Mestrado Integrado em Engenharia Electrónica e...
101
Mestrado Integrado em Engenharia Electrónica e Telecomunicações Fundamentos de Telecomunicações II w3.ualg.pt/∼sjesus/ Sérgio M.M. Jesus [email protected] Faculdade de Ciências e Tecnologia Universidade do Algarve 2006/07 Versão 1.0a - 12/Setembro/2016 (http://w3.ualg.pt/∼sjesus/aulas/ftel2-V1.0a.pdf) 1
Transcript of Mestrado Integrado em Engenharia Electrónica e...

Mestrado Integrado em
Engenharia Electrónica e Telecomunicações
Fundamentos de Telecomunicações IIw3.ualg.pt/∼sjesus/
Sérgio M.M. [email protected]
Faculdade de Ciências e TecnologiaUniversidade do Algarve
2006/07
Versão 1.0a - 12/Setembro/2016
(http://w3.ualg.pt/∼sjesus/aulas/ftel2-V1.0a.pdf)
1

História da disciplina (versão 0.3 - Setembro 2006)
Esta é uma versão preliminar do texto de apoio para a disciplina de ComunicaçõesDigitais. Encontra-se igualmente disponível uma versão on-line em w3.ualg.pt/∼sjesus/aulas/cd/.
Nota prévia
O material contido neste conjunto de apontamentos é cedido a título gratuito e paraser utilizado exclusivamente como texto de apoio da disciplina de Comunicações Dig-itais do curso de Engenharia de Sistemas e Informática da Universidade do Algarve.Este texto poderá (e tem com certeza) erros involuntários1, de cujas consequênciaso autor não poderá ser responsabilizado. Em caso de perdas ou prejuízos, directosou indirectos, causados pelo uso deste texto é concedida uma indemnização igualao custo do próprio texto, i.e., zero Euros. A sua consulta não dispensa (e aliásaconselha) a de outras obras, nomeadamente as citadas na bibliografia.
Boa leitura !...
Do seguimento das matérias
O material exposto nesta sebenta encontra-se no seguimento directo da disciplinade Fundamentos de Telecomunicações. As noções de Sistemas e Sinais e Proces-samento Digital de Sinal são também essenciais para a compreensão do materialcontido neste texto de apoio. O aluno deverá estar familiarizado com as ferramentasde cálculo matemático, nomeadamente de cálculo diferencial e integral (incluindo devariável complexa), assim como a manipulação de matrizes ao nível de Álgebra ele-mentar. Probabilidades elementares e noções de processos estocásticos são igualmentenecessárias.
1Agradecem-se correções e comentários para [email protected]
2

Índice
1 Introdução 6
2 Amostragem e modulação de impulsos 8
2.1 Amostragem ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Amostragem e modulação . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Amostragem não ideal . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Representação por modulação de impulsos . . . . . . . . . . . . . . . 16
3 Modulação digital de sinais 18
3.1 Modulação por amplitude de impulsos(amplitude shift keying - ASK) . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Modulação por fase de impulsos(phase shift keying - PSK) . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Modulação de amplitude em quadratura(Quadrature Amplitude Modulation - QAM) . . . . . . . . . . . . . . 22
3.4 Modulação de frequência (Frequency Shift Keying - FSK) . . . . . . . 24
3.5 Modulação com blocos de códigos binários . . . . . . . . . . . . . . . 25
3.6 Modulação com memória . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.6.1 Modulação FSK de fase contínua (CPFSK) . . . . . . . . . . . 27
3.6.2 Modulação de fase mínima (MSK) . . . . . . . . . . . . . . . . 28
3.7 Densidade espectral de potência do sinal modulado . . . . . . . . . . 29
3.7.1 Espectro de potência de sinais CPFSK . . . . . . . . . . . . . 32
3.7.2 Espectro de potência de sinais MSK . . . . . . . . . . . . . . . 33
3.8 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4 Receptor óptimo em presença de ruído aditivo Gaussiano 38
4.1 O desmodulador óptimo . . . . . . . . . . . . . . . . . . . . . . . . . 39
3

4.1.1 Desmodulador - correlacionador . . . . . . . . . . . . . . . . . 39
4.1.2 O filtro adaptado como desmodulador óptimo . . . . . . . . . 41
4.2 O detector óptimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2.1 O detector correlacionador . . . . . . . . . . . . . . . . . . . . 42
4.2.2 O filtro adaptado como detector óptimo . . . . . . . . . . . . 43
4.3 Desempenho do receptor óptimo . . . . . . . . . . . . . . . . . . . . . 46
4.3.1 Caso M = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3.2 Caso M = 2k com k > 1 . . . . . . . . . . . . . . . . . . . . . 49
4.4 Exemplos e aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5 Quantidade de informação e codificação 62
5.1 Quantidade de informação e entropia . . . . . . . . . . . . . . . . . . 63
5.2 Codificação para compactação . . . . . . . . . . . . . . . . . . . . . . 64
5.2.1 Com palavras de comprimento fixo . . . . . . . . . . . . . . . 65
5.2.2 Com palavras de comprimento variável . . . . . . . . . . . . . 66
5.2.3 Codificação baseada em modelos do sinal . . . . . . . . . . . . 68
5.3 Codificação da mensagem . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3.1 Códigos de repetição . . . . . . . . . . . . . . . . . . . . . . . 69
5.3.2 Códigos de paridade . . . . . . . . . . . . . . . . . . . . . . . 70
5.3.3 Códigos de blocos lineares . . . . . . . . . . . . . . . . . . . . 71
5.3.4 Códigos cíclicos . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.3.5 Códigos convolucionais . . . . . . . . . . . . . . . . . . . . . . 76
5.3.6 Turbo códigos . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6 Sincronização de símbolo e de portadora 80
7 Comunicação através canais de banda limitada 81
4

8 Modulação por espalhamento espectral 82
8.1 Sinais de espalhamento espectral por Direct Sequence . . . . . . . . . 82
A Tabelas e relações particulares 84
A.1 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . 84
A.2 Relações Trigonométricas Usuais . . . . . . . . . . . . . . . . . . . . 86
A.3 Desenvolvimentos em série . . . . . . . . . . . . . . . . . . . . . . . . 87
A.4 Algumas relações úteis . . . . . . . . . . . . . . . . . . . . . . . . . . 88
A.4.1 Integrais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
A.4.2 Séries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
A.4.3 Derivada particular . . . . . . . . . . . . . . . . . . . . . . . . 88
B Função Seno integral - Si(x) 89
C Folhas de Exercícios 91
C.1 Sinais determinísticos . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
C.2 Sinais aleatórios I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
C.3 Sinais aleatórios II . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
C.4 Modulação PAM II . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5

1 Introdução
É indiscutível que a área das comunicações tem tido nos últimos anos uma dasmaiores, senão mesmo a maior, taxa de crescimento entre todas as áreas da tec-nologia. A entrada dos sistemas pessoais de comunicação sem fios (telemóveis celu-lares, agendas portáteis e computadores pessoais) permitem que qualquer um de nósesteja contactável virtualmente a qualquer instante e em qualquer lugar, algo im-pensável apenas alguns anos atrás. Este desenvolvimento na área das comunicaçõesteve implicações directas no nascimento de toda uma indústria de dispositivos alta-mente sofisticados de larga difusão assim como uma série de sistemas de comunicaçõesprofissionais para instalação de estações e centralização/encaminhamento de tráfego.Paralelamente desenvolveram-se novas tecnologias WEB de difusão de informação,específicas para aplicações móveis. A estas podemos associar as tecnologias de ar-mazenamento de energia, ecrãs de visualização, sistemas embebidos, antenas e rádiofrequência, etc.
À partida a maior parte da informação é de natureza analógica, i.e., pode serrepresentada por uma função contínua de variável contínua. Porém, grande partedo desenvolvimento referido acima deve-se à possibilidade de traduzir a informaçãoanalógica em formato digital (processo conhecido por conversão analógica digital)de maneira a poder ser processada, encaminhada e armazenada por computadores.Mediante certas condições (já estudadas anteriormente em Sistemas e Sinais (SS)e/ou Processamento Digital de Sinal (PDS)) a informação contida no sinal analógicoencontra-se integralmente no sinal digital e pode ser no final convertida de novo emformato analógico, mediante o processo inverso de conversão digital analógica. Afacilidade de manipulação da informação em formato digital faz com que a sua trans-missão entre emissor e receptor seja feita também através de sistemas de comunicaçõesdigitais.
Uma mensagem digital não é mais do que uma sequência ordenada de símbolosdiscretos e de amplitude quantificada, representando a mensagem analógica original.Desde já se torna evidente que a transmissão desta sequência de símbolos pressupõea definição de uma taxa de transmissão, de um determinado número de níveis dequantificação e de um método de codificação sendo que todos estes dados devem ser doconhecimento do emissor e do receptor. Não vamos aqui falar dos vários constituintesde um sistema de comunicações admitindo que essa noção já foi introduzida emFundamentos de Telecomunicações (FdT). A nossa atenção vai-se concentrar duranteos próximos capítulos nas várias metodologias de modulação digital e de codificaçãoao nível do emissor tendo em vista a adaptação ao canal de transmissão. Em seguidapassaremos às técnicas de recepção de mensagens, desmodulação e descodificação.
A modulação e a codificação do sinal no emissor revestem-se da maior importânciano combate aos efeitos nefastos do canal de transmissão como sejam a atenuação, adistorção, as interferências e o ruído. A atenuação é própria a cada canal de trans-
6

missão e provoca uma redução da amplitude do sinal útil no receptor. Normalmente,esta redução pode ser compensada através de um aumento da potência do emissornão constituindo um grande problema na maior parte dos sistemas de comunicações.A distorção introduzida pelo canal de transmissão faz com que o sinal recebido nãoseja uma réplica do sinal emitido, mas sim uma função distorcida deste. O desenhodo receptor deverá poder ter em conta a distorção introduzida pelo canal e recuperaro sinal original através da introdução de um equalizador. A função do equalizadoré, como o seu nome indica, desfazer (ou equalizar) o efeito do canal de transmis-são. Interferências são sinais não desejados emitidos por outras fontes captados pelamesma antena de recepção que podem, até certo ponto ser filtrados no receptor. Oruído constitui um tipo de interferência de natureza aleatória, não desejável, que sesobrepõe ao sinal útil. O ruído pode ser gerado seja no sistema de comunicações sejano canal de transmissão. Um dos efeitos combinados da atenuação e do ruído é adiminuição da relação sinal-ruído, determinada como o rácio da potência do sinal eda potência do ruído, à entrada do receptor. Todos estes factores de perturbaçãofazem com que a mensagem transmitida possa não chegar de forma intelingível aoreceptor dando origem a erros. A taxa de erro de símbolo é um factor de desempenhoimportante num sistema de comunicações. Em resumo o desenho do receptor deveáter em conta: a distorção do canal, a filtragem de interferências e a maximização darelação sinal-ruído de forma a atingir uma baixa taxa de erro.
Uma das formas de optimizar a taxa de erro de transmissão através de um canalseveramente limitado por distorção, interferências e ruído é aumentando a banda defrequência. Não faz sentido falar de taxa de erro sem falar de taxa de transmissãoque (nos sistema digitais) se exprime em bits por segundo (bits/s) ou bauds. Sabe-seque para um sinal com uma taxa de r bits/s é necessária uma banda B Hz, tal que,B ≥ r/2. Normalmente um sistema de comunicações tem um bom desempenho seB ≥ r, com B em Hz e r em bits/s, i.e., 1 Hz = 1 bit/s.
7

2 Amostragem e modulação de impulsos
Como introdução aos sistemas de comunicação digital vamos começar por rever oconceito de amostragem de sinais analógicos e as regras básicas que a regem. Oconceito de amostragem será depois aproveitado para generalizar a representação deum sinal de variável discreta como uma decomposição numa base de funções e ostipos de modulação de impulsos seja em amplitude, seja no tempo ou na fase.
2.1 Amostragem ideal
Neste capítulo vamos recordar as características e as propriedades do processo deamostragem ideal. Este processo, descrito na figura 2.1 consiste em formar, a partirde um sinal contínuo x(t), uma nova função, x(t) chamada função amostrada. Esta
Figura 2.1: processo de amostragem e de reconstrução.
função obtém-se a partir da função inicial x(t) através de um processo periódico(de período T0 segundos). Noutras palavras, a função x(t) é obtida pelo produtode x(t) com a função de amostragem s(t), que é uma série periódica de impulsosinfinitamente estreitos. A forma que essa função periódica s(t) deve ter para realizaruma amostragem ideal, é dada por uma série periódica de impulsos de Dirac. Noutraspalavras, pode-se definir a função de amostragem ideal por
s(t) =∞∑
n=−∞δ(t− nT0), (2-1.1)
que tem como espectro (ver texto de apoio de Sistemas e Sinais [20])
S(f) =1
T0
∞∑
k=−∞δ(f − kfs), (2-1.2)
onde fs = 1/T0 é a frequência de amostragem. A função amostrada x(t) é formadapelo produto da função inicial x(t), de espectro limitado, com a função s(t). Pode-se
8

portanto escrever
x(t) = x(t)s(t) =∞∑
n=−∞x(nT0)δ(t− nT0), (2-1.3)
9

Figura 2.2: processo de amostragem e reconstituição.
10

e o espectro desta função amostrada é evidentemente
X(f) = X(f) ∗ S(f) = 1
T)
∞∑
k=−∞X(f − kfs). (2-1.4)
Pode-se ver desta maneira, que o espectro de X(f) se encontra a partir do espectro dosinal inicial, X(f), retardando este de ±kfs, isto é, valores múltiplos da frequência deamostragem. Este processo de amostragem encontra-se ilustrado na figura 2.2. Estesresultados foram obtidos considerando o caso particular em que o sinal contínuo x(t)é de banda limitada (≤ W )e onde a frequência de amostragem é suficientementeelevada em relação à frequência máxima do sinal x(t), isto é, fs > W . Observando afigura 2.2 torna-se evidente que, para que não exista sobreposição de dois espectrosconsecutivos, é necessário e suficiente que a frequência de amostragem fs seja superiorou igual a 2W , isto é, que
fs > 2W. (2-1.5)
Esta condição é absolutamente necessária para poder reconstituir o sinal x(t) a partirdo sinal amostrado x(t) através da filtragem passa-baixo deste último. Neste caso
Y (f) = Hr(f)X(f) = X(f)T0rect(f
W) = X(f), (2-1.6)
quando W ≤ fs/2. Este processo de reconstituição está também representado nafigura 2.2. Neste momento podemos recordar o teorema fundamental da amostragem,também chamado de Teorema de Nyquist ou de Shanon:
Teorema de amostragem
Se uma função não contém componentes superiores a uma frequência W (Hz),então essa função pode ser completamente determinada especificando o seuvalor a uma série de pontos espaçados no máximo de 1/(2W) segundos.O valor fs = 2W é chamada frequência de amostragem mínima oufrequência de Nyquist.
Evidentemente a transformada inversa de (2-1.6) é
x(t) = hr(t) ∗ x(t) = hr(t) ∗∞∑
n=−∞x(nT0)δ(t− nT0), (2-1.7)
que se pode também escrever
x(t) =∞∑
−∞x(nT0)hr(t− nT0), (2-1.8)
no caso do filtro passa-baixo ideal, a função de interpolação que é a TF−1 da funçãoporta é
hr(t− nT0) = T0sin 2πW (t− nT0)
π(t− nT0), (2-1.9)
11

o que nos dá por substituição em (2-1.8) e com T0 = 1/(2W ),
x(t) =∞∑
−∞x(nT0)
sin 2πW (t− nT0)
2πW (t− nT0). (2-1.10)
Esta fórmula permite-nos determinar a função contínua x(t) a partir das amostrasx(nT0).
2.2 Amostragem e modulação
Sendo o processo de amostragem essencialmente uma multiplicação de dois sinais nodomínio do tempo corresponde, como já sabemos, a uma convolução no domínio dafrequência e que se traduz, na prática, por uma modulação. Dizemos assim que afunção x(t) modula em amplitude s(t) para formar x(t), sinal modulado. Considere-mos um sinal x(t), passa-baixo, com uma banda limitada, tendo um espectro |X(f)|que é nulo fora de uma banda (−W,W ) (ver figura 2.3). Para efectuar o nosso pro-cesso de modulação consideremos, para ilustrar, um sinal sinusoidal de frequência ω0,de tal modo que o sinal modulado seja
v(t) = x(t) cosω0t, ω0 = 2πf0. (2-2.1)
Como sabemos que a representação frequencial de cosω0t é constituída por dois Diracscolocados a ω = −ω0 e ω = ω0, o produto temporal da (2-2.1) torna-se numa con-volução no domínio da frequência e o resultado é que
V (f) = X(f) ∗ TF[cos(2πf0t)] =1
2X(f + f0) +
1
2X(f − f0), (2-2.2)
o que se encontra ilustrado na figura 2.4. Este resultado pode ser generalizado para o
Figura 2.3: espectro do sinal original.
caso em que s(t) é uma soma de funções periódicas a frequências múltiplas de ω0, istoé, ±kω0. Neste caso o produto de (2-2.1) dá no domínio da frequência uma repetiçãodo espectro de x(t) às frequências harmónicas ±kω0.
12

Figura 2.4: espectro do sinal modulado.
2.3 Amostragem não ideal
A amostragem não ideal pode resultar de vários factores mas essencialmente de trêsque se podem encontrar seja simultaneamente seja separadamente. São eles:
a) erros devidos a uma frequência de amostragem demasiado baixa,
b) erros de quantificação na amplitude, devido à discretização e
c) duração do impulso de amostragem (Dirac) diferente de zero.
O primeiro factor introduz o chamado erro de “aliasing” e que deriva da escolhade uma frequência de amostragem demasiado baixa o que, de alguma forma, violao Teorema de Nyquist. Pondo de lado o caso da escolha de uma frequência deamostragem fs claramente inferior ao dobro da frequência máxima do sinal contínuo,o que é uma violação grosseira do Teorema de Nyquist, o caso mais frequente éaquele no qual o espectro do sinal a amostrar não é limitado em frequência. Naprática dificilmente o sinal toma o valor zero para uma gama de frequências superiora um determinado valor o que significa que o sinal não é de banda limitada no sentidoestrito. O mais frequente é que a energia contida no espectro do sinal decresça de umcerto número de dB/oitava a partir de uma determinada frequência W e portanto,mesmo que a energia do sinal seja reduzida, ela não é zero e pode implicar sobreposiçãode espectros e “aliasing” quando o valor da frequência de amostragem é escolhidomuito próximo de 2W . Este problema encontra-se exemplificado no desenho da figura2.5. Nesta figura podemos ver em (a) o espectro X(f) que, apesar de apresentar umaenergia reduzida, não é zero para além de W . Em (b) vemos o resultado obtido noespectro do sinal amostrado X(f). No painel (c) vemos o esboço do espectro do sinalreconstruido Xr(f) a partir do sinal amostrado utilizando um filtro passa-baixo idealde frequência de corte igual a W e no painel (d) vemos o erro Ea(f) = Xr(f)−X(f)entre os espectros do sinal reconstruído e do sinal original.
O segundo factor é normalmente impossível de evitar, podendo ser reduzido atravésde um aumento do número de níveis de quantificação (número de bits no conver-sor) e resulta num ruído, chamado ruído de quantificação ou simplesmente ruído deamostragem.
13

W W
...
(a)
(b)
(c)
(d)
W W
...
X(f)
X(f)^
W W
W W
X (f)
E(f)
f
f
f
f
r
Figura 2.5: erro de “aliasing” no processo de amostragem: espectro do sinal de bandanão limitada a W (a), espectro do sinal amostrado (b), espectro do sinal amostradoreconstruído (c) e erro de amostragem (d).
O terceiro, e último, factor é também inevitável e resulta do facto dos impulsos dafunção de amostragem não terem uma duração infinitamente estreita (Dirac) comoassumido no caso ideal. Como vamos ver este facto resulta num efeito de modulaçãodo sinal x(t) original. Consideremos então um processo de amostragem não ideal noqual o sinal amostrado x(t) resulta da multiplicação do sinal x(t) por uma função deamostragem s(t) no qual os Diracs foram substituidos por um trem de impulsos deduração finita τ tal como representado, de forma exagerada, na figura 2.6(a). O sinalamostrado resultante encontra-se representado no esboço da figura 2.6(b). Utilizandoo desenvolvimento em série de Fourier da função periódica s(t), podemos então dizerque
s(t) =∞∑
n=−∞S(n)ejn2πfst, (2-3.1)
onde
S(n) = fsτsinc[τnfs], (2-3.2)
14

