Modelos Matemáticos de Sistemas de Control

of 71
-
Upload
carlos-alberto-rey-soto -
Category
Documents
-
view
221 -
download
0
Transcript of Modelos Matemáticos de Sistemas de Control
-
7/26/2019 Modelos Matemticos de Sistemas de Control
1/71
1 - 1
FUNDAMENTOS Y MODELOS
MATEMTICOS DE SISTEMAS DE CONTROL
INTRODUCCIN
En las ltimas dcadas, los sistemas de control han desempeado un rol vital en el
desarrollo y avance tecnolgico de la ciencia y la ingeniera, y por ende de la sociedad moderna.
En la ltima dcada se han convertido en componentes esenciales en el control de vehculos
espaciales, sistemas robticos, y ms indispensables an, en el procesamiento de productos
alimenticios, combustibles, industria petroqumica, generacin y distribucin de energa elctrica,
distribucin y tratamiento de aguas residuales y servidas, electrnica de automviles,
electrodomsticos, etc. Los sistemas de control estn involucrados de manera implcita en todos
los aspectos de la vida diaria, siendo su objetivo fundamental el de mantener los ms altos
estndares de calidad de los productos (composicin, pureza, color, etc.), manteniendo los niveles
de produccin a mnimo costo y proporcionando adems las condiciones de trabajo adecuadas
para satisfacer la seguridad industrial y ambiental, con la menor intervencin del ser humano.
En este captulo se tratarn los aspectos relacionados con el desarrollo del modelo
matemtico, las estructuras tpicas, los componentes fsicos y dems elementos indispensables
para el anlisis de un sistema de control en tiempo continuo. Utilizando como herramienta la
transformada de Laplace, se aplicar el concepto de funcin de transferencia para modelar el
comportamiento dinmico del sistema, estableciendo su relacin con la respuesta impulso. La
representacin grfica del sistema utilizando diagrama de bloques, facilitar el modelado de cada
uno de los componentes del sistema de control. A partir del diagrama de bloques se desarrollar
el grfico de flujo de seales, que permitir el uso de la frmula de ganancia de Mason, como
herramienta para evaluar la funcin de transferencia de un sistema con varios lazos de control.
Finalmente, utilizando el concepto de variables fsicas fundamentales para establecer
analoga entre sistemas fsicos, se desarrollar el modelo matemtico de un conjunto de sistemas
tpicos, asociados con sistemas elctricos, sistemas mecnicos de traslacin, sistemas mecnicos
de rotacin, sistemas electromecnicos, sistemas trmicos y sistemas hidrulicos.
1.1 CONCEPTOS BSICOS DE SISTEMAS DE CONTROL
En esta seccin se presentar una visin global y un conjunto de aspectos fundamentales
relacionados con el propsito, definicin, componentes, estrategias, seales caractersticas
y campos de aplicacin de los sistemas de control.
1
-
7/26/2019 Modelos Matemticos de Sistemas de Control
2/71
1-2 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
As mismo se formular el problema de control, con el propsito de identificar los
elementos que deben considerarse en el diseo del controlador, as como otros aspectos
adicionales que intervienen en la solucin de este problema.
Definiciones bsicas
Aunque existen diferentes definiciones clsicas relacionadas con el objetivo y propsito de
un sistema de control, [Dorf05], [Ogata03a], [Kuo95], [Franklin91], [Phillips00], la
siguiente definicin incluye dos condiciones que caracterizan a un sistema de control:
DEFINICION 1.1 Propsito del sistema de control
Conjunto de componentes interconectados, de modo que puedan ser
comandados, o regulados por s mismos o por otro sistema en forma
automtica, para lograr una condicin deseadade una variable fsica.
Condiciones mnimas de un sistema de control:
Segn esta definicin, existen dos condiciones mnimasque debe satisfacer un sistema de
control: la primera se refiere a la capacidad de regulacin de sus componentes
interconectados, para responder a las especificaciones de uso de acuerdo con la variable
fsica a controlar o variable controlada. La segunda establece que la regulacin debe ser
automtica, lo cual implica que no es necesaria la intervencin del ser humano.
Podramos imaginarnos las consecuencias de tener a una persona ajustando manualmente la
vlvula de vapor de un sistema de control de temperatura que utiliza un intercambiador decalor. En primer lugar, el alto nivel de riesgo por descuido del operador podra elevar la
temperatura a valores peligrosos. En segundo lugar, la calidad en la regulacin del sistema
sera muy pobre, por la imposibilidad de garantizar que el operador est pendiente de las
variaciones en la temperatura del vapor, todas las horas del da y todos los das del ao.
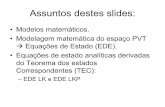
Diagrama funcional y modelo del sistema:
Permite identificar la relacin causa efecto asociada con la seal fsica a regular ovariable controlada, y la condicin esperada para esta variable o valor deseado(setpoint).
Esta identificacin permite formular la relacin entrada salidadel sistema tal como semuestra en la figura 1.1, la cual establece a su vez el propsito del sistema de control.
SISTEMADE CONTROL
Valor deseado
Causa (entrada)
Variable controlada
Efecto (salida)
Figura 1.1Diagrama funcionalasociado con elpropsito delsistema de control.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
3/71
1.1 CONCEPTOS BSICOS DE SISTEMAS DE CONTROL 1-3
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
El planteamiento anterior es consistente con la siguiente definicin [Carlson98]:
DEFINICION 1.2 Sistema dinmico
Proceso en el cual existe una relacin causa efecto y es posibleformular en forma algebraica o grfica una relacin entrada salida,para evaluar su comportamiento en el tiempo.
La formulacin de la relacin entrada salida conduce al desarrollo del modelo delsistema, el cual puede ser analtico o grfico y es el elemento bsico para el anlisis y
diseo del sistema de control.
Anlisis y diseo:
El problema de anlisis se refiere a la evaluacin de la respuesta dinmica del sistema
(salida) para una entrada conocida, referida generalmente como seal de prueba,
asumiendo que se conoce el modelo del sistema. Por otro lado, el problema de diseo se
refiere a determinar el modelo del sistema para satisfacer condiciones especficas de una
relacin entrada salida, referida normalmente como requerimientos de diseo.
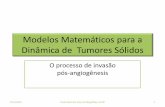
Sistemas SISO y sistemas MIMO:
Aunque el diagrama de la figura 1.1 muestra un sistema de 1-entrada y 1-salida o SISO
(Single-Input-Single-Output), la mayor parte de las aplicaciones prcticas corresponden a
sistemas multivariables o MIMO (Multiple-Input-Multiple-Output), cuyo diagrama
funcional se muestra en la figura 1.2. La flecha doble se usa para indicar que existen varias
entradas (causas) y salidas (varios efectos) en el proceso de regulacin del controlador.
Un ejemplo tpico de un sistema de control multivariable es el caso del sistema de
regulacin de velocidad de un automvil, mostrado en la figura 1.3, donde la velocidad
final depende del par mecnico o torque mT ejercido por la inercia total del vehculo y elngulo de posicin del acelerador
acel fijado por el conductor.
Figura 1.2Diagrama funcionalde un sistema desistema de controlmultivariable (MIMO).
SISTEMA DECONTROL
MULTIVARIABLE
Entradas Salidas
Valoresdeseados
Variablescontroladas
CONTROL DEVELOCIDADVEHICULO
mT
acel
Velocidad
Figura 1.3Diagrama funcional delsistema de regulacinde velocidad de unvehculo.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
4/71
1-4 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Campos de aplicacin de los sistemas de contro l
Aunque existe una gran variedad de sistemas de control que se pueden encontrar en
aplicaciones domsticas, comerciales e industriales, es frecuente clasificarlos en dos
grandes categoras [Johnson02], segn la naturaleza de variable fsica a regular:
- control de procesos
- servomecanismos
El control de procesostrata de forzar a que una variable fsica mantenga un valor constante
en el tiempo, respecto de un valor deseadoo setpoint. De este modo el control de procesos
se aplica generalmente en operaciones automticas de control de nivel, temperatura, flujo,
presin, posicin, relacionadas con procesos domsticos, comerciales e industriales.
Los servomecanismosobedecen a otro tipo de sistema de control, donde el objetivo es el
seguimiento o rastreo de una seal fsica, forzando a que se mantenga cercana a valor
especfico o target. El trmino servomecanismo se debe a la clase de componentes que
utiliza para lograr el propsito del sistema de control. Ejemplos tpicos son: el control de
posicin de una antena de un radar, el control de la direccin de un vehculo y el uso de
robots en aplicaciones industriales y biomedicina, para lograr movimientos precisos en el
espacio como una funcin del tiempo.
Otras clasificaciones hacen referencia a aplicaciones ms especficas como el control
secuencial, utilizado en sistemas electrodomsticos y en procesos de manufactura de
productos que utilizan mquinas herramientas computarizadas. El control analgicodondela funcin de regulacin es realizada por dispositivos analgicos electrnicos, neumticos o
hidrulicos y el control digitalque utiliza un microprocesador como unidad de control.
1.2 ESTRUCTURAS TPICAS DE LOS SISTEMAS DE CONTROL
En esta seccin se har una descripcin de las estrategias utilizadas para satisfacer el
requisito de regulacin automticadel sistema de control, sus estructuras, componentes y
caractersticas. Se har nfasis en elprincipio de control por realimentacin(feedback) por
su caracterstica de regulacin del error del sistema de control, adems de otras efectos ensu comportamiento dinmico como: estabilidad, capacidad de rechazo a las perturbaciones
y baja sensibilidadpor cambio en sus parmetros.
Estrategias de control
La condicin de regulacin automtica del sistema se puede lograr utilizando diversas
estrategias de control. Estas estrategias se desarrollan a travs de esquemas de controlque
-
7/26/2019 Modelos Matemticos de Sistemas de Control
5/71
1.2 ESTRUCTURAS TPICAS DE LOS SISTEMAS DE CONTROL 1-5
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
ofrecen caractersticas particulares. Los esquemas clsicos utilizados con mayor frecuencia
en aplicaciones prcticas, son:
- sistema de control de lazo abierto
- sistema de control de lazo cerrado o realimentado (feedback)- sistema de control de accin precalculada
- sistema de control en cascada
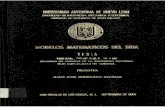
Sistema de control de lazo abierto:
La figura 1.4 muestra los elementos bsicos de un sistema de control de lazo abierto, donde
se ha introducido el trmino de compensador, ampliamente utilizado en la teora clsica de
sistemas de control para hacer referencia al controlador.
