motores de indução
20
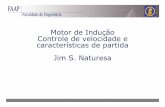
I -MOTOR DE INDUÇÃO TRIFÁSICO: Motor de Indução - vista interior Figura 1:Vista interior do motor Fonte: Manuais WEG I) ROTOR: 3-Núcleo formado de chapas laminadas; 12- Anéis interligagos por ranhuras inclinadas em relação ao eixo e isoladas do núcleo; 11-Rolamentos; 7- Eixo ; 5-Ventilador para aumentar a refrigeração. II) ESTATOR: 4- Carcaça com tampas laterais; 2-Núcleo laminado; 8-Enrolamentos; 1- Suporte de fixação; 10-Terminais de entrada de energia elétrica. Tipos de Motores: Rotor - Bobinado : permite acesso aos enrolamentos rotóricos através de anéis coletores para realização de, por exemplo, controle de velocidade do motor; - Gaiola : formado por barras de cobre curto-circuitadas, imersas nas ranhuras do rotor e conectadas nas extremidades por anéis. Rotor Bobinado: Rotor de Gaiola:
-
Upload
publio-alcantara -
Category
Documents
-
view
483 -
download
5
Transcript of motores de indução

I -MOTOR DE INDUÇÃO TRIFÁSICO:
Motor de Indução - vista interior
Figura 1:Vista interior do motorFonte: Manuais WEG
I) ROTOR:3-Núcleo formado de chapas laminadas;12- Anéis interligagos por ranhuras inclinadas em relação ao eixo e isoladas do núcleo;11-Rolamentos;7- Eixo ;5-Ventilador para aumentar a refrigeração.
II) ESTATOR:4- Carcaça com tampas laterais;2-Núcleo laminado;8-Enrolamentos;1- Suporte de fixação;10-Terminais de entrada de energia elétrica.
Tipos de Motores: Rotor- Bobinado: permite acesso aos enrolamentos rotóricos através de
anéiscoletores para realização de, por exemplo, controle de velocidade do
motor;- Gaiola: formado por barras de cobre curto-circuitadas, imersas nas ranhuras do rotor e conectadas nas extremidades por anéis.
Rotor Bobinado: Rotor de Gaiola:

II - PRINCÍPIO DE FUNCIONAMENTO:
As bobinas são dispostas no núcleo de modo a formar, com a tensão trifásica aplicada, um campo magnético que gira entorno do rotor, cortando as ranhuras do núcleo. A velocidade deste campo girante depende da frequência da rede elétrica e do número de pólos do rotor (P). A velocidade do campo girante, velocidade síncrona (Ns), pode ser definida por:
Velocidade Síncrona
Ns =
Velocidade síncrona em RPM e número de pólos
Frequência da rede f
Número de pólos P 60 Hz 50 Hz
2 3600 3000
4 1800 1500
6 1200 1000
8 900 750
O campo magnético girando na velocidade síncrona corta as ranhuras induzindo uma tensão no rotor, como o rotor está curto circuitado, faz-se circular uma corrente elétrica na bobina do rotor. A corrente elétrica induzida, na presença do campo

magnético faz com que as ranhuras sofram a ação de uma força, responsável pelo conjugado que faz o movimento do motor.
ESCORREGAMENTO:Para que haja indução de corrente nas bobina do núcleo do rotor, o mesmo não pode girar a mesma velocidade síncrona do campo girante. Se isto ocorresse não haveria movimento relativo entre campo e o rotor, por conseguinte, não haveria indução de corrente. A diferença de velocidade entre o campo girante (Ns) e o rotor (N) é chamada de escorregamento.
Escorregamento S
S =
Exemplo• Um motor de indução opera com freqüência de 60 Hz e possui 4 paresde pólos. A velocidade de operação, com uma dada carga é 1760 rpm.Calcule o escorregamento:
Ns = 120 x 60
4 = 1800 rpm
s = 1800−1760
1800 = 0.0222 ou 2,22% ou 0.0222 x 1800 = 40 rpm
Exercicio• Um motor de indução opera com freqüência de 50 Hz e possui 2 pares de pólos. Operando com escorregamento de 3%. Calcule a velocidade de operação em rpm.
III - Campo Magnético GiranteQuando uma bobina é percorrida por uma corrente elétrica, é criado um campo magnético dirigido conforme o eixo da bobina e de valor proporcional à corrente.

