y [1] = 1 , y [2] = 3
pois a entrada x[n] = n+1 esta no espaco de dimensao 2 descrito pelos modosproprios associados a raiz 1 com multiplicidade 2. As condicoes iniciais y [1] e y [2]foram obtidas da equacao original por substituicao.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 41/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.33Considere a equacao a diferencas da soma aritmetica-geometrica
y [n+1]−y [n] = (n+1)ρn+1 , y [0] = 0
Neste caso
D(p) = (p−1) e D(p) = (p−ρ)2 , y [0] = 0 , y [1] = ρ , y [2] = ρ +2ρ2
pois a entrada x[n] = (n+1)ρn+1 esta no espaco de dimensao 2 descrito pelos modosproprios associados a raiz ρ com multiplicidade 2. As condicoes iniciais y [1] e y [2]foram obtidas da equacao original por substituicao.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 42/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.34Considere a equacao a diferencas da tabela Price
y [n+1]− (1+α)y [n] =−γ , y [0] =M
Neste caso
D(p) = (p− (1+α)) e D(p) = (p−1) , y [0] =M , y [1] =M(1+α)− γ
pois a entrada x[n] =−γ esta no espaco de dimensao 1 descrito por um modo proprioassociado a raiz 1. A condicao inicial y [1] foi obtida da equacao original porsubstituicao.
A equacao homogenea resultante foi resolvida no Exemplo 1.29.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 43/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.35Considere novamente a equacao a diferencas do Exemplo 1.18
(p2+5p+6)y [n] = (3p+1)x[n] , y [0] = 1,y [1] = 2 , x[n] = (−2)n
Portanto, D(p) = (p+2), y [2] = 3x[1]+x[0]−5y [1]−6y [0] =−21 e
y [n] = 2.5n(−2)n+10(−2)n−9(−3)n
Note que a solucao vale para todo n ∈ Z e coincide para n ≥ 0 com a solucao obtidapor transformada Z no Exemplo 1.18.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 44/53

Cap. 5 – Equacoes a Diferencas
Propriedade 11 (Solucao Forcada)
O metodo dos coeficientes a determinar pode ser aplicado diretamente a equacao adiferencas nao homogenea (2). Para isso, identificam-se as parcelas homogenea eforcada (devido a entrada) da solucao.
y [n] = yh[n]+yf [n] ⇒ D(p)(
yh[n]+yf [n])
= N(p)x[n]
D(p)yf [n] = N(p)x[n] (3)
pois D(p)yh[n] = 0. As parcelas homogenea e forcada sao dadas por
yh[n] =m
∑k=1
ak fk [n] , yf [n] =m
∑k=1
bkgk [n]
sendo fk [n] os m modos proprios associados a D(λ ) = 0 e gk [n] os m modos forcadosassociados a D(γ) = 0, considerando-se as possıveis multiplicidades com as raızes λ .
Os coeficientes bk sao obtidos da equacao (3) e, em seguida, os coeficientes ak saoobtidos a partir das condicoes iniciais.
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 45/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.36
Considere a equacao a diferencas dada por
y [n+1]−y [n] = ρn+1 , y [0] = 1 ⇒ D(p) = p−1 , D(p) = (p−ρ)
Para ρ 6= 1, tem-se λ = 1 e γ = ρ (raızes distintas). A solucao forcada e
yf [n] = bρn ⇒ (bρ −b)ρn = ρn+1 , b =ρ
ρ −1
A solucao e y [n] = bρn+a. Da condicao inicial y [0] = 1, tem
1 = b+a ⇒ a=1
1−ρ
Para ρ = 1, ocorre o fenomeno conhecido como ressonancia (modo proprio excitadopelo modo da entrada). Neste caso, tem-se
λ = γ = 1 ⇒ yf [n] = bn1n , b = 1
A solucao e (usando-se a condicao inicial): y [n] = bn+a= n+1
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 46/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.37 (Soma aritmetica)
A soma aritmetica satisfaz a equacao a diferencas
y [n+1]−y [n] = n+1 , y [0] = 0 ⇒ D(p) = p−1 , D(p) = (p−1)2
Trata-se de uma ressonancia dupla, λ = γ1 = γ2 = 1. Portanto,
yf [n] = b1n2+b2n ⇒ b1 = b2 = 0.5
A solucao e (usando-se a condicao inicial)
y [n] =n2
2+
n
2+a =
n(n+1)
2
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 47/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.38 (Soma aritmetica-geometrica)
A soma aritmetica-geometrica, tratada no Exemplo 1.13, satisfaz a equacao adiferencas
y [n+1]−y [n] = (n+1)ρn+1 , y [0] = 0 ⇒ D(p) = p−1 , D(p) = (p−ρ)2
Para ρ 6= 1, tem-se λ = 1 e γ1 = γ2 = ρ (raiz dupla). Portanto,
yf [n] = b1nρn+b2ρn ⇒ b1 =ρ
ρ −1, b2 =
−ρ
(ρ −1)2
A solucao e (usando-se a condicao inicial)
y [n] = b1nρn+b2ρn+a ⇒ a =ρ
(ρ −1)2
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 48/53

