
Nº15 ano 8 ISSN: 1647-5496 EUTRO À TERRA -...
16
Revista Técnico-Científica |Nº15| Junho de 2015 http://www.neutroaterra.blogspot.com EUTRO À TERRA Instituto Superior de Engenharia do Porto – Engenharia Electrotécnica – Área de Máquinas e Instalações Eléctricas Mantendo o compromisso que temos convosco, voltamos à vossa presença com mais uma publicação. Esta já é a décima quinta edição da nossa revista e continua a verificar-se um interesse crescente pelas nossas publicações, particularmente em países estrangeiros, como o Brasil, Angola, os Estados Unidos e Alemanha. Este facto dá-nos a motivação necessária para continuarmos empenhados no nosso objetivo, ou seja, fazer desta revista uma referência a nível nacional e internacional nas áreas da Engenharia Eletrotécnica em que nos propomos intervir. José Beleza Carvalho, Professor Doutor Máquinas Elétricas Pág.05 Energias Renováveis Pág. 31 Instalações Elétricas Pág. 47 Telecomunicações Pág. 53 Segurança Pág. 57 Gestão de Energia e Eficiência Energética Pág.61 Automação Domótica Pág. 67 Nº15 ⋅ 1º semestre de 2015 ⋅ ano 8 ⋅ ISSN: 1647-5496
Transcript of Nº15 ano 8 ISSN: 1647-5496 EUTRO À TERRA -...

Revista Teacutecnico-Cientiacutefica |Nordm15| Junho de 2015
httpwwwneutroaterrablogspotcom
EUTRO Agrave TERRA
Instituto Superior de Engenharia do Porto ndash Engenharia Electroteacutecnica ndash Aacuterea de Maacutequinas e Instalaccedilotildees Eleacutectricas
Mantendo o compromisso que temos convosco voltamos agrave vossa presenccedila
com mais uma publicaccedilatildeo Esta jaacute eacute a deacutecima quinta ediccedilatildeo da nossa revista e
continua a verificar-se um interesse crescente pelas nossas publicaccedilotildees
particularmente em paiacuteses estrangeiros como o Brasil Angola os Estados
Unidos e Alemanha Este facto daacute-nos a motivaccedilatildeo necessaacuteria para
continuarmos empenhados no nosso objetivo ou seja fazer desta revista uma
referecircncia a niacutevel nacional e internacional nas aacutereas da Engenharia
Eletroteacutecnica em que nos propomos intervir
Joseacute Beleza Carvalho Professor Doutor
Maacutequinas EleacutetricasPaacuteg05
EnergiasRenovaacuteveis
Paacuteg 31
InstalaccedilotildeesEleacutetricasPaacuteg 47
Telecomunicaccedilotildees
Paacuteg 53
Seguranccedila
Paacuteg 57
Gestatildeo de Energia e Eficiecircncia Energeacutetica
Paacuteg61
AutomaccedilatildeoDomoacutetica
Paacuteg 67
Nordm15 sdot 1ordm semestre de 2015 sdot ano 8 sdot ISSN 1647-5496
EU
TR
O Agrave
TE
RR
A
FICHA TEacuteCNICA DIRETOR Joseacute Antoacutenio Beleza Carvalho Doutor
SUBDIRETORES Antoacutenio Augusto Arauacutejo Gomes EngordmRoque Filipe Mesquita Brandatildeo DoutorSeacutergio Filipe Carvalho Ramos Engordm
PROPRIEDADE Aacuterea de Maacutequinas e Instalaccedilotildees EleacutetricasDepartamento de Engenharia ElectroteacutecnicaInstituto Superior de Engenharia do Porto
CONTATOS jbcisepipppt aagisepipppt
Iacutendice
03| Editorial
05| Maacutequinas Eleacutetricas
Controlo vetorial (FOC) de um motor de induccedilatildeo trifaacutesico aplicado a um veiacuteculo eleacutetrico
Pedro Melo
Manutenccedilatildeo e diagnoacutestico de avarias em motores de induccedilatildeo trifaacutesicos
Pedro Melo
31| Energias Renovaacuteveis
Aproveitamento hidroeleacutetrico da bacia do Douro um olhar criacutetico
Antoacutenio Machado e Moura
Sistemas Eoacutelicos de Energia mais Leves que o Ar
Andreacute Filipe Pereira Ponte Joseacute Carlos P Cerqueira Maacuterio Andreacute S Fonseca
47| Instalaccedilotildees Eleacutetricas
Energia em qualquer situaccedilatildeo Grupos eletrogeacuteneos
Nelson Gonccedilalves
53| Telecomunicaccedilotildees
Resenha Histoacuterica da Regulamentaccedilatildeo de Infraestruturas de Telecomunicaccedilotildees em Loteamentos
Urbanizaccedilotildees e Conjuntos de Edifiacutecios (ITUR) em Portugal
Antoacutenio Gomes Rui Castro Seacutergio Filipe Carvalho Ramos
57| Seguranccedila
Deteccedilatildeo de incecircndios em tuacuteneis rodoviaacuterios
Carlos Neves
61| Gestatildeo de Energia e Eficiecircncia Energeacutetica
Reduza a sua fatura de eletricidade e poupe dinheiro Como optar pelo melhor comercializador de
energia
Luiacutes Rodrigues Pedro Pereira Judite Ferreira
67| Automaccedilatildeo e Domoacutetica
SMART CITY ndash O Futuro jaacute Acontece
Paulo Gonccedilalves
70| Autores
PUBLICACcedilAtildeO SEMESTRAL ISSN 1647-5496
EDITORIAL
3
Estimados leitores
Mantendo o compromisso que temos convosco voltamos agrave vossa presenccedila com mais uma publicaccedilatildeo Esta jaacute eacute a deacutecima quinta
ediccedilatildeo da nossa revista e continua a verificar-se um interesse crescente pelas nossas publicaccedilotildees particularmente em paiacuteses
estrangeiros como o Brasil Angola os Estados Unidos e Alemanha Este facto daacute-nos a motivaccedilatildeo necessaacuteria para continuarmos
empenhados no nosso objetivo ou seja fazer desta revista uma referecircncia a niacutevel nacional e internacional nas aacutereas da
Engenharia Eletroteacutecnica em que nos propomos intervir Nesta ediccedilatildeo destacam-se os assuntos relacionados com as maacutequinas
eleacutetricas as energias renovaacuteveis as instalaccedilotildees eleacutetricas as telecomunicaccedilotildees a gestatildeo de energia e a eficiecircncia energeacutetica
Nesta ediccedilatildeo da revista merece particular destaque a colaboraccedilatildeo do Professor Doutor Machado e Moura Professor
Catedraacutetico na FEUP com a publicaccedilatildeo de um importante artigo sobre ldquoAproveitamento Hidroeleacutetrico na Bacia do Dourordquo
Neste artigo faz-se uma breve resenha histoacuterica da evoluccedilatildeo do aproveitamento dos recursos hiacutedricos nacionais em termos
hidroeleacutetricos bem como uma anaacutelise da situaccedilatildeo atual O artigo destaca a insuficiecircncia das obras hidraacuteulicas ateacute agora
realizadas a niacutevel das nossas principais bacias em particular no caso da bacia portuguesa do Douro e alerta para as nefastas
consequecircncias que poderiam advir caso a situaccedilatildeo natildeo se alterasse
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo satildeo usados na maioria dos sistemas eletromecacircnicos e estatildeo muito
disseminados nos atuais sistemas de variaccedilatildeo de velocidade A sua simplicidade e robustez aliadas a baixos preccedilos e ampla
gama de potecircncias disponiacuteveis satildeo as principais razotildees Por estas razotildees a sua manutenccedilatildeo reveste-se de enorme importacircncia
A monitorizaccedilatildeo contiacutenua dos equipamentos eacute o elemento chave dos atuais sistemas de manutenccedilatildeo condicionada A anaacutelise
espectral da corrente absorvida pelo motor estaacute muito implantada na induacutestria mas apresenta vaacuterias limitaccedilotildees Diversos
meacutetodos de deteccedilatildeo e diagnoacutestico de avarias tecircm sido desenvolvidos baseados nas muacuteltiplas grandezas que caracterizam o
funcionamento do motor Nesta ediccedilatildeo da revista apresenta-se dois artigos cientiacuteficos de enorme valor que analisam aplicaccedilatildeo
do controlo vetorial na utilizaccedilatildeo de MI aplicados aos veiacuteculos eleacutetricos e um artigo sobre manutenccedilatildeo e diagnoacutestico de avarias
em MI trifaacutesicos
O mercado liberalizado de comercializaccedilatildeo de energia eleacutetrica tem evoluiacutedo ao longo dos anos e cada vez mais o consumidor de
energia tem em seu poder enumeras opccedilotildees de escolha Em paralelo com a evoluccedilatildeo deste mercado anda o mercado do gaacutes
natural O consumidor interessado no mercado liberalizado deve ponderar a sua escolha no caso de ser consumidor de gaacutes
natural Nesta ediccedilatildeo da revista apresenta-se um artigo ldquoReduza a sua fatura de eletricidade e poupe dinheiro Como optar pelo
melhor comercializador de energiardquo onde eacute analisado o processo de decisatildeo da escolha do comercializador de energia mais
adequado a cada tipo de perfil de consumidor
No acircmbito das telecomunicaccedilotildees nesta ediccedilatildeo da revista apresenta-se um interessante artigo que faz uma resenha histoacuterica da
evoluccedilatildeo das telecomunicaccedilotildees e da regulamentaccedilatildeo das infraestruturas de telecomunicaccedilotildees em loteamentos urbanizaccedilotildees e
conjuntos de edifiacutecios em Portugal ao longo dos uacuteltimos anos
Nesta ediccedilatildeo da revista ldquoNeutro agrave Terrardquo pode-se ainda encontrar outros assuntos muito interessantes e atuais como um artigo
sobre Grupos Eletrogeacuteneos e os principais criteacuterios que se devem adotar no seu dimensionamento um artigo que aborda a
Deteccedilatildeo de Incecircndios em Tuacuteneis Rodoviaacuterios e um artigo muito importante sobre Eficiecircncia na Iluminaccedilatildeo de espaccedilos puacuteblicos
apresentando-se o caso da cidade de Aacutegueda que foi premiada com o selo Smart City
Fazendo votos que esta ediccedilatildeo da revista ldquoNeutro agrave Terrardquo vaacute novamente ao encontro das expectativas dos nossos leitores
apresento os meus cordiais cumprimentos
Porto junho de 2015
Joseacute Antoacutenio Beleza Carvalho
DIVULGACcedilAtildeO
4
ENERGY OPEN DAY
28 DE JULHO 2015
Com o objetivo de promover o intercacircmbio entre a comunidade acadeacutemica e o setor empresarial o curso de Engenharia
Eletroteacutecnica ndash Sistemas Eleacutetricas de Energia do Instituto Superior de Engenharia do Porto (ISEP) organiza o evento ldquoEnergy
Open Dayrdquo no dia 28 de julho de 2015
O evento constaraacute de um Ted Talk durante a manhatilde e da apresentaccedilatildeo dos trabalhos de final de curso durante a tarde
O Ted Talk contaraacute com a presenccedila de um painel de convidados que refletiratildeo sobre as tendecircncias da energia nos planos
teacutecnico social e econoacutemico e sobre o papel que o ensino superior deve desempenhar na formaccedilatildeo de engenheiros Para
aleacutem de profissionais da aacuterea da Energia neste painel tambeacutem estaraacute o historiador Joel Cleto que apresentaraacute uma
perspetiva diferente do tema
Programa 0930h Acolhimento e boas vindas
1000h Ted Talk ldquoEnergia nos caminhos do Futurordquo
1200h Coffee break e exposiccedilatildeo dos trabalhos
