PolinômioscomMemóriadeComplexidade ...bluetooth, GPS, entre outros, tende, ao passar dos anos, a...
76
Luis Schuartz Polinômios com Memória de Complexidade Reduzida e sua Aplicação na Pré-distorção Digital de Amplificadores de Potência Curitiba, PR 2017
Transcript of PolinômioscomMemóriadeComplexidade ...bluetooth, GPS, entre outros, tende, ao passar dos anos, a...

Luis Schuartz
Polinômios com Memória de ComplexidadeReduzida e sua Aplicação na Pré-distorção
Digital de Amplificadores de Potência
Curitiba, PR
2017


Luis Schuartz
Polinômios com Memória de Complexidade Reduzida esua Aplicação na Pré-distorção Digital de Amplificadores
de Potência
Trabalho de conclusão de curso apresentadopor Luis Schuartz a comissão organizadoracomo requisito fundamental para formaçãoem Engenharia Elétrica pela UniversidadeFederal do Paraná, orientado pelo professorDr. Eduardo Gonçalves de Lima.
Universidade Federal do Paraná (UFPR)
Departamento de Engenharia elétrica
Orientador: Eduardo Gonçalves de Lima
Curitiba, PR2017

Luis Schuartz
Polinômios com Memória de Complexidade Reduzida esua Aplicação na Pré-distorção Digital de Amplificadores
de Potência
Trabalho de conclusão de curso apresentadopor Luis Schuartz a comissão organizadoracomo requisito fundamental para formaçãoem Engenharia Elétrica pela UniversidadeFederal do Paraná, orientado pelo professorDr. Eduardo Gonçalves de Lima.
Trabalho aprovado. Curitiba, PR, 27 de junho de 2017:
Eduardo Gonçalves de LimaOrientador
Bernardo Rego Barros de AlmeidaLeite
Professor avaliador
Luis Henrique Assumpção LolisProfessor avaliador
Curitiba, PR2017

Agradecimentos
Agradeço primeiro a Deus por me conceder o dom da vida e conhecimento paraque este trabalho fosse concluído.
Aos meus familiares, em especial meu pai Aloise Schuartz por todo apoio e paciênciadurante todo período de graduação, minha mãe Emilia Schuartz que sempre teve orgulhodas minhas conquistas e Rafaela Wojcik pelo apoio e paciência durante todo esse período.
Ao orientador Eduardo Gonçalves de Lima pelo incentivo e toda dedicação destinadaa conclusão deste trabalho.
Aos amigos e colegas que de diversas formas forneceram apoio para realização desteestudo, em especial Edson Leonardo por fornecer o projeto no Cadence Virtuoso para ostestes realizados.
Aos professores em especial membros do GICS, pela contribuição de forma indiretapara conclusão deste trabalho.


ResumoOs sistemas de comunicação em rádio frequência, difundidos principalmente por aparelhosportáteis, exigem alto desempenho e eficiência. Neste sistema, o amplificador de potência(PA) é o componente mais crítico por ser o maior responsável pela não linearidade e consumode energia do sistema. Quando o PA está operando com maior eficiência, em pontos de altacompressão de ganho, ocorre distorção do sinal criando componentes de intermodulaçãoque interferem em canais adjacentes, em geral, descumprindo normas regulamentadorascomo LTE e IEEE802.15.4. Com baixo ganho o PA apresenta resposta linear e baixaeficiência. Para que o sistema apresente resposta linear e eficiente simultaneamente, umpré-distorsor digital (DPD) operando em banda base é inserido previamente em cascatacom o PA, o DPD atua gerando uma função inversa do PA.
O DPD é baseado em modelos polinomiais com memória bastante precisos que podemapresentar quantidade significativa de coeficientes. Diminuir essa quantia é fundamentalpara reduzir o custo computacional e consumo de potência demandado pelo DPD. Logo,algoritmos são utilizados para escolher os coeficientes mais importantes, ignorando orestante deles. O objetivo deste trabalho é comparar 3 algoritmos: Mínimos QuadradosOrtogonais (OLS), Análise de Componentes Principais (PCA) e Amostragem Comprimida(CS) baseado em otimização inteira; e aplicá-los na redução de coeficientes em linearizadoresde PAs projetados em softwares de simulação de circuitos.
A linearização dos PAs mostra que o OLS apresenta melhor resultado na redução decoeficientes, apresentando resultado satisfatório com desempenho muito próximo ao melhorcaso, com 5% de coeficientes, seguido do PCA que reduz em média 50%. O CS de baixocusto computacional (CoSaMP) original não apresentou resultado satisfatório e uma dasduas modificações sugeridas apresentou resultados relevantes. Quando aplicado na reduçãode coeficientes, 5% dos coeficientes foram removidos mantendo a mesma qualidade demodelagem. Dois PAs foram linearizados, compensando distorção não linear de amplitudee de fase, reduzindo a potência dispersa nos canais adjacentes.
Palavras-chave: Amplificador de potência. Pré-distorção digital. Mínimos QuadradosOrtogonais. Análise de Componentes Principais. Amostragem Comprimida.


