O robô que alcança mais longe LowRes - library.e.abb.com · maior alcance pode realizar o...
6
Discrete Automation and Motion www.abb.pt O robô que alcança mais longe O novo IRB 2600 da ABB
Transcript of O robô que alcança mais longe LowRes - library.e.abb.com · maior alcance pode realizar o...
Discrete Automation and Motion
www.abb.pt
O robô que alcança mais longeO novo IRB 2600 da ABB

O robô industrial já foi apelidado de “prolongamento do braço do Homem".
Os robôs têm efectivamente ampliado as capacidades humanas, possi-bilitando uma maior produtividade em ambientes perigosos e oferecendo níveis de repetibilidade ou de capaci-dade de produção humanamente impossíveis. No entanto, a expressão “prolongamento do braço” tem um significado não só metafórico, como também muito prático.
Frequentemente, a utilidade de um robô depende do seu alcance físico.
Por exemplo, uma peça em fabricação não necessita de ser rodada ou reposi-cionada se o robô puder simplesmente alcançar um ponto determinado. E, nalgumas situações, um robô com
maior alcance pode realizar o trabalho de dois de menor alcance.
Embora a área de operação de um robô tenha que ser ampla, o robô propriamente dito deve ocupar o menor espaço possível. O robô ideal deveria permitir uma redução extra dos seus requisitos de espaço através da possibilidade de montagem em plata-formas, na parede ou mesmo ao tecto.
O novo robô IRB 2600 da ABB, com o seu largo alcance, construção com-pacta e opções flexíveis de montagem, preenche todos estes requisitos.
É também o robô mais rápido, mais preciso e com melhor protecção do mercado para a gama de capacidade de carga de 2 a 20 kg.
Per Löwgren - ABB Review
www.abb.pt Discrete Automation and Motion | Robotics 2

A gama de robôs de ca-pacidade de carga de 20 kg tem uma longa história dentro da ABB, iniciada há mais de 35 anos com o seu primeiro robô – o IRB6. O IRB 2600 repre-senta a quarta geração de robôs da ABB nesta categoria de carga.
CaracterísticasO IRB 2600 encontra-se disponível em três versões -1: a versão básica, com capacidade de carga de 12 kg e um alcance de 1,65 m, uma versão com uma capacidade alargada de carga de 20 kg, e outra com um alcance alargado de 1,85 m.
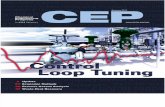
Área operacional e opções de montagemOs robôs de montagem em plataforma superior, ao contrário dos de montagem estritamente no solo, podem ser usados quando é necessária uma zona de operação parcial ou totalmente situada abaixo da base do robô. A figura -2 mostra a zona de trabalho do IRB 2600. A figura -3, ilustrando as várias opções de montagem (por exemplo, no solo, inclinada e em posição invertida no tecto1)), evidencia a economia na ocupação do solo trazida por estas alternativas. Outras vantagens são as
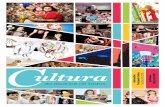
1. As três variantes do IRB 2600A versão básica IRB 2600-12/1.65
O IRB 2600-20/1.65, com uma capacidade alargada de carga de 20 kg (em vez de 12 kg)
O IRB 2600-20/1.85, com um alcance alargado de 1,85 m (em vez de 1,65 m)
melhorias nos tempos de ciclo ou nos padrões de operação possíveis através da optimização do posicionamento do robô, ou a possibilidade de operação simultânea de vários robôs na mesma célula através do seu posicionamento a diferentes alturas.
Tempos de cicloO IRB 2600 oferece tempos de ciclo até 25 por cento menores que o seu predecessor imediato, o IRB 2400, e exibe a aceleração mais elevada disponível no mercado. Contribuem para estas vantagens o seu menor peso (280 kg, em comparação com os 380 kg do IRB 2400) e a avançada tecnolo-gia de controlo de movimento da ABB.
A ABB introduziu em 1993 a primeira versão da sua funcionalidade de precisão de trajectória.Esta funcionalidade significa que: - O robô pode ser utilizado com sucesso em aplicações de processos exigindo trajectórias precisas- O robô pode ser facilmente progra-mado para seguir a trajectória- A trajectória programada é seguida correctamente, com uma apertada tolerância e independentemente da velocidade
O utilizador apenas necessita de introduzir os dados correctos relativos ao valor da carga e às características do braço. A precisão de trajectória é uma tecnologia desenvolvida pela ABB, e é ilustrativa da sua liderança na área do controlo de movimento robótico.
