
Modelação para análise de estabilidade de sistemas de ... · Tabela 9 – Gama de regulação e...
77
Modelação para análise de estabilidade de sistemas de excitação sem escovas em geradores síncronos Joel André Gonçalves Dissertação para obtenção do Grau de Mestre em Engenharia Eletrotécnica e de Computadores Orientador: Prof. Doutor José Luís Costa Pinto de Sá Júri Presidente: Prof. Doutor Rui Manuel Gameiro de Castro Orientador: Prof. Doutor José Luís Costa Pinto de Sá Vogal: Prof. Doutor Gil Domingos Marques Novembro de 2016
Transcript of Modelação para análise de estabilidade de sistemas de ... · Tabela 9 – Gama de regulação e...

Modelação para análise de estabilidade de sistemas de
excitação sem escovas em geradores síncronos
Joel André Gonçalves
Dissertação para obtenção do Grau de Mestre em
Engenharia Eletrotécnica e de Computadores
Orientador: Prof. Doutor José Luís Costa Pinto de Sá
Júri
Presidente: Prof. Doutor Rui Manuel Gameiro de Castro
Orientador: Prof. Doutor José Luís Costa Pinto de Sá
Vogal: Prof. Doutor Gil Domingos Marques
Novembro de 2016

i
Agradecimentos
Em primeiro lugar, ao Professor José Luís Costa Pinto de Sá, orientador da presente dissertação, por
me ter proporcionado desenvolver este tema, sobre um problema real e atual de engenharia, tornando-
o assim mais aliciante e motivador. Além disso, gostaria também de agradecer pela dedicação, apoio
e pelo esclarecimento das inúmeras dúvidas que foram surgindo ao longo da realização deste trabalho,
permitindo-me assim complementar e desenvolver novas capacidades quer a nível técnico, quer a nível
pessoal.
Ao meu irmão, pela ajuda, força e apoio na adaptação e passagem por esta fase da minha vida, o que
me levou a nunca desistir de lutar pelos meus objetivos, mesmo perante situações de maiores dificul-
dades.
Aos meus pais, um grande obrigado pelo apoio, educação, motivação e incentivo dados ao longo desta
caminhada e por me terem permitido realizar e concluir esta importante etapa.
A todos os meus amigos, pelos poucos, mas bons momentos de convívio que passámos e em especial
aos colegas de curso Luís Pinto e Henrique Ferreira pelo companheirismo e apoio, quer nos momentos
de convívio, quer nos momentos mais difíceis.
ii
Resumo
Atualmente, os geradores síncronos desempenham um importante papel nos sistemas de energia elé-
trica. Eles estão presentes na maioria das centrais elétricas, onde são usados para produzir energia
elétrica. Estes geradores possuem um sistema de excitação, utilizado na sua operação, o qual tem um
grande impacto na estabilidade transitória do sistema.
O intuito deste trabalho é identificar e caracterizar um sistema de excitação de um gerador real, cujo
modelo não é normalizado, e posteriormente realizar uma análise da estabilidade transitória.
Assim, esta dissertação estuda um tipo de sistema de excitação sem escovas (brushless), sendo um
dos mais usuais atualmente. O objetivo é modelar o sistema de excitação, começando por escolher um
modelo apropriado com base em modelos normalizadas pelo IEEE.
De seguida, são estimados os parâmetros do sistema global (gerador e respetivo sistema de excitação),
com base em ensaios de terreno do gerador real. A estimação é feita utilizando a ferramenta Parameter
Estimation disponível no Simulink.
Entre o processo de estimação de parâmetros realiza-se um estudo do impacto dos parâmetros do
sistema de excitação de forma a obter-se uma familiarização com o modelo em questão.
Na sequência deste trabalho realizou-se também uma análise dos ensaios de terreno para obtenção
dos parâmetros que caracterizam o gerador síncrono, dado que os valores dos parâmetros fornecidos
pelo fabricante apresentam algumas incongruências.
Por fim, são propostos modelos construídos em Simulink, integráveis em pacotes de software de aná-
lise de redes (ETAP) assim como as regras que se devem ter em conta na sua construção e utilização.
Palavras-chave:
Sistema de excitação sem escovas, gerador síncrono, AC1A, estimação de parâmetros, estabilidade
transitória

iii
Abstract
The synchronous generators have an important role in nowadays electric power system. They are typi-
cally present in most of the power plants and are used to produce electric energy. These generators
have an excitation system, used in its operation, which has an important impact on the transient stability
of the system.
The intention of this work is to identify and characterize an excitation system of an existent generator
whose model is not standard, and then perform an analysis of transient stability.
Thus, this dissertation studies a type of excitation system without brushes (brushless), one of the most
usual these days. The goal is to model the excitation system without brushes, starting by choosing the
appropriate model based on standardized models of the IEEE.
Then, the global system parameters are estimated (generator and its excitation system) based on the
real generator field-tests. The estimation is done using Parameter Estimation tool available in Simulink.
Along with the estimation of parameters is carried out an analyses of its impact on the excitation system
in a way to get familiar with the model in study.
Following this work was also made an analysis of the field-tests, used to obtain the parameters which
characterize the synchronous generator, since the parameters values provided by the manufacturer
have some incongruities.
Finally, are proposed models built in Simulink, which can be fitted in software packages of network
analysis (ETAP), as well as the rules that must be taken into account in its construction and utilization.
Keywords: brushless excitation system, synchronous generator, AC1A, parameters estimation, transi-
ent stability
iv
Índice
Agradecimentos .........................................................................................................................................i
Resumo .................................................................................................................................................... ii
Abstract.................................................................................................................................................... iii
Lista de Figuras ........................................................................................................................................v
Lista de Tabelas ..................................................................................................................................... vii
Lista de Acrónimos ................................................................................................................................ viii
Lista de Símbolos .................................................................................................................................... ix
1. Introdução ........................................................................................................................................ 1
1.1. Objetivos Principais ................................................................................................................. 1
1.2. Estrutura do Trabalho .............................................................................................................. 1
2. Enquadramento ................................................................................................................................ 2
2.1. Sistemas de excitação: funções, constituição e tipologias existentes .................................... 2
2.2. Sistemas de excitação AC ....................................................................................................... 4
2.3. Sistemas de excitação estáticos ............................................................................................. 5
2.4. Modelos normalizados pelo IEEE para sistemas de excitação ............................................... 6
2.4.1. Modelo do sistema de excitação do tipo AC1A ............................................................... 7
2.4.2. Modelo do sistema de excitação do tipo ST1A ............................................................. 10
2.5. Identificação dos parâmetros do gerador através de ensaios de rejeição de carga ............. 11
2.6. Estabilidade de tensão .......................................................................................................... 13
3. Caso prático de estudo .................................................................................................................. 15
3.1. Descrição do sistema de excitação ....................................................................................... 15
3.2. Caracterização do gerador .................................................................................................... 17
4. Modelação do sistema global em Matlab/Simulink ........................................................................ 25
4.1. Representação do gerador síncrono ..................................................................................... 25
4.2. Representação da carga ....................................................................................................... 26
4.3. Representação do Sistema de excitação .............................................................................. 26
4.4. Identificação dos parâmetros do gerador e respetivo sistema de excitação ........................ 40
4.5. Modelos integráveis em software de análise de redes ......................................................... 50
5. Conclusões ..................................................................................................................................... 54
Bibliografia ............................................................................................................................................. 57
Anexos ................................................................................................................................................... 59
Anexo I – Constituição interna do bloco “AC1A Excitation System” existente no Simulink e
identificação dos principais blocos constituintes ............................................................................... 59
Anexo II – Configurações iniciais e resultados da 1ª estimação ....................................................... 60
Anexo III – Resultados da última e melhor estimação ...................................................................... 65

v
Lista de Figuras
Figura 1 – Blocos constituintes do sistema de excitação de um gerador síncrono [2] ........................... 2 Figura 2 – Esquema unifilar de um sistema de excitação AC, com retificadores estacionários [2] ........ 4 Figura 3 – Sistema de excitação sem escovas [2] .................................................................................. 5 Figura 4 – Sistema de excitação estático “Potencial-source controlled-rectifier” [2] .............................. 6 Figura 5 – Modelo do sistema de excitação do tipo AC1A do IEEE ....................................................... 7 Figura 6 – Característica de regulação do retificador ............................................................................. 8 Figura 7 – Equações de regulação do retificador ................................................................................... 8 Figura 8 – Características de saturação da excitatriz ............................................................................. 9 Figura 9 – Limitador windup (a) e limitador non-windup (b) .................................................................. 10 Figura 10 – Modelo do sistema de excitação do tipo ST1A do IEEE ................................................... 11 Figura 11 – Variação da tensão aos terminais do gerador aquando de uma rejeição de carga
capacitiva [9] .......................................................................................................................................... 13 Figura 12 – Intervalos de tempo associados às dinâmicas de diferentes equipamentos e sistemas de
controlo que afetam a estabilidade de tensão ...................................................................................... 14 Figura 13 – Esquema típico de uma excitatriz sem escovas, com gerador de magnetos permanentes
(PMG) [14] ............................................................................................................................................. 15 Figura 14 – Principais blocos constituintes do gerador síncrono em estudo com sistema de excitação
sem escovas [15] ................................................................................................................................... 16 Figura 15 – Circuito do conversor AC-AC, existente na excitatriz piloto (estator) ................................ 16 Figura 16 – Formas de onda das correntes de saída do regulador de acordo com o ângulo de disparo
dos tirístores [16] ................................................................................................................................... 17 Figura 17 – Ponte retificadora trifásica a díodos [14] ............................................................................ 17 Figura 18 – Curva da WECC para obtenção dos parâmetros da máquina a partir dos ensaios de
rejeição de carga [19] ............................................................................................................................ 20 Figura 19 – Registo de 40 s da tensão eficaz aos terminais do gerador .............................................. 21 Figura 20 – Registo de 0.3 s da tensão eficaz aos terminais do gerador após a perturbação ............. 22 Figura 21 – Exponencial ajustada às amostras registadas da tensão aos terminais do gerador......... 23 Figura 22 – Tensão de campo da excitatriz piloto ................................................................................ 24 Figura 23 – Bloco adotado para modelação do gerador síncrono ........................................................ 25 Figura 24 – Bloco utilizado para modelação da carga do sistema ....................................................... 26 Figura 25 – Diagrama fornecido do sistema de excitação da ANSALDO ............................................. 28 Figura 26 – Bloco existente no Simulink do sistema de excitação AC1A ............................................. 29 Figura 27 – Modelo global construído em Simulink para cálculo das condições iniciais ...................... 29 Figura 28 – Grandezas elétricas (𝑽𝑻, 𝑰𝑭𝑫 e 𝑽𝑭) em regime estacionário .............................................. 31 Figura 29 – Diagrama de blocos dos elementos de controlo da excitação .......................................... 32 Figura 30 – Diagrama de blocos que descreve o comportamento da excitatriz ................................... 32 Figura 31 – Equações que descrevem os modos de funcionamento do retificador [25] ...................... 33 Figura 32 – Diagrama de blocos que descreve o comportamento do retificador ................................. 34 Figura 33 – Modelo construído em Simulink baseado no AC1A do IEEE ............................................ 35 Figura 34 – Tensão aos terminais do gerador para uma rejeição de 3 Mvar 0.5 MW .......................... 36 Figura 35 – Tensão aos terminais do gerador, 𝑽𝑻, variando o parâmetro 𝑲𝑭 ...................................... 37 Figura 36 – Modelo construído em Simulink sem o bloco de retroação diferencial de estabilização... 38 Figura 37 – Correspondência entre parâmetros do sistema de excitação construído e o sistema em
estudo .................................................................................................................................................... 39 Figura 38 – Tensão aos terminais do gerador, 𝑽𝑻, na ausência da retroação diferencial de
estabilização do sistema de excitação .................................................................................................. 40 Figura 39 – Registo da tensão aos terminais do gerador no ensaio de terreno, correspondente a uma
rejeição de carga de 3 Mvar 0.5 MW .................................................................................................... 41 Figura 40 – Registo da tensão aos terminais do gerador e resposta do sistema simulado ................. 42 Figura 41 – Tensão aos terminais do gerador obtida após a 1ª estimação de parâmetros ................. 43 Figura 42 – Influência na tensão aos terminais do gerador variando 𝑲𝑨 ............................................. 44 Figura 43 – Influência na tensão aos terminais do gerador variando 𝑻𝑨 .............................................. 45 Figura 44 – Influência na tensão aos terminais do gerador variando 𝑻𝑬 .............................................. 46

vi
Figura 45 – Tensão aos terminais do gerador obtida após nova estimação dos parâmetros .............. 47 Figura 46 – Influência na tensão aos terminais do gerador variando 𝑻𝑩 .............................................. 48 Figura 47 – Influência na tensão aos terminais do gerador variando 𝑻𝑪 .............................................. 48 Figura 48 – Influência na tensão aos terminais do gerador para várias combinações de (𝑻𝑩, 𝑻𝑪) ...... 49 Figura 49 – Influência na tensão aos terminais do gerador para várias combinações de (𝑻𝑩, 𝑻𝑪),
mantendo-se a relação 𝑻𝑩 = 𝟏𝟎𝑻𝑪 ....................................................................................................... 50 Figura 50 – Blocos e componentes do Simulink reconhecidos pelo ETAP [29] ................................... 51 Figura 51 – Modelo construído, sem bloco de estabilização, para integração no ETAP ..................... 52 Figura 52 – Modelo construído com dependência da tensão aos terminais do gerador, 𝑽𝑻, para
integração no ETAP .............................................................................................................................. 53 Figura 53 – Configurações iniciais dos parâmetros utilizados na 1ª estimação ................................... 62 Figura 54 – Relatório do progresso da 1ª estimação ............................................................................ 62 Figura 55 – Trajetória dos parâmetros estimados ao longo das iterações ........................................... 63 Figura 56 – Parâmetros estimados referentes à 1ª estimação ............................................................. 64 Figura 57 – Parâmetros estimados referentes à última e melhor estimação ........................................ 66
vii
Lista de Tabelas
Tabela 1 – Dados e características do gerador elétrico síncrono ......................................................... 18 Tabela 2 – Valores das constantes de tempo calculados, após correção de 𝑻𝒅
′′ ................................. 19 Tabela 3 – Resultados dos cálculos auxiliares para cálculo das reactâncias do gerador .................... 21 Tabela 4 – Classificações de excitatrizes de diversos fabricantes de acordo com os modelos
normalizados pelo IEEE ........................................................................................................................ 27 Tabela 5 – Classificação e caracterização dos modelos do IEEE para excitatrizes [14] ..................... 27 Tabela 6 – Parâmetros do sistema global considerados e respetivas condições iniciais .................... 30 Tabela 7 – Descrição dos estados inicial e final da perturbação em estudo ........................................ 36 Tabela 8 – Resultados do cálculo das variáveis “a” e “b” da curva de saturação da excitatriz ............ 36 Tabela 9 – Gama de regulação e parâmetros típicos que caracterizam o AVR da Figura 25 ............. 39 Tabela 10 – Parâmetros de partida que caracterizam o AVR do sistema de excitação sem o bloco de
estabilização .......................................................................................................................................... 39 Tabela 11 – Gama de variação dos parâmetros do sistema de excitação AC1A segundo várias fontes
e respetivos valores típicos segundo o IEEE ........................................................................................ 43 Tabela 12 – Parâmetros obtidos na última estimação .......................................................................... 46 Tabela 13 – Palavras reservadas pelo ETAP para caracterizar as entradas/saídas dos sistemas de
excitação [29] ........................................................................................................................................ 51

viii
Lista de Acrónimos
SEE – Sistema de Energia Elétrica
IEEE – Institute of Electrical and Electronics Engineers
WECC – Western Electricity Coordinating Council
CCRL – Ciclo Combinado Refinaria de Luanda
AC – Alternating Current
DC – Direct Current
PMG – Permanent magnet generator
AVR – Automatic Voltage Regulator
UDM – User-Defined Dynamic Models
ETAP – Electrical Transient and Analysis Program
q.d.t – queda de tensão
pu – por unidade
SI – Sistema Internacional
Sat. / não sat. – saturado / não saturado
Eixo d – eixo direto
Eixo q – eixo em quadratura

ix
Lista de Símbolos
Símbolo Quantidade Unidades
𝑋𝑑 Reatância síncrona segundo o eixo d pu
𝑋𝑞 Reatância síncrona segundo o eixo q pu
𝑋𝑑′ Reatância transitória segundo o eixo d pu
𝑋𝑞′ Reatância transitória segundo o eixo q pu
𝑋𝑑′′ Reatância sub-transitória segundo o eixo d pu
𝑋𝑞′′ Reatância sub-transitória segundo o eixo q pu
𝑋𝑙 Reactância de dispersão pu
𝑋𝑒 Reactância externa pu
𝑇𝑑0′ Constante de tempo transitória em vazio segundo o eixo d s
𝑇𝑑0′′ Constante de tempo sub-transitória em vazio segundo o eixo d s
𝑇𝑑′ Constante de tempo transitória em curto-circuito segundo o eixo d s
𝑇𝑑′′ Constante de tempo sub-transitória em curto-circuito segundo o eixo d s
𝑇𝑞0′′ Constante de tempo sub-transitória em vazio segundo o eixo q s
𝑅𝑠 Resistência do estator pu
𝐻 Coeficiente de inércia s
𝐹 Fator de fricção pu
𝜙 Desfasagem entre a tensão e corrente °
𝛿 Ângulo de potência °
𝑃𝑚 Potência mecânica pu
𝜖𝑉 Elasticidade da potência ativa em relação à tensão s/ unidades
𝜂𝑉 Elasticidade da potência reativa em relação à tensão s/ unidades
𝑃 Potência ativa W
𝑄 / 𝑄𝐿 Potência reativa Var
𝑄𝑐 Potência capacitiva Var
𝑓𝑛 Frequência elétrica Hz
𝑣𝑑 Tensão do estator segundo o eixo d pu
𝑣𝑞 Tensão do estator segundo o eixo q pu
𝐹𝐸𝑋 Função de operação do retificador pu
𝑉𝑋 Sinal proporcional à saturação da excitatriz pu
𝑉𝐸 Tensão de saída da excitatriz pu
𝑉𝑓 Tensão de campo pu
𝐼𝑁 Corrente de carga da excitatriz normalizada pu
𝑉𝑅𝐸𝐹 Tensão de referência do regulador de tensão pu
𝑉𝑠𝑡𝑎𝑏 / 𝑉𝑆 Sinal de estabilização adicional proveniente do PSS pu
𝑉𝑈𝐸𝐿 Limitador de sub-excitação pu
𝑉𝑂𝐸𝐿 Limitador de sobre-excitação pu
𝑉𝐴𝑀𝐼𝑁 , 𝑉𝐴𝑀𝐴𝑋 Tensão mínima e máxima de saída do regulador de tensão pu
𝑉𝑅𝑀𝐼𝑁 , 𝑉𝑅𝑀𝐴𝑋 Tensão mínima e máxima de saída do regulador de tensão pu
x
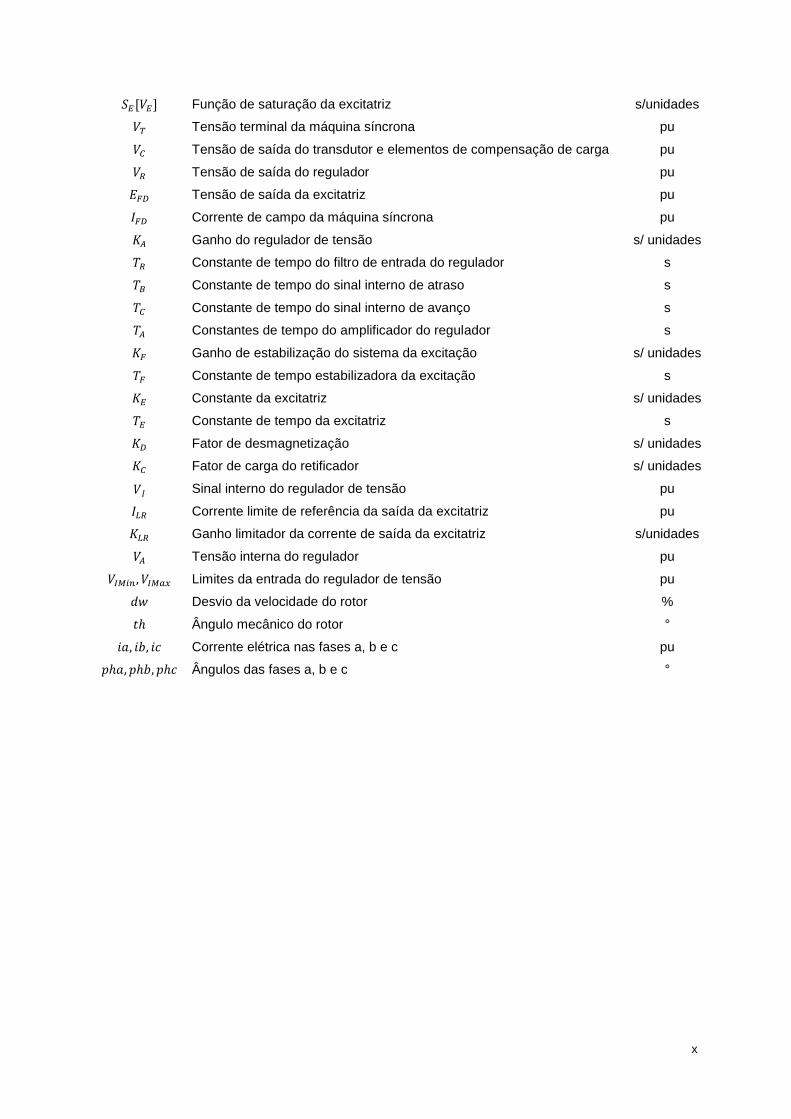
𝑆𝐸[𝑉𝐸] Função de saturação da excitatriz s/unidades
𝑉𝑇 Tensão terminal da máquina síncrona pu
𝑉𝐶 Tensão de saída do transdutor e elementos de compensação de carga pu
𝑉𝑅 Tensão de saída do regulador pu
𝐸𝐹𝐷 Tensão de saída da excitatriz pu
𝐼𝐹𝐷 Corrente de campo da máquina síncrona pu
𝐾𝐴 Ganho do regulador de tensão s/ unidades
𝑇𝑅 Constante de tempo do filtro de entrada do regulador s
𝑇𝐵 Constante de tempo do sinal interno de atraso s
𝑇𝐶 Constante de tempo do sinal interno de avanço s
𝑇𝐴 Constantes de tempo do amplificador do regulador s
𝐾𝐹 Ganho de estabilização do sistema da excitação s/ unidades
𝑇𝐹 Constante de tempo estabilizadora da excitação s
𝐾𝐸 Constante da excitatriz s/ unidades
𝑇𝐸 Constante de tempo da excitatriz s
𝐾𝐷 Fator de desmagnetização s/ unidades
𝐾𝐶 Fator de carga do retificador s/ unidades
𝑉𝐼 Sinal interno do regulador de tensão pu
𝐼𝐿𝑅 Corrente limite de referência da saída da excitatriz pu
𝐾𝐿𝑅 Ganho limitador da corrente de saída da excitatriz s/unidades
𝑉𝐴 Tensão interna do regulador pu
𝑉𝐼𝑀𝑖𝑛 , 𝑉𝐼𝑀𝑎𝑥 Limites da entrada do regulador de tensão pu
𝑑𝑤 Desvio da velocidade do rotor %
𝑡ℎ Ângulo mecânico do rotor °
𝑖𝑎, 𝑖𝑏, 𝑖𝑐 Corrente elétrica nas fases a, b e c pu
𝑝ℎ𝑎, 𝑝ℎ𝑏, 𝑝ℎ𝑐 Ângulos das fases a, b e c °

1
1. Introdução
1.1. Objetivos Principais
Esta dissertação tem como principais objetivos estudar, modelar e caracterizar o sistema de excitação
sem escovas de um gerador síncrono para posterior análise de estabilidade.
Inicialmente, começa-se por selecionar um modelo adequado de entre os vários disponibilizados e
normalizados pelo IEEE, passando-se de seguida à sua modelação. Mais tarde, pretende-se estimar
os parâmetros do gerador e respetivo sistema de excitação, com base em ensaios de terreno, de forma
a caracterizar o modelo que procura descrever o sistema real.
Por fim, é ainda esperado a otimização dos parâmetros reguláveis para melhoria da estabilidade
transitória e a construção de modelos em Simulink integráveis em pacotes de software de análise de
redes (ETAP), assim como as regras a ter em conta para realizar a sua construção.
1.2. Estrutura do Trabalho
A presente dissertação encontra-se organizada em 5 capítulos começando-se no primeiro capí-
tulo pela apresentação dos principais objetivos e descrição sumária da estrutura do trabalho.
No segundo capítulo, é realizada uma introdução teórica de forma a enquadrar as principais
temáticas que irão ser abordadas e desenvolvidas nos restantes capítulos. Começa-se pelo
enquadramento teórico dos sistemas de excitação onde é realizada uma descrição dos seus
constituintes, apresentadas as suas funções e principais grupos existentes. Em seguida é reali-
zada uma descrição com detalhe dos blocos e funções matemáticas que descrevem os modelos
normalizados pelo IEEE, do tipo AC1A e do tipo ST1A. Neste capítulo é ainda apresentado um
método para identificar os parâmetros do gerador através de ensaios de rejeição de carga e
realizada uma abordagem sobre estabilidade de tensão.
Posteriormente, no terceiro capítulo, começa-se por descrever e caracterizar o sistema de excita-
ção em estudo, referindo os seus constituintes e as principais particularidades que este apre-
senta face aos sistemas sem escovas típicos. De seguida é caracterizado o gerador síncrono e
são analisados os respetivos parâmetros com base em relações existentes entre estes e
recorrendo a ensaios de rejeição de carga efetuados no terreno.
No penúltimo capítulo, o quarto capítulo, é modelado o sistema global (gerador, sistema de
excitação e carga) em Matlab/Simulink. Neste capítulo são estimados os parâmetros do gerador
e respetivo sistema de excitação através da ferramenta de estimação existente no Simulink
(Parameter Estimation). Entre as estimações realizadas é ainda estudado o efeito de determina-
dos parâmetros do sistema de excitação na tensão aos terminais do gerador.
Por fim, no quinto e último capítulo são apresentadas as limitações e conclusões deste trabalho,
assim como propostas possíveis para trabalhos futuros que possam dar continuidade ao tema
estudado.