...
...
x(t)
t
...
...
x(t)
t
^
T
τ
Figura 2.6: processo de amostragem não ideal (scanning exacto): amostrador (a) esinal amostrado (b).
e onde fs = 1/T0 é a frequência de amostragem. De acordo com o que foi dito em SSacerca da TF de uma série periódica podemos escrever a TF de s(t) como
S(f) =∞∑
n−∞S(n)δ(f − nfs), (2-3.3)
e portanto o espectro do sinal amostrado x(t) escreve-se
X(f) = X(f) ∗ S(f),
= fsτ∞∑
n=−∞sinc[τnfs]X(f − nfs). (2-3.4)
Podemos assim dizer que este factor de erro na amostragem do sinal não introduzdistorção dado que a única diferença entre a expressão (2-3.4) e o caso ideal (2-1.4)é o factor de amplitude fsτsinc[τnfs] que é uma constante para cada valor de n, i.e.,não depende da frequência f . Este tipo de amostragem na qual o sinal de entradax(t) se encontra à saída durante tempo curtos (de duração τ) a intervalos de temporegulares T0 é chamado amostragem não ideal por “scanning exacto” e não introduzdistorção. Existe um outro tipo de amostragem, de realização mais fácil, que consisteem memorizar, ou reter, o valor do sinal de entrada a intervalos periódicos, digamos
15

x(nT0) e manter este valor constante na saída durante um intervalor de tempo τ . Aeste tipo de amostragem não ideal chama-se “scanning constante” e pode-se provarque introduz distorção no sinal amostrado através de uma função do tipo,
X(f) = fsτsinc[τf ]∞∑
n=−∞X(f − nfs). (2-3.5)
O dispositivo que permite realizar o scanning constante chama-se “filtro boxcar”.
2.4 Representação por modulação de impulsos
A partir do que foi dito acima, podemos deduzir que se o sinal contínuo pode seradequadamente descrito por um conjunto de amostras periódicas, a sua transmissãopode ser efectuada através da modulação analógica de impulsos periódicos. Este pro-cesso é chamado “modulação de amplitude de pulsos” (Pulse Amplitude Modulationou PAM) e já foi abordada em Fundamentos de Telecomunicações.
Podemos então escrever o sinal x(t) como uma expansão de impulsos moduladospelos valores do sinal a instantes periódicos,
xp(t) =
∞∑
k=−∞x(kTs)p(t− kTs), (2-4.1)
onde Ts é um intervalo de amostragem e p(t) é a forma do pulso, que é aqui utilizadade forma generalizada. Para fazer sobressair a noção de forma de pulso generalizadapodemos notar que p(t − kTs) = p(t) ∗ δ(t − kTs) e assim (2-4.1) pode tambémescrever-se
xp(t) = p(t) ∗∞∑
k=−∞x(kTs)δ(t− kTs),
= p(t) ∗ x(t), (2-4.2)
ou seja, podemos dizer que em termos de espectro Xp(f) = P (f)X(f) e portanto oespectro do sinal PAM é igual ao espectro do sinal amostrado ideal X(f) filtrado pelofiltro cuja resposta em frequência é igual à forma de pulso P (f). O pulso p(t) podeter uma forma arbitrária mas em geral podemos dizer que o seu efeito no espectroserá tanto menor quanto maior for a sua banda passante e, como a banda de um sinalé inversamente proporcional à sua duração, temos que a distorção introduzida porP (f) será tanto menor quanto mais τ/Ts ≪ 1. Isto significa, usando o teorema deNyquist, que τ ≪ Ts ≤ 1/2W .
Desta relação podemos deduzir uma das grandes desvantagens de PAM que é anecessidade de uma larga banda passante que inclui a componente contínua. Assim
16

a banda passante B de p(t) escreve-se
B ≥ 1
2τ≫W. (2-4.3)
Para além de PAM, na qual a informação se encontra na amplitude, podemos definiroutras variantes de modulução de impulsos, nas quais a informação se encontra sejana duração dos impulsos (Pulse Width Modulation - PWM) seja na sua posição(Pulse Position Modulation - PPM). Assume-se que estas variantes de PAM já foramabordadas em modulação analógica (Fundamentos de Telecomunicações).
17

3 Modulação digital de sinais
Neste capítulo vamos estudar a adaptação da mensagem a emitir ao canal de trans-missão. Este processo é chamado modulação que, neste caso, dado que a mensagemse encontra em formato discreto, é chamada modulação digital. Passaremos em re-vista algumas das técnicas de base mais utilizadas hoje em dia, que são as técnicas demodulação de impulsos, quer em amplitude quer em fase, como aliás acontece no casoda modulação analógica. Primeiro para o caso da modulação sem memória (capítulos3.1 até 3.4) e em seguida para os casos de modulação com memória (capítulo 3.6).De uma forma geral trata-se de associar os k dígitos binários à saída do codificadore associá-los a M = 2k sinais (ou níveis) possíveis. Esta é chamada uma técnica desinalização na qual cada um dos M níveis se encontra associado com um sinal sm(t)de um conjunto de sm(t);m = 1, . . . ,M sinais possíveis. Apesar de, teoricamente,cada um dos sinais sm(t) poder ter qualquer forma, na prática, e por questões defacilidade de implementação, a família de sinais é escolhida como uma variante deuma forma de base, que é normalmente chamada “forma de impulso” ou pulse shape.A escolha da forma do impulso depende nalguns casos do espectro desejado para osinal a emitir no meio físico, porque é ele que vai ser determinante na ocupação doespectro de frequências disponíveis para uma dada transmissão. Trataremos paracada modulação considerada, a sua representação no domínio da frequência, que éimportante para determinar qual o espectro ocupado por cada uma delas, uma con-sideração essencial para os cada vez menos espectros disponíveis. É claro que sendoa sequência de bits a enviar de natureza aleatória, o cálculo do seu espectro torna-senum processo de estimação de densidade espectral de potência.
3.1 Modulação por amplitude de impulsos
(amplitude shift keying - ASK)
Nesta técnica, também chamada pulse amplitude modulation - PAM, uma série deimpulsos de base são modulados por uma sequência de símbolos que constituem “umaimagem” da mensagem a transmitir. Em ASK os sinais da família de impulsos sãodados por
sm(t) = Re[Amg(t)ej2πfct]
= Amg(t) cos(2πfct), m = 1, . . . ,M, 0 ≤ t ≤ Ts (3-1.1)
onde Am;m = 1, . . . ,M representa a sequência de bits a transmitir e que forma aamplitude de cada um dos sinais sm(t). As amplitudes Am encontram-se distribuídasno intervalo [(1−M)d, (M − 1)d] sendo que cada nível será dado por
Am = (2m− 1−M)d, m = 1, . . . ,M (3-1.2)
18

e portanto a diferença entre dois níveis sucessivos é de 2d. O sinal g(t) é a formado impulso ou pulse shape da qual já falamos acima. Se a taxa de envio de bitsà entrada do modulador, também chamada bit rate, for de R bits por segundo, ointervalo entre dois bits será de Tb = 1/R. À saída do modulador teremos uma taxade símbolo (symbol rate) de R/k símbolos por segundo, e portanto o intervalo entrecada símbolo será Ts = k/R = kTb. Comecemos por definir a energia contida emcada uma das funções de base, utilizando (??)
Em =
∫ +∞
−∞s2m(t)dt
=1
2
∫ +∞
−∞|sm(t)|2dt,
=1
2
∫ T
0
A2mg
2(t)dt,
=A2
m
2
∫ T
0
g2(t)dt,
=A2
mEg2
, (3-1.3)
onde Eg é a energia do sinal g(t). Para simplificar os cálculos que seguem é convenienteexprimir os impulsos de base como
sm(t) = smf(t), (3-1.4)
onde f(t) é uma função normalizada em energia
f(t) =
√
2
Egg(t) cos(2πfct), (3-1.5)
e assim temos que a amplitude sm = Am
√
Eg/2. Claramente a possibilidade deconfundir o nível m com o nível n depende da “distância” entre sm(t) e sn(t). Dadoque cada um dos impulsos só difere pela sua amplitude a “distância” euclidiana mede-se ao longo da recta, o que nos permite escrever
dmn =√
(sm − sn)2
= |Am − An|√
Eg/2. (3-1.6)
Visto que dois níveis sucessivos se encontram separados por 2d, a distância mínimaentre os sinais correspondentes é
dmin = d√
2Eg. (3-1.7)
O mapeamento dos símbolos nos M níveis pode ser feito de muitas formas mas, naprática, é preferível utilizar um tipo de mapeamento no qual cada símbolo difere
19

daqueles que lhe estão vizinhos apenas por um bit. Este tipo de mapeamento chama-se Gray coding e permite, de uma forma muito simples, que o erro mais frequente,aquele entre níveis vizinhos, resulte num erro de apenas um bit. Na prática o sinal debase de (3-1.1) é um tipo de modulação AM-DSB, no qual duas bandas (cuja forma de-pende de g(t)) em torno a −fc e +fc são ocupadas pelo espectro de sm(t). Poderíamosefectuar uma modulação ASK-SSB, da mesma forma que no caso analógico AM-SSB,utilizando o sinal analítico ou o seu conjugado consoante desejarmos a banda lateralúnica superior ou inferior, respectivamente. Nesse caso teríamos
sm(t) = ReAm[g(t)± jg(t)]ej2πfct, m = 1, . . . ,M, 0 ≤ t ≤ T, (3-1.8)
onde g(t) é a TH de g(t). Se, por exemplo, o canal de transmissão for tal que deixepassar as frequências em torno a zero Hz não necessitamos de introduzir o termoexponencial em torno a fc e o impulso de base escreve-se então simplesmente
sm(t) = Amg(t), (3-1.9)
que é chamado ASK (ou PAM) em banda de base (baseband ASK (ou basebandPAM)).
3.2 Modulação por fase de impulsos
(phase shift keying - PSK)
Neste caso e, como o seu nome indica, será a fase e não a amplitude do impulso quevariará de acordo com a sequência digital a transmitir. Assim o impulso de baseescreve-se
sm(t) = Re[g(t)ej2π(m−1)/Mej2πfct],
= g(t) cos[2πfct+2π
M(m− 1)],
= g(t) cos2π
M(m− 1) cos 2πfct− g(t) sin
2π
M(m− 1) sin 2πfct. (3-2.1)
Assim a fase θm da portadora pode tomar os M valores, θm = 2π(m − 1)/M ;m =1, . . . ,M . Podemos notar, fazendo um cálculo análogo ao efectuado no caso da ASK,que cada um dos impulsos utilizados em PSK têm uma energia constante
E =
∫ T
0
s2m(t)dt,
=1
2
∫ T
0
g2(t),
=Eg2. (3-2.2)
20

Utilizando (3-2.1) podemos notar que cada função de base pode ser representadacomo uma combinação linear de duas funções ortogonais f1(t) e f2(t), tais que
sm(t) = sm1f1(t) + sm2f2(t), (3-2.3)
onde
f1(t) =
√
2
Egg(t) cos(2πfct), (3-2.4)
f2(t) = −√
2
Egg(t) sin(2πfct), (3-2.5)
e finalmente, tomando como coordenadas as funções f1(t) e f2(t) podemos representaro sinal sm(t) como um vector sm de coordenadas
sm =
[√
Eg2cos
2π
M(m− 1),
√
Eg2sin
2π
M(m− 1)
]
,
= [sm1, sm2]. (3-2.6)
Torna-se assim fácil compreender a representação dos impulsos de base num referen-cial ortonormado de acordo com a figura 3.1 para M=2, 4 e 8. Note-se que os símbolosatribuidos a cada ponto do espaço encontram-se distribuidos de tal forma a só mudarum bit entre pontos contíguos, com a intenção de minimizar o erro cometido (Graycoding). Da mesma forma que em ASK, em PSK, o erro entre dois níveis sucessivos
0 1 00
01
10
11 000
011
101
110
001010
100111
M=2 M=4 M=8
Figura 3.1: diagrama de espaço de sinais para a modulação PSK.
depende da distância euclidiana entre dois pontos no plano, dada por
d2mn = |sm − sn|,= |sm|2 + |sn|2 − 2|sm||sn| cos(θmn)
21

e visto que |sm| =√
Eg/2 e que o ângulo θmn entre os dois vectores sm e sn é dado porθmn = θm − θn = 2π/M(m− 1)− (2π/M)(n− 1) = (2π/M)(m− n), então podemosescrever que
d2mn =Eg2
+Eg2
− 2Eg2cos[
2π
M(m− n)]
= Eg[1− cos2π
M(m− n)], (3-2.7)
onde o seu valor mínimo é obtido para sinais consecutivos m = n+ 1 de onde
dmin =
√
E(
1− cos2π
M
)
. (3-2.8)
3.3 Modulação de amplitude em quadratura(Quadrature Amplitude Modulation - QAM)
A modulação de amplitude em quadratura (QAM) permite obter a mesma eficiênciada modulação PAM-SSB utilizando dois bits de informação em duas portadoras emquadratura (90 graus uma da outra). É um pouco como se fosse PAM em PSK comM = 2. Neste caso os sinais de base escrevem-se
sm(t) = Re[(Amc + jAms)g(t)ej2πfct], m = 1, . . . ,M, 0 ≤ t ≤ T,
= Amcg(t) cos(2πfct)−Amsg(t) sin(2πfct). (3-3.1)
Deste modo cada impulso leva o dobro da informação através da codificação de Amc
e Ams, amplitudes das componentes em fase e em quadratura da portadora, respecti-vamente. Outra forma de ver a relação entre QAM, PAM e PSK é de escrever o sinalda equação (3-3.1) como
sm(t) = Re[Vmg(t)ejθmej2πfct],
= Vmg(t) cos(2πfct+ θm), (3-3.2)
onde Vm =√
A2mc + A2
ms e θm = arctan(Ams/Amc), o que demonstra que QAM podeser visto como uma combinação de modulação de amplitude e modulação de fase.
Podemos agora generalizar a ideia introduzida com QAM a ordens superiores dePAM e PSK, combinando sempre os dois tipos de modulação. Assim, se notarmos M1
o número de níveis de PAM, e M2 o número de níveis de PSK, temos que o númerode níveis total obtido pela combinação PAM-PSK, é M = M1M2. Isto significa quese podem representar k = m1 +m2 bits por símbolo onde M1 = 2m1 e M2 = 2m2 . Ataxa de transmissão de símbolos encontra-se então reduzida a 1/Ts = R/(m1 +m2).A título de exemplo, a figura 3.2 representa os diagramas de espaço de sinais para
22

M=8 M=16
Figura 3.2: diagrama de espaço de sinais para a modulação PAM-PSK, M=8 e M=16.
a modulação combinada PAM-PSK, para M = 8 e M = 16. Como no caso PSK,também em QAM os sinais de base sm(t) podem ser repsentados em forma vectoriala partir de um conjunto das funções de base (3-2.5) com as coordenadas
sm = [Amc
√
E/2, Ams
√
E/2], (3-3.3)
onde, como habitualmente, Eg é a energia do impulso de base g(t). A distânciaeuclidiana entre dois pontos m, n é neste caso dada por
dmn = |sm − sn|,
=
√
E2[(Amc − Anc]2 + (Ams − Ans)2, (3-3.4)
A distância mínima entre dois pontos contíguos no espaço de sinais QAM dependeda forma da disposição da grelha de pontos. No caso em que as amplitudes discretasvariam de acordo com (2m − 1 −M)d;m = 1, . . . ,M a grelha toma uma formarectangular e nesse caso a distância mínima é dada por
dmin = d√
2Eg. (3-3.5)
23

3.4 Modulação de frequência (Frequency Shift Keying - FSK)
Nesta modulação, a separação entre níveis faz-se através de variações em frequência.Assim, a família de sinais de base escreve-se
sm(t) = Re[sbbm(t)ej2πfct], m = 1, . . . ,M, 0 ≤ t ≤ T,
=
√
2EsT
cos(2πfct + 2πm∆ft), (3-4.1)
onde Es é a energia num símbolo, ı.e., Es = kEb e T é o intervalo de símbolo, tambémT = kTb. As formas de onda em banda base são portanto
sbbm(t) =
√
2EsTej2πm∆ft, m = 1, . . . ,M, 0 ≤ t ≤ T. (3-4.2)
O coeficiente de correlação (função de autocorrelação para τ = 0) entre duas formasde onda em banda base escreve-se
ρmk =1
2Es
∫ ∞
−∞s∗bbm(t)sbbk(t)dt,
=1
T
∫ T
0
ej2π(m−k)∆ftdt,
=sin πT (m− k)∆f
πT (m− k)∆fejπT (m−k)∆f , (3-4.3)
cuja parte real é
Re(ρmk) =sin πT (m− k)∆f
πT (m− k)∆fcos[πT (m− k)∆f ],
=sin 2πT (m− k)∆f
2πT (m− k)∆f, (3-4.4)
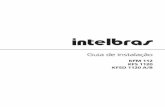
onde usámos o facto que sin 2x = 2 sin x cosx. Esta função é simplesmente um(sin x)/x que obviamente toma o valor máximo para m = k. Para m 6= k, esta funçãoanula-se para ∆f = n/2T , i.e., para múltiplos inteiros de 1/2T . A figura 3.3 mostraa variação da função (3-4.4) em função da separação em frequência normalizada∆fT para vários valores da separação entre formas de onda m − k. A conclusão é∆f = 1/2T é o valor mínimo de separação em frequência necessário e suficiente paraque as M formas de onda sejam ortogonais entre si.
Para o caso em que ∆f = 1/2T os M sinais FSK podem ser representados comooutros tantos vectores de dimensão M , dados por
s1 = [√
Es, 0, 0, . . . , 0]s2 = [0,
√
Es, 0, . . . , 0]... =
...
sM = [0, . . . , 0,√
Es], (3-4.5)
24

0 1 2 3 4 5−0.5
0
0.5
1
Re(
ρ)m−k=1
0 1 2 3 4 5−0.5
0
0.5
1
Re(
ρ)
m−k=2
0 1 2 3−0.5
0
0.5
1
Re(
ρ)
∆ f T
m−k=3
0 1 2 3−0.5
0
0.5
1
Re(
ρ)
∆ f T
m−k=4
Figura 3.3: coeficiente de correlação em função de separação em frequência normal-izada ∆fT para valores de m− k=1, 2, 3 e 4.
onde as funções da base são dadas por
fm(t) =
√
2
Tcos 2π(fc +m∆f)t. (3-4.6)
A distância no espaço de sinais é dada por
dkm = dmin =√2E , ∀m, k (3-4.7)
e que sendo independente de m e k é também a distância mínima.
3.5 Modulação com blocos de códigos binários
Ainda no âmbito da modulação PSK, outro tipo de sinalizacão pode ser obtida apartir de palavras de código binário de dimensão N do tipo
Cm = [cm1, cm2, . . . , cmN ], m = 1, . . .M (3-5.1)
25

onde as entradas cmj = 0 ou 1 para todos os valores de m ou j. A cada entrada napalavra do código binário é associada uma forma de onda de acordo com
cmj = 1 ⇒ smj(t) =
√
2EcTc
cos(2πfct), 0 ≤ t ≤ Tc
cmj = 0 ⇒ smj(t) = −√
2EcTc
cos(2πfct), 0 ≤ t ≤ Tc
(3-5.2)
onde Tc = T/N e Ec = E/N e portanto as M palavras de código do alfabetoencontram-se mapeadas num conjunto ordenado de N formas de onda sm(t). Né chamado o comprimento do bloco do código e podemos ver que existem exacta-mente 2N conjuntos de formas de onda possíveis associados às também 2N palavrasde código possíveis. Podemos escolher M < 2N dessas palavras para transmitir anossa informação. Notemos que cada uma das M palavras de código tem energia E ea correlação entre cada par de formas de onda associadas às respectivas palavras decódigo depende da seleção das M palavras válidas para transmissão de entre as 2N
possíveis.
3.6 Modulação com memória
Outros métodos de modulação digital de sinais em sistemas de comunicação sãotais que a informação emitida num determinado instante depende da informaçãotransmitida no instante anterior. Por outras palavras, o significado do bit ou símbolono instante t depende do(s) bit(s) ou símbolo(s) no(s) instante(s) t− ti. O exemplotípico é o do código NRZI no qual um bit “1” é representado por uma transiçãode estado enquanto um bit “0” é caracterizado por uma ausência de transição deestado. O código NRZI é um exemplo de codificação diferencial, no qual toda ainformação se encontra contida na transição de estado e não no estado propriamentedito, eliminando assim a necessidade de transmissão de amplitudes ou fases entrevalores precisos.
Outros exemplos de métodos de modulação com memória são os que constringema fase do sinal emitido a ter uma fase contínua ao longo do tempo, resultando numsinal cujo espectro não tem indesejáveis lóbulos laterias normalmente presentes emPSK ou FSK. Estes métodos de modulação são não lineares.
26