Segn la definicin 1.1, el sistema debe ser capaz de regular la seal de salida o variable
controlada ( )y t dentro de lmites aceptables del valor deseadoo setpoint, establecido por
la seal de entrada ( )r t . La seal de control ( )m t es determinada por la accin del
controlador o compensador y se encarga de ajustar el proceso o planta para garantizar quela variable controlada se mantenga cerca del valor deseado.
La seal ( )m t acta sobre un componente del proceso referido como el elemento final de
control (EFC), para regular su funcionamiento, tal como se muestra en la figura 1.4.
Ejemplos tpicos del EFC son: vlvulas, fuentes de potencia, reguladores, servomotores,
etc. En esquemas posteriores para efecto de simplificacin del esquema se omitir el EFC.
La seal ( )p t en la figura 1.4 se utiliza para simular la presencia de perturbacionesen el
proceso, entendida como una seal o seales que pueden modificar la variable controlada
o salida del sistema ( )y t . Para cada sistema en particular es posible identificar este tipo de
seales. Por ejemplo, la temperatura ambiente, la temperatura de entrada del fluido de
control y la masa de fluido cuya temperatura se desea regular, son ejemplos tpicos de
perturbacin en un sistema de control de temperatura de un proceso.
Si el sistema de regulacin de velocidad de un vehculo mostrado en la figura 1.3 es de lazo
abierto, la perturbacin puede ocurrir cuando se presenta una pendiente en la trayectoria del
Figura 1.4Componentes de unsistema de control delazo abierto.
COMPENSADOR OCONTROLADOR
( )r t ( )m t PROCESOO PLANTA
( )y t
( )p t
EFC
-
7/26/2019 Modelos Matemticos de Sistemas de Control
6/71
1-6 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
vehculo, la cual reduce de inmediato la velocidad . A menos que el conductor ajustemanualmenteel ngulo de posicin del acelerador
acel (seal de referencia o setpoint), la
variable controlada seguira la trayectoria mostrada en la figura 1.5. Luego, el sistema en
lazo abierto no es regulado, dado que no es capaz de ajustar automticamente la entrada
( )r t para responder a las perturbaciones del proceso ( )p t .
En este orden de ideas, las caractersticas del sistema de control de lazo abierto, son:
- es simple y econmico.
- no responde a cambios en la variable controlada por efecto de perturbaciones.
- es un sistema no regulado.
Sistema de control de lazo cerrado:
Para lograr un sistema regulado, es necesario modificar el esquema de la figura 1.4,
insertando un lazo de realimentacina travs del cual se pueda informar continuamente al
controlador o compensador de los cambios que ocurren en la variable controlada por efectode perturbaciones en el proceso. Esta estrategia se logra con el esquema mostrado en la
figura 1.6, conocido como sistema de control de lazo cerradoo control realimentado.
En el esquema de la figura 1.6, los cambios en la variable controlada ( )y t por efecto de
perturbaciones en el proceso ( )p t son transmitidos al controlador a travs de la seal de
realimentacin ( )b t . El controlador, segn la magnitud de estos cambios ajusta
aplicacin dem
T
t
Figura 1.5Respuesta de unsistema de control delazo abierto ante unaperturbacin.
Figura 1.6Sistema de control delazo cerrado o controlrealimentado.
COMPENSADORCONTROLADOR
( )r t ( )m t PROCESOO PLANTA
( )y t
( )p t
TRANSMISORMEDIDOR
( )b t
-
7/26/2019 Modelos Matemticos de Sistemas de Control
7/71
1.2 ESTRUCTURAS TPICAS DE LOS SISTEMAS DE CONTROL 1-7
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
automticamente la seal de control ( )m t para lograr que la variable controlada ( )y t se
mantenga cerca del valor deseado ( )r t ,
Retomando el ejemplo del sistema de regulacin de velocidad del automvil de la figura
1.3, podemos asumir que se instala un sensor de velocidad y un regulador que ajustaautomticamente el ngulo de posicin
acel del acelerador, cada vez que ocurra un cambio
en la velocidad del motor. La figura 1.7 muestra la respuesta dinmica de este sistema ante
una perturbacin, originada por un aumento en torque mecnicom
T .
Las caractersticas de un sistema de control de lazo cerrado , se pueden resumir en:
- transmite continuamente al controlador la informacin sobre el estado actual de la
variable controlada ( )y t .
- determina la accin de control ( )m t en funcin de los cambios de la variable
controlada, respecto del valor deseado ( )r t .
- es un sistema regulado, porque responde a los cambios en la variable controlada, porefecto de perturbaciones en el proceso.
- ms complejo y costoso que un sistema de control de lazo abierto.
- puede ser lento en la respuesta.
El esquema de la figura 1.6 es el fundamento de los sistemas realimentados de controlo
feedback y ser el modelo clsico a utilizar en los captulos posteriores relacionados con
el anlisis y diseo del sistema de control. Sus caractersticas y propiedades sern
analizadas con detalle ms adelante.
Sistema de control por accin precalculada:
Una forma de mejorar la velocidad de reaccin del sistema de control en lazo cerrado, es
utilizar el esquema de control por accin precalculada, mostrado en la figura 1.8. En esta
estrategia, el controlador recibe continuamente informacin relacionada con el estado
actual de las variables de perturbacin del proceso ( )p t . De este modo, el sistema
determina la accin de control ( )m t necesaria para ajustar el funcionamiento del proceso,
aplicacin de
mT
t
Figura 1.7
Respuesta dinmica deun sistema de controlde lazo cerrado.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
8/71
1-8 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
antes de que ocurran los cambios en la variable controlada ( )y t , mejorando la velocidad de
respuestadel sistema de control. Esta caracterstica es fundamental en sistemas de control
de temperatura, donde las constantes de tiempo del proceso son elevadas.
Sin embargo, el clculo de la accin de control ( )m t es complejo y generalmente se recurre
a registros histricos del comportamiento de la variable controlada ( )y t respecto de lasvariables de perturbacin ( )p t .
Las caractersticas del control por accin precalculada, pueden resumirse en:
- evala continuamente las variables de perturbacin del proceso, para determinar la
accin de control ( )m t .
- es ms rpido en la respuesta, que el sistema de control en lazo cerrado.
- es ms complejo y ms costoso de implementar.
- no utiliza realimentacin de la variable controlada.
Sistema de control en cascada:
El esquema tpico se muestra en la figura 1.9, donde se muestran 2 lazos de control que
utilizan el principio de realimentacin. El propsito de este esquema es regular una de las
variables de perturbacin que pueden tener mayor efecto en las alteraciones de la variable
controlada del proceso. A partir de esta variable se establece el lazo secundario de control,
logrando as minimizar su efecto sobre la variable controlada del sistema ( )y t .
Un caso prctico de control en cascada es el sistema mostrado en la figura 1.18, que utiliza
un intercambiador de calor para regular la temperatura de un fluido. El fluido de controles
vapor y una de las variables de perturbacin que tienen mayor incidencia en la variable
controlada (temperatura), son las posibles variaciones en el flujo de vapor aguas arriba de la
vlvula de control.
Una forma de minimizar el efecto de estas variaciones de flujo, es instalar un lazo
secundario de control de flujo, que regule la cantidad de vapor que llega al intercambiador,
COMPENSADORCONTROLADOR
( )r t ( )m t PROCESOO PLANTA
( )y t
( )p t
Figura 1.8Sistema de control poraccin precalculada.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
9/71
1.2 ESTRUCTURAS TPICAS DE LOS SISTEMAS DE CONTROL 1-9
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
tal como se muestra en la figura 1.9. Otra perturbacin, como la temperatura ambiente
puede minimizarse usando revestimiento trmico apropiado en el intercambiador de calor.
De acuerdo con la figura 1.9, el sistema de control en cascada utiliza un lazo de control
primario, cuya accin de control ( )pm t se convierte en el setpoint del controlador
secundario, el cual responder a su vez con una accin de control ( )s
m t para regular la
variable controlada o variable del proceso ( )y t . En aplicaciones prcticas el controlador
primario se denomina como control maestro y el controlador secundario como control
esclavoy el conjunto global como sistema de control maestro-esclavo.
Caractersticas del sistema control realimentado (feedback)
La razn de utilizar el principio de realimentacincomo estrategia de control se present
en el sistema de regulacin de velocidad de un automvil, mostrado en la figura 1.3. En
esta estrategia de control podemos identificar 3 operaciones bsicas que debe realizar el
sistema de control:
1. Detectar el valor actual de la variable controlada ( )y t , a travs del sistema de
medicin y transmitirla al controlador.
2. Comparar la seal de realimentacin ( )b t
con el valor deseado ( )r t
de la variablecontrolada. El resultado de esta comparacin establece el error del sistema, como
( ) ( ) ( )e t r t b t (1.1)
3. A partir del error del sistema ( )e testablecer la accin de control ( )m t necesaria para
corregir la desviacin de la variable controlada ( )y t .
Figura 1.9Sistema de control encascada.
CONTROLADORPRIMARIO
( )r t ( )pm t PROCESOO PLANTA
( )y t
( )p t
MEDIDOR
PRIMARIO
CONTROLADORSECUNDARIO
( )s
m t
MEDIDORSECUNDARIO
[Flujo]
[Temperatura]
-
7/26/2019 Modelos Matemticos de Sistemas de Control
10/71
1-10 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
La figura 1.10 muestra los componentes y las seales que intervienen en el desarrollo de las
3 operaciones que realiza el sistema de control realimentado. La lnea punteada permite
identificar al controlador o compensador mostrado en la figura 1.6. Esta similitud entre el
diagrama de las figuras 1.10 y 1.6, hace que el sistema de control con realimentacin, se
reconozca tambin como sistema de control de lazo cerrado.
La estrategia para el anlisis del sistema de control mostrado en la figura 1.10 consiste en
modelar la relacin entrada salida de cada componente por un bloque funcional, usandolas seales que se describen a continuacin:
( )y t : variable controlada o variable del proceso, la cual establece el propsito del
sistema de control.
( )r t : valor deseado de la variable controlada ( )y t , seal de referencia, o setpoint.( )b t: valor medido de la variable controlada ( )y t o seal de realimentacin.
( )e t: seal de error, como una medida de la desviacin que sufre la variable controlada
( )y t , respecto del valor deseado ( )r t .
( )m t : seal de control, calculada a partir de la seal de error ( )e t, de acuerdo con el
modo de accindel controlador.
( )p t: perturbacin del proceso, razn de uso del principio de realimentacin.
El sumador mostrado en la figura 1.10 para evaluar la seal de error, se reconoce como el
detector de error.
