PLATAFORMA ROBOT SUBACUÁTICA PROPULSADA POR …
124
1 PLATAFORMA ROBOT SUBACUÁTICA PROPULSADA POR ALETAS PECTORALES CÉSAR FERNANDO ALBA AYALA RODRIGO CASTIBLANCO MOSSOS DIANA ROCIO MANCERA GUEVARA PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA DEPARTAMENTO DE ELECTRÓNICA BOGOTA D.C. 2004
Transcript of PLATAFORMA ROBOT SUBACUÁTICA PROPULSADA POR …

1
PLATAFORMA ROBOT SUBACUÁTICA PROPULSADA POR ALETAS PECTORALES
CÉSAR FERNANDO ALBA AYALA RODRIGO CASTIBLANCO MOSSOS DIANA ROCIO MANCERA GUEVARA
PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA
DEPARTAMENTO DE ELECTRÓNICA BOGOTA D.C.
2004

2
PLATAFORMA ROBOT SUBACUÁTICA PROPULSADA POR ALETAS PECTORALES
CÉSAR FERNANDO ALBA AYALA RODRIGO CASTIBLANCO MOSSOS DIANA ROCIO MANCERA GUEVARA
Trabajo de Grado presentado como requisito parcial para optar al título de Ingeniero Electrónico
Ing. CARLOS ALBERTO PARRA RODRIGUEZ Director
PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA
DEPARTAMENTO DE ELECTRÓNICA BOGOTA D.C.
2004
3
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA
CARRERA DE INGENIERIA ELECTRÓNICA
RECTOR MAGNÍFICO: R.P. GERARDO REMOLINA S.J. DECANO ACADEMICO: Ing. ROBERTO ENRIQUE MONTOYA VILLA DECANO DEL MEDIO UNIVERSITARIO: R.P. ANTONIO J. SARMIENTO N. S.J. DIRECTOR DE CARRERA: Ing. JUAN CARLOS GIRALDO DIRECTOR DEL PROYECTO: Ing. CARLOS ALBERTO PARRA RODRIGUEZ
4
ARTICULO 23 DE LA RESOLUCIÓN No. 13 DE JUNIO DE 1946 “La universidad no se hace responsable de los conceptos emitidos por sus alumnos en sus proyectos de grado. Solo velará porque no se publique nada contrario al dogma y a la moral católica y porque los trabajos no contengan ataques o polémicas puramente personales. Antes bien, que se vea en ellos el anhelo de buscar la verdad y la justicia.”

5
A Dios por ser el sustento principal de mi vida y haber estado conmigo durante todo este proceso. A mi papá, mi mamá, mi tía, mi abuelita y mis hermanos por su apoyo incondicional.
A Rodrigo por ser tan excelente persona y buen amigo A Diana por ser una persona tan especial llena de alegría y entusiasmo
A la ingeniera Marta Manrique por todo el apoyo que nos brindo. A Daniel “phantom Romero”, Camilo L., Camilo V., Camilo M., Willy, Laura por su valiosa
colaboración. A todo el personal del laboratorio de electrónica
Al ingeniero Carlos Parra.
César

6
A Dios, a quien debo todo en mi vida. A la Santísima Virgen, quien me sostiene todos los días.
A mi Familia, que me respalda e impulsa a conseguir estas metas. A Diana, por su alegría y paciencia. Gracias por cambiar mi vida.
A César, ejemplo de nobleza, excelente ingeniero y amigo. A las familias de Diana y César. Ellos trabajaron con nosotros.
Al presidente de la República, ejemplo de trabajo. A Martha, por haber participado tanto en la construcción de este proyecto.
A los Ingeniero Karim Hay y Gabriel Perilla, ejemplos como personan e ingenieros. A los ingenieros Juan Carlos Giraldo, Camilo Otálora y Francisco Viveros.
A todas las personas del departamento que nos colaboraron sin parar. A CVirgüez, Willy y Kmelo, ministros de recursos.
A todos mis amigos y compañeros, la lista es muy larga. Al grupo BIOCHIP por seguirme en mis ideas locas. A Boltzman por que su constante es muy pequeña.
A Roberto Gómez B. por la inocencia y la risa. A todas las personas que trabajan para hacer de éste un país mejor.
A todas las personas que aportaron a mi vida y al desarrollo de este trabajo.
A Dios, todo a Dios, solo Dios.
Rodrigo.

7
A Dios, por regalarme la vida y la felicidad, por ser la luz del camino. A Jesús, por ser mi mejor Amigo.
A María y a los Ángeles del cielo por cuidar de mí y de mis seres queridos. A Jorge, mi papi, por ser el ejemplo, por el apoyo incondicional y la fuerza. Gracias por enseñarme a
perseverar. A Alba, mi mami, la mejor del mundo, mi amiga, una mujer ejemplar, y llena de virtudes. A ambos, gracias por todo el amor y el apoyo constante, gracias por existir. Gracias por dar lo mejor de su
vida para hacer lo mejor de la mía. Los amo. A Patty, mi hermanita, mi amiga, mi tercera compañera en este proyecto y maravillosa compañía
durante mi carrera. Gracias por la fuerza y la motivación absoluta y constante. Gracias por creer en mí. Te adoro.
A Alita, mi abuelita. Gracias por el amor, la dedicación, la ternura, la nobleza y la eterna alegría. A Gloris, mi tía, que me impulsa a ser feliz.
A María y Gabriel, mis abuelitos, ejemplo de fuerza y de vida. A toda mi familia, que me llena de esperanza y de alegría.
A Rodrigo, por su ayuda, su comprensión y por la felicidad de tener su presencia. A César por ser un buen compañero y amigo, por enseñarme el valor de la inteligencia noble.
A Martha por ser ejemplo de un trabajo admirable y honesto, por su calidez y generosidad. Por ayudarnos en este pequeño sueño.
A los ingenieros Karim Hay y Gabriel Perilla, por su ejemplo, por su interés, por compartir su sabiduría y ser personas admirables.
A los ingenieros Juan Carlos Giraldo, Jairo Hurtado, Jorge Sánchez, Camilo Melo y Camilo Otálora. A Lidia Pinto de Prieto, una profe para recordar.
A Caliche, Marlon, Leo, Justo, John Freddy, Iván y Manolo, Claudia, Gloria, Maryi y todo el personal del departamento de electrónica por su cordial atención y por brindar siempre una sonrisa.
A Maritza, por estar ahí siempre, de verdad. Gracias. A mis amigas y amigos, compañeras y compañeros por todo este tiempo, por la ayuda, alegría y
compañía. Gracias por ser personas muy especiales. A todas las personas que colaboraron en este proyecto.
A todas las personas que creyeron y creen en mí. A mi país, por ser mi tierra, porque puedo estar orgullosa de ser colombiana.
Diana Rocío
8
AGRADECIMIENTOS
A Dios por la vida, el tiempo, la fuerza, las capacidades y habilidades para culminar esta etapa de nuestras vidas. Por la creación, ejemplo de perfección, cúspide para la ingeniería y fuente de inspiración para este trabajo. A nuestras familias, por su apoyo constante e incondicional, por su paciencia y colaboración, cariño, esfuerzo, ejemplo, recursos, respaldo, interés y preocupación. Al ingeniero Juan Carlos Giraldo por su interés y apoyo. Al ingeniero Carlos Parra por su dirección, colaboración, respaldo y apoyo. A la ingeniera Martha Manrique por su entusiasmo, interés, dedicación, generosidad, apoyo constante y por compartirnos sus grandes virtudes y algo de su conocimiento casi infinito como ingeniera. A los ingenieros Karim Hay y Gabriel Perilla por su sabiduría y ejemplo. Al ingeniero Camilo Otálora por sus conocimientos y su generosidad. Al ingeniero Jorge Sánchez por su atención y colaboración. A Camilo Melo por su iniciativa y toda la ayuda prestada. También a Kelly. A Willy por la motivación, la colaboración para las pruebas, acompañarnos en el insomnio y en el ayuno. A Camilo Virgüez, gracias por habernos salvado de muchos apuros con su ayuda y su innumerable colección de artículos maravillosos. Gracias por aguantarnos tanto! A Patricia por su interés, apoyo, colaboración y sus aportes al diseño y construcción de este trabajo. A Caliche, Marlon, Justo, Leo, Manuel, Norberto, Iván y John Freddy por su constante y amable disposición, buen humor y por ayudarnos con su ingenio y su trabajo.
9
A Claudia, Gloria y Maryi por su disposición y colaboración. A todo el personal del departamento. Al personal del laboratorio de Procesos productivos de la facultad por su disposición y atención. A Lauris, Lilian, John, Sofía, Pacho, Edgar, Daniel, Fernando, Paula, Camilo Logreira, Lucio, Henry, Elkin, Andrés, Palau, Ramsés, Diana, Mauricio, Grima, Moisés, Sebastián, Nelson y JSilva por su apoyo, motivación y valiosa colaboración sin la cual no habríamos podido llegar hasta aquí. A Analog Devices por crear los dispositivos de calidad empleados en este proyecto. Al frío del 603 por mantener las pilas cargadas.
10
GLOSARIO
BATOIDEO: característica morfológica perteneciente a la clase de los elasmobranquios. BCF (Body or Caudal Fin): modo de locomoción de los animales acuáticos en el cual se utiliza todo el cuerpo o sólo la aleta caudal (trasera) para propulsarse.
BIELA: barra que sirve para transformar el movimiento de vaivén en otro de rotación, o viceversa. BIOMIMÉTICO: que imita la naturaleza y características de un ser vivo. DL (DISC LENGHT): distancia comprendida desde la punta de la cabeza de la raya hasta el inicio de sus aletas pélvicas. DORSOVENTRAL: área relativa o perteneciente a la espalda y el vientre. ELASMOBRANQUIOS: clase a la cual pertenecen las rayas. ELASTÓMERO: material natural o artificial que, como el caucho, tiene gran elasticidad. EMPUJE: fuerza que experimenta un objeto debido a la presión del líquido en el que se encuentra sumergido. También se denomina flotación. ENGRANAJES: los engranajes constituyen el tipo más común de transmisión. Consisten en un par de ruedas dentadas que transmiten la potencia y el movimiento mediante interacción por su periferia. Aparte de transmitir movimiento relativo, pueden también convertir movimiento rotativo en movimiento de traslación. EXTRUSIÓN: formación de un sólido, pasándolo a un estado de fusión y luego transportándolo y sometiéndolo a alta presión a través de una matriz, de la cual tomará la forma. FLUIDO: es una sustancia que se deforma continuamente al ser sometida a un esfuerzo cortante también llamado esfuerzo tangencial, no importa la magnitud que este tenga. FLUJO LAMINAR: régimen de movimiento de los fluidos en el cual la estructura del flujo se caracteriza por el movimiento de láminas o capas.
11
FLUJO TURBULENTO: régimen de movimiento de los fluidos que se caracteriza por los movimientos tridimensionales, aleatorios, de las partículas de fluido superpuestos al movimiento promedio. FUERZA DE FLOTACIÓN: fuerza debida a la presión sobre la superficie de un cuerpo en contacto con un fluido en reposo. FUSIFORME: de forma de huso. INCOMPRESIBILIDAD: característica del flujo donde las variaciones de densidad se consideran insignificantes. kPa (kilo Pascales): medida de presión equivalente a mil Pascales. LATEX: es un líquido de composición variable secretado por diversas especies vegetales con características de emulsión y de aspecto lechoso, se produce a partir de un árbol amazónico, la Hevea Brasiliensis (árbol del caucho), es hoy cultivada en varios lugares del mundo, especialmente en el sudeste asiático (Malasia). La savia lechosa es procesada con amoniaco para evitar la coagulación, centrifugada para eliminar el agua y calentada (vulcanizada) para darle elasticidad. MEMORIA FLASH: tipo especial de memoria ROM que permite la lectura y escritura de varias posiciones de memoria en el mismo ciclo de operación. MOMENTO: producto de la masa de un objeto por su velocidad. Es una cantidad vectorial. MPF: modo de locomoción de los animales acuáticos en el cual se emplean las aletas medias (dorsales y anales) o pareadas (pectorales y pélvicas) para propulsarse. Ni-MH: compuesto químico (Níquel Metal Hidruro) en el que se basa la elaboración de baterías. Se usan principalmente en productos donde es importante una capacidad de energía alta o un tamaño físico pequeño. ORNITÓPTERO: vehículo que se sostiene y avanza gracias a sus alas que ejecutan movimientos parecidos a los de las aves. PASCAL (Pa): unidad de presión del Sistema Internacional (SI), equivalente a la presión uniforme que ejerce la fuerza de un Newton (1N) sobre una superficie plana de un metro cuadrado.
12
POLÍMERO: es un compuesto químico, cuyas moléculas están formadas por la unión de otras moléculas más pequeñas llamadas monómeros, las cuales se enlazan entre sí como si fueran los eslabones de una cadena. Estas cadenas, que en ocasiones presentan también ramificaciones o entrecruzamientos, pueden llegar a alcanzar un gran tamaño, razón por la cual son también conocidas con el nombre de macromoléculas. PESO: es una cantidad que corresponde a la fuerza debida a la atracción que la tierra ejerce sobre un cuerpo en un determinado punto. PVC: Poli Cloruro de Vinilo, es un polímero termoplástico. Los métodos para su fabricación son múltiples y varían y comprenden algunos procedimientos como la extrusión, inyección, termoformado y soplado. PIEZORESISTIVO: elemento que cambia su resistencia eléctrica con la presión. RAIL TO RAIL: configuración de etapa de salida de un amplificador en donde la señal tiene como valores máximos la fuente positiva y negativa del amplificador. RAYIFORME: en zoología, nombre común de unas 425 especies de peces cartilaginosos que viven en casi todos los mares. Los rayiformes tienen el cuerpo aplanado, con grandes aletas pectorales que se extienden ampliamente uniendo la cabeza y el cuerpo. SMA (Shape Memory Alloy): metales que después de ser doblados recuperan su forma original a cierta temperatura. SPAN: excursión máxima de una variable. VISCOSIDAD: es la medida de la resistencia a la deformación de un fluido. Se denotaµ. VÓRTICES: disposiciones de forma que adoptan los fluidos con la estructura de un torbellino.
13
CONTENIDO
pág.
ARTICULO 23 DE LA RESOLUCIÓN No. 13 DE JUNIO DE 1946 4 AGRADECIMIENTOS 8 GLOSARIO 10
INTRODUCCIÓN 16
1. MARCO TEÓRICO 20
1.1 PARÁMETROS FÍSICOS ASOCIADOS AL MOVIMIENTO DE UN PEZ 20
1.2 CLASIFICACIÓN DE LOS MODOS DE LOCOMOCIÓN SUBACUÁTICA 23
1.3 EL MOVIMIENTO RAYIFORME 25
1.4 CARACTERIZACIÓN ESPECIE EAGLE RAY 25
1.5 ANÁLISIS DE VARIABLES CINEMÁTICAS DE ALGUNAS ESPECIES DE RAYAS 29
1.6 SERVOMOTORES 33
1.6 TUBO DE PITOT - PRANDTL 35
2. ESPECIFICACIONES 37
2.1 SISTEMA MECÁNICO 377 2.1.1 Soporte estructural 37 2.1.1.1 Cabeza ...................................................................................................................................37 2.1.1.2 Cola . ....................................................................................................................................38 2.1.1.3 Cuerpo.. .................................................................................................................................39
2.1.1.3.1 Transmisión 40
2.1.1.3.2 Servomotores 40
14
2.1.1.3.4 Empaques 41 2.1.2 Piel 41
2.2 SISTEMA ELECTRÓNICO 42 2.2.1 Secciones principales del circuito electrónico 42 2.2.1.1 Sistema de propulsión ...........................................................................................................42 2.2.1.2 Sistema de alimentación .......................................................................................................43 2.2.1.3 Sistema de control. ................................................................................................................44 2.2.1.4 Sistema de indicación ...........................................................................................................44 2.2.1.5 Sistema de recepción ............................................................................................................44 2.2.1.6 Control remoto .....................................................................................................................45
2.3 MANUAL DE USUARIO 45 2.3.1 Descripción general 45 2.3.2 Modos de operación 45 2.3.3 Control remoto 46 2.3.4 Diagrama en bloques del sistema general 47
3. DESARROLLOS 48
3.1 FASE INVESTIGATIVA 48
3.2 CONSTRUCCIÓN DEL PROTOTIPO 49
3.3 FORMULACIÓN Y DISEÑO DEL MODELO FINAL DE LA PLATAFORMA 52
3.4 CONSTRUCCIÓN DE LAS SECCIONES MECÁNICAS DE LA PLATAFORMA 53 3.4.1 Cabeza y Cola 53 3.4.2 Estructura Central o Cuerpo 55 3.4.3 Empaques 57 3.3.4 Aletas 60
3.5 SISTEMA SENSOR DE VELOCIDAD 63
3.6 DISEÑO Y JUSTIFICACIÓN DEL SISTEMA ELECTRÓNICO 65
15
3.6.1 Hardware del sistema de control 67 3.6.1.1 Diseño inicial ...........................................................................................................................67 3.6.1.2 Diseño final . .........................................................................................................................71
3.6.1.2.1 Circuito de alimentación 71
3.6.1.2.2 Circuito de control 71 3.6.1.2.3 Circuito receptor de señal 83 3.6.1.2.4 Circuito de indicación 90 3.6.1.2.5 Circuito del control remoto 91
3.6.2 Software del sistema de control 94 3.6.2.1 Programa principal 94 3.6.2.2 Programa del control remoto 1033 3.6.3 Circuito del sensor de presión 105 3.6.4 Equipo empleado durante el desarrollo del proyecto 110
4. ANÁLISIS DE RESULTADOS 111
4.1 MODELO DE PRUEBAS 111
4.2 MODELO FINAL 1122
5. CONCLUSIONES 121 BIBLIOGRAFÍA 123 ANEXOS 125
16
INTRODUCCIÓN
En los últimos años, la robótica se ha concentrado en la emulación de diversos mecanismos y características propias de los seres vivos, bajo la presunción de que la evolución en la naturaleza ha llegado a un punto óptimo de desarrollo. Esta evolución ha permitido una adaptación al entorno de acuerdo con las necesidades específicas de cada especie. Los robots inspirados en organismos biológicos se construyen para incorporar aspectos de la biomecánica animal que permiten mejorar sus características de agilidad, eficiencia y controlabilidad en una tarea específica. La investigación en sistemas de locomoción para robótica ha buscado inspirarse en diversas maneras de movimiento de animales, en diferentes medios y por diferentes sistemas. Entre otros, el vuelo (aleteo y ornitópteros∗), el arrastre, el uso de patas, etc. Por otra parte, el desarrollo de robots de apariencia humanoide ha comenzado a tener un auge importante en la comunidad robótica. Gran parte de la investigación en robots submarinos ha sido enfocada a la concepción de un sistema de propulsión que posea la eficiencia y maniobrabilidad de los peces1. El incremento del interés mundial en vehículos submarinos ha permitido el desarrollo de nuevos sistemas y la consecuente ejecución de diversas tareas dentro de las cuales se encuentran, la inspección y mantenimiento de tuberías que transportan petróleo, gas o aceite en plataformas oceánicas; en el proceso de tendido y supervisión de los cableados de redes submarinas de comunicación, al igual que en exploración e investigación geofísica del suelo marino. Sin embargo, algunos de los vehículos autónomos submarinos presentan problemas de eficiencia, es entonces, donde los modelos biomiméticos∗ representan la posible solución a este inconveniente. La mayoría de los vehículos submarinos existentes emplean como modo de propulsión las propelas o hélices, estas se encuentran frecuentemente obstruidas en parte por el cuerpo del vehículo, disminuyendo su eficiencia. Esto representa un factor crítico en vehículos sumergibles pequeños como los Vehículos Subacuáticos Autónomos AUV (Autonomous Underwater Vehicles), debido a que estos deben portar sus propias fuentes de energía, que en la mayoría de casos son baterías de peso considerable. Se han planteado diversas formas de solucionar este problema, una de ellas es la emulación de sistemas de locomoción animal que se adaptan al entorno para llevar a cabo un conjunto de operaciones delimitadas por el diseño y la construcción de la estructura.
∗ Ver glosario. 1 SFAKIOTASKIS, Michel; LANE, David and DAVIES, J. Bruce C. Review of fish swimming modes for aquatic locomotion. En: IEEE Journal of oceanic engineering. Vol. 24, No 2, April 1999; p. 237.
17
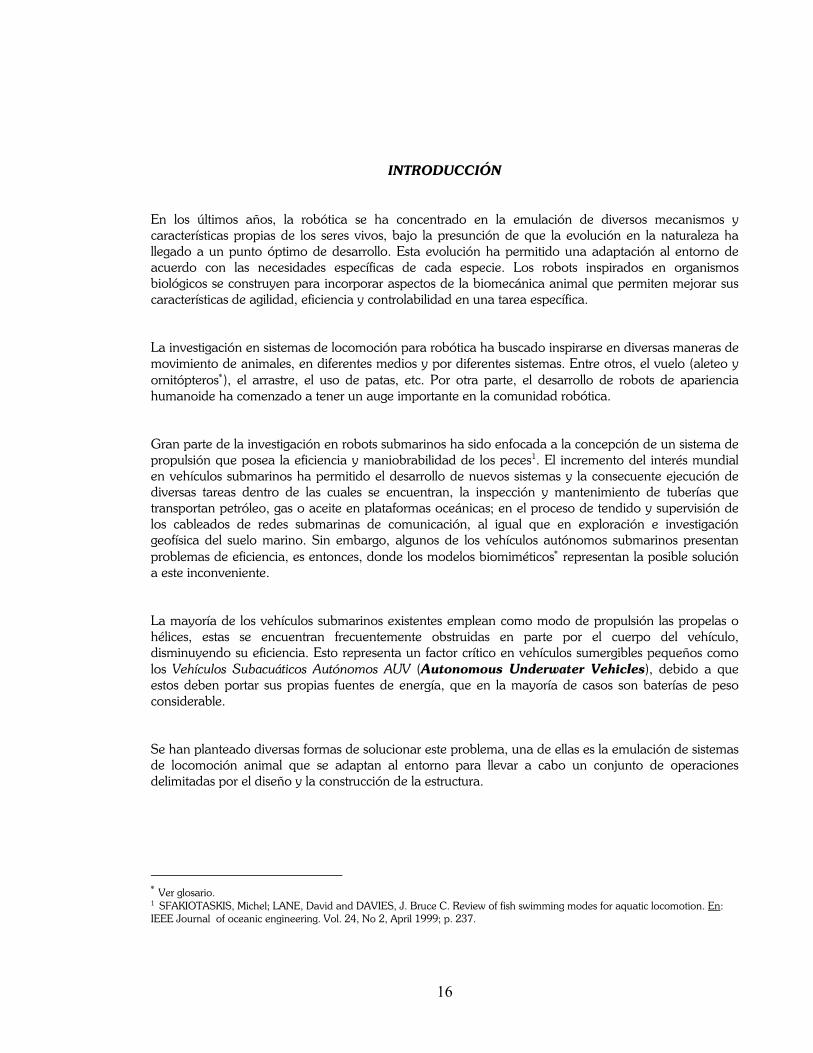
Una gran parte de las investigaciones que se han llevado a cabo, se ha enfocado en la emulación de sistemas BCF (Body or Caudal Fin)∗, en los cuales la propulsión es generada por el movimiento del cuerpo o una aleta principal denominada caudal. En el año de 1993 se inició en el InstitutoTecnológico de Massachussets MIT un proyecto denominado RoboTuna2, este trabajo emplea como modelo un pez atún que por su naturaleza desarrolla amplios periodos de natación. Este proyecto desarrolló un sistema de propulsión para vehículos subacuáticos autónomos, donde la eficiencia de los propulsores alcanzó el 80%, lo que representa un aumento significativo con respecto a los mecanismos tradicionales que tenían una eficiencia aproximada del 40%. El cuerpo tiene una estructura base articulada con tendones hechos de alambre y motores en la parte exterior, que estimulan el movimiento; además cuenta con un módulo rígido que le da estabilidad y permite mantener la transferencia de información. El movimiento simula el desplazamiento de un pez generado por su aleta caudal o cola, con un movimiento oscilatorio de esta parte del cuerpo, descrito por el modo BCF. Posteriormente los proyectos RoboTuna II3 (figura 1) y RoboPike4 (figura 2) continuaron la línea de la investigación pero esta vez con el fin de mejorar las características y la velocidad del giro. La estructura física de RoboPike contaba con dos articulaciones cada una controlada con un servomotor. Figura 1. RoboTuna II Figura 2. RoboPike
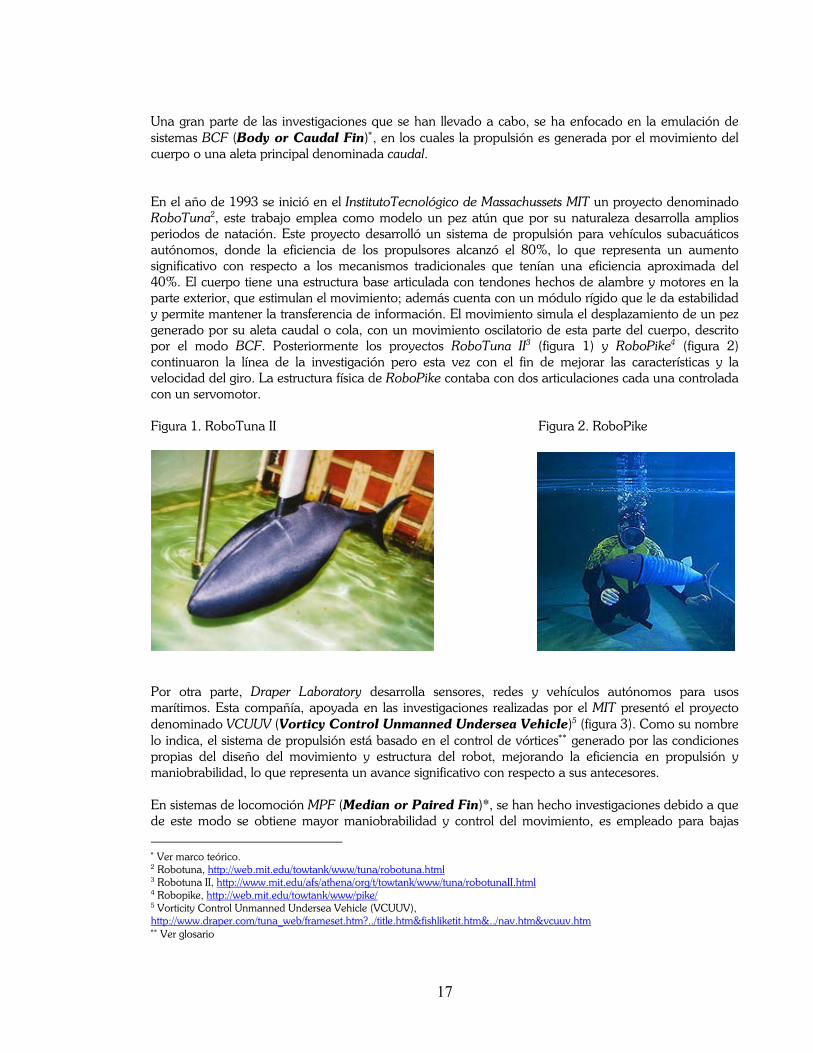
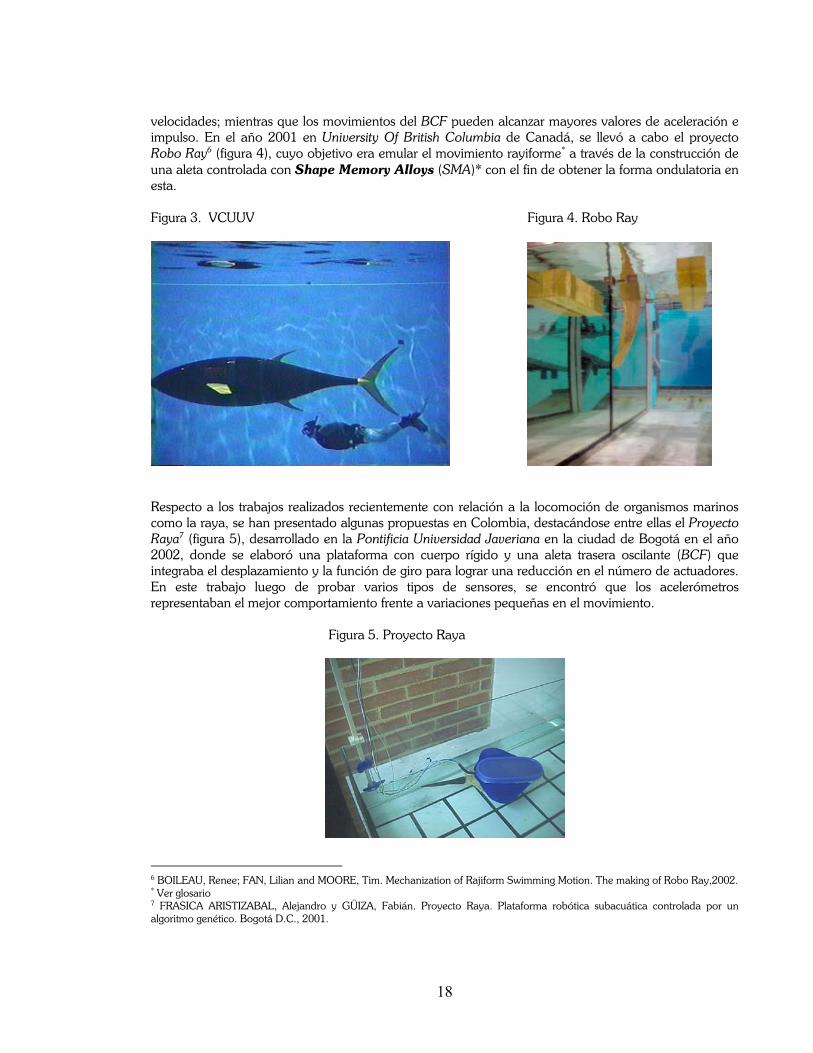
Por otra parte, Draper Laboratory desarrolla sensores, redes y vehículos autónomos para usos marítimos. Esta compañía, apoyada en las investigaciones realizadas por el MIT presentó el proyecto denominado VCUUV (Vorticy Control Unmanned Undersea Vehicle)5 (figura 3). Como su nombre lo indica, el sistema de propulsión está basado en el control de vórtices∗∗ generado por las condiciones propias del diseño del movimiento y estructura del robot, mejorando la eficiencia en propulsión y maniobrabilidad, lo que representa un avance significativo con respecto a sus antecesores. En sistemas de locomoción MPF (Median or Paired Fin)*, se han hecho investigaciones debido a que de este modo se obtiene mayor maniobrabilidad y control del movimiento, es empleado para bajas
∗ Ver marco teórico. 2 Robotuna, http://web.mit.edu/towtank/www/tuna/robotuna.html 3 Robotuna II, http://www.mit.edu/afs/athena/org/t/towtank/www/tuna/robotunaII.html 4 Robopike, http://web.mit.edu/towtank/www/pike/ 5 Vorticity Control Unmanned Undersea Vehicle (VCUUV), http://www.draper.com/tuna_web/frameset.htm?../title.htm&fishliketit.htm&../nav.htm&vcuuv.htm ∗∗ Ver glosario
18
velocidades; mientras que los movimientos del BCF pueden alcanzar mayores valores de aceleración e impulso. En el año 2001 en University Of British Columbia de Canadá, se llevó a cabo el proyecto Robo Ray6 (figura 4), cuyo objetivo era emular el movimiento rayiforme* a través de la construcción de una aleta controlada con Shape Memory Alloys (SMA)* con el fin de obtener la forma ondulatoria en esta. Figura 3. VCUUV Figura 4. Robo Ray
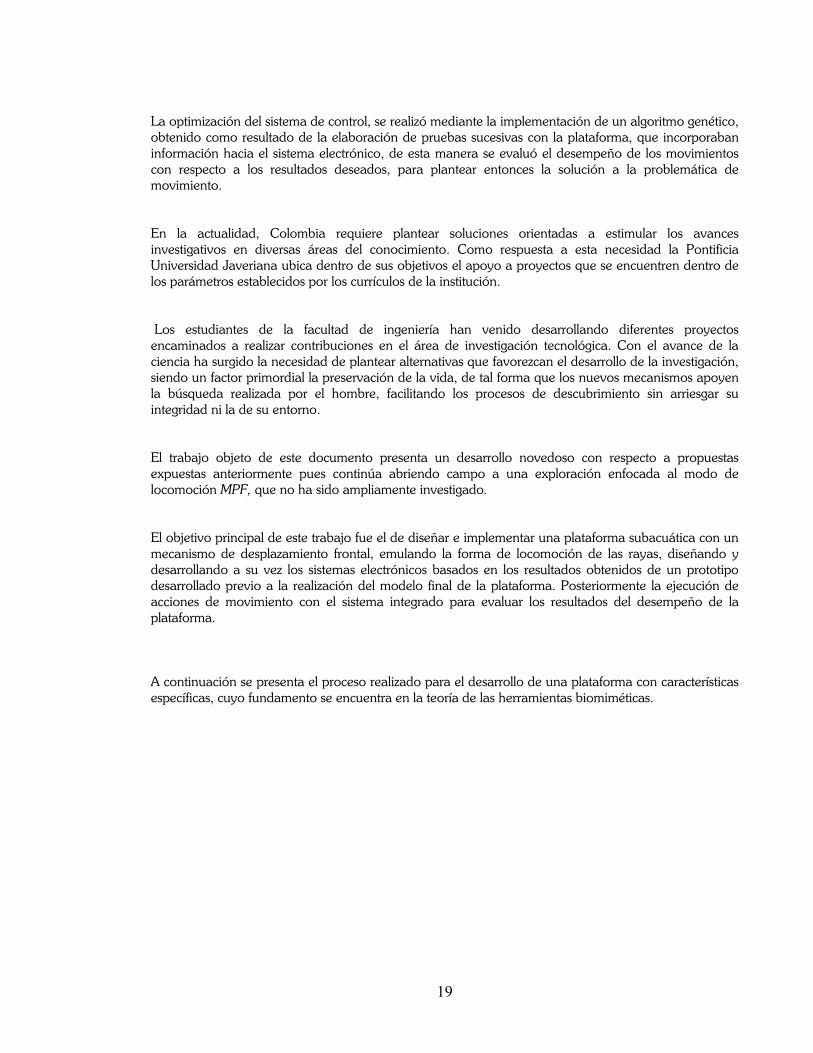
Respecto a los trabajos realizados recientemente con relación a la locomoción de organismos marinos como la raya, se han presentado algunas propuestas en Colombia, destacándose entre ellas el Proyecto Raya7 (figura 5), desarrollado en la Pontificia Universidad Javeriana en la ciudad de Bogotá en el año 2002, donde se elaboró una plataforma con cuerpo rígido y una aleta trasera oscilante (BCF) que integraba el desplazamiento y la función de giro para lograr una reducción en el número de actuadores. En este trabajo luego de probar varios tipos de sensores, se encontró que los acelerómetros representaban el mejor comportamiento frente a variaciones pequeñas en el movimiento.
Figura 5. Proyecto Raya
6 BOILEAU, Renee; FAN, Lilian and MOORE, Tim. Mechanization of Rajiform Swimming Motion. The making of Robo Ray,2002. * Ver glosario 7 FRASICA ARISTIZABAL, Alejandro y GÜIZA, Fabián. Proyecto Raya. Plataforma robótica subacuática controlada por un algoritmo genético. Bogotá D.C., 2001.
19
La optimización del sistema de control, se realizó mediante la implementación de un algoritmo genético, obtenido como resultado de la elaboración de pruebas sucesivas con la plataforma, que incorporaban información hacia el sistema electrónico, de esta manera se evaluó el desempeño de los movimientos con respecto a los resultados deseados, para plantear entonces la solución a la problemática de movimiento. En la actualidad, Colombia requiere plantear soluciones orientadas a estimular los avances investigativos en diversas áreas del conocimiento. Como respuesta a esta necesidad la Pontificia Universidad Javeriana ubica dentro de sus objetivos el apoyo a proyectos que se encuentren dentro de los parámetros establecidos por los currículos de la institución. Los estudiantes de la facultad de ingeniería han venido desarrollando diferentes proyectos encaminados a realizar contribuciones en el área de investigación tecnológica. Con el avance de la ciencia ha surgido la necesidad de plantear alternativas que favorezcan el desarrollo de la investigación, siendo un factor primordial la preservación de la vida, de tal forma que los nuevos mecanismos apoyen la búsqueda realizada por el hombre, facilitando los procesos de descubrimiento sin arriesgar su integridad ni la de su entorno. El trabajo objeto de este documento presenta un desarrollo novedoso con respecto a propuestas expuestas anteriormente pues continúa abriendo campo a una exploración enfocada al modo de locomoción MPF, que no ha sido ampliamente investigado. El objetivo principal de este trabajo fue el de diseñar e implementar una plataforma subacuática con un mecanismo de desplazamiento frontal, emulando la forma de locomoción de las rayas, diseñando y desarrollando a su vez los sistemas electrónicos basados en los resultados obtenidos de un prototipo desarrollado previo a la realización del modelo final de la plataforma. Posteriormente la ejecución de acciones de movimiento con el sistema integrado para evaluar los resultados del desempeño de la plataforma. A continuación se presenta el proceso realizado para el desarrollo de una plataforma con características específicas, cuyo fundamento se encuentra en la teoría de las herramientas biomiméticas.
20
1. MARCO TEÓRICO La sección presentada a continuación contiene apartes de la teoría de fluidos aplicada al movimiento de los peces en el agua. Esta teoría contiene algunas de las clasificaciones expuestas por autores que han realizado investigaciones principalmente en las áreas de biología e ingeniería, orientadas en su mayoría a la reproducción de las características de los animales en mecanismos de locomoción artificiales. También contiene una breve reseña de los trabajos anteriores más destacados en sistemas de locomoción subacuática biomimética. 1.1 PARÁMETROS FÍSICOS ASOCIADOS AL MOVIMIENTO DE UN PEZ Como características del agua se encuentran principalmente la incompresibilidad y la alta densidad con respecto a fluidos como el aire, esta última implica que la gravedad y el peso no afectan considerablemente a los peces. Los peces que cuentan con flotabilidad neutra no necesitan (como si lo requieren los pájaros) generar fuerzas adicionales que contrarresten el efecto del peso y la gravedad para mantenerse en movimiento, lo cual se ve reflejado en apoyo neto al impulso hacia adelante8. Nadar, es una acción que implica transferencia de momento* del pez al agua que lo rodea y viceversa. El efecto de los mecanismos para transferir momento puede verse reflejado tanto en la generación de impulso como en la aparición de resistencia. Los mecanismos para transferir momento son: • ARRASTRE (DRAG): está constituido por tres parámetros:
o Arrastre de fricción (friction drag): efecto debido a la fricción entre la piel del pez y el borde de la capa de agua. Es un parámetro que aumenta con el gradiente de velocidad de desplazamiento.
o Arrastre de forma (form drag): efecto causado por la distorsión del fluido alrededor del
cuerpo del pez dependiendo de su forma.
o Arrastre por vórtices (vortex drag): depende de la forma de las aletas, es producido por la energía perdida en los vórtices generados en el movimiento.
La unión de estos dos últimos es también conocida como arrastre por presión.
• EMPUJE (LIFT): Se origina en la viscosidad* del agua y es causado por asimetrías en el fluido. El
empuje es perpendicular a la dirección de movimiento del fluido.
8 WALKER, Jeffrey A. and WESTNEAT, Mark. Labriform propulsion in fishes: kinematics of flapping aquatic flight in the bird wrasse gomphosus varius (Labridae) En: The Journal of experimental Biology 200, 1997; p.1549-1569 . * Ver glosario.
21
• REACCIÓN POR ACELERACIÓN (ACCELERATION REACTION): Es la fuerza inercial generada por la resistencia del agua alrededor de un cuerpo o aleta dada por los cambios de velocidad.
En un pez que se impulsa con una velocidad constante, las fuerzas y los momentos están balanceados, es decir, el impulso es igual a la resistencia que ofrece el agua. En general las fuerzas que actúan sobre un pez pueden ser clasificadas en dos grupos9:
• Fuerzas Verticales:
o Peso. o Fuerza de flotación. o Empuje hidrodinámico.
• Fuerzas Horizontales:
o Fuerza de impulso. o Resistencia.
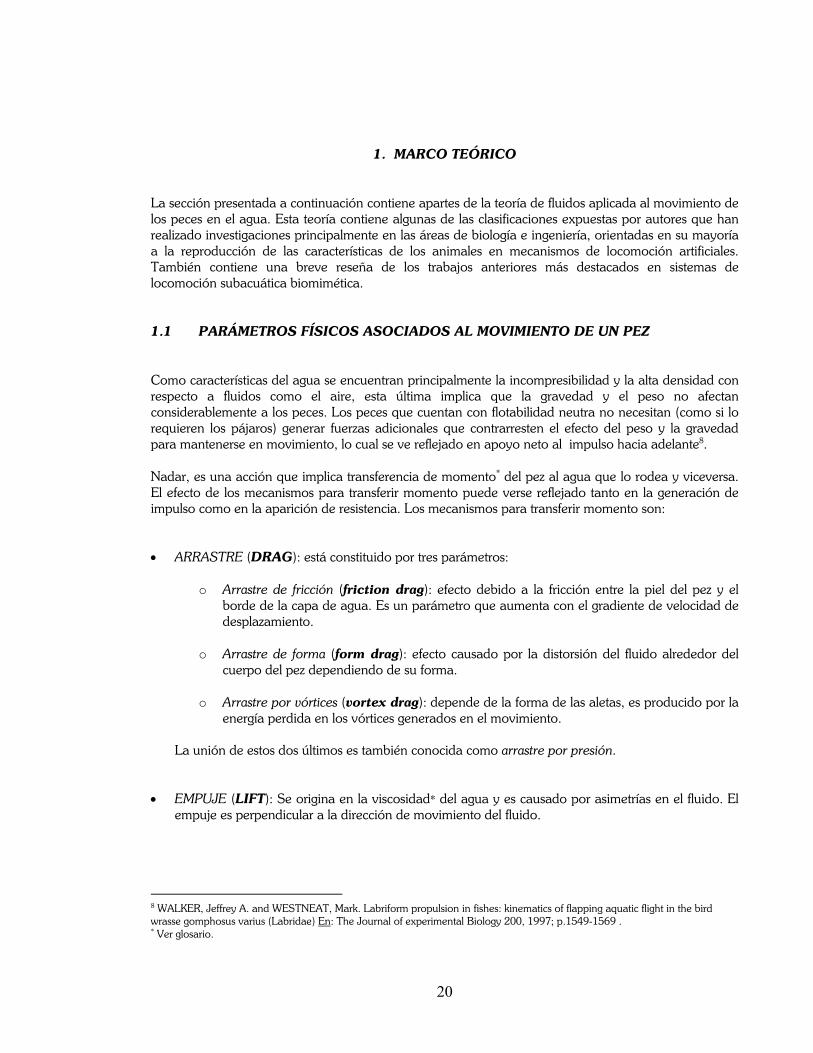
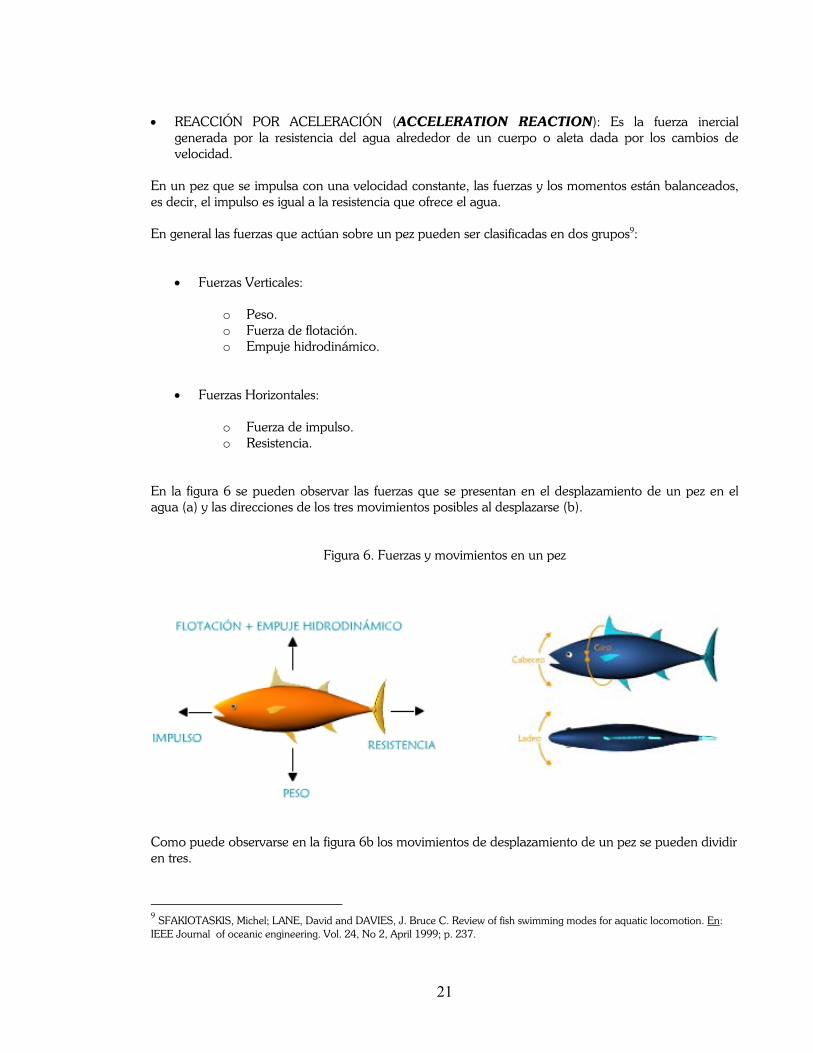
En la figura 6 se pueden observar las fuerzas que se presentan en el desplazamiento de un pez en el agua (a) y las direcciones de los tres movimientos posibles al desplazarse (b).
Figura 6. Fuerzas y movimientos en un pez
Como puede observarse en la figura 6b los movimientos de desplazamiento de un pez se pueden dividir en tres.
9 SFAKIOTASKIS, Michel; LANE, David and DAVIES, J. Bruce C. Review of fish swimming modes for aquatic locomotion. En: IEEE Journal of oceanic engineering. Vol. 24, No 2, April 1999; p. 237.

22
• Giro (roll): rotación sobre el eje longitudinal del pez. • Cabeceo (pitch): movimiento del pez sobre el plano vertical. • Ladeo (yaw): movimiento del pez sobre el plano horizontal.
Las fuerzas verticales, soportan el peso del animal y las horizontales proveen el impulso para generar el movimiento hacia adelante. Los peces con flotabilidad negativa, es decir que tienden a hundirse (como es el caso de las rayas) deben contrarrestar este efecto mediante un movimiento de las aletas. Los principales factores que determinan las contribuciones relativas de los mecanismos de transferencia de momento al impulso y la resistencia son: • El número de Reynolds (Re): En la década de 1880, Osborne Reynolds, ingeniero británico, estudió
la transición entre el flujo laminar y turbulento a través de un tubo; Reynolds pudo descubrir que el parámetro (que lleva su nombre) constituye un criterio mediante el cual se puede determinar el estado de un flujo. El número de Reynolds se puede considerar como la razón entre las fuerzas inerciales y las fuerzas viscosas10. Está definido como:
vLU
=Re
Donde L es la longitud del cuerpo, U es la velocidad de nado y v es la viscosidad cinemática del agua.
Para 63 105Re10 ×<< la aceleración de reacción, el arrastre de presión y el empuje, pueden generar fuerzas efectivas porque las fuerzas inerciales son dominantes y las fuerzas viscosas son despreciables.
Si bien para Re>2300 el flujo suele ser turbulento, y para Re<2300 el flujo es laminar, no existe en realidad un único valor del número de Reynolds para el cual el flujo cambie de laminar a turbulento, propiamente se tiene un intervalo de valores de Re en el cual el flujo puede cambiar de laminar a turbulento.
• La frecuencia reducida )(σ : Es la relación entre el tiempo de desplazamiento del cuerpo y la
frecuencia de aleteo ( )f . Se define como:
UfLπσ 2=
La definición de los intervalos presentados a continuación determina la influencia predominante de alguno de los mecanismos de transferencia de momento, mencionados en la sección anterior, dependiendo del valor de la frecuencia reducida:
10 MILNE-THOMSON, L.M. Tratado de hidrodinámica teórica. Madrid: Aguilar, 1951.
23
Para 1.0<σ el movimiento se considera estable. Para 4.01.0 <<σ los tres mecanismos son igualmente influyentes. Para 4.0>σ domina el mecanismo reacción por aceleración11. 1.2 CLASIFICACIÓN DE LOS MODOS DE LOCOMOCIÓN SUBACUÁTICA
Los sistemas de locomoción de los animales acuáticos tienen varias clasificaciones de acuerdo al sistema de propulsión empleado. De acuerdo a que partes del cuerpo se utilizan como propulsores12: • BCF (Body or Caudal Fin): en la cual se utiliza todo el cuerpo o solo la aleta caudal (trasera) para
propulsarse. • MPF (Median or Paired Fin): en la cual se utilizan las aletas medias (dorsales y anales) o
pareadas (pectorales y pélvicas) para propulsarse. De acuerdo a la distribución en el tiempo del movimiento de propulsión: • Transiente: movimientos cortos, rápidos y esporádicos. • Periódico: movimientos lentos y repetidos. De acuerdo al movimiento que describen las partes propulsoras: • Ondulatoria: en la cual se propaga una onda sinusoidal a través del órgano propulsor (aleta o
cuerpo) por medio de movimientos transversales de membranas en forma de filamentos. • Oscilatoria: en esta la aleta propulsora tiene un punto fijo sobre el cual oscila. En la figura 7, se aprecia la clasificación de los sistemas de locomoción. En la parte de arriba BCF, abajo MPF y de derecha a izquierda de ondulatorio a oscilatorio.
11 ALBERTSON, Maurice L; BARTON, James R and SIMONS, Daryl B. Fluid mechanics for engineers. Prentice Hall, 1960. 12 SFAKIOTASKIS, Michel; LANE, David and DAVIES, J. Bruce C. Review of fish swimming modes for aquatic locomotion. En: IEEE Journal of oceanic engineering. Vol. 24, No 2, April 1999; p. 237.

