Optimização de uma bomba radial utilizando uma versão ... · que me transmitiu das mais variadas...
102
Optimização de uma bomba radial utilizando uma versão paralela do algoritmo genético de evolução diferencial Diogo Jorge da Costa Teixeira Neves Ferreira Dissertação para a obtenção de Grau de Mestre em Engenharia Mecânica Orientadores: Prof. João Carlos de Campos Henriques Prof. Luís Manuel de Carvalho Gato Júri Presidente: Prof. Viriato Sérgio de Almeida Semião Orientador: Prof. Luís Manuel de Carvalho Gato Vogal: Prof. José Carlos Páscoa Marques Julho de 2014
-
Upload
nguyenkiet -
Category
Documents
-
view
216 -
download
0
Transcript of Optimização de uma bomba radial utilizando uma versão ... · que me transmitiu das mais variadas...

Optimização de uma bomba radial utilizando uma versãoparalela do algoritmo genético de evolução diferencial
Diogo Jorge da Costa Teixeira Neves Ferreira
Dissertação para a obtenção de Grau de Mestre em
Engenharia Mecânica
Orientadores: Prof. João Carlos de Campos HenriquesProf. Luís Manuel de Carvalho Gato
Júri
Presidente: Prof. Viriato Sérgio de Almeida SemiãoOrientador: Prof. Luís Manuel de Carvalho Gato
Vogal: Prof. José Carlos Páscoa Marques
Julho de 2014


Agradecimentos
Em primeiro lugar, gostaria de agradecer ao Professor João Henriques, orientador desta
dissertação, pelo seu interesse no trabalho realizado e pelo conhecimento científico e técnico
que me transmitiu das mais variadas áreas da engenharia.
Ao Professor Luís Gato, co-orientador, cuja vasta experiência na área das turbomáquinas,
se revelou essencial durante o decorrer desta dissertação.
Aos meus pais, irmãs e amigos por todo o apoio que me deram.
i

ii

Resumo
Na presente dissertação foi criado um algoritmo de cálculo automático capaz de importar
uma geometria inicial, gerar uma malha de cálculo, proceder à análise do escoamento com
recurso a um software comercial de volumes finitos e aplicar um algoritmo genético de opti-
mização. A geometria é definida parametricamente com recurso a curvas de Bézier que em
conjunto com uma transformação conforme permite a simulação de turbomáquinas radiais,
axiais e mistas. A malha de cálculo gerada é de construção híbrida, composta por prismas
rectangulares e triangulares nas zonas de camada limite e por tetraedros e pirâmides na zona
intermédia. O escoamento é simulado no programa comercial Fluent, onde são calculados
os parâmetros integrais que caracterizam o funcionamento da bomba radial. O algoritmo de
optimização usado é conhecido por Evolução Diferencial e permite de forma iterativa alterar a
geometria do rotor através da manipulação dos pontos de controlo das curvas de Bézier, com-
parar os valores integrais do escoamento e seleccionar a melhor geometria com base numa
função objectivo. Foi utilizado uma versão para execução paralela do algoritmo optimização.
A metodologia é testada numa bomba radial projectada com recurso à aproximação unidimen-
sional do escoamento. As variáveis de optmização usadas foram dois pontos de controlo que
definem a curvatura das pás e a função objectivo foi a uniformização do perfil de velocidades
à saída do rotor.
Palavras-chave: Turbomáquinas, Bomba radial, Mecânica dos fluidos computacional, Opti-
mização, Evolução diferencial.
iii

iv

Abstract
In the present dissertation an automatic algorithm which is capable of importing an existing
geometry, generate a computational mesh, compute the flow inside the rotor using a finite
volume commercial software and use a genetic optimization algorithm was developed. The
geometry is parametrically defined using Bézier curves that together with an conformal map,
allow the simulation of radial, axial and mixed flow turbomachines. The computational mesh
generated has hybrid construction, it uses rectangular and triangular prisms for the boundary
layer zones e tetrahedron and pyramids for the interior volume. The flow is simulated using the
commercial solver Fluent, in which the integral parameters that describe the pump performance
are calculated. The optimization algorithm is known as Differential Evolution and allows to
iteratively change the rotor geometry by manipulating the Bezier curves control points, compare
the integral parameters and to select the best geometry concerning an objective function. A
version for parallel execution of the optimization algorithm was used. The methodology was
tested in a radial pump impeller designed with the unidimensional approach. The optimization
variables used are two control points that define the blade curvature and the objective function
is the increase of the outlet flow uniformity.
Key-words: Turbomachinery, Radial pump, Computational fluid dynamics, Optimization, Dif-
ferential evolution.
v

vi

Índice
1 Introdução 1
1.1 Contexto, objectivos e abordagem . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Aspectos gerais de uma bomba radial . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Geometria inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4 Aspectos gerais de uma malha de cálculo . . . . . . . . . . . . . . . . . . . . . . 10
1.4.1 Malhas estruturadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.2 Malhas multi-bloco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.3 Malhas não estruturadas . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4.4 Malhas híbridas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5 Algoritmo de optimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.1 Mutação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.2 Cruzamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.3 Selecção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Geração da geometria 17
2.1 Conceitos matemáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1 Curvas de Bézier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.2 Splines cúbicos paramétricos . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1.3 Método da bissecção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.4 Método de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2 Modelação do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2.1 Parametrização da geometria inicial . . . . . . . . . . . . . . . . . . . . . 26
2.2.2 Geração da geometria tridimensional . . . . . . . . . . . . . . . . . . . . 34
3 Malha de cálculo 39
3.1 Bloco da pá . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2 Blocos de camada limite dos pratos . . . . . . . . . . . . . . . . . . . . . . . . . 43
vii

3.3 Bloco intermédio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4 Modelação Numérica 51
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2 Equações de transporte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2.1 Modelos de turbulência . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.3 Método do Volumes Finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.3.1 Acoplamento da pressão/densidade com o campo de velocidades . . . . 55
4.3.2 Discretização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.4 Condições de operação e de fronteira . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4.1 Condição de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4.2 Condição de saída . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.4.3 Condições nas paredes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.4.4 Condições de periodicidade . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5 Resultados Numéricos 61
5.1 Geometria inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.1 Visualização dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.1.2 Parâmetros de funcionamento . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 Geometria optimizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2.1 Processo de optimização . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2.2 Resultados da optimização . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6 Conclusão 77
6.1 Considerações finais e trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . 78
viii

Lista de Figuras
1.1 Corte axial do rotor de uma bomba radial [1] . . . . . . . . . . . . . . . . . . . . 2
1.2 Corte longitudinal de uma bomba radial [1] . . . . . . . . . . . . . . . . . . . . . 2
1.3 Fluxograma do trabalho desenvolvido . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Representação esquemática da malha de cálculo gerada . . . . . . . . . . . . . 5
1.5 Plano meridional, adaptado de [1] . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Plano radial, adaptado de [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.7 Perdas de energia numa bomba radial [1] . . . . . . . . . . . . . . . . . . . . . . 8
1.8 Exemplo de uma malha estruturada 2D [3] . . . . . . . . . . . . . . . . . . . . . . 11
1.9 Exemplo de malhas estruturadas [3] . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.10 Construção de uma malha multi-bloco [4] . . . . . . . . . . . . . . . . . . . . . . 12
1.11 Estrutura Multibloco composto [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.12 Exemplo de malhas não estruturadas . . . . . . . . . . . . . . . . . . . . . . . . 13
1.13 Discretização de uma camada limite . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.14 Exemplo de uma função objectivo bidimensional e o processo de geração de
vi ,G+1 [11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.15 Exemplo de uma processo de cruzamento para D = 7 parâmetros [11] . . . . . . 16
2.1 Representação dos polinómios de Bernstein de grau n = 2 . . . . . . . . . . . . 19
2.2 Representação de uma curva de Bézier de grau n = 2 . . . . . . . . . . . . . . . 19
2.3 Exemplo de um spline cúbico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Parameterização de uma curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5 Distribuição de t com uma sucessão geométrica . . . . . . . . . . . . . . . . . . 22
2.6 Representação gráfica do método da bissecção [14] . . . . . . . . . . . . . . . . 23
2.7 Representação gráfica do método de Newton [14] . . . . . . . . . . . . . . . . . 25
2.8 Transformação de uma superficie de revolução numa cascata de pás . . . . . . 26
2.9 Conservação dos angulos na transformação . . . . . . . . . . . . . . . . . . . . 27
2.10 Secção meridional (esquerda) e vista axial da linha média de uma pá (direita) . . 27
ix

2.11 Interpolação do canal meridional . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.12 Extensão do canal meridional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.13 Secção meridional com os respectivos pontos de controlo . . . . . . . . . . . . . 31
2.14 Cascata de pás e respectivos pontos de controlo para a superfície hub . . . . . 32
2.15 Distribuição de espessura em função do comprimento da pá . . . . . . . . . . . 33
2.16 Representação tridimensional dos pratos . . . . . . . . . . . . . . . . . . . . . . 34
2.17 Representação da linha médida da pá no espaço tridimensional . . . . . . . . . 35
2.18 Pormenor do espaço entre p(s), a azul e o shroud . . . . . . . . . . . . . . . . . 36
2.19 Pormenor da intersecção de p(s), a azul com o shroud . . . . . . . . . . . . . . 37
2.20 Representação do rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.21 Pormenor do bordo de ataque de uma pá . . . . . . . . . . . . . . . . . . . . . . 38
3.1 Discretização 2D para camada limite da pá . . . . . . . . . . . . . . . . . . . . . 41
3.2 Discretização de uma camada limite . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3 Construção da malha 3D da pá . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4 Conversão de um prisma rectangular em cinco prismas triangulares [18] . . . . . 43
3.5 Malha completa para o bloco da pá . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.6 Planificação da superfície shroud . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.7 Malha bidimensional no plano transformado . . . . . . . . . . . . . . . . . . . . . 45
3.8 Malha bidimensional no plano físico . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.9 Blocoshr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.10 Corte do blocoshr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.11 Constução do bloco de malha não estruturada . . . . . . . . . . . . . . . . . . . 48
3.12 Discretização das restantes superfícies . . . . . . . . . . . . . . . . . . . . . . . 48
3.13 Bloco intermédio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.14 Malha completa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.1 Cell-centered scheme (esquerda) e Vertex-centered scheme (direita) [29] . . . . 57
4.2 Malha do bloco de entrada no domínio . . . . . . . . . . . . . . . . . . . . . . . . 59
4.3 Malha do bloco de saída do domínio . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.4 Condição de fronteira periódica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.1 Valor dos resíduos e de y+ para a geometria optimizada . . . . . . . . . . . . . 62
5.2 Velocidade relativa (m/s) no bordo de ataque da geometria inicial . . . . . . . . 63
5.3 Velocidade relativa (m/s) no bordo de fuga da geometria inicial . . . . . . . . . . 64
5.4 Velocidade relativa (m/s) no domínio completo da geometria inicial . . . . . . . . 64
x

5.5 Vectores de velocidade relativa (m/s) na zona crítica do lado de sucção da pá . 64
5.6 Rendimento hidráulico para o rotor inicial . . . . . . . . . . . . . . . . . . . . . . 67
5.7 Elevação para o rotor inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.8 Coeficientes ψp,ψr e ψ da geometria inicial . . . . . . . . . . . . . . . . . . . . . 68
5.9 Coeficientes ζ para a geometria inicial . . . . . . . . . . . . . . . . . . . . . . . . 69
5.10 Limite dos parâmetros de optimização . . . . . . . . . . . . . . . . . . . . . . . . 70
5.11 Valor dos resíduos de y+ para a geometria optimizada . . . . . . . . . . . . . . . 71
5.12 Velocidade relativa no bordo de ataque da geometria optimizada, em m/s . . . . 72
5.13 Velocidade relativa no bordo de fuga da geometria optimzada, em m/s . . . . . 72
5.14 Velocidade relativa no domínio completo da geometria optimizada, em m/s . . . 73
5.15 Vectores de relativa na zona crítica da pá, em m/s . . . . . . . . . . . . . . . . . 73
5.16 Rendimento hidráulico para o rotor optimizado . . . . . . . . . . . . . . . . . . . 74
5.17 Elevação para o rotor optimizado . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.18 Coeficientes ψp,ψr e ψ da geometria optimizada . . . . . . . . . . . . . . . . . . 75
5.19 Coeficientes ζ para a geometria optimizada . . . . . . . . . . . . . . . . . . . . . 75
5.20 Comparação das perdas para as geometrias inicial e optimizada . . . . . . . . . 76
5.21 Comparação do rendimento hidráulico para as geometrias inicial e optimizada . 76
xi

xii

Lista de Tabelas
1.1 Variáveis geométricas de entrada no algoritmo desenvolvido . . . . . . . . . . . 9
1.2 Parâmetros de projecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5.1 Coeficientes adimensionais para a geometria inicial . . . . . . . . . . . . . . . . 67
5.2 Elevação (m) para a geometria inicial . . . . . . . . . . . . . . . . . . . . . . . . 67
5.3 Tabela comparativa de parâmetros obtidos pela aproximação unidimensional e
pela análise numérica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.4 Valor da função objectivo inicial e final . . . . . . . . . . . . . . . . . . . . . . . . 70
5.5 Coeficientes adimensionais para a geometria optimizada . . . . . . . . . . . . . 73
5.6 Comparação das perdas por mistura entre as geometrias inicial e optimizada . . 74
5.7 Comparação do rendimento hidráulico entre as geometrias inicial e optimizada . 74
xiii

xiv

Nomenclatura
Abreviaturas
1D = Aproximação unidimensional
CFD = Mecânica dos Fluidos Computacional (Computational Fluid Dynamics)
DE = Evolução Diferencial (Diferential Evolution)
MVF = Método dos volumes finitos
NACA = National Advisory Comitee for Aeronautics
RANS = Reynolds-averaged Navier-Stokes equations
Símbolos romanos
b = Largura do canal meridional
D = Diâmetro
Er = Energia por unidade de massa fornecida pelo rotor ao escoamento
Ep = Energia por unidade de massa perdida pelo rotor
Fobj = Função objectivo do DE
g = Aceleração gravítica
G = Geração do DE
H = Altura de elevação
k = Energia cinética turbulenta
Pest = Pressão estática
Ptot = Pressão de estagnação
Q = Caudal
r = Coordenada radial
r , θ, z = Coordenadas cilíndricas
R = Polinómio de Bernstein
s = Comprimento local da curva (dimensional)
xv

t = Comprimento local da curva (adimensional, coordenada paramétrica)
U = Velocidade de transporte
V = Velocidade absoluta
W = Velocidade relativa
x , y , z = Coordenadas cartesianas
Z = Número de pás
Símbolos gregos
α = Ângulo do escoamento absoluto
β = Ângulo do escoamento relativo
β ′ = Ângulo da pá do rotor
β ′′ = Ângulo da pá do rotor no plano radial
∆ = Variação
ε = Dissipação turbulenta
ζ = Coeficiente de perdas no rotor
ζmst = Coeficiente de perdas por mistura
ζtot = Coeficiente de perdas total
ηm = Rendimento mecânico
ηh = Rendimento hidráulico
ηv = Rendimento volumétrico
φ = Fluxo genérico
µ = Viscosidade dinâmica
µt = Viscosidade turbulenta
ν = Viscosidade cinemática
ξ,η = Coordenadas no plano transformado
ρ = Massa volúmica
σ = Coeficiente de escorregamento
τ = Tensão de corte
Ω = Velocidade de rotação
xvi

Índices inferiores
0 = Secção de entrada do rotor
1 = Secção de saída do rotor
ba = Bordo de ataque das pás
bf = Bordo de fuga das pás
c = Corrigido
ger = Geratriz
hub = Prato hub
m = Meridional
r = Radial
shr = Prato shroud
t = Tangencial
xvii

