
MÉTODO DA RIGIDEZ DIRETA PARA MODELOS...
27
MÉTODO DA RIGIDEZ DIRETA PARA MODELOS ESTRUTURAIS LINEARES E ELÁSTICOS CAPÍTULOS 6 a 8 Luiz Fernando Martha Pontifícia Universidade Católica do Rio de Janeiro – PUC-Rio Departamento de Engenharia Civil Rua Marquês de São Vicente, 225 - Gávea CEP 22453-900 – Rio de Janeiro, RJ Tel.: (21) 3527-1190 – Fax: (21) 3527-1195 E-mail: [email protected] URL: http://www.tecgraf.puc-rio.br/~lfm
Transcript of MÉTODO DA RIGIDEZ DIRETA PARA MODELOS...

MÉTODO DA RIGIDEZ DIRETA PARA MODELOS ESTRUTURAIS LINEARES E ELÁSTICOS
CAPÍTULOS 6 a 8
Luiz Fernando Martha
Pontifícia Universidade Católica do Rio de Janeiro – PUC-Rio Departamento de Engenharia Civil Rua Marquês de São Vicente, 225 - Gávea CEP 22453-900 – Rio de Janeiro, RJ Tel.: (21) 3527-1190 – Fax: (21) 3527-1195
E-mail: [email protected] URL: http://www.tecgraf.puc-rio.br/~lfm

6. CARGAS EQUIVALENTES NODAIS LOCAIS
A discretização de um modelo estrutural dentro do contexto do método da rigidez direta, conforme descrito na Seção 2.1 (veja Figura 2.1), está fundamentada na representação do comportamento contínuo do modelo por parâmetros de rigidez e de solicitações externas (carregamentos) nos seus nós (pontos de discretização). Os parâmetros de rigidez globais do modelo são definidos em função dos coeficientes de rigidez locais (de barras isoladas), que são condensados nas matrizes de rigidez locais que foram deduzidas no capítulo ante-rior. Este capítulo trata da representação discreta das solicitações externas, isto é, da representação dessas solicitações nos nós do modelo.
De acordo com a metodologia de discretização descrita na Seção 2.1, as solicitações externas atuantes no mo-delo estrutural são transformadas em cargas nodais combinadas, que resultam da superposição das cargas nodais propriamente ditas com as cargas equivalentes nodais. As cargas equivalentes nodais correspondem às reações de engastamento perfeito dos elementos de barra carregados (com solicitação externa em seu inte-rior), com sentidos invertidos. Este capítulo mostra como um carregamento (ou qualquer outra solicitação) atuante no interior de um elemento de barra é transformado em cargas equivalentes nodais locais. Essas cargas são ditas locais porque são definidas para um elemento de barra isolado. As cargas equivalentes nodais lo-cais vão compor, juntamente com as cargas nodais propriamente ditas, as cargas nodais combinadas globais (do modelo como um todo). Isso será mostrado no Capítulo 7.
Como dito, as cargas equivalentes nodais locais de uma barra isolada são iguais às reações de engastamento perfeito do carregamento atuando no seu interior com sentido invertido. Portanto, a maior parte deste capí-tulo está focada na dedução de reações de engastamento perfeito de barras isoladas para vários tipos de soli-citação externa, no sistema de eixos locais da barra. As últimas seções do capítulo formalizam a transformação das reações de engastamento perfeito em cargas equivalentes nodais locais. Primeiro as reações de engasta-mento dos carregamentos nas barras são transformadas dos seus sistemas de eixos locais para o sistema de eixos globais. Finalmente, as reações de engastamento no sistema de eixos globais são transferidas para os nós extremos de cada barra carregada.
6.1. Reações de engastamento de barra isolada para solicitações externas
Esta seção apresenta soluções fundamentais de engastamento perfeito de barras isoladas para carregamentos aplicados e solicitações de variação de temperatura. Essas soluções são utilizadas no método dos desloca-mentos, apresentado no próximo capítulo.
A Figura 6.1 mostra a notação e os sentidos positivos das reações de engastamento perfeito de uma barra de pórtico plano isolada, em que:
→′if̂ reação de engastamento perfeito de barra no sistema local: reação força ou momento que atua na direção da deslocabilidade local id′ de uma barra com as extremidades fixas para equilibrá-la quando há uma soli-citação externa genérica.
l
q(x)
x
y
2f̂ ′ 3f̂ ′ 5f̂ ′
6f̂ ′
1f̂ ′ 4f̂ ′
Figura 6.1 – Notação e sentidos positivos de reações de engastamento de barra de pórtico plano.
No caso de efeitos axiais, como forças aplicadas na direção axial ou variação uniforme de temperatura, as reações de engastamento axiais 1f̂ ′ e 4f̂ ′ não são afetadas pelo fato de a barra possuir uma articulação em uma das extremidades. Por outro lado, as reações de engastamento para solicitações transversais 2f̂ ′ , 5f̂ ′ , 3f̂ ′ e 6f̂ ′ são influenciadas pela existência de articulação.
84 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
6.1.1. Reações de engastamento de barra prismática para carregamentos axiais e transversais
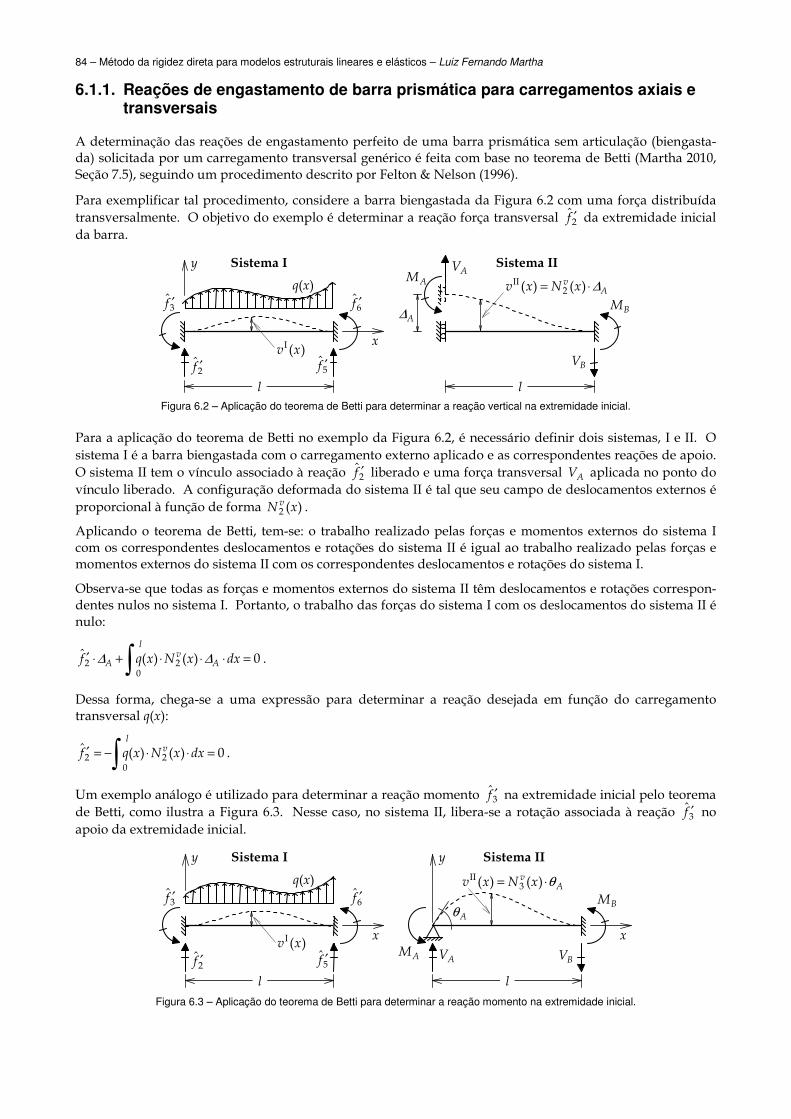
A determinação das reações de engastamento perfeito de uma barra prismática sem articulação (biengasta-da) solicitada por um carregamento transversal genérico é feita com base no teorema de Betti (Martha 2010, Seção 7.5), seguindo um procedimento descrito por Felton & Nelson (1996).
Para exemplificar tal procedimento, considere a barra biengastada da Figura 6.2 com uma força distribuída transversalmente. O objetivo do exemplo é determinar a reação força transversal 2f̂ ′ da extremidade inicial da barra.
Av xNxv ∆⋅= )()( 2
II
A∆
l
AM
BM
AV
BV
Sistema II
l
x
y
)(I xv
2f̂ ′
3f̂ ′
5f̂ ′
6f̂ ′
Sistema I
q(x)
Figura 6.2 – Aplicação do teorema de Betti para determinar a reação vertical na extremidade inicial.
Para a aplicação do teorema de Betti no exemplo da Figura 6.2, é necessário definir dois sistemas, I e II. O sistema I é a barra biengastada com o carregamento externo aplicado e as correspondentes reações de apoio. O sistema II tem o vínculo associado à reação 2f̂ ′ liberado e uma força transversal AV aplicada no ponto do vínculo liberado. A configuração deformada do sistema II é tal que seu campo de deslocamentos externos é proporcional à função de forma )(2 xN v .
Aplicando o teorema de Betti, tem-se: o trabalho realizado pelas forças e momentos externos do sistema I com os correspondentes deslocamentos e rotações do sistema II é igual ao trabalho realizado pelas forças e momentos externos do sistema II com os correspondentes deslocamentos e rotações do sistema I.
Observa-se que todas as forças e momentos externos do sistema II têm deslocamentos e rotações correspon-dentes nulos no sistema I. Portanto, o trabalho das forças do sistema I com os deslocamentos do sistema II é nulo:
0)()(ˆ0
22 =⋅⋅⋅+⋅′ ∫ dxxNxqf A
lv
A ∆∆ .
Dessa forma, chega-se a uma expressão para determinar a reação desejada em função do carregamento transversal q(x):
0)()(ˆ0
22 =⋅⋅−=′ ∫ dxxNxqfl
v .
Um exemplo análogo é utilizado para determinar a reação momento 3f̂ ′ na extremidade inicial pelo teorema de Betti, como ilustra a Figura 6.3. Nesse caso, no sistema II, libera-se a rotação associada à reação 3f̂ ′ no apoio da extremidade inicial.
l
q(x)
x
y
Av xNxv θ⋅= )()( 3
II
Aθ
l
x )(I xv AM
BM
AV BV 2f̂ ′
3f̂ ′
5f̂ ′
6f̂ ′
Sistema I Sistema II y
Figura 6.3 – Aplicação do teorema de Betti para determinar a reação momento na extremidade inicial.