1300h Pausa para Almoccedilo
1430h Apresentaccedilatildeo e avaliaccedilatildeo de trabalhos de fim de curso
Inscriccedilatildeo gratuita mas obrigatoacuteria aagisepipppt
ARTIGO TEacuteCNICO
5
I INTRODUCcedilAtildeO
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo
estatildeo muito disseminados nos atuais sistemas de variaccedilatildeo de
velocidade (ldquodrivesrdquo) A sua simplicidade e robustez aliadas
a baixos preccedilos (comparativamente com outras maacutequinas) e
ampla gama de potecircncias disponiacuteveis satildeo as principais
razotildees
A evoluccedilatildeo verificada nos domiacutenios da eletroacutenica de
potecircncia e nos sistemas de controlo (em particular o
controlo digital) permitiram aplicar os MI em sistemas de
elevado desempenho dinacircmico (eg controlo de binaacuterio
eou posiccedilatildeo) substituindo os motores DC cujas
caracteriacutesticas dinacircmicas e simplicidade de controlo os
tornavam a primeira escolha em tais aplicaccedilotildees Com efeito
as ldquodrivesrdquo baseadas em MI apresentam caracteriacutesticas
dinacircmicas em tudo semelhantes aos sistemas DC incluindo a
possibilidade de funcionamento nos quatro quadrantes do
plano (T nr) No entanto a complexidade do conversores e
sobretudo dos sistemas de controlo eacute muito mais elevada
nos sistemas AC Os sistemas baseados no controlo vetorial
satildeo os mais usuais nas ldquodrivesrdquo baseadas nas maacutequinas AC
convencionais (assiacutencronas e siacutencronas) Existem outras
metodologias tambeacutem usadas na induacutestria (eg controlo
direto do binaacuterio ndash DTC) mas neste trabalho somente o
controlo vetorial seraacute abordado
No domiacutenio do controlo vectorial existem diversas variantes
sendo o meacutetodo mais poderoso e utilizado o controlo por
orientaccedilatildeo de campo (Field Oriented Control ndash FOC) Desde
finais da deacutecada de 60 do seacuteculo passado tecircm vindo a ser
desenvolvidos vaacuterios meacutetodos de controlo por orientaccedilatildeo de
campo [1] Na sua essecircncia assentam numa filosofia
semelhante aos sistemas DC controlo independente do
fluxo magneacutetico e do binaacuterio desenvolvido A sua
implementaccedilatildeo assenta na consideraccedilatildeo de um referencial
que gira com velocidade instantacircnea igual agrave do campo
girantegirante (referencial siacutencrono) estando alinhado em
qualquer instante com a posiccedilatildeo desse mesmo campo
O mais eficaz eacute sem duacutevida o controlo por orientaccedilatildeo do
campo do rotor sendo por isso o mais usual No entanto a
implementaccedilatildeo deste processo em AC eacute bastante mais
complexa para aleacutem dos valores das amplitudes eacute tambeacutem
necessaacuterio o controlo instantacircneo da posiccedilatildeo relativa dos
fasores da expressatildeo anterior ou seja eacute imprescindiacutevel o
conhecimento em cada instante da posiccedilatildeo espacial do
fluxo do rotor em relaccedilatildeo ao estator (ie referencial fixado
ao estator)
II ROTOR FOC
A implementaccedilatildeo do controlo por orientaccedilatildeo de campo
rotoacuterico assenta na conversatildeo da maacutequina polifaacutesica em
anaacutelise (natildeo necessariamente trifaacutesica) num sistema bifaacutesico
equivalente (eixos ortogonais d-q) definido no referencial
siacutencrono ωΨr A Figura 1 ilustra os conceitos associados ao
controlo por orientaccedilatildeo do campo do rotor ndash Rotor FOC (com
base em [2])
Figura 1 Controlo por orientaccedilatildeo do campo do rotor em MI
O Rotor FOC assenta na definiccedilatildeo das equaccedilotildees eleacutetricas e
magneacuteticas no referencial siacutencrono (ωΨr= 2πfp (rads-1))
sendo a direccedilatildeo do fluxo do rotor alinhada em cada
instante com o eixo d desse referencial As partes real e
imaginaacuteria do fasor espacial corrente estatoacuterica (is) satildeo
respetivamente if e iT pelo que
Pedro MeloInstituto Superior de Engenharia do Porto
CONTROLO VETORIAL (FOC) DE UM MOTOR DE INDUCcedilAtildeO TRIFAacuteSICO APLICADO A
UM VEIacuteCULO ELEacuteTRICO
1 Poderaacute ser considerado qualquer um dos campos girantes presentes no motor estator entreferro ou rotor
ARTIGO TEacuteCNICO
6
if alinhada com Ψr regula o seu valor (eixo d)
iT desfasada de π2 rad eleacutectricos em relaccedilatildeo a if controla
o binaacuterio electromagneacutetico desenvolvido (eixo q)
Em regime permanente tem-se
Ψr =Lmif (1)
Tel = KT Ψr iT (2)
Em termos conceptuais o controlo eacute implementado no
referencial siacutencrono No entanto o controlador fiacutesico
(hardware) actua ao niacutevel do referencial do estator isto eacute
sobre as tensotildees e correntes que alimentam o motor (3 fases
(ua ub uc) (ia ib ib)) A determinaccedilatildeo instantacircnea de if e iT
no referencial estaacutetico (ω=0) eacute fundamental Uma vez que
θT= arctg(iTif) a obtenccedilatildeo do valor instantacircneo de θf eacute o
ponto central (simultaneamente o mais exigente) na
implementaccedilatildeo do Rotor FOC
Rotor FOC ndash Meacutetodo Indirecto
Sendo esta a metodologia mais usualmente empregue
apresenta-se em seguida o modelo matemaacutetico do
respectivo algoritmo de controlo No essencial θf eacute
determinado atraveacutes da mediccedilatildeo de θr e da estimaccedilatildeo de θdl
(ver Figura 1)
Considerando a representaccedilatildeo no sistema de eixos d-q no
referencial siacutencrono as equaccedilotildees eleacutectricas do rotor de um
MI com gaiola de esquilo satildeo dadas por
Sendo Ψrd = Ψr e Ψrq =0 as equaccedilotildees anteriores tomam a
forma seguinte
Por outro lado as equaccedilotildees magneacuteticas do rotor definidas
no mesmo referencial tomam a seguinte forma
Fixando isd = if e isq = iT vem que
Substituindo estas uacuteltimas expressotildees nas equaccedilotildees
eleacutectricas do rotor obteacutem-se
[Tr0 constante de tempo do rotor c o estator em circuito
aberto)]
Com base nas equaccedilotildees magneacuteticas do estator tambeacutem
definidas no referencial ωΨr o binaacuterio electromagneacutetico
instantacircneo eacute dado por
Assim a velocidade associada ao deslizamento ωdl expressa
em funccedilatildeo de Tel e Ψr eacute dada por
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
2 De modo a simplificar a representaccedilatildeo na Figura 1 estatildeo somente representados os eixos d
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

EU
TR
O Agrave
TE
RR
A
FICHA TEacuteCNICA DIRETOR Joseacute Antoacutenio Beleza Carvalho Doutor
SUBDIRETORES Antoacutenio Augusto Arauacutejo Gomes EngordmRoque Filipe Mesquita Brandatildeo DoutorSeacutergio Filipe Carvalho Ramos Engordm
PROPRIEDADE Aacuterea de Maacutequinas e Instalaccedilotildees EleacutetricasDepartamento de Engenharia ElectroteacutecnicaInstituto Superior de Engenharia do Porto
CONTATOS jbcisepipppt aagisepipppt
Iacutendice
03| Editorial
05| Maacutequinas Eleacutetricas
Controlo vetorial (FOC) de um motor de induccedilatildeo trifaacutesico aplicado a um veiacuteculo eleacutetrico
Pedro Melo
Manutenccedilatildeo e diagnoacutestico de avarias em motores de induccedilatildeo trifaacutesicos
Pedro Melo
31| Energias Renovaacuteveis
Aproveitamento hidroeleacutetrico da bacia do Douro um olhar criacutetico
Antoacutenio Machado e Moura
Sistemas Eoacutelicos de Energia mais Leves que o Ar
Andreacute Filipe Pereira Ponte Joseacute Carlos P Cerqueira Maacuterio Andreacute S Fonseca
47| Instalaccedilotildees Eleacutetricas
Energia em qualquer situaccedilatildeo Grupos eletrogeacuteneos
Nelson Gonccedilalves
53| Telecomunicaccedilotildees
Resenha Histoacuterica da Regulamentaccedilatildeo de Infraestruturas de Telecomunicaccedilotildees em Loteamentos
Urbanizaccedilotildees e Conjuntos de Edifiacutecios (ITUR) em Portugal
Antoacutenio Gomes Rui Castro Seacutergio Filipe Carvalho Ramos
57| Seguranccedila
Deteccedilatildeo de incecircndios em tuacuteneis rodoviaacuterios
Carlos Neves
61| Gestatildeo de Energia e Eficiecircncia Energeacutetica
Reduza a sua fatura de eletricidade e poupe dinheiro Como optar pelo melhor comercializador de
energia
Luiacutes Rodrigues Pedro Pereira Judite Ferreira
67| Automaccedilatildeo e Domoacutetica
SMART CITY ndash O Futuro jaacute Acontece
Paulo Gonccedilalves
70| Autores
PUBLICACcedilAtildeO SEMESTRAL ISSN 1647-5496
EDITORIAL
3
Estimados leitores
Mantendo o compromisso que temos convosco voltamos agrave vossa presenccedila com mais uma publicaccedilatildeo Esta jaacute eacute a deacutecima quinta
ediccedilatildeo da nossa revista e continua a verificar-se um interesse crescente pelas nossas publicaccedilotildees particularmente em paiacuteses
estrangeiros como o Brasil Angola os Estados Unidos e Alemanha Este facto daacute-nos a motivaccedilatildeo necessaacuteria para continuarmos
empenhados no nosso objetivo ou seja fazer desta revista uma referecircncia a niacutevel nacional e internacional nas aacutereas da
Engenharia Eletroteacutecnica em que nos propomos intervir Nesta ediccedilatildeo destacam-se os assuntos relacionados com as maacutequinas
eleacutetricas as energias renovaacuteveis as instalaccedilotildees eleacutetricas as telecomunicaccedilotildees a gestatildeo de energia e a eficiecircncia energeacutetica
Nesta ediccedilatildeo da revista merece particular destaque a colaboraccedilatildeo do Professor Doutor Machado e Moura Professor
Catedraacutetico na FEUP com a publicaccedilatildeo de um importante artigo sobre ldquoAproveitamento Hidroeleacutetrico na Bacia do Dourordquo
Neste artigo faz-se uma breve resenha histoacuterica da evoluccedilatildeo do aproveitamento dos recursos hiacutedricos nacionais em termos
hidroeleacutetricos bem como uma anaacutelise da situaccedilatildeo atual O artigo destaca a insuficiecircncia das obras hidraacuteulicas ateacute agora
realizadas a niacutevel das nossas principais bacias em particular no caso da bacia portuguesa do Douro e alerta para as nefastas
consequecircncias que poderiam advir caso a situaccedilatildeo natildeo se alterasse
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo satildeo usados na maioria dos sistemas eletromecacircnicos e estatildeo muito
disseminados nos atuais sistemas de variaccedilatildeo de velocidade A sua simplicidade e robustez aliadas a baixos preccedilos e ampla
