![Lean Manufacturing e o impacto no desenvolvimento ...108]lean... · Lean Manufacturing e o impacto no ... correções no processo de produção ... organizações se vêem forçadas](https://static.fdocumentos.com/doc/165x107/5ba2a3cb09d3f2cc2e8c6aeb/lean-manufacturing-e-o-impacto-no-desenvolvimento-108lean-lean-manufacturing.jpg)
NGEIRAl TESE SUBMETIDA AO CORPO DOCENTE DA … · tante distintas das vibrações forçadas: -, ....
131
INSTABILIDADE ELASTODINÂMICA DE UMA VIGA SOB AÇÃO DE UM MOMENTO AXIAL PERIÓDICO JORGE LEDO LARA\NGEIRAl TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS , PROGRAMAS POS-GRADUADOS DE ENGENHARIA DA UNIVERSIDADE FEDER1ll. , DO RIO DE JANEIRO COMO PARlE DOS REQUISITOS NECESSARIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM c:rtNCIAS (M.Sc.). Aprovada por Presidente RIO DE JANEIRO ESTADO DA GUANABARA - BRASIL DEZEMBRO DE 1971
Transcript of NGEIRAl TESE SUBMETIDA AO CORPO DOCENTE DA … · tante distintas das vibrações forçadas: -, ....
INSTABILIDADE ELASTODINÂMICA DE UMA VIGA
SOB AÇÃO DE UM MOMENTO AXIAL PERIÓDICO
JORGE LEDO LARA\NGEIRAl
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS ,
PROGRAMAS POS-GRADUADOS DE ENGENHARIA DA UNIVERSIDADE FEDER1ll. ,
DO RIO DE JANEIRO COMO PARlE DOS REQUISITOS NECESSARIOS PARA
A OBTENÇÃO DO GRAU DE MESTRE EM c:rtNCIAS (M.Sc.).
Aprovada por
Presidente
RIO DE JANEIRO
ESTADO DA GUANABARA - BRASIL
DEZEMBRO DE 1971

à SÔNIA

A G R A D E C I M E N T O S
À CAPES, COPPE/UFRJ, NCE/UFRJ, UFRGS e UFSM.
Aos professôres Peter Hagedorn (atualmente na Univer
sidade de Karlsruhe, Alemanha) e Luiz Bevilacqua que, sucessi-A
vamente, me orientaram neste trabalho.
' A meus pais, a Hugo e Clara, a Geraldine.
À SÔnia,pelo apÔio e compreensão de sempre.
IV
S I N O P S E
A ,
Neste trabalho e analisado o problema da instabilida-A
de elastodinamica de uma viga de Bernoulli-Euler uniforme, sob ·,
ação de um momento axial periodico aplicado em uma de suas ex-
tremidades. - , As equaçoes de movimento, estabelecidas pelo Princi -
pio de Hamilton, são integradas pelo método de Galerkin, resu!
tando em dois sistemas de equações diferenciais de Mathieu-Hill
em têrmos de coordenadas generalizadas,
As soluções triviais dêstes sistemas determinam as r~
giÕes de ressonância paramétrica das vibrações flexionais da
viga como funções de suas frequências naturais e dos parâme -
tros de excitação.
são apresentados alguns resultados numéricos relati -
vos ao problema,
V
ABSTRACT
The problem of the elastodynamic instability of a un!
forro Bernoulli-Euler beam subject to an axial periodic torque
applied in one of its extremities is analyzed.
Equations of motion, established via Hamilton Princi
ple, are integrated by Galerkin method, resulting in two sys
tems of Mathieu-Hill differential equations in terms of gener~
lized coordinates.
The trivial solutions of these systems determine the
regions of parametric resonance of flexural vibrations of beam
as functions of their natural frequencies and excitation para
meters.
So.me numerical resul ts related to the problem are pr~
sented,

VI
ÍNDICE
SINOPSE • . . • . . • . • • • • • • • . . • • • • • • • • • • • . • • • • • • • • • • • • • IV
ABSTRACT • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • V
-INTRODUÇAO • • • • • • • . • • . • . • • • • • • • • . • • • • • • . • • • • • • • • • • • • • • • • • 1
CAP. I - ESTABELECIMENTO DAS EQUAÇÕES
DE MOVIMENTO DA VIGA
, 1.1. Hipoteses . . . . . . . . . . . . . . . . . . . . . . . . . • . . . . • 7
1.2. Obtenção das Equações de Movimento ,
pelo Principio de Hamilton.............. 8
1. 3. Determinação dos momentos torçores
ao longo da viga • • • • • • • • • • • • • • • • • • • • • • • • 20
1. 3.1. Viga ' engastada a torção • • • • • • • • • • 22
1.3.2. Viga ' livre a torção • ••••••••••••• 23
1.4. Considerações A - obtidas 29 sobre as equaçoes •
CAP. II - INTEGRAÇÃO DAS EQUAÇÕES DE MOVIMENTO
2.1. Viga bi-engastada à flexão e
' -engastada a torçao .............. ,,, . . . . . . 32
' -2.2. Viga bi-engastada a flexao e
' livre a torção . . . . . . . . . . . . . . . . . . . . . . . . . . 40

VII
2,3, Viga bi-rotulada à flexão e
engastada à torção•••••••••••••••••••••• 46 2,4, Considerações sÔbre as equações obtidas, 53
CAP. III - INSTABILIDADE E RESSONÂNCIAS
PARAMÉTRICAS DA VIGA
3.1. Instabilidade das soluções de
sistemas de equações de Mathieu • • • • • • • • • ,
3.1.1. Soluções
3.1.2. Soluções
esta veis ............... . ,
instaveis •••••••••••••••
3,2. Instabilidade das soluções de
sistemas de equações de Hill • • • • • • • • • • • •
3.3. Aplicação das condições de
instabilidade aos problemas em estudo
CAP, IV - ALGUNS RESULTADOS NUMÉRICOS
4,1, Determinação numérica das
•••
60
62
66
77
82
regiões de instabilidade................ 88
4,2, Determinação dos comprimentos ,
críticos da viga • • • • • • • • • • • • • • • • • • • • • • • • 103
LISTA DE SÍMBOLOS••••••••••••••••••••••••••••••••••••••• 118
BIBLIOGRAFIA •••••• e..................................... 121

1
I N T R O D U Ç Ã O
Na Teoria da Estabilidade Elastodinâmica sao estuda
dos os problemas relacionados à estabilidade de corpos elás
ticos sob ação de carregamentos pulsantes que, por atuarem
de uma forma especial sÔbre êsses corpos, recebem a denomi -
nação de carregamentos paramétricos. Por serem tais carrega-,
mentes variaveis com o tempo, produzem vibrações e a insta -
bilidade elastodinâmica se manifesta quando ocorre uma ten -
dência para o aumento ilimitado das amplitudes dessas vibra-
çoes.
1 Em 1924, BELIAEV publicou o que pode ser conside -A A A
rado o primeiro trabalho sobre este assunto. Trata ele de um
problema hoje clássico e que ilustra satisfatoriamente as i-,
deias acima expostas.
Com efeito,suponha-se inicialmente uma haste esbel
ta rotulada em ambas as extremidades à qual se aplica uma
fôrça axial estática P. , A ,
Como e sabido, para valores criti -
cos Pd~ ocorre flambagem na haste.
Consideremos agora o caso do esfôrço axial dado por
P(t) = P cos D.t , com p < p \1) cr·
2
Nessas condições, de um modo geral, a haste experimentarás~
mente vibrações longitudinais. Suponha-se agora, que devido
a uma perturbação qualquer, a haste assuma também vibrações
transversais. Em geral essas vibrações terão amplitudes li -
mitadas.
Entretanto foi demonstrado, tanto analítica como ex
perimentalmente, que para determinadas relações entre a fre
quência de excitação .!l e as frequências naturais w das vi
brações transversais da haste, esta se torna dinâmicamente
instável, isto é, as amplitudes das vibrações transversais ,
tendem a crescer de modo rapido e ilimitado, caracterizando-. ' se assim um fenomeno tipicamente ressonante.
, Poderiam ser citados inumeros outros exemplos de
• instabilidade elastodinamica ocorrentes
arcos, anéis, placas e cascas. Conforme
'
em vigas, colunas,
• observa BOLOTIN ,
sempre que um carregamento estatico de um determinado tipo ,
puder causar instabilidade estatica, o carregamento pulsante , . .
correspondente podera ocasionar instabilidade dinamica.
Vamos agora destacar algumas peculiaridades intere~
santes das vibrações tratadas, que as tornam, inclusive, bas
tante distintas das vibrações forçadas:
- , . lQ) A equaçao de movimento que as rege e homogenea.

3
Assim, a excitação é nela representada por coeficientes (ev!
dentemente funções do tempo) de um ou mais têrmos à esquerda ,
do sinal de igualdade. Dai a denominação - carregamentos pa-, .
rametricos - usual na bibliografia sobre o tema. Entretanto,
segundo BOLOTIN~, "seria mais correto falar não em carrega -, -mentos parametricos em geral, mas em,carregamentos que sao
paramétricos em relação a certas formas de deformações". Por
• exemplo, no caso mencionado anteriormente, a força axial p~
sante é uma excitação paramétrica em relação às vibrações
transversais, mas é simplesmente uma excitação forçada em re
lação às vibrações longitudinais da haste.
2º) Contràriamente às vibrações forçadas, as oscil~ .._ , - ..
çoes parametricas podem ocorrer em direçoes normais a exci -
tação, como se viu no exemplo anterior. Ainda como exemplo, 4 , ,
neste trabalho, o carregamento parametrico e um momento tor-
çor axial, que, no entanto, produz vibrações paramétricas
flexionais.
3Q) Em contraste com as vibrações forçadas, que sao
ressonantes apenas para frequências de excitação iguais aos
valÔres (discretos) das frequências naturais, independente -- , mente da amplitude do carregamento, as oscilaçoes parametri-
cas serão ressonantes para "faixas" de frequências de exci -
tação, faixas essas tanto mais largas quanto maior o carre -• gamento. Para valores suficientemente pequenos da amplitude
4
' do carregamento, essas faixas localizam-se simetricamente em
tôrno de valÔres múltiplos ou fracionários de cada uma das
frequências naturais ou de combinações lineares destas.
42) Um fato que parece paradoxal é que o amorteci -
mente pode ampliar as mencionadas faixas de ressonância, ten
do então, um efeito desestabilizante.
* * * 16
Em 1949 METTLER formulou uma teoria geral para a 4
Estabilidade Elastodinamica, da qual vamos, a seguir, comen-
' tar suscintamente alguns de seus topices que mais se relacio ' ' nam com o trabalho que vamos desenvolver nos proximos capi -
tulos.
, O objetivo final dessa teoria e discutir a estabil!
dade das soluções de um sistema de equações diferenciais li
neares do tipo MATHIEU-HILL, soluções essas que são as coor-
' N ' denadas generalizadas associadas as vibraçoes do corpo elas-
tico.
4
Tendo em vista esse objetivo, parte-se, em geral,
da formulação variacional do problema dinâmico utilizando o ,
Principio Estendido de HAMILTON, recorrendo-se frequentemen-
te a linearizações nessa etapa.

5
-Chega-se, assim, a uma equaçao variacional, que po-
de ser tratada diretamente pelo método de RITZ, ou então (c~
mo nêste trabalho) a partir dela estabelecer a equação a de
rivadas parciais do movimento.
Caso adotada a segunda alternativa, pode-se aplicar
nas equações de movimento o método de GALERKIN, ou ainda, a-• plicar a Analise Modal caso se conheçam as autofunções do
problema.
De qualquer forma resulta o já referido sistema de
-equaçoes de MATHIEU-HILL.
Referindo-nos apenas a equações de MATHIEU, temos a
forma geral (ver por exemplo METTLER 17 ):
I'\
e. e.o::. nt L F o = a p=1 . ,p t f
1""=\,'2., ... ,n
(0.1)
- . onde qr sao coordenadas generalizadas, w~ frequencias natu -4 - ' ... rais,.n a frequencia de excitaçao (constante) e€ e Frp sao
- . , constantes. A soluçao trivial do sistema (0.1) e instavel se . , n se situa na vizinhança de certas frequencias "criticas"
dadas por
f2 - '2Wr . o- m rn.=1,'2., ... (0.2)
. , , caso em que se tem ressonancia parametrica de primeira espe-
cie; ou dadas por
6
M=1,'2.1''' (0.3}
- . , quando entao diz-se ocorrer ressonancia parametrica de segll!! , , ~ ,
da especie (tambem chamada ressonancia combinatoria),
A maior restrição que pode ser feita à Teoria que , , , , -
vamos utilizar e que ela so e valida para excitaçoes ''sufic!
entemente pequenas", Acrescente-se que a partir dela (ou de
modo mais geral, a partir de uma formulação linear) nao , e
, -possível a determinaçao de amplitudes ressonantes, conforme - 3 expoe BOLOTIN ,
* * *
A obra de BOLOTIN 3, "The Dynamic Stability of Elas-
, , , , tic Systems" e, ate o presente momento, o unico texto didati
co sÔbre Instabilidade Elastodinâmica na literatura mundial
(infelizmente, no .entianto, tal obra é muito suscinta no que
se refere a ressonâncias combinatórias).
4 ' O "survey" de EVAN-IWANOWSKI e um excelente levan-
tamento de trabalhos sÔbre o tema publicados até 1964/1965, A , ~ .
Referencias bibliograficas comentadas sobre alguns trabalhos
mais modernos são encontradas em artigo de HAGEDORN e KOVAL 8,

7
CAPÍTULO I
ESTABELECIMENTO DAS EQUAÇÕES DE MOVIMENTO DA VIGA
1.1. HIPÓTESES
, No presente trabalho faremos a analise do problema
da estabilidade elastodinâmica de uma viga de BERNOULLI-EULER,
uniforme, de secção transversal com dois eixos de simetria. ,
Suponhamos ainda que os momentos principais de inercia das
-secçoes transversais da viga sejam desiguais.
Em uma das extremidades da viga aplicam-se, axialmeQ
te, o par T(t) = T0
+ T1
cos .Qt A
e a força constante P, ambos
mantendo suas direções iniciais independentemente dos desloca 4
mentes ocasionados por esses mesmos carregamentos,
Quanto às condições de vinculação, a viga poder~ se
apresentar:
À flexão: bi-engastada ou bi-rotulada
À torção: engastada ou livre na extremidade oposta
' aquela onde se aplicam T(t) e P.
1----<>- li:
. 1 o T(tl
1f. -::~~~--~----_·:~_-_-L-~~~:_·_-_ ------------·~_-::1 __ ----p
FIG.1
8
Dado que nesta análise, a frequ~ncia de excitação , ~ ,
podera assumir valores proximos, ou mesmo maiores do que a me
nor das frequências naturais das vibrações-torcionais da viga,
serão levados em conta os efeitos destas Últimas. Vale dizer,
os momentos torçores e seus associados, momentos fletores, s~
rao considerados variáveis não apenas com o tempo, como tam
bém com a coordenada x da secção.
Não serão considerados efeitos de amortecimento de ,
qualquer especie no movimento da viga.
Destaque-se ainda o fato de que no desenvolvimento
dêste trabalho, não serão considerados os efeitos transitÓ -
rios provenientes da aplicação de qualquer dos carregamentos.
Finalmente, devemos limitar a aplicação dos resulta
dos obtidos a valÔres suficientemente pequenos de T(t), a
fim de que seja válida a formulação linear que vamos aplicar.
1.2, OBTENÇÃO DAS EQUAÇÕES DE MOVIMENTO
PELO PRINCÍPIO DE HAMILTON
, , , Uma posição de equilibrio possivel para a viga e a-
t quela em que a mesma permanece retilinea e, consequentemente,
T(t) produz somente torção e P apenas deformação longitud!
nal.
Como é sabido (ver p. ex., ZIEGLER25
ou BIEZENO &
GRAMMEL2),esta configuração (correspondente à solução trivial

9
, , ... "" do problema) e instavel para determinados valores desses car-
regamentos. ,
Suponhamos agora, como e usual nos problemas de ins-
tabilidade elástica, que devido a uma pequena imperfeição da
viga, e/ou excentricidade do carregamento P, e/ou perturba -
ção inicial, a viga se deforme, isto é, seu eixo baricêntrico N
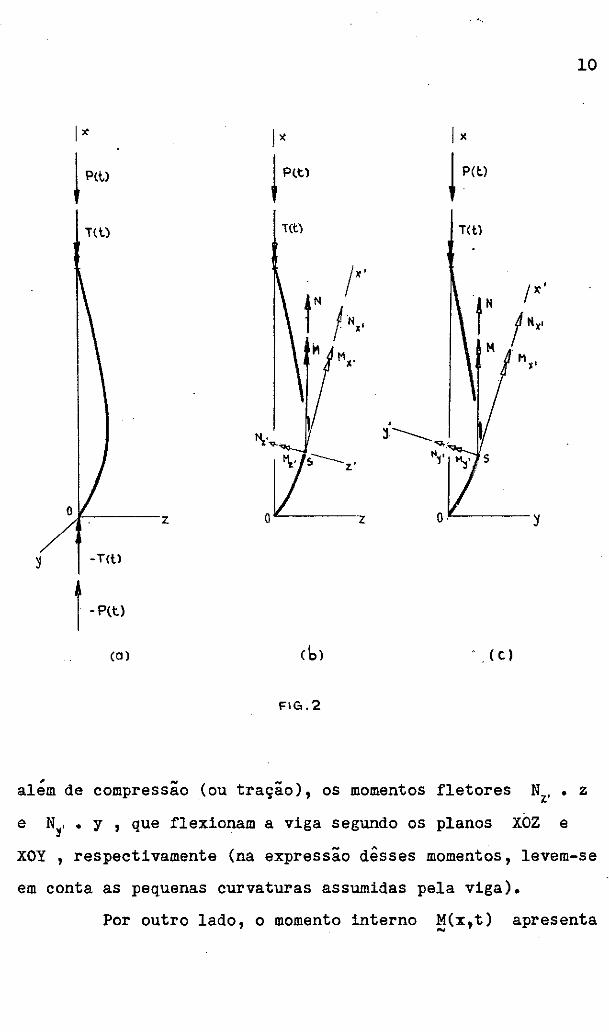
assuma a forma de uma curva espacial definida pelas equaçoes
y = y(x,t) , ,
z = z(x,t) , (fig. 2a) compativel com as condi-
ções vinculares a que está sujeita a mesma. Suponha-se entre
tanto, que as curvaturas assumidas pela viga sejam pequenas.
Deve-se observar que nessas condições, o par T(t), , "' - Â ,
alem de obviamente nao conservativo sob o aspecto dinamico, e 1 ~ ,
tambem nao conservativo sob o ponto de vista geometrico, con-
forme demonstram TIMOSHENKO & GERE 21.
Designemos por M(x,t) o momento interno produzido p~
lo par T(t).
Por outro lado, ainda que posteriormente considere -
mps a carga P A ,
constante, vamos, neste capitulo, associar a
P(t) , A
variavel, o esforço axial interno N(x,t).
Os vetores ~(x,t) e ~(x,t), aplicados no baricen
tro de uma secção genérica S, são, por equilÍbrio, paralelos
a T(t) N
e P(t) -,
e podem ser substituidos pelas componentes
tangente, normal e bi-normal, ou sejam, componentes segundo o
triedro OX'Y'Z' (figs, 2b e 2c).
Nessas condições, o esfôrço axial N(x,t) ,
produzira, N
T(l)
o
/ ~ -T(t)
t -Plt)
(O)
z
J ><
l Pltl
1(t)
FIG.2
/x
! P(t)
T(tl
· . (t 1
10
além de compressão (ou tração), os momentos fletores Nz, • z
e N~, • y , que flexionam a viga segundo os planos XOZ e
XOY, respectivamente (na expressão dêsses momentos, levem-se
em conta as pequenas curvaturas assumidas pela viga).
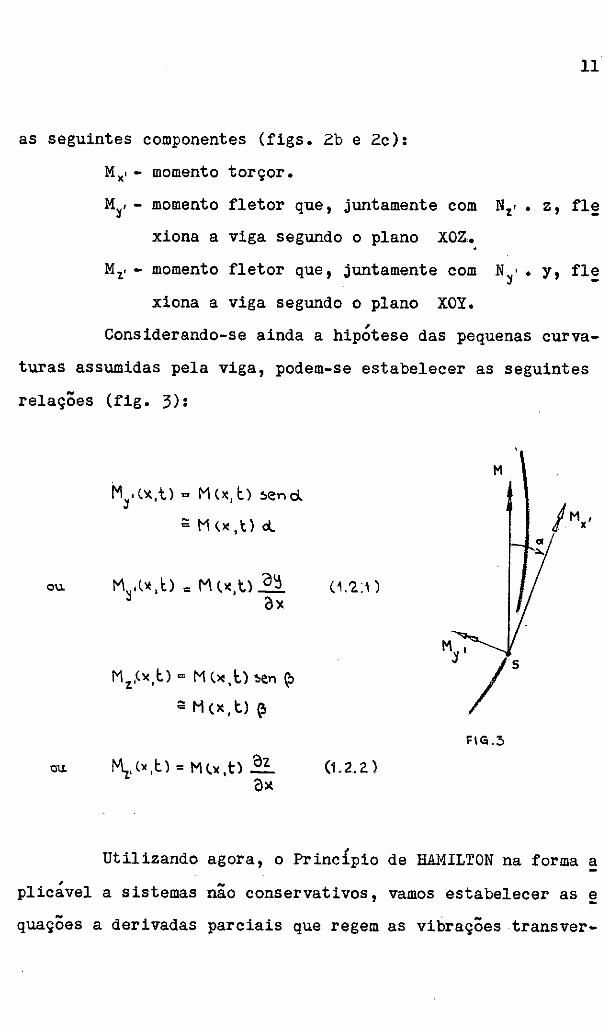
Por outro lado, o momento interno M(x,t) - apresenta
11
as seguintes componentes (figs. 2b e 2c):
M,-X momento torçor.
M,-)
momento fletor que, juntamente com Nz' • z, fl!!!
xiona a viga segundo o plano xoz • . M1.' - momento fletor que, juntamente com N~· • Y, fle
xiona a viga segundo o plano XOY. ,
Considerando-se ainda a hipotese das pequenas curva-
turas assumidas pela viga, podem-se estabelecer as seguintes
relações (fig. 3):
M
M l l \1.. t) = M ( >C, t.) !>en d
/Mx' ;,; M(>C,tl d. .. "-
O\l. M~,()(, 1:) = M (>e, t) 0 ':I (1,'2.:\) õx
M1
,<1<,l) = M (~.l) ~en ~ ",·;, ~ H (X. t) {?,
FIG.3
~. <• ,t.) = M ~l( ,t) a2. (1.2.2) a~
Utilizando agora, o Principio de HAMILTON na forma a
plicável a sistemas não conservativos, vamos estabelecer as!!!
quações a derivadas parciais que regem as vibrações transver-

12
sais da viga nos planos XOY e XOZ. , . 6
Como e sabido (ver p. ex., GOLDSTEIN ), o chamado r ,
Principio de HAMILTON Estendido e expresso por
õ 5 t, (k - V+ W) dl = o (1 ,2,3)
t,
onde K - energia ,
cinetica
V - energia potencial
w - trabalho não conservativo
Consideremos, inicialmente, a vibração transversal
da viga no plano XOY. Seja m(x) sua massa distribuída por
unidade de comprimento e EI~(x)
flexão.
a correspondente rigidez
y m (X), E ~(xl
·l-1 __ dx -----i-[ o-l----------------------
x
FIG-. 4
-Dada a suposta esbeltez da viga, serao desprezados
' a
13
nêste desenvolvimento, os efeitos de cizalhamento e de inérc!
a rotativa.
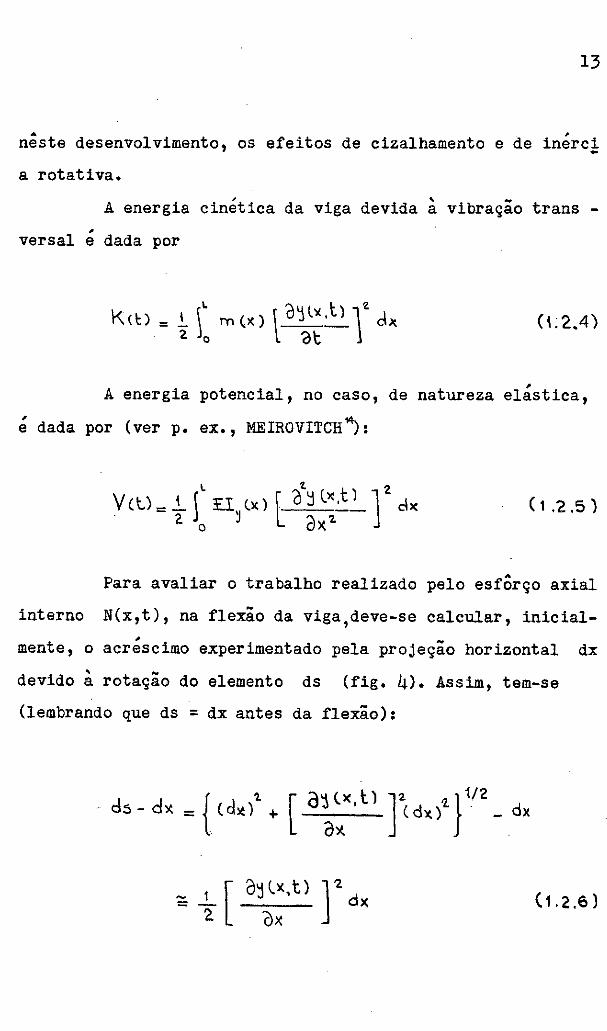
A energia cinética da viga devida à vibração trans -,
versal e dada por
K<t) = ~ (L rn(><) l Ô~ll<,l) 1e dx · 2. )o l ôt
(1:2.4)
, A energia potencial, no caso, de natureza elastica,
é dada por (ver P• ex., MEIROVITCH°):
L t 2 V ( \:.) = .!.. r il (X) [ o ~ lic ,t l 1 dx · 2 Jo ~ L êlx2.
( t .2 .5)
A
Para avaliar o trabalho realizado pelo esforço axial
interno N(x,t), na flexão da viga,deve-se calcular, inicial-,
mente, o acrescimo experimentado pela projeção horizontal dx
devido à rotação do elemento ds (fig. 4). Assim, tem-se
(lembrando que ds = dx antes da flexão):
- -t [ Ô'j lx,t)
ê)x ] '2 dx (1.2.6)

14
onde, dados os pequenos valÔres assum:Íveis por l êllj / Olt} , fo
ram desprezados os demais têrmos da expansão binomial, Por ou
tro lado, observe-se que os deslocamentos transversais da vi
ga são suficientemente pequenos de modo a, em uma primeira a
proximação, não alterarem os valÔres de N(x,t),
Tem-se então
(1.2.7}
Quanto ao trabalho realizado por Mz,(x,t) , conside
rando (1,2,2) temos:
d2(x.t) ][ ô\\(i<,t))dx êlx õ-x ~
(1. 2.8)
onde o sinal negativo deve-se ao fato de que um momento .nega-,
tivo (sentido contrario ao eixo z,, fig, 2b) realiza um tra-,
balho positivo, isto e, aumenta a curvatura da viga.
Evidentemente, o trabalho externo total W(t) na
flexão da viga é
( 1 .2 .9)
Estudemos agora as variações de cada uma das parce -
las do integrando de (1,2,3) (sÔbre propriedades operacionais
de b 10 5 ver HILDEBRAND ou FUNG ).

