MODELAGEM E CONTROLE DE UMA...
157
UNIVERSIDADE FEDERAL DE SANTA MARIA CENTRO DE TECNOLOGIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA MODELAGEM E CONTROLE DE UMA MICRO CENTRAL HIDRELÉTRICA COM UTILIZAÇÃO DE GERADOR DE INDUÇÃO AUTO-EXCITADO DISSERTAÇÃO DE MESTRADO Lucas Giuliani Scherer Santa Maria, RS, Brasil 2012
Transcript of MODELAGEM E CONTROLE DE UMA...

UNIVERSIDADE FEDERAL DE SANTA MARIA CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
MODELAGEM E CONTROLE DE UMA MICRO CENTRAL HIDRELÉTRICA COM UTILIZAÇÃO DE
GERADOR DE INDUÇÃO AUTO-EXCITADO
DISSERTAÇÃO DE MESTRADO
Lucas Giuliani Scherer
Santa Maria, RS, Brasil
2012

1
MODELAGEM E CONTROLE DE UMA MICRO CENTRAL
HIDRELÉTRICA COM UTILIZAÇÃO DE GERADOR DE
INDUÇÃO AUTO-EXCITADO
por
Lucas Giuliani Scherer
Dissertação apresentada ao Programa de Pós-Graduação em Engenharia
Elétrica, Área de Concentração em Processamento de Energia, da Universidade
Federal de Santa Maria (UFSM, RS), como requisito parcial para obtenção do
grau de
Mestre em Engenharia Elétrica.
Orientador: Prof. Dr. Robinson Figueiredo de Camargo
Santa Maria, RS, Brasil
2012
2
_________________________________________________________________________
© 2012
Todos os direitos autorais reservados a Lucas Giuliani Scherer. A reprodução de partes ou do
todo deste trabalho só poderá ser realizada com a autorização por escrito do autor. Endereço:
Av. Borges de Medeiros, n. 1988/708, Bairro Centro, Santa Maria, RS. CEP: 97.015-090.
Fone (0xx)55-30268224; E-mail: [email protected]
_________________________________________________________________________

3
Universidade Federal de Santa Maria Centro de Tecnologia
Programa de Pós-Graduação em Engenharia Elétrica
A Comissão Examinadora, abaixo assinada, aprova a Dissertação de Mestrado
MODELAGEM E CONTROLE DE UMA MICRO CENTRAL HIDRELÉTR ICA COM UTILIZAÇÃO DE GERADOR DE INDUÇÃO AUTO-EXCITADO
elaborada por Lucas Giuliani Scherer
como requisito parcial para obtenção do grau de Mestre em Engenharia Elétrica
COMISSÃO EXAMINADORA:
Robinson Figueiredo de Camargo, Dr. (UFSM) (Presidente/Orientador)
Paulo Sérgio Sausen, Dr. (UNIJUI)
Fábio Ecke Bisogno, Dr. (UFSM)
Santa Maria, 30 de janeiro de 2012.

4
DEDICO ESTA DISSERTAÇÃO:
A meus pais, Ivanoi e Carmem,
e à minha esposa, Cristiane.
5
AGRADECIMENTOS
Em primeiro lugar quero agradecer à Universidade Federal de Santa Maria, por ser
uma instituição de ensino pública e de qualidade, através da qual obtive toda a minha
formação desde o ensino Fundamental, Técnico e Tecnológico, incluindo graduação e pós-
graduação a nível de Mestrado em Engenharia Elétrica.
Ao Professor Robinson Figueiredo de Camargo pela orientação, ensino, seriedade e
dedicação ao longo do desenvolvimento deste trabalho, além da amizade construída durantes
estes anos.
Ao professor Humberto Pinheiro um agradecimento especial por me acolher no início
deste trabalho e continuar oferecendo valiosas contribuições até a sua conclusão.
Agradecimento especial também aos colegas e amigos do Grupo de Eletrônica de
Potência e Controle - GEPOC, pela excelente amizade e recepção desde o começo do
Mestrado.
Um agradecimento especial à Fábio Cadore Posser e Tomás Cherobini Dalla Corte
pela valioza ajuda e pela sincera amizade construída.
Agradecimento à CAPES por ser o órgão financiador desta pesquisa e auxiliar-me
financeiramente na concretização dos meus projetos.
Com muito amor e carinho agradeço à meus pais, Ivanoi Bastos Scherer e Carmem
Terezinha Giuliani Scherer, por serem desde o princípio verdadeiros pais, no mais completo
sentido da palavra, me ajudando em todas as minhas dificuldades.
Sincero agradecimento à quem foi, durante este período, meu alicerce, meu ombro
amigo e minha companheira de todas as horas, a minha esposa Cristiane Copetti.
Aos meus irmãos, Clarissa Giuliani Scherer e Tiago Giuliani Scherer, pelos exemplos
de toda uma vida e pelo apoio incondicional a todas as minhas decisões.
Aos meus amigos, fiéis companheiros de todos os momentos, meu muito obrigado
pelas suas presenças. São as amizades verdadeiras que fazem a vida valer a pena.
Lucas Giuliani Scherer.

6
“Descobri como é bom chegar quando se tem paciência.
E para se chegar, onde quer que seja, aprendi que não é preciso dominar a força, mas a razão.
É preciso, antes de mais nada, querer.”
Amyr Klink

7
RESUMO Dissertação de Mestrado
Programa de Pós-Graduação em Engenharia Elétrica
Universidade Federal de Santa Maria
ESTUDO, MODELAGEM E CONTROLE DE UMA MICRO CENTRAL
HIDRELÉTRICA COM UTILIZAÇÃO DE GERADOR DE INDUÇÃO
AUTO-EXCITADO
Autor: Lucas Giuliani Scherer
Orientador: Robinson Figueiredo de Camargo, Dr.
Santa Maria, 30 de janeiro de 2012.
Na última década houve um aumento significativo no interesse em tecnologias
aplicáveis a microgeração de energia elétrica. Fontes de geração de energia hidráulicas,
eólicas e solares representam algumas das tecnologias que tiveram importantes evoluções
decorrentes dos esforços em pesquisas destinados a esta área de geração de energia.
A razão para tal interesse se deve a consolidação do que é chamado futuro em termos
de geração de energia, sendo este baseado na descentralização da geração de energia através
de redes interligadas de pequenos centros geradores/consumidores.
A nível de distribuição, as fontes de geração distribuída, juntamente com as cargas
conectadas ao seu barramento, formariam o que é definido como uma micro-rede.
Dependendo da carga instantânea e da capacidade de geração instalada, uma micro-rede pode
comportar-se como um ponto de consumo ou de geração de energia em diferentes momentos,
sendo capaz também de operar conectada à rede ou de forma ilhada de acordo com a
qualidade da energia fornecida ou necessidade do sistema em caso de falta.
Dentre as tecnologias de microgeração, as micro centrais hidrelétricas (MCH) com
geradores de indução auto-excitados (GIAE) passaram a representar uma excelente opção
para a geração de energia elétrica em áreas isoladas, devido basicamente as suas
características de robustes e baixo custo, quando comparadas às máquinas síncronas. Trata-se
de uma alternativa ao uso de geradores síncronos em sistemas de baixa potência acionados
por pequenos aproveitamentos hidrelétricos, ricos em nosso território nacional.
Neste sentido, a presente Dissertação de Mestrado trata da modelagem e controle de
uma MCH com GIAE com controle de frequência e tensão. O controle de frequência é obtido

8
a partir do controle de abertura do sistema de alimentação da turbina enquanto que, o controle
de tensão é realizado a partir do controle da potência reativa do conjunto, utilizando para isso
um inversor de tensão.
Partindo destas definições e dos conhecimentos adquiridos, foi proposto um sistema a
ser implementado experimentalmente, composto de uma micro central hidrelétrica, neste caso
um motor acionado por um inversor de tensão, emulando o comportamento de uma turbina
hidráulica, acoplado ao gerador de indução. Os terminais do GIAE alimentam um barramento
onde são conectadas cargas com características distintas, caracterizando uma micro-rede,
tendo como objetivo o controle da estabilidade da tensão e frequência da energia fornecida
pelo gerador ao sistema isolado.
Dentre os estudos desenvolvidos para a implementação do protótipo é possível
destacar: modelagem do sistema trifásico considerado, modelagem do sistema hidráulico,
controle de tensão e frequência e método de sincronismo.
Ao longo desta dissertação, resultados de simulações e experimentais são
apresentados, a fim de que, seja demonstrada a aplicabilidade dos métodos de controle, seus
desempenhos e a viabilidade técnica do sistema.
Palavras-Chaves: Gerador de Indução, Micro Central Hidrelétrica, Controle de Tensão e
Frequência.
9
ABSTRACT Master Dissertation
Pos-Graduation Program on Electrical Engineering
Federal University of Santa Maria
STUDY, MODELING AND CONTROL OF MICRO HYDROELECTRIC POWER
GENERATION STATION WITH INDUCTION GENERATOR
Author: Lucas Giuliani Scherer
Research Supervisor: Robinson Figueiredo de Camargo, Dr.
Santa Maria, January 30, 2012.
In the last decade there has been a significant increase in interest in microgeneration
technologies for electric power. Sources of hydraulic power generation, wind and solar
technologies represent some of the important developments that have had arising from the
research efforts aimed at this area of power generation.
The reason for this interest is due to the consolidation of what is called future in terms
of power generation, which is based on decentralization of power generation through
interconnected centers of small generators / consumers.
At distribution level, distributed generation sources, together with the loads connected
to its bus, forms what is defined as a microgrid. Depending on the instantaneous load and
installed generation capacity, a microgrid can behave as a point of consumption or generation
of energy at different times, being able to operate also connected to the network or islanded
form according to the quality energy supplied or need in case of system failure.
Among the technologies of microgeneration, micro hydro power plants with self-
excited induction generators (SEIG) came to represent an excellent option for electricity
generation in isolated areas, mainly due to its characteristics of robustness and low cost,
compared to synchronous machines. It is an alternative to the use of synchronous generators
in low-power systems powered by small hydroelectric plants, rich in our country.
In this sense, this Master's thesis deals with the modeling and control of a micro hydro
power plant with SEIG with frequency and voltage control. The frequency control is achieved
by controlling the opening of the feeding system of the turbine while the voltage control is
performed through the control of reactive power of the set, using for this a Pulse Width
Modulated (PWM) inverter.

10
Based on these definitions and knowledge acquired, it was proposed a system to be
implemented experimentally, consisting of a micro hydro power plant, in this case a motor
driven by a voltage PWM inverter, emulating the behavior of a turbine coupled to the
induction generator. The terminals of the SEIG feed a bus where loads with different
characteristics are connected, featuring a microgrid, having as main goal the control of the
voltage and frequency stability of the energy supplied by the generator to the isolated system.
Among the studies developed for the implementation of the prototype is possible to
highlight: three-phase system modeling, hydraulic system modeling, voltage and frequency
control, and synchronization method.
Throughout this paper, simulations and experimental results are presented in order to
be demonstrated the applicability of control methods, their performance and technical
feasibility of the system.
Keywords: Induction Generator, Micro Hydroelectric Power Generation Unit, Voltage and
Frequency Control.

11
Abreviaturas
A − Ampére
ANEEL − Agência Nacional de Energia Elétrica
C − Capacitância
CA − Corrente alternada
CC − Corrente contínua
CEC − Controle eletrônico de carga
CER − Compensador estático de reativos
DSP − Processador digital de sinais (Digital Signal Processor)
FOH − First Order Holder
FP − Fator de potência
FT − Função de transferência
GI − Gerador de indução
GIAE − Gerador de Indução Auto-excitado
GS − Gerador Síncrono
IEA − Agência Internaciona de Energia (International Energy Agency)
IFC − Inversor fonte de corrente
IFT − Inversor fonte de tensão
kWh − Kilowatthora
MCH − Micro Central Hidrelétrica
MCH − Mini Central Hidrelétrica
MIT − Máquina de indução trifásica
MP − Máquina primária
Mtc − Milhões de toneladas de carbono
PCH − Pequena Central Hidrelétrica
PD − Proporcional-derivativo
PI − Proporcional-integral
PROINFA − Programa de Incentivo as Fontes Alternativas de Energia Elétrica
PWM − Modulação por largura de pulso (Pulse Width Modulation)
Q − Potência reativa
RAT − Regulador automático de tensão

12
SEP − Sistema elétrico de potência
SGD − Sistema de geração distribuída
TWh − Terawatthora
V − Volt
VCFC − Velocidade constante – frequência constante
VVFC − Velocidade variável – frequência constante
VVFV − Velocidade variável – frequência variável
µCH − Micro Central Hidrelétrica

13
Simbologia
A − Seção transversal do conduto forçado
abc − Sistema de coordenadas estacionário em um sistema trifásico
ga − Aceleração da gravidade
tA − Ganho da turbina
B − Constante de atrito rotacional
CCC − Capacitância do barramento CC do inversor
D − Diâmetro do conduto forçado
dq0 − Sistema de coordenadas síncronas em um sistema trifásico
reff − Frequência de referência
g − Abertura real do distribuidor
G − Abertura ideal do distribuidor
FLg − Abertura do distribuidor a plena carga
NLg − Abertura do distribuidor em condição sem carga
H − Altura da coluna d’água
ai , bi , ci − Correntes trifásicas
basei − Corrente base
di , qi − Correntes em eixos síncronos dq
mI − Corrente de magnetização
J − Constante de inércia do rotor
aK − Ganho do atuador
dk − Ganho derivativo
ik − Ganho integral
pk − Ganho proporcional
uK , pK − Constantes de proporcionalidade
L − Comprimento do conduto forçado

14
fL − Indutância do filtro de saída do inversor
lsL , lrL − Indutâncias de dispersão
msL , mrL − Indutâncias de magnetização
ssL , rrL − Indutâncias próprias dos enrolamentos do estator e rotor
srL − Indutância mútua máximo entre um enrolamento do estator e outro
do rotor
xsxrL − Indutâncias mútuas entre enrolamentos do estator e rotor
ssM , rrM − Indutâncias mútuas dos enrolamentos do estator e rotor
N − Constante de tempo derivativo
rn − Velocidade rotórica em rpm
P − Potência ativa
LP − Potência elétrica de carga
mP − Potência mecânica
PP − Perda de carga fixa da turbina
ruP − Potência base da turbina
dR − Resistor de descarga
fR − Resistência do filtro de saída do inversor
sR , rR − Resistência do estator e do rotor
TR − Ganho transitório
s − Escorregamento
S − Potência aparente
_ 0abc dqT − Matriz de transformação de abc para dq0
eT − Torque eletromagnético
GT − Constante de tempo do servo-motor
LT − Conjugado de carga
mT − Torque mecânico

15
RT − Tempo de reset
WT − Tempo de partida da água
U − Velocidade da água no conduto forçado
_d pwmu , _q pwmu − Sinais PWM em eixos dq
frequ − Sinal de controle de frequência
NLU − Velocidade da água no conduto forçado em condição sem carga
vu − Sinais de controle de tensão
av , bv , cv − Tensões trifásicas
basev − Tensão base
ccv − Tensão do barramento CC do inversor
dv , qv − Tensões em eixos síncronos dq
MX − Reatância de magnetização
sX , rX − Reatância de dispersão do estator e do rotor
dsλ , qsλ , drλ , qrλ − Fluxos concatenados em eixos síncronos
ω − Velocidade angular
rω − Velocidade angular rotórica
refω − Velocidade angular de referência
sω − Velocidade elétrica (síncrona) do estator
θ − Deslocamento angular
rθ − Ângulo elétrico

16
Sumário
Capítulo 1 .................................................................................................... 22
1 I NTRODUÇÃO GERAL ........................................................................... 22
1.1 Revisão Bibliográfica .......................................................................................... 31
1.2 Objetivos do Trabalho ......................................................................................... 40
1.3 Organização da Dissertação ................................................................................ 41
Capítulo 2 .................................................................................................... 43
2 M ODELAGEM DO SISTEMA ................................................................... 43
2.1 Introdução ............................................................................................................ 43
2.2 Modelamento do Sistema Hidráulico .................................................................. 44
2.2.1 Modelo Linear da turbina hidráulica. .................................................................. 44
2.2.2 Modelo Não-Linear da turbina hidráulica. .......................................................... 47
2.2.3 Características especiais das turbinas hidráulicas ............................................... 51
2.2.4 Modelagem dos atuadores de vazão .................................................................... 51
2.3 Máquina de Indução Trifásica ............................................................................. 53
2.3.1 Modelo Dinâmico da Máquina de Indução Trifásica .......................................... 53
2.3.2 Transformação de Eixos de Referência ............................................................... 55
2.3.3 Representação da Máquina de Indução Trifásica em um Eixo de Referência
Arbitrário ...................................................................................................................... 57
2.3.4 Modelo da Máquina de Indução em Regime Permanente ................................... 60
2.3.5 Balanço de Energia do Motor de Indução ........................................................... 61
2.3.6 O Gerador de Indução.......................................................................................... 64
2.3.7 Operação Isolada do Gerador de Indução............................................................ 66
2.4 Modelo Dinâmico dos Capacitores de Excitação e Inversor PWM .................... 69
Capítulo 3 .................................................................................................... 76
3 PROJETO DOS CONTROLADORES DO SISTEMA E RESULTADOS DE
SIMULAÇÃO .......................................................................................... 76
3.1 Introdução ............................................................................................................ 76
3.2 Auto-excitação do Gerador de Indução ............................................................... 80
3.3 Controle de Frequência ....................................................................................... 82

17
3.4 Controle de Tensão CA e CC .............................................................................. 90
3.4.1 Projeto dos controladores das malhas internas de corrente ................................. 96
3.4.2 Projeto do controlador da malha externa de tensão CC..................................... 101
3.4.3 Projeto do controlador da malha externa de tensão CA .................................... 107
Capítulo 4 .................................................................................................. 112
4 DESCRIÇÃO DO PROTÓTIPO E RESULTADOS EXPERIMENTAIS ........... 112
4.1 Introdução .......................................................................................................... 112
4.2 Descrição do Protótipo de Micro Central Hidrelétrica ...................................... 112
4.2.1 Conjunto Máquina Primária/Gerador ................................................................ 113
4.2.2 Capacitores de auto-excitação ........................................................................... 114
4.2.3 Inversor PWM de Tensão .................................................................................. 114
4.2.4 Indutores de Filtro ............................................................................................. 115
4.2.5 Circuito de conexão do inversor PWM ............................................................. 115
4.2.6 Placas de interface, aquisição e condicionamento de sinais .............................. 116
4.3 Resultados Experimentais ................................................................................. 117
Conclusões Gerais ..................................................................................... 124
Referências Bibliográficas ......................................................................... 127
Anexo A - OBTENÇÃO DAS EQUAÇÕES DE ESTADO DA PLANTA EM EIXOS
ESTACIONÁRIO E SÍNCRONO ................................................................ 135
A.1 Normalização das Variáveis do Circuito ........................................................... 135
A.2 Equação de Estados da Planta em Coordenadas αβ0 ........................................ 137
A.3 Equação de Estados da Planta em Coordenadas dq0 ........................................ 140
Anexo B - MÉTODO DE SINCRONIZAÇÃO E RASTREAMENTO DE FREQUÊNCIA
APLICADO A CONVERSORES DE TENSÃO .............................................. 144
B.1 Descrição do novo método proposto ................................................................. 144
B.1.1 Filtros passa-baixa ............................................................................................. 145
B.1.2 Modelagem da Planta e Controlador Proporcional-Integral .............................. 149
B.1.3 Leitura da frequência instantânea e adequação dos parâmetros dos filtros ....... 150
B.2 Resultados de Simulação ................................................................................... 151
B.3 Resultados Experimentais ................................................................................. 154

18
Índice de Figuras
Figura 1.1 - Dados de geração de energia elétrica Mundial de 1971 a 2009. Fonte [2]. .......... 23
Figura 1.2 - Comparativo entre a geração de energia mundial nos anos de 1973 e 2009. ....... 23
Figura 1.3 - Histórico de consumo de energia elétrica no Brasil. Fonte [8]. ............................ 25
Figura 1.4 - Oferta interna de energia elétrica por fonte – 2010. Fonte [7]. ............................ 25
Figura 1.5 - Histórico da participação da energia hidráulica no cenário brasileiro. Fonte [8]. 26
Figura 1.6 - Localização das PCH’s em operação no Brasil, segundo a ANEEL – situação em
março de 2003. Fonte [9]. ......................................................................................................... 28
Figura 1.7 - Localização das µCH’s e MCH’s em operação no Brasil, segundo a ANEEL –
situação em março de 2003. Fonte [9]. ..................................................................................... 29
Figura 1.8 - Índice de aproveitamento do potencial hidrelétrico brasileiro, segundo a ANEEL
– situação em março de 2003. Fonte [9]. .................................................................................. 30
Figura 1.9 - Classificação dos esquemas de regulação de tensão dos GIAE. Fonte [22]. ........ 33
Figura 1.10 - Esquema de regulador de tensão baseado em reator com núcleo saturável........ 34
Figura 1.11 – Esquema de regulação de tensão baseado em indutor controlado por chave
semicondutora. Fonte [22]. ....................................................................................................... 35
Figura 1.12 – Esquema de regulação de tensão baseado em comutação de capacitores em
paralelo. Fonte [22]................................................................................................................... 35
Figura 1.13 – (a) Regulação de tensão baseada no controle de capacitores em paralelo. ........ 35
Figura 1.14 – (a) Inversor PWM fonte de tensão e (b) inversor PWM fonte de corrente. ....... 36
Figura 1.15 – Tipos de CEC. (a) chaveamento de cargas resistivas; (b) retificador controlado
com resistor de descarga; (c) retificador não-controlado com resistor de descarga controlado
por elemento chopper. .............................................................................................................. 38
Figura 1.16 - Sistema de controle de frequência a partir do controle liga/desliga do sistema de
distribuição. Fonte [48]. ........................................................................................................... 40
Figura 2.1 - Subsistemas considerados para a modelagem do sistema proposto. .................... 43
Figura 2.2 - Esquema básico de uma planta hidrelétrica. ......................................................... 44
Figura 2.3 - Modelo não-linear do sistema hidráulico. Fonte [59]. .......................................... 50
Figura 2.4 - Resposta ao degrau do sistema conduto forçado/turbina hidráulica. .................... 51
Figura 2.5 - Diagrama de blocos dos atuadores da turbina hidráulica. .................................... 52

19
Figura 2.6 - Interpretação trigonométrica da mudança de variáveis abc para dq de uma
máquina de indução trifásica. (s) variáveis do estator, (r) variáveis do rotor. .......................... 56
Figura 2.7 - Representação por circuito equivalente do modelo de uma máquina de indução
em um eixo de referência arbitrário. ......................................................................................... 59
Figura 2.8 - Circuito equivalente por fase de um motor de indução em regime permanente... 60
Figura 2.9 - Fluxo de potência do motor de indução trifásico. Fonte [23]. .............................. 61
Figura 2.10 - Curva característica em regime permanente da máquina de indução trifásica.
Relação torque elétrico/velocidade e torque elétrico/escorregamento. Fonte [17]. ................. 65
Figura 2.11 - Gerador de indução no modo de operação isolado. ............................................ 66
Figura 2.12 – Curva de magnetização característica da máquina de indução. ......................... 67
Figura 2.13 - Ponto de operação para auto-excitação do GI. ................................................... 68
Figura 2.14 - Circuito equivalente utilizado para obter as equações da planta. ....................... 69
Figura 3.1 - Diagrama esquemático do sistema proposto para o controle da microcentral
hidrelétrica. ............................................................................................................................... 77
Figura 3.2 - Processo de auto-excitação do gerador de indução: tensão de saída. ................... 81
Figura 3.3 - Processo de auto-excitação do gerador de indução: Zoom da tensão de saída. .... 81
Figura 3.4 - Sistema isolado de geração alimentando carga local. Fonte [59]. ........................ 83
Figura 3.5 - Função de transferência relacionando velocidade e torques. Fonte [59]. ............. 83
Figura 3.6 - Diagrama em blocos do regulador de velocidade em conjunto com os atuadores
da turbina hidráulica. Fonte [57]. ............................................................................................. 85
Figura 3.7 - Diagrama em blocos da nova configuração do regulador de velocidade (na malha
direta) em conjunto com os atuadores da turbina hidráulica. Fonte [57]. ................................ 85
Figura 3.8 - Dados de simulação - Relação entre abertura do distribuidor (g ) e torque
mecânico da turbina (mT ). ........................................................................................................ 87
Figura 3.9 - Diagrama de Bode da planta da malha de frequência. .......................................... 88
Figura 3.10 - Lugar das raízes da planta da malha de frequência. ........................................... 89
Figura 3.11 - Diagrama de Bode da malha de frequência em malha fechada. ......................... 89
Figura 3.12 - Lugar das raízes da malha de frequência em malha aberta. ................................ 90
Figura 3.13 – Frequência das tensões geradas sob diferentes condições de carga. .................. 91
Figura 3.14 - Variação na amplitude sob variação de carga a velocidade constante. .............. 92
Figura 3.15 - Diagrama simplificado do sistema de geração e regulação de tensão. ............... 93
Figura 3.16 - Diagrama de blocos do sistema de controle do inversor PWM. ......................... 95
Figura 3.17 – Digramas de blocos das malhas internas de controle de corrente. ..................... 97

20
Figura 3.18 - Diagrama de Bode da planta da malha interna de corrente. ............................... 98
Figura 3.19 – Lugar das raízes da planta da malha interna de corrente. .................................. 99
Figura 3.20 - Diagrama de Bode da malha interna de corrente em malha fechada. ................. 99
Figura 3.21 - Lugar das raízes da malha interna de corrente em malha aberta. ..................... 100
Figura 3.22 - Resposta dos controladores das malhas internas de controle de tensão à degraus
nos sinais de referência di
∗ e qi
∗ . ............................................................................................ 101
Figura 3.23 - Diagrama de blocos da malha externa de controle da tensão CC. .................... 103
Figura 3.24 - Diagrama de Bode da planta da malha externa de tensão CC. ......................... 104
Figura 3.25 - Lugar das raízes da planta da malha externa de tensão CC. ............................. 105
Figura 3.26 - Diagrama de Bode da malha externa de tensão CC em malha fechada. ........... 105
Figura 3.27 - Lugar das raízes da malha externa de tensão CC em malha aberta. ................. 106
Figura 3.28 - Resposta do controlador da malha de tensão CC à uma variação no sinal de
referência. ............................................................................................................................... 106
Figura 3.29 – Diagrama de blocos da malha externa de controle da tensão CA. ................... 107
Figura 3.30 - Diagrama de Bode da planta da malha externa de tensão CA. ......................... 109
Figura 3.31 - Lugar das raízes da planta da malha externa de tensão CA. ............................. 109
Figura 3.32 - Diagrama de Bode da malha externa de tensão CA em malha fechada. .......... 110
Figura 3.33 - Lugar das raízes da malha externa de tensão CA em malha aberta. ................. 110
Figura 3.34 - Resposta do controlador da malha de tensão CA à uma variação no sinal de
referência. ............................................................................................................................... 111
Figura 3.35 - Resposta do controle de tensão à variações de carga – conexão e desconexão de
carga puramente resistiva de 600 W. ...................................................................................... 111
Figura 4.1 - Visão geral do protótipo construído. .................................................................. 113
Figura 4.2 - Auto-excitação do gerador de indução. .............................................................. 118
Figura 4.3 - Tensões de saída para operação a vazio, antes de conectar o inversor PWM. ... 119
Figura 4.4 - Etapas de carregamento e entrada de controle do barramento CC. .................... 119
Figura 4.5 - Resposta do controlador de frequência à variações no sinal de referência *f . .. 120
Figura 4.6 – Frequência das tensões geradas durante a conexão e desconexão de uma carga
resistiva de 600 W. ................................................................................................................. 120
Figura 4.7 - Resposta dos controles de correntes a variações nos sinais de referência *
di e *qi .
................................................................................................................................................ 122

21
Figura 4.8 - Resposta do controle do barramento CC à variações no sinal de referência *
ccv .
................................................................................................................................................ 122
Figura 4.9 – Resultado experimental da resposta do controlador da malha de tensão CA à uma
variação no sinal de referência *
dv . ......................................................................................... 123
Figura 4.10 - Resposta do controle de tensão à variações de carga – conexão e desconexão de
carga puramente resistiva de 600 W. ...................................................................................... 123

22
Capítulo 1
1 INTRODUÇÃO GERAL
Nos primórdios da geração de energia, a geração distribuída era a forma mais comum
de acesso à energia para a maior parte da população. Limitações tecnológicas e a inexistência
de redes de transmissão eram os maiores problemas encontrados na época. As primeiras
plantas de geração de energia abasteciam apenas consumidores localizados nas suas
vizinhanças e conectados a sua micro rede de distribuição. A tensão da rede era contínua e em
baixa tensão e por esse motivo, o fornecimento era limitado a pequenas distâncias. O balanço
de demanda e fornecimento era realizado localmente através de baterias conectadas a rede CC
[1]. Diversas limitações em termos de tecnologia na área de condicionamento, armazenagem,
transmissão e mesmo de comunicação, impediram a consolidação desse sistema
descentralizado como padrão.
Com o passar dos anos e com o desenvolvimento de novas tecnologias, surgiram as
redes de tensão alternada, permitindo o transporte de energia elétrica em alta tensão e a longas
distâncias. Com a alteração no padrão de transmissão, as unidades de geração de energia
também sofreram grande evolução levando à centralização da produção de energia em poucas
unidades de alta potência. Malhas de conexão foram construídas em larga escala, consistindo
de longas linhas de transmissão alimentadas por grandes unidades de geração com redes de
distribuição radiais fornecendo energia aos consumidores finais. O balanço de demanda e
fornecimento passou então a ser realizado pelo efeito médio da combinação de grandes
quantidades de energia gerada e consumida [1]. O armazenamento de energia em grande
escala passou a ser feito a partir da energia em seu estado primário (água, carvão, petróleo,
etc.), consolidando assim a centralização da geração de energia em locais próximos a fontes
naturais destes combustíveis. Este padrão de geração e transmissão de energia tem se mantido
por décadas, apesar do número de consumidores e da demanda de energia terem crescido
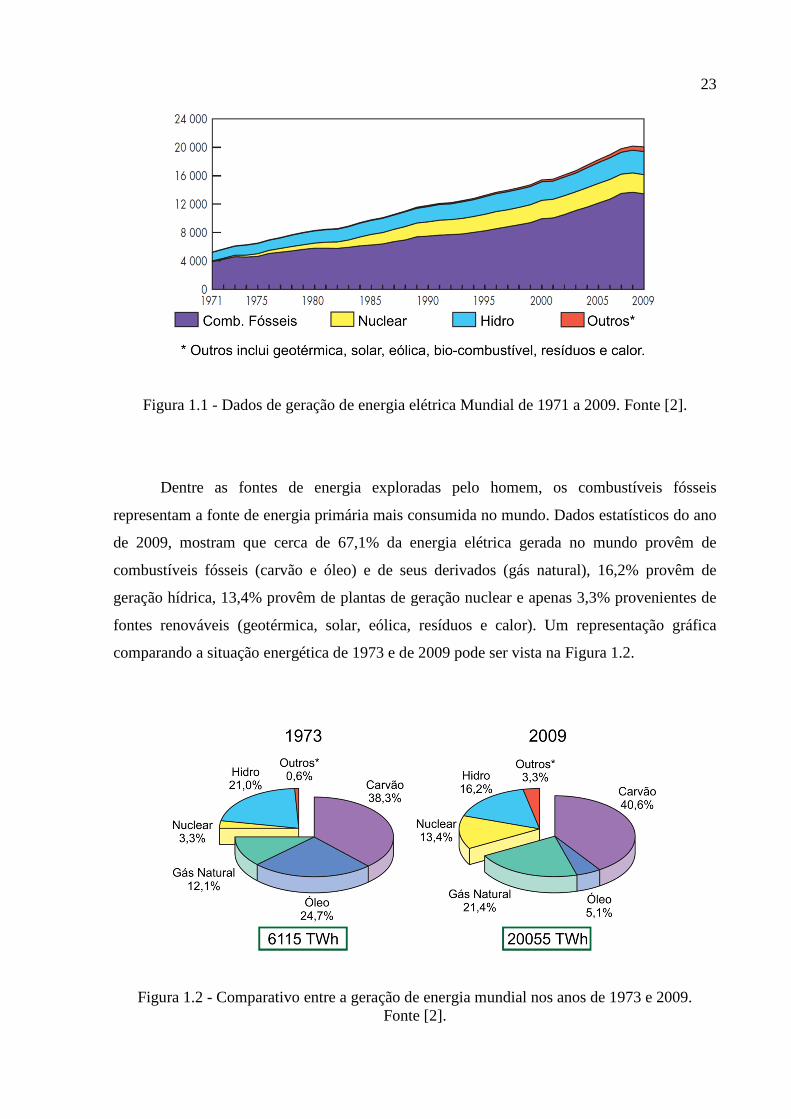
exponencialmente. Para ilustrar esta afirmação, na Figura 1.1 são apresentados dados
estatísticos dos últimos 40 anos obtidos a partir do relatório anual [2] elaborado pela Agência
Internacional de Energia (IEA). Percebe-se a dependência da demanda mundial de energia das
fontes de energia em seu estado primário (água, carvão, óleo, gás natural).
23
Figura 1.1 - Dados de geração de energia elétrica Mundial de 1971 a 2009. Fonte [2].
Dentre as fontes de energia exploradas pelo homem, os combustíveis fósseis
representam a fonte de energia primária mais consumida no mundo. Dados estatísticos do ano
de 2009, mostram que cerca de 67,1% da energia elétrica gerada no mundo provêm de
combustíveis fósseis (carvão e óleo) e de seus derivados (gás natural), 16,2% provêm de
geração hídrica, 13,4% provêm de plantas de geração nuclear e apenas 3,3% provenientes de
fontes renováveis (geotérmica, solar, eólica, resíduos e calor). Um representação gráfica
comparando a situação energética de 1973 e de 2009 pode ser vista na Figura 1.2.
Figura 1.2 - Comparativo entre a geração de energia mundial nos anos de 1973 e 2009. Fonte [2].