Capítulo 1
Introdução
As bombas radiais são turbomáquinas usadas para o transporte de um fluido num
circuito hidráulico através do aumento da pressão total do escoamento. Os compo-
nentes fundamentais de uma bomba radial são: a caixa exterior com um bocal de
aspiração, o rotor, uma voluta, um veio de transmissão com a respectiva caixa de
rolamentos e um motor, ver Fig. 1.1 e 1.2.
O funcionamento de uma bomba pode ser descrito resumidamente pelos seguintes
processos: o fluido a ser bombeado entra, através do bocal de aspiração, para o rotor
que se encontra ligado pelo veio ao motor e é accionado por este; a transferência de
energia ocorre no rotor através da aceleração do fluido na direcção tangencial, em
que o aumento de pressão é provocado pela trajectória curvilínea das partículas do
fluido; à saída do rotor o fluido é recolhido por um difusor e/ou uma voluta cuja função
é desacelerar o fluido de modo a converter o máximo de energia cinética em pressão
estática; à saída da voluta encontra-se o bocal de descarga que liga a bomba ao
circuito hidráulico. A transferência de energia é baseada num processo hidrodinâmico
no qual a variação de pressão é proporcional ao quadrado da velocidade tangencial
do rotor.
Existem variantes da geometria apresentada nas Fig. 1.1 e 1.2, nomeadamente
em número e formato do rotor, do difusor e da voluta. Por apresentarem característi-
cas de funcionamento diferentes, as geometrias são sempre escolhidas em função da
aplicação. A dificuldade na análise e no projecto de uma bomba radial deve-se princi-
palmente à complexidade da geometria dos componentes, nos quais os escoamentos
apresentam fenómenos tridimensionais de difícil modelação, tais como turbulência,
separação, vorticidade, escoamentos secundários e escoamentos não permanentes.
1

Figura 1.1: Corte axial do rotor de uma bomba radial [1]
Figura 1.2: Corte longitudinal de uma bomba radial [1]
2

Inicialmente o projecto de uma bomba radial era baseado em modelos simplifica-
dos com correlações semi-empíricas em conjunto com a experiência do projectista e
num vasto número de ensaios experimentais. Com a era digital tornou-se possível a
aplicação de modelos matemáticos que permitem contabilizar os fenómenos comple-
xos, nomeadamente através de um ramo da engenharia designado por Computational
Fluid Dynamics (Mecânica dos Fluidos Computacional). O CFD consiste na utilização
de métodos numéricos para a resolução dos modelos matemáticos do escoamento de
fluidos e dos fenómenos de transporte associados, tais como transferência de quanti-
dade de movimento, calor e massa.
O aumento da capacidade de computação e de memória dos computadores, per-
mitiu o desenvolvimento do CFD, tornando-se hoje em dia uma ferramenta essencial
no desenvolvimento das mais variadas tecnologias em áreas como a industria aero-
espacial, naval, automóvel e petrolífera, entre outras.
O software de simulação em CFD tem um custo elevado, porém mais baixo do que
o de uma instalação experimental de qualidade. No entanto, o uso do CFD não dis-
pensa o uso de uma análise experimental. Assim, o procedimento seguido, em geral,
no projecto de uma bomba radial consiste em usar os métodos clássicos de projecto
para obter a geometria tipo para a aplicação pretendida, usar o CFD para analisar e
optimizar diversos parâmetros e validar experimentalmente um número reduzido dos
melhores resultados.
1.1 Contexto, objectivos e abordagem
Na presente dissertação apresenta-se o desenvolvimento de um algoritmo de cál-
culo capaz de proceder à análise e optimização do desempenho de uma bomba radial
existente. O trabalho desenvolvido surge em seguimento do conteúdo leccionado na
disciplina de Turbomáquinas do Instituto Superior Técnico, onde foi realizado o pro-
jecto de uma bomba radial seguindo os métodos clássicos de projecto. Pretendeu-se
desenvolver um algoritmo de cálculo automático capaz de analisar e optimizar, com
recurso a métodos de CFD, a geometria do rotor projectado. Procurou-se também,
que o algoritmo fosse genérico e robusto de modo a ser aplicável a outros tipos de
geometrias e servir de base para o desenvolvimento de trabalhos futuros.
O algoritmo parametriza a geometria do rotor, que pode ser radial, axial ou mista,
3

Gerador degeometria
Parâmetrosgeométricos
Importador degeometria
Critério deparagem
Geometriaoptimizada
Fluent
Gerador demalha
vmsh3D Gmsh
EvoluçãoDiferencial
Resultadosnuméricos
Algoritmo desenvolvido
Geometriainicial
Métodos clássicos
Parâmetros de projecto(H , Q, N)
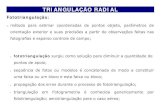
Figura 1.3: Fluxograma do trabalho desenvolvido
gera uma malha de cálculo híbrida de tetraedros, pirâmides, prismas rectangulares e
triangulares, procede à análise do escoamento através de um software comercial de
volumes finitos e realiza a optimização da geometria com base num algoritmo genético
conhecido como Evolução Diferencial. A geometria inicial foi gerada com base nos
métodos clássicos de projecto de bombas radiais em função de três parâmetros de
funcionamento: altura de elevação, caudal e velocidade de rotação.
No presente trabalho procurou-se optimizar a distribuição da velocidade radial à
saida variando a distribuição da curvatura das pás. Pretendeu-se que as variáveis
de entrada do algoritmo fossem a geometria do rotor, as características da malha e os
parâmetros de configuração do sofware comercial e do algoritmo de optimização. Esta
abordagem torna possível a análise de um grande número de parâmetros geométricos
e a selecção da melhor geometria sem intervenção contínua de um utilizador.
Na Fig. 1.3 apresenta-se esquematicamente o algoritmo gerado. As caixas rectan-
gulares representam códigos desenvolvidos anteriormente. As caixas elípticas são as
4

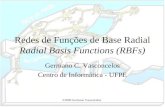
bloco de camadalimite da pá
blocos de camada
limite dos pratos
pá
saída
entrada fronteiraperiódica
fronteiraperiódica
Figura 1.4: Representação esquemática da malha de cálculo gerada
etapas do processo desenvolvidas durante a presente dissertação: a traço cheio estão
representados códigos desenvolvidos na linguagem de programação Python 2.7 e a
traço interrompido os resultados intermédios mais relevantes, escritos em ficheiros de
texto.
1.2 Aspectos gerais de uma bomba radial
Na abordagem clássica do projecto de bombas radiais, a principal hipótese sig-
nificativa é considerar o escoamento no interior do rotor como unidimensional, isto
é, assume-se que as propriedades do escoamento são uniformes para uma secção
transversal do canal entre pás. Esta aproximação usada em conjunto com correla-
ções semi-empiricas permite estimar os diversos parâmetros de funcionamento e está
na base do método apresentado por [2]. Ao longo da presente dissertação, o mé-
todo de projecto será designado, por método clássico ou por método da aproximação
unidimensional.
A análise clássica é realizada em dois planos físicos representativos da geometria
do rotor, o plano meridional e o plano radial, apresentados nas Fig. 1.5 e Fig. 1.6.
Numa primeira fase há duas localizações do rotor importantes de analisar, a zona do
bordo de ataque e de fuga.
Durante o funcionamento de uma bomba radial, energia é fornecida ao rotor pelo
motor através do veio de rotação. No rotor é transferida ao escoamento através da
5

Figura 1.5: Plano meridional, adaptado de [1]
Figura 1.6: Plano radial, adaptado de [1]
6

conversão de energia mecânica em energia interna (pressão estática) e energia ci-
nética (velocidade). O processo é descrito pela equação de Euler, que provém da
aplicação do balanço da quantidade de momento angular entre as superfícies de en-
trada e de saída do rotor,
Er = U2Vt2 − U1Vt1, (1.1)
onde Er representa a quantidade de energia por unidade de massa de fluido fornecida
ao escoamento em condições ideais, isto é, sem perdas no processo. É possível
verificar que quanto maior for a velocidade tangencial à saída, maior será a energia
transferida ao fluido.
Supondo que número de pás do rotor fosse muito elevado, o canal formado levaria
a que as linhas de corrente saíssem do rotor com um ângulo β2 próximo do ângulo de
saída das pás β ′2. No entanto tal não é fisicamente possível, por isso um escoamento
real apresenta sempre uma deflexão incompleta das linhas de corrente. Esta diferença
é representada adimensionalmente pelo factor de escorregamento σ definido por
σ =Vt2
V ′t2(1.2)
Para se relacionar Er com a geometria do rotor usa-se o factor de escorregamento
obtido através de relações semi-empíricas, tendo sida usada a expressão desenvol-
vida por Pfleiderer para geometrias semelhantes à do presente trabalho, dada pela
eq. (1.3), em que Z representa o número de pás.
1σ= 1 + Ψ
(12D2
)2
ZS(1.3)
com
Ψ = 1.1 (1 + sinβ ′2)D1
D2(1.4)
S =D2
2 − D21
8(1.5)
Uma vez que o factor de escorregamento foi usado como parâmetro de projecto da
geometria inicial, será calculado pela definição para os resultados numéricos e será
um dos factores de validação dos mesmos através da comparação com a estimativa
apresentada por Pfleiderer usada na aproximação unidimensional.
A energia por unidade de peso que é efectivamente fornecida ao fluido é dada pela
altura de elevação H definida por
H =Ptot 2 − Ptot 1
ηhg(1.6)
7

Figura 1.7: Perdas de energia numa bomba radial [1]
Um parâmetro determinante na avaliação do desempenho de uma bomba radial é o
rendimento hidráulico que representa a eficiência do rotor na transferência de energia
mecânica para o fluido.
ηh =Er − Ep
Er(1.7)
As outras perdas que afectam o rendimento total de uma bomba são as perdas
mecânicas que contabilizam o efeito do atrito em componentes como rolamentos e
vedantes e as perdas volumétricas que representam a porção de fluido que atravessa
o rotor, mas que não chega à conduta de descarga. Assim o rendimento total é definido
por:
ηtotal = ηh ηv ηm (1.8)
Ep corresponde às perdas de energia no rotor por unidade de massa de fluido. Esta
perda pode decompôr-se em duas parcelas, uma é aproximadamente proporcional ao
quadrado do caudal e corresponde à perda ao longo dos canais, é do tipo perda de
carga em condutas fixas. A segunda parcela corresponde às perdas denominadas
perdas por choque, que ocorrem quando a direcção da velocidade relativa se afasta
consideravelmente da direcção das pás, originando separação da camada limite. A re-
ferência [1] apresenta vários tipos de perda que ocorrem numa bomba radial completa,
ver Fig. 1.7. Uma vez que a geometria inicial foi projectada para maximizar ηtotal para o
caudal nominal, devido à eq. 1.7, espera-se que o rendimento do rotor ηh ocorra para
um caudal diferente do de projecto. De acordo com o observado em [2], ηh máximo
deverá ocorrer para um caudal inferior ao nominal.
8

r [mm] β [] b [mm]
81.0 16.5 25.8
86.0 17.4 24.8
91.0 18.3 24.0
96.0 19.2 23.3
101.0 20.2 22.8
106.0 21.1 22.4
111.0 22.1 22.0
116.0 23.0 21.7
121.0 23.9 21.4
126.0 24.7 21.1
131.0 25.4 20.9
136.0 25.9 20.7
141.0 26.2 20.5
146.0 26.3 20.3
151.0 26.2 20.1
156.0 25.8 19.9
160.0 25.3 19.8
Tabela 1.1: Variáveis geométricas de entrada no algoritmo desenvolvido
Q [m3/s] H [m] Ω [rpm] ηv Z
0.047 30.0 1450 0.95 7
Tabela 1.2: Parâmetros de projecto
1.3 Geometria inicial
O algorítmo desenvolvido teve como variáveis de entrada a distribuição de curva-
tura da pá projectada no plano radial, β ′′ e a distribuição da largura do canal meridi-
onal, b, definidos em função do raio das pás, assim como o raio no bordo de ataque
(r1) e no bordo de fuga (r2), ver Tab. 1.1.
Na Tab. 1.2 estão representados os parâmetros de projecto que originaram a geo-
metria inicial. Note-se que o caudal usado no cálculo foi o caudal real do rotor dado
por Q ′ = ηvQ com ηv = 0.95. Outro parâmetro essencial na geração da malha de
cálculo foi o número de pás, que permitiu obter a localização das fronteiras peródicas.
9

1.4 Aspectos gerais de uma malha de cálculo
A utilização de métodos numéricos na resolução de equações diferenciais exige
que o domínio de cálculo seja discretizado. No presente trabalho foi usado o software
comercial Fluent que utiliza o Método dos Volumes Finitos (MVF). Este método requer
que a discretização se faça em pequenos volumes de controlo (células). De um modo
genérico, no domínio físico faz-se uma distribuição de nós aos quais correspondem os
vértices das células. As células são então definidas pelo polígono ou prisma formado
pelas linhas que unem os vértices. Ao conjunto das células dá-se o nome de malha de
cálculo. O modo como se define a ligação entre as células, dá-se o nome de estrutura
da malha.
1.4.1 Malhas estruturadas
Numa malha estruturada, a distribuição dos pontos faz-se exclusivamente através
da intersecção de duas ou três linhas consoante a dimensão do espaço físico, bidi-
mensional ou tridimensional respectivamente. A distribuição das linhas pelo espaço
físico, assim como a sua forma geral depende do tipo de malha que se quer construir.
Considere-se a Fig. 1.8 e os pontos vermelho e azul, designados respectivamente
por V e A. Cada ponto é definido pelas coordenadas xi ,j e yi ,j . Em que aos índices i , j
correspondem cada uma das linhas geradoras do ponto. Neste tipo de malha requer-
se que a distribuição das linhas seja tal que se a coordenada x do ponto V for dada
por xi ,j a coordenada x do ponto A é dada simplesmente por xi+6.
As malhas estruturadas têm como característica serem fáceis de construir para
geometrias simples quando comparadas com malhas não estruturadas. O cálculo de
um escoamento neste tipo de malhas, é também mais eficiente, uma vez que obter as
coordenadas de um ponto ou célula vizinha torna-se um problema trivial.
Na Fig. 1.8 está ilustrado o problema de, numa malha estruturada, controlar a con-
centração dos pontos no domínio de cálculo. Para a geometria apresentada é neces-
sário uma maior concentração de pontos junto aos vértices convexos, no entanto, com
esta estrutura e tipo, tal não é possível sem aumentar a concentração noutras zonas
do domínio.
Seguem-se exemplos de três tipos de malhas estruturadas usadas em calculo de
perfis, ver Fig. 1.9.
10

Figura 1.8: Exemplo de uma malha estruturada 2D [3]
(a) Tipo C (b) Tipo H (c) Tipo O
Figura 1.9: Exemplo de malhas estruturadas [3]
Em domínios bidimensionais, as células usadas são quadriláteros, no caso tridi-
mensional, são hexaedros ou prismas quadrangulares.
1.4.2 Malhas multi-bloco
O conceito subjacente à construção de malhas multi-bloco é o de dividir o domínio
físico em subdomínios onde se usa o tipo de malha e construção mais adequado
em função da geometria e das propriedades locais do escoamento. Na Fig. 1.10, a
referência [4] apresenta este tipo de abordagem, em que é usada uma combinação de
malhas tipo H para os blocos 1 e 3 e do tipo C para o bloco 2.
Existem vários métodos de ligação entre blocos que podem ser consultados em
[4]. No presente trabalho o método usado é designado por Multibloco composto. Neste
método as linhas da malha são contínuas através da fronteira dos blocos, ver Fig. 1.11.
O que significa, que não é necessário interpolar a solução do escoamento na fronteira
dos subdomínios.
11

