MultiAgent Planning Ismênia Galvão Lourenço da Silva [email protected] PÓS-GRADUAÇÃO EM...
63
MultiAgent Planning Ismênia Galvão Lourenço da Silva [email protected] PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CENTRO DE INFORMÁTICA UNIVERSIDADE FEDERAL DE PERNAMBUCO
-
Upload
agatha-caldeira -
Category
Documents
-
view
218 -
download
1
Transcript of MultiAgent Planning Ismênia Galvão Lourenço da Silva [email protected] PÓS-GRADUAÇÃO EM...

MultiAgentPlanning
Ismênia Galvão Lourenço da [email protected]
PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃOCENTRO DE INFORMÁTICA
UNIVERSIDADE FEDERAL DE PERNAMBUCO

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 2
Roteiro
Motivação
Resolução Distribuída de Problemas
Compartilhamento de Tarefas
Compartilhamento de Resultados
Planejamento Distribuído
Representações de Planos Distribuídos
Execução e Planejamento Distribuídos
Conclusões
Referências

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 3
Motivação
Lidar com problemas onde: É necessário usar recursos distribuídos concorrentemente,
dependendo do seu grau de paralelismo;
Muitas vezes é necessário empregar capacidades de vários especialistas para chegar à uma solução;
Crenças e dados podem estar distribuídos, mas as suas interpretações podem ser realizadas localmente;
Os resultados de sua resolução ou de seu planejamento podem ser distribuídos para serem influenciados por outros agentes.

Resolução Distribuída de Problemas

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 5
Introdução
Na Resolução Distribuída de Problemas (RDP), os agentes envolvidos trabalham juntos para resolver problemas que requerem um esforço coletivo;
Em Sistemas Abertos, os agentes não são necessariamente cooperativos e podem ingressar e sair do sistema de maneira dinâmica;
Dentro desta segunda classificação, estão inseridos os Sistemas Multi-agentes: Conjunto de agentes autônomos Possivelmente pré-existentes Solução de um problema que está além da capacidade de um único
agente.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 6
Relação entre RDP e SMA
RDP
Ênfase na solução de um ou mais problemas, com o esforço de múltiplos agentes com interesse em propriedades extrínsecas como:
Competência de grupo
Robustez
Uso eficiente de recursos
SMA
Ênfase na existência de múltiplos agentes com interesse em propriedades intrínsecas como:
Revelação da verdade
Manipulação
Coerência de grupo

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 7
Resolução Distribuída de Problemas
Presume a existência de problemas que precisam ser resolvidos; Existe uma expectativa sobre o que pode constituir soluções; Exemplo: time de agentes para projetar um artefato
A solução deve satisfazer requisitos gerais (motor, rodas, ...); O problema já existe em alguma forma particular (um documento
com a estrutura do carro); Cada agente do time formula soluções para os subproblemas, que
em seguida são sintetizadas para uma solução geral.

Compartilhamentode Tarefas

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 9
Compartilhamento de tarefas
Princípio: quando um agente tiver muitas tarefas para fazer, ele deve solicitar ajuda;
Principais passos: Decomposição da tarefa
Alocação da tarefa
Realização da tarefa
Síntese do resultado

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 10
• Problema: encontrar figuras escondidas em uma determinada área1. Decomposição: dividir a
área ou as figuras para a busca;
2. Alocação: distribuir as sub-tarefas entre os agentes;
3. Execução: cada agente deve procurar as figuras atribuídas a ele, ou fazer uma busca na área destinada a ele;
4. Síntese: cada agente apresenta as figuras encontradas.
Exemplo 1: Figuras Escondidas

