Manual 297
20
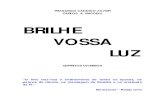
Controlador de Motores de Passo L297 O L297 integra todos os circuitos de controlo necessários para controlar um motor de passo unipolar ou bipolar. Usando com um controlador dual brige como o L298N forma um m icroprocessad or completo para motores bipolares. Os motores unipolares poderão ser controlados com um L297 mais um quad darilington array. Este documento descreve a operação do circuito e mostra como é utilizado. O controlador de motor de passo L297 está projectado principalmente para trabalhar com um bridge driver como o L298N ou L297E em aplicações para motores de passo. Ele recebe os sinais de controlo de um sistema controlador, normalmente um microprocessador, e providencia todos os sinais necessários. Adicionalmente, inclui dois circuitos PWM choppers para regular a corrente nas bobinas do motor. Com um actuador adequado, o L297 controla um motor de iman permanente (permanent magnet) bipolar de duas fases, unipolar de de quadro fases e de quatro fases com relutância magnética variável. Mais, ele consegue controlar com vários tipos de passo: normal, wave driver e half step (meio passo) (Isto será tudo explicado na secção “Motores de Passo: Básico”) Há duas versões do dispositivo disponíveis: a versão regular do L297 e a versão especial chamada L297A. O L297A tem um duplicador de pulsos e é desenhado especificamente para o posicionamento das cabeças das drives de disco. VANTAGENS: O l297 combinado com uma drive tem inúmeras vantagens: baixo custo dos componentes necessário s, simplicidad e do software e a dificuldade do microproces sador é reduzida. Para além disso, a escolha de dois dispositivos confere uma enorme flexibilidade – o L298N pode ser usado para motores DC (corrente continua) e o L297 pode ser usado para qualquer tipo energético, incluindo dispositivos de “discrete power” (suportando 20mA para o motor) Figure 1 : Nesta configuração tipica o controlador de motor de passo L297 e a dual bridge L298 combinam-se para formar um microprocessador completo para motores bipolares.
-
Upload
clesiorki2009 -
Category
Documents
-
view
99 -
download
0
Transcript of Manual 297

