
MAPEAMENTO MÓVEL NO BRASIL: RESULTADOS OBTIDOS …
9
Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002. p.269-277. J. F. C. Silva; P.O. Camargo; R. B. A. Gallis MAPEAMENTO MÓVEL NO BRASIL: RESULTADOS OBTIDOS COM A UTILIZAÇÃO DA UNIDADE MÓVEL DE MAPEAMENTO DIGITAL JOÃO FERNANDO CUSTÓDIO DA SILVA PAULO DE OLIVEIRA CAMARGO RODRIGO BEZERRA DE ARAÚJO GALLIS Universidade Estadual Paulista - UNESP Faculdade de Ciências e Tecnologia - FCT Departamento de Cartografia, Presidente Prudente - SP {jfcsilva, paulo, rodrigo}@prudente.unesp.br RESUMO - O rápido desenvolvimento da tecnologia e a disseminação de métodos cartográficos de análise de problemas espaciais e ambientais estão demandando rapidez, eficiência e economia nos métodos de obtenção de informações geográficas. Um dos novos métodos de levantamento são os Sistemas Móveis de Mapeamento, cuja configuração básica é composta de câmaras digitais, receptores GPS e sistema de armazenamento e de acesso à s imagens. UMMD é a sigla do sistema em desenvolvimento, desde 1998, no Câmpus da UNESP - Presidente Prudente, constituído por um veículo, um par de vídeo-câmaras digitais, um par de receptores GPS e uma estação computacional de processamento de imagens. Com o presente trabalho, propõe-se a realização de levantamentos de ruas e rodovias com o protótipo em construção e processar os dados (imagens e posições) para subsidiar a criação de um Banco de Imagens Georreferenciadas (BIG). Este armazém de imagens pode ser útil a uma gama de aplicações de engenharia e serviços de utilidade pública. ABSTRACT - The fast development of the technology and the dissemination of cartographic methods of analysis of spatial problems have been demanding speed, efficiency and economy in the methods of obtaining the geographical information. One of the new methods is the Mobile Systems Mapping, whose basic configuration is composed of digital cameras, GPS receiver, a system of storage and access of the images. UMMD is the acronym of the system in development, since 1998, in the Campus of UNESP - Presidente Prudente, constituted by a vehicle, a pair of digital video-cameras, a pair of GPS receiver and a computacional station of images processing. The present paper, intends to accomplish the surveying of streets and roads with the prototype in construction, as well as to process the data (images and positions) to subsidize the creation of a Georeferenced Image Database (BIG). This images database can be useful to a range of applications and services of public utilities. 1 INTRODUÇÃO A popularização da Cartografia está acompanhada de uma revolução nos métodos de obtenção de informações espaciais. Os sistemas de informações geográficas (SIG) estão com alto índice de aceitação em diversas áreas de trabalho, tais como: companhias de energia elétrica, telecomunicações, planejamento e engenharia urbana, controle de fluxo e outras empresas de diferentes ramos. A permanente atualização das bases de dados digitais acarreta a necessidade de obter informações geográficas com rapidez, eficiência e economia de recursos. Um dos novos métodos de levantamento que tem contribuído são os Sistemas Móveis de Mapeamento. No Brasil, algumas variantes do método já foram empregadas. A empresa ENGEMAP, a serviço do Departamento de Estradas de Rodagem (DER), fez a atualização das rodovias estaduais pavimentadas para o Mapa Rodoviário do Estado de São Paulo de 1999, utilizando receptores GPS embarcados em veículos. Os Sistemas Móveis de Mapeamento podem ser usados para diversas finalidades ligadas a levantamentos rodoviários. Uma dessas novas aplicações é o uso no levantamento de dados para estudo de relação de acidentes com as características geométricas de rodovias (Lotti,, 2002). Atualmente, em fase de protótipo, a Unidade Móvel de Mapeamento Digital (UMMD) em desenvolvimento na FCT / Unesp é uma integração de sistemas de aquisição de dados e de sensores, composto pelos sistemas de imageamento digital e de posicionamento global, e tem a finalidade de coletar informação georreferenciada para construção de um Banco de Imagens Georreferenciadas (BIG). A UMMD (Figura 1) tem como principal característica determinar coordenadas tridimensionais de feições com base em imagens sem a necessidade de pontos de controle espacial no terreno.
Transcript of MAPEAMENTO MÓVEL NO BRASIL: RESULTADOS OBTIDOS …
Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002. p.269-277.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
MAPEAMENTO MÓVEL NO BRASIL: RESULTADOS OBTIDOS COMA UTILIZAÇÃO DA UNIDADE MÓVEL DE MAPEAMENTO DIGITAL
JOÃO FERNANDO CUSTÓDIO DA SILVA
PAULO DE OLIVEIRA CAMARGO
RODRIGO BEZERRA DE ARAÚJO GALLIS
Universidade Estadual Paulista - UNESPFaculdade de Ciências e Tecnologia - FCT
Departamento de Cartografia, Presidente Prudente - SP{jfcsilva, paulo, rodrigo}@prudente.unesp.br
RESUMO - O rápido desenvolvimento da tecnologia e a disseminação de métodos cartográficos de análise deproblemas espaciais e ambientais estão demandando rapidez, eficiência e economia nos métodos de obtenção deinformações geográficas. Um dos novos métodos de levantamento são os Sistemas Móveis de Mapeamento, cujaconfiguração básica é composta de câmaras digitais, receptores GPS e sistema de armazenamento e de acesso àsimagens. UMMD é a sigla do sistema em desenvolvimento, desde 1998, no Câmpus da UNESP - PresidentePrudente, constituído por um veículo, um par de vídeo-câmaras digitais, um par de receptores GPS e umaestação computacional de processamento de imagens. Com o presente trabalho, propõe-se a realização delevantamentos de ruas e rodovias com o protótipo em construção e processar os dados (imagens e posições) parasubsidiar a criação de um Banco de Imagens Georreferenciadas (BIG). Este armazém de imagens pode ser útil auma gama de aplicações de engenharia e serviços de utilidade pública.
ABSTRACT - The fast development of the technology and the dissemination of cartographic methods ofanalysis of spatial problems have been demanding speed, efficiency and economy in the methods of obtainingthe geographical information. One of the new methods is the Mobile Systems Mapping, whose basicconfiguration is composed of digital cameras, GPS receiver, a system of storage and access of the images.UMMD is the acronym of the system in development, since 1998, in the Campus of UNESP - PresidentePrudente, constituted by a vehicle, a pair of digital video-cameras, a pair of GPS receiver and a computacionalstation of images processing. The present paper, intends to accomplish the surveying of streets and roads withthe prototype in construction, as well as to process the data (images and positions) to subsidize the creation of aGeoreferenced Image Database (BIG). This images database can be useful to a range of applications andservices of public utilities.
