Mecatrônica Fácil 43

of 36
-
Upload
pitter-pio-pinto -
Category
Documents
-
view
244 -
download
3
Transcript of Mecatrônica Fácil 43
ME AT C RNI A F I C C
w w me arnc fcl o b w . c t iaa ic m.r o .
A o6- 3- $65 n n4 R ,0
Fne d A m na S p s o ts e l e to i l i m eA rn ac mofn in m a pe d o uc a s o fne d ai na b s a o ts e l me t o i s c
N u i E t n o e rn s l r i s o e c pr M q i s aa u a n Itl e ts ne gne iV j aeo od s ie s e a vl o s tma u s i eg ne eq a op i p so n le ts u l rx ti mo as asr t g op l n u i e ai i e s e rn s nd o o
R ld Tm o e ee p R b M vl o e
Tmp r a o ai na op r i a e oi d r l z me td o pl s h eb tr s o tn q ev r aei c m e s o u ai a a e c s a nep l rl uiz d xl i me t eo e ti o uv la
IS 1 7 -9 0 S N 6 60 8
D sn ov nod u poeo ee v lme t e m rjt i c nrld rmoa nev w b o t a o e tme t i e o a
Ce t ts eH radd sn ovm ini a d av r ee v l s e L sr e c n uo atme t drc n l a e S mi d tr l o a ne i i a eo
Lsr e i n uo ae Sm c d tr o
Hardware
PC&CIA # 81 # Abril 2008
ndiceEditora Saber Ltda. Diretores Hlio Fittipaldi Thereza M. Ciampi Fittipaldi
i
16
MECATRNICA FCIL
www.mecatronicafacil.com.brEditor e Diretor Responsvel Hlio Fittipaldi Conselho Editorial Luiz Henrique C. Bernardes, Newton C. Braga Auxiliar de Redao Erika M. Yamashita Produo Diego M. Gomes Design Grfico Carlos C. Tartaglioni Edimldia Ferreira Publicidade Carla de Castro Assis, Ricardo Nunes Souza
21
PARA ANUNCIAR: (11)2095-5339 [email protected] Bianchini, Jeff Eckert, Michael Meneses, Newton C. Braga,Victor Luiz de Marchi
Notcias Robonews
2 8
Capa Arquivo Editora Saber
ASSINATURAS www.mecatronicafacil.com.br Fone: (11) 2095-5335/Fax: (11) 2098-3366 Atendimento das 8:30 s 17:30 h
Laser SemicondutorCientistas de Harvard desenvolvem Laser Semicondutor altamente direcional
10
Associado da:
Fontes de Alimentao SimplesAprenda como funcionam as fontes de alimentao bsicas e alguns circuitos simples para projetos mecatrnicos
12
Associao Nacional dos Editores de Revistas
Neurnios EletrnicosAnlise sobre as novas tecnologias e mquinas inteligentes
16
Associao Nacional das Editoras de Publicaes Tcnicas, Dirigidas e Especializadas.
Rel de tempoVeja um circuito de pequenas temporizaes alimentado por pilhas ou baterias
21
Rob MvelConfira o desenvolvimento de um projeto controlado remotamente via web
24
n
notcias
RoboFotos: Fernando Cavalcanti
Confira as atraes da segunda edio da Campus Party brasileiraAnote na sua agenda o maior encontro de Internet e cultura digital do planetaA Campus Party acontecer entre os dias 19 e 25 de janeiro, no Centro de Exposies Imigrantes, em So Paulo. O evento contar com acesso banda individual de Internet mais rpida do mundo (10 Gb), proporcionada pela Telefonica, alm de atividades como palestras, workshops e competies. Entre os acontecimentos previstos esto: Oficina Microsoft Robtica Studio, Oficina de Programao com Robotino - Festo, Palestra de Microblogs, Palestra sobre como armazenar Energia solar,Campeonato de ProSoccer On Line, Minicurso de Viso Robtica e muito mais. Outra grande atrao estar na rea de robtica, que ir construir no
decorrer do evento um rob totalmente composto por tecnologias livres de software. O projeto deste mecanismo ficar disponvel para download e, consequentemente, o prottipo poder ser criticado e melhorado pelos campuseiros. O diretor-geral do evento, Marcelo Branco, confirma que o aumento das redes sociais, blogs e semelhantes mostra que atualmente o internauta prefere interagir a ser passivo neste processo. A era dos portais acabou! Cada mdulo do rob livre ser independente dos demais e controlado por TCP/ IP (Transmission Control Protocol e Internet Protocol) atravs do sistema operacional Linux. Ns nos permitimos sonhar alto. Ainda no existe
uma utilizao standard de cdigo aberto na robtica e acreditamos que na Campus Party poder surgir a primeira, afirma Branco. Na rea de Astronomia, os organizadores do evento estaro embalados pelo Ano Internacional da Astronomia que comemora os 400 anos das primeiras observaes do cu feitas por Galileu Galilei. 2009 foi eleito o ano da Astronomia pela ONU (Organizao das Naes Unidas), Unio Astronmica Internacional (IAU) e UNESCO (Organizao das Naes Unidas para a Educao, a Cincia e a Cultura); e a programao da Campus Party ser ecltica. Ela trar desde a exposio de arte Sobre os cus at a proposta de Mecatrnica Fcil n43
notcias
n
Dia-a-dia na Campus Party Brasil
Acomodaes dos campuseiros na edio 2008
Marcos Pontes em palestra
uma criao transversal. Reunindo as divises de Robtica e Desenvolvimento, alm da Astronomia, o projeto consiste na elaborao de um observatrio coletivo com livre acesso na Internet. Os visitantes interessados em Astronomia podero contar com a agenda cheia, como a oficina Brincando com astronomia, Observaes do cu com telescpios remotos e Planetrios e tecnologia digital. J para aqueles que nunca tiveram a oportunidade de conhecer as tecnologias e avanos que um computador pode porporcionar a Campus Party apresentar o Batismo Digital 1.0, que dar noes bsicas sobre o uso de PCs. O diretor de Contedos da Campus Party Brasil, Srgio Amadeu, Mecatrnica Fcil n43
explica que se trata de uma ao de incluso digital: Entidades, empresas, escolas, sindicatos, grupos de melhor idade, qualquer um pode participar. A idia que as pessoas includas levem at o Campus Party conhecidos, familiares, empregados que nunca usaram o computador. Queremos incentivar os empresrios a levarem seus funcionrios, diz. E para as pessoas que j tiveram o seu primeiro contato com a informtica mas no vo muito alm dos emails e comunicadores instantneos, ser feito o Batismo Digital 2.0, que mostrar como a rede pode ser uma ferramenta decisiva na vida pessoal e profissional. No Batismo 2.0, Amadeu adianta que os inscritos podero
aprender a usar as redes sociais, a exemplo do Orkut e MySpace, wikis, blogs, nanoblogs, gadgets, folksonimia, entre outras ferramentas de colaborao. Para os interessados o preo do ingresso custa R$ 150 com o pacote de alimentao opcional no mesmo valor. J para os visitantes da rea Expo a circulao ser livre, porm ser necessrio fazer a retirada do convite no Centro de Exposies Imigrantes. Sero 38 mil M2 para a sede do encontro onde a capacidade de seis mil campuseiros, onde ficaro acampados e conectados 24 horas ao longo da semana para trocar experincias e compartilhar conhecimentos das diversas reas tecnolgicas.3
n
notcias
Honda cria perna robtica para auxiliar usurios a caminharemDispositivo reduz carga corporal e alivia cansao atravs de apoio suplementar para o corpo
A Honda divulgou em novembro sua nova tecnologia, capaz de ajudar um indivduo a andar, alm de subir e descer escadas. O dispositivo foi concebido para pessoas capazes de caminhar e pode beneficiar a populao como apoio suplementar para as pernas e corpo. O equipamento contm dois motores acionados por baterias recarregveis de ons de ltio e sua carga de bateria suficiente para proporcionar uma autonomia de duas horas. Com um peso de 6,5 kg, a perna robtica auxilia trabalhadores a executarem suas tarefas em p, reduzindo a carga sobre os msculos e articulaes inferiores (no quadril, joelhos e tornozelos), apoiando uma poro da massa corporal do usurio. Com uma estrutura simples que consiste de banco, moldura, e calados, ele possui um mecanismo que direciona a fora auxiliar do usurio em direo ao centro de gravidade,4
capacitando o controle com o movimento das pernas. A empresa iniciou investigaes sobre um dispositivo auxiliar de caminhada em 1999, com o objetivo de proporcionar maior mobilidade s pessoas com dificuldades de locomoo. Na poca, ele havia sido projetado para pessoas com pernas e msculos enfraquecidos. Hoje, com a modelao do projeto, o caminhar natural alcanado atravs da alterao do montante de prestar assistncia fora aplicada para as pernas direita e esquerda por meio do controle de dois motores baseados nas informaes obtidas, embora os sensores sejam embutidos no sapato do dispositivo. Esta pesquisa foi conduzida pelo Centro de Pesquisa de Tecnologia Fundamental Honda R & D Co. e avalia a eficcia do modelo experimental em ambientes reais como residncias e fbricas.
Perna robtica desenvolvida pela Honda
Mecatrnica Fcil n43
notcias
n
Veculo esportivo acadmico desenvolvido por apenas 480 reaisPreofessores e alunos da Ulbra apresentam seu projeto Avus, desenvolvido ao longo de 2008O Avus, prottipo projetado e desenvolvido pelos alunos e professores do curso de Engenharia Automotiva da ULBRA - Universidade Luterana do Brasil, j est em fase de testes. O projeto foi desenvolvido ao longo de 2008 e j est rodando pelas pistas. um esportivo de dois lugares com suspenso dianteira embarcada e injeo programvel. Aps a finalizao teremos a certeza de que estvamos no caminho certo, comenta o coordenador do Laboratrio, professor Luiz Carlos Gertz. Ele ainda completa que a maior satisfao poder acompanhar o envolvimento de seus alunos. Os primeiros testes realizados em pista comprovaram tratar-se de um veculo com motor potente e mais leve do que os demais da categoria. Em sua fabricao foram utilizadas doaes e prmios que a equipe do Laboratrio de Engenharia Automotiva da ULBRA recebeu nos ltimos semestres. O motor de Astra foi ganho na Maratona de Eficincia Energtica de So Paulo, quando o projeto de um veculo econmico (Camelo) se consagrou campeo. Alm disso, algumas empresas do setor automotivo se engajaram no projeto Avus e forneceram sistema de injeo eletrnica, eletrnica embarcada, tubos e painel. Alguns ajustes ainda devem ser realizados. A idia dos desenvolvedores agora conseguir um parceiro para financiar, principalmente, a carenagem. O veculo depois de pronto contar ainda com um motor traseiro com potncia de 116 HP e menos de 750 kg. Segundo Gertz, se tudo der certo, em dois ou trs meses ele estar finalizado. Entretanto, a brincadeira de construir um carro de gente grande no pra por aqui. O professor j pensa em novos desafios como projetar um carro com o motor dianteiro. Mas isso assunto para as prximas turmas de Prottipos Automotivos!
