LUCAS DIAS ALMEIDA - sorocaba.unesp.br · Ficha catalográfica elaborada pela Biblioteca da Unesp...
65
UNIVERSIDADE ESTADUAL PAULISTA “JÚLIO DE MESQUITA FILHO” Instituto de Ciência e Tecnologia Campus de Sorocaba LUCAS DIAS ALMEIDA Sistema para Reconhecimento de Padrões por Meio de Instrumentação Virtual: Estudo de Casos no Futebol. Sorocaba 2017
Transcript of LUCAS DIAS ALMEIDA - sorocaba.unesp.br · Ficha catalográfica elaborada pela Biblioteca da Unesp...

UNIVERSIDADE ESTADUAL PAULISTA
“JÚLIO DE MESQUITA FILHO”
Instituto de Ciência e Tecnologia
Campus de Sorocaba
LUCAS DIAS ALMEIDA
Sistema para Reconhecimento de Padrões por Meio de Instrumentação Virtual: Estudo
de Casos no Futebol.
Sorocaba
2017

LUCAS DIAS ALMEIDA
SISTEMA PARA RECONHECIMENTO DE PADRÕES POR MEIO DE
INSTRUMENTAÇÃO VIRTUAL: ESTUDO DE CASOS NO FUTEBOL
Orientador: Prof. Dr. Galdenoro Botura Junior
Sorocaba
2017
Trabalho de Conclusão de Curso
apresentado ao Instituto de Ciência
e Tecnologia de Sorocaba,
Universidade Estadual Paulista
(UNESP), como parte dos
requisitos para obtenção do grau de
Bacharel em Engenharia de
Controle e Automação.

Ficha catalográfica elaborada pela Biblioteca da Unesp Instituto de Ciência e Tecnologia – Câmpus de Sorocaba
Almeida, Lucas Dias. Sistema para Reconhecimento de Padrões por Meio de Instrumentação Virtual: Estudo de Casos no Futebol / Lucas Dias Almeida, 2017. 60 f.: il. Orientador: Galdenoro Botura Junior. Trabalho de Conclusão de Curso (Graduação) – Universidade Estadual Paulista "Júlio de Mesquita Filho". Instituto de Ciência e Tecnologia (Câmpus de Sorocaba), 2017. 1. Futebol. 2. LabVIEW. 3. Processamento de imagem. I. Universidade Estadual Paulista "Júlio de Mesquita Filho". Instituto de Ciência e Tecnologia (Câmpus de Sorocaba). II. Título.

AGRADECIMENTOS
Em primeiro lugar, a Deus, por proporcionar saúde, amor e alegria a mim e a todos ao
meu redor.
À minha família, José Antônio, Marilene, Eveline e Luna, pela criação, ensinamentos,
crescimento e total apoio em todos os momentos de minha vida.
À minha namorada Larissa, pelo amor, companheirismo e crescimento que
compartilhamos nestes últimos anos.
Aos meus amigos Arthur, Bruno, Cássio, Gabriel, Lucas, Marcos, Pedro, Rafael, Renan
Rodrigues, Renan Schumacher pela amizade construída há muitos anos, e que se mantém
forte e se manterá por muitos outros.
Aos meus professores e colegas que me acompanharam durante todo o trajeto
percorrido na faculdade, em especial ao Prof. Dr. Galdenoro Botura Junior pelo grande apoio
durante a realização deste projeto, e à todas as pessoas que direta ou indiretamente
contribuíram para minha formação.

“A melhor maneira de prever o futuro é inventá-lo”
Alan Kay

RESUMO
O projeto apresentado neste trabalho de graduação é um protótipo de um sistema que,
através de aquisição e processamento de imagens utiliza a técnica de reconhecimento de
padrões em uma maquete simulando um jogo de futebol para obter a posição de todas as
peças que representam os jogadores e a bola dentro do campo, aplicando a regra do
impedimento para determinar se algum jogador está em posição de impedimento. O sistema
projetado consiste em uma câmera, posicionada de modo que capture imagens de todo o
campo visto de cima e as envie para um computador, onde foi feito o processamento dessas
imagens e obtenção das posições das peças dos jogadores e da bola, utilizando o software
LabVIEW. As etapas desse projeto são basicamente, montagem da maquete do campo de
futebol, jogadores e bola, posicionamento da câmera, programação do reconhecimento de
padrões para obtenção das posições das peças, por fim, programação lógica para, a partir das
posições obtidas, identificar se o jogador esta em posição de impedimento, impondo
condições referentes aos jogadores e a outros parâmetros de acordo com a regra do
impedimento.
Com a programação finalizada, foi realizada a configuração referente à seleção dos
padrões que foram monitorados (peças dos jogadores e da bola). Com a configuração
realizada o sistema foi submetido a vários testes para validação da ferramenta. Os testes
realizados verificam diversos casos de posição de impedimento em relação aos jogadores
adversários somente, em relação à linha do meio de campo e em relação à linha da bola. Este
procedimento foi feito para todos os jogadores em diversas posições do campo.
O sistema realizou o monitoramento das peças na maquete conforme proposto, porém,
para uma aplicação em partidas reais, a etapa de processamento de imagens deve ser mais
elaborada, utilizando recursos de melhor desempenho. A etapa relacionada à identificação de
posição de impedimento é muito próxima do que poderia ser utilizado em aplicações de jogos
reais, pois parte do principio da regra do impedimento.
Palavras-chave: Futebol; LabVIEW; Processamento de Imagem; Reconhecimento de
Padrões; Tecnologia nos Esportes.

ABSTRACT
The project presented in this graduation work is a prototype of a system capable of,
through acquisition and processing of images, uses pattern identification technique in a
simulation of a soccer game to acquire the position of all pieces that represent the players and
ball inside the pitch, applying the offside rule, indicating if someone is in an offside position.
The system designed consists of a camera, positioned that it captures images of the entire field
seen from above, and send it to a computer, where the images were processed and obtained
the position of the players and ball pieces, using the LabVIEW software. The stages of this
project are basically, the assembly of the soccer pitch model, players and ball, camera
positioning, programming of pattern matching to obtain the positions of the pieces, and
finally, logical programming using these positions to identify if a player is in offside position,
imposing conditions related to other player and parameters according to the offside rule.
With the system ready, it was configured by selecting the patterns that were monitored
(players and ball pieces). Once the configuration was done, the system was subjected through
tests for validating of the tool. The test verifies different cases of offside position, related to
the players itself, related to the midfield line and to the ball line. These tests were applied to
all players, in various positions in the field.
The system monitored the model pieces like proposed, however, for a real game
application, the image processing method should be more complex, using better performance
features. The stage related to offside position identification is close to what could be used in
real game applications, because it is made from the offside rule.
Keywords: Image Processing; LabVIEW; Pattern Matching; Soccer; Sports
Technology.

LISTA DE FIGURAS
Figura 1 – Exemplo de uma imagem em escala de cinza ...................................................................... 13
Figura 2 – Exemplo de uma imagem binária ........................................................................................ 14
Figura 3 – Exemplo do método seguidor de fronteira ........................................................................... 14
Figura 4 – Especificação dos valores para cada direção ....................................................................... 15
Figura 5 – Exemplo de representação em códigos de cadeia ................................................................ 15
Figura 6 – Exemplo de representação por aproximação poliginal ........................................................ 16
Figura 7 – Exemplo de representação por distância X ângulo .............................................................. 16
Figura 8 – Exemplo dos blocos fechados de aquisição de processamento de imagem ......................... 17
Figura 9 – Exemplo da utilização da ferramenta de reconhecimento de padrões na contagem de
glóbulos vermelhos no sangue .............................................................................................................. 19
Figura 10– Exemplo da utilização da ferramenta de reconhecimento de padrões na contagem da
plantação em uma fazenda .................................................................................................................... 19
Figura 11 – Trajetória da bola de tênis realizada pelo “Hawk-eye” ...................................................... 20
Figura 12 – Ferramenta de verificação da zona de strike no baseball ................................................... 21
Figura 13 – Tecnologia da linha de gol no futebol................................................................................ 22
Figura 14 – Maquete do sistema ........................................................................................................... 25
Figura 15 – Posições das peças ............................................................................................................. 26
Figura 16 – Distâncias das peças em relação à linha de fundo ............................................................. 26
Figura 17 – Tela de programação em blocos da aquisição de imagem ................................................. 27
Figura 18 – Tela de interface da aquisição de imagem ......................................................................... 27
Figura 19 – Display do processamento de imagem ............................................................................... 28
Figura 20 – Diagrama de blocos do display preto e branco .................................................................. 29
Figura 21 – Interface da configuração do “template” ........................................................................... 30
Figura 22 – Diagrama de blocos do estado inicial da primeira parte .................................................... 30
Figura 23 – Diagrama de blocos do evento referente ao botão “Campo” ............................................. 31
Figura 24 – Interface após o acionamento do botão “Campo” .............................................................. 31
Figura 25 – “Região de Interesse” destacada ........................................................................................ 32
Figura 26 – Diagrama de blocos do evento referente ao botão “Template” .......................................... 32
Figura 27 – Interface após o acionamento do botão “Template” .......................................................... 33
Figura 28 – Diagrama de blocos do estado inicial da segunda parte ..................................................... 33
Figura 29 – Diagrama de blocos referente ao botão “Monitorar” ......................................................... 34
Figura 30 – Informações obtidas a partir do monitoramento ................................................................ 35
Figura 31 – Interface após o monitoramento da peça ........................................................................... 35
Figura 32 – Direção e sentido dos valores de X e Y ............................................................................. 36
Figura 33 – Tela de interface da calibragem do sistema ....................................................................... 36
Figura 34 – Posicionamento da peça para determinação da origem ..................................................... 37
Figura 35 – Posição da peça utilizada na calibragem ............................................................................ 37
Figura 36 – Posicionamento da peça para determinação dos valores máximos .................................... 38
Figura 37 – Valores determinados após a calibragem ........................................................................... 39
Figura 38 – Valores de X central, mínimo e máximo das peças ........................................................... 39
Figura 39 – Parâmetros obtidos para a determinação dos valores máximos e mínimos de X ............... 40
Figura 40 – Representação de Xlim como os valores de X máximo e mínimo ...................................... 41
Figura 41 – Gráfico da função de Xlim em relação à α .......................................................................... 41
Figura 42 – Diagrama de blocos da função de Xlim ............................................................................... 42

Figura 43 – Diagrama de blocos das comparações entre os jogadores ................................................. 43
Figura 44 – Diagrama de blocos do subVI “Tabela verdade” ............................................................... 43
Figura 45 – Diagrama de blocos de algumas condições impostas na última etapa ............................... 47
Figura 46 – Área combinada das duas condições impostas .................................................................. 48
Figura 47 – Diagrama de blocos das últimas condições ....................................................................... 48
Figura 48 – Combinação das regras de comparação os valores máximos de X e Y ............................. 49
Figura 49 – Combinação de todas as condições de posição da origem e posição máxima ................... 49
Figura 50 – Condição de campo de ataque do jogador ......................................................................... 50
Figura 51 – Condição do campo de ataque do jogador junto com as outras condições ........................ 50
Figura 52 – Comparação da posição do jogador com a posição da bola ............................................... 51
Figura 53 – Todas as condições impostas nesta etapa ........................................................................... 51
Figura 54 – Tela principal para a utilização do sistema ........................................................................ 53
Figura 55 – Exemplo de lance onde o jogador não está em posição de impedimento .......................... 54
Figura 56 – Exemplo de lance onde o jogador está em posição de impedimento ................................. 55
Figura 57 – Exemplo de lance onde o jogador não está em posição de impedimento .......................... 55
Figura 58 – Exemplo de lance onde o jogador está em posição de impedimento ................................. 56
Figura 59 – Exemplo de lance onde o jogador não está em posição de impedimento .......................... 56
Figura 60 – Exemplo de lance onde o jogador está em posição de impedimento ................................. 57

LISTA DE TABELAS
Tabela 1 – Tabela verdade para seis jogadores ..................................................................................... 44
Tabela 2 – Tabela verdade para cinco jogadores .................................................................................. 45
Tabela 3 – Tabela verdade para quatro jogadores ................................................................................. 46