Capítulo 6: Forças equivalentes nodais locais – 85
O campo de deslocamentos externos do sistema II da Figura 6.3 é proporcional à função de forma )(3 xN v . A aplicação do teorema de Betti para esse exemplo resulta em:
0)()(ˆ0
33 =⋅⋅−=′ ∫ dxxNxqfl
v .
Os resultados obtidos nos exemplos das Figuras 6.2 e 6.3 podem ser generalizados para diversos tipos de cargas: axiais, transversais distribuídas, transversais concentradas e momentos concentrados, como ilustra a Figura 6.4.
l
p(x)
1f̂ ′ 4f̂ ′
l
q(x) Pj Mj
2f̂ ′ 3f̂ ′ 5f̂ ′
6f̂ ′
Pj
Figura 6.4 – Reações de engastamento perfeito axiais e transversais de barras isoladas.
A Equação 6.1, resultante da aplicação do teorema de Betti, é utilizada para determinar as reações axiais 1f̂ ′ e
4f̂ ′ na barra prismática provocadas por uma força axial distribuída p(x). Utiliza-se a Equação 6.2 para de-terminar as reações forças transversais 2f̂ ′ e 5f̂ ′ e as reações momentos 3f̂ ′ e 6f̂ ′ na barra prismática provo-cadas por forças transversais distribuídas, forças transversais concentradas e cargas momentos concentrados (Figura 6.4).
∑∫ ⋅−⋅⋅−=′
j
jjui
luii PxNdxxpxNf )()()(ˆ
0 ( )4,1=i (6.1)
∑ ∑∫ ⋅−⋅−⋅⋅−=′
j j
jj
vi
jjvi
lvii M
dx
xdNPxNdxxqxNf
)()()()(ˆ
0 ( )6,5,3,2=i (6.2)
A Figura 6.5 mostra reações de engastamento axiais de barras prismáticas submetidas a uma força concen-trada axial e a uma força distribuída linearmente. Essas reações são obtidas utilizando a Equação 6.1, consi-derando as funções de forma axiais deduzidas na Seção 4.2.
lPb/ lPa/
l
p(x)
AH BH
l
P lPbf /ˆ
1 −=′
lPaf /ˆ4 −=′ a b
p(x)
x pA
pB
ABA
A Hflplp
H −=′→⋅
+⋅
= 1ˆ
63
BBA
B Hflplp
H −=′→⋅
+⋅
= 4ˆ
36
Figura 6.5 – Reações de engastamento perfeito axiais de barras prismáticas.
As Figuras 6.6, 6.7 e 6.8 indicam reações de engastamento de barras prismáticas submetidas a carregamentos transversais. As forças transversais aplicadas têm o sentido inverso ao sentido do eixo local y. Essas reações são determinadas com base na Equação 6.2, utilizando as funções de forma deduzidas na Seção 4.3, para bar-ras que seguem a teoria de vigas de Navier, ou na Seção 4.4, para barras que seguem a teoria de vigas de Ti-moshenko. As reações de engastamento mostradas nas Figuras 6.6, 6.7 e 6.8 correspondem à teoria de vigas de Navier.

86 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
l
2/ql
12/2ql 2/ˆ2 qlf +=′
12/ˆ 23 qlf +=′
2/ˆ5 qlf +=′
12/ˆ 26 qlf −=′
2/ql
12/2ql
8/3ql
8/2ql 8/3ˆ2 qlf +=′
0ˆ3 =′f
8/5ˆ5 qlf +=′
8/ˆ 26 qlf −=′
8/5ql
8/5ql
8/5ˆ2 qlf +=′
8/ˆ 23 qlf +=′
8/3ˆ5 qlf +=′
0ˆ6 =′f
8/3ql
8/2ql
q
q
q
Figura 6.6 – Reações de engastamento de barras prismáticas com força transversal uniformemente distribuída, para barras que seguem a teoria de vigas de Navier.
P
2/P
2/ˆ2 Pf +=′
8/ˆ3 Plf +=′
2/ˆ5 Pf +=′
8/ˆ6 Plf −=′
2/P
8/Pl
l/2 l/2
8/Pl
P
16/5P
16/5ˆ2 Pf +=′
0ˆ3 =′f
16/11ˆ5 Pf +=′
16/3ˆ6 Plf −=′
16/11P
16/3Pl
P
16/11P
16/11ˆ2 Pf +=′
16/3ˆ3 Plf +=′
16/5ˆ5 Pf +=′
0ˆ6 =′f
16/5P
16/3Pl
Figura 6.7 – Reações de engastamento de barras prismáticas com força concentrada no meio do vão, para barras que seguem a teoria de vigas de Navier.

Capítulo 6: Forças equivalentes nodais locais – 87
l
P
( ) 32 /3 lbaPb +
( ) 322 /3ˆ lbaPbf ++=′
223 /ˆ lPabf +=′
( ) 325 /3ˆ lbaPaf ++=′
226 /ˆ lbPaf −=′
22 /lPab
a b
22 /lbPa
( ) 32 /3 lbaPa +
l
M
3/6 lMab
32 /6ˆ lMabf +=′
( ) 23 /2ˆ lbaMbf −+=′
35 /6ˆ lMabf −=′
( ) 26 /2ˆ labMaf −+=′
( ) 2/2 lbaMb −
a b
( ) 2/2 labMa −
3/6 lMab
20/3ˆ2 qlf +=′
30/ˆ 23 qlf +=′
20/7ˆ5 qlf +=′
20/ˆ 26 qlf −=′
l
q
20/3ql
20/2ql
20/7ql
30/2ql
Figura 6.8 – Reações de engastamento de barras com força concentrada, momento concentrado e força transversal linearmente distribuída vão, para barras que seguem a teoria de vigas de Navier (West 1989).
Nesta seção, as expressões para determinar reações de engastamento de barras isoladas solicitadas por car-regamentos externos são exatas para o caso de barras com seções transversais que não variam ao longo de comprimento. Isso ocorre porque os campos de deslocamentos externos utilizados no sistema auxiliar para a aplicação do teorema de Betti (sistema II das Figuras 6.2 e 6.3) são proporcionais às funções de forma, que correspondem a soluções exatas do campo de deslocamentos para barras com seção transversal constante.
Para barras com seção transversal variável, duas estratégias distintas são adotadas: uma para reações de en-gastamento axiais e outra para reações de engastamento relacionadas com o efeito transversal de flexão. No primeiro caso, utiliza-se o método das forças, como descrito na Seção 9.3.4 do livro de Martha (2010). A se-gunda estratégia, apresentada na Seção 6.6.1 daquele livro, é baseada na analogia da viga conjugada e de-termina parâmetros fundamentais para reações de engastamento de barras não prismáticas provocadas por carregamentos transversais.
Entretanto, o caso mais geral de carregamento considerado para a obtenção de reações de engastamento de barras com seção transversal variável é o de uma força linearmente distribuída, tanto para o efeito axial quanto para o transversal. Quando esse tipo de carregamento atua parcialmente no comprimento da barra, é possível subdividi-la em mais barras inserindo nós intermediários nas seções transversais onde ocorre a mu-dança de carregamento. A consequência é a criação de mais graus de liberdade (deslocabilidades) para o problema, o que é tratado normalmente em uma análise pelo método da rigidez direta.
6.1.2. Reações de engastamento de barra prismática para variação de temperatura
Esta seção apresenta a determinação de reações de engastamento de barras isoladas com seção transversal constante para solicitações de variação de temperatura. Inicialmente mostra-se um procedimento simples (McGuire et al. 2000), baseado em uma superposição de efeitos utilizada no método das forças. Um método geral, baseado no PDV, é exposto na sequência.
A Figura 6.9 ilustra o caso de uma variação uniforme de temperatura, correspondendo à variação de tempe-ratura ∆TCG na fibra do centro de gravidade da seção transversal. A barra tem um material com módulo de elasticidade E e coeficiente de dilatação térmica α. A seção transversal é constante com área A e momento de inércia I. A variação de temperatura na fibra do centro de gravidade é obtida por interpolação linear da va-riação de temperatura ∆Ti na face inferior da barra e da variação de temperatura ∆Ts na face superior:

88 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
⋅+
−⋅=
h
yT
h
yhTT siCG ∆∆∆ , (6.3)
sendo h a altura da seção transversal e y a distância do centro de gravidade à fibra inferior da seção.
l
lTCGT ⋅⋅= ∆αδ
∆TCG ]Θ[
l
CGTEAf ∆α ⋅⋅=′1ˆ CGTEAf ∆α ⋅⋅−=′4
ˆ
EA
x
y
( ) TlEAN δ/=
l
∆TCG ]Θ[
( ) TlEAN δ/=
Tδ
Figura 6.9 – Superposição de efeitos para determinar reações axiais de engastamento de barra prismática para variação uniforme de temperatura (McGuire et al. 2000).
As reações de engastamento provocadas pela variação uniforme de temperatura do exemplo da Figura 6.9 são calculadas por superposição de efeitos, tendo como estrutura-base a barra com o vínculo que impede o deslocamento axial do apoio da direita liberado. Na primeira parcela da superposição – que é, na verdade, o caso (0) da solução pelo método das forças –, a barra sofre a variação uniforme de temperatura e pode se a-longar ou encurtar livremente. O deslocamento axial no apoio da direita é lTCG
T ⋅⋅= ∆αδ . Na segunda parcela da superposição – caso (1) do método das forças –, é aplicada uma força axial ( ) TlEAN δ/= que im-põe um deslocamento axial desse apoio igual a Tδ , mas no sentido contrário. Observa-se que as reações de engastamento desse exemplo são forças axiais iguais ao esforço normal N.
O cálculo das reações de engastamento para uma variação transversal de temperatura em uma barra prismá-tica é feito de forma análoga, ou seja, por superposição de efeitos, como indicado na Figura 6.10.
l
∆Ts ]Θ[ ∆Ti ]Θ[
dx
l dx
dEIM
Tθ=
EI
( )h
TTEIf si ∆∆α −⋅⋅
=′3ˆ
l
∆Ts ]Θ[ ∆Ti ]Θ[
( )h
TTEIf si ∆∆α −⋅⋅
−=′6ˆ
dx
dEIM
Tθ=
M M dxEI
Md =θ
x
y
( )dx
h
TTd siT ∆∆α
θ−⋅
=
Figura 6.10 – Superposição de efeitos para determinar momentos de engastamento de barra prismática para variação transversal de temperatura (McGuire et al. 2000).
As parcelas da superposição mostrada na Figura 6.10 têm vínculos que impedem as rotações nas extremida-des da barra liberados. Na primeira parcela – caso (0) do método das forças –, ocorre uma deformação por flexão da barra devida à variação transversal de temperatura, na qual cada elemento infinitesimal de barra sofre uma rotação relativa interna Tdθ , que é dada pela Equação 3.66. Na segunda parcela – caso (1) –, são aplicados momentos dxdEIM T /θ⋅= nas extremidades da barra de maneira a anular essa deformação. Ob-serva-se que as reações de engastamento desse exemplo são momentos iguais ao momento M aplicado.
Os mesmos resultados encontrados acima podem ser alcançados de uma maneira mais formal com base no PDV (Martha 2010, Equação 7.37). O sistema real corresponde à barra biengastada que sofre uma variação axial e transversal de temperatura. Como pode ser observado nas Figuras 6.9 e 6.10, os deslocamentos finais