ltimas vistorias no Avus
Mecatrnica Fcil n43
n
notcias
Alunos conferem palestras sobre mercado de trabalho no Isa Show
Dia do Estudante Membro da Isa contou com a presena de Nelson Ninin e Cludio GarciaDurante o Isa Show, no Expo Center Norte, os estudantes tiveram a oportunidade de conferir o Dia do Estudante Membro da Isa. O evento aconteceu no dia 19 de novembro e contou com palestras proferidas por especialistas do setor de Automao e Controle, alm de executivos das empresas expositoras do Isa Show. Seu objetivo foi contribuir para o desenvolvimento e transferncia de conhecimentos para os participantes. Entre os palestrantes estava o diretor da Yokogawa e da Abinee, Nelson Ninin, que relatou as necessidades do mercado internacional e a forma como um concorrente ao cargo de gerente, diretor ou engenheiro deve comportarse frente a uma nova oportunidade. preciso conhecer a histria da empresa em que se deseja entrar, para onde ela est caminhando e quais sero seus prximos passos para dessa forma penetrar nessa estrutura afirma Ninin. Para o mercado de trabalho necessrio planejar cada situao, no somente no setor de automao. A empresa tem que saber que pode contar com voc para tudo, conclui. Outro palestrante foi o Professor Doutor da Escola Politcnica da USP, Cludio Garcia, que teve como tema Como preparar o engenheiro do futuro. Ele reforou as palavras de Ninin sobre o planejamento de
carreira dos estudantes e como o networking pode ser importante para futuras negociaes. No auditrio reservado aos estudantes estavam presentes os integrantes da equipe da Seo Estudantil Isa Poli, que ficou entre as melhores colocadas na competio acadmica: International Student Games em Houston, Estados Unidos. Nas palestras haviam cerca de 50 estudantes de todo o pas. Um deles, Matheus Otero, 19 anos, acredita que sua vinda da Praia Grande colaborou em seu currculo pelo o fato da feira ser uma organizao sria. J o segundo ano que ele comparece junto com seus colegas do ramo de automao do Centro Federal de Educao Tecnolgica (CEFET) e da rea de automao do Servio Nacional de Aprendizagem Industrial (Senai), de Santos, para obter maiores conhecimentos sobre as tecnologias existentes. Luciana Vieria, 17 anos, tambm se deslocou de Botucatu para conferir o Dia do Estudante. A aluna do curso de Eltrica da escola Senai diz ter gostado da feira e ser uma das nica meninas, tanto de sua turma de letrica como dos jovens, que vieram para o local despertados pela a curiosidade de conhecer as empresas presentes.
O Isa Show considerado o maior evento de automao da Amrica Latina e promovido pela ISA Distrito 4. O evento j est em seu XII Congresso e foi realizado entre os dias 17 e 19 de novembro, em So Paulo, no Expo Center Norte. Na edio de 2007, cerca de 13 mil pessoas prestigiaram o evento. Para este ano a expectativa foi receber 15 mil visitantes tanto do Brasil como do exterior. Com 20 mil metros quadrados o show teve destaque para a indstria de processos, manufatura, automao predial, energia, leo e gs, papel e celulose, saneamento, meio ambiente, sistemas embarcados, tecnologia da informao, gesto empresarial, pesquisa, ensino e tecnologia.Nelson Ninin palestrante do evento Isa Show
Mecatrnica Fcil n43
notcias
n
Microsoft Corporation lana Robotics Developer Studio 2008Plataforma de desenvolvimento de software permite simplicao por ampla variedade de hardwareDurante a Conferncia e Expo RoboDevelopment, que aconteceu em 18 e 19 de novembro no Centro de Convenes Santa Clara, Califrnia, a Microsoft Corp. anunciou a disponibilidade geral do Microsoft Robotics Developer Studio 2008 (Microsoft RDS), uma nova verso da plataforma de programao robtica. A plataforma inclui melhorias a ponto dos desenvolvedores poderem definir de forma mais especfica a comunicao entre os servios, reduzindo a utilizao da rede e otimizao do processamento de dados. Alm de vantagens na Programao Visual Language (VPL) e na ferramenta Visual Simulation Environment (VSE). Este o terceiro lanamento do Microsoft RDS e baseia-se nas verMecatrnica Fcil n43 ses anteriores. Esta verso uma demonstrao do nosso empenho em apoiar o investimento e surgimento de novas comunidades robticas, disse o gerente geral do Microsoft Robotics Group, Tandy Trower. Ele ainda afirma que a Microsoft obtm uma resposta positiva para os fornecimentos da empresa e possui esperanas em prover uma base comum e catalisadora para o futuro da robtica pessoal. O objetivo da Microsoft RDS proporcionar um terreno comum para contribuir com a participao de toda a comunidade. At o momento, mais de 250.000 cpias do Microsoft RDS j foram transferidas e mais de 60 companhias de hardware e software de apoio utilizaro a plataforma como parte de seus produtos. A ABB, uma das maiores fornecedoras de software e robtica para robs industriais, est entre as primeiras empresas a liberar um pacote conhecido como Conectividade ABB, estabelecendo uma relao com o Microsoft Robotics Developer Studio 2008. Esta esfera cria um ambiente virtual para fins educacionais, podendo vir a ensinar estudantes a projetarem e implementarem a robtica virtual. O pacote tambm contm todos os servios necessrios para construir um rob virtual completamente controlado. Maiores Informaesacesse: www.microsoft.com/robotics
n
notcias
Robo
Jeef Eckert
Limpeza nas prximas linhas de robsNormalmente associamos os robs industriais a tarefas pesadas como engraxar, pintar e outras atividades menos higinicas, mas a empresa Kuka oferece uma linha de mquinas para salas limpas, aplicaes mdicas, manuseio de alimentos etc. Um exemplo recentemente introduzido foi o KR 15 SL , o nico rob articulado feito exclusivamente de ao sem estanho em todas as suas superfcies, tornando-o aplicvel em caminhos com altos requisitos de higienie, esterilizao e ausncia de contaminao por partculas. Com uma taxa de proteo (IP) com nota 67 (proteo contra poeira, selado contra gua do mar ou jatos potentes), ele ideal para trabalhar com alimentos, medicamentos e outros produtos mdicos. Mas, caso voc precise de uma mquina para operar num ambiente fortemente congelado, poder optar pelo o KR 180-2 PA Ardtic. Ele opera em temperaturas at -30 C sem a necessidade de aquecedores ou outros dispositivos semelhantes. Tudo isso voc pode encontrar na linha inteira de robs incluindo quatro, cinco ou seis eixos no site da empresa: www.kuka.com.
Rob capaz de manusear alimentos e medicamentos Cortesia da Kuka Robotics
Transportador de Servio PesadoNa maioria das aplicaes da indstria robtica, miniaturizao o nome do jogo, mas no assim para a Caterpillar Inc., que est trabalhando juntamente com o Instituto de Robtica da Carnegie Mellon. O intuito dessa juno desenvolver verses de caminhes transporta
dores utilizados em operaes de minerao. Entre eles, est o caminho transportador 793D que pode carregar cargas de mais de 240 toneladas e possui um peso bruto estimado em 700 toneladas. O veculo equipado com uma srie de dispositivos
que o mantm em funcionamento, incluindo receptores GPs, localizadores larses e sensores visuais. Para 2010 diversos desses equipamentos j esto agendados para operar em minas pertencentes a BHP Billiton, que espera ser a maior companhia mineradora do mundo. Mecatrnica Fcil n43
notcias
Lanamento do Rob PlantaEstranhamente no existem especificaes tcnicas, mas o laboratrio de robtica da Chonnam National University (www.jnu.ac.kr/en) da Coria, diz ter desenvolvido uma planta robtica que, por diversos motivos, prefervel em relao s plantas de raiz. O que ns sabemos que ela mede 130 cm de altura e tem 40 cm de dimetro, possui um caule e cinco brotos, sendo colocada num vaso. Exatamente como um vegetal real, ela emite oxignio e odor agradvel atravs dePlanta robtica desenvolvida pela Chonnam National University Cortesia da Yonhap News Agency
n
um mecanismo no especificado. Alm disso, se curva em direo s pessoas que se aproximam a menos de 40 cm, e seus brotos abrem. A flor tambm abre e dana ao som de uma boa msica. De acordo com o idealizador do projeto, Park Jong-ho, trata-se de uma maneira de introduzir o conceito de plantas, tanto quanto de humanos ou animais, na realizao de robs. Tudo bem, at o dia em que alguns insetos daninhos robticos a atacarem...
Rob pode identificar e destruir IEDsIED (Improvised Explosive Device) significa dispositivo explosivo improvisado e um rob apresentado pelo ministro da defesa da Austrlia, Warren Snowdown, que pretende encontrar e desarmar explosivos improvisados. O IED Killer Experimental Robot (SPIKER) um veculo controlado remotamente que utiliza um conjunto Mecatrnica Fcil n43 de dispositivos incluindo explosivos para seu prprio uso. Dotado de diversos sistemas de armas, ele pode subir escadas e realizar comunicaes a longas distncias. Talvez o mais importante nele seja o preo de $15000 dlares, que aproximadamente um dcimo do preo dos equivalentes que fazem o mesmo trabalho.
