Organização Básica de computadores e linguagem de...
75
Organização Básica de computadores e linguagem de montagem 1 o Semestre de 2013 Prof. Edson Borin
Transcript of Organização Básica de computadores e linguagem de...

Organização Básica de computadores e linguagem de
montagem
1o Semestre de 2013
Prof. Edson Borin

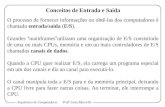
Barramentos

Barramentos
• Caminhos de comunicação entre dois ou mais dispositivos
• Diversas linhas de comunicação que podem ser classificadas em:
– Linhas (ou barramento) de controle
– Linhas (ou barramento) de endereço
– Linhas (ou barramento) de dados
• Exemplos de barramento
– PCI: desenvolvido originalmente pela Intel. Atualmente é um padrão público
– AMBA: desenvolvido pela ARM
Barramentos
CPU Memória E/S E/S
Linhas de dados Linhas de endereço Linhas de controle

Barramentos
• Todos os dispositivos compartilham o mesmo barramento • Problema: todos têm que operar na mesma velocidade
CPU Memória E/S E/S
Linhas de dados Linhas de endereço Linhas de controle

Barramentos Modernos
CPU Memória
Cache/Ponte
SCSI
Barramento Local Memória Principal
Barramento do Sistema
Barramento de alta velocidade
FireWire GPU Rede
Modem
Barramento de expansão
Interface de barramento de expansão Interface serial

Barramentos
• Leitura recomendada: Capítulo 3.4 do livro do Stallings.
Entrada e Saída
Entrada e Saída
• Dispositivos de E/S (Entrada/Saída) ou I/O (Input/Output) permitem a entrada e saída de dados do processador.
• Ex: Teclado, Mouse, Monitor, Impressora, Placa de rede, disco rígido, unidade de CD-ROM.
• Como funciona?

Saída
42 CAPITULO 8. ORGANIZACAO DE COMPUTADORES MODERNOS
CPU
Memoria
E/S
E/S
...
E/S
Bar
ram
ento
Figura 8.1: Organizacao Geral de um Computador Moderno
8.1 A Memoria Principal
Diferente do computador IAS, a maioria dos computadores modernos foramprojetados para utilizarem memorias enderecadas a byte, onde cada enderecoda memoria esta associado a um byte, em vez de uma palavra de 40 bits. AFigura 8.2 ilustra a organizacao de uma memoria enderecada a byte. Nesteexemplo, o primeiro byte da memoria, associado ao endereco 0 (zero), contemo valor FF enquanto que o quarto byte da memoria, associado ao endereco 3,contem o valor 00.
Apesar da memoria ser enderecada a byte, o processador pode solicitar amemoria a leitura ou a escrita de uma palavra (4 bytes) ou meia palavra (2bytes). Nesses casos, a memoria le ou escreve os bytes em posicoes de memoriaconsecutivas a partir do endereco de memoria fornecido. Por exemplo, na Fi-gura 8.2, a operacao de leitura de uma palavra no endereco 0 retornaria o valor00 00 00 0F, o equivalente ao numero 15. Note que, neste exemplo, o byte 0F,lido do endereco 0, foi interpretado como sendo o ultimo byte do dado, ou seja,o byte menos significativo. Esta maneira de organizar uma palavra na memoriae conhecida como little-endian, e e utilizada por diversos processadores moder-nos, incluindo os processadores da famılia x86 e os processadores ARM. Namaneira oposta a esta, conhecida como big-endian, o byte menos significativodo dado e armazenado na maior posicao de memoria. Assim sendo, um proces-
A escrita de dados em um dispositivo de saída é feita através do barramento.

Saída • Como o programa realiza uma saída?
Saída • Como o programa realiza uma saída? • Escreve em uma porta, que está associada a um dispositivo
de saída.

Saída • Como o programa realiza uma saída? • Escreve em uma porta, que está associada a um dispositivo
de saída.
• 2 opções comuns: – Instrução especial para saída. Ex:
out 0x10, r1!– Instrução de store em uma faixa de endereços reservada.
Ex: ldr !r0, =0x80000!str !r1, [r0]!
• Como o processador sabe se é uma saída ou acesso à memória?
Entrada
42 CAPITULO 8. ORGANIZACAO DE COMPUTADORES MODERNOS
CPU
Memoria
E/S
E/S
...
E/S
Bar
ram
ento
Figura 8.1: Organizacao Geral de um Computador Moderno
8.1 A Memoria Principal
Diferente do computador IAS, a maioria dos computadores modernos foramprojetados para utilizarem memorias enderecadas a byte, onde cada enderecoda memoria esta associado a um byte, em vez de uma palavra de 40 bits. AFigura 8.2 ilustra a organizacao de uma memoria enderecada a byte. Nesteexemplo, o primeiro byte da memoria, associado ao endereco 0 (zero), contemo valor FF enquanto que o quarto byte da memoria, associado ao endereco 3,contem o valor 00.
Apesar da memoria ser enderecada a byte, o processador pode solicitar amemoria a leitura ou a escrita de uma palavra (4 bytes) ou meia palavra (2bytes). Nesses casos, a memoria le ou escreve os bytes em posicoes de memoriaconsecutivas a partir do endereco de memoria fornecido. Por exemplo, na Fi-gura 8.2, a operacao de leitura de uma palavra no endereco 0 retornaria o valor00 00 00 0F, o equivalente ao numero 15. Note que, neste exemplo, o byte 0F,lido do endereco 0, foi interpretado como sendo o ultimo byte do dado, ou seja,o byte menos significativo. Esta maneira de organizar uma palavra na memoriae conhecida como little-endian, e e utilizada por diversos processadores moder-nos, incluindo os processadores da famılia x86 e os processadores ARM. Namaneira oposta a esta, conhecida como big-endian, o byte menos significativodo dado e armazenado na maior posicao de memoria. Assim sendo, um proces-
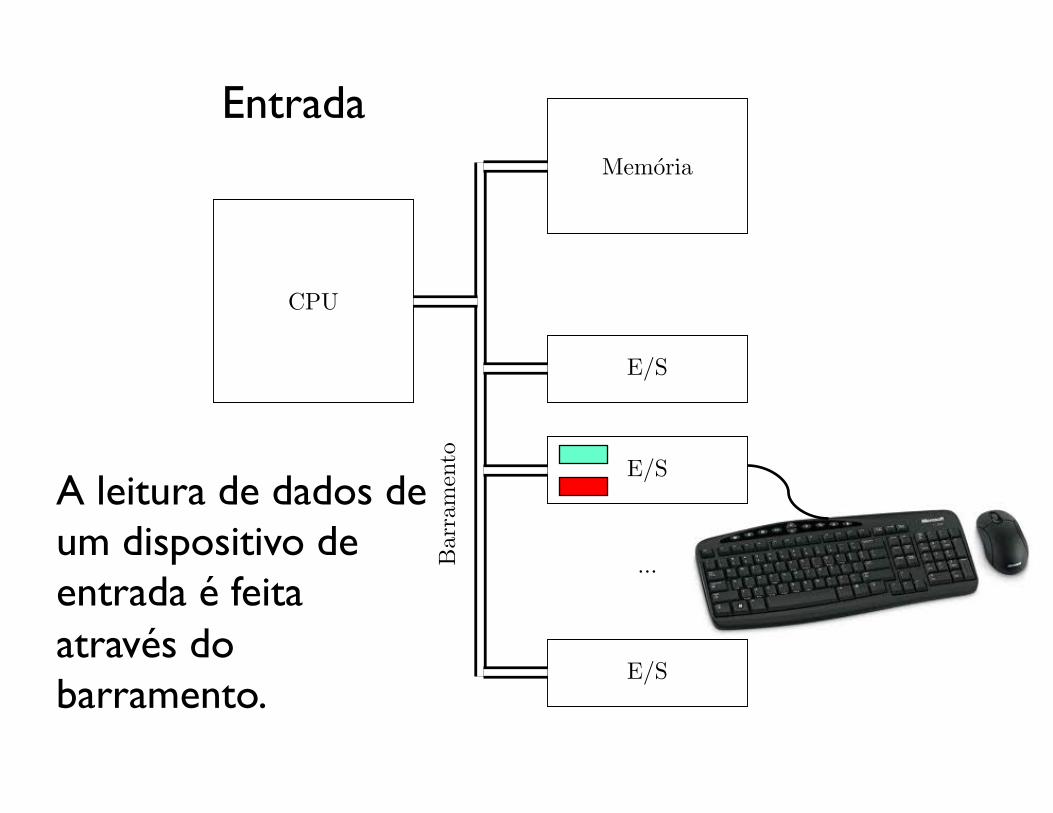
A leitura de dados de um dispositivo de entrada é feita através do barramento.
Entrada • Como o programa realiza uma entrada? • Lê de uma porta, que está associada a um dispositivo de
entrada.
• 2 opções comuns: – Instrução especial para entrada. Ex:
in r1, 0x10!– Instrução de load em uma faixa de endereços reservada.
Ex: ldr !r0, =0x80000!ldr !r1, [r0]!
• Como o processador sabe se é uma entrada ou acesso à memória?

