Mecanica Clˆ assica II´ - bem-vindo - …´ıtulo 1 Oscilac¸˜oes /parte 1 1.1 Introdu¸c˜ao As...
49
Mec ˆ anica Cl ´ assica II Oscila¸ c˜oes/1 Jos´ e Pinto da Cunha Notas Lectivas Universidade de Coimbra 2012
Transcript of Mecanica Clˆ assica II´ - bem-vindo - …´ıtulo 1 Oscilac¸˜oes /parte 1 1.1 Introdu¸c˜ao As...
Mecanica Classica II
Oscilacoes / 1
Jose Pinto da Cunha
Notas Lectivas
Universidade de Coimbra2012
2

Conteudo
1 Oscilacoes /parte 1 51.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Equacoes diferenciais lineares de coeficientes constantes . . . . 8
1.2.1 Equacoes diferenciais homogeneas . . . . . . . . . . . . 81.2.2 Equacoes diferenciais completas . . . . . . . . . . . . . 91.2.3 Analise das solucoes da equacao diferencial x + ax +
bx = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3 O oscilador livre . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4 Energia do oscilador linear . . . . . . . . . . . . . . . . . . . . 151.5 O oscilador linear amortecido . . . . . . . . . . . . . . . . . . 201.6 O oscilador forcado . . . . . . . . . . . . . . . . . . . . . . . . 21
1.6.1 Ressonancia . . . . . . . . . . . . . . . . . . . . . . . . 271.7 Osciladores acoplados . . . . . . . . . . . . . . . . . . . . . . . 30
1.7.1 Analise da energia do sistema de osciladores . . . . . . 371.7.2 Analise das oscilacoes da molecula de CO2 . . . . . . . 391.7.3 Modos de oscilacao molecular . . . . . . . . . . . . . . 42
1.8 Osciladores acoplados e forcados . . . . . . . . . . . . . . . . . 451.9 Sistema de N osciladores acoplados − transicao para o contınuo 47
3
4 CONTEUDO
Capıtulo 1
Oscilacoes /parte 1
1.1 Introducao
As leis de Newton da Fısica Classica sao suficientes para descrever o movi-mento da materia, desde corpos simples ate aos sistemas mais complexos(se as velocidades forem muito menores que a velocidade da luz no vazio eexcluirmos sistemas quanticos). Isso e assim porque essas leis (tres) sistem-atizam a experiencia concreta mais elementar.
i) A 1a lei diz que o movimento nao pode ser definido so por si, emabsoluto, mas sim sempre em relacao ao movimento do observador.Que a velocidade de um corpo livre se mantem, pois que havera umobservador para o qual esse corpo esta em repouso e assim permanecera.
ii) A 2a lei traduz formalmente a relacao causal causa-efeito: - se agirmoscom uma forca sobre um corpo alteramos a sua velocidade. E umarelacao entre as causas (as forcas) e o efeito (a aceleracao) em cadapartıcula de materia, i.e.,
efeito =∑
causas ; ~a =
∑ ~F
m
A equacao assim escrita, serve ela propria como definicao de uma forca:1N = 1m/s2 × 1kg. Esta eq. de Newton e uma lei consequente:uma forca origina uma aceleracao; se houver forca ha necessariamenteaceleracao; se ha aceleracao entao e porque ha forca ou forcas a actuarnesse corpo.
5
6 CAPITULO 1. OSCILACOES /PARTE 1
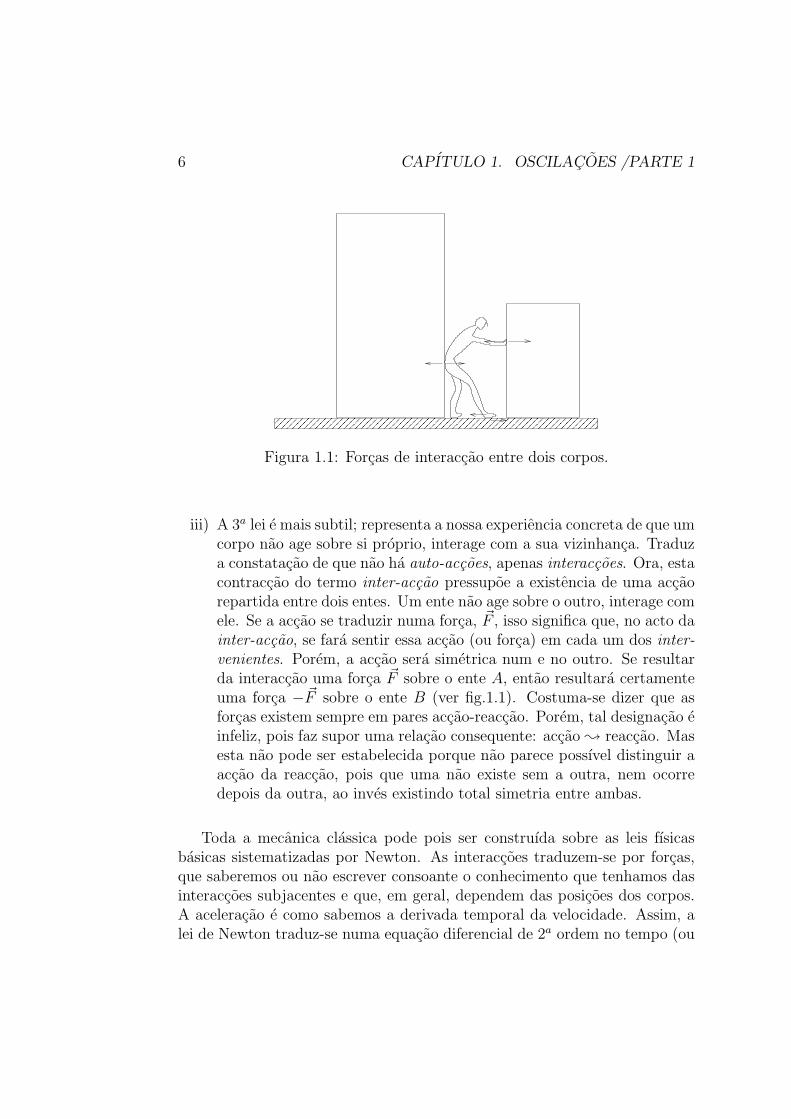
Figura 1.1: Forcas de interaccao entre dois corpos.
iii) A 3a lei e mais subtil; representa a nossa experiencia concreta de que umcorpo nao age sobre si proprio, interage com a sua vizinhanca. Traduza constatacao de que nao ha auto-accoes, apenas interaccoes. Ora, estacontraccao do termo inter-accao pressupoe a existencia de uma accaorepartida entre dois entes. Um ente nao age sobre o outro, interage comele. Se a accao se traduzir numa forca, ~F , isso significa que, no acto dainter-accao, se fara sentir essa accao (ou forca) em cada um dos inter-venientes. Porem, a accao sera simetrica num e no outro. Se resultarda interaccao uma forca ~F sobre o ente A, entao resultara certamenteuma forca −~F sobre o ente B (ver fig.1.1). Costuma-se dizer que asforcas existem sempre em pares accao-reaccao. Porem, tal designacao einfeliz, pois faz supor uma relacao consequente: accao ; reaccao. Masesta nao pode ser estabelecida porque nao parece possıvel distinguir aaccao da reaccao, pois que uma nao existe sem a outra, nem ocorredepois da outra, ao inves existindo total simetria entre ambas.
Toda a mecanica classica pode pois ser construıda sobre as leis fısicasbasicas sistematizadas por Newton. As interaccoes traduzem-se por forcas,que saberemos ou nao escrever consoante o conhecimento que tenhamos dasinteraccoes subjacentes e que, em geral, dependem das posicoes dos corpos.A aceleracao e como sabemos a derivada temporal da velocidade. Assim, alei de Newton traduz-se numa equacao diferencial de 2a ordem no tempo (ou

1.1. INTRODUCAO 7
a sistemas de equacoes diferenciais se houver mais do que um corpo) do tipo1
m~r =∑
i
~Fi(~r) (1.1)
A descricao da posicao do corpo em cada instante, ~r(t), e da sua veloci-dade, ~r(t), dependem da resolucao desta equacao. Todavia, essa tarefa poderevelar-se complicada, dependendo das forcas em presenca2. Em muitos ca-sos praticos, a eq. 1.1 pode ser resolvida analiticamente. Como e sabidoda teoria das equacoes diferenciais, a solucao vai depender sempre de duasconstantes de integracao, que e necessario adequar a situacao fısica conc-reta, e que sao geralmente a posicao e a velocidade iniciais. Estes conceitostornar-se-ao mais claros quando aplicados a casos concretos, mais adiante.
Paradoxalmente a dificuldade primeira que se nos depara ao analisar umasituacao fısica concreta e a de escrever correctamente a equacao causal deNewton, eq.1.1. Ha que identificar quais as interaccoes que estao presentese ter em mente que qualquer forca e sempre parte de uma interaccao; quehavera sempre uma forca simetrica a agir sobre o outro elemento envolvidona interaccao. Devemos tambem ser capazes de identificar inequivocamentequem sao os agentes causadores de cada uma das forcas que julgamos estarema ser exercidas num corpo, i.e. que elementos da sua vizinhanca estao ainteragir com ele. Se nao os pudermos identificar entao possivelmente nemsequer existem, contrariamente ao que pensavamos. Para alem disso, temque se convir que as interaccoes sao sempre locais, i.e. um corpo so interagecom a sua vizinhanca imediata. Mesmo quando ha um campo envolvido, ainteraccao da-se entre o corpo e o campo que existe nesse local (p.ex. o pesode um corpo e o resultado da interaccao entre o corpo e o campo gravıticoda Terra que existe na posicao em que esta esse corpo). Nao ha accoes adistancia.
1Usa-se a notacao compacta habitual que consiste em representar a derivada temporalcom uma pinta. Ou seja, por f refere-se a derivada temporal de f , enquanto f ′ representaa derivada espacial:
df
dt≡ f ;
d2f
dt2≡ fe
df
dt≡ f ′ ;
d2f
dx2≡ f ′′
2Pode pois ser mais conveniente em muitas situacoes formular o problema recorrendoa chamada mecanica analıtica, nomeadamente a mecanica de Lagrange. Nesses casos, asequacoes de movimento obtem-se a partir das equacoes de Euler-Lagrange, uma por cadagrau de liberdade do sistema fısico.

8 CAPITULO 1. OSCILACOES /PARTE 1
1.2 Equacoes diferenciais lineares de coefi-
cientes constantes
Vamos aqui rever brevemente alguns conceitos fundamentais acerca dasequacoes diferenciais mais simples, i.e. as equacoes diferenciais ordinarias,lineares e de coeficientes constantes. Visto que as equacoes de Newton saoequacoes de 2a ordem no tempo, abordaremos apenas equacoes diferenciaisdesse tipo.
1.2.1 Equacoes diferenciais homogeneas
Seja a equacao diferencial
x + ax + bx = 0 (1.2)
com a e b constantes. Esta equacao diz-se homogenea pois o 2o membro enulo. Definindo o operador derivada, δ ≡ d
dte, a partir deste, o operador
polinomial Ω = δ2 + aδ + b, podemos escrever a equacao diferencial na formasimbolica,
Ω x = 0
onde Ω e o operador que representa todas as operacoes a efectuar sobre x.O polinomio que representa Ω tem duas raızes, r1 e r2, e pode ser factor-
izado na forma,
Ω = (δ − r2)(δ − r1)
Portanto,
(δ − r2) (δ − r1)x = 0
donde ou
(δ − r1)x = 0(δ − r2)x = 0
qualquer das duas equacoes da dxx
= r dt e tem solucao do tipo x = Aert,com A constante. Por conseguinte, a solucao geral da eq. 1.2 e
x(t) = Aer1t + Ber2t (1.3)
onde A e B sao duas constantes de integracao. Como se ve pois, o numerode constantes de integracao e igual a ordem da equacao diferencial.

1.2. EQUACOES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES9
O argumento anterior falha no caso em que r1 = r2 = r. Nesse caso, peloargumento anterior, (δ2 − r)2x = 0 ; x = Aert + Bert = Cert. Todavia,esta solucao so depende de uma constante de integracao pelo que esta poiscertamente incompleta. No caso vertente, a solucao geral e do tipo
x = (A + Bt)ert (1.4)
ja que a equacao 1.2 fica (δ − r)(δ − r)(A + Bt)ert = (δ − r)Bert = 0.As raızes r1 e r2 podem ser reais ou complexas. Em qualquer caso, a
solucao fısica de um problema real sera obviamente sempre real, sendo emgeral dada pela parte real da solucao matematica.
As constantes de integracao obtem-se num problema concreto particu-lar obrigando a solucao geral da equacao a satisfazer certas condicoes doproblema em causa − sao as chamadas condicoes fronteira.
1.2.2 Equacoes diferenciais completas
A equacao diferencial diz-se completa se o 2o membro for nao nulo. No casomais geral o 2o membro da equacao e uma funcao do tempo, i.e.,
Ωx = f(t) (1.5)
A solucao geral desta equacao e dada por
x(t) = xG(t) + xP (t) (1.6)
onde xG e a solucao geral da equacao homogenea correspondente, ΩxG = 0,acima discutida, e xP e a solucao particular da equacao completa, ΩxP =f(t). E facil de perceber que x = xG + xP e de facto a solucao da eq.1.5, jaque
Ω(xG + xP ) = ΩxG︸ ︷︷ ︸=0
+ ΩxP = f(t)︸ ︷︷ ︸por def.
A solucao particular pode ser formalmente escrita como
xP = Ω−1f(t) (1.7)
onde Ω−1 e o operador inverso de Ω, tal que Ω Ω−1 = 1 (i.e. Ω−1 representaa operacao inversa de Ω, sendo por isso uma especie de integracao3).
3Assumimos sem discussao que o operador inverso existe em todo o domınio de Ω.