El problema de control
Es posible formular el problema de control, en trminos de la siguiente definicin:
DEFINICION 1.3 El problema de control
Controlar con un mnimo de precisin un proceso o planta, utilizando el
principio de realimentacin, a travs del esquema de lazo cerrado.
Figura 1.10Componentes delsistema de controlrealimentado o de lazocerrado.
+ MODO DECONTROL
( )r t ( )m t PROCESOO PLANTA
( )y t
( )p t
MEDICIN
( )e t
( )b t
CONTROLADOR
-
7/26/2019 Modelos Matemticos de Sistemas de Control
11/71
1.2 ESTRUCTURAS TPICAS DE LOS SISTEMAS DE CONTROL 1-11
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
De este modo, el propsito de la realimentacin es el de minimizar el error, y su magnitud
es una medida de la precisinlograda por el sistema de control. La figura 1.11 muestra la
seal de error en dos sistemas de control que puede utilizarse para comparar su exactitud.
La figura 1.12 muestra las 4 etapas [Bishop97] que se utilizan en la Ingeniera de Control
para la solucin del problema.
La descripcin detallada de cada etapa se presenta a continuacin:
t
( )e t baja exactitudalta exactitud
Figura 1.11Exactitud de dossistemas de control apartir de la seal deerror.
Figura 1.12Fases en la solucindel problema decontrol.
Propsito del sistema de control:- variables a ser reguladas- variables de perturbacin- requerimientos del sistema
Modelo del sistema de control:- esquema de control- modelo del sensor y actuador- modelo del proceso o planta
Diseo del sistema de control:- especificaciones de diseo- ajuste de parmetros- modelo del controlador
Se cumplen especificaciones?SNo Documentacin
del proyecto
Verificacin de resultados:- comprobar especificaciones- anlisis de sensibilidad
- rechazo a perturbaciones
1
2
3
4
-
7/26/2019 Modelos Matemticos de Sistemas de Control
12/71
1-12 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Fase 1: Establecimiento del propsito del sistema de control
En esta etapa es necesario identificar las seales a ser reguladas y las seales de
perturbacin, las cuales establecen el propsito del sistema de control. As mismo es
necesario formular los requerimientos del sistema en trminos de valores caractersticos
esperados para la respuesta transitoria y permanente.
Fase2: Desarrollo del modelo del sistema de control
Esta fase es la que presenta mayor complejidad en la solucin del problema y se inicia
estableciendo la estrategia de control y el esquema a ser utilizado: lazo abierto, lazo
cerrado, cascada, accin precalculada, etc. donde la experiencia prctica del diseador es
fundamental para lograr una estrategia de control sencilla pero efectiva, segn los
requerimientos del sistema. Un segundo elemento a considerar en esta fase, es la seleccin
de sensores para medicin de la seal de campo y de actuadores para modificar el proceso.
A continuacin es necesario desarrollar el modelo del procesoo planta, del actuador y del
sensor, aplicando criterios prcticos para lograr una abstraccin del modelo fsico,
mediante el uso de elementos conceptuales de fsica, qumica, mecnica, etc. para lograr un
modelo matemtico simplificado, pero que a su vez sea una adecuada representacin de los
componentes fsicos del proceso o planta.
Fase 3: Diseo del sistema de control
Esta fase se inicia formulando las especificaciones de diseoa partir de lo requerimientos
del sistema presentados en la fase 1. De acuerdo con el esquema de control seleccionado en
la fase 2, es posible establecer el modelo matemtico del controlador o compensador a
utilizar y a partir de este calcular el ajuste de sus parmetros, aplicando mtodos clsicos o
modernos de diseo.
Fase 4: Verificacin de resultados y documentacin del proyecto
Una vez diseado el controlador, es necesario verificar el resultadoobtenido, evaluando la
respuesta dinmica del sistema a la luz de las especificaciones de diseo. En esta fase
generalmente se recurre al uso de herramientas de simulacin. Adems de verificar el
cumplimiento de las especificaciones de diseo, se deben evaluar otros aspectos
relacionados con la sensibilidad por cambio en parmetrosdel sistema y el rechazo a las
perturbaciones.
Si el resultado del diseo no es satisfactorio es necesario retornar a la fase 2, para la
revisin del esquema seleccionado y de las simplificaciones hechas en el desarrollo del
modelo de los componentes del proceso, hasta lograr un resultado que se ajuste a los
requerimientos del sistema, formulados en la fase 1.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
13/71
1.2 ESTRUCTURAS TPICAS DE LOS SISTEMAS DE CONTROL 1-13
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Una vez logrado un resultado satisfactorio, la etapa final consiste en la documentacin del
proyecto, usando tcnicas y herramientas de la ingeniera de detallepara la descripcin de
las especificaciones de cada componente del sistema de control, el desarrollo de planos y
diagramas de control usando simbologa ISA (Instrument Society of America) [ISA92].
1.3 EJEMPLOS TIPICOS DE SISTEMAS DE CONTROL
A continuacin se presentar la descripcin de de casos prcticos de sistemas de control,
algunos de los cuales sern utilizados en los ejemplos de anlisis y diseo en captulos
posteriores, con el objeto de identificar las 3 acciones operaciones bsicas, la accin de
control y posible perturbaciones.
Sistema de control de nivel de un tanque
La figura 1.13 muestra los componentes de un sistema de control de nivel de lazo cerrado
para regular el nivel de un tanque que contiene un fluido. Se desea mantener constante el
nivel (variable controlada), usando como elemento final de control (EFC) la vlvula de
entrada (VE). La vlvula de salida (VS) se asume que est abierta en una posicin fija.
Si se presenta un aumento en el caudal de salida ( )sq tel nivel disminuye, generando una
seal de error ( )e trespecto del valor deseadoo setpoint(SP). La seal de error es utilizada
por el controlador para generar la seal de control ( )m t que se encarga de abrir la vlvula
de controlVE, para aumentar el caudal de entrada ( )q ty recuperar as el nivel ( )h t del
tanque. En este ejemplo la accin de controlconsiste en abrir o cerrar la vlvula VEsi baja
o sube el nivel del tanque. Una posible perturbacin en este sistema es el cambio en elcaudal del fluido de control, aguas arriba de la vlvula de control: VE.
Sistema de contro l de temperatura de una cmara de cultivo
La figura 1.14 muestra el caso tpico de un sistema de control de temperatura de lazo
cerrado[Phillips00], cuyo propsito es regular la temperatura de una cmara utilizada para
el cultivo orgnico de plantas. La variable controladaes la temperatura de la cmara y para
Figura 1.13Sistema de controlde nivel.
VE
VS
SP
( )sq t
( )q t
( )h t
-
7/26/2019 Modelos Matemticos de Sistemas de Control
14/71
1-14 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
medirla se usa una resistencia RTD (Resistive Thermal Device), cuyas variaciones ( )ohms
se convierten en una seal de voltaje ( )mVa travs de un puente de Wheatstone.
Como la seal de salida del puente suele ser de pocos milivoltios, se usa un amplificador de
voltaje para acondicionarla a un nivel de 1-5V. La salida del amplificador se compara con
el valor deseado o setpoint (SP) para generar la seal de error ( )e t, que es utilizada por el
controlador o compensador para generar la seal de control ( )m t , necesaria para modificar
la salida de la fuente de potencia que alimenta la resistencia de calefaccin. De este modo,
la accin de control se traduce en aumentar o disminuir la potencia suministrada a la
resistencia de calefaccin, cada vez que disminuya o aumente la temperatura interior de la
cmara de cultivo. Unaposible perturbacinen este sistema de control es la apertura de la
puerta de entrada, tal como se analizar en el ejemplo 1.4.
Sistema de control de posicin de una antena
La figura 1.15 los componentes de este sistema de control, cuyo propsito es regular el
ngulo de posicin de una antena. El controlador genera una seal de voltaje que es
utilizada para posicionar el eje de un servomotor, el cual a travs de una caja de engranajes
regula la posicin de la antena. El sensor reporta una seal de voltaje como una medida del
ngulo de posicin de la antena, que es utilizada para compararla con el SP para generar la
seal de error ( )e tentregada a controlador. La accin de controlse reduce a establecer la
posicin del eje del servomotor y unaposible perturbacines la presin del viento sobre la
superficie de la antena.
Figura 1.14Sistema de controlde temperatura.
Controlador ocompensador
Servomotor
Sensor deposicin
Caja deengranajes
SP
+
voltios grados
( )e t ( )m t
Figura 1.15Sistema de controlde posicin.
Controlador ocompensador Fuente depotencia
Cmara decultivo
Puente deWheatstone
K
Resistencia
RTD
SP
Amplificador
+
- mV Puerta deacceso
( )e t
( )m t
-
7/26/2019 Modelos Matemticos de Sistemas de Control
15/71
1.3 EJEMPLOS TIPICOS DE SISTEMAS DE CONTROL 1-15
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Sistema de control digital
Los ejemplos presentados hasta este momento utilizan y procesan seales continuas y en
este sentido se reconocen como sistemas analgicos de control. Sin embargo, el desarrollo
de los microprocesadores ha tenido una fuerte incidencia en los sistemas de control,
permitiendo que la funcin de control pueda efectuarse en forma digital.
La figura 1.16 muestra los componentes de un sistema de control digital de lazo cerrado
donde la funcin del controlador analgico se ha sustituido por un microcontrolador ( C).La accin de control [ ]m kse establece a travs de un algoritmo de controlalmacenado en
el C. En este esquema es necesario incluir un convertidor anlogo digital (A/D) y unconvertidor digital analgico (D/A) como dispositivos de interfase. Detalles relacionados
con el anlisis y diseo de este modo de control sern tratados en los captulos 5 y 6.
Sistema de control multivariable
Los ejemplos anteriores se han referido a sistemas de una entrada y una salida o sistemas
SISO. Sin embargo, en aplicaciones prcticas, los sistemas de control pueden incluir varios
lazos de control, que se identifican a travs de la variable controlada de cada uno.
La figura 1.17 muestra el caso tpico del control de lazo cerrado de un turbogenerador,
formado por tres componentes: una calderapara la produccin de vapor, una turbinapara
convertir la energa trmica en energa cintica y un generador de corriente alterna o
alternador, para transformar la energa cintica en energa elctrica. En este sistema es
necesario regular simultneamente cuatro variables:
- composicin de la mezcla en la caldera.
- temperatura de salida del valor.
- presin de salida del vapor.
- frecuencia del voltaje de salida del generador.
Figura 1.16Sistema de controldigital.
