M¶etodos dos Elementos Finitos - ime.unicamp.brsoniag/book_pulino.pdf · M¶etodos dos Elementos...
45
M´ etodos dos Elementos Finitos Aspectos Te´ oricos, Computacionais e Aplica¸ c˜ oes Petronio Pulino Departamento de Matem´atica Aplicada Instituto de Matem´atica, Estat´ ısticaeComputa¸c˜aoCient´ ıfica Universidade Estadual de Campinas Caixa Postal 6065, CEP 13083-859, Campinas–SP, Brasil e-mail: [email protected]
Transcript of M¶etodos dos Elementos Finitos - ime.unicamp.brsoniag/book_pulino.pdf · M¶etodos dos Elementos...

Metodos dos Elementos FinitosAspectos Teoricos, Computacionais e Aplicacoes
Petronio PulinoDepartamento de Matematica Aplicada
Instituto de Matematica, Estatıstica e Computacao Cientıfica
Universidade Estadual de Campinas
Caixa Postal 6065, CEP 13083-859, Campinas–SP, Brasil
e-mail: [email protected]

Conteudo
1 Interpolacao Polinomial 1
1.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 O Problema de Interpolacao Polinomial . . . . . . . . . . . . . . . . . . . . 1
1.2.1 Base de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 Metodo da Matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Interpolacao Polinomial de Lagrange . . . . . . . . . . . . . . . . . . . . . 5
1.4 Analise de Erro da Interpolacao Polinomial . . . . . . . . . . . . . . . . . . 6
1.5 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Espacos de Elementos Finitos 9
2.1 Espacos de Lagrange Polinomial por Partes . . . . . . . . . . . . . . . . . . 9
2.1.1 Espaco das Funcoes de Lagrange Lineares . . . . . . . . . . . . . . 11
2.1.2 Espaco das Funcoes de Lagrange Quadraticas . . . . . . . . . . . . 14
2.2 Espaco das Funcoes Cubicas de Hermite . . . . . . . . . . . . . . . . . . . 17
2.3 Interpolacao Polinomial por Partes . . . . . . . . . . . . . . . . . . . . . . 22
2.3.1 Erro da Interpolacao Polinomial por Partes . . . . . . . . . . . . . . 23
2.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Problema Variacional Simetrico 27
3.1 Formas Bilineares. Continuidade e Coercividade . . . . . . . . . . . . . . . 27
3.1.1 Exemplo de Forma Bilinear Contınua e Coerciva . . . . . . . . . . . 28
3.2 Formas Lineares. Continuidade . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2.1 Exemplo de Forma Linear Contınua . . . . . . . . . . . . . . . . . . 30
3.3 Problema Variacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4 Problema de Minimizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Metodo de Galerkin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5.1 Exemplos de Problemas Variacionais Simetricos . . . . . . . . . . . 33
3.6 Teorema de Lax–Milgram . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
i

ii CONTEUDO
3.6.1 Interpretacao Geometrica para Solucao de Galerkin . . . . . . . . . 36
3.7 Problema Variacional de Valores de Contorno . . . . . . . . . . . . . . . . 37
Bibliografia 41

Capıtulo 1
Interpolacao Polinomial
1.1 Introducao
Neste capıtulo vamos fazer uma breve introducao ao problema de interpolacao polino-
mial, apresentando dois metodos de construcao do polinomio interpolador e a analise de
erro da interpolacao polinomial. Os conceitos e os resultados das proximas secoes serao
funtamentais para o estudo dos Metodos de Elementos Finitos que iremos estudar nos
capıtulos que seguem. Podemos indicar as referencias (Conte, 1980) e (Rappaz, 1998)
para um estudo mais detalhado sobre interpolacao polinomial.
1.2 O Problema de Interpolacao Polinomial
Seja f : [a, b] −→ IR uma funcao contınua e Π uma particao qualquer de [a, b] , isto
e, Π : a = x0 < x1 < · · · < xn = b . Queremos construir um polinomio de grau ≤ n
que satisfaca as condicoes de interpolacao pura, isto e,
p(xi) = f(xi) ; i = 0, 1, · · · , n . (1.1)
O polinomio p construıdo com as condicoes acima e denominado de polinomio interpo-
lador da funcao f nos pontos da particao Π . A seguir mostraremos a Unicidade do
Polinomio Interpolador
Vamos considerar que existam dois polinomios de grau ≤ n , p e q , que interpolam a
funcao f nos pontos da particao Π , isto e,
p(xi) = f(xi) ; i = 0, 1, · · · , n , (1.2)
1

2 Metodos dos Elementos Finitos
q(xi) = f(xi) ; i = 0, 1, · · · , n . (1.3)
Desse modo, temos que o polinomio r = p − q que e de grau ≤ n possui n + 1
raızes distintas, que sao os pontos de interpolacao x0, · · · , xn . De fato
r(xi) = p(xi) − q(xi) = 0 ; i = 0, 1, · · · , n . (1.4)
Portanto, temos que o polinomio r e identicamente nulo, e podemos concluir que p = q .
Provamos desse maneira a unicidade do polinomio interpolador.
Podemos observar que o Problema de Interpolacao Polinomial consiste em encontrar um
polinomio p ∈ Pn([a, b]) satisfazendo as condicoes (1.1), onde Pn([a, b]) e o espaco
vetorial real dos polinomios de grau ≤ n definidos em [a, b] .
A seguir, vamos apresentar alguns metodos para a construcao do polinomio interpo-
lador que sao baseados simplesmente na escolha da base para o espaco vetorial Pn([a, b]) .
Sabemos que dada uma particao Π de [a, b] o polinomio interpolador e unico, indepen-
dendo do metodo pelo qual foi construıdo.
1.2.1 Base de Lagrange
Dada uma particao qualquer de [a, b] , isto e, Π : a = x0 < x1 < · · · < xn = b ,
queremos construir polinomios Li para i = 0, 1, · · · , n , de grau n que satisfazem
as seguintes condicoes
Li(xj) =
{1 se i = j
0 se i 6= j .
Como Li e um polinomio de grau n com n raızes distintas nos pontos
x0, x1, · · · , xi−1, xi+1, · · · , xn , podemos escreve-lo da seguinte forma:
Li(x) = ci(x− x0)(x− x1) · · · (x− xi−1)(x− xi+1) · · · (x− xn)
e impondo a condicao de que Li(xi) = 1 obtemos o valor para a constante ci :
ci =1
(xi − x0)(xi − x1) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xn).
Podemos mostrar que o conjunto Γ = { L0, · · · , Ln } e linearmente independente no
espaco vetorial Pn([a, b]) que tem dimensao n + 1 , portanto pode ser considerado

Capıtulo 1. Interpolacao Polinomial 3
como uma base para Pn([a, b]) . Neste caso, dizemos que os polinomios L0, · · · , Ln
formam a base de Lagrange para Pn([a, b]) associada aos pontos x0, x1, · · · , xn .
Desse modo, temos que ∀ p ∈ Pn([a, b]) e escrito da seguinte forma:
p(x) = α0L0(x) + α1L1(x) + · · · + αnLn(x) , (1.5)
onde
~α =
α0
α1
...
αn
∈ IRn+1
e o vetor de coordenadas de p com relacao a base Γ .
1.2.2 Metodo da Matriz
Consideremos o espaco vetorial Pn([a, b]) com a base canonica, isto e,
β = { 1, x, x2, · · · , xn } ,
desse modo temos que ∀ p ∈ Pn([a, b]) e escrito da seguinte forma:
p(x) = c0 + c1x + · · · + cnxn , (1.6)
onde
~c =
c0
c1
...
cn
∈ IRn+1
e o vetor de coordenadas de p com relacao a base canonica β .
Queremos encontrar um polinomio p ∈ Pn([a, b]) satisfazendo as condicoes de inter-
polacao pura (1.1). Considerando que o polinomio p esta escrito na forma (1.6), temos
as seguintes equacoes dadas pelas condicoes (1.1)
p(xi) = c0 + c1xi + · · · + cnxni = f(xi) , i = 0, 1, · · · , n . (1.7)

4 Metodos dos Elementos Finitos
Desse modo, para cada ponto xi ∈ Π para i = 0, 1, · · · , n as equacoes (1.7)
formam um sistema linear com n + 1 equacoes a n + 1 incognitas c0, · · · , cn .
Vamos escrever as equacoes (1.7) na forma matricial. Assim a matriz do sistema linear
fica dada por:
A =
1 x0 · · · xn0
1 x1 · · · xn1
......
...
1 xi · · · xni
......
...
1 xn · · · xnn
(1.8)
que e denominada Matriz de Vandermonde associada aos pontos x0, x1, · · · , xn .
O vetor do lado direito do sistema linear fica dado por
~b =
f(x0)
f(x1)...
f(xn)
∈ IRn+1
Assim o sistema linear definido em (1.7) pode ser reescrito da seguinte forma
A~c = ~b . (1.9)
Portanto, o problema de Interpolacao Polinomial se resume na resolucao de um sistema
linear de ordem n + 1 , cuja solucao e o vetor de coordenadas do polinomio interpolador,
da funcao f nos pontos da particao Π , com relacao a base canonica para Pn([a, b]) .
Como o polinomio interpolador e unico, e fica bem determinado pelo vetor de coorde-
nadas, podemos concluir que o sistema linear dado pela matriz de Vandermonde possui
solucao unica.
Sabemos que o custo computacional para obtermos a solucao numerica do sistema linear
(1.9) pelo Metodo de Decomposicao LU , ou pelo Metodo de Eliminacao Gaussiana, e da
ordem de ( n + 1 )3/3 . Podemos dizer que todo custo computacional para a obtencao do
polinomio interpolador pelo Metodo da Matriz esta na resolucao do sistema linear, pois
a avaliacao do polinomio pode ser feita de maneira eficiente e barata pela regra de Horner.