AbstractRadio frequency communication systems, mainly used by mobile devices, require highperformance and efficiency. In this system, the power amplifier (PA) is the most criticalcomponent because it is the major responsible for the system nonlinearity and energyconsumption. When the PA is operating more efficiently, e.g. in region at high gaincompression, there is signal distortion creating intermodulation components that interfereat adjacent channels, generally, not complying with regulatory standards such as LTE andIEEE802.15.4. With low gain the PA presents linear response and low efficiency. In orderfor the system to present linear and efficient response simultaneously, a baseband digitalpredistorter (DPD) is pre-cascaded with the PA, the DPD acts generating an inverse PAfunction.
The DPD is based on very precise polynomial models with memory that can presentsignificant amount of coefficients. Reducing this amount is critical for reducing memoryusage and power consumption demanded by DPD. Therefore, algorithms are used tochoose the most relevant coefficients, ignoring the rest of them. The objective of this workis to compare three algorithms: Orthogonal Least Squares (OLS), Principal ComponentAnalysis (PCA) and Compressed Sampling (CS) based on integer optimization; andapplying reduction of coefficients in linearization of PAs designed in circuit simulationsoftwares.
The linearization of the PAs shows that the OLS presents the better result in the reductionof coefficients, presenting a satisfactory result with near-best-case performance, with5% of coefficients, followed by PCA that reduces on average 50%. The original lowcomputational CS (CoSaMP) did not present satisfactory results, and one from twosuggested modifications presented relevant results. When applied in reducing coefficients,5% of coefficients were removed while maintaining the same modeling quality. Two PAswere linearized to compensate nonlinear amplitude and phase distortion, reducing theleaked power in the adjacent channels.
Keywords: Power Amplifier. Digital Predistortion. Orthogonal Least Squares. PrincipalComponent Analysis. Compressed Sampling.


Lista de ilustrações
Figura 1 – Sistema de transmissão simplificado. . . . . . . . . . . . . . . . . . . . 25Figura 2 – Diagrama de transferência de energia realizada pelo PA e distorção do
sinal através da densidade espectral de potência (PSD). . . . . . . . . . 26Figura 3 – Compensação de não linearidade com o DPD. . . . . . . . . . . . . . . 27Figura 4 – Comparação entre OLS e PCA considerando o NMSE em função do
número de coeficientes. . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Figura 5 – Curva característica de um amplificador com extrapolação da região
linear. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Figura 6 – NMSE em função de s e R aplicando CoSaMP na modelagem compor-
tamental de PAs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Figura 7 – NMSE em função de s e R utilizando modificação a. . . . . . . . . . . 42Figura 8 – NMSE em função do parâmetro s utilizando modificação b. . . . . . . 43Figura 9 – Figuras de mérito para a linearização do PA com redução de parâmetros
utilizando CS modificação b. . . . . . . . . . . . . . . . . . . . . . . . . 45Figura 10 – Circuito base de simulação no Cadence Virtuoso. . . . . . . . . . . . . 46Figura 11 – Circuito de simulação no Cadence Virtuoso com informação de arquivo
texto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Figura 12 – Diferença entre informação inserida e lida utilizando o Cadence Virtuoso 47Figura 13 – Circuito de simulação no Cadence Virtuoso considerando a reamostragem. 48Figura 14 – Diagrama de simulação completa no Cadence Virtuoso. . . . . . . . . . 48Figura 15 – Resposta do PA e modelo. . . . . . . . . . . . . . . . . . . . . . . . . . 49Figura 16 – Resposta do PA com e sem DPD. . . . . . . . . . . . . . . . . . . . . . 50Figura 17 – Resposta em frequência do sinal entregue à carga com e sem o DPD. . 51Figura 18 – Característica de transferência do PA. . . . . . . . . . . . . . . . . . . 51Figura 19 – NMSE da modelagem inversa do PA no ADS. . . . . . . . . . . . . . . 52Figura 20 – Comparação entre resposta com e sem DPD. . . . . . . . . . . . . . . . 53Figura 21 – Resposta em frequência do sinal entregue à carga com e sem o DPD. . 54Figura 22 – NMSE em função da quantidade de coeficientes utilizando OLS no
Cadence Virtuoso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Figura 23 – Comparação entre resposta com e sem DPD usando OLS no Cadence
Virtuoso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Figura 24 – Resposta em frequência do sinal entregue à carga com e sem o DPD
usando OLS no Cadence Virtuoso. . . . . . . . . . . . . . . . . . . . . 56Figura 25 – NMSE em função da quantidade de coeficientes utilizando PCA no
Cadence Virtuoso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57

Figura 26 – Comparação entre resposta com e sem DPD usando PCA no CadenceVirtuoso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Figura 27 – Resposta em frequência do sinal entregue à carga com e sem o DPDusando PCA no Cadence Virtuoso. . . . . . . . . . . . . . . . . . . . . 58
Figura 28 – NMSE em função da quantidade de coeficientes utilizando CoSaMPmodificação b no Cadence Virtuoso. . . . . . . . . . . . . . . . . . . . . 59
Figura 29 – Comparação entre resposta com e sem DPD usando CoSaMP modifica-ção b no Cadence Virtuoso. . . . . . . . . . . . . . . . . . . . . . . . . 60
Figura 30 – Resposta em frequência do sinal entregue à carga com e sem o DPDusando CoSaMP modificação b no Cadence Virtuoso. . . . . . . . . . . 60
Figura 31 – NMSE em função da quantidade de coeficientes utilizando OLS no ADS. 61Figura 32 – Comparação entre resposta com e sem DPD usando OLS no ADS. . . . 62Figura 33 – Resposta em frequência do sinal entregue à carga com e sem o DPD
usando OLS no ADS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Figura 34 – NMSE em função da quantidade de coeficientes utilizando PCA no ADS. 63Figura 35 – Comparação entre resposta com e sem DPD usando PCA no ADS. . . 64Figura 36 – Resposta em frequência do sinal entregue à carga com e sem o DPD
usando PCA no ADS. . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Figura 37 – NMSE em função da quantidade de coeficientes utilizando CS modifica-
ção b no ADS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Figura 38 – Comparação entre resposta com e sem DPD usando CoSaMP modifica-
ção b no ADS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Figura 39 – Resposta em frequência do sinal entregue à carga com e sem o DPD
usando CoSaMP modificação b no ADS. . . . . . . . . . . . . . . . . . 66