24
Na última década, entretanto, inúmeros fatores vêm demonstrando a necessidade de
mudanças no sistema energético atual. Questões de âmbito econômico, técnológico, social e
ambiental impõem necessidades não mais atendidas pelo sistema atual e requerem uma
atualização do sistema elétrico mundial.
Dentre os fatores que contribuem para esta tendência estão a crescente demanda de
energia por parte dos países desenvolvidos e em desenvolvimento, escassez de recursos para a
construção de grandes centrais de geração e redes de distribuição por parte dos países em
desenvolvimento, insuficiência de geração de energia por parte de alguns países
desenvolvidos e a crescente preocupação com relação à emissão de poluentes e as mudanças
climáticas [3].
De acordo com um estudo conduzido pelo Laboratório Americano de Energias
Renováveis, se nada for feito, estima-se que a emissão de carbono pelos Estados Unidos
aumente dos atuais 1700 milhões de toneladas de carbono (Mtc) por ano para 2300 Mtc no
ano de 2030. No mesmo estudo, foi demonstrado que através da implementação de programas
de eficiência energética e do uso de fontes de energia renováveis, seria possível não apenas
frear esse aumento na emissão de carbono, mas efetivamente reduzi-lo para valores inferiores
a 1000 Mtc até 2030 [4].
A nível nacional, as projeções de consumo de energia elétrica, conforme Figura 1.3,
apontam para a necessidade de investimentos maciços em um curto prazo para a ampliação da
planta de geração de energia elétrica no Brasil. Fato ocorrido no ano de 2001 e início de 2002,
o racionamento de energia experimentado pelo Brasil, atraiu atenções e a partir de então,
passou a motivar muitos investimentos na área de geração e transmissão de energia elétrica
[5], [6].
Ao contrário do panorama mundial, no Brasil a contribuição da energia hidráulica ao
desenvolvimento econômico do País tem sido expressiva, seja no atendimento das diversas
demandas da economia – atividades industriais, agrícolas, comercial e de serviços – ou da
própria sociedade. A contribuição da energia hidráulica na matriz energética nacional,
segundo o Balanço Energético Nacional (2011) – ano base 2010 [7], é da ordem de 14%,
participando com 74% de toda a energia elétrica gerada no País, conforme Figura 1.4.
Considerando ainda a parcela de 6,5% proveniente de importação, referente à energia
produzida na Hidrelétrica de Itaipú de propriedade do Paraguai, comprada pelo Brasil, a
parcela de energia elétrica proveniente de fonte hidráulica consumida pelo Braisl sobe para
80,5%. Esta ampla participação da energia hidráulica no cenário brasileiro é histórica e se
mantém praticamente a mesma a décadas (Figura 1.5).

25
Figura 1.3 - Histórico de consumo de energia elétrica no Brasil. Fonte [8].
Figura 1.4 - Oferta interna de energia elétrica por fonte – 2010. Fonte [7].

26
Figura 1.5 - Histórico da participação da energia hidráulica no cenário brasileiro. Fonte [8].
Apesar da tendência de aproveitamento de outras fontes de energia, devido a restrições
ambientais e socioeconômicas de projetos hidrelétricos e aos avanços tecnológicos no
aproveitamento de fontes não-convencionais, tudo indica que a energia hidráulica continuará
sendo, por muitos anos, a principal fonte geradora de energia elétrica do Brasil. Estima-se
que, nos próximos anos, pelo menos 50% da necessidade de expansão da capacidade de
geração seja de origem hídrica [9].
Outra barreira importante a ser vencida no Brasil está ligada ao acesso de energia a
toda a população. Segundo dados do Programa Luz no Campo, da Eletrobrás, a eletrificação
rural no Brasil é ainda bastante deficiente no que se refere ao percentual de propriedades
atendidas. Isto é decorrência do alto custo de instalação e manutenção de redes rurais de
transmissão e distribuição de energia, devido principalmente as grandes distâncias, a baixa
densidade de cargas e a reduzida demanda [6]. Segundo a legislação atual, as concessionárias
de energia têm prazo até dezembro de 2015 para eletrificar todos os domicílios sem acesso à
energia no Brasil [10].
Por essas razões, e seguindo a tendência mundial no ramo da energia, as políticas de
estímulo do Governo Federal têm incentivado a aplicação de sistemas de geração distribuída
(SGD) e os esforços no campo do desenvolvimento de fontes de energias renováveis, buscado
soluções de cunho regional para o uso de fontes renováveis de energia na matriz energética
27
nacional através do PROINFA - Programa de Incentivo as Fontes Alternativas de Energia
Elétrica [11].
Destaque especial vêm sendo dado a pesquisa de tecnologias no âmbito da energia
eólica, sistemas fotovoltaicos e micro e pequenas centrais hidrelétricas, sendo previsto que
estas tecnologias serão responsáveis por uma maior fatia no balanço energético mundial nas
próximas décadas.
Entre estas fontes de energia renováveis destacam-se a construção de novas centrais
hidrelétricas de energia elétrica, podendo estas serem classificadas em Micro Centrais
Hidrelétricas (µCH’s até 100 kW), Mini Centrais Hidrelétricas (MCH’s, de 100 kW até
1 MW) e Pequenas Centrais Hidrelétricas (PCH’s – de 1 MW até 30 MW).
Enquanto as PCH’s podem ser caracterizadas como empreendimentos a partir do
momento em que o excedente de energia elétrica gerada pode ser comercializado, as µCH’s e
MCH’s destinam-se ao aproveitamento local na propriedade rural ou comunidade.
Nas Figura 1.6 e Figura 1.7 são apresentados mapas com a localização dos pequenos
aproveitamentos hidrelétricos (µCH’s, MCH’s e PCHs) existentes no Brasil, segundo dados
da Agência Nacional de Energia Elétrica (ANEEL) [9].
Apesar do considerável número de aproveitamentos hidrelétricos, em nível nacional,
cerca de apenas 25,6% do potencial hidrelétrico estimado encontra-se aproveitado. Em
relação ao potencial inventariado, essa proporção aumenta para 37,3%. A Figura 1.8 ilustra os
índices de aproveitamento dos potenciais hidráulicos brasileiros por sub-bacia hidrográfica.
As µCH’s e MCH’s têm como características principais apresentarem uma relação
custo/kWh gerado relativamente mais alto se comparadas com médias e grandes centrais
hidrelétricas, porém apresentam possibilidade de geração descentralizada e localizam-se mais
próxima aos pequenos centros de carga, com consequente redução de perdas e custo em
transmissão e distribuição de energia. Outra importante diferença é o baixo impacto ambiental
e otimização do uso dos recursos naturais, já que não depende de grandes reservatórios de
água, utilizando apenas o fluxo natural dos rios.
Além das questões técnicas, questões econômicas também impõem restrições à
utilização de SGD. Para uma única fonte de geração distribuída, o custo relativo ao sistema de
interconexão com a rede principal pode aumentar em até 50% o custo do sistema. O conceito
de micro-rede oferece a solução para este problema ao propor o emprego de inúmeras fontes
de geração distribuídas através de um único sistema de interconexão com a rede [12].
A energia gerada por SGD atinge menor custo com a agregação de sistemas de
diferentes naturezas de operação, combinando as características distintas de operação e
28
capacidade de geração. Além disso, em termos de confiabilidade de fornecimento, a utilização
de múltiplos SGD torna o sistema mais eficiente se comparado com um sistema com ponto
único de geração [12].
Em termos tecnológicos, as inovações dos últimos anos transpuseram obstáculos
definidos como limitantes para a aplicabilidade de SGD e sua conexão à malha de transmissão
e distribuição convencional. Avanços tecnológicos na área de processamento de energia, que
incluem o desenvolvimento de semicondutores mais rápidos e conversores estáticos de
energia mais eficientes, aliados a estratégias de controle mais sofisticadas, permitiram a
expansão do campo de aplicação de sistemas que anteriormente eram considerados inviáveis
técnica e economicamente.
Figura 1.6 - Localização das PCH’s em operação no Brasil, segundo a ANEEL – situação em
março de 2003. Fonte [9].

29
Figura 1.7 - Localização das µCH’s e MCH’s em operação no Brasil, segundo a ANEEL –
situação em março de 2003. Fonte [9].
Um exemplo típico é o caso de micro centrais hidrelétricas operando de forma isolada,
ou seja, não conectada a nenhum outro sistema elétrico de potência (SEP), e abastecendo
pequenas comunidades. Apesar de ser um sistema consolidado tecnicamente, a nível
comercial encontra fortes barreiras em termos econômicos, principalmente pelo alto custo
relativo ao Gerador Síncrono (GS) e ao Regulador Automático de Tensão (RAT).
A implantação de micro centrais hidrelétricas torna-se atrativa com a utilização de
máquinas de indução, ou gerador de indução auto-excitado (GIAE), em substituição aos GS
normalmente utilizados, devido ao seu baixo custo, maior robustez, baixos custos de
manutenção, alta densidade de potência (W/kg) e a sua auto-proteção contra sobrecarga
conforme [13], [14] e [15]. Estas vantagens tornan-se ainda mais contundentes no caso de
máquinas de indução com rotor gaiola de esquilo, sendo esta, portanto, uma opção

30
interessante para utilização em locais remotos por requerer menos manutenção, quando
comparada a outros tipos de geradores.
Figura 1.8 - Índice de aproveitamento do potencial hidrelétrico brasileiro, segundo a ANEEL
– situação em março de 2003. Fonte [9].
Como desvantagem, quando trabalhando de forma isolada, a amplitude e a freqüência
das tensões de saída de um GIAE é sensivelmente dependente da carga elétrica aplicada a
seus terminais e diretamente relacionada com a velocidade imposta pela máquina primária.
Na literatura são encontradas várias referências à utilização de GIAE em diferentes
sistemas de micro-geração, sendo eles mais comumente utilizados nas áreas de geração eólica,
grupo-geradores à diesel e micro-centrais hidrelétricas. Para cada aplicação, diferentes
topologias de conversores e métodos de controle já foram aplicados. No entanto, vislumbra-se
ainda um vasto campo de pesquisa e desenvolvimento de sistema com a tecnologia de GIAE,

31
principalmente no que tange a sua aplicação em micro aproveitamentos hidrelétricos e
operação isolada.
1.1 Revisão Bibliográfica
As máquinas de indução trifásicas (MIT) tem como característica principal a
habilidade em operar tanto como motor ou gerador [16], [17], [18] e [19]. A utilização de tais
máquinas como gerador é impulsionada pelo crescente interesse em fontes renováveis de
energia e microgeração, uma vez que o gerador de indução (GI) representa uma opção
alternativa às demais tecnologias existentes, tais como gerador síncrono e gerador de ímãs
permanentes, devido às suas características construtivas e de operação, já mencionadas
anteriormente.
No entanto, o GI apresenta uma característica particular associada à regulação da
tensão gerada que se mostra sensivelmente dependente da carga aplicada a seus terminais e da
velocidade de rotação, sendo esse o maior desafio à sua aplicação [20], [21] e [22].
Outra característica interessante do GI é a sua considerável flexibilidade de aplicação.
Pode-se classificar um sistema de geração com GI em termos do tipo de rotor, podendo ser
rotor bobinado ou rotor gaiola de esquilos, tipo de acionamento, podendo ser velocidade
constante ou velocidade variável, e pelo modo de operação, podendo ser conectado à rede ou
em sistema isolado. Em termos de aplicação, pode-se classificar em três esquemas básicos de
geração [21]:
I. Velocidade Constante – Frequência Constante (VCFC): neste esquema, a
velocidade da máquina primária é mantida constante através de um sistema de
controle de velocidade atuando sobre a variável de controle em questão, por
exemplo, a vazão de água ou ângulo de pás em uma micro central hidrelétrica,
conforme a entrada e saída de carga nos terminais do gerador;
II. Velocidade Variável – Frequência Constante (VVFC): característico de sistema
de geração eólica devido à característica intermitente da velocidade do vento,
neste esquema não se tem o controle sobre a velocidade do gerador. São
utilizados então conversores em série com o gerador, responsáveis pela
conversão da energia a níveis constantes de frequência e amplitude de tensão.
III. Velocidade Variável – Frequência Variável (VVFV): unicamente aplicáveis a
cargas resistivas destinadas ao aquecimento, as quais são insensíveis à variação
32
de frequência, neste esquema as tensões do GI apresentam frequência variável
proporcional á velocidade de operação.
Em vista da variedade de esquemas de geração, topologias e aplicações nas quais pode
ser inserido o GI, será apresentada a seguir uma breve revisão bibliográfica no que tange a
aplicação do GI com rotor gaiola de esquilos em sistemas isolados de geração, as topologias
de controle de tensão e os esquemas de regulação de frequência.
A simples conexão do GI em sistemas de potência isolados e seu acionamento à
velocidade superior à velocidade síncrona por meio de uma máquina primária, não garante a
geração de energia. Isto ocorre porque o GI, ao contrário das demais tecnologias de geradores,
não possui circuito de campo e por isso não é capaz de produzir a potência reativa necessária
a sua magnetização.
Desta forma, faz-se necessário o fornecimento de potência reativa por meio de fonte
externa para a excitação do GI. Este fenômeno é conhecido como fenômeno de auto-excitação
e é comumente realizado através da conexão em paralelo de um banco de capacitores de valor
específico aos terminais do GI, passando este a ser chamado de GIAE. O magnetismo residual
presente no circuito do rotor do GI mantém uma pequena tensão nos terminais do GI. Esta
tensão, aplicada sobre os capacitores gera um fluxo de corrente nos capacitores que, por
consequência, causa a elevação da tensão, estabelecendo-se então o fenômeno da auto-
excitação. O ponto de equilíbrio será estabelecido e a tensão terminal estabilizará quando a
corrente dos capacitores e as correntes induzidas no GI se igualarem.
O processo de auto-excitação do GI e o projeto dos capacitores de excitação foram
temas de inúmeros trabalhos ao longo dos anos, estando estes conceitos bem consolidados na
literatura, conforme [20], [21] e [23].
A tensão nos terminais do GIAE é governada pela capacitância de excitação, pela
velocidade da máquina primária e pela potência e fator de potência da carga aplicada, uma
vez que a tensão terminal decresce com o aumento da diferença entre a potência reativa
fornecida pelos capacitores de excitação e a potência reativa requerida pelo próprio gerador e
pelas cargas agregadas [13], [15].
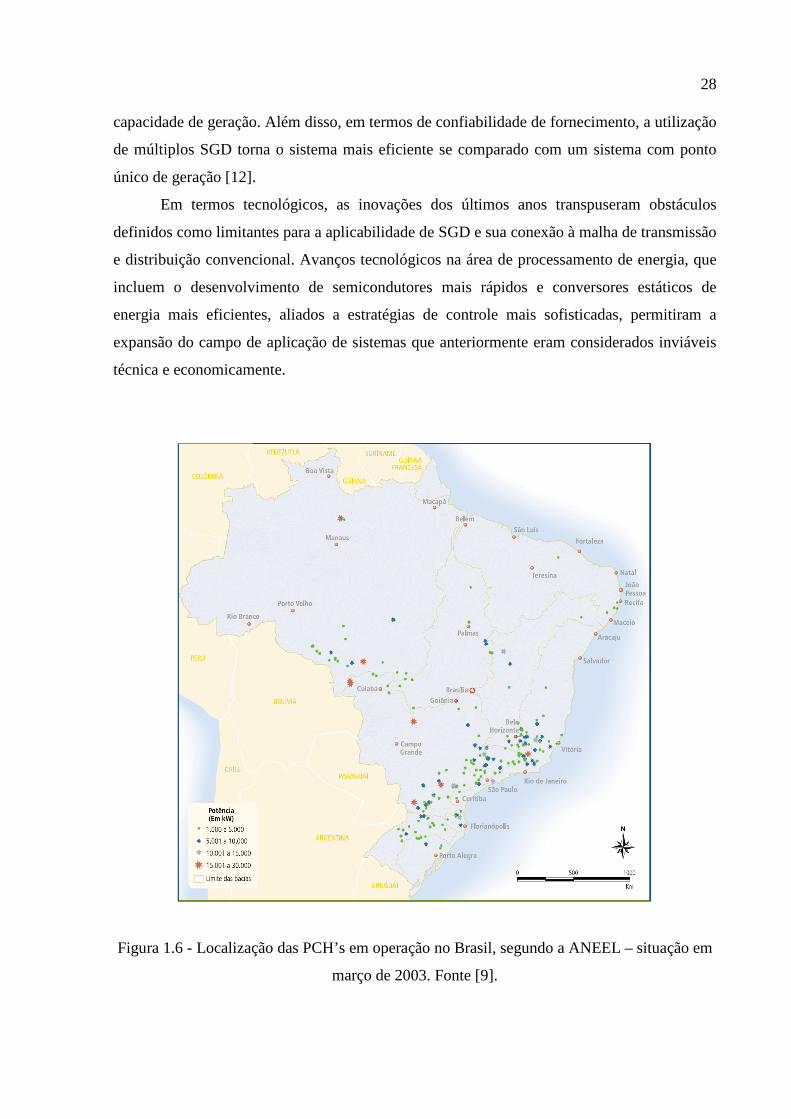
Assim, a regulação das tensões nos terminais do GIAE é sustentada através do
controle do balanço da potência reativa do sistema. Em [22] é apresentada uma classificação
dos esquemas de controle de tensão, todos aplicados ao controle do balanço da potência
reativa, o qual divide em dois grandes grupos, sendo eles, compensação série e compensação
paralela, conforme ilustrado na Figura 1.9.
33
Figura 1.9 - Classificação dos esquemas de regulação de tensão dos GIAE. Fonte [22].
A partir desta classificação, serão detalhados a seguir alguns dos principais esquemas,
descrevendo suas vantagens e desvantagens.
Um esquema de regulação de tensão clássico com compensação paralela é baseado no
uso de um reator com núcleo saturável [24]. Neste esquema, conforme Figura 1.10, o banco
de capacitores é dimensionado para condição extrema de compensação de potência reativa, ou
seja, o gerador é posto a plena carga sendo esta puramente indutiva, enquanto que o reator
com núcleo saturável absorve as correntes capacitivas em condições que não a de plena carga
indutiva.
A tensão terminal reduz com o acréscimo de carga, causando a desaturação do núcleo
e o aumento efetivo da indutância, o que causa a redução das correntes do reator, por
consequência. Ocorre então a transferência das correntes dos capacitores para o GIAE,
aumentando a excitação e consequentemente a tensão terminal. Esta topologia apresenta
vantagem na estabilidade da tensão, porém incorre em perdas elevadas devido as correntes de
saturação.

34
Figura 1.10 - Esquema de regulador de tensão baseado em reator com núcleo saturável.
Fonte [22].
Os esquemas de regulação de tensão baseados em chaves semicondutoras, seja em
compensação série ou paralela, seguem no geral o mesmo princípio que é o controle do
balanço da potência reativa do sistema a partir do chaveamento de elementos capacitivos e/ou
indutivos. As topologias divergem apenas na natureza do elemento chaveado e na tecnologia
da chave semicondutora.
As topologias que sugerem o chaveamento de cargas reativas, sendo elas capacitivas
ou indutivas, apresentam a vantagem de não injetarem componentes em alta frequência no
sistema e apresentarem baixas perdas por comutação, porém o controle da tensão terminal
ocorre em nível discreto prejudicando sua exata regulação [25], [26]. Algumas destas
topologias são apresentadas na Figura 1.11 e Figura 1.12.
Em contrapartida, as topologias que propõem o chaveamento em alta frequência das
chaves semicondutoras, ajustando o ângulo de disparo das chaves de acordo com a potência
reativa a ser compensada, oferecem ajuste periódico e exato da tensão terminal com a
desvantagem de impôr perdas elevadas de comutação e injeção de distorções em alta
frequência no sistema [27], [28], [29], [30], [31]. Exemplos dessas topologias são
apresentados na Figura 1.13.

35
Figura 1.11 – Esquema de regulação de tensão baseado em indutor controlado por chave
semicondutora. Fonte [22].
Figura 1.12 – Esquema de regulação de tensão baseado em comutação de capacitores em
paralelo. Fonte [22].
(a) (b)
Figura 1.13 – (a) Regulação de tensão baseada no controle de capacitores em paralelo.
(b) Regulação de tensão baseada em variação de reatância em paralelo. Fonte [22].

36
As topologias que fazem uso de compensadores estáticos de reativos seguem o
princípio do controle de tensão pela injeção de correntes reativas no sistema, geradas por um
inversor PWM conectado em paralelo com o barramento de tensão. Neste caso, os capacitores
de excitação ficam responsáveis, apenas, pelo fornecimento da potência reativa necessária
para que o GI tenha, a vazio, tensão nominal em seus terminais. O inversor PWM responde
pela potência reativa (Q) solicitada ou fornecida pela carga (ou seja, é capaz de fornecer ou
drenar potência reativa) e pelo acréscimo de potência reativa necessária para manter o fluxo
de entreferro do GI com a variação da potência ativa da carga [32].
Seguindo basicamente o mesmo princípio, a compensação de reativos pode ser
realizada a partir de inversores PWM fonte de tensão (IFT) [33], [34], [35] ou fonte de
corrente (IFC) [36]. Fisicamente, a diferença se restringe à configuração das chaves e do
barramento CC do inversor, conforme pode ser comparado na Figura 1.14.
Em termos de aplicação, a utilização de IFC torna-se vantajosa para aplicações em
altas potências. Em contrapartida, a utilização de IFT tornou-se mais predominante, devido ao
pequeno volume dos capacitores e custo inferior se comparado com a estrutura IFC para as
faixas de pequenas e médias potências [37].
Dentro desta topologia, os diferentes estudos encontrados na literatura divergem
unicamente no método de controle proposto ao inversor PWM.
(a) (b)
Figura 1.14 – (a) Inversor PWM fonte de tensão e (b) inversor PWM fonte de corrente.
Fonte [22].
37
Em [38] é proposto o controle da tensão do sistema de geração a partir da inserção de
um conversor buck, um conversor boost bi-direcional e um banco de baterias nos terminais do
barramento CC do inversor PWM, de forma a controlar a tensão do barramento CC do
inversor e quando necessário, fornecer potência ativa à carga local com frequência e tensão
constantes.
Em [39] é proposto a regulação da tensão CA através do controle do índice de
modulação das chaves do inversor sem se preocupar com a manutenção da tensão no
barramento CC do inversor a um valor constante. Esta técnica elimina a necessidade de uma
chave semicondutora no barramento CC do inversor, reduzindo os custos do sistema e as
correntes em alta frequência sobre o capacitor o que eleva a vida útil deste.
Outra configuração é proposta em [6], [35], [40], [41], [42]. Nesta, a regulação da
tensão CA continua sendo através do controle do índice de modulação das chaves do inversor,
no entanto, a tensão sobre o barramento CC do inversor é regulada de forma a ser mantida um
valor constante de tensão em seus terminais, evitando flutuações de tensão que poderiam
ocasionar a diminuição da vida útil do capacitor.
Este último método, com regulação da tensão CA e tensão do barramento CC, têm se
mostrado o mais adequado ao controle de tensão a partir da compensação de potência reativa
com o uso de inversores PWM. Isto porque, com a adição de um resistor de descarga
comutado por uma chave semicondutora de potência (elemento chopper), estes associados em
paralelo ao barramento CC do inversor PWM, é possível realizar o controle sobre o balanço
de potência ativa, e consequentemente sobre a frequência do sistema, a partir do consumo do
excesso de potência, mantendo-se constante a velocidade de operação. Essa técnica é
discutida em [41] e [43], e apresenta como vantagem a rápida resposta do controle de
frequência sob condições de variação de carga. A desvantagem está na eficiência do sistema
como um todo e principalmente na alta potência a ser processada pelo inversor, exigindo
assim um inversor com potência equivalente à do gerador.
Em termos de controle de frequência outro método que segue o mesmo princípio do
elemento chopper, é o controle eletrônico de carga (CEC). Semelhante ao método anterior, o
CEC atua no balanço da potência ativa do sistema, ou seja, no equilíbrio entre a potência
gerada e a potência consumida, ao controlar a inserção de cargas conectadas diretamente aos
terminais do gerador. Inúmeros tipos de CEC para o controle de sistemas com GIAE tem sido
reportados na literatura [44], [45], [46], [47], [48], [49] podendo citar como os mais
conhecidos o chaveamento de cargas resistivas, o retificador controlado com resistor de

38
descarga, e o retificador não-controlado com resistor de descarga controlado por elemento
chopper [46]. Na Figura 1.15 são ilustrados os tipos de CEC citados.
(a) (b) (c)
Figura 1.15 – Tipos de CEC. (a) chaveamento de cargas resistivas; (b) retificador controlado
com resistor de descarga; (c) retificador não-controlado com resistor de descarga controlado
por elemento chopper.
Uma outra proposta para o controle integrado da tensão e frequência do sistema
considera a disponibilidade de rede monofásica que, conectada ao barramento CC do inversor,
absorve parte da energia gerada e não utilizada instantaneamente pelas cargas conectadas ao
sistema [50], [51], [52], [53]. Assim como os métodos anteriores, não há a preocupação com o
controle da velocidade do gerador, uma vez que o controle de frequência e tensão ocorre
unicamente pelo balanço das potências ativa e reativa do sistema que se dá, neste caso, pela
conexão com a rede monofásica.
A vantagem deste método está no fato de, assim como os demais, não requerer sistema
de regulação de velocidade da máquina primária, o que permite sua aplicação em sistemas
com característica de velocidade variável. No entanto, por requerer conexão com rede
monofásica, não pode ser classificado como um sistema de geração isolado. Outro ponto
negativo se refere á qualidade da energia injetada na rede monofásica, uma vez que é
composta por componentes de alta frequência e alto conteúdo harmônico.

39
Como visto, em se tratando de sistemas isolados de geração de energia, vários são os
métodos propostos na literatura para a regulação da amplitude e frequência das tensões de
saída de sistemas baseados em GI. No entanto, poucos são os trabalhos que levam em
consideração as características dinâmicas da máquina primária. Os métodos até então
apresentados são independentes do comportamento dinâmico imposto pelo sistema motriz ao
gerador de indução.
Existem, no entanto, alguns trabalhos que sugerem o controle de frequência através do
controle da velocidade da máquina primária, ou seja, sob variações de carga nos terminais do
gerador, é realizado o controle da máquina primária de forma a manter a velocidade da
máquina primária a um valor constante, independentemente da potência mecânica solicitada
pelo GI.
Em [40] é proposto o controle da frequência através unicamente do controle da
velocidade da máquina primária. O controle aplicado é um controlador proporcional-integral
(PI) clássico, sendo a medição de velocidade obtida a partir do ângulo de fase das tensões do
gerador. Neste trabalho, entretando é desconsiderado o comportamento dinâmico da máquina
primária uma vez que em seu lugar é aplicado um servomotor, tornando inviável sua
aplicação prática.
Em [48], é proposto um sistema de controle de frequência integrando duas ações de
controle distintas, a primeira atuando sobre a velocidade da máquina primária e a segunda um
CEC com retificador controlado, conforme Figura 1.16. O sistema considera o modelo de uma
MCH, e por consequência, leva em consideração sua dinâmica de operação no projeto dos
controladores e resultados. O controle de velocidade da máquina primária é realizado através
da abertura e fechamento de válvulas posicionadas no sistema de alimentação da turbina,
conferindo comportamento discreto ao sistema. O controle suave é realizado pelo CEC
conectado aos terminais do gerador.
Já em [54], [55] e [57] é considerada a modelagem de MCH’s e o controle de
frequência é realizado integralmente através do controle da velocidade da máquina primária.
Nestes trabalhos, entretando, são aplicados controladores dedicados à regulação da velocidade
da MP, conferindo características mais reais aos modelos considerados. São levadas em
consideração não apenas as características dinâmicas da turbina hidráulica e sistema
hidráulico, mas também a dinâmica dos atuadores.