d
dispositivos
Cientistas de Harvard desenvolvem LASER Semicondutor altamente direcionalComo toda fonte de luz, os LASERs comuns tm a tendncia de espalhar a luz emitida e deixam de formar um feixe perfeitamente direcional. Isso ocorre principalmente com os LASERs semicondutores, o que limita sua gama de aplicaes. No entanto, cientistas de Harvard em Cambridge (Mass.) conseguiram desenvolver um LASER semicondutor altamente direcional. Veja neste artigo o que realmente significa este novo avano da tecnologia.Newton BragaOs LASERs consistem nas fontes de luz mais direcionais que existem, produzindo feixes praticamente paralelos que pouco divergem mesmo em longas distncias. Eles j conseguiram iluminar uma rea de poucos quilmetros na Lua, a 384 mil quilmetros de distncia da Terra. No entanto, no so perfeitos. No caso especfico dos LASERs semicondutores, onde a luz produzida em regies muito pequenas, o fenmeno da difrao manifesta-se de maneira mais acentuada. Isso faz com que os raios de luz curvem-se ao passar pelas bordas de pequenas aberturas ou ainda pequenos obstculos, conforme mostra a figura 1. Nos casos em que necessita-se de um feixe de luz perfeitamente paralelo, ou o mais prximo disso quanto seja possvel, so utilizadas lentes ou outros dispositivos que devem ser ajustados de forma bastante crtica para se obterem os efeitos desejados. A figura 2 ilustra o que foi dito. Para se desenvolver LASERs com caractersticas altamente direcionais, utilizam-se tecnologias da plasmnica, incorporando-se estruturas metlicas colimadoras diretamente na sua face. O colimador plasmnico consiste numa abertura centralizada na regio ativa do LASER e uma rede de fendas prximas. A abertura acopla parte da luz emitida de maneira a criar ondas eletromagnticas superficiais, denominadas plasmons na face do LASER. Como essas ondas se propagam na face, progressivamente so dirigidas pelas fendas e emitidas, atingindo a parte oposta do dispositivo de onde emergem. Estes feixes de plasmons esto em fase e chegam mesma posio em fase de tal maneira que a energia ptica est concentrada em um nMecatrnica Fcil n43
10
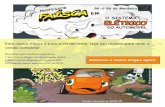
dispositivosgulo slido muito estreito, a partir de onde emitida. Pode-se dizer que as fendas no colimador plasmnico comportam-se como fontes de luz coerente que interferem de maneira construtiva de modo que a luz projetada est numa nica direo perpendicular face do laser, com uma divergncia muito pequena. Pode-se comparar o funcionamento deste laser ao de um conjunto de antenas em fase, quando se deseja uma emisso direcional - veja a figura 3. No desenvolvimento obtido pelos pesquisadores conseguiu-se uma divergncia pequena no sentido vertical, mas substituindo-se a estrutura metlica por uma srie de fendas concntricas seria possvel conseguir uma divergncia pequena tambm no sentido horizontal. Com isso, ser vivel alcanar a colimao total do feixe. Os resultados preliminares mostraram que o esquema funciona muito bem, obtendo-se uma divergncia de poucos graus tanto no plano vertical quanto no horizontal. O estudante graduado Nanfang Yu e Frederico Capasso (da Escola de Engenharia e Cincias Aplicadas de Harvard) e uma equipe da Hamamatsu encabeada pelo Dr. Hirofumi Kan, apresentaram os resultados de sua inovao na edio de Julho da revista Nature Photonics, a ser publicada em setembro de 2008. Os pesquisadores esculpiram estruturas metlicas na face de um laser semicondutor, criando um colimador plasmnico. O colimador consiste numa abertura e uma estrutura peridica de fendas de sub-comprimento de onda, diretamente colocadas na face de um LASER quntico de cascata emitindo radiao em um comprimento de onda de 10 mcrons, correspondente faixa do infravermelho. Com a tcnica foi possvel reduzir em 25 vezes o ngulo de divergncia da radiao emitida. O LASER manteve a intensidade da radiao, podendo ser utilizado (entre outras aplicaes) no sensoriamento qumico da atmosfera, incluindo segurana e monitoramento ambiental, sem a necessidade de uma ptica de colimao complexa e cara. f4Nanfang Yu e Frederico Capasso, desenvolvedores da tecnologia plasmnica para lasers altamente direcionais
d
2
Para se obter feixes de luz com pequenas aberturas, devem ser utilizados recursos pticos como, por exemplo, lentes
3
Antenas em fase proporcionam uma emisso altamente direcional
A descoberta dos Cientistas de HarvardCientistas da Universidade de Harvard, em colaborao com a Hamamatsu Photonics do Japo, demonstraram pela primeira vez LASERs semicondutores altamente direcionais com uma divergncia menor que os tipos comuns. A inovao abre portas para uma grande gama de novas aplicaes.1
A difrao faz com que os raios de luz abram, formando feixes divergentes
Mecatrnica Fcil n43
11
d
dispositivos
Fontes de Alimentao SimplesA maioria dos projetos de mecatrnica, por serem mveis, so alimentados por pilhas e baterias. No entanto, existem outros que, por serem fixos, podem ser alimentados a partir da rede de energia. E, mesmo projetos mveis, quando na fase de testes, podem ser alimentados numa bancada a partir da rede de energia. Para essa finalidade so usadas fontes de alimentao que podem ter as mais diversas configuraes. Neste artigo mostramos como funcionam as fontes de alimentao bsicas e daremos alguns circuitos simples de fontes para alimentar seus projetos mecatrnicos.Newton Braga
Para alimentar muitos projetos mecatrnicos que usam circuitos no crticos, no preciso possuir uma fonte estabilizada e regulada eletronicamente com muitos componentes de alto custo. Fontes relativamente simples, empregando poucos componentes podem perfeitamente servir, com as vantagens do pequeno espao, baixo custo e facilidade de montagem.
Fonte BsicaA fonte mais simples que podemos montar usa apenas trs componentes e tem seu circuito apresentado na figura 1. Essa fonte tem um tansformador que reduz a tenso da rede de 110 V ou 220 V para o valor aproximado que desejamos aplicar carga, normalmente entre 4,5 e 12 V, com a corrente que essa carga exige ou mais, para termos uma margem de segurana. Na verdade, uma corrente maior que a exigida pela carga sempre importante, pois um motor, por exemplo, no momento da partida precisa de uma corrente maior do que aquela que ele drena em funcionamento normal. Um pequeno motor de 200 mA pode exigir 500 mA ou mais no momento12
da partida. Assim, para alimentar um motor com 200 mA ser conveniente utilizar um transformador que fornea pelo menos 500 mA. O segundo componente o diodo retificador. Esse componente tem por finalidade converter a corrente alternada do enrolamento secundrio do transformador em corrente contnua. Na verso mais simples usamos um diodo apenas, e temos um retifi1Fonte simples com apenas trs componentes
cador de meia onda, ou seja, apenas metade dos semiciclos da corrente alternada so retificados. Esse fato leva a um rendimento algo precrio em termos de corrente mxima de sada, que deve ser compensado pela corrente no transformador. Uma forma de obtermos um rendimento maior para esse setor de retificao consiste em se usar dois diodos, retificando os dois semiciclos
Mecatrnica Fcil n43
dispositivosda corrente alternada do transformador, conforme ilustra a figura 2. No entanto, para essa finalidade, alm de precisarmos de dois diodos, o transformador dever ser de tipo que tenha um enrolamento secundrio duplo ou com tomada central. Assim, em lugar de um trasformador de 6 V x 500 mA, ser necessrio um transformador de 6 + 6 V ou 6-0-6 V com 500 mA. claro que existe a possibilidade do leitor usar um transformador com enrolamento simples e mesmo assim obter a retificao de onda completa. Neste caso, entretanto, sero precisos diodos que devam ser ligados em ponte, conforme indica a figura 3. Ao montar uma fonte deste tipo, atente para as especificaes dos diodos usados. O diodo deve ser capaz de trabalhar com a corrente do circuito. Normalmente, pode-se dar uma boa margem de seguranca. Por exemplo, um diodo de 1 A serve para qualquer fonte de 4,5 a 12 V com correntes de 10 mA a 1 A. A tenso do diodo deve ser pelo menos duas vezes maior do que a que teremos no circuito. Veja que essa tenso no a especificada pelo secundrio do transformador. A tenso do secundrio rms. Assim, o valor mximo no circuito, que o valor de pico, 1,41 vezes maior, observe a figura 4. Isso significa que em um circuito com transformador de 12 V, a tenso que aparece no diodo chegar perto de 18 V. O diodo dever ser capaz de suportar pelo menos o dobro! Os diodos da srie 1N4000 so os mais usados nas fontes comuns, por suportarem correntes at 1 A e partirem de tenses de 50 V para o 1N4001, 100 V para o 1N4002, 200 V para o 1N4004 e 400 V para o 1N4007. Note que possvel usar numa fonte de 12 V qualquer um dos diodos indicados, sem problemas! Temos, para encerrar, o capacitor de filtro. Sua finalidade eliminar as ondulaes resultantes do processo de retificao. O que ocorre que o diodo conduz pulsos de corrente, veja a figura 5. Isso significa que depois do diodo temos uma corrente contnua pulsante e no uma corrente contnua pura. Para filtrar essa corrente transformanMecatrnica Fcil n432Retificao de onda completa com dois diodos
d
3
Retificao em ponte com quatro diodos, para transformadores com enrolamento simples
4
A tenso de pico 1,41 vezes maior que a tenso RMS
5
Forma de onda pulsante aps o diodo
do-a numa corrente contnua pura colocado um capacitor eletroltico de valor elevado. Para fontes de 4,5 a 12 V comum adotar-se que para cada ampre de corrente, 1 000 u de capacitncia fornecem uma boa filtragem. Assim, as fontes comuns at 1 A costumam usar capacitores de 1 000 F.13
d
dispositivos6O capacitor se carrega com a tenso de pico
7
A tenso cai medida que a corrente na carga aumenta
8
Uso de um diodo zener como regulador de tenso
A Tenso de SadaTemos uma fonte completa, bastante til nas aplicaes que no sejam muito crticas quanto tenso de sada. Essas fontes no possuem regulagem de tenso, de modo que somente os aparelhos que tolerem uma alimentao com uma boa tolerncia podem ser ligados a ela. Uma fonte de 6 V desse tipo, por exemplo, quando est ligada sem nada em sua sada, ou seja, em aberto, tem o seu capacitor de filtro carregado com a tenso de pico do transformador, ou seja, algo em torno de 8,5 V, conforme indica a figura 6. Quando a carga ligada, medida que seu consumo aumenta (maior corrente drenada), a tenso cai, conforme o grfico da figura 7. Assim, se o aparelho alimentado no for crtico e funcionar com uma certa faixa de tenses, nada impedir que esse tipo de fonte seja usado. Pequenos motores e muitos circuitos eletrnicos com transistores podem perfeitamente ser ligados a esta fonte, sem problemas.
RegulagemSe o circuito alimentado for crtico e exigir uma tenso crtica, que no pode sofrer alteraes a no ser numa faixa muita estreita, precisaremos acrescentar a esta fonte um regulador de tenso. Existem diversas maneiras de se fazer isso. A mais simples consiste em se usar um diodo zener e um transistor, acompanhe na figura 8. Entretanto, para este tipo de fonte preciso calcular o resistor R que 14
funo da tenso do zener, ganho do transistor e tenso de entrada do circuito. A forma mais fcil de se obter uma tenso regulada para alimentar seu circuito a que faz uso de circuito integrado regulador de tenso. Os tipos mais comuns so os reguladores positivos fixos de 3 terminais, como o exibido na figura 9. Este tipo de regulador precisa de uma faixa de tenses de entrada que vai de 2 V a mais do que se deseja na sada e at 25 V. A srie mais comum de reguladores a 78XX com corrente at 1 ampre. O xx indica a tenso de sada. Para o 7806, preciso ento de 8 a 25 V de entrada para obter sempre 6 V fixos, independentemente da corrente consumida pelo circuito alimentado, desde que seja menor do 1 A. Para o 7812 obtemos 12 V de sada, e para o 7815 obtemos 15 V de sada. Veja que este tipo de circuito integrado precisa ser montado em um dissipador de calor, pois trabalha tanto mais aquecido quanto maior seja a diferena entre a tenso de entrada e sada e maior a corrente drenada pelo circuito alimentado. Observe ento que, para uma fonte de 6 V, por exemplo, como precisamos de uma tenso um pouco maior de entrada, o transformador deve ter tenses de secundrio de 7,5 + 7,5 V, 9 + 9 V, ou mesmo 12 + 12 V com 1 A. Para uma fonte de 12 V, necessrio um transformador de 15 + 15 V ou mesmo 18 + 18 V. Uma fonte completa de 6 V com capacidade para fornecer at 1 A vista na figura 10.
