Miolo Tektronix R TV DIGITAL - acessopercon.com.br · Tradução e impressão autorizadas para o...
124
TV DIGITAL
Transcript of Miolo Tektronix R TV DIGITAL - acessopercon.com.br · Tradução e impressão autorizadas para o...

TV DIGITAL

Este Guia é um novo paradigma das medições para as indústrias de televi-são e telecomunicações. Informações teóricas, dados experimentais, do-cumentos apresentados em conferências e seminários, artigos publicados em jornais e revistas, serão divulgados em próximas edições.
Para expressar o seu interesse por novas tecnologias e obter informações e novidades técnicas e teóricas, produtos disponíveis na área, resumos técnicos ou outros recursos para auxiliar engenheiros que trabalham com tecnologia avançada, visite nossos sites ou entre em contato direto. A Tektronix possui uma coleção bastante abrangente sobre o assunto.
TEKTRONIX
www.tektronix.com.br

Editora SENAIRio de Janeiro
2009
TV DIGITAL
© 2009. TEKTRONIX
Direitos da obra original em inglês.Tradução e impressão autorizadas para o SENAI Departamento Nacional.
TradutorDalton Vilella Camilher
Revisora TécnicaNelia Caetano
Catalogação-na-Publicação (CIP) - Brasil
T 235 t Tektronix.
TV Digital / Tektronix ; tradução Dalton Vilella Camilher. - Rio de Janeiro : Ed. SENAI, 2009.
124 p. : il. ; 23 cm. - (Coleção TV Digital)
Tradução de: A guide to digital television systems and mesasurements
Inclui glossário
ISBN 978-85-99002-14-8
1. Engenharia eletrônica e comunicação. 2. Televisão di-gital. I. SENAI Departamento Nacional. II. Título.
CDD: 621.388002
Editora SENAI
Rua São Francisco Xavier, 417 - Maracanã20550-010 - Rio de Janeiro - RJ
Tel.: (0XX21) [email protected]

SUMÁRIO
1. Introdução ..............................................................................72. Conceitos Básicos ....................................................................9
Componente e Composto (analógico) ............................................. 11Amostragem e Quantização ........................................................... 13Padrões de Vídeo Digital .............................................................. 15Vídeo Serial Digital...................................................................... 22Conversão de Taxa – Conversão de Formato ..................................... 25
3. Áudio Digital ......................................................................... 29
Formato de Dados de Áudio AES/EBU ............................................. 31Áudio Multiplexado ...................................................................... 33
4. Hardware de Sistema e Questões ............................................. 45
Seleção de Cabo ......................................................................... 47Conectores .................................................................................48Patch Panels ..............................................................................48Terminações e Loop-Throughs ....................................................... 49Cabos de Áudio Digital e Tipos de Conectores ..................................50Distribuição de Sinal, Reclocking ................................................... 51Tempo de Sistema ....................................................................... 54
5. Monitoramento e Medições ..................................................... 576. Medindo o Sinal Serial ........................................................... 63
Medidas de Forma de Onda ........................................................... 65Medindo o Tempo do Sinal de Vídeo Digital Serial ............................. 67
7. Defi nição de Detecção de Erros ............................................... 71
Defi nição de Erros ....................................................................... 73Quantifi cando Erros ..................................................................... 75Natureza de Sistemas de Transmissão de Vídeo Digital de Estúdio ....... 75Medindo Taxas de Erro de Bit (BER) ...............................................78

Um Método de Medição de Erro para Televisão ................................. 81Considerações de Sistema ............................................................. 83
8. Efeito de Oscilação e Medições ............................................... 85
Jitter em Sinais Digitais ............................................................... 87Medindo Jitter ............................................................................ 91
9. Teste de Sistema ................................................................... 95
Teste de Desgaste (Stress) ............................................................ 97Verifi cação de Campo SDI .............................................................98
10. Bibliografi a ....................................................................... 103
Livros e Artigos ........................................................................ 105Padrões ................................................................................... 107
11. Glossário ........................................................................... 109
1Introdução
Novos métodos de testes e de medidas são necessários para se determinar a qualidade do sistema de transmissão de vídeo digital e dos sinais que ele transmite. Os métodos de análise para os programas de vídeo e áudio já são bem conhecidos. Contudo, métodos para a forma serial do sinal di-gitalizado diferem grandemente daqueles utilizados para analisar os sinais de vídeo de banda básica.
Este guia básico aborda muitos tópicos de interesse de designers e usu-ários de sistemas de televisão digital. Você encontrará informação sobre áudio embedded (Item 3), questões relativas a tempo de sistema (Item 4), e sistema de medições de tempo (Item 6). Os leitores que já estão fami-liarizados com os conceitos básicos da televisão digital devem começar a leitura a partir do Item 4. “Hardware de Sistema e Questões”. A discussão

sobre tópicos específi cos de medidas inicia-se no item 6. São abordados neste guia os seguintes tópicos principais:
1. Defi nição de televisão digital, incluindo conceitos básicos, padrões de vídeo, conversões entre formatos de sinal de vídeo e formatos e padrões de áudio digital.
2. São apresentadas considerações para a seleção de componentes passivos dos sistemas de transmissão, tais como cabo, conectores e preocupações em relação ao casamento de impedância, bem como o uso contínuo do conceito de “loop-through” passivo. A maioria dos métodos de sistemas de transmissão e hardware atuais podem ser utilizados para o digital serial.
3. Questões de sistemas antigos e novos, são particularmente importantes para o vídeo digital, também são apresentadas, incluindo a equalização, reclocking, e sistema de timing.
4. Teste e medida de sinais serial digital podem ser caracterizados em três aspectos diferentes: uso, métodos e ambiente operacional. Alguns tipos de uso são: bancada de designers, garantia de qualidade de fabricação, avaliação do equipamento do usuário, instalação do sistema e teste de aceitação, manutenção do sistema e do equipamento e, talvez o mais importante: a operação.
5. Vários métodos de medida são abordados em detalhes, incluindo me-didas da forma de onda serial, defi nições e detecção de erros, efeitos e medidas de jitter e teste de sistema com sinais de teste especiais.
Agradecimentos
David K. Fibush – Autor
Com as contribuições de:
Bob Elkind e Kenneth Ainsworth
Alguns textos e fi guras usados neste Guia foram impressos com a permis-são da DESIGNING DIGITAL SYSTEMS, publicado por Grass Valley Products.
2Conceitos Básicos

11
Um Guia para Televisão Digital
Componente e Composto (analógico)
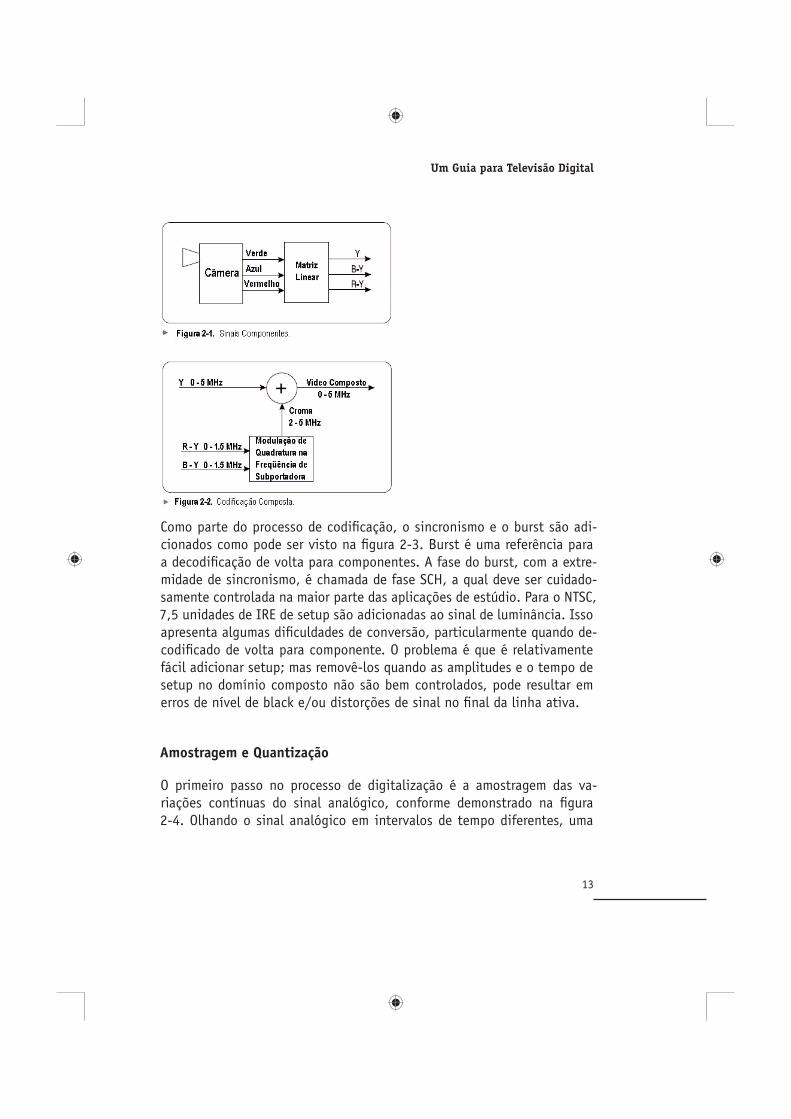
Fontes de origem de sinal, tais como: câmeras e telecines produzem inter-namente imagens coloridos com três sinais de largura de banda completa – um para o Verde, outro para o Azul e outro para o Vermelho. Aproveitando-se que a visão humana não é tão apurada para a cor como é para o nível de brilho, os sinais de televisão são geralmente transformados em sinais diferentes de luminância e de cor como demonstrado na fi gura 2-1. Y, o sinal de luminância, é derivado de cores componentes de RGB, baseadas na equação:
Y = 0.59G + 0.30R + 0.11B
Os sinais de diferença de cor operam numa largura de banda reduzida, ti-picamente metade da largura de banda da luminância. Em alguns sistemas, especialmente no NTSC, os sinais de diferença de cor têm largura de banda ainda mais baixa e desigual. Formatos de sinais de componentes e níveis de tensão não são padronizados para sistemas de 525 linhas, enquanto há um documento EBU (EBU N-10) para sistemas de 625 linhas. Detalhes para sistemas componente analógico estão amplamente descritos em ou-tro manual da Tektronix Resolvendo o Quebra-Cabeça do Componente
- Solving the Component Puzzle. É importante notar que valores de nível de sinal, no domínio da diferença de cor, permitem combinações Y, B-Y, R-Y que estarão fora do range legal do gamut quando convertido para RGB. Portanto, há uma necessidade de verifi cação do gamut de sinais de diferença de cor ao fazer os ajustes operacionais tanto para o formato analógico como para o formato digital desses sinais.
A maioria dos sinais de televisão hoje em dia é de dois campos -por- qua-dro “entrelaçado”. Um quadro contém todas as linhas de varredura de uma imagem, 525 linhas em aplicativos de 30 quadro/segundo e 625 linhas em aplicativos de 25 quadro/segundo. O entrelaçamento aumenta a reso-lução temporal fornecendo duas vezes a mesma quantidade de campos por segundo, cada um com somente metade das linhas. Qualquer outra linha de imagem é representada no primeiro campo e as outras são preenchidas no segundo campo.

12
2. Conceitos Básicos
Outra forma de ver o entrelaçamento é a redução da largura de banda. Taxas de amostragem de 50 ou mais apresentações por segundo são ne-cessário para eliminar o notório piscado.
Usando-se 2 campos entrelaçados, a largura de banda para transmissão fi ca reduzida por um fator de 2. O entrelaçamento produz de fato artefatos nas imagens com alto conteúdo de informação vertical. No entanto, para a imagem de televisão, isso não é geralmente considerado um problema quando comparado com o custo do dobro da largura de banda. Em apli-cações de tela de computadores, os artefatos de entrelaçamento não são aceitos, portanto a varredura progressiva é utilizada, geralmente com fra-me rates bem acima de 60Hz. Como a televisão (especialmente a de alta defi nição) e as aplicações da computação fi cam cada vez mais integradas, haverá uma migração do entrelaçamento para o mapeamento progressivo para todas as aplicações.
Maior redução da largura de banda do sinal de televisão ocorre quando ela é codifi cada em PAL ou NTSC como demonstrado na Figura 2-2. NTSC é de-fi nido para operação em estúdio por SMPTE 170M, que formaliza e atualiza o ainda não completamente aprovado, RS 170A. As defi nições para PAL e NTSC (bem como SECAM) podem ser encontradas em ITU-R (ofi cialmente CCIR) Relatório 624. Onde cada sinal RGB teria até 6 MHz de largura de banda, os sinais de diferença de cor teriam tipicamente Y em 6MHz e cada sinal de diferença de cor, em 3 MHz; contudo um sinal composto é um canal de 6 MHz ou menos. O resultado da rede é um canal de 6MHz composto transportando campos de cor a uma taxa de 60 por Segundo, o que no formado de varredura progressiva e não comprimido, precisaria de 3 canais de 12 MHz para uma largura de banda total de 36 MHz. Então a compressão de dados não consiste em nada de novo, o meio digital só a torna mais fácil.
Para sinais NTSC composto, existem considerações de gamut adicionais quando convertidas do domínio da diferença de cor. Transmissores NTSC não permitem amplitude de cor de 100 por cento com alto nível de lumi-nância (tal como o amarelo). Isso ocorre por que a portadora do trans-missor cai a zero em sinais maiores que cerca de 15 por cento acima de 1 volt. Portanto, há um limite mais baixo de gamut para alguns sinais de diferença de cor NTSC quando convertidos para transmissão de RF.
13
Um Guia para Televisão Digital
Como parte do processo de codifi cação, o sincronismo e o burst são adi-cionados como pode ser visto na fi gura 2-3. Burst é uma referência para a decodifi cação de volta para componentes. A fase do burst, com a extre-midade de sincronismo, é chamada de fase SCH, a qual deve ser cuidado-samente controlada na maior parte das aplicações de estúdio. Para o NTSC, 7,5 unidades de IRE de setup são adicionadas ao sinal de luminância. Isso apresenta algumas difi culdades de conversão, particularmente quando de-codifi cado de volta para componente. O problema é que é relativamente fácil adicionar setup; mas removê-los quando as amplitudes e o tempo de setup no domínio composto não são bem controlados, pode resultar em erros de nível de black e/ou distorções de sinal no fi nal da linha ativa.
Amostragem e Quantização
O primeiro passo no processo de digitalização é a amostragem das va-riações contínuas do sinal analógico, conforme demonstrado na fi gura 2-4. Olhando o sinal analógico em intervalos de tempo diferentes, uma
14
seqüência de amostragem de tensões pode ser armazenada, manipulada e mais tarde, reconstruída.
A fi m de recuperar o sinal analógico com precisão, a taxa de amostragem deve ser sufi cientemente rápida a fi m de evitar a perda de informação importante.
Geralmente isso requer que a freqüência de amostragem seja ao menos o dobro da maior freqüência analógica. No mundo real, a freqüência é um pouco maior que o dobro. (O Teorema de Amostragem Nyquist diz que o intervalo entre amostras sucessivas deve ser igual ou menor que a metade do período da freqüência mais alta presente no sinal).
O segundo passo para a digitalização de vídeo é “quantizar” determinando um número digital para os níveis de tensão da amostra do sinal analógico
– 256 níveis para vídeo de 8-bit, 1024 para vídeo de 10-bit e até vários milhares para áudio.
A fi m de obter um melhor aproveitamento digital, é necessário o proces-samento de 10-bit. Enquanto que a maior parte dos equipamentos de fi ta é de 8-bit, o SMPTE 125M requer um padrão de interface de 10-bit. Pro-cessamento menor que 10-bit pode causar artefatos e arredondamentos, particularmente em imagens geradas eletronicamente. Defeitos visíveis serão revelados na imagem se os níveis de quantização forem grosseiros (níveis baixos). Esses defeitos podem aparecer no “contorno” das imagens. Contudo, a boa notícia é que ruídos aleatórios e detalhes na imagem presentes na maioria dos sinais de vídeo ao vivo de fato ajudam a ocul-tar esses defeitos de contorno, adicionando uma aleatoriedade natural a eles. Às vezes o número de níveis de quantização pode ser reduzido; por exemplo, quando a saída de um equipamento de processamento de 10-bit alimentar um gravador de 8-bit. Neste caso, os efeitos de contorno são minimizados pela adição deliberadamente de pequena quantidade de ruído aleatório (dither) a este sinal. Esta técnica é conhecida como “Ran-domized Rounding”.
2. Conceitos Básicos

15
Um Guia para Televisão Digital
Padrões de Vídeo Digital
Embora experimentos primários com a tecnologia digital fossem baseados em amostragem de sinais compostos (NTSC ou PAL), percebeu-se que para uma melhor qualidade de operação era necessário o processamento em componente. Os primeiros padrões digitais eram componente. O interesse em digital composto foi revisto quando a Ampex e a Sony anunciaram um formato de gravação digital composto, o qual fi cou conhecido como D-2.
Primeiramente, essas máquinas foram projetadas como equipamentos de entrada/saída analógica para uso em ambientes analógicos NTSC e PAL existentes; entradas e saídas digitais eram usadas para mixagens de má-quina-para-máquina. Contudo a comunidade de pós-produção reconheceu a grande vantagem da capacidade multi-geração dessas máquinas se elas fossem utilizadas em um ambiente digital.
A recomendação ITU-R BT.601 (ofi cialmente CCIR Recomendação 601) não é uma interface de vídeo padrão, mas um padrão de amostragem. O Rec. 601 desenvolveu-se a partir de uma força tarefa SMPTE/EBU para deter-minar os parâmetros de vídeo digital componente para os sistemas de

16
televisão 525/59.94 e 625/50. Este trabalho culminou numa série de tes-tes patrocinados pela SMPTE em 1981, que resultaram no conhecido CCIR Recomendação 601. Este documento especifi cou o mecanismo de amos-tragem a ser usado por ambos os sinais de linha 525 e 625. Especifi cou a amostragem ortogonal em 13.5 MHz para luminância, e 6.75 MHz para os dois sinais de diferença de cor CB e CR, os quais são versões escalonadas dos sinais B-Y e R-Y.
A estrutura de amostragem defi nida é conhecida como “4:2:2.” Essa no-menclatura é derivada de quando os múltiplos de subportadora NTSC eram considerados para a freqüência de amostragem. Essa abordagem foi aban-donada, mas o uso do “4” para representar a freqüência de amostragem de luminância foi mantido. A força tarefa mencionada acima examinou a freqüência de amostragem de luminância de 12 MHz a 14.3 MHz. Eles sele-cionaram 13.5 MHz como uma meta porque o submúltiplo 2.25 MHz é um fator comum para ambos os sistemas de linha 525 e 625. Outros sistemas de televisão de defi nição estendida usam um formato de resolução maior chamado de 8:4:4, os quais tem o dobro de largura de banda do 4:2:2.
Digital Componente ParaleloA Rec. 601 descreveu a amostragem de sinal. Interfaces elétricas de dados produzidos por essa amostragem foram padronizadas separadamente pelo SMPTE e o EBU. A interface paralela para o 525/59.94 foi defi nida pelo SMPTE como Padrão SMPTE 125M (uma revisão do antigo RP-125) e para o 625/50 como EBU Tech 3267 (revisão do antigo EBU Tech 3246). Ambas foram adotadas pela CCIR e estão incluídas na Recomendação 656, o do-cumento que defi ne a interface de hardware.
A interface paralela usa onze pares trançados e conectores “D” de 25-pin. (Documentos antigos especifi cavam travamento deslizantes nos conecto-res; revisões posteriores modifi caram o mecanismo de retenção para para-fusos 4/40.) Essa interface multiplexa as palavras de dados na seqüência CB, Y, CR, Y, CB…, resultando numa taxa de dados de 27 Mwords/s. As seqüências de tempo SAV e EAV foram incluídas em cada linha para repre-sentar Início de vídeo ativo e Final de vídeo ativo. A linha ativa digital
2. Conceitos Básicos

17
Um Guia para Televisão Digital
contém 720 amostras de luminância e inclui espaço para representação de apagamento analógico dentro da linha ativa.
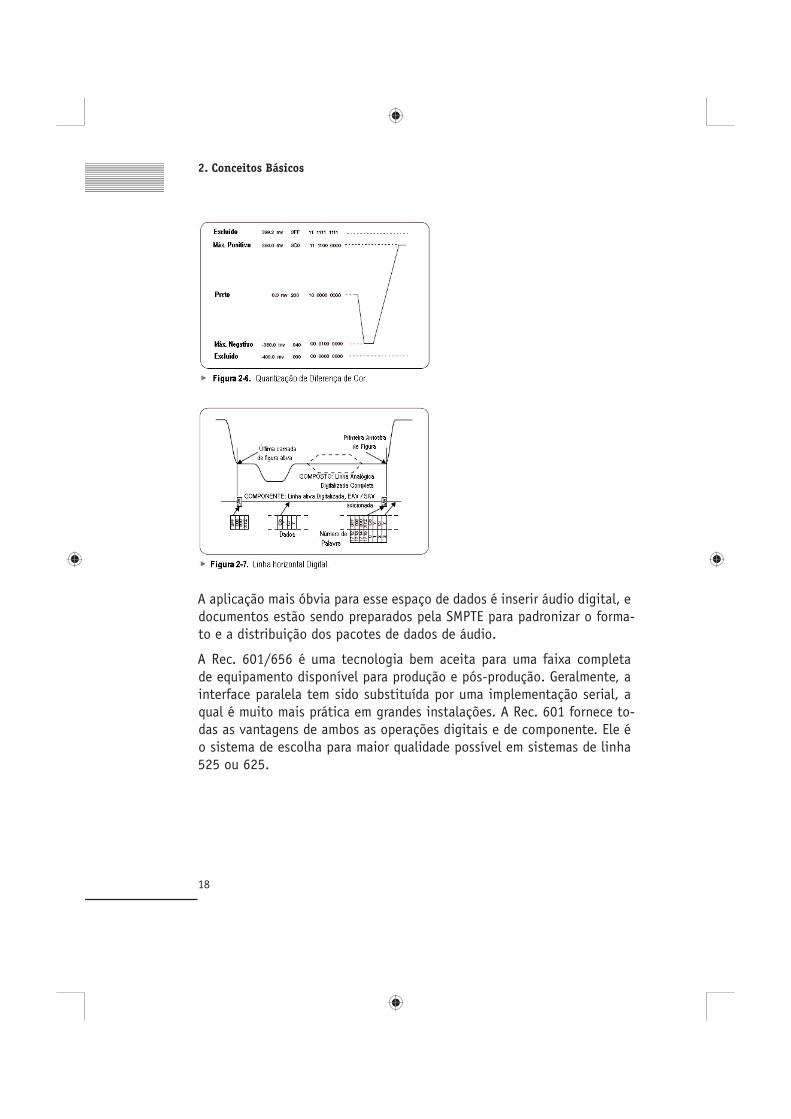
A Rec. 601 especifi cou 8 bits de precisão para as palavras de dados re-presentando o vídeo. Na época em que os padrões foram escritos, alguns participantes sugeriram que não eram adequados, e foi feito menção para a expansão da interface para precisão de 10-bit. A operação 10-bit pro-vou ser benéfi ca em muitas circunstâncias, e as mais recentes revisões do padrão de interface indicam a interface 10 bit, mesmo se apenas 8 bits são usados. A faixa de conversão analógico-digital é a opção para forne-cer níveis acima do pico de branco e abaixo do black como demonstrado na Figura 2-5. Níveis de quantização para black e white são selecionados tal que os níveis de 8-bit com dois “0”s adicionados terão o mesmo valor que os níveis de 10-bit. Valores 000 a 003 e 3FF a 3FC são reservados para efeitos de sincronização. Fatores similares determinam os valores de quantização para sinais de diferença de cor como na Figura 2-6.
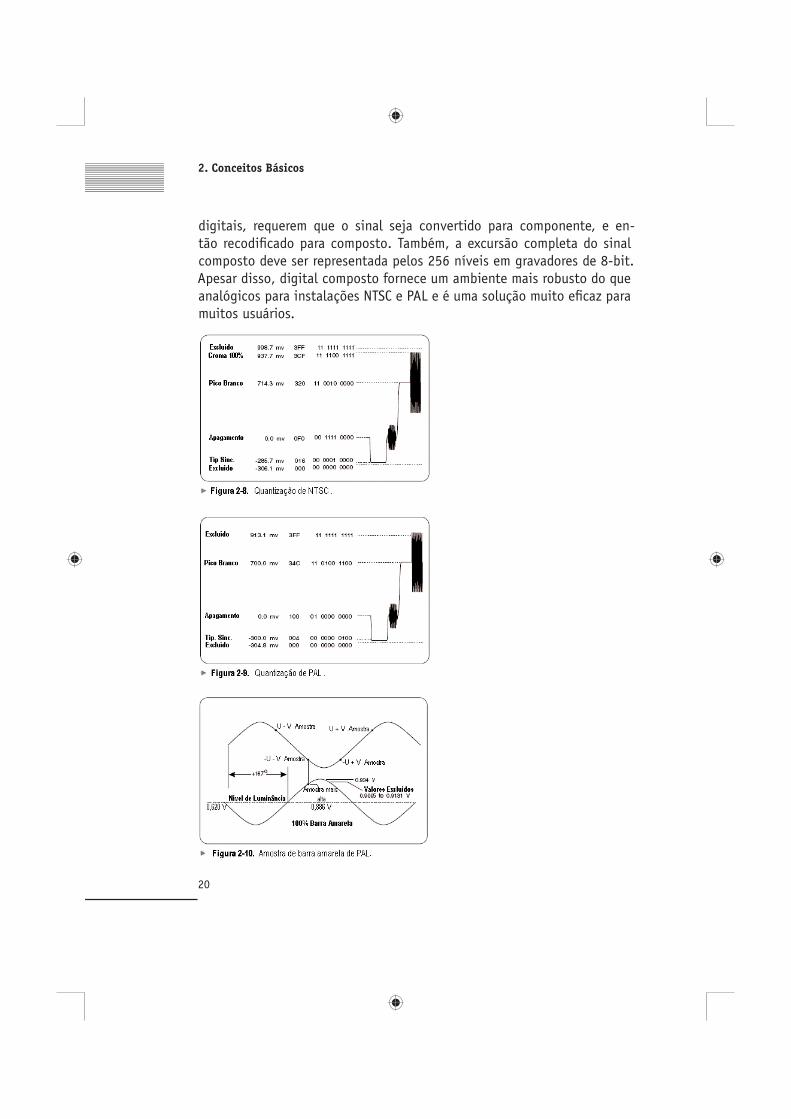
A Figura 2-7 mostra o local das amostras e palavras digitais com relação a uma linha horizontal analógica. Porque a informação de tempo é dada por EAV e SAV, não há necessidade de sinais se sincronismo convencional, e os intervalos horizontais (e os períodos de linha ativos durante o intervalo vertical) podem ser usados para dados auxiliares.
18
A aplicação mais óbvia para esse espaço de dados é inserir áudio digital, e documentos estão sendo preparados pela SMPTE para padronizar o forma-to e a distribuição dos pacotes de dados de áudio.
A Rec. 601/656 é uma tecnologia bem aceita para uma faixa completa de equipamento disponível para produção e pós-produção. Geralmente, a interface paralela tem sido substituída por uma implementação serial, a qual é muito mais prática em grandes instalações. A Rec. 601 fornece to-das as vantagens de ambos as operações digitais e de componente. Ele é o sistema de escolha para maior qualidade possível em sistemas de linha 525 ou 625.
2. Conceitos Básicos