40
Figura 1.16 - Sistema de controle de frequência a partir do controle liga/desliga do sistema de
distribuição. Fonte [48].
1.2 Objetivos do Trabalho
Nessa dissertação é apresentado um panorama do cenário energético mundial,
comparando sua atual condição com projeções futuras e destacando o importante papel da
geração distribuída e das micro-redes neste novo sistema que se projeta. Neste contexto é
abordada a importância de pequenos aproveitamentos hidrelétricos, propondo-se para tanto, a
utilização de tecnologias destinadas ao emprego e controle de GIAE.
A motivação deste trabalho surgiu de uma breve revisão bibliográfica e da
constantação da inexistência de trabalhos que abordem a modelagem do sistema hidráulico
associada à utilização de GIAE, em sistemas de geração isolados, de uma forma completa.
Dessa forma, o objetivo geral deste trabalho reside na modelagem e controle de uma
micro central hidrelétrica na qual é considerada a utilização de GIAE como elemento gerador.
A definição de um modelo matemático associado ao sistema (i.e., planta) permite entre outras
coisas a simulação através de software específico, com aproximação razoável ao do
comportamento dinâmico da planta real. Ao conhecer a dinâmica da planta, caracterizada pelo
seu modelo, é possível, a partir de um procedimento de projeto dos controladores, realizar o
controle das variáveis de interesse do sistema.
Como objetivos específicos para esta dissertação define-se:

41
(i) Revisão bibliográfica dos principais trabalhos publicados na literatura que tratam
da aplicação de GIAE em sistemas de geração, com destaque para micro-centrais
hidrelétricas;
(ii) Modelagem do sistema, contemplando modelagem mecânica da planta hidráulica
e turbina e modelagem elétrica de GIAE e sistema elétrico considerado;
(iii) Controle de frequência das tensões dos terminais do GIAE por meio de controle
de velocidade da máquina primária (turbina hidráulica), respeitando os limites
estabelecidos pela legislação;
(iv) Controle de amplitude das tensões nos terminais do GIAE por meio do balanço de
potência reativa do sistema, quando operando em modo isolado, respeitando os
limites estabelecidos pela legislação;
(v) Demonstrar o estudo, a análise e projeto realizados mediante resultados de
simulação e experimentais.
1.3 Organização da Dissertação
Esta dissertação é organizada da seguinte maneira:
O Capítulo 1 apresenta uma introdução geral sobre a condição mundial e nacional em
termos de geração de energia elétrica. São apresentados os problemas decorrentes da
dependência estabelecida aos combustíveis fósseis para o suprimento da demanda energética
mundial, contextualizando desta forma a busca por meios alternativos de geração de energia
elétrica, baseado em fontes renováveis de energia, geração distribuída e pequenos
aproveitamentos energéticos. Nesta categoria, são enquadradas as micro-centrais hidrelétricas
com geradores assíncronos. É apresentada então, uma breve revisão bibliográfica relativa a
aplicação de GIAE e o controle da frequência e amplitude das tensões geradas quando
aplicados a centrais hidrelétricas, sejam em sistemas isolados ou conectados a rede.
O Capítulo 2 apresenta a configuração proposta para o sistema de micro-geração
hidrelétrica com GIAE. Nesse capítulo é desenvolvida a modelagem do sistema completo,
sendo este dividido em três subsistema: sistema hidráulico, MIT e sistema composto por
capacitores de auto-excitação e inversor PWM. São apresentados e discutidos as
características de operação da MIT como GIAE e os detalhes pertinentes ao seu controle.
No Capítulo 3 são analisadas as características dinâmicas da topologia proposta. Nesse
capítulo são apresentadas as metodologias de projeto dos controladores de frequência e

42
tensão. São ainda apresentados a modelagem do sistema em estudo e os resultados de
simulação para um sistema de micro-geração hidrelétrica com potência em torno de 4 kVA.
O Capítulo 4 apresenta as principais características do protótipo implementado, o qual
sugere a emulação de uma micro-central hidrelétrica com GIAE, e emprega sistemas de
controle dedicados ao controle de amplitude e frequência das tensões geradas. Ainda, é
realizada uma breve descrição dos circuitos de medição, controle, potência e partida dos
mesmos. São também apresentados resultados experimentais obtidos a partir do protótipo
implementado com o intuito de validar o estudo e análises realizadas em ambiente de
simulação.
Para finalizar este trabalho, serão apresentadas as conclusões gerais relativas a
configuração do sistema, desempenho dos controladores propostos e viabilidade técnica com
base nos resultados obtidos, bem como sugestões de trabalhos futuros.
43
Capítulo 2
2 MODELAGEM DO SISTEMA
2.1 Introdução
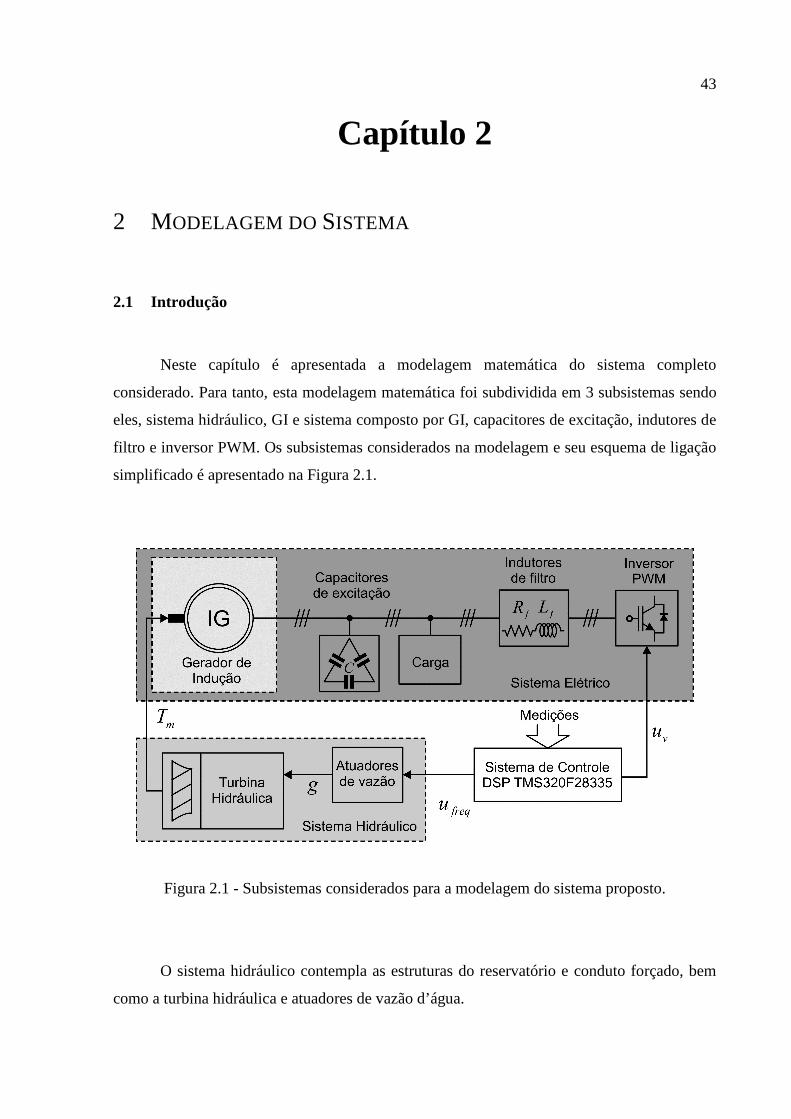
Neste capítulo é apresentada a modelagem matemática do sistema completo
considerado. Para tanto, esta modelagem matemática foi subdividida em 3 subsistemas sendo
eles, sistema hidráulico, GI e sistema composto por GI, capacitores de excitação, indutores de
filtro e inversor PWM. Os subsistemas considerados na modelagem e seu esquema de ligação
simplificado é apresentado na Figura 2.1.
Figura 2.1 - Subsistemas considerados para a modelagem do sistema proposto.
O sistema hidráulico contempla as estruturas do reservatório e conduto forçado, bem
como a turbina hidráulica e atuadores de vazão d’água.
44
A Máquina de Indução Trifásica (MIT) é utilizada normalmente como motor. Neste
tipo de aplicação não se tem grandes variações de velocidade ou frequência e a máquina pode
ser representada de maneira satisfatória pelo seu modelo em regime permanente ou estático.
Entretanto, na aplicação da MIT como GI, operando como um componente de um sistema de
controle em malha fechada e sujeito a perturbações, torna-se fundamental o estudo do seu
comportamento dinâmico [56].
O sistema elétrico, considerado para modelagem, é composto basicamente por um
barramento trifásico no qual estão conectados o gerador de indução, o banco de capacitores e
o inversor de tensão, sendo este conectado por meio de um filtro indutivo. A função de cada
componente será posteriormente discutida.
A seguir serão descritos os métodos de modelagem aplicados a cada um dos 3
subsistemas supra citados.
2.2 Modelamento do Sistema Hidráulico
2.2.1 Modelo Linear da turbina hidráulica.
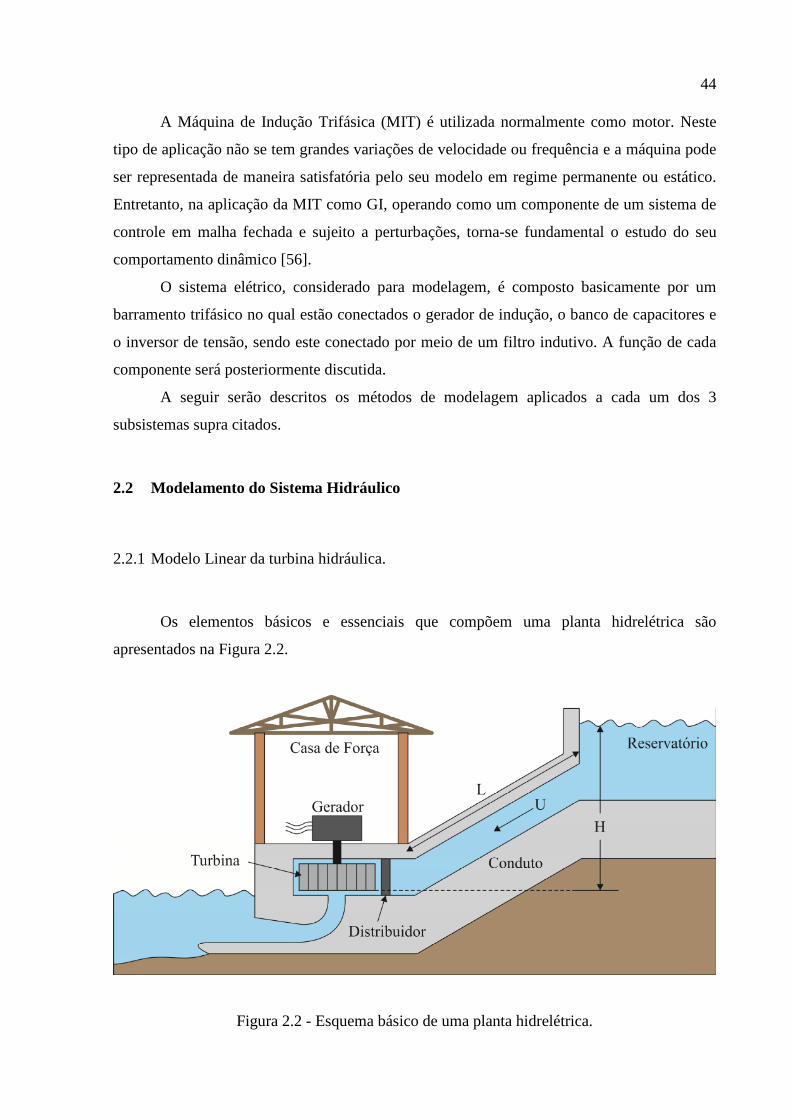
Os elementos básicos e essenciais que compõem uma planta hidrelétrica são
apresentados na Figura 2.2.
Figura 2.2 - Esquema básico de uma planta hidrelétrica.

45
A modelagem de sistemas compostos de turbinas hidráulicas e colunas d’água, por
hipóteses simplificadoras, é usualmente baseada nas seguintes considerações [57], [58] e [59]:
• A resistência hidráulica é insignificante;
• O conduto é inelástico e a água incompressível;
• A velocidade da água varia diretamente com a abertura do distribuidor e com a raiz
quadrada da altura da coluna d’água;
• A potência gerada pela turbina é diretamente proporcional à altura da coluna d’agua
e ao volume de vazão.
Com base nestas considerações, as características da turbina e represa são
determinadas por três equações básicas:
(2.1)
m PP K HU= (2.2)
gadUH
dt L= − ∆ (2.3)
onde:
U - velocidade da água no conduto forçado;
G - abertura ideal do distribuidor;
H - altura da coluna d’água, da superfície do reservatório até o distribuidor da
turbina (não confundir com a constante de inércia H);
mP - potência mecânica da turbina;
L - comprimento do conduto;
ga - aceleração da gravidade;
t - tempo em segundos;
,u pK K - constantes de proporcionalidade.
As equações (2.1), (2.2) e (2.3) representam, respectivamente, a velocidade da água, a
potência mecânica da turbina hidráulica e a aceleração da coluna d’água.
uU K G H=

46
A linearização destas equações, considerando pequenas variações em torno de um
determinado ponto de operação, resulta em três novas equações:
1
2U H G∆ = ∆ + ∆ (2.4)
mP H U∆ = ∆ + ∆ (2.5)
W
d UT H
dt
∆ = −∆ (2.6)
onde por definição:
0
0W
g
LUT
a H= (2.7)
Sendo WT definida como constante de inércia da água, ela representa o tempo que uma
coluna d’água 0H requer para acelerar a água no conduto do estado de repouso à velocidade
0U . O subscrito “0” define valores iniciais, o prefixo ∆ designa pequenas variações em torno
do ponto de operação, e a sobrebarra indica os valores normalizados baseados em valores
em regime permanente.
Através da associação das equações (2.4) e (2.6) e da substituição de d d t pelo
operador s, é possível expressar a relação existente entre a mudança na velocidade e a
mudança na abertura da comporta, por:
11
12 W
U GT s
∆ = ∆+
(2.8)
Da associação das equações (2.4) e (2.5) e substituição de U∆ na equação (2.8),
obtêm-se:
11
12
m W
W
T sP
G T s
−∆ =∆ +
(2.9)
47
Sendo esta equação definida como a função de transferência clássica da turbina
hidráulica a qual demonstra o comportamento da potência de saída da turbina a variações na
abertura da comporta, considerando condições ideais e sem perdas no sistema [59].
Este modelo linear representa o desempenho da turbina a pequenas variações sendo
desta forma, útil ao projeto de controle do sistema utilizando técnicas lineares de análise, tais
como resposta em frequência, lugar das raízes, entre outros. Devido a sua simplicidade, este
auxilia na compreensão das características básicas da turbina hidráulica.
A equação (2.9), definida como a função de transferência da turbina hidráulica, foi por
muitos anos largamente utilizada na modelagem de tais sistemas. No entanto, este modelo é
inadequado na representação de sistemas sujeitos a grandes variações de carga e frequência.
Para tais análises, foi desenvolvido um modelo não linear mais adequado para simulações no
domínio do tempo com grandes variações de sinais. Este modelo é descrito a seguir.
2.2.2 Modelo Não-Linear da turbina hidráulica.
Considerando novamente um sistema hidráulico simples, conforme apresentado na
Figura 2.2, e regido por equações básicas da hidrodinâmica conforme abaixo:
uU K G H= (2.10)
PP K HU= (2.11)
0( )gadUH H
dt L= − − (2.12)
Q A U= (2.13)
onde:
0H - Valor inicial da altura da coluna d’água H ;
P - Potência da turbina;
Q - Taxa de vazão da água;
A - Seção transversal do conduto.

48
Uma vez que o interesse está no desempenho do sistema a grandes distúrbios, deve-se
normalizar as equações com base nos valores nominais de operação, obtendo desta forma, as
seguintes equações:
1
2
r r r
U G H
U G H
=
(2.14)
r r r
P U H
P U H= (2.15)
0g r
r r r r
a HHd U H
dt U L U H H
= − −
(2.16)
sendo o subscrito r a notação utilizada para valores nominais de operação. Realizando a
substituição de pelo operador , as equações reescritas por unidade de base (pu) são
apresentadas da seguinte forma:
12( )U G H= (2.17)
P U H= (2.18)
0
1
W
U
T sH H
−=−
(2.19)
sendo agora o termo WT definido como o tempo de partida da água em condição nominal de
operação, sendo estabelecido através da equação:
r rW
g r g r
LU LQT
a H a AH= = (2.20)
A potência mecânica de saída mP é definida por:
m PP P P= − (2.21)
sendo PP definida como a perda de carga fixa da turbina dada por:
d dt s

49
P NLP U H= (2.22)
onde NLU representa a velocidade da água no conduto forçado em condição sem carga. Na
forma normalizada com base nos valores nominais de operação, obtém-se:
( )m NLP U U H= − (2.23)
A equação (2.23) estabelece o valor em pu da potência de saída da turbina tendo como
base a potência nominal da turbina. Estabelecendo uma base comum à potência nominal do
gerador, é obtida a seguinte equação:
( )m ruNLP U U HP= − (2.24)
sendo r uP a potência de referência (ou base) da turbina em pu, dada por:
( )
( )base r
ru
base base
kW turbina PP
kW gerador P= = (2.25)
Finalmente, obtêm-se a equação do torque mecânico da turbina:
( )0 1m m ruNLT P U U HP = = −
ωω ω
(2.26)
sendo 0ω o valor base da velocidade angular, ω a velocidade angular real da turbina e ω a
velocidade angular da turbina em pu.
Nas equações até então apresentadas, foi considerado o valor ideal de abertura do
distribuidor em pu, G . A sua relação com a abertura real do distribuidor em pu, g , é dada
por:
tG A g= (2.27)

50
sendo tA definido como o ganho da turbina e sendo obtido através da equação:
1t
FL NL
Ag g
=−
(2.28)
onde FLg e NLg representam, respectivamente, as aberturas em pu do distribuidor a plena
carga e sem carga.
Rearranjando as equações até então definidas, pode-se expressar o modelo do sistema
hidráulico em termos de duas equações distintas, relacionadas à coluna d’água e à turbina,
respectivamente:
( )2
0 01 1
W W t
dU UH H H
dt T T A g
= − − = − −
(2.29)
2
NLmec ru
t
U U UT P
A gω −=
(2.30)
A partir da equação (2.29), considerando condição de regime permanente e sem carga,
obtem-se:
( )1
20NL t NLU A g H= (2.31)
As equações (2.20), (2.26), (2.28) e (2.31) descrevem completamente as características
da coluna d’água e turbina, podendo ser representadas na forma de diagrama de blocos
conforme apresentado na Figura 2.3.
Figura 2.3 - Modelo não-linear do sistema hidráulico. Fonte [59].

51
2.2.3 Características especiais das turbinas hidráulicas
Analisando-se a função de transferência clássica da turbina hidráulica, dada por (2.9),
percebe-se a característica de um sistema de fase não-mínima, caracterizado pela existência de
zeros no semi-plano direito do plano s. Esta característica pode ser melhor representada pela
Figura 2.4, que ilustra a resposta da potência mecânica da turbina a uma variação em degrau
na posição do distribuidor.
Figura 2.4 - Resposta ao degrau do sistema conduto forçado/turbina hidráulica.
Na Figura 2.4 percebe-se que a variação inicial de potência é oposta ao sentido de
variação do distribuidor. Isto acontece porque, numa repentina abertura do distribuidor, o
fluxo de água não se altera imediatamente devido à inércia da água, no entanto, a pressão
sobre a entrada da turbina é reduzida instantaneamente, causando a redução da potência. Com
uma resposta determinada pela constante de inércia da água (WT ), a água apresenta uma
aceleração até o sistema atingir o novo valor de potência mecânica de saída.
2.2.4 Modelagem dos atuadores de vazão
O conjunto de atuadores representa uma parte importante no conjunto hidráulico,
sendo responsável pela abertura e fechamento do distribuidor da turbina. Associado a um

52
sistema de controle dedicado, é responsável pelo controle da potência ativa gerada pelo
sistema de geração, uma vez que controla a vazão de água na turbina e por consequência, a
potência mecânica fornecida em seu eixo.
Conforme descrito em [59], sistemas de controle mais antigos eram realizados usando
componentes puramente mecânicos e hidráulicos. Mais recentemente, com o avanço das
tecnologias de controle, estes sistemas de controle passaram a empregar componentes eletro-
hidráulicos. Apesar desta mudança, a forma de operação manteve-se similar, com a vantagem
de oferecer maior flexibilidade e ganho de desempenho com relação a zonas mortas e atrasos
de respostas. Assim, optou-se por adotar um esquema de atuadores semelhante ao apresentado
em [58] e [59], e posteriormente adotado em [57] a nível de simulação na representação de
um sistema real.
O sistema é constituído pelos seguintes elementos básicos: uma servo-válvula
hidráulica e um servo-motor. A servo-válvula, comandada por sinais elétricos provenientes do
controlador, controla o sentido e o fluxo de fluido hidráulico; o servo-motor, de acordo com
esse fluxo, comanda diretamente os movimentos do distribuidor da turbina [57].
O diagrama de blocos do conjunto de atuadores é mostrado na Figura 2.5, sendo os
parâmetros assim definidos:
aK : ganho dos atuadores;
1s
: função de transferência (integrador) relacionando as posições do servo-motor e
da servo-válvula;
1
1 GsT+: função de transferência relacionando a abertura do distribuidor, g, à posição
do servo-motor;
GT : constante de tempo do servo-motor;
g : sinal de saída correspondendo à abertura real do distribuidor (em pu);
u: sinal de controle;
Figura 2.5 - Diagrama de blocos dos atuadores da turbina hidráulica.
53
A seguir será descrito a modelagem do segundo subsistema referente a MIT,
considerando as características peculiares à sua operação como GIAE.
2.3 Máquina de Indução Trifásica
2.3.1 Modelo Dinâmico da Máquina de Indução Trifásica
Máquinas de indução trifásicas são máquinas de velocidade assíncrona, ou seja,
trabalham numa frequência ligeiramente diferente da frequência imposta. Operando como
motor, trabalha abaixo da velocidade síncrona imposta pela frequência da rede, enquanto que
operando como gerador, deve trabalha ligeiramente acima da frequência da tensão a ser
gerada.
A modelagem apresentada na sequência deste trabalho considera, sem perda de
generalidade, máquinas de indução simétricas trifásicas. Por máquina simétrica, define-se uma
máquina polifásica com as seguintes considerações [16], [17]:
• Os enrolamentos do estator são idênticos e dispostos uniformemente formando um
ângulo de 120º entre si;
• Rotores gaiola de esquilos, com enrolamentos distribuídos uniformemente, podem
ser da mesma forma, representados por um enrolamento trifásico equivalente [17];
• O circuito magnético é considerado ideal (linear), não havendo desta forma,
saturação nem perdas magnéticas;
• O entreferro é uniforme;
• A distribuição de densidade de fluxo magnético no entreferro é radial e senoidal.
A partir das considerações citadas, pode-se afirmar que:
a) As indutâncias próprias dos enrolamentos do estator e do rotor são constantes e
iguais entre si, sendo definidas como a soma das indutâncias de dispersão, lsL e lrL ,
e das indutâncias de magnetização, msL e mrL . Assim:
cscss asas bsbs s ls msL L L L L L= = = = +
(2.32)
c crr arar brbr r r lr mrL L L L L L= = = = +
(2.33)

54
b) As indutâncias mútuas entre os enrolamentos do estator são iguais entre si.
0,5ss asbs ascs bsas bscs csas csbs msM L L L L L L L= = = = = = =−
(2.34)
c) As indutâncias mútuas entre os enrolamentos do rotor são iguais entre si.
0,5rr arbr arcr brar brcr crar crbr mrM L L L L L L L= = = = = = =−
(2.35)
d) As indutâncias mútuas entre um enrolamento de uma fase do estator e outro de uma
fase do rotor são funções senoidais do ângulo rθ entre os mesmos e podem ser
escritos como:
cos( )asar sr rL L= θ
(2.36)
cos( 2 3)asbr sr rL L= +θ π (2.37)
cos( 2 3)ascr sr rL L= −θ π
(2.38)
cos( 2 3)bsar sr rL L= −θ π
(2.39)
cos( )bsbr sr rL L= θ
(2.40)
cos( 2 3)bscr sr rL L= +θ π
(2.41)
cos( 2 3)csar sr rL L= +θ π (2.42)
cos( 2 3)csbr sr rL L= −θ π
(2.43)
csc cos( )r sr rL L= θ
(2.44)
O ângulo rθ é o ângulo elétrico formado entre o eixo de um enrolamento do estator
tomado como referência e outro do rotor, também tomado como referência. srL é o valor
máximo da indutância mútua entre um enrolamento do estator e outro do rotor, o qual ocorre
quando seus eixos estão alinhados.
As equações clássicas de tensão do motor de indução trifásico que descrevem o
modelo dinâmico da máquina são melhor descritas em [16] e [17].

55
A análise dinâmica de uma máquina de indução, baseada em equações diferenciais, é
uma tarefa complexa devido ao comportamento senoidal apresentado pelas indutâncias
mútuas existentes entre os enrolamentos do estator e do rotor com relação ao deslocamento
angular do rotor. Ou seja, as indutâncias mútuas variam no tempo conforme o movimento do
rotor, caracterizando assim um comportamento não-linear das equações diferenciais das
tensões.
Para eliminar este comportamento temporal dos coeficientes das equações de estado
da máquina em relação à posição angular do rotor, usualmente são aplicadas técnicas de
transformação matemática, nas quais o modelo trifásico do motor, o qual é um modelo
acoplado, é transformado em um modelo bifásico, desacoplado em eixos semi-estacionário.
2.3.2 Transformação de Eixos de Referência
Em sistemas trifásicos equilibrados, a transformação trifásica-bifásica, ou teoria dos
dois eixos ou transformação dq0 é largamente empregada para estudos dinâmicos da MIT
[16], [17] e [18]. Nessa teoria, os parâmetros variáveis no tempo são eliminados e as variáveis
e parâmetros são expressos em um sistema de dois eixos ortogonais (ou mutuamente
desacoplados): direto (d) e quadratura (q).
A interpretação trigonométrica da mudança de variáveis de um sistema trifásico para
um sistema de dois eixos ortogonais é mostrada na Figura 2.6. Nela estão representados,
esquematicamente, os enrolamentos do estator e do rotor, bem como os eixos de seus
enrolamentos. A transformação é expressa em função do ângulo, θ, entre o eixo d e o eixo as.
O eixo d adianta-se do eixo q por π/2.
Ao longo dos anos, foram propostas diferentes técnicas de mudanças de variáveis,
concluindo-se, por final, serem todas derivadas do mesmo princípio de transformação. Nesta
transformação geral, as variáveis da máquina são referidas a um eixo de referência que gira a
uma velocidade angular arbitrária. Todas as transformações são obtidas a partir desta
transformação geral, simplesmente pela atribuição da conveniente velocidade de rotação do
eixo de referência.
Apesar das mudanças de variáveis terem sido originalmente desenvolvidas para a
análise de máquinas CA, no intuito de eliminar os termos variantes no tempo, estas técnicas
também passaram a ser empregadas na análise de vários sistemas estáticos de potência e
controle associados a drives. No controle digital aplicado ao estudo de estabilidade de grandes

56
sistemas de potência, por exemplo, a mudança de variáveis para eixos síncronos das variáveis
associadas a transformadores, linhas de transmissão, cargas, bancos de capacitores, e
compensador estáticos de reativos tornou-se uma prática comum.
Figura 2.6 - Interpretação trigonométrica da mudança de variáveis abc para dq de uma
máquina de indução trifásica. (s) variáveis do estator, (r) variáveis do rotor.
A transformação de variáveis trifásicas abc para o eixo de referência dq0 é expressa
pela seguinte equação:
0 _ 0dq abc dq abcf T f=
(2.45)
onde:
( )0 0
T
dq d qf f f f = (2.46)
( ) [ ]T
abc a b cf f f f=
(2.47)
sendo f uma variável representativa para as tensões de fase, fluxos concatenados ou
correntes da máquina; d, q e 0 os eixos direto, quadratura e de seqüência zero,
respectivamente; e os subscritos a, b e c as variáveis trifásicas da máquina [18].

