Modelos Elástico Resistencia Materiales

of 24
-
Upload
camilo-andres -
Category
Documents
-
view
230 -
download
0
Transcript of Modelos Elástico Resistencia Materiales
-
8/19/2019 Modelos Elástico Resistencia Materiales
1/74
333 EEEssstttaaadddooo dddeeelll AAAr r r ttteee sssooobbbr r r eee lllaaa
MMMooodddeeellliiizzzaaaccciiióóónnn CCCooonnnssstttiiitttuuutttiiivvvaaa
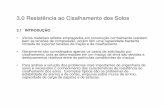
3 0 Introducción
Se llama modelo constitutivo a una formulación matemática capaz de describir el
funcionamiento físico macroscópico de un “sólido ideal”, que resulta luego de aplicarhipótesis simplificativas sobre un “sólido real”. De aquí que la formulación de los modelosconstitutivos sólo represente una “realidad condicionada” por ciertas hipótesissimplificativas y por lo tanto su utilización debe realizarse consecuentemente con ellas.Debido a esto existen innumerables modelos constitutivos y actualmente se siguetrabajando en la formulación de otros nuevos, cuyo objetivo es conseguir una formulaciónsuficiente y acorde con el problema que se quiere resolver, ya que no es trivial obtener unaformulación única que permita alcanzar la solución general para “todos los problemas”.
ESTUDIOS AGRAN ESCALA
- ESTRUCTURAS-
MECÁNICADEL SÓLIDO:
MMC(Mec. de Med. Cont.)
MFL(Mec. de Frac. Lineal)
MECÁNICACOMPUTACIONAL
TÉCNICASNUMÉRICAS
MODELOS
CONSTITUTIVOS
ESTUDIOSDE LOS
MATERIALES
Figura 3.1 – Modelos constitutivos e interrelación entre las disciplinas que le dan origen.
-
8/19/2019 Modelos Elástico Resistencia Materiales
2/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS12
En la Figura 3.1 puede verse la interrelación entre distintas disciplinas que establecen lasbases en que se fundamenta un modelo constitutivo genérico. Cuando en esta figura sehace referencia a la mecánica de sólido, se está englobando tanto la Mecánica de MediosContinuos clásica, como la Mecánica de Fractura.
3.0.1 Clasif icación General.
No hay una forma única de clasificar los modelos constitutivos que se han formuladopara el tratamiento no lineal de los materiales, pues esto depende del punto de vista que sequiera resaltar. No obstante esto, aquí se sigue una forma clásica presentada en el ASCE ytambién por W. Chen and Ting, que aunque ha sido escrita en relación con el hormigón,tiene un punto de vista muy general. Así, los modelos pueden clasificarse en:
• Modelos basados en la elasticidad lineal y no-lineal
• Modelos basados en la teoría de la plasticidad
• Modelos basados en la teoría endocrónica• Modelos de fractura
Con esta clasificación se quiere transmitir la idea que el comportamiento macroscópicode un sólido puede representarse por distintos caminos. Todos ellos permiten obtener muybuenos resultados sin que en ningún caso se esté representando la verdadera físicamicroestructural que se desarrolla en el material. Así pues, el denominado fenómeno defractura puede representarse mediante un modelo basado en mecánica de fractura en elque los fundamentos derivan de la propia teoría de la elasticidad. También puedeaproximarse este comportamiento mediante mecánica de medios continuos luego derealizar adecuadas regularizaciones que permitan representar las discontinuidades que
ocurren en los campos de desplazamiento y deformación. A continuación se muestra brevemente un resumen de algunos modelos clásicos que se
utilizan para representar el comportamiento del material. Por supuesto que hay algunosmás adecuados que otros, según sea el problema que se quiera resolver, no obstante esbueno mencionar desde aquellos más simples hasta los de mayor complejidad.
3.0.1.1 Modelos Basados en la Elasticidad Lineal y No-lineal.
Son modelos simples pero inapropiados para representar un sólido en estado de
fractura, aunque es importante tenerlos en cuenta para representar su comportamientodentro del rango elástico. Estos modelos básicamente son,
• Elásticos de Cauchy , basados en la ley de Hooke1, en los cuales el campo tensional se
define a partir del campo de deformaciones
ijσ
klε en el instante actual mediante una
función tensorial del tipo .( )klijij f ε=σ
• Hiperelásticos de Green 3, tales que la tensión ijσ se define a partir de un potencial en
función de , que es la variable libre del problema. Esto esklε klij ε∂ω∂=σ .
1 Malvern, L. E. (1969). Introduction to the mechanics of a continuous medium - Prentice Hall - U.S.A.
-
8/19/2019 Modelos Elástico Resistencia Materiales
3/74
Capitulo 3- Estado del Arte sobre la Modelización Constitutiva 13
• Hipoelásticos 3,, en los cuales se define en forma arbitraria la variación temporal de latensión en función de la variación temporal de deformación . Estos
modelos pueden violar los principios básicos de la termodinámica (ver apéndice A3).
( klijij f ε=σ )
3.0.1.2 Modelos Basados en la Teoría de la Plasticidad.Estos modelos permiten la representación de un comportamiento macroscópico no-
lineal a partir de considerar una disipación energética provocada por el desarrollo de unadeformación irrecuperable denominada deformación plástica2. Más adelante se presentarála aproximación necesaria que permite utilizar una formulación de este tipo para eltratamiento de problemas de fractura.
Puede ahora hacerse una clasificación de los posibles modelos basados en plasticidadque permite tratar fenómenos de fractura
•Plasticidad perfecta , basado en los clásicos modelos, de cuyas formulacionesactualmente se utilizan las funciones umbrales de fluencia.
• Plasticidad con ablandamiento y/o endurecimiento, que permite aproximar mejor elfenómeno de fractura que la plasticidad perfecta
• Plasticidad con ablandamiento y/o endurecimiento y/o daño, que completa de mejor manerala formulación no-lineal para tratar problemas de metales y/o geomateriales.
3.0.1.3 Modelos Basados en la Teoría Endocrónica.
Estos modelos desarrollados inicialmente para metales y posteriormente adaptados para
el tratamiento de geomateriales han significado un gran avance respecto de aquellosbasados en la plasticidad clásica. No obstante esto, su vigencia fue muy breve debido a lagran cantidad de parámetros que necesitaban para su definición.
3.0.1.4 Modelos de Fractura.Estos modelos han sido formulados con el principal objetivo de tratar problemas de
fractura. Los hay muy diversos y en general pueden clasificarse en los siguientes tresgrupos,
• Modelos de mecánica de fractura. Como su propio nombre lo indica, son modelosformulados en factores de intensidad de tensiones o también en el concepto deconcentración de tensiones, y en este capítulo se presentarán algunos de ellos.
• Modelos de fisura distribuida. Son modelos basados en la mecánica de medios continuos,pero utilizan conceptos de la mecánica de fractura. Estos modelos han sido la punta delanza que ha permitido demostrar que los problemas de discontinuidad -fractura-pueden aproximarse mediante problemas continuos tratados en su estado límite.
• Modelos de Fisura discreta. Los orígenes de la combinación de teorías elásticas con otrasde umbral máximo de tensión -fractura-, se encuentran en el modelo de Ngo and
2 Lubliner, J. (1990). Plasticity Theory. Macmillan Publishing - U.S.A.
-
8/19/2019 Modelos Elástico Resistencia Materiales
4/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS14
Scordelis. Estos modelos sólo están justificados a nivel de la intuición ingenieril y seaprovechan de la representación del sólido en elementos finitos.
A continuación se muestra un cuadro sintético sobre esta clasificación y más adelanteserán presentados con detalle algunos de estos modelos significativos para el desarrollo de
la simulación numérica del fenómeno de fractura.
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
⎪⎩
⎪⎨
⎧
•
•
••
⎪⎩
⎪⎨
⎧
•
•
•
•
⎪⎪⎩
⎪⎪⎨
⎧
•
•
•
−
•
Dañoy/od Plasticida
ento,endurecimi y/ontoablandamie cond Plasticida
perfecta,d Plasticida
y Dañodad Plastici
ladeTeoríalaen
basadosModelos
fractura.demecánicalaen Basados
discreta,Fisura
difusa,oadistribuid Fisura
Fracturade Modelos
elástico.Hipo
Green, de icoHiperelást
Cauchy, de Elástico
linealnoyLinealdad Elastici
laen basadosModelos
VOS CONSTITUTI
MODELOS
Figura 3.2 – Clasificación de los modelos constitutivos independientes del tiempo, pararepresentar el comportamiento de un sólido.
-
8/19/2019 Modelos Elástico Resistencia Materiales
5/74
333...111 EEEcccuuuaaaccciiiooonneeesss
CCCooonnnssstttiiitttuuutttiiivvvaaasss
n
3 1 1 Introducción
Las ecuaciones que caracterizan a cada material individualmente y su reacción cuando
sobre él se aplican cargas se denominan ecuaciones constitutivas 1,2
. Estas describen elcomportamiento macroscópico que resulta de la constitución interna del material.
Pero los materiales, y en especial los sólidos, se comportan de una manera tan compleja,cuando se tienen en cuenta todas las posibles temperaturas y deformaciones que puedenpresentar, que no es posible escribir una única ecuación o conjunto de ecuaciones quedescriban de forma apropiada al comportamiento de un material real. En cambio vamos aformular distintas ecuaciones que describen varios tipos de materiales ideales, con suformulación matemática diseñada para un rango restringido y apropiado.
3 1 2 Elasticidad
Un material se llama elástico ideal si éste recobra su forma original completamente con soloquitar las fuerzas que causaban la deformación, y existe una relación uno a uno entre elestado de tensión y el de deformación para una dada temperatura.Los metales estructurales se aproximan a este comportamento si las deformaciones son losuficientemente pequeñas. Los coeficientes de las ecuaciones constitutivas que relacionanlas defromaciones con las tensiones para un material en general dependen de latemperatura, pero vamos a suponer que esta depoendencia es suficientemente pequeña oque la variación de la temperatura lo es y por lo tanto los coeficientes serán tratados comoconstantes durante la deformación.