19
Um Guia para Televisão Digital
Digital Composto ParaleloO sinal de vídeo composto é amostrado em quatro vezes a freqüência da subportadora (NTSC ou PAL), resultando em faixas nominais de amostra-gem de 14,3 MHz para NTSC e 17,7 MHz para PAL. O NTSC é padronizado como SMPTE 244M e, a documentação EBU está em processo para PAL. Ambos são especifi cados em dez bits, embora máquinas D-2 e D-3 grava-rem apenas oito bits para fi ta. A quantização do sinal NTSC (mostrada na Figura 2-8) é defi nida com uma quantidade modesta de headroom acima de 100% das barras, um pequeno footroom abaixo da extremidade de sin-cronismo e os mesmos valores excluídos como para componente.
O digital composto PAL foi defi nido para minimizar o ruído de quantização pela utilização de uma grande quantidade da faixa digital variável. Como pode ser visto na Figura 2-9, os valores analógicos de pico realmente ex-cedem a faixa dinâmica digital, o que pode parecer ser um erro. Por causa dos eixos de amostragem especifi cados, referência para a subportadora e a fase das barras de nível mais alto de luminância (como a amarela), as amostras nunca excedem a faixa dinâmica digital. Os valores envolvidos são mostrados na Figura 2-10.
Como o sinal componente, a linha ativa digital composta é longa o sufi -ciente para acomodar a linha ativa analógica e as extremidades de apa-gamento analógico. Diferente do sinal componente, o sinal composto transmite uma representação digital de sincronismo convencional e burst durante o intervalo de apagamento horizontal. Uma representação digital de sincronismo vertical e pulsos de equalização é também transmitida sobre o sinal composto.
Instalações com digital composto têm as vantagens de interface e pro-cessamento digital, e particularmente a capacidade de multi-geração de gravação digital. Porém, há algumas limitações.
O sinal composto realmente suporta a base de codifi cação NTSC ou PAL, incluindo a informação de cor de faixa estreita inerente a esse tipo de codifi cação. Processos de croma key geralmente não têm qualidade sa-tisfatória para trabalhos de alta qualidade, e sinal de keying componente devem ser trabalhados separadamente. Algumas operações, como efeitos
20
digitais, requerem que o sinal seja convertido para componente, e en-tão recodifi cado para composto. Também, a excursão completa do sinal composto deve ser representada pelos 256 níveis em gravadores de 8-bit. Apesar disso, digital composto fornece um ambiente mais robusto do que analógicos para instalações NTSC e PAL e é uma solução muito efi caz para muitos usuários.
2. Conceitos Básicos

21
Um Guia para Televisão Digital
Tal Como digital componente, a interface composta paralela utiliza um cabo multi-par e conectores “D” de 25-pin. Novamente, isso tem provado ser satisfatório para instalações médias e pequenas, mas uma implemen-tação prática de um sistema grande requer uma interface serial.
Sinais digitais componentes widescreen 16:9. Muitos mercados de televi-são em todo o mundo estão vendo a introdução do sistema para imagens widescreen (relação de aspecto 16:9). Alguns desses sistemas, como o MUSE no Japão e o futuro sistema ATV no EUA, são destinados a imagens de qualidade de alta defi nição. Outros, como PALplus na Europa utilizarão imagem de 525 ou 625 linhas. Receptores domésticos com telas de 16:9 tem sido introduzidos em muitos mercados, e a penetração irá provavel-mente aumentar signifi cativamente nos próximos anos. Para muitos broad-casters, isto gera uma demanda de material de programa em 16:9.
Duas sugestões foram propostas para a representação digital de vídeo 16:9 de 525 ou 625 linhas. O primeiro método retém a freqüência de amos-tragem do padrão Rec. 601 para imagens 4:3 (13,5 MHz para luminância). Isso “expande” o pixel representado por cada palavra de dado por um fator de 1,33 horizontalmente, e resulta em uma perda de 25 % da reso-lução espacial horizontal quando comparado às imagens do Rec. 601. Para algumas aplicações, esse método possui uma resolução aceitável, e tem grande vantagem em relação a muitos equipamentos Rec. 601 utilizados.
Um segundo método mantém a resolução espacial onde os pixels (e palavra de dados) são adicionados para representar a largura adicional da imagem. Essa abordagem resulta em 960 amostras de luminância para linha ativa digital (comparado com 720 amostras para uma tela 4:3, e para 1920 amostras para uma tela de alta defi nição 16:9). A taxa de amostragem resultante para luminância é 18 MHz. Esse sistema proporciona a mesma resolução espacial que as imagens 4:3 do Rec. 601; mas equipamentos existentes projetados somente para 13,5 MHz não podem ser utilizados. A resolução maior desse método pode ser vantajosa quando desejar uma qualidade mais alta para pós-produção ou up-conversion quando um siste-ma de alta defi nição for contemplado.
SMPTE 267M determina 13,5 MHz e 18 MHz para ambos os sistemas. Por-que sinais 16:9 utilizando uma amostragem de 13,5 MHz são eletricamente

22
indistinguíveis dos sinais 4:3, eles podem ser transportados pela interface serial SMPTE 259M em 270 Mb/s. Foi planejado a revisão do SMPTE 259M (abordado abaixo) para proporcionar uma transmissão serial de sinais de amostragem de 18 MHz, utilizando o mesmo algoritmo, em uma taxa de dados de 360 Mb/s.
Vídeo Serial Digital
Conexão paralela de equipamento digital é na prática somente para insta-lações relativamente pequenas, e há uma necessidade clara de transmis-sões além de um simples cabo coaxial. Isso não é simples quando a taxa de dados é alta, e se o sinal foi transmitido serialmente sem modifi cações, uma recuperação confi ável seria muito difícil. O sinal serial deve ser modi-fi cado antes da transmissão a fi m de assegurar que haja limites sufi cientes para uma recuperação de clock confi ável, para minimizar o conteúdo de baixa freqüência do sinal transmitido, e para propagar o espectro de sinal transmitido para que os problemas de emissão de radiofreqüência sejam minimizados.
No início dos anos 80, uma interface serial para sinais Rec. 601 foi re-comendada pelo EBU. Essa interface utilizava codifi cação de bloco 8/9 e resultou em uma taxa de bit de 243 Mb/s. Esta interface não suportou sinais de precisão de 10-bits, e houve algumas difi culdades em produzir circuitos integrados de custo efetivo e confi ável. A interface baseada em codifi cação de bloco foi abandonada e foi substituída por uma interface
2. Conceitos Básicos

23
Um Guia para Televisão Digital
com codifi cação de canal que utiliza o embaralhamento e a conversão para NRZI. A interface serial foi padronizada como SMPTE 259M e EBU Tech. 3267, e é defi nida por ambos os sinais composto e componente incluindo áudio digital embedded.
Conceitualmente, a interface digital serial é muito parecida com o sis-tema de portadora para aplicações de estúdio. Áudio de banda básica e sinais de vídeo são digitalizados e combinados na “portadora” digital serial como mostrado na Figura 2-11. (não é estritamente um sistema de portadora, é um sinal digital de banda básica, não um sinal modulado em uma portadora).
A taxa de bit (freqüência da portadora) é determinada pela taxa de clock dos dados digitais: digital componente de 143 Mb/s para NTSC, 177 Mb/s para PAL e 270 Mb/s para Rec. 601. O sistema componente widescreen (16:9) defi nido em SMPTE 267 produzirá uma taxa de bit de 360 Mb/s.
Informação paralela é processada representando as amostras do sinal ana-lógico como mostrado na Figura 2-12 para criar stream de dados digital serial. O clock paralelo é utilizado para carregar os dados da amostra em um registrador de transferência, e um múltiplo de dez vezes o clock pa-ralelo transfere os bits, LSB (bit menos signifi cante) primeiro, para cada palavra de dados de 10-bits. Se na entrada tivermos somente 8 bits de dados, o serializador coloca zeros nos dois LSBs para completar a palavra de 10 bits. Sinais componentes não necessitam processamentos como os sinais SAV e EAV a interface paralela fornece seqüências únicas que podem ser identifi cadas no domínio serial para permitir estrutura de palavra. Se dados auxiliares como áudio foram inseridos no sinal paralelo, esses dados serão transportados pela interface serial. A interface serial pode ser utili-zada com um cabo coaxial de vídeo normal.
A conversão de paralelo para serial para sinais compostos é de alguma forma mais complexa. Como mencionado acima, os sinais SAV e EAV na interface paralela componente fornecem seqüências únicas que podem ser identifi cadas no domínio serial. A interface composta paralela não pos-sui tais sinais, logo é necessário inserir um sinal de referência de tempo adequado (TRS) no sinal paralelo antes da serialização. Um diagrama do intervalo horizontal NTSC digital serial é mostrado na Figura 2-13. O inter-

24
valo horizontal para o digital serial PAL seria similar exceto pelo fato de que a localização da amostragem ser levemente diferente em cada linha, colocando duas amostras extras por campo. Um TRS de três palavras é in-serido na extremidade de sincronismo para habilitar a estrutura de palavra no receptor serial, que também remove o TRS do sinal serial recebido.
A interface paralela composta não permite a transmissão de dados auxi-liares, e a transmissão de sincronismo e burst signifi ca menos espaço dis-ponível para inserção de dados. Sob conversão de paralelo para serial, as extremidades de sincronismo podem ser usadas. Porém, o espaço de dados em NTSC é sufi ciente para quatro canais de áudio digital AES/EBU. Dados auxiliares como áudio podem ser adicionados antes da serialização, e seria normalmente desempenhado pelo mesmo processador que insere o TRS.
Seguindo a serialização da informação paralela, o stream de dados é em-baralhado por um algoritmo matemático e então codifi cado em NRZI (sem retorno para zero invertido) por uma concatenação das seguintes funções.
2. Conceitos Básicos

25
Um Guia para Televisão Digital
61 (X) = X9 + X4 + 1
62 (X) = X + 1
No receptor, o inverso desse algoritmo é utilizado no deserializador para recuperar os dados corretos. No sistema de transmissão digital serial, o clock é contido nos dados como oposição ao sistema paralelo onde há uma linha de clock separada. Pelo embaralhamento dos dados, é garantida uma abundância de transições necessárias para recuperação do clock. A mate-mática de embaralhamento e desembaralhamento leva a alguns sinais de teste especializados para sistema digital serial que serão abordados mais a frente nesse guia.
Codifi cando em NRZI torna a polaridade do stream de dados serial insensi-tivo. NRZ (sem retorno para zero, um termo de gravação de dados digital antigo) é o familiar circuito impresso de nível lógico, alto é um “1” e baixo é um “0”.
Para um sistema de transmissão é conveniente não requerer certa polari-dade do sinal no receptor. Como mostrado na Figura 2-14, uma transição de dados é utilizada para representar cada “1” e não há transição para um dado “0”. O resultado é que somente é necessário detectar transições, isso signifi ca que as polaridades do sinal podem ser utilizadas. Outro resulta-do de codifi cação NRZI é que o sinal de todos os “1”s agora produz uma transição a cada intervalo de clock e resulta em uma onda quadrada em metade da freqüência de clock. Porém, os “0”s não produzem transição, o que leva à necessidade de embaralhamento. No receptor, a rampa de subida de uma onda quadrada na freqüência de clock seria utilizada para detecção de dados.
Conversão de Taxa – Conversão de Formato
Quando nos movemos entre digital componente e digital composto, em ambas as direções, há dois passos: a real codifi cação e decodifi cação e a conversão da taxa de amostragem de um padrão para o outro. As taxas de amostragem digital para esses dois formatos são diferentes: 13,5 Mhz para digital componente e 14,3 Mhz para digital composto NTSC (17,7 Mhz para

26
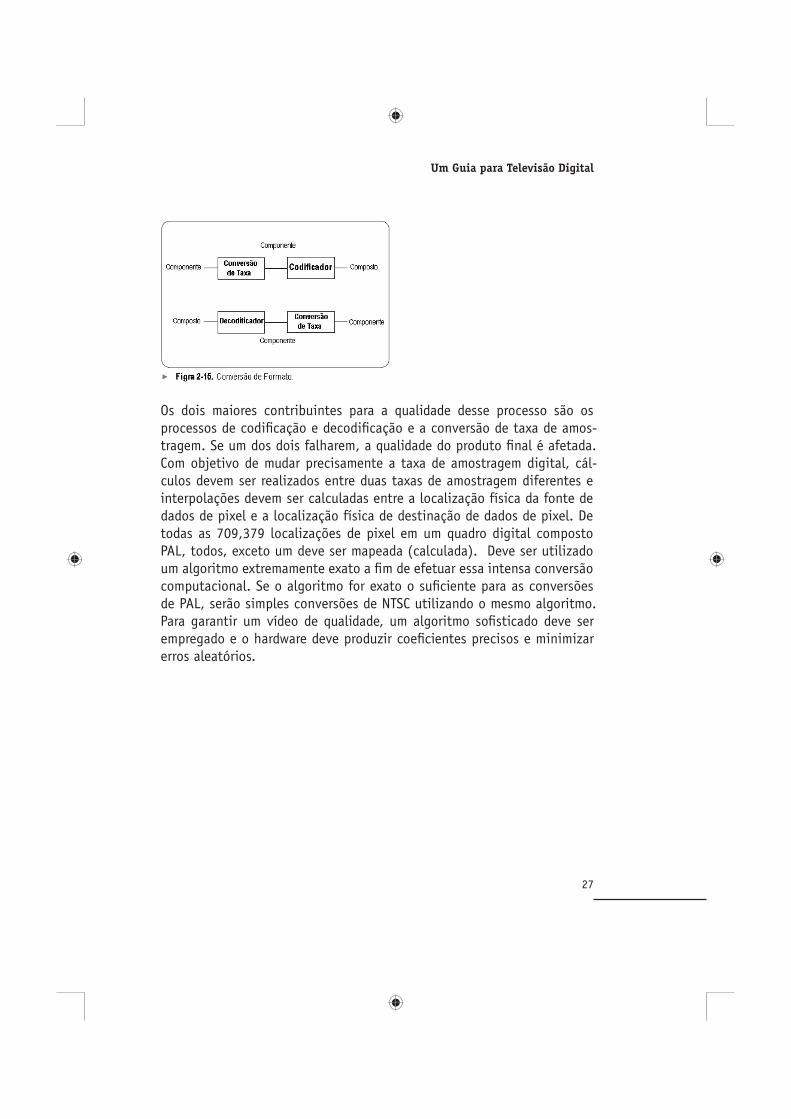
PAL). Esse segundo passo é chamado de “conversão de taxa”. Freqüentemen-te o termo conversão de taxa signifi ca ambas as codifi cação/decodifi cação e reamostragem da taxa digital. Estritamente falando, a conversão de taxa toma uma taxa de amostragem e realiza outra taxa de amostragem a partir da outra. Para nossos objetivos, usaremos o termo “conversão de formato” para signifi car ambos os passos de codifi cação/decodifi cação e reamostra-gem de taxas digitais. A seqüência de conversão de formato depende da direção. De componente para composto, a seqüência usual é conversão de taxa seguida pela codifi cação. De composto para componente, a seqüência é a decodifi cação seguida pela conversão de taxa. Veja a Figura 2-15.
É mais fácil produzir em componente, porque não é necessário esperar por cada limite de color framing (quatro campos para NTSC e oito para PAL) para casar dois vídeos, ao invés disso, eles podem ser casados a cada dois campos (motion frame). Adicionalmente, componente é um formato de alta qualidade uma vez que a luminância e crominância são processadas sepa-radamente. Para uma possível extensão, a produção num ambiente compo-nente deve ser completamente em componente. Um conversor de formato composto-para-componente de alta qualidade é uma alternativa confi ável.
Após o trabalho de pós-produção, digital componente freqüentemente deve ser convertido para digital composto. Fontes que são digital componente podem ser convertidas para entrada de um switcher digital composto ou máquinas de efeitos. Ou uma fonte de um “telecine” digital componente pode ser convertida para entrada em um suíte digital composto. Além disso, gravações produzidas em digital componente podem necessitar ser distribuídas ou arquivadas em digital composto.
2. Conceitos Básicos
27
Um Guia para Televisão Digital
Os dois maiores contribuintes para a qualidade desse processo são os processos de codifi cação e decodifi cação e a conversão de taxa de amos-tragem. Se um dos dois falharem, a qualidade do produto fi nal é afetada. Com objetivo de mudar precisamente a taxa de amostragem digital, cál-culos devem ser realizados entre duas taxas de amostragem diferentes e interpolações devem ser calculadas entre a localização física da fonte de dados de pixel e a localização física de destinação de dados de pixel. De todas as 709,379 localizações de pixel em um quadro digital composto PAL, todos, exceto um deve ser mapeada (calculada). Deve ser utilizado um algoritmo extremamente exato a fi m de efetuar essa intensa conversão computacional. Se o algoritmo for exato o sufi ciente para as conversões de PAL, serão simples conversões de NTSC utilizando o mesmo algoritmo. Para garantir um vídeo de qualidade, um algoritmo sofi sticado deve ser empregado e o hardware deve produzir coefi cientes precisos e minimizar erros aleatórios.


3Aúdio Digital


31
Um Guia para Televisão Digital
Formato de Dados de Áudio AES/EBU
Áudio digital AES (também conhecido como AES/EBU) está de acordo com as especifi cações AES3 (ANSI 4,40) titulado “AES norma recomendada para engenharia de áudio digital – Formato de transmissão serial para da-dos para dois canais linearmente representados pela informação de áudio digital”. Áudio digital AES/EBU é o resultado da cooperação entre a Socie-dade de Engenheiros de Áudio e a União de Broadcasting Européia.
Quando falamos sobre áudio digital, uma das considerações importantes é o número de bits por amostra. Enquanto o vídeo opera com 8 ou 10 bits por amostra, implementações de áudio têm um range de 16 a 24 bits para proporcionar o range dinâmico e razão de sinal-para-ruído (SNR) deseja-dos. A fórmula básica para determinar o SNR para áudio digital é:
SNR = (6.02 * n) + 1.76
Onde “n” é o número de bits por amostra
Para um sistema de 16-bit, o máximo SNR teórico seria (6,02 * 16) + 1,76 = 98,08 dB; para um sistema de 18-bit, o SNR seria 110,2 dB; e para um dispo-sitivo de 20-bit, 122,16 dB. Um ADC de 20-bit bem projetado provavelmente oferece um valor entre 100 e 110 dB. Utilizando a fórmula acima para um SNR de 110 dB, esse sistema possui uma resolução equivalente de 18,3-bit.
Um sinal de áudio digital AES sempre consiste em dois canais que podem ser separados distintamente em material de áudio ou áudio estereofônico. Também há possibilidade para operação de um único canal monofônico onde o segundo canal de dados digital é idêntico ao primeiro ou possui uma confi guração de dados para a lógica “0”. A formatação de dado AES é mostrada na Figura 3-1. Cada amostra é transportada por uma subes-trutura contendo: 20 bits de dados de amostra, 4 bits de dados auxiliares (que podem ser utilizados para estender a amostra para 24 bits), 4 outros bits de dados e um preâmbulo. Dois sub-frame constroem um frame que contém uma amostra de cada um dos dois canais.
Os frames são agrupados mais a frente em blocos de 192-frames que defi -nem os limite de dados do usuário e o status do canal de blocos de dados.

32
Um preâmbulo especial indica a identidade do canal para cada amostra (preâmbulo X ou Y) e o início de um bloco 192-frames (preâmbulo Z). Para minimizar o componente de corrente contínua (DC) na linha de transmis-são, facilitar a recuperação de clock e tornar a polaridade da interface insensitiva, o dado é codifi cado no canal como marca bifásica. Os pre-âmbulos especifi camente violam as regras da marca bifásica para um fácil reconhecimento e para garantir a sincronização. Quando o áudio digital é embutido no stream de dados de vídeo digital serial, o início do bloco de 192-frames é indicado pelo então chamado bit “Z” que corresponde à ocorrência do preâmbulo de tipo-Z.
O bit de validade indica se os bits de amostra de áudio no subframe estão adequados para a conversão para um sinal de áudio analógico. Dado do usuário carrega outra informação, como o time code. Dados de status do canal contem informação associada com cada canal de áudio. Há três níveis de implementação de status dos dados do canal: mínimo, padrão e aprimorado. A implementação padrão é recomendada para utilização em aplicações de televisão profi ssionais, portanto o status dado do canal conterá a informação sobre ênfases de sinal, freqüência de amostragem, status do canal (estéreo, mono, etc.), utilização de bits auxiliares (dados de áudio estendidos para 24 bits ou outra utilização) e um CRC (Código de Redundância Cíclica) para verifi cação de erro de todo o bloco status do canal.
3. Aúdio Digital