Capıtulo 1. Interpolacao Polinomial 5
Sabemos que a estabilidade do sistema linear definido pela matriz de Vandermonde esta
relacionada com a escolha dos pontos de interpolacao, bem como com a ordem da matriz.
A seguir vamos apresentar um metodo mais elegante de construcao do polinomio inter-
polador que nao necessita da resolucao de um sistema linear. Portanto, nao temos que
nos preocupar com a estabilidade da solucao numerica e nem com o fato de termos que
armazenar uma matriz cheia, como e o caso da matriz de Vandermonde.
1.3 Interpolacao Polinomial de Lagrange
Seja f : [a, b] −→ IR uma funcao contınua e Π uma particao qualquer de [a, b] , isto e,
Π : a = x0 < x1 < · · · < xn = b. Queremos construir um polinomio p ∈ Pn([a, b]) ,
considerando o espaco vetorial Pn([a, b]) com a base de Lagrange associada aos pontos
de interpolacao e que satisfaca as condicoes de interpolacao pura (1.1), isto e,
p(xi) = f(xi) ; i = 0, 1, · · · , n .
O polinomio p construıdo com as condicoes acima e denominado polinomio interpolador
de Lagrange da funcao f nos pontos da particao Π . Considerando que o polinomio p
e representado como em (1.5) e impondo as condicoes de interpolacao pura, tem-se que
n∑j=0
αj Lj(xi) = f(xi) ; i = 0, 1, · · · , n . (1.10)
Como Lj(xi) = δij temos que as coordenadas do polinomio interpolador de Lagrange
sao dadas por
αi = f(xi) ; i = 0, 1, · · · , n .
Desse modo, o polinomio interpolador fica escrito da seguinte forma:
p(x) =n∑
j=0
f(xj) Lj(x) ; ∀ x ∈ [a, b] . (1.11)
Podemos observar que as coordenadas do polinomio interpolador de Lagrange sao obtidas
sem nenhum custo computacional. Entretanto todo custo operacional esta na construcao
dos polinomios de Lagrange, Li para i = 0, 1, · · · , n , associados aos pontos de
interpolacao. Neste caso, como nao temos que resolver um sistema linear evitamos a
instabilidade numerica na construcao do polinomio interpolador.

6 Metodos dos Elementos Finitos
1.4 Analise de Erro da Interpolacao Polinomial
Teorema 1.1 Seja f ∈ C(n+1)([a, b]) e pn ∈ Pn([a, b]) o polinomio interpolador da
funcao f nos pontos da particao Π : a = x0 < x1 < . . . < xn = b. Entao, para todo
x ∈ [a, b] , existe pelo menos um ponto ξ = ξ(x) ∈ (a, b) tal que
e(x) = f(x)− pn(x) =W (x)
(n + 1)!f (n+1)(ξ) , (1.12)
onde W (x) = (x− x0)(x− x1) · · · (x− xn) .
Considerando uma particao regular de [a, b] , isto e, h = xk+1 − xk para todo
k = 0, 1, · · · , (n− 1) , podemos mostrar que a funcao W satisfaz a desigualdade
|W (x) | ≤ hn+1
4n! ; ∀ x ∈ [a, b] . (1.13)
Assim, temos a seguinte Estimativa para o Erro da Interpolacao Polinomial
| e(x) | ≤ hn+1
4(n + 1)max{
∣∣ f (n+1)(x)∣∣ ; a ≤ x ≤ b } . (1.14)
A estimativa dada por (1.14) tem uma utilizacao pratica maior do que a expressao para
o erro (2.12), como veremos mais adiante. Para a demonstracao do Teorema 1.1 vamos
precisar dos seguintes teoremas.
Teorema 1.2 ( Teorema de Rolle ) Seja ϕ : [a, b] −→ IR uma funcao contınua e
diferenciavel em (a, b) . Se ϕ(a) = ϕ(b) , entao existe pelo menos um ponto ξ ∈ (a, b)
tal que ϕ′(ξ) = 0 .
Teorema 1.3 ( Extensao do Teorema de Rolle ) Seja ϕ : [a, b] −→ IR uma
funcao de classe C(n+1)([a, b]) . Se a funcao ϕ possui (n + 2) zeros em [a, b] , entao
existe pelo menos um ponto ξ ∈ (a, b) tal que ϕ(n+1)(ξ) = 0 .
Demonstracao do Teorema 1.1 Considere um ponto x ∈ (a, b) ; x /∈ Π , fixo porem
arbitrario. Vamos construir uma funcao auxiliar da seguinte forma
ϕ(x) = [ f(x) − pn(x) ] − W (x)
W (x)[ f(x) − pn(x) ] ; x ∈ [a, b] . (1.15)
Agora, basta verificar que a funcao ϕ satisfaz as hipoteses da Extensao do Teorema
de Rolle. Do mesmo, modo podemos verificar que a funcao ϕ e uma funcao de classe
C(n+1)([a, b]) e que possui (n+2) zeros em [a, b] . Em seguida, aplicamos sucessivamente
o Teorema de Rolle as funcoes ϕ , ϕ′ , · · · , ϕ(n+1) .

Capıtulo 1. Interpolacao Polinomial 7
1.5 Exercıcios
Exercıcio 1.1 Mostre que os polinomios de Lagrange L0, · · · , Ln , associados aos
pontos de interpolacao x0, x1, · · · , xn , formam um conjunto linearmente independente
no espaco vetorial Pn([a, b]) .
Exercıcio 1.2 Construa a base de Lagrange para o espaco vetorial P2([−1, 1]) asso-
ciada aos pontos x0 = −1 , x1 = 0 e x2 = 1 . Faca o esboco do grafico de cada
uma das funcoes da base de Lagrange.
Exercıcio 1.3 Encontre o polinomio p ∈ P2([−1, 1]) tal que p(−1) = 8 ,
p(0) = 3 e p(1) = 6 , utilizando a base de Lagrange obtida no exercıcio anterior.
Exercıcio 1.4 Idem o exercıcio 1.3 utilizando o Metodo da Matriz.
Exercıcio 1.5 Considere a seguinte funcao f(x) = sin(πx/2) ; x ∈ [−1, 1] .
Construir o polinomio interpolador de f nos pontos x0 = −1 , x1 = 0 e x2 = 1 .
Faca uma estimativa do erro da interpolacao polinomial utilizando (1.14)
Exercıcio 1.6 Seja f uma funcao contınua definida no intervalo [−1, 1] e
p ∈ P2([−1, 1]) o polinomio que interpola f nos pontos x0 = −1 , x1 = 0 e
x2 = 1 . Calcule∫ 1
−1p(x)dx em funcao dos valores f(−1) , f(0) e f(1) . Verifique
que a formula obtida coincide com a regra de Simpson.
Exercıcio 1.7 Termine de escrever os detalhes da demonstracao do Teorema 1.1.
Exercıcio 1.8 Mostre a desigualdade (2.13).

8 Metodos dos Elementos Finitos

Capıtulo 2
Espacos de Elementos Finitos
Neste capıtulo vamos abordar o problema da interpolacao polinomial por partes. Cons-
truiremos as bases de Lagrange para os espaco das Funcoes de Lagrange Polinomiais por
Partes e para as Funcoes Cubicas de Hermite, bem como faremos uma analise de erro
para cada uma das interpolacoes. Esses espaco sao utilizados no Metodo de Galerkin que
iremos estudar nos capıtulos 5 e 6. Para um estudo mais profundo sobre interpolacao
polinomial por partes e suas aplicacoes nos Metodos de Elementos finitos podemos citar
(Axelsson, 1984) e (Rappaz, 1998).
2.1 Espacos de Lagrange Polinomial por Partes
Podemos observar que a estimativa do erro da Interpolacao Polinomial, dada por (1.14),
depende fortemente do comportamento de fn+1 . Assim, quando estamos interpolando
uma funcao, em pontos equidistantes, por um polinomio de grau muito elevado o erro
vai depender se as derivadas de ordem (n + 1) da funcao f ficam limitadas ou nao .
Temos um exemplo muito interessante de um problema de interpolacao polinomial onde
a funcao e infinitamente continuamente diferenciavel, mas suas derivadas crescem muito
rapidamente fazendo com que o polinomio interpolador fique cada vez mais afastado da
funcao conforme vamos aumentando o seu grau.
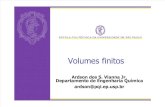
Exemplo 2.1 Considere a funcao f(t) = 1 / ( 1 + 25t2 ) para t ∈ [−1, 1] . A
funcao f possui derivada contınua de qualquer ordem no intervalo [−1, 1] , entretanto
tem-se que∣∣ f (n+1)(0)
∣∣ cresce muito rapido quando n cresce. A Figura 2.1 mostra este
fenomeno, que e denominado de fenomeno de Runge, para polinomios interpoladores
pn ∈ Pn([−1, 1]) , em pontos equidistantes, nos casos em que n = 5 e n = 10.
9