Las ecuaciones constitutivas de los modelos constitutivos elásticos clasicos están bienestablecidas y son las siguientes3: 1. Modelo Elástico de Cauchy, es el más clásico de los modelos elásticos y la variable delproblema se establece a través de una función tensorial lineal de argumentos tensorialessegún:
)(
)(
1
klijij
klijij
f
f
σ ε
ε σ
−=
= ( 3.1.1)
Asi resulta la tensión a partir de un modelo cuya variable libre es la deformación, o bien seobtiene la deformación en los modelos basados en variable libre de tensión. Estas
1 Malvern, L.E. (1969). Introduction to the Mechanics of a Continuous Medium . Prentice Hall., Englewood Cliffs, NJ. 2 Lubliner, J. (1990). Plasticity Theory . Macmillan Publishing Company, Third Avenue, N. Y. 3 Oller, S. (2002). Dinámica No-Lineal. Monografía CIMNE Nº63, UPC, Barcelona, España.
-
8/19/2019 Modelos Elástico Resistencia Materiales
6/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS16
relaciones son invertibles y reversibles por lo que en elasticidad no hay disipación de laenergía.2. Modelo elástico de Green, o también llamado hiperelástico, tal que la variable del
problema depende de una densidad de potencial que debe ser preestablecida ijε Ψ=Ψ o
de su complemento ijσ Ψ=Ψ ,
( )
ij
ij
ij
ij
ij
ij
σ
σ ε
ε
ε σ
∂
Ψ∂=
∂
Ψ∂=
( 3.1.2)
Al igual que en el modelo de Cauchy, la tensión resulta a partir de un potencial basado en la variable libre de deformación, o, en cambio, se obtiene la deformación a partir de unpotencial basado en la variable libre de tensión. También estas relaciones son invertibles yreversibles, por lo tanto no hay disipación de energía. Este modelo contiene al anterior y esla forma más general y amplia para definir el comportamiento elástico de un punto del
sólido.3. Modelos Hipoelásticos, se basan en una definición que proviene normalmente de laobservación experimental. Estos modelos no son apropiados cuando se define elcomportamiento de un material elástico no-lineal. Esto se debe a la arbirariedad con quepueden ser establecidos. Normalmente se pueden escribir en la siguiente forma,
( )mnijijij
mnijijij
g
f
σ ε ε
σ ε σ
;
;
=
= ( 3.1.3)
En todos los modelos antes citados debe siempre cumplirse el concepto dereversibilidad termodinámica e independencia entre tensiones y trayectoria.
3.1.2.1 Elasticidad lineal
Las ecuaciones constitutivas clásicas de la elasticidad se denominan Ley de Hooke generalizada y son nueve ecuaciones que expresan la relación entre las componentes detensión como funciones lineales homogéneas de las nueve componentes de deformación:
RS IJRS IJ E C T = ( 3.1.4)
Cuando el tensor de tensiones T IJ y el tensor de deformaciones lagrangeano ERS seconsideran como el campo de variables constitutivas referidas al estado natural del material.
Si los gradientes de desplazamiento son en todo punto pequeños en relación a la unidad,los desplazamientos serán lo suficientemente pequeños para que no exista distinción entre
las coordenadas iniciales X I y la posición deformada actual x i de la misma partícula.Entonces podemos escribir la ecuación anterior con suficiente aproximación según:
rsijrsij C ε σ = ( 3.1.5)
El tensor de constantes elásticas C ijrs es de 4to orden tiene 81 componentes
independientes en su forma mas general. Dada la simetría de σ ij y ε rs
-
8/19/2019 Modelos Elástico Resistencia Materiales
7/74
Capitulo 3- Estado del Arte 17
⎥⎥⎥
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
=⇒
⎥
⎥⎥
⎦
⎤
⎢
⎢⎢
⎣
⎡
=
⎥
⎥⎥
⎦
⎤
⎢
⎢⎢
⎣
⎡
=
6
5
4
3
2
1
12
31
23
13
12
11
332313
232212
131211
333231
232221
131211
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ σ σ
σ σ σ
σ σ σ
σ σ σ
σ σ σ
σ σ σ
σ ij
simetria
ij
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=⇒
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
6
5
4
3
2
1
12
31
23
13
12
11
332313
232212
131211
333231
232221
131211
2
2
2
2
1
2
12
1
2
12
1
2
1
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε γ γ
γ ε γ
γ γ ε
ε ε ε
ε ε ε
ε ε ε
ε def
rs
notacionsimetria
rs
( 3.1.6)
debe cumplirse que C ijrs =C jirs lo cual reduce a 36 las componentes independientes.
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
6
5
4
3
2
1
666564636261
165554535251
464544434241
363534333231
262524232221
161514131211
6
5
4
3
2
1
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
C C C C C C
C C C C C C
C C C C C C
C C C C C C
C C C C C C
C C C C C C
( 3.1.7)
Además existe otra simetría dada la igualdad entre derivadas parciales cruzadas con lo
cual se cumple: C ijrs =C rsij y esto reduce a 21 las componentes independientes.
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
6
5
4
3
2
1
665646362616
165545352515
464544342414
363534332313
262524232212
161514131211
6
5
4
3
2
1
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
C C C C C C
C C C C C C
C C C C C C
C C C C C C
C C C C C C
C C C C C C
( 3.1.8)
3.1.2.1.1 Elasticidad lineal isótropa
Cuando el material es isótropo (no hay direcciones preferenciales en el material) lasconstantes elásticas deben ser las mismas para una misma partícula para todos los posibles
sistemas de referencia cartesianos en los que se evalúen las componentes σ ij y ε rs .
jr is jsir rsijijrsC δ δ δ δ µ δ δ λ ++= ( 3.1.9)
De forma que la ley de Hooke generalizada adopta la forma:
-
8/19/2019 Modelos Elástico Resistencia Materiales
8/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS18
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ ++==
=ij jiijss
rs jr isrs jsir rsrsijrsijrsij C
ε ε ε ε
ε δ δ ε δ δ µ ε δ δ λ ε σ
ijssijij ε µ ε δ λ σ 2+=
( 3.1.10)
λ y µ son conocidas como constantes de Lamé . Si se hace i=j se obtiene:( )
iiii ε λ σ 23 += ( 3.1.11)
Las constantes de Lamé están relacionadas con los más conocidos como módulo de
elasticidad transversal G y módulo de Young E y módulo de Poisson ν de la siguientemanera:
( ) ( )( )ν ν ν
λ ν
µ 21112 −+
=+
== E y
E G ( 3.1.12)
El tensor C toma la forma:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
++
+
=
µ
µ
µ
µ λ λ λ
λ µ λ λ
λ λ µ λ
00000
00000
00000
0002
0002
0002
C ( 3.1.13)
Y puede escribirse la ecuación constitutiva de forma inversa según:
ijijkk ij E E
σ ν
δ σ ν
ε +
+−= 1
( 3.1.14)
Y el tensor de constantes elásticas inverso:
( )( )
( )⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+
+
−−
−−−−
=−
ν
ν
ν
ν ν
ν ν ν ν
1200000
0120000
0012000
0001
00010001
11
E C ( 3.1.15)
3.1.2.2 Elasticidad no lineal
Para representar este comportamiento constitutivo se partirá de una formulaciónhiperelástica. Para ello será necesario definir la densidad de energía, lo cual puede hacersetomando como variable libre el campo de deformaciones:
dt ij
t
t
ij ε σ ∫
=
=Ψ0
( 3.1.16)
o a partir de su forma complementaria, tomando como variable libre el campo detensiones:
dt ij
t
t
ij σ ε ∫=
=Ψ0
( 3.1.17)
-
8/19/2019 Modelos Elástico Resistencia Materiales
9/74
Capitulo 3- Estado del Arte 19
Ψ - Densidad de energía de deformaciónσ
ε
Ψ
Ψ Ψ - Densidad de energía complementaria
Figura 3.1.1- Energía de deformación y complementaria
3.1.2.2.1 Modelo Hiperelástico no lineal
Se parte de la definición general de los potenciales a partir de los invariantes4,,
ij
ij I I I
ε
σ
∂
Ψ∂=⇒Ψ=Ψ )',','( 321 Basado en deformación
ij
ij I I I σ
ε ∂
Ψ∂=⇒Ψ=Ψ ),,( 321 Basado en tensión
( 3.1.18)
3.1.2.2.1.1 Modelo Hiperelástico basado en tensiones
Si se considera como hipótesis que en el material tienen especial influencia el primerinvariante del tensor de tensiones y el segundo invariante del tensor desviador de tensiones
se puede elegir el siguiente potencial basado en tensión: 21221 ),( J I b J a J I +=Ψ . Deaquí resulta la siguiente ley constitutiva.
ijijij
ijijijijij
ij
I ba J b
J I
J
J
I
I
δ δ ε
δ δ σ σ σ ε
)( 12
21
2
2
1
1
++=
∂
Ψ∂
+∂
Ψ∂
=∂
∂
∂
Ψ∂
+∂
∂
∂
Ψ∂
=∂
Ψ∂
= ( 3.1.19)
Suponiendo un problema uniaxial a la tracción los invariantes del tensor de tensiones ydel tensor desviador de tensones son:
2
2
231312
3322
11
1
3
1
03
3
2
σ
σ
σ
σ
=
===
−==
=
=
J
sss
ss
s
I
(3.1.20)
Figura 3.1.2- Problemauniaxial a tracción
σ
σ
el modelo que definimos se reduce a la siguiente ley constitutiva:
( ) σ σ σ σ σ ε ε 3
2
3
2
3
22
11
abba
b+=++== ( 3.1.21)
4 Ver Anexos A1.4.6.4
-
8/19/2019 Modelos Elástico Resistencia Materiales
10/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS20
Y para obtener los parámetros a y b se realiza un ensayo de laboratorio. Paraparametrizar el modelo bastan dos puntos.
