
Multiobjective Biogeography-Based Optimization Based on Predator-Prey Approach
4
IEEE TRANSACTIONS ON MAGNETICS, VOL. 48, NO. 2, FEBRUARY 2012 951 Multiobjective Biogeography-Based Optimization Based on Predator-Prey Approach Marsil de A. Costa e Silva , Leandro dos S. Coelho , and Luiz Lebensztajn Graduação em Engenharia de Controle e Automação, Pontifícia Universidade Católica do Paraná, PR 80215-901 Brazil Laboratório de Automação e Sistemas, PPGEPS-PUCPR, Pontifícia Universidade Católica do Paraná, PR 80215-901 Brazil Departamento de Engenharia Elétrica, Universidade Federal do Paraná, PR 80215-901 Brazil Laboratório de Eletromagnetismo Aplicado, LMAG-PEA, Escola Politécnica da Universidade de São Paulo, São Paulo 05508-900, Brazil Biogeography is the science that studies the geographical distribution and the migration of species in an ecosystem. Biogeography- based optimization (BBO) is a recently developed global optimization algorithm as a generalization of biogeography to evolutionary algorithm and has shown its ability to solve complex optimization problems. BBO employs a migration operator to share information between the problem solutions. The problem solutions are identified as habitat, and the sharing of features is called migration. In this paper, a multiobjective BBO, combined with a predator-prey (PPBBO) approach, is proposed and validated in the constrained design of a brushless dc wheel motor. The results demonstrated that the proposed PPBBO approach converged to promising solutions in terms of quality and dominance when compared with the classical BBO in a multiobjective version. Index Terms—Electromagnetics, evolutionary computation, optimization. I. INTRODUCTION E VOLUTIONARY algorithms (EAs) have demonstrated over the past years good performance when solving op- timization problems in the electromagnetics field [1]–[8]. EAs are created to solve implicit and explicit functions and, unlike many numerical methods, do not require the objective function to be different. Further, when the problem has discontinuities and many constraints, they are very suitable for finding a good solution in a very short time, while classical methods based on gradient information are not able or cannot be applied. In this paper, we will evaluate the performance of a recent optimization technique based on biogeography concepts, the biogeography-based optimization (BBO) [9], which studies the geographical distribution and the migration of species in an ecosystem. The solutions are treated as habitats and the concepts and models of biogeography are applied in order to find a solution with good aspects. One characteristic of BBO is that the original population is not discarded after each generation. It is rather modified by migration. Also, for each generation, BBO uses the fitness of each solution to determine its emigration and immigration rate. BBO has already proven itself a worthy competitor to its better known siblings. The Markov analysis in [10] and [11] proves that BBO outperforms GA on simple unimodal, multi- modal, and deceptive benchmark functions when used with low mutation rates. Simon [12] provides experimental studies com- paring BBO’s performance to many other EAs on a wide set of benchmarks. The concept of predator-prey is also included in the biogeog- raphy algorithm in order to improve its capability of finding Manuscript received July 06, 2011; revised October 09, 2011; accepted Oc- tober 22, 2011. Date of current version January 25, 2012. Corresponding author: L. Lebensztajn (e-mail: [email protected]). Digital Object Identifier 10.1109/TMAG.2011.2174205 good solutions [13]. Predators are included in the population of solutions for hunting the worst individuals and making the other solutions run away from those to avoid the predator [14]. These approaches are used to optimize the construction pa- rameters of a brushless dc wheel motor [15]. It is a multiobjec- tive constrained problem with two objective functions: 1) the efficiency and 2) the mass of the motor. The remainder of this paper is organized as follows. Sec- tion II shows the basic concepts of the biogeography-based op- timization approaches. Section III presents the formulation of the brushless dc wheel motor problem. Sections IV and V show the results and conclusion, respectively. II. BBO Biogeography is modeled after the process of natural immi- gration and emigration of species between islands in search of more friendly habitats. The BBO algorithm [9] uses the con- cepts and models of biogeography. These models describe the migration of species from a