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 11
Exemplo 2: Torres de Hanoi• Problema: mover todos os discos da estaca
inicial para outra estaca determinada, movendo um disco por vez e sem colocar um disco maior sobre um menor1. Decomposição: se preocupa em sempre mover o
maior disco para o seu destino;
2. Alocação: escolha randômica dos agentes;
3. Execução: as tarefas são recursivamente decompostas até que o estado inicial e final sejam o mesmo;
4. Síntese: quando um agente resolve um problema, ele passa a solução para outro, que irá utilizá-la para encontrar sua própria solução.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 12
Compartilhamento em Sistemas Heterogêneos
O compartilhamento em sistemas heterogêneos aplica-se quando: As atribuições de subproblemas para agentes não são
simples: Os agentes podem ter diferentes habilidades; Os subproblemas precisam de diferentes habilidades;
As decisões são baseadas em informações mais dinâmicas. Ex: Contract Net Protocol

Compartilhamentode Resultados

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 14
Compartilhamento de Resultados
Uma mesma tarefa pode ter resultados diferentes se executada por agentes diferentes;
Agentes podem resolver problemas via integração de resultados locais; O compartilhamento de resultados pode ser proativo ou reativo; Solucionadores de problemas podem aumentar o desempenho do
grupo se combinarem as seguintes características: Confiança Completude Precisão Rapidez

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 15
Compartilhamento de Resultados
Complicações: Os agentes devem saber o que fazer com os resultados
compartilhados ! A comunicação de um grande volume de resultados pode ser
custosa.
Técnicas: Cooperação funcionalmente precisa Repositórios compartilhados e busca negociada Busca heurística para CSP distribuída (DCHS) Estruturação organizacional

Planejamento Distribuído
- Planejamento Centralizado para Planos Distribuídos- Planejamento Distribuído para Planos Centralizados
- Planejamento Distribuído para Planos Distribuídos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 17
Planejamento Distribuído
Especialização da RDP, onde o problema sendo resolvido é o projeto de planos.
Um modelo de Planejamento Distribuído (PD) deve considerar: A concorrência existente entre os agentes em um ambiente
compartilhado;
As alterações ocorridas no ambiente entre o planejamento e a execução dos planos resultantes deste;
Possibilidades de ajustes nos planos.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 18
Planejamento Multi-Agente (PMA)
Estende o planejamento clássico para domínios onde vários agentes podem planejar e agir juntos;
Em ambientes multi-agentes, os agentes não são indiferentes às intenções dos demais;
A construção de um plano eficiente é útil, mas não garante o sucesso: os agentes precisam concordar em usar o mesmo plano;
Algumas formas de coordenação, possivelmente usando comunicação, são requeridas;
Suas aplicações incluem: ambientes multi-robôs, agentes cooperativos na internet, logística, produção, tarefas militares, ...

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 19
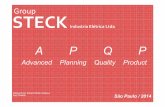
Problema da dupla de tênis
Agents (A,B)Init (At (A, [Left,Baseline]) ^ At (B, [Right,Net]) ^ Approaching (Ball, [Right, Baseline])) ^ Partner (A,B) ^ Partner (B,A)Goal (Returned(Ball) ^ At (agent, [x,Net]))Action (Hit(agent, Ball)),
PRECOND: Approaching (Ball, [x,y]) ^At (agent, [x,y]) ^Partner (agent, partner) ^¬ At (partner, [x,y])
EFFECT: Returned (Ball))Action (Go (agent, [x,y]),
PRECOND: At (agent, [a,b]), EFFECT: At (agent, [x,y]) ¬ At (agent, [a,b])
Problema da dupla de tênis:Dois agentes jogam tênis no mesmo time e podem estar em uma das 4 localizações: [Left,Baseline], [Left,Net], [Right,Baseline], [Right,Net]. A bola só pode ser retornada se exatamente um jogador estiver na posição correta.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 20
Planos conjuntos
Uma solução para um problema de PMA é o uso de planos conjuntos, consistindo de ações para cada agente.
Um plano conjunto é uma solução se o objetivo for atingido quando cada agente realizar as tarefas que lhe foram atribuídas.
A existência de planos conjuntos corretos não significa que objetivo será alcançado.
Os agentes precisam de um mecanismo de coordenação e de conhecimentos comuns para que o objetivo do plano conjunto seja alcançado.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 21
ABA B
Planos conjuntos Plan 1:
A: [Go (A, [Right, Baseline]), Hit (A,Ball)]B: [NoOp (B), NoOp (B)]
● ● ●
Plan 2:A: [Go (A, [Left, Net]), NoOp (A)]B: [Go (B, [Right, Baseline]), Hit (B, Ball)]
A1 / B1 A2 / B2 A1 / B2 A2 / B1Início
AA AB B B
● ●