1 INTRODUÇÃO
A popularização da Cartografia está acompanhadade uma revolução nos métodos de obtenção deinformações espaciais. Os sistemas de informaçõesgeográficas (SIG) estão com alto índice de aceitação emdiversas áreas de trabalho, tais como: companhias deenergia elétrica, telecomunicações, planejamento eengenharia urbana, controle de fluxo e outras empresas dediferentes ramos. A permanente atualização das bases dedados digitais acarreta a necessidade de obter informaçõesgeográficas com rapidez, eficiência e economia derecursos. Um dos novos métodos de levantamento quetem contribuído são os Sistemas Móveis de Mapeamento.
No Brasil, algumas variantes do método já foramempregadas. A empresa ENGEMAP, a serviço doDepartamento de Estradas de Rodagem (DER), fez aatualização das rodovias estaduais pavimentadas para oMapa Rodoviário do Estado de São Paulo de 1999,utilizando receptores GPS embarcados em veículos.
Os Sistemas Móveis de Mapeamento podem serusados para diversas finalidades ligadas a levantamentosrodoviários. Uma dessas novas aplicações é o uso nolevantamento de dados para estudo de relação deacidentes com as características geométricas de rodovias(Lotti,, 2002).
Atualmente, em fase de protótipo, a UnidadeMóvel de Mapeamento Digital (UMMD) emdesenvolvimento na FCT / Unesp é uma integração desistemas de aquisição de dados e de sensores, compostopelos sistemas de imageamento digital e deposicionamento global, e tem a finalidade de coletarinformação georreferenciada para construção de umBanco de Imagens Georreferenciadas (BIG). A UMMD(Figura 1) tem como principal característica determinarcoordenadas tridimensionais de feições com base emimagens sem a necessidade de pontos de controle espacialno terreno.

Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
Figura 1 - Unidade Móvel de Mapeamento Digital
2 LABORATÓRIO DE MAPEAMENTO MÓVEL
No Laboratório de Mapeamento Móvel (LMM) daFCT/Unesp, concentra-se toda a parte de pesquisa edesenvolvimento de trabalhos ligados à UMMD. Nestelaboratório é onde se realiza todo o processamento dasimagens e dos dados GPS obtidos em campo, visando aconfecção de um produto final, como por exemplo ummapa. Também são desenvolvidas as ferramentas(programas) que hoje são utilizados no processamento dosdados coletados em campo. A Figura 2 mostra o ambientede trabalho encontrado no LMM.
Figura 2 – Laboratório de Mapeamento Móvel Digital
3 CARACTERÍSTICAS DA UNIDADE MÓVEL DEMAPEAMENTO DIGITAL
Desenvolvida na FCT / Unesp, a UMMD temcomo principal característica a integração entre sistemasde imageamento digital e de posicionamento global. Entreoutras características da UMMD, destacam-se:
- Capacidade de determinar coordenadastridimensionais de feições com base emimagens em posicionamento global, sem anecessidade de pontos de controle espacial noterreno, apenas com processo defototriangulação;- Rapidez e agilidade na coleta deinformações em campo, propiciando umaconsiderável redução dos custos com tempo delevantamento;- Bom desempenho em áreas em que nãohaja obstrução do sinal GPS devido aosobstáculos (árvores, viadutos, grandesconstruções, etc.).
Entre os equipamentos que compõem a UMMD,cita-se um veiculo (VW Kombi), um par de vídeo-câmaras digitais, receptor GPS Reliance, um GPS ZXII(utilizado como base), um GPS de navegação da Garmin,modelo 12 XL, um notebook FUJITSU e um sistema desincronização das imagens (Figura 3).
Figura 3 – Equipamentos montados na UMMD
4 METODOLOGIA EMPREGADA NA UMMD
4.1 Caminhamento FotogramétricoA metodologia básica utilizada pela UMMD é o
caminhamento fotogramétrico, que segundo Silva (1997),consiste em obter uma seqüência de pares estereoscópicostomados ao longo de uma trajetória definida e fazer usoda fototriangulação terrestre para determinar ascoordenadas dos pontos no espaço objeto. Sendo assim,os pares de imagens são tomados frontalmente no sentidoda trajetória do veículo, ou seja, com o eixo ótico dascâmaras aproximadamente paralelos entre si e ao eixo dolevantamento (Figura 4).
.P
E1 E2 E3 E4
D1 D2 D3 D4 .Q
Figura 4 – Representação do método de CaminhamentoFotogramétrico
Nesta figura tem-se:- P e Q : são pontos no espaço objeto;- D1, D2, D3, D4: posições sucessivas da câmara da
direita;- E1, E2, E3, E4: posições sucessivas da câmara da
esquerda.
É uma metodologia rápida e eficaz para obtençãode dados e informações de feições urbanas e ao longo dasvias de transporte, tendo como característica a amplacobertura dos objetos.

Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
4.2 Posicionamento Global (GPS)Permite a determinação das coordenadas dos
centros perspectivos (CPs) das câmaras, e posteriormente,a partir do processo de fototriangulação determinar aposição tridimensional das imagens(georreferenciamento). Nos levantamentos realizados coma UMMD, foi utilizado o posicionamento cinemático.
Neste método tem-se como observávelfundamental a fase da onda portadora, onde um receptorocupa uma estação de coordenadas conhecidas enquanto ooutro se desloca sobre as feições de interesse. Asobservações simultâneas dos dois receptores geram asduplas diferenças, no qual vários erros envolvidos nasobserváveis são reduzidos. No posicionamento cinemático, embora a antenaesteja em movimento, a trajetória é descrita peloposicionamento de uma série de pontos. Maiores detalhespodem serem encontrados em Monico (2000).
4.3 Calibração de Câmaras de Vídeo
A calibração de câmaras consiste na estimação devalores numéricos dos parâmetros de orientação interiorda câmara, que são responsáveis pela modelagem do feixede raios no interior da câmara, bem como da estimativadas suas precisões (Oliveira e Silva, 1999).