+( ) [ ]m kC Proceso
y(t)(t)
Sensor oTransmisor
A/D D/A
Controlador
( )m t
-
7/26/2019 Modelos Matemticos de Sistemas de Control
16/71
1-16 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
De acuerdo con la estrategia de lazo cerrado, es necesario medir cada una de estas variables
y enviar su estado actual al controlador, que en este caso en un microprocesador, el cual se
encarga de generar la respectiva seal de control en funcin de cada seal de error y delmodo de control establecido para regular cada una de las variables controladas.
Para regular cada una de las variables anteriores es necesario establecer una variable
manipulada ( )m t para cada lazo de control, que sea capaz mantener su respectiva variable
controlada cerca del setpoint. Segn la figura 1.17 se identifican cuatro lazos de control:
- flujo de entrada de aire a la caldera.
- flujo de entrada de combustible a la caldera.
- flujo de entrada de agua a la caldera.
- velocidad nde la turbina en revoluciones por minuto (rpm)
Para facilitar la identificacin de los lazos de control, en la figura 1.17 las seales
correspondientes a la accin de control se han dibujado en lneas punteadas. De este modo
se identifican cuatro lazos de control y se reconoce como un sistema de control
multivariableo sistema MIMO.
Figura 1.17Sistema de controlmultivariable para laregulacin de unturbogenerador.
Combustible
Aire
Agua
Caldera Turbina Generador
Reguladorde velocidad
Medidor demezcla
Medidor detemperatura
Medidor defrecuencia
Medidor depresin
C
Setpoint de cada lazo de control
n
-
7/26/2019 Modelos Matemticos de Sistemas de Control
17/71
1.3 EJEMPLOS TIPICOS DE SISTEMAS DE CONTROL 1-17
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Simbologa estndar en sistemas de control de procesos
En los ejemplos anteriores se han utilizando diagramas funcionales, para identificar los
componentes de cada sistema de control. Sin embargo, en aplicaciones prcticas, en
particular en los sistemas de control de procesos, se utiliza una simbologa estndar
[ISA92] desarrollada y aprobada en julio de 1992 entre el American National Standard
Institute (ANSI) y la Instrument System and Automation Society (ISA), conocida como
ANSI-ISA S5.1-1984 (R1992).
Esta simbologa se utiliza en los planos de la ingeniera de detalle del proyecto y la figura
1.18 muestra el caso de un sistema de control en cascada similar al esquema de la figura
1.9, para controlar la temperatura de salida2( )T tde un fluido, usando como actuador un
intercambiador de calor.
El sistema utiliza un lazo secundario de control para regular el flujo de vapor con el objeto
de contrarrestar sus posibles variaciones, aguas arriba de la vlvula de control. En el
apndice F se presenta un resumen de los smbolos y letras utilizadas en este diagrama.
Intercambiador decalor
TT25
TRC
25
FY25
FRC
25
FT25
T
Vapor
1( )T t 2( )T t
SP
Figura 1.18Sistema de controlen cascada usandosimbologa ISA.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
18/71
1.4 FUNCION DETRANSFERENCIA Y RESPUESTA IMPULSO 1 - 18
1 - 18
1.4 FUNCIN DE TRANSFERENCIA Y RESPUESTA IMPULSO
En las secciones anteriores se presentaron los elementos necesarios para comprender el
funcionamiento de un sistema de control. En esta seccin se har referencia a los tres
modelos clsicosusados en el anlisis y diseo del sistema de control en tiempo continuo:ecuacin diferencial (ED), la respuesta impulso ( )h t y la funcin de transferencia (FT).
Para el desarrollo del modelo de FT se utilizar como herramienta la transformada de
Laplace(TL), cuyos fundamentos bsicos se presentan en el apndice B.
Respuesta dinmica como solucin de una ecuacin d iferencial
Los 3 modelos clsicos utilizados en el anlisis de un sistema de control se derivan de la
teora de sistemas lineales y se reconocen como [ReySoto08]:
- ecuacin diferencial- respuesta impulso
- funcin de transferencia
La ecuacin diferencial ordinaria de coeficientes constantes (ED) permite formular la
relacin entrada-salida representada simblicamente como ( ) ( )x t y t , del sistema linealinvariante en el tiempo (LIT) mostrado en la figura 1.19.
Asumiendo que el sistema es de orden-2, la ED normalizada se formula como
2
1 0 1 02
d y dy dx a a y b b x
dt dt dt (1.2)
En el sistema anterior 2n y 1m . Como m n se puede demostrar [ReySoto08] que es
causal o realizable. Si el sistema LIT es modelado por una ED, su solucin permite obtener
la respuesta dinmica del sistema ( )y t a una entrada arbitraria ( )x t. Aunque existen
mtodos clsicos para esto [ReySoto08], es preferible utilizar mtodos de transformacin
basados en la transformada de Laplace, tal como se muestra en el siguiente ejemplo.
EJEMPLO 1.1: Obtener la respuesta dinmica de un sistema LIT modelado por la siguiente
ED, ante una entrada escaln unitario.
SISTEMA
CONTINUO
( )x t ( )y tFigura 1.19Relacin entrada
salida de un sistemaLIT continuo.
Respuesta
dinmica como
solucin de la ED
de un sistema LIT
-
7/26/2019 Modelos Matemticos de Sistemas de Control
19/71
1.4 FUNCIN DE TRANSFERENCIA Y RESPUESTA IMPULSO 1-19
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
2
2
(0) 12 6 4 10 ( )
'(0) 2
yd y dy y x t
ydt dt
Solucin: Comenzamos normalizando la ED
2
2 3 2 ( ) 5 ( )d y dy y t x t
dt dt
Llevando al dominio-spara ( ) ( )x t u t y aplicando la tabla B.1, obtenemos
2 ( ) (0) '(0) 3[ ( ) (0)] 2 ( ) ( )s Y s sy y sY s y Y s X s
Resolviendo para ( )Y s
2
2 2
5 1 5( ) ( )
( 3 2) 3 2 ( 1)( 2)
s s sY s X s
s s s s s s s
respuesta naturalrespuesta forzada
La expresin anterior permite identificar las 2 componentes de la solucin: la
respuesta natural ( )NY s o respuesta a entrada cero y la respuesta forzada
( )FY so respuesta a estado cero.
Para la respuesta natural ( )N
y t, usando la tabla B.1, obtenemos
21 1( ) ( ) , 0
( 1)( 2) 2
t
N N
sY s y t e t
s s s
Para la respuesta forzada, descomponemos ( )FY sen fracciones parciales
5 2.5 5 2.5( )
( 1)( 2) 1 2FY s
s s s s s s
que puede verificarse usando matemtica simblica de MATLAB
:
syms s, Ys=5/ s/ ( s 2+3*s+2) ; FPYFs=di f f ( i nt ( Ys) )
FPYFs = 5/ 2/ s- 5/ ( s+1) +5/ 2/ ( s+2)
Utilizando la tabla B.1, obtenemos finalmente,
2( ) 2.5 5 2.5 , 0t tF
y t e e t
Luego la respuesta completa es
2( ) ( ) ( ) 2.5 5 1.5 , 0t t
N Fy t y t y t e e t
La solucin completa y las dos componentes pueden obtenerse usando la
funcin dsolve() del Toolbox de Matemtica Simblica (TBMS) de
MATLAB:
yF=dsol ve( ' D2y+3*Dy+2*y=5, y( 0) =0, Dy( 0)=0' )
-
7/26/2019 Modelos Matemticos de Sistemas de Control
20/71
1-20 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
yF = 5/ 2+5/ 2*exp( - 2*t ) - 5*exp( - t )
yN=dsol ve( ' D2y+3*Dy+2*y=0, y( 0)=- 1, Dy( 0)=2' )
yN = - exp( - 2*t )
y=dsol ve( ' D2y+3*Dy+2*y=5, y( 0)=- 1, Dy( 0)=2' )
y = 5/ 2+3/ 2*exp( - 2*t ) - 5*exp( - t )
Respuesta impulso
El segundo modelo de un sistema LIT es la respuesta impulso: ( )h t, que se obtiene
[ReySoto08] asumiendo que la entrada del sistema de la figura 1.19 es ( ) ( )x t t . Comoen este caso la entrada ( ) 0x t para 0t , no es posible incluir condiciones iniciales en lasolucin de la ED y se reconoce como un sistema en reposo. (Respuesta forzada).
EJEMPLO 1.2: Obtener la respuesta impulso del sistema LIT de ejemplo 1.1, cuya ED es
2
2 3 2 5 ( )
d y dy y x t
dt dt
(0) 1
'(0) 2
y
y
Solucin: Como se asume que el sistema est en reposo, llevamos la ED al dominio-s,
asumiendo (0) '(0) 0y y , para ( ) ( )x t t y ( ) ( )y t h t :
2 ( ) 3 ( ) 2 ( ) 5s H s sH s H s
Resolviendo para ( )H s, obtenemos ( )h tcomo
2
2
5 5 5( ) ( ) 5 5 , 0
3 2 1 2
t tH s h t e e t
s s s s
Usando convolucin lineales posible [ReySoto08] obtener la respuesta del sistema a una
entrada arbitraria como
( ) ( ) ( ) ( ) ( )y t h x t d h t x t
(1.3)
Desplazando la funcin ( )h tse obtiene una expresin alterna para la convolucin
( ) ( ) ( ) ( ) ( )y t x h t d x t h t
(1.4)
Por lo tanto ( ) ( ) ( ) ( )h t x t x t h t que se reconoce como lapropiedad conmutativa.
Respuesta
impulso a partir
de la ED de un
sistema LIT
-
7/26/2019 Modelos Matemticos de Sistemas de Control
21/71
1.4 FUNCIN DE TRANSFERENCIA Y RESPUESTA IMPULSO 1-21
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Si el sistema y la seal de entrada son causales solo existen para 0t y las expresiones(1.3) y (1.4) se reducen a
0 0
( ) ( ) ( ) ( ) ( )
t t
y t h x t d x h t d (1.5)
Como la respuesta impulso implica que el sistema est en reposo, la convolucin (1.3),
(1.4) o (1.5) conducen a la respuesta forzada del sistema, suficiente para el anlisis y
diseo del sistema de control.
De este modo, un sistema de control LIT puede ser modelado a travs de la respuesta
impulso ( )h t, tal como se muestra en la figura 1.20, para evaluar su respuesta dinmica
ante una entrada arbitraria ( )x t.
Existen tres aspectos importantes en el uso de este modelo:
1. Como el sistema est en reposo, la solucin ( )y t corresponde a la respuesta forzada.
2. El uso de la convolucin lineal para obtener la respuesta del sistema puede presentar
dificultades algebraicas.