Figura 1.10: Construção de uma malha multi-bloco [4]
Figura 1.11: Estrutura Multibloco composto [4]
1.4.3 Malhas não estruturadas
Nas malhas não estruturadas, nem os pontos, nem as células têm uma ordem de-
finida, isto é, não é possível saber à partida as coordenadas de um ponto vizinho a
partir dos índices. Não havendo nenhuma restrição quando à numeração dos pontos e
das células, um ponto genérico P1,0 não é necessariamente vizinho do ponto P2,0. Isto
significa que os pontos podem ser distribuídos pelo domínio de calculo de forma ale-
atória e posteriormente ajustados consoante a necessidade de uma maior ou menor
concentração em determinadas zonas.
Uma vez que não há uma estrutura na numeração dos nós e das células, torna-
se necessário definir uma topologia de malha e usar um algoritmo e uma estrutura
de dados que permita, para a célula, a identificação dos vértices constituintes e das
células vizinhas e, por fim, obter uma matriz de conectividade.
Segundo [3] e [5], a geração e o cálculo em malhas não estruturadas é mais exi-
12

(a) Elementos triangulares (b) Elementos tetraedricos
Figura 1.12: Exemplo de malhas não estruturadas
gente em termos de recursos computacionais quando comparado ao cálculo em ma-
lhas estruturadas. No entanto, segundo [3], o uso de malhas não estruturadas tornou-
se, ao longo dos últimos anos, no método mais usado em aplicações comerciais de-
vido à impossibilidade de gerar automaticamente malhas estruturadas em geometrias
arbitrárias. Tornou-se assim comum o uso de geradores de malha para este tipo de
problemas.
No presente trabalho usaram-se elementos triangulares e tetraédricos para malhas
bidimensionais e tridimensionais, respectivamente. A Fig. 1.12 mostra um exemplo de
cada um dos tipos de malha.
Para a geração de malhas bidimensionais, usou-se o programa vmesh2D que tem
como base o algoritmo de triangulação de Delaunay. Para uma compreensão do algo-
ritmo sugere-se a consulta de [5] e [6].
Para a geração de malhas tridimensionais usou-se o gerador de malha de distri-
buição livre Gmsh, que a partir de uma superfície fechada, previamente discretizada
com uma malha triangular, permite gerar uma malha tetraédrica no seu interior. O
algoritmo usado foi o Frontal Netgen, que pode ser consultado em [7] e [8].
1.4.4 Malhas híbridas
As malhas híbridas conjugam aspectos construtivos das malhas estruturadas e
não estruturadas e quando comparadas com estas, permitem melhorar a solução do
escoamento [4].
Considere-se, por exemplo, uma zona de camada-limite (Fig. 1.13). Para a discre-
tização deste tipo de zonas, existem várias abordagens e considerações presentes na
13

(a) Espaçamento uniforme em y [9] (b) Espaçamento não uniforme em y [9]
Figura 1.13: Discretização de uma camada limite
literatura. Em [10], Casey sugere o uso de prismas em detrimento de tetraedros. As
publicações [4] e [10] referem a influência de elementos distorcidos, isto é, para o caso
de se usarem prismas para discretizar uma zona de camada limite, deve-se procurar
que as geratrizes dos mesmos façam um ângulo de 90 com a superfície do corpo. Em
[10] refere-se a importância da simetria central dos elementos, no caso de uma dis-
cretização de um plano com triângulos, isto implica que devam ser aproximadamente
equiláteros.
Uma possível discretização para uma zona de camada limite pode ser obtida atra-
vés da construção de uma malha não estruturada triangular sobre a superfície física
do corpo e posteriormente realizar uma projecção dos elementos na direção perpendi-
cular à superfície. Obtém-se assim uma malha híbrida, na qual é usada uma constru-
ção não estruturada nos planos paralelos à superfície e uma construção estruturada
na direcção perpendicular à superfície. Segundo [10] esta abordagem confere maior
flexibilidade em discretizar geometrias complexas quando comparado com o uso de
malhas puramente estruturadas, no entanto mantém o requisito de controlar a distri-
buição de pontos na direcção de crescimento de camada limite.
1.5 Algoritmo de optimização
O problema de optimização foi resolvido usando uma versão paralela do algoritmo
genético de Evolução Diferencial (DE). O DE é um algoritmo genético de minimização
de uma função objectivo e que não usa o gradiente da mesma, o que o torna útil no
caso de funções que não são facilmente diferenciáveis e cujos extremos não possam
ser calculados [11]. O DE é um método que utiliza Np vectores de dimensão D de
14

parâmetros a optimizar como população para cada geração G (iteração do processo),
xi ,G, com i = 1, 2, 3, ..., NP. (1.9)
A população inicial é escolhida aleatoriamente com uma distribuição uniforme de
probabilidade a partir de um espaço definido previamente pelo utilizador onde se as-
sume estar a solução óptima para o problema, isto é, o vector de parâmetros que
minimiza a função objectivo.
De modo genérico o DE cruza e avalia vectores de parâmetros pertencentes a uma
população inserindo uma mutação nos valores durante o processo. Se o novo vector
resultar num valor mais baixo da função objectivo passa à geração seguinte para ser
comparado com novos indivíduos, seguindo um esquema de selecção natural dos
mais aptos de uma população, em que o critério de sobrevivência é dado pela função
objectivo.
Em cada geração, uma nova população é gerada usando três operações genéticas:
mutação, cruzamento e selecção. No contexto do presente trabalho, e tendo em conta
a utilização do DE apresentada em [13] segue-se a descrição destas operações.
1.5.1 Mutação
O algoritmo gera um novo vector de parâmetros adicionando uma diferença pon-
derada entre dois vectores da população a um terceiro vector da mesma.
Para cada vector alvo xi ,G, i = 1, 2, 3..., NP, o vector mutante é gerado de acordo
com
vi ,G+1 = xbest ,G + F (xr1,G + xr2,G), (1.10)
em que best é o vector da geração G com o menor valor da função objectivo, r1 e
r2 ∈ 1, 2, ..., NP e são mutualemnte diferentes entre si e do índice i , F ∈ [0, 2] e é uma
constante real que controla a amplificação da variação diferencial. Este operação está
representada esquematicamente na Fig. 1.14.
1.5.2 Cruzamento
Os parâmetros do vector mutante vi ,G+1 são combinados com outro vector, desig-
nado por alvo xi ,G, numa operação chamada de cruzamento, resultando no vector de
teste ui ,G+1. Ver Fig. 1.15.
15

Figura 1.14: Exemplo de uma função objectivo bidimensional e o processo de geração de
vi ,G+1 [11]
Figura 1.15: Exemplo de uma processo de cruzamento para D = 7 parâmetros [11]
uji ,G+1 =
vji ,G+1 se randb(j) 6 CR ou j = rnbr(i)
xji ,G se randb(j) > CR e j 6= rnbr(i)
j = 1, 2, 3, ..., D
(1.11)
em que randb(j) é o valor resultante de um gerador aletório de números ∈ [0, 1],
CR é uma constante ∈ [0, 1] definida pelo utilizador e rnbr(i) é um indice aleatório
∈ 1, 2, ..., D.
1.5.3 Selecção
Se o vector de teste u conduzir a um valor da função objectivo inferior à do vector
alvo x , substitui-o na geração seguinte. Todos os vectores da população são usados
como vector alvo, assim por cada geração há NP comparações. O processo repete-se
durante um número de iterações definido pelo utilizador, ou até um determinado valor
da função objectivo ter sido atingida.
16

Capítulo 2
Geração da geometria
O presente capítulo tem como objectivo definir a geometria do rotor de forma para-
métrica de modo a poder modificar de forma automática os parâmetros de controlo no
algoritmo genético de optimização. Usaram-se curvas de Bézier para definir a geome-
tria a partir de pontos de controlo e splines paramétricos para alterar a discretização
das linhas e controlar a distribuição dos pontos da malha de cálculo. Para calcular
intersecções entre superfícies recorreu-se ao método de Newton em conjunto com
o método da bissecção. Em primeiro lugar introduzem-se os conceitos matemáticos
mais relevantes para este capítulo. De seguida descreve-se a metodologia usada para
gerar uma geometria genérica e como adaptar essa geometria a um rotor existente.
2.1 Conceitos matemáticos
2.1.1 Curvas de Bézier
As curvas de Bézier são curvas paramétricas usadas em várias áreas, nomeada-
mente em computação gráfica e no design automóvel, pois permitem a construção de
curvas suaves, isto é, com controlo sobre as variações da primeira e segunda deri-
vada.
As curvas são polinomiais de grau n, geradas a partir de n + 1 pontos de controlo
e para um espaço tri-dimensional definem-se de acordo com as seguintes equações
x(t) = x0B0,n(t) + x1B1,n(t) + x2B2,n(t) + ... + xnBn,n(t)
y(t) = y0B0,n(t) + y1B1,n(t) + y2B2,n(t) + ... + ynBn,n(t)
z(t) = z0B0,n(t) + z1B1,n(t) + z2B2,n(t) + ... + znBn,n(t)
(2.1)
17

em que cada coeficiente xi , yi e zi correspondem ás coordenadas dos pontos de con-
trolo i e cada um dos termos Bi ,n(t) correspondem um polinómio de Bernstein de grau
n. Em notação vectorial tem-se
R(t) = R0B0,n(t) +R1B1,n(t) +R2B2,n(t) + ... +RnBn,n(t) (2.2)
R(t) =n∑
i=0
RiBi ,n(t) (2.3)
Os polinómios de Bernstein definem-se de acordo com [12]
Bni (t) =
(ni
)t i(1 − t)n−i (2.4)
onde (ni
)=
n!
i !(n − i)!, if 0 6 i 6 n,
0, de outro modo.(2.5)
As propriedades mais relevantes dos polinómios de Bernstein são [12]:
• são positivos no domínio considerado: Bi ,n(t) > 0 em 0 6 t 6 1;
• são a partição da unidade:∑n
i=0 Bi ,n(t) = [(1 − t) + t ]n = 1 (pelo teorema do
binómio de Newton);
• o polinómio i da base é simétrico em relação ao polinómio n − i em t = 0.5:
Bni = Bm
n−i(1 − t).
Na prática uma curva de Bézier aproxima de forma suave o polígono formado pelos
pontos de controlo através de uma interpolação ponderada pelos polinómios de Berns-
tein. A cada ponto de controlo corresponde um polinómio cujo peso na interpolação
depende do parâmetro t, ver Figura 2.1
Considere-se uma curva de Bézier de grau n = 2. Para definir esta cuva são ne-
cessários três pontos de controlo (R0, R1, R2) ponderados com três polinómios (B20 , B2
1
e B22). Obtem-se assim a seguinte expressão
r(t) = (1 − t)2 r0 + 2t(1 − t) r1 + t2 r2 (2.6)
Concretizando para um espaço bidimênsional vem
x(t) = (1 − t)2 x0 + 2t(1 − t) x1 + t2 x2
y(t) = (1 − t)2 y0 + 2t(1 − t) y1 + t2 y2,(2.7)
18

Figura 2.1: Representação dos polinómios de Bernstein de grau n = 2
Figura 2.2: Representação de uma curva de Bézier de grau n = 2
em que xi e yi são respectivamente as coordenadas x e y do ponto de controlo i , t é o
parâmetro adimensional da curva, portanto t ∈ [0, 1]. Um exemplo deste tipo de curva
encontra-se representado na Figura 2.2.
Apresentam-se agora algumas propriedades das curvas de Bézier importantes
para o presente trabalho:
• Condições geométricas nos extremos — o primeiro ponto r0 e o último rn são,
respectivamente, os pontos de origem e chegada da curva, r(0) = r0 e r(1) =
rn. Nestes pontos a curva é tangente ao segmento de recta que une os dois
primeiros e os dois últimos pontos de controlo, r(0) = n(r1 − r2) e r(1) = n(rn −
rn−1);
19

Figura 2.3: Exemplo de um spline cúbico
• Condições de simetria — se os pontos de controlo forem simétricos em relação a
um eixo de simetria, a curva de Bézier resultante também é simétrica em relação
a esse eixo;
• Compatibilidade com transformações afins — a forma da curva de Bézier mantém-
se quando os pontos de controlo sofrem uma transformação afim, como por
exemplo, rotação e translação. Isto é, os dois processos referidos em seguida
resultam na mesma curva final. (1) Calcular a curva r(t) a partir dos pontos ri e
aplicar uma transformação afim. (2) Aplicar a transformação afim aos pontos ri e
calcular a curva r(t). Note-se que do ponto de vista computacional, a opção (2)
é mais eficiente, uma vez que número de pontos ri é menor do que o número de
pontos r(t).
• Fecho convexo — a curva de Bézier aproxima o polígono formado pelos pontos
de controlo, há exepção do ponto inicial e final. O que significa que se dois polí-
gonos de duas curvas não se intersectam, o mesmo se verifica para as curvas.
No entanto, caso se intersectem, não é garantido que as curvas o façam.
2.1.2 Splines cúbicos paramétricos
Os splines cúbicos foram usados para interpolar curvas para as quais se conhecem
um determinado conjunto de pontos, ver Fig. 2.3. Por serem paramétricos, permitem
obter cada uma das coordenadas x e y em função do comprimento local da curva
20

Figura 2.4: Parameterização de uma curva
adimensionalizado pelo comprimento total, t ∈ [0, 1], ver eq. (2.8) e Fig. 2.3
y(x) =
x(t)
y(t)(2.8)
Do ponto de vista matemático, os splines são curvas paramétricas, cúbicas, com-
postas e com continuidade C1. Cada troço i = 1, 2, ..., N é interpolado com um polinó-
mio de terceiro grau, assim para o spline completo tem-se um sistema de N equações
e 4N incógnitas.
X (t) =
A1 + B1 t + C1 t2 + D1 t3
A2 + B2 t + C2 t2 + D2 t3
...
AN + BN t + CN t2 + DN t3
(2.9)
A continuidade C1 é imposta pelas condições de fronteira. Para cada troço interior i do
spline, nos pontos das duas extremidades X (ti ,j), em que j identifica o ponto do troço,
tem-se:
X (ti ,2) = X (ti+1,1)
X ′(ti ,2) = X ′(ti+1,1)(2.10)
21

Figura 2.5: Distribuição de t com uma sucessão geométrica
Na extermidade do spline as condições de fronteira são:
X (t0,0) = X0
X ′′(t0,0) = 0
X (tN,2) = XN
X ′′(tN,2) = 0
(2.11)
O facto de serem curvas paramétricas, permitiu usar os splines paramétricos para
interpolar funções não unívocas e alterar a discretização de várias curvas obtidas
pelos polinómios de Bézier, como ilustrado na Fig. 2.5 em que se recorreu a uma
sucessão geométrica para distribuir t no intervalo [0, 1]. Esta propriedade foi usada
para alterar o número de pontos e distribuição dos mesmos nas linhas da malha de
cálculo.
2.1.3 Método da bissecção
O método da bissecção foi usado em conjunto com o método de Newton e permite
encontrar a raiz de uma equação escrita na forma f (x) = 0 e tem como base o Te-
orema do Valor Intermédio. Este teorema postula que para uma função em que f (x)
com x ∈ [a, b], em que f (a) e f (b) têm sinais opostos, existe pelo menos uma raiz no
intervalo, f (p) = 0, com p ∈ [a, b].
Seja a1 = a, b1 = b e p1 o ponto médio do intervalo tal que:
p1 =a1 + b1
2(2.12)
22