33
Um Guia para Televisão Digital
Áudio Multiplexado
Uma das vantagens importantes do SDI (Interconexão Digital Serial) é a habilidade de embutir (multiplexar) vários canais de áudio digital no vídeo digital. Isto é particularmente útil em muitos sistemas onde uma rotina separada de áudio digital torna-se de custo considerável e outra vantagem é a garantia de que o áudio esteja associado ao vídeo apropria-do. Em sistemas menores, como uma seqüência de pós-produção, é geral-mente mais econômico manter o áudio separado, sendo assim eliminando a necessidade de vários módulos mux (multiplexer) e demux (demultiple-xer). No desenvolvimento do padrão SDI, SMPTE 259M, uma das principais considerações foi a habilidade de embutir pelo menos quatro canais de áudio num sinal digital serial composto que tem limitado espaço de dado extra. Uma forma básica de áudio embedded no vídeo composto foi docu-mentada em SMPTE 259M e há uma quantidade signifi cante de equipamen-tos utilizando esse método para ambos os sinais componente e compos-to. Como os engenheiros estavam utilizando as especifi cações do SMPTE 259M para seus projetos, fi cou claro que era necessário um documento mais defi nitivo. Uma versão proposta padrão está sendo desenvolvida para áudio embedded que incluem distribuição de amostras de áudio dentro do espaço de dado extra disponível no digital composto, a habilidade para transportar áudio de 24-bit, métodos para carregar clocking não sincro-nizado e freqüências de clock, direfentes de 48 Khz e especifi cações para áudio embedded em vídeo digital componente.
34
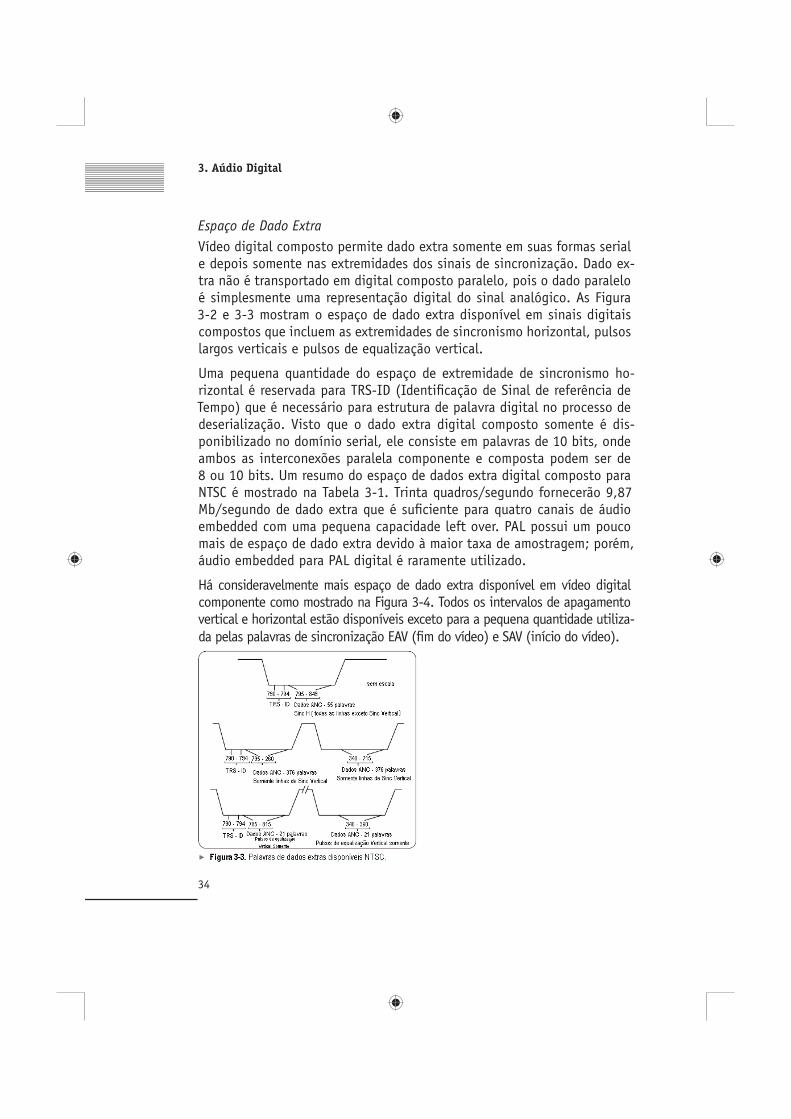
Espaço de Dado ExtraVídeo digital composto permite dado extra somente em suas formas serial e depois somente nas extremidades dos sinais de sincronização. Dado ex-tra não é transportado em digital composto paralelo, pois o dado paralelo é simplesmente uma representação digital do sinal analógico. As Figura 3-2 e 3-3 mostram o espaço de dado extra disponível em sinais digitais compostos que incluem as extremidades de sincronismo horizontal, pulsos largos verticais e pulsos de equalização vertical.
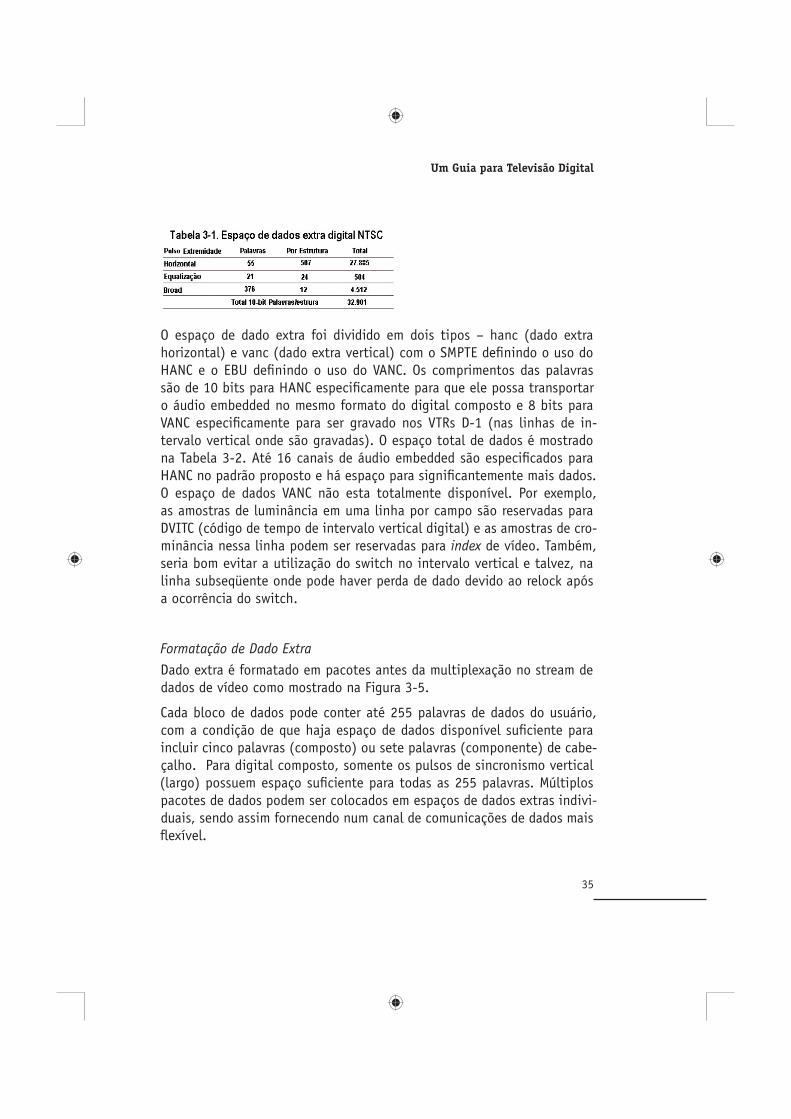
Uma pequena quantidade do espaço de extremidade de sincronismo ho-rizontal é reservada para TRS-ID (Identifi cação de Sinal de referência de Tempo) que é necessário para estrutura de palavra digital no processo de deserialização. Visto que o dado extra digital composto somente é dis-ponibilizado no domínio serial, ele consiste em palavras de 10 bits, onde ambos as interconexões paralela componente e composta podem ser de 8 ou 10 bits. Um resumo do espaço de dados extra digital composto para NTSC é mostrado na Tabela 3-1. Trinta quadros/segundo fornecerão 9,87 Mb/segundo de dado extra que é sufi ciente para quatro canais de áudio embedded com uma pequena capacidade left over. PAL possui um pouco mais de espaço de dado extra devido à maior taxa de amostragem; porém, áudio embedded para PAL digital é raramente utilizado.
Há consideravelmente mais espaço de dado extra disponível em vídeo digital componente como mostrado na Figura 3-4. Todos os intervalos de apagamento vertical e horizontal estão disponíveis exceto para a pequena quantidade utiliza-da pelas palavras de sincronização EAV (fi m do vídeo) e SAV (início do vídeo).
3. Aúdio Digital
35
Um Guia para Televisão Digital
O espaço de dado extra foi dividido em dois tipos – hanc (dado extra horizontal) e vanc (dado extra vertical) com o SMPTE defi nindo o uso do HANC e o EBU defi nindo o uso do VANC. Os comprimentos das palavras são de 10 bits para HANC especifi camente para que ele possa transportar o áudio embedded no mesmo formato do digital composto e 8 bits para VANC especifi camente para ser gravado nos VTRs D-1 (nas linhas de in-tervalo vertical onde são gravadas). O espaço total de dados é mostrado na Tabela 3-2. Até 16 canais de áudio embedded são especifi cados para HANC no padrão proposto e há espaço para signifi cantemente mais dados. O espaço de dados VANC não esta totalmente disponível. Por exemplo, as amostras de luminância em uma linha por campo são reservadas para DVITC (código de tempo de intervalo vertical digital) e as amostras de cro-minância nessa linha podem ser reservadas para index de vídeo. Também, seria bom evitar a utilização do switch no intervalo vertical e talvez, na linha subseqüente onde pode haver perda de dado devido ao relock após a ocorrência do switch.
Formatação de Dado ExtraDado extra é formatado em pacotes antes da multiplexação no stream de dados de vídeo como mostrado na Figura 3-5.
Cada bloco de dados pode conter até 255 palavras de dados do usuário, com a condição de que haja espaço de dados disponível sufi ciente para incluir cinco palavras (composto) ou sete palavras (componente) de cabe-çalho. Para digital composto, somente os pulsos de sincronismo vertical (largo) possuem espaço sufi ciente para todas as 255 palavras. Múltiplos pacotes de dados podem ser colocados em espaços de dados extras indivi-duais, sendo assim fornecendo num canal de comunicações de dados mais fl exível.

36
3. Aúdio Digital

37
Um Guia para Televisão Digital
No início de cada pacote de dados existe um leitor utilizando valores de palavras que não são usadas para dados de vídeo digital e reservadas para propósitos de sincronização. Para vídeo composto, um simples leitor de palavra de 3FCh é utilizado para vídeo componente, um leitor de três pa-lavras 000h 3FFh 3FFh é utilizado. Cada tipo de pacote de dado é defi nido com uma palavra de Dado ID diferente. Várias palavras de dado ID dife-rentes são defi nidas para organizar os vários pacotes de dados utilizados para áudio embedded. O número de bloco de dado (DBN) é um contador opcional que pode ser utilizado para fornecer uma ordem seqüencial para pacotes de dado extra, permitindo que um receptor
determine se há perda de dados. Como exemplo, com áudio embedded o DBN pode ser utilizado para detectar a ocorrência de uma comutação de intervalo vertical, permitindo então que o receptor processe o dado de áudio para remover transientes como “click” ou “pop”. Antes do dado está a palavra do Contador de Dado indicando a quantidade de dado no pacote. Finalmente, seguindo o dado está um somatório de verifi cações que é utilizado para detectar erros no pacote de dado.

38
Áudio embedded básicoÁudio embedded, defi nido em SMPTE 259M, fornece quatro canais de da-dos de áudio de 20 bits amostrado em 48 Khz com amostra de clock sincronizado com o sinal de televisão. Embora a especifi cação seja para a parte digital composta do padrão, o mesmo método também é utilizado para vídeo digital componente. O áudio embedded básico corresponde ao Nível A no padrão de áudio embedded proposto. Outros níveis de operação fornecem mais canais, outras freqüências de amostragem e informação adicional sobre o dado de áudio. A formatação do pacote de dado de áudio embedded básico deriva do áudio AES mostrado na Figura 3-6.
Dois pares de canais AES são mostrados como fonte; porém, é possível para cada um dos quatro canais de áudio embedded vir de um sinal AES diferente (especialmente implementando algum VTRs digital D-1). O paco-te de dado de áudio contém uma ou mais amostras de áudio de até quatro canais de áudio. 23 bits (20 bits de áudio mais os bits C, U e V) de cada sub-frame de AES são mapeados em três palavras de vídeo de 10 bits (X, X+1, X+2) como mostrado na Tabela 3-3.
O bit 9, não o bit 8, garante que nenhum dos valores das palavras exclu-ídas (3FFh-3FCh ou 003h-000h) são utilizados. O bit Z é colocado em “1” correspondendo ao primeiro frame do bloco AES de 192-frames. Canais de áudio embedded são essencialmente independentes (apesar deles sempre serem transmitidos em pares).
Então o bit Z é colocado em “1” em cada canal mesmo se derivado da mesma fonte de AES. Os bits C, U e V são mapeados do sinal AES; porém
3. Aúdio Digital
39
Um Guia para Televisão Digital
o bit de paridade não é o bit de paridade do AES. O bit 8 na palavra X+2 é de mesma paridade para os bits 0-8 em todas as três palavras.
Há várias restrições considerando a distribuição de pacotes de dados de áudio apesar de existir uma “grandfather clause” no padrão proposto para ser levada em conta para equipamentos mais antigos que podem não aten-der todas as restrições. Pacotes de dados de áudio não são transmitidos no espaço de dado extra horizontal seguindo o switch de intervalo vertical normal como defi nido em RP 168. Eles também não são transmitidos no espaço de dado extra designado em RP 165. Para vídeo digital composto, pacotes de dado de áudio não são transmitidos em pulsos de equalização. Levando em conta essas restrições “os dados devem ser distribuídos tão uniformemente o quanto possível através do campo de vídeo”.
A razão por esta última declaração é minimizar o tamanho do buffer do receptor que é uma questão importante para transmitir áudio de 24 bits em sistemas digitais compostos. Basicamente, Nível A, resulta em três ou quatro amostras de áudio por canal em cada pacote de dado de áudio.
40
Áudio embedded estendidoÁudio embedded caracterizado por completo defi nido no padrão proposto inclui:
- Transporte dos quatro bits auxiliares AES (que podem ser utilizados para estender as amostras de áudio para 24 bits)
- Permissão da operação de clock não síncrono
- Permissão de outras freqüências de amostragem outras sem ser 48 Khz
- Fornecimento de informação de atraso de áudio-para-vídeo para cada canal
- Documentação de Dados IDS para permitir até 16 canais de áudio em sistemas digitais componente
- Contagem de “frame de áudio” para sistemas de 525 linhas
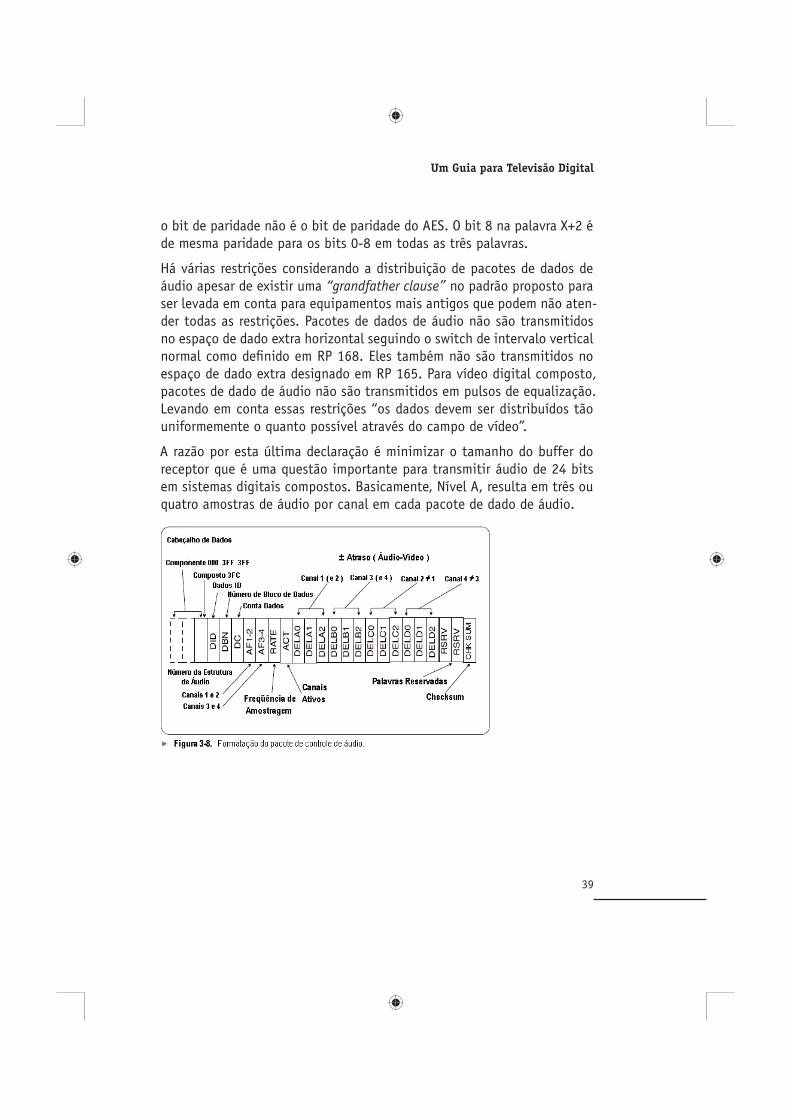
Para fornecer essas características, dois pacotes de dados adicionais são defi nidos. Pacotes de dado estendido transportam os quatro bits auxiliares AES formatados como uma palavra de vídeo contendo dado auxiliar para duas amostras de áudio como mostrado na Figura 3-7. Pacotes de dados estendidos devem ser localizados no mesmo espaço de dado extra como os pacotes de dados de áudio associados e deve seguir os pacotes de dados de áudio. O pacote de controle de áudio (mostrado na Figura 3-8) é transmitido uma vez por campo no segundo espaço horizontal de dado extra após o ponto de switch de intervalo vertical. Ele contém informação do número de frames de áudio,
freqüência de amostragem, canais ativos e atraso de áudio-para-vídeo relativo de cada canal. Transmissão de pacotes de controle de áudio é opcional para operação sincronizada de 48 KHz e necessária para todos os
3. Aúdio Digital

41
Um Guia para Televisão Digital
outros modos de operação (visto que ele contenha a informação de qual modo está sendo utilizado).
Números de frame de áudio é um artefato de 525 linhas, com 29,97 qua-dros/segundo. Nesse sistema há exatamente 8008 amostras de áudio em exatamente cinco frames, o que signifi ca que há um número não inteiro de amostras por frame. Uma seqüência de frame de áudio é o número de frames para um número inteiro de amostras (nesse caso cinco) e o número de frame de áudio indica em qual seqüência pertence um frame particu-lar. Isso é importante quando há comutação entre fontes porque alguns equipamentos (o mais notável digital VTRs) requerem uma operação sín-crona consistente para prevenir o fl uxo over/under do buffer. Quando uma comutação freqüente é planejada, um equipamento de recepção pode ser designado para adicionar ou retirar uma amostra, seguindo uma mudança nos quatro dos cinco casos onde a seqüência é quebrada. O desafi o em tal sistema é detectar se uma comutação ocorreu. Isso pode ser facilitado pela utilização do número de bloco de dados na estrutura do formato de dado extra e pela inclusão de um contador de frame adicional, com os bits não utilizados na palavra de número de frame de áudio do pacote de controle de áudio.
A informação de atraso de áudio contido no pacote de controle de áudio utiliza um modo de falha de canal par. Isto é, atraso-A (DELA0-2) é para ambos os canais 1 e 2, a menos que o atraso para o canal 2 não seja igual ao do canal 1, nesse caso, o atraso para o canal 2 é localizado no atraso-C. A freqüência de amostragem deve ser a mesma para cada canal em um par, portanto o dado em “ACT” fornece somente dois valores, um para os canais 1 e 2 e outro para os canais 3 e 4.
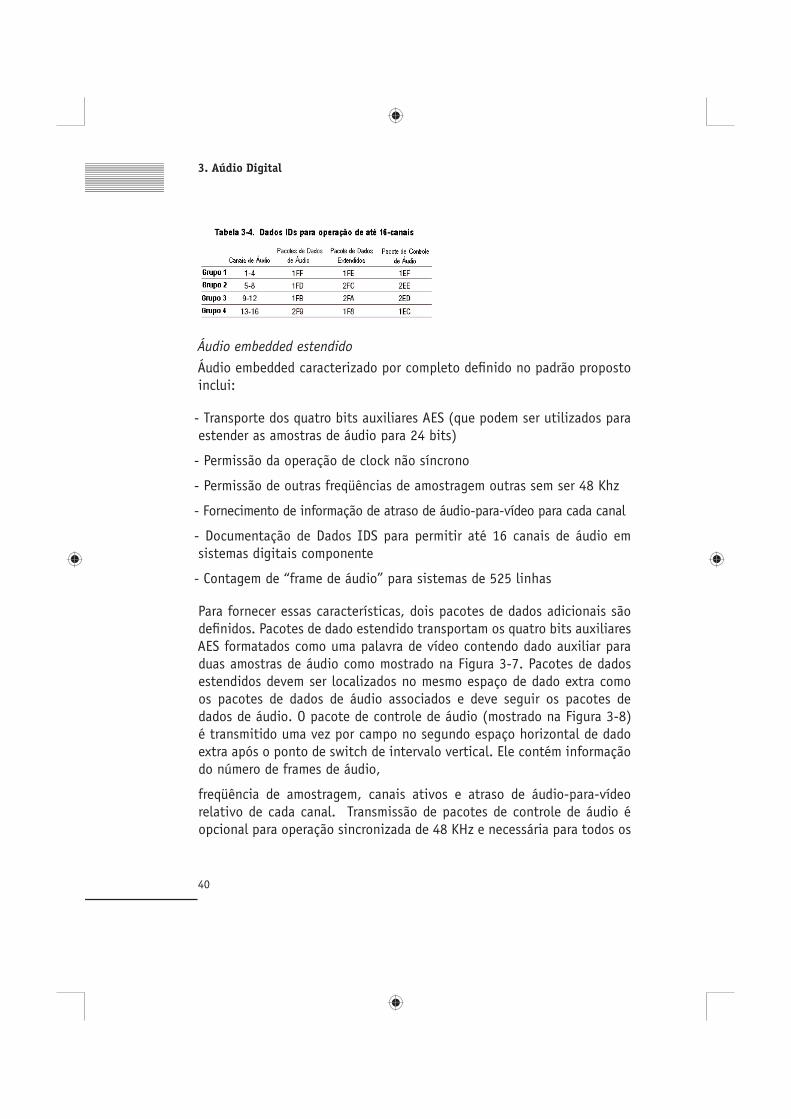
Com o intuito de fornecer até 16 canais de áudio em sistemas digitais componentes o áudio embedded é dividido em grupos de áudio correspon-dendo à operação de quatro canais básicos. Para cada um dos três tipos de pacotes de dados são associados quatro Dados IDs como mostrado na Tabela 3-4.

42
Tamanho de Buffer do ReceptorEm vídeo digital componente, o buffer do receptor em um demultiplexador de áudio não é uma questão crítica, visto que há muito espaço de dados extras disponíveis e poucas linhas excluindo os dados extras de áudio. O caso é consideravelmente diferente para vídeo digital composto devido ao fato da exclusão de dados em pulsos de equalização, e até mais importan-te, devido à distribuição de pacotes de dados para áudio estendido. Por essa razão o padrão proposto requer um buffer no receptor de 64 amostras por canal com um “grandfather clause” de 48 amostras por canal para de-signers das limitações em equipamentos antigos. No padrão proposto, o nível A defi ne uma distribuição de amostra permitindo a utilização de um buffer no receptor de 48 amostras por canal enquanto outros níveis ge-ralmente requerem a utilização de um buffer específi co de 64 amostras. A determinação do tamanho do buffer é analisada nessa seção para sistemas NTSC digitais, porém o resultado é o mesmo para sistema PAL digital.
Amostragem síncrona em 48 KHz fornece exatamente 8008 amostras em cinco frames, que é 8008 ÷ (5 x 525) = 3,051 amostras por linha. Por-tanto, muitas linhas podem transportar três amostras por canal enquanto alguns devem carregar quatro amostras por canal. Para NTSC digital, cada extremidade de sincronismo horizontal tem espaço para 55 palavras de dados extras. A Tabela 3-5 mostra como essas palavras são utilizadas por quatro canais, áudio de 24 bits e 20 bits (o cabeçalho inclui leitor, dado ID, contador de dado, etc.). Visto que ele requer 24 palavras de vídeo a mais para transportar uma amostra adicional por canal para quatro canais de áudio de 24 bits e isso excederia o espaço de 55 palavras, não pode ter mais que três amostras por linha de áudio de 24 bits.
3. Aúdio Digital

43
Um Guia para Televisão Digital
Um buffer de amostra no receptor é necessário para guardar amostras ne-cessárias para fornecer a saída contínua necessária durante o tempo dos pulsos de equalização e outras linhas excluídas (a linha de comutação de intervalo vertical e a linha subseqüente). Quando for necessário somente áudio de 20 bits a “mesma distribuição de amostras” diz que, algumas linhas horizontais transportam quatro amostras por canal resultando em um tamanho de buffer modesto de 48 amostras ou menos dependendo do tipo de buffer. Utilizando somente o primeiro pulso largo de cada linha de sincronismo vertical, quatro ou cinco amostras em cada pulso largo forneceram uma satisfatória, distribuição. Isso é conhecido como nível A. Porém, se for utilizado áudio de 24 bits ou se a distribuição de amostra permitir áudio de 24 bits mesmo se não for utilizado, pode haver não mais do que três amostras por espaço horizontal de dado extra para um sistema de 4 canais. O primeiro pulso largo de cada linha de sincronismo vertical é requerido para transportar 16 ou 17 amostras por canal para conseguir uma mesma distribuição melhor possível. Isso resulta em um de buffer de 80 amostras por canal, ou menos, dependendo do tipo de buffer.
Para atender o buffer de 64 amostras por canal, é necessário um buffer melhor. Há dois tipos comuns de buffer que são equivalentes com a fi na-lidade de entender o padrão proposto.
Um é o buffer FIFO (fi rst in fi rst out) e o outro é um buffer circular. Buffers inteligentes têm as seguintes possibilidades sincronizadas:
Buffer FIFO – Mantém as “leituras” até que um número específi co de amostras esteja no buffer (requer um contador) e não lê e nem escreve até que um tempo seja especifi cado (requer sincronismo vertical)
Buffer Circular – coloca o endereço de leitura para ser um número certo de amostras após o endereço de escrita em um tempo especifi cado (requer um sincronismo vertical)
Utilizando um buffer inteligente, os tamanhos mínimos são de 24 amos-tras por canal para operação de 20 bits e 40 amostras por canal para operação de 24 bits. Por causa das condições diferentes para os dois tipos de distribuição de amostra, o tamanho mínimo do buffer inteligente para
44
ambos os números de bits por amostra é de 57 amostras. Portanto, um buffer inteligente de 64 amostras por canal deve ser adequado.
No caso de um buffer não tão inteligente, endereços de leitura e escrita para um buffer circular devem estar longe o sufi ciente para carregar tanto uma extensão de 40 amostras como uma depleção de 40 amostras. Isso signifi ca que o tamanho do buffer deve ser de 80 amostras por áudio de 24 bits ou para operação automática de ambos os tamanhos de amostras. Portanto, um buffer inteligente de 64 amostras por canal é necessário para atender as especifi cações do padrão proposto.
Sistematizando Áudio AES/EBUÁudio e vídeo digital serial estão se tornando comum em ambientes de produções e pós-produção assim como em estações de televisão. Em mui-tos casos, o áudio e vídeo são fontes casadas; e isso pode ser desejável para mantê-los juntos e tratá-los como um único stream de dados digital serial. Isso possui, por exemplo, a vantagem de manter os sinais no do-mínio digital e comutá-los juntos com um roteador de vídeo digital serial. Em situações ocasionais, onde é desejado retirar algumas das fontes de áudio, o áudio digital pode ser demultiplexado e comutado separadamen-te através de um roteador de áudio digital AES/EBU.
No fi m da recepção, após o áudio multiplexado ter passado através do roteador digital serial, pode ser necessário extrair o áudio do vídeo, de modo que a edição, áudio mais delicado ou outro processo possa ser exe-cutado. Isto requer um demultiplexador que retira o áudio AES/EBU do ví-deo digital serial. A saída de um típico demultiplexador possui um BNC de vídeo digital serial assim como conectores para os sinais de áudio digital de dois pares estéreo AES/EBU.
3. Aúdio Digital