Capítulo 6: Forças equivalentes nodais locais – 89
reais axiais u(x) e transversais v(x) são nulos. Dessa forma, a Equação 7.37 no livro de Martha (2010) se reduz a:
⋅
−+⋅
−= ∫∫
l Tl T
dxdx
vd
dx
dEIdx
dx
du
dx
duEAP
02
2
0
1 θ
∆. (6.4)
O sistema virtual é escolhido de tal forma que apenas a reação real de engastamento que se deseja determi-nar produza trabalho virtual externo. Portanto, para o cálculo da reação 1f̂ ′ , escolhe-se um campo de deslo-camentos virtuais igual a )()( 11 xNdxu ⋅= , sendo 1d o deslocamento axial virtual na extremidade inicial. De maneira semelhante, para o cálculo da reação 2f̂ ′ , é escolhido um campo de deslocamentos virtuais igual a
)()( 22 xNdxv ⋅= , e analogamente para as outras reações.
Com base nas Equações 6.4, 3.65 e 3.66, chega-se às expressões gerais para o cálculo das reações de engasta-mento de uma barra prismática isolada provocadas por uma variação de temperatura:
∫⋅⋅⋅−=′l u
iCGi dx
dx
dNTEAf
0
ˆ ∆α ( )4,1=i (6.5)
( )∫⋅
−⋅−=′
l visi
i dxdx
Nd
h
TTEIf
02
2ˆ ∆∆α
( )6,5,3,2=i (6.6)
As reações de engastamento calculadas pelas Equações 6.5 e 6.6 estão mostradas na Figura 6.11. Observa-se que os valores são os mesmos encontrados anteriormente nos exemplos das Figuras 6.9 e 6.10.
CGTEA ∆α ⋅⋅ l
CGTEAf ∆α ⋅⋅+=′1ˆ
0ˆ2 =′f ∆Ts ]Θ[
∆Ti ]Θ[
( ) hTTEI si /∆∆α −⋅⋅
( ) hTTEIf si /ˆ3 ∆∆α −⋅⋅+=′
CGTEAf ∆α ⋅⋅−=′4ˆ
0ˆ5 =′f
( ) hTTEIf si /ˆ6 ∆∆α −⋅⋅−=′
( ) hTTEI si /∆∆α −⋅⋅
CGTEA ∆α ⋅⋅
Figura 6.11 – Reações de engastamento de uma barra prismática biengastada para variação de temperatura vão, para barra que segue a teoria de vigas de Navier.
Na Seção 6.8.1 do livro de Martha (2010) apresenta-se uma metodologia para determinar as reações de enga-tamento para barra com seção transversal variável solicitada por uma variação transversal de temperatura. A Seção 9.3.6 daquele livro indica a metodologia para cálculo de reações axiais de engastamento para barras com seção transversal variável.
6.2. Reações de engastamento de barra isolada no sistema global
O problema discreto de análise estrutural que se quer resolver é o do estágio de carregamento II, descrito na Seção 2.1. Nesse problema, todas as solicitações do modelo discretizado são convertidas em cargas nodais combinadas, que consideram as cargas equivalentes nodais e as cargas nodais propriamente ditas. As cargas equivalentes nodais de uma barra correspondem às reações de engastamento perfeito, para os carregamen-tos atuando no interior da barra, transferidas, com sentidos invertidos, para os nós extremos da barra. Ocor-re que as cargas nodais combinadas recebem a contribuição das cargas equivalentes nodais de todas as bar-ras. Para que se possa superpor as cargas equivalentes nodais das diversas barras do modelo nos nós de uma maneira global, é necessário que as cargas equivalentes nodais das barras sejam transformadas dos sis-temas de eixos locais das barras para o sistema de eixos globais do modelo.
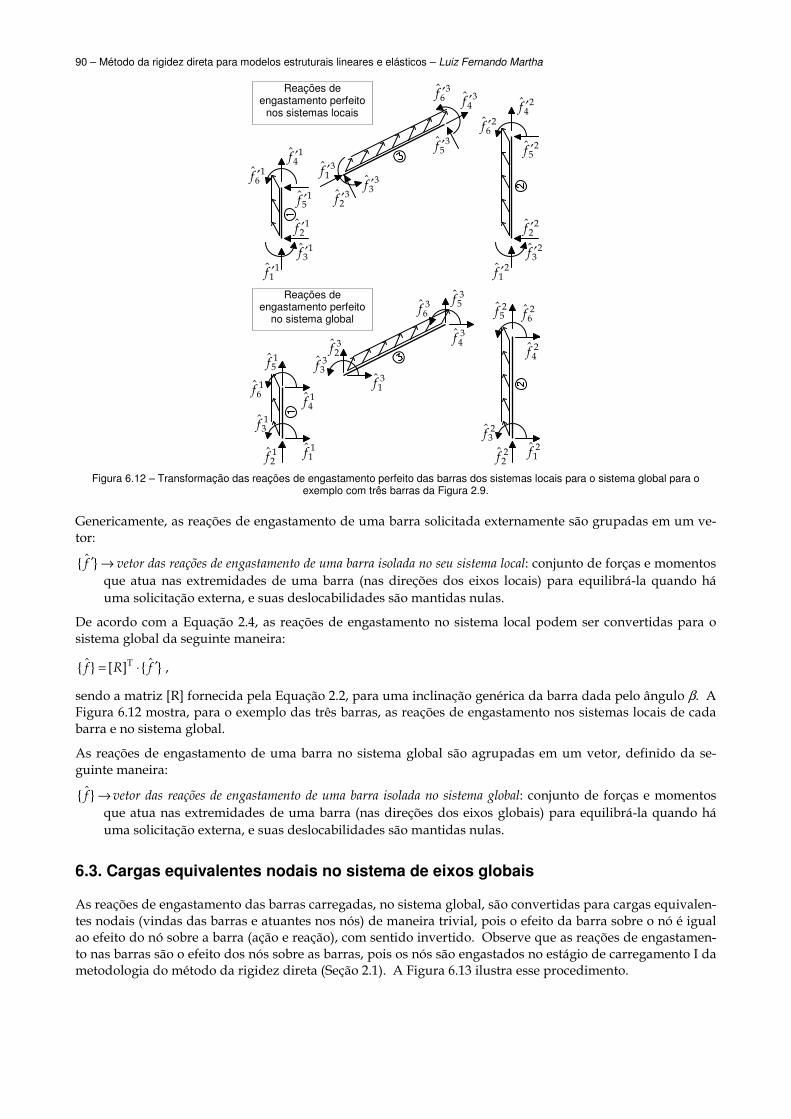
Esta seção mostra o procedimento para transformar as reações de engastamento perfeito dos carregamentos das barras, que inicialmente são calculadas nos seus eixos locais, para o sistema de eixos globais. O proce-dimento é ilustrado na Figura 6.12 para o exemplo com três barras da Figura 2.9.
90 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
11f̂ 1
2f̂
13f̂
14f̂
15f̂
16f̂
21f̂ 2
2f̂
23f̂
24f̂
25f̂ 2
6f̂
31f̂
32f̂
33f̂
34f̂
35f̂ 3
6f̂
11f̂ ′
Reações de engastamento perfeito
no sistema global
13f̂ ′
12f̂ ′
35f̂ ′
36f̂ ′ 3
4f̂ ′ 2
6f̂ ′
24f̂ ′
25f̂ ′
Reações de engastamento perfeito
nos sistemas locais
16f̂ ′
14f̂ ′
15f̂ ′
21f̂ ′
23f̂ ′
22f̂ ′
32f̂ ′
33f̂ ′
31f̂ ′
Figura 6.12 – Transformação das reações de engastamento perfeito das barras dos sistemas locais para o sistema global para o exemplo com três barras da Figura 2.9.
Genericamente, as reações de engastamento de uma barra solicitada externamente são grupadas em um ve-tor:
→′}ˆ{ f vetor das reações de engastamento de uma barra isolada no seu sistema local: conjunto de forças e momentos que atua nas extremidades de uma barra (nas direções dos eixos locais) para equilibrá-la quando há uma solicitação externa, e suas deslocabilidades são mantidas nulas.
De acordo com a Equação 2.4, as reações de engastamento no sistema local podem ser convertidas para o sistema global da seguinte maneira:
}ˆ{][}ˆ{ T fRf ′⋅= ,
sendo a matriz [R] fornecida pela Equação 2.2, para uma inclinação genérica da barra dada pelo ângulo β. A Figura 6.12 mostra, para o exemplo das três barras, as reações de engastamento nos sistemas locais de cada barra e no sistema global.
As reações de engastamento de uma barra no sistema global são agrupadas em um vetor, definido da se-guinte maneira:
→}ˆ{ f vetor das reações de engastamento de uma barra isolada no sistema global: conjunto de forças e momentos que atua nas extremidades de uma barra (nas direções dos eixos globais) para equilibrá-la quando há uma solicitação externa, e suas deslocabilidades são mantidas nulas.
6.3. Cargas equivalentes nodais no sistema de eixos globais
As reações de engastamento das barras carregadas, no sistema global, são convertidas para cargas equivalen-tes nodais (vindas das barras e atuantes nos nós) de maneira trivial, pois o efeito da barra sobre o nó é igual ao efeito do nó sobre a barra (ação e reação), com sentido invertido. Observe que as reações de engastamen-to nas barras são o efeito dos nós sobre as barras, pois os nós são engastados no estágio de carregamento I da metodologia do método da rigidez direta (Seção 2.1). A Figura 6.13 ilustra esse procedimento.

Capítulo 6: Forças equivalentes nodais locais – 91
11
11 f̂fe −=
12
12 f̂fe −=
13
13 f̂fe −=
14
14 f̂fe −=
15
15 f̂fe −=
16
16 f̂fe −=
31
31 f̂fe −=
32
32 f̂fe −=
33
33 f̂fe −=
34
34 f̂fe −=
35
35 f̂fe −=
36
36 f̂fe −=
24
24 f̂fe −=
25
25 f̂fe −=
26
26 f̂fe −=
21
21 f̂fe −=
23
23 f̂fe −=
2 22 2
ˆfe f= −
Figura 6.13 – Conversão das reações de engastamento dos carregamentos nas barras, no sitema de eixos globais, para cargas equivalentes nodais para o exemplo com três barras da Figura 2.9.
A seguinte definição é feita:
→−= }ˆ{}{ ffe vetor das cargas equivalentes nodais de uma barra no sistema global: conjunto de forças e momentos que atua nos nós adjacentes a uma barra (nas direções dos eixos globais), resultante do transporte do carregamento que atua no interior da barra.
As cargas equivalentes nodais correspondem a reações de engastamento perfeito da barra carregada trans-portadas para os nós, com sentidos invertidos. Pelo menos para barras prismáticas, esse transporte é feito de forma consistente, isto é, levando em conta as funções de forma analíticas das barras (Seção 4.1). Isso ocorre porque as cargas equivalentes nodais, calculadas como reações de engastamento da barra e com sentidos invertidos, produzem o mesmo trabalho virtual que o carregamento no interior da barra, para um campo de deslocamentos virtuais baseado nas funções de forma da barra, como demonstrado na Seção 6.1.1.