2
2. Enquadramento
2.1. Sistemas de excitação: funções, constituição e tipologias existentes
O gerador síncrono é um dos elementos mais importantes num SEE uma vez que este é o responsável
pela maioria da energia elétrica produzida atualmente no mundo, [1]. No gerador, a energia mecânica,
normalmente obtida a partir de uma turbina acoplada ao seu veio, é transformada em energia elétrica.
Esta transformação é apenas possível se existir o sistema de excitação do gerador, o qual possui um
papel fundamental neste processo de transformação de energia.
Assim, a principal função de qualquer sistema de excitação consiste em fornecer corrente contí-
nua (DC) ao enrolamento de campo da máquina síncrona. Além disso, este sistema realiza ainda
funções de compensação de carga, controlo e proteção, as quais são cruciais para se obter um
desempenho satisfatório do sistema elétrico ligado ao gerador, através primeiramente do controlo
da tensão de campo e consequentemente da corrente de campo.
As funções de controlo abrangem quer o controlo da tensão aos terminais do gerador, quer o controlo
da potência reativa, além de permitirem um aumento da estabilidade do sistema elétrico.
Relativamente às funções de proteção, estas desempenham um papel importante pois garantem que
os limites admissíveis da máquina síncrona, sistema de excitação, entre outros equipamentos
pertencentes ao sistema não sejam excedidos, de forma a não os danificar.
Para esquematizar e expor os elementos constituintes de um sistema de excitação segue-se a Figura
1, a qual apresenta os vários blocos funcionais e a nomenclatura usual, segundo o IEEE, destes siste-
mas. Os seus blocos constituintes podem incluir o transdutor da tensão terminal e compensador de
carga, elementos de controlo da excitação (regulador), excitatriz e em alguns casos um sistema estabili-
zador de potência.
Figura 1 – Blocos constituintes do sistema de excitação de um gerador síncrono [2]

3
Os blocos apresentados na Figura 1 têm funções específicas, as quais são brevemente descritas de
seguida:
● Excitatriz – fornece a corrente contínua (DC) ao enrolamento de campo do gerador síncrono;
● Regulador – o qual é um dos constituintes dos elementos de controlo da excitação, cuja função é
processar e amplificar os sinais de controlo da entrada para um nível e forma adequada, de modo que
o sinal resultante controle a excitatriz. Este inclui não só funções de regulação do sistema de excitação,
mas também funções de estabilização, através por exemplo de compensadores avanço-atraso;
● Transdutor da tensão terminal e compensador de carga – o transdutor mede a tensão elétrica aos
terminais do gerador, retifica-a e, de seguida filtra essa medida numa quantidade de corrente contínua.
Depois esta quantidade é comparada com a referência a qual representa o valor desejável da tensão
elétrica aos terminais do gerador síncrono. O compensador de carga pode ou não ser considerado,
tendo como objetivo manter constante a tensão num ponto distante através dos terminais do gerador.
● Sistema estabilizador de potência – fornece um sinal adicional à entrada do regulador de forma a
amortecer oscilações do sistema de energia. Os sinais de entrada tipicamente utilizados são: o desvio
da velocidade, o desvio de frequência e a potência de aceleração;
● Limitadores e circuitos de proteção – estes incluem uma grande diversidade de funções quer de
controlo, quer de proteção, os quais garantem que os limites de capacidade da excitatriz e do gerador
síncrono não são excedidos. Existem várias funções normalmente utilizadas, como por exemplo, a
limitação da corrente de campo, a limitação de sub-excitação e sobre-excitação, a limitação da tensão
elétrica aos terminais do gerador síncrono e a proteção e regulação de tensão/frequência elétrica.
A Figura 1, permite ainda esquematizar o princípio básico de funcionamento de um sistema de excita-
ção. Inicialmente, a tensão aos terminais do gerador, 𝑉𝑇 , começa por ser enviada para os elementos
de controlo da excitação através dos sinais de realimentação (𝑉𝐶 𝑒 𝑉𝑆). No caso de 𝑉𝑇 ser instável e
diferente de 𝑉𝑅𝐸𝐹, os elementos de controlo irão fornecer 𝑉𝑅 de forma a controlar a saída da excitatriz,
ou seja, a corrente e tensão de campo (𝐼𝐹𝐷 𝑒 𝐸𝐹𝐷, respetivamente) são ajustadas para que a tensão aos
terminais do gerador, 𝑉𝑇, volte novamente ao regime estacionário e ao seu valor de referência, [3].
Ao longo dos anos os sistemas de excitação têm evoluído e tomado diversas formas, os quais podem
ser divididos em três grupos principais [4], de acordo com a proveniência da alimentação da excitação:
- Sistemas de excitação do tipo DC, que utilizam um gerador de corrente contínua com um comutador
como fonte do sistema de excitação.
- Sistemas de excitação do tipo AC, os quais usam um alternador (máquina AC) ou retificadores rotati-
vos ou estacionários para produzir a corrente contínua requerida pelo enrolamento de excitação do
gerador.
- Sistemas de excitação do tipo ST, ou também designados por estáticos, onde o sistema de excitação
é alimentado através de transformadores ou através dos enrolamentos do gerador e retificadores.

4
Dado que no desenvolvimento deste trabalho, dos três tipos de sistemas de excitação indicados
anteriormente, apenas dois deles são referidos (sistemas do tipo AC e estáticos) considerou-se impor-
tante realizar uma abordagem referente a estes, a qual se apresenta de seguida.
2.2. Sistemas de excitação AC
Estes sistemas de excitação utilizam alternadores como fontes de alimentação do enrolamento de
campo do gerador principal. Nestes, a solução mais usual consiste em ter a excitatriz no próprio veio
da turbina, o qual está acoplado ao gerador principal. A saída AC da excitatriz pode ser retificada quer
através de retificadores controlados, quer por retificadores não controlados, de forma a produzir a
corrente necessária para alimentar o enrolamento de campo do gerador. Os retificadores presentes no
rotor do gerador principal podem ser de dois tipos: estacionários ou rotativos. Assim, este tipo de siste-
mas de excitação pode tomar diversas formas dependendo do retificador existente no rotor, fonte de
alimentação e controlo da excitatriz.
- Sistemas com retificadores estacionários:
Neste caso, onde estão presentes retificadores estacionários, a saída do alternador, depois de ser
transformada para um nível de tensão adequado, é retificada e conectada ao enrolamento de campo
do gerador através de anéis coletores. Quando se utilizam retificadores a tirístores, ou seja, controla-
dos, o regulador é responsável por controlar a tensão de saída DC da excitatriz.
Figura 2 – Esquema unifilar de um sistema de excitação AC, com retificadores estacionários [2]

5
- Sistemas com retificadores rotativos:
Este tipo de sistemas ao contrário do anterior, não possui anéis coletores nem escovas. A alimentação
do enrolamento de campo do gerador é feita a partir da saída DC do retificador, sem contacto galvânico.
Na Figura 3 é possível verificar que a armadura da excitatriz AC e os retificadores a díodos rodam
solidariamente com o veio do gerador principal. Nestes sistemas existe ainda uma pequena excitatriz
piloto, cujo rotor possui ímanes permanentes, o qual roda com armadura da excitatriz e com o retificador
a díodos.
Figura 3 – Sistema de excitação sem escovas [2]
Estes sistemas, dado que não possuem escovas, nem anéis deslizantes, necessitam de menos
manutenção, sendo esta a principal vantagem. Por outro lado, o facto do retificador presente na estru-
tura rotativa ser constituído por díodos leva a que a tensão de campo não possa tomar um valor menor
que zero, o que pode ser visto como uma desvantagem, face aos sistemas com retificadores controla-
dos, a tirístores.
Neste tipo de sistemas de excitação é ainda importante referir que não é possível medir a corrente e
tensão de campo do gerador principal, uma vez que não se tem acesso direto a estas grandezas elétri-
cas.
2.3. Sistemas de excitação estáticos
Nestes sistemas de excitação, tal como o próprio nome indica, todos os seus componentes são estáti-
cos. Os retificadores alimentam diretamente o enrolamento de excitação do gerador principal através
de anéis coletores, podendo estes ser controlados ou não controlados. Por sua vez, os retificadores
podem ser alimentados através dos terminais do gerador principal ou por um barramento auxiliar da
central elétrica.

6
Figura 4 – Sistema de excitação estático “Potencial-source controlled-rectifier” [2]
Estes apresentam uma vantagem quando comparados com os sistemas sem escovas (com retificado-
res rotativos), já que o seu tempo de resposta é inferior (praticamente instantâneo), pois a corrente de
excitação é disponibilizada diretamente no enrolamento de campo do gerador síncrono.
A principal desvantagem deste sistema é que a tensão de saída da excitatriz, incluindo a tensão de teto
disponível, depende da tensão aos terminais do gerador principal, existindo uma dificuldade em resta-
belecer a estabilidade do sistema, por exemplo, após a ocorrência de um curto-circuito. No entanto,
esta desvantagem é superada pela sua rapidez de resposta, [5].
Nestes sistemas, como a alimentação da excitatriz é adquirida a partir dos próprios terminais do gerador
principal é necessário recorrer, no seu arranque, a outra fonte de energia durante alguns segundos de
forma a obter-se a corrente de campo necessária para o arranque a frio. Este processo é designado
por field flashing, onde é utilizado um banco de baterias como fonte, [2].
2.4. Modelos normalizados pelo IEEE para sistemas de excitação
No âmbito de estudos de estabilidade transitória, a modelação com precisão do gerador e do respetivo
sistema de excitação é considerada fundamental para avaliar os requisitos de desempenho do sistema.
Além da sua importância em estudos de estabilidade, a correta modelação destes sistemas também é
essencial no projeto e coordenação de circuitos de proteção e de controlo auxiliar. O detalhe dos
modelos requerido depende essencialmente da finalidade do estudo em questão, [2]. Assim o IEEE,
reconhecido como entidade normalizadora de modelos para sistemas de excitação, disponibiliza vários
modelos destes sistemas, controlos suplementares e limitadores importantes para realizar tais estudos.
Dado os inúmeros modelos disponibilizados por esta entidade irão apenas descrever-se em particular
dois dos seus modelos: AC1A e ST1A, os quais serão referidos no desenvolvimento deste trabalho.

7
2.4.1. Modelo do sistema de excitação do tipo AC1A
O modelo indicado na Figura 5, designado por Tipo AC1A, representa um sistema de excitação com
excitatriz AC, sem escovas e do tipo rotativo, dada a presença de uma ponte retificadora rotativa a
díodos na sua excitatriz principal. Este tipo de modelo é adequado para representar a excitatriz de um
gerador síncrono nos estudos de estabilidade em grandes sistemas de energia. Neste, a excitatriz não
possui auto-excitação, e a potência do regulador é obtida a partir de uma fonte que não é afetada pelos
transitórios externos. A característica dos díodos, presentes na excitatriz principal, impõe na sua saída
um limite inferior de tensão nulo, o qual se encontra representado no bloco integrador com constante
de tempo, 𝑇𝐸 .
Figura 5 – Modelo do sistema de excitação do tipo AC1A do IEEE
Em termos funcionais, quando o sistema sofre uma perturbação, é originado um sinal de erro, dado por
𝑉𝐸𝑅𝑅𝑂 = 𝑉𝑅𝐸𝐹 − 𝑉𝐶, o qual é adicionado ao sinal de estabilização, 𝑉𝑆, e subtraído do sinal de realimenta-
ção, 𝑉𝐹. De seguida, o sinal resultante passa pelo compensador avanço-atraso, que representa o AVR,
e segue para o bloco do amplificador, sendo neste limitado entre 𝑉𝐴𝑀𝐼𝑁 e 𝑉𝐴𝑀𝐴𝑋 . O compensador
avanço-atraso tem como finalidade reduzir o ganho a altas frequência, minimizando o efeito negativo
do amplificador no amortecimento do sistema, [6]. Já o ganho do amplificador, 𝐾𝐴, é responsável pela
redução do erro em regime permanente e do tempo de resposta do sistema. O sinal que sai do
regulador, 𝑉𝑅, sofre então a ação dos limitadores de sub-excitação, 𝑉𝑈𝐸𝐿, e sobre-excitação, 𝑉𝑂𝐸𝐿, caso
estes estejam representados e também dos limites 𝑉𝑅𝑀𝐼𝑁 e 𝑉𝑅𝑀𝐴𝑋. Depois, 𝑉𝑅 é subtraído do sinal 𝑉𝐹𝐸 ,
que representa a soma do sinal da função de saturação da excitatriz 𝑆𝐸[𝑉𝐸], com o sinal proveniente
do fator de desmagnetização, 𝐾𝐷. Como o enrolamento de campo da máquina principal corresponde a
uma carga maioritariamente indutiva para a excitatriz AC, esta provoca uma reação na armadura
gerando um fluxo no sentido oposto ao criado pelo regulador de tensão. A reação da armadura, de
acordo com a carga ligada à máquina principal, pode levar a alterações no modo de comutação dos
díodos da excitatriz rotativa. No modelo da Figura 5, este efeito é representado por 𝐾𝐶, 𝐼𝑁 e 𝐹𝐸𝑋. Por
fim, a tensão de excitação da máquina síncrona principal é gerada, a partir do produto entre a saída da
excitatriz, 𝑉𝐸, e 𝐹𝐸𝑋, [7].
𝑽𝑬𝑹𝑹𝑶
8
Em seguida, descrevem-se as duas principais funções presentes no modelo AC1A, 𝐹𝐸𝑋 e 𝑆𝐸[𝑉𝐸], as
quais correspondem à função de regulação do retificador e à função de saturação da excitatriz,
respetivamente. São ainda apresentados os tipos de limitadores existentes.
- Função de regulação do retificador:
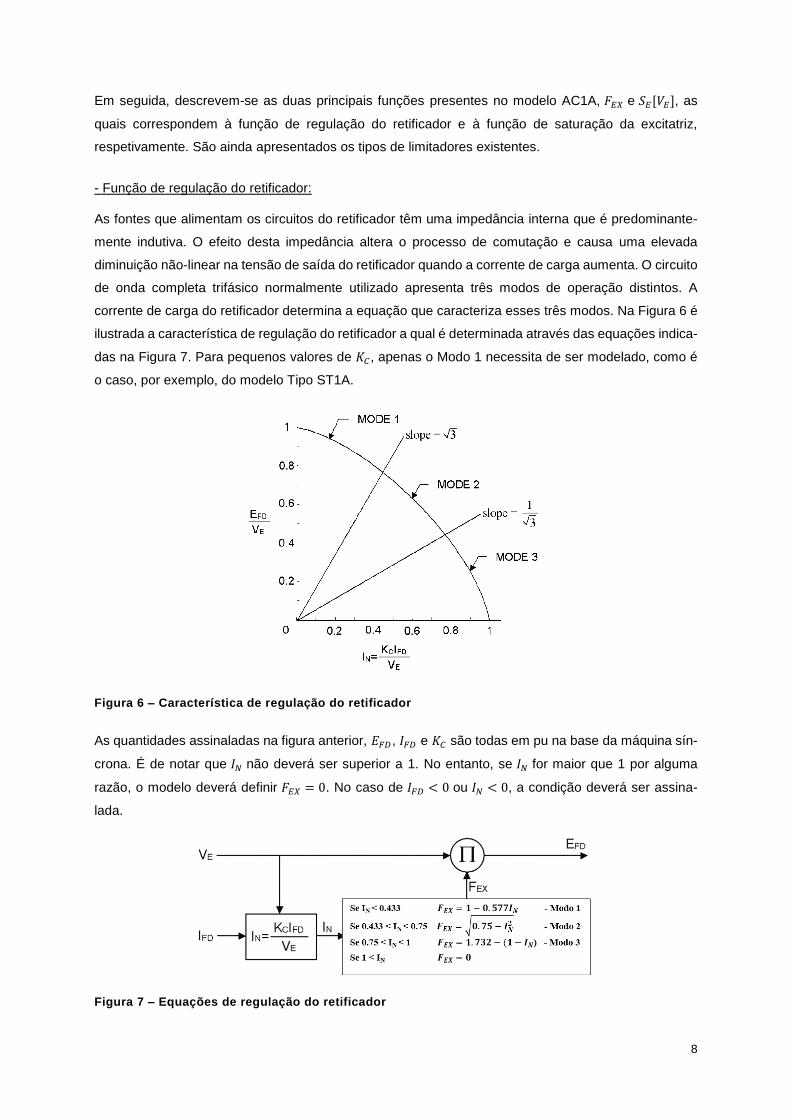
As fontes que alimentam os circuitos do retificador têm uma impedância interna que é predominante-
mente indutiva. O efeito desta impedância altera o processo de comutação e causa uma elevada
diminuição não-linear na tensão de saída do retificador quando a corrente de carga aumenta. O circuito
de onda completa trifásico normalmente utilizado apresenta três modos de operação distintos. A
corrente de carga do retificador determina a equação que caracteriza esses três modos. Na Figura 6 é
ilustrada a característica de regulação do retificador a qual é determinada através das equações indica-
das na Figura 7. Para pequenos valores de 𝐾𝐶, apenas o Modo 1 necessita de ser modelado, como é
o caso, por exemplo, do modelo Tipo ST1A.
Figura 6 – Característica de regulação do retificador
As quantidades assinaladas na figura anterior, 𝐸𝐹𝐷, 𝐼𝐹𝐷 e 𝐾𝐶 são todas em pu na base da máquina sín-
crona. É de notar que 𝐼𝑁 não deverá ser superior a 1. No entanto, se 𝐼𝑁 for maior que 1 por alguma
razão, o modelo deverá definir 𝐹𝐸𝑋 = 0. No caso de 𝐼𝐹𝐷 < 0 ou 𝐼𝑁 < 0, a condição deverá ser assina-
lada.
Figura 7 – Equações de regulação do retificador

9
- Função de saturação da excitatriz
A função de saturação da excitatriz, 𝑆𝐸 é definida como um multiplicador da tensão de saída da exci-
tatriz em pu para representar o aumento da corrente de excitação devido à sua saturação. A Figura 8
ilustra o cálculo do valor em particular de 𝑆𝐸[𝐸𝐹𝐷]. Dada a tensão de saída da excitatriz, as quantidades
A, B e C são definidas como a excitação requerida para produzir a tensão de saída na curva “constant-
resistance-load saturation”, na recta “air-gap line”, e na curva “no-load saturation”, respectivamente.
Para representar a saturação em carga, 𝑆𝐸[𝐸𝐹𝐷] é dada pela equação seguinte.
𝑆𝐸[𝐸𝐹𝐷] =𝐴 − 𝐵
𝐵 (1)
Figura 8 – Características de saturação da excitatriz
No caso em que a resistência de campo da excitatriz é significativamente diferente da resistência base
da excitatriz, pode ser feito um ajuste do valor de 𝑆𝐸. Neste caso, 𝑆𝐸[𝐸𝐹𝐷] é dado por:
𝑆𝐸[𝐸𝐹𝐷] =𝐶 − 𝐵
𝐵 (2)
A função de saturação é modelada matematicamente pela seguinte expressão:
𝑆𝐸 = 𝐴𝑥 ∗ 𝑒𝐵𝑥∗𝐸𝐹𝐷 (3)
As constantes 𝐴𝑥 e 𝐵𝑥 podem ser calculadas a partir da especificação de 𝑆𝐸 para dois valores diferen-
tes de 𝐸𝐹𝐷. Normalmente, 𝑆𝐸 é indicado para um valor próximo da tensão de teto e o valor inferior para
75% do anterior, [6].
- Limitadores:
A representação dos limitadores nos modelos de sistemas de excitação pode ser de dois tipos distintos:
limitadores windup ou limitadores non-windup. Como o comportamento de cada um destes limitadores
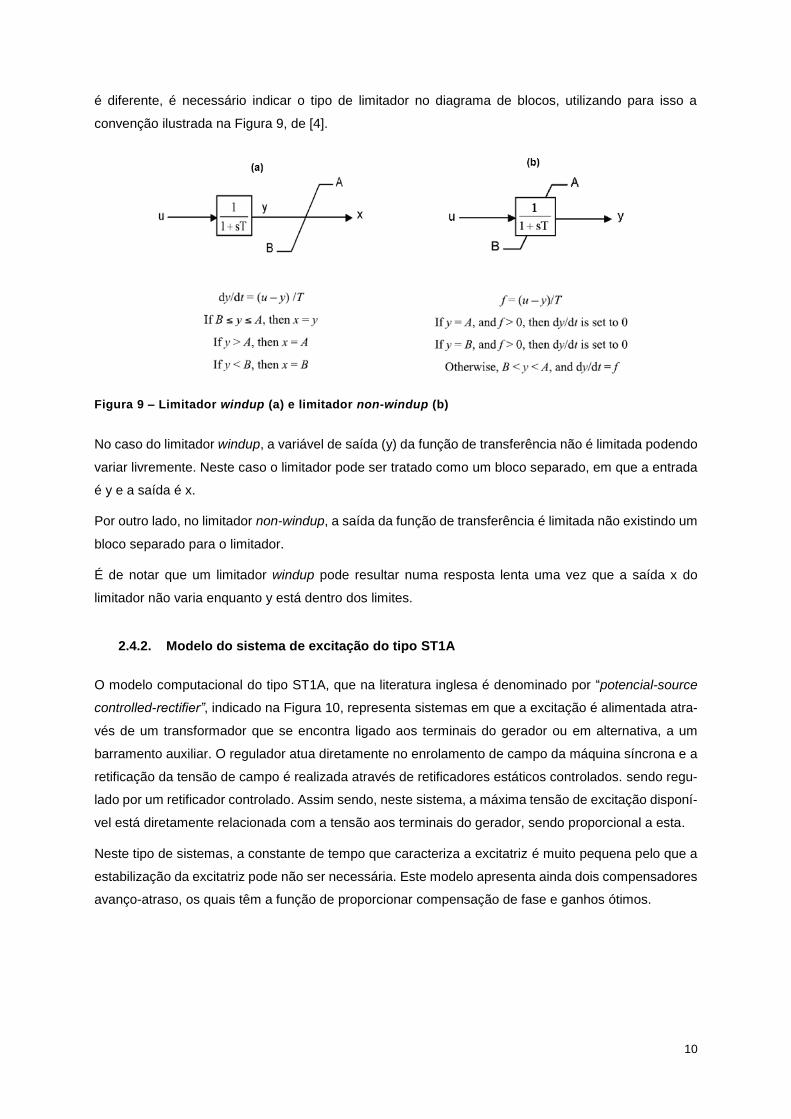
10
é diferente, é necessário indicar o tipo de limitador no diagrama de blocos, utilizando para isso a
convenção ilustrada na Figura 9, de [4].
Figura 9 – Limitador windup (a) e limitador non-windup (b)
No caso do limitador windup, a variável de saída (y) da função de transferência não é limitada podendo
variar livremente. Neste caso o limitador pode ser tratado como um bloco separado, em que a entrada
é y e a saída é x.
Por outro lado, no limitador non-windup, a saída da função de transferência é limitada não existindo um
bloco separado para o limitador.
É de notar que um limitador windup pode resultar numa resposta lenta uma vez que a saída x do
limitador não varia enquanto y está dentro dos limites.
2.4.2. Modelo do sistema de excitação do tipo ST1A
O modelo computacional do tipo ST1A, que na literatura inglesa é denominado por “potencial-source
controlled-rectifier”, indicado na Figura 10, representa sistemas em que a excitação é alimentada atra-
vés de um transformador que se encontra ligado aos terminais do gerador ou em alternativa, a um
barramento auxiliar. O regulador atua diretamente no enrolamento de campo da máquina síncrona e a
retificação da tensão de campo é realizada através de retificadores estáticos controlados. sendo regu-
lado por um retificador controlado. Assim sendo, neste sistema, a máxima tensão de excitação disponí-
vel está diretamente relacionada com a tensão aos terminais do gerador, sendo proporcional a esta.
Neste tipo de sistemas, a constante de tempo que caracteriza a excitatriz é muito pequena pelo que a
estabilização da excitatriz pode não ser necessária. Este modelo apresenta ainda dois compensadores
avanço-atraso, os quais têm a função de proporcionar compensação de fase e ganhos ótimos.

