Oscilações Amortecidas - Laboratório de Sistemas...
23
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque Aula 7 1 Oscilações Amortecidas O modelo do sistema massa-mola visto nas aulas passadas, que resultou nas equações do MHS, é apenas uma idealização das situações mais realistas existentes na prática. Sempre que um sistema físico é posto para oscilar livremente, as oscilações decaem com o tempo até desaparecer completamente. Todo sistema real possui características dissipativas que levam a sua energia mecânica (cinética mais potencial) a se converter em outras formas de energia (calor, por exemplo). Portanto, o modelo do MHS que leva à descrição matemática de um sistema oscilante em termos de uma função senoidal de amplitude constante e que perdura indefinidamente deve ser modificado para que possa descrever de maneira mais precisa as oscilações que decaem com o tempo. A força resistiva de um fluido (ar, água, etc) a um corpo em movimento é função da velocidade do corpo. Ela se opõe ao sentido da velocidade e seu módulo é dado por 2 2 1 ) ( v b v b v R + = , (1) onde v é o módulo de v e b 1 e b 2 são constantes positivas.
Transcript of Oscilações Amortecidas - Laboratório de Sistemas...
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
1
Oscilações Amortecidas
O modelo do sistema massa-mola visto nas aulas passadas, que
resultou nas equações do MHS, é apenas uma idealização das
situações mais realistas existentes na prática.
Sempre que um sistema físico é posto para oscilar livremente, as
oscilações decaem com o tempo até desaparecer completamente.
Todo sistema real possui características dissipativas que levam a sua
energia mecânica (cinética mais potencial) a se converter em outras
formas de energia (calor, por exemplo).
Portanto, o modelo do MHS que leva à descrição matemática de um
sistema oscilante em termos de uma função senoidal de amplitude
constante e que perdura indefinidamente deve ser modificado para
que possa descrever de maneira mais precisa as oscilações que
decaem com o tempo.
A força resistiva de um fluido (ar, água, etc) a um corpo em
movimento é função da velocidade do corpo. Ela se opõe ao sentido
da velocidade e seu módulo é dado por
2
21)( vbvbvR += , (1)
onde v é o módulo de v e b1 e b2 são constantes positivas.
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
2
Pergunta: quais as unidades de b1 e b2?
Quando as velocidades são pequenas, como é o caso para pequenas
oscilações, o termo quadrático na equação acima pode ser
desprezado e fica-se apenas com o termo linear:
bvvR =)( . (2)
Vamos novamente tomar o modelo de um corpo preso a mola como
o protótipo de um sistema oscilando. No presente caso,
considerando que há uma força resistiva se opondo ao movimento
do corpo como a da equação (2), a segunda lei de Newton para o
corpo é
bvkxdt
xdm −−=
2
2
. (3)
Esta equação pode ser reescrita como:
02
2
=++ kxdt
dxb
dt
xdm
ou
02
02
2
=++ xdt
dx
dt
xdωγ
, (4)
onde

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
3
m
b
m
k== γω e 2
0 . (5)
Pergunta: quais as unidades de γ?
A constante γ caracteriza o amortecimento e, quando ela é nula, não
há amortecimento e o corpo oscila com freqüência angular ω0 como
nos casos vistos anteriormente.
A equação (4) é uma equação diferencial linear homogênea de 2a
ordem com coeficientes constantes. Para resolvê-la, iremos usar o
método da exponencial complexa e supor que a solução x(t) é a parte
real do vetor girante z(t) que satisfaz a equação complexa
02
02
2
=++ zdt
dz
dt
zdωγ
. (6)
A solução da equação acima pode ser encontrada pelo método da
substituição. Vamos supor uma solução da forma
iptetz =)( . (7)
Substituindo (7) em (6) obtemos (mostre como exercício):
022 =++− ipt
o
iptipt epeiep ωγ .

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
4
Para que esta equação seja satisfeita para todos os valores de t
devemos ter:
022 =++− opip ωγ . (8)
Esta equação é conhecida como equação característica.
Observe que, pela equação acima, p não pode ser um número real
puro. Por causa do termo ipγ, se p for um número real puro
(diferente de zero) a equação não tem solução (a menos que γ seja
nulo, o que não nos interessa aqui).
Portanto, p tem que ser um número complexo. Vamos escrevê-lo
como:
idcp += .
Então,
222 2 dicdcp −+= .