10 CAPITULO 1. OSCILACOES /PARTE 1
Concluımos assim que a solucao mais geral da eq. completa deve incluirtambem a solucao da eq. homogenea. Neste caso ha tambem obviamenteduas constantes de integracao que devem ser determinadas pelas condicoesfronteira do problema, p.ex. pelas condicoes iniciais de posicao e de veloci-dade.
1.2.3 Analise das solucoes da equacao diferencial x +ax + bx = 0
Aalisemos as solucoes da equacao diferencial,
x + ax + bx = 0 , ou seja, (δ2 + aδ + b)x = 0 (1.8)
com a e b constantes. As raızes do polinomio simbolico (caracterıstico) sao
δ = −a
2± 1
2
√a2 − 4b
sendo a solucao da equacao diferencial dada pelas expressoes 1.3 ou 1.4,consoante o caso, como vimos.
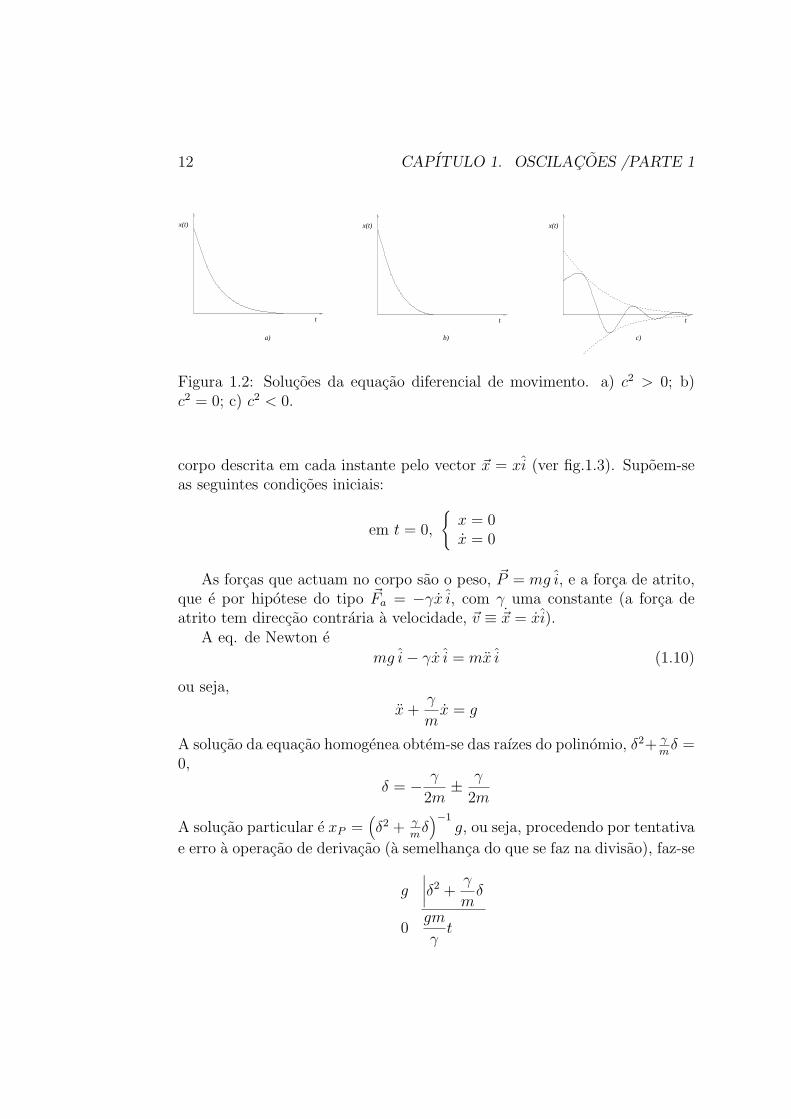
E conveniente discutir separadamente os casos, em funcao do argumentoda raiz quadrada, c2 = a2 − 4b : ou seja, consoante i) c2 > 0; ii) c2 = 0; ouiii) c2 < 0.
i) c2 > 0 No caso em que c2 > 0, a solucao de 1.8 e do tipo
x(t) = e−a2tAe
c2t + Be−
c2t
A forma generica desta solucao esta representada na fig.1.2a.
ii) c2 = 0 No caso de c2 = 0, as duas raızes sao iguais pelo que a solucaotem a forma
x(t) = (A + Bt)e−a2t
Esta solucao esta representada na fig.1.2b.
iii) c2 < 0 Se c2 < 0 as duas raızes sao complexas. Por conveniencia faze-mos c2 = −4ω2 = 4i2ω2, com ω2 = b− (a/2)2 > 0, e i =
√−1. Deste
modo, ±12
√a2 − 4b = ±iω. Assim,
x(t) = e−a2tAeiωt + Be−iωt
(1.9)

1.2. EQUACOES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES11
Esta e a solucao matematica e e uma solucao complexa. Todavia, seesta solucao representar uma solucao fısica deve ser real. Portanto,impondo essa condicao a solucao, ficamos com4
A + B = C = no realA−B = −iD = no imaginario puro
com C e D constantes arbitrarias. Fica entao
x(t) = e−a2t (C cos ωt + D sin ωt)
Esta expressao sugere que se faca a transformacao5
C = x0 cos ϕD = x0 sin ϕ
com x0 e ϕ constantes arbitrarias. Obtemos assim6,
x(t) = x0e−
a2t cos(ωt + ϕ)
Esta solucao e claramente oscilatoria, de frequencia angular ω, e am-plitude que tende exponencialmente para zero. Podemos ve-la na (verfig.1.2c).
Exemplo: queda de um corpoCom vista a concretizar o que se acabou de dizer analisemos o movimento
de um corpo de massa m que cai no ar com atrito viscoso (laminar), pro-porcional a velocidade. A aceleracao da gravidade e g, sendo a posicao do
4Usamos aqui a relacao de Euler eiθ = cos θ + i sin θ.5E sempre possıvel fazer esta transformacao, trata-se apenas de redefinir constantes
arbitrarias.6De um ponto de vista mais geral, veja-se que podemos sempre escrever a solucao
complexa (eq. 1.9) na formax(t) = e−
a2
t|x0|ei(ωt+ϕ)
com x0 =√
(A + B)2 + (A−B)2 e ϕ = atanA−BA+B
, sendo esta uma fase. A solucao fısicae a parte real deste no complexo,
x(t)|fis = ℜe x(t) = e−a2
t|x0| cos(ωt + ϕ)
12 CAPITULO 1. OSCILACOES /PARTE 1
t
x(t)
t
x(t)
t
x(t)
a) b) c)
Figura 1.2: Solucoes da equacao diferencial de movimento. a) c2 > 0; b)c2 = 0; c) c2 < 0.
corpo descrita em cada instante pelo vector ~x = xi (ver fig.1.3). Supoem-seas seguintes condicoes iniciais:
em t = 0,
x = 0x = 0
As forcas que actuam no corpo sao o peso, ~P = mg i, e a forca de atrito,que e por hipotese do tipo ~Fa = −γx i, com γ uma constante (a forca deatrito tem direccao contraria a velocidade, ~v ≡ ~x = xi).
A eq. de Newton e
mg i− γx i = mx i (1.10)
ou seja,
x +γ
mx = g
A solucao da equacao homogenea obtem-se das raızes do polinomio, δ2+ γm
δ =0,
δ = − γ
2m± γ
2m
A solucao particular e xP =(δ2 + γ
mδ)−1
g, ou seja, procedendo por tentativa
e erro a operacao de derivacao (a semelhanca do que se faz na divisao), faz-se
g∣∣∣∣δ
2 +γ
mδ
0gm
γt

1.2. EQUACOES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES13
v
P
Fi
x
Figura 1.3: O movimento de um corpo em queda livre, com atrito viscoso,~Fa = −γ~v.
e obtem-se (verifique)
xP =gm
γt
Portanto, a solucao geral da eq. 1.10 e entao
x(t) = Ae−γ
mt + B +
gm
γt
com A e B constantes, concluindo-se ainda que
x(t) = −Aγ
me−
γ
mt +
gm
γ
As constantes de integracao, A e B, sao determinadas pelas condicoes iniciaisdo problema,
t = 0 :
A + B = 0 ; A = −B
−Aγm
+ gmγ
= 0 ; A = m2gγ2
A posicao, velocidade e aceleracao do corpo em causa sao pois dados emcada instante por (ver fig.1.4),
x(t) =mg
γ
m
γ
(e−
γ
mt − 1
)+ t
(1.11)
x(t) =mg
γ
(1− e−
γ
mt)
(1.12)
x(t) = ge−γ
mt (1.13)

14 CAPITULO 1. OSCILACOES /PARTE 1
t
x(t)
t
x(t)
a) b) c)
t
x(t).. .
Figura 1.4: Posicao, velocidade e aceleracao do corpo em queda livre comatrito viscoso.
A aceleracao tende para zero com o decorrer do tempo, pois a forca de atritovai crescendo durante a queda proporcionalmente ao aumento da velocidadeate ser equivalente ao peso que o faz cair. Por isso a velocidade tende paraum valor constante − a velocidade terminal7.
1.3 O oscilador livre
Analisemos agora o caso em que uma mola de massa desprezavel e constanteelastica K e pendurada num ponto fixo e suporta um corpo de massa m (verfig. 1.5). A mola representa aqui um sistema elastico linear, caracterizado porter uma forca de interaccao directamente proporcional a perturbacao a que osistema for sujeito. Supoe-se por hipotese que a mola tem um comprimentonatural ℓ0. Qualquer variacao desse comprimento traduz uma perturbacaoda mola, sendo x = ℓ − ℓ0 a medida da perturbacao. Tratando-se de umsistema linear, a forca elastica e por conseguinte ~F = −K~x, onde ~x e ovector posicional da extremidade da mola em cada instante, com origem naposicao natural, nao perturbada8.
Nao havendo atrito, a eq. de Newton escreve-se
~P + ~F = m~a
ou mais explicitamente,
mgi−Kxi = m~x = mxi , ou seja, x +K
mx = g (1.14)
7Nao fora isso e as gotas de chuva na cabeca PIM! (ai!).8Esta e no essencial a lei de Hook.

1.4. ENERGIA DO OSCILADOR LINEAR 15
F
P
i
x
O
l
x
o
Figura 1.5: O movimento de um corpo suspenso de uma mola vertical semmassa.
Esta equacao toma a forma (δ2 + ω2) x = g, com ω =√
K/m, e tem por
solucao x = xG+xP , com xG a solucao da eq. homogenea e xP = (δ2+ω2)−1g,a solucao particular9. A solucao da equacao e entao
x =mg
K+ x0 cos(ωt + ϕ) (1.15)
Concluımos assim que a oscilacao se da em torno do ponto mgK
, que e a posicaode equilıbrio estatico do sistema corpo-mola (ver fig.1.6).
1.4 Energia do oscilador linear
Seja um oscilador livre e sem atrito (ver fig. 1.7). A forca, ~F , exercida pelamola no corpo de massa m faz variar a sua energia cinetica, de
dT = ~F · d~ℓ
fazendo-a aumentar se a forca for na direccao do movimento. Visto que~F = d~p
dt, e d~ℓ = ~vdt, entao
dT = md~v
dt· d~ℓ = m~v · d~v
9Neste caso a operacao de integracao/derivacao da (”armou-se a conta” como faz coma divisao)
g∣∣δ2 + ω2
0g
ω2