SUMÁRIO
1 INTRODUÇÃO ...................................................................................................................... 11
2 REVISÃO DE LITERATURA ............................................................................................... 13
2.1 Processamento de Imagem ...................................................................................................... 13
2.1.1 Seguidor de Fronteira (contorno) ................................................................................... 14
2.1.2 Códigos de Cadeia ............................................................................................................ 15
2.1.3 Aproxmações Poligonais .................................................................................................. 15
2.1.4 Distância X Ângulo .......................................................................................................... 16
2.2 Software .................................................................................................................................... 16
2.2.1 NI LabVIEW .................................................................................................................... 17
2.2.2 NI Vision Assistant ........................................................................................................... 17
2.3 Outras Aplicações para a Ferramenta de Identificação de Padrões ................................... 18
2.4 Regras do Impedimento ........................................................................................................... 20
2.5 Tecnologias no Esporte ............................................................................................................ 20
2.5.1 Tênis .................................................................................................................................. 20
2.5.2 Baseball ............................................................................................................................. 21
2.5.3 Futebol .............................................................................................................................. 22
3 METODOLOGIA ............................................................................................................................ 24
3.1 Materiais Utilizados ................................................................................................................. 24
3.2 Métodos e Procedimentos ........................................................................................................ 24
3.2.1 Parte Computacional ....................................................................................................... 27
3.2.1.1 Aquisição de imagem ............................................................................................... 27
3.2.1.2 Processamento de imagem ...................................................................................... 28
3.2.1.3 Calibragem do sistema e determinação de parâmetros ........................................ 35
3.2.1.4 Determinações dos valores mínimo e máximo de X .............................................. 39
3.2.1.5 Comparação da peça monitorada com as peças do time adversário ................... 42
3.2.1.6 Demais condições para a verificação da condição de impedimento .................... 47
3.2.2 Parte Física ....................................................................................................................... 52
4 RESULTADOS E DISCUSSÕES ................................................................................................... 53
4.1 Tela Principal ........................................................................................................................... 53
4.2 Simulação .................................................................................................................................. 54
4.3 Considerações Gerais ............................................................................................................... 57
5 CONCLUSÕES ................................................................................................................................ 59

11
1 INTRODUÇÃO
A inserção da tecnologia nos esportes é um fato cada vez mais discutido e aclamado nos
dias de hoje devido à evolução da tecnologia que ocorre ao longo dos anos e a presença cada
vez mais intensa dessa tecnologia, que atualmente é utilizada para qualquer tipo de atividade,
desde uma comunicação com o outro lado do mundo instantaneamente, uma posição global
com uma precisão desejável, ou com atividades mais simples, por exemplo, fechar um portão.
Esta presença mais intensa se deve ao fato de que geralmente estas ferramentas são utilizadas
para facilitar ou simplificar uma ação ou processo, e também pelo custo que diminui com o
desenvolvimento da tecnologia, se tornando mais acessível e consequentemente mais
presente. Com o crescimento da cobertura pelas emissoras de televisão nos eventos esportivos
(fato que também é decorrente do desenvolvimento da tecnologia), são utilizadas mais
câmeras e recursos, mostrando para os telespectadores os mínimos detalhes que não eram
notados no passado.
Nos últimos anos, estão cada vez mais presentes os recursos eletrônicos utilizados pela
equipe de arbitragem no auxílio das tomadas de decisões que surgem durante os jogos. Os
primeiros equipamentos que apareceram foram os sensores que os juízes auxiliares acionavam
quando detectavam alguma infração, na maioria dos casos impedimentos. Quando era
observada a ocorrência, o auxiliar apertava um botão, e era enviado um sinal para o juiz
principal saber que ocorreu uma infração de forma mais rápida.
Anos depois esta ferramenta foi substituída pelos comunicadores, no qual permitiu a
comunicação entre o juiz, auxiliares e quarto árbitro durante toda a partida, o que melhorou a
comunicação e proporcionou uma decisão conjunta de forma mais rápida.
Outro grande passo da tecnologia no futebol foi a utilização da tecnologia de validação
de gol, onde é possível afirmar com uma precisão extremamente alta se a bola entrou
totalmente no gol ou não, através de processamento de imagens.
Por fim, mais recentemente, e ainda de forma indefinida, são utilizados os árbitros de
vídeo, onde pessoas ficam fora do campo analisando os lances do jogo por diversos ângulos e,
quando solicitados, comunicam ao juiz principal sua avaliação em determinado lance. Esse
recurso é utilizado em lances mais críticos como pênaltis e expulsões. Ainda em fase de
testes, essa ferramenta é muito discutida, gerando inúmeras divergências de opiniões e muitas
vezes não atingem os resultados esperados.
12
O projeto deste trabalho de graduação simula um sistema capaz de analisar lances de
uma partida de futebol e verificar se determinado jogador está em posição de impedimento
(simulação realizada através de uma ferramenta de reconhecimento de padrões e uma maquete
representando a partida de futebol). A composição desta ferramenta com uma programação de
processamento de imagem mais elaborada, utilizando recursos tecnológicos mais avançados
poderia ser utilizada em conjunto com os árbitros de vídeo, especificamente para lances de
posição de impedimento, permitindo uma precisão maior do que a obtida simplesmente
observando os lances, e com uma velocidade maior, fator crucial para decisões tomadas
durante um jogo de futebol.
Este trabalho está apresentado na forma de capítulos, de forma a organizar a linha de
raciocínio no desenvolvimento do projeto de criação do “Sistema que simula a aplicação da
regra do impedimento através de reconhecimento de padrões”. No primeiro capítulo está uma
revisão bibliográfica para contextualizar o leitor quanto à ferramenta utilizada e ao material
utilizado como base, além da tecnologia empregada no sistema. No segundo capítulo é
apresentada a metodologia utilizada, isto é, materiais utilizados e procedimentos realizados.
No terceiro, os resultados obtidos são mostrados e interpretados de forma a levantar uma
discussão e reflexão sobre o tema. E por fim, no último capítulo, estão as conclusões
levantadas em relação ao projeto realizado.

13
2 REVISÃO DE LITERATURA
2.1 Processamento de Imagem
A parte do projeto que utilizou processamento de imagens é fundamentada na teoria de
reconhecimento de padrões. De acordo com Gonzalez e Woods (2008), para que uma imagem
possa ser processada para reconhecer padrões, a mesma deve ser convertida para escala de
cinza, mais conhecida como preto e branco. Isso se faz necessário, pois a imagem se torna
simplificada do ponto de vista do processamento, cada pixel possui uma intensidade que varia
de 255 (branco) até 0 (preto), com diferentes tons de cinza representados pelos valores
intermediários (figura 1).
Figura 1 – Exemplo de uma imagem em escala de cinza
Fonte: Reconhecimento de padrões (RODRIGUES, 2011)
Foi possível determinar um valor de intensidade específico para que seja um limiar, ou
seja, um valor onde todos os pixels com intensidade maior que este valor determinado sejam
representados pela cor branca, e todos os pixels de intensidade menor sejam representados
pela cor preta. Após este procedimento a imagem se torna binária, apenas com pixels de
intensidade 0 ou 1.
14
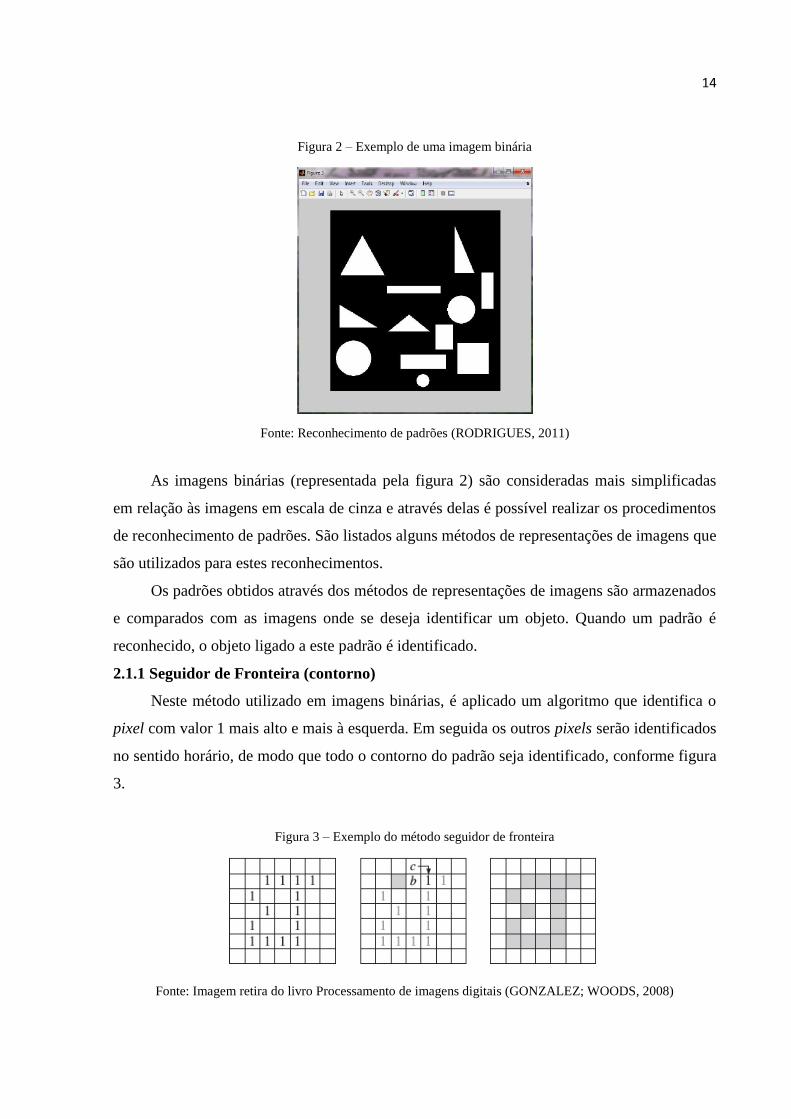
Figura 2 – Exemplo de uma imagem binária
Fonte: Reconhecimento de padrões (RODRIGUES, 2011)
As imagens binárias (representada pela figura 2) são consideradas mais simplificadas
em relação às imagens em escala de cinza e através delas é possível realizar os procedimentos
de reconhecimento de padrões. São listados alguns métodos de representações de imagens que
são utilizados para estes reconhecimentos.
Os padrões obtidos através dos métodos de representações de imagens são armazenados
e comparados com as imagens onde se deseja identificar um objeto. Quando um padrão é
reconhecido, o objeto ligado a este padrão é identificado.
2.1.1 Seguidor de Fronteira (contorno)
Neste método utilizado em imagens binárias, é aplicado um algoritmo que identifica o
pixel com valor 1 mais alto e mais à esquerda. Em seguida os outros pixels serão identificados
no sentido horário, de modo que todo o contorno do padrão seja identificado, conforme figura
3.
Figura 3 – Exemplo do método seguidor de fronteira
Fonte: Imagem retira do livro Processamento de imagens digitais (GONZALEZ; WOODS, 2008)

15
2.1.2 Códigos de Cadeia
Os códigos de cadeia representam uma fronteira por uma sequencia de números que
indicam a direção dos segmentos. Este código segue uma norma diferente para diferentes
quantidades de direções, apresentadas na figura 4.
Figura 4 – Especificação dos valores para cada direção
Fonte: Imagem retira do livro Processamento de imagens digitais (GONZALEZ; WOODS, 2008)
Utilizando a norma de oito direções, é apresentado na figura 5 um exemplo onde uma
fronteira é representada na forma de códigos de cadeia.
Figura 5 – Exemplo de representação em códigos de cadeia
Fonte: Imagem retira do livro Processamento de imagens digitais (GONZALEZ; WOODS, 2008)
Para o exemplo da figura 5, o código de cadeia é representado por: 0 7 6 6 6 6 6 4 5 3 3
2 1 2 1 2, sendo iniciado na parte de cima da imagem.
2.1.3 Aproximações Poligonais
Outro método utilizado para identificar padrões em imagens é a aproximação poligonal.
A imagem binária é convertida para um polígono de perímetro mínimo, ligando os pontos dos
vértices internos e externos observados na imagem. Este procedimento está apresentado na
figura 6.

16
Figura 6 – Exemplo de representação por aproximação poliginal
Fonte: Imagem retira do livro Processamento de imagens digitais (GONZALEZ; WOODS, 2008)
2.1.4 Distância X Ângulo
Este método consiste na associação da distância do centro da imagem até o contorno
com o ângulo desta distância (é percorrido um ciclo completo). Dois exemplos deste método
são apresentados na figura 7.
Figura 7 – Exemplo de representação por distância X ângulo
Fonte: Imagem retira do livro Processamento de imagens digitais (GONZALEZ; WOODS, 2008)
A associação resulta na função da distância em relação ao ângulo, onde foi observada na
figura 7 uma função contínua para o primeiro caso, onde a distância é a mesma para todo o
ciclo (sempre será o valor do raio da circunferência) e oscila para o segundo caso (variando
entre a distância até o lado do quadrado e até a diagonal do quadrado).
2.2 Software
Para a realização deste projeto, foi utilizado o software da National Instruments
LabVIEW, juntamente com sua extensão Vision Assistant.