57
A matriz de transformação _ 0abc dqT é então definida como
0
120 1202
120 1203
1 1 12 2 2
abc _ dq
cos cos( - ) cos( )
T sen sen( - ) sen( )
° + ° = ° + °
θ θ θθ θ θ
(2.48)
sendo sua matriz inversa dada por
( ) 1
0
12
120 120 13
120 120 1abc_dq
cos sen
T cos( ) sen( )
cos( ) sen( )
− = − ° − ° + ° + °
θ θθ θθ θ
(2.49)
e a relação entre a velocidade angular, ω , e o deslocamento angular, θ, dada por:
d
dt
θω =
(2.50)
A seqüência zero é nula para a condição trifásica equilibrada, sendo esta considerada
somente para obtenção de relações de transformação únicas. O modelo dinâmico dq de uma
máquina pode ser expresso em um eixo de referência estacionário ou girante. No eixo
estacionário, os eixos de referência d e q são fixados sobre o estator ( 0ω = ) e é conveniente
fazer 0θ = , tal que o eixo d coincida com o eixo as. Por outro lado, o eixo de referência
girante pode ser fixado sobre o rotor ( rω ω= ) ou mover-se na velocidade do campo girante
(síncrono) ( sω ω= ). A vantagem deste último está em que, com alimentação senoidal e em
regime permanente, as variáveis aparecem como quantidades CC, podendo ser representadas
por seus valores de pico.
2.3.3 Representação da Máquina de Indução Trifásica em um Eixo de Referência Arbitrário
As equações para um sistema de eixos de referência arbitrários são desenvolvidas
considerando uma velocidade angular ω. A partir das equações gerais obtidas, pode-se então
58
desenvolver as equações para qualquer referência, podendo esta ser o campo girante, o rotor
ou o estator.
Considerando os parâmetros da máquina referenciados aos enrolamentos do estator e a
indutância própria separada em componentes de dispersão e magnetização, as equações de
tensão podem ser expressas como [18], [19]:
ds s ds qs dsv R i pωλ λ= + +
(2.51)
qs s qs ds qsv R i pωλ λ= + + (2.52)
' ' ' ( ) ' 'dr r dr r qr drv R i pω ω λ λ= − − +
(2.53)
' ' ' ( ) ' 'qr r qr r dr qrv R i pω ω λ λ= − − +
(2.54)
sendo as equações dos fluxos concatenados definidas como
( ' )ds ls ds M ds drL i L i iλ = + +
(2.55)
( ' )qs ls qs M qs qrL i L i iλ = + +
(2.56)
' ' ' ( ' )dr lr dr M ds drL i L i iλ = + +
(2.57)
' ' ' ( ' )qr lr qr M qs qrL i L i iλ = + +
(2.58)
Os apóstrofes denotam quantidades do rotor referidas para o lado do estator. Tem-se
que p é o operador d d t , ω é a velocidade arbitrária em que gira (na direção da rotação do
rotor) o sistema de eixos de referência, rω é a velocidade angular elétrica equivalente do
rotor. Os parâmetros sR e 'rR são a resistências do estator e do rotor referida ao estator. As
quantidades sL , ML e 'rL são as indutâncias por fase do estator, de magnetização e do rotor
referida ao estator, respectivamente.
As equações (2.55) – (2.58) sugerem o circuito equivalente mostrado na Figura 2.7.

59
Figura 2.7 - Representação por circuito equivalente do modelo de uma máquina de indução
em um eixo de referência arbitrário.
O torque eletromagnético desenvolvido pela máquina em variáveis dq, segundo [19], é
dado por:
( )3
2 2e ds qs qs ds
PT i i = −
λ λ
(2.59)
Enquanto que, o comportamento dinâmico do sistema eletromecânico é determinado
por:
2 2( )m L r r
JT T B p
P P= + +ω ω
(2.60)
sendo P o número de pólos da máquina, J a constante de inércia do rotor em 2.kgm; B , a
constante de atrito rotacional em 2.kgm s e LT o conjugado de carga em .N m. O modelo da
máquina de indução representado em (2.51) a (2.60) corresponde ao modo de operação como
motor. Para funcionamento como gerador é suficiente considerar o torque da carga LT em
(2.60) como negativo.

60
Caso não disponíveis, os parâmetros da máquina podem ser determinados a partir de
seu modelo em regime permanente, o qual é facilmente obtido mediante ensaios a vazio e de
curto-circuito [16], [18], [23].
2.3.4 Modelo da Máquina de Indução em Regime Permanente
A MIT é composta por três pares idênticos de enrolamento primário e secundário,
sendo cada par relativo a uma fase. Considerando uma perfeita simetria entre os
enrolamentos, é possível considerar um único par de enrolamentos na análise do
comportamento do motor em regime permanente.
O circuito equivalente da MIT com rotor gaiola de esquilos, sendo assim, com todos
os parâmetros refletidos ao lado do estator, é apresentado na Figura 2.8.
Figura 2.8 - Circuito equivalente por fase de um motor de indução em regime permanente.
O circuito é constituído pelas resistências e reatâncias de dispersão dos enrolamentos
do estator, sR e sX , e do rotor, 'rR e 'rX , respectivamente. MX é a reatância de
magnetização do entreferro e MR representa a resistência para as perdas no núcleo e perdas
por atrito. A tensão terminal por fase no estator é representada por sV enquanto MV representa
a tensão de entreferro por fase. O escorregamento s do motor é definido pela relação entre a
velocidade elétrica do estator (sω ), ou frequência síncrona da rede, e a velocidade angular
rotórica ( rω ) expressa por:

61
s r
s
sω ω
ω−=
(2.61)
A seguir é mostrado o balanço de energia do motor de indução trifásico, importante
para a compreensão da sua dinâmica de operação como GIAE.
2.3.5 Balanço de Energia do Motor de Indução
O balanço dos vários componentes da potência é usado para analisar a conversão de
energia elétrica em energia mecânica do motor. A Figura 2.9 mostra graficamente o fluxo de
potência de um motor de indução trifásico [23].
Figura 2.9 - Fluxo de potência do motor de indução trifásico. Fonte [23].
Conectando os terminais do motor de indução trifásico a uma rede trifásica, será
drenada pelo motor uma potência aparente expressa por:

62
3 linha linhaS V I= (2.62)
A potência aparente é composta por uma pequena parcela de potência reativa (Q),
responsável pelo estabelecimento do campo magnético, e por uma grande parcela de potência
ativa (P), sendo está convertida em potência mecânica.
3 linha linhaQ V I sen= φ (2.63)
3 linha linhaP V I cos= φ (2.64)
A potência mecânica útil no eixo do motor, por sua vez, é uma função do torque de
saída e a velocidade do motor, dada por:
_ _ _
22
60r
m u m u m u r
nP T T
P= =π ω
(2.65)
onde:
_m uT - torque mecânico útil em Nm;
rn - velocidade do rotor em rpm;
rω - velocidade angular do rotor em rad/s;
P - número de pólos do motor.
Assim, para o caso de um motor elétrico, a eficiência da máquina é dada pela razão
entre a potência mecânica de saída (útil) e a potência elétrica de entrada
_m uP
P=η
(2.66)
e a diferença entre a potência elétrica de entrada e a potência mecânica útil na ponta do eixo
do motor constitue as perdas da máquina:
_perdas m uP P= −∑
(2.67)
63
As perdas da máquina podem ser distinguidas em 4 diferentes tipos, sendo elas, perdas
mecânicas, perdas no ferro, perdas no cobre e perdas por correntes parasitas.
As perdas mecânicas (f wP+ ) incluem as perdas por rotação devido ao atrito dos
rolamentos e à ação de arraste do ventilador. As perdas no ferro (FeP ) são devido a histerese e
as correntes parasitas inerentes as varições normais de densidade de fluxo no estator. As
perdas no ferro do estator são geralmente desconsideradas por serem pequenas. As perdas por
correntes parasitas ocorrem nos enrolamentos do rotor, sendo da ordem de menos de 0,5% da
potência nominal da máquina e por este motivo, usualmente desprezadas. Por fim, as perdas
no cobre ocorrem devido ao efeito Joule, ocasionado pela resistência do enrolamento do
estator e rotor, sendo definidas por:
2, 3Cu r r rP R I=
(2.68)
2, 3Cu s s sP R I=
(2.69)
A potência transferida do estator para o rotor é chamada de potência de entreferro ou
potência eletromagnética (eP ) sendo definida por:
,e Cu s FeP P P P= − −
(2.70)
Uma vez que potência pode também ser expressa por uma relação entre o torque e a
velocidade angular, pode-se definir o torque eletromagnético gerado no estator e agindo sobre
o rotor, dada pela equação:
260e e s e
nsP T T= =ω π
(2.71)
O torque eletromagnético é o mesmo no estator e no rotor, sendo diferente apenas as
velocidades angulares do rotor e estator devido ao escorregamento, conforme definido pela
equação (2.61). Assim,
(1 ) (1 )m e r e s eP T T s P s= = − = −ω ω
(2.72)

64
A diferença entre a potência eletromagnética e a potência mecânica corresponde às
perdas no cobre do rotor.
2_ 3Cu r e m e r rP P P sP R I′ ′= − = =
(2.73)
Para obter a potência mecânica útil, devem ser consideradas as perdas mecânicas.
_mec u m f wP P P+= −
(2.74)
O torque mecânico útil é então obtido:
_ __ 2 60
m u m um u
r r
P PT
n= =
ω π (2.75)
2.3.6 O Gerador de Indução
A relação torque elétrico/velocidade e torque elétrico/escorregamento, curva
característica de máquinas de indução trifásica é mostrada na Figura 2.10. As máquinas de
indução apresentam tipicamente este comportamento, uma vez que seus parâmetros de projeto
são escolhidos de forma a obter o máximo torque próximo à velocidade síncrona de operação
e com valor igual a duas ou três vezes o valor do torque nominal da máquina [17].
A curva é apresentada em termos da relação r sω ω , sendo rω a velocidade rotória
(ou mecânica) e sω a velocidade estatórica (ou síncrona), e do escorregamento s, todas em
pu. Observa-se que quando a velocidade mecânica é igual à velocidade síncrona da máquina
(100% de sω ), o conjugado mecânico desenvolvido pela máquina é nulo.

65
Figura 2.10 - Curva característica em regime permanente da máquina de indução trifásica.
Relação torque elétrico/velocidade e torque elétrico/escorregamento. Fonte [17].
Observam-se, portanto, três regiões distintas de operação em regime permanente:
• Operação como motor (0 1s< < ): O sentido de rotação do rotor (rω ) é o mesmo do
campo girante (sω ). O torque elétrico (eT ) é positivo (concorda com o sentido da
velocidade síncrona (sω ). A máquina recebe potência elétrica.
• Operação como gerador ( 0s < ): O rotor e o campo girante movem-se no mesmo
sentido, mas a velocidade do rotor (rω ) é maior do que a velocidade síncrona,
ocasionando um escorregamento negativo. O torque elétrico ( eT ) é negativo
(contrário ao sentido da velocidade síncrona sω ). A máquina recebe potência
mecânica e entrega potência elétrica para o sistema ao qual o estator está conectado.
• Operação como freio ( 1s> ): O campo girante gira em sentido oposto ao rotor,
levando a um escorregamento maior do que 1. Isto pode ocorrer quando se faz a
inversão na conexão de 2 fases do estator, provocando a súbita mudança no sentido
de rotação do campo. O conjugado desenvolvido (eT ) é positivo. A máquina recebe
potência elétrica e desenvolve conjugado no sentido contrário ao de rotação,
atuando como freio.

66
Conclui-se então que, se uma máquina de indução for acionada por uma máquina
primária a uma velocidade maior que a frequência síncrona ( sω ), o escorregamento será
negativo e a máquina atuará como gerador. Nesta condição a máquina de indução transforma
a potência mecânica provida à seu eixo pela máquina primária, (turbina hidráulica, turbina
eólica, motor a combustão, etc) em potência elétrica nos terminais do estator.
2.3.7 Operação Isolada do Gerador de Indução
Como um gerador de indução (GI) não possui circuito de campo, ele não pode
produzir a potência reativa necessária à sua magnetização necessitando dessa forma, de uma
fonte externa de potência reativa conectada aos seus terminais para manter seu campo
magnético. Assim, é possível que uma máquina de indução funcione como um gerador
isolado, independentemente de qualquer sistema de potência, desde que sejam usados, por
exemplo, capacitores para fornecer a potência reativa requerida pelo gerador e pelas cargas,
conforme ilustrado na Figura 2.11 [60].
Com a velocidade da máquina fixa, a amplitude da tensão terminal depende do valor
da capacitância e da carga conectada em seus terminais. Entretanto, se a capacitância é
mantida fixa, a tensão decresce com o aumento da carga. Por outro lado, a frequência síncrona
(de saída) varia não somente com a velocidade da máquina, mas também com a carga e a
própria capacitância de excitação [61], [62], [63] e [64].
Figura 2.11 - Gerador de indução no modo de operação isolado.

67
A característica indutiva da máquina assíncrona é representada no seu modelo em
regime permanente pela reatância de magnetização (MX ). Os efeitos da saturação do circuito
magnético da máquina produzem uma relação não linear entre a corrente de magnetização
( mI ) e a tensão de entreferro (eV ).
A curva de magnetização de uma máquina de indução relaciona a tensão terminal da
máquina com a sua corrente de magnetização, sendo esta obtida acionando-se o motor sem
carga por meio de uma fonte de tensão variável, registrando-se diferentes valores de tensão
terminal e os respectivos valores de corrente de estator, obtendo-se assim curva semelhante à
apresentada na Figura 2.12.
Figura 2.12 – Curva de magnetização característica da máquina de indução.
Considerando um GI isolado da rede operando em vazio, a tensão em seus terminais
será determinada pela potência reativa suprida pelo banco de capacitores conectado em
paralelo aos terminais do GI. Esta deve compensar a potência reativa magnetizante do GI,
determinada pela reatância magnetizante na tensão de operação, a qual pode ser obtida a partir
da curva de magnetização e da relação:
1M mX V I=
(2.76)

68
onde 1V é a tensão de operação. Logo:
CA MX X=
(2.77)
1
2CACA
CfX
=π
(2.78)
Graficamente, esta igualdade entre a reatância magnetizante do GI e a reatância
capacitiva de um determinado banco de capacitores com capacitância CAC , pode ser
identificada como o ponto de interseptação entre suas curvas de operação, para determinada
tensão (127 V) e frequência (60 Hz), conforme Figura 2.13.
Figura 2.13 - Ponto de operação para auto-excitação do GI.
A seguir será apresentada a modelagem dos capacitores de excitação e inversor PWM
considerados para o controle do GIAE.

69
2.4 Modelo Dinâmico dos Capacitores de Excitação e Inversor PWM
O modelo dinâmico do sistema composto por gerador de indução, capacitores de
excitação e inversor PWM é obtido com base no diagrama esquemático do circuito
apresentado na Figura 2.1. O sistema proposto é constituído do gerador de indução, banco de
capacitores de excitação, inversor PWM trifásico e filtro de entrada Lf (e resistência interna
Rf). Desta forma, as equações de estados da planta, desprezando as não linearidades do
conversor e a dinâmica do capacitor do barramento CC, podem ser obtidas a partir do circuito
equivalente representado na Figura 2.14.
Figura 2.14 - Circuito equivalente utilizado para obter as equações da planta.
Percebe-se que o gerador de indução foi substituído por fontes ideais de tensão
alternada. Trata-se de uma simplificação adotada na modelagem do sistema considerando
operação em regime permanente e tensões equilibradas produzidas pelo gerador.
Aplicando as leis de Kirchhoff das tensões nas malhas I e II, III e IV da Figura 2.14,
obtém-se as seguintes equações:
0ab Cabv v− = , (2.79)

70
0bc Cbcv v− = , (2.80)
12_ 0pwm Ra La Cab Lb Rbu v v v v v− − − + + + = (2.81)
23_ 0pwm Rb Lb Cbc Lc Rcu v v v v v− − − + + + = (2.82)
Pelas leis de Kirchhoff das correntes no nó 1 tem-se:
0a b ci i i+ + = (2.83)
Portanto, pode-se afirmar que:
0a b cdi di di
dt dt dt+ + = , (2.84)
Assumindo que as resistências Rf e indutâncias Lf do filtro são idênticas, e sendo a
queda de tensão sobre estas definidas por:
Rx f xv R i= , (2.85)
xLx f
div L
dt= (2.86)
onde x representa o sistema de coordenadas a, b e c.
A queda de tensão nas resistências do filtro, a partir da multiplicação de Rf em cada
termo da equação (2.83), tem-se:
0Ra Rb Rcv v v+ + = . (2.87)
Da mesma forma, a queda de tensão nas indutâncias do filtro, multiplicando Lf em
cada termo da equação (2.84), obtém-se:
0La Lb Lcv v v+ + = . (2.88)

71
Reescrevendo as equações (2.81), (2.82), (2.87) e (2.88), na forma matricial, e
isolando os termos referentes a queda de tensão nas resistências e indutâncias do filtro tem-se:
12_
23_
1 1 0
0 1 1
1 1 1 0
Ra La ab pwm
Rb Lb bc pwm
Rc Lc
v v v u
v v v u
v v
− + − − + = − +
. (2.89)
Pré-multiplicado os dois lados da equação (2.89), pela seguinte matriz,
11 1 0
0 1 1
1 1 1
−− −
, (2.90)
obtém-se a seguinte equação na forma matricial:
12_
23_
2 1 11
1 1 13
1 2 1 0
Ra La ab pwm
Rb Lb bc pwm
Rc Lc
v v v u
v v v u
v v
+ − + = − − + − −
. (2.91)
Isolando-se os termos do lado direito da equação (2.91), tem-se:
12_
23_
2 1 2 11 1
1 1 1 13 3
1 2 1 2
Ra Lapwmab
Rb Lbpwmbc
Rc Lc
v vuv
v vuv
v v
+ − − + = − + −
+ − −
. (2.92)
Transformando as grandezas de linha para fase nos termos do lado direito da equação
(2.92), através da matriz de transformação de linha para fase dada na equação abaixo:
1 1 0
0 1 1linha fase
− = −
T , (2.93)
tem-se:

72
1_
2_
3_
2 1 1 2 1 11 1
1 2 1 1 2 13 3
1 1 2 1 1 2
Ra La a pwm
Rb Lb b pwm
Rc Lc c pwm
v v v u
v v v u
v v v u
+ − − − + = − − + − + − − −
(2.94)
Isolando os termos vLx da equação (2.94) e obtendo as correntes ia, ib e ic e suas
derivadas a partir da equação (2.86), obtém-se:
1_
2_
3_
1 0 0 2 1 1 2 1 11 1
0 1 0 1 2 1 1 2 13 3
0 0 1 1 1 2 1 1 2
a
a a pwmfb
b b pwmf f f
c c pwmc
di
dt i v uRdi
i v udt L L L
i v udi
dt
− − − − = − + − − + − − − − −
(2.95)
Pelas leis de Kirchhoff das correntes nos nós 2, 3 e 4 tem-se:
Ca Ga ai i i= + (2.96)
Cb Gb bi i i= + (2.97)
Ca Ga ai i i= + (2.98)
onde:
Ca CaCa
C
dv vi C
dt R= + (2.99)
Cb CbCb
C
dv vi C
dt R= + (2.100)
Cc CcCc
C
dv vi C
dt R= + (2.101)
Substituindo as equações (2.99), (2.100) e (2.101) em (2.96), (2.97) e (2.98),
respectivamente, e isolando os termos em derivada, obtém-se:

73
1 0 0 1 0 0 1 0 01 1 1
0 1 0 0 1 0 0 1 0
0 0 1 0 0 1 0 0 1
Ca
a Ca Ga
Cbb Cb Gb
Cc Cc Gc
Cc
dv
dt i v idv
i v idt C CR C
i v idv
dt
− = + − + −
(2.102)
A partir das equações (2.79) e (2.80) pode-se concluir:
Ca av v= (2.103)
Cb bv v= (2.104)
Cc cv v= (2.105)
Então, a representação por espaço de estados em coordenadas estacionárias abc é dada
por:
x( ) ( ) ( ) ( )abc abc abct t t t= + +A x B u F wɺ , (2.106)
onde:
1
2
3
; ; ;
a
bpwm Ga
cpwm Gb
apwm Gc
b
c
i
iu i
iu i
vu i
v
v
= = =
x u w
(2.107)

74
2 1 10 0
3 3 3
1 2 10 0
3 3 3
1 1 20 0
3 3 3
1 10 0 0 0
1 10 0 0 0
1 10 0 0 0
f
f f f f
f
f f f f
f
f f f fabc
C
C
C
R
L L L L
R
L L L L
R
L L L L
C CR
C CR
C CR
− −− − − −
− − − = − − −
A
(2.108)
2 1 1
1 2 1
1 1 210 0 03
0 0 0
0 0 0
abcfL
− − −
=
B (2.109)
0 0 0
0 0 0
0 0 011 0 0
0 1 0
0 0 1
abc C
=
F (2.110)
A partir das equações de espaço de estados em coordenadas estacionárias abc, fazendo
uso de matrizes de transformações apropriadas, é possível decompor o sistema original em um
sistema normalizado, composto de apenas dois eixos, direto e quadratura, e eliminar os termos
variantes no tempo. Esta técnica é propriamente descrita no Anexo A deste trabalho, obtendo-
se ao final as seguintes matrizes:
( ) ( ) ( ) ( )dq dq dq dq dq dq dqt t t t= + +x A x B u F wɺ . (2.111)
75
_
_
; ; ;
d
q d pwm Gd
dq dq dqd q pwm Gq
q
i
i u i
v u i
v
= = =
x u w
(2.112)
ω 0
ω 0
10 ω
10 ω
f base
f f base
f base
f f basedq
base
base C
base
base C
R v
L L i
R v
L L i
i
Cv CR
i
Cv CR
− − − = − − −
A (2.113)
1 0
0 1
0 0
0 0
basedq
base f
v
i L
− − =
B (2.114)
0 0
0 0
1 0
0 1
basedq
base
i
Cv
=
F (2.115)
Estas equações encerram a etapa de modelagem do sistema, a partir do que torna-se
possível o projeto dos controladores a serem empregados na regulação das grandezas de
freqüência e tensão. Os detalhes e características de projeto dos controladores são o assunto
do capítulo 3 desta dissertação.

76
Capítulo 3
3 PROJETO DOS CONTROLADORES DO SISTEMA E
RESULTADOS DE SIMULAÇÃO
3.1 Introdução
Este capítulo tem por objetivo a descrição do projeto dos controladores escolhidos e
responsáveis pelo controle das váriáveis de interesse do sistema. Para o projeto de
controladores, na maioria das vezes torna-se imprescindível o conhecimento da planta a ser
controlada. No capítulo anterior foi apresentada a modelagem dos três subssistemas
considerados para o sistema proposto: sistema hidráulico, gerador de indução e sistema
elétrico. Estes modelos servirão de base para o projeto e ajuste dos controladores.
A modelagem em partes do sistema foi adotada para efeito de simplificação
matemática e melhor representação da planta, não afetando em nada o projeto dos
controladores. No entanto, para melhor entendimento do sistema proposto, cabe a
representação do sistema completo e a descrição dos componentes de uma forma mais
detalhada.
A Figura 3.1 apresenta o diagrama esquemático do sistema proposto para a micro
central hidrelétrica. Neste diagrama, além dos subsistemas previamente discutidos, percebe-se
a presença de um sistema de controle dedicado ao processamento e controle do sistema,
constituído de diferentes blocos com funções definidas.
Para efeito de análise das características e comportamento do sistema à diferentes
condições de operação e, principalmente auxílio no projeto dos controladores, o sistema
proposto foi implementado em um ambiente próprio de simulação do software Matlab®
chamado Simulink. Neste ambiente, a planta completa do sistema, incluindo sistema
hidráulico, elétrico e de controle, é representada através de diagramas de blocos, cujos blocos
são definidos a partir das equações matemáticas que modelam a planta, conforme descritas no
capítulo 2 desta dissertação.
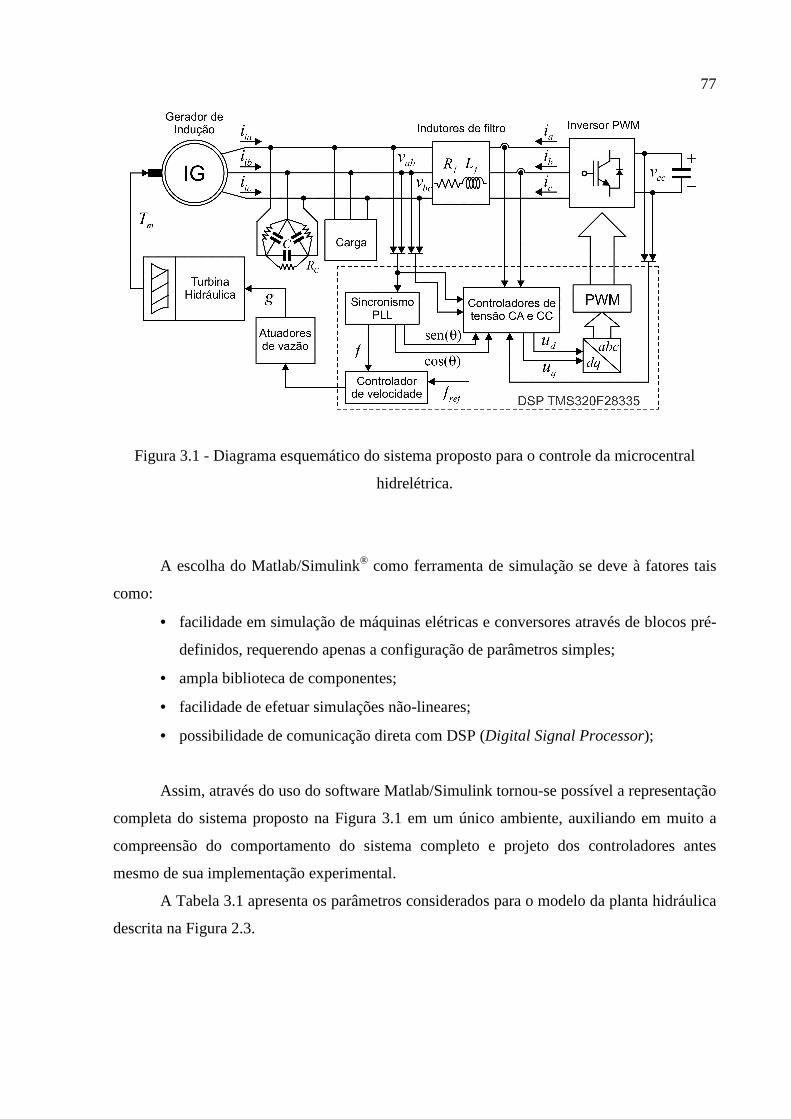
77
Figura 3.1 - Diagrama esquemático do sistema proposto para o controle da microcentral
hidrelétrica.
A escolha do Matlab/Simulink® como ferramenta de simulação se deve à fatores tais
como:
• facilidade em simulação de máquinas elétricas e conversores através de blocos pré-
definidos, requerendo apenas a configuração de parâmetros simples;
• ampla biblioteca de componentes;
• facilidade de efetuar simulações não-lineares;
• possibilidade de comunicação direta com DSP (Digital Signal Processor);
Assim, através do uso do software Matlab/Simulink tornou-se possível a representação
completa do sistema proposto na Figura 3.1 em um único ambiente, auxiliando em muito a
compreensão do comportamento do sistema completo e projeto dos controladores antes
mesmo de sua implementação experimental.
A Tabela 3.1 apresenta os parâmetros considerados para o modelo da planta hidráulica
descrita na Figura 2.3.
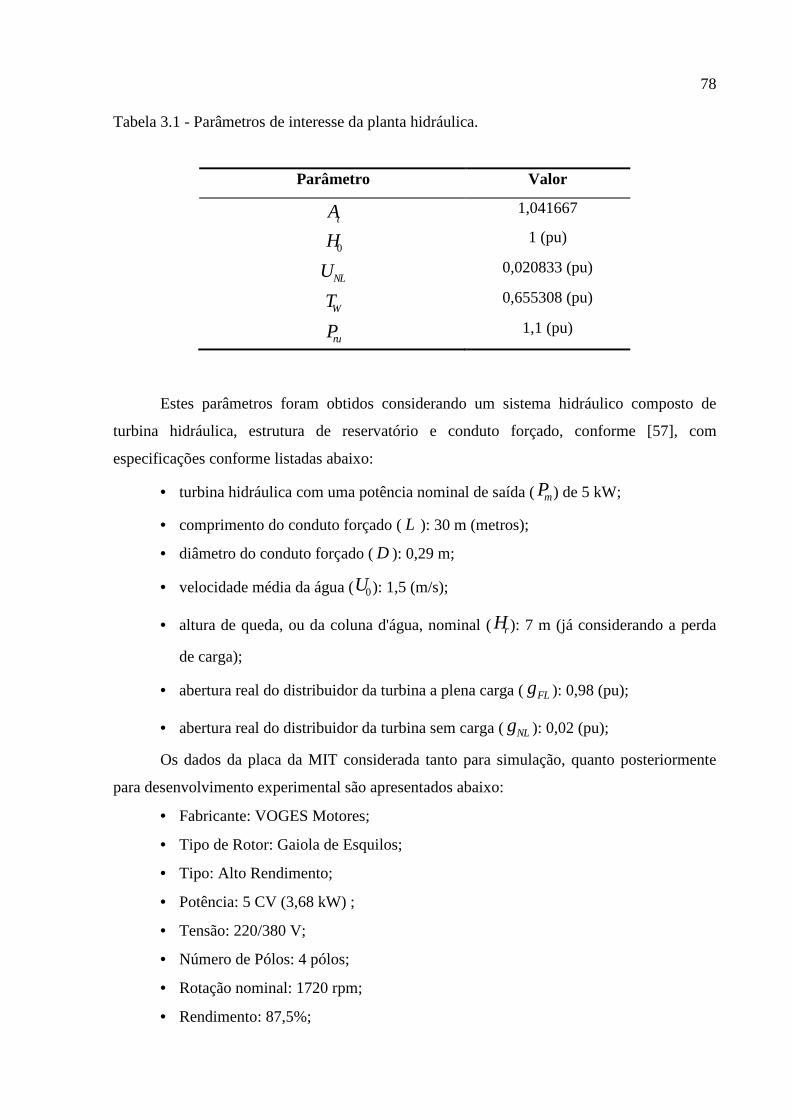
78
Tabela 3.1 - Parâmetros de interesse da planta hidráulica.
Parâmetro Valor
tA 1,041667
0H 1 (pu)
NLU 0,020833 (pu)
WT 0,655308 (pu)
ruP 1,1 (pu)
Estes parâmetros foram obtidos considerando um sistema hidráulico composto de
turbina hidráulica, estrutura de reservatório e conduto forçado, conforme [57], com
especificações conforme listadas abaixo:
• turbina hidráulica com uma potência nominal de saída ( mP ) de 5 kW;
• comprimento do conduto forçado (L ): 30 m (metros);
• diâmetro do conduto forçado (D ): 0,29 m;
• velocidade média da água (0U ): 1,5 (m/s);
• altura de queda, ou da coluna d'água, nominal (rH ): 7 m (já considerando a perda
de carga);
• abertura real do distribuidor da turbina a plena carga ( FLg ): 0,98 (pu);
• abertura real do distribuidor da turbina sem carga ( NLg ): 0,02 (pu);
Os dados da placa da MIT considerada tanto para simulação, quanto posteriormente
para desenvolvimento experimental são apresentados abaixo:
• Fabricante: VOGES Motores;
• Tipo de Rotor: Gaiola de Esquilos;
• Tipo: Alto Rendimento;
• Potência: 5 CV (3,68 kW) ;
• Tensão: 220/380 V;
• Número de Pólos: 4 pólos;
• Rotação nominal: 1720 rpm;
• Rendimento: 87,5%;

79
• Fator de Potência (FP): 0,81;
Com base nos dados de placa e, a partir de ensaios clássicos, conforme descrito em
[65], foram determinados os parâmetros do circuito equivalente do gerador de indução, sendo
estes apresentados na Tabela 3.2.
Tabela 3.2 - Parâmetros do circuito equivalente do motor de indução trifásico.
Parâmetro Valor
1R 0,66 Ω
1X 0,929 Ω
2R 0,25 Ω
2X 0,929 Ω
MX 24,2 Ω
Para efeito de simplificação, as grandezas do sistema serão normalizadas a uma base
comum de forma a se trabalhar com todas as grandezas em pu. Para tanto, são considerados
valores bases para as grandezas de corrente e tensão, a partir das quais podem ser derivadas as
demais. A Tabela 3.3 apresenta os valores base considerados.
Tabela 3.3 - Valores base para a normalização das grandezas do sistema.
Parâmetro Valor
baseV 450 V
basei 20 A
baseZ 22,5 Ω
baseP 9000 W
basef 60 Hz
baseω 376,99 rad/s

80
Em se tratando dos controladores, o controle de frequência e de amplitude das tensões
geradas estão diretamente relacionados ao controle da potência ativa e reativa do sistema,
respectivamente. Sabendo-se que os fluxos de potência ativa e potência reativa em uma rede
de transmissão podem ser considerados independentes um do outro, pode-se empregar ações
de controle distintas para cada um deles, atuando assim de forma independente em cada um
das variáveis de interesse, frequência e amplitude de tensão. Desta forma, ao longo deste
capítulo, serão detalhados os projetos dos controladores individualmente, apresentando as
plantas analisadas, suas características, controladores empregados e parâmetros considerados.
3.2 Auto-excitação do Gerador de Indução
O processo de auto-excitação do gerador de indução operando de forma isolada já foi
devidamente introduzido no item 2.3.7 desta dissertação. Logo, esta seção tem por objetivo
apresentar os resultados de simulação do processo de auto-excitação, estes obtidos a partir do
projeto dos capacitores de excitação.
Para obter um tensão de linha de 220 V, o que corresponde a uma tensão de fase de
127 V, e considerando a curva de magnetização apresentada na Figura 2.13 para o motor de
indução aplicado como GI, a corrente de magnetização a ser considerada deve ser igual à
5,6 A. Sendo o gerador acionado à uma velocidade de 1800 rpm, a frequência da tensão
gerada à vazio (escorregamento praticamente nulo) é de 60 Hz. Logo, a partir das equações
(2.76) a (2.78), obtem-se o valor de capacitância igual à 117 Fµ . Como o banco de
capacitores é conectado em ∆ , o valor das capacitâncias é dividido por três, obtendo-se então
o valor de 39 Fµ . Por não se tratar de um valor comercial de capacitância, adota-se o valor
comercial de 40 Fµ para cada um dos capacitores de excitação.
A Figura 3.2 apresenta a forma de onda das tensões de linha abv e bcv geradas pela
máquina de indução, enquanto que na Figura 3.3 são mostradas as mesmas formas de onda em
um menor período de tempo, já em regime permanente.
Convém ressaltar que foram incluídos valores iniciais de 0,1 A para as correntes no
estator de forma a simular os efeitos do magnetismo residual do gerador de indução.
Acionando o gerador à uma velocidade de 1800 rpm e utilizando um banco de capacitores de
40 Fµ conectado em ∆ , o valor eficaz da tensão de linha na saída do gerador operando sem
carga foi de 223 V em regime permanente.