ProtecçãoA protecção é um elemento importante em muitas aplicações em robótica. Pode, por um lado, ter que ver com a protecção de um robô contra elemen-tos agressivos presentes no seu ambiente de trabalho, por exemplo, humidade, corrosão ou partículas abrasivas. Por outro lado, pode incidir sobre a protecção do produto a ser fabricado contra possível contaminação provinda do próprio robô, por exemplo, sob a forma de partículas sólidas ou líquidas por ele libertadas. O IRB 2600 foi concebido para uma ampla gama de aplicações em ambientes muito variados, indo desde os extremamente hostis, tais como em fundições, aos extremamente sensíveis, tais como na preparação alimentar ou mesmo na manufactura de sistemas electrónicos em salas limpas. Vem para isso provido de toda uma gama de opções de protecção, adaptáveis a aplicações específicas.
Um aspecto importante de protecção comum a todos os robôs IRB 2600 é a sua conformidade com o nível IP67 de protecção -4.
Em fundições, partículas em fusão ou agentes estranhos veiculados pela água podem causar degradação do robô. As medidas de protecção para tal ambiente incluem uma flange de montagem com protecção contra oxidação e guardas de protecção para a cablagem, bem como uma pintura especialmente
2)
www.abb.pt Discrete Automation and Motion | Robotics 3
a
b
c
ed
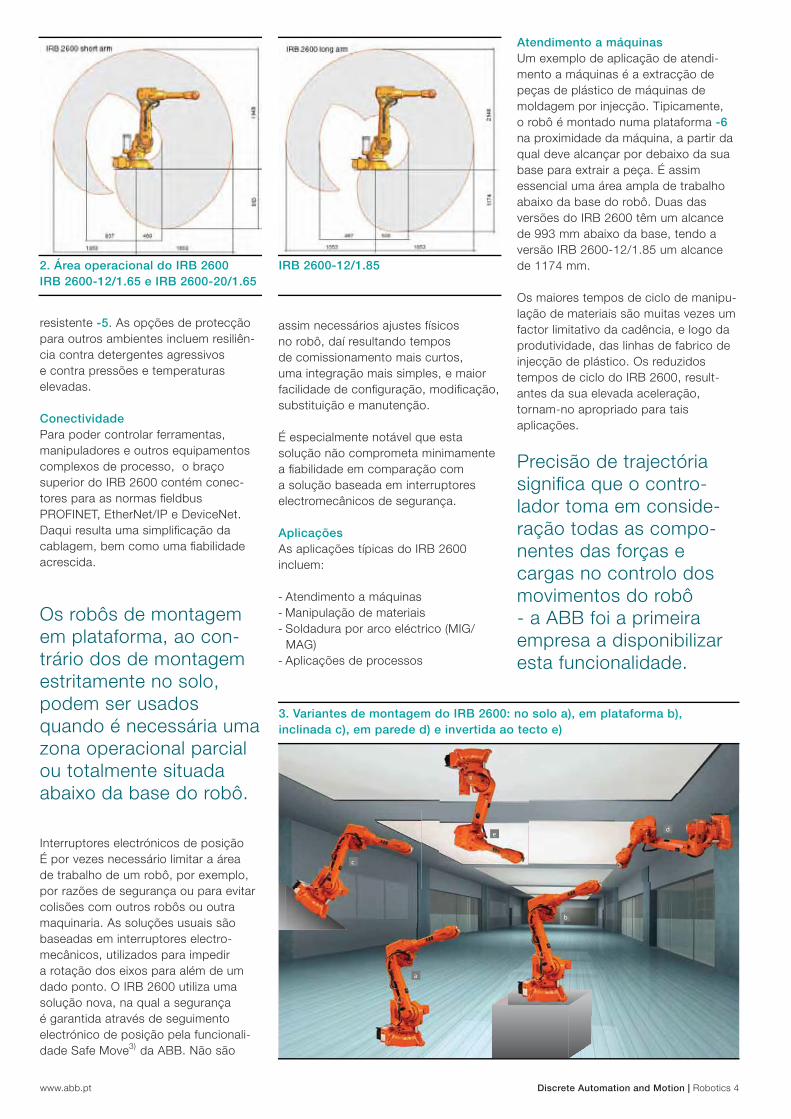
2. Área operacional do IRB 2600IRB 2600-12/1.65 e IRB 2600-20/1.65
3. Variantes de montagem do IRB 2600: no solo a), em plataforma b),inclinada c), em parede d) e invertida ao tecto e)
IRB 2600-12/1.85
resistente -5. As opções de protecção para outros ambientes incluem resiliên-cia contra detergentes agressivos e contra pressões e temperaturas elevadas.