17
2.2.1 NI LabVIEW
No site oficial da National Instruments (National Instruments, 2017), o software tem a
seguinte definição: “O LabVIEW é um software de engenharia de sistemas criado
especificamente para aplicações que envolvam teste, medição e controle, com rápido acesso
ao hardware e a informações obtidas a partir dos dados”. Em outras palavras, o LabVIEW é
um software muito amplo, que permite realizar qualquer tarefa que envolva principalmente
monitoramento e automação de processos de maneira prática, com uma programação muito
intuitiva e de alto desempenho.
2.2.2 NI Vision Assistant
Há duas maneiras de utilizar a extensão Vision Assistant dentro do LabVIEW, uma
delas é utilizando os blocos prontos de aquisição e processamento de imagem, mostrados na
figura 8, e a outra maneira seria utilizando os blocos disponibilizados na biblioteca para
programação dentro do LabVIEW, opção que foi utilizada neste projeto.
Figura 8 – Exemplo dos blocos fechados de aquisição de processamento de imagem
Fonte: Estudo de caso do site National Instruments (LEONG, 2017)
No exemplo da figura 8, a programação é muito mais intuitiva, por ter uma interface
adaptada ao processamento de imagem, mostrada no Anexo A deste relatório.
Na interface apresentada no Anexo A é possível verificar os aspectos da programação
dentro do bloco Vision Assistant. No canto superior esquerdo se encontra a imagem captada

18
pela câmera, sem nenhum procedimento realizado sobre ela. Na lista à esquerda são
encontradas as ferramentas de processamento de imagem disponíveis, como identificação,
monitoramento e contagem de padrões, cores, formas geométricas, colocação de filtros na
imagem captada, como preto e branco, ajuste de brilho, contraste, medições de distâncias,
entre muitos outros. Na parte inferior da tela está a programação realizada no processamento,
observando o primeiro bloco, que representa a imagem captada, com a linha saindo deste
bloco representando o sinal da imagem, onde passará por outros blocos, ou seja, sofrera
procedimentos de acordo com os blocos seguintes. Estão presentes dois blocos “Pattern
Matching”, onde é identificado um padrão (uma determinada área da imagem total) e este
padrão é procurado por toda a imagem, encontrando padrões repetidos dentro da mesma.
Também se encontram um bloco ”Edge Detector” que detecta determinada forma geométrica,
e dois blocos “Caliper”, que são utilizados para medições. Enfim, na tela principal, é
mostrada a imagem após o processamento. Antes de concluir a programação nesta interface, é
possível determinar quais dados serão extraídos deste bloco para outras manipulações (dados
referentes ao processamento de imagem que são necessários fora do bloco).
2.3 Outras Aplicações para a Ferramenta de Identificação de Padrões
A parte do projeto referente ao processamento de imagem, o reconhecimento de
padrões previamente identificados, é uma ferramenta que pode ser utilizada em outras
aplicações e executar tarefas em diversos campos onde a tecnologia pode proporcionar uma
melhoria a um determinado processo. Um exemplo da utilização desta ferramenta em outras
aplicações é a contagem de glóbulos vermelhos em uma amostra de sangue. Através da
imagem microscópica do sangue, a imagem do glóbulo vermelho foi identificada, e com o
reconhecimento do padrão desta imagem, é possível determinar a quantidade presente na
amostra, sendo somada em uma contagem para cada padrão reconhecido. Este exemplo pode
ser observado na figura 9.

19
Figura 9 – Exemplo da utilização da ferramenta de reconhecimento de padrões na contagem de glóbulos
vermelhos no sangue
Fonte: Informativo do site ATAPY (ATAPY, 2015)
Outro exemplo de aplicação onde a identificação de imagens pode ser utilizada é em
uma ferramenta que auxilia no monitoramento de plantações em fazendas. Com as imagens
captadas de cima das plantações, e com o padrão pré-identificado do vegetal maduro (ou
qualquer plantação que está sendo produzida), é possível monitorar o amadurecimento da
plantação, podendo identificar o momento em que a colheita deve ser realizada. Além da
previsão da colheita, também pode ser realizada a contagem da quantidade que será colhida.
Este exemplo é mostrado na figura 10.
Figura 10– Exemplo da utilização da ferramenta de reconhecimento de padrões na contagem da plantação em
uma fazenda
Fonte: Informativo do site HARRISGEOSPATIAL (HARRISGEOSPATIAL, 2017)

20
2.4 Regras do Impedimento
As regras do impedimento, retiradas do Livro de Regras de futebol 2017/2018
(CONFEDERAÇÃO BRASILEIRA DE FUTEBOL, 2017), presentes no Anexo B deste
relatório, foram levadas em consideração para a realização da programação referente à
aplicação das regras.
2.5 Tecnologias no Esporte
Alguns esportes já utilizam a tecnologia envolvendo imagens a favor da equipe de
arbitragem, com ferramentas mais complexas além de simplesmente observar os lances e
tentar enxergar algo que não foi possível no momento do ocorrido, o que contribui para uma
decisão mais correta perante as regras do esporte, e consequentemente a resultados mais
justos. Nesta seção serão demonstrados alguns exemplos dessas ferramentas.
2.5.1 Tênis
No tênis é utilizada uma ferramenta chamada “Hawk-eye” e é um dos recursos
tecnológicos de esportes mais conhecidos, por ser utilizado oficialmente há bastante tempo
comparado aos outros recursos deste tipo e pelo fato de ser solicitado com bastante frequência
pelos jogadores nas partidas de tênis, através do pedido conhecido no Brasil como “desafio”.
Esta ferramenta é capaz de rastrear a trajetória da bola, exibindo um registro estatisticamente
provável através de imagens captadas.
Este sistema é composto de dez câmeras de alto desempenho e sensores de monitoração
da bola, que rastreiam o movimento da bola de diferentes ângulos pela quadra de tênis. A
combinação das imagens captadas pelas diferentes câmeras é processada rapidamente,
realizando uma triangulação da trajetória da bola, assim criando uma representação
tridimensional da mesma, sendo possível estimar sua trajetória. O resultado desta ferramenta
pode ser observado na figura 11.
Figura 11 – Trajetória da bola de tênis realizada pelo “Hawk-eye”
Fonte: Notícia do site IQ-INTEL (IQ-INTEL, 2017)
21
A ferramenta é utilizada quando solicitada por um jogador para determinar se a bola
pingou dentro ou fora da área demarcada pelas linhas da quadra. Está presente em todas as
competições do circuito internacional de tênis, que é realizado pela principal associação de
tenistas no mundo.
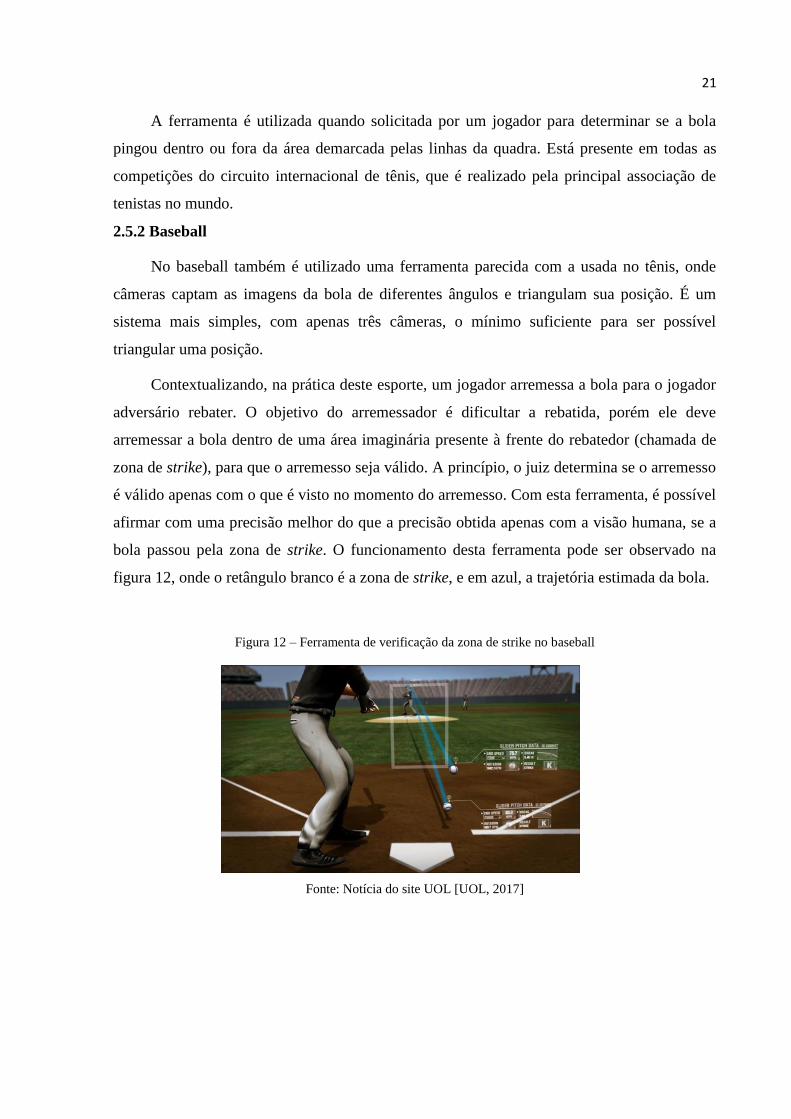
2.5.2 Baseball
No baseball também é utilizado uma ferramenta parecida com a usada no tênis, onde
câmeras captam as imagens da bola de diferentes ângulos e triangulam sua posição. É um
sistema mais simples, com apenas três câmeras, o mínimo suficiente para ser possível
triangular uma posição.
Contextualizando, na prática deste esporte, um jogador arremessa a bola para o jogador
adversário rebater. O objetivo do arremessador é dificultar a rebatida, porém ele deve
arremessar a bola dentro de uma área imaginária presente à frente do rebatedor (chamada de
zona de strike), para que o arremesso seja válido. A princípio, o juiz determina se o arremesso
é válido apenas com o que é visto no momento do arremesso. Com esta ferramenta, é possível
afirmar com uma precisão melhor do que a precisão obtida apenas com a visão humana, se a
bola passou pela zona de strike. O funcionamento desta ferramenta pode ser observado na
figura 12, onde o retângulo branco é a zona de strike, e em azul, a trajetória estimada da bola.
Figura 12 – Ferramenta de verificação da zona de strike no baseball
Fonte: Notícia do site UOL [UOL, 2017]

22
2.5.3 Futebol
No futebol, já foi utilizado uma ferramenta para confirmar se a bola entrou no gol em
sua totalidade, para assim validar de maneira correta pela equipe de arbitragem se de fato foi
gol. Este sistema também é composto por um conjunto de câmeras (sete para cada gol), e
utilizando da mesma teoria dos outros recursos já citados. Um sinal é enviado para o juiz,
quando a bola passa totalmente da linha do gol. A imagem mostrada na figura 13 é utilizada
para confirmar a decisão do árbitro, porém não se faz necessária a verificação, uma vez que o
sinal enviado é proveniente destas imagens, o que permite uma decisão mais rápida do juiz.
Figura 13 – Tecnologia da linha de gol no futebol
Fonte: Notícia do site Techtudo [TECHTUDO, 2017]
É possível observar que todas as ferramentas que auxiliam diretamente ou indiretamente
na decisão da arbitragem no esporte tem algo em comum: a utilização de imagens. Partindo
deste princípio, o projeto proposto tomará como base para o seu desenvolvimento a utilização
e processamento de imagens.
Atualmente, não existe nenhum pronunciamento oficial das entidades que comandam o
futebol no mundo sobre a utilização da tecnologia para uma ferramenta de auxílio à equipe de
arbitragem específica para as marcações de impedimentos em partidas de futebol, assunto
tratado neste projeto. Recentemente vem sendo utilizado o “árbitro de vídeo”, que é a
utilização de imagens de replays de lances em geral para caso surgir alguma dúvida em
alguma jogada, os árbitros terem a oportunidade de ver novamente o lance para ter uma
conclusão mais precisa. Essas ferramentas de replay são apenas reproduções de vídeo dos
lances que ocorrem no jogo, diferente da ferramenta que é proposta neste projeto, onde se
utilizará as imagens de uma partida de futebol, e haverá um tratamento dessas imagens para

23
que se obtenham outras variáveis de interesse da aplicação (posições), e, com isso, criar um
sistema que possa indicar com maior precisão a posição de cada jogador no campo, afirmando
se um jogador está em posição de impedimento, de forma instantânea, para a rápida decisão
da arbitragem.
Concluindo, não existem estudos ou desenvolvimentos de projetos oficiais autenticados
pelas federações de futebol que foquem em ferramentas mais precisas (não somente da
utilização de imagens) especificamente para lances de impedimento.