16 CAPITULO 1. OSCILACOES /PARTE 1
mg
K
x(t)
t
Figura 1.6: Oscilacao do corpo suspenso da mola vertical.
F
xx O xoo
E
Ek
p
EE
mec
i
x xxo O o
a) b)
Figura 1.7: a) Oscilador simples sem atrito. b) A energia cinetica e potencialdo oscilador em funcao amplitude de oscilacao.
donde10
T =∫ v
0mv dv =
mv2
2
Pode-se tambem definir uma energia potencial elastica para o sistema11.A energia potencial e uma ”energia em potencia” que esta armazenada nosistema, que se libertara em resultado da interaccao com ele (neste casoatraves da forca elastica). Isto e, a forca elastica ha-de ser sempre de moldea fazer baixar a energia potencial do sistema, transferindo-a neste caso para
10N.B. ~v = vv, e d~v = dvv + vdv, sendo dvdt
v a aceleracao tangencial e v dvdt
a aceleracaonormal (pois dv ⊥ v). Logo ~v · d~v = v dv + 0.
11Como e sabido, a energia potencial so tem significado se a forca for conservativa(rotacional nulo). E esse o caso de ~F = −K~x, pois
∮C
~F · d~ℓ = 0, num movimento devai-vem.
1.4. ENERGIA DO OSCILADOR LINEAR 17
o movimento do corpo,
−dV = ~F · d~ℓ
Por conseguinte, d(T + V ) = 0 ou Emec = T + V = constante, se nao houver
atrito. No caso presente, ~F = −K~x, pelo que a variacao de energia potenciale dV = K~x · d~x, quando d~x e a perturbacao do sistema em relacao a suaposicao de equilıbrio. Assim,
V (x)− V (0) =∫ x
0K~x · d~x =
Kx2
2
E frequente referir a energia potencial elastica relativamente a posicao deequilıbrio, fazendo V (0) = 0. Fica entao simplesmente V (x) = Kx2
2.
Vemos que a energia potencial e mınima na posicao de equilıbrio,crescendo parabolicamente com o afastamento em relacao a essa posicao. Asposicoes de equilıbrio do oscilador nao perturbado podem pois ser definidascomo os pontos que correspondem a mınimos da energia potencial. Este con-ceito e sobremaneira importante para a analise de sistemas complexos. Defacto, um sistema se for perturbado oscilara em geral em torno do mınimode energia em que se encontre e a que corresponde uma certa posicao deequilıbrio estavel. Tal nao faz desse sistema necessariamente um osciladorlinear, com energia potencial parabolica (ver fig. 1.8). Porem, para oscilacoespequenas em torno do mınimo a energia potencial e quasi parabolica, sendoas oscilacoes aproximadamente harmonicas. Este argumento e valido paraqualquer sistema, mecanico ou nao. No regime de pequenas oscilacoes o sis-tema (qualquer que ele seja) constitui um oscilador harmonico. Porem, se aamplitude de oscilacao for aumentada, o oscilador e em geral anarmonico eas oscilacoes podem ser assimetricas.
Na fig. 1.8 representa-se a energia potencial de um sistema em funcao dadistancia interatomica, r. Esta funcao e caracterıstica p.ex. de uma moleculadiatomica. Neste caso, mesmo nao se tratando de um oscilador harmonico,a energia potencial e aproximadamente parabolica em torno do mınimo, eportanto o sistema tem um comportamento de oscilador harmonico parapequenas oscilacoes. De facto, expandindo V (x) em serie de Taylor a voltado mınimo, com x = r − r0, temos
V (x, . . .) = V (0) +∂V
∂x
∣∣∣∣∣0
x +∂2V
∂x2
∣∣∣∣∣0
x2
2+ · · · (1.16)

18 CAPITULO 1. OSCILACOES /PARTE 1
ro
E
ro
p
rO
Figura 1.8: Energia potencial tıpica de um sistema ligado. Se for perturbado,o sistema oscila em torno do mınimo de energia, em r = r0.
U(eV)
0
−2
−4
−6
6
2
4
r.5 1 1.5
ro
(nm)
Figura 1.9: Energia potencial da molecula de NaCl (a energia do infinito enecessaria para ionizar o Na e o Cl).
Ou seja,
V (x) ≈ V (0) +Kx2
2; com K =
∂2V
∂x2
∣∣∣∣∣x=0
(1.17)
ja que em x = 0 ha um mınimo e portanto ∂V∂x
= 0. Esta conclusao e muitoimportante: − a analise da curva de energia do sistema permite-nos extrairinformacao acerca das suas caracterısticas elasticas, e portanto da frequenciade oscilacao (podendo falar-se de uma constante elastica equivalente aindaque esta nao tenha nada a ver com molas).
Exemplo:
Seja a molecula diatomica de NaCl (que forma uma ligacao ionica dotipo Na+ Cl−). O mınimo de energia desta molecula ocorre para a distancia
1.4. ENERGIA DO OSCILADOR LINEAR 19
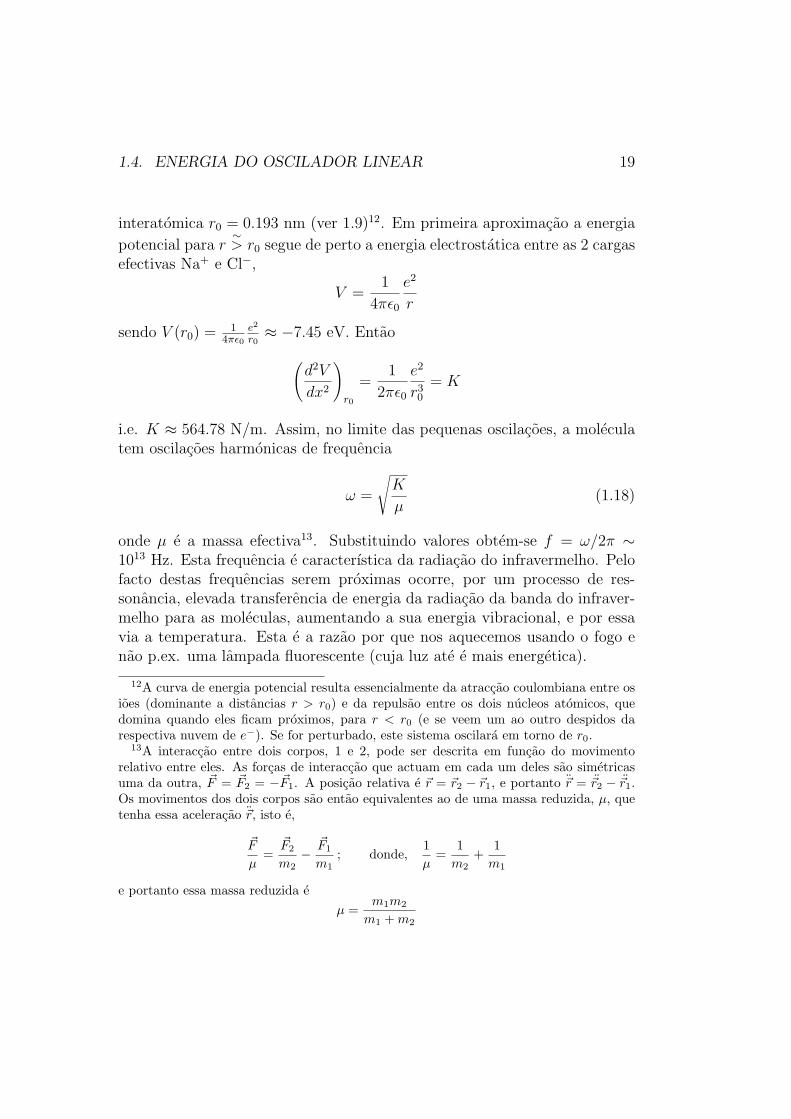
interatomica r0 = 0.193 nm (ver 1.9)12. Em primeira aproximacao a energia
potencial para r∼
> r0 segue de perto a energia electrostatica entre as 2 cargasefectivas Na+ e Cl−,
V =1
4πǫ0
e2
r
sendo V (r0) = 14πǫ0
e2
r0
≈ −7.45 eV. Entao
(d2V
dx2
)
r0
=1
2πǫ0
e2
r30
= K
i.e. K ≈ 564.78 N/m. Assim, no limite das pequenas oscilacoes, a moleculatem oscilacoes harmonicas de frequencia
ω =
√K
µ(1.18)
onde µ e a massa efectiva13. Substituindo valores obtem-se f = ω/2π ∼1013 Hz. Esta frequencia e caracterıstica da radiacao do infravermelho. Pelofacto destas frequencias serem proximas ocorre, por um processo de res-sonancia, elevada transferencia de energia da radiacao da banda do infraver-melho para as moleculas, aumentando a sua energia vibracional, e por essavia a temperatura. Esta e a razao por que nos aquecemos usando o fogo enao p.ex. uma lampada fluorescente (cuja luz ate e mais energetica).
12A curva de energia potencial resulta essencialmente da atraccao coulombiana entre osioes (dominante a distancias r > r0) e da repulsao entre os dois nucleos atomicos, quedomina quando eles ficam proximos, para r < r0 (e se veem um ao outro despidos darespectiva nuvem de e−). Se for perturbado, este sistema oscilara em torno de r0.
13A interaccao entre dois corpos, 1 e 2, pode ser descrita em funcao do movimentorelativo entre eles. As forcas de interaccao que actuam em cada um deles sao simetricasuma da outra, ~F = ~F2 = −~F1. A posicao relativa e ~r = ~r2 − ~r1, e portanto ~r = ~r2 − ~r1.Os movimentos dos dois corpos sao entao equivalentes ao de uma massa reduzida, µ, quetenha essa aceleracao ~r, isto e,
~F
µ=
~F2
m2−
~F1
m1; donde,
1
µ=
1
m2+
1
m1
e portanto essa massa reduzida e
µ =m1m2
m1 + m2
20 CAPITULO 1. OSCILACOES /PARTE 1
i
FF
O
x
a
lo
x
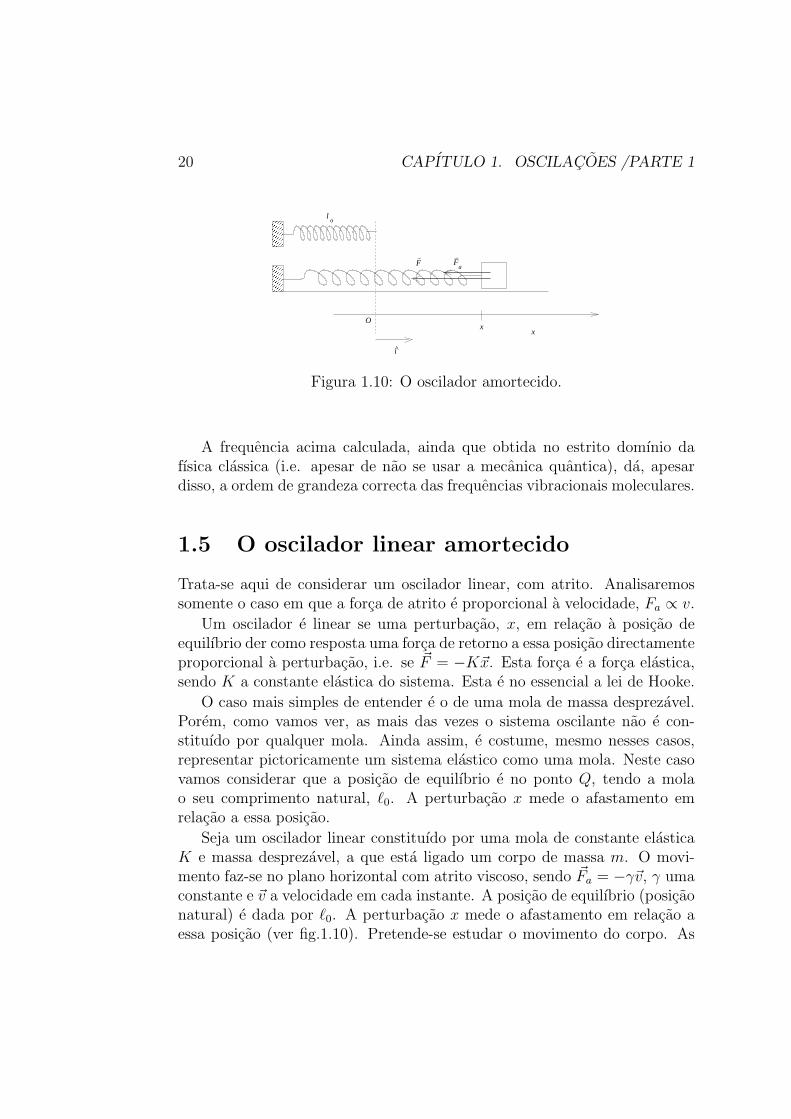
Figura 1.10: O oscilador amortecido.
A frequencia acima calculada, ainda que obtida no estrito domınio dafısica classica (i.e. apesar de nao se usar a mecanica quantica), da, apesardisso, a ordem de grandeza correcta das frequencias vibracionais moleculares.
1.5 O oscilador linear amortecido
Trata-se aqui de considerar um oscilador linear, com atrito. Analisaremossomente o caso em que a forca de atrito e proporcional a velocidade, Fa ∝ v.
Um oscilador e linear se uma perturbacao, x, em relacao a posicao deequilıbrio der como resposta uma forca de retorno a essa posicao directamenteproporcional a perturbacao, i.e. se ~F = −K~x. Esta forca e a forca elastica,sendo K a constante elastica do sistema. Esta e no essencial a lei de Hooke.
O caso mais simples de entender e o de uma mola de massa desprezavel.Porem, como vamos ver, as mais das vezes o sistema oscilante nao e con-stituıdo por qualquer mola. Ainda assim, e costume, mesmo nesses casos,representar pictoricamente um sistema elastico como uma mola. Neste casovamos considerar que a posicao de equilıbrio e no ponto Q, tendo a molao seu comprimento natural, ℓ0. A perturbacao x mede o afastamento emrelacao a essa posicao.
Seja um oscilador linear constituıdo por uma mola de constante elasticaK e massa desprezavel, a que esta ligado um corpo de massa m. O movi-mento faz-se no plano horizontal com atrito viscoso, sendo ~Fa = −γ~v, γ umaconstante e ~v a velocidade em cada instante. A posicao de equilıbrio (posicaonatural) e dada por ℓ0. A perturbacao x mede o afastamento em relacao aessa posicao (ver fig.1.10). Pretende-se estudar o movimento do corpo. As