9
Regulador fixo de trs terminais
10
Diagrama de fonte completa de 1 A para 6 V
11
Aumentando a tenso de referncia com a ajuda de diodos
Mecatrnica Fcil n43
dispositivos12Usando um LED como referncia de tenso
d
A vantagem em se usar os circuitos integrados da srie 78xx est no fato de que eles possuem proteo interna contra curto-circuitos. Se acontecer alguma coisa que leve o circuito alimentado a um excesso de consumo, os componentes da fonte no queimaro.
Truques com o 78XXSe o leitor no conseguir um 78XX para a tenso que o circuito alimentado precisa, existem alguns pequenos truques que podero ajud-lo. Podese aumentar a tenso de sada ligando diodos no terminal de referncia, conforme indica a figura 11. Para cada diodo que ligarmos no terminal de referncia, a tenso de sada subir de 0,6 a 0,7 V. Assim, usando-se quatro diodos em srie com um 7806, obteremos uma fonte 8,4 a 8,8 V de sada. Outra forma de se aumentar essa tenso consiste em se ligar um LED, veja a figura 12. O LED vermelho aumenta de 1,6 V a tenso de sada e dois LEDs em srie aumentam em 3,2 V a tenso de sada. LEDs de outras cores, como os verdes, aumentam a tenso de sada em 2,1 V cada um.
ConclusoO que vimos aqui so apenas algumas sugestes que podem ser teis para que o leitor saiba como funcionam as fontes de alimentao, e com isso possam implementar suas prprias fontes para projetos. Evidentemente, no entramos em clculos pormenorizados dos componentes, o que matria para quem deseja ir mais alm e domina conhecimentos tericos bsicos que so ministrados nos cursos tcnicos f e de engenharia. Mecatrnica Fcil n4315
d
dispositivos
Neurnios Eletrnicos para Mquinas InteligentesSe h algo que apavora muitos, principalmente depois do advento dos computadores, imaginar que as mquinas possam pensar e com isso tomar decises implicando na nossa submisso. At que ponto uma mquina pode vir a raciocinar e o que estamos fazendo no sentido de obter isso (ou evitar) algo que todo praticante da eletrnica deve saber. Neste artigo vamos fazer uma anlise do que realmente pode acontecer no futuro e o que est ocorrendo agora para levar criao de mquinas que realmente possam ser chamadas de inteligentes.Para os cientistas do passado estava tudo resolvido: Como Newton, muitos estudiosos achavam que uma vez que o homem era capaz de equacionar qualquer sistema, vivo ou inerte, bastaria ter os elementos correspondentes para que pudssemos fazer sua reproduo. Assim, uma vez que se tivesse as equaes que descrevessem uma flor, uma pedra ou um pssaro, seria possvel reproduzir qualquer um deles com perfeio, a ponto de ser impossvel distinguir o natural do artificial. Houve at quem propusesse na poca que as academias de cincias,
Newton Braga
universidades e centros de pesquisas deveriam ser fechados e os cientistas e pesquisadores aposentados porque no havia mais nada para ser descoberto!. Puro engano! Quando pensamos na complexidade que o crebro humano tem, com seus 15 bilhes de unidades lgicas (neurnios), vemos que o homem est longe de conseguir uma reproduo, por mais simplificada que seja, de algo a que possamos atribuir uma inteligncia. Isso ficou claro quando as primeiras mquinas de calcular foram desenvolvidas, revelando-se puros dispositivos mecnicos.
O advento do computador trouxe inicialmente uma esperana de que no estaria longe o dia em que as mquinas pudessem pensar, e muitos achavam nos anos 50 que, antes do ano 2.000, j teramos verdadeiras mquinas pensantes a nosso servio. Os pesquisadores, entretanto, subestimaram a complexidade de nosso crebro e superestimaram a capacidade dos computadores, e mesmo agora com alguns anos do novo sculo estamos longe de ter mquinas pensantes. Isso no significa, porm, que no exista uma preocupao no sentido Mecatrnica Fcil n43
16
dispositivos1Um arquivo varivel pode acumular conhecimentos
2
Comando de um brao mecnico diretamente atravs crebro
3
d
Computadores trabalhados por lgica
de se obter mquinas que possam aprender pela experincia, tomar decises que no sejam programadas e at reconhecer formas ou sons como o da voz humana, ou da fisionomia e alguns resultados bastante positivos esto sendo conseguidos. A prpria evoluo dos computadores que usamos hoje na maioria dos locais dificulta a obteno desses comportamentos, mas isso no significa que solues no estejam sendo procuradas e algumas at levando a resultados interessantes. As implicaes morais e ticas que a convivncia, no futuro, com uma mquina que raciocine, e que at tenha sentimentos, no fazem parte deste artigo. Deixamos isso para que o leitor pense e, quem sabe, nos d algumas indicaes sobre suas opinies a respeito do assunto.
As solues:a) Soluo por Software Um computador no pode fazer nada que no tenha sido previamente programado. Se programarmos um computador de tal forma que ele saiba que 2+1 = 3, no dia que aparecer o problema inverso, perguntando quanto 1+2 ele no ser capaz de concluir que a mesma coisa. claro que se ele for programado para isso, as coisas mudam, mas isso j implica na ao externa de program-lo! O homem se comporta de modo diferente: tudo que faz gerar novas experincias, ele assimila e usa na resoluo de novos problemas. o que denominamos aprendizado pela experincia. A estrutura lgica de um computador, baseada em regras fixas, no Mecatrnica Fcil n43
comportamento absolutamente lgico e inflexvel dos circuitos, impede esse mesmo comportamento, pelo menos de forma natural. Nos Estados Unidos, na Universidade de Carnegie Mellon, pesquisadores esto trabalhando para criar programas que possam fazer com que, se novas informaes forem obtidas no processamento ou no trabalho normal de um computador, elas sejam assimiladas e passem a fazer parte desse programa. O sistema (denominado SOAR) quando recebe um problema para resoluo, em primeiro lugar verifica se ele conhece uma soluo. Se isso no acontecer, usar um procedimento especial para procurar no universo dessas solues uma que possa ser utilizada, e se der certo, ele a incorporar de modo a poder us-la em outras situaes. Os sistemas inteligentes em que isso ocorre podem, portanto, aumentar seu conhecimento medida que trabalharem, pois cada nova experincia passar a integrar um arquivo. (figura 1) Esse trabalho, muito interessante, feito por um grupo de pesquisadores que ento prev que o computador no tenha todas as solues dos problemas programadas inicialmente, mas sim uma srie de procedimentos no sentido de procur-las. Desta forma, ao passo que processa problemas e vai encontrando solues, ele vai aprendendo, e com isso consegue resolver os problemas mais rapidamente medida que adquire experincia. Talvez, no futuro , seja interessante vermos nos anncios de venda de computadores usados a importante citao de tantos anos de experincia valorizando ainda mais uma mquina desse tipo!
Muitos sistemas inteligentes atuais baseados em software se comportam desta forma. Mas, h uma dificuldade enorme no sentido de se obter uma mquina realmente inteligente: os cientistas acreditam que para que uma mquina possa realmente tomar decises por conta prpria num nvel aceitvel, seriam necessrias pelo menos 10 milhes de situaes programadas para que houvesse um banco de consulta que possibilitasse a resoluo dos problemas mais comuns. E, para decepcionar um pouco aqueles que esperam ver esta mquina funcionando rapidamente, informamos que at agora, depois de alguns anos de trabalho, os cientistas s conseguiram prever pouco mais de 1 milho de situaes programadas. A soluo por software, ao que parece, mesmo com as enormes velocidades dos nossos computadores e um crescente nmero de unidades de memria, ainda est um pouco longe. b) A Soluo Binica Binica o nome da cincia que, por meios eletrnicos e mecnicos, procura imitar os seres vivos. Um brao mecnico que tenha circuitos sensores interligados com o sistema nervoso de uma pessoa e que possa mover-se comandado por impulsos nervosos vindos do crebro dessa pessoa um exemplo de aplicao da binica.(Figura 2) Indo alm, a base da binica a prpria imitao da clula nervosa, que processa e comanda os impulsos dos sensores para os rgos efetores. Se pudermos montar clulas nervosas artificiais e lig-las numa estrutura semelhante ao nosso crebro, de se esperar que esta estrutura ad-
17
d
dispositivos4Estrutura de um neurnio
5
A faixa de resposta de um neurnio varivel
6
Amplificador diferencial com 2 transistores
quira uma propriedade muito almejada: a inteligncia. Os pesquisadores que procuram imitar os neurnios por meio de circuitos eletrnicos no esto trabalhando apenas em nossos dias. O prprio autor deste artigo trabalhou em pesquisa, com uma equipe de mdicos da Escola Paulista de Medicina em So Paulo - SP nos anos 70, no sentido de obter um neurnio eletrnico. Acreditava-se, na ocasio que se um certo nmero desses neurnios fosse interligado, seria possvel estudar de uma forma mais eficaz a maneira como se processa o aprendizado, e com isso partir-se para a construo de verdadeiras mquinas inteligentes. Em diversos pases, os avanos foram grandes neste campo e hoje j se fala em redes neurais ou computadores neurais que possuem uma estrutura completamente diferente dos computadores comuns, se assemelhando mais estrutura de nosso crebro (com muito mais simplicidade, claro) mas que tambm apresentam propriedades extremamente interessantes. Para entender bem a soluo por hardware ser interessante compreender inicialmente como funciona o neurnio, ou clula nervosa natural, e a partir dele tentar reproduzir um equivalente eletrnico. O que diferencia o nosso sistema nervoso, incluindo o crebro, de um computador comum a forma como os pulsos so processados.