24
Figura 7. Clasificación de los modos de locomoción subacuática.
Las aletas en los peces se pueden clasificar en: Pareadas:
• Aletas pectorales (pectoral fins) • Aletas pélvicas (pelvic fins)
Sencillas: • Aleta dorsal (dorsal fin) • Aleta anal (anal fin) • Aleta caudal (caudal fin)
Figura 8. Clasificación y distribución de las aletas en los peces
25
1.3 EL MOVIMIENTO RAYIFORME El movimiento Rayiforme usa las aletas pareadas en lugar de todo el cuerpo para generar propulsión, este movimiento mantiene el cuerpo rígido para mejorar la maniobrabilidad13. Los peces que pertenecen a la especie llamada Raya, usan un par de aletas pectorales para generar el movimiento Rayiforme que a su vez, comprende dos modos. El primero de ellos es el oscilatorio, similar al aleteo de un pájaro. El segundo modo es denominado ondulatorio, en este modo una determinada forma de onda se desplaza a lo largo de la aleta desde adelante hacia atrás produciendo una velocidad neta. El movimiento rayiforme varía según la especie y puede incluir solo uno de estos movimientos o ser una combinación de ambos.
Las especies llamadas Dasyatis se propulsan en el agua estrictamente por medio de sus aletas pectorales. Estas especies presentan 0.7 ondas en su aleta pectoral al momento de desplazarse. Además la frecuencia de aleteo se incrementa con el incremento de velocidad. En contraste, la Rinobatidae o Rhinobatos, usa principalmente la cola para su propulsión y nada de una manera similar a los tiburones comunes. 1.4 CARACTERIZACIÓN ESPECIE EAGLE RAY A continuación se presentan algunas de las características de rayas pertenecientes a la especie que fue escogida, tomando algunas de sus características con el fin de que estas representaran guías de diseño y construcción de los sistemas mecánico y electrónico de la plataforma robótica que se presenta en este documento. Las especies expuestas a continuación son parte de una clasificación presentada por una organización llamada FishBase14 que con el apoyo de la FAO y la Comisión Europea, ha creado una base de datos que contiene información de mas de 20000 especies de peces, clasificadas y descritas por científicos y zoólogos entre otros profesionales que han contribuido a la investigación marina. La especie escogida como guía para el desarrollo este proyecto es llamada comúnmente Eagle Ray y comprende a su vez animales con variaciones en ciertas características físicas y de ubicación geográfica, todas pertenecen a la familia denominada Myliobatidae, son del orden de las Rayiformes y la clase a la que pertenecen se llama Elasmobranquios, generalmente las familias de esta especie coinciden en ciertas características como el cuerpo aplanado, las aletas pectorales son grandes y se expanden hacia los lados, usualmente tienen aleta dorsal, mas no caudal, y tampoco cuentan con órganos que generen descargas eléctricas. Todas son ovíparas.
13 BOILEAU, Renee; FAN, Lilian and MOORE, Tim. Mechanization of Rajiform Swimming Motion. The making of Robo Ray ,2002. 14 FishBase. http://www.fishbase.org
26
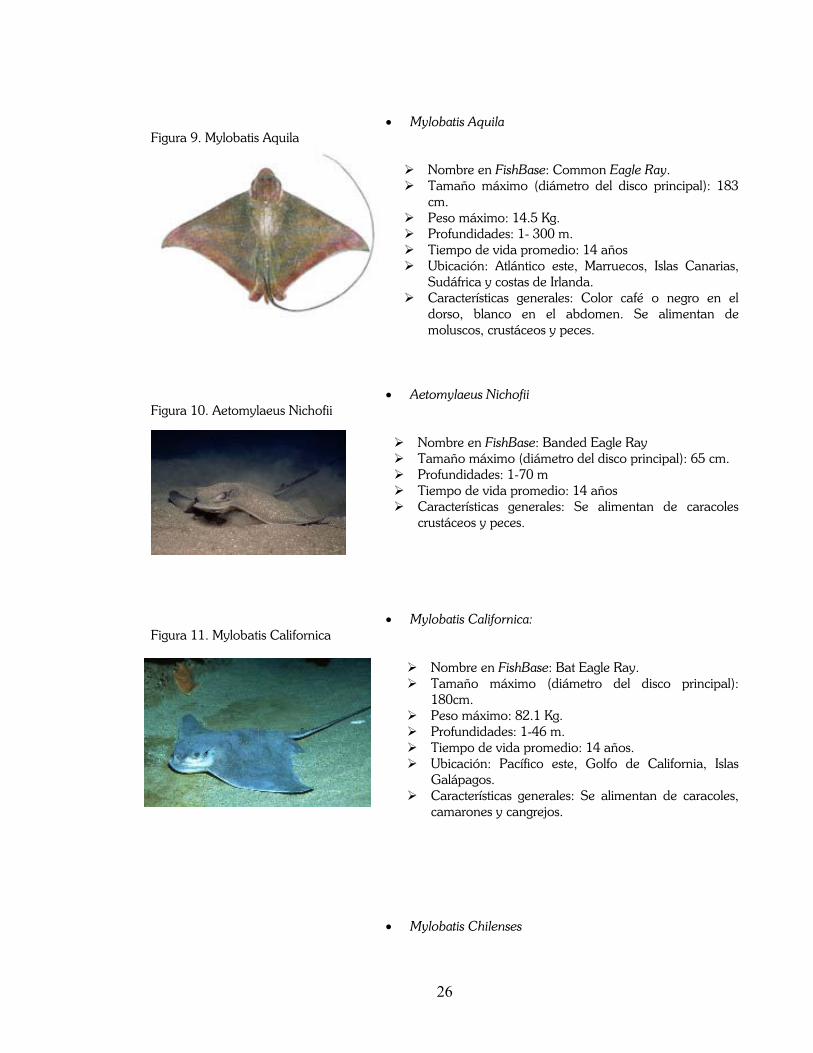
• Mylobatis Aquila Figura 9. Mylobatis Aquila
Nombre en FishBase: Common Eagle Ray. Tamaño máximo (diámetro del disco principal): 183
cm. Peso máximo: 14.5 Kg. Profundidades: 1- 300 m. Tiempo de vida promedio: 14 años Ubicación: Atlántico este, Marruecos, Islas Canarias,
Sudáfrica y costas de Irlanda. Características generales: Color café o negro en el
dorso, blanco en el abdomen. Se alimentan de moluscos, crustáceos y peces.
• Aetomylaeus Nichofii Figura 10. Aetomylaeus Nichofii
Nombre en FishBase: Banded Eagle Ray Tamaño máximo (diámetro del disco principal): 65 cm. Profundidades: 1-70 m Tiempo de vida promedio: 14 años Características generales: Se alimentan de caracoles
crustáceos y peces.
• Mylobatis Californica: Figura 11. Mylobatis Californica
Nombre en FishBase: Bat Eagle Ray. Tamaño máximo (diámetro del disco principal):
180cm. Peso máximo: 82.1 Kg. Profundidades: 1-46 m. Tiempo de vida promedio: 14 años. Ubicación: Pacífico este, Golfo de California, Islas
Galápagos. Características generales: Se alimentan de caracoles,
camarones y cangrejos.
• Mylobatis Chilenses
27
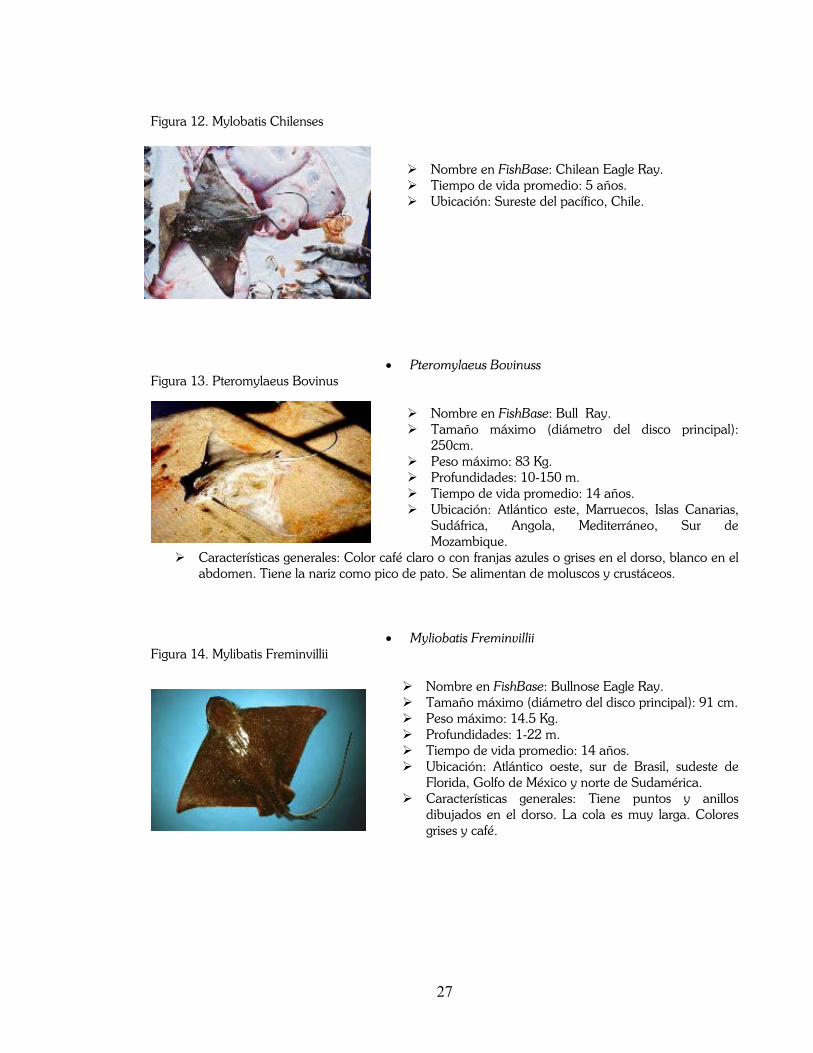
Figura 12. Mylobatis Chilenses
Nombre en FishBase: Chilean Eagle Ray. Tiempo de vida promedio: 5 años. Ubicación: Sureste del pacífico, Chile.
• Pteromylaeus Bovinuss Figura 13. Pteromylaeus Bovinus
Nombre en FishBase: Bull Ray. Tamaño máximo (diámetro del disco principal):
250cm. Peso máximo: 83 Kg. Profundidades: 10-150 m. Tiempo de vida promedio: 14 años. Ubicación: Atlántico este, Marruecos, Islas Canarias,
Sudáfrica, Angola, Mediterráneo, Sur de Mozambique.
Características generales: Color café claro o con franjas azules o grises en el dorso, blanco en el abdomen. Tiene la nariz como pico de pato. Se alimentan de moluscos y crustáceos.
• Myliobatis Freminvillii
Figura 14. Mylibatis Freminvillii
Nombre en FishBase: Bullnose Eagle Ray. Tamaño máximo (diámetro del disco principal): 91 cm. Peso máximo: 14.5 Kg. Profundidades: 1-22 m. Tiempo de vida promedio: 14 años. Ubicación: Atlántico oeste, sur de Brasil, sudeste de
Florida, Golfo de México y norte de Sudamérica. Características generales: Tiene puntos y anillos
dibujados en el dorso. La cola es muy larga. Colores grises y café.
28
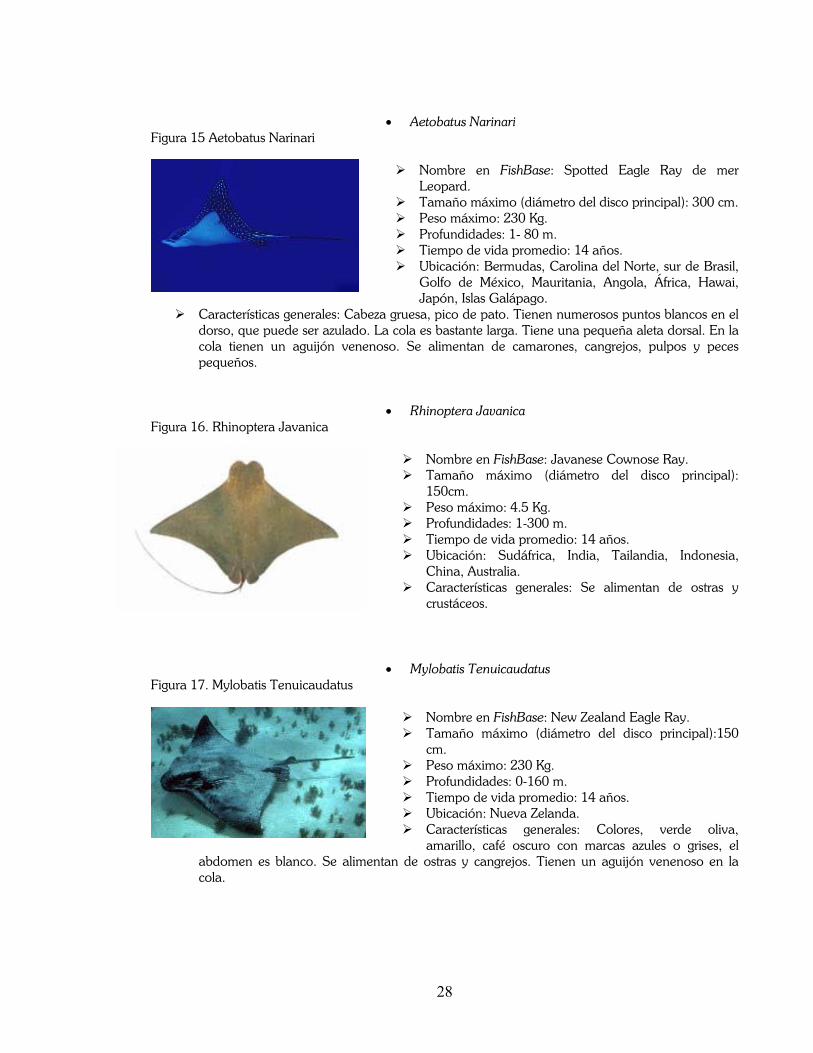
• Aetobatus Narinari Figura 15 Aetobatus Narinari
Nombre en FishBase: Spotted Eagle Ray de mer
Leopard. Tamaño máximo (diámetro del disco principal): 300 cm. Peso máximo: 230 Kg. Profundidades: 1- 80 m. Tiempo de vida promedio: 14 años. Ubicación: Bermudas, Carolina del Norte, sur de Brasil,
Golfo de México, Mauritania, Angola, África, Hawai, Japón, Islas Galápago.
Características generales: Cabeza gruesa, pico de pato. Tienen numerosos puntos blancos en el dorso, que puede ser azulado. La cola es bastante larga. Tiene una pequeña aleta dorsal. En la cola tienen un aguijón venenoso. Se alimentan de camarones, cangrejos, pulpos y peces pequeños.
• Rhinoptera Javanica Figura 16. Rhinoptera Javanica
Nombre en FishBase: Javanese Cownose Ray. Tamaño máximo (diámetro del disco principal):
150cm. Peso máximo: 4.5 Kg. Profundidades: 1-300 m. Tiempo de vida promedio: 14 años. Ubicación: Sudáfrica, India, Tailandia, Indonesia,
China, Australia. Características generales: Se alimentan de ostras y
crustáceos.
• Mylobatis Tenuicaudatus Figura 17. Mylobatis Tenuicaudatus
Nombre en FishBase: New Zealand Eagle Ray. Tamaño máximo (diámetro del disco principal):150
cm. Peso máximo: 230 Kg. Profundidades: 0-160 m. Tiempo de vida promedio: 14 años. Ubicación: Nueva Zelanda. Características generales: Colores, verde oliva,
amarillo, café oscuro con marcas azules o grises, el abdomen es blanco. Se alimentan de ostras y cangrejos. Tienen un aguijón venenoso en la cola.
29
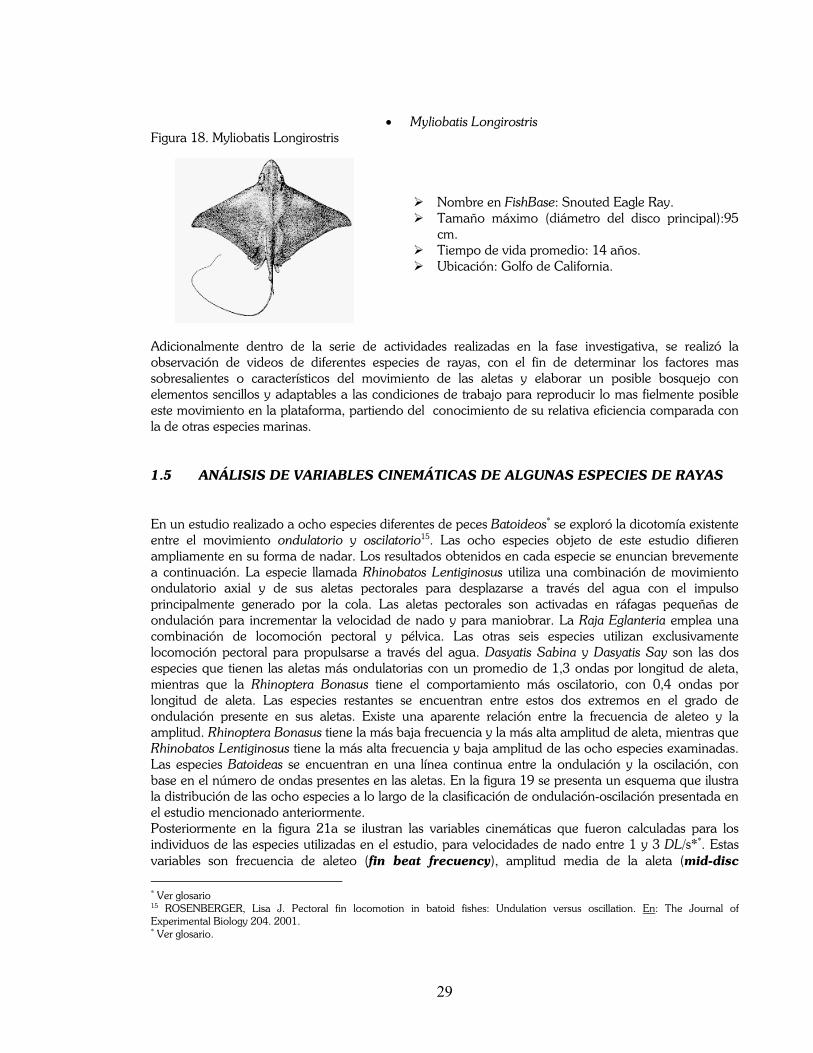
• Myliobatis Longirostris Figura 18. Myliobatis Longirostris
Nombre en FishBase: Snouted Eagle Ray. Tamaño máximo (diámetro del disco principal):95
cm. Tiempo de vida promedio: 14 años. Ubicación: Golfo de California.
Adicionalmente dentro de la serie de actividades realizadas en la fase investigativa, se realizó la observación de videos de diferentes especies de rayas, con el fin de determinar los factores mas sobresalientes o característicos del movimiento de las aletas y elaborar un posible bosquejo con elementos sencillos y adaptables a las condiciones de trabajo para reproducir lo mas fielmente posible este movimiento en la plataforma, partiendo del conocimiento de su relativa eficiencia comparada con la de otras especies marinas. 1.5 ANÁLISIS DE VARIABLES CINEMÁTICAS DE ALGUNAS ESPECIES DE RAYAS En un estudio realizado a ocho especies diferentes de peces Batoideos* se exploró la dicotomía existente entre el movimiento ondulatorio y oscilatorio15. Las ocho especies objeto de este estudio difieren ampliamente en su forma de nadar. Los resultados obtenidos en cada especie se enuncian brevemente a continuación. La especie llamada Rhinobatos Lentiginosus utiliza una combinación de movimiento ondulatorio axial y de sus aletas pectorales para desplazarse a través del agua con el impulso principalmente generado por la cola. Las aletas pectorales son activadas en ráfagas pequeñas de ondulación para incrementar la velocidad de nado y para maniobrar. La Raja Eglanteria emplea una combinación de locomoción pectoral y pélvica. Las otras seis especies utilizan exclusivamente locomoción pectoral para propulsarse a través del agua. Dasyatis Sabina y Dasyatis Say son las dos especies que tienen las aletas más ondulatorias con un promedio de 1,3 ondas por longitud de aleta, mientras que la Rhinoptera Bonasus tiene el comportamiento más oscilatorio, con 0,4 ondas por longitud de aleta. Las especies restantes se encuentran entre estos dos extremos en el grado de ondulación presente en sus aletas. Existe una aparente relación entre la frecuencia de aleteo y la amplitud. Rhinoptera Bonasus tiene la más baja frecuencia y la más alta amplitud de aleta, mientras que Rhinobatos Lentiginosus tiene la más alta frecuencia y baja amplitud de las ocho especies examinadas. Las especies Batoideas se encuentran en una línea continua entre la ondulación y la oscilación, con base en el número de ondas presentes en las aletas. En la figura 19 se presenta un esquema que ilustra la distribución de las ocho especies a lo largo de la clasificación de ondulación-oscilación presentada en el estudio mencionado anteriormente. Posteriormente en la figura 21a se ilustran las variables cinemáticas que fueron calculadas para los individuos de las especies utilizadas en el estudio, para velocidades de nado entre 1 y 3 DL/s**. Estas variables son frecuencia de aleteo (fin beat frecuency), amplitud media de la aleta (mid-disc * Ver glosario 15 ROSENBERGER, Lisa J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. En: The Journal of Experimental Biology 204. 2001. * Ver glosario.
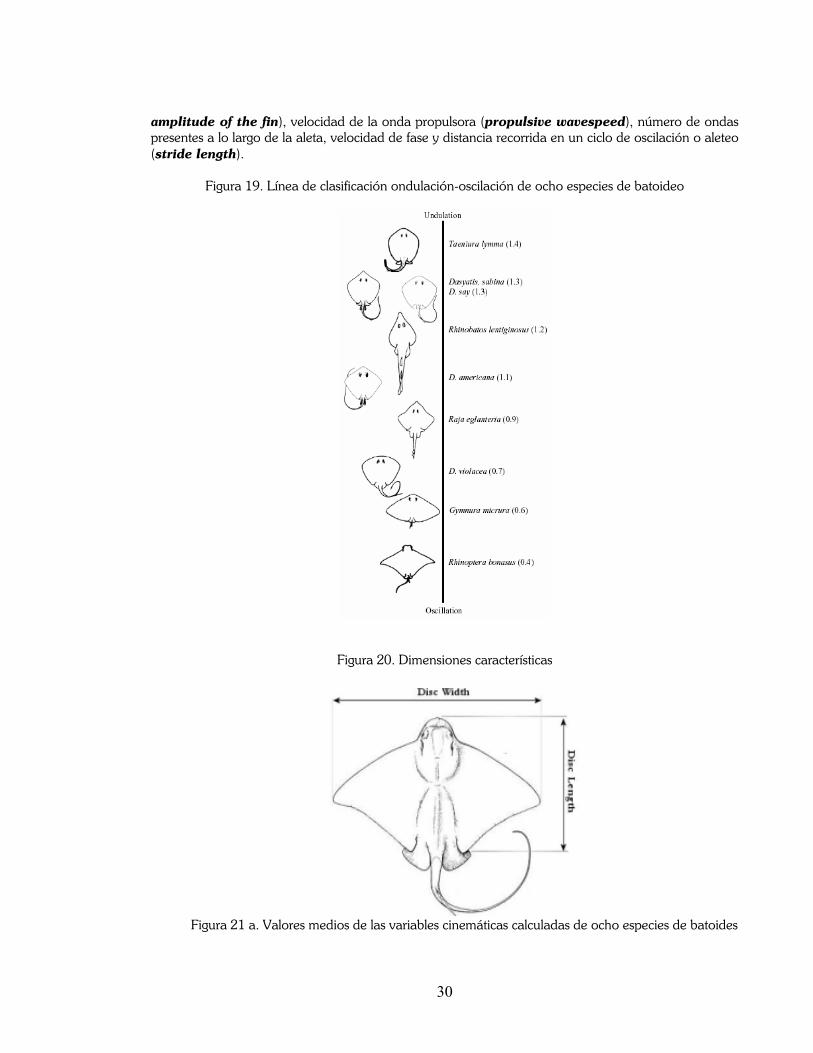
30
amplitude of the fin), velocidad de la onda propulsora (propulsive wavespeed), número de ondas presentes a lo largo de la aleta, velocidad de fase y distancia recorrida en un ciclo de oscilación o aleteo (stride length).
Figura 19. Línea de clasificación ondulación-oscilación de ocho especies de batoideo
Figura 20. Dimensiones características
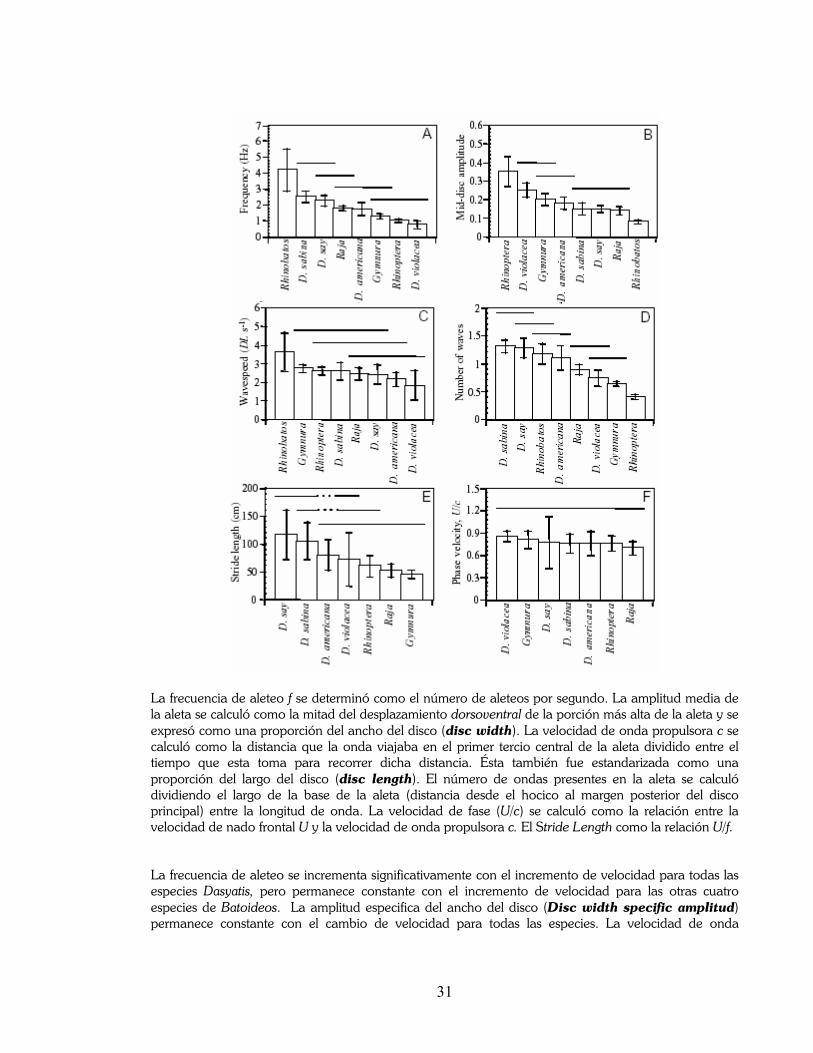
Figura 21 a. Valores medios de las variables cinemáticas calculadas de ocho especies de batoides
31
La frecuencia de aleteo f se determinó como el número de aleteos por segundo. La amplitud media de la aleta se calculó como la mitad del desplazamiento dorsoventral de la porción más alta de la aleta y se expresó como una proporción del ancho del disco (disc width). La velocidad de onda propulsora c se calculó como la distancia que la onda viajaba en el primer tercio central de la aleta dividido entre el tiempo que esta toma para recorrer dicha distancia. Ésta también fue estandarizada como una proporción del largo del disco (disc length). El número de ondas presentes en la aleta se calculó dividiendo el largo de la base de la aleta (distancia desde el hocico al margen posterior del disco principal) entre la longitud de onda. La velocidad de fase (U/c) se calculó como la relación entre la velocidad de nado frontal U y la velocidad de onda propulsora c. El Stride Length como la relación U/f. La frecuencia de aleteo se incrementa significativamente con el incremento de velocidad para todas las especies Dasyatis, pero permanece constante con el incremento de velocidad para las otras cuatro especies de Batoideos. La amplitud especifica del ancho del disco (Disc width specific amplitud) permanece constante con el cambio de velocidad para todas las especies. La velocidad de onda
32
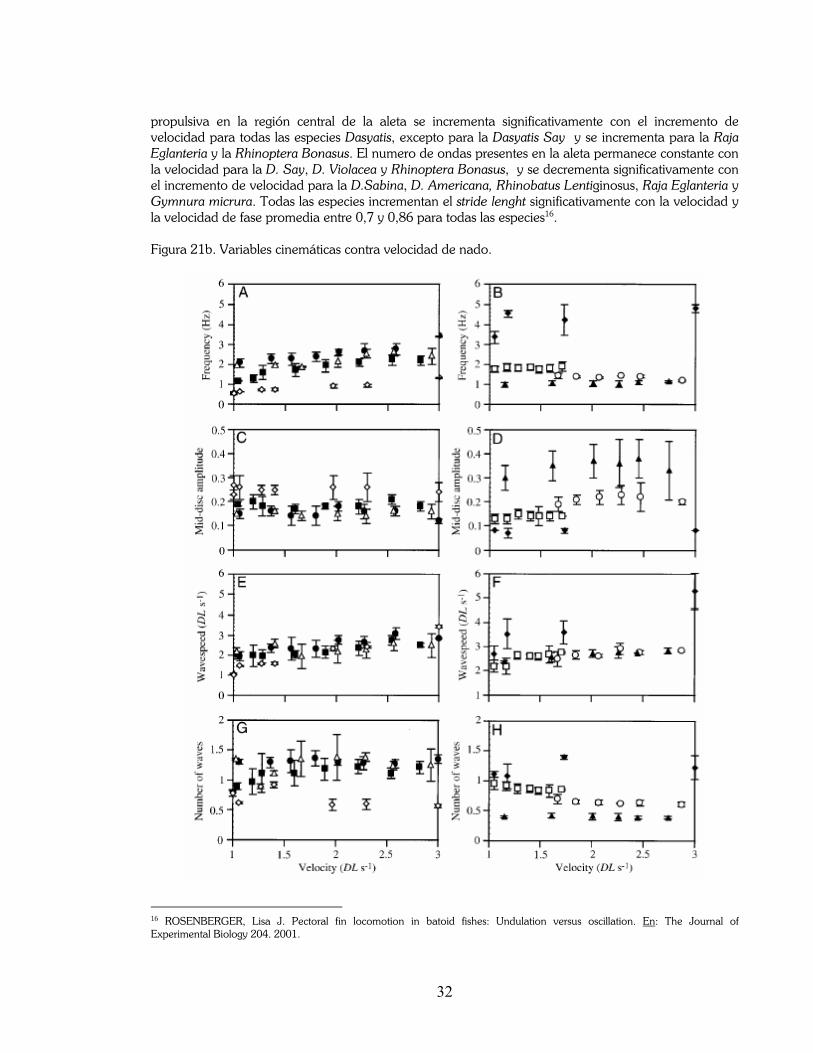
propulsiva en la región central de la aleta se incrementa significativamente con el incremento de velocidad para todas las especies Dasyatis, excepto para la Dasyatis Say y se incrementa para la Raja Eglanteria y la Rhinoptera Bonasus. El numero de ondas presentes en la aleta permanece constante con la velocidad para la D. Say, D. Violacea y Rhinoptera Bonasus, y se decrementa significativamente con el incremento de velocidad para la D.Sabina, D. Americana, Rhinobatus Lentiginosus, Raja Eglanteria y Gymnura micrura. Todas las especies incrementan el stride lenght significativamente con la velocidad y la velocidad de fase promedia entre 0,7 y 0,86 para todas las especies16. Figura 21b. Variables cinemáticas contra velocidad de nado.
16 ROSENBERGER, Lisa J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. En: The Journal of Experimental Biology 204. 2001.
33
Donde la convención correspondiente a cada especie es:
Dasyatis Americana Dasyatis Sabina
Dasyatis Say Dasyatis Violacea Raja Eglanteria Gymnura Micrura Rhinoptera Bonasus Rhinobatos Lentiginosus 1.6 SERVOMOTORES
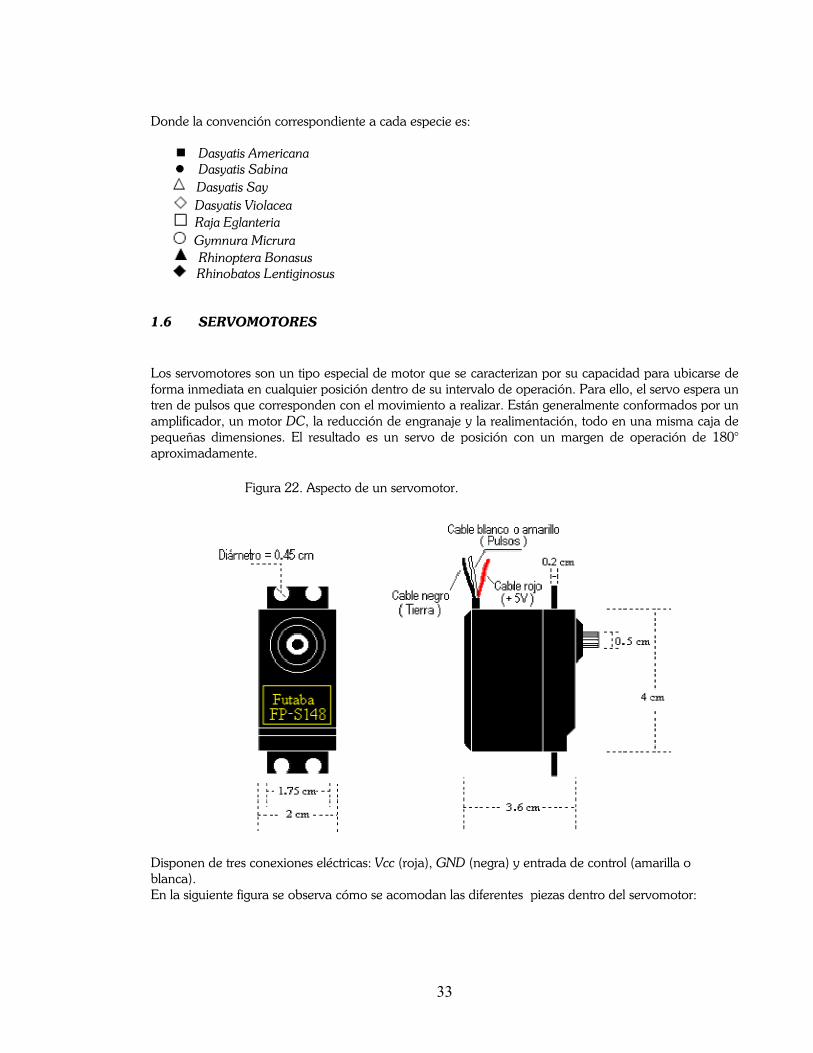
Los servomotores son un tipo especial de motor que se caracterizan por su capacidad para ubicarse de forma inmediata en cualquier posición dentro de su intervalo de operación. Para ello, el servo espera un tren de pulsos que corresponden con el movimiento a realizar. Están generalmente conformados por un amplificador, un motor DC, la reducción de engranaje y la realimentación, todo en una misma caja de pequeñas dimensiones. El resultado es un servo de posición con un margen de operación de 180° aproximadamente.
Figura 22. Aspecto de un servomotor.
Disponen de tres conexiones eléctricas: Vcc (roja), GND (negra) y entrada de control (amarilla o blanca). En la siguiente figura se observa cómo se acomodan las diferentes piezas dentro del servomotor:
34
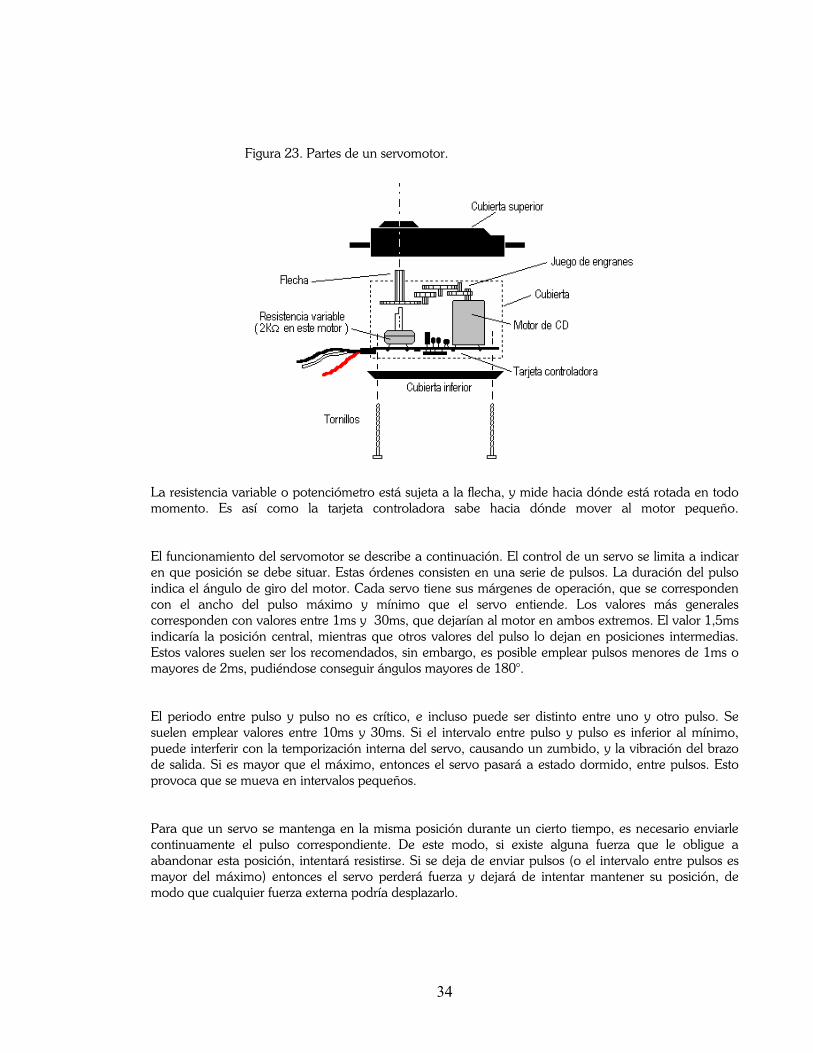
Figura 23. Partes de un servomotor.
La resistencia variable o potenciómetro está sujeta a la flecha, y mide hacia dónde está rotada en todo momento. Es así como la tarjeta controladora sabe hacia dónde mover al motor pequeño. El funcionamiento del servomotor se describe a continuación. El control de un servo se limita a indicar en que posición se debe situar. Estas órdenes consisten en una serie de pulsos. La duración del pulso indica el ángulo de giro del motor. Cada servo tiene sus márgenes de operación, que se corresponden con el ancho del pulso máximo y mínimo que el servo entiende. Los valores más generales corresponden con valores entre 1ms y 30ms, que dejarían al motor en ambos extremos. El valor 1,5ms indicaría la posición central, mientras que otros valores del pulso lo dejan en posiciones intermedias. Estos valores suelen ser los recomendados, sin embargo, es posible emplear pulsos menores de 1ms o mayores de 2ms, pudiéndose conseguir ángulos mayores de 180°. El periodo entre pulso y pulso no es crítico, e incluso puede ser distinto entre uno y otro pulso. Se suelen emplear valores entre 10ms y 30ms. Si el intervalo entre pulso y pulso es inferior al mínimo, puede interferir con la temporización interna del servo, causando un zumbido, y la vibración del brazo de salida. Si es mayor que el máximo, entonces el servo pasará a estado dormido, entre pulsos. Esto provoca que se mueva en intervalos pequeños. Para que un servo se mantenga en la misma posición durante un cierto tiempo, es necesario enviarle continuamente el pulso correspondiente. De este modo, si existe alguna fuerza que le obligue a abandonar esta posición, intentará resistirse. Si se deja de enviar pulsos (o el intervalo entre pulsos es mayor del máximo) entonces el servo perderá fuerza y dejará de intentar mantener su posición, de modo que cualquier fuerza externa podría desplazarlo.
35
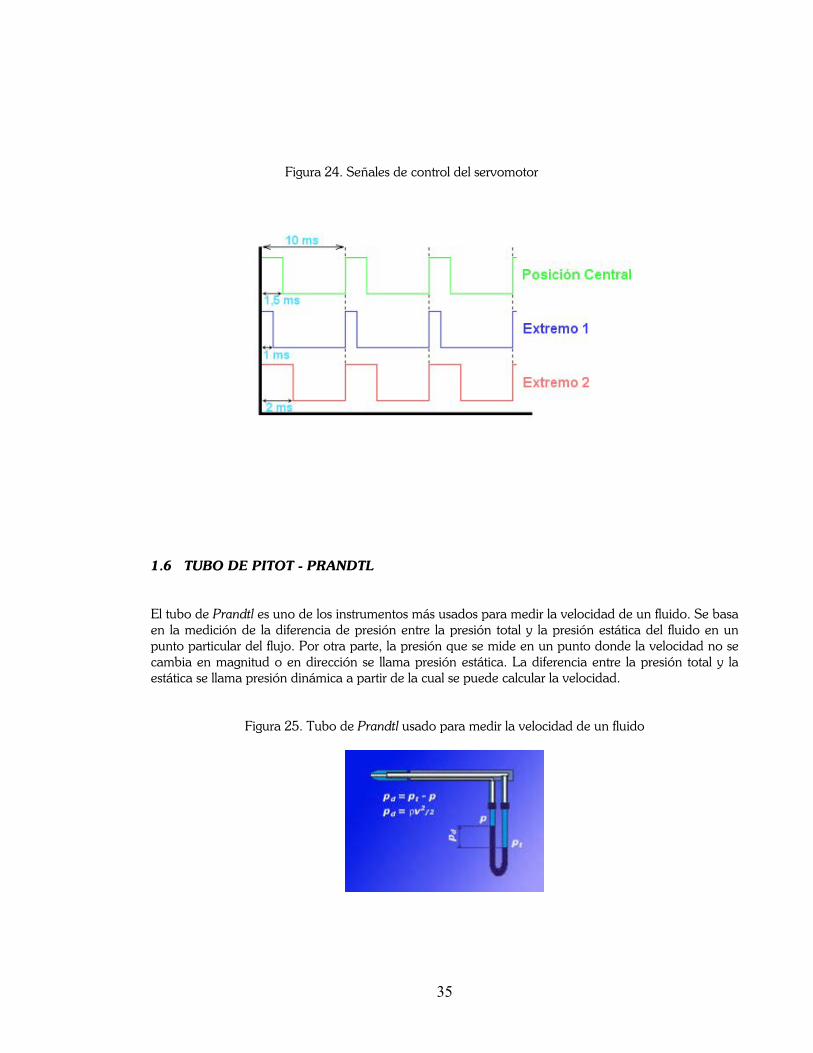
Figura 24. Señales de control del servomotor
1.6 TUBO DE PITOT - PRANDTL El tubo de Prandtl es uno de los instrumentos más usados para medir la velocidad de un fluido. Se basa en la medición de la diferencia de presión entre la presión total y la presión estática del fluido en un punto particular del flujo. Por otra parte, la presión que se mide en un punto donde la velocidad no se cambia en magnitud o en dirección se llama presión estática. La diferencia entre la presión total y la estática se llama presión dinámica a partir de la cual se puede calcular la velocidad.
Figura 25. Tubo de Prandtl usado para medir la velocidad de un fluido