Substituindo estas duas expressões na equação (8):
⇒=+−++−− 02 222
odicdicdc ωγγ
( ) ( ) 022
0
22 =−−+−+−⇒ γωγ ccdiddc .
Esta equação só é satisfeita se os dois termos entre parênteses forem
simultaneamente nulos:

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
5
02
0
22 =+−+− ωγddc
02 =− γccd .
Da segunda equação temos que:
2
γ=d
.
Substituindo na primeira equação:
⇒−=4
22
0
2 γωc
4
22
0
γω −±=c
. (9)
Observe que há três possibilidades para c:
a) Se 4
22
0
γω > , c é um número real diferente de zero;
b) Se 4
22
0
γω = , c é zero;
c) Se 4
22
0
γω < , c é um número imaginário puro.
A primeira leva ao caso chamado de amortecimento subcrítico, a
segunda leva ao caso chamado de amortecimento crítico, e a terceira
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
6
leva ao caso chamado de amortecimento supercrítico. Veremos a
razão para estes nomes mais adiante, quando interpretarmos
fisicamente as soluções.
Vamos começar considerando a possibilidade (a), que é a que faz
com que c seja um número real não nulo. Considerando então que
4
22
0
γω >
, (10)
temos que
04
22
0
2 >−=γ
ωc
e
ωγ
ω ±≡−±=4
22
0c. (11)
A solução obtida implica que há dois valores possíveis de p:
2 e
221
γω
γω ipip +−=+=
,
ou seja, há dois valores possíveis de z:
tiitip
tiitip
eezeez
+−
+
==== 2
2
2
121 e
γω
γω
.

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
7
A solução mais geral de (6) para este caso é dada por uma
combinação linear das duas soluções acima:
⇒+=
+−
+ tiitii
eaeatz 2
2
2
1)(
γω
γω
[ ]titi
t
eaeaetzωω
γ−
−
+=⇒ 212)( , (12)
onde as constantes a1 e a2 podem ser números complexos.
O fato de que a1 e a2 podem ser números complexos implica que, em
princípio, há quatro constantes reais arbitrárias na solução acima
(porque?). Porém, a equação diferencial (6) é de segunda ordem e
sabemos que a sua solução geral deve conter apenas duas constantes
reais arbitrárias.
O número de constantes independentes pode ser reduzido a dois se
fizermos que os dois números complexos a1 e a2 sejam complexos
conjugados:
israaisra −==+= *
121 e ,
onde r e s são números reais.
Na forma trigonométrica, dois números complexos conjugados são
escritos como (mostre como exercício):
ϕϕ iiBeaaBea
−=== *
121 e ,
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
8
onde B e φ são números reais.
Substituindo esses números complexos conjugados nas suas formas
trigonométricas na equação (12), obtemos:
( ) ( )[ ]ϕωϕωγ
+−+−
+= titi
t
eeBetz 2)( . (13)
Tomando a parte real desta expressão como a solução x(t)
procurada, obtemos:
( )ϕωγ
+=−
tAetx
t
cos)( 2, (14)