Os computadores digitais trabalham exclusivamente com lgica, respondendo apenas de duas maneiras possveis aos estmulos: sim ou no (HI ou LO). (figura 3) Um neurnio tambm trabalha com impulsos, porm de forma completamente diferente. Para aqueles que pensam que um neurnio um processador complexo, com a capacidade de trabalhar com informaes de uma maneira que a eletrnica no possa imitar, temos uma surpresa.7Resposta de um neurnio e um trem de impulsos
Conforme mostra a figura 4, os neurnios possuem terminais de entrada que recebem trens de impulsos e um terminal de sada que emite um trem de impulsos que depende da combinao dos impulsos recebidos nas entradas. Diferentemente dos circuitos lgicos, os neurnios levam em conta na resposta tanto a amplitude, quanto a durao e a prpria quantidade de impulsos de cada entrada para fornecer sua sada. Alm disso, devemos considerar que existem en-
18
Mecatrnica Fcil n43
dispositivostradas que tanto podem servir para estimular quanto inibir a clula. No se trata, portanto, de um dispositivo digital propriamente, mas sim com um comportamento mais prximo do analgico, pois, variando linearmente os trs parmetros de entrada, poderemos ter uma combinao quase infinita de situaes. Mais do que isso, o neurnio no tem uma resposta fixa aos estmulos, mas se adapta a eles. Se numa dada entrada predominarem estmulos de determinadas caractersticas, por exemplo, de certa intensidade, a faixa de repostas do neurnio, que inicialmente era larga, poder se estreitar e se adaptar a estes estmulos, observe a figura 5. Isso significa que ele aprende a reconhecer tais estmulos, e em pouco tempo deixar de responder aos estmulos que estejam fora desta faixa.8Circuito de um oscilador controlado por tenso (VCO)
d
A Soluo EletrnicaEvidentemente, no vamos utilizar circuitos lgicos para obter uma estrutura que se comporte da forma indicada. Porm, se o leitor pensa que seria muito difcil obter um circuito capaz de apresentar o comportamento descrito, est engando. Uma equipe de pesquisadores do Institute of Technology de Passadena - Califrnia, encontrou uma soluo bastante simples e interessante para reproduzir neurnios, e que pode at ser usada para experincias pelos leitores interessados. Analisemos o circuito desenvolvido pelos pesquisadores: Primeiramente vamos tomar uma configurao bastante conhecida de nossos leitores, que o amplificador diferencial com dois transistores, apresentado na figura 6. Os dois transistores nesta configurao conduzem de modo a manter o mesmo potencial nos seus emissores, que esto interligados. Se um dos transistores recebe um sinal de base, o circuito se desequilibra de tal forma que o outro transistor tambm modifica seu estado de conduo. Caso os dois transistores sejam excitados, o circuito reagir de forma combinada de tal forma que, na sada, teremos uma tenso que corresMecatrnica Fcil n43
ponda a uma diferena amplificada dessas tenses. Se as tenses ou estmulos aplicados nas entradas deste circuito forem iguais, o circuito se ajustar e no teremos tenso de sada. Em outras palavras, este circuito s fornece uma resposta se os estmulos ou tenses de entrada forem diferentes, da seu nome de amplificador diferencial. Observe tambm que este circuito funciona de uma maneira bem diferente dos digitais em que temos sada do tipo 0 ou 1, ou seja, apenas dois nveis de tenso: neste temos uma sada proporcional diferena das tenses de entrada, numa ampla gama de valores. Este comportamento nos permite fazer uma associao muito mais real ao neurnio, onde temos uma entrada estimuladora e uma inibidora. Mas, aperfeioamentos podem ser feitos ainda neste circuito, se desejarmos que ele responda a pulsos com o mesmo formato de onda que os neurnios, levando em conta agora os tempos. Para isso, o que se faz acrescentar um integrador ao circuito.
Com ele, os impulsos muito rpidos no provocam respostas, mas somente os impulsos na forma de trens que ento geram uma resposta contnua, conforme ilustra a figura 7. Mas, a resposta contnua ainda no interessante, pois no corresponde realidade. Os neurnios respondem a trens de pulsos gerando novos trens de pulsos. Uma maneira de se conseguir isso ligando o par diferencial a um novo par diferencial que tenha uma realimentao positiva feita por um capacitor. Teremos ento um oscilador comandado por tenso, conforme mostra a figura 8. A quantidade de pulsos gerados por este circuito e sua velocidade, assim como a intensidade, vo depender agora da tenso contnua aplicada sua entrada. O neurnio eletrnico passar ento, a ter um comportamento que se aproxima muito do neurnio de verdade, veja a figura 9. Os trens de impulsos ou estmulos aplicados nas entradas determinam pelas suas caractersticas, o nvel de tenso gerado no par diferencial.
19
d
dispositivosSe os trens tiverem a mesma intensidade, sendo um inibidor e outro excitador, a tenso ser nula e no haver resposta. Contudo, se um dos trens predominar, a tenso desta etapa far com que o segundo par diferencial, ligado como oscilador controlado, gere um trem de pulsos de sada. A quantidade desses pulsos (freqncia) e sua intensidade dependem justamente da combinao dos impulsos de entrada, exatamente como no neurnio real. Este circuito no tem, todavia, uma propriedade importante dos neurnios reais, mas esta poder ser agregada com um pouco de estudo: o aprendizado. As respostas aos estmulos, se bem que admitam uma enorme variedade de combinaes, diferentemente do 0 e 1 digital, se mantm constantes no se alterando com o tempo. Uma idia a ser estudada seria o acrscimo de circuitos de amostragem e reteno nos neurnios, conforme mostra a figura 10. Estes circuitos poderiam ser usados para armazenar os nveis de tenso mais comuns na entrada de modo a levar o neurnio ao seu reconhecimento. O capacitor de reteno funcionaria, no caso, como uma memria. Mesmo armazenando cargas, talvez no mximo durante algumas horas, isso poderia ser suficiente para satisfazer um pesquisador numa bateria de testes. Montando-se uma boa quantidade destes circuitos seria possvel criar uma estrutura neural capaz de processar sinais de uma forma muito diferente dos circuitos digitais, talvez revelando traos de comportamentos que at ento eram atribuidos apenas s criaturas vivas. funcionamento dando por exemplo indicaes de onde estariam provveis defeitos, j so baseadas em redes neurais. No resta dvida que o prximo passo na interligao mais ntima do homem com a mquina seria justamente uma estrutura com um9Comportamento do neurnio eletrnico
funcionamento baseado em princpios comuns, e o neurnio a soluo. Dizer, porm, que quando isso ocorrer, o computador alcanar o nvel humano com pensamentos e sentimentos prprios, algo que no podemos afirmar. f
10
Agregando um circuito de amostragem e reteno (sample-hold)
Circuito prticoNa figura A damos o circuito prtico de um neurnio que pode ser usado em experincias pelos leitores interessados. Os resistores e capacitores de tempo (integrao e freqncia) eventualmente devem ser ACircuito prtico de um neurnio eletrnico.
alterados na faixa indicada conforme o tipo de aplicao, ou seja, a velocidade com que se pretenda fazer o sistema funcionar. Lembramos tambm que a fonte de alimentao empregada deve ser simtrica.
ConclusoAs mquinas neurais j esto em funcionamento em muitos lugares. So computadores deste tipo que so utilizados em aeroportos para farejar explosivos e txicos, pois os sensores no podem excitar circuitos digitais comuns, dada a variedade de reposta que podem ter. Mquinas que, pelas informaes de sensores, monitoram seu prprio20
Mecatrnica Fcil n43
montagem
m
Rel de tempoEm alguns projetos de mecatrnicos como, por exemplo, sistemas sensoriais e de mudana de direo para robs, so necessrios circuitos de pequenas temporizaes. Estes circuitos devem manter os contatos de um rel fechados por alguns segundos, o suficiente para que o motor do rob inverta sua rotao e volte para mudar de direo. O circuito que apresentamos serve para esta aplicao e outras semelhantes e se caracteriza pela sua simplicidade. Ele pode ser alimentado por pilhas ou baterias, com tenso que depende exclusivamente do rel usadoNewton C. BragaUm temporizador simples que aciona um rel um recurso til em qualquer projeto de robtica ou mecatrnica. Alm da aplicao indicada na introduo, ele tambm pode ser usado para manter um transmissor de controle remoto acionado por alguns segundos ou minutos para teste e ajustes; pode servir para fazer provas remotas, dando tempo para que o leitor v at outro local esperando um circuito ser acionado automaticamente e muito mais. Ele ainda pode ser empregado na oficina para automatizar pequenos dispositivos como ventiladores, agitadores de substncias qumicas etc. O circuito que descrevemos fornece temporizaes na faixa de alguns segundos at alguns minutos, conforme o valor de C1. Trata-se de um temporizador fixo que deve ter esse componente (C1) escolhido de acordo com a aplicao. Entretanto, se substituirmos R1 por um trimpot ou potencimetro, o tempo poder ser ajustado numa ampla faixa de valores. A alimentao do circuito pode ser feita a partir de pilhas, bateria ou fonte com tenso de acordo com o rel utilizado. Caractersticas: Tenso de alimentao: 6 a 12 V conforme rel; Consumo quando ativado: 50 mA com rel de 6 V x 50 mA; Temporizao: 1 segundo a 15 minutos (aproximadamente); Carga controlada: 2 A (ou de acordo com o rel usado); Nmero de componentes ativos: 2 (transistores).
Como FuncionaQuando pressionamos o interruptor S1, ou quando o sensor usado em seu lugar ativado, o capacitor C1 carregase com a tenso de alimentao. Soltando-se S1, ou quando o sensor desativado, o capacitor C1 comea a se descarregar lentamente atravs do par de transistores ligados na configurao Darlington, mantendo esses componentes saturados. Durante o tempo em que os transistores permanecem saturados, o rel estar energizado e, com isso, a carga a ele ativada. Podemos ligar a carga tanto nos contatos NA como NF. Se usarmos os contatos NA, a carga ficar ligada duante a temporizao, e se usarmos os contatos NF a carga ficar desligada durante a21
Mecatrnica Fcil n43
m1
montagemDiagrama do Rel de tempo
temporizao, ligando no final. Quando o capacitor estiver no final de sua carga e no conseguir mais saturar os transistores, a corrente na bobina no rel comear a cair at o ponto em que ele no manter mais os contatos fechados e abrir. Neste momento, estar terminada a temporizao. Para nova temporizao, basta ativar novamente S1. Veja que o consumo do aparelho maior quando o rel se encontra ativado. Na condio de espera, com o rel desativado, o circuito vai para uma condio de consumo muito baixo.