81
Figura 3.2 - Processo de auto-excitação do gerador de indução: tensão de saída.
Figura 3.3 - Processo de auto-excitação do gerador de indução: Zoom da tensão de saída.
82
3.3 Controle de Frequência
A operação satisfatória de um sistema de potência requer a manutenção praticamente
constante da frequência das tensões geradas. Esta é diretamente dependente da velocidade de
operação do gerador, síncrono ou neste caso assíncrono, a qual deve ser mantida o mais
constante possível mesmo quando sob variações abruptas de carga.
Conclui-se então, que a frequência esta diretamente relacionada ao balanço de
potência ativa do sistema, ou seja, mudanças na demanda de potência ativa, tais como
conexão e desconexão de cargas em um ponto do barramento, refletem em mudanças na
frequência do sistema como um todo.
Assim, a função básica de um controle de frequência está associada ao controle de
balanço da potência ativa, podendo este ser realizado pelo consumo da potência excedente,
através do controle de carga, ou pelo controle da potência gerada.
Conforme apresentado na revisão bibliográfica desta dissertação, item 1.1 , inúmeros
trabalhos foram dedicados ao controle de frequência através do controle de cargas aplicadas
ao sistema. Tais soluções tem como vantagem o baixo custo do sistema a ser implementado.
Entretanto, tais aplicações restringem-se a condições suficientes de armazenamento de água
em reservatórios [47], sem levar em conta a sazonalidade de condições climáticas adequadas,
já que não controlam a vazão da água.
Neste trabalho, entretanto, é proposto o controle de frequência pelo controle de
velocidade da máquina primária, considerada neste caso uma turbina hidráulica. A atuação é
realizada no distribuidor do sistema de geração, por meio de uma servo-válvula e um servo-
motor, que por sua vez atua no controle da vazão da água sobre a turbina. Como vantagem
este sistema pode ser aplicado em sistemas de microgeração onde seja possível controlar a
vazão da água e evitar que em períodos de escassez de água este sistema deixe de operar.
A função primária de um controle de velocidade envolve a realimentação da medida
de frequência, ou variável relacionada, tal como velocidade angular, para o controle da
abertura do distribuidor. A concepção básica de um controlador de velocidade pode ser
melhor ilustrada considerando um sistema isolado de geração alimentando uma carga local,
conforme ilustrado na Figura 3.4.

83
Figura 3.4 - Sistema isolado de geração alimentando carga local. Fonte [59].
Onde:
mT - torque mecânico;
eT - torque elétrico;
mP - potência mecânica;
eP - potência elétrica;
LP - potência elétrica da carga.
Uma eventual mudança de carga é refletida instantaneamente em uma mudança no
torque elétrico eT do gerador. Isto causa uma diferença entre o torque mecânico mT
proveniente da turbina e o torque elétrico eT , o que resulta em variação de velocidade,
conforme determinado pela função de transferência apresentada na Figura 3.5.
Figura 3.5 - Função de transferência relacionando velocidade e torques. Fonte [59].
Onde:
s - Operador de Laplace;
aT - Torque de aceleração (pu);

84
H - Constante de inércia (kg.m²);
r∆ω - Variação da velocidade rotórica (pu).
No item 2.2.3 desta dissertação foi comentado que a turbina hidráulica é um sistema
de fase não-mínima. Esta característica influi diretamente no projeto de um regulador de
velocidade, uma vez que representa uma característica dinâmica da planta a qual deve ser
considerada. Assim, para um desempenho estável do controlador, a função de transferência do
regulador de velocidade deverá possuir uma constante de tempo que retarde seu sinal de saída
(sinal de controle), e conseqüentemente, a atuação do distribuidor, até que a resposta inversa
da potência já tenha se extinguido.
Em [59] é proposta uma função de transferência (FT) para o regulador de velocidade
com o seguinte formato:
1R
TR
sTR
sT+ (3.1)
sendo,
TR - ganho transitório;
RT - tempo de reset;
A disposição do regulador de velocidade em relação aos atuadores é apresentada em
[57] conforme o diagrama em blocos da Figura 3.6. Onde refω e ω são, respectivamente, a
velocidade angular de referência do gerador em pu (portanto igual a 1) e sua velocidade
angular real, também em pu.
Este diagrama em blocos pode ser simplificado, alocando-se o controlador não mais na
malha de realimentação, e sim na malha direta, conforme Figura 3.7.
Ainda em [57], é mostrado que esta função de transferência do controlador em malha
direta tem as características de um controlador proporcional-derivativo (PD), podendo então
ser substituída pela seguinte FT:
1d
p
k sk
Ns+
+ (3.2)

85
sendo,
pk - ganho proporcional;
dk - ganho derivativo;
N - constante de tempo derivativo;
Figura 3.6 - Diagrama em blocos do regulador de velocidade em conjunto com os atuadores
da turbina hidráulica. Fonte [57].
Figura 3.7 - Diagrama em blocos da nova configuração do regulador de velocidade (na malha
direta) em conjunto com os atuadores da turbina hidráulica. Fonte [57].
Considerando a ação integradora presente na FT dos atuadores, o emprego de um
controlador PD atende as necessidades de regulagem em regime transitório.
Para o projeto dos ganhos do controlador, faz-se necessário o conhecimento dos parâmetros
da planta hidráulica, especialmente os parêmetros dos atuadores. Em virtude da ausência de
dados reais sobre os atuadores do sistema hidráulico, seus parâmetros foram baseados em
86
faixas de operação considerando como base dados existentes em [59]. A Tabela 3.4 apresenta
os parâmetros considerados para os atuadores da planta hidráulica.
Tabela 3.4 - Parâmetros dos atuadores considerados para o projeto do controlador de
velocidade.
Parâmetro Valor
aK 8
GT 0,01
Conforme discutido anteriormente e evidenciado na Figura 3.5, a velocidade do
conjunto gerador está diretamente relacionada com o torque mecânico, e consequentemente
com a potência mecânica, desenvolvido pela turbina hidráulica. Da mesma forma, percebe-se
uma relação direta entre a potência mecânica e a abertura do distribuidor, ou seja, ambos
apresentam curvas semelhantes, divergindo apenas em amplitude e devido à característica de
fase não mínima da turbina hidráulica. A Figura 3.8 apresenta dados de simulação
comparando as respostas de abertura do distribuidor e de torque mecânico da turbina.
Logo, é possível projetar o regulador de velocidade a partir apenas da característica
dinâmica dos atuadores e considerando o restante da planta como um ganho. A função de
transferência em malha aberta da planta a ser considerada para projeto do regulador de
velocidade é apresentada a seguir:
2( ) a
freqG
KG s
T s s=
+ (3.3)
Substituindo os parâmetros apresentados na Tabela 3.4, têm-se:
2
8( )
0,01freqG ss s
=+
(3.4)
Com base na FT da planta, pode se projetar o regulador de velocidade com as
características de um controlador PD. Considerando que os parâmetros da planta a ser
controlada são conhecidos, o software Matlab apresenta um ambiente de projeto chamado

87
Sisotool, no qual é possível sintonizar os ganhos do controlador de forma a obter a resposta
desejada. Desta forma, foi definido o seguinte controlador, conforme os parâmetros de projeto
indicados na Tabela 3.4.
0,9( ) 1,5
1 0,01freq
sC s
s= +
+ (3.5)
Figura 3.8 - Dados de simulação - Relação entre abertura do distribuidor (g ) e torque
mecânico da turbina (mT ).
Tabela 3.2 - Parâmetros de projeto dos controladores PD do regulador de velocidade.
Parâmetro Valor
Ganho proporcional (pk ) 1,5
Ganho derivativo (dk ) 0,9
Constante de tempo derivative (N ) 0,01

88
Através da discretização das FT’s da planta e do controlador pelo método First Order
Holder (FOH), obtém-se as seguintes equações:
6 2 6 6
2
1,33.10 5,307.10 1,323.10( )
1,99 0,99freq
z zG z
z z
− − −+ +=− +
(3.6)
91,05 91,04( )
0,99freq
zC z
z
−=−
(3.7)
A Figura 3.9 apresenta o diagrama de Bode da planta considerada para o projeto do
controlador de frequência, indicada na equação (3.4), enquanto que a Figura 3.10 mostra o
lugar das raízes desta mesma planta. As Figura 3.11 e Figura 3.12 apresentam,
respectivamente, o diagrama de Bode da malha de frequência em malha fechada e o lugar das
raízes da malha de frequência em malha aberta já considerando o controlador da equação
(3.5).
Figura 3.9 - Diagrama de Bode da planta da malha de frequência.

89
Figura 3.10 - Lugar das raízes da planta da malha de frequência.
Figura 3.11 - Diagrama de Bode da malha de frequência em malha fechada.
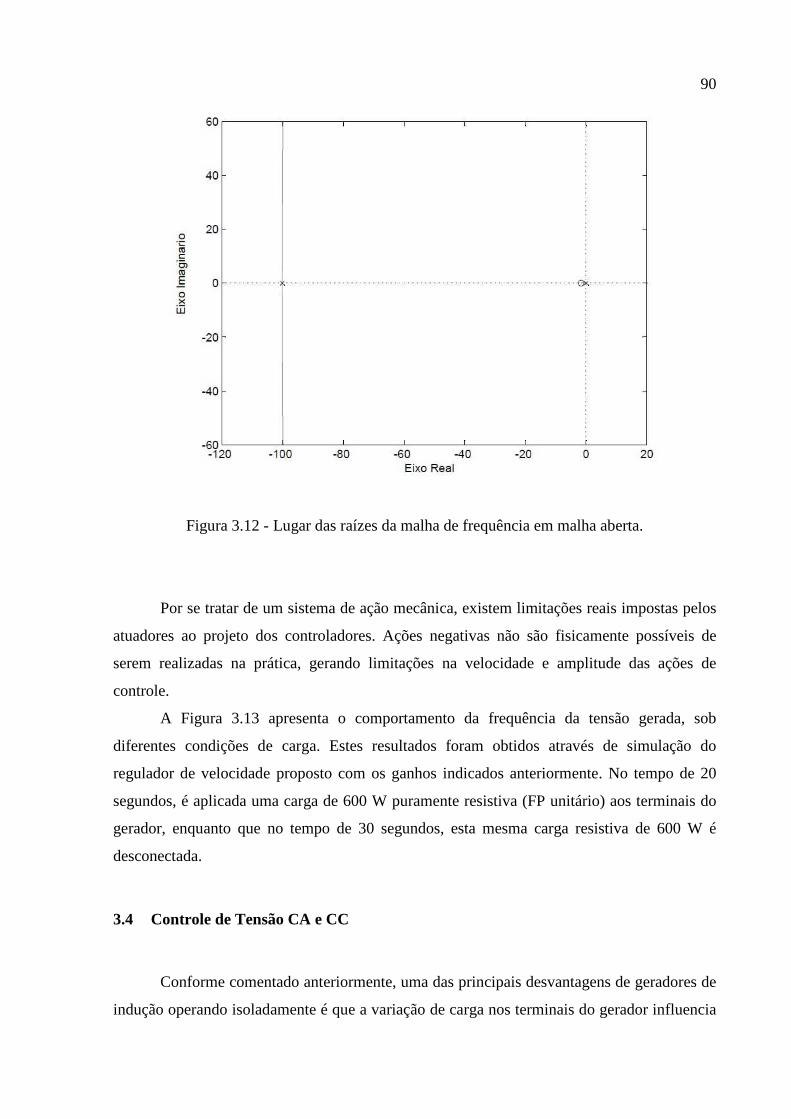
90
Figura 3.12 - Lugar das raízes da malha de frequência em malha aberta.
Por se tratar de um sistema de ação mecânica, existem limitações reais impostas pelos
atuadores ao projeto dos controladores. Ações negativas não são fisicamente possíveis de
serem realizadas na prática, gerando limitações na velocidade e amplitude das ações de
controle.
A Figura 3.13 apresenta o comportamento da frequência da tensão gerada, sob
diferentes condições de carga. Estes resultados foram obtidos através de simulação do
regulador de velocidade proposto com os ganhos indicados anteriormente. No tempo de 20
segundos, é aplicada uma carga de 600 W puramente resistiva (FP unitário) aos terminais do
gerador, enquanto que no tempo de 30 segundos, esta mesma carga resistiva de 600 W é
desconectada.
3.4 Controle de Tensão CA e CC
Conforme comentado anteriormente, uma das principais desvantagens de geradores de
indução operando isoladamente é que a variação de carga nos terminais do gerador influencia

91
consideravelmente a amplitude da tensão gerada pela máquina de indução, mesmo que a
velocidade do rotor seja mantida constante. Para ilustrar esta característica, a Figura 3.14
apresenta o comportamento da tensão gerada durante a conexão de uma carga de
aproximadamente 1 kW e fator de potência unitário. Este resultado foi obtido sem controle
algum sobre a amplitude da tensão gerada. Foi mantido apenas o controle de frequência,
conforme item anterior, para regulação da velocidade a um valor constante, neste caso, 1800
rpm.
A amplitude da tensão de saída varia significativamente com a mudança da carga. Essa
variação será mais significativa para cargas indutivas, pois o banco de capacitores usados para
a excitação do gerador fornece parte de sua energia reativa para a carga, reduzindo a energia
reativa fornecida ao gerador e, portanto, reduzindo a amplitude da tensão gerada. Por outro
lado, a tensão de saída tende a aumentar quando a carga for de característica capacitiva, pois o
gerador de indução recebe uma maior quantidade de energia reativa. É importante salientar
que existe uma carga máxima que o gerador suporta, sendo que a partir desse ponto a
amplitude da tensão cai significativamente ou até mesmo se reduz a zero, caracterizando a
perda de excitação do gerador de indução.
Figura 3.13 – Frequência das tensões geradas sob diferentes condições de carga.
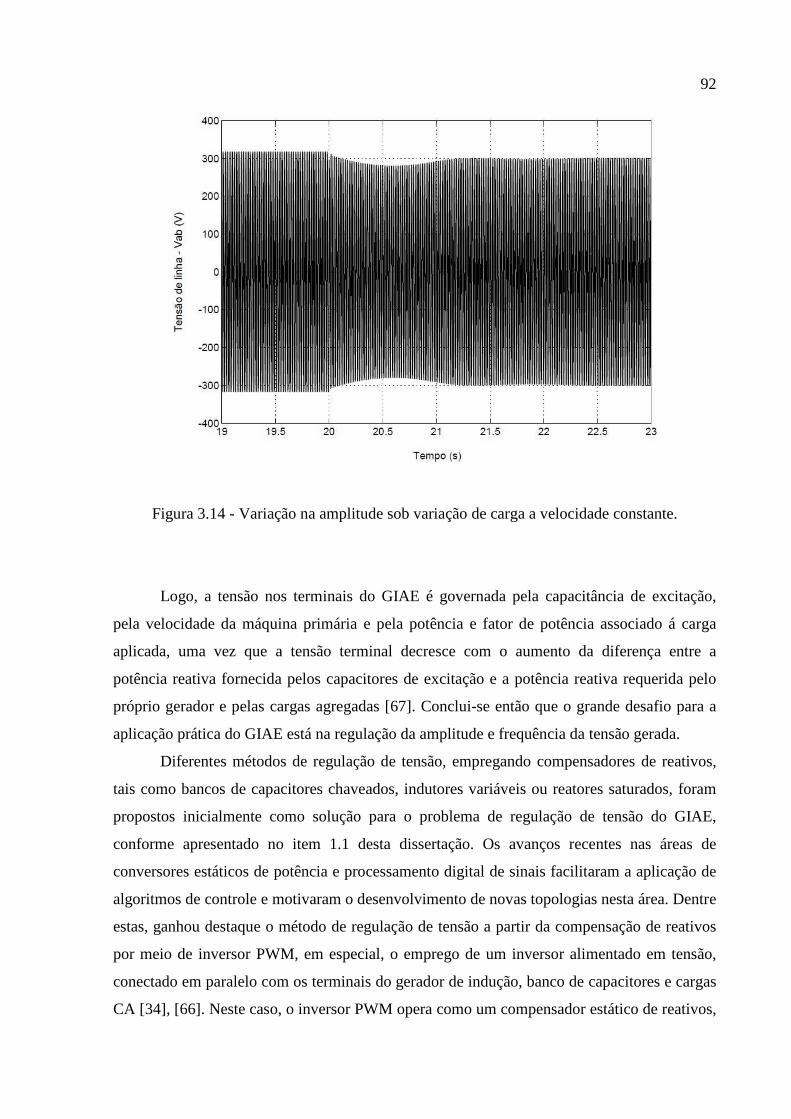
92
Figura 3.14 - Variação na amplitude sob variação de carga a velocidade constante.
Logo, a tensão nos terminais do GIAE é governada pela capacitância de excitação,
pela velocidade da máquina primária e pela potência e fator de potência associado á carga
aplicada, uma vez que a tensão terminal decresce com o aumento da diferença entre a
potência reativa fornecida pelos capacitores de excitação e a potência reativa requerida pelo
próprio gerador e pelas cargas agregadas [67]. Conclui-se então que o grande desafio para a
aplicação prática do GIAE está na regulação da amplitude e frequência da tensão gerada.
Diferentes métodos de regulação de tensão, empregando compensadores de reativos,
tais como bancos de capacitores chaveados, indutores variáveis ou reatores saturados, foram
propostos inicialmente como solução para o problema de regulação de tensão do GIAE,
conforme apresentado no item 1.1 desta dissertação. Os avanços recentes nas áreas de
conversores estáticos de potência e processamento digital de sinais facilitaram a aplicação de
algoritmos de controle e motivaram o desenvolvimento de novas topologias nesta área. Dentre
estas, ganhou destaque o método de regulação de tensão a partir da compensação de reativos
por meio de inversor PWM, em especial, o emprego de um inversor alimentado em tensão,
conectado em paralelo com os terminais do gerador de indução, banco de capacitores e cargas
CA [34], [66]. Neste caso, o inversor PWM opera como um compensador estático de reativos,

93
controlando a energia reativa do sistema, através da injeção de correntes, para regular a tensão
de saída do gerador. Esta topologia, no entanto, exige a aplicação de controladores dedicados
ao controle das tensões geradas devidamente projetados com base na planta considerada.
A Figura 3.15 apresenta o diagrama simplificado do sistema de regulação de tensão
proposto neste trabalho. Com pequenas modificações, este sistema foi inicialmente proposto
em [67], sendo posteriormente utilizado em outras publicações [68], [69], [70].
Figura 3.15 - Diagrama simplificado do sistema de geração e regulação de tensão.
O sistema é composto por um gerador de indução com rotor gaiola de esquilo,
excitado por um banco de capacitores trifásico conectado em ∆ , e por um inversor PWM
alimentado em tensão. O barramento CC do inversor é composto por capacitores eletrolíticos.
Os terminais do gerador de indução são conectados ao lado CA do inversor através de
indutores, que, juntamente com o banco de capacitores de excitação do GI, compõem um
filtro de segunda-ordem trifásico que promovem a redução de harmônicos de alta frequência
produzidos pelo inversor. O valor dos indutores de filtro define a frequência de ressonância do
filtro, uma vez que o valor dos capacitores é fixado pelas características magnetizantes do GI.
A equação abaixo possibilita o cálculo dos indutores.

94
1
2f
LC=
π (3.8)
Adotando-se o valor de 2,5 mH para os indutores de filtro, obtêm-se a frequência de
corte de 500 Hz, sendo este valor considerado suficiente para filtrar as componentes na
frequência de 10 kHz provenientes do inversor.
O sistema de regulação de tensão requer a utilização de cinco sensores, sendo um para
medição da tensão CC do barramento do inversor, dois para a medição das correntes de saída
do inversor e outros dois para a medição das tensões de linha de saída do GIAE. Note que,
não é utilizado qualquer sensor mecânico, o que reduz consideravelmente o custo do
controlador desenvolvido.
O sistema de controle é desenvolvido utilizando um sistema de coordenadas síncronas
dq, sendo esta uma prática usual para aplicações com máquinas elétricas trifásicas, uma vez
que o problema de rastreamento é modificado para um problema de regulação, o que torna
possível o uso de controladores do tipo proporcional-integral (PI) para regular as variáveis de
interesse. Portanto, as variáveis de realimentação medidas no sistema abc devem ser
transformadas para os eixos dq, utilizando a seguinte transformação:
6 6 2 6 2
3 6 2 6 2
6 6 2 6 2
3 6 2 6 2
dq
cos( ) cos( ) s en( ) cos( ) s en( )T
sen( ) sen( ) cos( ) sen( ) cos( )
− + − −
= − + −
θ θ θ θ θ
θ θ θ θ θ
(3.9)
Esta matriz é obtida a partir da multiplicação das matrizes (A.10) e (A.21)
apresentadas no Anexo A desta dissertação. A aplicação desta matriz na transformação de um
sistema de coordenadas abc para o sistema de coordenadas dq segue o seguinte princípio:
dq dq abcf T f= ⋅
(3.10)
sendo T
dq d qf f f = e T
abc a b cf f f f= , definidas como vetores de variáveis quaisquer
de interesse em coordenadas síncronas dq e coordenadas abc, respectivamente.
Percebe-se que a matriz de transformação da equação (3.9) exige o conhecimento do
ângulo de sincronismo θ ou dos sinais seno e cosseno. Para obtenção destes sinais é utilizado

95
o método de sincronismo conforme descrito no Anexo B desta dissertação. É importante
salientar que o desempenho do sistema de controle é diretamente influenciado pelo
desempenho do método de sincronismo aplicado, resultando em tensões de saída distorcidas
e/ou desequilibradas, decorrentes de um ângulo defasado ou de sinais seno e cosseno não
senoidais, se o método de sincronismo não for adequado.
A partir do conhecimento das variáveis de interesse em coordenadas síncronas dq,
torna-se possível a implementação do sistema de controle do inversor PWM. A Figura 3.16
apresenta o diagrama de blocos simplificado do sistema de controle do inversor PWM.
Figura 3.16 - Diagrama de blocos do sistema de controle do inversor PWM.
O controle do barramento CC é realizado através do controle da corrente do inversor
no eixo d ( di ), realizado através de duas malhas de controle, uma externa de tensão, e outra
interna de corrente. A malha externa de tensão é composta por um controlador PI, cuja
entrada é o erro entre a tensão CC do barramento do inversor ( ccv ) e seu valor de referência
(*
ccv ), gerando em sua saída a corrente de referência no eixo d (*
di ). Enquanto que a malha
interna de corrente emprega um segundo controlador PI cuja entrada é o sinal de erro
proveniente da comparação entre a corrente de referência obtida da malha externa de tensão
(*
di ) e a corrente no eixo d medida (di ).
O controle da amplitude das tensões de saída do sistema de geração é realizado de
forma análoga, através do controle da corrente fornecida pelo inversor no eixo q ( qi ), também
realizado através de duas malhas de controle, uma externa de tensão, e outra interna de

96
corrente. A malha externa de tensão também composta por um controlador PI tem como
entrada o erro entre a tensão de saída do gerador no eixo d ( dv ) e seu valor de referência
(*
dv ), gerando em sua saída a corrente de referência no eixo q ( *qi ). Composta também por um
controlador PI, a malha interna de corrente possui como entrada o sinal de erro proveniente da
comparação entre a corrente de referência obtida da malha externa de tensão (*qi ) e a corrente
no eixo q medida (qi ). Os sinais de saída das duas malhas de corrente são os sinais de controle
em eixos dq ( du e qu ).
3.4.1 Projeto dos controladores das malhas internas de corrente
O projeto dos controladores PI aplicados à malha interna de corrente do sistema de
controle do inversor PWM requer o conhecimento da planta, mais precisamente, da FT
relacionando a entrada e saída da planta.
No item 2.4 desta dissertação foi obtido o modelo dinâmico do sistema incluindo
gerador de indução, capacitores de excitação, inversor PWM e filtros de saída do inversor. Ao
final da seção, foram apresentadas as equações de espaço de estados (2.111) a (2.115) que
descrevem o modelo do sistema em coordenadas síncronas dq.
A partir destas equações, e dos parâmetros considerados e apresentado no item 3.1
desta dissertação, é possível obter as FT que relacionam as correntes no eixo dq ( di e qi ) com
os sinais de controle também no eixo dq ( du e qu ):
5
2 5
9000 1,08 10( )
24 1,423 10d
di
d
i sG s
u s s
− − ×= =+ + ×
(3.11)
5
2 5
9000 1,08 10( )
24 1,423 10q
qi
q
i sG s
u s s
− − ×= =+ + ×
(3.12)
A igualdade entre as FT das duas malhas se deve à simetria das matrizes de espaço de
estados que definem o sistema.
A malha interna de controle de corrente pode então ser ilustrada conforme Figura 3.17.

97
Figura 3.17 – Digramas de blocos das malhas internas de controle de corrente.
Novamente emprega-se o Matlab® no projeto dos controladores PI aplicados nas
malhas internas de controle do inversor, obtendo-se como resultado a seguinte função de
transferência:
105( ) 0,2888iC s
s= − − (3.13)
Os parâmetros considerados no projeto dos controladores PI são apresentados na
Tabela 3.3.
Tabela 3.3 - Parâmetros de projeto dos controladores PI das malhas internas.
Parâmetro Valor
Frequência de chaveamento 10 kHz
Ganho proporcional (pk ) -0,2888
Ganho integral ( ik ) -105
Aplicando o método de discretização FOH às FT da planta e do controlador, obtêm-se
as seguintes equações no domínio Z, que relacionam as correntes no eixo dq ( di e qi ) com as
ações de controle também no eixo dq ( du e qu ):
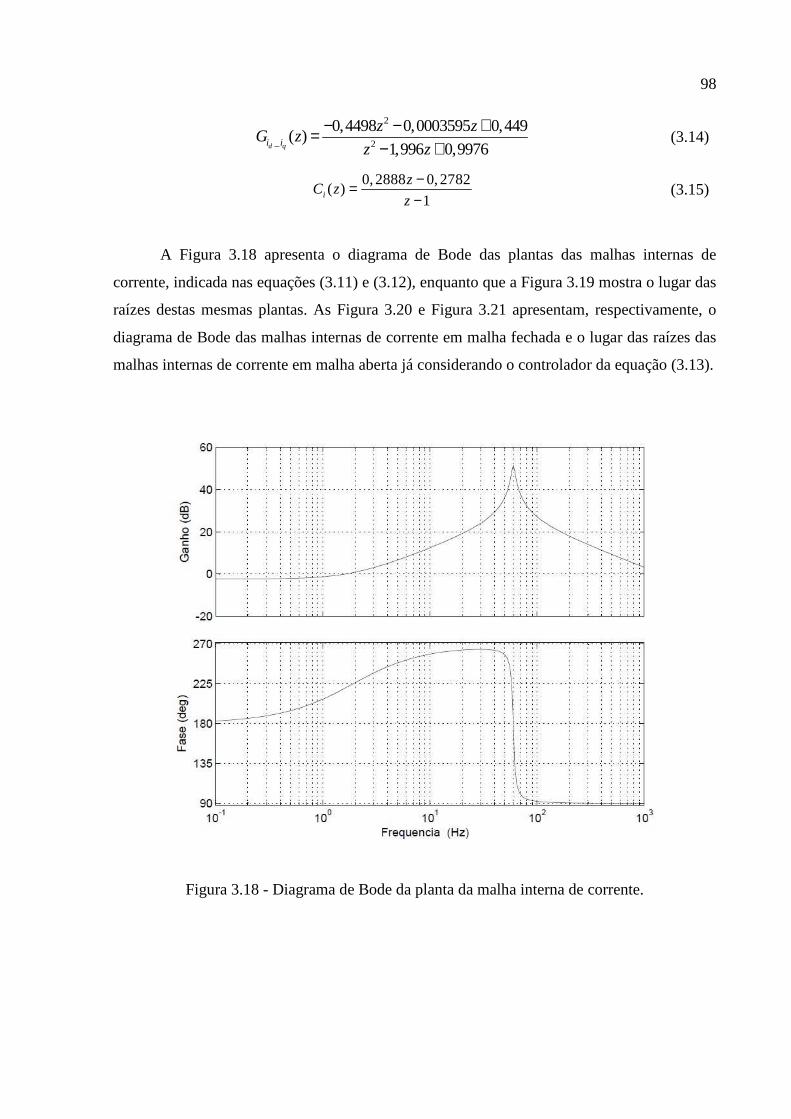
98
2
_ 2
0,4498 0,0003595 0,449( )
1,996 0,9976d qi i
z zG z
z z
− − +=− +
(3.14)
0,2888 0,2782( )
1i
zC z
z
−=−
(3.15)
A Figura 3.18 apresenta o diagrama de Bode das plantas das malhas internas de
corrente, indicada nas equações (3.11) e (3.12), enquanto que a Figura 3.19 mostra o lugar das
raízes destas mesmas plantas. As Figura 3.20 e Figura 3.21 apresentam, respectivamente, o
diagrama de Bode das malhas internas de corrente em malha fechada e o lugar das raízes das
malhas internas de corrente em malha aberta já considerando o controlador da equação (3.13).
Figura 3.18 - Diagrama de Bode da planta da malha interna de corrente.