Figura 2.6: Representação gráfica do método da bissecção [14]
De seguida calcula-se f (p1), podendo acontecer três casos:
• Caso 1: Se f (p1) = 0, encontrou-se a solução. p = p1. Se f (p1) 6= 0, então tem o
mesmo sinal ou de f (a1) ou de f (a2).
• Caso 2: Se f (p1) e f (a1) têm o mesmo sinal, então a p ∈ [a1, p1]
• Caso 3: Se f (p1) e f (b1) têm o mesmo sinal, então a p ∈ [p1, b1]
Supondo que se verifica o caso 2, na iteração seguinte vem:
p2 =a1 + p1
2. (2.13)
Calcula-se, então, f (p2) e repete-se o processo até se atingir o Caso 1, um número
máximo de iterações ou um determinado critério de convergência, por exemplo:
|pi − pi−1|
|pi |< ε, pi 6= 0, (2.14)
em que ε é a tolerância máxima admitida para a solução.
O método da bissecção, apesar de ser facilmente implementável, pode tornar-se
lento a convergir para a solução (convergência linear), isto é, necessita de um elevado
número de iterações para atingir o critério de paragem. No entanto, é garantido que
converge para a solução e, como tal, é um bom método para estimar uma solução
inicial para outros métodos mais rápidos [14].
23

2.1.4 Método de Newton
Tal como o método da bissecção, o método de Newton permite obter a raiz de
uma equação escrita na forma f (x) = 0 e foi usado para calcular a intersecção de
superfícies. É um método que tem convergência quadrática. No entanto, apresenta
a desvantagem de ser necessário calcular f ′(x). Para entender o melhor o conceito
de convergência e as diferenças para os vários métodos disponíveis para o cálculo de
raizes de equações, aconselha-se a consulta de [14].
Considere-se uma função f (x) em que f ∈ C2[a, b]. Seja p0 ∈ [a, b] uma aproxima-
ção para p em que f (p) = 0, f ′(p0) 6= 0 e |p − p0| é "pequeno". Considere-se ainda a
expansão em série de Taylor a partir de p0:
f (x) = f (p0) +(x − p0)
1!f ′(p0) +
(x − p0)2
2!f ′′(p0) + ... +
(x − p0)n
n!f (n)(p0) (2.15)
f (x) =∞∑
n=0
f n(p)n!
(x − p)n (2.16)
Para a dedução do método de Newton assume-se que |p − p0| é baixo o suficiente
para que se possa desprezar os termos da eq. (2.16) para n > 2. Como tal, e tendo
em conta que se pretende resolver f (x) = 0 tem-se
0 ≈ f (p0) + (x − p0)f ′(p0) (2.17)
resolvendo em ordem a x vem
x ≈ p0 −f (p0)
f ′(p0)(2.18)
A partir da equação (2.17) é possivel calcular iterativamente x tal que x = p em
que f (p) = 0. Assim, tem-se
pn = pn−1 −f (pn−1)
f ′(pn−1)para n > 1 (2.19)
Na Figura 2.7 mostra-se a representação gráfica do método de Newton. Uma das
dificuldades deste método é o de necessitar de uma boa estimativa inicial para que se
possa verificar a equação (2.17), caso contrário, o método não converge. Para resolver
este problema, pode-se usar o método da bissecção mostrado na secção 2.1.3.
O método de Newton pode também ser usado para resolver sistemas de equações
não lineares. [14] apresenta a dedução do método a partir do método do ponto fixo.
No presente texto faz-se a dedução a partir do método de Newton aplicado a uma
equação. No entanto, em ambos os casos obtém-se o mesmo algoritmo.
24

Figura 2.7: Representação gráfica do método de Newton [14]
Considere-se o seguinte sistema de n equações e n incógnitas
f1(p1, p2, ..., pn) = 0
f2(p1, p2, ..., pn) = 0
...
fn(p1, p2, ..., pn) = 0
(2.20)
Considerando p = (p1, p2, ..., pn) como o vector da solução do sistema e f =
(f1, f2, ..., fn), pode-se reescrever o sistema (2.17) na forma
f (p) = 0, (2.21)
Aplicando a expansão em série de Taylor, tal como nas equações (2.15) e (2.16), a
partir de uma estimativa inicial p0, obtém-se
0 ≈ f (p0) + (p − p0)Df (p0), (2.22)
em que Df (v0) é o jacobiano da matriz f (v)
Df (v0) =
∂f1∂v1
(v0)∂f1∂v2
(v0) ... ∂f1∂vn
(v0)
∂f2∂v1
(v0)∂f2∂v2
(v0) ... ∂f2∂vn
(v0)
... ... ... ...∂fn∂v1
(v0)∂fn∂v2
(v0) ... ∂fn∂vn
(v0)
(2.23)
Tem-se agora um sistema de equações que pode ser resolvido iterativamente.
∆pi = pi − pi−1 (2.24)
25

Figura 2.8: Transformação de uma superficie de revolução numa cascata de pás
Pode reescrever-se (2.22)
Df (pi−1)∆pi = −f (pi−1) (2.25)
Os critérios de paragem a usar, podem ser os mesmos do método da bissecção.
Para cada iteração i resolve-se o sistema em ordem a ∆pi e calcula-se pi de acordo
com (2.24). Os critérios de paragem a usar, são os mesmos do método da bissecção:
ou é atingido o número limite de iterações ou se verifica (2.14).
2.2 Modelação do rotor
2.2.1 Parametrização da geometria inicial
Na presente secção mostra-se como gerar a geometria parameterizada do rotor
obtido pela aproximação unidimensional e obter um conjunto de pontos de controlo
que podem ser escritos, por exemplo, num ficheiro de texto para serem manipulados
manualmente ou por um algoritmo de optimização.
Considere-se uma transformação apresentada em [15] e ilustrada na Figura 2.8
que permite, a partir de uma superfície de revolução de um rotor, obter um plano que
contém a respectiva cascata de pás:dξ =dsr
dη = dθ(2.26)
em que ξ e η são as coordenadas no plano transformado. r e s são, respectivamente,
o raio local e a comprimento local da geratriz da superfície e γ é o angulo local da
geratriz com o eixo de revolução.
26

Figura 2.9: Conservação dos angulos na transformação
Figura 2.10: Secção meridional (esquerda) e vista axial da linha média de uma pá (direita)
Verifica-se que a transformação é conforme uma vez que
dξdη
=dsrdθ
(2.27)
o que permite calcular dη a partir da distribuição de curvatura da linha média da pá
(β ′) tendo em conta a seguinte equação (ver Figura 2.10):
dθ =ds
r tanβ ′(2.28)
Obtém-se, assim, a seguintes expressões para calcular a cascata de pás a partir
de uma superficie de revolução:
ξpa(s) =∫ sbf
sba
dsrpa(s)
+ ξ0 pa, (2.29)
ηpa(s) =∫ sba
sbf
dsr(s) tan(β ′(s))
+ η0 pa, (2.30)
27

em que sba e sbf são o comprimento local s da geratriz no bordo de ataque e de fuga
respectivamente. Note-se que a formulação das equações (2.29) e (2.30) é genérica e
permite a transformação de geometrias axiais, radiais e mistas, desde que se conheça
a geometria das superficies de revolução (z(s) e r(s)), a curvatura das pás (β ′(s)) e a
localização da mesmas sobre as superficies (s0 = sba, s1 = sbf e r(s)).
Considere-se a geometria obtida pelos métodos clássicos. Com a transformação
(2.26) é agora possivel gerar a geometria tridimensional do rotor. Uma vez que se usou
uma aproximação unidimensional, os parâmetros calculados para a curvatura das pás
são válidos para todas as superficies de revolução do rotor. Como tal, consideraram-
se duas superficies, as dos dois pratos que limitam o rotor, designadas por hub e
shroud (fint e fext na Fig. 2.10).
Na secção 2.2.2 mostra-se que a obtenção dos dos pontos intermédios entre as
duas superfícies foi obtida por interpolação linear. Começando pela definição do ca-
nal, recorde-se a, onde se apresentou a distribuição da largura do canal (bpa i) em
função do raio (rpa i) na zona de implantação das pás (designada aqui com o sufixo
pa). Considerou-se a geratriz do hub perfeitamente radial na zona de implantação e
assumiu-se uma coordenada axial (z) para o hub. As coordenadas r e z para o hub
foram obtidas da seguinte forma (ver Fig.2.11)
zi pa hub = constante
ri pa hub = ri
zi pa shr = zi pa hub + bi
ri pa shr = ri
(2.31)
A forma parameterizada das eq.(2.31) foi obtida passando um spline interpolador
pelos pontos zi pa hub, ri pa hub, zi pa shr e ri pa shr sem alterar a discretização dos mesmos.
Isto é:
s0 = 0
si = si−1 + ∆si , i > 0,(2.32)
em que para cada uma das zonas de implantação definiu-se um ∆i diferente de acordo
com:
∆si =√
(zi − zi−1)2 + (ri − ri−1)2 (2.33)
Tendo em conta que a aproximação unidimensional não contabiliza a espessura
das pás, foi necessário prolongar a geratriz dos dois pratos. Adicionaram-se duas
28

Figura 2.11: Interpolação do canal meridional
curvas de Bézier com continuidade tangencial às curvas já existentes tendo o cuidado
de manter a área de secção constante (Figura 2.12).
À união do spline interpolador da zona de implantação com os dos dois prolonga-
mentos, deu se o nome de zger (s) e rger (s) e correspondem às geratrizes dos pratos.
Posteriormente aproximaram-se as geratrizes com curvas de Bézier, a fim de se obte-
rem os respectivos pontos de controlo. Ver Fig. 2.13
Assim obteveram-se duas curvas paramétricas (para cada geratriz) diferentes e
necessárias para os calculos do presente trabalho:
• zger (s) e rger (s) ver Fig. 2.13 ;
• zpa(s) e rpa(s) ver Fig. 2.11;
A coordenada sa foi obtida calculando comprimento da curva de Bézier da entrada,
sf foi obtida somando sa ao comprimento do spline da zona intermédia.
Para aplicar a transformação (2.29) é necessário ainda obter r(s) e β ′(s), o que
pode ser feito facilmente a partir do método da aproximação unidimensional. A curva
r(s) obtém-se passando um spline paramétrico pelos dados obtidos sem alterar a
discretização da coordenada s.
A distribuição do ângulo β ′′ que está relacionado com β ′ de acordo com a seguinte
equação (ver Fig. 2.10):
tanβ ′(s) =tanβ ′′(s)cos ε(s)
(2.34)
29

Figura 2.12: Extensão do canal meridional
com
tan ε(s) =dzds
(drds
)−1
(2.35)
Mais uma vez, β ′′(s) foi obtido passando um spline paramétrico nos dados obtidos
sem alterar a discretização.
Falta agora calcular os valores iniciais η0 e ξ0. Quanto ao primeiro, considera-se
que o bordo de ataque da pá se encontra em θ = 0, como tal, assume-se η0 = 0. Para
calcular ξ0, aplicou-se a eq. (2.29) à curva de Bézier de entrada do canal. Note-se que
apenas as quantidades β ′′(s) e r(s) são iguais para a superficie do rotor e do shroud,
todas as outras têm de ser calculadas para as duas superficies.
A Fig. 2.14 mostra o resultado da tranformação conforme para a cascata de pás do
hub. Como seria de esperar, devido à pouca diferença entre o comprimento das duas
geratrizes, as duas cascatas apresentam valores de ξ(s) muito próximos. Torna-se
então desnecessário a apresentaçao das duas figuras neste texto.
O método clássico seguido permite calcular uma espessura uniforme para as pás,
mas não sugere nenhuma abordagem para definir o perfil das mesmas. No presente
trabalho optou-se por definir a espessura recorrendo a uma metodologia semelhante
à usada para os perfis NACA da série de 4 dígitos, em que se define uma função de
distribuição de espessura (ver [16]). Neste caso usou-se a nomenclatura t(s), em que
s corresponde à posição sobre a linha média e t(s) a espessura.
A distribuição t(s) foi também definida através de curvas de Bézier com uma forma
30

Figura 2.13: Secção meridional com os respectivos pontos de controlo
aproximadamente elíptica quer para o bordo de ataque, quer para o de fuga. Segue-se
o procedimento usado.
Considere-se a linha média da pá, cujo comprimento adimensional é definido por
sadim e uma distribuição de espessura definida paramétricamente em função de sadim,
ts adim.
Multiplicando o vector t(sadim) pelo comprimento m da pá, já calculado, obtém-se o
vector t(s), em que s é o comprimento dimensional.
Como não se partiu de nenhuma geometria já existente, o vector t(sadim) pode ser
construido directamente manipulando os pontos de controlo de uma curva de Bézier.
Como a forma deste tipo de curvas não se altera com uma transformação afim, para
se obter t(s), basta multiplicar os pontos de controlo pelo comprimento da linha média
ja obtido. Ver Fig. 2.15.
Com o procedimento seguido nesta secção foi possivél definir completamente a
geometria da bomba através de pontos de controlo em planos bi-dimensionais, o que
permite que se altere facilmente a geometria manipulando as coordenadas dos pontos
de controlo.
A geração da geometria tridimensional, será explicada em detalhe na secção 2.2.2.
No entanto é relevante nesta altura referir que nessa secção será necessário aplicar a
transformação da eq. (2.26) para obter s(ξ) e θ(η):
s(ξ) =∫ξ1
ξ0
rdξ+ s0 (2.36)
31

[t]
Figura 2.14: Cascata de pás e respectivos pontos de controlo para a superfície hub
θ(η) =
∫η1
η0
dη+ θ0 (2.37)
Assim como parâmetro gerador da geometria, é necessária também a coordenada
so para a definição das pás. Assume-se θ0 = 0.
As coordenadas dos pontos de controlo foram escritas em ficheiros de texto de
modo a poderem ser facilmente acedidas por um algoritmo de optimização ou gerador
de geometria. Tem-se então os seguintes vectores para as coordenadas dos pontos
de controlo.
Pratos, plano (z, r):
• zi ctrl hub ≡ coordenadas z dos pontos i para o hub;
• ri ctrl hub ≡ coordenadas r dos pontos i para o hub;
• zi ctrl shr ≡ coordenadas z dos pontos i para o shr;
• ri ctrl shr ≡ coordenadas r dos pontos i para o shr;
Linha média da pá, plano (η, ξ):
• ηctrl i hub ≡ coordenadas η dos pontos i para o hub;
• ξctrl i hub ≡ coordenadas ξ dos pontos i para o hub;
• ηctrl i shr ≡ coordenadas η dos pontos i para o shr;
32

Figura 2.15: Distribuição de espessura em função do comprimento da pá
• ξctrl i shr ≡ coordenadas ξ dos pontos i para o shr;
Espessura da pá, plano (s, t):
• sctrl i hub ≡ coordenadas s dos pontos i para o hub;
• tctrl i hub ≡ coordenadas t dos pontos i para o hub;
• sctrl i shr ≡ coordenadas s dos pontos i para o shr;
• tctrl i shr ≡ coordenadas t dos pontos i para o shr;
Note-se ainda que ao invés de se partir de uma geometria já existente, poderia
ter-se manipulado manualmente e de forma intuitiva os pontos de controlo para gerar
qualquer tipo de geometria (axial, radial ou mista), uma vez que não há restrições
quanto à orientação das geratrizes dos pratos.
33