ConectividadePara poder controlar ferramentas, manipuladores e outros equipamentos complexos de processo, o braço superior do IRB 2600 contém conec-tores para as normas fieldbus PROFINET, EtherNet/IP e DeviceNet. Daqui resulta uma simplificação da cablagem, bem como uma fiabilidade acrescida.
Os robôs de montagem em plataforma, ao con-trário dos de montagem estritamente no solo, podem ser usados quando é necessária uma zona operacional parcial ou totalmente situada abaixo da base do robô.
Interruptores electrónicos de posiçãoÉ por vezes necessário limitar a área de trabalho de um robô, por exemplo, por razões de segurança ou para evitar colisões com outros robôs ou outra maquinaria. As soluções usuais são baseadas em interruptores electro-mecânicos, utilizados para impedir a rotação dos eixos para além de um dado ponto. O IRB 2600 utiliza uma solução nova, na qual a segurança é garantida através de seguimento electrónico de posição pela funcionali-dade Safe Move da ABB. Não são 3)
assim necessários ajustes físicos no robô, daí resultando tempos de comissionamento mais curtos, uma integração mais simples, e maior facilidade de configuração, modificação, substituição e manutenção.
É especialmente notável que esta solução não comprometa minimamente a fiabilidade em comparação com a solução baseada em interruptores electromecânicos de segurança.
AplicaçõesAs aplicações típicas do IRB 2600 incluem:
- Atendimento a máquinas- Manipulação de materiais- Soldadura por arco eléctrico (MIG/ MAG)- Aplicações de processos
Atendimento a máquinasUm exemplo de aplicação de atendi-mento a máquinas é a extracção de peças de plástico de máquinas de moldagem por injecção. Tipicamente, o robô é montado numa plataforma -6 na proximidade da máquina, a partir da qual deve alcançar por debaixo da sua base para extrair a peça. É assim essencial uma área ampla de trabalho abaixo da base do robô. Duas das versões do IRB 2600 têm um alcance de 993 mm abaixo da base, tendo a versão IRB 2600-12/1.85 um alcance de 1174 mm.
Os maiores tempos de ciclo de manipu-lação de materiais são muitas vezes um factor limitativo da cadência, e logo da produtividade, das linhas de fabrico de injecção de plástico. Os reduzidos tempos de ciclo do IRB 2600, result-antes da sua elevada aceleração, tornam-no apropriado para tais aplicações.
Precisão de trajectória significa que o contro-lador toma em conside-ração todas as compo-nentes das forças e cargas no controlo dos movimentos do robô - a ABB foi a primeira empresa a disponibilizar esta funcionalidade.
www.abb.pt Discrete Automation and Motion | Robotics 4

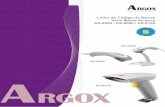
4. Satisfazendo a classificação IP67 de protecção de ingresso. Submerso em água a) e resistindo a poeiras b). O robô em b) é de cor laranja como todos os outros no presente artigo, mas a camada de poeira dificulta o reconhecimento da cor.
6. O IRB pode alcançar abaixo da sua base, sendo apropriado para monta-gem em plataformas superiores.
5. Protecção de cablagem em ambi-entes hostis, tais como fundições
Manipulação de materiaisUma das áreas de aplicação para que o IRB 2600 está vocacionado é a fabricação de painéis fotovoltaicos. A influência de uma crescente conscien-cialização ambiental em combinação com as preocupações sobre as emissões de carbono, incentivos governamentais e os avanços resultantes na tecnologia e nas econo-mias de escala está a levar a um rápido crescimento da indústria fotovoltaica.
Numa altura em que a energia fotovoltaica progride para a paridade de preços (o ponto no qual os seus custos de produção igualam os das fontes convencionais) e se encontram em planeamento grandes agregados fotovoltaicos em áreas com níveis elevados de insolação, continuará a registar-se uma elevada taxa de procura de elementos fotovoltaicos, em particu-lar de painéis de grandes dimensões.
O IRB 2600 está preparado para estas indústrias, pois a sua ampla área de trabalho permite-lhe manufacturar painéis de dimensão da ordem de 6 x 12 células . A conjugação da sua conformidade com especificações de salas limpas (até ISO 14644-1 classe 5) e da sua configuração compacta, minimizando a sua ocupação no solo, são factores adicionais para esta aplicação.
Outras aplicações de manipulação de materiais podem ser encontradas
4)
5)
6)
na indústria alimentar, como por exemplo, na paletização de caixas.
Soldadura a arcoA precisão e a repetibilidade elevadas dos movimentos do IRB 2600, combinadas com o seu reduzido tempo de ciclo, tornam este robô adequado para aplicações de soldadura MIG/MAG.
