Mestrado em Geotecnia para Engenharia Civiljaime/Dinafunda.pdf · e três de rotação segundo os...
123
Mestrado em Geotecnia para Engenharia Civil Disciplina de Fundações Apontamentos sobre Dinâmica de Fundações Prof. Jaime Santos (IST) Outubro de 2002 LABORATÓRIO NACIONAL DE ENGENHARIA CIVIL
Transcript of Mestrado em Geotecnia para Engenharia Civiljaime/Dinafunda.pdf · e três de rotação segundo os...

Mestrado em Geotecnia para Engenharia Civil
Disciplina de Fundações
Apontamentos sobre
Dinâmica de Fundações
Prof. Jaime Santos (IST)
Outubro de 2002
LABORATÓRIO NACIONAL DE ENGENHARIA CIVIL

Capítulo 1 Fundações sob acções dinâmicas no topo
1-1
CAPÍTULO 1
FUNDAÇÕES SOB ACÇÕES DINÂMICAS NO TOPO
1.1 - Generalidades
A resposta de uma fundação quando sujeita a acções “dinâmicas” depende de múltiplos factores
nomeadamente: a natureza e as características mecânicas do terreno, a geometria dos elementos
envolvidos, a rigidez da fundação e da superestrutura e ainda a natureza da própria excitação.
A excitação pode ser provocada por diversas origens: movimento do terreno de fundação
induzido pela chegada das ondas geradas por um sismo, explosão adjacente, passagem de
veículos; ou pode ser resultante de forças dinâmicas impostas directamente à fundação por
máquinas, veículos em movimento na superestrutura, etc.
Neste capítulo aborda-se o problema das fundações sob acções dinâmicas impostas no topo. O
ponto chave do problema consiste na avaliação da rigidez dinâmica da fundação - traduzida por
funções complexas, designadas genericamente por funções de impedância dinâmica. Estas
funções descrevem a rigidez e a capacidade de dissipação de energia do sistema solo-fundação.
Para efeitos de engenharia, recorre-se muitas vezes a modelos simplificados em que o sistema
solo-fundação é modelado através de elementos simples tipo mola e amortecedor. Estes
elementos são caracterizados por coeficientes que podem ser calculados através de soluções
algébricas aproximadas, resultantes do trabalho de investigação de diversos autores.
No final deste capítulo, apresenta-se uma compilação das soluções existentes para um conjunto
vasto de situações de cálculo. De referir, que a aplicabilidade destas soluções não se limita apenas
ao caso das fundações de máquinas sob acções harmónicas, pois também podem ser utilizadas
para o estudo de fundações sob acções sísmicas.

Capítulo 1 Fundações sob acções dinâmicas no topo
1-2
Estruturasensível
Figura 1.1 - Interacção dinâmica solo-fundação
Re
Im
X
�
Figura 1.2 - Representação gráfica de um número complexo
1.2 - Fundações superficiais sujeitas a acções dinâmicas no topo
1.2.1 - Generalidades
A Figura 1.1 ilustra a situação típica de uma fundação rígida sob acções “dinâmicas” de uma
máquina. As acções dinâmicas devem-se à massa m0 que roda com excentricidade a umar0
frequência . As forças e momentos que se transmitem à fundação são do tipoT'2B f
ou utilizando a notação exponencial complexa.F(t)'m0 r0T2 cos(Tt) F(t)'m0 r0T
2 e iTt
Como se verá mais adiante, o recurso à notação exponencial complexa permite facilitar o
tratamento matemático das equações. Convém assim, apresentar uma revisão sumária do conceito
do número complexo. A constante complexa pode ser representada por um vector como mostraX
a Figura 1.2.

Capítulo 1 Fundações sob acções dinâmicas no topo
1-3
O vector representado em coordenadas cartesianas apresenta uma parte real e uma parteimaginária (notação trigonométrica):
X ' X1% i X2 em que X1 ' |X|cosθ ; X2 ' |X|senθ ; |X| ' X 21%X
22 (1.1)
ou, em alternativa, pode-se recorrer à notação exponencial definida pela amplitude e pelo|X|
ângulo de fase medido no sentido anti-horário em relação ao eixo Real:θ
X ' |X|cosθ % i |X|senθ ' |X|e iθ (1.2)
Analisando a expressão anterior é fácil de perceber que a multiplicação de um vector pelaconstante complexa tem como efeito provocar uma rotação de 90º no sentido anti-horário. Dei
modo semelhante se multiplicar um vector por este sofrerá uma rotação de 90º no sentido&i
horário.
As equações anteriores podem ser utilizadas para obter a relação entre as funções trigonométricase as funções exponenciais:
cosθ '12
(e iθ%e &iθ ) (1.3)
senθ ' &i2
(e iθ&e &iθ ) (1.4)
Retomando a Figura 1.1, as ondas geradas no contacto solo-fundação propagam-se em todas asdirecções no depósito de solo. Quando as ondas atingem zonas de transição entre camadasdiferentes sofrem reflexões e refracções, bem como parte da energia se transforma em ondassuperficiais. Grande parte da energia é dissipada desta forma, enquanto que apenas uma pequenaporção se dissipa por amortecimento interno do solo, por razões que se expõem mais adiante.
A fundação experimenta movimentos harmónicos do tipo , ou utilizando au ' u0 cos(ωt%n)
notação exponencial complexa , em que representa a amplitude do movimentou ' u0ei (ωt%n) u0
e o ângulo de fase. Ambos os valores dependem da frequência de excitação, ou seja,n
e .u0 ' u0(ω) n ' n(ω)
Um dos aspectos fundamentais a ter em conta no dimensionamento, tem a ver com o controlodos movimentos da fundação. Estes movimentos deverão ser limitados a valores relativamentereduzidos de modo a não danificar nem pôr em risco a funcionalidade da maquinaria e tambémde não causar problemas aos operários ou às pessoas em edifícios próximos. A Figura 1.3 mostrauma proposta típica que pode servir de elemento de orientação para a selecção dos limites decomportamento aceitável para uma fundação. Na prática, tem sido mais frequente a aplicação decritérios baseados na amplitude das velocidades (Moura Esteves, 1993).

Capítulo 1 Fundações sob acções dinâmicas no topo
1-4
Frequência (Hz)
Am
pli
tude
de
vib
raçã
o(c
m)
Limite de segurança para máquinas
fundaçõesde
máquinas
Causa problemas às pessoas
Figura 1.3 - Valores limite da amplitude de vibração, Richart (1962)
É de realçar, que estes limites (amplitude dos deslocamentos verticais em função da frequência
de vibração) tomam valores típicos da ordem da centésima do centímetro, ou seja, bem inferiores
aos assentamentos admissíveis para as acções estáticas que tipicamente são da ordem de alguns
centímetros.
Para se ter uma ideia das deformações induzidas, admite-se que a fundação está apoiada num
meio elástico contínuo e determina-se a deformação normal média na direcção e no sentido do
carregamento de acordo com a expressão aproximada seguinte:
g . y2.5B
(1.5)
sendo o deslocamento vertical e a largura da fundação.y B
Na direcção ortogonal como a deformação normal é igual a , deduz-se então que a distorção&< g
máxima é igual a:(máx
(máx ' (1%<) g '1%<2.5B
y (1.6)
Considere-se agora uma fundação superficial com 1m de largura, sujeita a uma amplitude de
vibração vertical da ordem da centésima do centímetro (10-4 m). A distorção máxima
correspondente será da ordem de 5×10-5.
A conclusão que se pode tirar de imediato é a de que as deformações induzidas no solo são
bastante pequenas, pelo que o modelo visco-elástico linear pode ser utilizado para modelar
adequadamente o comportamento do solo. A caracterização do solo de fundação deverá
contemplar ensaios in situ ou de laboratório adequados para o domínio das muito pequenas a

Capítulo 1 Fundações sob acções dinâmicas no topo
1-5
12
45
6
3
Figura 1.4 - Graus de liberdade de uma fundação rígida
pequenas deformações. Para estes níveis de deformação, o amortecimento interno do solo é
muito reduzido tomando, em geral, valores inferiores a 2%. O módulo de distorção inicial (ou
máximo) do solo constitui o parâmetro fundamental para a análise do problema.
1.2.2 - Fundação superficial sujeita a acção harmónica vertical no topo
As fundações de máquinas são geralmente constituídas por elementos de betão armado de elevada
rigidez, cujos movimentos dependem exclusivamente da deformabilidade do terreno de fundação.
Assim, como qualquer corpo rígido, a fundação exibe seis graus de liberdade - três de translação
e três de rotação segundo os eixos x, y e z (Figura 1.4). Para situações correntes, os movimentos
de vibração vertical e de torção segundo o eixo z (movimentos 3 e 6) podem ser considerados
independentes e desacoplados em relação aos restantes movimentos, enquanto que os
movimentos 1 e 5 ou 2 e 4 estão acoplados devido à inércia da fundação e, por isso, devem ser
estudados conjuntamente.
Para ilustrar os principais conceitos toma-se como referência a situação do movimento vertical.
Considera-se, então, o exemplo da fundação rígida representada na Figura 1.5, onde actua uma
carga vertical centrada Fz(t).
A questão reside na determinação do deslocamento vertical uz(t). Analisa-se, em primeiro lugar,
separadamente o movimento de dois conjuntos: o bloco rígido (representando a fundação) e o
terreno. Se se admitir que a fundação está sempre em contacto com o terreno, o deslocamento da
fundação terá que ser necessariamente igual ao deslocamento do solo, pelo que por equilíbrio:
Pz(t) % muz(t) ' Fz(t) (1.7)

Capítulo 1 Fundações sob acções dinâmicas no topo
1-6
m
Força de inércia
Força de reacção
Força de acção noterreno de fundação
Força aplicada
Figura 1.5 - Equilíbrio dinâmico do sistema
Assumindo, por hipótese, que o solo se comporta como um material visco-elástico linear, a acção
-reacção ao nível do contacto fundação-solo será proporcional ao deslocamento vertical, isto é:
Pz(t) ' Kz uz(t) (1.8)
em que é a impedância dinâmica para o movimento vertical.Kz
Combinando as equações (1.7) e (1.8) obtém-se:
muz(t) % Kzuz(t) ' Fz(t) (1.9)
Para uma excitação tipo harmónica , a solução correspondente é bemFz(t) ' Fz cos(Tt )
conhecida da teoria dos osciladores de um grau de liberdade. Note-se que, a acção-reacção ePz(t)
o deslocamento são funções harmónicas com frequência , mas desfasadas no tempouz(t) T
devido ao amortecimento do sistema.
Pz(t) ' Pzcos(Tt%") (1.10)
uz(t) ' uzcos(Tt%"%n) (1.11)
ou
uz(t) ' u1 cos(Tt%") & u2 sen(Tt%") (1.12)

Capítulo 1 Fundações sob acções dinâmicas no topo
1-7
O deslocamento resulta assim da combinação de duas harmónicas simples, onde a amplitude uz(t) uz
e o ângulo de fase estão relacionadas com as duas componentes, uma em fase e outra n u1 u2
com 90º de desfasamento,:
uz ' u 21 %u 2
2 ; tgn 'u2
u1
(1.13)
O recurso à notação exponencial permite um tratamento matemático bastante mais expedito. As
equações anteriores (1.10) e (1.11) podem ser reescritas sob a forma seguinte:
Pz(t) ' Pzei(Tt%") ' Pze
iTt (1.14)
uz(t) ' uzei(Tt%"%n) ' uze
iTt (1.15)
sendo e números complexos, cujo módulo é igual às amplitudes e .Pz uz Pz uz
A função de impedância dinâmica , que é definida como sendo a relação entre a força eKz Pz(t)
o deslocamento , será assim uma função complexa definida por:uz(t)
Kz 'Pz(t)
uz(t)'
Pz
uz
' K dz % iTCz (1.16)
onde e são funções reais dependentes da frequência de excitação K dz Cz T
1.2.3 - Significado físico das funções e K dz Cz
Viu-se então, que a rigidez dinâmica do sistema solo-fundação pode ser caracterizada pela função
complexa . A parte real traduz a rididez dinâmica da fundação e o facto de depender daKz
frequência deve-se apenas à massa existente do sistema, uma vez que se pode assumir para o solo
o comportamento histerético, isto é, independente da frequência. A parte complexa deve-se ao
amortecimento do sistema e tem duas componentes: uma devida ao efeito de radiação das ondas
geradas ao nível da interfase solo-fundação e uma outra resultante do amortecimento interno do
solo. A Figura 1.6 mostra o modelo físico que representa a fundação.
Combinando as equações (1.9) e (1.16) e atendendo a que:
0uz(t) ' iTuz(t) e uz(t) ' &T2 uz(t) (1.17)
obtém-se:
muz(t) % Cz 0uz(t) % K dz uz(t) ' Fz(t) (1.18)
{(K dz &mT2) % iTCz} uz ' Fz (1.19)
Note-se agora, que a equação anterior traduz exactamente a equação de equilíbrio dinâmico de
um oscilador de um grau de liberdade com massa m, rigidez da mola e coeficiente doK dz

Capítulo 1 Fundações sob acções dinâmicas no topo
1-8
Kzd
uz(t)
Fz(t)
m
Cz
Figura 1.6 - Modelo físico solo-fundação
amortecedor . De referir novamente, que os coeficientes e dependem da frequênciaCz K dz Cz
de excitação , podendo até exibir valores de negativos (a excitação e o movimento daT K dz
fundação em oposição de fase).
Para uma determinada frequência de vibração , a solução do problema, isto é, o deslocamentoT
vertical é igual a:
uz 'Fz
(K dz &mT
2) % iTCz(1.20)
cuja amplitude de vibração é dada por:
|uz| 'Fz
(K dz &mT
2) 2 % T2C 2z
(1.21)
1.2.4 - Generalização do conceito de impedância dinâmica
A definição de impedância dinâmica para o movimento vertical pode ser agora generalizado para
os outros movimentos: .K dx , K d
rx , K dry , K d
t e K dy
Assim, genericamente define-se para cada tipo de movimento uma função de impedância
dinâmica dependente da frequência de excitação:
K(T) ' K d(T)% iTC(T) (1.22)
Estas funções foram objecto de intensa investigação por diversos autores, recorrendo a métodos
analíticos e semi-analíticos para situações particulares com geometria mais simples. Para casos
mais complexos: fundações superficiais embebidas no terreno, fundações por estacas e fundações
em terrenos com rigidez variável em profundidade torna-se necessário recorrer a métodos
numéricos.

Capítulo 1 Fundações sob acções dinâmicas no topo
1-9
Em alternativa aos métodos matemáticos mais rigorosos existem formulações aproximadas
constituídas por equações algébricas de ajustamento e gráficos adimensionais que podem ser
aplicadas com grande facilidade, para efeitos práticos de dimensionamento. Esta informação
compilada por Gazetas (1991) cobre um conjunto muito vasto de situações para diferentes tipos
de perfil do terreno e de geometria da fundação.
Apresentam-se, no final deste capítulo, as tabelas 1 a 5 resultantes do trabalho de compilação
daquele autor.
A tabela 1 refere-se a fundações superficiais, sem embebimento, apoiadas num meio visco-
elástico, homogéneo e semi-infinito.
A tabela 2 refere-se a fundações superficiais embebidas num meio visco-elástico, homogéneo e
semi-infinito.
A tabela 3 refere-se a fundações superficiais, sem embebimento, apoiadas num meio visco-
elástico, homogéneo e limitado inferiormente por um estrato rígido.
A tabela 4 refere-se a fundações superficiais embebidas num meio visco-elástico, homogéneo e
limitado inferiormente por um estrato rígido.
A tabela 5 refere-se a fundações superficiais, sem embebimento, apoiadas num meio não
homogéneo em que o módulo de distorção varia com a profundidade de acordo com a equaçãoG
seguinte:
G ' Go (1%".) n com . ' z/B (1.23)
sendo o módulo de distorção à superfície, a profundidade e a largura da fundação Go z B
Por último, a tabela 6 refere-se às estacas flexíveis. Considera-se que apenas a parte superior da
estaca sofre deslocamentos apreciáveis, pelo que a solução do problema não depende do
comprimento total da estaca. A estaca será flexível se o seu comprimento for superior ao
comprimento crítico lc, o qual depende das características da estaca e do próprio terreno de
fundação. O comprimento crítico lc pode ser calculado recorrendo às equações da tabela 6 e toma
valores típicos da ordem de 5 a 10 diâmetros. A tabela 6 fornece ainda as equações necessárias
para o cálculo das impedâncias laterais: (impedância horizontal para a situação deKHH
translação pura), (impedância de rotação para a situação de rotação pura) e (termoKMM KMH
cruzado da matriz de rigidez dinâmica).

Capítulo 1 Fundações sob acções dinâmicas no topo
1-10
As tabelas 1 a 6 permitem calcular:
- a rigidez dinâmica , como sendo igual ao produto da rigidez estática peloK d ' K d(ω) K
coeficiente de rigidez dinâmica , isto é:k (ω)
K d ' K × k (ω) (1.24)
- o coeficiente de amortecimento por radiação . Este coeficiente não incluiu oC ' C (ω)
amortecimento histerético do solo , com excepção das expressões da tabela 6 referentes àsβ
estacas. Para incorporar o amortecimento histerético do solo (equações das tabelas 1 a 5), bastasimplesmente considerar uma parcela adicional para o cálculo do amortecimento total:
C (total) ' C (radiação) % 2K d
ωβ (1.25)
1.2.5 - Efeitos de acoplamento
A Figura 1.7 esquematiza o caso típico de uma fundação rígida parcialmente embebida noterreno, com dois planos verticais de simetria e , cuja intersecção define o eixo de simetriaxz yz
. Em planta a área da fundação dispõe também de dois eixos de simetria e . Nestasz x y
condições, os movimentos de vibração vertical e de torção segundo o eixo são tratadosz
separadamente, visto que não há acoplamento com os outros movimentos.
Por outro lado, os movimentos de translação (movimentos horizontais) e de rotação estãoacoplados devido à inércia do bloco e pelo facto de o centro de gravidade se localizar acima doplano de fundação. De facto, quando o bloco experimenta um deslocamento horizontal a forçaδy
de inércia que actua no centro de gravidade produz um momento na base de fundação em tornodo eixo . O mesmo se passa em relação ao efeito de acoplamento entre a translação segundo x x
e a rotação em torno do eixo .y
Para estudar este efeito de acoplamento considera-se então a situação da Figura 1.7, em que afundação está sujeita às acções harmónicas e no centro de gravidade do bloco.Fy(t) Mx(t)
As condições de equilíbrio dinâmico conduzem às equações seguintes:
m δy(t) % Py(t) ' Fy(t) (1.26)
Tx(t) & Py(t)zCG % Ix θx(t) ' Mx(t) (1.27)
em que: é a massa total da fundação rígida; é o momento de inércia de massa segundo um eixom Ix
horizontal passando pelo ponto CG; e são, respectivamente, as reacções do terreno,Py(t) Tx(t)
em termos de força horizontal e momento referentes ao centro da base da fundação (ponto O).

Capítulo 1 Fundações sob acções dinâmicas no topo
1-11
CG
Fy(t)
Py(t)
Mx(t)
Tx(t)
CG
O
CG�
y
�y- �
xz
CG
�x
y y
y
x
z
zCG
m�y
..
�y CG
Figura 1.7 - Acoplamento translação-rotação
As acções harmónicas escritas sob a forma exponencial são dadas por:
Fy(t) ' Fy e iTt (1.28)
Mx(t) ' Mx e iTt (1.29)
em que as amplitudes e podem ser constantes reais ou imaginárias. A frequência Fy Mx T
depende obviamente da natureza da excitação. Note-se que as equações anteriores não implicam
que as duas componentes da excitação (força horizontal e momento) estejam em fase, visto que
o “verdadeiro” ângulo de fase pode estar mascarado nas amplitudes complexas.
Em movimento harmónio, a resposta pode ser escrita sob a forma:
*y(t) ' *y ' *y e iTt ; 2x(t) ' 2x ' 2x e iTt (1.30)
Py(t) ' Py e iTt ; Tx(t) ' Tx e iTt (1.31)
Note-se que o deslocamento refere-se ao centro de gravidade do bloco (ponto CG). Ao nível*y
da base, as reacções relacionam-se com o deslocamento e com a rotação*(y ' *y& 2x zCG
, através da matriz de rigidez dinâmica:2(x ' 2x

Capítulo 1 Fundações sob acções dinâmicas no topo
1-12
Ky Kyrx
Kyrx Krx
*(y
2x
'
Py(t)
Tx(t)(1.32)
Substituindo agora o resultado da equação (1.32) nas equações de equilíbrio dinâmico (1.26) e
(1.27) resulta assim um sistema de (2×2) cujas incógnitas são e :*y 2x
*y ' (B22 Fy & B12 Mx ) / N (1.33)
2x ' (B11 Mx & B12 Fy ) / N (1.34)
em que,
B11 ' Ky(T) & mT2 (1.35)
B12 ' Kyrx(T) & Ky(T) zCG (1.36)
B22 ' Krx(T) & IxT2 % Ky(T) z 2
CG & 2 Kyrx zCG (1.37)
N ' B11 B22 & B 212 (1.38)

Capítulo 1 Fundações sob acções dinâmicas no topo
1-13
Cenários de estudo - Tabelas 1 a 6

Capítulo 1 Fundações sob acções dinâmicas no topo
1-14
Tab
ela
1-
Rig
idez
din
âmic
ae
coef
icie
nte
sdo
amort
eced
or
par
afu
ndaç
ãosu
per
fici
alem
mei
oel
ásti
co,hom
ogén
eoe
sem
i-in
finit
o

Capítulo 1 Fundações sob acções dinâmicas no topo
1-15
Gráficos da Tabela 1

Capítulo 1 Fundações sob acções dinâmicas no topo
1-16
Tab
ela
2-
Rig
idez
din
âmic
ae
coef
icie
nte
sd
oam
ort
eced
or
par
afu
nd
ação
sup
erfi
cial
emb
ebid
aem
mei
oel
ásti
co,
ho
mo
gén
eoe
sem
i-in
fin
ito

Capítulo 1 Fundações sob acções dinâmicas no topo
1-17

Capítulo 1 Fundações sob acções dinâmicas no topo
1-18
Gráficos da Tabela 2

Capítulo 1 Fundações sob acções dinâmicas no topo
1-19
Tab
ela
3-
Rig
idez
din
âmic
ae
coef
icie
nte
sd
oam
ort
eced
or
par
afu
nd
ação
sup
erfi
cial
emm
eio
elás
tico
eh
om
og
éneo
lim
itad
oin
feri
orm
ente
po
ru
mes
trat
orí
gid
o

Capítulo 1 Fundações sob acções dinâmicas no topo
1-20
Gráficos da Tabela 3

Capítulo 1 Fundações sob acções dinâmicas no topo
1-21
Tab
ela
4-
Rig
idez
din
âmic
ae
coef
icie
nte
sd
oam
ort
eced
or
par
afu
nd
ação
sup
erfi
cial
emb
ebid
aem
mei
oel
ásti
coe
ho
mo
gén
eoli
mit
ado
infe
rio
rmen
tep
or
um
estr
ato
ríg
ido

Capítulo 1 Fundações sob acções dinâmicas no topo
1-22
Tab
ela
5-
Rig
idez
din
âmic
ae
coef
icie
nte
sd
oam
ort
eced
or
par
afu
nd
ação
sup
erfi
cial
emm
eio
elás
tico
não
ho
mo
gén
eo

Capítulo 1 Fundações sob acções dinâmicas no topo
1-23

Capítulo 1 Fundações sob acções dinâmicas no topo
1-24
Gráficos da Tabela 5

Capítulo 1 Fundações sob acções dinâmicas no topo
1-25
Tab
ela
6-
Rig
idez
din
âmic
ae
coef
icie
nte
sdo
amort
eced
or
par
aes
taca
sfl
exív
eis

Capítulo 1 Fundações sob acções dinâmicas no topo
1-26

Capítulo 2 Estacas sob acções sísmicas
2-1
CAPÍTULO 2
ESTACAS SOB ACÇÕES SÍSMICAS
2.1 - Generalidades
A interacção solo-estaca-superestrutura sob acções sísmicas é um problema complexo que tem
despertado bastante interesse no domínio da investigação nas últimas décadas. A informação
existente acerca de danos ocorridos em estacas durante os últimos sismos de grande intensidade
é relativamente escassa, dada as óbvias dificuldades e os custos envolvidos para a sua detecção.
Novak (1991) refere a ocorrência de danos em estacas nos sismos de Alaska em 1964, da cidade
do México em 1985 e de Loma Prieta em 1989 e destaca o trabalho de inspecção levado a cabo
por Mizuno (1987).
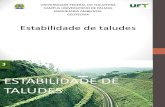
Mizuno (1987) efectuou um levantamento de 28 casos de danos em estacas, provocados pelas
acções símicas, que ocorreram no Japão no período entre 1923 e 1983. Aquele autor concluiu
que muitos dos danos (e ruínas de edificações) foram devidos às elevadas forças de inércia e
momentos que provocaram a rotura estrutural das estacas (no topo) por corte ou por flexão
(Figura 2.1), ou a rotura por derrubamento e arrancamento do sistema solo-estacas-maciço de
encabeçamento. Roturas provocadas por liquefacção do terreno de fundação também
constituiram um dos cenários mais frequentes naquele estudo (Figura 2.2).
Porém, em muitos dos casos investigados detectou-se que a localização da zona afectada da
estaca estava demasiadamente profunda para que pudesse ser imputada às forças de inércia
actuantes no topo, e que também seria improvável a ocorrência de liquefacção. Estas zonas
danificadas estavam na realidade associadas à presença de descontinuidades com variação brusca
das características mecânicas do terreno estratificado. Assim, ele concluiu que durante a
ocorrência de um sismo, o terreno envolvente impõe curvaturas elevadas que podem conduzir à
rotura estrutural da estaca (Figura 2.3).