7. SISTEMA DE EQUAÇÕES GLOBAIS DE EQUILÍBRIO
Conforme apresentado na Seção 2.1 do Capítulo 1, a solução completa de um modelo estrutural pelo método da rigidez direta é obtida pela superposição de uma solução global do modelo (estágio II) com soluções lo-cais (estágio I) em cada barra do modelo. A solução global é uma representação discreta do problema, em que o campo de deslocamentos contínuo é representado pelas componentes de deslocamentos e rotações dos nós do modelo e as solicitações externas (carregamentos) são representadas por cargas equivalentes nodais, que são cargas força e cargas momento aplicadas nos nós do modelo.
O capítulo anterior tratou da discretização das solicitações externas em cargas equivalentes nodais, que, para uma barra isolada, são iguais às reações de engastamento perfeito do carregamento atuando no seu interior com sentido invertido. As cargas equivalentes nodais são ditas locais porque estão associadas a uma situa-ção de engastamento perfeito de um elemento de barra isolado. As cargas equivalentes nodais locais vão compor, juntamente com as cargas nodais propriamente ditas, as cargas nodais combinadas globais (do mo-delo como um todo).
Este capítulo trata das estratégias de montagem e solução do sistema de equações do problema global do método da rigidez direta (estágio de carregamento II). Esse sistema de equações expressa a imposição de condições de equilíbrio a cada um dos nós do modelo. Os coeficientes desse sistema correspondem a parâ-metros de rigidez globais do modelo, que são definidos em função dos coeficientes de rigidez locais (de bar-ras isoladas), que foram deduzidos no Capítulo 5. As incógnitas desse sistema de equações são das desloca-bilidades globais do problema, que correspondem às componentes de deslocamentos e rotações nodais dos graus de liberdade livres (não restritos por apoios). A solicitação atuante nesse sistema de equações (vetor no lado direito do sinal de igual do sistema) é o vetor das cargas nodais combinadas globais, considerando todos os graus de liberdade do modelo, inclusive os que têm restrições de apoio.
A solução do sistema de equações de equilíbrio do problema global discreto (estágio de carregamento II) só é possível quando se consideram as restrições de suporte do modelo. Sem essas restrições, ainda é possível existirem movimentos de corpo rígido do modelo estrutural, indicando que o problema tem infinitas solu-ções para os deslocamentos e rotações nodais que satisfazem condições de equilíbrio. Portanto, este capítulo também apresenta estratégias para consideração das condições de suporte na solução do problema global discreto.
7.1. Montagem da matriz de rigidez global
O método dos deslocamentos determina a matriz de rigidez global de um modelo por superposição de casos básicos (Figura 1.4). Em cada caso básico, é imposta uma configuração deformada que isola o efeito de um grau de liberdade global.
Pode-se dizer que esse procedimento faz a montagem da matriz de rigidez global por coluna, pois a j-ésima coluna da matriz de rigidez global [K] corresponde ao conjunto de forças e momentos que atua nas direções das co-ordenadas generalizadas globais para equilibrar a estrutura quando se impõe uma configuração deformada com grau de liberdade Dj = 1. Por exemplo, a Figura 7.1 mostra os coeficientes da 9ª e da 10ª colunas da ma-triz de rigidez global de um pórtico genérico, que correspondem, respectivamente, à imposição de D9 = 1 e D10 = 1.

94 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
1
2 3
7
8 9
5 4
6
10
11 12
Coordenadas generalizadas
globais
K10,10
K11,10
K12,10
K7,10
K8,10 K9,10
K6,10
K4,10 K5,10
K1,10
K2,10
K3,10
K10,9
K11,9
K12,9
K7,9 K9,9
K6,9
K4,9 K5,9
K1,9
K2,9
K3,9
D10 = 1
D9 = 1
K8,9
Figura 7.1 – Coeficientes de rigidez da 9ª e da 10ª colunas de uma matriz de rigidez global para o exemplo com três barras da Figura 2.9.
Observe que o modelo da Figura 7.1 está solto no espaço, isto é, a matriz de rigidez global está sendo mon-tada considerando todos os graus de liberdade, inclusive os que podem estar com restrições de apoio. Con-forme comentando anteriormente, a consideração das condições de suporte é feita em uma fase posterior à montagem da matriz de rigidez global (Seção 7.4), que é, portanto, montada por completo.
O procedimento de montagem da matriz [K] por coluna é adequado para uma resolução manual. Entretan-to, esse algoritmo não é o mais adequado para uma implementação computacional. O procedimento carac-terístico do método da rigidez direta é o da montagem da matriz de rigidez por barra. Tal algoritmo monta a matriz [K] de forma direta, somando a contribuições das matrizes de rigidez das barras, uma de cada vez, o que será explicado a seguir.
Na Figura 7.1, observe que, quando se impõe o grau de liberdade D9 = 1, somente as barras com índices 1 e 3 são mobilizadas. Essas duas barras são adjacentes ao nó associado a D9. Nessa situação, a barra com índice 2 não sofre deformação alguma e, portanto, não contribui para a 9ª coluna da matriz de rigidez global. De maneira análoga, somente as barras com índices 2 e 3 são mobilizadas pela configuração deformada imposta por D10 = 1, sendo que a barra com índice 1 não contribui para a 10ª coluna de [K].
Esse raciocínio pode ser generalizado da seguinte maneira:
• Os coeficientes da matriz de rigidez [ ]k de uma barra contribuem apenas para os termos da matriz de rigidez global [ ]K associados às coordenadas generalizadas globais dos nós inicial e final da barra.
Tal afirmação parte do princípio que não se considera restrição alguma nas deformações das barras, como, por exemplo, a consideração de barras inextensíveis. Dessa forma, a cada nó de um pórtico plano, são asso-ciados exatamente três graus de liberdade.
Portanto, a informação principal para a montagem da matriz de rigidez global a partir das matrizes de rigi-dez das barras é o relacionamento entre as coordenadas generalizadas locais de cada barra com as coordena-das generalizadas globais. Note que só faz sentido estabelecer esse relacionamento se as coordenadas gene-ralizadas locais e globais estiverem no mesmo sistema de eixos. Por isso, é preciso transformar as matrizes de rigidez das barras dos sistemas locais para o global.
Essencialmente, o relacionamento entre coordenadas generalizadas locais e globais é uma garantia de satis-fação das condições de compatibilidade interna. Isso ocorre porque a associação de coordenadas generaliza-das locais (que se correspondem em barras adjacentes) com uma única coordenada generalizada global é, na verdade, uma imposição de compatibilidade entre componentes de deslocamento ou rotação das barras que se conectam. Como no método dos deslocamentos, o método da rigidez direta trabalha intrinsecamente sa-tisfazendo condições de compatibilidade em todas as etapas da metodologia.
A Figura 7.2 mostra um exemplo para explicar como é feito o relacionamento entre coordenadas generaliza-das locais e globais. As matrizes de rigidez locais das barras no sistema global são ilustradas na figura em separado, com o índice da barra identificando cada matriz. Nos desenhos representativos das matrizes, so-mente os coeficientes de rigidez locais não nulos são mostrados.
Capítulo 7: Sistema de equações globais de equilíbrio – 95
1
2
3
4
5 6
1
2 3
4
5
6 4
5 6
1
2 3
Coordenadas generalizadas locais no
sistema global 1
2
3
7
8 9
4
5 6
10
11
12 10
11 12
7
8 9
Coordenadas generalizadas globais
em cada barra
1 2 3 7 8 9
9 8 1 2 3 7
1 2 3 4 5 6 7 8 9 10 11 12
12 11 10 9 8 7 6 5 1 2 3 4
4 5 6 10 11 12
12 11 4 5 6 10
1 2 3 4 5 6 7 8 9 10 11 12
12 11 10 9 8 7 6 5 1 2 3 4
7 8 9 10 11 12
12 11 7 8 9 10
1 2 3 4 5 6 7 8 9 10 11 12
12 11 10 9 8 7 6 5 1 2 3 4
vetor de espalhamento
vetor de espalhamento
vetor de espalhamento
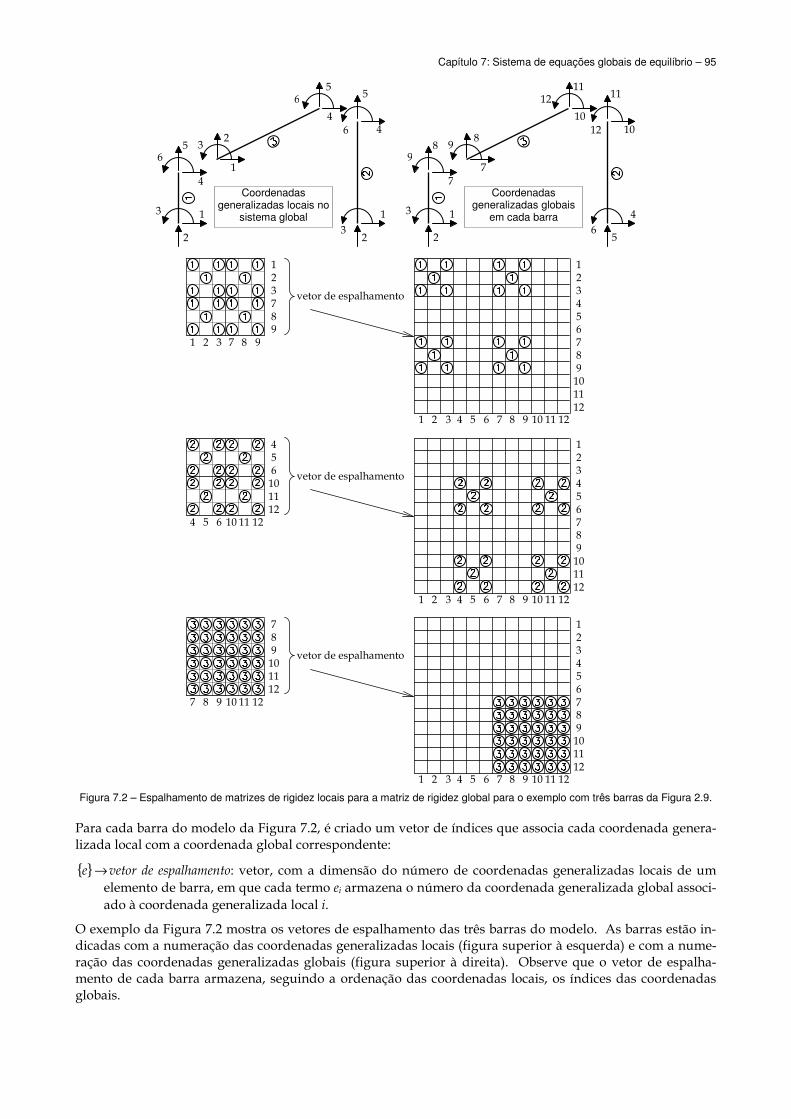
Figura 7.2 – Espalhamento de matrizes de rigidez locais para a matriz de rigidez global para o exemplo com três barras da Figura 2.9.
Para cada barra do modelo da Figura 7.2, é criado um vetor de índices que associa cada coordenada genera-lizada local com a coordenada global correspondente:
{ }→e vetor de espalhamento: vetor, com a dimensão do número de coordenadas generalizadas locais de um elemento de barra, em que cada termo ei armazena o número da coordenada generalizada global associ-ado à coordenada generalizada local i.
O exemplo da Figura 7.2 mostra os vetores de espalhamento das três barras do modelo. As barras estão in-dicadas com a numeração das coordenadas generalizadas locais (figura superior à esquerda) e com a nume-ração das coordenadas generalizadas globais (figura superior à direita). Observe que o vetor de espalha-mento de cada barra armazena, seguindo a ordenação das coordenadas locais, os índices das coordenadas globais.