Lista de tabelas
Tabela 1 – NMSE calculado nas etapas da linearização do PA. . . . . . . . . . . . 44Tabela 2 – Característica do PA GaN_classeAB. . . . . . . . . . . . . . . . . . . . 51Tabela 3 – Resultados numéricos. . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Tabela 4 – Resultados numéricos utilizando OLS no Cadence Virtuoso. . . . . . . 57Tabela 5 – Resultados numéricos usando PCA no Cadence Virtuoso. . . . . . . . . 59Tabela 6 – Resultados numéricos usando CS modificação b no Cadence Virtuoso. . 61Tabela 7 – Resultados numéricos usando OLS no ADS. . . . . . . . . . . . . . . . 63Tabela 8 – Resultados numéricos usando PCA no ADS. . . . . . . . . . . . . . . . 65Tabela 9 – Resultados numéricos usando CoSaMP modificação b no ADS. . . . . . 65Tabela 10 – Comparação entre resultados utilizando Cadence Virtuoso. . . . . . . . 67Tabela 11 – Comparação entre resultados utilizando ADS. . . . . . . . . . . . . . . 68


Lista de abreviaturas e siglas
ACPR Razão de Potência de Canal Adjacente
ADS Advanced Design System
CDS Cadence Design Systems
CMOS Semicondutor-Metal-Óxido Complementar
CMOS_classeAB_reconfiguravel Projeto do PA desenvolvido no Cadence Virtuoso
CoSaMP Amostragem Comprimida de Perseguição Correspondente
CS Amostragem Comprimida
DPD Pré-distorsor digital
EVM Magnitude de Vetor de Erro
GaN Nitreto de Gálio
GaN_classeAB Projeto do PA desenvolvido no ADS
GMP Polinômio de memória generalizado
GPS Sistema de Posicionamento Global
HB Equilíbrio Harmônico
HEMT Transistor de Mobilidade de Elétrons Alta
in Dados medidos de entrada
LMS Mínimos Quadrados Médio
LS Mínimos Quadrados
LTE Evolução a longo prazo
LUTs Tabelas de Busca
MP Polinômio de memória
MPA Polinômio de memória avançado
NMSE Erro Quadrático Médio Normalizado

OCP1dB Ponto de 1 dB de compressão de ganho
OLS Mínimos Quadrados Ortogonais
out Dados medidos de saída
PAE Eficiência de Potência Adicionada
PCA Análise de Componentes Principais
PSD Densidade Espectral de potência
RF Rádio Frequência
RLS Mínimos Quadrados Recursivo
RMS Valor Eficaz
WCDMA Acesso Múltiplo por Divisão de Código de Banda Larga
3G Terceira Geração nos padrões da telefonia móvel
4G Quarta Geração nos padrões da telefonia móvel

Lista de símbolos
η Eficiência
Θ Fase de um sinal
Φ Matriz de entradas
∆ Matriz diagonal com os autovalores da matriz XHX
P Fator de truncamento de não linearidade dos modelos polinomiais commemória
M Fator de truncamento de memória dos modelos polinomiais com memória


Sumário
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.2.1 Objetivo geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.2.2 Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.3 Justificativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.4 Metodologia de desenvolvimento . . . . . . . . . . . . . . . . . . . . . 211.5 Recursos necessários . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2 FUNDAMENTAÇÃO TEÓRICA . . . . . . . . . . . . . . . . . . . . 252.1 Modelos para o PA/DPD . . . . . . . . . . . . . . . . . . . . . . . . . 262.2 Extração de coeficientes do modelo . . . . . . . . . . . . . . . . . . . 292.3 Redução do número de coeficientes do modelo . . . . . . . . . . . . 302.3.1 Mínimos Quadrados Ortogonais (OLS) . . . . . . . . . . . . . . . . . . . . 312.3.2 Análise de Componentes Principais (PCA) . . . . . . . . . . . . . . . . . . 322.3.3 Amostragem Comprimida (CS) . . . . . . . . . . . . . . . . . . . . . . . . 322.4 Definições complementares . . . . . . . . . . . . . . . . . . . . . . . . 332.4.1 Erro quadrático médio normalizado . . . . . . . . . . . . . . . . . . . . . 332.4.2 Eficiência e PAE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.4.3 Otimização inteira aplicada na redução de coeficientes do modelo . . . . . 342.4.4 PSD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.4.5 ACPR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4.6 EVM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4.7 Simulação de envoltória . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4.8 Ponto de compressão de 1 dB . . . . . . . . . . . . . . . . . . . . . . . . 36
3 RESULTADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.1 Implementação do Amostragem Comprimida . . . . . . . . . . . . . . 393.1.1 CoSaMP modificado a . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.1.2 CoSaMP modificado b . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2 Aplicando CoSaMP modificação B para linearizar um PA . . . . . . 433.3 Linearização de um PA utilizando Cadence Virtuoso . . . . . . . . . 453.3.1 Linearização do PA CMOS_classeAB_reconfiguravel usando todos os coefi-
cientes do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.4 Linearização do PA GaN_classeAB utilizando ADS . . . . . . . . . . 503.4.1 Caracterização do PA GaN_classeAB . . . . . . . . . . . . . . . . . . . . 50

3.4.2 Linearização do PA GaN_classeAB usando todos os coeficientes do modelo 523.5 Linearização de PAs nos simuladores aplicando redução de coefici-
entes do modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.5.1 Cadence Virtuoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.5.1.1 Utilizando OLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.5.1.2 Utilizando PCA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.5.1.3 Utilizando CoSaMP modificação b . . . . . . . . . . . . . . . . . . . . . . . 573.5.2 Advanced Design System . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.5.2.1 Utilizando OLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.5.2.2 Utilizando PCA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.5.2.3 Utilizando CoSaMP modificação b . . . . . . . . . . . . . . . . . . . . . . . 633.6 Análise dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.6.1 Análise CS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.6.2 Linearização no Cadence Virtuoso . . . . . . . . . . . . . . . . . . . . . . 673.6.3 Linearização no ADS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73

