Modelado de un seguidor solar con paneles de alta ...
8
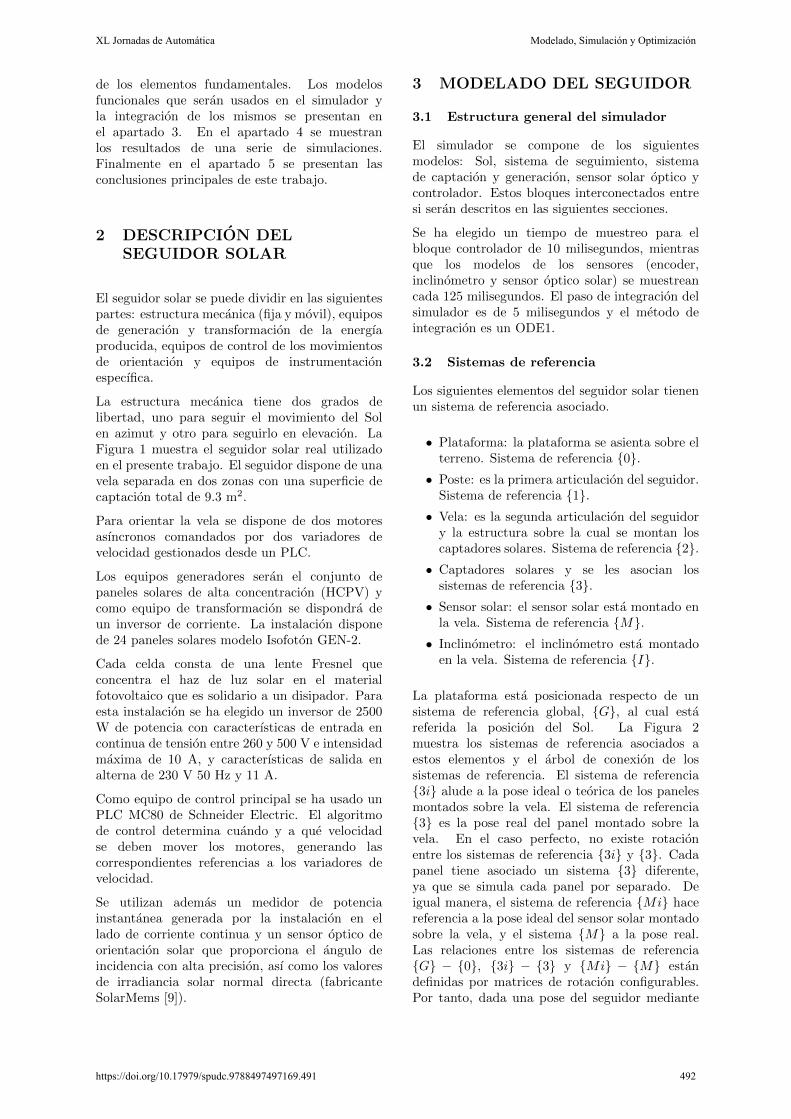
MODELADO DE UN SEGUIDOR SOLAR CON PANELES DE ALTA CONCENTRACI ´ ON Manuel G. Satu´ e, Fernando Casta˜ no, Manuel G. Ortega y Francisco R. Rubio Depto. de Ingenier´ ıa de Sistemas y Autom´ atica Escuela T. Superior de Ingenier´ ıa, Universidad de Sevilla [email protected], [email protected], [email protected], [email protected] Resumen El presente trabajo trata sobre el modelado y simulaci´on de una instalaci´ on de seguimiento solar fotovoltaico para producci´on de energ´ ıa. Se parte de una instalaci´on real con unas especificaciones de funcionamiento muy estrictas en cuanto al seguimiento del sol, debido a que alberga paneles solares fotovoltaicos de alta concentraci´on, donde peque˜ nas desviaciones en el apuntamiento suponen grandes diferencias en la generaci´on de energ´ ıa. El objetivo es la obtenci´on de un modelo matem´atico que sirva como simulador para ser utilizado como primera herramienta en el dise˜ no y ajuste de los controladores o estrategias de seguimiento que se implementar´an en la instalaci´on fotovoltaica. Palabras clave: Modelado, simulaci´ on, seguidor solar 1 INTRODUCCI ´ ON En la investigaci´ on en el campo de producci´ on de energ´ ıa solar fotovoltaica, una de las l´ ıneas seguidas es la que involucra el uso de paneles fotovoltaicos de alta concentraci´ on (HCPV), y ello es debido a la mejora en la eficiencia de la transformaci´ on de la energ´ ıa lum´ ınica en energ´ ıa el´ ectrica (hasta un 39% [4]), casi el doble de la eficiencia que se obtiene al usar paneles fotovoltaicos comunes. Los m´ odulos HCPV montan una lente que concentra los rayos del sol sobre la c´ elula fotovoltaica, aumentando la relaci´ on ´ area de captaci´ on - ´ area de c´ elula respecto de un panel fotovoltaico com´ un [4]. Pero mientras que los m´ odulos fotovoltaicos comunes absorben radiaci´ on directa y difusa, los m´ odulos HCPV s´ olo aprovechan la radiaci´ on directa debido precisamente a la lente. El ´ angulo de aceptancia de la lente suele ser peque˜ no, del orden de un grado [5]. Esto en la pr´ actica significa que una desviaci´ on en el apuntamiento de los m´ odulos de tan solo un grado puede hacer que el sistema disminuya mucho su eficiencia o incluso no produzca energ´ ıa el´ ectrica. Por tanto, para lograr un buen aprovechamiento de esta tecnolog´ ıa se hace necesario el uso seguidores de gran precisi´ on y la aplicaci´ on de estrategias de control y seguimiento que garanticen las condiciones de apuntamiento requeridas. Figura 1: Seguidor solar con paneles de alta concentraci´ on y lente Fresnel. Si bien, a nivel te´ orico, el problema de seguimiento estar´ ıa resuelto aplicando las ecuaciones solares (conociendo las coordenadas de la instalaci´ on y la hora solar se podr´ ıa obtener la direcci´ on de apuntamiento y aplicar una estrategia de seguimiento en bucle abierto), en la pr´ actica, en una instalaci´ on real, los resultados que se obtienen no son satisfactorios debido a una serie de incertidumbres (imprecisiones de montaje, holguras de mecanismos, deformaciones de la estructura, etc.) [1]; y que degradan el funcionamiento del sistema de seguimiento. Por todo