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 1/20
Controlador de Motores de Passo L297
O L297 integra todos os circuitos de controlo necessários para controlar um motor depasso unipolar ou bipolar.Usando com um controlador dual brige como o L298N forma um microprocessadorcompleto para motores bipolares.
Os motores unipolares poderão ser controlados com um L297 mais um quad darilingtonarray. Este documento descreve a operação do circuito e mostra como é utilizado.
O controlador de motor de passo L297 está projectado principalmente para trabalhar com umbridge driver como o L298N ou L297E em aplicações para motores de passo.
Ele recebe os sinais de controlo de um sistema controlador, normalmente ummicroprocessador, e providencia todos os sinais necessários. Adicionalmente, inclui doiscircuitos PWM choppers para regular a corrente nas bobinas do motor.
Com um actuador adequado, o L297 controla um motor de iman permanente (permanentmagnet) bipolar de duas fases, unipolar de de quadro fases e de quatro fases com relutânciamagnética variável. Mais, ele consegue controlar com vários tipos de passo: normal, wavedriver e half step (meio passo) (Isto será tudo explicado na secção “Motores de Passo: Básico”)
Há duas versões do dispositivo disponíveis: a versão regular do L297 e a versão especialchamada L297A. O L297A tem um duplicador de pulsos e é desenhado especificamente para oposicionamento das cabeças das drives de disco.
VANTAGENS:O l297 combinado com uma drive tem inúmeras vantagens: baixo custo dos componentesnecessários, simplicidade do software e a dificuldade do microprocessador é reduzida. Paraalém disso, a escolha de dois dispositivos confere uma enorme flexibilidade – o L298N podeser usado para motores DC (corrente continua) e o L297 pode ser usado para qualquer tipoenergético, incluindo dispositivos de “discrete power” (suportando 20mA para o motor)
Figure 1 : Nesta configuração tipica o controlador de motor de passo L297 e a dual bridgeL298 combinam-se para formar um microprocessador completo para motores bipolares.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 2/20
Para motores bipolares de corrente superior a 2A (V/R=A) O L297 tem de ser utilizado com umL298N; Para motores com correntes superiores a 1A é recomendado o uso de uma L293E (oL293E também pode ser útil se o chopper não for necessário). Para correntes mais elevadaspode-se utlizar transístores energéticos (power transístores) ou de darlingtons e para motoresunipolares é recomendado o uso de darlington array como o ULN2075B. O diagramada deblocos, figura 1, mostra um sistema típico.
As aplicações para o L297 podem ser encontradas quase em todo o lado. Impressoras(posicionador do cartucho, posição do daisy, puchador de papel, etc) maquinas de escrever,máquinas controladas numericamente, máquinas de costura, caixas registadoras,fotocopiadoras, fax, equipamento fotográfico, scanners, etc.
O L297 é feito com a tecnologias comparador analógico/digital SGS I2L (como Zodiac) emontado num DIP de 20 pinos. A fonte usada é de 5V e todos os sinais TTL/CMOS sãocompatíveis ou transístores com colector aberto. A alta densidade é um dos factores chaves doL297, é bastante compacto.
O L298N e L293E
Tendo em conta que o L297 é usado normalmente com um L298N ou uma ponte L293E, umcurto resumo destes dispositivos facilita a compreensão deste documento.
O L298N e o L293E contem duas bridges (bridges driver stages) cada uma controlada por duasentradas lógicas TTL e duas entradas de enable (ligar desligar) TTL. Adicionalmente, o emissordos transitores baixos (lower transístores) liga ao terminais externos para permitir a ligação deduas resistências para sensor de corrente. (fig. 2)
Para o L298N a inovadora tecnologia SGS permite o uso de elevadas tensões/corentes,permitindo potências com cerca de 160W (46V de fonte e 2A por bridge). O circuito lógicoseparado de 5V é desenhado para reduzir a dissipação de calor e para permitir a ligaçãodirecta com o L297 ou outro dispositivo lógico.
Neste documento os pins do L298N estão rotolados com o nome correspondete aos pins doL297 para evitar confusões.
O L298N é disponibilizado num pacote plástico 15-lead Multiwatt. O L293E é o irmão maispequeno, é disponibilizado num pacote Powerdip.
Figura 2: O L298 contem duas bridges (quatro push pull stages) cada uma controlada comduas entradas lógicas e dois interrupotores de entrada. As ligações externadas são suportadaspelos sensores de resistência. O L293E tem 4 ligações externas de emissores.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 3/20
Motores de Passo: BásicoHá dois tipos básicos de motores de passo usados normalmente: o iman permante (permanentmagnet) e o de redundancia variavel (variable reluctance). Os motores de íman permante sãodivididos em 2 tipos, o unipolar e o bipolar.
MOTORES BIPOLARESSimplificando para a essência, os motores bipolares de íman fixo consistem na rotação de ummagnet (íman) rodeado por bobinas. (figura 3). O controlador de corrente bidireccional é usado
e o motor dá um passo com a mudança da sequência das bobinas.Figura 3: Muito simplificado, o motor de passo bipolar consiste na rotação de um íman cercadopor bobinas.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 4/20
Para este tipo de motor há 3 tipos de controlo:O primeiro é ligar as bobinas na sequência AB/CD/BA/DC (BA quer dizer ligar AB mas emsentido inverso). Esta sequência é conhecida como “one phase on” full step (passo completo).Apenas uma fase é ligada em cada momento. (fig. 4a)
A segunda possibilidade é ligar ambas as fases juntas, então o motor irá alinhar-se sempreentre as duas posições. Isto é chamado “two-phase-on” full step, este modo normalmente é
utilizado para um motor bipolar de modo a obter o torque (força) máximo . (fig. 4b)A terceira opção é ligar uma fase, depois duas, depois uma……. Então o motor irá avançarmeio passo de cada vez. Esta sequencia, conhecida como modo half-step (meio passo), divideo passo a meio mas tem menos força (torque) (fig.4C)
Para rodar em sentido contrário (counter-clock-wise) é usado um dos 3 modos enunciados mascom a ordem inversa.
No diagrama da fig.3 o motor teria um ângulo de 90º. Na realidade os motores tem múltiplospólos para reduzir o tamanho do passo para poucos graus mas o numero de bobinas e desequências mantêm-se. Um motor típico bipolar é mostrado na figura 5.
MOTORES UNIPOLARESUm motor unipolar de íman permantente é indentico ao motor bipolar descrito anteriormenteexepto no facto que é utilizado uma bobina bifiliar para inverter o fluxo das bobinas, é necesárioum controlador bidireccional. (fig.6)
Este motor é controlado exactamente da mesma forma que o motor bipolar excepto que abridge é substituída por um “simple unipolar stages” – quatro darlingtons ou um quad darlingtonarray. Claro que um motor uniplar é mais caro porque tem o dobro das bobinas (o dobro do fioentenda-se). Alem disso, o motor unipolar tem menos força do que um bipolar do mesmotamanho porque as bobinas são feitas com fio mais fino. Antigamente o motor unipolar eramais atractivo para os designers porque simplificava o controlo. Agora com os monolithic pushpull drivers como o L298M os motores bipolares estão a tornar-se mais populares.
Todos os motores de íman permante têm um contador EMF gerado pelo rotor que limita onumero de rotações. Quando são necessárias altas rotações são utilizados motores derelutância variável.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 5/20
Figura 4: Os 3 modos de sequência para controlar os motores bipolares. Rotação no sentidodos relógios.
Figura 5: Motor real. Os multiplos polos são normalmente utilizados para reduzir otamnho do passo para valores práticos. Os princípios de operação e controlopermanecem os mesmos.
Figura 6: O motor unipolar usa bobinas bifiliares para inverter o fluxo em cada fase