4Hardware de Sistema eQuestões


47
Um Guia para Televisão Digital
Seleção de Cabo
A melhor classifi cação de cabos de vídeo analógico de precisão exige bai-xas perdas em freqüências muito baixas (próximo de DC) em torno de 10 MHz. Na palavra digital serial, perda de cabos nessa porção de espectro tem conseqüência menor, mas ainda importante. As altas freqüências são associadas com taxas de transmissão de 143, 177, 270 ou 360 Mb/s onde perdas são consideráveis. Afortunadamente, a robustez do sinal digital se-rial possibilita a equalização dessas perdas muito facilmente. Logo, quan-do convertemos de analógico para digital, a utilização existente, cabos de qualidade pode não originar problemas. A mais importante característica de cabo coaxial para ser utilizado para digital serial é sua perda em ½ freqüência de clock do sinal a ser transmitido. Esse valor determinará o comprimento máximo do cabo que pode ser equalizado por um dado re-ceptor. Também é importante que a perda de resposta de freqüência em dB seja aproximadamente proporcional a 1/√f abaixo das freqüências abaixo de 5 MHz. Alguns dos cabos comuns utilizados são os seguintes:
PSF 2/3 UK
Belden 8281 EUA e Japão
F&G 1.0 / 6.6 Alemanha
Todos esses cabos possuem um desempenho excelente para sinais digi-tais serial. Fabricantes de cabos estão aproveitando a oportunidade de introduzir cabos novos, de baixa perda, e com dielétricos especialmente projetados para digital serial. Exemplos de cabos de vídeo alternativos são o Beldem 1505A que, apesar de mais fi no, mais fl exível e não tão caro quanto o 8281, possuem um desempenho mais alto nas freqüências que são mais críticas para sinais digitais serial. Um desenvolvido recentemen-te especifi camente para vídeo digital serial é o Belden 1694A com perda menor do que o 1505A.
48
Conectores
Até recentemente, todos os conectores BNC utilizados em televisão tinha uma impedância característica de 50 ohms. Está disponível uma variedade de conectores BNC de 75 ohms, mas não são fi sicamente compatíveis com conectores de 50 ohms. A infl uência do “descasamento” de impedância é de menor conseqüência em freqüências de vídeo analógico porque o com-primento de onda dos sinais é muitas vezes maior do que o comprimento do conector. Mas com alta taxa de dados do digital serial (e os pequenos comprimentos de onda), a impedância do conector deve ser considerada. Em geral, o comprimento de um simples conector BNC não tem efeito signifi cante no sinal digital serial. Muitas polegadas de conexões de 50 ohms, tais como um número de barris curto ou coaxial, teriam que ser utilizadas para qualquer efeito notável. No caso específi co de um receptor ou transmissor serial, os dispositivos ativos associados com os conectores de chassis necessitam de casamento de impedância signifi cante.
Isso pode facilmente fazer um conector de 50 ohms se parecer com um de 75 ohms acima da banda de freqüência de interesse. Uma boa norma de engenharia nos adverte para evitar descasamentos de impedância e utilizar componentes de 75 ohms onde for possível e essa regra está sendo seguida no desenvolvimento de equipamentos novos para digital serial.
Patch Panels
O mesmo se torna verdade para outros elementos passivos no sistema como “Patch Panels”. A fi m de evitar refl exões causadas por desconti-nuidades de impedância, esses elementos também devem possuir uma impedância característica de 75 ohms. Patch Panels de 50 ohms existentes provavelmente serão adequados em muitas ocasiões, mas novas instala-ções devem utilizar patch panels de 75 ohms. Muitos fabricantes de patch panels oferecem agora versões de 75 ohms especifi camente projetadas para aplicações de digital serial.
4. Hardware de Sistemas e Questões

49
Um Guia para Televisão Digital
Terminações e Loop-Throughs
O padrão digital serial especifi ca que a perda de retorno do receptor e transmissor deve ser maior do que 15 dB até 270 MHz. Isto é, terminações devem ser de 75 ohms com componente reativo não signifi cante para 270 MHz.. Claramente essa freqüência é relacionada ao digital componente, portanto, uma freqüência mais baixa deve ser adequada para NTSC e isso pode ser considerado no futuro. Como pode ser visto pela consideravel-mente modesta especifi cação de 15 dB, perda de retorno não é uma ques-tão crítica em sistemas de vídeo digital serial. Isso é mais importante em comprimentos curtos de cabos onde a refl exão poderia distorcer o sinal mais do que em comprimentos longos onde o sinal refl etido recebe mais atenuação. Muitos receptores de digital serial são terminados diretamen-te a fi m de evitar problemas de perda de retorno. Visto que os circuitos ativos do receptor não aparentam ser de 75 ohms, o circuito deve ser in-cluído para fornecer uma boa terminação resistiva e baixa perda de retor-no. Alguns dos equipamentos de hoje não fornecem valores de perdas de retorno atendendo as especifi cações para altas freqüências. Isso não pode causar nenhum problema de sistema conhecido; porém, uma boa prática de engenharia deve prevalecer aqui também.
“Loop-Throughs” ativos são muito comuns em equipamentos de digital serial porque eles são relativamente simples e possuem qualidades de geração de sinais similares a um amplifi cador de distribuição de reclock. Também, eles proporcionam isolação entre entrada e saída. Porém, se a fonte do equipamento é desligada por qualquer razão, a conexão é quebra-da. Loop-Throughs ativos também tem a mesma necessidade de se atentar para o casamento de impedância no circuito como mencionado acima.
Loop-Througs passivos são também possíveis e práticos.
Implementações utilizadas em monitores de forma de onda digital serial pos-suem perda de retorno maior que 25 dB até a freqüência de clock. Isso torna possível monitorar o sinal real que está sendo recebido pelo equipamento operacional ou sob unidade de teste e não substitui o receptor monitor.
A mais importante utilização de loop-throughs passivos é para diagnósti-cos de sistemas e encontro de faltas onde é necessário observar o sinal o

50
percurso problemático. Se um Loop-Through é para ser utilizado para mo-nitoramento, é importante que ele seja um Loop-Through passivo por duas razões. Primeiramente, transmissores seriais com saídas múltiplas usual-mente possuem dispositivos ativos separados em cada saída, portanto, o monitoramento de uma saída não necessariamente indica a qualidade de outra saída como era realizado na época dos sinais analógicos resistivos. Segundo, quando um Loop-Through ativo for utilizado, perda de potência no dispositivo de monitoração desligará o sinal. Isso seria desastroso em uma situação operacional. Se um Loop-Through passivo disponível não está sendo utilizado, é importante ter certeza de que a terminação é de 75 ohms sem nenhum componente reativo signifi cante pelo menos para a freqüência de clock do sinal serial. Aquela antiga terminação, talvez “de precisão”, em sua caixa de ferramentas pode não funcionar para digital serial.
Cabos de Áudio Digital e Tipos de Conectores
Áudio digital AES/EBU tem levantado algumas questões interessantes por causa de suas características. Em aplicações profi ssionais, áudio balancea-do tem sido tradicionalmente usado a fi m de evitar o hum e outros ruídos. Geralmente é utilizado cabos de áudio trançado, isolado e multicondutor. O conector XLR foi selecionado como conector e é utilizado universalmen-te em quase todas as aplicações profi ssionais. Quando o áudio digital se desenvolveu, naturalmente assumiu que os cabos e conectores de trans-missão de áudio analógico tradicional ainda poderiam ser utilizados. O escopo do AES3 cobre transmissão de áudio digital de até 100 metros, que pode ser manuseado adequadamente com interconexão de par balanceado, trançado e isolado.
Porque o áudio AES/EBU possui uma largura de banda muito mais larga que o áudio analógico, o cabo deve ser selecionado com cuidado. A impe-dância, a fi m de atender as especifi cações de AES3, requer uma fonte de 110 ohms e impedâncias de carga. O padrão não possui defi nição para uma carga de conexão, embora as entradas Loop-Through, como utilizado em áudio analógico, serem teoricamente possíveis. Cabos terminados impro-priamente podem causar refl exões de sinal e erros de dados subseqüentes.
4. Hardware de Sistemas e Questões
51
Um Guia para Televisão Digital
As altas freqüências dos sinais AES/EBU não podem trafegar sobre cabos de par trançado tão facilmente como em áudio analógico. Perdas de alta freqüência e capacitância causam “Rolloff” de alta freqüência.
Eventualmente, as extremidades dos sinais se tornam tão arredondadas e a amplitude tão baixa que os receptores não podem mais distinguir o “1”s do “0”s. Isso torna o sinal indetectável. Tipicamente, os comprimentos dos cabos são limitados em poucas centenas de pés. Conectores XLR tam-bém são especifi cados. Visto que áudio digital AES/EBU possui freqüên-cias até 6 MHz, há sugestões para utilizar cabos coaxiais desbalanceados com conectores BNC para melhorar o desempenho em instalações de vídeo existentes e transmissões além de 100 metros.
Há dois comitês defi nindo a utilização de conectores BNC para áudio di-gital AES/EBU. A Sociedade de Engenharia de Áudio desenvolveu AES3-ID e SMPTE está desenvolvendo uma recomendada norma similar. Essas recomendações utilizarão um sinal balanceado de 110 ohms ao invés de não balanceado de 75 ohms e reduz o sinal de 3 a 10 volts para 1 volt. O sinal resultante agora possui as mesmas características que um vídeo analógico, e amplifi cadores de distribuição de vídeo analógico tradicio-nais, roteadores e Patch Panels de vídeo podem ser utilizados. O custo de montagem de cabo coaxial com BNCs também é menor do que para um cabo multicondutor com XLRs. Testes têm indicado que emissões EMI são também reduzidas com distribuição coaxial.
Distribuição de Sinal, Reclocking
Embora o sinal de vídeo seja digital, o mundo real através do qual o sinal passa é analógico. Consequentemente é importante considerar as distor-ções analógicas que afetam um sinal digital. Isso inclui Rolloff de respos-ta de freqüência causada pela atenuação do cabo, distorção de fase, ruído, oscilação de jitter e deslocamento da linha de base devido ao acoplamento AC. Enquanto um sinal digital reterá a habilidade de comunicar seus dados apesar de certo grau de distorção, há um ponto além do qual os dados não serão recuperáveis. Os cursos dos longos cabos são as principais causas de distorção de sinal. Muitos equipamentos digitais fornecem alguma forma

52
de equalização e regeneração em todas as entradas a fi m de compensar o curso do cabo de comprimentos variados. Considerando o caso específi co de amplifi cadores de distribuição e roteadores, há várias abordagens que podem se utilizadas: Amplifi cador de banda larga, amplifi cador digital de banda larga e amplifi cador digital de regeneração.
Tomando primeiro o último caso, regeneração do sinal digital geralmente signifi ca recuperar dados de um sinal de chegada e retransmiti-lo com uma forma de onda limpa utilizando uma fonte de clock estável. Regeneração de um sinal digital permite-o ser transmitido posteriormente e mantém mais degradação analógica que um sinal que já tem acumulado algumas distorções analógicas. Regeneração geralmente utiliza as características do sinal de entrada, tal como clock extraído, para produzir a saída. Em vídeo digital serial, há dois tipos de regeneração: serial e paralela.
Regeneração serial é mais simples. Consiste na equalização de cabo (ne-cessário mesmo para comprimentos de cabos de poucos metros ou menos), recuperação de clock, recuperação de dados e retransmissão dos dados utilizando o clock recuperado.
Um “Loop” de fase fechado (PLL) com um oscilador LC (indutor/capacitor) ou RC (resistor/capacitor) regenera a freqüência de clock serial, um pro-cesso chamado de reclocking.
Regeneração paralela é mais complexa. Isso envolve três passos: desse-rialização; reclocking paralelo, usualmente utilizando uma base de tempo controlada a cristal; e serialização.
Cada forma de regeneração pode reduzir o jitter fora de sua largura de banda PLL, mas o jitter dentro na largura de banda do Loop será reprodu-zido e pode acumular signifi cantemente com cada regeneração. (Para uma abordagem completa de efeitos e medição de jitter, veja a Seção 8.) Um regenerador serial terá uma largura de banda de loop na ordem de muitas centenas de kilohertz para poucos Megahertz. Um regenerador paralelo terá uma largura de banda mais estreita na ordem de alguns Hertz. Além disso, um jitter inerente a um cristal controlado timebase (paralelo re-generador) é muito menor do que a de um oscilador LC ou RC timebase (serial regenerador).
4. Hardware de Sistemas e Questões

53
Um Guia para Televisão Digital
Adicionalmente, o jitter inerente em uma base de tempo controlada a cris-tal (regenerador paralelo) é muito menor do que em uma base de tempo do oscilador RC ou LC (regenerador serial). Regeneração serial obviamente não pode ser desempenhada em um número ilimitado de vezes por causa da oscilação do jitter PLL acumulativo e pelo fato de que o clock é extraí-do do sinal de entrada. Regeneração serial pode ser tipicamente executa-da, várias vezes antes de uma regeneração paralela ser necessária. Jitter excessivo embutido eventualmente causa falha no sistema; jitter aceitável para um receptor serial deve ainda ser considerado e manuseado de um ponto de vista do sistema que será discutido mais a frente. Regeneração, onde um clock de referência é utilizado para produzir a saída, pode ser executado um número ilimitado de vezes e eliminará todo o jitter embu-tido em uma série de operações de regeneração. Esse tipo de regeneração acontece na maioria dos equipamentos operacionais tais como VTRs, ro-teadores de produção (“Vision Mixers”) ou unidades de efeitos especiais que utilizam referências externas para executarem seus processos digitais. Portanto a linha de baixo é regenerada (ou reclocking) pode ser perfeita, somente limitada por considerações econômicas.
Uma abordagem completamente diferente para distribuição de sinal é a utilização de roteadores analógicos de banda larga, mas há muitas limi-tações. É verdade que roteadores analógicos de banda larga (mais de 100 MHz) passará um sinal digital serial de 143 Mb/s. Porém, eles provavel-mente possuem o desempenho necessário para 270 ou 360 Mb/s. Com roteadores designados para sinais analógicos de banda larga, as carac-terísticas de resposta de freqüência 1/√f afetarão adversamente o sinal. Receptores destinados a trabalhar com sinais SMPTE 259M esperam ver um sinal transmitido da fonte padrão e atenuado por um cabo coaxial com perdas de resposta de freqüência. Qualquer desvio de rolloff de 6dB/oitava sobre largura de banda de 1 MHz até a freqüência de clock causará operações impróprias do equalizador automático no receptor serial.
Em geral, isso será um problema signifi cante porque o roteador analógico é projetado para ter resposta plana até certa largura de banda e depois roll off em algumas rampas que pode, ou não, ser 6 dB/oitava. Essa é a diferença entre a resposta in-band e out-of-band que causa o problema.

54
Entre esses dois extremos estão os roteadores digitais serial de banda larga que não reclock o sinal. Tais roteadores não-reclocking geralmente executarão adequadamente em todas as freqüências de clock para a quan-tidade de atenuação coaxial dada nas suas especifi cações. Porém, essa especifi cação será usualmente menor para roteadores de reclocking.
Tempo de Sistema
A necessidade de entender, planejar e medir o tempo do sinal não foi eliminado em vídeo digital, somente é possui uma confi guração diferente de valores e parâmetros. Em muitos casos, tempos precisos não serão necessários em ambientes digitais e serão medidos em microsegundos, linhas e quadros ao invés de nanosegundos. De muitas maneiras, distri-buição e tempo são simplifi cadas com processamento digital por causa dos equipamentos que possuem entradas e saídas digitais podendo ter compensação de tempo de entrada automática. Porém, sistemas analógi-co/digital misturados requerem cuidado adicional no manuseio no tempo do sinal digital.
Tempo relativo de sinais múltiplos com respeito a uma referência é ne-cessário em muitos sistemas. Em um extremo, entradas para um roteador de produção analógica composta devem estar com o tempo determinado para a faixa de nanosegundos, logo não haverá erros de fase de subporta-dora. No outro extremo, muitos roteadores de produção digital permitem tempos relativos entre sinais de entrada na faixa de uma linha horizontal. Requisito de tempo de Sinal-para-Sinal para entradas de vídeo digital podem ser enquadrados em três categorias:
1. Equipamento digital com compensação de tempo de entrada automática
2. Equipamento digital sem compensação de tempo de entrada automática
3 Conversores digital-analógico sem compensação de tempo de entrada automática
No primeiro caso, os sinais devem estar na faixa da compensação auto-mática, geralmente sobre uma linha horizontal. Para instalação e manu-
4. Hardware de Sistemas e Questões

55
Um Guia para Televisão Digital
tenção de sistema é importante medir o tempo relativo de tais sinais para garantir que eles estejam na faixa de tempo automático com “Headroom” sufi ciente para permitir qualquer mudança esperada. Ajustes de tempo automático são componentes principais para sistemas digitais; mas eles não podem comumente ser aplicados em um stream de dados serial devido às altas freqüências digitais envolvidas. Uma conversão de volta para o formato paralelo para ajustar o atraso é necessário devido às altas taxas de dados. Portanto, tempo de entrada automático não esta disponível em todo equipamento.
Para o segundo caso, os sinais estão nominalmente no tempo como seria esperado na estrada de um roteador.
A norma recomendada do SMPTE RP 168, a qual se aplica para ambas as operações de 525 e 625 linhas, defi ne uma janela de tempo em uma li-nha horizontal específi ca onde a comutação de intervalo vertical pode ser executada. Veja a Figura 4-1, que mostra a área de chaveamento para o campo 1. (Campo 2 muda na linha 273 para 525 e linha 319 para 625.) O tamanho da janela é de 10 μs que implicaria em uma aceitável diferença de tempo entre os dois sinais de poucos microsegundos. A diferença de tempo selecionada é geralmente determinada pela reação do equipamento
“Downstream” para comutação de intervalo vertical. No caso de roteadores analógicos uma tolerância muito apertada é mantida frequentemente ba-seada na condição de fase da subportadora.
56
Para os sinais digitais serial, microsegundos de diferença de tempo pode ser aceitável. No ponto de comutação, clock lock do sinal serial será recuperado em uma ou duas palavras digitais (10 a 20 períodos de clock serial). Porém, frame de palavra, muito provavelmente, será perdido fazen-do com que o valor do sinal assuma algum valor aleatório até que o próximo dado de sincronização (EAV) recomece o frame de palavra e produza uma sincronização completa do sinal no receptor. Um sinal com um valor alea-tório por parte de uma linha é claramente não adequado em linha para uma alimentação de programa; porém equipamentos “Downstream” podem ser projetados para apagar a porção indesejada da linha. No caso onde o sinal indesejado não é eliminado, o tempo de sinal serial para o roteador terá que estar dentro de um ou dois nanosegundos para que não ocorram variações. Claramente, a abordagem de apagamento de “Downstream” é selecionada.
Finalmente, o caso mais difícil de entradas para DACs sem compensa-ções de tempo requerem a mesma precisão dos sistemas analógicos de hoje – na faixa de nano segundo. Isso será verdadeiro onde mais tarde o processamento analógico for necessário, tal como o utilizado em rotea-dores de produção analógica (vision mixers). Alternativamente, se o sinal analógico é simplesmente uma saída de estúdio, essa alta precisão pode não ser exigida.
Ajustes de tempo automáticos são componentes chave para sistemas di-gitais; mas eles não podem ser comumente aplicados para um stream de dados serial devido as altas freqüências envolvidas. Uma conversão de volta para um formato paralelo para o atraso é necessário devido às altas taxas de dados. Há necessidade de uma variedade de dispositivos de atra-so ajustáveis para essas novas exigências de tempo. Isso inclui um dispo-sitivo de atraso de múltiplas linhas e um dispositivo de atraso de frame. Um equipamento de atraso de frame, é claro, resultaria em um atraso de vídeo que poderia potencialmente criar algum problema de variação em relação ao tempo de áudio e a passagem de código de tempo através do sistema. Sempre que sinais de áudio e vídeo são processados através de caminhos diferentes, pode ocorrer atraso de áudio-para-vídeo. O atraso diferencial causado pelo áudio embedded é insignifi cante (abaixo de 1ms). Porém, problemas ocorrem onde frame delays são utilizados e vídeo e áu-dio seguem caminhos separados.
4. Hardware de Sistemas e Questões

5Monitoramento e Medições


59
Um Guia para Televisão Digital
Testes e medidas de sinal digital serial podem ser caracterizados em três diferentes aspectos: utilização, métodos e ambiente operacional. Tipos de utilização incluiriam: bancada de projetistas, garantia de qualidade de fabricação, avaliação do equipamento pelo usuário, instalação de sistema e teste de aceitação, manutenção do equipamento e sistema e talvez o mais importante, a operação.
Requisitos para um monitor básico operacional incluem display dos sinais de programa carregados por sinal digital com características e precisão consistentes com monitores de sinal de banda básica analógicos de hoje. Um monitor operacional também deve incluir informação sobre o seu pró-prio sinal digital serial, tal como dado disponível, erros de bit e erros de formatação de dados.
Não é necessária uma tela de forma de onda serial atual. Pode ser possí-vel uma redução no número de monitores operacionais devido à natureza robusta dos sinais de vídeo digital. Porém, monitoramento da forma de onda do sinal de programa é necessário em todas as aplicações onde um operador ou equipamento possui a habilidade de mudar parâmetros de programa. A Figura 5-1 mostra a série WFM601 da Tektronix de monitores de componente serial.

60
Métodos para avaliação técnica cobrem várias áreas de utilização que requerem transição. Em adição às medições de sistemas de televisão tra-dicionais, há uma nova dimensão para teste e medidas – para quantifi car os vários parâmetros associados diretamente com a forma de onda serial. O resultado é que várias categorias de métodos de monitoramento e medi-das sejam consideradas: análises de sinal de programa, análises de dados, verifi cação de formato, operação de transmissor/receptor, hardware de transmissão e relatório de falha. Um mostrador de amostragem de tempo equivalente à forma de onda serial é mostrado no Monitor de Componente Serial WFM601M da Tektronix na Figura 5-2.
Medidas de sinal de programa são essencialmente medidas de áudio e vídeo de banda básica que têm sido utilizados por anos. Um aspecto im-portante para essas medidas é que a exatidão na representação de sinal é limitada pelo número de bits por amostra.
Em sistemas analógicos uma pequena quantidade de dados digitais pre-sentes em sinais de vídeo na forma de Código de Tempo de Intervalo Vertical (VITC); mas o stream de dado serial possui muito mais capacidade para dados que o vídeo. Portanto, são necessários métodos de medição mais completos.
A análise da forma de onda de sinal digital e seus efeitos na operação de transmissor/receptor é um novo requisito em testes e medidas para equi-pamentos de televisão. Ao invés de adquirir equipamento especial para in-
5. Monitoramento e Medições

61
Um Guia para Televisão Digital
terpretar essa forma de onda de alta velocidade, capacidades apropriadas estão sendo adicionadas a equipamentos de teste de televisão tradicio-nais, ajudando na transição econômica para televisão digital serial. Teste de componentes de transmissão passivos (coaxial, Patch Panels, etc.) é similar ao utilizado com sistemas de banda básica exceto que larguras de banda muito grandes sejam consideradas.
O terceiro aspecto para testes e medidas é se está dentro ou fora de servi-ço. Todo o monitoramento operacional deve estar dentro de serviço, o que signifi ca que monitores devem ser capazes de dar ao operador informação sobre o sinal digital que contém material de programa ativo assim como o próprio sinal de programa. Se há problemas para serem resolvidos, até aqueles com uma natureza intermitente também exigirão medições dentro de serviço.
Por causa do conhecido tipos de falha do ponto crítico para sistemas digitais, testes fora de serviço são também especialmente importantes. A fi m de conhecer o limite disponível, é necessário adicionar parâmetros de desgaste para o sinal digital em quantidades medidas até o ponto crítico o que certamente não é aceitável em situações operacionais.
As próximas seções tratam dos detalhes de técnicas de medição especí-fi cas cobrindo monitoramento, medições, teste dentro de serviço e teste fora de serviço.