onde definiu-se A = 2B.
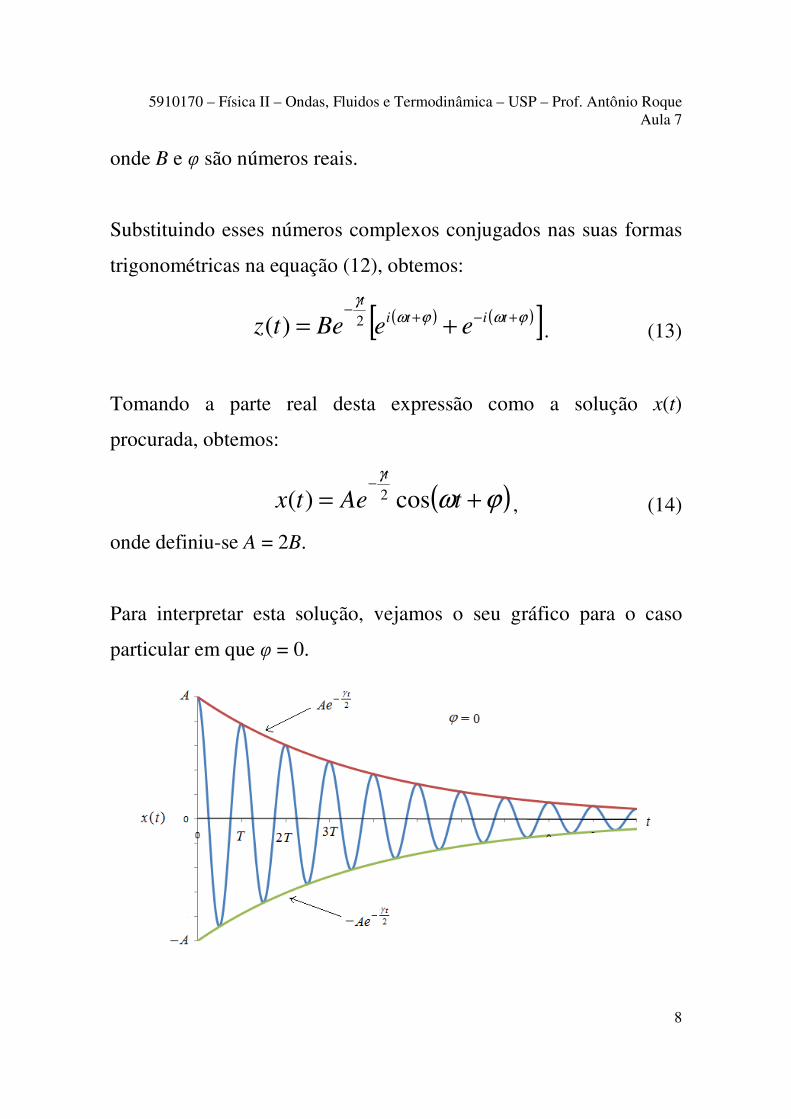
Para interpretar esta solução, vejamos o seu gráfico para o caso
particular em que φ = 0.
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
9
Exercício: tente reproduzir este gráfico usando o Excel ou outro
programa qualquer. Dica: o gráfico foi feito para um caso em que γ
<< ω0, onde ω0 é a freqüência angular do oscilador não amortecido.
Observe que o gráfico mostra uma oscilação cuja amplitude diminui
com o tempo. Ela corresponde à noção intuitiva que temos de um
oscilador amortecido.
A grandeza ω, definida por (11), é chamada de frequência do
oscilador amortecido. Estritamente falando, não se pode definir uma
frequência para o caso de um oscilador amortecido, pois o
movimento não é periódico (o oscilador nunca passa duas vezes pela
mesma posição com a mesma velocidade).
Para o caso de um amortecimento fraco, em que γ << ω0 (que é o
caso da figura acima), pode-se escrever
0
22
04
ωγ
ωω ≅−=.
Desta forma, pode-se usar o termo “frequência” sem incorrer em um
grande erro, mas deve-se ter em mente que o termo só tem
significado preciso quando γ = 0. Apesar disso, é costume se referir
ao termo ω como a “frequência” angular do oscilador amortecido e
isto será feito aqui.
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
10
Assim como se define uma “frequência” para o oscilador
amortecido, também se define o “período”, dado por
ω
π2=T
.
Note que a frequência do oscilador amortecido é sempre menor que
a frequência do oscilador sem amortecimento. Por outro lado, o
período do oscilador amortecido é sempre maior que o período do
oscilador não amortecido.
Continuando com os abusos de linguagem, também é costume
chamar o fator Ae–γt/2
de “amplitude” da oscilação amortecida.
Observe que essa amplitude decai com o tempo de forma
exponencial. As curvas
2)(
t
A Aetx
γ−
± ±=
definem a envoltória (ou envelope) das oscilações. Essas duas
curvas também estão mostradas na figura acima.
Define-se o tempo de decaimento τd (uma constante) como o tempo
que a amplitude acima leva para cair a um valor igual a 1/e do seu
valor inicial. Logo:
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
11
( )⇒=⇒=
−
±
±
eA
Ae
ex
xd
A
dA 11
)0(
2
γτ
τ
⇒=⇒=⇒ −−
12
12 deed γτ
γτ
b
md
22==⇒
γτ
. (15)
Pode-se então reescrever a equação (14) como:
( )ϕωτ +=−
tAetx d
t
cos)( . (16)
A forma acima é útil quando se estuda experimentalmente um
movimento oscilatório com amortecimento. Isto porque o tempo de
decaimento τd pode ser determinado experimentalmente e, a partir
dele, o valor de b.