19
1 INTRODUÇÃO
O constante crescimento da comunicação em rádio frequência (RF) e o avanço damicroeletrônica, em especial o avanço da tecnologia cmos, abre caminhos para pesquisanesta área da engenharia. A comunicação sem fio difundida em comunicação 3G, 4G,bluetooth, GPS, entre outros, tende, ao passar dos anos, a estar presente em todos osaparelhos eletrodomésticos conectados a uma rede (Razavi & Behzad (1998, p 1-2)).Atualmente, a comunicação demanda fluxos bastante elevados de dados gerados emespecial pelo aumento de recursos em multimídia (qualidade de som, imagem e vídeo) etambém a inclusão de novos dispositivos que dependem de comunicação (BONFIM, 2016, p17).
A grande demanda exigida na comunicação força a alta restrição em frequênciade portadora e largura de banda disponível (MACHADO, 2016, p 9). Para cumprir coma demanda respeitando às restrições, é necessário utilizar modulações que modificamsimultaneamente fase e amplitude (SILVA, 2014, p 12). Atualmente são utilizados ospadrões wcdma e lte (FREIRE, 2015, p 12). Como efeito, o amplificador de potência (PA)está entre os componentes com maior influência na distorção da informação (MACHADO,2016, p 9).
O PA é um dos principais componentes no sistema de transmissão (MACHADO, 2016,p 9) e também o maior consumidor de potência da fonte. A qualidade de transmissão dainformação está diretamente associada à linearidade do PA e, por ser o maior consumidorde potência, deve operar com a máxima eficiência possível, possibilitando maior autonomiapara a bateria (FREIRE, 2015), (BONFIM, 2016).
Nas classes de operação A ou AB, o PA naturalmente não é eficiente apresentandopicos de eficiência em pontos de maior compressão de ganho (próximos da saturação)(RAZAVI; BEHZAD, 1998). Operando em região não linear, dificilmente as especificações danorma são cumpridas, e linearmente a eficiência é comprometida. Manter o compromissoentre linearidade e eficiência é fundamental. Uma técnica comumente apresentada naliteratura para este fim é a inserção de um pré-distorsor digital (DPD) ligado em cascatacom o PA e em banda base. A estrutura de um DPD é baseada em modelos matemáticoscom modelagem caixa preta, que não considera parâmetros físicos, como o caso dos modeloscomportamentais descritos por séries de Volterra apresentados em Mathews & Sicuranza(2000) ou modelos baseados em alguns parâmetros físicos em geral utilizando redes neuraiscomo aplicado por FREIRE (2015).

20 Capítulo 1. INTRODUÇÃO
1.1 MotivaçãoPesquisas recentes estudam os modelos para DPD/PA, redução de coeficientes, baixo
custo computacional do DPD e baixo erro de modelagem. Nas dissertações MACHADO(2016) e BONFIM (2016) são comparadas estruturas que apresentam menor erro demodelagem com menor custo computacional além de propor novos modelos. Em FREIRE(2015) o DPD é implementado através de modelos baseados em redes neurais, por possuíremmenor erro, com menor complexidade computacional. Na dissertação SILVA (2014), modelosbaseados na inserção de parâmetros físicos do PA são propostos verificando o númerode parâmetros do modelo e sua precisão de modelagem baseados em redes neurais. Napublicação SCHUARTZ & LIMA (2015), uma comparação entre diferentes algoritmospara extração de modelos com poucos parâmetros visando menor custo computacional ebaixo erro de modelagem é apresentada. Como sequência de pesquisas, em SCHUARTZ& LIMA (2016b) é realizada uma comparação de algoritmos para redução do número decoeficientes de um modelo com quantidade significativa de coeficientes. Posteriormente,o mais eficiente é aplicado em um PA conforme apresentado em SCHUARTZ & LIMA(2016a).
Realizar redução de coeficientes de um modelo é fundamental para reduzir o custocomputacional de um DPD, isso acontece porque o número de parâmetros do modeloé proporcional ao número de operações de soma e multiplicação, as quais demandamconsumo de potência da fonte considerável, desta forma, quanto menor a quantidade decoeficientes, menor é o consumo de potência de um DPD.
1.2 Objetivos
1.2.1 Objetivo geral
O objetivo deste trabalho é aplicar o DPD com redução de coeficientes através dosalgoritmos Mínimos Quadrados Ortogonais (OLS), Análise de Componentes Principais(PCA) e Amostragem Comprimida (CS), linearizando circuitos de PAs descritos emsoftwares de simulação de circuito de RF e verificando melhora nos principais parâmetrosde qualidade de um transmissor. O modelo referência usado neste trabalho é baseado nasimplificação das séries de Volterra, utilizando o modelo baseado no polinômio de memóriageneralizado (GMP), especificamente o modelo proposto em BONFIM & LIMA (2015, p3) e BONFIM (2016, p 41-42).
1.2.2 Objetivos específicos
São incluídos para desenvolvimento do trabalho 3 objetivos específicos apresentadosna sequência.