gama de potecircncias disponiacuteveis satildeo as principais razotildees Por estas razotildees a sua manutenccedilatildeo reveste-se de enorme importacircncia
A monitorizaccedilatildeo contiacutenua dos equipamentos eacute o elemento chave dos atuais sistemas de manutenccedilatildeo condicionada A anaacutelise
espectral da corrente absorvida pelo motor estaacute muito implantada na induacutestria mas apresenta vaacuterias limitaccedilotildees Diversos
meacutetodos de deteccedilatildeo e diagnoacutestico de avarias tecircm sido desenvolvidos baseados nas muacuteltiplas grandezas que caracterizam o
funcionamento do motor Nesta ediccedilatildeo da revista apresenta-se dois artigos cientiacuteficos de enorme valor que analisam aplicaccedilatildeo
do controlo vetorial na utilizaccedilatildeo de MI aplicados aos veiacuteculos eleacutetricos e um artigo sobre manutenccedilatildeo e diagnoacutestico de avarias
em MI trifaacutesicos
O mercado liberalizado de comercializaccedilatildeo de energia eleacutetrica tem evoluiacutedo ao longo dos anos e cada vez mais o consumidor de
energia tem em seu poder enumeras opccedilotildees de escolha Em paralelo com a evoluccedilatildeo deste mercado anda o mercado do gaacutes
natural O consumidor interessado no mercado liberalizado deve ponderar a sua escolha no caso de ser consumidor de gaacutes
natural Nesta ediccedilatildeo da revista apresenta-se um artigo ldquoReduza a sua fatura de eletricidade e poupe dinheiro Como optar pelo
melhor comercializador de energiardquo onde eacute analisado o processo de decisatildeo da escolha do comercializador de energia mais
adequado a cada tipo de perfil de consumidor
No acircmbito das telecomunicaccedilotildees nesta ediccedilatildeo da revista apresenta-se um interessante artigo que faz uma resenha histoacuterica da
evoluccedilatildeo das telecomunicaccedilotildees e da regulamentaccedilatildeo das infraestruturas de telecomunicaccedilotildees em loteamentos urbanizaccedilotildees e
conjuntos de edifiacutecios em Portugal ao longo dos uacuteltimos anos
Nesta ediccedilatildeo da revista ldquoNeutro agrave Terrardquo pode-se ainda encontrar outros assuntos muito interessantes e atuais como um artigo
sobre Grupos Eletrogeacuteneos e os principais criteacuterios que se devem adotar no seu dimensionamento um artigo que aborda a
Deteccedilatildeo de Incecircndios em Tuacuteneis Rodoviaacuterios e um artigo muito importante sobre Eficiecircncia na Iluminaccedilatildeo de espaccedilos puacuteblicos
apresentando-se o caso da cidade de Aacutegueda que foi premiada com o selo Smart City
Fazendo votos que esta ediccedilatildeo da revista ldquoNeutro agrave Terrardquo vaacute novamente ao encontro das expectativas dos nossos leitores
apresento os meus cordiais cumprimentos
Porto junho de 2015
Joseacute Antoacutenio Beleza Carvalho
DIVULGACcedilAtildeO
4
ENERGY OPEN DAY
28 DE JULHO 2015
Com o objetivo de promover o intercacircmbio entre a comunidade acadeacutemica e o setor empresarial o curso de Engenharia
Eletroteacutecnica ndash Sistemas Eleacutetricas de Energia do Instituto Superior de Engenharia do Porto (ISEP) organiza o evento ldquoEnergy
Open Dayrdquo no dia 28 de julho de 2015
O evento constaraacute de um Ted Talk durante a manhatilde e da apresentaccedilatildeo dos trabalhos de final de curso durante a tarde
O Ted Talk contaraacute com a presenccedila de um painel de convidados que refletiratildeo sobre as tendecircncias da energia nos planos
teacutecnico social e econoacutemico e sobre o papel que o ensino superior deve desempenhar na formaccedilatildeo de engenheiros Para
aleacutem de profissionais da aacuterea da Energia neste painel tambeacutem estaraacute o historiador Joel Cleto que apresentaraacute uma
perspetiva diferente do tema
Programa 0930h Acolhimento e boas vindas
1000h Ted Talk ldquoEnergia nos caminhos do Futurordquo
1200h Coffee break e exposiccedilatildeo dos trabalhos
1300h Pausa para Almoccedilo
1430h Apresentaccedilatildeo e avaliaccedilatildeo de trabalhos de fim de curso
Inscriccedilatildeo gratuita mas obrigatoacuteria aagisepipppt
ARTIGO TEacuteCNICO
5
I INTRODUCcedilAtildeO
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo
estatildeo muito disseminados nos atuais sistemas de variaccedilatildeo de
velocidade (ldquodrivesrdquo) A sua simplicidade e robustez aliadas
a baixos preccedilos (comparativamente com outras maacutequinas) e
ampla gama de potecircncias disponiacuteveis satildeo as principais
razotildees
A evoluccedilatildeo verificada nos domiacutenios da eletroacutenica de
potecircncia e nos sistemas de controlo (em particular o
controlo digital) permitiram aplicar os MI em sistemas de
elevado desempenho dinacircmico (eg controlo de binaacuterio
eou posiccedilatildeo) substituindo os motores DC cujas
caracteriacutesticas dinacircmicas e simplicidade de controlo os
tornavam a primeira escolha em tais aplicaccedilotildees Com efeito
as ldquodrivesrdquo baseadas em MI apresentam caracteriacutesticas
dinacircmicas em tudo semelhantes aos sistemas DC incluindo a
possibilidade de funcionamento nos quatro quadrantes do
plano (T nr) No entanto a complexidade do conversores e
sobretudo dos sistemas de controlo eacute muito mais elevada
nos sistemas AC Os sistemas baseados no controlo vetorial
satildeo os mais usuais nas ldquodrivesrdquo baseadas nas maacutequinas AC
convencionais (assiacutencronas e siacutencronas) Existem outras
metodologias tambeacutem usadas na induacutestria (eg controlo
direto do binaacuterio ndash DTC) mas neste trabalho somente o
controlo vetorial seraacute abordado
No domiacutenio do controlo vectorial existem diversas variantes
sendo o meacutetodo mais poderoso e utilizado o controlo por
orientaccedilatildeo de campo (Field Oriented Control ndash FOC) Desde
finais da deacutecada de 60 do seacuteculo passado tecircm vindo a ser
desenvolvidos vaacuterios meacutetodos de controlo por orientaccedilatildeo de
campo [1] Na sua essecircncia assentam numa filosofia
semelhante aos sistemas DC controlo independente do
fluxo magneacutetico e do binaacuterio desenvolvido A sua
implementaccedilatildeo assenta na consideraccedilatildeo de um referencial
que gira com velocidade instantacircnea igual agrave do campo
girantegirante (referencial siacutencrono) estando alinhado em
qualquer instante com a posiccedilatildeo desse mesmo campo
O mais eficaz eacute sem duacutevida o controlo por orientaccedilatildeo do
campo do rotor sendo por isso o mais usual No entanto a
implementaccedilatildeo deste processo em AC eacute bastante mais
complexa para aleacutem dos valores das amplitudes eacute tambeacutem
necessaacuterio o controlo instantacircneo da posiccedilatildeo relativa dos
fasores da expressatildeo anterior ou seja eacute imprescindiacutevel o
conhecimento em cada instante da posiccedilatildeo espacial do
fluxo do rotor em relaccedilatildeo ao estator (ie referencial fixado
ao estator)
II ROTOR FOC
A implementaccedilatildeo do controlo por orientaccedilatildeo de campo
rotoacuterico assenta na conversatildeo da maacutequina polifaacutesica em
anaacutelise (natildeo necessariamente trifaacutesica) num sistema bifaacutesico
equivalente (eixos ortogonais d-q) definido no referencial
siacutencrono ωΨr A Figura 1 ilustra os conceitos associados ao
controlo por orientaccedilatildeo do campo do rotor ndash Rotor FOC (com
base em [2])
Figura 1 Controlo por orientaccedilatildeo do campo do rotor em MI
O Rotor FOC assenta na definiccedilatildeo das equaccedilotildees eleacutetricas e
magneacuteticas no referencial siacutencrono (ωΨr= 2πfp (rads-1))
sendo a direccedilatildeo do fluxo do rotor alinhada em cada
instante com o eixo d desse referencial As partes real e
imaginaacuteria do fasor espacial corrente estatoacuterica (is) satildeo
respetivamente if e iT pelo que
Pedro MeloInstituto Superior de Engenharia do Porto
CONTROLO VETORIAL (FOC) DE UM MOTOR DE INDUCcedilAtildeO TRIFAacuteSICO APLICADO A
UM VEIacuteCULO ELEacuteTRICO
1 Poderaacute ser considerado qualquer um dos campos girantes presentes no motor estator entreferro ou rotor
ARTIGO TEacuteCNICO
6
if alinhada com Ψr regula o seu valor (eixo d)
iT desfasada de π2 rad eleacutectricos em relaccedilatildeo a if controla
o binaacuterio electromagneacutetico desenvolvido (eixo q)
Em regime permanente tem-se
Ψr =Lmif (1)
Tel = KT Ψr iT (2)
Em termos conceptuais o controlo eacute implementado no
referencial siacutencrono No entanto o controlador fiacutesico
(hardware) actua ao niacutevel do referencial do estator isto eacute
sobre as tensotildees e correntes que alimentam o motor (3 fases
(ua ub uc) (ia ib ib)) A determinaccedilatildeo instantacircnea de if e iT
no referencial estaacutetico (ω=0) eacute fundamental Uma vez que
θT= arctg(iTif) a obtenccedilatildeo do valor instantacircneo de θf eacute o
ponto central (simultaneamente o mais exigente) na
implementaccedilatildeo do Rotor FOC
Rotor FOC ndash Meacutetodo Indirecto
Sendo esta a metodologia mais usualmente empregue
apresenta-se em seguida o modelo matemaacutetico do
respectivo algoritmo de controlo No essencial θf eacute
determinado atraveacutes da mediccedilatildeo de θr e da estimaccedilatildeo de θdl
(ver Figura 1)
Considerando a representaccedilatildeo no sistema de eixos d-q no
referencial siacutencrono as equaccedilotildees eleacutectricas do rotor de um
MI com gaiola de esquilo satildeo dadas por
Sendo Ψrd = Ψr e Ψrq =0 as equaccedilotildees anteriores tomam a
forma seguinte
Por outro lado as equaccedilotildees magneacuteticas do rotor definidas
no mesmo referencial tomam a seguinte forma
Fixando isd = if e isq = iT vem que
Substituindo estas uacuteltimas expressotildees nas equaccedilotildees
eleacutectricas do rotor obteacutem-se
[Tr0 constante de tempo do rotor c o estator em circuito
aberto)]
Com base nas equaccedilotildees magneacuteticas do estator tambeacutem
definidas no referencial ωΨr o binaacuterio electromagneacutetico
instantacircneo eacute dado por
Assim a velocidade associada ao deslizamento ωdl expressa
em funccedilatildeo de Tel e Ψr eacute dada por
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
2 De modo a simplificar a representaccedilatildeo na Figura 1 estatildeo somente representados os eixos d
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

EDITORIAL
3