2.2.2 Geração da geometria tridimensional
Na presente secção mostra-se como a partir do conjunto de pontos de controlo
calculados na secção 2.2.1 se obtém a geometria tridimensional do rotor para posterior
construção da malha de cálculo.
O objectivo foi o de obter em coordenadas cilindricas (z, r , θ) a forma exterior das
pás e as superficies dos pratos, hub e shroud.
Considerem-se as geratrizes dos pratos zger (s) e rger (s). A representação tridimen-
sional pode ser facilmente obtida através da seguinte de rotaçãoxij
yij
zij
=
cos θj − sin θj 0
sin θj cos θj 0
0 0 1
xger i
yger i
zger i
(2.38)
com
θi =2πn
i (2.39)
xger i = rger i
yger i = 0
zger i = zger i
(2.40)
Figura 2.16: Representação tridimensional dos pratos
Recorde-se a secção 2.2.1 e as equações (2.26), (2.36) e (2.37). Estas expressões
permitem obter spa e θpa.
34

Figura 2.17: Representação da linha médida da pá no espaço tridimensional
Uma vez que se têm as curvas geratrizes dos pratos parameterizadas em função
de s, obter zpa e rpa da linha média, consiste apenas em calcular
zpa i = zger i(spa i)
rpa i = rger i(spa i)(2.41)
Transformando as coordenadas cilíndricas em cartesianas tem-se:
xpa i = rpa i sin(θpa i)
ypa i = rpa i cos(θpa i)
zpa i = zpa i
(2.42)
Considere-se a Figura 2.17 e os vectores vermelho, verde e amarelo, designados
respectivamente por vr , vg e va definidos para cada ponto da linha média.
vr é o vector tangente à linha média:
vr i =
vr x i = xi − xi−1 , com i 6= 0
vr y i = yi − yi−1 , com i 6= 0
vr z i = zi − zi−1 , com i 6= 0
(2.43)
vg é o vector localmente perpendicular à superficie de revolução:
vg r i = −dzi
dsi(2.44)
vg i =
vg x i = vg r i sin θi
vg y i = vg r i cos θi
vg z i =dri
dsi
(2.45)
35

Figura 2.18: Pormenor do espaço entre p(s), a azul e o shroud
va é um vector perpendicular aos anteriores que resulta do seguinte produto ex-
terno:
va = vr × vg (2.46)
Seja p(s) o contorno da pá no lado concavo e u(s) o contorno da pá no lado con-
vexo, ambos definidos em coordenadas cartesianas.
pi = (px i , py i , pz i) (2.47)
ui = (ux i , uy i , uz i) (2.48)
Para obter p(s) e u(s) distribuiu-se a espessura t(s), gerada na secção 2.2.1, se-
gundo a direcção de va.
pi = mpa,i + ti va i (2.49)
ui = mpa,i − ti va i (2.50)
Com este método garante-se que a espessura da pá no plano real é a definida no
plano (s, t), mas os contornos pi e ui não são coincidentes com as superficies de
revolução, ver Fig. 2.18. Como tal, foi necessário calcular a interseção das pás com
as superfícies do hub e do shroud. Sejam X , Y e Z as coordenadas dos pontos de
intersecção, como pertencem às superfícies de revolução são definidos por:
X (s, θ) = r(s) sin(θ)
Y (s, θ) = r(s) cos(θ)
Z (s) = z(s)
(2.51)
36

Figura 2.19: Pormenor da intersecção de p(s), a azul com o shroud
Tendo em conta que o objectivo é obter os pontos intermédios das pás por interpo-
lação linear entre o hub e shroud, ou seja,
x(t) = xhub + t(xhub − xshr )
y(t) = yhub + t(yhub − yshr )
z(t) = zhub + t(zhub − zshr )
(2.52)
pode-se usar uma interpolação linear para "estender"os contornos da pá para além
de p(s) e u(s) (t > 1 ou t < 0) e intersectar a superfície do hub e do shroud. Assim
o problema da intersecção resume-se a resolver o seguinte sistema de equações não
lineares de três equações e três incógnitas (t , s, θ).X (s, θ) = x(t)
X (s, θ) = y(t)
Z (s) = z(t)
(2.53)
Combinando as eq. (2.51) e (2.52) obtém-se:r(s) sin(θ) = xhub + t(xhub − xshroud)
r(s) cos(θ) = yhub + t(yhub − yshroud)
z(s) = zhub + t(zhub − zshroud)
(2.54)
O sistema de equações (2.52) foi resolvido com o método de Newton apresentado
na secção 2.1.4 e o resultado está ilustrado na Fig. 2.19.
37

Figura 2.20: Representação do rotor
Figura 2.21: Pormenor do bordo de ataque de uma pá
38

Capítulo 3
Malha de cálculo
O presente capítulo tem como objectivo demonstrar as operações fundamentais
realizadas pelo gerador de malha que lhe conferem versatilidade e o tornam adequado
para gerar a malha requerida .
O domínio de cálculo foi separado em três blocos de malha principais do tipo mul-
tibloco composto. Criou-se um bloco para a rotor (blocorot), um para o escoamento
de aproximação (blocoapr) e um para a esteira (blocoest). A necessidade da utiliza-
ção dos dois blocos adicionais será explicada no capítulo de modelação numérica.
Note-se que o número de elementos usados no processo de cálculo foi superior aos
apresentados nas figuras do presente capítulo.
Cada um destes blocos foram por sua vez compostos por sub-blocos, também com
a construção multibloco composto.
O blocorot foi constituído por:
• blocopá – malha para a zona de camada limite da pá;
• blocohub – malha para a zona de camada limite do hub;
• blocoshr – malha para a zona de camada limite do shroud ;
• blocotet – malha para a intermédia entre as fronteiras do domínio e as zonas de
camada limite;
Excluiu-se do presente texto uma descrição detalhada da construção dos blocos
de aproximação e de esteira, uma vez que metodologia seguida foi a do blocorotor, á
excepcão de não se construir o sub-bloco blocopá.
Uma vez que o escoamento na roda é periódico, e com o objectivo de optimizar os
recursos computacionais existentes, optou-se por construir uma malha apenas para
39

um canal cujas fronteiras são: a entrada e a saída do rotor e dois planos médios de
dois canais entre pás consecutivos. No capítulo de modelação numérica é explicado
como a aplicação das condições de fronteira correctas permite obter resultados válidos
para o rotor completo.
3.1 Bloco da pá
Para o bloco da pá foi definida uma malha estruturada do tipo O de modo a conta-
bilizar os efeitos de camada limite. O processo de construção é semelhante ao usado
na geração do contorno da pá a partir da linha média e usou vários conceitos mate-
máticos apresentadas no Capítulo 1.
Considere-se o contorno da pá p(s) e u(s) definidos na secção Geração da ge-
ometria tridimensional para a superfície hub e shroud (contorno interior das Figuras
3.1a, 3.1b e 3.1a). Começou por se criar um spline periódico cnt(u) com os pontos
de p(s) e u(s), em que s é o comprimento local do contorno. De seguida, usaram-
se as propriedades dos splines paramétricos e o algoritmo apresentado em [17] para
distribuir s de acordo com a curvatura local da pá.
Considere-se a Fig. 3.1 onde se encontram representados o contorno da pá na
superfície shroud e os vectores vermelho (vv ), verde (vg) e amarelo (va):
• vv é o vector tangente ao contorno da pá.
• vg é o vector localmente perpendicular á superfície de revolução.
• va é o vector perpendicular, simultaneamente, a vv e vg, obtido pelo produto
externo dos dois.
A curva exterior ext(u) foi obtida expandindo cnt(u) no sentido de va. As curvas
intermédias int(u) foram obtidas através de interpolação em conjunto com uma suces-
são geométrica usando as seguintes equações
int(u) = cnt(u) + T (j) (ext(u) − cnt(u)) , j = 1, 2, 3, ..., N (3.1)
com
T (j) =∑j
i=1 K i−1 − 1∑Ni=1 K i−1 − 1
, j = 1, 2, 3, ..., N , (3.2)
em que N é o número de pontos da camada limite na direcção perpendicular ao con-
torno da pá e K é a base da sucessão geométrica.
40

(a) Linhas cnt(u) e ext(u) (b) Linhas cnt(u), ext(u) e int(u)
(c) Malha completa
Figura 3.1: Discretização 2D para camada limite da pá
As curvas c(u), ext(u) e int(u), encontram-se representadas simultaneamente na
Fig. 3.1c
Esta metodologia foi seguida para os contornos da pá no hub e no shroud. As
secções intermédias entre estas duas superfícies de revolução foram obtidas através
de interpolação linear das malhas int(u) definidas para o hub e o shroud.
Começou por se definir os planos intermédios do canal, nos quais se pretende
interpolar as camadas limite bidimensionais, a partir da representação do canal meri-
dional ilustrado na Fig. 3.2a
Tendo em conta que os efeitos de camada limite também se fazem sentir junto das
superfícies dos pratos, nessa zona optou-se por fazer uma expansão das superfícies
hub e shroud segundo o vector localmente perpendicular, e orientado para o interior
do canal, em conjunto com a sucessão geométrica da Eq. (3.2), definindo assim os
planos intermédios de camada limite dos pratos, ver Fig. 3.2b
Na zona intermédia do canal fez-se uma interpolação linear entre a geratriz interior
dos planos intermédios de camada limite de ambos os pratos, ver Fig. 3.2c
Recorde-se o sistema de equações não lineares, usado no Capítulo 1 para projec-
tar o contorno da pá sobre as superfícies hub e shourd. O mesmo procedimento foi
41

(a) hub(s) e shr(s) (b) inter(s) da C.L. dos pratos (c) intr(s)
Figura 3.2: Discretização de uma camada limite
usado para intersectar a resultante da interpolação linear das malhas bidimensionais
de camada limite da pá com cada uma das superfícies de revolução do canal: hub(s),
shr(s) e intr(s). O que resultou no sistema de equações (3.3), tendo sido resolvido
com recurso ao método de Newton em conjunto com o método da bissecção.
rintr(s) sin θintr = xhub + t(xhub − xshr)
rintr(s) cos θintr = yhub + t(yhub − yshr)
zintr(s) = zhub + t (zhub − zshr)
(3.3)
A Fig. 3.3 mostra a resultante do sistema (3.3) para duas superfícies de revolução
intermédias do canal.
Conforme referido anteriormente, para a construção da malha interior do canal,
blocotet, foi necessária a criação de uma superfície fechada, previamente discretizada
com uma malha triangular. Uma parte dessa superfície corresponde ao exterior da
malha de camada limite da pá.
Por isso, a superfície exterior da malha da pá, fora da zona de camada limite dos
42

Figura 3.3: Construção da malha 3D da pá
pratos foi modificada. A última camada de prismas rectangulares foi convertida em
pirâmides de acordo com [18] e encontra-se ilustrada na a Fig. 3.4.
Figura 3.4: Conversão de um prisma rectangular em cinco prismas triangulares [18]
A malha do blocopa encontra-se representada na Fig. 3.5.
3.2 Blocos de camada limite dos pratos
A zona de camada limite dos pratos foi discretizada com uma malha de construção
híbrida de acordo o conteúdo apresentado no Capítulo 1.
O bloco é constituido por prismas triangulares obtidos através da projecção de uma
triangulação de Delaunay gerada nas superfícies, hub e shroud, sobre os planos de
revolução definidos por intr(s) ilustrados na Fig. 3.2b
43

(a) blocopa (b) Bordo de ataque
(c) Interior do bloco
Figura 3.5: Malha completa para o bloco da pá
Na presente secção mostra-se o procedimento para obter o blocoshr, já que a me-
todologia para o blocohub é identica
O código de geração de malha triangular usado, vmesh2D, gera malhas apenas
em superfícies planas bidimensionais. Para contornar esta limitação, planificaram-
se a geratriz, a linha média e o contorno exterior das linhas de camada limite da pá
através da transformação conforme apresentada no Capítulo 2. Na Fig. 3.6 encontra-
se representada esta transformação, onde é possível ver a azul a fronteira interior da
triangulação, a magenta a linha média da pá e o limite exterior da triangulação a preto.
Definiram-se o limites do domínio η a partir da translação da linha média em con-
junto com duas linhas de ξ constante anexadas às extremidades. A translação é dada
por
ηlim = ηpá ±π
Z(3.4)
em que Z é o número de pás.
Os limites inferior e superior de ξ correspondem, respectivamente, à entrada e à
44

Figura 3.6: Planificação da superfície shroud
saída do rotor na superfície shroud.
Na Fig. 3.7 apresenta-se o resultado da triangulação de Delaunay realizada pelo
programa vmesh2D.
Considere-se a metodologia do Capítulo 2 usada para tranformar do plano (η,ξ)
para o plano real a planificação da linha média da pá nas superfícies hub e shroud.
As malhas bidimensionais das superfícies de camada limite dos pratos no plano real
foram obtidas seguindo o mesmo principio, transformando a malha da Fig. 3.7 segundo
as superfícies de revolução intr(s) representadas da Fig. 3.2b.
Na Fig. 3.8 apresentam-se duas malhas triangulares transportadas para o plano
físico segundo duas superfícies de revolução de intr(s).
Figura 3.7: Malha bidimensional no plano transformado
Como a triangulação nas superfícies é a mesma, o bloco tridimensional foi obtido
através do empilhamento destas camadas, gerando prismas triangulares. Em que as
45

Figura 3.8: Malha bidimensional no plano físico
duas faces triangulares de um prisma correspondem à mesma célula em duas malhas
bidimensionais consecutivas, ver Fig. 3.9 e 3.10.
Figura 3.9: Blocoshr
46

Figura 3.10: Corte do blocoshr
3.3 Bloco intermédio
No bloco intermédio foi gerada uma malha não estruturada tetraédrica através de
uma implementação do algoritmo NETGEN no software de distribuição livre Gmsh,
a documentação referente ao algoritmo e ao software pode ser consultada em [7] e
[8]. A malha foi gerada no formato legacy do Gmsh e posteriormente convertida no
formato .msh compatível com o Fluent.
No Gmsh o procedimento de geração de malha tridimensional começa pela dis-
cretização das arestas da geometria. A partir da malha linear, é gerada uma malha
bidimensional para a superfície fechada que limita o volume, por fim, a partir dessa
superfície, o interior do volume é preenchido.
As entradas para o algoritmo foram onze malhas triangulares que limitam o vo-
lume a discretizar: superfície da pá, superfície da camada limite do hub e do shroud,
entrada, saida e seis fronteiras periódicas.
Três dessas superfícies já se encontram discretizadas devido à construção dos
blocos de camada limite da pá e dos pratos. Ver Fig. 3.12.
Assim, foi necessário criar as malhas lineares verticais da Fig. 3.11 por interpolação
linear que, em conjunto com as malhas lineares de contorno dos blocos dos pratos,
permitiram usar o Gmsh para fechar a superfície do volume com malhas não estrutu-
radas triangulares. Ver Fig. 3.12. Na Fig. fig:intfig3 apresenta-se o bloco intermédio.
47

Linhas verticais para a entrada, saida e fronteiras periódicas
Contorno discretizadono bloco C.L. shroud
Superfície discretizadano bloco da pá
Superfície discretizadano bloco C.L. shroud
Superfície discretizadano bloco C.L. hub
Contorno discretizadono bloco C.L. hub
Figura 3.11: Constução do bloco de malha não estruturada
XY Z XY Z
Superfíciede entrada
Superfíciesperiódicas
Superfíciesperiódicas
Superfíciede saída
Figura 3.12: Discretização das restantes superfícies
48