11
Figura 10 – Modelo do sistema de excitação do tipo ST1A do IEEE
Relativamente ao seu funcionamento, tal como no modelo anterior, quando o sistema está sujeito a
uma perturbação é gerado um sinal de erro, dado por 𝑉𝐸𝑅𝑅𝑂 = 𝑉𝑅𝐸𝐹 − 𝑉𝐶, somado ao sinal estabilizador
𝑉𝑆 e subtraído da realimentação 𝑉𝐹, limitado posteriormente por 𝑉𝐼𝑀𝑖𝑛 e 𝑉𝐼𝑀𝑎𝑥, os quis são proporcionais
à tensão aos terminais da máquina. Depois, 𝑉𝐼 pode sofrer a ação do limitador de sub-excitação, 𝑉𝑈𝐸𝐿.
Posteriormente a este limitador, passa pelo compensador avanço-atraso cujo sinal de saída vai para o
amplificador. O sinal de saída do amplificador, 𝑉𝐴, o qual é limitado por 𝑉𝐴𝑀𝐼𝑁 e 𝑉𝐴𝑀𝐴𝑋 (valores estes
que são proporcionais à tensão do secundário do transformador excitação) é subtraído da função que
representa o limite nominal da ponte retificadora. Posto isto, o a valor atual da corrente de excitação,
𝐼𝐹𝐷 é comparado com a corrente máxima que a ponte retificadora suporta, 𝐼𝑙𝑅, durante um determinado
intervalo de tempo e passa pelo ganho 𝐾𝐿𝑅. Para evitar que haja a atuação do limitador numa situação
de operação normal, a saída mínima deste é limitada a zero. Após passar pelos limitadores 𝑉𝑈𝐸𝐿 e 𝑉𝑂𝐸𝐿,
o sinal que daí advém segue para os limitadores 𝑉𝑅𝑀𝐼𝑁 e 𝑉𝑅𝑀𝐴𝑋 , os quais são dependentes e
proporcionais à tensão aos terminais da máquina síncrona, 𝑉𝑇 . A limitação anterior incluí ainda os
parâmetros 𝐾𝐶 e 𝐼𝐹𝐷, os quais estão relacionados com a reação da armadura da máquina síncrona e
podem alterar o modo de comutação da ponte retificadora de acordo com a corrente do sistema de
excitação, [7].
Finalmente, a tensão de excitação a alimentar o enrolamento de campo da máquina síncrona é gerada,
sendo representada por 𝐸𝐹𝐷.
2.5. Identificação dos parâmetros do gerador através de ensaios de rejeição de carga
A identificação dos parâmetros da máquina síncrona é muito importante para se poder realizar uma
análise sobre um SEE, quer em regime estacionário, quer em regime transitório, [8]. A precisão de um
estudo de estabilidade depende da precisão dos modelos dinâmicos e dos parâmetros que descrevem
os grupos de geração. O processo de identificação requere normalmente uma grande quantidade de
informação sobre o tipo de equipamento e respetivas características [9], a qual na maioria dos casos é
insuficiente. Ao longo dos anos foram desenvolvidos vários métodos para identificação dos parâmetros
𝑽𝑬𝑹𝑹𝑶

12
da máquina síncrona. No entanto dois desses, devido ao baixo risco para a máquina durante o teste e
à qualidade dos dados obtidos têm vindo a destacar-se. Os dois métodos são então o de rejeição de
carga e o método de resposta em frequência. Este último método é maioritariamente utilizado em
ensaios de laboratório, [8].
No método de identificação dos parâmetros através dos testes de rejeição de carga, existem um certo
número de requisitos que devem ser garantidos:
● o AVR deve estar em modo manual;
● deve-se garantir que a força-eletromotriz do gerador se mantém constante durante a rejeição de
carga;
● o gerador deverá estar sub-excitado, e, portanto, a consumir uma quantidade de potência reativa
considerável;
● o gerador deve produzir uma potência ativa aproximadamente nula, certificando-se que este se
encontra sincronizado com o sistema;
Com os requisitos descritos anteriormente é possível através do registo da tensão aos terminais do
gerador calcular os seus parâmetros segundo o eixo d, nomeadamente as reatâncias não saturadas
[10], 𝑋𝑑 , 𝑋𝑑′ e 𝑋𝑑
′′ e as constantes de tempo 𝑇𝑑0′ e 𝑇𝑑0
′′ .
A tensão aos terminais do gerador, quando ocorre a rejeição de carga pode ser descrita por:
𝑈(𝑡) = 𝑈∞ + (𝑈0′ − 𝑈∞)𝑒
−𝑡
𝑇𝑑0′
+ (𝑈0′′ − 𝑈0
′ )𝑒−
𝑡
𝑇𝑑0′′
(4)
Ou por:
𝑈(𝑡) = 𝑈0 − 𝐼0𝑋𝑑 + 𝐼0(𝑋𝑑 − 𝑋𝑑′ )𝑒
−𝑡
𝑇𝑑0′
+ 𝐼0(𝑋𝑑′ − 𝑋𝑑
′′)𝑒−
𝑡
𝑇𝑑0′′
(5)
Em que 𝑈0, 𝐼0 corresponde à tensão e corrente inicial do gerador, antes da rejeição de carga, e 𝑈∞
representa a tensão em regime estacionário final. 𝑈0 e 𝑈0′′ é os valores transitórios e sub-transitórios
das tensões.
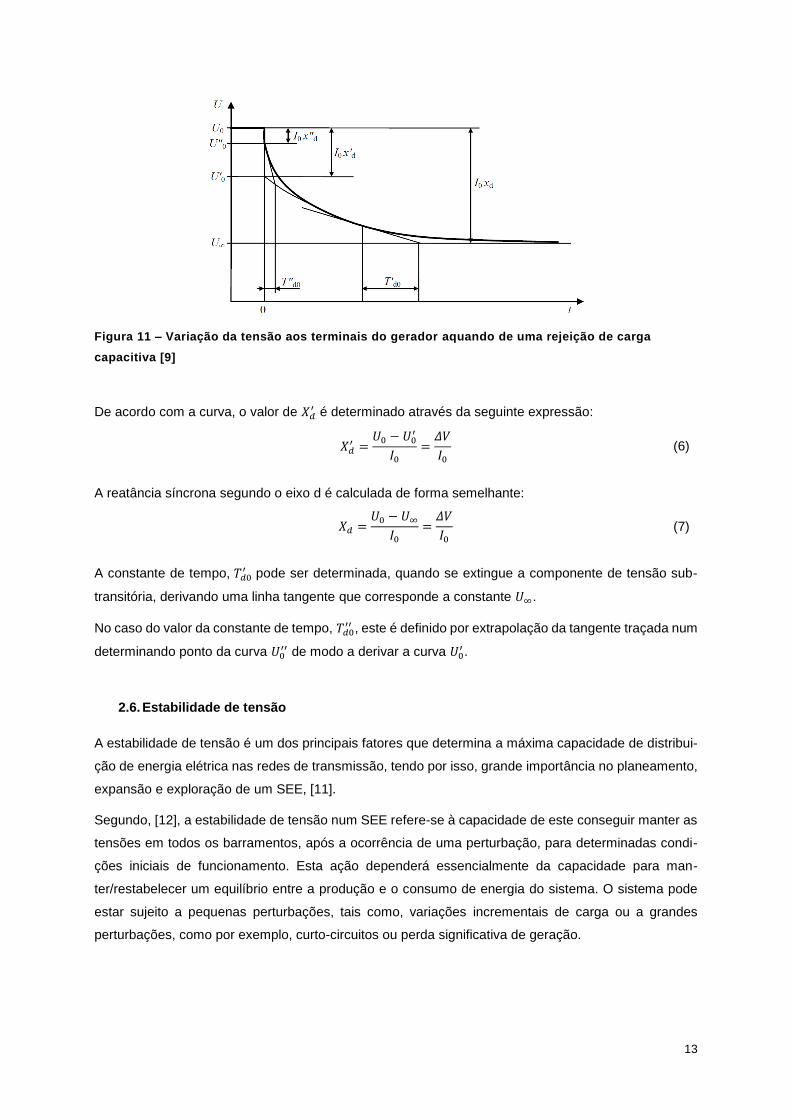
A variação da tensão, quando o gerador, com uma carga capacitiva ligada, ou seja, a consumir potência
reativa, é desligada, apresenta o comportamento mostrado na Figura 11.
13
Figura 11 – Variação da tensão aos terminais do gerador aquando de uma rejeição de carga
capacitiva [9]
De acordo com a curva, o valor de 𝑋𝑑′ é determinado através da seguinte expressão:
𝑋𝑑′ =
𝑈0 − 𝑈0′
𝐼0
=𝛥𝑉
𝐼0
(6)
A reatância síncrona segundo o eixo d é calculada de forma semelhante:
𝑋𝑑 =𝑈0 − 𝑈∞
𝐼0
=𝛥𝑉
𝐼0
(7)
A constante de tempo, 𝑇𝑑0′ pode ser determinada, quando se extingue a componente de tensão sub-
transitória, derivando uma linha tangente que corresponde a constante 𝑈∞.
No caso do valor da constante de tempo, 𝑇𝑑0′′ , este é definido por extrapolação da tangente traçada num
determinando ponto da curva 𝑈0′′ de modo a derivar a curva 𝑈0
′ .
2.6. Estabilidade de tensão
A estabilidade de tensão é um dos principais fatores que determina a máxima capacidade de distribui-
ção de energia elétrica nas redes de transmissão, tendo por isso, grande importância no planeamento,
expansão e exploração de um SEE, [11].
Segundo, [12], a estabilidade de tensão num SEE refere-se à capacidade de este conseguir manter as
tensões em todos os barramentos, após a ocorrência de uma perturbação, para determinadas condi-
ções iniciais de funcionamento. Esta ação dependerá essencialmente da capacidade para man-
ter/restabelecer um equilíbrio entre a produção e o consumo de energia do sistema. O sistema pode
estar sujeito a pequenas perturbações, tais como, variações incrementais de carga ou a grandes
perturbações, como por exemplo, curto-circuitos ou perda significativa de geração.

14
De acordo com a escala de tempo da dinâmica dos equipamentos a estabilidade de tensão pode ser
classificada como sendo de curto-termo ou longo-termo. A Figura 12 ilustra os equipamentos e siste-
mas de controlo que podem afetar a estabilidade de tensão num sistema de energia, assim como o
tempo correspondente à sua dinâmica.
A estabilidade de curto-termo envolve sistemas de elevada dinâmica, como motores de indução,
geradores síncronos, sistemas de excitação entre outros. Para realizar estes estudos de estabilidade,
o período de interesse em análise é apenas de alguns segundos, os quais requerem a obtenção da
solução de um conjunto de equações diferenciais que descrevam o sistema adequadamente.
Quanto à estabilidade de longo-termo, esta está relacionada com equipamentos que atuam mais lenta-
mente, como por exemplo, o arranque de uma turbina a gás e cargas controladas através de um ter-
mostato. Neste caso o período de interesse para análise da estabilidade pode ser estendido desde
alguns a vários minutos, [13].
Figura 12 – Intervalos de tempo associados às dinâmicas de diferentes equipamentos e sistemas
de controlo que afetam a estabilidade de tensão

15
3. Caso prático de estudo
Neste capítulo começa-se por descrever o sistema de excitação em estudo, nomeadamente as suas
características e os seus principais constituintes, sendo evidenciadas as particularidades apresentadas
por este face ao esquema típico de uma excitatriz sem escovas. De seguida, são indicadas as caracte-
rísticas do gerador e é realizada uma análise dos seus parâmetros com base em ensaios de terreno,
que embora não fosse o foco principal de estudo deste trabalho, se considerou relevante fazê-la por
razões que serão apresentadas na secção 3.2.
3.1. Descrição do sistema de excitação
O sistema de excitação em estudo, tal como já foi referido anteriormente é do tipo AC, sem escovas
(brushless), embora apresente algumas particularidades relativamente ao esquema típico destes siste-
mas, segundo o IEEE. No esquema mais usual deste tipo de excitação, indicado na Figura 13, verifica-
se que a alimentação da excitatriz piloto é proveniente de um gerador auxiliar de magnetos perma-
nentes (PMG), o qual se encontra acoplado ao próprio rotor do gerador sendo por ele acionado. No
caso do sistema em estudo não existe o gerador auxiliar de magnetos permanentes para realizar essa
alimentação.
Figura 13 – Esquema típico de uma excitatriz sem escovas, com gerador de magnetos permanentes
(PMG) [14]
Assim sendo, a alimentação da excitatriz piloto é obtida através dos terminais do próprio gerador princi-
pal, tendo-se, portanto, características combinadas dos sistemas de excitação sem escovas e dos
designados por estáticos. Além da particularidade indicada anteriormente, este ainda apresenta uma
outra, a qual se encontra no estator da máquina. No estator, e como é mais usual nos sistemas de
excitação sem escovas, existiria um conversor controlado AC-DC a tirístores a partir do qual seria ali-
mentado o circuito do rotor do gerador. Já no sistema em estudo, em substituição do conversor AC-
DC, tem-se um conversor AC-AC, o qual será apresentado e descrito mais pormenorizadamente ao
longo desta seção. Assim, o sistema em análise consiste essencialmente numa máquina de excitação,

16
que é normalmente uma máquina de indução trifásica de rotor cilíndrico montada no próprio veio do
gerador principal e alimentada por um conversor AC-AC. Este apresenta ainda um retificador a díodos
o qual está conectado ao enrolamento de excitação do gerador principal. Os seus principais consti-
tuintes são esquematizados na Figura 14.
Figura 14 – Principais blocos constituintes do gerador síncrono em estudo com sistema de
excitação sem escovas [15]
O conversor AC-AC, alimentado a partir dos terminais do gerador síncrono é constituído por três pares
antiparalelos de tirístores, tal como ilustrado na Figura 15.
Figura 15 – Circuito do conversor AC-AC, existente na excitatriz piloto (estator)
Este conversor presente na excitatriz piloto, apresenta a função de regulador de corrente que permite,
por controlo de largura de impulso e de acordo com o ângulo de disparo escolhido nos seus tirístores
obter diversas formas de onda de corrente na sua saída, as quais são indicadas na Figura 16.
Na Figura 14, da esquerda para a direita, segue-se a máquina de excitação que é normalmente uma
máquina trifásica de indução de rotor cilíndrico. O uso desta máquina permite gerar a corrente de
excitação requerida para o arranque a frio do gerador (black-start), ou seja, quando este tem velocidade
nula e escorregamento unitário. Esta característica apresenta benefícios significativos quando compa-
rado com outros sistemas uma vez que dispensa a utilização do gerador auxiliar de magnetos per-
manentes normalmente utilizado para o arranque de geradores com típicos sistemas de excitação sem
escovas. Por outro lado, dispensa também o recurso transitório a baterias, com field flashing durante
Máquina de excitação Gerador síncrono
Conversor AC-AC Retificador a díodos
Estrutura rotativa
17
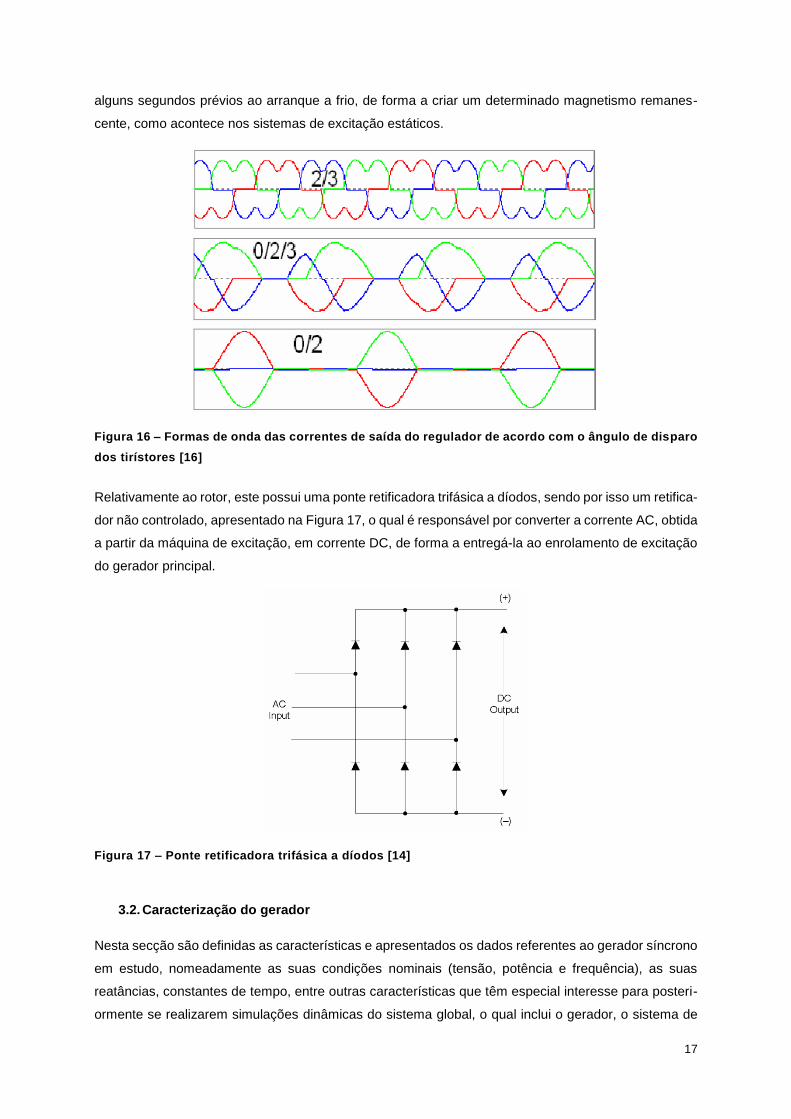
alguns segundos prévios ao arranque a frio, de forma a criar um determinado magnetismo remanes-
cente, como acontece nos sistemas de excitação estáticos.
Figura 16 – Formas de onda das correntes de saída do regulador de acordo com o ângulo de disparo
dos tirístores [16]
Relativamente ao rotor, este possui uma ponte retificadora trifásica a díodos, sendo por isso um retifica-
dor não controlado, apresentado na Figura 17, o qual é responsável por converter a corrente AC, obtida
a partir da máquina de excitação, em corrente DC, de forma a entregá-la ao enrolamento de excitação
do gerador principal.
Figura 17 – Ponte retificadora trifásica a díodos [14]
3.2. Caracterização do gerador
Nesta secção são definidas as características e apresentados os dados referentes ao gerador síncrono
em estudo, nomeadamente as suas condições nominais (tensão, potência e frequência), as suas
reatâncias, constantes de tempo, entre outras características que têm especial interesse para posteri-
ormente se realizarem simulações dinâmicas do sistema global, o qual inclui o gerador, o sistema de

18
excitação e a respetiva carga. Além disso é realizada uma análise e discussão dos parâmetros
disponibilizados pelo fabricante uma vez que se verificou ao longo do tempo que estes apresentavam
entre si algumas inconsistências. Inicialmente os dados disponibilizados foram indicados para uma
potência nominal do gerador de 13.975 MVA, embora se tenha verificado mais tarde que a sua potência
máxima garantida seria apenas de 12.153 MVA. Assim, foi necessário realizar um ajuste dos valores
das reactâncias para a nova base de potência do gerador, apresentando-se na Tabela 1, os dados
iniciais e os correspondentes após o ajuste realizado. A tensão e frequência nominal do gerador é de
11 kV e 50 Hz, respetivamente.
Tabela 1 – Dados e características do gerador elétrico síncrono
𝑆𝑛1 = 13.975 MVA 𝑆𝑛2 = 12.153 MVA
Reactâ
ncia
s [p
u]
𝑋𝑑 (sat.) 1.95 1.7
𝑋𝑑 (não sat.) 2.17 1.89
𝑋𝑞 (sat.) 1.72 1.5
𝑋𝑞 (não sat.) 1.91 1.66
𝑋𝑑′ (sat.) 0.16 0.14
𝑋𝑑′ (não sat.) 0.18 0.16
𝑋𝑞′ (não sat.) 1.91 1.66
𝑋𝑑′′ (sat.) 0.14 0.12
𝑋𝑑′′ (não sat.) 0.15 0.13
𝑋𝑞′′ (sat.) 0.26 0.23
𝑋𝑞′′ (não sat.) 0.29 0.25
Consta
nte
s d
e T
em
po
[s]
𝑇𝑑0′ 3
𝑇𝑑′ 0.245
𝑇𝑑0′′ 0.045
𝑇𝑑′′ 0.4
𝑇𝑞′′ 0.067
𝑇𝑞0′′ 0.438
Outr
as c
ara
cte
-
rísticas
𝑅𝑠 [pu] 0.0038
𝐻 [s] 6
𝐹 [pu] 0.001
Par de polos 2
Tipo de polos Salientes
O ajuste das reatâncias, da potência inicial do gerador, 𝑆𝑛1, para a nova base de potência, 𝑆𝑛2, foi
realizado através da seguinte equação, de [17]:
𝑍𝑝𝑢′′ = 𝑍𝑝𝑢
𝑆𝑏′′𝑉𝑏
2
𝑆𝑏′ 𝑉𝑏
′′2 (8)