96 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
Os vetores de espalhamento de todas as barras dependem da numeração das coordenadas generalizadas globais, que é arbitrária. Deve-se salientar que, como não poderia deixar de ser, os resultados de uma análi-se não dependem da estratégia utilizada para essa numeração. Existem diversas estratégias para numerar os graus de liberdade de um modelo estrutural, dependendo da técnica utilizada para resolver o sistema de equações globais, cujos coeficientes são os termos da matriz de rigidez global. No entanto, foge do escopo deste livro abordar esse problema. Pode-se dizer que a numeração dos graus de liberdade, de uma forma geral, procura diminuir ao máximo o número de coeficientes da matriz [K] armazenados na memória do computador. Em algumas situações, a técnica de numeração visa uma solução numérica mais eficiente do sistema de equações. Muitas vezes, as duas questões, minimização do uso de memória e eficiência numérica de solução do sistema, determinam em conjunto a escolha da estratégia de numeração dos graus de liberda-de. Os artigos de Cuthill e Mckee (1969), Gibbs et al. (1976) e Sloan (1986) são referências clássicas sobre esse assunto.
Por simplicidade, no presente contexto, a numeração das coordenadas generalizadas globais segue a ordem dos índices fornecidos para os nós do modelo. Considere que os nós são numerados consecutivamente de 1 até o número total de nós (nn), e que i é o índice do nó inicial de uma barra, e j, o índice do nó final. Utili-zando essa estratégia, para o caso de pórtico plano, o vetor de armazenamento da barra resulta com os se-guintes valores:
{ } { }jjjiiie 3,13,23,3,13,23T −−−−= .
Essa estratégia de numeração será modificada para permitir o particionamento do sistema de equações que é utilizado por uma das técnicas para considerar condições de apoio (Seção 7.4.1).
O algoritmo para montagem da matriz de rigidez global por barra independe da estratégia adotada para numerar as coordenadas generalizadas globais. Tal algoritmo segue um procedimento-padrão, que é descri-to a seguir.
Em uma etapa de inicialização, a matriz de rigidez global [K] é criada com todos os coeficientes nulos. Em seguida, a contribuição de cada uma das barras, uma de cada vez, é somada na matriz [K]. Ao final, depois de todas as barras terem sido consideradas, a matriz de rigidez global está completa.
Note, na Figura 7.2, o posicionamento de cada um dos coeficientes de rigidez das barras na matriz de rigidez global. A linha e a coluna da matriz global que recebem a contribuição de um coeficiente de rigidez local de uma barra são determinadas com base no vetor de espalhamento {e} da barra. Considere que i e j são os ín-dices do coeficiente de rigidez local kij . A linha e a coluna na matriz [K] associadas a esse coeficiente são:
ii = ei ;
jj = ej .
Dessa forma, a contribuição de kij para Kii,jj é obtida da seguinte maneira:
Kii,jj = Kii,jj + kij .
Observa-se que o algoritmo é muito simples. De uma maneira informal, pode-se condensar esse algoritmo da seguinte maneira:
[ ] [ ]∑=
barras
barrakK ,
sendo que esse somatório pressupõe um espalhamento prévio das matrizes de rigidez locais das barras para a dimensão da matriz de rigidez global.
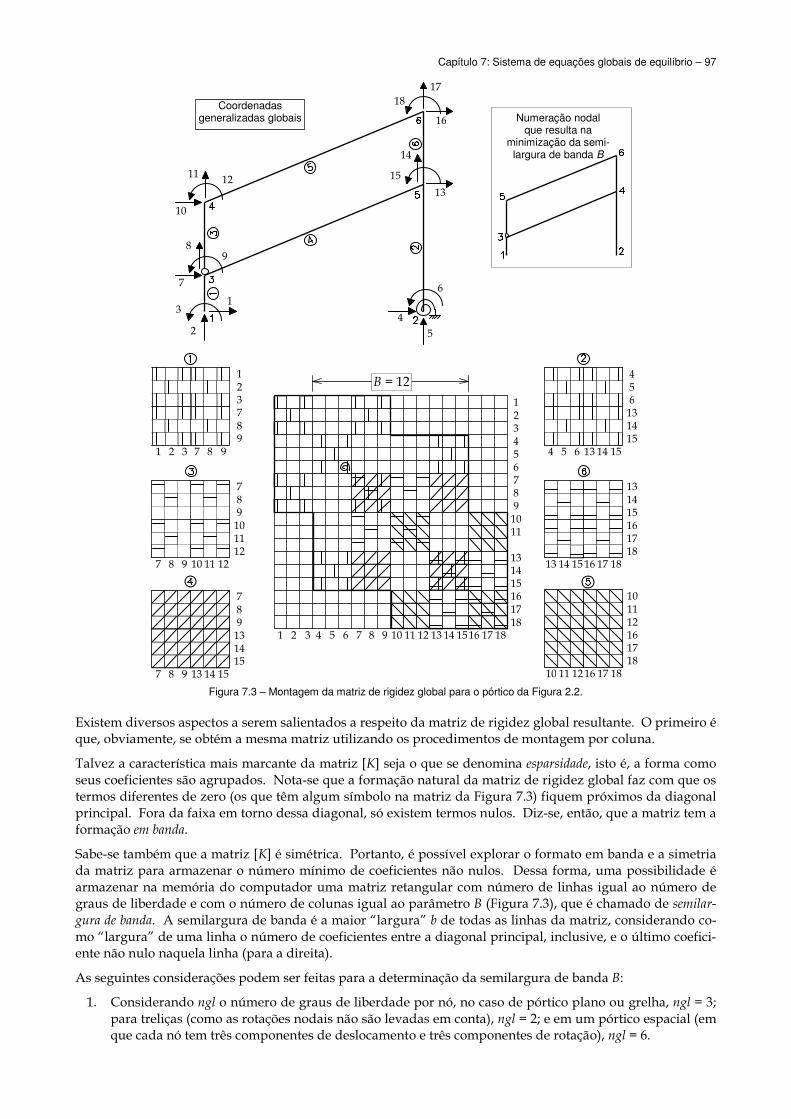
O procedimento de montagem da matriz de rigidez global é exemplificado na Figura 7.3 para o pórtico pla-no da Figura 2.2.
Na Figura 7.3, cada matriz de rigidez local tem seus coeficientes não nulos identificados por um símbolo ú-nico. Note que a barra com índice 3 tem uma articulação na extremidade inicial (inferior). Portanto, a tercei-ra linha e a terceira coluna da matriz de rigidez dessa barra são nulas, pois correspondem ao grau de liber-dade associado à rotação liberada pela rótula.
Os diferentes símbolos utilizados para os coeficientes de rigidez locais servem para identificar em que posi-ções da matriz de rigidez global sente-se a contribuição de cada coeficiente, ao mesmo tempo em que é pos-sível visualizar a sobreposição de coeficientes de rigidez das diversas barras.
Capítulo 7: Sistema de equações globais de equilíbrio – 97
1 2 3 4 5 6 7 8 9 10 11
12 11 10 9 8 7 6 5 1 2 3
18 17
16
15
14
13 12 11
10
9 8
7 6
4 3
2
1
Coordenadas generalizadas globais
13 14 15
17 18
4
16
18 17 16 15 14 13
7 8 9 13 14 15
15 14 7 8 9 13
1 2 3 7 8 9
9 8 1 2 3 7
7 8 9 10 11 12
12 11 7 8 9 10
13 14 15 16 17 18
18 17 13 14 15 16
4 5 6 13 14 15
15 14 4 5 6 13
10 11 12 16 17 18
18 17 10 11 12 16
5
B = 12
Numeração nodal que resulta na
minimização da semi-largura de banda B
Figura 7.3 – Montagem da matriz de rigidez global para o pórtico da Figura 2.2.
Existem diversos aspectos a serem salientados a respeito da matriz de rigidez global resultante. O primeiro é que, obviamente, se obtém a mesma matriz utilizando os procedimentos de montagem por coluna.
Talvez a característica mais marcante da matriz [K] seja o que se denomina esparsidade, isto é, a forma como seus coeficientes são agrupados. Nota-se que a formação natural da matriz de rigidez global faz com que os termos diferentes de zero (os que têm algum símbolo na matriz da Figura 7.3) fiquem próximos da diagonal principal. Fora da faixa em torno dessa diagonal, só existem termos nulos. Diz-se, então, que a matriz tem a formação em banda.
Sabe-se também que a matriz [K] é simétrica. Portanto, é possível explorar o formato em banda e a simetria da matriz para armazenar o número mínimo de coeficientes não nulos. Dessa forma, uma possibilidade é armazenar na memória do computador uma matriz retangular com número de linhas igual ao número de graus de liberdade e com o número de colunas igual ao parâmetro B (Figura 7.3), que é chamado de semilar-gura de banda. A semilargura de banda é a maior “largura” b de todas as linhas da matriz, considerando co-mo “largura” de uma linha o número de coeficientes entre a diagonal principal, inclusive, e o último coefici-ente não nulo naquela linha (para a direita).
As seguintes considerações podem ser feitas para a determinação da semilargura de banda B:
1. Considerando ngl o número de graus de liberdade por nó, no caso de pórtico plano ou grelha, ngl = 3; para treliças (como as rotações nodais não são levadas em conta), ngl = 2; e em um pórtico espacial (em que cada nó tem três componentes de deslocamento e três componentes de rotação), ngl = 6.