Exemplos no ARM
• Entrada:!ldr !r0, =0x53FA0008!ldr !r1, [r0]! • Saída ldr !r0, =0x53FA0000!str !r1, [r0]!

Exemplo - Elevador
• Dois dispositivos. 1 de entrada e 1 de saída
• Entrada: – sensor de andar. Conectado à porta 0x20. – quando acessado, responde com um byte indicando o
andar atual (de 0 a 9)

Exemplo - Elevador
• Saída – mostrador digital: Conectado à porta 0x30 – dispositivo com 7 segmentos (a,b,...,g) e um ponto
luminoso que ficam ligados ou desligados de acordo com o dado no registrador de controle.
– a saída corresponde em escrever um byte no registrador de controle.
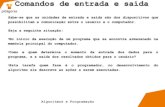
4 CAPÍTULO 5. ENTRADA E SAÍDA
elevador:
1 SENSOR_DATA equ 20h ; porta do sensor23 inb r0,SENSOR_DATA ; le valor do andar corrente
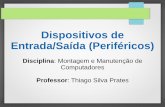
O mostrador é um dispositivo apenas de saída, com um único dígito, conforme aFigura 5.1 (a). Os segmentos do mostrador, mais o ponto decimal, podem ser indivi-dualmente ligados ou desligados. Cada segmento corresponde a um bit em um byte,mostrado na Figura 5.1 (b). O mostrador está conectado à porta 30h, chamada de portade dados do mostrador. A operação de escrita de um byte nessa porta controla quaissegmentos são acesos e quais são apagados. Se um determinado bit tem o valor 1, osegmento correspondente é aceso, caso contrário o segmento correspondente é apagado.Assim, por exemplo, se um byte com o valor 7eh for escrito na porta do mostrador, odígito ‘0’ será mostrado (apenas os segmentos p e g apagados) e se um byte com o valor30h for escrito na porta do mostrador o dígito ‘1’ será mostrado (apenas os segmentos b
e c ligados).
a
b
c
d
e
fg
p
bp gca e fd
6 0157 3 24
(a) (b)
Figura 5.1: Mostrador de sete segmentos (a) e os bits correspondentes no byte de controle(b).
Exercício 5.1 Escrever um procedimento que atualize o valor do mostrador do elevadorcom o valor lido do sensor.

Exemplo - Elevador
@ Procedimento atualiza andar!@ Lê o andar do sensor e atualiza o valor do mostrador!!
.equ !SENSOR_DATA, 0x20!
.equ !DISPLAY_DATA, 0x30!!
atualiza_andar:!!ldr !r1, =SENSOR_DATA!!ldrb !r1, [r1] ! !@ lê o valor do sensor!!ldr !r0, =tab_digitos !@ converte valor para!!ldrb !r0, [r0, r1] !@ byte de controle!!ldr !r1, =DISPLAY_DATA!@ escreve byte de controle!!strb !r0, [r1] ! !@ no mostrador!!mov !pc, lr!
!
tab_digitos: .byte 7e,30,6d,79,33,5b,5f,70,7f,7b!
Problemas com a abordagem anterior
• Suponha que o elevador suba 8 andares.
• Quando devemos chamar o procedimento AtualizaAndar?

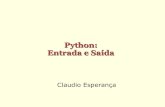
Outro Exemplo - Teclado
• Teclado: – Dispositivo de Entrada – Duas portas: dados (0x40) e estado (0x41) – Dado lido representa caractere!
• E se o teclado for apertado múltiplas vezes?
• Como saber se o dado que está lá já foi lido?
6 CAPÍTULO 5. ENTRADA E SAÍDA
1 2 3
4 5 6
7 8 9
* 0 #
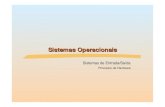
Figura 5.2: Teclado simples
Bit Nome Estado0 READY Existe dado pronto, não lido ainda1 OVRN Houve atropelamento (dado perdido)
Tabela 5.1: Bits de estado do teclado.
Se o bit READY estiver ligado, significa que uma tecla foi pressionada e que seuvalor ainda não foi lido. Esse bit é automaticamente desligado quando é feita uma lei-tura na porta de dados do teclado. O bit OVRN indica uma condição de erro: se estiverligado significa que uma nova tecla foi pressionada sem que o valor da tecla pressionadaimediatemante antes tenha sido lido. Nesse caso, o valor da tecla pressionada imediata-mente antes é perdido, sendo sobre-escrito pelo valor da nova tecla.
5.2.1 Espera forçada
Podemos agora escrever um procedimento para ler o valor de uma tecla pressionada noteclado:

Outro Exemplo - Teclado
• Teclado: – um bit de estado indica se o dado atual não foi lido
pelo processador ainda (READY). Bit 0
– outro bit de estado indica se mais de um botão já foi apertado antes do processador ler o dado, ou seja, houve dado perdido (OVRN). Bit 1
6 CAPÍTULO 5. ENTRADA E SAÍDA
1 2 3
4 5 6
7 8 9
* 0 #
Figura 5.2: Teclado simples
Bit Nome Estado0 READY Existe dado pronto, não lido ainda1 OVRN Houve atropelamento (dado perdido)
Tabela 5.1: Bits de estado do teclado.
Se o bit READY estiver ligado, significa que uma tecla foi pressionada e que seuvalor ainda não foi lido. Esse bit é automaticamente desligado quando é feita uma lei-tura na porta de dados do teclado. O bit OVRN indica uma condição de erro: se estiverligado significa que uma nova tecla foi pressionada sem que o valor da tecla pressionadaimediatemante antes tenha sido lido. Nesse caso, o valor da tecla pressionada imediata-mente antes é perdido, sendo sobre-escrito pelo valor da nova tecla.
5.2.1 Espera forçada
Podemos agora escrever um procedimento para ler o valor de uma tecla pressionada noteclado:
Outro Exemplo - Teclado (Busy waiting)
• Rotina le_tecla
• Lê palavra de controle (end. 0x40) • Se o dispositivo não tiver dado (bit 0 - READY)
– Tenta novamente (Busy waiting) • Se o dispositivo tiver dado
– Verifica se houve perda de dado (bit 1 - OVRN) – Se houve perda de dado
• Trata o erro – Senão
• Lê dado do dispositivo (end. 0x41) e retorna
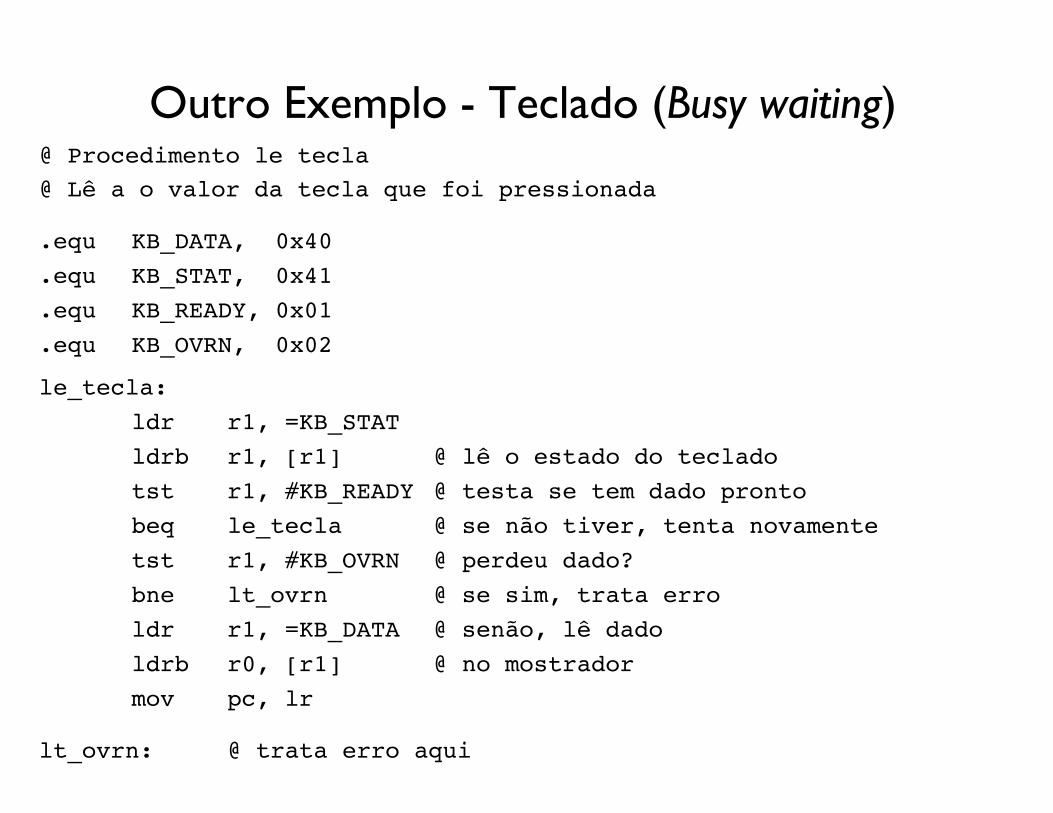
Outro Exemplo - Teclado (Busy waiting) @ Procedimento le tecla!@ Lê a o valor da tecla que foi pressionada!!
.equ !KB_DATA, 0x40!
.equ !KB_STAT, 0x41!
.equ !KB_READY, 0x01!
.equ !KB_OVRN, 0x02!!
le_tecla:!!ldr !r1, =KB_STAT!!ldrb !r1, [r1] ! @ lê o estado do teclado!!tst !r1, #KB_READY! @ testa se tem dado pronto!!beq !le_tecla ! @ se não tiver, tenta novamente!!tst !r1, #KB_OVRN ! @ perdeu dado?!!bne !lt_ovrn ! @ se sim, trata erro!!ldr !r1, =KB_DATA ! @ senão, lê dado!!ldrb !r0, [r1] ! @ no mostrador!!mov !pc, lr!
!
lt_ovrn: !@ trata erro aqui!
Problemas com a abordagem anterior
• Suponha que o usuário demore para apertar algo.
• O que o processador faz?

Problemas com a abordagem anterior
• Suponha que o usuário demore para apertar algo.
• O que o processador faz?
• Como melhorar?
– Verifique o teclado de tempos em tempos e faça algum trabalho útil no entre as verificações.
Problemas com a abordagem anterior
• Suponha que o usuário demore para apertar algo.
• O que o processador faz?
• Como melhorar?
– Verifique o teclado de tempos em tempos e faça algum trabalho útil no entre as verificações.
• Ainda há o risco do usuário pressionar a tecla múltiplas vezes antes do programa verificar se alguma tecla foi pressionada.
• Talvez o usuário não seja tão rápido para causar este problema, mas e se for uma placa de rede.