Montagem2Montagem em uma matriz de contato
3
Sensores que podem ser utilizados
5
Acionamentos NF e NA
4
Agregao da temporizao ajustvel
Na figura 1 temos o diagrama completo do aparelho. A montagem pode ser feita numa placa de circuito impresso universal com padro de matriz de contatos, conforme disposio de componentes exibida na figura 2. Outras tcnicas de montagem podem ser usadas como, por exemplo, a incluso do padro de circuito impresso na prpria placa do dispositivo com que ele deve operar, ou ainda uma montagem mais pendurada, usando uma ponte de terminais isolados. O rel utilizado do tipo com base em terminal DIL (Dual In Line) que se encaixa com facilidade nas placaspadro e pode ter bobina de 6 ou 12 V, conforme a alimentao usada. Deve-se optar por rels sensveis com bobinas na faixa de 10 a 50 mA. Normalmente, os contatos desses rels so especificados para uma corrente de 2 A. Se o leitor precisar controlar uma carga maior, dever procurar por um rel que atenda s caractersticas exigidas. Se for usado rel com outro tipo de base, dever ser feita uma placa que atenda a sua disposio de terminais. Os capacitores devem ter uma tenso de trabalho um pouco maior do que a usada na alimentao. O valor de C1 determina a temporizao e pode ficar entre 1 F e 1 000 F. Ser interessante deixar a colocao deste componente para ser feita em ltimo lugar, uma vez que o montador deve experimentar diversos valores at conseguir o tempo que deseja. Os transistores admitem equivalentes e S1 pode ser um interruptor de presso tipo boto de campainha, Mecatrnica Fcil n43
22
montagemou um sensor tipo reed-switch ou de lminas, para o caso de robs, conforme ilustra a figura 3. Se for utilizada uma fonte de alimentao, ela deve fornecer uma corrente de pelo menos 100 mA.
m
Prova e UsoPara provar o aparelho, basta liglo alimentao. Depois, presione ou ative S1 por um instante. O rel dever fechar imediatamente os contatos e assim permanecer por um tempo que vai depender do valor de C1. Para uma temporizao ajustvel, ligue um potencimetro de 1 M ohms em srie com um resistor de 10 k em lugar de R1, observe a figura 4. Na figura 5 mostramos como devem ser ligadas as cargas para acionamento de duas formas. Em (a) a carga desligada no final da temporizao, e em (b) a carga ligada no final da temporizao. f Lista de material:Semicondutores: Q1, Q2 BC548 ou equivalentes transistores NPN de uso geral D1 1N4148 diodo de silcio Resistor: (1/8W, 5%) R1 100 k ohms marrom, preto, amarelo Capacitores: C1 1 a 1000 F x 6 ou 12 V eletroltico ver texto C2 100 F x 6 ou 12 V eletroltico Diversos: S1 Interruptor de presso NA (Normalmente Aberto) ou sensor ver texto S2 Interruptor simples (opcional) B1 4 pilhas pequenas (opcional) ou fonte de acordo com a tenso do rel K1 Rel de 6 V ou 12 V sensvel Placa de circuito impresso universal ou ponte de terminais, suporte para pilhas (opcional), fios, solda etc.
Mecatrnica Fcil n43
23
r
robtica
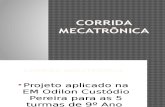
Rob mvelvia webEste projeto apresenta o desenvolvimento de um sistema de controle via web de um prottipo de rob mvel constitudo por componentes de baixo custo. O sistema completo composto de hardware e software. O primeiro foi desenvolvido com microcontrolador PIC 16F628A, que contm um firmware responsvel por interpretar os sinais de controle e uma microcmera sem fio usada para enviar sinais de vdeo via radiofreqncia a um servidor. O segundo, feito com um misto de tecnologias (JSP, HTML e JAVA), proporciona uma simples interface de controle entre o usurio e o sistema controlador do rob mvel. O prottipo construdo capaz de transitar em superfcies slidas e planas, num raio de ao de aproximadamente 200 mDouglas Bianchini Michael Bissoto Meneses Victor Luiz de MarchiA principal motivao para a realizao deste projeto vem da necessidade de se utilizar um rob mvel que realize inspees em locais hostis ou de difcil acesso a uma pessoa. A parte de hardware referente ao rob mvel e a parte de software aos programas de computador integrantes do projeto e esto presentes tanto no servidor remoto, quanto no rob. Estas partes interligadas constituem o prottipo do sistema de controle. O rob mvel consiste basicamente de base, rodas, eixos, microcontrolador PIC, que se encontra em uma das placas de circuitos, motores, macro-sistemas de reduo de velocidade com engrenagens, fontes de energia e microcmera.1Componentes integrantes do mdulo de recepo de sinais de vdeo
Tecnologia de RadiofreqnciaA aplicao de radiofreqncia concentra-se no envio de sinais de controle para o rob mvel e na transmisso de vdeo em tempo real. Esta tecnologia empregada tendo em vista a mobilidade do prottipo, uma vez que com fios e cabos ligados ao mesmo, sua locomoo se tornaria invivel.24
Mecatrnica Fcil n43
robticaMicrocmera sem fioPara que seja possvel a visualizao de imagens do ambiente em que o rob se encontra, necessrio utilizar algum dispositivo de captao de imagens. A microcmera modelo SafeCam (fabricante TechnoTek), com tecnologia de radiofreqncia, usualmente empregada em vigilncia de presdios e residncias, foi a tecnologia escolhida. Esta uma microcmera de vigilncia, que opera em uma frequncia de 1,2 GHz, alimentada por uma bateria de 9 V, com capacidade de transmisso de imagens de at duzentos metros em ambientes de campo aberto, facilmente adquirida em lojas de eletroeletrnica. Na figura 1 so apresentados os componentes integrantes do mdulo de recepo de vdeo. Na parte dianteira inferior da base de madeira, encontram-se as fontes de alimentao de energia posicionadas nos cantos direito e esquerdo, na parte dianteira central superior se encontra a microcmera, presa por uma pea de metal adaptada em uma haste. A parte dianteira da base possui uma cavidade central, como mostrado na figura 2, e furo transversal finalizado nesta cavidade. Isto permite a transposio dos eixos das rodas e sua fixao por porcas. Na base central superior encontra-se um motor, responsvel pela trao e seu macro-sistema de reduo com engrenagens. Na base central inferior, encontra-se um outro motor e mais um macro-sistema de reduo com engrenagens para uma roda de direo, como mostrado na figura 3b, que se encontra na parte traseira inferior do rob mvel.3CD utilizado como roda dianteira
r
aRoda de direo, com suporte superior
Base do rob mvelA base projetada foi feita em madeira de pinho (figura 2), por possuir baixo custo, ser leve e possuir alta disponibilidade no mercado. Nela so acoplados os componentes presentes no rob mvel, como o componente de transmisso e recepo de sinais de vdeo (micro-cmera sem fio), a placa de controle, contendo microcontrolador PIC (16F628A), as fontes de alimentao (dois conjuntos contendo quatro pilhas AA de 1,9.2 V cada e uma bateria de 9 V), os motores e seus respectivos sistemas de reduo com engrenagens e as rodas. Para facilitar a explicao da montagem dos componentes na base, utiliza-se a denominao superior, quando se refere parte de cima da base. De forma anloga, usa-se inferior para referenciar a parte de baixo da base.2Base de madeira projetada para o rob mvel com medidas em mm
Rodas do rob mvelO rob mvel possui trs rodas: uma roda traseira, que indica a direo a ser tomada, possibilitando a realizao de curvas, que possui um macrosistema de reduo com engrenagens ligado a um motor, que possibilita sua movimentao em todos os sentidos. As duas outras rodas so paralelas e independentes, conectadas cada uma a um eixo dianteiro, sendo que um destes eixos est ligado a um motor de trao e o outro eixo livre e serve apenas como apoio. As rodas dianteiras so CDs reciclveis como ilustra a figura 3a. Para possibilitar maior atrito entre com o piso, os CDs tiveram suas extremidades de aderncia encapadas com fita isolante. A roda traseira um rodzio de roda, como mostrada na figura 3b, tpico de cadeiras e/ou mveis de escritrio. Foi adaptada a esta roda uma engrenagem para controlar a direo do rob mvel, a qual est ligada a um dos motores por meio de um macro-sistema de reduo com engrenagens. Ao girar este motor, a roda 4
b
direcionada para a direita ou para a esquerda. Este tipo de roda foi escolhido por possuir uma estrutura que permite que o rob possa girar para todos os lados. Alm disso, seu tamanho permite um alinhamento horizontal adequado. A roda est presa na parte inferior da base de madeira, na parte traseira central, considerando como parte traseira o local onde encontra-se a roda de direo. Os eixos dianteiros das rodas so fundamentais, pois garantem que as rodas dianteiras fiquem alinhadas, evitando desvios de rota do rob mvel. Um dos eixos livre e um outro conectado a um motor por meio de um sistema de reduo com engrenagens.
Itens constituintes dos eixos das rodas e eixo montado
a
b
c
d
e
Mecatrnica Fcil n43
25
r
robtica5Microcontrolador PIC 16F628A
Eixos das rodasO eixo projetado constitudo de: arruelas, parafuso, eixo cilndrico torneado e porca. Estes itens esto representados na figura 4 de a a d, respectivamente. Na figura 4 (e) mostrado o eixo montado.
Placas de circuito de transmisso e recepo de sinaisNa transmisso de sinais de controle ao rob mvel foi necessrio construir dois tipos de placas de circuitos, uma que tem um transmissor e outra que possui um receptor juntamente com o PIC, entre outros componentes eletrnicos. Para possibilitar o controle do rob foram desenvolvidas duas placas de circuitos (figura 6). Uma recepta os sinais de radiofreqncia (mesma placa em que est o PIC 16F628A) e fica acoplada ao rob mvel na parte traseira central e opera em uma freqncia de 146,6 MHz com um campo de alcance de aproximadamente vinte metros (campo aberto). A outra emite os sinais de radiofreqncia para o rob mvel e fica acoplada ao servidor remoto, operando na mesma freqncia e alcance da placa de recepo, em sua sada serial. A placa de transmisso de sinais possui um transmissor para emitir sinais de comando, um circuito integrado, um transistor e trs capacitores. A mesma alimentada por uma bateria de 9 V. A placa consiste de um receptor, um PIC 16F628A, onze resistores, dez transistores e um capacitor como mostrado na figura 6, e na figura 7 apresentado o esquema eltrico. Para que os motores M1 e M2 possam girar para frente e para trs necessrio que suas duas sadas (negativa e positiva) estejam ligadas a dois pares de transistores cada. Isso possibilita que os sinais eltricos, emitidos pelas sadas do PIC (M1A e M2A ou M2A e M2B), passem por estes pares de transistores, fazendo com que a carga de sinal circule de um lado para outro ou vice-versa, permitindo girar os motores para os dois lados.
Microcontrolador PIC 16F628A906
Placa de recepo de sinais
Um microcontrolador PIC 16F628A utilizado para controlar os motores, visto que pode-se controlar emisses de sinais por meio de seus pinos, com auxlio de uma placa de circuitos, permitindo controlar o rob mvel. Este microcontrolador PIC possui dezoito pinos, sendo oito utilizados para entrada de dados, outros oito pinos para sada e o restante para a carga de sinal positivo e negativo. A seguir, na figura 5, apresentado o esquema de portas do PIC 16F628A. Neste microcontrolador PIC encontra-se gravado um firmware, desenvolvido para realizar o controle do rob mvel.