O processo de calibração das câmaras de vídeopara uso prolongado numa plataforma móvel é deprimordial importância, em termos de exatidão, uma vezque os parâmetros de orientação interior podem variarcom o tempo por causa da vibração causada pelomovimento da plataforma e pelo fato das câmaras seremretiradas do teto do veículo após cada seção delevantamento (Li, R. et al.,1996). As câmaras DVCAMSONY – DSR 200 A, que fazem parte da UMMD, nãosão métricas, isto é, possuem uma geometria instável eseus parâmetros de orientação são desconhecidos. Porestes motivos é necessário a realização da autocalibraçãotoda vez que as câmaras são montadas para a realizaçãode um levantamento.
Para realização da calibração das câmarasusadas nos levantamentos construiu-se em uma dasparedes do ginásio de Esportes da FCT/Unesp um campode calibração. Este campo é constituído por uma malha de54 alvos de metal galvanizado, pintadas de preto,formando 6 colunas e 9 linhas. Possui um sistema decoordenadas local. A Figura 5 mostra o sistema do campode calibração e a disposição do sistema das câmaras comrelação ao sistema de coordenadas de calibração.
Figura 5 – Sistema de coordenadas do campo decalibração e sistema de coordenadas das câmaras
Ao término dos levantamentos dirige-se aoCampo de Calibração com a UMMD e tomam-se imagensde três posições diferentes: convergente esquerda, frontale convergente direita conforme a Figura 6.
Figura 6 - Posições da UMMD na tomada das imagensno campo de calibração
Para coletar as fotocoordenadas dos alvos nasimagens é utilizado um aplicativo chamado FOTOCIC(FOTOComparador de Imagens Consecutivas)desenvolvido no LMM (Guardia et al., 1999). O arquivode fotocoordenadas é preparado como arquivo de entradapara o software de calibração FOTRAC(FOtoTRiangulação com Auto-Calibração); além disso,faz-se necessário montar arquivos de orientação exterioraproximada para as câmaras e o de pontos de apoio docampo de calibração.
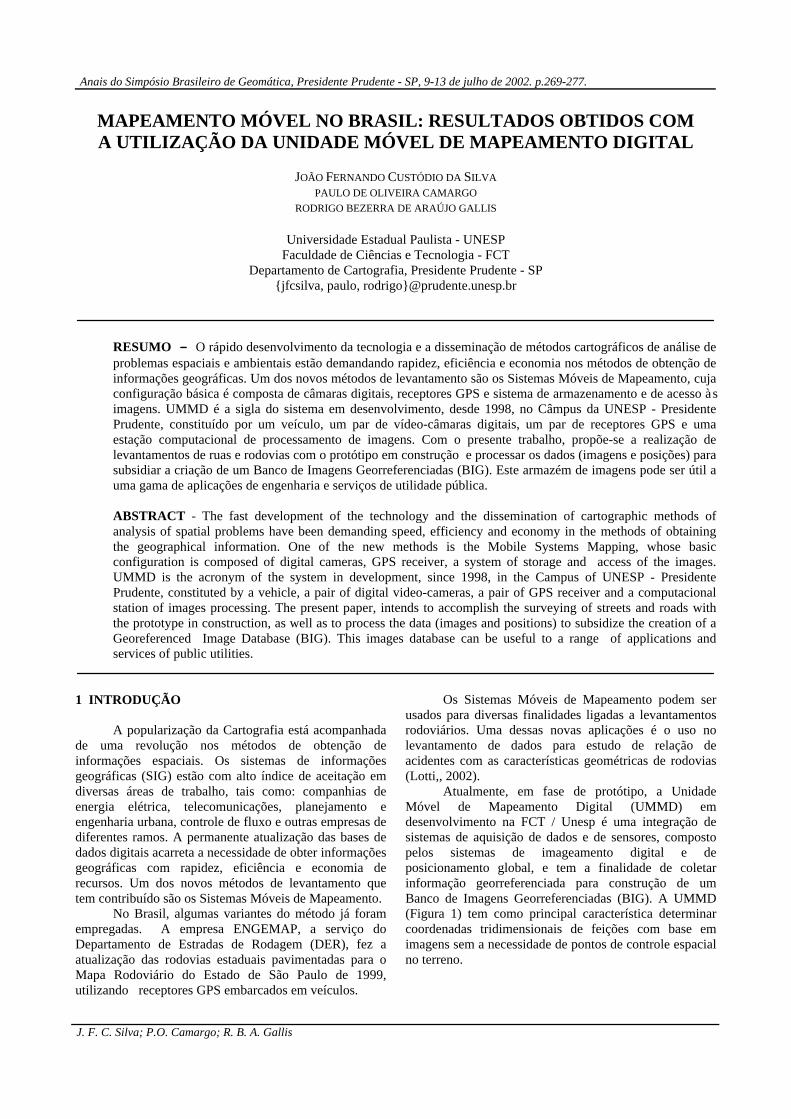
Do processamento do software FOTRAC,independentemente para cada câmara, foram estimados osparâmetros, exemplificados na Tabela 1. Os resultadosreferem-se ao processamento de três imagens por vez (trêsreferentes à câmara esquerda e três à câmara da direita).Tendo em vista que o software TFTC (Triangulação deFotos Terrestres por Caminhamento), implementado porSilva (1997), atualmente, aceita um único conjunto deparâmetros de orientação interior, e que o softwareFOTOCIC corrige os parâmetros de distorção das lentesno momento da leitura de fotocoordenadas, adotou-separa fototriangulação uma única focal, sendo o seu valora média da distância focal das duas câmaras. A Tabela 1
Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
mostra os valores obtidos na calibração do par de vídeo-câmaras.
4.4 Coleta dos pontos de passagem necessários para afototriangulação
Nas imagens foram coletadas as fotocoordenadasdos pontos de passagem, necessárias para afototriangulação, e de feições lineares e pontuais paraposterior interseção fotogramétrica.
Pontos de passagem são pontos determinados nafotografia (imagem) por métodos fotogramétricos, queservem para orientar fotografias (imagens) adjacentes.
Para a coleta dos pontos de passagem foiutilizado o programa FOTOCIC. Este programa, contémalgumas operações que facilitam e agilizam a coleta dasfotocoordenadas, como a redução delas para o sistemafotogramétrico, aplicando-se um fator de escala (tamanhodo pixel). As correções dos parâmetros de distorção daslentes também são realizadas a cada coordenada coletada,através da inserção dos parâmetros oriundos da calibraçãodas câmaras em um arquivo apropriado.
A seqüência de operações que o programaFOTOCIC realiza para a coleta de pontos de passageminicia-se com a abertura de duas bases consecutivas docomeço do sentido de coleta.