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 6/20
Motores de Relutância Variável
Os motores de relutância variável o ferro central não magnetizado têm menos pólos doque o estator (parte fixa do motor). É utilizado um controlo unipolar e o motor de passomove-se pela ligação de pares de pólos para alinhar o rotor com pólos com as bobinasligadas.
Mais uma vez podem ser utilizadas as três formas de sequência……….
Fig. 7: Um motor de relutância variável com rotor de ferro com menos pólos que oestator. O passo deste motor é 15º
Gerando sequências de fasesA cabeça do diagrama de blocos do L297, figura 8, é um bloco chamado “translator”(tradutor) cujo gera uma sequência de fases adequada ao meio passo, one-phase onfull step e two-phase-on full step. Este bloco é controlado por duas entradas de modo – direcção (CW/CCW) e HALF/FULL – e pelo relógio de passo cujo faz o tradutoravançar de um passo para o seguinte.
Do tradutor saiem quadro saídas que são processadas por um bloco de saída lógica(output logic block) cujo implementa as funcionalidades de inibição e cortador(chopper).
Internamente o tradutor consiste num contador de 3bit mais algumas combinaçõeslógicas que geram uma sequência de 8 passos cinzenta (Basic eight-step gray codesequences) como mostra a figura 9. Todos os três t ipos de sequência podem sergerados facilmente a partir deste sinal. Este estado de sequência corresponde ao halfstep mode, selecionado pelo nível alto (1) na entrada HALF/FULL .

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 7/20
Figura 8: O l297 contem uma tradutor (gerador de fases), um chopper PWM duplo euma saída de controlo lógico
Figura 9: Os 8 passos mestres saídos do tradutor. Estes correspondem ao Half StepMode. É indicada a rotação no sentido do relógio (clockwise)
A forma da onda emitida para esta sequência é demonstrada na figura 10.Note que os outros dois sinais, INH1 e INH2 são gerados nesta sequência. Opropósito destes sinais é explicado adiante.
Os full step modes são ambos obtidos saltado alteranadamente os estados dasequência de 8 passos. O que acontece é que o relógio de passo salta o primeiro
estado do contador de 3bits do tradutor. O ultimo bit significante (ultimo digito) não éafectado logo a sequencia gerada depende do estado do tradutor quando o modo fullstep é seleccionado (sinal baixo (0) na entrada HALF/FULL )
Se o modo full step é seleccionado quando o tradutor está num numero impar nosobtemos um two-phase-on full step (fig.11).
Por contraste, o modo one-phase-on full step é obtido selecionando full step modequando o tradutor está num número par.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 8/20
Fig.10 A formada da onda emitida correspondente ao modo half step. A acção dochopper não está representada.
Fig.11 : Estado da sequência e onda emitida no two phase on. INH1 e INH2permanecem no nível elevado (1)

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 9/20
Fig. 12 Estado da sequência e a onda emitida pelo wave driver (one-phase-on)