3.6.1 Modulação FSK de fase contínua (CPFSK)
Consideremos um sinal PAM em banda base do tipo
d(t) =∞∑
n=−∞Ing(t− nT ), (3-6.1)
onde In é a sequência de amplitudes ±1,±3, . . . ,±(M − 1) representando blocosde k bits da sequência original an e g(t) é um impulso de forma rectangular deamplitude 1/2T e de duração T . O sinal d(t) contém a mensagem e vai ser utilizadopara modular a frequência da portadora de forma a obter um sinal resultante cujafase tenha uma evolução contínua. O sinal modulado em banda base escreve-se
sbb(t) =
√
2ET
exp
j[4πTfd
∫ t
−∞d(τ)dτ + φ0]
, (3-6.2)
onde fd e φ0 são o desvio máximo em frequência e a fase inicial, respectivamente. Osinal modulado em banda-passante utilizando (3-6.2) escreve-se
s(t) =
√
2ET
cos[2πfct+ φ(t; I) + φ0], (3-6.3)
com
φ(t; I) = 4πTfd
∫ t
−∞d(τ)dτ,
= 4πTfd
∫ t
−∞
∞∑
n=−∞Ing(τ − nT )dτ. (3-6.4)
Resolvendo o integral obtemos no intervalo nT ≤ t ≤ (n + 1)T ,
φ(t; I) = 4πTfd
n−1∑
k=−∞Ik
∫ (k+1)T
kT
g(τ)dτ + 4πTfdIn
∫ t
nT
g(τ)dτ,
= 4πTfd
n−1∑
k=−∞Ik
1
2T[τ ]
(k+1)TkT + 4πTfdIn
1
2T[τ ]tnT ,
= 2πTfd
n−1∑
k=−∞Ik + 2πfdIn(t− nT ),
e assim
φ(t; I) = 2πTfd
n−1∑
k=−∞Ik + 2πTfdIn
(
t− nT
2T
)
,
= θn + 2πhInq(t− nT ), (3-6.5)
27

onde
h = 2fdT, (3-6.6)
θn = πh
n−1∑
k=−∞Ik, (3-6.7)
q(t) =
0 if t < 0,
t/2T if 0 ≤ t ≤ T,
1/2 if t > T,
, (3-6.8)
sendo que o termo θn representa a memória da fase de todos os bits até ao instante(n − 1)T e onde o parâmetro h é chamado índice de modulação porque depende defd excursão máxima em frequência. A função rampa q(t) aparece como a primitivada função de pulso rectangular g(t) e permitira em seguida utilizar outras funções depulso.
3.6.2 Modulação de fase mínima (MSK)
A modulação de fase mínima (ou minimum-shift keying - MSK) é um caso particularde CPFSK no qual o índice de modulação h = 1/2. A fase da portadora no intervalonT ≤ t ≤ (n+ 1)T escreve-se
φ(t; I) =π
2
n−1∑
k=−∞Ik + πInq(t− nT ),
= θn +π
2In
(t− nT
T
)
, nT ≤ t ≤ (n+ 1)T, (3-6.9)
e o sinal modulado em banda-passante s(t) é dado por
s(t) = A cos[
2πfct + θn +π
2In(t− nT
T
)
]
,
= A cos[
2π(fc +In4T
)t+ θn −π
2nIn
]
, nT ≤ t ≤ (n+ 1)T (3-6.10)
esta última expressão indica-nos que neste tipo de modulação o sinal pode ter uma deduas frequências f1 = fc − 1/4T ou f2 = fc + 1/4T , no intervalo nT ≤ t ≤ (n+ 1)T .A separação em frequência ∆f = f2−f1 = 1/2T que corresponde ao valor mínimo deseparação em frequência na modulação FSK de forma a assegura a ortogonalidade dossinais de sinalização s1 e s2 num mesmo intervalo. Daí o nome desta modulação comomodulação de fase mínima - MSK. Alternativamente, MSK pode ser representadacomo uma 4-PSK (ver [18], p.197-199).
28

3.7 Densidade espectral de potência do sinal modulado
Tendo em conta as limitações impostas nas bandas de frequência disponíveis, cadavez mais ocupadas com a maior variedade de serviços de comunicações móveis e fixas,torna-se importante poder determinar de forma precisa o conteúdo espectral do sinaltransmitido no canal de comunicações. Dado que a sequência de bits é essencialmenteuma série aleatória de símbolos, o sinal transmitido vai por sua vez ser tambémum sinal aleatório. Assim, a determinação do espectro do sinal a transmitir é umproblema de estimação espectral.
Comecemos por notar que podemos designar um sinal de tipo passabanda modu-lado em torno à frequência fc como
s(t) = Re[sbb(t)ej2πfct], (3-7.1)
onde sbb(t) é o sinal passa-baixo de s(t) que, para as modulações lineares introduzidasacima, se escreve
sbb(t) =
∞∑
m=−∞Amg(t−mTs). (3-7.2)
De notar que para este tipo de modulações Am é real e contém a informação damensagem no caso ASK, e é complexo no caso PSK, QAM, e PAM-PSK. Em qualquerdos casos a sequência Am, m = 1, . . . ,M é aleatória e portanto sbb(t) e s(t) são elesmesmos processos aleatórios. O primeiro passo no cálculo da densidade espectral depotência é estimar a função de autocorrelação, que para o caso do sinal (3-7.1) seescreve
φs(τ) = Re[φsbb(τ)ej2πfct], (3-7.3)
onde φsbb(τ) é a função de autocorrelação do componente passa-baixo sbb(t). A TFde (3-7.3) permite obter a densidade espectral de potência
Ps(f) = TF[φs(τ)],
=1
2[Psbb(f − fc) + Psbb(f + fc)], (3-7.4)
onde se utilizou explicitamente a expressão (??). Trata-se agora de determinar aexpressão da densidade espectral de potência da componente passa-baixo Psbb(f). Afunção de autocorrelação de sbb(t) escreve-se
φsbb(t + τ, t) = E[sbb(t+ τ)s∗bb(t)], (3-7.5)
e por substituição de (3-7.2) em (3-7.5) obtemos
φsbb(t + τ, t) =
∞∑
m=−∞
∞∑
n=−∞E[AmA
∗n]g(t+ τ −mT )g∗(t− nT ). (3-7.6)
29

Assumindo que a mensagem é uma sequência de bits/símbolos estacionária de médiaµA e de função de autocorrelaçãoe
φA(m− n) = E[AmA∗n], (3-7.7)
então podemos escrever (3-7.6) como
φsbb(t+ τ, t) =∞∑
m=−∞
∞∑
n=−∞φA(m− n)g(t+ τ −mT )g∗(t− nT ), (3-7.8)
e fazendo uma mudança de variável i = m− n, obtemos
φsbb(t + τ, t) =
∞∑
i=−∞φA(i)
∞∑
n=−∞g(t+ τ − iT − nT )g∗(t− nT ), (3-7.9)
a partir da qual é agora fácil determinar que
φsbb(t+ τ, t) = φsbb(t + T + τ, t+ T ), (3-7.10)
o que simplesmente significa que se trata de uma função periódica, de período igualao intervalo de bit T . Dado que a média de do processo s(t) é dada por
E[s(t)] = µA
∞∑
n=−∞g(t− nT ) (3-7.11)
também periódica de mesmo período T chegamos à conclusão que o processo es-tocástico s(t) se enquadra na definição de um processo periodicamente estacionáriono sentido lato ou cicloestacionário definida em ??. Como tivemos ocasião de referir,o cálculo do espectro dos sinais cicloestacionários faz-se através da TF da média tem-poral da função de autocorrelação do processo num período. Essa média temporalescreve-se neste caso como
φsbb(τ) =1
T
∫ T
0
φsbb(t+ τ, t)dt, (3-7.12)
e por isso substituindo (3-7.9) em (3-7.12) com a mudança de variável u = t− nT , oque implica que quando t = 0, u = −nT e para t = T , u = −(n− 1)T temos
φsbb(τ) =∞∑
i=−∞φA(i)
∞∑
n=−∞
1
T
∫ −(n−1)T
−nT
g(u+ τ − iT )g∗(u)du, (3-7.13)
de onde, combinando o somatório em n e o integral num intervalo T , podemos escrever
φsbb(τ) =
∞∑
i=−∞φA(i)
∫ ∞
−∞
1
Tg(u+ τ − iT )g∗(u)du, (3-7.14)
30

e finalmente
φsbb(τ) =1
T
∞∑
i=−∞φA(i)φg(τ − iT ), (3-7.15)
onde
φg(τ) =
∫ ∞
−∞g(t+ τ)g∗(t)dt. (3-7.16)
Escrevendo finalmente o espectro de potência de sbb(t) como a TF de φsbb(τ), i.e.,
Psbb(f) =
∫ ∞
−∞φsbb(τ)e
−j2πfτdτ, (3-7.17)
e notando que (3-7.15) representa apenas a convolução das autocorrelações de Ak eda função de pulso g(t), permite chegar a
Psbb(f) =1
T|G(f)|2PA(f), (3-7.18)
Na prática somos levados a determinar g(t) de forma a que o seu espectro se adapteao canal de transmissão ou, alternativamente, tendo em conta (3-7.18), controlandoas propriedades da função de autocorrelação φA(i) da sequência de bits transmitida.Com efeito dado que φA(i) é uma função periódica podemos determinar a sua densi-dade espectral através da série complexa de Fourier
PA(f) =
∞∑
i=−∞φA(i)e
−j2πfiT , (3-7.19)
e inversamente
φA(i) = T
∫ 1/2T
−1/2T
PA(f)ej2πfiTdf, (3-7.20)
Considerando, por exemplo, que os bits/símbolos de informação são reais de médiaE[Am] = µA e descorrelacionados com variância σ2
A teremos que a função de autocor-relação se escreve
φA(i) =
σ2A + µ2
A, i = 0
µ2A, i 6= 0
(3-7.21)
Substituindo (3-7.21) em (3-7.19) obtemos
PA(f) = σ2A + µ2
A
+∞∑
i=−∞e−j2πfiT , (3-7.22)
onde o somatório do segundo termo pode ser visto como a expansão em série deFourier de um trem de Diracs de amplitude 1/T ,
PA(f) = σ2A +
µ2A
T
+∞∑
i=−∞δ(f − i/T ), (3-7.23)
31

e finalmente a substituição da densidade espectral da sequência de informação PA(f)na expressão da densidade espectral do sinal passa-baixo (3-7.18) permite escrever
Psbb(f) =σ2A
T|G(f)|2 + µ2
A
T 2
+∞∑
i=−∞|G(i/T )|2δ(f − i/T ). (3-7.24)
É interessante constatar que os dois termos desta expressão poêm em relevo dois tiposde componentes espectrais: 1) o primeiro termo é um espectro contínuo e dependeunicamente do espectro da forma do impulso g(t) e 2) o segundo termo é formadopor uma série infinita de componentes espectrais espaçadas de 1/T cuja amplitudeé igual ao espectro da função de pulso G(f) nos pontos i/T . De notar que no casoµA = 0 temos apenas
Psbb(f) =σ2A
T|G(f)|2, (3-7.25)
de onde podemos concluir que, neste caso, o espectro do sinal a transmitir se tornaindependente da mensagem dependendo apenas do espectro da função de pulso g(t).
3.7.1 Espectro de potência de sinais CPFSK
O sinal em banda-passante escreve-se (a partir de 3-6.3)
s(t; I) = A cos[2πfct + φ(t; I)], (3-7.26)
onde a fase no instante t é dada por
φ(t; I) = θn + 2πhInq(t− nT ), (3-7.27)
com os valores de h, θn, e q(t) dados por (3-6.6) - (3-6.8). Demonstra-se que adensidade espectral de potência do sinal em banda-base se escreve (ver [18] p.209-214)
Psbb(f) = T[ 1
M
M∑
n=1
A2n(f) +
2
M2
M∑
n=1
M∑
m=1
Bnm(f)An(f)Am(f)]
, (3-7.28)
onde os vários factores são dados por
An(f) =sin π[fT − 1
2(2n− 1−M)h]
π[fT − 12(2n− 1−M)h]
, (3-7.29)
Bnm(f) =cos(2πfT − αnm)− ψ cosαnm
1 + ψ2 − 2ψ cos 2πfT, (3-7.30)
αnm = πh(m+ n− 1−M), (3-7.31)
ψ =1
M
sinMπh
sin πh. (3-7.32)
32

0 1 2 30
0.5
1
1.5
2
Frequencia normalizada
Mod
ulo
M = 2
0.50.60.70.80.9 11.11.21.31.4
0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Frequencia normalizada
Mod
ulo
M = 4
0.50.60.70.80.9 11.11.21.31.4
0 1 2 30
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Frequencia normalizada
Mod
ulo
M = 8
0.50.60.70.80.9 11.11.21.31.4
0 1 2 30
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Frequencia normalizada
Mod
ulo
M = 16
0.50.60.70.80.9 11.11.21.31.4
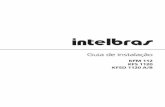
Figura 3.4: densidade espectral de potência da modulação CPFSK para índice demodulação 0.5 ≤ h ≤ 1.4 e M=2, 4, 8 e 16.
A densidade espectral de potência do sinal CPFSK encontra-se representado nafigura 3.4 para vários valores de M e para um índice de modulação h variável entre0.5 e 1.4. Nestes gráficos o valor fT = 0 corresponde à frequência da portadorafc e apenas metade da densidade espectral se encontra representada. A respostaem frequência é em geral relativamente suave para valores do índice de modulação0.5 ≤ h ≤ 0.8. Adquire valores bastante altos em bandas estreitas a partir de h = 0.8,sendo que o número de máximos depende da dimensão do alfabeto e será igual a M/2.
3.7.2 Espectro de potência de sinais MSK
Como vimos anteriormente a modulação MSK é idêntica à CPFSK com o índicede modulação h = 1/2. Nesse caso o termo ψ em (3-7.32) torna-se igual a zero e
33

0 1 2 3 4 5 6 7 8 9 10−60
−50
−40
−30
−20
−10
0
Frequencia normalizada
Mod
ulo
(dB
)M = 2 4 8 16, h = 0.5
2 4 816
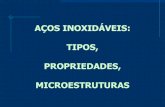
Figura 3.5: densidade espectral de potência da modulação MSK.
fdT = 1/4 faz com que o respectivo espectro se escreva
Psbb(f) =16A2T
π2
( cos 2πfT
1− 16f 2T 2
)2
(3-7.33)
o que permite obter a representação da figura 3.5 onde se pode verificar a forteatenuação de mais de 20 dB entre o pico principal e o valor mais elevado do picosecundário apenas a 1/T Hz da frequenência da portadora.
3.8 Exemplos
Exemplo 1: considere a forma de pulso representada na figura 3.6(a), e definida por
g(t) =
0 t ∈ [−∞, 0[
A t ∈ [0, T ]
0 t ∈]T,∞[
(3-8.1)
Calcule o seu espectro de potência |G(f)|2.
Trata-se de um cálculo clássico, que se pode fazer como exercício de revisão da TF,
34

(a) (b)
−2 −1 0 1 2 3 4 5 6 7 8−1
−0.5
0
0.5
1
1.5
2
Tempo (ms)
Am
plitu
de
−1500 −1000 −500 0 500 1000 15000
100
200
300
400
500
600
Frequencia (Hz)
Am
plitu
de(|
•|2 )
Figura 3.6: forma de pulso rectangular causal de duração T = 5 ms (a) e respectivoespectro de potência |G(f)|2 (b).
assim temos que
G(f) =
∫ T
0
Ae−j2πftdt,
= A
[
e−j2πft
−j2πf
]T
0
= A
[
e−j2πfT − 1
−j2πf
]
= Ae−jπfT
[
e−jπfT − ejπfT
−j2πf
]
= Ae−jπfT sin(πfT )
πf, (3-8.2)
(3-8.3)
ou ainda
G(f) = ATsin πfT
πfTe−jπfT , (3-8.4)
e finalmente
|G(f)| = (AT )2(
sin πfT
πfT
)2
, (3-8.5)
espectro que se encontra representado na figura 3.6(b).
Exemplo 2: outra forma de pulso tipicamente utilizada em comunicações é o
35

(a) (b)
−2 −1 0 1 2 3 4 5 6 7 8−1
−0.5
0
0.5
1
1.5
2
Tempo (ms)
Am
plitu
de
−1500 −1000 −500 0 500 1000 15000
50
100
150
200
250
300
Frequencia (Hz)A
mpl
itude
(|•|
2 )
Figura 3.7: forma de pulso coseno elevado (raised cosine) de duração T = 5 ms (a) erespectivo espectro de potência |G(f)|2 (b).
coseno elevado (raised cosine) dado pela expressão
g(t) =sin(πt/T )
πt/T
cos(παt/T )
1− 4α2t2/T 2, (3-8.6)
onde 0 ≤ α ≤ 1 é chamado o factor de excesso de banda ou factor de roll-off e seencontra representado na figura 3.7(a). O cálculo do seu espectro de potência passaobviamente pela TF de g(t). O cálculo é algo semelhante ao do exemplo anteriorporém muito mais trabalhoso. Após algumas páginas de cálculo podemos chegar aoresultado notável
G(f) =
T 0 ≤ |f | ≤ 1−α2T
T21 + cos[πT
α(|f | − 1−α
2T)] 1−α
2T≤ |f | ≤ 1+α
2T
0 1+α2T
< |f |(3-8.7)
sendo o seu espectro de potência dado por |G(f)|2 que se encontra representado nafigura 3.7(b). Comparando com o espectro de potência da forma de pulso rectangularpode-se notar que também aqui os nulos são obtidos para múltiplos do inverso daduração do pulso n/T , porém contrariamente ao caso do pulso rectangular o primeirozero não se obtém para n = 1 mas só a partir de n = 2, indiciando uma largura dolóbulo principal muito maior do que no caso do pulso rectangular. Em compensação,a curva de decaimento do lóbulo central do espectro de potência é muito mais rápidado que no caso do pulso rectangular. Em comunicações este facto é apreciável dadoque permite obter uma menor interferência entre símbolos consecutivos.
Exemplo 3: para exemplificar a modelação do espectro através da correlação dasequência de bits transmitida consideremos uma sequência de bits bn a partir da
36

qual formamos os bits In = bn + bn−1. Se os bits bn forem não correlacionados ecom variância unidade então temos que a autocorrelação de In se escreve
φA(i) = E[InIn+i]
=
2, i = 0
1 i = ±1
0 outroi,
(3-8.8)
e portanto a densidade espectral de potência da sequência de bits a transmitir escreve-se
PA(f) = 2(1 + cos 2πfT ),
= 4 cos2 πfT, (3-8.9)
e finalmente a densidade espectral de potência do sinal equivalente passa-baixo dosinal transmitido
Psbb(f) =4
T|G(f)|2 cos2 πfT, (3-8.10)
de onde podemos deduzir que uma simples introdução de correlação nos símbolos atransmitir produz uma alteração da densidade espectral de potência do sinal bastantesignificativa.
37

4 Receptor óptimo em presença de ruído aditivo Gaus-siano
Como já tivemos oportunidade de referir o desmodulador no bloco receptor, constituio elemento central do sistema de comunicação pois ele permite realizar, para além dacolocação em banda base através de uma deslocação em frequência do sinal saído docanal de transmissão, duas tarefas essenciais:
• eliminar ou pelo menos diminuir a interferência intersimbólica (ISI) à entradado amostrador e do decisor trabalhando em conjunto com o filtro emissor e adefinição da função de pulso.
• aumentar a relação sinal ruído à entrada do decisor e assim diminuir a proba-bilidade da escolha de um símbolo errado.
Já vimos igualmente que estas duas tarefas, apesar de não serem completamentecontraditórias, necessitam o estabelecimento de um compromisso tendo em contaa complexidade prática dos sistema a implementar. Vamos abordar a questão damaximização da probabilidade de detecção à entrada do decisor assumindo que nãoexiste ISI e que o canal é do tipo ruído aditivo Gaussiano e, nesse caso, vamosdeterminar qual o receptor óptimo. Veremos então que esse receptor óptimo podeser implementado através do receptor correlacionador ou do filtro adaptado (matchedfilter).
Um modelo suficientemente simples para ser tratado analiticamente e, ainda assimrepresentativo do problema real, é aquele constituido pelo canal com ruído aditivobranco Gaussiano (additive white Gaussian noise - AWGN). Como o seu nome indica,neste modelo o sinal recebido é formado pela soma entre o sinal emitido e umasequência de ruído branco Gaussiano, i.e.,
r(t) = sm(t) + w(t), 0 ≤ t ≤ T (4-0.1)
onde T é o intervalo de sinalização e onde o espectro de potência do ruído é dadopor Pww(f) = N0/2 W/Hz. O problema do receptor óptimo é o de desenhar umdispositivo que após a observação de r(t); 0 ≤ t ≤ T permita determinar que osímbolo m foi transmitido com o mínimo erro possível. Por questões de clareza naapresentação do texto optou-se por separar o receptor óptimo em dois blocos, quesão o desmodulador (4.1) e o detector (4.2).
38