Capítulo 2 Estacas sob acções sísmicas
2-2
Figura 2.2 - Colapso da ponte provocado pela liquefacção do solo (Niigata 1964)
Figura 2.1 - Colapso do terminal fluvial devido à rotura por corte das fundações (Kobe 1995)

Capítulo 2 Estacas sob acções sísmicas
2-3
Aterros
Argila moleou
solo com potencialrisco de liquefacção
Substratoresistente
deslocamento lateraldo terreno devido à passagem
das ondas sísmicas
Figura 2.3 - Mecanismo de rotura devido ao efeito de interacção cinemática solo-estacas
Este tipo de mecanismo de rotura não tem recebido a atenção devida na comunidade
técnico-científica geotécnica e estrutural (Santos e Gomes Correia, 1999). Na prática corrente de
dimensionamento, este problema é habitualmente ignorado e o dimensionamento estrutural das
estacas de fundação baseia-se unicamente nas forças de inércia provenientes da superestrutura.
Na realidade, durante a actuação de um simo, os esforços nas estacas são devidos, por um lado,
às forças de inércia da superestrutura (interacção com a superestrutura) e, por outro, pelo
movimento do solo envolvente (interacção cinemática). Diversos modelos teóricos foram
desenvolvidos contemplando, em geral, os dois efeitos separadamente. Refere-se o trabalho
importante de Novak (1991) ao apresentar uma síntese dos diferentes modelos recentemente
desenvolvidos.
As observações de Mizuno (1987) apontaram claramente para a necessidade de uma reavaliação
do procedimento a adoptar ao nível de dimensionamento para a verificação da segurança das
estacas sob acções horizontais em zonas sísmicas.
A importância da consideração do efeito de interacção cinemática é reconhecida nos
regulamentos mais recentes: AASHTO (1983), JSCE (1988), AFPS (1990) e Eurocódigo
EC8 (1994). A nível nacional não existe de momento nenhuma regulamentação que aborde este
problema.
Segundo o EC8-Parte 5 as estacas devem ser dimensionadas para resistir ao efeito de dois tipos
de acções devidos aos sismos:
• "as forças de inércia provenientes da superestrutura;
• as forças cinemáticas provocadas pelo movimento do solo envolvente aquando da passagem
das ondas sísmicas.

Capítulo 2 Estacas sob acções sísmicas
2-4
Os momentos flectores devidos à interacção cinemática devem ser calculados quando se reunir
duas ou mais das condições seguintes:
• terreno pertencente à classe C ou pior e constituído por uma alternância de camadas com
contraste significativo de rigidez. A classe C incluiu os depósitos de solo incoerente solto, com
ou sem camadas intercalares de solo coesivo, caracterizados por valores de vs abaixo de
200m/s nos primeiros 20m de profundidade;
• local da obra pertencente a uma zona de sismicidade moderada a elevada (com aceleração
de pico efectiva em terreno firme ou rochoso superior a 0.1g);
• superestrutura pertencente à classe de importância I e II. A classe I incluiu os edifícios cuja
integridade durante os sismos é de particular importância para a protecção civil, tais como:
os hospitais, quartéis de bombeiros, centrais de energia, etc..). A classe II incluiu os edifícios
cuja integridade é também importante garantir-se durante os sismos face às consequências
graves que podem decorrer do colapso: escolas e lugares de culto e reunião.
As estacas devem ser dimensionadas para resistirem no domínio elástico. Quando isso não for
possível, devem-se considerar as seguintes zonas potenciais de plastificação da estaca:
• uma zona até à profundidade de 2d contada a partir da base do maciço de encabeçamento;
• zonas a ±2d de qualquer interface entre duas camadas com contraste significativo de rigidez
(relação entre os módulos de distorção superior a 6).
Estas zonas potenciais de plastificação deverão ser dimensionadas para serem dúcteis através
da colocação de uma armadura transversal de confinamento adequada.
Em situações onde possam ocorrer fenónemos de liquefacção, a utilização de estacas como
medida de trasferência das cargas verticais deverá ser encarada com cautela, devido às elevadas
forças induzidas nas estacas como consequência da perda da resistência lateral dos estratos com
potencial risco de liquefacção, e ainda às inevitáveis incertezas associadas à posição e à
espessura destes estratos."
No recente sismo de Hyogoken-Nambu em 1995, Mizuno (1996) identificou mais de 30 casos
de danos em estacas de betão pré-fabricadas, estacas de betão moldadas "in situ" e estacas
metálicas. Os danos ocorreram em zonas de aterro conquistadas ao mar, em colinas e em zonas
onde se registaram maiores abalos sísmicos. De acordo com o levantamento realizado, aquele
autor classificou as causas externas que provocaram danos (em estacas) em 4 grupos:
• movimento de zonas de aterro (em locais montanhosos);
• forças de inércia provenientes da superestrutura;
• movimento do solo devido à liquefacção (Figura 2.4);
• movimento do solo sem liquefacção.

Capítulo 2 Estacas sob acções sísmicas
2-5
Figura 2.4 - Rotura devido ao efeito de interacção cinemática solo-estacas (Kobe 1995)
Aquele autor cita ainda um caso interessante onde foram detectados danos em estacas de betão
moldadas "in situ", mesmo antes da construção do edifício. Este caso ocorreu na cidade de Kobe
numa zona sem liquefacção e constitui uma situação exemplar para ilustrar a importância do
efeito de interacção cinemática solo-estaca.
Este problema complexo de interacção cinemática não tem recebido a atenção devida e
encontra-se muito menos bem estudada do que o efeito das forças de inércia actuantes no topo
das estacas.
Far-se-á numa primeira parte deste capítulo uma descrição sumária dos métodos de resolução do
problema de equilíbrio dinâmico, com particular detalhe nos métodos baseados na sobreposição
modal.
Na segunda parte far-se-á uma análise de alguns modelos simplificados que consideram o solo
envolvente (campo livre) como um meio homogéneo elástico e que recorrem à técnica de análise
por espectro de resposta para a determinação dos deslocamentos horizontais do campo livre.
A terceira parte deste capítulo contempla uma descrição dos modelos dinâmicos mais rigorosos
dando particular ênfase ao modelo BDWF cujas potencialidades serão demonstradas, através de
comparações com análises tridimensionais.

Capítulo 2 Estacas sob acções sísmicas
2-6
2.2 - Breves considerações acerca dos métodos de resolução do problema de
equilíbrio dinâmico
2.2.1 - Generalidades
A análise rigorosa do problema de interacção cinemática solo-estaca levanta dificuldades
acrescidas dados o seu carácter tridimensional e a dificuldade em modelar adequadamente as
condições de radiação nas fronteiras. Acresce ainda, a necessidade de considerar o
comportamento não linear do solo.
Em rigor, o comportamento não linear do solo obriga a realização de análises incrementais no
domínio do tempo e a consequente definição explícita do comportamento histerético do solo,
através de modelos constitutivos visco-elastoplásticos (Prevost, 1993), que exigem um grande
número de parâmetros de cálculo e potentes meios computacionais.
Por estas razões, é habitual recorrer-se ao método linear equivalente para simular de forma
aproximada, o comportamento não linear do solo. A não linearidade é simulada à custa da
consideração de valores secantes ou equivalentes da rigidez e do amortecimento histerético do
solo, em função do nível de deformação. O método é assim iterativo, procurando em cada análise
compatibilizar as propriedades do solo com o nível de deformação. Este método apresenta
obviamente a limitação de não poder determinar as deformações plásticas irreversívies do solo
dado o carácter elástico que está implícito neste método de análise.
Na análise do problema de equilíbrio dinâmico linear, é mais usual recorrer-se ao amortecimento
viscoso do que ao amortecimento histerético, dada as vantagens que aquele tipo de amortecimento
proporciona em termos computacionais.
A aplicação do método dos elementos finitos, para o problema de equilíbrio dinâmico num
sistema com amortecimento viscoso, conduz, após o processo de discretização e de espalhamento
topológico das matrizes elementares, a um sistema de equações diferenciais que é expresso sob
a forma geral seguinte:
[M] {u(t)} % [C] {0u(t)} % [K] {u(t)} ' {F(t)} (2.1)
em que:
[M] ' matriz de massa{u(t)} ' vector de acelerações[C] ' matriz de amortecimento viscoso{0u(t)} ' vector de velocidades[K] ' matriz de rigidez{u(t)} ' vector de deslocamentos{F(t)} ' vector de forças aplicadas

Capítulo 2 Estacas sob acções sísmicas
2-7
As técnicas habitualmente utilizadas para a resolução deste problema dividem-se em dois grupos
(Bathe e Wilson, 1976):
• métodos de integração directa, no domínio do tempo;
• métodos de sobreposição modal, no domínio do tempo ou da frequência.
Nos métodos de integração directa o equilíbrio dinâmico é verificado passo a passo para
intervalos de tempo discretos. Assim, em cada instante de tempo, o problema de equilíbrio
dinâmico pode ser resolvido recorrendo às técnicas habitualmente utilizadas para as análises
estáticas, bastando acrescentar as parcelas adicionais devido às forças de inércia e de
amortecimeto. Como o equilíbrio é apenas verificado em instantes de tempo discretos torna-se
necessário escolher formas de variação dos deslocamentos, das velocidades e das acelerações ao
longo do intervalo de tempo de integração. A diferença essencial entre os diversos métodos de
integração directa reside pois naquelas formas de variação. Estes métodos apresentam a
vantagem de permitirem introduzir, com toda a generalidade, as leis de comportamento não linear
dos materiais. Porém, quando a duração da solicitação for relativamente longa, estes métodos
apresentam a desvantagem de envolverem um grande volume de cálculos, dado que o sistema
de equações diferenciais tem que ser resolvido repetidamente para um grande número de vezes.
No segundo grupo de métodos, admite-se a linearidade do sistema e propõe-se uma transformação
do sistema de equações diferenciais numa outra forma de resolução mais eficiente. Esta
transformação é efectuada com base no bem conhecido método de sobreposição modal que pode
ser aplicado, quer no domínio do tempo, quer no domínio da frequência. Descreve-se, a seguir,
com maior detalhe a sua aplicação para dois tipos de análise:
• análise no domínio do tempo considerando amortecimento viscoso;
• análise no domínio da frequência considerando amortecimento histerético.
2.2.2 - Análise modal no domínio do tempo admitindo amortecimento viscoso
Na análise no domínio do tempo, o método de sobreposição modal consiste na realização prévia
de uma transformação dos deslocamentos nodais {u(t)} para os deslocamentos generalizados
{x(t)} através de uma matriz modal [M]:
{u(t)} ' [M] {x(t)} (2.2)
Introduzindo a equação (2.2) em (2.1) e multiplicando, ambos os membros desta equação, à
esquerda por [M]T obtém-se:
[M]T[M][M]{x(t)} % [M]T[C] [M]{0x(t)} % [M]T[K] [M]{x(t)} ' [M]T{F(t)} (2.3)

Capítulo 2 Estacas sob acções sísmicas
2-8
NTi [C]Nj ' Ci*ij ' 2Ti>i*ij com i , j'1,2...m (2.9)
O objectivo desta transformação é obter um novo sistema com matrizes de menor largura de
banda que as originais. Para tal, escolhem-se para os deslocamentos generalizados as amplitudes
dos modos de vibração do sistema, resumindo-se assim ao problema da determinação de valores
e vectores próprios:
{[K] & T2 [M]}{N} ' 0 (2.4)
O problema inicial é transformado para o espaço modal com m modos de vibração associados aos
respectivos valores próprios Ti2, e vectores próprios Ni, com i=1,2...m. Os vectores próprios Ni
representam configurações de deformadas ou modos de vibração, os quais justapostos em coluna
formam a referida matriz modal [M].
Uma das vantagens da análise modal reside no facto de permitir obter uma solução bastante
próxima da exacta considerando apenas os modos de vibração com frequências mais baixas.
Após aplicação das devidas condições de ortonormalização mostra-se que (Clough e Penzien,
1975):
[M]T[K] [M] ' [S] (2.5)
[M]T[M][M] ' [I] (2.6)
em que [S] é uma matriz diagonal constituída pelos valores próprios ou frequências próprias
elevadas ao quadrado:
Sij ' T2i *ij com i , j'1,2...m (2.7)
e [I] é a matriz de identidade.
Assim, o sistema original (2.1) transforma-se em:
[I]{x(t)} % [M]T[C] [M]{0x(t)} % [S]{x(t)} ' [M]T{F(t)} ' {f(t)} (2.8)
O método de sobreposição modal torna-se particularmente eficiente caso a matriz de
amortecimento seja igualmente ortogonalizável pelos modos de vibração verificando a condição
seguinte:
em que >i representa o coeficiente de amortecimento modal.

Capítulo 2 Estacas sob acções sísmicas
2-9
Assim, o problema inicial da resolução de um sistema de n graus de liberdade pode ser reduzido
à sobreposição das soluções de n sistemas de um grau de liberdade:
xi(t) % 2Ti>i 0xi(t) % T2i xi(t) ' fi(t) com i'1,2...n (2.10)
Após o desacoplamento, a solução para cada uma das equações independentes pode ser obtida
recorrendo às técnicas utilizadas na análise de resposta de sistemas de um grau de liberdade.
Se bem que a acção dos sismos pode ser modelada como uma excitação periódica procendo à
decomposição em série de Fourier, em que a resposta do sistema resume-se a uma sobreposição
de harmónicas, o procedimento habitual e mais eficiente consiste em aplicar o conceito de
integral de Duhamel, em que a resposta do sistema é resultante da convolução, no domínio do
tempo, da acção e da função resposta ao impulso instantâneo unitário (Clough e Penzien, 1975).
A aplicação do conceito de integral de Duhamel permite a obtenção da resposta para cada um dos
modos de vibração de uma forma eficiente recorrendo às técnicas habituais de integração
numérica.
2.2.3 - Análise modal no domínio da frequência admitindo amortecimento
histerético
Para o caso do amortecimento histerético, torna-se conveniente que o problema seja resolvido no
domínio da frequência.
Para o caso da solicitação harmónica, o amortecimento histerético do solo pode ser implementado
de uma forma eficiente, aplicando o princípio da correspondência que conduz à consideração dos
módulos elásticos complexos do solo.
A aplicação do método dos elementos finitos, para o problema de equilíbrio dinâmico linear com
amortecimento histerético, conduz agora a um sistema de equações lineares complexas que é
expresso sob a forma geral seguinte:
{[K (] & T2 [M]}{u(T)} ' {F(T)} (2.11)
ou em alternativa,
{[K] % i [C] & T2 [M]}{u(T)} ' {F(T)} (2.12)

Capítulo 2 Estacas sob acções sísmicas
2-10
em que:
[K (] ' matriz de rigidez complexaT ' frequência de vibraçãoi ' unidade imaginária
[C] ' matriz de amortecimento histerético{u(T)} ' vector de deslocamentos{F(T)} ' vector de forças aplicadas
Para o caso da acção dos sismos o vector {F(T)} é como sabido dado por:
{F(T)} ' & [M] Ub(T) (2.13)
em que Üb(T) representa a amplitude das acelerações impostas na fronteira.
Esta abordagem no domínio da frequência implica uma transformação prévia do registo das
acelerações no domínio do tempo Üb(t) para a correspondente transformada de Fourier Üb(T) no
domínio da frequência. Após a resolução no domínio da frequência a solução homóloga no
domínio do tempo é obtida mediante a transformada inversa de Fourier. Este técnica de resolução
será objecto de maior desenvolvimento no capítulo seguinte.
A aplicação do método de sobreposição modal faz-se de forma semelhante recorrendo aos
deslocamentos generalizados, agora definidos do domínio da frequência:
{u(T)} ' [M] {x(T)} (2.14)
Introduzindo a equação (2.14) em (2.12) e multiplicando, ambos os membros desta equação, à
esquerda por [M]T obtém-se:
[M]T{[K] % i [C] & T2 [M]}[M]{x(T)} ' [M]T{F(T)} ' {f(T)} (2.15)
Atendendo às já referidas condições de ortonormalização, o sistema original (2.12) transforma-se
finalmente em:
{[S] % i [M]T[C][M] & T2 [I]}{x(T)} ' {f(T)} (2.16)
De referir, que os modos de vibração são ortogonais em relação a qualquer matriz que seja uma
combinação linear da matriz de massa e de rigidez. Assim, como a matriz [C] resulta do
espalhamento topológico das matrizes de amortecimento elementares [C](e)=[K](e)×i2>(e), ela só
será ortogonalizável pelos modos de vibração, caso todos os elementos tenham o mesmo

Capítulo 2 Estacas sob acções sísmicas
2-11
coeficiente de amortecimento histerético. Quando isto não acontecer, a matriz de amortecimento
histerético não será ortogonalizável pelos modos de vibração, pelo que não ocorrerá o total
desacoplamento do sistema de equações iniciais. Nesta situação, o problema simplifica-se apenas,
no sentido da sua transformação num sistema reduzido de m (modos) de equações.
2.2.4 - Tipo de amortecimento a considerar
Em face do exposto, concluiu-se que em regime linear o método de sobreposição modal revela-se
mais adequado para resolver sistemas com um grande número de graus de liberdade e sujeitos a
acções relativamente prolongadas, tal como acontece com os sismos.
A consideração de amortecimento viscoso permite evitar o recurso a variáveis complexas e, para
certos casos particulares, o problema de equilíbrio dinâmico pode ser resolvido de uma forma
muito eficiente, devido ao total desacoplamento do sistema de equações iniciais, tal como descrito
anteriormente.
Porém, a natureza histerética do amortecimento do solo da forma como é ele entendido no
modelo de Kelvin-Voight acaba por esvanecer, passando-se a definir coeficientes de
amortecimento (modal) para cada modo de vibração.
Assim, a aplicação deste tipo de análise modal para o estudo de problemas de interacção
solo-estrutura deverá ser feita de forma calculosa, no sentido de seleccionar valores adequados
de amortecimento modal, que conduzam a uma dissipação de energia equivalente ao
amortecimento histerético do solo, como se procurará analisar mais adiante.
2.3 - Modelos simplificados de interacção cinemática solo-estaca
Nos modelos simplificados a análise do efeito de interacção cinemática solo-estaca é dividida em
duas partes:
• determinação da resposta sísmica do campo livre com base numa análise espectral;
• determinação dos esforços induzidos na estaca aplicando um determinado modelo simplificado
de interacção.
Integram-se neste grupo os modelos propostos por Soulomiac (1986) e Mineiro (1988), que são
descritos a seguir.