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 22
Ações conjuntas
Go (A, [Left, Net]), Go (B, [Right, Baseline]) NoOp(a), Hit(B, Ball)
Ações conjuntas são agrupamentos de ações concorrentes, executadas cada uma por um único agente;
Um plano conjunto consiste de um grafo parcialmente ordenado de ações conjuntas;
Usar POP torna-se intratável a nível de pré-condições e efeitos à medida que aumenta o conjunto de ações possíveis;
B●
A
A
B
●

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 23
Listas de Ações Concorrentes
Uma solução para o problema de sincronização é adicionar listas de ações concorrentes às descrições das ações em STRIPS ou ADL;
Essas listas descrevem as ações que podem ou não ser executadas concorrentemente;
Action (Hit(A, Ball)),CONCURRENT: ¬ (Hit(B, Ball))PRECOND: Approaching (Ball, [x,y]) ^ At (A, [x,y])EFFECT: Returned (Ball))

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 24
Listas de Ações Concorrentes
É possível criar um planejador parecido com o POP, com 3 diferenças: Além da relação de ordenação temporal A B, permite-se
A=B (concorrente) e A B (anterior ou concorrente)
Quando uma nova ação requer ações concorrentes, deve-se instanciar essas ações usando ações novas ou já existentes
As ações concorrentes proibidas são uma fonte adicional de restrições...

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 25
Planejamento Distribuído
Existem três classes de planejamento distribuído: Planejamento centralizado para planos distribuídos
Planejamento distribuído para planos centralizados
Planejamento distribuído para planos distribuídos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 26
Planejamento Centralizado para Planos Distribuídos
Contexto: Um problema a ser resolvido e vários agentes disponíveis;
Agente coordenador
Objetivo: Encontrar, dentro de todos os planos possíveis, aquele que
pode ser decomposto e distribuído mais eficientemente

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 27
Planejamento Centralizado para Planos Distribuídos
Dado a descrição do objetivo, um conjunto de operadores e um estado inicial, o coordenador deve: Gerar um plano parcialmente ordenado
Decompor este plano em sub-planos Restrições de ordenação devem ficar dentro e não entre os
sub-planos
Inserir sincronização
Atribuir sub-planos a agentes

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 28
Planejamento Centralizado para Planos Distribuídos
Alocação de tarefas pode ser: Estática: a coordenação é utilizada apenas para sincronizar os
planos
Dinâmica: a coordenação serve para sincronizar e alocar os planos
Algumas considerações: Nem sempre o plano que pode ser mais decomposto e mais
distribuído é o melhor;
A infra-estrutura de comunicação tem grande impacto na decisão de como os planos são decompostos e distribuídos.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 29
Planejamento Centralizado para Planos Distribuídos
C
D
A B
A
D
B
C
PutDownTable (D)PutDown (A,D)
PutDownTable (C)PutDown (B,C)

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 30
Planejamento Centralizado para Planos Distribuídos
PutDownTable (D)PutOn (A,D)
PutDownTable (C)PutOn (B,C)
Pliers

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 31
Planejamento Distribuído para Planos Centralizados
Contexto: Tarefa muito complexa que requer o auxílio de especialistas
em cada sub-tarefa
Objetivo: Utilizar a expertise de cada agente para formular sub-planos
especializados