Estimados leitores
Mantendo o compromisso que temos convosco voltamos agrave vossa presenccedila com mais uma publicaccedilatildeo Esta jaacute eacute a deacutecima quinta
ediccedilatildeo da nossa revista e continua a verificar-se um interesse crescente pelas nossas publicaccedilotildees particularmente em paiacuteses
estrangeiros como o Brasil Angola os Estados Unidos e Alemanha Este facto daacute-nos a motivaccedilatildeo necessaacuteria para continuarmos
empenhados no nosso objetivo ou seja fazer desta revista uma referecircncia a niacutevel nacional e internacional nas aacutereas da
Engenharia Eletroteacutecnica em que nos propomos intervir Nesta ediccedilatildeo destacam-se os assuntos relacionados com as maacutequinas
eleacutetricas as energias renovaacuteveis as instalaccedilotildees eleacutetricas as telecomunicaccedilotildees a gestatildeo de energia e a eficiecircncia energeacutetica
Nesta ediccedilatildeo da revista merece particular destaque a colaboraccedilatildeo do Professor Doutor Machado e Moura Professor
Catedraacutetico na FEUP com a publicaccedilatildeo de um importante artigo sobre ldquoAproveitamento Hidroeleacutetrico na Bacia do Dourordquo
Neste artigo faz-se uma breve resenha histoacuterica da evoluccedilatildeo do aproveitamento dos recursos hiacutedricos nacionais em termos
hidroeleacutetricos bem como uma anaacutelise da situaccedilatildeo atual O artigo destaca a insuficiecircncia das obras hidraacuteulicas ateacute agora
realizadas a niacutevel das nossas principais bacias em particular no caso da bacia portuguesa do Douro e alerta para as nefastas
consequecircncias que poderiam advir caso a situaccedilatildeo natildeo se alterasse
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo satildeo usados na maioria dos sistemas eletromecacircnicos e estatildeo muito
disseminados nos atuais sistemas de variaccedilatildeo de velocidade A sua simplicidade e robustez aliadas a baixos preccedilos e ampla
gama de potecircncias disponiacuteveis satildeo as principais razotildees Por estas razotildees a sua manutenccedilatildeo reveste-se de enorme importacircncia
A monitorizaccedilatildeo contiacutenua dos equipamentos eacute o elemento chave dos atuais sistemas de manutenccedilatildeo condicionada A anaacutelise
espectral da corrente absorvida pelo motor estaacute muito implantada na induacutestria mas apresenta vaacuterias limitaccedilotildees Diversos
meacutetodos de deteccedilatildeo e diagnoacutestico de avarias tecircm sido desenvolvidos baseados nas muacuteltiplas grandezas que caracterizam o
funcionamento do motor Nesta ediccedilatildeo da revista apresenta-se dois artigos cientiacuteficos de enorme valor que analisam aplicaccedilatildeo
do controlo vetorial na utilizaccedilatildeo de MI aplicados aos veiacuteculos eleacutetricos e um artigo sobre manutenccedilatildeo e diagnoacutestico de avarias
em MI trifaacutesicos
O mercado liberalizado de comercializaccedilatildeo de energia eleacutetrica tem evoluiacutedo ao longo dos anos e cada vez mais o consumidor de
energia tem em seu poder enumeras opccedilotildees de escolha Em paralelo com a evoluccedilatildeo deste mercado anda o mercado do gaacutes
natural O consumidor interessado no mercado liberalizado deve ponderar a sua escolha no caso de ser consumidor de gaacutes
natural Nesta ediccedilatildeo da revista apresenta-se um artigo ldquoReduza a sua fatura de eletricidade e poupe dinheiro Como optar pelo
melhor comercializador de energiardquo onde eacute analisado o processo de decisatildeo da escolha do comercializador de energia mais
adequado a cada tipo de perfil de consumidor
No acircmbito das telecomunicaccedilotildees nesta ediccedilatildeo da revista apresenta-se um interessante artigo que faz uma resenha histoacuterica da
evoluccedilatildeo das telecomunicaccedilotildees e da regulamentaccedilatildeo das infraestruturas de telecomunicaccedilotildees em loteamentos urbanizaccedilotildees e
conjuntos de edifiacutecios em Portugal ao longo dos uacuteltimos anos
Nesta ediccedilatildeo da revista ldquoNeutro agrave Terrardquo pode-se ainda encontrar outros assuntos muito interessantes e atuais como um artigo
sobre Grupos Eletrogeacuteneos e os principais criteacuterios que se devem adotar no seu dimensionamento um artigo que aborda a
Deteccedilatildeo de Incecircndios em Tuacuteneis Rodoviaacuterios e um artigo muito importante sobre Eficiecircncia na Iluminaccedilatildeo de espaccedilos puacuteblicos
apresentando-se o caso da cidade de Aacutegueda que foi premiada com o selo Smart City
Fazendo votos que esta ediccedilatildeo da revista ldquoNeutro agrave Terrardquo vaacute novamente ao encontro das expectativas dos nossos leitores
apresento os meus cordiais cumprimentos
Porto junho de 2015
Joseacute Antoacutenio Beleza Carvalho
DIVULGACcedilAtildeO
4
ENERGY OPEN DAY
28 DE JULHO 2015
Com o objetivo de promover o intercacircmbio entre a comunidade acadeacutemica e o setor empresarial o curso de Engenharia
Eletroteacutecnica ndash Sistemas Eleacutetricas de Energia do Instituto Superior de Engenharia do Porto (ISEP) organiza o evento ldquoEnergy
Open Dayrdquo no dia 28 de julho de 2015
O evento constaraacute de um Ted Talk durante a manhatilde e da apresentaccedilatildeo dos trabalhos de final de curso durante a tarde
O Ted Talk contaraacute com a presenccedila de um painel de convidados que refletiratildeo sobre as tendecircncias da energia nos planos
teacutecnico social e econoacutemico e sobre o papel que o ensino superior deve desempenhar na formaccedilatildeo de engenheiros Para
aleacutem de profissionais da aacuterea da Energia neste painel tambeacutem estaraacute o historiador Joel Cleto que apresentaraacute uma
perspetiva diferente do tema
Programa 0930h Acolhimento e boas vindas
1000h Ted Talk ldquoEnergia nos caminhos do Futurordquo
1200h Coffee break e exposiccedilatildeo dos trabalhos
1300h Pausa para Almoccedilo
1430h Apresentaccedilatildeo e avaliaccedilatildeo de trabalhos de fim de curso
Inscriccedilatildeo gratuita mas obrigatoacuteria aagisepipppt
ARTIGO TEacuteCNICO
5
I INTRODUCcedilAtildeO
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo
estatildeo muito disseminados nos atuais sistemas de variaccedilatildeo de
velocidade (ldquodrivesrdquo) A sua simplicidade e robustez aliadas
a baixos preccedilos (comparativamente com outras maacutequinas) e
ampla gama de potecircncias disponiacuteveis satildeo as principais
razotildees
A evoluccedilatildeo verificada nos domiacutenios da eletroacutenica de
potecircncia e nos sistemas de controlo (em particular o
controlo digital) permitiram aplicar os MI em sistemas de
elevado desempenho dinacircmico (eg controlo de binaacuterio
eou posiccedilatildeo) substituindo os motores DC cujas
caracteriacutesticas dinacircmicas e simplicidade de controlo os
tornavam a primeira escolha em tais aplicaccedilotildees Com efeito
as ldquodrivesrdquo baseadas em MI apresentam caracteriacutesticas
dinacircmicas em tudo semelhantes aos sistemas DC incluindo a
possibilidade de funcionamento nos quatro quadrantes do
plano (T nr) No entanto a complexidade do conversores e
sobretudo dos sistemas de controlo eacute muito mais elevada
nos sistemas AC Os sistemas baseados no controlo vetorial
satildeo os mais usuais nas ldquodrivesrdquo baseadas nas maacutequinas AC
convencionais (assiacutencronas e siacutencronas) Existem outras
metodologias tambeacutem usadas na induacutestria (eg controlo
direto do binaacuterio ndash DTC) mas neste trabalho somente o
controlo vetorial seraacute abordado
No domiacutenio do controlo vectorial existem diversas variantes
sendo o meacutetodo mais poderoso e utilizado o controlo por
orientaccedilatildeo de campo (Field Oriented Control ndash FOC) Desde
finais da deacutecada de 60 do seacuteculo passado tecircm vindo a ser
desenvolvidos vaacuterios meacutetodos de controlo por orientaccedilatildeo de
campo [1] Na sua essecircncia assentam numa filosofia
semelhante aos sistemas DC controlo independente do
fluxo magneacutetico e do binaacuterio desenvolvido A sua
implementaccedilatildeo assenta na consideraccedilatildeo de um referencial
que gira com velocidade instantacircnea igual agrave do campo
girantegirante (referencial siacutencrono) estando alinhado em
qualquer instante com a posiccedilatildeo desse mesmo campo
O mais eficaz eacute sem duacutevida o controlo por orientaccedilatildeo do
campo do rotor sendo por isso o mais usual No entanto a
implementaccedilatildeo deste processo em AC eacute bastante mais
complexa para aleacutem dos valores das amplitudes eacute tambeacutem
necessaacuterio o controlo instantacircneo da posiccedilatildeo relativa dos
fasores da expressatildeo anterior ou seja eacute imprescindiacutevel o
conhecimento em cada instante da posiccedilatildeo espacial do
fluxo do rotor em relaccedilatildeo ao estator (ie referencial fixado
ao estator)
II ROTOR FOC
A implementaccedilatildeo do controlo por orientaccedilatildeo de campo
rotoacuterico assenta na conversatildeo da maacutequina polifaacutesica em
anaacutelise (natildeo necessariamente trifaacutesica) num sistema bifaacutesico
equivalente (eixos ortogonais d-q) definido no referencial
siacutencrono ωΨr A Figura 1 ilustra os conceitos associados ao
controlo por orientaccedilatildeo do campo do rotor ndash Rotor FOC (com
base em [2])
Figura 1 Controlo por orientaccedilatildeo do campo do rotor em MI
O Rotor FOC assenta na definiccedilatildeo das equaccedilotildees eleacutetricas e
magneacuteticas no referencial siacutencrono (ωΨr= 2πfp (rads-1))
sendo a direccedilatildeo do fluxo do rotor alinhada em cada
instante com o eixo d desse referencial As partes real e
imaginaacuteria do fasor espacial corrente estatoacuterica (is) satildeo
respetivamente if e iT pelo que
Pedro MeloInstituto Superior de Engenharia do Porto
CONTROLO VETORIAL (FOC) DE UM MOTOR DE INDUCcedilAtildeO TRIFAacuteSICO APLICADO A
UM VEIacuteCULO ELEacuteTRICO
1 Poderaacute ser considerado qualquer um dos campos girantes presentes no motor estator entreferro ou rotor
ARTIGO TEacuteCNICO
6
if alinhada com Ψr regula o seu valor (eixo d)
iT desfasada de π2 rad eleacutectricos em relaccedilatildeo a if controla
o binaacuterio electromagneacutetico desenvolvido (eixo q)
Em regime permanente tem-se