36
PPP td −=
2
2vPdρ
=
ρρ)(22 PPP
v td −==
Donde dP es la presión dinámica, tP es la presión total, P es la presión estática, ρ es la densidad del
fluido y v la velocidad. Utilizando un sensor de presión electrónico se puede calcular la presión dinámica y por medio de un microcontrolador con un módulo de ADC se puede implementar un algoritmo que calcule la velocidad basándose en la ecuación anterior.
37
2. ESPECIFICACIONES
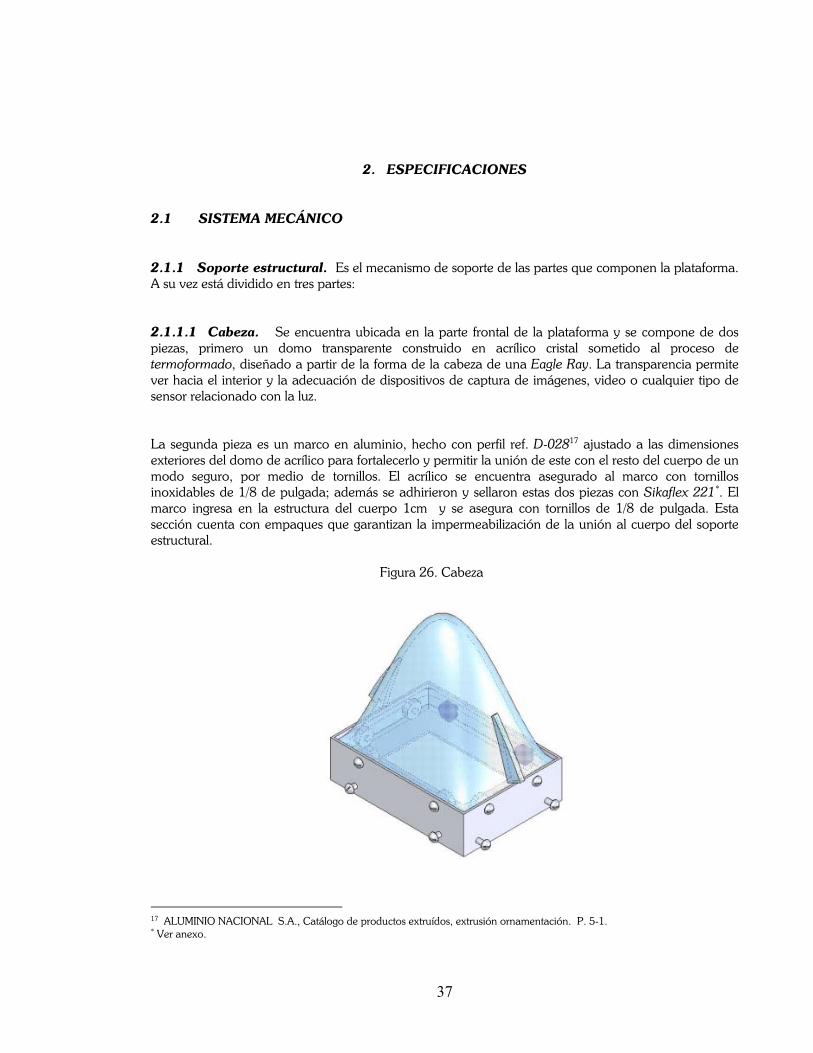
2.1 SISTEMA MECÁNICO 2.1.1 Soporte estructural. Es el mecanismo de soporte de las partes que componen la plataforma. A su vez está dividido en tres partes: 2.1.1.1 Cabeza. Se encuentra ubicada en la parte frontal de la plataforma y se compone de dos piezas, primero un domo transparente construido en acrílico cristal sometido al proceso de termoformado, diseñado a partir de la forma de la cabeza de una Eagle Ray. La transparencia permite ver hacia el interior y la adecuación de dispositivos de captura de imágenes, video o cualquier tipo de sensor relacionado con la luz. La segunda pieza es un marco en aluminio, hecho con perfil ref. D-02817 ajustado a las dimensiones exteriores del domo de acrílico para fortalecerlo y permitir la unión de este con el resto del cuerpo de un modo seguro, por medio de tornillos. El acrílico se encuentra asegurado al marco con tornillos inoxidables de 1/8 de pulgada; además se adhirieron y sellaron estas dos piezas con Sikaflex 221*. El marco ingresa en la estructura del cuerpo 1cm y se asegura con tornillos de 1/8 de pulgada. Esta sección cuenta con empaques que garantizan la impermeabilización de la unión al cuerpo del soporte estructural.
Figura 26. Cabeza
17 ALUMINIO NACIONAL S.A., Catálogo de productos extruídos, extrusión ornamentación. P. 5-1. * Ver anexo.
38
El diseño de la cabeza fue orientado a cumplir dos objetivos básicos, el primero de ellos, que permitiera el acople a la parte central o cuerpo y el siguiente que la forma y la escala correspondiera con algún nivel de proporcionalidad a la forma de la especie de raya escogida de referencia (Eagle Ray). Dentro de esta parte, se encuentran ubicados varios componentes: una serie de leds que indican el estado en el que se encuentra trabajando la plataforma, con estos es posible determinar que rutina de movimiento está ejecutándose a través del microcontrolador (amplitud de los actuadores y desfase adelante-atrás), adicionalmente señalan el estado de baterías bajas y la recepción exitosa de un comando del control remoto. Posee un acelerómetro ADXL202 para sensar aceleraciones en el plano horizontal de +/- 2 gravedades. Esta sección se observa en el dibujo de la figura 26. Las dimensiones del marco de la cabeza son iguales a las del marco de la cola y se presentan a continuación: MARCO • Largo: 9,22cm • Ancho: 6,79cm • Alto: 2,33cm DOMO CON MARCO • Altura máxima: 10,33cm
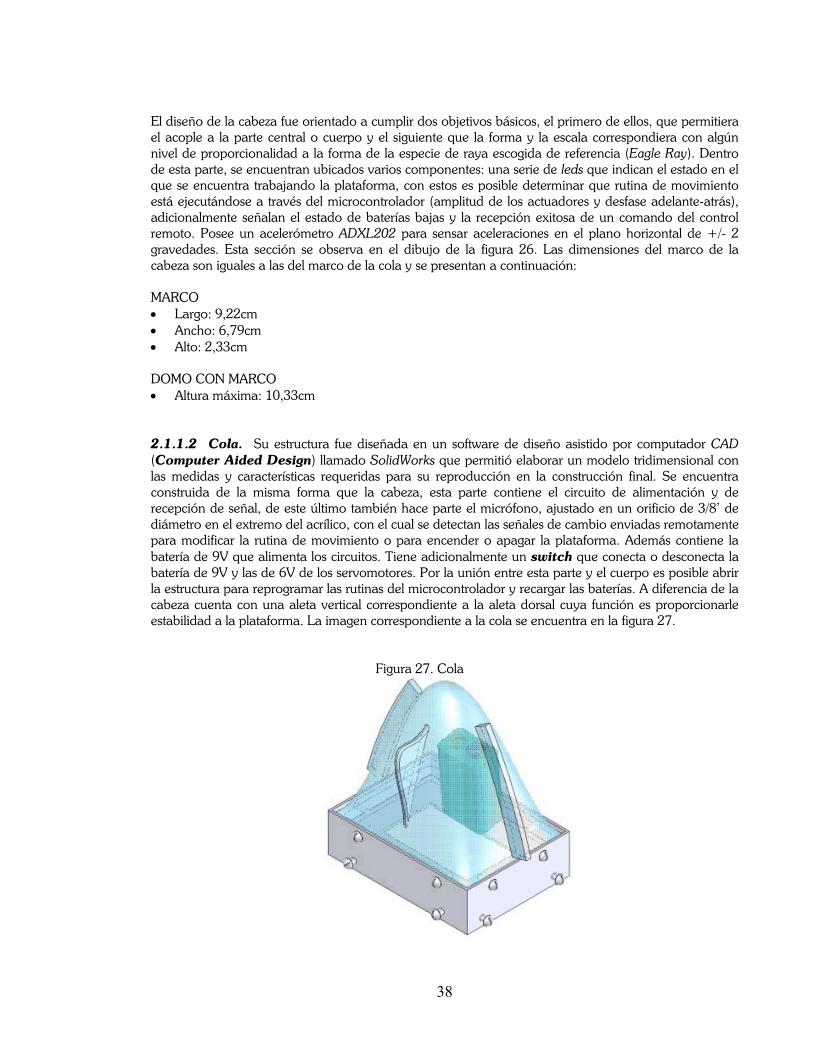
2.1.1.2 Cola. Su estructura fue diseñada en un software de diseño asistido por computador CAD (Computer Aided Design) llamado SolidWorks que permitió elaborar un modelo tridimensional con las medidas y características requeridas para su reproducción en la construcción final. Se encuentra construida de la misma forma que la cabeza, esta parte contiene el circuito de alimentación y de recepción de señal, de este último también hace parte el micrófono, ajustado en un orificio de 3/8’ de diámetro en el extremo del acrílico, con el cual se detectan las señales de cambio enviadas remotamente para modificar la rutina de movimiento o para encender o apagar la plataforma. Además contiene la batería de 9V que alimenta los circuitos. Tiene adicionalmente un switch que conecta o desconecta la batería de 9V y las de 6V de los servomotores. Por la unión entre esta parte y el cuerpo es posible abrir la estructura para reprogramar las rutinas del microcontrolador y recargar las baterías. A diferencia de la cabeza cuenta con una aleta vertical correspondiente a la aleta dorsal cuya función es proporcionarle estabilidad a la plataforma. La imagen correspondiente a la cola se encuentra en la figura 27.
Figura 27. Cola
39
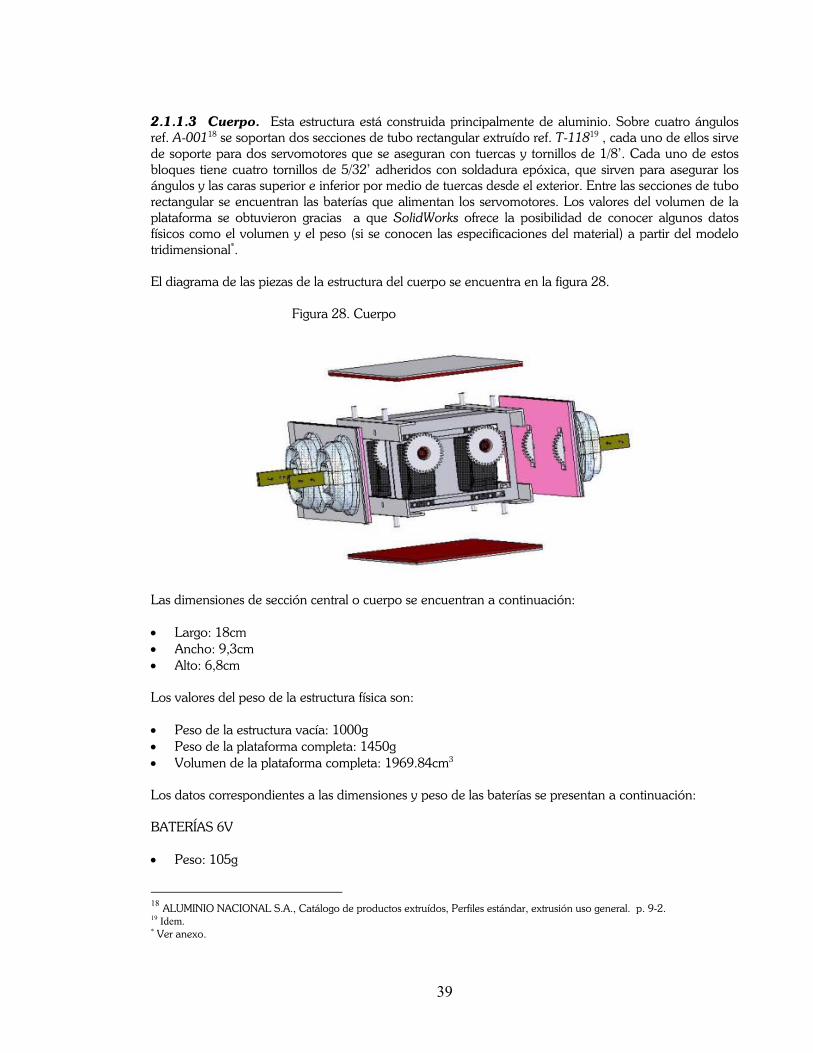
2.1.1.3 Cuerpo. Esta estructura está construida principalmente de aluminio. Sobre cuatro ángulos ref. A-00118 se soportan dos secciones de tubo rectangular extruído ref. T-11819 , cada uno de ellos sirve de soporte para dos servomotores que se aseguran con tuercas y tornillos de 1/8’. Cada uno de estos bloques tiene cuatro tornillos de 5/32’ adheridos con soldadura epóxica, que sirven para asegurar los ángulos y las caras superior e inferior por medio de tuercas desde el exterior. Entre las secciones de tubo rectangular se encuentran las baterías que alimentan los servomotores. Los valores del volumen de la plataforma se obtuvieron gracias a que SolidWorks ofrece la posibilidad de conocer algunos datos físicos como el volumen y el peso (si se conocen las especificaciones del material) a partir del modelo tridimensional*. El diagrama de las piezas de la estructura del cuerpo se encuentra en la figura 28.
Figura 28. Cuerpo
Las dimensiones de sección central o cuerpo se encuentran a continuación: • Largo: 18cm • Ancho: 9,3cm • Alto: 6,8cm Los valores del peso de la estructura física son: • Peso de la estructura vacía: 1000g • Peso de la plataforma completa: 1450g • Volumen de la plataforma completa: 1969.84cm3 Los datos correspondientes a las dimensiones y peso de las baterías se presentan a continuación: BATERÍAS 6V • Peso: 105g
18 ALUMINIO NACIONAL S.A., Catálogo de productos extruídos, Perfiles estándar, extrusión uso general. p. 9-2. 19 Idem. * Ver anexo.
40
• Largo: 8,35cm • Ancho:6,2cm • Alto:1,8cm
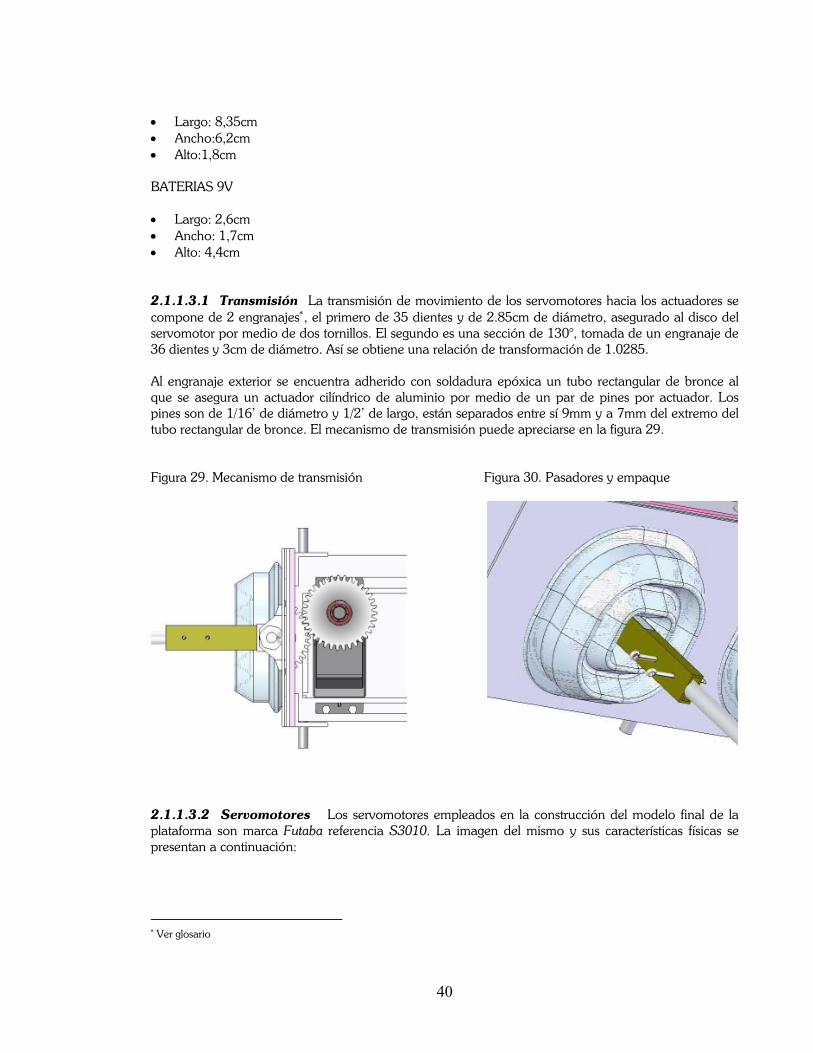
BATERIAS 9V • Largo: 2,6cm • Ancho: 1,7cm • Alto: 4,4cm 2.1.1.3.1 Transmisión La transmisión de movimiento de los servomotores hacia los actuadores se compone de 2 engranajes∗, el primero de 35 dientes y de 2.85cm de diámetro, asegurado al disco del servomotor por medio de dos tornillos. El segundo es una sección de 130°, tomada de un engranaje de 36 dientes y 3cm de diámetro. Así se obtiene una relación de transformación de 1.0285. Al engranaje exterior se encuentra adherido con soldadura epóxica un tubo rectangular de bronce al que se asegura un actuador cilíndrico de aluminio por medio de un par de pines por actuador. Los pines son de 1/16’ de diámetro y 1/2’ de largo, están separados entre sí 9mm y a 7mm del extremo del tubo rectangular de bronce. El mecanismo de transmisión puede apreciarse en la figura 29. Figura 29. Mecanismo de transmisión Figura 30. Pasadores y empaque
2.1.1.3.2 Servomotores Los servomotores empleados en la construcción del modelo final de la plataforma son marca Futaba referencia S3010. La imagen del mismo y sus características físicas se presentan a continuación:
∗ Ver glosario

41
Figura 31. Servomotor Futaba S3010 • Tipo de motor: ferrita de tres polos • Material de piñón interno: nylon • Largo: 4,1cm • Ancho: 2cm • Alto: 3,8cm • Peso: 41g (1,4oz) • Torque al voltaje máximo de operación: 6,5kg.cm (90oz/in) • Torque al voltaje mínimo de operación: 5,2kg.cm (72oz/in) • Angulo Máximo de giro 180°.
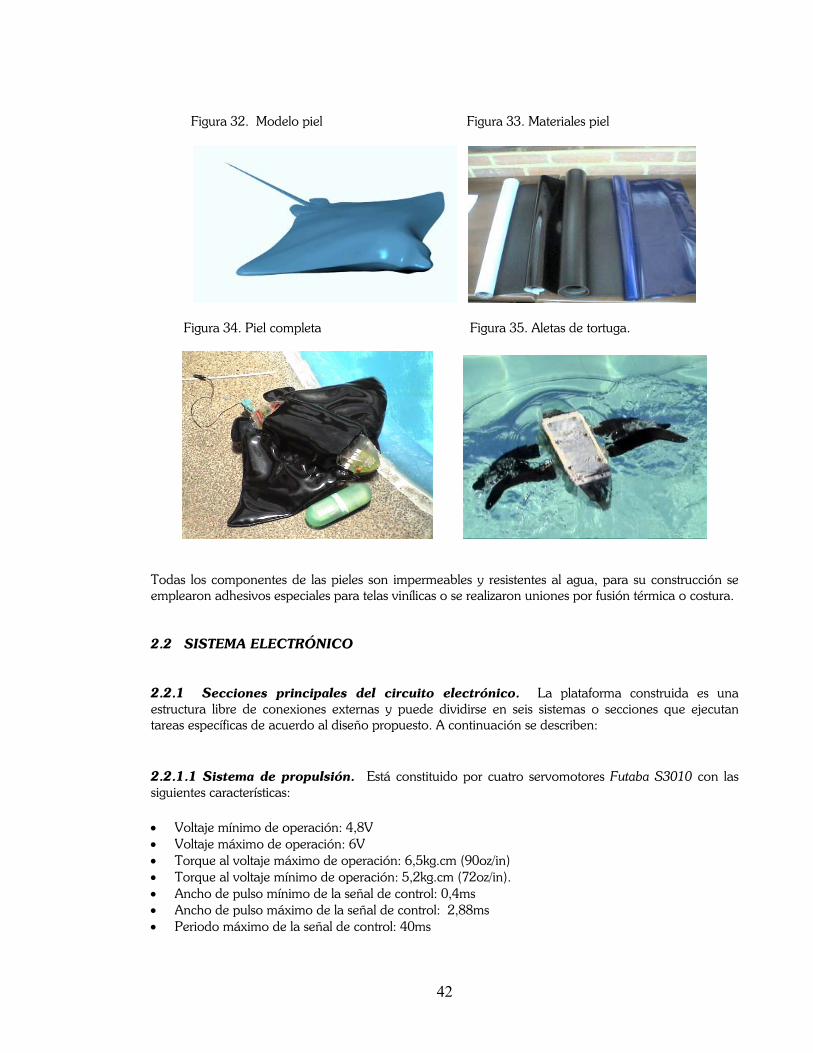
Aunque los servomotores tienen un ángulo máximo de giro de 180°, es decir +/- 90°, están controlados para operar en un intervalo de +/- 45° (90° de apertura total), pues si superan estos ángulos pueden dañar los empaques, los actuadores y el propio mecanismo de transmisión. Si por alguna razón el servomotor sobrepasa estos ángulos límite, los engranajes se desacoplarán y se liberará el actuador evitando la ruptura de las partes. 2.1.1.3.3 Empaques. Los empaques son de vinilo calibre 20 elaborados mediante el proceso de termoformado, diseñados específicamente para la aplicación, de modo que se ajustan a los tubos rectangulares de bronce (figura 30) y presentan la mínima resistencia con la consistencia adecuada. Una lámina, troquelada con orificios especiales para que el empaque encaje y no pierda movilidad, los asegura contra la estructura y facilita el proceso de sellado. 2.1.2 Piel. La piel o recubrimiento exterior debía cumplir con especificaciones que permitieran libertad de movimiento de los actuadores para que estos a su vez pudieran reproducir fielmente el movimiento para el cual fueron diseñados los acoples mecánicos y la programación del microcontrolador. Las películas plásticas y las películas de PVC representaron la opción mas adecuada para la elaboración de las aletas. Existe una gran variedad de películas de PVC, con diferentes especificaciones de textura, resistencia y elasticidad. A continuación una breve descripción sobre aspectos relacionados con estos materiales. El PVC es el único material plástico que no es 100% originario del petróleo. El PVC contiene 57% de cloro (derivado del cloruro de sodio - sal de cocina) y 43% de etileno, derivado del petróleo. Es liviano, resistente a reactivos químicos, es buen aislante eléctrico, térmico y acústico. Es impermeable a gases y líquidos, es resistente a la intemperie, es durable, su vida útil puede llegar a ser de cincuenta años. El modelo de la piel para la plataforma y los materiales escogidos se observan en las figuras 32 y 33 respectivamente.
42
Figura 32. Modelo piel Figura 33. Materiales piel
Figura 34. Piel completa Figura 35. Aletas de tortuga.
Todas los componentes de las pieles son impermeables y resistentes al agua, para su construcción se emplearon adhesivos especiales para telas vinílicas o se realizaron uniones por fusión térmica o costura.
2.2 SISTEMA ELECTRÓNICO 2.2.1 Secciones principales del circuito electrónico. La plataforma construida es una estructura libre de conexiones externas y puede dividirse en seis sistemas o secciones que ejecutan tareas específicas de acuerdo al diseño propuesto. A continuación se describen:
2.2.1.1 Sistema de propulsión. Está constituido por cuatro servomotores Futaba S3010 con las siguientes características:
• Voltaje mínimo de operación: 4,8V • Voltaje máximo de operación: 6V • Torque al voltaje máximo de operación: 6,5kg.cm (90oz/in) • Torque al voltaje mínimo de operación: 5,2kg.cm (72oz/in). • Ancho de pulso mínimo de la señal de control: 0,4ms • Ancho de pulso máximo de la señal de control: 2,88ms • Periodo máximo de la señal de control: 40ms
43
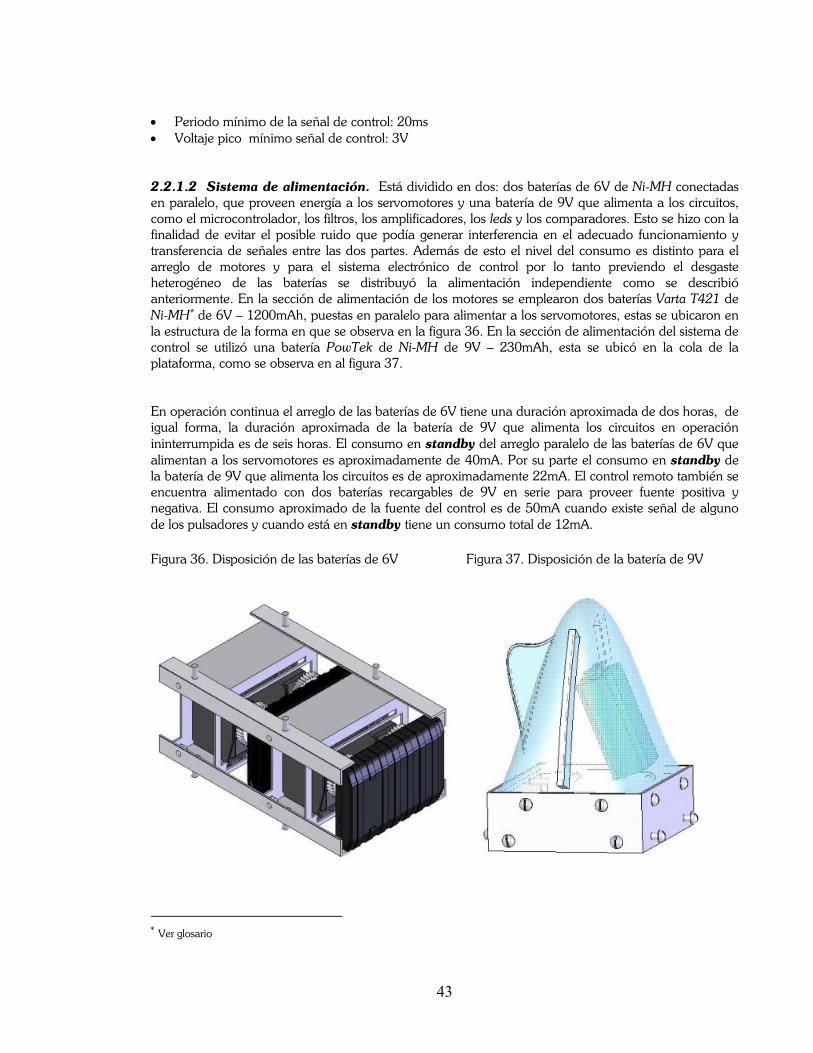
• Periodo mínimo de la señal de control: 20ms • Voltaje pico mínimo señal de control: 3V 2.2.1.2 Sistema de alimentación. Está dividido en dos: dos baterías de 6V de Ni-MH conectadas en paralelo, que proveen energía a los servomotores y una batería de 9V que alimenta a los circuitos, como el microcontrolador, los filtros, los amplificadores, los leds y los comparadores. Esto se hizo con la finalidad de evitar el posible ruido que podía generar interferencia en el adecuado funcionamiento y transferencia de señales entre las dos partes. Además de esto el nivel del consumo es distinto para el arreglo de motores y para el sistema electrónico de control por lo tanto previendo el desgaste heterogéneo de las baterías se distribuyó la alimentación independiente como se describió anteriormente. En la sección de alimentación de los motores se emplearon dos baterías Varta T421 de Ni-MH∗ de 6V – 1200mAh, puestas en paralelo para alimentar a los servomotores, estas se ubicaron en la estructura de la forma en que se observa en la figura 36. En la sección de alimentación del sistema de control se utilizó una batería PowTek de Ni-MH de 9V – 230mAh, esta se ubicó en la cola de la plataforma, como se observa en al figura 37. En operación continua el arreglo de las baterías de 6V tiene una duración aproximada de dos horas, de igual forma, la duración aproximada de la batería de 9V que alimenta los circuitos en operación ininterrumpida es de seis horas. El consumo en standby del arreglo paralelo de las baterías de 6V que alimentan a los servomotores es aproximadamente de 40mA. Por su parte el consumo en standby de la batería de 9V que alimenta los circuitos es de aproximadamente 22mA. El control remoto también se encuentra alimentado con dos baterías recargables de 9V en serie para proveer fuente positiva y negativa. El consumo aproximado de la fuente del control es de 50mA cuando existe señal de alguno de los pulsadores y cuando está en standby tiene un consumo total de 12mA.
Figura 36. Disposición de las baterías de 6V Figura 37. Disposición de la batería de 9V
∗ Ver glosario
44
2.2.1.3 Sistema de control. El circuito de control es el encargado de monitorear todas las variables de entrada y salida del sistema, ejecutando los comandos necesarios para el funcionamiento de la plataforma. El dispositivo principal del circuito de control es el microcontrolador MC68HC908GP32 de Motorola, de 8bits, 32kBytes de memoria flash, 512bytes de memoria RAM, dos timers de 16bits, un conversor análogo digital ADC (Analog to Digital Converter) con resolución de 8bits y 8 canales, una unidad de interfaz de comunicación serial SCI (Serial Communication Interface), una unidad interfaz serial para periféricos SPI (Serial Peripheral Interface) y un módulo de interrupción de teclado KBI (Keyboard Interrupt). 2.2.1.4 Sistema de indicación. Es el circuito que informa sobre el estado de la plataforma (encendido, apagado), la rutina de movimiento que está ejecutando, el estado de baja carga de las baterías y la recepción exitosa de un comando del control remoto. Fundamentalmente se compone de un arreglo de ocho leds de chorro de diferentes colores que se encuentran directamente controlados por el microcontrolador principal MC68HC908GP32. Los leds indicadores se encuentran en la cabeza de tal forma que la luz que despiden pueda ser observada desde el exterior. La disposición de los leds es como se observa en la figura 38. Figura 38. Disposición de los leds
2.2.1.5 Sistema de recepción. Se compone del micrófono que recibe la señal de audio proveniente del control remoto para convertirla en una señal digital que pueda ser procesada por el microcontrolador, y del circuito que está ubicado en la cola de la plataforma. Para la alimentación del circuito de recepción se empleó un regulador de 5V referencia LM78L05, que a su vez se encuentra alimentado por la batería de 9V mencionada en la sección del sistema de alimentación. El micrófono usado en esta aplicación es de tipo electret ref. CZN-15E, omnidireccional con ancho de banda de 16kHz.
Figura 39. Micrófono utilizado para el circuito de recepción (CZN-15E)
45
2.2.1.6 Control remoto. La plataforma avanza de forma autónoma como respuesta a las señales de encendido, apagado y modos de funcionamiento que le son transmitidos de forma remota e inalámbrica por un módulo de control que envía señales de audio de 11,28kHz generadas por un parlante de celular con impedancia 180 Ω y que contiene pulsadores del tipo switch de contacto (domos) a través de los cuales se escoge el comando que se transmitirá. Estas órdenes comprenden el encendido, el apagado, la coordinación de los motores, y el cambio en la rutina de movimiento que está ejecutando la plataforma. Los comandos posibles son de aumentar o disminuir el desfase ente los actuadores delanteros y traseros o la amplitud de estos, entre valores discretos previamente programados. Este control emplea dos baterías PowTek de Ni-MH de 9V – 230mAh para alimentarse. Cuenta con dos leds indicadores del estado de transmisión de control hacia la plataforma. En operación constante la carga de las baterías sería suficiente para operar el control durante 8 horas.
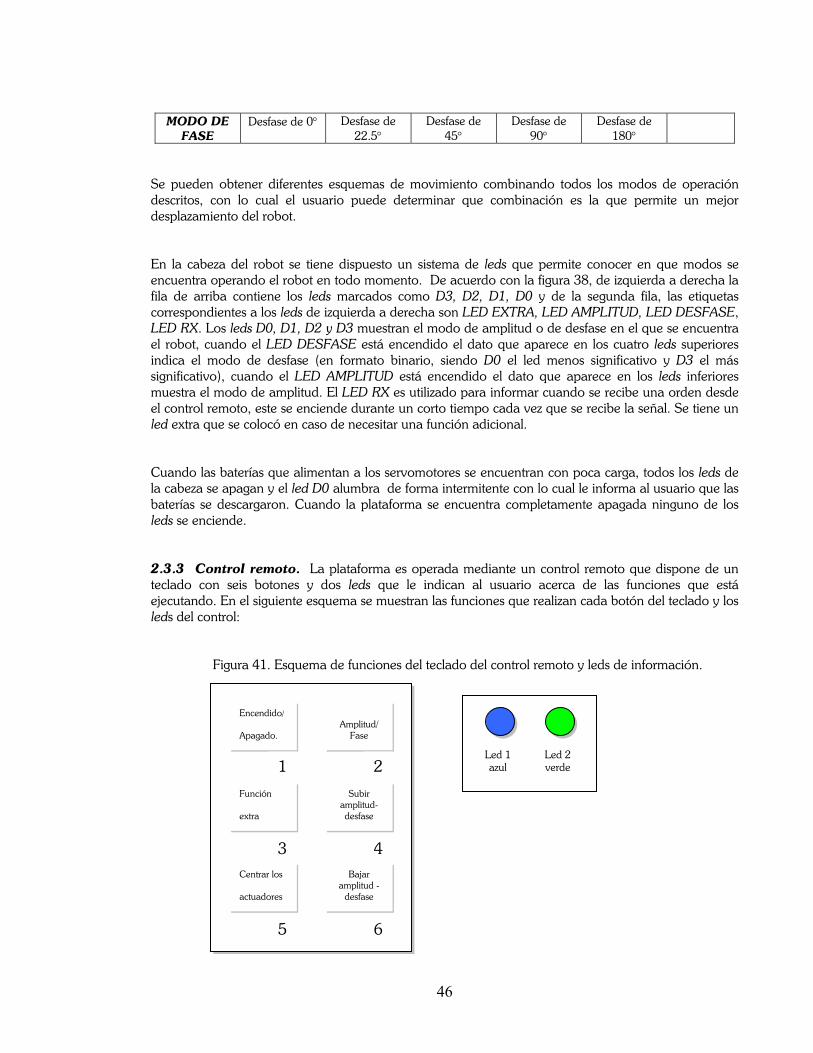
2.3 MANUAL DE USUARIO. A continuación se presenta una breve reseña del objetivo de la plataforma, las funciones implementadas y los modos de operación correspondientes. Esta sección está orientada al usuario para permitirle una aproximación al manejo de la plataforma. 2.3.1 Descripción general. El objetivo principal de la plataforma es el de alcanzar un desplazamiento frontal a través de una secuencia de movimientos desarrollados por los actuadores. La base teórica de la plataforma es la locomoción a través de aletas pectorales. El mecanismo principal está constituido por cuatro actuadores que son accionados cada uno por un servomotor. Los parámetros que se le controlan a estos actuadores son la amplitud de oscilación y el desfase que existe entre los actuadores delanteros y traseros. El robot puede operar en uno de seis modos de amplitud de oscilación y cinco modos de desfase. Para medir estos parámetros se tiene como referencia la posición central de los actuadores que se tiene cuando todos estos están ubicados perpendicularmente a las caras laterales del robot.
Figura 40. Esquema del movimiento del actuador
2.3.2 Modos de operación. Los diferentes modos de operación del robot se ilustran en la siguiente tabla. Tabla 1. Modos de operación del robot.
NUMERO DE MODO
0 1 2 3 4 5
MODO DE AMPLITUD
Amplitud de 40°
Amplitud de 50°
Amplitud de 60°
Amplitud de 70°
Amplitud de 80°
Amplitud de 90°
0 grados
90 grados
-90 grados
46
MODO DE FASE
Desfase de 0° Desfase de 22.5°
Desfase de 45°
Desfase de 90°
Desfase de 180°
Se pueden obtener diferentes esquemas de movimiento combinando todos los modos de operación descritos, con lo cual el usuario puede determinar que combinación es la que permite un mejor desplazamiento del robot. En la cabeza del robot se tiene dispuesto un sistema de leds que permite conocer en que modos se encuentra operando el robot en todo momento. De acuerdo con la figura 38, de izquierda a derecha la fila de arriba contiene los leds marcados como D3, D2, D1, D0 y de la segunda fila, las etiquetas correspondientes a los leds de izquierda a derecha son LED EXTRA, LED AMPLITUD, LED DESFASE, LED RX. Los leds D0, D1, D2 y D3 muestran el modo de amplitud o de desfase en el que se encuentra el robot, cuando el LED DESFASE está encendido el dato que aparece en los cuatro leds superiores indica el modo de desfase (en formato binario, siendo D0 el led menos significativo y D3 el más significativo), cuando el LED AMPLITUD está encendido el dato que aparece en los leds inferiores muestra el modo de amplitud. El LED RX es utilizado para informar cuando se recibe una orden desde el control remoto, este se enciende durante un corto tiempo cada vez que se recibe la señal. Se tiene un led extra que se colocó en caso de necesitar una función adicional. Cuando las baterías que alimentan a los servomotores se encuentran con poca carga, todos los leds de la cabeza se apagan y el led D0 alumbra de forma intermitente con lo cual le informa al usuario que las baterías se descargaron. Cuando la plataforma se encuentra completamente apagada ninguno de los leds se enciende. 2.3.3 Control remoto. La plataforma es operada mediante un control remoto que dispone de un teclado con seis botones y dos leds que le indican al usuario acerca de las funciones que está ejecutando. En el siguiente esquema se muestran las funciones que realizan cada botón del teclado y los leds del control: Figura 41. Esquema de funciones del teclado del control remoto y leds de información.
Led 1 azul
Led 2 verde
Encendido/
Apagado.
Amplitud/
Fase
Función
extra
Subir amplitud- desfase
Centrar los
actuadores
Bajar amplitud -
desfase
1 2
3 4
5 6
47
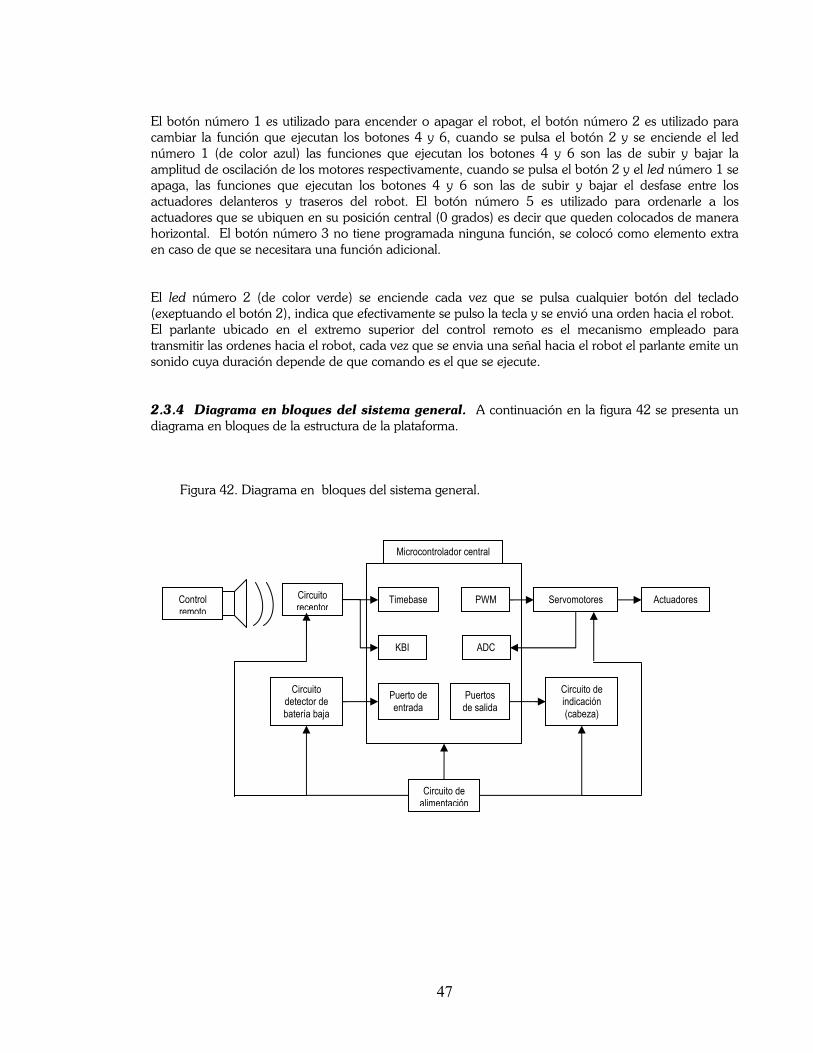
El botón número 1 es utilizado para encender o apagar el robot, el botón número 2 es utilizado para cambiar la función que ejecutan los botones 4 y 6, cuando se pulsa el botón 2 y se enciende el led número 1 (de color azul) las funciones que ejecutan los botones 4 y 6 son las de subir y bajar la amplitud de oscilación de los motores respectivamente, cuando se pulsa el botón 2 y el led número 1 se apaga, las funciones que ejecutan los botones 4 y 6 son las de subir y bajar el desfase entre los actuadores delanteros y traseros del robot. El botón número 5 es utilizado para ordenarle a los actuadores que se ubiquen en su posición central (0 grados) es decir que queden colocados de manera horizontal. El botón número 3 no tiene programada ninguna función, se colocó como elemento extra en caso de que se necesitara una función adicional. El led número 2 (de color verde) se enciende cada vez que se pulsa cualquier botón del teclado (exeptuando el botón 2), indica que efectivamente se pulso la tecla y se envió una orden hacia el robot. El parlante ubicado en el extremo superior del control remoto es el mecanismo empleado para transmitir las ordenes hacia el robot, cada vez que se envia una señal hacia el robot el parlante emite un sonido cuya duración depende de que comando es el que se ejecute. 2.3.4 Diagrama en bloques del sistema general. A continuación en la figura 42 se presenta un diagrama en bloques de la estructura de la plataforma. Figura 42. Diagrama en bloques del sistema general.
Timebase PWM
ADC KBI
Puerto de entrada
Puertos de salida
Microcontrolador central
Servomotores Actuadores
Circuito de indicación (cabeza)
Circuito de alimentación
Control remoto
Circuito receptor
Circuito detector de batería baja
48
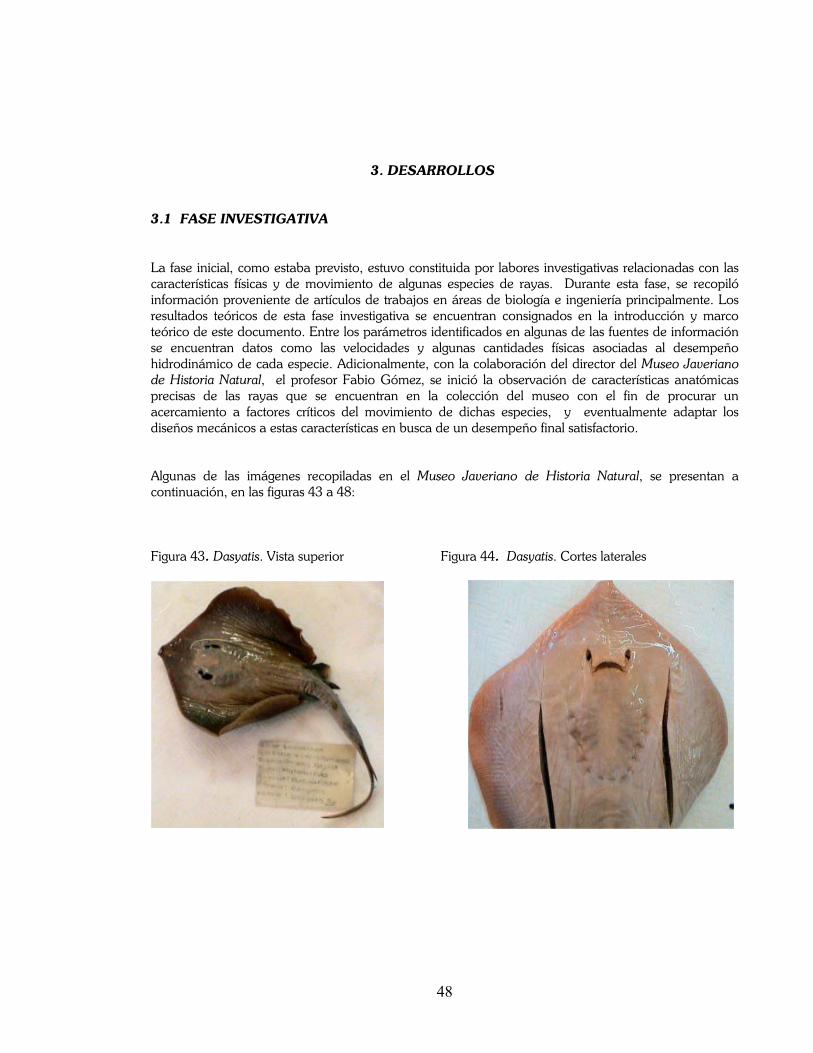
3. DESARROLLOS 3.1 FASE INVESTIGATIVA La fase inicial, como estaba previsto, estuvo constituida por labores investigativas relacionadas con las características físicas y de movimiento de algunas especies de rayas. Durante esta fase, se recopiló información proveniente de artículos de trabajos en áreas de biología e ingeniería principalmente. Los resultados teóricos de esta fase investigativa se encuentran consignados en la introducción y marco teórico de este documento. Entre los parámetros identificados en algunas de las fuentes de información se encuentran datos como las velocidades y algunas cantidades físicas asociadas al desempeño hidrodinámico de cada especie. Adicionalmente, con la colaboración del director del Museo Javeriano de Historia Natural, el profesor Fabio Gómez, se inició la observación de características anatómicas precisas de las rayas que se encuentran en la colección del museo con el fin de procurar un acercamiento a factores críticos del movimiento de dichas especies, y eventualmente adaptar los diseños mecánicos a estas características en busca de un desempeño final satisfactorio. Algunas de las imágenes recopiladas en el Museo Javeriano de Historia Natural, se presentan a continuación, en las figuras 43 a 48: Figura 43. Dasyatis. Vista superior Figura 44. Dasyatis. Cortes laterales
49
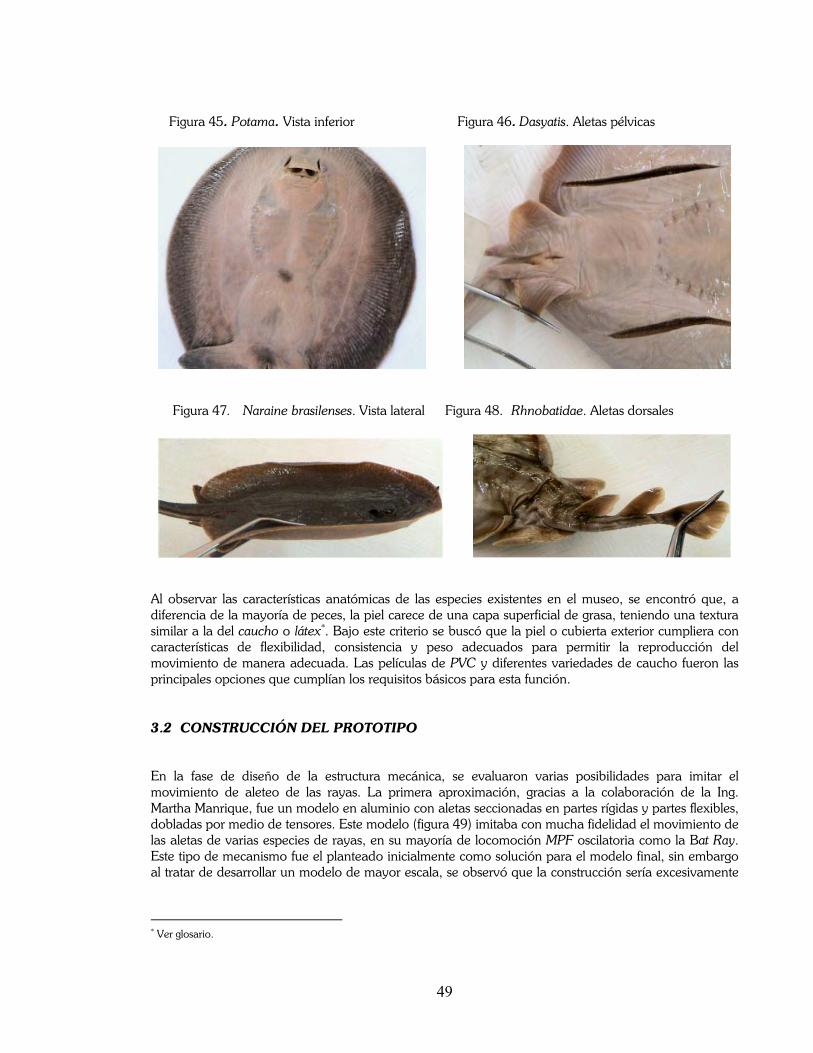
Figura 45. Potama. Vista inferior Figura 46. Dasyatis. Aletas pélvicas
Figura 47. Naraine brasilenses. Vista lateral Figura 48. Rhnobatidae. Aletas dorsales
Al observar las características anatómicas de las especies existentes en el museo, se encontró que, a diferencia de la mayoría de peces, la piel carece de una capa superficial de grasa, teniendo una textura similar a la del caucho o látex*. Bajo este criterio se buscó que la piel o cubierta exterior cumpliera con características de flexibilidad, consistencia y peso adecuados para permitir la reproducción del movimiento de manera adecuada. Las películas de PVC y diferentes variedades de caucho fueron las principales opciones que cumplían los requisitos básicos para esta función. 3.2 CONSTRUCCIÓN DEL PROTOTIPO En la fase de diseño de la estructura mecánica, se evaluaron varias posibilidades para imitar el movimiento de aleteo de las rayas. La primera aproximación, gracias a la colaboración de la Ing. Martha Manrique, fue un modelo en aluminio con aletas seccionadas en partes rígidas y partes flexibles, dobladas por medio de tensores. Este modelo (figura 49) imitaba con mucha fidelidad el movimiento de las aletas de varias especies de rayas, en su mayoría de locomoción MPF oscilatoria como la Bat Ray. Este tipo de mecanismo fue el planteado inicialmente como solución para el modelo final, sin embargo al tratar de desarrollar un modelo de mayor escala, se observó que la construcción sería excesivamente
* Ver glosario.

50
complicada y que no se podía por lo tanto pensar en desarrollar distintos perfiles de aleta, además de las altas exigencias de torque necesarias para poder imitar el movimiento a partir de los tensores. Figura 49. Primer modelo mecánico construido
Además de la configuración de actuadores con tensores, descartada por características de torque e impermeabilización, se analizaron otras opciones, como los Shape Memory Alloys, pero fueron descartadas por complejidad e insuficiencia para generar el movimiento∗, escogiendo así actuadores rígidos para la estructura. Paralelo a la fase investigativa, se llevó a cabo la construcción de un prototipo a escala 1:2, del modelo final planteado inicialmente, para evaluar algunas opciones y características mecánicas (torque en los motores, amplitud, velocidad y frecuencia de los actuadores, volumen, etc.) y electrónicas (potencia, intervalos
de tiempo, relaciones voltaje frecuencia, etc.) fundamentales para el diseño del modelo final. En este momento, la formulación de soluciones planteó un mecanismo de transmisión simple que se juzgó adecuado por su sencillez en la construcción y acople al servomotor. El mecanismo adaptado fue el llamado biela-manivela.
Figura 50. Esquema del mecanismo biela-manivela y mecanismo del prototipo
Este modelo constaba solo de 2 actuadores rígidos (en aluminio) movidos simétricamente por un servomotor Hobbico CS-60 asegurado a una placa redonda de acrílico, insertada en una unión de PVC que soportaba a su vez el riel componente del sistema biela manivela, que permitía transformar el movimiento circular del servomotor en movimiento en una dimensión para los actuadores
∗Robo Ray nunca consiguió propulsión con SMAs.
51
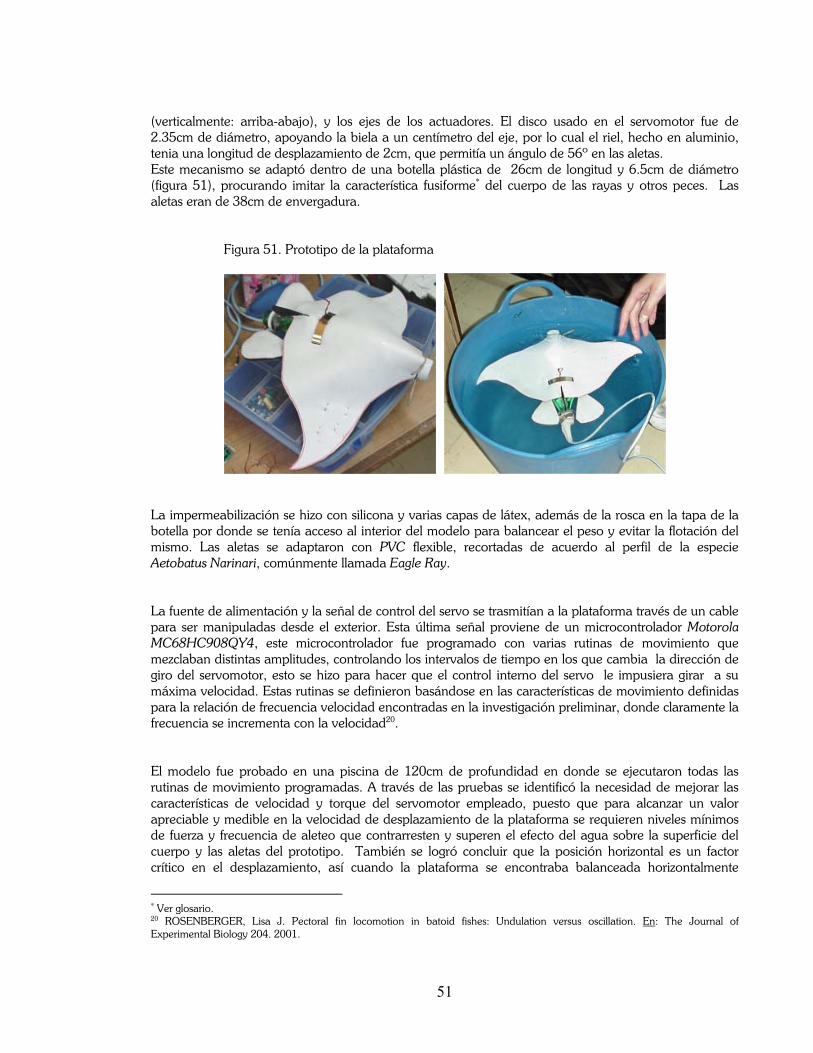
(verticalmente: arriba-abajo), y los ejes de los actuadores. El disco usado en el servomotor fue de 2.35cm de diámetro, apoyando la biela a un centímetro del eje, por lo cual el riel, hecho en aluminio, tenia una longitud de desplazamiento de 2cm, que permitía un ángulo de 56º en las aletas. Este mecanismo se adaptó dentro de una botella plástica de 26cm de longitud y 6.5cm de diámetro (figura 51), procurando imitar la característica fusiforme* del cuerpo de las rayas y otros peces. Las aletas eran de 38cm de envergadura. Figura 51. Prototipo de la plataforma
La impermeabilización se hizo con silicona y varias capas de látex, además de la rosca en la tapa de la botella por donde se tenía acceso al interior del modelo para balancear el peso y evitar la flotación del mismo. Las aletas se adaptaron con PVC flexible, recortadas de acuerdo al perfil de la especie Aetobatus Narinari, comúnmente llamada Eagle Ray. La fuente de alimentación y la señal de control del servo se trasmitían a la plataforma través de un cable para ser manipuladas desde el exterior. Esta última señal proviene de un microcontrolador Motorola MC68HC908QY4, este microcontrolador fue programado con varias rutinas de movimiento que mezclaban distintas amplitudes, controlando los intervalos de tiempo en los que cambia la dirección de giro del servomotor, esto se hizo para hacer que el control interno del servo le impusiera girar a su máxima velocidad. Estas rutinas se definieron basándose en las características de movimiento definidas para la relación de frecuencia velocidad encontradas en la investigación preliminar, donde claramente la frecuencia se incrementa con la velocidad20. El modelo fue probado en una piscina de 120cm de profundidad en donde se ejecutaron todas las rutinas de movimiento programadas. A través de las pruebas se identificó la necesidad de mejorar las características de velocidad y torque del servomotor empleado, puesto que para alcanzar un valor apreciable y medible en la velocidad de desplazamiento de la plataforma se requieren niveles mínimos de fuerza y frecuencia de aleteo que contrarresten y superen el efecto del agua sobre la superficie del cuerpo y las aletas del prototipo. También se logró concluir que la posición horizontal es un factor crítico en el desplazamiento, así cuando la plataforma se encontraba balanceada horizontalmente
* Ver glosario. 20 ROSENBERGER, Lisa J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. En: The Journal of Experimental Biology 204. 2001.