1.6. O OSCILADOR FORCADO 21
forcas relevantes estao representadas na figura. A lei de Newton escreve-se
m~x = ~Fa + ~F = −γ~x−K~x
com ~x = x i, ~x = x i e ~x = x i. Isto e,
x +γ
mx +
K
mx = 0 (1.19)
Fazendo ζ = γ/m e ω20 = K/m, a eq. diferencial fica
(δ2 + ζδ + ω20)x = 0
Dado que as raızes do polinomio caracterıstico sao δ = − ζ2± 1
2
√ζ2 − 4ω2
0,
entao as solucoes da eq. diferencial sao (com η2 = (ζ2 − 4ω20))
i) x(t) = e−ζ
2t(Ae
η
2t + Be−
η
2t)
; se η2 > 0 (1.20)
ii) x = (A + Bt)e−ζ
2t ; se η2 = 0 (1.21)
iii) x = e−ζ
2t(A1e
iωt + A2e−iωt
)= Ae−
ζ
2t cos(ωt + ϕ) ; se η2 < 0(1.22)
onde ω =√
ω20 − ζ2/4. As solucoes da equacao estao representadas na
fig.1.11a−c. Todas as solucoes decrescem exponencialmente para zero de-vido ao atrito. No caso ii) o amortecimento e muito rapido e designa-se poramortecimento crıtico. Ha casos praticos em que se pretende esse comporta-mento, p.ex. nos amortecedores de automoveis. Porem, a solucao mais inter-essante que nos interessa aqui considerar e a solucao iii), porque e essa quecorresponde a oscilacoes (amortecidas) do objecto preso a mola. A frequencia
de oscilacao e ω =√
ω20 − ζ2/4. Esta frequencia e ligeiramente menor do que
a frequencia do oscilador livre correspondente, pois com ζ = 0, ω = ω0 =√
Km
.Na fig.1.12 representa-se o caso de um sistema harmonico amortecido.
1.6 O oscilador forcado
Consideremos um oscilador harmonico forcado por uma accao exteriorperiodica de frequencia ω. Para concretizar, supomos que o oscilador e con-stituıdo por uma mola de massa desprezavel, a que se encontra preso umcorpo de massa m, que se move com atrito Fa ∝ −v. O corpo e solicitado em
22 CAPITULO 1. OSCILACOES /PARTE 1
t
x(t)
t
x(t)
t
x(t)
a) b) c)
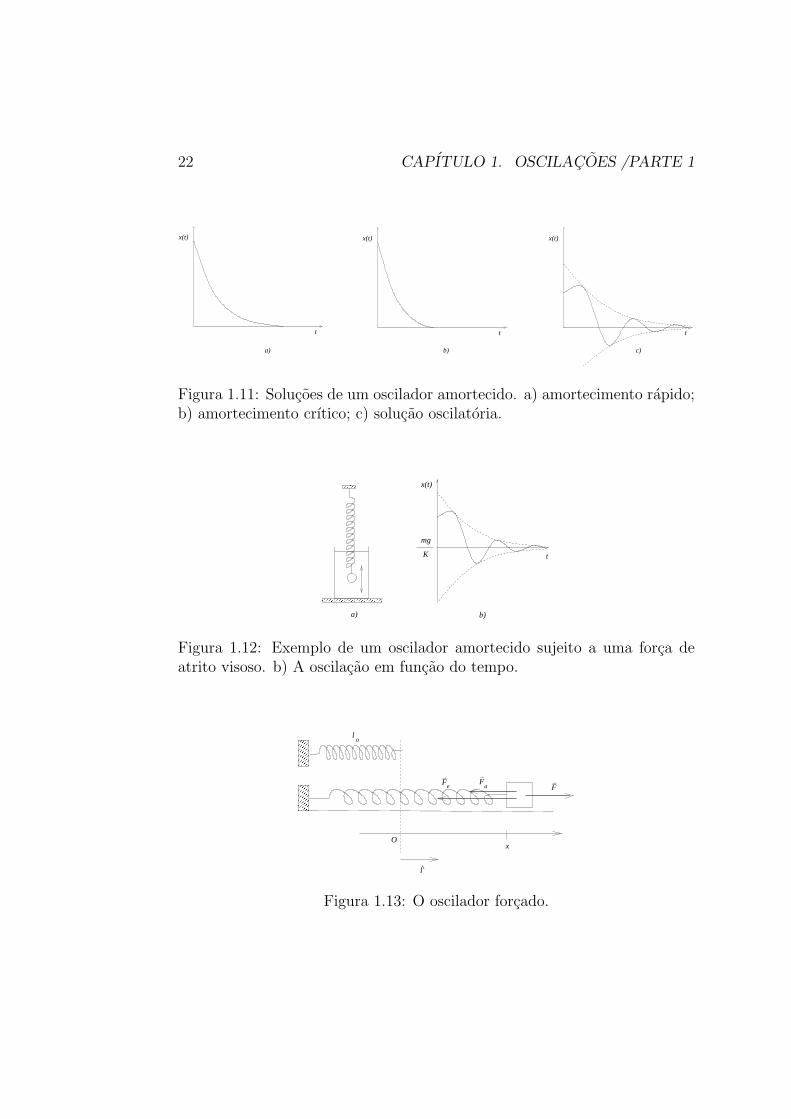
Figura 1.11: Solucoes de um oscilador amortecido. a) amortecimento rapido;b) amortecimento crıtico; c) solucao oscilatoria.
mg
K
a) b)
x(t)
t
Figura 1.12: Exemplo de um oscilador amortecido sujeito a uma forca deatrito visoso. b) A oscilacao em funcao do tempo.
i
FFF
O
a
lo
x
e
Figura 1.13: O oscilador forcado.

1.6. O OSCILADOR FORCADO 23
cada instante por uma forca periodica do tipo F (t) = F0 cos ωt, sendo ω afrequencia da accao exterior, que pode ser qualquer (ver fig.1.13). As forcas
que actuam no corpo sao a forca elastica, ~Fe = −K~x, a forca de atrito,~Fa = −γ~x e ~F = F0 cos ωt i, com K, γ e ω constantes. A lei de Newtonescreve-se
x +γ
mx +
K
mx =
F0
mcos ωt
Fazendo ζ = γm
e ω20 = K
m(ω0 e a frequencia natural do sistema sem atrito),
tem-se (δ2 + ζδ + ω2
0
)x =
F0
mcos ωt
Ora,
δ = −ζ
2± 1
2η , com η =
√ζ2 − 4ω2
0
com η real ou imaginario. A solucao desta equacao e pois x = xG + xP , com
xG(t) = e−ζ
2t(Ae
η
2t + Be
−η
2t)
xP (t) = ℜe(
δ2 + ζδ + ω20
)−1 F0
meiωt
isto e14
xP = ℜe
F0
meiωt
−ω2 + iζω + ω20
=F0
mℜe
eiωt [(ω2
0 − ω2)− iζω]
(ω20 − ω2)
2+ ζ2ω2
=F0/m
(ω20 − ω2)
2+ ζ2ω2
ℜe|Z|ei(ωt−ϕ)
14Note que a operacao inversa da derivacao e a primitivacao e que∫
eαxdx = 1αeαx.
Aplicando por tentativa e erro a derivacao-primitivacao:
eiωt∣∣δ2 + ζδ + ω2
0
0eiωt
−ω2 + iωζ + ω20

24 CAPITULO 1. OSCILACOES /PARTE 1
t
x(t)
t
x(t)
tx(t)
b)
c)
a)
Figura 1.14: A oscilacao de um oscilador forcado em funcao do tempo.
onde se fez Z = (ω20 − ω2)− iζω = |Z|e−iϕ. Ou seja, (ver fig. 1.15),
xP (t) = A cos(ωt− ϕ) (1.23)
com
A = A(ω) =F0/m√
(ω20 − ω2)
2+ ζ2ω2
(1.24)
e
tan ϕ =ζω
ω20 − ω2
(1.25)
onde ζ = γ/m e o coeficiente de atrito.Resulta assim, finalmente, que
x(t) = e−ζ
2t(Aeηt + Be−ηt
)+ A cos(ωt− ϕ) (1.26)
A solucao do oscilador forcado e assim constituıda por duas partes. A 1a
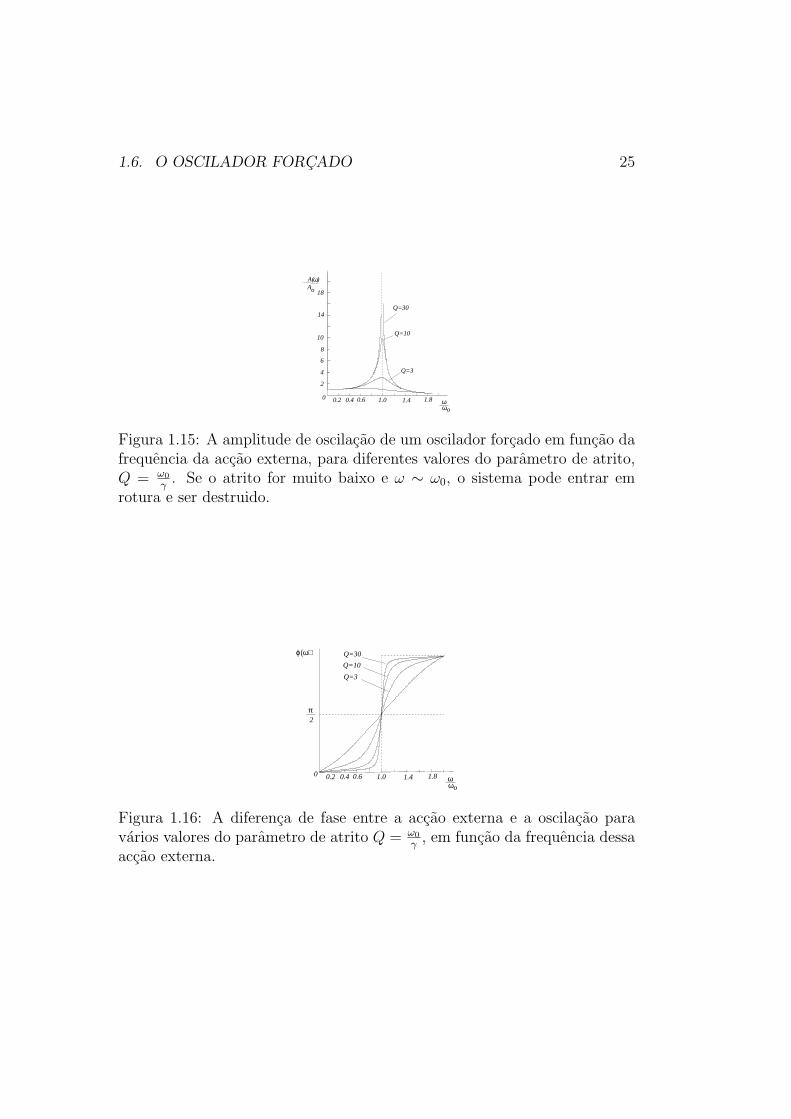
parcela representa o comportamento transitorio, que tende exponencialmentepara zero e rapidamente se extingue. A 2a parcela representa o regime esta-cionario. Decorrido tempo suficiente, o sistema oscila com a frequencia dooscilador exterior de modo permanente, enquanto essa accao persistir15 (verfig. 1.14). A amplitude de oscilacao (1.24) e fortemente dependente dafrequencia com que o sistema e excitado do exterior. Quando ω ∼ ω0, aamplitude atinge o valor maximo. Nesse caso, a diferenca de fase entre aaccao externa e a oscilacao e π/2 (ver fig. 1.16)16.
15Isto e, o sistema protesta inicialmente mas depois cala-se e faz o que lhe mandam.16O leitor deve pensar um pouco na questao ate perceber porque e que quando o oscilador
1.6. O OSCILADOR FORCADO 25
o
A( )A
ω
18
14
10
8
6
4
2
Q=30
Q=10
Q=3
ωoω
0 0.2 0.4 0.6 1.0 1.4 1.8
Figura 1.15: A amplitude de oscilacao de um oscilador forcado em funcao dafrequencia da accao externa, para diferentes valores do parametro de atrito,Q = ω0
γ. Se o atrito for muito baixo e ω ∼ ω0, o sistema pode entrar em
rotura e ser destruido.
ωoω
0 0.2 0.4 0.6 1.0 1.4 1.8
Q=3
Q=10
Q=30ϕ(ω)
π2
Figura 1.16: A diferenca de fase entre a accao externa e a oscilacao paravarios valores do parametro de atrito Q = ω0
γ, em funcao da frequencia dessa
accao externa.