3. Para facilitar la evaluacin de la respuesta se recurre a mtodos de transformacin.
Funcin de transferencia
Aunque es posible utilizar la ED o la respuesta impulso para evaluar la respuesta dinmica
de un sistema de control, es ms prctico recurrir al tercer modelo conocido como la
funcin de transferencia(FT), representando el sistema de la figura 1.20 en el dominio de
Laplace, asumiendo condiciones iniciales cero (reposo).
Si el sistema se modela en funcin de su respuesta impulso ( )h t, aplicando la propiedad de
convolucin de la transformada de Laplace (tabla B.2), obtenemos:
( ) ( ) ( ) ( ) ( ) ( )y t h t x t Y s H s X s (1.6)
Por lo tanto, el problema se reduce a resolver la ecuacin algebraica (1.6), donde ( )H ses
la transformada de Laplace de la respuesta impulso ( )h t, es decir
1( ) ( )} ( ) { ( )}H s h t h t H s L { L (1.7)
( )h t( )x t ( )y t
(Reposo)
( )X s ( )Y s
Figura 1.20Respuesta impulsocomo modelo de unsistema continuo enreposo.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
22/71
1-22 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Despejando ( )H sen la ecuacin (1.6) es posible definir la FT en los siguientes trminos.
DEFINICION 1.4 Funcin de transferencia
La funcin de transferencia (FT) es la funcin caracterstica de un
sistema LIT en reposo en el dominio-sy se obtiene como la relacin entre
la TL de la salida ( )y t y TL de la entrada ( )x t:
( )( )
( )reposo
Y sH s
X s (1.8)
El siguiente ejemplo muestra el clculo de la FT y de la respuesta impulso, a partir del
modelo bsico de ED de un sistema LIT, y su aplicacin para obtener la respuesta dinmica
del sistema ante una entrada escaln.
EJEMPLO 1.3: Obtener la respuesta escaln del sistema LIT del ejemplo 1.2, cuya ED es
2
2 3 2 5 ( )
d y dy y x t
dt dt
Solucin: Para obtener la FT llevamos la ED al dominio-s, asumiendo el sistema en reposo
2 ( ) 3 ( ) 2 ( ) 5 ( )s Y s sY s Y s X s
Utilizando la definicin (1.8) de FT
2
( ) 5( )
( ) 3 2
Y sH s
X s s s
Para obtener la respuesta escaln aplicamos (1.6), asumiendo ( ) 1/X s s
2
5 1 5( )
3 2 ( 1)( 2)Y s
s s s s s s
Usando fracciones parciales obtenemos la TIL
22.5 5 2.5( ) ( ) 2.5 5 2.5 , 01 2
t tY s y t e e t
s s s
FT y respuesta
escaln de
sistema LIT.
Figura 1.21Respuesta escalnde un sistemacontinuo en reposo.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
23/71
1.4 FUNCIN DE TRANSFERENCIA Y RESPUESTA IMPULSO 1-23
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
La grfica de ( )y t se muestra en la figura 1.21 y corresponde a la respuesta
forzadade la solucin que se obtuvo en el ejemplo 1.1.
Estabilidad a partir de la respuesta impulso y la FT
El resultado del ejemplo 1.3 muestra que la respuesta escaln es suficiente para evaluar la
estabilidad de un sistema LIT. Lo anterior se basa en el concepto de estabilidad acotada
que se define a continuacin:
DEFINICION 1.5 Estabilidad acotada o estabilidad BIBO
Un sistema LIT se considera que posee estabilidad acotada, si para una
entrada ( )x tacotada, su salida ( )y t tambin es cotada. Esta condicin se
define como estabilidad BIBO (Bounded-Input Bounded-Output) la cual
establece que para todo valor de t, debe existir un valor finito M, tal que
( ) ( )x t M y t M (1.9)
Un sistema LIT que satisface (1.9) se dice que es absolutamente estable. Como
consecuencia de lo anterior, si el sistema es modelado por su respuesta impulso ( )h t,
aplicando convolucin (1.3) para ( ) ( )x t t se puede demostrar [ReySoto08] que elsistema tiene estabilidad absoluta, si ( )h tes absolutamente integrable, es decir
0
( )h t dt M
(1.10)
De acuerdo con (1.7), la respuesta impulso ( )h t puede evaluarse como la transformada
inversa de la FT ( )H s. Para esto, asumiendo que ( )H ses causaly tiene npolos simples,
reales o complejos conjugados, aplicando el mtodo de fracciones parciales obtenemos:
1 21 21 2
1 2
( ) ( ) np t p t p t nn
n
k k kH s h t k e k e k e
s p s p s p
(1.11)
Luego, cada polokp a jb genera en (1.11) un trmino de la forma ( )a jb t at jbt ke ke e .
Por lo tanto, para lograr la condicin de estabilidad absoluta (1.10) todos los trminos en(1.11) deben tener parte real negativa, es decir
0kp R e (1.12)
Lo anterior se consigue si los polos de ( )H sse ubican en el semiplano izquierdo (SPI) del
plano-s. La expresin algebraica que permite evaluar los polos del sistema se reconoce
como la ecuacin caractersticay se obtiene a partir del denominador de la FT.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
24/71
1-24 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
EJEMPLO 1.4: Evaluar la estabilidad del sistema LIT del ejemplo 1.3, donde
2
5( )
3 2H s
s s
Solucin: Para evaluar los polos de ( )H sdebemos resolver la ecuacin caracterstica:
23 2 0s s
El resultado es 1 21, 2p p , que se ubican en el semiplano izquierdo (SPI)del plano-s y por lo tanto el sistema es absolutamente estable. Tambin es
posible evaluar la estabilidad a partir de la respuesta impulso ( )h t, que
corresponde a la TIL de ( )H s. Utilizando el resultado del ejemplo 1.2:
2( ) 5 5 , 0t th t e e t
Considerando que ( )h ten (1.10) es real
2 20 0
0 0
( ) 5 5 5 5 2.5t t t t
h t dt e e dt e e
El resultado anterior se puede verificar utilizando MATLAB:
pk=r oot s( [ 1 3 2] )
pk = - 2 - 1
syms t , ht =5*exp( - t ) - 5*exp( - 2*t ) ; Sh=i nt ( abs( ht ) , 0, i nf )
Sh = 5/ 2
Propiedades de la func in de transferencia
El anlisis anterior nos permite enumerar las siguientes propiedades de la funcin de
transferencia (FT) cuando se utiliza para modelar un sistema LIT:
P1.La FT es la transformada de Laplace de la respuesta impulso de un sistema LIT.
P2.Es posible obtener la ED del sistema LIT a partir de su FT, aplicando la propiedad
de derivacin de la transformada de Laplace, asumiendo condiciones iniciales cero.
P3.Los componentes de un sistema de control pueden ser modelados por una FT
obtenida a partir de su ED, asumiendo condiciones iniciales cero.
Aplicando la propiedad P3 al esquema de la figura 1.10, obtenemos el modelo del sistema
de control de lazo cerradomostrado en la figura 1.22.
Estabilidad a
partir de la FT y
la respuesta
impulso.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
25/71
1.4 FUNCIN DE TRANSFERENCIA Y RESPUESTA IMPULSO 1-25
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Los componentes de este modelo son:
( )c
G s: FT del controlador o compensador, segn el modo de control utilizado.
( )pG s: FT del proceso o planta.
( )H s: FT del sistema de medicin y transmisin.
La figura 1.22 constituye la base de la teora de diagramas de bloque, cuyos fundamentos
sern presentados en la seccin 1.5. Las seales que intervienen en este modelo son:
( )Y s: variable controlada. Establece el propsito del sistema de control.
( )B s: seal de realimentacin. Es una medida de la variable controlada.
( )R s: seal de referencia, setpoint o valor deseado de la variable controlada.
( ):E s seal de error. Es una medida de las desviaciones de la variable controlada.
( )M s: accin de control. Calculada en funcin de la seal de error.
En algunas aplicaciones prcticas ( ) 1H s y se refiere como un sistema de control conrealimentacin unitariasimplemente de lazo cerrado unitario.
EJEMPLO 1.5: Obtener la ED del proceso del sistema de control de lazo cerrado de la
figura 1.22, asumiendo que su FT es:
2
3 2 ( )( )
2 5 ( )p
s Y sG s
s s M s
Solucin: Utilizando descomposicin directa de la FT, obtenemos
2( 2 5) ( ) (3 2) ( )s s Y s s M s
Como el concepto de FT implica que el sistema est en reposo, aplicamos la
propiedad de la derivada, llevamos la expresin anterior al dominio-t,
asumiendo condiciones iniciales cero:
2
2 2 5 ( ) 3 2 ( )
d y dy dm y t m t
dt dt dt
que es la ED del proceso del sistema de control de lazo cerrado.
Figura 1.22Componentes de unsistema de control
de lazo cerrado.
+( )c
G s( )R s ( )M s
( )pG s( )Y s
( )H s
( )E s
( )B s
ED asociada
con una FT.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
26/71
1.5 FUNCION DE MATLABEN SISTEMAS DE CONTROL 1 - 26
1 - 26
1.5 FUNCIONES DE MATLABEN SISTEMAS DE CONTROL
Utilizando una estrategia similar a la del ejemplo 1.5, podra obtenerse la ED a partir de la
FT de cada componente del esquema de control de lazo cerrado de la figura 1.22. Sin
embargo, es conveniente revisar antes los comandos y funciones que ofrece MATLAB
parala representacin y manipulacin algebraica de una funcin racional de variable compleja
( )G s, las cuales se incluyen como parte del Toolbox de Control [MWorks92].
Creacin de objetos LIT
La versin 4.2 del Toolbox de Control (TBC) de MATLAB incorpora el uso de objetos
para la creacin de modelos de sistemas LIT. Se trata de una estructura basada en arreglos
de celdas, que permite encapsular en una sola variable diferentes tipos de datos de un
modelo continuo o discreto. Existen tres tipos de objeto LIT [Hanselman97]:
- tipo TF: modelo de FT representada por la relacin de dos polinomios.
- tipo ZPK: modelo de FT en forma de factores de polos, ceros y constante de ganancia.
- tipo SS: modelo de estado (ME).
Estos tres tipos de objetos LIT pueden crearse usando las siguientes funciones:
Gs=t f ( nGs, dGs)
donde nGsy dGsson arreglos del polinomio del numerador y denominador de ( )G s.