σ
baa
b
ab
B B B
A A A
,
3
23
2
2
2
⇒
⎪⎪⎭
⎪⎪⎬
⎫
+=
+=
σ σ
σ
ε
σ ε
A
B
ε
Figura 3.1.3- Energía de deformación y complementaria
3.1.2.2.1.2 Modelo Hiperelástico basado en deformaciones
Para desarrollar la formulación hiperelástica basada en deformaciones se elije ladefinición cuadrática clásica del potencial que es apropiada para pequeñas deformaciones.
klijklij C ε ε 2
1=Ψ ( 3.1.22)
Donde el tensor de tensiones y el tensor de deformaciones, ambos de segundo ordenpueden representarse a través de su parte simétrica como una matriz columna según lasecuaciones (2.2.6). El tensor constitutivo C es el correspondiente a un material isótropo yhomogéneo y se representa según su forma simplificada como indica la ecuación (2.2.13).
Al desarrollar el producto de la ecuación (2.2.22) se tiene:
( ) ( ) ( )[ ]2
13
2
23
2
12332233112211
2
33
2
22
2
11 22
1
γ γ γ ε ε ε ε ε ε ε ε ε ++++++++=Ψ cba
( 3.1.23)
Que puede escribirse en función de los invariantes del tensor de deformaciones según:
( )ijijijij
ij
J
J
J
J
I
I J J I f
ε ε ε ε σ
∂
∂
∂Ψ∂
+∂∂
∂Ψ∂
+∂∂
∂Ψ∂
=∂
Ψ∂=⇒=Ψ 3
3
2
2
1
1
321
'
'
'
'
'
'';';' ( 3.1.24)
3.1.2.2.2 Modelos Hipoelásticos basados en tensiones
Estos modelos surgen a partir de modificaciones practicadas en las leyes constitutivaslineales, basando la razón de estos cambios en evidencias que normalmente se observan enla experimentación.
3.1.2.2.3 Postulados de estabilidad
El criterio de estabilidad o postulados de Durker garantizan indirectamente elcumplimiento de la segunda ley de la termodinámica5, por lo que es conveniente tenerlos encuenta.
Se considera un sólido de volumen V y superficie externa S , bajo agentes de carga desuperficie externa t y cargas de volumen b , que producen un estado de desplazamiento u ,
deformación y tensión , en cada punto del sólido. Si ahora se considera un cambioarbitrario en la magnitud de dichos agentes de carga, t y b , que producen un incrementoen los estados de desplazamiento u , deformación ε y tensión u s. Se dice ahora que el
5 Ver Anexos A1.5.10
-
8/19/2019 Modelos Elástico Resistencia Materiales
11/74
Capitulo 3- Estado del Arte 21
comportamiento de este material será estable si se cumplen las dos condiciones siguientes(Postulados de Durker).
Requisitos de estabilidad: 1. El trabajo realizado por el cambio de magnitud de los agentes externos debe ser
siempre positivo:
0>⋅+⋅= ∫∫∫ V S V dV dS dV u b u t ε : σ ( 3.1.25)
2. El trabajo realizado por un cambio de magnitud cíclico experimentado por losagentes externos debe ser no negativo.
∫ ∫∫ ≥⋅+⋅=V V S
dV dS dV 0u b u t ε : σ ( 3.1.26)
Existencia de la energía libre:Estos criterios de estabilidad aplicados a materiales elásticos, donde todas las
deformaciones son recuperables, constituyen una condición necesaria y suficiente quegarantiza la existencia de una energía libre )(εΨ y de su complemento )(σΨ , por lo tantola existencias de dos leyes constitutivas, una cuya variable libre es la deformación ( ) y
otra cuya variable libre es la tensión (
). Esto es,
σ
σ
σεσεσ
ε
ε
εσεσε
σ
ε
∂Ψ∂
=⇒=Ψ
∂Ψ∂
=⇒=Ψ
∫
∫)(
)(:)(
)()(:)(
d
d
( 3.1.27)
Condición necesaria y suficiente de estabilidad: Toda relación constitutiva del tipo hiperelástica o de Green, cumple los criterios de
estabilidad antes citados, siempre que los potenciales de energía sean definidos positivos.
Para probar esto, considérese una relación constitutiva del tipo ε
ε
εσ
∂
Ψ∂
=
)(
)( , tal quecualquier variación en los agentes externos provoca el siguiente cambio de tensión.
ε
εε
ε
ε
ε
εσ
εσ :)(
:)(
)(2
∂⊗∂Ψ∂
=∂
∂= ( 3.1.28)
La condición necesaria y suficiente para que se cumpla el criterio de estabilidad decargas para todo volumen y también para cargas cíclicas es que todos y cada unos de lospuntos de este sólido realicen un trabajo específico de segundo orden positivo,
0εσ > : ( 3.1.29)
Sustituyendo la ultima ecuación en la anterior, resulta la siguiente forma cuadrática,
0εεεε
εεε
ε
εσεεσ >∂⊗∂ Ψ∂=∂∂=
::)(::)(:)(2
( 3.1.30)
De forma que va a garantizarse la condición de estabilidad si el Hessiano sea definidopositivo. Esto es:
0εε
ε
H >∂⊗∂
Ψ∂==
)(det
2
ijkl H ( 3.1.31)
También se cumple la condición de estabilidad si el Hessiano complementario esdefinido positivo, para estos modelos basados en tensiones:
( ) 0)(
det::)(
::)(
:22
>∂⊗∂
Ψ∂=⇒>
∂⊗∂
Ψ∂=
∂
∂=
σσ
σ
H'0σσσσ
σ
σσ
σ
σε
σσε ( 3.1.32)
-
8/19/2019 Modelos Elástico Resistencia Materiales
12/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS22
Estas dos ultimas ecuaciones garantizan la existencia de la existencia de la energía libre ysu carácter positivo garantiza la unicidad de la inversa de la ecuación constitutiva.
Condición de convexidad La convexidad del potencial garantiza el cumplimiento de los criterios de estabilidad
expresados por la condición de positivo del Hessiano. Se entiende que una función es
convexa cuando ninguna tangente a la curva cte=Ψ )(ε o cte=Ψ )(σ corta a la misma enotro punto de dicha curva.
Función CóncavaFunción Convexa
0: >∆ ε σ 0: ≤∆ ε σ Figura 3.1.4- Función cóncava y función convexa
B A A
A Cθ
( )
ε∂
Ψ∂=aε
σ ( )ε
σ
∂
Ψ∂=aε
C
A θ B
Matemáticamente se dice que una función potencial es convexa si siempre se cumple lasiguiente relación entre dos estado cualesquiera de tensión: ( ) 0: ≤−=∆ εσσε:σ aba y sedice que hay concavidad en el potencial si hay al menos dos estados de tensión aσ y bσ que
cumplen la relación: 0: >−=∆ εσσε:σ aba .
Figura 3.1.5- Postulados de estabilidad de Durker
ε
σ ESTABLE0>ε :σ
σ
ε
σ
ε
ε ε
σ σ
ε
σ
ε
σ
σ
ε
INESTABLE0: >ε σ ε
σ
ε
σ σ
ε
Básicamente para cumplir con los postulados de Durker conviene tener en cuenta lassiguientes recomendaciones,
1. Los potenciales y)(εΨ )(σΨ deben ser definidos positivos,2. Que exista una relación elástica directa y su inversa,
-
8/19/2019 Modelos Elástico Resistencia Materiales
13/74
Capitulo 3- Estado del Arte 23
ijijijij f F σ ε ε σ =⇔= ( 3.1.33)
3. Que los potenciales y)(εΨ )(σΨ sean funciones convexas.
3 1 3 Inelasticidad
Para elasticidad la deformación en cada punto queda completamente determinada apartir de la tensión actual y de la temperatura. En inelasticidad, en cambio, debe tenerse encuenta también el historial de tensiones, de modo que en este caso existe una dependenciadel tiempo. La dependencia entre la deformación actual y el historial de tensiones se puedeexpresar explícitamente cuando el comportamiento es lineal.
Una forma en la que el historial de tensiones puede afectar la relación entre tensión ydeformación es a través de la velocidad de aplicación : la deformación producida por aplicaciónde carga lenta es en general mayor que la producida por aplicación rápida. Unamanifestación particular de este fenómeno es el hecho de que la deformación puede engeneral aumentar a través del tiempo dada una tensión constante. Este fenómeno sedenomina creep o fluencia lenta .
P=cte
Figura 3.1.6- Fluencia lenta
Esta sensibilidad a la velocidad aumenta con la temperatura, de forma que hay materialesque aparentan comportarse elásticamente dentro de un rango de ciertas temperaturas y setransforman en marcadamente inelásticos a temperaturas mayores.
De la misma manera una aplicación mas lenta de las cargas implica mayoresdeformaciones para la misma tensión, e implica una tensión menor para la misma
deformación. De esta manera las tensiones van a disminuir a través del tiempo dada unadeformación fija, este fenómeno se llama relajación .
l=cte
Figura 3.1.7- Relajación
La sensibilidad a la velocidad de muchos materiales, entre ellos polímetros, asfalto yhormigón, puede ser bien descrita a través de la teoría lineal, siempre dentro de ciertos
-
8/19/2019 Modelos Elástico Resistencia Materiales
14/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS24
límites. Sin embargo la inelasticidad de los metales tiende a ser fuertemente no lineal en sucomportamiento ya que son muy bien representables por la elasticidad dentro de ciertorango de tensiones pero muy dependientes del historial de tensiones fuera de ese rango.Cuando se alcanza ese límite del rango elástico ( límite elástico ) se dice que el metal fluye .Cuando el rango elástico forma una región en el espacio de las componentes de las
tensiones, este se denomina región elástica y sus límites se denominan superficie de fluencia .