26 CAPITULO 1. OSCILACOES /PARTE 1
1
0
2
3
4
0.6 0.80
90
180
0.4 1.21.0
o
o
o
(Hz)
A(w)(cm)
ω
ϕ
Figura 1.17: Curvas de ressonancia observadas em sistema fısicos. Ampli-tude de oscilacao e diferenca de fase medidas para um oscilador mecanicosemelhante ao da fig. 1.12
Quando ω ≈ ω0 dizemos que ha ressonancia. A importancia do atrito estaexemplificada na fig.1.15, em funcao de Q = ω0/γ. Este factor Q designa-sepor figura de merito ou ”Quality factor”. Sendo adimensional caracterizaconvenientemente o sistema. O coeficiente Q e infinito se nao houver atritoe tende para zero se ele for muito elevado. Nao havendo atrito, ζ = 0, eA(ω = ω0) = ∞. Nesse caso, ou se ζ for muito pequeno, da-se a disrupcaodo oscilador.
Como se pode observar, o valor maximo de A(ω) nao ocorre exacta-mente em ω0, mas essa diferenca e muito pequena e em geral ignora-se17.Na fig. 1.17 representam-se medidas experimentais efectuadas com um os-cilador forcado18.
O fenomeno de ressonancia e seguramente dos conceitos mais importantesda Fısica, estando presente nos mais diversos domınios quer da Fısica Classicaquer da Mecanica Quantica. Com efeito, a capacidade de interaccao com umsistema e a resposta que resulta dessa interaccao dependem fortemente dafrequencia com que excitarmos esse sistema.
tem maxima oscilacao a diferenca de fase e π/2. Note que quer a oscilacao quer a forcasao sinusoidais, ambas com a mesma frequencia. Em condicoes optimas, no instante emque o oscilador esta na posicao de maxima amplitude e inicia o movimento de retorno, aforca externa deve ser nula, crescendo a partir daı ate atingir o seu valor maximo quandox = 0.
17O maximo esta de facto em ω′0 = κω0, onde κ = (1− ζ2/4ω2
0) e em geral κ ≈ 1.18Vide French; Vibration and Waves.

1.6. O OSCILADOR FORCADO 27
1.6.1 Ressonancia
Analisemos agora como e que varia a potencia que e transferida para umoscilador forcado. Da definicao de potencia19,
P =dw
dt=
~F · d~ℓ
dt= ~F · ~x = F0x cos ωt
No regime estacionario,
x = A cos(ωt− ϕ)
x = −Aω sin(ωt− ϕ)
Entao, a potencia media (media temporal) no regime estacionario e
< P > = −F0Aω 〈cos(ωt) sin(ωt− ϕ)〉= −F0Aω 〈cos(ωt) (sin(ωt) cos ϕ− cos(ωt) sin ϕ)〉= F0Aω
⟨cos2(ωt) sin ϕ
⟩+ 0
pois cos ωt sin ωt e uma funcao ımpar.20 Visto que ϕ nao depende do tempoe que < cos2 ωt >= 1
2, fica
< P > =F0Aω
2sin ϕ
=F 2
0 ω
2m
1√(ω2
0 − ω2)2+ ζ2ω2
ζω√(ω2
0 − ω2)2+ ζ2ω2
Como se ve da expressao anterior, < P > e dominado por frequencias navizinhanca de ω0, ω ∼ ω0, sendo muito pequeno fora dessa regiao. Mas, nazona em que < P > e significativo, ω2
0−ω2 = (ω0+ω)(ω0−ω) ≈ 2ω0(ω0−ω),e portanto
< P >≈ F 20 ζ
8m
1
(ω0 − ω)2 + ζ2
4
(1.27)
19Como vimos, a oscilacao da-se na direccao da forca e com a mesma frequencia desta,~F = F i e ~x = xi.
20O valor medio de uma funcao f(t) sobre o perıodo T = 2π/ω e < f >= 1T
∫ T
0dt f(t).

28 CAPITULO 1. OSCILACOES /PARTE 1
fmax
fmax
x
f(x)
µ
Γ 12
Figura 1.18: Curva Lorentziana ou curva de Cauchy, com media µ e larguraΓ.
Esta curva de potencia e maxima para ω = ω0. A essa frequencia e maximaa transferencia de energia por unidade de tempo para o oscilador, vindado exterior. Em regime estacionario, a amplitude de oscilacao mantem-seconstante se ω for constante (cf. eq.1.24), o que significa que a energiadissipada e compensada pela energia injectada no sistema por unidade detempo.
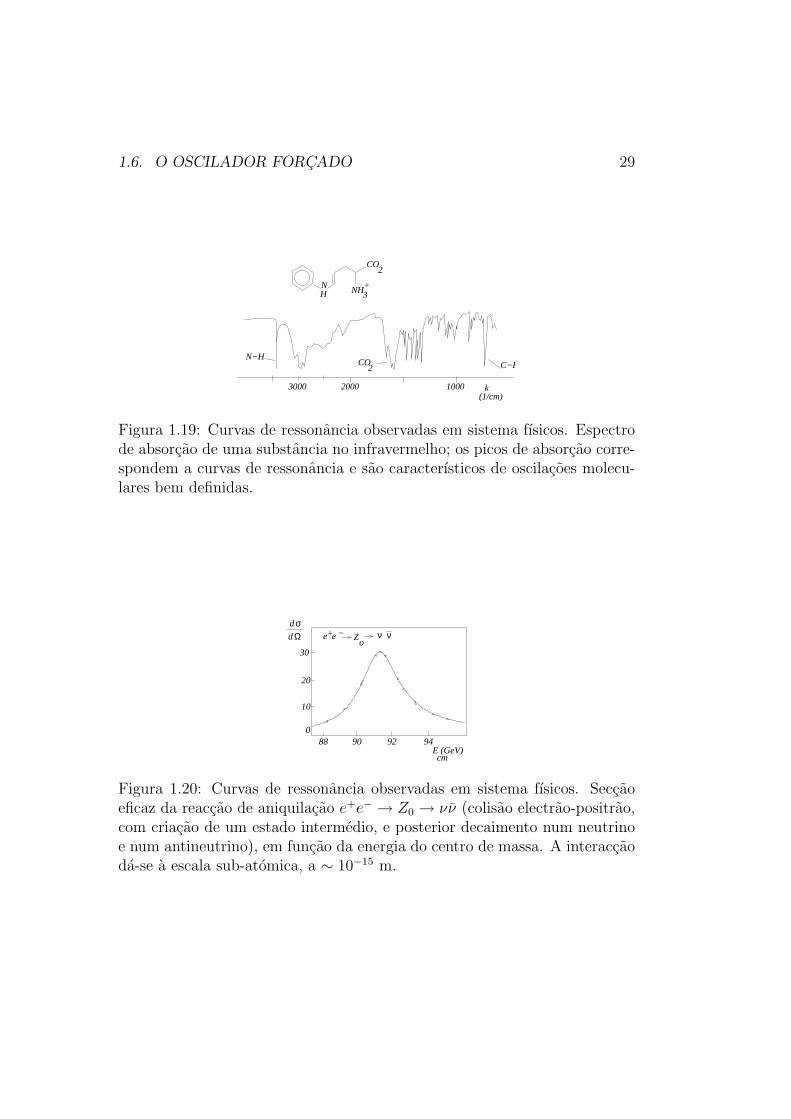
A curva de potencia da eq. 1.27 e caracterıstica de qualquer res-sonancia: − e uma Lorentziana. De facto, independentemente da naturezado fenomeno subjacente, a ressonancia tem geralmente a forma de umacurva Lorentziana21. A forma Lorentziana da curva de transferencia de en-ergia observa-se em qualquer ressonancia, quer em sistemas mecanicos, querem fenomenos electromagneticos, quanticos, etc., apesar de ser diferente afenomenologia. Em quaisquer dos casos, as ressonancias evidenciam-se pelasua forma tıpica. A seccao eficaz de interaccao com um sistema apresentapicos de ressonancia caracterısticos da interaccao em causa. Por exemplo,os espectros moleculares, os espectros de absorcao, a producao de partıculassub-atomicas, etc., todos evidenciam o mesmo padrao de ressonancia (verfigs. 1.19 e 1.20) e tem uma largura intrınseca que e descrita por uma curvaLorentziana.
21Uma Lorentziana ou curva de Cauchy e uma curva semelhante a uma Gaussiana. Asua forma geral e
f(x) =1
π
Γ/2
(x− µ)2 + Γ2
4
onde µ e a media e Γ a largura a meia altura. O factor 1/π apenas normaliza a area dacurva a unidade.
1.6. O OSCILADOR FORCADO 29
NH NH3
CO2−
+
3000 2000 1000 k(1/cm)
N−HC−HCO
2
Figura 1.19: Curvas de ressonancia observadas em sistema fısicos. Espectrode absorcao de uma substancia no infravermelho; os picos de absorcao corre-spondem a curvas de ressonancia e sao caracterısticos de oscilacoes molecu-lares bem definidas.
0
E (GeV)
Ωσ
d
d
cm
88 90 92 94
10
20
30
e e + − Z ν νo
Figura 1.20: Curvas de ressonancia observadas em sistema fısicos. Seccaoeficaz da reaccao de aniquilacao e+e− → Z0 → νν (colisao electrao-positrao,com criacao de um estado intermedio, e posterior decaimento num neutrinoe num antineutrino), em funcao da energia do centro de massa. A interaccaoda-se a escala sub-atomica, a ∼ 10−15 m.
30 CAPITULO 1. OSCILACOES /PARTE 1
1.7 Osciladores acoplados
Em geral os osciladores nao existem isolados, interagem com outros os-ciladores, nomeadamente se eles fizerem parte de um sistema que contenhavarios deles. O acoplamento de osciladores e por isso um conceito muitoimportante.
Cada oscilador tem a sua equacao de movimento, que nao ha-de ser inde-pendente das equacoes dos restantes osciladores seus vizinhos, com os quaisinteractua. Essas equacoes serao por hipotese todas lineares. Assim, emprincıpio deve ser possıvel combinar as equacoes de movimento e construirnovas coordenadas que sejam combinacao linear das coordenadas originais, esatisfacam equacoes diferenciais desacopladas. Tais coordenadas designam-se por coordenadas normais. Associado a cada uma dessas coordenadas deveexistir um modo de vibracao que ha-de ser independente dos restantes, poisque nessas coordenadas as equacoes sao independentes umas das outras (estaodesacopladas). Ou seja, deve haver um modo de vibracao por cada uma dascoordenadas normais. Esses modos, designam-se por modos normais de vi-bracao ou tambem modos proprios de vibracao. Nao sabemos ainda comoserao esses modos, pois ainda nao analisamos a questao, mas podemos ante-cipar que em qualquer deles todas as partes do sistema oscilam com a mesmafrequencia e em fase, visto que as coordenadas normais ja nao descrevem omovimento de qualquer das suas partes, mas o sistema propriamente dito,globalmente. Na fig. 1.21 ilustram-se os modos normais de tres sistemasdiferentes com osciladores acoplados. O problema que aqui se coloca e entaocomo obter esses modos a partir das equacoes de movimento.
Um sistema constituıdo por N osciladores acoplados, havera um por cadagrau de liberdade do sistema, e descrito por N equacoes diferenciais e teraportanto N modos normais. A oscilacao desse sistema pode pois ser de-scrita na forma de uma sobreposicao dos seus modos proprios, ja que ascoordenadas originais de cada oscilador se podem escrever como uma com-binacao linear das coordenadas normais22, descrevendo estas ultimas movi-mentos de frequencia bem definida. Esta conclusao foi tirada primeiramentepor Bernoulli em 1753.
Se o sistema for iniciado num dos modos normais assim continuara, naointeragindo com os outros modos (pois eles sao independentes). Todavia, se
22Visto que as coordenadas normais ja sao uma combinacao linear das coordenadasoriginais, estao serao uma especie de combinacao linear inversa daquela.

1.7. OSCILADORES ACOPLADOS 31
a)
b)
c)
d)
e)
f)
Figura 1.21: Modos normais de oscilacao de dois osciladores acoplados. a)e b) modos longitudinais; c) e d) modos transversais; modos de oscilacao dedois pendulos acoplados.

32 CAPITULO 1. OSCILACOES /PARTE 1
xa
F FF F
xb
c a cbK K Kc
Figura 1.22: Acoplamento de dois osciladores.
assim nao for, se o movimento de oscilacao se iniciar numa outra configuracaoqualquer, entao a energia disponıvel sera distribuıda entre os diferentes modosnormais do sistema.
Por ser de mais facil apreensao, analisemos primeiramente um caso dodomınio do concreto. Consideremos 2 massas iguais ligadas entre si como semostra na fig.1.22. Ignoramos o atrito e o peso das massas.
A figura pode interpretar-se como representando dois osciladores iguais,acoplados atraves de uma mola de constante elastica, Kc. Trata-se aqui deanalisar o comportamento de osciladores que estao acoplados entre si. Osconceitos envolvidos e as conclusoes a que chegarmos ultrapassam porem osistema particular da fig. 1.22.
Neste caso o sistema e descrito por duas equacoes diferenciais acopladas,uma por cada corpo (se o movimento for apenas longitudinal). Para simpli-ficar a exposicao consideramos que por hipotese Ka = Kb = K e desprezamoso atrito e as massas das molas. Cada bola esta ligada a 2 molas e e atravesdesses pontos de ligacao que interage quer com a outra bola, quer com aparede (ver fig. 1.22).
Num certo instante sejam ξa e ξb as perturbacoes na posicao de equilıbriode cada bola, respectivamente. As forcas que actuam sao ~Fa = −K~xa, ~Fb =−K~xb e ~Fc = −Kc(xa−xb) i (ver fig. 1.22). A equacao de Newton para cadabola e entao,
−Kxai− Fci = mxai
−Kxbi + Fci = mxbi(1.28)
Ou seja, −Kxa −Kc(xa − xb) = mxa
−Kxb + Kc(xa − xb) = mxb(1.29)
Obtem-se assim 2 equacoes diferenciais acopladas que, por estarem acopladas,nao sao independentes uma da outra nem podem ser resolvidas separada-mente.