52
muestra un movimiento ligeramente más veloz. Al realizar las pruebas se descubrió la influencia desfavorable del cable sobre el movimiento de la plataforma, ya que la frenaba y en algunos casos cambiaba su dirección, además de los niveles de ruido que introdujo en las señales del motor al ser sumergida una cierta longitud de cable. Luego se encontraría que no es recomendable el uso de cables bajo el agua, especialmente en largas longitudes21. Sin embargo la velocidad desarrollada por la plataforma fue tan baja y los movimientos bajo el agua fueron tan tenues que no se pudieron realizar medidas concretas, aunque se observó que la plataforma tendía a desarrollar velocidades superiores con rutinas de frecuencia más alta y amplitudes mas bajas en los actuadores*. 3.3 FORMULACIÓN Y DISEÑO DEL MODELO FINAL DE LA PLATAFORMA Luego de observar los problemas presentados en los ensayos del modelo de pruebas, de las capacidades de los servomotores y las características de peso y volumen, se cambió el planteamiento del modelo final, que en un principio era de 52cm de largo por 76 de ancho y cilíndrico, por uno rectangular, que permite el acople de las partes y facilita el proceso de ensamblaje, en el que se redujeran las dimensiones al máximo, de modo que todos los componentes tuvieran solo el espacio necesario para su ensamblaje y operación, llegando a un modelo de 36cm de largo por 56cm de ancho (envergadura de las aletas), escalando las medidas de una raya real de la especie escogida Aetobatus Narinari o Eagle Ray, de modo que se disminuyó el volumen y por lo tanto el peso necesario para alcanzar la flotabilidad neutra, disminuyendo la exigencia de los servomotores, que ahora serían cuatro y cada uno movería independientemente un actuador. También se observó que controlar el servomotor por intervalos de tiempo no era adecuado, ya que no se puede predecir la velocidad de los actuadores al mover las aletas bajo el agua, por lo tanto era necesario implementar un control con realimentación que permitiera conocer la posición real para controlar así la amplitud de cada actuador y el desfase entre ellos. Para la aplicación de este trabajo de grado los actuadores tendrán movimientos simétricos, es decir que las aletas se elevaran igualmente a derecha o izquierda, aunque cada uno de los servomotores es independiente y puede tener movimientos individuales. Por estas razones se escogieron servomotores de alto torque Futaba S3010, que tienen 6.5kg/cm. de torque a 6V con las mismas dimensiones físicas de los Hobbico CS-60 anteriormente usados. Con el fin de obtener una velocidad de onda determinada a la que, según los estudios de la especie, corresponde la velocidad máxima, se buscó controlar el desfase entre dos puntos fijos donde se encuentran ubicados los actuadores (dos por cada aleta), para esto se diseñaron rutinas con las cuales se sensaba la posición de los servomotores. Para sensar esta posición se recurrió a tomar la señal del potenciómetro interno de cada servomotor. Con la variación de esta señal fue posible determinar la correspondencia entre los puntos físicos de movimiento y las señales obtenidas desde el interior del
21 PINCOCK, D.G and VOEGELI, F.A. Quick course in underwater telemetry systems. VEMCO LIMITED Copyright, 2002; p.25. * Ver video prototipo.
53
servomotor, así al detectar la posición de cada servomotor se conoce la posición del actuador y se determina si está en la posición correcta con relación al otro para mantener la velocidad de onda. 3.4 CONSTRUCCIÓN DE LAS SECCIONES MECÁNICAS DE LA PLATAFORMA La construcción de la estructura pasó por varias etapas y modificaciones, para hacer más sencillo el ensamblaje. La primera fase fue la escogencia del material. El aluminio fue escogido debido a las múltiples características favorables y adecuadas que presenta en particular para esta aplicación. El aluminio es un metal muy ligero con un peso específico de 2,71 g/cm3
es decir, tres veces más liviano que el acero, el cobre o el zinc y cuatro veces más liviano que el plomo. Su resistencia puede adaptarse a la aplicación que se desee modificando la composición de su aleación. El aluminio genera de forma natural una capa de óxido que lo hace muy resistente a la corrosión. Los diferentes tipos de tratamiento de revestimiento con óxido de aluminio pueden mejorar aún más esta propiedad. Resulta especialmente útil para aquellos productos que requieren de protección y conservación, para este caso específico el contacto con el agua. El aluminio es un excelente conductor del calor y la corriente eléctrica y, en relación con su peso, es casi dos veces mejor que el cobre, adicionalmente es dos veces más económico que este último, es un buen reflector tanto de la luz como del calor. El aluminio es dúctil y tiene una densidad y un punto de fusión bajos. Esta situación de fundido, puede procesarse de diferentes maneras. La lámina de aluminio, incluso cuando se lamina a un grosor de 0,007mm sigue siendo completamente impermeable. Además, el metal no es tóxico, ni desprende olor o sabor. El aluminio es cien por ciento reciclable sin disminución de sus cualidades. El refundido del aluminio necesita poca energía. El proceso de reciclado requiere sólo un 5% de la energía necesaria para producir el metal primario inicial. Tiene una resistividad eléctrica de 0.035 Ohm.mm2/m a 20°C. 3.4.1 Cabeza y Cola. Estas dos piezas fueron las mas difíciles de crear, ya que se busca que la forma de la plataforma sea lo mas hidrodinámica posible, además se buscó que fueran transparentes con el fin de permitir un contacto del usuario con el interior del robot y el desarrollo de aplicaciones futuras. La cola y la cabeza fueron hechas mediante un proceso de termoformado de acrílico cristal de 3mm de espesor, este material también cuenta con especificaciones adecuadas para el uso planteado en esta aplicación, algunas de las características que presenta son: la resistencia a la intemperie pues no presenta cambios significativos en color y apariencia frente a condiciones atmosféricas severas; la facilidad de transmisión de luz, es un material visible en 92% con relación al vidrio. Su nivel de resistencia al impacto es alto, soporta impactos seis veces más fuertes que el vidrio. Es buen aislante y resiste el paso de la corriente. En referencia a las propiedades térmicas se destaca que es 20% mejor aislante que el vidrio. Es 50% más ligero que el vidrio y 43% más ligero que el aluminio. Su dureza es similar al cobre y al latón. El proceso de termoformado se inicia con la elaboración de un molde en madera del sólido a reproducir, este molde se fabrica a partir de planos con las dimensiones y características necesarias. Posterior a esta etapa, se acopla el molde a un marco de madera sobre el cual se ubica la lámina de acrílico y estas tres piezas son sometidas a una temperatura de 180˚C y a continuación se extrae el aire del acople del marco y el molde mediante un proceso de generación de vacío y así el acrílico se ajusta a la forma del molde. Luego son cortadas las partes que exceden las
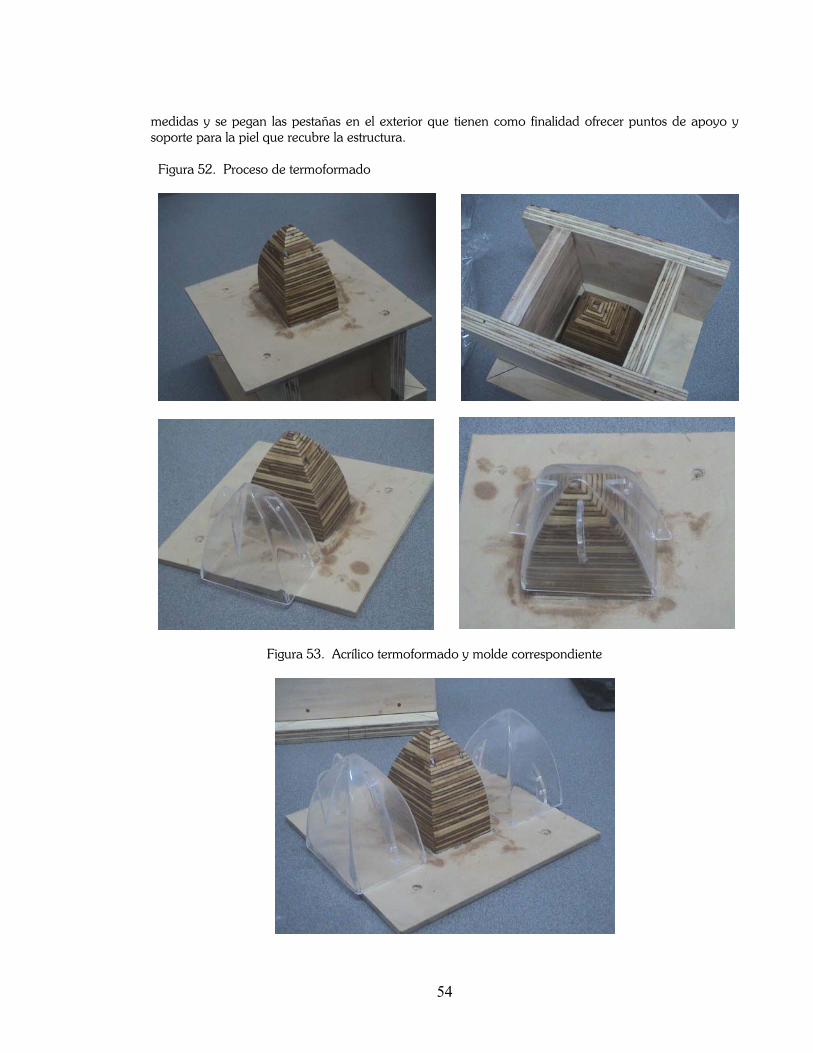
54
medidas y se pegan las pestañas en el exterior que tienen como finalidad ofrecer puntos de apoyo y soporte para la piel que recubre la estructura. Figura 52. Proceso de termoformado
Figura 53. Acrílico termoformado y molde correspondiente

55
Una vez termoformado el acrílico, se adapta un marco, hecho con perfil de aluminio “T” referencia D-028, que protege y fortalece la pieza y permite el acople con el cuerpo de la plataforma. Este marco se asegura al acrílico con dos tornillos inoxidables de 1/8’ en cada cara y luego se usa Sikaflex para sellar esta unión. En la figura 54. Se puede apreciar el proceso de ensamblaje de la cabeza y la cola. Figura 54. Ensamblaje cabeza y cola con los marcos correspondientes
3.4.2 Estructura Central o Cuerpo. En esta se encuentran contenidos los servomotores, las baterías dedicadas a su alimentación, y todo el mecanismo que permite transferir el movimiento a las aletas. La estructura del cuerpo esta construida con secciones de aluminio: Un conjunto de cuatro ángulos sostiene dos bloques que contienen dos servomotores cada uno, estos bloques fueron cortados de un perfil rectangular de aluminio extruído T-118. Cada bloque fue adaptado para que los servomotores pudieran acoplarse y desplazarse para ajustar su posición (figura 55).
Figura 55. Servomotores ajustados en el bloque

56
En un principio se pensó en usar una estructura formada por una sola pieza de aluminio que constituyera las caras laterales e inferior del cuerpo, sin embargo se descartó esta opción por dificultad en el ensamblaje, optando por tapas independientes en las cuatro caras (figura 56). Figura 56. Estructura del cuerpo opción inicial (izquierda), elección final (derecha)
Cada una de las cuatro caras que conforman el exterior de la estructura central de aluminio fueron forradas por la parte interior con una película de caucho, usado como empaque, de 1/16’ de espesor para que la elasticidad de la misma permitiera el ensamble de las partes entre si, al ser ajustadas las caras. El mecanismo de transmisión de movimiento hacia los actuadores escogido para el modelo final fue un arreglo de engranajes cilíndricos de eje paralelo. Este arreglo permite un control mas directo sobre los actuadores, ya que se tiene la señal de realimentación de posición interna de los servomotores y se evitan los puntos de acople y deslizamiento de las bielas, que generan fricción y ruido, reduciendo la eficiencia. La configuración de este modelo puede apreciarse en la figura 40 de la sección 2.3.1. Uno de los engranajes se encuentra acoplado al disco del servomotor fijado por medio de tornillos pequeños (color gris 35 dientes), este se une con una sección de engranaje de 130º, calculada para operar en +/- 45º de amplitud, al cual se encuentra adherida una pieza de bronce con base rectangular (figura 57) que permite incrustar el actuador cilíndrico de aluminio de las aletas al arreglo, esto se hizo con el fin de proporcionar la posibilidad de cambio de las aletas pues el actuador de aluminio se encuentra fijo a cada par de aletas. Figura 57. Arreglo para acoplar la transmisión al actuador
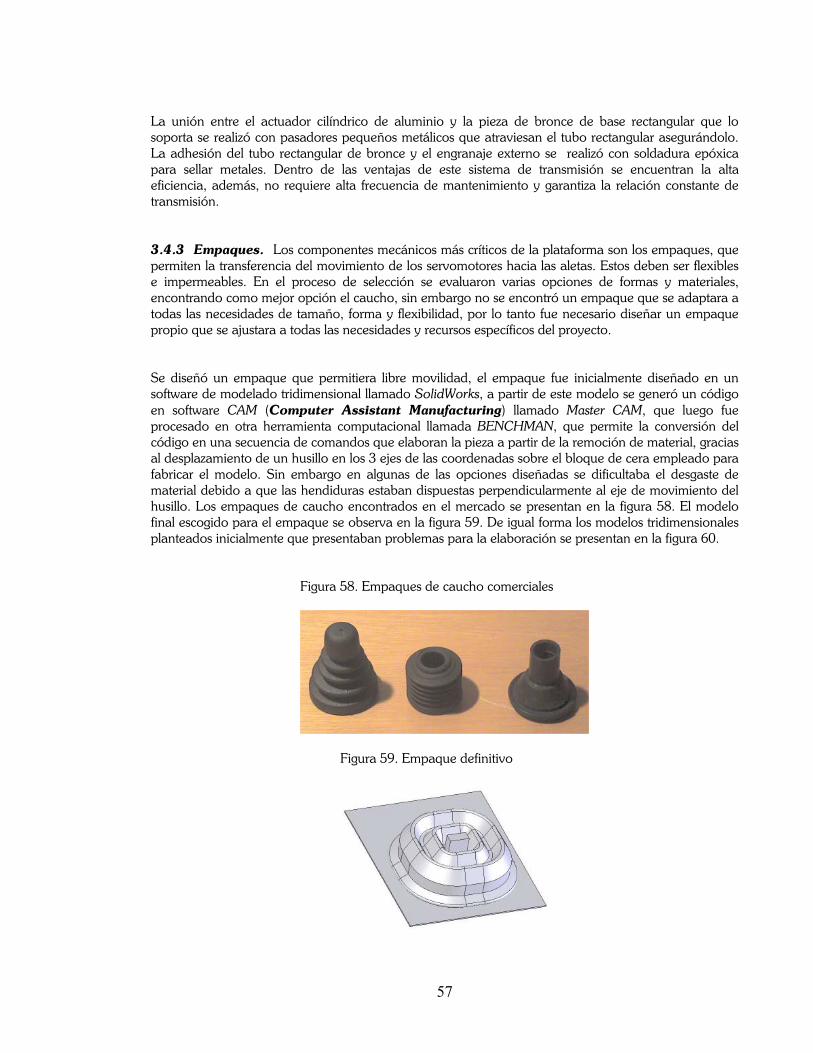
57
La unión entre el actuador cilíndrico de aluminio y la pieza de bronce de base rectangular que lo soporta se realizó con pasadores pequeños metálicos que atraviesan el tubo rectangular asegurándolo. La adhesión del tubo rectangular de bronce y el engranaje externo se realizó con soldadura epóxica para sellar metales. Dentro de las ventajas de este sistema de transmisión se encuentran la alta eficiencia, además, no requiere alta frecuencia de mantenimiento y garantiza la relación constante de transmisión. 3.4.3 Empaques. Los componentes mecánicos más críticos de la plataforma son los empaques, que permiten la transferencia del movimiento de los servomotores hacia las aletas. Estos deben ser flexibles e impermeables. En el proceso de selección se evaluaron varias opciones de formas y materiales, encontrando como mejor opción el caucho, sin embargo no se encontró un empaque que se adaptara a todas las necesidades de tamaño, forma y flexibilidad, por lo tanto fue necesario diseñar un empaque propio que se ajustara a todas las necesidades y recursos específicos del proyecto. Se diseñó un empaque que permitiera libre movilidad, el empaque fue inicialmente diseñado en un software de modelado tridimensional llamado SolidWorks, a partir de este modelo se generó un código en software CAM (Computer Assistant Manufacturing) llamado Master CAM, que luego fue procesado en otra herramienta computacional llamada BENCHMAN, que permite la conversión del código en una secuencia de comandos que elaboran la pieza a partir de la remoción de material, gracias al desplazamiento de un husillo en los 3 ejes de las coordenadas sobre el bloque de cera empleado para fabricar el modelo. Sin embargo en algunas de las opciones diseñadas se dificultaba el desgaste de material debido a que las hendiduras estaban dispuestas perpendicularmente al eje de movimiento del husillo. Los empaques de caucho encontrados en el mercado se presentan en la figura 58. El modelo final escogido para el empaque se observa en la figura 59. De igual forma los modelos tridimensionales planteados inicialmente que presentaban problemas para la elaboración se presentan en la figura 60. Figura 58. Empaques de caucho comerciales
Figura 59. Empaque definitivo
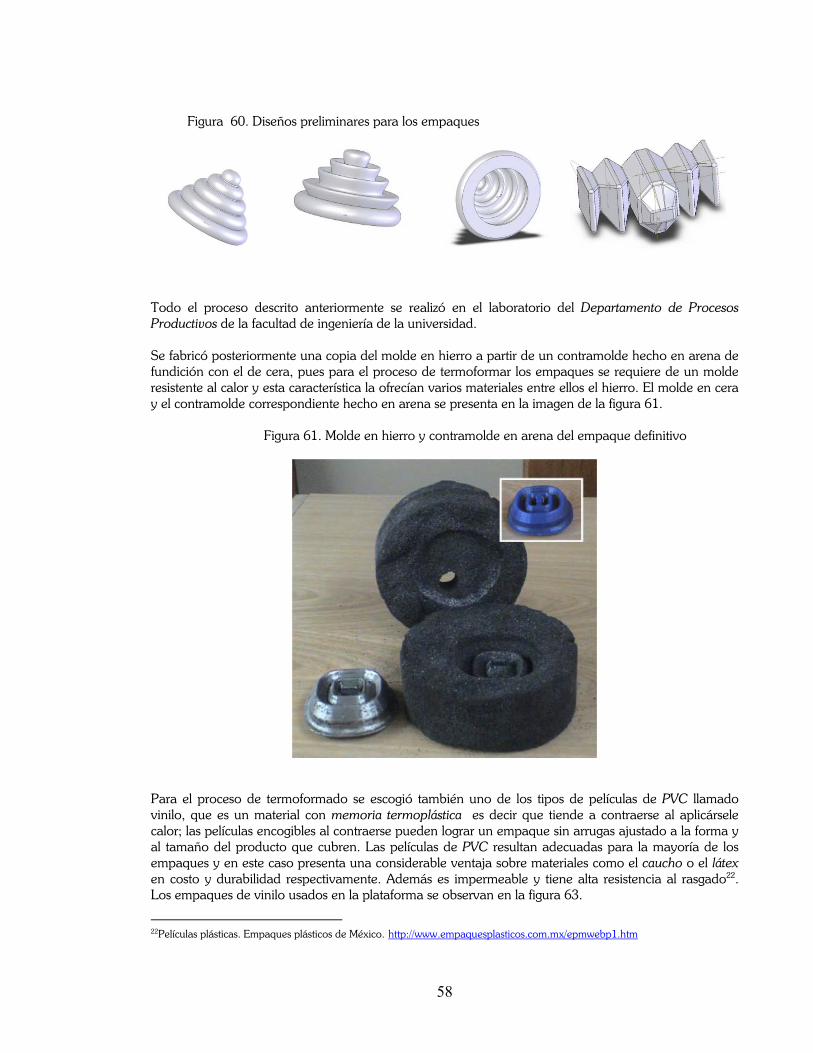
58
Figura 60. Diseños preliminares para los empaques
Todo el proceso descrito anteriormente se realizó en el laboratorio del Departamento de Procesos Productivos de la facultad de ingeniería de la universidad. Se fabricó posteriormente una copia del molde en hierro a partir de un contramolde hecho en arena de fundición con el de cera, pues para el proceso de termoformar los empaques se requiere de un molde resistente al calor y esta característica la ofrecían varios materiales entre ellos el hierro. El molde en cera y el contramolde correspondiente hecho en arena se presenta en la imagen de la figura 61. Figura 61. Molde en hierro y contramolde en arena del empaque definitivo
Para el proceso de termoformado se escogió también uno de los tipos de películas de PVC llamado vinilo, que es un material con memoria termoplástica es decir que tiende a contraerse al aplicársele calor; las películas encogibles al contraerse pueden lograr un empaque sin arrugas ajustado a la forma y al tamaño del producto que cubren. Las películas de PVC resultan adecuadas para la mayoría de los empaques y en este caso presenta una considerable ventaja sobre materiales como el caucho o el látex en costo y durabilidad respectivamente. Además es impermeable y tiene alta resistencia al rasgado22. Los empaques de vinilo usados en la plataforma se observan en la figura 63.
22Películas plásticas. Empaques plásticos de México. http://www.empaquesplasticos.com.mx/epmwebp1.htm
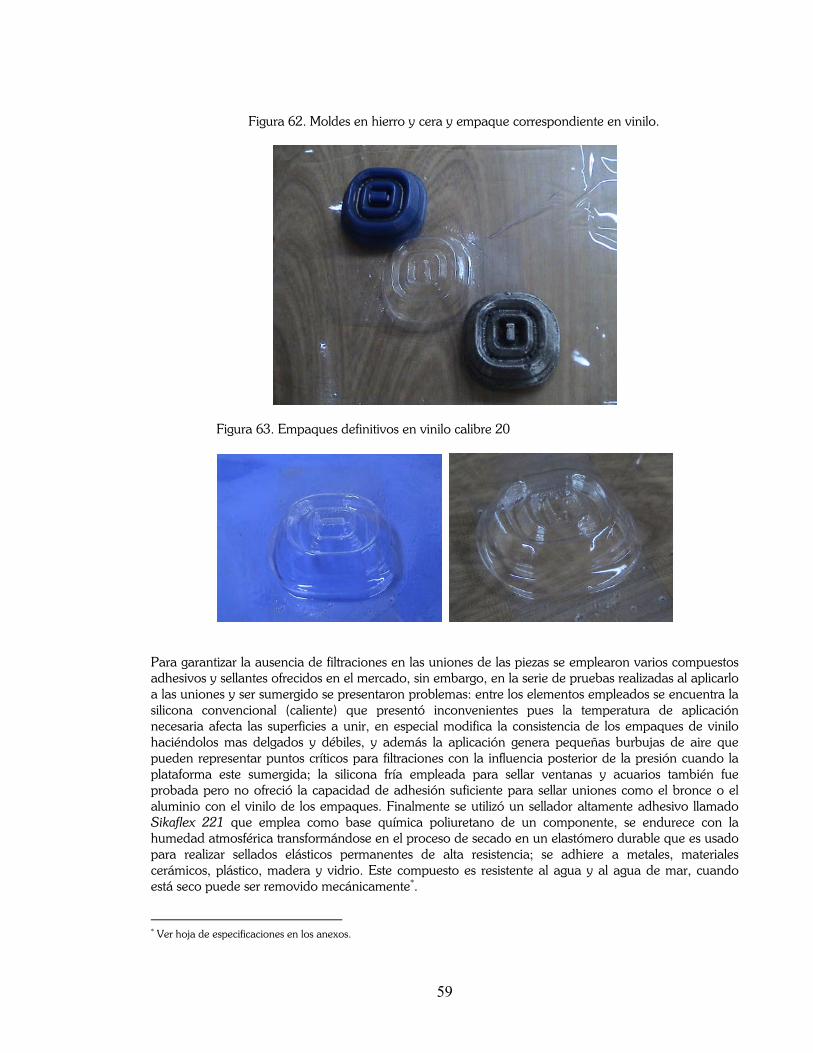
59
Figura 62. Moldes en hierro y cera y empaque correspondiente en vinilo.
Figura 63. Empaques definitivos en vinilo calibre 20
Para garantizar la ausencia de filtraciones en las uniones de las piezas se emplearon varios compuestos adhesivos y sellantes ofrecidos en el mercado, sin embargo, en la serie de pruebas realizadas al aplicarlo a las uniones y ser sumergido se presentaron problemas: entre los elementos empleados se encuentra la silicona convencional (caliente) que presentó inconvenientes pues la temperatura de aplicación necesaria afecta las superficies a unir, en especial modifica la consistencia de los empaques de vinilo haciéndolos mas delgados y débiles, y además la aplicación genera pequeñas burbujas de aire que pueden representar puntos críticos para filtraciones con la influencia posterior de la presión cuando la plataforma este sumergida; la silicona fría empleada para sellar ventanas y acuarios también fue probada pero no ofreció la capacidad de adhesión suficiente para sellar uniones como el bronce o el aluminio con el vinilo de los empaques. Finalmente se utilizó un sellador altamente adhesivo llamado Sikaflex 221 que emplea como base química poliuretano de un componente, se endurece con la humedad atmosférica transformándose en el proceso de secado en un elastómero durable que es usado para realizar sellados elásticos permanentes de alta resistencia; se adhiere a metales, materiales cerámicos, plástico, madera y vidrio. Este compuesto es resistente al agua y al agua de mar, cuando está seco puede ser removido mecánicamente*.
* Ver hoja de especificaciones en los anexos.
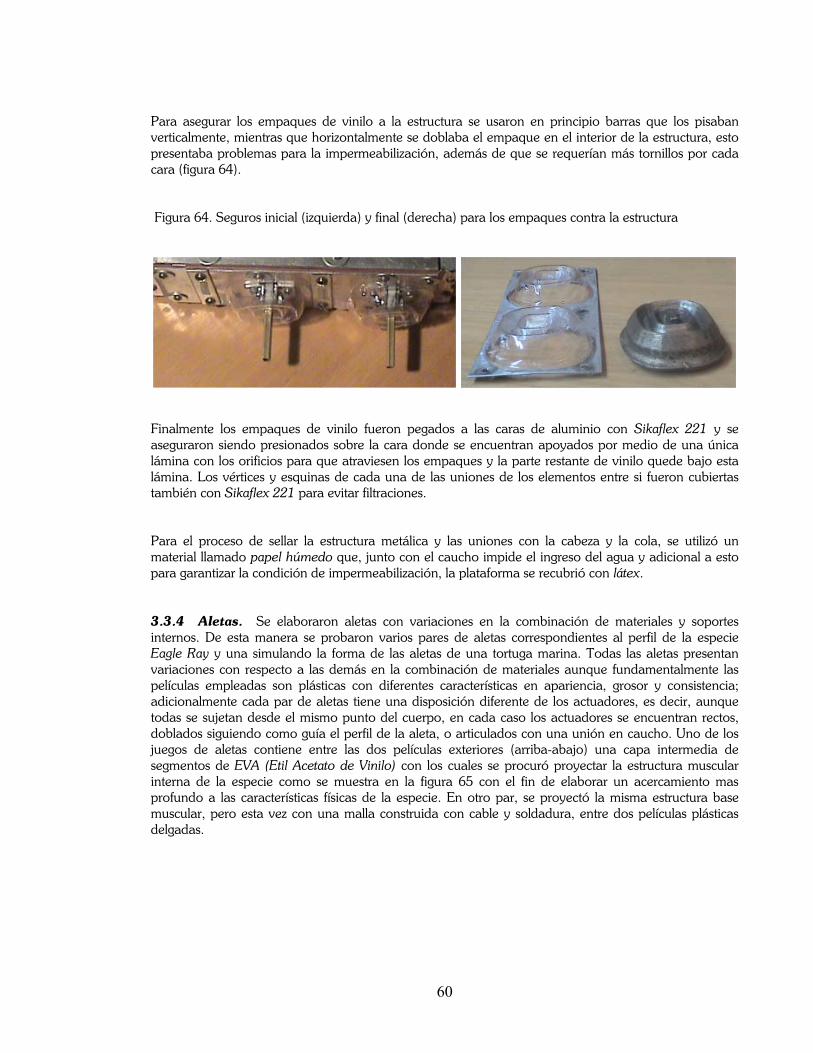
60
Para asegurar los empaques de vinilo a la estructura se usaron en principio barras que los pisaban verticalmente, mientras que horizontalmente se doblaba el empaque en el interior de la estructura, esto presentaba problemas para la impermeabilización, además de que se requerían más tornillos por cada cara (figura 64). Figura 64. Seguros inicial (izquierda) y final (derecha) para los empaques contra la estructura
Finalmente los empaques de vinilo fueron pegados a las caras de aluminio con Sikaflex 221 y se aseguraron siendo presionados sobre la cara donde se encuentran apoyados por medio de una única lámina con los orificios para que atraviesen los empaques y la parte restante de vinilo quede bajo esta lámina. Los vértices y esquinas de cada una de las uniones de los elementos entre si fueron cubiertas también con Sikaflex 221 para evitar filtraciones. Para el proceso de sellar la estructura metálica y las uniones con la cabeza y la cola, se utilizó un material llamado papel húmedo que, junto con el caucho impide el ingreso del agua y adicional a esto para garantizar la condición de impermeabilización, la plataforma se recubrió con látex. 3.3.4 Aletas. Se elaboraron aletas con variaciones en la combinación de materiales y soportes internos. De esta manera se probaron varios pares de aletas correspondientes al perfil de la especie Eagle Ray y una simulando la forma de las aletas de una tortuga marina. Todas las aletas presentan variaciones con respecto a las demás en la combinación de materiales aunque fundamentalmente las películas empleadas son plásticas con diferentes características en apariencia, grosor y consistencia; adicionalmente cada par de aletas tiene una disposición diferente de los actuadores, es decir, aunque todas se sujetan desde el mismo punto del cuerpo, en cada caso los actuadores se encuentran rectos, doblados siguiendo como guía el perfil de la aleta, o articulados con una unión en caucho. Uno de los juegos de aletas contiene entre las dos películas exteriores (arriba-abajo) una capa intermedia de segmentos de EVA (Etil Acetato de Vinilo) con los cuales se procuró proyectar la estructura muscular interna de la especie como se muestra en la figura 65 con el fin de elaborar un acercamiento mas profundo a las características físicas de la especie. En otro par, se proyectó la misma estructura base muscular, pero esta vez con una malla construida con cable y soldadura, entre dos películas plásticas delgadas.

61
Figura 65. Piel de la plataforma sobrepuesta a una imagen de la estructura muscular de un ejemplar de la especie Eagle Ray
Se construyeron varios pares de aletas, de modo que cada una tenía un par de actuadores a la derecha y otro par a la izquierda. Los actuadores se hicieron con barras de aluminio adecuados en tornos manuales del departamento de procesos productivos de la Facultad de Ingeniería, pues era necesario tener precisión en el acople con la estructura central. A continuación se presenta la apariencia exterior del modelo final de la plataforma colocada sobre un perfil recortado correspondiente a la especie Eagle Ray en la escala escogida para la construcción del modelo final. En la foto se observa la estructura mecánica hecha en aluminio ajustada con los dos extremos de acrílico y con los acoples de bronce que sujetan el actuador cilíndrico de aluminio. A continuación se presenta la descripción de los juegos de aletas que se observan en los cuadros de figura 66. En el primer cuadro se aprecian, aletas con superficie superior en película de PVC negra y blanca de plástico delgado en la parte inferior, los actuadores presentan una articulación en manguera de caucho que une dos segmentos de aluminio, uno de ellos va sujeto al acople de la plataforma, en la parte de abajo se encuentran independientes las aletas pélvicas que son fijadas a la cola a través de los orificios de las pestañas pegadas al acrílico. En el segundo cuadro de la figura está la imagen correspondiente a las aletas que para permitir mayor libertad, no cuentan con el segmento adicional que las sujeta a la cabeza, los materiales empleados en su elaboración son los mismos que los del par de aletas descrito anteriormente, los actuadores son rectos en aluminio. En el fotografía se presenta un par de aletas empleando dos capas de plástico, la superior de color azul y la inferior blanca, para completar la estructura interna se adhirió una malla de cable y los actuadores están ligeramente doblados para seguir la línea del tejido simulado. En el cuadro siguiente la combinación de materiales es la misma que en el juego anterior de aletas pero no cuenta con la malla de cable y los actuadores se encuentran tienen un doblez mas pronunciado. Al igual que el par de aletas de color negro, tienen un par de aletas pélvicas azules que completan la estructura y forma de las aletas. Luego puede apreciarse el quinto juego de aletas que simula el perfil de las aletas de una tortuga marina, estas aletas proveen mas libertad al movimiento de los actuadores de la plataforma, estas también están formadas por PVC negro y una