4.1 O desmodulador óptimo
O papel do desmodulador é o de decompôr a forma de onda recebida r(t) num vectorde dimensão N , rT = [r1, r2, . . . , rN ]
1 onde N é a dimensão das formas de onda trans-mitidas. Na prática existem duas representações equivalentes para o desmoduladoróptimo que são: o desmodulador correlacionador e o filtro adaptado.
4.1.1 Desmodulador - correlacionador
O desmodulador - correlacionador tem por objectivo expandir o sinal recebido r(t)numa base de funções fn(t);n = 1, . . . , N. Supõe-se obviamente que a base defunções considerada é geradora do espaço de sinal, i.e., que qualquer forma de ondado conjunto sm(t);m = 1, . . . ,M ; 0 ≤ t ≤ T pode ser representada através de umacombinação linear ponderada das funções da base. De acordo com o que foi descritono capítulo ?? a projeção rk de uma forma de onda r(t) na função de base de ordemk escreve-se
rk =
∫ T
0
r(t)fk(t)dt (4-1.1)
=
∫ T
0
[sm(t) + n(t)]fk(t)dt
= smk + nk, k = 1, . . . , N (4-1.2)
onde
smk =
∫ T
0
sm(t)fk(t)dt, (4-1.3)
nk =
∫ T
0
n(t)fk(t)dt. (4-1.4)
Podemos então escrever o sinal recebido r(t) como
r(t) =
N∑
k=1
smkfk(t) +
N∑
k=1
nkfk(t) + n′(t),
=
N∑
k=1
rkfk(t) + n′(t), (4-1.5)
onde n′(t) é a diferença entre o ruído original e o ruído projectado na base de funçõesfk(t), i.e.,
n′(t) = n(t)−N∑
k=1
nkfk(t), (4-1.6)
1a notação minúscula bold significa vector e maiúscula Bold significa matriz.
39

Dado que n′(t) não apresenta nenhuma dependência nos coeficientes do sinal smk, umaqualquer optimização em relação a estes pode fazer-se independentemente de n′(t),o que por outra palavras significa que, a informação necessária para a determinaçãodo receptor óptimo encontra-se inteiramente no vector r = smk + n de dimensão Ne cujas entradas são os respectivos coeficientes rk; k = 1, . . . , N . É fácil determinarque
E[rk] = E[smk + nk] = smk (4-1.7)
dado que o ruído é de média nula e o sinal é determinístico. Prova-se ainda facilmenteque a sequência nk é descorrelacionada notando que
E[nknm] =
∫ T
0
∫ T
0
E[n(t)n(τ)]fk(t)fm(τ)dtdτ
=1
2N0
∫ T
0
∫ T
0
δ(t− τ)fk(t)fm(τ)dtdτ
=1
2N0
∫ T
0
fk(t)fm(t)dt
=1
2N0δmk
= σ2nδmk (4-1.8)
onde assumimos que o conjunto de funções fk(t) constituem uma base ortonor-mada. Podemos agora determinar que as componentes rk tem a mesma variânciapara qualquer k e
σ2r = σ2
n =1
2N0 (4-1.9)
Como consequência as componentes rk são identicamente distribuidas, Gaussianase independentes o que implica directamente que a densidade de probabilidade doconjunto r é apenas o produto das densidades marginais das componentes rk, tantoumas como a outra condicionadas no sinal smk. Assim,
p(r|sm) =
N∏
k=1
p(rk|smk), m = 1, . . . ,M
=N∏
k=1
1√πN0
exp
[
−(rk − smk)2
N0
]
, m = 1, . . . ,M
=1
(πN0)N/2exp
[
−N∑
k=1
(rk − smk)2
N0
]
, m = 1, . . . ,M. (4-1.10)
Visto que n′(t) é independente das saídas rk do correlacionador então podemosdizer que os rk constituem uma estatística suficiente para detectar o sinal sm.
40

4.1.2 O filtro adaptado como desmodulador óptimo
O filtro adaptado representa uma forma alternativa ao correlacionador para imple-mentação do desmodulador óptimo. Em vez de adoptar N correlacionadores podemosusar N filtros lineares de resposta impulsiva
hk(t) =
fk(T − t), se 0 ≤ t ≤ T, k = 1, . . . , N
0 se t /∈ [0, T ](4-1.11)
a partir das quais podemos facilmente escrever as respectivas respostas ao sinal rece-bido r(t) como sendo
yk(t) =
∫ t
0
r(τ)hk(t− τ)dτ
=
∫ t
0
r(τ)fk(t− T + τ)dτ, k = 1, . . . , L (4-1.12)
que se for amostrada no momento t = T , permite escrever
yk(T ) =
∫ T
0
r(τ)fk(τ)dτ, k = 1, . . . , L (4-1.13)
que é exactamente igual à expressão de rk dada pelo correlacionador (4-1.1). Umfiltro do tipo (4-1.11) chama-se um filtro adaptado (matched filter) ao sinal fk(t).Um filtro adaptado a um determinado sinal não é mais do que um filtro cuja respostaimpulsiva é igual ao sinal invertido no tempo, e eventualmente atrasado/adiantadode uma constante temporal. Note-se no entanto que para obter o desmodulador-correlacionador não basta utilizar um filtro adaptado à função de base, é necessárioigualmente que a saída se encontre amostrada no ponto igual à duração do filtro,neste caso T . Uma das propriedades mais interessantes, com aplicação directa em co-municações, é de que no caso de ruído aditivo o filtro adaptado é aquele que maximizaa relação sinal-ruído à sua saída.
4.2 O detector óptimo
O papel do detector por sua vez é o de, a partir do vector rT = [r1, r2, . . . , rN ] decidirqual das M formas de onda possíveis foi transmitida, minimizando a probabilidadede erro. Como já foi fito acima, supôr que o sistema não tem ISI é equivalente asupôr que cada pulso (por exemplo num sistema PAM) é recebido isoladamente e nãotem relação com os anteriores, numa palavra, trata-se de um sistema sem memória.De um modo geral o que se pretende é que dado um determinado sinal recebido
r(t) = sm(t) + w(t), (4-2.1)
41

cuja versão discreta num determinado intervalo de tempo pode ser escrita sob formavectorial r = sm +w, a probabilidade que seja tomada a decisão de que o sinal sm(t)se encontra presente seja tomada. Vamos notar essa probabilidade como P [sm|r]que, por palavras, é a probabilidade para que o sinal sm seja escolhido quando osinal r é observado sabendo que sm foi emitido. Esta probabilidade é normalmentedesignada por probabilidade à posteriori. O critério que consiste em maximizar aprobabilidade à posteriori (e que veremos corresponde a minimizar a probabilidade deerro) é denomidado o critério do maximum a posteriori probability (MAP). Utilizandoa lei de Bayes podemos escrever
P [sm|r] =P [r|sm]P [sm]
P [r], (4-2.2)
onde P [r|sm] é a probabilidade de receber a sequência r condicionada no sinal sm. Poroposição P [sm] é normalmente denominada probabilidade à priori. A resolução doproblema requer o conhecimento da probabilidade à priori P [sm]. No caso de sinaisequiprováveis (frequente na prática), onde P [sm] = 1/M ;m = 1, . . . ,M , substituindoem (4-2.2) permite obter
P [sm|r] =1
M
P [r|sm]P [r]
, (4-2.3)
de onde se vê que o problema de encontrar sm que maximize a probabilidade à pos-teriori é idêntico ao de maximizar a densidade de probabilidade condicional P [r|sm],dado que P [r] não depende de sm. É interessante verificar que o critério MAP conduzà maximização da mesma densidade de probabilidade do máximo de verosímilhança,neste sentido P [r|sm] é denominada função de verosímilhança (ou likelihood function).A maximização da função de verosimilhança conduz ao critério de máxima verosímil-hança (maximum likelihood (ML) criterion). Neste caso, no qual os sinais sm sãoequiprováveis, os critérios MAP e ML conduzem ao mesmo resultado.
4.2.1 O detector correlacionador
Torna-se conveniente escrever a função de verosímilhança utilizando uma funçãomonótona da densidade de probabilidade como por exemplo o logaritmo de (4-1.10)(frequentemente chamada log-likelihood function). Assim a função de verosímilhançapode-se escrever
log p[r|sm] = −N2log(πN0)−
1
N0
N∑
k=1
(rk − smk)2, m = 1, . . . ,M
= −N2log(πN0)−
1
N0‖r− sm‖2, m = 1, . . . ,M (4-2.4)
onde se nota que o primeiro termo é constante e independente de sm e onde a maximi-zação da expressão é equivalente à minimização do segundo termo (por causa do sinal
42

- antes do somatório) em relação a sm. Este segundo termo escreve-se (desprezandoa constante multiplicativa),
C(r, sm) = ‖r− sm‖2 m = 1, . . . ,M
= |r|2 − 2r · sm + |sm|2, m = 1, . . . ,M (4-2.5)
sendo que o primeiro termo da expressão à direita não depende de sm podemos notarque a minimização de C(r, sm) é equivalente à maximização de C ′(r, sm) dada por
C ′(r, sm) = 2r · sm − |sm|2, m = 1, . . . ,M (4-2.6)
onde r·sm;m = 1, . . . ,M é o produto escalar entre os dois vectores r e sm para todos osvalores de m ou, por outras palavras, a projecção de r no sub espaço vectorial geradopelos vectores sm;m = 1, . . . ,M e onde o segundo termo |sm|2 representa a energiacontida em cada um dos sinais sm(t). O valor de cada uma destas projecções podeser visto como a correlação entre o sinal recebido r(t) e cada um dos possíveis sinaisemitidos sm(t), e assim C ′ pode ser implementado por um receptor-correlacionador
C ′(r, sm) = 2
∫ T
0
r(t)sm(t)dt− Em m = 1, . . . ,M (4-2.7)
onde a função de correlação é calculada para o ponto τ = 0 e em seguida é sele-cionado o sinal sm para o qual C(r, sm) é máximo. O receptor óptimo correspondenteencontra-se representado na figura 4.1.
4.2.2 O filtro adaptado como detector óptimo
A maximização da relação sinal/ruído à saída de um filtro é um problema clássicoem teoria do sinal e pode ser transposto para o caso da recepção de mensagensnum sistema de comunicação considerando primeiramente que o sistema se encontraem banda base (ou seu equivalente) e que apenas um símbolo é transmitido, o quesignifica que não existe ISI. O sinal recebido pode ser então
r(t) = A0g(t) + n(t), (4-2.8)
onde A0 é o símbolo transmitido, g(t) é a forma de pulso e n(t) é o ruído supostoaditivo branco e Gaussiano. Neste caso o sinal à saída do filtro de recepção de respostaimpulsiva h(t) escreve-se
q(t) =
∫ ∞
−∞r(τ)h(t− τ)dτ. (4-2.9)
O sinal q(t) encontra-se depois amostrado ao instante t = 0 (para retirar o símboloA0) e então
Q0 =
∫ ∞
−∞r(τ)h(−τ)dτ. (4-2.10)
43

+
12E1-
+
12E1-
+
12E1-
Escolher
o
maximo’
X
0
T()dt
s(t)1
X
0
T()dt
s(t)
X
0
T()dt
s(t)M
2
r(t)
t=T
.
.
.
....
.
Figura 4.1: receptor-correlacionador para M sinais.
Substituindo agora (4-2.8) em (4-2.10) temos
Q0 = A0
∫ ∞
−∞g(τ)h(−τ)dτ +
∫ ∞
−∞n(τ)h(−τ)dτ, (4-2.11)
na qual o primeiro termo corresponde ao sinal e o segundo corresponde ao ruído.Intuitivamente o desempenho do nosso decisor será tanto melhor quanto maior for oprimeiro termo em relação ao segundo, i.e., quanto maior for a relação SNR à saídado filtro. Esta relação SNR escreve-se
SNRout =energia sinal
energia ruido, (4-2.12)
onde ambas as energias são medidas à saída do filtro. A energia do sinal Es é dadapela E[.] do primeiro termo de (4-2.11), i.e.,
Es = σ2A|∫ ∞
−∞g(τ)h(−τ)dτ |2, (4-2.13)
enquanto a energia do ruído (suposto estacionário e ergódico), En, à saída do filtro édada por
En = E[n20] =< n2
0 >=
∫ ∞
−∞|H(f)|2Pn(f)df, (4-2.14)
44

onde < . > indica média temporal e onde o ruído branco Pn(f) = cte = N0/2 e porisso, utilizando de novo o teorema de Parseval
En = N0
∫ ∞
−∞h2(τ)dτ. (4-2.15)
O problema agora é de determinar de forma única o filtro h(t) que maximize2
SNRout =
σ2A|∫ ∞
−∞g(τ)h(−τ)dτ |2
N0
∫ ∞
−∞h2(τ)dτ
. (4-2.16)
A demonstração mais simples passa pela utilização da desigualdade de Schwarzque diz que
|∫ b
a
g1(x)g2(x)dx|2 ≤[∫ b
a
|g1(x)|2dx] [∫ b
a
|g2(x)|2dx]
, (4-2.17)
onde a igualdade só é verificada quando g2(x) = Kg1(x), K constante. Portanto, uti-lizando (4-2.17) no numerador de (4-2.16) chegamos à conclusão que o valor máximodo SNR é obtido quando
h(t) = Kg(−t). (4-2.18)
Este valor do filtro h(t) é chamado filtro adaptado ou matched filter. Mais, quandoh(t) é o matched filter então obtemos o valor máximo do SNR que é
SNRmax =σ2Aσ
2g
N0, (4-2.19)
onde σ2g é a energia na função de pulso recebida
σ2g =
∫ ∞
−∞|g(t)|2dt. (4-2.20)
O matched filter tem como resposta impulsiva a forma do sinal de entrada invertidano tempo (time-reversed), g(−t) e a sua TF é G∗(ω) isto é o conjugado da forma dosinal de entrada. Podemos assim perceber que a resposta do filtro adaptado ”equaliza”exactamente a fase do sinal de entrada resultando numa saída que é real e igual a|G(ω)|2. O valor do sinal de saída do filtro adaptado escreve-se a partir de (4-2.10)como
Q0 =
∫ ∞
−∞r(τ)g(τ)dτ, (4-2.21)
2de notar que no numerador da expressão 4-2.16, devido à comutatividade da convolução, temos
que∫
g(τ)h(−τ)dτ =∫
h(τ)g(−τ)dτ
45

o que não é mais do que o valor da função de correlação entre a entrada e a forma depulso esperada para o instante t = 0. Por isso o filtro adaptado é por vezes tambémchamado receptor correlacionador.
Demonstrámos que o filtro adaptado constitui o receptor óptimo de um único im-pulso em ruído branco e Gaussiano. Este resultado pode ser facilmente generalizadoao caso de uma sucessão de impulsos desde que não exista ISI. Para que tal não acon-teça é necessário e suficiente que cada impulso g(t) do sinal recebido esteja contidonum e só num intervalo de símbolo.
No caso do sinal PAM em banda passante um único pulso recebido no receptorescreve-se
r(t) =√2ReA0g(t)e
jωct+ n(t), (4-2.22)
onde agora o pulso recebido g(t) e o símbolo A0 podem ser complexos. Demonstra-seque o receptor-correlacionador ou matched filter maximiza o SNR à saída do filtroreceptor e segue exactamente os mesmos passos que no caso banda base mas onde os[.]2 foram alterados em |.|2 devido ao facto de g(t) ser agora uma função complexa.Desafiamos o leitor a fazer essa demonstração que resulta no evidente resultado queo matched filter se escreve neste caso
h(t) = g∗(−t). (4-2.23)
4.3 Desempenho do receptor óptimo
Uma vez que determinamos a estrutura do receptor óptimo no caso do canal AWGN,trata-se de calcular o respectivo desempenho para os vários tipos de modulação es-tudados no capítulo anterior. Primeiro iremos estudar o caso binário para M = 2 eem seguida o caso de ordem M = 2k, com k > 1.
4.3.1 Caso M = 2
Consideremos o caso simples de uma modulação PAM/ASK na qual
0 → s0(t), 0 ≤ t ≤ Tb
1 → s1(t), 0 ≤ t ≤ Tb
onde Tb = 1/R é a duração temporal do bit em segundos e R é a taxa de transmissãoem bits/s. As formas de onda são escolhidas tal que s0(t) = g(t) e s1(t) = −g(t),onde g(t) é a forma de pulso de energia Eg. Vamos para já considerar que os bits 0e 1 são equiprováveis e mutuamente independentes. O sinal recebido r(t) é dado porr(t) = si(t)+n(t) com i = 0, 1 e 0 ≤ t ≤ Tb onde o ruído n(t) é branco e Gaussiano de
46

densidade espectral de potência N0/2. Nestas condições o papel do receptor óptimoé de, tendo em conta r(t), determinar qual dos sinais foi emitido. A saída do receptoróptimo escreve-se quando s0 é emitido
r0 = s0 + n =√
Eg + n,
r1 = n,
e quando s1 é emitido
r0 = n,
r1 = s1 + n = −√
Eg + n.
O limiar de escolha é neste caso o valor zero, i.e., se r > 0 é escolhido o símbolo 0 eo símbolo 1 no caso contrário. Devido à simetria do problema torna-se claro que aprobabilidade de erro é igual nos dois casos, quer seja s0 ou s1 transmitidos e é iguala
Pe(r < 0|s0) =
∫ 0
−∞p(r|s1)dr
=1√πN0
∫ 0
−∞exp
[
−(r −√
Eg)2N0
]
dr
=1√2π
∫ −√
2Eg/N0
−∞e−x2/2dx
=1√2π
∫ ∞
√2Eg/N0
e−x2/2dx
= Q
(
√
2EgN0
)
(4-3.1)
onde a função Q(x), frequentemente utilizada para calcular a área da "cauda" deuma Gaussiana, é dada por
Q(x) =1
2π
∫ ∞
x
et2/2dt, 0 ≤ x. (4-3.2)
A probabilidade de erro total Pe = p0pe(r < 0|s0) + p1pe(r > 0|s1), mas como os bitssão equiprováveis p0 = p1 = 1/2 e as duas probabilidades de erro também são iguaistemos que Pe total é simplesmente dada por (4-3.1). Note-se que a probabilidadede erro depende apenas do quociente Eg/N0 e não na forma das funções de pulso oulimiares escolhidos. Em particular pode-se ver que Pe diminui quando o quocienteEg/N0 aumenta. Ora este quociente não é mais do que a relação sinal-ruído por bit(SNRb)e por isso chegamos à conclusão de que a maximização do SNRb é equivalenteà minimização da probabilidade de erro. Considerando que a distância mínima entre
47

os pontos na constelação para sinais antipodais é dada por (3-1.7), podemos exprimira probabilidade de erro como
Pe = Q
√
d2min
2N0
(4-3.3)
onde dmin = 2√
Eg. Da mesma forma, podemos calcular a probabilidade de erro parao caso de formas de onda de sinalização ortogonais em vez de antipodais. Neste casoa distância mínima dmin =
√
2Eg o que, substituindo em (4-3.3) dá
Pe = Q
(
√
EgN0
)
(4-3.4)
A figura 4.2 mostra a probabilidade de erro teórica da modulação binária para os casosantipodal e ortogonal, na qual se pode ver que existe um ganho do caso antipodal emrelação ao ortogonal devido à diferença de distância entre os pontos na constelaçãoentre os dois casos.
−4 −2 0 2 4 6 8 10 12 1410
−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
SNR (dB)
Pro
babi
lidad
e de
err
o
antipodalortogonal
Figura 4.2: probabilidade de erro em função da relação sinal-ruído por bit (em dB) nocaso de modulação PAM/ASK binária (M = 2) para os casos antipodal e ortogonal.
48

4.3.2 Caso M = 2k com k > 1
As formas de onda utilizadas para sinalização com M níveis distintos no caso da mod-ulação PAM/ASK encontram-se representadas geometricamente com coordenadas
sm =
√
Eg2Am, m = 1, . . . ,M (4-3.5)
onde Eg é a energia da função de pulso g(t) e onde os níveis de amplitude Am sãodados por
Am = (2m− 1−M)d, m = 1, . . . ,M (4-3.6)
onde d é uma constante. A distância mínima entre dois níveis é dada por (3-1.7).Claramente o detector óptimo compara a saída do desmodulador r com um conjuntode M − 1 níveis estrategicamente colocados nos pontos intermédios entre os valoresde amplitude sm. O sinal escolhido será aquele nível mais próximo de r. Se o nívelm for transmitido, o sinal à saída do desmodulador óptimo será
r =
√
Eg2Am + n, (4-3.7)
onde n é o ruído que tem média zero e variância σ2n = N0/2. Considerando que todos
os níveis são equiprováveis, a probabilidade de erro é simplesmente a probabilidadepara que a variável de ruído ultrapasse o valor igual a metade da distância entre doisníveis consecutivos. Isto para qualquer um dos níveis entre 2 e M − 1. Para os níveisdos extremos, i.e., os níveis 1 e M o erro só acontece num dos lados. A probabilidadede erro nos M níveis é então M − 1/M vezes a probabilidade de erro bilateral,
PM =M − 1
MPe(|r − sm| > d
√
(1/2)Eg)
=M − 1
M
2√πN0
∫ ∞
d√
Eg/2e−x2/N0dx
=M − 1
M
2√2π
∫ ∞
√d2Eg/N0
e−x2/2dx
=2(M − 1)
MQ
(√
d2EgN0
)
. (4-3.8)
49