3.1.3.1 Deformación inelástica
Para cuerpos de comportamiento inelástico sometidos a una deformación infinitesimal,se asume que el tensor de deformaciones puede ser descompuesto aditivamente en un
tensor de deformación elástica e y un tensor de deformación inelástica i .i
ij
e
ijij ε ε ε += ( 3.1.34)
Con klijkle
ij C σ ε 1−=
-
8/19/2019 Modelos Elástico Resistencia Materiales
15/74
Capitulo 3- Estado del Arte 25
3.1.3.2 Viscoelast icidad Lineal
Uno de los comportamientos que provoca no-linealidad en la respuesta en el tiempo de
los materiales se debe a la viscoelasticidad, que estudia el comportamiento reológico de losmateriales, es decir, aquellos comportamientos afectados por el transcurso del tiempo. Poresta razón la respuesta depende de la velocidad con la cual se excita al elemento.
Las analogías con resortes y amortiguamiento viscoso da una representación cualitativadel comportamiento viscoelástico.
Resorte Amortiguamiento Viscoso
E
t t
)()( σ
ε = η
σ ε
)()(
t t =
Figura 3.1.8 – Ecuación y constantes pararesorte elástico
Figura 3.1.9 – Ecuación y constantes paraamortiguamiento viscoso
E η
Siendo E la constante elástica del muelle y η la constante viscosa del amortiguador.
La fuerza axial en el modelo representa a las tensiones en el continuo y el estiramientoaxial y la velocidad representan deformación y velocidad de deformación respectivamente.
Hay dos familias de modelos de elasticidad dependientes del tiempo:1. Una de ellas, en la cual la variable libre del problema es la tensión, recibe el
nombre de modelos de elasticidad retardada o de fluencia en el tiempo, yrepresenta físicamente lo mismo que el vocablo ingles “creep”. Un modelorepresentativo de esta familia es el modelo viscoelástico de Kelvin.
2. La otra, cuya variable libre es la deformación, recibe el nombre de modelos derelajación. Un modelo representativo de esta familia es el modelo viscoelástico deMaxwell.
Estos modelos tienen leyes constitutivas no invertibles, pero cada uno de estos modelosrepresentan la forma inversa implícita del otro, es decir, que un modelo de elasticidad
retardada es la forma inversa de representar un modelo de relajación.
σ(t)
ε
η
σ(t)σ(t)σ(t) σ(t)
σ(t)
E
ε
t
-
8/19/2019 Modelos Elástico Resistencia Materiales
16/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS26
3.1.3.2.1 Modelo de Maxwell
Se denomina también a la formulación de Maxwell modelo de relajación y en el sesupone que la variable libre es la deformación. Este modelo dispone en serie el muelle y elamortiguador, situación que hace que la deformación total resulte de la composición de una
parte elástica , más una viscosa ,
eε visε
)()()()( t t E t t visevise ε η ε σ σ ===
)()()( t t t vise ε ε ε == ( 3.1.35)
E η
Figura 3.1.10 – Modelo en serie de Maxwell
Si se somete el material a un ensayo de creep y uno de relajación:Modelo de Maxwell
Ensayo de Creep: 0=σ Ensayo de Relajación 0=ε
E t t 00)(
σ
η
σ ε +=
t E
o e E t η ε σ
−
=)(
Figura 3.1.11 – Ensayo de creep delModelo de Maxwell
Figura 3.1.12 –Ensayo de relajaciónModelo de Maxwell
Ε ε0
t0
σ
t
σ0
/E
t0
ε
t
σ0
/η
ε0
t0
ε
t
σ(t) σ(t)
εe
ε vis
σ
σ0
tt0
-
8/19/2019 Modelos Elástico Resistencia Materiales
17/74
Capitulo 3- Estado del Arte 27
3.1.3.2.2 Modelo de Kelvin-Voigt
En este modelo de elasticidad retardada, o fluencia en el tiempo, se supone que la variable libre es la tensión. Por lo tanto, para escribir la ecuación se parte de un modelo enparalelo con compatibilidad de deformaciones y de allí se obtiene la ecuación de gobiernodel problema. La tensión resulta entonces de la siguiente forma aditiva,
E
Figura 3.1.13 – Modelo en paralelo de Kelvin-Voigt
En este caso las deformaciones son la variable libre del problema. La fuerza axial total esla suma de la fuerza producida en el resorte y la producida en el amortiguamiento viscoso,pero el desplazamiento tiene que ser el mismo en ambos dispositivos
)()()( t t t vise ε ε ε +=
)()()()()( t t E t t t visevise ε η ε σ σ σ ==== ( 3.1.36)
Sometemos el material a un ensayo de creep y uno de relajación:Modelo de Kelvin-Voigt
Ensayo de Creep: 0=σ Ensayo de Relajación 0=ε
ε0
t0
ε
t
σ(t) σ(t)
η
σ
σ0
tt0
-
8/19/2019 Modelos Elástico Resistencia Materiales
18/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS28
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −=
− t E
e E
t η σ
ε 1)( 0 0)( ε σ E t =
Figura 3.1.14 – Ensayo de creep del Modelode Kelvin-Voigt
Figura 3.1.15 –Ensayo de relajación Modelode Kelvin-Voigt
3.1.3.3 Plasticidad
Para representar el comportamiento de fluencia de un material puede usarse el elementoFriccional de Coulomb6,
Elemento Friccional de Coulomb
Figura 3.1.16 – Constantes para elemento Friccional de Coulomb
Este modelo establece que el módulo de la tensión que actúa sobre el dispositivo no
puede alcanzar un valor limiteY
σ . En consecuencia, mientras el módulo de la tensión σ
sea menor que dicho valor límite, el dispositivo no presenta variación de deformación. Una
vez alcanzado el valor límite Y σ el dispositivo comienza a deformarse en un estado de
cuasi-equilibrio y no puede excederse ese valor para permanecer en equilibrio. Esto es,
⎪⎩
⎪⎨
⎧
>
=≠
-
8/19/2019 Modelos Elástico Resistencia Materiales
19/74
Capitulo 3- Estado del Arte 29
3.1.3.3.1 Modelo Elástico-Friccional
La combinación del elemento elástico Resorte presentado en 2.3.2 y el elementoFriccional de Coulomb dispuestos en serie da lugar a un modelo más complejo que sedenomina elastoplástico.
E
σ σ
Y σ
Figura 3.1.17 – Modelo elástico friccional
Al estar los dos elementos colocados en serie, la tensión que actúa sobre cada uno deellos es la misma. Por otro lado podemos descomponer la deformación total como la suma
de la deformación experimentada por el elemento elástico más la deformación
experimentada por el elemento friccional .
eε pε
p pe
e
E ε
σ ε ε ε
σ σ σ
+=+=
== ( 3.1.38)
Teniendo en cuenta el comportamiento tensión-deformación de cada uno de loselementos, se tendrá para el modelo combinado
⎪⎪⎩
⎪⎪⎨
⎧
>
=≠=
-
8/19/2019 Modelos Elástico Resistencia Materiales
20/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS30
3.1.3.3.2 Modelo de fricción con endurecimiento
Experimentalmente se observa en muchos metales un fenómeno que llamamos deendurecimiento. Este supone que luego de la tensión de fluencia el módulo de elasticidad E
que suponíamos constante para el modelo elástico friccional, tiene una variación enaumento con la variación de deformación.
Esto se puede representar matemáticamente mediante el modelo elástico friccional conendurecimiento que no está compuesto de ningún elemento nuevo, sinó de la nuevadisposición de los elementos ya presentados.
σ
σ
E
' H
σ
Figura 3.1.19 – Modelo elástico friccional con endurecimiento
El modelo esta formado por un bloque en paralelo, con un dispositivo de fricción
caracterizado por el limite elástico Y σ y un resorte caracterizado por el parámetro de
endurecimiento H’ , y otro resorte de constante E en serie con éstos. Analizando los dos elementos en paralelo vemos que esta disposición motiva que ambos
elementos compartan la deformación mientras que la tensión total será la suma de lastensiones pasantes por cada uno de los elementos.
Y σ f σ
' H
hσ
σ σ
Figura 3.1.20 – Modelo friccional con endurecimiento
h f
f h f H
ε ε ε
ε σ σ σ σ
==
+=+= ' ( 3.1.40)
Siendo la tensión que atraviesa el elemento friccional y la que atraviesa elelemento elástico.
f σ hσ
Pueden darse dos situaciones:
totalidad suenelásticoelementoel por absorbidoestensióndeincrementoTodoSi
nulaesndeformacióla y friccionalodispositivel por pasatensiónlaTodaSi
Y
f
Y
f
⇒=
⇒<
σ σ
σ σ
Si se analiza ahora el modelo conjunto que combina el modelo elástico en serie con estemodelo paralelo, se obtiene de las ecuaciones de equilibrio y de compatibilidad dedeformaciones,
h f e
h f e
−
−
+===ε ε ε
σ σ σ ( 3.1.41)
-
8/19/2019 Modelos Elástico Resistencia Materiales
21/74
Capitulo 3- Estado del Arte 31
Analizando un ciclo de carga y descarga se puede obtener la curva en tensióndeformación según:
Figura 3.1.21 – Modelo elástico friccionalY
σ −
Y σ
ε
σ
0
3.1.3.4 Daño
El daño de un sólido continuo, en el sentido de degradación de rigidez, es una
alteración de las propiedades elásticas durante la aplicación de la carga como consecuenciade una disminución del área efectiva resistente. Esta pérdida de área efectiva esnormalmente causada por el crecimiento de vacíos y/o micro fisuras.
El fenómeno de daño sólo afecta a las propiedades elásticas del material, mientras laplasticidad se desarrolla como consecuencia de un crecimiento irrecuperable en ladeformación, deformación plástica. Ambos fenómenos son complementarios y es normalobservar en los materiales una pérdida de resistencia motivada por el daño –pérdida deelasticidad– y por la plasticidad –crecimiento en la deformación inelástica–.