99
Figura 3.19 – Lugar das raízes da planta da malha interna de corrente.
Figura 3.20 - Diagrama de Bode da malha interna de corrente em malha fechada.

100
Figura 3.21 - Lugar das raízes da malha interna de corrente em malha aberta.
A resposta dos controladores da malha interna de controle pode ser simulada testando-
se a capacidade do controlador em seguir uma referência ao degrau. Mede-se então uma
tensão para obtenção dos sinais de sincronismo, necessários para transformação das variáveis,
e as correntes do inversor para obtenção do valor do erro de entrada dos controladores.
Inicialmente fixados, os valores de referência das correntes em eixo dq, *
di e *qi ,
podem ser alterados de forma a exigir ação dos controladores na atualização dos sinais de
controle, du e qu , de forma a zerar o erro existente entre o sinal de referência e as correntes
medidas, di e qi . A Figura 3.22 apresenta a resposta dos controladores à degraus de variações
nos sinais de referência.

101
Figura 3.22 - Resposta dos controladores das malhas internas de controle de tensão à degraus
nos sinais de referência di
∗ e qi
∗ .
3.4.2 Projeto do controlador da malha externa de tensão CC
O projeto do controlador é baseado na equação dinâmica de balanço de potências,
conforme [71], para o circuito da Figura 3.15. Logo:
_capacitor barramento CAP P= − (3.16)
ou ainda,
( ) ( ) ( ) ( ) ( )( )2
1
2cc
cc d d q q
dv tC v t i t v t i t
dt
= − +
(3.17)
102
Assumindo para o caso em questão que, o inversor PWM consome somente uma
pequena parcela de potência ativa, e que as tensões da rede são equilibradas e sem
harmônicos, tem-se que 0qv = . Logo, a equação (3.17), torna-se:
( ) ( ) ( )( )2
1
2cc
cc d d
dv tC v t i t
dt
= −
(3.18)
Agora, normalizando a equação (3.18), multiplicando ambos os lados da mesma por
21 basev tem-se:
( ) ( ) ( )21
2ccn dn
cc dbase
dv t v tC i t
dt v
= −
(3.19)
onde 2 2 2
ccn cc basev v v= e dn d basev v v= .
Aplicando-se a transformada de Laplace obtêm-se a seguinte equação:
2
2cc dn
ccn dbase
C vv i
s v=− (3.20)
Rearranjando os termos da equação (3.20) e multiplicando por basev , obtêm-se a FT da
planta de controle do barramento CC:
2
( )cc
cc cc dnv
d ccn
v C vG s
i s v= = − (3.21)
Considerando-se os parâmetros definidos para a planta, obtem-se a seguinte FT:
212,75( )
cc
ccv
d
vG s
i s
−= =
(3.22)

103
A malha externa de controle da tensão CC pode então ser ilustrada conforme Figura
3.23.
Figura 3.23 - Diagrama de blocos da malha externa de controle da tensão CC.
Através do ambiente Sisotool do Matlab, projeta-se o controlador PI a ser empregado,
conforme equação abaixo:
4020( ) 2,68
ccvC ss
= − − (3.23)
Os parâmetros considerados no projeto do controlador PI são apresentados na Tabela
3.4.
Tabela 3.4 - Parâmetros de projeto do controlador PI da malha externa de tensão CC.
Parâmetro Valor
Frequência de chaveamento 10 kHz
Ganho proporcional (pk ) -2,68
Ganho integral ( ik ) -4020
Através da discretização das FT’s da planta e do controlador pelo método FOH,
obtem-se as seguintes equações:
0,01065 0.01063( )
1ccv
zG z
z
− −=−
(3.24)
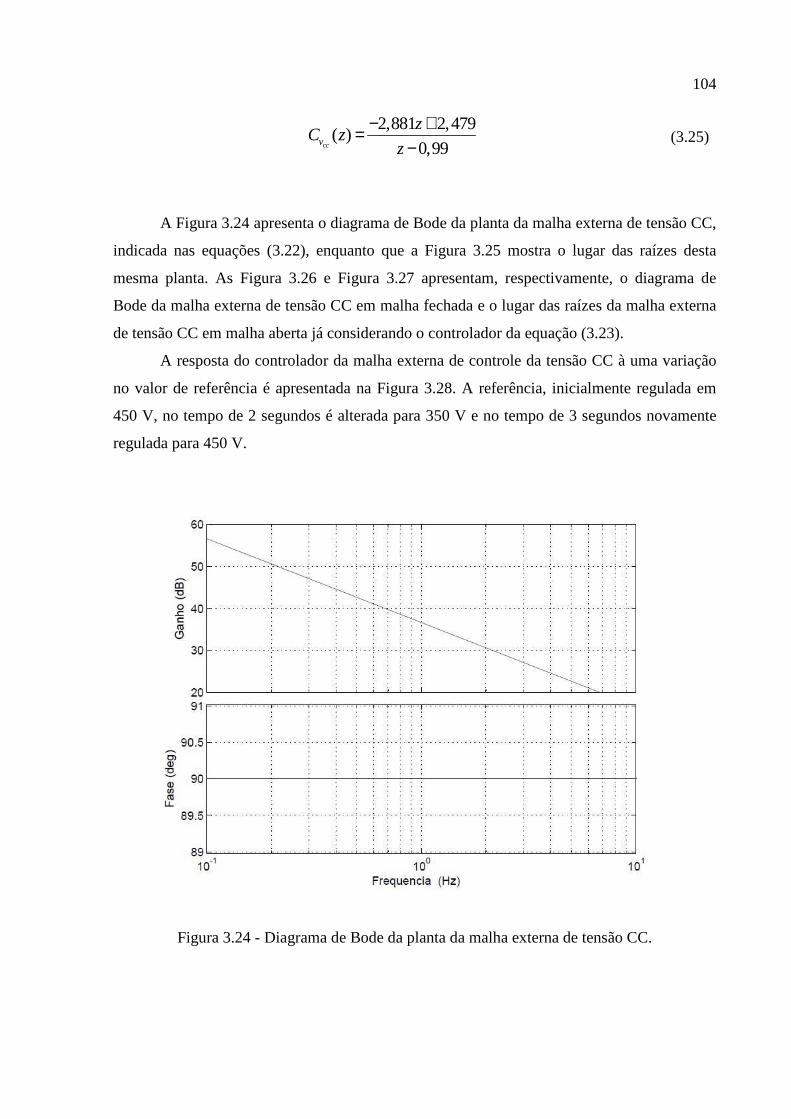
104
2,881 2,479( )
0,99ccv
zC z
z
− +=−
(3.25)
A Figura 3.24 apresenta o diagrama de Bode da planta da malha externa de tensão CC,
indicada nas equações (3.22), enquanto que a Figura 3.25 mostra o lugar das raízes desta
mesma planta. As Figura 3.26 e Figura 3.27 apresentam, respectivamente, o diagrama de
Bode da malha externa de tensão CC em malha fechada e o lugar das raízes da malha externa
de tensão CC em malha aberta já considerando o controlador da equação (3.23).
A resposta do controlador da malha externa de controle da tensão CC à uma variação
no valor de referência é apresentada na Figura 3.28. A referência, inicialmente regulada em
450 V, no tempo de 2 segundos é alterada para 350 V e no tempo de 3 segundos novamente
regulada para 450 V.
Figura 3.24 - Diagrama de Bode da planta da malha externa de tensão CC.

105
Figura 3.25 - Lugar das raízes da planta da malha externa de tensão CC.
Figura 3.26 - Diagrama de Bode da malha externa de tensão CC em malha fechada.
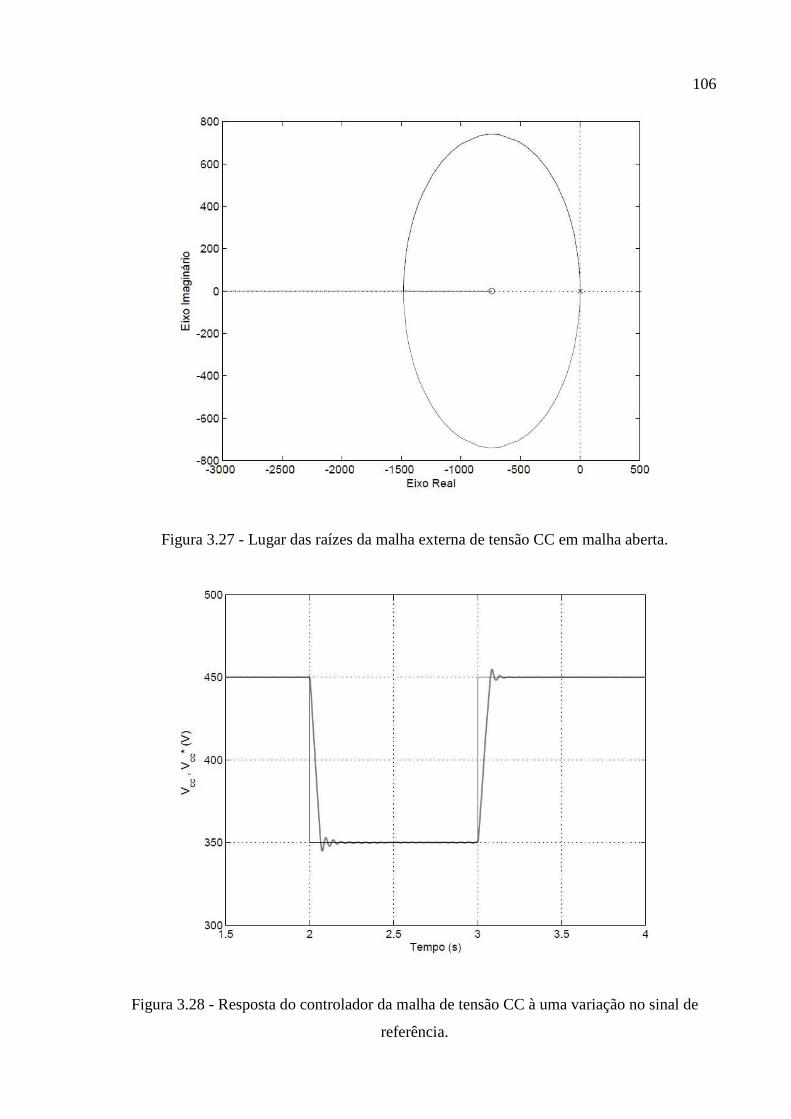
106
Figura 3.27 - Lugar das raízes da malha externa de tensão CC em malha aberta.
Figura 3.28 - Resposta do controlador da malha de tensão CC à uma variação no sinal de
referência.

107
3.4.3 Projeto do controlador da malha externa de tensão CA
Assim como as malhas internas de controle, a FT que descreve o comportamento da
planta da malha externa de controle da tensão CA é obtida a partir das equações de espaço de
estados (2.111) a (2.115), apresentadas no item 2.4 desta dissertação.
Sabendo-se que o controle da amplitude da tensão CA gerada está associada ao
balanço da potência reativa do sistema, a qual está diretamente relacionada ao controle da
corrente no eixo q, a FT obtida da planta relaciona dv e qi . Considerando-se os parâmetros
definidos para a planta, obtem-se a seguinte FT:
2 7
279,3( )
0,1538 3,948 10d
dv
q
vG s
i s s
−= =+ + ×
(3.26)
A malha externa de controle da tensão CA pode então ser ilustrada conforme Figura
3.29.
Figura 3.29 – Diagrama de blocos da malha externa de controle da tensão CA.
Através do ambiente Sisotool do Matlab, projeta-se o controlador PI a ser empregado,
conforme equação abaixo:
20( ) 0,151
dvC ss
= − − (3.27)
Os parâmetros considerados no projeto do controlador PI são apresentados na Tabela
3.5.

108
Tabela 3.5 - Parâmetros de projeto do controlador PI da malha externa de tensão CA.
Parâmetro Valor
Frequência de chaveamento 10 kHz
Ganho proporcional (pk ) -0,151
Ganho integral ( ik ) -20
Através da discretização das FT’s da planta e do controlador pelo método FOH,
obtém-se as seguintes equações:
7 2 6 7
2
4,564.10 1,79.10 4,564.10( )
1,618 1dv
z zG z
z z
− − −− − −=− +
(3.28)
0,151 0,149( )
1dv
zC z
z
− +=−
(3.29)
A Figura 3.30 apresenta o diagrama de Bode da planta da malha externa de tensão CA,
indicada nas equações (3.26), enquanto que a Figura 3.31 mostra o lugar das raízes desta
mesma planta. As Figura 3.32 e Figura 3.33 apresentam, respectivamente, o diagrama de
Bode da malha externa de tensão CA em malha fechada e o lugar das raízes da malha externa
de tensão CA em malha aberta já considerando o controlador da equação (3.27).
A resposta do controlador da malha externa de controle da tensão CA à uma variação
no valor de referência é apresentada na Figura 3.34. A referência, inicialmente regulada em
220 V, no tempo de 4,5 segundos é alterada para 200 V, voltando novamente a ser regulada
em 220 V no tempo de 7 segundos.
A Figura 3.35 apresenta o comportamento da tensão gerada, durante a conexão e
desconexão de uma carga de 600 W puramente resistiva (FP unitário) aos terminais do
gerador. A conexão da carga ocorre no tempo de 16 s enquanto que a desconexão ocorre no
tempo de 17 s. Mostrando um desempenho adequado para o controlador projetado.
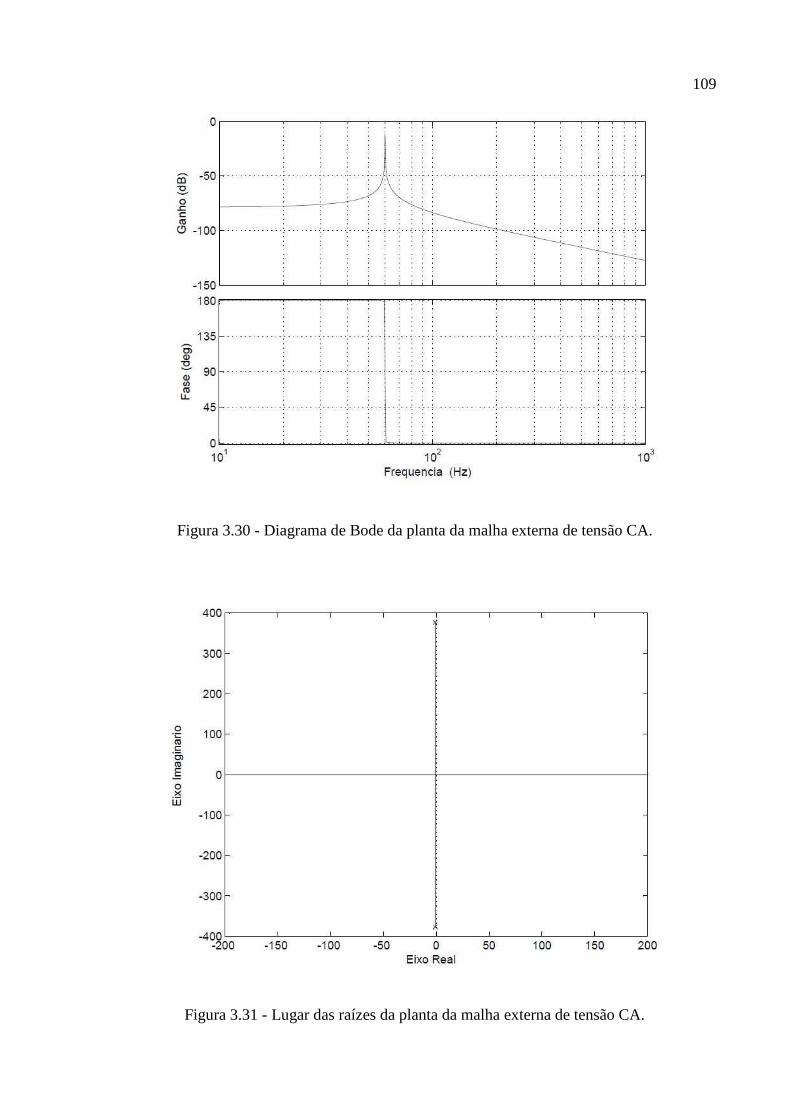
109
Figura 3.30 - Diagrama de Bode da planta da malha externa de tensão CA.
Figura 3.31 - Lugar das raízes da planta da malha externa de tensão CA.
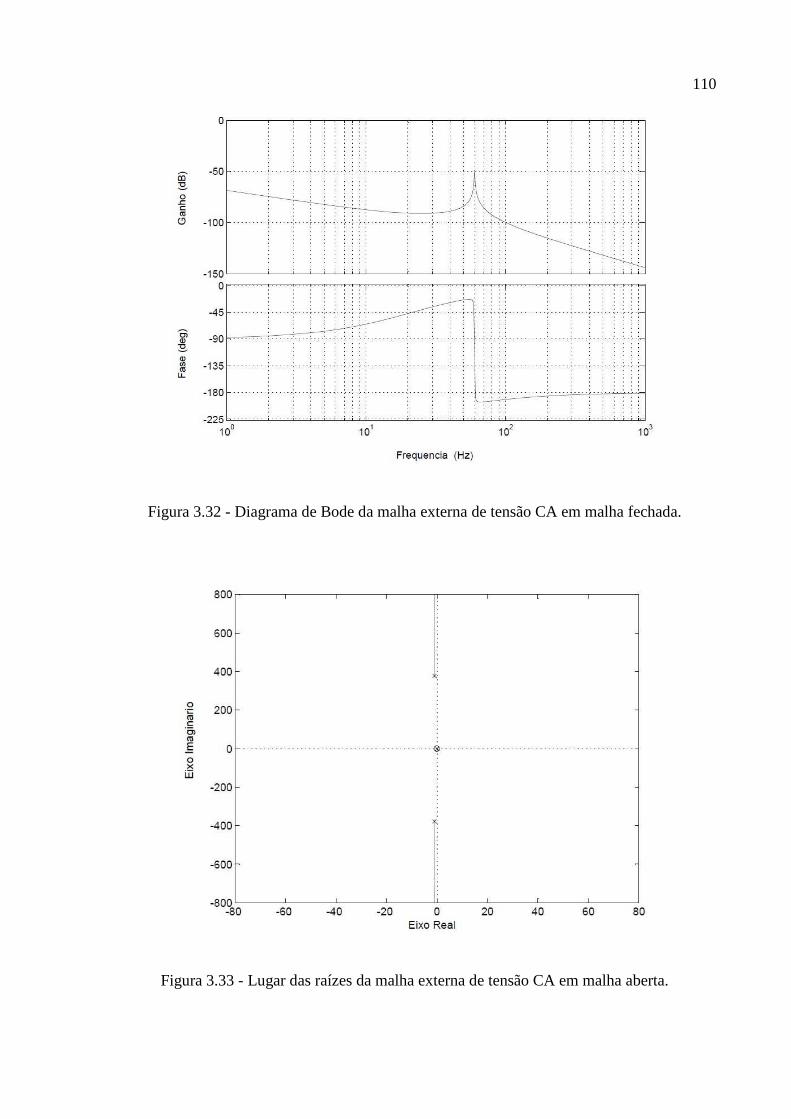
110
Figura 3.32 - Diagrama de Bode da malha externa de tensão CA em malha fechada.
Figura 3.33 - Lugar das raízes da malha externa de tensão CA em malha aberta.

111
Figura 3.34 - Resposta do controlador da malha de tensão CA à uma variação no sinal de
referência.
Figura 3.35 - Resposta do controle de tensão à variações de carga – conexão e desconexão de
carga puramente resistiva de 600 W.
112
Capítulo 4
4 DESCRIÇÃO DO PROTÓTIPO E RESULTADOS
EXPERIMENTAIS
4.1 Introdução
Com o objetivo de demonstrar o estudo desenvolvido nos Capítulos 2 e 3,
implementou-se um sistema semelhante ao proposto na Figura 3.1 de forma a representar o
comportamento de um sistema de microgeração hidrelétrica com gerador de indução.
Neste capítulo, portanto, será apresentado o protótipo do sistema de microgeração
hidrelétrica implementado. Na sequência, serão apresentados os resultados experimentais
obtidos através do protótipo implementado, para comprovação dos resultados de simulação
obtidos no capítulo 3.
4.2 Descrição do Protótipo de Micro Central Hidrelétrica
O sistema é composto basicamente por um conjunto máquina primária/gerador auto-
excitado, inversor PWM de tensão com filtro de saída indutivo de 1ª ordem, sistema de
conexão do inversor PWM, e sistema de controle formado principalmente por um processador
digital de sinais DSP (Digital Signal Processor) TMS320F28335 da Texas Instruments Inc. e
dispositivos de sensoriamento de tensões e correntes. De forma a representar o
comportamento da turbina hidráulica, atuador e sistema hidráulico, levando-se em conta as
limitações físicas do laboratório, utilizou-se um motor de indução acionado por inversor de
frequência como máquina primária.
A escolha do modelo do DSP, deve-se à sua disponibilidade no laboratório, alto
desempenho e principalmente à sua característica de operação em ponto flutuante cujos
benefícios simplificam o desenvolvimento do algoritmo de programação.
A Figura 4.1 mostra uma visão geral do protótipo construído. As partes constituíntes
do protótipo serão melhores descritas, separadamente, nas seções seguintes.

113
Figura 4.1 - Visão geral do protótipo construído.
4.2.1 Conjunto Máquina Primária/Gerador
O conjunto máquina primária/gerador empregado no protótipo é composto por uma
máquina de indução de 7,5 CV da Voges Motors (Modelo VIF 112 M4-E249), sendo aplicada
como máquina primária, enquanto que uma máquina de indução de 5 CV, também da Voges
Motors (Modelo V 100 L4), é empregada como gerador.
As duas máquinas foram fixadas em uma base rígida de madeira, devidamente
alinhadas e acopladas entre si com um acoplamento flexível.
A máquina primária é acionada através de um inversor de frequência CFW08 da
WEG, cujo controle é realizado remotamente através das entradas analógicas do inversor de
frequência em nível de tensão 0-10 V. Para obtenção do sinal de tensão, o DSP gera um sinal
PWM, sendo este posteriormente convertido ao correspondente sinal de tensão através de um
circuito eletrônico dedicado.

114
O conjunto formado pela máquina primária e seu sistema de acionamento, constituído
de inversor de frequência e circuito de conversão de sinal, juntamente com as equações que
modelam o comportamento dinâmico do sistema hidráulico, emulam o comportamento real de
uma turbina hidráulica.
4.2.2 Capacitores de auto-excitação
Conforme mencionado anteriormente, um gerador de indução requer o uso de uma
fonte de energia reativa para produzir a corrente de magnetização e manter o campo
magnético do estator, sendo comumente utilizado para esta finalidade um banco de
capacitores trifásico. No item 3.2 desta dissertação foi calculado o valor dos capacitores de
excitação considerando uma conexão trifásica em ∆ , sendo então considerado o valor
comercial de 40 Fµ para cada um dos capacitores de excitação. Os capacitores para
excitação do gerador estão diretamente conectados ao barramento CA do sistema.
4.2.3 Inversor PWM de Tensão
Conforme proposto na Figura 3.1, um inversor PWM é empregado na compensação de
potência reativa de forma a regular as tensões de saída do sistema de geração,
independentemente da carga, devendo ser conectado em paralelo com o gerador de indução,
com os capacitores de auto-excitação e com as cargas. O inversor atua como um capacitor e
injeta potência reativa no sistema quando as tensões de saída do gerador de indução são
menores que a tensão de referência. Por outro lado, o inversor atua como uma carga indutiva e
absorve potência reativa do sistema de geração quando as tensões do barramento CA são
maiores que o valor desejado.
No protótipo desenvolvido foi utilizado um conversor desenvolvido pela Semikron,
constituído de três braços de IGBT’s, três drivers para acionamento dos IGBT’s, capacitores
do barramento CC, dissipador e ventilação forçada. As especificações do inversor PWM
utilizado são apresentadas na Tabela 4.1.

115
Tabela 4.1 – Especificações do Inversor PWM utilizado no protótipo
Componente Especificação
Módulos de IGBT’s SKM75GB128D
Drivers dos IGBT’s SKHI22A
Placa de interface dos drivers
k
SKPC 22/2
Capacitores do barramento CC 4700 900F Vµ
4.2.4 Indutores de Filtro
De forma a reduzir os harmônicos de alta freqüência produzidos pelo inversor, o lado
CA do inversor PWM é conectado ao barramento CA do sistema através de três indutores,
formando um filtro passa-baixas trifásico de segunda ordem com o banco de capacitores
usado no procedimento de auto-excitação do gerador.
No protótipo implementado foram utilizados indutores com capacidade nominal de
corrente de 25 A e quatro possibilidades distintas de ligação: 0,5 mH, 1 mH, 2,5 mH e 5 mH;
sendo utilizado no protótipo a indutância de 2,5 mH, para uma melhor filtragem dos
harmônicos de alta freqüência produzidos pelo inversor e ao mesmo tempo evitando
ressonâncias em frequências próximas as de operação.
4.2.5 Circuito de conexão do inversor PWM
Um circuito de partida temporizado foi implementado para conexão do inversor PWM
ao barramento CA. Faz-se necessário um circuito de comutação do inversor para evitar
elevados picos de corrente no sistema de geração devido ao carregamento do barramento CC
do inversor, o que poderia ocasionar a desexcitação do gerador de indução.
Num primeiro momento os terminais do filtro de saída do inversor são conectados por
meio de uma contatora ao barramento CA do sistema através de três resistores de 5 Ω para
limitar as correntes de partida. Como os IGBT’s do inversor ainda estão desligados, durante
este período de tempo o conversor atua como um retificador não controlado trifásico através
116
dos diodos em anti-paralelo dos IGBT’s, carregando os capacitores do barramento CC até um
determinado valor de tensão.
Em um segundo momento uma segunda contatora é acionada, curto-circuitando e
removendo as resistências do circuito. Por fim, o DSP habilita a operação dos IGBT’s através
de um sinal enviado por fibra óptica à placa de interface do inversor. Neste exato momento
entram em operação também as rotinas de controle de tensão e frequência do sistema.
4.2.6 Placas de interface, aquisição e condicionamento de sinais
Para o interfaceamento, aquisição e condicionamento dos diferentes sinais inerentes ao
controle do sistema, é de extrema importância o emprego de circuitos eletrônicos dedicados.
Os seguintes circuitos foram considerados na implementação do protótipo:
• Placa de interface com DSP;
• Placa de interface com inversor PWM;
• Placa de aquisição de tensão;
• Placa de aquisição de corrente;
• Placas de condicionamento de sinais;
• Placa de acionamento das contatoras;
• Placa de condicionamento do sinal de controle de frequência.
O kit de desenvolvimento do DSP é conectado em uma placa de interface, que recebe
sinais dos sensores de tensão e corrente e, após o cálculo das leis de controle no DSP, este
envia, através de fibras ópticas, os sinais PWM de comando das chaves do inversor PWM,
bem como, o sinal de controle do inversor de tensão responsável pelo acionamento da
máquina primária. Nesta placa estão ainda incluídos os circuitos de aquisição de medidas, o
circuito de geração de referências de tensão e circuitos de transmissão por fibra ótica.
A placa de interface com o conversor é responsável por adequar os sinais PWM,
recebidos através dos canais de fibra óptica aos drivers de comando do conversor estático de
potência. Esta placa esta equipada com receptores de fibra ótica usados na recepção dos sinais
PWM condicionados a serem encaminhados às chaves semicondutoras.
Conforme discutido anteriormente, o sistema de controle digital implementado no
DSP para regular a amplitude e frequência das tensões de saída do gerador de indução
necessita receber as seguintes informações: duas tensões de linha nos terminais do gerador,

117
duas correntes de linha do inversor e tensão do barramento CC do inversor. Assim, a
aquisição dos sinais foi realizada através de duas placas distintas, uma contemplando as
medições de tensões CA e tensão CC e outra para correntes CA.
As placas de condicionamento de sinal são utilizadas para condicionamento dos sinais
de medida antes da sua leitura pelos conversores analógico-digital (A/D). Esta placa recebe
sinais diferenciais de medida, transmitidos em corrente pelas placas de aquisição e se utiliza
de resistores sensores para convertê-los em tensão. Está equipada com um amplificador de
instrumentação para atenuação de ruído de modo comum onde é adicionado ainda o offset
necessário para adequar as medidas ao canal A/D. Ainda nesta placa, se encontra um buffer
com amplificadores rail-to-rail para proteção dos canais A/D do DSP.
As placas de acionamento das contatoras são constituídas de receptores de fibra
ópticas, que recebem sinais discretos de tensão provenientes do DSP. Estes sinais de tensão
comutam chaves transistores acionando as diferentes contatoras responsáveis pela comutação
dos circuitos de potência do sistema.
Por fim, a placa de condicionamento do sinal de controle de frequência recebe sinal
PWM proveniente do DSP e gera em sua saída sinal de tensão equivalente no nível de 0 V a
10 V, definido como a referência de frequência do inversor de tensão quando este configurado
para operação em modo remoto.
4.3 Resultados Experimentais
Nesta seção são apresentados os resultados experimentais obtidos a partir do protótipo
implementado. São apresentados resultados relativos às diferentes malhas de controle
aplicadas na regulação da frequência e amplitude das tensões geradas, bem como resultados
contemplando a conexão e desconexão de cargas resistivas ao barramento CA. Na maioria dos
resultados procura-se, comprovar os resultados de simulação apresentados ao longo do
Capítulo 3, e desta forma, validar os métodos de modelagem e controle propostos ao longo
dos Capítulos 2 e 3.
A Figura 4.2 ilustra o processo de auto-excitação do gerador, enquanto que a Figura
4.3 apresenta as formas de ondas das tensões de linha nos terminais do gerador de indução
operando sem carga, antes da atuação do controle e da conexão do inversor PWM aos seus
terminais.