Problemas com a abordagem anterior
• Suponha que o usuário demore para apertar algo.
• O que o processador faz?
• Como melhorar?
– Verifique o teclado de tempos em tempos e faça algum trabalho útil no entre as verificações.
• Ainda há o risco do usuário pressionar a tecla múltiplas vezes antes do programa verificar se alguma tecla foi pressionada.
• Talvez o usuário não seja tão rápido para causar este problema, mas e se for uma placa de rede.
Interrupção: O dispositivo avisa o
processador quando acondecer
alguma coisa!
Interrupção
• Iniciativa de comunicação é do periférico • Exemplo:
– Quando o dado está disponível, o teclado “interrompe” o processador.
– O processador pára o que está fazendo para atender o teclado
– Após o processamento da leitura, o processador continua com o que estava fazendo.
Interrupção
• O processador pára o que está fazendo para atender o teclado.
• O que acontece com o programa que o processador estava executando???
Exemplo: Interrupção
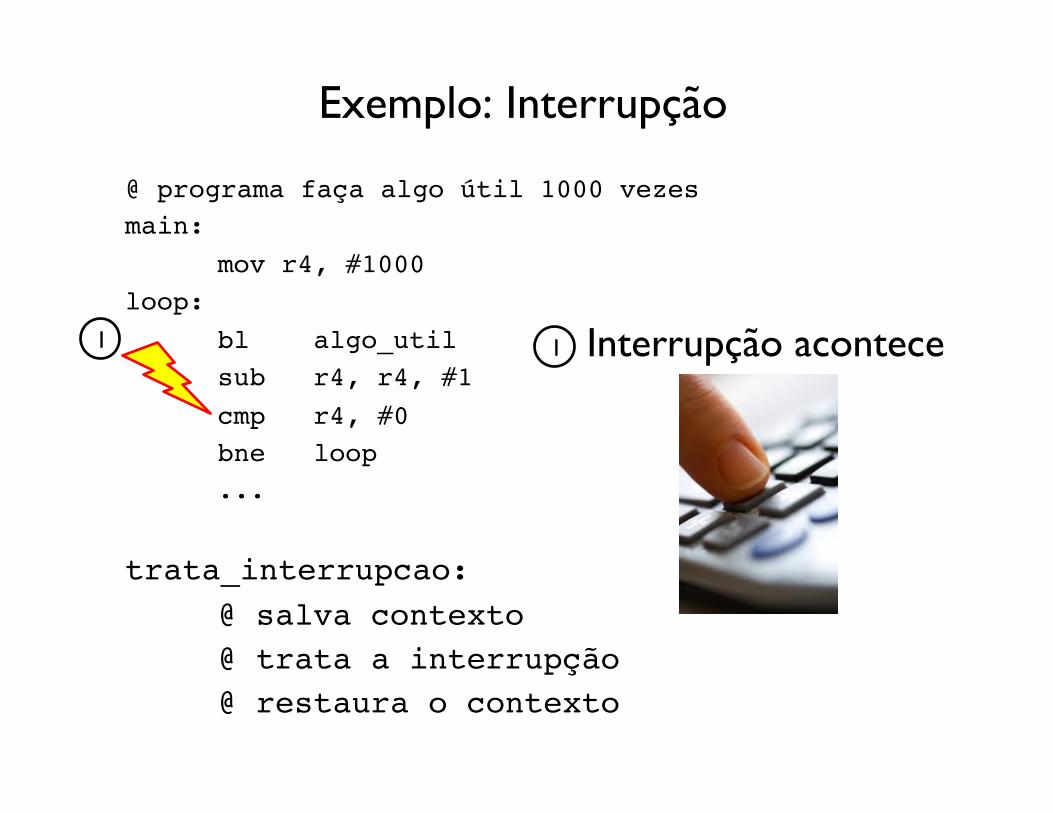
@ programa faça algo útil 1000 vezes!!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne!loop!!...!
Exemplo: Interrupção
@ programa faça algo útil 1000 vezes!!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne!loop!!...!
Interrupção
Interrupção
• O processador pára o que está fazendo para atender o teclado.
• O que acontece com o programa que o processador estava executando??? – Antes de tratar a interrupção, é importante salvar todo
o “contexto” do programa que está executando • Registradores, • flags, • Manter a pilha consistente...
Exemplo: Interrupção
@ programa faça algo útil 1000 vezes!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne !loop!!...!
!
trata_interrupcao:!!@ salva contexto!!@ trata a interrupção!!@ restaura o contexto!
!
Exemplo: Interrupção
@ programa faça algo útil 1000 vezes!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne !loop!!...!
!
trata_interrupcao:!!@ salva contexto!!@ trata a interrupção!!@ restaura o contexto!
!
1 Interrupção acontece 1
Exemplo: Interrupção
@ programa faça algo útil 1000 vezes!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne !loop!!...!
!
trata_interrupcao:!!@ salva contexto!!@ trata a interrupção!!@ restaura o contexto!
!
1
2
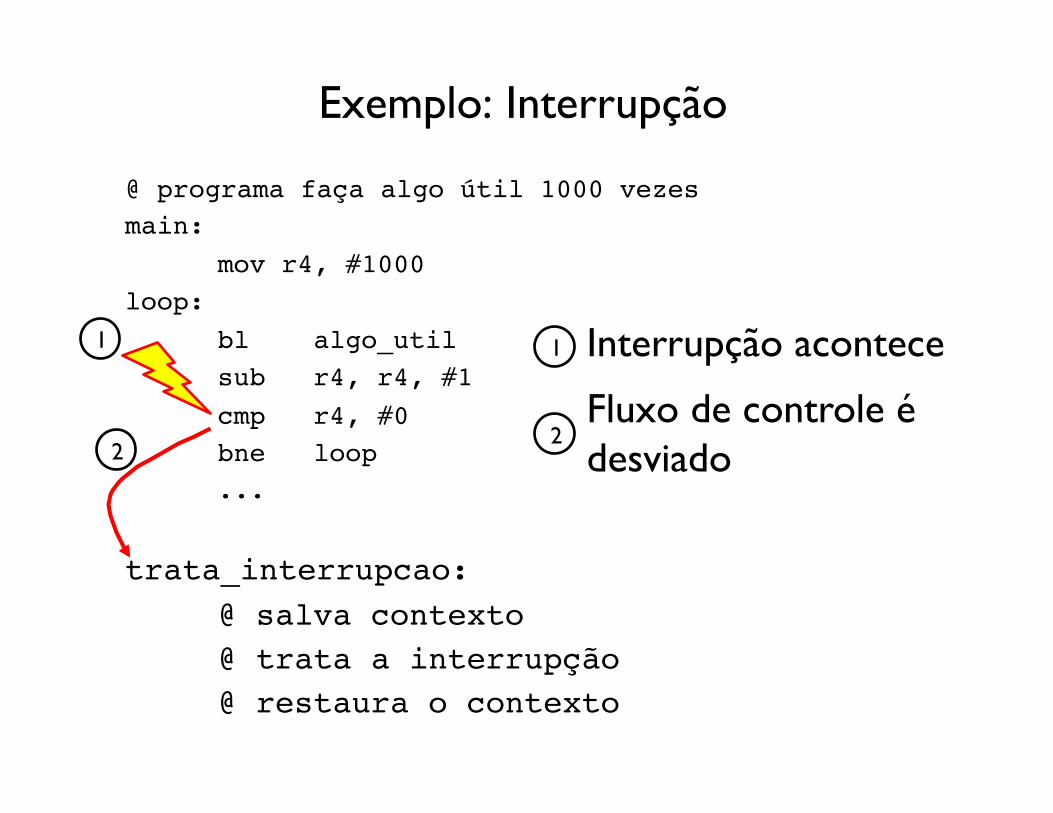
Interrupção acontece
Fluxo de controle é desviado
1
2

Exemplo: Interrupção
@ programa faça algo útil 1000 vezes!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne !loop!!...!
!
trata_interrupcao:!!@ salva contexto!!@ trata a interrupção!!@ restaura o contexto!
!
1
2
Interrupção acontece
Fluxo de controle é desviado
A interrupção é tratada
1
2
3
3
Exemplo: Interrupção
@ programa faça algo útil 1000 vezes!main:!
!mov r4, #1000!loop:!
!bl !algo_util!!sub !r4, r4, #1!!cmp !r4, #0!!bne !loop!!...!
!
trata_interrupcao:!!@ salva contexto!!@ trata a interrupção!!@ restaura o contexto!
!
1
2
4
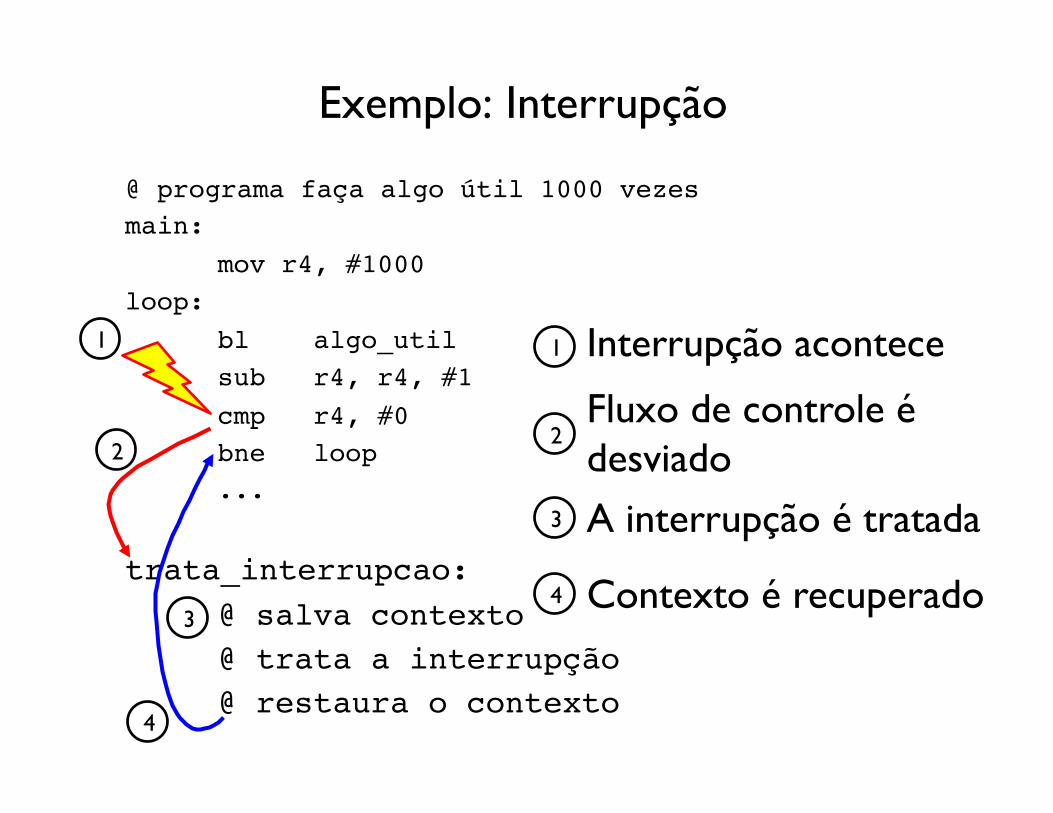
Interrupção acontece
Fluxo de controle é desviado
A interrupção é tratada
1
2
3
Contexto é recuperado 43