1.3. Justificativa 21
Primeiro, estudar e utilizar a Amostragem Comprimida como otimizador inteirodo número de coeficientes do modelo por meio do software Matlab, baseado no artigo(ABDELHAFIZ et al., 2014). Segundo, aplicar um sinal distorcido no software de simulação decircuitos Cadence Virtuoso da Cadence Design Systems (CDS). Utilizando a documentaçãodo simulador, encontrar uma forma de inserir dados distorcidos, realizar a simulação eextrair dados do simulador para posteriormente tratá-los no Matlab. Terceiro, com osobjetivos anteriores alcançados, estudar e aplicar distorção nos softwares com redução decoeficientes utilizando outros algoritmos redutores de complexidade.
1.3 JustificativaDestinado à comunidade acadêmica, contribuindo para o desenvolvimento da
microeletrônica e circuitos de RF em qualidade e eficiência dos transmissores. Este trabalhoapresenta o diferencial de aplicar algoritmos de redução do número de parâmetros domodelo polinomial de um DPD, diretamente aplicado em projetos de PAs desenvolvidosem softwares de simulação e projeto.
1.4 Metodologia de desenvolvimentoAs metodologias de desenvolvimento deste estudo são caracterizadas de forma
distinta para os diferentes objetivos a serem alcançados.
O estudo do algoritmo Amostragem Comprimida para redução de coeficientes écaracterizado como um estudo de caso com etapas sequenciais. Em um primeiro momento,uma pesquisa buscando informação referente ao seu equacionamento é realizada. Nosegundo passo, utilizando o Matlab, aplica-se a redução do número de coeficientes domodelo, verificando erros de modelagem através da comparação entre os dados medidosou calculados com modelo completo e dados calculados com modelo reduzido. Com osresultados satisfatórios1, é realizada a linearização de um PA no Matlab com redução decoeficientes aplicados no DPD.
O segundo objetivo, caracterizado por buscar conhecimento sobre o CadenceVirtuoso e aplicar a linearização de um PA, também é um estudo de caso. As diferentesopções de fontes são analisadas buscando uma maneira de inserir dados distorcidos erealizar a simulação.
Aplicar a redução de coeficientes com diferentes algoritmos, desenvolvidos emtrabalhos anteriores, em diferentes softwares é caracterizada por um estudo de caso. Aimplementação é realizada através da distorção e tratamento de dados realizados no Matlabe inserindo os dados nos simuladores de circuito.1 Baixo erro de modelagem e máxima redução de coeficientes.

22 Capítulo 1. INTRODUÇÃO
No objetivo geral, comparando os resultados obtidos na linearização dos PAs,um estudo comparativo de casos é aplicado. Os diferentes algoritmos com redução decoeficientes são comparados com os resultados da literatura e com resultados da linearizaçãosem redução de coeficientes.
1.5 Recursos necessários
Os principais recursos exigidos neste trabalho com maior criticidade são a disponi-bilidade dos softwares, os projetos de PAs desenvolvidos em circuitos, dados de medidasde PAs em arquivos e disponibilidade de documentação.
Os softwares para simulação de circuito Advanced Design System (ADS) e CadenceVirtuoso da Cadence Design Systems (CDS), juntamente com o software matemático Matlabestão disponíveis para esta pesquisa pelo grupo de Concepção de Circuitos e SistemasIntegrados (GICS) da UFPR. Com grande importância a documentação (publicações) estádisponível para pesquisa nos laboratórios conectados na rede, ou por conexão utilizandoservidores da universidade através de contas de estudante. Os amplificadores utilizadosnos softwares de simulação estão disponíveis pelo grupo de pesquisa GICS, e foramanteriormente projetados por alunos de pós graduação.
Para realizar todos os procedimentos desta pesquisa são utilizados 4 PAs distintos,dois destes apenas para testes no Matlab através de amostras in out. O primeiro, chamadode InOutP2, são informações extraídas de um modelo baseado em medidas realizadas deum PA GaN, classe AB, centrado em 900 MHz, amplificando um sinal 3GPP WCDMA ecaracterizado por possuir efeito de resposta não linear acentuado. O segundo, chamadode InOutM3, são dados medidos de um PA GaN HEMT classe AB modulado com umsinal WCDMA de banda 3,84 MHz e centrado em 900 MHz, que possui características detransferência caracterizadas pelo elevado efeito de memória.
No Cadence Virtuoso, o PA utilizado para distorção é um projeto totalmenteintegrado em tecnologia CMOS 130 nm, classe AB, de ganho reconfigurável com 6modos de operação. Opera em 2,4 GHz, possui características bastante lineares, apre-sentando máximo ganho de 35,9 dB e potência de saturação em 17 dBm (SANTOS,2015) e (SANTOS; LEITE; MARIANO, 2015). Neste trabalho, o projeto é mencionado comoCMOS_classeAB_reconfiguravel.
No ADS, o PA é um projeto classe AB com frequência de portadora centrada em900 MHz. Realizado com um modelo de transistor HEMT, para tecnologia nitreto de gálio(GaN) e circuito passivo projetado em um substrato com as características 0,635 mm deespessura e permissividade relativa 10,5. Neste texto, este projeto será mencionado como2 Esse conjunto de informações é o mesmo utilizado em SCHUARTZ & LIMA (2015).3 Mesmos dados utilizados em SCHUARTZ & LIMA (2016a) e SCHUARTZ & LIMA (2016b).

1.5. Recursos necessários 23
GaN_classeAB.


25
2 FUNDAMENTAÇÃO TEÓRICA
A comunicação sem fio é dividida em 3 sub-sistemas principais: o transmissor, omeio transmissor (ar) e o receptor. Este trabalho é focado no transmissor, independente detratar-se do dispositivo móvel ou da estação base. O transmissor possui diversos elementosentre a fonte de informação (som, imagem, voz) até a antena, conforme representaçãosimplificada da figura 1.
Figura 1 – Sistema de transmissão simplificado.
Fonte de informação
Processamento digital D
/A Processamento Analógico
Oscilador
PA
Fonte: O autor, 2017 (adaptado da disciplina Circuitos lineares, 2014).
Dentro do sistema transmissor, o componente de maior demanda de energia dafonte contínua é o PA, por isso, é fundamental garantir que a sua operação seja eficiente(BONFIM; LIMA, 2015, p 1). O PA também é importante por ser o componente que transferepotência da fonte em potência irradiada pela antena. O diagrama da figura 2 apresentacomo o PA transfere a energia da fonte em energia irradiada e energia dissipada comoforma de calor para o meio.
Além da eficiência, a demanda por alta taxa de transferência de dados e as restriçõesimpostas por agências reguladoras de espectro exigem que o PA opere de forma linear,causando um conflito, já que PAs operam de forma eficiente apenas na região próximada saturação e de forma linear somente com baixa amplitude de sinal (BONFIM; LIMA,2015, p 1), gerando grandes perdas de energia dissipadas em calor (CAVALHEIRO; WEBER;
LIMA, 2014, p 1). A figura 2 apresenta também dois gráficos representando a resposta emfrequência da informação a ser transmitida na entrada e saída do PA. A curva amarelarepresenta a restrição imposta pela norma regulamentadora e as diferenças de densidadede potência nas bandas adjacentes ao canal representam a distorção causada pela nãolinearidade do PA. Quando o PA está operando com baixa amplitude de sinal a distorçãoé mínima, porém, a eficiência é muito baixa, e quando operando com maior eficiência, adistorção é muito alta.
A característica de transferência não linear do PA é caracterizada pela potência desaída que decai 1 dB da potência ideal, ou ponto de 1 dB de compressão de ganho (OCP1dB)(MACHADO, 2016, p 13). Além do efeito não linear que ocorre puramente devido à amplitude