15
~ , De (1.2.4) decorre a variaçao da energia cinetica:
e portanto:
Tendo-se presente, todavia, que por definição,
Sy(x,t) = O para t = t, e t = tz, segue que:
(1.2.10)
A variação da energia potencial (1.2.5) é dada por:
i '2.
(\J (L El ~ s (ªa':iz) dit = o - jo ) 0~_? X

16
que integrada por partes sucessivamente, resulta em:
(1.2.11)
- A A variaçao do trabalho devido ao esforço axial in -
terno W (t) N
, dado por (1.2.7), e
ou integrando por partes:
(1.2.12)
Finalmente, a variação do trabalho realizado pelo mg
mente interno, w,...(t), dado por '<1.2.8) ~:
17
ou integrando por partes sucessivamente:
( 1 . '2 .13 )
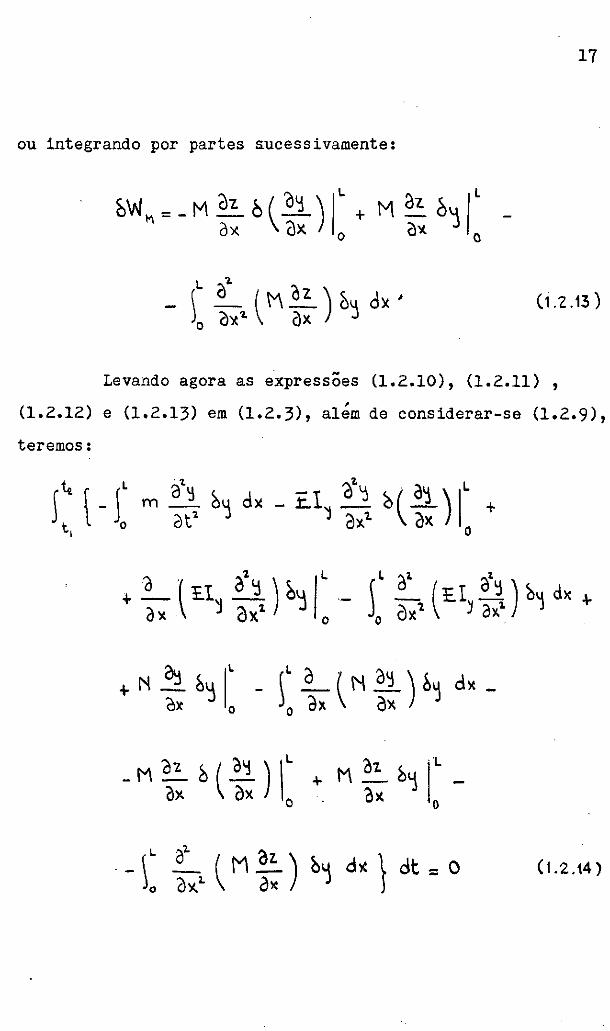
Levando agora as expressões (1.2.10), (1.2.11) , ,
(1.2.12) e (1.2.13) em (1.2.3), alem de considerar-se (1.2.9),
teremos:
~ ll rL a r a~ ) ( + N _ b'J _ j _ \ N _ o~ õ)( o o dX ÕX
d>C -
Ô L + M _:.. ?)i 1 -
Ô>I. o
-r o
(t.2.i4)

18
ou ainda, reagrupando:
+"ª-(N~) + ax êlx
2 . .
~ ( M ~ )] ~':\ dx + élx 2 ax .
- [. l_ / :t.1 n + M ol ) + N !!.J bj 1L} dt = o à)( \ 1 c)x 2 ox ox
0
( 1 .2.15)
De acÔrdo com o lema fundamental do cálculo Variaci-23 onal (ver p, ex., \>/EINSTOCK ), a integral (1,2,15) deve anu-
lar-se para valÔres arbitrários de óy e de s·( a~; ôx)' de
modo que estas variações podem ser assumidas como iguais a ze
roem x = O e x = L e diferentes de zero no interior do
intervalo [x,L].
Portanto, resulta a seguinte equaçao de movimento no
plano XY:
+ ~( N~) + ôX \ ôX
{_ ( M )z ) + '"" ~ = O ó'X.l. ox é)t2
( t.2.16)
19
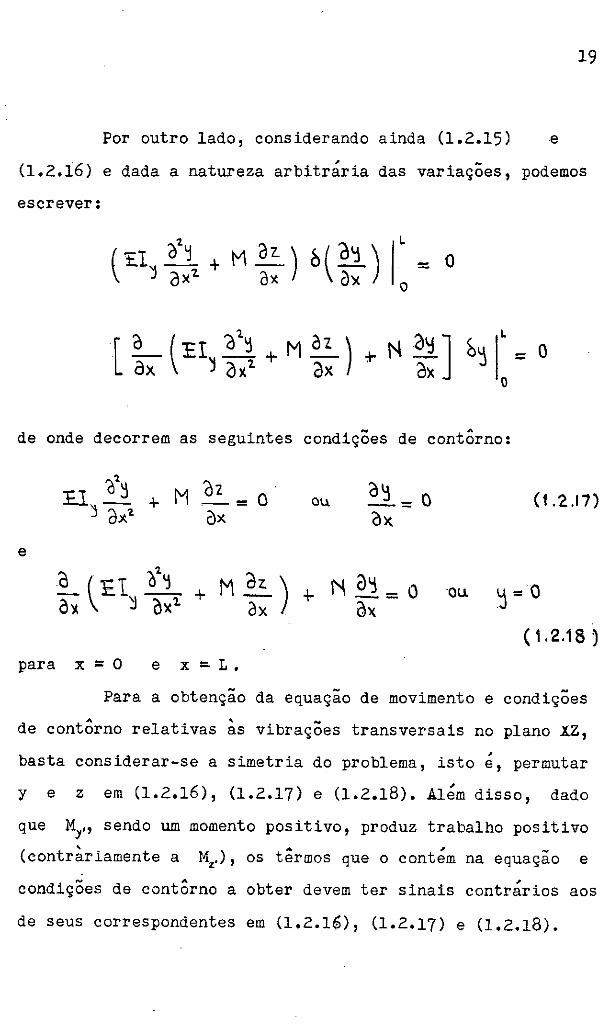
Por outro lado, considerando ainda (1.2.15) e
(1.2.16) e dada a natureza arbitrária das variações, podemos
escrever:
L
- o o
de onde decorrem as seguintes condições de contôrno:
e
para x = O
+ M 'ôz = o c)X
e x=-L.
ou õ~ --º õx. (1.2.17)
( 1.2.18)
Para a obtenção da equaçao de movimento e condições
de contôrno relativas às vibrações transversais no plano iz, basta considerar-se a simetria do problema, isto é, permutar
y e z em (1,2.16), (1.2,17) e (1,2,18), Além disso, dado
que M1,, sendo um momento positivo, produz trabalho positivo
' 4 , (contrariamente a Mz.), os termos que o contem na equaçao e
condições de contôrno a obter devem ter sinais contrários aos
de seus correspondentes em (1.2.lé), (1.2,17) e (1.2.18).
20
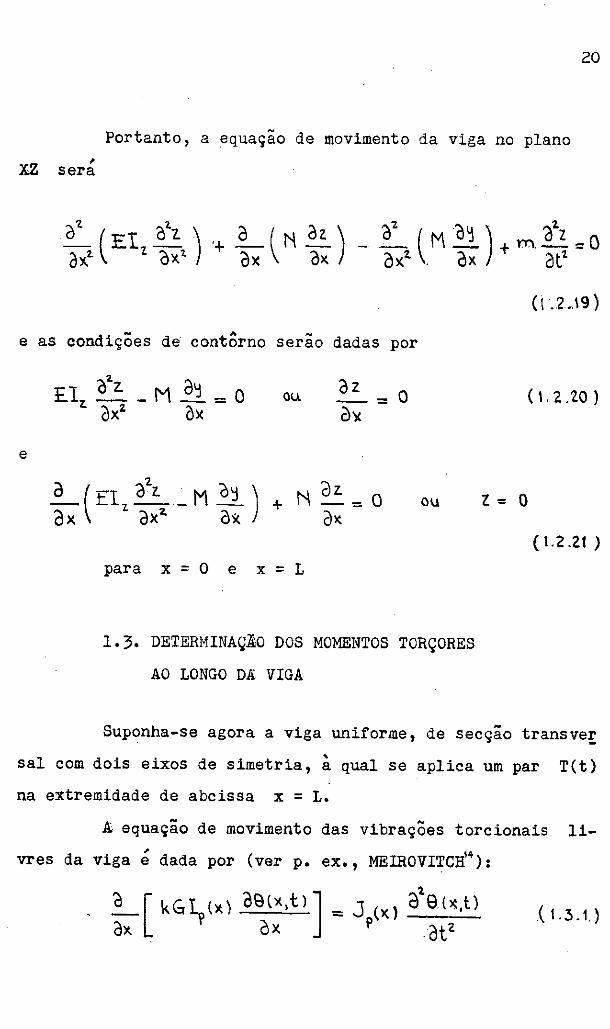
Portanto, a equaçao de movimento da viga no plano ,
XZ sera
e
e
- A as condiçoes de contorno
E lz. o'z. - M ~ = O ê)x2 ôx
-serao dadas
ou ÔZ -= ô')(
N êlz. = o ê)x
para x = O e x = L
por
o
ou
1.3. DETERMINAÇÃO DOS MOMENTOS TORÇORES
AO LONGO DA VIGA
(t.2.19)
( \. 2 .20 )
z = o
( 1.2.2t)
-Suponha-se agora a viga uniforme, de secçao transve~
' sal com dois eixos de simetria, a qual se aplica um par T(t}
na extremidade de abcissa x = L.
A equação de movimento ,
vres da viga e dada por (ver p.
das vibrações torcionais i4 ex. , MEIROVITCH ) :
l
li-
= J (X) Õ 9{x,t) P at2
(1.3.1}

21
, No entanto, dadas as caracteristicas da viga aqui con
siderada, pode-se escrever simplesmente
onde
sendo
2 'I. o EHx,t) t a e (x,t) -- - Ct.3.2) ox 'I. ci at 1
e= kGlp ~pf Jp
(\.3.3)
~ ' C - velocidade de propagaçao das ondas associadas as
vibrações torcionais.
k - coeficiente dependente da forma da secçao 22 ' ( ver . T IMOSHENKO & GOOD IER , pag. 277 )
, G - modulo de elasticidade transversal.
, ~
I - momento de inercia polar da secçao transversal p
da viga. , ,
J - momento de inercia massice por unidade de compr! p
mento do eixo longitudinal da viga, ,
(:> - massa especifica do material,
A resposta transit;ria não nos interessa nêste tra -
' balho, pelo motivo de que a mesma desaparece rapidamente de -
vido ao amortecimento interno da viga.
Assim, vamos obter inicialmente a resposta permanen
te da viga à excitação T(t) :: T0 + T1
cos.Qt , para, em segui
da, determinarmos a expressão do momento torçor a ela assoei-

22
ado, considerando sucessivamente dois tipos de vinculação
torção.
' a
1.3.1. VIGA ENGASTADA À TORÇÃO
Suponhamos a viga engastada à torção na extremidade
de abcissa . . -x =O.Recorrendo ao metodo da separaçao das va-
• riaveis, suponha-se a resposta permanente a T1
cosot na for-
ma
e t li. t) = e e\() co::. nl 1 '
(1.3.4)
• que levada em (1.3.2) nos da
( 1.5 .6)
onde ( 1.:5.7)
Portanto
(1.3.8)
Aplicando agora as condições de contôrno correspon -
dentes ao caso,
e C1:>tl = o \ ' .
kGl oe, P olt.
(1 . .3.9)
l< = L

23
e tendo em conta (1.3.4), resulta
e.os nt (1.3.10)
, Por outro lado, para o momento estatico T
0, tem-se
pela Resistência dos Materiais:
(1.3,11)
Assim, sendo a resposta permanente dada por
(1.3.\?.)
e o momento torçor ao longo da viga, conforme a Teoria da E
lasticidade, expresso por
teremos, nêste caso, após as devidas substiçÕes:
M<)( t) - T T c.o5 ~x C.05 nt ' -
0 + 1 to5 ~L ( 1.3.1.3)
1.3.2. VIGA LIVRE À TORÇÃO
Seja agora o caso da viga com a extremidade de abci=
sa x; O, livre.

Para a determinação da resposta permanente associada
' vamos, analogamente ao caso anterior, aplicar o , ... . , .
metodo da separaçao das variaveis.
Considerando então as condições de contôrno corres -
pondentes ao caso,
k G 1 ae, P a~
.kGI os, f ôx
- o
= T1 e.os .o.t
e levando em consideração (1,3,4) e (1,3,8), vem
( 1.3 .14 a)
(1. ~.14 b)
(1.3.15)
Para a determinação da resposta a T0
, precisamos, A ' # neste caso, recorrer a analise modal,
Consideremos então a equação de movimento do proble• , A
ma, obtida a partir de (1,3,2) pelo acrescimo do termo corre~
pondente à excitação: . ~ ~
k G IP Ô 60 + T0 ( t ) . b ( X - L ) = J p Õ 90 êx1. õt'I.
(1.3.16)
onde Õ(x - L) ' -e a funçao delta de Dirac, definida por
b(x-L)=·o (1.3.17)
\.
J ~(x-L)dx -1 1)
25
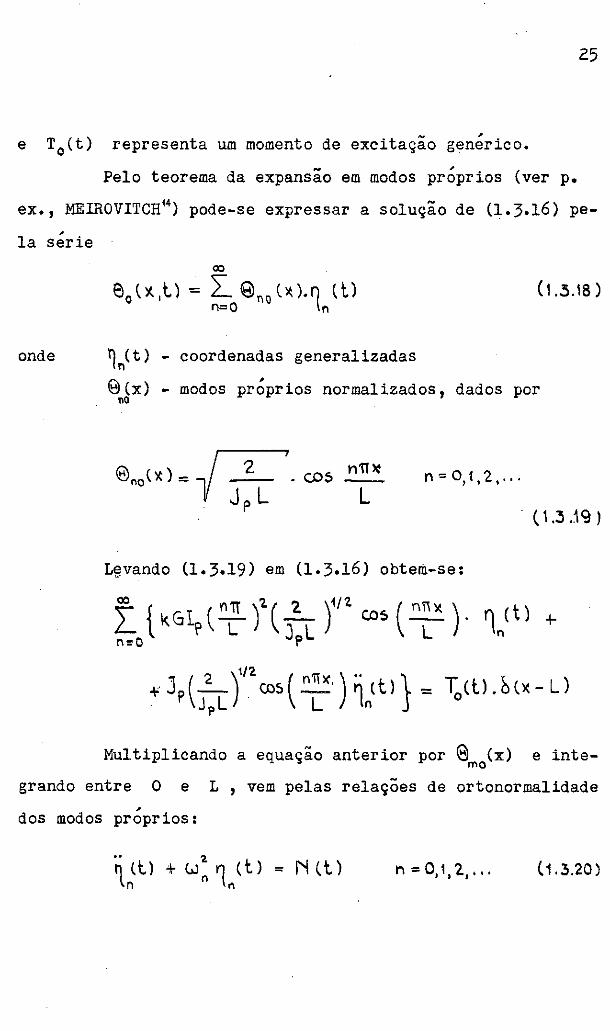
, representa um momento de excitação generico. e
Pelo teorema da expansão em modos próprios (ver p.
ex., MEIR0VITCH14) pode-se expressar a solução de (1.3.16) pe-
, la serie
onde
a:,
e0 tx,t..) = ~9n0 l~).1ntU (1..3.18)
- coordenadas generalizadas ,
- modos proprios normalizados, dados por
n=0,1,2, ...
L ( 1.:3 .19 )
L~vando (1.3.19) em (1.3.16) obtem-se:
Multiplicando a equação anterior por e (x) e intemo
grande entre O e L, vem pelas relações de ortonormalidade ,
dos modos proprios:
n = O, 1, 2, •.. (1.3.20)
Z6
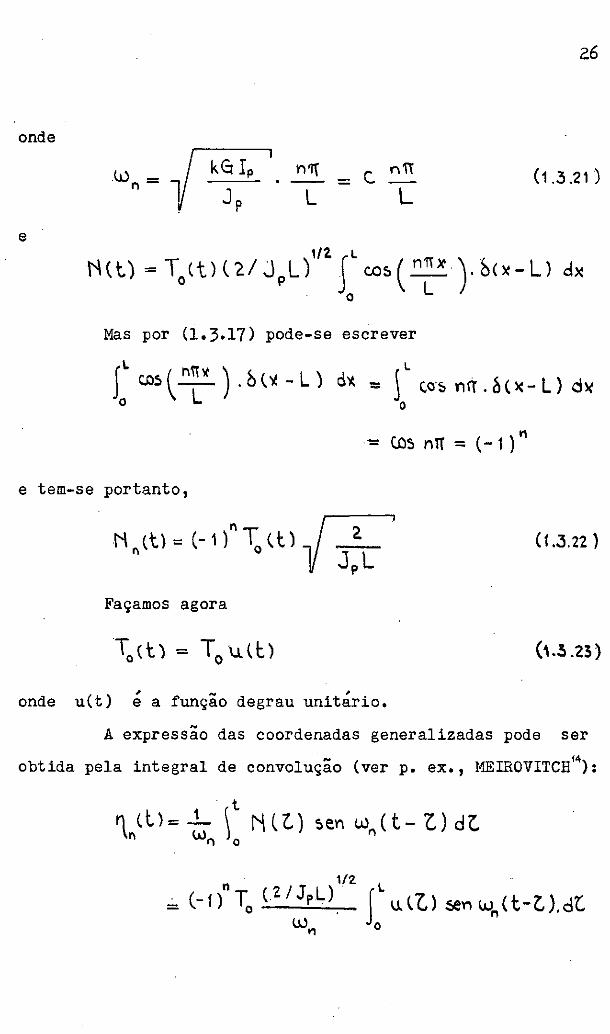
onde
(1.3.21)
e
Mas por (1.3.17) pode-se escrever
JL ( nn 11 ) ( L
C.05 \- . b('ll - L) d"K = J e.o·~ nfl'. õ(ic- L) di< o L 0
-= co~ n1T = ( - t ) .,
e tem-se portanto,
N tt)=(-1)"T(t)r;ç· " º J L p
( 1.3.22)
Façamos agora
(\ . .3.23)
onde , N ,
u(t) e a funçao degrau unitario.
A expressão das coordenadas generalizadas pode ser
obtida pela integral de convolução (ver p. ex., MEIROVITCH'4):

27
( 1.3.24)
Considerando-se então (1.3.18), (1.3.19), (1.3.21)
e (1.3.24) pode-se escrever
N
Mas pela expressao (1.3.21) tem-se que W0 = O e as-A , ,
sim o termo da serie anterior correspondente a n = O e in-
determinado, pelo que se considera o valor do limite
( 1.3.26)
Por outro lado, tendo em vista que o desenvolvimento
em série de Fourier da função definida por
, e dado por
' xE.[-L,L]
t(~+iL> = f oe)
L2 t<x) __ - '!,
(O "'
+·4[(-1)
resulta imediatamente
~ t\ '\" (-1) L n2. \"\: \
(1 . .3.27)
28
Substituindo-se as expressões (1,3,26) e (1,3,27) em
(1,3,25) tem-se a resposta correspondente a T0(t) = T
0u(t):
(1.~.2.8)
Na expressão (1,3,28), são imediatamente reconheci -
dos o primeiro têrmo como a rotação rÍgida da viga, e o segug
do como a resposta transitória, ambos não dizendo respeito a 4
este trabalho, ao qual interessa apenas a resposta permanente, ,
representada pela ultima parcela,
Superpondo então, e,(x,t) dada por (1,3,15), com a
componente permanente de eº (x, t) ' vem e
(1.3.29)
Finalmente, considerando que o momento torçor ao lo~ ,
goda viga e dado por M(x,t) = KGI (àe/ax) , teremos
:;en ~X e.o~ _n t $en ~ L
(~.3 . .30)

29
1.4. CONSIDERA:ÇÔES SÔBRE AS EQUAÇÕES OBTIDAS
-Nas secçoes anteriores, obtivemos um sistema de equ~ - A çoes a derivadas parciais lineares homogeneas, que regem as
vibrações flexionais da viga em seus dois planos principais,
bem como as correspondentes condições de contôrno,
Essas equações são válidas para vigas não uniformes, ,
bem como para esforços axiais variaveis com o tempo. Com isso
pretendeu-se apenas facilitar a obtenção de resultados mais ,
gerais, em analises posteriores. A
Todavia, neste trabalho teremos
m(x) = m = constante
EI:i (x) = EI 1 = constante (1.4.1)
EI, (x) = EI 2 = constante
N(x,t) = p = constante
Por outro lado, a fim de tornar mais clara a exposi-
-çao que se segue, vamos fazer daqui por diante
y(x,t) = y1
(x,t)
z(x,t) = y (x,t) 2.
(f.4. 2)
Portanto teremos, de (1.2.16), (1.2.17), (1.2.18),
(1.2.19), (1.2.20), (1.2.21), (1.4.1) e (1.4.2):

30
PLANO XY
e
EI1 + L [ M(x,t) êl~2 ]. + ro. ó2
'jt = O êlx l olt õl1
r.t o.,,':I, + M(x ,l) <l~'l. = o 1 õx '2. ox
E.I i'j, + 1 '). ~ ox .
ou..
para x = O e x = L
a1:1, - o . ô)(
cu.
(1.4.3)
{1.4.4)
j, = o
( 1.4 .5)
PLANO XZ
cl4
~i
1.
~ L [ M<~.t) º~1]
l
El + P a ~2 m d~z o %. + -= ox.4 ê) X 2 . ôx:z. Q)( ôt1
(1.4.G)
.t...l êl"'.h - !M (x,t) 0Y1 = o 01.1 Ô':h - o (1.4.7} 2. . ·%. . -êlx ôx OX .. -e
3 a [ M dj J + 'P o:J2 = 0 EI o ~1 ~=O _ - (x,t)--.!.. ou.
1 ê)x3 ê) )( õx õx 2
para x = O e x = L

31
No capítulo seguinte vamos estudar as soluções des-
-sas equaçoes particularizando-as para vigas com diferentes t!
- ,. - "" ' pos de vinculaçao, isto e, fixando condiçoes de contorno a
flexão e substituindo os momentos torçores internos conforme
- ,A ' -as condiçoes de contorno a torçao.
É oportuno observar, a esta altura, o fato de que
tratamos as vibrações flexionais da viga separadamente de su
as vibrações torcionais, embora seja evidente que do ponto de , - ..
vista fisico, haja uma interaçao entre elas. Este fato pode -
ria, à primeira vista, obrigar-nos a uma formulação, bem mais
complexa do problema, qual seja, a de estabelecer, a partir , A -do Principio de HAMILTON, um sistema de tres equaçoes de mov!
A ,
manto simultaneas, em cada uma delas aparecendo variaveis re-
lativas à flexão e à torção dinâmicas.
Felizmente no entanto, 1'1ETTLER15 em artigo publicado
em 1947, demonstrou a validade do tipo de formulação que ora
empregamos.