Quando é finalizada a coleta dos pontos nasbases visualizadas, a base posterior toma o lugar daanterior e uma nova base é inserida pelo usuário. A Figura7 mostra a interface do FOTOCIC para a coleta dospontos de passagem.
Figura 7– Sistema de coordenadas do campo de calibraçãoe sistema de coordenadas das câmaras
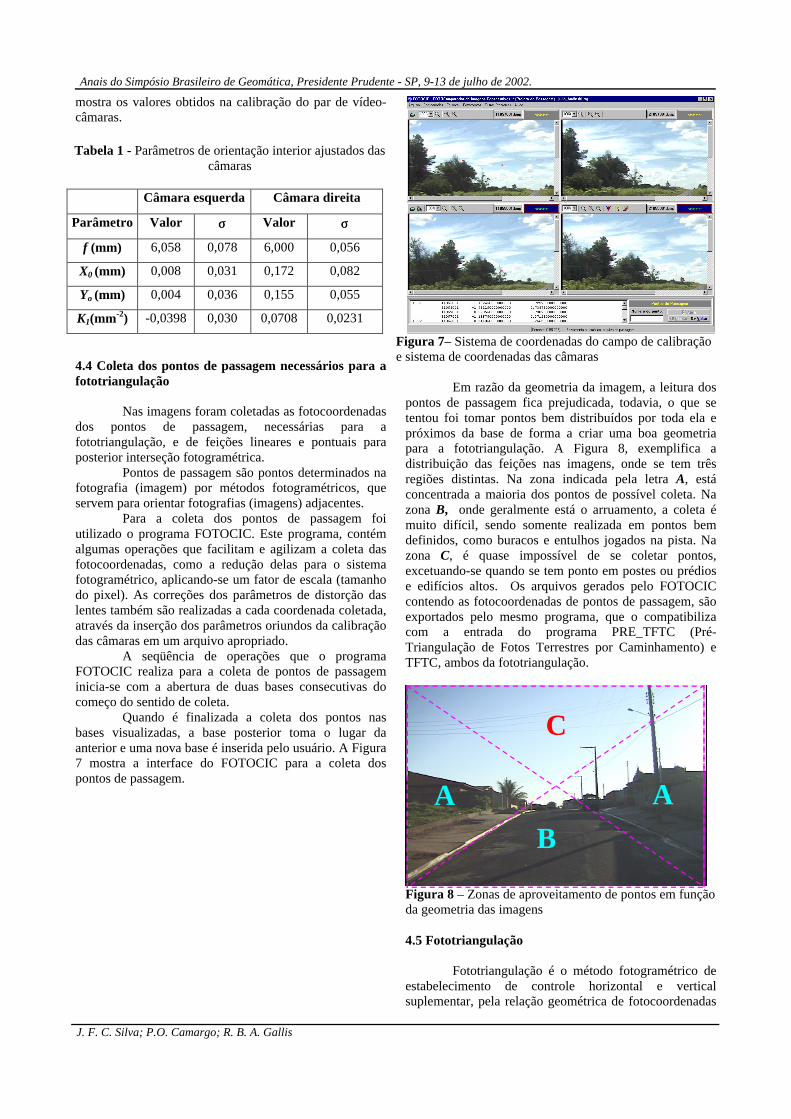
Em razão da geometria da imagem, a leitura dospontos de passagem fica prejudicada, todavia, o que setentou foi tomar pontos bem distribuídos por toda ela epróximos da base de forma a criar uma boa geometriapara a fototriangulação. A Figura 8, exemplifica adistribuição das feições nas imagens, onde se tem trêsregiões distintas. Na zona indicada pela letra A, estáconcentrada a maioria dos pontos de possível coleta. Nazona B, onde geralmente está o arruamento, a coleta émuito difícil, sendo somente realizada em pontos bemdefinidos, como buracos e entulhos jogados na pista. Nazona C, é quase impossível de se coletar pontos,excetuando-se quando se tem ponto em postes ou prédiose edifícios altos. Os arquivos gerados pelo FOTOCICcontendo as fotocoordenadas de pontos de passagem, sãoexportados pelo mesmo programa, que o compatibilizacom a entrada do programa PRE_TFTC (Pré-Triangulação de Fotos Terrestres por Caminhamento) eTFTC, ambos da fototriangulação.
Figura 8 – Zonas de aproveitamento de pontos em funçãoda geometria das imagens
4.5 Fototriangulação
Fototriangulação é o método fotogramétrico deestabelecimento de controle horizontal e verticalsuplementar, pela relação geométrica de fotocoordenadas
Tabela 1 - Parâmetros de orientação interior ajustados dascâmaras
Câmara esquerda Câmara direita
Parâmetro Valor σσ Valor σσ
f (mm) 6,058 0,078 6,000 0,056
X0 (mm) 0,008 0,031 0,172 0,082
Yo (mm) 0,004 0,036 0,155 0,055
K1(mm-2) -0,0398 0,030 0,0708 0,0231
B
AA
C
Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
adjacentes que constituem estereo-modelos (Lugnani,1987). Também utiliza-se para a orientação da câmara (ouda imagem), que requer a observação de pontos nasimagens, valores aproximados dos parâmetros deorientação exterior e das imagens dos pontos objetos(terreno). O objetivo da fototriangulação, neste trabalho, éfornecer um conjunto de parâmetros de orientaçãoabsoluta das imagens. Dadas as coordenadas dos centrosperspectivos das câmaras e um conjunto defotocoordenadas de pontos de passagem, afototriangulação, através de um ajustamento, utilizando omodelo de colinearidade, possibilita a orientação de umafoto em relação ao seu espaço objeto. O programa queexecuta o processo de fototriangulação é o TFTC. Paraseu processamento, é necessário a montagem de algunsarquivos de entrada, sendo eles:
- parâmetros de orientação exterior das imagens,sendo as translações conhecidas peloposicionamento GPS e as rotações aproximadas;
- fotocoordenadas dos pontos de passagem,coletadas pelo FOTOCIC;
- coordenadas aproximadas dos pontos de terreno,geradas pelo PRE_TFTC por meio de interseçãosimples; e
- orientação interior, contendo apenas a distânciafocal média como parâmetro relevante, uma vezque os efeitos sistemáticos foram previamentecorrigidos nas fotocoordenadas.