Ψr =Lmif (1)
Tel = KT Ψr iT (2)
Em termos conceptuais o controlo eacute implementado no
referencial siacutencrono No entanto o controlador fiacutesico
(hardware) actua ao niacutevel do referencial do estator isto eacute
sobre as tensotildees e correntes que alimentam o motor (3 fases
(ua ub uc) (ia ib ib)) A determinaccedilatildeo instantacircnea de if e iT
no referencial estaacutetico (ω=0) eacute fundamental Uma vez que
θT= arctg(iTif) a obtenccedilatildeo do valor instantacircneo de θf eacute o
ponto central (simultaneamente o mais exigente) na
implementaccedilatildeo do Rotor FOC
Rotor FOC ndash Meacutetodo Indirecto
Sendo esta a metodologia mais usualmente empregue
apresenta-se em seguida o modelo matemaacutetico do
respectivo algoritmo de controlo No essencial θf eacute
determinado atraveacutes da mediccedilatildeo de θr e da estimaccedilatildeo de θdl
(ver Figura 1)
Considerando a representaccedilatildeo no sistema de eixos d-q no
referencial siacutencrono as equaccedilotildees eleacutectricas do rotor de um
MI com gaiola de esquilo satildeo dadas por
Sendo Ψrd = Ψr e Ψrq =0 as equaccedilotildees anteriores tomam a
forma seguinte
Por outro lado as equaccedilotildees magneacuteticas do rotor definidas
no mesmo referencial tomam a seguinte forma
Fixando isd = if e isq = iT vem que
Substituindo estas uacuteltimas expressotildees nas equaccedilotildees
eleacutectricas do rotor obteacutem-se
[Tr0 constante de tempo do rotor c o estator em circuito
aberto)]
Com base nas equaccedilotildees magneacuteticas do estator tambeacutem
definidas no referencial ωΨr o binaacuterio electromagneacutetico
instantacircneo eacute dado por
Assim a velocidade associada ao deslizamento ωdl expressa
em funccedilatildeo de Tel e Ψr eacute dada por
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
2 De modo a simplificar a representaccedilatildeo na Figura 1 estatildeo somente representados os eixos d
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

DIVULGACcedilAtildeO
4
ENERGY OPEN DAY
28 DE JULHO 2015
Com o objetivo de promover o intercacircmbio entre a comunidade acadeacutemica e o setor empresarial o curso de Engenharia
Eletroteacutecnica ndash Sistemas Eleacutetricas de Energia do Instituto Superior de Engenharia do Porto (ISEP) organiza o evento ldquoEnergy
Open Dayrdquo no dia 28 de julho de 2015
O evento constaraacute de um Ted Talk durante a manhatilde e da apresentaccedilatildeo dos trabalhos de final de curso durante a tarde
O Ted Talk contaraacute com a presenccedila de um painel de convidados que refletiratildeo sobre as tendecircncias da energia nos planos
teacutecnico social e econoacutemico e sobre o papel que o ensino superior deve desempenhar na formaccedilatildeo de engenheiros Para
aleacutem de profissionais da aacuterea da Energia neste painel tambeacutem estaraacute o historiador Joel Cleto que apresentaraacute uma
perspetiva diferente do tema
Programa 0930h Acolhimento e boas vindas
1000h Ted Talk ldquoEnergia nos caminhos do Futurordquo
1200h Coffee break e exposiccedilatildeo dos trabalhos
1300h Pausa para Almoccedilo
1430h Apresentaccedilatildeo e avaliaccedilatildeo de trabalhos de fim de curso
Inscriccedilatildeo gratuita mas obrigatoacuteria aagisepipppt
ARTIGO TEacuteCNICO
5
I INTRODUCcedilAtildeO
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo
estatildeo muito disseminados nos atuais sistemas de variaccedilatildeo de
velocidade (ldquodrivesrdquo) A sua simplicidade e robustez aliadas
a baixos preccedilos (comparativamente com outras maacutequinas) e
ampla gama de potecircncias disponiacuteveis satildeo as principais
razotildees
A evoluccedilatildeo verificada nos domiacutenios da eletroacutenica de
potecircncia e nos sistemas de controlo (em particular o
controlo digital) permitiram aplicar os MI em sistemas de
elevado desempenho dinacircmico (eg controlo de binaacuterio
eou posiccedilatildeo) substituindo os motores DC cujas
caracteriacutesticas dinacircmicas e simplicidade de controlo os
tornavam a primeira escolha em tais aplicaccedilotildees Com efeito
as ldquodrivesrdquo baseadas em MI apresentam caracteriacutesticas
dinacircmicas em tudo semelhantes aos sistemas DC incluindo a
possibilidade de funcionamento nos quatro quadrantes do
plano (T nr) No entanto a complexidade do conversores e
sobretudo dos sistemas de controlo eacute muito mais elevada
nos sistemas AC Os sistemas baseados no controlo vetorial
satildeo os mais usuais nas ldquodrivesrdquo baseadas nas maacutequinas AC
convencionais (assiacutencronas e siacutencronas) Existem outras
metodologias tambeacutem usadas na induacutestria (eg controlo
direto do binaacuterio ndash DTC) mas neste trabalho somente o
controlo vetorial seraacute abordado
No domiacutenio do controlo vectorial existem diversas variantes
sendo o meacutetodo mais poderoso e utilizado o controlo por
orientaccedilatildeo de campo (Field Oriented Control ndash FOC) Desde
finais da deacutecada de 60 do seacuteculo passado tecircm vindo a ser
desenvolvidos vaacuterios meacutetodos de controlo por orientaccedilatildeo de
campo [1] Na sua essecircncia assentam numa filosofia
semelhante aos sistemas DC controlo independente do
fluxo magneacutetico e do binaacuterio desenvolvido A sua
implementaccedilatildeo assenta na consideraccedilatildeo de um referencial
que gira com velocidade instantacircnea igual agrave do campo
girantegirante (referencial siacutencrono) estando alinhado em
qualquer instante com a posiccedilatildeo desse mesmo campo
O mais eficaz eacute sem duacutevida o controlo por orientaccedilatildeo do
campo do rotor sendo por isso o mais usual No entanto a
implementaccedilatildeo deste processo em AC eacute bastante mais
complexa para aleacutem dos valores das amplitudes eacute tambeacutem
necessaacuterio o controlo instantacircneo da posiccedilatildeo relativa dos
fasores da expressatildeo anterior ou seja eacute imprescindiacutevel o
conhecimento em cada instante da posiccedilatildeo espacial do
fluxo do rotor em relaccedilatildeo ao estator (ie referencial fixado
ao estator)
II ROTOR FOC
A implementaccedilatildeo do controlo por orientaccedilatildeo de campo
rotoacuterico assenta na conversatildeo da maacutequina polifaacutesica em
anaacutelise (natildeo necessariamente trifaacutesica) num sistema bifaacutesico
equivalente (eixos ortogonais d-q) definido no referencial
siacutencrono ωΨr A Figura 1 ilustra os conceitos associados ao
controlo por orientaccedilatildeo do campo do rotor ndash Rotor FOC (com
base em [2])
Figura 1 Controlo por orientaccedilatildeo do campo do rotor em MI
O Rotor FOC assenta na definiccedilatildeo das equaccedilotildees eleacutetricas e
magneacuteticas no referencial siacutencrono (ωΨr= 2πfp (rads-1))
sendo a direccedilatildeo do fluxo do rotor alinhada em cada
instante com o eixo d desse referencial As partes real e
imaginaacuteria do fasor espacial corrente estatoacuterica (is) satildeo
respetivamente if e iT pelo que
Pedro MeloInstituto Superior de Engenharia do Porto
CONTROLO VETORIAL (FOC) DE UM MOTOR DE INDUCcedilAtildeO TRIFAacuteSICO APLICADO A
UM VEIacuteCULO ELEacuteTRICO
1 Poderaacute ser considerado qualquer um dos campos girantes presentes no motor estator entreferro ou rotor
ARTIGO TEacuteCNICO
6
if alinhada com Ψr regula o seu valor (eixo d)
iT desfasada de π2 rad eleacutectricos em relaccedilatildeo a if controla
o binaacuterio electromagneacutetico desenvolvido (eixo q)
Em regime permanente tem-se
Ψr =Lmif (1)
Tel = KT Ψr iT (2)
Em termos conceptuais o controlo eacute implementado no
referencial siacutencrono No entanto o controlador fiacutesico
(hardware) actua ao niacutevel do referencial do estator isto eacute
sobre as tensotildees e correntes que alimentam o motor (3 fases
(ua ub uc) (ia ib ib)) A determinaccedilatildeo instantacircnea de if e iT
no referencial estaacutetico (ω=0) eacute fundamental Uma vez que
θT= arctg(iTif) a obtenccedilatildeo do valor instantacircneo de θf eacute o
ponto central (simultaneamente o mais exigente) na
implementaccedilatildeo do Rotor FOC
Rotor FOC ndash Meacutetodo Indirecto
Sendo esta a metodologia mais usualmente empregue
apresenta-se em seguida o modelo matemaacutetico do
respectivo algoritmo de controlo No essencial θf eacute
determinado atraveacutes da mediccedilatildeo de θr e da estimaccedilatildeo de θdl
(ver Figura 1)
Considerando a representaccedilatildeo no sistema de eixos d-q no
referencial siacutencrono as equaccedilotildees eleacutectricas do rotor de um
MI com gaiola de esquilo satildeo dadas por
Sendo Ψrd = Ψr e Ψrq =0 as equaccedilotildees anteriores tomam a
forma seguinte
Por outro lado as equaccedilotildees magneacuteticas do rotor definidas
no mesmo referencial tomam a seguinte forma
Fixando isd = if e isq = iT vem que
Substituindo estas uacuteltimas expressotildees nas equaccedilotildees
eleacutectricas do rotor obteacutem-se
[Tr0 constante de tempo do rotor c o estator em circuito
aberto)]
Com base nas equaccedilotildees magneacuteticas do estator tambeacutem
definidas no referencial ωΨr o binaacuterio electromagneacutetico
instantacircneo eacute dado por
Assim a velocidade associada ao deslizamento ωdl expressa
em funccedilatildeo de Tel e Ψr eacute dada por
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
2 De modo a simplificar a representaccedilatildeo na Figura 1 estatildeo somente representados os eixos d
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

ARTIGO TEacuteCNICO
5
I INTRODUCcedilAtildeO
Os motores de induccedilatildeo (MI) com rotor em gaiola de esquilo
estatildeo muito disseminados nos atuais sistemas de variaccedilatildeo de
velocidade (ldquodrivesrdquo) A sua simplicidade e robustez aliadas
a baixos preccedilos (comparativamente com outras maacutequinas) e
ampla gama de potecircncias disponiacuteveis satildeo as principais
razotildees
A evoluccedilatildeo verificada nos domiacutenios da eletroacutenica de
potecircncia e nos sistemas de controlo (em particular o
controlo digital) permitiram aplicar os MI em sistemas de
elevado desempenho dinacircmico (eg controlo de binaacuterio
eou posiccedilatildeo) substituindo os motores DC cujas
caracteriacutesticas dinacircmicas e simplicidade de controlo os
tornavam a primeira escolha em tais aplicaccedilotildees Com efeito