19
Na equação anterior, as grandezas designadas por ′′, referem-se à nova base (12.153 MVA), enquanto
que as designadas por ′, se referem à base antiga (13.975 MVA). Esta equação pode ainda ser
simplificada uma vez que na correção realizada, se mantém a tensão de base, isto é, 𝑉𝑏′ = 𝑉𝑏
′′, tendo-
se:
𝑍𝑝𝑢′′ = 𝑍𝑝𝑢
′𝑆𝑏
′′
𝑆𝑏′
(9)
Ao realizar uma análise sob os parâmetros do gerador indicados na Tabela 1, e comparando-os com
valores típicos de referências consultadas verifica-se que alguns destes, nomeadamente as constantes
de tempo apresentam valores inconsistentes entre si. De acordo com [18], 𝑇𝑑′′ ≪ 𝑇𝑑0
′′ , e de [17], sabe-
se que a gama de variação típica de 𝑇𝑑0′′ é de (0.01 s – 0.05 s). Assim, ao considerar-se os valores
saturados de 𝑋𝑑′′ e 𝑋𝑑
′ e recorrendo à relação (10) pode-se verificar que a gama típica de 𝑇𝑑′′ será então
de (0.01 s – 0.043 s). Conclui-se então que 𝑇𝑑′′ não poderá ter o valor de 0.4 s, pelo que o valor mais
plausível para esta constante de tempo será de 0.04 s, já que obedece às duas condições indicadas
anteriormente. Por outro lado, para se ter um maior grau de confiança nas restantes constantes de
tempo realizaram-se os cálculos com base nas relações (10), (11) e (12) , retiradas de [1], de modo a
confirmar se com a correção de 𝑇𝑑′′ e a utilização dos restantes parâmetros indicados pelo fabricante
obedecem a estas relações. É apenas de notar que a relação (10) pode apresentar-se de uma forma
mais simplificada, tal como foi utilizada, tendo-se para isso substituído a relação (11) em (10).
𝑇𝑑′′ = 𝑇𝑑0
′′𝑋𝑑
′′𝑇𝑑0′
𝑋𝑑𝑇𝑑′ = 𝑇𝑑0
′′𝑋𝑑
′′
𝑋𝑑′ (10)
𝑇𝑑′ = 𝑋𝑑
′𝑇𝑑0
′
𝑋𝑑
(11)
𝑇𝑞′′ =
𝑋𝑞′′
𝑋𝑞
𝑇𝑞0′′ (12)
Na Tabela 2 são indicados os valores calculados para as constantes de tempo do gerador, através das
expressões anteriores, considerando para o efeito o valor corrigido de 𝑇𝑑′′ ,de 0.04 s, e para os restan-
tes valores (constantes de tempo e reatâncias saturadas), os indicados pelo fabricante.
Tabela 2 – Valores das constantes de tempo calculados, após correção de 𝑻𝒅′′
𝑇𝑑′′[𝑠] 𝑇𝑑
′ [𝑠] 𝑇𝑞′′ [𝑠]
0.0450.12
0.14= 0.04 0.14
3
1.7= 0.247 0.23
0.438
1.5= 0.067
Ao comparar os valores calculados com os do fabricante, através das relações existentes entre os
diversos parâmetros do gerador apenas se verifica uma diferença mínima no parâmetro 𝑇𝑑′ , pelo que
esta pode ser desprezável. Com a realização destes cálculos conseguiu-se pelo menos garantir que a
proporção das constantes de tempo, entre si, e considerando as reatâncias saturadas do fabricante, se

20
encontra correta, não garantido, no entanto, que os parâmetros apresentados individualmente tomem
exatamente estes valores.
Assim sendo, recorreu-se a ensaios realizados no terreno. Os ensaios realizados na CCRL (Ciclo
Combinado Refinaria de Luanda), sobre os quais se irá realizar uma análise tratam-se de ensaios de
rejeição de carga. Este tipo de testes, embora não seja standard e normalmente utilizado para a
determinação dos parâmetros do gerador, apresenta um baixo risco de execução, daí a sua preferência.
O procedimento, para uma correta realização deste tipo de testes, deve garantir vários requisitos, os
quais foram mencionados em 2.5. No entanto, no caso que se está a tratar e como se verá adiante nem
todas as condições foram cumpridas.
No caso em análise, os dois ensaios disponibilizados correspondem a rejeições de carga de 3 Mvar 1
MW e 2.4 Mvar 0.5 MW, em modo manual. Em ambos os ensaios o gerador encontrava-se inicialmente
a consumir potência reativa, estando por isso sub-excitado. A certa altura foi realizada uma rejeição
total de carga tendo-se no final o gerador a funcionar em vazio.
No primeiro ensaio (3 Mvar 1 MW) foram registados 40 segundos de observação dos valores eficazes
de várias grandezas elétricas, com uma frequência de amostragem de 100 amostras/s, tendo-se, por-
tanto, um período de amostragem de 0.01 s. A grandeza elétrica mais importante a analisar trata-se do
valor eficaz da tensão aos terminais do gerador, 𝑉𝑇. Esta apresenta uma forma de onda característica
a partir da qual se pode obter os parâmetros do gerador. A Figura 18, da WECC, ilustra a forma de
obter os parâmetros do gerador a partir de ensaios de rejeição de carga.
Figura 18 – Curva da WECC para obtenção dos parâmetros da máquina a partir dos ensaios de
rejeição de carga [19]
No primeiro ensaio, a rejeição de 3 Mvar 1 MW ocorreu aos 6,11 s e a tensão atinge novamente o
regime estacionário sensivelmente aos 11,11 s, ou seja, 5 segundos após a perturbação. Na Figura 19,

21
encontram-se as amostras de 𝑉𝑇, durante 40 s assim como a delimitação da zona de maior interesse
em ser analisada.
Figura 19 – Registo de 40 s da tensão eficaz aos terminais do gerador
Na análise que se segue é desprezado o efeito da componente da corrente segundo o eixo em quadra-
tura (eixo q).
Por inspeção da figura anterior verifica-se que após a perturbação a tensão cai de 6.38 kV para um
valor final de 4.08 kV, ou seja, ∆𝑉 = 2.3 𝑘𝑉. Com base nas equações auxiliares (13), (14) e (15), é
possível retirar quantidades que serão necessárias ao cálculo de 𝑋𝑑.
- Desfasagem entre tensão e corrente, 𝜙:
𝜙 = tan−1 (𝑄
𝑃) (13)
- Ângulo de potência, 𝛿:
𝑬𝒒𝒅 = 𝑽 + 𝑗𝑋𝑞𝑰 = 𝑽 + 𝑗𝑋𝑞 (𝑃 − 𝑗𝑄
𝑉) = 𝐸𝑞𝑑𝑒𝑗𝛿 (14)
- Componente da corrente segundo o eixo d antes da perturbação, |𝐼𝑑0|:
|𝐼𝑑0| = 𝐼0 sen(𝛿 − 𝜙) (15)
Tabela 3 – Resultados dos cálculos auxiliares para cálculo das reactâncias do gerador
𝜙 [°] 𝑬𝒒𝒅 [𝑝𝑢] 𝛿 [°] |𝐼𝑑0| [𝑝𝑢] 𝑋𝑞 [𝑝𝑢]
71.57 0.6456𝑒𝑗11° 11 0.2264 1.5
Das considerações anteriores e através da expressão (16) , de [8], retira-se 𝑋𝑑 ≅ 1.60 𝑝𝑢 :
𝑋𝑑 =∆𝑉 [𝑝𝑢]
𝐼𝑑0 [𝑝𝑢] (16)
0
1000
2000
3000
4000
5000
6000
70001
13
0
25
9
38
8
51
7
64
6
77
5
90
4
10
33
11
62
12
91
14
20
15
49
16
78
18
07
19
36
20
65
21
94
23
23
24
52
25
81
27
10
28
39
29
68
30
97
32
26
33
55
34
84
36
13
37
42
38
71
40
00
VT
[V]
Tempo [centésimos de segundo]
Tensão eficaz aos terminais do gerador
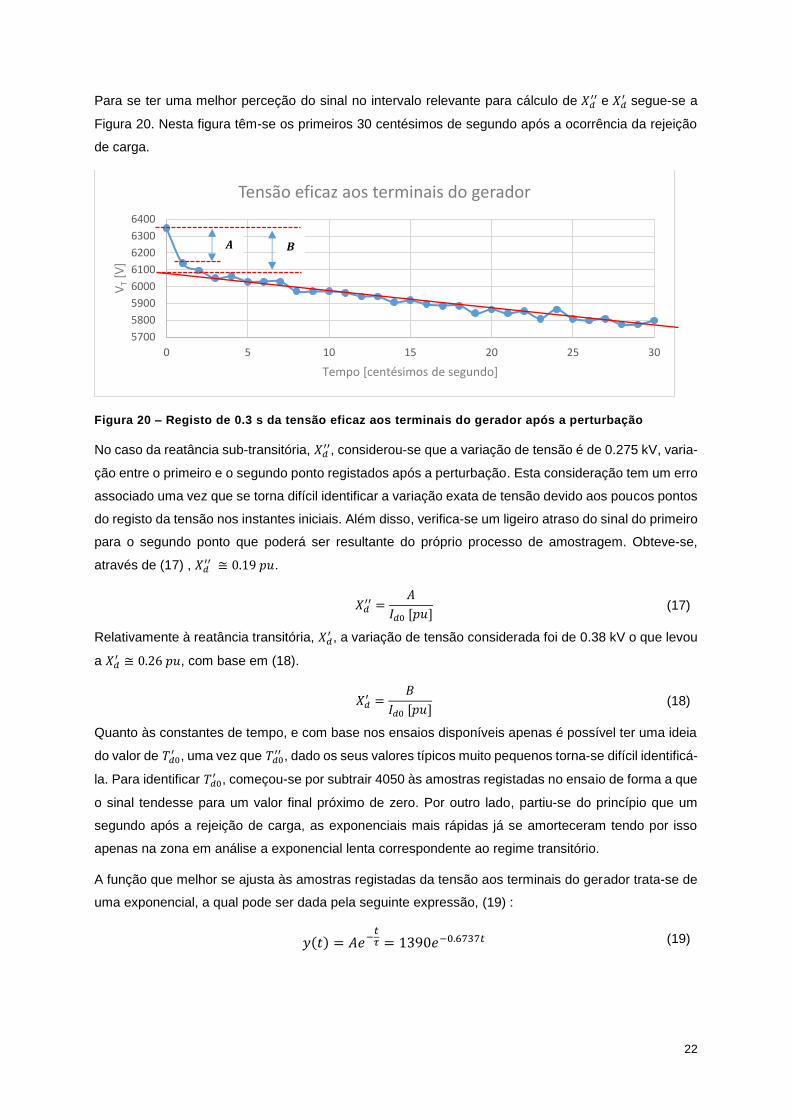
22
Para se ter uma melhor perceção do sinal no intervalo relevante para cálculo de 𝑋𝑑′′ e 𝑋𝑑
′ segue-se a
Figura 20. Nesta figura têm-se os primeiros 30 centésimos de segundo após a ocorrência da rejeição
de carga.
Figura 20 – Registo de 0.3 s da tensão eficaz aos terminais do gerador após a perturbação
No caso da reatância sub-transitória, 𝑋𝑑′′, considerou-se que a variação de tensão é de 0.275 kV, varia-
ção entre o primeiro e o segundo ponto registados após a perturbação. Esta consideração tem um erro
associado uma vez que se torna difícil identificar a variação exata de tensão devido aos poucos pontos
do registo da tensão nos instantes iniciais. Além disso, verifica-se um ligeiro atraso do sinal do primeiro
para o segundo ponto que poderá ser resultante do próprio processo de amostragem. Obteve-se,
através de (17) , 𝑋𝑑′′ ≅ 0.19 𝑝𝑢.
𝑋𝑑′′ =
𝐴
𝐼𝑑0 [𝑝𝑢] (17)
Relativamente à reatância transitória, 𝑋𝑑′ , a variação de tensão considerada foi de 0.38 kV o que levou
a 𝑋𝑑′ ≅ 0.26 𝑝𝑢, com base em (18).
𝑋𝑑′ =
𝐵
𝐼𝑑0 [𝑝𝑢] (18)
Quanto às constantes de tempo, e com base nos ensaios disponíveis apenas é possível ter uma ideia
do valor de 𝑇𝑑0′ , uma vez que 𝑇𝑑0
′′ , dado os seus valores típicos muito pequenos torna-se difícil identificá-
la. Para identificar 𝑇𝑑0′ , começou-se por subtrair 4050 às amostras registadas no ensaio de forma a que
o sinal tendesse para um valor final próximo de zero. Por outro lado, partiu-se do princípio que um
segundo após a rejeição de carga, as exponenciais mais rápidas já se amorteceram tendo por isso
apenas na zona em análise a exponencial lenta correspondente ao regime transitório.
A função que melhor se ajusta às amostras registadas da tensão aos terminais do gerador trata-se de
uma exponencial, a qual pode ser dada pela seguinte expressão, (19) :
𝑦(𝑡) = 𝐴𝑒−𝑡𝜏 = 1390𝑒−0.6737𝑡 (19)
5700
5800
5900
6000
6100
6200
6300
6400
0 5 10 15 20 25 30
VT
[V]
Tempo [centésimos de segundo]
Tensão eficaz aos terminais do gerador
𝑨 𝑩
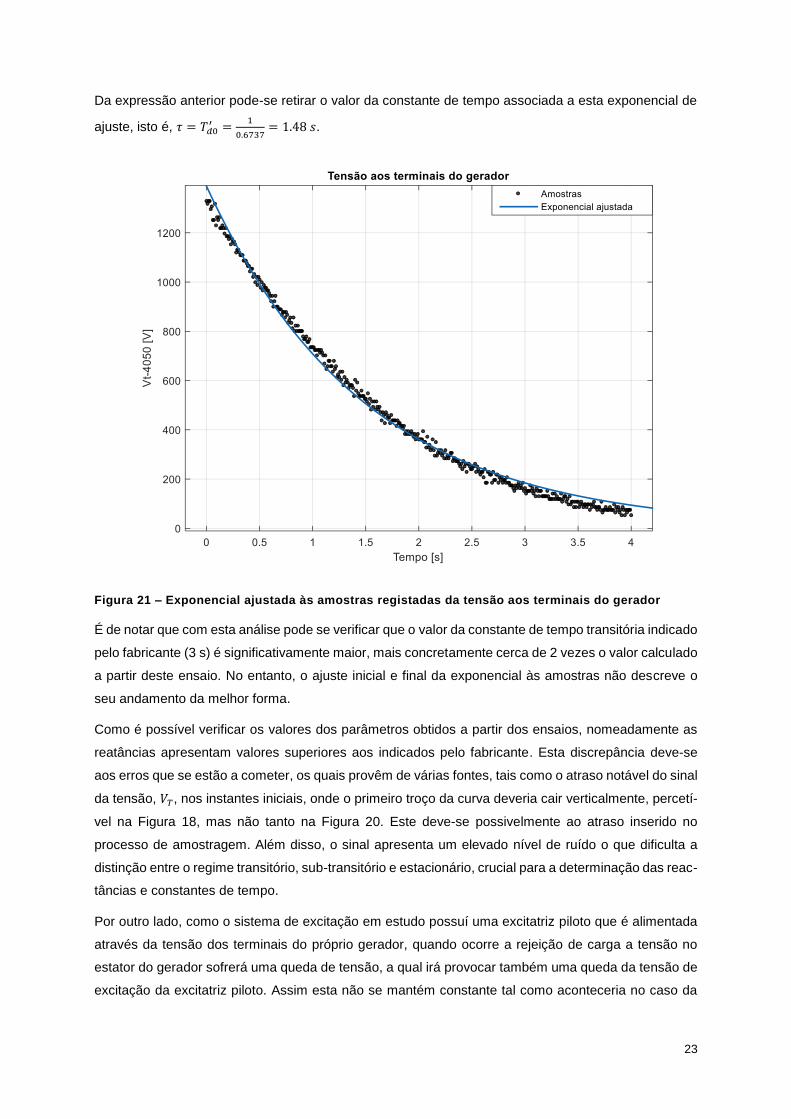
23
Da expressão anterior pode-se retirar o valor da constante de tempo associada a esta exponencial de
ajuste, isto é, 𝜏 = 𝑇𝑑0′ =
1
0.6737= 1.48 𝑠.
Figura 21 – Exponencial ajustada às amostras registadas da tensão aos terminais do gerador
É de notar que com esta análise pode se verificar que o valor da constante de tempo transitória indicado
pelo fabricante (3 s) é significativamente maior, mais concretamente cerca de 2 vezes o valor calculado
a partir deste ensaio. No entanto, o ajuste inicial e final da exponencial às amostras não descreve o
seu andamento da melhor forma.
Como é possível verificar os valores dos parâmetros obtidos a partir dos ensaios, nomeadamente as
reatâncias apresentam valores superiores aos indicados pelo fabricante. Esta discrepância deve-se
aos erros que se estão a cometer, os quais provêm de várias fontes, tais como o atraso notável do sinal
da tensão, 𝑉𝑇, nos instantes iniciais, onde o primeiro troço da curva deveria cair verticalmente, percetí-
vel na Figura 18, mas não tanto na Figura 20. Este deve-se possivelmente ao atraso inserido no
processo de amostragem. Além disso, o sinal apresenta um elevado nível de ruído o que dificulta a
distinção entre o regime transitório, sub-transitório e estacionário, crucial para a determinação das reac-
tâncias e constantes de tempo.
Por outro lado, como o sistema de excitação em estudo possuí uma excitatriz piloto que é alimentada
através da tensão dos terminais do próprio gerador, quando ocorre a rejeição de carga a tensão no
estator do gerador sofrerá uma queda de tensão, a qual irá provocar também uma queda da tensão de
excitação da excitatriz piloto. Assim esta não se mantém constante tal como aconteceria no caso da

24
excitatriz piloto ser alimentada por um gerador de magnetos permanentes. A tensão de campo na exci-
tatriz piloto, ilustrada na Figura 22 também foi uma das grandezas registadas podendo-se verificar que
esta não é constante durante a rejeição de carga e que além disso padece de um elevado nível de
ruído. O início da rejeição de carga está indicado no gráfico através da reta verde a partir da qual é
visível uma queda de tensão atingindo mais tarde o regime estacionário num valor superior ao existente
antes da perturbação apresentando assim um pequeno erro estático final (cerca de 3%).
Figura 22 – Tensão de campo da excitatriz piloto
Da análise dos ensaios realizados no terreno pode-se pelo menos concluir que o valor da constante de
tempo em vazio segundo o eixo d, 𝑇𝑑0′ , apresenta um valor inferior ao indicado pelo fabricante. Do
ensaio retira-se um 𝑇𝑑0′ = 1.5 𝑠, enquanto que o valor indicado pelo fornecedor era de 3 s. Assim,
mesmo não sendo um valor totalmente correto, o retirado do ensaio, devidos às fontes de erro enuncia-
das anteriormente, irá considerar-se este valor como ponto de partida na realização da estimação de
parâmetros.

25
4. Modelação do sistema global em Matlab/Simulink
Neste capítulo é realizada uma descrição das considerações e simplificações tomadas para efeitos de
modelação do sistema global, o qual incluí o sistema de excitação, o gerador síncrono e a respetiva
carga. No entanto será dado uma especial ênfase à modelação do sistema de excitação uma vez que
se trata do foco principal este trabalho. Para a modelação do sistema recorreu-se ao Simulink, que se
trata de uma ferramenta de simulação integrada no software Matlab. Esta permite modelar, simular e
analisar sistemas dinâmicos, que corresponde ao que se pretende fazer. O Simulink utiliza uma inter-
face gráfica em que os modelos são criados sob a forma de diagramas de blocos, facilitando assim a
interação com o utilizador. Esta ferramenta incluí uma biblioteca de blocos pré-definidos, embora tam-
bém permita ao utilizador criar os seus próprios blocos [20].
4.1. Representação do gerador síncrono
Primeiramente, para a modelação do sistema global começou-se por escolher um bloco que irá
representar o gerador de entre os vários existentes na biblioteca do Simpowersystems. A escolha do
bloco em questão foi baseada nos parâmetros que são necessários para a sua caracterização, ou seja,
optou-se por um bloco tal que os parâmetros requeridos por este coincidissem na sua maioria com os
dados conhecidos e disponibilizados pelo fornecedor do gerador síncrono. Além disso, optou-se por
este bloco porque os parâmetros são apresentados em pu, tal como os disponibilizados pelo fabricante.
O bloco adotado para modelação foi então o indicado na Figura 23.
Figura 23 – Bloco adotado para modelação do gerador síncrono
O bloco que representa o comportamento da máquina síncrona apresenta a entrada 𝑉𝑓 (tensão de
campo), que permite ajustar a potência reativa. Por outro lado, a entrada 𝑃𝑚 (potência mecânica), define
a potência ativa do sistema.
Este bloco representativo da máquina síncrona pode operar em dois modos distintos de acordo com a
entrada de potência mecânica, 𝑃𝑚:
● 𝑃𝑚 > 0 – modo gerador;
● 𝑃𝑚 < 0 − modo motor.
Para o caso em estudo interessará que a máquina síncrona funcione como gerador, pelo que a entrada
𝑃𝑚 será sempre positiva.

26
No que diz respeito às saídas tem-se naturalmente as três fases (A, B, C) para ligação à carga do
sistema. A saída designada por “m” permite ter acesso a várias grandezas da máquina, quer em unida-
des do SI, quer em pu, as quais podem ser consultadas na íntegra em [21]. No caso em estudo as que
revelam maior interesse em obter são: a corrente de campo (𝐼𝐹𝐷) e a tensão aos terminais do gerador
(𝑉𝑇 ). Esta última, embora não esteja acessível diretamente consegue-se obtê-la através das com-
ponentes do eixo d e do eixo q da tensão do estator, utilizando a expressão (20).
𝑉𝑇 = √𝑣𝑑2 + 𝑣𝑞
2 (20)
4.2. Representação da carga
A carga do sistema, a ser alimentada pelo gerador, foi modelada através do bloco designado por
“Three-Phase Parallel RLC Load”, indicado na Figura 24. Este bloco representa uma carga trifásica
equilibrada como uma combinação de elementos RLC. Para uma frequência constante, neste caso, 50
Hz, a carga apresenta uma impedância constante. As potências P e Q da carga variam proporcional-
mente com o quadrado da tensão apresentando assim uma elasticidade em relação à tensão igual a 2
(𝜖𝑣 = 𝜂𝑣 = 2). Este bloco é caracterizado essencialmente pela tensão composta (fase-fase) da carga,
(11 kV), e frequência nominal (50 Hz). Por outro lado, é ainda necessário especificar a potência ativa
(P), reativa (𝑄𝐿) e capacitiva (𝑄𝑐) associadas à carga. De entre as várias configurações de conexão das
três fases considerou-se que estas estão ligadas em estrela (Y), com o neutro ligado à terra [22].
Figura 24 – Bloco utilizado para modelação da carga do sistema
4.3. Representação do Sistema de excitação
A modelação do sistema de excitação em estudo pretende-se que seja realizada com base em modelos
disponibilizados pelo IEEE, instituição normalizadora internacionalmente reconhecida nestes domínios.
No entanto, segundo [23], este não corresponde a nenhum modelo standard do IEEE, tal como indicado
na Tabela 4.