ello es necesario complementar o sustituir la estrategia en bucle abierto, basada en ecuaciones solares, por otras estrategias m´ as sofisticadas, en las que, de alguna forma, se pueda aplicar un esquema realimentado. Este trabajo se basa en una instalaci´ on situada en la azotea de los laboratorios del departamento de Ingenier´ ıa de Sistemas y Autom´ atica de la Universidad de Sevilla; presentando las caracter´ ısticas de la instalaci´ on as´ ı como el dise˜ no de un simulador, que podr´ a ser configurado para esta instalaci´ on u otras de similares caracter´ ısticas. El resto del art´ ıculo se organiza de la siguiente manera: la descripci´on del seguidor solar se realiza en el apartado 2, analizando cada uno XL Jornadas de Automática Modelado, Simulación y Optimización https://doi.org/10.17979/spudc.9788497497169.491 491
Transcript of Modelado de un seguidor solar con paneles de alta ...

MODELADO DE UN SEGUIDOR SOLAR CON PANELESDE ALTA CONCENTRACION
Manuel G. Satue, Fernando Castano, Manuel G. Ortega y Francisco R. RubioDepto. de Ingenierıa de Sistemas y Automatica
Escuela T. Superior de Ingenierıa, Universidad de [email protected], [email protected], [email protected], [email protected]
Resumen
El presente trabajo trata sobre el modelado ysimulacion de una instalacion de seguimientosolar fotovoltaico para produccion de energıa.Se parte de una instalacion real con unasespecificaciones de funcionamiento muy estrictasen cuanto al seguimiento del sol, debido aque alberga paneles solares fotovoltaicos de altaconcentracion, donde pequenas desviaciones enel apuntamiento suponen grandes diferenciasen la generacion de energıa. El objetivo esla obtencion de un modelo matematico quesirva como simulador para ser utilizado comoprimera herramienta en el diseno y ajuste de loscontroladores o estrategias de seguimiento que seimplementaran en la instalacion fotovoltaica.
Palabras clave: Modelado, simulacion, seguidorsolar
1 INTRODUCCION
En la investigacion en el campo de produccionde energıa solar fotovoltaica, una de las lıneasseguidas es la que involucra el uso de panelesfotovoltaicos de alta concentracion (HCPV), yello es debido a la mejora en la eficiencia dela transformacion de la energıa lumınica enenergıa electrica (hasta un 39% [4]), casi eldoble de la eficiencia que se obtiene al usarpaneles fotovoltaicos comunes. Los modulosHCPV montan una lente que concentra los rayosdel sol sobre la celula fotovoltaica, aumentandola relacion area de captacion - area de celularespecto de un panel fotovoltaico comun [4]. Peromientras que los modulos fotovoltaicos comunesabsorben radiacion directa y difusa, los modulosHCPV solo aprovechan la radiacion directa debidoprecisamente a la lente. El angulo de aceptanciade la lente suele ser pequeno, del orden deun grado [5]. Esto en la practica significaque una desviacion en el apuntamiento de losmodulos de tan solo un grado puede hacer que elsistema disminuya mucho su eficiencia o inclusono produzca energıa electrica. Por tanto, paralograr un buen aprovechamiento de esta tecnologıa
se hace necesario el uso seguidores de granprecision y la aplicacion de estrategias de controly seguimiento que garanticen las condiciones deapuntamiento requeridas.