as ldquodrivesrdquo baseadas em MI apresentam caracteriacutesticas
dinacircmicas em tudo semelhantes aos sistemas DC incluindo a
possibilidade de funcionamento nos quatro quadrantes do
plano (T nr) No entanto a complexidade do conversores e
sobretudo dos sistemas de controlo eacute muito mais elevada
nos sistemas AC Os sistemas baseados no controlo vetorial
satildeo os mais usuais nas ldquodrivesrdquo baseadas nas maacutequinas AC
convencionais (assiacutencronas e siacutencronas) Existem outras
metodologias tambeacutem usadas na induacutestria (eg controlo
direto do binaacuterio ndash DTC) mas neste trabalho somente o
controlo vetorial seraacute abordado
No domiacutenio do controlo vectorial existem diversas variantes
sendo o meacutetodo mais poderoso e utilizado o controlo por
orientaccedilatildeo de campo (Field Oriented Control ndash FOC) Desde
finais da deacutecada de 60 do seacuteculo passado tecircm vindo a ser
desenvolvidos vaacuterios meacutetodos de controlo por orientaccedilatildeo de
campo [1] Na sua essecircncia assentam numa filosofia
semelhante aos sistemas DC controlo independente do
fluxo magneacutetico e do binaacuterio desenvolvido A sua
implementaccedilatildeo assenta na consideraccedilatildeo de um referencial
que gira com velocidade instantacircnea igual agrave do campo
girantegirante (referencial siacutencrono) estando alinhado em
qualquer instante com a posiccedilatildeo desse mesmo campo
O mais eficaz eacute sem duacutevida o controlo por orientaccedilatildeo do
campo do rotor sendo por isso o mais usual No entanto a
implementaccedilatildeo deste processo em AC eacute bastante mais
complexa para aleacutem dos valores das amplitudes eacute tambeacutem
necessaacuterio o controlo instantacircneo da posiccedilatildeo relativa dos
fasores da expressatildeo anterior ou seja eacute imprescindiacutevel o
conhecimento em cada instante da posiccedilatildeo espacial do
fluxo do rotor em relaccedilatildeo ao estator (ie referencial fixado
ao estator)
II ROTOR FOC
A implementaccedilatildeo do controlo por orientaccedilatildeo de campo
rotoacuterico assenta na conversatildeo da maacutequina polifaacutesica em
anaacutelise (natildeo necessariamente trifaacutesica) num sistema bifaacutesico
equivalente (eixos ortogonais d-q) definido no referencial
siacutencrono ωΨr A Figura 1 ilustra os conceitos associados ao
controlo por orientaccedilatildeo do campo do rotor ndash Rotor FOC (com
base em [2])
Figura 1 Controlo por orientaccedilatildeo do campo do rotor em MI
O Rotor FOC assenta na definiccedilatildeo das equaccedilotildees eleacutetricas e
magneacuteticas no referencial siacutencrono (ωΨr= 2πfp (rads-1))
sendo a direccedilatildeo do fluxo do rotor alinhada em cada
instante com o eixo d desse referencial As partes real e
imaginaacuteria do fasor espacial corrente estatoacuterica (is) satildeo
respetivamente if e iT pelo que
Pedro MeloInstituto Superior de Engenharia do Porto
CONTROLO VETORIAL (FOC) DE UM MOTOR DE INDUCcedilAtildeO TRIFAacuteSICO APLICADO A
UM VEIacuteCULO ELEacuteTRICO
1 Poderaacute ser considerado qualquer um dos campos girantes presentes no motor estator entreferro ou rotor
ARTIGO TEacuteCNICO
6
if alinhada com Ψr regula o seu valor (eixo d)
iT desfasada de π2 rad eleacutectricos em relaccedilatildeo a if controla
o binaacuterio electromagneacutetico desenvolvido (eixo q)
Em regime permanente tem-se
Ψr =Lmif (1)
Tel = KT Ψr iT (2)
Em termos conceptuais o controlo eacute implementado no
referencial siacutencrono No entanto o controlador fiacutesico
(hardware) actua ao niacutevel do referencial do estator isto eacute
sobre as tensotildees e correntes que alimentam o motor (3 fases
(ua ub uc) (ia ib ib)) A determinaccedilatildeo instantacircnea de if e iT
no referencial estaacutetico (ω=0) eacute fundamental Uma vez que
θT= arctg(iTif) a obtenccedilatildeo do valor instantacircneo de θf eacute o
ponto central (simultaneamente o mais exigente) na
implementaccedilatildeo do Rotor FOC
Rotor FOC ndash Meacutetodo Indirecto
Sendo esta a metodologia mais usualmente empregue
apresenta-se em seguida o modelo matemaacutetico do
respectivo algoritmo de controlo No essencial θf eacute
determinado atraveacutes da mediccedilatildeo de θr e da estimaccedilatildeo de θdl
(ver Figura 1)
Considerando a representaccedilatildeo no sistema de eixos d-q no
referencial siacutencrono as equaccedilotildees eleacutectricas do rotor de um
MI com gaiola de esquilo satildeo dadas por
Sendo Ψrd = Ψr e Ψrq =0 as equaccedilotildees anteriores tomam a
forma seguinte
Por outro lado as equaccedilotildees magneacuteticas do rotor definidas
no mesmo referencial tomam a seguinte forma
Fixando isd = if e isq = iT vem que
Substituindo estas uacuteltimas expressotildees nas equaccedilotildees
eleacutectricas do rotor obteacutem-se
[Tr0 constante de tempo do rotor c o estator em circuito
aberto)]
Com base nas equaccedilotildees magneacuteticas do estator tambeacutem
definidas no referencial ωΨr o binaacuterio electromagneacutetico
instantacircneo eacute dado por
Assim a velocidade associada ao deslizamento ωdl expressa
em funccedilatildeo de Tel e Ψr eacute dada por
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
2 De modo a simplificar a representaccedilatildeo na Figura 1 estatildeo somente representados os eixos d
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

ARTIGO TEacuteCNICO
6
if alinhada com Ψr regula o seu valor (eixo d)
iT desfasada de π2 rad eleacutectricos em relaccedilatildeo a if controla
o binaacuterio electromagneacutetico desenvolvido (eixo q)
Em regime permanente tem-se
Ψr =Lmif (1)
Tel = KT Ψr iT (2)
Em termos conceptuais o controlo eacute implementado no
referencial siacutencrono No entanto o controlador fiacutesico
(hardware) actua ao niacutevel do referencial do estator isto eacute
sobre as tensotildees e correntes que alimentam o motor (3 fases
(ua ub uc) (ia ib ib)) A determinaccedilatildeo instantacircnea de if e iT
no referencial estaacutetico (ω=0) eacute fundamental Uma vez que
θT= arctg(iTif) a obtenccedilatildeo do valor instantacircneo de θf eacute o
ponto central (simultaneamente o mais exigente) na
implementaccedilatildeo do Rotor FOC
Rotor FOC ndash Meacutetodo Indirecto
Sendo esta a metodologia mais usualmente empregue
apresenta-se em seguida o modelo matemaacutetico do
respectivo algoritmo de controlo No essencial θf eacute
determinado atraveacutes da mediccedilatildeo de θr e da estimaccedilatildeo de θdl
(ver Figura 1)
Considerando a representaccedilatildeo no sistema de eixos d-q no
referencial siacutencrono as equaccedilotildees eleacutectricas do rotor de um
MI com gaiola de esquilo satildeo dadas por
Sendo Ψrd = Ψr e Ψrq =0 as equaccedilotildees anteriores tomam a
forma seguinte
Por outro lado as equaccedilotildees magneacuteticas do rotor definidas
no mesmo referencial tomam a seguinte forma
Fixando isd = if e isq = iT vem que
Substituindo estas uacuteltimas expressotildees nas equaccedilotildees
eleacutectricas do rotor obteacutem-se
[Tr0 constante de tempo do rotor c o estator em circuito
aberto)]
Com base nas equaccedilotildees magneacuteticas do estator tambeacutem
definidas no referencial ωΨr o binaacuterio electromagneacutetico
instantacircneo eacute dado por
Assim a velocidade associada ao deslizamento ωdl expressa
em funccedilatildeo de Tel e Ψr eacute dada por
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
2 De modo a simplificar a representaccedilatildeo na Figura 1 estatildeo somente representados os eixos d
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO
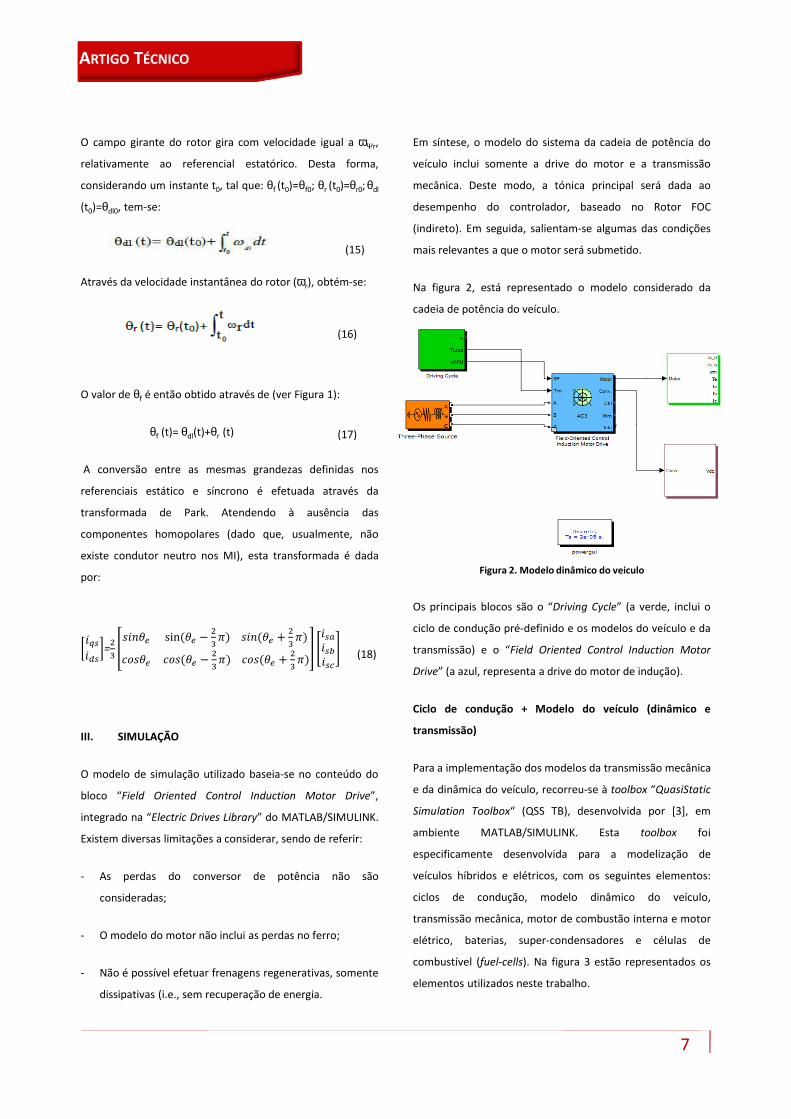
ARTIGO TEacuteCNICO
7
O campo girante do rotor gira com velocidade igual a ωΨr
relativamente ao referencial estatoacuterico Desta forma
considerando um instante t0 tal que θf (t0)=θf0 θr (t0)=θr0θdl
(t0)=θdl0 tem-se
Atraveacutes da velocidade instantacircnea do rotor (ωr) obteacutem-se
O valor de θf eacute entatildeo obtido atraveacutes de (ver Figura 1)
θf (t)= θdl(t)+θr (t)
A conversatildeo entre as mesmas grandezas definidas nos
referenciais estaacutetico e siacutencrono eacute efetuada atraveacutes da
transformada de Park Atendendo agrave ausecircncia das
componentes homopolares (dado que usualmente natildeo
existe condutor neutro nos MI) esta transformada eacute dada
por
=
sin
III SIMULACcedilAtildeO
O modelo de simulaccedilatildeo utilizado baseia-se no conteuacutedo do
bloco ldquoField Oriented Control Induction Motor Driverdquo
integrado na ldquoElectric Drives Libraryrdquo do MATLABSIMULINK
Existem diversas limitaccedilotildees a considerar sendo de referir
- As perdas do conversor de potecircncia natildeo satildeo
consideradas
- O modelo do motor natildeo inclui as perdas no ferro
- Natildeo eacute possiacutevel efetuar frenagens regenerativas somente
dissipativas (ie sem recuperaccedilatildeo de energia
Em siacutentese o modelo do sistema da cadeia de potecircncia do
veiacuteculo inclui somente a drive do motor e a transmissatildeo
mecacircnica Deste modo a toacutenica principal seraacute dada ao
desempenho do controlador baseado no Rotor FOC
(indireto) Em seguida salientam-se algumas das condiccedilotildees
mais relevantes a que o motor seraacute submetido
Na figura 2 estaacute representado o modelo considerado da
cadeia de potecircncia do veiacuteculo
Figura 2 Modelo dinacircmico do veiculo
Os principais blocos satildeo o ldquoDriving Cyclerdquo (a verde inclui o
ciclo de conduccedilatildeo preacute-definido e os modelos do veiacuteculo e da
transmissatildeo) e o ldquoField Oriented Control Induction Motor
Driverdquo (a azul representa a drive do motor de induccedilatildeo)
Ciclo de conduccedilatildeo + Modelo do veiacuteculo (dinacircmico e
transmissatildeo)
Para a implementaccedilatildeo dos modelos da transmissatildeo mecacircnica
e da dinacircmica do veiacuteculo recorreu-se agrave toolbox ldquoQuasiStatic
Simulation Toolboxldquo (QSS TB) desenvolvida por [3] em
ambiente MATLABSIMULINK Esta toolbox foi
especificamente desenvolvida para a modelizaccedilatildeo de
veiacuteculos hiacutebridos e eleacutetricos com os seguintes elementos
ciclos de conduccedilatildeo modelo dinacircmico do veiacuteculo
transmissatildeo mecacircnica motor de combustatildeo interna e motor