3.1.3.4.1 Daño Isótropo
La teoría del Daño Continuo fue presentada por primera vez por Kachanov en el año
1958 en el contexto de problemas relacionados con la fluencia, pero ha sido aceptada conposterioridad como una alternativa válida para simular el comportamiento de diversosmateriales. Entre las diferentes formulaciones posibles, en este apartado se presenta unmodelo de daño simple con una variable interna escalar que permite caracterizar el dañolocal. Este modelo a pesar de ser simple, tiene una gran potencialidad y puede utilizarsepara representar el comportamiento no lineal de materiales metálicos y geomateriales.
Este tipo de modelo permite simular el comportamiento de materiales en los queocurre una degradación en la rigidez del material una vez superada el umbral de daño delmaterial.
La ecuación de daño queda definida por la siguiente expresión:
d −= 1σ
σ0 ( 3.1.42)
donde d es la variable interna de daño, σ es el tensor de tensiones de Cauchy y esel tensor de tensiones efectivas, medido en el espacio “no-dañado”. Esta variable interna esuna medida de la pérdida de rigidez del material y sus límites superior e inferior está dadopor:
0σ
10 ≤≤ d ( 3.1.43)
donde d=1 representa un estado del material completamente degradado y define larotura local completa y d=0 representa un material no dañado. Las formas que puedepresentar la variable interna de daño d son discutidas en el apartado 3.3.
-
8/19/2019 Modelos Elástico Resistencia Materiales
22/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS32
3.1.3.4.2 Daño Plástico
El modelo constitutivo de plasticidad para geomateriales es un modelo general, muyapropiado para representar el comportamiento de materiales tanto dúctiles como frágiles.Hasta ahora se presentaron modelos para tratar metales u otros materiales dúctiles. Elmodelo de plasticidad para geomateriales fue formulado inicialmente para materiales
frágiles, sin embargo puede utilizarse para representar el comportamiento de algunosmateriales dúctiles si se realizan algunas particularizaciones en los parámetros.
El modelo de daño plástico fundamenta su formulación en la mecánica del sólido,particularmente en la teoría de la plasticidad y en la teoría del daño continuo y utiliza como
vehículo para la resolución del problema estructural el método de los elementos finitos ydiversas técnicas numéricas necesarias para controlar y garantizar la solución del problema.
Materiales Friccionales, que son por ejemplo: cerámicos, suelos constituidos porarenas u otros componentes friccionales, hormigón.
Figura 3.1.22- Dilatancia
Se define a los Materiales Friccionales como aquellos cuya relación entre su resistencia
y la presión depende del ángulo de rozamiento interno φ . Cuando se somete a estos
materiales a tensiones tangenciales presentan dilatancia que significa un cambio de volumen aparente.
Para el caso simple uniaxial la evolución de la resistencia tiene la siguiente forma:
Figura 3.1.23- Evolución de Resistencia en materiales con daño plástico
El desarrollo de este modelo se detalla en el apartado 3.3.
-
8/19/2019 Modelos Elástico Resistencia Materiales
23/74
333...222 PPPlllaaassstttiiiccciiidddaaaddd
3.2.1 Introducción.
El adjetivo “plástico” proviene del griego significando “moldear”; y entonces, describemateriales dúctiles tales como el acero, que tienen la propiedad que se puede cambiar laforma de los cuerpos que están hechos de estos materiales mediante la aplicación defuerzas adecuadamente dirigidas y mantener esta nueva forma luego de haberle quitado las
fuerzas.Generalmente se observa que, de existir, el cambio de volumen que acompaña a losgrandes cambios de forma tiene un valor muy pequeño. Se concluye entonces que elproceso de deformación plástica es en principio una distorsión.
La teoría de la plasticidad1 representa el comportamiento de los sólidos cargadosdentro de un rango de aplicación en el que no es posible hacerlo mediante la teoría de laelasticidad.
En este capítulo se presentan brevemente las bases de la teoría de la plasticidad comouno de los posibles modelos para representar los refuerzos de acero sumergidos en lamatriz de hormigón que se presenta como simulación en esta tesina.
Al final del capítulo se presentan los criterios clásicos de fluencia o discontinuidad
plástica. En la simulación realizada, tanto para la matriz como para las fibras, se utiliza uncriterio de fluencia de daño, que se presentará en el próximo capítulo, y un criterio depotencial de Durker-Prager circunscrita, descrito al final.
3.2.2 Plasticidad en pequeñas
deformaciones
La plasticidad en pequeñas deformaciones se caracteriza por postular que las
deformaciones en un punto se pueden descomponer en una parte elástica y otra plástica
irreversible de forma que . La deformación plástica es la que induce a uncomportamiento energético no conservativo dependiente del camino recorrido.
eε
pε pe ε ε ε +=
Para presentar algunos conceptos se analiza el caso simple de un ensayo uniaxial de unmaterial elástico ideal. Se considera el caso de una barra de acero de longitud inicial l ysección A sometida a una fuerza de tracción F en sus extremos. La tensión de la barra será
A F =σ y la deformación l δ ε = , donde δ es el alargamiento de la barra.
l ε δ 2
12/ =2/δ
l
A F =σ σ
1 Oller, S. (2002). Dinámica No-Lineal. Monografía CIMNE Nº63, UPC, Barcelona, España
-
8/19/2019 Modelos Elástico Resistencia Materiales
24/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS34
Figura 3.2.1- Ensayo de tracción uniaxial
Si se somete a esta pieza a varios ciclos de carga y descarga se puede obtener unarespuesta en términos de la curva tensión-deformación.
Figura 3.2.2- Ciclos de carga-descarga para ensayo uniaxial
E E E
Y σ
σ
ε
142
eε pε
ε
530
Analizando el primer ciclo se observa que, mientras la tensión no supera el valor Y σ ,
punto 1, denominado limite elástico o limite de fluencia , se tiene un período inicial elásticocaracterizado por el módulo elástico E. En este período no existen deformacionesirrecuperables.
Luego de este punto comienza el comportamiento elastoplástico caracterizado por undecrecimiento sostenido del módulo de rigidez tangente debido a la acción de losmecanismos inelásticos reversibles.
En el punto 2 se inicia un proceso de descarga hasta el punto 3. Puede observarse que
solo se recupera la parte elástica del total de la deformacióneε ε , quedando ladeformación plástica como la parte no recuperable. Si vuelve a cargarse se produce uncomportamiento incrementalmente elástico hasta que la tensión alcanza en el punto 2 elmáximo valor que había alcanzado durante el proceso de carga anterior. A partir de estepunto el material deja de nuevo de ser incrementalmente elástico.
pε
Este material elasto-plástico ideal permite representar bastante bien el comportamientomacroscópico de distintos materiales reales mediante una simple modificación de loslímites definidos anteriormente.
3.2.2.1 Espacio de tensiones principales
Se considera un sistema de ejes cartesianos en { }3213 ,, σ σ σ ≡≡≡ z y x R de tal
forma que a cada estado tensional, caracterizado por los valores de las tres tensiones
principales 321 σ σ σ ≥≥ , le corresponde un punto en dicho espacio que se denomina
espacio de tensiones principales o de High-Westergaard .
2σ
( )321 ,, σ σ σ P
3σ
1σ
-
8/19/2019 Modelos Elástico Resistencia Materiales
25/74
Capitulo 3- Estado del Arte 35
Figura 3.2.3- Dominio elástico
En este espacio de tensiones principales se puede distinguir el eje de tensión hidrostática, oespacio diagonal de tensiones, que es el lugar geométrico de los puntos del espacio de
tensiones principales que verifican la condición 321 σ σ σ == . Los puntos situados sobre
el eje de tensión hidrostática representan estados tensionales hidrostáticos2. El plano octaédrico es cualquiera de los planos normales al eje de tensión hidrostática. La
ecuación de un plano octaédrico es cte=++ 321 σ σ σ y la normal unitaria al mismo es
{ }T 1,1,13
1=n . En estos planos el primer invariante del tensor de tensiones se mantiene
constante. cte I =1 . A través de los invariantes puede conocerse la posición de cualquier punto P del
espacio de tensiones principales que se encuentre sobre un plano octaédrico .Π
Figura 3.2.4- Posicionamiento de un punto en función de los invariantes
1σ
2σ
3σ
Π
P
oct σ 3
oct τ 3
n
La tensión oct σ es la que informa sobre la distancia entre el origen del plano
octaédrico que pasa por el punto P. El lugar geométrico de todas las tensiones principales
con igual oct σ es el plano octaédrico que está a una distancia oct σ 3 del origen.
La tensión oct τ informa de la distancia entre el punto P y el eje de tensión hidrostática.
El lugar geométrico de los puntos del espacio de tensiones principales con igual oct τ es un
cilindro cuyo eje es el eje de tensión hidrostática y cuyo radio es oct τ 3 .
Entonces un punto P del espacio de tensiones principales queda inequívocamente
caracterizado por los tres invariantes 3211 ',', J J J I ≡ :
1 I caracteriza la distancia al origen del plano octaédrico Π sobre el que está el punto
P 1333 I OA oct == σ
2' J caracteriza la distancia del punto P al eje de tensión hidrostática
2'233 J AP oct == τ
3' J caracteriza la posición del punto dentro del círculo definiendo el ángulo ( )3' J θ
2 Ver Anexos A1.3.5
-
8/19/2019 Modelos Elástico Resistencia Materiales
26/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS36
Figura 3.2.5- Posicionamiento de un punto en función de los invariantes
1σ
2σ
3σ
Π P
33 3 I oct =σ
2'23 J oct =τ
( )3' J θ
Plano meridiano de compresión máxima : Estos planos son ortogonales a los planosoctaédricos y quedan inequívocamente definidos por la recta que describe el espaciodiagonal y por cada una de las rectas que describen un radio octaédrico ρ para
π π π θ 6
9,
6
5,
6
1= . Estos planos cortan a los ejes de tensiones principales iσ en puntos de
igual valor de tensión uniaxial de compresión C σ . La intersección de estos planos con la
superficie de fluencia define las curvas que se denominan funciones de fluencia segúnplanos meridianos de compresión.