10 Metodos dos Elementos Finitos
−1 −0.5 0 0.5 1−0.5
0
0.5
1
1.5
2
−1 −0.5 0 0.5 1−0.5
0
0.5
1
1.5
2
Figura 2.1: Fenomeno de Runge: Interpolantes de grau 5 e 10
Temos duas maneiras muito eficientes para evitar o fenomeno de Runge. A primeira
e na escolha dos pontos de interpolacao. A escolha e feita observando que o erro da
Interpolacao Polinomial, dado por (2.13), depende dos pontos de interpolacao atraves da
funcao W . Assim, vamos escolher os pontos de interpolacao de modo que tenhamos
min { max { |W (x) | ; x ∈ [a, b] } ; Π } . (2.1)
A escolha adequada dos pontos de interpolacao para o problema apresentado no exemplo
2.1 sao os zeros do polinomio de Chebyshev Tn+1 , denominados Pontos de Inter-
polacao de Chebyshev, que sao dados por:
tj = − cos(2j + 1
2n + 2π ) ; j = 0, 1, · · · , n . (2.2)
No caso em que estamos trabalhando no intervalo [a, b] , basta fazer uma mudanca de
variavel para obtermos os pontos de interpolacao adequados:
xj =(b + a)
2+
(b− a)
2tj ; j = 0, 1, · · · , n . (2.3)
Vamos deixar como exercıcio para o leitor refazer o exemplo 2.1 utilizando os zeros de
Tn+1 como pontos de interpolacao para obter o polinomio interpolador pn da funcao f .
A segunda maneira para evitar o fenomeno de Runge esta na escolha do espaco de
funcoes no qual vamos buscar a funcao interpolante. Vamos fazer a interpolacao nao
em Pn([a, b]) , mas em determinados espacos de funcoes onde seus elementos sao po-
linomios por partes, definidos em uma particao qualquer de [a, b] . Esses espacos de
funcoes sao denominados Espacos de Elementos Finitos, que passaremos a definir a
seguir. Os espacos de Elementos Finitos sao muito utilizados nao somente em problemas

Capıtulo 2. Espacos de Elementos Finitos 11
de interpolacao, mas tambem em problemas de quadrados mınimos e na obtencao de uma
solucao aproximada para problemas de valores de contorno por metodos variacionais. Os
metodos variacionais serao abordados em um capıtulo especial.
Digamos que o fenomeno de Runge seria uma motivacao para o estudo dos espacos de
elementos finitos, bem como dos metodos variacionais, dentre os quais podemos menci-
onar o metodo dos quadrados mınimos e o metodo de Galerkin. Entretanto, uma outra
motivacao esta baseada no fato que, em geral, os metodos de aproximacao de funcoes
requerem a resolucao de um sistema linear. Quando utilizamos os espacos de elementos
finitos, a matriz do sistema linear resultante do metodo de aproximacao tem sempre uma
estrutura especial de esparsidade , o que facilita o seu armazenamento no que se refere a
economia de memoria. A combinacao de espacos de elementos finitos e metodos variacio-
nais resulta em sistemas lineares com boas propriedades de estabilidade numerica, o que
e uma nova motivacao para o estudos desses topicos.
Definiremos a seguir os Espacos de Funcoes de Lagrange Polinomial por Partes.
Dada uma particao qualquer de [a, b] , isto e, Π : a = x0 < x1 < · · · < xn = b ,
seja Ld(Π) o conjunto das funcoes definidas no intervalo [a, b] com as propriedades:
∀ s ∈ Ld(Π) , tem-se que
s(x) = p(x) ∈ Pd(K) ; x ∈ K = [xk−1, xk] (2.4)
s ∈ C([a, b]) , (2.5)
isto e, s e um polinomio de grau menor ou igual a d em cada subintervalo K =
[xk−1, xk] e uma funcao contınua no intervalo [a, b]. Podemos mostrar que Ld(Π) e um
subespaco vetorial de C([a, b]) com dim( Ld(Π) ) = nd + 1 . e importante observar que
nos espacos Ld(Π) o grau do polinomio em cada subintervalo K e sempre o mesmo,
independendo do numero de subintervalos da particao Π. Assim, evitamos o fenomeno
de Runge nos problemas de interpolacao.
2.1.1 Espaco das Funcoes de Lagrange Lineares
De acordo com a definicao do espaco Ld(Π) temos as propriedades das funcoes no
espaco L1(Π) que e denominado de Espaco das Funcoes de Lagrange Lineares
por Partes.

12 Metodos dos Elementos Finitos
Assim temos que, ∀ s ∈ L1(Π)
s(x) = p(x) ∈ P1(K) ; x ∈ K = [xk−1, xk] (2.6)
s ∈ C([a, b]) . (2.7)
A seguir, vamos construir as funcoes em L1(Π) e mostrar que este e um subespaco
vetorial de C([a, b]) com dim( L1(Π) ) = n + 1 . Neste caso, temos que a restricao
de uma funcao que pertence a L1(Π) e sempre um polinomio de grau menor ou igual
a 1 em cada subintervalo, isto e , s|K = p ∈ P1(K) . O espaco L1(Π) tambem e
denominado Espaco das Funcoes Splines Lineares.
Vamos considerar a base de Lagrange para o espaco vetorial P1(K) associada aos
pontos xk−1 e xk , com o objetivo de utiliza-la na representacao da restricao da funcao
s aos subintervalos K = [xk−1, xk].
Denotando por λ(k)1 e λ
(k)2 as funcoes da base de Lagrange para P1(K) , tem-se que:
λ(k)1 (x) = ( xk − x ) / hk (2.8)
λ(k)2 (x) = ( x − xk−1 ) / hk , (2.9)
onde hk = xk − xk−1 e o comprimento do k-esimo subintervalo. Desse modo, temos
que ∀ s ∈ L1(Π) pode ser escrita da seguinte forma:
s(x) = αk1 λ
(k)1 (x) + αk
2 λ(k)2 (x) ; x ∈ K . (2.10)
As funcoes λ(k)1 e λ
(k)2 sao chamadas de Funcoes de Base Local, no k-esimo subin-
tervalo, do espaco L1(Π) .
A partir da definicao de base local, vamos construir as funcoes que sao denominadas
Funcoes de Base Global do espaco L1(Π) associadas aos pontos xj da particao Π .
Denotando por ϕ0 , ϕ1 , · · · , ϕj , · · · , ϕn as funcoes da base global e considerando as
equacoes (2.8) − (2.10) , temos que:
ϕ0(x) =
( x1 − x ) / h1 ; se x ∈ [x0, x1]
0 ; caso contrario.
(2.11)

Capıtulo 2. Espacos de Elementos Finitos 13
ϕj(x) =
( x − xj−1 ) / hj ; se x ∈ [xj−1, xj]
( xj+1 − x ) / hj+1 ; se x ∈ [xj, xj+1]
0 ; caso contrario.
(2.12)
ϕn(x) =
( x − xn−1 ) / hn ; se x ∈ [xn−1, xn]
0 ; caso contrario.
(2.13)
-
6
0¢¢¢¢¢¢¢¢¢
AA
AA
AA
AAA
¢¢¢¢¢¢¢¢¢
AA
AA
AA
AAA
r r r r r r rx0 x1 xj−1 xj xj+1 xn−1 xn
ϕ0(x) ϕj(x) ϕn(x)1
Figura 2.2: Funcoes de base para o subespaco L1(Π)
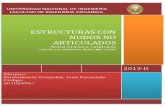
Podemos mostrar que as funcoes ϕ0 , ϕ1 , · · · , ϕj , · · · , ϕn , ilustradas na Figura 2.2,
sao linearmente independentes e formam uma base para o espaco L1(Π) . Observamos
tambem que as funcoes ϕj possuem a seguinte propriedade
ϕj(xi) = δij ; 0 ≤ i , j ≤ n , (2.14)
fazendo com que essas funcoes sejam denominadas funcoes de base nodais. O espaco
L1(Π) sera muito utilizado nos Metodos de Elementos Finitos que vamos estudar nos
proximos capıtulos. Portanto, temos que toda funcao s ∈ L1(Π) pode ser escrita de
modo unico da seguinte forma:
s(x) =n∑
j=0
αj ϕj(x) . (2.15)

14 Metodos dos Elementos Finitos
2.1.2 Espaco das Funcoes de Lagrange Quadraticas
Os elementos do espaco L2(Π) , que e denominado Espaco das Funcoes de Lagrange
Quadraticas por Partes, tem as seguintes propriedades : para toda s ∈ L2(Π)
s(x) = p(x) ∈ P2(K) ; x ∈ K = [xk−1, xk] (2.16)
s ∈ C([a, b]) . (2.17)
A seguir, vamos construir as funcoes em L2(Π) e mostrar que L2(Π) e um subespaco
vetorial de C([a, b]) com dim( L2(Π) ) = 2n + 1 . Neste caso, temos que a restricao
de uma funcao que pertence a L2(Π) e sempre um polinomio de grau menor ou igual
a 2 em cada subintervalo, isto e , s|K = p ∈ P2(K) .
Vamos considerar a base de Lagrange para o espaco vetorial P2(K) associada aos pon-
tos xk−1 , xk e xk , onde xk e o ponto medio do k-esimo subintervalo K = [xk−1, xk].
Denotamos por β(k)1 , β
(k)2 e β
(k)3 as funcoes da base de Lagrange para P2(K) , que
podem ser construıdas em funcao da base de Lagrange para P1(K) da seguinte forma
β(k)1 (x) = λ
(k)1 (x) ( 2 λ
(k)1 (x) − 1 ) (2.18)
β(k)2 (x) = 4 λ
(k)1 (x) λ
(k)2 (x) (2.19)
β(k)3 (x) = λ
(k)2 (x) ( 2 λ
(k)2 (x) − 1 ). (2.20)
Desse modo, temos que toda funcao s ∈ L2(Π) pode ser escrita da seguinte forma:
s(x) = αk1 β
(k)1 (x) + αk
2 β(k)2 (x) + αk
3 β(k)3 (x) ; x ∈ K = [xk−1, xk] . (2.21)
As funcoes β(k)1 , βk
2 e β(k)3 sao chamadas Funcoes de Base Local, no k-esimo
subintervalo, do espaco L2(Π) . A partir da definicao de base local, vamos construir as
funcoes que sao denominadas Funcoes de Base Global do espaco L2(Π) associadas
aos pontos x0, x1, · · · , xj, · · · , xn da particao Π e tambem aos pontos medios de
cada subintervalo x1 ∈ [x0, x1], · · · , xk ∈ [xk−1, xk], · · · , xn ∈ [xn−1, xn] . Desse modo,
teremos 2n + 1 funcoes de base nodais para o espaco L2(Π) .