4.6 Interseção fotogramétrica
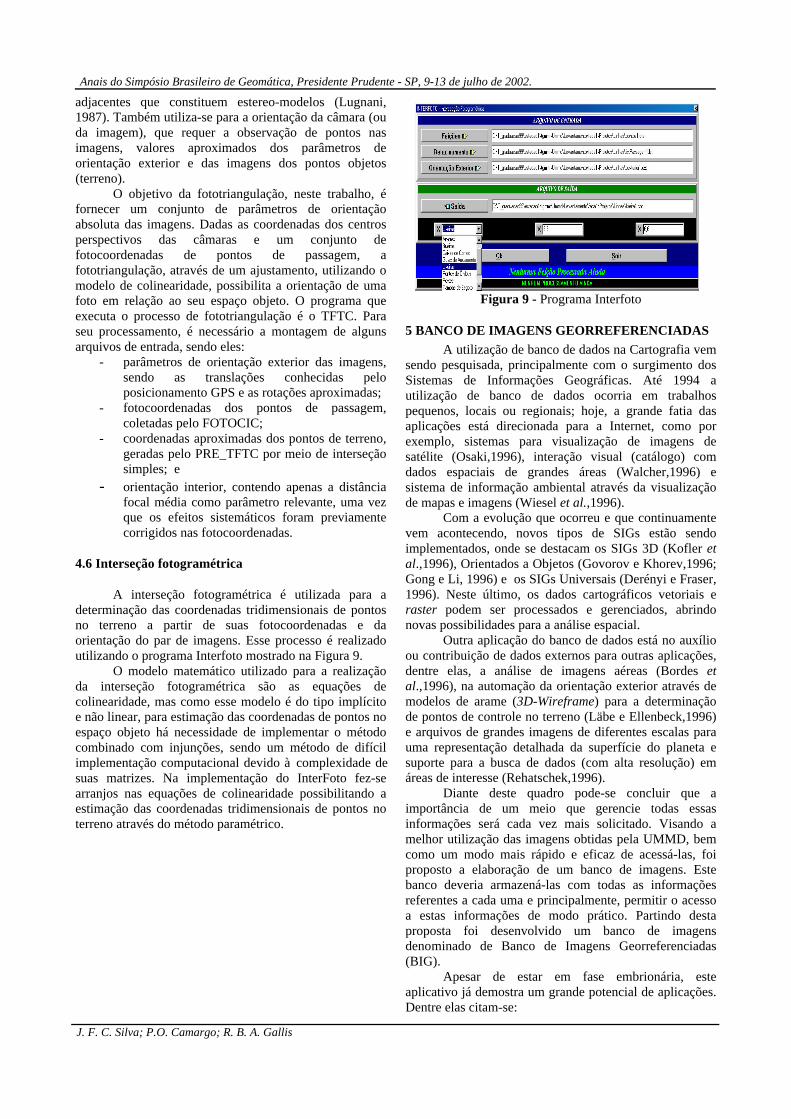
A interseção fotogramétrica é utilizada para adeterminação das coordenadas tridimensionais de pontosno terreno a partir de suas fotocoordenadas e daorientação do par de imagens. Esse processo é realizadoutilizando o programa Interfoto mostrado na Figura 9.
O modelo matemático utilizado para a realizaçãoda interseção fotogramétrica são as equações decolinearidade, mas como esse modelo é do tipo implícitoe não linear, para estimação das coordenadas de pontos noespaço objeto há necessidade de implementar o métodocombinado com injunções, sendo um método de difícilimplementação computacional devido à complexidade desuas matrizes. Na implementação do InterFoto fez-searranjos nas equações de colinearidade possibilitando aestimação das coordenadas tridimensionais de pontos noterreno através do método paramétrico.
Figura 9 - Programa Interfoto
5 BANCO DE IMAGENS GEORREFERENCIADASA utilização de banco de dados na Cartografia vem
sendo pesquisada, principalmente com o surgimento dosSistemas de Informações Geográficas. Até 1994 autilização de banco de dados ocorria em trabalhospequenos, locais ou regionais; hoje, a grande fatia dasaplicações está direcionada para a Internet, como porexemplo, sistemas para visualização de imagens desatélite (Osaki,1996), interação visual (catálogo) comdados espaciais de grandes áreas (Walcher,1996) esistema de informação ambiental através da visualizaçãode mapas e imagens (Wiesel et al.,1996).
Com a evolução que ocorreu e que continuamentevem acontecendo, novos tipos de SIGs estão sendoimplementados, onde se destacam os SIGs 3D (Kofler etal.,1996), Orientados a Objetos (Govorov e Khorev,1996;Gong e Li, 1996) e os SIGs Universais (Derényi e Fraser,1996). Neste último, os dados cartográficos vetoriais eraster podem ser processados e gerenciados, abrindonovas possibilidades para a análise espacial.
Outra aplicação do banco de dados está no auxílioou contribuição de dados externos para outras aplicações,dentre elas, a análise de imagens aéreas (Bordes etal.,1996), na automação da orientação exterior através demodelos de arame (3D-Wireframe) para a determinaçãode pontos de controle no terreno (Läbe e Ellenbeck,1996)e arquivos de grandes imagens de diferentes escalas parauma representação detalhada da superfície do planeta esuporte para a busca de dados (com alta resolução) emáreas de interesse (Rehatschek,1996).
Diante deste quadro pode-se concluir que aimportância de um meio que gerencie todas essasinformações será cada vez mais solicitado. Visando amelhor utilização das imagens obtidas pela UMMD, bemcomo um modo mais rápido e eficaz de acessá-las, foiproposto a elaboração de um banco de imagens. Estebanco deveria armazená-las com todas as informaçõesreferentes a cada uma e principalmente, permitir o acessoa estas informações de modo prático. Partindo destaproposta foi desenvolvido um banco de imagensdenominado de Banco de Imagens Georreferenciadas(BIG).
Apesar de estar em fase embrionária, esteaplicativo já demostra um grande potencial de aplicações.Dentre elas citam-se:

Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
- utilização em administrações municipaispara a localização, visualização egerenciamento das informações referentes aum arruamento, a um lote ou a umaconstrução;- interesse de empresas e órgãos públicosrelacionados ao planejamento, construção,conservação e utilização de rodovias eferrovias;- organizações responsáveis pelos serviçosde utilidade pública, tais como: água eesgoto, energia elétrica, telecomunicações,coleta de lixo, engenharia de transporte,tráfego e trânsito, segurança e saúdepública, etc;- mapeamento topográfico de detalhesurbanos por meio do caminhamentofotogramétrico (como exemplo, cita-se alocalização de postes da rede de distribuiçãoelétrica e telecomunicações, de boca delobos, etc).