Figura 1: Seguidor solar con paneles de altaconcentracion y lente Fresnel.
Si bien, a nivel teorico, el problema de seguimientoestarıa resuelto aplicando las ecuaciones solares(conociendo las coordenadas de la instalaciony la hora solar se podrıa obtener la direccionde apuntamiento y aplicar una estrategia deseguimiento en bucle abierto), en la practica,en una instalacion real, los resultados que seobtienen no son satisfactorios debido a una seriede incertidumbres (imprecisiones de montaje,holguras de mecanismos, deformaciones de laestructura, etc.) [1]; y que degradan elfuncionamiento del sistema de seguimiento.
Por todo ello es necesario complementar osustituir la estrategia en bucle abierto, basadaen ecuaciones solares, por otras estrategias massofisticadas, en las que, de alguna forma, se puedaaplicar un esquema realimentado.
Este trabajo se basa en una instalacion situadaen la azotea de los laboratorios del departamentode Ingenierıa de Sistemas y Automatica dela Universidad de Sevilla; presentando lascaracterısticas de la instalacion ası como el disenode un simulador, que podra ser configuradopara esta instalacion u otras de similarescaracterısticas.
El resto del artıculo se organiza de la siguientemanera: la descripcion del seguidor solar serealiza en el apartado 2, analizando cada uno
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 491
de los elementos fundamentales. Los modelosfuncionales que seran usados en el simulador yla integracion de los mismos se presentan enel apartado 3. En el apartado 4 se muestranlos resultados de una serie de simulaciones.Finalmente en el apartado 5 se presentan lasconclusiones principales de este trabajo.
2 DESCRIPCION DELSEGUIDOR SOLAR
El seguidor solar se puede dividir en las siguientespartes: estructura mecanica (fija y movil), equiposde generacion y transformacion de la energıaproducida, equipos de control de los movimientosde orientacion y equipos de instrumentacionespecıfica.
La estructura mecanica tiene dos grados delibertad, uno para seguir el movimiento del Solen azimut y otro para seguirlo en elevacion. LaFigura 1 muestra el seguidor solar real utilizadoen el presente trabajo. El seguidor dispone de unavela separada en dos zonas con una superficie decaptacion total de 9.3 m2.
Para orientar la vela se dispone de dos motoresasıncronos comandados por dos variadores develocidad gestionados desde un PLC.
Los equipos generadores seran el conjunto depaneles solares de alta concentracion (HCPV) ycomo equipo de transformacion se dispondra deun inversor de corriente. La instalacion disponede 24 paneles solares modelo Isofoton GEN-2.
Cada celda consta de una lente Fresnel queconcentra el haz de luz solar en el materialfotovoltaico que es solidario a un disipador. Paraesta instalacion se ha elegido un inversor de 2500W de potencia con caracterısticas de entrada encontinua de tension entre 260 y 500 V e intensidadmaxima de 10 A, y caracterısticas de salida enalterna de 230 V 50 Hz y 11 A.
Como equipo de control principal se ha usado unPLC MC80 de Schneider Electric. El algoritmode control determina cuando y a que velocidadse deben mover los motores, generando lascorrespondientes referencias a los variadores develocidad.
Se utilizan ademas un medidor de potenciainstantanea generada por la instalacion en ellado de corriente continua y un sensor optico deorientacion solar que proporciona el angulo deincidencia con alta precision, ası como los valoresde irradiancia solar normal directa (fabricanteSolarMems [9]).
3 MODELADO DEL SEGUIDOR
3.1 Estructura general del simulador
El simulador se compone de los siguientesmodelos: Sol, sistema de seguimiento, sistemade captacion y generacion, sensor solar optico ycontrolador. Estos bloques interconectados entresi seran descritos en las siguientes secciones.
Se ha elegido un tiempo de muestreo para elbloque controlador de 10 milisegundos, mientrasque los modelos de los sensores (encoder,inclinometro y sensor optico solar) se muestreancada 125 milisegundos. El paso de integracion delsimulador es de 5 milisegundos y el metodo deintegracion es un ODE1.