YYZZ XX
Figura 3.13: Bloco intermédio
Figura 3.14: Malha completa
49

50

Capítulo 4
Modelação Numérica
4.1 Introdução
Os três métodos numéricos mais usados em MFC para a resolução dos modelos
matemáticos são: o Método das Diferenças Finitas, o Método dos Elementos Finitos
e o Método dos Volumes Finitos. No presente capítulo descreve-se como foi mode-
lado o escoamento da roda a bomba radial usando o Método dos Volumes Finitos
implementado no software comercial FLUENT.
4.2 Equações de transporte
Os modelos matemáticos que descrevem o escoamento numa bomba radial são
baseados em três princípios: conservação da massa, conservação da quantidade de
movimento e conservação da energia. As equações da conservação de energia são
usadas em conjunto com as duas primeiras para analisar escoamentos onde ocorre
transferência de calor e/ou para escoamentos compressíveis. No escoamento anali-
sado não se verificaram estes fenómenos, pelo que se dispensa a apresentação des-
tas equações.
A equação da continuidade resulta do balanço integral da conservação da massa
para um elemento de fluido infinitesimal. A dedução pode ser consultada em [21]. Sem
termos fonte, a equação da continuidade pode ser escrita na seguinte forma diferencial
∂ρ
∂t+∇ · (ρv) = 0, (4.1)
51

em que ∇ representa o operador gradiente
∇ =∂
∂xex +
∂
∂yey +
∂
∂zez . (4.2)
Para escoamentos incompressíveis ∂ρ/∂t = 0, logo, para um escoamento tridimensi-
onal, a Eq. (4.1) reduz-se a∂vx
∂x+∂vy
∂y+∂vz
∂z= 0. (4.3)
A equação da conservação da quantidade de movimento resulta da aplicação da
segunda lei de Newton a um elemento de fluido infinitesimal e relaciona a taxa de
variação de quantidade de movimento no elemento com a resultante das forças apli-
cadas. Uma vez que a quantidade de movimento é uma grandeza vectorial, a equação
desdobra-se nas componentes da quantidade de movimento segundo as direcções do
referencial escolhido. A dedução, que pode ser consultada em [21], e resulta na cha-
mada equação de Navier-Stokes (NS). No caso particular de escoamentos de fluidos
Newtonianos, sem transmissão de calor, incompressíveis, com viscosidade constante
e cuja única força mássica aplicada é a gravítica, a equação de NS é escrita na se-
guinte forma diferencial
∂vi
∂t+ vj
∂vi
∂xj= −
1ρ
∂p∂xi
+ ν∂2vi
∂x2j
, (4.4)
em que vi representa a velocidade instantânea na direcção i , ν é a viscosidade cine-
mática do fluido e p é a pressão relativa à hidrostática local. Alternativamente pode
ser escrita em notação vectorial
∂v
∂t+ v · ∇v = −
1ρ∇p + ν∇2v (4.5)
em que o laplaciano, ∇2, é definido por
∇2 =∂2
∂x2 +∂2
∂y2 +∂2
∂z2 . (4.6)
O escoamento numa bomba radial é turbulento. Surge assim a necessidade de
aplicar às eq.(4.3) e (4.5) a decomposição de Reynolds do valor instantâneo da velo-
cidade, V, que consiste na soma do valor médio da velocidade com a flutuação em
torno desse valor, u ′,
v = U+ u ′. (4.7)
resulta nas equações designadas por RANS (Reynolds Averaged Navier Stokes):
∇ · (ρU) = 0 (4.8)
52

U∂U∂x
+ V∂U∂y
+ W∂U∂z
= −1ρ
∂p∂x
+∂
∂x
(ν∂U∂x
− uu)+∂
∂y
(ν∂U∂y
− uv)+∂
∂z
(ν∂U∂z
− uw)
U∂V∂x
+ V∂V∂y
+ W∂V∂z
= −1ρ
∂p∂y
+∂
∂x
(ν∂V∂x
− vu)+∂
∂y
(ν∂V∂y
− vv)+∂
∂z
(ν∂V∂z
− vw)
U∂W∂x
+ V∂W∂y
+ W∂W∂z
= −1ρ
∂p∂z
+∂
∂x
(ν∂W∂x
− wu)+∂
∂y
(ν∂W∂y
− wv)+∂
∂z
(ν∂W∂z
− ww)(4.9)
U · ∇U = −1ρ∇p +∇ (ν∇U+R) (4.10)
Esta dedução é apresentada em [21]. Os termos U, V e W correspondem respecti-
vamente aos valores médios da velocidade nas direcções x , y e x . R é o tensor de
Reynolds definido pela hipótese de Boussinesq:
R = −u ′i u′j = νt
(∂Ui
∂xj+∂Uj
∂xi
)−
23
(k + νt
∂Uk
∂xk
)δij (4.11)
Para fechar o sistema é necessário recorrer a relações suplementares para calcular νt
e k , designados modelos de turbulência que serão abordados na secção 4.2.1.
O software Fluent resolve, por defeito, as eq. (4.8) e (4.9) num referencial estacio-
nário. No presente trabalho simulou-se um escoamento em torno de uma peça móvel,
o rotor. Ao simular-se o escoamento em torno da rotor num referêncial fixo, o problema
torna-se transiente uma vez que o campo de pressão e velocidade numa coordenada
(x , y) do domínio depende da posição das pás (que varia no tempo) no instante consi-
derado. No entanto, é possível simular o escoamento como um problema estacionário,
resolvendo as equações para um referencial móvel coincidente com o rotor [22].
Assim, as eq. (4.8) e (4.9) tomam a seguinte forma para um referencial com uma
velocidade de rotação Ω em torno do eixo z
∂Urel
∂x+∂Vrel
∂y+∂Wrel
∂z= 0 (4.12)
Urel∂Urel
∂x+ Vrel
∂Urel
∂y+ Wrel
∂Urel
∂z= −
1ρ
∂p∂x
+∂
∂x
(ν∂Urel
∂x− u ′relu
′rel
)+∂
∂y
(ν∂Urel
∂y− u ′relv
′rel
)+∂
∂z
(ν∂Urel
∂z− u ′relw
′rel
)+Ω2x − 2ΩVrel,
(4.13)
em que Urel, Vrel e Wrel são as componentes da velocidade média no referencial móvel,
−Ω2x corresponde à contribuição da aceleração centrifuga e 2ΩVrel à aceleração de
Coriolis. Esta abordagem é designada no Fluent por Single Reference Frame
53

4.2.1 Modelos de turbulência
Os modelos de turbulência definem a distribuição das tensões de Reynolds no do-
mínio do escoamento. São correlações semi-empíricas desenvolvidas para aproximar
os resultados numéricos com resultados experimentais. Como tal, os diversos mode-
los existentes na literatura foram desenvolvidos com o objectivo de modelar situações
específicas, não existindo, por isso, um modelo que produza resultados válidos para
todos os tipos de escoamento.
Uma revisão da literatura mostra que mesmo para a análise de um escoamento
específico, a escolha de um determinado modelo nem sempre é consensual. Tome-se
o exemplo de várias publicações de estudos de escoamentos em rodas de bombas
radiais e mistas: [23, 24, 25, 26, 27]. Em todas se usou o modelo de duas equações
k − ε. No entanto, segundo [33] este modelo de turbulência não é indicado para
modelar escoamentos neste tipo de componentes e justifica a popularidade do modelo
k − ε com o facto de, por ter sido o primeiro modelo de duas equações a ser aplicado
a nível industrial.
Um estudo comparativo entre os modelos de turbulência mais populares é apre-
sentado em [28]. Neste estudo é apresentada a formulação matemática dos vários
modelos e os resultados numéricos são comparados com resultados experimentais
para uma serie de escoamentos. No estudo conclui-se que os modelo mais indicado
para simular escoamentos em gradientes de pressão adversos é o k −ωSST . Assim,
no presente trabalho a escolha do modelo de turbulência recaiu sobre o k −ω SST .
Este modelo foi criado com o objectivo de combinar a formulação do do modelo k −ω,
indicada para escoamentos de camada limite, com a formulação do modelo k − ε,
indicado para escoamentos tipo jacto livre. Dentro da zona e camada limite tem-se:
νt =kω
(4.14)
Fora da zona de camada limite tem-se:
νt = Cµkε
(4.15)
A formulação do modelo no programa Fluent e as equações que definem k , ε e ω
podem ser consultadas em [22].
Ao usar o modelo k − ω SST é necessário ter em consideração a localização do
primeiro ponto da malha na direcção perpendicular às superfícies físicas. Isto porque
54

o modelo calcula a tensão de corte directamente a partir da definição, assim junto a
uma parede com a direcção x tem-se:
τw = µ∂U∂y
∣∣∣∣y=0
(4.16)
Como tal, para obter o valor correcto da derivada na parede, os primeiros pontos
da malha devem estar dentro da sub-camada linear, cuja localização e dada pela
coordenada adimensional y+ < 5, definida por
y+ =uτyν
(4.17)
com
uτ =√τw
ρ(4.18)
No presente trabalho procurou-se colocar o primeiro ponto das malhas de camada
limite em y+ 6 1
4.3 Método do Volumes Finitos
O Método dos Volumes Finitos é um método numérico usado para a resolução das
equações de transporte na forma integral, neste caso a equação da continuidade e de
Navier-Stokes.
A equação de transporte na forma integral para uma propriedade genérica φ é∫V
∂(ρφ)
∂tdV +
∫V∇ · (ρφu)dV =
∫V∇ · (Γ∇φ)dV +
∫V
SφdV (4.19)
Aplicando o teorema de Gauss e considerando regime permanente tem-se∮An · (ρφu)dA =
∮An · (Γ∇φ)dA +
∫V
SφdV (4.20)
4.3.1 Acoplamento da pressão/densidade com o campo de velocidades
O Fluent disponibiliza dois métodos distintos para a resolução das equações que
regem o escoamento: o density-based-solver e o pressure-based-solver. Em ambos
os casos o campo de velocidade é obtido através das equações da quantidade de
movimento. No density-based-solver a equação da continuidade é usada para calcular
o campo de massa volúmica do fluido e a pressão é calculada pela equação de estado
(p = p(ρ, T )). No pressure-based-solver o campo de pressão é obtido directamente
manipulando as equações da continuidade e da quantidade de movimento.
55

Uma vez que no presente trabalho o escoamento é incompressível, escolheu-se o
pressure-based-solver. Neste solver existem dois métodos diferentes para resolver o
sistema de equações. No Pressure-based segregated algorithm as equações da con-
tinuidade e da quantidade de movimento são resolvidas de forma separada e sequen-
cial. No pressure-based coupled algorithm as equações são resolvidas em simultâneo
num sistema. Para ambos os algoritmos as equações da turbulência são resolvidas
sequencialmente. O método escolhido foi o pressure-based coupled algorithm, por-
que segundo [22], permite uma convergência mais rápida da solução, embora tenha o
inconveniente de ocupar praticamente o dobro da memória.
4.3.2 Discretização
Como o MFV é um método numérico, a eq. (4.20) necessita de ser discretizada. De
forma genérica, o espaço físico é primeiro discretizado em vários volumes de controlo,
polígonos ou poliedros conforme a dimensão do espaço. Os integrais de superfície
da Eq. (4.20) são então aproximados pela soma dos fluxos que atravessam cada uma
das faces dos volumes de controlo. Assim, para cada célula de uma malha tem-se
Nfaces∑f
ρfφf uf Af =
Nfaces∑f
Γφf∇φf Af + S∇φf Vf (4.21)
Em que Nfaces é o numero de faces da célula, Af é a area de cada face f e Vf o
volume.
A resolução da equação (4.21) requer o conhecimento de ∇φf e de φf nas faces
das células. Estes valores são calculados a partir dos valores nos centróides das
células vizinhas segundo um de vários esquemas disponíveis. Existem dois modos de
definir o volume de controlo, representados na Fig. 4.1, em função da malha gerada
• Cell-centred scheme - Neste esquema as variáveis são calculadas nos centróides
das células da malha e o volume de controlo corresponde à propria célula.
• Cell-vertex scheme - Neste esquema as variáveis são calculadas nos nós da ma-
lha e o volume de controlo é definido de modo a que o centróide seja coincidente
com o próprio nó.
No Fluent, para o Cell-vertex scheme, o valor de φf é calculado através de uma média
aritmética de φ dos nós vizinhos (opção Green-Gauss Node-Based). Para o Cell-
centered scheme existem dois métodos, usar uma média aritmética, ou assumir uma
56

Figura 4.1: Cell-centered scheme (esquerda) e Vertex-centered scheme (direita) [29]
variação linear dos gradientes dentro da célula. Optou-se por usar o esquema Cell-
centered com variação linear dos gradientes. Este método é designado no Fluent por
Least Squares Cell-Based. Para o cálculo de φf existem vários esquemas de interpo-
lação, descritos em [22]. Segundo esta publicação o esquema QUICK é recomendado
para escoamentos com rotação. No entanto, para o presente trabalho não se conse-
guiu convergência da solução com este método, pelo que a escolha recaiu sobre o
método Second-order upwind. Neste método φf é calculado por
φf = φ+∇φ · r (4.22)
em que φ e ∇φ são valores no centroide e r é o vector de deslocamento entre o
centroide da face e da célula.
4.4 Condições de operação e de fronteira
O fluido simulado foi água, com massa volúmica ρ = 998 kg/m3 e viscosidade
dinâmica µ = 1.002 × 10−3 Pa s. A pressão de referência é a pressão atmosférica
padrão pref = 101325 Pa.
4.4.1 Condição de entrada
Na entrada do domínio optou-se por impor a velocidade absoluta nas várias super-
fícies enthub, entshr e enttet através da definição um perfil de velocidades em função
das coordenadas físicas dos centroides das faces nessas superfícies.
Uma vez que um campo de velocidades local afecta também o campo a montante
desse local, impôs-se a condição de fronteira a 60% do raio do bordo de ataque para
que não fosse imposta uma condição irrealista numa zona afectada pela presença do
57

mesmo. A localização da condição de fronteira considerou-se adequada uma vez que
o ângulo médio do escoamento no bordo de ataque obtido por CFD foi coincidente
com o previsto pelo método clássico.
No método da aproximação unidimensional considerou-se que a velocidade de en-
trada na zona das pás é puramente radial, como o prolongamento do canal foi feito
com conservação da área do canal, impôs-se um perfil de velocidade radial constante
Vr (z) = Vr , sendo que Vr é o valor no bordo de ataque obtido pela aproximação unidi-
mensional.
O uso de perfis, mesmo que constantes, tem como vantagem tornar a condição
de fronteira independente das dimensões das várias superfícies que constituem a en-
trada, tal não acontece caso se imponha uma quantidade para cada uma das ditas
superfícies. O que permite por exemplo, alterar a dimensão das camadas limite sem
ter de corrigir a condição de fronteira.
Para o valor da turbulência na fronteira, usaram-se valores típicos para escoamen-
tos com baixos números de Reynolds: 5% para a intensidade turbulenta (I) e 10 para
o viscosity ratio (V ), definidos respectivamente por
I =u ′
U(4.23)
V =µt
µ(4.24)
4.4.2 Condição de saída
Na saída do domínio optou-se por impor um valor de pressão estática uniforme
nas várias superfícies. Caso haja separação e inversão do escoamento à saída, o
programa de cálculo assume o valor introduzido como a pressão total do escoamento
nessa zona. Aplicou-se assim a condição a 170% do raio do bordo de fuga da pá, já
que se sabe à partida que no bordo de fuga o escoamento está afectado pela esteira,
o que tornaria a imposição de pressão uniforme nesta zona uma condição irrealista
do ponto de vista físico. Como tal justifica-se a adição do bloco de malha à saída do
rotor, referido, no capítulo de geração de malha, de modo a colocar a condição numa
zona onde já houve dissipação turbulenta e o campo de pressão se encontra uniforme.
Note-se que a opção de manter a área de secção constante no bloco de saída implica
58