CAPÍTULO II
INTEGRAÇÃO DAS EQUAÇÕES DE MOVIMENTO
4 , -
Neste capitulo vamos transformar as equaçoes de mov!
mento obtidas anteriormente, em sistemas de equações diferen-
ciais ordinárias de MATHIEU, utilizando para êste fim, o
todo de GALERKIN ( ver p. ex., MEIROVITCH 14 ou FUNG5).
, me-
Z.l. VIGA BI-ENGASTADA À FLEXÃO E ENGASTADA À TORÇÃO
/ /
/ / /
!...,------~ i o
L
FIG,. 5
Tlll p
/, ·/
/ /
··--1
Substituindo (1.3.13) em (1.4.3) e efetuando as der!
vações indicadas, resulta a pPimeira das equações de movimen-,
to especificas para o caso:
+ p ª'2.~I êlic. 2
( T T e.os .n t cos ~li. ) + o + , COSi L

33
+ IY\ (2.1,i)
Aqui as condições de contôrno correspondentes ao ca
so sao evidentemente
(2.1.2)
e
e 2.1 .3)
Façamos agora as seguintes substituições de variá -
veis:
(2.1.4)
( 2. \, 5)
Teremos então a EDP
4 2 -:,.3
EI ôw, + Ç) ÕW1 + /T +Te.o::, ot C05~X ) o"W2. -i ox4 ôx2. \ o 1 e.os ~L o>t3
34
(2. t .6)
, , que e formalmente a mesma (2.1.1), como alias se poderia pre- ·
ver fàcilmente. As novas condições de contôrno do problema ~
sao obtidas imediatamente:
w, t o,t ) = w 1 ( L, t ) = w 1. C o, t ) = wz. l L, t ) = 1. (2.l .7) e
(2.1.8)
Tendo em vista (2,1,6), (2,1,7) e (2,1.8), pode-se
propor a seguinte expansão em série para a solução:
CX)
w,,x ,t) = L. q (l) C.05 '2fl'll( p=o ,p L
('2.1.9)
QJ
Wi ~. t) = L q (t) C05 2.p'il '\( jl=Q '2fl L
(2.1.10)
onde
q ( t ) e 9 ( t ) · sao coordenadas generalizadas 1p '2f' e
~ ( t l = m e t) = co~ 2.pTí 1(
~ ~P L ('2.1 .1l)
são funções de comparação do problema de autovalor (conforme·
.. 35
FUNG 5, MEIR0VITCH 14 e outros, funções arbitrárias satisfazendo
tÔdas as condições de contôrno, sejam geométricas ou naturais
do problema de autovalor, sendo ainda ' A 2n diferenciaveis so-, ,
bre o dominio, onde 2n e a ordem do operador ·~· do pro -
blema),
Observe-se por outro lado, que
(2.1 .12.)
é um conjunto completo de funções ortogonais (ver p. ex.,
WYLIE"4).
Passando a aplicar o método de GALERKIN, vamos levar
(2.1.9) e (2.1.10) em (2.1.6), daí resultando
a:>
- p L ( Z?f{ \ 'l 9 ( t) ÇO':,
p=o L ) 'f
C0'5 ~X )
co5 vL
00 ~
L r ~) a (l) p=o \ L hp
<XI '2
+ { 2 ~ T1
e.os nt _~e_n_~_">C ) L. ( 2P11 ) 0 ( t) \ e.o& ~ L p::. o . L 1zp
e.os '2.p'li ~ l
+
o::,
+ ( ~2. T1
e.os nt C05 ~ l( J I.(:E_)~tt) sen '2.p'ti l(
+ c.os~L ?=O L 2? L
co
+- rn L .. tt) C05 '2p1' l< o (2.1,13) i'=O °t1p -
L
Multiplicando agora a equação (2,1,13) por
;K. (~)·_ co~ 2.<"'itx ~LI" -
L r= 0,1,'2, ... (2.1 .14)
e integrando-a entre ~ O e L, resulta depois de operaçoes
' algebricas simples:
2?íT)( d 1 ... (t) .C.05 X j ~ +
L tp
+ I_ [EI1 \ 2~ff)4 - p \ zr ) ~1 [ ~: (.O~ ~r~)( , co5 1p:x d~ Jq,p (t) p=O
+~ C.05 .n_ t. e.os ~ L
•
37
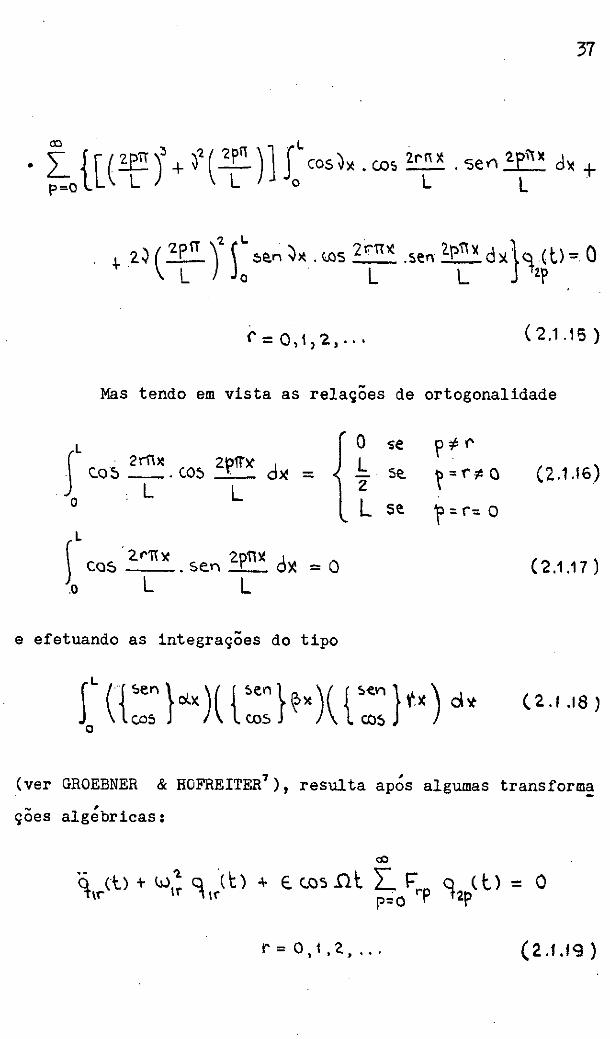
• f_ {r( 2.p'ií ):3 + ~'2 ( '2p!l ) 1 JL. COS ~)e • C.O~ Zrfi ~ . '5efl 2 ?"ll dx + p=O . L L L o L L
"=0,1,2, ... (2.1.16)
Mas tendo em vista as relações de ortogonalidade
L
j . · 2riilC 2\)ft)( e.o 5 _ . co:; · d~ = . . L L o .
o .!::. se.
se p * (' ? =rt e
~ == r: o
(2.1.16) 2
L se L
) Ca5 _2._rTI_)(_. sen 2.p'l'IX d~ .o L L
== o (2.1.17)
e efetuando as integrações do tipo
(2.1.18)
(ver GROEBNER & HOFREITER7), resulta após algumas transforma
, çoes algebricas:
ó:)
E. C.05 n t L Frp q ( t) = Ó p=o ip
r=0,1,2., ... (2.f.19}

onde
( '2 .1 . 2.0 )
são frequências naturais das vibrações flexionais no plano
XY;
('2,1.21)
onde -~ = .(l/ C
('2.l.22)
-Considerando agora a segunda das equaçoes de movimeB
to (1.4.6) e as condições de contôrno (1.4.7) e (1.4.8) e lep
brando a simetria do problema, podemos, a partir de (2.1.19) ' -e (2.1.ZO), estabelecer diretamente o sistema de equaçoes de
, Mathieu correspondente, bastando para isso permutar os indi -
ces 1 e Z e multiplicar por (-1) os têrmos em T1
•
Resulta assim,
00
01 (t) + w2"'2
a <t) - E. c.05 Ol ~ Frpª <t) - O T'2r -t ,r p=Cl t tp
Y"=O,I 2 .•. . . ' (2.1.2.3)

39
onde
(2.1.24)
e E. e Frp sao os coeficientes definidos em (2.1.21) e
(2.1.22), respectivamente.
Observe-se agora que as equaçoes correspondentes a
r = O - A terao as frequencias naturais W1r e w,r nulas, de on
de se conclui que estão associadas a movimentos não vibratÓ -
rios. Por outro lado, de. (2.1,14), é imediato que 92{.0
(><) = i ,
o que corresponde a um modo rigido da viga, Portanto wi0(x,t)
corresponde a um deslocamento rígido e evidentemente, está -A , A
vel do ponto de vista da elastodinamica. Alias este modo foi ,
introduzido "artificialmente", pela substituição de variaveis
feita de acÔrdo com (2,1,4) e (2,1,5), Conclui-se que podere
mos tomar nos posteriores desenvolvimentos relativos ao caso,
r=1,2, ... (2.1.25)
, Finalmente, um aspecto que deve ser ressaltado e que
, , o valor do torque medio T0 e irrelevante para os resultados
obtidos.
40
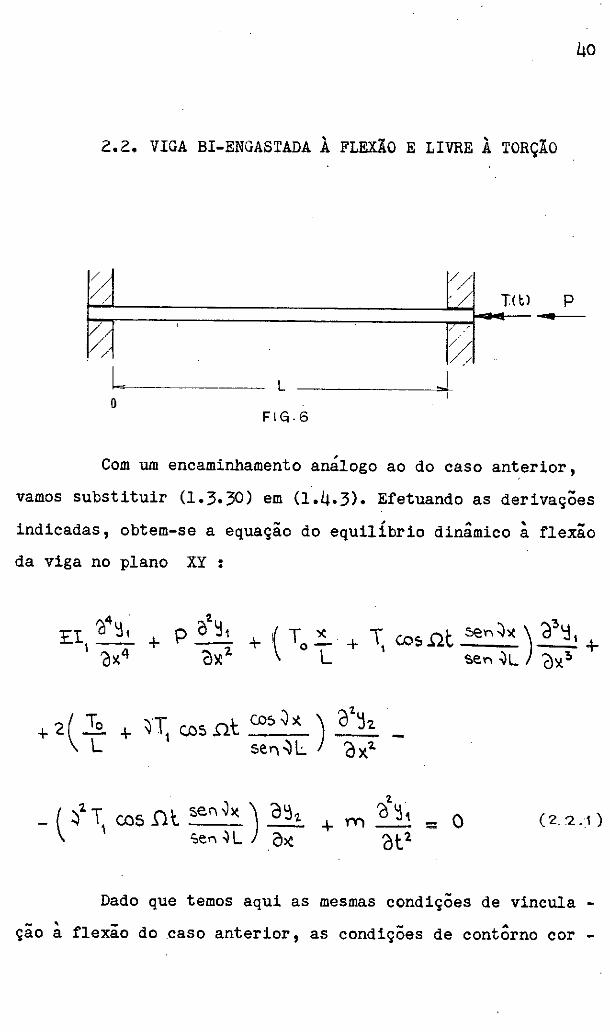
2.2. VIGA BI-ENGASTADA À FLEXÃO E LIVRE À TORÇÃO
I/ //
·/ T( tl p /
'./ / /
% /
L 1
o 1
FIG-6
Com um encaminhamento análogo ao do caso ant_erior,
vamos substituir (1.3.30) em (1.4,3). Efetuando as derivações
indicadas, obtera-se a equação do equilÍbrio dinâmico à flexão
da viga no plano XY:
EI 'ô4
':l, , ôx4
(2.2.1)
Dado que temos aqui as mesmas condições de vincula -' - - A çao a flexao do caso anterior, as condiçoes de contorno cor

re~póntlentes são as mesmas (2.1.2) e (2.1.3).
Façamos também aqui a substituição de variáveis:
( 2.1.4 )
(2.1.5)
, , ' E obvio que, analogamente ao caso anterior, a EDP
, (2.2.1) mantem a mesma forma (basta assim, substituir y por
w ) e as condições de contôrno resultam as mesmas (2.1.9) e ,
(2.1.10). Portanto teremos, ainda, a mesma solução em serie:
OJ
w (x,t)=L q. ltl C.05 2 ~li)(
1 p=o 1p L ('2.1.9)
G:)
W2(,c,l)=L °t(t) C05 2~11:it
p=o t? L (2.1.10)
onde valem as observações relativas a (2.1.11) e (2.1.12). ,
Aplicando agora o metodo de GALERKIN, teremos então
de (2.2.1), (2.1.9) e (2.1.10):
. 00 4
Er1 [. 1 2.píl ) 9 ttl p:o \ L 111
_ P L. _r_ a ( l ) ~o5 o:, ( 2 l, f'i )t f=O L 1,p
2.prrx L
2p1i"x + l
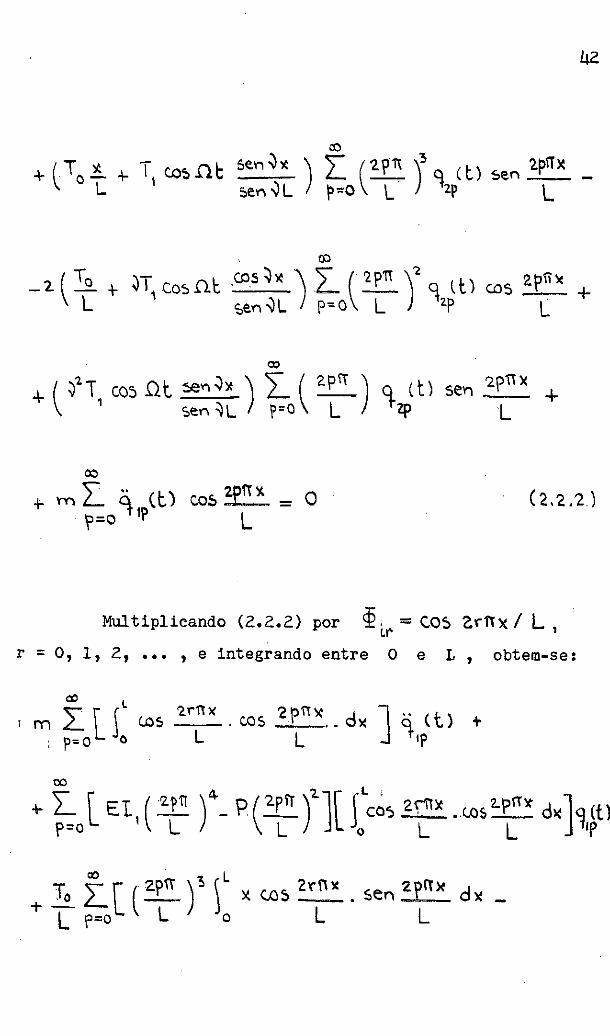
42
o:l
L (2p-n )3 9 Ct) $en 2.~!Tx -~"º l zp l
·~ ( t) sev, '2píl x + 2P L
(2.2:2)
Multiplicando (2.2.2) por 1\r = C.05 2.rffx / L , r = o, 1, 2, ••• , e integrando entre O e L, obtem-se:
ctJ L
i m L. L 1 (.OS '2.r'ílx . e.os 2pnx. dx J 9- (t) + ; p=O O L L 1p
00
-\- I._ L E l ( 2.fíl )4- p (2p!T )i.]f j~~':) 2fi'{X ,,C..0$ z.pl'TlC' dx]~ (t) p=o
1 L L L o L L 'P
<X> . 3 L + To L [ ( zprr ) } x <..o5 Z'('flic • sen zprt)( dx _
L p=o L o L L

43
CO!) .D.t + ~ •
tos ~L
5en i':I!. cns 2.r'llic , :ie.,., 2.pn ic d'><+ L L
'2 L _'2.~ ( 2~11) ( C.0$ ~~. (.()$ '2.t''i\l< .cos '2p1'1)t . d,>c }q (t,) = ()
. \ L jo L L 2P .
í=Cl,1-,'2., .. , ( 2 .2 ,3)
Considerando agora as relações de ortogonalidade
(2.1.16) e (2.1.17) e efetuando as demais integrações, resul-, - ,
ta apos algumas transformaçoes algebricas:
Q:, 00
" 1. a l t ) + w ir a l t) + 1 1r -,,r il:,~ Drp9 (t) +~tos .nl: L.1-r0 q 0lt)= O
,- p=O 2~ p=o r 'r \>1 r
r= 0,1,'2., ... ('2,2.4)
onde
(2.2,5)
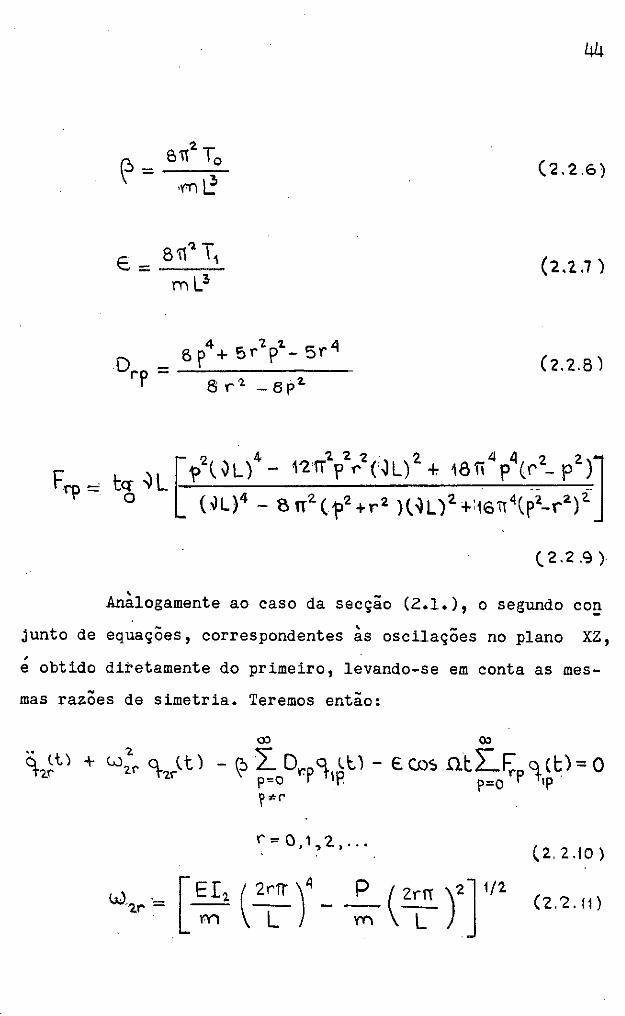
44
(2.2.6)
(2.'2..7)
4 7. i. 4 6p +5r p -5r oro = __..:. _____ _
1 6r 2 -8P2. (2.2.8)
( 2.2 .9)
' Analogamente ao caso da secçao (Z.l.), o segundo con
- ' -junto de equaçoes, correspondentes as oscilaçoes no plano xz, , e obtido diretamente do primeiro, levando-se em conta as mes-
mas razões de simetria. Teremos então:
o:> 00 •• '2. ei t t..) + W 2r a l t) t2r t2r - ~ L. Dr.p~ L\:.) - E. e.os ntL~P 9- ct):: o
p=O lp p=O tp ?"'r
1"'=0,1,2, ... (2..2.10)

45
e t' , Drp , Es
acima.
e ~ ,
sao os coeficientes ja definidos logo
Ainda como no caso anterior, as equaçoes correspon -
dentes a r: O terão as frequências naturais nulas, bem co
mo tem-se ~ to = 1 e portanto, a r = O corres ponde um , ,
deslocamento rigido da viga, irrelevante na presente analise. A
Assim, nos posteriores desenvolvimentos relativos a este ca-
so, poderemos fazer
(2,'2.12)
A distinção mais interessante entre os dois casos já , ,
abordados (alem das diferenças numericas entre alguns coefic!
entes), é de que nêste segundo, o torque médio T0
, esta pre-
sente nas equações diferenciais e portanto, influi no compor
tamento elastodinâmico da viga.
46
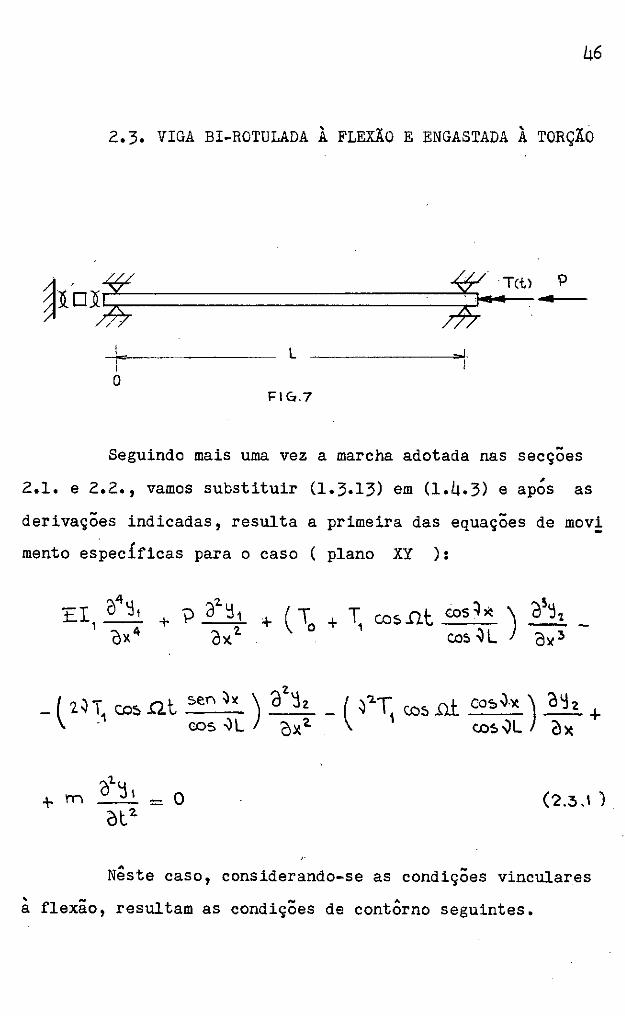
2.3. VIGA BI-ROTULADA À FLEXÃO E ENGASTADA À TORÇÃO
â},OJ~C; ~-=====================~=::-}"•,...· · ...... Tc-:-tl _?_
1
o L -------~'-
!
FIC:i.7
~
Seguindo mais uma vez a marcha adotada nas secçoes ,
2.1. e 2.2., vamos substituir (1.3.13) em (1.4.3) e apos as
derivações indicadas, resulta a primeira das equações de movi ,
mente especificas para o caso ( plano XY ):
+ rn ('2.3.1 )
Nêste caso, considerando-se as condições vinculares
à flexão, resultam as condições de contôrno seguintes.
47
De (1.4.5) tem-se:
u(Ob)=Ll(lb)=ll (Ot)=u·(Lt)=O J1 ' J1 ' '1 Jl. ' J l ,
('2.3.2)
Considerando agora (1.4,4) e (1.3.13), resultam:
2 c.,os n t ) Õ'.h = o EI õ ~1 + (To+~ ·. 1 '2. e.o~ ~L d)( ê) )(
e lt = o
-1 :02'j2 _ ( T0 + T1
co~Dt ) ó~ 1 o r. 2 -- -= o x.'2 co~~L ô li.
(2.3,3)
e X=L
(2 . .3.4)
É evidente que se torna pràticamente impossível a ob
tenção de funções que satisfaçam simultâneamente a tÔdas as
condições de contôrno acima, pelo que vamos empregar na reso
lução dêste problema de contôrno, funções admissíveis do pro-
48
, 5 blema de autovalores correspondente (isto e, conforme FUNG,
MEIROVITCH•4 e outros, funções que satisfazem apenas as condi-
ções de contôrno geométricas, sendo n A ,
vezes diferenciaveis A ' ,
sobre o dominio, onde 2n e a ordem do operador '~' ),
onde
Assim, tendo em vista apenas (2.3,2), façamos
hf()( !>en .r__
l (2.3.!3)
( 2.3.6)
q (l) e '1 ( l l - coordenadas generalizadas tp 2p
ilp = <;,en f>1i X - funções
, admissiveis do
l problema de autovalor
l=1,'2. 1 p= 1,2, .. ·• ( '2.3.7)
, Acentue-se que
funções ortogonais, \ ~tp) e um conjunto completo de
' , Passando a aplicação do metodo de GALERKIN, vamos
substituir (2.3.5) e (2,3,6) em (2,3,1), dai resultando:

ao """ ?'il'l( ••
rn L $e'!'\ _ . °t ( t) + p=1 L ,p
_ T c.o5 nt • -1
cos ~L
49
se." pnx . e ( t) _ L t1p
'\ ~í!l( e.o~ '\IX. C.05 - -L
Multiplicando agora (2.3.8) por
(2. 3. S)
~ =5en(rrnc/L) li' .
r; 1, 2, ••• , e integrando entre O e L, teremos:
oo L m L l. j sen l'í!X . sen ptrx dx J ~ ( t) +
p= 1 o L L 1P
50
+ Í_ [-±I1 ( p: f -P ( ~: f][ sen r~)(. sen t'~l< .d)( J 91~t) -
p=1
e.o~ .n.t cos vL
(I) 3 2. nn s l . L{ [(~·) + ~ { l_ )] CD5 ~x . sen ~.015 'fl1'X .d~ -p= 1 . L l O L L
_ 2. ~ (. ?'lí )2 j L tien ~X, ::ien 1"1iX • Sen \?~X· d.)(} '1 ( t) =- O
l o L L 2p
f'= 1,'2., ... ('2.3.9')
Tendo em vista, entretanto, as condições de ortogona
lidade
JL ~en r'fl ~ . sef'I p11'x . dx _ L L
o
o ::.e ?'# r
L se ?=r,,.,o -·· 2
(2.3.10)
j L 1'11' )( ~el"I _ co~
º L
[ ( - 1 l r+ " - 1 ] L r T{z.( ?1.- l''l)
o
51
5e p=I"'
(2.3.11)
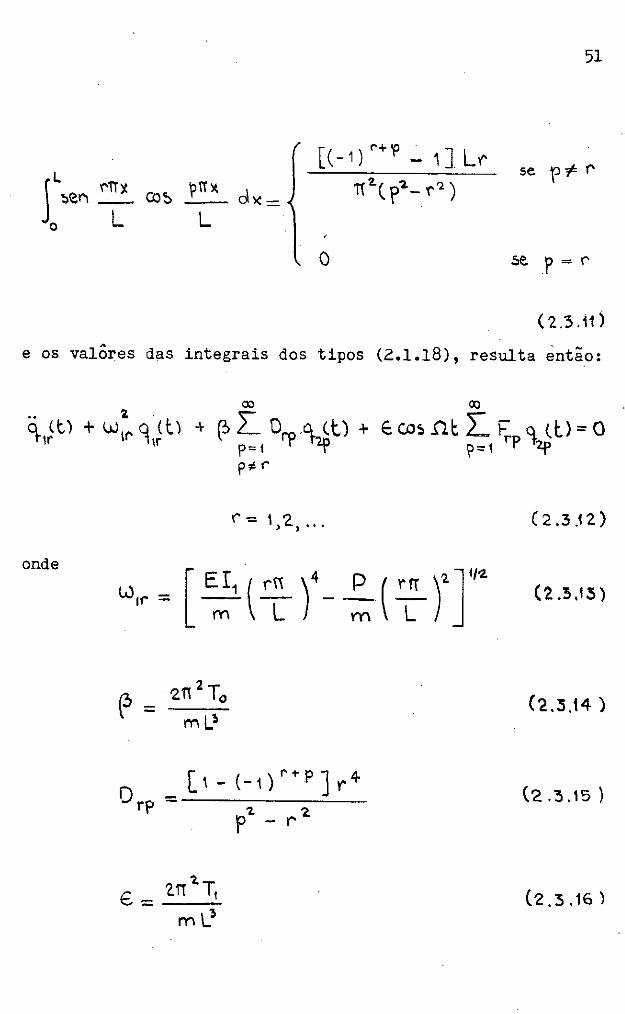
e os valÔres das integrais dos tipos (2.1.18), resulta então:
onde
00 (X)
ri L ºro·C\- (t) + é co~ .n~ L rr q tt> = o p=1 ·r '\' \>"1 P 2f> p>! ('
1"'=1,2., ...
[1-(-1)r+,p]r 4 o = rp ~~~~~~2~~-
. p - r
e 2 .3 .12)
(2.3,15)
('2.5.14)
('2.3.15)
('2.3.16)
52
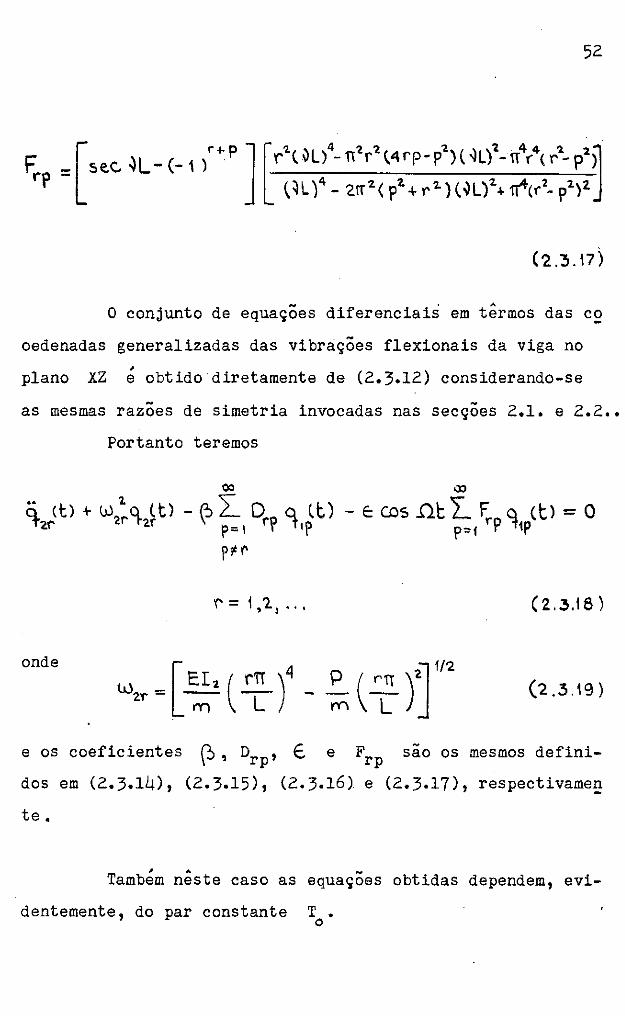
(2.'3.17)
O conjunto de equações diferenciais em têrmos das co
oedenadas generalizadas das vibrações flexionais da viga no
plano XZ , e obtido diretamente de (2.3.12) considerando-se
as mesmas razões de simetria invocadas nas secções 2.1, e 2,2,,
Portanto teremos
~ 00
9- Ct) + IJ\~q. (t) - \-' L oro a tt) - E: e.os n't L f Q (t> = o ,r- 2r ?= 1 r t 1p P"f rp t1p
pitr
\"=1,'2., ... (2.3.18)
onde
(2.3.19)
e os coeficientes 0, Drp' E. e Frp sao os mesmos defini
dos em (2.3.14), (2.3,15), (2,3,16) e (2.3.17), respectivame!!
te.
Também nêste caso as equações obtidas dependem, evi-
dentemente, do par constante T • o
53
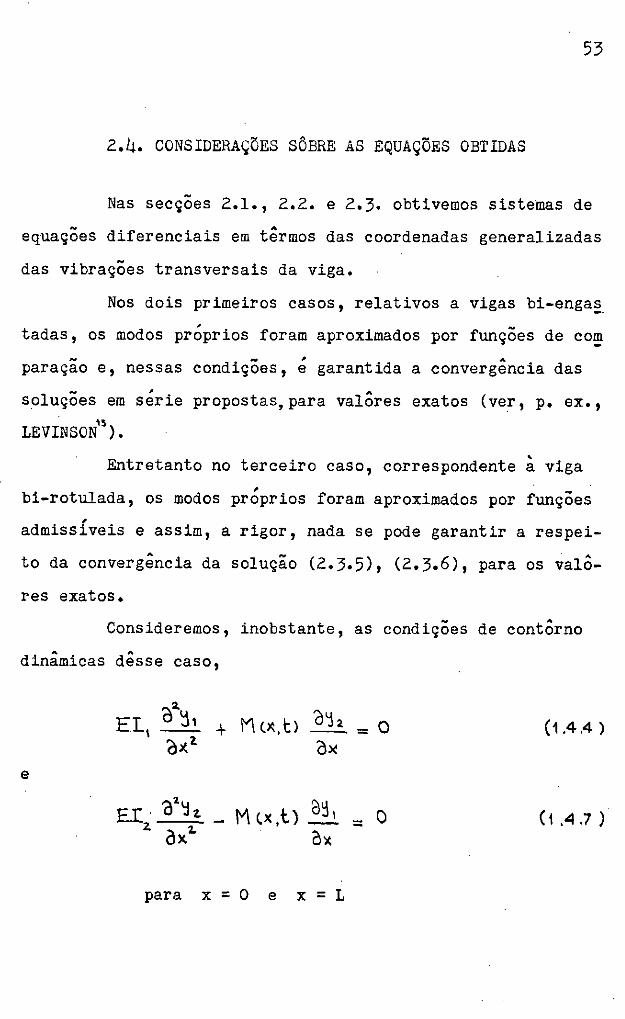
2.4. CONSIDERAÇÕES SÔBRE AS EQUAÇÕES OBTIDAS
Nas secçoes 2.1., 2.2. e 2.3. obtivemos sistemas de - A equaçoes diferenciais em termos das coordenadas generalizadas
das vibrações transversais da viga,
Nos dois primeiros casos, relativos a vigas bi-enga~_
tadas, os modos próprios foram aproximados por funções de co~
paraçao e, nessas condições, é garantida a convergência das
soluções em série propostas, para valÔres exatos (ver, p. ex.,
LEVINSON'~).
' Entretanto no terceiro caso, correspondente a viga ,
bi-rotulada, os modos proprios foram aproximados por funções ,
admissiveis e assim, a rigor, nada se pode garantir a respei-
to da convergência da solução (2,3.5), (2.3.6), para os valÔ
res exatos.
Consideremos, inobstante, as condições de contÔrno
dinâmicas dêsse caso,
2.
El, ô~, + M(~.t> o':h o -oX?. a~
(1.4.4)
e
EI. ô2';12. M tx,t) êJ~, = o 2. àxa. õx
( 1 ,4 .7 )
para x = O e x = L
54
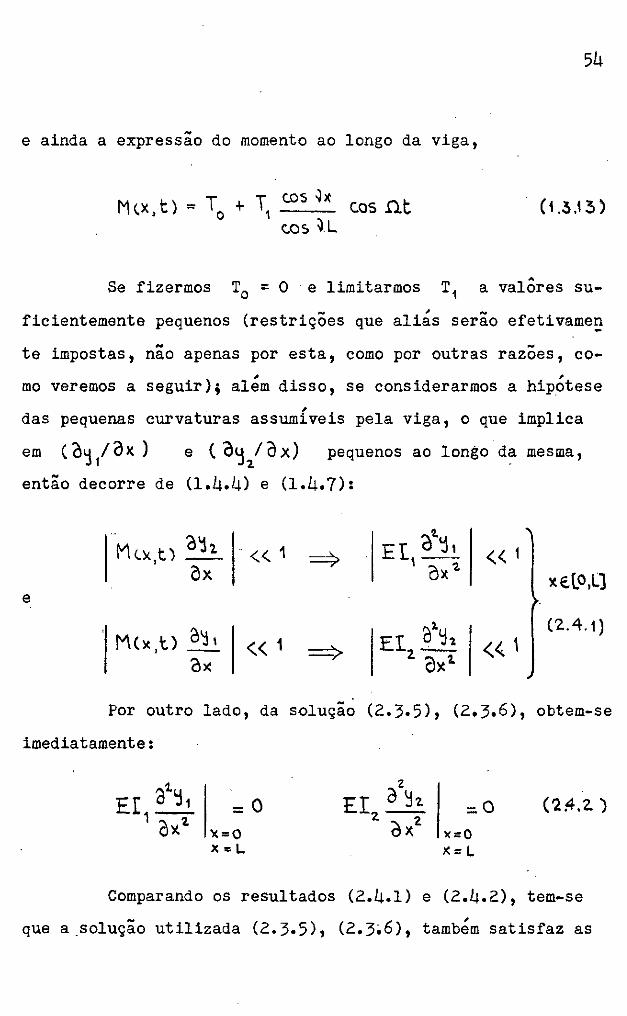
-e ainda a expressao do momento ao longo da viga,
T T e.os ~x M tx, t) = 0 + 1 e.os nt
Se fizermos
e.os ~-L
T = O - e limitarmos o
(1.3.13)
A
a valores su-
ficientemente pequenos (restrições que aliás serão efetivamen
te impostas, não apenas por esta, como por outras razões, co-, '
mo veremos a seguir); alem disso, se considerarmos a hipotese . ' das pequenas curvaturas assumíveis pela viga, o que implica
em (O~/ Ô X ) e ( Ô':)2_/ O X) pequenos ao longo da mesma,
então decorre de (1,4,4) e (1,4,7):
..
Mcx,t) ô'j2. 1
-- <<. 1 ~ E I, ô 'j .!. << 1
õx ox '2 xE.lO,L) e
Mcxt) ô~, 1 {2.4.1)
<< 1 > EI ô ~-a <( \ 1 - 2 ôx 1 Ô>C
Por outro lado, da solução (2,3,5), (2,3,6), obtem-se
imediatamente:
1 EI ô ~1
1 ox '2 =º )(=0 X=L
=º ><=O X:L
('2:4.2.)
Comparando os resultados (2,4,1) e (2,4,2), tem-se
que a _solução utilizada (2,3,5), (2,3~6), também satisfaz as
55
condições de contôrno dinâmicas, ainda que aproximadamente, A ,
ou forçando a linguagem, os termos das series tratadas são
aproximações de funções de comparação do problema.
Em vista do que foi exposto, julgamos que podem ser ,
esperados resultados suficientemente aproximados tambem para
o terceiro dos casos tratados.
Todavia o problema acima abordado comporta um trata-.
mente mais rigoroso, como por exemplo, o realizado em um tra
balho de HAGED0RN 9 (sÔbre um determinado problema não conser-,
vativo da Estabilidade Elastica).
Dado que no presente trabalho limitamo-nos a estudar
alguns problemas de estabilidade elastodinâmica que redundem , -na analise da estabilidade das soluçoes de sistemas de equa -
ções de Mathieu-Hill, deveremos considerar nulos os momentos ,
medios T0
no segundo e terceiro casos.
Assim, fazendo (?> = O em (2.2,4), (2.2.10) e
(2.3.12), (2.3.18), tem-se para os três casos a forma geral:
56
00
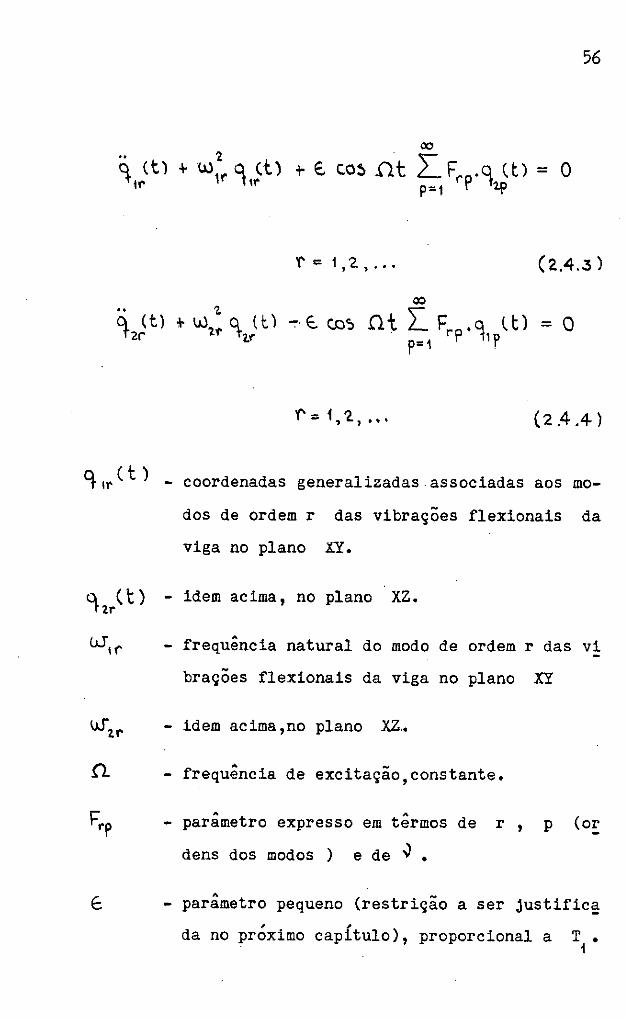
q (t) + w; .. '1 ct) + E. e.o~ .O.t L Fr-p·°+ (t) - O 11' l1" p=1 lp
'('=1,2, .•. (2.4 . .3)
00 .. Q (t) tir +w.;'\. (t) "'.'E. C.0'=> .nt L. Frp•º tt) - O
U p•1 11p
'f':1,'2, ... ( 2 .4 .4)
9, 1r ( t ) - coordenadas generalizadas. associadas aos mo
dos de ordem r das vibrações flexionais da
viga no plano XY.
o (t) - idem acima, no plano XZ. tir
Lú1r - frequência natural do modo de ordem r das vi
brações flexionais da viga no plano XY
W"1 r - idem acima,no plano XZ .•
!1. - frequência de excitação,constante.
Frp - parâmetro expresso em têrmos de r, p (or
dens dos modos ) e de V •
- parâmetro pequeno (restrição a ser justific~
da no próximo capítulo), proporcional a T. 1
J Frr
10
5
-~L
-5
-10
~-1 ,~ [ . ?. l '\t 1 1a: ~ ....
.- F..'l.
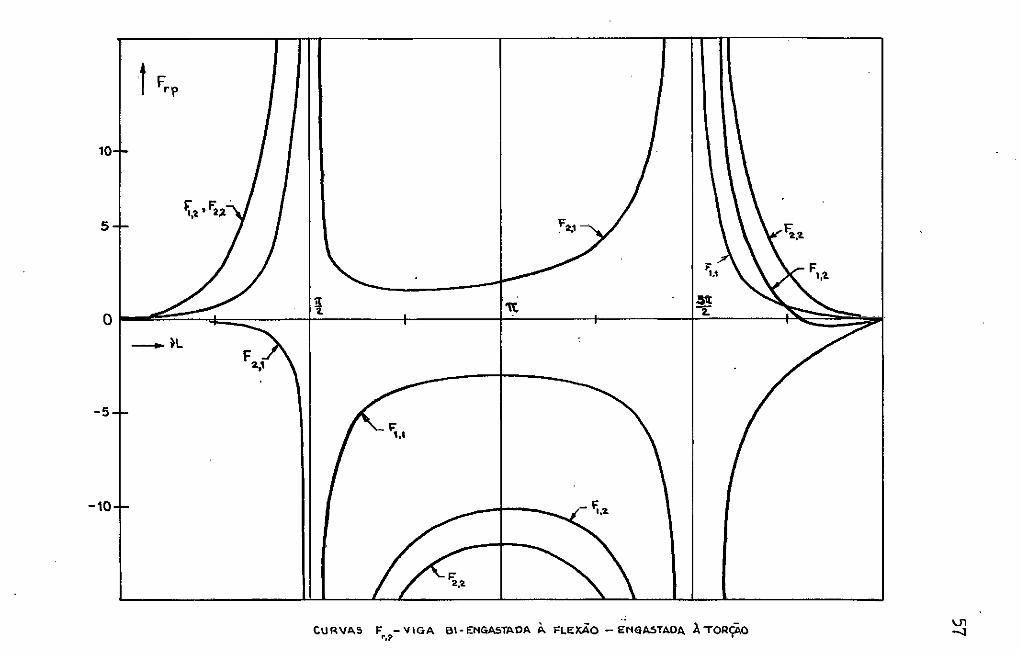
CURVAS F - VIGA 61· f:NGAsTAOA À FLEXÃO - ENQASTAOA À TORÔ.0 ~p •
Vl -J

58
o
lo; /t-1 1c( O• a: ~
,c(
:w a: > J
,i ~ ,,.
•c(
á ~ ,a <!I z w ' iii
e( <li >
.. 11.•
"' ~ ,a, :, u
-IO o '° o
' -

n. l.l. ..
o -
1
~'"'
t:'i"'
o
t li)
1 o -
59
'~-a: ,O ,1-<I < o ~ ifl < <!1 z w 1
o r<I )( ,w ., ,i.
,<f.
<I o <I ., ':;) ... o a: !. t!)
<I
" > l ...
u.'-~ <I > a: :, o
6ó
CAPÍTULO III
A ,
INSTABILIDADE E RESSONANCIAS PARAMETRICAS DA VIGA
•
A ,
Nesta capitulo vamos, inicialmente, estudar as condi
ções de instabilidade das soluções triviais de sistemas de e
quações d~· Màthieu-Hill para, a seguir, aplicá-las nos proble . . • A
mas de estabilidade elastodinamica do trabalho que estamos de
senvolvendo.
3.1. INSTABILIDADE DAS SOLUÇÕES DE'•SISTEMAS.
DE EQUAÇÕES DE MATHIEU
, A analise que vamos apresentar nesta secçao baseia-
• 11. . ,,
se no artigo de HSU, "On the Parametric Excitation of a·Dy-
namic System having Multiple Degrees of 1'reedom". , , ,
Na referida analise sera utilizado um metodo que co~
siste, fundamentalmente, na determinação das curvas que deli
mitam as zonas de instabilidade das soluções no chamado plano
€ - D. a partir das condições sob as quais essas soluções ... ~ , , ,
sao periodicas. Para tal fim, e empregada uma tecnica de ana-
lise que combina o clássico método de variação dos parâmetros
de Lagrange com o método da perturbação da Mecânica Não Line-20 . ~
ar, conforme o fêz STRUBLE para equaçoes de Mathieu.
61
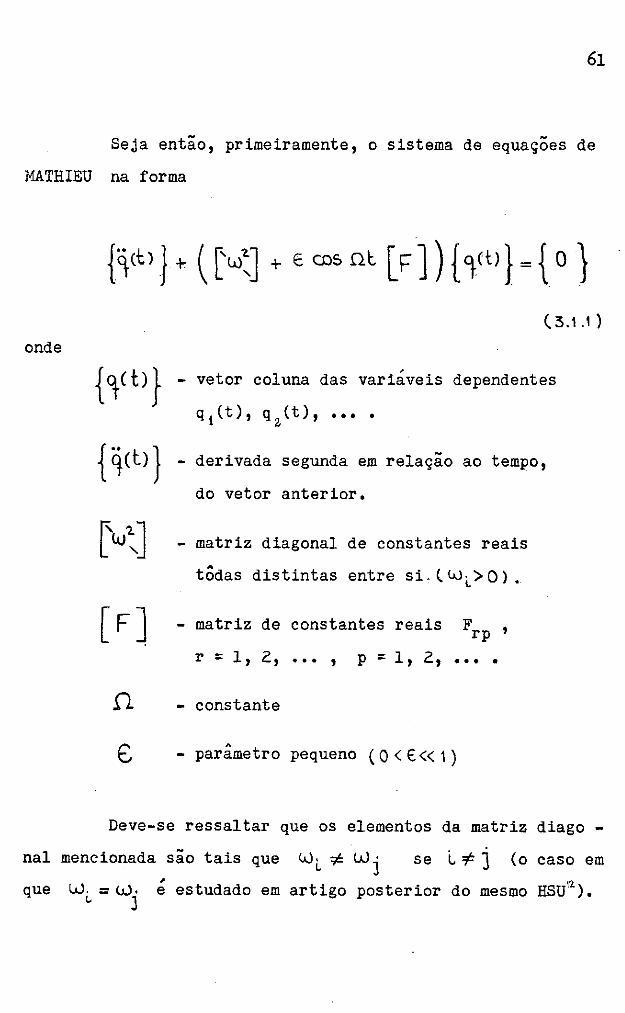
Seja então, primeiramente, o sistema de equações de
MATHIEU na forma
onde
{~<ll J + ( ['w~ + E co5 nt [r]) { 'tct>} = { o }
{ q<t>}
(3.1.1)
- vetor coluna das variáveis dependentes
- derivada segunda em relação ao tempo,
do vetor anterior,
- matriz diagonal de constantes reais
tÔdas distintas entre sLlWi.>O).
- matriz de constantes reais
r = 1, 2 1 . . . ' p = 1, 2, • • • •
fl - constante
- parâmetro pequeno ( O < E<< 1 )
Deve-se ressaltar que os elementos da matriz diago -
nal mencionada são tais que ~'L ,t= Wj se L -:/= j (o caso em
que W. =W, ~ }
~ estudado em artigo posterior do mesmo HSU12),
62
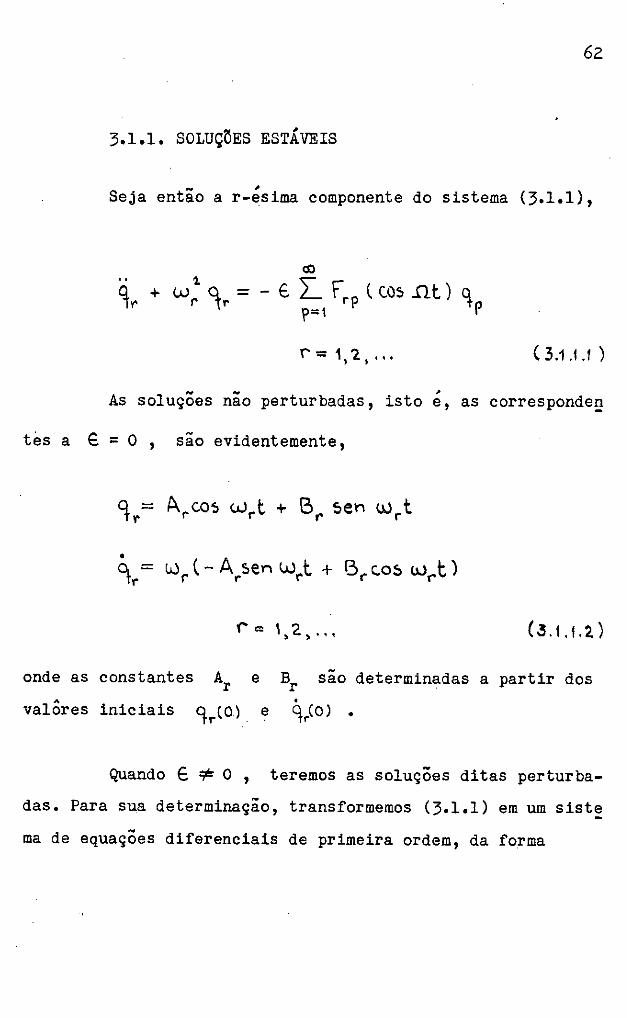
3.1.1. SOLUÇÕES ESTÁVEIS
, Seja então a r-esima componente do sistema (3.1.1),
co E. I_ frp ( e.o~ .nt) ~
p~1 p
l"=1,'2, ... ( 3.1.1.1 )
As soluções não perturbadas, isto é, as corresponde~
tesa Ê =O, são evidentemente,
f"= l,'2, .. , (3.1.t.2)
onde as constantes Ar e ~
sao determinadas a partir dos A
valores iniciais
Quando E * O , teremos as soluções ditas perturba
das. Para sua determinação, transformemos (3.1.1) em um siste
ma de equações diferenciais de primeira ordem, da forma