62
película plástica blanca abajo, los actuadores en este caso están ligeramente doblados siguiendo el perfil de la aleta. En todas las aletas descritas hasta el momento la unión entre las películas plásticas fue hecha con pegante especial para este tipo de material llamado Maxón que presenta alta adherencia. En el último cuadro se observa una piel que carece de una división en la parte superior, la estructura interior fue elaborada teniendo como referencia la estructura muscular expuesta anteriormente pero esta vez los segmentos fueron recortados en EVA, adheridos por medio de Maxón y asegurados con una costura que repasa los caminos entre segmentos con la película plástica blanca de la parte de abajo; de igual forma esta parte se encuentra unida al hule negro de la parte de arriba con costuras que bordean todo el perfil de la piel. Figura 66. Perfil de aletas desarrolladas
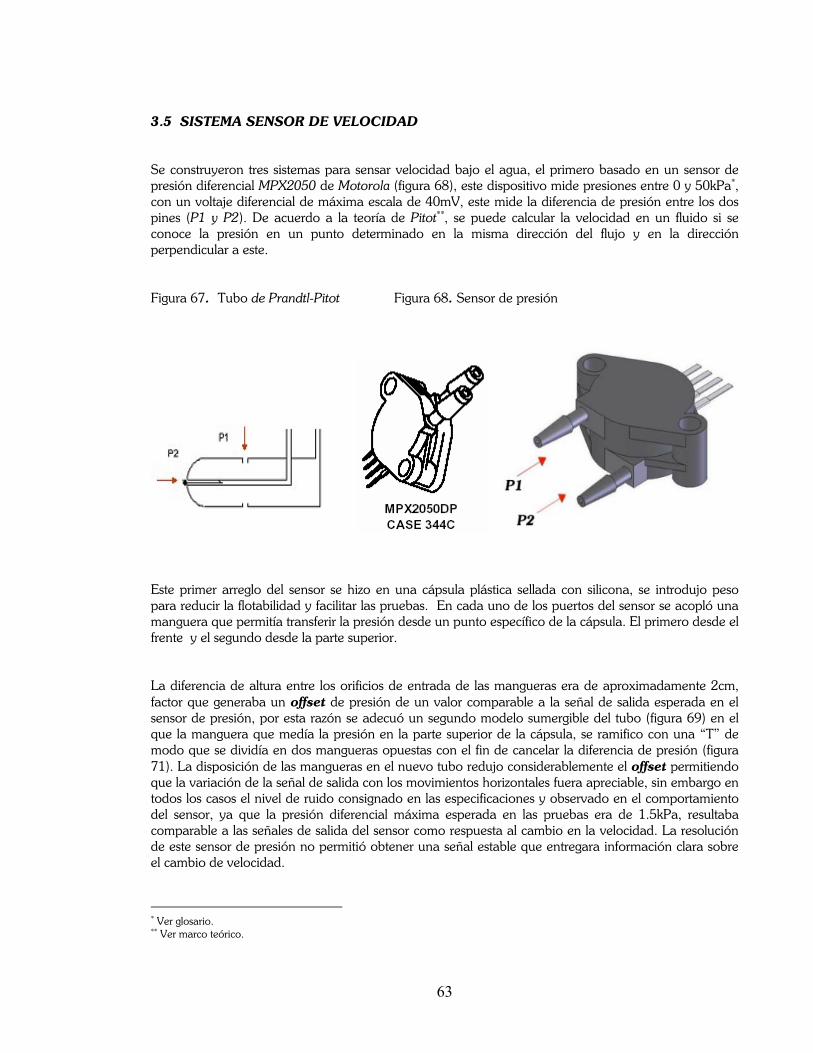
63
3.5 SISTEMA SENSOR DE VELOCIDAD Se construyeron tres sistemas para sensar velocidad bajo el agua, el primero basado en un sensor de presión diferencial MPX2050 de Motorola (figura 68), este dispositivo mide presiones entre 0 y 50kPa*, con un voltaje diferencial de máxima escala de 40mV, este mide la diferencia de presión entre los dos pines (P1 y P2). De acuerdo a la teoría de Pitot**, se puede calcular la velocidad en un fluido si se conoce la presión en un punto determinado en la misma dirección del flujo y en la dirección perpendicular a este. Figura 67. Tubo de Prandtl-Pitot Figura 68. Sensor de presión
Este primer arreglo del sensor se hizo en una cápsula plástica sellada con silicona, se introdujo peso para reducir la flotabilidad y facilitar las pruebas. En cada uno de los puertos del sensor se acopló una manguera que permitía transferir la presión desde un punto específico de la cápsula. El primero desde el frente y el segundo desde la parte superior. La diferencia de altura entre los orificios de entrada de las mangueras era de aproximadamente 2cm, factor que generaba un offset de presión de un valor comparable a la señal de salida esperada en el sensor de presión, por esta razón se adecuó un segundo modelo sumergible del tubo (figura 69) en el que la manguera que medía la presión en la parte superior de la cápsula, se ramifico con una “T” de modo que se dividía en dos mangueras opuestas con el fin de cancelar la diferencia de presión (figura 71). La disposición de las mangueras en el nuevo tubo redujo considerablemente el offset permitiendo que la variación de la señal de salida con los movimientos horizontales fuera apreciable, sin embargo en todos los casos el nivel de ruido consignado en las especificaciones y observado en el comportamiento del sensor, ya que la presión diferencial máxima esperada en las pruebas era de 1.5kPa, resultaba comparable a las señales de salida del sensor como respuesta al cambio en la velocidad. La resolución de este sensor de presión no permitió obtener una señal estable que entregara información clara sobre el cambio de velocidad.
* Ver glosario. ** Ver marco teórico.
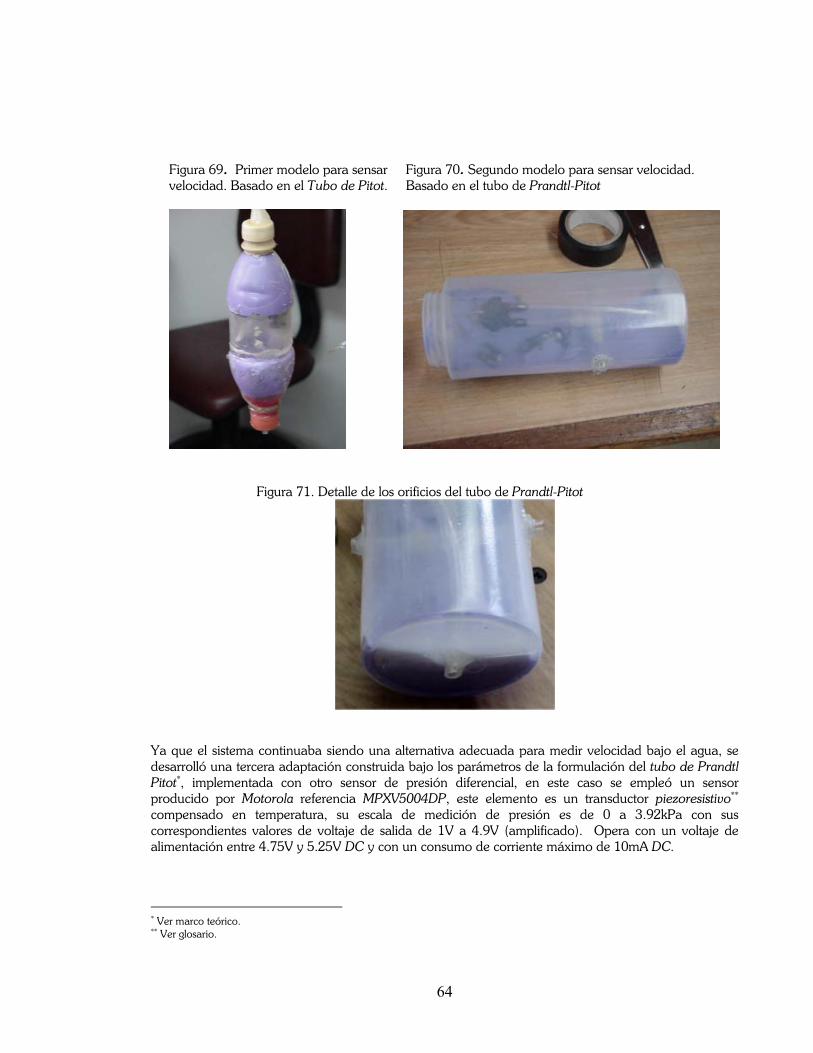
64
Figura 69. Primer modelo para sensar Figura 70. Segundo modelo para sensar velocidad. velocidad. Basado en el Tubo de Pitot. Basado en el tubo de Prandtl-Pitot
Figura 71. Detalle de los orificios del tubo de Prandtl-Pitot
Ya que el sistema continuaba siendo una alternativa adecuada para medir velocidad bajo el agua, se desarrolló una tercera adaptación construida bajo los parámetros de la formulación del tubo de Prandtl Pitot*, implementada con otro sensor de presión diferencial, en este caso se empleó un sensor producido por Motorola referencia MPXV5004DP, este elemento es un transductor piezoresistivo** compensado en temperatura, su escala de medición de presión es de 0 a 3.92kPa con sus correspondientes valores de voltaje de salida de 1V a 4.9V (amplificado). Opera con un voltaje de alimentación entre 4.75V y 5.25V DC y con un consumo de corriente máximo de 10mA DC.
* Ver marco teórico. ** Ver glosario.
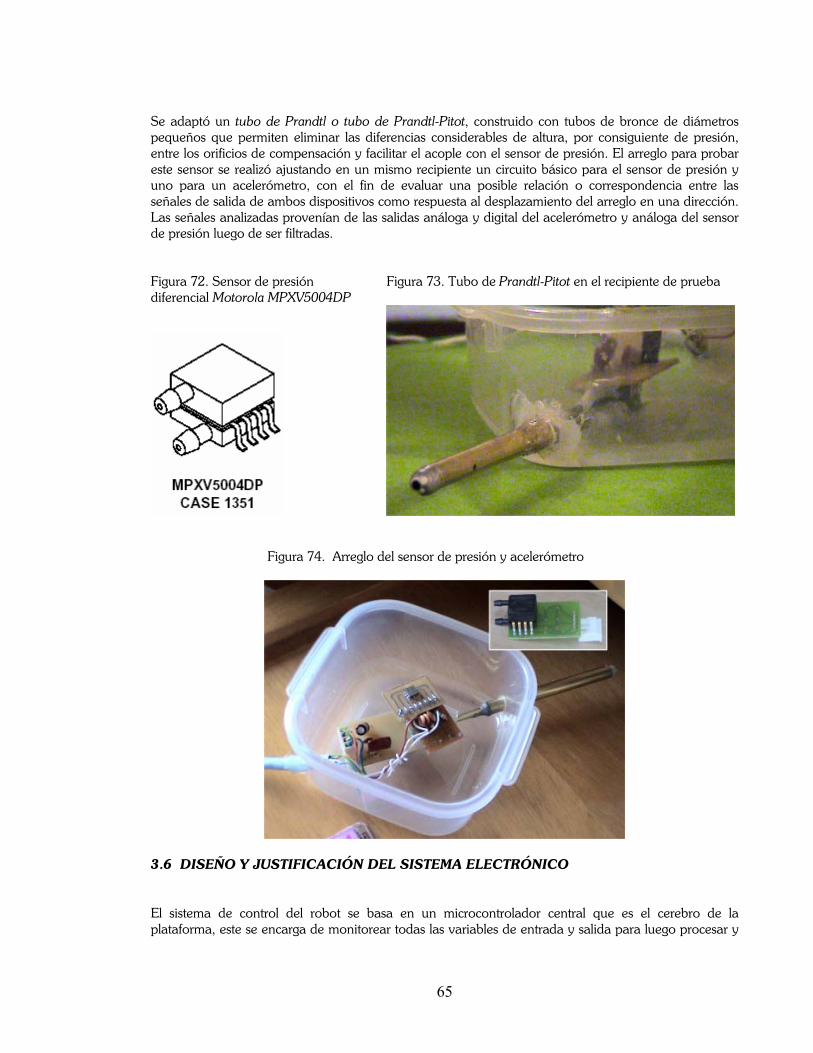
65
Se adaptó un tubo de Prandtl o tubo de Prandtl-Pitot, construido con tubos de bronce de diámetros pequeños que permiten eliminar las diferencias considerables de altura, por consiguiente de presión, entre los orificios de compensación y facilitar el acople con el sensor de presión. El arreglo para probar este sensor se realizó ajustando en un mismo recipiente un circuito básico para el sensor de presión y uno para un acelerómetro, con el fin de evaluar una posible relación o correspondencia entre las señales de salida de ambos dispositivos como respuesta al desplazamiento del arreglo en una dirección. Las señales analizadas provenían de las salidas análoga y digital del acelerómetro y análoga del sensor de presión luego de ser filtradas. Figura 72. Sensor de presión Figura 73. Tubo de Prandtl-Pitot en el recipiente de prueba diferencial Motorola MPXV5004DP
Figura 74. Arreglo del sensor de presión y acelerómetro
3.6 DISEÑO Y JUSTIFICACIÓN DEL SISTEMA ELECTRÓNICO El sistema de control del robot se basa en un microcontrolador central que es el cerebro de la plataforma, este se encarga de monitorear todas las variables de entrada y salida para luego procesar y
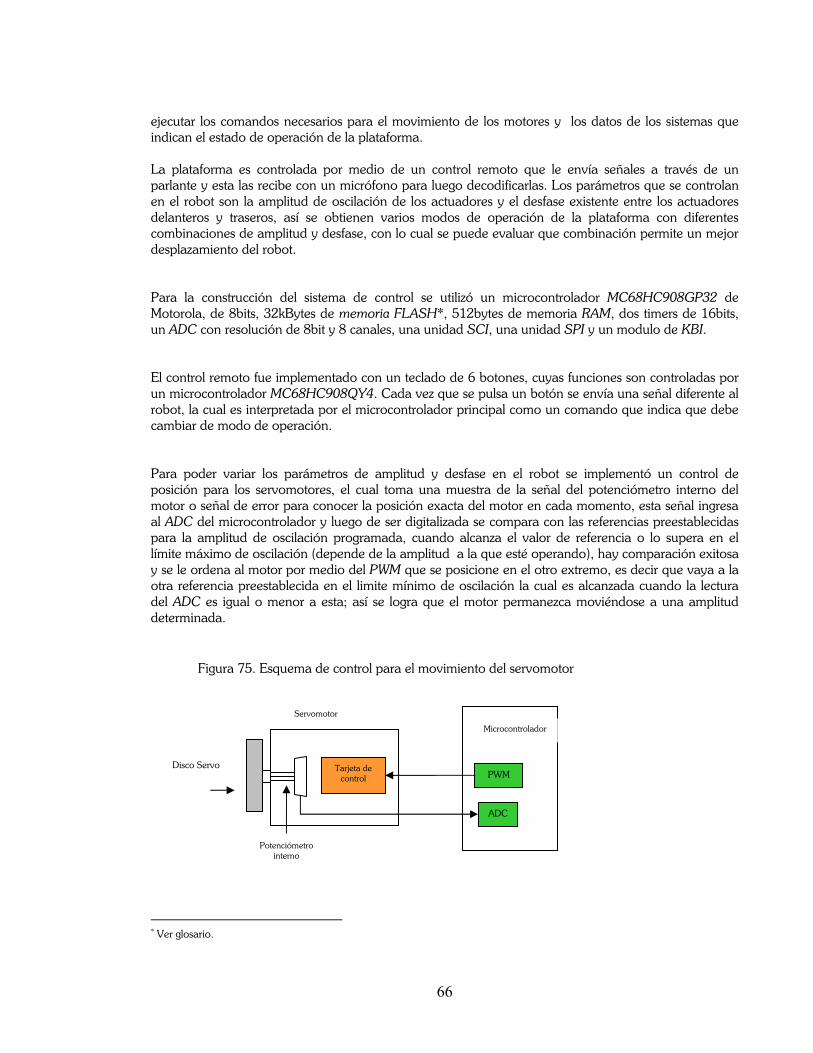
66
ejecutar los comandos necesarios para el movimiento de los motores y los datos de los sistemas que indican el estado de operación de la plataforma. La plataforma es controlada por medio de un control remoto que le envía señales a través de un parlante y esta las recibe con un micrófono para luego decodificarlas. Los parámetros que se controlan en el robot son la amplitud de oscilación de los actuadores y el desfase existente entre los actuadores delanteros y traseros, así se obtienen varios modos de operación de la plataforma con diferentes combinaciones de amplitud y desfase, con lo cual se puede evaluar que combinación permite un mejor desplazamiento del robot. Para la construcción del sistema de control se utilizó un microcontrolador MC68HC908GP32 de Motorola, de 8bits, 32kBytes de memoria FLASH*, 512bytes de memoria RAM, dos timers de 16bits, un ADC con resolución de 8bit y 8 canales, una unidad SCI, una unidad SPI y un modulo de KBI. El control remoto fue implementado con un teclado de 6 botones, cuyas funciones son controladas por un microcontrolador MC68HC908QY4. Cada vez que se pulsa un botón se envía una señal diferente al robot, la cual es interpretada por el microcontrolador principal como un comando que indica que debe cambiar de modo de operación. Para poder variar los parámetros de amplitud y desfase en el robot se implementó un control de posición para los servomotores, el cual toma una muestra de la señal del potenciómetro interno del motor o señal de error para conocer la posición exacta del motor en cada momento, esta señal ingresa al ADC del microcontrolador y luego de ser digitalizada se compara con las referencias preestablecidas para la amplitud de oscilación programada, cuando alcanza el valor de referencia o lo supera en el límite máximo de oscilación (depende de la amplitud a la que esté operando), hay comparación exitosa y se le ordena al motor por medio del PWM que se posicione en el otro extremo, es decir que vaya a la otra referencia preestablecida en el limite mínimo de oscilación la cual es alcanzada cuando la lectura del ADC es igual o menor a esta; así se logra que el motor permanezca moviéndose a una amplitud determinada.
Figura 75. Esquema de control para el movimiento del servomotor
* Ver glosario.
Tarjeta de control
ADC
PWM
Microcontrolador
Servomotor
Potenciómetro interno
Disco Servo
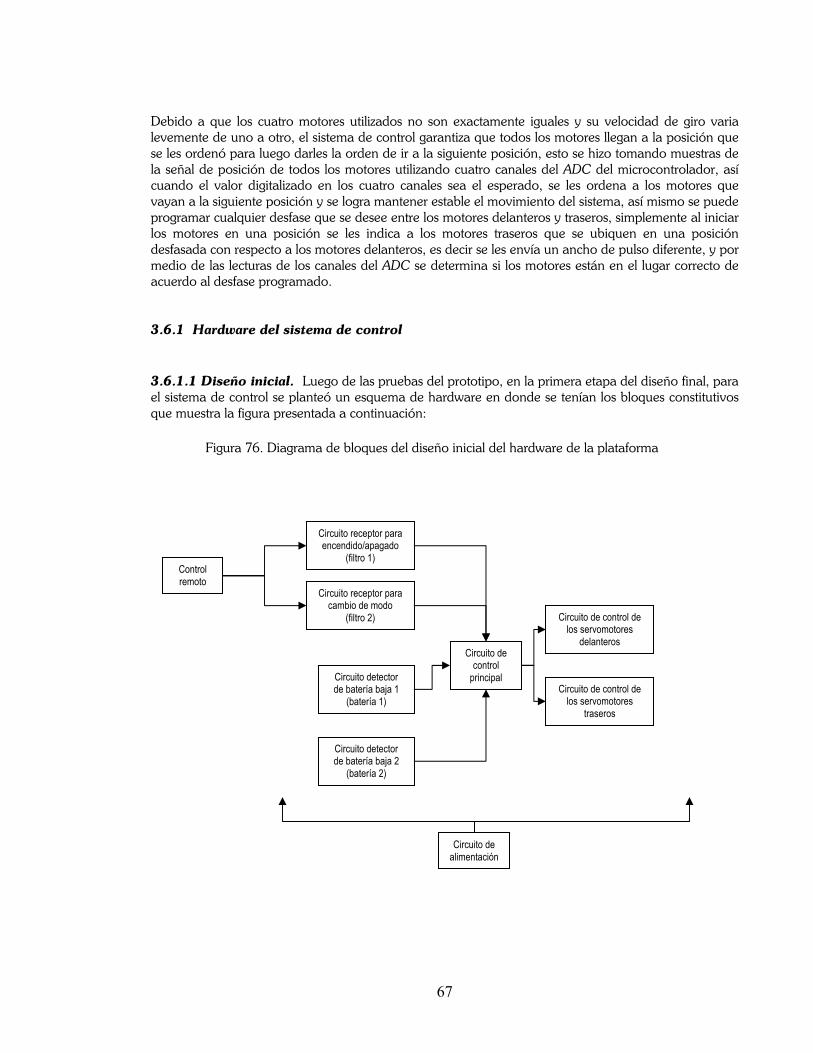
67
Debido a que los cuatro motores utilizados no son exactamente iguales y su velocidad de giro varia levemente de uno a otro, el sistema de control garantiza que todos los motores llegan a la posición que se les ordenó para luego darles la orden de ir a la siguiente posición, esto se hizo tomando muestras de la señal de posición de todos los motores utilizando cuatro canales del ADC del microcontrolador, así cuando el valor digitalizado en los cuatro canales sea el esperado, se les ordena a los motores que vayan a la siguiente posición y se logra mantener estable el movimiento del sistema, así mismo se puede programar cualquier desfase que se desee entre los motores delanteros y traseros, simplemente al iniciar los motores en una posición se les indica a los motores traseros que se ubiquen en una posición desfasada con respecto a los motores delanteros, es decir se les envía un ancho de pulso diferente, y por medio de las lecturas de los canales del ADC se determina si los motores están en el lugar correcto de acuerdo al desfase programado. 3.6.1 Hardware del sistema de control
3.6.1.1 Diseño inicial. Luego de las pruebas del prototipo, en la primera etapa del diseño final, para el sistema de control se planteó un esquema de hardware en donde se tenían los bloques constitutivos que muestra la figura presentada a continuación:
Figura 76. Diagrama de bloques del diseño inicial del hardware de la plataforma
Control remoto
Circuito de control
principal Circuito detector de batería baja 1
(batería 1)
Circuito detector de batería baja 2
(batería 2)
Circuito receptor para encendido/apagado
(filtro 1)
Circuito receptor para cambio de modo
(filtro 2) Circuito de control de los servomotores
delanteros
Circuito de control de los servomotores
traseros
Circuito de alimentación
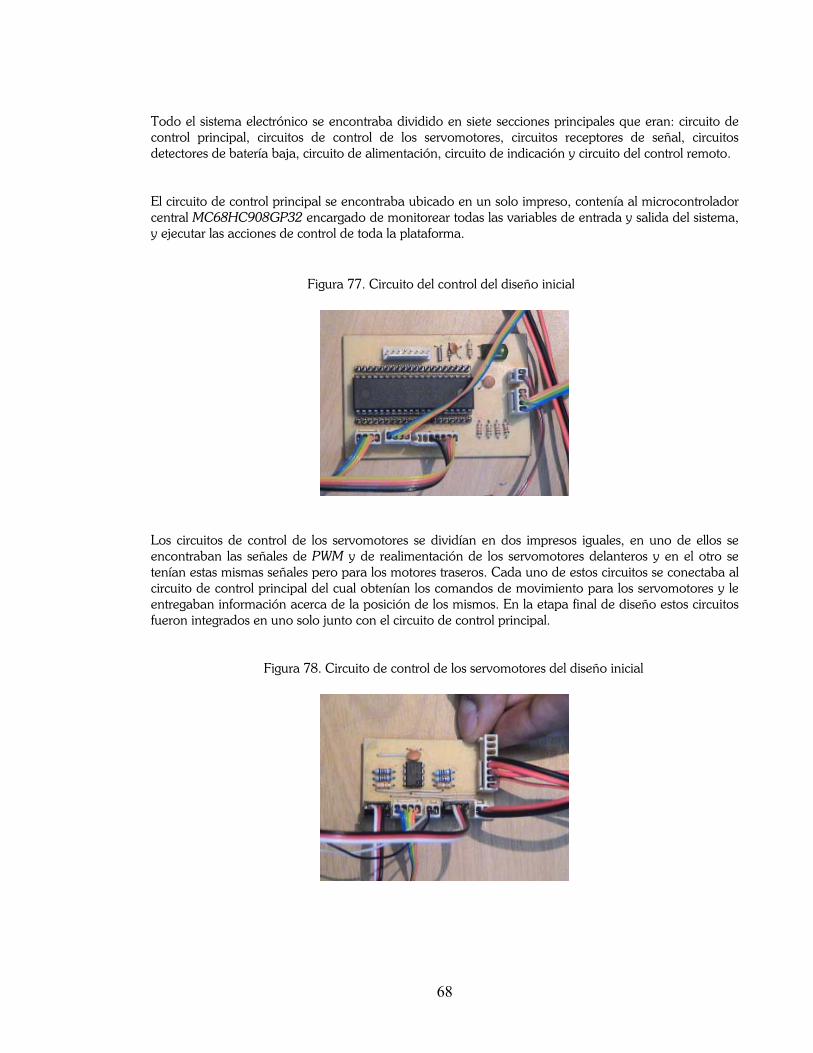
68
Todo el sistema electrónico se encontraba dividido en siete secciones principales que eran: circuito de control principal, circuitos de control de los servomotores, circuitos receptores de señal, circuitos detectores de batería baja, circuito de alimentación, circuito de indicación y circuito del control remoto. El circuito de control principal se encontraba ubicado en un solo impreso, contenía al microcontrolador central MC68HC908GP32 encargado de monitorear todas las variables de entrada y salida del sistema, y ejecutar las acciones de control de toda la plataforma.
Figura 77. Circuito del control del diseño inicial
Los circuitos de control de los servomotores se dividían en dos impresos iguales, en uno de ellos se encontraban las señales de PWM y de realimentación de los servomotores delanteros y en el otro se tenían estas mismas señales pero para los motores traseros. Cada uno de estos circuitos se conectaba al circuito de control principal del cual obtenían los comandos de movimiento para los servomotores y le entregaban información acerca de la posición de los mismos. En la etapa final de diseño estos circuitos fueron integrados en uno solo junto con el circuito de control principal. Figura 78. Circuito de control de los servomotores del diseño inicial
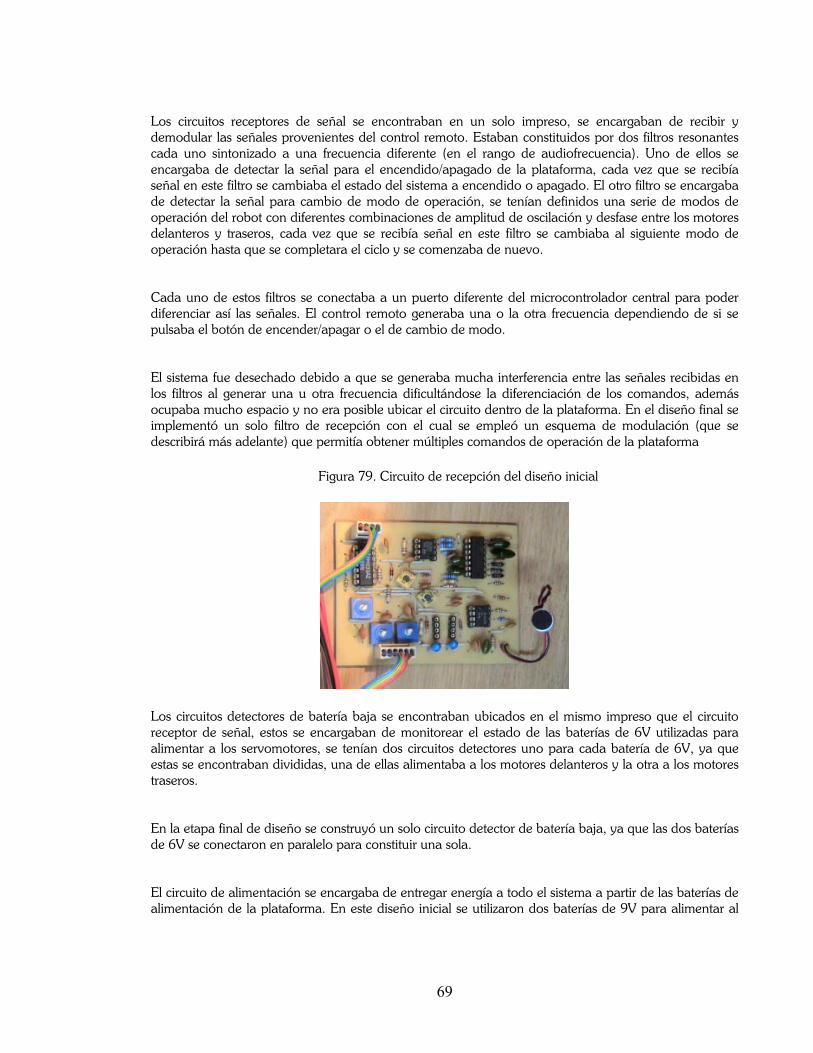
69
Los circuitos receptores de señal se encontraban en un solo impreso, se encargaban de recibir y demodular las señales provenientes del control remoto. Estaban constituidos por dos filtros resonantes cada uno sintonizado a una frecuencia diferente (en el rango de audiofrecuencia). Uno de ellos se encargaba de detectar la señal para el encendido/apagado de la plataforma, cada vez que se recibía señal en este filtro se cambiaba el estado del sistema a encendido o apagado. El otro filtro se encargaba de detectar la señal para cambio de modo de operación, se tenían definidos una serie de modos de operación del robot con diferentes combinaciones de amplitud de oscilación y desfase entre los motores delanteros y traseros, cada vez que se recibía señal en este filtro se cambiaba al siguiente modo de operación hasta que se completara el ciclo y se comenzaba de nuevo. Cada uno de estos filtros se conectaba a un puerto diferente del microcontrolador central para poder diferenciar así las señales. El control remoto generaba una o la otra frecuencia dependiendo de si se pulsaba el botón de encender/apagar o el de cambio de modo. El sistema fue desechado debido a que se generaba mucha interferencia entre las señales recibidas en los filtros al generar una u otra frecuencia dificultándose la diferenciación de los comandos, además ocupaba mucho espacio y no era posible ubicar el circuito dentro de la plataforma. En el diseño final se implementó un solo filtro de recepción con el cual se empleó un esquema de modulación (que se describirá más adelante) que permitía obtener múltiples comandos de operación de la plataforma
Figura 79. Circuito de recepción del diseño inicial
Los circuitos detectores de batería baja se encontraban ubicados en el mismo impreso que el circuito receptor de señal, estos se encargaban de monitorear el estado de las baterías de 6V utilizadas para alimentar a los servomotores, se tenían dos circuitos detectores uno para cada batería de 6V, ya que estas se encontraban divididas, una de ellas alimentaba a los motores delanteros y la otra a los motores traseros. En la etapa final de diseño se construyó un solo circuito detector de batería baja, ya que las dos baterías de 6V se conectaron en paralelo para constituir una sola. El circuito de alimentación se encargaba de entregar energía a todo el sistema a partir de las baterías de alimentación de la plataforma. En este diseño inicial se utilizaron dos baterías de 9V para alimentar al
70
sistema electrónico, una era la fuente positiva y la otra la fuente negativa. En el diseño final se utilizó una sola batería de 9V a partir de la cual se generaba la fuente positiva y la negativa.
Figura 80. Circuito de alimentación del diseño inicial
El circuito de indicación era el encargado de informar al usuario acerca del estado de operación de la plataforma por medio de un arreglo de leds. Este circuito mantuvo su misma configuración en el diseño final.
Figura 90. Circuito indicador del diseño inicial
El circuito del control remoto se encargaba de dar los comandos de movimiento de la plataforma, en esta etapa de diseño inicial era utilizado para generar las dos frecuencias de operación de los filtros receptores descritos anteriormente. En la etapa de diseño final este circuito fue rediseñado con el fin de utilizar una sola frecuencia con la cual las señales que emitía podían ser moduladas. A partir de este diseño de hardware inicial que se realizó se pudo concluir que había muchas limitaciones en cuanto al espacio ocupado por los circuitos, el consumo de corriente y el funcionamiento general, debido a estos se rediseño todo el sistema electrónico con el fin de corregir los errores encontrados y optimizar su funcionamiento.

71
3.6.1.2 Diseño final. En la etapa final de diseño, el sistema electrónico se subdividió en cuatro partes principales que son: circuito de alimentación, circuito receptor de señal, circuito de control y circuito de indicación. Todos estos circuitos se encuentran ubicados dentro del robot; adicionalmente se tiene el circuito del control remoto.
3.6.1.2.1 Circuito de alimentación. El circuito de alimentación y de recepción de señal fue construido en un solo impreso, el cual se encuentra ubicado en la cola del robot.
Figura 91. Vistas superior (izquierda) e inferior (derecha) del circuito de alimentación y recepción
Este circuito es el encargado de suministrar energía a todo el sistema. Como se mencionó anteriormente el sistema de alimentación se subdividió en dos secciones principales: alimentación de los motores y alimentación del sistema electrónico, para la alimentación de los motores se utilizaron dos baterías recargables de 6V de NIMH y para el sistema electrónico se utilizó una batería de 9V también recargable y de NIMH. Este sistema de baterías se conecta al circuito de alimentación desde donde se subdivide hacia todos los demás circuitos. La alimentación del sistema de control también se subdividió en dos secciones: alimentación de la sección análoga y alimentación de la sección digital, esto con el fin de reducir la interferencia que se pueda generar en el circuito análogo debido a las señales lógicas del circuito digital. Las tierras o referencias cero del circuito análogo, circuito digital y alimentación de los motores se unen en un solo punto en el circuito de alimentación lo que impide que haya intercambio de corriente entre estos circuitos eliminando así el ruido y las interferencias que pueden afectar el funcionamiento del sistema. 3.6.1.2.1.1 Alimentación del sistema electrónico. El sistema de alimentación de la plataforma se encuentra constituido por dos secciones principales que son las secciones de alimentación análoga y digital, estas se encuentran expuestas a continuación.
72
3.6.1.2.1.1.1 Alimentación de la sección análoga. La sección análoga del sistema electrónico está constituida por: un circuito receptor de señal que se encarga de obtener la señal que envía el control remoto, un circuito de realimentación de los motores que sensa y acopla la señal de posición proveniente de los mismos al ADC del microcontrolador y el circuito detector de batería baja para las baterías de 6V de los motores. Todo el sistema análogo opera a un voltaje de 5V, se utilizó un regulador LM78L05 para generar este voltaje a partir de la batería de 9V. En el caso del circuito receptor de señal se necesitaba una fuente positiva y una negativa para poder captar la señal sinusoidal que manejaba; para generar la fuente negativa se utilizaron tres bombas de carga ICL7660 conectadas en paralelo las cuales convertían el voltaje de +5V del regulador a -5V mediante conmutación de capacitores. El circuito de alimentación para la sección análoga se muestra a continuación:
Figura 92. Circuito de alimentación de la sección análoga
0 0
C710u
C3100n
ICL7660/SO
67
8
3
524
LVOSC
V+ GN
D
VOUTCAP+CAP-
+5Vanalog
C810u
0
L78L05/TO92
1
2
3 OUT
GN
DIN
0
C410u
C610u
0
C110u
0
+5Vanalog
ICL7660/SO
67
8
3
524
LVOSC
V+ GN
D
VOUTCAP+CAP-
ICL7660/SO
67
8
3
524
LVOSC
V+ GN
D
VOUTCAP+CAP-
0
-5Vanalog
+9V
0
C510u
0
+5Vanalog +5Vanalog
C2100n
3.6.1.2.1.1.2 Alimentación de la sección digital. La sección digital consta principalmente del microcontrolador MC68HC908GP32 ubicado en el circuito de control, el cual se encuentra polarizado a 5V. Para generar este voltaje se utilizó otro regulador LM78L05 conectado a la batería de 9V, que polariza al microcontrolador, al ADC y al PLL internos.
Figura 93. Circuito de alimentación de la sección digital
C2100n
C410u
C3100n
+9V
L78L05/TO92
1
2
3OUT
GN
DIN
+5Vlogic
C110u
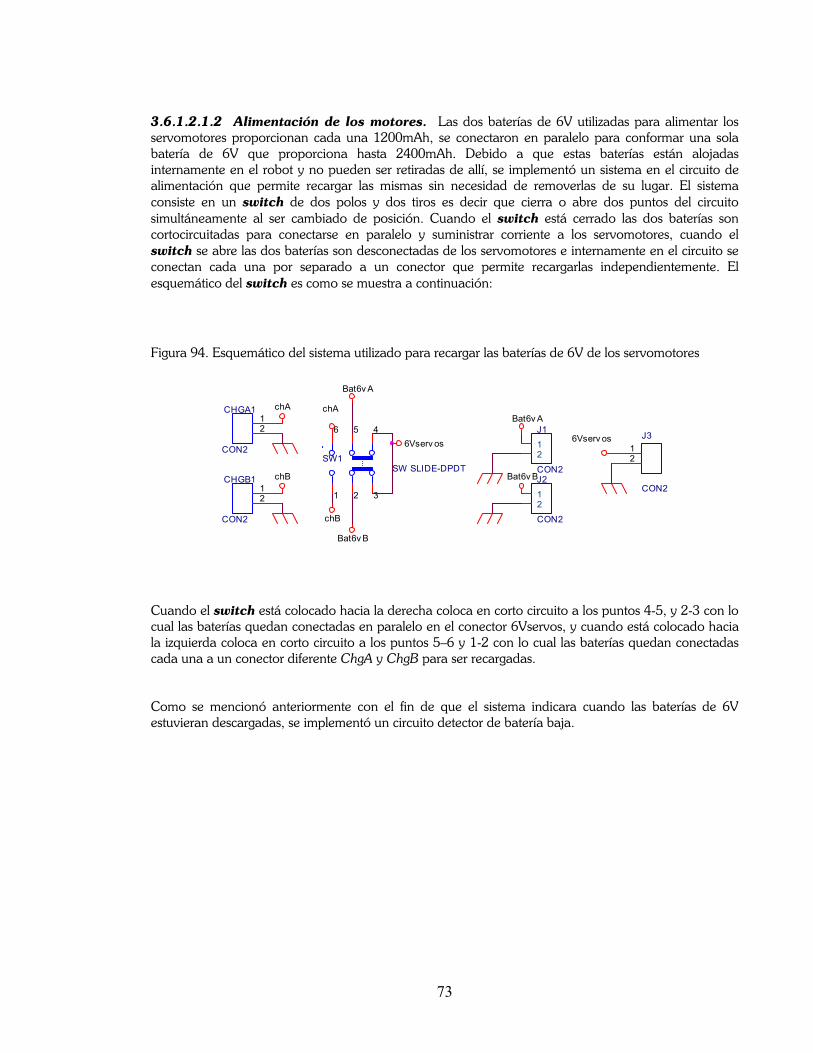
73
3.6.1.2.1.2 Alimentación de los motores. Las dos baterías de 6V utilizadas para alimentar los servomotores proporcionan cada una 1200mAh, se conectaron en paralelo para conformar una sola batería de 6V que proporciona hasta 2400mAh. Debido a que estas baterías están alojadas internamente en el robot y no pueden ser retiradas de allí, se implementó un sistema en el circuito de alimentación que permite recargar las mismas sin necesidad de removerlas de su lugar. El sistema consiste en un switch de dos polos y dos tiros es decir que cierra o abre dos puntos del circuito simultáneamente al ser cambiado de posición. Cuando el switch está cerrado las dos baterías son cortocircuitadas para conectarse en paralelo y suministrar corriente a los servomotores, cuando el switch se abre las dos baterías son desconectadas de los servomotores e internamente en el circuito se conectan cada una por separado a un conector que permite recargarlas independientemente. El esquemático del switch es como se muestra a continuación:
Figura 94. Esquemático del sistema utilizado para recargar las baterías de 6V de los servomotores
6Vserv os
CHGB1
CON2
12
Bat6v BJ2
CON2
12
chAchA
chB
Bat6v B
6Vserv os
Bat6v A
chB
Bat6v A
SW1SW SLIDE-DPDT
5 46
1 2 3
J3
CON2
12
J1
CON2
12
CHGA1
CON2
12
Cuando el switch está colocado hacia la derecha coloca en corto circuito a los puntos 4-5, y 2-3 con lo cual las baterías quedan conectadas en paralelo en el conector 6Vservos, y cuando está colocado hacia la izquierda coloca en corto circuito a los puntos 5–6 y 1-2 con lo cual las baterías quedan conectadas cada una a un conector diferente ChgA y ChgB para ser recargadas. Como se mencionó anteriormente con el fin de que el sistema indicara cuando las baterías de 6V estuvieran descargadas, se implementó un circuito detector de batería baja.
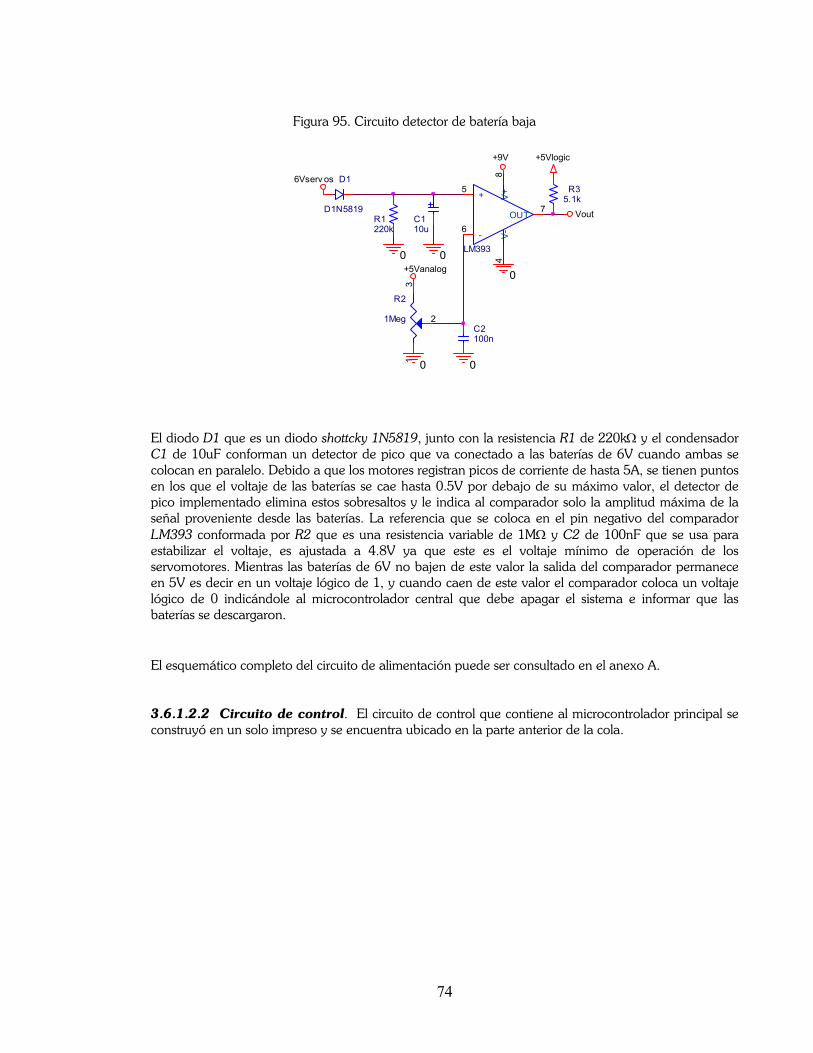
74
Figura 95. Circuito detector de batería baja
R1220k
Vout
R2
1Meg
13
2
R35.1k
+5Vlogic
0
+9V
LM393
5
6
84
7+
-
V+
V-
OUT
0
6Vserv os
0
D1
D1N5819
0
+5Vanalog
C110u
0
C2100n
El diodo D1 que es un diodo shottcky 1N5819, junto con la resistencia R1 de 220kΩ y el condensador C1 de 10uF conforman un detector de pico que va conectado a las baterías de 6V cuando ambas se colocan en paralelo. Debido a que los motores registran picos de corriente de hasta 5A, se tienen puntos en los que el voltaje de las baterías se cae hasta 0.5V por debajo de su máximo valor, el detector de pico implementado elimina estos sobresaltos y le indica al comparador solo la amplitud máxima de la señal proveniente desde las baterías. La referencia que se coloca en el pin negativo del comparador LM393 conformada por R2 que es una resistencia variable de 1MΩ y C2 de 100nF que se usa para estabilizar el voltaje, es ajustada a 4.8V ya que este es el voltaje mínimo de operación de los servomotores. Mientras las baterías de 6V no bajen de este valor la salida del comparador permanece en 5V es decir en un voltaje lógico de 1, y cuando caen de este valor el comparador coloca un voltaje lógico de 0 indicándole al microcontrolador central que debe apagar el sistema e informar que las baterías se descargaron.
El esquemático completo del circuito de alimentación puede ser consultado en el anexo A. 3.6.1.2.2 Circuito de control. El circuito de control que contiene al microcontrolador principal se construyó en un solo impreso y se encuentra ubicado en la parte anterior de la cola.
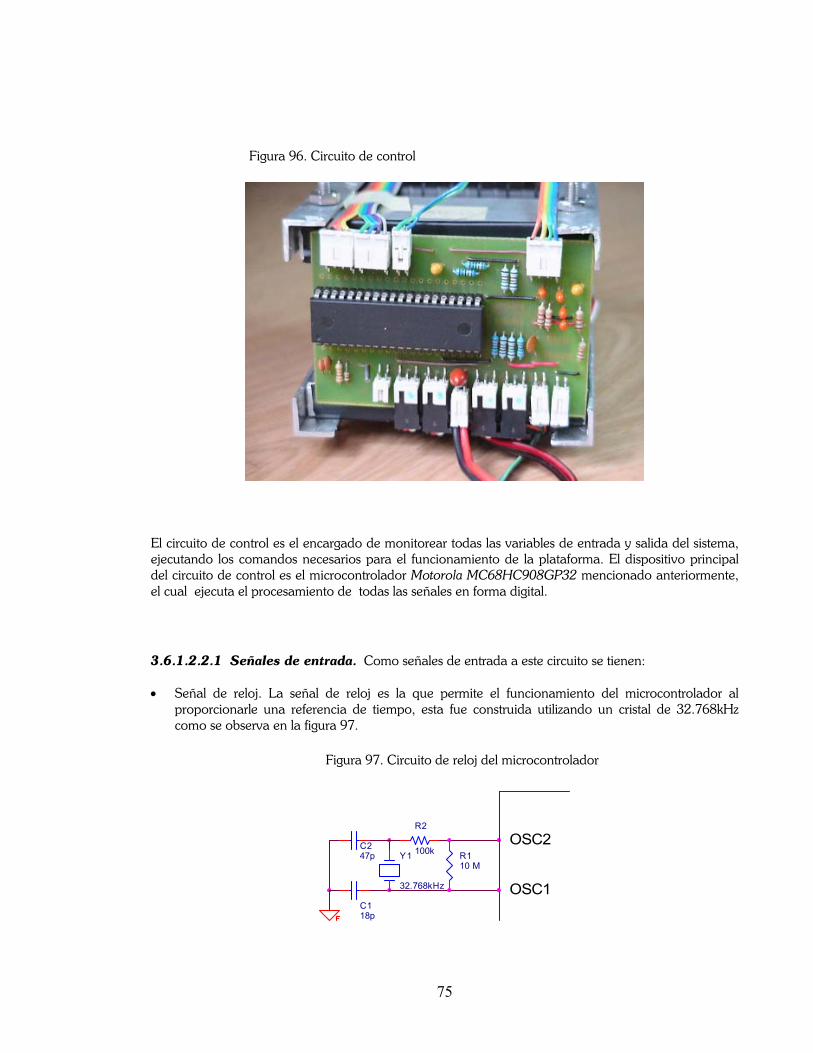
75
Figura 96. Circuito de control
El circuito de control es el encargado de monitorear todas las variables de entrada y salida del sistema, ejecutando los comandos necesarios para el funcionamiento de la plataforma. El dispositivo principal del circuito de control es el microcontrolador Motorola MC68HC908GP32 mencionado anteriormente, el cual ejecuta el procesamiento de todas las señales en forma digital.
3.6.1.2.2.1 Señales de entrada. Como señales de entrada a este circuito se tienen: • Señal de reloj. La señal de reloj es la que permite el funcionamiento del microcontrolador al
proporcionarle una referencia de tiempo, esta fue construida utilizando un cristal de 32.768kHz como se observa en la figura 97.
Figura 97. Circuito de reloj del microcontrolador
OSC2R2
100kY1
32.768kHz
R110 M
C118p
C247p
OSC1
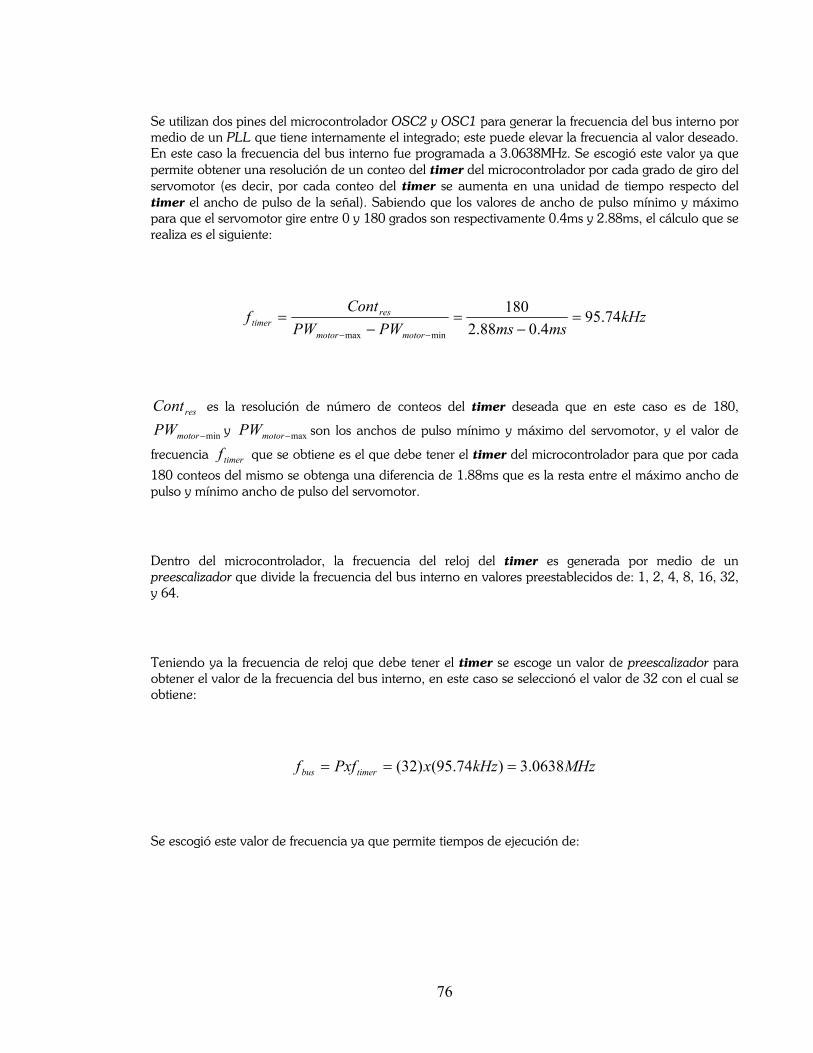
76
Se utilizan dos pines del microcontrolador OSC2 y OSC1 para generar la frecuencia del bus interno por medio de un PLL que tiene internamente el integrado; este puede elevar la frecuencia al valor deseado. En este caso la frecuencia del bus interno fue programada a 3.0638MHz. Se escogió este valor ya que permite obtener una resolución de un conteo del timer del microcontrolador por cada grado de giro del servomotor (es decir, por cada conteo del timer se aumenta en una unidad de tiempo respecto del timer el ancho de pulso de la señal). Sabiendo que los valores de ancho de pulso mínimo y máximo para que el servomotor gire entre 0 y 180 grados son respectivamente 0.4ms y 2.88ms, el cálculo que se realiza es el siguiente:
kHzmsmsPWPW
Contf
motormotor
restimer 74.95
4.088.2180
minmax
=−
=−
=−−
resCont es la resolución de número de conteos del timer deseada que en este caso es de 180,
min−motorPW y max−motorPW son los anchos de pulso mínimo y máximo del servomotor, y el valor de
frecuencia timerf que se obtiene es el que debe tener el timer del microcontrolador para que por cada
180 conteos del mismo se obtenga una diferencia de 1.88ms que es la resta entre el máximo ancho de pulso y mínimo ancho de pulso del servomotor.
Dentro del microcontrolador, la frecuencia del reloj del timer es generada por medio de un preescalizador que divide la frecuencia del bus interno en valores preestablecidos de: 1, 2, 4, 8, 16, 32, y 64.
Teniendo ya la frecuencia de reloj que debe tener el timer se escoge un valor de preescalizador para obtener el valor de la frecuencia del bus interno, en este caso se seleccionó el valor de 32 con el cual se obtiene:
MHzkHzxPxff timerbus 0638.3)74.95()32( ===
Se escogió este valor de frecuencia ya que permite tiempos de ejecución de:
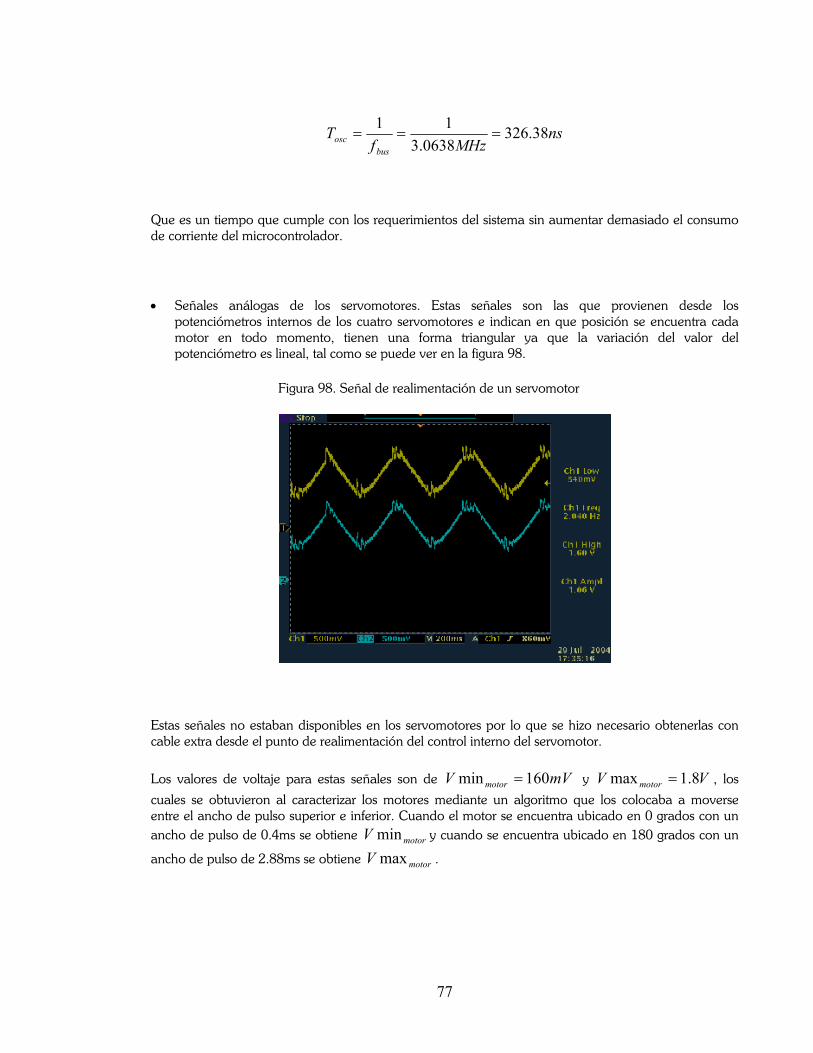
77
nsMHzf
Tbus
osc 38.3260638.3
11===
Que es un tiempo que cumple con los requerimientos del sistema sin aumentar demasiado el consumo de corriente del microcontrolador.
• Señales análogas de los servomotores. Estas señales son las que provienen desde los potenciómetros internos de los cuatro servomotores e indican en que posición se encuentra cada motor en todo momento, tienen una forma triangular ya que la variación del valor del potenciómetro es lineal, tal como se puede ver en la figura 98.
Figura 98. Señal de realimentación de un servomotor
Estas señales no estaban disponibles en los servomotores por lo que se hizo necesario obtenerlas con cable extra desde el punto de realimentación del control interno del servomotor.
Los valores de voltaje para estas señales son de mVV motor 160min = y VV motor 8.1max = , los
cuales se obtuvieron al caracterizar los motores mediante un algoritmo que los colocaba a moverse entre el ancho de pulso superior e inferior. Cuando el motor se encuentra ubicado en 0 grados con un ancho de pulso de 0.4ms se obtiene motorV min y cuando se encuentra ubicado en 180 grados con un
ancho de pulso de 2.88ms se obtiene motorV max .
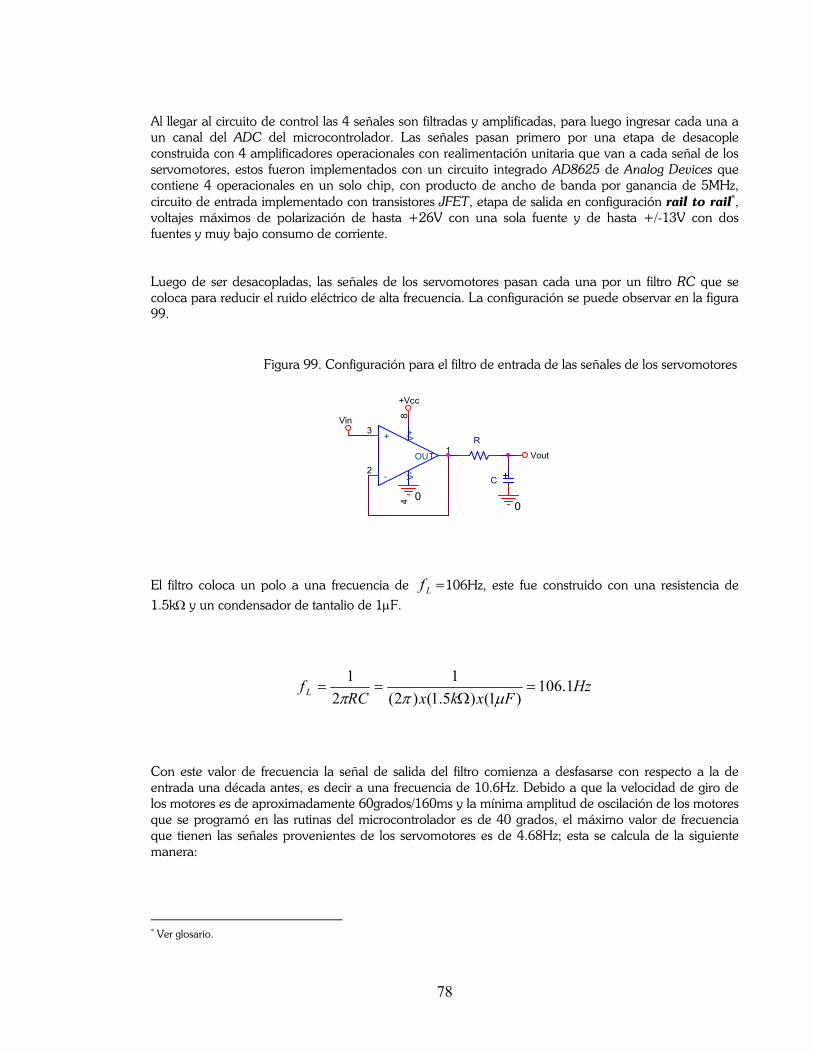
78
Al llegar al circuito de control las 4 señales son filtradas y amplificadas, para luego ingresar cada una a un canal del ADC del microcontrolador. Las señales pasan primero por una etapa de desacople construida con 4 amplificadores operacionales con realimentación unitaria que van a cada señal de los servomotores, estos fueron implementados con un circuito integrado AD8625 de Analog Devices que contiene 4 operacionales en un solo chip, con producto de ancho de banda por ganancia de 5MHz, circuito de entrada implementado con transistores JFET, etapa de salida en configuración rail to rail*, voltajes máximos de polarización de hasta +26V con una sola fuente y de hasta +/-13V con dos fuentes y muy bajo consumo de corriente. Luego de ser desacopladas, las señales de los servomotores pasan cada una por un filtro RC que se coloca para reducir el ruido eléctrico de alta frecuencia. La configuración se puede observar en la figura 99.
Figura 99. Configuración para el filtro de entrada de las señales de los servomotores
0
+Vcc
3
2
84
1+
-
V+
V-
OUT
Vin
C
Vout
R
0
El filtro coloca un polo a una frecuencia de Lf =106Hz, este fue construido con una resistencia de 1.5kΩ y un condensador de tantalio de 1µF.
HzFxkxRC
fL 1.106)1()5.1()2(
12
1=
Ω==
µππ
Con este valor de frecuencia la señal de salida del filtro comienza a desfasarse con respecto a la de entrada una década antes, es decir a una frecuencia de 10.6Hz. Debido a que la velocidad de giro de los motores es de aproximadamente 60grados/160ms y la mínima amplitud de oscilación de los motores que se programó en las rutinas del microcontrolador es de 40 grados, el máximo valor de frecuencia que tienen las señales provenientes de los servomotores es de 4.68Hz; esta se calcula de la siguiente manera:
* Ver glosario.
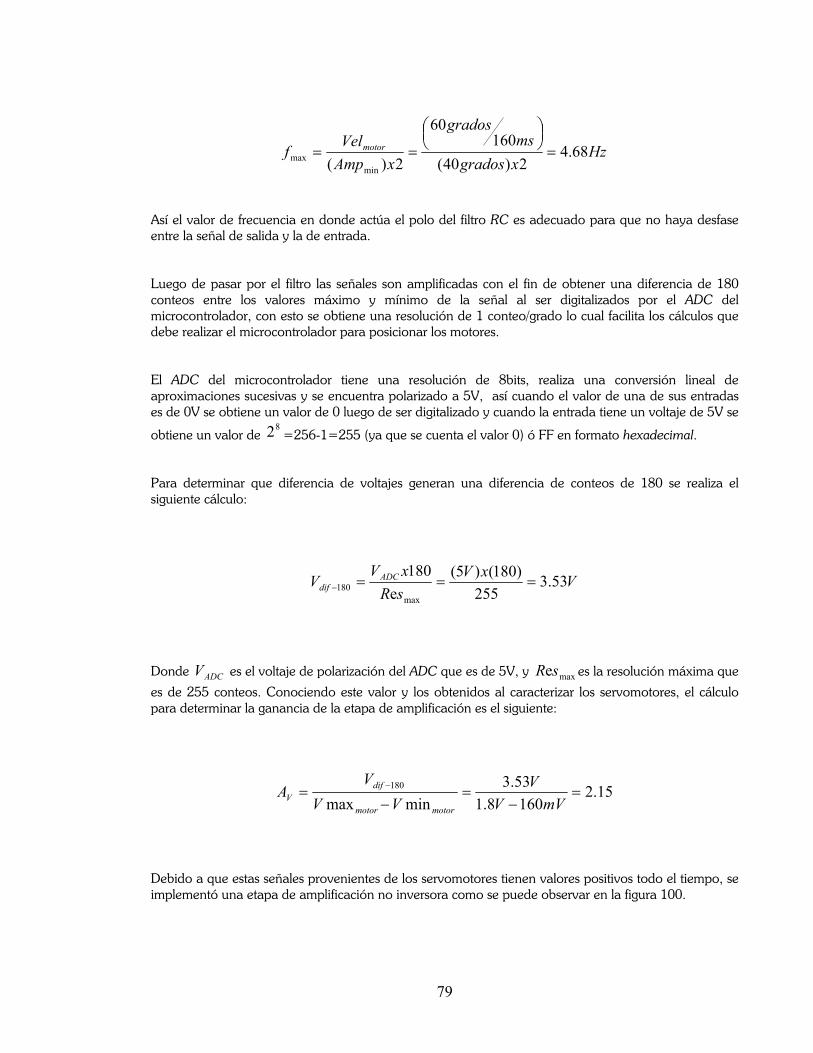
79
Hzxgradosms
grados
xAmpVel
f motor 68.42)40(
16060
2)( minmax =
==
Así el valor de frecuencia en donde actúa el polo del filtro RC es adecuado para que no haya desfase entre la señal de salida y la de entrada. Luego de pasar por el filtro las señales son amplificadas con el fin de obtener una diferencia de 180 conteos entre los valores máximo y mínimo de la señal al ser digitalizados por el ADC del microcontrolador, con esto se obtiene una resolución de 1 conteo/grado lo cual facilita los cálculos que debe realizar el microcontrolador para posicionar los motores. El ADC del microcontrolador tiene una resolución de 8bits, realiza una conversión lineal de aproximaciones sucesivas y se encuentra polarizado a 5V, así cuando el valor de una de sus entradas es de 0V se obtiene un valor de 0 luego de ser digitalizado y cuando la entrada tiene un voltaje de 5V se
obtiene un valor de 82 =256-1=255 (ya que se cuenta el valor 0) ó FF en formato hexadecimal.
Para determinar que diferencia de voltajes generan una diferencia de conteos de 180 se realiza el siguiente cálculo:
VxVsRxV
V ADCdif 53.3
255)180()5(
e180
max180 ===−
Donde ADCV es el voltaje de polarización del ADC que es de 5V, y maxesR es la resolución máxima que
es de 255 conteos. Conociendo este valor y los obtenidos al caracterizar los servomotores, el cálculo para determinar la ganancia de la etapa de amplificación es el siguiente:
15.21608.1
53.3minmax
180 =−
=−
= −
mVVV
VVV
Amotormotor
difV
Debido a que estas señales provenientes de los servomotores tienen valores positivos todo el tiempo, se implementó una etapa de amplificación no inversora como se puede observar en la figura 100.
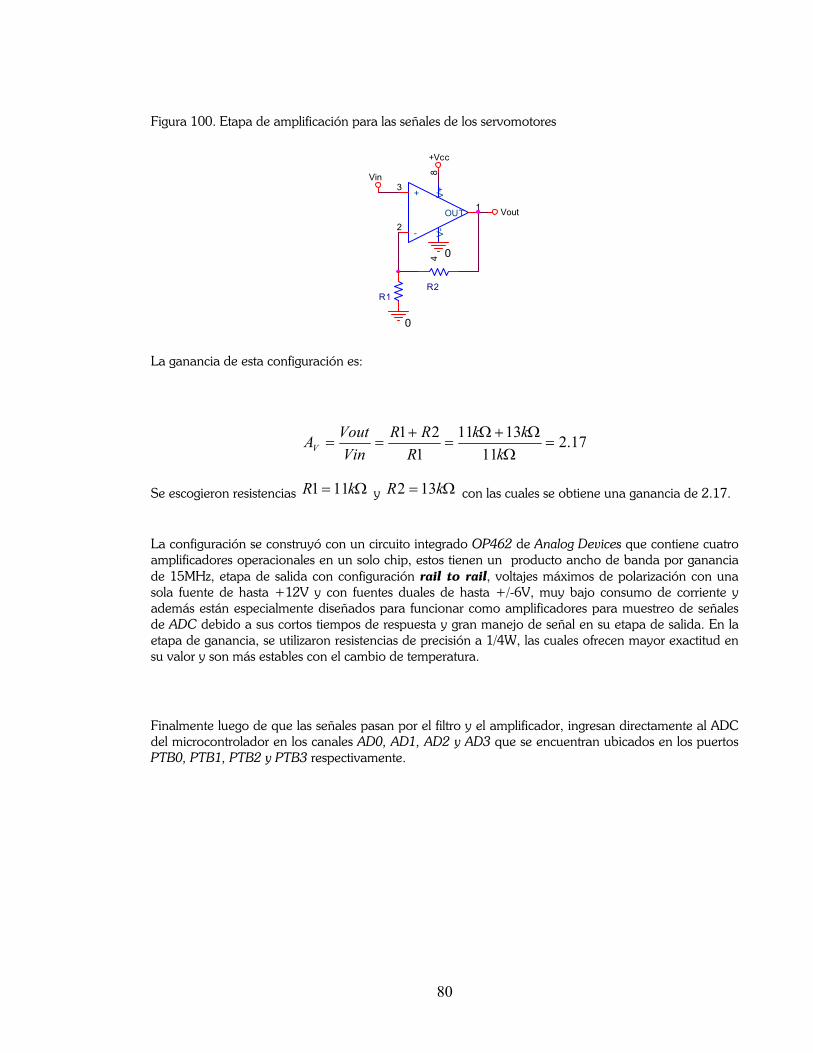
80
Figura 100. Etapa de amplificación para las señales de los servomotores
0
+Vcc
3
2
84
1+
-
V+
V-
OUT
Vin
R1
Vout
0
R2
La ganancia de esta configuración es:
17.211
13111
21=
ΩΩ+Ω
=+
==kkk
RRR
VinVoutAV
Se escogieron resistencias Ω= kR 111 y Ω= kR 132 con las cuales se obtiene una ganancia de 2.17.
La configuración se construyó con un circuito integrado OP462 de Analog Devices que contiene cuatro amplificadores operacionales en un solo chip, estos tienen un producto ancho de banda por ganancia de 15MHz, etapa de salida con configuración rail to rail, voltajes máximos de polarización con una sola fuente de hasta +12V y con fuentes duales de hasta +/-6V, muy bajo consumo de corriente y además están especialmente diseñados para funcionar como amplificadores para muestreo de señales de ADC debido a sus cortos tiempos de respuesta y gran manejo de señal en su etapa de salida. En la etapa de ganancia, se utilizaron resistencias de precisión a 1/4W, las cuales ofrecen mayor exactitud en su valor y son más estables con el cambio de temperatura.
Finalmente luego de que las señales pasan por el filtro y el amplificador, ingresan directamente al ADC del microcontrolador en los canales AD0, AD1, AD2 y AD3 que se encuentran ubicados en los puertos PTB0, PTB1, PTB2 y PTB3 respectivamente.