Figura 4.2: Malha do bloco de entrada no domínio
uma limitação na distância máxima a que se pode colocar a condição de saída, já que
a largura do canal meridional tende para zero com o aumento do raio.
4.4.3 Condições nas paredes
Na parede do bloco central do domínio, impôs-se a condição de não escorrega-
mento, isto é, velocidade nula na superfície. Os blocos de entrada e saída não fazem
parte da geometria física da roda e foram criados de modo a colocar as condições de
entrada e saída adequadas. Como tal foi preciso garantir que não exercem influencia
no escoamento, assim, nas paredes foi imposta a condição de tensão de corte nula.
4.4.4 Condições de periodicidade
Conforme referido no capítulo da geração de malha, optou-se por definir o domínio
de cálculo entre as duas linhas médias de dois canais entre pás consecutivas, assu-
mindo que o escoamento é igual em todos os canais. O Fluent permite modelar este
tipo de escoamentos através da aplicação de fronteiras periódicas. Nestas fronteiras
é assumido que o escoamento de ambos os lados da fronteira é idêntico. Este tipo
de condição é definido emparelhando duas fronteiras (A e A ′) e o programa calcula o
escoamento de modo a que os fluxos das quantidades a calcular que saem de uma
fronteira sejam iguais aos que entram na fronteira emparelhada. Ou seja, por exemplo,
o fluxo da quantidade de movimento que de cauda atravessa uma face na fronteira A
59

Figura 4.3: Malha do bloco de saída do domínio
é igual ao fluxo que atravessa a face correspondente na superfície A ′.
Figura 4.4: Condição de fronteira periódica
60

Capítulo 5
Resultados Numéricos
5.1 Geometria inicial
Na presente secção apresentam-se os resultados do cálculo para a geometria ini-
cial, obtidos para uma malha com 1280952 elementos.
A análise dos resultados passa numa primeira fase por uma verificação do valor
dos resíduos, seguida de uma visualização dos campos de velocidade e por fim o
cálculo de diversas quantidades integrais a fim de determinar os parâmetros de funci-
onamento da bomba.
O erro de arredondamento surge da precisão finita dos computadores e tende a
aumentar com o refinamento da malha. A forma mais usual de o minimizar passa por
usar precisão dupla nos cálculos efectuados.
A não linearidade das equações que modelam o escoamento e o facto de estas
serem calculadas por um processo iterativo em conjunto com um critério de paragem,
implica o aparecimento de um erro iterativo. Para avaliar a convergência do processo,
monitorizaram-se os resíduos, e a convergência de duas quantidades integrais, a pres-
são de estagnação à entrada e à saída do rotor.
Em CFD, o critério de paragem é muito menos exigente do que a precisão da
máquina, uma vez que o tempo de processamento para obter tal solução pode ser
muito superior ao gasto para se obter uma solução aceitável do ponto de vista da
engenharia. Segundo [30], o critério de convergência do resíduo deveria ser inferior a
10−5, valor a partir do qual se espera que o erro iterativo comece a ser desprezável
em relação ao erro de discretização.
No entanto, no presente trabalho, e em linha com outras publicações relacionadas
61

[31] e [32], o critério de convergência usado foi 10−4, o que representou um substancial
ganho de tempo durante o processo de optimização.
Quando se resolvem as equações que regem o escoamento, discretiza-se o do-
mínio em pequenos volumes de controlo, que passam a descrever um meio contínuo.
Surge assim o erro de discretização do modelo numérico. Para reduzi-lo é necessário
refinar sucessivamente a malha até a solução das equações ser independente do nú-
mero de elementos. Tendo em conta as limitações do computador pessoal usado em
termos de memória disponível, 8GB de RAM, e à necessidade de correr o algoritmo de
optimização com processamento paralelo de três casos, estabeleceu-se um limite má-
ximo de 2.0 GB de memória para cada processo, a restante memória foi deixada livre
para o sistema operativo. Numa primeira fase correram-se vários casos com malhas
sucessivamente mais refinadas e observou-se que a que a partir do limite estabele-
cido, as variações no rendimento hidráulico foram inferiores a 0.001. Considerou-se,
do ponto de vista dos objectivos do presente trabalho, que a partir deste limite, a solu-
ção se torna independente do refinamento da malha.
Na Fig.5.1 verifica-se que se atingiu o valor de 10−4 pretendido para os resíduos.
(a) Evolução dos resíduos (b) Valores de y+
Figura 5.1: Valor dos resíduos e de y+ para a geometria optimizada
De acordo com o apresentado no capítulo da modelação numérica, o uso do mo-
62

delo de turbulência k − w SST exige que o parâmetro y+ seja inferior à unidade.
Através da Fig. 5.1 verifica-se o cumprimento deste requisito.
5.1.1 Visualização dos resultados
Na Fig. 5.2 apresenta-se a distribuição da velocidade relativa no bordo de ataque.
Apesar de não haver separação nesta zona, é possível verificar que o escoamento
apresenta alguma incidência, o que significa que o ponto de rendimento hidráulico
máximo do rotor não ocorre para o caudal nominal devido às perdas por choque na
entrada.
Figura 5.2: Velocidade relativa (m/s) no bordo de ataque da geometria inicial
Na Fig. 5.3 apresenta-se a velocidade relativa no bordo de fuga onde é possível
verificar o efeito do escorregamento à saída e a existencia de uma esteira. Em apli-
cações industriais de pequenas bombas radiais, as pás não apresentam um bordo de
fuga arredondado, mas sim truncado á saída do rotor, o que permite um processo de
fabrico mais simples e por sua vez, menores custos de produção. Em termos do es-
coamento, tal construção leva a uma esteira de dimensões superiores á apresentada
devido á variação brusca da geometria da pá, o que significa que o rotor analisado
apresenta um rendimento hidráulico superior a um rotor industrial típico de dimensões
semelhantes. A Fig. 5.4 apresenta a distribuição da velocidade relativa em todo o
domínio de cálculo. É possível verificar a influência do choque à entrada sobre o es-
coamento e a dimensão da esteira à saída. No lado de pressão é possível verificar
uma redução do valor de velocidade, tal está de acordo com o esperado, uma vez que
a curvatura das linhas de corrente implica que o escoamento se encontre em gradiente
63

Figura 5.3: Velocidade relativa (m/s) no bordo de fuga da geometria inicial
de pressão adverso, sendo esta zona crítica para o aparecimento de separação.
Na Fig. 5.5 é possível verificar pelos perfis de velocidade do bloco de camada limite,
que o escoamento está perto de atingir da separação.
Figura 5.4: Velocidade relativa (m/s) no domínio completo da geometria inicial
Figura 5.5: Vectores de velocidade relativa (m/s) na zona crítica do lado de sucção da pá
64

5.1.2 Parâmetros de funcionamento
Os parâmetros que caracterizam o rotor da geometria inicial foram obtidos através
da manipulação de várias quantidades integrais calculadas para duas superfícies:
Entrada do rotor – Superfície de raio constante, r = 80 mm.
Saída do rotor – Superfície de raio constante, r = 160 mm.
Pretendeu-se com a análise a estas superfícies ter uma base de comparação com
a abordagem clássica de análise de uma bomba radial, assim tem-se a entrada (de-
signada com o sufixo 1) e a saída (sufixo 2) distanciadas de 1 mm dos bordos da pás,
localização que se considerou representativa dos valores nos bordos.
Este cálculo deve ser feito de modo a que os valores obtidos tenham significado
físico, isto é, que respeitem a conservação da massa e quantidade de movimento.
Assim o valor médio de uma quantidade φ pode ser calculado com ponderação pela
massa ou pela área.
φmassa =
∫ρφ |v · n|dA∫φ |v · n|dA
(5.1)
φarea =
∫φ dA
A(5.2)
Os valores de velocidade e pressão estática (Pest) devem ser calculados com pon-
deração pela área, enquanto que a pressão total (Ptot) deve ser calculada com ponde-
ração mássica.
De modo a obter uma base de comparação com os resultados de outros autores,
os valores característicos da bomba foram adimensionalizados com a velocidade tan-
gencial da extremidade do rotor, U2 = ΩR2.
Coeficiente de pressão estática ψp:
ψp =2ρU2
2
(Pest 2 − Pest 1
)(5.3)
Coeficiente de energia ψr:
ψr =2
U22
((UVt)2 − (UVt)1
)(5.4)
Coeficiente de elevação ψh:
ψh =2ρU2
2
(Ptot 2 − Ptot 1
)(5.5)
65

Coeficiente de perdas hidráulicas ζ:
ζ = ψr −ψh (5.6)
Rendimento hidráulico:
ηh =ψ
ψr=ψr − ζ
ψr(5.7)
Se o perfil de velocidade à saída do rotor for aproximadamente uniforme, a eq. (5.6),
representa uma boa aproximação da realidade. No entanto, um escoamento forte-
mente não uniforme à saída provoca perdas devido dissipação viscosa da quantidade
de movimento entre elementos de fluido. Apesar de estas perdas ocorrerem no difu-
sor, são provocadas pelas condições de saida do rotor, mas não são contabilizadas
pela eq. (5.6). Assim, segundo [33], caso se faça a uma análise ao rotor em separado
do difusor pode-se atingir um rendimento hidráulico próximo da unidade.
Surge assim a necessidade de corrigir as perdas no rotor com um coeficiente de
"não-uniformidade", designado na presente dissertação por coeficiente de mistura,
ζmst .
Em [33] são apresentadas correlações que permitem estimar ζmst , no entanto con-
sideram apenas a não uniformidade do perfil de velocidade radial. Para englobar igual-
mente a não uniformidade da velocidade tangencial, optou-se por calcular ζmst através
da diferença na pressão de estagnação entre a saída do rotor e a saída do domínio
(5.8). Na saída do domínio tem-se condições uniformes quer de velocidade quer de
pressão e uma vez que a tensão de corte da parede do bloco de saída é nula, a
perda de pressão de estagnação deve-se exclusivamente á uniformização dos perfis
de velocidade.
ζmst =2ρU2
2
(Ptot 2 − Ptot unif .
)(5.8)
O valor das perdas por mistura foi então adicionado ás restantes perdas.
ζtot = ψr −ψh + ζmst (5.9)
ψh c = ψh − ζmst (5.10)
ηh c =ψh c
ψr=ψr − ζtot
ψr(5.11)
Segue-se a apresentação dos coeficientes obtidos para a geometria inicial, calcu-
lados para cinco valores de caudal, adimensionalizados com o caudal de projecto.
66

Q/Qnom ψp ψr ψh ηh ζ . 10−3 ζmst . 10−3 ζtot . 10−3 ψh c ηh c
0.70 0.884 1.361 1.325 0.974 35.9 5.4 41.3 1.283 0.943
0.85 0.848 1.255 1.224 0.975 31.4 1.5 32.9 1.191 0.949
1.00 0.814 1.176 1.141 0.970 35.0 2.8 37.8 1.103 0.938
1.15 0.783 1.108 1.067 0.963 41.3 2.5 43.8 1.023 0.923
1.30 0.753 1.042 0.998 0.957 44.4 5.5 49.8 0.948 0.910
Tabela 5.1: Coeficientes adimensionais para a geometria inicial
Q/Qnom 0.70 0.85 1.00 1.15 1.30
H [m] 39.8 37.3 34.8 32.5 30.4
Hc [m] 38.6 36.3 33.6 31.2 28.9
Tabela 5.2: Elevação (m) para a geometria inicial
0.6 0.8 1 1.2 1.40.9
0.92
0.94
0.96
0.98
1
Q/Qnom
ηh
ηhηh c
Figura 5.6: Rendimento hidráulico para o rotor inicial
Uma análise á curva de rendimento permite verificar que mesmo considerando as
perdas devido á não uniformidade do escoamento, o rendimento hidráulico cálculado
é superior ao obtido pela aproximação unidimensional para o caudal nominal (ηh =
0.83).
Tal pode ser explicado pelo facto de as correlação usadas no método clássico ser
baseadas em resultados experimentais. Numa instalação laboratorial não é possível
analisar a geometria do rotor tal como foi analisada no presente trabalho, uma vez que
67

0.6 0.8 1 1.2 1.425
30
35
40
45
Q/Qnom
H(m
)
HHc
Figura 5.7: Elevação para o rotor inicial
0.6 0.8 1 1.2 1.4
0.8
1
1.2
1.4
Q/Qnom
ψi
ψhψh cψrψp
Figura 5.8: Coeficientes ψp,ψr e ψ da geometria inicial
uma bomba real necessita de um difusor e uma voluta e a estes componentes existem
sempre perdas de carga associadas. Outro factor relevante prende-se com a entrada
no rotor. Numa bomba real, a entrada faz-se axialmente e dependendo da boca de
aspiração a perda de carga é considerável podendo mesmo ocorrer separação nessa
zona. Nessa situação as condições do escoamento no bordo de ataque são diferentes
das aqui analisadas.
No entanto, segundo [33], numa bomba cuja geometria da boca de aspiração e das
pás permita a ausência de separação, o rendimento hidráulico varia entre 85 a 95%,
gama de valores nos quais se enquadra a curva de rendimento apresentada
68

0.6 0.8 1 1.2 1.4
0
2
4
6
·10−2
Q/Qnom
ζi
ζ
ζtotζmst
Figura 5.9: Coeficientes ζ para a geometria inicial
O resultado obtido vai de encontro com o publicado por [32], onde também é feita
uma análise CFD ao rotor de uma bomba radial em separado do colector. Este autor
não considerou o factor ζmst e mesmo tendo pás com um bordo de fuga truncado,
obteve um rendimento próximo da unidade numa curva de andamento semelhante á
obtida no presente trabalho.
A validade dos resultados obtidos pode também ser verificada comparando o fac-
tor de escorregamento, a altura de elevação, ângulos do escoamento nos bordos de
ataque e de fuga previstos pela aproximação unidimensional. Ver Tab. 5.3. A maior
discrepância encontra-se nos valores da altura de elevação e o rendimento entre os
dois métodos devido à ausência do bocal de aspiração na simulação. No entanto uma
análise ao escoamento na zona das pás mostra uma concordância entre os valores
previstos e os obtidos no cálculo em CFD.
Estes valores mostram que o algoritmo criado é capaz de importar e simular cor-
rectamente a geometria de um rotor existente.
H[m] η β1() σ β2(
)
1D 30.0 0.83 17.3 0.76 14,6
CFD 33.6 0.94 17.1 0.75 13.8
Tabela 5.3: Tabela comparativa de parâmetros obtidos pela aproximação unidimensional e pela
análise numérica
69