(X) w: o = - € L F.-o ( (O!, n l ) q p tr ?"' 1 r
r = 1,'2., ••. (~.1.1.~)
, , Estendendo o metodo de Struble ja mencionado, ao sis
tema de equações (3.1.1.3) é tomada como expressão possível
' da solução perturbada a que segue (lembrando que, por hipote-
s e, O <.E:<. <.1 ) :
r=1,2, ...
f'= 1,2., ...
~ e tal L. € 9 (t) 13= 1 r
( 3.1.1.4 ')
~ a • (0l L E. qr ( t) e=1
(3.i.1.5)
observando-se que os coeficientes Ar e Br sao, agora, co~
siderados funções de tempo. Os dois primeiros têrmos de
(3.1.1.4) e (3.1.1.5) são denominados variacionais e aquêles , .
das series, perturbacionais.
Substituindo (3.1.1.4) e (3.1,1,5) nas equações
(3.1,1,3) e considerando, numa primeira aproximação, apenas

64
, os têrmos de primeira potência em E, ,
mas operações simples, o nôvo sistema:
obtem-se, apos algu -
• • Ar C05 w/c + !3r ~e.,... Wr\:. = O (' = 1,'2., ... (~.1.1.G)
e
o,
= - ~ ~I Frp l Af [ cos ( wí' t + n t ) + cos ( w p ~ - n e.) ] +
,==1,2, ... (3.\.1.7)
Nêste ponto, chega-se à concepção fundamental do mé-
' todo de Struble-Hsu: associar as parcelas perturbacionais da - , (1) ( 1)
soluçao (i.e, '1, ,i2
, •••
' nesta primeira aproximação), to
dos os têrmos da direita das equações (3.1.1.7), exceto aque-A ,
les correspondentes a termos com caracteristicas ressonantes
dessa mesma solução. !stes Últimos têrmos, por sua vez, serão A
associados aos termos variacionais de (3.1.1.6) e (3.1.1.7).
Portanto tem-se de (3,1.1.7):
a:, .. (1)
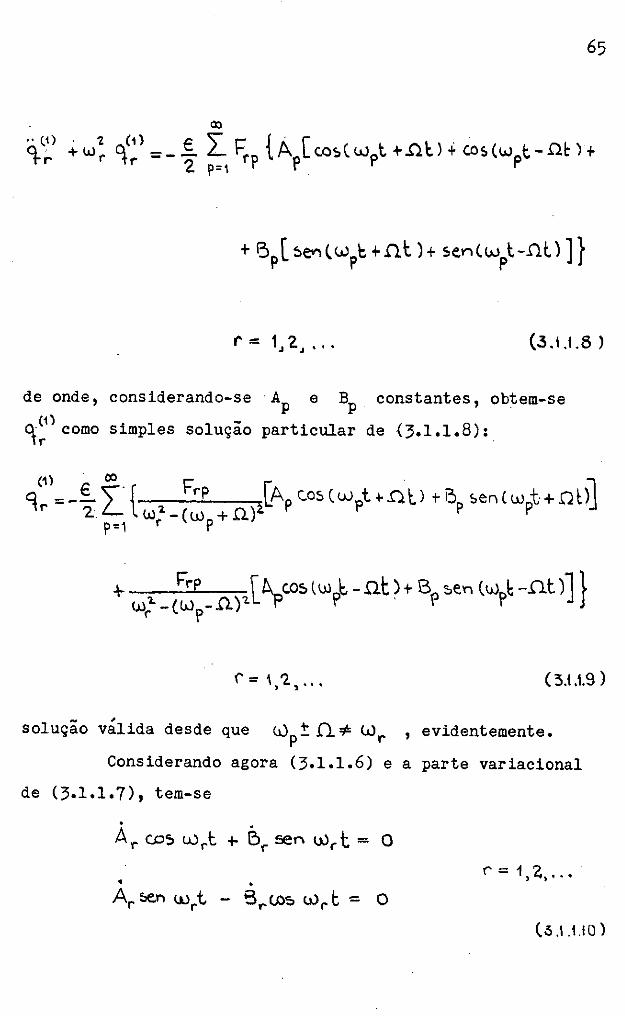
q.~ + w! 0+'1) ,__ .§. L F;.p {A0[c.o~(wpt +..Q\:.) + CO$(wpt.-.D.I: )+
r 2 p=I r
r = 1, 2, ... (3.t.1.8)
de onde, considerando-se AP e BP constantes, obtem-se
~~) como simples solução particular de {3.1,1.8):
+- Frp r t,, e.o::, l w0I:, - nt ) + B,.., $en ( wpb -flt)] }
wl.-(W -.0.)'l.l P r r r p
<' = \, '2., .. • ( 3.1.1.9 )
- , soluçao valida desde que Wp :!: fl. ;la w.,. , evidentemente.
Considerando agora (3.1.1.6) e a parte variacional
de (3,1,1,7), tem-se
À r C.05 w,.t + 5,. sen Wr t = O
• • I" = 1, Z, ..•
A.,. 5en wrt - Sre,o~ w.,. t = O
(.5.1.1.10)

66
' que, obviamente, pode ser considerado um sistema linear em . . , Ar e Br. O determinante de (3.1.1.10) e igual a 1, ou
seja, diferente de zero e assim, êsse sistema homogêneo pode
ter apenas as soluções triviais • A : O e r de onde
tem-se imediatamente as soluç-oes Ar(t): Aro e B (t) - B r - ro - ' -constantes, que sao as proprias condiçoes iniciais do proble-
ma.
' Levando-se essas constantes e (3.1.1.9).em (3.1.1.4) - , obtem-se a soluçao desejada, que sera !'bem comportada", isto
, - , e, nao tera problemas de instabilidade.
3.1.2. so1uçtES INSTÁVEIS
Se n , e igual, ou aproximadamente igual, a l).)p '!: l).)'!I
4 ' para um determinado par de valores p e s , constata-se fa
cilmente que alguns têrmos de (3.1.1.9), por conterem o fator I . ,i '2 l 1 / [ wr - ( wp - n) 1} , tornam-se respectivamente infinitos
• 4 ou muito grandes, ocorrendo, evidentemente, ressonancia.
Com efeito, se
( ~.1.'2..1 )
resulta
(3.1.2.2.)

67
Considerando ainda (3.1,2.1) e o fato de que na- ex-
pressao (1) , ,
de qr em (3,1.1,9), p e um indice mudo e portanto , , ,
pode ser substituido pelo indice s , tem-se tambem
se r = p
Passemos agora ao estudo dos três casos possíveis de
frequências de excitação ressonantes.
onde I\ - nÚmero real finito
~ - parâmetro pequeno
com ('5.1,2:4)
A -Neste caso, as equaçoes para a parte variacional da
solução provém imediatamente de (3.1,1,6) e (3.1.1.7) e assim,
levando em consideração (3.1.2.2) e (3.1.2.3), temos os sist~
mas:
. • A. e.o~ w t + 6.,. ~n wJ = O :; . :; ., .,
(3.i. ,.õ)
. . A .. '->en w t. _ B e.e~ ., :; s

• • AP (O_;J wpt + (:, p :ien wpt = o
ÂP 5er, w; - '~p O':J:!> wpl;; = .§.. l="ps L A5 (o~ ( wpt +- éÃl) -'2 wp
68
-'355er,(wpl:. + €."t )]
(.3.1.2.G)
Resolvendo os sistemas (3.1.2.5) e (3.1.2.6) para • • • • As , AP , Bs , BP e fazendo tf ~ = w5 t , , li) P"' wpt , obtem-
se imediatamente:
Às=~: [_Apccs(f5
+EÃt)-13Psen(l\>5+E.>·,l)]5eh ~~
5
e\= ! ': l-Al'c..os t~5.-E.>-t) + í::>P::ie!') e(\\+€')., t)] ,co~ 1,,
5
Â.p= ~ ~"'[ A5 cos(~P+E\l:.)-13s.:ien (~?-1-€Àt)] ~E:Y"\ 'fp p
Gp==_§_ Fp, [-=As c.o~(~p+E)1l) + e,.s 5el'"'I (~P+€\t) J e.os 'fp 2 Wp
(3.1.2.7)
Tendo em vista agora, que as quatro derivadas acima
são proporcionais ao parâmetro pequeno E , conclui-se que

A B A e B variam lentamente com t. Portanto, s ' s ' p p
nos intervalos ('2'11/w~) e (21T/Wp), (\.(\+E.Ãt) e (l\\+E.>-t)
aumentarão aproximadamente de 2n , enquanto que As, Bs ,
Ap .e BP não se alteram apreciàvelmente. Diante dessas con-.... A .. ' -sideraçoes, este metodo recorre a chamada aproximaçao de Kry-
loff-Bogoliuboff (ver p. ex,, PIPES19), isto é, toma os valÔ -
, res medios das derivadas (3,1,2,7) nos intervalos f:.E.[0,21TJ
e ~p €. [. O, '2TT] , considerando-se As , Bs , Ap . e BP cons
tantes. Resulta, assim,
• F.: 1 'L'ft .
A::,=~ 2J:. 'f [A cos(~:; +-E:.Ãl) - Bp.~enC\\l +e}.t )] 5en '" .d,O 41T W J · p ~. Tf. 1~ .:, o
(.3.1 .2.8)
, ou apos as integrações:

70
B:;= _ : . :l' (Apcos ~'-t..., ':,P <;ie11 ~).\:. J ~
Ao= -~ .!E:. [ A SeY'I €.)..1;. + e, e.o~ e>. l J r 4 LU :; ~
p
(!, .1, 2.9 )
Para a resolução do ,
sistema (3.1,2,9), e conveniente
fazer as seguintes substituições (onde . ,--. L= ,-1 ) :
. Xt A..,+ Ll3:;
(3.l.2,fO)
Y=e, -ti3 'Z. p p
Tem-se então para ( 3.1,'2. 9):
, E - tE.>-l y X = __ LF..,P e . 2 1 4W • s
(3.1.2.11)
. Ê . X2 =--LF e.
4W :;p :,
(~.l.'2..12)
71
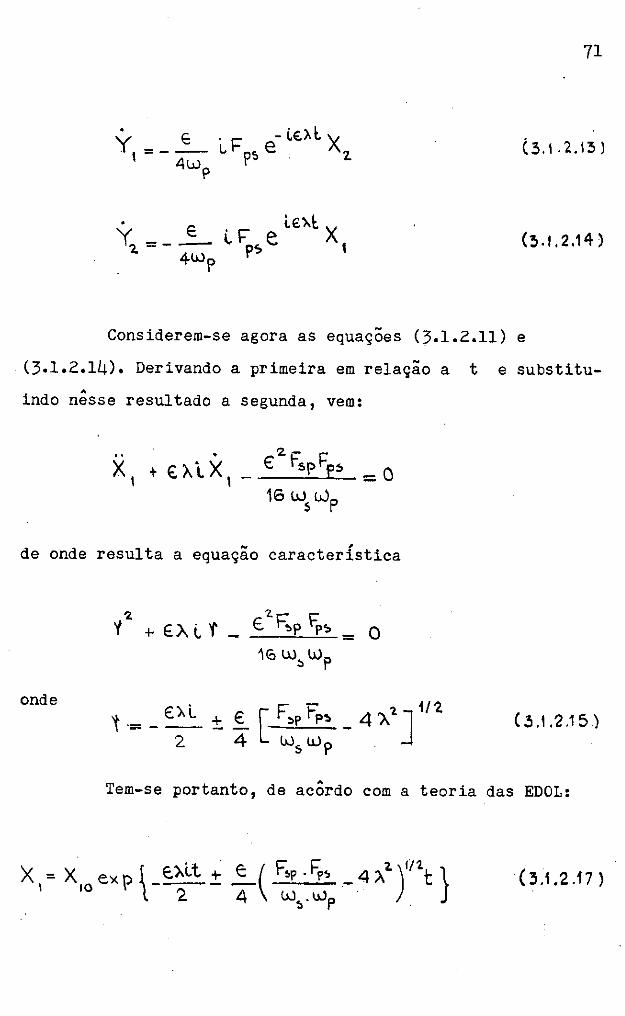
Y. E: . -LE.>-lx =-- 1.F0 "'e 1.
1 4w r p
(3.1.2.13)
(3.1,2.14)
Considerem-se agora as equaçoes (3.1.2.11) e
(3.1.2.14). Derivando a primeira em relação a t e substitu-A
indo nesse resultado a segunda, vem:
- , de onde resulta a equaçao caracteristica
onde
'f" + E:}.. L 't - E. 2
~P \='P~ _ o Wi w:, Wp
''" . F ;:- '2 1 / '2. t ·== - c._"_L_ ± ~ [ :,p ' p~ - 4 À J 2 4 w5 Wp
(.3.1.2.15)
A
Tem-se portanto, de acordo com a teoria das EDOL:
(3.1.2.17)
72
(~.1.2.n)
' De (3.1.2.12) e (3.1,2,13) obtem-se, analogamente,
(5.1.2.16)
Uma simples inspeção nas expressoes de (3.1.2.16) a ,
(3,1,2.19) indica que a parcela real de seus expoentes e co-
mum às quatro expressões, Seu coeficiente r , usualmente cha , ,
mado expoente caracteristico, e dado por
(3.1.2.20)
Assim, de acÔrdo com a teoria elementar das oscila -
çoes, teremos
r >O - soluções instáveis (ressonantes)
í'=O
r<o
, A
- soluções estaveis (harmonicas) ' , - soluções assintoticamente estaveis
(por extensão de linguagem, "amortecidas").
(3.1,2.21)

73
Considerando então a expressao do expoente caracter.is
tico r dada por (3,1,2.20) e as condições (3,1,2,21), tem
se instabilidade quando
F. F 1 \ 112. ± ~ ( sp · p$ _ 4 À ) ) O 4 W
5• Wp
(.3.1.2.22)
Levando-se em conta que de (3,1,2,4) tem-se
e que por (3,1,2,2) pode-se fa
zer r = s , resulta de (3,1,2.22):
ou
, -Apos algumas transformaçoes simples, conclui-se que
ocorre INSTABILIDADE quando a frequência de excitação .flR
(ressonante) satisfaz a relação
(3.1.2.22)
74
2º CASO) .0. = 2 W + E.).. . 5 Cs.1.2 .2;5 -)
.Considerando novamente o fator {1/[w .. 2 -(wp-.Q)']}
de q<•) (ver (3.1.1,9)), tem-se que quando .O. é dado por .. ,· A
(3,1,2,23) e para r = p = s , que esse fator tende a infini
to com 8 tendendo a zero, Nessas condições, os têrmos por ~ ,
le afetados assumem características ressonantes, A ' Associando tais termos as parcelas variacionais de
(3,1.1,6) e (3,1,1,7), tem-se:
• • A"' co::i w ~t. + 6~ sen L,\t = O
• • A1:, se"" w~ t - <?>5 cos
Procedendo-se como no caso anterior, conclui-se que , , ,
o criterio obtido e o mesmo se fazemos p = r naquelas forrou
las, isto é, haverá INSTABILIDADE para frequências de exci-,
tação í2R que satisfaçam a relação
(3.f.2..'Z.4)

3Q CASO) D = W - W + € À .s p
A
W)W :, p
75
(3.1.'2.25)
Neste caso, temos as seguintes equaçoes diferenciais
para a parte variacional da solução:
• • A::, C:..05 w5t + ~ 5 'Seri G-.\ t. = O
+ 13 ~eri ( oJ t - E. Ã t) J ~ li
• • AfCO<;, wpt,. 6P 5e"' wpl: = O
• • AP 5e"' wp t - 1~P e.o!>
' Procedendo-se analogamente ao primeiro caso, obtem-,
se o expoente caracteristico
F. F: - 4 "'2 )1/2. r = ! .§_ ( _ 5P ps " 4 w:, u.l?
Sendo aqui À= [ n. - (w:.-wp)]/E , e ainda levando
em conta que podemos fazer s: r, resulta:

76
soluções ,
insta veis €2 Fpr. Fp, t. (n- (wr- Wp)]2 soluções
, estaveis -- ·-
4 wrwp 7 soluções assint.est.
Conclui-se que ocorre INSTABILIDADE quando a fre -
qBncia de excitação .QR satisfaz a relação
(.3.1.2.26 )
No primeiro e terceiro dos casos estudados, as fre -
quências de excitação ressonantes para € == O são dadas, co-4 "' A • • ,... mo se ve, por "combinaçoes" de frequencias naturais, razao p~
"' - ... , la qual esses casos sao denominados de ressonancias parametr! , ... , ...
cas de 2a. especie ou ressonancias combinatorias. O mesmo nao
se passa com o segundo caso, denominado ressonância paramétr! , A ,
cadela. especie ou simplesmente, ressonancia parametrica.
3.2. INSTABILIDADE DAS SOLUÇÕES DE SISTEMAS
DE EQUAÇÕES DE HILL
77
Nesta secçao vamos estender a aplicação dos resulta
dos anteriores a sistemas de equações de HILL da forma
onde
e os demais elementos já foram definidos na pág. 61.
Evidentemente (3.1.3.1) pode ser escrita na forma
00 <X)
•• 2. °"' 'Ç"' ( r(mJ G~""') t) q + w,.. a = - E L .L \ rrp co~ mnt + rp sen m.Cl a r l'r rn~, p=I Tp
-í=l,2, •.. (3.1.3.2.)
, e então torna-se quase imediata a aplicação dos metodos e re-
sultados anteriores para cada um dos 'm' do duplo somatório
L. L F("''·C.05 m .nt , "' P rp
o tratamento de equações com L. L G;) :;en m nt. "' p
apresenta diferenças puramente algébricas em relação ao caso
anterior. Finalmente, dada a linearidade das equações, pode-
78
se aplicar a superposição.
Portanto, para estudarmos as condições de instabili
dade da solução trivial de (3.1.3.1) podemos dispensar grande
parte dos detalhes expostos nas secçoes anteriores.
Assim, as soluções estiveis de (3.1.3.1 ou 2) sao da
das por:
1 = - -
2.
1 +· ... w~ -(w _....,.n.)7·
~ p
1"'=1,2, ••• (3J.!!.3)
, , A
E obvio que os termos contendo o fator
{1/[w;-(wP-mn)"l} n = ( w:. ~ w P) / n,
tornam-se ressonantes quando
para determinados valÔres de p, s
e m.
Vamos, a seguir, analisar três casos de instabilida-
de.
12 CASO) .0. = W~ + ~.P +.' €1' , rn
(3.1.3.4)
Associando os têrmos com características ressonantes

79
' , a parte variacional da analise, tem-se:
• • Asco~ w~t + B5 sen w5t. = O
e
.. . Apco~ wpt. + ~P ::,en wpt = O
• • • Resolvendo os sistemas acima para As , Bs , Ap e
BP, aplicando a aproximação de Kriloff-Bogoliuboff e fazendo
as substituições (3,1,2,10), ter-se-á imediatamente:
1 t' ljlt-- ÊÀm L X=X e 2.
1 10

80
onde
e
1 l' pl:--().m L y -Y 1.
, - 10 e onde
Para a ocorrência ,
evidente de instabilidade, e que
as parcelas reais de ~ e ,
e , alias comuns a ambas, devem
ser positivas.
Depois de algumas N
operaçoes simples, chega-se final-
' condição de INSTABILIDADE êste mente a para caso:
]
1/2 ) o
com
ol=--- [F(mlFl"") G(m)G(m)J·
rp pr + l"f' pr
À = ~ [ D.~ _ Wr; Wp J (3. 1'.3.5)
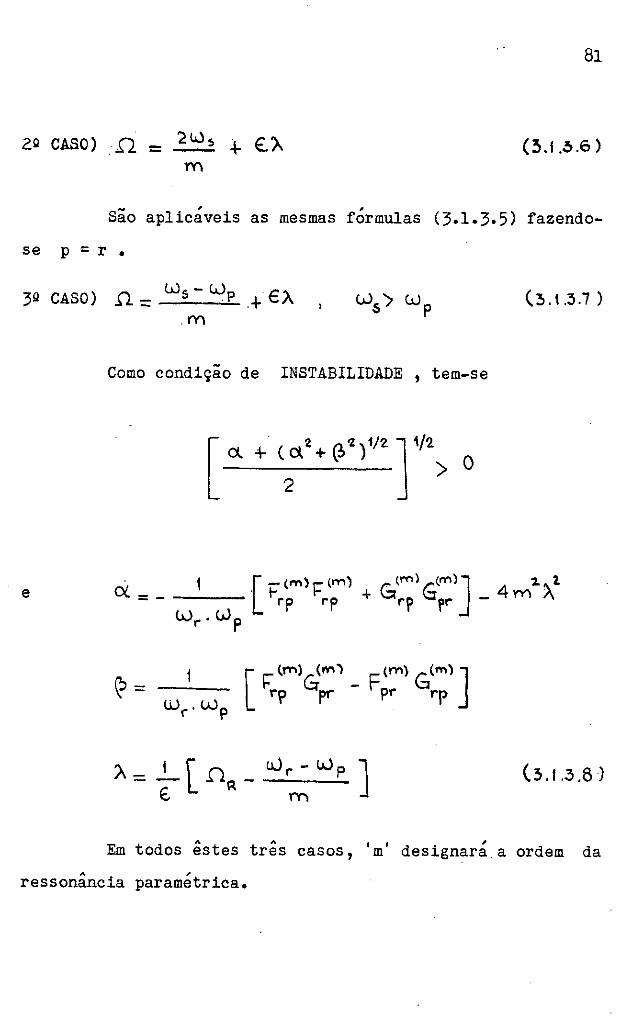
2ll CASO) {2 _ '2W$ + €.Ã m
81
(~.1.~.6)
, , são aplicaveis as mesmas formulas (3.1.3.5) fazendo-
se p = r •
3g CASO) ..(l:: Ws - Wp .+ €Ã .m
(3.\.:5.7)
Como condição de INSTABILIDADE, tem-se
e
(3. f .3 .8)
Em todos êstes três casos, 1 ' , m designara a ordem da A ,
ressonancia parametrica.

3.3. APLICAÇÃO DAS CONDIÇÕES DE INSTABILIDADE
AOS PROBLEMAS EM ESTUDO
82
Nesta secçao vamos fazer algumas considerações sÔbre
a aplicação às equações (2.4.3), (2.4.4), das condições de
instabilidade estudadas na secção anterior. , -Para tal fim, e conveniente escrever as equaçoes aci
ma referidas, na forma:
(~.'2.1)
(3.2.2.)
f': 1,'2, ...
L= 1,'2.
, a) Inicialmente, observe-se que e suficiente analisar
apenas as condições de instabilidade das soluções triviais do
sistema (3.2.1), pois as condições de instabilidade correspon-
' - -dentes as soluçoes triviais de (3.2.2) sao exatamente as mes-, . '
mas (ja que, obviamente, Frp. Fpr = (-Frp) • (-Fpr), produ-. , -tos esses considerados nas formulas que delimitam as regioes
, de instabilidades parametricas).
b) na--condição i F j das equações (3,2,1), conclu! A ,
se imediatamente que ocorrem ressonancias parametricas exclu--
sivamente entre modos flexionais pertencentes a diferentes
planos principais de vibração da viga.
c) Como pode ser observado em todos os três casos de
vinculação da viga, as frequências naturais w10
e W2n ,
correspondentes a modos de mesma ordem dos dois planos de vi
bração da viga diferem entre si apenas pelas respectivas rig!
dezes. Ora, foi visto que as condições de instabilidade estu-N , A
dadas anteriormente sao validas apenas quando todas as fre -
quências naturais do sistema são diferentes entre si, Fica as , -sim justificada a hipotese formulada na secçao 1.1., de que
, -os momentos principais de inercia das secçoes da viga devem
ser diferentes entre si,
, d) Uma característica interessante dos casos de ins-
tabilidade elastodinâmica tratados, é que em nenhum dêles o-A , ,
corre ressonancia parametrica de primeira especie, Com efeito,
ainda que seja r = p = s , ,
temos, por hipotese, i # j '
isto é, ressonâncias entre modos de mesma ordem, mas distin -
tos por pertencerem a planos de vibração distintos. Enfim, em
qualquer hipótese, sempre teremos aqui, ressonâncias entre mo A ,
dos-distintos, e portanto ressonancias parametricas de segun-
da espécie ou, simplesmente, ressonâncias combinatórias.