27
Tabela 4 – Classificações de excitatrizes de diversos fabricantes de acordo com os modelos
normalizados pelo IEEE
É de notar que, a referência [6] mencionada na tabela anterior refere-se à norma internacional IEEE
Std. 421.5, o que confirma que o sistema de excitação e respetivo controlo da Ansaldo Energia não é
representado por nenhum modelo internacionalmente normalizado.
Na Tabela 5, são apresentados os tipos de modelos disponíveis pelo IEEE, assim como as suas
características de acordo com a categoria, tipo e fonte de alimentação da excitatriz.
Tabela 5 – Classificação e caracterização dos modelos do IEEE para excitatrizes [14]
Como já foi referido anteriormente, o sistema de excitação em estudo é do tipo AC, sem escovas
(brushless), apresentando, no entanto, alimentação estática, isto é, a alimentação da excitatriz piloto
presente no estator é obtida através da tensão aos terminais do gerador principal. Assim sendo, têm-
28
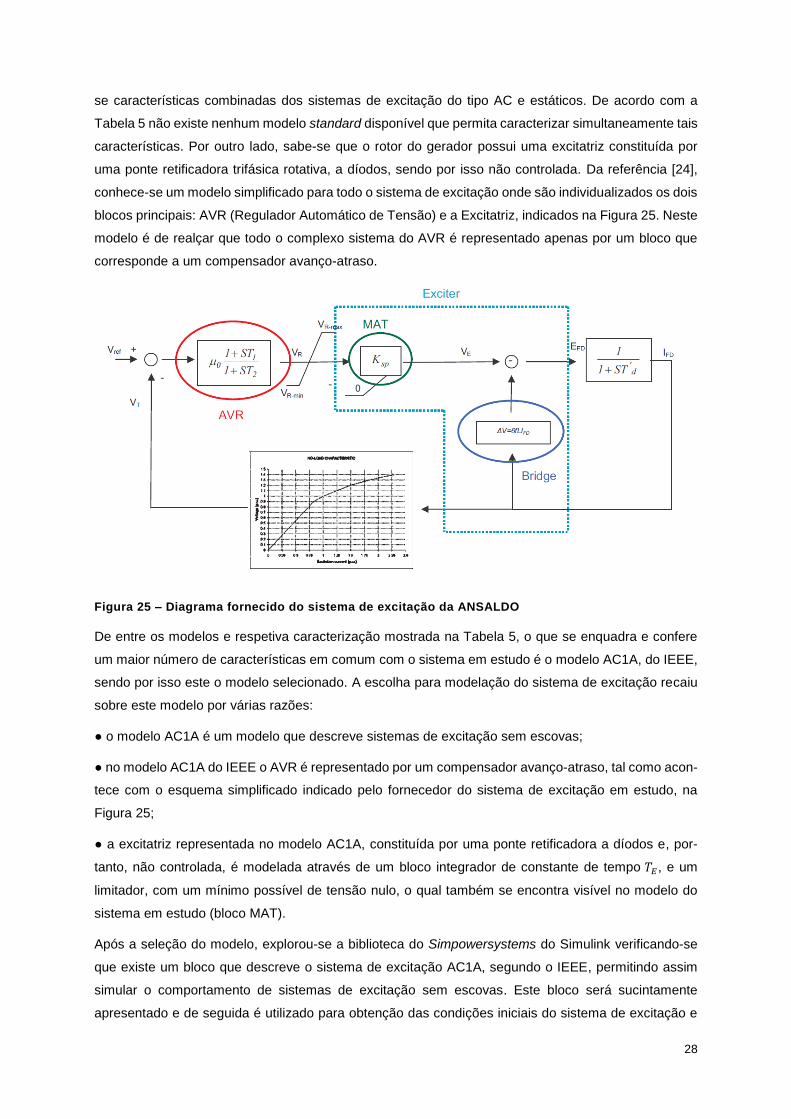
se características combinadas dos sistemas de excitação do tipo AC e estáticos. De acordo com a
Tabela 5 não existe nenhum modelo standard disponível que permita caracterizar simultaneamente tais
características. Por outro lado, sabe-se que o rotor do gerador possui uma excitatriz constituída por
uma ponte retificadora trifásica rotativa, a díodos, sendo por isso não controlada. Da referência [24],
conhece-se um modelo simplificado para todo o sistema de excitação onde são individualizados os dois
blocos principais: AVR (Regulador Automático de Tensão) e a Excitatriz, indicados na Figura 25. Neste
modelo é de realçar que todo o complexo sistema do AVR é representado apenas por um bloco que
corresponde a um compensador avanço-atraso.
Figura 25 – Diagrama fornecido do sistema de excitação da ANSALDO
De entre os modelos e respetiva caracterização mostrada na Tabela 5, o que se enquadra e confere
um maior número de características em comum com o sistema em estudo é o modelo AC1A, do IEEE,
sendo por isso este o modelo selecionado. A escolha para modelação do sistema de excitação recaiu
sobre este modelo por várias razões:
● o modelo AC1A é um modelo que descreve sistemas de excitação sem escovas;
● no modelo AC1A do IEEE o AVR é representado por um compensador avanço-atraso, tal como acon-
tece com o esquema simplificado indicado pelo fornecedor do sistema de excitação em estudo, na
Figura 25;
● a excitatriz representada no modelo AC1A, constituída por uma ponte retificadora a díodos e, por-
tanto, não controlada, é modelada através de um bloco integrador de constante de tempo 𝑇𝐸 , e um
limitador, com um mínimo possível de tensão nulo, o qual também se encontra visível no modelo do
sistema em estudo (bloco MAT).
Após a seleção do modelo, explorou-se a biblioteca do Simpowersystems do Simulink verificando-se
que existe um bloco que descreve o sistema de excitação AC1A, segundo o IEEE, permitindo assim
simular o comportamento de sistemas de excitação sem escovas. Este bloco será sucintamente
apresentado e de seguida é utilizado para obtenção das condições iniciais do sistema de excitação e

29
do gerador. O bloco principal que representa o sistema de excitação encontra-se na Figura 26. Os seus
blocos internos são ilustrados no Anexo I.
Figura 26 – Bloco existente no Simulink do sistema de excitação AC1A
O bloco do sistema de excitação tem como entradas: 𝑉𝑟𝑒𝑓 (tensão de referência), 𝑉𝑡 (tensão aos termi-
nais do gerador), 𝐼𝑓𝑑 (corrente de excitação) e 𝑉𝑠𝑡𝑎𝑏 (sinal de estabilização adicional no caso de ser
implementado um PSS).
Já o sinal de saída corresponde à tensão de campo, 𝐸𝑓𝑑, a aplicar posteriormente à entrada do gerador,
designada por 𝑉𝑓.
Ao conciliar as considerações até então tomadas e os blocos principais selecionados para modelação,
passou-se ao cálculo das condições iniciais do gerador e sistema de excitação.
Para este cálculo foi necessário construir o sistema global, indicado na Figura 27. Além dos blocos
principais foi ainda utilizado o bloco “powergui” e definido um barramento de referência, através do
bloco designado por “Load Flow Bus”, condições necessárias para o cálculo referido anteriormente.
Figura 27 – Modelo global construído em Simulink para cálculo das condições iniciais
Os parâmetros considerados no sistema assim como as respetivas condições iniciais calculadas são
indicadas na Tabela 6. As reatâncias do gerador utilizadas correspondem aos seus valores saturados,

30
apresentados na Tabela 1. No caso das constantes de tempo e de acordo com a análise dos ensaios
existentes optou-se inicialmente por tomar 1,5 s, como valor de partida para 𝑇𝑑0′ . Sendo este valor
metade do indicado pelo fabricante as restantes constantes de tempo que foram escolhidas para
caracterizar o gerador em Simulink, vêm também elas reduzidas a metade.
Tabela 6 – Parâmetros do sistema global considerados e respetivas condições iniciais
Sistema de excitação
𝑇𝑅 [𝑠] 𝐾𝐴 𝑇𝐴 [𝑠] 𝑇𝐵[𝑠] 𝑇𝐶 [𝑠] 𝐾𝐹 𝑇𝐹 [𝑠] 𝐾𝐸 𝑇𝐸 [𝑠] 𝐾𝐷
0.02 400 0.02 0 0 0.03 1 1 0.8 0.38
𝐾𝐶 𝑉𝐴𝑀𝐴𝑋 [𝑝𝑢] 𝑉𝐴𝑀𝐼𝑁 [𝑝𝑢] 𝑉𝑅𝑀𝐼𝑁 [𝑝𝑢] 𝑉𝑅𝑀𝐴𝑋 [𝑝𝑢] 𝑉𝐸1 [𝑝𝑢] 𝑆𝐸[𝑉𝐸1] 𝑉𝐸2 [𝑝𝑢] 𝑆𝐸[𝑉𝐸2]
0.2 14.5 -14.5 -5.43 6.03 4.18 0.1 3.14 0.03
Gerador
𝑃𝑛 [𝑀𝑉𝐴] 𝑉𝑛 [𝑘𝑉] 𝑓𝑛 [𝐻𝑧] 𝑋𝑑 [𝑝𝑢] 𝑋𝑑′ [𝑝𝑢] 𝑋𝑑
′′ [pu] 𝑋𝑞 [𝑝𝑢] 𝑋𝑞′′ [𝑝𝑢] 𝑋𝑙 [𝑝𝑢] 𝑇𝑑0
′ [𝑝𝑢]
12.153 11 50 1.7 0.14 0.12 1.5 0.23 0.119 1.5
𝑇𝑑′′ [𝑝𝑢] 𝑇𝑞0
′′ [𝑝𝑢] 𝑅𝑠 [𝑝𝑢] 𝐻 [𝑠] 𝐹 𝑝
0.023 0.219 0.0038 6 0.001 2
Carga
𝑃 [𝑀𝑊] 𝑄𝑐 [𝑀𝑣𝑎𝑟]
1 3
Condições iniciais
𝑑𝑤 [𝑝𝑢] 𝑡ℎ [°] 𝑖𝑎, 𝑖𝑏, 𝑖𝑐
[𝑝𝑢]
𝑝ℎ𝑎, 𝑝ℎ𝑏,
𝑝ℎ𝑐 [°]
𝑉𝑓 [𝑝𝑢] 𝑃𝑚𝑒𝑐
[𝑝𝑢] 𝑉𝑡0 [𝑝𝑢]
𝐸𝑓𝑑0
[𝑝𝑢]
0 -78.8267 0.2602 71.6, -48.4, -168.4
0.597 0.083 1 0.597
Os resultados após simulação são apresentados no gráfico da Figura 28. Como seria espectável as
principais grandezas elétricas em regime estacionário, tais como tensão e corrente de campo e a tensão
aos terminais do gerador são constantes, tendo as duas primeiras um valor igual entre si, de 0.6 pu e
a tensão 𝑉𝑇 igual a 1 pu.
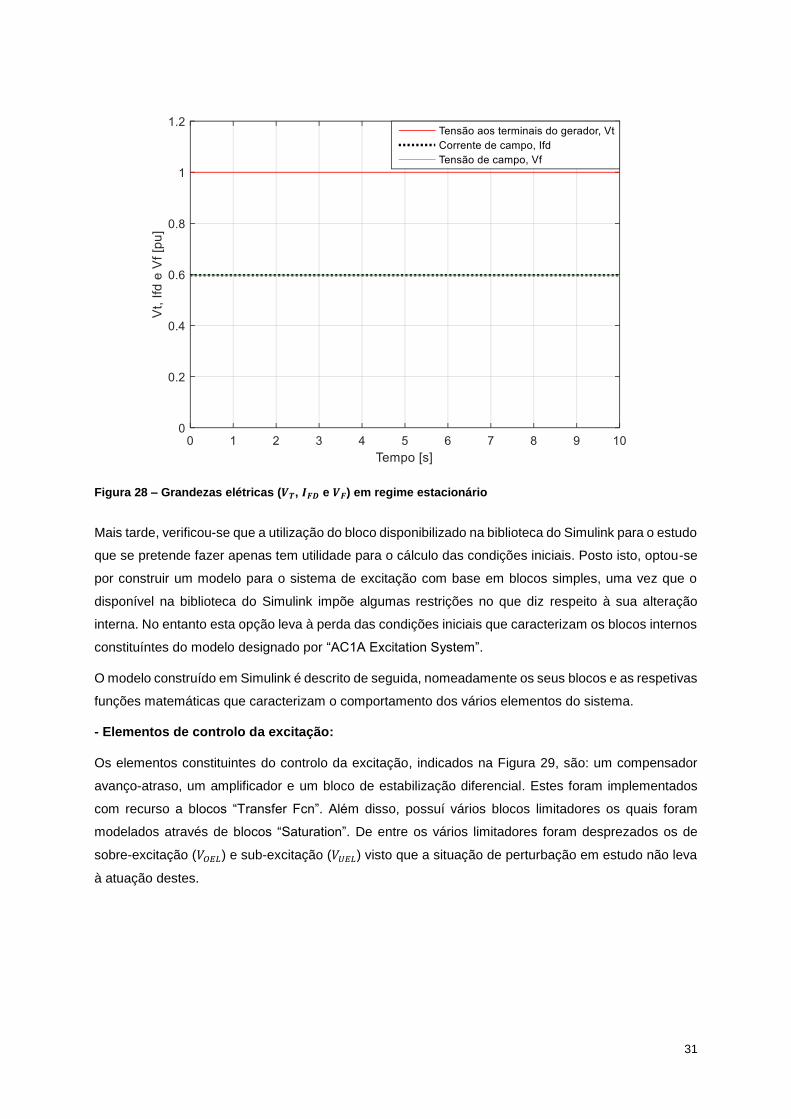
31
Figura 28 – Grandezas elétricas (𝑽𝑻, 𝑰𝑭𝑫 e 𝑽𝑭) em regime estacionário
Mais tarde, verificou-se que a utilização do bloco disponibilizado na biblioteca do Simulink para o estudo
que se pretende fazer apenas tem utilidade para o cálculo das condições iniciais. Posto isto, optou-se
por construir um modelo para o sistema de excitação com base em blocos simples, uma vez que o
disponível na biblioteca do Simulink impõe algumas restrições no que diz respeito à sua alteração
interna. No entanto esta opção leva à perda das condições iniciais que caracterizam os blocos internos
constituíntes do modelo designado por “AC1A Excitation System”.
O modelo construído em Simulink é descrito de seguida, nomeadamente os seus blocos e as respetivas
funções matemáticas que caracterizam o comportamento dos vários elementos do sistema.
- Elementos de controlo da excitação:
Os elementos constituintes do controlo da excitação, indicados na Figura 29, são: um compensador
avanço-atraso, um amplificador e um bloco de estabilização diferencial. Estes foram implementados
com recurso a blocos “Transfer Fcn”. Além disso, possuí vários blocos limitadores os quais foram
modelados através de blocos “Saturation”. De entre os vários limitadores foram desprezados os de
sobre-excitação (𝑉𝑂𝐸𝐿) e sub-excitação (𝑉𝑈𝐸𝐿) visto que a situação de perturbação em estudo não leva
à atuação destes.

32
Figura 29 – Diagrama de blocos dos elementos de controlo da excitação
- Excitatriz:
A excitatriz é descrita por um bloco integrador de constante de tempo 𝑇𝐸 , um limitador, uma função de
saturação não-linear e um ganho 𝐾𝐸 , apresentados na Figura 30.
Figura 30 – Diagrama de blocos que descreve o comportamento da excitatriz
Como é visível na figura anterior, o integrador é seguido de um bloco limitador, o qual impede que a
tensão de campo na excitatriz tome valores negativos. Isto deve-se ao facto de no rotor do gerador
existir uma ponte retificadora rotativa a díodos, a qual limita a zero a tensão mínima que é possível
fornecer ao enrolamento de excitação do gerador.
O sinal 𝑉𝑋, proporcional à saturação da excitatriz, é dado por 𝑉𝑋 = 𝑉𝐸𝑆𝐸(𝑉𝐸), onde 𝑆𝐸(𝑉𝐸) , a função de
saturação, pode ser descrita pela expressão (21).
𝑆𝐸(𝑉𝐸) = 𝑎×𝑒𝑏×𝑉𝐸 (21)
Dados dois pontos da curva de saturação (𝑉𝐸1, 𝑆𝐸(𝑉𝐸1)) e (𝑉𝐸2, 𝑆𝐸(𝑉𝐸2)) é possível calcular as variáveis
“a” e “b”, através das expressões (22) e (23).

33
𝑏 =
ln (𝑉𝐸1×𝑆𝐸(𝑉𝐸1)𝑉𝐸2×𝑆𝐸(𝑉𝐸2)
)
𝑉𝐸1 − 𝑉𝐸2
(22)
𝑎 =𝑉𝐸1×𝑆𝐸(𝑉𝐸1)
𝑒𝑏×𝑉𝐸1
(23)
- Retificador:
O retificador é descrito pela função 𝐹𝐸𝑋, uma função não-linear. Esta recebe a corrente de carga da
excitatriz normalizada, 𝐼𝑁, e com base nesse valor determina o modo de operação de entre os três
possíveis. O valor de 𝐼𝑁 é obtido da seguinte forma:
𝐼𝑁 =𝐾𝐶𝐼𝐹𝐷
𝑉𝐸
(24)
Uma vez calculado o valor de 𝐼𝑁 fica a conhecer-se o modo em que o retificador está a operar e por
sua vez é calculada a função 𝐹𝐸𝑋 para o correspondente modo e valor de 𝐼𝑁.
A curva 𝐹𝐸𝑋(𝐼𝑁), função de regulação do retificador, é definida, para efeitos de modelação, por vários
segmentos cujas equações, se apresentam na Figura 31.
Figura 31 – Equações que descrevem os modos de funcionamento do retificador [25]
Para a modelação em Simulink do retificador utilizaram-se blocos de comparação “Switch” e blocos de
função “Fcn”. O bloco de comparação passa para a sua saída o valor da primeira entrada ou da terceira
entrada de acordo com o valor da segunda entrada. As 1ª e 3ª entradas designam-se por entradas de
dados e a 2ª por entrada de controlo. Neste bloco a 2ª entrada é comparada com um determinado valor
e de seguida é escolhida a 1ª entrada no caso de se satisfazer essa condição, caso contrário é
escolhida a 3ª entrada. Na Figura 32 é possível ver a implementação do retificador.
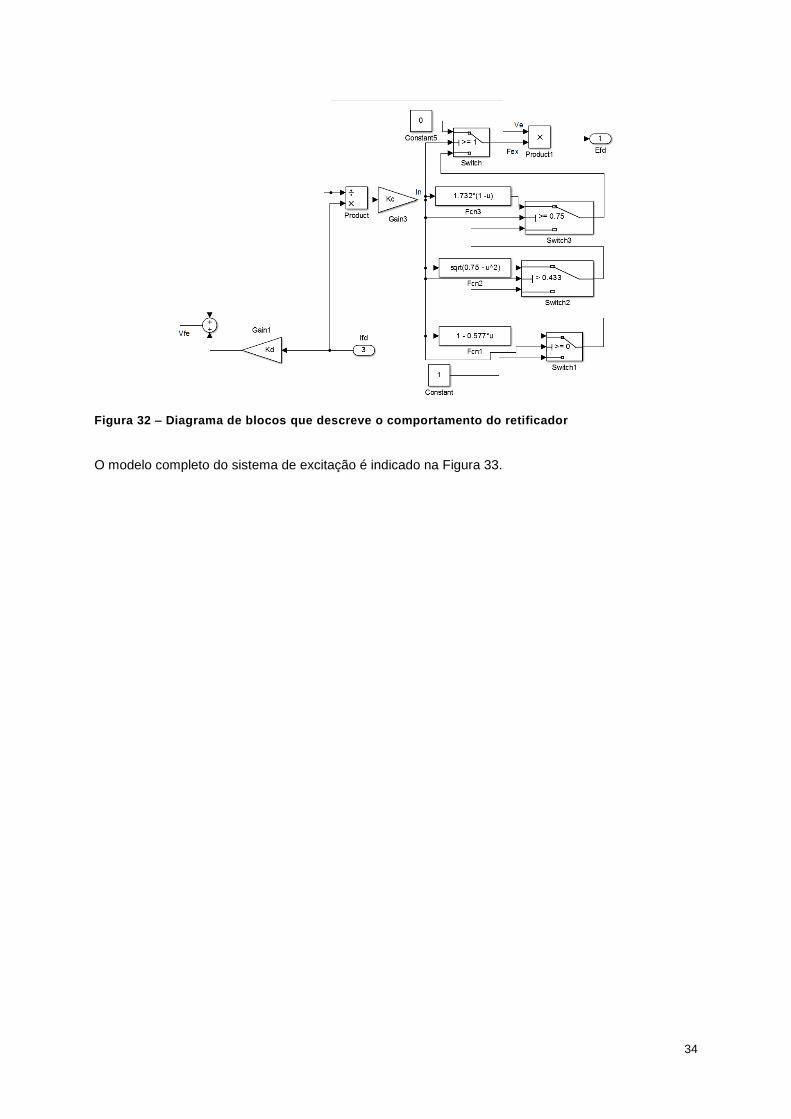
34
Figura 32 – Diagrama de blocos que descreve o comportamento do retificador
O modelo completo do sistema de excitação é indicado na Figura 33.

35
Figura 33 – Modelo construído em Simulink baseado no AC1A do IEEE
Após se ter modelado todo o sistema e calculado as condições iniciais aplicou-se uma perturbação ao
sistema. Esta perturbação corresponde a um rejeição de carga, a qual ocorre aos 6 s. A descrição dos
estados inicial e final desta variação de carga encontram-se na Tabela 7.