Figura 4: Resultante do Campo Magnético no motor.
IV - Circuito Equivalente do Motor de Indução
Onde:
R1 = Resistência do estator. X1 = Reatância do estator.
R2 = Resistência do rotor X2 = Reatância do rotor.

Ro = Resistência do núcleo Xm = Reatância do núcleo
S = Escorregamento
V - FLUXO DE POTÊNCIA DO MOTOR DE INDUÇÃO
Potência de Entrada: Pin = q . V. I . cosφ
Potência Perdida no Cobre do estator: Pcu1 = q . I 2. R1
Potência Transferida através do Entreferro: Pg = q . I 2. R2/s = T . ns
Potência Perdida no Cobre do rotor: Pcu2 = q . I 2. R2
Potência Mecânica Gerada: Pm = Pg ( 1 – s) = T . n
Potência Rotacional: Prot = Pat + Phc + Pfr
Pat = Perdas por atrito
Phc = Perdas por Harmônicos
Pfr = Perdas no ferro
Potência Mecânica de Saída: Pout = Pm – Prot = Tout . Wr
Tout = Torque de saída do motor
Wr = Velocidade do rotor em [rad/s]
Rendimento: η = Pout / Pin
EXEMPLO:Um motor de indução trifásico, conectado em Y, com 4 pólos, 50HP, 480V, 60Hz, temos seguintes parâmetros por fase: R1 = 0.1Ω, X1 =0.35 Ω, R2 = 0.12 Ω, X2 = 0.4 Ω. Sabe-se que as perdas no núcleo é de 1200W e as 950W. Em vazio, o motor solicita uma corrente de 19,64 (A), com fator de potência 0.089 atrasado. Quando o motor opera com um escorregamento de 2.5%. Calcule:
a) A corrente da rede, e o fator d potência;
b) O torque desenvolvido em [N.m];
c) A potência de saída em [HP];
d) O rendimento.
Exercício: Um motor trifásico, 6 pólos, 220V, está conectado em estrela, Os parâmetros do motor são, R1 = 0.128Ω, X1 =0.248 Ω, R2 = 0.0935 Ω, X2 = 0.248 Ω, Rm = 183 Ω e Xm = 8 Ω. As perdas rotacionais são iguais as perdas no ferro, para um escorregamento de 3%. Calcule:

a) A corrente da rede, e o fator d potência;
b) O torque desenvolvido em [N.m];
c) A potência de saída em [HP];
d) O rendimento.
VI - TIPOS DE ENSAIOS NO MOTOR DE INDUÇÃO
1) ENSAIO EM VAZIO
Este ensaio serve para determinar os parâmetros do ramo magnetizante do circuito equivalente.
A potência medida neste ensaio é composta de 3 componentes:
a) Perda no cobre do estator;
b) Perda no núcleo;
c) Perdas Rotacionais.
OBS: Para máquinas convencionais as perdas no núcleo e rotacionais são iguais.
Assim: Ic = (Po – q . I 2. R1 ) / 2. q. V1 e Rm = V1 / Ic
Ângulo do Fator de Potência à vazio: β = arc cos (P/√3VI)
Assim: Im = I sen β e Xm = V1/Im
2) Ensaio com Rotor Bloqueado
Serve para determinar as resistências e as reatâncias dos enrolamentos (estator e rotor).
Aplicação: Ligar o motor com tensão zero e aumentar a tensão até que circule a corrente nominal do motor, com o eixo do motor travado.
Com o eixo travado o escorregamento (s=1)
Medir : V , I, P
Obs: Como este teste é feito com tensão reduzida 10 a 20% da tensão nominal a corrente de magnetização é desprezível e as perdas no núcleo também.
Assim: Zeq = Req + Xeq
Zeq = V / √3 . I e Req = P / 3 I 2 e Xeq = √Zeq2 - Req2
Obs: Para as categorias N e D, temos:

Xe = Xr = Xeq/2
Para categoria H, temos:
Xe = 0.3 Xeq e Xr = 0.7 Xeq
Exemplo: Os seguintes testes foram executados num motor de indução, categoria N, conectados em Y, trifásico, 4 pólos, f = 60Hz, 20Hp, 550V.
Teste em vazio: V = 550V, I = 5,8A, P = 754W
Teste com rotor bloqueado: V = 123V, I = 25A, P = 2.419W
As perdas rotacionais são de 328W. Determine os parâmetros do circuito equivalente desse motor.
Exercício: Os seguintes testes foram executados num motor de indução, categoria H, conectados em Y, trifásico, 2 pólos, f = 60Hz, 50Hp, 440V.
Teste em vazio: V = 440V, I = 16,3A, P = 2157W
Teste com rotor bloqueado: V = 106V, I = 65A, P = 3423W
As perdas rotacionais são de 834W. Determine os parâmetros do circuito equivalente desse motor.
As curvas características do motor de indução trifásico, descrevem seu funcionamento, podendo ser destacadas as principais parâmetros : CONJUGADO, FATOR DE POTÊNCIA, RENDIMENTO E CORRENTE.Uma das caracterísiticas do motor de indução trifásico é que para uma determinada potência de saída, carga mecânica no eixo,teremos um correspondente rendimento, fator de potência, conjugado e corrente.
VII - CURVAS CARACTERÍSTICAS< Coloque o cursor sobre células para vizualizar >
CONJUGADO RENDIMENTO FATOR DE POTÊNCIA CORRENTE VELOCIDADE

VIII - CONJUGADO:
O conjugado descreve a força de rotação do motor, tendo como unidade o Kf.m e não tem variação constante. Podemos verificar na curva do conjugado pontos de destaque como o conjugado de partida Cp, Conjugado máximo Cmáx e conjugado nominal Cn.
Conjugado
C ( Kgf.m ) = 974,40 .
O conjugado de partida é importante para a partida do motor, apresentando valores que variam de 1,5 a 2,5 vezes o conjugado nominal. Merece destaque que na partida o conjugado resistente, da carga , não deve ser superior ao Conjugado de partida do motor, pois em contrário o motor não partirá. Pode ser demonstrado que o conjugado de partida é proporcional ao quadrado da tensão aplicada no enrolamento do estator: Cp = K. V 22 Deste modo reduzindo a tensão primária no estator de ½ reduzimos o conjugado de partida a 1/4 ,o que poderá inviabilizar a partida do motor.
Tomemos como exemplo prático o método de partida com chave estrela / triângulo (Y/D) onde partimos em Y, com redução de tensão de 57,73% . Isto significa uma redução do conjugado Cp para 1/3.Tanto a o material quanto a forma da gaiola do rotor têm papel importante na curva do conjugado e na corrente de partida. As ranhuras e barras do rotor podem ser fabricadas de diferentes formas, aumentando o conjugado de partida e reduzindo a corrente. Um dos detalhes na construção das gaiolas é a inclinação , em relação ao eixo do rotor, que melhora as condições de partida.A norma NBR7094 classifica conforme as curvas de conjugado , os motores de indução com rotor em gaiola em três categorias básicas :Categoria N : Conjugado e corrente de partida normais, com baixo escorregamento. É o conjugado