Capítulo 2 Estacas sob acções sísmicas
2-12
(máx(x) 'H
v 2s
jn
D(K,n)an
Kancos(anxH
)%sen(anxH
) San (2.17)
K an tg(an) ' 1 (2.18)
D(K ,n) '2
Ka 2n cos(an)%an (1%K )sen(an)
(2.19)
2.3.1 - Resposta sísmica de camadas de terrreno
Ambraseys (1960) citado por Mineiro (1988) deduziu a a solução analítica que governa o
comportamento em corte simples, de uma camada de terreno com a superfície uniformemente
carregada e sujeita à acção sísmica na sua base rígida.
H , �
Substrato rígido
Camada rígidah ,m m�
x
z
Camada elástica
Figura 2.5 - Resposta sísmica de uma camada elástica
A solução geral do problema em termos de distorções máximas ao longo da camada elástica, em
função do espectro de aceleração da perturbação sísmica aplicada na base, é a indicada naequação
seguinte:
em que:
H = espessura da camada deformável
vs = velocidade de propagação das ondas de corte
K = hm(m/H(
hm = espessura da camada rígida
(m = peso volúmico da camada rígida
( = peso volúmico da camada elástica
n = número de ordem do modo de vibração
San = valor da aceleração espectral tomado em função da frequência e do coeficiente de
amortecimento
D(K,n) e an = coeficientes adimensionais dados por:

Capítulo 2 Estacas sob acções sísmicas
2-13
u(z) ' mz
0
(máx(z)dz (2.20)
u(z) 'H
vsa1
2
D(K , a1) Sa1 k1 sena1z
H& k2 cos
a1z
H% k2
(2.21)
k1 ' Ka1 cos(a1) % sen(a1) (2.22)
k2 ' Ka1 sen(a1) & cos(a1) (2.23)
u(z) 'H
vsa1
2
D1 sen(B2
zH
) Sa1(2.26)
u(z) ' uo senB2
zH
ou u(x) ' uo cosB2
xH
(2.27)
Segundo Mineiro (1988) a contribuição dos modos altos (n>1) é pequena, podendo do ponto de
vista prático considerar apenas a contribuição do modo fundamental para o cálculo da distorção
e do deslocamento.
O deslocamento horizontal relativo do solo, u, a uma determinada altura, z, da base obtém-se
fazendo a integração das distorções ou seja:
Expressando o valor de (máx da equação (2.17) em função da coordenada z e substituindo na
equação (2.20) obtém-se, então, após algumas manipulações matemáticas, o valor do
deslocamento, considerando apenas a contribuição do primeiro modo de vibração:
em que:
Para o caso particular de não haver camada rígida no topo da camada elástica a expressão (2.17)
anterior simplica-se para:
(máx(x) 'H
v 2s
D1
a1
sena1x
HSa1 (2.24)
em que D1 e a1 tomam os valores de 4/B e B/2, respectivamente.
Atendendo ainda a que sen(a1x/H) = cos(a1z/H) a expressão anterior pode, também, ser escrita
em função da coordenada z:
(máx(z) 'H
v 2s
D1
a1
cosa1z
HSa1 (2.25)
O deslocamento horizontal relativo do solo, u, a uma determinada altura, z, é dado por:

Capítulo 2 Estacas sob acções sísmicas
2-14
uo 'H
vsa1
2
D1 Sa1(2.28)
T '4Hvs
(2.29)
em que uo é o deslocamento relativo no topo da camada dado por:
O período fundamental, T, da camada elástica toma para este caso particular o valor de:
2.3.2 - Modelo de interacção proposto por Soulomiac (1986)
Nalgumas situações particulares, quando as estacas são de pequeno a médio diâmetro ou quando
a rigidez da massa de solo em movimento for relativamente elevada, pode-se admitir que a estaca
acompanha o movimento do solo, sofrendo os mesmos deslocamentos do campo livre
(Soulomiac, 1986).
Como se viu na secção anterior, a deformada do terreno considerando apenas o 1º modo de
vibração segue uma lei sinusoidal descrevendo 1/4 de uma sinusoide. Assim sendo, a 1ª e a 2ª
derivada da função deslocamentos anulam-se, respectivamente, no topo (ponto máximo) e na base
(ponto de inflexão).
Considera-se agora que a estaca é suficientemente flexível e tem a rotação impedida ao nível da
sua cabeça. Segundo aquele autor, a consideração da deformada a) indicada na Figura 2.6 parece,
do ponto de vista prático, pouco realista uma vez que se gerariam esforços de flexão muito
elevados e incomportáveis na zona de ligação da estaca ao substrato rígido. Deste modo, ele
propôs que se admitisse a condição de rotação livre (rótula) na base, seguindo a estaca a mesma
deformada sinusoidal correspondente ao campo livre.
Substrato rígido
a) base encastrada b) rótula na base
� = 0o
deslocamentos docampo livre
(1º modo de vibração)
Figura 2.6 - Deformada da estaca

Capítulo 2 Estacas sob acções sísmicas
2-15
p(x) ' po cosB2
xH
(2.30)
T(x) '2HB
po senB2
xH
(2.31)
M(x) '2HB
2po cos
B2
xH
'2HB
2p(x) (2.32)
EpIpd 4y(x)
dx 4' p(x) Y EpIp
B2H
4u(x) ' p(x) (2.33)
M(x) 'B
2H
2EpIp u(x) (2.34)
Mmáx 'B
2H
2EpIp uo (2.35)
Tmáx 'B
2H
3EpIp uo (2.36)
Admitindo que as tensões horizontais no solo se podem obter a partir dos deslocamentos através
de uma constante de proporcionalidade, a estaca fica assim sob a acção de um diagrama de
tensões com andamento sinusoidal e valor máximo, po, à superfície, isto é:
O esforço transverso, T, à profundidade x obtém-se integrando a equação anterior:
e seguindo a mesma via de procedimento, obtém-se o momento flector, M:
Por outro lado, introduz-se a equação diferencial de equilíbrio da estaca e admite-se que a estaca
acompanha os mesmos deslocamentos do campo livre, ou seja, y(x)=u(x):
Eliminando agora p(x) nas equações (2.32) e (2.33), obtém-se o valor do momento flector em
função do deslocamento:
O diagrama de momentos flectores segue exactamente o mesmo andamento sinusoidal do campo
livre de deslocamentos (Figura 2.7). Indica-se, seguidamente, as duas relações úteis que
exprimem os valores máximos do momento flector (no topo) e do esforço transverso (na base)
em função do deslocamento à superfície:

Capítulo 2 Estacas sob acções sísmicas
2-16
Mo '3EpIp
H 2uo (2.37)
Deslocamentou
Tensãop
Esforço transversoT
Momento flectorM
Figura 2.7 - Diagramas de esforços
2.3.3 - Modelo de interacção proposto por Mineiro (1988)
Para avaliar a capacidade resistente das estacas ao deslocamento sísmico horizontal
Mineiro (1988) propôs um modelo de interacção simplificado que considera o seguinte:
• a estaca e o solo têm comportamento elástico;
• o solo é modelado por molas (meio discreto do tipo Winkler) ou como um meio contínuo;
• as estacas são, primeiramente, supostas articuladas na base e na cabeça e calcula-se
simplificadamente o valor da rotação da cabeça, dividindo o deslocamento sísmico à
superfície pela altura da camada;
• o efeito de interacção solo-estaca-maciço traduz-se, seguidamente, em aplicar à cabeça da
estaca, inicialmente suposta como livre, um momento que anule o valor da rotação
calculado no ponto anterior, tendo em atenção a interacção com o terreno.
Chama-se a atenção, pela particular importância de se ter em conta o andamento real da
deformada do terreno quando se pretende estimar os esforços da estaca devido ao efeito de
interacção. O modelo simplificado proposto por Mineiro (1988) considera apenas uma condição
de compatibilidade à cabeça da estaca podendo conduzir, nalgumas situações, a resultados
incorrectos. Deste modo, aquele autor propôs recentemente que seja adoptada uma das
modelações sugeridas pelo EC8 (versão de 1985) e que consiste em desprezar este tipo de
interacção calculando o momento de encastramento da cabeça da estaca com base na expressão
seguinte (Mineiro, 2000):
Para efeitos de comparação, considere-se o exemplo de cálculo de uma estaca com 1.00m de
diâmetro (EpIp=490873kNm2) embebida num camada elástica com Es.k=50000 kPa , H=20m e
uo=0.0246m.

Capítulo 2 Estacas sob acções sísmicas
2-17
Mo '3EpIp
H 2uo ' 90.6kNm (2.38)
2livre 'uo
H(2.39)
8 '
4 k4EpIp
' 0.399m &1 e 8L ' 8.0 > 3.0 (2.40)
2o '4Mo8
3
k(2.41)
Mo 'k
483×
uo
H' 242.0kNm (2.42)
Mo 'B
2H
2EpIp uo ' 74.5kNm (2.43)
• Não considerando o efeito de interacção (EC8, 1985; Mineiro, 2000):
• Modelo simplificado proposto por Mineiro (1988):
A rotação da cabeça da estaca, 2o , devido a um momento concentrado aplicado, Mo , pode ser
calculado com base na solução analítica das estacas flexíveis (Santos, 1993), dado que:
O valor do momento de encastramento devido ao efeito de interacção, será igual ao valor de Mo
aplicado que conduza a um valor de 2o igual a 2livre , ou seja:
• Modelo considerando que a estaca acompanha o deslocamento do solo (Soulomiac, 1986)
Nestas condições aplica-se a expressão (2.35) apresentada anteriormente:
Estes resultados mostram claramente como os diversos modelos podem conduzir a resultados
bem diferentes. O modelo que não considera o efeito de interacção e o modelo de
Soulomiac (1986) conduzem a resultados relativamente próximos, pois é fácil de deduzir que a
relação entre eles é de .3/(B2/4) . 1.2

Capítulo 2 Estacas sob acções sísmicas
2-18
2.3.4 - Modelo elástico contínuo tridimensional
2.3.4.1 - Teste de validação do modelo proposto por Soulomiac (1986)
Para verificar a validade do modelo proposto por Soulomiac (1986), torna-se necessário efectuar
análises tridimensionais, recorrendo ao método dos elementos finitos considerando o solo como
um meio contínuo.
A solução do problema foi obtida recorrendo a programas de análise dinâmica disponíveis no
DECivil do IST (ABAQUS e SAP-90). Efectuou-se uma análise modal, tendo-se imposto na base
da camada elástica uma aceleração espectral unitária actuando na direcção longitudinal da malha.
Salienta-se que, houve a preocupação de estender a malha (Figura 2.9) a uma distância
consideravelmente superior ao diâmetro da estaca (60 vezes), de modo a atingir-se dois
objectivos:
• a massa de solo envolvente seja muito superior à massa da estaca;
• o erro cometido devido à truncatura da malha nas fronteiras laterais seja praticamente
desprezável.
H = 20 m
Substrato rígido
2 r = 1.0 mo
Estaca
Solo envolvente
E = 10 GPa
= 0.2�p
p{
{E = 50 MPa
= 0.49
= 20 kN/m
�
�
s
s
s
3
rotação nula
rótula
Figura 2.8 - Cenário de estudo
PORMENOR(Ampliado 8 vezes)
Estaca
Solo envolvente
Figura 2.9 - Malha de elementos finitos
Nos nós situados nas fronteiras laterais libertou-se apenas o deslocamento segundo a direcção de
actuação do sismo e impôs-se a condição de igualdade de deslocamentos para os nós situados à
mesma profundidade.
Mostram-se, na Figura 2.10, para o 1º modo de vibração, o andamento qualitativo dos
deslocamentos e dos esforços obtidos ao longo do fuste da estaca.

Capítulo 2 Estacas sob acções sísmicas
2-19
Diagrama de momentos flectores
Diagrama de momentos flectores
Deformada
Diagrama de esforços transversos
Figura 2.10 - Deformada e diagrama de esforços
É interessante comparar os resultados obtidos pelo programa de cálculo automático com os da
aplicação da formulação analítica proposta por Soulomiac (1986). Esta comparação é apresentada
no Quadro 2.1, onde se pode constatar que a concordânica dos resultados é excelente e deve-se
essencialmente a dois factos:
• as condições de fronteira admitidas para o topo e a base da estaca estão em consonância com
o andamento sinusoidal do campo livre;
• para os parâmetros arbitrados no cenário de estudo a rigidez da massa de solo em movimento
é muito superior à rigidez da estaca isolada.
Quadro 2.1 - Comparação de resultados
M.E.F. Formulação analítica
yo=uo (m) 0.0258 0.0246
Mo (kNm) 72.5 74.5
T (s) 0.89 0.87
2.3.4.2 - Estudo paramétrico
O ponto anterior mostrou a necessidade de efectuar um estudo paramétrico mais alargado com
vista à definição do domínio de validade da formulação analítica, a qual pressupõe que a estaca
acompanha o movimento do campo livre, sofrendo os mesmos deslocamentos.
Para tal, efectuaram-se no total um conjunto de 27 cálculos correspondentes à combinação de três
valores diferentes do diâmetro (d), da espessura da camada (H) e do módulo de deformabilidade
do solo (Es):

Capítulo 2 Estacas sob acções sísmicas
2-20
Quadro 2.2 - Parâmetros utilizados no estudo paramétrico
• d=0.5, 1.0 e 1.5m
• H=5, 10 e 20m
• Es=5000kPa ((=16kN/m3), 10000kPa ((=17kN/m3) e 20000kPa ((=18kN/m3)
• <s=0.49 para todas as situações
• aceleração espectral unitária no substrato rígido
• condições de fronteira da estaca: rotulada na base e impedida de rodar à cabeça
Mostram-se na Figura 2.11 os valores da relação yo/uo , isto é, da relação entre o deslocamento
horizontal da cabeça da estaca e o deslocamento horizontal do solo em campo livre. Verifica-se
que nalgumas situações, há uma redução muito significativa do deslocamento, não sendo de facto
correcto admitir que a estaca acompanha os mesmos deslocamentos do campo livre.
0
0.2
0.4
0.6
0.8
1
1.2
0.5 1 1.5
Diâmetro da estaca (m)
y/
uo
o
H=5m,E =5000kPas
H=5m,E =10000kPas
H=5m,E =20000kPas
H=10m,E =5000kPas
H=10m,E =10000kPas
H=10m,E =20000kPas
H=20m,E =5000kPas
H=20m,E =10000kPas
H=20m,E =20000kPas
Figura 2.11 - Relação yo/uo à cabeça da estaca
Na realidade, quando a rigidez da estaca for relativamente elevada, ela opõe-se ao movimento da
massa de solo reduzindo o deslocamento horizontal y do solo na zona envolvente. Na Figura 2.12
mostram-se os valores da relação y/uo à superfície obtidos para um dos casos analisados, em que
o efeito de interacção é particulamente mais notório (Es=5000kPa, H=5m, d=1.5m). Os valores
indicados nos eixos coordenados representam os afastamentos relativos normalizados em relação
ao diâmetro da estaca (sa/d e sb/d).

Capítulo 2 Estacas sob acções sísmicas
2-21
s /da
s/d b
s /da
s/d b
Figura 2.12 - y/uo à superfície para Es=5000kPa, H=5m e d=1.5m
As isolinhas descrevem figuras com configuração aproximada de uma elipse com o eixo maior
segundo a direcção do movimento do solo, conforme mostra o pormenor à direita na Figura 2.12.
Para as zonas mais afastadas da estaca, as isolinhas obtidas descrevem trajectórias mais
irregulares devido por um lado ao efeito das fronteiras laterais e por outro à menor
pormenorização da malha de elementos finitos. Para o caso particular representado nesta figura
pode-se verificar ainda que o efeito de interacção solo-estaca na direcção do movimento do solo
é particularmente importante na zona envolvente até o afastamento de 5 diâmetros decrescendo
depois lentamente a sua importância.
As Figuras 2.13 , 2.14 e 2.15 seguintes mostram a comparação dos valores obtidos dos momentos
flectores na cabeça da estaca, Mo,com os que se obtêm por aplicação da formulação analítica
(expressão 2.35).
0
2000
4000
6000
8000
10000
0.5 1 1.5
Diâmetro da estaca (m)
E =5000kPa,y =us o o E =5000kPa,H=5ms
E =5000kPa,H=10ms E =5000kPa,H=20ms
M(k
Nm
)o
Figura 2.13 - Mo versus diâmetro da estaca para Es=5000kPa

Capítulo 2 Estacas sob acções sísmicas
2-22
0
1000
2000
3000
4000
5000
0.5 1 1.5
Diâmetro da estaca (m)
M(k
Nm
)o
E =10000kPa,y =us o o E =10000kPa,H=5ms
E =10000kPa,H=10ms E =10000kPa,H=20ms
Figura 2.14 - Mo versus diâmetro da estaca para Es=10000kPa
0
500
1000
1500
2000
2500
3000
0.5 1 1.5
Diâmetro da estaca (m)
E =20000kPa,y =us o o E =20000kPa,H=5ms
E =20000kPa,H=10ms E =20000kPa,H=20ms
M(k
Nm
)o
Figura 2.15 - Mo versus diâmetro da estaca para Es=20000kPa
A análise destes resultados mostram, efectivamente, que a formulação analítica constitui um
limite superior, quer para os deslocamentos, quer para os momentos flectores gerados à cabeça
das estacas. Este conjunto de resultados levanta de imediato duas questões pertinentes:
Q1)qual o domínio de validade da formulação analítica?
Q2)quando se verifica uma redução substancial do deslocamento devido ao efeito de
interacção quais as alterações a introduzir na formulação analítica?
Para responder à primeira questão, recorda-se que para o estudo do comportamento de estacas
flexíveis sob acções horizontais estáticas embebidas num meio discreto com módulo de reacção

Capítulo 2 Estacas sob acções sísmicas
2-23
constante em profundidade, é habitual tornar as soluções adimensionais em função do coeficiente
de rigidez relativa 8. Deste modo, tendo em conta a natureza do modelo utilizado, definiu-se um
novo coeficiente de rigidez relativa semelhante dado por:
7 '
4 Es
4EpIp
(2.44)
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4 5 6 7 8 9 10
�L
y/
uo
o
H=5m,E =5000kPas
H=5m,E =10000kPas
H=5m,E =20000kPas
H=10m,E =5000kPas
H=10m,E =10000kPas
H=10m,E =20000kPas
H=20m,E =5000kPas
H=20m,E =10000kPas
H=20m,E =20000kPas
Figura 2.16 - yo/uo à cabeça da estaca versus 7777L
A Figura 2.16 mostra os valores da relação yo/uo à cabeça da estaca em função do parâmetro
adimensional 7L para todos os 27 casos analisados. Verifica-se, curiosamente, que a estaca exibe
comportamento flexível para valores de 7L superiores a 3, limite este coincidente com o que se
obteve para as estacas sujeitas a acções horizontais estáticas aplicadas à cabeça (Santos, 1993).
Assim, quando o parâmetro 7L for superior a 3 a estaca acompanha o deslocamento do solo
tomando os mesmos deslocamentos do campo livre podendo estimar os deslocamentos e os
esforços com base na formulação analítica apresentada anteriormente.
Quanto à segunda questão, e retomando os resultados indicados nas Figuras 2.13, 2.14 e 2.15
torna-se necessário investigar qual a redução do momento flector devido ao efeito de interacção
solo-estaca.
Para tal, considera-se supostamente que a deformada da estaca continua a descrever um quarto
de uma sinusóide, ou seja, que os deslocamentos em profundidade são afectados pelo mesmo
factor de redução yo/uo. Se assim for, o momento flector à cabeça da estaca poderá ser estimado
igualmente pela expressão (2.35) bastando considerar para uo o deslocamento da cabeça da estaca

Capítulo 2 Estacas sob acções sísmicas
2-24
yo tendo em conta o efeito de interacção. Nestas condições, a redução do momento flector será
igual à redução do deslocamento devido ao efeito de interacção.
Representam-se na Figura 2.17 os valores de yo/uo em função de Mo/Muo em que Muo é calculado
com base na equação (2.35) considerando uo=yo. A análise desta figura evidencia uma boa
correlação entre as duas variavéis validando assim a hipótese considerada.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
H=5m,E =5000kPas H=10m,E =5000kPas H=20m,E =5000kPas
H=5m,E =10000kPas H=10m,E =10000kPas H=20m,E =10000kPas
H=5m,E =20000kPas H=10m,E =20000kPas H=20m,E =20000kPas
y/
uo
o
M / Mo uo
Figura 2.17 - yo/uo versus Mo/Muo
2.3.5 - Modelo discreto
Em alternativa ao modelo contínuo acabado de descrever, poder-se-á recorrer ao modelo discreto
do tipo Winkler. Admitam-se então conhecidos os deslocamentos horizontais do solo (campo
livre) e que as forças de inércia e de amortecimento ao longo do fuste da estaca podem ser
desprezadas. Nestas condições, as condições de equilíbrio e de compatibilidade conduzem à
equação seguinte:
EpIpd 4y
dx 4& k(u&y) ' 0 (2.45)
a qual é equivalente a:
EpIpd 4y
dx 4% ky ' ku (2.46)
ou seja, o efeito dos deslocamentos impostos é equivalente à actuação das forças exteriores ku.
A resolução da equação anterior pode ser feita via analítica para casos particulares simples, ou
via numérica (programa de cálculo ESTSISMO desenvolvido no IST, o qual permite introduzir

Capítulo 2 Estacas sob acções sísmicas
2-25
de uma forma simples distribuições de deslocamentos do campo livre do tipo linear, sinusoidal
ou genérica).
Os 27 casos analisados anteriormente utilizando o modelo elástico contínuo foram reanalisados
utilizando agora o modelo discreto e adoptando para o módulo de reacção um valor igual ao
módulo de deformabilidade do solo, ou seja, k=Es. O campo de deslocamentos, u, foi obtido a
partir da solução analítica exacta existente para o caso particular do meio homogéneo elástico.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
y/
u(m
od
elo
dis
cret
o)
oo
y / u (modelo contínuo)o o
H=5m,E =5000kPas H=10m,E =5000kPas H=20m,E =5000kPas
H=5m,E =10000kPas H=10m,E =10000kPas H=20m,E =10000kPas
H=5m,E =20000kPas H=10m,E =20000kPas H=20m,E =20000kPas
Figura 2.18 - Modelo discreto versus modelo contínuo. Comparação dodeslocamento à cabeça da estaca
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
H=5m,E =5000kPas H=10m,E =5000kPas H=20m,E =5000kPas
H=5m,E =10000kPas H=10m,E =10000kPas H=20m,E =10000kPas
H=5m,E =20000kPas H=10m,E =20000kPas H=20m,E =20000kPas
M/
M(m
od
elo
dis
cret
o)
ou
o
M / M (modelo contínuo)o uo
Figura 2.19 - Modelo discreto versus modelo contínuo. Comparação domomento flector à cabeça da estaca

Capítulo 2 Estacas sob acções sísmicas
2-26
As Figuras 2.18 e 2.19 mostram que para as estacas rígidas o modelo discreto conduz a resultados
mais conservativos comparativamente com o modelo contínuo enquanto que para as estacas
flexíveis inverte-se a tendência dos valores. De qualquer modo, a discrepância de resultados é,
em geral, inferior a 10%, validando assim a utilização do modelo discreto com k=Es, o qual é
muito mais expedito do que o modelo contínuo.
Aliás, cita-se o trabalho de Reis et al. (1989), em que aqueles autores descreveram a utilização
deste tipo de modelo discreto para o dimensiomento das estacas de fundação da nova ponte de
Alcácer do Sal.
2.4 - Modelos rigorosos de interacção cinemática solo-estaca
Em rigor, o efeito de interacção cinemática solo-estaca deve ser analisado recorrendo a análises
dinâmicas tridimensionais aplicando o método dos elementos finitos ou em alternativa, utilizando
formulações mistas com elementos de fronteira para a modelação do solo envolvente.
A utilização do método dos elementos finitos levanta algumas dificuldades, aliás bem conhecidas
da literatura, dada a sua dificuldade em modelar fronteiras infinitas e de assegurar as adequadas
condições de radiação nas fronteiras laterais e na base (Novak, 1991). É de destacar, neste
domínio, as formulações por elementos finitos especiais recentemente propostas por Wolf e
Song (1996).
Os primeiros trabalhos com estudos mais rigorosos acerca do comportamento de estacas sob
acções dinâmicas basearam-se em formulações por elementos de fronteira, admitindo o solo como
um material elástico e isótropo com amortecimento histerético linear. Todos estes trabalhos se
baseiam na utilização de funções de Green que relacionam o campo de deslocamentos no interior
do solo com as tensões actuantes na interface solo-estaca. Várias abordagens diferentes foram
apresentadas consoante o tipo de carregamento admitido para cada troço elementar da estaca
variando desde cargas pontuais, cargas distribuídas em linha ou em disco e finalmente cargas
cilíndricas.
A aplicação da função de Green para todos os troços elementares ao longo do fuste da estaca
permite obter a matriz de flexibilidade dinâmica do solo envolvente. A inversão desta matriz
conduz à matriz de rigidez dinâmica do solo a qual combinada com a matriz de rigidez da estaca
permite obter finalmente a matriz de rigidez global do sistema solo-estaca. Para a modelação da
estaca, recorre-se habitualmente a elementos finitos de barra. Destacam-se, no domínio do estudo
do efeito de interacção cinemática solo-estaca, os trabalhos de Kaynia (1982), Kaynia e
Kausel (1991), Mammon e Banerjee (1990) e Ke Fan et al. (1991).