A determinação experimental de τd pode ser feita da seguinte
maneira: Mede-se o valor da amplitude da oscilação x0 para um
tempo t0 correspondente a um dos picos mostrados na figura da
página 8. Depois, mede-se a amplitude xN em um tempo tN que esteja
N picos à frente (ou seja, em um tempo NT depois de t0).

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
12
Da equação (16), temos que a razão entre as duas amplitudes é
( )d
N
d
N
d tt
t
t
N
e
e
e
x
x τ
τ
τ 0
0
0
−
−
−
==,
de maneira que o tempo de decaimento é dado por:
( )( )N
Nd
xx
tt
0
0
ln
−=τ
. (17)
Apesar disso, no resto desta aula continuaremos a representar o
movimento oscilatório amortecido pela equação (14).
Ao contrário do caso do oscilador harmônico simples, visto nas
aulas passadas, a energia do oscilador amortecido não é constante ao
longo do tempo. Pelo contrário, ela é continuamente dissipada e
transformada em calor ou outras formas de energia.
A energia mecânica do oscilador amortecido num instante de tempo
t é dada por:
)(2
1)(
2
1)( 22 tkxtxmtE += &
. (18)
A taxa de variação temporal da energia é, portanto (usando-se a
notação do “ponto” para expressar a derivada temporal):

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
13
( )kxxmxxkxxxmdt
dE+=+= &&&&&&&
. (19)
Relembrando das equações (3) e (5),
⇒=−−=m
bxbkxxm γ e &&&
xmxbkxxm &&&& γ−=−=+⇒ ,
de maneira que
2xmdt
dE&γ−=
. (20)
A taxa de perda de energia é proporcional ao quadrado da
velocidade instantânea do corpo. Logo, a diminuição da energia não
é uniforme. A taxa de perda de energia possui máximos nos pontos
em que o corpo atinge os máximos de velocidade e é
instantaneamente nula nos pontos em que a velocidade do corpo é
zero.
Esses pontos podem ser obtidos calculando-se a expressão para a
velocidade do corpo. De (14) temos que (mostre como exercício):
( ) ( )
+++−=
−
γωωϕωγγ
ttAetx
t
sencos2
)( 2&,
de maneira que (mostre como exercício),
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
14
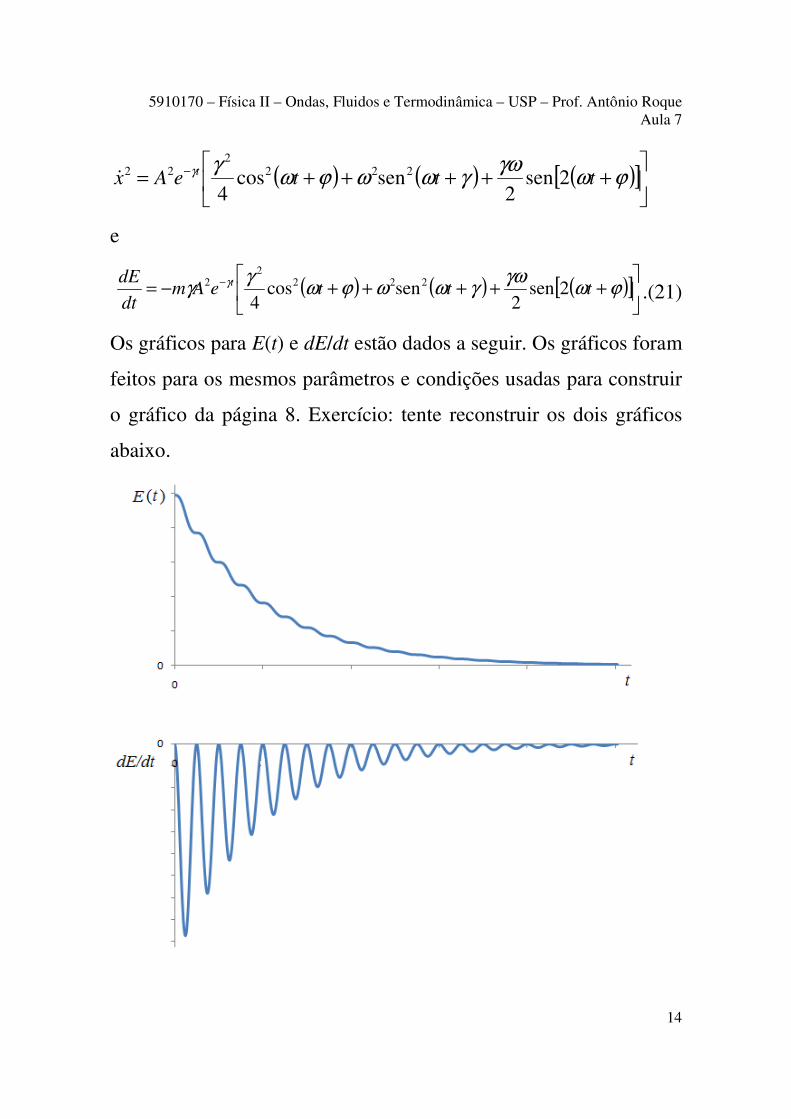
( ) ( ) ( )[ ]
+++++= − ϕω
γωγωωϕω
γγ ttteAx t 2sen2
sencos4
2222
22&
e
( ) ( ) ( )[ ]
+++++−= − ϕω
γωγωωϕω
γγ γ ttteAm
dt
dE t 2sen2
sencos4
2222
2
.(21)
Os gráficos para E(t) e dE/dt estão dados a seguir. Os gráficos foram
feitos para os mesmos parâmetros e condições usadas para construir
o gráfico da página 8. Exercício: tente reconstruir os dois gráficos
abaixo.