98 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
2. Considerando uma barra genérica que conecta os nós com índices i e j, suponha que i < j.
3. As coordenadas generalizadas globais são numeradas seguindo a ordenação da numeração dos nós.
4. A matriz está sendo montada para a estrutura solta no espaço, isto é, nenhum nó tem restrição de a-poio e todos os graus de liberdade do modelo estão sendo considerados. Dessa forma, a dimensão da matriz (quadrada), que é igual ao número total de graus de liberdade, é n = nn⋅ngl, sendo nn o número total de nós.
O procedimento para determinação da semilargura de banda também é realizado por barra. Para cada bar-ra, verifica-se qual é a maior “largura” b das linhas da matriz global que são afetadas pela inserção da matriz de rigidez da barra:
b = ngl⋅j – [ngl⋅(i – 1) + 1] + 1;
b = ngl⋅(j – i + 1).
A semilargura de banda depende da máxima diferença entre os índices dos dois nós extremos de barra, con-siderando todas a barras do modelo:
B = ngl⋅[(j – i)máx + 1].
A expressão [(j – i)máx + 1] é chamada de banda nodal.
Observa-se, com base no exemplo da Figura 7.3, que o formato em banda ainda considera, em seu interior, um número considerável de termos nulos da matriz. O que se busca é uma numeração que minimize a semi-largura de banda, a fim de diminuir a quantidade de memória necessária para armazenar a matriz [K]. A numeração adotada no exemplo não é a que minimiza a semilargura de banda, pois a banda nodal é igual a 4 (proporcionada pela barra com índice 2), resultando em B = 12. O detalhe no canto superior direito da figura mostra uma renumeração dos nós que minimiza a banda nodal para 3.
Existem outros formatos para armazenar em memória a matriz [K], buscando sempre evitar o armazenamen-to de coeficientes nulos. O mais famoso é o skyline (Cook et al. 1989) – de silhueta dos arranha-céus – que armazena em um vetor único, de forma consecutiva, os coeficientes de cada coluna da matriz, da diagonal principal até o último termo não nulo (para cima). Ainda pode restar o armazenamento de alguns termos nulos, mas bem menos do que no formato em banda.
Nota-se também, na Figura 7.3, que as sobreposições de coeficientes de rigidez locais se dão em torno da di-agonal principal da matriz de rigidez global. Essa é uma característica associada ao arranjo de barras em uma estrutura, que ficam conectadas pelos nós. A sobreposição próxima à diagonal principal se dá por submatrizes com dimensão nglxngl (3x3, no caso do pórtico plano). No exemplo, o maior número de subma-trizes sobrepostas é 3. Isso está associado ao fato de os nós com índices 3 e 5 serem usados por 3 barras cada um.
Na verdade, a montagem de toda a matriz se dá por submatrizes com dimensão 3x3, uma vez que a numera-ção das coordenadas generalizadas globais de cada nó é consecutiva nesse exemplo. Por causa disso, um grupo consecutivo de três linhas e um grupo consecutivo de três colunas da matriz global estão associados a um determinado nó. Pode-se pensar que as submatrizes são unidades para o preenchimento da matriz glo-bal. Dessa maneira, a identificação das posições de contribuição de uma matriz de rigidez local na matriz global baseia-se apenas nos números dos nós da barra.
Um último ponto a ser salientado na montagem da matriz de rigidez global da Figura 7.3 é a contribuição do coeficiente de rigidez rotacional do apoio elástico no nó com índice 2. Esse coeficiente de rigidez se soma ao termo K6,6 da matriz de rigidez global: um apoio elástico translacional ou rotacional, que restringe parcial-mente o grau de liberdade Di, é considerado adicionando seu coeficiente de rigidez ao coeficiente de rigidez global Ki,i.
7.2. Montagem das cargas nodais combinadas no vetor das forças generalizadas globais
O problema discreto de análise estrutural que se quer resolver é o do estágio de carregamento II, descrito na Seção 2.1. Nesse problema, o comportamento do modelo estrutural é representado por parâmetros associa-dos aos nós, que são os pontos de discretização. Todas as solicitações desse modelo discretizado são conver-tidas em cargas nodais combinadas, que consideram os efeitos dos carregamentos atuantes no interior das

Capítulo 7: Sistema de equações globais de equilíbrio – 99
barras e as cargas nodais propriamente ditas. As cargas nodais combinadas e as reações de apoio formam o vetor das forças nodais generalizadas {F} do modelo. A dimensão desse vetor é a dimensão da matriz de rigidez global completa, isto é, o número de termos de {F} é igual a n = nn⋅ngl, sendo nn o número de nós do modelo, e ngl, o número de graus de liberdade por nó (ngl = 3, no caso de pórtico plano). Esta seção descre-ve um procedimento para a montagem das cargas nodais combinadas no vetor das forças nodais generalizas globais. O procedimento se dá em duas etapas, que estão ilustradas nas Figuras 6.12, 6.13 e 7.4, para o e-xemplo com três barras da Figura 2.9.
Na primeira etapa, inicialmente as reações de engastamento perfeito das barras carregadas, nos seus siste-mas locais, são transformadas para o sistema global (Seção 6.2, ver Figura 6.12). Isso é necessário porque as reações de engastamento das barras carregadas se transformam em cargas equivalentes nodais, que se so-mam às cargas nodais propriamente ditas para formar as cargas nodais combinadas. Em seguida (Seção 6.3, ver Figura 6.13), as reações de engastamento nas barras carregadas são convertidas em cargas equivalente nodais.
A segunda etapa do procedimento de montagem das cargas nodais combinadas no vetor {F} é mostrada na Figura 7.4, para o mesmo exemplo das três barras.
Contribuição das cargas
nodais combinadas para o vetor das forças nodais generalizadas
globais
1F 2F
3F
4F 5F
6F 7F
8F 9F
10F
11F 12F
1P
2P 3P 11fe
12fe
13fe
7P
8P 9P
14fe
15fe
16fe
31fe
32fe
33fe
10P 11P
12P 34fe
35fe
36fe
24fe
25fe
26fe
4P
5P 6P 21fe
22fe 2
3fe
Cargas equivalentes nodais (vindas das barras)
superpostas a cargas nodais propriamente ditas
veto
r de
espal
ham
ento
veto
r de
espal
ham
ento
7 8 9 10 11 12
1 2 3 4 5 6 7 8 9 10 11 12
veto
r de
espal
ham
ento
1 2 3 7 8 9
1 2 3 4 5 6 7 8 9 10 11 12
4 5 6 10 11 12
1 2 3 4 5 6 7 8 9 10 11 12
Figura 7.4 – Transporte e espalhamento das forças equivalentes nodais (vindas das barras) e superposição com cargas nodais propriamente ditas para formar as cargas nodais combinadas para o exemplo com três barras da Figura 2.9.
No exemplo da Figura 7.4, os nós do modelo são mostrados isolados com os efeitos vindos das barras (cargas equivalentes nodais) indicados em cada nó. Na figura, também estão indicadas em cada nó as correspon-dentes componentes das cargas nodais propriamente ditas, que formam um vetor definido da seguinte ma-neira:
→}{P vetor das cargas nodais propriamente ditas no sistema global: conjunto de forças e momentos externos que atua diretamente sobre os nós (nas direções dos eixos globais). Considerando todos os graus de liber-dade do modelo, inclusive os que têm restrições de apoio, a dimensão desse vetor é igual à dimensão do vetor das forças nodais generalizadas.
100 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
O vetor {fe} de cargas equivalentes nodais de cada barra tem como dimensão o número de graus de liberdade da barra. Para somar as cargas equivalentes nodais com as cargas nodais propriamente ditas, é preciso “es-palhar” as cargas equivalentes nodais para a dimensão global do vetor {P}. Esse espalhamento é semelhante ao que ocorre na montagem da matriz de rigidez global. Na verdade, é mais simples, pois é um espalha-mento para um vetor e não para uma matriz.
De maneira informal, pode-se escrever a seguinte expressão para a montagem das cargas nodais combinadas no vetor das forças nodais generalizadas globais:
{ } { }∑ +=
barras
barra }{PfeF ,
sendo que esse somatório pressupõe um espalhamento prévio dos vetores das forças equivalentes nodais das barras para a dimensão do vetor {F}.
Finalmente, deve-se salientar que algumas componentes das cargas nodais combinadas atuam na direção de coordenadas generalizadas globais que correspondem a graus de liberdade restritos por apoios. Essas com-ponentes poderiam ser negligenciadas, pois uma força aplicada em um apoio que restringe o movimento na direção da força não produz efeito em termos de esforços internos: a força “morre” no apoio. Na verdade, as componentes das cargas nodais combinadas correspondentes aos graus de liberdade restritos por apoio são superpostas, com sentidos invertidos, diretamente às reações de apoio. A Seção 7.4.1 mostra um procedi-mento formal para determinar reações de apoio. O procedimento mais usado, entretanto, é descrito na Seção 8.1.
7.3. Interpretação do sistema de equações finais como imposição de equilíbrio aos nós isolados
A estratégia adotada no método dos deslocamentos (Figura 1.4) para resolver uma estrutura é superpor uma série de configurações cinemáticas (deformadas) que satisfazem a compatibilidade (os casos básicos) para, no somatório, atender as condições de equilíbrio. As configurações cinemáticas de cada caso básico satisfa-zem o equilíbrio, mas à custa de forças e momentos fictícios que atuam nas direções das deslocabilidades. Essas forças e momentos fictícios são os termos de carga e os coeficientes de rigidez de cada coluna da matriz [K] (Figura 7.1). O equilíbrio final da estrutura original é alcançado impondo-se que, na superposicão dos casos básicos, as forças e momentos fictícios sejam nulos.
O método da rigidez direta é apenas uma roupagem diferente para o método dos deslocamentos. A princi-pal diferença está na estratégia da montagem da matriz de rigidez global, conforme visto na Seção 7.1. Na verdade, é tudo a mesma coisa, até porque o sistema de equações de equilíbrio do método dos deslocamen-tos é o mesmo do método da rigidez. E é isso que se pretende demonstrar nesta seção.
O conceito de equilíbrio global do modelo discretizado no método da rigidez direta é o de equilíbrio dos nós isolados. Considerando que as barras isoladas estão em equilíbrio (garantido pelos coeficientes de rigidez da barra) e que existe compatibilidade de deslocamentos e rotações nas ligações da barras (garantida pelo rela-cionamento entre coordenadas generalizadas locais e globais), o equilíbrio global da estrutura é alcançado se todos os nós isolados estiverem em equilíbrio. Isso resulta em um sistema de equações, cada uma associada a uma coordenada generalizada global. Para auxiliar na explicação desse conceito, o exemplo das três barras é utilizado novamente, como ilustra a Figura 7.5.
A relação { } [ ] { }dkf ⋅= , dada pela Equação 5.14, fornece o conjunto de forças generalizadas locais que atua nas extremidades da barra (nas direções dos eixos globais) para equilibrá-la em uma dada configuração de-formada com valores arbitrários para as deslocabilidades no vetor {d}. Essas forças generalizadas represen-tam o efeito dos nós sobre a barra. O efeito da barra sobre seus dois nós é igual, mas com sentido invertido (a-ção e reação). Pode-se, então, definir o seguinte:
→−= }{}{ ffi vetor dos efeitos das deformações de uma barra sobre seus nós no sistema global: conjunto de forças e momentos que atua nos nós adjacentes a uma barra (nas direções dos eixos globais) resultante das de-formações sofridas pela barra.
A Figura 7.5 ilustra os efeitos dos vetores {fi} nos nós do exemplo com três barras. O somatório das contribu-ições dos vetores {fi} de todas as barras, precedido de um espalhamento para a dimensão global da estrutura, resulta em:

Capítulo 7: Sistema de equações globais de equilíbrio – 101
{ } { }∑=
barras
barrafiFi .
A definição do vetor resultante desse somatório é:
→}{Fi vetor dos efeitos das deformações de todas as barras de um modelo sobre seus nós no sistema global: conjunto de forças e momentos que atua em todos os nós do modelo (nas direções dos eixos globais) resultante das deformações sofridas pelas barras.
Forças generalizadas
globais (externas)
Forças generalizadas locais no sistema global
11f
1F
12f
13f
14f
15f
16f
21f 2
2f
23f
24f
25f
26f
31f
32f
33f
34f
35f
36f
2F
3F 4F
5F
6F
7F
8F 9F
10F
11F 12F
1F
2F 3F 11
11 ffi −=−
12
12 ffi −=
13
13 ffi −=
7F
8F
9F
14
14 ffi −=
15
15 ffi −=
16
16 ffi −=
31
31 ffi −=
32
32 ffi −=
33
33 ffi −=
10F 11F
12F 34
34 ffi −=
35
35 ffi −=
36
36 ffi −=
24
24 ffi −=
25
25 ffi −=
26
26 ffi −=
4F
5F 6F 21
21 ffi −=
22
22 ffi −=
23
23 ffi −=
Forças externas e forças internas (vindas das barras)
atuantes nos nós
Figura 7.5 – Equilíbrio nodal das forças generalizadas internas (vindas das barras) com as forças externas generalizadas.
Pode-se mostrar que:
{ } [ ] { }( ) { }DKdkFi ⋅−=⋅−= ∑ ][barras
barra ,
sendo,
→}{D vetor dos graus de liberdade globais do problema discreto, incluindo graus de liberdade restritos por apoio.
Novamente, esse somatório pressupõe um espalhamento das matrizes e vetores das dimensões locais das barras para as dimensões globais da estrutura.
O vetor {Fi} representa o efeito interno (da estrutura) sobre os nós. O vetor {F}, das forças generalizadas glo-bais, representa o efeito externo.
Por fim, impondo o equilíbrio de forças e momentos atuantes, internos e externos, nas direções de todas as coordenadas generalizadas globais, chega-se a:
{ } { } 0=+ FFi .
Ou seja,
{ } }{][ FDK =⋅ . (7.1)

102 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
Esse sistema representa o equilíbrio de todos os nós da estrutura, inclusive os restritos por apoio, nas dire-ções de todos os graus de liberdade. Alguns termos do vetor {D} dos graus de liberdade são conhecidos (res-trições de apoio). Os termos correspondentes do vetor {F} são desconhecidos (reações de apoio).
7.4. Consideração das condições de apoio
Até o presente ponto da formulação do método da rigidez direta não foram consideradas as condições de suporte na solução do problema. Matematicamente, isso se reflete no fato de que a matriz de coeficientes do sistema de equações indicado na Equação 7.1 é singular, e, por enquanto, não é possível resolver o sistema. Isso mesmo: a matriz de rigidez global resultante do processo de montagem definido na Seção 7.1 tem o de-terminante nulo. Para identificar isso, basta pensar que é possível um movimento de corpo rígido para o modelo, associado a um vetor dos graus de liberdade {D} com valores não nulos, mas com vetor de forças {F} nulos.
É evidente que, sem considerar as condições de apoio, o problema não tem solução. Esta seção apresenta três procedimentos usualmente adotados para modificar o sistema de equações de equilíbrio, considerando condições de suporte e, dessa forma, chegar a um sistema de equações que tem solução.
7.4.1. Particionamento do sistema de equações
A maneira mais formal para considerar as condições de apoio é através do particionamento do sistema de equações, o que é conseguido por meio de uma renumeração das coordenadas generalizadas globais, de tal maneira que as coordenadas correspondentes aos graus de liberdade restritos por apoio sejam numeradas por último. Um exemplo desse tipo de renumeração é mostrado na Figura 7.6 para o pórtico da Figura 2.2.
O algoritmo para fazer a renumeração é muito simples: basta percorrer os nós do modelo e numerar inicial-mente apenas as coordenadas com direções livres de restrição de apoio; em um segundo passo, numeram-se as coordenadas restantes. Com a renumeração das coordenadas generalizadas globais, a única modificação em relação ao procedimento descrito na Seção 7.1 para a montagem da matriz de rigidez global reside nos vetores de espalhamento {e} das barras: os índices de coordenadas generalizadas globais armazenados nesses vetores refletem a renumeração.
6
5
4
12
11
10 3
2
1
9 8
7 13
18 17
16
15
14
Coordenadas generalizadas globais
renumeradas
Figura 7.6 – Renumeração das coordenadas generalizadas globais do pórtico da Figura 2.2 para particionamento do sistema de equações de equilíbrio.
Após a renumeração, o sistema da Equação 7.1 pode ser subdivido em dois sistemas:
}{}{][}{][ lflflll FDKDK =⋅+⋅ ; (7.2)
}{}{][}{][ fffflfl FDKDK =⋅+⋅ . (7.3)
Nessas equações, o subscrito “ l ”se refere a livre, e o “ f ” se refere a fixo. O particionamento do sistema permite a identificação dos seguintes vetores:

Capítulo 7: Sistema de equações globais de equilíbrio – 103
→}{ lD vetor dos graus de liberdade globais livres: são as incógnitas do problema (desconhecidas);
→}{ lF vetor das cargas nodais combinadas nas direções dos graus de liberdade livres (conhecidas);
→}{ fD vetor dos graus de liberdade globais fixos: são os valores impostos pelas restrições de apoio (conhecidos); em geral, são nulos, a não ser para recalques de apoio (conhecidos);
→}{ fF vetor das forças nodais generalizadas nas direções dos graus de liberdade fixos: são as componentes de rea-ções da apoio (desconhecidas).
A Equação 7.2 pode ser manipulada, resultando em:
}{][}{}{][ flfllll DKFDK ⋅−=⋅ . (7.4)
O lado direito do sinal de igual dessa equação é totalmente conhecido, pois o vetor {Fl} corresponde às cargas nodais combinadas nas direções livres, e o vetor {Df} corresponde aos valores impostos nas restrições de a-poio.
O sistema da Equação 7.4 corresponde exatamente ao sistema obtido pelo método dos deslocamentos, que só considera deslocabilidades globais livres {Dl}. A solução desse sistema resulta na determinação dessas des-locabilidades.
A Equação 7.3, na verdade, não é um sistema a ser resolvido, pois o vetor {Dl} é conhecido após a solução da Equação 7.4. A Equação 7.3 fornece diretamente os valores das reações de apoio:
}{][}{][}{ ffflflf DKDKF ⋅+⋅= . (7.5)
Para complementar, deve-se superpor, às componentes de reações de apoio obtidas com base na Equação 7.5, eventuais cargas nodais combinadas aplicadas nos graus de liberdade restritos por apoio, com sentidos invertidos.
7.4.2. Diagonalização da linha e coluna da matriz de rigidez global correspondente ao grau de liberdade restrito
Neste procedimento, inicialmente, a matriz global [K] e o vetor das forças nodais generalizadas {F} são mon-tados sem levar em conta nenhuma condição de apoio. Para considerar o caso de uma restrição de apoio com um valor de deslocamento ou rotação imposto (recalque de apoio), é necessário modificar a matriz e o vetor. A seguir, mostra-se uma expansão do sistema de equações [ ]{ } { }FDK = , sem levar em conta o fato de que muitos termos da matriz [K] são nulos. Considere que o grau de liberdade Di tem deslocamento prescri-to ou rotação prescrita com valor ρi:
=
⋅
+
−
+
−
+
+−
−
n
i
i
i
n
i
i
i
nnin
ii
niiiiiiiii
ii
i
i
F
F
F
F
F
F
D
D
D
D
D
KK
K
KKKKKK
K
KKKK
KKKK
...
...
...
...
...
......
......
...
...
...
1
1
2
1
1
1
2
1
,,
,1
,1,,1,2,1,
,1
,23,22,21,2
,13,12,11,1
ρ
A i-ésima linha e a i-ésima coluna da matriz [K] e o vetor {F} são modificados da seguinte maneira:

104 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
⋅−
⋅−
⋅−
⋅−
⋅−
=
⋅
++
−−
+
−
iinn
iiii
i
iiii
ii
ii
n
i
i
i
nn KF
KF
KF
KF
KF
D
D
D
D
D
D
K
KKK
KKK
ρ
ρ
ρ
ρ
ρ
ρ
,
,11
,11
,22
,11
1
1
2
1
,
3,22,21,2
3,12,11,1
...
...
...
...
...0
......
0
0...010...00
0
...
0...
0...
A i-ésima linha da matriz fica com um “1” na diagonal principal e “0” nos outros termos. Nessa linha, a for-ça nodal generalizada Fi no vetor {F} é substituída pelo valor do recalque imposto ρi. Para manter a simetria da matriz de rigidez global, os outros termos da i-ésima coluna da matriz são anulados, sendo que os outros termos do vetor {F} são alterados como indicado, levando em conta que os termos anulados da matriz são os que multiplicam o valor conhecido do recalque de apoio. Dessa forma, o número de equações do sistema não se altera em relação ao número total de graus de liberdade (a dimensão da matriz [K] é mantida), Di con-tinua sendo uma incógnita, e a solução da i-ésima linha do sistema resulta para Di um valor igual ao recal-que imposto.
O procedimento deve ser aplicado para cada restrição de apoio. Considerando que um recalque de apoio não é o tipo de solicitação mais frequente, na maioria das vezes ρi = 0. Nesse caso, o único termo alterado do vetor {F} é o i-ésimo.
7.4.3. Inserção de um apoio elástico fictício com valor muito alto do coeficiente de rigidez
Este procedimento usa um artifício que soma ao termo da diagonal da matriz [K], correspondente ao grau de liberdade com recalque de apoio prescrito, um coeficiente de rigidez fictício Kg com valor muito grande (por exemplo, 104 vezes o maior valor entre os termos da diagonal principal de [K]), como se fosse um apoio elás-tico. O termo correspondente do vetor {F} é substituído por um valor igual a Kg vezes o valor do recalque de apoio:
( )
⋅=
⋅
+
+
−
+
−
+
+−
−
n
i
ig
i
n
i
i
i
nnin
ii
niiigiiiiii
ii
i
i
F
F
K
F
F
F
D
D
D
D
D
D
KK
K
KKKKKKK
K
KKKK
KKKK
...
...
...
...
...
......
......
...
...
...
1
1
2
1
1
1
2
1
,,
,1
,1,,1,2,1,
,1
,23,22,21,2
,13,12,11,1
ρ
Esse procedimento é um macete numérico conhecido. Como Kg tem um valor muito grande em relação aos outros coeficientes da matriz [K], na solução da i-ésima linha do sistema de equações, o valor de Kg ofusca os valores dos outros coeficientes, resultando em:
ig
igi
K
KD ρ
ρ=
⋅≈ .
Dessa forma, as modificações na matriz [K] e no vetor {F} são mínimas, as suas dimensões são mantidas, e não se afetam as outras linhas do sistema de equações que não estão relacionadas com a restrição de apoio.
8. OBTENÇÃO DE RESULTADOS DE ANÁLISE
O capítulo anterior tratou da montagem do sistema de equações globais de equilíbrio resultante da formula-ção discreta do método da rigidez direta para modelos de pórticos planos. Conforme salientado na Seção 7.3, esse sistema de equações pode ser interpretado como imposição do equilíbrio isolado de todos os nós do modelo. A solução desse sistema de equações resulta na determinação dos valores das deslocabilidades, isto é, valores das componentes de deslocamentos e rotações nodais livres (não restritas por apoios), que são as incógnitas do método da rigidez direta.
Os resultados de uma análise estrutural de modelos reticulados (formados por barras) vão além da determi-nação dos valores das deslocabilidades. Os resultados mínimos típicos de uma análise, conforme menciona-do na Seção 2.3 do Capítulo 2, são, além dos deslocamentos e rotações nodais, as componentes de reações de apoio e os esforços internos nas extremidades das barras. Este capítulo mostra procedimentos para determi-nação das reações de apoio, que correspondem aos valores das componentes de forças e momentos nos graus de liberdade restritos por suporte, e para determinação dos esforços internos nas extremidades das barras, que devem ser apresentados nas direções dos eixos locais das barras, pois correspondem aos esforços normais, esforços cortantes, momentos fletores etc. das barras. A exposição é feita para modelos de pórticos planos. Procedimentos análogos são realizados para o caso de modelos de grelhas.
8.1. Determinação de reações de apoio
A Seção 7.4.1 apresentou uma metodologia para a consideração de condições de apoio a partir do particio-namento do sistema de equações de equilíbrio. Tal metodologia possibilita uma determinação formal das reações de apoio da estrutura, como indica a Equação 7.5.
Entretanto, muitas vezes, para minimizar o uso de memória do computador ou para evitar cálculos desne-cessários, a segunda partição do sistema de equações de equilíbrio, dada pela Equação 7.3, não é implemen-tada. Quando isso ocorre, a segunda parcela do vetor do lado direito do sinal de igual da Equação 7.4 é de-terminada junto com a montagem da matriz de rigidez global. Dessa forma, o vetor –[Klf]⋅{Df} não é monta-do explicitamente. A alternativa é montar um vetor local –[klf]⋅{df} para cada barra adjacente a um grau de liberdade com recalque imposto e superpor esse vetor, precedido de um espalhamento, no vetor global no lado direito do sinal de igual da Equação 7.4. Observe que isso só é necessário se o valor imposto ao grau de liberdade for não nulo, isto é, quando existe um recalque de apoio.
Quando essa estratégia de solução é adotada, ou quando se considera as condições de apoio das maneiras mostradas nas Seções 7.4.2 e 7.4.3, é necessário algum procedimento para determinar as reações de apoio.
Um procedimento simples, usado com frequência, baseia-se nas forças generalizadas finais que atuam nas barras da estrutura. A Figura 8.1 é utilizada para explicar esse conceito. Considere, a título de exemplo, du-as barras com carregamento arbitrário convergindo em um nó com um engaste. As forças generalizadas fi-nais que atuam na barra são provenientes da solução local do estágio I e da solução global do estágio II, co-mo apresentado na Seção 2.1.