3.2 Sistemas de referencia
Los siguientes elementos del seguidor solar tienenun sistema de referencia asociado.
• Plataforma: la plataforma se asienta sobre elterreno. Sistema de referencia {0}.
• Poste: es la primera articulacion del seguidor.Sistema de referencia {1}.
• Vela: es la segunda articulacion del seguidory la estructura sobre la cual se montan loscaptadores solares. Sistema de referencia {2}.
• Captadores solares y se les asocian lossistemas de referencia {3}.• Sensor solar: el sensor solar esta montado en
la vela. Sistema de referencia {M}.• Inclinometro: el inclinometro esta montado
en la vela. Sistema de referencia {I}.
La plataforma esta posicionada respecto de unsistema de referencia global, {G}, al cual estareferida la posicion del Sol. La Figura 2muestra los sistemas de referencia asociados aestos elementos y el arbol de conexion de lossistemas de referencia. El sistema de referencia{3i} alude a la pose ideal o teorica de los panelesmontados sobre la vela. El sistema de referencia{3} es la pose real del panel montado sobre lavela. En el caso perfecto, no existe rotacionentre los sistemas de referencia {3i} y {3}. Cadapanel tiene asociado un sistema {3} diferente,ya que se simula cada panel por separado. Deigual manera, el sistema de referencia {Mi} hacereferencia a la pose ideal del sensor solar montadosobre la vela, y el sistema {M} a la pose real.Las relaciones entre los sistemas de referencia{G} − {0}, {3i} − {3} y {Mi} − {M} estandefinidas por matrices de rotacion configurables.Por tanto, dada una pose del seguidor mediante
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 492

(θ1, θ2) es posible proyectar el vector solar, G−→S , enlos sistemas de referencia de los paneles y el sensoroptico mediante transformaciones de rotacion.
Figura 2: Sistemas de referencia y coordenadasarticulares θ1 y θ2 (orientacion y elevacion).
3.3 Modelo del Sol
En este bloque se calcula tanto la posicion del Solcomo la irradiancia directa. Se basa en el uso delas Ecuaciones Solares PSA [2]. Estas ecuacionesproporcionan los angulos azimut y zenit delSol para un instante de tiempo y una posiciongeografica (longitud y latitud) determinados. Laposicion proporcionada por estas ecuaciones estareferida al sistema de referencia global {G}.
3.4 Modelo del seguidor
La Figura 12 muestra el diagrama de bloques delsistema de seguimiento. Las reductoras acopladasa los ejes de los motores se modelan como simplesganancias.
3.4.1 Modelo cinematico directo
El modelo cinematico directo permite obtener elvector de apuntamiento de la vela del seguidor,0−→p , a partir de las coordenadas articulares dela primera y la segunda articulacion, θ1 y b,respectivamente. Para la configuracion de esteseguidor se obtiene la expresion (1). Para resolverel problema es necesario obtener θ2 en funcion dela coordenada articular b. Aplicando el teoremadel coseno se obtiene la expresion (2).
0−→p = [cθ1cθ2, sθ1cθ2, sθ2]T (1)
θ2 = 3π/4− α− β (2)
Figura 3: Geometrıa del mecanismo de elevacion.Relacion entre la coordenada articular b y θ2
3.4.2 Modelo del conjunto variador defrecuencia - motor
Este conjunto se ha modelado como un generadorde trayectorias trapezoidal. Recibe como entradala referencia de velocidad y proporciona comosalida la velocidad del motor.
3.4.3 Modelo del encoder
Se ha modelado un encoder absoluto con unaresolucion de 214 pulsos para 360 grados degiro. La entrada del modelo es el angulo de lacoordenada articular θ1. Como salida proporcionael angulo medido en grados, θ1m, incluyendo unruido con una distribucion uniforme.
3.4.4 Modelo del inclinometro
Para modelar el inclinometro se proyecta el eje xdel sistema de referencia {I}.
G−→xI = (x, y, z) (3)
θI = atan2(z,√x2 + y2) (4)
θIm = resol · round((θI + rndp)/resol) (5)
Los valores de precision y resolucion son 0.05o y0.001o respectivamente.
3.5 Modelo del sistema de captacion -generacion
El modelo del sistema de captacion estaconstituido por el modelo del panel fotovoltaicode alta concentracion, que a su vez se compone deun modelo optico y de un modelo electrico, y delmodelo de la conexion electrica en serie de los 24paneles. El modelo electrico esta implementadomediante una Look Up Table (LUT) que contieneuna serie de curvas IV para distintos valores dela irradiancia. La entrada a esta LUT es el valorde irradiancia efectiva en el panel y su salida esel vector de tensiones de la curva IV. El vectorde intensidades es siempre el mismo y ademas esequi-espaciado.