84
A • e) Por outro lado, poderemos ter ressonancias combi-
natórias tanto para frequências de excitação .f.2R dadas por
w~r + wj? , quanto dadas por 1 '-'\r - wjp 1 , pois conforme se A
três casos (ver ,
57, 58 e 59), ve pelas curvas Frp dos pags.
tanto poderemos ter Frp • Fpr > o como Frp • F ( O pr (ês-, , ,
te caso soe possivel quando r ;t p , evidentemente).
-f) Observe-se pelas expressoes de Frp corresponden A -tes aos tres casos de vinculaçao da viga, que se
:;IL = ( '2 n - 1 ) 'lt / '2 , n = 1, '2. , ... '
torna-se infinito. As-
sim, fique estabelecido , -que as analises de condiçoes de insta 4 ,
bilidada deste trabalho sao validas desde que
. ~L;E, <2n-1) 'lt 2
~n=-1,2,,~, (3.2,3)
g) Uma vez que ~L se situe no entôrno de
{tin-l)~/2.} teremos valÔres de Frp muito grandes. É;sse
fato implica em regiões de instabilidade mais amplas, como se
' depreende facilmente por simples inspeções em (3.1.z.22) e
( 3.1.z.26).
' Inobstante (3.z.z), assuma-se provisoriamente
n=1,'2, ... (~.2.+)
A
Chamando de frequencia ressonante de corte, .O.RO ,
aquela correspondente a E; =·O , ,
isto e ,
85
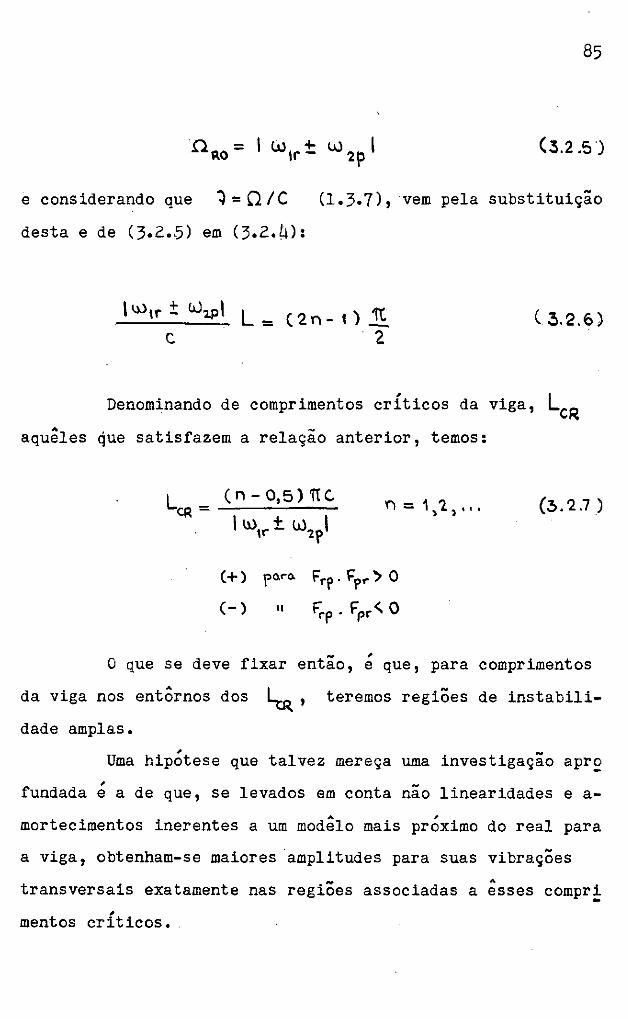
(5.2 .5 )
e considerando que ~=O. /C
desta e de (3.2,5) em (3.2,4):
(1.3.7), vem pela substituição
lw,r±W'2.P\ L= (2n-l)~ (~.2.6) e · 2
Denominando de comprimentos críticos da viga, LCR
aquêles que satisfazem a relação anterior, temos:
Lei~ = ( n - o, 5 ) 1i e. 1 w,r ±. w'Zp 1
n=1,'l, ...
( +) po..-o. Frp . Fpr '> O
(-) 11 Frp . Fpr <. O
(~. 2.7)
O que se deve fixar então,~ que, para comprimentos
da viga nos entôrnos dos ~, teremos regiões de instabili
dade amplas.
Uma hipÓtese que talvez mereça uma investigação apr~ ,
fundada e a de que, se levados em conta nao linearidades e a-A ,
mortecimentos inerentes a um modelo mais proximo do real para
a viga, obtenham-se maiores amplitudes para suas vibrações 4
transversais exatamente nas regiões associadas a esses compri -, mentos criticos.
86
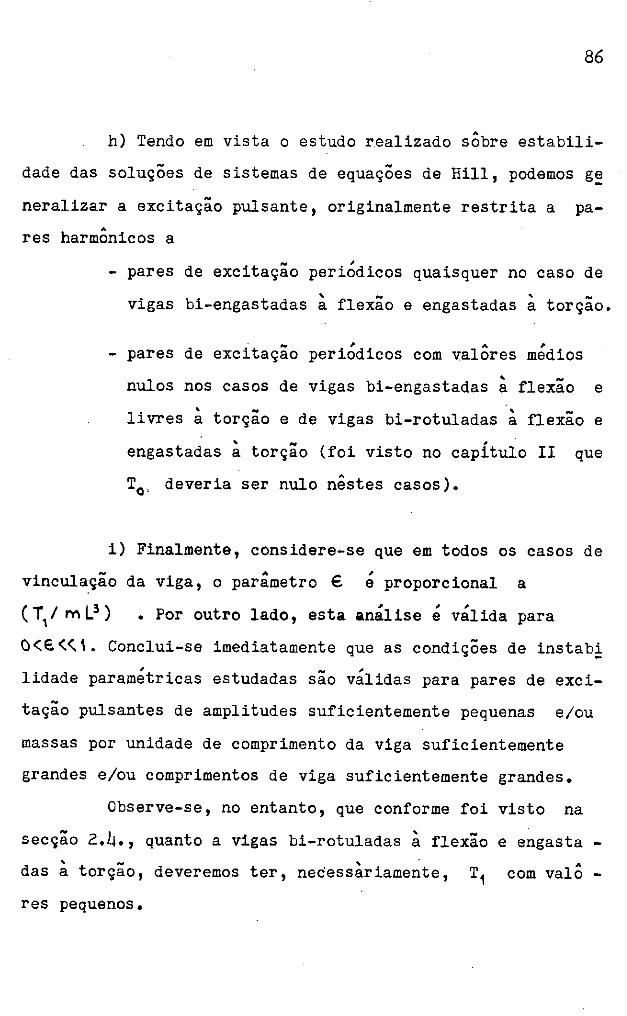
h) Tendo em vista o estudo r.ealizado sÔbre estabili
dade das soluções de sistemas de equações de Hill, podemos g~
neralizar a excitação pulsante, originalmente restrita a pa-• res harmonicos a
- pares de excitação periÓdicos quaisquer no caso de
' - ' -vigas bi-engastadas a flexao e engastadas a torçao.
- pares de excitação per1Ód1cos com valÔres médios ' ~ nulos nos casos de vigas bi-engastadas a flexao e
' - ' -livres a torçao e de vigas bi-rotuladas a flexao e
' ~ ' engastadas a torçao (foi visto no capitulo II que
T0 , deveria ser nulo nêstes casos).
1) Finalmente, considere-se que em todos os casos de
vinculação da viga, o parâmetro € ' e proporcional a
' ' ' • Por outro lado, esta analise e valida para
O<é<<I. Conclui-se imediatamente que as condições de instabi , ... , .
lidade parametricas estudadas sao validas para pares de exci-
tação pulsantes de amplitudes suficientemente pequenas e/ou
massas por unidade de comprimento da viga suficientemente
grandes e/ou comprimentos de viga suficientemente grandes.
Observe-se, no entanto, que conforme foi visto na
secção 2,4., quanto a vigas bi-rotuladas à flexão e engasta -
' - ' " das a torçao, deveremos ter, necessariamente, T1 com valo -
res pequenos.
87
, Depois dessas considerações, sonos resta aplicar as
condições de instabilidade paramétrica a modêlos de viga com
parâmetros definidos numericamente, É o que vamos fazer no c~ ,
pitulo que segue.

88
, CAPITULO IV
, ALGUNS RESULTADOS NUMERICOS
A , ~
Neste capitulo nao pretendemos realizar uma prospec-~ ,
çao exaustiva de resultados numericos, mas simplesmente, atra
vés de alguns exemplos, objetivar a análise desenvolvida nos ,
capitules anteriores.
Todavia, os programas para computação digital foram
organizados de tal modo que com simples troca dos cartões de
dados, .podem ser obtidos os resultados correspondentes a vi -,
gas com outras caracteristicas construtivas, desde que sejam
respeitadas as restrições formuladas na secção 1.1 ••
Os programas dêste capitulo estão formulados em lin
guagem FORTRAN II e foram processados em computador IBM 1130 ,
com 32 K de memoria do NCE/UFRJ.
4,1, DETERMINAÇÃO DAS REGIÕES .DE
INSTABILIDADE ELASTODINÂMICA DA VIGA
Vamos aqui considerar apenas as regiões de instabil!
dade (RIED) correspondentes ao primeiro e ao segundo modos
das vibrações flexionais da viga, isto porque, geralmente são
89
essas as regiões de maior interêsse tecnolÓgico (devido a A , -maiores possibilidades de ocorrencia), alem de que sao as que
, , oferecem resultados numericos mais confiaveis (pois, como vi-
mos, as RIED são delimitadas por funções das frequências natu ,
rais e e sabido que quanto mais alta a ordem destas, menos e~
xatas são suas determinações).
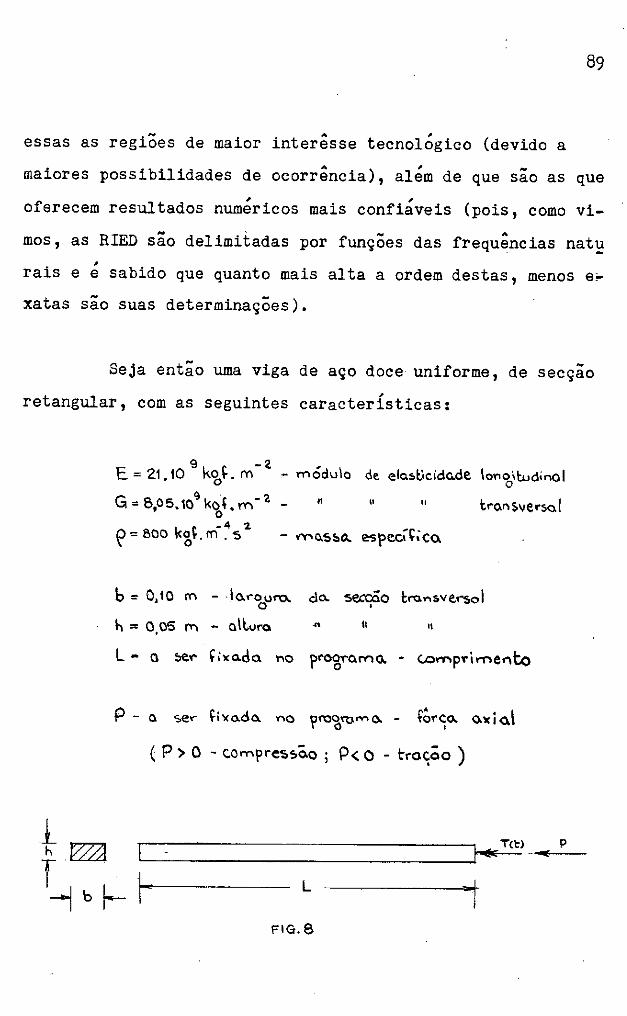
Seja então uma viga de aço doce uniforme, de secção ,
retangular, com as seguintes caracteristicas:
9 -2 E= 21.10 k~f. m - módulo de ela!>tocidc..de \or,i\l:,..,d,nol
9 · -i G = B,05.10 ko{,m -o
,. • • 4 '.2 (' = eco "g•. rn . s
b" 0,10 m - .\o..-ouro.. o h = 0,05 IY\ - cillvra
" " li
do.. seccão l:.-a ... :r.versol •
11 li
( P > O - c.ompre'l>sÕ.o ; P< O - t:ro~Õo )
L
FIG.8
Tctl p

90
A
Com esses dados obteve-se imediatamente os seguintes A ' ' parametros necessarios a determinação das RIED:
-3 2 m ª 4 ~'bí. m ::, - mosso ?Or unido.de de CoMpl'lrnento
ri = \,04. ,o-E>,.,.., 4 \ _ mo'""e ... tos de ine'rcio. prí,icipais
-6 4 J I =4.1&.IO 1'n o\a seccoo 2 '
El, = 5 460 m 5s· 2
rr,
k"' º· '246 { ver TIMOSHE.NKO 1 €,0001c~22
• l'°i>· 277 )
-1 C. = 15Gõ mS ( ver ( 1.3.~))
Suponhamos agora o caso da
VIGA Bl-ENGASTADA À FLEXÃO E ENGASTADA À TORÇÃO
Em primeiro lugar atente-se ao fato de que P deve
ser menor que a carga crítica à flambagem P , nêste ca-crit. so, dada por
(4 .1.1 )

91
De acÔrdo com (2,1,20) e (2,1,24) temos as frequên -
cias naturais:
( 21'!1'" )·2. ] t/2 0,'2!:i p -L
0,2.S --P ( 2.IH' )1 J 1/2. L
(4.1.2)
(4.1.3)
Designando por frequências de ressonância combinató
ria .Q.~0
aquelas correspondentes a E:= O (ver (3,1.2.22) e
(3.1.2.26)), tem-se
(4.f .4)
ou (4.-1.5)
Por outro lado, designemos por .nllE e ..QR.0 as fre-A A ~ ' quencias de ressonancia combinatoria que delimitam as RIED a
' esquerda e a direita, respectivamente (t* O).
Tem-se então
E
(4.1.7)
(4.1.8) .íl o
FIG. 9

92
onde
(4.1.9)
,. Neste caso, como se viu, -sao
dados por (2.1.22). De acÔrdo com (1.3.7) tem-se.
(4.UO l
Antes de passarmos à fase de programação propriamen-. . , te dita, observe-se que considerando~= 0,3 (este e, de um
modo geral, o valor máximo admissível para um parâmetro pequ~
no por definição), tem-se, a seguir, alguns valÔres correspo~
T• ,. -dentes para a amplitude
1 do torque harmonico de excitaçao
(ver (2.1.21)):
L-=1m __ T,., = 1
0,015 2. mk~f L:'ln,_._ T"=
1 0,121 6 mkoÇ o
L=4.m __ r,• .. '2.,4~2 O m 'k.gr L=8 ...., __ TI .. = ~.7'2.SO tn koÇ o
. , (pelo que se constata a relativa pequenez dos valores maximos
admissíveis para Tf, nesta análise).
Damos a seguir a correspondência entre os simbolos·u ,
sados no desenvolvimento teorice e no programa:

L HL p p
po-it PCRtT
, - (1/C.) - AK CARA.C.TERISTICAS
( EL/rn) E,K Oé C.ON:â>TRl.>c.ÀO
(1/m) _ CK
( Er.,_t rn) DK
2'!{ PY2.
r r te nou !"1)
p J (e N ou M)
vL AR.G0 Cl,J)
f rp F ( I.,J)
Fpr------- _ F(J,I)
~ E.P5LN (MA&)
A J-ILANO tl,J).
.OR.O ----- VE.RT ( I,J)
nRE------------ 0MEL(l,J,MAG)
Duo 0,MEP. (I,J,MAG)
' As variaveis assinaladas no programa por A(M,N), ,
93
B(M,N), C(M,N), D(M,N), E(M,N) e F(M,N) correspondem ao cal-
94
culo de Frp(M: I,N: J) e de Frp(M: J,N: I).
Deve-se atentar para os desvios realizados no progr~
ma conforme os casos de F(I,J)* F(J,I) maiores ou menores
que zero.
Nos programas RIED para o caso de vigas bi-engasta -
das à flexão e livres à torção, as variáveis A(M,N), B(M,N),
C(M,N), D(M,N) e F(M,N) ' . devem ser expressas de acordo com
(2.2.9). Para o caso de vigas bi-rotuladas à.flexão e engast~ ... - A A Â
das a torçao, devemos expressar esses mesmos fatores de acor-
do com (2.3.17), bem como fazer PY2: PY (ver (2.3.13) e
(2.3.19)).
PROGRAMA PARII. DETERMINACA.0 DAS ~ 1 ED •
DIAGRAMA DE: BLOCOS
o~
2 PCRIT
1-!L,P
AK,BK,CK,OK
PY, PY'Z.
PCRIT =
<O
4 l-lL,P
L = 1
7 J= 1, 2
®
I = 1 2 . @'
FNVT1(t)=
FNVT2.U) =
95
RIED1

8 \/E.RT.([,J) =
= FNVTHr) + FN'IT'2(J)
O>
10 t-1 =I N=J k" o AlsGi<il(I,J)=
12 A(M,N)=
F(H,N):
K= K+t
M=l N =J
>O
9 VERTU:,JJ = = A~5(.FNVT1 (I)-FN VT2(J)}
RlE.02

~o
20 l-llANO(l})=
F(f,J), HJ,1) \.ILANO(L,l)
0HE,L(1_3,Hllq)=
!11HE(s([.l,HAG)=
' 01-\eL (I,J,Ht.G)
/t'.)HeR (I,J,Mll.6.)
0)
97
> o
>O
~o
38 L=Z
o>
50 CALL E.X IT
RIE03.

PAGE 1 A 63
// JOB T OOFF lOFF
LOG DRIVE 0000 0001
CART SPEC OOFF lOFF
C.4RT AVAIL OOFF lOFF
V2 MOS ACTUAL 32K CONFIG 32K
/ / FORTRAN *LIST SOURCE PROGRAM •I0CS(25Dl READER,1403 PRINTERI *EXTENDED PRECISION
PHY DRIVE 0000 0001
A 63 98
C DETERMJNACAO DAS REGIOES DE INSTABILIDADE ELASTICA DA VIGA C BI-ENGASTADA A FLEXAO - ENGASTADA A TORCAO
DIMENSION FNVT1(2l,FNVT2(2l,VERT(B,8),ARG0(8,8), l A(8,8),8(8,81,C(8,8l,D(8,8),E(8,8),F(B,8),HLAND(8,8), 2EPSLN(4),0MEL(4,4,4),0MER(4,4,4l
HL=3.5D P=4000. AK=0.00064 BK=5460. CK=0.25 DK=21840. PY=3.141592 PY2=2*PY
PCRIT=(BK/CK)*IPY2/Hll**2 IF(P-PCR!Tl4,2,2
2 WRITE(5,3lPCRIT 3 FORMAT(//,lDX,'PCRIT=',Fl0.4)
GOTO 50 4 WRITE(5,5)HL,P 5 FORMAT(IH1,///,11X,'REGI0ES DE INSTABILIDADE ELASTICA DA',
1 lX,'VlGA',/,llX,'Bl-E~GASTADA A FLEXAO -•, 2 lX,'ENGASTADA A TDRCAO',//, 3 11X,'HL= 1 ,F8.5,6X,'P=',F5.0)
L=l 7 DO 40 J=l,2
DO 40 1=1,2 FNVTl(l)=SQRT(BK*(PY2*1/HLl**4-CK*P*(PY2*1/Hll**2) FNVT2(Jl=SQRT(DK*(PY2*J/Hll**4-CK*P*(PY2*J/Hll**2) !F(L-118,8,9
8 VERT(l 1 JJ=FNVTl(l)+FNVT2(J) GOTO 10
9 VERT(I,JJ=ABS(FNVTl(Il-FNVT2(J)) 10 M=l
N=J K=O AR GO I I , J l = A K *VER T I I , J ) * HL
12 A(M,N)=l./COS(ARGOI l,Jl )-1. B(M,N)=(N'a*2H'!ARGOI !,Jl l**4
PI\GE 2 A 63
CIM,N)=l2*PY**2*1N**2)*CN**2+M**2)*(ARGOCI,Jl)**2 D1M,Nl=l6*PY**4*1N**4l*CN**2-M**2l E(M,Nl=(ARGOII,Jll**4-8*PY**2*(N**2+M**2)*(ARGOCI,Jll**2
1 +16*PY**4*1N**Z-M**Zl**2 F(M,Nl=AIM,N)*IBIM,Nl-CIM,Nl+DIM,N)llE(M,N) K=K+l M=J N=I JF(K-2) 12,14,14
14 IFIL-1115,15,17 15 JF{FII,Jl*FIJ,1)136,20,20 17 IFCFII,J)*FlJ,lll20,20,40 2 O H LA NO C I , J l =O. 5 O *S Q R T C l F C I , J ) *F ( J , l ) l II F N VT l ( I l * F NVT 2 ( J J l I
WRITEIS,25)!,J,FNVTl(I),FNVTZ(Jl,ARGO(I,Jl, l HLANOII,J),FII,Jl,FCJ,Il
25 FORMATCl,5X,'l=',Il,2X,'J=',I1,l,15X, 1 'FNVT11Il=',F9.4,4X,'FNVT2(Jl=',F9.4,4X, 2 l/,15X,'ARGO(I,J)=',F7.4,5X,'HLAND1I,J)=',F7.4, 3 11, 15X, • FC I,J )=' ,Fll.6,6X,' FC J, I l=' ,Fll.61
WRITEC5,30) 30 FORMAT(ll5X,'EPSLN',5X,'OMELCI,Jl',6X,'OMER(l,Jl'l
DO 35 MAG=l,4 NORD=MAG-1 EPSLN(MAGJ=O.l*NORD OMEL(I,J,MAG)=VERTII,Jl-EPSLN(MAGl*HLAND(I,Jl OMERCI,J,MAGl=VERTII,J)+EPSLNlMAGl*HLANDCI,Jl WRITEC5,33)EPSLNlMAGl,OMEL(I,J,MAG),OMER(I,J,MAGl
33 FORMAT(l5X,F4.2,2(3X,Fl2.4)) 35 CONTINUE 36 IF(I-2)40,37,37 37 IF(J-2)40,38,38 38 L=2
GOTO 7 40 CONTINUE 50 CALL EXIT
END
FEATURES SUPPORTED EXTENDED PRECISION roes
CORE REQUIREMENTS FOR COMMON O VARIABLES
END OF COMPILATION
li XEQ
2216 PROGRAM 1066
99

REGIOES DE INSTABILIDADE ELASTICA DA VIGA BI-ENGASTADA A FLEXAO - ENGASTADA A TORCAO
HL= 3.50000
I=l J=l
P=4000.
1=2 J=2
!=2 J=l
l=l J=2
FNVTl(Il= 231.2674
ARGO(I,Jl= 1.5772
F(I,Jl=-234.462029
EPSLN D.DO 0.10 0.20 0.30
OMEL( I,Jl 704.1382 704.1028 704.0673 704.0319
FNVTl!I)= 945.7415
ARGO(l,J)= 6.3782
F(I,J)=
EPSLN o.ao 0.10 0.20 0.30
0.027821
OMEL(l,Jl 2847.4201 2847.4201 2847.4201 2847.4201
FNVT11I)= 945.7415
ARGOII,Jl= 1.0592
F(l,J)= -0.409772
EPSLN O.DO 0.10 0.20 :) • 30
OM EU I, J l 472.8707 472.8706 472.8705 472.8704
FNVTl(ll= 231.2674
ARGOl!,'J)= 3.7417
F(I,J)= -10.792233
EPSLN O.DO 0.10 0.20 O. 30
OMEU!,Jl 1670.4110 1670.4106 1670.4101 1670.4097
FNVT2(Jl= 472.8707
HLAND(I,Jl= 0.3544
F(J,Il=-234.462029
OMER(l,Jl · 704.1382
704.1737 704.2091 704.2446
F~VT2(Jl=l90l.6785
HLANDII,Jl= 0.0000
F(J,Il=
OMER(I,J) 2847.4201 2847.4201 2847.4201 2847.4201
0.027821
FNVT2(J1= 472.8707
HLANDII,Jl= 0.0011
F(J,Il=
OMER(l,Jl 472.8707 472.8709 472.8710 472.8711
5.538384
FNVT2(J)=l901.6785
HLAND(I,Jl= 0.0044
F(J,Il=
OMER( I,Jl 1670.4110 1670.4115 1670.4119 1670.4124
3.248100
100