Capítulo 2 Estacas sob acções sísmicas
2-27
Estes estudos mais rigorosos, embora escassos, têm permitido compreender melhor a
complexidade do problema de interacção cinemática solo-estaca e abriram caminho para o
desenvolvimento de métodos mais expeditos calibrados com base nos resultados obtidos a partir
dos métodos mais rigorosos.
Wolf (1994) propôs um modelo físico simples em que o solo é idealizado por um cone truncado.
Cada um dos graus de liberdade do modelo é tratado de forma desacoplada ou isolada conduzindo
às respectivas funções de Green para o modelo aproximado. Assim, o modelo de cone pode ser
considerado como uma formulação simplificada unidimensional por elementos de fronteira, com
potencialidades de aplicação prática no domínio da dinâmica.
Surgem ainda nesta linha dos métodos expeditos, estudos baseados no modelo discreto de
Winkler adaptado agora às acções dinâmicas. O primeiro trabalho baseado neste modelo foi
apresentado por Flores-Berrones e Whitman (1982) para o estudo do problema de interacção
cinemática solo-estaca, quando o sistema é solicitado por uma acção harmónica na base. O solo
foi admitido como uma camada elástica homogénea assente sobre substrato rígido e sem
amortecimento.
Posteriormente, o modelo foi sujeito a sucessivos melhoramentos, destacando-se os estudos
levados a cabo por Gazetas e seus colaboradores (Makris e Gazetas,1992; Kavvadas e Gazetas,
1993; Nikolaou e Gazetas, 1997). Foram introduzidos adequadamente no modelo os
amortecimentos histerético e por radiação do solo, a possibilidade de incorporar camadas de solo
com diferentes características, o efeito de grupo entre estacas e ainda a extensão para o domínio
do tempo utilizando a técnica bem conhecida da transformada discreta de Fourier. Este modelo
é conhecido na literatura pelas suas iniciais em inglês: BDWF ("beam on dynamic Winkler
foundation").
Para o estudo de interacção cinemática solo-estaca a desenvolver neste trabalho aplicou-se este
último modelo tendo em conta as suas óbvias vantagens em termos de tempo de cálculo quando
comparado com os modelos mais rigorosos. Os estudos comparativos de resultados mostram que
mesmo em condições extremas as diferenças são inferiores a 15%, o que viabiliza perfeitamente
a sua utilização prática. No presente trabalho, o referido modelo é ainda melhorado incorporando
o comportamento não linear do solo.
Proceder-se-á, seguidamente, a uma descrição pormenorizada deste modelo com a apresentação
de alguns resultados de comparação com modelos tridimensionais mais rigorosos para sua
validação.

Capítulo 2 Estacas sob acções sísmicas
2-28
2.4.1 - Modelo BDWF (Beam on Dynamic Winkler Foundation) para estaca
isolada
2.4.1.1 - Descrição do modelo. Soluções analíticas
No modelo BDWF aplicado ao estudo de interacção cinemática solo-estaca, o solo que resiste ao
movimento lateral da estaca é modelado através de um conjunto de molas, k(x), e de
amortecedores, c(x) com características dependentes da frequência de excitação. O movimento
do solo (campo livre) é obtido através da teoria de propagação das ondas sísmicas (Figura 2.20).
Figura 2.20 - Modelo BDWF
Considera-se então em primeiro lugar o caso particular simples de uma estaca embebida numa
camada elástica homogénea assente sobre substrato rígido, onde é aplicada uma acção harmónica
na base de amplitude ub, como mostra a Figura 2.21 seguinte:
Substrato rígido
� = 0o
U =u eb b
i t�
H
uy
u
y
z
y
deslocamentodo solo
deslocamentoda estaca
x
Figura 2.21 - Modelo de Flores-Berrones (1982)

Capítulo 2 Estacas sob acções sísmicas
2-29
EpIpM4y
Mx 4% m
M2y
Mt 2% c
M(y&u)Mt
% k(y&u) ' 0 (2.47)
y ' y(z,t) ' y(z)e iTt (2.48)
y(z) ' A % Bcos(az) % Csen(az) , com a 'Tvs
(2.49)
Este problema foi investigado de forma pioneira por Flores-Berrones e Whitman (1982), embora
tendo aqueles autores desprezado o efeito do amortecimento.
O amortecimento do solo pode ser introduzido de uma forma simples na equação de equilíbrio
dinâmico que é dada por:
em que:
EpIp = módulo de flexão da estaca
y = deslocamento relativo da estaca em relação ao substrato
x = profundidade
m = massa da estaca por unidade de comprimento
t = tempo
c = coeficiente do amortecedor
k = módulo de reacção do solo
y = deslocamento absoluto da estaca
u = deslocamento absoluto do solo
A resposta da estaca apoiada neste conjunto de molas e de amortecedores e excitada nestes pontos
de apoio pela acção do movimento do campo livre é obtida resolvendo a equação de equilíbrio
dinâmico (2.47) tendo em conta as condições de fronteira nos extremos da estaca. Admite-se
desprezável o efeito do amortecimento da própria estaca.
Em regime de vibração permanente, Flores-Berrones e Whitman (1982) admitiram uma solução
aproximada para a equação (2.47) do tipo:
em que
Aqueles autores determinaram as constantes A, B e C e obtiveram a solução aproximada do
problema não considerando o efeito do amortecimento do solo, o que limita a sua aplicação
prática.
Assim, e seguindo a mesma linha de investigação daqueles autores, apresenta-se no Anexo do
Capítulo 8 a dedução da solução aproximada, mas incluindo agora o efeito do amortecimento do
solo.

Capítulo 2 Estacas sob acções sísmicas
2-30
y ' {' [cos(az)% tg(aH)sen(az)]}ub e iTt (2.50)
' 'k% i cT
EpIp a 4%k&mT2% i cT (2.51)
y(x) ' e8cx [C1 cos(8cx)%C2 sen(8cx) ] % e
&8cx [C3 cos(8cx)%C4 sen(8cx) ] % 'ubcos(ax)cos(aH)
(2.52)
8c '
4k&mT2% i cT
4EpIp
(2.53)
0 1 0 &1
&1 1 &1 &1
e8cHcos(8cH) e
8cHsen(8cH) e&8cHcos(8cH) e
&8cHsen(8cH)
&e8cHcos(8cH) e
8cHsen(8cH) e&8cHcos(8cH) &e
&8cHsen(8cH)
C1
C2
C3
C4
'
' a 2
282ccos(aH)
0
1&'
' a 2
282c
(2.54)
Demonstra-se que o deslocamento absoluto da estaca pode ser expresso pela equação seguinte:
em que,
e o valor de a é calculado com base na expressão (2.49) mas considerando a velocidade complexa
das ondas de corte.
Salienta-se que, esta solução aproximada apresenta a 1ª derivada nula à superfície, ou seja, está
implícita a condição de rotação nula à cabeça da estaca.
Ainda para o caso particular em análise existe solução analítica exacta cuja dedução é apresentada
no Anexo do Capítulo 8. A solução exacta em termos de deslocamentos absolutos é traduzida
pela equação seguinte:
em que,
As constanstes C1, C2, C3 e C4 são determinadas tendo em conta as condições de fronteira nos
extremos da estaca. Tomando para o deslocamento da base uma amplitude unitária (ub=1), é-se
conduzido a um sistema de (4x4) cujas incógnitas são as constantes que se pretendem determinar
(ver Anexo do Capítulo 8):
• estaca com cabeça livre

Capítulo 2 Estacas sob acções sísmicas
2-31
1 1 &1 1
&1 1 &1 &1
e8cHcos(8cH) e
8cHsen(8cH) e&8cHcos(8cH) e
&8cHsen(8cH)
&e8cHcos(8cH) e
8cHsen(8cH) e&8cHcos(8cH) &e
&8cHsen(8cH)
C1
C2
C3
C4
'
0
0
1&'
'a 2
282c
(2.55)
c(x) . cm(x) % cr(x) (2.56)
cm(x) '2k(x)>T
(2.57)
• estaca com cabeça impedida de rodar
Uma vez determinadas as constantes, os esforços (momento flector e esforço transverso) ao longo
do fuste da estaca podem ser obtidos sem dificuldade a partir da derivação da função de
deslocamentos.
Salienta-se, ainda que, ao estabelecer uma comparação directa entre as equações (2.50) e (2.52),
concluiu-se que a solução aproximada proposta por Flores-Berrones e Whitman não é mais do
que a solução particular do problema, que como se verá mais adiante, é em muitas situações
praticamente dominante.
2.4.1.2 - Amortecimento histerético do solo e amortecimento por radiação
Um dos pontos chave do modelo BDWF tem a ver com a adequada modelação do amortecimento
que é composto por duas componentes, uma de natureza histerética do solo, cm, e outra devida
ao efeito de radiação, cr :
Admitindo para o solo um amortecimento do tipo histerético o coeficiente cm é dado
simplesmente por:
Quanto à avaliação do amortecimento por radiação, vários modelos baseados na teoria de
propagação das ondas (unidimensionais, bidimensionais e tridimensionais) foram apresentados
por diferentes autores.
O modelo unidimensional proposto por Berger et al. (1977) aplica a analogia com a teoria de
propagação unidimensional das ondas numa barra com comprimento semi-infinito . Com base
nesta teoria, o amortecedor com coeficiente c=DvA absorve a energia de uma onda propagando-se

Capítulo 2 Estacas sob acções sísmicas
2-32
cr ' 2bDs vs 1%vp
vs
(2.58)
com velocidade v num meio com massa volúmica D e área tranversal A. Tentando aplicar para
o caso das estacas, Berger et al. (1977) consideraram que numa secção horizontal da estaca se
gerariam apenas ondas de compressão-extensão P na direcção do movimento da estaca e ondas
de corte S na direcção ortogonal. Considerando para a estaca um largura efectiva b, aqueles
autores propuseram que o coeficiente do amortecedor, cr (considerando apenas o efeito da
radiação) fosse estimado pela expressão seguinte:
Este modelo simplificado apresenta duas desvantagens importantes que limita de certa forma a
sua aplicação prática. Primeiro, o facto de limitar a propagação das ondas em zonas restritas de
secção constante e largura b, dá-se origem a amortecedores cujas características não dependem
da frequência de excitação. Por outro lado a consideração da velocidade vp em zonas de
compressão-extensão torna a equação proposta extremamente sensível ao valor do coeficiente de
Poisson <s, tendendo para valor infinito quando <s toma o valor de 0.5.
Um outro modelo bidimensional em estado plano de deformação foi utilizado por Novak et al.
(1978). Obtiveram a solução dinâmica rigorosa para uma excitação horizontal numa barra rígida
de secção circular e comprimento infinito embebida num meio viscoelástico infinito. Os
resultados obtidos por este modelo mostraram que ao contrário do que sucedia anteriormente com
o modelo unidimensional, o coeficiente cr decrescia com o aumento da frequência de excitação.
Posterioremente Roesset (1980), baseando-se numa formulação tridimensional pelo método dos
elementos finitos, tentou relacionar, ao nível local, a reacção do solo com o respectivo
deslocamento com o objectivo de deduzir os coeficientes das molas e dos amortecedores.
Com base nestes estudos anteriores, Gazetas e Dobry (1984a e 1984b) propuseram então um
modelo simplificado que pode ser considerado como o modelo de Berker melhorado em estado
plano de deformação. Este modelo baseia-se na hipótese de considerar a propagação de ondas
de compressão-extensão em dois quadrantes na direcção do movimento da estaca e a propagação
de ondas de corte nos dois restantes quadrantes ortogonais (Figura 2.22). Admitindo que só
existe deformações no plano horizontal, assumiram que as ondas de corte se propagariam com
a velocidade, vs ,e as ondas de compressão-extensão se propagariam com uma velocidade
aparente vc próxima da velocidade de Lysmer, vLa, a qual é habitualmente utilizada para o estudo
de fundações superficiais sujeitas a acções dinâmicas. A utilização da velocidade vLa em vez da
velicidade vp ultrapassa uma das limitações apontadas ao modelo de Berker, quanto à sua
sensibilidade relativamente ao valor do coeficiente de Poisson.

Capítulo 2 Estacas sob acções sísmicas
2-33
cr ' 2dDs vs 1%vc
vs
5/4a &1/4
o (2.59)
ao 'Tdvs
(2.60)
vc . vLa '3.4vs
B (1&<)(2.61)
vc . vs (2.62)
Secção transversal (planta)
vLavLa
vs
vs
Estaca sujeita a acções dinâmicas
�z=0
Figura 2.22 - Modelo de radiação 2-D (Gazetas e Dobry, 1984a)
O coeficiente do amortecedor é assim obtido somando as contribuições dos quatro quadrantes e
a expressão proposta por Gazetas e Dobry (1984a, 1984b) para estacas circulares é a seguinte:
em que,
e
Para zonas próximas da superfície (x<2.5d) onde o efeito tridimensional se faz sentir devido à
aproximação a uma fronteira livre os autores Kavvadas e Gazetas (1993) propuseram que se
adoptasse:

Capítulo 2 Estacas sob acções sísmicas
2-34
k(x) . * Es(x) (2.63)
No entanto, estudos de sensibilidade efectuados neste trabalho permitiram constatar que os
resultados não são praticamente afectados por esta correcção na zona superficial, pelo que este
efeito não foi considerado nas análises de interacção cinemática solo-estaca que se vão apresentar.
Mostra-se na Figura 2.23, extraída de Gazetas e Dobry (1984a), a comparação dos diferentes
modelos para dois valores do coeficiente de Poisson (<=0.25 e <=0.40), evidenciando um relativo
bom ajustamento dos resultados do modelo de Gazetas e Dobry (1984) com os de modelos mais
rigorosos.
Figura 2.23 - Valores de cr para diferentes modelos
2.4.1.3 - Módulo de reacção das molas
Gazetas e seus colaboradores (Makris e Gazetas,1992; Kavvadas e Gazetas,1993) baseando-se
em resultados mais rigorosos obtidos pelo método dos elementos finitos (3-D) concluem que o
módulo de reacção das molas, k(x), se poderia considerar independente da frequência de
excitação e proporcional ao módulo de deformabilidade do solo:
Tratando-se de um modelo discreto que pretende simular a resposta duma estaca embebida num
meio contínuo é natural que este parâmetro * dependa da rigidez relativa solo-estaca tal como
acontece para as acções estáticas.

Capítulo 2 Estacas sob acções sísmicas
2-35
k(x) . 2.1 Es(x) , para estacas com cabeça livre (2.64)
k(x) . 1.2 Es(x) , para estacas com rotação impedida à cabeça (2.65)
yub
' fxH
,TT1
,Ep
Es
,Hd
, <s , > ,Dp
Ds
(2.66)
Aqueles autores levaram a cabo um conjunto importante de estudos paramétricos, quer para
estacas com cabeça livre, quer para estacas com rotação impedida à cabeça, em meio homogéneo
e em meios estratificados constituídos por duas camadas com características diferentes. Destes
estudos concluiram que os deslocamentos da estaca são pouco sensíveis ao valor de *.
Contrariamente, os esforços máximos na estaca exibem alguma sensibilidade ao valor de * mas
apenas para frequências próximas da frequência fundamental do terreno.
O ajustamento dos resultados para excitações com frequência igual à frequência fundamental do
terreno para casos de meio homogéneo e casos em que o meio é composto por dois estratos
diferentes levou a que Makris e Gazetas (1992) e Makris (1994) propusessem a adopção dos
seguintes valores de *:
e
Convém salientar, que a adopção destes valores não implica um grande prejuízo na precisão dos
resultados, uma vez que a acção sísmica não se trata de uma solicitação harmónica simples com
frequência igual à frequência fundamental do terreno.
2.4.2 - Aplicação do modelo BDWF ao estudo do efeito de interacção
cinemática solo-estaca num meio homogéneo
2.4.2.1 - Variáveis adimensionais
A solução analítica exacta apresentada anteriormente para o caso particular do meio elástico
homogéneo permite identificar de forma clara quais as variáveis independentes que intervêm no
problema de interacção cinemática solo-estaca e por outro lado ainda exprimir a solução sob a
forma de variáveis adimensionais.
No que respeita aos deslocamentos, os termos da equação geral (2.52) podem ser expressos em
função de sete variavéis independentes:

Capítulo 2 Estacas sob acções sísmicas
2-36
k ' 1.2Es % Es (2.67)
icT ' i (cm % cr) em que:
icmT ' i2.4Es> % Es f(>)
icrT ' iEs
1%3.4
B(1&<s)
5/4
2 (1%<s)TT1
B2
dH
3/4
% Es fTT1
,dH
, <s
(2.68)
mT2 'B3
13
Es
2(1%<s)TT1
2 dH
2 Dp
Ds
% Es fTT1
,Hd
, <s ,Dp
Ds
(2.69)
Ep Ip a 4 'B5
1024Es
Ep
Es
TT1
4 dH
4 1
(1%i2>)2% Es f
TT1
,Ep
Es
,Hd
, > (2.70)
' 'k% i cT
EpIp a 4%k&mT2% i cT' f
TT1
,Ep
Es
,Hd
, <s , > ,Dp
Ds(2.71)
ax 'B2
xH
TT1
1
1%2i>% f
xH
,TT1
, > (2.72)
8c x ' x4
k&mT2% i cT4Ep Ip
'xH
4k&mT2% i cT
4Ep Ip
H 4
' fxH
,TT1
,Ep
Es
,Hd
, <s , > ,Dp
Ds
(2.73)
Aliás, após algumas manipulações algébricas faz-se notar que para uma estaca com rotação
impedida ao nível da cabeça:
O parâmetro ' não depende explicitamente de Es, podendo ser expresso em função das variáveis
independentes atrás mencionadas:
As restantes variáveis que faltam analisar são:

Capítulo 2 Estacas sob acções sísmicas
2-37
M
Dp d 4T2' f
xH
,TT1
,Ep
Es
,Hd
, <s , > ,Dp
Ds(2.74)
V
Dp d 3T2' f
xH
,TT1
,Ep
Es
,Hd
, <s , > ,Dp
Ds(2.75)
De forma análoga é possível exprimir os momentos flectores (M) e os esforços transveros (V) sob
a forma adimensional em função das variáveis independentes:
Note-se que se tomou para a base um deslocamento de amplitude unitária. Os esforços expressos
nas duas equações anteriores representam assim valores adimensionais para excitações
harmónicas com aceleração unitária na base.
Uma vez conhecidas quais as variavéis independentes que controlam o efeito de interacção
cinemática solo-estaca é possível agora compreender melhor o problema analisando a influência
isolada das diferentes variáveis. Discute-se então, seguidamente, a influência dos parâmetros
mais importantes: a frequência da excitação, o amortecimento e a rigidez relativa solo-estaca.
2.4.2.2 - Efeito da frequência
Sendo um problema de natureza dinâmica, a frequência da excitação e mais concretamente a sua
aproximação em relação às frequências próprias de vibração do terreno, caracterizado pela relação
T/T1 é, sem dúvida, um dos parâmetros mais importantes. O movimento do campo livre é como
já referido anteriormente, dominado essencialmente pelo modo de vibração fundamental do
terreno sendo o efeito dos modos mais altos praticamente desprezável. Porém, para estes modos
mais altos a estaca não consegue acompanhar a forma irregular da deformada do solo podendo
conduzir assim a esforços de interacção não desprezáveis.
A Figura 2.24 ilustra o andamento do parâmetro Iu em função da frequência podendo identificar
claramente a existência de três zonas distintas em termos de comportamento da estaca:
• uma zona de baixas frequências em que a estaca consegue acompanhar o movimento do solo
caracterizado por comprimentos de onda elevados. O parâmetro Iu toma valores próximos
da unidade;
• uma zona de frequências intermédias em que se assiste a um decréscimo rápido do parâmetro
Iu devido à dificuldade da estaca conseguir acompanhar o andamento ondulatório da
deformada do terreno.

Capítulo 2 Estacas sob acções sísmicas
2-38
• uma zona de altas frequências em que se verifica uma flutuação dos valores de Iu. Neste
domínio, o crescente efeito do andamento ondulatório da deformada do solo é
contrabalançado pelo efeito da redução da amplitude do movimento do solo.
Iu
����
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4 5 6 7 8 9 10
E =1000Ep s Ep=5000Es E =10000Ep s
E =20000Ep s solução exacta
H/d=20 , =5% ,
�s=0.4 ; s=0.7 p
Figura 2.24 - Meio homogéneo: H/d=20, ξ=5%, νξ=5%, νξ=5%, νξ=5%, νs=0.4, ρρρρs/ρρρρp=0.7. Solução aproximada versus solução exacta
Esta mesma Figura 2.24 apresenta ainda a comparação dos resultados obtidos pela solução
analítica exacta e pela solução analítica aproximada descritos anteriormente. Nota-se uma boa
concordância das duas soluções no domínio das baixas e intermédias frequências. Para
frequências mais elevadas a solução particular diverge da solução exacta (representada com linhas
a cheio) indicando que a parcela correspondente à solução homogénea não pode ser desprezada
nestas situações.
Mostra-se a seguir, a título ilustrativo, na Figura 2.25 a distribuição dos esforços para frequências
de excitação iguais às três primeiras frequências próprias da camada elástica e com as
características indicadas. Sendo variáveis complexas, indicam-se a parte real, a parte imaginária
e o valor absoluto dos esforços normalizados.

Capítulo 2 Estacas sob acções sísmicas
2-39
H/d=20 , =5% , �s=0.4
Ep/Es=1000 , s=0.7 p
���� ����� �� ��
10
15
0
5
10
15
20
-80 -60 -40 -20 0 20 40 60 80
Re(M)/ d�����p
4 2
0
5
10
15
20
-40 -20 0 20 40
Re(V)/ d�����p
3 2
Pro
f.re
lati
va
x/H
Pro
f.re
lati
va
x/H
0
5
10
15
20
-1400 -1000 -600 -200 200 600
0
5
10
15
20
-200 -100 0 100 200
Pro
f.re
lati
va
x/H
Pro
f.re
lati
va
x/H
Im(M)/ d�����p
4 2Im(V)/ d�����p
3 2
0
5
10
15
20
0 200 400 600 800 1000 1200 1400
0
5
20
0 50 100 150 200
Pro
f.re
lati
va
x/H
Pro
f.re
lati
va
x/H
|M|/ d�����p
4 2|V|/ d�����p
3 2
Figura 2.25 - Meio homogéneo: H/d=20, ξ=5%, νξ=5%, νξ=5%, νξ=5%, νs=0.4, Ep/Es=1000, ρρρρs/ρρρρp=0.7.Diagramas de esforços
Para este caso particular, verifica-se uma maior contribuição dos modos altos nos esforços
transversos do que nos momentos flectores. Fica igualmente bem ilustrado, que para estes modos
mais altos a estaca não consegue acompanhar a forma irregular da deformada do solo podendo
conduzir assim a esforços de interacção não desprezáveis.

Capítulo 2 Estacas sob acções sísmicas
2-40
2.4.2.3 - Efeito do coeficiente de amortecimento
Antes de analisar o efeito do amortecimento, salienta-se que para a grande maioria das situações
práticas, excluindo apenas as estacas rígidas sujeitas a frequências intermédias a elevadas, a
solução particular do problema é praticamente dominante (Figura 2.26).
0
5
10
0 1 2 3 4 5 6
solução exacta solução particular
|y|/ub
H/d=10 , =10% ,
�s=0.4 Ep /Es=10000 ,
s=0.7 p
Pro
f.re
lati
va
x/H
Figura 2.26 - Meio homogéneo: ωωωω=ωωωω1, H/d=10, ξ=10%, νξ=10%, νξ=10%, νξ=10%, νs=0.4,Ep/Es=10000, ρρρρs/ρρρρp=0.7. Solução particular versus solução exacta
Isto quer dizer, que o problema de interacção cinemática é particularmente condicionado pelos
deslocamentos do campo livre. Assim sendo, os esforços de interacção na estaca serão afectados
pelo amortecimento essencialmente pela forma como este parâmetro afecta os deslocamentos do
campo livre.
Mostram-se nas Figuras 2.27 e 2.28 os valores máximos dos esforços Mo (no topo) e Vb (na base)
em função da frequência para dois níveis de amortecimento.