24
3 METODOLOGIA
Este trabalho descreveu o desenvolvimento de um protótipo de um sistema capaz de
verificar em uma maquete representando jogo de futebol, se algum jogador está em posição de
impedimento, através de reconhecimento de padrões.
3.1 Materiais Utilizados
O protótipo do projeto e material para a maquete contou com os seguintes componentes:
1 computador;
1 câmera (foi utilizada a webcam do computador);
1 painel magnético;
1 folha representando o campo de futebol;
12 imãs quadrados representando os jogadores;
1 imã redondo representando a bola;
Software NI LabVIEW 2015;
Software NI Vision Assistant;
Driver NI-IMAQdx.
3.2 Métodos e Procedimentos
Para a simulação foi determinado que cada time é composto por seis jogadores e a
quantidade mínima de quatro jogadores. O painel de LEDs não irá funcionar para número de
jogadores menor do que quatro. Também é necessário explicitar que somente o painel de
LEDs não é suficiente para afirmar se um jogador está em posição de impedimento ou não, a
análise das imagens se faz necessária para observar o momento exato em que ocorre o passe
(momento em que as posições dos jogadores devem ser verificadas), assim, somente quando
este momento estiver congelado na tela, deve-se verificar o painel de LEDs. Para melhor
entendimento deste projeto, é preferível associar as imagens enviadas ao software como um
replay de um lance que pode ser manipulado (com a possibilidade de adiantar, atrasar e
pausar), pois com as ferramentas disponíveis nos replays é possível evidenciar o momento
exato em que ocorre o passe, crucial para a eficiência do programa. Esses aspectos do replay
são mais próximos às propriedades das imagens obtidas no projeto, pois para a simulação as
peças serão manipuladas pelo próprio usuário, sendo assim possível “escolher” o lance a ser
analisado, como ocorre ao manipular o replay.
Primeiramente, com a maquete disposta do campo de futebol e das peças que
representam os jogadores e a bola, a câmera foi posicionada de modo que seja capaz de

25
capturar imagens do campo inteiro, visto de cima, de maneira que seja possível criar uma
visão do campo em duas dimensões, conforme a figura 14.
Figura 14 – Maquete do sistema
Fonte: Acervo pessoal
Com a câmera posicionada, foi realizada a programação no LabVIEW para a aquisição
e processamento das imagens e obtenção das posições das peças na maquete. Foi proposta a
utilização do software Vision Assistant (extensão do LabVIEW) para a aquisição e
processamento das imagens, porém, com o desenvolvimento do projeto, o procedimento foi
alterado e foram utilizados os blocos disponibilizados por essa extensão dentro do LabVIEW
ao invés de utilizar o Vision Assistant de forma separada.
Com as imagens sendo transmitidas da câmera para o LabVIEW, foi realizada a
programação relacionada ao reconhecimento de padrões, onde serão detectadas as peças que
representam os jogadores e a bola, uma vez essas peças detectadas, serão obtidas as posições
de cada uma dessas peças em relação ao campo, em um formato semelhante a um plano
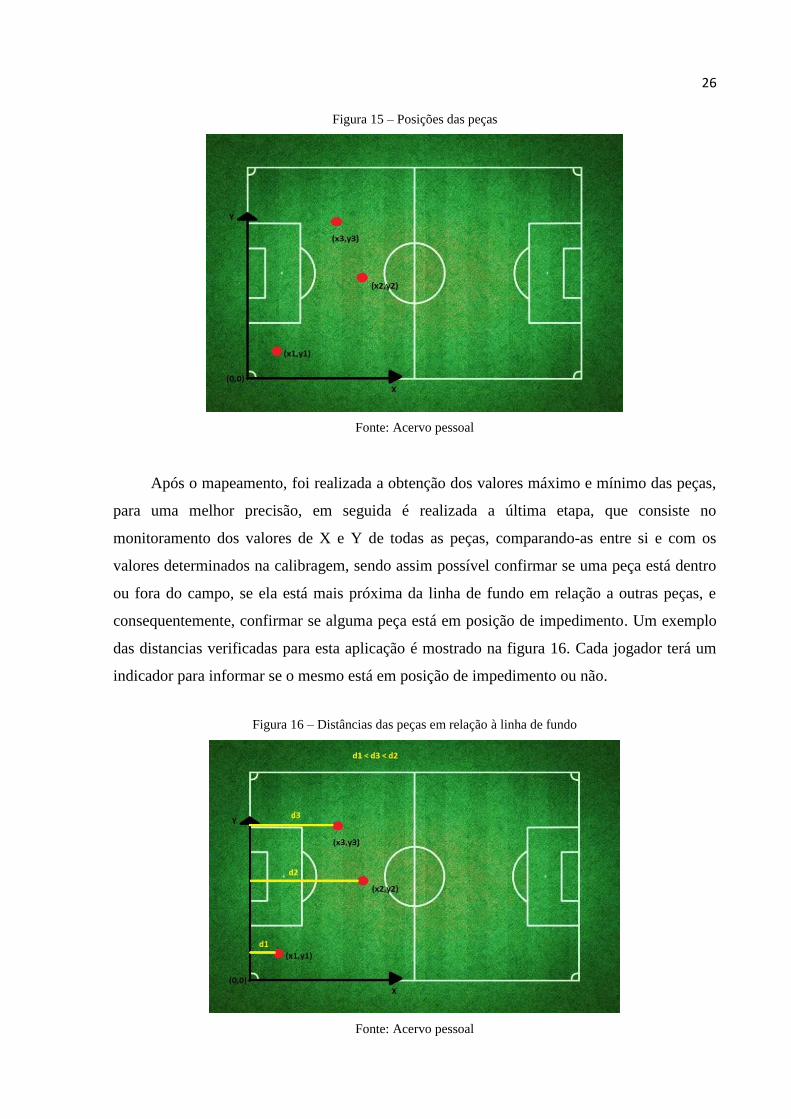
cartesiano, conforme a figura 15. Como a imagem foi captada constantemente, essas posições
irão se alterar conforme as peças se movimentarem no campo.
Com as posições obtidas, prosseguiu-se para a próxima etapa, a calibragem do sistema,
e com isso, a determinação de parâmetros. Nesta etapa foi realizado o mapeamento de toda a
área em que o campo preenche, definindo os valores de X0 e Y0 da origem e Xmáx e Ymáx do
canto oposto do campo em relação à origem.
26
Figura 15 – Posições das peças
Fonte: Acervo pessoal
Após o mapeamento, foi realizada a obtenção dos valores máximo e mínimo das peças,
para uma melhor precisão, em seguida é realizada a última etapa, que consiste no
monitoramento dos valores de X e Y de todas as peças, comparando-as entre si e com os
valores determinados na calibragem, sendo assim possível confirmar se uma peça está dentro
ou fora do campo, se ela está mais próxima da linha de fundo em relação a outras peças, e
consequentemente, confirmar se alguma peça está em posição de impedimento. Um exemplo
das distancias verificadas para esta aplicação é mostrado na figura 16. Cada jogador terá um
indicador para informar se o mesmo está em posição de impedimento ou não.
Figura 16 – Distâncias das peças em relação à linha de fundo
Fonte: Acervo pessoal
27
3.2.1 Parte Computacional
3.2.1.1 Aquisição de imagem
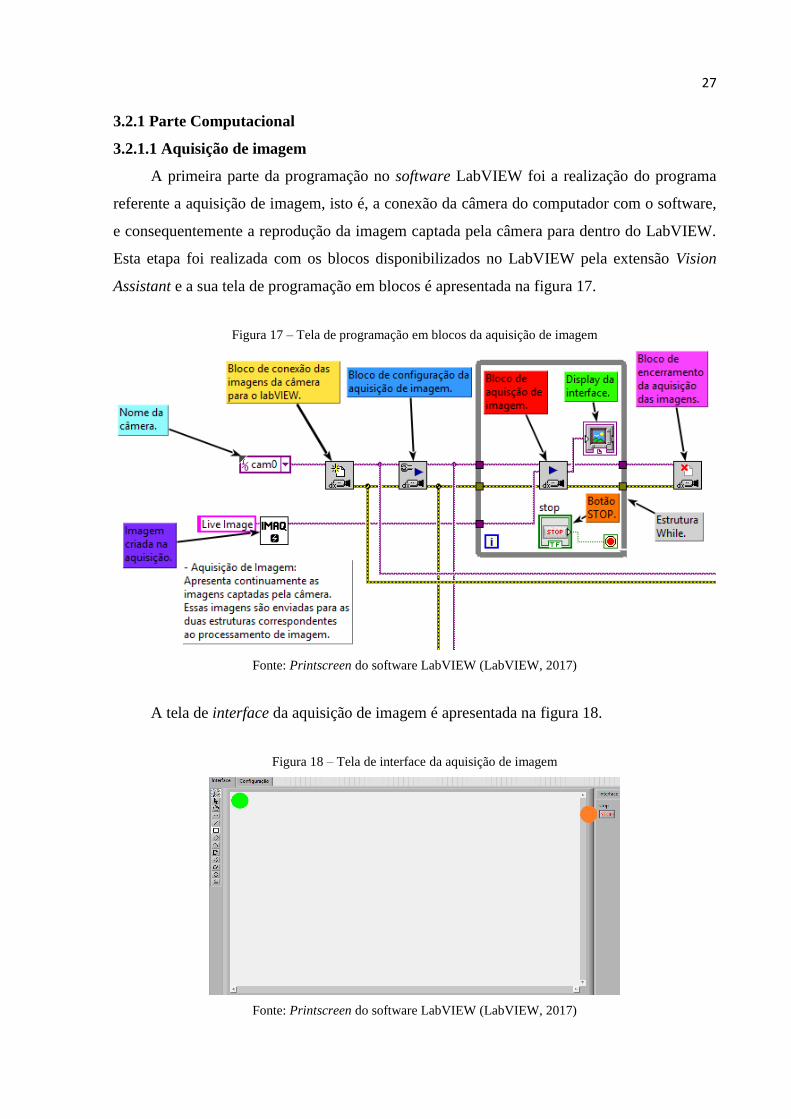
A primeira parte da programação no software LabVIEW foi a realização do programa
referente a aquisição de imagem, isto é, a conexão da câmera do computador com o software,
e consequentemente a reprodução da imagem captada pela câmera para dentro do LabVIEW.
Esta etapa foi realizada com os blocos disponibilizados no LabVIEW pela extensão Vision
Assistant e a sua tela de programação em blocos é apresentada na figura 17.
Figura 17 – Tela de programação em blocos da aquisição de imagem
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
A tela de interface da aquisição de imagem é apresentada na figura 18.
Figura 18 – Tela de interface da aquisição de imagem
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

28
Na figura 17 são mostrados todos os blocos necessários para a aquisição de imagem,
juntamente com suas descrições. São apresentados os blocos que representam a câmera, os
blocos de configuração da aquisição, bloco do display (com a descrição em verde e destacado
em verde na figura 18), bloco do botão STOP (destacado em laranja na figura 18), e os dois
pares de fios que enviam o sinal desta imagem para as próximas etapas. Além desses blocos,
também está presente uma estrutura “While” que se faz necessária para a realização da
captação desta imagem constantemente, em tempo real.
Essas imagens captadas são enviadas para a próxima etapa da programação, o
processamento das imagens.
3.2.1.2 Processamento de imagem
Nesta etapa, o mesmo procedimento foi feito para a quantidade de peças que foram
determinadas na simulação para representar os jogadores e a bola, no caso, a programação foi
realizada 13 vezes (seis para cada time, e um para a bola). Esta etapa consiste basicamente em
identificar cada jogador, através da seleção de uma parte específica da imagem apresentada
(deve ser selecionada a parte da imagem da peça do jogador ou da bola), essa imagem
selecionada é chamada de “template”.
Primeiramente, a imagem captada pela câmera é convertida em preto e branco e enviada
para outro display, onde foi realizada a identificação dos “templates”. Esta etapa se faz
necessária, pois o método de processamento de imagem utilizado só é possível em imagens
em preto e branco. Este novo display onde ocorrerá o processamento de imagem é mostrado
na figura 19.
Figura 19 – Display do processamento de imagem
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

29
O diagrama de blocos que realiza esta etapa é apresentado na figura 20, juntamente com
os comentários descrevendo as funções dos blocos.
Figura 20 – Diagrama de blocos do display preto e branco
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Os dois fios amarelo e roxo que surgem no topo da imagem representam o sinal
proveniente da etapa de aquisição de imagem. Estes fios entram na estrutura “While” para que
o processo se realize constantemente, em seguida, entram no bloco de aquisição de imagem,
passam pelo bloco que converte a imagem colorida para preto e branco, finalmente, os fios
seguem para as duas estruturas que realizam os outros passos do processamento de imagem,
pela direita e pela parte de baixo da imagem. Esta imagem também é enviada para um bloco
de display, como já foi mostrado na figura 19.
Para a escolha do “template”, foi criada uma tela para cada peça do jogo onde existem
três botões, um para captar a imagem onde será escolhido o “template” (botão “Campo”),
outro para definir o “template”, após a seleção na imagem captada com o botão anterior
(botão “Template”), e o último botão é referente ao monitoramento (botão “Monitorar”),
onde, quando acionado, o programa irá procurar o padrão do “template” definido na imagem
de processamento de imagem (preto e branco). Esta tela é apresentada na figura 21.