REG!OES DE INSTABILIDADE ELASTICA DA VIGA BI-ENGASTAOA A FLEXAO - LIVRE A TORCAO
HL= 3.50000 P=4000.
l=l J=l
1=2 J=2
1=2 J=l
[=1 J=2
FNVTl(IJ= 231.2674
ARGO!I,JJ= 1.5772
F(I,Jl=-115.238290
EPSLN o.oo 0.10 0.20 0.30
OMEL(I,Jl 704.1382 · 704.1208 704.1034 704.0860
FNVTl(l)= 945.7415
ARGO(I,Jl= 6.3782
F<I,Jl=
EPSLN o.oo 0.10 0.20 0.30
0.279407
OMEL<I,Jl 2847.4201 2847.4201 2847.4201 2847.4201
FNVTllll= 945.7415
ARGO(I,Jl= 1.0592
F(I,Jl= -0.682564
EPSLN o.ao 0.10 0.20 0.30
OMEL(I,J) 472.8707 472.8706 472.8704 472.8702
FNVTl( I J= 231.2674
.~RGO(I,JJ= 3.7417
F(I,JJ=
EPSLN o.oo 0.10 0.20 0.30
5.427035
DMEL(I,Jl 16 70. 411 O 1670.4109 1670.4107 1670.4105
FNVT2(JJ= 472.8707
HLANDCI,Jl= 0.1742
FCJ,Il=-115.238290
OMER( I,Jl 704.1382 704.1557 704.1731 704.1905
FNVT2CJJ=l901.6785
HLANDCI,J)= 0.0001
FIJ,I)=
DMER(I,Jl 2847.4201 2847.4201 2847.4201 2847.4201
0.279407
FNVT2(Jl= 472.8707
HLANO(l,Jl= 0.0019
F(J,Il=
DMERCI,Jl 472.8707 472.8709 472.8711 472.8713
9.739609
FNVT2(Jl=l901.6785
HLAND(l,Jl= 0.0016
F(J,Il= -0.874492
DMER(I,JJ 1670.4110 1670.4112 1670.4114 1670.4115
101

REGIOES OE INSTABILIDADE ELASTICA DA VIGA BI-RDTULADA A FLEXAO - E~GASTADA A TORCAO
HL= 3.50000 P=4000.
I=l J=l
1=2 J=2
I=2 J=l
I=l J=2
FNVTl( l )= 52.3309
ARGOll,Jl= 0.3762
Ftl,Jl=
EPSLN o.ao 0.10 0.20 0.30
0.056338
OM EU I, J l 167.9647 167.9646 167.9646 167.9645
FNVTl(ll= 231.2674
ARGO(l,Jl= 1.5772
Fll,Jl=-463.946814
EPSLN o.oo 0.10 0.20 0.30
OMEL(I,Jl 704.1382 704.0681 703.9979 703.9278
FNVTl(l)= 231.2674
ARGO(I,Jl= 0.2590
Fll,J)= -10.976553
EPSLN o.oo o. lo 0.20 0.30
OMEL(I,Jl 115.6337 115.6329 115.6320 115.6312
FNVTl(ll= 52.3309
ARGO(l,Jl= 0.9420
FlI,Jl=
EPSLN o.ao O. 1 O 0.20 0.30
0.881903
OMEL<I,Jl 420.5398 420.5386 420.5373 420.5361
FNVT2(Jl= 115.6337
HLAND(I,Jl= 0.0003
F(J,Il=
OMERI I,JJ 167.9647 167.9647 167.9647 167.9648
0.056338
FNVT21Jl= 472.8707
HLANDll,J)= 0.7014
FlJ,Il=-463.946814
OMER(l,Jl 704.1382 704.2084 704.2785 704.3487
FNVT21Jl= 115.6337
HLAND(I,Jl= 0.0083
FIJ,Il=
OMER(l,Jl 115.6337 115.6345 115.6354 115.6362
0.677144
FNVT2(Jl= 472.8707
HLAND<I,Jl= 0.0122
F(J,Il= -16.811032
OMERll,Jl 420.5398 420.5410 420.5422 420.5435
102
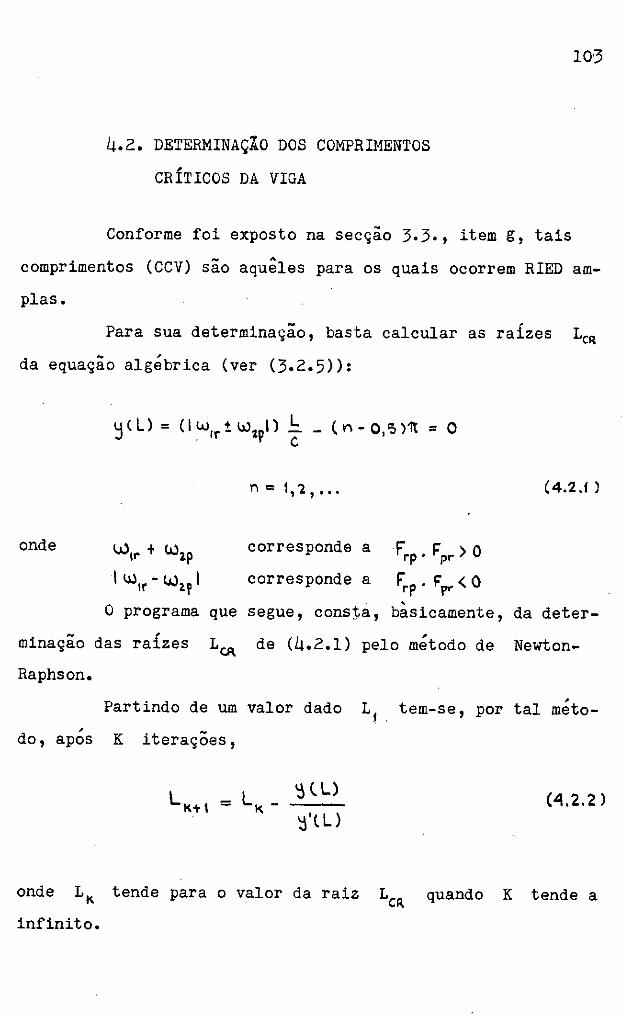
4.2, DETERMINAÇÃO DOS COMPRIMENTOS ,
CRIT ICOS DA VIGA
Conforme foi exposto na secçao 3.3., item g, tais - A comprimentos (CCV) sao aqueles para os quais ocorrem RIED am-
plas.
Para sua determinação, basta calcular as raízes 1c~
da equação algébrica (ver (3.2.5)):
t'\=1,'2, ... (4.2 .f )
onde W1,. + W2p corresponde a Frp, Fpr > O
1 w,r - W:i.f 1 corresponde a Frp . F l"' < O ' O programa que segue, consta, basicamente, da deter-
minação das raízes 1CR de (4.2,1) pelo método de Newton
Raphson.
' Partindo de um valor dado 11
tem-se, por tal meto-,
do, apos K iterações,
'3 l L) - LK -
'j 1tl) (4.2.2)
onde 1K tende para o valor da raiz 1,'1. quando K tende a
infinito.

104
' Praticamente, no entanto, pode-se considerar
desde que
(4.2.!>)
ondé b é um parâmetro pequeno escolhido convenientemente,
No programa que segue temos, além dos parâmetros e
variáveis definidos no programa anterior, os abaixo relaciona
dos
lc.R HLGR
Lk HL
Lk+1 1~ L1
n MULT
(n -0,5)'it RE~01'1
:1tLC~) '(lt,J)
' ~ t LCR) PERY(!,J)
As demais variáveis tem seu significado esclarecido ,
no proprio programa.
O programa para determinação dos CCV que apresenta
mos está adaptado para o caso de vigas bi-engastadas à flexão
e engastadas à torção. Pesquisam-se os ' LCR• compreendidos
entre 1 e 10 metros, para 'n' de 1 a 4.

105
Por simples trocas de parâmetros podem ser obtidos . ,
valores para vigas com outras características construtivas.
Em qualquer caso, obtem-se várias iterações para um
mesmo LOI ' e um aspecto importante dêste programa é o con-
. -veniente ajustamento dos parametros de iteraçao,
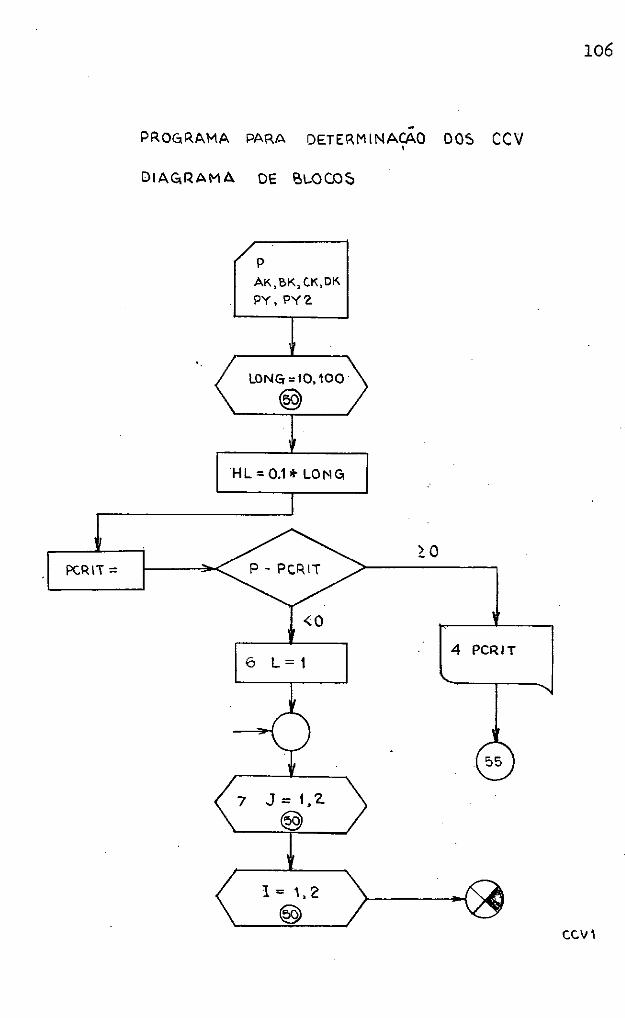
PCRIT =
-PROGRAMA PARA OETEí-l.MINACAO 005 CCV
DIA~RAMA OE e,1...QC.O~
p
AK,BK,C:K,OK
PY, PY'2
LONG = 10,100 ·
@
Hl=0.1* LONG,
<O
6 L=t
7 J=1,'2.
@
l = '· 2 @
'
4 PCRIT
106
CCV\

o ?. •
8 VEi:1.T(I,J) = =F1'1'11"\(tl ~FNVT2(J)
O>
FNVT1(I) = FN V T2 (Jl =
10 M=I._
N=J K:O AR&0(I,J) =
12 A(M,N):
F"(M,N):
107
>0
g VERi(I,J) = = A6~(FNVT1 (I)-FNVT'2(3))
c.c.v '2.
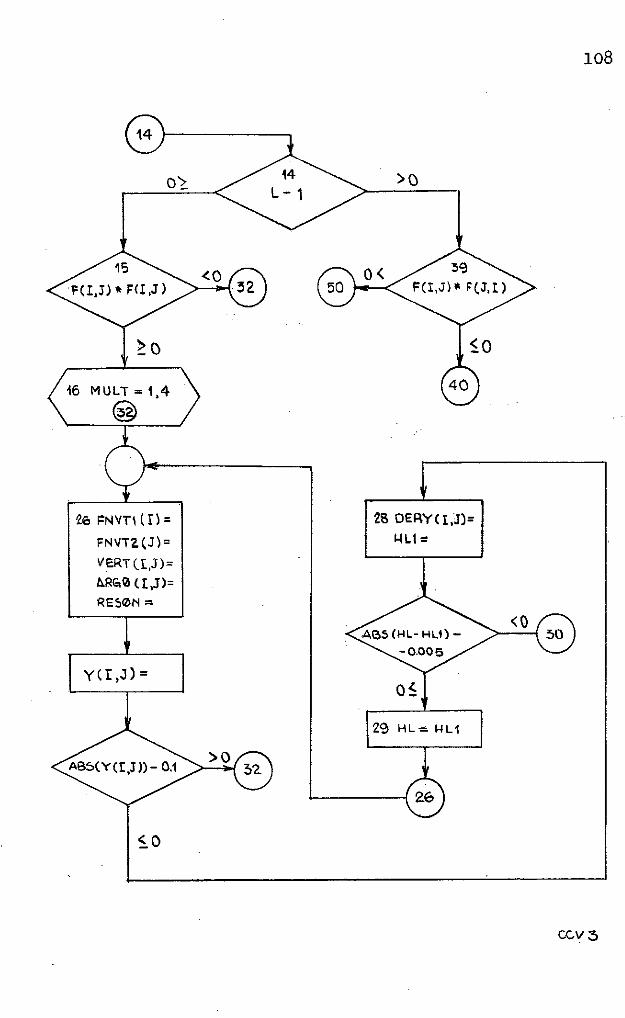
16
2é FNVTI ( rl = FNVT2(J)=
VERT (I,J)=
b.RG.0 (I,J)=
RE50N =
ycr,J) =
>O
>a
O<
~o
ZS OEP.Y C I ,'J)= 1-1 L 1 =
29 HL: l-lL1
108
<O
CCN~
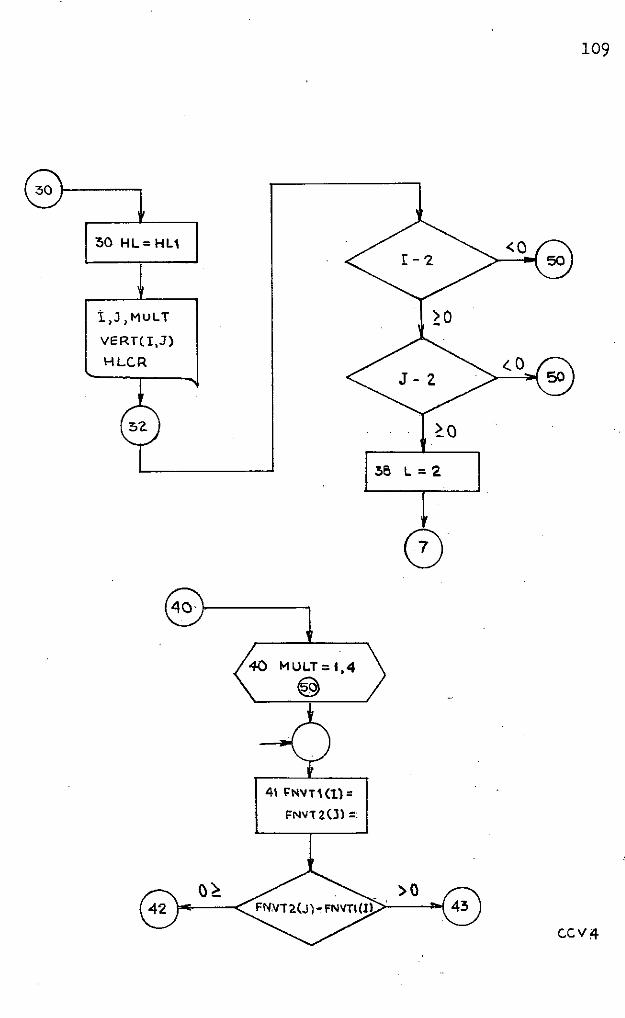
50 HL= HL1
i,J,MULT
VERT(I,J)
HLCR
40 MULT=l,4
®
41 l'N'I/T1(1)"
FNVT 2 (J) :,
109
<O
~o
(O
:38 L = 2
0
>O
ccv4
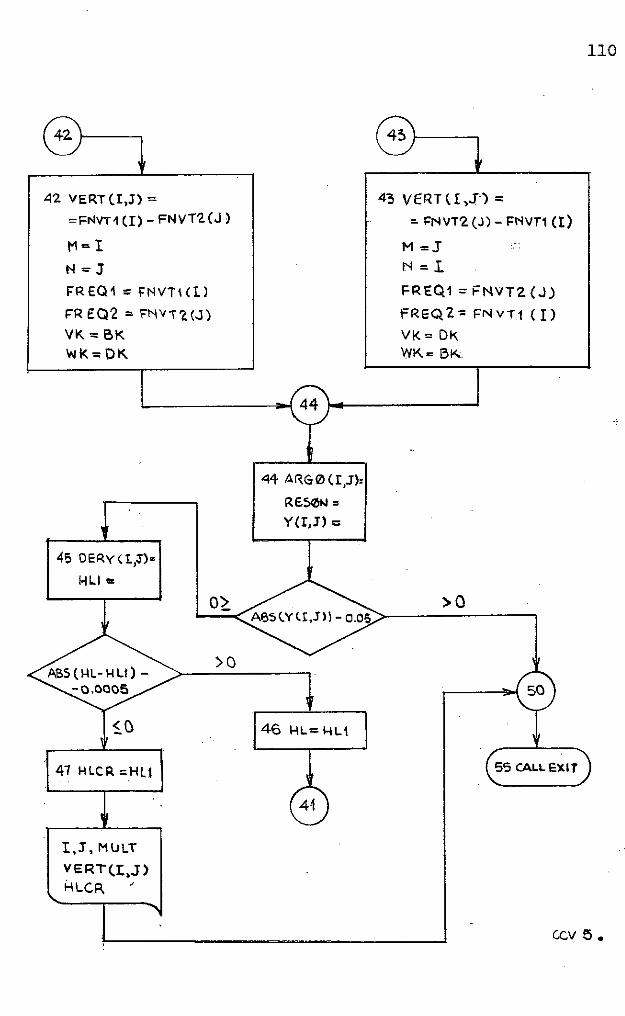
42 VERT (I,J) = =FNVT1 (I)- FNYT2(J)
MuI
"' = J FREQ1 = FNVT\Cll
FR EQ'2 = ;:-NV"i'2(J)
VK."' BK Wk=OK.
4S OERY < l,J):
HL.I =
o~
41 HLCR :HLI
I,.T, MlJL.T
VERT(.I,J) Í-ILCP, '
>O
44 ARG0(I,J),
R€.50N = Y(I,J) =
146 HL=HL1
cb
43 VERTtI, .. f) = ~ 1"NVT'2(J)-FNVT1 (I)
M =J N = .1
FREQ1 = FNVT2 (J)
FREQ2-= FNVT1 (I)
VK= DK WK= BK.
>O
SS CALL Elll 7
110
CCV 6 •
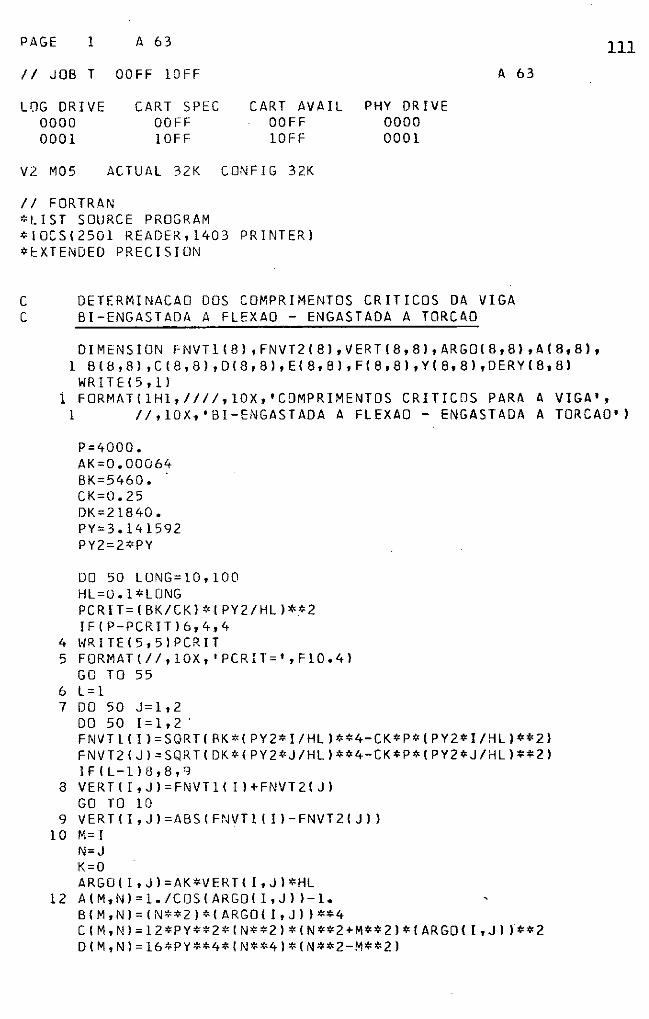
PAGE 1 A 63
// JOB T OOFF lDFF
LOG DRIVE 0000 0001
CART SPEC OOFF lOFF
CART AVAIL OOFF lOFF
V2 M05 ACTUAL 32K CONFIG 32K
// FORTRAN *LlST SOURCE PROGRAM *IOCS12501 READER,1403 PRINTERl *~XTENOED PRECISION
PHY DRIVE 0000 0001
A 63
C DETERMINACAO DOS COMPRIMENTOS CRITICOS DA VIGA C SI-ENGASTADA A FLEXAO - ENGASTADA A TORCAO
OIMENSION FNVT1(8l,FNVT2(8l,VERT(8,8),ARGOC8,8),A(8,8l, l B(B,8l,C(8,8l,D(8,8l,E(8,8J,F(8,8l,YC8,8l,OERYC8,8l
WRITE(5,ll
111
1 FORMAT(1Hl,////,10X,'COMPRIMENT0S CRITICOS PARA A VIGA', 1 //,1DX,'BI-ENGASTADA A FLEXAO - ENGASTADA A TORCAO•J
P=4000. AK=0.00064 BK=5460. . CK=0.25 DK=21840. PY=3.141592 PY2=2~'PY
DO 50 LONG=l0,100 HL=ü.l*LONG PCRIT=CBK/CKl*lPY2/HL)**2 IF(P-PCRIT)6,4,4
4 WRITE(5,5)PCRIT 5 FORMAT(//,lOX,'PCRIT=',Fl0.4)
GO TO 55 6 L=l 7 DO 50 J=l,2
DO 50 1=1,2. FNVTl(IJ=SQRTCBK*(PY2*l/HLl**4-CK*P*CPY2*I/HLl**2l FNVT2(J)=SQRT(DK*IPY2*J/HL)**4-CK*P*(PY2*J/Hll**2) IF(L-1)8,8,9
8 VERT(l,Jl=FNVTl< I)+FNVTZ(Jl GOTO 10
9 VERT( I.,JJ=ABSlHJVTl( 1)-FNVTZ(Jl l 10 M=I
N=J K=O ARGO(!,Jl=AK*VERT(l,Jl*HL
12 A(M,Nl=l./COS(ARGO( 1,J) )-1. B(M,NJ=lN**Zl*(ARGO(l,Jll**4 C(M,Nl=l2*PY**2*1N**2)*(N**2+M**2l*CARGO(l,Jll**2 D(M,N)=l6*PY**4*(N**4)0(N**2-M**2l
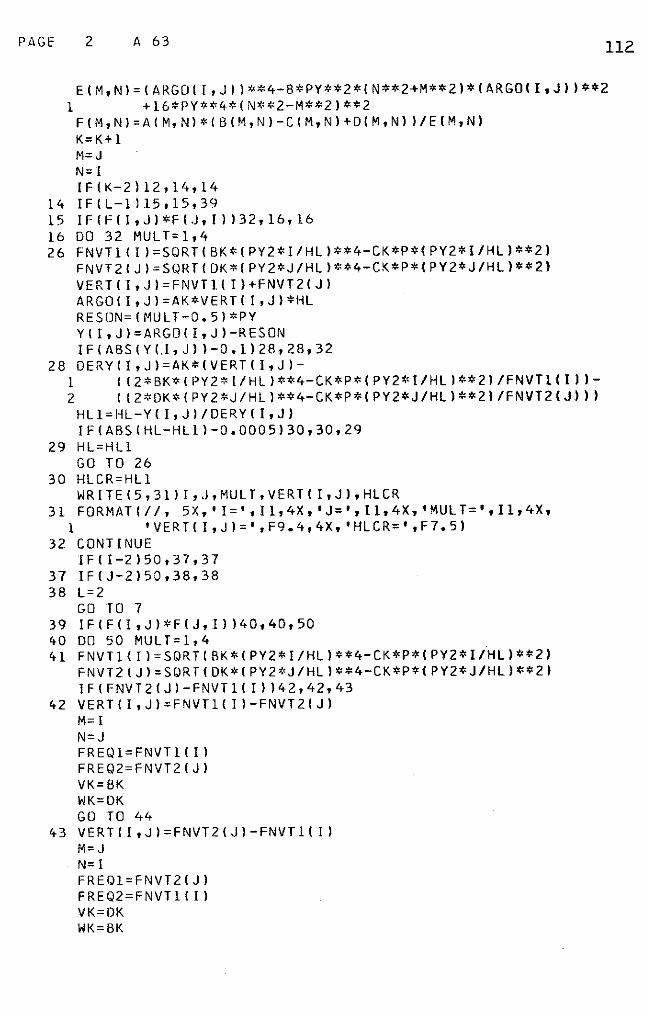
PAGE 2 A 63 112
E(M,N)=(ARGO(l,Jll**4-8*PY**Z*(N**2+M**2l*(ARGO(I,Jll**2 1 +16*PY**4*(N**Z-M**2l**2
F(M,Nl=A(M,Nl*(B(M,Nl-C(M,Nl+D(M,Nll/ECM,Nl K=K+l M=J N=I IF(K-2)12,l'ttl4
14 IF(L-lll5,15,39 15 IFIFCI,Jl*F(J,1))32,16,16 16 DO 32 MULT=l,4 26 FNVT1Cll=SQRT(BK*(PY2*1/HLl**4-CK*P*lPY2*1/HLl**2l
FNVT2CJ)=SQRTCDK*(PY2*J/HLl**4-CK*P*(PY2*J/HLl**2l VERTCI,Jl=FNVTl(I)+FNVT2CJl ARGOII,Jl=AK*VERT( 1,Jl*HL RES0N=(MULT-0.5l*PY Y(l,J)=ARGO(l,Jl-RESON I F { A BS ( Y U , J l J -O • l l 2 8, 2 8, 3 2
28 DERY( I ,J)=AK*(VERT( I,J )-1 lC2*BK*IPY2*l/HLl**4-CK*P*(PY2*1/HLl**2l/FNVTl(I)l-2 1(2*DK*(PY2*J/HLl**4-CK*P*(PY2*J/HLl**2l/FNVT2(J)l)
Hll=HL-Y(I,Jl/DERY(l,J) IF(ABS(HL-Hlll-0.0005)30,30,29
29 HL=Hll GOTO 26
30 HLCR=Hll WRITE(5,3lll,J,MULT,VERT( I,Jl,HLCR
31 FORMAT ( / /, 5X,' !=', I 1,4X, 'J=', I 1,4X, 'MUL T=', I1,4X, l 'VERT( I,Jl=' ,F9.4,4X, 'HLCR=',F7.5)
32 CONTINUE IFCl-2)50,37,37
37 IF(J-2)50,38,38 38 L=2
GOTO 7 39 IF(Fll,Jl*F(J,Ill40,40,50 40 DO 50 MULT=l,4 41 FNVTllll=SQRT(BK*IPY2*!/Hll**4-CK*P*(PY2*I/HLl**2l
FNVT2(Jl=SQRT(DK*CPY2*J/Hll**4-CK*P*IPY2*J/Hll**2l IF(FNVT21Jl-FNVT111)142,42,43
42 VERT( I ,Jl=FNVTl( 1 )-FNVT2( Jl M=I N=J FREQl=FNVTl C l l FREQZ=FNVT2(J) VK=BK WK=OK GOTO 44
43 VERT(l,Jl=FNVT2(Jl-FNVT1(1) M=J N=I FREQl=FNVT2(JJ FREQ2=FNVTl(ll VK=DK WK=BK