Aplicações de processosAplicações de processos para as quais o IRB é apropriado incluem:- Corte por jacto de água- Corte por laser- Fresagem e corte de plásticos- Dispensing, aplicação de selantes ou colas- Rebarbagem e remoção de materiais
Para poder controlar ferramentas, manipu-ladores e outros equipa-mentos complexos de processo, o braço supe-rior do IRB 2600 contém conectores para as normas fieldbus PROFINET, EtherNet/IP e DeviceNet.
8)
7)
Um robô verdadeiramente versátilDevido ao seu amplo alcance em conjugação com os seus reduzidos requisitos de espaço, o IRB 2600 é um elemento de trabalho flexível capaz de satisfazer as necessidades de muitas indústrias.
a) b)
www.abb.pt Discrete Automation and Motion | Robotics 5

1974IRB 6
1986IRB 2000
1996IRB 2400
2009IRB 2600
www.abb.pt
Quadro. Quatro gerações de robôs
Os seus modestos requisitos de espaço são ainda potenciados pela flexibilidade das suas opções de montagem, tais como em plataforma, em parede, inclinada ou invertida, contribuindo quer para a economia de espaço, quer para a flexibilidade de implantação. A sua elevada aceleração e os seus curtos tempos de ciclo concorrem
1ª geração 2ª geração 3ª geração 4ª geração
também para o aumento da produtivi-dade e do débito de muitas linhas de produção. A estas vantagens acrescem as suas atractivas soluções de protecção e opções de controlo e conectividade. O IRB 2600 é um robô que consegue realmente alcançar mais longe para a satisfação das necessidades da aplicação.
A ASEA, uma das empresas predecesso-
ras da ABB, lançou o seu primeiro robô, o
IRB6, em 1974. Este robô representou um
marco em muitos aspectos. Não só foi o
primeiro robô completamente eléctrico a
nível mundial (até aí os robôs eram
hidráulicos), mas foi também o primeiro
controlado por microprocessador. Na
realidade, constituiu a primeira aplicação
industrial dos microprocessadores (utilizou
o Intel 8008, um produto central para a
revolução dos microcomputadores e um
predecessor directo do posterior e bem
conhecido 8080). Uma outra característica
significativa do IRB6 foi a configuração
antropomórfica do seu braço.
O IRB6 tinha uma capacidade de carga de
6 kg e era utilizado numa variedade de
aplicações, indo de manipulação a
soldadura e rebarbação. A ASEA (ABB,
a partir de 1988) continuou a disponibilizar
o IRB6 até 1991, com cerca de 7 000
unidades produzidas. O IRB 2600
constitui a quarta geração de robôs da
ABB para a gama de carga de 6 a 20 kg.
Tal como o seu antepassado, o IRB 2600
estabelece um ponto de referência: é,
entre os robôs existentes no mercado na
sua classe de carga, aquele com a maior
aceleração, o maior alcance, a maior
precisão e a melhor protecção.
Notas1) A montagem invertida encontra-se disponível como opção.
2) O sistema de classificação IP exprime a protecção de ingresso (de elementos estranhos) através de dois algarismos. O primeiro descreve a protecção contra a entrada de partículas sólidas, o segundo contra a de líquidos. A classificação IP67 estabelece a protecção total do dispositivo contra poeiras (classe 6) e a protecção contra os efeitos de imersão até 1 m de profundidade (classe 7).
3) Ver também “Taming the robot: Better safety without higher fences” em ABB Review 4/2006, pp. 11 – 14.
4) Para informações adicionais sobre as actividades da ABB no sector fotovoltaico, ver “From light to power” em ABB Review ,4/2009, pp. 22–24. Para uma visão mais alargada das actividades da ABB na área da energia solar, ver também “New power under the sun”, ABB Review ,4/2009, pp. 16–21.
5) Com células individuais com dimensões típicas de 125 x 125 mm2, um painel com 6 x 12 células pode ter dimensões de 810 x 1580 mm2, incluindo o espaçamento entre células.
6) A classe 5 da ISO especifica menos de 100 000 partículas de dimensão superior a 0,1 µm por m3 de ar. Para a classe 6, o requisito refere-se a 1 000 000 de partículas.
7) Fresagem e corte de plásticos com uma lâmina rotativa.
8) Dispensing: aplicação de materiais a uma superfície, por exemplo, colas ou selantes.
Para mais informações:
ABB, S.A.
Discrete Automation and Motion - Robotics
Quinta da Fonte, Edifício Plaza 1
2774-002 Paço de Arcos
Tel. +351 214 256 600
Fax. +351 214 256 392
E-mail. [email protected]