A partir de um Banco de ImagensGeorreferenciadas, pode-se utilizar a fototriangulaçãopara obter as atitudes das câmaras (coordenadas doscentros perspectivos e ângulos de orientação) e, então,utilizar a interseção fotogramétrica para obter ascoordenadas no terreno de qualquer ponto que se localizena região de sobreposição das imagens de um parestereoscópico. O Banco de Imagens Georreferenciadas(BIG), desenvolvido na FCT - Unesp, já encontra-seimplementado e testado, conforme mostra a Figura 10.
Figura 10 – Tela do programa BIG
6 PROGRAMA VISUALIZADOR DOS MAPAS,IMAGENS E VÍDEOS
Considerando a disponibilidade dosequipamentos e dos dados coletados nos levantamentosrealizados com a UMMD iniciou-se a construção de umprograma que permite a ligação entre arquivos gráficos,vídeos e imagens. Este programa permite ao usuário ver omapa, localizar uma feição nele representada (postes,placas de sinalização, pontos de ônibus, etc) e, ao clicarnesta feição, visualizar a imagem do local onde a mesmase encontra e ainda visualizar o vídeo do local conformeilustra a Figura 11.
Este módulo encontra-se em fase de testes, masjá permite a visualização do mapa com seus respectivos
layers, possui ferramentas de zoom e ainda permite que ousuário visualize a imagem e um trecho do vídeo do localdo levantamento ao clicar na feição no mapa.
Futuramente dar-se-á início à construção de umsistema que indique no mapa a posição mostrada novídeo, no momento em que este estiver passando.
Figura 11 – Programa que permite a visualização domapa, vídeo e imagem
Dentre as diversas aplicações e utilidades doprograma citam-se:
- Utilização em administrações municipais para alocalização, visualização e gerenciamento dasinformações referentes a um arruamento;- Interesse de empresas relacionadas à conservaçãode estradas, tais como DNER, DER, eterceirizadas;- Empresas e organizações que lidam com serviçosde utilidade pública: água, energia,(tele)comunicações, transportes etc.
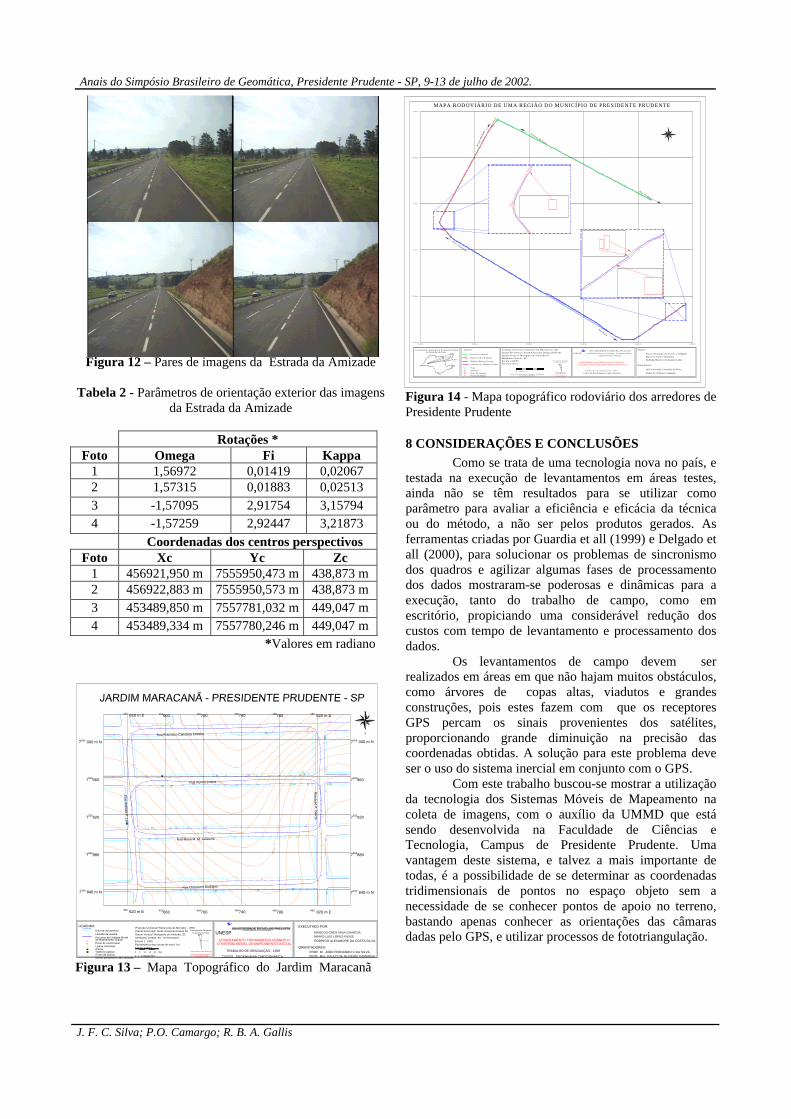
7 RESULTADOS Os resultados finais obtidos são a obtenção dosparâmetros de orientação exterior (georreferenciamento)das imagens dos levantamentos realizados com a UMMDnas áreas testes para inclusão das mesmas no BIG, e osmapas digitais das áreas levantadas, assim como todosaplicativos desenvolvidos no LMM. Para a obtençãodestas imagens e dos mapas algumas tarefas foramimprescindíveis, como levantamento em campo,processamento dos dados obtidos com os receptores GPSe processamento dos vídeos das câmaras em softwarespara tratamento de imagens. Na Figura 12 mostram-sedois pares de imagens georreferenciadas e, na Tabela 2,seus respectivos parâmetros de orientação exterior. NasFiguras 13 e 14 mostram-se os mapas dos levantamentosrealizados com a UMMD.
Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
Figura 12 – Pares de imagens da Estrada da Amizade
Tabela 2 - Parâmetros de orientação exterior das imagensda Estrada da Amizade
Rotações *Foto Omega Fi Kappa
1 1,56972 0,01419 0,020672 1,57315 0,01883 0,025133 -1,57095 2,91754 3,157944 -1,57259 2,92447 3,21873
Coordenadas dos centros perspectivosFoto Xc Yc Zc
1 456921,950 m 7555950,473 m 438,873 m2 456922,883 m 7555950,573 m 438,873 m3 453489,850 m 7557781,032 m 449,047 m4 453489,334 m 7557780,246 m 449,047 m
*Valores em radiano
UNIVERSIDADE ESTADUAL PAULISTA
UNESP
TRABALHO DE GRADUAÇÃO - 1999
RODRIGO ALEXANDRE DA COSTA SILVA
CURSO: ENGENHARIA CARTOGRÁFICA
Guia de arruamentoTestada de quadra
Poste de eletricidadeLixeira domiciliarÁrvore
Datum Vertical: Marégrafo de Imbituba, SCMeridiano Central: 51º W Greenwich
Eqüidistância das curvas de nível: 1m
LEGENDA:
Telefone públicoPonto de ônibusCentro perspectivo das câmaras PROF. Msc. PAULO DE OLIVEIRA CAMARGO
Escala Gráfica
Escala 1: 1000
456 456 456 456 456 456
5567
5557
5557
5557
5557
0
960
920
880
660 700 780740
5567
5557
5557
5557
5557
960
920
880
456 456 456 456 456 456660 700 780740620 m E
000 m N
840 m N
620 m E 820 m E
840 m N
820 m E
000 m N
Datum horizontal: South American Datum 69
k = 0,99962281
5 10 15 20 25m
NG NQ
9' 24,328''
Projeção Universal Transversa de Mercator - UTM
Rua R
ubens P. Leite
Rua Aurora Lisboa
Rua Francisco Carlos de Oliveira
Rua Maria M. M. Caravina
Rua Claudemir Rodriges
Rua José A
. Garcia
435 m
440 m
445 m
440
m
440
m
440 m
Percurso da Unidade Movelde Mapeamento Digital
Convergência Meridianano Centro da Folha
Utilizar Somente Dados Numéricos
Esta carta atende a classe Cna escala 1:2.000
EXECUTADO POR:
MÁRIO LUIS LOPES REISSMARCOS CRESTANA GUARDIA
PROF. Dr. JOÃO FERNANDO C.DA SILVA
ORIENTADORES:
LEVANTAMENTO TOPOGRÁFICO USANDO OO SISTEMA MÓVEL DE MAPEAMENTO DIGITAL
S
N
Figura 13 – Mapa Topográfico do Jardim Maracanã
Figura 14 - Mapa topográfico rodoviário dos arredores dePresidente Prudente
8 CONSIDERAÇÕES E CONCLUSÕESComo se trata de uma tecnologia nova no país, e
testada na execução de levantamentos em áreas testes,ainda não se têm resultados para se utilizar comoparâmetro para avaliar a eficiência e eficácia da técnicaou do método, a não ser pelos produtos gerados. Asferramentas criadas por Guardia et all (1999) e Delgado etall (2000), para solucionar os problemas de sincronismodos quadros e agilizar algumas fases de processamentodos dados mostraram-se poderosas e dinâmicas para aexecução, tanto do trabalho de campo, como emescritório, propiciando uma considerável redução doscustos com tempo de levantamento e processamento dosdados.
Os levantamentos de campo devem serrealizados em áreas em que não hajam muitos obstáculos,como árvores de copas altas, viadutos e grandesconstruções, pois estes fazem com que os receptoresGPS percam os sinais provenientes dos satélites,proporcionando grande diminuição na precisão dascoordenadas obtidas. A solução para este problema deveser o uso do sistema inercial em conjunto com o GPS.
Com este trabalho buscou-se mostrar a utilizaçãoda tecnologia dos Sistemas Móveis de Mapeamento nacoleta de imagens, com o auxílio da UMMD que estásendo desenvolvida na Faculdade de Ciências eTecnologia, Campus de Presidente Prudente. Umavantagem deste sistema, e talvez a mais importante detodas, é a possibilidade de se determinar as coordenadastridimensionais de pontos no espaço objeto sem anecessidade de se conhecer pontos de apoio no terreno,bastando apenas conhecer as orientações das câmarasdadas pelo GPS, e utilizar processos de fototriangulação.
5 0 0 m
Projeção Universal Transversa De Mercator (UTM)Datum Horizontal : South Americam Datum (SAD 69)Datum Vert ical : Marégrafo de Imbituba-SCMeridiano Central: -51ºEscala 1:10000Escala Gráfica:
UNESP
M A P E A M E N T O D E R O D O V I A S U S A N D O AU N I D A D E M Ó V E L D E M A P E A M E N T O D I G I T A L
T R A B A L H O D E G R A D U A Ç Ã O - 2 0 0 0
C U R S O D E E N G E N H A R I A C A R T O G R Á F I C A
Alunos:
Flavio Fernando de Oliveira DelgadoMarcelo Tomio MatsuokaRodrigo Bezerra de Araújo Gall is
Orientadores:
João Fernando Custódio da Silva
Paulo de Oliveira Camargo
Faculdade de Ciências e Tecnologia - Presidente Prudente
Departamento de Cartografia
Presidente Prudente Convergência Meridiana
no Cent ro da Folha
Utilizar Somente Dados dados Numéricos
Esta carta atende a classe Ana escala 1:10000
NGNQ
9' 57,593' '
Execução do levantamento topográfico em Abr/2000Data do mapa: nov/2000
K = 0.99962557
7553000 m452000 m
7558000 m
457000 m
Poste
TelefonePlaca de TransitoPonto de Onibus
S
N
Álvares Machado
Pres. Prudente
Pres. Venceslau
São Paulo
Álv
ares
Mac
hado
U N I V E R S I D A D E E S T A D U A L P A U L I S T A
MAPA RODOVIÁRIO DE UMA REGIÃO DO MUNICÍPIO DE PRESIDENTE PRUDENTE
Localização do município de Presidente Prudente no Estado de São Paulo
453000 m 454000 m 455000 m 456000 m
7554000 m
7555000 m
7556000 m
7557000 m
Estrada da Amizade
Rodovia Júl io Budinski
Rodovia Raposo Tavares
Avenida Cel . Manoel Goular t
Legenda:
0 100 200 300 400
Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
Pode-se concluir que, o sistema móvel é umatécnica válida como metodologia rápida, precisa e eficazpara mapeamentos em áreas urbanas e rodoviárias.Porém, muito pode ser desenvolvido para que a UMMDpossa continuamente estar melhorando em qualidade,precisão e eficiência.
AGRADECIMENTOS
À FAPESP, pelos recursos financeiros quepermitiram a realização do mesmo, ao CNPq pelaconcessão da bolsa de mestrado e à UNESP pelaconstrução do LMM.
REFERÊNCIAS
BORDES, G.; GUÉRIN, P.; GIRAUDON, G.; MAÎTRE,H. Contribution of external data to aerial imageanalysis. In: INTERNATIONAL CONGRESS OF ISPRS, 18.,Viena, International Archives... ISPRS, 1996, v. 31, t. B4,p. 134-8, 1996.