Capítulo 2 Estacas sob acções sísmicas
2-41
0
2000
4000
6000
8000
10000
12000
14000
0 2 4 6 8 10
� � ����
����
�pd� �
|M |o
H/d=20 , �s=0.4
Ep/Es=5000 , s=0.7 p
Figura 2.27 - Meio homogéneo: H/d=20, ννννs=0.4, Ep/Es=5000, ρρρρs/ρρρρp=0.7.|Mo| versus ωωωω/ωωωω1
����
0
100
200
300
400
500
0 2 4 6 8 10
� � ����
�pd� �
|V |b
H/d=20 , �s=0.4
Ep/Es=5000 , s=0.7 p
Figura 2.28 - Meio homogéneo: H/d=20, ννννs=0.4, Ep/Es=5000, ρρρρs/ρρρρp=0.7.|Vb| versus ωωωω/ωωωω1
A análise destas figuras permite concluir que as curvas têm andamento semelhante verificando-se
uma relação de aproximadamente dois entre os valores de pico das curvas, valor esse que coincide
com a relação dos factores de amplificação dinâmica dos deslocamentos do campo livre.

Capítulo 2 Estacas sob acções sísmicas
2-42
2.4.2.4 - Efeito da rigidez relativa
À partida como os esforços actuantes na estaca são proporcionais ao módulo de flexão EpIp seria
de esperar que os esforços de interacção crescessem com a relação Ep/Es. Para as estacas com
comportamento flexível (relação H/d elevada) e no domínio das baixas frequências (T#T1), o
parâmetro Iu toma valores próximos da unidade, isto é, a estaca acompanha praticamente o
movimento do campo livre, e os esforços variam, neste caso, linearmente com a relação Ep/Es.
Para estacas mais rígidas e no domínio das médias a altas frequências a estaca não consegue
acompanhar os deslocamentos do campo livre traduzindo-se por valores mais baixos do
parâmetro Iu. Nestas situações, verifica-se então uma redução dos deslocamentos e dos esforços
adimensionais da estaca.
A influência das quatro principais variáveis acabadas de descrever (ω/ω1, ξ, Ep/Es, H/d) fica bem
ilustrada nas Figuras 2.29 e 2.30 seguintes.
=5%;H/d=10 =5%;H/d=20 =5%;H/d=40
=10%;H/d=10 =10%;H/d=20 =10%;H/d=40
E /Ep s
0
5000
10000
15000
20000
25000
0 5000 10000 15000 20000
�s=0.4 , s=0.7 p ,
����
Ep/Es
�pd� �
|M |o
�pd� �
|M |o
0
2000
4000
6000
8000
0 5000 10000 15000 20000
�s=0.4 , s=0.7 p ,
�����
Figura 2.29 - Meio homogéneo:Valores de |Mo|
=5%;H/d=10 =5%;H/d=20 =5%;H/d=40
=10%;H/d=10 =10%;H/d=20 =10%;H/d=40
�p
3d �
|V |b
Ep/Es
0
500
1000
1500
2000
2500
3000
0 5000 10000 15000 20000
�s=0.4 , s=0.7 p ,
����
�p
3d �
|V |b
0
200
400
600
800
1000
0 5000 10000 15000 20000
�s=0.4 , s=0.7 p ,
�����
Ep/Es
Figura 2.30 - Meio homogéneo: Valores de |Vb|

Capítulo 2 Estacas sob acções sísmicas
2-43
2.4.3 - Modelo BDWF. Efeito de grupo
Ao contrário, daquilo que sucede com as acções estáticas ou dinâmicas aplicadas ao nível do topo
das estacas, em que o efeito de interacção é importante e deve ser devidamente contemplado nas
análises, mostra-se como o efeito de grupo é praticamente desprezável no problema de interacção
cinemática estaca-solo-estaca.
Para analisar o efeito do grupo Makris e Gazetas (1992) propuseram um método geral aproximado
que envolve a consideração de três etapas de cálculo (Figura 2.31):
1) calcula-se a deformada da estaca 1 (considerando-a como isolada) devida ao efeito de
interacção cinemática solo-estaca;
2) calcula-se a diferença entre os deslocamentos da estaca e os deslocamentos do campo livre:
)u(x)=y(x)-u(x); esta diferença gera ondas ao longo do fuste da estaca e considera-se
simplificadamente, que elas se propagam apenas no plano horizontal; assim no local da
estaca 2 se esta não estivesse presente, a chegada das ondas atenuadas produziriam um
deslocamento lateral do solo )us(x);
3) a solução final considerando o efeito de grupo obtém-se sobrepondo os deslocamentos da
estaca isolada e os deslocamentos de interacção adicionais devidos a )us(x).
Estaca 1
y(x)
u(x)
x
�u(x)Estaca 2
� � �u (x)= (r, )s �u(x)
Figura 2.31 - Método proposto por Makris e Gazetas (1992) para analisar o efeitode grupo para estacas sujeitas a acções dinâmicas

Capítulo 2 Estacas sob acções sísmicas
2-44
y(x) • ub'cos(ax)cos(aH)
(2.76)
)u(x) ' ub ('&1)cos(ax)cos(aH)
(2.77)
)us( r ,2 ,x ) ' R( r ,2 ) )u(x) (2.78)
R( r ,2 ) ' R( r ,0)cos22 % R( r ,B2
)sen 22 (2.79)
R( r ,0) 'ro
re&>TrVLa e
&iTrVLa (2.80)
R( r ,B2
) 'ro
re&>TrVs e
&iTrVs (2.81)
)u21(x) ' R(r,2)ub' ('&1)cos(ax)cos(aH)
(2.82)
Considera-se o caso do meio elástico homogéneo, contemplando apenas o efeito da propagação
vertical das ondas de corte. Viu-se, anteriormente, através do modelo BDWF que a solução
particular do problema (em termos de deslocamentos) é praticamente dominante pelo que a
expressão geral (2.52) pode ser simplificada conduzindo a:
donde,
Esta diferença de deslocamentos origina o aparecimento de novas ondas que se vão propagar a
partir da estaca 1 de raio ro até à estaca 2 situada a uma distância r. Este campo de ondas
difractadas pode ser descrito através de funções de atenuação propostas por Dobry e Gazetas
(1988). Seguindo a metodologia proposta por aqueles autores, o valor de )us pode ser obtido pela
expressão simplificada seguinte:
em que:
O factor 1//r representa a redução da amplitude devido ao amortecimento geométrico ou
amortecimento por radiação. O primeiro termo exponencial representa o amortecimento
histerético do solo (>) enquanto que o outro termo exponencial descreve a propagação radial da
onda com velocidade VLa para 2=0 e velocidade Vs para 2=B/2.
Os deslocamentos adicionais na estaca receptora 2, u21, obtêm-se resolvendo a equação de
equilíbrio dinâmico impondo o campo de deslocamentos )us(x). Considerando novamente apenas
a solução particular tem-se:

Capítulo 2 Estacas sob acções sísmicas
2-45
"21(x) 'u21(x)
y(x)' R(r,2) ('&1) (2.83)
O factor de interacção dinâmico "21 para o efeito de interacção cinemática solo-estaca será assim
dado por:
À semelhança das acções estáticas no topo, o efeito de grupo para qualquer arranjo de estacas
poderá ser analisado recorrendo aos factores de interacção.
A Figura 2.32 ilustra para um caso particular com as características indicadas a variação das
partes real e imaginária do factor de interacção em função da frequência normalizada T/T1.
Na Figura 2.33 pretende-se ilustrar a influência do espaçamento no valor do factor de interacção.
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 1 2 3 4 5 6 7 8 9 10
H/d=20 , =5% , �s=0.4
Ep/Es=1000 , s=0.7 p
s/d=3
Parte real Parte imaginária Valor absoluto
�
����
21
Figura 2.32 - Factor de interacção dinâmico. Partes real e imaginária
� ��
����
0
0.1
0.2
0.3
0.4
0 1 2 3 4 5 6 7 8 9 10
s/d=3 s/d=6 s/d=10
H/d=20 , =5% , �s=0.4
Ep/Es=1000 , s=0.7 p
21
Figura 2.33 - Factores de interacção dinâmicos para diferentes espaçamentos

Capítulo 2 Estacas sob acções sísmicas
2-46
8H '
4 k4Ep Ip
'Hd
4 1.2Es
4EpB64
' 204
1.2
4×1000×B64
' 5.6(2.84)
"DF ' 0.6Dc
Ep
Gc
17
ro
s(1%cos2R) '
' 0.6Dc
Ep
Es
×2(1%<s)
1%0.75<s
17 d
2s(1%cos2R) ' 0.599 > 0.5
pelo que após correcção,
"DF ' 1&(4×0.599)&1 ' 0.582
(2.85)
A análise destas figuras permite evidenciar aspectos importantes do efeito de grupo na interacção
cinemática solo-estaca:
• enquanto que para as acções estáticas os factores de interacção são valores reais e tomam
sempre valores positivos e inferiores à unidade, para as acções dinâmicas as partes real e
imaginária dos factores de interacção flutuam em função da frequência podendo tomar
valores positivos ou negativos. Os valores negativos corrrespondem a ondas originadas da
estaca 1 e que chegam à estaca receptora 2 com oposição de fase induzindo por isso valores
de u21 com sinal exactamente contrário aos deslocamentos y(x) da própria estaca 2
(considerada como isolada). Como consequência, a rigidez de um grupo de estacas sob
acções dinâmicas poderá nalgumas situações ser até superior à soma das rigidezes de cada
uma das estacas individualmente;
• para condições iguais de espaçamento e de rigidez relativa os factores de interacção estáticos
são maiores do que os correspondentes valores dinâmicos. Para o exemplo particular
indicado na Figura 2.32 as estacas exibem comportamento flexível relativamente às cargas
estáticas uma vez que o parâmetro 8H é maior que 3.0 (vide Capítulo 6):
podendo aplicar a equação proposta por Randolph (1981), conduzindo para o factor de
interacção estático o valor de:
e faz-se notar que, para as acções dinâmicas os valores do factor de interacção são
consideravelmente menores não ultrapassando 0.2 mesmo para frequências até 5 vezes a
frequência fundamental do terreno (Figura 2.33);
• para frequências inferiores a 3 vezes a frequência fundamental do terreno, os factores de
interacção dinâmicos tomam valores muito baixos (<0.05), conforme mostra a Figura 2.33.

Capítulo 2 Estacas sob acções sísmicas
2-47
Como os esforços de interacção na estaca são condicionados essencialmente pelo conteúdo
de frequências do sismo na gama entre o 1º e o 2º modo de vibração do terreno (vide Figuras
2.27 e 2.28), pode-se concluir deste modo, que em termos práticos, o efeito de grupo pode
ser desprezado no problema de interacção cinemática solo-estaca. Aliás, Ke Fan et al. (1991)
baseando-se numa formulação rigorosa por elementos de fronteira estudaram a variação do
parâmetro Iu para diversos tipos de distribuição de estacas (isolada, 1x2, 1x3, 1x4, 1x6, 1x9,
2x2, 4x4, 6x6) e apontaram exactamente que o efeito de grupo é desprezável no problema
de interacção cinemática solo-estaca em meio homogéneo, mesmo para estacas relativamente
próximas com espaçamento igual a 3 diâmetros.
Makris e Gazetas (1992) chamaram no entanto a atenção, para o caso dos meios estratificados
constituídos por camadas com grande contraste de rigidez. Nesta situação, é de esperar que a
estaca não consiga acompanhar os deslocamentos do campo livre sobretudo no domínio das
médias a altas frequências contribuindo assim para esta gama de frequências uma maior evidência
do efeito de grupo estaca-solo-estaca.
Porém, conforme já referido anteriormente, a resposta da estaca não é condicionada por esta faixa
de frequências mais elevadas. No domínio das baixas frequências o efeito de grupo (no problema
de interacção cinemática solo-estaca) é igualmente desprezável mesmo em terreno estratificado
constituído por camadas com grande contraste de rigidez. Este facto é demonstrado através de
um caso de estudo apresentado por Kaynia (1997) e que será objecto de maior detalhe no capítulo
seguinte.
2.4.4 - Modelação tridimensional pelo método dos elementos finitos
2.4.4.1 - Tipos de amortecimento
Para efeitos de validação do modelo BDWF, optou-se por estudar o efeito de interacção
cinemática solo-estaca recorrendo à análise modal 3-D admitindo amortecimento viscoso,
atendendo às suas vantagens no que respeita à sua eficiência de cálculo. Por outro lado,
pretendeu-se também de certa forma calibrar este tipo de análise, para o estudo de problemas de
interacção solo-estrutura. Esta contribuição revela-se de particular interesse prático, uma vez que
a grande maioria dos programas de análise dinâmica se baseiam ou dispõem de rotinas para este
tipo de análise modal.
Considere-se então, que se pretende estudar o efeito de interacção cinemática para o seguinte
cenário:

Capítulo 2 Estacas sob acções sísmicas
2-48
µ ' µ'G '2>GT
(2.86)
D '1
cosT H
vs (1%2i>)(2.87)
• estaca isolada embebida numa camada homogénea com extensão lateral infinita e assente
sobre substrato rígido;
• excitação harmónica simples na base;
• comportamento viscoelástico linear do solo.
A aplicação da análise modal para o estudo deste problema levanta fundamentalmente duas
questões:
Q1) qual o tipo de amortecimento modal a considerar de forma a conduzir a uma dissipação de
energia equivalente ao amortecimento histerético do solo?
Q2) como modelar adequadamente as condições de radiação nas fronteiras?
Para responder à questão Q1, torna-se necessário analisar a resposta de uma camada elástica sob
a acção de uma excitação harmónica na sua base rígida, para vários tipos de amortecimento.
Note-se que a resposta do sistema solo-estaca é condicionada fundamentalmente pelos
deslocamentos do campo livre.
O desenvolvimento teórico bem como a dedução das equações que descrevem a resposta da
camada é apresentada em pormenor no Anexo do Capítulo 8. Apresenta-se apenas, a seguir, um
resumo das principais equações que permitem determinar o factor de amplificação dinâmica D
no topo da camada, para vários tipos de amortecimento:
i1) Amortecimento histerético do solo (>)
Neste caso o coeficiente de viscosidade decresce proporcionalmente com a frequência de
excitação T, isto é:
O factor de amplificação dinâmica é dado por:
i2) Amortecimento com coeficiente de viscosidade constante
Para esta situação pode-se aplicar a solução exacta do Anexo do Capítulo 8 ou recorrer à solução
com desenvolvimento em série correspondente à sobreposição definindo diferentes coeficientes
de amortecimento (modal) para cada um dos modos de vibração do sistema.

Capítulo 2 Estacas sob acções sísmicas
2-49
u(H,t) '4B
ub jn
i'1
±$2
n
1&$2n
2% 2>n$n
2
1&$2n sen(Tt)&2>n$n cos(Tt)
(2n&1)(2.88)
D ' D1 2% D2 2 (2.89)
D1 ' 1 %4B j
n
i'1±
$2n
1&$2n
2% 2>n$n
2
1&$2n
(2n&1)(2.90)
D2 '4B j
n
i'1±
$2n
1&$2n
2% 2>n$n
2&
2>n$n
(2n&1)(2.91)
É possível demonstrar-se que o deslocamento relativo no topo da camada é expresso pela equação
seguinte (Santos, 1999):
em que:
ub = amplitude do deslocamento na base da camada
$n = T/Tn
Tn = frequência própria do modo n
>n = coeficiente de amortecimento modal
Os termos de ordem ímpar e de ordem par desta série tomam respectivamente, o sinal positivo
e negativo.
O factor de amplificação dinâmica é obtido calculando a relação entre a amplitude do
deslocamento absoluto no topo e na base da camada. Para isso, agrupam-se os termos em seno
e coseno e após eliminação da variável ub obtém-se:
em que:
Estas equações permitem determinar a resposta da camada para diferentes tipos de amortecimento
modal. Analisam-se, a seguir, quatro tipos de amortecimento modal:
m1) amortecimento modal constante;
m2) amortecimento tipo Rayleigh;
m3) coeficiente de viscosidade constante (correspondente à situação em que a matriz de
amortecimento é proporcional à matriz de rigidez);
m4) matriz de amortecimento proporcional à matriz de massa.

Capítulo 2 Estacas sob acções sísmicas
2-50
µ' '2>Tn
(2.92)
[C] ' [M]jp&1
k'0
ak{[M]&1 [K]}k (2.93)
[C] ' a0 [M] % a1 [K] (2.94)
Cn ' a0 Mn % a1 Kn ' 2>nTnMn Y >n 'a0
2Tn
%a1Tn
2(2.95)
m1) amortecimento modal constante
Este caso corresponde a considerar >n=> para todos os modos de vibração. O coeficiente de
viscosidade descresce proporcionalmente com as frequências próprias de vibração e não com a
frequência da excitação tal como sucede no amortecimento histerético, ou seja:
m2) amortecimento tipo Rayleigh
Viu-se anteriormente, que na análise modal o desacoplamento do sistema de equações
diferenciais inicial é possível desde que a matriz de amortecimento seja igualmente
ortogonalizável pelos modos de vibração verificando a condição (2.9) anterior.
Referiu-se também, que os modos de vibração são ortogonais em relação a qualquer matriz que
seja uma combinação linear da matriz de massa e de rigidez. Para o caso mais geral, é possível
demonstrar matematicamente, que aquela condição é verificada por qualquer matriz de
amortecimento obtida a partir da série de Caughey:
em que ak são coeficientes a determinar resolvendo um sistema de equações (pxp) admitindo que
são conhecidos os coeficientes de amortecimento ξk, k=1,2,...p.
O amortecimento Rayleigh habitualmente utilizado em análises dinâmicas constitui um caso
particular da anterior em que se considera apenas os dois primeiros termos da série, isto é:
donde,
As constantes a0 e a1 podem ser determinadas se forem conhecidos os valores do coeficiente de
amortecimento para dois modos de vibração m e n quaisquer:

Capítulo 2 Estacas sob acções sísmicas
2-51
>m
>n
'
12Tm
Tm
2
12Tn
Tn
2
a0
a1
(2.96)
a0 '53> T1
a1 '13>T1
(2.97)
µ' '53>T1
T2n
%13>T1
(2.98)
>n
>'
56
T1
Tn
%16
Tn
T1
(2.99)
µ' '2>T1
(2.100)
>n
>'Tn
T1
(2.101)
Se se efectuar o ajustamento ao amortecimento histerético para o 1º e o 3º modo de vibração,
considera-se então >1=>3=> para T1 e T3=5T1, respectivamente. Nestas condições mostra-se que:
o coeficiente µ' é dado por:
e
m3) coeficiente de viscosidade constante (correspondente à situação em que a matriz de
amortecimento é proporcional à matriz de rigidez)
Faz-se notar que esta situação constitui um caso particular do amortecimento tipo Rayleigh em
que a0=0 e a1=µ'. Efectuando o ajustamento ao amortecimento histerético para o 1º modo de
vibração tem-se:
e
donde se conclui que o amortecimento modal cresce com o número de ordem do modo de
vibração variando proporcionalmente com a relação Tn/T1.

Capítulo 2 Estacas sob acções sísmicas
2-52
a0 ' 2>T1 (2.102)
µ' '2>T1
T2n
(2.103)
>n
>'T1
Tn
(2.104)
m4) matriz de amortecimento propocional à matriz de massa
Constitui o outro caso particular do amortecimento tipo Rayleigh em que a1=0. Efectuando a
ajustamento ao amortecimento histerético para o 1º modo de vibração obtém-se:
e
neste caso, o amortecimento modal decresce com o número de ordem do modo de vibração,
conduzindo a valores de >n praticamente nulos para os modos altos. Este caso foi eliminado nas
análises subsequentes.
Apresenta-se na Figura 2.34 a comparação dos valores de >n/> para diferentes tipos de
amortecimento modal.
����n �
0
1
2
3
4
5
6
7
8
9
1 3 5 7 9
Rayleigh a =c , a =00 1
te
��
n
n constante a =0 , a =0 1 cte
Figura 2.34 - Valores de >>>>n/>>>> para diferentes tipos de amortecimento modal

Capítulo 2 Estacas sob acções sísmicas
2-53
Ilustra-se então a seguir, nas Figuras 2.35,2.36 e 2.37 a comparação dos factores de amplificação
dinâmica D, obtidos para os diferentes tipos de amortecimento e correspondentes aos casos com
>=5, 10 e 20%, respectivamente. Para tal, aplicaram-se as equações (2.89), (2.90) e (2.91)
considerando os primeiros 21 termos da série.
0
2
4
6
8
10
12
14
D
0 5 10 15 20
����
(histerético) n constante
� constante Rayleigh
� �
Figura 2.35 - Valores de D para diferentes tipos de amortecimento. >>>>=5%
0
1
2
3
4
5
6
7
D
0 5 10 15 20
����
����
(histerético) n constante
� constante Rayleigh
Figura 2.36 - Valores de D para diferentes tipos de amortecimento. >>>>=10%

Capítulo 2 Estacas sob acções sísmicas
2-54
0
0,5
1
1,5
2
2,5
3
3,5
D
0 5 10 15 20
����
����
(histerético) n constante
� constante Rayleigh
Figura 2.37 - Valores de D para diferentes tipos de amortecimento. >>>>=20%
Estes resultados mostram claramente o seguinte:
C todos os tipos de amortecimento conduzem a resultados próximos para frequências inferiores
a duas vezes a frequência fundamental do sistema;
C o caso com coeficiente de amortecimento modal constante é aquele que mais se aproxima do
amortecimento histerético do solo;
C o amortecimeto tipo Rayleigh conduz a resultados sobrestimados sobretudo para frequências
próximas à do 2º modo de vibração e a tendência inverte-se para frequências superiores à do
3º modo; no entanto, o ajustamento geral pode-se considerar igualmente aceitável,
constituindo um tipo de amortecimento com particular interesse em meios estratificados, em
que se torna difícil a escolha de valores adequados para o amortecimento modal, uma vez que
o nível de amortecimento varia ao longo do perfil do terreno;
C o caso com coeficiente de viscosidade constante conduz a resultados subestimados para grande
parte do espectro das frequências pelo que deve ser evitada a sua utilização prática.
2.4.4.2 - Fronteiras laterais
Conforme já referido anteriormente, o problema da radiação nas fronteiras laterais pode ser
resolvido de forma rigorosa recorrendo quer ao método dos elementos de fronteira, quer ao
método dos elementos finitos, aplicando neste último caso formulações especiais recentemente
propostas por Wolf e Song (1996).