36
Tabela 7 – Descrição dos estados inicial e final da perturbação em estudo
Estado Inicial Estado Final Variação de carga
𝑃 [𝑀𝑊] 1 0.5 𝛥𝑃 [𝑀𝑊] 0.5
𝑄𝐶 [𝑀𝑣𝑎𝑟] 3 0 𝛥𝑄𝐶 [𝑀𝑣𝑎𝑟] 3
Os parâmetros utilizados para o sistema de excitação foram os indicados no documento [4], excepto o
valor de 𝑇𝑅. Dado que esta constante de tempo pretende descrever o atraso do transdutor de tensão
na aquisição deste mesmo sinal optou-se por considerar inicialmente um valor mais realista de 20 ms
em vez dos 0 s, do IEEE. Os dados do gerador considerados foram os indicados na Tabela 6. Além
disso foi necessário calcular as variáveis “a” e “b” que caracterizam a curva de saturação da excitatriz,
com base na expressão (22) e (23), cujos resultados se encontram na Tabela 8.
Tabela 8 – Resultados do cálculo das variáveis “a” e “b” da curva de saturação da excitatriz
𝑉𝐸1 4.18 𝑉𝐸2 3.14 a 0.00105
𝑆𝐸[𝑉𝐸1] 0.1 𝑆𝐸[𝑉𝐸2] 0.03 b 1.43275
Da simulação realizada obteve-se a curva da Figura 34, onde é possível verificar o comportamento da
tensão aos terminais do gerador, 𝑉𝑇.
Figura 34 – Tensão aos terminais do gerador para uma rejeição de 3 Mvar 0.5 MW
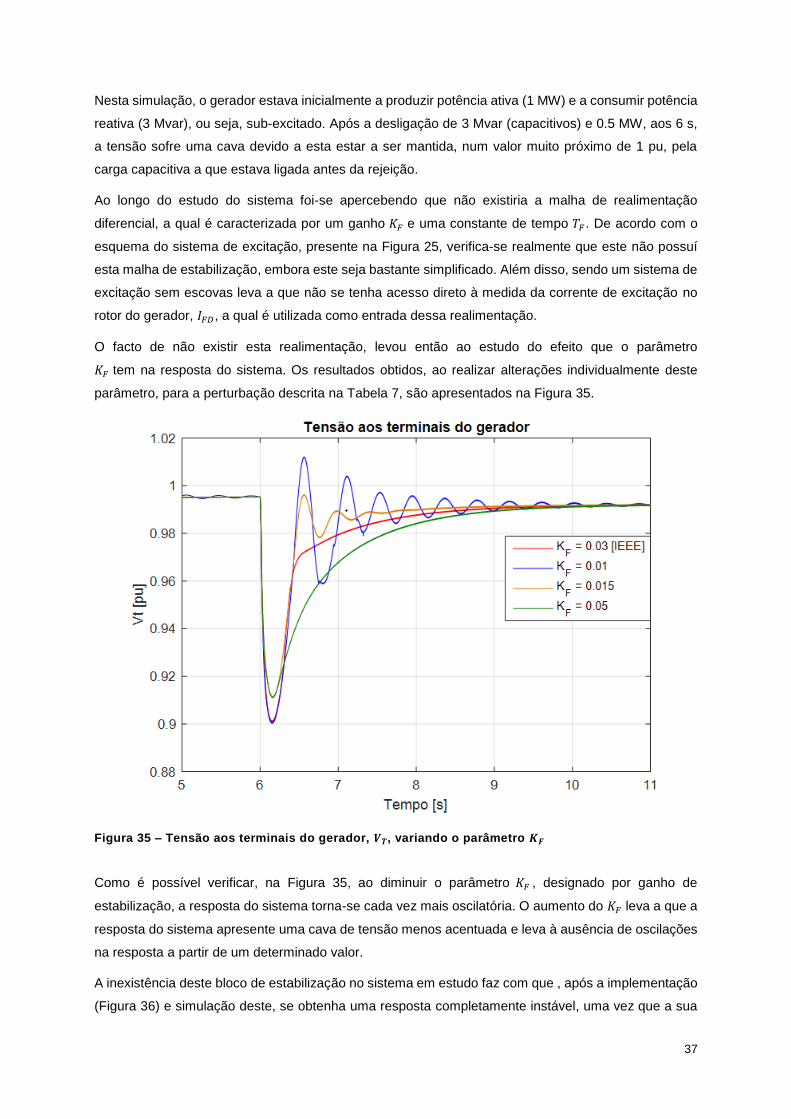
37
Nesta simulação, o gerador estava inicialmente a produzir potência ativa (1 MW) e a consumir potência
reativa (3 Mvar), ou seja, sub-excitado. Após a desligação de 3 Mvar (capacitivos) e 0.5 MW, aos 6 s,
a tensão sofre uma cava devido a esta estar a ser mantida, num valor muito próximo de 1 pu, pela
carga capacitiva a que estava ligada antes da rejeição.
Ao longo do estudo do sistema foi-se apercebendo que não existiria a malha de realimentação
diferencial, a qual é caracterizada por um ganho 𝐾𝐹 e uma constante de tempo 𝑇𝐹. De acordo com o
esquema do sistema de excitação, presente na Figura 25, verifica-se realmente que este não possuí
esta malha de estabilização, embora este seja bastante simplificado. Além disso, sendo um sistema de
excitação sem escovas leva a que não se tenha acesso direto à medida da corrente de excitação no
rotor do gerador, 𝐼𝐹𝐷, a qual é utilizada como entrada dessa realimentação.
O facto de não existir esta realimentação, levou então ao estudo do efeito que o parâmetro
𝐾𝐹 tem na resposta do sistema. Os resultados obtidos, ao realizar alterações individualmente deste
parâmetro, para a perturbação descrita na Tabela 7, são apresentados na Figura 35.
Figura 35 – Tensão aos terminais do gerador, 𝑽𝑻, variando o parâmetro 𝑲𝑭
Como é possível verificar, na Figura 35, ao diminuir o parâmetro 𝐾𝐹 , designado por ganho de
estabilização, a resposta do sistema torna-se cada vez mais oscilatória. O aumento do 𝐾𝐹 leva a que a
resposta do sistema apresente uma cava de tensão menos acentuada e leva à ausência de oscilações
na resposta a partir de um determinado valor.
A inexistência deste bloco de estabilização no sistema em estudo faz com que , após a implementação
(Figura 36) e simulação deste, se obtenha uma resposta completamente instável, uma vez que a sua
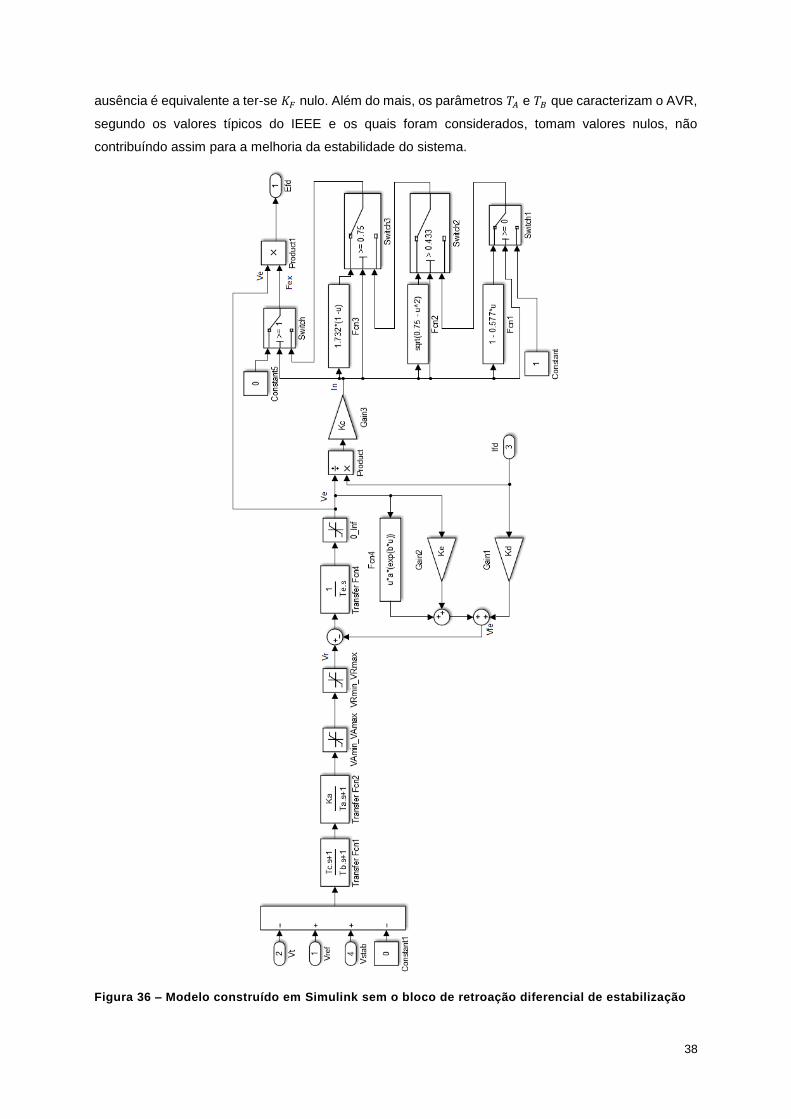
38
ausência é equivalente a ter-se 𝐾𝐹 nulo. Além do mais, os parâmetros 𝑇𝐴 e 𝑇𝐵 que caracterizam o AVR,
segundo os valores típicos do IEEE e os quais foram considerados, tomam valores nulos, não
contribuíndo assim para a melhoria da estabilidade do sistema.
Figura 36 – Modelo construído em Simulink sem o bloco de retroação diferencial de estabilização
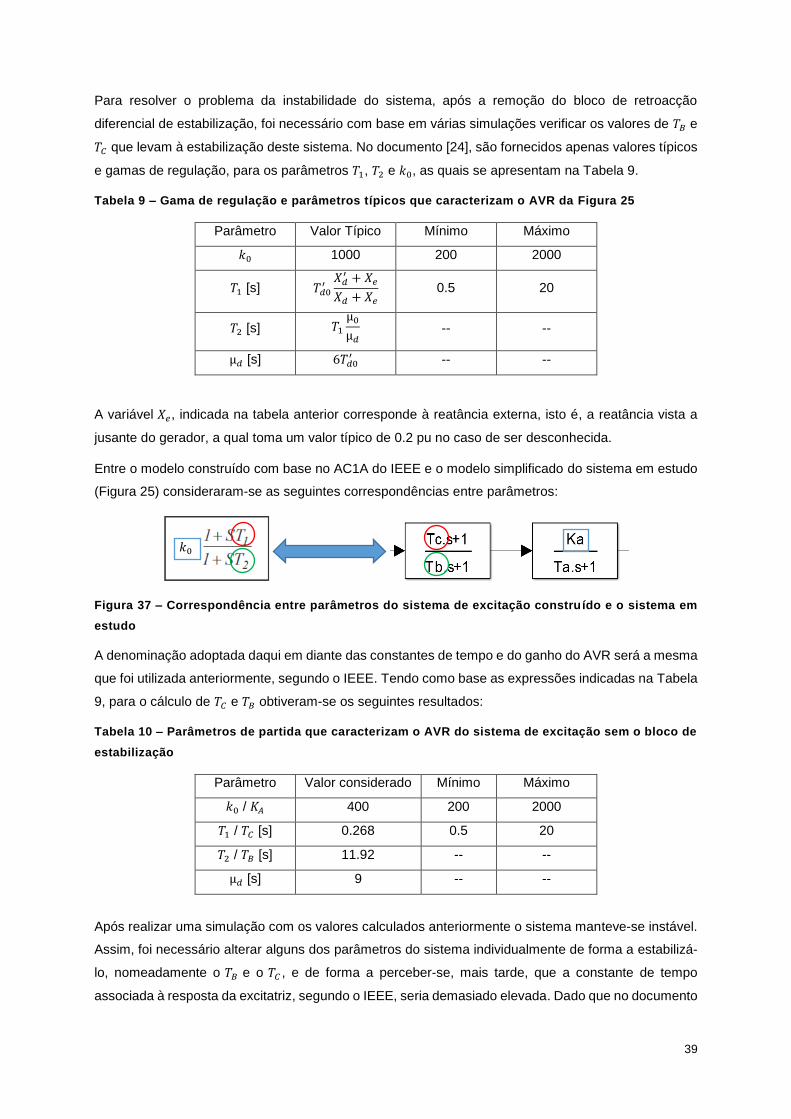
39
Para resolver o problema da instabilidade do sistema, após a remoção do bloco de retroacção
diferencial de estabilização, foi necessário com base em várias simulações verificar os valores de 𝑇𝐵 e
𝑇𝐶 que levam à estabilização deste sistema. No documento [24], são fornecidos apenas valores típicos
e gamas de regulação, para os parâmetros 𝑇1, 𝑇2 e 𝑘0, as quais se apresentam na Tabela 9.
Tabela 9 – Gama de regulação e parâmetros típicos que caracterizam o AVR da Figura 25
Parâmetro Valor Típico Mínimo Máximo
𝑘0 1000 200 2000
𝑇1 [s] 𝑇𝑑0′
𝑋𝑑′ + 𝑋𝑒
𝑋𝑑 + 𝑋𝑒
0.5 20
𝑇2 [s] 𝑇1
µ0
µ𝑑
-- --
µ𝑑 [s] 6𝑇𝑑0′ -- --
A variável 𝑋𝑒, indicada na tabela anterior corresponde à reatância externa, isto é, a reatância vista a
jusante do gerador, a qual toma um valor típico de 0.2 pu no caso de ser desconhecida.
Entre o modelo construído com base no AC1A do IEEE e o modelo simplificado do sistema em estudo
(Figura 25) consideraram-se as seguintes correspondências entre parâmetros:
Figura 37 – Correspondência entre parâmetros do sistema de excitação construído e o sistema em
estudo
A denominação adoptada daqui em diante das constantes de tempo e do ganho do AVR será a mesma
que foi utilizada anteriormente, segundo o IEEE. Tendo como base as expressões indicadas na Tabela
9, para o cálculo de 𝑇𝐶 e 𝑇𝐵 obtiveram-se os seguintes resultados:
Tabela 10 – Parâmetros de partida que caracterizam o AVR do sistema de excitação sem o bloco de
estabilização
Parâmetro Valor considerado Mínimo Máximo
𝑘0 / 𝐾𝐴 400 200 2000
𝑇1 / 𝑇𝐶 [s] 0.268 0.5 20
𝑇2 / 𝑇𝐵 [s] 11.92 -- --
µ𝑑 [s] 9 -- --
Após realizar uma simulação com os valores calculados anteriormente o sistema manteve-se instável.
Assim, foi necessário alterar alguns dos parâmetros do sistema individualmente de forma a estabilizá-
lo, nomeadamente o 𝑇𝐵 e o 𝑇𝐶 , e de forma a perceber-se, mais tarde, que a constante de tempo
associada à resposta da excitatriz, segundo o IEEE, seria demasiado elevada. Dado que no documento
𝑘0

40
[18], a excitatriz era caracterizada como sendo de elevada dinâmica, optou-se por considerar um valor
menor, de 0.2 s, para 𝑇𝐸 .
Com estas considerações, e 𝑇𝐵 = 27 s e 𝑇𝐶 = 1 s, os quais foram obtidos após várias simulações com
diferentes combinações destes dois parâmetros, o sistema passou a ser estável, embora apresentasse
ainda assim algumas oscilações de pequena amplitude, visíveis na Figura 38. Com estes parâmetros
verifica-se ainda que a resposta do sistema é lenta (cerca de 4 s), dada a perturbação que ocorre sobre
este.
Figura 38 – Tensão aos terminais do gerador, 𝑽𝑻 , na ausência da retroação diferencial de
estabilização do sistema de excitação
4.4. Identificação dos parâmetros do gerador e respetivo sistema de excitação
Nesta secção irá estimar-se os parâmetros do gerador e respetivo sistema de excitação recorrendo
para isso à ferramenta de estimação de parâmetros (Parameter Estimation) existente no
Matlab/Simulink. Ao longo do processo de estimação realizaram-se várias simulações alterando
manualmente os parâmetros do sistema global de forma a ter uma ideia do impacto destes na resposta
do sistema, ou seja, os efeitos provocados na tensão aos terminais do gerador. Este estudo revela-se
importante uma vez que permite conhecer os parâmetros que condicionam mais a resposta do sistema
e de que forma a afetam, facilitando mais tarde o processo de identificação dos mesmos.
Para identificar o sistema recorreu-se ao registo da tensão aos terminais do gerador dos ensaios que
foram realizados no terreno. Os dois ensaios efetuados no terreno tratam-se de rejeições totais de

41
carga em modo automático de 0.5 MW 2.5 Mvar e 0.5 MW 3 Mvar. Utilizando o Simulink foi criado um
evento de rejeição de carga, em t = 6 s, que se aproximasse o mais possível da rejeição de 0.5 MW 3
Mvar. No entanto, o Simulink não permite realizar simulações em que o gerador fique em vazio pois
leva à não convergência do algoritmo de cálculo das grandezas e parâmetros. Assim, considerou-se
que inicialmente existe uma carga de 1 MW, 3 Mvar e no instante t = 6 s ocorre uma rejeição de carga
de 0.5 MW, 3 Mvar ficando o sistema no final com uma carga de 0.5 MW. Esta aproximação é aceitável
visto que a variação da tensão aos terminais do gerador é praticamente proporcional apenas à potência
reativa rejeitada. Além disso, como a componente ativa da potência é bem menor do que a reativa e
está em quadratura relativamente a esta última, a componente ativa tem pouco efeito na variação da
tensão. Após implementar este cenário de rejeição de carga em Simulink procurou-se obter uma
resposta do sistema tão semelhante quanto possível à registada no ensaio, ainda que o sinal deste
padeça de bastante ruído.
O sinal registado no ensaio de terreno (tensão aos terminais do gerador, 𝑉𝑇) utilizado como sinal de
comparação para estimação dos parâmetros do sistema de excitação e gerador foi o indicado na Figura
39.
Figura 39 – Registo da tensão aos terminais do gerador no ensaio de terreno, correspondente a uma
rejeição de carga de 3 Mvar 0.5 MW
Da secção anterior obteve-se uma resposta do sistema à rejeição de 3 Mvar 0.5 MW, a qual foi sobre-
posta ao sinal registado no ensaio de terreno, como mostra a Figura 40.

42
Comparando o sinal obtido na simulação com o registado no ensaio verifica-se que o primeiro apresenta
uma cava de tensão mais acentuada e oscilações de pequena amplitude que levam a uma resposta
mais lenta do que a obtida no registo do ensaio realizado no sistema real.
Assim, começou-se por efetuar uma primeira estimação considerando os parâmetros 𝑇𝑅 e 𝑇𝐴 fixos com
o valor de 20 ms, pois tratam-se de duas constantes de tempo que dependem do tipo de equipamento
que está instalado no sistema real sobre o qual não se tem informação. Tendo então o sistema
modelado em Simulink para aceder à ferramenta de estimação seguiram-se os seguintes passos:
Analysis Parameter Estimation New Experiment.
Figura 40 – Registo da tensão aos terminais do gerador e resposta do sistema simulado
Em cada estimação é necessário especificar o registo do sinal que irá ser utilizado como comparação,
sendo neste caso o sinal azul da Figura 40, e selecionar o local no diagrama do Simulink em que o
sinal de simulação vai ser sucessivamente comparado com o primeiro. Neste processo, especificam-
se também os valores de partida dos parâmetros assim como a sua gama de variação, [26]. Os limites
considerados para os parâmetros do sistema de excitação foram em parte baseados nos estabelecidos
para o sistema de excitação AC1A, indicados em [27], [25] e [28], os quais se apresentam na tabela
seguinte.

43
Tabela 11 – Gama de variação dos parâmetros do sistema de excitação AC1A segundo várias fontes
e respetivos valores típicos segundo o IEEE
[27] [25] [28] IEEE Std. 421.5
𝑇𝑅 [𝑠] 0 – 0.49 0 – 0.5 -- 0
𝑇𝐵 [𝑠] 0 – 19.99 0 – 20 0 – 100 0
𝑇𝐶 [𝑠] 0 – 19.99 0 – 20 0 – 100 0
𝐾𝐴 0.01 – 999.99 0 – 1000 0.1 – 1000 400
𝑇𝐴 [𝑠] 0 – 9.99 0 – 10 0.01 – 10 0.02
𝑉𝐴𝑀𝐼𝑁[𝑝𝑢] -15 – 0 -15 – 0 -15 – 0 -14.5
𝑉𝐴𝑀𝐴𝑋[𝑝𝑢] 0 – 15 0 – 15 0.1 – 15 14.5
𝑉𝑅𝑀𝐼𝑁 [𝑝𝑢] -14.99 – 0 -10 – 0 -15 – 0 -5.43
𝑉𝑅𝑀𝐴𝑋[𝑝𝑢] 0 – 14.99 0 – 10 0.1 – 15 6.03
𝑇𝐸 [𝑠] 0.021 – 1.49 0.02 – 2 0.01 – 2 0.8
𝐾𝐹 0 – 0.29 0 – 0.03 0 – 0.3 0.03
𝑇𝐹 [𝑠] 0.021 – 1.49 0.02 – 1.5 0 – 2 1
𝐾𝐶 0 – 1 0 – 1 0.001 – 2 0.2
𝐾𝐷 0 – 1 0 – 1 0 – 1 0.38
𝐾𝐸 0 – 1 0 – 1 0 – 1 1
𝑉𝐸1 [𝑝𝑢] ≥ 0 ≥ 0 0 – 100 4.18
𝑆𝐸[𝑉𝐸1] 0 – 1 0 – 1 0 – 100 0.1
𝑉𝐸2 [𝑝𝑢] ≥ 0 ≥ 0 0 – 100 3.14
𝑆𝐸[𝑉𝐸2] 0 – 1 0 – 1 0 – 100 0.03
A resposta do sistema obtida após realizar a 1ª estimação, na qual se fixou 𝑇𝑅 e 𝑇𝐴, encontra-se na
Figura 41. Quanto às configurações utilizadas e respetivos parâmetros estimados estas podem ser
consultadas no Anexo 3.
Figura 41 – Tensão aos terminais do gerador obtida após a 1ª estimação de parâmetros

44
Ao analisar a resposta obtida através da simulação com os parâmetros do sistema estimados verifica-
se que o erro estático final é maior quando comparado com a resposta obtida no ensaio. Isto está
principalmente relacionado com o valor de 𝐾𝐴, o qual toma o valor neste caso de 484.58. É ainda de
notar que entre o valor mínimo da curva da simulação e os 6.5 s a resposta desta é mais rápida do que
a do ensaio no mesmo intervalo, diferença essa que poderá estar relacionada com o parâmetro 𝑇𝐴.
De seguida, para se ter uma melhor perceção do impacto de alguns dos parâmetros do sistema de
excitação, nomeadamente a influência dos parâmetros 𝐾𝐴, 𝑇𝐸 e 𝑇𝐴 na tensão aos terminais do gerador,
realizam-se várias simulações alterando manualmente e individualmente estes mesmos parâmetros.
● Variação de 𝐊𝐀 (Ganho do regulador de tensão):
Como era de esperar com o aumento do 𝐾𝐴, o valor final já se aproxima mais do valor anterior à
perturbação, uma vez que o ganho do regulador é inversamente proporcional ao erro estático final. É
ainda importante referir que o aumento de 𝐾𝐴 leva a um aumento da velocidade de subida da tensão
após ser atingido o mínimo. Além disso, o mínimo atingido (profundidade da cava) é menor quando se
aumenta o valor de 𝐾𝐴.
Figura 42 – Influência na tensão aos terminais do gerador variando 𝑲𝑨
● Variação de 𝑻𝑨 (constante de tempo do regulador de tensão):
Com a realização desta simulação é possível confirmar que o aumento de 𝑇𝐴 leva a que a resposta
fique mais lenta nomeadamente entre o momento em que é atingido o mínimo e sensivelmente os 6.5

45
s. Assim sendo, o aumento da constante de tempo 𝑇𝐴 tem um efeito contrário ao do 𝐾𝐴 quanto ao valor
mínimo atingido na cava de tensão, isto é, quanto maior 𝑇𝐴, maior a cava de tensão.
Figura 43 – Influência na tensão aos terminais do gerador variando 𝑻𝑨
● Variação de 𝑻𝑬 (constante de tempo da excitatriz):
Ao analisar o efeito da constante de tempo 𝑇𝐸 verifica-se que quanto menor o seu valor mais rápida se
torna a resposta, com seria espetável. Relativamente à cava de tensão atingida, 𝑇𝐸 tem um efeito
semelhante ao de 𝑇𝐴 e contrário ao de 𝐾𝐴, ou seja, quanto maior 𝑇𝐸 , maior a cava de tensão.