DELGADO, F. F. O.; GALLIS, R. B. A.; MATSUOKA,M. T. Mapeamento de rodovias utilizando a UnidadeMóvel de Mapeamento Digital. Trabalho de Graduaçãodo Curso de Engenharia Cartográfica. Faculdade deCiencias e Tecnologia da Universidade Estadual Paulista,Presidente Prudente, 2000. 72 p.
DERÉNYI, E.; FRASER, D. Using images within a GISfor spatial analysis. In: INTERNATIONAL CONGRESS OF
ISPRS, 18., Viena, International Archives... ISPRS, 1996,v. 31, t. B4, p. 216-18, 1996.
GONG, J.; LI, D. Design and implementation of anobject-oriented GIS Software. In: INTERNATIONAL
CONGRESS OF ISPRS, 18. Viena, International Archives...ISPRS, 1996, v. 31, t. B4, p. 299-304, 1996.
GOVERNO DO ESTADO DE SÃO PAULO.Departamento de Estradas de Rodagem. MapaRodoviário do Estado de São Paulo. São Paulo,Engemap, 2000. Mapa color., 62 x 96 cm. Escala1:1.000.000.
GOVOROV, M.O.; KHOREV, A.G. Object-orientedGIS and representation of multi-detailed data. In:INTERNATIONAL CONGRESS OF ISPRS, 18., Viena,International Archives... ISPRS, 1996, v. 31, t. B4, p.445-50, 1996.
GUARDIA, M. C.; REISS, M. L. L.; SILVA, R. A. C.Levantamento Topográfico Usando o Sistema Móvelde Mapeamento Digital. Trabalho de Graduação doCurso de Engenharia Cartográfica. Faculdade de Cienciase Tecnologia da Universidade Estadual PaulistaPresidente Prudente, 1999. 111p.
LOTTI, C. P. Método de sistematização e levantamentode dados para o estudo da relação de acidentes com acaracteristicas geométricas da rodovia. Tese(Doutorado). USP - Escola de Engenharia de São Carlos.2002, 324 p.
KOFLER, M.; REHATSCHEK, H.; GRUBER,M. Adatabase for a 3D GIS for urban environmetssupporting Photo-Realistic Visualization. In:INTERNATIONAL CONGRESS OF ISPRS, 18., Viena,International Archives... ISPRS, v. 31, t. B2, p. 198-202,1996.
LÄBE, T.; ELLENBECK, K.H. 3D-wireframe modelsas ground control points for the automatic exteriororientation. In: INTERNATIONAL CONGRESS OF ISPRS, 18.,Viena, International Archives... ISPRS, 1996, v. 31, t. B2,p. 218-23, 1996.
LI, R.; CHAPMAN, A.; QIAN, L.; XIN, Y.; TAO, C.VISAT: a real time system for highway spatialinformation acquisition. In: ASPRS-ACSM ANNUAL
CONVENTION AND EXPOSITION, Reno, Proceedings...Bethesda: ASPRS & ACSM, v.1, p.344-9, 1994.
LUGNANI, J. B. Introdução à Fototriangulação.Curitiba: Ed. da UFPR, 1987, 134 p.
MONICO, J.F.G. Posicionamento pelo Navstar-GPS:Descrição, fundamentos e aplicações. São Paulo,Editora da Unesp, 2000. 287p.
OLIVEIRA, R. A.; SILVA, J. F. C.; GALLIS, R. B. A.Banco de Imagens obtidas por Sistema Móvel deMapeamento Digital. IV Congresso Brasileiro deCadastro Técnico Multifinalitário, CD- ROM,Florianópolis, 2000, 10p.
OLIVEIRA, R. A.; SILVA, J. F. C. Calibração de UmPar de Vídeo Câmaras Digitais. Congresso Brasileiro deCartografia, Recife, 1999, 4p.
OSAKI, K. Preliminary new satellite data retrievalsystem on world wide web. In: INTERNATIONAL CONGRESS
OF ISPRS, 18., Viena, International Archives... ISPRS, v.31, t. B1, p. 150-3, 1996.
REHATSCHEK, H. A Concept for a network-baseddistributed image data archive. In: INTERNATIONAL
CONGRESS OF ISPRS, 18., Viena, International Archives...ISPRS, v. 31, t. B2, p. 327-32, 1996.
SILVA, J. F. C.; OLIVEIRA, R. A; GALLIS, R. B. A.Georeferenced Road Image Database. In:INTERNATIONAL SYMPOSIUM ON MOBILE MAPPING
TECHNOLOGY, 3., Cairo, International Archives..., ISPRS,CD-ROM. 8 p., 2001.
SILVA, J.F.C., CAMARGO, P.O., OLIVEIRA, R.A.,GALLIS, R.B.A., GUARDIA, M.C., REISS, M.L.L.,SILVA, R.A.C. A Street Map Built by a Mobile

Anais do Simpósio Brasileiro de Geomática, Presidente Prudente - SP, 9-13 de julho de 2002.
J. F. C. Silva; P.O. Camargo; R. B. A. Gallis
Mapping System. International Archives ofPhotogrammetry and Remote Sensing, Vol. XXXIII, PartB2, Anais, Amsterdam, 2000. P 510-517.
SILVA, J.F.C.; OLIVEIRA, R.A. CaminhamentoFotogramétrico para Levantamentos Urbanos. XVIIICongresso Brasileiro de Cartografia, Rio de Janeiro,1997, 8p.
SILVA, J.F.C. Solução Seqüencial para oCaminhamento Fotogramétrico. Coletânea Politécnica- Rev. Bras. Tecnol. Ciênc. 1(1):92-96, 1996.
_______. Fototriangulação no CaminhamentoFotogramétrico. Tese (Livre Docência) – Departamentode Cartografia, Faculdade de Ciências e Tecnolgoia,Campus de Presidente Prudente, Universidade EstadualPaulista “Júlio de Mesquita Filho”. 1997, 85p.
WALCHER, W. Visual interaction with very largespatial data sets. In: INTERNATIONAL CONGRESS OF ISPRS,18., Viena, International Archives... ISPRS, v. 31, t. B1,p. 197-202, 1996.
WIESEL, J.; HAGG, W.; KOSCHEL, A.; KRAMER, R.;NICOLAI, R. A client/server map visualizationcomponent for an environmental information systembased on www. In: INTERNATIONAL CONGRESS OF ISPRS,18., Viena, International Archives... ISPRS, 1996, v. 31, t.B2, p. 402-7, 1996.


