habitat to another one and how species arise or become extinct. Each solution used in the al- gorithm is considered as a habitat and has particular aspects re- lated to its suitability. For habitat comparison, a habitat suit- ability index (HSI) is used that measures the habitat goodness, which is related to several aspects as, for example, rainfall, flora and fauna diversities, topography, and environment temperature. All of these aspects are called suitability index variables (SIVs). A good habitat has a high HSI (i.e., has good aspects that make its suitability high), while a poor habitat has a low HSI because its aspects are not good for living in. This means that good habitats have better aspects than the poor ones. Habitats with high HSI have a high immigration rate due to their good aspects, whereas poor habitats have a low immigration rate but a high emigration rate unlike good ones. This happens because species tend to migrate to the habitats which are more suitable to live and leave worst places. 0018-9464/$31.00 © 2012 IEEE
Transcript of Multiobjective Biogeography-Based Optimization Based on Predator-Prey Approach

IEEE TRANSACTIONS ON MAGNETICS, VOL. 48, NO. 2, FEBRUARY 2012 951
Multiobjective Biogeography-Based Optimization Basedon Predator-Prey Approach
Marsil de A. Costa e Silva�, Leandro dos S. Coelho���, and Luiz Lebensztajn�
Graduação em Engenharia de Controle e Automação, Pontifícia Universidade Católica do Paraná, PR 80215-901 BrazilLaboratório de Automação e Sistemas, PPGEPS-PUCPR, Pontifícia Universidade Católica do Paraná, PR 80215-901 Brazil
Departamento de Engenharia Elétrica, Universidade Federal do Paraná, PR 80215-901 BrazilLaboratório de Eletromagnetismo Aplicado, LMAG-PEA, Escola Politécnica da Universidade de São Paulo, São Paulo
05508-900, Brazil
Biogeography is the science that studies the geographical distribution and the migration of species in an ecosystem. Biogeography-based optimization (BBO) is a recently developed global optimization algorithm as a generalization of biogeography to evolutionaryalgorithm and has shown its ability to solve complex optimization problems. BBO employs a migration operator to share informationbetween the problem solutions. The problem solutions are identified as habitat, and the sharing of features is called migration. In thispaper, a multiobjective BBO, combined with a predator-prey (PPBBO) approach, is proposed and validated in the constrained designof a brushless dc wheel motor. The results demonstrated that the proposed PPBBO approach converged to promising solutions in termsof quality and dominance when compared with the classical BBO in a multiobjective version.
Index Terms—Electromagnetics, evolutionary computation, optimization.
I. INTRODUCTION
E VOLUTIONARY algorithms (EAs) have demonstratedover the past years good performance when solving op-
timization problems in the electromagnetics field [1]–[8]. EAsare created to solve implicit and explicit functions and, unlikemany numerical methods, do not require the objective functionto be different. Further, when the problem has discontinuitiesand many constraints, they are very suitable for finding a goodsolution in a very short time, while classical methods based ongradient information are not able or cannot be applied.
In this paper, we will evaluate the performance of a recentoptimization technique based on biogeography concepts, thebiogeography-based optimization (BBO) [9], which studiesthe geographical distribution and the migration of species inan ecosystem. The solutions are treated as habitats and theconcepts and models of biogeography are applied in orderto find a solution with good aspects. One characteristic ofBBO is that the original population is not discarded after eachgeneration. It is rather modified by migration. Also, for eachgeneration, BBO uses the fitness of each solution to determineits emigration and immigration rate.
BBO has already proven itself a worthy competitor to itsbetter known siblings. The Markov analysis in [10] and [11]proves that BBO outperforms GA on simple unimodal, multi-modal, and deceptive benchmark functions when used with lowmutation rates. Simon [12] provides experimental studies com-paring BBO’s performance to many other EAs on a wide set ofbenchmarks.
The concept of predator-prey is also included in the biogeog-raphy algorithm in order to improve its capability of finding
Manuscript received July 06, 2011; revised October 09, 2011; accepted Oc-tober 22, 2011. Date of current version January 25, 2012. Corresponding author:L. Lebensztajn (e-mail: [email protected]).