7
Esquema eltrico da placa de repcepo
Firmware desenvolvidoFirmware um conjunto de instrues de comando destinadas ao controle de hardware de algum dispositivo. possvel encontrar firmwares em vrios dispositivos, como modems, gravadores de CD, celulares, etc. O firmware armazenado em um chip de memria ROM ou memria flash. Neste projeto ele foi gravado no microcontrolador PIC 16F628A e ar26
Mecatrnica Fcil n43
robticamazenado na memria flash, que preserva seu contedo mesmo quando a eletricidade desligada. O firmware controla o hardware diretamente, ocupando uma posio intermediria entre o software e o hardware. O cdigo em execuo do firmware possui alguns recursos simples, prprios de programao, como por exemplo, mover valores de variveis para registradores, ou usar desvios de interrupo. Foi desenvolvido um firmware para o gerenciamento dos sinais de controle. Este realiza o tratamento dos sinais oriundos dos componentes de transmisso e recepo do sistema de controle do prottipo do rob mvel. O firmware foi criado em linguagem assembly. Ele permite o controle dos motores que impulsionam o rob para a direo requisitada pelo usurio. Ou seja, os comandos do usurio so enviados via radiofreqncia e captados pela placa de recepo de sinais. O firmware por sua vez, utiliza um protocolo de comunicao, para interpretar estes sinais e os comandos vlidos so repassados para os motores, movimentando-os. Na figura 8 mostrada uma pequena parte do cdigo do firmware desenvolvido e a figura 9 o diagrama do cdigo.10 8Parte do cdigo do Firmware PROCESSA MOVLW B00001111 ANDWFDADO_RX,W ADDWFPCL,F RETLW.0 GOTOFRENTE GOTODIR GOTOESQ GOTOVOLTAR GOTOPARAR RETLW.1 ;FRENTE W=A(01100001) RETLW.2 ;DIR W=B(O1100010) RETLW.3 ;ESQ W=C (01100011) RETLW.4 ;VOLTAR W=D (01100100) RETLW.5 ;PARARW=E(01100101)
r
9
Desvio da execuo do cdigo para uma das rotinas de direo
Motores do rob mvelA movimentao do rob feita com dois motores alimentados com uma tenso nominal de 3,5 V cada, podendo chegar a at 12 V. Tendo o objetivo de utilizar materiais reciclados, os motores usados so provenientes de videocassetes e possuem uma acoplagem especfica em seu eixo central que permite o encaixe aos macro-sistemas de reduo com engrenagens. O motor ligado ao eixo da roda dianteira esquerda impulsiona o rob mvel, e outro ligado roda traseira responsvel pela direo a ser tomada. Essa acoplagem consiste em um sistema de polia preso ao eixo do motor, ligada por uma correia lisa de silicone outra polia com um vinco central, viabilizando o encaixe pretendido. Na figura 12a visto o acoplamento de trao, a figura 12b mostra o acoplamento direcional. Este tipo de acoplamento possibilita, dependendo da superfcie de locomoo, a diminuio das variaes na centralizao das rodas traseiras, ou no encaixe destas com os motores. Alm disso, faz com que o contato entre eles no seja prejudicado em momento algum. Com a localizao superior traseira, caso haja tal deslocamento de posio da roda, os motores acompanharo o movimento, pois se estabelece uma fora de contato maior sobre a rea de circunferncia das rodas. Como ilustrado na figura 11. No projeto utilizou-se os macrosistemas de reduo de velocidade com engrenagens. A melhor posio para colocar o motor de trao na parte superior central da base de madeira do prottipo. O motor de trao responsvel por girar o eixo esquerdo da roda27
Inicialmente, uma rotina de controle de LEDs para atestar o funcionamento da lgica do cdigo do firmware desenvolvido foi implementada. Assim, pde-se constatar o recebimento de sinais que seriam emitidos pelas portas certas do microcontrolador PIC. A emisso de sinais fazia com que alguns LEDs acendessem, simulando os motores ligados. Na figura 10 temos o algoritmo do firmware em fluxograma para melhor entendimento.
Fluxograma do firmware
Mecatrnica Fcil n43
r11
robticaAcoplamento antigo dos motores
12
Macro-sistema de reduo de velocidade com engrenagens da roda de trao
dianteira. O outro motor do mesmo tipo se encontra na parte central inferior da base e responsvel pelo direcionamento, permitindo ao rob mvel fazer curvas. Macro-sistema de reduo de velocidade com engrenagens Um sistema de reduo importante para diminuir a velocidade de um motor sem que sua potncia seja prejudicada. Existem dois sistemas de reduo de velocidade no prottipo mvel. Um dos macro-sistemas de reduo de velocidade formado por um sistema de polias e correia e um sistema de engrenagens. Um motor de trao est acoplado a um macrosistema, que gira o eixo da roda dianteira esquerda. Este se localiza na parte superior central da base do rob mvel, como apresentado na figura 12a. O sistema de polias e correia (1) composto por um conjunto de duas polias e uma correia de silicone, sendo que uma das polias sai diretamente do eixo do motor. Este sistema integrado ao sistema de engrenagens, que composto por uma engrenagem mdia (2), ligada ao sistema de polias, uma rosca sem fim (3), uma engrenagem grande (4) e uma pequena (5). No centro da engrenagem mdia encontra-se acoplada a rosca sem fim (engrenagem semelhante a um parafuso), que est acoplada engrenagem grande, que por sua vez est em contato com a engrenagem pequena, presa ao eixo da roda dianteira esquerda, esta responsvel pela trao do rob mvel. O outro macro-sistema de reduo de velocidade, como apresentado na figura 12b, responsvel por direcionar a roda traseira. O mesmo composto por um sistema de polias e correia (idntico ao anterior) e um sistema de engrenagens diferenciado, composto por uma rosca sem fim e uma engrenagem grande. Este ma-
a
b
cro-sistema est interligando o motor 13Fontes de alimentao primria (direcional) central inferior e a roda traseira central. Uma das polias est acoplada diretamente ao eixo do motor, a outra parte integrante de uma rosca sem fim, que est acoplada a uma engrenagem grande, esta por sua vez se encontra na horizontal, presa roda traseira. Este macro-sistema foi projetado para ser possvel girar a roda traseira para a direita ou Fontes de alimentao secundria esquerda, fazendo com que o rob mvel possa realizar curvas, abertas ou fechadas.
a
Fontes de alimentao primria e secundriaPara o funcionamento so empregadas duas fontes de alimentao. A alimentao primria, conforme apresentado na figura 13a, composta de oito pilhas AA recarregveis, com capacidade de 1,2 V cada, ligadas em srie e divididas em grupos de quatro por dois conjuntos, localizados na parte frontal inferior direita e esquerda do rob mvel, presas a base por fitas de velcro. Estas pilhas so responsveis pela alimentao dos motores e pela alimentao da placa de circuitos, que contm o PIC 16F628A, que capta os sinais de radiofreqncia. Esta fonte de alimentao primria tem capacidade para alimentar a placa de circuito e os motores durante uma hora ininterrupta. A alimentao primria, inicialmente estava nas partes traseiras superiores direita e esquerda, distribuda em dois grupos, cada qual acoplado em suportes prprios para quatro pilhas
b
AA. Notou-se que seu peso prejudicava o movimento da roda traseira, responsvel pelo direcionamento do rob mvel. Por este motivo, estes dois grupos de pilhas foram acoplados na parte dianteira inferior direita e esquerda, como mostrado na figura 13a . A alimentao secundria, como ilustrado na figura 13b, composta por uma nica bateria de 9 V no recarregvel, responsvel pela alimentao da microcmera localizada no rob mvel e tem sua capacidade de alimentao ininterrupta, que varia entre uma e duas horas. Mecatrnica Fcil n43
28
robticaRequisitosOs softwares que compem o conjunto citado, que atua no controle remoto do rob mvel projetado, foram divididos em dois grupos para facilitar os requisitos necessrios. Primeiramente, tratou-se o conjunto de softwares responsveis pela comunicao servidor-rob e, em seguida, o conjunto responsvel pela comunicao usurio/servidor. quanto com o usurio-servidor, pode- 14Diagrama do caso de uso do firmware se visualizar um caso de uso completo das comunicaes, como mostrado na figura 17.
r
Tecnologias utilizadasFirmware e Software Controlador 15 Diagrama do caso de uso do Software Nos requisitos da comunicao Controlador servidor-rob, necessrio que o software que atenda essa funcionalidade tenha fcil integrao com a porta serial do servidor remoto, facilitando o envio dos sinais interpretados para o mdulo de recepo de sinais do rob mvel. Neste projeto doi utilizada a tecnologia Java para ser usada no Software Controlador.
Comunicao servidor-rob
O conjunto de softwares que realizam a funo de comunicao entre servidor e rob inclui dois programas especficos, a saber: Firmware: embarcado no PIC e localizado na placa de controle do rob mvel. Software Controlador: instalado no 16Diagrama do caso de uso completo da comunicao servidor-rob servidor remoto. Os levantamentos de requisitos funcionais e no-funcionais destes programas so apresentados a seguir: Firmware Este ser responsvel por interpretar os sinais recebidos pelo mdulo de recepo e controlar os motores do rob mvel. Na figura 14 mostrado o Diagrama do caso de uso do firmware. Como requisito no funcional, desejvel que o tempo de resposta dos motores em relao aos comandos enviados pelo firmware no ultrapasse 0,5 segundos.
Software ControladorSoftware responsvel pela recepo dos comandos direcionais emitidos pelo usurio controlador, interpretao dos mesmos e repasse destes (j interpretados) para o mdulo de recepo de sinais do rob mvel. Na figura 15 ilustrado o Diagrama do caso de uso do Software Controlador. Com base nestas informaes possvel definir um caso de uso completo da comunicao servidor-rob, como visto na figura 16. Como requisito no-funcional, desejvel que o tempo de comunicao entre o software e a porta serial do servidor no ultrapasse 0,5 segundos.
17
Diagrama completo do caso de uso comunicaes
Comunicao usurio -servidorFinalizada a anlise de requisitos tanto na comunicao servidor-rob Mecatrnica Fcil n4329
r
robticaComunicao usurioservidorAs tecnologias empregadas foram: HTML, JSP e JS. Elas foram selecionadas levando em considerao as facilidades que as mesmas fornecem ao desenvolvimento e a disponibilidade de uma vasta documentao de apoio. Na tabela 1 apresentada de forma detalhada onde e como cada uma destas tecnologias foi aplicada. Com o conceito de acesso remoto a esse software, fez-se necessrio a configurao de um servidor remoto que suporte todas as tecnologias empregadas. O TOMCAT, host para aplicaes que possuem tecnologia Java, foi desenvolvido e distribudo como software livre, atualmente endossado pela empresa Sun.T1Tecnologias utilizadas e sua descrio
Tecnologia
Descrio Utilizada para a construo da pgina principal de frames e na pgina responsvel pela transmisso das imagens capturadas pelo rob mvel Utilizada no desenvolvimento do joystick virtual, pois permite capturar a ao de clique do usurio e transform-la em evento para uma chamada remota Tecnologia embarcada no desenvolvimento JSP, responsvel pela transformao das aes de clique no joystick virtual em eventos de chamada remota
Localizao e funo Hospedada no servidor, divide a pgina pelo controlador remoto em trs frames (superior, central e esquerdo
HTML
JSP
Hospedada no servidor, exibe o joystick virtual no frame central da pgina
JS
Hospedada no servidor, suas funes so chamadas quando o controlador remoto clica em alguma direo do joystick virtual.