26 Capítulo 2. FUNDAMENTAÇÃO TEÓRICA
Figura 2 – Diagrama de transferência de energia realizada pelo PA e distorção do sinalatravés da densidade espectral de potência (PSD).
PA
Potência CC
Potência CA
Potência dissipada
em forma de calor
Potência CA
Máscara
Resposta em frequência antes da amplificação
Resposta em frequência pós amplificação
f f
PSD PSD
Fonte: O autor, 2017 (adaptado de SILVA (2014, p 15)).
de tensão na entrada do PA, quando operando em RF, aparece um efeito chamado memóriacausado devido aos componentes armazenadores de energia (capacitâncias e indutâncias)dos circuitos de casamento de impedâncias de entrada e saída (MACHADO, 2016, p 13), etambém dos circuitos de polarização, contribuindo significativamente na distorção.
O DPD, operando em banda base e implementado por meio de Tabelas de Busca(LUTs), é uma solução eficiente com baixo custo computacional (SCHUARTZ; LIMA, 2015,p 1) (CAVALHEIRO; WEBER; LIMA, 2014, p 1) que, no sistema DPD + PA formandouma cascata, permite que o PA opere com alta eficiência compensando a distorção. Aestrutura matemática de um DPD é a mesma de um pós distorsor que, ligado em cascatana saída do PA, realiza a função inversa (SCHUARTZ; LIMA, 2015, p 2), através de ummodelo matemático equivalente em banda base bidimensional e linear em seus parâmetros(SCHUARTZ; LIMA, 2015, p 2). A figura 3 apresenta as características ideais de transferênciado DPD, do PA e a resultante do sistema.
2.1 Modelos para o PA/DPDAs séries de Volterra são bastante difundidas para a modelagem comportamental
(BONFIM, 2016, p 36) por não dependerem de parâmetros físicos do circuito, os quais,raramente são conhecidos1, e desta forma, podem ser aplicados na modelagem de qualquerPA. Este tipo de modelo é conhecido como caixa-preta (BONFIM, 2016, p 28), onde,1 Se todos os parâmetros fossem conhecidos, conhecendo o equacionamento completo do circuito, uma
função inversa poderia ser encontrada, possivelmente muito mais complexa que séries de Volterra.

2.1. Modelos para o PA/DPD 27
Figura 3 – Compensação de não linearidade com o DPD.
PredistorsorEntrada
SinalDistorcido Saída
PA
+ =
Fonte: O autor, 2017.
apenas medidas das informações de entrada (in) e saída (out) em domínio temporalsão necessárias. As séries de Volterra, apresentadas em Mathews & Sicuranza (2000) sãocomplexas e dependentes de muitos termos, que ao serem truncados formam simplificações,as quais são utilizadas para modelagem comportamental de PAs e DPDs.
Um modelo simples, utilizado na modelagem comportamental simplificada dasséries de Volterra considerando apenas componentes unidimensionais2 é o polinômio dememória (MP), que é um modelo compacto, de baixo custo computacional e linear emseus parâmetros3. O MP gera baixo erro quando aplicado à PAs que apresentam poucoefeito de memória4. O DPD e pós distorsor apresentam característica inversa a do PA(SCHUARTZ; LIMA, 2015) (CAVALHEIRO; WEBER; LIMA, 2014), portanto o mesmo modelopode ser utilizado. A equação 2.1 apresenta o MP conforme apresenta SCHUARTZ &LIMA (2015, p 2):
y(n) =P∑p=1
M∑m=0
hp,mx(n−m)|x(n−m)|p−1, (2.1)
onde M é a quantidade de memória, P é o grau do polinômio considerado, x é a entrada,y é a saída, n é a amostra considerada e h o coeficiente.
Considerando um caso simples onde M = 1 e P = 2, cada amostra n é dada pelaequação:
y(n) = h1,0x(n) + h1,1x(n− 1) + h2,0x(n)|x(n)|+ h2,1x(n− 1)|x(n− 1)|, (2.2)
2 Cada termo do somatório é composto por apenas um instante de tempo, por exemplo: x(n)|x(n)|,x(n − 1)|x(n − 1)|; termos bidimensionais são compostos por dois instantes de tempos distintos ex:x(n)|x(n− 1)|.
3 A equação 2.5 apresenta um sistema linear equivalente do MP.4 10 coeficientes são suficientes para modelar o PA, conforme realizado em SCHUARTZ & LIMA (2015).