Capítulo 2 Estacas sob acções sísmicas
2-55
Para o estudo de interacção cinemática solo-estaca que se pretende efectuar, o problema
complexo das fronteiras laterais pode ser resolvido de forma aproximada, extendendo a malha
de elementos finitos na direcção da excitação e procedendo à truncagem nas fronteiras laterais
colocando apenas apoios móveis. A análise anterior do comportamento cinemático da estaca
isolada ou em grupo mostra efectivamente, que durante a actuação dos sismos não se geram ondas
difractadas de intensidade importante, devido ao efeito de interacção solo-estaca. Sendo assim,
mesmo considerando fronteiras laterais opacas mas suficientemente afastadas das estacas, o erro
que se comete não será certamente significativo, justificando assim a opção tomada.
Porém, alerta-se que esta truncagem origina outro tipo de problema importante quando se
pretende aplicar a análise modal, pelo facto de conduzir ao aparecimento de modos de vibração
espúrios. Aliás, este problema foi igualmente apontado por Mineiro (1988), tendo verificado para
um caso analisado, três modos intermédios com factores de participação nulos entre o 1º e o 2º
modo de vibração da camada. Este problema reduz assim gravemente a eficiência da análise
modal, uma vez que se torna necessário extrair um grande número de frequências e poderá
também conduzir a resultados finais menos precisos.
Uma análise mais detalhada deste modos espúrios, permitiu concluir que correspodem a
configurações de deformada com distribuição simétrica dos deslocamentos relativamente ao plano
de simetria vertical (que passa pelo eixo da estaca) perpendicular à direcção de actuação da
excitação.
Esta constatação, sugeriu uma forma expedita de solucionar o problema que consiste em impôr
uma condição de igualdade de deslocamentos (horizontais) entre pontos situados à mesma
profundidade e simetricamente em relação àquele plano de simetria.
Campo livre - zona não perturbada
Zona perturbada pela difracção das ondas
10d
Direcção de actuação da excitação
Figura 2.38 - Zona perturbada pela presença da estaca

Capítulo 2 Estacas sob acções sísmicas
2-56
Por outro lado, atendendo ainda aos valores dos factores de interacção apresentados
anteriormente, considerou-se que para zonas situadas a uma distância superior a 10 diâmetros da
estaca, se poderia considerar como zona não afectada com deslocamentos iguais às do campo
livre. Assim, impôs-se uma condição de igualdade de deslocamentos (horizontais) no interior da
zona não perturbada, como se pretende ilustrar na Figura 2.38.
Acrescenta-se ainda, que se considerou apenas o efeito da propagação unidimensional das ondas
de corte. Para tal, libertaram-se apenas os deslocamentos horizontais segundo a direcção da
excitação.
2.4.4.3 - Apresentação dos resultados da análise modal 3-D. Validação do
modelo BDWF
Apresentam-se, a seguir, os resultados obtidos da análise modal 3-D e efectua-se uma análise
comparativa com a formulação rigorosa utilizada por Ke Fan et al. (1991). Estes autores aplicaram
a formulação por elementos de fronteira originalmente proposta por Kaynia (1982), e
apresentaram apenas a solução em termos do parâmetro Iu para vários cenários de cálculo.
Aproveita-se ainda para comparar estes resultados com os que se obtêm por aplicação do modelo
BDWF, para a sua validação.
O cenário de cálculo considerado na análise modal foi o seguinte:
• estaca com rotação impedida ao nível da cabeça;
• camada elástica homogénea sobre sustrato rígido;
• solicitações harmónicas na base, apenas numa só direcção;
• considerou-se apenas o efeito da propagação vertical das ondas de corte;
• admtiu-se apenas a contribuição dos 5 primeiros modos de vibração;
• H/d=20, >=5%, <s=0.4, Ds/Dp=0.7 e Ep/Es=1000.
A Figura 2.39 mostra a configuração da deformada obtida para os três primeiros modos de
vibração. Para a obtenção destes resultados recorreram-se a programas de análise dinâmica
disponíveis no DECivil, utilizando a mesma malha de elementos finitos e a mesma forma de
modelação da estaca referida anteriormente no ponto 8.3.4. Esta figura mostra que a estaca
acompanha o andamento geral da deformada do campo livre, notando-se apenas uma redução da
sua amplitude sobretudo nos modos mais altos.
A Figura 2.40 mostra os valores de Iu em função da frequência normalizada T/T1 para as
diferentes formulações. Verifica-se que existe um ajustamento quase perfeito entre os resultados
da análise modal 3-D e os apresentados por Ke Fan et al. (1991). O model BDWF sobrestima os
valores de Iu sobretudo no domínio das altas frequências.

Capítulo 2 Estacas sob acções sísmicas
2-57
1º modo de vibração
3º modo de vibração
2º modo de vibração
Figura 2.39 - Configuração da deformada para os três primeiros modos de vibração
Iu
0
0,2
0,4
0,6
0,8
1
1,2
0 1 2 3 4 5 6 7 8 9 10
BDWF Ke Fan et al.(1991) 3-D (MEF)
H/d=20 , =5% , �s=0.4
Ep/Es=1000 , s=0.7 p
����
Figura 2.40 - Valores de Iu em função de TTTT/TTTT1. Ep/Es=1000

Capítulo 2 Estacas sob acções sísmicas
2-58
Na Figura 2.41 seguinte comparam-se os valores de Iu para a relação Ep/Es=10000. Constata-se
que para esta situação há um melhor ajustamento entre os resultados do modelo BDWF com a
formulação rigorosa utilizada por Ke Fan et al. (1991).
Iu
0
0,2
0,4
0,6
0,8
1
1,2
0 1 2 3 4 5 6 7 8 9 10
BDWF Ke Fan et al.(1991)
H/d=20 , =5% , �s=0.4
Ep/Es=10000 , s=0.7 p
����
Figura 2.41 - Valores de Iu em função de TTTT/TTTT1. Ep/Es=10000
Outra comparação importante, prende-se com o momento flector máximo Mo na cabeça da estaca.
Comparam-se na Figura 2.42 os valores normalizados de Mo obtidos da análise modal 3-D com
os que se obtêm por aplicação do modelo BDWF. Verifica-se, efectivamente, um excelente
ajustamento dos resultados.
0
200
400
600
800
1000
1200
1400
0 1 2 3 4 5 6 7 8 9 10
BDWF 3-D(MEF)
H/d=20 , =5% , �s=0.4
Ep/Es=1000 , s=0.7 p
����
�����pd� �
|M |o
Figura 2.42 - Momento normalizado em função de TTTT/TTTT1. Ep/Es=1000

Capítulo 2 Estacas sob acções sísmicas
2-59
S(T) 'Vo(T)
yo(T)'
kc
8c
'k & mT2 % i cT
4k & mT2 % i cT
4EpIp
(2.105)
ao 'Tdvs
(2.106)
S(T) ' Kt [k(ao)% i ao c(ao) ] (2.107)
2.5 - Considerações finais acerca do modelo BDWF
A análise global dos resultados comparativos anteriores, permite evidenciar claramente as
potencialidades do modelo BDWF. Embora, tratando-se de um modelo discreto, consegue
modelar de forma adequada o problema de interacção cinemática solo-estaca, com um bom
ajustamento aos modelos dinâmicos mais rigorosos, mesmo para as frequências mais elevadas.
Salienta-se ainda, que o modelo BDWF pode ser utilizado para modelar o comportamento de
estacas sob acções dinâmicas na sua cabeça. Embora este assunto esteja fora dos objectivos
principais deste trabalho, far-se-á apenas uma breve ilustração das potencialidades do modelo
para aquele tipo de solicitação.
Considere-se então o cenário de cálculo analisado por Kaynia (1982) recorrendo à formulação
rigorosa por elementos de fronteira com as características seguintes:
• estaca embebida num meio elástico semi-infinito com amortecimento histerético >=5%, sujeita
a uma força horizontal harmónica no topo;
• relação dos módulos Ep/Es=1000;
• relação comprimento-diâmetro L/d=15;
• relação entre massas volúmicas Dp/Ds=1.43;
• coeficiente de Poisson <s=0.4.
Admitindo para a estaca o comportamento flexível, e estabelecendo a semelhança às acções
estáticas aplicadas no topo (vide Anexo do Capítulo 6), a rigidez transversal complexa da estaca
será expressa por:
É habitual decompor a rigidez transversal nas suas partes real e imaginária e exprimi-las em
função da variável, ao, definida por:
Para tornar a solução adimensional é usual ainda dividir a rigidez dinâmica pelo seu respectivo
valor estático, isto é:

Capítulo 2 Estacas sob acções sísmicas
2-60
A comparação dos resultados é apresentada na Figura 2.43 seguinte:
0
0.2
0.4
0.6
0.8
1
1.2
0
1
2
3
4
5
6
0 0.2 0.4 0.6 0.8 1
BDWF a) BDWF b) Kaynia e Kausel(1982)
k(a o
)
c(a o
)
ao
Figura 2.43 -Coeficientes de rigidez dinâmica
Salienta-se que, para este tipo de carregamento dinâmico, o efeito da correcção dos amortecedores
na zona superficial não é desprezável. Assim, analisaram-se duas situações extremas para o
modelo BDWF:
a) com vc=vLa ao longo do fuste da estaca;
b) com vc=vs ao longo do fuste da estaca.
Como se pode constatar da Figura 2.43, há um bom ajustamento geral dos resultados, e a solução
de Kaynia (1982) situa-se entre as duas soluções extremas a) e b) do modelo BDWF. Se tivesse
sido considerada a correcção apenas na zona superficial até à profundidade de 2.5d, tal como
sugerido por Kavvadas e Gazetas (1993), o ajustamento seria ainda melhor.
Acrescenta-se ainda, que para valores de ao inferiores à unidade o produto do comprimento da
estaca pela parte real do coeficiente complexo 8c é maior que 3, justificando assim a escolha da
solução para estacas flexíveis.
O efeito de grupo para este tipo de carregamento dinâmico pode também ser simulado à custa de
factores de interacção dinâmicos (Makris e Gazetas, 1992).
Foram evidenciadas neste capítulo, as potencialidades de aplicação do modelo BDWF para o
estudo do comportamento de estacas, quer para as acções dinâmicas provenientes da
superestrutura, quer para as forças cinemáticas provocadas pelo movimento do solo envolvente.
Assim, a sua implementação num programa geral de análise estrutural, permitirá analisar de uma
forma mais correcta o problema complexo de interacção solo-estaca-superestrutura durante a
acção dos sismos.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-1
CAPÍTULO 3
INTERACÇÃO CINEMÁTICA SOLO-ESTACA.
MODELO BDWF
3.1 - Generalidades
No capítulo anterior, apresentou-se uma descrição detalhada do modelo BDWF tendo-se ilustrado
alguns resultados do estudo do efeito de interaçcão cinemática para o caso do meio homogéneo
sob acções harmónicas na base.
A sua generalização para situações mais complexas, nomeadamente: terreno constituído por
camadas horizontais com diferentes características, consideração do comportamento não linear
do solo bem como a sua transformação para análises no domínio do tempo é discutida em
pormenor neste capítulo. O modelo de interacção cinemática desenvolvido no IST (Santos, 1999)
resulta da combinação do modelo BDWF com um modelo de propagação unidimensional da
acção sísmica. A solução do problema para estas situações gerais só é possível obter-se por via
numérica.
No que respeita ao comportamento não linear do solo, recorre-se ao tradicional método linear
equivalente aplicando as curvas não lineares G/G0-( e >-(.
Na primeira parte deste capítulo efectua-se uma descrição sumária do método de resolução
numérica desenvolvido.
A segunda parte deste capítulo é reservada para estudos paramétricos efectuados no domínio da
frequência e no domínio do tempo. Será analisado um caso de estudo típico de uma estaca
atravessando uma baixa aluvionar onde um cenário geotécnico mais realista, contemplando a
estratificação do terreno e o comportamento não linear do solo, é devidamente considerado nas
análises.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-2
EpIpM4y
Mx 4% (k&mT2% i cT) y ' (k% i cT) u (3.1)
mxe%1
xe
EpIpM2v
Mx 2
M2y
Mx 2dx % m
xe%1
xe
(k&mT2% i cT) v ydx '
mxe%1
xe
(k% i cT) u vdx % Q1vxe% Q2
MvMx xe
% Q3vxe%1% Q4
MvMx xe%1
(3.2)
3.2 - Implementação do modelo BDWF num programa de elementos finitos
3.2.1 - Descrição sumária do método numérico de resolução no domínio da
frequência
Assumindo para o solo um amortecimento do tipo histerético torna-se conveniente que o
problema seja resolvido no domínio da frequência. A equação de equilíbrio dinâmico, formulada
em termos de deslocamentos absolutos, em regime de vibração harmónica permanente é a
seguinte (Santos, 1999):
Para a resolução deste problema aplicou-se o método dos elementos finitos formulado em termos
de deslocamentos. O domínio S que representa neste caso particular a estaca, é dividido num
conjunto de N subdomínios ou elementos finitos Se de linha com dois pontos nodais, definidos
pelas suas coordenadas, ou seja, Se0[xe,xe+1].
A aplicação do princípio dos trabalhos virtuais ao elemento Se , habitualmente designado também
como formulação variacional ou fraca do problema de valores na fronteira em estudo, conduz à
equação integral seguinte (Reddy, 1985):
em que:
v = função de teste da classe C2(Se) (duas vezes diferenciável em ordem a x no domínio Se)
Qj = forças generalizadas aplicadas nos pontos nodais (j=1,2..4)
Admitindo como incógnitas os deslocamentos generalizados dos pontos nodais dk(e) (k=1,2..4),
escolhem-se funções de interpolação que permitem obter o campo aproximado de deslocamentos
no interior de cada elemento em função destas incógnitas.
A aplicação do método de Galerkin, que constitui um caso particular do método dos resíduos
pesados, conduz à solução aproximada seguinte:

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-3
y (e)' j
ng'4
k'1
d (e)k N (e)
k (3.3)
em que:
ng = número de graus de liberdade do elemento
dk = deslocamentos nodais generalizados
Nk = funções de interpolação
Considerando para a função de teste v=Nj e introduzindo a aproximação (3.3) na equação
variacional ou fraca (3.2) é-se conduzido então à equação de equilíbrio dinâmico aproximada do
elemento:
[K](e) & [M](e)T2 % i [C(T)](e) {d(T)}(e) ' {F(T)}(e) (3.4)
em que:
K (e)jk ' m
xe%1
xe
EpIp
M2Nj(e)
Mx 2
M2Nk(e)
Mx 2% k N(e)
j N(e)k dx matriz de rigidez elementar (3.5)
M (e)jk ' m
xe%1
xe
m N(e)j N
(e)k dx matriz de massa elementar (3.6)
C (e)jk (T) ' m
xe%1
xe
c T N(e)j N
(e)k dx matriz de amortecimento elementar
(contando com o amortecimento histerético dosolo e o amortecimento por radiação lateral)
(3.7)
F (e)j (T) ' m
xe%1
xe
(k% i cT) u N(e)j dx % Q (e)
j matriz das forças nodais generalizadas (3.8)
Na equação (3.8) anterior a primeira parcela é devida aos deslocamentos do campo livre e a
segunda parcela corresponde às forças generalizadas aplicadas nos pontos nodais, que para este
caso particular não existem.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-4
u(x) ' (Am e iax % Bm e &iax) (3.11)
Salienta-se ainda, que a equação de equilíbrio dinâmico elementar (3.4) pode ser escrita sob uma
forma mais condensada considerando, para o efeito, uma matriz de rigidez dinâmica (complexa)
que inclua o efeito da massa e do amortecimento:
[K (](e) {d(T)}(e) ' {F(T)}(e) (3.9)
em que:
K ((e)jk ' m
xe%1
xe
EpIp
M2Nj(e)
Mx 2
M2Nk(e)
Mx 2% (k & mT2 % i cT) N(e)
j N(e)k dx (3.10)
Quanto aos parâmetros intervenientes no efeito de interacção cinemática considerou-se que no
domínio Se se pudesse admitir o seguinte:
• Ep e Ip são constantes
• m é constante
• k é constante
• c é função da frequência T
• u é função da frequência T e da coordenada x
Faz-se notar ainda, que a equação variacional (3.2) obriga a que as funções de interpolação e as
suas derivadas até à ordem três sejam contínuas e que satisfaçam as condições de fronteira
essenciais nos pontos nodais de cada elemento. Isto leva à adopção de funções de interpolação
polinomiais do terceiro grau, vulgarmente conhecidos por polinómios cúbicos de Hermite, Hj(x)
com j=1,2..4. Nos termos da matriz de rigidez complexa os parâmetros intervenientes não
dependem da coordenada x e o resultado da integração das funções de interpolação pode ser
encontrado em (Reddy, 1985).
No que respeita às forças generalizadas, estas foram obtidas a partir da equação (3.8) efectuando
as respectivas integrações no referencial local x0[0,L] em que L é o comprimento do elemento.
Para o caso de se aplicar a teoria de propagação unidimensional das ondas de corte a amplitude
dos deslocamentos do campo livre no domínio Se pode ser obtida pela equação seguinte:
A descrição mais pormenorizada sobre o modelo utilizado para a determinação dos
deslocamentos do campo livre será apresentada no ponto seguinte.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-5
As equações de equilíbrio dinâmico elementar (3.4) ou (3.9) são gerais e válidas para qualquer
elemento finito pertencente ao domínio S discretizado. Respeitando as condições de
compatibilidade nos pontos nodais de ligação entre elementos torna-se possível agrupar os
sistemas de equações do conjunto de elementos que formam o domínio S, os quais conjuntamente
com as condições de fronteira, formam um sistema de equações lineares, reescritas em termos dos
deslocamentos globais generalizados d(T). As equações (3.4) e (3.9) transformam-se,
respectivamente em:
[K] & [M]T2 % i [C(T)] {d(T)} ' {F(T)} (3.12)
e
[K (] {d(T)} ' {F(T)} (3.13)
em que:
[K] ' matriz de rigidez global[M] ' matriz de massa global[C(T)] ' matriz de amortecimento global{d(T)} ' vector de deslocamentos globais generalizados{F(T)} ' vector de forças globais generalizadas[K (] ' matriz de rigidez complexa global
(3.14)
Para a resolução do problema de equilíbrio dinâmico linear expresso pela equação (3.12) não se
revelou vantajoso a aplicação do método de sobreposição modal face ao reduzido número de
graus de liberdade do sistema em análise.
3.2.2 - Modelação da resposta do campo livre
No modelo BDWF a resposta do campo livre, em termos de deslocamentos horizontais u(x), pode
ser obtida, com toda a generalidade, recorrendo a análises tridimensionais. No entanto, a solução
é consideravelmente simplificada no caso unidimensional. Na análise unidimensional admite-se
que:
• a resposta da camada é essencialmente condicionada pela propagação vertical das ondas de
corte;
• todas as camadas são horizontais e com extensão lateral infinita.
Embora, constitua um modelo teórico simplificado, a experiência mostra que métodos baseados
nestes pressupostos têm conduzido a resultados que se ajustam bem à resposta do terreno em
muitos casos reais relatados na bibliografia. Assim, optou-se por adoptar um modelo de
propagação unidimensional para o terreno seguindo uma formulação semelhante àquela adoptada
por Schnabel et al. (1972) no programa de cálculo SHAKE, largamente difundido na área da

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-6
u m(x) ' (Am eiamx
% Bm e&iamx
) e iTt em que am 'Tvsc
(3.15)
Jm(x) ' i am G (
m (Am eiamx
& Bm e&iamx
) em que G (
m' Gm(1%2i>m) (3.16)
um(x'hm) ' um%1(x'0) Y Am eiamhm % Bm e
&iamhm ' Am%1 % Bm%1 (3.17)
dinâmica dos solos, e que foi utilizado para os testes de verificação do programa de cálculo
desenvolvido.
Analisa-se, então, o efeito da propagação vertical das ondas de corte num sistema constituído por
N camadas com extensão lateral infinita, conforme ilustra a Figura 3.1. Em cada camada m
considera-se o solo homogéneo e isotrópico com comportamento viscoelástico, caracterizado pela
espessura hm, massa volúmica Dm, módulo de distorção Gm e coeficiente de amortecimento
histerético >m.
Propagação verticaldas ondas de corte
h ,m G , ,m m m� �
x1camada 1
camada m
camada m+1
camada N
.
.
.
.
.
.
xm
xn
xN
h ,m+1 G , ,m+1 m+1 m+1� �
h ,1 G , ,1 1 1�����
h ,N G , ,N N N� �
A1 B1
Am Bm
Am+1 Bm+1
AN BN
Figura 3.1 - Propagação vertical das ondas de corte
Recorrendo à notação complexa, a solução geral para uma determinada camada m, em termos de
deslocamentos absolutos, é dada por:
pelo que a tensão de corte é igual a:
Num sistema estratificado as condições de continuidade em termos de deslocamentos e de tensões
de corte na interface de transição entre duas camadas consecutivas m e m+1 são expressas pelas
equações seguintes:

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-7
Jm(x'hm) ' Jm%1(x'0) Y
Y i am G (
m (Am eiamhm & Bm e
&i amhm) ' i am%1 G (
m%1 (Am%1 & Bm%1)(3.18)
Am%1 '12
Am(1%"m)eiamhm %
12
Bm(1&"m)e&iamhm (3.19)
Bm%1 '12
Am(1&"m)eiamhm %
12
Bm(1%"m)e&iamhm (3.20)
"m 'amG (
m
am%1G(
m%1
'DmG (
m
Dm%1G(
m%1
'DmGm(1%2i>m)
Dm%1Gm%1(1%2i>m%1)(3.21)
AN ' fAN(T) A1 (3.22)
BN ' fBN(T) A1 (3.23)
Estas duas condições permitem estabelecer as equações de recorrência que relacionam as
amplitudes das ondas incidente e reflectida entre duas camadas consecutivas:
em que:
À superfície, como se trata de uma fronteira livre, sabe-se que A1=B1. Aplicando sucessivamente
as equações de recorrência até ao topo de uma determinada camada N tem-se:
em que fAN(T) e fBN
(T) são as denominadas funções de transferência.
Se o movimento sísmico for conhecido nesta camada N, o valor de A1 poderá ser determinado
bem como a resposta do sistema nas restantes camadas.
No que respeita às condições de radiação na fronteira inferior, pode-se considerar duas situações
extremas:
• substrato rígido, em que as ondas que atingem a fronteira inferior são totalmente reflectidas;
• meio viscoelástico semi-infinito em que a amplitude da onda incidente proveniente do espaço
semi-infinito não é afectado pelas camadas sobrejacentes uma vez que a onda reflectida é
totalmente absorvida pelo espaço semi-infinito.
Estas duas situações foram ambas contempladas no programa de cálculo CINEMAT
desenvolvido no IST.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-8
3.3 - Caso de estudo para terreno estratificado constituído por duas camadas
3.3.1 - Caso apresentado por Kaynia (1997). Validação do método numérico
desenvolvido
Apresenta-se neste ponto o estudo elaborado por Kaynia (1997) que servirá não só para validar
o modelo BDWF mas também para evidenciar alguns aspectos do efeito de interacção
estrutura-solo-estaca.
Aquele autor analisou o efeito de interacção estrutura-solo-estaca num sistema estratificado
constituído por uma camada superficial com espessura HA sobrejacente a um meio viscoelástico
semi-infinito. A superestrutura foi modelada como um oscilador de um grau de liberdade ligado
a um maciço de encabeçamento rígido apoiado em 9 estacas distribuídas em malha quadrangular
(Figura 3.2).
H
HA
21s
A
B
Figura 3.2 - Cenário estudado por Kaynia (1997)
Os cálculos foram efectuados no domínio da frequência para acções harmónicas em regime de
vibração permanente recorrendo ao método dos elementos de fronteira. Aquele autor realizou
um estudo paramétrico variando a frequência própria da estrutura e apresentou as seguintes
conclusões:
• para excitações com frequência próxima à frequência fundamental da estrutura o efeito das
forças de inércia dominam os esforços nas estacas;
• fora desta gama de frequências, o efeito de interacção cinemática pode contribuir
significativamente para os esforços nas estacas, principalmente na zona de transição entre
camadas;
• para o caso de ausência de massa para a superestrutura os esforços obtidos foram muito
semelhantes para todas as estacas mostrando efectivamente, que o efeito de grupo pode ser

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-9
desprezado na análise do efeito de interacção cinemática solo-estaca, facto este já comentado
no Capítulo 2.
Para validar o modelo BDWF e o programa de cálculo automático desenvolvido apresenta-se a
confrontação dos resultados para um dos cenários apresentados no trabalho de Kaynia (1997).
O cenário estudado apresenta as características seguintes:
• Superestrutura:
Sem massa
• Terreno:
Ds = 1.8 g/cm3 ; > = 0.05 ; <s = 0.4
vs = 90 m/s (camada A)
vs = 200 m/s (camada B: meio viscoelástico semi-infinito)
HA = 3 m
• Estacas:
Dp = 2.4 g/cm3 ; >p = 0 ; <s = 0.2
Ep = 20 GPa (Ep/Es = 100 e 500 para as camadas A e B, respectivamente)
vs = 200 m/s (camada B: meio viscoelástico semi-infinito)
H = 15 m
d = 0.75 (H/d=20) ; s = 3.75 m (s/d=5)
• Acção:
Excitação harmónica simples com frequência igual a 0.5 Hz, considerando apenas a propagação
vertical das ondas de corte e impondo uma aceleração unitária (1 m/s2) à superfície do terreno.
A
B
�=0
Meio semi-infinito B
a) base livreb) deslocamento relativo nulo
Figura 3.3 - Discretização do problema