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 10/20
INH1 e INH2Nos modos half step e one-phase-on full step são gerados dois outros sinais: INH1 eINH2. Estes são os 2 sinais inibidores que são ligados às entradas enable do L298 eservem para diminuir a velocidade da corrente quando a bobina é desligada, isto é,para parar o motor.
Desde que ambas as bobinas estejam ligadas continuamente no modo two-phase-onfull step mode, não há bobinas sempre desligadas e estes sinais não são gerados.
Para visualizar o que estes sinais fazem vamos olhar para o modo one half do L298Nligado à primeira fase das duas fases do motor bipolar (figura 13). É importanterelembrar que as entradas A e B do L298 determinam o transístor em cada par pushpull que será ligado. Por outro lado, INH1 desliga os 4 transístores.
Figura 13: Quando a bobina é desligada os bits inibidores (inhibit ) são activados paradiminuirem a velocidade da corrente. Se não esta corrente irá re-circular pelo D2 e D4neste exempo. A dissipação no Rs também é reduzida.
Assumindo que o A está no nível alto (1) e B=0 e que a corrente desloca-se pelo Q1,Q4 e bobina do motor. Se A estivesse no nível baiixo a corrente poderia recircular peloD2,Q4 e Rs, dando uma perda de corrente lenta (slow decay) e aumentando adissipação do Rs. Se, por outro lado, A =0 e INH1 estiver activado, todos os quatrotransístores estão desligados. Neste caso a corrente recircula do ground para o Vsatravés do D2 e D3, dando uma decadência de corrente mais rápida, permitindo ofuncionamento mais rápido do motor. Alem disso, desde que a recirculação dacorrente não atravesse o Rs, pode ser utilizada uma resistência mais barata.
A mesma coisa acontece exactamente na segunda bobina, a outra metade do L298 eo sinal C,D e INH2.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 11/20
Os sinais INH1 e INH2 são gerados pela função OR (ou):A+B=INH1 C+d=INH2
Contudo, as saidas logicas podem ser mais complexos porque os inhbits também sãoutilizados pelo chopper, como nós iremos ver depois.
Outros sinais:Os dois outros sinais ligados ao tradutor são a entrada Reset e a saída HOME.O Reset é uma entrada reset assíncrona cuja restaura o bloco translator para aposição HOME (estado 1, ABCD=0101). A saída HOME (colector aberto) assinala estaposição.
Finalmente, a entrada ENABLE é ligada à saída lógica. Um nível baixo desliga o INH1,INH2, A,B,C e D. Esta entrada é útil para desactivar o mor quando o sistema está ainicializar.
Regulação da corrente carregadaA forma do controlo da corrente é essencial para obter boas velocidades e forças.
Estão aqui algumas das formas que podem ser utilizadas – alternando a fonte entreduas voltagens (switching the supply between two voltages), impulsos modelados pelochopping (pulse rate modulation chopping) ou impulsos sem a modelação dochopping (pulse width modulation choping).
O L297 oferece um controlo de corrente carregada na forma de dois PWM choppers,um para cada uma das duas fases do motor bipolar ou para cada par de bobinas deum motor unipolar. (num motor unipolar as bobinas A e B nunca são ligadas aomesmo tempo por isso podem partilhar o chopper; o mesmo se aplica à C e D).
Cada chopper consiste num comparador, um flip flop e um sensor de resistênciaexterno. Um oscilador comum no chip fornece os impulsos ao rate do chopper paraambos os choppers.
Em cada chopper (figura 14) o flipflop é definido por cada impulsovindo do oscilador, ligando a saídae permitindo o aumento dacorrente carregada. Como istoaumenta a voltagem que passapelo sensor resistência, quando avoltagem atinge o Vref o flip flop éreiniciado (reset), desactivando assaídas até que chegue o próximoimpulso do oscilador. A saídadeste circuito (a saída flip flop Q)é, por conseguinte, um sinal PWM
constante. Note que Vrefdetermina o pico da correntecarregada.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 12/20
Phase chopping and inhibit choppingO chopper pode actuar nas linhas de fase (ABCD) ou nas linhas de inibição (inhibitlines) INH1 E INH2. Uma entrada chamada CONTROL decidi-o.O inhibit copper é o único utilizado para motores unipolares mas nos motores bipolares
podes escolher entre o phase chopping e o inhibit choping. As razões para a escolhasão clarificadas com outro exemplo:
Vamos primeiro examinar a situação em que as linhas de fase são interrompidas(phase chopping).
Figura 15: Phase Chopping. Neste exemplo a corrente X é interrompida através daactivação do B, reciculando a corrente pela linha Y. A alteranativa é reactivar o A,podendo reciculando pela linha Z, aumentando a dissipação no Rs.
Como antes, nós estamos a utilizar um motor de duas fases bipolar e A=1, B=0(figura 15). A corrente passa pelo Q1, Bobinas e D3. A queda de corrente é lentaporque a voltagem das bobinas é baixa (
Vcestat Q1+ V
d3) (figura 16)