É comum estabelecer (4-3.8) em função da energia média dos sinais
Eav =1
M
M∑
m=1
Em
=1
M
M∑
m=1
|sm|2
=d2Eg2M
M∑
m=1
(2m− 1−M)2
= d2Eg1
6(M2 − 1). (4-3.9)
e assim
PM =2(M − 1)
MQ
(√
6Eav(M2 − 1)N0
)
. (4-3.10)
Dado que cada símbolo é transmitido em T = kTb segundos e que k = log2M ,podemos exprimir a energia média por bit Ebav = kEav e assim a probabilidade deerro
PM =2(M − 1)
MQ
(√
(6 log2M)Ebav(M2 − 1)N0
)
. (4-3.11)
onde finalmente Ebav/N0 é a relação sinal-ruído (SNR) por bit. A equação (4-3.11)foi utilizada para calcular as curvas da figura 4.3. Esta figura mostra claramentea penalização sofrida em termos de SNR por bit quando M aumenta. Para umaprobabilidade de erro sufientemente baixa, digamos inferior a 10−4, este aumentotende a ser linear (em dBs) em função do número de bits k. Assim por exemplo paraPe = 10−5, existe um perda de cerca de 4 a 5 dBs cada vez que se acrescenta um bit,i.e., quando M passa de 2 para 4 ou de 4 para 8, etc...
Para o caso da modulação PSK, a sinalização faz-se através do vector de sinaldado por (3-2.6). Neste caso o detector óptimo utiliza a expressão dada por (4-2.6)que essencialmente calcula a projeção do sinal recebido r em cada um dos sinaispossíveis sm;m = 1, . . . ,M . Isto é equivalente a um detector de fase que estima afase do sinal recebido r e a compara com a fase de cada um dos sinais possíveis sm.Vamos agora calcular a densidade de probabilidade da fase de r de onde deduziremosa probabilidade de erro. A fase de r escreve-se
Θr = arctanr2r1, (4-3.12)
onde r1 e r2 são as componentes do sinal r. Calculemos Θr para o caso em que osinal s1 é emitido e nesse caso Θr = 0. Nesse caso temos
r1 =√
Es + n1
r2 = n2,
50

−5 0 5 10 15 20 2510
−6
10−5
10−4
10−3
10−2
10−1
100
Bit SNR (dB)
Pro
babi
lidad
e de
err
o
M=2M=4M=8M=16
Figura 4.3: probabilidade de erro em função da relação sinal-ruído por bit em dB, nocaso de modulação PAM/ASK para M = 2, 4, 8 e 16.
onde Es = Eg/2. Visto que n1 e n2 são variáveis normais de média nula e independentestemos que r1 : N(
√
Eg, N0/2) e r2 : N(0, N0/2), assim densidade de probabilidadeconjunta de r1 e r2 é dada por
pr(r1, r2) =1
2πσ2r
exp
[
−(r1 −√Es)2 + r22
2σ2r
]
, (4-3.13)
onde σ2r = N0/2. Façamos agora a mudança de variáveis
Vr = sqrtr21 + r22
Θr = arctanr2r1
que permite escrever (4-3.13) como
pVr ,Θr(vr, θr) =vr
2πσ2r
exp
(
−v2r − Es − 2
√Esvr cos θr
2σ2r
)
. (4-3.14)
Para obter a densidade de probabilidade marginal em Θr basta integrar (4-3.14) em
51

−3 −2 −1 0 1 2 30
5
10
15
20
25
30
Θr (rd)
Pro
babi
lidad
e (
Θr)
σs=−5 dB
σs=0 dB
σs=5 dB
σs=10 dB
Figura 4.4: densidade de probabilidade da fase Θr do sinal recebido para vários valoresda relação sinal-ruído de símbolo (em dB).
relação a vr no seu domínio de variação [0,∞]. Assim,
pΘr(θr) =
∫ ∞
0
pVr ,Θr(vr, θr)dvr
=1
2πe−2γs sin2 θr
∫ ∞
0
vre−(vr−
√4σs cos θr)2/2dvr, (4-3.15)
onde σs = Es/N0 é a relação sinal-ruído de símbolo. A figura 4.4 mostra a densidadede probabilidade da fase do sinal recebido em torno ao valor zero calculada numeri-camente a partir da expressão (4-3.15) para vários valores da SNR por símbolo emdBs. Nota-se que esta função é tanto mais concentrada quanto maior é a SNR o que,obviamente, significa que a probabilidade de erro é menor.
Quando o sinal sm é transmitido um erro de decisão tem lugar quando o ruídofizer com que a fase do sinal recebido caia fora do intervalo −π/M ≤ Θr ≤ π/M eportanto a probabilidade de erro escreve-se
PM = 1−∫ π/M
−π/M
pΘr(θr)dθr, (4-3.16)
que se encontra representada na figura 4.5 para vários valores de M . Como no caso damodulação de amplitude ASK, existe uma clara penalização quando do aumento da
52

0 5 10 15 2010
−6
10−5
10−4
10−3
10−2
10−1
Bit SNR (dB)
Pro
babi
lidad
e de
err
o
M=2M=4M=8M=16
Figura 4.5: probabilidade de erro para a modulação PSK e para vários valores deM = 2, 4, 6 e 8.
dimensão do alfabeto utilizado para codificar os símbolos em PSK. Essa penalizaçãoé de cerca de 4 a 5 dB por cada bit para k > 2.
Este cálculo de desempenho foi levado a cabo partindo do princípio de que a fasedo sinal recebido podia ser determinada de modo absoluto. Acontece que, na prática,a fase do sinal recebido é conhecida com um determinado grau de ambiguidade dadaa natureza da fase. É comum um sinal em PSK binário (BPSK) ter uma ambiguidadede ±180 graus e 4-PSK de ±90 graus. Uma forma de obviar este problema consisteem codificar a mensagem não no valor absoluto da fase mas na mudança da fase.Quer isto dizer que, por exemplo para BPSK, um bit 1 podia ser condificado atravésde um salto de fase de 180 graus enquanto um bit 0 era codificado por um salto defase de 0 graus. Da mesma forma num sistema 4-PSK cada um dos quatro níveisseria associado a saltos de fase de 0, 90, 180 e -90 graus. Este tipo de modulaçãotoma o nome de PSK diferencial ou DPSK. O desempenho teórico do DPSK é inferiorao do PSK, mas trata-se de um sistema mais robusto e por isso por vezes preferidona prática em certas aplicações. Prova-se que a probabilidade de erro para DPSKbinário se escreve
P2dpsk =1
2e−Eb/N0 , (4-3.17)
53

Esta forma relativamente simples constrasta com a dificuldade em calcular a prob-abilidade de erro para o caso M = 4. O resultado pode-se encontrar nas páginas 276,277 e apêndices de [18]. A figura 4.6 mostra o desempenho comparado entre BPSKe 2-DPSK e 4-DPSK, onde se pode ver que a penalização do DPSK é inferior a 1 dBem relação a BPSK para probabilidades de erro da ordem de 10−5.
0 2 4 6 8 10 12 14 1610
−6
10−5
10−4
10−3
10−2
10−1
Bit SNR (dB)
Pro
babi
lidad
e de
err
o
BPSKM=2M=4
Figura 4.6: probabilidade de erro para a modulação DPSK e para valores de M = 2, 4comparada com o caso BPSK.
4.4 Exemplos e aplicações
Exemplo 1: considere um sinal cuja resposta em frequência é
G(f) = A1− e−j2πfT
j2πf(4-4.1)
a) determine a sua forma de onda no tempo g(t)
G(f) = Ae−jπfT ejπfT − e−jπfT
j2πft
= Asin(πfT )
πfe−jπfT
54

cuja TF inversa é
g(t) =
A if 0 ≤ t ≤ T
0 se t /∈ [0, T ]
b) se o sinal g(t) for utilizado como forma de pulso de uma modulação PAM/ASKcom um alfabeto de dimensão M em banda de base que ataca um canal de tipoAWGN, determine as funções de base f(t)
A energia do pulso é
Eg =∫ T
0
g2(t)dt =
∫ T
0
A2dt = A2T
Como a dimensão da base de funções é N = 1, existe uma única função de basef1(t) que se escreve
f1(t) =1√A2T
g(t)
=
1√T
se 0 ≤ t ≤ T
0 se t /∈ [0, T ]
c) calcule a saída do desmodulador correlacionador em presença de ruído, i.e.,quando r(t) = sm(t) + n(t)
A saída do correlacionador escreve-se
r1 =
∫ T
0
r(t)f1(t)dt
=1√T
∫ T
0
r(t)dt
=1√T
∫ T
0
[sm(t) + n(t)]dt
=1√T
[∫ T
0
sm(t)dt+
∫ T
0
n(t)
]
dt
= sm + n
d) determine a densidade de probabilidade do sinal recebido r quando o sinalemitido é sm
55

A partir da equação anterior e porque E[n] = 0, temos que
σ2n = E
[
1
T
∫ T
0
∫ T
0
n(t)n(τ)dtdτ
]
=1
T
∫ T
0
∫ T
0
E[n(t)n(τ)]dtdτ
=N0
2T
∫ T
0
∫ T
0
δ(t− τ)dtdτ
=N0
2
e portanto a densidade de probabilidade de r escreve-se
p(r|sm) =1√πN0
exp
[
−(r − sm)2
N0
]
e) determine a forma de onda do filtro adaptado correspondente
s(t) = g(−t)
=
0 se t /∈ [−T, 0]1 se − T ≤ t ≤ 0
Exemplo 2: considere os sinais da figura 4.7 como sendo os sinais utilizados numamodulação digital biortogonal de dimensão M = 4 a transmitir num canal com ruídoaditivo branco e Gaussiano de densidade espectral de potência N0/2.
0 T/2| |T t 0 T/2
|T t
s1(t) s2(t)
1 1
Figura 4.7: sinais para a modulação biortogonal.
a) determine a base de funções para este sistema de sinalização
Dado que se trata de um sistema de sinalização biortogonal o conjunto de sinaisutilizado é s1(t), s2(t), −s1(t) e −s2(t) o que indica que a dimensão do espaço
56

de funções é N = 2 sendo que a energia em cada sinal é idêntica e igual a
E =
∫ T
0
s21(t)dt
=
∫ T/2
0
dt
=T
2e portanto as duas funções da base devidamente normalizadas são
f1(t) =
1√E se 0 ≤ t ≤ T
2
0 se t /∈ [0, T/2]
f2(t) =
1√E se T
2≤ t ≤ T
0 se t /∈ [T/2, T ]
b) determine as respostas impulsivas dos filtros adaptados a utilizar no desmodu-lador óptimo
Sabendo que, de uma forma geral, o filtro adaptado h(t) a um sinal s(t) numintervalo T se escreve h(t) = s(T − t), temos que para f1(t) e f2(t),
h1(t) =
1√E se T
2≤ t ≤ T
0 se t /∈ [T/2, T ]
h2(t) =
1√E se 0 ≤ t ≤ T
2
0 se t /∈ [0, T ]
c) calcule as respostas dos filtros adaptados da alínea anterior yis quando o sinaltransmitido é s1(t) sem ruído
Trata-se de calcular para já as respostas sem ruído yis(t) = hi(t) ∗ s1(t); i =1, . . . , 4 que são
y1s(t) =
∫ ∞
−∞h1(τ)s1(t− τ)dτ,
=
0 se t ≤ T/2∫ t
T/21E dτ se T/2 ≤ t ≤ T
∫ T
t−T/21E dτ se T ≤ t ≤ 3T/2
0 se t ≥ 3T/2
=
0 se t ≤ T/21E (t− T/2) se T/2 ≤ t ≤ 3T/21E (T/2− t) se T ≤ t ≤ 3T/2
0 se t ≥ 3T/2
57

amostrando o sinal de saída do correlacionador no instante T , temos que y1s =y1s(T ) =
√
T/2.
Agora para a saída do filtro h2(t) temos que
y2s(t) =
∫ ∞
−∞h2(τ)s1(t− τ)dτ,
=
0 se t ≤ 0∫ t
01E dτ se 0 ≤ t ≤ T/2
∫ T/2
t−T/21E dτ se T/2 ≤ t ≤ T
0 se t ≥ T
=
0 se t ≤ 0tE se 0 ≤ t ≤ T/21E (T − t) se T/2 ≤ t ≤ T
0 se t ≥ T
amostrando o sinal de saída do correlacionador no instante T , temos que y2s =y2s(T ) = 0. De forma similar obtemos y3s = −
√
T/2 e y4s = 0.
d) calcule agora as respostas yin do filtro adaptado i ao ruído Gaussiano n(t)
Podemos então escrever que
yin(t) =
∫ ∞
−∞hi(τ)n(t− τ)dτ, i = 1, . . . , 4
que não pode ser calculado de modo explícito dado que ni(t) é um sinal aleatórioe passa, naturalmente, por uma caracterização da distribuição dos yin resul-tantes da amostragem de yin(t) a t = T . Temos então que E[yin(t)] = 0 e a suavariância que se escreve
E[y2in(T )] = E[
∫ iT/2
(i−1)T/2
1√En(T − τ)dτ
∫ iT/2
(i−1)T/2
1√En(T − ν)dν],
=1
E
∫ iT/2
(i−1)T/2
∫ iT/2
(i−1)T/2
E[n(T − τ)n(T − ν)]dτdν,
=1
E
∫ iT/2
(i−1)T/2
∫ iT/2
(i−1)T/2
N0/2δ(τ − ν)dτdν,
=N0
2E
∫ iT/2
(i−1)T/2
dν,
=N0
2.
Podemos assim dizer que as respostas ni = yin(T ) do filtro adaptado i ao ruídon(t) são variáveis Gaussianas de média nula e de variância N0/2.
58

e) determine o vector r recebido formado à saída dos filtros adaptados amostradosno instante t = T , quando o sinal de entrada é s1(t)
Escreve-se
r = [r1r2r3r4]
= [√E + n1n2 −
√E + n3n4]
Exemplo 3: suponha que se pretende transmitir a sequência de bits de infor-mação "110100010110" utilizando uma modulação digital DPSK, sendo que o sinaltransmitido no intervalo [0, T ] é dado por
s(t) = A cos(2πfct+ θ)
onde θ é o termo de fase que contém a informação.
a) começando com uma fase nula no instante inicial escreva a sequência de valoresda fase correspondente à mensagem a transmitir
Sendo que a um bit ‘0’ é associado um salto de fase de θ0 = 0 graus e que aum bit ‘1’ é associado um salto de fase θ1 = 180 graus temos a seguinte fase dosinal no instante nT
φ(nT ) = [180 0 0 180 180 180 180 0 0 180 0 0]
O raciocínio é o seguinte: no instante t = 0 a fase φ(0) = 0, visto que o primeirobit é 1 a fase dá um salto de π e passa a ser φ(T ) = 180. No instante t = 2T ,o bit é de novo 1 e o salto de fase é de novo π, assim φ(2T ) = 0. No instantet = 3T o bit é 0 e o salto é zero portanto a fase do sinal não muda φ(3T ) = 0. Noinstante t = 4T o bits é 1 e por isso o salto é π o que significa que φ(4T ) = 180.Para t = 5T, 6T e 7T os bits são sempre 0, o que significa saltos de fase 0 e porisso teremos que φ(5T ) = φ(6T ) = φ(7T ) = 180 e assim sucessivamente.
b) considerando que a sequência de bits da mensagem é descorrelacionada, deter-mine e represente a densidade espectral de potência do sinal DPSK transmitido.
O sinal transmitido pode ser colocado sob a forma
s(t) = Re[sbb(t)ej2πfct],
onde a componente em banda base se escreve
sbb(t) = Ag(t)ejθ(t),
=
∞∑
n=−∞AIng(t− nT ),
59

com In = an + jbn símbolo emitido e que é um típico sinal PSK em banda basecom g(t) = rect(t − T/2) e para o qual a densidade espectral toma a formaclássica dada por (3-7.18) com
G(f) = TF[g(t)]
e PA(f) é a densidade espectral de potência da mensagem. Sabemos quePA(f) = TF[φA(i)], onde φA(i) é a função de autocorrelação da mensagemIn. No caso binário em que os saltos de fase são 0 ou π e em que os bits damensagem são descorrelacionados entre si podemos dizer que In = an+ jbn combn = 0 e an = ±1 com probabilidade 1/2. Mais E[In] = 0 e que
V [In] = E[I2n],
=
2∑
n=1
a2npn,
sendo que p1 = p2 = 1/2 e portanto V [In] = 1. Podemos escrever
φA(k) = E[In+kI∗n]
=2∑
n=1
anan+kpn
sabendo que k par implica
an = 1 → an+k = 1
an = −1 → an+k = −1
e φ(k) = (1/2)1 1 + (1/2)(−1) (−1) = 1, e que para k ímpar
an = 1 → an+k = −1
an = −1 → an+k = 1
e φ(k) = (1/2)1 (−1) + (1/2)(−1) 1 = −1. Em resumo a função de autocorre-lação escreve-se
φA(k) =
1 se kpar
−1 se kimpar,
e é portanto uma função discreta e periódica de período T0 = 2T . Basta entãocalcular o seu desenvolvimento em série de Fourier
Cn =1
2T
1∑
k=0
φA(k)e−jnω0kT ,
=1
2T
[
−1 + e−jnω0]
60

com ω0 = 2π/T0 = π/T , visto que T0 = 2T . A TF de uma função periódica éfinalmente
PA(f)
∞∑
n=−∞Cnδ(f − nf0)
e a densidade espectral de potência do sinal emitido
Psbb(f) =1
T|G(f)|2
∞∑
n=−∞Cnδ(f − nf0)
=1
T
∞∑
n=−∞Cn|G(nf0)|2δ(f − nf0)
61