6Medindo o Sinal Serial


65
Um Guia para Televisão Digital
Medidas de Forma de Onda
Quando observadas em um monitor ou osciloscópio apropriado, muitas varreduras de tempo (superpostas pela persistência do CRT ou memória de amostra digital) produzem uma forma de onda que seguem vários ca-minhos diferentes através da tela. Os diferentes caminhos são devido ao fato que os dígitos no stream serial variam baseados nos dados (estado alto ou baixo, com ou sem mudança em possíveis tempos de transição). A forma de onda que resulta é conhecida como um padrão de olho (com dois “olhos” como na Figura 6-1 e apresentados em um monitor como mostrado no Monitor de Componente Serial WFM601M na Figura 5-2).
Medidas analógicas da forma de onda digital serial começam com as es-pecifi cações da saída do transmissor como mostrado na Figura 6-2. As es-pecifi cações para serem medidas são: amplitude, tempo de subida e jitter, que são defi nidos no padrão serial, SMPTE 259M. Freqüência, ou período, é determinado pelo gerador de sincronismo de televisão desenvolvendo a fonte de sinal, não o processo de serialização. Um intervalo de unidade (UI) é defi nido como o tempo entre duas transições de sinal adjacentes, que é o recíproco da freqüência de clock. O intervalo de unidade é de 7,0 ns para NTSC, 5,6 ns para PAL e 3,7 ns para componente de 525 ou 625.
Um receptor serial determina se o sinal é “alto” ou “baixo” no centro de cada olho, assim detectando o dado serial. Como o ruído e o jitter aumentam através do canal de transmissão, certamente o melhor ponto de decisão é no centro do olho (como mostrado na Figura 6-3) apesar de alguns receptores selecionarem um ponto em um tempo fi xo após cada ponto de transmissão. Qualquer efeito que fecha o olho pode reduzir a utilidade do sinal recebido.
Em um sistema de comunicações com correções de erros diretos, uma exa-ta recuperação de dados pode ser feita com o olho quase fechado. Com as taxas de erros muito baixas necessárias para transmissões de vídeo digital serial corretas (veja a Seção 7) uma enorme e limpa abertura do olho é necessária após a equalização do receptor. Isso é porque o processo natu-ral aleatório que fecha o olho tem “caldas” estatísticas que causariam um ocasional, mas inaceitável, erro. Efeitos de jitter que fecham o olho são abordados na Seção 8.
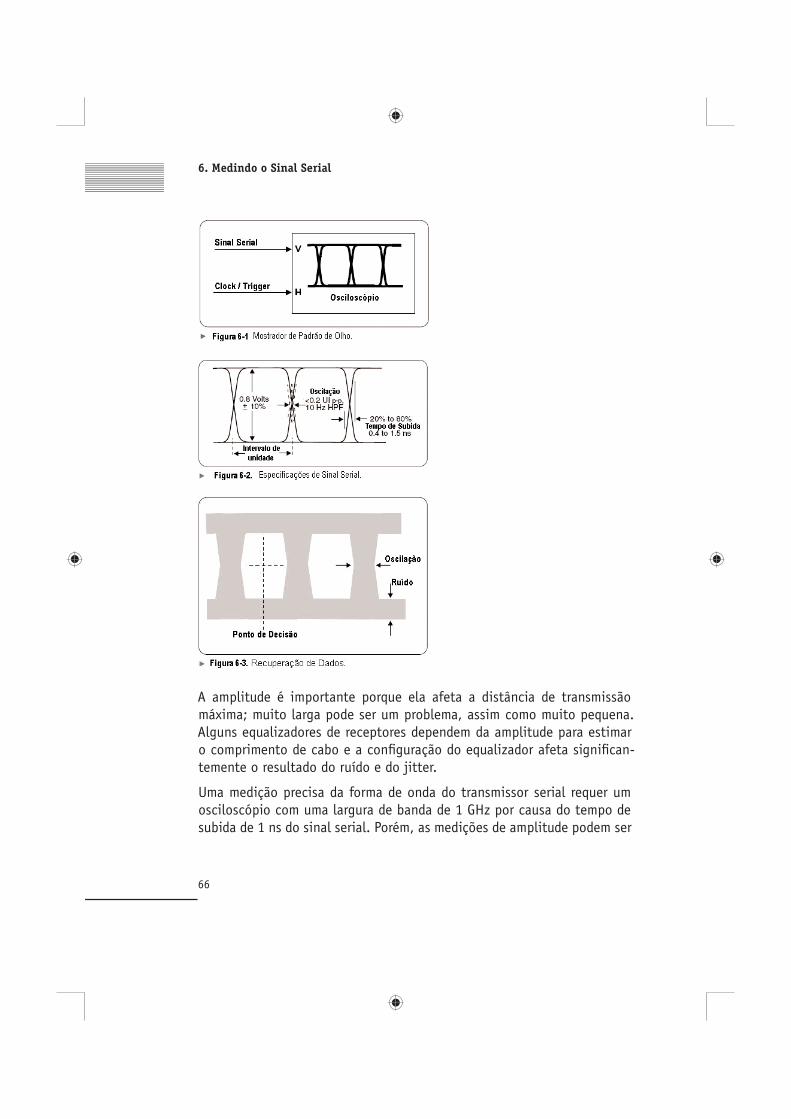
66
A amplitude é importante porque ela afeta a distância de transmissão máxima; muito larga pode ser um problema, assim como muito pequena. Alguns equalizadores de receptores dependem da amplitude para estimar o comprimento de cabo e a confi guração do equalizador afeta signifi can-temente o resultado do ruído e do jitter.
Uma medição precisa da forma de onda do transmissor serial requer um osciloscópio com uma largura de banda de 1 GHz por causa do tempo de subida de 1 ns do sinal serial. Porém, as medições de amplitude podem ser
6. Medindo o Sinal Serial

67
Um Guia para Televisão Digital
realizadas com osciloscópios de baixa largura de banda (300 a 500 MHz de largura de banda).
O monitoramento de qualidade das medidas de tempo de subida pode ser realizado com equipamentos de teste de televisão utilizando amostragem de tempo equivalente em baixas larguras de banda. Medições de tempo de subida são realizadas nos pontos de 20% até 80% como nos dispositivos lógicos ECL. Visto que o sinal serial possui aproximadamente um tempo de subida de 1 ns, a medida deve ser ajustada pela seguinte fórmula:
ta = √ (Tm2 - 0.5 Ts
2)
Onde:
Ta = tempo de subida real
Tm = tempo de subida medido
Ts = tempo de subida do osciloscópio
O fator de ajuste de 0,5 é pelo fato de que a especifi cação de tempo de subida do osciloscópio é para os pontos de 10% até 90%. Como exemplo: com um osciloscópio com tempo de subida de 1 ns de 10% até 90%, um tempo de subida medido de 1,2 ns indicaria uma forma de onda serial real com um tempo de subida de 0,97 ns de 20 até 80%, e uma medição de 1,6 ns indicaria um tempo de subida real de 1,44 ns.
Medindo o Tempo do Sinal de Vídeo Digital Serial
Tempo relativo entre sinais de vídeo serial que estão dentro de uma faixa operacional para utilização em equipamento de estúdio pode variar de vários nanosegundos a poucas linhas de televisão. Medição das diferenças de tempo no percurso do sinal operacional pode ser executada utilizando o Sinal de Teste de Tempo de Imagem Ativa disponível no Gerador Componen-te Digital TSG 422 em conjunto com os cursores de tempo e seleção de linha da série WF601 de monitores de forma de onda de componente serial.

68
A Figura 6-4 mostra a representação de uma tela de monitor de imagem do Sinal de Teste de Tempo de Imagem Ativa (anteriormente conhecido como o Sinal de Teste de Apagamento Digital). As primeiras e últimas li-nhas analógicas ativas cheias têm uma barra branca (somente luminância) com extremidades de apagamento nominal. Dependendo do campo, essas podem ou não ser as primeiras e últimas linhas cheias ativas digitais. A utilização das linhas cheias específi ca, mostradas abaixo, garantem que o sinal completo será visível após a conversão de digital para analógico. É responsabilidade do conversor construir metade das linhas onde apropria-do. As linhas com a barra branca de luminância são:
Sinais de 525 linhas: linhas 21, 262, 284 e 525
Sinais de 625 linhas: linhas 24, 310, 336 e 622
Todas as outras linhas de imagem ativa possuem uma amostra, palavra de meia amplitude em quatro localizações: primeira e última amostra digital ativa, primeira e última amostra no ponto de 100% de uma barra branca nominal. A Figura 6-5 mostra a localização específi ca de cada palavra de meia amplitude. Note: a última amostra de crominância ativa em cada linha está co-instalada com a amostra de luminância #718 enquanto que a última amostra de luminância é #719.
Para realizar medida de tempo relativo largo entre dois sinais, confi gure o WFM601 como mostrado na Figura 6-6. Alternadamente, selecione cada entrada no modo de seleção de linha e encontre o ponto de 50% na barra branca. A medida do delta-T e do número de linha fornecem a diferença de tempo total.
6. Medindo o Sinal Serial

69
Um Guia para Televisão Digital
Para medição de alta resolução de pequenas diferenças de tempo, utilize a mesma confi guração para observar o tempo de pulsos duplos no início da linha ativa como mostrado na Figura 6-7. Embora a fi gura mostrar pulsos corretos e limpos, consideráveis alertas será vistos devido à natureza não Nyquist da excursão da única palavra. Como com outras confi gurações freqüentemente utilizadas, isso pode ser gravado como uma das nove
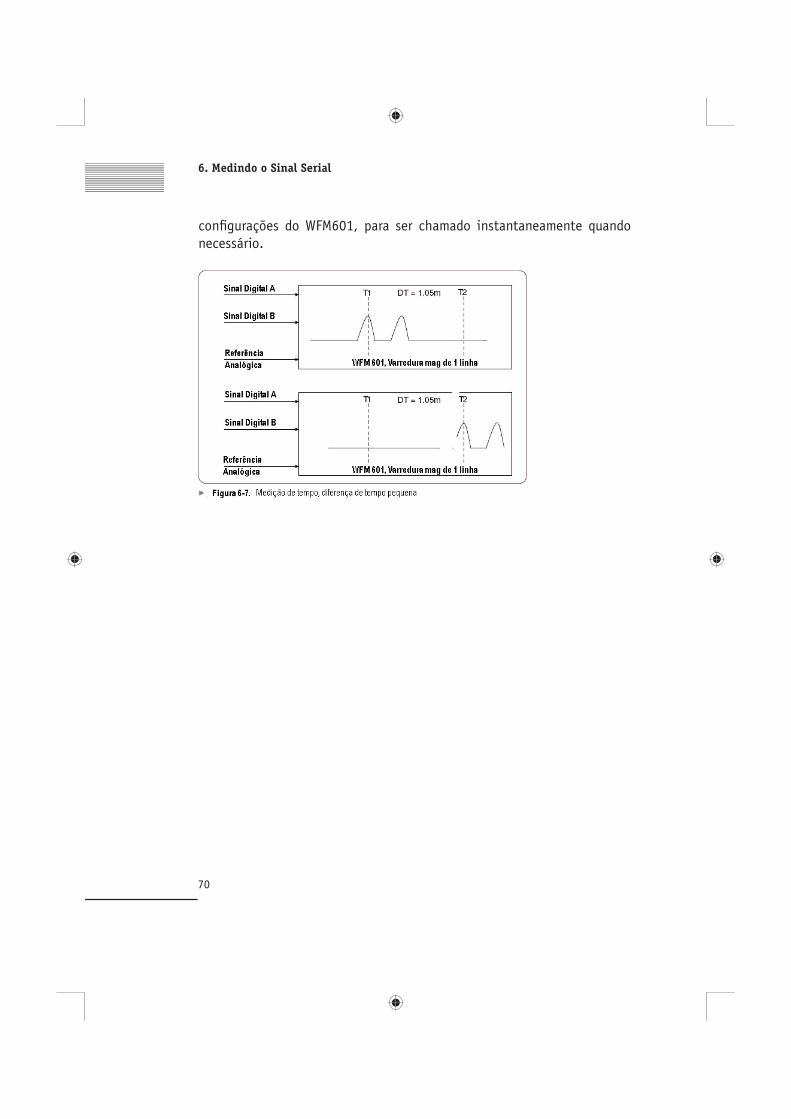
70
confi gurações do WFM601, para ser chamado instantaneamente quando necessário.
6. Medindo o Sinal Serial

7Defi nição e Detecção de Erros
Em nossa aplicação de computadores e técnicas digitais para automatizar muitas tarefas, nós tínhamos evoluído para esperar que o hardware e o software reportassem os problemas para um operador. Isso é particular-mente importante conforme o sistema se torna maior, mais complexo e mais sofi sticado. É razoável esperar que sistemas de televisão digitais tenham capacidades similares para reportarem falhas.
Equipamento de televisão tem tido tradicionalmente uma variedade de capacidades de níveis de diagnósticos. Com o desenvolvimento dos sinais de áudio e vídeo digitais é agora possível adicionar uma ferramenta vital para a notifi cação de falha de sistema; confi rmação de integridade de sinal em sistemas de interconexão de estúdio. Para entender e utilizar essa ferramenta, é necessário se aprofundar na tecnologia de detecção de

erro digital. A combinação do método de interligar vídeo digital serial, o natural de sistemas de televisão, e típico projeto de equipamento digital, leva a utilização de métodos de medidas de erros que são econômicos e especializados para essa aplicação.
Vídeo digital serial opera basicamente em ambiente livre de ruído, logo, métodos tradicionais de medidas de taxas de erros aleatórios não são particularmente úteis. O exame de todas as características do sistema leva à conclusão de que um especializado sistema de medidas de erro de burst fornecerá ao engenheiro de estúdio de televisão uma ferramenta efi ciente para monitorar e avaliar o desempenho de erro de sistemas de vídeo digital serial.

73
Um Guia para Televisão Digital
Defi nição de Erros
No teste de links de transmissão dentro de estúdio e equipamento ope-racional, um único erro é defi nido como uma palavra de dados cujo valor digital muda entre a fonte do sinal e o receptor de medição. Isso é sig-nifi cantemente diferente do caso analógico onde uma faixa de valores recebidos poderia ser considerada correta. A aplicação dessa defi nição para links de transmissão está mais adiante. Se qualquer valor de palavra de dados digital muda entre o transmissor e o receptor há um erro. Para equipamento de estúdio operacional, a situação é um pouco mais compli-cada e necessita de maior explicação.
Equipamentos como roteadores, amplifi cadores de distribuição e Patch Pa-nels deveriam, em geral, não mudar o dado transportado pelo sinal; sendo assim, a defi nição básica se aplica. Porém, quando um roteador muda a seleção de fonte haverá uma curta variação. Isso não deveria ser conside-rado como um erro apesar do tamanho da variação estar sujeito à avalia-ção e medição. A recomendada norma SMPTE RP 168 especifi ca a linha no intervalo vertical onde a comutação está para ocorrer, o que permite com que o equipamento de medição de erro ignore esse erro aceitável.
Há vários tipos de equipamentos de estúdio que normalmente não mu-daria o sinal. Como exemplos têm frame synchronizers (sincronizador de quadro) sem controles de processamento e amplifi cação, o sinal passa direto pelos roteadores, e VTRs digitais no modo E-para-E. Todos possuem a capacidade (provavelmente) de substituir todos os intervalos de apaga-mento do horizontal e parte do vertical. Em geral, a substituição de parte do sinal de televisão destruirá a integridade do erro livre do sinal. Isso é verdadeiro para ambos os sinais componentes e compostos como poderia haver dado extra nas seções substituídas do sinal. Há um caso bem mais forte para sinais compostos, como as áreas de sincronismo não são um conjunto de dígitos estritamente defi nidos, podem variar com os limites de padrões de sinais analógicos.
Considerando a possível substituição de áreas de apagamento por algum equipamento e sabendo que as localizações de amostra de sinal da ima-gem ativa estão bem defi nidas pelos vários padrões digitais, é possível
74
medir Erros de Imagem Ativa separadamente de Erros de Campo Cheio. O conceito de Erro de Imagem Ativa refere-se à área de apagamento. Porém, há uma possibilidade mais insidiosa baseada no histórico de engenheiros de projetos de televisão para modifi car as extremidades de apagamento. Muitos padrões digitais foram projetados com apagamento digital mais estreito do que o apagamento analógico para garantir transições de ex-tremidade apropriadas no domínio analógico. (Transições de extremidades de larga amplitude dentro de um período de amostra causou pelo tempo deformações na forma de onda de apagamento gerando componentes es-pectrais fora de banda que podem aparecer como excessivos alertas após a fi ltragem e a conversão de digital para analógico.) O que acontece em al-guns equipamentos é que engenheiros têm modifi cado as amostras repre-sentando a extremidade de apagamento analógico a fi m de fornecer uma transição desejada; portanto, medições de erro através de tais equipamen-tos mesmo utilizando o conceito de Imagem Ativa não funcionarão.
Com VTRs, o limite é maior para medição de erros. O formato de VTR de bit rate cheio original (D-1, D-2 e D-3) são projetados com quantidades signifi cantes de correção de erros diretos e funcionam muito bem. Porém, é natural das fi tas de gravação e processo de reprodução que alguns erros não serão corrigidos. Geralmente o sistema de correção de erro identifi ca o dado não corrigido e sistemas de dissimulação de erros sofi sticados podem ser aplicados para gerar uma imagem virtualmente perfeita.
Os sistemas são tão bons que são possíveis dez gerações sem defeito percebido por humanos. Embora a dissimulação de erro for excelente, é quase certo que sistemas de medição de erros (que por defi nição requerem uma reprodução de dados perfeita) encontrariam erros em muitos campos completamente aceitáveis. Novos formatos de VTR que utilizam redução de bit rate terão potencialmente uma fonte adicional de pequenos, mas aceitáveis trocas de valores de dados.
Os esquemas de compressão e descompressão de dados não são abso-lutamente sem perdas, resultando em alguma pequena modifi cação dos dados. Portanto, todos os métodos de medição de erro externos para VTRs digitais não signifi cativos por causa do potencial ajuste das extremidades de apagamento, métodos de disfarce de erro e, em alguns equipamentos,
7. Defi nição e Detecção de Erros
75
Um Guia para Televisão Digital
a utilização de redução de taxa de dados. A boa nova é que vários tipos de taxa de erro e dados de taxa de disfarce estão disponíveis e visíveis dentro do VTR, e padrões para reportar essa informação estão sendo de-senvolvidos.
Quantifi cando Erros
Muitos engenheiros estão familiarizados com o conceito de Taxa de Erro de Bit (BER), que é a razão de bits com erro para o total de bits. Como exemplo, a taxa de dados componente digital de 10 bits é de 270 Mb/s. Se ocorreu um erro por quadro o BER seria 30/(270 x 106) = 1,11 x 10-7 para sistemas de 525 linhas ou 25/(270 x 106) = 0,93 x 10-7 para sistemas de 625 linhas. A Tabela 7-1 mostra o BER para um erro sobre diferentes comprimentos de tempo para vários sistemas de televisão. O BER é uma útil medida de desempenho de sistema onde a razão de sinal para ruído no receptor é tal que ocorrem erros aleatórios de ruídos produzidos.
Como parte do sistema de interligação digital serial, um embaralhamento é utilizado para o conteúdo de DC mais baixo do sinal e fornece cruzamen-tos de zero sufi ciente para confi ável recuperação de clock. É a natureza do decifrador que absolutamente um único erro de bit causa um erro em duas palavras (amostras) e possui uma probabilidade de 50% do erro em uma das palavras, sendo o mais, ou próximos do bit mais signifi cante. Portan-to, uma taxa de erro de 1 erro/quadro será perceptível por um observador razoavelmente paciente. Se for perceptível, é inaceitável; mas é muito mais inaceitável por causa do que nos diz sobre a operação do sistema de transmissão serial.
Natureza de Sistemas de Transmissão de Vídeo Digital de Estúdio
Especifi cações para fontes de sinais de vídeo digital são defi nidas pelo SMPTE 259M. Embora as especifi cações não incluírem uma razão de sinal-ruído (SNR), valores típicos seriam de 40 dB ou maior no transmissor. Erros ocorrerão se a SNR em alguma localização no sistema alcançar um

76
valor baixo o sufi ciente, geralmente em torno de 20 dB. A Figura 7-1 é um diagrama em bloco do transmissor básico serial e sistema do receptor. Um método intuitivo de teste do sistema serial é para adicionar cabo – um método direto para baixar o SNR. Visto que o próprio coaxial não é uma fonte de ruído signifi cante, é a imagem ruídosa do receptor que determina o SNR de operação. Assumindo um equalizador automático no receptor, eventualmente, quanto mais cabo é adicionado, o nível do sinal devido à atenuação do coaxial faz com que o SNR no receptor esteja de tal forma que ocorram erros.
Baseado no código do canal NRZI embaralhado utilizado, assumindo ruído de distribuição gaussiana, um cálculo utilizando a função de erro fornece os valores teóricos mostrados na Tabela 7-2. O ponto de calibração para esse cálculo é baseado nas capacidades da interface digital serial. O pa-drão digital serial proposto afi rma que a distância operacional esperada através de um comprimento de coaxial atenue a freqüência de ½ da taxa de clock por até 30 dB. Isto é, receptores podem ser projetados com me-nos ou mais capacidade, mas o valor de 30 dB é considerado realizável.
7. Defi nição e Detecção de Erros
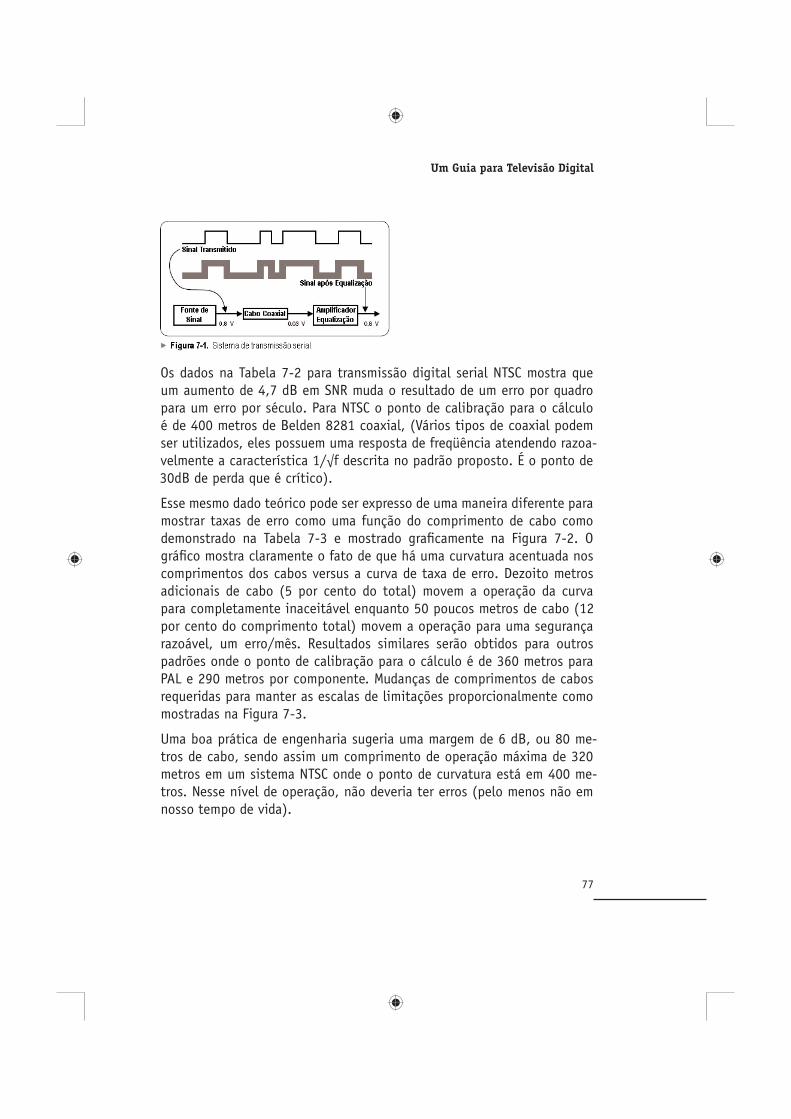
77
Um Guia para Televisão Digital
Os dados na Tabela 7-2 para transmissão digital serial NTSC mostra que um aumento de 4,7 dB em SNR muda o resultado de um erro por quadro para um erro por século. Para NTSC o ponto de calibração para o cálculo é de 400 metros de Belden 8281 coaxial, (Vários tipos de coaxial podem ser utilizados, eles possuem uma resposta de freqüência atendendo razoa-velmente a característica 1/√f descrita no padrão proposto. É o ponto de 30dB de perda que é crítico).
Esse mesmo dado teórico pode ser expresso de uma maneira diferente para mostrar taxas de erro como uma função do comprimento de cabo como demonstrado na Tabela 7-3 e mostrado grafi camente na Figura 7-2. O gráfi co mostra claramente o fato de que há uma curvatura acentuada nos comprimentos dos cabos versus a curva de taxa de erro. Dezoito metros adicionais de cabo (5 por cento do total) movem a operação da curva para completamente inaceitável enquanto 50 poucos metros de cabo (12 por cento do comprimento total) movem a operação para uma segurança razoável, um erro/mês. Resultados similares serão obtidos para outros padrões onde o ponto de calibração para o cálculo é de 360 metros para PAL e 290 metros por componente. Mudanças de comprimentos de cabos requeridas para manter as escalas de limitações proporcionalmente como mostradas na Figura 7-3.
Uma boa prática de engenharia sugeria uma margem de 6 dB, ou 80 me-tros de cabo, sendo assim um comprimento de operação máxima de 320 metros em um sistema NTSC onde o ponto de curvatura está em 400 me-tros. Nesse nível de operação, não deveria ter erros (pelo menos não em nosso tempo de vida).