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
15
A análise feita até agora mostra que o oscilador amortecido é
caracterizado por dois parâmetros: ω0 e γ = b/m. A constante ω0 é a
freqüência angular das oscilações sem amortecimento e a constante γ
caracteriza o amortecimento. Se você fez a análise dimensional de γ
corretamente acima (página 3), terá visto que γ tem dimensão de
inverso de tempo. Esta é a mesma dimensão de ω0.
Portanto, pode-se definir uma grandeza adimensional para
caracterizar o oscilador amortecido:
γ
ω0≡Q. (22)
O parâmetro Q é chamado de fator “Q” (de qualidade) ou fator de
mérito do oscilador.
O fator Q de um oscilador amortecido é um número puro que pode
ser usado para caracterizar a força do amortecimento. Em termos de
Q, a equação (11) torna-se
−=−=
2
2
0
22
0
2
4
11
4 Qω
γωω
. (23)
Note que quanto maior o valor de Q, mais próximo de ω0 fica o
valor de ω. Valores grandes do fator Q (>> 1) indicam

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
16
amortecimento fraco, enquanto que valores pequenos indicam
amortecimento forte.
O fator Q é muito utilizado na descrição de oscilações de voltagem
ou de corrente em circuitos elétricos, e é por isso que ele foi
apresentado aqui. Quando vocês estudarem circuitos elétricos
compostos por capacitores, indutores e resistores, verão que
aparecerão equações idênticas à equação (4) e o fator Q será útil na
análise do comportamento dessas oscilações não mecânicas.
Vamos passar agora aos outros dois casos possíveis para a equação
(9):
b) Se 4
22
0
γω = , c é zero;
c) Se 4
22
0
γω < , c é um número imaginário puro.
No caso (b), se c for zero as duas soluções possíveis do caso (a) (p1 e
p2) tornam-se apenas uma:
⇒==2
γiidp
tipt eetz 2)(
γ−
==⇒ .

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
17
Neste caso, pode-se mostrar por substituição que uma segunda
função dada por
t
tetz 21 )(
γ−
=
também é solução da equação diferencial (6) (mostre como
exercício).