Interrupção
• Diversos dispositivos de E/S.
• Como chamar o tradador de interrupção correto?

Interrupção
• Diversos dispositivos de E/S.
• Como chamar o tradador de interrupção correto?
• Diversas opções:
– a) Um único tratador que verifica qual dispositivo interrompeu e chama o procedimento adequado.
– b) Múltiplos tratadores, um para cada dispositivo.
• Vetor de interrupções!
– Armazena o endereço das rotinas de tratamento.

Vetor de Interrupções
• É um espaço de memória que contém o endereço ou o instruções das rotinas de tratamento de interrupções – Endereço: o processador carrega da memória o
endereço da rotina e desvia o fluxo de execução para o endereço carregado.
– Instruções: o processador desvia o fluxo de execução para o espaço que contém o código.

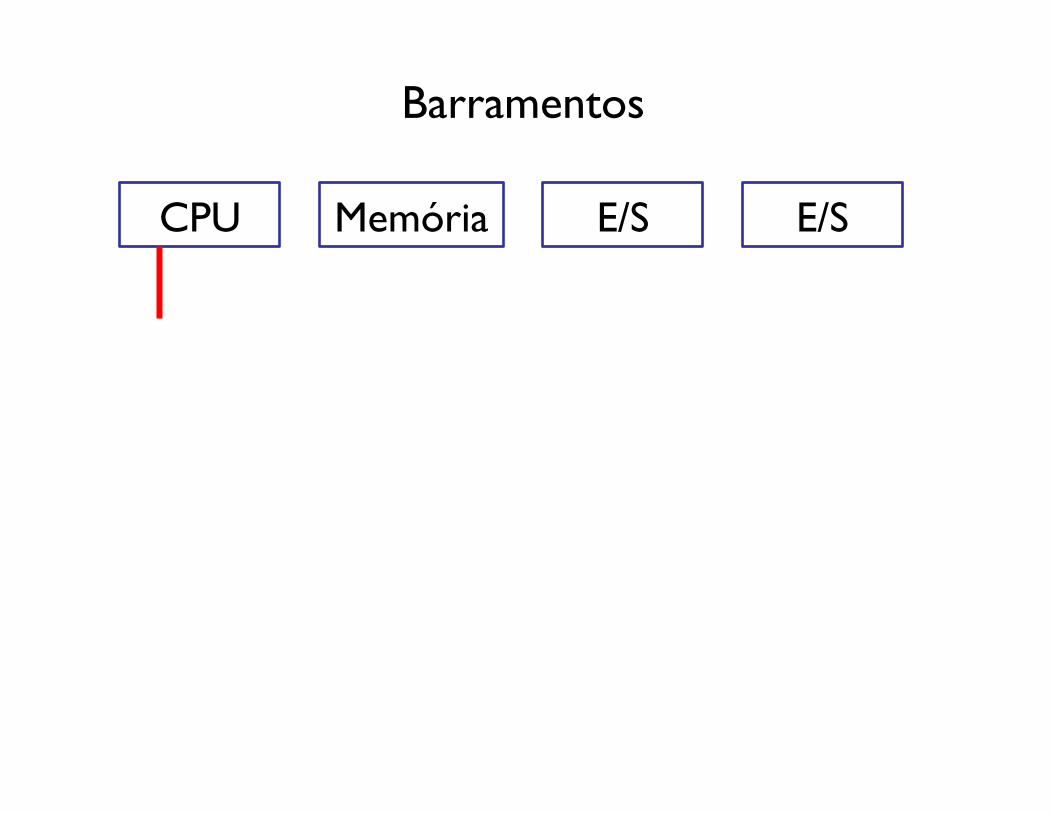
Vetor de Interrupções
• No ARM, o vetor de interrupções contém a instrução inicial de cada rotina.
• Vetor inicia-se tipicamente no endereço 0x000
The ARM Instruction Set - ARM University Program - V1.0 10
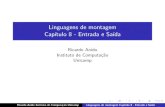
* When an exception occurs, the core:• Copies CPSR into SPSR_<mode>• Sets appropriate CPSR bits
If core implements ARM Architecture 4T and is currently in Thumb state, then
ARM state is entered. Mode field bits Interrupt disable flags if appropriate.
• Maps in appropriate banked registers• Stores the “return address” in LR_<mode>• Sets PC to vector address
* To return, exception handler needs to:• Restore CPSR from SPSR_<mode>• Restore PC from LR_<mode>
Exception Handlingand the Vector Table
0x00000000
0x0000001C
0x00000018
0x00000014
0x00000010
0x0000000C
0x00000008
0x00000004
Reset
Undefined Instruction
FIQ
IRQ
Reserved
Data Abort
Prefetch Abort
Software Interrupt
Vetor de Interrupções
• Só cabe 4 bytes, ou seja, 1 instrução. Logo a primeira intrução do tratador deve ser um salto para rotina que trata a interrupção.
• Opções: b ! !reset!ldr !pc, =reset!mov !pc, #0xEF000000!