81
Figura 101. Puertos de entrada del microcontrolador para las señales analógicas de los servomotores
AD1/PTB1Motor2
Motor1
AD2/PTB2Motor3
AD3/PTB3
Motor0AD0/PTB0
• Señal del circuito de recepción. Esta señal proviene del circuito de audio ubicado en la cola del robot que detecta las señales que envía el control remoto (estas señales tienen una forma sinusoidal en el rango de audiofrecuencia). Por medio de un micrófono se capta la señal, luego pasa por un filtro resonante, sintonizado a una frecuencia central de 11,28kHz y es demodulada para convertirla en una señal digital que puede ser entendida por el microcontrolador. La señal digitalizada ingresa al puerto PTA7 del microcontrolador que es configurado como entrada. Más adelante se dará una explicación más detallada de este circuito.
Figura 102. Puerto del microcontrolador al que llega la señal del circuito de recepción
PTA7
Desde el circuito de recepción
• Señal del circuito detector de batería baja. Esta señal proviene de un circuito ubicado también en la cola del robot, el cual monitorea el estado de las baterías de 6V que son utilizadas para alimentar a los servomotores, como se explicó en la sección anterior. La señal ingresa al puerto PTB5 del microcontrolador que es configurado como entrada. Mientras las baterías no estén descargadas, la señal del puerto permanece en un valor lógico de 1 es decir 5V, cuando el circuito detecta que las baterías están con carga baja la señal cambia al estado lógico cero o 0V y el microcontrolador indica esto en el circuito de indicación al encender un led de manera intermitente.
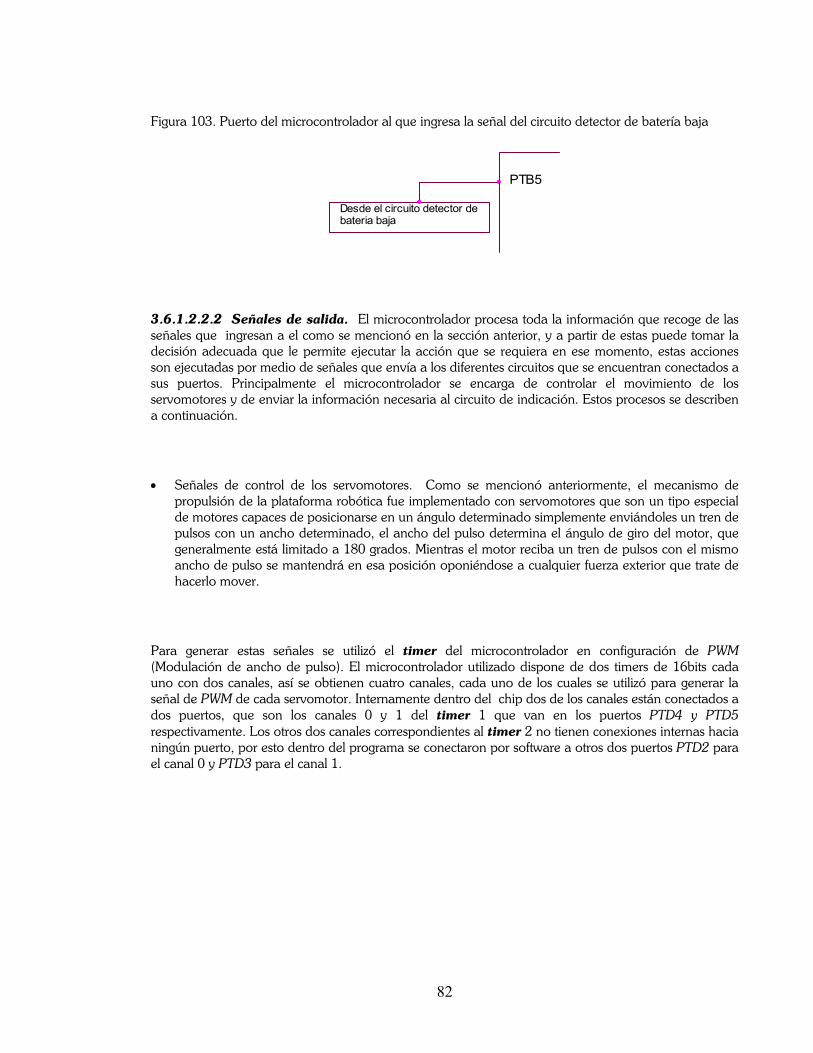
82
Figura 103. Puerto del microcontrolador al que ingresa la señal del circuito detector de batería baja
PTB5
Desde el circuito detector debateria baja
3.6.1.2.2.2 Señales de salida. El microcontrolador procesa toda la información que recoge de las señales que ingresan a el como se mencionó en la sección anterior, y a partir de estas puede tomar la decisión adecuada que le permite ejecutar la acción que se requiera en ese momento, estas acciones son ejecutadas por medio de señales que envía a los diferentes circuitos que se encuentran conectados a sus puertos. Principalmente el microcontrolador se encarga de controlar el movimiento de los servomotores y de enviar la información necesaria al circuito de indicación. Estos procesos se describen a continuación.
• Señales de control de los servomotores. Como se mencionó anteriormente, el mecanismo de propulsión de la plataforma robótica fue implementado con servomotores que son un tipo especial de motores capaces de posicionarse en un ángulo determinado simplemente enviándoles un tren de pulsos con un ancho determinado, el ancho del pulso determina el ángulo de giro del motor, que generalmente está limitado a 180 grados. Mientras el motor reciba un tren de pulsos con el mismo ancho de pulso se mantendrá en esa posición oponiéndose a cualquier fuerza exterior que trate de hacerlo mover.
Para generar estas señales se utilizó el timer del microcontrolador en configuración de PWM (Modulación de ancho de pulso). El microcontrolador utilizado dispone de dos timers de 16bits cada uno con dos canales, así se obtienen cuatro canales, cada uno de los cuales se utilizó para generar la señal de PWM de cada servomotor. Internamente dentro del chip dos de los canales están conectados a dos puertos, que son los canales 0 y 1 del timer 1 que van en los puertos PTD4 y PTD5 respectivamente. Los otros dos canales correspondientes al timer 2 no tienen conexiones internas hacia ningún puerto, por esto dentro del programa se conectaron por software a otros dos puertos PTD2 para el canal 0 y PTD3 para el canal 1.
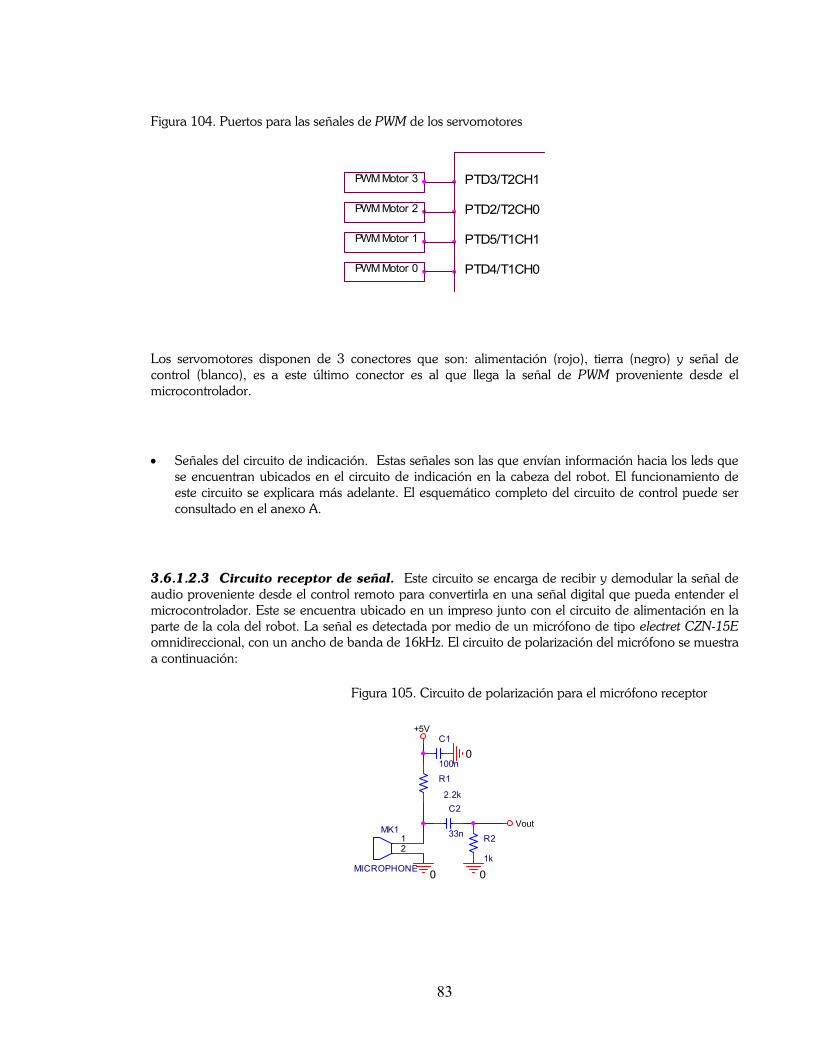
83
Figura 104. Puertos para las señales de PWM de los servomotores
PWM Motor 3
PTD4/T1CH0
PWM Motor 2
PWM Motor 0
PTD3/T2CH1
PTD2/T2CH0
PWM Motor 1 PTD5/T1CH1
Los servomotores disponen de 3 conectores que son: alimentación (rojo), tierra (negro) y señal de control (blanco), es a este último conector es al que llega la señal de PWM proveniente desde el microcontrolador.
• Señales del circuito de indicación. Estas señales son las que envían información hacia los leds que se encuentran ubicados en el circuito de indicación en la cabeza del robot. El funcionamiento de este circuito se explicara más adelante. El esquemático completo del circuito de control puede ser consultado en el anexo A.
3.6.1.2.3 Circuito receptor de señal. Este circuito se encarga de recibir y demodular la señal de audio proveniente desde el control remoto para convertirla en una señal digital que pueda entender el microcontrolador. Este se encuentra ubicado en un impreso junto con el circuito de alimentación en la parte de la cola del robot. La señal es detectada por medio de un micrófono de tipo electret CZN-15E omnidireccional, con un ancho de banda de 16kHz. El circuito de polarización del micrófono se muestra a continuación:
Figura 105. Circuito de polarización para el micrófono receptor
R1
2.2k
MK1
MICROPHONE
12
C2
33n R2
1k
C1
100n
+5V
Vout
00
0
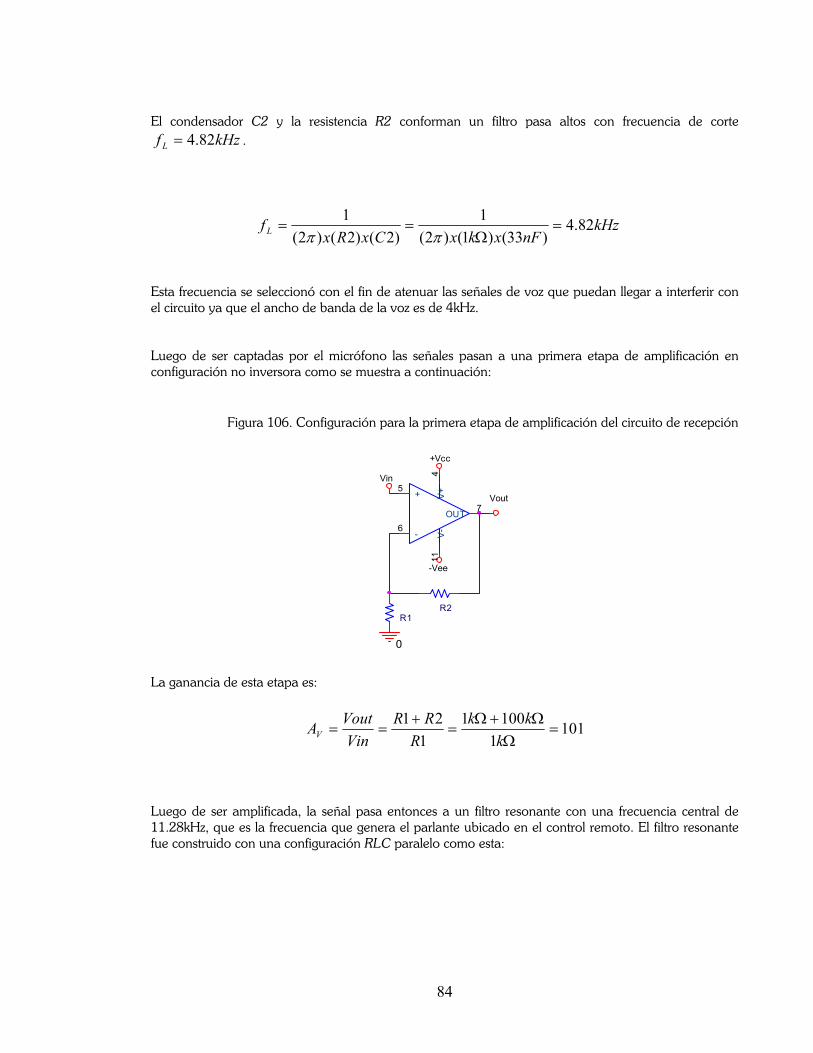
84
El condensador C2 y la resistencia R2 conforman un filtro pasa altos con frecuencia de corte kHzf L 82.4= .
kHznFxkxCxRx
fL 82.4)33()1()2(
1)2()2()2(
1=
Ω==
ππ
Esta frecuencia se seleccionó con el fin de atenuar las señales de voz que puedan llegar a interferir con el circuito ya que el ancho de banda de la voz es de 4kHz. Luego de ser captadas por el micrófono las señales pasan a una primera etapa de amplificación en configuración no inversora como se muestra a continuación:
Figura 106. Configuración para la primera etapa de amplificación del circuito de recepción
0
R1
Vout
R2
Vin
-Vee
+Vcc
5
6
411
7+
-
V+
V-
OUT
La ganancia de esta etapa es:
1011
10011
21=
ΩΩ+Ω
=+
==k
kkRRR
VinVoutAV
Luego de ser amplificada, la señal pasa entonces a un filtro resonante con una frecuencia central de 11.28kHz, que es la frecuencia que genera el parlante ubicado en el control remoto. El filtro resonante fue construido con una configuración RLC paralelo como esta:
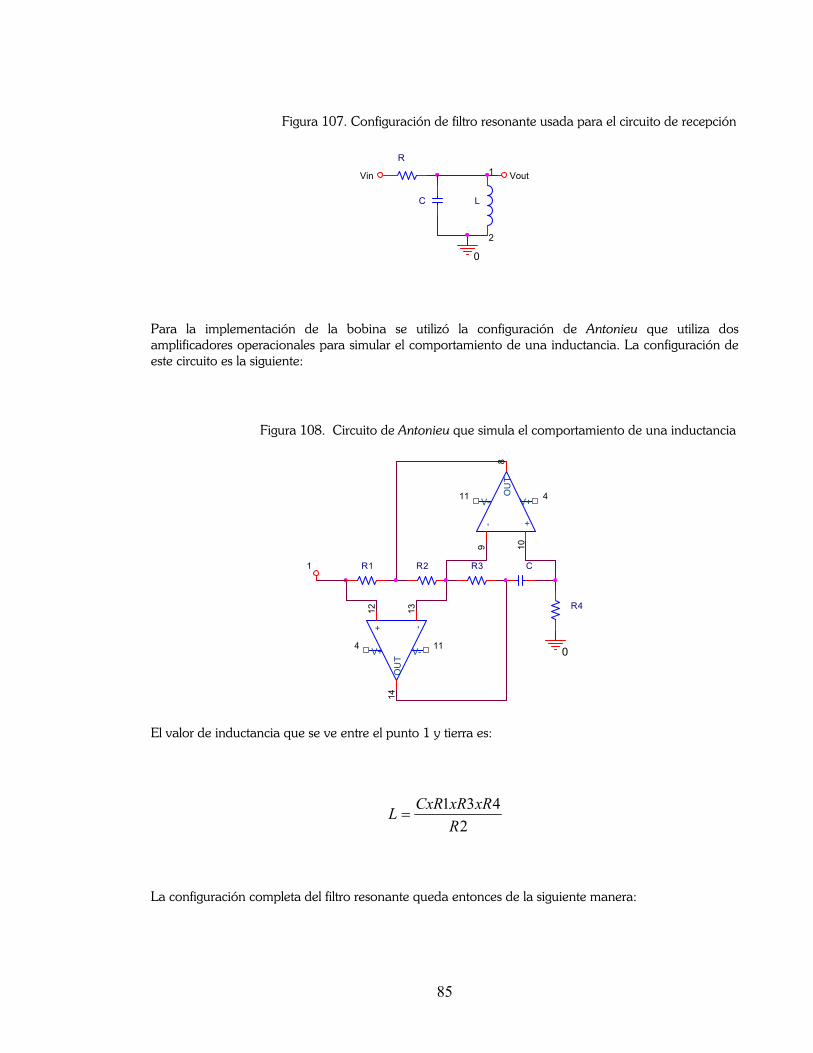
85
Figura 107. Configuración de filtro resonante usada para el circuito de recepción
Para la implementación de la bobina se utilizó la configuración de Antonieu que utiliza dos amplificadores operacionales para simular el comportamiento de una inductancia. La configuración de este circuito es la siguiente:
Figura 108. Circuito de Antonieu que simula el comportamiento de una inductancia
0
CR2
12 13
4 11
14+ -
V+ V-
OU
T
R4
1 R1 R3
109
4118
+-
V+V-O
UT
El valor de inductancia que se ve entre el punto 1 y tierra es:
2431
RxRxRCxRL =
La configuración completa del filtro resonante queda entonces de la siguiente manera:
C
0
VoutVin
R
L
1
2
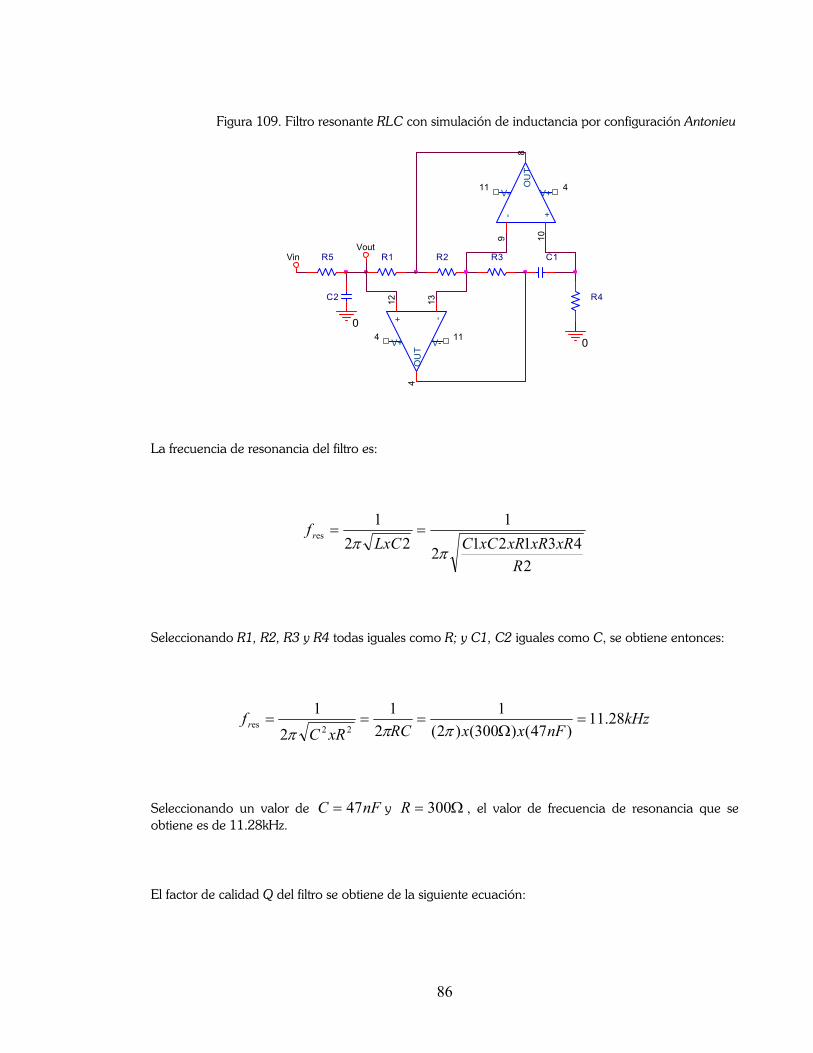
86
Figura 109. Filtro resonante RLC con simulación de inductancia por configuración Antonieu
R3 C1Vin R1
0
Vout
R412 13
4 11
4+ -
V+ V-
OU
T
0
109
411
8
+-
V+V-
OU
T
R5
C2
R2
La frecuencia de resonancia del filtro es:
2431212
122
1es
RxRxRxRxCCLxC
frππ
==
Seleccionando R1, R2, R3 y R4 todas iguales como R; y C1, C2 iguales como C, se obtiene entonces:
kHznFxxRCxRC
fr 28.11)47()300()2(
12
12
122es =
Ω===
πππ
Seleccionando un valor de nFC 47= y Ω= 300R , el valor de frecuencia de resonancia que se obtiene es de 11.28kHz.
El factor de calidad Q del filtro se obtiene de la siguiente ecuación:
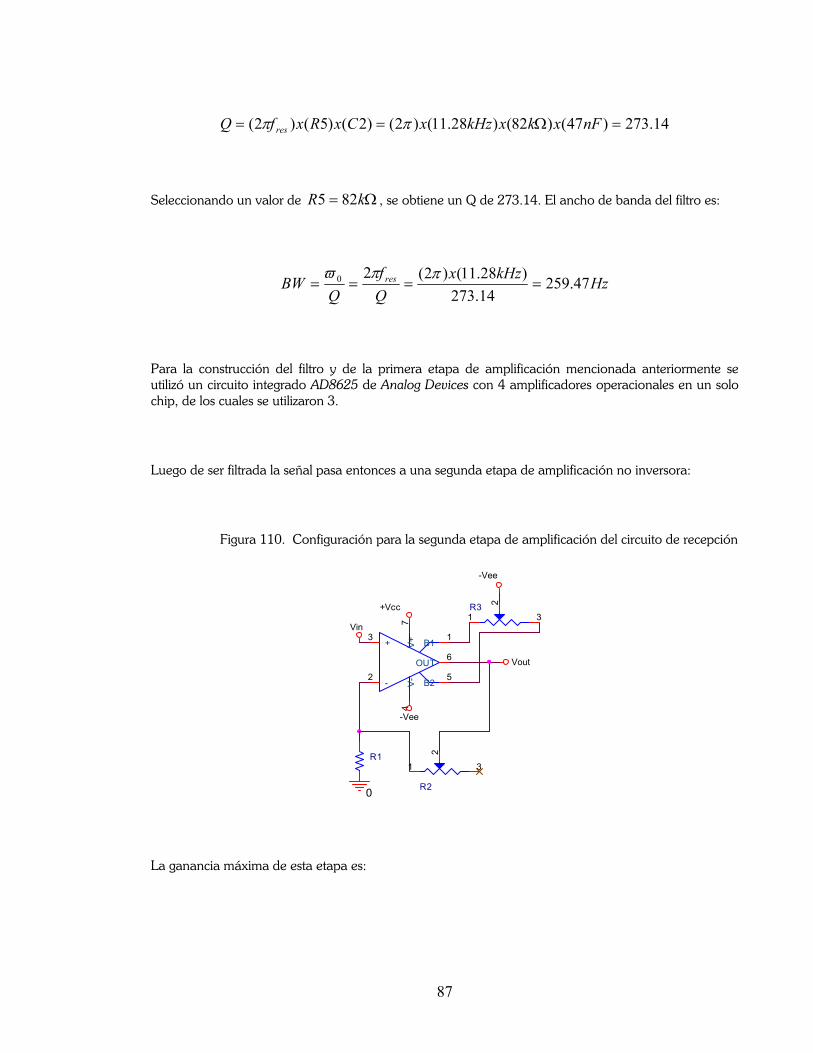
87
14.273)47()82()28.11()2()2()5()2( =Ω== nFxkxkHzxCxRxfQ res ππ
Seleccionando un valor de Ω= kR 825 , se obtiene un Q de 273.14. El ancho de banda del filtro es:
HzkHzxQf
QBW res 47.259
14.273)28.11()2(20 ====
ππϖ
Para la construcción del filtro y de la primera etapa de amplificación mencionada anteriormente se utilizó un circuito integrado AD8625 de Analog Devices con 4 amplificadores operacionales en un solo chip, de los cuales se utilizaron 3.
Luego de ser filtrada la señal pasa entonces a una segunda etapa de amplificación no inversora:
Figura 110. Configuración para la segunda etapa de amplificación del circuito de recepción
Vout
3
2
74
6
5
1+
-
V+
V-
OUT
B2
B1
+Vcc R31 3
2
R1
R2
1 3
2
Vin
0
-Vee
-Vee
La ganancia máxima de esta etapa es:
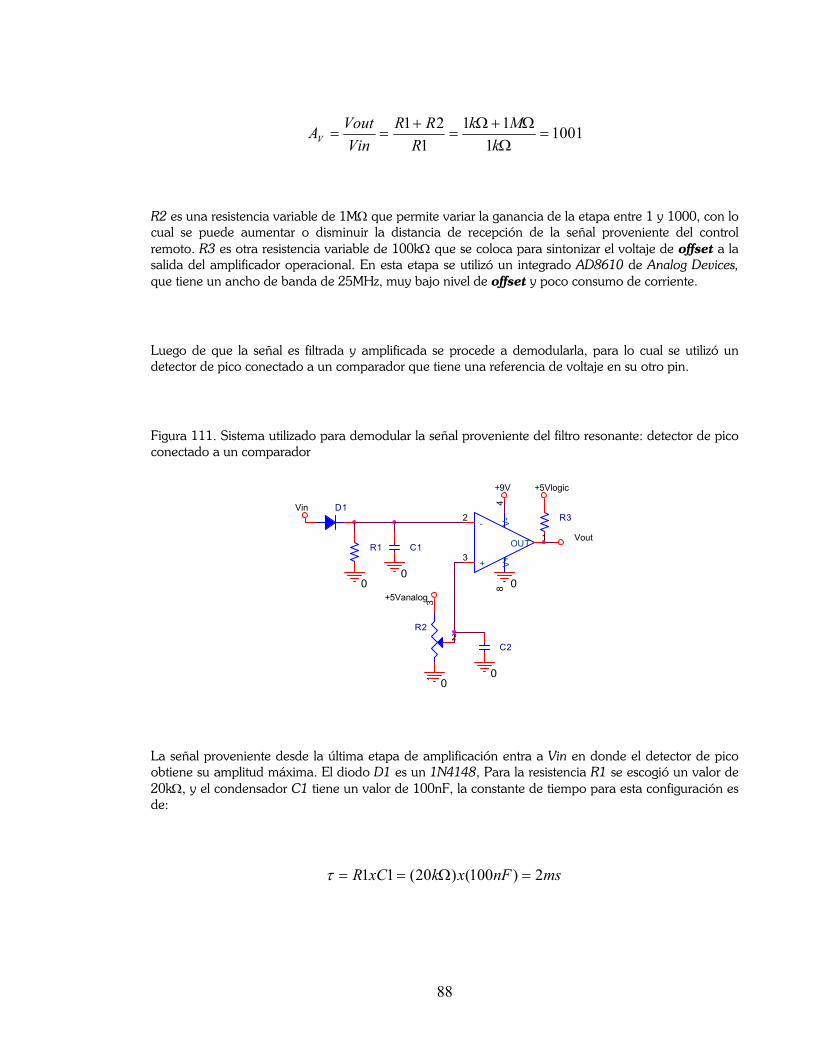
88
10011
111
21=
ΩΩ+Ω
=+
==kMk
RRR
VinVoutAV
R2 es una resistencia variable de 1MΩ que permite variar la ganancia de la etapa entre 1 y 1000, con lo cual se puede aumentar o disminuir la distancia de recepción de la señal proveniente del control remoto. R3 es otra resistencia variable de 100kΩ que se coloca para sintonizar el voltaje de offset a la salida del amplificador operacional. En esta etapa se utilizó un integrado AD8610 de Analog Devices, que tiene un ancho de banda de 25MHz, muy bajo nivel de offset y poco consumo de corriente.
Luego de que la señal es filtrada y amplificada se procede a demodularla, para lo cual se utilizó un detector de pico conectado a un comparador que tiene una referencia de voltaje en su otro pin.
Figura 111. Sistema utilizado para demodular la señal proveniente del filtro resonante: detector de pico conectado a un comparador
0
R3
+9V
R2
13
2
0
R13
2
84
1
+
-
V+
V-
OUT
C2
0+5Vanalog
0
Vout
D1
0
C1
Vin
+5Vlogic
La señal proveniente desde la última etapa de amplificación entra a Vin en donde el detector de pico obtiene su amplitud máxima. El diodo D1 es un 1N4148, Para la resistencia R1 se escogió un valor de 20kΩ, y el condensador C1 tiene un valor de 100nF, la constante de tiempo para esta configuración es de:
msnFxkxCR 2)100()20(11 =Ω==τ
89
La señal que llega al detector tiene un período de:
skHzf
Tres
µ65.8828.1111
===
Se observa que la constante de tiempo del detector es mayor a 10 veces el período de la señal con lo cual se garantiza obtener un voltaje constante a la entrada del comparador en el pin 2. El condensador C2 y la resistencia R2 se conectan a la fuente de 5V del circuito analógico, y son utilizados para colocar una referencia de voltaje en el pin 3 del comparador. R2 es una resistencia variable de 1MΩ y C2 tiene un valor de 100nF utilizado para estabilizar el voltaje presente en este punto; R2 permite entonces colocar un valor de voltaje de referencia que va entre 0 y 5V con lo cual se puede variar también la distancia de recepción de la señal externa proveniente del control remoto.
Mientras no se reciba señal, el detector de pico colocará un voltaje de 0V en su salida con lo cual la salida del comparador permanecerá en 5V, ya que la diferencia de potencial en su entrada es positiva. La salida del comparador al ser de tipo open collector se conecta a la fuente de 5V del circuito lógico a través de una resistencia de pull-up R3 de 5.1kΩ, mientras que no hay señal recibida la diferencia de potencial en esta resistencia es de 0V por lo tanto no circula corriente, con lo cual se ayuda a reducir el consumo del sistema.
El comparador utilizado es un LM393 que contiene dos comparadores de tipo open collector en un solo chip, con muy bajo consumo de corriente. Este se polariza a 9V ya que la otra parte del chip es utilizada para el circuito detector de batería baja para los servomotores, y ya que las baterías de estos son de 6V debe ser capaz de reconocer este voltaje.
Teniendo ya la señal digitalizada, esta va al circuito de control e ingresa a uno de los puertos del microcontrolador para ser decodificada como se dijo anteriormente.
El esquema de detección que se utiliza para saber que comando es el que se recibe es el siguiente: si la señal recibida dura 20ms el comando que se ejecuta es el de bajar la amplitud de oscilación de los motores, si la señal dura 50ms se ejecuta el comando para subir la amplitud de oscilación, si la duración es de 80ms se ejecuta el comando para bajar el desfase entre los motores delanteros y traseros, si es de 110ms se sube el desfase, si es de 140ms se ejecuta un comando que le ordena a los motores colocarse en su posición central es decir en 90 grados, si la señal dura 170ms se ejecuta el comando de apagar/encender el sistema. A partir de este sistema de detección se pueden definir múltiples comandos que permiten obtener flexibilidad en el manejo de la plataforma.
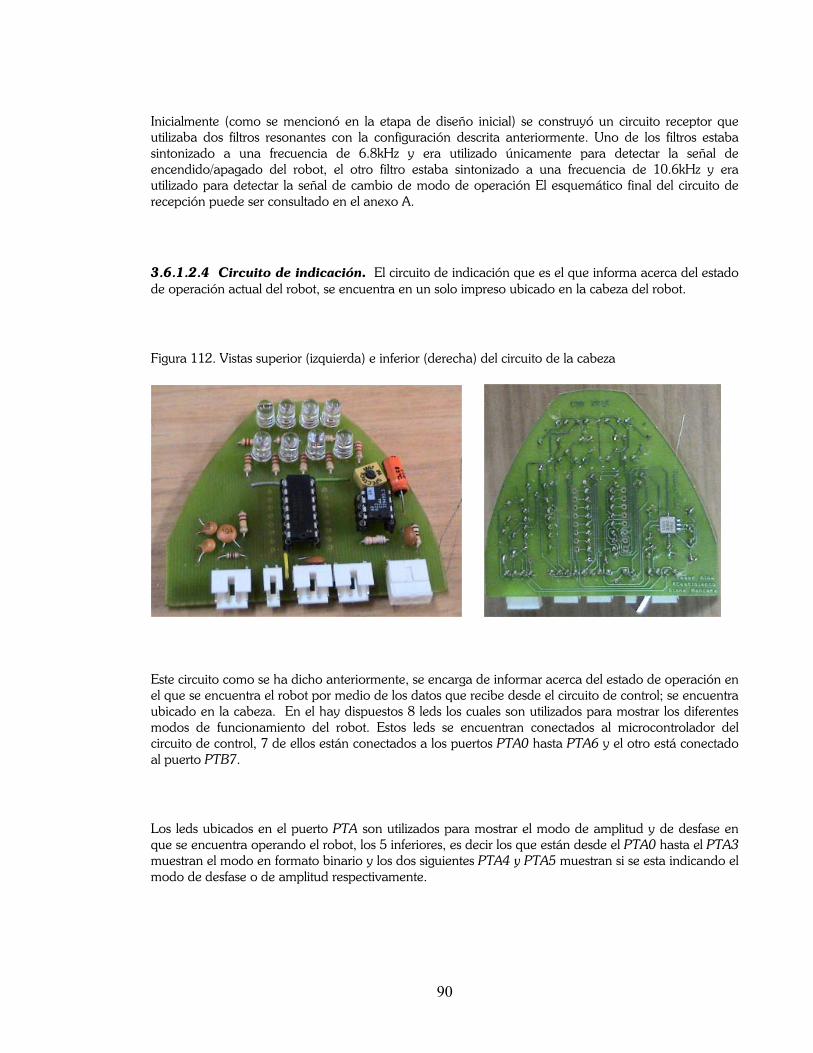
90
Inicialmente (como se mencionó en la etapa de diseño inicial) se construyó un circuito receptor que utilizaba dos filtros resonantes con la configuración descrita anteriormente. Uno de los filtros estaba sintonizado a una frecuencia de 6.8kHz y era utilizado únicamente para detectar la señal de encendido/apagado del robot, el otro filtro estaba sintonizado a una frecuencia de 10.6kHz y era utilizado para detectar la señal de cambio de modo de operación El esquemático final del circuito de recepción puede ser consultado en el anexo A.
3.6.1.2.4 Circuito de indicación. El circuito de indicación que es el que informa acerca del estado de operación actual del robot, se encuentra en un solo impreso ubicado en la cabeza del robot.
Figura 112. Vistas superior (izquierda) e inferior (derecha) del circuito de la cabeza
Este circuito como se ha dicho anteriormente, se encarga de informar acerca del estado de operación en el que se encuentra el robot por medio de los datos que recibe desde el circuito de control; se encuentra ubicado en la cabeza. En el hay dispuestos 8 leds los cuales son utilizados para mostrar los diferentes modos de funcionamiento del robot. Estos leds se encuentran conectados al microcontrolador del circuito de control, 7 de ellos están conectados a los puertos PTA0 hasta PTA6 y el otro está conectado al puerto PTB7.
Los leds ubicados en el puerto PTA son utilizados para mostrar el modo de amplitud y de desfase en que se encuentra operando el robot, los 5 inferiores, es decir los que están desde el PTA0 hasta el PTA3 muestran el modo en formato binario y los dos siguientes PTA4 y PTA5 muestran si se esta indicando el modo de desfase o de amplitud respectivamente.
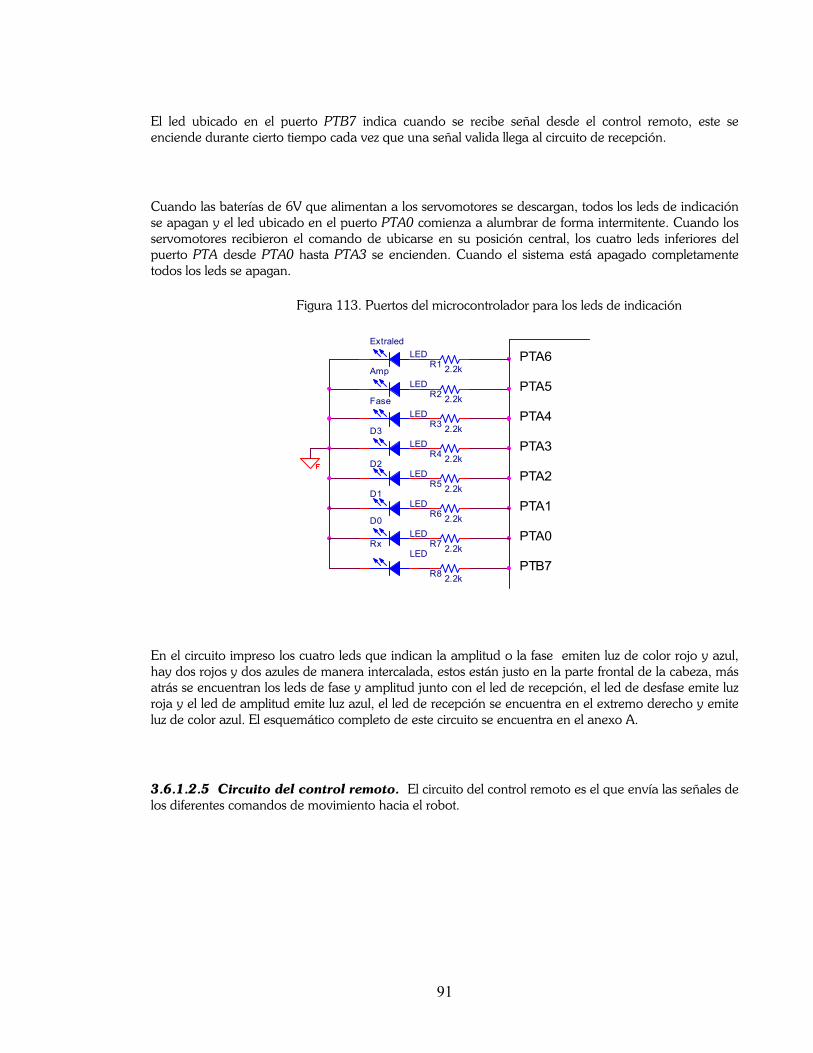
91
El led ubicado en el puerto PTB7 indica cuando se recibe señal desde el control remoto, este se enciende durante cierto tiempo cada vez que una señal valida llega al circuito de recepción.
Cuando las baterías de 6V que alimentan a los servomotores se descargan, todos los leds de indicación se apagan y el led ubicado en el puerto PTA0 comienza a alumbrar de forma intermitente. Cuando los servomotores recibieron el comando de ubicarse en su posición central, los cuatro leds inferiores del puerto PTA desde PTA0 hasta PTA3 se encienden. Cuando el sistema está apagado completamente todos los leds se apagan.
Figura 113. Puertos del microcontrolador para los leds de indicación
R4 2.2k
PTA0
R2 2.2k
RxLED
PTA4
PTA2D2
LED
R3 2.2k
PTA3D3
LED
PTA6
R6 2.2k
PTB7
FaseLED
R5 2.2k
R8 2.2k
D0LED
D1LED
PTA5
ExtraledLED
R1 2.2k
R7 2.2k
PTA1
AmpLED
En el circuito impreso los cuatro leds que indican la amplitud o la fase emiten luz de color rojo y azul, hay dos rojos y dos azules de manera intercalada, estos están justo en la parte frontal de la cabeza, más atrás se encuentran los leds de fase y amplitud junto con el led de recepción, el led de desfase emite luz roja y el led de amplitud emite luz azul, el led de recepción se encuentra en el extremo derecho y emite luz de color azul. El esquemático completo de este circuito se encuentra en el anexo A.
3.6.1.2.5 Circuito del control remoto. El circuito del control remoto es el que envía las señales de los diferentes comandos de movimiento hacia el robot.
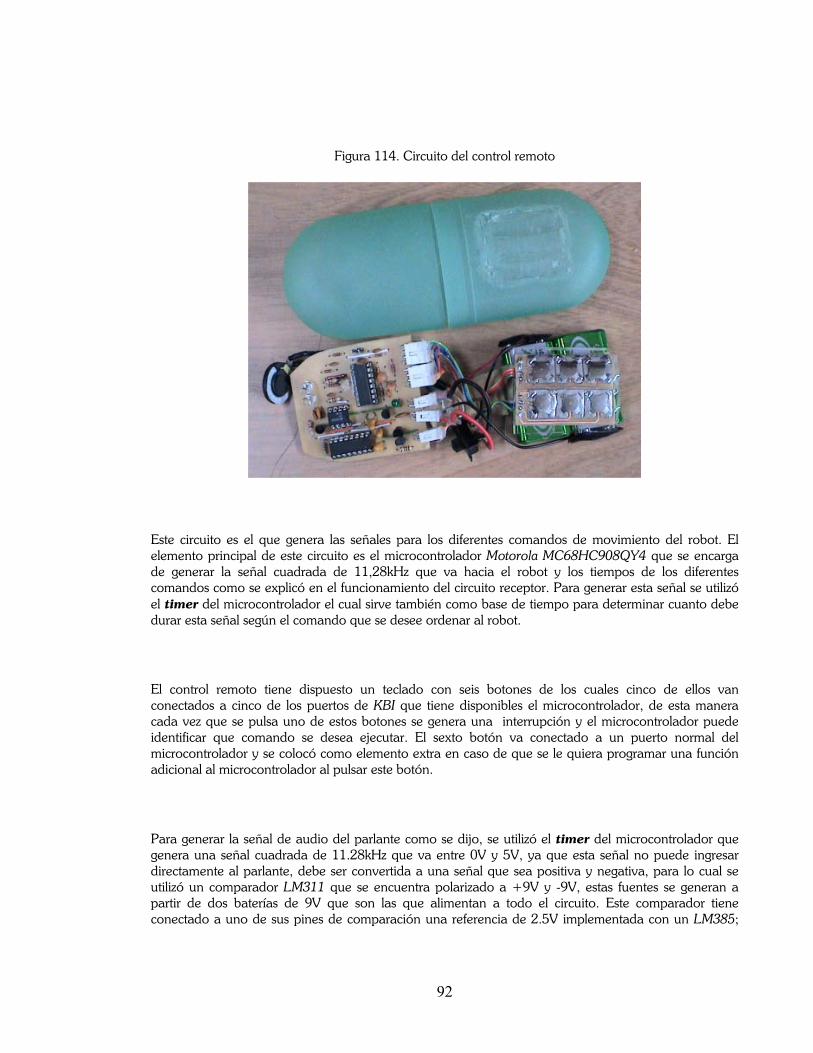
92
Figura 114. Circuito del control remoto
Este circuito es el que genera las señales para los diferentes comandos de movimiento del robot. El elemento principal de este circuito es el microcontrolador Motorola MC68HC908QY4 que se encarga de generar la señal cuadrada de 11,28kHz que va hacia el robot y los tiempos de los diferentes comandos como se explicó en el funcionamiento del circuito receptor. Para generar esta señal se utilizó el timer del microcontrolador el cual sirve también como base de tiempo para determinar cuanto debe durar esta señal según el comando que se desee ordenar al robot.
El control remoto tiene dispuesto un teclado con seis botones de los cuales cinco de ellos van conectados a cinco de los puertos de KBI que tiene disponibles el microcontrolador, de esta manera cada vez que se pulsa uno de estos botones se genera una interrupción y el microcontrolador puede identificar que comando se desea ejecutar. El sexto botón va conectado a un puerto normal del microcontrolador y se colocó como elemento extra en caso de que se le quiera programar una función adicional al microcontrolador al pulsar este botón.
Para generar la señal de audio del parlante como se dijo, se utilizó el timer del microcontrolador que genera una señal cuadrada de 11.28kHz que va entre 0V y 5V, ya que esta señal no puede ingresar directamente al parlante, debe ser convertida a una señal que sea positiva y negativa, para lo cual se utilizó un comparador LM311 que se encuentra polarizado a +9V y -9V, estas fuentes se generan a partir de dos baterías de 9V que son las que alimentan a todo el circuito. Este comparador tiene conectado a uno de sus pines de comparación una referencia de 2.5V implementada con un LM385;
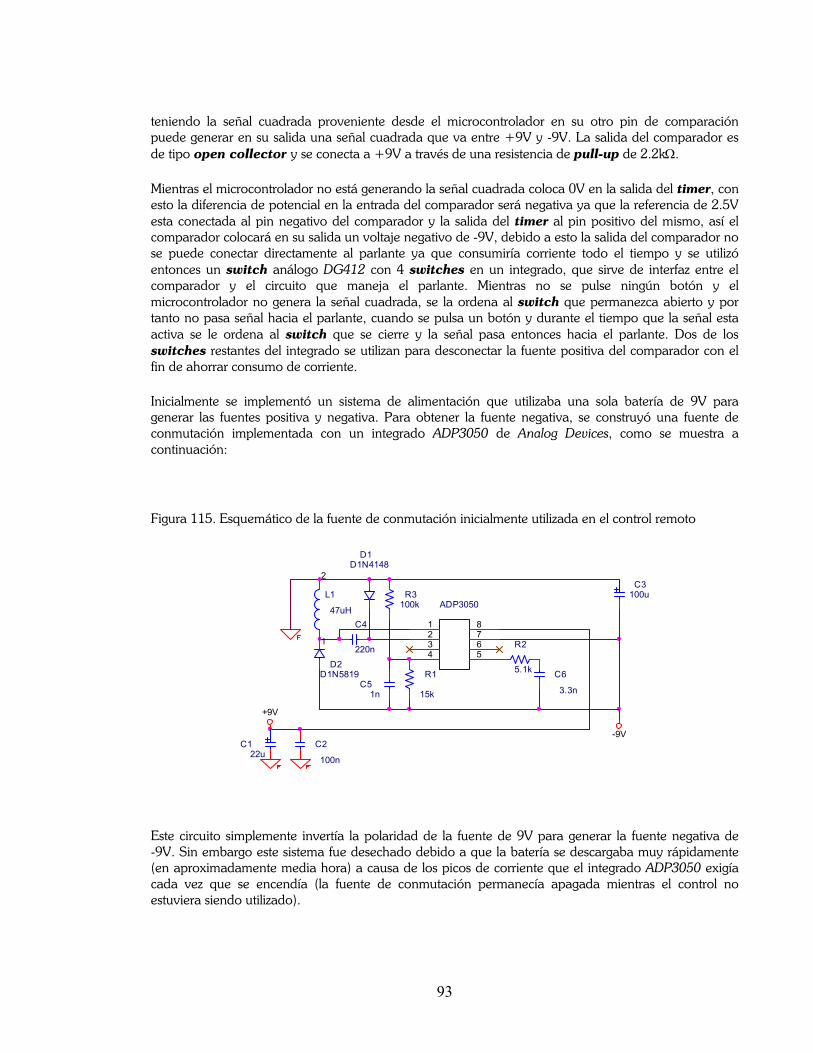
93
teniendo la señal cuadrada proveniente desde el microcontrolador en su otro pin de comparación puede generar en su salida una señal cuadrada que va entre +9V y -9V. La salida del comparador es de tipo open collector y se conecta a +9V a través de una resistencia de pull-up de 2.2kΩ.
Mientras el microcontrolador no está generando la señal cuadrada coloca 0V en la salida del timer, con esto la diferencia de potencial en la entrada del comparador será negativa ya que la referencia de 2.5V esta conectada al pin negativo del comparador y la salida del timer al pin positivo del mismo, así el comparador colocará en su salida un voltaje negativo de -9V, debido a esto la salida del comparador no se puede conectar directamente al parlante ya que consumiría corriente todo el tiempo y se utilizó entonces un switch análogo DG412 con 4 switches en un integrado, que sirve de interfaz entre el comparador y el circuito que maneja el parlante. Mientras no se pulse ningún botón y el microcontrolador no genera la señal cuadrada, se la ordena al switch que permanezca abierto y por tanto no pasa señal hacia el parlante, cuando se pulsa un botón y durante el tiempo que la señal esta activa se le ordena al switch que se cierre y la señal pasa entonces hacia el parlante. Dos de los switches restantes del integrado se utilizan para desconectar la fuente positiva del comparador con el fin de ahorrar consumo de corriente.
Inicialmente se implementó un sistema de alimentación que utilizaba una sola batería de 9V para generar las fuentes positiva y negativa. Para obtener la fuente negativa, se construyó una fuente de conmutación implementada con un integrado ADP3050 de Analog Devices, como se muestra a continuación:
Figura 115. Esquemático de la fuente de conmutación inicialmente utilizada en el control remoto
R1
15k
ADP3050
1234 5
678
L1
47uH
1
2
-9VC2
100n
D2D1N5819
R2
5.1kC5
1n
R3100k
C3100u
C6
3.3n
C4
220n
C122u
D1D1N4148
+9V
Este circuito simplemente invertía la polaridad de la fuente de 9V para generar la fuente negativa de -9V. Sin embargo este sistema fue desechado debido a que la batería se descargaba muy rápidamente (en aproximadamente media hora) a causa de los picos de corriente que el integrado ADP3050 exigía cada vez que se encendía (la fuente de conmutación permanecía apagada mientras el control no estuviera siendo utilizado).
94
El circuito que maneja el parlante es una etapa de salida clase AB implementada con un transistor 2N2222 y un transistor 2N2907. El parlante tiene una impedancia de 180Ω.
Figura 116. Parlante utilizado en el control remoto
El esquemático completo del circuito del control remoto se encuentra en el anexo A.
3.6.2 Software del sistema de control
3.6.2.1 Programa principal. El programa principal se encarga de controlar el movimiento de los servomotores e indica el estado del sistema monitoreando las variables de entrada y salida al mismo. Este se encuentra instalado en el microcontrolador MC68HC908GP32.
El diagrama de flujo que explica su funcionamiento se muestra a continuación:
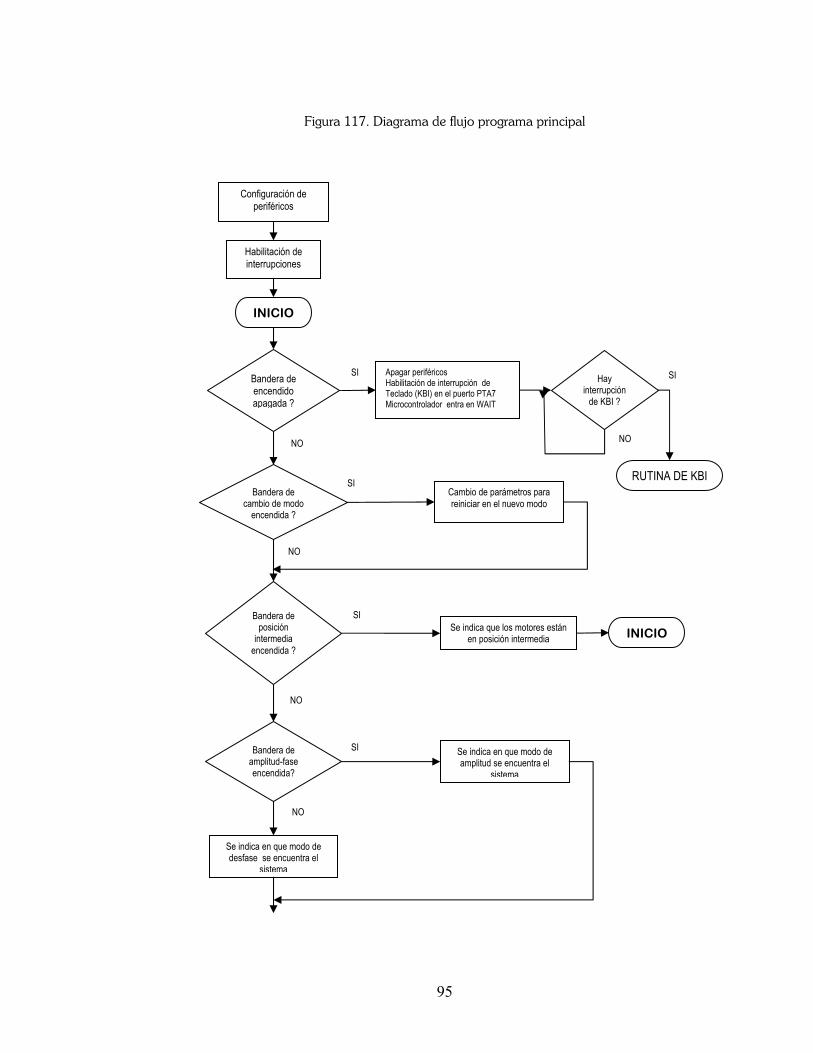
95
Figura 117. Diagrama de flujo programa principal
Configuración de periféricos
Habilitación de interrupciones
Bandera de encendido apagada ?
SI
NO
Apagar periféricos Habilitación de interrupción de Teclado (KBI) en el puerto PTA7 Microcontrolador entra en WAIT
Bandera de cambio de modo
encendida ?
Cambio de parámetros para reiniciar en el nuevo modo
SI
NO
Bandera de posición
intermedia encendida ?
Se indica que los motores están en posición intermedia
SI
NO
Bandera de amplitud-fase encendida?
Se indica en que modo de amplitud se encuentra el
sistema
SI
NO
INICIO
Hay interrupción
de KBI ?
SI
NO
RUTINA DE KBI
Se indica en que modo de desfase se encuentra el
sistema
INICIO
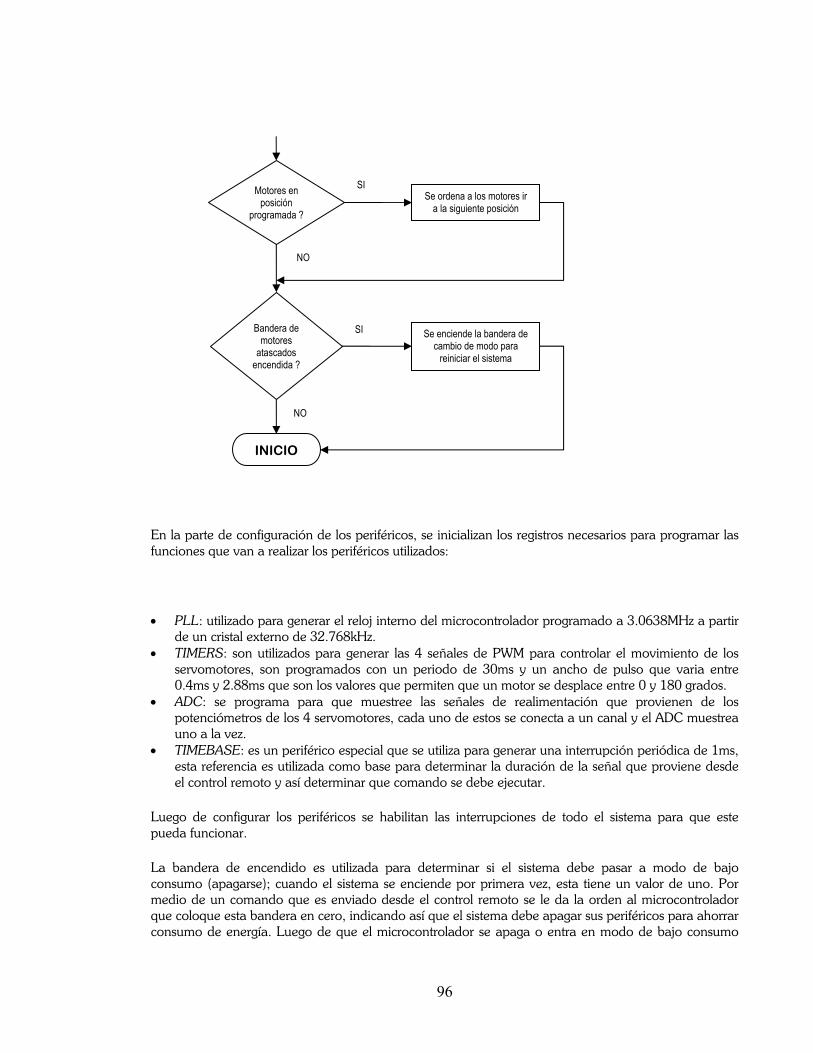
96
En la parte de configuración de los periféricos, se inicializan los registros necesarios para programar las funciones que van a realizar los periféricos utilizados:
• PLL: utilizado para generar el reloj interno del microcontrolador programado a 3.0638MHz a partir de un cristal externo de 32.768kHz.
• TIMERS: son utilizados para generar las 4 señales de PWM para controlar el movimiento de los servomotores, son programados con un periodo de 30ms y un ancho de pulso que varia entre 0.4ms y 2.88ms que son los valores que permiten que un motor se desplace entre 0 y 180 grados.
• ADC: se programa para que muestree las señales de realimentación que provienen de los potenciómetros de los 4 servomotores, cada uno de estos se conecta a un canal y el ADC muestrea uno a la vez.
• TIMEBASE: es un periférico especial que se utiliza para generar una interrupción periódica de 1ms, esta referencia es utilizada como base para determinar la duración de la señal que proviene desde el control remoto y así determinar que comando se debe ejecutar.
Luego de configurar los periféricos se habilitan las interrupciones de todo el sistema para que este pueda funcionar.
La bandera de encendido es utilizada para determinar si el sistema debe pasar a modo de bajo consumo (apagarse); cuando el sistema se enciende por primera vez, esta tiene un valor de uno. Por medio de un comando que es enviado desde el control remoto se le da la orden al microcontrolador que coloque esta bandera en cero, indicando así que el sistema debe apagar sus periféricos para ahorrar consumo de energía. Luego de que el microcontrolador se apaga o entra en modo de bajo consumo
Motores en posición
programada ?
SI
NO
Bandera de motores
atascados encendida ?
Se enciende la bandera de cambio de modo para
reiniciar el sistema
Se ordena a los motores ir a la siguiente posición
INICIO
SI
NO
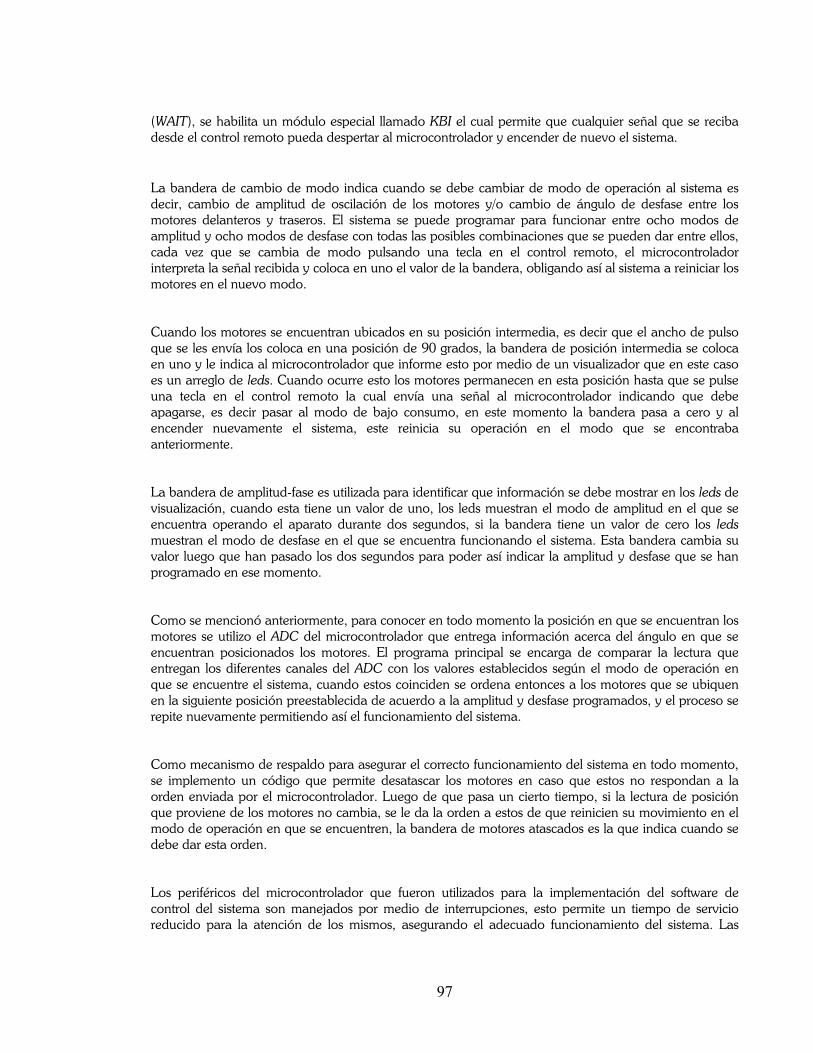
97
(WAIT), se habilita un módulo especial llamado KBI el cual permite que cualquier señal que se reciba desde el control remoto pueda despertar al microcontrolador y encender de nuevo el sistema.
La bandera de cambio de modo indica cuando se debe cambiar de modo de operación al sistema es decir, cambio de amplitud de oscilación de los motores y/o cambio de ángulo de desfase entre los motores delanteros y traseros. El sistema se puede programar para funcionar entre ocho modos de amplitud y ocho modos de desfase con todas las posibles combinaciones que se pueden dar entre ellos, cada vez que se cambia de modo pulsando una tecla en el control remoto, el microcontrolador interpreta la señal recibida y coloca en uno el valor de la bandera, obligando así al sistema a reiniciar los motores en el nuevo modo. Cuando los motores se encuentran ubicados en su posición intermedia, es decir que el ancho de pulso que se les envía los coloca en una posición de 90 grados, la bandera de posición intermedia se coloca en uno y le indica al microcontrolador que informe esto por medio de un visualizador que en este caso es un arreglo de leds. Cuando ocurre esto los motores permanecen en esta posición hasta que se pulse una tecla en el control remoto la cual envía una señal al microcontrolador indicando que debe apagarse, es decir pasar al modo de bajo consumo, en este momento la bandera pasa a cero y al encender nuevamente el sistema, este reinicia su operación en el modo que se encontraba anteriormente. La bandera de amplitud-fase es utilizada para identificar que información se debe mostrar en los leds de visualización, cuando esta tiene un valor de uno, los leds muestran el modo de amplitud en el que se encuentra operando el aparato durante dos segundos, si la bandera tiene un valor de cero los leds muestran el modo de desfase en el que se encuentra funcionando el sistema. Esta bandera cambia su valor luego que han pasado los dos segundos para poder así indicar la amplitud y desfase que se han programado en ese momento. Como se mencionó anteriormente, para conocer en todo momento la posición en que se encuentran los motores se utilizo el ADC del microcontrolador que entrega información acerca del ángulo en que se encuentran posicionados los motores. El programa principal se encarga de comparar la lectura que entregan los diferentes canales del ADC con los valores establecidos según el modo de operación en que se encuentre el sistema, cuando estos coinciden se ordena entonces a los motores que se ubiquen en la siguiente posición preestablecida de acuerdo a la amplitud y desfase programados, y el proceso se repite nuevamente permitiendo así el funcionamiento del sistema. Como mecanismo de respaldo para asegurar el correcto funcionamiento del sistema en todo momento, se implemento un código que permite desatascar los motores en caso que estos no respondan a la orden enviada por el microcontrolador. Luego de que pasa un cierto tiempo, si la lectura de posición que proviene de los motores no cambia, se le da la orden a estos de que reinicien su movimiento en el modo de operación en que se encuentren, la bandera de motores atascados es la que indica cuando se debe dar esta orden. Los periféricos del microcontrolador que fueron utilizados para la implementación del software de control del sistema son manejados por medio de interrupciones, esto permite un tiempo de servicio reducido para la atención de los mismos, asegurando el adecuado funcionamiento del sistema. Las
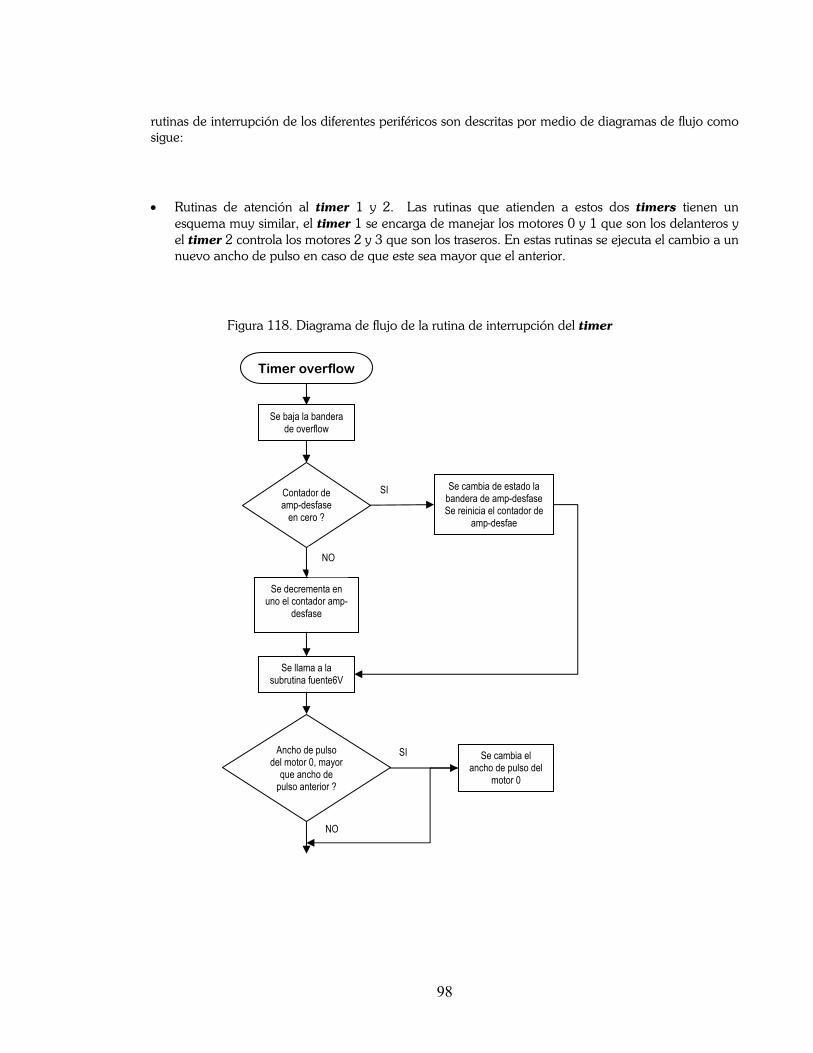
98
rutinas de interrupción de los diferentes periféricos son descritas por medio de diagramas de flujo como sigue:
• Rutinas de atención al timer 1 y 2. Las rutinas que atienden a estos dos timers tienen un esquema muy similar, el timer 1 se encarga de manejar los motores 0 y 1 que son los delanteros y el timer 2 controla los motores 2 y 3 que son los traseros. En estas rutinas se ejecuta el cambio a un nuevo ancho de pulso en caso de que este sea mayor que el anterior.
Figura 118. Diagrama de flujo de la rutina de interrupción del timer
Timer overflow
Se baja la bandera de overflow
Contador de amp-desfase
en cero ?
Se cambia de estado la bandera de amp-desfaseSe reinicia el contador de
amp-desfae
SI
Se decrementa en uno el contador amp-
desfase
NO
Se llama a la subrutina fuente6V
Ancho de pulso del motor 0, mayor
que ancho de pulso anterior ?
SI
NO
Se cambia el ancho de pulso del
motor 0
99
• Rutinas de atención a los canales 0 y 1 de los timers. Estas rutinas también controlan el cambio de ancho de pulso de los motores, ejecutando este en caso en cual el nuevo ancho de pulso sea menor que el anterior, el canal 0 del timer 1 controla al motor 0, el canal 1 al motor 1; el canal 0 del timer 2 controla al motor 2 y el canal 1 al motor 3.
Figura 119. Diagrama de flujo para la rutina de atención al canal cero del timer
NO
NONO
Ancho de pulso del motor 1, mayor
que ancho de pulso anterior?
Se cambia el ancho de pulso del
motor 1
SI
Bandera de posición
intermedia apagada ?
Ancho de pulso del motor 1 igual
a ancho de pulso actual ?
SI Se suma 1 al contador de
atascado
SI
Se reinicia el contador de
atascado
RTI
NO
NO
Timerch0 compare
Se baja la bandera del canal 0
Ancho de pulso del motor 0/2,
menor que ancho de pulso anterior ?
Se cambia el ancho de pulso del
motor 0/2
SI
RTI
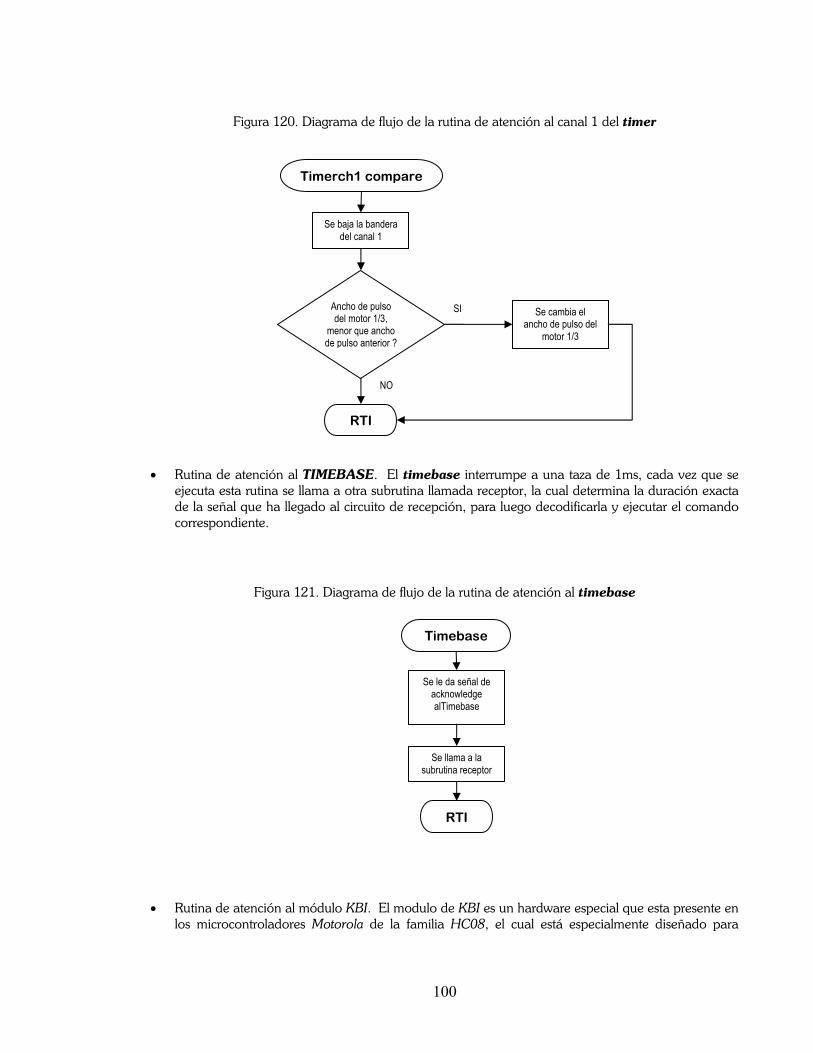
100
Figura 120. Diagrama de flujo de la rutina de atención al canal 1 del timer
• Rutina de atención al TIMEBASE. El timebase interrumpe a una taza de 1ms, cada vez que se ejecuta esta rutina se llama a otra subrutina llamada receptor, la cual determina la duración exacta de la señal que ha llegado al circuito de recepción, para luego decodificarla y ejecutar el comando correspondiente.
Figura 121. Diagrama de flujo de la rutina de atención al timebase
• Rutina de atención al módulo KBI. El modulo de KBI es un hardware especial que esta presente en los microcontroladores Motorola de la familia HC08, el cual está especialmente diseñado para
Timerch1 compare
Se baja la bandera del canal 1
Ancho de pulso del motor 1/3,
menor que ancho de pulso anterior ?
Se cambia el ancho de pulso del
motor 1/3
SI
NO
RTI
Timebase
Se le da señal de acknowledge alTimebase
RTI
Se llama a la subrutina receptor
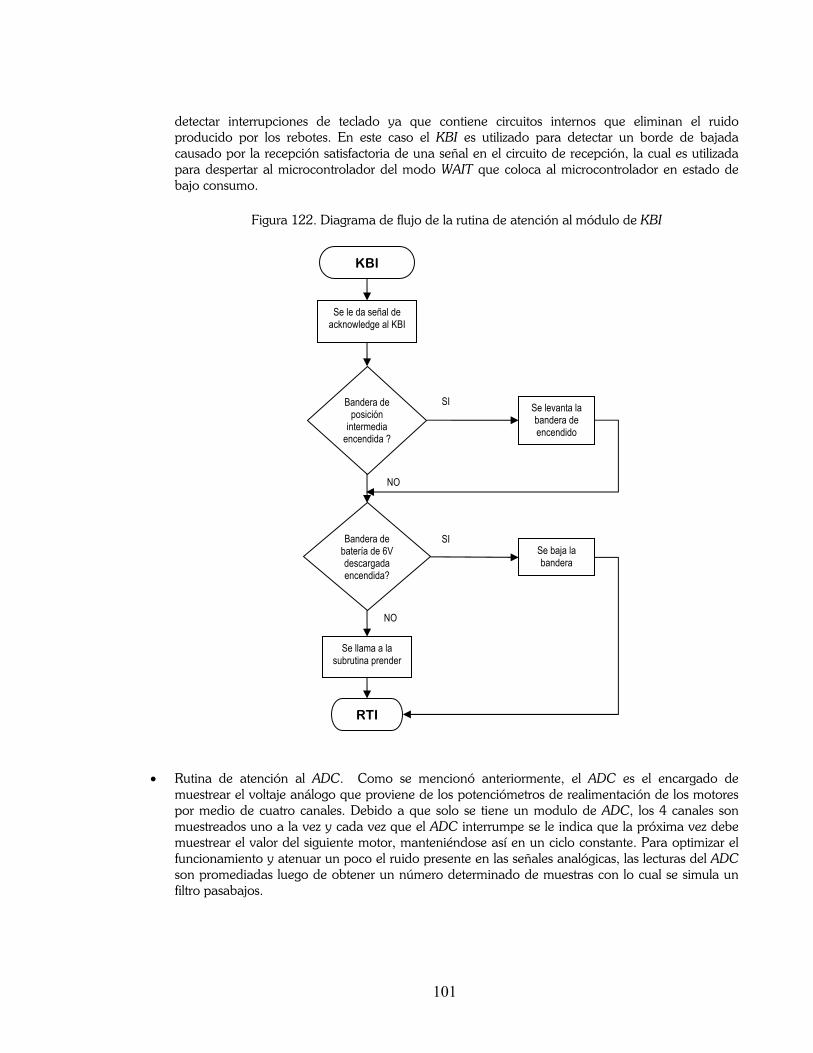
101
detectar interrupciones de teclado ya que contiene circuitos internos que eliminan el ruido producido por los rebotes. En este caso el KBI es utilizado para detectar un borde de bajada causado por la recepción satisfactoria de una señal en el circuito de recepción, la cual es utilizada para despertar al microcontrolador del modo WAIT que coloca al microcontrolador en estado de bajo consumo.
Figura 122. Diagrama de flujo de la rutina de atención al módulo de KBI
• Rutina de atención al ADC. Como se mencionó anteriormente, el ADC es el encargado de muestrear el voltaje análogo que proviene de los potenciómetros de realimentación de los motores por medio de cuatro canales. Debido a que solo se tiene un modulo de ADC, los 4 canales son muestreados uno a la vez y cada vez que el ADC interrumpe se le indica que la próxima vez debe muestrear el valor del siguiente motor, manteniéndose así en un ciclo constante. Para optimizar el funcionamiento y atenuar un poco el ruido presente en las señales analógicas, las lecturas del ADC son promediadas luego de obtener un número determinado de muestras con lo cual se simula un filtro pasabajos.
KBI
Se le da señal de acknowledge al KBI
Bandera de posición
intermedia encendida ?
Se levanta la bandera de encendido
SI
NO
RTI
Bandera de batería de 6V descargada encendida?
Se baja la bandera
SI
NO
Se llama a la subrutina prender
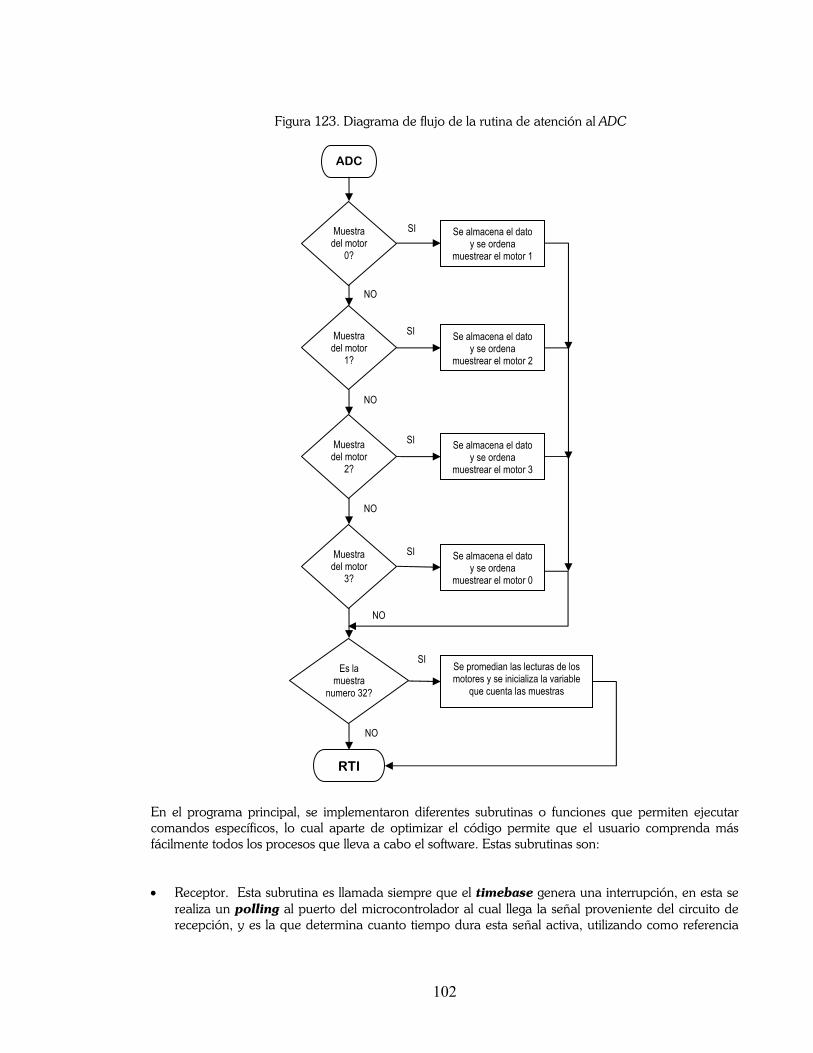
102
Figura 123. Diagrama de flujo de la rutina de atención al ADC
En el programa principal, se implementaron diferentes subrutinas o funciones que permiten ejecutar comandos específicos, lo cual aparte de optimizar el código permite que el usuario comprenda más fácilmente todos los procesos que lleva a cabo el software. Estas subrutinas son: • Receptor. Esta subrutina es llamada siempre que el timebase genera una interrupción, en esta se
realiza un polling al puerto del microcontrolador al cual llega la señal proveniente del circuito de recepción, y es la que determina cuanto tiempo dura esta señal activa, utilizando como referencia
ADC
Muestra del motor
0?
Se almacena el dato y se ordena
muestrear el motor 1
SI
NO
RTI
Muestra del motor
1?
Se almacena el dato y se ordena
muestrear el motor 2
SI
NO
Muestra del motor
2?
Se almacena el dato y se ordena
muestrear el motor 3
SI
NO
Muestra del motor
3?
Se almacena el dato y se ordena
muestrear el motor 0
SI
NO
Es la muestra
numero 32?
Se promedian las lecturas de los motores y se inicializa la variable
que cuenta las muestras
SI
NO
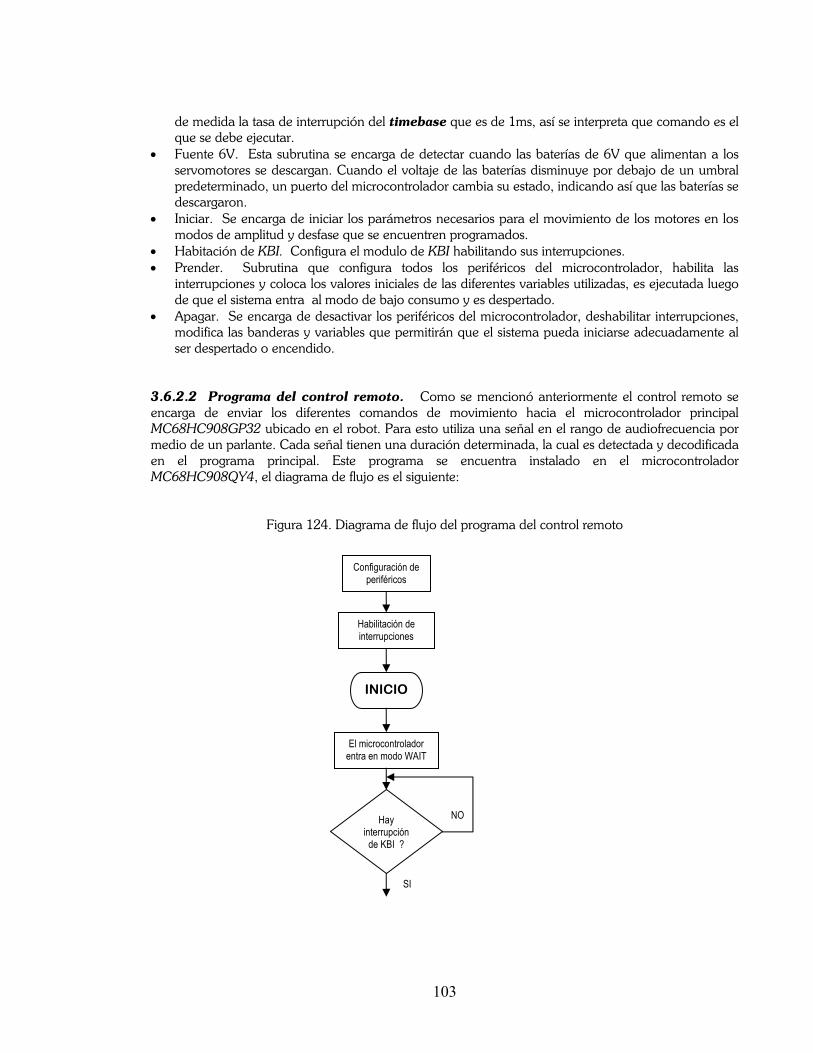
103
de medida la tasa de interrupción del timebase que es de 1ms, así se interpreta que comando es el que se debe ejecutar.
• Fuente 6V. Esta subrutina se encarga de detectar cuando las baterías de 6V que alimentan a los servomotores se descargan. Cuando el voltaje de las baterías disminuye por debajo de un umbral predeterminado, un puerto del microcontrolador cambia su estado, indicando así que las baterías se descargaron.
• Iniciar. Se encarga de iniciar los parámetros necesarios para el movimiento de los motores en los modos de amplitud y desfase que se encuentren programados.
• Habitación de KBI. Configura el modulo de KBI habilitando sus interrupciones. • Prender. Subrutina que configura todos los periféricos del microcontrolador, habilita las
interrupciones y coloca los valores iniciales de las diferentes variables utilizadas, es ejecutada luego de que el sistema entra al modo de bajo consumo y es despertado.
• Apagar. Se encarga de desactivar los periféricos del microcontrolador, deshabilitar interrupciones, modifica las banderas y variables que permitirán que el sistema pueda iniciarse adecuadamente al ser despertado o encendido.
3.6.2.2 Programa del control remoto. Como se mencionó anteriormente el control remoto se encarga de enviar los diferentes comandos de movimiento hacia el microcontrolador principal MC68HC908GP32 ubicado en el robot. Para esto utiliza una señal en el rango de audiofrecuencia por medio de un parlante. Cada señal tienen una duración determinada, la cual es detectada y decodificada en el programa principal. Este programa se encuentra instalado en el microcontrolador MC68HC908QY4, el diagrama de flujo es el siguiente:
Figura 124. Diagrama de flujo del programa del control remoto
INICIO
Configuración de periféricos
Habilitación de interrupciones
Hay interrupción
de KBI ?
SI
NO
El microcontrolador entra en modo WAIT
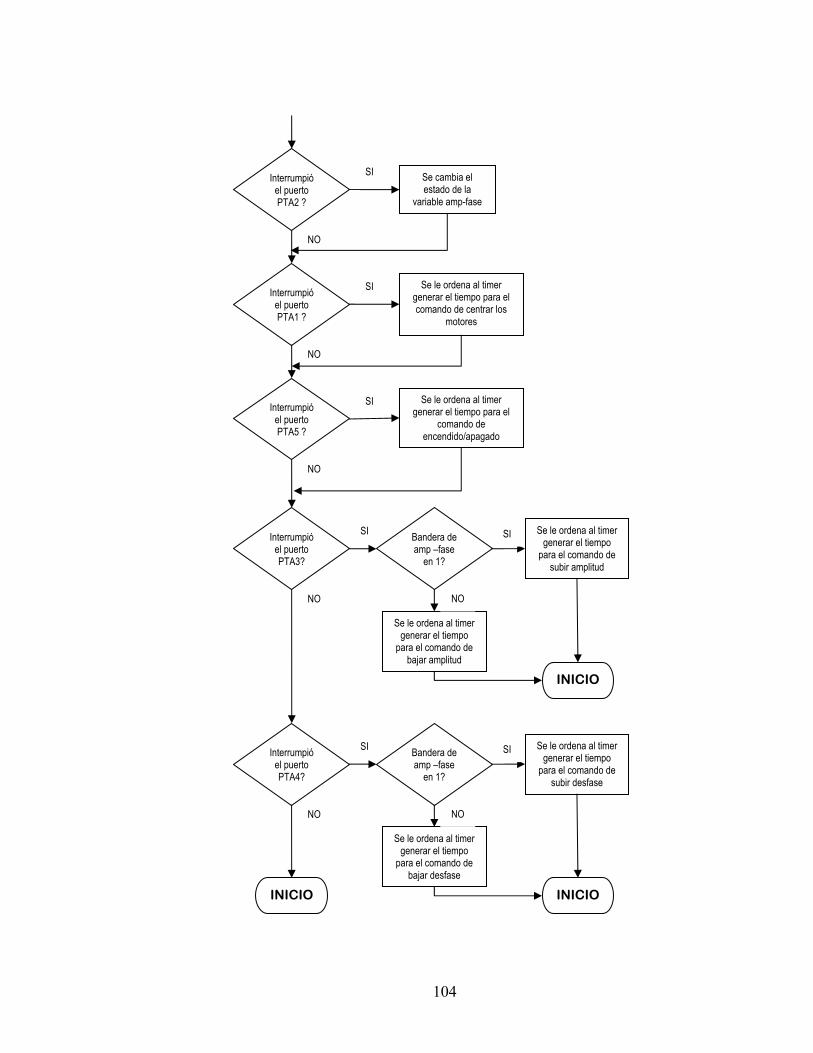
104
Interrumpió el puerto PTA2 ?
Se cambia el estado de la
variable amp-fase
SI
NO
Interrumpió el puerto PTA1 ?
Se le ordena al timer generar el tiempo para el comando de centrar los
motores
SI
NO
Interrumpió el puerto PTA5 ?
Se le ordena al timer generar el tiempo para el
comando de encendido/apagado
SI
NO
Interrumpió el puerto PTA4?
Interrumpió el puerto PTA3?
SI
NO
Bandera de amp –fase
en 1?
Se le ordena al timer generar el tiempo
para el comando de subir amplitud
SI
Se le ordena al timer generar el tiempo
para el comando de bajar amplitud
NO
INICIO
SI
NO
Bandera de amp –fase
en 1?
Se le ordena al timer generar el tiempo
para el comando de subir desfase
SI
Se le ordena al timer generar el tiempo
para el comando de bajar desfase
NO
INICIO INICIO
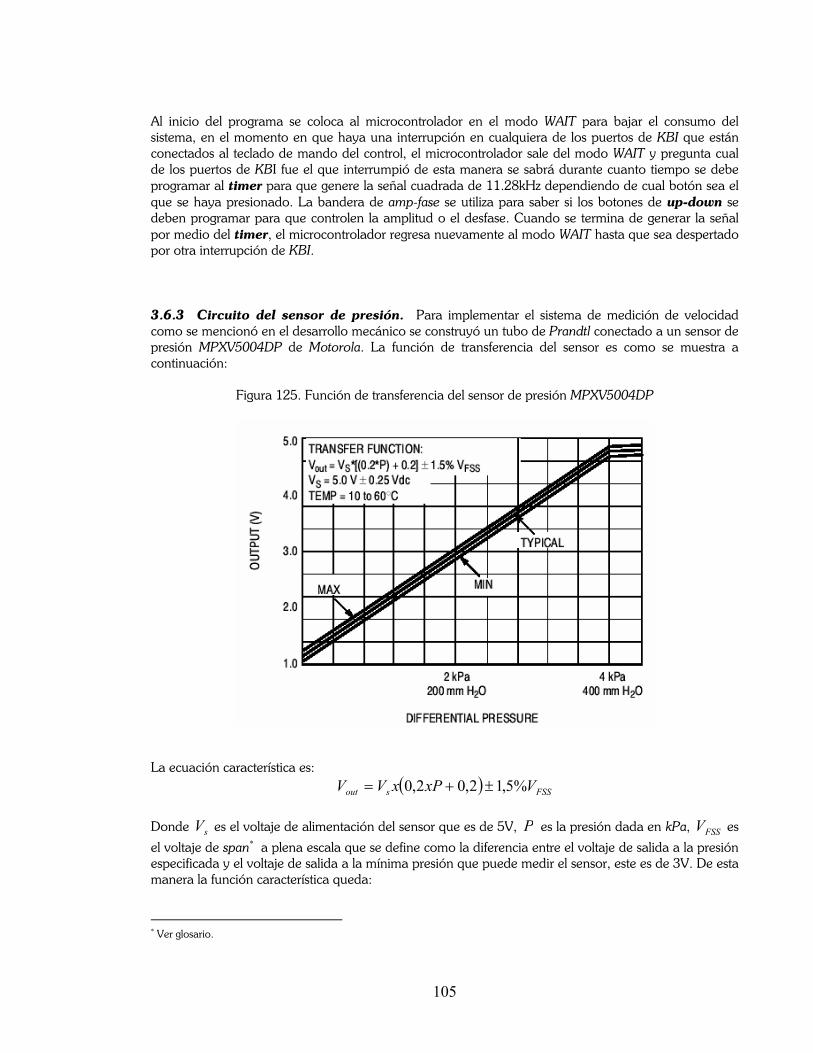
105
Al inicio del programa se coloca al microcontrolador en el modo WAIT para bajar el consumo del sistema, en el momento en que haya una interrupción en cualquiera de los puertos de KBI que están conectados al teclado de mando del control, el microcontrolador sale del modo WAIT y pregunta cual de los puertos de KBI fue el que interrumpió de esta manera se sabrá durante cuanto tiempo se debe programar al timer para que genere la señal cuadrada de 11.28kHz dependiendo de cual botón sea el que se haya presionado. La bandera de amp-fase se utiliza para saber si los botones de up-down se deben programar para que controlen la amplitud o el desfase. Cuando se termina de generar la señal por medio del timer, el microcontrolador regresa nuevamente al modo WAIT hasta que sea despertado por otra interrupción de KBI. 3.6.3 Circuito del sensor de presión. Para implementar el sistema de medición de velocidad como se mencionó en el desarrollo mecánico se construyó un tubo de Prandtl conectado a un sensor de presión MPXV5004DP de Motorola. La función de transferencia del sensor es como se muestra a continuación:
Figura 125. Función de transferencia del sensor de presión MPXV5004DP
La ecuación característica es: ( ) FSSsout VxPxVV %5,12,02,0 ±+=
Donde sV es el voltaje de alimentación del sensor que es de 5V, P es la presión dada en kPa, FSSV es
el voltaje de span* a plena escala que se define como la diferencia entre el voltaje de salida a la presión especificada y el voltaje de salida a la mínima presión que puede medir el sensor, este es de 3V. De esta manera la función característica queda:
* Ver glosario.
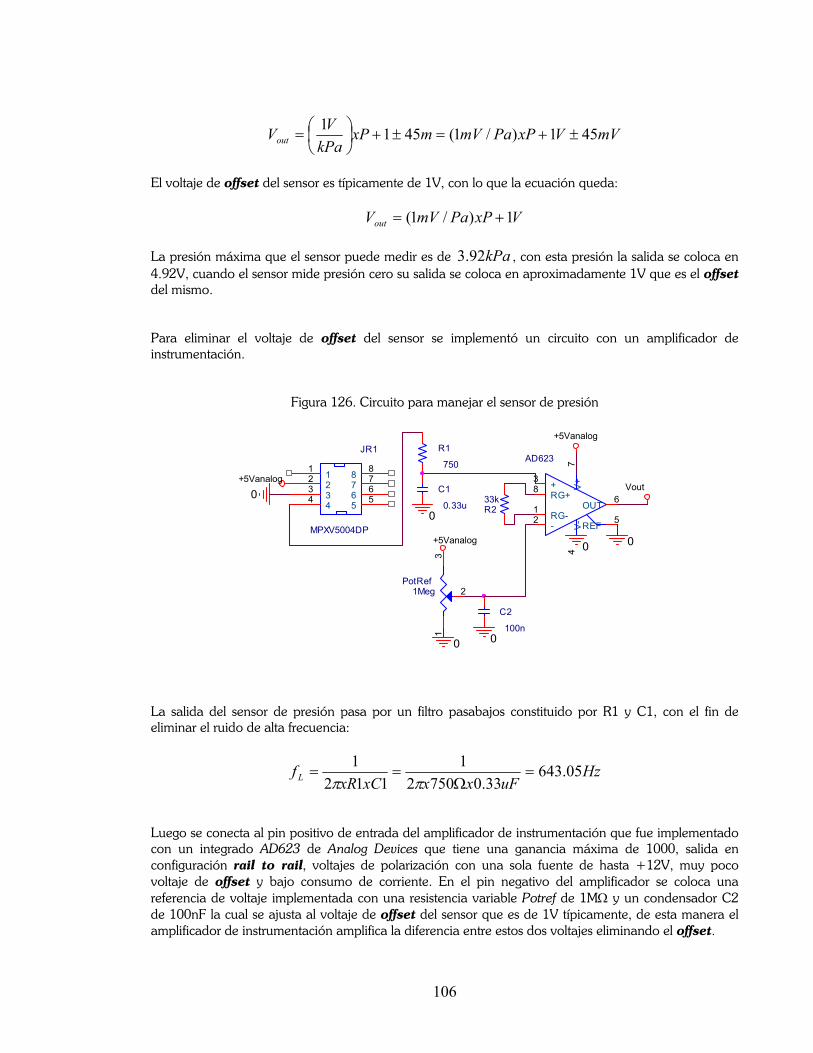
106
mVVxPPamVmxPkPaVVout 451)/1(4511
±+=±+
=
El voltaje de offset del sensor es típicamente de 1V, con lo que la ecuación queda:
VxPPamVVout 1)/1( +=
La presión máxima que el sensor puede medir es de kPa92.3 , con esta presión la salida se coloca en 4.92V, cuando el sensor mide presión cero su salida se coloca en aproximadamente 1V que es el offset del mismo. Para eliminar el voltaje de offset del sensor se implementó un circuito con un amplificador de instrumentación.
Figura 126. Circuito para manejar el sensor de presión
0
0
R1
750
Vout
0
C2
100n
JR1
MPXV5004DP
1234 5
678
1234 5
678+5Vanalog
C1
0.33u R233k
0
AD623
6
3
2 5
74
8
1 OUT
+
- REF
V+
V-
RG+
RG-
+5Vanalog
0
PotRef1Meg
13
2
+5Vanalog
0 La salida del sensor de presión pasa por un filtro pasabajos constituido por R1 y C1, con el fin de eliminar el ruido de alta frecuencia:
HzuFxxxCxR
fL 05.64333.07502
1112
1=
Ω==
ππ
Luego se conecta al pin positivo de entrada del amplificador de instrumentación que fue implementado con un integrado AD623 de Analog Devices que tiene una ganancia máxima de 1000, salida en configuración rail to rail, voltajes de polarización con una sola fuente de hasta +12V, muy poco voltaje de offset y bajo consumo de corriente. En el pin negativo del amplificador se coloca una referencia de voltaje implementada con una resistencia variable Potref de 1MΩ y un condensador C2 de 100nF la cual se ajusta al voltaje de offset del sensor que es de 1V típicamente, de esta manera el amplificador de instrumentación amplifica la diferencia entre estos dos voltajes eliminando el offset.
107
La ganancia del amplificador se ajusta dependiendo de la presión máxima que se vaya a medir en el sensor la cual depende a su vez de la velocidad máxima. Suponiendo que la velocidad máxima que se va a alcanzar en la plataforma es de aproximadamente 1.5m/s, se tiene entonces que la presión máxima en el sensor es:
( ) ( ) kPasmxmkgvPd 125.1/5,1/100021
21 232
maxmax === ρ
Donde p es la densidad del agua que es de 3/1000 mkg . Con este valor de presión el voltaje que se obtiene a la salida del sensor es:
VVkPaxPamVVout 125.21)125.1()/1( =+=
A la entrada del amplificador de instrumentación este voltaje se resta con el voltaje de referencia en el pin negativo con lo cual queda en 1.125V. La ganancia del amplificador se ajusta entonces de manera que cuando se registre este voltaje se tenga la máxima escala en la salida (es decir llegue a los 5V de la fuente de alimentación).
44.4125.15
max
===− VV
VV
Aout
SinstV
Para ajustar esta ganancia se utiliza la resistencia R3 como se observa en el circuito de la figura y, cuyo valor se calcula a partir de la función de transferencia del amplificador de instrumentación la cual viene dada por:
indifampout xVRkV
Ω+=− 3
1001
Donde ampoutV − es el voltaje a la salida del amplificador y inddifV es el voltaje diferencial a la entrada,
sabiendo que la ganancia que se debe obtener es de 4.44 se calcula entonces el valor de R3:
Ω=−Ω
=−Ω
=−
Ω=
−−
kkA
k
VV
kRinstv
indif
ampout06.29
144.4100
1100
1
1003
De esta forma la función de transferencia completa desde la salida del sensor de presión hasta la salida del amplificador de instrumentación queda descrita por la siguiente ecuación:
( )( ) ( )xPPamVxxPPamVxAVV instVsensorout /44.444.4/1 === −
Donde la presión P viene dada en Pa.
108
Para calcular la velocidad, la salida del amplificador de instrumentación se conecta a una de las entradas del ADC de un microcontrolador MC68HC908QY4, y por medio de la ecuación de Bernoulli para la presión dinámica* se puede calcular la velocidad.
2
21 vP ρ=
( )outout
out
out
VxxxVxxVx
Vx
xPv )1015.671(1045.450100045.4501044.4
22 33
3−−
−
===
==ρρ
Dentro del microcontrolador la lectura de voltaje es digitalizada a un valor que viene dado por su resolución, en este caso el ADC es de 8 bits con la cual la resolución máxima es de 28=256 pero se toman 255 ya que el valor de cero se incluye. De esta forma la relación entre el voltaje de entrada al ADC y la conversión digital es:
( ) ADCinADCinADCinADC xVxVxVVs
Cont −−− =
=
= 51
5255255
ADCinV − es el voltaje de entrada al ADC y ADCCont es el resultado digital luego de ser convertido por el
mismo. Teniendo esta ecuación, la velocidad en términos de ADCCont queda de la siguiente forma:
( ) ADCADC
out ContxxCont
xxVxxv 333 1097.9351
)1015.671()1015.671( −−− ===
Debido a las limitaciones de memoria RAM y tiempo de procesamiento del microcontrolador no es posible utilizar un algoritmo de raíz cuadrada que venga implementado en un compilador, es por esto que se realizó una aproximación polinómica de orden cuatro de la función raíz cuadrada entre 0 y 255. En la figura 127 se puede apreciar la función de raíz cuadrada en color azul y la curva de la aproximación realizada en color rojo.
* Ver marco teórico.
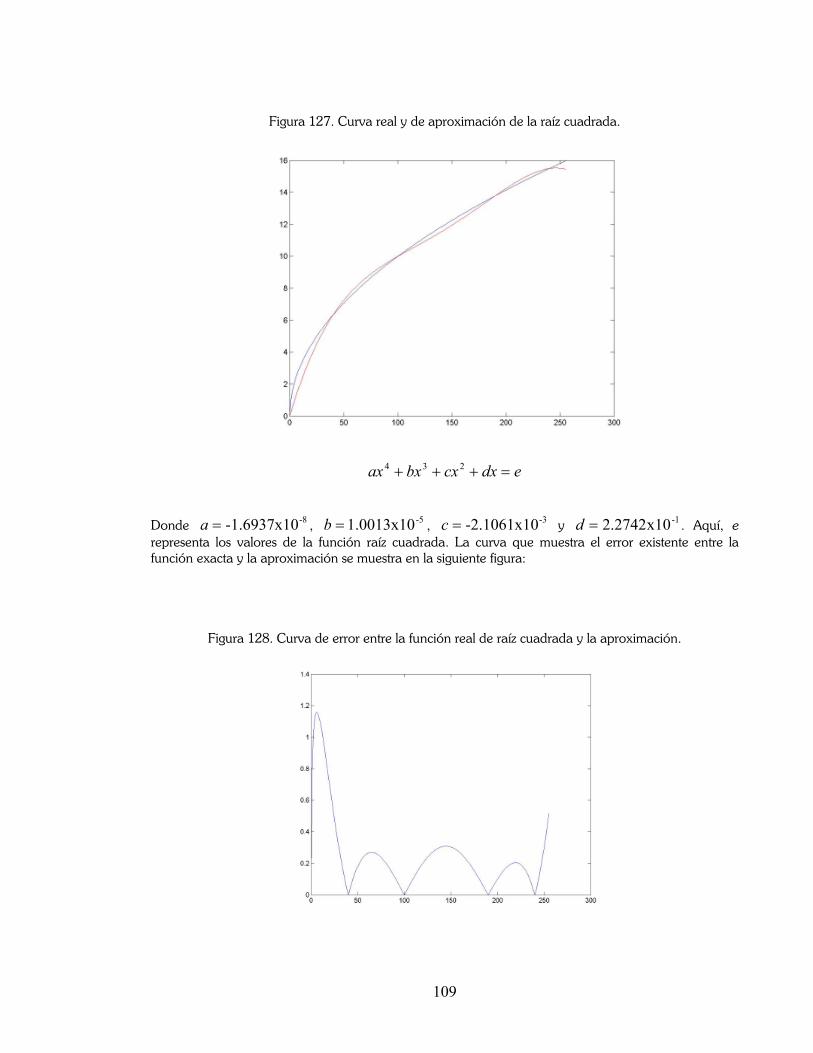
109
Figura 127. Curva real y de aproximación de la raíz cuadrada.
edxcxbxax =+++ 234
Donde -8-1.6937x10=a , -51.0013x10=b , -3-2.1061x10=c y -1x102742.2=d . Aquí, e representa los valores de la función raíz cuadrada. La curva que muestra el error existente entre la función exacta y la aproximación se muestra en la siguiente figura:
Figura 128. Curva de error entre la función real de raíz cuadrada y la aproximación.