Como z = eat
e z1=teat
são linearmente independentes, a solução mais
geral da equação diferencial (6) para o caso em que 4
22
0
γω = é:
( )ttt
eBtABteAetz 222)(
γγγ−−−
+=+= . (24)
A parte real desta solução é ela mesma (note que não há mais o
número complexo i). Portanto, a solução para a equação diferencial
(4) no caso (b) é:
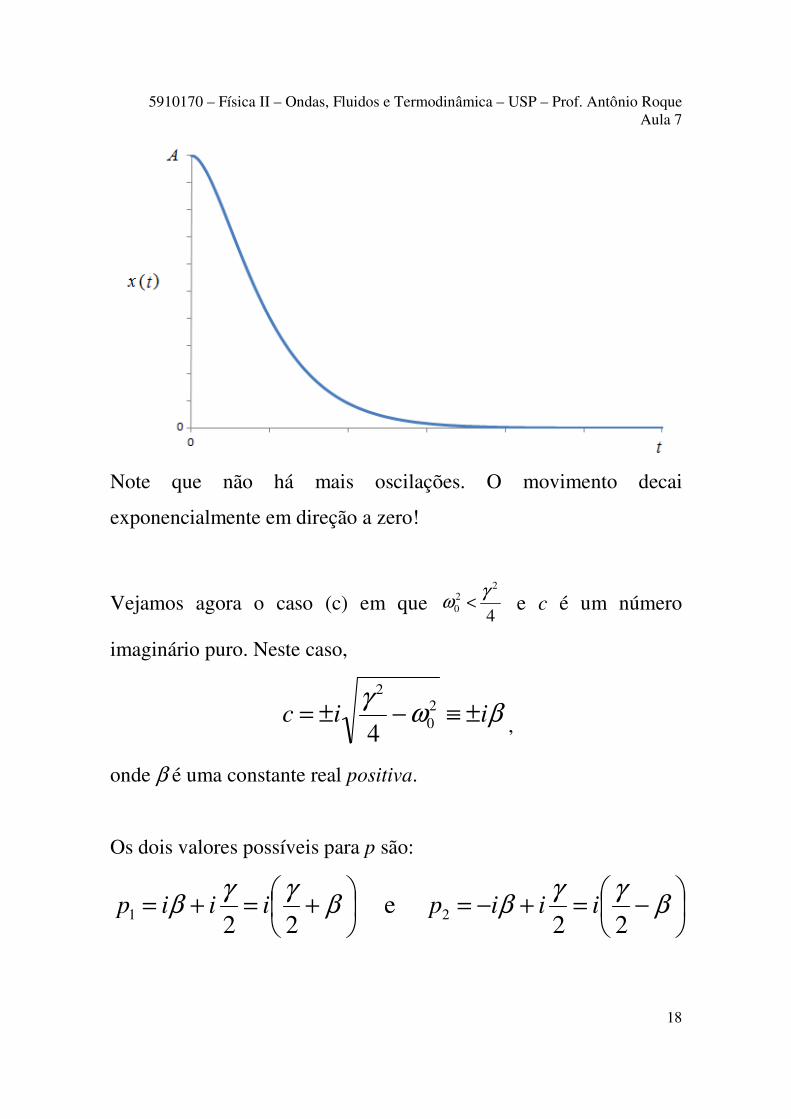
( )t
eBtAtx 2)(
γ−
+= . (25)
O gráfico desta solução é dado abaixo (supondo que x(0) = A e que
)0)0( =x& .
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
18
Note que não há mais oscilações. O movimento decai
exponencialmente em direção a zero!
Vejamos agora o caso (c) em que 4
22
0
γω < e c é um número
imaginário puro. Neste caso,
βωγ
iic ±≡−±= 2
0
2
4 ,
onde β é uma constante real positiva.
Os dois valores possíveis para p são:
−=+−=
+=+= β
γγββ
γγβ
22 e
2221 iiipiiip

5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
19
e os dois valores de z são então:
ttip
ttip
eezeez
−−
+−
====β
γβ
γ
2
2
2
121 e .
Notem que estas duas soluções também não são mais complexas (os
fatores dependentes de i desapareceram todos!).
Podemos, portanto, passar a escrever as soluções diretamente como
x1 e x2, e a solução mais geral de (4) para este caso é dada por uma
combinação linear de x1 e x2:
tt
eaeatx
−−
+−
+=β
γβ
γ
2
2
2
1)( . (26)
onde as constantes a1 e a2 são dois números reais arbitrários.
Observem que a solução acima não é mais oscilatória, assim como
no caso (b). Ela é dada pela soma de duas exponenciais e, portanto,
pode ser uma função que cresce indefinidamente ou decresce
indefinidamente, dependendo dos valores relativos dos expoentes
constantes que multiplicam t nas duas exponenciais.
O expoente da primeira exponencial é
+− β
γ
2, que é sempre
negativo; portanto, a primeira exponencial é sempre decrescente. O
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
20
expoente da segunda exponencial é
−− β
γ
2 e também é sempre
negativo, pois γ/2 > β (para mostrar isto, basta lembrar da definição
de β:
( ) βγβγωβγωγβ >⇒>⇒>=−⇒−= 2404)4( 222
0
222
0
22).
Portanto, a segunda exponencial também é sempre decrescente.