46
Figura 44 – Influência na tensão aos terminais do gerador variando 𝑻𝑬
Após a realização desta simulações onde se alterou individualmente os parâmetros indicados procurou-
se combinar os valores mais apropriados de forma a obter-se uma resposta o mais próxima da registada
no ensaio. Assim na estimação seguinte fixaram-se os parâmetros 𝐾𝐴 = 820 e 𝑇𝐴 = 0.06 s e estimaram-
se os restantes parâmetros. O valor de 𝐾𝐴 procura aproximar maioritariamente a fase final da resposta,
à do ensaio, quando é atingido o regime estacionário. Quanto ao parâmetro 𝑇𝐴 , embora se tenha
considerado inicialmente o valor de 0.02 s, este não será muito realista já que esta constante de tempo
procura representar uma soma de vários tempos associados ao sistema real: tempo de aquisição e
processamento de 𝑉𝑇 (0.02-0.03 s), computação do algoritmo de controlo e cálculo do respetivo ângulo
de disparo dos tirístores (0.02 s), emissão do sinal de disparo para os tirístores (0.01 s), o que leva a
um total de 0.05-0.06 s. Além do mais, é visível na Figura 43 que o valor de 𝑇𝐴 que leva às respostas
(simulada vs ensaio) mais próximas entre o mínimo e a zona em que atinge aproximadamente o regime
estacionário será entre 0.5 s e 0.8 s. Os resultados dos parâmetros estimados após estas
considerações encontram-se no Anexo 4 e na Tabela 12 .
Tabela 12 – Parâmetros obtidos na última estimação
𝐾𝐴 𝑇𝐴 [𝑠] 𝐾𝐶 𝐾𝐷 𝐾𝐸 𝑇𝐵 [𝑠] 𝑇𝐶 [𝑠] 𝑇𝐸 [𝑠] 𝑇𝑅 [𝑠] a
820 0.06 0.11 0.26 0.99 20.13 2.14 0.1 0.014 0.001
b 𝑇𝑑𝑜′′ [𝑝𝑢] 𝑇𝑑0
′ [𝑝𝑢] 𝑇𝑞0′′ [𝑝𝑢] 𝑋𝑑 [𝑝𝑢] 𝑋𝑑
′′ [𝑝𝑢] 𝑋𝑑′ [𝑝𝑢] 𝑋𝑙 [𝑝𝑢] 𝑋𝑞 [𝑝𝑢] 𝑋𝑞
′′ [𝑝𝑢]
6.04 0.011 1.80 0.26 1.71 0.12 0.13 0.13 1.53 0.25

47
A Figura 45 mostra mais uma vez a comparação entre a curva obtida por simulação com os parâmetros
estimados e a curva registada no ensaio.
Figura 45 – Tensão aos terminais do gerador obtida após nova estimação dos parâmetros
A curva apresentada na figura anterior corresponde à melhor aproximação que se conseguiu obter,
após tomar várias considerações entre estimações. Estas revelam-se importantes uma vez que a ferra-
menta de estimação do Matlab/Simulink, dado o número de parâmetros a estimar, apresenta uma
solução que tem muitos ótimos locais. Os ótimos globais dependerão essencialmente dos valores de
partida para os parâmetros e a sua gama de variação (mais ou menos estreita), pelo que se optou ao
longo deste processo por procurar manualmente determinados parâmetros com juízos de plausibi-
lidade.
De forma a complementar a análise dos parâmetros mais importantes, quer os que mais influenciam a
velocidade de resposta já estudados (𝐾𝐴, 𝑇𝐸 e 𝑇𝐴), quer os parâmetros 𝑇𝐵 e 𝑇𝐶 os quais tal como o 𝐾𝐴,
são reguláveis no sistema real, alteraram-se estes individualmente realizando posteriormente algumas
simulações para combinações de (𝑇𝐵, 𝑇𝐶) com o objetivo de verificar também o seu impacto na resposta
do sistema.

48
● Variação de 𝑻𝑩 (constante de tempo do sinal interno de atraso):
Figura 46 – Influência na tensão aos terminais do gerador variando 𝑻𝑩
● Variação de 𝑻𝑪 (constante de tempo do sinal interno de avanço):
Figura 47 – Influência na tensão aos terminais do gerador variando 𝑻𝑪

49
● Combinações de (𝑻𝑩, 𝑻𝑪):
Figura 48 – Influência na tensão aos terminais do gerador para várias combinações de (𝑻𝑩, 𝑻𝑪)
Com a realização das simulações anteriores retiram-se algumas conclusões sobre o impacto dos
parâmetros 𝑇𝐵 e 𝑇𝐶 na resposta do sistema.
Ao diminuir o valor de 𝑇𝐶, constante de tempo do sinal interno de avanço, verificou-se um atraso no
sinal, aumentando assim o tempo de resposta. A sua diminuição provoca ainda um aumento da sobre-
elevação do sinal.
Relativamente ao valor de 𝑇𝐵, constante de tempo do sinal interno de atraso, verificou-se que ao au-
mentá-la, ocorre um atraso do sinal, aumentando assim o tempo de resposta, tendo por isso um impacto
contrário ao de 𝑇𝐶.
Com os resultados destas simulações conclui-se também que os valores que estarão parametrizados
no regulador de tensão (𝑇𝐵 e 𝑇𝐶 ) existente no sistema real serão próximos dos obtidos na melhor
estimação pois quaisquer das combinações utilizadas levaram a respostas do sistema mais distantes
da resposta do ensaio, quando comparadas com a obtida por estimação, com 𝑇𝐵 = 20.13 s e 𝑇𝐶 = 2.14
s. Com os valores de 𝑇𝐵 e 𝑇𝐶 estimados consegue-se obter uma resposta estável e sem sobre-eleva-
ção. A escolha de uma combinação (𝑇𝐵, 𝑇𝐶) com vista a otimizar o sistema seria no sentido de aumentar
a velocidade de resposta, mantendo a ausência de sobre-elevação, embora seja difícil conciliar ambas
as características descritas anteriormente.
Por fim, foram ainda realizadas simulações para várias combinações de (𝑇𝐵, 𝑇𝐶) mantendo uma relação
de 10 entre ambos os parâmetros.
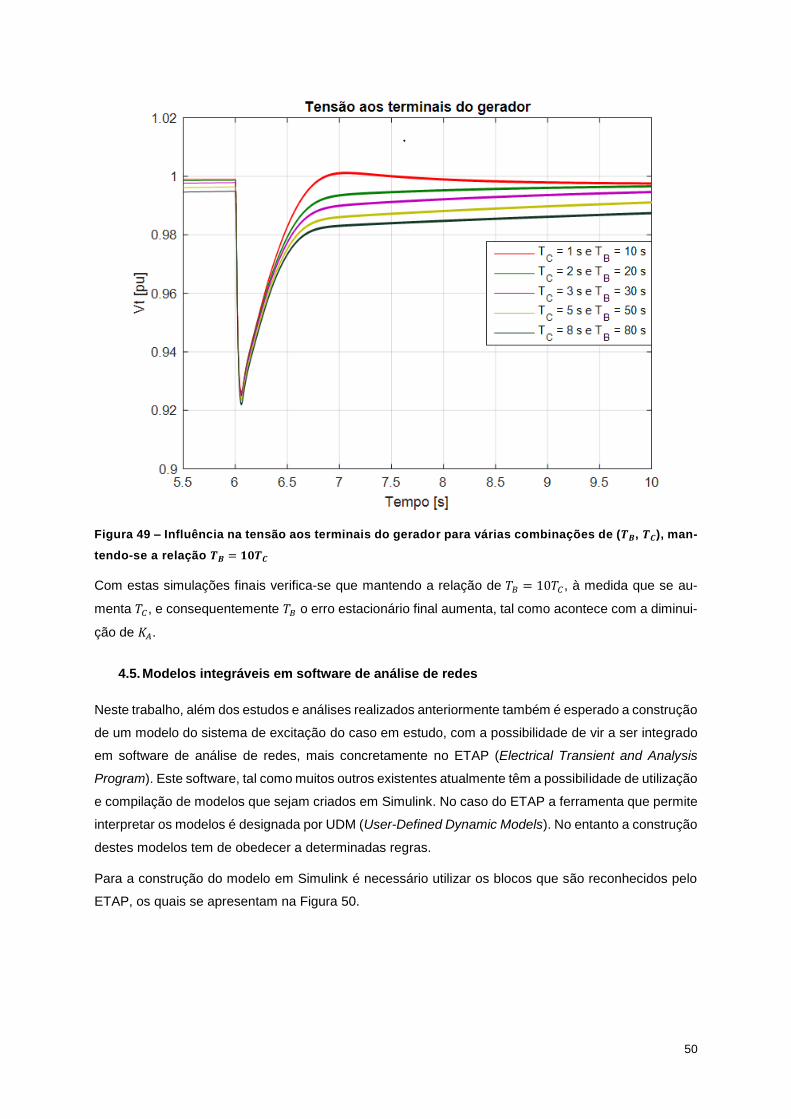
50
Figura 49 – Influência na tensão aos terminais do gerador para várias combinações de (𝑻𝑩, 𝑻𝑪), man-
tendo-se a relação 𝑻𝑩 = 𝟏𝟎𝑻𝑪
Com estas simulações finais verifica-se que mantendo a relação de 𝑇𝐵 = 10𝑇𝐶, à medida que se au-
menta 𝑇𝐶, e consequentemente 𝑇𝐵 o erro estacionário final aumenta, tal como acontece com a diminui-
ção de 𝐾𝐴.
4.5. Modelos integráveis em software de análise de redes
Neste trabalho, além dos estudos e análises realizados anteriormente também é esperado a construção
de um modelo do sistema de excitação do caso em estudo, com a possibilidade de vir a ser integrado
em software de análise de redes, mais concretamente no ETAP (Electrical Transient and Analysis
Program). Este software, tal como muitos outros existentes atualmente têm a possibilidade de utilização
e compilação de modelos que sejam criados em Simulink. No caso do ETAP a ferramenta que permite
interpretar os modelos é designada por UDM (User-Defined Dynamic Models). No entanto a construção
destes modelos tem de obedecer a determinadas regras.
Para a construção do modelo em Simulink é necessário utilizar os blocos que são reconhecidos pelo
ETAP, os quais se apresentam na Figura 50.

51
Figura 50 – Blocos e componentes do Simulink reconhecidos pelo ETAP [29]
Os tipos de funções que podem ser utilizados no bloco “Fcn” são os seguintes: sin, cos, tan, atan, abs,
exp, sqrt e log. Quanto ao bloco designado por “Transfer Fcn” este poderá ser no máximo de terceira
ordem.
Relativamente aos nomes das variáveis de entrada e saída especificados nos diagramas de blocos
contruídos em Simulink podem ser arbitrariamente escolhidos e depois mapeados no ETAP. No en-
tanto, para simplificar o trabalho é recomendável seguir os nomes das variáveis de entrada/saída já
reservados para a caracterização de sistemas de excitação, apresentados na Tabela 13.
Tabela 13 – Palavras reservadas pelo ETAP para caracterizar as entradas/saídas dos sistemas de
excitação [29]
Modelo do Sistema de Excitação
Palavra-chave Descrição
Entradas
Vt Tensão terminal da máquina
CVt Tensão terminal complexa da máquina
It Corrente terminal da máquina
CIt Corrente complexa da máquina
Pe Potência Ativa da máquina
Qe Potência Reativa da máquina
Vs Sinal do PSS (Power System Stabilizer)
Ifd Corrente de campo da máquina
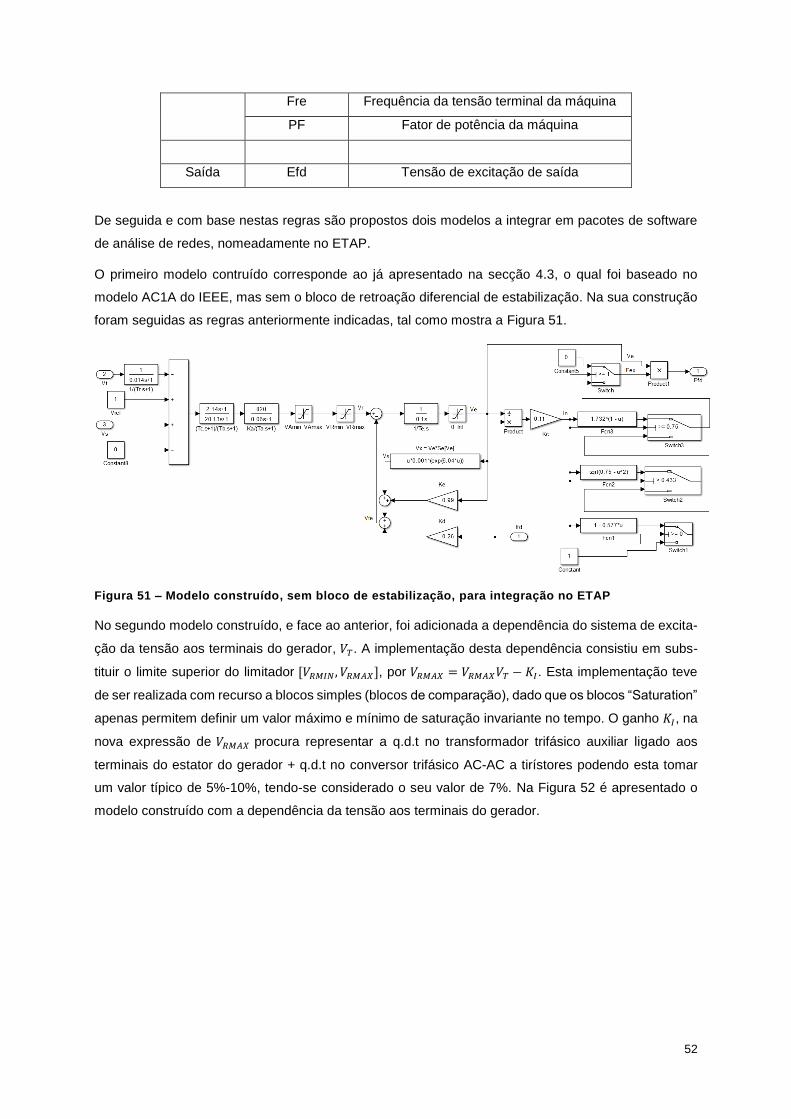
52
Fre Frequência da tensão terminal da máquina
PF Fator de potência da máquina
Saída Efd Tensão de excitação de saída
De seguida e com base nestas regras são propostos dois modelos a integrar em pacotes de software
de análise de redes, nomeadamente no ETAP.
O primeiro modelo contruído corresponde ao já apresentado na secção 4.3, o qual foi baseado no
modelo AC1A do IEEE, mas sem o bloco de retroação diferencial de estabilização. Na sua construção
foram seguidas as regras anteriormente indicadas, tal como mostra a Figura 51.
Figura 51 – Modelo construído, sem bloco de estabilização, para integração no ETAP
No segundo modelo construído, e face ao anterior, foi adicionada a dependência do sistema de excita-
ção da tensão aos terminais do gerador, 𝑉𝑇. A implementação desta dependência consistiu em subs-
tituir o limite superior do limitador [𝑉𝑅𝑀𝐼𝑁 , 𝑉𝑅𝑀𝐴𝑋], por 𝑉𝑅𝑀𝐴𝑋 = 𝑉𝑅𝑀𝐴𝑋𝑉𝑇 − 𝐾𝐼. Esta implementação teve
de ser realizada com recurso a blocos simples (blocos de comparação), dado que os blocos “Saturation”
apenas permitem definir um valor máximo e mínimo de saturação invariante no tempo. O ganho 𝐾𝐼, na
nova expressão de 𝑉𝑅𝑀𝐴𝑋 procura representar a q.d.t no transformador trifásico auxiliar ligado aos
terminais do estator do gerador + q.d.t no conversor trifásico AC-AC a tirístores podendo esta tomar
um valor típico de 5%-10%, tendo-se considerado o seu valor de 7%. Na Figura 52 é apresentado o
modelo construído com a dependência da tensão aos terminais do gerador.
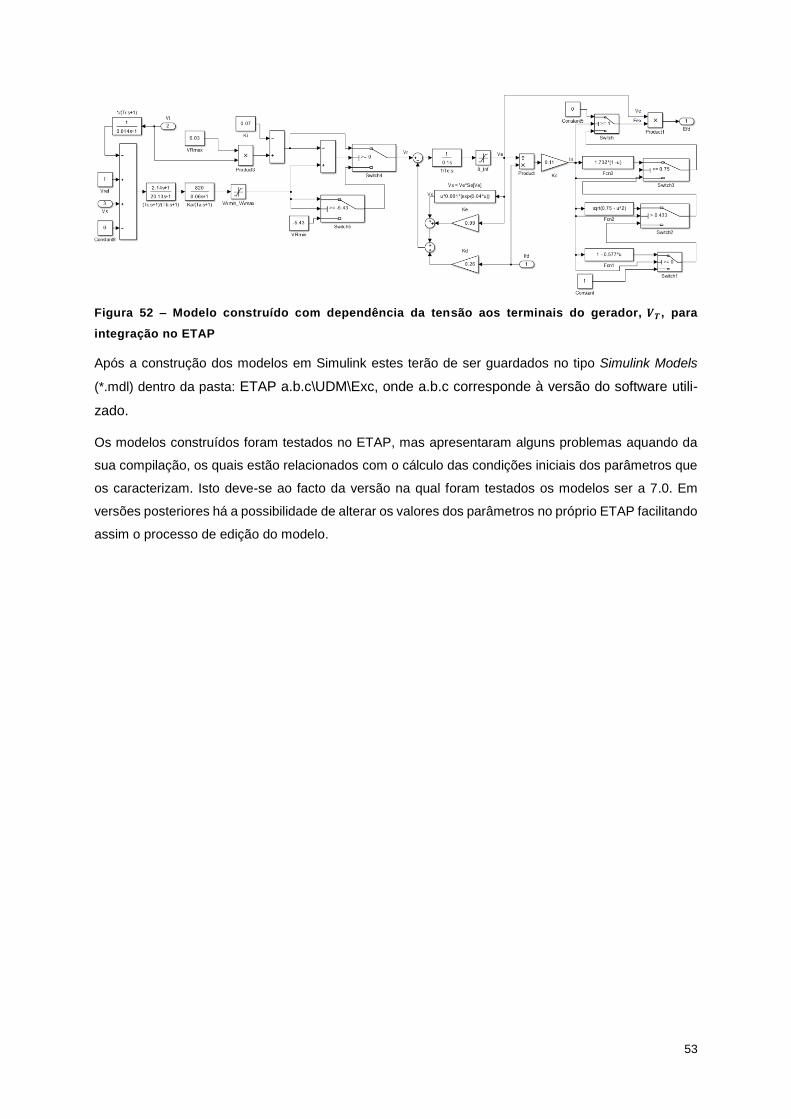
53
Figura 52 – Modelo construído com dependência da tensão aos terminais do gerador, 𝑽𝑻 , para
integração no ETAP
Após a construção dos modelos em Simulink estes terão de ser guardados no tipo Simulink Models
(*.mdl) dentro da pasta: ETAP a.b.c\UDM\Exc, onde a.b.c corresponde à versão do software utili-
zado.
Os modelos construídos foram testados no ETAP, mas apresentaram alguns problemas aquando da
sua compilação, os quais estão relacionados com o cálculo das condições iniciais dos parâmetros que
os caracterizam. Isto deve-se ao facto da versão na qual foram testados os modelos ser a 7.0. Em
versões posteriores há a possibilidade de alterar os valores dos parâmetros no próprio ETAP facilitando
assim o processo de edição do modelo.
54
5. Conclusões
5.1. Considerações finais
Ao longo desta dissertação estudou-se e identificou-se um sistema de excitação sem escovas não
estandardizado, apresentando por isso algumas particularidades quando comparado com os sistemas
usuais. Para tal, foi necessário e importante começar por estudar os sistemas já existentes e normaliza-
dos verificando-se que o modelo AC1A do IEEE é bastante utilizado em sistemas de produção de
energia que possuam geradores síncronos com excitatriz sem escovas. Além disso estudou-se a
função e constituição de um sistema de excitação verificando-se que este tem um grande impacto no
desempenho dinâmico e na disponibilidade do gerador, o qual garante a qualidade da tensão e da
potência reativa, ou seja, a qualidade da energia entregue às cargas/consumidores. É ainda de notar
que, para a realização de estudos de estabilidade de tensão, o intervalo de tempo de interesse deste
tipo de sistemas recai entre 0.1 - 1 s, após a existência de uma perturbação.
No capítulo 3, foi descrito o sistema em estudo comparando as suas características com soluções
típicas de sistemas de excitação sem escovas. Posteriormente analisaram-se e compararam-se os
parâmetros do gerador indicados pelo fabricante com os obtidos a partir de ensaios de terreno. Desta
comparação verificou-se que os dados do gerador fornecidos pelo fabricante, face aos que foram possí-
veis calcular a partir dos ensaios de rejeição de carga, apresentam algumas discrepâncias. Estas estão
relacionadas com o facto de os sinais registados nos ensaios apresentarem bastante ruído e atrasos
devido ao processo de amostragem. Por outro lado, o ensaio não foi realizado nas melhores condições,
dado que a rejeição envolve potência ativa e reativa, ainda que a reativa seja predominante face à
ativa. Isto leva a que se cometam erros ao calcular os parâmetros segundo o eixo d a partir da curva
registada. Além disso, como neste sistema de excitação sem escovas, a alimentação da excitatriz piloto
é obtida a partir dos terminais do próprio gerador principal leva a que as condições necessárias ao
cálculo dos parâmetros com a precisão desejada, não sejam cumpridas já que, a obtenção a partir
deste tipo de ensaios pressupõe que a alimentação da excitatriz piloto se mantém constante durante a
rejeição de carga, o que não acontece neste caso em particular.
No capítulo 4, realizou-se a modelação do sistema global de forma a estudar o seu comportamento
quando sujeito a uma perturbação (rejeição de carga) e mais tarde identificar os parâmetros do modelo
que o descrevem com base num ensaio de campo. Nesta modelação procurou-se escolher um modelo
do sistema de excitação que melhor descrevesse o sistema real, tendo-se optado pelo modelo AC1A.
Das simulações realizadas concluiu-se que ao retirar o bloco de retroação diferencial do sistema, isto
é, considerando, 𝐾𝐹 = 0 , a resposta do sistema apresenta-se bastante oscilatória. Com os
pressupostos considerados e 𝐾𝐹 = 0, o controlo de estabilidade da tensão aos terminais do gerador
torna-se fortemente dependente dos três parâmetros reguláveis que descrevem o AVR:
● 𝐾𝐴 − este ganho tem um forte impacto no erro estático final da resposta do sistema, no tempo de
subida da cava de tensão e ainda na sua profundidade. O seu aumento leva à diminuição do erro
estático, do tempo de subida e da profundidade da cava de tensão.