típico da maioria dos motores e suas aplicações.Categoria H : Alto conjugado de partida, corrente normal e baixo escorregamento. São os motores usados em cargas com alto conjugado de partida.Categoria D : Nesta categoria o conjugado de partida é o máximo. ë usado em cargas que exigem elevado conjugado de partida e correntes reduzida.
IX - FATOR DE POTÊNCIA:
O motor elétrico, assim como outras cargas indutivas, consome, para o seu funcionamento potência aparente, que é a soma da potência ativa e reativa. Somente a potência ativa é transformada em potência mecânica, ou seja realiza trabalho. A potência reativa serve apenas para a manutenção dos campos magnéticos no interior do motor.
O fator de potência pode ser definido como a relação entre a potência parente e a potência ativa. Deste modo quando dizemos que o fator de potência é 0,80 ; significa que 80% da potência parente é transformada em potência ativa. Outra definição seria o fator de potência é o cosseno do ângulo entre a tensão e a corrente absorvida pelo motor. Quando aumentamos o fator de potência, reduzimos a potência aparente, que é o produto da tensão e corrente ( V.I ).
Figura 7: Potência aparente (KVA) e fator de potência
As perdas ( I²x R ), perdas no cobre, são proporcionais ao quadrado da corrente e como a corrente é reduzida na razão direta da melhoria do fator de potência, as perdas são inversamente proporcionais ao quadrado do fator de potência.
Para o motor elétrico o baixo fator de potência significa corrente maior, mais perdas, mais aquecimento emenor rendimento e outras conseqüências no sistema elétrico:
I. Aumento da corrente e sobrecarga ;II. Maior queda de tensão na alimentação;III. Aumento das perdas do motor :por efeito Joule ( I²x R );IV. Maior temperatura de operação;V. Aumento da conta de energia industrial pela cobrança de reativos.
X - RENDIMENTO:
O rendimento é a relação entre a potência de saída e a potência de entrada.

n =
O motor elétrico tem como função transformar a energia elétrica no estator em energia mecânica no rotor. Nem toda energia elétrica é convertida em energia mecânica. Devido a resistência dos conduotres da armadura, do rotor e o atrito mecânico, ocorrem perdas que se tranformam em calor. A potência ( Pe ) de entrada é a soma da potência de saída ( Ps ) mais as perdas.
Pe = Ps + Perdas
As perdas são dos seguintes tipos:
Perdas elétricas devidos a correntes que circulão nos condutores da armadura e do rotor. São proporcionais ao quandro da corrente e a resistência dos enrolamentos;
Perdas no núcleo devidos às correntes que cirulam nos mesmos, histerese; Perdas por atrito nos rolametos do eixo do rotor e devido ao ventilação.
O rendimento do motor de indução varia com a carga mecânica no seu eixo, ou potência de saída. Abaixo da potência nominal o rendimento começa a reduzir de valor até ficar próximo de zero , quando o motor esta sem carga e a poteência de saída é suficiente para vencer o atrito. Veja a curva do Rendimento e Potência de saída nas características do motor.
XI - DADOS DE PLACA DO MOTOR DE INDUÇÃO
1) Tipo: [Indução (gaiola, rotor bobinado), anéis, síncrono, cc, etc)
2) Potência: [cv], [kW]
3) Número de Fases: mono ou trifásico
4) Tensão Nominal em Y e ∆ (ex: 380/220V)
5) Corrente Nominal em Y e ∆ (ex: 1.84/3.18V)
6) Frequência [Hz]

7) Rotações do rotor [rpm], ex: 1760rpm
8) Categoria N, D, H
9) Classe de Isolamento: É a temperatura limite de suportabilidade do material isolante do motor, é classificada como:
Classe A [105 graus]
Classe E [120 graus]
Classe B [130 graus]
Classe F [155 graus]
Classe H [180 graus], As classes B e F são as mais utilizadas.
10) Fator de Serviço [Fs]: É o fator que aplicado à potência nominal, indica a carga permissível que pode ser aplicada continuamente ao motor.
Exemplo: Fs = 1.15, indica que o motor pode trabalhar com 15% de sobrecarga.
11) Regime de Serviço: Varia de S1 à S10, indica o grau de regularidade da carga que o motor é submetido. Exemplo:
S1 = Funcionamento com carga constante de duração suficiente para atingir o equilíbrio térmico.
À
S10 = Regime com cargas constantes distintas.
12) Grau de Proteção
A norma NBR-6146 define os graus de proteção dos equipamentos elétricos por meio das letras características IP:
1 LETRA: Proteção contra penetração de corpos sólidos.
2 LETRA: Proteção penetração de água.
Exemplo:
IP22 [Proteção contra corpos sólidos acima de 12mm e contra pingos de água com inclinação de 15 graus]
IP44 [Proteção contra corpos sólidos acima de 1mm e contra respingos em todas as direções]
13) LETRA CÓDIGO
Os motores elétricos são construídos obedecendo normas, segundo o uso a que se destinam, que os padronizam conforme definições da NEMA ou da ABNT. (Deverá constar na plaqueta de identificação a letra correspondente ao seu padrão construtivo). A NEMA define os códigos de letras conforme a tabela abaixo:

Letra CódigoKVA que o motor necessita
para partida direta (por KVA)A 0,00 a 3,14B 3,15 a 3,54C 3,55 a 3,99D 4,00 a 4,49E 4,50 a 4,99F 5,00 a 5,59G 5,60 a 6,29 H 6,30 a 7,09J 7,10 a 7,99K 8,00 a 8,99L 9,00 a 9,99M 10,00 a 11,19N 11,20 a 12,49P 12,50 a 13,99R 14,00 a 15,99S 16,00 a 17,99T 18,00 a 19,99U 20,00 a 22,39V 22,40
Para a ABNT, 5 códigos são definidos, conforme a tabela seguinte:
Letra Código
Corrente de partida direta (Motores com enrolamento tipo gaiola)
A ALTA Até 6 x IN
B NORMAL 3,80 a 6,00 x IN C NORMAL 3,80 a 6,00 x IN
D NORMAL 3,80 a 6,00 x IN
F BAIXA Até 4 x IN
IN = Corrente Nominal do motor. IP = Corrente de Partida do motor.
É comum encontrarmos motores com corrente de partida igual a 7 ou 8 vezes a corrente nominal.Porém, para os motores de produção seriada, normalmente encontrados no mercado, a corrente de partida situa-se entre 5,5 e 7,00 vezes a corrente nominal. (5,5 x IN < IP < 7,00 x IN).
São cinco os métodos de partida mais utilizados no acionamento de motores elétricos de indução:1) Partida direta;2) - Com chave estrela-triângulo 3) - Com chave compensadora4) Soft Starter

5) Inversor de Frequência.
Além dos sistemas tradicionais de chaves estrela-triângulo e compensadora por autotransformador, começa a surgir no mercado os sistemas de demarradores de estado sólido, conhecidos como softstart e inversores de frequência. Os Soft Starter fazem as mesmas funções de fornecer corrente reduzida durante o período de partida do motor elétrico, porém a corrente é controlada por meio de SCR's (Retificadores Controlados de Silício). Os Inversores de Frequência utilizam Tiristores para esse controle. Quando for o caso, observar que a partida de motores com estes dispositivos submete o alternador a uma carga deformante (também chamada carga não linear), que poderá introduzir distorções não suportadas por outros consumidores. (Os efeitos da distorção harmônica, resultante da utilização de SCR's), Para o primeiro caso, a corrente de partida deverá ser calculada por uma das tabelas acima ou medida durante um ciclo de partida do motor.
No segundo caso, a corrente de partida é reduzida para 1/3. Assim, a corrente de partida for, por exemplo, de 6 x IN, com o uso da chave estrela-triângulo, ficará reduzida para 2 x IN.
Diagrama típico - chave de partida estrela-triângulo
No terceiro caso, a corrente de partida depende do tipo de chave compensadora. Dois exemplos podem melhor esclarecer:a) Com tape de 80%: a corrente será reduzida para 0,8 x 0,8 = 0,64 ou 64%.b) Com tape de 65%: a corrente será reduzida para 0,65 x 0,65 = 0,4225 ou 42,25%.
Na figura abaixo, a partida é acionada com a corrente fluindo pelos contatos "S" (de "Start"). No momento seguinte, depois que o motor alcançou velocidade próxima à nominal, os contatos são revertidos para "R" (de Run).