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 32
Planejamento Distribuído para Planos Centralizados
O planejamento pode ser feito em uma das duas formas: Síncrona: a ordenação é feita durante o processo de
planejamento
Assíncrona: somente durante o compartilhamento de resultados os conflitos com relação à ordem são resolvidos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 33
Planejamento Distribuído para Planos Centralizados
Exemplos: Manufatura: especialistas em geometria, encaixe, pintura,
etc;
Logística: especialistas em planejamento de caminho, carregamento de veículos e despache;
Comunicação fim-a-fim: especialistas no roteamento de mensagens.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 34
Planejamento Distribuído para Planos Centralizados
PutDownTable (B)PutDownTable (A)
PutDownTable (E)PutDownTable (D)
PutDown (C,A)
Goal R1
B
A
F B
C
A
E
D
C
F
E
D
R1 R2
Goal R1
P1

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 35
Planejamento Distribuído para Planos Centralizados
PutDownTable (B)PutDownTable (A)
PutDownTable (E)PutDownTable (D)
PutDown (F,E)
Goal R2
PutDown (E,D)
PutDownTable (B)PutDownTable (A)
PutDownTable (E)PutDownTable (D) PutDown (F,E)
Goal R2PutDown (E,D)
Goal R1
PutDown (C,A)
P2

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 36
Planejamento Distribuído para Planos Distribuídos
Não existe um plano global da tarefa em nenhum ponto do sistema, apenas planos parciais de relevância local;
Compatibilidade global entre esses planos parciais deve ser mantida para: Evitar conflitos durante a execução ;
Fomentar ajuda mútua.
Troca de mensagens e/ou temporização são usados para resolver interações negativas entre os agentes.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 37
Delayed work
Look after Hector
Delayed work
Go to cinemaPublic
TransportCar
Go to meeting
Put Hector to bed
Julian Helen
Look after Hector
Hector
Planejamento Distribuído para Planos Distribuídos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 38
Planejamento Distribuído para Planos Distribuídos
Técnicas: Fusão de planos
Construção iterativa de planos
Negociação de planejadores distribuídos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 39
Fusão de Planos
Cada agente, individualmente, formula planos, que podem ser executados separadamente sem conflitos;
Um agente coleta os planos individuais e analisa os planos para descobrir que seqüências de ações podem levar a conflitos;
Consiste de três estágios: Análise de interação
Análise de segurança
Resolução de interação

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 40
Construção Iterativa de Planos
Problema das abordagem anterior: às vezes, decisões locais dependem das ações de outros agentes
Espaço de Planos x Plano Único
Cada agente, ao invés de propor um único passo, propõe um conjunto de alternativas e, a cada iteração, escolhe-se a que melhor se ajusta para o bem de todos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 41
Busca por Combinação de planos
Dadas proposições iniciais sobre o mundo: Agentes formam estado sucessores propondo mudanças causadas
por uma ação;
É escolhido o melhor estado sucessor e esta escolha é expandida (heurística A*);
O processo é repetido até que nenhum agente queira propor mais mudanças.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 42
Planejamento Distribuído Contínuo
Planejamento e execução intercalados
Um agente deve planejar continuamente quando: Aspectos do mundo podem mudar dinamicamente;
Aspectos do mundo são revelados incrementalmente;
Pressão do tempo faz com que a execução comece antes do plano ter sido totalmente gerado;
Os objetivos podem evoluir com o tempo.

Representações dePlanos Distribuídos

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 44
Representações de Planos Distribuídos
Planejamento e resolução de problemas distribuídos geralmente lidam com agentes com capacidade de comunicar tarefas, soluções, objetivos, planos, ...
Alguns protocolos de propósito geral têm sido desenvolvidos para lidar com interação em alto-nível;
Em linguagens baseadas nos atos de fala, o envio de uma mensagem pode ser interpretado como a invocação de um comportamento do agente receptor;
Os agentes precisam entender não apenas o ato de fala, mas também o conteúdo da mensagem.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 45
Representações de Planos Distribuídos
Um plano pode ser visto como um conjunto de vários campos que representam diferentes tipos de informações relacionadas;
Diferentes agentes necessitam acessar e modificar diferentes combinações de campos de um plano.
Os agentes precisam: Ser capazes de encontrar as informações que querem, podendo
interpretar, modificar e executar o plano; Saber como modificar o plano de maneira que seja interpretado
corretamente pelos demais agentes e tenha efeitos desejáveis;