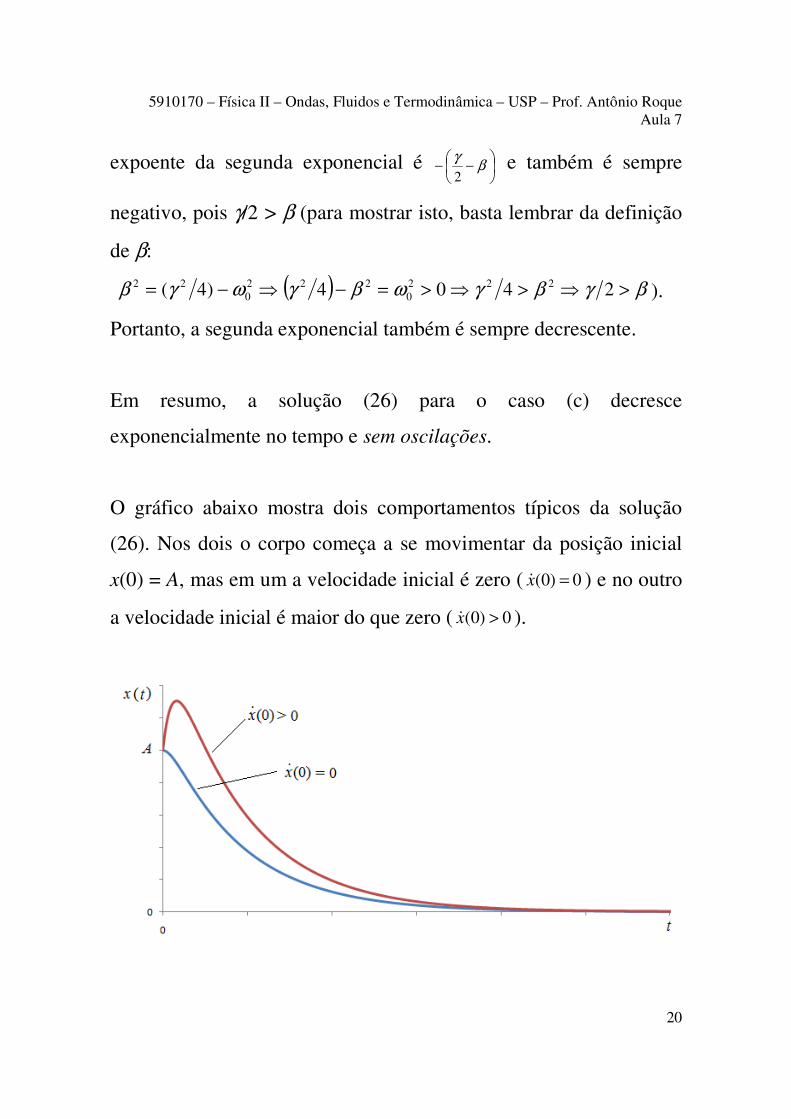
Em resumo, a solução (26) para o caso (c) decresce
exponencialmente no tempo e sem oscilações.
O gráfico abaixo mostra dois comportamentos típicos da solução
(26). Nos dois o corpo começa a se movimentar da posição inicial
x(0) = A, mas em um a velocidade inicial é zero ( 0)0( =x& ) e no outro
a velocidade inicial é maior do que zero ( 0)0( >x& ).
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
21
Se a velocidade do corpo no instante inicial é positiva, a posição do
corpo aumenta a partir desse instante, atinge um máximo e depois
decai em direção a zero. Se a velocidade inicial do corpo é nula, sua
posição decai monotonamente em direção a zero.
Notem que para tempos grandes os dois decaimentos se igualam.
Observando a solução (26), vemos que o termo exponencial cujo
expoente é
+− β
γ
2 decai mais rapidamente que o termo exponencial
cujo expoente é
−− β
γ
2 (explique o porquê disto).
Isto implica que, para tempos grandes, o termo cujo expoente é
−− β
γ
2 domina o comportamento da solução (26):
grande) (para ,)( 2
2 teatxt
−−
≅β
γ
. (27)
Independentemente da velocidade inicial do corpo e do que acontece
para valores pequenos de t, para tempos grandes o decaimento da
solução para o caso (c) é sempre o mesmo, de tipo exponencial
como na equação (27).
Exercício: Use um programa como o Excel ou qualquer outro
similar para estudar o comportamento da solução (26) para
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
22
diferentes valores de )0(x& (supondo sempre que x(0) = A). Em
particular, veja o que acontece quando a velocidade inicial for
negativa e tiver um módulo suficientemente grande.