106 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
11f̂
12f̂ 1
3f̂
14f̂
15f̂
16f̂
21f̂
22f̂
23f̂
24f̂
25f̂2
6f̂Estágio I: reações de engastamento perfeito
no sistema global
Estágio II: forças generalizadas
provenientes das deformações das barras
Superposição para obter reações de apoio
21
21
14
14
ˆˆ ffffF x +++=
22
22
15
15
ˆˆ ffffF y +++=23
23
16
16
ˆˆ ffffM z +++=
11f
12f 1
3f
14f
15f
16f
21f
22f
23f
24f
25f2
6f
Figura 8.1 – Determinação de componentes de reação de apoio por superposição de forças generalizadas locais que atuam nas barras isoladas (nas direções dos eixos globais).
No estágio I, as forças que atuam nas extremidades de cada barra são dadas pelo vetor }ˆ{ f , que é o vetor das reações de engastamento de uma barra isolada no sistema global (Seção 7.2). Esse vetor é obtido com base nas reações de engastamento }ˆ{ f ′ da barra no sistema local (que é uma solução fundamental conhecida), utilizando a transformação da Equação 2.4.
No estágio II, as forças que atuam nas extremidades de cada barra são obtidas pelo vetor }{ f , que é o vetor das forças generalizadas de barra, no sistema global, provenientes das deformações sofridas pela barra. Re-solvido o sistema de equações de equilíbrio global e determinados os valores dos graus de liberdade livres, chega-se aos valores do vetor das deslocabilidades locais {d} da barra. Pela Equação 5.14, chega-se a
}]{[}{ dkf = .
Conforme ilustrado na Figura 8.1, as componentes das reações de apoio são obtidas superpondo os termos dos vetores }ˆ{ f e }{ f correspondentes aos graus de liberdade com restrição de apoio, considerando todas as barras que convergem no nó que tem a restrição de apoio. Observe que o sentido das componentes de rea-ção de apoio é o mesmo dos termos dos vetores }ˆ{ f e }{ f que atuam sobre as barras. Na figura, todos os termos dos dois vetores estão mostrados com seus sentidos positivos.
Para complementar, deve-se superpor, às componentes de reações de apoio obtidas, eventuais cargas nodais propriamente ditas aplicadas diretamente nos graus de liberdade restritos por apoio, com sentidos inverti-dos.
8.2. Determinação de esforços internos nas barras
Além dos deslocamentos e rotações nodais, e das reações de apoio, qualquer programa de computador que analisa estruturas reticuladas fornece como resultados os esforços internos (esforços normais, esforços cor-tantes e momentos fletores) nas extremidades de todas as barras. Conforme mencionado na Seção 2.3, esses resultados se referem a direções dos eixos locais, isto é, os esforços internos são fornecidos nas direções das coordenadas generalizadas locais no sistema local de cada barra. Os sinais dos esforços estão associados com os sentidos das coordenadas locais. Portanto, a convenção de sinais utilizada é a do método da rigidez direta (Tabela 2.1).
De acordo com a Seção 2.1, os esforços internos finais em uma barra descarregada são obtidos utilizando somente os resultados da análise discreta do estágio II. Nessa situação, os esforços internos dependem ape-nas das deformações que a barra sofre, que são definidas pelas deslocabilidades locais {d}. Nesse ponto da execução do programa de computador, essas deslocabilidades têm valores conhecidos, pois o sistema global de equações de equilíbrio já deve ter sido resolvido. Assim, os esforços internos nas extremidades de uma barra são obtidos em dois passos. No primeiro, calcula-se o vetor das forças generalizadas da barra no sis-tema global:
}]{[}{ dkf = .

Capítulo 7: Sistema de equações globais de equilíbrio – 107
No segundo passo, transforma-se esse vetor para o sistema local:
}{][}{ fRf ⋅=′ .
Alternativamente pode-se determinar o vetor das forças generalizadas de uma barra no sistema local calcu-lando inicialmente o vetor das deslocabilidades da barra no sistema local, utilizando a Equação 2.1, e, em seguida, multiplicando pela matriz de rigidez da barra no sistema local, como indica a Equação 5.2:
}{][}{ dRd ⋅=′ ;
{ } [ ] { }dkf ′⋅′=′ .
Para uma barra descarregada, as componentes desse vetor já são os esforços internos nas extremidades da barra.
Para uma barra com carregamento no seu interior, também conforme a Seção 2.1, além dos esforços internos provenientes das deformações da barra (estágio II), é necessário sobrepor as reações de engastamento }ˆ{ f ′ do estágio I no sistema local da barra. A Figura 8.2 ilustra essa superposição. Nessa figura, Ni e Nj são os esforços normais nas extremidades inicial e final da barra, respectivamente; Qi e Qj são os esforços cortantes; e Mi e Mj são os momentos fletores. Na figura, todos os esforços internos estão indicados com sentidos posi-tivos.
5f̂ ′
6f̂ ′ 4f̂ ′
2f̂ ′3f̂ ′
1f̂ ′
Estágio I: reações de engastamento perfeito
no sistema local
Estágio II: forças generalizadas
provenientes das deformações das barras
Superposição para obter esforços internos nas
extremidades
5f ′
6f ′4f ′
2f ′3f ′
1f ′
jQ
jMjN
iQiM
iN
11ˆ ffN i ′+′=
22ˆ ffQi ′+′=
33ˆ ffMi ′+′=
44ˆ ffN j ′+′=
55ˆ ffQ j ′+′=
66ˆ ffM j ′+′=
Figura 8.2 – Determinação de esforços internos finais nas extremidades de uma barra por superposição de forças generalizadas locais (nas direções dos eixos locais).
Observa-se que, nas etapas finais da determinação de reações de apoio e esforços internos, utilizam-se a ma-triz de rigidez [k] e a matriz de transformação por rotação [R] de cada barra. As duas matrizes são calcula-das na etapa anterior de montagem da matriz de rigidez global (Seções 5.1 e 7.1). A questão que surge é se essas matrizes são armazenadas na memória do computador ou se são recalculadas nas etapas finais. A es-colha entre as duas alternativas depende de vários fatores. Esse balanço entre uso de memória de computa-dor (matrizes armazenadas para serem utilizadas nas fases finais) e eficiência (não se repetem os cálculos) é constante em qualquer implementação computacional.
Deve-se salientar, também, que os procedimentos descritos para determinar reações de apoio e esforços in-ternos são completamente genéricos, isto é, podem ser utilizados para qualquer tipo de barra, com e sem articulação, inclusive para barras com seção transversal variável.
8.3. Considerações finais
Este livro apresentou um resumo dos principais conceitos do método da rigidez direta, aplicado para uma análise de pórticos planos, com comportamento estático, linear e elástico. Procurou-se dar um enfoque con-ceitual sobre o método, sem focar em sua implementação computacional. Apenas alguns detalhes de im-plementação foram comentados. O que se pretende é que, com os conceitos apresentados, uma pessoa en-

108 – Método da rigidez direta para modelos estruturais lineares e elásticos – Luiz Fernando Martha
tenda o que é realizado por um programa de computador para uma análise desse tipo, sem precisar entender como ele é implementado.
Além disso, a notação matricial utilizada facilita uma generalização dos conceitos para outros tipos de mode-los estruturais. Dessa forma, por analogia, pode-se estender a aplicação do método.
Os procedimentos subsequentes para a aplicação do método da rigidez direta para treliças planas são análo-gos aos procedimentos para pórticos planos.
Todos os outros passos para a análise de uma grelha pelo método da rigidez direta são semelhantes aos des-critos para pórticos planos. Pode-se observar que o método é relativamente simples e genérico. A extensão para pórticos espaciais também é direta.
Além disso, conforme comentado ao longo da Seção 1, o método da rigidez direta pode ser generalizado pa-ra modelos contínuos, resultando no método dos elementos finitos com formulação em deslocamentos para o problema estrutural. Isso é apenas uma interpretação (bastante simplista) para o método dos elementos finitos, pois este tem uma dedução bem mais geral, baseada em uma formulação variacional e integral. En-tretanto, para um estudante ou profissional com formação em engenharia civil ou engenharia mecânica, a interpretação de que o método da rigidez direta é um caso particular do método dos elementos finitos pode facilitar muito o entendimento deste segundo.


