La irradiancia efectiva en el panel la proporciona
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 493
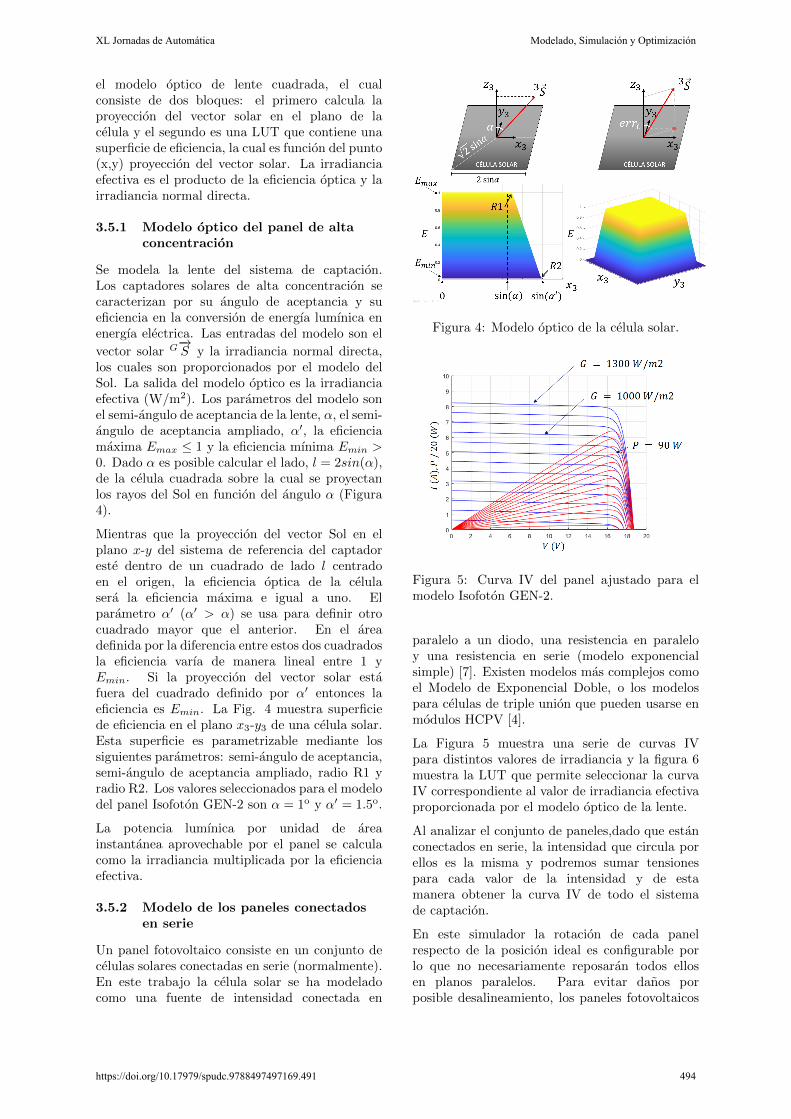
el modelo optico de lente cuadrada, el cualconsiste de dos bloques: el primero calcula laproyeccion del vector solar en el plano de lacelula y el segundo es una LUT que contiene unasuperficie de eficiencia, la cual es funcion del punto(x,y) proyeccion del vector solar. La irradianciaefectiva es el producto de la eficiencia optica y lairradiancia normal directa.
3.5.1 Modelo optico del panel de altaconcentracion
Se modela la lente del sistema de captacion.Los captadores solares de alta concentracion secaracterizan por su angulo de aceptancia y sueficiencia en la conversion de energıa lumınica enenergıa electrica. Las entradas del modelo son el
vector solar G−→S y la irradiancia normal directa,los cuales son proporcionados por el modelo delSol. La salida del modelo optico es la irradianciaefectiva (W/m2). Los parametros del modelo sonel semi-angulo de aceptancia de la lente, α, el semi-angulo de aceptancia ampliado, α′, la eficienciamaxima Emax ≤ 1 y la eficiencia mınima Emin >0. Dado α es posible calcular el lado, l = 2sin(α),de la celula cuadrada sobre la cual se proyectanlos rayos del Sol en funcion del angulo α (Figura4).