118
Figura 4.2 - Auto-excitação do gerador de indução.
A Figura 4.4 ilustra o procedimento de carga do barramento CC do inversor PWM. No
instante que a primeira contatora é acionada, os terminais do inversor PWM são conectados
ao barramento CA através de resistências para limitar a corrente de partida. Durante este
período, os IGBT’s estão desabilitados e o conversor PWM atua como um retificador não
controlado, causando uma pré-carga dos capacitores, elevando a tensão do barramento CC a
aproximadamente 315 V. Aproximadamente 4 s após o início da carga dos capacitores, a
segunda contatora é acionada e os resistores de partida são retirados do circuito. Após mais 4
s, os IGBT’s são habilitados e o controle passa a atuar sobre as chaves, fazendo com que a
tensão sobre o barramento CC seja controlada em aproximadamente 450 V.
Na Figura 4.5 é apresentada a resposta do controlador à mudança de referência de
frequência *f . No tempo de 2 s a referência de frequência é alterada para 58 Hz, enquanto
que no tempo de 13 s, a referência de frequência retorna ao valor de 60 Hz. O resultado obtido
mostra que o controlador de frequência apresenta um comportamento adequado, mediante a
variações de frequência.
A Figura 4.6 apresenta o comportamento transitório da frequência da tensão gerada,
durante a conexão e desconexão de uma carga de 600 W puramente resistiva (FP unitário) aos
terminais do gerador. A resposta obtida experimentalmente assemelha-se à resposta obtida via
simulação e apresentada na Figura 3.13.

119
Figura 4.3 - Tensões de saída para operação a vazio, antes de conectar o inversor PWM.
Figura 4.4 - Etapas de carregamento e entrada de controle do barramento CC.

120
Figura 4.5 - Resposta do controlador de frequência à variações no sinal de referência *f .
Figura 4.6 – Frequência das tensões geradas durante a conexão e desconexão de uma carga
resistiva de 600 W.
121
A ação dos controladores das malhas internas de controle podem ser analisadas a partir
da resposta dos controladores à mudança de referências.
Para realização deste ensaio, o GIAE é separado do inversor e filtro de saída, os
terminais do filtro de saída do inversor são curto-circuitados e o capacitor do barramento CC
do inversor é substituído por uma fonte CC de valor conhecido.
A Figura 4.7 apresenta a resposta do controlador a sucessivas mudanças nos valores de
referência *
di e *qi e a consequente resposta das correntes em eixo dq do inversor di e qi .
A resposta obtida apresenta comportamento semelhante ao resultado obtido por meio
de simulação e exposto na Figura 3.22.
A ação do controle de tensão do barramento CC pode ser analisada a partir da resposta
do controle à mudança de referência *
ccv . A Figura 4.8 apresenta a resposta do controlador à
mudança de referência de tensão CC de 450 V para 400 V e posteriormente de 400 V para
450 V. Percebe-se uma grande semelhança ao resultado de simulação exposto na Figura 3.28.
Da mesma forma, a ação do controle de tensão do barramento CA pode ser analisada a
partir da resposta do controle à mudança de referência *
dv . A Figura 4.9 apresenta a resposta
do controlador à mudança de referência de tensão CA no eixo d de 220 Vrms para 200 Vrms e
posteriormente de 200 Vrms para 220 Vrms. Comparando a resposta obtida
experimentalmente com a resposta obtida em simulação e apresentada na Figura 3.34, nota-se
considerável semelhança.
Por fim, é apresentada na Figura 4.10 a resposta transitória do controlador de tensão à
variações controladas de carga. Neste ensaio, foram realizadas a conexão seguida da
desconexão de uma carga de 600 W puramente resistiva (FP unitário) aos terminais do
gerador. A resposta obtida experimentalmente assemelha-se bastante à resposta obtida via
simulação e apresentada na Figura 3.35.
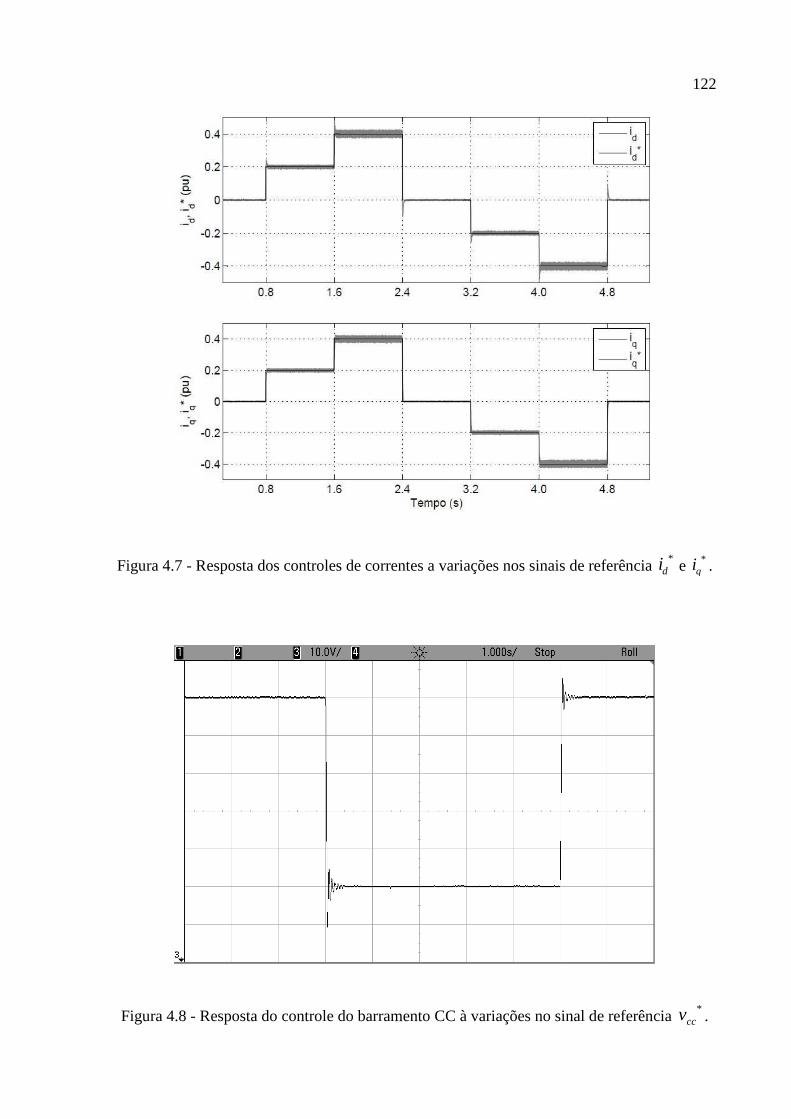
122
Figura 4.7 - Resposta dos controles de correntes a variações nos sinais de referência *
di e *qi .
Figura 4.8 - Resposta do controle do barramento CC à variações no sinal de referência *
ccv .

123
Figura 4.9 – Resultado experimental da resposta do controlador da malha de tensão CA à uma
variação no sinal de referência *
dv .
Figura 4.10 - Resposta do controle de tensão à variações de carga – conexão e desconexão de
carga puramente resistiva de 600 W.
124
Conclusões Gerais
A presente dissertação tem como principal contribuição a modelagem e o controle de
uma micro central hidrelétrica tendo como foco a utilização de gerador de indução auto-
excitado em sistemas de geração isolados. Este tipo de sistema, caracterizado como um
sistema de geração distribuído, vem ganhando destaque em pesquisas devido ao grande
interesse das concessionárias e dos governos no seu desenvolvimento, visando a sua utilização
em larga escala dentro da matriz energética nacional e também mundial. Neste contexto, a
utilização de tecnologias empregando o gerador de indução surge como uma solução para
micro sistemas de geração na questão relativa ao custo de implementação, tornando
economicamente viável a implementação de tais empreendimento que antes se mostravam
inviáveis com a utilização de geradores síncronos. Os recentes avanços nas áreas de eletrônica
de potência e controle, permitiram o controle adequado das variáveis do gerador de indução,
questão essa que era definida como limitante à utilização deste tipo de gerador em sistemas
isolados de geração. Os detalhes relativos à modelagem e ao controle do sistema proposto,
bem como ao desenvolvimento de um protótipo experimental, foram abordados ao longo dos
capítulos que compôem essa Dissertação de Mestrado.
No Capítulo 1 foi realizada uma introdução geral ao assunto mostrando o importante
papel da geração de energia elétrica a partir de fontes de energia hidráulicas na matriz
energética nacional e também mundial, dando destaque à grande capacidade de geração ainda
pouco explorada relacionada a pequenos aproveitamentos hídricos. Dentro deste panorama, é
justificada a aplicação de geradores de indução em micro-centrais hidrelétricas, com
capacidade de geração de até 100 kW, viabilizando economicamente o aproveitamento. Na
sequência do capítulo é então realizada uma revisão bibliográfica, a qual apresentou as
principais técnicas de controle e metodologias de projeto até então empregadas no controle do
gerador de indução. A partir desse estudo surgiu a motivação ao estudo de micro-centrais
hidrelétricas com gerador de indução auto-excitado, partindo do estudo das características e
limitações do sistema, modelagem das características mecânicas e elétricas da planta e projeto
de controladores dedicados ao controle da amplitude e frequência das tensões geradas.
Logo, no Capítulo 2 foi desenvolvida a modelagem do sistema completo,
considerando as características hidráulico-mecânicas do sistema hidráulico e as características
125
elétricas do sistema constituído pelo gerador de indução auto-excitado, inversor PWM, filtro
indutivo e cargas. Para efeito de redução das equações de estados a serem trabalhadas, foram
consideradas simplificações ao longo da modelagem do sistema, o que, a partir dos resultados
de simulação e experimentos, ficou comprovado não afetarem significativamente a
representação do sistema e a satisfatória ação dos controladores projetados.
No Capítulo 3 foram desenvolvidos os projetos dos controladores responsáveis pelo
controle dos parâmetros do sistema com base nas plantas obtidas no Capítulo 2. Optou-se pela
implementação de controladores simples, do tipo proporcional-integral e proporcional-
derivativo, que atendessem a regulação das grandezas de interesse sem grandes preocupações
com as respostas transitórias obtidas. Ficou evidente a dinâmica lenta imposta pelo sistema
mecânico, exigindo respostas lentas dos controladores de frequência sendo este um fator
limitante à sintonia dos controladores. No projeto dos controladores das malhas de controle
das tensões CA e CC, notou-se a influência da carga sobre o comportamento da planta,
mostrando ser necessário a sintonia dos controladores com relação ao ponto de operação
desejado.
No Capítulo 4 foi detalhado o protótipo experimental desenvolvido com o objetivo de
representar o comportamento de uma micro-central hidrelétrica e assim comprovar os
resultados obtidos em simulação, validando a modelagem realizada do sistema. Apesar da
modelagem do sistema hidráulico, ocorreram limitações que impediram a representação tal
qual o sistema simulado. A representação do sistema hidráulico por meio de um motor de
indução trifásico acionado por inversor de frequência, atendeu ao propósito de emulação da
turbina, ficando evidente pequenas diferenças de resposta decorrentes das diferenças nas
dinâmicas modeladas. Apesar disso, os resultados experimentais obtidos mostraram grande
semelhança aos resultados obtidos através de simulações.
Como resultado principal do trabalho cabe salientar os avanços no estudo da
modelagem do sistema hidráulico, ficando evidenciado a viabilidade técnica da utilização de
geradores de indução auto-excitados em micro-centrais hidrelétricas operando de forma
isolada. A partir do emprego de técnicas simples de controle, foram obtidos resultados
satisfatórios na regulação da frequência e amplitude das tensões geradas, mostrando ser
possível a geração de energia elétrica com qualidade para consumo.
126
Dando sequência a este trabalho, algumas propostas para trabalhos futuros incluem:
1) Estudo do comportamento do sistema frente a cargas não lineares e/ou
desbalanceadas.
2) Investigação quanto à utilização e desempenho de diferentes técnicas de controle
na regulação de frequência e amplitude das tensões geradas.
3) Desenvolvimento do controle de potência e sistema de conexão com a rede.
4) Modelagem do sistema considerando o comportamento dinâmico do gerador de
indução.
5) Analisar a utilização do sistema proposto em conjunto com outras fontes de
energia renováveis, de modo a estabelecer uma micro rede.

127
Referências Bibliográficas
[1] HAMMONS, T. J.; Integrating Renewable Sources Into European Grids, IEEE UPEC
06, 2006.
[2] INTERNATIONAL ENERGY AGENCY; Key World Energy Statistics 2011,
disponível em www.iea.org.
[3] MOHD, A.; ORTJOHANN, E.; SCHMELTER, A.; HAMSIC, N.; MORTON, D.;
Challenges in integrating distributed Energy storage systems into future smart grid,
IEEE Industrial Electronics, 2008. ISIE 2008, p.1627–1632, 2008.
[4] X. ENERGY; Xcel Energy Smart Grid: A White Paper, Denver Business Journal,
2007.
[5] OPERADOR NACIONAL DO SISTEMA ELÉTRICA (ONS); Sumário Executivo –
Planejamento Anual da Operação Energética – Ano 2005, 2005.
[6] MARTINS, N.; SOUSA, G. C. D.; Controle Fuzzi do gerador de Indução Trifásico
para Micro Centrais Hidrelétricas, Revista de Eletrônica de Potência - SOBRAEP,
v.12, n. 2, p. 137-146, julho de 2007.
[7] EMPRESA DE PESQUISA ENERGÉTICA (EPE); Balanço Energético Nacional –
Ano 2011, disponível em https://ben.epe.gov.br/BENRelatorioFinal2011.aspx,
acessado em 27 de março de 2012.
[8] FUNDAÇÃO INSTITUTO DE PESQUISA ECONÔMICA APLICADA (IPEA),
Ipeadata, disponível em http://www.ipeadata.gov.br/Default.aspx, acessado em 27 de
março de 2012.
[9] AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA (ANEEL); Atlas de Energia
Elétrica, 3ª Edição, Brasília, 2008.
[10] ELETROBRÁS; Programa Luz para Todos, Disponível em: http://www.eletrobras.
.gov.br. Acesso em 11 de setembro 2007.
[11] ELETROBRÁS; Programa PROINFA, disponível em:
http://www.eletrobras.com.br/elb/portal/data/Pages/LUMISABB61D26PTBRIE.htm.
Acesso em 16 de novembro 2011.

128
[12] PIAGI, P.; LASSETER, R. H.; Autonomous Control of Microgrids, IEEE Power
Engineering Society General Meeting, 2006.
[13] MARRA, E. N.; POMÍLIO, J. A.; Self-Excited Induction Generator Controlled by a
VS-PWM Bidirectional Converter for Rural Applications, IEEE Transactions On
Industry Applications, v. 35, n. 4, 1999.
[14] DANIEL, S. A.; GOUNDEN, N. A.; A Novel Hybrid Isolated Generating System
Based on PV Fed Inverter-Assisted Wind-Driven Induction Generators, IEEE
Transactions On Energy Conversion, v. 19, n. 2, 2004.
[15] BASSET, D. E.; POTTER, M. F.; Capacitive excitation for induction generators,
AIEE Transactions, v. 54, p. 540–545, 1935.
[16] BARBI, I.; Teoria Fundamental do Motor de Indução, 1. ed. Florianópolis: Editora da
UFSC/ELETROBRÁS, 1985.
[17] KRAUSE, P. C.; WASYNCZUK, O.; SUDHOFF, S. D.; Analysis of Electric
Machinery, McGraw-Hill Book Co., 1. Ed., 1986.
[18] ONG, C. M.; Dynamic Simulation of Electric Machinery Using Matlab/Simulink.
Prentice Hall PTR, New Jersey, EUA, 1997.
[19] KRAUSE, P. C.; THOMAS, C. H.; Simulation of Symmetrical Induction Machinery,
IEEE Trans. On Power Apparatus and Systems, v. PAS-84, n. 11, p. 1038-1053, Nov.
1965.
[20] BANSAL, R. C.; BHATI, T. S.; KOTHARI, D. P.; Bibliography on the Application of
Induction Generators in Nonconventional Energy Systems, IEEE Transactions on
Energy Conversion, v. 18, n. 3, Setembro 2003.
[21] BANSAL, R. C.; Three-Phase Self-Excited Induction Generators: An Overview, IEEE
Transactions On Energy Conversion, v. 20, n. 2, Junho 2005.
[22] CHAUHAN, Y. K.; JAIN, S. K.; SINGH, B.; A Prospective on Voltage Regulation of
Self-Excited Induction Generators for Industry Applications, IEEE Transactions on
Industry Applications, v. 46, n. 2, Março/Abril 2010.
[23] CHAPALLAZ, J.-M.; DOS GHALI, J.; EICHENBERGER, P.; FISCHER, G.; Manual
on Induction Motors Used as Generators, Vieweg, Braunschweig, 1992.

129
[24] ALGHUWAINEM, S. M.; Steady state analysis of an induction generator self-excited
by a capacitor in parallel with a saturable reactor, IEEE Electric Machinery Power
System, v. 26, n. 6, p. 617–625, Julho 1998.
[25] QUISPE, E. C.; ARIAS, R. D.; QUNTERO, J. E.; A New Voltage Regulator for Self-
Excited Induction Generator - Design, Simulation, and Experimental Results, IEEE
Conference of Electric Machinery Drives, p. TB3/7.1 – TB3/7.3, 1997.
[26] RAI, H. C.; TANDAN, A. K.; MURTHY, S. S.; SINGH, B.; SINGH, B. P.; Voltage
regulation of self-excited induction generator using passive elements, IEEE
Conference of Electric Machine Drives, p. 240–245, 1993.
[27] AL-SAFFAR, M. A.; NHO, E. C.; LIPO, T. A.; Controlled shunt capacitor self-
excited induction generator, IEEE Industrial Applications Conference, v. 2, p. 1486–
1490, 1998.
[28] AHMED, T.; NORO, O.; HIRAKI, E.; NAKAOKA, M.; Terminal voltage regulation
characteristics by static VAR compensator for a three-phase self-excited induction
generator, IEEE Transaction on Industrial Applications, v. 40, n. 4, p. 978–988,
Jul./Ago. 2004.
[29] MURTHY, S. S.; PINTO, A. J. P.; BEIG, A. R.; Novel integral cycle voltage
controller for self-excited induction generator, IEEE International Conference on
Power Electronics, Drives and Energy Systems, p. 1–4, 2006.
[30] WIJAYA, F. D.; ISOBE, T.; USUKI, K.; WIIK, J. A.; SHIMADA, R.; A new
automatic voltage regulator of self-excited induction generator using SVC magnetic
energy recovery switch (MERS), IEEE Power Electronics Specialists Conference, p.
697-703, 2008.
[31] JAIN, D. K.; MITTAL, A. P.; SINGH, B.; Advanced controlled series compensated
self-excited induction generator, IEEE International Conference on Power Electronics,
Drives and Energy Systems for Industrial Growth, v. 2, p. 707-712, 1996.
[32] MARTINS, F. N.; SOUSA, G. C. D.; Controle “Fuzzy” do Gerador de Indução
Trifásico para Micro Centrais Hidrelétricas, SOBRAEP Revista de Eletrônica de
Potência, v. 12, n. 2, p. 137-146, Julho de 2007.

130
[33] SINGH, B.; SHILPAKAR, L. B.; Analysis of a novel solid state voltage regulator for
a self-excited induction generator, IEE Proceedings- Generation, Transmission and
Distribution, v. 45, n. 6, p. 647–655, Nov. 1998.
[34] KUO, S. C.; WANG, L.; Analysis of voltage control for a self-excited induction
generator using a current-controlled voltage source inverter (CC-VSI), IEE
Proceedings- Generation, Transmission and Distribution, v. 148, n. 5, p. 431–438, Sep.
2001.
[35] SINGH, B.; MURTHY, S. S.; GUPTA, S.; STATCOM-based voltage regulator for
self-excited induction generator feeding nonlinear loads, IEEE Transaction on
Industrial Electronics, v. 53, n. 5, p. 1437–1452, Out. 2006.
[36] KARSHENAS, H. R.; ABDOLAHI, A.; Analysis of a voltage regulator for self-
excited induction generator employing current-type static compensator, in Proc. Int.
Conf. Elect. Comput. Eng., 2001, vol. 2, pp. 1053–1058.
[37] CAMARGO, R. F.; Contribuição ao Estudo de Filtros Ativos de Potência. 2002. 290 f.
Dissertação (Mestrado em Engenharia Elétrica) – Universidade Federal de Santa
Maria, Santa Maria, 2002.
[38] MARTINEZ, R. M.; POMÍLIO, J. A.; DA SILVA, L. C. P.; Power Flow Control and
Islanding Detection of the Local Generation System with Induction Generator, IEEE
International Symposium on Power Electronics, Electrical Drives, Automation and
Motion, p. 958-963, 2008.
[39] YOUSSEF, K. H.; WAHBA, M. A.; YOUSEF, H. A.; SEBAKHY, O. A.; A New
Method for Voltage and Frequency Control of Stand-Alone Self-Excited Induction
Generator Using PWM Converter with Variable DC link Voltage, IEEE American
Control Conference, p. 2486-2491, 2008.
[40] CHEN, W.-L.; HSU, Y.-Y.; Experimental Evaluation of an Isolated Induction
Generator with Voltage and Frequency Control, IEEE International Symposium on
Power Electronics, Electrical Drives, Automation and Motion, p. 497-502, 2006.
[41] BARRADO, J. A.; GRIÑÓ, R.; Voltage and Frequency Control for a Self-Excited
Induction Generator Using a Three-Phase Four-Wire Electronic Converter, IEEE
Power Electronics and Motion Control Conference, p. 1419-1424, 2006.
131
[42] NISHIDA, K.; AHMED, T.; NAKAOKA, M.; Induction generator hybrid applications
with active power filter, IEE Proceedings Electric Power Applications, v. 153, n. 2, p.
197-205, 2006.
[43] TAMRAKAR, I.; SHILPAKAR, L. B.; FERNANDES, B. G.; NILSEN, R.; Voltage
and frequency control of parallel operated synchronous generator and induction
generator with STATCOM in micro hydro scheme, IET Generation, Transmission &
Distribution, v. 1, n. 5, p. 743-750, 2007.
[44] HENDERSON, D.; An advanced Electronic Load Governor for Control of
Hydroelectric Generation, IEEE Transactions on Energy Conversion, v. 13, n. 3, p.
300-304, Set. 1998.
[45] RAMIREZ, J. M.; TORRES, E.; An Electronic Load Controller for Self-Excited
Induction Generators, IEEE Power Engineering Society General Meeting, p. 1-8,
2007.
[46] SINGH, B.; MURTHY, S. S.; GUPTA, S.; Analysis and Design of Electronic Load
Controller for Self-Excited Induction Generators, IEEE Transaction on Energy
Conversion, v. 21, n. 1, p. 285–293, Mar. 2006.
[47] BONERT, R.; RAJAKARUNA, S.; Self-excited induction generator with excellent
voltage and frequency control, IEE Proceedings - Generation, Transmission and
Distribution, v. 145, n. 1, p. 33-39, 1998.
[48] DOOLLA, S.; BHATTI, T. S.; Load Frequency Control of an Isolated Small-Hydro
Power Plant With Reduced Dump Load, IEEE Transactions on Power Systems, v. 21,
n. 4, p. 1912-1919, Nov. 2006.
[49] SINGH, B.; MURTHY, S. S.; MADHUSUDAN; GOEL, M.; TANDON, A. K.; A
Steady State Analysis on Voltage and Frequency Control of Self-Excited Induction
Generator in Micro-Hydro System, IEEE International Conference on Power
Electronics, Drives and Energy Systems, p. 1-6, 2006.
[50] MARRA, E. G.; POMÍLIO, J. A.; Induction-Generator-Based System Providing
Regulated Voltage with Constant Frequency, IEEE Transactions on Industrial
Electronics, v. 47, n. 4, p. 908-914, Ago. 2000.

132
[51] MACHADO, R. Q.; BUSO, S.; POMÍLIO, J. A.; Sistema de Geração Distribuída
Utilizando Gerador de Indução Trifásico e Fontes CC Conectado a Rede Monofásica,
Revista Eletrônica de Potência – SOBRAEP, v. 1, n. 10, p. 51-58, Jun. 2005.
[52] JACOBINA, C. B.; JUNIOR, E. C. S.; CORREA, M. B. R.; SILVA, E. R. C.; Sistema
Distribuído de Geração Elétrica com um Gerador de Indução Trifásico Interligado
com uma Rede Monofásica, Revista Eletrônica de Potência – SOBRAEP, v. 11, n. 1,
p. 43-51, Mar. 2006.
[53] MARRA, E. G.; Self-Excited Induction Generator Controlled by a VS-PWM
Converter Providing High Power-Factor Current to a Single-Phase Grid, IEEE
Conference of Industrial Electronics Society, v. 2, p. 703-708, 1998.
[54] BJÖRNSTEDT, J.; SAMUELSSON, O.; Voltage and Frequency Control for Island
Operated Induction Generators, IET-CIRED Seminar on SmartGrids for Distribution,
paper 98, p. 1-4, 2008.
[55] DOS SANTOS, S. R.; Proposta para Implantação de Microcentrais Hidrelétricas
Automatizadas com o Emprego de Geradores Assíncronos. 2003. 114 f. Dissertação
(Mestrado em Engenharia Elétrica) – Universidade Federal do Rio Grande do Sul,
Porto Alegre, 2003.
[56] DA CUNHA, Y. P. S. A.; Micro Centrais Hidrelétricas baseadas no Gerador de
Indução em operação Isolada e Freqüência Fixa. 2007. 108 f. Dissertação (Mestrado
em Engenharia Elétrica e de Computação) – Universidade Federal de Goias, Goiânia,
2007.
[57] SILVA, J. C. L. V.; Modelagem, Controle e Simulação da Dinâmica Eletromecânica
de uma Micro Usina Hidrelétrica na Amazônia. 2003. 136 f. Dissertação (Mestrado
em Engenharia Elétrica) - Instituto Militar de Engenharia, Rio de Janeiro, 2003.
[58] WORKING GROUP ON PRIME MOVER AND ENERGY SUPPLY MODELS FOR
SYSTEM DYNAMIC PERFORMANCE STUDIES, Hydraulic Turbine and Turbine
Control Models for System Dynamic Studies, IEEE Transactions on Power Systems,
v. 7, n. 1, p. 167-179, Fev. 1992.
[59] KUNDUR, P.; Power System Stability and Control, McGrawHill, New York, 1994.
[60] PEREIRA, V. M.; Estudo e Modelagem Dinâmica de Gerador de Indução Acionado
por Máquina de Combustão Interna com Controle de Tensão e de Freqüência por Meio

133
de Inversor PWM. 2003. 158 f. Tese (Doutorado em Engeharia Elétrica) –
Universidade Federal de Campinas, Campinas, 2003.
[61] SINGH, S. P.; SINGH, B.; JAIN, M. P.; Performance Characteristics and Optimum
Utilization of Cage Machine as Capacitor Excited Induction Generator, IEEE
Transactions on Energy Conversion, v. 5 , n. 4, p. 679-685, 1990.
[62] AL-BAHRANI, A. H.; MALIK, N. H.; Steady State Analysis and Performance
Characteristics of a Three-phase Induction Generator Self-excited with a Single
Capacitor, IEEE Transactions on Energy Conversion, v. 5, v. 4, p. 725-732, Dez.
1990.
[63] AL JABRI, A. K.; ALOLAH, A. I.; Limits on the Performance of the Three-phase
Self-excited Induction Generator, IEEE Transactions on Energy Conversion, v. 5, n. 2,
p. 350-356, June 1990.
[64] RAINA, G.; MALIK, O. P.; Wind Energy Conversion Using a Self-excited Induction
Generator, IEEE Transactions on Power Apparatus and Systems, v. PAS-102, n. 12, p.
3933-3936, Dez. 1983.
[65] AZZOLIN, R. Z.; Identificação Automática dos Parâmetros Elétricos de Motores de
Indução Trifásicos. 2008. 103 f. Dissertação (Mestrado em Engenharia Elétrica) –
Universidade Federal de Santa Maria, Santa Maria, 2008.
[66] AHMED, T.; NISHIDA, K.; NAKAOKA, M.; A Novel Stand-Alone Induction
Generator System for AC and DC Power applications, IEEE Transactions on Industry
Applications, v. 43, n. 6, p. 1465-1474, 2007.
[67] RECH, C.; CAMARGO, R. F.; et. al.; Impacto de métodos de sincronismo no
desempenho de geradores de indução auto-excitados, Revista Controle & Automação,
v. 19, n. 4, p. 475-485, Out.-Dez. 2008.
[68] SCHERER, L. G.; CAMARGO, R. F.; PINHEIRO, H.; RECH, C.; Advances in the
modeling and control of micro hydro power stations with induction generators, IEEE
Energy Conversion Congress and Exposition, p. 997-1004, 2011.
[69] SCHERER, L. G.; CAMARGO, R. F.; Frequency and voltage control of micro hydro
power stations based on hydraulic turbine's linear model applied on induction
generators, Congresso Brasileiro de Eletrônica de Potência – COBEP, p. 546-552,
2011.
134
[70] SCHERER, L. G.; CAMARGO, R. F.; Control of micro hydro power stations using
nonlinear model of hydraulic turbine applied on microgrid systems, Congresso
Brasileiro de Eletrônica de Potência – COBEP, p. 812-818, 2011.
[71] CAMARGO, R. F.; Método de Sincronização Aplicado a Conversores PWM
Trifásicos, 2006. 356 f. Tese (Doutorado em Engenharia Elétrica) – Universidade
Federal de Santa Maria, Santa Maria, 2006.
[72] CAMARGO, R. F.; PEREIRA, A. T.; PINHEIRO, H.; New Synchronization Method
for Three-Phase Three-Wire PWM Converters under Unbalance and Harmonics in the
Grid Voltages, IEEE Power Electronics Specialists Conference, p. 506-512, 2005.
[73] CAMARGO, R. F.; PINHEIRO, H.; Synchronization method for three-phase PWM
converters under unbalanced and distorted grid, IEE Proceedings on Electronics Power
Applications, v. 153, n. 5, p. 763–772, 2006.
[74] MARAFÃO, F. P.; DECKMANN, S. M.; POMÍLIO, J. A.; MACHADO, R. Q.;
Metodologia de Projeto e Análise de Algoritmos de Sincronismo PLL, Revista
Eletrônica de Potência, v. 10, n. 1, p. 7-14, Jun. 2005.