eleacutetrico baterias super-condensadores e ceacutelulas de
combustiacutevel (fuel-cells) Na figura 3 estatildeo representados os
elementos utilizados neste trabalho
(15)
(16)
(17)
(18)
ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

ARTIGO TEacuteCNICO
8
A potecircncia instantacircnea pedida ao MI (Tloadωr) eacute calculada
com base no ciclo de conduccedilatildeo selecionado no
comportamento dinacircmico do veiacuteculo (considera o atrito
resultante do contacto roda-pavimento e a resistecircncia
aerodinacircmica do ar em deslocamentos planos) e num
sistema de transmissatildeo mecacircnico com uma razatildeo constante
A equaccedilatildeo seguinte corresponde ao modelo dinacircmico do
veiacuteculo
Mt Massa do veiacuteculo + massa equivalente dos elementos
moacuteveis
v(t) Velocidade instantacircnea do veiacuteculo (direccedilatildeo
longitudinal)
Fd(t) Forccedila motora (instantacircnea) aplicada ao veiacuteculo
segundo a direccedilatildeo longitudinal
g Aceleraccedilatildeo graviacutetica [98 ms-2]
Cr CW Coeficiente de atrito de rolamento coeficiente de
atrito aerodinacircmico
ρ A Densidade do ar [1294 kgm3] superfiacutecie frontal do
veiacuteculo
O 1ordm membro da equaccedilatildeo anterior representa a forccedila de
ineacutercia associada agrave aceleraccedilatildeo do veiacuteculo considerando
tambeacutem a variaccedilatildeo da energia cineacutetica acumulada nos
componentes do veiacuteculo animados de movimento rotativo
(Massa equivalente dos elementos moacuteveis ndash Tabela 3)
Com efeito tais variaccedilotildees da energia cineacutetica satildeo suportadas
pelo motor
Os paracircmetros do veiacuteculo e do sistema de transmissatildeo
considerados estatildeo indicados respetivamente nas Tabelas 1
e 2
Tabela 1 Paracircmetros do veiacuteculo
Tabela 2 Paracircmetros da Transmissatildeo Mecacircnica
A Tabela 3 conteacutem os paracircmetros do MI considerado
Tabela 3 Paracircmetros do motor de induccedilatildeo (75 kW 400 V 13 A 50
Hz 4 poacutelos 1440 rpm)
Figura 3 Ciclo de conduccedilatildeo e modelo do veiacuteculo (dinacircmica + transmissatildeo
(19)
ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

ARTIGO TEacuteCNICO
9
Drive do motor de induccedilatildeo trifaacutesico
Na figura 4 estaacute representado o modelo da drive do MI3
(conversor de potecircncia + controlador + Motor de induccedilatildeo)
Eacute visiacutevel a cadeia de transmissatildeo de potecircncia (conversor +
motor de induccedilatildeo) bem como o controlador de velocidade e
o controlador vetorial ndash bloco ldquoFOCrdquo O valor de referecircncia
do fluxo do rotor (Flux) eacute gerado pelo controlador de
velocidade Deste modo eacute definida a gama de velocidades
associada a fluxo constante (binaacuterio maacuteximo constante) e a
zona de enfraquecimento de campo (potecircncia constante) de
acordo com a figura 5
Figura 5 Zonas de funcionamento do MI Fluxo constante (Baixas
velocidades) e enfraquecimento de campo (Elevadas velocidades)
O conversor eacute do tipo fonte de tensatildeo (Voltage Source
Inverter ndash VSI) usual para a potecircncia do motor considerado
Eacute composto por um retificador natildeo controlado (ponte de
diacuteodos ndash Three-phase diode rectifier) e um inversor (Three-
phase inverter) cuja tensatildeo de saiacuteda eacute regulada por PWM
(Pulse Width Modulation)
Existe a possibilidade de funcionamento nos 4 quadrantes
atraveacutes de frenagens dissipativa (ie natildeo eacute possiacutevel a
recuperaccedilatildeo da energia cineacutetica do veiacuteculo) com efeito haacute
somente uma resistecircncia de frenagem (bloco ldquoBraking
chopperrdquo) onde se daacute a dissipaccedilatildeo da referida energia
cineacutetica Com vista a evitar sobretensotildees no barramento DC
(Vdc) devido a desaceleraccedilotildees bruscas ou velocidades
excessivas nas descidas A accedilatildeo frenante associada agrave
resistecircncia eacute regulada atraveacutes de um controlador histereacutetico
de tensatildeo (ON se Vdc geVmax OFF se Vdc le Vmin)
3 As perdas no ferro do motor e as perdas do conversor natildeo satildeo incluiacutedas4 O siacutembolo estaacute associado agrave representaccedilatildeo das grandezas de referecircncia
Figura 4 Estrutura da drive conversor(vermelho) motor (verde) e controlador (azul)
ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

ARTIGO TEacuteCNICO
10
Rotor FOC
A Figura 6 ilustra o conteuacutedo do bloco ldquoFOCrdquo onde eacute
implementado o algoritmo da secccedilatildeo 21
Figura 6 Implementaccedilatildeo do Rotor FOC (indireto)
Eacute bem visiacutevel o desacoplamento da regulaccedilatildeo do fluxo
rotoacuterico e do binaacuterio atraveacutes do controlador PI do fluxo do
rotor (ldquoFlux_PIrdquo) eacute gerado o sinal Phir sendo calculado o
valor de referecircncia Id atraveacutes de (1)
O bloco ldquoiqs Calculationrdquo determina a referecircncia da
corrente associada ao binaacuterio (Iq) com base em (2)
Os blocos a verde estatildeo associados agrave transformada de Park
no referencial siacutencrono (ABC-DQ) e respetiva inversa (DQ-
ABC) Neste referencial o fluxo instantacircneo do rotor eacute regido
por (11) o seu valor eacute obtido atraveacutes do bloco ldquoFlux
Calculationrdquo
Finalmente ωdl e θf satildeo calculados no bloco
ldquoTeta_Calculationrdquo atraveacutes de respetivamente (14) e (17)
O duty-cycle do trem de impulsos aplicado aos terminais das
ldquogatesrdquo dos IGBTs do inversor eacute regulado em funccedilatildeo da
diferenccedila entre Iabc e Iabc ndash bloco ldquoCurrent Regulatorrdquo
Anaacutelise de Resultados
Nas figuras 7-10 estatildeo representados os resultados obtidos
para o ciclo de conduccedilatildeo considerado (Japan 11-Mode )
A figura 7 ilustra as referecircncias de velocidade (ciclo de
conduccedilatildeo) e binaacuterio (eixo motor) bem como o desempenho
do MI3
Figura 7 Perfil de velocidade e binaacuterio
A velocidade rotoacuterica segue de modo muito fiel a referecircncia
pretendida Naturalmente tal resulta do facto do perfil do
binaacuterio motor desenvolvido seguir a respetiva referecircncia
(modo motor valores positivos frenagem valores
negativos)
Eacute de salientar o ldquorippleldquo existente nos intervalos de
aceleraccedilatildeo e desaceleraccedilatildeo sendo uma componente de alta
frequecircncia o momento de ineacutercia do sistema
(motor+transmissatildeo+carga) atenua quase na totalidade a
influecircncia desta componente o que eacute visiacutevel no perfil de
velocidade obtido
As influecircncias de Id e Iq (referencial siacutencrono) sobre
respetivamente o fluxo rotoacuterico e o binaacuterio desenvolvido
estatildeo bem evidenciados na Figura 8
0 20 40 60 80 100 1200
1000
2000
3000
4000
5000
Vel
oci
dade
(rp
m)
0 20 40 60 80 100 120-20
-10
0
10
20B
inaacuter
io (
Nm
)
tempo [s]
Ref
Motor
ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

ARTIGO TEacuteCNICO
11
Figura 8 Perfis de Id e Iq (referencial siacutencrono)
A fronteira entre zona de ldquofluxo constanteldquo e
bdquoenfraquecimento de campoldquo eacute definida pela velocidade de
sincronismo do motor (ns) ndash neste caso 1500 rpm Observa-
se o valor constante de Id para nr lt 1500 rpm Para valores
superiores da velocidade (zona de enfraquecimento de
campo) Id varia de forma inversamente proporcional agrave
velocidade Por seu turno eacute visiacutevel a semelhanccedila entre os
perfis de Iq e do binaacuterio desenvolvido naturalmente na
zona de enfraquecimento de campo Iq tende a desviar-se do
perfil do binaacuterio de modo a compensar a diminuiccedilatildeo do
fluxo rotoacuterico de acordo com (2)
Para o ciclo de conduccedilatildeo seleccionado a potecircncia
instantacircnea eacute inferior agrave potecircncia nominal do motor
seleccionado (Figura 9)
Figura 9 Puacutetil do motor
No entanto tratando-se de regimes dinacircmicos eacute necessaacuteria
uma anaacutelise mais profunda relativamente agraves condiccedilotildees de
funcionamento do motor A tiacutetulo de exemplo na Figura 10
eacute patente o risco de danos causados pelos efeitos teacutermicos
atendendo aos intervalos em que a corrente se encontra
entre 20 A e 30 A (altas velocidades) Notar que o valor da
corrente de pico nominal do motor eacute igual a sqrt(2)13=184
A)
Figura 10 Corrente absorvida pelo motor
A escolha da classe de isolamento do motor e a necessidade
de inclusatildeo de ventilaccedilatildeo forccedilada deveratildeo ser devidamente
ponderadas As solicitaccedilotildees mecacircnicas nas altas velocidades
(nomeadamente nos rolamentos) eacute outro fator a ser
analisado
Por outro lado o motor eacute submetido a uma gama de
potecircncias bastante ampla Torna-se importante caracterizar
o rendimento da maacutequina em muacuteltiplos regimes de
funcionamento (motor e frenagem) Os mapas de eficiecircncia
satildeo usualmente empregues com este fim
Na Figura 11 estaacute representado o mapa da maacutequina usada
(modo motor ndash 1ordm quadrante) bem como os regimes de
funcionamento impostos pelo ciclo de conduccedilatildeo escolhido
(vermelho)
0 20 40 60 80 100 1200
2
4
6
Id (
A)
0 20 40 60 80 100 120-30
-20
-10
0
10
20
30
Iq (
A)
tempo [s]
0 20 40 60 80 100 120-4
-2
0
2
4
6
8
Pu
(kW
)
tempo [s]
0 20 40 60 80 100 120
-40
-30
-20
-10
0
10
20
30
Corrente
(A)
tempo (s)
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO
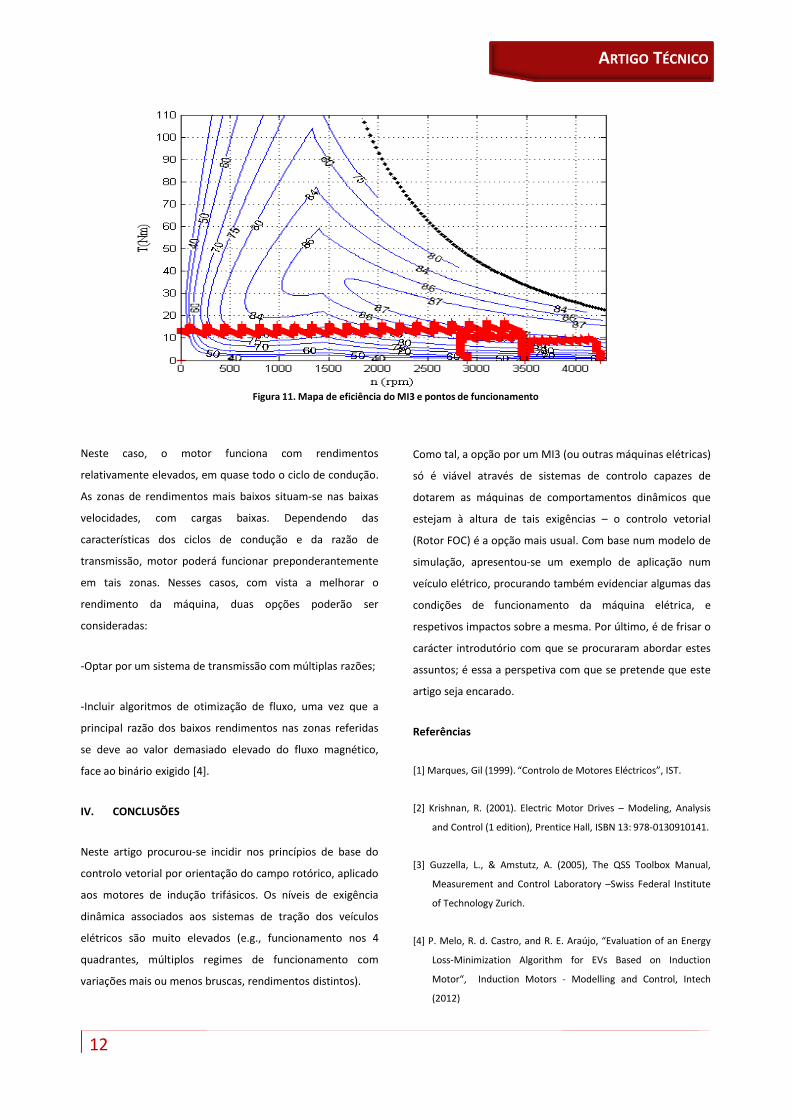
ARTIGO TEacuteCNICO
12
Neste caso o motor funciona com rendimentos
relativamente elevados em quase todo o ciclo de conduccedilatildeo
As zonas de rendimentos mais baixos situam-se nas baixas
velocidades com cargas baixas Dependendo das
caracteriacutesticas dos ciclos de conduccedilatildeo e da razatildeo de
transmissatildeo motor poderaacute funcionar preponderantemente
em tais zonas Nesses casos com vista a melhorar o
rendimento da maacutequina duas opccedilotildees poderatildeo ser
consideradas
-Optar por um sistema de transmissatildeo com muacuteltiplas razotildees
-Incluir algoritmos de otimizaccedilatildeo de fluxo uma vez que a
principal razatildeo dos baixos rendimentos nas zonas referidas
se deve ao valor demasiado elevado do fluxo magneacutetico
face ao binaacuterio exigido [4]
IV CONCLUSOtildeES
Neste artigo procurou-se incidir nos princiacutepios de base do
controlo vetorial por orientaccedilatildeo do campo rotoacuterico aplicado