Vetor de Interrupções
.org 0x000!b trata_reset!.org 0x18!b trata_IRQ!...!.org 0x20!trata_IRQ:!!@ salva contexto!!@ trata a interrupção!!@ restaura o contexto!
!!
Vetor de Interrupções – Salvando o contexto
• Como fazemos para salvar o contexto?
Vetor de Interrupções – Salvando o contexto
• Como fazemos para salvar o contexto? • O que acontece com o valor de PC do programa que
estava sendo executado? Perdemos o valor?
Vetor de Interrupções – Salvando o contexto
• Como fazemos para salvar o contexto? • O que acontece com o valor de PC do programa que
estava sendo executado? Perdemos o valor? – Resposta: o processador salva o valor de PC em um registrador LR especial, o LR_<mode>!
• Mode é o modo de operação. Existem 7 modos de operação: User, System, Supervisor, Abort, Undefined, Interrupt, Fast Interrupt.
Vetor de Interrupções – Salvando o contexto
• Como fazemos para salvar o contexto? • O que acontece com o valor de PC do programa que
estava sendo executado? Perdemos o valor? – Resposta: o processador salva o valor de PC em um
registrador LR especial, o LR_<mode>!
• Mode é o modo de operação. Existem 7 modos de operação: User, System, Supervisor, Abort, Undefined, Interrupt, Fast Interrupt. – O modo de operação é selecionado de acordo com a interrupção
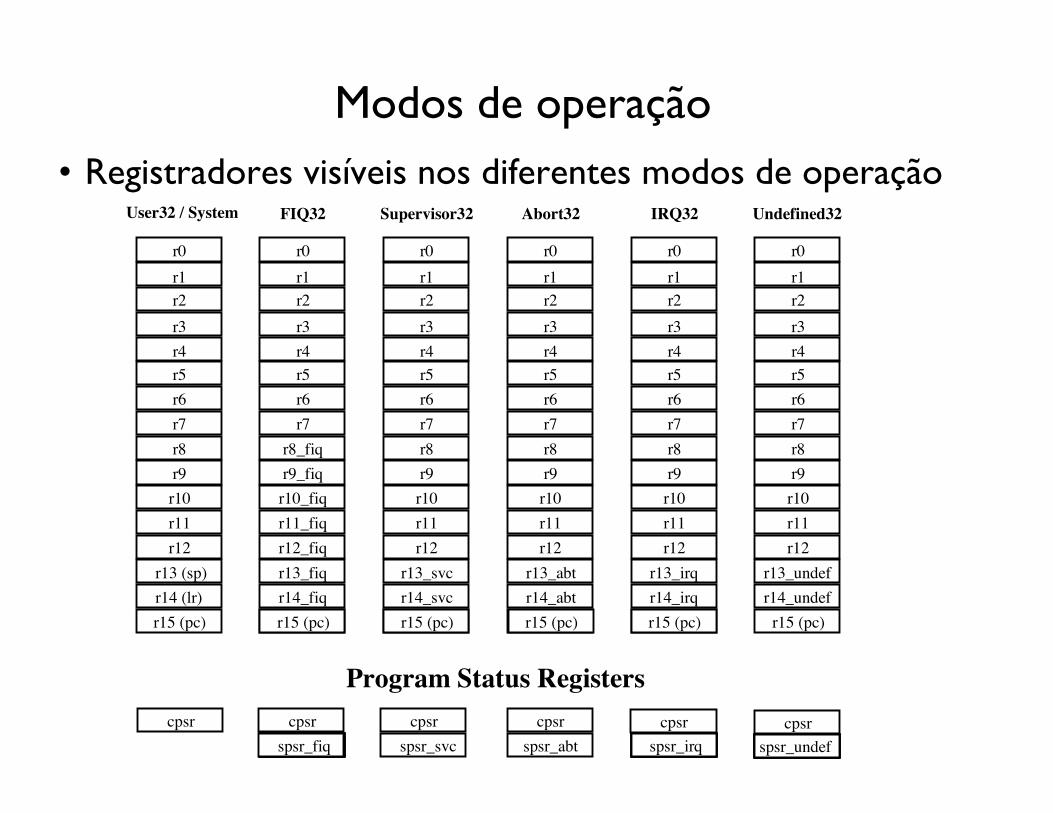
Modos de operação • Registradores visíveis nos diferentes modos de operação
The ARM Instruction Set - ARM University Program - V1.0 4
Register OrganisationGeneral registers and Program Counter
Program Status Registers
r15 (pc)r14 (lr)r13 (sp)
r14_svcr13_svc
r14_irqr13_irq
r14_abtr13_abt
r14_undefr13_undef
User32 / System FIQ32 Supervisor32 Abort32 IRQ32 Undefined32
cpsrsprsr_fiqsprsr_fiqsprsr_fiq spsr_abtspsr_svcsprsr_fiqsprsr_fiqspsr_fiq sprsr_fiqsprsr_fiqsprsr_fiqsprsr_fiqsprsr_fiqspsr_irq
r12
r10r11
r9r8r7
r4r5
r2r1r0
r3
r6r7
r4r5
r2r1r0
r3
r6
r12
r10r11
r9r8r7
r4r5
r2r1r0
r3
r6