Capıtulo 2. Espacos de Elementos Finitos 15
Denotamos por β0 , β1 , · · · , β2k−1 , β2k , · · · , β2n−1 , β2n as funcoes da base
global. Por convencao, as funcoes com enumeracao par estao associadas aos pontos da
particao Π e as funcoes com enumeracao ımpar estao associadas aos pontos medios dos
subintervalos. Considerando as equacoes (2.18)–(2.20), temos que:
a funcao β0 associada ao ponto x0 e dada por
β0(x) =
β(1)1 (x) ; se x ∈ [x0, x1]
0 ; caso contrario.
(2.22)
As funcoes β2k associadas aos pontos xk ∈ Π para k = 1, · · · , (n− 1) , sao dadas por
β2k(x) =
β(k)3 ; se x ∈ [xk−1, xk]
β(k+1)1 ; se x ∈ [xk, xk+1]
0 ; caso contrario.
(2.23)
As funcoes β2k−1 associadas aos pontos medios xk ∈ K para k = 1, · · · , n , sao dadas
por
β2k−1(x) =
β(k)2 ; se x ∈ [xk−1, xk]
0 ; caso contrario.
(2.24)
A funcao β2n associada ao ponto xn e dada por
β2n(x) =
β(n)3 (x) ; se x ∈ [xn−1, xn]
0 ; caso contrario.
(2.25)
Portanto, temos que ∀ s ∈ L2(Π) pode ser escrita de modo unico da seguinte forma:
s(x) =2n∑
j=0
αj βj(x) . (2.26)

16 Metodos dos Elementos Finitos
−1 −0.5 0 0.5 1−0.2
0
0.2
0.4
0.6
0.8
1
1.2
β 1(x
)
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
xβ 2
(x)
−1 −0.5 0 0.5 1
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
x
β 3(x
)
Figura 2.3: Funcoes da Base local para o espaco L2(Π)

Capıtulo 2. Espacos de Elementos Finitos 17
2.2 Espaco das Funcoes Cubicas de Hermite
Os espacos L1(Π) e L2(Π) sao subespacos vetoriais de C([a, b]) , cujas funcoes sao
contınuas em [a, b] mas com derivada descontınua nos pontos da particao Π . Vamos
agora estudar um espaco de funcoes polinomiais por partes, definidas sobre uma particao
Π : a = x0 < x1 < · · · < xn = b , cujas funcoes sao contınuas com derivada tambem
contınua no intervalo [a, b] .
Vamos definir o espaco H3(Π) denominado Espaco das Funcoes Cubicas de
Hermite, no qual seus elementos tem as seguintes propriedades : ∀ s ∈ H3(Π)
s(x) = p(x) ∈ P3(K) ; x ∈ K = [xk−1, xk] (2.27)
s ∈ C(1)([a, b]) . (2.28)
A seguir, vamos construir as funcoes em H3(Π) e mostrar que este e um subespaco de
C(1)([a, b]) com dim( H3(Π) ) = 2n + 2 . Neste caso, temos que a restricao de uma
funcao que pertence a H3(Π) e sempre um polinomio de grau menor ou igual a 3 em
cada subintervalo, isto e, s|K = p ∈ P3(K) .
Inicialmente definimos a Base de Hermite para o espaco vetorial P3(K) associada
aos pontos xk−1 e xk , com o objetivo de utiliza-la na representacao da restricao da
funcao s aos subintervalos K = [xk−1, xk].
Denotando por ψ(k)1 , ψ
(k)2 , ψ
(k)3 e ψ
(k)4 as funcoes da base de Hermite para P3(K)
que possuem as seguinte propriedades
ψ(k)1 (xk−1) = 1 , ψ
(k)1 (xk) = 0
(ψ(k)1 )′(xk−1) = 0 , (ψ
(k)1 )′(xk) = 0
(2.29)
ψ(k)3 (xk−1) = 0 , ψ
(k)3 (xk) = 1
(ψ(k)3 )′(xk−1) = 0 , (ψ
(k)3 )′(xk) = 0
(2.30)

18 Metodos dos Elementos Finitos
(ψ(k)2 )′(xk−1) = 1 , (ψ
(k)2 )′(xk) = 0
ψ(k)2 (xk−1) = 0 , ψ
(k)2 (xk) = 0
(2.31)
(ψ(k)4 )′(xk−1) = 0 , (ψ
(k)4 )′(xk) = 1
ψ(k)4 (xk−1) = 0 , ψ
(k)4 (xk) = 0 .
(2.32)
Como as funcoes da base de Hermite sao polinomios de grau 3, podemos escreve-las da
seguinte forma:
ψ(k)j (x) = ak
0 + ak1 x + ak
2 x2 + ak3 x3 ; k = 1, · · · , n e j = 1, 2, 3, 4 .
Impondo as condicoes (2.29) temos que resolver um sistema linear com 4 equacoes a 4
incognitas ak0 , ak
1 , ak2 , ak
3 e ak4 para obtermos a primeira funcao da base:
ψ(k)1 (x) = ( x− xk )2 ( 2x + xk − 3xk−1 ) /h3
k . (2.33)
Impondo as condicoes (2.30) temos que resolver um sistema linear com 4 equacoes a 4
incognitas ak0 , ak
1 , ak2 , ak
3 e ak4 para obtermos a terceira funcao da base:
ψ(k)3 (x) = −( x− xk−1 )2 ( 2x + xk−1 − 3xk ) /h3
k . (2.34)
Impondo as condicoes (2.31) temos que resolver um sistema linear com 4 equacoes a 4
incognitas ak0 , ak
1 , ak2 , ak
3 e ak4 para obtermos a segunda funcao da base:
ψ(k)2 (x) = ( x− xk )2 ( x− xk−1 ) /h2
k . (2.35)
Impondo as condicoes (2.32) temos que resolver um sistema linear com 4 equacoes a 4
incognitas ak0 , ak
1 , ak2 , ak
3 e ak4 para obtermos a quarta funcao da base:
ψ(k)4 (x) = ( x− xk−1 )2 ( x− xk ) /h2
k . (2.36)
Podemos mostrar que as funcoes ψ(k)1 , ψ
(k)2 , ψ
(k)3 e ψ
(k)4 sao linearmente indepen-
dentes em P3(K) , portanto, formam uma base para este espaco.

Capıtulo 2. Espacos de Elementos Finitos 19
Desse modo, temos que ∀ s ∈ H3(Π) pode ser escrita da seguinte forma:
s(x) = αk1 ψ
(k)1 (x) + αk
2 ψ(k)2 (x) + αk
3 ψ(k)3 (x) + αk
4 ψ(k)4 (x) ; x ∈ K . (2.37)
As funcoes ψ(k)1 , ψk
2 , ψk3 e ψ
(k)4 sao chamadas de Funcoes de Base Local, no
k-esimo subintervalo, do espaco H3(Π) .
Denotaremos por ψ0 , ψ1 , · · · , ψ2k , ψ2k+1 , · · · , ψ2n , ψ2n+1 as funcoes da base glo-
bal para o espaco H3(Π) . As funcoes com enumeracao par estao associadas aos pontos
da particao Π com informacoes sobre a interpolacao do valor da funcao e as funcoes com
enumeracao ımpar estao associadas aos pontos da particao Π com informacoes sobre a
interpolacao do valor da derivada.
As funcoes ψ0 e ψ1 associadas ao ponto x0 sao dadas por
ψ0(x) =
ψ(1)1 (x) ; se x ∈ [x0, x1]
0 ; caso contrario
(2.38)
ψ1(x) =
ψ(1)2 (x) ; se x ∈ [x0, x1]
0 ; caso contrario.
(2.39)
As funcoes ψ2k associadas aos pontos xk ∈ Π para k = 1, · · · , (n− 1) , sao dadas por
ψ2k(x) =
ψ(k)3 ; se x ∈ [xk−1, xk]
ψ(k+1)1 ; se x ∈ [xk, xk+1]
0 ; caso contrario.
(2.40)
As funcoes ψ2k+1 associadas aos pontos xk ∈ Π para k = 1, · · · , (n − 1) , sao dadas
por
ψ2k+1(x) =
ψ(k)4 ; se x ∈ [xk−1, xk]
ψ(k+1)2 ; se x ∈ [xk, xk+1]
0 ; caso contrario.
(2.41)