Gs=zpk(z, p, k)
donde zy pson arreglos de los ceros y polos; el escalar kes la constante de ganancia de ( )G s. meC=ss( A, B, C, D)
donde A, B, C, Dson arreglos correspondientes a las matrices del modelo de estado.
Recuperacin de datos en objetos LIT
Una vez creado el objeto LIT en cualquiera de las tres formas anteriores, es posible obtener
los datos asociados con cada una, utilizando las siguientes funciones:
[ num, den] =t f dat a( sys, ' v' )
Devuelve el polinomio del numerador y denominador de la forma TF del objeto sys.
[ z, p, k] =zpkdat a( sys, ' v' )
Devuelve los ceros, polos y constante de ganancia de la forma ZPK del objeto sys.
[ a, b, c, d] =ssdat a( sys)
Devuelve las matrices del modelo de estado de la forma SS del objeto sys.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
27/71
1.5 FUNCIONES DE MATLABEN SISTEMAS DE CONTROL 1-27
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
El siguiente ejemplo muestra el uso de estas funciones para el desarrollo del modelo de un
sistema continuo LIT tipo SISO. En el captulo 5 se presentarn las variantes de estas
funciones para la creacin de objetos discretos LIT. El tutorial de MATLABdel apndice D
incluye el uso de estas y otras funciones de objetos tipo MIMO.
EJEMPLO 1.6: Obtener los objetos LIT de un sistema SISO cuya FT viene dada por:
3 2
2 3( )
2 5
sG s
s s s
Solucin: Para crear ( )G scomo objeto en la forma TF,
num=[ 2 3] ; den=[ 1 2 5 0] ; G1s=t f ( num, den)
Tr ansf er f unct i on:
2 s + 3
- - - - - - - - - - - - - - - - -s 3 + 2 s 2 + 5 s
Para crear ( )G sen la forma ZPK, calculamos los polos y ceros de ( )G s, como
las races del polinomio del numerador y denominador
z=r oot s( num) ; p=r oot s( den) ; k=2; G2s=zpk(z, p, k)
Zer o/ pol e/ gai n:
2 ( s+1. 5)- - - - - - - - - - - - - - - -s ( s 2 + 2s + 5)
El resultado anterior muestra que las funciones tf()y zpk()crean modelos de
funcin de transferencia, que son equivalentes. La diferencia est en que la
forma TF representa a ( )G scomo la relacin de dos polinomios, mientras que
la forma ZPK lo hace en forma factorizada asociada con sus ceros, polos y
constante de ganancia. Cuando los polos o ceros son complejos conjugados la
forma ZPK incluye un polinomio de orden-2. La creacin de modelos de estado
como objetos LIT en la forma SS ser tratada en el captulo 7.
Una vez creado un objeto de FT es posible cambiarlo a cualquiera de las dos
formas de FT, aplicando la misma funcin utilizada para la creacin. Por
ejemplo, a partir del modelo TF obtenemos el modelo ZPK como
G2sm=zpk( G1s)
Zer o/ pol e/ gai n:2 ( s+1. 5)
- - - - - - - - - - - - - - - -s ( s 2 + 2s + 5)
Objetos LIT en
las forma TF,
ZPK y SS.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
28/71
1-28 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
De modo similar, a partir de la forma ZPK, obtenemos
G1sm=t f ( G2s)
Tr ansf er f unct i on:
2 s + 3
- - - - - - - - - - - - - - - - -
s 3 + 2 s 2 + 5 s
Como era de esperar, se obtiene el mismo resultado. Para la recuperacin de
datos asociados con las formas TF y ZPK
[ nGs, dGs] =t f dat a(G1s, ' v' )
nGs = 0 0 2 3dGs = 1 2 5 0
Para los datos de la forma ZPK
[ z, p, k]=zpkdat a( G2s, ' v' )
z = p = k =
- 1. 5000 0 2- 1. 0000 + 2. 000i- 1. 0000 2. 000i
Es posible obtener datos de la forma TF a partir de la forma ZPK
[ num, den] =t f dat a( G2s, ' v' )
num = 0 0 2 3den = 1 2 5 0
o datos de la forma ZPK a partir de la forma TF
[ zm, pm, km] =zpkdat a( G1s, ' v' )
zm = pm = k =- 1. 5000 0 2
- 1. 0000 + 2. 0000i- 1. 0000 - 2. 0000i
Utilizando la funcin pzmap() del TBC, es posible capturar directamente los
polos y ceros de una FT creada como objeto TF o ZPK:
[ p1, z1] =pzmap( G1s) %a part i r de f or ma TF
p1 = z1 =
0 - 1. 5000- 1. 0000 + 2. 0000i- 1. 0000 - 2. 0000i
[ p2, z2] =pzmap( G2s) %a part i r de f or ma ZPK
p1 = z1 =0 - 1. 5000
- 1. 0000 + 2. 0000i- 1. 0000 - 2. 0000i
-
7/26/2019 Modelos Matemticos de Sistemas de Control
29/71
1.5 FUNCIONES DE MATLABEN SISTEMAS DE CONTROL 1-29
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Comentarios:
1. Las funciones tf() y zpk() devuelven modelos equivalentes de funcin de
transferencia en las formas TF y ZPK. Estas mismas funciones pueden utilizarse para
cambiar de una forma a otra.
2. Para recuperar datos de las formas TF y ZPK es necesario usar la cadena 'v'paraindicar que se requieren los valores guardados como arreglo de celdas.
3. Aunque los modelos de FT creados en estas formas son equivalentes, el modelo ZPK
ofrece mejor precisin numrica.
4. En operaciones con objetos LIT existe un orden de precedencia: SS ZP TF(ver ejemplo 1.7). Lo anterior implica que si se combinan dos modelos en forma TF y
ZPK, el resultado se dar en la forma ZPK.
5. Existen otras funciones del TBC, asociadas con objetos LIT que sern incorporadas a
medida que sean requeridas.
Ms detalles sobre el uso de las funciones tf(), zpk() y ss()pueden conseguirse en el
Tutorial de MATLABque se presenta en el apndice D.
1.6 DIAGRAMAS DE BLOQUE Y GRAFICO DE FLUJO DE SEALES
En la figura 1.22 se utiliz el concepto de funcin de transferencia (FT) para representar
cada componente del sistema de control de lazo cerrado, en forma de bloques funcionales
entrada salida. En esta seccin se utilizarn los conceptos de diagrama de bloques(DB)
y grfico de flujo de seales (GFS) para desarrollar el modelo grfico del sistema decontrol. Aplicando lafrmula de ganancia de Mason(FGM) al GFS, ser posible evaluar la
funcin de transferencia equivalentede lazo cerrado de un sistema de control.
Elementos del diagrama de bloques
La figura 1.23 muestra los elementos utilizados en la construccin de un diagrama de
bloques(DB), donde la FT se utiliza para representar la gananciade cada bloque.
Usando estos 3 elementos bsicos se construy el diagrama del sistema de control de lazo
cerrado de la figura 1.22.
( )Y s( )G s
( )X s
( )X s
( )Y s
( ) ( )X s Y s
+
( )X s ( )X s
( )X sBloque de ganancia
Sumador Derivacin o toma
Figura 1.23Elementos de undiagrama debloques.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
30/71
1-30 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Aunque existe un conjunto de reglas algebraicas [Dorf05] que pueden aplicarse para
simplificar un diagrama de bloques (DB), como se demostrar posteriormente es ms
prctico hacerlo usando la frmula de ganancia de Mason (FGM). Sin embargo, tres de
estas reglas son de utilidad en la manipulacin de DB aplicados a sistemas de control y se
describen a continuacin:
R1. Bloques en serie o en cascada:
La figura 1.24 muestra dos bloques conectados en serie o en cascada, los cuales
pueden reducirse a un bloque equivalente, como el producto de sus ganancias.
Para obtener la FT equivalente, formulamos la relacin entrada salida del segundobloque como: 2( ) ( ) ( )Y s G s M s . De modo similar, en el primer bloque obtenemos:
1( ) ( ) ( )M s G s X s . Sustituyendo ( )M sen la expresin anterior:
2 1( ) ( ) ( ) ( ) ( ) ( )eY s G s G s X s G s X s
donde,
2 1( ) ( ) ( )eG s G s G s (1.13)
es la ganancia oFT equivalentemostrada en la figura 1.23. Si se trata de un sistemaSISO, los valores de 1( )G sy 2( )G sson escalares y el orden del producto no afecta el
resultado de (1.13).
R2. Bloques en paralelo:
La figura 1.25 muestra dos bloques conectados en paralelo, que pueden reducirse a un
equivalente, como la suma de sus ganancias.
Para desarrollar la expresin equivalente, calculamos la salida de cada bloque como
1 1( ) ( ) ( )Y s G s X s y 2 2( ) ( ) ( )Y s G s X s . Sumando estas dos seales, la salida ( )Y ses
( )Y s
2 1( ) ( )G s G s
( )X sFigura 1.24Reduccin debloques en serie oen cascada.
1( )G s
( )Y s( )X s
2( )G s( )M s
Figura 1.25Reduccin debloques enparalelo.
1( )G s
( )Y s( )X s
2( )G s
+
( )Y s1 2( ) ( )G s G s ( )X s
-
7/26/2019 Modelos Matemticos de Sistemas de Control
31/71
1.6 DIAGRAMAS DE BLOQUE Y GRFICO DE FLUJO DE SEALES 1-31
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
1 2 1 2( ) ( ) ( ) ( ) ( ) ( ) ( )Y s Y s Y s G s X s G s X s
Finalmente, factorizando ( )X s
1 2( ) ( ) ( )eG s G s G s (1.14)
que es la ganancia oFT equivalentemostrada en la figura 1.25.
R3. Bloques en realimentacin:
La figura 1.26 muestra la conexin de dos bloques en realimentacin, conocida como
forma cannica de lazo cerrado, por su similitud con el modelo del sistema de control
en lazo cerrado de la figura 1.22.
Para conseguir la expresin equivalente, calculamos la salida como
( ) ( ) ( )Y s G s E s
Por otro lado, la seal ( )E spuede expresarse como
( ) ( ) ( ) ( ) ( ) ( )E s R s B s R s H s Y s
Sustituyendo en la expresin anterior
( ) ( ) ( ) ( ) ( )Y s G s R s H s Y s
Reagrupando trminos y simplificando
( )( ) ( )
1 ( ) ( )
G sY s R s
G s H s
(1.15)
Por lo tanto
( )( )
1 ( ) ( )e
G sG s
G s H s
(1.16)
que es la gananciao FT equivalentemostrada en la figura 1.26.