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 13/20
Figura 16.Forma da onda com o phase chopping. O exemplo demonstra abobina A e B ligadas com A positivo com respeito a B. CONTROLO=1
Porque que B passa a elevado (1), porque que A passa a baixo (0)? A razão éque a corrente cai pelo Rs. Tendo em conta que a corrente recircula na parte superiorda bridge, a corrente vai para os sensores de resistência apenas quando as bobinassão controladas. Menos energia é dissipado na resistência Rs e nós podemos mandarfora a resistência do chopper.
Para explicar porque que o phase chopping não é compatível com os motoresunipolares: Quando a bobina A é activada, o chopper actua na B. Claro, isto não éusado para todos os motores de relutância variável e será mais lento e ineficiente paramotores de magnet fixo bifiliares.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 14/20
A alternativa é colocar a entrada CONTROL no ground (=0) e o chopper iráactuar no INH1 e INH2. Olhando para o mesmo exemplo, A=1, B=0. Q1 e Q4 estão aconduzir e a corrente passa pelo Q1, bobina, Q2 e Rs (figura 17)
Figura17: Inhibit chopper. A corrente de controlo (Q1, bobina, Q4) neste caso éinterrompida pela activação do INH1. A queda que passa pelo D2 e D3 é mais rápidado que o percurso Y da figura 15
Neste caso quando a voltagem pelo Rs atinge o Vref o flip flop do choperreinicia e o INH1 é activado (passa a 0). INH1, lembra-te, desliga os 4 transistores epermite que a corrente recircule do ground, pelo D2, Bobina e D3 para o Vs.Descarregando na fonte, consegue atingir os 46V com uma queda de corrente muitorápida (figura 18)
Fig.18. Forma da onda do Inhibit chopper. As bobinas AB estão ligadas e oCONTROL=0

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 15/20
A vantagem da utilização desta segunda forma de queda é muito óbvia:
Permite a operação rápida de motores bipolares e é a única escolha para os motoresunipolares. Então porque que há hipótese da forma mais lenta, o phase chopping?
A resposta é que nós temos poder para obrigar a usar o rate do chopper baixo(low chopper rate) com um motor que não acumule muita energia nas bobinas. Se aqueda de corrente for rápida, a corrente no motor pode ser insuficiente para dar umaforça (torque) útil, ou seja, o motor fica sem força. O baixo rate do chopper pode-se,por exemplo, impor se tivermos um motor maior no mesmo sistema. Para evitar osruídos, todos os motores devem estar sincronizados e o chopper rate é determinadopelo motor maior.
É fácil sincronizar vários L297 usando o pin SYNC. Este pino é uma saída deonda quadrada do oscilador interno e da entrada de clock do chopper. O primeiro L297é equipado com os componentes do oscilador e a saí uma onda quadrada por estepino (figura 19)
Figura 19: O oscilador do chopper de vários L297 é sincronizado pela ligaçãode todos os SYNC.
Os restantes L297 não necessitam dos componentes do SYNC, usamapenas o SYNC como entrada de relógio. Um sinal de relógio externo pode ser
injectado neste terminal se quisermos que o L297 esteja sincronizado com oscomponentes de outro sistema.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 16/20
Dicas de AplicaçãoOs motores bipolares podem ser controlados com um L297, L298N ou L293E e
muito poucos componentes externos.
Figura21. Este é uma aplicação típica que mostra um L297 e um L298N acontrolar um motor de passo bipolar com correntes nas fases superiores a 2A.
Juntando estes dois chips formamos um circuito completo de controlo dmotores de passo. Com um L298N esta configuração controla motores com bobinascom cerca de 2A. Para motores com 1A por bobina é utilizado o L293E. Se o PWMchopper não for necessário, um L293 também pode ser utilizado (ele não tem umaligação externa para os sensores de resistência mas um L297 é subaproveitado. Sesão necessárias correntes mais elevadas, o controlador bridge é substituído por umcircuito equivalente feito com transistors. Para correntes superiores a 3.5A sãoutilizados dois L298N com ligando as saídas paralelamente.
Para motores unipolares a melhor escolha é um “quad darlington array”. OL702B pode ser usado se o chopper não for necessário mas é preferível ULN2075B épreferível. Este quad darlington tem ligação para sensores de resistência (figura 22)