Digital Object Identifier 10.1109/TMAG.2011.2174205
good solutions [13]. Predators are included in the population ofsolutions for hunting the worst individuals and making the othersolutions run away from those to avoid the predator [14].
These approaches are used to optimize the construction pa-rameters of a brushless dc wheel motor [15]. It is a multiobjec-tive constrained problem with two objective functions: 1) theefficiency and 2) the mass of the motor.
The remainder of this paper is organized as follows. Sec-tion II shows the basic concepts of the biogeography-based op-timization approaches. Section III presents the formulation ofthe brushless dc wheel motor problem. Sections IV and V showthe results and conclusion, respectively.
II. BBO
Biogeography is modeled after the process of natural immi-gration and emigration of species between islands in search ofmore friendly habitats. The BBO algorithm [9] uses the con-cepts and models of biogeography. These models describe themigration of species from a habitat to another one and howspecies arise or become extinct. Each solution used in the al-gorithm is considered as a habitat and has particular aspects re-lated to its suitability. For habitat comparison, a habitat suit-ability index (HSI) is used that measures the habitat goodness,which is related to several aspects as, for example, rainfall, floraand fauna diversities, topography, and environment temperature.All of these aspects are called suitability index variables (SIVs).
A good habitat has a high HSI (i.e., has good aspects thatmake its suitability high), while a poor habitat has a low HSIbecause its aspects are not good for living in. This means thatgood habitats have better aspects than the poor ones. Habitatswith high HSI have a high immigration rate due to their goodaspects, whereas poor habitats have a low immigration rate buta high emigration rate unlike good ones. This happens becausespecies tend to migrate to the habitats which are more suitableto live and leave worst places.
0018-9464/$31.00 © 2012 IEEE

952 IEEE TRANSACTIONS ON MAGNETICS, VOL. 48, NO. 2, FEBRUARY 2012
Fig. 1. Migration model.
The migration rates are directly related to the number ofspecies in a habitat. So a habitat with many species has a highemigration rate, because it is almost saturated, while habitatswith few species have a high immigration rate because theydo not have good conditions to live in. This migration processincreases the diversity of the habitat and contributes for speciesinformation sharing and the mutation probability.
Fig. 1 shows the emigration and the immigration as a functionof the number of species, where and represent the maximumrates of immigration and emigration, respectively, and denotesthe number of species.
These concepts are used in the BBO algorithm to find a goodsolution for a given problem, or a set of solutions in the caseof multiobjective optimization problems. The immigration andemigration rates are calculated using (1) and (2), respectively
(1)
(2)
where is the immigration rate of the habitat with species;is the emigration rate of the habitat with species; is the
quantity of species in the habitat; is the maximum numberof species in all habitats; and and are the maximum ratesof emigration and immigration, respectively. These two ratesare used to calculate the probability of share information in ahabitat. The initial probability of each habitat is calculated asin (3). The probability is dynamic and its value is changed in alliterations of the algorithm using
(3)
(4)
where .The probability is then updated with
(5)
(6)
The probability and the migration rates are used to proba-bilistically change some item of a solution. The change is madeusing information about other habitats (i.e., an item is changedto the same value of the item in another habitat). This preservesthe aspects of the habitat that provided the information.
The habitats are possible solutions to the optimizationproblem and to measure the suitability the objective functionof the problem is used . In multiobjective optimization, insteadof a unique solution, there is a set of optimal solutions, calledPareto optimal solutions. This set is also called a nondominatedset because its solutions are not dominated by any other solution(i.e., there is no solution that improves some objectives withoutdeteriorating another).