Chave compensadora de partida com auto-transformador de 3 taps (diagrama típico) No 4 e 5 casos com softstart ou invesor de frequência, em geral, a redução de corrente é de 50%. Nestes casos esses equipamentos injetam correntes com frequências indesejáveis (harmônicas), que podem ser eliminadas por filtros específicos.
Os motores para acionamento de máquinas centrífugas tais como, por exemplo, bombas e ventiladores, deverão ser projetados de tal forma que seu torque de partida ainda permaneça acima da curva de torque da máquina acionada, no caso de ligação direta ou estrela-triângulo, mesmo durante uma queda momentânea de tensão para 80% da tensão nominal.
Para o acionamento de máquinas alternativas, tais como bomba a pistão e compressores, como também agitadores, etc., será sempre necessário um dispositivo de alívio para o período de partida, porque essas máquinas requerem um torque elevado já no início da operação
Inversor de Freqüência Descrição do Funcionamento. Atualmente, a necessidade de aumento de produção e diminuição de custos, se fez dentro deste cenário surgir a automação, ainda em fase inicial no Brasil, com isto uma grande infinidade de equipamentos foram desenvolvidos para as mais diversas variedades de aplicações e setores industriais, um dos equipamentos mais utilizados nestes processos conjuntamente com o CLP é o Inversor de Freqüência, um equipamento versátil e dinâmico,vamos expor agora o princípio básico do inversor de freqüência. Um inversor de frequência é um dispositivo capaz de gerar uma tensão e freqüência trifásicas ajustáveis, com a finalidade de controlar a velocidade de um motor de indução trifásico. A figura abaixo mostra resumidamente o diagrama em blocos de um inversor de freqüência escalar:

Seção Retificadora Os seis diodos retificadores situados no circuito de entrada do inversor, retificam a tensão trifásica da rede de entrada (L1, L2 e L3). A tensão DC resultante é filtrada pelo capacitor C e utilizada como entrada para a Seção Inversora. Seção Inversora Na seção inversora, a tensão retificada DC é novamente convertida em Trifásica AC. Os transistores chaveiam várias vezes por ciclo, gerando um trem de pulsos com largura variável senoidalmente (PWM). Esta saída de tensão pulsada, sendo aplicada em um motor (carga indutiva), irá gerar uma forma de onda de corrente bem próxima da senoidal através do enrolamento do motor.
Abaixo, a forma de onda na saída do inversor
Blocos do inversor
1º bloco - CPU
A CPU (unidade central de processamento) de um inversor de freqüência
pode ser formada por um micro processador ou por um micro controlador
(PLC). Isso depende apenas do fabricante. De qualquer forma, é nesse
bloco que todas as informações (parâmetros e dados do sistema) estão
armazenadas, visto que também uma memória está integrada a esse
conjunto. A CPU não apenas armazena os dados e parâmetros relativos ao
equipamentos, como também executa a função mais vital para o
funcionamento do inversor: Geração dos pulsos de disparo, através de uma
lógica de controle coerente, para os IGBT’s.

2º Bloco - IHM
O segundo bloco é o IHM (interface Homem máquina). É através desse
dispositivo que podemos visualizar o que está ocorrendo no inversor
(display), e parametrizá-lo de acordo com a aplicação (teclas).
3ºBloco - Interfaces
A maioria dos inversores pode ser comandada através de dois tipos de
sinais: Analógicos ou digitais. Normalmente, quando queremos controlar a
velocidade de rotação de um motor AC no inversor, utilizamos uma tensão
analógica de comando. Essa tensão se situa entre 0 á 10 Vcc. A velocidade
de rotação (RPM) será proporcional ao seu valor, por exemplo:
1 Vcc = 1000 RPM, 2Vcc = 2000 RPM.
Para inverter o sentido de rotação basta inverter a polaridade do sinal
analógico (de 0 á 10 Vcc sentido horário, e –10 á 0 Vcc sentido anti-
horário). Esse é sistema mais utilizados em maquinas-ferramenta
automáticas, sendo que a tensão analógica de controle é proveniente do
controle numérico computadorizado (CNC).
Além da interface analógica, o inversor possui entradas digitais. Através de
um parâmetro de programação, podemos selecionar qual entrada é válida
(Analógica ou digital).
4º Bloco – Etapa de potência
A etapa de potência é constituída por um circuito retificador, que alimenta (
através de um circuito intermediário chamado “barramento DC”), o circuito
de saída inversor (módulo IGBT).