aos motores de induccedilatildeo trifaacutesicos Os niacuteveis de exigecircncia
dinacircmica associados aos sistemas de traccedilatildeo dos veiacuteculos
eleacutetricos satildeo muito elevados (eg funcionamento nos 4
quadrantes muacuteltiplos regimes de funcionamento com
variaccedilotildees mais ou menos bruscas rendimentos distintos)
Como tal a opccedilatildeo por um MI3 (ou outras maacutequinas eleacutetricas)
soacute eacute viaacutevel atraveacutes de sistemas de controlo capazes de
dotarem as maacutequinas de comportamentos dinacircmicos que
estejam agrave altura de tais exigecircncias ndash o controlo vetorial
(Rotor FOC) eacute a opccedilatildeo mais usual Com base num modelo de
simulaccedilatildeo apresentou-se um exemplo de aplicaccedilatildeo num
veiacuteculo eleacutetrico procurando tambeacutem evidenciar algumas das
condiccedilotildees de funcionamento da maacutequina eleacutetrica e
respetivos impactos sobre a mesma Por uacuteltimo eacute de frisar o
caraacutecter introdutoacuterio com que se procuraram abordar estes
assuntos eacute essa a perspetiva com que se pretende que este
artigo seja encarado
Referecircncias
[1] Marques Gil (1999) ldquoControlo de Motores Eleacutectricosrdquo IST
[2] Krishnan R (2001) Electric Motor Drives ndash Modeling Analysis
and Control (1 edition) Prentice Hall ISBN 13 978-0130910141
[3] Guzzella L amp Amstutz A (2005) The QSS Toolbox Manual
Measurement and Control Laboratory ndashSwiss Federal Institute
of Technology Zurich
[4] P Melo R d Castro and R E Arauacutejo ldquoEvaluation of an Energy
Loss-Minimization Algorithm for EVs Based on Induction
Motorldquo Induction Motors - Modelling and Control Intech
(2012)
Figura 11 Mapa de eficiecircncia do MI3 e pontos de funcionamento
13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

13
Andreacute Filipe Pereira Ponte 1110433isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) tendocompletado o grau de licenciatura em Engenharia de Sistemas (LES) no ISEP em 20131014 As suasaacutereas de interesse estatildeo vocacionadas para sistemas inteligente aplicados a redes eleacutetricas deenergia (Smat Grids)
Antoacutenio Augusto Arauacutejo Gomes aagisepippptMestre (preacute-bolonha) em Engenharia Eletroteacutecnica e Computadores pela Faculdade de Engenhariada Universidade do PortoProfessor do Instituto Superior de Engenharia do Porto desde 1999 Coordenador de Obras naCERBERUS - Engenharia de Seguranccedila entre 1997 e 1999 Prestaccedilatildeo para diversas empresas deserviccedilos de projeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica
Antoacutenio Carlos Sepuacutelveda Machado e MouraNatural do Porto (1950) eacute licenciado (1973) e doutorado (1984) em Engenharia Eletroteacutecnica pelaFaculdade de Engenharia da Universidade do Porto (FEUP)Desenvolveu trabalho de investigaccedilatildeo na Direction des Eacutetudes et Recherches da Electriciteacute de France(EDF) para a preparaccedilatildeo do grau de Doutor (1979-82)Professor Catedraacutetico da FEUP desde Novembro de 1991 Eacute membro eleito do Conselho deDepartamento de Engenharia Eletroteacutecnica e Computadores e do Conselho Cientiacutefico da FEUPPromoveu a criaccedilatildeo instalaccedilatildeo e montagem do Laboratoacuterio de Alta Tensatildeo (LAT) da FEUPTem dedicado particular atenccedilatildeo aos problemas relativos agrave produccedilatildeo de energia eleacutetrica por recursoa fontes renovaacuteveis em especial a energia hidroeleacutetricaMembro efetivo da Ordem dos Engenheiros assume as funccedilotildees de Presidente do Coleacutegio Nacionalde Engenharia Eletroteacutecnica para o mandato de 2013-2016Colabora com a Agecircncia de Avaliaccedilatildeo e Acreditaccedilatildeo do Ensino Superior (A3ES) na aacuterea da EngenhariaEletroteacutecnica e Computadores tendo participado em diversas Comissotildees de Avaliaccedilatildeo Externa (CAE)
Carlos Valbom Neves cnevestecnisisptCom formaccedilatildeo em Engenharia Eletroteacutecnica pelo Instituto Superior de Engenharia de Lisboa elicenciatura em Gestatildeo de Empresas tendo colaborado com a FESTO PHILIPS ABB ndash Asea BrownBoveri EndressampHauser e TECNISIS Eacute especialista em Instrumentaccedilatildeo Controle de ProcessosIndustriais e em Sistemas de Aquecimento e Traccedilagem Eleacutetrica Tem cerca de 25 anos de experiecircnciaadquirida em centenas de projetos executados nestas aacutereas Vive no Estoril em Portugal
Tecnisis eacute especialista em Sistemas de extinccedilatildeo automaacutetica de incecircndios em instrumentaccedilatildeoindustrial em sistemas para zonas perigosas ATEX e em mediccedilatildeo de visibilidade e deteccedilatildeo deincecircndios em tuneis rodoviaacuterios A Tecnisis tem 25 anos de atividade em Portugal com milhares deaplicaccedilotildees em todos os segmentos da industriawwwtecnisispt
Joseacute Carlos P Cerqueira 1140189isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suas aacutereasde interesse estatildeo vocacionadas para as energias renovaacuteveis sistemas inteligentes aplicados agrave gestatildeode equipamentos de redes eleacutetricas de energia
COLABORARAM NESTA EDICcedilAtildeO
14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

14
Maria Judite Madureira Da Silva Ferreira mjuisepippptDiretora e docente na licenciatura de Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia(LEE-SEE) no Instituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP)As suas aacutereas de investigaccedilatildeo satildeo relacionadas com Redes Eleacutetricas
Luiacutes Miguel Pereira da Costa Rodrigues 1100356isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suasatividades de pesquisa atuais estatildeo focadas em Wireless Power
Maacuterio Andreacute da Silva Fonseca 1140191isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEESEE) noInstituto Superior de Engenharia do Porto no Instituto Superior de Engenharia do Porto ndash InstitutoPoliteacutecnico do Porto (ISEPIPP) tendo completado o grau de licenciatura em EngenhariaEletroteacutecnica na Universidade de Traacutes-os-Montes e Alto Douro (UTAD) em 20132014 As suasaacutereas de interesse estatildeo vocacionadas para as energias renovaacuteveis e sistemas inteligentesaplicados agrave gestatildeo de equipamentos de redes eleacutetricas de energia
Nelson Joseacute Domingues Machado Gonccedilalves negoncalvesautosuecoptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Engenharia pelo Instituto Superiorde Engenharia do PortoDesde agosto de 2009 que desempenha funccedilotildees na Auto Sueco na Direccedilatildeo de EquipamentosIndustriais no apoio teacutecnico e comercial agrave representaccedilatildeo de grupos eletrogeacuteneos
Auto SuecoEmpresa do grupo NORS eacute responsaacutevel pela representaccedilatildeo em Portugal de veiacuteculos pesados damarca Volvo motores industriais e mariacutetimos da Volvo Penta e soluccedilotildees de energia da SDMO
Paulo Gonccedilalves paulogoncalvesexporluxptBacharelato e Licenciatura em Engenharia Eletroteacutecnica ndash Sistemas de Energia Instituto Superiorde Engenharia do Porto Poacutes-Graduaccedilatildeo em Gestatildeo de Vendas Escola de Gestatildeo do PortoDe 1985 a 1988 Empregado de Armazeacutem Atendimento ao Puacuteblico DIODO LDA De 1988 a 1997Teacutecnico Comercial Gestor de Produto CASA DAS LAMPADAS LDA De 1997 a 2011 TeacutecnicoComercial Gestor de Negoacutecio SCHREacuteDER ndash Iluminaccedilatildeo SA Desde 2011 Diretor CoordenadorComercial EXPORLUX ndash Iluminaccedilatildeo SA
Pedro Miguel Azevedo de Sousa Melo pmaisepippptMestre em Automaccedilatildeo Instrumentaccedilatildeo e Controlo pela Faculdade de Engenharia da Universidadedo Porto Aluno do Programa Doutoral em Engenharia Eletroteacutecnica e de Computadores naFaculdade de Engenharia da Universidade do Porto Docente do Instituto Superior de Engenhariado Porto desde 2001 Desenvolveu atividade de projetista de instalaccedilotildees eleacutetricas de BT na DHV-TECNOPOR
COLABORARAM NESTA EDICcedilAtildeO
15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO

15
Pedro Miguel Lopes Pereira 1100367isepippptFrequenta o Mestrado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia (MEE-SEE) noInstituto Superior de Engenharia do Porto ndash Instituto Politeacutecnico do Porto (ISEPIPP) As suas aacutereasde investigaccedilatildeo satildeo relacionadas com Smart Grids
Rui Paulo Ramos De Castro rrcisepippptLicenciado em Engenharia Eletroteacutecnica ndash Sistemas Eleacutetricos de Energia pelo Instituto Superior deEngenharia do Porto e Mestre em Gestatildeo de Ciecircncia Tecnologia e Inovaccedilatildeo pela Universidade deAveiro Atualmente frequenta o Doutoramento em Engenharia Eletroteacutecnica e Computadores naUniversidade de Traacutes-os-Montes e Alto DouroDocente do Instituto Superior de Engenharia do Porto na aacuterea de Sistemas de Eleacutetricos de Energiae Especialista em Eletricidade e Energia do Departamento de Engenharia Eletroteacutecnica Desenvolveo seu trabalho na aacuterea de projetos de instalaccedilotildees eleacutetricas de meacutedia e baixa tensatildeo bem como eminfraestruturas de telecomunicaccedilotildees tendo uma atividade regular no acircmbito de projetos deconsultoria teacutecnica e cooperaccedilatildeo com empresas do sectorInvestigador do Grupo de Investigaccedilatildeo em Engenharia do Conhecimento e Apoio agrave Decisatildeo
Seacutergio Filipe Carvalho Ramos scrisepipppt
Mestre em Engenharia Eletroteacutecnica e de Computadores na Aacuterea Cientiacutefica de Sistemas Eleacutetricosde Energia pelo Instituto Superior Teacutecnico de Lisboa Aluno de doutoramento em EngenhariaEletroteacutecnica e de Computadores no Instituto Superior Teacutecnico de Lisboa Docente doDepartamento de Engenharia Eletroteacutecnica do curso de Sistemas Eleacutetricos de Energia do InstitutoSuperior de Engenharia do Porto desde 2001 Prestaccedilatildeo para diversas empresas de serviccedilos deprojeto de instalaccedilotildees eleacutetricas telecomunicaccedilotildees e seguranccedila formaccedilatildeo assessoria econsultadoria teacutecnica Investigador do GECAD (Grupo de Investigaccedilatildeo em Engenharia doConhecimento e Apoio agrave Decisatildeo) do ISEP desde 2002
COLABORARAM NESTA EDICcedilAtildeO



