110
3.6.4 Equipo empleado durante el desarrollo del proyecto
Para la ejecución del proyecto se emplearon instrumentos y herramientas para medición y programación. A continuación se presenta una breve reseña de estos instrumentos:
• Fuente de voltaje dual: King instruments DPS303. 30V. 3A • Generador de funciones: Leader. LFG1310. Permitió simular las señales de entrada y salida de los
microcontroladores o los circuitos análogos, como la señal de sonido empleada para transmitir órdenes a través del mando remoto, las señales cuadradas moduladas en ancho de pulso transmitidas por el microcontrolador para generar movimiento a través de la respuesta de los servomotores. De igual manera permitió evaluar la respuesta en frecuencia de los filtros análogos del sistema.
• Osciloscopio Digital: Tektronix. TDS3012. Permitió determinar el comportamiento de cada una de las señales de entrada y salida de los diversos puntos análogos y digitales del sistema. Adicionalmente, este modelo permite capturar imágenes de las señales a través de una unidad de diskette en formato JPG, para posteriormente analizarlas y consignarlas como parte del análisis del trabajo.
• Tarjeta de desarrollo Nitron Evaluation Board para MC68C908Q. Este dispositivo permite programar los microcontroladores de la familia Motorola hasta 8 bits de las familias 908QT y 908QY con adaptador propio para programar el microcontrolador del sistema principal MC68HC908GP32. Ver figura 129.
Figura 129. Tarjeta programadora utilizada durante el proyecto.
111
4. ANÁLISIS DE RESULTADOS
Este proyecto tenía como objetivo principal construir una plataforma robot subacuática con un mecanismo que permita desarrollar desplazamiento frontal inspirado en la forma de locomoción de los peces raya. Ésta es una de las áreas con menores avances en aplicaciones robóticas a pesar de ser una de las que más posibilidades ofrece en el desarrollo de nuevos mecanismos de propulsión eficientes. Sin lugar a dudas el futuro de los sistemas de propulsión, aéreos y acuáticos, se encuentra en el desarrollo de mecanismos basados en propulsores eficientes como aletas y alas flexibles, inspiradas en la evolución que han tenido en la naturaleza. Como resultado, el sistema de locomoción implementado logró la propulsión de la plataforma superando las expectativas iniciales y los limites previstos luego de la realización del modelo de pruebas. 4.1 MODELO DE PRUEBAS El ambiente de pruebas empleado para la evaluación de este modelo fue una piscina con las siguientes dimensiones: 12m de largo por 7m de ancho y 1,2m de profundidad. Se empleó el video como medio de registro y análisis del comportamiento de la plataforma. Los videos correspondientes a estas pruebas se presentan en la sección de anexos de este documento. Esta plataforma inicial, puede verse operando en los videos prototipo1, prototipo2, prototipo3, prototipo5mov y prototipo12. Como se observó en el desarrollo del trabajo, el modelo de pruebas construido presentaba grandes limitaciones debidas al insuficiente torque de los motores (3,7kg.cm), eficiencia del mecanismo de transmisión de movimiento y control de las secuencias de movimiento de las aletas. Adicionalmente el sistema de alimentación carecía de condiciones óptimas que le proporcionaran a la plataforma libertad de movimiento. El cable usado para esto, limitó notablemente el movimiento y generó interferencia eléctrica en las señales de control de los motores debido a su considerable longitud. Para mejorar el desempeño del mecanismo de propulsión y para proporcionarle flexibilidad a las maniobras de la plataforma en un futuro, fue necesario independizar los actuadores, acoplando cada actuador a un motor propio. La velocidad de desplazamiento alcanzada por este prototipo en las pruebas realizadas fue casi imperceptible y en ningún caso superior a 1cm/s. Esto debido a los problemas mecánicos descritos anteriormente y la presencia de un cable implementado para proveer la alimentación y la señal de
112
control de movimiento del servomotor. A estos problemas se suman además deficiencias en el diseño de las aletas y la forma del cuerpo. De este proceso de pruebas se determinaron los siguientes cambios para el desarrollo del modelo final: • Emplear motores de mayor torque. • Construir un mecanismo de transmisión independiente para cada actuador. • Diseñar y acoplar un mecanismo de transmisión de movimiento más eficiente, cuya construcción
eliminara las considerables pérdidas por fricción observadas en el mecanismo inicial biela-manivela. • Incrementar el número de actuadores para poder manipular la forma, generar y controlar el desfase
de la aleta. • Diseñar un control de posición para los servomotores con el fin de controlar la ubicación del
actuador. • Incluir un sistema de alimentación interno con baterías, con el fin de evitar conexiones externas. • Implementar un sistema de indicación que permitiera al usuario conocer el estado de operación de
la plataforma. • Diseñar un sistema remoto que permitiera cambiar el modo de operación de la plataforma. 4.2 MODELO FINAL En la construcción del modelo final se corrigieron las deficiencias encontradas en el modelo de pruebas y se planteó un diseño para facilitar la adecuación de elementos adicionales para futuras aplicaciones. Se probaron diferentes modos de operación con varios tipos de aletas lo que permitió evaluar la conveniencia de los materiales y la influencia de éstos en el desempeño de la plataforma. Con estas variaciones fue posible concluir que las películas plásticas más delgadas no permitían una reproducción uniforme del movimiento de los actuadores a través de la aleta. Por el contrario, la combinación de la película delgada (blanca) con la de PVC presentó la consistencia más adecuada en lo que se refiere a aspectos como la propagación uniforme y suave de los movimientos de las aletas en el agua. Por otra parte la combinación del hule con la película plástica delgada (piel enteriza) mostró un buen comportamiento aunque presentó dificultades por su elasticidad pues cuenta con una base tejida que reduce la flexibilidad del material y absorbe el agua. Al utilizar la plataforma con las aletas independientes (esquema de operación tipo tortuga) se observó más versatilidad en el movimiento debido a que no existían ligaduras entre los actuadores, lo que representó velocidades más altas. Como se mencionó anteriormente, cuando se utilizó la piel enteriza se presentaron problemas por su falta de elasticidad y por que los segmentos musculares de EVA absorbían agua, aumentando el ya elevado peso de la piel. Sin embargo con esta piel el movimiento registrado es muy similar al empleado por una Eagle Ray en su locomoción. La plataforma puede mejorar su desempeño con este perfil utilizando un material más flexible.
113
Cuando la plataforma opera en amplitudes altas, el cuerpo adquiere un movimiento vertical oscilatorio pronunciado (ver video Tmodo12), en el que se pierde energía. Estas amplitudes deberían ser usadas por intervalos luego de haber alcanzado una velocidad alta y constante, de la misma forma que lo hacen especies como la Rhinoptera Bonasus. El sistema de propulsión construido para la plataforma demostró ser muy efectivo ya que se logró obtener un desplazamiento frontal con una velocidad máxima relativamente alta (38cm/s, ver tabla 6), ligeramente superior a un DL/s*. A partir de este resultado se puede ver que este nuevo mecanismo puede ser aplicado a la construcción de vehículos acuáticos. La plataforma desarrollada se encuentra en la capacidad de realizar movimientos en cinco grados de libertad, solo con cambios en la programación de las rutinas de movimiento de las aletas. En principio la plataforma puede avanzar frontal o lateralmente, girar sobre sus tres ejes, o realizar las combinaciones de estos movimientos estando completamente sumergida. Por un problema en el sistema mecánico durante una de las pruebas (ver video girando3816), los actuadores de uno de los lados se detuvieron momentáneamente, razón por la cual la plataforma presentó un desplazamiento circular. Con esto puede apreciarse la capacidad de giro de la plataforma a partir del control de movimiento de cada uno de los actuadores. La utilidad de las membranas flexibles para la propulsión subacuática quedó demostrada a través del desarrollo de este proyecto, así como el gran número de desarrollos que se pueden conseguir basados en este sistema de locomoción poco explorado. Una de las grandes dificultades que se tuvo fue lograr la completa impermeabilización de la plataforma tal como se enunció en la sección de desarrollo. Se probaron varias alternativas para la construcción de los empaques de los actuadores y los pegamentos y sellantes usados para las uniones de las diferentes piezas de la plataforma. Sin embargo no se logró obtener un resultado ciento por ciento satisfactorio ya que siempre había pequeños orificios por los cuales se filtraba el agua hacia el interior de la estructura. Además, el gran número de piezas que constituyen la plataforma hacen que el proceso de armado y sellado sea lento y difícil, y aumentan la posibilidad de filtraciones. Sin embargo esta alternativa empleada para la construcción de la plataforma fue la que mejor se adaptó al presupuesto y alcances del proyecto. El sistema de control implementado con el microcontrolador MC68HC908GP32, junto con el hardware adicional, permite gran flexibilidad en la operación de la plataforma, obteniendo un vehículo autónomo AUV u operado remotamente ROV (Remotely Operated Vehicle) a través de algunos cambios en el software, control independiente de cada uno de los cuatro actuadores, capacidad de informar al usuario acerca de la operación de la plataforma y capacidad de almacenar datos de forma permanente gracias a la memoria flash del microcontrolador (32K).
* Ver glosario.
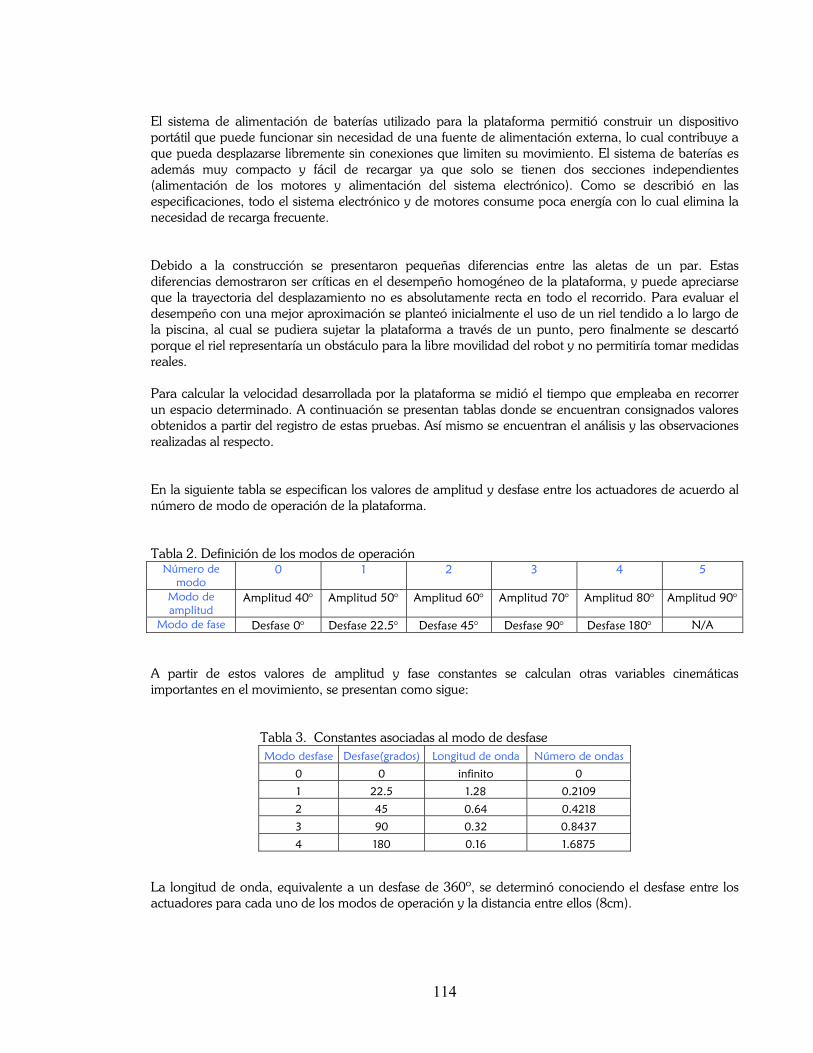
114
El sistema de alimentación de baterías utilizado para la plataforma permitió construir un dispositivo portátil que puede funcionar sin necesidad de una fuente de alimentación externa, lo cual contribuye a que pueda desplazarse libremente sin conexiones que limiten su movimiento. El sistema de baterías es además muy compacto y fácil de recargar ya que solo se tienen dos secciones independientes (alimentación de los motores y alimentación del sistema electrónico). Como se describió en las especificaciones, todo el sistema electrónico y de motores consume poca energía con lo cual elimina la necesidad de recarga frecuente. Debido a la construcción se presentaron pequeñas diferencias entre las aletas de un par. Estas diferencias demostraron ser críticas en el desempeño homogéneo de la plataforma, y puede apreciarse que la trayectoria del desplazamiento no es absolutamente recta en todo el recorrido. Para evaluar el desempeño con una mejor aproximación se planteó inicialmente el uso de un riel tendido a lo largo de la piscina, al cual se pudiera sujetar la plataforma a través de un punto, pero finalmente se descartó porque el riel representaría un obstáculo para la libre movilidad del robot y no permitiría tomar medidas reales. Para calcular la velocidad desarrollada por la plataforma se midió el tiempo que empleaba en recorrer un espacio determinado. A continuación se presentan tablas donde se encuentran consignados valores obtenidos a partir del registro de estas pruebas. Así mismo se encuentran el análisis y las observaciones realizadas al respecto. En la siguiente tabla se especifican los valores de amplitud y desfase entre los actuadores de acuerdo al número de modo de operación de la plataforma. Tabla 2. Definición de los modos de operación
Número de modo
0 1 2 3 4 5
Modo de amplitud
Amplitud 40° Amplitud 50° Amplitud 60° Amplitud 70° Amplitud 80° Amplitud 90°
Modo de fase Desfase 0° Desfase 22.5° Desfase 45° Desfase 90° Desfase 180° N/A A partir de estos valores de amplitud y fase constantes se calculan otras variables cinemáticas importantes en el movimiento, se presentan como sigue: Tabla 3. Constantes asociadas al modo de desfase
Modo desfase Desfase(grados) Longitud de onda Número de ondas
0 0 infinito 0
1 22.5 1.28 0.2109
2 45 0.64 0.4218
3 90 0.32 0.8437
4 180 0.16 1.6875 La longitud de onda, equivalente a un desfase de 360º, se determinó conociendo el desfase entre los actuadores para cada uno de los modos de operación y la distancia entre ellos (8cm).