Planos meridianos de tracción máxima : Estos planos son ortogonales a los planosoctaédricos y quedan inequívocamente definidos por la recta que describe el espaciodiagonal y por cada una de las rectas que describen un radio octaédrico ρ para
π π π θ 6
9,
6
5,
6
1−−−= . Cortan a los ejes de tensiones principales iσ en puntos de igual
valor de tensión uniaxial de compresión T σ . La intersección de estos planos con la
superficie de fluencia define las curvas que se denominan funciones de fluencia segúnplanos meridianos de tracción.
Planos principales : Son aquellos que quedan definidos por la intersección de dos de lastres direcciones de tensión principal. La intersección de estos planos con la superficie defluencia define curvas en el espacio de tensiones que de denominan funciones de fluenciasegún planos de tensión principal.
-
8/19/2019 Modelos Elástico Resistencia Materiales
27/74
Capitulo 3- Estado del Arte 37
Figura 3.2.6- Representación de un genérico criterio de fluencia plástico,descompuesto en planos octaédricos, meridianos y principales
3.2.2.2 Dominio elástico
Existen dos grandes aspectos a tratar dentro de la teoría matemática de la plasticidad:El criterio de fluencia o de discontinuidad ( ) 0; =q F σ , que permite establecerdurante el proceso de carga el inicio del comportamiento inelástico y posterior evoluciónde las fronteras del dominio elástico dentro del espacio de tensiones.
El comportamiento más allá del limite elástico, denominado comportamientoelasto-plástico, queda definido a partir de la formulación de: una descomposición de las
deformaciones en una parte elástica y una plástica , una regla de flujo plástica pe ε ε ε +=( )σ g y unas variables internas ( )qq ,σ que dependen de la evolución del proceso
elastoplástico.
Figura 3.2.7- Dominio elástico
3σ 2σ
1σ
( ) 0; =q F σ ( ) imposibleq F 0; >σ
3.2.2.3 Criterio de discont inuidad de comportamiento ocriterio de fluencia plástica.
Se puede definir el criterio de discontinuidad o Fluencia como una función escalar deargumentos tensoriales que delimita el dominio elástico.
-
8/19/2019 Modelos Elástico Resistencia Materiales
28/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS38
Este criterio se puede representar a través de una función que se denominará funciónde fluencia plástica y responde a la siguiente forma matemática:
( ) 0=qσ;F ( 3.2.1)
Donde σ es el tensor de tensiones de Cauchy y q es el conjunto de variables internas
agrupadas en forma de matriz columna (“back stress”). Esta función establece el límite apartir del cual se establece el comportamiento no lineal. Cualquier estado tensorial fuera delrecinto plástico consiste en forzar a que el estado tensorial se sitúe en la frontera y en elinterior de la función elastoplástica.
En un proceso uniaxial esta función está perfectamente establecida por tratarse de unescalar que se compara con otro escalar que representa el umbral entre un comportamientoelástico y otro plástico para el ensayo de laboratorio. En cambio para comportamientosmultiaxiales no existe un escalar que se obtenga directamente, entonces la función defluencia se comporta como un traductor de estados multiaxiales a uniaxiales. Una vezobtenida la tensión uniaxial equivalente al estado multiaxial, se compara con el escalar querepresenta el umbral obtenido en el laboratorio para un problema uniaxial.
La ley de evolución de las variables internas q pueden escribirse en forma generaldependiendo del estado tensional y magnitud actual de todas las variables internas según,
( )qσ;Hq λ = ( 3.2.2)
Donde λ es un escalar no negativo denominado factor de consistencia plástica,
es una función tensorial que describe la forma en que evoluciona cada variable
interna.
( qσ;H )
La teoría de la plasticidad solo admite dos posibles estados de comportamiento paraun sólido ideal: “el estado elástico” o “el estado elasto-plástico”.
En función de la función de fluencia plástica, se distinguen los dos estados según,El proceso de deformación es elástico si:
( ) 0
-
8/19/2019 Modelos Elástico Resistencia Materiales
29/74
Capitulo 3- Estado del Arte 39
3.2.3 Comportamiento Elasto Plástico
No hay una teoría única para representar el comportamiento elasto-plástico de losmateriales. Existen distintas aproximaciones al problema según el objetivo para el que fueraformulado. A continuación se mencionarán aquellas aproximaciones al problema
elastoplástico que se consideran más clásicas.
3.2.3.1 Teoría de Levi-Mises
Una forma de modelar el comportamiento elasto-plástico de un punto del sólido esmediante la teoría de Levy-Mises. Esta admite, como primera hipótesis, que el incrementotemporal de deformación total es igual el incremento temporal de deformación plásticadurante el proceso elasto-plástico. Esta suposición comporta que la deformación elástica espróxima a cero, o también que el módulo de Young se hace muy grande en este período.
Esto es:
0≅⇒= e p εεε o bien ∞→ E ( 3.2.7)
Esta teoría también supone, como segunda hipótesis, que el sólido ideal que se
modela es plásticamente incompresible ; resultando de aquí y de la hipótesis
anterior, que el incremento temporal del tensor desviador de deformación plástica, es igualal incremento temporal del tensor de deformación plástica total. Esto es:
0= pvε
p p poct
p peεe1εε ≅⇒+= o bien eε ≡ ( 3.2.8)
donde la deformación octaédrica es nula y se define como y el vector
unidad es igual a . De estas dos hipótesis se deduce que el material se
comporta como un rígido plástico no influenciado por los cambios de volumen debido a la
presión hidrostática. Esto se identifica bastante bien con los materiales metálicos. La teoríade Levy-Mises propone que los ejes principales de deformación plástica coincidan con losde tensión, lo que conduce a la tercera hipótesis que define la denominada regla de flujo,
0εε v == poct p3
{ T 0,0,0,1,1,1=1 }
sεe λ =≡ ( 3.2.9)
donde ( ) 3I-σs σ = ), es el tensor desviador de tensiones.
3.2.3.2 Teoría de Prandtl-Reus
Es una generalización de la teoría de Levy-Mises. La diferencia fundamental con la teoríaantes citada es que se considera que la deformación total resulta de la contribución de una
parte elástica y otra plástica, peεεε += ( 3.2.10)
donde el incremento temporal de deformación elástica sigue las leyes de la teoría de la
elasticidad y el incremento temporal del tensor de deformación plástica se obtendrácomo una escala del tensor desviador de tensiones s , con lo cual la parte volumétrica deltensor de deformaciones plásticas será nula. Esta hipótesis se conoce como regla de flujode Prandtl-Reus:
eε
pε
0=⇒= v p p ε sε λ ( 3.2.11)
El factor de consistencia plástico λ se obtiene en este caso a partir del espacio de
tensiones y deformaciones principales.
-
8/19/2019 Modelos Elástico Resistencia Materiales
30/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS40
( ) ( ) { }3,2,1, ∈−=−→= ji s sεε ji p j pii pi λ λ sε ( 3.2.12)Elevando al cuadrado ambos miembros y sumando componente a componente se obtiene,
( ) ( ) ( ) ( ) ( ) ( )[ ]2312322212
31
2
32
2
21 s s s s s sεεεεεε p p p p p p −+−+−=−+−+− λ ( 3.2.13)
Pero recordando que ji ji s s σ σ −=− , resulta,
2
2
22
'
6'6
J
J
J J
P
P
=
=
λ
λ
( 3.2.14)
donde ( p p P J e:e 2
1'2 = ) es el segundo invariante del incremento temporal del tensor
desviador de deformaciones plásticas y pe ( s:s2
12 = J ) el segundo invariante del tensor
desviador de tensiones s . Sustituyendo (3.2.14) en (3.2.11), resulta:
2
2
2
2 ''
J J
J
J P P
p ssε
== ( 3.2.15)
3.2.4 Teoría Clásica de la Plasticidad
Cuando el estado tensional de un punto de un sólido ideal alcanza el criterio de
discontinuidad inicial , y a la vez cumple con la condición de consistencia
plástica , se admite por hipótesis que este punto se encuentra en estadoelastoplástico. La teoría de la plasticidad clásica en pequeñas deformaciones permiteadoptar la hipótesis de descomposición de la deformación total.
( ) 0=qσ;F
( ) 0=qσ;F
p pe C εσεεε +=+= − :1 ( 3.2.16)
Donde la deformación plástica representa la variable interna fundamental delproblema elasto-plástico, cuya definición tiene la siguiente forma,
pε
gσ
qσ,Hε
ελ λ λ =
∂
∂== )(G
p
p ( 3.2.17)
Esta expresión también recibe el nombre de regla de la normalidad por ser normal a la
superficie de potencial plástico cteG =)( qσ, y λ es un escalar no negativo denominadoparámetro de consistencia plástica. La función de potencial plástico se determina a travésde estudios experimentales y es la que define la dirección del incremento temporal de ladeformación plástica.
3.2.4.1 Trabajo Plástico Unitario o Específico
El trabajo total desarrollado en una unidad de volumen de un sólido elasto-plástico
ideal, en un proceso cuasi-estático y durante un pseudo-incremento de tiempo ( ),se le denomina incremento temporal de trabajo unitario o trabajo específico,
dt t t +→
pe pe pe
uuu +=+=+== ε:σε:σεε:σε:σ ( 3.2.18)
-
8/19/2019 Modelos Elástico Resistencia Materiales
31/74
Capitulo 3- Estado del Arte 41
Se conoce esta forma de escribir la variación temporal de la energía como elasticidaddesacoplada y solo vale para problemas elastoplásticos cuyas deformaciones elásticas soninfinitesimales y por lo tanto se acepta la hipótesis de aditividad de las deformaciones.