5 Quantidade de informação e codificação
Tivemos oportunidade de abordar no capítulo 2 a questão da passagem do sinal con-tínuo x(t) para a sua versão discreta no tempo x(k). Em particular, preocupámo-nosem deduzir um processo que garantisse duas coisas: 1) que a representação discretaocupasse o mínimo de banda possível e 2) que permitisse uma reconstrução fiel e semambiguidade do sinal original. Por outras palavras, uma reconstrução fiel significauma reconstrução com o mínimo de distorção. Normalmente diz-se que a distorçãoé mínima, neste caso zero, quando a quantidade de informação é preservada. Isto équando a informação contida no sinal x(t) se encontra contida integralmente no sinalx(k).
É facilmente compreensível que a noção de quantidade de informação seja umaquestão central em problemas de telecomunicações. O objectivo primário de umsistema de comunicação não é mais do que transmitir informação de um ponto para ooutro. Foi Claude Shannon em 1940 que, pela primeira vez, introduziu a possibilidadede quantificar a quantidade de informação, e assim revolucionou a nossa forma de vera problemática das comunicações.
Porém não basta que uma determinada mensagem seja fielmente discretizada notempo, é também necessário que ela seja discretizada na sua amplitude. Isto é, x(t) éà partida uma função real de variável real t. Uma vez que se procedeu à discretizaçãoda variável tempo t, ela passou a ser uma função real de variável discreta k, quetoma valores inteiros. Teoricamente uma função real pode tomar um número infinitode valores o que, utilizando um sistema binário, necessitaria na prática um númeroinfinito de bits para ser representado. O processo que permite reduzir o númerode níveis que pode tomar a amplitude de uma determinada mensagem chama-sequantificação. A quantificação é um processo que introduz inevitavelmente algumadistorção. Não voltaremos sobre este assundo da teoria da quantificação assim comodos vários tipos de modulação analógica por códigos de pulso (PCM) e modulaçãodelta, que se supõe já terem sido abordados em Fundamentos de Telecomunicações.
Vamos no entanto insistir na parte da codificação do sinal digital emitido pelafonte. Quando a mensagem que se pretende transmitir se encontra discretizada,seja no tempo seja na amplitude, trata-se de determinar qual o melhor modo de re-presentar os níveis obtidos após discretização de forma a minimizar, tanto quantopossível, a quantidade de dados a transmitir, sem que no entanto haja perda deinformação. A este último processo chama-se codificação sem ruído ou compressãode dados. Talvez esta última etapa não seja muito clara e por isso vamos dar umexemplo simples. Vamos imaginar que uma determinada mensagem é quantificadaentre -10 e +10 volts utilizando 1024 níveis discretos. Admitindo que o sinal é emgeral de média nula, é provável que uma estatística demonstre que os valores dosníveis centrais (em torno a 0) são mais prováveis do que os níveis perto dos -10 oudos +10 volts. Compreende-se então facilmente que seria vantajoso para o sistema
62

de comunicações que os níveis centrais fossem codificados com menos bits, enquantoos níveis menos prováveis (que ocorrem menos frequentemente) fossem codificadoscom mais bits. Este processo de atribuição de códigos mais curtos a símbolos maisprováveis e de códigos mais longos a símbolos menos prováveis, consiste um exemplosimples da utilização eficiente da codificação para a diminuição do volume de dadosa transmitir, aumentando assim a eficiência do sistema de transmissão. Trata-se dealguma forma de uma compressão de dados, cujo exemplo mais familiar de todos éo algoritmo de Lempel-Ziv universalmente utilizado nos programas de “zipagem” eminformática.
5.1 Quantidade de informação e entropia
A entropia é uma forma de medir a quantidade de informação. Intuitivamente umamensagem tem tanta mais informação quanto maior for o seu grau de aleatoriadadeou imprevisibilidade. Por exemplo, se dissermos: ”o sol nasceu esta manhã”. Temosaqui uma menssagem com uma certa quantidade de informação. Agora se dissermos:”houve um terramoto em Lisboa.” Qual das duas frases tem mais informação ?Intuitivamente seremos levados a dizer que a segunda tem mais informação que aprimeira. Isto, porque a segunda mensagem era mais imprevisível, ou seja representaum acontecimento que ocorre menos vezes que o da primeira mensagem. A entropiatenta traduzir uma forma de quantificar este conceito. Assim, por exemplo, a entropiaou quantidade de informação da variável aleatória x de probabilidade pX(x), é definidapor
H(x) = E[− log2 pX(x)] = −∑
x∈Ωx
pX(x) log2 pX(x). (5-1.1)
Nesta equação percebemos o porquê da densidade de probabilidade e do sinal demenos, pois a entropia deverá ser tanto maior quanto menos provável for o sinal, etambém percebemos o porquê da esperança matemárica E[.], que realiza uma “mé-dia” sobre todas as tiragens possíveis. Mas de onde vem o log2 ? A introdução dologaritmo está ligada com o facto de que se considerarmos dois processos estocásticosindependentes X e Y , a informação do acontecimento conjunto de X e de Y deveráser simplesmente a soma das quantidades de informação de um e do outro (o loga-ritmo do produto é a soma dos logaritmos!). Assim deverá haver um logaritmo talque
H(x, y) = E[− log2 pXY (x, y)] (5-1.2)
= E[− log2 pX(x)− log2 pY (y)] (5-1.3)
= H(x) +H(Y ), (5-1.4)
onde pXY (x, y) não é mais do que a densidade de probabilidade conjunta das va’s Xe Y , tal que, visto que as va’s são independentes, pXY (x, y) = pX(x)pY (y). Para o
63

caso do alfabeto binário, formado de 0 e 1’s, com probabilidades p e 1− p a entropiatotal é dada por
Hb(p) = −p log2 p− (1− p) log2(1− p) (5-1.5)
que se encontra representada na figura 5.1.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Probabilidade p
Ent
ropi
a al
fabe
to b
inar
io H
b(p)
Figura 5.1: entropia do alfabeto binário.
5.2 Codificação para compactação
Já vimos como colocar uma mensagem sob a forma de uma sequência de símbolos queforma uma representação discreta da informação emitida pela fonte. Vamos agoratratar do problema de como codificar de forma óptima esta sequência de símbolosnuma sequência de digitos binários. Tendo em conta que o alfabeto utilizado pelafonte é geralmente finito, o problema da codificação torna-se um problema relativa-mente fácil. No entanto isto só é verdade quando os símbolos são estatisticamenteindependentes entre si, i.e., quando o sistema não tem memória - diz-se nesse casoque temos uma fonte discreta sem memória. Infelizmente, na prática, poucas fontesde mensagens podem ser consideradas como sendo fontes discretas sem memória.
O exemplo clássico consiste em considerar uma fonte discreta sem memória queproduz um símbolo cada τ segundos. Cada um dos símbolos é selecionado de umalfabeto finito com L símbolos xn;n = 1, . . . , L, com a probabilidade p(xn). Assim a
64

entropia da fonte, de acordo com (5-1.1), é dada por
H(x) = −L∑
n=1
p(xn) log2 p(xn). (5-2.1)
Se os símbolos forem igualmente prováveis temos que p(xn) = 1/L e então
H(x) = − 1
L
L∑
n=1
log21
L
= log2 L, (5-2.2)
o que representa o valor máximo que pode tomar H(x) em (5-2.1), e que é o númerode bits médio necessário para representar cada símbolo do alfabeto. A taxa de trans-missão é então de H(x)/τ bits/s. Existem essencialmente dois grandes grupos demétodos de codificação para fontes discretas sem memória, que são: codificação compalavras de comprimento fixo e codificação com palavras de comprimento variável.
5.2.1 Com palavras de comprimento fixo
Neste caso utiliza-se um número de bits R fixo para cada símbolo. De acordo com esteesquema de codificação, a cada símbolo corresponderá um único conjunto de R bits.Dado que temos L símbolos e, admitindo que L é uma potência de 2, o número de bitsnecessário é dado por R = log2 L. Se L não for uma potência de 2 então o número debits necessário será R = int[log2 L]+1, onde int significa “o maior inteiro inferior a”. Éóbvio que se H(x) ≤ log2 L teremos que R ≥ H(x). Na prática um bom esquema decodificação é aquele que se aproxima o mais possível da entropia, e portanto H(x)/Ré uma medida da eficiência do esquema de codificação. Existem métodos alternativosque consistem em codificar não cada símbolo individualmente mas sim sequênciasde símbolos (um exemplo típico é um código fonte no qual as palavras while do,etc se encontram frequentemente repetidas). Assim pode-se melhorar a eficiência doesquema de codificação aumentando o número de símbolos por grupo tanto quantose pretender.
Alternativamente, existem esquemas nos quais a relação entre a representação embits de cada símbolo não é única. Isto significa que no alfabeto podem coexistir umconjunto de símbolos cuja representação é única (os mais frequentes) e um outroconjunto de símbolos representados pelo mesmo conjunto de bits (os muito poucofrequentes). É claro que este esquema de codificação não permite a recuperação detoda a informação emitida pela fonte no momento de descodificação. Trata-se aqui deuma codificação que introduz ruído de codificação e portanto perda de informação. Oproblema na prática é de controlar o ruído de quantificação dentro de níveis aceitáveisobtendo em troca um forte aumento da compactação da informação que se traduznuma eficiência alta e portanto uma alta taxa de transmissão efectiva.
65

5.2.2 Com palavras de comprimento variável
Quando os símbolos emitidos pela fonte não são equiprováveis torna-se óbvio que oesquema de codificação mais apropriado deverá ter códigos de comprimento variável:os símbolos mais frequentes deverão ter códigos com menos bits e vice-versa. O exem-plo mais conhecido é o código Morse que já na época utilizava códigos mais curtospara as letras mais frequentes do alfabeto. Um problema óbvio desde logo é que asletras mais frequentes por exemplo em inglês não serão sempre as mais frequentes emportuguês o que leva inevitavelmente a perdas de eficiência quando de mudanças delíngua. Um problema que se coloca na prática quando da codificação com palavras decomprimento variável é que por vezes não podemos saber imediatamente no receptorse uma dada sequência de bits forma vários símbolos codificados com códigos cur-tos ou símbolos codificados com códigos longos, dado que utilizando digitos binários,utilizar o ‘1’ para o A, ‘00’ para o B, ‘01’ para o C e ‘10’ para o D, a sequência‘001001’ não nos permite determinar unicamente quais os símbolos emitidos. Clara-mente temos B como primeiro símbolo mas em seguida não sabemos se é ABA ou CB.Na prática temos que ter a certeza que o código escolhido não contém ambiguidadese pode ser únicamente e instantanemante descodificado. Desde já podemos notar queexiste uma condição de base que é chamada a Condição do prefixo: e que consiste emafirmar que nenhum código deverá ser o prefixo de um outro código. Pode-se efectiva-mente demonstrar que códigos com palavras de comprimento variável que satisfazema condição do prefixo são eficientes para qualquer fonte discreta sem memória comsímbolos não equiprováveis. O algoritmo de Huffman permite construir tais códigose é muito importante na prática.
Algoritmo de codificação de Huffman
O método proposto por Huffman em 1952 baseia-se no princípio de atribuir deforma progressiva os códigos mais longos aos símbolos menos prováveis até aos sím-bolos mais prováveis, evitando os prefixos. Desde logo se pode constatar que paraconstruir um esquema de codificação com o algoritmos de Huffman é necessário dis-pôr das probabilidades de cada símbolo. O procedimento inicia-se concatenando osdois símbolos menos prováveis construindo um novo símbolo cuja probabilidade éigual à soma das probabilidades dos dois símbolos iniciais. Este processo prossegueaté ficarmos com um único símbolo de probabilidade 1. Obtem-se assim uma árvorecontendo todas as combinações dos símbolos existentes. Começa-se depois pela raízda árvore alocando os digitos ‘0’ e ‘1’ aos dois símbolos mais prováveis (e que assimterão o código mais curto); em seguida os dois símbolos que formam, por exemploo símbolo codificado com o ‘0’ serão codificados com ‘00’ e ‘01’, da mesma formapara o outro ramo com ‘10’ e ‘11’ e assim sucessivamente aumentando o número dedigitos do código à medida que se diminui a probabilidade do símbolo e garantidoque a condição do prefixo é satisfeita.
Voltamos agora ao caso geral no qual a fonte não é sem memória, i.e., o caso
66

em que os símbolos emitidos não são estatisticamente independentes uns dos outros,porém consideraremos sempre o caso em que a sequência de símbolos será consideradaestacionária. Ou seja, o processo aleatório discreto associado à fonte não é branco masé estacionário. Aqui o problema é singularmente mais complicado dada a dependênciaestatística entre símbolos, que não nos permite determinar a entropia (e portanto onúmero mínimo de bits necessário), de forma directa. Felizmente pode-se definir aentropia de um alfabeto de uma fonte estacionária através da definição da entropia deum bloco de símbolos. Assim, seja a entropia do bloco de símbolos X1, X2, . . . , Xk,
H(X1, X2, . . . , Xk) =
k∑
i=1
H(Xi|X1, X2, . . . , Xi−1), (5-2.3)
onde H(Xi|X1, X2, . . . , Xk) é a entropia condicional do símbolo Xi dados os símbolosanteriores Xn;n = 1, . . . , i − 1. A entropia por símbolo dentro do conjunto de ksímbolos, define-se como sendo
Hk(X) =1
kH(X1, X2, . . . , Xk). (5-2.4)
Finalmente a entropia do alfabeto escreve-se como sendo a entropia do bloco k quandok → ∞,
H(X) = limk→∞
Hk(X) = limk→∞
1
kH(X1, X2, . . . , Xk). (5-2.5)
O papel da definição da noção de entropia no caso estacionário é essencial pois per-mite estabelecer uma métrica da eficiência da codificação. A partir daqui prova-seque uma codificação eficiente de uma fonte discreta estacionária com memória é pos-sível através da representação de largos blocos de símbolos por códigos. Para cadaum dos blocos pode (e deve) ser utilizado o algoritmo de Huffman com código depalavras de comprimento variável. De notar no entanto que para que isso seja pos-sível será necessário conhecer as densidades de probabilidade conjuntas dos símboloscontidos no mesmo bloco, o que nem sempre acontece de forma directa e requere fre-quentemente na prática uma fase de amostragem para obter uma estimação empíricadessas probabilidades. Para obviar este problema da necessidade da estimação dasprobabilidades a priori foi proposto o algoritmo de Lempel-Ziv.
Algoritmo de Lempel-Ziv
Este algoritmo é independente das propriedades estatísticas dos dados e por issotem um carácter universal. Este algoritmo procede separando a sequência emitidapela fonte em blocos de comprimento variável, chamadas frases. Uma nova frase écriada cada vez que ela difere no seu último símbolo de uma outra frase formadaanteriormente. As frases são colocadas num dicionário juntamente com o respectivoíndice de início de frase na mensagem. Quando toda a mensagem foi lida, atribui-sesequencialmente um código a cada uma das frases formado pela localização da frasena mensagem acrescentada da última letra em que cada mensagem difere das outras
67

já classificadas no dicionário. Esta etapa de codificação é inicializada começando como código ‘0000’ (no número de bits necessário para o comprimento do dicionário). Nodescodificador constrói-se a tabela a partir dos códigos recebidos procedendo ao con-trário, separando o código em localização e última letra de forma ordenada. A partirda tabela reconstrói-se a mensagem. Trata-se de um processo não linear cuja análiseultrapassa largamente o objectivo deste capítulo introdutivo à codificação. Mencione-se no entanto que este algoritmo é hoje em dia o mais utilizado em aplicativos decompressão e descompressão de dados tais como os programas zip e unzip tanto emUnix como em DOS.
5.2.3 Codificação baseada em modelos do sinal
Convém ainda referir, para completar este capítulo, que existe uma outra classe demétodos que tenta resolver o problema da condificação através de um método com-pletamente diferente que é utilizando modelos do sinal. Neste tipo de métodos oque é transmitido deixa de ser o sinal propriamente dito (ou suas componentes) massim os coeficientes de um modelo ajustado no sinal. Para certos tipos de sinais, quepodem ser correctamente representados pelo modelo utilizado, o ganho em termos detaxa de transmissão e número de bits utilizado pode ser muito superior a qualquerum dos outros métodos de codificação utilizados anteriormente. Um erro de quan-tificação mínimo é obtido através de um maior ou menor ajuste do modelo e que setraduz por um maior ou menor número de coeficientes. Obviamente que, se o sinalfor dificilmente representado pelo modelo, o número de coeficientes necessários parauma representação correcta torna-se muito elevado e devido a limitações práticas nonúmero máximo de coeficientes, a distorção tende a aumentar. Não nos vamos alongaraqui neste tipo de métodos, basta dizer que o mais utilizado se chama codificação depredicção linear (Linear Prediction Coding - LPC). LPC é um sistema muito utilizadona transmissão da voz e passa essencialmente por um sintetizador de voz (vocoder)que tem como objectivo gerar uma forma de onda com características semelhantesà da voz humana mediante a definição de alguns parâmetros. Estes parâmetros sãoajustados até o erro entre o sinal de voz a transmitir e o sinal sintetizado seja mínimo.Basta em seguida transmitir os parâmetros em questão juntamente com o sinal deerro de forma a poder sintetizar o sinal original.
5.3 Codificação da mensagem
Como acabámos de ver a codificação da sequência de informação transmitida pode/deveser codificada de forma a diminuir o fluxo de dados tirando partido da repetitividadeda messagem ou da capacidade de representar padrões de informação por outros queocupem uma menor largura de banda. Mas a codificação vai muito para além desteobjectivo de compactação dos dados sobretudo quando a mensagem se destina a ser
68

transmitida num canal de banda limitada com distorção e/ou ruído. Nesse caso osinal recebido vai enevitavelmente mostrar uma deformação em relação ao sinal orig-inal que levará a erros de transmissão. Uma das formas de diminuir os erros detransmissão é de aumentar a relação sinal-ruído (SNR) à entrada do receptor. Porémisso nem sempre é possível e nem sempre dá os resultados esperados, nomedamenteem sistemas cuja limitação é a distorção do canal e não a SNR. Uma das formas decontornar o problema consiste em codificar o sinal emitido de forma a poder detectarpossíveis erros de transmissão de forma a que, quando um erro é detectado, o receptorpede ao emissor para voltar a transmitir a mensagem. Este é o sistema utilizado nasredes de computadores. Existem porém sistemas de transmissão nos quais a retrans-missão do sinal não é possível e nesse caso podem ser utilizados códigos que permitamnão só a detecção do erro mas também a sua correção de forma automática.
Normalmente os códigos de detecção e correção de erros fazem com que a quanti-dade de informação a transmitir seja superior do que se estes códigos não tivessemsido utilizados, no entanto o sistema de transmissão torna-se muito mais robusto eem muitos casos torna-se possível atingir taxas de transmissão com baixo nível deerro que de outro modo seriam impraticáveis. Diz-se assim que a codificação permiteobter um ganho equivalente em SNR.
5.3.1 Códigos de repetição
Este método usa palavras de código de n bits para representar cada um dos bitsa transmitir. Qualquer alteração num dos n bits permite detectar um erro e, emcerta medida, corrigi-lo. Vamos supôr que temos um alfabeto de 2 bits ‘0’ e ‘1’ eque codificamos o ‘0’ por 000 e o ‘1’ por 111. Se recebermos o conjunto 001 ou 101,podemos dizer que existem erros de transmissão e que, com uma determinada margemde erro, o primeiro bit é um ‘0’ enquanto o segundo é um ‘1’. Supondo que errosde transmissão ocorrem aleatoriamente de forma independente com probabilidade p,então a lei binomial diz-nos que aconteçam i erros numa palavra de n bits é dada por
P (i, n) ≈ n!
i!(n− i)!pi, com p≪ 1 (5-3.6)
onde a condição p≪ 1 faz sentido dado que em geral uma taxa de erro p que não ver-ifica esta condição seria excepcionalmente alta para qualquer sistema de transmissãominimamente robusto para utilização prática. No entanto pode-se desde já verificarque palavras com um bit de erro ocorrem com uma probabilidade P (1, 3) = 3p e comdois bits de erro com uma probabilidade P (2, 3) = 3p2 e tanto um como outro casopodem ser detectados pelo sistema. Da mesma forma podemos ver que um erro detrês bits em simultâneo resultaria num erro indetectável porque alteraria um ‘0’ em‘1’ ou vice-versa, mas esses ocorrem com uma probabilidade de P (3, 3) = p3, o quese p for ≪ 1 dá uma probabilidade de ocorrência extremamente baixa.
69

No que diz respeito à correção de erros utiliza-se a regra da maioria assumindo,no nosso exemplo, que pelo menos 2 dos 3 bits são correctos e assim 001 e 101 serãodetectados como erros e corrigidos para 000 e 111, respectivamente. Obviamente queas margens de erro e a segurança deste tipo de código tanto para detecção como paracorreção de erros podem/devem ser aumentados através do aumento do comprimentoda palavra de codificação mas tal aumento ao trazer um aumento de segurança trástambém uma redução da taxa de bit que no nosso exemplo com 3 bits para cada bitserá de 1/3.
5.3.2 Códigos de paridade
A paridade corresponde ao número de bits 1 de uma palavra. Assim diz-se que aparidade é par se tiver um número par de ‘1’ e ímpar no caso contrário. Neste códigoum dos bits da palavra é utilizado para controlo de paridade, assim numa palavra den = 3 bits, e assumindo que quando o bit de paridade é igual a ‘0’ temos paridade pare que quando é ‘1’ temos paridade ímpar, então 000, 011, 101 e 110 são mensagensválidas sem erro, sendo que o último bit é o bit de paridade. Uma das vantagensdeste tipo de có digo é que a taxa de bit não é tão reduzida como no código anteriormas um dos problemas do código de paridade é que não é possível correção de errospois sabe-se que ocorreu um erro mas não se sabe qual o bit errado na palavra. Outroproblema é que um número par de erros na mesma palavra passa sem erros. Assimsabe-se que 001 contém um erro, ou três erros ou geralmente um número ímpar deerros. Como a probabilidade de acontecerem dois erros numa mesma palavra é muitomaior do que acontecerem 4 ou mais podemos dizer que a probabilidade de um erronão ser detectado numa palavra de n bits é aproximadamente o de acontecerem doiserros, i.e.,
P (2, n) ≈ n(n− 1)
2p2 (5-3.7)
Se a mesma mensagem for enviada através de palavras de n− 1 bits mas sem códigoteríamos uma probabilidade de erro
Psem cod = 1− P (0, n− 1) ≈ (n− 1)p (5-3.8)
de onde podemos deduzir que o ganho em termos de probabilidade de erro é daordem de np/2 ou seja, para valores típicos de n = 10 e p = 10−3 a robustez docódigo paridade é da ordem de 200 vezes mais seguro do que não usando código comuma redução de taxa de transmissão correspondente a um bit em cada n, ou nestecaso, apenas 9/10. Este simples facto faz do código de paridade (juntamente com asua facilidade de implementação) um dos mais usados em sistemas de computadores.
Uma variante do código de paridade em sistemas sujeitos a erros do tipo tran-sitório que tendem a afectar vários bits ou até palavras sucessivos é aquela que utilizapalavras alternadas (interleaving) de tal modo que uma palavra e o seu bit de pari-dade não é emitida sequencialmente mas sim alternadamente com os bits das outras
70