30
Figura 21 – Interface da configuração do “template”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
O procedimento é dividido em duas partes, que recebem as imagens que foram
enviadas conforme mostrado na figura 20. Uma delas é responsável pelas etapas referentes
aos botões “Campo” e “Template”, e a outra responsável pela etapa referente ao botão
“Monitorar” que executa o reconhecimento dos padrões. A primeira parte consiste em uma
estrutura “Event” (estrutura dependente de um evento, no caso, um botão acionado) dentro de
uma estrutura “While”, para atuação constante. Esta estrutura “Event” possui um estado
inicial, onde não é realizado nenhum procedimento enquanto nenhum botão for acionado. A
primeira parte com o estado inicial é apresentada na figura 22.
Figura 22 – Diagrama de blocos do estado inicial da primeira parte
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

31
Essa estrutura permanece neste estado até que ocorra o acionamento do botão “Campo”.
No momento em que o usuário acionar o botão “Campo”, a estrutura “Event” se altera para
outra programação, realizando outras ações, conforme a figura 23.
Figura 23 – Diagrama de blocos do evento referente ao botão “Campo”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Na figura 23 é mostrada a programação referente ao acionamento do botão “Campo”,
com comentários descritivos de cada bloco. Nesta etapa, é possível observar a entrada do sinal
da imagem proveniente da etapa anterior, primeiramente na estrutura “While” e em seguida na
estrutura “Event”. O sinal entra no bloco destacado em amarelo e este bloco grava a imagem
no momento em que o botão é acionado, a imagem é enviada a outro display, presente na tela
de cada peça. A interface desta etapa realizada é mostrada na figura 24.
Figura 24 – Interface após o acionamento do botão “Campo”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

32
Com a imagem devidamente gravada pelo botão “Campo”, o próximo passo é
selecionar o “template”. Para isso, deve ser utilizado o cursor do computador para selecionar a
área desejada dentro desta imagem. Ao selecionar uma área, a mesma será contornada com
uma linha verde, conforme a figura 25. Esta área é chamada pelo software de “Region of
Interest” (ROI), ou em português, “Região de Interesse”.
Figura 25 – “Região de Interesse” destacada
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Realizando a seleção da peça o usuário deve acionar o botão “Template”, para gravar a
“Região de Interesse” selecionada. Ao acionar o botão, o diagrama de blocos da estrutura
“Event” se altera novamente para outra programação, mostrada na figura 26.
Figura 26 – Diagrama de blocos do evento referente ao botão “Template”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

33
Esta etapa gravou somente a imagem selecionada na “Região de Interesse”, em seguida
irá converter para preto e branco, pois ela foi utilizada juntamente com a imagem do
processamento de imagem, que também está em preto e branco. A imagem selecionada será
mostrada no outro display presente na interface de cada peça. A interface desta etapa é
mostrada na figura 27.
Figura 27 – Interface após o acionamento do botão “Template”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
A imagem do “template” selecionado foi enviada para a outra parte do processamento
de imagem, a parte referente ao botão “Monitorar”. A princípio, da mesma maneira da
primeira parte, quando o botão ainda não foi acionado, a estrutura “Case” tem seu estado
“False” como inicial. Na figura 28 é mostrada a programação em diagrama de blocos deste
estado inicial, juntamente com os comentários.
Figura 28 – Diagrama de blocos do estado inicial da segunda parte
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

34
Esta parte é composta de uma estrutura “While” (mesma estrutura para todas as peças),
que não aparece na imagem, e dentro dela há uma estrutura “Case”, controlado pelo botão
“Monitorar”. Neste estado a estrutura não realiza nenhum processo, somente é indicado valor
zero aos dados de saída. Ao acionar o botão “Monitorar”, esta estrutura se altera para uma
programação diferente, conforme a figura 29.
Figura 29 – Diagrama de blocos referente ao botão “Monitorar”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Com o botão “Monitorar” acionado, o sistema estará monitorando a posição da peça
selecionada. Na estrutura, os valores de entrada são dados de configuração de processamento
de imagem presente nas telas dos “templates”, a imagem em preto e branco do campo e o
“template”. A programação busca, na imagem em preto e branco, padrões próximos ao
“template”. Ao encontrar o mais próximo (justamente onde a peça se encontra), irá monitorar
este padrão e apresentar informações necessárias para as próximas etapas do sistema, como
valores de X e Y em relação ao campo e ângulo em relação ao “template”. As informações
obtidas pelo monitoramento são mostradas na figura 30.

35
Figura 30 – Informações obtidas a partir do monitoramento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
O padrão monitorado é destacado em vermelho na tela em preto e branco, para melhor
observação do monitoramento. Isso pode ser observado na figura 31.
Figura 31 – Interface após o monitoramento da peça
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Além dos botões citados, também há o botão “STOP” para cada “template”, onde
devem ser acionados caso o usuário deseja encerrar o programa. Com esta configuração
prévia realizada, o sistema foi capaz de monitorar todas as peças do campo.
3.2.1.3 Calibragem do sistema e determinação de parâmetros
Nesta fase da programação, com os valores de posição X e Y obtidos para cada peça
através do processamento de imagem, foi realizada a calibragem do sistema, processo que
deve ser realizado pelo usuário antes do monitoramento final dos jogadores. Esta etapa se faz
necessária pelo fato de que as imagens captadas não possuem a origem em um ponto fixo. Foi
verificado nas imagens obtidas que os valores do eixo X aumentam da esquerda para a direita

36
na direção horizontal, e os valores do eixo Y aumentam de cima para baixo, na direção
vertical, conforme a figura 32.
Figura 32 – Direção e sentido dos valores de X e Y
Fonte: Acervo pessoal
A realização desta etapa consiste em preencher manualmente os campos “Calibragem”,
“Origem” e “Máximo”, mostradas na figura 33, presentes na aba “Sistema” da interface do
programa.
Figura 33 – Tela de interface da calibragem do sistema
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

37
Primeiramente, é necessário estar monitorando uma peça, conforme indicado na seção
de processamento de imagem, posicionando a peça no caso o canto superior esquerdo do
campo. Como os valores de X e Y obtidos são em relação ao centro da peça, a mesma deve
ser posicionada conforme a figura 34.
Figura 34 – Posicionamento da peça para determinação da origem
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
A peça em questão é a que está sendo representada pela marcação em vermelho. Assim,
deve ser observada a posição da peça, na aba do “template” utilizado neste procedimento,
conforme a figura 35.
Figura 35 – Posição da peça utilizada na calibragem
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

38
O campo “Calibrado” não estará preenchido a princípio. Os valores obtidos no campo
“Imagem” da figura 35, devem ser inseridos no campo “Calibração”, mostrado na figura 33,
(como o valor oscila bastante na medição, deve-se observar o menor valor que aparece entre
os valores apresentados). Os valores utilizados neste exemplo foram: X = 158 e Y = 27.
Assim, é possível observar na figura 35, o campo “Calibrado” preenchido com valores
próximos de zero (para o campo “Calibrado”, é realizada a subtração do valor obtido no
campo “Imagem” com os valores inseridos no campo “Calibragem”).
Desta forma, todas as posições das peças monitoradas serão medidas em relação à
origem do campo, ponto onde a peça foi posicionada.
Da mesma forma, para determinar os valores máximos de X e Y, a peça deve ser
posicionada conforme a figura 36, onde seria o limite de monitoramento. Observando os
valores encontrados no monitoramento, os mesmos devem ser inseridos no campo “Máximo”
da figura 33, da mesma maneira do procedimento anterior.
Figura 36 – Posicionamento da peça para determinação dos valores máximos
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Com estes valores devidamente preenchidos, a calibragem está concluída, e os pontos
indicados na figura 37 estão determinados, sendo assim possível realizar o monitoramento do
jogo.

39
Figura 37 – Valores determinados após a calibragem
Fonte: Acervo pessoal
Estas informações são necessárias para o monitoramento dos jogadores em relação ao
campo, e estão presentes na aba “Câmera”, dentro da aba “Configuração”, anteriormente
mostradas na figura 31.
3.2.1.4 Determinações dos valores mínimo e máximo de X
Após a calibragem do sistema, é necessário realizar a determinação do valor máximo e
mínimo do X, onde em cada caso será usado um desses valores. Conforme dito anteriormente,
o valor obtido de X é em relação ao centro do “template” identificado. Para maior precisão do
sistema, estes valores mínimo e máximo devem ser encontrados. Na figura 38 são
apresentados exemplos de posições de peças, e seus valores central, mínimo e máximo são
destacados.
Figura 38 – Valores de X central, mínimo e máximo das peças
Fonte: Acervo pessoal

40
Os valores máximos de X são utilizados para determinar a posição de impedimento no
lado direito do campo, enquanto os valores mínimos de X são utilizados para determinar a
posição de impedimento no lado esquerdo do campo de futebol. Na figura 39 são
apresentados os parâmetros utilizados na determinação destes valores.
Figura 39 – Parâmetros obtidos para a determinação dos valores máximos e mínimos de X
Fonte: Acervo pessoal
Os valores L, que indicam o lado da peça de jogador e R, raio da peça circular da bola
devem ser obtidos através de medições prévias e devem ser inseridos na tela já apresentada na
figura 33, juntamente com os valores de calibragem.
Os valores de X central, e o ângulo da peça são obtidos através do monitoramento no
“template”, conforme a figura 37, também já apresentada.
Para a peça que representa a bola, como só depende do raio, os cálculos utilizados para
a determinação dos valores mínimo e máximo são apresentados pelas equações 1 e 2.
Xmín = X – R (1)
Xmáx = X + R (2)
Para as peças que representam os jogadores, o cálculo se torna mais complexo, pois
depende também do ângulo em que a peça se encontra, sendo que para cada ângulo, terá um
valor de X mínimo e máximo diferente. Foi necessário encontrar uma equação em função do
ângulo para determinar esta variação nos valores de X mínimo e máximo. Primeiramente foi
adotado outro parâmetro, o Xlim, que representa a distância entre o X central e os valores
mínimos e máximos de X, conforme a figura 40 (foi observado que para o mesmo ângulo, a
distância entre o X e o Xmín e entre o X e o Xmáx são as mesmas).