Mientras que la proyeccion del vector Sol en elplano x-y del sistema de referencia del captadoreste dentro de un cuadrado de lado l centradoen el origen, la eficiencia optica de la celulasera la eficiencia maxima e igual a uno. Elparametro α′ (α′ > α) se usa para definir otrocuadrado mayor que el anterior. En el areadefinida por la diferencia entre estos dos cuadradosla eficiencia varıa de manera lineal entre 1 yEmin. Si la proyeccion del vector solar estafuera del cuadrado definido por α′ entonces laeficiencia es Emin. La Fig. 4 muestra superficiede eficiencia en el plano x3-y3 de una celula solar.Esta superficie es parametrizable mediante lossiguientes parametros: semi-angulo de aceptancia,semi-angulo de aceptancia ampliado, radio R1 yradio R2. Los valores seleccionados para el modelodel panel Isofoton GEN-2 son α = 1o y α′ = 1.5o.
La potencia lumınica por unidad de areainstantanea aprovechable por el panel se calculacomo la irradiancia multiplicada por la eficienciaefectiva.
3.5.2 Modelo de los paneles conectadosen serie
Un panel fotovoltaico consiste en un conjunto decelulas solares conectadas en serie (normalmente).En este trabajo la celula solar se ha modeladocomo una fuente de intensidad conectada en
Figura 4: Modelo optico de la celula solar.
Figura 5: Curva IV del panel ajustado para elmodelo Isofoton GEN-2.
paralelo a un diodo, una resistencia en paraleloy una resistencia en serie (modelo exponencialsimple) [7]. Existen modelos mas complejos comoel Modelo de Exponencial Doble, o los modelospara celulas de triple union que pueden usarse enmodulos HCPV [4].
La Figura 5 muestra una serie de curvas IVpara distintos valores de irradiancia y la figura 6muestra la LUT que permite seleccionar la curvaIV correspondiente al valor de irradiancia efectivaproporcionada por el modelo optico de la lente.
Al analizar el conjunto de paneles,dado que estanconectados en serie, la intensidad que circula porellos es la misma y podremos sumar tensionespara cada valor de la intensidad y de estamanera obtener la curva IV de todo el sistemade captacion.
En este simulador la rotacion de cada panelrespecto de la posicion ideal es configurable porlo que no necesariamente reposaran todos ellosen planos paralelos. Para evitar danos porposible desalineamiento, los paneles fotovoltaicos
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 494

Figura 6: LUT para obtener la curva IV en funcionde la irradiancia efectiva.
incorporan un diodo de paso en anti-paralelode forma que cuando el panel se polarizainversamente el diodo de paso lo hace de formadirecta quedando el panel fuera del circuito serie.En la parte superior de la figura 7 se muestrael funcionamiento de los diodos de paso y en laparte inferior de esta figura 7 se muestra la curvaIV de tres paneles conectados en serie que tienendistintas eficiencias instantaneas.
Figura 7: Funcionamiento de los diodos de paso.
3.5.3 Modelo del inversor de corriente
Solo se modela el lado de corriente continuadel inversor y bajo la idealizacion de queel seguimiento del punto de maxima potencia(MPPT) es instantaneo.
Por otra parte, tambien se ha modelado elcomportamiento del inversor en el arranque ycuando se deja de enfocar el Sol. Se hacomprobado experimentalmente que los inversorestardan cierto tiempo en comenzar la inyeccion deenergıa a la red tanto cuando son conectados comocuando se se desenfoca la vela durante demasiadotiempo.
Para modelar este comportamiento se ha disenadola maquina de estados de la figura 8 que tiene lossiguiente estados:
• Arranque: en este estado la potenciaproducida es nula, la tension es la de circuitoabierto y la intensidad es nula. Si la potenciadisminuye por debajo de un valor umbral,PA = 60W, se produce una transicion alestado Desconectado. Si el tiempo en elestado, tArr, supera un valor lımite, tC =120s, se produce una transicion al estadoConectado.
• Desconectado: al igual que en el estadoArranque, en este estado la potenciaproducida es nula, la tension es la de circuitoabierto y la intensidad es nula. Si la potenciasupera un cierto valor umbral, PA, se produceuna transicion al estado Arranque.
• Conectado: en este estado la tension eintensidad son las del punto de maximapotencia. Si la potencia disminuye por debajode un valor umbral, PR = 40W, se produceuna transicion al estado Reconexion.
• Reconexion: en este estado la potenciaproducida es nula, la tension es la de circuitoabierto y la intensidad es nula. Desde esteestado se pueden producir dos transiciones:hacia el estado Conectado si se supera ciertovalor de potencia, PA, antes de que el tiempoen el estado, tRec, alcance el lımite tA = 60s,y hacia el estado Arranque si se supera eltiempo predefinido.
Figura 8: Maquina de estados del inversor.
3.6 Modelo del sensor solar optico
Este sensor se monta en la estructura de la vela yproporciona la siguiente informacion:
• los angulos ϕx y ϕy (o) que determinan comoincide el rayo solar sobre el plano (xM -yM )del sensor.