78
Sistemas práticos incluem equipamento que necessariamente não restitui completamente o sinal em termos de SNR. Isto é, o envio do sinal atra-vés de um amplifi cador de distribuição ou roteador pode resultar em um sinal completamente útil, mas não sinal completamente padrão para ser enviado para um dispositivo de recepção. A não padronização pode ser por ruído ou jitter, mas a característica de curvatura acentuada do siste-ma continuaria, ocorrendo em uma quantidade diferente de atenuação de sinal. A utilização de distribuição propriamente equalizada e re-cloked e equipamento de roteamento com intervalos adequados fornece virtual-mente distâncias de transmissão totalmente ilimitada.
Medindo Taxas de Erro de Bit (BER)
Medições de BER podem ser realizadas diretamente utilizando equipa-mentos especialmente projetados para esse propósito. Infelizmente, em um sistema de operação apropriado, com 6 dB de limitação, não há BER para medir. Isso é porque o sistema de televisão digital serial geralmente opera em um ambiente que é livre de erros aleatórios. Se erros nunca vão ocorrer (como indicado pela Tabela 7-2) com 6 dB de limitação, o que há para medir? Um problema mais comum serão os erros de burst devido a alguns sinais de interferência tais como um ruído “Spike” que ocorre em intervalos intermitentes espaçados no tempo. Outra fonte poderia ser o “Crosstalk”que pode vir e ir dependendo de outros sinais que estão sendo utilizados em um tempo particular. Também, há a baixa conexão elétrica em uma interface que causaria ruído somente quando é mecanicamente perturbado.
7. Defi nição e Detecção de Erros
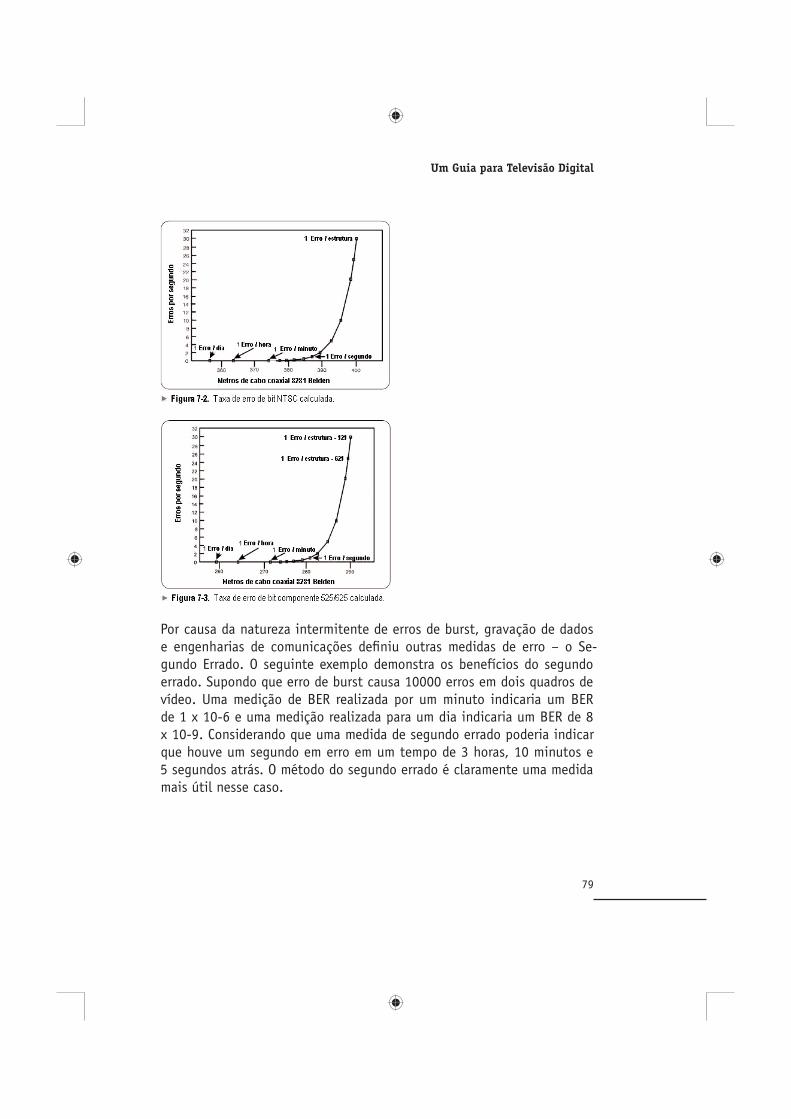
79
Um Guia para Televisão Digital
Por causa da natureza intermitente de erros de burst, gravação de dados e engenharias de comunicações defi niu outras medidas de erro – o Se-gundo Errado. O seguinte exemplo demonstra os benefícios do segundo errado. Supondo que erro de burst causa 10000 erros em dois quadros de vídeo. Uma medição de BER realizada por um minuto indicaria um BER de 1 x 10-6 e uma medição realizada para um dia indicaria um BER de 8 x 10-9. Considerando que uma medida de segundo errado poderia indicar que houve um segundo em erro em um tempo de 3 horas, 10 minutos e 5 segundos atrás. O método do segundo errado é claramente uma medida mais útil nesse caso.
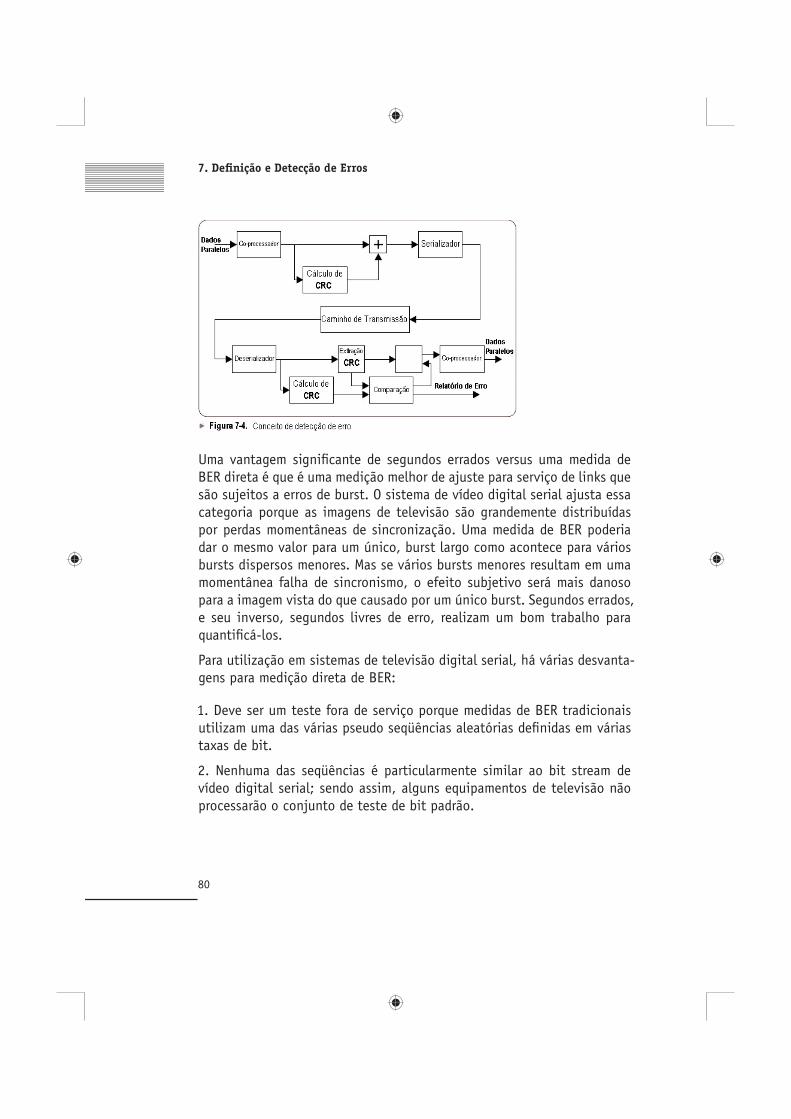
80
Uma vantagem signifi cante de segundos errados versus uma medida de BER direta é que é uma medição melhor de ajuste para serviço de links que são sujeitos a erros de burst. O sistema de vídeo digital serial ajusta essa categoria porque as imagens de televisão são grandemente distribuídas por perdas momentâneas de sincronização. Uma medida de BER poderia dar o mesmo valor para um único, burst largo como acontece para vários bursts dispersos menores. Mas se vários bursts menores resultam em uma momentânea falha de sincronismo, o efeito subjetivo será mais danoso para a imagem vista do que causado por um único burst. Segundos errados, e seu inverso, segundos livres de erro, realizam um bom trabalho para quantifi cá-los.
Para utilização em sistemas de televisão digital serial, há várias desvanta-gens para medição direta de BER:
1. Deve ser um teste fora de serviço porque medidas de BER tradicionais utilizam uma das várias pseudo seqüências aleatórias defi nidas em várias taxas de bit.
2. Nenhuma das seqüências é particularmente similar ao bit stream de vídeo digital serial; sendo assim, alguns equipamentos de televisão não processarão o conjunto de teste de bit padrão.
7. Defi nição e Detecção de Erros
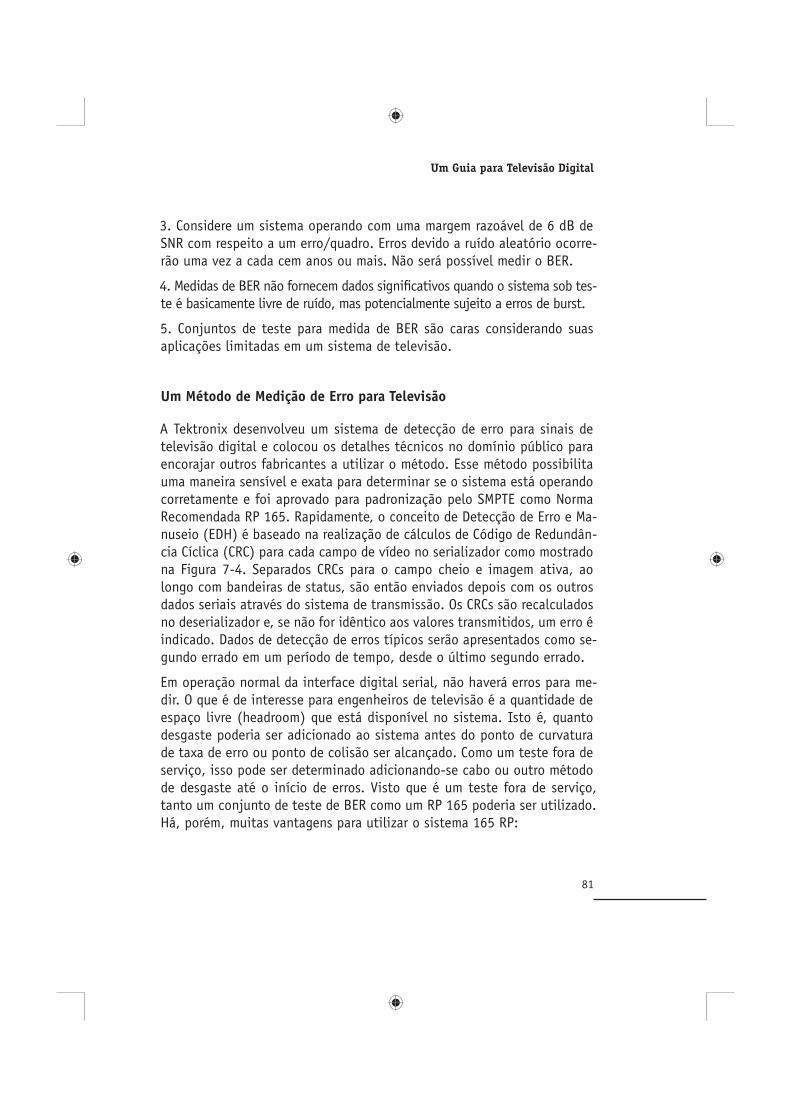
81
Um Guia para Televisão Digital
3. Considere um sistema operando com uma margem razoável de 6 dB de SNR com respeito a um erro/quadro. Erros devido a ruído aleatório ocorre-rão uma vez a cada cem anos ou mais. Não será possível medir o BER.
4. Medidas de BER não fornecem dados signifi cativos quando o sistema sob tes-te é basicamente livre de ruído, mas potencialmente sujeito a erros de burst.
5. Conjuntos de teste para medida de BER são caras considerando suas aplicações limitadas em um sistema de televisão.
Um Método de Medição de Erro para Televisão
A Tektronix desenvolveu um sistema de detecção de erro para sinais de televisão digital e colocou os detalhes técnicos no domínio público para encorajar outros fabricantes a utilizar o método. Esse método possibilita uma maneira sensível e exata para determinar se o sistema está operando corretamente e foi aprovado para padronização pelo SMPTE como Norma Recomendada RP 165. Rapidamente, o conceito de Detecção de Erro e Ma-nuseio (EDH) é baseado na realização de cálculos de Código de Redundân-cia Cíclica (CRC) para cada campo de vídeo no serializador como mostrado na Figura 7-4. Separados CRCs para o campo cheio e imagem ativa, ao longo com bandeiras de status, são então enviados depois com os outros dados seriais através do sistema de transmissão. Os CRCs são recalculados no deserializador e, se não for idêntico aos valores transmitidos, um erro é indicado. Dados de detecção de erros típicos serão apresentados como se-gundo errado em um período de tempo, desde o último segundo errado.
Em operação normal da interface digital serial, não haverá erros para me-dir. O que é de interesse para engenheiros de televisão é a quantidade de espaço livre (headroom) que está disponível no sistema. Isto é, quanto desgaste poderia ser adicionado ao sistema antes do ponto de curvatura de taxa de erro ou ponto de colisão ser alcançado. Como um teste fora de serviço, isso pode ser determinado adicionando-se cabo ou outro método de desgaste até o início de erros. Visto que é um teste fora de serviço, tanto um conjunto de teste de BER como um RP 165 poderia ser utilizado. Há, porém, muitas vantagens para utilizar o sistema 165 RP:
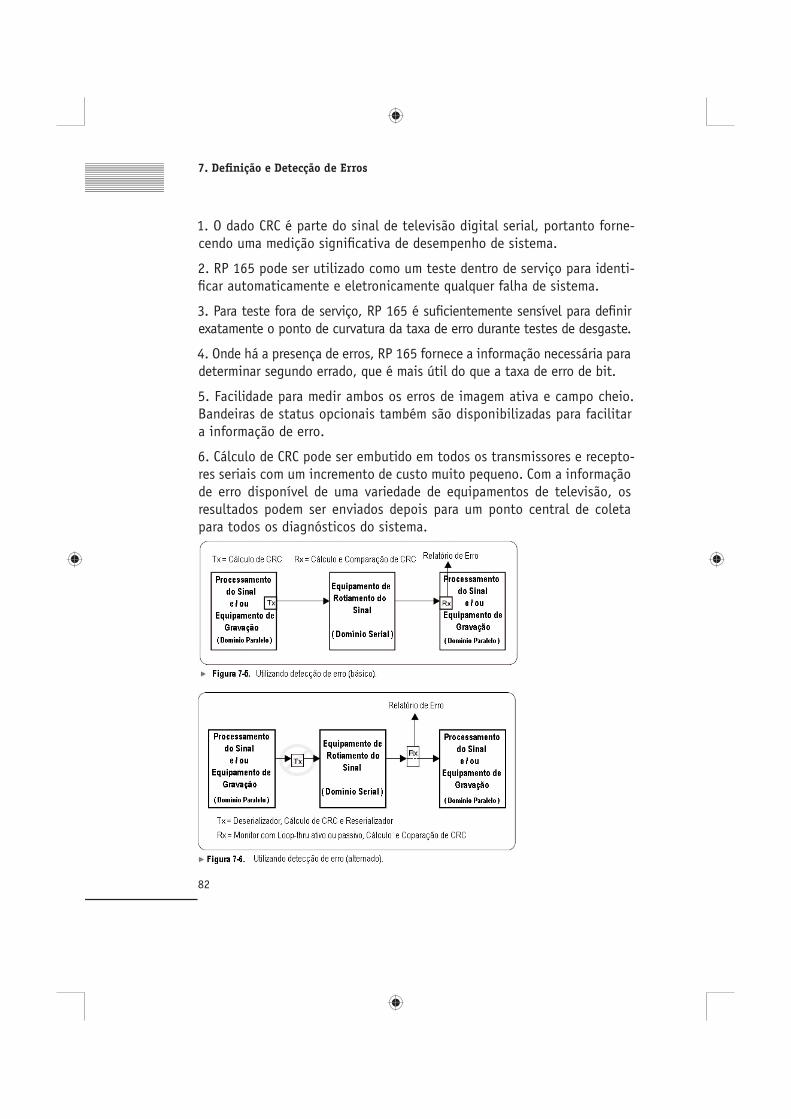
82
1. O dado CRC é parte do sinal de televisão digital serial, portanto forne-cendo uma medição signifi cativa de desempenho de sistema.
2. RP 165 pode ser utilizado como um teste dentro de serviço para identi-fi car automaticamente e eletronicamente qualquer falha de sistema.
3. Para teste fora de serviço, RP 165 é sufi cientemente sensível para defi nir exatamente o ponto de curvatura da taxa de erro durante testes de desgaste.
4. Onde há a presença de erros, RP 165 fornece a informação necessária para determinar segundo errado, que é mais útil do que a taxa de erro de bit.
5. Facilidade para medir ambos os erros de imagem ativa e campo cheio. Bandeiras de status opcionais também são disponibilizadas para facilitar a informação de erro.
6. Cálculo de CRC pode ser embutido em todos os transmissores e recepto-res seriais com um incremento de custo muito pequeno. Com a informação de erro disponível de uma variedade de equipamentos de televisão, os resultados podem ser enviados depois para um ponto central de coleta para todos os diagnósticos do sistema.
7. Defi nição e Detecção de Erros

83
Um Guia para Televisão Digital
Sistemas digitais compostos uma vez devem possuir um co-processador para manipular sinais de tempo especiais requeridos no dado serial e não permitido no dado paralelo. Adicionando capacidades de CRC básicas para o co-processador quase não custa nada. Para sistemas componente que não possuem as diferenças entre serial e paralelo, há um pequeno aumen-to no custo, o qual deve ser uma fração de uma porcentagem do custo total em equipamento onde é apropriado para utilizar esse método.
Considerações de Sistema
Em uma grande instalação digital serial a necessidade para monitoramento de forma de onda tradicional pode ser reduzida pela aplicação sistemática de métodos de detecção de erros. Em fonte de sinais, tais como câmeras, DVE e VTR, onde controles operacionais podem afetar o sinal de programa, ainda continuará sendo importante verifi car os parâmetros do sinal de programa chave utilizando monitores de forma de onda com capacidades de entrada digital serial. Os resultados de certas operações técnicas tais como áudio embedded mux/demux, transmissão de link serial e roteador I/O, podem ser monitorados com equipamento somente digital menos so-fi sticado verifi cando a integridade dos dados do sinal. É função do sistema RP 165 fornecer essa verifi cação. Para equipamentos onde o sinal digital permanece no domínio serial, tais como roteadores ou amplifi cadores de distribuição, não é econômico fornecer a função de cálculo de CRC. Por-tanto, um sistema básico de detecção de erro será implementado como mostrado na Figura 7-5. Equipamento que processa o sinal no domínio paralelo, como os VTR, DVE ou roteadores de produção, deveria fornecer o cálculo de CRC de transmissão e recepção necessário para detecção de erro. Esse equipamento pode então reportar erros localmente e/ou para um computador de diagnósticos central. Roteadores e outros equipamen-tos operando no domínio serial terão suas integridades de caminho dos sinais verifi cadas pelo sistema de detecção de erro.
Para enfatizar a importância de inclusão do cálculo de CRC em equipamen-to de processamento no domínio paralelo, considere o diagrama de bloco da Figura 7-6. Visto que a fonte do sinal não possui um gerador de dados

84
CRC interno, alguém pode considerar uma caixa preta para fornecer essa função. Infelizmente, o custo do deserializador e reserializador torna o custo proibitivamente tão alto como um sistema não recomendado. Em um receptor que não calcula o CRC, é possível, e não razoável fornecer um monitor com loop-through ativo ou passivo que determina a integridade do sinal. A desvantagem desse sistema é que o receptor do monitor está sendo utilizado para processar o sinal, não o equipamento de destino real.
É possível que diferentes características de receptores de dois equipamen-tos forneceriam resultados enganosos. Se o receptor que está sendo tes-tado possui um “Loop-through” ativo, isso é útil para colocar o monitor de detecção de erro na saída. Erros detectados seriam muito susceptíveis devido ao primeiro receptor, que é a unidade que está sendo testada, eli-minando a diferença nas sensibilidades do receptor.
Para estender a idéia de diagnósticos de sistema além da detecção de erro de dado digital simples, isso seria útil para fornecer um sistema que re-porte falha de sistema. SMPTE 269M documenta um único contato fechado de sistema de falha de encerramento e debates começaram em protocolos de comunicações de dados de computador para reporte de falha mais sofi sticado. Detecção de erro é uma importante parte de diagnósticos de sistema como mostrado na Figura 7-7. Informações relativas a erros de transmissão de sinal são combinadas com diagnósticos internos de outros equipamentos para serem enviados para um computador central.
Um grande roteador pode suportar economicamente diagnósticos interno. Utilizando dois receptores seriais, uma lista de erros de dados serial pode ser implementada. A estrutura normal interna de bus poderia ser utilizada para enviar dados seriais para um receptor para detectar erros de entrada e um bus de saída especial poderia ser utilizado para garantir que nenhum erro fosse criado com o grande roteador no domínio serial.
7. Defi nição e Detecção de Erros
8Efeitos de Oscilação e Medições
Sistemas de transmissão digital podem operar com uma quantidade consi-derável de jitter, de fato, mais jitter do que poderia ser tolerado no sinal de programa representado pelos dígitos. Essa seção foca as razões por traz dessa separação de efeitos de jitter – a quantidade de jitter que pode ser encontrada em diferentes sistemas de transmissão digital e como medir o jitter em sistemas de transmissão serial.
A especifi cação de jitter no padrão para os sinais de vídeo digital serial é “o tempo das extremidades de subida dos sinais de dados deve estar dentro + 0,25 ns do tempo médio de extremidades de subida, como determinado sobre um período de uma linha.” Desde a primeira publicação do padrão, em fevereiro de 1992, há uma nota para a especifi cação que coloca: “essa especifi cação é a tentativa para um trabalho posterior em progresso para

determinar o método de medição.” De fato, ambos os métodos de medida e especifi cação são os temas de trabalho da comissão de engenharia da SMPTE. Em transmissão de componente paralelo, especifi cações de jitter para o sinal de clock de 27 MHz são colocadas como “o jitter de pico a pico entre as extremidades de subida deva estar dentro de 3 ns do tempo da média da extremidade de subida calculada sobre pelo menos um cam-po.” Para NTSC composto, a especifi cação é de 5 ns.
Áudio digital pelo padrão AES é um sinal serial que é um multiplex de amostras de dois canais de áudio e algum dado suplementar (veja os for-matos de áudio digital na Seção 3). Para televisão, a taxa de amostragem de áudio preferida é de 48 KHz, clock-locked para vídeo como para VTRs digitais. Há 32 bits de dados associados com cada amostra de áudio, que produz uma taxa de dados de 2 canais (um serial stream) de 3,07 Mb/s. Visto que o esquema de código de canal (marca bifase) insere uma tran-sição para cada clock, a taxa de transição resultante do sinal serial pode ser de 6,14 MHz, dando um intervalo de unidade de olho padrão de 163 ns. Para áudio AES, a especifi cação de jitter é que “as transições de dados deva ocorrer dentro +20 ns de um clock ideal livre de jitter.”