41
Figura 40 – Representação de Xlim como os valores de X máximo e mínimo
Fonte: Acervo pessoal
Em seguida, foram determinados os valores máximos e mínimos de Xlim em função de
L, representados por “d” e “D”. Os cálculos destes valores são representados pelas equações 3
e 4.
d =
(3)
D = √
L (4)
Foi possível observar que a cada 45° que a peça gira os valores “d” e “D” se alternam.
Assim, foi encontrado o gráfico da função entre os valores de Xlim e o ângulo α, apresentado
na figura 41.
Figura 41 – Gráfico da função de Xlim em relação à α
Fonte: Acervo pessoal
[mm]
[°]
42
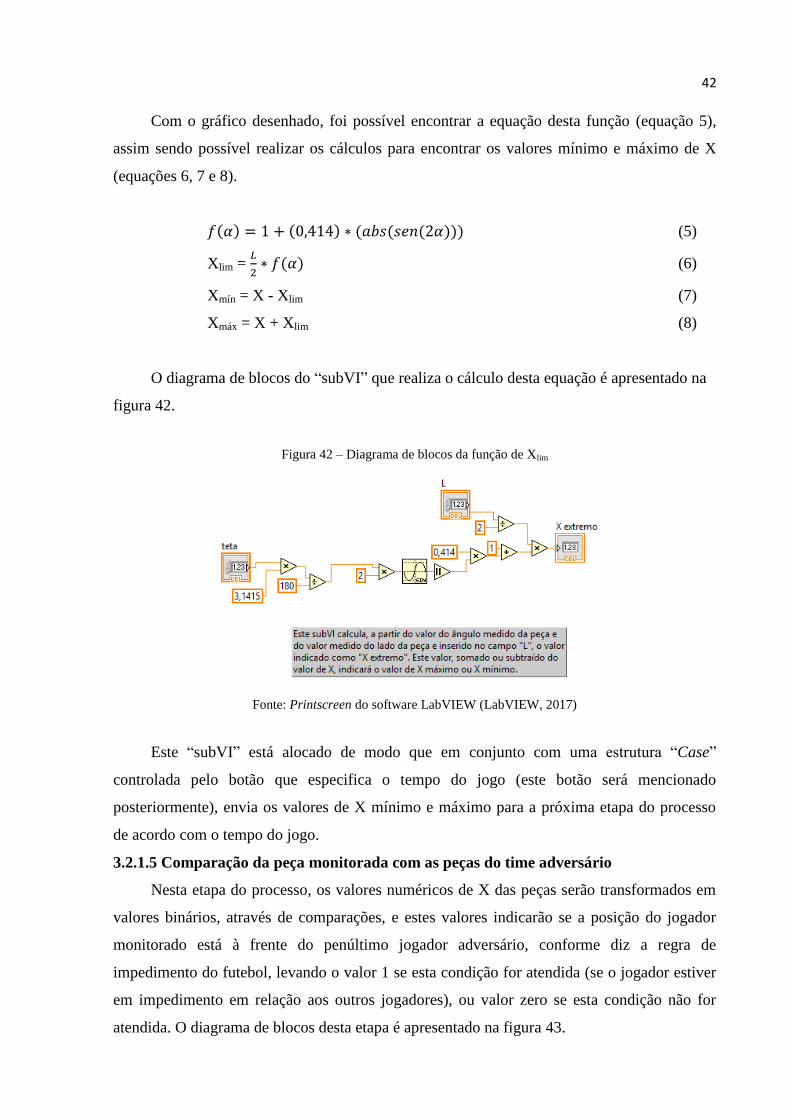
Com o gráfico desenhado, foi possível encontrar a equação desta função (equação 5),
assim sendo possível realizar os cálculos para encontrar os valores mínimo e máximo de X
(equações 6, 7 e 8).
( ) ( ) ( ( ( ))) (5)
Xlim =
( ) (6)
Xmín = X - Xlim (7)
Xmáx = X + Xlim (8)
O diagrama de blocos do “subVI” que realiza o cálculo desta equação é apresentado na
figura 42.
Figura 42 – Diagrama de blocos da função de Xlim
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Este “subVI” está alocado de modo que em conjunto com uma estrutura “Case”
controlada pelo botão que especifica o tempo do jogo (este botão será mencionado
posteriormente), envia os valores de X mínimo e máximo para a próxima etapa do processo
de acordo com o tempo do jogo.
3.2.1.5 Comparação da peça monitorada com as peças do time adversário
Nesta etapa do processo, os valores numéricos de X das peças serão transformados em
valores binários, através de comparações, e estes valores indicarão se a posição do jogador
monitorado está à frente do penúltimo jogador adversário, conforme diz a regra de
impedimento do futebol, levando o valor 1 se esta condição for atendida (se o jogador estiver
em impedimento em relação aos outros jogadores), ou valor zero se esta condição não for
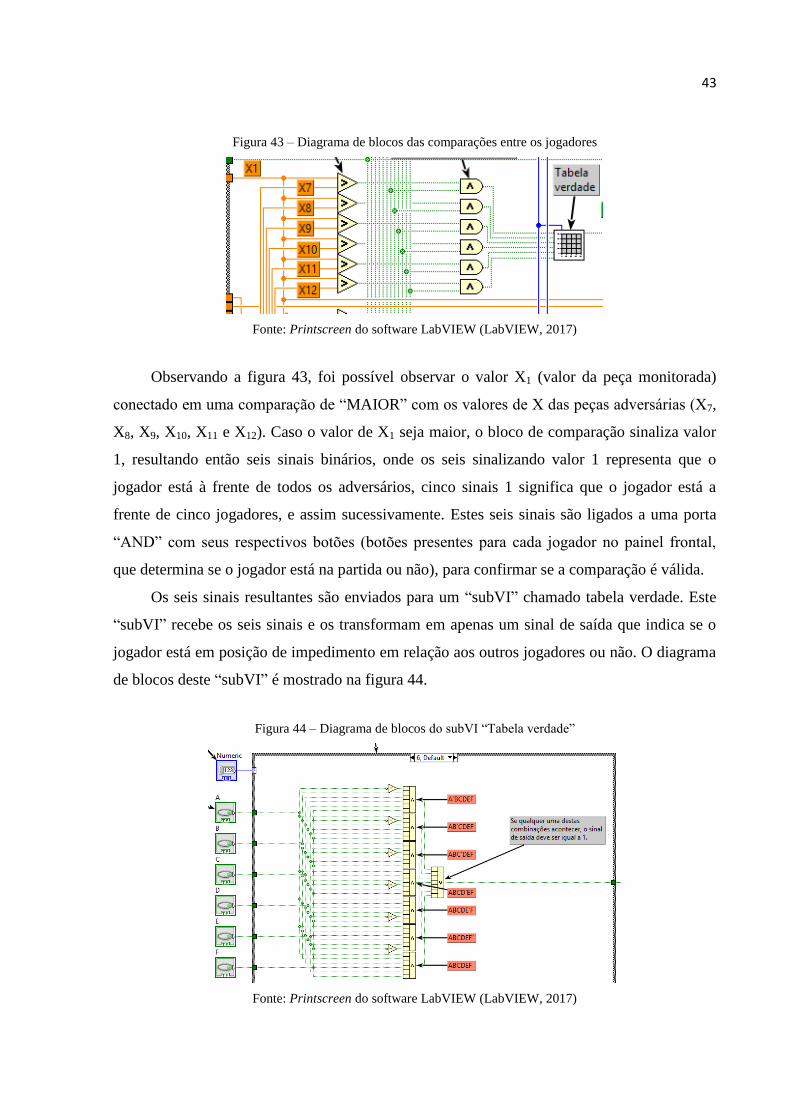
atendida. O diagrama de blocos desta etapa é apresentado na figura 43.
43
Figura 43 – Diagrama de blocos das comparações entre os jogadores
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Observando a figura 43, foi possível observar o valor X1 (valor da peça monitorada)
conectado em uma comparação de “MAIOR” com os valores de X das peças adversárias (X7,
X8, X9, X10, X11 e X12). Caso o valor de X1 seja maior, o bloco de comparação sinaliza valor
1, resultando então seis sinais binários, onde os seis sinalizando valor 1 representa que o
jogador está à frente de todos os adversários, cinco sinais 1 significa que o jogador está a
frente de cinco jogadores, e assim sucessivamente. Estes seis sinais são ligados a uma porta
“AND” com seus respectivos botões (botões presentes para cada jogador no painel frontal,
que determina se o jogador está na partida ou não), para confirmar se a comparação é válida.
Os seis sinais resultantes são enviados para um “subVI” chamado tabela verdade. Este
“subVI” recebe os seis sinais e os transformam em apenas um sinal de saída que indica se o
jogador está em posição de impedimento em relação aos outros jogadores ou não. O diagrama
de blocos deste “subVI” é mostrado na figura 44.
Figura 44 – Diagrama de blocos do subVI “Tabela verdade”
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)

44
Além dos seis sinais já mencionados, outro sinal de entrada deste “subVI” é o que
indica o número de jogadores presentes no time, fator que altera a programação deste
processo. Este indicador numérico altera a estrutura “Case” presente na figura, onde é
mostrado o caso para seis jogadores. Esta programação foi realizada se baseando na tabela
verdade construída previamente. A tabela verdade é mostrada na tabela 1.
Tabela 1 – Tabela verdade para seis jogadores
A B C D E F Saída A B C D E F Saída
0 0 0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 1 0 1 0 0 0 0 1 0
0 0 0 0 1 0 0 1 0 0 0 1 0 0
0 0 0 0 1 1 0 1 0 0 0 1 1 0
0 0 0 1 0 0 0 1 0 0 1 0 0 0
0 0 0 1 0 1 0 1 0 0 1 0 1 0
0 0 0 1 1 0 0 1 0 0 1 1 0 0
0 0 0 1 1 1 0 1 0 0 1 1 1 0
0 0 1 0 0 0 0 1 0 1 0 0 0 0
0 0 1 0 0 1 0 1 0 1 0 0 1 0
0 0 1 0 1 0 0 1 0 1 0 1 0 0
0 0 1 0 1 1 0 1 0 1 0 1 1 0
0 0 1 1 0 0 0 1 0 1 1 0 0 0
0 0 1 1 0 1 0 1 0 1 1 0 1 0
0 0 1 1 1 0 0 1 0 1 1 1 0 0
0 0 1 1 1 1 0 1 0 1 1 1 1 1
0 1 0 0 0 0 0 1 1 0 0 0 0 0
0 1 0 0 0 1 0 1 1 0 0 0 1 0
0 1 0 0 1 0 0 1 1 0 0 1 0 0
0 1 0 0 1 1 0 1 1 0 0 1 1 0
0 1 0 1 0 0 0 1 1 0 1 0 0 0
0 1 0 1 0 1 0 1 1 0 1 0 1 0
0 1 0 1 1 0 0 1 1 0 1 1 0 0
0 1 0 1 1 1 0 1 1 0 1 1 1 1
0 1 1 0 0 0 0 1 1 1 0 0 0 0
0 1 1 0 0 1 0 1 1 1 0 0 1 0
0 1 1 0 1 0 0 1 1 1 0 1 0 0
0 1 1 0 1 1 0 1 1 1 0 1 1 1
0 1 1 1 0 0 0 1 1 1 1 0 0 0
0 1 1 1 0 1 0 1 1 1 1 0 1 1
0 1 1 1 1 0 0 1 1 1 1 1 0 1
0 1 1 1 1 1 1 1 1 1 1 1 1 1 Fonte: Acervo pessoal

45
A tabela verdade foi construída baseada na regra do impedimento. Analisando os seis
jogadores do time adversário, o jogador estará em impedimento (saída = 1) caso esteja à
frente de cinco ou seis jogadores adversários, ou seja, cinco ou seis valores 1 de entrada.
Foram considerados casos para seis, cinco ou quatro jogadores, e para cada um desses
casos há uma tabela verdade diferente. A tabela 2 representa a tabela verdade do caso de cinco
jogadores.
Tabela 2 – Tabela verdade para cinco jogadores
A B C D E F Saída
A B C D E F Saída
0 0 0 0 0 0 0
1 0 0 0 0 0 0
0 0 0 0 0 1 0
1 0 0 0 0 1 0
0 0 0 0 1 0 0
1 0 0 0 1 0 0
0 0 0 0 1 1 0
1 0 0 0 1 1 0
0 0 0 1 0 0 0
1 0 0 1 0 0 0
0 0 0 1 0 1 0
1 0 0 1 0 1 0
0 0 0 1 1 0 0
1 0 0 1 1 0 0
0 0 0 1 1 1 0
1 0 0 1 1 1 1
0 0 1 0 0 0 0
1 0 1 0 0 0 0
0 0 1 0 0 1 0
1 0 1 0 0 1 0
0 0 1 0 1 0 0
1 0 1 0 1 0 0
0 0 1 0 1 1 0
1 0 1 0 1 1 1
0 0 1 1 0 0 0
1 0 1 1 0 0 0
0 0 1 1 0 1 0
1 0 1 1 0 1 1
0 0 1 1 1 0 0
1 0 1 1 1 0 1
0 0 1 1 1 1 1
1 0 1 1 1 1 1
0 1 0 0 0 0 0
1 1 0 0 0 0 0
0 1 0 0 0 1 0
1 1 0 0 0 1 0
0 1 0 0 1 0 0
1 1 0 0 1 0 0
0 1 0 0 1 1 0
1 1 0 0 1 1 1
0 1 0 1 0 0 0
1 1 0 1 0 0 0
0 1 0 1 0 1 0
1 1 0 1 0 1 1
0 1 0 1 1 0 0
1 1 0 1 1 0 1
0 1 0 1 1 1 1
1 1 0 1 1 1 1
0 1 1 0 0 0 0
1 1 1 0 0 0 0
0 1 1 0 0 1 0
1 1 1 0 0 1 1
0 1 1 0 1 0 0
1 1 1 0 1 0 1
0 1 1 0 1 1 1
1 1 1 0 1 1 1
0 1 1 1 0 0 0
1 1 1 1 0 0 1
0 1 1 1 0 1 1
1 1 1 1 0 1 1
0 1 1 1 1 0 1
1 1 1 1 1 0 1
0 1 1 1 1 1 1
1 1 1 1 1 1 X Fonte: Acervo pessoal

46
Enfim, é apresentada a tabela verdade para quatro jogadores, onde são considerados
casos em que o jogador monitorado está à frente de três ou quatro jogadores adversários. O
resultado é apresentado na tabela 3.
Tabela 3 – Tabela verdade para quatro jogadores
A B C D E F Saída
A B C D E F Saída
0 0 0 0 0 0 0
1 0 0 0 0 0 0
0 0 0 0 0 1 0
1 0 0 0 0 1 0
0 0 0 0 1 0 0
1 0 0 0 1 0 0
0 0 0 0 1 1 0
1 0 0 0 1 1 1
0 0 0 1 0 0 0
1 0 0 1 0 0 0
0 0 0 1 0 1 0
1 0 0 1 0 1 1
0 0 0 1 1 0 0
1 0 0 1 1 0 1
0 0 0 1 1 1 1
1 0 0 1 1 1 1
0 0 1 0 0 0 0
1 0 1 0 0 0 0
0 0 1 0 0 1 0
1 0 1 0 0 1 1
0 0 1 0 1 0 0
1 0 1 0 1 0 1
0 0 1 0 1 1 1
1 0 1 0 1 1 1
0 0 1 1 0 0 0
1 0 1 1 0 0 1
0 0 1 1 0 1 1
1 0 1 1 0 1 1
0 0 1 1 1 0 1
1 0 1 1 1 0 1
0 0 1 1 1 1 1
1 0 1 1 1 1 X
0 1 0 0 0 0 0
1 1 0 0 0 0 0
0 1 0 0 0 1 0
1 1 0 0 0 1 1
0 1 0 0 1 0 0
1 1 0 0 1 0 1
0 1 0 0 1 1 1
1 1 0 0 1 1 1
0 1 0 1 0 0 0
1 1 0 1 0 0 1
0 1 0 1 0 1 1
1 1 0 1 0 1 1
0 1 0 1 1 0 1
1 1 0 1 1 0 1
0 1 0 1 1 1 1
1 1 0 1 1 1 X
0 1 1 0 0 0 0
1 1 1 0 0 0 1
0 1 1 0 0 1 1
1 1 1 0 0 1 1
0 1 1 0 1 0 1
1 1 1 0 1 0 1
0 1 1 0 1 1 1
1 1 1 0 1 1 X
0 1 1 1 0 0 1
1 1 1 1 0 0 1
0 1 1 1 0 1 1
1 1 1 1 0 1 X
0 1 1 1 1 0 1
1 1 1 1 1 0 X
0 1 1 1 1 1 X
1 1 1 1 1 1 X Fonte: Acervo pessoal
Com o sinal de saída do “subVI” tabela verdade definido, o sinal prossegue para a
próxima etapa do processo, a imposição de outras condições para este sinal, para confirmar de
fato se o jogador está em posição de impedimento de acordo com todas as regras.