1.7. OSCILADORES ACOPLADOS 33
Supomos por hipotese, a priori, que ha 2 modos normais de vibracao defrequencias ω1 e ω2. A posteriori verificaremos a consistencia dessa hipotese.Por modo normal entende-se aquele em que todas as partes do sistema os-cilam com a mesma frequencia, em movimentos sincronizados.
Querendo obter a configuracao dos modos normais nada melhor do quesupor que o sistema esta a oscilar num modo normal e observar o seu compor-tamento nesse estado. Suponha-se pois a priori que o sistema esta a oscilarnum modo normal. Entao o movimento de cada parte (i.e. de cada bola)deve ser da forma,
xa = a cos(ωt + ϕ) ;
xb = b cos(ωt + ϕ) ;
xa = −ω2a cos(ωt + ϕ)
xb = −ω2b cos(ωt + ϕ)(1.30)
com a, b e ϕ constantes. As eqs. diferenciais podem entao ser escritas naforma matricial
(−(K + Kc) Kc
Kc −(K + Kc)
)(ab
)= −mω2
(ab
)(1.31)
A equacao anterior e uma equacao de valores proprios do tipo, Au = λu,onde u representa as amplitudes de cada um dos elementos osciladores e λos valores proprios da matriz A. A solucao nao trivial desta equacao e dadapela equacao secular |A− λI| = 0, isto e,
(A− λI)u = 0 ; |A− λI| = 0 (1.32)
Os valores proprios da matriz, e os vectores proprios correspondentes, obtem-se resolvendo a equacao secular. No caso em apreco, a equacao secular e
∣∣∣∣∣(K + Kc)− ω2m −Kc
−Kc (K + Kc)− ω2m
∣∣∣∣∣ = 0 (1.33)
o que da
(K + Kc −mω2)2 −K2c = 0 ; K + Kc −mω2 = ±Kc
donde
ω =րց
ω1 =√
Km
ω2 =√
Km
+ 2Kc
m
(1.34)

34 CAPITULO 1. OSCILACOES /PARTE 1
Obtem-se assim dois valores possıveis para a frequencia de oscilacao. Ouseja, existem dois modos normais de oscilacao com frequencias ω1 e ω2, quesao por isso as frequencias normais ou frequencias proprias (ou frequenciasressonantes caracterısticas) do sistema. Ainda nao sabemos, porem, como eque sao esses modos normais, i.e., qual e a sua configuracao.
As amplitudes relativas dos dois osciladores em cada um dos modos nor-mais sao descritas pelos vectores proprios da matriz:
a) Se ω = ω1, entao da eq. 1.31(−(K + Kc) + K Kc
Kc −(K + Kc) + K
)(ab
)= 0 (1.35)
ou (a− ba− b
)= 0 ; a = b
Ou seja, o modo com frequencia ω1 =√
K/m caracteriza-se pelo factode as duas bolas oscilarem para o mesmo lado, em fase e com a mesmaamplitude; a mola central neste caso e um mero espectador, pois naocontribui para o movimento.
b) Se ω = ω2, entao da eq. 1.31(−(K + Kc) + K + 2Kc Kc
Kc −(K + Kc) + K + 2Kc
)(ab
)= 0
(1.36)i.e., (
a + ba + b
); a = −b
ou seja, no modo com frequencia ω2 =√
K/m + 2Kc/m, as bolas os-cilam em cada instante com movimentos opostos, com a mesma ampli-tude.
Os estados proprios que se obtem sao precisamente os modos de oscilacaorepresentados na fig. 1.21a e b.
A solucao geral do sistema de equacoes diferenciais 1.29 e dada pela com-binacao linear das solucoes anteriores,
(xa
xb
)= A1
(11
)cos(ω1t + ϕ1) + A2
(1−1
)cos(ω2t + ϕ2)

1.7. OSCILADORES ACOPLADOS 35
Em resumo:
i) o sistema de osciladores acoplados tem modos proprios de vibracao;
ii) as frequencias desses modos sao dadas pelos valores proprios da matrizque descreve a dinamica do sistema, no caso presente,
ω1 =
√K
me ω2 =
√K
m+ 2
Kc
m
iii) a configuracao do sistema em cada um dos modos proprios e dada pelosvectores proprios respectivos. No caso vertente
u1 =
(aa
)= a
(11
)
u2 =
(a−a
)= a
(1−1
) (1.37)
e nesses estados,
u1 ←
xa = a cos(ω1t + ϕ1)xb = a cos(ω1t + ϕ1)
(1.38)
u2 ←
xa = a cos(ω2t + ϕ2)xb = −a cos(ω2t + ϕ2)
(1.39)
iv) os modos proprios sao pois modos colectivos de oscilacao, nos quaistodas as partes do sistema oscilam em fase, todas com a mesmafrequencia. Quando o sistema esta num desses estados os outros es-tados proprios tem amplitude zero;
v) a solucao mais geral do problema e uma combinacao linear dos estadosproprios, os quais formam uma base ortogonal de vectores23.
xa = A1 cos(ω1t + ϕ1) + A2 cos(ω2t + ϕ2)xb = B1 cos(ω1t + ϕ1) + B2 cos(ω2t + ϕ2)
(1.40)
23Em geral, nos casos com significado fısico, a matriz e hermıtica, A† ≡ A∗, os valoresproprios sao numeros reais e os vectores proprios sao ortogonais entre si (valores propriosdegenerados, os correspondentes vectores proprios de valores proprios degenerados podemser combinados e ortogonalizados). Sejam dois vectores proprios: Auj = λjuj e Auk =

36 CAPITULO 1. OSCILACOES /PARTE 1
sendo as constantes tais que B1 = A1 e B2 = −A2, de acordo com aconfiguracao do estado proprio respectivo, e ϕ1 e ϕ2 duas fases con-stantes. Ou seja, pode-se de facto descrever o sistema de osciladoresna forma de uma combinacao linear dos seus modos normais, como laatras se anteviu.
Exemplo:Seja o sistema da fig. 1.22. Por hipotese, no instante inicial, t = 0, o
sistema satisfaz as condicoes fronteira iniciais
t = 0 :
xa = A , xa = 0xb = 0 , xb = 0
(1.41)
Quais sao concretamente as equacoes de movimento de cada bola? A solucaoda eq. 1.40 deve satisfazer estas condicoes iniciais,
A = A1 cos ϕ1 + A2 cos ϕ2
0 = A1 cos ϕ1 − A2 cos ϕ2
0 = A1ω1 sin ϕ1 + A2ω2 sin ϕ2
0 = A1ω1 sin ϕ1 − A2ω2 sin ϕ2
donde, 2ω1 sin ϕ1 = 0 ⇒ ϕ1 = 0 ; ⇒ ϕ2 = 0. Isto significa que
A1 + A2 = AA1 − A2 = 0
⇒ A1 = A2
A1 = A2
Por conseguinte, neste caso,
xa(t) = A2(cos ω1t + cos ω2t)
xb(t) = A2(cos ω1t− cos ω2t)
(1.42)
λkuk, com j = 1, 2, . . . e k = 1, 2, . . ., entao
u†kAuj = λju
†kuj
u†jAuk = λku†
juk
mas, se A = A†, (u†jAuk)∗ =
∑ℓn
(u∗
ℓjAℓnunk
)∗=∑
ℓn u∗nkA∗
ℓnuℓj = u†kAuj . Entao,
u†kAuj = λ∗
ku†kuj e
(λj − λ∗k)u†
kuj = 0րց
se j = k ⇒ λ = no realse j 6= k ⇒ uk ⊥ uj
(vide p.ex. Mathews Walker; Mathematical Methods of Physics).

1.7. OSCILADORES ACOPLADOS 37
a
b
x
x
t
Figura 1.23: A oscilacao de cada um dos osciladores acoplados da fig. 1.22pode apresentar batimentos. Nesse caso a energia do sistema oscila alter-nadamente entre um modo e o outro.
isto e,24
xa(t) = A cos(
ω1−ω2
2t)
cos(
ω1+ω2
2t)
xb(t) = A sin(
ω1−ω2
2t)
sin(
ω1+ω2
2t) (1.43)
Estas equacoes representam duas funcoes sinusoidais moduladas periodica-mente (ver fig. 1.23). Ou seja, em casos como o presente, devido a so-breposicao de modos de vibracao, pode surgir um efeito de batimentos (verfig. 1.23). A energia do sistema, que e proporcional ao quadrado da am-plitude de oscilacao, oscila entao entre os varios modos proprios. Ou seja,a amplitude de oscilacao da bola a baixa ate se anular, quando a da outraaumenta ate ser maxima e vice-versa, periodicamente.
1.7.1 Analise da energia do sistema de osciladores
E possıvel e muitas vezes util analisar o problema de obter as equacoes demovimento de um sistema de osciladores com base em consideracoes acercaenergia do sistema. Admitimos a priori que a energia de um sistema deixadoa si proprio e constante, se nao houver atrito, e que, se este existir, a ener-gia tende para zero, ao ser dissipada (por atrito) ao longo do tempo. Estascondicoes sao validas quaisquer que sejam os movimentos das partes do sis-tema. Portanto, a sua aplicacao deve conduzir-nos as respectivas equacoesde movimento.
24N.B. cos(α + β) + cos(α− β) = 2 cos α cos β.

38 CAPITULO 1. OSCILACOES /PARTE 1
Seja por hipotese um oscilador a 1 dimensao, amortecido por uma forcade atrito ~Fa = −γ~x (ver fig.1.13). A energia do oscilador em cada instanteescreve-se como
E =Kx2
2+
mx2
2(1.44)
ainda que nao saibamos a priori qual e a perturbacao x(t) e a velocidadex(t). A variacao de energia e dada pelo trabalho da forca de atrito,
dE = ~Fa · d~ℓ (1.45)
Logo, diferenciando a eq. 1.44 em ordem a x vem25,
Kxdx + mxxdt = −γxdx ou seja, Kxx + mxx = −γxx (1.46)
Obtem-se assim como resultado da equacao de energia a equacao diferencialde movimento,
mx + γx + Kx = 0 (1.47)
que coincide com a lei de Newton do movimento.Refira-se contudo que em geral e mais conveniente estudar a evolucao do
Lagrangiano do sistema, L = T − V , aplicando para o efeito a equacao deEuler-Lagrange,
d
dt
(∂L
∂q
)− ∂L
∂q= Q
a cada uma das variaveis dinamicas do sistema, q, q, (que sao em numeroigual ao numero de graus de liberdade do sistema). Neste caso Q representaas forcas de atrito.
A condicao de conservacao de energia permite tambem obter as equacoesde movimento do sistema da fig.1.22. Neste caso nao ha atrito e a energiadeve manter-se constante. A energia do sistema e dada em cada instante por
E(xa, xb, t) =Kx2
a
2+
Kx2b
2+
Kc
2(xa − xb)
2 +mx2
a
2+
mx2b
2(1.48)
Nao ha dissipacao de energia, pelo que dE = 0, i.e.,
dE = 0 ⇒
∂E∂xa
= 0
∂E∂xb
= 0;
Kxa + Kc(xa − xb) + mxaxa1xa
= 0
Kxb −Kc(xa − xb) + mxbxb1xb
= 0(1.49)
25Note que se f = f(x, t), df = ∂xf dx + ∂tf dt. No caso concreto acima, d(x2) =∂x2
∂xdx + ∂x2
∂t, dt = 2xx dt, pois a velocidade nao depende explicitamente da posicao.

1.7. OSCILADORES ACOPLADOS 39
Mm mK K
ξ 1 ξ ξ 32
Figura 1.24: A molecula de CO2.
onde se usou a regra de derivacao composta ∂f∂x
= ∂f∂t
∂t∂x
. Obtem-se entao
Kxa + Kc(xa − xb) + mxa = 0
Kxb −Kc(xa − xb) + mxb = 0(1.50)
Ora, estas sao exactamente as equacoes diferenciais de movimento que seobtiveram anteriormente a partir das leis de Newton (ver eqs. 1.29). Deixa-se a si obter estas equacoes pelo formalismo de Lagrange.
1.7.2 Analise das oscilacoes da molecula de CO2
Para ilustrar os conceitos e as tecnicas acima discutidas vamos analisar asoscilacoes de uma molecula triatomica, linear, simetrica, como e a moleculade CO2. O facto de ser um sistema linear simplifica muito o problema, poissao mais faceis de obter as equacoes de movimento. Na configuracao deequilıbrio, a molecula tem 2 atomos simetricamente dispostos em relacao aoatomo central (ver fig.1.24). As distancias de equilıbrio sao r0. As massassao m1 = m3 = m = mO e m2 = M = mC . As variaveis de posicaoobvias sao as coordenadas de cada massa, x1, x2 e x3, respectivamente. Parasimplificar consideramos apenas as vibracoes longitudinais ao longo do eixoda molecula26. Como vimos antes, para pequenas amplitudes as oscilacoessao aproximadamente harmonicas; associamos-lhes uma constante elastica,K, ainda que o potencial interatomico seja complicado.
Os desvios em relacao as posicoes de equilıbrio sao ξ1, ξ2 e ξ3, respectiva-mente (ver fig.1.24). A energia da molecula em cada instante e
E(ξ1, ξ2, ξ3) = T +V =m
2(ξ2
1 + ξ23)+
M
2ξ22 +
K
2(ξ2−ξ1)
2+K
2(ξ2−ξ3)
2 (1.51)
26Ha tambem os modos de vibracao transversais que sao mais difıceis de calcular, masque se obtem pela mesma tecnica. Na analise espectral de substancias que contenham ogrupo molecular CO2 observam-se ambos os modos de oscilacao.