20 Metodos dos Elementos Finitos
As funcoes ψ2n e ψ2n+1 associadas ao ponto xn , sao dadas por
ψ2n(x) =
ψ(n)3 (x) ; se x ∈ [xn−1, xn]
0 ; caso contrario
(2.42)
ψ2n+1(x) =
ψ(n)4 (x) ; se x ∈ [xn−1, xn]
0 ; caso contrario.
(2.43)
Podemos mostrar que as funcoes ψ0 , ψ1 , · · · , ψ2k , ψ2k+1 , · · · , ψ2n , ψ2n+1 sao
linearmente independentes e formam uma base para o espaco H3(Π) . Observamos
tambem que as funcoes da base global possuem as seguintes propriedades
ψ2j(xi) = δij ; 0 ≤ i , j ≤ n
ψ′2j(xi) = 0 ; 0 ≤ i , j ≤ n
(2.44)
ψ′2j+1(xi) = δij ; 0 ≤ i , j ≤ n
ψ2j+1(xi) = 0 ; 0 ≤ i , j ≤ n .
(2.45)
Portanto, temos que ∀ s ∈ H3(Π) pode ser escrita de modo unico da seguinte forma:
s(x) =2n+1∑j=0
αj ψj(x) . (2.46)

Capıtulo 2. Espacos de Elementos Finitos 21
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
ψ1(x
)
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
ψ3(x
)
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
1.2
1.4
x
ψ2(x
)
−1 −0.5 0 0.5 1
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
x
ψ4(x
)
Figura 2.4: Funcoes da Base local para o espaco H3(Π)

22 Metodos dos Elementos Finitos
2.3 Interpolacao Polinomial por Partes
Seja f : [a, b] −→ IR uma funcao contınua e Π uma particao qualquer de [a, b] , isto
e, Π : a = x0 < x1 < · · · < xn = b . Queremos encontrar uma funcao s1 ∈ L1(Π)
satisfazendo as condicoes de interpolacao pura, isto e,
s1(xi) = f(xi) ; i = 0, 1, · · · , n . (2.47)
A funcao s1 construıda com as condicoes acima e denominada funcao spline linear
interpolante da funcao f nos pontos da particao Π . Utilizando as funcoes de base do
espaco L1(Π) temos que
s1(xi) =n∑
j=0
αj ϕj(xi) = f(xi) ; 0 ≤ i ≤ n . (2.48)
Como ϕj(xi) = δij obtemos que αi = f(xi) para i = 0, 1, · · · , n . Podemos
observar que na interpolacao por partes em L1(Π) , como as funcoes de base sao nodais,
os coeficientes da funcao interpolante sao obtidos sem a necessidade da resolucao de um
sistema linear.
De modo analogo, podemos encontrar uma funcao s2 ∈ L2(Π) satisfazendo as condicoes
de interpolacao pura, isto e,
s2(xi) = f(xi) ; i = 0, 1, · · · , n (2.49)
s2(xi) = f(xi) ; i = 1, 2, · · · , n . (2.50)
A funcao s2 construıda com as condicoes acima e denominada funcao de Lagrange
Quadratica interpolante da funcao f nos pontos da particao Π e nos pontos medios de
cada subintervalo. Utilizando as funcoes de base do espaco L2(Π) temos que
s2(xi) =n∑
j=0
αj βj(xi) = f(xi) ; 0 ≤ i ≤ n (2.51)
s2(xi) =n∑
j=0
αj βj(xi) = f(xi) ; 1 ≤ i ≤ n . (2.52)
Como as funcoes de base do espaco L2(Π) sao nodais, obtemos que α2i = f(xi) para
i = 0, 1, · · · , n e obtemos α2i−1 = f(xi) para i = 1, 2, · · · , n , sem a necessidade
da resolucao de um sistema linear.

Capıtulo 2. Espacos de Elementos Finitos 23
Finalmente veremos como usar as funcoes cubicas de Hermite em problemas de inter-
polacao. Seja f : [a, b] −→ IR uma funcao de classe C(1)([a, b]) e Π uma particao
qualquer de [a, b] , isto e, Π : a = x0 < x1 < · · · < xn = b . Queremos encontrar uma
funcao s ∈ H3(Π) satisfazendo as condicoes mistas de interpolacao e suavidade, isto e,
s(xi) = f(xi) ; i = 0, 1, · · · , n (2.53)
s′(xi) = f ′(xi) ; i = 0, 1, · · · , n . (2.54)
A funcao s construıda com as condicoes acima e denominada funcao cubica de Hermite
interpolante das funcoes f e f ′ nos pontos da particao Π . Utilizando as funcoes de
base do espaco H3(Π) temos que
s(xi) =2n+1∑j=0
αj ψj(xi) = f(xi) ; 0 ≤ i ≤ n . (2.55)
Como as funcoes de base do espaco H3(Π) possuem as propriedades (2.44)− (2.45) ,
obtemos que α2i = f(xi) para i = 0, 1, · · · , n e obtemos α2i+1 = f ′(xi) para
i = 0, 1, · · · , n , sem a necessidade da resolucao de um sistema linear.
2.3.1 Erro da Interpolacao Polinomial por Partes
A partir do Teorema 1.1 e das desigualdades (2.13) e (1.14) obtemos os seguinte resultados
para o erro da interpolacao polinomial por partes.
Teorema 2.1 Seja f ∈ C(2)([a, b]) e s1 ∈ L1(Π) a funcao spline linear que interpola
a funcao f nos pontos da particao Π : a = x0 < x1 < . . . < xn = b. Entao, para
todo x ∈ [xk−1, xk] , existe pelo menos um ponto ξk = ξ(x) ∈ (xk−1, xk) tal que
e(k)(x) = f(x) − s1(x) =W (k)(x)
2!f (2)(ξk) , (2.56)
onde W (k)(x) = ( x − xk−1 )( x − xk ).
e facil mostrar que a funcao W (k) satisfaz
∣∣ W (k)(xk)∣∣ = max{
∣∣ W (k)(x)∣∣ ; xk−1 ≤ x ≤ xk } =
h2k
4. (2.57)

24 Metodos dos Elementos Finitos
Assim, temos uma Estimativa para o Erro da Interpolacao em L1(Π) :
∣∣ e(k)(x)∣∣ ≤ h2
k
8max{
∣∣ f (2)(x)∣∣ ; xk−1 ≤ x ≤ xk }. (2.58)
Teorema 2.2 Seja f ∈ C(3)([a, b]) e s2 ∈ L2(Π) a funcao de Lagrange Quadratica
que interpola a funcao f nos pontos da particao Π : a = x0 < x1 < . . . < xn = b.
Entao, para todo x ∈ [xk−1, xk] , existe pelo menos um ponto ξk = ξ(x) ∈ (xk−1, xk)
tal que
e(k)(x) = f(x) − s2(x) =W (k)(x)
3!f (3)(ξk) , (2.59)
onde W (k)(x) = ( x − xk−1 )( x − xk )( x − xk ).
Utilizando a desigualdade (2.13) podemos mostrar que a funcao W (k) satisfaz
|W (x) | ≤ h3k
16; ∀ x ∈ [xk−1, xk] . (2.60)
Assim, temos uma Estimativa para o Erro da Interpolacao em L2(Π) :
∣∣ e(k)(x)∣∣ ≤ h3
k
96max{
∣∣ f (3)(x)∣∣ ; xk−1 ≤ x ≤ xk } . (2.61)
Teorema 2.3 Seja f ∈ C(4)([a, b]) e s ∈ H3(Π) a funcao cubica de Hermite que
interpola as funcoes f e f ′ nos pontos da particao Π : a = x0 < x1 < . . . < xn = b.
Entao, para todo x ∈ [xk−1, xk] , existe pelo menos um ponto ξk = ξ(x) ∈ (xk−1, xk)
tal que
e(k)(x) = f(x) − s(x) =W (k)(x)
4!f (4)(ξk) , (2.62)
onde W (k)(x) = ( x − xk−1 )2( x − xk )2.
Utilizando a relacao (2.57) temos a seguinte Estimativa para o Erro da Interpolacao
em H3(Π) :
∣∣ e(k)(x)∣∣ ≤ h4
k
384max{
∣∣ f (4)(x)∣∣ ; xk−1 ≤ x ≤ xk } . (2.63)

Capıtulo 2. Espacos de Elementos Finitos 25
Demonstracao do Teorema 2.3 Considere um ponto x ∈ (xk−1, xk) , fixo porem
arbitrario. Vamos construir uma funcao auxiliar da seguinte forma
ϕ(x) = [ f(x) − s(x) ] − W (k)(x)
W (k)(x)[ f(x) − s(x) ] ; x ∈ [xk−1, xk] . (2.64)
De modo analogo a demonstracao do Teorema 1.1, basta verificar que a funcao ϕ e uma
funcao de classe C(4)([xk−1, xk]) e que se anula nos pontos xk−1 , xk , x . Observe
a multiplicidade dos zeros, em seguida aplique sucessivamente o Teorema de Rolle as
funcoes ϕ , ϕ′ , · · · , ϕ(4).
2.4 Exercıcios
Exercıcio 2.1 Considere a funcao f(t) = 1 / ( 1 + 25t2 ) para t ∈ [−1, 1] . Encontre
os polinomios p5 ∈ P5([−1, 1]) e p10 ∈ P10([−1, 1]) que interpolam a funcao f nos
pontos de Chebyshev. Fazer os graficos dos polinomios interpolantes e comparar com a
Figura 2.1.
Exercıcio 2.2 Mostre que o conjunto L1(Π) e um subespaco vetorial de C([a, b]) .
Exercıcio 2.3 Esbocar os graficos das funcoes ϕ0 , ϕ1 , · · · , ϕn definidas em (2.11)–
(2.13). Mostrar que sao linearmente independentes e formam uma base para o espaco
L1(Π) .
Exercıcio 2.4 Esbocar os graficos das funcoes β(k)1 , β
(k)2 e β
(k)3 definidas em
(2.18)–(2.20). Mostrar que sao linearmente independentes e formam uma base para o
espaco P2(K) .
Exercıcio 2.5 Mostre que o conjunto L2(Π) e um subespaco vetorial de C([a, b]) .
Exercıcio 2.6 Esbocar os graficos das funcoes β0 , β1 , · · · , β2k−1 , β2k , · · · ,
β2n−1 , β2n definidas em (2.22)–(2.25). Mostrar que sao linearmente independentes e
formam uma base para o espaco L2(Π) .
Exercıcio 2.7 Construir as funcoes da base para o espaco P3(K) , ψ(k)1 , ψ
(k)2 , ψ
(k)3
e ψ(k)4 , impondo as condicoes (2.29)–(2.32). Esbocar os graficos das funcoes e mostrar
que sao linearmente independentes em P3(K) .