47
3.2.1.6 Demais condições para a verificação da condição de impedimento
A partir do sinal obtido através da tabela verdade (sinal principal), finalmente foi
realizada a última etapa do processo computacional, que é a imposição de outras condições
aos sinais comparativos de acordo com as regras do futebol, para, de fato, concluir se um
determinado jogador está em posição de impedimento. Primeiramente, o sinal principal de
cada jogador é comparado com o sinal de saída do botão do mesmo, para confirmar se o
jogador está presente na partida (é possível que o jogador esteja ausente por motivo de
expulsão ou lesão), conforme a figura 45.
Figura 45 – Diagrama de blocos de algumas condições impostas na última etapa
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Como podemos observar, além da comparação já citada, ocorrem duas comparações
utilizando o bloco “MAIOR”, entre os valores de X e Y, com os valores zero (valor de X e de
Y na origem). Estas comparações, juntamente com o bloco “AND” conectado junto ao sinal
principal, indicam que o jogador monitorado esteja com um valor acima do valor da origem.
Podemos visualizar na prática, observando a figura 46 área em que o jogador pode estar após
estas condições.

48
Figura 46 – Área combinada das duas condições impostas
Fonte: Acervo pessoal
O sinal principal mostrado na figura 45 segue para as combinações com as próximas
condições referentes à regra do impedimento. O diagrama de blocos destas últimas condições
é mostrado na figura 47.
Figura 47 – Diagrama de blocos das últimas condições
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Nesta imagem podemos observar mais quatro condições sendo impostas ao sinal
principal, através de outras quatro comparações entre valores de X e Y com outros parâmetros
do campo. Da mesma forma que foi feita para a origem, também é realizada a comparação
dos valores de X e Y em relação aos valores de Xmáx e Ymáx. A combinação destas duas
condições resulta na área mostrada na figura 48.

49
Figura 48 – Combinação das regras de comparação os valores máximos de X e Y
Fonte: Acervo pessoal
Enfim, unindo todas as condições impostas até agora, podemos observar que a área
monitorada é exatamente a área total do campo de futebol, dentro das quatro linhas. Isso pode
ser visualizado na figura 49.
Figura 49 – Combinação de todas as condições de posição da origem e posição máxima
Fonte: Acervo pessoal
A próxima condição é referente à linha do meio de campo. De acordo com a regra do
impedimento, o jogador poderá estar em posição de impedimento somente se estiver no
campo de ataque do seu time. Levando em consideração esta regra, também é realizada a
comparação do valor de X dos jogadores com o valor de X da linha de meio de campo. Se o
valor de X do jogador for maior do que o valor de X da linha, este pode estar em
impedimento. Esta condição pode ser observada na figura 50.

50
Figura 50 – Condição de campo de ataque do jogador
Fonte: Acervo pessoal
Combinando novamente esta condição com as outras já unidas, podemos observar o
resultado na figura 51.
Figura 51 – Condição do campo de ataque do jogador junto com as outras condições
Fonte: Acervo pessoal
Do mesmo modo, para o outro lado do campo, a mesma condição é imposta, desta vez
comparando qual valor é menor.
Enfim, a última condição é imposta ao sinal principal. Esta condição compara o valor
de X dos jogadores com o valor de X da bola. Se o jogador estiver atrás da bola, ele não estará
em posição de impedimento. Caso contrário, ele poderá estar em condição de impedimento.
Esta regra pode ser visualizada no campo conforme a figura 52.

51
Figura 52 – Comparação da posição do jogador com a posição da bola
Fonte: Acervo pessoal
Esta condição também ocorre para o outro lado do campo, comparando qual valor de
X é menor.
Compilando todas as condições apresentadas nesta etapa, temos as áreas demarcadas
pela figura 53. O mesmo se aplica para o outro lado do campo.
Figura 53 – Todas as condições impostas nesta etapa
Fonte: Acervo pessoal
Considerando todas as condições apresentadas nesta última etapa, juntamente com as
comparações e iterações realizadas com a tabela verdade, é possível afirmar se determinado
jogador está em posição de impedimento ou não. O sinal principal de cada jogador é enviado
a um LED que está posicionado na tela principal. Se este sinal principal, após todo esse
procedimento realizado nesta etapa, estiver ativado (sinal = 1), o jogador está em posição de
52
impedimento de acordo com as regras do futebol. Se este sinal for baixo (sinal = 0), o jogador
não está em posição de impedimento.
3.2.2 Parte Física
A parte física consiste em um painel magnético com uma imagem de um campo de
futebol e nas peças quadradas, representando os jogadores dos dois times, e uma peça
redonda, representando a bola, como podem ser observados nas figuras que mostram as
imagens da câmera, como a figura 54.
A simulação é realizada através da alteração da posição das peças pelo campo, que deve
ser feita manualmente, testando diversas situações onde pode ser verificada a confiabilidade
do sistema, verificando todas as condições aplicadas.

53
4 RESULTADOS E DISCUSSÕES
4.1 Tela Principal
Através dos procedimentos de programação de reconhecimento de padrões e
identificação de posição de impedimento, foi possível obter o funcionamento do sistema da
forma que foi proposta, possibilitando a confirmação de que os jogadores em campo estão em
posição de impedimento ou não. Para a utilização deste sistema deve ser utilizada a tela
principal, que funcionou após as configurações prévias. Esta tela principal é apresentada na
figura 54.
Figura 54 – Tela principal para a utilização do sistema
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Na figura 54 podemos observar todos os elementos necessários para a identificação da
posição de impedimento. Na tela à esquerda, está a imagem do campo e dos jogadores captada
pela câmera. Na coluna à direita, estão os indicadores de cada jogador, ou seja, doze
indicadores, um botão referente à bola, e outro que permite o usuário escolher o lado em que
os times estão atacando, para que seja utilizada a programação correta.
Para cada jogador existe um botão em que o usuário pode definir se o jogador está na
partida (os botões estão inicialmente ligados, pois no início da partida todos os jogadores
estão presentes no jogo, caso haja alguma expulsão ou um jogador esteja impossibilitado de
jogar, o botão deste jogador deve ser desligado). Cada jogador também possui um LED verde,
onde ficará aceso quando o jogador estiver na partida, e apagado quando estiver fora da
partida. Para a ocorrência de substituições de jogadores, é necessário apenas alterar o
“template” do jogador substituído pelo “template” do jogador que irá ingressar ao jogo.

54
Os LEDs em vermelho são os que deverão ser observados durante a partida, pois são
controlados pelo sinal principal mostrado na metodologia, logo estes LEDs estarão acesos
caso o jogador esteja em posição de impedimento, considerando as regras de impedimento do
futebol. Também há um contador de jogadores para cada time que foi utilizado na
programação da tabela verdade.
4.2 Simulação
Para entender a simulação, devemos considerar as imagens captadas como sendo um
replay do lance do jogo de futebol. Assim podemos selecionar o frame da imagem que
desejamos analisar, onde para o caso de lances de impedimento, o lance crucial que deve ser
verificado é o momento do passe de um jogador para outro do mesmo time em que há a
dúvida de que esteja em posição de impedimento ou não.
Na figura 55 é mostrada a imagem do sistema em funcionamento, simulando um lance
de um jogo de futebol onde ocorre um passe de um jogador para outro do mesmo time, sendo
que o atleta que irá receber a bola não está em posição de impedimento.
Figura 55 – Exemplo de lance onde o jogador não está em posição de impedimento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Na figura 55 é possível observar que este frame é o momento exato em que o jogador
número dois do São Paulo está realizando um passe para o jogador número quatro, também do
São Paulo. É possível observar também, que o jogador número quatro do São Paulo não está
em posição de impedimento, pois os jogadores de números quatro, três e cinco, do Santos,
estão dando condição a posição do atacante. Logo, podemos confirmar essa informação
observando os LEDs vermelhos, onde nenhum está aceso.

55
Agora, na figura 56, podemos observar um lance semelhante ao anterior, porém desta
vez o jogador número quatro do São Paulo está à frente que os três jogadores do Santos.
Figura 56 – Exemplo de lance onde o jogador está em posição de impedimento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Como podemos observar na figura 56, o jogador está em impedimento e o LED
vermelho referente ao jogador está aceso, indicando que o mesmo está impedido.
Para testar a condição da linha do meio de campo, foi imposta uma situação onde o
jogador está em impedimento em relação aos jogadores adversários, porém não está em
impedimento em relação à linha do meio de campo, conforme figura 57.
Figura 57 – Exemplo de lance onde o jogador não está em posição de impedimento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
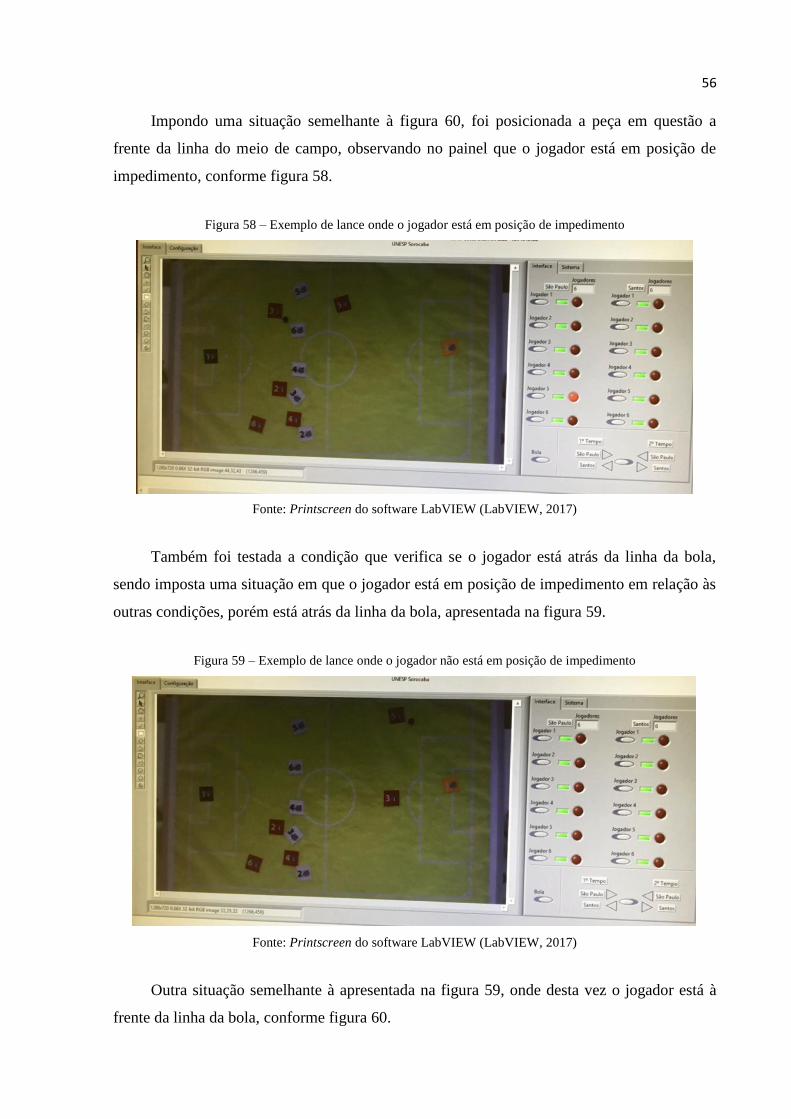
56
Impondo uma situação semelhante à figura 60, foi posicionada a peça em questão a
frente da linha do meio de campo, observando no painel que o jogador está em posição de
impedimento, conforme figura 58.
Figura 58 – Exemplo de lance onde o jogador está em posição de impedimento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Também foi testada a condição que verifica se o jogador está atrás da linha da bola,
sendo imposta uma situação em que o jogador está em posição de impedimento em relação às
outras condições, porém está atrás da linha da bola, apresentada na figura 59.
Figura 59 – Exemplo de lance onde o jogador não está em posição de impedimento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Outra situação semelhante à apresentada na figura 59, onde desta vez o jogador está à
frente da linha da bola, conforme figura 60.