87
Um Guia para Televisão Digital
Jitter em Sinais Digitais
Jitter, ruído, mudanças de amplitude e outras distorções para o sinal digi-tal serial podem ocorrer como são processados por amplifi cadores de dis-tribuição, roteadores e outros equipamentos que operam no sinal exclusi-vamente em sua forma serial. A Figura 8-1 mostra como o sinal recuperado pode ser tão perfeito como o original se os dados são detectados com um clock livre de jitter. Enquanto o ruído e o jitter não excedem o limiar dos circuitos de detecção (isto é, o olho está sufi cientemente aberto) os dados estarão perfeitamente reconstruídos.
Em um sistema prático, o clock é extraído do bit stream serial e contém a presença de algum jitter no sinal.
Jitter no clock pode ser uma característica desejável à medida que o jitter ajuda a posicionar a extremidade do clock no meio do olho. Grandes quan-tidades de jitter de baixa freqüência podem ser toleradas em receptores
88
seriais se o clock seguir a localização de abertura do olho, conforme sua posição varia com o tempo. Um exemplo da sensibilidade do jitter do receptor é mostrado na Figura 8-2 onde a linha sólida representa a quanti-dade de jitter que causaria erros de dados no receptor. Para jitter de baixa freqüência, as variações das localizações do olho até vários intervalos de unidades não perderão a extração de dados. Com o aumento da freqüência de jitter, a tolerância do receptor diminuiu para um valor em torno de 0,25 intervalos de unidade. Os pontos de quebra para essa curva de tole-rância dependem do tipo de circuito de “Phase-locked Loop” utilizado na extração de clock.
Baseado na aceitação de alguns jitter no clock extraído utilizado para recuperar os dados, são defi nidos dois tipos de jitter:
1. Jitter de tempo é defi nida como a variação no tempo de instantes sig-nifi cantes (como cruzamentos de zero) de um sinal digital relativo para clock sem nenhum jitter acima da freqüência baixa (em torno de 10 Hz).
2. Jitter de alinhamento (ou jitter relativo) é defi nido como a variação no tempo dos instantes signifi cantes (como, cruzamento de zero) de um sinal digital relativo ao clock recuperado do próprio sinal. (Esse clock terá componentes de jitter acima de 10 Hz, mas nada acima que uma freqüên-cia maior na faixa de 1 KHz até 10 KHz.)
Visto que os dados geralmente serão recuperados utilizando um clock com jitter, a informação digital resultante pode ter jitter em suas extremidades de transição como mostrado na Figura 8-3. Isso é ainda uma informação completamente válida, visto que o processamento do sinal digital somen-te considerará o valor alto/baixo no meio do período de clock. Porém, se o mesmo clock com jitter (ou considerando um simples submúltiplo) é utilizado para converter a informação digital para analógica, erros podem ocorrer como mostrados na Figura 8-4. Valores de amostra convertidos para analógico nos tempos corretos exatamente produzem uma linha reta, considerando que a utilização de um clock com jitter produz uma forma de onda analógica incorreta. O efeito relativo da forma de onda analógica produzida utilizando o mesmo clock para conversão digital-analógica e para extração de dados do sinal serial depende da quantidade de jitter
8. Efeitos de Oscilação e Medições

89
Um Guia para Televisão Digital
(em unidades de intervalo) e o número de níveis de quantização no sinal digitalizado. Onde o jitter reduzido é necessário para o clock do conversor digital-analógico (DAC), um circuito como o mostrado na Figura 8-5 pode ser utilizado onde um alto ganho (cristal) “Phase-Locked Loop” produz um clock com um jitter muito mais baixo.
Típicas especifi cações de jitter para sinais de vídeo serial/paralelo e áudio serial são mostradas na Tabela 8-1. O padrão AES/EBU para áudio digital serial permite um jitter de +20 ns, que é apropriado como valor de pico a pico de 40 ns está em torno de 1/4 de um intervalo de unidade.
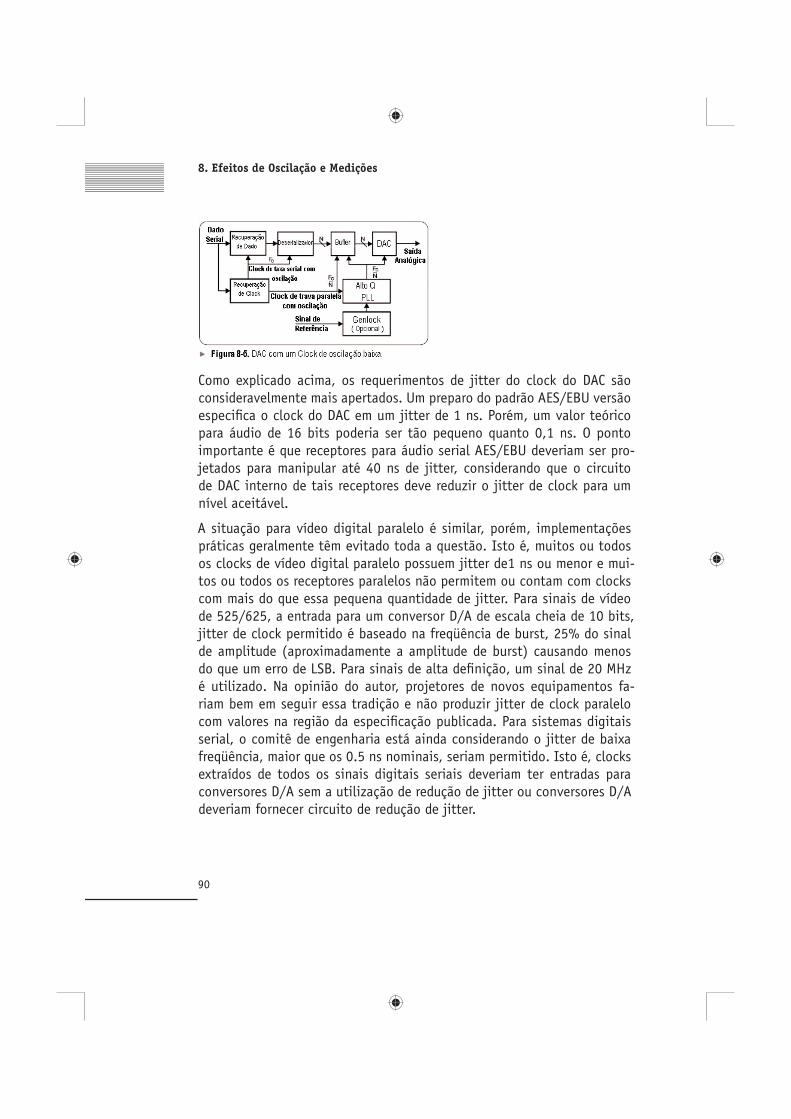
90
Como explicado acima, os requerimentos de jitter do clock do DAC são consideravelmente mais apertados. Um preparo do padrão AES/EBU versão especifi ca o clock do DAC em um jitter de 1 ns. Porém, um valor teórico para áudio de 16 bits poderia ser tão pequeno quanto 0,1 ns. O ponto importante é que receptores para áudio serial AES/EBU deveriam ser pro-jetados para manipular até 40 ns de jitter, considerando que o circuito de DAC interno de tais receptores deve reduzir o jitter de clock para um nível aceitável.
A situação para vídeo digital paralelo é similar, porém, implementações práticas geralmente têm evitado toda a questão. Isto é, muitos ou todos os clocks de vídeo digital paralelo possuem jitter de1 ns ou menor e mui-tos ou todos os receptores paralelos não permitem ou contam com clocks com mais do que essa pequena quantidade de jitter. Para sinais de vídeo de 525/625, a entrada para um conversor D/A de escala cheia de 10 bits, jitter de clock permitido é baseado na freqüência de burst, 25% do sinal de amplitude (aproximadamente a amplitude de burst) causando menos do que um erro de LSB. Para sinais de alta defi nição, um sinal de 20 MHz é utilizado. Na opinião do autor, projetores de novos equipamentos fa-riam bem em seguir essa tradição e não produzir jitter de clock paralelo com valores na região da especifi cação publicada. Para sistemas digitais serial, o comitê de engenharia está ainda considerando o jitter de baixa freqüência, maior que os 0.5 ns nominais, seriam permitido. Isto é, clocks extraídos de todos os sinais digitais seriais deveriam ter entradas para conversores D/A sem a utilização de redução de jitter ou conversores D/A deveriam fornecer circuito de redução de jitter.
8. Efeitos de Oscilação e Medições

91
Um Guia para Televisão Digital
Medindo Jitter
Há três métodos relacionados a osciloscópio de medição de jitter em um sinal digital serial. Medição de tempo de jitter requer um clock de re-ferência livre de jitter como mostrado na parte superior da Figura 8-6. Jitter de alinhamento (relativo) é medido utilizando um clock extraído do sinal serial que está sendo avaliado como mostrado na parte inferior da mesma fi gura. Medições de jitter de tempo incluem essencialmente todos os componentes de freqüência de jitter como indicado pelo guia de linha tracejada na linha sólida na Figura 8-7. Os componentes de freqüência de jitter medidos utilizando o método de alinhamento de jitter dependerão da largura de banda do circuito de extração de clock. Componentes de bai-xa freqüência de jitter não serão incluídos porque o clock extraído segue o jitter do sinal serial. Esses componentes de jitter de baixa freqüência não são signifi cantes para recuperação de dados fornecidos, o sistema de ex-tração de clock possui a mesma largura de banda como o sistema de medi-ção de extração de clock recuperado. Todas as freqüências de jitter acima de certo valor serão medidas com pontos de quebra entre as duas áreas de freqüências apropriadas para a largura de banda do sistema de extração de clock utilizado. Quando o trigger do osciloscópio decorre, é importante considerar a divisão de freqüência que usualmente toma lugar no extrator de clock. Se for divido por dez, então o jitter de palavra sincronizada não será observada dependendo se o tempo de varredura do mostrador cobre exatamente 10 cruzamentos de zero. Divisão por outro número sem ser o comprimento da palavra garantirá que todo o jitter seja medido.

92
O terceiro método de observação, mas sem medição, de jitter é a simples, mas enganosa, medição de osciloscópio auto sincronizado, descrita na Figura 8-8. Por um sincronismo interno, o osciloscópio na rampa de subida (ou de descida) da forma de onda é possível mostrar o olho padrão em um tempo atrasado após o ponto de sincronismo. Utilizando osciloscópios modernos de amostragem digital, atrasos longos podem ser obtidos com quantidades extremamente pequenas de oscilação atribuídas aos circuitos de atraso do osciloscópio. A primeira vista, isso parece uma forma direta para avaliar o olho padrão, visto que um circuito de extração de clock não é necessário. O problema é que os componentes da freqüência de jitter que estão sendo medidos é uma função do atraso de varredura utilizado e tal função é um comb fi lter. Como resultado, há algumas freqüências de jitter que não serão medidas e outras que indicarão duas vezes quão alto um valor seria esperado. Apesar de haver um efeito de passa baixa com esse tipo de medição, a forma do fi ltro é muito diferente do que é obtido com uma medição de clock extraído, sendo assim, os resultados podem não ser uma boa indicação da habilidade de um receptor para recuperar os dados de um bit stream serial.
Como exemplo, vídeo digital serial componente possui um intervalo de unidade de 3,7 ns. Se o atraso de varredura é de 37 ns, o décimo cru-zamento de zero será amostrado. Em muitos dos serializadores de hoje há um componente de jitter forte em um décimo da freqüência de clock (devido em parte as 10 vezes do multiplicador no serializador). Uma me-dição de auto sincronismo no décimo cruzamento de zero não mostrará esse jitter. Alternadamente, uma medição em outros cruzamentos de zero
8. Efeitos de Oscilação e Medições

93
Um Guia para Televisão Digital
pode mostrar quão alto é o valor de jitter. Para uma maior complicação do problema, se uma décima freqüência de jitter estava exatamente simétrica (tal como, uma onda senoidal), o quinto cruzamento de zero também pode não ter jitter. Na prática, o quinto cruzamento de zero também mostra muito jitter, somente o décimo, vigésimo, trigésimo, etc., cruzamentos aparecem estar quase livre de jitter.
Em soluções de problemas de um sistema, o método de auto sincronismo pode ser usado para diminuir uma fonte de jitter. Porém, medições de jitter apropriadas, para atender as especifi cações do sistema, deveriam ser realizadas com um método de extração de clock. Um grupo ad-hoc da SMPTE está desenvolvendo métodos para medir e especifi car o jitter para vídeo digital serial, mais provavelmente incorporando um sistema de extração de clock defi nido.


9Teste de Sistema


97
Um Guia para Televisão Digital
Teste de Desgaste (Stress)
Diferentemente dos sistemas analógicos que tendem a degradar gradati-vamente, sistemas digitais tendem a trabalhar sem falha até eles caírem. Essa característica é mais claramente ilustrada pela abordagem de detec-ção de erro na Seção 7. Porém, outras funções de desgaste produzirão o mesmo resultado. Quando operando com sistema digital, é bom saber quanto espaço livre “Headroom” é disponibilizado; isto é quanto o siste-ma está longe do ponto de cair. Hoje, não há testes dentro de serviço para medir o Headroom; mas uma pesquisa está sendo realizada nessa área. Portanto, testes de stress fora de serviço são necessários para avaliar a operação do sistema.
O teste de stress consiste na mudança de um ou mais parâmetros de sinal digital até que a falha ocorra. A quantidade de mudança necessária para produzir uma falha é a medida do Headroom. Começando com as espe-cifi cações no padrão de vídeo digital serial (SMPTE 259M), a forma mais intuitiva para estressar o sistema é adicionar cabo até o início de erros. Outro teste seria o de mudar a amplitude ou o tempo de subida, ou adi-cionar ruído e/ou jitter para o sinal. Cada um desses testes está avaliando um ou mais aspectos do desempenho do receptor, especifi camente a faixa do equalizador automático, precisão e características de ruído do receptor. Resultados experimentais indicam que o teste de comprimento do cabo é o teste de desgaste mais signifi cativo porque ele representa a opera-ção real. As habilidades do receptor de teste de stress para manipular as mudanças de amplitude e jitter são úteis em equipamentos de avaliação e aceitação, mas não tão signifi cativos na operação de sistema (Medir a amplitude do sinal no transmissor e medir o jitter em vários pontos no sistema é importante em testes operacionais como abordado na Seção 6 e 8, mas não como o teste de stress.). Adição de ruído ou mudança no tempo de subida (dentro de limites razoáveis) possui um efeito pequeno em sistemas digitais e não é importante em teste de stress.
Teste de desgaste de comprimento de cabo pode ser realizado utilizando um coaxial real ou um simulador de cabo. Coaxial é o mundo real e o método mais exato. O parâmetro chave para ser medido está no início de erros porque isso defi ne o ponto de choque como descrito na seção 7.

98
Com um método de medição de erro no local, a qualidade da medição será determinada pela nitidez do ponto da curvatura de erro. Como exemplo, utilizando o coaxial 8281, uma mudança de cinco metros no comprimento irá de nenhum erro em um minuto para mais de um erro por segundo.
Para avaliar um simulador de cabo, a sugestão natural é comparar sua curva de perda com o coaxial utilizando um Network Analyzer. Certamente que é um critério apropriado; mas o mais importante ainda é a nitidez da curva de erro em vários comprimentos simulados.
Experimentos têm mostrado que bons simuladores de cabo requerem uma mudança entre 10 a 15 metros adicionados em um coaxial 8281 produ-zindo nenhum erro para mais de um erro por segundo. Simuladores que requerem uma mudança mais longa em coaxial (curva menos acentuada) ainda são úteis para teste de comparação, mas devem ser evitados em avaliação de equipamento.
Verifi cação de Campo SDI
A verifi cação de campo SDI (interface digital serial) (também conhecida como “sinal patológico”) não é um teste de stress, mas porque ele é um sinal de teste de campo cheio, ele deve ser um teste fora de serviço. Ele é um sinal difícil para o sistema digital serial manipular e é um teste muito importante para se desempenhar. A característica da verifi cação de campo SDI é que ele possui uma quantidade máxima de energia de baixa freqüên-cia em dois sinais separados. Um sinal testa a operação do equalizador e o outro testa a operação do “Phase-locked Loop”. Ele é um sinal comple-tamente válido para digital componente e foi originalmente desenvolvido para testar gravadores D-1. No domínio composto, ele não é um sinal válido (sendo assim, pode ser considerado um teste de stress); porém, ele também é um bom teste para se desempenhar. A verifi cação de campo SDI foi defi nida em proposta na norma RP 178 Recomendada pelo SMPTE.
NRZI Embaralhado É a matemática do processo de embaralhamento que produz o sinal patológico. Apesar dos níveis de equalização 3FF e 000 estarem excluídos da imagem ativa e dado extra, a razão de “1”s para “0”s
9. Teste de Sistema

99
Um Guia para Televisão Digital
pode ser muito desigual para alguns valores de um campo de cor plano. Essa é uma das principais razões para embaralhar o sinal. A conversão para NRZI elimina a sensibilidade de polaridade do sinal, mas possui um efeito pequeno na razão de “1”s para “0”s. Embaralhamento que realmen-te quebra as séries de “1”s ou “0”s e produz o espectro desejado com o mínimo conteúdo de baixa freqüência, enquanto fornece o cruzamento de zero máximo necessário para extração de clock no receptor. Porém, há certas combinações de entrada de dados e estado de embaralhamento que, ocasionalmente, causará séries (20 a 40) de “0”s. Essas execuções longas de “0”s não criam cruzamento de zero e é a fonte do conteúdo de baixa freqüência no sinal. (“1”s não é um problema porque ele produz um sinal NRZI na metade da freqüência de clock, que é exatamente no meio da banda de freqüência ocupada por todo o sinal.)
O embaralhador é um registrador de mudança na célula nove como mos-trado na Figura 9-1. Para cada bit de entrada, há um bit de saída enviado para célula um do encoder NRZI. Um bit de saída é determinado pelo esta-do de 10 células e o bit de entrada. Uma típica distribuição de execuções de “1”s e “0”s é mostrada na Tabela 9-1 para 100 quadros de componente preto. (Para o propósito dessas análises os “1”s são alto e os “0” são bai-xo como o oposto para a transição, defi nição de dados sem transição.) As séries (16, 19, 22, 32, 33, 34 e 39) ocorrem como eventos únicos que os amplifi cadores e receptores do sistema de transmissão podem manipular com relativa facilidade por causa de suas durações muito curtas.
Eventos de execuções longas múltiplas podem ser encorajados com cer-tos sinais de entrada, que é a base para a geração de sinais patológicos. Quando as palavras de entrada alternam entre certos valores digitais, o sinal patológico de multi evento ocorrerá para um estado de embaralhador específi co, geralmente todos os “0”s, sendo assim a seqüência usualmente inicia em um SAV. A seqüência de multi evento fi naliza no próximo EAV, que quebra a seqüência de entrada. Visto que o estado do embaralhador é mais ou menos um número aleatório, a seqüência do multi evento de execuções longas de “0”s acontece em torno de uma vez por quadro (9 bits, 512 estados possíveis, 525 ou 625 linhas por quadro).
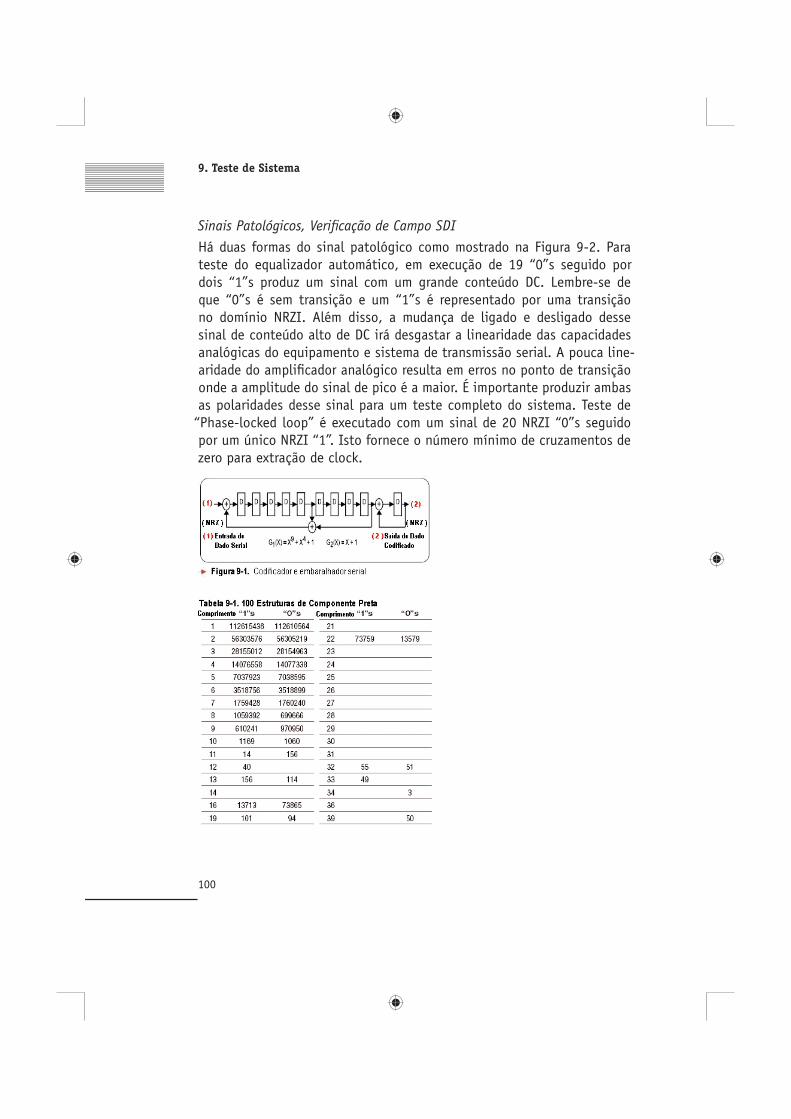
100
Sinais Patológicos, Verifi cação de Campo SDIHá duas formas do sinal patológico como mostrado na Figura 9-2. Para teste do equalizador automático, em execução de 19 “0”s seguido por dois “1”s produz um sinal com um grande conteúdo DC. Lembre-se de que “0”s é sem transição e um “1”s é representado por uma transição no domínio NRZI. Além disso, a mudança de ligado e desligado desse sinal de conteúdo alto de DC irá desgastar a linearidade das capacidades analógicas do equipamento e sistema de transmissão serial. A pouca line-aridade do amplifi cador analógico resulta em erros no ponto de transição onde a amplitude do sinal de pico é a maior. É importante produzir ambas as polaridades desse sinal para um teste completo do sistema. Teste de “Phase-locked loop” é executado com um sinal de 20 NRZI “0”s seguido por um único NRZI “1”. Isto fornece o número mínimo de cruzamentos de zero para extração de clock.
9. Teste de Sistema

101
Um Guia para Televisão Digital
A verifi cação de campo SDI consiste da metade do campo de cada sinal como mostrado na Figura 9-3. O teste do equalizador é baseado nos valo-res de 300h e 198h enquanto o teste de “Phase-Locked Loop” é baseado nos valores de 200h e 110h. Na ordem C-Y mostrada, a metade superior do campo será aqui roxa e a metade inferior uma sombra de cinza. Alguns geradores de sinal de teste utilizam outra ordem, Y-C, dando duas sombras de verde diferentes. Cada uma funciona, mas a ordem C-Y é especifi cada na norma recomendada. Uma palavra com um único bit “1” é colocada em cada quadro para garantir que ambas as polaridades do sinal de stress do equalizador para a verifi cação de campo SDI. O único “1” inverte a polari-dade da função NRZ para NRZI porque o campo (para vídeo componente) teria de outra forma o mesmo número de “1”s e a fase nunca mudaria.
Estatísticas para 100 quadros de verifi cação de campo SDI são mostradas na Tabela 9-2. São as execuções de 19 e 20 que representam o desgaste de baixa freqüência do sistema. Quando eles acontecem (em torno de uma vez por quadro), eles ocorrem para uma completa linha de televisão ativa e causam uma variação de baixa freqüência signifi cante. Visto que o sinal de stress PLL é uma onda quadrada de uns 20 “1”s, 20 “0”s, você pode esperar uma mesma quantidade de cada tipo de execução. O sinal de stress do equalizador é baseado em execuções de 19 “1”s seguidos por um “0” ou 19 “0”s seguido por um “1”. Como descrito acima, um “1” extra em cada quadro força as duas polaridades acontecerem e ambas são representadas na informação.

102
9. Teste de Sistema
10Bibliografi a


105
Um Guia para Televisão Digital
Livros e Artigos
Ainsworth, Kenneth. “Monitoring the Serial Digital Signal”, Broadcast En-gineering, Nov. 1991. Tektronix literature number 25W-7156.
Ainsworth, Kenneth and Andrews, Gary. “Evaluating SErial Digital Video Systems”, IEEE 4th International Montreux Symposium, MOntreux Swit-zerland, June 1991.
Ainsworth, Kenneth and Andrews, Gary. “ Comprehending the Video Digital Serial”, Broadcast Engineering, Spanish language edition, Sept. 1992, p.34-44. Tektronix literature number 25W-7153.
Avis, Richard, Sony Broadcast & Pro-Audio Division, Basingstoke, U.K. “Serial Digital Interface”, Booklet. Sony Broadcast & Communications, Basingstoke, England, June 1991.
Elkind, Bob. Ainsworth, Kenneth. Fibush, David. Lane, Richard. Overton, Michael. “Error Measurements and Analysis of Serial CCIR-601 Equipment”, International Broadcaster’s Convention, Amsterdam, Holland, June 1992.
Elkin, Bob and Fibush, David. “Proposal for Error Detection and Handing in Studio Equipment”, 25th SMPTE Television Conference, Detroit, MI, Feb. 1991. SMPTE Journal, Dec. 1991. Tektronix Literature number 25W-7128-1.
Eguchi, Takeo. Sony Corporation, Japan. “Pathological Check Codes for Serial Digital Interface Systems”, 133rd SMPTE Technical Conference, Los Angeles, CA, Oct. 1991. SMPTE Journal, Aug. 1992, p. 553-558.
Fibush, David and Elkind, Bob. “Test and Measurement of SErial Digital Syste-ms”, 133rd SMPTE Technical Conference, Los Angeles, CA, Oct. 1991. SMPTE Journal, Sept. 1992, p. 622-631. Tektronix literature number 25W-7154.
Fibush, David. “Understanding the Serial Digital Video Interface”, In View, Midwest Publishing, Winter/Spring 1991, p. 16-18.
Fibush, David. “ Error Detection in Serial Digital Systems”, NAB, Las Vegas, NV, Apr. 1993. SMPTE Journal, Aug. 1993, p. 688-692. Tektronix literatu-re number 25W-7198.

106
Fibush, David. “Jitter Effects and Measurements in Serial Digital Televi-sion Signals”, 26th SMPTE Conference, Feb. 1993. SMPTE Journal, Aug. 1993, p. 693-698. Tektronix literature number 25W-7179.
Fibush, David. “Error Measurements in Studio Digital Video Systems”, 134th SMPTE Tchenical Conference, Toronto, Canada, Nov. 1992. SMPTE Journal, Aug. 1993, p. 688-692. Tektronix literature number 25W-7185.
Fibush, David. “Test and Measurement of Serial Digital Signals error detec-tion and jitter”, SBE Convention, San Jose, CA, Oct. 1992.
Grass Valley Group, “Digital Television: The Transition”, Grass Valley Group, Inc, Grass Valley, CA. 1992.
Huckfi eld, Dave. Sony Broadcast & Communications Ltd. “Serial Digital Interfacing”, Internacional Broadcast Engineer, Sept. 1990.
Mendelson, Philip. Digital Magic, Danta Monica, CA. “Buildins a Serial Com-ponent Facility”, Broadcast Engineering, Mar. 1992, p.38, 42, 44, 48, 50.
Martin, Bruno. Advanced Audio Visual Systems, Montreuil, France. “A Com-prehensive Method of Digital Video Signal Analysis”, 135th SMPTE Tech-nical Conference, Los Angeles, California, Nov. 1993.
Reynolds, Keith. Grass Valley Group, Grass Valley, CA. “The Transition Pro-cess: Getting from A to D”, Brodcast Engineering, Mar. 1992, p. 86-90.
Robin, Michael and Poulin, Michel. CBC, Montreal, Canada. “Performance Evaluation and Acceptance Testing of Bit-Serial Digital Video Equipment and Systems at the CBC”, 134th SMPTE Technical Conference, Toronto, Canada, Nov. 1992.
Robin, Michael. CBC, Montreal, Canada. “Bit-serial Digital Signal Jitter Causes, Effects, Remedies and Measurement”, 135th SMPTE Technical Conference, Los Angeles, California, Nov. 1993.
Stremler, Ferrel G. “Inreoduction to Communications Systems”, Addison-Wesley Series in Electrical Engineering, December 1982.
Smith, David R. Digital Transmission Systems, Van Nostrand Reinhold Company, New York, 1985.