135
Anexo A
OBTENÇÃO DAS EQUAÇÕES DE ESTADO DA PLANTA EM
EIXOS ESTACIONÁRIO E SÍNCRONO
Neste anexo será apresentado em detalhes o procedimento para obtenção das equações
de estado da planta em coordenadas αβ0 e dq0. Iniciando pela normalização das variáveis, ao
final serão obtidas as matrizes em espaço de estados em coordenadas girantes dq0.
Como princípio de todo o desenvolvimento deste anexo serão consideradas as
equações (2.106) a (2.110), deduzidas no capítulo 2 desta dissertação.
A.1 Normalização das Variáveis do Circuito
Visando limitar a faixa dinâmica das variáveis para uma implementação discreta em
um DSP de ponto flutuante, pode-se utilizar uma transformação linear que normaliza as
variáveis do circuito. Escolhendo os valores base (Pbase, vbase), as variáveis normalizadas de
tensão e corrente podem ser definidas como: n base n basev = v v , i = i i , onde: .base base baseI P v=
Agora, definindo esta transformação linear, dada pela matriz Tn,
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
base
base
basen
base
base
base
i
i
i
v
v
v
=
T , (A.1)
os vetores de estado, entrada e distúrbio tornam-se:

136
( ) x( )
( ) x( )
( ) ( )
( ) ( )
n n
n n
base n
base n
t t
t t
t v t
t i t
==
==
x T
x T
u u
w w
ɺ ɺ
(A.2)
Como resultado, a equação de estado (2.106) pode ser reescrita da seguinte forma,
-1( ) ( ) ( ) ( )n n abc n n n abc base n n abc base nt t v t i t= + +x T A T x T B u T F wɺ , (A.3)
onde:
; ; n n abc n n n abc base n n abc basev i−= = =1A T A T B T B F T F , (A.4)
Logo, a equação (A.3) na forma compacta para a representação por espaço de estado
em coordenadas estacionárias normalizadas é dada por:
( ) ( ) ( ) ( )n n n n n n nt t t t= + +x A x B u F wɺ , (A.5)
onde:
1_
2_
3_
; ; .
a
bpwm Ga
cn n pwm n Gb
apwm Gc
b
c
i
iu i
iu i
vu i
v
v
= = =
x u w
(A.6)

137
20 0
3 3 3
20 0
3 3 3
20 0
3 3 3
10 0 0 0
10 0 0 0
0 0
f base base base
f f base f base f base
f base base base
f f base f base f base
f base base base
f f base f base f basen
base
base C
base
base C
base
b
R v v v
L L i L i L i
R v v v
L L i L i L i
R v v v
L L i L i L i
i
Cv CR
i
Cv CR
i
Cv
− −−
− −−
− −−=
−
−
A
10 0
ase CCR
−
(A.7)
2 1 1
1 2 1
1 1 2
0 0 03
0 0 0
0 0 0
basen
f base
v
L i
− − −
=
B (A.8)
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
basen
base
i
Cv
=
F (A.9)
A.2 Equação de Estados da Planta em Coordenadas αβ0
A transformação do sistema trifásico de coordenadas estacionárias abc em um sistema
de coordenadas estacionárias αβ0 pode ser obtida através da seguinte matriz de
transformação.

138
0
1 1/2 1/22
0 3/2 3/23
1/ 2 1/ 2 1/ 2
αβ
− −
= −
T (A.10)
Logo, tem-se:
( ) ( )( ) ( )( ) ( )( ) ( )
αβ0 αβ0
αβ0 αβ0
αβ0 αβ0
αβ0 αβ0
n
n
n
n
t t
t t
t t
t t
=
=
=
=
x T x
x T x
u T u
w T w
ɺ ɺ
(A.11)
Isolando os termos obtém-se:
( ) ( )( ) ( )( ) ( )( ) ( )
-1αβ0 αβ0
-1αβ0 αβ0
-1αβ0 αβ0
-1αβ0 αβ0
n
n
n
n
t t
t t
t t
t t
=
=
=
=
x T x
x T x
u T u
w T w
ɺ ɺ
(A.12)
Aplicando as equações (A.12) na equação (A.5), obtém-se:
( ) ( ) ( ) ( )-1 -1 -1 -1αβ0 αβ0_ αβ0 αβ0 αβ0 αβ0 αβ0 αβ0n n n nt t t t= + +T x A T x B T u F T wɺ (A.13)
Pré-multiplicando os dois lados da equação (A.13) pela matriz Tαβ0, tem-se:
( ) ( ) ( ) ( )-1 -1 -1αβ0_ αβ0 αβ0 αβ0_ αβ0 αβ0 αβ0_ αβ0 αβ0 αβ0_n n n n n n nt t t t= + +x T A T x T B T u T F T wɺ , (A.14)
onde:
0 0 0 0 0 0 0 0 0 ; ; n n n− − −
αβ αβ αβ αβ αβ αβ αβ αβ αβ= = =1 1 1A T A T B T B T F T F T . (A.15)

139
Como resultado da equação (A.14), a representação por espaço de estado em
coordenadas estacionárias αβ0 normalizadas, é dada por:
( ) ( ) ( ) ( )αβ0_ αβ0 αβ0_ αβ0 αβ0_ αβ0 αβ0_n n n nt t t t= + +x A x B u F wɺ , (A.16)
onde:
α_ Gα0
αβ0 αβ0 β_ αβ0_ Gβ
0_ 0
0
; ; .pwm
pwm n
pwm G
i
iu i
iu i
vu i
v
v
α
β
α
β
= = =
x u w
(A.17)
0
0 0 0 0
0 0 0 0
0 0 0 0 0
10 0 0 0
10 0 0 0
10 0 0 0
f base
f f base
f base
f f base
f
f
base
base C
base
base C
base
base C
R v
L L i
R v
L L i
R
L
i
Cv CR
i
Cv CR
i
Cv CR
αβ
− − −
= − − −
A
(A.18)
0
1 0 0
0 1 0
0 0 0
0 0 0
0 0 0
0 0 0
base
f base
v
L iαβ
− −
=
B (A.19)
140
0
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
base
base
i
Cvαβ
=
F (A.20)
A.3 Equação de Estados da Planta em Coordenadas dq0
A transformação do sistema trifásico de coordenadas αβ0 em um sistema de
coordenadas síncronas dq0 é realizada através da matriz de transformação apresentada a
seguir:
( ) ( )( ) ( )0
ω ω 0
ω ω 0
0 0 1dq
cos t sen t
sen t cos t
= −
T (A.21)
Logo, tem-se:
( ) ( )( ) ( )( ) ( )
0 0 αβ0
0 0 αβ0
0 0 αβ0
dq dq
dq dq
dq dq
t t
t t
t t
=
=
=
x T x
u T u
w T w
(A.22)
Isolando os termos, obtém-se:
( ) ( )( ) ( )( ) ( )
-1αβ0 0 0
-1αβ0 0 0
-1αβ0 0 0
dq dq
dq dq
dq dq
t t
t t
t t
=
=
=
x T x
u T u
w T w
(A.23)
Aplicando as equações de (A.23) na equação (A.16), obtém-se:

141
( )( ) ( ) ( ) ( )1 1 1 10 0 αβ0 0 0 αβ0 0 0 αβ0 0 0dq dq dq dq dq dq dq dqt t t t
•− − − −= + +T x A T x B T u F T w , (A.24)
Expandindo a parcela da direita na equação (A.24) em termos de sua derivada parcial,
tem-se:
( ) ( ) ( ) ( ) ( )1 1 1 1 10 0 0 0 αβ0 0 0 αβ0 0 0 αβ0 0 0dq dq dq dq dq dq dq dq dq dqt t t t t− − − − −+ = + +T x T x A T x B T u F T wɺ ɺ . (A.25)
Isolando o termo ( )0dq txɺ da parcela da esquerda na equação (A.25), obtém-se:
( ) ( ) ( ) ( )1 1 1 10 0 αβ0 0 0 0 0 αβ0 0 0 0 αβ0 0 0dq dq dq dq dq dq dq dq dq dq dqt t t t− − − − = − + + + x T A T T x T B T u T F T wɺɺ (A.26)
onde:
1 10 0 0 αβ0 0
0 0 0
0 0 0
dq dq dq dq
dq dq dq
dq dq dq
− −
−αβ
−αβ
= − +
=
=
1
1
A T T A T
B T B T
F T F T
ɺ
. (A.27)
Como resultado, da equação (A.26), encontra-se:
( ) ( ) ( ) ( )0 0 0 0 0 0 0dq dq dq dq dq dq dqt t t t= + +x A x B u F wɺ . (A.28)
sendo:
_0
0 _ 0_ _ 0_
0_ 0
0
; ; .
d
qd pwm Gd
dq n dq n q pwm dq n Gqd
pwm Gq
i
iu i
iu i
vu i
v
v
= = =
x u w (A.29)

142
0
0 0 0
0 0 0
0 0 0 0 0
10 0 0
10 0 0
10 0 0 0
f base
f f base
f base
f f base
f
fdq
base
base C
base
base C
base
base C
R v
L L i
R v
L L i
R
L
i
Cv CR
i
Cv CR
i
Cv CR
− −ω ω − −
= − −ω −ω −
A
(A.30)
0
1 0 0
0 1 0
0 0 0
0 0 0
0 0 0
0 0 0
basedq
f base
v
L i
− −
=
B (A.31)
0
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
basedq
base
i
Cv
=
F (A.32)
Desprezando-se as componentes das variáveis de estado da componente zero as
matrizes de estado da equação (A.29) torna-se:
_
_
; ; ;
d
q d pwm Gd
dq dq dqd q pwm Gq
q
i
i u i
v u i
v
= = =
x u w (A.33)

143
ω 0
1 0 0 0ω 0
0 1 0 0; ; .
0 0 1 010 ω
0 0 0 1
10 ω
f base
f f base
f base
base basef f basedq dq dq
base f basebase
base C
base
base C
R v
L L i
R v
v iL L i
i L Cvi
Cv CR
i
Cv CR
− − − − − = = = − − −
A B F
(A.34)
Então, a representação por espaço de estado em coordenadas girantes dq normalizadas
é dada por:
( ) ( ) ( ) ( )dq dq dq dq dq dq dqt t t t= + +x A x B u F wɺ . (A.35)

144
Anexo B
MÉTODO DE SINCRONIZAÇÃO E RASTREAMENTO DE
FREQUÊNCIA APLICADO A CONVERSORES DE TENSÃO
Neste anexo é apresentado o método de sincronização e rastreamento de frequência
desenvolvido para fins de aplicação no sistema proposto nesta dissertação. O método
apresentado a seguir sugere um algoritmo de simples implementação, no entanto, robusto a
distorções e desequilíbrios de tensão. Seu princípio de funcionamento é baseado na medição
de uma única tensão do sistema, habilitando-o a aplicações em conversores de tensão
monofásicos, podendo também ser aplicado a conversores trifásicos sem perda de
generalidade de resultados. Ainda, com simples modificações, o método descrito abaixo
permite o rastreamento da frequência da rede viabilizando uma possível conexão.
B.1 Descrição do novo método proposto
Este método de sincronização foi desenvolvido visando sua aplicação em conversores
monofásicos conectados a rede elétrica de distribuição. A Figura B.1 mostra o diagrama
esquemático do método proposto.
Figura B.1 - Diagrama do método de sincronização proposto.
Basicamente o método apresentado na Figura B.1, apresenta as seguintes etapas:
1) Medição da tensão monofásica do sistema de distribuição;
145
2) Filtragem da tensão medida, a partir de dois filtros passa-baixas (FPB), a fim de
atenuar possíveis componentes harmônicas presentes na tensão da rede e realizar o
deslocamento de fase do sinal medido.
3) Obtenção do valor do ângulo de referência, refθ , a cada ciclo do programa
conforme a seguinte equação:
1 ( )tan
cos( )ref
sen− =
θθθ
(B.1)
4) Compensação do sinal de erro, definido como a diferença entre refθ e o valor
medido θ, através de compensador PI para eliminar erros em regime permanente
senoidal. O sinal obtido é a variação de freqüência angular ∆ω , a qual é somada com
a frequência angular da rede, nω .
5) Caso haja variação nas tensões da rede, um algoritmo de adequação da freqüência
ajusta os ganhos dos filtros de forma a sintonizá-los à nova frequência de operação.
A seguir serão detalhadas as principais partes do diagrama apresentado na Figura B.1.
B.1.1 Filtros passa-baixa
A utilização de filtros passa-baixas em sequência para a obtenção dos sinais de
sincronismo foi proposto inicialmente em [72] e oferece a vantagem de gerar sinais de
sincronismo com baixa distorção harmônica total (THD – Total Harmonic Distortion),
mesmo com distorções harmônicas e cargas desequilibradas.
No método proposto originalmente, o vetor das tensões de fase, obtido a partir da
medição de duas tensões de linha, é filtrado por um conjunto de filtros passa-baixas de 2ª
ordem, FPB1, projetados para possuir ganho unitário e defasagem de -90 graus na freqüência
fundamental. Este vetor filtrado é, novamente, filtrado por um segundo conjunto de filtros
passa-baixas de 2ª ordem, chamado de FPB2, um para cada tensão de fase. Estes promovem
um deslocamento de fase adicional de -90 graus resultando num vetor que apresenta a mesma
146
amplitude na freqüência fundamental do vetor original, mas com uma defasagem de -180
graus [73], [67].
No método aqui proposto, é utilizada apenas a medição de uma única tensão do
sistema, reduzindo assim o número de sensores necessários. Além disso, percebeu-se que o
uso de filtros de 2ª ordem não seriam adequados para obtenção do ângulo refθ , pois a
inserção de harmônicos de 3ª ordem com amplitude de 30% da tensão da rede, provocou
distorções no sinal obtido após o primeiro filtro, causando oscilação no refθ . Este problema
foi solucionado substituindo-se o primeiro filtro por um filtro de 4ª ordem de forma a filtrar
essas componentes de ordem mais elevada. Na sequência, foi mantido o filtro de 2ª ordem,
necessário apenas para a defasagem do sinal filtrado.
A função de transferência do filtro passa-baixa de 4ª ordem é descrita a seguir:
4 4 3 2 2 2 3 4
1( )
4 (2 4 ) 4an n n n
Ft ss Q s Q s Q s
=+ + + + +ω ω ω ω
(B.2)
Este filtro proporciona um atraso de 180 graus na freqüência de 60 Hz e uma
atenuação de 37,4 dB em 180 Hz, como mostra a Figura B.2.
Para a obtenção de refθ a partir da equação (B.1), com a garantia de que este ângulo
não sofra distorções significativas, faz-se necessário obter sinais com 90 graus de defasagem
entre si. Para isso, é aplicado um segundo filtro, sendo este de 2ª ordem, após o filtro de 4ª
ordem.
A função de transferência do filtro de segunda ordem é apresentada a seguir:
2 2 2
1( )
2an n
Ft ss Q s
=+ +ω ω
(B.3)
O filtro passa-baixa de 2ª ordem irá ocasionar um atraso de 90 graus em 60 Hz e uma
atenuação de 19,1 dB em 180 Hz, como pode ser verificado na Figura B.3.

147
Figura B.2 - Diagrama de Bode do Filtro de 4ª ordem.
Figura B.3 - Diagrama do Bode do filtro passa-baixa de 2ª ordem.
A Figura B.4 apresenta os resultados de simulação dos sinais obtidos após os filtros.
Tem-se, em vermelho, o sinal de tensão da rede medida pelo microcontrolador, em azul, com
uma defasagem de 180 graus devido ao filtro passa-baixa (4ª ordem), tem-se o sinal de tensão
após o primeiro filtro, e em verde, defasada 90 graus em relação ao sinal de tensão em azul,
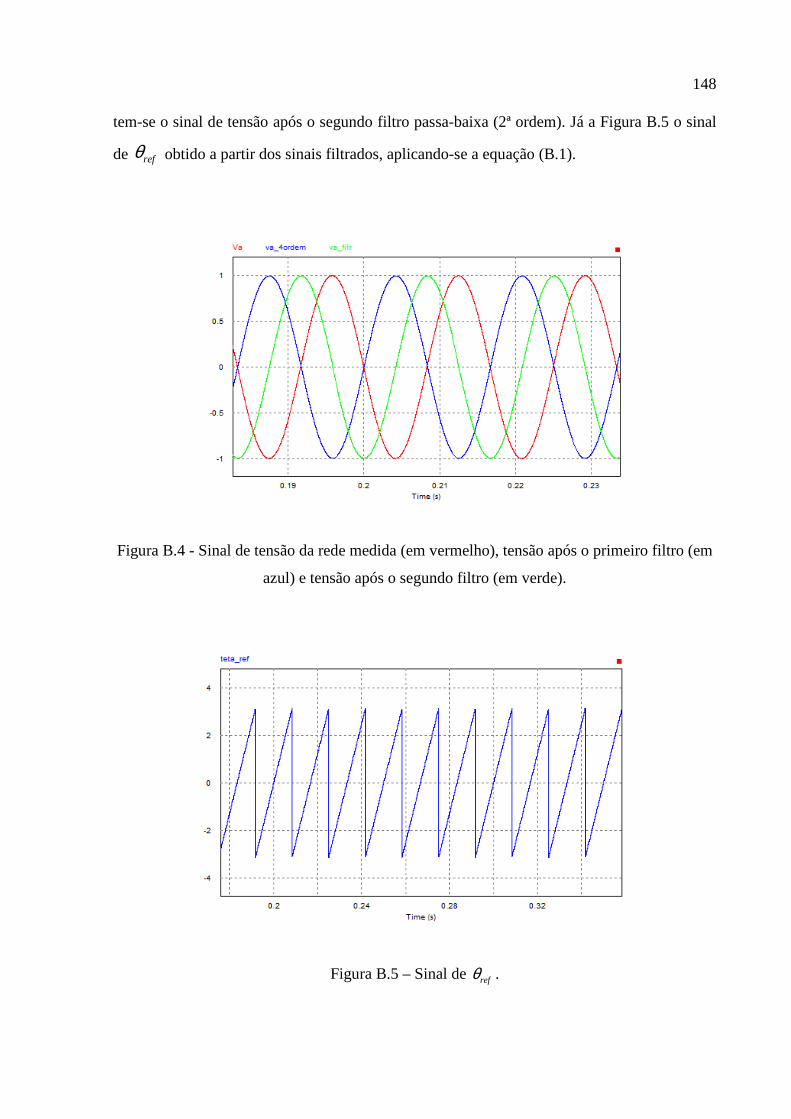
148
tem-se o sinal de tensão após o segundo filtro passa-baixa (2ª ordem). Já a Figura B.5 o sinal
de refθ obtido a partir dos sinais filtrados, aplicando-se a equação (B.1).
Figura B.4 - Sinal de tensão da rede medida (em vermelho), tensão após o primeiro filtro (em
azul) e tensão após o segundo filtro (em verde).
Figura B.5 – Sinal de .
refθ

149
B.1.2 Modelagem da Planta e Controlador Proporcional-Integral
O modelo linear simplificado do PLL (Phase-Locked-Loop) monofásico proposto em
[74] é mostrado na Figura B.6.
Figura B.6 - Modelo simplificado do PLL. Fonte [74].
Conforme dito, a Figura B.6 é um modelo simplificado e diverge em dois pontos em
relação ao esquema apresentado na Figura B.1. No primeiro ponto, a referência antecipativa (
2n nf=ω π ) considerada inicialmente para melhorar a resposta dinâmica inicial, sendo nf o
valor nominal da freqüência da rede, é desconsiderada para fins de simplificação na obtenção
da FT em malha fechada. O segundo ponto se refere à função relacionada ao atraso de
amostragem decorrente da discretização do modelo (tempo de amostragem aT ), a qual deve
ser considerada para uma correta representação da planta. O regulador PI fornece uma saída
constante ω , se o valor médio do erro em sua entrada for nulo. Nesta condição, t=θ ω e o
PLL sincroniza-se com a freqüência ω do sinal de entrada com um atraso de fase de (2−π ),
o qual garante a condição de ortogonalidade. Portanto o PLL é capaz de fornecer a freqüência
fundamental da rede (ω ) e o ângulo de sincronismo, ( 2= +φ θ π ).
A função de transferência em malha fechada do esquema proposto acima, incluindo
controlador e planta, resulta em:
3 2( ) p i
CLa p i
K s KH s
s T s K s K
+=
+ + + (B.4)
Considerando pequenos passos de amostragem, pode-se desconsiderar o atraso
referente á discretização da planta, e o sistema de terceira ordem pode ser reduzido à forma

150
canônica de um sistema de segunda ordem, sem prejudicar a capacidade do controle. Esta
simplificação é possível desde que o pólo relativo ao passo de amostragem situado no lado
esquerdo do plano s , esteja longe da origem e dos outros dois pólos dominantes. Assim
sendo, a função de transferência simplificada é dada por:
2( ) p i
CLp i
K s KH s
s K s K
+=
+ + (B.5)
Onde , 2p nK ξω= e 2
i nK ω= , sendo nω a frequência de corte desejada e ξ a
constante de amortecimento.
A função do integrador é gerar uma rampa contínua que siga refθ .
Para que isto ocorra é necessário subtrair o valor de π− do integrador a cada ciclo.
Desta maneira ele trabalha integrando continuamente no tempo, sem causar um erro grande
para o controlador PI no final de cada ciclo (passagem de π para π− ).
Para identificar o final de cada ciclo, monitora-se a passagem por zero da tensão após
o segundo filtro passa-baixa, garantindo assim, não haver distorções no sinal analisado.
B.1.3 Leitura da frequência instantânea e adequação dos parâmetros dos filtros
O ∆ω obtido após a ação de controle é somado ao ωn da rede resultando em uma
frequência angular, ω . A sua integração, resulta no ângulo de saída do PLL, θ, conforme
ilustrado na Figura B.1.
A partir de , dividindo-o por 2π , é possível obter o valor da frequência instantânea
da tensão medida. Este valor de frequência é analisado pelo algoritmo que irá escolher quais
serão os parâmetros dos filtros passa-baixas para o próximo ciclo. Buscando, desta maneira,
garantir que a defasagem entre os sinais de sincronismo da equação (B.1) permanecerão
defasados em 90 graus para não distorcer o refθ .
A partir da descrição realizada deste algoritmo a seguir serão apresentados resultados
de simulação e experimentais.
ω
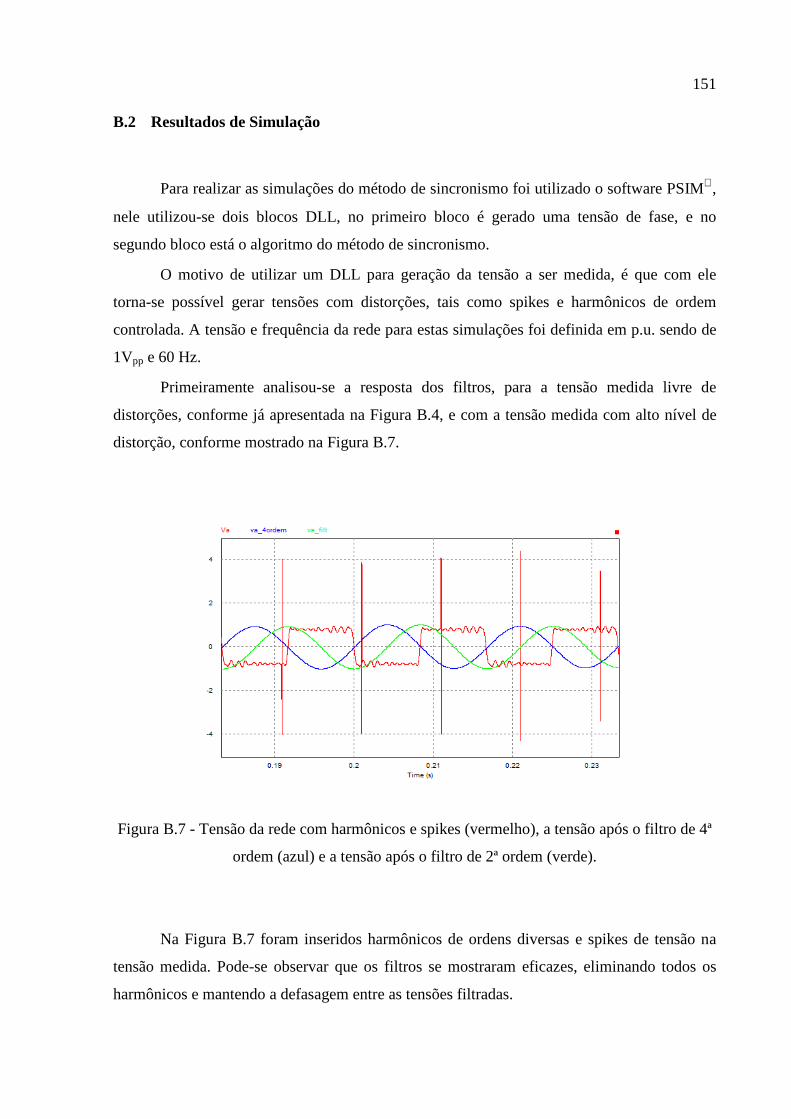
151
B.2 Resultados de Simulação
Para realizar as simulações do método de sincronismo foi utilizado o software PSIM,
nele utilizou-se dois blocos DLL, no primeiro bloco é gerado uma tensão de fase, e no
segundo bloco está o algoritmo do método de sincronismo.
O motivo de utilizar um DLL para geração da tensão a ser medida, é que com ele
torna-se possível gerar tensões com distorções, tais como spikes e harmônicos de ordem
controlada. A tensão e frequência da rede para estas simulações foi definida em p.u. sendo de
1Vpp e 60 Hz.
Primeiramente analisou-se a resposta dos filtros, para a tensão medida livre de
distorções, conforme já apresentada na Figura B.4, e com a tensão medida com alto nível de
distorção, conforme mostrado na Figura B.7.
Figura B.7 - Tensão da rede com harmônicos e spikes (vermelho), a tensão após o filtro de 4ª
ordem (azul) e a tensão após o filtro de 2ª ordem (verde).
Na Figura B.7 foram inseridos harmônicos de ordens diversas e spikes de tensão na
tensão medida. Pode-se observar que os filtros se mostraram eficazes, eliminando todos os
harmônicos e mantendo a defasagem entre as tensões filtradas.

152
A Figura B.8 apresenta o sinal de saída do PI no gráfico superior e o ângulo de
referência, , (azul) e o ângulo de saída, θ (vermelho) no gráfico inferior com um tempo de
aproximadamente 0,2 s de resposta transitória.
Figura B.8 - Erro na saída do PI; ângulo de referência, (azul);
e ângulo de saída, (vermelho).
A Figura B.9 apresenta os resultados em regime permanente senoidal relativos a
Figura B.8, onde percebe-se que os sinais de e são muito semelhantes. Além disso, é
apresentado também o valor instantâneo da frequência, f .
Na Figura B.10 a freqüência da tensão da medida de 60 Hz sofreu uma variação para
62Hz em t=0,4 s. Pode-se notar que o seno fica defasado da tensão de entrada, por
aproximadamente 7 ciclos de rede, voltando a ficar em fase em função do algoritmo de
adequação dos parâmetros dos filtros passa-baixas.
refθ
refθ
θ
refθ θ

153
Figura B.9 - Condição em regime permanente. Sinal de saída do PI; (azul)
e (vermelho); e frequência, f .
Figura B.10 - Variação de freqüência de 60 Hz para 62 Hz. No gráfico superior, tensão
medida (vermelho), função seno de (azul). No gráfico inferior a frequência instantânea.
refθ
θ
θ

154
A fim de verificar a aplicação prática deste método, faz-se necessário a obtensão de
resultados experimentais para sua validação.
B.3 Resultados Experimentais
Na realização dos testes práticos utilizou-se um DSP TMS320F28335 do kit da Texas
Instruments EzDSPF28335 e um gerador de funções Icel GV-2002. O gerador de função
serve para emular a tensão da rede, possibilitando a variação da amplitude e frequência do
sinal gerado.
Para testar os filtros passa-baixas foi gerada uma onda quadrada no gerador de função
obtendo-se os resultados através das variáveis do DSP. A Figura B.11 mostra a tensão de
entrada e a tensão após o filtro de 2ª ordem.
Na Figura B.12 são mostrados a tensão de entrada e o valor de seno gerado a partir do
θ de saída na frequência de 60 Hz, enquanto que a Figura B.13 mostra a frequência do sinal
obtido, a partir de ω , a qual se encontra na frequência de 60 Hz.
Figura B.11 - Tensão de entrada no gráfico superior e tensão após o filtro de 2ª ordem no
gráfico inferior.

155
Figura B.12 - Tensão de entrada e seno gerado a partir do de saída na freqüência de 60 Hz.
Figura B.13 - Resultado experimental para a frequência estantânea, f .
Com o auxílio do gerador de funções alterou-se a frequência para 61 Hz do sinal de
entrada de forma a testar o controlador. A Figura B.14 mostra a freqüência ω, enquanto que a
Figura B.15 compara a tensão de entrada e o seno gerado, mostrando que a fase entre estes
dois últimos sinais é mantida.
θ

156
Figura B.14 – Frequência no valor de 61 Hz..
Figura B.15 – Tensão de entrada e seno gerado a partir do de saída na freqüência de 61 Hz.
f
θ