Se analiza solamente la parte plástica de la estructura, el trabajo plástico para unmaterial metálico ideal como los vistos anteriormente será:
( )s:sε:σ
εs1ε:σ
λ γ τ
γ τ ε σ
==+===
+=+=⎟ ⎠ ⎞⎜
⎝ ⎛ +==
p p
oct oct G p p p
desviadora
G p
avolumétric
k p p
oct oct
p
voct
p p p
J J uu
uu I u
'3
8
3
2
:31
22
0
1
( 3.2.19)
Donde 31 I poct ==σ es la tensión normal octaédrica o presión, 3/2 2 J oct =τ es
la tensión tangencial octaédrica o desviación, es la deformación
normal octaédrica, y
3/'3/ 1 p p
voct p I == ε ε
3/'8 2 p p
oct J =γ es la desviación octaédrica.
Sustituyendo la regla de flujo de Prandtl-Reus ec. (3.2.15), se tiene que:
( ) ( ) ( ) p p p p p p
J
J u ε:εε:εs:s
2
2
'
1 ===λ
λ ( 3.2.20)
Siendo:
( )
0
23
1:
2
1' ij
p
v
p
ij
p
ij
p p P e J δ ε ε −== ee ( 3.2.21)
Tal que en metales puede escribirse ( ) pij pij P J ε ε :2
1'2 = , con lo que el trabajo plástico,
ecuación (3.2.20), resulta
( ) p p p p p p
p J J u ε:εε:εε:ε
22 22 == ( 3.2.22)
La función potencial que sustituida en (3.2.17) da un flujo plástico equivalente a
Prandtl-Reus, es la función de von Mises,
G
[ ] MisesvonGG = ,
[ ]s
σg =
∂
∂=
MisesvonG
( 3.2.23)
Donde,
[ ] [ ] 0330 222
2 =Κ −=∂ ⎯ ⎯ ⎯ → ⎯ =Κ −=∂ J G J G Misesvontambieno Misesvon ( 3.2.24)
Siendo2
3 J =σ la tensión efectiva o uniaxial equivalente de von Mises, que
sustituida en la ecuación (3.2.22), resulta:
p p p pu ε σ σ == ε:ε3
2 ( 3.2.25)
Esta expresión permite escribir en forma general la deformación plástica efectiva,como:
p p pε:ε γ ε = ( 3.2.26)
tal que en el caso particular de la plasticidad de Prandtl-Reus (o von Mises) 32≡γ .En los casos restantes hay que determinar su magnitud.
Es más general utilizar como variable de endurecimiento el trabajo plástico u obtenerla deformación plástica efectiva a partir de este trabajo,
-
8/19/2019 Modelos Elástico Resistencia Materiales
32/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS42
( )∫∫∫ === t
p pt
pt
p p dt dt dt 000 3
2ε:ε
σ
ω ε ε ( 3.2.27)
La ecuación anterior puede simplificarse en el caso particular de un problema de cargaradial, es decir cuando todas las componentes del tensor de tensión mantienen su
proporción a lo largo del proceso de carga …== 022
220
11
11
σ
σ
σ
σ . Esto es,
( ) p p p ε:ε 3
2=ε ( 3.2.28)
3.2.4.2 Superf icie de Carga Plástica. Variable deEndurecimiento Plástico
En el apartado 3.2.2 se ha analizado el comportamiento uniaxial de un material elasto-plástico ideal. Se ha distinguido una zona dentro de la función de fluencia plástica, una
zona límite y la zona fuera del dominio elástico. A partir de la zona límite, llamada superficiede fluencia o superficie de discontinuidad , la superficie adquiere movilidad en el espacio detensiones, siguiendo la evolución del proceso plástico, transformándose en la denominadasuperficie de carga plástica . Esta superficie de carga plástica no es otra cosa que la actualizaciónde la función límite de discontinuidad o límite de fluencia para cada valor de las variablesinternas q correspondiente a cada instante del pseudo tiempo t del proceso elasto-plástico.El fenómeno que gobierna este cambio de posición en el espacio de tensiones, se lo conocecomo endurecimiento plástico, que puede ser isótropo o cinemático.
Figura 3.2.8- Superficie de carga plástica. Movimiento isótropo y cinemático
Una manera simple de introducir el endurecimiento en el comportamiento
elastoplástico es a través de una función de carga plástica ( ) 0=qσ;F . Esta puede definirsemediante una función escalar de argumentos tensoriales y homogénea de primer grado enlas tensiones.
( ) ( ) 0=Κ −= σqσ; f F ( 3.2.29)
Para ello se establece la función de tensión ( )σ f como un traductor de un estadotensorial de tensiones a otro escalar equivalente. Este escalar se utiliza para ser comparado
con la evolución del endurecimiento plástico Κ , que inequívocamente se relaciona con laevolución de la tensión uniaxial equivalente Κ =σ .
-
8/19/2019 Modelos Elástico Resistencia Materiales
33/74
Capitulo 3- Estado del Arte 43
3.2.4.2.1 Endurecimiento isótropo
Se dice que hay endurecimiento isótropo cuando hay movimiento homotético de lasuperficie de carga plástica. A su vez este movimiento puede ser:
Positivo: Cuando el movimiento homotético de la superficie de carga plástica es deexpansión. En este caso se dice que el proceso es elasto-plástico isótropo con
endurecimiento.Nulo: Cuando la superficie de carga plástica no evoluciona durante el proceso elasto-
plástico. En ese caso se dice que el proceso elasto-plástico es isótropo perfecto.Negativo: Cuando hay movimiento homotético de contracción en la superficie de
carga plástica. En este caso se dice de un proceso elasto-plástico con ablandamiento.El endurecimiento isótropo, movimiento homotético de la función de carga plástica,
queda controlado por la evolución de la función de endurecimiento plástico Κ , que en elcaso más general puede estar definida como una variable interna q. La evolución de esta
variable interna depende del proceso mismo y lo hace condicionada por una regla deevolución cuya formulación se debe ajustar al comportamiento del sólido.
En plasticidad clásica es habitual expresar la variable interna de endurecimiento
plástico como una función de endurecimiento plástico ( ) pκ Κ , que depende a su vez dela variable interna de endurecimiento plástico pκ . . Esto es
( ) ( )⎩⎨⎧
=
==Κ
p p
p p p p
ucon f
κ
ε κ κ κ : ( 3.2.30)
Es mucho más general y permite una mayor posibilidad de representación delcomportamiento de una gran diversidad de sólidos, definiendo la función deendurecimiento como una variable interna del proceso plástico,
( ) ( ) ( )
( ) ( ) p
p p G
κ λ
κ λ λ κ κ κ
qσ;qσ;
σ
σ;qσ;qσ;
Κ Κ ==Κ
⎥⎦
⎤⎢⎣
⎡
∂
∂==
hH
hH : ( 3.2.31)
donde la función tensorial ( )qσ;κ h y la función escalar , dependen delestado de tensiones actualizado y de las variables internas. En el caso más simple de lateoría de la plasticidad se identifican las siguientes relaciones,
( qσ;Κ h )
tal que en esta última ( ) ( ) p p f κ κ =Κ es una función tal como lo expresa la ecuación(3.2.30).