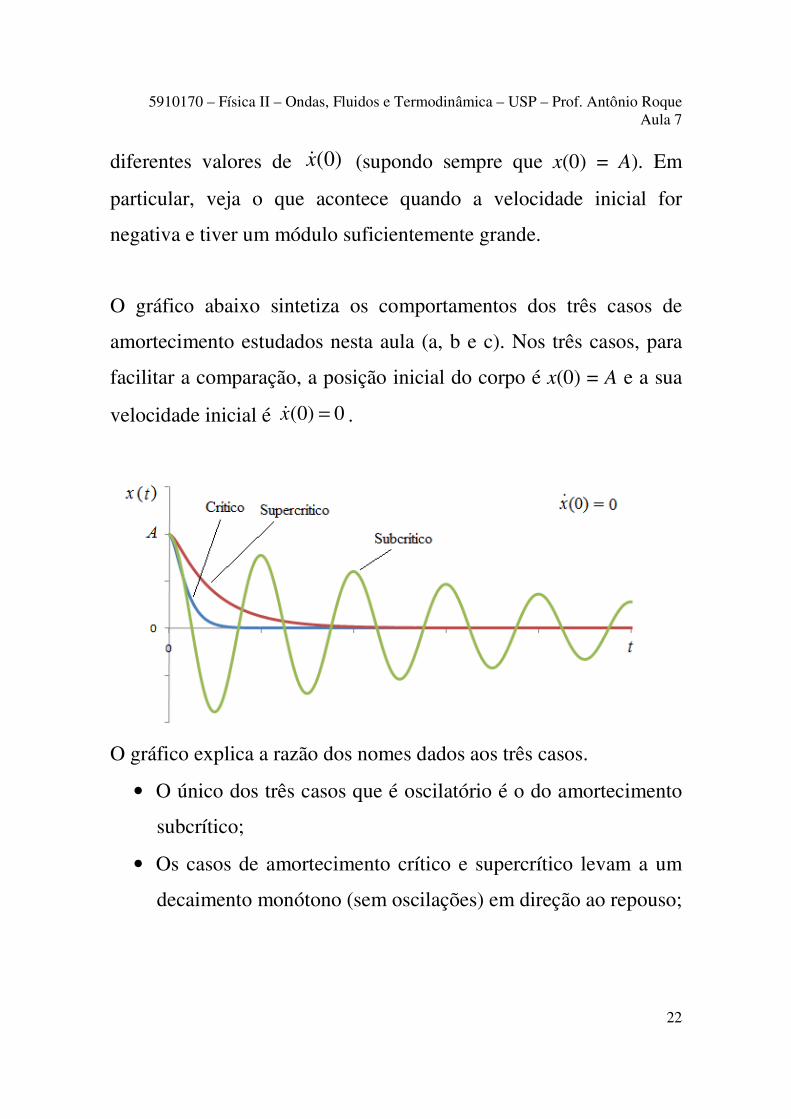
O gráfico abaixo sintetiza os comportamentos dos três casos de
amortecimento estudados nesta aula (a, b e c). Nos três casos, para
facilitar a comparação, a posição inicial do corpo é x(0) = A e a sua
velocidade inicial é 0)0( =x& .
O gráfico explica a razão dos nomes dados aos três casos.
• O único dos três casos que é oscilatório é o do amortecimento
subcrítico;
• Os casos de amortecimento crítico e supercrítico levam a um
decaimento monótono (sem oscilações) em direção ao repouso;
5910170 – Física II – Ondas, Fluidos e Termodinâmica – USP – Prof. Antônio Roque
Aula 7
23
• A solução com amortecimento crítico é a que decai mais
rapidamente em direção ao repouso;
• O nome “crítico” vem do fato de que é para o valor do
parâmetro γ deste caso (γ/2 = ω0) que o comportamento de
decaimento do corpo em direção ao repouso deixa de ser
oscilatório e passa a ser monótono (exponencial).
O caso de amortecimento crítico tem aplicação prática importante
na construção de balanças ou outros instrumentos de precisão
baseados em sistemas mecânicos elásticos. A ideia é construir o
aparelho de maneira que o seu amortecimento seja crítico para
que o movimento atinja o equilíbrio o mais depressa possível e
permita uma rápida leitura do resultado.
Amortecedores de automóveis também são ajustados para o caso
crítico, para retornar o mais rapidamente possível ao equilíbrio
após um buraco para estar prontos para o próximo.