28 Capítulo 2. FUNDAMENTAÇÃO TEÓRICA
que pode ser escrita como um produto escalar entre vetores:
y(n) =[x(n) x(n− 1) x(n)|x(n)| x(n− 1)|x(n− 1)|
] [h1,0 h1,1 h2,0 h2,1
]T.
(2.3)
Considerando que existam 5 amostras de entrada, y pode ser escrito na seguinteforma5:
y(1)y(2)y(3)y(4)y(5)
=
x(1) x(0) x(1)|x(1)| x(0)|x(0)|x(2) x(1) x(2)|x(2)| x(1)|x(1)|x(3) x(2) x(3)|x(3)| x(2)|x(2)|x(4) x(3) x(4)|x(4)| x(3)|x(3)|x(5) x(4) x(5)|x(5)| x(4)|x(4)|
h1,0
h1,1
h2,0
h2,1
. (2.4)
Portanto, o sistema formado é linear e pode ser escrito na seguinte forma matricial:
Y = XH, (2.5)
onde X é a matriz de entradas, Y o vetor de saídas e H o vetor de coeficientes.
A solução do sistema pode ser realizada utilizando um conjunto de N amostrasde entrada e saída (x e y) e uma técnica para cálculo que pode ser direta como mínimosquadrados, ou recursiva onde os coeficientes são atualizados a medida que as amostrassão lidas utilizando por exemplo mínimos quadrados recursivo ou mínimos quadradosmédio conforme SCHUARTZ & LIMA (2015). A aquisição dos coeficientes permite umaleitura de um determinado número de amostras e a operação matricial, no entanto, o DPDdeve operar em tempo real. Conhecidos os coeficientes e as amostras passadas, o modelopermite que o DPD faça a distorção de cada amostra n inserida através da equação 2.1.
A vantagem do MP é o baixo número de parâmetros do modelo (na ordem dealgumas dezenas) pois estes são apenas dependentes de dois fatores (m e p) conformeapresentado na equação 2.1. Quando a modelagem de PAs com efeito de memória elevadoapresenta erros elevados, versões mais gerais são necessárias, como por exemplo, o modeloconhecido na literatura como polinômio de memória generalizado (GMP) onde novosfatores de truncamento são inseridos. Outra opção é o modelo proposto em BONFIM& LIMA (2015) e referenciado neste documento como polinômio de memória avançado(MPA), que é uma generalização do GMP e apresenta resultados melhores. A equação2.6 apresenta o MPA conforme BONFIM & LIMA (2015, p 3) também apresentado emBONFIM (2016, p 41-42):
y(n) =M∑
m1=0
M∑m2=0
P∑p1=0
P∑p2=0
hm1,m2,p1,p2|x(n−m1)|p1 |x(n−m2)|p2x(n−m1), (2.6)
5 As amostras x(n < 1) são consideradas 0. Posteriormente para cálculo dos coeficientes as M primeiraslinhas são removidas do sistema.

2.2. Extração de coeficientes do modelo 29
onde M é a quantidade de memória, P é o grau do polinômio considerado, x é a entrada,y é a saída e h o coeficiente. O MPA é linear em seus parâmetros e, portanto, pode serescrito em um sistema matricial, conforme:
Y = XH, (2.7)
onde X é a matriz de entradas, Y o vetor de saídas e H o vetor de coeficientes.
Por possuir somatórios repetidos de um mesmo truncamento (M ou P ), algumaslinhas se repetem. Estas linhas repetidas podem ser removidas para reduzir a complexidadedo modelo, sem nenhuma deterioração na precisão. Além disso, para garantir que a máximanão linearidade seja limitada em P , linhas que apresentam grau total de não linearidademaior que P devem ser removidas do sistema. Para isso, é necessário impor as restriçõesm1 6= m2 e p1 + p2 ≤ P (BONFIM; LIMA, 2015, p 3). Com as restrições impostas, o modelopode ser reescrito conforme:
y(n) =M∑
m1=0x(n−m1)[
P−1∑p1=0
hm1,p1 |x(n−m1)|p1+
M∑m2=0
P−1∑p1=0
P−1∑p2=1
hm1,m2,p1,p2|x(n−m1)|p1 |x(n−m2)|p2 ]. (2.8)
A equação 2.8 foi utilizada nos artigos SCHUARTZ & LIMA (2016b, p 2) eSCHUARTZ & LIMA (2016a, p 2) e é adotada como modelo para este trabalho, onde hsão os coeficientes, P a ordem polinomial e M o comprimento de memória. Similarmenteaos modelos já apresentados, o modelo pode ser escrito como uma expressão matricialconforme equação 2.7 (SCHUARTZ; LIMA, 2016b).
2.2 Extração de coeficientes do modeloConhecendo dados equivalentes em banda base in e out de um PA e truncamentos
M e P dos modelos apresentados na seção 2.1, os coeficientes são calculados pela soluçãodeste sistema. Diferentes algoritmos computacionais, recursivos ou não, podem ser utilizadospara isso. O documento SCHUARTZ & LIMA (2015) apresenta 3 algoritmos utilizadospara este fim. Realizando uma comparação entre Mínimos Quadrados (LS), MínimosQuadrados Médio (LMS) e Mínimos Quadrados Recursivo (RLS) em relação à exigênciacomputacional e erro de modelagem, o algoritmo que apresenta melhor relação entre custocomputacional e erro de modelagem é o LS (SCHUARTZ; LIMA, 2015, p 3). A equação2.9 apresenta o LS conforme SCHUARTZ & LIMA (2015, p 2), também apresentado emMathews & Sicuranza (2000, 5.2.2):
H = (X*X)−1X*Y, (2.9)

30 Capítulo 2. FUNDAMENTAÇÃO TEÓRICA
sendo X a matriz obtida na combinação das entradas, (.)∗ indica o complexo conjugadoda matriz transposta, e Y o vetor das saídas medidas.
2.3 Redução do número de coeficientes do modelo
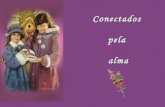
Os modelos GMP e MPA apresentados possuem quantidade significativa de coefici-entes6. Em SCHUARTZ & LIMA (2016b) uma comparação entre os algoritmos MínimosQuadrados Ortogonais (OLS) e Análise de Componentes Principais (PCA) levando emconta a capacidade de precisão do modelo em função do número de coeficientes é realizada.
A figura 4 retirada do documento SCHUARTZ & LIMA (2016b) ilustra essacomparação e mostra que o OLS apresenta melhor resultado, ou seja, com mesmo númerode parâmetros, o erro do modelo é menor utilizando OLS.
Figura 4 – Comparação entre OLS e PCA considerando o NMSE em função do númerode coeficientes.
5 10 15 20 25 30 35 40−40
−30
−20
−10
0
Número de parâmetros
NM
SE
(dB
)
OLSPCA
Fonte: SCHUARTZ & LIMA (2016b, p 3).
Similar ao OLS e PCA, o documento Abdelhafiz et al. (2014) apresenta umacomparação entre Amostragem Comprimida (CS) e PCA, apresentando melhor resultadocom o CS, onde 50 coeficientes são necessários para chegar próximo ao erro mínimo(ABDELHAFIZ et al., 2014). Este resultado é atraente e, nesta pesquisa, uma comparaçãoentre os 3 diferentes algoritmos será realizada.
6 Com M = 7 e P = 4 utilizando MPA são necessários 368 coeficientes conforme SCHUARTZ & LIMA(2016b).