Como el signo del sumador de la figura 1.26 es negativo, se refiere como realimentacin
negativa. Si el signo de ( )B s en la figura 1.26 es positivo, el denominador de (1.16) se
convierte en 1 ( ) ( )G s H s y se refiere como realimentacin positiva. Sin embargo, como sedemuestra ms adelante, en aplicaciones prcticas de control la realimentacin positiva
genera inestabilidad en el sistema y por lo tanto no es de inters prctico.
Figura 1.26FT equivalente dela forma cannicade lazo cerrado.
( )Y s( )
1 ( ) ( )
G s
G s H s
( )R s
( )G s( )Y s( )R s
( )H s
+ ( )E s
( )B s
-
7/26/2019 Modelos Matemticos de Sistemas de Control
32/71
1-32 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Funcin de transferencia de lazo abierto y de lazo cerrado
Asociadas con la forma cannica de la figura 1.26, se definen dos expresiones que son
fundamentales en el anlisis y diseo de un sistema de control realimentado (feedback). La
primera se reconoce como lafuncin de transferencia de lazo cerrado(FTLC): ( )T s, que
permite establecer la relacin ( ) ( )R s Y s y puede obtenerse aplicando (1.16). Para elcaso de realimentacin negativa, obtenemos
( ) ( )( )
( ) 1 ( ) ( )
Y s G s T s
R s G s H s
(1.17)
La segunda es la funcin de transferencia de lazo abierto (FTLA): ( )F s, utilizada para
formular la relacin ( ) ( )E s B s , como
( )( ) ( ) ( )
( )
B sF s G s H s
E s
(1.18)
Tomando el denominador de (1.17) es posible identificar la ecuacin caracterstica (EC)
del sistema de control modelado por laforma cannica, como
1 ( ) ( ) 0G s H s (1.19)
De acuerdo con (1.12) la estabilidad absoluta del sistema de control se logra si las races de
esta ecuacin estn en el semi-plano izquierdo (SPI) del plano-s.
EJEMPLO 1.7: Aplicando las reglas bsicas del lgebra de bloques, reducir el siguiente
diagrama de bloques a laforma cannicade lazo cerrado y a partir de este
obtener la FTLA y FTLC. Evaluar adems su estabilidad.
1
1( )
2
sG s
s
2( )
1
sG s
s
1( ) 2H s
2
1( )H s
s
Solucin: Para el lazo de realimentacin2 2( ) ( )G s H saplicamos (1.16)
23
2 2
( )( )
1 ( ) ( )
G sG s
G s H s
Simplificacin
del DB para
calcular la
FTLA, FTLC y
EC en la forma
cannica.
2( )G s
2( )H s
1( )H s
+ +1( )G s
-
7/26/2019 Modelos Matemticos de Sistemas de Control
33/71
1.6 DIAGRAMAS DE BLOQUE Y GRFICO DE FLUJO DE SEALES 1-33
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Utilizando los datos del enunciado
2
31( )
1 ( 1) 21
1
s
s ssG ss s s s s
s s
Este resultado puede verificarse usando objetos LIT de MATLAB
G1s=t f ( [ 1 1] , [ 1 2] ) ; G2s=zpk(0, - 1, 1) ; H1s=2; H2s=t f ( 1, [ 1 0] ) ; G3s=mi nreal ( G2s/ ( 1+G2s*H2s) )
Zer o/ pol e/ gai n:s
- - - - -( s+2)
Para los bloques en cascada 1( )G sy 3( )G saplicamos (1.13)
4 1 3 2
1 ( 1)( ) ( ) ( )
2 2 ( 2)
s s s s G s G s G s
s s s
Utilizando objetos LTI de MATLAB
G4s=mi nreal ( G1s*G3s)
Zer o/ pol e/ gai n:s ( s+1)- - - - - - -( s+2) 2
Luego, el diagrama anterior se reduce a la siguiente forma estndar
2
( 1)( )
( 2)
s sG s
s
( ) 2H s
Aplicando (1.17) obtenemos la FTLC como
forma TF forma ZPK
22
2 2
2
1 1 13 3 3
4 43 3
( 1)
( 1)( ) ( 2)( )( 1)1 ( ) ( ) 2 2
1 2( 2)
s s
s s s s G s sT ss sG s H s s s s s
s
La forma ZPK muestra el denominador como un polinomio de orden-2, lo cual
permite identificar que los polos de ( )T s son complejos conjugados. Usando
objetos LTI de MATLAB:
2
+2
( 1)
( 2)
s s
s
-
7/26/2019 Modelos Matemticos de Sistemas de Control
34/71
1-34 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Gs=G4s, Hs=H1s, Ts=f eedback( Gs, Hs)
Zer o/ pol e/ gai n:0. 33333 s ( s+1)
- - - - - - - - - - - - - - - - - -( s 2 + 2s + 1. 333)
Aunque la expresin de ( )T spuede calcularse usando operaciones con objetos
LIT, tal como se hizo al evaluar a3( )G s, el TBC incluye la funcin
feedback()que facilita el clculo directo de la FTLC, a partir de ( )G sy ( )H s
correspondientes a laforma cannicade lazo cerrado.
Aplicando (1.18), la FTLA es
2 2
( 1) 2 ( 1)( ) ( ) ( ) 2
( 2) ( 2)
s s s s F s G s H s
s s
La ecuacin caracterstica(EC) necesaria para evaluar la estabilidad es
22
2 2
2 ( 1) ( 2) 2 ( 1)1 0 3 6 4 0
( 2) ( 2)
s s s s s s s
s s
que corresponde al denominador de ( )T s. Calculando sus races, los polos del
sistema en lazo cerrado son: 1,2 1 0.5774p j . Como se encuentran en el SPI,el sistema es absolutamente estable.
Utilizando MATLAB:
pk=pol e(Ts)pk = - 1. 0000 + 0. 5774i
- 1. 0000 0. 5774i
Comentarios:
1. En el ejemplo anterior las funciones1( )G sy
2( )H sse crearon como objetos LIT en
la forma TF, mientras que2( )G sse cre en la forma ZPK.
2. Sin embargo, al combinar estos objetos para obtener 3( )G saparece en la forma ZPK,
como consecuencia del orden de precedenciaen las operaciones con objetos.3. La funcin minreal() del TBC se utiliza para simplificar en un resultado, los
factores comunes del numerador y denominador.
4. En aplicaciones prcticas es conveniente usar la funcin feedback()para evaluar la
funcin de transferencia de lazo cerrado correspondiente a laforma cannica.
5. La funcin pole()del TBC permite calcular los polos de una FT. En el ejemplo 1.7
se utiliz para calcular las races de la ecuacin caracterstica, a partir de la FTLC.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
35/71
1.6 DIAGRAMAS DE BLOQUE Y GRFICO DE FLUJO DE SEALES 1-35
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Fundamentos del grfico de flujo de seales
Una forma prctica para evaluar la FTLC de un sistema que incluye varios lazos de control,
sin necesidad de reducirlo a la forma cannica, consiste en utilizar el grfico de flujo de
seales (GFS), introducido por S.J. Mason en 1953 para la representacin causaefectode un sistema LIT modelado a travs de ecuaciones algebraicas. El GFS es un modelo
grficode la funcin de transferencia de un sistema LIT y puede considerarse como una
versin simplificadadel diagrama de bloques (DB) presentado en el prrafo anterior.
El GFS est asociado a un DB y utiliza los 3 elementos mostrados en la figura 1.27, donde
las seales se representan mediante nodos interconectados por ramas orientadas. A cada
rama se le asigna la ganancia G correspondiente a la FT del bloque. Esta ganancia se
reconoce como la transmitanciade la rama, para indicar que la seal ( )X ses transmitida
desde un nodo hacia otro nodo, para crear la seal ( )Y s.
Un nodo se considera como un sumideroo depsito en el cual se guarda el valor de una
seal. El propsito del GFS es formular una ecuacin en el dominio-spara expresar la seal
en un nodo cualquiera, como relacin causaefectoo entradasalida: ( ) ( )X s Y s De este modo, se logra un conjunto de ecuaciones estndarde la forma
( ) ( ) ( )j jk kY s G s X s (1.20)
donde ( )jkG ses la gananciao transmitanciaentre un nodo de entrada ( )kX sy un nodo de
salida ( )jY s. En este sentido, en un GFS se identifican 3 tipos de nodos:
Nodo de entrada: solo transmite seales; solo pueden existir ramas que salen.
Nodo de salida: solo recibe seales; a este nodo solo pueden llegar ramas.
Nodo mixto: recibe y transmite seales; pueden existir ramas entrando y saliendo.
Al recorrer un GFS entre un par de nodos en el sentido de sus ramas, es posible identificar
los siguientes elementos:
Trayectoria directa: trayectoria abierta desde un nodo de entrada hasta un nodo de
salida, sin pasar por un nodo ms de una vez. El producto de las
( )Y s( )X s G( ) ( )X s Y s
1
( )X s
( )Y s
( )X s
( )X s
( )X s
Figura 1.27Elementos de ungrfico de flujo deseales.
Ganancia
Sumador Derivacin o toma
-
7/26/2019 Modelos Matemticos de Sistemas de Control
36/71
1-36 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
ganancias de las ramas recorridas establece la ganancia de la
trayectoria directa.
Lazo: trayectoria cerrada que inicia y termina en el mismo nodo, sin pasar por un nodo
ms de una vez. El producto de las ganancias de las ramas recorridas establece la
ganancia del lazo.
Trayectorias conexas: trayectorias directas o lazos que se tocan o que tienen un
elemento en comn (nodo o rama).
La figura 1.28 muestra un ejemplo tpico de un GFS utilizado para formular la relacin
( ) ( )R s Y s , donde existe un nodo de entrada: ( )R s, un nodo de salida: ( )Y sy 4 nodosmixtos:
1( )E s,
2( )E s,
3( )E s,
4( )E s.
As mismo se identifican los siguientes elementos:
2 trayectorias directas para la relacin ( ) ( )R s Y s : 1 1 2 3 4T G G G G , 2 4 5T G G 2 lazos:
1 1 1L G H , 2 2L H
En cuanto a la relacin entre lazos y trayectorias, se observa que:
Los lazos 1L y 2L no son conexos.La trayectoria 1Tes conexacon los 2 lazos.
La trayectoria 2Tes conexasolo con 1L .
Estas caractersticas son indispensables al aplicar la frmula de ganancia de Mason.