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 46
Representações de Planos Distribuídos
Todos os campos de um plano devem estar numa linguagem de conteúdo compreensível pelos agentes que podem utilizá-lo;
Padrões para especificação de planos para agentes inteligentes: STRIPS c/ operador
Cypress ACT
Lógica temporal
Formalismos operacionais (Redes de Petri, Graphcet)

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 47
Representações de Planos Distribuídos
Estrutura do ACT em um formalismo Cypress:
CAMPO DESCRIÇÃOName Rótulo único para identificar o ACTCue Metas que o ACT é capaz de atingirPrecondition
Características do estado do mundo que precisam ser validadas para o ACT ser aplicável
Setting Características do estado do mundo que são ligadas a variáveis do ACT
Resources Recursos requeridos pelo ACT durante a sua execuçãoProperties Outras propriedades associadas ao ACTComment Informações de documentação
Plot Especificação do procedimento a ser executado (seqüências parcialmente ordenadas de objetivos/ ações)

Planejamento e Execução Distribuídos
- Mecanismos de Coordenação- Coordenação Pós-Planejamento- Coordenação Pré-Planejamento
- Planejamento, Coordenação e Execução Intercalados- Coordenação de Planos em Tempo de Execução sem Comunicação

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 49
Mecanismos de Coordenação
Uma convenção ou norma é qualquer restrição na seleção de planos conjuntos relacionada aos padrões de comportamento dos agentes;
Leis sociais são normas amplamente adotadas, como por exemplo dirigir em determinado lado da rua;
Estabelecer normas prévias é um método pelo qual um grupo de agentes pode garantir acordos entre planos conjuntos;
Comportamentos emergentes são aqueles onde não há necessidade de que cada agente possua o plano conjunto que modela as ações de outros agentes;

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 50
Mecanismos de Coordenação
As normas podem ser específicas ou independentes de um determinado domínio;
Na ausência de normas aplicáveis, os agentes podem utilizar comunicação (verbal ou não-verbal) para atingir um conhecimento comum sobre um plano conjunto viável;
AB
●
A●
B
É minha !!!
Uhuu !!!

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 51
Mecanismos de Coordenação
Reconhecimento de planos é um método de coordenação que ocorre quando uma ação (ou pequena seqüência de ações) é suficiente para determinar um plano conjunto sem ambigüidade;
A garantia do reconhecimento de planos pode ser dada pelo projetista ou pelos agentes em si.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 52
Planejamento e Execução Distribuídos
O produto do planejamento distribuído precisa ser executado...
Coordenar é garantir que uma seqüência de planos, com determinadas restrições, seja atingida;
A coordenação de planejamento e execução de planos distribuídos é um desafio da IA;
Algumas estratégias: Coordenação Pós-Planejamento
Coordenação Pré-Planejamento
Planejamento, Coordenação e Execução Intercalados
Coordenação de Planos em Tempo de Execução sem Comunicação

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 53
Coordenação Pós-Planejamento
Durante a execução de um plano, pode ocorrer alguma falha inesperada e o conjunto de planos coordenados pode falhar por inteiro;
Uma solução é utilizar planos de contingência: cada agente além de formular seus planos esperados, pode formular planos alternativos para atender às contingências;
Esses planos com suas ramificações podem ser consolidados e coordenados em tempo de execução, o que torna o processo mais complicado;

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 54
Coordenação Pós-Planejamento
Outra solução é usar monitoramento e replanejamento;
Cada agente monitora a execução de seu plano, se houver algum desvio, ele pára sua execução e repete o ciclo planejar-coordenar-executar;
Algumas estratégias podem reduzir o esforço e aumentar a gerenciabilidade do processo: Consertar planos anteriores;
Acessar uma biblioteca de planos reusáveis...