40 CAPITULO 1. OSCILACOES /PARTE 1
A conservacao de energia impoe que27
dE = 0 ;
∂ξ1E = 0∂ξ2E = 0∂ξ3E = 0
(1.52)
donde28
mξ1 −K(ξ2 − ξ1) = 0
Mξ2 + K(ξ2 − ξ1) + K(ξ2 − ξ3) = 0
mξ3 −K(ξ2 − ξ3) = 0
(1.53)
Pondo o sistema a oscilar num modo proprio,
ξ1 = aei(ωt+ϕ)
ξ2 = bei(ωt+ϕ)
ξ3 = cei(ωt+ϕ)
(1.54)
obtem-se a equacao matricial, Aξ = 0,
K − ω2m −K 0−K 2K − ω2M −K0 −K K − ω2m
ξ1
ξ2
ξ3
= 0 (1.55)
cuja equacao secular e |A| = 0. O calculo do determinante da a equacaocubica em ω2,
ω2(K − ω2m)[K(M + 2m)− ω2Mm
]= 0
cujas raızes sao
ω1 = 0 ; ω2 =
√K
m; ω3 =
√K
m
(1 +
2m
M
)(1.56)
27sendo ∂ξ ≡ ∂∂ξ
.28Conclui-se o mesmo a partir do lagrangeano do sistema:
L = T − V =m
2(ξ2
1 + ξ23)−
[M
2ξ22 +
K
2(ξ2 − ξ1)
2 +K
2(ξ2 − ξ3)
2
]
As equacoes de Euler-Lagrange, (ddt)∂
ξkL−∂ξk
L=0 , k = 1, 2, 3, dao-nos directamente as mes-
mas equacoes diferenciais.
1.7. OSCILADORES ACOPLADOS 41
ω
ω
ω
a)
b)
c)
1
2
3
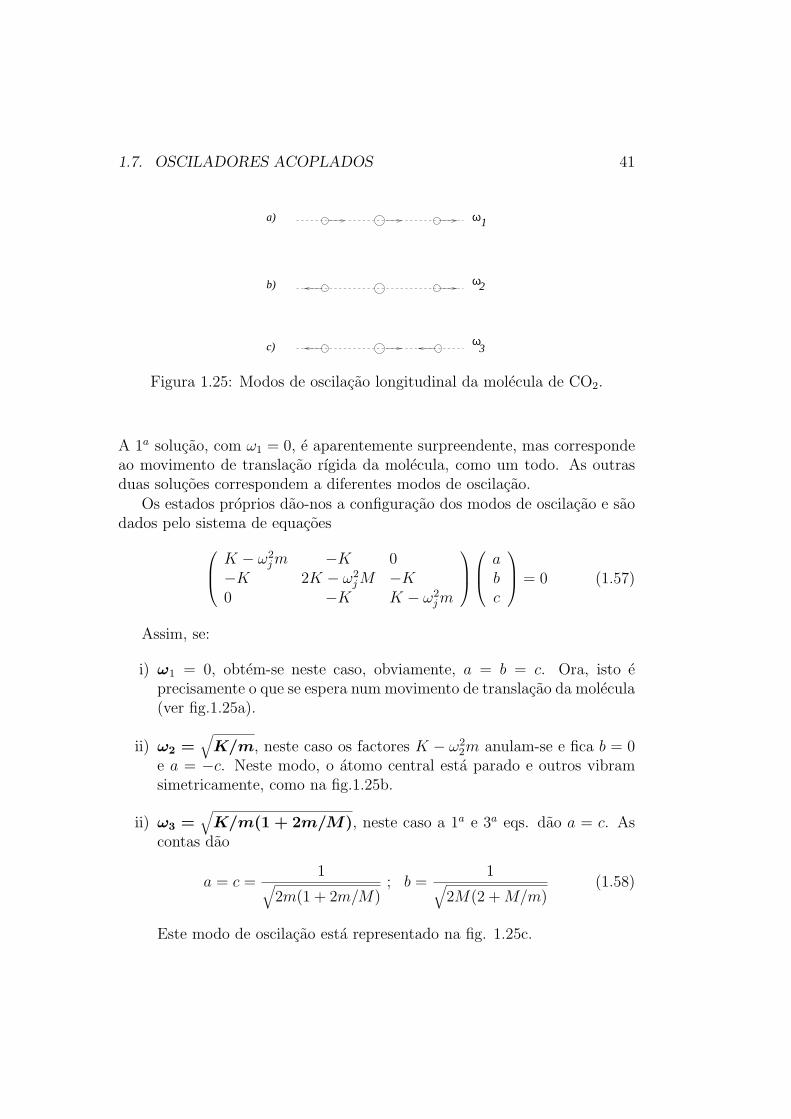
Figura 1.25: Modos de oscilacao longitudinal da molecula de CO2.
A 1a solucao, com ω1 = 0, e aparentemente surpreendente, mas correspondeao movimento de translacao rıgida da molecula, como um todo. As outrasduas solucoes correspondem a diferentes modos de oscilacao.
Os estados proprios dao-nos a configuracao dos modos de oscilacao e saodados pelo sistema de equacoes
K − ω2j m −K 0
−K 2K − ω2j M −K
0 −K K − ω2j m
abc
= 0 (1.57)
Assim, se:
i) ω1 = 0, obtem-se neste caso, obviamente, a = b = c. Ora, isto eprecisamente o que se espera num movimento de translacao da molecula(ver fig.1.25a).
ii) ω2 =√
K/m, neste caso os factores K − ω22m anulam-se e fica b = 0
e a = −c. Neste modo, o atomo central esta parado e outros vibramsimetricamente, como na fig.1.25b.
ii) ω3 =√
K/m(1 + 2m/M), neste caso a 1a e 3a eqs. dao a = c. Ascontas dao
a = c =1√
2m(1 + 2m/M); b =
1√2M(2 + M/m)
(1.58)
Este modo de oscilacao esta representado na fig. 1.25c.

42 CAPITULO 1. OSCILACOES /PARTE 1
p+1pp−1
l
ξ ξ ξ
Figura 1.26: Acoplamento de N osciladores a 1 dimensao
Os estados proprios sao pois da forma
u1 =
aaa
; u2 =
a0−a
; u3 =
aba
; com
b
a= −2m/M
O movimento geral dos atomos desta molecula em torno das posicoes deequilıbrio e pois descrito por uma combinacao linear dos estados propriosanteriores,
ξ1 = A1ei(ω1t+ϕ1) + A2e
i(ω2t+ϕ2) + A3ei(ω3t+ϕ3)
ξ2 = B1ei(ω1t+ϕ1) + B2e
i(ω2t+ϕ2) + B3ei(ω3t+ϕ3)
ξ3 = C1ei(ω1t+ϕ1) + C2e
i(ω2t+ϕ2) + C3ei(ω3t+ϕ3)
(1.59)
com A1 = B1 = C1, A2 = −C2, B2 = 0, A3 = C3 e B3 = −2 mM
A3. A solucaofısica e obviamente ξ = ℜeξ. Depois disto restam ainda 6 constantes deintegracao por determinar, que sao as posicoes e velocidades iniciais de cadamassa, a uma dimensao. Isto e, se nos disserem as posicoes e velocidadesiniciais de cada atomo, saberemos descrever (do ponto de vista classico!) osseus movimentos em qualquer instante posterior.
1.7.3 Modos de oscilacao molecular
Num sistema com N osciladores a 1 dimensao cada massa pode ter 3 desloca-mentos independentes, segundo x, y e z. Num tal sistema ha pois 3N grausde liberdade, e possui 3N modos independentes de vibracao, que sao os seusmodos proprios (ver fig. 1.28).
Suponha-se uma molecula constituıda por um conjunto de N atomos,ligados entre si por forcas que mantem o sistema em equilıbrio. Cada atomo

1.7. OSCILADORES ACOPLADOS 43
e uma massa pontual que possui 3 graus de liberdade, pois pode deslocar-seem x, y e z. A molecula tem pois 3N graus de liberdade. Todavia, estes grausde liberdade nao correspondem todos eles a oscilacoes internas da molecula,ja que a molecula pode efectuar como um todo 3 movimentos de translacaoe 3 rotacoes independentes, nos quais as distancias interatomicas se mantemconstantes. O numero de modos de oscilacao de uma tal molecula e entaoefectivamente 3N−6 modos proprios (i.e. ha seis movimentos com frequencianula). Todavia, se a molecula for linear o numero total de modos de oscilacao(longitudinais e transversais) e de apenas 3N − 5, pois essa molecula temsimetria axial e apenas 2 movimentos de rotacao em torno seu centro demassa. A rotacao axial, em torno do eixo da molecula, nao e distinguıvel,pelo que nao constitui uma rotacao fısica.
Se os N atomos da molecula estiverem todos num mesmo plano, ha 2Ngraus de liberdade, incluindo 2 translacoes no plano e uma rotacao. Estamolecula tera entao 2N − 3 modos em que a oscilacao e no plano e (3N −6)−(2N−3) = N−3 modos que vibram fora do plano. Mas, se a molecula forlinear ha N graus de liberdade sobre o eixo, incluindo uma translacao. Estamolecula tem pois N −1 modos longitudinais e (3N −5)− (N −1) = 2N −4modos transversais. Contudo, os modos transversais sao todos degeneradose ha apenas N − 2 frequencias transversais diferentes (por simetria, cadamodo transversal tem outro exactamente igual no plano perpendicular, coma mesma frequencia).
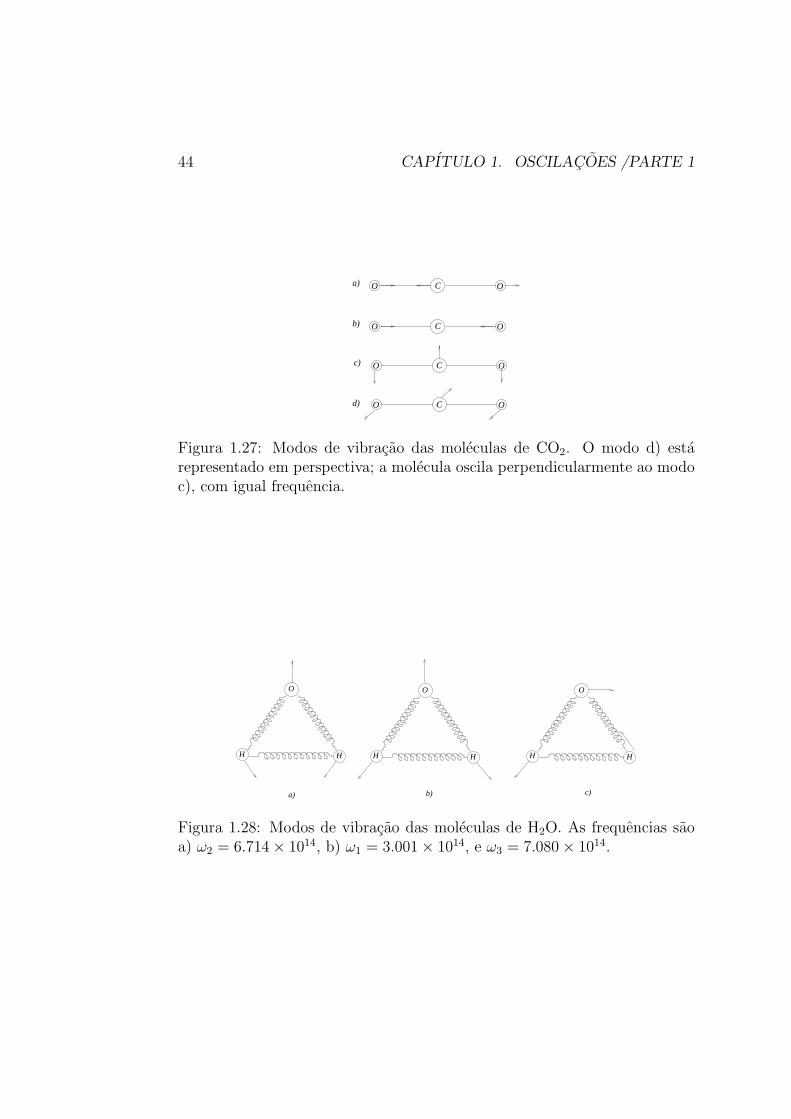
A molecula de CO2 e um bom exemplo de uma molecula linear:- tem 4modos de oscilacao, sendo 2 longitudinais e 2 transversais (ver fig. 1.27),com frequencias angulares ω1 = 4.4278 × 1014 Hz; ω2 = 2.616 × 1014 Hz eω3 = ω4 = 1.2573× 1014 Hz.29.
A molecula da agua e outro exemplo; tem 3 modos proprios de oscilacao,todos no plano da molecula, a que correspondem as 3 frequencias carac-terısticas distintas(fig. 1.28),
ω1 = 3.001× 1014 Hz ; ω2 = 6.714× 1014 Hz ; ω3 = 7.080× 1014 Hz
O calculo destes modos faz-se do mesmo modo que atras fizemos. Desta vezporem e mais complicado escrever as equacoes de movimento e resolve-lasanaliticamente.
Ao interagir com o espectro de radiacao da banda do infravermelho, amolecula da agua deixa bem visıvel a sua assinatura no espectro de ab-
29(vide Landau; Mechanics, 1960, e A. Finn; Fısica, vol. 1, 2.ed.; 1967).
44 CAPITULO 1. OSCILACOES /PARTE 1
CO O
CO O
CO O
CO O
a)
b)
c)
d)
Figura 1.27: Modos de vibracao das moleculas de CO2. O modo d) estarepresentado em perspectiva; a molecula oscila perpendicularmente ao modoc), com igual frequencia.
H
O
H H
O
H H
O
H
a) b) c)
Figura 1.28: Modos de vibracao das moleculas de H2O. As frequencias saoa) ω2 = 6.714× 1014, b) ω1 = 3.001× 1014, e ω3 = 7.080× 1014.

