
MICROPROCESSADORES - ime.usp.bradao/MPINTRODUCAO.pdf · tudo em um só dentro de um CI !). n...
17
1 MICROPROCESSADORES Adão de Melo Neto
Transcript of MICROPROCESSADORES - ime.usp.bradao/MPINTRODUCAO.pdf · tudo em um só dentro de um CI !). n...

1
MICROPROCESSADORES
Adão de Melo Neto

2
OBJETIVO DA DISCIPLINA
Conhecer a estrutura interna de um microprocessador
através do uso do microcontrolador PIC16F84A .
Usar o simulador PROTEUS
Conhecer o conjunto de instruções do PIC16F84A
Programar o PIC16F84A.

3
MICROCONTROLADOR
n Como surgiu os microcontroladores?– A evolução da tecnologia de circuitos integrados (CI)
permitiu a fabricação de um CI contendo ummicrocomputador e que, no entanto, mais tarde foidesignado por microcontrolador (Um microcontrolador étudo em um só dentro de um CI !).
n Microcontrolador– É um microprocessador + periféricos (memória e
dispositivos de entrada e saída)
n Microprocessador– Um microprocessador é o coração do computador (a
UCP, unidade central de processamento).

4
MICROCONTROLADOR
PIC16F84A

5
CARACTERÍSTICAS DO PIC16F84A
n O PIC16F84, é perfeitamente adequado para muitasvariedades de aplicações, como a indústria automóvel,sensores remotos, fechaduras elétricas e dispositivos desegurança, etc.
n Arquitetura de Harvard invés da Von Newman
n Cerca de 35 instruções (arquitetura RISC)
n Os dados são possuem 8 bits.
n As instruções possuem 14 bits.n

6Arquitetura Neumann (computador tradicional) X Arquitetura Harvard (PIC16F84A)
Esquema do microntrolador PIC16F84A
A
B

7
PINAGEM DO PIC16F84A

8
Pinos do PIC16F84A

9
GERADOR DE SINAIS
• Um gerador de sinais (relógio ou clock) é ligado ao microcontrolador
através do pino OSC1.
•O circuito interno divide o sinal de clock em quatro fases, Q1, Q2, Q3 e Q4
que não se sobrepõem (estas fases poderiam ser por exemplo busca da
instrução, interpretação, busca do operando e execução da instrução).
•Estas quatro pulsações perfazem um ciclo de instrução (também chamado
de ciclo de máquina) durante o qual uma instrução é executada.

10
CARACTERÍSTICAS DO PIC16F84A
•MEMÓRIA DE PROGRAMA COM 1K (1024) ENDEREÇOS
•68 BYTES DE MEMÓRIA RAM
•64 BYTES DE MEMÓRIA EEPROM
•35 INSTRUÇÕES
•15 REGISTRADORES ESPECIAIS EM RAM
•12 PINOS DE ENTRADA E SAÍDA (PORTA A e PORTA B)
•CAPACIDADE DE GERENCIAR ATÉ 4 INTERRUPÇÕES

11
RESET

12
MEMÓRIA DE PROGRAMA
– Área onde será gravado o programa de controle do PIC16F84A
– Palavra de 14 bits
– Tipo Flash
– Possui 1K endereços (0000 h até 03F3 endereços)
14 bits
13
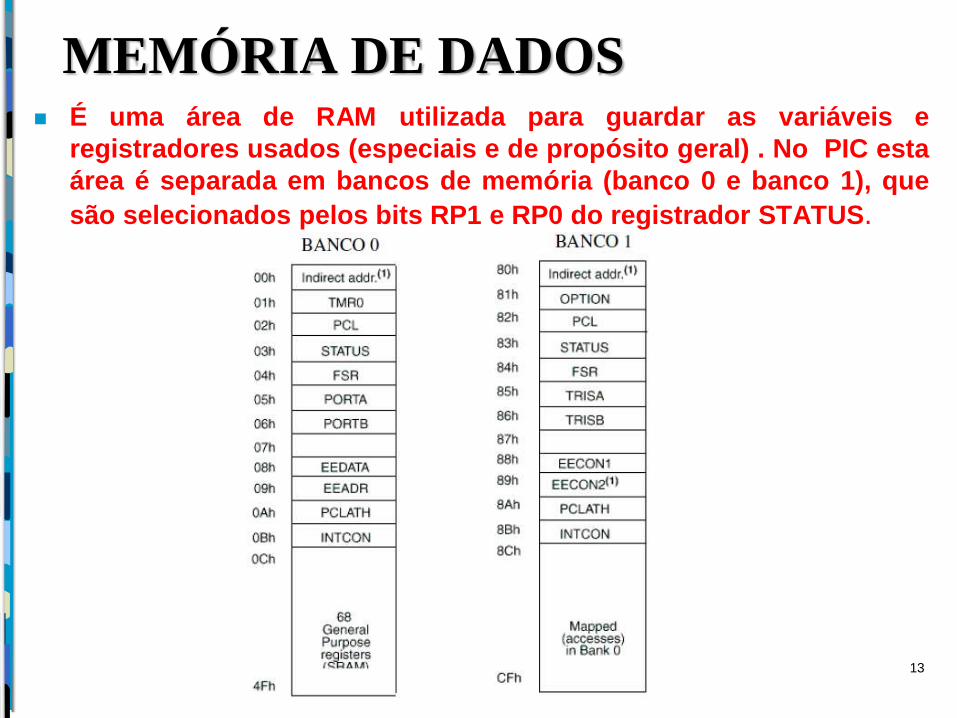
MEMÓRIA DE DADOS É uma área de RAM utilizada para guardar as variáveis e
registradores usados (especiais e de propósito geral) . No PIC esta
área é separada em bancos de memória (banco 0 e banco 1), que
são selecionados pelos bits RP1 e RP0 do registrador STATUS.

14
REGISTRADORES ESPECIAIS
São usados controlar o funcionamento do PIC conforme o desejado.
São lidos e escritos, ocupam espaço na RAM, podendo estar em um ou em
ambos os bancos de memória.
São acessados através de seu endereço.

15
EEPROM
O PIC16F84A possui uma de 64 bytes que pode ser usada para ler
ou escrever dados .
Pode ser usada como memória de dados e não perde informação,
mesmo sem alimentação.

16
INTERRUPÇÕES
Evento gerado que chama atenção do processador afim
de que pare o processamento e atenda a requisição
No PIC16F84A as interrupções podem ocorrer por:
– OVERFLOW do registrador TMR0.
– Fim de escrita na EEPROM.
– Interrupção externa pelo pino RB0/INT.
– Mudança nos pinos RB4 a RB7.

17
DIAGRAMA EM BLOCOS DO PIC16F84A


