palavras. Por exemplo num sistema de n bits, cada bit de uma dada palavra aparececom uma frequência n. Na prática para construir uma dada palavra é necessárioesperar n× n bits.
5.3.3 Códigos de blocos lineares
Como o seu nome indica no sistema de codificação por blocos lineares o processo decodificação é representado por uma matriz que durante o processo de codificação geraos bits de teste para um determinado bloco de mensagens. Um código de bloco linearde dimensão (n, k) consiste num conjunto de k vectores de n bits, onde os vectorescodificados de saída tem n bits e os da mensagem de entrada a transmitir tem k bits,com k < n. Assim a taxa de transmissão do codificador é R = k/n.
Importa aqui definir a noção de distância entre dois vectores X e Y formados dedigitos binários, que se define como sendo igual ao número de digitos diferentes entreos dois vectores. Esta é chamada a distância de Hamming e nota-se d(X, Y ). Comoexemplo os vectores 101 e 110 tem uma distância de Hamming igual a 2, visto quediferem em dois dos seus bits. Chama-se a distância mínima dmin de um determinadocódigo a menor distância de Hamming entre os vectores do código. O valor de dmin éimportante porque vê-se facilmente que a deteção de erros é sempre possível quandoo número de erros de transmissão é inferior a dmin. Da discussão do capítulo anteriorpodemos ainda deduzir que quando o número de erros de transmissão é superior àdistância mínima então a palavra pode ser igual a uma das palavras de código válidase então o erro passa sem ser detectado. Podemos assim demonstrar que é possível
• detectar até l erros por palavra de código se dmin ≥ l + 1
• corrigir até t erros por palavra de código se dmin ≥ 2t+ 1
• corrigir até t erros e detectar até l erros por palavra de código se dmin ≥ t+ l+1
A potência de um código depende obviamente do número de bits adicionados acada palavra de código dado que, quantos mais bits suplementares existirem maisdiferentes (distantes) as palavras de código podem ser e maior será dmin. Para umcódigo de blocos (n, k) no qual são adicionados n− k bits para controlo prova-se quea distância mínima é limitada por dmin ≤ n− k + 1 e a eficiência do código dependeda taxa de transmissão R = k/n que se pretende tanto mais próxima de 1 quantopossível.
O objectivo fundamental dos códigos de blocos lineares (e não só!) é o de escolheros 2n vectores do bloco de saída de tal forma que a distância mínima entra eles sejaa maior possível. Um dos problemas é o de determinar a distância mínima para um
71

dado código. Os códigos de blocos lineares tem a particularidade de ser extremamentefácil determinar dmin, o que é devido à propriedade de linearidade que se enuncia daseguinte forma:
Um determinado código é dito linear se ele inclui o vector zero e a soma de dois
vectores do código resultam ainda num vector do código
Isto é, dado um determinado vector do código X = (x1, x2, . . . , xn), podemos terx1 = x2 = . . . = xn = 0 e se Z = X + Y é tal que Z é ainda um vector do código,onde
X + Y = (x1 ⊕ y1, x2 ⊕ y2, . . . , xn ⊕ yn) (5-3.9)
e onde a soma entre digitos binários segue a regra da adição módulo 2
x⊕ y =
0 sex = y
1 sex 6= y(5-3.10)
Demonstra-se então que a distância mínima para um código linear é dado por
dmin = min[w(X)], X 6= (0, 0, . . . , 0) (5-3.11)
onde w(X) é definido como sendo o peso do vector X e igual ao número de elementosdiferentes de zero de X.
Tendo em conta a forma da adição de vectores binários definida por 5-3.10, temosque
d(X, Y ) = w(X + Y ), (5-3.12)
que como o código de blocos é linear o vector resultante Z da soma Z = X + Y éainda um vector do mesmo código de blocos e por isso d(X, Y ) = w(Z). Minimizar adistância d(X, Y ) é portanto equivalente a minimizar o peso do vector soma Z. Vistoque, devido a 5-3.10, temos que X + Y = X se Y for o vector 0, Y = (0, 0, . . . , 0),podemos escrever a minimização do vector Z, para qualquer Z pertencente ao códigode blocos, como
minw(Z) = min d(Z, 0) = dmin, (5-3.13)
de onde, obviamente, devemos excluir o vector Z = (0, 0, . . . , 0).
Tudo isto não nos diz como devemos/podemos escolher o nosso código de blocos.Uma forma simples e sitemática de o fazer consiste em formar um conjunto de vec-tores de n elementos cujos primeiros k elementos são iguais aos bits da mensagem atransmitir, sendo que os outros q = n− k elementos são os bits de controlo a definir.A definição dos bits de controlo é que vai determinar a potência do código em termosde dmin, R e facilidade de implementação para a codificação, descodificação, detecçãoe correção de erros. Um classe bem conhecida de códigos de blocos lineares são oscódigos de Hamming.
72

Um código de blocos linear de Hamming é do tipo (n, k) onde n = 2q−1 e k = n−qcom q ≥ 3. A distância mínima é independente do número de bits de controlo q eé fixada em 3. Na prática o problema da escolha dos bits de controlo resume-se aescolher q bits de controlo ao acaso e em qualquer ordem com a única condição deque cada palavra deverá ter pelo menos 2 bits ‘1’ de forma a assegurar dmin = 3.
Por exemplo um código de Hamming com q = 3. Então teremos n = 23 − 1 = 7e k = 7 − 3 = 4. Cada palavra codificada X será formada por 7 bits dos quais os 4primeiros correspondem à mensagem original não codificada M e os restantes 3 bitscorrespondem aos bits de código C. Assim podemos representar
X = (m1, m2, m3, m4, c1, c2, c3), (5-3.14)
ou ainda utilizando notação matricial
X =MG, (5-3.15)
onde a matriz G, chamada matriz geradora do código, e de dimensões k × n é for-mada por uma submatriz identidade quadrada de dimensão k e uma submatriz P dedimensão k × q tal que
G = [I|P] (5-3.16)
=
1 0 0 0 1 0 10 1 0 0 1 1 10 0 1 0 1 1 00 0 0 1 0 1 1
, (5-3.17)
de tal forma que a matriz P corresponde às últimas três colunas de palavras de 3bits em que cada uma tem 2 ou mais “1”. Para uma dada mensagem M os bits decontrolo C são dados neste exemplo por
c1 = m1 ⊕m2 ⊕m3 ⊕ 0
c2 = 0⊕m2 ⊕m3 ⊕m3
c3 = m1 ⊕m2 ⊕ 0⊕m3.
Visto que k = 4, X pode tomar 16 valores possíveis. Como exercício podemosescrever todas as mensagens codificadas possíveis e verificar se dmin é efectivamenteigual a 3.
5.3.4 Códigos cíclicos
De tudo o que foi dito anteriormente deduz-se facilmente que de um modo geralpara obter taxas de transmissão aceitáveis à saída do codificador, i.e, R = k/n ≈ 1,
73

precisamos de ter k próximo de n. Inversamente um código forte obtem-se quandodmin é elevado o que por sua vez requere um número de bits de controlo q = n − ksubstancial. Ter n próximo de k e ter q = n− k elevado são objectivos contraditóriose só podem ser satisfeitos se k ≫ 1 e n ≫ 1. Porém quando n ≫ 1 o númerode palavras a testar ou a corrigir igual a 2n torna-se proibitivo. É então necessárioestabelecer uma estratégia que permita uma implementação rápida do hardware deteste e verificação dos bits de controlo.
A deteção de erros faz-se normalmente através da matriz de controlo de paridadeH, de dimensão q × n, que é formada a partir da submatriz P tal que
H = [PT |I], (5-3.18)
e que tem a propriedade importante de que para qualquer palavra condificada X semerro
XHT = (0, 0, . . . , 0), (5-3.19)
o que significa que para uma palavra Y com um erro, o resultado do produto YHT
tem pelo menos um elemento diferente de zero. Como já vimos anteriormente edependendo da força do código é sempre possível que a palavra X possa ter um erroe que este não seja detectado. O produto da palavra recebida Y pela matriz decontrolo de paridade transposta H
T tem por isso um papel determinante na detecçãode erros no receptor e, dado que a matriz H é, em parte, semelhante à matriz geradoraG, os circuitos de implementação do descodificador vão ser muito semelhantes aoscircuitos do codificador, o que é uma vantagem óbvia em termos de desenvolvimento eimplementação. Podemos ainda juntar que a correção de erros pode ser feita, quandoo erro é detectado (ou detectável), pela mesma estrutura e a partir do mesmo produtoYHT . Com efeito tendo em conta que a palavra codificada recebida com erro podeser escrita sob a forma de
Y = X + E, (5-3.20)
onde E é a palavra de erro, substituindo (5-3.20) no produto YHT dá
YHT = XHT + EHT = EHT , (5-3.21)
por via de (5-3.19). Desta última equação deduz-se que o resultado do produto YHT
está directamente ligado ao vector de erro e é assim possível determinar E e portantolocalizar qual o(s) bit(s) na palavra Y que estão errados e corrigi-los. O resultadodo produto YHT é um vector que chamaremos S e que tem dimensão q, existem porisso 2q vectores S possíveis em vez dos 2n vectores Y possíveis, dado que o vectorcodificado observado Y tem dimensão n. Noutras palavras o vector E não pode serdeterminado unicamente a partir de um dado S, pois S apenas pode tomar 2q − 1valores diferentes correspondentes aos vectores de erro E, onde o 1 corresponde aocaso sem erro no qual Y = X. Existem portanto 2n − 2q + 1 valores de E que nãopodem ser corrigidos. Dado que não podemos corrigir todos os erros, o descodificadordeve ser desenhado de forma a corrigir os erros mais frequentes. De qualquer forma
74

um dos problemas consiste no facto do receptor ter que controlar 2n combinaçõespossíveis, com n necessariamente um valor elevado. Uma das formas de simplificaro hardware do receptor/descodificador sem diminuir o desempenho (força) do códigoé o de criar “relações” entre as 2n combinações através de permutações cíclicas dosbits. Diz-se que uma palavra de código X ′ é uma permutação cíclica de uma outraX, quando os bits de X ′ são obtidos a partir dos de X através uma deslocação tipo"shift register" para a esquerda de uma posição e o primeiro bit de X encontra-seagora na última posição de X ′. Um código cíclico define-se por cada palavra decódigo ser obtida através de um número finitio de permutações cíclicas de qualqueroutra. As propriedades dos códigos cíclicos e a forma de os determinar estão ligadosà algebra de Galois e muito para além do programa desta disciplina. Podemos noentanto referir os códigos cíclicos de Hamming, Golay e BCH (Bose, Chaudhuri eHocquenghem) como sendo os mais conhecidos (ver tabela 5.1).
Código n k R dmin
Hamming 7 4 0.57 315 11 0.73 331 26 0.84 3
BCH 15 7 0.46 531 21 0.68 563 45 0.71 7
Golay 23 12 0.52 7
Tabela 5.1: exemplos de códigos cíclicos e respectivos parametros de desempenho
Já vimos que os códigos cíclicos permitem obter uma simplificação do hardware doreceptor/descodificador através da introdução de redundâncias entre as palavras decódigo. Outra grande vantagem dos códigos cíclicos é que dado que todas as palavrascodificadas se deduzem umas a partir das outras e a partir de um polinómio geradorde base, não é necessário armazenar tabelas de código no codificador e no descodifi-cador e daí uma economia de memória. Além disso cada palavra de código é deduzidade uma outra através de uma permutação, que corresponde a uma operação de di-visão em termos binários, extremamente fácil de realizar com os circuitos existentes.Devemos ainda mencionar os códigos de redundância cíclica (cyclic redundancy codes- CRC) que são códigos cíclicos com a particularidade de que um número de per-mutações cíclicas igual ao número de bits n produzir ainda uma palavra válida docódigo. Isto significa que são códigos cíclicos fechados sobre eles mesmos de formaa reduzir a probabilidade de erro por interferências transitórias que duram mais doque uma palavra de código (bursts errors). Nesse aspecto os CRC tem uma forçade codificação semelhante aos códigos de paridade alternados (interleaving) e são porisso frequentemente utilizados na prática.
75

Finalmente, os códigos do tipo Reed-Solomon (RS) que são uma variante dos BCHcom a particularidade de ter uma distância de detecção/correcção t muito superioraos códigos binários usuais. Os códigos RS são códigos não binários membros deuma família de M = 2m símbolos, onde m é o número de bits por palavras. Assim onúmero de bits no codificador n para representar estes M símbolos é n = 2m − 1 e adistância mínima dmin é dada por dmin = n− k + 1 e portanto t é
t =dmin − 1
2=n− k
2. (5-3.22)
5.3.5 Códigos convolucionais
Os códigos convolucionais diferem dos códigos lineares por blocos no sentido emque o código não se encontra localizado num bloco de bits da palavra codificadamas estende-se através de toda a palavra codificada. Em termos práticos os códigosconvolucionais são muito eficazes e simples de implementar no codificador, porémtêm a desvantagem de ser relativamente dificies de descodificar. Nesse sentido sãoespecificamente utilizados em aplicações ondem é desejada uma codificação robusta esimples e onde a complexidade do descodificador não é importante como por exemplocomunicações satélite ou espaciais.
A facilidade de implementação dos códigos convolucionais vem do facto de poderemser implementados através de um simples shift register dando origem à equação
xj =L∑
i=0
mj−igi mod.− 2,
= mj−LgL ⊕mj−L+1gL−1 ⊕ . . .⊕mj−1g1 ⊕mjg0, (5-3.23)
onde se pode constatar que a equação (5-3.23) tem a forma de uma equação deconvolução entre os bits da mensagem a codificar mj e os coeficientes do codificadorgi; i = 0, . . . , L, sendo que a diferença principal consiste no facto de que as somasno somatório são do tipo módulo 2. A primeira constatação é de que na codificaçãoconvolucional a mensagem não se encontra dividida em palavras mas sim num streamde bits contínuo e por isso a codificação estende-se entre palavras numa extensão debits proporcional à duração da resposta impulsiva do codificador e á n(L+1). Existempelo menos três formas de representar e estudar códigos convolucionais que são: arepresentação em árvore, representação em trellis e em diagramas de estado (ver [17]pp. 575 e seguintes para mais detalhes sobre estas representações). A estruturado condificador convolucional pode ser alterada colocando vários shift register emparalelo e um interruptor à saída funcionando a uma taxa superior à da taxa deentrada de forma a melhorar a taxa de transmissão global.
Antes de passar ao problema da descodificação de códigos convolucionais convémainda rever a noção de distância mínima introduzida em (5-3.11). Esta revisão imõe-
76

se porque a definição de distância mínima encontra-se intimamente ligada à definiçãode palavra sendo igual, lembramos, ao valor mínimo do peso da palavra codificada,ou ainda, igual ao número de bits diferentes de zero na palavra. Como no caso doscódigos convolucionais não são definidas palavras mas sim uma sequência contínuade bits, sendo que o código atravessa de umas palavras para as outras então devemosagora definir a distância livre de um código convolucional como sendo
df = min[w(X)], X 6= (0, 0, ...0), (5-3.24)
sendo que df define a “força” ou poder de controle de erros do código. O problemaque se coloca agora é o de determinar df para um determinado código. Uma formade o fazer seria calcular o valor do peso de cada palavra codificada para o que serianecessário efectuar uma listagem exaustiva de todas as palavras possíveis o que seriauma tarefa incrivelmente pesada. A forma de o fazer necessita a introdução dasrepresentações de estados que não vamos fazer aqui. Limitar-nos-emos a dizer que adistância livre df de um determinado código é igual ao peso mínimo de um caminhonão trivial entre a entrada e a saída do codificador. Onde o peso total do caminho éigual à soma dos pesos a cada ligação entre estados. A noção de “caminho mínimonão trivial” é muito importante pois permite abordar o problema da descodificaçãode códigos convolucionais.
A descodificação de um código convolucional pode fazer-se através de três algorit-mos diferentes em graus de complexidade e desempenho crescentes: descodificaçãocom retroação (feedback decoding), descodificação sequencial (sequential decoding)e descodificação com o máximo de verosimilhança (maximum-likelihood decoding) -algoritmo de Viterbi.
5.3.6 Turbo códigos
Os turbo códigos são uma classe de algoritmos de codificação relativamente recente(1993)[16]. A capacidade teórica de um canal de comunicações dada pelo teorema deShannon, baseia-se em codificação aleatória onde a taxa de erro de bit (bit error rate- BER) aproxima zero quando o número de bits de codificação tende para infinito.Porém, como é evidente, isto é um limite teórico pois não é possível descodificar umcódigo formado por bits de código verdadeiramente aleatórios. Tem inevitavelmentede existir uma estrutura de codificação reprodutível no descodificador/corrector deforma a permitir a implementação de uma descodificador realizável. Isto prende-se igualmente com o aspecto prático da maior ou menor complexidade do receptor:código mais aleatório e mais longo implica maior complexidade e vice-versa.
Os turbo códigos ultrapassam este aparente paradoxo no sentido em que incluemum grau de aleatoriadade elevado através de métodos iterativos que são reprodutíveisde forma relativamente simples no receptor/descodificador. A figura 5.2 representa o
77

esquema de blocos de um turbo codificador (a) e de um codificador convolucional sis-temático recursivo (RSC) (b). Nos turbo codificadores a palavra codificada é formada
mensagem mk
RSC 1
RSC 2interpolador
MUXmensagem
codificada
ky2
(a)
(b)
xk
xk
+
+
D D D D
y1k
yk
xk
Figura 5.2: turbo codificador (a) e codificador convolucional sistemático recursivo(RSC) (b) (pp. 593 [17]).
pelos chamados bits sistemáticos xk e pelos bits de controlo de paridade yk. Os bitsde paridade são formados por duas partes y1k que é a saída de um codificador RSC ey2k que é a saída de um segundo codificador RSC. O primeiro codificador tem comoentrada os bits sistemáticos xk da mensagem original e o segundo codificador temcomo entrada os mesmos bits sistemáticos interpolados através de um permutadorpseudo aleatório de comprimento variável entre 100 e 100000 bits. Os codificadoresRSC podem não ser iguais e podem ser convolucionais ou não. Também podem serutilizados mais do que dois codificadores e nesse caso teremos mais do que dois con-juntos de bits de controlo de paridade. Finalmente os bits da mensagem original (bits
78

sistemáticos) e os bits de controlo de paridade são multiplexados e enviados para otransmissor formando a sequeência de bits codificada. Um exemplo de codificadorRSC encontra-se representado na figura 5.2(b) na qual se pode constatar que a estru-tura é do tipo recursiva com alguns bits da saída reinjectados à entrada e o númerode bits de controlo é igual ao da mensagem e portanto a sua taxa de transmissãoR = 1/2. No total e, tendo em conta a estrutura do turbo codificador da figura5.2(a), a taxa de transmissão R = 1/3. Esta taxa pode ser melhorada através de umsistema de multiplexagem com pontuação nu qual alguns bits são eliminados comopor exemplo, os bits de controlo de paridade pares em y1k e os bits ímpares em y2k.
Como no caso do codificador também o turbo descodificador é formado por doisdescodificadores do tipo máximo à posteriori (MAP) em semi-cascata e com retroação(ver pp. 594 [17] para mais detalhes). O resultado de um turbo codificador sãoimpressionantes já que o modelo com uma taxa de R = 1/2, (G1, G2) = (37, 21) euma interpolação de 65537 permite obter uma taxa de erro de bit de apenas BER =10−5 com uma relação sinal-ruído de 0.7 dB. A principal desvantagem dos turbocodificadores é a sua latência, i.e., a diferença de tempo que uma palavra leva entrea entrada e a saída do descodificador, o que impede a sua utilização em aplicaçõestempo real como por exemplo no telefone.
79

6 Sincronização de símbolo e de portadora
80

7 Comunicação através canais de banda limitada
81

8 Modulação por espalhamento espectral
Um factor de desempenho usado de forma geral nos sistemas de comunições é orácio de expansão de banda B = R/W , onde R é a taxa de transmissão em bits/se W a banda espectral total utilizada em Hz. Obviamente, pretende-se que umdeterminado sistema de comunicações tenha o maior número de bits/s por Hz parauma dada taxa de erro por bit (bit error rate - BER). Os sistemas de modulaçãopor espalhamento espectral são caracterizados por um baixo rácio de expansão debanda porque utilizam uma banda extremamente larga e por isso, R/W ≫ 1. Doponto de vista da eficiência espectral, este método de modulação pode ser consideradopouco eficiente, no entanto a sua principal vantagem é a de ser relativamente imunea interferências e ruido por vezes encontrados em certos canais de comunicações viarádio ou via satélite. A imunidade às interferências pode ser também vista como umaforma de obter um maior grau de confidencialidade e/ou uma maior imunidade aoruído. Maior imunidade ao ruído significa que se para obter o mesmo desempenhoem termos de taxa de erro pode-se enviar sinais com um potência inferior.
O espalhamento espectral é frequentemente utilizado em combinação com codifi-cação da informação o que permite, utilizando códigos diferentes para cada utilizador,partilhar o memos canal de comunicações entre vários utilizadores, método que é hojechamado de acesso múltiplo por separação de código (code division multiple access -CDMA).
Estas características de confidencialidade, baixa potência e imunidade às interfer-ências e ruído são conseguidas através da introdução de um determinado grau dealeatoriadade no código de transmissão. Isto é, ao sinal antes de ser transmitido éadicionada uma sequência pseudo-aleatória conhecida apenas do emissor e do recep-tor. O sinal é em seguida modulado utilizando os métodos de modulação clássicosvistos no capitúlo 3, sendo que insistiremos apenas nos mais utilizados que são PSKe FSK e suas variantes.
No caso de PSK, a fase do sinal vai sofrer um número pre-determinado de saltos defase em cada intervalo de bit. O sinal resultante é chamado espalhamento espectraldo tipo Direct Sequence - DS. No case de FSK, os saltos de frequência são feitos deacordo com a sequência pseudo-aleatória e obtem-se então um tipo de modulação quetoma o nome de espalhamento espectral por frequency hopping - FH.
8.1 Sinais de espalhamento espectral por Direct Sequence
Nos métodos DSSS3 a sequência pseudo-aleatória vai fazer variar a fase do sinal umnúmero de vezes por segundo igual à banda do sinal. Assumindo que a banda do sinal
3Direct Sequence Spread Spectrum
82