26 Metodos dos Elementos Finitos
Exercıcio 2.8 Esbocar os graficos das funcoes ψ0 , ψ1 , · · · , ψ2k , ψ2k+1 , · · · ,
ψ2n , ψ2n+1 definidas em (2.38)–(2.43). Mostrar que sao linearmente independentes e
formam uma base para o espco H3(Π) .
Exercıcio 2.9 Utilizando o Teorema 1.1, demonstre o Teorema 2.1 e o Teorema 2.2.
Exercıcio 2.10 Obter a estimativa para o erro da interpolacao em H3(Π) dada por
(2.63).
Exercıcio 2.11 Mostre o resultado dado em (2.57).
Exercıcio 2.12 Termine de escrever os detalhes da demonstracao do Teorema 2.3.

Capıtulo 3
Problema Variacional Simetrico
3.1 Formas Bilineares. Continuidade e Coercividade
Definicao 3.1 Seja (E, +, ·) um espaco vetorial real de dimensao infinita munido do
produto interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno. Dizemos
que uma forma bilinear a(·, ·) sobre E e uma Forma Bilinear Contınua se existe
uma constante β > 0 tal que
| a(u, v) | ≤ β ‖ u ‖E ‖ v ‖E para todo u, v ∈ E , (3.1)
a constante β e denominada constante de continuidade da forma bilinear.
Definicao 3.2 Seja (E, +, ·) um espaco vetorial real de dimensao infinita munido do
produto interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno. Dizemos
que uma forma bilinear a(·, ·) sobre E e uma Forma Bilinear Coerciva se existe
uma constante ρ > 0 tal que
a(u, u) ≥ ρ ‖ u ‖2E para todo u ∈ E . (3.2)
a constante ρ e denominada constante de coercividade da forma bilinear. Note
que a condicao de coercividade implica na positividade da forma bilinear.
Desse modo, se uma forma bilinear a(·, ·) sobre E for simetrica e coerciva, entao ela
define um produto interno sobre E , isto e, a aplicacao 〈 · , · 〉a : E×E −→ IR definida
da forma 〈 u , v 〉a = a(u, v) para todo u, v ∈ E , define um produto interno sobre
E, denominado produto interno energia. Este fato e de extrema importancia para os
nosso objetivos. Vamos denotar por ‖ · ‖a a norma proveniente desse produto interno,
denominada norma energia.
27

28 Metodos dos Elementos Finitos
Teorema 3.1 Seja (E, +, ·) um espaco vetorial real de dimensao infinita munido do
produto interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno. Seja
a(·, ·) uma forma bilinear simetrica, contınua e coerciva sobre E . Seja ‖ · ‖a a norma
proveniente do produto interno 〈 · , · 〉a associado a forma bilinear a(·, ·) . Entao, as
normas ‖ · ‖E e ‖ · ‖a sao equivalentes, isto e,
√ρ ‖ u ‖E ≤ ‖ u ‖a ≤
√β ‖ u ‖E para todo u ∈ E ,
1√β‖ u ‖a ≤ ‖ u ‖E ≤ 1√
ρ‖ u ‖a para todo u ∈ E .
O resultado acima e de extrema importancia para a demonstracao do Teorema de Lax–
Milgram, que iremos ver mais adiante.
3.1.1 Exemplo de Forma Bilinear Contınua e Coerciva
Vamos considerar o seguinte conjunto de funcoes reais
L([a, b]) = { f : [a, b] −→ IR / f contınua, f ′ contınua por partes e limitada } .
(3.3)
Podemos observar que o conjunto de funcoes reais L([a, b]) munido das operacoes usuais
de soma de funcoes e multiplicacao de uma funcao por um escalar, (L([a, b]), +, ·) , e um
subespaco vetorial do espaco vetorial real (C([a, b]), +, ·) munido do produto interno
usual 〈 · , · 〉L2 definido da seguinte forma
〈 f , g 〉L2 =
∫ b
a
f(x) g(x) dx para toda f, g ∈ C([a, b]) .
Considerando o espaco vetorial real E = (L([a, b]), +, ·) vamos definir um produto
interno 〈 · , · 〉E sobre E da seguinte maneira
〈 u , v 〉E =
∫ b
a
u′(x) v′(x) dx +
∫ b
a
u(x) v(x) dx . (3.4)
Considerando o espaco vetorial real E = (L([a, b]), +, ·) vamos definir uma forma
bilinear a(·, ·) sobre E da seguinte maneira
a(u, v) =
∫ b
a
α(x) u′(x) v′(x) dx +
∫ b
a
σ(x) u(x) v(x) dx , (3.5)
onde as funcoes α e σ sao contınuas e estritamente positivas no intervalo [a, b] .
Podemos observar facilmente que a forma bilinear a(·, ·) definida em (3.5) e uma forma

Capıtulo 3. Problema Variacional Simetrico 29
bilinear simetrica e positiva. Podemos tambem mostrar que essa forma bilinear e contınua
e coerciva com relacao a norma ‖ · ‖E proveniente do produto interno 〈 · , · 〉Edefinido em (3.4).
Vamos tambem utilizar os seguintes subespacos de L([a, b])
L0([a, b]) = { f ∈ L([a, b]) / f(a) = f(b) = 0 }
L0+([a, b]) = { f ∈ L([a, b]) / f(b) = 0 }
L0−([a, b]) = { f ∈ L([a, b]) / f(a) = 0 } ,
os quais estabelecem certas condicoes de contorno para os Problemas Variacionais, que
iremos estudar mais adiante, definidos sobre esses espacos.
3.2 Formas Lineares. Continuidade
Definicao 3.3 Seja (E, +, ·) um espaco vetorial real de dimensao infinita munido do
produto interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno. Dizemos
que uma forma linear b(·) sobre E e uma Forma Linear Contınua se existe uma
constante δ > 0 tal que
| b(u) | ≤ δ ‖ u ‖E para todo u ∈ E . (3.6)
a constante δ e denominada constante de continuidade da forma linear.
Teorema 3.2 Seja (E, +, ·) um espaco vetorial real de dimensao infinita munido do
produto interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno. Seja
a(·, ·) uma forma bilinear simetrica, contınua e coerciva sobre E e b(·) uma forma
linear contınua. Seja ‖ · ‖a a norma proveniente do produto interno 〈 · , · 〉a associado
a forma bilinear a(·, ·) . Entao, a forma linear b(·) e contınua com relacao a norma
‖ · ‖a , isto e,
| b(u) | ≤ δ√ρ‖ u ‖a para todo u ∈ E .
O resultado acima e de extrema importancia para a demonstracao do Teorema de Lax–
Milgram, que iremos ver mais adiante.

30 Metodos dos Elementos Finitos
3.2.1 Exemplo de Forma Linear Contınua
Considerando o espaco vetorial real E = (L([a, b]), +, ·) vamos definir uma forma
linear b(·) sobre E da seguinte maneira
b(v) =
∫ b
a
f(x) v(x) dx . (3.7)
onde a funcao f e uma funcao contınua no intervalo [a, b]. Podemos mostrar que a
forma linear definida em (3.7) e contınua com relacao a norma ‖ · ‖E proveniente do
produto interno 〈 · , · 〉E definido em (3.4). Assim, a forma linear definida em (3.7)
tambem e contınua em relacao a norma energia ‖ · ‖a .
3.3 Problema Variacional
Definicao 3.4 Seja (E, +, ·) um espaco vetorial real de dimensao infinita munido
do produto interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno.
Consideremos a(·, ·) uma forma bilinear sobre E simetrica, contınua e coerciva e b(·)uma forma linear sobre E contınua. O problema definido da seguinte maneira
(V) encontrar u∗ ∈ E solucao da equacao
a(u, v) = b(v) para todo v ∈ E , (3.8)
e denominado Problema Variacional Simetrico.
3.4 Problema de Minimizacao
Vamos agora definir o Problema de Minimizacao associado ao Problema Variacio-
nal definido em (3.8). Isto pode ser feito desde que a forma bilinear seja simetrica. Para
isso, necessitamos do seguinte funcional quadratico
J(u) =1
2a( u , u ) − b(u) para todo u ∈ E , (3.9)
e consideramos o seguinte Problema de Minimizacao
(M) encontrar u∗ ∈ E tal que
J(u∗) = min{ J(u) ; u ∈ E }. (3.10)