de donderesulta: ( ) p
p
p p
p p p p p
h
u
κ κ
κ κ
ε σ κ κ κ
∂
Κ ∂==Κ
==≡=⇒≡
Κ
εσεhσh ::
( 3.2.32)
3.2.4.2.2 Endurecimiento Cinemático
El endurecimiento cinemático, movimiento de traslación de la superficie de cargaplástica, queda controlado por la variable interna de endurecimiento plásticocinemático η , que define las coordenadas del centro del dominio elástico en el espacio de
tensiones. El continuo cambio de estas coordenadas, durante la evolución del procesoelasto-plástico, provoca un movimiento de traslación de la superficie de fluencia que puedeo no combinarse con un movimiento isótropo de expansión o contracción de la misma. En
el caso más general, se puede escribir la función de carga plástica como:
-
8/19/2019 Modelos Elástico Resistencia Materiales
34/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS44
( ) ( ) 0=Κ −= η-σqσ; f F ( 3.2.33)
donde el endurecimiento plástico puede definirse, según Prager y Melan, como
con pk p
εβη c== κ p pk ε εβ c= . La constante depende del tipo de función de
potencial plástico que se utilice.k c
3.2.4.3 Relación Tensión-Deformación. Consistencia Plástica yRigidez Tangente
La ley constitutiva elasto-plástica tangente εσ :T C= y el parámetro de consistencia
plástica λ pueden obtenerse a partir del criterio general de fluencia plástica y de lacondición de consistencia de Prager. Esto es,
( ) ( )
0::0:::
0
1
=Κ ∂
∂+
∂
∂
⎪
⎭
⎪⎬
⎫
=Κ Κ ∂
∂+
∂
∂+
∂
∂=
=Κ −=
-ηη
σσ
ηη
σσ
η-σqσ;
FFFFFF
F f
( 3.2.34)
Sustituyendo en esta la ecuación (3.2.31) y la ecuación , resulta pk p εβη c== κ
( ) ( )
0::::::
0:::
=⎥⎦
⎤⎢⎣
⎡
∂
∂+
∂
∂
∂
∂−
∂
∂
∂
∂−⎥⎦
⎤⎢⎣
⎡
∂
∂
=∂
∂+
∂
∂
Κ
Κ
σh
σησC
σεC
σ
ε-h-εη
ε-εCσ
GGFGFF
FF
κ
κ
λ hc
hc
k
p p
k
p
( 3.2.35)
De esta última expresión se puede obtener el factor de consistencia plástica λ , quepuede interpretarse como el factor que evalúa la distancia que hay entre un estado tensionalinadmisible, fuera del dominio elástico y la superficie de carga plástica. Esto es
0
::::
::
=
⎥⎦
⎤⎢⎣
⎡
∂
∂
∂
∂+⎥
⎦
⎤⎢⎣
⎡
∂
∂+
∂
∂
∂
∂−
∂∂
=
Κ σ
Cσσ
hση
εCσ
GFGGF
F
A
k hc κ
λ ( 3.2.36)
donde A es el parámetro de endurecimiento plástico. En un caso simple de la teoría de
la plasticidad clásica sin endurecimiento cinemático 0=k c , este parámetro resulta ser la
pendiente de la curva tensión uniaxial equivalente ( ) ( ) p p ε ε σ Κ = vs pε . Para demostraresto, se considera una función de endurecimiento ( ) ( ) p p f ε ε =Κ y se define su pendiente,
( ) ( ) p
p
p
p
p
p
d
d
d
d
d
d A
ε
κ
κ
ε
ε
ε Κ =Κ = ( 3.2.37)
De esta última y la ecuación (3.2.32), se verifica el denominador de la ecuación (3.2.36)
σh
∂
∂=
∂
∂= Κ
GF:κ σ
κ h A
p ( 3.2.38)
Sustituyendo la ecuación (3.2.36) en la ecuación constitutiva tangente,
( ) pε-ε:Cσ = ( 3.2.39)Resulta la ley elasto-plástica tangente,
-
8/19/2019 Modelos Elástico Resistencia Materiales
35/74
Capitulo 3- Estado del Arte 45
Cσε
σC
σσh
ση
Cσσ
C
-Cσ :
::::
::
k hc
=⇒
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂
∂
∂+
∂
∂+
∂
∂
∂
∂−
⎥⎦
⎤⎢⎣
⎡
∂
∂⊗⎥⎦
⎤⎢⎣
⎡
∂
∂
=
Κ
GFGGF
FG
κ
( 3.2.40)
Donde es el tensor constitutivo tangente continuo.T C
3.2.5 Postulado de estabilidad de Durker y
Axioma de la Máxima Disipación Plástica
El segundo postulado de Durker define la estabilidad local del comportamiento de unpunto de un sólido sometido a un estado tenso-deformacional . En el problema no-lineal
este postulado está relacionado con el axioma de la máxima disipación plástica.Considérese un punto de un sólido sometido a un estado de tensiones qεε;σσ ; p=
deformación , tal que en el instante previo sus magnitudes eranε ( )qε;εσσ ; p∗∗ = y * .Se dice que el comportamiento ha sido estable si se cumple la siguiente desigualdad,
∗ε
( ) 0:: ≥→≥ ∗∗ p p p εσ-σεσε:σ ( 3.2.41)donde puede verse que necesariamente se exige que el estado tensional posterior σ ,
sea siempre mayor que el anterior ∗σ .Haciendo ahora la siguiente aproximación,
dt dt εCσ-σεε-ε :=⇒≈ ∗∗ ( 3.2.42)
Sustituyendo esta última en la ecuación (3.2.41), resulta la siguiente forma particular del2ndo postulado de Durker
0:: ≥ pεCε ( 3.2.43)
La forma local del axioma de la máxima disipación plástica (M.D.P.), se escribe,
0: ≥⎟ ⎠
⎞⎜⎝
⎛
∂
Ξ∂eε
ε ( 3.2.44)
donde la disipación plástica Ξ , para problemas sin degradación de rigidez, se escribecomo
0≥Ψ−=Ξ pε:σ ( 3.2.45)
Sustituyendo ésta última en la expresión de la M.D.P., se tiene
0:: ≥ pεCε ( 3.2.46)
De esta última y de la ecuación (3.2.43) se deduce que el postulado de estabilidad deDurker, coincide plenamente con el axioma de la máxima disipación plástica.
3.2.6 Condición de estabilidad
La condición de estabilidad de Durker es también conocida como condición de
estabilidad local y sólo se refiere a la estabilidad del comportamiento de un punto delsólido. El cumplimiento de esta condición en todos los puntos del sólido es suficiente para
-
8/19/2019 Modelos Elástico Resistencia Materiales
36/74
MODELIZACIÓN NUMÉRICA DE MATERIALES COMPUESTOS46
garantizar la estabilidad del conjunto, sin embargo no es necesario que se verifique en todosy cada uno de los puntos para asegurar la estabilidad del conjunto. Este hecho puedecomprobarse en materiales con ablandamiento, en los cuales puede no cumplirse lacondición de estabilidad local en algunos puntos, sin que por esto el sólido global pierdaestabilidad. La estabilidad de todo un cuerpo se prueba mediante una condición más débil,
que es conocida como condición de estabilidad global . A continuación se hace una brevepresentación de estos dos conceptos.
3.2.6.1 Estabi lidad local
El segundo postulado de Durker, ecuación (3.2.41), constituye una condición deestabilidad necesaria y suficiente para problemas de plasticidad con endurecimiento y reglade flujo asociada, pero es sólo una condición suficiente para problemas de plasticidad conablandamiento y/o regla de flujo no asociada. A continuación se prueba que exigiendoconvexidad en las funciones de fluencia, potencial plástico y flujo asociado en materialescon endurecimiento, queda garantizado el cumplimiento del segundo postulado de Durker
( ) ( ) 0:::: ≥⎟ ⎠ ⎞⎜
⎝ ⎛
∂∂=σ
CεεCε Gλ p ( 3.2.47)
Pero el factor de consistencia plástica λ es un escalar no negativo. Por ello ladesigualdad anterior puede también escribirse, como
( ) 0::,0 ≥∂
∂≥
σCε
Gλ ( 3.2.48)
Además, analizando el propio factor de consistencia plástica, se deduce que,
0≥
∂
∂
∂
∂+
∂
∂
=
σ:C:σ
ε:C:σ
FG
F
A
λ ( 3.2.49)
si el endurecimiento es positivo , y y son funciones convexas, para que elfactor de consistencia plástico sea positivo, debe cumplirse necesariamente que
0> A G F
( ) 0:: ≥∂
∂
σCε
G ( 3.2.50)
Para garantizar que las desigualdades (3.2.48) y (3.2.50) se cumplan a la vez, debeocurrir que el flujo plástico sea asociado. Es decir,
,σσ ∂
∂∝
∂
∂ FGFlujo asociado ( 3.2.51)
3.2.6.2 Estabi lidad Global
Como ya se ha mencionado, para materiales con ablandamiento, el postulado deDurker se transforma en una condición suficiente de estabilidad, pero no necesaria.
La condición de estabilidad necesaria, debe formularse a nivel global, es decir, de todo
el sólido. Sea una configuración estable donde la energía potencial total vale
, donde intervienen las variables de tensión
3R ⊂Ω∗
ind P P ∗∗∗ −=Π
∗σ , deformación ,fuerzas de superficie , volumen y desplazamiento , y donde se cumple el equilibriodel sólido. Dando un desplazamiento virtual
∗ε
∗t
∗b
∗u
uδ sobre esta configuración estable, se
obtiene una nueva configuración , cuyas variables son , ,3R ⊂Ω t uuu δ += ∗
εεε δ += ∗
-
8/19/2019 Modelos Elástico Resistencia Materiales
37/74
Capitulo 3- Estado del Arte 47
σσσ δ += ∗ , , , y la energía total será,∗= bb ∗= tt Π+Π+Π≅−=Π ∗ 2!2
1δ δ ind P P . Se
dice que esta nueva configuración estará en equilibrio, si durante la aplicación deldesplazamiento virtual se desarrolla una variación de energía potencial total nula. Esto es
+Π+Π≅Π−Π=∆Π⇒+Π+Π+Π=Π
∗∗ 2
0
2
!2
1
!2
1
δ δ δ δ ( 3.2.52)
donde la primera variación de la energía o condición de estacionalidad del funcional
vale 0=⋅−⋅−=Π ∫∫∫ dV dS dV V S V
ubutε:σ δ ρ δ δ δ . Dado que el desplazamiento virtual
uδ y sus campos derivados εδ son arbitrarios, resulta entonces la ecuación de equilibrio.La segunda variación de la energía potencial total, o condición de estabilidad del funcional,
puede escribirse como 02 =⋅−⋅−=Π ∫∫∫ dV dS dV V S V
ubutε:σ δ δ ρ δ δ δ δ δ . A pesar que
en plasticidad no siempre es posible conocer la expresión del funcional de energía potencialtotal, si que es posible conocer sus respectivas variaciones, por ejemplo mediante el
principio de los trabajos virtuales que es lo que se ha establecido en las ecuacionesanteriores. Sustituyendo en (3.2.52) la condición de equilibrio, se tiene que el incrementototal de trabajo virtual es igual a la segunda variación del funcional y que es a la vez lacondición de estabilidad (concavidad o convexidad del funcional),
⎪⎪⎩
⎪⎪⎨
⎧
⇒<
⇒>
Π+Π≅∆Π
virtual entodesplazamieste para
inestableesoriginal iónconfigurac La
virtual entodesplazamicualquier para
estableesoriginal iónconfigurac La
0
0
!2
1 2
0
δ δ ( 3.2.53)
Sustituido el estado definido anteriormente ( , ,uuu δ += ∗ εεε δ += ∗ σσσ δ += ∗ ,
, ), en la segunda variación del funcional, se obtiene,∗= bb ∗= tt
⎩⎨⎧
⇒<
⇒>≅∆Π ∫ inestableoriginal iónConfigurac
estableoriginal iónConfiguracdV
V 0
0
2
1ε:σ δ δ ( 3.2.54)
Según Bažant, esta condición aplicada a materiales con ablandamiento, permite definir
un tamaño límite, de volumen , de la zona donde puede ocurrir un comportamiento
plástico inestable, entendido según el postulado de estabilidad local de Durker (zona dondese produce ablandamiento). Así, en el resto del sólido, donde el comportamient