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 17/20
Figura 22: Para motores unipolares com um “quad darlington array” acupuladoao L297. O inhibit chopping é utilizado por isso as 4 portas AND tem de ser utilizadas.
Como o chopper actua nas linhas inhibit, as quadro portas AND tem de seradicionadas a esta aplicação. Como é demonstrado no esquema são utilizados díodosde protecção.
Em todas as aplicações onde os choppers não são utilizados é importantelembrar que as entradas dos sensores tem de ser ligadas ao Ground e o Vref ligado aoVs ou a algum ponto com tensão entre o Vs e o Ground.
A frequência do oscilador do chopper é determinada pela rede RC no pino 16.A frequência é aproximadamente de 1/0.7 RC e a resistência R tem se ser superior a10K. Quando a duplicação do impulso do L297A é utilizado, o tempo de espera (delay)
é determinado pela rede Rd Cd e é aproximadamente 0.75 Rd Cd. Rd deve ter entre3K e 100K (figura 23)

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 18/20
Figura 23. O duplicador de impulso cria um pulso fanstasma t0 segundos apóso pulso da entrada de relógio. Rd Cd estão fechadas para dar um atraso comaproximadamente metade do período da entrada de relógio.

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 19/20
Funções dos Pinos do L297
Nº Nome Função1 SYNC Saida do oscilador interno do Chopper. O SYNC de todos os L297
são ligados juntos para os sincronizar e apenas 1 dos L297 temrede de oscilador. Se algum sinal externo for utilizado, estedeverá ser ligado aqui.
2 GND Ligação Ground (negativo)3 HOME Saida de colector aberto que indica quando é que o L297 está na
fase inicial (ABCD=0101). O transístor está aberto quando o sinalé activado
4 A Fornecimento energético para a Fase A do motor5 INH1 Activa o inhibit control paras as fases A e B. Quando é utilizado
uma ponte bipoplar este sinal pode ser usado para assegurar aqueda rápida da tensão acumulada quando a bobina é
descarregada. Pode também ser utilizado pelo chopper pararegular a corrente carregada se o CONTROL=0
6 B Fornecimento energético para a Fase B do motor7 C Fornecimento energético para a Fase C do motor8 INH2 Activa o inhibit control para as fases C e B. Mesmas funções do
INH19 D Fornecimento energético para a Fase D do motor10 ENABLE Interruptor do chip. Quando baixo (inactivo) INH1, INH2, A,B,C e
D estão desligados11 CONTROL É a entrada control que define a acção do chopper. Quando=0 o
chopper actua no INH1 e INH2. Quando =1 actua nas linhas defase ABCD
12 Vs Entrada de energia para 5V13 SENS2 Entrada do sensor de voltagem carregada vinda das fases C e D
14 SENS1 Entrada do sensor de voltagem carregada vinda das fases A e B15 Vref Voltagem de referencia para o circuito do chopper. A voltagemaplicada neste pin determina o pico máximo de corrente
carregada16 OSC Uma rede RC (R to Vcc, C para o GND) é ligada a este terminal
para getar o rate do chopper. Este terminal é ligado ao GNDquando há sincronização pelo SYNC (f = 1/0.69 RC)
17 CW/CCW Determina o sentido do motor. 1= Sentido do Relógio. 0=Contrário do Sentido do Relógio. A direcção física do motor
depende da ligação das bobinas. Pode-se alterar a direcção aqualquer momento
18 CLOCK Relógio do passo. Um pulso 0 nesta entrada faz o motor avançar1 incremento. O passo ocorre durante a queda do sinal
19 HALF/FULL Selector de meio passo ou passo completo. Quando =1selecionamos a operação em meio passo quando =0
seleccionamos o modo de passo completo.One-phase-on full step mode é obtido selecionando FULL quando
o L297 está num numero par.O two-phase-on full step é seleccionado quando activamos o
FULL e o tradutor está num numero impar20 RESET Um impulso 0 faz o tradutor reiniciar e regressar à posição HOME
(ABCD=0101)

5/12/2018 Manual 297 - slidepdf.com
http://slidepdf.com/reader/full/manual-297-55a359059dfdb 20/20