• un binario que indica si el vector solar estadentro del campo de vision del sensor.
• el valor de irradiancia solar (W/m2).
Los angulos ϕx y ϕy que proporciona permiten
calcular el vector M−→S m.
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 495

3.7 Controlador
La estructura de control consiste en un controljerarquico en el cual el modulo Control de AltoNivel calcula las referencias para las coordenadasθ1 (orientacion) y θI (elevacion), y dos modulosControl de Bajo Nivel calculan las referencias develocidad para los variadores de frecuencia a partirde las medidas de los sensores θ1m y θIm y lasreferencias que genera el modulo Control de AltoNivel.
3.7.1 Control de alto nivel
El modulo Control de Alto Nivel tiene porentradas las lecturas del sensor solar, del encoderde orientacion, del inclinometro de elevacion, delsensor de potencia y dos variables que indican silos variadores estan actuando o estan detenidos.En este trabajo se han usado dos controlesdiferentes:
• Lazo abierto basado en Ecuaciones Solares.
• Lazo cerrado realimentando la posicion delSol mediante el sensor optico.
El control en lazo abierto no utiliza la informaciondel sensor optico. Las referencias de orientacion yelevacion se calculan con las Ecuaciones Solaresy es posible simular una correccion del error deinstalacion mediante una terna de angulos RPYque estime la transformacion existente entre lossistemas de referencia {G} y {0}. Tambien sepuede simular una correccion del error de montajede los paneles mediante una terna de angulos RPYque estime la transformacion existente entre lossistemas de referencia {3i} y {3}. Es decir, elcontrolador tiene como parametros una estimacionde dichas transformaciones. Este controladorcalcula nuevas referencias cada cierto tiempoconfigurable, de manera que la vela (o los paneles)del seguidor apunte a la orientacion y elevacionproporcionadas por las Ecuaciones Solares.
En el control en lazo cerrado la posicion del Solse conoce a traves del sensor optico. Ademasde las dos correcciones explicadas en el caso decontrol en lazo abierto, es posible corregir lamedida del sensor a traves de una estimacion dela transformacion existente entre los sistemas dereferencia {Mi} y {M} que se proporciona comoparametro. Este control trata de mantener elvector solar dentro de la piramide de aceptanciade la vela (o los paneles). La apertura de lapiramide se proporciona mediante el semi-angulode aceptancia, α (definido igual que en el apartado3.5.1).
3.7.2 Control de bajo nivel
El control de bajo nivel actua cada vez quedetecta un cambio en la referencia angular, θref .Cuando esto sucede, el controlador compara laposicion angular medida, θm, con la referenciaproporcionada, y calcula un umbral U mediante(6), dependiendo de si hay que incrementar odecrementar el angulo para alcanzar la referencia.Si hay que incrementar el angulo se establecela referencia de velocidad a la velocidad decrucero del variador y si hay que decrementarlo,se establece la velocidad de crucero negativa.Cuando el angulo medido alcanza el umbral,se establece la referencia de velocidad a cero.Los parametros configurables son: velocidad decrucero, Vc (rpm), y distancia de frenado, d (o).Se trata de elegir una distancia de frenado quegarantice que la coordenada articular al final delmovimiento tenga un error de posicionamiento delorden del ruido de medida. El valor elegido esd = 0.15o.
U = θref − d, U = θref + d (6)
Figura 9: Control de bajo nivel.
4 RESULTADOS DESIMULACION
El simulador esta implementado en Simulinkhaciendo uso de S-functions y la velocidad deprocesamiento es de aproximadamente 3 minutospor cada hora simulada.
La figura 10 muestra el resultado de controlarel seguidor solar en bucle abierto medianteecuaciones solares en un caso ideal, es decir, con elseguidor perfectamente instalado con su referenciaal Sur geografico, y los paneles perfectamentealineados con la vela. El controlador estaconfigurado para realizar movimientos deapuntamiento cada 120 segundos y ademas tieneun error de reloj de 30 segundos para simularuna incertidumbre entre la posicion real del Soly la proporcionada por las Ecuaciones Solaresimplementadas en el controlador. Se puedeobservar como no hay perdidas de potencia pormal apuntamiento ya que este error se mantienepor debajo de 0.5 grados.
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 496

Figura 10: Resultado de la simulacion con controlen bucle abierto, caso de instalacion perfecta.