115
Por su parte, el número de ondas presentes en la aleta fue el resultado de la razón entre la longitud de la base de la aleta, que en el caso de la plataforma es de 27cm, y la longitud de onda correspondiente a cada uno de los modos de desfase. Tabla 4. Valores de amplitud para cada uno de los modos
Modo de amplitud Ángulo Amplitud (m) MDA
0 40 0.1368 0.2443
1 50 0.1690 0.3019
2 60 0.2000 0.3571
3 70 0.2294 0.4097
4 80 0.2571 0.4591
5 90 0.2828 0.5051 En la tabla 4 se encuentran consignados los valores correspondientes a cada uno de los modos de amplitud. Estos valores se calcularon teniendo en cuenta que el movimiento de las aletas puede representarse en un triángulo compuesto a su vez por dos triángulos rectángulos cuya hipotenusa es el ancho de las aletas (la dimensión que se extiende desde el cuerpo hacia los lados, para este caso 20cm) y el ángulo de cada uno de estos triángulos es la mitad del ángulo que cubre el movimiento del servomotor. El cálculo se realizó como sigue:
[ ] 2)2/(2,0 xSenAmplitud α=
Donde α es el ángulo correspondiente a cada uno de los modos de amplitud. De esta manera es posible determinar la amplitud del movimiento de las aletas. De la misma manera se presenta el MDA (Mid Disc Amplitud) como el valor de la amplitud normalizado con respecto a la envergadura total de las aletas, que para el caso de la plataforma tiene un valor de 0,56m. Figura 130. Esquema del movimiento de las aletas
En la tabla 5 se presentan los valores obtenidos de velocidad U, frecuencia f, velocidad de la onda propulsora c, velocidad normalizada U (DL/s), velocidad de fase v y Stride Lenght, obtenidos de la siguiente manera: la velocidad y frecuencia medidas en las pruebas, la velocidad de onda propulsora c es el resultado del producto de la longitud de onda de cada modo con su correspondiente frecuencia. La velocidad normalizada U (DL/s) se expresa en DL/s y se define como el cociente entre la velocidad
A/2
A
Ancho de las aletas
α
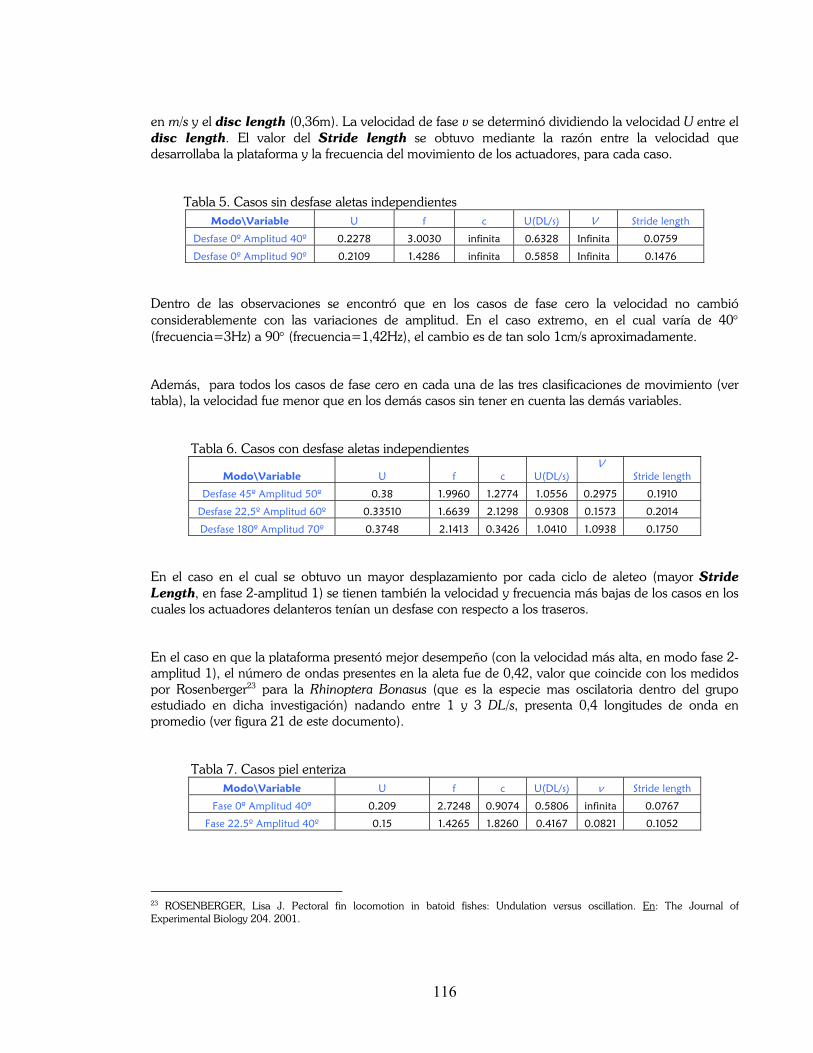
116
en m/s y el disc length (0,36m). La velocidad de fase v se determinó dividiendo la velocidad U entre el disc length. El valor del Stride length se obtuvo mediante la razón entre la velocidad que desarrollaba la plataforma y la frecuencia del movimiento de los actuadores, para cada caso. Tabla 5. Casos sin desfase aletas independientes
Modo\Variable U f c U(DL/s) V Stride length
Desfase 0º Amplitud 40º 0.2278 3.0030 infinita 0.6328 Infinita 0.0759
Desfase 0º Amplitud 90º 0.2109 1.4286 infinita 0.5858 Infinita 0.1476
Dentro de las observaciones se encontró que en los casos de fase cero la velocidad no cambió considerablemente con las variaciones de amplitud. En el caso extremo, en el cual varía de 40° (frecuencia=3Hz) a 90° (frecuencia=1,42Hz), el cambio es de tan solo 1cm/s aproximadamente.
Además, para todos los casos de fase cero en cada una de las tres clasificaciones de movimiento (ver tabla), la velocidad fue menor que en los demás casos sin tener en cuenta las demás variables. Tabla 6. Casos con desfase aletas independientes
Modo\Variable U f c U(DL/s) V Stride length
Desfase 45º Amplitud 50º 0.38 1.9960 1.2774 1.0556 0.2975 0.1910
Desfase 22,5º Amplitud 60º 0.33510 1.6639 2.1298 0.9308 0.1573 0.2014
Desfase 180º Amplitud 70º 0.3748 2.1413 0.3426 1.0410 1.0938 0.1750
En el caso en el cual se obtuvo un mayor desplazamiento por cada ciclo de aleteo (mayor Stride Length, en fase 2-amplitud 1) se tienen también la velocidad y frecuencia más bajas de los casos en los cuales los actuadores delanteros tenían un desfase con respecto a los traseros. En el caso en que la plataforma presentó mejor desempeño (con la velocidad más alta, en modo fase 2-amplitud 1), el número de ondas presentes en la aleta fue de 0,42, valor que coincide con los medidos por Rosenberger23 para la Rhinoptera Bonasus (que es la especie mas oscilatoria dentro del grupo estudiado en dicha investigación) nadando entre 1 y 3 DL/s, presenta 0,4 longitudes de onda en promedio (ver figura 21 de este documento). Tabla 7. Casos piel enteriza
Modo\Variable U f c U(DL/s) v Stride length
Fase 0º Amplitud 40º 0.209 2.7248 0.9074 0.5806 infinita 0.0767
Fase 22.5º Amplitud 40º 0.15 1.4265 1.8260 0.4167 0.0821 0.1052
23 ROSENBERGER, Lisa J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. En: The Journal of Experimental Biology 204. 2001.
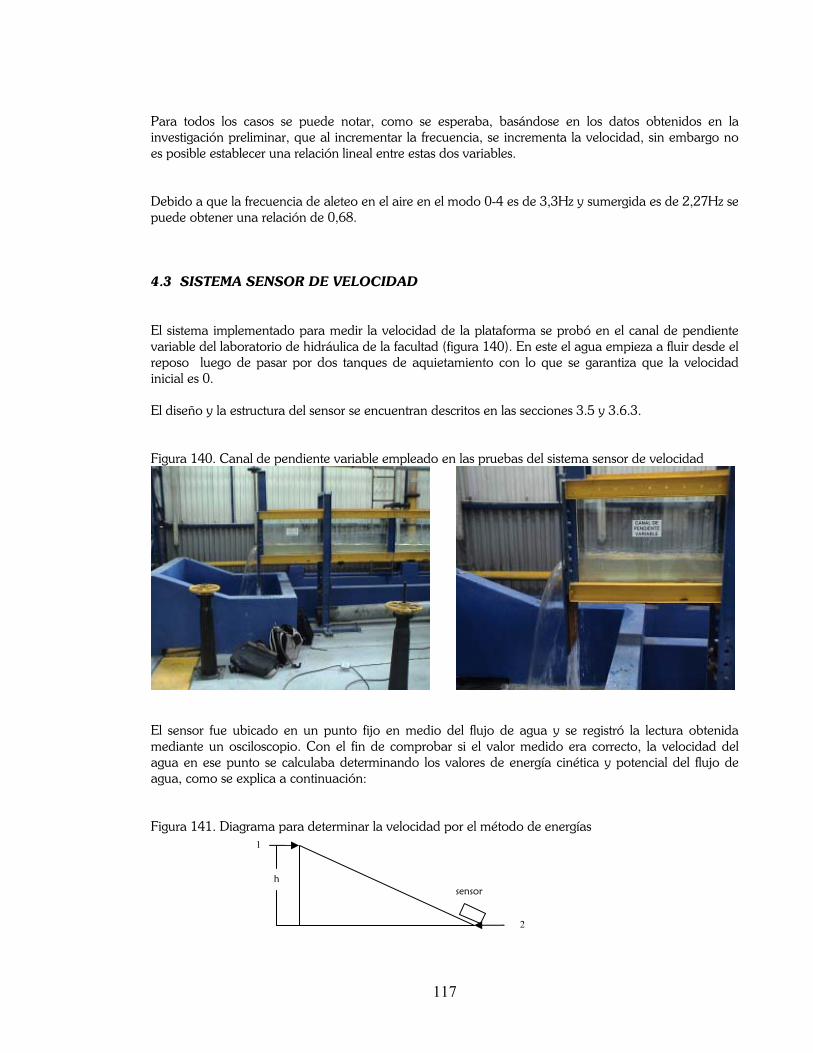
117
Para todos los casos se puede notar, como se esperaba, basándose en los datos obtenidos en la investigación preliminar, que al incrementar la frecuencia, se incrementa la velocidad, sin embargo no es posible establecer una relación lineal entre estas dos variables. Debido a que la frecuencia de aleteo en el aire en el modo 0-4 es de 3,3Hz y sumergida es de 2,27Hz se puede obtener una relación de 0,68. 4.3 SISTEMA SENSOR DE VELOCIDAD El sistema implementado para medir la velocidad de la plataforma se probó en el canal de pendiente variable del laboratorio de hidráulica de la facultad (figura 140). En este el agua empieza a fluir desde el reposo luego de pasar por dos tanques de aquietamiento con lo que se garantiza que la velocidad inicial es 0. El diseño y la estructura del sensor se encuentran descritos en las secciones 3.5 y 3.6.3. Figura 140. Canal de pendiente variable empleado en las pruebas del sistema sensor de velocidad
El sensor fue ubicado en un punto fijo en medio del flujo de agua y se registró la lectura obtenida mediante un osciloscopio. Con el fin de comprobar si el valor medido era correcto, la velocidad del agua en ese punto se calculaba determinando los valores de energía cinética y potencial del flujo de agua, como se explica a continuación: Figura 141. Diagrama para determinar la velocidad por el método de energías
1
2
sensor h
118
La referencia cero de energía potencial gravitacional se fija en el mismo punto donde se coloca el sensor (punto 2), así en este punto un elemento de agua tiene solamente energía cinética; de la misma forma cuando el agua comienza su recorrido en la parte alta del canal (punto 1) un elemento de agua tiene solamente energía potencial y no tiene energía cinética ya que su velocidad es cero. De esta forma se plantean las ecuaciones de energías y se puede calcular así la velocidad del agua en el punto 2. Punto 1:
mghEpotencial =
0=cinéticaE
Punto 2:
0=potencialE
2
21 mvEcinética =
Por la ley de conservación de la energía mecánica, suponiendo que la fricción es cero, se tiene que toda la energía potencial que el elemento de agua tiene en el punto 1 se transforma en energía cinética en el punto 2:
2
21 mvmgh =
ghv 2=
De esta forma conociendo los valores de h y g se puede calcular la velocidad del flujo de agua en el punto 2, y de esta manera comparar la lectura registrada por el sensor de presión con la medida de velocidad calculada. Figura 142. Sistema probado en el canal Figura 143. Equipo empleado en las pruebas
119
En las figuras 142 y 143 se presentan respectivamente las imágenes del sistema sensor de velocidad sumergido en el canal y el equipo empleado en la realización de las pruebas. A continuación se presenta la tabla que contiene la respuesta ideal (valores esperados) del sensor de velocidad para un intervalo de valores que varía de 0 a 1 Voltio en pasos de 100mV. Tabla 8. Relaciones velocidad-voltaje
V. Salida V. Sensor Presión (Pa) Velocidad
0 0 0 0
0.1 0.0231 23.0771 0.2148
0.2 0.0462 46.1542 0.3038
0.3 0.0692 69.2313 0.3721
0.4 0.0923 92.3084 0.4297
0.5 0.1154 115.3855 0.4804
0.6 0.1385 138.4626 0.5262
0.7 0.1615 161.5397 0.5684
0.8 0.1846 184.6168 0.6076
0.9 0.2077 207.6939 0.6445
1 0.2308 230.7710 0.6794 Donde V. Salida es el voltaje de salida supuesto, V. Sensor es el valor del voltaje obtenido en el sensor correspondiente a cada uno de los voltajes de salida, a los cuales también corresponden los valores de presión y velocidad contenidos en la tabla. Se realizaron dos pruebas, cada una con cuatro puntos de muestra a lo largo del canal.
Tabla 9. Ubicación de los puntos de prueba h(m) v (m/s) 0.01 0.445 0.014 0.527 0.023 0.668 0.028 0.739
La tabla que sigue muestra los valores obtenidos de las dos mediciones realizadas al sistema en dos momentos diferentes bajo las mismas condiciones. Para cada uno de los valores de voltaje obtenido a la salida (y en el sensor) se presentan las variables presión y velocidad correspondientes a estas mediciones.
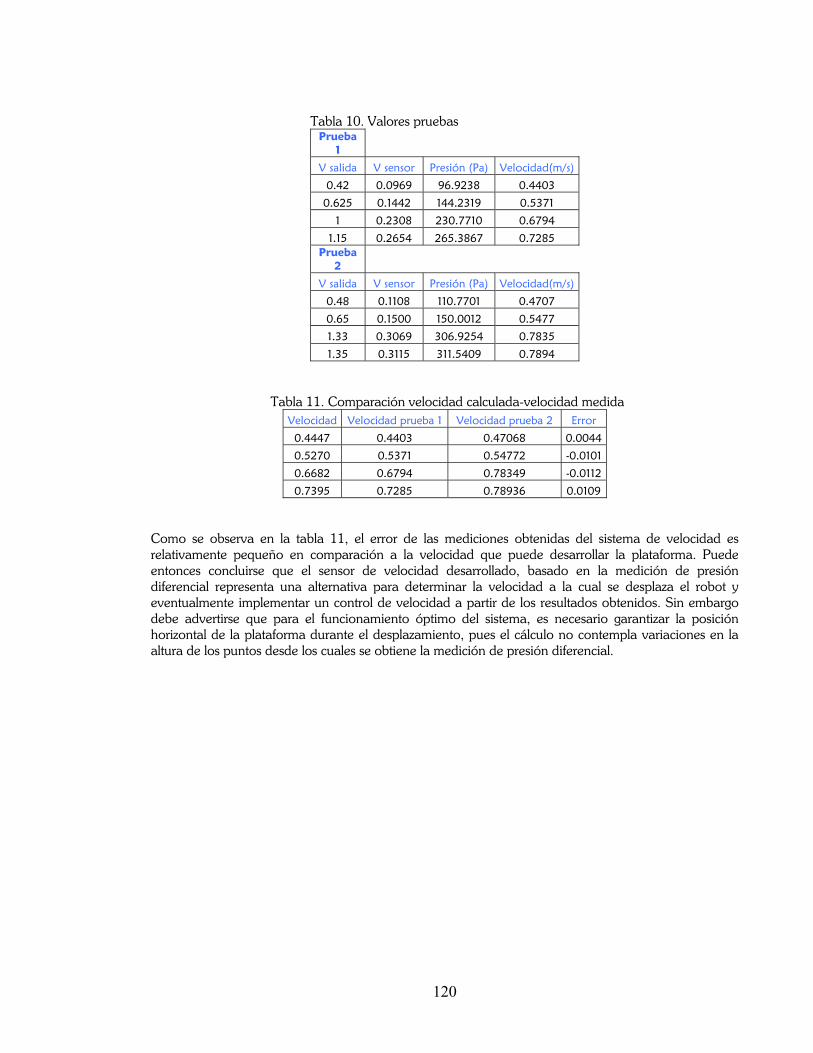
120
Tabla 10. Valores pruebas Prueba
1
V salida V sensor Presión (Pa) Velocidad(m/s)
0.42 0.0969 96.9238 0.4403
0.625 0.1442 144.2319 0.5371
1 0.2308 230.7710 0.6794
1.15 0.2654 265.3867 0.7285 Prueba
2
V salida V sensor Presión (Pa) Velocidad(m/s)
0.48 0.1108 110.7701 0.4707
0.65 0.1500 150.0012 0.5477
1.33 0.3069 306.9254 0.7835
1.35 0.3115 311.5409 0.7894
Tabla 11. Comparación velocidad calculada-velocidad medida
Velocidad Velocidad prueba 1 Velocidad prueba 2 Error
0.4447 0.4403 0.47068 0.0044
0.5270 0.5371 0.54772 -0.0101
0.6682 0.6794 0.78349 -0.0112
0.7395 0.7285 0.78936 0.0109 Como se observa en la tabla 11, el error de las mediciones obtenidas del sistema de velocidad es relativamente pequeño en comparación a la velocidad que puede desarrollar la plataforma. Puede entonces concluirse que el sensor de velocidad desarrollado, basado en la medición de presión diferencial representa una alternativa para determinar la velocidad a la cual se desplaza el robot y eventualmente implementar un control de velocidad a partir de los resultados obtenidos. Sin embargo debe advertirse que para el funcionamiento óptimo del sistema, es necesario garantizar la posición horizontal de la plataforma durante el desplazamiento, pues el cálculo no contempla variaciones en la altura de los puntos desde los cuales se obtiene la medición de presión diferencial.
121
5. CONCLUSIONES A partir de la realización de este proyecto se puede ver la factibilidad que hay de realizar proyectos sencillos de robótica empleando un bajo presupuesto y utilizando materiales de uso común. Se encontraron inconvenientes en cuanto a la consecución de recursos, equipos y ambientes de pruebas específicos para la medición de parámetros como velocidad de desplazamiento, fuerzas y volumen entre otros, lo cual dificultó la realización de un proceso ágil de pruebas de diseño y construcción de la plataforma, impidiendo a su vez la evaluación del desempeño de elementos adicionales que incrementarían el nivel de autonomía y funcionalidad de la plataforma. Se observaron grandes dificultades en el proceso de diseño y construcción de la estructura mecánica debido principalmente al problema de la impermeabilización de la plataforma, que es un factor crítico para el adecuado funcionamiento del sistema. Con mayor asesoría especializada, una planeación extensa, y la posibilidad de pruebas sucesivas, puede aumentarse la robustez de la plataforma. La integración de elementos interdisciplinarios, revela el amplio campo de aplicación de la electrónica dentro del desarrollo de nuevos dispositivos, y de igual forma la importancia de los conocimientos aportados por otras áreas, para alcanzar un óptimo resultado en el desarrollo de proyectos que buscan innovar en la exploración y construcción de nuevos sistemas. Se adquirió un gran conocimiento de las propiedades y el manejo de los diferentes materiales utilizados en el proyecto; se encontró por ejemplo que el aluminio es un material que permite mucha flexibilidad en cuanto a las diversas formas que se pueden construir con el, ya que es fácil de cortar y moldear. El acrílico también es un material muy funcional, con el proceso de termoformado se puede obtener cualquier forma que se desee. El látex es muy económico y fácil de conseguir, y ofrece una buena opción para la construcción de los empaques y elementos de impermeabilización. En cuanto al sistema de propulsión utilizado en la plataforma, se encontró que los servomotores son dispositivos que ofrecen grandes prestaciones debido a su facilidad de manejo y excelentes características de torque y velocidad. Gracias a estos se pudo implementar un sistema de desplazamiento sencillo que permitía obtener diversas rutinas de movimiento en los actuadores. La transmisión por sonido para el mando remoto de la plataforma brinda grandes ventajas en cuanto a la sencillez de su diseño, construcción y costos, sin embargo a lo largo del desarrollo del proyecto fue posible detectar inconvenientes debidos a interferencia de señales del ambiente que se encuentran en el mismo intervalo de frecuencias de recepción del sistema. Fue posible determinar la gran influencia que tienen el perfil y el material de las aletas de la plataforma en factores como desplazamiento, estabilidad. Sin duda imitar un modelo biológico adecuado mejora el desempeño de estas.
122
Un factor determinante en la locomoción subacuática es la ubicación del centro de masa y la flotabilidad cero, condición difícil de alcanzar y mantener. Se desarrolló un sistema de medición de velocidad a partir de la presión diferencial, obteniendo resultados satisfactorios y posiblemente constituyan una alternativa orientada a complementar en un futuro las funciones y los modos de operación de la plataforma. A lo largo del proyecto fue posible determinar la amplia diferencia que existe en el desempeño de dispositivos electrónicos y mecánicos, al ser accionados en medios diferentes, para este caso particular aire y agua. Para tener un mayor acercamiento previo al comportamiento real de un módulo sería favorable el uso de herramientas especializadas como software de simulación que se ajuste a cada caso, y adicionalmente un análisis mas profundo acerca de las condiciones y las variables que influyen en el comportamiento de los diversos elementos que componen la plataforma. Esta parte del estudio representa un proyecto extenso que no podía ser cubierto en su totalidad durante la ejecución del trabajo objeto de este documento por cuestiones de tiempo, recursos y costos. El desplazamiento de la plataforma representa un gran avance en la emulación de mecanismos de locomoción de organismos biológicos, de una forma satisfactoria. De esta forma se marca una pauta en el diseño y construcción de sistemas robóticas subacuáticos, ya que se empleó un sistema de locomoción subacuática que no había sido ampliamente explorado hasta el momento en propuestas anteriores. El proyecto marca un punto de partida para la realización de futuras investigaciones que pueden seguir la línea planteada para construir sistemas de locomoción subacuática más eficientes y versátiles.
123
BIBLIOGRAFÍA ALBERTSON, Maurice L; BARTON, James R and SIMONS, Daryl B. Fluid mechanics for engineers. Prentice Hall, 1960. BOILEAU, Renee; FAN, Lilian and MOORE, Tim. Mechanization of Rajiform Swimming Motion. The making of Robo Ray ,2002. Películas plásticas. Empaques plásticos de México. http://www.empaquesplasticos.com.mx/epmwebp1.htm FishBase, www.fishbase.org FRASICA ARISTIZABAL, Alejandro y GÜIZA, Fabián. Proyecto Raya. Plataforma robótica subacuática controlada por un algoritmo genético. Bogotá D.C., 2001, 86p. Trabajo de grado (Ingeniero Electrónico). Pontificia Universidad Javeriana. Facultad de Ingeniería. Departamento de Electrónica. JIMENEZ, J.M.; BUCHHOLZ, J.H.; STAPLES, A.E.; ALLEN, J.J. and SMITS, A.J. Flapping membranes for thrust production. KALIDE, Wolfgang. Introducción a la hidrodinámica técnica. Bilbao: Urmo, 1969 MILNE-THOMSON, L.M. Tratado de hidrodinámica teórica. Madrid: Aguilar, 1951. PINCOCK, D.G and VOEGELI, F.A. Quick course in underwater telemetry systems. VEMCO LIMITED Copyright, 2002. Propiedades del acrílico, http://www.tridimension.com.ar/acrilico.htm Propiedades del aluminio, http://www.confemetal.es/aseral/obtencion.htm ROSENBERGER, Lisa J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. En: The Journal of Experimental Biology 204. 2001. Robotuna, http://web.mit.edu/towtank/www/tuna/robotuna.html
124
Robotuna II, http://www.mit.edu/afs/athena/org/t/towtank/www/tuna/robotunaII.html Robopike, http://web.mit.edu/towtank/www/pike/ Servocity, http://www.servocity.com Servomotores, http://www.creaturoides.com/srvesp.htm SFAKIOTASKIS, Michael; LANE, David and DAVIES, J. Bruce C. Review of fish swimming modes for aquatic locomotion. En: IEEE Journal of oceanic engineering. Vol. 24, No 2, April 1999. Vorticity Control Unmanned Undersea Vehicle (VCUUV), http://www.draper.com/tuna_web/frameset.htm?../title.htm&fishliketit.htm&../nav.htm&vcuuv.htm WALKER, Jeffrey A. and WESTNEAT, Mark. Labriform propulsion in fishes: kinematics of flapping aquatic flight in the bird wrasse gomphosus varius (Labridae) En: The Journal of experimental Biology 200, 1997. .