Capıtulo 3. Problema Variacional Simetrico 31
Mostraremos a seguir a equivalencia entre os problemas (V) e (M) .
Inicialmente, vamos considerar que u∗ ∈ E e uma solucao do problema variacional (V) .
Seja w ∈ E definimos v = u∗ + w . Desse modo, tem-se que para todo u ∈ E
J(v) = J(u∗) + [ a(u∗, w) − b(w) ] +1
2a(w, w) ≥ J(u∗) , (3.11)
desde que, u∗ e solucao do problema variacional (V) e a(w,w) ≥ 0 pois temos uma
forma bilinear positiva. Portanto u∗ e solucao do problema de minimizacao (M) .
Por outro lado, consideremos u∗ ∈ E solucao do problema de minimizacao (M) . Dessa
forma, temos que para todo v ∈ E e ε ∈ IR
J(u∗) ≤ J(u∗ + ε v) . (3.12)
Definimos agora uma funcao g : IR −→ IR , que e diferenciavel, da seguinte forma
g(ε) = J(u∗ + ε v) (3.13)
g(ε) = J(u∗) + ε a(u∗, v) − ε b(v) +ε2
2a(v, v) . (3.14)
Sabemos que g possui um ponto de mınimo em ε = 0 , assim temos que g′(0) = 0 .
Desse modo, obtemos
g′(ε) = a(u∗, v) − b(v) + ε a(v, v) (3.15)
g′(0) = a(u∗, v) − b(v) = 0 para todo v ∈ E . (3.16)
Portanto mostramos que u∗ e solucao do problema variacional (V) . Assim acabamos
de mostrar a equivalencia entre o problema variacional (V) e o problema de minimizacao
(M) .
3.5 Metodo de Galerkin
Temos neste momento a ferramenta necessaria para apresentarmos o Metodo de Ga-
lerkin, que e baseado no Problema Variacional (3.8), ponto de partida para os Metodos
dos Elementos Finitos e para os Metodos Espectrais.
Vamos considerar um subespaco de dimensao finita Eh do espaco vetorial E. Vamos
tomar uma base para o subespaco vetorial Eh , β = { ϕ1 , · · · , ϕn } .

32 Metodos dos Elementos Finitos
Desse modo, toda funcao v ∈ Eh e escrita da seguinte forma
v(x) =n∑
j=1
αj ϕj(x) . (3.17)
Portanto, fica natural uma Discretizacao para o Problema Variacional (3.8), usu-
almente denominada de Metodo de Galerkin, que pode ser formalizado da seguinte
maneira
(Vh) encontrar uma funcao u∗h ∈ Eh solucao da equacao
a(uh, v) = b(v) para todo v ∈ Eh . (3.18)
Como a funcao uh ∈ Eh , podemos escreve-la da seguinte forma
uh(x) =n∑
j=1
αj ϕj(x) . (3.19)
Como (3.18) e valida para toda funcao em Eh , em particular sera valida para as funcoes
de base. Desse modo, utilizando as funcoes de base e substituindo (3.19) em (3.18) tem-se
que
n∑j=1
αj a(ϕj, ϕi) = b(ϕi) para todo i = 1, · · · , n . (3.20)
Podemos observar que (3.20) e um sistema linear com n equacoes e n incognitas
α1, · · · , αn , que sao as coordenadas de uh com relacao a base do subespaco Eh .
Fazendo uma representacao matricial do sistema linear acima, C α = d , temos que os
elementos da matriz do sistema C = [ cij ] sao dados por
cij = a(ϕj, ϕi) para todo i, j = 1, · · · , n ,
e os elementos do vetor d = [ di ] sao dados por
di = b(ϕi) para todo i = 1, · · · , n .
Podemos tambem definir uma Aproximacao para o Problema de Minimizacao
(3.10), usualmente denominado de Metodo de Ritz, da seguinte forma

Capıtulo 3. Problema Variacional Simetrico 33
(Mh) encontrar uma funcao u∗h ∈ Eh tal que
J(u∗h) = min{ J(v) ; v ∈ Eh } . (3.21)
De maneira analoga ao procedimento anterior, podemos mostrar que os problemas (Mh)
e (Vh) sao equivalentes.
Teorema 3.3 Seja (Eh, +, ·) um espaco vetorial real de dimensao finita munido do
produto interno 〈 · , · 〉a associado a forma bilinear a(·, ·) simetrica, contınua e coerciva
sobre Eh . Se b(·) e uma forma linear contınua sobre Eh . Entao, existe um unico
elemento u∗h ∈ Eh solucao do Problema Variacional Discreto definido em (3.18). Alem
disso, temos a seguinte estimativa de estabilidade
‖ u∗h ‖E ≤ δ
ρ, (3.22)
com δ a constante de continuidade da forma linear e ρ a constante de coercividade da
forma bilinear.
3.5.1 Exemplos de Problemas Variacionais Simetricos
Considerando a forma bilinear a(·, ·) definida em (3.5) e Eh um subespaco de dimensao
finita do espaco vetorial E = (L([a, b]), +, ·) , que pode ser o espaco das Funcoes
Splines Lineares associado a uma particao qualquer do intervalo [a, b]. Note que no
espaco L([a, b]) nao impomos condicoes nas fronteira para as funcoes. Desse modo,
temos que os elementos da matriz C = [cij] , cij = a(ϕj, ϕi) , sao da seguinte forma
cij =
∫ b
a
α(x) ϕ′j(x) ϕ′i(x) dx +
∫ b
a
σ(x) ϕj(x) ϕi(x) dx ; i, j = 1, · · · , n .
(3.23)
Geralmente, a matriz C e escrita como a soma de duas matrizes; M = [ mij ]
denominada de matriz de massa e K = [ kij ] denominada matriz de rigidez, que
sao definidas por
mij =
∫ b
a
σ(x) ϕj(x) ϕi(x) dx para todo i, j = 1, · · · , n , (3.24)
kij =
∫ b
a
α(x) ϕ′j(x) ϕ′i(x) dx para todo i, j = 1, · · · , n . (3.25)

34 Metodos dos Elementos Finitos
Tendo em vista a simetria e a positividade da forma bilinear a(·, ·) , temos que a matriz
C e simetrica e positiva-definida. Estas duas propriedades indicam que o Metodo de De-
composicao de Cholesky, que possui uma boa estabilidade numerica, e o mais apropriado
para resolver o sistema linear proveniente do Metodo de Galerkin. Considerando a forma
linear b(·) definida em (3.7) os elementos do vetor d , denominado vetor de carga, sao
dados por
di =
∫ b
a
f(x) ϕi(x) dx para todo i = 1, · · · , n . (3.26)
Portanto, temos que a resolucao do Problema Variacional Discreto fica convertido na re-
solucao de um sistema linear, cuja solucao e um vetor com os coeficientes da aproximacao
de Galerkin uh ∈ Eh com relacao a base escolhida. A estrutura da matriz do sistema
linear proveniente do Metodo de Galerkin depende da escolha da base para o subespaco
de aproximacao Eh . Os espacos de aproximacao mais adequados sao os Espacos de
Elementos Finitos. No caso em que Eh for o espaco das Funcoes Splines Lineares
a matriz proveniente do Metodo de Galerkin tem uma estrutura tridiagonal. Assim, o
Metodo de Galerkin e usualmente denominado de Metodo dos Elementos Finitos.
E importante observar que podemos utilizar os espacos (L0([a, b]), +, ·) , (L0+([a, b]), +, ·)e (L0−([a, b]), +, ·) , nos quais as funcoes satisfazem certas condicoes de contorno, para
definirmos os Problemas Variacionais. Desse modo, as funcoes do subespaco Eh con-
tido em cada um dos espacos anteriores, respectivamente, devem satisfazer as mesmas
condicoes de contorno. Assim, para cada escolha temos um Problema Variacional dife-
rente.

Capıtulo 3. Problema Variacional Simetrico 35
3.6 Teorema de Lax–Milgram
Consideremos o espaco vetorial real (E, +, ·) de dimensao infinita munido do produto
interno 〈 · , · 〉E e ‖ · ‖E a norma proveniente do produto interno. Vamos apresentar
os resultados de existencia e unicidade, bem como uma estimativa de estabilidade, para
a solucao do problema variacional simetrico (V) .
Teorema 3.4 (Teorema de Lax–Milgram) Seja a(·, ·) uma forma bilinear contınua,
simetrica e coerciva sobre E e b(·) uma forma linear contınua sobre E. Entao, existe
um unico elemento u∗ ∈ E solucao da equacao
a(u, v) = b(v) para todo v ∈ E , (3.27)
valendo a seguinte estimativa de estabilidade
‖ u∗ ‖E ≤ δ
ρ, (3.28)
com δ a constante de continuidade da forma linear e ρ a constante de coercividade da
forma bilinear. Alem disso, como a(·, ·) e uma forma bilinear simetrica temos que u∗
e a unica solucao do problema de minimizacao (M).
Para a demonstracao do Teorema de Lax–Milgram vamos necessitar do Teorema de Re-
presentacao de Riesz no caso em que o espaco vetorial (E, +, ·) seja de dimensao
infinita. Desse modo, precisamos que o espaco vetorial (E, +, ·) munido da norma
‖ · ‖E seja um espaco de Hilbert, isto e, todo sequencia de Cauchy em E converge para
um elemento de E com relacao a norma ‖ · ‖E .
Teorema 3.5 (Teorema de Representacao de Riesz) Seja (E, +, ·) um espaco
vetorial real de dimensao infinita munido do produto interno 〈 · , · 〉E e ‖ · ‖E a
norma proveniente do produto interno, com E um espaco de Hilbert. Se f : E −→ IR
e um funcional linear contınuo. Entao, existe um unico elemento u ∈ E de modo que
o funcional f e representado por
f(v) = 〈 v , u 〉E para todo v ∈ E . (3.29)
Teorema 3.6 (Teorema de Cea) Considerando as hipoteses do Teorema de Lax-Milgram,
sejam u∗ a solucao do Problema Variacional (V) e u∗h a solucao do Problema Va-
riacional Discreto (Vh). Entao, temos a seguinte estimativa de erro para a solucao de
Galerkin
‖ u∗ − u∗h ‖E ≤ β
ρmin{ ‖ u∗ − v ‖E para todo v ∈ Eh } , (3.30)
com β a constante de continuidade e ρ a constante de coercividade da forma bilinear
a(·, ·) em (V).