Frmula de ganancia de Mason
Esta frmula o algoritmo fue desarrollada por S. J. Mason en el ao 1956 como parte de un
procedimiento grfico para determinar la funcin de transferencia (FT) entre un nodo de
entrada y un nodo de salida, de un grfico de flujo de seales (GFS) o de su diagrama debloques (DS) equivalente. La base de este algoritmo es la regla de Crammer, utilizada para
resolver un sistema simultneo de ecuaciones algebraicas.
Asumiendo un sistema continuo LIT, la frmula de ganancia de Mason (FGM) permite
calcular la ganancia entre un nodo de entraday un nodo de salidacomo:
1G( )R s
1H
2G1E 2E 3G
2H
3E 4E ( )Y s
5G
4G
Figura 1.28Ejemplo tpico deun grfico de flujode seales.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
37/71
1.6 DIAGRAMAS DE BLOQUE Y GRFICO DE FLUJO DE SEALES 1-37
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
1
( ) ( )( )
( )( ) ( )
NTD
k k
k
T s sY s
T sX s s
(1.21)
donde:
( )T s ganancia o FT equivalente para la relacin ( ) ( )X s Y s .( )s determinante del sistema, asociado con los lazos del GFS.( )
kT s ganancia de trayectorias directaspara la relacin ( ) ( )X s Y s .
( )ks cofactorde cada trayectoria directa, evaluado a partir de ( )s .
Para facilitar la aplicacin de la FGM, se recomienda seguir un orden especfico al evaluar
los trminos que conforman la ecuacin (1.21), usando el siguiente procedimiento:
1. Obtener el determinante del sistema: ( )s , como:
2 3( ) 1 i i is L L L (1.22)donde
iL representa la ganancia de los lazos simples(cada lazo); 2iL la ganancia de los
lazos no conexosen grupos de2;3iL la ganancia de los lazos no conexos en grupos de
3, y as sucesivamente. Como el determinante ( )s solo depende de los lazos del GFS,se convierte en un valornico del grafo, independiente del par de nodos entrada-salida
considerados al aplicar (1.21).
2. Calcular la ganancia de las trayectorias directas: ( )k
T s.
Las trayectorias directas dependen nicamente de la relacin ( ) ( )X s Y s para la cual
se quiere calcular la FT, aplicando (1.21). Se obtienen recorriendo el grafo desde el nodo
de entrada ( )X shasta el nodo de salida ( )Y s.
3.Evaluar los cofactores asociados con cada trayectoria directa: ( )ks .
El cofactor de una trayectoria directa se obtiene anulando en el determinante del sistema
( )s , la ganancia de los lazos conexos con dicha trayectoria.
El siguiente ejemplo muestra la aplicacin de la FGM para determinar la ganancia o FT
equivalente del modelo grfico de un sistema continuo LIT, utilizando el procedimiento
anterior.
EJEMPLO 1.8: Aplicar la FGM para obtener la ganancia o FT equivalente del sistema
continuo LIT cuyo modelo grfico se muestra en la figura 1.28.
Solucin: Aplicando el procedimiento anterior, obtenemos
1.Determinante del sistema:
FGM para
calcular
ganancia
equivalente.
-
7/26/2019 Modelos Matemticos de Sistemas de Control
38/71
1-38 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
Existen 2 lazos cuyas ganancias son 1 1 1L G H y 2 2L H . Como no sonconexos, conforman un grupo de 2 cuya ganancia es
1 2 1 1 2L L G H H . Por lo
tanto, aplicando (1.22), obtenemos
1 2 1 2 1 1 2 1 1 2( ) 1 ( ) 1s L L L L G H H G H H 2. Trayectorias directas:
Para la relacin ( ) ( )R s Y s existen 2 trayectorias directas con ganancias:
1 1 2 3 4T G G G G
2 4 5T G G
3. Cofactores de trayectorias directas:
La trayectoria1
T es conexa con los 2 lazos; para obtener su cofactor
anulamos 1L y 2L en ( )s , obteniendo 1( ) 1s . Por otro lado, como latrayectoria
2T es conexa solo con
1L debemos anular este lazo en ( )s ,
obteniendo 2 2 2( ) 1 1s L H .
4. Ganancia equivalente:aplicando la FGM (1.21)
1 1 2 2 1 2 3 4 4 5 2
1 1 2 1 1 2
(1 )( )
1
T T G G G G G G H T s
G H H G H H
Estabilidad a partir de la FGM
Adems de facilitar el clculo de la FT de un sistema de control con mltiples lazos decontrol, la FGM permite evaluar su estabilidad, si se considera que los polos de ( )T sen la
expresin (1.21), se pueden obtener a partir de las races del denominador, como
( ) 0s (1.23)
De este modo la expresin (1.23) es la ecuacin caractersticade un sistema de control que
utiliza un esquema arbitrario. La ecuacin (1.19) es un caso particular que solo puede ser
aplicado a un sistema cuyo esquema corresponde a laforma cannicade la figura 1.25.
Del diagrama de bloques al grfico de flujo de seales
Como se mencion anteriormente la FGM puede aplicarse a un diagrama de bloques (DB).
Sin embargo, es ms fcil identificar lazos y trayectorias en el GFS. Para lograr un GFS
con el nmero mnimo de nodos, es conveniente tomar en cuenta las siguientes sugerencias:
- identificar y dar nombre en el DB, a todas las seales de entrada a cada bloque
(podra trabajarse con las seales de salida. Ver ejemplo 1.16.).
-
7/26/2019 Modelos Matemticos de Sistemas de Control
39/71
1.6 DIAGRAMAS DE BLOQUE Y GRFICO DE FLUJO DE SEALES 1-39
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
- seleccionar el nmero mnimo de nodos igual al nmero de seales anteriores, ms
las seales de entrada y salida del sistema.
- desarrollar el GFS a partir de las relaciones algebraicas causa efecto del DB.
EJEMPLO 1.9: Aplicar la FGM para obtener FTLC del sistema del ejemplo 1.7.
Solucin: Antes de utilizar la FGM desarrollamos el GFS, a partir del DB. Utilizando la
sugerencia anterior, el nmero mnimo de nodos:
- seales de entrada y salida del sistema: ( )R s, ( )Y s
- seales de entrada a cada bloque: , ,1 2( ) ( ) ( )E s E s Y s
No. mnimo de nodos 2 2 4
Usando estos 4nodos desarrollamos el GFS considerando las relaciones causa
efecto del DB.
Aplicando el procedimiento propuesto para la relacin ( ) ( )R s Y s :
1.Determinante del sistema.
Dos lazos simples:1 2 2L G H y
2 1 2 1L G G H
No existen grupos no conexos.
Aplicando (1.22), obtenemos
1 2 2 2 1 2 1( ) 1 ( ) 1s L L G H G G H
2. Trayectorias directas.Una trayectoria directa para la relacin ( ) ( )R s Y s :
1 1 2T G G
GFS a partir
del DB y FGM
para calcular
FTLC. 2( )G s
2( )H s
1( )H s
+ +1( )G s
( )R s 1( )E s 2( )E s ( )Y s
2H
1G( )R s 2G1( )E s 2( )E s ( )Y s
1H
-
7/26/2019 Modelos Matemticos de Sistemas de Control
40/71
1-40 Captulo 1 FUNDAMENTOS Y MODELOS MATEMTICOS DE SISTEMAS DE CONTROL
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
3. Cofactores de trayectorias directas.
1Tes conexa con
1L y
2L , luego
1 1
4. Ganancia o FT equivalente.
1 1 1 2
2 2 1 2 1
( )1
T G GT s
G H G G H
Sustituyendo los datos del ejemplo 1.7
2
2
1
2 1 2( )1 1 1 2 3 6 4
1 2 11 2 1 1 2
s s s
s ss s sT ss s s s s s
s s s s s s
Utilizando MATLAB
G1s=t f ( [ 1 1] , [ 1 2] ) ; G2s=zpk(0, - 1, 1) ; H1s=2; H2s=t f ( 1, [ 1 0] ) ; Ts=mi nreal ( G1s*G2s/ ( 1+G2s*H2s+G1s*G2s*H1s) )
Zer o/ pol e/ gai n:0. 33333 s ( s+1)
- - - - - - - - - - - - - - - - - -( s 2 + 2s + 1. 333)
que corresponde a la forma ZPK del resultado que se obtuvo usando la FGM.
EJEMPLO 1.10: Obtener el GFS del sistema continuo LIT cuyo DB se muestra a
continuacin y aplicar la FGM para obtener la ganancia o FT equivalente
de lazo cerrado.
Solucin: Para determinar el nmero mnimo de nodos:
- seales de entrada y salida del sistema: ( )R s, ( )Y s
- seales de entrada a cada bloque:1( )E s,
2( )E s,
3( )E s,
4( )E s
GFS a partir de
un DB y FGM
para calcular
FT equivalente
de lazo cerrado.
2E
2H
+
1G 2G 3G 4G( )Y s
4E3E1E( )R s +
1H
3H
++
5G
1Y
-
7/26/2019 Modelos Matemticos de Sistemas de Control
41/71
1.6 DIAGRAMAS DE BLOQUE Y GRFICO DE FLUJO DE SEALES 1-41
ANALISIS Y DISEO DE SISTEMAS DE CONTROL CON APLICACIONES EN MATLAB Carlos Alberto Rey Soto - 2009
No. mnimo de nodos 2 4 6
Utilizando estos 6 nodos desarrollamos el GFS considerando las relaciones
causa efecto del DB.
Se observa que no es necesario incluir el nodo1( )Y sdel DB en el GFS, dado
que es la seal de salida del bloque 3G, se evalu como 1 3 3Y G E .
Aplicando el procedimiento propuesto para la relacin ( ) ( )R s Y s :
1.Determinante del sistema.
3 lazos simples:1 1 1
L G H ,2 1 2 3 2L G G G H y
3 3 3L G H
1 grupo de 2 no conexos: 1 3 1 3 1 3L L G G H H
Aplicando (1.22), obtenemos
1 2 3 1 3 1 1 1 2 3 2 3 3 1 3 1 3( ) 1 ( ) 1s L L L L L G H G G G H G H G G H H
2. Trayectorias directas.
2 trayectorias directas para la relacin ( ) ( )R s Y s :
y1 1 2 3 4 2 1 4 5
T G G G G T G G G
3. Cofactores de trayectorias directas.
1Tes conexa con
1L ,
2L y
3L , luego
1 1
2Tes conexa con 1L y 2L , luego 2 3 31G H
4. Ganancia o FT equivalente.
1 2 3 4 1 4 5 3 3
1 1 1 2 3 2 3 3 1 3 1 3
(1 )( )
1
G G G G G G G G HT s
G H