A. Concept of Predator-Prey and the BBO
In this paper, the concept of predator-prey is also used to in-crease the diversity of the population and overcome local op-timum traps. In nature, predators hunt prey to guarantee theirown existence. The prey need to be able to run away from preda-tors. In the algorithm, the predators are modeled based on theworst solutions as (7) demonstrates
(7)
where is the predator (a possible solution), isthe worst solution in the population, and is the current iteration.
is the maximum number of iterations and is the huntingrate. To model the fugue of prey, (8) is used and this providesthe solutions to maintain a distance from the predator
(8)
where is the distance between the solution and the predator,and is the current iteration.
In multiobjective optimization, including one predator foreach objective is necessary, because it is not easy to identify theworst solutions when dealing with multiple objectives. Then,each predator will hunt the solutions with the worst values ineach objective function.
In this paper, two predators are included in the population,and then they will hunt the worst individuals of the popula-tion (i.e., the individuals with the worst values of the objectivefunctions at the current iteration). Meanwhile, the other individ-uals will run away from those ones to avoid the predators. Thisstraightforward mechanism does not let the population convergeto a point in the search space improving the capability of explo-ration, and forces the solutions to run onto the Pareto front. Thisapproach is called predator-prey biogeography-based optimiza-tion (PPBBO).
Also, to overcome problems with the amplitude of the vari-ables in each solution, to apply the concepts of predator-prey,there is the need to normalize the solutions between 0 and 1.This is made by simply dividing the variables of the solutionsby its respective maximum value.
The PPBBO algorithm is basically depicted, as in Fig. 2.
III. PROBLEM FORMULATION
The optimization of a brushless dc wheel motor for a racesolar car [15] is analyzed in this paper. Fig. 3 shows the geom-etry of this motor (extracted from [15]). The authors proposethree benchmarks: the first one has five optimization variables,the second one has 10 variables, and the last one has 11 vari-ables, with different constraints. The optimization variables arepresented in Table I with their upper and lower boundaries.
COSTA E SILVA et al.: MULTIOBJECTIVE BIOGEOGRAPHY-BASED OPTIMIZATION BASED ON PREDATOR-PREY APPROACH 953
Fig. 2. PPBBO basic algorithm.
Fig. 3. Geometry of the motor.
TABLE IOPTIMIZATION VARIABLES
The main difference between the second problem and thethird problem proposed in [15] is related to the number of poles.In the second problem, the number of poles is constant andequals to 6, and in the third problem, the range of number ofpoles [4], [6], i.e., one variable of this problem is an integer. Inthis work, we solved the second problem.