PAGE 3 A 63
44 ARGO(I,J)=AK*VERT(l,Jl*HL RESON=(MULT-D.Sl*PY Y C I, J) =ARGO ( I, J )-RESON IF(ABSCY( I,Jl l-0.05)45,45,50
45 OERY(l,Jl=AK*(VERT(I,J)-1 (C2*VK*CPYZ*M/Hll**4-CK*P*(PY2*M/Hll**2l/FREQ11-2 (C2*WK*(PY2*N/Hll**4-CK*P*CPY2*N/Hll**2)/FREQ2)1
Hll=HL-YC I,Jl/OERY( l,Jl IFCABSCHL-Hll)-0.0005)47,47,46
46 HL=Hll GOTO 41
47 HLCR=Hll WRITEC5,4BlI,J,MULT,VERT(J,Jl,HLCR
48 FORMATC// 1 5X,'I='1 ,I1,4X,'J=',Il,.4X,'MULT=',1l,4X, l 'VERT( I,Jl=' ,F9.4,4X, 1 HLCR=• ,F7.5)
50 CONTINUE 55 CALL EXIT
ENO
FEATURES SUPPORTEO EXTENDED PRECISION 1 JCS
CORE REQUIREMENTS FOR CDMMON O VARIABLES
END OF COMPILATION
// XEQ
2068 PRDGRAM 1634
113

I= 1
I=2
1=2
I=l
I=l
l=l
I = 1
I=l
1=2
1=2
I=l
I=l
I=l
I=l
l=l
I=l
COMPRIMENTOS CR!TICOS PARA A VIGA
BI-ENGASTADA A FLEXAO - E~GASTADA A TORCAO
J=l MULT=2 VERT1I,J)=6206.7807
J=l MU L T= l VERTI I,J)=l037.6456
J=l MULT=l VERT1I,Jl=l034.0824
J=2 MULT=2 VERTI I,J )=2650.8184
J=l MULT=l VERTII,Jl= 698.4540
J=l MULT=l VERTII,J)= 698.4747
J=l MULT=l VERTll,Jl= 698.4530
J=l MULT=l VERTCI,J)= 698.4631
J=2 MULT=2 VERT( I,J )=1558.9724
J=2 MULT=2 VERT(J,J)=1558.8968
J=2 MULT=l VERTII,Jl= 290.9505
J=2 MULT=l VERTII,J)= 290.9301
J=2 MULT=l VERT(I,J)= 290.9531
J=2 MULT=l VERTII,J)= 290.8738
J=2 MULT=l VERTII,J)= 290.8758
J=2 MULT=l VERTII,Jl= 290.8598
114
HLCR=l.18660
HLCR=2.36773
HLCR=2.37098
HLCR=2.77702
HLCR=3.51400
HLCR=3.51400
HLCR=3.51400
HLCR=3.514DO
HLCR=4.72328
HLCR=4.72328
HLCR=8.43678
HLCR=8.43689
HLCR=8.43676
HLCR=8.43720
HLCR=B.43719
HLCR:8.43726
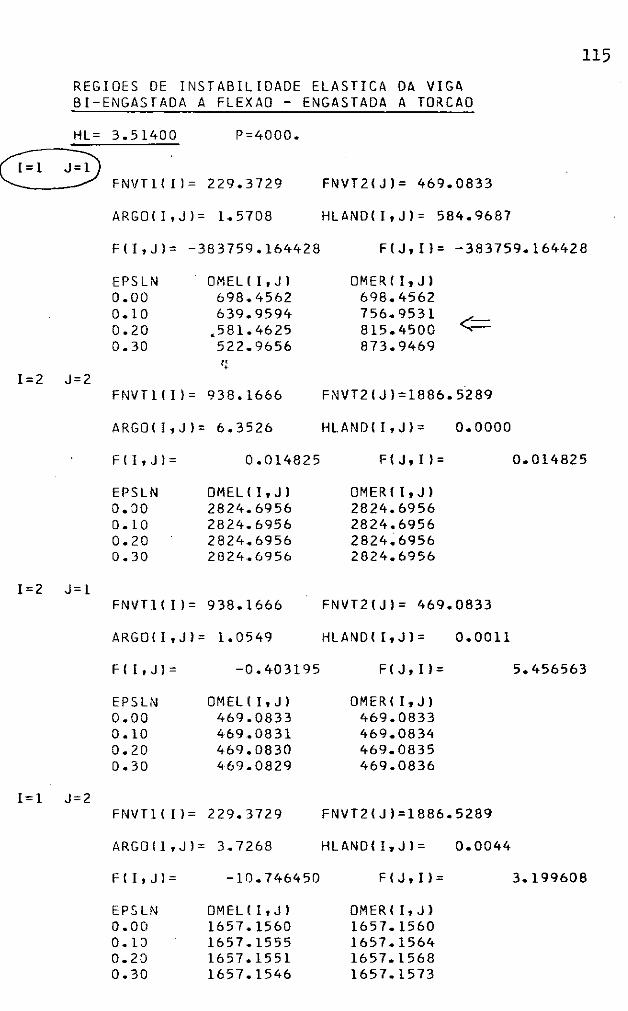
REGIOES OE INSTABILIDADE ELASTJCA DA VIGA BI-ENGASfADA A FLEXAO - ENGASTADA A TORCAO
HL= 3.51400 P=4000.
E3 FNVTl(II= 229.3729 FNVT2(J)= 469.0833
ARGO(l,JI= 1.5708 HLAND(I,JI= 584.9687
115
F(I,JI= -383759.164428 F(J,Il= -383759.164428
1=2 J=2
1=2 J=l
I=l J=2
EPSLN o.ao 0.10 0.20 0.30
OMELCI,JJ 698.4562 639.9594
.581.4625 522.9656 ,, •
FNVTl(I)= 938.1666
ARGO(l,Jl= 6.3526
F(l,JI=
EPSLN o.:io 0.10 0.20 0.30
0.014825
OMELC I,JJ 282 1+. 6956 2824.6956 2824.6956 2824.6956
FNVTl(II= 938.1666
ARGO(I,Jl= 1.0549
FII,JJ=
EPSLN o.oo 0.10 0.20 0.30
-0.403195
OMEL(I,Jl 469.0833 469.0831 469.0830 469.0829
FNVTl(II= 229.3729
ARGOII,Jl= 3.7268
FII,JJ=
EPSLN o.oo 0.10 0.20 0.30
-10.746450
OMEL(l,Jl 1657.1560 1657.1555 1657.1551 1657.1546
OMERII,Jl 698.4562 756.9531 815.4500 873.9469
<
FNVT2(JJ=l886.5289
HLAND(J,.JI=
F{ J,I l=
OMERII,JJ 2824.6956 2824.6956 2824.6956 2824.6956
0.0000
FNVT2(JJ= 469.0833
HLANDlI,J )=
FIJ,Il=
OMERII,Jl 469.0833 469.0834 469.0835 469.0836
0.0011
FNVT2(Jl=l886.5289
HLAND(I,Jl=
F(J,Il=
OMER(I,JI 1657.1560 1657.1564 1657.1568 1657.1573
0.0044
0.014825
5.456563
3.199608

REGIOES DE INSTABILIDADE .SI-ENGASTADA A FLEXAD -
HL= 8.43750 P=4000.
!= l J=l FNVTl(Il= 33.5333
ARGO(!,J)= 0.6049
F(I,J)= 0.323898
EPSLN DMELII,Jl o.oo 112.0288 0.10 112.0285 0.20 112.0282 0.30 112.0279
!=2 J=2 FNVTlCI)= 156.9911
ARGOCI,Jl= 2.5995
FC!,J)= -13.050869
EPSLN OMEL(I,J) o.oo 481.3972 0.10 481.3943 0.20 481.3914 0.30 481.3885
1=2 J=l FNVTll 11= 156.9911
ARGO(l,Jl= 0.4238
FO,Jl=
EPSLN O.DO 0.10 0.20 0.30
~ ~ FNVTl(ll=
-0.033267
OMEL(I,Jl 78.4955 78.4954 78.4954 78.4953
33.5333
ELASTICA DA VIGA ENGASTADA A TO~CAO
FNVT2(Jl= 78.4955
HLAND(I,J)= 0.0031
F(J,I)= 0.323898
DMER(I,J) 112.0288 112.0292 112. 0295 112.0298
FNVT2(J)= 324.4060
HLANDC I,Jl= 0.0289
F(J,I)= -13.050869
OMER( l ,J) 481.3972 481.4000 481.4029 481.4058
FNVT2CJ)= 78.4955
HLANDCI,Jl= 0.0005
FCJ,Il=
DMERC 1,Jl 78.4955 78.4956 78.4956 78 .• 4957
o. 51 7488
FNVT2CJ)= 324.4060
ARGO(l,Jl= 1.5707 HLAND(I,Jl=90.4754
FCI,Jl= 63312.530258 F(J,ll= -5625.975717
EPSLN O.DO 0.10 0.20 0.30
OMELl I, J l 290.8727 281.8252 272.7776 263.7301
OMERCI,JJ 290.8727 299.9203 308.9678 318.0154
<=
116
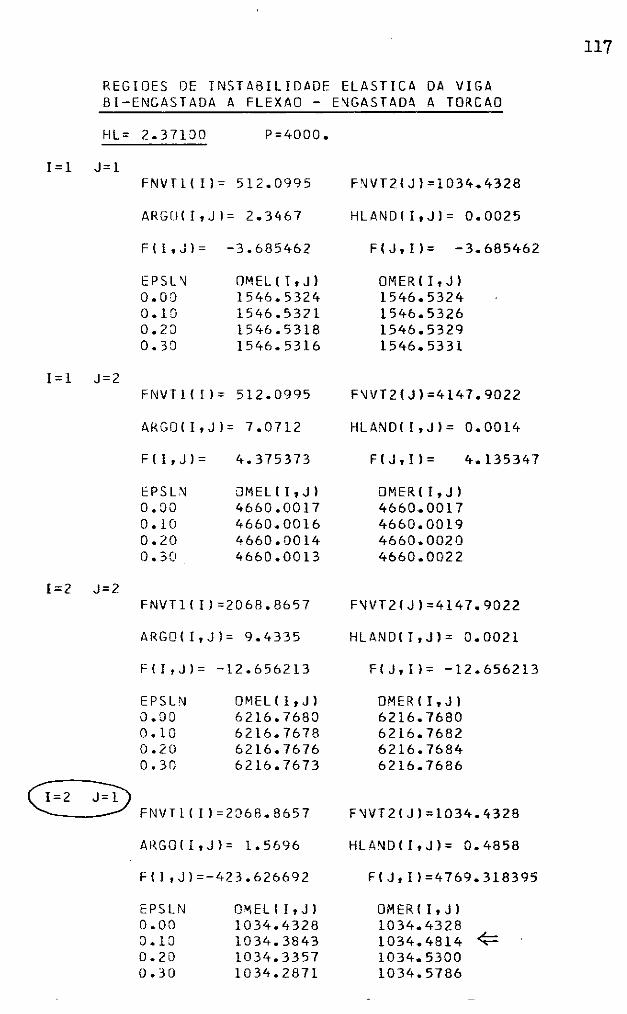
I=l
l=l
!=2
REGIOES DE INSTABILIDADE ELASTICA DA VIGA SI-ENGASTADA A FLEXAO - ENGASTADA A TORCAO
HL= 2.37100 P=4000.
J=l FNVTl{ll= 512.0995 FNVT2{Jl=l034.4328
ARGU{ I ,J J= 2.3467 HLAND{I,Jl= 0.0025
F{I,Jl= -3.685462 F{J,Il= -3.685462
EPSL \J OMEL { I, J l OMER{I,J) O.O') 1546.5324 1546.5324 0.10 1546.5321 1546.53.26 O. 2 O 1546.5318 1546.5329 O. 3 O 1546.5316 1546.5331
J=2 FNVTl{ ! l= 512.0995 FNVT2(Jl=4147.9022
ARGO(I,Jl= 7.0712 HL AN D { I , J l = 0.0014
F{l,J)= 4.375373 FCJ,I l= 4.135347
EPSLN CJMELCI,JI OMERII,Jl
º·ºº 4660.0017 4660.0017 0.10 4660.0016 4660.0019 0.20 4660.0014 4660.0020 0.30 4660.0013 4660.0022
J=2 FNVT1Cll=2D68.8657 FNVT2(J)=4147.9022
ARGOCI,Jl= 9.4335 HLANOII,JJ= 0.0021
F(I,Jl= -12.656213 F{J,Il= -12.656213
EPSLN DMELCI,Jl OMER(I,JJ
º·ºº 6216.768D 6216.7680 0.10 6216.7678 6216.7682 0.20 6216.7676 6216.7684 0.30 6216.7673 6216.7686
~ FNVT 1 { l l =2068. 8657 FNVT2(J)=l034.4328
ARGO{ I,Jl= 1.5696 HLA'IIDI I, J l = 0.4858
F(l,Jl=-423.626692 F{J,!)=4769.318395
EPSLN O"IELII,Jl OMER{ I,Jl
º·ºº 1034.4328 1034.4328 0.10 1034.3843 1034.4814 <= 0.20 1034.3357 1034.5300 0.30 1034.2871 1034.5786
117

118
L I S T A D E SÍMBOLOS
c -- velocidade de propagaçao das ondas torcionais A
- parametro relativo ao momento axial constante de excita
-çao ,
E modulo de elasticidade longitud. do material da viga
F0p - parâmetro relativo ao momento axial harmônico de excita
-çao ,
- modulo de elasticidade transvers. do material da viga ,
- momento de inercia polar da secção transversal da viga
- momento de inércia principal da superfície transversal
da viga em relação ao eixo dos y , ,
- momento de inercia principal da superficie transversal
da viga em relação ao eixo dos z , ,
- momento de inercia massico em relação ao eixo dos x (b~
ricêntrico) por unidade de comprimento da viga
k - coeficiente dependente da forma da secção transversal
da viga ,
K - energia cinetica
L - comprimento da viga
LCR comprimento crítico à ressonância paramétrica da viga
M - momento interno da viga
Mx• momento torçor da viga
M~· - momento fletor da viga no plano de XOY
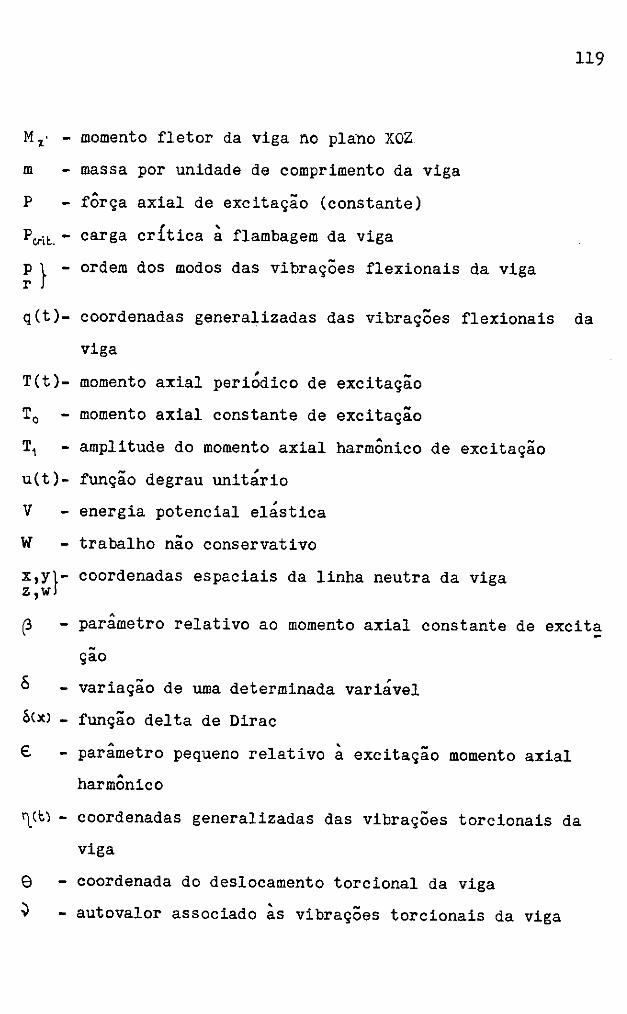
M z · - momento fletor da viga no plano XOZ
m - massa por unidade de comprimento da viga
P - fôrça axial de excitação (constante)
P ., - carga crítica à flambagem da viga cn~.
~ } - ordem dos modos das vibrações flexionais da viga
119
q(t)- coordenadas generalizadas das vibrações flexionais da
viga
T(t)- momento axial periÓdico de excitação
T0 - momento axial constante de excitação
T1 - amplitude do momento axial harmônico de excitação - , u(t)- funçao degrau unitario
V - energia potencial elástica
W - trabalho não conservativo
x,y}- coordenadas espaciais da linha neutra da viga z,w
~ - parâmetro relativo ao momento axial constante de excita
-çao
Ó - variação de uma determinada variável
õ(Xl - função delta de Dirac
e - parâmetro pequeno relativo à excitação momento axial A
harmonico
ri_ct.) - coordenadas generalizadas das vibrações torcionais da
viga
- coordenada do deslocamento torcional da viga
' -- autovalor associado as vibraçoes torcionais da viga

120
e ,
- massa·especifica do material da viga
n frequência do momento axial harmônico de excitação
' - idem acima, parametricamente ressonantes
w,r - frequências naturais das vibrações transversais da viga
no plano xoy;
w,p - idem acima, no plano XOZ.

121
B I B L I O G R A F I A
1. BELIAEV, N.M., "Stability of Prismatic Rods Subject to
Variable Longitudinal Forces", Collection Engineering
Construction and Structural Mechanics, págs. 149-167,
Put', Leningrado, 1924.
2. BIEZENO, C.B. & R. GRAMMEL, "Engineering Dynamics" ,
vol. II, (tradução do original alemão) Blackie & Sons,
Londres, 1955.
3. BOLOTIN, V. V., "The Dynamic Stability of Elastic Sys -
tems", (tradução do original russo, Gostekhizdat, Moscou,
1956), Holden-Day, San Francisco, 1964.
4. EVAN-IWANOWSKY, R.M., "On the Parametric Response of Stru~
tures", Appl. Mech. Rev., vol. 18, págs. 699-702, 1965.
5. FUNG,Y.C., "Foundations of Solid Mechanics" , Prentice
Hall of India, N. Delhi, 1968.
6. GOLDSTEIN, H., "Classical Mechanics 11 , Addison-Wesley,
Reading-Mass., 1950.

122
7. GROEBNER, W, & N.HOFREITER, "Integraltafel", vol. 11
"Unbestimmte Integral e 11 , Spr inger Verlag, Viena, 1950.
8. HAGEDORN, P.B. & KOVAL, "On the Parametric Stability of
a Timoshenko Beam Subjected to a Periodic Axial Load 11
(em impressão).
9. HAGEDORN, P.B., "On the Lateral Buckling of a Beam Sub
jected to the Reaction of a Pulsating Fluid Jet", COPPE/
UFRJ, Rio de Janeiro, 1970.
10. HILDEBRAND 1 F.B., "Methods of Applied Mathematics 11 ,
Frentice-Hall of India, N. Delhi , 1968.
11. HSU, C.S., "On the Parametric Excitation of a Dynamic
System Having Multiple Degrees of Freedom", J. Appl.
Mech., ASME, vol, 30, págs 367-372, 1963.
12. HSU, c.s., "Further Results on Parametric Excitation of ,
a Dynamic System", J, Appl. Mech,, ASME, vol,32, pags.
373-317, 1965.
13. LEVINSON, M., "Application of the Galerkin and Ritz Me
thods to Nonconservative Problems of Elastic Stability",
z. angew. Math. Physic, vol. 17, págs. 431-4112, 1966.
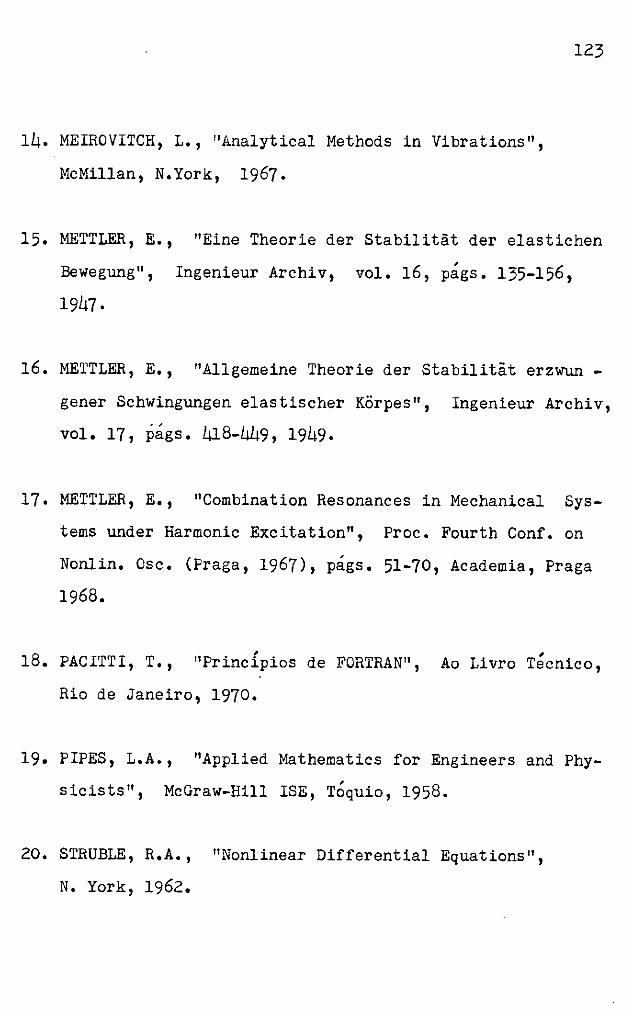
14, MEIROVITCH, L,, "Analytical Methods in Vibrations",
McMillan, N,York, 1967,
123
15, METTLER, E., "Eine Theorie der Stabilitãt der elastichen
Bewegung", Ingenieur Archiv, vol, 16, págs. 135-156,
1947,
16. METTLER, E,, "Allgemeine Theorie der Stabilitãt erzwun -
gener Schwingungen elastischer Kõrpes", Ingenieur Archiv,
vol, 17, págs, 418-449, 1949,
17, METTLER, E,, "Combination Resonances in Mechanical Sys
tems under Harmonic Excitation", Proc. Fourth Conf. on
Nonlin, Osc. (Praga, 1967), págs, 51-70, Academia, Praga
1968.
18. PACITTI, T., , ,
"Principios de FORTRAN", Ao Livro Tecnico,
Rio de Janeiro, 1970,
19, PIFES, L.A., "Applied Mathematics for Engineers and Phy
sicists", McGraw-Hill ISE, TÓquio, 1958.
20. STRUBLE, R,A., "Nonlinear Differential Equations",
N, York, 1962.

124
21, TIMOSHENKO, S. & J, GERE, "Theory of Elastic Stability",
McGraw-Hill, N, York, 1961.
22, TIMOSHENKO, S. & J, GOODIER, "Theory of Elasticity",
McGraw-Hill, 1951.
23, WEINSTOCK, R,, "Calculus of Variations 11 , McGraw-Hill,
N, York, 1952,
24, WYLIE JR,, C,R,, "Advanced Engineering Mathematics" ,
McGraw-Hill ISE, TÓquio, 1966.
25, ZIEGLER, H., "On the Elastic Stability", Adv. in Appl,
Mech., vol. IV, págs. 351-403, 1956.