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-10
Para o modelo BDWF considerou-se para a base da estaca duas situações de fronteira:
a) base livre, e portanto com esforços nulos;
b) base restringida, impondo que o deslocamento da estaca seja igual ao deslocamento do campo
livre.
Restringiu-se a rotação da cabeça da estaca e o sistem solo-estaca foi discretizado em troços de
0.5m, conforme mostra a Figura 3.3.
A confrontação dos momentos flectores e dos esforços transversos é apresentada nas Figuras 3.4
e 3.5, respectivamente.
|M| (kNm)
0
5
10
15
Pro
fund
idad
e (m
)
0 5 10 15 20 25 30
BDWF a) BDWF b) Kaynia (1997)
Figura 3.4 - Cenário analisado por Kaynia (1997). Momentos flectores
|V| (kN)
0
5
10
15
Pro
fund
idad
e (m
)
0 5 10 15 20
BDWF a) BDWF b) Kaynia (1997)
Figura 3.5 - Cenário analisado por Kaynia (1997). Esforços transversos

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-11
A análise destas figuras permite evidenciar novamente as potencialidades do modelo BDWF
mostrando efectivamente uma boa concordância de resultados, exceptuando os valores do
segundo pico das curvas de distribuição dos esforços. Mostra também que, as condições de
fronteira na base pouco afectam o valor dos momentos flectores e em termos de esforços
tranversos a situação b) conduziu a resultados muito próximos àqueles apresentados por
Kaynia (1997). Deste modo, se for lícito admitir uma aderência perfeita entre a base da estaca
e o solo, a situação b) é aquela que se deve considerar no modelo BDWF.
3.3.2 - Estudo paramétrico no domínio da frequência
O efeito de interacção cinemática solo-estaca é particularmente importante em duas situações:
• quando o solo apresenta fracas características mecânicas com a possibilidade de ocorrerem
efeitos de amplificação local importantes;
• quando o terreno é constituído por camadas com contraste significativo de rigidez.
Para ilustrar bem estas situações apresenta-se seguidamente o estudo para um cenário em que o
terreno é constituído por duas camadas limitado inferiormente pelo substrato rígido. Efectuou-se
um estudo paramétrico alargado considerando as seguintes características:
• cabeça da estaca impedida de rodar
• base da estaca com deslocamento igual à do campo livre(base restringida); base livre
• Ds = 0.7 Dp
• > = 10%
• <s = 0.4
• H1 = 0.15H ; 0.30H ; 0.50H (H1=espessura da camada superior; H=espessura total)
• G2 = G1 ; 4G1 ; 8G1 ; 16G1 ; G1=4G2 (G1, G2=módulos de distorção das camadas 1 e 2)
• Ep/E1 = 5000
• H/d = 20
• excitação harmónica simples na base
Os resultados foram obtidos por aplicação do programa CINEMAT e resumem-se nas Figuras
3.6 a 3.29. Apresentam-se os diagramas de esforços da estaca para a situação em que o sistema
solo-estaca é sujeito a uma excitação com frequência T igual à frequência fundamental T1 do
terreno. Para o caso do meio homogéneo mostra-se ainda a variação do momento flector máximo
(que ocorre ao nível da cabeça) e do esforço transverso máximo em função da frequência de
excitação, onde são comparados com os valores obtidos pela formulação analítica exacta descrita
no Capítulo 2. Na situação de base restringida o esforço transverso máximo, |V|, ocorre na base
da estaca (Figura 3.9) enquanto que quando se considera a base livre a secção de esforço
transverso máximo ocorre a uma profundidade de cerca de 0.7H (Figura 3.21) .

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-12
Base restringida
• Meio homogéneo: Valores máximos dos esforços em função de T/T1
_________
ρpd4ω2
ω/ω1
0
500
1000
1500
2000
2500
3000
3500
0 2 4 6 8 10
Solução analítica Programa CINEMAT
H/d=20 , ξ=10% , νs=0.4Ep/Es=5000 , ρs=0.7ρp
Base restringida|Mo|
Figura 3.6 - |Mo| versus TTTT/TTTT1
_________
ρpd3ω2
ω/ω1
0
50
100
150
200
250
300
0 2 4 6 8 10
Solução analítica Programa CINEMAT
|V|
H/d=20 , ξ=10% , νs=0.4Ep/Es=5000 , ρs=0.7ρp
Base restringida
Figura 3.7 - |V| versus TTTT/TTTT1
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
Programa CINEMAT Solução analítica
|M|/ρpd4ω2
Figura 3.8 - Distribuição de |M| para TTTT=TTTT1
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 50 100 150 200 250
Programa CINEMAT Solução analítica
|V|/ρpd3ω2
Figura 3.9 - Distribuição de |V| para TTTT=TTTT1
Meio estratificado com H1=0.15H
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
G2=4G1 G2=16G1
Meio homogéneo(G1)
H1=0.15H
Figura 3.10 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 50 100 150 200 250
G2=4G1 G2=16G1
Meio homogéneo(G1)
H1=0.15H
Figura 3.11 - Distribuição de |V| para TTTT=TTTT1

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-13
Meio estratificado com H1=0.30H
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.30H
Figura 3.12 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 100 200 300 400 500 600 700
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.30H
Figura 3.13 - Distribuição de |V| para TTTT=TTTT1
Meio estratificado com H1=0.50H
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.50H
Figura 3.14 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 200 400 600 800 1000
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.50H
Figura 3.15 - Distribuição de |V| para TTTT=TTTT1
Meio estratificado com G1=4G2
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 2000 4000 6000 8000 10000 12000 14000
H1=0.15H H1=0.30H
H1=0.5H Meio homogéneo(G2)
G1=4G2
Figura 3.16 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 200 400 600 800 1000 1200 1400 1600
H1=0.15H H1=0.30H
H1=0.5H Meio homogéneo(G2)
G1=4G2
Figura 3.17 - Distribuição de |V| para TTTT=TTTT1

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-14
Base da estaca livre
• Meio homogéneo: Valores máximos dos esforços em função de T/T1
_________
ρpd4ω2
ω/ω1
0
500
1000
1500
2000
2500
3000
3500
0 2 4 6 8 10
Solução analítica Programa CINEMAT
H/d=20 , ξ=10% , νs=0.4Ep/Es=5000 , ρs=0.7ρp
Base livre|Mo|
Figura 3.18 - |Mo| versus TTTT/TTTT1
_________
ρpd3ω2
ω/ω1
0
50
100
150
200
250
300
0 2 4 6 8 10
Solução analítica Programa CINEMAT
H/d=20 , ξ=10% , νs=0.4Ep/Es=5000 , ρs=0.7ρp
Base livre|V|
Figura 3.19 - |V| versus TTTT/TTTT1
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
Programa CINEMAT Solução analítica
|M|/ρpd4ω2
Figura 3.20 - Distribuição de |M| para TTTT=TTTT1
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 50 100 150 200 250 300
Programa CINEMAT Solução analítica
|V|/ρpd3ω2
Figura 3.21 - Distribuição de |V| para TTTT=TTTT1
Meio estratificado com H1=0.15H
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
G2=4G1 G2=16G1
Meio homogéneo(G1)
H1=0.15H
Figura 3.22 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 50 100 150 200 250 300
G2=4G1 G2=16G1
Meio homogéneo(G1)
H1=0.15H
Figura 3.23 - Distribuição de |V| para TTTT=TTTT1

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-15
Meio estratificado com H1=0.30H
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.30H
Figura 3.24 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 100 200 300 400 500 600 700
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.30H
Figura 3.25 - Distribuição de |V| para TTTT=TTTT1
Meio estratificado com H1=0.50H
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 500 1000 1500 2000 2500 3000 3500
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.50H
Figura 3.26 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 200 400 600 800 1000
G2=4G1 G2=8G1
G2=16G1 Meio homogéneo(G1)
H1=0.50H
Figura 3.27 - Distribuição de |V| para TTTT=TTTT1
Meio estratificado com G1=4G2
|M|/ρpd4ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 2000 4000 6000 8000 10000 12000
H1=0.15H H1=0.30H
H1=0.5H Meio homogéneo(G2)
G1=4G2
Figura 3.28 - Distribuição de |M| para TTTT=TTTT1
|V|/ρpd3ω2
0
5
10
15
20
Pro
f. r
elat
iva
x/d
0 200 400 600 800 1000 1200
H1=0.15H H1=0.30H
H1=0.5H Meio homogéneo(G2)
G1=4G2
Figura 3.29 - Distribuição de |V| para TTTT=TTTT1

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-16
A análise dos resultados das Figuras 3.6 a 3.29 permite tirar as conclusões seguintes:
• para o caso do meio homogéneo constata-se que:
- existe uma concordância quase perfeita entre os resultados numéricos obtidos pelo programa
CINEMAT e os valores exactos obtidos pela solução analítica (Figuras 3.6 a 3.9 e 3.18 a
3.21);
- a condição de fronteira na base da estaca não afecta praticamente o valor do momento flector
máximo na cabeça da estaca (Figuras 3.6 e 3.18); já em termos de esforços transversos
verificam-se algumas diferenças para frequências superiores a T1 (Figuras 3.7 e 3.19);
• para o caso em que a camada superior exibe menor rigidez (G1<G2) verifica-se que:
- os esforços de interacção tornam-se cada vez mais importantes com o aumento da espessura
da camada superficial H1;
- para H1=0.5H os momentos flectores na zona de transição entre camadas atingem valores
importantes quando G2>8G1 (próximos dos valores máximos que ocorrem no topo da estaca
para a situação de meio homogéneo, Figuras 3.14 e 3.26);
- os esforços transversos são significativamente maiores do que os do caso do meio homogéneo
(cerca de 3 a 4 vezes, Figuras 3.15 e 3.27);
• para o caso em que a camada superior apresenta maior rigidez (G1=4G2) constata-se que:
- para H1=0.5H os momentos flectores na zona de transição entre camadas atingem valores
próximos dos valores máximos que ocorrem no topo da estaca para a situação de meio
homogéneo (Figuras 3.16 e 3.28);
- em termos de esforços transversos, o acréscimo dos valores, comparativamente com a
situação de meio homogéneo é bastante menos notária não ultrapassando os 50%, mesmo para
a situação mais desfavorável analisada com H1=0.5H (Figuras 3.17 e 3.29).

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-17
y(t) '1
2B m4
&4
H(T)A(T) e &iTt dT (3.26)
3.4 - Análise no domínio do tempo. Método linear equivalente
A natureza histerética do amortecimento conduziu à consideração de uma rigidez complexa para
o solo. Por conseguinte, a discretização geométrica das equações de equilíbrio dinâmico que
governam a interacção cinemática solo-estaca conduz igualmente a um sistema de equações
complexas.
Numa abordagem determinística do problema a acção sísmica é caracterizada habitualmente
através de histórias de aceleração impostas na fronteira basal. Atendendo à linearidade do
sistema em apreço o problema no domínio do tempo é transposto e resolvido no domínio da
frequência. Este método vulgarmente designado por método de resposta complexa no domínio
da frequência recorre à bem conhecida técnica de transformada de Fourier.
Considera-se então um processo físico descrito no domínio do tempo por uma variável a(t) em
função do tempo t, ou no domínio da frequência em que o mesmo processo é caracterizado pela
amplitude A(T) em função da frequência angular T. As equações de transformada directa e
inversa de Fourier são expressas respectivamente por:
A(T) ' m4
&4
a(t) e iTt dt (3.24)
e
a(t) '1
2B m4
&4
A(T) e &iTt dT (3.25)
em que f(t) e A(T) poderão ser ambas funções complexas.
No modelo BDWF a acção sísmica é considerada como uma acção determinística sem
variabilidade espacial e considera-se apenas a componente horizontal do movimento do solo. A
resolução do problema obriga à transformação prévia da acção sísmica para o domínio da
frequência pela transformada directa de Fourier. A resposta do sistema é então calculada para
cada uma das harmónicas com amplitude unitária obtendo-se a chamada função de resposta
complexa no domínio da frequência H(T), muitas vezes também designada por função de
transferência.
A função resposta y(t) no domínio do tempo é obtida sobrepondo as respostas harmónicas o que
em termos matemáticos corresponde em aplicar a transformada inversa de Fourier expressa pela
equação seguinte:

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-18
Faz-se notar, que esta equação (3.26) é geral e poderá representar a resposta em termos de
deslocamentos, velocidades, acelerações ou mesmo esforços internos da estaca consoante a
função de transferência considerada.
Para a análise dinâmica de um determinado problema concreto a história de acelerações é definida
por uma série temporal, com N valores discretos geralmente com igual espaçamento no tempo.
Nestas condições, as transformadas de Fourier passam a tomar a forma discreta de somatório
(DFT - "Discrete Fourier Transform") com um número de termos igual ao número de pontos de
discretização da acção. A avaliação da resposta total do sistema implica a aplicação das
transformadas directa e inversa de Fourier o que conduz, em termos práticos, a um número
elevado de operações (N2). Graças ao desenvolvimento do algoritmo da transformada rápida de
Fourier (FFT - "Fast Fourier Transform") o número de operações é reduzido para Nlog2N
(Cooley e Tukey, 1965), viabilizando do ponto de vista prático a aplicação do método de resposta
complexa no domínio da frequência. Por exemplo para N=2048 a aplicação do algoritmo FFT
reduz o número de operações para cerca de 0.5% quando comparado com o método DFT.
Salienta-se ainda, que pelo facto da história de acelerações ser definida por valores reais é
possível tirar partido das propriedades de simetria das transformadas de Fourier reduzindo o
número total de harmónicas para N/2+1. A descrição exaustiva do algoritmo FFT pode ser
encontrada em Cooley e Tukey (1965) e Press et al. (1986).
O programa de cálculo CINEMAT incorpora uma subrotina que aplica o algoritmo FFT para
funções reais tirando assim proveito das propriedades de simetria acabadas de referir.
O método de resposta complexa no domínio da frequência acabado de descrever pressupõe a
linearidade do sistema. O comportamento não linear do solo é modelado de forma aproximada
utilizando o método linear equivalente. Este método de natureza iterativa consiste em procurar
a compatibilização entre a distorção e os respectivos valores secantes de G e > no ponto médio
de cada camada de solo, de acordo com a discretização geométrica do problema.
Esta compatibilização é feita habitualmente recorrendo às curvas não lineares G-( e >-( obtidas
em laboratório através de ensaios de carregamento sinusoidal considerando os valores máximos
da distorção em cada ciclo de histerese. Porém, durante a actuação de um sismo, as distorções
no solo variam de forma irregular atingindo poucas vezes os valores de pico.
Seed et al. (1975), no contexto da verificação à susceptibilidade de liquefacção das areias,
introduziram então uma metodologia para converter a história irregular das tensões de corte num
número equivalente de ciclos uniformes de acções sinusoidais com amplitude igual a 65% do
valor máximo do módulo da tensão de corte, definindo uma tensão de corte média dada por:

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-19
Jav ' 0.65 Jmáx (3.27)
(ef ' R( (máx 'M&110
(máx (3.28)
em que:
Jav = tensão de corte média equivalente (ciclos sinusoidais)
Jmáx = valor máximo do módulo da tensão de corte (história irregular)
Convém frisar, que este procedimento foi originalmente estabelecido para amplitudes de distorção
elevadas e suficientes para provocar a liquefacção das areias. Posteriormente, admitiu-se que de
forma aproximada se poderia admitir o mesmo tipo de relação (3.27) para níveis de distorção
mais baixos sugerindo que a resposta do solo fosse calculada com base num valor representativo
da distorção que é tomado como uma fracção do valor máximo da distorção ocorrido durante o
tempo de actuação do sismo (Makdisi e Seed, 1979). A este valor representativo da distorção
é-lhe atribuído na literatura a designação de distorção cíclica equivalente ou efectiva, (ef.
Idriss e Sun (1992) propuseram que o valor de (ef fosse calculado com base na relação empírica
seguinte:
em que:
M = magnitude do sismo
(máx = valor máximo da distorção (história irregular)
O valor do coeficiente R( varia então entre 0.5 e 0.7 para sismos com magnitude entre 6 e 8,
respectivamente. No entanto, segundo aqueles autores, a resposta dinâmica do sistema não é
altamente sensível àquele coeficiente, aliás o valor de 0.65 é frequentemente referido na literatura.
A análise iterativa é feita até à obtenção de convergência entre os valores de G e >
correspondentes a duas iterações consecutivas. Para a maioria dos casos, consegue-se uma boa
convergência de resultados com erros associados da ordem de 1%, após 5 a 8 iterações (Idriss e
Sun, 1992).
Na utilização deste conceito de distorção cíclica equivalente impõe-se que as propriedades
compatíveis do solo G-( e >-( se mantenham invariáveis durante a actuação do sismo,
independentemente se a distorção num determinado instante for pequena ou elevada. Este
método é incapaz de modelar a variação da rigidez do solo que ocorre na realidade durante a
actuação de um sismo. Assim, poderão ocorrer resultados menos correctos nalgumas situações
particulares:

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-20
• como a rigidez do sistema não varia durante o tempo de análise, caso haja uma coincidência
entre o período predominante da acção sísmica e o período fundamental do sistema,
obter-se-iam efeitos de sobreamplificação que não ocorreriam na realidade;
• por outro lado, a utilização dos parâmetros compatíveis conduzem, em geral, a uma resposta
mais amortecida ou atenuada, sobretudo quando a história de distorções tiver um valor de pico
bem pronunciado.
Salienta-se ainda, que não foram considerados outros efeitos de não linearidade ao nível local
devido a fenónemos de separação ou perda de contacto entre a estaca e o solo envolvente.
Admitiu-se no modelo BDWF uma aderência perfeita entre o solo e a estaca, ou seja, em termos
da formulação de elementos finitos, foram impostos nos pontos nodais da estaca um campo de
forças exteriores correspondentes aos deslocamentos do campo livre calculados tendo em conta
o comportamento não linear do solo.
No método linear equivalente, a convergência é relativamente rápida bastando, em geral, um
número de iterações inferior a 10 para conseguir obter as propriedades compatíveis do campo
livre (com erros relativos inferiores a 1%). O cálculo da resposta dinâmica completa do sistema
solo-estaca pode ser efectuado em poucos minutos num computador PC compatível com as
características de um Pentium II.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-21
3.5 - Caso de estudo para um cenário típico de uma estaca atravessando uma
baixa aluvionar
3.5.1 - Modelo geotécnico
Considere-se então um cenário de estudo mais realista do ponto de vista prático, em que se
pretende analisar o efeito de interacção cinemática para uma estaca atravessando uma formação
aluvionar com a seguinte estratificação contando de cima para baixo:
• camada A: constituída por aterros e/ou por uma zona sobreconsolidada devido à dessecação
do solo;
• camada B: representando uma camada aluvionar de natureza argilosa, normalmente
consolidada apresentando um ligeiro aumento do módulo em profundidade;
• camada C: representando uma zona mais alterada do estrato competente;
• camada D: constituída por um maciço de boa qualidade e de elevada rigidez, podendo-se
considerar simplificadamente como um substrato rígido.
Atribuiram-se para cada uma destas zonas as propriedades geotécnicas que se indicam no Quadro
3.1 e Figura 3.30.
Quadro 3.1 - Propriedades geotécnicas consideradas para o estudo
Camada Descrição Comportamento (t(kN/m3) < G0(MPa) Curvas G/G0-( >-(
AAterros e/ou zona
dessecadaNão linear 19 0.3 80
Areia (Oceanário,
Expo'98)
BCamada aluvionar
de natureza argilosaNão linear 17 0.5
variável
entre 20 e 30
Argila (Stª Iria de
Azóia)
CZona alterada do
maciço competente
Linear com
>=1%22 0.3
200
(vs.300m/s)—
DMaciço de boa
qualidadeRígido — — — —
Convém frisar que se trata de um cenário de estudo hipotético, em que se aplicaram os resultados
de ensaios reais realizados sobre solos de natureza semelhante e que estão relatados em
Santos (1999).
Procurou-se de facto estudar para um cenário geotécnico mais realista qual a importância do
efeito de interacção cinemática solo-estaca durante a ocorrência de um sismo.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-22
5m A
B
C5m
10m
3m
Substrato rígido
= 0o G (MPa)0
80
20
30
200
D
E=29GPa
camada 1
camada 20
Figura 3.30 - Modelo geotécnico
0
0.2
0.4
0.6
0.8
1
G/G
0
6
12
18
24
30
ξ (%
)
1E-06 1E-05 1E-04 1E-03 1E-02
γ
Solo A: Areia (Oceanário, Expo'98)
Solo B: Argila (Stª Iria de Azóia)
Figura 3.31 - Propriedades dos solos A e B
Para a estaca admitiu-se um comportamento elástico com as propriedades de um betão da classe
B25, de acordo com o Regulamento de Estruturas de Betão Armado e Pré-Esforço (REBAP,
1985).
Restringiu-se a rotação da cabeça da estaca e admitiu-se que na base o deslocamento da estaca
é igual ao deslocamento do campo livre. A estaca e o solo foram discretizados em elementos de
0.5m (Figura 3.30).

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-23
3.5.2 - Acções determinísticas consideradas
Para este estudo, a acção sísmica foi definida por quatro séries temporais de aceleração horizontal
impostas no topo do substrato rígido:
• sismo de Kobe-JMA (1995): registo obtido na estação meteorológica de Kobe a cerca de
17km do epicentro (Suetomi e Yoshida,1998);
• sismo de Arménia (1988): registo obtido na cidade de Gukasian a cerca de 35km do
epicentro (Gomes Correia et al, 1994);
• sismo de Lisboa (1969): registo obtido no maciço de amarração Norte da Ponte sobre
o rio Tejo na direcção E-W a cerca de 300km do epicentro
(Mineiro, 1979);
• sismo dos Açores (1998): registo obtido na ilha do Faial a cerca de 15km do epicentro
(Oliveira et al., 1998).
A representação gráfica dos respectivos acelerogramas encontra-se nas Figuras 3.32 a 3.38. Cada
um destes acelerogramas é definido por 2048 pontos de discretização.
O contéudo de frequências de cada um dos sismos seleccionados pode ser melhor visualizado
num gráfico com a representação do espectro de Fourier dos respectivos acelerogramas.
Representam-se assim nas Figuras 3.33 a 3.39 a amplitude, |A|, dos coeficientes complexos de
Fourier em função da frequência f, para cada um dos sismos referidos e normalizados para a
aceleração máxima de 0.1g.
Este tipo de abordagem determinística apresenta obviamente algumas limitações inerentes à
pequena representatividade estatística das conclusões que se podem tirar baseadas num número
restrito de análises de carácter determinístico. Para ultrapassar este problema é sempre possível
efectuar um conjunto de análises para diversos acelerogramas e proceder à posteriori a um
tratamento estatístico dos resultados obtidos. Uma outra via possível recentemente sugerida por
Vieira (1995) e Bilé Serra (1998) consiste na definição de uma estrutura probabilística para a
acção sísmica de modo a possibilitar a aplicação da teoria dos processos estocásticos na resolução
do problema de equilíbrio dinâmico.
Salienta-se, no entanto, que o principal objectivo do estudo de sensibilidade que se apresenta
neste ponto é o de mostrar a influência e a forma como diversos factores afectam o efeito de
interacção cinemática solo-estaca durante a ocorrência de um sismo.
Deste modo, não foram seleccionados acelerogramas reais compatíveis com as características
principais dos sismos esperados para um determinado local, nem foram utilizados acelerogramas
artificiais gerados de acordo os espectros de densidade de potência do RSAEEP (1986).