In this approach, the thermal model is very simple, becausethe model is for only pre-sizing purposes. So, it is assumed thatthe thermal conduction resistance is always much lower thanthermal resistances of convection and as we are dealing with a
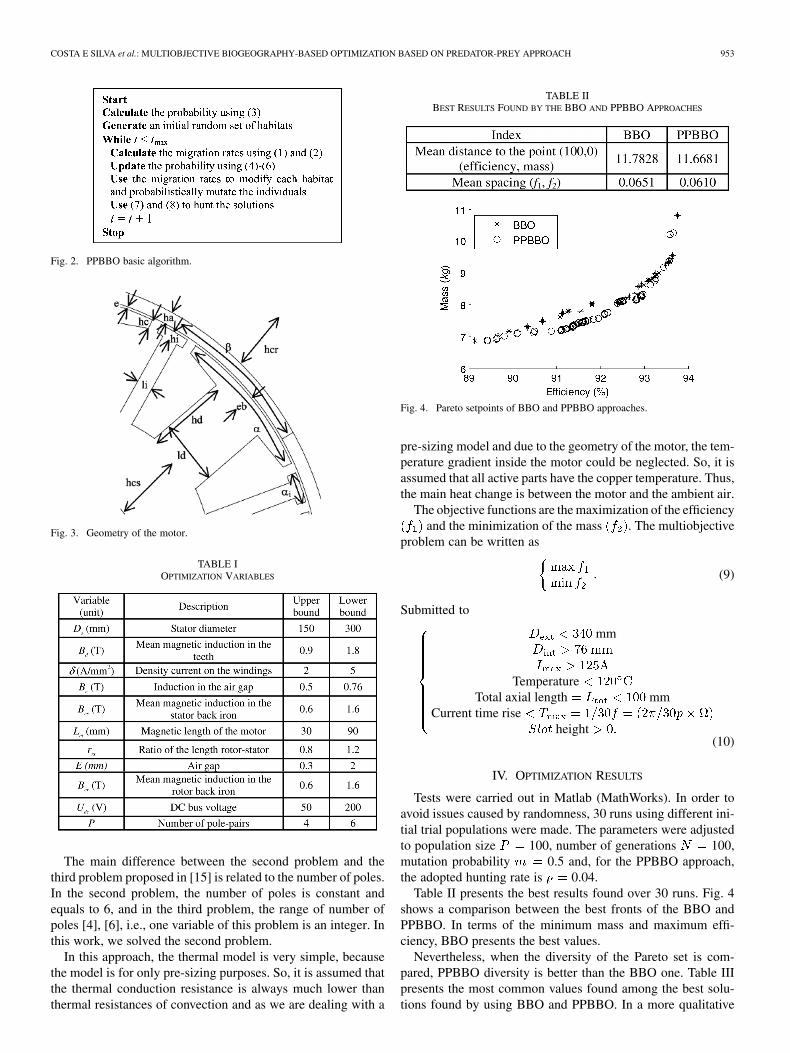
TABLE IIBEST RESULTS FOUND BY THE BBO AND PPBBO APPROACHES
Fig. 4. Pareto setpoints of BBO and PPBBO approaches.
pre-sizing model and due to the geometry of the motor, the tem-perature gradient inside the motor could be neglected. So, it isassumed that all active parts have the copper temperature. Thus,the main heat change is between the motor and the ambient air.
The objective functions are the maximization of the efficiencyand the minimization of the mass . The multiobjective
problem can be written as
(9)
Submitted to
mm
TemperatureTotal axial length mm
Current time riseheight
(10)
IV. OPTIMIZATION RESULTS
Tests were carried out in Matlab (MathWorks). In order toavoid issues caused by randomness, 30 runs using different ini-tial trial populations were made. The parameters were adjustedto population size 100, number of generations 100,mutation probability 0.5 and, for the PPBBO approach,the adopted hunting rate is 0.04.
Table II presents the best results found over 30 runs. Fig. 4shows a comparison between the best fronts of the BBO andPPBBO. In terms of the minimum mass and maximum effi-ciency, BBO presents the best values.
Nevertheless, when the diversity of the Pareto set is com-pared, PPBBO diversity is better than the BBO one. Table IIIpresents the most common values found among the best solu-tions found by using BBO and PPBBO. In a more qualitative

954 IEEE TRANSACTIONS ON MAGNETICS, VOL. 48, NO. 2, FEBRUARY 2012
TABLE IIIDESIGN VARIABLES AND THEIR MOST FREQUENT VALUES
point of view, one can see that the Pareto set obtained by PPBBOcovers the Pareto set obtained by BBO.
From Table III, we can extract some interesting results thatare in good agreement with some classical criteria for the elec-tric machines design: a good motor should have a small gap (e)and the magnetic induction at the back of the stator iron ,in the teeth , and in the back rotor iron should be ashigh as possible. Typically, either the magnetic induction in thegap or the current density do not have extreme values.
V. CONCLUSION
BBO is a new global optimization algorithm and has shownthe ability to solve an optimization problem. It is a biology-inspired and population-based optimization technique. It fol-lows the migration and mutation mechanism, similar to otherbiology-based algorithms.
In this paper, we evaluated two multiobjective bioinspired ap-proaches: BBO and PPBBO. The use of the biogeography, com-bined with predator-prey concepts, is promising and can be val-idated in other types of optimization problems. The results for
BBO and PPBBO techniques seem to be very close, but the con-cept of predator-prey allows BBO, that is, PPBBO to reach amore representative Pareto set, due to better diversity.
Adaptive migration rates and other control parameter se-lections are additional directions for future study in BBO andPPBBO designs.