Cap. 5 – Equacoes a Diferencas
Exemplo 1.39
Considere a equacao a diferencas
y [n+2]−3y [n+1]+2y [n] = 1 y [0] = 0, y [1] = 0 ⇒D(p) = (p−1)(p−2) , D(p) = p−1
Note que λ1 = 1, λ2 = 2 e γ = 1 (ressonancia). A solucao forcada e
yf [n] = bn ⇒ b =−1
A solucao e (usando-se as condicoes iniciais)
y [n] =−n+a1+a22n ⇒ a1 =−1, a2 = 1
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 49/53

Cap. 5 – Equacoes a Diferencas
Propriedade 12 (Resposta ao Impulso)
D(p)y [n] = N(p)x[n] , x[n] = δ [n] (condicoes iniciais nulas)
A priori, o metodo dos coeficientes a determinar nao poderia ser utilizado paradeterminar y [n] pois nao existe equacao a diferencas linear com coeficientesconstantes que produza como solucao a funcao δ [n], isto e, δ [n+k] e linearmenteindependente de δ [n] qualquer que seja k 6= 0.
Entretanto, a resposta ao impulso pode ser calculada pelo metodo dos coeficientes adeterminar da seguinte forma. Primeiramente, resolva
D(p)f [n] = 1 , (condicoes iniciais nulas)
Por linearidade, tem-se
y [n] = N(p)(
f [n]u[n]− f [n−1]u[n−1])
Note que a resposta ao degrau e dada por N(p)f [n]u[n].
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 50/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.40
Calculando a resposta ao degrau da equacao a diferencas
(p−ρ)y [n] = u[n] , y [0] = 0 ⇒ (p−ρ)f [n] = 1 (λ = ρ,γ = 1)
f [n] = b1+a1ρn , b1−ρb1 = 1 ⇒ b1 =1
1−ρ, a1 =−b1
y [n] = f [n]u[n] =1−ρn
1−ρu[n]
A resposta ao impulso e
y [n]−y [n−1] = ρn−1u[n−1]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 51/53

Cap. 5 – Equacoes a Diferencas
Exemplo
Exemplo 1.41Considere
(p−2)(p−3)y [n] = px[n] , x[n] = δ [n] , (condicoes iniciais nulas)
(p−2)(p−3)f [n] = 1 ⇒ f [n] = b1+a12n+a23
n , b1 = 0.5 , a1 =−1 , a2 = 0.5
A resposta ao degrau e dada por
yu[n] = pf [n]u[n] =(1
2−2n+1+
1
23n+1
)
u[n+1]
e a resposta ao impulso e
h[n] = pf [n]u[n]−pf [n−1]u[n−1] = f [n+1]u[n+1]− f [n]u[n]
= (f [n+1]− f [n])u[n] = (−2n+3n)u[n]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 52/53

Cap. 5 – Equacoes a Diferencas
Note que as respostas ao degrau e ao impulso poderiam ser obtidas portransformada Z com menor trabalho algebrico.
A resposta ao impulso e a transformada Z inversa de H(z), ou seja
H(z) =z
(z−2)(z −3)⇒ H(z)
z=
−1
z −2+
1
z−3, h[n] = (−2n+3n)u[n]
e a resposta ao degrau
Yu(z) =z
(z−2)(z −3)
z
(z −1)⇒ Yu(z)
z=
−2
z−2+
3/2
z−3+
1/2
z−1
yu [n] =(
−2(2n)+3
2(3n)+
1
2
)
u[n]
Prof. Pedro L. D. Peres Linearidade em Sinais e Sistemas 53/53









![Orient. Coop. Benefic. Comerc. Moluscos [LSS]](https://static.fdocumentos.com/doc/165x107/5571fc44497959916996e045/orient-coop-benefic-comerc-moluscos-lss.jpg)