107
Um Guia para Televisão Digital
Stone, David. Pro-Bel Ltd. “Digital Signal Analysis”, International Broad-cast Engineer, Nov. 1992, p. 28-31.
Tancock, M.B., Sony Broadcast & Communications, Basingstoke, U.K. “The Digital Evolution: The Serial Digital interface”, Sony, Basingstoke, U.K. Booklet released at IBC Convention, Brighton, England, Sept. 1990.
Walker, Marc S. BTS, Salt Lake City, UT. “Distributing Serial Digital Video”, Broadcast Engineering, Feb. 1992, p. 46-50.
Ward, Ron. Utah Scientifi c, Salt Lake City, UT. “ Avoiding the Pitfalls in Serial Digital Signal Distribution”, SMPTE Journal, Jan. 1993, p. 14-23.
Watkinson, John. The Art of Digital Video, Focal Press, London & Boston.
Watkinson, John and Rumsey, Francis. The Digital Interface Handbook, Focal Press, London & Boston.
Wonsowicz, John. CBC, Toronto, Canada. “Design Considerations for Te-levision Facilities in the CBC Toronto Broadcast Center”, 134th SMPTE Technical conference, Toronto, Canada, Nov. 1992.
Padrões
AES 3 (ANSI S4.40), “AES Recommended Practice for Digital Audio Enginee-ring, Serial Transmission Format for Linearly Represented Digital Audio Data”
AES 11 (Versão ANSI S4.44), “AES Recommended Practice for Digital Audio Engineering, Synchronization of Digital Audio Equipment in Studio Operations”
Recomendação ITU-R BT.601, “Encoding Parameters of Digital Television for Studios”
Recomendação ITU-R BT.656, “Interfaces for Digital Component Video Signals in 525-line and 625-line Television Systems Operating at the 4:2:2 level of Recommendation 601”
Recomendação ITU-R BT.711, “Synchronizing Reference Signals for the Component Digital Studio” Relatório ITU-R BT.624, “Characteristics of Te-levision Systems”

108
Relatório ITU-R BT.1212, “Measurements and Test Signals for Digitally Encoded Color Television Signals”
EBU Tech 3246, “EBU Parallel Interface for 625-line Digital Video Signals”
EBU N-10, “Parallel Component Video Interface for Non-composite ENG Signals”
SMPTE 125M, “Bit-Parallel Digital Interface, Component Video Signal 4:2:2”
SMPTE 170M, “Composite Analog Video Signal, NTSC for Studio Applications”
SMPTE 244M, “Digital Representation of NTSC Encoded Video Signal”
SMPTE 259M, “Serial Digital Interface for 10-bit 4:2:2 Component and 4ƒsc NTSC Composite Digital Signals”
SMPTE 267M, “Bit Parallel Digital Interface, Component Video Signal 4:2:2, 16x9 Aspect Ratio”
SMPTE 269M, “Fault Reporting in Television Systems”
SMPTE RP 154, “Reference Signals for the Synchronization of 525-line Video Equipment”
SMPTE RP 168, “Defi nition of Vertical Interval Switching Point for Syn-chronous Video Switching”
SMPTE RP 165, “Error Detection Checkwords and Status Flags for Use in Bit-serial Digital Television Interfaces”
SMPTE RP 178, “Serial Digital Interface Check Field for 10-bit 4:2:2 Com-ponent and 4ƒsc Composite Digital Signals”
Nota
Relatórios e Recomendações de CCIR antigas são agora documentos ITU-R. A União de Telecomunicação Internacional, Setor de Comunicação a Rádio substituiu o CCIR

11Glossário


111
Um Guia para Televisão Digital
125M – Veja SMPTE 125M.
4:2:2 – Um termo comumente utilizado para formato de vídeo digital componente. Os detalhes do formato são especifi cados no documento pa-drão CCIR-601. Os numerais 4:2:2 denotam a razão de freqüências de amostragem do único canal de luminância para os dois canais de diferença de cor. Para todas as amostras de luminância, há duas amostras de cada canal de diferença de cor. Veja CCIR-601.
4fsc – Taxa de amostragem de quatro vezes a subportadora utilizada em sistemas digitais compostos. Em NTSC, é igual a 14,3 MHz. Em PAL é igual a 17,7 Mhz.
AES/EBU – Nome informal para um padrão de áudio digital estabelecido juntamente pela Sociedade de Engenharia de Áudio e as organizações da União de Transmissão Européia.
Algoritmo – Um conjunto de regras e processos para resolver problemas em um fi nito número de passos.
“Aliasing” – Defeitos na imagem tipicamente causados por amostras in-sufi cientes ou fi ltragem pobre de vídeo digital. Defeitos são tipicamente vistos como “Jaggies” em linhas diagonais e “Twinkling” ou “Brightening” em detalhe da imagem.
Amostragem – Processo onde sinais analógicos são medidos, milhões de vezes por segundo para vídeo.
Amostragem Ortogonal – Amostragem de uma linha de sinal de vídeo repetiti-vo de forma que amostras em cada linha estejam na mesma posição horizontal.
Analógico – um adjetivo que descreve qualquer sinal que varia constan-temente como o oposto a um sinal digital que contém níveis discretos representando os dígitos binários 0 e 1.
Artefatos de Compressão – Compactação de um sinal digital, particular-mente quando uma alta taxa de compressão é utilizada, pode resultar em pequenos erros no sinal descumprindo. Esses erros são conhecidos como “artefatos”, ou defeitos não desejados. Esses artefatos podem originar ru-ído (ou “ocupação” de extremidade) ou pode fazer com que partes da

fi gura, particularmente se movam rapidamente, para ser mostrado com o movimento distorcido ou pedido.
Assíncrona – Um procedimento de transmissão que não é sincronizado pelo clock.
Atraso – O tempo necessário para um sinal passar através de um disposi-tivo ou condutor.
Atraso de Grupo – Uma detecção de sinal causado por freqüências dife-rentes tendo atrasos de propagação diferentes (atraso em 1 Mhz é dife-rente de atraso em 5 Mhz).
Atraso de Propagação (comprimento de percurso) – O tempo que o sinal leva para viajar através de um circuito, peça ou equipamento, ou um comprimento de cabo.
Áudio Multiplexado – áudio digital é multiplexado em um stream de dados digital serial.
Bit – Uma representação binária de 1 ou 0. Um dos níveis quantizados de um pixel.
Bit Paralelo – Transmissão de “Byte-wise” de vídeo digital em um cabo multicondutor, onde cada par de fi os transporta um único bit. Esse padrão está sob a cobertura de SMPTE 125M, EBU 3267-E e CCIR 656.
Bit Serial – Transmissão “Bit-wise” de vídeo digital em um único condutor tal como cabo coaxial. Pode também ser enviado através de fi bras ópticas. Esse padrão está sob a cobertura do CCIR 656
Bit Slippage – 1. Ocorre quando uma estrutura de palavra é perdida em um sinal serial, portanto, o valor relativo de um bit está incorreto. Isso é geralmente zerado no próximo sinal serial, TRS-ID para composto e EAV/SAV para componente. 2. A leitura errada de um bit stream serial quando a fase do clock recuperado deriva o sufi ciente para perder um bit. 3. Um fenômeno que ocorre em “Buses” de dados digital paralelo quando um ou mais bits saem do tempo em relação ao restante. Os resultados são dados errados. Comprimentos de cabos diferentes são as causas mais comuns.
Blocking – Ocorre em um sistema roteador de muitos estágios quando uma destinação requer uma fonte e encontra esta fonte indisponível. Em
113
Um Guia para Televisão Digital
um sistema de linha de laço, isso signifi ca que a destinação requer uma linha de laço e recebe uma mensagem de “linha de laço ocupada”, indi-cando que todas as linhas de laço estão em utilização.
BNC – Abreviação de “Conector N Baby”. Um conector de cabo utilizado extensivamente em televisão.
Byte – Um conjunto completo de níveis quantizados contendo todos os bits. Bytes consistindo de 8 a 10 bits por amostra são comuns.
Cabo Coaxial – Uma linha de transmissão com um par concêntrico de condutores de transporte de sinal. Há um condutor interno e uma bainha metálica condutiva exterior. A bainha ajuda na prevenção de radiação ex-terna afetando o sinal no condutor interno e minimiza a radiação do sinal da linha de transmissão..
Cabo Paralelo – Um cabo multicondutor transportando transmissões si-multâneas de bits de dados. Análogo às fi leiras de uma “Marching Band” passando um ponto de revisão.
CCIR – Comitê Consultivo de Rádio Internacional, um comitê de padrões internacionais, agora substituídos por ITU-R.
CCIR-601 – Veja ITU-R BT. 601.
CCIR-656 – O esquema de interconexão física paralela e série para CCIR-601. CCIR 656 defi ne o diagrama ou tabela que representa a função de cada fi o num cabo ou de cada pino num conector paralelo assim como o apagamento, sincronismo e esquemas de multiplexação utilizados em ambas as interfaces paralela e serial. Refl ete as defi nições em EBU Tech 3267 (para sinais de 625 linhas) e em SMPTE 125M (525 paralelo) e SMPTE 259M (%@% Série).
Codifi cador – Em vídeo, um dispositivo que forma um único sinal colorido composto único de um conjunto de sinais componente
Codifi cação – Representação de cada nível de sinal de vídeo como um número, usualmente na forma binária.
Codifi cação de Canal – Descreve a forma na qual os 1s e 0s do fl uxo de dados são representados no caminho da transmissão.
114
Codifi cação de Quadrado Miller – Um esquema de codifi cação do canal livre de DC utilizado em D-2 VTRs.
Codifi cação Não Linear – Relativamente mais níveis de quantização são designados para sinais de pequena amplitude, relativamente menores do que a largura dos picos do sinal.
Coefi cientes – Um número (frequentemente uma constante) que expressa alguma propriedade de um sistema físico em uma forma quantitativa.
Componente Analógico – A saída não codifi cada de uma câmera, grava-dor de fi ta de vídeo, etc., que consiste em três sinais de cores primárias: verde, azul e vermelho (RGB) que juntas transmitem todas as informações necessárias de uma imagem. Em alguns formatos de vídeo componente, essas três componentes foram traduzidas em um sinal de luminância e dois sinais de diferença de cor, por exemplo, Y, B-Y, R-Y.
Componente Digital - Uma representação digital de um conjunto de sinal analógico componente, mais frequentemente Y, B-Y, R-Y. Os parâmetros de codifi cação são especifi cados por CCIR 601. A interface paralela é especi-fi cada por CCIR 656 e SMPTE 125M (1991).
Composto Analógico – Um sinal de vídeo codifi cado, tal como vídeo NTSC ou PAL, que inclui informação de sincronismo horizontal e vertical.
Composto Digital – Um sinal de vídeo codifi cado digitalmente, tal como ví-deo PAL ou NTSC, que inclui informação de sincronismo horizontal e vertical.
Contorno – Defeito de fi gura de vídeo devido à quantização em um nível muito grosseiro.
Correção de Erro – Um esquema que adiciona “Overhead” aos dados para permitir que certo nível de erros sejam detectados e corrigidos.
Conversão de Formato – O processo de codifi cação/decodifi cação e rea-mostragem de taxas digitais.
Conversão de Taxa – 1. Tecnicamente, o processo de conversão de uma taxa de amostra para outra. A taxa de amostra digital para o formato com-ponente é 13,5 MHz; para o formato composto pode ser 14,3 MHz para NTSC ou 17,7 MHz para PAL. 2. Frequentemente utilizada incorretamente para indicar a reamostragem de taxas digitais e codifi cação/decodifi cação.
115
Um Guia para Televisão Digital
Conversor AD (analógico para digital) – Um circuito que utiliza amos-tragem digital para converter um sinal analógico em uma representação digital deste sinal.
Conversor D/A (digital-analógico) – Um dispositivo que converte sinais digitais para sinais analógicos.
Corretor de Base de Tempo – Dispositivo utilizado para corrigir erros de base de tempo e estabilizar o tempo da saída de vídeo de uma máquina de gravação.
D1 – Um formato de gravação de vídeo digital componente que utiliza dados de acordo com o padrão CCIR-601. Gravações em fi ta magnética de 19 mm. (Frequentemente utilizada incorretamente para indicar vídeo digital componente).
D2 - Um formato de gravação de vídeo digital composto que utiliza dados de acordo com o padrão SMPTE 244M. Gravações em fi ta magnética de 19 mm. (Frequentemente utilizada incorretamente para indicar vídeo digital componente).
D3 - Um formato de gravação de vídeo digital composto que utiliza dados de acordo com o padrão SMPTE 244M. Gravações em fi ta magnética de 1/2”.
Demultiplexador (demux) – Um dispositivo utilizado para separar dois ou mais sinais que foram anteriormente combinados por um multiplexador compatível e transmitido sobre um único canal.
Deserializador – Um dispositivo que converte a informação digital serial para paralelo.
Deslocamento – Deslocamento gradual ou mudança na saída sobre um perío-do de tempo devido à mudança ou ação dos componentes do circuito. A mu-dança é causada frequentemente por instabilidade térmica de componentes.
Deslocamento de Fase – O movimento em tempo relativo de um sinal em relação a outro sinal.
Digital Serial – Informação digital que é transmitida em forma serial. Frequentemente utilizada informalmente para referenciar os sinais de te-levisão digital serial.

116
Disfarce de Erro – Uma técnica utilizada quando a correção de erros falha (veja correção de erro). Dados errados são substituídos por dados sinteti-zados de pixels arredondados.
Distorção de Fase – Um defeito de fi gura causado por um atraso desigual (deslocamento de fase) de componentes de freqüência diferentes no sinal conforme eles passam através de elementos de impedância diferente – fi ltros, amplifi cadores, variações ionosféricas, etc. O defeito na imagem é “Fringing”. Como anéis de difração, nas extremidades onde o contraste muda abruptamente.
Distorção de tempo de campo (linear) – Uma mudança não justifi cada na amplitude do sinal de vídeo que ocorre em uma estrutura de tempo de 16 ms.
Discreto – Tendo uma identidade individual. Um circuito individual componente.
Dither – Tipicamente um sinal de nível baixo aleatório (oscilação) que pode ser adicionado a um sinal analógico antes da amostragem. Frequen-temente consiste no ruído branco da amplitude de pico a pico de nível de quantização.
DVTR – Abreviação de recodifi cador de fi ta de vídeo digital.
EAV – Fim de vídeo ativo em sistemas digitais componente.
EBU – União de Transmissão da Europa. Uma organização de transmissores europeus que, entre outras atividades, produz declarações técnicas e reco-mendações para o sistema de televisão de linha 625/50.
EBU TECH.3267-E – A recomendação EBU para a interface paralela de sinal de vídeo digital de 625 linhas. Uma revisão do EBU Tech.3246-E mais moderno, que foi derivado do CCIR-601 e contribuído para padrões CCIR-656.
EDH (detecção de erro e manuseamento) – SMPTE 165 proposto para reconhecimento de inexatidões no sinal digital serial. Ele pode ser in-corporado em um equipamento digital serial e emprega um simples LED indicador de erro.
Fase Diferencial – Uma mudança na fase de crominância de um sinal de vídeo causada por uma mudança no nível de luminância do sinal.
117
Um Guia para Televisão Digital
Efeitos de Muitas Camadas – Um termo genérico para um sistema mistu-ra/efeitos que permite imagens de vídeo múltiplas serem combinadas em uma imagem composta.
Elevação de Linha de Base – Uma forma de distorção de baixa freqüência resultante de um aumento no nível DC do sinal.
Embaralhamento – 1. Para transpor ou inverter dados digitais de acordo com um esquema pré arranjado com sinais digitais serial. 2. O sinal digital é embaralhado para produzir uma distribuição de espectro melhor.
Equalização (EQ) – Processo que alterna a resposta de freqüência de um amplifi cador de vídeo para compensar as perdas por alta freqüência em cabo coaxial.
Equalização de Cabo – O processo de alteração da resposta de freqüência de um amplifi cador de vídeo para compensar as perdas de alta freqüência em cabo coaxial.
Erro de Fase – Um defeito de imagem causado pelo tempo relativo incor-reto de um sinal em relação a outro sinal.
Fluxo de Bit – Uma série contínua de bits transmitidos em uma linha.
Forma de Onda – A forma de uma onda eletromagnética. Uma representa-ção gráfi ca da relação entre tensão e corrente e tempo.
Freqüência de Amostragem – O número de medições de amostra discre-tos realizados em um dado período de tempo. Frequentemente expresso em MHz para vídeo.
Ganho – Qualquer aumento ou decréscimo em força de um sinal elétrico. O Ganho é medido em relação de decibéis ou número de vezes de magnifi cação.
Ganho Diferencial – Uma mudança na amplitude de crominância de um sinal de vídeo causada por uma mudança no nível de luminância do sinal.
Gerador de Caractere (CG) - Um computador utilizado para gerar texto e algumas vezes, gráfi cos, para títulos de vídeo ou capítulos.
I/O – Abreviação de entrada/saída. Tipicamente se refere ao envio de informação ou sinais de dados para e oriundas de um dispositivo.

118
Interpolação – Em vídeo digital, a criação de novos pixels na imagem por algum método de manipulação matemática dos valores de pixels vizinhos.
Intervalo Horizontal (Intervalo de Apagamento Horizontal) – O perío-do de tempo entre linhas de vídeo ativas.
ITU-R – A União Internacional de Telecomunicação, Setor de Comunicação a Rádio (substitui o CCIR).
ITU-R BT.601 – Um padrão internacional para televisão digital compo-nente da qual foi derivado o SMPTE 125M (era RP-125) e os padrões EBU 3246E. CCIR defi ne os sistemas de amostragem, valores de matrix e carac-terísticas de fi ltro para a televisão digital componente Y, B-Y, R-Y e RGB.
Jaggies – Gíria para o “Stair-Step Aliasing” que aparece em linhas diago-nais. Causado por fi ltragem insufi ciente, violação da Teoria Nyquist, e/ou interpolação baixa.
Largura de Banda – 1. A diferença entre os limites superiores e inferiores de uma freqüência, freqüentemente medida em megahertz (MHz). 2. A fai-xa completa de freqüências sobre a qual um circuito ou sistema eletrônico pode funcionar com menos do que 3 dB de perda de sinal. 3. A capacidade de transporte de informação de um canal de televisão particular.
MAC – Vídeo componente analógico multiplexado. Isso é o signifi cado de um vídeo analógico componente de multiplexação de tempo em um único canal de transmissão, tal como canal coaxial, fi bra ou satélite. Usualmen-te envolve processos digitais para alcançar a compressão de tempo.
Microssegundo (μ) – um milionésimo de um segundo: 1 x 10-6 ou 0,000001 segundo.
Modulação de Freqüência – Modulação de uma onda senoidal ou “porta-dora” através da variação de sua freqüência de acordo com as variações de amplitude do sinal modulado.
MPEG-2 – “Motion Pictures Expert Group”. Um grupo internacional de peritos de indústrias para padronizar áudio e fi guras de movimento comprimidos.
Multiplexador (mux) – Dispositivo para combinação de dois ou mais sinais elétrico sem um único, sinal composto.
119
Um Guia para Televisão Digital
Multiplex de Tempo – No caso de CCIR-601, uma técnica para transmitir três sinais no mesmo tempo em um grupo de fi os paralelos.
Nanosegundo (ns) – Um bilionésimo de um segundo: 1 x 10-9 ou 0,000000001 segundo.
Não Linearidade – Tendo a variação de ganho como uma função de am-plitude do sinal.
NICAM (quase instantâneo multiplexe de áudio “Companded”) - Um sistema de codifi cação de áudio digital originalmente desenvolvido por BBC por links de ponto a ponto. Um desenvolvimento posterior, NICAM 728 é utilizado em muitos países da Europa para fornecer áudio digital estéreo para receptores de televisão domésticos.
NRZ – Sem retorno ao zero. Um esquema de codifi cação que é sensível à polaridade. 0 = lógica baixa, 1 = lógica alta.
NRZI – Sem retorno ao zero inverso. Um esquema de embaralhamento de dados de vídeo que insensível à polaridade. O = sem mudança na lógica; 1 = uma transição do nível de lógica um para o outro.
NTSC (Comitê de Sistemas de Televisão nacional) – Organização que formula padrões para o sistema de televisão NTSC. Agora descreve o sis-tema Americano de transmissão de TV que é utilizado principalmente na América do Norte, Japão e partes da América do Sul.
Oscilação – Jitter - Uma variação de sinal aleatório indesejado com rela-ção ao tempo.
Oscilação de Clock – jitter de Clock - Incerteza de tempo das extremida-des da célula de dados em um sinal digital.
Padrão de Olho – Uma forma de onda utilizada para avaliar o desempenho do canal.
PAL (Linha de Fase Alternada) – O nome do sistema de televisão colorida no qual o componente V de burst é invertido em fase de uma linha para a próxima a fi m de minimizar erros que podem ocorrer na transmissão de cores.
Palavra – Veja Byte.
120
Palavra de Sincronismo – Um padrão de bit de sincronismo, diferenciado do modelo de bit de dados normal, utilizado para identifi car pontos de re-ferência no sinal de televisão; também para facilitar a estrutura da palavra em um receptor serial.
Palavra Digital – O número de bits tratados como uma entidade única pelo sistema.
Patch Panel – Um método manual de sinais de roteamento utilizando um painel de receptáculos para fontes e destinos e fi os de ligação direta para interconectá-los.
Pico a Pico - A diferença de amplitude (tensão) entre os picos mais posi-tivos e os mais negativos de um sinal elétrico.
Pixel – A menor e solucionável área distinguível em uma imagem de vídeo. Um único ponto na tela. Em vídeo digital, uma única amostra da fi gura. Derivado dos elementos da fi gura das palavras.
PRBS – Pseudo seqüência binária aleatória.
Quantização – O processo de conversão de uma entrada analógica contí-nua em um conjunto de níveis de saída discretos.
Rec.601 – Veja CCIR-601.
Reclocking – O processo de clock dos dados com um clock regenerado.
Recuperação de Clock – A reconstrução de informação de tempo de dados digitais.
Resolução – O número de bits (quatro, oito, dez, etc) determina a reso-lução do sinal digital:
4 bits = uma resolução de 1 em 168 bits = uma resolução de 1 em 25610 bits = uma resolução de 1 em 1024Oito bits é o mínimo aceitável para transmissão de TV.
“Rollof” de Resposta de Freqüência – Uma distorção em um sistema de transmissão onde os componentes de freqüência mais altos não são

121
Um Guia para Televisão Digital
transmitidos em total amplitude original e há a possibilidade de perdas de saturação de cor.
Roteador – Um dispositivo eletrônico que comuta um sinal requerido pelo usuário (áudio, vídeo, etc) de qualquer entrada para qualquer saída selecionada pelo usuário.
Roteador de Produção (Vision Mixer) – um dispositivo que permite tran-sições entre fi guras de vídeo diferentes. Também permite chaveamento e casamento (composto).
RP 125 – Veja SMPTE 125M.
Ruído de Quantização – O ruído (desvio de um sinal de seu valor original e correto) que resulta de um processo de quantização. Em digital serial, um tipo granular de ruído presente na presença de um sinal.
SAV – Início de vídeo ativo em sistemas digitais componente.
Scope – Abreviação para osciloscópio (monitor de forma de onda) ou vec-torscope, dispositivos utilizados para medir o sinal de televisão.
Serializador – Um dispositivo que converte informação digital paralela para digital serial.
SMPTE (Sociedade de Figura em Movimento e Engenheiros de Televi-são) – Uma organização profi ssional que recomenda padrões para televi-são e indústrias de fi lmes.
SMPTE 125M (era RP 125) – Norma recomendada SMPTE para interface digital paralela de bit para sinais de vídeo componente. SMPTE 125M defi ne os parâmetros necessários para gerar e distribuir sinais de vídeo componente em uma interface paralela.
SMPTE 244M – A prática recomendada SMPTE para interface digital de bit paralela para sinais de vídeo composto. SMPTE defi ne os parâmetros necessários para gerar e distribuir sinais de vídeo composto em uma in-terface paralela.
SMPTE 259M – Norma recomendada SMPTE 259M para interfaces compo-nente e composto digital serial de 525 linhas.
122
Síncrono – Um processo de transmissão pelo qual o bit e o stream carac-terístico estão subordinados a clocks exatamente sincronizados, ambos no fi m da recepção e envio.
Still Store – Dispositivo para gravação de quadro específi co de vídeo.
TDM (Multiplex de divisão de Tempo) – O gerenciamento de sinais múl-tiplos em um canal enviando alternadamente porções de cada sinal e designando cada porção para blocos particulares de tempo.
Telecine – Um dispositivo para capturar fi lmes com um sinal de vídeo.
“Temporal Aliasing” – Um defeito visual que ocorre quando a imagem que está sendo amostrada se move muito rapidamente para a taxa de amostra-gem. Um exemplo comum é “Wagon Wheels” que aparece para rotear na direção contrária.
Teorema de Amostragem Nyquist – Intervalos entre amostras sucessivas devem ser iguais ou menores do que uma metade do período de freqüência mais alta.
TRS – Sinais de referência de tempo em sistemas digital composto (quatro palavras ao longo).
TRS-ID (Identifi cação de sinal de referência de tempo) – Um sinal de referência utilizado para manter o tempo em sistemas digital composto. É de quatro palavras ao longo.
Truncamento – Retirada de bits menos signifi cantes em um sistema digi-tal. Usualmente resulta em ruído digital.
VTR (gravador de fi ta de vídeo) – um dispositivo que permite que sinais de vídeo e áudio sejam gravados em fi tas magnéticas.


Este livro foi impresso em papel offset 90g/m2
tipologia ITC Offi cina Sans Std, corpo 11, pela Gráfi ca FIRJAN.Editora SENAI
Rua São Francisco Xavier 417, MaracanãCEP 20550-010 - Rio de Janeiro, RJ
Tel: (0XX21) [email protected]