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-24
-1 -0.8 -0.6 -0.4 -0.2
0 0.2 0.4 0.6 0.8
1
a (g
)
0 5 10 15 20
t (s)
Kobe-JMA (1995)
Figura 3.32 - Kobe-JMA: Acelerograma
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
|A| (
g·s)
0 2 4 6 8 10
f (Hz)
Kobe-JMA (1995)
Figura 3.33 - Kobe-JMA: Espectro de Fourier
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
a (g
)
0 5 10 15 20
t (s)
Arménia (1988)
Figura 3.34 - Arménia: Acelerograma
0
0.0005
0.001
0.0015
0.002
0.0025
|A| (
g·s)
0 2 4 6 8 10
f (Hz)
Arménia (1988)
Figura 3.35 - Arménia: Espectro de Fourier
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
a (g
)
0 5 10 15 20 25 30
t (s)
Lisboa E-W (1969)
Figura 3.36 - Lisboa: Acelerograma
0
0.001
0.002
0.003
0.004
0.005
|A| (
g·s)
0 2 4 6 8 10
f (Hz)
Lisboa E-W (1969)
Figura 3.37 - Lisboa: Espectro de Fourier
-0.1
-0.05
0
0.05
0.1
a (g
)
0 5 10 15 20
t (s)
Faial (1998)
Figura 3.38 - Faial: Acelerograma
0
0.0005
0.001
0.0015
0.002
0.0025
|A| (
g·s)
0 2 4 6 8 10
f (Hz)
Faial (1998)
Figura 3.39 - Faial: Espectro de Fourier

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-25
3.5.3 - Método linear equivalente
3.5.3.1 - Estudo de sensibilidade
Os resultados que se vão apresentar referem-se aos valores máximos dos esforços obtidos na
estaca para as diferentes situações de cálculo no domínio do tempo, utilizando o método linear
equivalente (convencional) com R(=0.65. Efecturam-se, no total, um conjunto de 36 análises
resultante da combinação de quatro acelerogramas reais, com três níveis de aceleração máxima
(amáx=0.1, 0.15 e 0.20g) e com três valores do diâmetro da estaca (d=0.50, 0.80 e 1.30m).
Faz-se notar, que os momentos flectores máximos ocorrem nas zonas de transição entre camadas
(A-B e B-C), passando-se a designar o valor absoluto destes valores por M1 e M2,
respectivamente. Utilizou-se uma simbologia semelhante para designar os valores máximos dos
esforços tranversos, V1 e V2 que ocorrem nas camadas A e C, respectivamente. A Figura 3.40
ilustra o andamento qualitativo dos diagramas de esforços (em termos de valores absolutos).
0
5
10
15
20
Pro
f. (
m)
|M| , |V|
|M| |V|
M1
M2
V2
V1 Camada A
Camada B
Camada C
Figura 3.40 - Andamento qualitativo dos esforços
Dado que estas análises são feitas para estacas com diferentes diâmetros, os resultados só
poderiam ser comparáveis após normalização. Assim para o caso dos momentos flectores
calcularam-se os respectivos valores reduzidos dados por:
Mr 'M
2B r 3 fcd(3.29)
em que: r=raio da estaca ; fcd=valor de cálculo da tensão de rotura do betão à compressão.
Para o caso dos esforços transversos compararam-se os valores actuantes com os valores de
cálculo do esforço transverso resistente devido apenas à contribuição do betão, Vcd, e com o seu
valor máximo, VRd(máx), permitido no regulamento REBAP (1985).
Os resultados obtidos resumem-se nas Figuras 3.41 a 3.56.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-26
0
0.04
0.08
0.12
0.16
0.2 M
r1
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Kobe-JMA (1995)
amáx (g)
Figura 3.41 - Kobe: Mr1
0
0.04
0.08
0.12
0.16
0.2
0.24
0.28
Mr2
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Kobe-JMA (1995)
amáx (g)
Figura 3.42 - Kobe: Mr2
0
0.04
0.08
0.12
0.16
0.2
Mr1
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Arménia (1988)
amáx (g)
Figura 3.43 - Arménia: Mr1
0
0.04
0.08
0.12
0.16
0.2
0.24
0.28
Mr2
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Arménia (1988)
amáx (g)
Figura 3.44 - Arménia: Mr2
0
0.04
0.08
0.12
0.16
0.2
Mr1
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Lisboa E-W (1969)
amáx (g)
Figura 3.45 - Lisboa E-W: Mr1
0
0.04
0.08
0.12
0.16
0.2
0.24
0.28
Mr2
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Lisboa E-W (1969)
amáx (g)
Figura 3.46 - Lisboa E-W: Mr2
0
0.04
0.08
0.12
0.16
0.2
Mr1
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Faial (1998)
amáx (g)
Figura 3.47 - Faial: Mr1
0
0.04
0.08
0.12
0.16
0.2
0.24
0.28
Mr2
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Faial (1998)
amáx (g)
Figura 3.48 - Faial: Mr2

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-27
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Kobe-JMA (1995)
V1/Vcd
V1/VRd(máx)
amáx (g)
V1/
Vcd
V1/
VR
d(m
áx)
Figura 3.49 - Kobe: V1
0
1
2
3
4
5
0
1
2
3
4
5
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
Kobe-JMA (1995)
V2/Vcd
V2/VRd(máx)
amáx (g)
V2/
VR
d(m
áx)
V2/
Vcd
Figura 3.50 - Kobe: V2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
V1/Vcd
V1/VRd(máx)
Arménia (1988)
amáx (g)
V1/
Vcd
V1/
VR
d(m
áx)
Figura 3.51 - Arménia: V1
0
1
2
3
4
5
0
1
2
3
4
5
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
V2/Vcd
V2/VRd(máx)
Arménia (1988)
amáx (g)
V2/
VR
d(m
áx)
V2/
Vcd
Figura 3.52 - Arménia: V2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
V1/Vcd
V1/VRd(máx)
Lisboa E-W (1969)
amáx (g)
V1/
Vcd
V1/
VR
d(m
áx)
Figura 3.53 - Lisboa E-W: V1
0
1
2
3
4
5
0
1
2
3
4
5
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
V2/Vcd
V2/VRd(máx)
Lisboa E-W (1969)
amáx (g)
V2/
VR
d(m
áx)
V2/
Vcd
Figura 3.54 - Lisboa E-W: V2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
V1/Vcd
V1/VRd(máx)
Faial (1998)
amáx (g)
V1/
Vcd
V1/
VR
d(m
áx)
Figura 3.55 - Faial: V1
0
1
2
3
4
5
0
1
2
3
4
5
0.1 0.15 0.2
d=0.50m d=0.80m d=1.30m
V2/Vcd
Faial (1998)
amáx (g)
V2/
VR
d(m
áx)
V2/
Vcd
V2/VRd(máx)
Figura 3.56 - Faial: V2

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-28
A análise destas figuras permite tirar algumas ilações de índole geral acerca do efeito de
interacção cinemática solo-estaca:
• Influência do diâmetro da estaca
O aumento do diâmetro da estaca traduz-se, em geral, num aumento do momento flector
reduzido, o qual é proporcional à relação M/r3. Como já se viu no Capítulo 2, o momento
actuante é aproximadamente proporcional ao momento de inércia da estaca e portanto ao seu
diâmetro elevado ao expoente quatro, estando assim justificada a razão do tal aumento do
momento flector reduzido. Em termos de esforços transveros observa-se igualmente a mesma
tendência de valores.
• Influência do acelerograma
Como é óbvio, para um mesmo sismo, o aumento da aceleração máxima conduz a um
agravamento dos esforços na estaca. Verifica-se, no entanto, dois tipos de andamento destas
curvas.
Para os sismos de Kobe, Arménia e de Faial, observa-se uma ligeira tendência de redução da taxa
de crescimento dos esforços com o aumento da aceleração máxima. Isto deve-se provavelmente
à mobilização de maiores níveis de amortecimento para os sismos com aceleração máxima mais
elevada.
Por outro lado, e para o sismo de Lisboa, observa-se uma tendência diferente, com um aumento
da taxa de crescimento dos esforços com o aumento da aceleração máxima. Neste caso, a
explicação deve-se ao comportamento não linear do solo e à consequente perda de rigidez do
sistema. A frequência fundamental do terreno decresce com o aumento do nível de aceleração
máxima movendo-se para uma zona onde o sismo apresenta maior riqueza no seu conteúdo de
frequências (f<1Hz, vide Figura 3.37).
De entre os quatro sismos analisados, o de Kobe é aquele que conduziu a resultados mais
desfavoráveis. A representação dos factores de amplificação dinâmica, ou seja, do valor absoluto
das funções de transferência da aceleração basal para a aceleração no ponto médio da camada
mais superficial (camada 1 - Figura 3.30) nas Figuras 3.57 e 3.58, permite mostrar o seguinte:
- para as propriedades iniciais, devido aos baixos níveis de amortecimento associados,
verificam-se efeitos de amplificação importantes para as várias frequências próprias do sistema
estratificado;
- no cálculo linear equivalente, a função de transferência obtida, após a convergência, é bastante
suave devido aos elevados níveis de amortecimento induzidos na camada aluvionar B. O pico

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-29
desta curva bem como da curva de transferência do momento flector M1 na transição entre as
camadas A e B (Figura 3.58), localiza-se próximo da frequência de 1Hz numa zona de
particular riqueza no espectro de Fourier do acelerograma do sismo de Kobe (Figura 3.33).
0
2
4
6
8
10
D
0 10 20 30 40 50
f (Hz)
Propriedades iniciais Após convergência
Kobe-JMA (1995)amáx=0.2g
Figura 3.57 - Funções de transferência para aprimeira e a última iteração
0
1
2
3
4
5
6
D
0
1000
2000
3000
4000
5000
6000
M1
(kN
m)
0 1 2 3 4 5 6 7 8 9 10
f (Hz)
a M1
Kobe-JMA (1995)amáx=0.2g
após convergência
Figura 3.58 - Funções de transferência:aceleração e momento flector
A título indicativo, mostram-se ainda nas Figuras 3.59 a 3.62 os perfis envolventes com os
valores máximos da distorção ((máx) e do deslocamento absoluto (umáx) do campo livre e das
respectivas propriedades compatíveis G e > para as diferentes camadas, referentes ao mesmo
sismo de Kobe normalizado para a aceleração máxima de 0.2g.
0
5
10
15
20
Pro
f. (
m)
1E-05 1E-04 1E-03 1E-02
Kobe-JMA (1995)amáx=0.2g
γmáx
Figura 3.59 - Perfil de distorções máximas
umáx (m)_
0
5
10
15
20
Pro
f. (
m)
0 0.02 0.04 0.06 0.08
Kobe-JMA (1995)amáx=0.2g
Figura 3.60 -Perfil de desl. absolutos máximos

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-30
0
5
10
15
20
Pro
f. (
m)
0 50 100 150 200
G (MPa)
Kobe-JMA (1995)amáx=0.2g
Figura 3.61 - Perfil de valores de G
0
5
10
15
20
Pro
f. (
m)
0 5 10 15 20
ξ (%)
Kobe-JMA (1995)amáx=0.2g
Figura 3.62 -Perfil de valores de >>>>
A Figura 3.59 evidencia a ocorrência de elevados níveis de distorção na camada aluvionar B. A
distorção máxima ocorre sensivelmente a meio da camada aluvionar tendo-se obtido um valor
máximo de cerca de 5x10-3 (R(=0.65) para a distorção cíclica equivalente. Este valor, embora
elevado, encontra-se ainda dentro dos limites aceitáveis para os quais se pode aplicar o método
linear equivalente.
As funções de transferência representadas nas Figuras 3.57 e 3.58, permitem ainda explicar de
certa forma por que o sismo de Faial conduziu a esforços relativamente menos importantes. De
facto, observando o conteúdo de frequências do acelerograma (vide Figura 3.39), verifica-se que
o espectro de Fourier apresenta valores mais significativos na gama de frequências entre 3 a 5Hz,
pouco afectando assim o sistema com uma frequência fundamental próxima de 1Hz.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-31
M1 'B
2H
2EpIp yo ' 4013kNm (3.30)
• Considerações de índole geral
Os resultados obtidos permitem evidenciar claramente a importância do efeito de interacção
cinemática solo-estaca durante a actuação de um sismo, principalmente para as estacas de grande
diâmetro. Em situações reais, tal como se procurou simular no cenário de estudo arbitrado, o
terreno é geralmente constituído por camadas com algum contraste de rigidez. Nestas condições,
a estaca não consegue acompanhar a deformada do terreno originando esforços de interacção
particularmente importantes.
Obtiveram-se valores bastante gravosos, em termos de momentos flectores na zona de transição
entre as camadas A e B (Mr1=0.16 a 0.20), localizada a um profundidade de 5m. Repare-se que
para esta profundidade (>3d, mesmo para a secção com 1.30m de diâmetro), os esforços devidos
às forças de inércia da superestrutura são já praticamente insignificantes. Salienta-se ainda, que
os esforços de interacção cinemática obtidos são provavelmente superiores aos esforços que
ocorrem na cabeça da estaca devidos às forças de inércia da superestrutura, face à rigidez da
camada superficial A.
Outro aspecto importante ainda por esclarecer, prende-se com a aplicabilidade dos métodos
simplificados apresentados no Capítulo 2. Nestes métodos os deslocamentos horizontais são
entendidos como valores espectrais obtidos a partir de uma análise por espectro de resposta.
Numa situação real, os deslocamentos máximos não ocorrem simultaneamente em todos os
pontos no interior do terreno. A Figura 3.63 mostra a deformada do terreno (em termos de
deslocamentos absolutos) para dois instantes de tempo:
• deformada A: instante para o qual ocorrem os deslocamentos máximos na camada A;
• deformada C: instante para o qual ocorrem os deslocamentos máximos na camada C.
Ao sobrepor nesta mesma figura a curva envolvente dos valores máximos, verifica-se
efectivamente uma certa divergência relativamente à deformada A. Assim, a utilização da
deformada envolvente ou de uma deformada obtida a partir de uma análise simplificada por
espectro de resposta para a estimativa dos esforços na estaca, deverá ser encarada com as devidas
reservas, pois podem conduzir a resultados pouco correctos.
Salienta-se ainda que, a estratificação do terreno e o comportamento não linear do solo conduziu
a uma deformada que se afasta muito do andamento sinusoidal admitido no método simplificado
de Soulomiac (1986), apresentado no Capítulo 2. No caso de se aplicar tal formulação
simplificada, ser-se-ia conduzido a:

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-32
M1 '6EpIp
L 2yo ' 5270kNm (3.31)
em que H (=10m) é a espessura da camada aluvionar B e yo (=0.04m) é o deslocamento relativo
da estaca entre o topo e a base da camada aluvionar (neste caso particular os deslocamentos da
estaca são praticamente iguais aos deslocamentos do campo livre).
Observando com mais cuidado a deformada da estaca, constata-se a semelhança com a da barra
bi-encastrada sujeita a um deslocamento imposto de yo. Para o instante de tempo mais
desfavorável (instante A) obteve-se yo=0.07m. Nestas condições, o momento flector nos apoios
é dado por:
em que L é o comprimento total da estaca, isto é, 18m.
Na análise dinâmica (modelo BDWF), obteve-se para M1 o valor máximo de 4390kNm, e
portanto, dentro do intervalo de variação dos resultados obtidos nos métodos simplificados. Este
exemplo serve para mostrar que os métodos simplificados se revelam por vezes apropriados e
que poderão servir de orientação a título de pré-dimensionamento.
0
5
10
15
20
Prof
. (m
)
0 0.02 0.04 0.06 0.08 0.1
envolvente máx. em A máx. em C
Kobe-JMA (1995)amáx=0.2g
u (m)
Figura 3.63 - Deformadas do terreno

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-33
Em termos de esforços transversos, obtiveram-se valores máximos da relação V1/VRd(máx) de
cerca de 0.6. Alerta-se a necessidade de as estacas disporem de armadura transversal, não apenas
no topo e nas zonas próximas de transição entre camadas com grande contraste de rigidez. Aliás,
este estudo revelou que a meio da camada aluvionar B a cerca de 10m de profundidade ocorrem
esforços transversos da mesma ordem de grandeza ou até superiores àqueles que ocorrem na
camada A, como se pode constatar da Figura 3.40.
Quanto à zona de transição da camada aluvionar para o estrato competente, ocorrem esforços de
interacção ainda mais gravosos.
Se por razões de ordem económica ou por razões construtivas, não for viável dimensionar a estaca
para resistir a estes esforços de interacção cinemática em regime elástico, há que tomar as devidos
cuidados quanto à disposição das armaduras no sentido de garantir uma certa ductilidade à estaca
e de garantir a transmissão das cargas verticais ao estrato competente.
Como nota final, salienta-se ainda que para situações onde possam ocorrer fenómenos de
liquefacção e portanto a ocorrência de grandes deslocamentos horizontais no terreno, o efeito de
interacção cinemática torna-se num problema ainda mais dramático podendo causar grandes
estragos ou mesmo a ruína da superestrutura por perda de equilíbrio global, ou por deformações
excessivas. Casos reais ilustrativos desta situação encontram-se bem relatados na literatura para
o caso do sismo de Kobe de 1995.
3.5.3.2 - Influência do parâmetro R((((
Conforme, já referido anteriormente, a resposta dinâmica calculada com base no método linear
equivalente não é, segundo a opinião de alguns autores, muito sensível ao parâmetro R(.
Para esclarecer este aspecto, repetiram-se os cálculos para o sismo de Kobe (normalizado para
a aceleração máxima de 0.2g), mas adoptando agora para o coeficiente R( o valor unitário, em
vez de R(=0.65.
A Figura 3.64 mostra a resposta do campo livre em termos de acelerações no ponto médio da
camada mais superficial (camada 1 - Figura 3.30) para R(=0.65 e R(=1. Representa-se também
nesta mesma figura a história de acelerações que foi imposta no topo do substrato rígido.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-34
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
a (g
)
0 5 10
t (s)
topo do substrato
Kobe-JMA (1995)
camada 1: Rγ = 0.65 camada 1: Rγ = 1
Figura 3.64 - Aceleração a meio da camada 1 para R((((=0.65 e R((((=1
A análise desta figura permite verificar efectivamente, que as duas respostas em termos de
acelerações são muito próximas. Ao contrário do que seria de esperar à partida, observam-se
curiosamente maiores amplificações para o caso de R(=0.65. A adopção de um valor de R( mais
elevado traduz-se numa maior redução da rigidez mas ao mesmo tempo num aumento do nível
de amortecimento no sistema. Neste caso particular, o segundo efeito foi dominante explicando
assim os resultados apresentados.
Em termos de esforços, a Figura 3.65 mostra a história de momentos flectores (M1) na secção
mais solicitada junto à zona de transição entre as camadas A e B. Esta figura mostra claramente
que a resposta dinâmica em termos de esforços também não é particularmente sensível ao
coeficiente R(, no caso do cenário particular analisado.
-6000
-4000
-2000
0
2000
4000
6000
M1
(kN
m)
0 5 10
t (s)
Kobe-JMA (1995)
Rγ = 0.65 Rγ = 1
Figura 3.65 - M1 para R((((=0.65 e R((((=1

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-35
Mmáx(t) ' 0Mmáx(T) (3.32)
3.5.3.3 - Domínio da frequência versus domínio do tempo
Como se viu, a resposta dinâmica é altamente sensível às características relativas de frequência
da excitação e das funções de transferência do sistema solo-estaca. A Figura 3.66 mostra, para
o cenário particular analisado, o andamento típico dos diagramas dos esforços máximos (em
termos de valor absoluto) no domínio do tempo e no domínio da frequência (em regime de
vibração permanente), normalizados para a mesma aceleração máxima.
0
5
10
15
20
Pro
f. (
m)
|M| , |V|
M(tempo) V(tempo) M(frequência) V(frequência)
Camada A
Camada B
Camada C
Figura 3.66 - Esforços máximos nos domínios do tempo e da frequência
Contata-se efectivamente, que os diagramas têm o mesmo andamento qualitativo.
Nikolaou e Gazetas (1997) propuseram a ideia de estabelecer uma correlação entre os valores dos
momentos flectores máximos que ocorrem no domínio do tempo, Mmáx(t), e no domínio da
frequência, Mmáx(T), ou seja:
Efectuaram um estudo paramétrico com base no modelo BDWF em regime elástico linear para
um cenário simples constituído apenas por duas camadas de solo com características homogéneas.
Verificaram que para as acções com período predominante próximo do período fundamental do
sistema havia uma certa tendência do aumento do parâmetro 0 com a duração do sismo ou com
o número de ciclos efectivos da acção sísmica, tomando valores entre 0.3 e 0.5.
Agora com base no estudo de sensibilidade efectuado para um cenário geotécnico mais realista
considerando a estratificação do terreno e o comportamento não linear do solo através do método
linear equivalente (com R(=0.65), seria interessante estabelecer o mesmo tipo de correlação entre
os resultados obtidos no domínio do tempo e no domínio da frequência. A Figura 3.67 mostra
os valores de 0 obtidos para o momento flector máximo M1 na zona de transição entre as
camadas A e B, para todos os 36 casos analisados.

Capítulo 3 Interacção cinemática solo-estaca. Modelo BDWF
3-36
amáx (g)
0
0.2
0.4
0.6
0.8
1
η
0.1 0.15 0.2
Kobe-JMA (1995) Arménia (1988)
Lisboa E-W (1969) Faial (1998)
d=0.50, 0.80 e 1.30m
Figura 3.67 - Factor 0000 relativo a M1
A análise desta Figura 3.67 permite concluir o seguinte:
• a influência do diâmetro da estaca é praticamente insignificante;
• a aceleração máxima do sismo também não afectou de forma significativa o parâmetro 0;
• o aspecto principal prende-se essencialmente em verificar se a frequência fundamental do
sistema solo-estaca está ou não dentro da gama de frequências predominantes do sismo. Os
sismos de Kobe, de Arménia e de Lisboa E-W conduziram a valores semelhantes de 0 de cerca
de 0.4. Note-se que, para o sismo de Lisboa E-W os valores mais elevados de 0 só foram
atingidos para a situação correspondente a amáx=0.2g. Pois, só para este nível de aceleração
mais elevado é que se verificou uma maior perda de rigidez do sistema, movendo-se a
frequência fundamental do terreno para a zona das frequências predominantes do sismo
(f<1Hz). Para o sismo de Faial, os valores reduzidos de 0 devem-se ao facto de a frequência
fundamental do terreno estar fora da zona das frequências predominantes do sismo;
• estes resultados confirmam de certa forma os valores obtidos anteriormente por Nikolaou e
Gazetas (1997), mostrando de forma clara que o parâmetro 0 em situações mais desfavoráveis
poderá tomar valores de cerca de 0.4 a 0.5.
Este parâmetro 0 poderá revelar-se de grande utilidade em termos práticos de dimensionamento.
Pois, após a escolha de um cenário com as propriedades compatíveis que se revelam mais
desfavoráveis, basta efectuar um único cálculo dinâmico em regime de vibração permanente para
uma frequência próxima da frequência fundamental do terreno.
Mais estudos de sensibilidade serão necessários para poder sustentar uma nova filosofia de
dimensionamento com base no parâmetro 0, e correlações semelhantes poderão ser obtidas para
outros esforços internos ou deslocamentos.