REFERENCES
[1] H.-K. Kim, J.-K. Chong, K.-Y. Park, and D. A. Lowther, “Differentialevolution strategy for constrained global optimization and applicationto practical engineering problems,” IEEE Trans. Magn., vol. 43, no. 4,pp. 1565–1568, Apr. 2007.
[2] E. F. Wanner, F. G. Guimarães, R. H. C. Takahashi, D. A. Lowther,and J. A. Ramírez, “Multiobjective memetic algorithms with quadraticapproximation-based local search for expensive optimization in elec-tromagnetics,” IEEE Trans. Magn., vol. 44, no. 6, pp. 1126–1129, Jun.2008.
[3] M. Ziolkowski and S. R. Gratkowski, “Genetic algorithm and Beziercurves-based shape optimization of conducting shields for low-fre-quency magnetic fields,” IEEE Trans. Magn., vol. 44, no. 6, pp.1086–1089, Jun. 2008.
[4] E. I. Amoiralis, P. S. Georgilakis, M. A. Tsili, M. A. , and A. G. Kladas,“Global transformer optimization method using evolutionary designand numerical field computation,” IEEE Trans. Magn., vol. 45, no. 3,pp. 1720–1723, Mar. 2009.
[5] G. Crevecoeur, P. Sergeant, L. Dupré, and R. Van de Walle, “A two-level genetic algorithm for electromagnetic optimization,” IEEE Trans.Magn., vol. 46, no. 7, pp. 2585–2595, Jul. 2010.
[6] K. Watanabe, F. Campelo, Y. Iijima, K. Kawano, T. Matsuo, T. Mi-fune, and H. Igarashi, “Optimization of inductors using evolutionaryalgorithms and its experimental validation,” IEEE Trans. Magn., vol.46, no. 8, pp. 3393–3396, Aug. 2010.
[7] G. Stumberger, S. Seme, B. Stumberger, B. Polajzer, and D. Dolinar,“Determining magnetically nonlinear characteristics of transformersand iron core inductors by differential evolution,” IEEE Trans. Magn.,vol. 44, no. 6, pp. 1570–1573, Jun. 2008.
[8] L. S. Coelho and P. Alotto, “Electromagnetic optimization using a cul-tural self-organizing migrating algorithm approach based on normativeknowledge,” IEEE Trans. Magn., vol. 45, no. 3, pp. 1446–1449, Mar.2009.
[9] D. Simon, “Biogeography-based optimization,” IEEE Trans. Evol.Comput., vol. 12, no. 6, pp. 702–713, Dec. 2008.
[10] D. Simon, M. Ergezer, D. Du, and R. Rarick, “Markov models for bio-geography-based optimization,” IEEE Trans. Syst., Man, Cybern. B,Cybern., vol. 41, no. 1, pp. 299–306, Feb. 2011.
[11] D. Simon, M. Ergezer, and D. Du, “Population distributions in bio-geography-based optimization algorithms with elitism,” in Proc. IEEEConf. Syst., Man, Cybern., San Antonio, TX, 2009, pp. 1017–1022.
[12] D. Simon, “A probabilistic analysis of a simplified biogeography-basedoptimization algorithm,” Evol. Comput., vol. 19, no. 2, pp. 167–188,2011.
[13] A. Silva, A. Neves, and E. Costa, “SAPPO: A simple, adaptable,predator prey optimiser,” in Lecture Notes in Computer Science 2902(EPIA 2003). Heidelberg, Germany: Springer-Verlag, 2003, pp.59–73.
[14] K. Deb and U. N. Rao, “Investigating predator-prey algorithms formulti-objective optimization,” Indian Inst. Technol. Kanpur, India,KanGAL Rep. No. 2005010.
[15] S. Brisset and P. Brochet, “Analytical model for the optimal design ofa brushless DC wheel motor,” COMPEL: Int. J. Comput. Math. Elect.Electron. Eng., vol. 24, no. 3, pp. 829–848, 2005.


