57
Figura 60 – Exemplo de lance onde o jogador está em posição de impedimento
Fonte: Printscreen do software LabVIEW (LabVIEW, 2017)
Da mesma forma, os testes foram realizados para todos os jogadores dos dois times, nas
duas situações (primeiro e segundo tempo) e o sistema funcionou conforme proposto.
4.3 Considerações Gerais
Durante a idealização e execução deste projeto, foi admitido que a tela principal,
conforme mostrada na figura 54, seja suficiente para a análise proposta, sendo possível, com
as imagens e os indicadores dos jogadores, a confirmação de que algum jogador esteja em
posição de impedimento na simulação.
Os testes foram realizados para todos os jogadores, para todas as situações possíveis
(cada jogador em posição de impedimento em relação aos jogadores, em relação à linha de
meio de campo e em relação à linha da bola). Também foram testadas situações onde dois
jogadores estão na mesma linha, com um deles sem nenhuma inclinação e o outro inclinado
de 45°. Essa situação testa a utilização dos valores mínimos e máximos criados na
programação. O sistema funcionou para todas as situações, porém, na parte da configuração
do sistema, foram realizados testes com cada “template” para verificar seu reconhecimento.
Cada peça foi monitorada individualmente posicionando-a em diferentes partes do
campo e observando o que foi reconhecido pelo sistema na tela de processamento de imagem.
Esse teste foi realizado, pois em algumas situações o sistema identificou uma peça diferente
da solicitada. Quando isso ocorreu, foi realizada novamente a seleção do “template”, até que
o sistema reconhecesse a peça correto em todo o campo.

58
Outro problema identificado foi o reconhecimento do jogador número 1 do Santos, da
cor amarela, pois na imagem preto e branco ficou com uma escala de cinza muito próxima a
cor do campo, também dificultando no seu reconhecimento.
Durantes os testes foram observados alguns “templates” com pouca nitidez e imagens
embaçadas. A câmera utilizada (webcam do computador) que possui uma resolução baixa
contribuiu para a dificuldade em encontrar um “template” que monitorasse as peças por todo
o campo de maneira correta.
A iluminação do ambiente, que deve ser uniforme para todo o campo para melhor
funcionamento do projeto, também contribuiu para possíveis erros no sistema. Com uma
iluminação irregular, o “template” é selecionado em uma área mais clara do campo, por
exemplo, e no momento em que a peça foi posicionada em uma área mais escura do campo, a
mesma não foi reconhecida.
Cada vez que a maquete foi montada em um lugar diferente e o sistema foi testado, toda
a configuração referente à posição do ponto da origem e ponto máximo e à calibração teve
que ser realizada, pois a posição do campo referente à câmera nunca é a mesma após a
desmontagem e montagem da maquete. Se o teste é realizado no mesmo lugar onde foi
testado pela última vez, não foi necessário refazer estes procedimentos.

59
5 CONCLUSÕES
Ao final do estudo apresentado através da realização do projeto de simulação, foi
possível constatar que o sistema de verificação da posição de impedimento satisfaz a proposta
apresentada: através do sistema, foi possível afirmar se um jogador está em posição de
impedimento ou não na simulação especificada.
O erro observado em relação ao reconhecimento de padrões foi minimizado com o
cuidado na seleção do “template” das peças e poderiam ser resolvido também com uma
iluminação adequada para a aplicação e com uma câmera de melhor desempenho.
Foi concluído também que todos os procedimentos realizados para este sistema são
necessários e aplicados exclusivamente para a simulação do sistema de identificação de
posição de impedimento, não sendo aplicável para um jogo real. Para um sistema aplicável
em um jogo real, a parte de processamento de imagem seria diferente do que foi realizado
para este projeto, com fatores que deveriam ser levados em consideração e que não foram
considerados neste sistema e vice-versa.
O conceito deste sistema, ou seja, a parte que realiza a manipulação das distâncias e
comparação entre si para a verificação da posição de impedimento, é muito próxima do que
deveria ser aplicada para uma partida real, pois foram construídas a partir das regras do
impedimento. Contudo, pode-se concluir que o estudo serve como um bom ponto de partida
para a realização de um projeto capaz de identificar se um jogador está em posição de
impedimento para partidas reais, que possa ser utilizado em jogos oficiais, auxiliando a equipe
de arbitragem e proporcionando resultados mais justos.

60
REFERÊNCIAS
GONZALEZ R. C.; WOODS R. E. Processamento digital de imagens. 3.ed. São Paulo: Pearson, 2008. 644p.
RODRIGUES. Reconhecimento de Padrões. Disponível em: < https://pt.slideshare.net/RafaelLial/robtica-
reconhecimento-automtico-de-padres>. Acessado em 12 jan. 2018.
National Instruments. O que é o LabVIEW? Disponível em: <http://www.ni.com/pt-br/shop/labview.html>.
Acessado em: 12 set. 2017.
IMAQ. NI Vision Assistant Tutorial. Disponível em:
<https://neurophysics.ucsd.edu/Manuals/National%20Instruments/NI%20Vision%20Assistant%20Tutorial.pdf>.
Acessado em: 22 ago. 2017.
National Instruments. Use Vision Assistant to Find Matched Patterns. Disponível em:
<https://forums.ni.com/t5/Example-Program-Drafts/Use-Vision-Assistant-to-Find-Matched-Patterns/ta-
p/3523169> . Acessado em: 24 ago. 2017.
National Instruments. Object Tracking using LabVIEW and Vision Development Module. Disponível em:
<https://forums.ni.com/t5/Example-Programs/Object-Tracking-using-LabVIEW-and-Vision-Development-
Module/ta-p/3505034>. Acessado em: 24 ago. 2017.
CBF. Regras de futebol 2017/2018. Disponível em:
<https://cdn.cbf.com.br/content/201709/20170911114118_0.pdf>. Acessado em: 2 set. 2017.
IQ Intel. Tecnologia no tênis. Disponível em: <https://iq.intel.com.br/como-tecnologia-revolucionou-tambem-o-
tenis/>. Acessado em: 8 set. 2017.
UOL. Liga profissional de beisebol usará computador para marcar bolas e strikes em jogo. Disponível em:
<http://extratime.uol.com.br/liga-profissional-de-beisebol-usara-computador-para-chamar-bolas-e-strikes-em-
jogo>. Acessado em: 8 set. 2017.
TECHTUDO. Entenda a tecnologia que validou o gol da França na Copa do Mundo. Disponível em: < http://www.techtudo.com.br/noticias/noticia/2014/06/entenda-tecnologia-que-validou-o-gol-da-franca-na-copa-
do-mundo.html>. Acessado em: 8 set. 2017.
E&T. Vision Systems: Accelerating the Art of the Design. Disponível em: < https://eandt.theiet.org/content/sponsored/national-instruments-vision-systems-accelerating-the-art-of-the-
design/>. Acessado em: 28 set. 2017.
National Instruments. Vision Assistant. Disponível em: < http://sine.ni.com/cs/app/doc/p/id/cs-
14160/#prettyPhoto[gallery]/4/>. Acessado em: 28 set. 2017.
ATAPY. ATAPY Software helped automate blood cell counting. Disponível em: < http://www.atapy.com/en-
us/casestudies/helpingautomatebloodcellcounting.aspx>. Acessado em: 27 out. 2017.
HARRIS. ENVI feature extraction module. Disponível em: < http://www.harrisgeospatial.com/Portals/0/pdfs/HG_ENVI_FX_module_data-sheet_WEB.pdf>. Acessado em:
27 out. 2017.

61
ANEXO A – Exemplo da Interface do bloco Vision Assistant

62
ANEXO B – Regra do Impedimento
1. Posição de impedimento
Estar em posição de impedimento não constitui infração.
Um jogador estará em posição de impedimento quando:
• qualquer parte de sua cabeça, corpo ou pés estiver na metade do campo
adversário (excluindo a linha de meio de campo) e se;
• qualquer parte de sua cabeça, corpo ou pés estiver mais próximo da linha de
meta adversária do que a bola e o penúltimo adversário.
As mãos e os braços dos jogadores, inclusive dos goleiros, não são
considerados.
Um jogador não se encontrará em posição de impedimento quando estiver em
linha com:
• o penúltimo adversário ou;
• os dois últimos adversários.
2. Infração de impedimento
Um jogador em posição de impedimento no momento em que a bola for jogada
ou tocada por um companheiro de equipe só deve ser punido se participar
ativamente do jogo:
• Interferindo no jogo ao jogar ou tocar na bola, passada ou tocada por um
companheiro ou;
• Interferindo em um adversário de uma das seguintes maneiras:
> Impedindo um adversário de jogar ou de poder jogar a bola ao
obstruir claramente sua linha de visão ou;
> disputando a bola com o adversário ou;
> tentando claramente jogar a bola que se encontre próxima de si e
quando essa ação causar impacto no adversário ou;
> Praticando uma ação óbvia que tenha impacto claro na possibilidade
de o adversário jogar a bola.
ou
• Ganhando vantagem da posição de impedimento por jogar a bola ou interferir
em um adversário, quando a bola haja sido:
> Desviada ou rebotada em um dos postes ou no travessão da meta, em
um oficial de arbitragem ou em um adversário;
> Jogada por um adversário para fazer uma defesa deliberada (impedir
que a bola entre em sua meta).

63
(Explicação – O(s) texto(s) acrescentado(s) e que está/estão em negrito
visa(m) a tornar claro que: quando a bola toca em oficial de arbitragem e o
jogador que a recebe já se encontrava em posição de impedimento, deve ser
punido).
Um jogador em posição de impedimento que receber a bola jogada
deliberadamente por um adversário (exceto quando se tratar de uma defesa
deliberada), não deve ser punido (não ganha vantagem).
Uma “defesa deliberada” se caracteriza quando um jogador deliberadamente
joga ou tenta jogar a bola que vai em direção ou que está muito próxima de
sua meta, com qualquer parte do corpo, exceto com as mãos, a menos que seja
o goleiro em sua própria área de pênalti.
(Explicação – O(s) texto(s) acrescentado(s) e que está/estão em negrito
visa(m) a tornar mais clara a definição de defesa deliberada).
Situações:
Quando um jogador, em posição de impedimento, se move dessa posição
ou fica parado nessa posição no caminho de um adversário que estiver
indo para a bola e interfere em seu deslocamento, comete uma infração de
impedimento, se impacta na possibilidade do adversário jogar ou disputar
a bola; quando um jogador se move no caminho de um adversário e
impede seu deslocamento (por exemplo, bloqueia o adversário), a infração
deve ser punida com base na regra 12.
Quando um jogador, em posição de impedimento, se movimenta em
direção à bola com intenção de jogar a bola e é impossibilitado por um
adversário antes de jogar ou tentar jogar a bola ou disputar a bola com
um adversário, a falta deve ser punida porque ocorreu antes de uma
infração de impedimento.
Quando uma infração for cometida contra um jogador que estiver em
posição de impedimento e que já esteja jogando ou tentando jogar a bola
ou disputando a bola com um adversário, o impedimento deve ser punido,
porque ocorreu antes da falta.
(Explicação – O(s) texto(s) acrescentado(s) e que está/estão em negrito
visa(m) a tornar claras as situações: a) em que um jogador em posição de
impedimento, mesmo estando distante da bola, pode cometer uma infração,
se impacta na possibilidade do defensor jogar ou disputar a bola; b) que uma
infração pode ser cometida em um jogador que esteja em posição de
impedimento).

64
3. Não é infração
Não há infração de impedimento quando um jogador recebe a bola diretamente
de um:
• tiro de meta;
• arremesso lateral;
• tiro de canto.
4. Infrações e sanções
Se for cometida uma infração de impedimento, o árbitro concederá a favor da
equipe adversária um tiro livre indireto, a ser executado do local onde a
infração ocorrer, inclusive se for na própria metade do campo do jogador.
Qualquer jogador defensor que saia do campo de jogo sem autorização do
árbitro será considerado como se estivesse sobre a linha de meta ou linha
lateral, para efeitos de impedimento, até à primeira interrupção do jogo ou até
que a equipe defensora tenha jogado a bola na direção da linha de meio de
campo e até a bola estar fora da área de pênalti. Se um defensor abandonar o
campo de jogo deliberadamente deve ser advertido com Cartão Amarelo,
quando a bola estiver fora de jogo.
Um jogador atacante pode sair ou permanecer fora do campo de jogo para não
ser envolvido em jogo ativo. Se o jogador regressar pela linha de meta e se
envolver no jogo antes de a bola ter saído de jogo, ou antes da equipe defensora
jogar a bola na direção da linha de meio campo e de a bola ter saído da área
penal, deve-se considerar que o jogador está posicionado sobre a linha de meta
adversária para efeito de impedimento. Um jogador que deixar
deliberadamente o campo de jogo, regressar sem a autorização do árbitro e que
não seja punido por impedimento, se obtiver qualquer vantagem deve ser
advertido com Cartão Amarelo.
Se um jogador atacante permanecer imóvel entre os postes da meta e no
interior da meta, um gol pode ser validado, a menos que o jogador cometa uma
infração de impedimento ou outra infração da regra 12. Nesses casos, o jogo
deve ser reiniciado com tiro livre indireto ou direto.