r12
r10r11
r9r8r7
r4r5
r2r1r0
r3
r6
r12
r10r11
r9r8r7
r4r5
r2r1r0
r3
r6
r12
r10r11
r9r8r7
r4r5
r2r1r0
r3
r6
r15 (pc) r15 (pc) r15 (pc) r15 (pc) r15 (pc)
cpsrcpsrcpsrcpsrcpsr
r14_fiqr13_fiqr12_fiq
r10_fiqr11_fiq
r9_fiqr8_fiq
sprsr_fiqsprsr_fiqsprsr_fiqsprsr_fiqsprsr_fiqspsr_undef
Vetor de Interrupções – Salvando o contexto
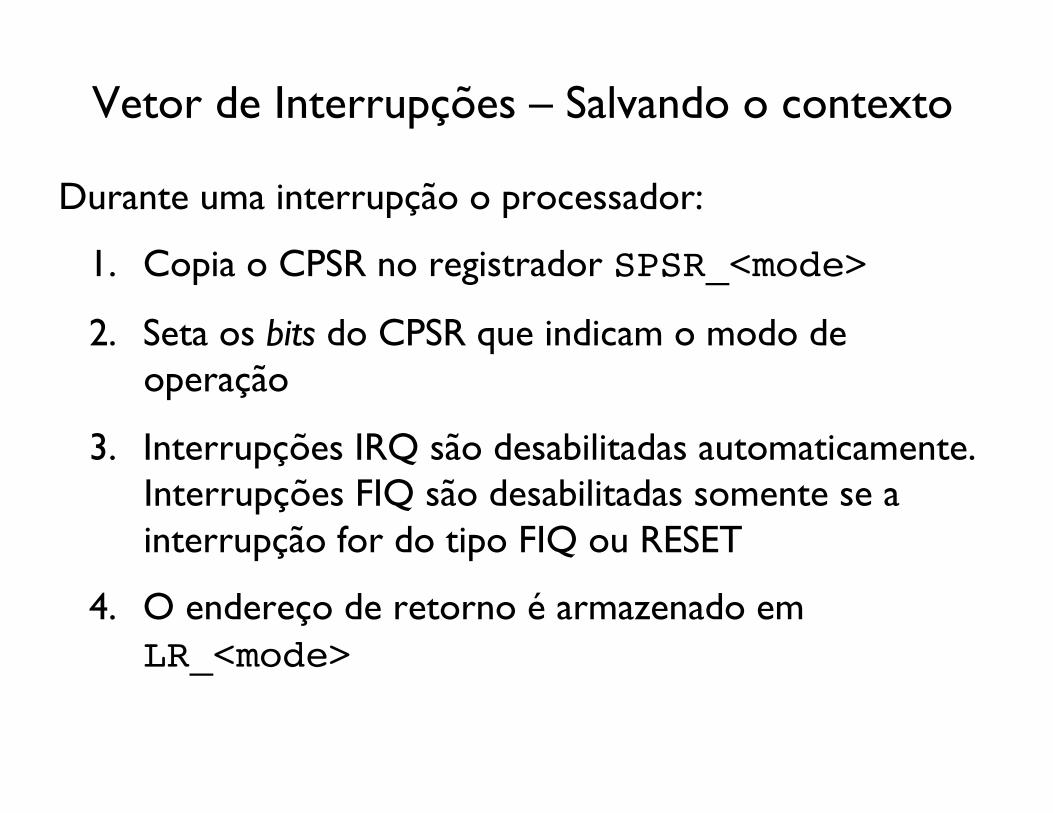
Durante uma interrupção o processador:
1. Copia o CPSR no registrador SPSR_<mode>!
2. Seta os bits do CPSR que indicam o modo de operação
3. Interrupções IRQ são desabilitadas automaticamente. Interrupções FIQ são desabilitadas somente se a interrupção for do tipo FIQ ou RESET
4. O endereço de retorno é armazenado em LR_<mode>!
Interrupção/Exceção
The ARM Instruction Set - ARM University Program - V1.0 5
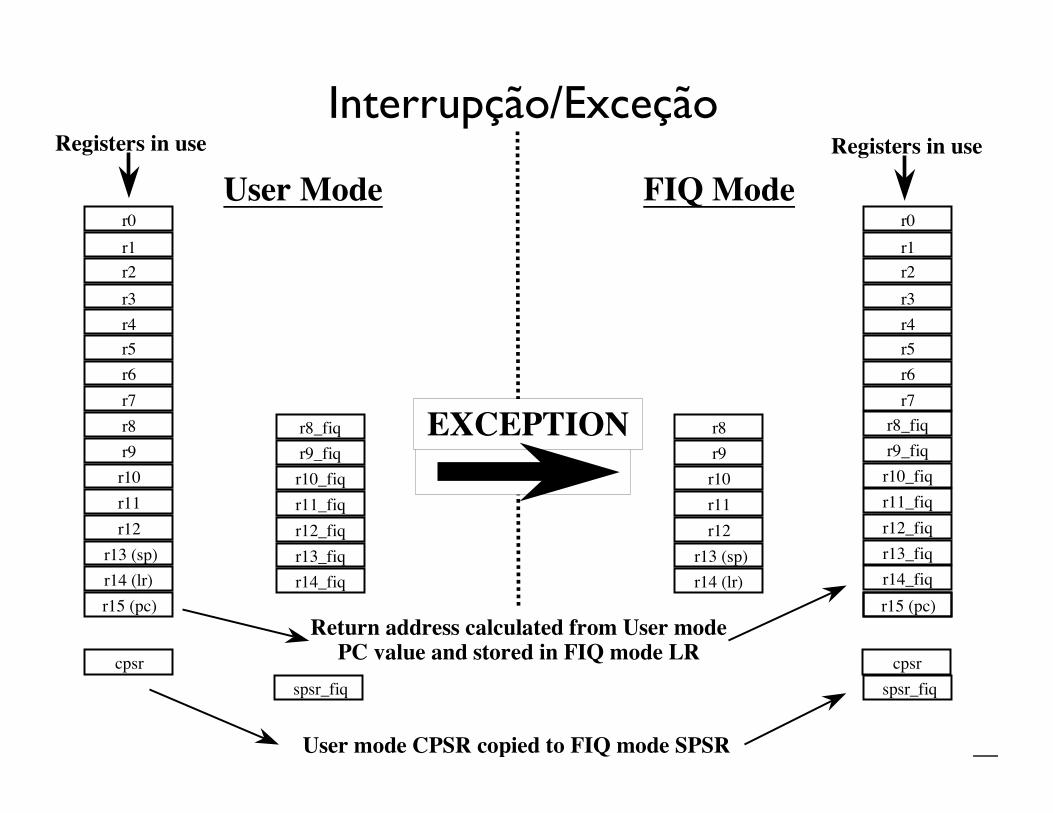
Register Example:User to FIQ Mode
spsr_fiqcpsr
r7
r4r5
r2r1r0
r3
r6
r15 (pc)r14_fiqr13_fiqr12_fiq
r10_fiqr11_fiq
r9_fiqr8_fiq
r14 (lr)r13 (sp)
r12
r10r11
r9r8
User mode CPSR copied to FIQ mode SPSR
cpsr
r15 (pc)r14 (lr)r13 (sp)
r12
r10r11
r9r8r7
r4r5
r2r1r0
r3
r6
r14_fiqr13_fiqr12_fiq
r10_fiqr11_fiq
r9_fiqr8_fiq
Return address calculated from User mode PC value and stored in FIQ mode LR
Registers in use Registers in use
EXCEPTION
User Mode FIQ Mode
spsr_fiq
Interrupção/Exceção
The ARM Instruction Set - ARM University Program - V1.0 7
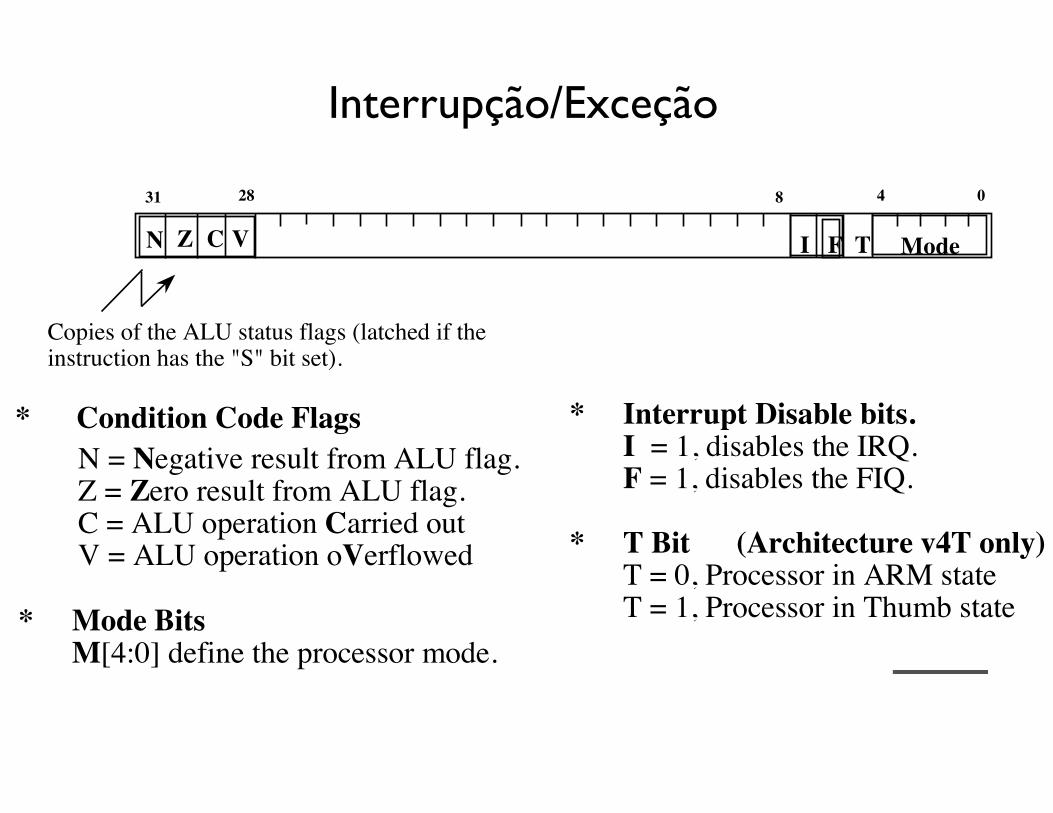
The Program Status Registers(CPSR and SPSRs)
Copies of the ALU status flags (latched if theinstruction has the "S" bit set).
N = Negative result from ALU flag.Z = Zero result from ALU flag.C = ALU operation Carried outV = ALU operation oVerflowed
* Interrupt Disable bits.I = 1, disables the IRQ.F = 1, disables the FIQ.
* T Bit (Architecture v4T only)T = 0, Processor in ARM stateT = 1, Processor in Thumb state
* Condition Code Flags
ModeN Z C V
2831 8 4 0
I F T
* Mode BitsM[4:0] define the processor mode.