1.8. OSCILADORES ACOPLADOS E FORCADOS 45
sorcao, na forma de picos de absorcao, naquelas frequencias proprias, ω1, ω2
e ω3 (tambem chamadas frequencias ressonantes). Esta e de resto a base dastecnicas de analise instrumental. Por exemplo a molecula de naftaleno, C10H8
tem 48 frequencias ressonantes. Uma base de dados contendo a informacaode todas estas frequencias permite depois identificar tracos da presenca dessasubstancia numa amostra de composicao desconhecida Trata-se afinal de lo-calizar os picos de ressonancia caracterısticos.
1.8 Osciladores acoplados e forcados
Referiu-se anteriormente a interaccao da radiacao electromagnetica com amolecula da agua e o aparecimento de espectros de absorcao caracterısticos.Trata-se de facto da observacao das oscilacoes forcadas de um sistema comvarias frequencias proprias, i.e. da ressonancia num sistema de osciladoresacoplados sujeitos a uma accao externa periodica (no caso a forca e ~F = e ~E,
onde ~E = ~E0 cos(ωt) e o campo electrico da onda electromagnetica).Consideremos o sistema da fig. 1.22 (ainda, novamente). Suponhamos
por hipotese que uma das bolas, p.ex. a bola a, e solicitada externamentecom uma forca periodica, ~Fe = F0 cos ωt i. As equacoes de Newton sao agora
−Kxa −Kc(xa − xb) + F0 cos ωt = mxa
−Kxb + Kc(xa − xb) = mxb(1.60)
Fazendo a transformacao de variaveis, para as coordenadas normais do sis-tema, u1 = xa +xb e u2 = xa−xb (ver eqs. ??), as equacoes anteriores ficam,como vimos, desacopladas, i.e.,
−Ku1 + F0 cos ωt = mu1
−Ku2 − 2Kcu2 + F0 cos ωt = mu2(1.61)
ou seja, u1 + ω2
1u1 = F0
mcos ωt
u2 + ω22u2 = F0
mcos ωt
(1.62)
Chegamos assim a uma conclusao muito interessante, que e a seguinte: asequacoes dos modos proprios estao desacopladas, mas ambos os modos saoigualmente sujeitos a accao da forca exterior, apesar de a forca so estar aser aplicada num dos osciladores (na bola a).

46 CAPITULO 1. OSCILACOES /PARTE 1
As equacoes 1.62 sao equacoes de oscilador forcado - qualquer delas. Logo,no regime estacionario (apos a fase transitoria inicial) o sistema ha-de oscilarcomo um todo, com a frequencia da accao externa, ω. Isto e, escrevemos apriori que
u1 = A1 cos ωtu2 = A2 cos ωt
(1.63)
donde −ω2A1 cos ωt + ω2
1A1 cos ωt = F0
mcos ωt
−ω2A2 cos ωt + ω22A2 cos ωt = F0
mcos ωt
(1.64)
Resulta destas equacoes condicoes para A1 e A2,
A1 =F0/m
ω21 − ω2
; e A2 =F0/m
ω22 − ω2
(1.65)
Por conseguinte, xa e xb oscilam ambos com a frequencia da forca externa,ω,
xa = A cos ωt = A1+A2
2cos ωt
xb = B cos ωt = A1−A2
2cos ωt
(1.66)
com amplitudes dadas por,
A = F0
2m
ω2
1+ω2
2
(ω2
1−ω2)(ω2
2−ω2)
B = F0
2m
ω2
2−ω2
1
(ω2
1−ω2)(ω2
2−ω2)
(1.67)
A moral desta historia e que ha um fenomeno de ressonancia sempre que afrequencia de excitacao se aproximar de qualquer das frequencias proprias dosistema. Por isso essas frequencias tambem sao designadas como frequenciasressonantes. Isto e, podemos excitar os modos normais do sistema do mesmomodo como se excita um oscilador simples − o processo de ressonancia eo mesmo. Neste caso, como nao consideramos o atrito, as amplitudes deressonancia divergem quando ω = ω1 ou ω = ω2. Em tais condicoes, sematrito ou com atrito reduzido, o sistema pode entar de facto em ruptura, eser destruıdo devido a accao externa.

1.9. SISTEMA DE N OSCILADORES ACOPLADOS− TRANSICAO PARA O CONTINUO47
1.9 Sistema de N osciladores acoplados −transicao para o contınuo
Seja o sistema representado na fig.1.26. Por hipotese, o sistema e constituıdopor N massas, com N ≫ 1, igualmente espacadas, sendo as molas todasiguais, com constante elastica K. Consideramos por hipotese desprezaveis asmassas das molas e o atrito. Este sistema e portanto uma generalizacao dosistema da fig. 1.22.
As leis de Newton dao um sistema de N equacoes diferenciais acopladas,
mξp = −K(ξp − ξp−1)−K(ξp − ξp+1) , com p = 1, 2, . . . , N (1.68)
Em princıpio o problema resolve-se da mesma maneira que antes: e necessarioresolver a equacao de valores proprios de uma matriz N × N , da qual seobterao N valores proprios de frequencia. Porem, o nosso interesse esta agorafocado em analisar o sistema contınuo que corresponde a fazer-se N → ∞,mantendo constante a massa total do sistema (i.e. distribuindo a massamais e mais ate ao limite do contınuo). Nesse limite, o sistema pode servisto como uma unica mola de comprimento L, cuja massa esta distribuıdauniformemente por todo o comprimento e uma constante elastica equivalentea N + 1 pequenas molas em serie.
Se N → ∞, entao ℓ ; δx ≪ 1; m ; δm; e ξp(t) ; ξ(x, t), com x = pℓ.A eq. 1.68 transforma-se em
δm
Kξ(x, t) = − (ξ(x)− ξ(x− δx))− (ξ(x)− ξ(x + δx)) (1.69)
Podemos desenvolver ξ(x, t) em serie de Taylor,
ξ(x± δx, t) = ξ(x, t)± ∂ξ
∂xδx +
1
2
∂2ξ
∂x2δx2 ± · · ·
donde∂2ξ
∂t2=
(K δx2
dm
)∂2ξ
∂x2(1.70)
Esta equacao e, como veremos adiante, a equacao de D’Alembert de umaonda a uma dimensao,
∂2t ξ = v2∂2
xξ (1.71)

48 CAPITULO 1. OSCILACOES /PARTE 1
onde v e a velocidade de propagacao. Ou seja, quando se passa para ocontınuo, a equacao dinamica que descreve as oscilacoes do sistema expressa-se como uma onda que se propaga atraves desse meio − uma onda e afinaluma perturbacao a propagar-se. Este resultado e de facto muito interes-sante, diz-nos que: as oscilacoes (ou perturbacoes) de um sistema contınuoconstituem e propagam-se como uma onda.
O factor (K δx2/dm) e a velocidade de propagacao das ondas nesse meio.Porem, δx ≪ 1, pelo que a equacao parece nao estar ainda numa formasatisfatoria. Contudo, se repararmos, a constante elastica da mola, vistaagora como um todo, aquela que nos medimos e que associamos a mola, naoe K, mas sim a que corresponde a associacao das N + 1 pequenas molas emserie da figura, i.e.
1
Ke
=N+1∑
p=1
1
K=
N + 1
K=
L
Kℓ
onde Ke e a constante elastica da mola (vista como um todo contınuo) e L eo seu comprimento. Substituindo Ke na equacao acima fica (com ℓ ∼ δx)
∂2ξ
∂t2=
KeL
µ
∂2ξ
∂x2(1.72)
onde µ = dm/dx e a massa por unidade de comprimento e L e o comprimentototal dessa mola.
Como se vera mais a frente (§??) a eq. 1.72 descreve a propagacao deuma perturbacao do sistema que e a mola, com velocidade
v =
√KeL
µ(1.73)
Ora, um sistema a uma dimensao, com N osciladores acoplados, temcomo sabemos N modos proprios de oscilacao (ver fig. 1.29). Mas quandoN → ∞, e esse sistema tende para o contınuo, as oscilacoes do sistema daoorigem a ondas.
O que e feito entao desses modos proprios, com frequencia e configuracaobem definidas? De facto, as ondas que se formam nao sao quaisquer, saoondas estacionarias30. O que a seu tempo verificaremos e que os estadosproprios correspondem justamente as ondas estacionarias do sistema contınuo
30Formam-se ondas estacionarias porque o sistema tem uma extensao limitada no espaco,com fronteiras bem definidas.
1.9. SISTEMA DE N OSCILADORES ACOPLADOS− TRANSICAO PARA O CONTINUO49
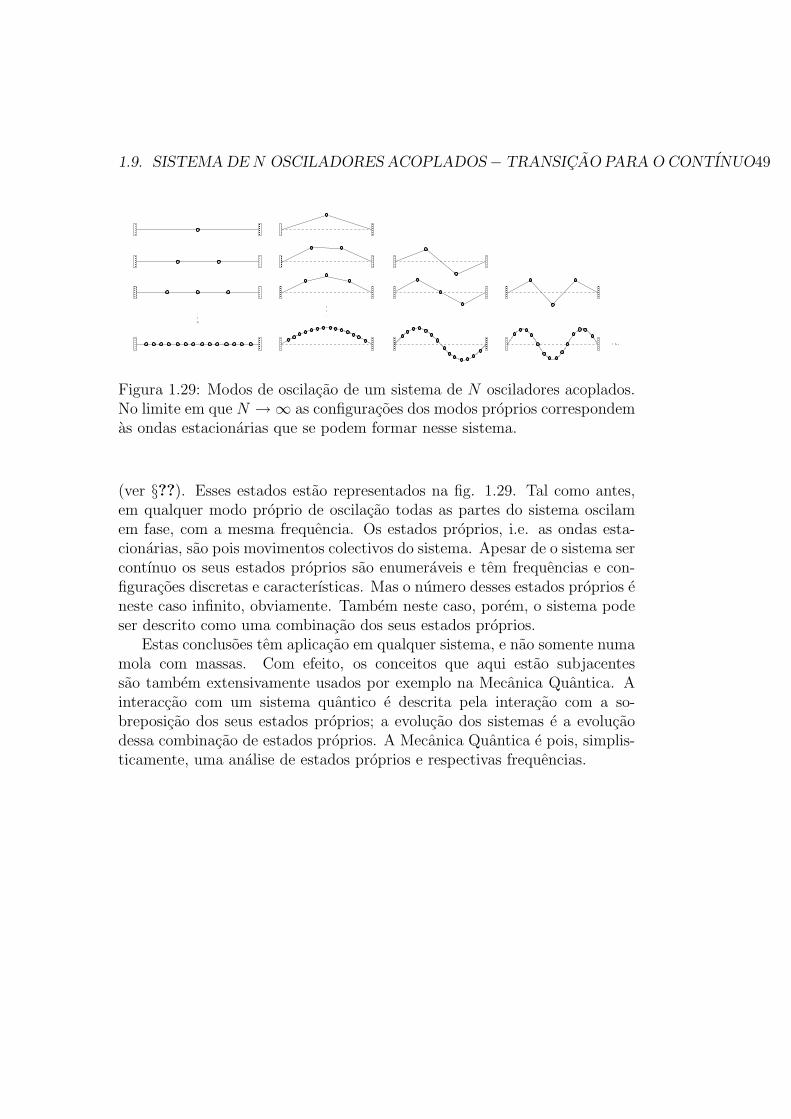
Figura 1.29: Modos de oscilacao de um sistema de N osciladores acoplados.No limite em que N →∞ as configuracoes dos modos proprios correspondemas ondas estacionarias que se podem formar nesse sistema.
(ver §??). Esses estados estao representados na fig. 1.29. Tal como antes,em qualquer modo proprio de oscilacao todas as partes do sistema oscilamem fase, com a mesma frequencia. Os estados proprios, i.e. as ondas esta-cionarias, sao pois movimentos colectivos do sistema. Apesar de o sistema sercontınuo os seus estados proprios sao enumeraveis e tem frequencias e con-figuracoes discretas e caracterısticas. Mas o numero desses estados proprios eneste caso infinito, obviamente. Tambem neste caso, porem, o sistema podeser descrito como uma combinacao dos seus estados proprios.
Estas conclusoes tem aplicacao em qualquer sistema, e nao somente numamola com massas. Com efeito, os conceitos que aqui estao subjacentessao tambem extensivamente usados por exemplo na Mecanica Quantica. Ainteraccao com um sistema quantico e descrita pela interacao com a so-breposicao dos seus estados proprios; a evolucao dos sistemas e a evolucaodessa combinacao de estados proprios. A Mecanica Quantica e pois, simplis-ticamente, uma analise de estados proprios e respectivas frequencias.