ImplementaoNa figura 18 voc encontra parte do cdigo ainda em seu ambiente de desenvolvimento. Este firmware, uma vez embarcado no PIC, o responsvel por interpretar os sinais de comando enviados pelo Software Controlador, localizado no servidor remoto.Apresentamos parte deste cdigo-fonte ainda em seu ambiente de desenvolvimento na figura 19. Este Software Controlador consiste na estrutura de classes descrita a seguir.
SerialCom.javaClasse que contm o mtodo responsvel pela comunicao com a porta serial do servidor remoto. Essa comunicao realizada com uma biblioteca Java chamada javaxcomm. jar. Essa biblioteca possui rotinas que, quando invocadas pela classe em questo, realizam a comunicao com portas seriais disponveis no computador, permitindo assim o envio de qualquer tipo de dado porta. A porta a ser usada est contida na rotina de comunicao da classe, que a COM1 (porta padro de comunicao serial). Uma vez realizada a comunicao com a porta serial, a mesma permanecer exclusivamente alocada at que, por algum motivo, a mesma seja cancelada.
Remote.javaClasse responsvel por receber os sinais de controle determinados pelo30
usurio controlador. Esta recepo se d por meio da atuao dos arquivos javascripts, que invocam uma chamada remota desta classe, enviando como parmetro para o mtodo move uma string contendo a direo que o rob mvel dever seguir. Essa string, assim que recebida, comparada com algumas variveis fixas que empregam um valor de controle (acima, abaixo, esquerda, direita e parar). Assim que essa string validada como um comando de controle, uma rotina de envio de sinais iniciada. Nesta rotina, um objeto da classe SerialCom.java instanciado, criando uma conexo vlida com a porta serial do servidor remoto. Uma vez criada esta conexo, os dados de controle, interpretados e alterados para sinais legveis pelo firmware embarcado no PIC, comearo a ser enviados em conjunto de 20 bits cada. Como meio de informar o usurio controlador, um mtodo return invocado, gerando uma frase que indica qual a direo que o rob mvel est se dirigindo. Esta frase chega at o usurio controlador atravs da ao dos javascripts. A interface desenvolvida para a interao com o usurio controlador foi projetada com a diviso da tela em trs frames independentes. Desta maneira, possvel prover ao usurio controlador uma visualizao bsica das imagens transmitidas pelo rob mvel e, juntamente, prover
18
Parte do cdigo-fonte do firmware em seu ambiente de desenvolvimento
;************************************** ; LGICA ;************************************** PROCESSA MOVLW B 00000111 ANDWF DADO_RX , W ADDWF PCL , F RETURN GOTO FRENTE ;00000001 - A GOTO DIREITA ;00000010 - B GOTO ESQUERDA ;00000011 -C GOTO PARA ;00000100 - D GOTO VOLTA ;00000101 - E RETURN RETURN RETURN FRENTE MOVLW B 00000010 MOVWF PORTA RETURN DIREITA MOVLW B 01000000 MOVWF PORTE CALL DELAY CLRF PORTB RETURN ESQUERDA MOVLW B 10000000 MOVWF PORTB CALL DELAY CLRF PORTB RETURN
Mecatrnica Fcil n43
robticaa funcionalidade de control-lo numa rea diferente da j utilizada para a transmisso de imagens. O browser do usurio controlador divide-se em trs frames: Frame superior Responsvel por realizar a chamada da pgina encarregada de exibir a transmisso das imagens capturadas pelo rob mvel. Frame central Responsvel por realizar a chamada da pgina encarregada de exibir o joystick virtual de controle do rob mvel. Frame esquerdo Responsvel por realizar a chamada de uma pgina HTML com a descrio dos autores deste projeto.19Desvio da execuo da cdigo para uma das rotinas de direo
package source ; public class Remote { public static final String DIRECAO_ACIMA = acima ; public static final String DIRECAO_ABAIXO = abaixo ; public static final String DIRECAO_ESQUERDA = esquerda ; public static final String DIRECAO_DIREITA = direita ; public static final String DIRECAO_PARAR = parar ; public static String move (String direcao ) { Serial Com sc = new SerialCom () ; //SerialServer Ss = new SerialServer () ; if (direcao.equalsIgnoreCase (DIRECAO_ACIMA) ) { while ( true ) { //Ss.Set_StringValue (E); sc.enviarDadosPorta (E COM1) ; return ROB DIZ: ANDANDO PARA FRENTE ; }
No servidor remoto instalada 20Fases de desenvolvimento do rob mvel uma aplicao denominada CamPermanent, de fabricao realizada pela empresa CrazyPixels, cuja licena de uso Shareware (sem cobrana quando usada apenas para uma microcmera). Esta aplicao responsvel por capturar os sinais oriundos da placa de vdeo alocada no servidor a remoto, que recebe os sinais da microcmera acoplada ao rob mvel. Uma vez instalada, esta aplicao realiza a decodificao de sinal digital em imagem visvel, possibilitando que uma pessoa a visualize perfeitamente e viabilize o controle do rob mvel. Esta aplicao tambm possui um componente capaz de gerar pginas b HTML que possibilitam a visualizao das imagens capturadas. Um detalhe importante que deve ser destacado a velocidade de comunicao entre o usurio controlador e o servidor remoto, sendo esta varivel. Essa variao ocorre devido ao fato do usurio controlador estar conectado remotamente ao servidor, utilizando a Internet c como meio, desta maneira estando vulnervel a queda de qualidade e velocidade de conexo. Como meio de se reduzir tempo de desenvolvimento, utilizou-se deste componente para que a pgina responsvel pela transmisso de imagens (localizada no frame superior da interface) fosse alocada neste projeto. d
r
Resultados AlcanadosPara possibilitar a realizao do projeto, foi necessrio criar um rob mvel controlado por um usurio remotamente. Na figura 20 so mostradas as fases do rob com suas etapas progressivas de melhorias. Na figura 20a ilustramos a primeira fase de desenvolvimento do rob mvel, ainda sem fontes de alimentao, microcmera e motores. Nesta fase, o rob possui apenas a roda boba e os CDs (tambm como rodas), acoplados a parafuso simples, adaptados para serem os eixos. Na figura 20b o rob mvel possua uma nova base que foi melhor elaborada, rodas revestidas para melhorar a aderncia com o piso, motores e a primeira verso dos eixos torneados. Teve incio nesta fase, uma primeira tentativa de acoplamento da fonte de alimentao primria. Os motores usados so de 1,5 V.
e
Na figura 20c vemos o rob mvel em sua terceira verso, que possui a estrutura para as fontes de alimentao j acopladas, a microcmera, a segunda verso dos eixos torneados e a placa de recepo de sinais. Esta placa possui um microcontrolador PIC, sendo que nesta fase, o firmware gravado ainda no tinha um bom desempenho para interpretar os sinais de comando, devido ao protocolo de comunicao ainda no estar pronto.
Mecatrnica Fcil n43
31
r21
robticaPartes relevantes do prottipo mvel desenvolvido
c a b d
e
f
g
Componentes Microcmera sem fio (conjunto) 8 pilhas AA recarregveis Baterias 9 V regarregvel Placa de captura de vdeo Componentes eletrnicos para placa de circuitos
Na figura 20d apresentado o rob com a terceira verso da placa de recepo de sinais, j com o protocolo de comunicao do firmware em fase funcional, assim como sua nova forma de acoplamento de motores. Nesta fase, os motores usados so de 12 V, porm trabalham com uma corrente de 3,5 V provida pela fonte de alimentao primria. Cada um dos motores est acoplado a uma roda pelo intermdio de um sistema de polias com correia. Na figura 20e observamos o projeto em fase de concluso, sendo mudada a forma de acoplagem dos motores, rodas e o posicionamento da fonte de alimentao primria. Alm disso, foi feita a inverso entre as rodas dianteira e traseira do rob mvel, possibilitando a execuo de curvas fechadas sem perder desempenho no deslocamento. A forma de32
acoplagem, do motor de trao e da roda dianteira esquerda, passou a ser intermediada por um macro-sistema de reduo de velocidade com engrenagens. O mesmo ocorreu com o outro motor e com a roda de direo. Esses macro-sistemas foram implementados para reduzir a velocidade do rob mvel e para controlar a direo do mesmo. A fonte de alimentao primria passa para a parte dianteira do rob mvel, para que seu peso no prejudique o desempenho da roda de direo. Aps a descrio das fases do rob mvel assim como os componentes de hardware e software, que fazem parte do prottipo do sistema de controle, possvel entender o seu funcionamento completo. Aps os testes, as aplicaes e as adaptaes apresentadas neste documento, foi possvel o desenvolvimento de um prottipo de rob mvel totalmente funcional e dotado de estrutura adequada para a recepo de sinais de controle e transmisso de imagens por radiofreqncia. Apesar da reciclagem de materiais, alguns componentes precisaram ser adquiridos comercialmente - confira a tabela 3. Nas figuras 21a a 21g so apresentadas a evoluo do prottipo, destacando algumas partes fundamentais no projeto.
Para que o rob mvel possa ser controlado remotamente, foram construdas placas de recepo e transmisso de sinais. A placa de transmisso se encontra acoplada ao servidor onde o sistema est instalado e a placa de recepo est acoplada ao rob mvel.
ConclusoEste projeto teve como propsito desenvolver um prottipo de rob mvel com baixo custo de construo e estrutura capaz de realizar seu controle remoto via radiofreqncia. importante enfatizar que o sistema de controle juntamente com o rob mvel fazem parte de um prottipo funcional. No entanto, alguns itens podem ser melhorados, de forma que no futuro, este possa ser adaptado a um projeto comercial de baixo custo e grande eficincia. Como trabalhos e melhorias futuras, podem ser citados alguns itens como: acoplamento de fontes luminosas, desenvolvimento do sistema de adaptao a solos irregulares, adaptao de sensores de presena ao rob mvel e sistemas inteligentes ao servidor remoto, desenvolvimento de mdulo robusto e adaptao de um dispositivo externo (porta paralela) como joystick de controle. f
Mecatrnica Fcil n43
33