é W o intervalo entre cada alteração da sequência pseudo-aleatória será Tc = 1/Wsegundos. A este intervalo de tempo é chamado chip e portanto Tc é a duração dumchip, ou seja, cada um dos bits da sequência pseudo-aleatória. Como Tc = 1/W eTb = 1/R então a expansão de banda é
B =W
R=TbTc
(8-1.1)
na prática este número é um inteiro Lc = Tb/Tc que é o número de chips por cadabit. Portanto Lc é igual ao número de desvios de fase do sinal em cada intervalo debit Tb.
83

A Tabelas e relações particulares
A.1 Transformada de Fourier
84

85

A.2 Relações Trigonométricas Usuais
sin2 x+ cos2 x = 1 cos2 x =1 + cos 2x
2sin2 x =
1− cos 2x
2
sin x =ejx − e−jx
2jcosx =
ejx + e−jx
2tan x =
ejx − e−jx
j(ejx + e−jx)
Adição
sin(a+ b) = sin a cos b+ sin b cos a sin(a− b) = sin a cos b− sin b cos a
cos(a+ b) = cos a cos b− sin a sin b cos(a− b) = cos a cos b+ sin a sin b
tan(a+ b) =tan a+ tan b
1− tan a tan btan(a− b) =
tan a− tan b
1 + tan a tan b
Multiplicação: com tan a = t
sin(2a) = 2 sin a cos a =2t
1 + t2
cos(2a) = cos2 a− sin2 a = 2 cos2 a− 1 = 1− 2 sin2 a =1− t2
1 + t2
tan(2a) =2 tan a
1− tan2 a=
2t
1− t2
cos a cos b =1
2[cos(a+ b) + cos(a− b)] sin a sin b =
1
2[cos(a− b)− cos(a + b)]
sin a cos b =1
2[sin(a+ b) + sin(a− b)]
cos p+ cos q = 2 cosp+ q
2cos
p− q
2cos p− cos q = −2 sin
p+ q
2sin
p− q
2
sin p+ sin q = 2 sinp + q
2cos
p− q
2sin p− sin q = 2 sin
p− q
2cos
p+ q
2
tan p+ tan q =sin(p+ q)
cos p cos qtan p− tan q =
sin(p− q)
cos p cos q
Trigonometria Hiperbólica
cosh x+ sinh x = exp(x) cosh x− sinh x = exp(−x) cosh2 x− sinh2 x = 1
86

sinh(a+ b) = sinh a cosh b+sinh b cosh a sinh(a− b) = sinh a cosh b− sinh b cosh a
cosh(a+b) = cosh a cosh b+sinh a sinh b cosh(a−b) = cosh a cosh b− sinh a sinh b
sinh 2a = 2 sinh a cosh a cosh 2a = cosh2 a sinh2 a = 1 + 2 sin2 a = 2 cosh2 a− 1
cosh2 a =1 + cosh 2a
2sinh2 a =
cosh 2a− 1
2tanh2 a =
cosh 2a− 1
cosh 2a + 1
tanh 2a =2 tanh a
1 + tanh2 a
sinh x =ex − e−x
2cosh =
ex + e−x
2tanh =
ex − e−x
ex + e−x
cosh jx = cosx sinh jx = j sin x tanh jx = j tanx
A.3 Desenvolvimentos em série
sin x = x− x3
3!+ x5
5!+ . . .+ (−1)n x2n+1
(2n+1)!+ x2n+1ǫ(x)
cosx = 1− x2
2!+ x4
4!+ . . .+ (−1)n x2n
(2n)!+ x2nǫ(x)
tan x = x− x3
3+ 2x5
15+ x5ǫ(x)
sinh x = x+ x3
3!+ . . .+ x2n−1
(2n−1)!+ x2n−1ǫ(x)
cosh x = 1 + x2
2!+ . . .+ x2n
(2n)!+ x2nǫ(x)
tanh x = x− x3
3+ 2x5
15+ x5ǫ(x)
arcsin x = x+ x3
6+ . . .+ 1.3.5...(2n+1)
2.4.6...(2n)x2n+1
(2n+1)!− x2n+1ǫ(x)
arctan x = x− x3
3+ x5
5+ . . .+ (−1)n x2n+1
(2n+1)!+ x2n+1ǫ(x)
sinh−1 x = x− x3
6+ . . .+ (−1)n 1.3.5...(2n+1)
2.4.6...(2n)x2n+1
(2n+1)!+ x2n+1ǫ(x)
tanh−1 x = x+ x3
3+ x5
5+ . . .+ x2n+1
(2n+1)!+ x2n+1ǫ(x)
ex = 1 + x+ x2
2!+ x3
3!+ . . .+ xn
n!+ xnǫ(x)
log(1 + x) = x− x2
2+ x3
3+ . . .+ (−1)n−1 xn
n+ xnǫ(x)
(1 + x)α = 1 + αx+ α(α− 1)x2
2+ . . .+ α(α− 1) . . . (α− n+ 1)x
n
n+ xnǫ(x)
11−x
= 1 + x+ x2 + . . .+ xn + xnǫ(x)
87

11+x
= 1− x+ x2 − x3 + . . .+ (−1)nxn + xnǫ(x)
A.4 Algumas relações úteis
A.4.1 Integrais
∫∞0e−ax2
dx = 12
√
πa
∫∞0xe−ax2
dx = 12a
∫∞0x2e−ax2
dx =√π
4a3/2
∫∞0x3e−ax2
dx = 12a2
∫∞0x4e−ax2
dx = 38a2
√
πa
A.4.2 Séries
Geométrica: u1 + qu1 + q2u1 + . . .+ qn−1u1 = u11−qn
1−q
Aritmética: u1 + qu1 + 2qu1 + . . .+ (n− 1)qu1 =
A.4.3 Derivada particular
[af(x)]′ = log aaf(x)f ′(x)
88

B Função Seno integral - Si(x)
A função seno integral Si(x) é definida como
Si(x) =
∫ x
0
sin t
tdt. (B-0.1)
Esta função faz intervir fundamentalmente a nossa conhecida função
f(x) =sin x
x, (B-0.2)
cuja principal propriedade é de que limx→0 f(x) = 1. A primeira coisa que podemosnotar em f(x) é que contrariamente a sin x, f(x) é uma função par e é uma funçãotal que lim|x|→∞ f(x) = 0. O outro ponto interessante aparece quando calculamos osseus extremos que são encontrados quando f ′(x) = 0, i.e., quando
f ′(x) =x cos x− sin x
x2= 0, (B-0.3)
o que implicatanx = x. (B-0.4)
Dado que tan x é uma função periódica vamos ter uma infinidade de valores para osquais tan x é igual à bissectriz y = x. Esses valores não se calculam de forma trivial.A seguir a x0 = 0, obtemos os valores seguintes que são x1 = 2.68π/2, x2 = 4.92π/2,x3 = 6.94π/2, etc...Os zeros de f(x) por seu lado são fáceis de calcular e são dadospor xn = ±kπ.
Voltemos agora a Si(x). O que acontece com este função é que não existe umaforma fechada para a primitiva de f(x). Não quer dizer que ela não exista ! Apenasnão pode ser colocada sob forma analítica. No entanto uma forma aproximada decalcular este integral, com uma aproximação arbitrária, é de substituir sin x pelo seudesenvolvimento em série e dividir por x, calculando em seguida o integral. Assimpodemos escrever que
Si(x) ≈ x− x3
3 · 3! +x5
5 · 5! −+ . . . , (B-0.5)
que é uma série que converge para todo o x. Um valor particular do seno integralobtem-se quando x→ ∞, que é
Si(∞) =
∫ ∞
0
sin x
xdx =
π
2(B-0.6)
conhecido como o integral de Dirichlet. Um resultado interessante do integral deDirichlet é que
2/π
∫ ∞
0
sin kx
xdx =
1 para k > 0
0 para k = 0
−1 para k < 0.
(B-0.7)
89

O gráfico do seno integral e do seu limite quando x → ∞ encontra-se na figura B.1.
−30 −20 −10 0 10 20 30−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
Si(x
)
Figura B.1: função seno integral Si(x).
90

C Folhas de Exercícios
C.1 Sinais determinísticos
Exercício 1:
Um dado sistema tem uma resposta impulsiva h(t) e função de transferência H(f).Calcule as expressões da resposta y(t) e Y (f) ao sinal de entrada x(t)
a) x(t) = A[δ(t− td)− δ(t− td)]
b) x(t) = Ah(t− td)
c) x(t) = Au(t− td)
d) calcule o módulo e o argumento de H(f) quando a relação entrada-saída dosistema se escreve
dy(t)
dt+ 4πy(t) =
dx(t)
dt+ 16πx(t)
e) calcule uma relação aproximada para a resposta y(t) quando a função de trans-ferência H(f) se escreve
H(f) =B
B + jf
e X(f) ≈ 0 para |f | < W com W ≪ B. Verifique este resultado numericamenteutilizando o Matlab.
f) se o sistema H(f) for realizável então h(t) é real e causal. Nesse caso demonstreque
h(t) = 4
∫ ∞
0
Hr(f) cos 2πftdf = 4
∫ ∞
0
Hi(f) cos 2πftdf
onde Hr(f) e Hi(f) são as partes real e imaginária de H(f), respectivamente.
Exercício 2:
Considere um sistema passa-baixo de primeira ordem de banda passante a -3 dBB.
a) demonstre que a passagem de um sinal x(t) de banda limitada W ≪ B nãosofre distorção quando passa pelo sistema
91

b) faça um esboço do sinal de saída y(t) quando o sinal de entrada é uma ondatriangular aproximada por x(t) = 4 cosω0t+4/9 cos 3ω0t+4/25 cos 5ω0t quandoB = 3f0,
c) calcule e faça um esboço de y(t) quando o filtro é agora um filtro passa-alto defunção de transferência H(f) = jf/(B + jf) e B = 3f0
Exercício 3:
A banda passante e a duração da resposta impulsiva de um filtro passa-baixo sãodados por
B =
∫∞−∞ |H(f)|df
2H0t0 =
∫∞−∞ h(t)dt
|h(t)|max
Obtenha as expressões de H0 e |h(t)| a partir da TF[h(t)] e da TF−1[H(f)]. Demon-stre que t0 ≥ B/2.
92

C.2 Sinais aleatórios I
Exercício 1:
Considere um processo estocástico com a seguinte forma
X(t) =
∞∑
n=−∞ang(t− nT )
onde an é uma sequência discreta de variáveis aleatórias de média mn = E[an] efunção de autocorrelação
raa(k) =1
2E[ana
∗n+k],
que representa a mensagem a transmitir e g(t) é um sinal determinístico que repre-senta a função de pulso.
Calcule
a) a média do processo X(t)
b) a função de autocorrelação de X(t), rxx(t+ τ, t)
c) demonstre que X(t) é um processo cicloestacionário
d) para ma = 0, raa(k) =σ2a
2δ(k) e
g(t) =
cos(ω0t), se− T/2 ≤ t ≤ T/2, ω0 = π/T
0, outro t,
determine rxx(t + τ, t).
e) nas mesmas condições que em d) determine a função de autocorrelação médiado processo X(t)
rxx(τ) =1
T
∫ T/2
−T/2
rxx(t + τ, t)dt
f) a partir de rxx(τ) calculada em e) determine a densidade espectral média depotência, Pxx(f) = TF[rxx(τ)].
93

Exercício 2:
Considere um processo estocástico de média nula e estacionário X(t) com a densi-dade espectral de potência
Pxx(f) =
1, se|f | ≤W
0, se |f | > W
O processo X(t) é amostrado a uma taxa 1/T para obter um processo discreto X(n) =X(nT ) determine:
a) a expressão da função de autocorrelação de X(n)
b) o valor mínimo de T que resulta numa sequência branca e constante na frequência
c) repita b) para uma densidade espectral de potência de X(t)
Pxx(f) =
1− |f |/W, se |f | ≤W
0, se |f | > W
Exercício 3:
A função de autocorrelação de um processo estocástico de ruído branco X(t) é
rxx(τ) =1
2N0δ(τ)
Supondo que x(t) é o sinal de entrada de um sistema tendo como reposta em fre-quência
|H(f)| =
1, se− B/2 ≤ |f − fc| ≤ B/2
0, outro valor de f
Determine a potência total de ruído à saída do filtro.
94

C.3 Sinais aleatórios II
Exercício 1:
Considere um processo estocástico Z(t), definido por
Z(t) = S(t)ejωct
onde S(t) é um processo estocásticos estacionário. Demonstre que se E[S(t)] = 0então Z(t) é também estacionário e que as funções de correlação são ligadas por
RZ(τ) = RS(τ)ejωct
Determine igualmente o espectro PZ(ω) de Z(t).
Exercício 2:
Demonstre que Z(t) e Z∗(t) (do exercício anterior) são conjuntamente estacionáriosse e só se
RSS∗(τ) = 0
Demonstre ainda que esta mesma condição implica também que
RZZ∗(τ) = 0
Exercício 3:
Considerando o sinal estocástico complexo S(t) = R(t) + jI(t), demonstre queRSS∗(τ) = 0 implica
RR(τ) = RI(τ)
e queRRI(τ) = −RIR(τ) = −RRI(τ)
Exercício 4:
O equivalente em banda base de um sinal PAM passa banda pode-se escrever
S(t) =∞∑
k=−∞Akh(t− kT +Θ)
onde h(t) pode ser complexo e Θ é um termo de fase aleatório. Considerando que Ak
é uma sequência aleatória estacionária e independente de Θ, demonstre que
95

a) uma condição suficiente para que RSS∗(τ) = 0 é que
E[AkAm] = 0 (1)
b) que para que (1) seja satisfeita é suficiente que as partes real e imaginária de Ak
tenham a mesma função de autocorrelação e que seja descorreladas uma da outra.
Exercício 5:
Seja
X(t) =√2ReZ(t) =
1√2[Z(t) + z∗(t)]
a) demonstre que X(t) é estacionário se e só se S(t) tiver média nula, for tambémestacionário e tal que
RSS∗(τ) = 0
b) demonstre também que sob as condições enumeradas em a) a função de auto-correlação de X(t) se escreve
RX(τ) = ReRZ(τ) = ReejωcτRS(τ)
c) calcule a densidade espectral de X(t).
96

C.4 Modulação PAM II
Exercício 1:
Considere um sistema PAM em banda base que utiliza impulsos coseno elevado(raised cosine). Fazendo a hipótese de que a sequência a transmitir é branca e nor-malizada de forma que o seu espectro se escreve
SA(ω) = 1
demonstre que a potência transmitida é independente de T para qualquer valor dofactor de rool-off α.
Exercício 2:
Considere um canal limitado a |ω/2π| ≤ 1500 Hz. Qual é o valor máximo dasymbol rate que pode ser atingida nesse canal para um excesso de banda de 50% eassumindo que o filtro de recepção é do tipo passa-baixo e que não existe ISI.
Exercício 3:
Considere o seguinte sinal PAM em banda base
u(t) =∑
n
[ang(t− 2nT )− jbng(t− 2nT − T )
onde an e bn são duas sequências aleatórias estatisticamente independentes e afunção de pulso g(t) é
g(t) =
sin(πt/2T ), se 0 < t < 2T
0, outro t
No sinal u(t) as sequências an e bn são transmitidas à velocidade 1/2T bits/senquanto u(t) é transmitido a 1/T bits/s.
a) demonstre que o envelope |u(t)| é constante independentemente de an e debn.
b) determine a densidade espectral de u(t)
Exercício 4:
97

Considere um sinal 4-PSK definido pelo seu equivalente banda base
u(t) =∑
n
Ing(t− nT )
onde In toma um dos valores entre quatro possíveis 1/√2(±1,±j) com igual prob-
abilidade. A sequência resultante é branca.
a) calcule e represente a densidade espectral de u(t) quando
g(t) =
A, se 0 ≤ t ≤ T
0, outro t
b) repita a) com
g(t) =
A sin(πt/T ), se 0 ≤ t ≤ T
0, outro t
c) compare os espectros obtidos em a) e b) em termos de largura de banda a -3 dBe largura de banda no primeiro zero.
98

Referências
[1] Shannon, Claude E., “A Mathematical Theory of Communications”, Bell Syst.Tech. Journal, 27, part I, pp.379-423, July 1948; part II, pp.623-656, October1948.
[2] I.M. Guelfand e G.E. Chilov, Les distributions, Tome 1, Dunod, Paris, 1962.
[3] S.M.Jesus, Análise de Circuitos, Eng. de Sistemas e Computação, UCEH, Uni-versidade do Algarve, Fevereiro 2001.
[4] M. Abramowitz and I.A. Stegun, editors. Handbook of Mathematical Functions.U.S. Government Printing Office, 1968.
[5] C. Blackman and J.W. Tukey, The Measurement of power spectra from the pointof view of communications engineering, New York: Dover, 1959.
[6] A.H. Nutall and G.C. Carter, “A generalized framework for power spectral esti-mation”, IEEE Trans. Acoust. Speech and Signal Processing, vol. ASSP 28, pp334-335, June 1980.
[7] S.M.Kay and S.L. Marple Jr. “Spectrum analysis - a modern perspective”, ProcIEEE, vol. 69, no. 11, p1380-1419, Nov. 1981.
[8] G.R.B de Prony, “Essai experimental et analytique, etc...”, Paris, Journal del’Ecole Polythecnique, vol 1, cahier 2, pp 24-76, 1795.
[9] J. Capon, “High-resolution frequency-wavenumber spectrum analysis”, Proc.IEEE, vol. 57, no.8, August 1969.
[10] M.Kunt “Traitement Numerique des Signaux”, DUNOD, 3ieme Edition, 1981,Ed. GEORGI.
[11] S. Lawrence Marple “Digital Spectral Analysis with Applications”, Prentice-Hall,Signal Processing Series, USA 1987.
[12] A. Oppenheim and R.W. Schaffer “Digital Signal Processing”, Prentice-Hall.
[13] G. Rabiner “Theory and Applications of Digital Signal Processing”, Prentice-Hall.
[14] D. Stearns “Digital Signal Analysis”, Hayden Book Company Inc., 1983.
[15] H. Urkowitz “Signal Theory and Random Processes”, Artech House Inc., 1983.
[16] C. Berrou, A. Glavieux and P. Thitmajshima, “Near Shannon limit error-correction coding and decoding: turbo codes”, Proc. IEEE Int. Conf. on Com-munications, pp.1064-1070, Geneva, Switzerland, 1993.
99

[17] A.B. Carlson, P.B. Crilly and J.C. Rutledge, Communication System: an intro-duction to signals and noise in electrical communication, Fourth Ed., McGrawHill, 2002.
[18] J.G. Proakis, “Digital Communications”, 3rd Edition, McGraw-Hill, 1995.
[19] J.G. Proakis and Masoud Salehi, “Contemporary Communication Systems usingMATLAB”, Brooks Cole Thomson Learning, 2000.
[20] S.M. Jesus, “Sistemas e Sinais” (texto de apoio), LESI, FCTt - Universidade doAlgarve, 2006.
100

Bibliografia aconselhada
A.B. Carlson, P.B. Crilly e J.C. Rulledge “Communications Systems”, 4 Edition,McGraw-Hill, 2002.
J.G. Proakis, “Digital Communications”, 3rd Edition, McGraw-Hill, 1995.
J.G. Proakis and Masoud Salehi, “Contemporary Communication Systems usingMATLAB”, Brooks Cole Thomson Learning, 2000.
S.M. Jesus, “Comunicações Digitais” (texto de apoio), FCT - Universidade do Algarve,2006.
101





![[PPT]Estudo da lã - Stoa Social · Web viewFatores intrínsecos Fatores antimicrobianos Naturais: Mantém a estabilidade de alguns alimentos contra ataques de microrganismos, retardando](https://static.fdocumentos.com/doc/165x107/5c650e9809d3f2876e8c1d1b/pptestudo-da-la-stoa-social-web-viewfatores-intrinsecos-fatores-antimicrobianos.jpg)