55
● 𝑇𝐵 − o seu aumento leva a que o sistema se torne mais lento, aumentando o seu tempo de resposta;
● 𝑇𝐶 − ao reduzir-se este parâmetro, obtém-se uma resposta mais lenta, provocando também a um
aumento da sua sobre-elevação.
Concluiu-se ainda que para além destes parâmetros, a constante de tempo da excitatriz, 𝑇𝐸 , também
influencia bastante a rapidez de resposta do sistema, nomeadamente a velocidade de subida aquando
da existência de uma cava de tensão, assim como a profundidade desta. Ao diminuir 𝑇𝐸 , a resposta fica
consideravelmente mais rápida, apresentando uma menor profundidade da cava de tensão. A
realização de simulações para várias combinações de 𝑇𝐵 e 𝑇𝐶 permitiram concluir que o par (𝑇𝐵 , 𝑇𝐶) =
(20.13, 2.14) leva à resposta do sistema mais próxima da obtida no ensaio de terreno, o que reforça a
ideia que estes serão os valores parametrizados na instalação. Neste par de valores, verifica-se
também que a sua relação é de aproximadamente 10. Assim sendo, testou-se e concluíu-se que para
combinações de 𝑇𝐵 = 10𝑇𝐶 , dentro dos limites possíveis de 𝑇𝐵 e 𝑇𝐶 , o sistema mantém-se estável
notando-se apenas um aumento do erro em regime estacionário com o aumento de 𝑇𝐶 , e conse-
quentemente, 𝑇𝐵.
Relativamente à estimação dos parâmetros do gerador e respetivo sistema de excitação foi possível
apurar que a ferramenta disponível no Matlab/Simulink, dado o elevado número de parâmetros a
identificar, apresenta como solução diversos ótimos locais. Assim, a obtenção de ótimos globais de-
pende essencialmente das condições iniciais dos parâmetros que se consideram em cada estimação
e ainda do seu intervalo de variação, revelando-se, por isso, importante o estudo do impacto da varia-
ção dos parâmetros na resposta, por forma a ter uma perceção das condições iniciais mais adequadas
para obter uma resposta o mais semelhante possível à do ensaio de terreno. Quanto aos parâmetros
do gerador estimados estes apresentam algumas discrepâncias quando comparados com os retirados
dos ensaios e também com os disponibilizados pelo fornecedor uma vez que na modelação do sistema,
o modelo do IEEE utilizado (AC1A), não modela na totalidade o sistema real que se estudou,
especialmente a dependência que a excitação tem da tensão aos terminais do próprio gerador principal.
Por fim, são propostos dois modelos a integrar no ETAP, um dos quais é baseado no modelo AC1A do
IEEE, sem a retroação diferencial de estabilização, e um segundo, em que a alimentação da excitatriz
piloto é realizada a partir da própria tensão aos terminais do gerador principal. A construção destes
modelos permitiu tomar conhecimento das várias regras que devem ser seguidas neste processo. No
entanto, dada a versão utilizada não foi possível a compilação dos modelos devido às condições iniciais
que se consideraram nestes modelos.
5.2. Limitações do trabalho e trabalhos futuros
A realização deste trabalho pretendeu atingir os objetivos inicialmente descritos no Capítulo 1. No en-
tanto surgiram vários problemas durante a sua realização os quais impossibilitaram o seu desenvolvi-
mento mais aprofundado. Inicialmente e como era esperado, o foco principal seria realizar um estudo
e identificação do sistema de excitação conhecendo os restantes parâmetros do sistema global. Con-
tudo ao longo do trabalho foram surgindo dúvidas quanto à consistência apresentada pelos parâmetros

56
do gerador, razão pela qual se decidiu realizar uma análise destes. Assim sendo, os parâmetros em
análise passaram a ser, não só os do gerador, mas também os do sistema de excitação tornando o
sistema com um elevado número de variáveis desconhecidas e, portanto, mais complexo. Por outro
lado, os ensaios de campo a partir dos quais se realizaram várias análises na tentativa de identificar os
parâmetros do gerador não foram executados nas melhores condições, razão pela qual não se conse-
guiu retirar grandes conclusões destes. Porém, as limitações encontradas nesta dissertação permitem
abrir portas no que diz respeito a trabalhos futuros, tais como:
● otimização dos parâmetros (𝐾𝐴, 𝑇𝐵 e 𝑇𝐶) que descrevem o AVR de forma a ter-se uma resposta está-
vel, rápida e sem sobre-elevação, quer para pequenas perturbações (variações de carga), quer para
grandes perturbações (curto-circuitos);
● estudar e comparar o impacto na resposta do sistema entre o modelo AC1A com e sem a dependên-
cia da tensão aos terminais do gerador, 𝑉𝑇.

57
Bibliografia
[1] J. C. P. Suni, E. Ruppert e F. Fajoni, “A Guide for Synchronous Generator Parameters
Determination using Dynamic Simulations Based on IEEE Standards,” em XIX International
Conference on Electrical Machines - ICEM, Rome, 2010.
[2] P. Kundur, Power Systems Stability and Control, McGraw-Hill, 1994.
[3] J. Lai, “Parameter Estimation of Excitation Systems,” Master´s thesis, Raleigh, North Carolina,
2007.
[4] “IEEE Recommended Practice for Excitation System Models for Power System Stability Studies,”
IEEE Std 421.5-2005 (Revision of IEEE Std 421.5-1992), 21 April 2006.
[5] R. Ramanujam, Power System Dynamics: Analysis and Simulation, PHI Learning Private Limited,
2010.
[6] K. R. Padiyar, Power System Dynamics: Stability and Control, 2º ed., BS Publications, 2002.
[7] M. Calsan, “Análise de Desempenho Dinâmico de Sistemas de Excitação para Geradores
Síncronos em Plantas de Geração Distribuída,” Dissertação de Mestrado, Campinas, 2011.
[8] E. Bortoni e J. Jardini, “Identification of Synchronous Machine Parameters Using Load Rejection
Test Data,” IEEE Power Engineering Review, vol. 17, pp. 242-247, 2002.
[9] M. Azubalis, V. Azubalis e A. Jonaitis, “Practical Assessment of Synchronous Generator Dynamic
Model Parameters,” Electronics and Electrical Engineering, pp. 33-36, 2010.
[10] M. Amaya, Á. Costa , J. Palacios e H. Cadavid, “Identification of the Synchronous Machine
Parameters by the Simulation of the Time Domain Tests using Finite-Elements Method,” em
Electric Machines And Drives Conference, Madison, Wisconsin USA, 2003.
[11] “ebah.pt,” [Online]. Available: http://www.ebah.pt/content/ABAAAgnjoAB/estabilidade-tensao.
[Acedido em 23 04 2016].
[12] S. Chakrabarti, “Notes on power system voltage stability,” January 2011.
[13] P. Kundur, J. Paserba, V. Ajjarapu, G. Andersson e e. al, “Definition and Classification of Power
System Stability,” IEEE Trans. Power Syst., vol. 19, pp. 1387-1401, 2004.
[14] “IEEE Standard Definitions for Excitation Systems for Synchronous Machines,” IEEE Std 421.1-
2007 (Revision of IEEE Std 421.1-1986), 15 July 2007.
[15] V. Ruuskanen, M. Niemela, J. Pyhonen, S. Kanerva e J. Kaukonen, “Modelling the brushless
excitation system for a synchronous machine,” IET Electric Power Applications, vol. 3, pp. 231-
239, June 2009.
[16] J. L. C. Pinto de Sá, “Resumo Executivo - Resultados obtidos nos ensaios realizados na CCRL,”
2016.
[17] J. P. S. Paiva, Redes de Energia Elétrica: uma análise sistémica, IST Press, 2007.
[18] J. L. C. Pinto de Sá, “Central CCC da Refinaria de Luanda: Estudos Sistémicos das Condições de
Operação,” 2016.
[19] WECC, “WECC Test Guidelines for Synchronous Unit Dynamic Testing and Model Validation,”
2010.

58
[20] J. P. Coelho e T. Pinho, “ipb.pt,” [Online]. Available:
http://www.ipb.pt/~jpcoelho/CCD/documento.pdf. [Acedido em 20 03 2016].
[21] MathWorks, “read.pudn,” October 2004. [Online]. Available:
http://read.pudn.com/downloads152/ebook/667368/simulink_power_system.pdf. [Acedido em 20
02 2016].
[22] MathWorks, “mathworks.com,” [Online]. Available:
http://www.mathworks.com/help/physmod/sps/powersys/ref/threephaseparallelrlcload.html.
[Acedido em 07 01 2016].
[23] A. Burmistrov, E. Popov, A. Urganov, A. Gerasimov e A. Esipovich, “Estimation of efficiency of
modern excitation controllers of synchronous machines in the conditions of physical model of a
complex system and suggestion of estimation technique and criteria as an addition to the IEC
standard,” em 44th International Conference on Large High Voltage Electric Systems, Paris, 2012.
[24] GE Oil & Gas, “VDF SILCOSTAT MODEL,” 2012.
[25] NEPLAN, “neplan.ch,” [Online]. Available: http://www.neplan.ch/wp-
content/uploads/2015/08/Nep_EXCITERS1.pdf. [Acedido em 15 01 2016].
[26] Mathworks, “cn.mathworks.com,” [Online]. Available:
http://cn.mathworks.com/help/pdf_doc/sldo/sldo_gs.pdf. [Acedido em 18 02 2016].
[27] Siemens, “energy.siemens.com,” October 2012. [Online]. Available:
http://www.energy.siemens.com/hq/pool/hq/services/power-transmission-distribution/power-
technologies-international/software-solutions/BOSL_Controllers_Standard-1.pdf. [Acedido em 06
01 2016].
[28] PHASETOPHASE, “phasetophase.nl,” May 2016. [Online]. Available:
http://www.phasetophase.nl/pdf/SynchronousMachineExcitationSystems.pdf. [Acedido em 15 06
2016].
[29] O. Tecnology, ETAP 7.0 User Guide - User Defined Dynamic Models (UDM), Chapter 25.
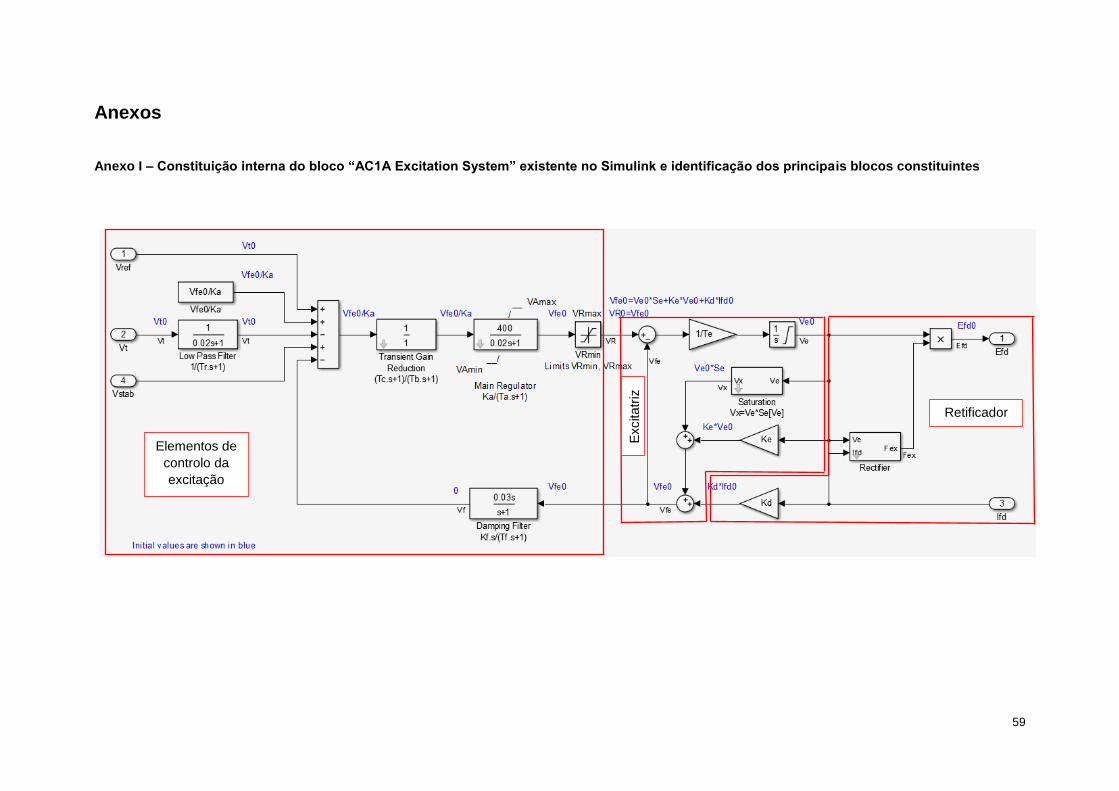
59
Anexos
Anexo I – Constituição interna do bloco “AC1A Excitation System” existente no Simulink e identificação dos principais blocos constituintes
Elementos de
controlo da
excitação
Excitatr
iz
Retificador
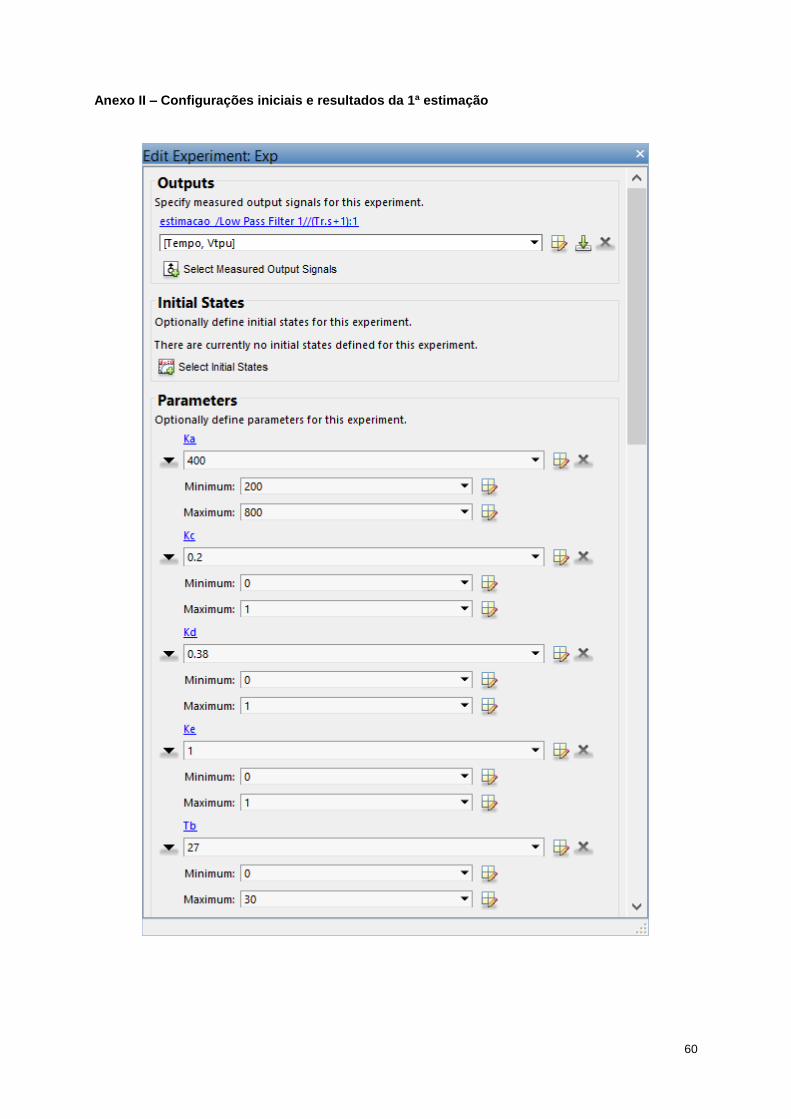
60
Anexo II – Configurações iniciais e resultados da 1ª estimação

61

62
Figura 53 – Configurações iniciais dos parâmetros utilizados na 1ª estimação
Figura 54 – Relatório do progresso da 1ª estimação
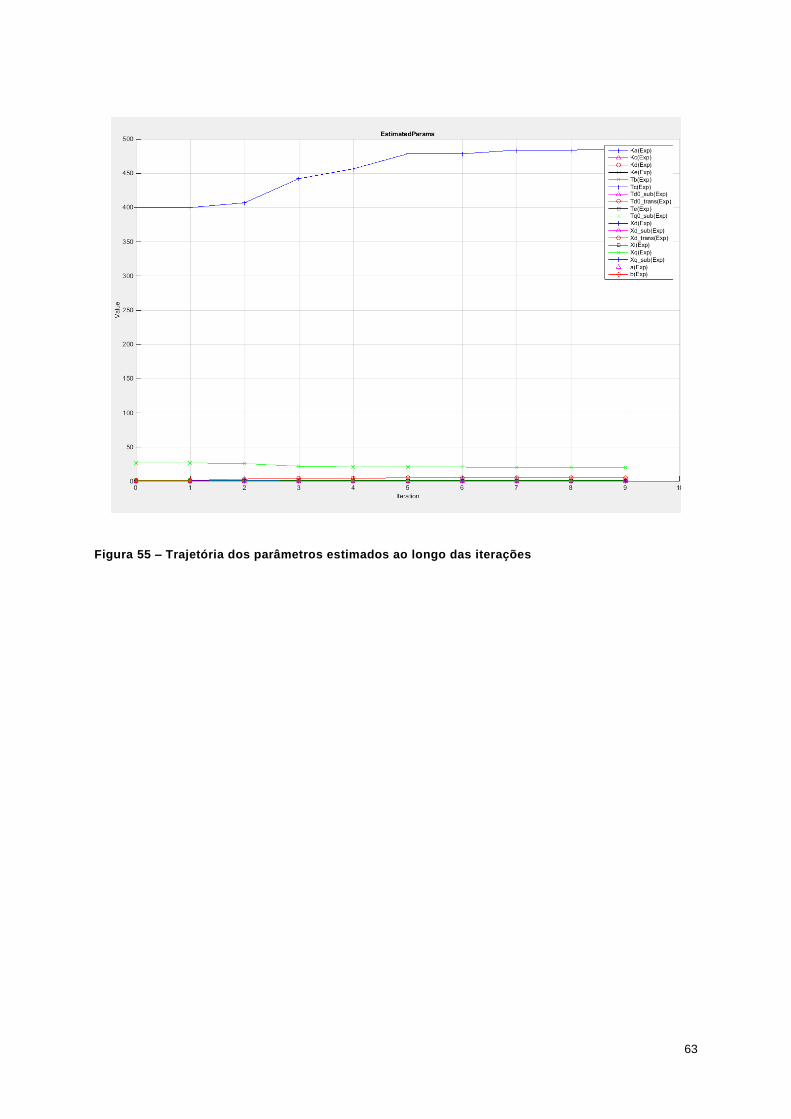
63
Figura 55 – Trajetória dos parâmetros estimados ao longo das iterações
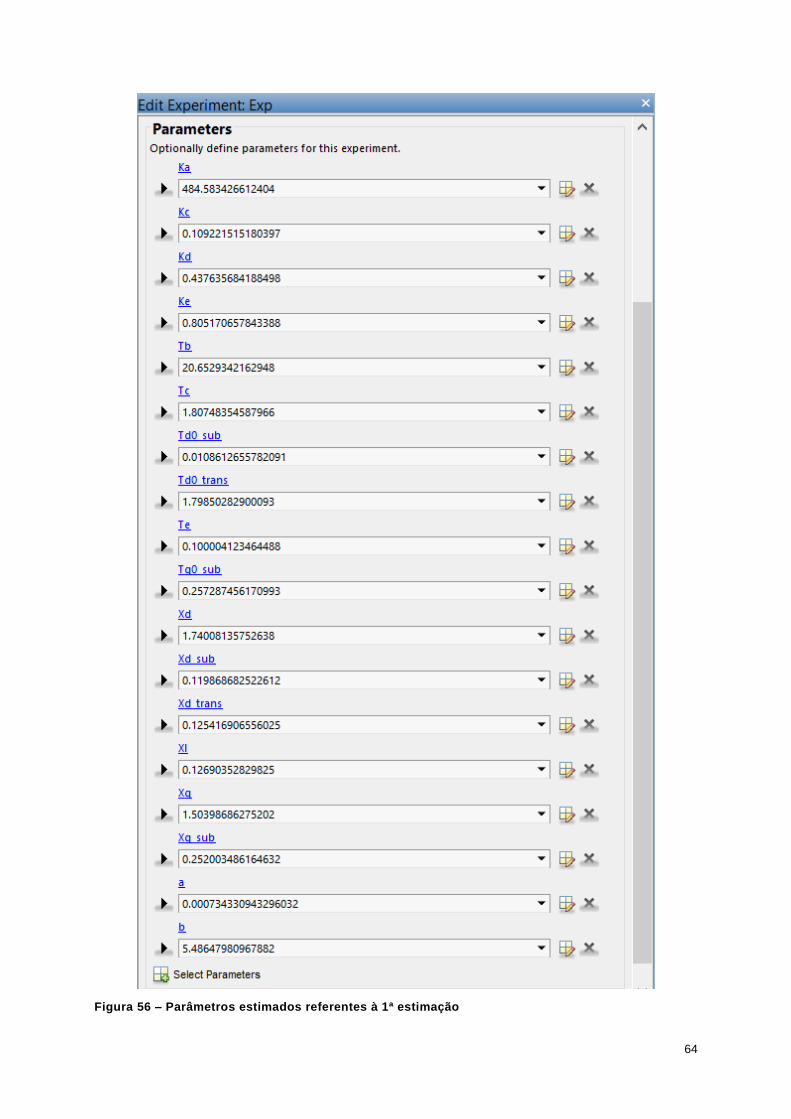
64
Figura 56 – Parâmetros estimados referentes à 1ª estimação

65
Anexo III – Resultados da última e melhor estimação
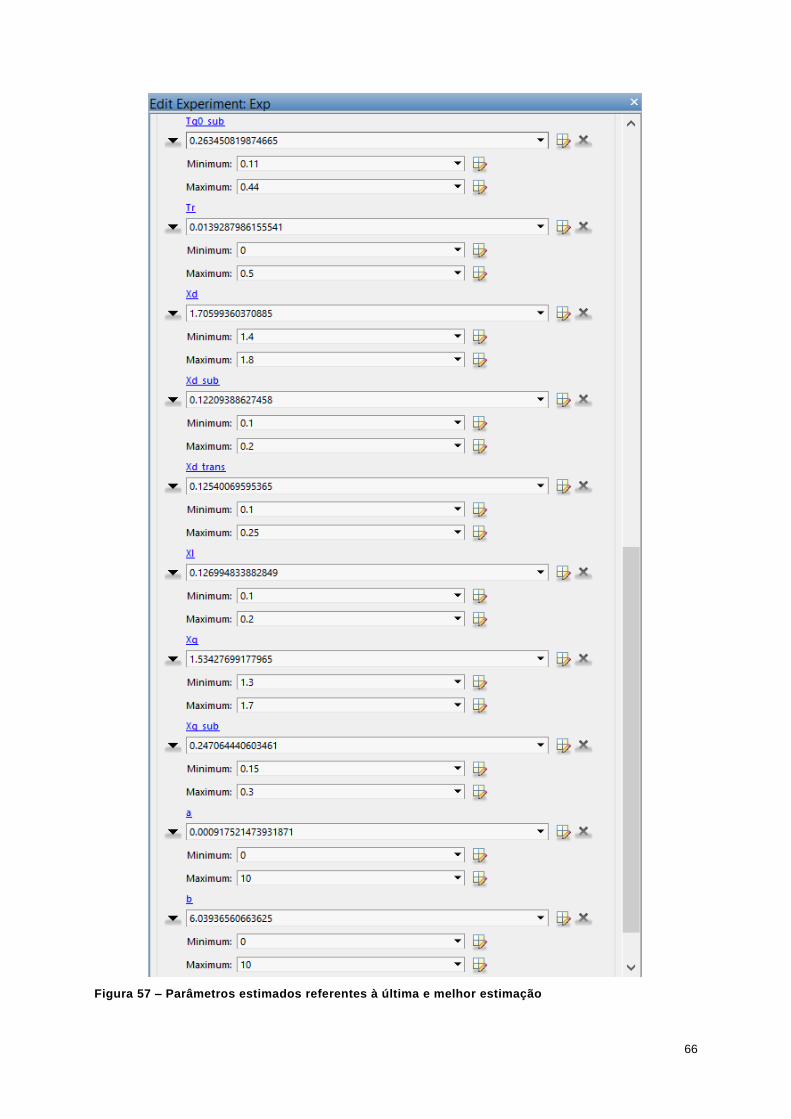
66
Figura 57 – Parâmetros estimados referentes à última e melhor estimação


