La figura 11 muestra las potencias y errores deapuntamiento obtenidos en cuatro simulaciones.La simulacion SIM 1 corresponde al caso idealexplicado previamente, mientras que en lasimulacion SIM 2 se ha rotado el sistema dereferencia {0} respecto del {G} segun los angulosRPY = [0, 0, 178.9](o) para simular un error deinstalacion. La simulaciones SIM 3 y SIM 4mantienen esta rotacion pero ahora el control serealiza en bucle cerrado realimentando la posiciondel Sol mediante el sensor optico solar. Encontrolador en este caso esta configurado pararealizar movimientos de apuntamiento cuando elerror medido en el sensor sea igual o superior a 1grado. En la simulacion SIM 4 se introduce unarotacion del sistema {M} respecto del {Mi} dadapor RPY = [0.5,−0.15,−0.15](o) para simularun error de montaje del sensor optico. Se puedeobservar como al controlar en bucle abierto el errorde instalacion del seguidor hace que se produzcancaıdas de potencia importantes a lo largo del dıa.De igual manera, al controlar en bucle cerradotambien se producen importantes disminucionesde la potencia en el caso con error de montaje delsensor.
5 CONCLUSIONES
Se ha realizado un modelo matematico deun seguidor solar real teniendo en cuenta
explıcitamente la existencia de imprecisiones deinstalacion, estructurales y de montaje de losdiferentes elementos de los que se componeel mismo. Se ha simulado cada panel dealta concentracion independientemente y se harealizado un modelo de la conexion en serie detodos los paneles. Tambien se han modeladoruidos realistas para los sensores de medida. Porultimo, se han realizado una serie de simulacionescon el objetivo de poner de manifiesto el efectoque pueden tener las incertidumbres mecanicas,etc. sobre la potencia generada cuando se utilizanpaneles solares de alta concentracion junto conesquemas de control basicos.
Figura 11: Comparacion de control en bucleabierto y cerrado.
Agradecimientos
Los autores quieren expresar su agradecimientoal Ministerio de Ciencia e Innovacion por lafinanciacion de este trabajo a traves del proyectoDPI2016-79444-R.
English summary
MODELLING A SOLARTRACKER WITH HIGHCONCENTRATION PANELS
Abstract
The present work deals with the modellingand simulation of a photovoltaic solartracking installation for energy production.It starts from a real installation withvery strict performance specifications interms of tracking the sun, because ithouses high concentration photovoltaicsolar panels, where small deviations in
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 497

Figura 12: Diagrama de bloques del modelo completo.
pointing represent large differences inpower generation. The objective is toobtain a mathematical model that servesas a simulator and is used as the firsttool in the design and adjustment ofthe controllers or tracking strategies thatwill be implemented in the photovoltaicinstallation.
Keywords: Modelling, Simulation andSolar tracker.
Referencias
[1] Berenguel M., Rubio F.R. (2004) An artificialvision-based control system for automaticheliostat positioning offset correction in acentral receiver solar power plant, Sol.Energ., vol. 76, pp 563-75.
[2] Blanco-Muriel M., Alarcon-Padilla D.C.(2001) Computing the solar vector, SolarEnergy, vol. 70, pp 431-441.
[3] Fernandez F.E., Rodrigo P. (2013) Modelsfor the electrical characterization of highconcentration photovoltaic cells and modules:A review, Renewable and Sustainable EnergyReviews, vol. 26, pp. 752-760.
[4] Ghassan Zubi, Jose L. Bernal-Agustın(2009) High concentration photovoltaicsystems applying III–V cells, Renewable
and Sustainable Energy Reviews, vol. 13, pp2645-2652.
[5] Kurtz S., Muller M., (2015) Key parametersin determining energy generated by CPVmodules, Progress in photovoltaics: researchand applications, vol. 23, pp. 1250-1259.
[6] Mikati M., Santos M. (2012) Modeladoy Simulacion de un Sistema Conjunto deEnergıa Solar y Eolica para Analizar suDependencia de la Red Electrica, RevistaIberoamericana de Automatica e Informaticaindustrial, vol. 9, pp. 267-281.
[7] Ramos Hernanz JA., (2010), Modellingof Photovoltaic Module, InternationalConference on Renevable Energies anf PowerQuality, vol. 1, No 8, pp 1186-1190.
[8] Rubio F.R., Ortega M.G. (2007) Applicationof new control strategy for sun tracking,Energy Conversion and Management, vol. 48,pp. 2174-2184.
[9] http://www.solar-mems.com/solar-tracking/
c© 2019 by the authors.Submitted for possibleopen access publication
under the terms and conditions of the CreativeCommons Attribution CC BY-NC-SA 4.0 license(https://creativecommons.org/licenses/by-nc-sa/4.0/deed.es).
XL Jornadas de Automática Modelado, Simulación y Optimización
https://doi.org/10.17979/spudc.9788497497169.491 498