Vetor de Interrupções – Tratando RESET
• A interrupção de RESET não precisa salvar o contexto, afinal, foi uma operação de reset.
• No entanto, o tratador deve supor que a máquina acabou de ser ligada, e deve preparar o contexto para execução. – Configurar os vetores de exceção – Inicializar a MMU – Inicializar as pilhas e registradores. – Inicializar dispositivos de E/S críticos – Habilitar interrupções – Mudar o modo para execução de código do usuário.
Traps ���
ou���Interrupções por software

Traps / Interrupções por Software Papéis do sistema operacional: • Abstrair o funcionamento dos dispositivos de entrada e
saída. • Proteger o sistema contra a execução de código
malicioso. • Gerenciar o acesso aos dispositivos. • Etc...
Traps / Interrupções por Software • Ex: Abstrair o funcionamento dos dispositivos de entrada
e saída. – Como escrever um dado em um arquivo no disco
rígido da Seagate, ou da Hitachi? – E se o arquivo estiver em um pen-drive?

Traps / Interrupções por Software • Ex: Abstrair o funcionamento dos dispositivos de entrada
e saída. – Como escrever um dado em um arquivo no disco
rígido da Seagate, ou da Hitachi? – E se o arquivo estiver em um pen-drive?
• O sistema operacional provê uma interface bem definida para acessar arquivos e abstrai os detalhes de acesso ao dispositivo. – O driver do dispositivo cuida dos detalhes!
• O programa pode acessar o dispositivo diretamente? Sem o auxílio do sistema operacional???

Traps / Interrupções por Software
• Ex: Proteger o sistema contra a execução de código malicioso. – O que acontece se um programa executar o seguinte
trecho de código:
trecho_malicioso:! mrs r0, CPSR! orr r0, r0, #0xC0! msr CPSR, r0!laco:! b laco!
Traps / Interrupções por Software
• Precisamos de um meio de: 1) proteger o sistema de código malicioso! 2) permitir que o programa do usuário chame o sistema operacional para executar tarefas (E/S, etc...)
• Proteger o sistema de código malicioso: – Restringir o código de usuário à execução de
instruções seguras. Não permitir a execução de instruções de entrada e saída, msr, e outras.
• Para chamar o sistema operacional: – Podemos usar a instrução b (ou bl)?
Traps / Interrupções por Software
• Vamos supor que nós restringimos o código do usuário.
– Se nós chamarmos uma rotina do SO com a instrução b, o SO conseguirá executar instruções que inibem interrupções, realizam entrada e saída ou outras instruções protegidas?
• Não
Traps / Interrupções por Software
• Vamos supor que nós restringimos o código do usuário.
– Se nós chamarmos uma rotina do SO com a instrução b, o SO conseguirá executar instruções que inibem interrupções, realizam entrada e saída ou outras instruções protegidas?
• Não
• Solução: 2 modos de execução
– Supervisor: todas as instruções estão disponíveis.
– Usuário: apenas instruções seguras estão disponíveis.
Traps / Interrupções por Software
• Como ir para o modo supervisor e chamar o SO ao mesmo tempo?
– Traps, ou interrupções por Software
• Uma interrupção por Software invoca uma função registrada no vetor de interrupções!
– Ajuda a garantir que apenas o SO executará no modo superusuário
• ARM:
– Instrução: svc #0!

Traps / Interrupções por Software
• Processador começa (boot) no modo supervisor.
• O kernel do SO inicializa os vetores de interrupções, mapas de memória, etc.
• SO prepara a pilha de cada modo de execução
• SO inicia contexto do processo de usuário e muda para o modo usuário.
Traps / Interrupções por Software • O programa está executando
– Se o programa precisa chamar o sistema operacional, executa uma interrupção por Software
svc #0!– O processador gera uma interrupção, chamando o
tratador cadastrado no vetor de interrupções.
• Neste momento o processador entra no modo supervisor.
– O tratador do SO realiza a operação e retorna com movs pc, lr, trazendo a execução de volta para a aplicação no modo usuário e restaurando o CPSR!

Exceções

Exceções • Interrupções:
– Eventos causados por dispositivos externos ao processador. • Ex: dispositivo de entrada e saída.
– Estes eventos podem ocorrer a qualquer momento.
• Exceções: – Eventos causados pelo próprio processador. – Causados durante a execução de instruções. – Somente sob certas circunstâncias!
• Ex: divisão por zero...
Exceções • Exemplos de exceções:
– Divisão por zero – Instrução inexistente – Acesso a região de memória protegida – Falta de página
• São eventos infrequentes: Exceções à regra!
Exemplo – Divisão por Zero • O resultado de uma divisão por zero é indefinido.
• Como o processador deve tratar a divisão por zero?
Exemplo – Divisão por Zero • O resultado de uma divisão por zero é indefinido.
• Como o processador deve tratar a divisão por zero?
– Resposta: deixe o software (programador) tratar.

Exemplo – Divisão por Zero • O resultado de uma divisão por zero é indefinido.
• Como o processador deve tratar a divisão por zero?
– Resposta: deixe o software (programador) tratar.
• Como?
Exemplo – Divisão por Zero • O resultado de uma divisão por zero é indefinido.
• Como o processador deve tratar a divisão por zero?
– Resposta: deixe o software (programador) tratar.
• Como?
– Opção 1: antes de dividir, compare o divisor com zero, se for igual, salte para uma rotina que trata a divisão por zero.
• OBS: este exemplo não se aplica ao ARM do simulador, que não possui instrução de divisão!

Exemplo – Divisão por Zero !!! ...! cmp r1, #0! beq trata_div_zero! div r2, r1! ...!! trata_div_zero:! ...!
(a) Verificar o divisor antes.

Exemplo – Divisão por Zero !!! ...! cmp r1, #0! beq trata_div_zero! div r2, r1! ...!! trata_div_zero:! ...!
(a) Verificar o divisor antes.
Não é efficiente verificar se o valor do divisor é zero toda vez que realizarmos uma
divisão.

Exemplo – Divisão por Zero !!! ...! cmp r1, #0! beq trata_div_zero! div r2, r1! ...!! trata_div_zero:! ...!
.org 0x...!b trata_div_zero!!...!cmp r1, 0!beq trata_div_zero!div r2, r1!...!!trata_div_zero:!...!
(b) Usar o mecanismo de Exceções. (a) Verificar o divisor antes.
Utilizamos o mecanismo de
exceções, similar ao de interrupções!
Exceções • O tratamento de uma exceção é similar ao tratamento
de uma interrupção. – O processador salva parte do contexto – Desvia a execução para o tratador da exceção
• Tipicamente, o endereço do tratador é armazenado no vetor de interrupções.
– O tratador da exceção salva o restante do contexto – Após tratar a exceção, o tratador “pode” recuperar o
contexto e retornar ao programa ou abortar a execução do programa.