Figura 5.10: Limite dos parâmetros de optimização
5.2 Geometria optimizada
5.2.1 Processo de optimização
Tendo em conta que o objectivo do presente trabalho é o de uniformizar o perfil
de velocidade radial á saida do rotor, a função objectivo a minimizar no algoritmo de
evolução diferencial foi a eq. (5.12).
Fobj =
∫v2
r 2dA (5.12)
Como parâmetros de optimização usaram-se dois pontos de controlo definidos no
plano transformado (η, ξ) apresentado no capitulo de geração da geometria. Com o
objectivo de obter uma nova curvatura, optou-se por fixar a localização dos pontos no
eixo ξ, e libertar em η, o que permitiu ajustar a curvatura e poupar tempo de cálculo
pela diminuição do número de dimensões do espaço vectorial da população.
Na Fig. 5.10 apresentam-se graficamente os limites impostos para o parâmetros,
assim como a geometria inicial e final.
Geometria inicial Geometria optimizada
0.01873 0.01832
Tabela 5.4: Valor da função objectivo inicial e final
5.2.2 Resultados da optimização
O processo de optimização foi realizado em paralelo num computador pessoal com
um processador de quatro núcleos e 8GB de memória RAM, em que 3 núcleos foram
70

usados no processo (1 caso por núcleo). Conforme referido, devido ás limitações de
memória cada processo usou cerca de 2GB de RAM.
No processo de optimização foram realizadas 60 avaliações da função objectivo
divididas em 4 gerações de 15 indivíduos com uma duração total 50 dias.
O processo convergiu para os valores limite impostos para os parâmetros geomé-
tricos, pelo que a solução obtida não é óptima, uma vez que não se pode garantir que
a solução obtida corresponde ao valor mínimo da função objectivo. No entanto mostra
a tendência da localização dos pontos de controlo da solução óptima.
No entanto na presente secção apresentam-se os resultados do cálculo para a geo-
metria calculada pelo DE, obtidos para uma malha de 996476 elementos. Verificou-se
a obtenção de 10−4 para o valor dos resíduos, ver Fig. 5.11.
(a) Evolução dos resíduos (b) Valores de y+
Figura 5.11: Valor dos resíduos de y+ para a geometria optimizada
O requisito imposto pelo modelo de turbulência k −w SST foi igualmente cumprido
como pode ser verificado na Fig. 5.11.
Na Fig. 5.12 apresenta-se a distribuição da velocidade relativa no bordo de ataque.
É possível verificar um aumento da incidência e da perturbação do escoamento, pelo
que à partida se espera que as perdas por choque sejam maiores do que na geometria
inicial.
Para a Fig. 5.13) ângulo de saída da pá e por consequência o escoamento apre-
senta uma esteira menor do que na geometria inicial, o que diminui as perdas por
dissipação turbulenta.
71

Na fig. 5.14 observa-se que o escoamento no rotor é mais uniforme quando com-
parado com o caso inicial e uma análise da zona crítica da pá revela uma camada
limite estável. Estes são fenómenos que à partida diminuem as perdas no rotor.
Figura 5.12: Velocidade relativa no bordo de ataque da geometria optimizada, em m/s
Figura 5.13: Velocidade relativa no bordo de fuga da geometria optimzada, em m/s
Uma análise aos coeficientes adimensionais para a geometria optimizada, revela
que apesar de o escoamento ser aparentemente mais uniforme no domínio, tal não
se reflectiu num aumento do rendimento do rotor, devido essencialmente ao aumento
perdas por mistura ζmst .
Uma análise aos coeficientes adimensionais revela uma redução de 76% das per-
das por mistura pelo que se prova que o algoritmo desenvolvido para alem de simular
com sucesso uma geometria inicial é capaz de forma automática optimizar uma geo-
metria em função de um parâmetro do escoamento definido pelo utilizador.
72

Figura 5.14: Velocidade relativa no domínio completo da geometria optimizada, em m/s
Figura 5.15: Vectores de relativa na zona crítica da pá, em m/s
Q/Qnom ψp ψr ψh ηh ζ . 10−3 ζmst . 10−3 ζtot . 10−3 ψh . c ηh c
0.70 0.867 1.289 1.254 0.973 35.3308 31.2 66.5 1.187 0.921
0.85 0.828 1.172 1.142 0.974 29.9307 1.4 31.4 1.111 0.948
1.00 0.783 1.076 1.045 0.971 30.8822 0.7 31.5 1.014 0.942
1.15 0.702 0.939 0.907 0.965 32.7079 0.7 33.4 0.873 0.930
1.30 0.692 0.902 0.863 0.957 38.7532 0.8 39.5 0.824 0.913
Tabela 5.5: Coeficientes adimensionais para a geometria optimizada
No entanto, tal redução e ζmst não se reflectiu num aumento significativo do ren-
dimento hidráulico do rotor. O que pode ser explicado pela ausência do bocal de
aspiração na simulação, já que grande parte da não uniformidade do escoamento é
73

ζmst Ini ζmst Opt ∆ζmst/ζmst Ini
27.55e−4 6.59e−4 0.76
Tabela 5.6: Comparação das perdas por mistura entre as geometrias inicial e optimizada
H[m] η β1() β2(
) ψr
Ini. 33.6 0.938 17.1 13.8 1.36
Opt. 30.9 0.942 17.3 12.4 1.17
Tabela 5.7: Comparação do rendimento hidráulico entre as geometrias inicial e optimizada
0.6 0.8 1 1.2 1.40.9
0.92
0.94
0.96
0.98
1
Q/Qnom
ηh
ηhηh c
Figura 5.16: Rendimento hidráulico para o rotor optimizado
provocada por este componente. Pelo que se prevê um aumento significativo do rendi-
mento no processo de optimização caso este componente seja incluido na simulação.
74

0.6 0.8 1 1.2 1.420
25
30
35
40
45
Q/Qnom
H(m
)
HHc
Figura 5.17: Elevação para o rotor optimizado
0.6 0.8 1 1.2 1.40.6
0.8
1
1.2
1.4
Q/Qnom
ψi
ψhψh cψrψp
Figura 5.18: Coeficientes ψp,ψr e ψ da geometria optimizada
0.6 0.8 1 1.2 1.4
0
2
4
6
·10−2
Q/Qnom
ζi
ζ
ζtotζmst
Figura 5.19: Coeficientes ζ para a geometria optimizada
75

0.6 0.8 1 1.2 1.4
0
2
4
6
·10−2
Q/Qnom
ζi
ζtot Iniζmst Iniζtot Optζmst Opt
Figura 5.20: Comparação das perdas para as geometrias inicial e optimizada
0.6 0.8 1 1.2 1.40.9
0.92
0.94
0.96
0.98
1
Q/Qnom
ηh
ηh Iniηh c Iniηh Optηh c Opt
Figura 5.21: Comparação do rendimento hidráulico para as geometrias inicial e optimizada
76

Capítulo 6
Conclusão
O algoritmo implementado de geração da geometria e da malha de cálculo apre-
senta grande versatilidade pois permite importar e criar geometrias complexas, pre-
servando a continuidade a tangencial de todas as superfícies físicas. A utilização de
curvas de Bézier revelou-se importante por ter permitido definir a geometria de forma
paramétrica usando um número reduzido de pontos de controlo. O algoritmo gerador
da geometria e respectiva malha de cálculo tem capacidade para importar geometrias
de outros tipos de turbomáquinas (axiais ou mistas), desde que sejam de escoamento
confinado, o que permite a sua aplicação, por exemplo, a turbinas do tipo bi-radial,
Wells ou Francis. Esta versatilidade advém do uso das curvas de Bézier em conjunto
com a transformação conforme usada. A espessura da pá foi definida no espaço físico
de modo a que possam ser geradas pás com a espessura desejada de forma fácil e
intuitiva com recurso a curvas de Bézier. A metodologia implementada para a espes-
sura permite adaptar facilmente o código para gerar perfis alares como, por exemplo,
a série NACA 4 dígitos. O algoritmo tem igualmente capacidade para gerar pás de
espessura variável linearmente entre os dois pratos.
A versatilidade do algoritmo desenvolvido é igualmente verificável na geração da
malha. O gerador permite a construção de blocos de camada limite em todas as
superfícies interiores de forma independente e com controlo sobre um vasto número
de parâmetros como o número e distribuição dos pontos na direcção perpendicular
às superfícies, capacidade que se revelou importante na escolha dos modelos de
turbulência. O gerador permite igualmente refinar as malhas de camada limite nos
planos localmente paralelos às superfícies. A geração do bloco interior com recurso a
uma malha tetraédrica permitiu a ligação entre os diferentes blocos de malha mesmo
77

que estes tenham número diferente de elementos.
Para a geração da geometria e da malha foi necessário dotar o algoritmo de capa-
cidade de cálculo de interseção de superfícies no espaço. Um método desenvolvido a
partir do método da bissecção revelou-se demasiado lento para que o código criado
fosse uma ferramenta de trabalho útil. A criação de um algoritmo baseado no método
de Newton permitiu reduzir o tempo de cálculo das intersecções de 50 minutos para
10 minutos em malhas adequadas ao problema em questão.
Para resolver as equações que modelam o escoamento no interior do rotor recorreu-
se ao software comercial Fluent com processamento em série. Esta etapa revelou-se
lenta do ponto de vista prático, sendo que cada processo levou até 72 horas para
atingir um valor aceitável para os resíduos. O gerador de malha criado, por permitir
ajustar facilmente a localização do primeiro ponto da camada limite, permitiu a esco-
lha do modelo de turbulência mais adequado para a simulação de escoamentos em
gradiente de pressão adverso, o modelo k −ω SST.
A análise numérica da geometria inicial revelou um rendimento superior ao previsto
inicialmente pelos métodos clássicos de projecto. No entanto a diferença observada
vai de encontro ao verificado por outros autores. Os outros parâmetros de comparação
revelaram-se bastante próximos dos previstos pelo projecto inicial. Pelo que se conclui
que o com o processo de cálculo seguido se obtêm resultados que vão de encontro
aos obtidos pelas correlações semi-empíricas usadas no projecto inicial da bomba.
O processo de optimização revelou não ser compatível com o tempo definido para a
realização da presente dissertação nem com os recursos computacionais disponíveis.
O tempo de cálculo da optimização realizada foi de cerca de 50 dias. Por se ter
atingido os limites impostos para as variáveis geométricas, não se pode concluir que
a solução óptima para o problema se encontra dentro do intervalo definido. Como tal,
teriam de ser mudados os limites dos parâmetros e realizar uma nova optimização.
6.1 Considerações finais e trabalho futuro
A fim de aumentar a versatilidade do gerador de malha, sugere-se a implementação
de um terceiro perfil para a pá numa superfície de revolução localizada entre os dois
pratos que limitam o canal meridional. Em conjunto com uma interpolação cúbica dos
três perfis, tal permitira o estudo de pás com uma geometria mais complexa, mantendo
78

a continuidade tangencial das superfícies.
De modo a contabilizar os efeitos de perda na entrada do rotor sugere-se a geração
de um bloco de malha desta zona. Foi iniciada a criação de um código que o permite,
mas a sua implementação no algoritmo apresentado não foi compatível com a duração
da presente dissertação.
Para diminuir o tempo de cálculo aconcelha-se a utilização de um cluster de vários
computadores equipados com uma versão do Fluent com processamento paralelo.
Deste modo seria possível correr cada caso do processo de optimização num compu-
tador dedicado. Por sua vez o cálculo de cada caso poderia ser repartido por vários
processadores.
Para melhorar a metodologia seguida, sugere-se em primeiro lugar a aplicação do
algorítmo genético a um escoamento bidimensional, por exemplo, no plano transfor-
mado. Isto permitiria obter mais rapidamente o valor correcto dos limites dos parâme-
tros geométricos.
79

80

Bibliografia
[1] Grundfos Research and Technology. The Centrifugal Pump.
[2] Falcão, A.F. Turbomáquinas. Secção de Folhas. AEIST. Lisboa. 2010.
[3] Hirsch, C. Numerical Computation of Internal and External Flows, Volume 1. 2nd
edition. Butterworth-Heinemann. Comput. 2007
[4] Baker, Timothy J. Mesh generation: Art or science?. 2005
[5] Rebay, S. Efficient Unstructured Mesh Generation by Means of Delaunay Trian-
gulation and Bowyer-Watson Algorithm. Journal of Computational Physics 106,
p125-p138. 1991
[6] Henriques, J. vmesh2d: A two-dimensional triangular mesh generator. Internal
Report, IST. 2012.
[7] Schöberl, J. NETGEN: An advancing front 2D/3D-mesh generator based on abs-
tract rules. Comput. Visual. Sci., 1, pp. 41-52, 1997.
[8] Geuzaine, C. e Remacle, J. Gmsh Reference Manual. 2013.
[9] Anderson J.D.Jr. Computational fluid dynamics: The basics with applications.
McGraw-Hill. 1995.
[10] Casey, M. e Wintergerste, T. Best Practice Guidelines, Version 1.0. ERCOFTAC
Special Interest Group on Quality and Trust in Industrial CFD. 2000.
[11] Storn, R e Price, K. Diferential Evolution – a simple and efficient heuristic for glo-
bal optimization over continuous spaces. Journal of Global Optimization, 11:341-
359. 1997
[12] Farin, Gerald E., 1997. Curves and surfaces for computer aided geometric de-
sign: A pratical guide, 4th Ed. , Academic Press.
81

[13] Candeias, T. Optimização numérica das pás directrizes de entrada de uma tur-
bina auto-rectificadora bi-radial. Dissertação para a obtenção de Grau de Mes-
tre. Instituto Superior Técnio. 2013.
[14] Burden, Richard L. and Faires, J. Douglas, 2010. Numerical Analysis, 9th edition,
Cengage Learning.
[15] Lewis, R. I., 1991. Vortex element methods for fluid dynamic analysis of engine-
ering systems. Cambridge University Press.
[16] Abbot, Ira H., 1959. "Theory of wing sections". Dover Publications, Inc.
[17] Morgan Jr., Harry. Computer programs for smoothing and scaling airfoil coordi-
nates. NASA Technical Memorandum 84666. 1983.
[18] Kallinderis, Y. e Kavouklis, C. A dynamic adaptation scheme for general 3-D
hybrid meshes. 2004
[19] Shah, Jami J. and Mäntylä, Martti., 1995. Parametric and Feature-Based
CAD/CAM: Concepts, Techniques and Applications, 1st Ed. , John Wiley and
Sons.
[20] Bartels, Richard H. and Beatty, John C., 1987.
An introduction to splines for use in computer graphics and geometric modeling,
Morgan Kaufmann Publishers Inc.
[21] Brederode, V. Fundamentos de Aerodinâmica Incompressível. Edição do Autor.
1997.
[22] Fluent Incorporated. Fluent 6.3 User’s Guide, 2006.
[23] Manivannan, A. Computational fluid dynamics analysis of a mixed flow pump
impeller. International Journal of Engineering, Science and Technology Vol. 2,
No. 6, 2010, pp. 200-206.
[24] ShojaeeFard, M. et al. Experimental Study and Three-Dimensional Numerical
Flow Simulation in a Centrifugal Pump when Handling Viscous Fluids. IUST In-
ternational Journal of Engineering Science, Vol. 17, No.3-4, 2006, Page 53-60.
[25] Anagnostopoulos, J. CFD Analysis and Design Effects in a Radial Pump Impel-
ler. WSEAS Transactions on fluid mechanics. Issue 7, Vol. 1, July 2006.
82

[26] Djerroud, M. et al. emphNumerical Identification of Key Design Parameters
Enhancing the Centrifugal Pump Performance: Impeller, Impeller-Volute, and
Impeller-Diffuser. International Scholarly Research Network, Mechanical Engi-
neering Volume, 2011, Article ID: 794341.
[27] Bacharoudis, E.C. et al. Parametric Study of a Centrifugal Pump Impeller by
Varying the Outlet Blade Angle. The Open Mechanical Engineering Journal,
2008, 2, 75-83.
[28] Bardina, J.E. et al. Turbulence Modeling Validation, Testing, and Development
NASA Technical Memorandum 110446. 1997
[29] Blazek, J. Computational Fluid Dynamics: Principles and Applications. Elsevier.
2005.
[30] J.M. Paixão Conde. Verificação e validação de um código numérico na simulação
de escoamentos turbulentos. In Proc.CMNE/CILANCE 2007. Porto. 2007.
[31] J. Liu, et. al. Numerical Simulation of the Transient Flow in a Radial Flow Pump
during Stopping Period. ASME: Journal of Fluids Engineering, Volume 133, Issue
11. 2011.
[32] S. Kaewnai et. al. Predicting performance of radial flow type impeller of centrifu-
gal pump using CFD. Journal of Mechanical Science and Technology. Springer.
2006
[33] J. Gülich. Centrifugal Pumps. 2nd Edition. Springer. 2010
83