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 55
Coordenação Pré-Planejamento
Assumindo-se restrições de coordenação aceitáveis, os agentes podem garantir previamente a coordenação de seus planos com os dos outros agentes;
A estrutura organizacional pode permitir que um agente escolha seu trabalho numa parte qualquer de um problema que se encaixe em suas responsabilidades;
O uso de leis sociais pode auxiliar na coordenação pré-planejamento uma vez que ajuda a prever estados indesejáveis.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 56
Planejamento, Coordenação e Execução Intercalados
Tipos diferentes de coordenação podem ser realizados dependendo do nível de abstração com que o plano é representado;
Planejamento Parcial Global (PPG) é um método que assume que decisões de planejamento e coordenação devem ser continuamente revistas e revisadas;
PPG permite que algumas atividades sem coordenação sejam toleradas e submetidas;
PPG é aplicável a domínios onde a garantia de coordenação não precisa ser feita antes de qualquer execução.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 57
Planejamento, Coordenação e Execução Intercalados
Coordenação via PPG: Cada agente decide seus objetivos e gera planos de curto
prazo para atingí-los;
Agentes trocam informações;
Agentes alteram planos locais para melhor coordenar suas atividades;

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 58
Planejamento, Coordenação e Execução Intercalados
Decomposição de tarefas
Formulação de planos locais
Abstração de planos locais
Identificação de objetivos globais parciais
Ação em planos globais parciais
Modificação em andamento
Re-alocação de tarefas

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 59
Coordenação de Planos em Tempo de Execução sem Comunicação
Em algumas aplicações, re-coordenação em tempo real precisa ser realizada quando os agentes não podem ou não devem se comunicar;
Coordenação sem comunicação explícita: Permitir que os agentes façam inferências dos demais planos,
baseados em observações (Coordenação de planos baseada em observações);
Permitir que os agentes façam inferências sobre as escolhas que os demais vão fazer, baseados em hipóteses sobre suas racionalidades ou visão do mundo (pontos focais).

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 60
Competição
Agentes com funções de utilidade conflitantes estão em competição uns com os outros;
Um agente em um ambiente competitivo deve: Reconhecer a existência de outros agentes no ambiente; Computar alguns dos possíveis planos dos outros agentes; Computar como os planos dos outros agentes interagem com os
seus planos; Decidir sobre a melhor ação de acordo com essas interações.
Competição requer o modelo dos planos dos outros agentes, entretanto, não há compromisso com planos conjuntos.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 61
Taxonomia da Coordenação
COORDENAÇÃO
COOPERAÇÃO COMPETIÇÃO
PLANEJAMENTO NEGOCIAÇÃO
PLANEJAMENTODISTRIBUÍDO
PLANEJAMENTOCENTRALIZADO

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 62
Conclusões
Planejamento multi-agente é necessário quando há outros agentes no ambiente com os quais cooperar, competir ou coordenar;
Um dos principais desafios do planejamento distribuído é identificar quando e como aplicá-lo;
Representações e estratégias de propósito geral para RDP ainda são evasivas;
A coordenação é um fator vital para o funcionamento de um SMA, mantendo os benefícios advindos da RDP.

17.11.2003 Tópicos Avançados em Inteligência Artificial Simbólica I 63
Referências
[1] An Introduction to MultiAgent Systems, M. J. Wooldridge, 2002, John Wiley and Sons.
[2] Multiagent Systems – A Modern Approach to Distributed Artificial Intelligence, G. Weiss, 2000, The MIT Press.
[3] Multi-Agent Systems – An Introduction to Distributed Artificial Intelligence, J. Ferber, 1999, Addison-Wesley.
[4] Artificial Intelligence – A Modern Approach (2nd Edition), S. Russel & P. Norvig, 2002, Prentice-Hall.