36 Metodos dos Elementos Finitos
3.6.1 Interpretacao Geometrica para Solucao de Galerkin
Vamos apresentar uma interpretacao geometrica para a solucao de Galerkin do Problema
Variacional (V) com relacao ao produto interno energia 〈 · , · 〉a associado a
forma bilinear a(·, ·) sobre E.
Considerando que u∗ ∈ E e a solucao do Problema Variacional (V) e que u∗h ∈ Eh ⊂E e a solucao do Problema Variacional Discreto (Vh) , temos que
a(u∗, v) = b(v) para todo v ∈ Eh (3.31)
a(u∗h, v) = b(v) para todo v ∈ Eh . (3.32)
Desse modo, subtraindo (3.32) de (3.31) e utilizando a definicao de 〈 · , · 〉a obtemos
a( (u∗ − u∗h) , v ) = 〈 (u∗ − u∗h) , v 〉a = 0 para todo v ∈ Eh . (3.33)
O que equivale a dizer que o erro da solucao de Galerkin eh = u∗ − u∗h e orto-
gonal ao subespaco de aproximacao Eh com relacao ao produto interno energia, isto e,
a solucao de Galerkin u∗h e a projecao ortogonal de u∗ no espaco de aproximacao
Eh com relacao ao produto interno energia. Portanto, temos que a solucao de Galerkin
u∗h ∈ Eh ⊂ E e a Melhor Aproximacao de u∗ ∈ E com relacao a norma energia.
Desse modo, podemos enunciar o seguinte resultado.
Teorema 3.7 Considerando que u∗ ∈ E seja a solucao do Problema Variacional (V)
e que u∗h ∈ Eh ⊂ E seja a solucao do Problema Variacional Discreto (3.18), temos que
‖ u∗ − u∗h ‖a ≤ ‖ u∗ − v ‖a para todo v ∈ Eh (3.34)
O teorema acima e o Teorema de Cea serao muito utilizados para obtermos estimativas
de erro para a solucao de Galerkin.

Capıtulo 3. Problema Variacional Simetrico 37
3.7 Problema Variacional de Valores de Contorno
Consideremos inicialmente os seguintes Problemas de Valores de Contorno Unidimensio-
nais:
Exemplo 3.1 Encontrar u∗ ∈ C2([a, b]) solucao da equacao diferencial ordinaria
−( α(x) u′(x) )′ + σ(x) u(x) = f(x) ; x ∈ (a, b) (3.35)
sujeita as condicoes de contorno
u(a) = 0 e u(b) = 0 . (3.36)
Exemplo 3.2 Encontrar u∗ ∈ C2([a, b]) solucao da equacao diferencial ordinaria
−( α(x) u′(x) )′ + σ(x) u(x) = f(x) ; x ∈ (a, b) (3.37)
sujeita as condicoes de contorno
u′(a) = 0 e u(b) = 0 . (3.38)
Exemplo 3.3 Encontrar u∗ ∈ C2([a, b]) solucao da equacao diferencial ordinaria
−( α(x) u′(x) )′ + σ(x) u(x) = f(x) ; x ∈ (a, b) (3.39)
sujeita as condicoes de contorno
u(a) = 0 e u′(b) = 0 . (3.40)
Exemplo 3.4 Encontrar u∗ ∈ C2([a, b]) solucao da equacao diferencial ordinaria
−( α(x) u′(x) )′ + σ(x) u(x) = f(x) ; x ∈ (a, b) (3.41)
sujeita as condicoes de contorno
u′(a) = 0 e u′(b) = 0 . (3.42)
Vamos considerar que as funcoes σ e f sejam contınuas em [a, b] e α uma
funcao continuamente diferenciavel em [a, b]. Consideremos que as funcoes α e σ
sao estritamente positivas, para que possamos dar uma interpretacao fısica ao problema.
Geralmente, dizemos que a funcao α representa um coeficiente de difusao, a funcao σ
representa um coeficiente de absorcao e a funcao f representa uma fonte externa.

38 Metodos dos Elementos Finitos
Vamos agora obter a Formulacao Variacional de cada um dos Problemas de Valores de
Contorno definidos acima. Inicialmente, multiplicamos a equacao diferencial ordinaria
por uma funcao v ∈ C1([a, b]) , denominada funcao teste, e em seguida integramos
sobre o domınio [a, b]. Assim, obtemos
−∫ b
a
( α(x) u′(x) )′ v(x) dx +
∫ b
a
σ(x) u(x) v(x) dx =
∫ b
a
f(x) v(x) dx . (3.43)
Fazendo uma integracao por partes na primeira integral de (3.43) , tem-se que
−∫ b
a
( α(x) u′(x) )′ v(x) dx =
− α(b) u′(b) v(b) + α(a) u′(a) v(a) +
∫ b
a
α(x) u′(x) v′(x) dx . (3.44)
As condicoes de contorno do problema sao impostas na expressao
− α(b) u′(b) v(b) + α(a) u′(a) v(a)
que aparece da integracao por partes. Assim, a condicao de contorno u(a) = 0 e/ou
u(b) = 0 devem ser impostas no espaco das funcoes admissıveis e no espaco das funcoes
testes impondo v(a) = 0 e/ou v(b) = 0 . Esse tipo de condicao de contorno e
denominada condicao essencial. Entretanto, a condicao de contorno u′(a) = 0
e/ou u′(b) = 0 aparecem naturalmente na integracao por partes, nao sendo necessario
impor no espaco das funcoes admissıveis ou no espaco das funcoes testes. Esse tipo de
condicao de contorno e denominada condicao natural.
Depois de analisada as condicoes de contorno, obtemos de (3.43)–(3.44) a seguinte igual-
dade
∫ b
a
α(x) u′(x) v′(x) dx +
∫ b
a
σ(x) u(x) v(x) dx =
∫ b
a
f(x) v(x) dx . (3.45)
Finalmente, podemos apresentar a Formulacao Variacional de cada um dos Problemas
de Valores de Contorno dados nos exemplos 3.1–3.4, da seguinte forma

Capıtulo 3. Problema Variacional Simetrico 39
Exemplo 3.5 Encontrar u∗ ∈ L0([a, b]) solucao da equacao
∫ b
a
α(x) u′(x) v′(x) dx +
∫ b
a
σ(x) u(x) v(x) dx =
∫ b
a
f(x) v(x) dx
para toda v ∈ L0([a, b]).
Exemplo 3.6 Encontrar u∗ ∈ L0+([a, b]) solucao da equacao
∫ b
a
α(x) u′(x) v′(x) dx +
∫ b
a
σ(x) u(x) v(x) dx =
∫ b
a
f(x) v(x) dx
para toda v ∈ L0+([a, b]).
Exemplo 3.7 Encontrar u∗ ∈ L0−([a, b]) solucao da equacao
∫ b
a
α(x) u′(x) v′(x) dx +
∫ b
a
σ(x) u(x) v(x) dx =
∫ b
a
f(x) v(x) dx
para toda v ∈ L0−([a, b]).
Exemplo 3.8 Encontrar u∗ ∈ L([a, b]) solucao da equacao
∫ b
a
α(x) u′(x) v′(x) dx +
∫ b
a
σ(x) u(x) v(x) dx =
∫ b
a
f(x) v(x) dx
para toda v ∈ L([a, b]).
A priori, a solucao do problema variacional e menos regular que a solucao do problema de
valores de contorno. De fato, no problema variacional as funcoes devem ter as propriedades
necessarias para que as integrais estejam bem definidas, enquanto que no problema de
valores de contorno necessitamos de informacao pontual da segunda derivada da solucao.
Podemos mostrar sob certas condicoes que o problema de valores de contorno e o problema
variacional sao equivalentes.

40 Metodos dos Elementos Finitos

Bibliografia
[1] Axelsson, O. & Barker, V. A., 1984. Finite element solution of boundary value
problems, Academic Press.
[2] Becher, E. B. , Carey, G. F. & Oden, J. T., 1981. Finite Elements – An
Introduction, Volume I, Prentece–Hall.
[3] Ciarlet, P. G., 1991. Introduction to Numerical Linear Algebra and Optimisation,
Cambridge University Press.
[4] Conte, S. D. & Carl de Boor, 1980. Elementary Numerical Analysis, MacGraw–
Hill.
[5] Johnson, C. , 1987. Numerical solution of partial differential equations by the finite
element method, Cambridge University Press.
[6] Rappaz, J. & Picasso, M., 1998. Introduction a l’analyse numerique, Presses
polytechniques et universitaires romandes.
[7] Rektorys, K., 1980. Variational Methods in Mathematics, Science and Enginne-
ring, D. Reidel Publishing Company.
41

Metodos dos Elementos FinitosAspectos Teoricos, Computacionais e Aplicacoes
Petronio Pulino
sqPULINUS