2.3. Redução do número de coeficientes do modelo 31
2.3.1 Mínimos Quadrados Ortogonais (OLS)
Apresentado em Chen, Cowan & Grant (1991), e aplicado ao MPA em SCHUARTZ& LIMA (2016b), é utilizado para reduzir o número de coeficientes através de um processo deortogonalização da matriz de entradas (SCHUARTZ; LIMA, 2016b, p 2), sendo os coeficientesordenados na ordem decrescente de importância. Cada coeficiente é calculado por iteraçãorealizada. Truncando o número de iterações é possível definir a quantidade de coeficientes.As equações 2.10 abaixo apresentam o algoritmo (CHEN; COWAN; GRANT, 1991, p 2-4)(SCHUARTZ; LIMA, 2016b, p 2-3):
Y = XH,Y = [Y (1)...Y (n)]H ,
X = [x1...xQ] xi = [xi(1)...xi(n)]H , 1 ≤ i ≤ Q,
H = [h1...hQ]H .
(2.10)
Da equação 2.10, tem-se que Y é o vetor de saídas, X é a matriz de entradas(definida pelo MP avançado), e H é o vetor de coeficientes. O algoritmo é definido emduas etapas. Na primeira etapa, calcular para 1 ≤ i ≤ Q:
w(1)1 = xi,
g(i)1 =
(w(i)
1
)HY(
w(i)1
)Hw(i)
1
,
[err](i)1 =
∣∣∣g(i)1
∣∣∣2 (w(i)1
)Hw(i)
1
YHY,
[err](i1)1 = max[err](i)1 , 1 ≤ i ≤ Q,
(2.11)
e selecionar:w1 = w(i1)
1 = xi1 . (2.12)
Para as próximas kas iterações, onde k ≥ 2, para 1 ≤ i ≤ Q, i 6= i1, ..., i 6= ik−1 calcular:
α(i)jk =
wHj xi
wHj wj
1 ≤ j ≤ k,
w(i)k = xi −
∑k−1j=1 α
(i)jkwj,
g(i)k =
(w(i)k
)HY(
w(i)k
)Hw(i)k
,
[err](ik)k =
(g
(i)k
)2 (w(i)k
)Hw(i)k
YHY,
(2.13)
encontrar:[err](ik)
k = max[err](i)k , 1 ≤ i ≤ Q, i 6= i1, ..., i 6= ik−1, (2.14)
e selecionar:wk = w(ik)
k = xik −k−1∑j=1
αjkwj, (2.15)

32 Capítulo 2. FUNDAMENTAÇÃO TEÓRICA
onde αjk = αikjk, 1 ≤ j ≤ k.
Após feita a ortogonalização7, a saída pode ser calculada a partir da matriz W queé a matriz X ortogonalizada, e os coeficientes G conforme mostra:
Y = WG. (2.16)
2.3.2 Análise de Componentes Principais (PCA)
O PCA é um algoritmo já consolidado na literatura para reduzir o número decoeficientes (GILABERT et al., 2013, p 2). Aplicando uma mudança de base8, é possíveldefinir a ordem e a quantidade dos coeficientes mais significativos por meio dos autovalorese autovetores da matriz de entradas. A contribuição do coeficiente é diretamente associadaà magnitude do autovalor relacionado (GILABERT et al., 2013, p 2). A quantidade utilizadaé feita a partir de testes variando a quantidade de coeficientes. O algoritmo está descritonas equações a seguir conforme Gilabert et al. (2013, p 2) e SCHUARTZ & LIMA (2016b,p 2):
Y = XH, (2.17)
onde Y é o vetor de saídas, X é a matriz de entradas e H são os coeficientes a seremdeterminados,
XHX = V∆V−1, (2.18)
onde ∆ é a matriz diagonal com os autovalores da matriz XHX e V é a matriz com osautovetores associados. A contribuição de cada autovetor é definida pelo valor do autovalor:
X′ = XP, (2.19)
onde P é a matriz com os autovetores de maior contribuição e os novos coeficientes H′ sãocalculados utilizando LS conforme:
H′ = (X′HX′)−1X′HY. (2.20)
2.3.3 Amostragem Comprimida (CS)
Dando continuidade a pesquisa, um novo algoritmo, baseado em otimização inteira9,é utilizado para redução de coeficientes do modelo. Com base nos resultados apresentadosem Abdelhafiz et al. (2014), o CS apresenta como principais vantagens comparadas aoPCA o baixo custo computacional, não necessidade de calcular autovalores e autovetorese menor erro de modelagem com a mesma quantidade de coeficientes. O algoritmo éanalisado para realizar comparação com o OLS e PCA simultaneamente. No documento7 O algoritmo OLS modifica a matriz de entradas.8 Este algoritmo modifica a matriz de entradas.9 Não há a necessidade de modificar a matriz de entradas.

2.4. Definições complementares 33
Abdelhafiz et al. (2014) não está apresentado o equacionamento do CS, apenas umbreve comentário do seu funcionamento indicando sua forma computacionalmente eficazAmostragem Comprimida de Perseguição Correspondente (CoSaMP) desenvolvida porNeedell and Tropp (ABDELHAFIZ et al., 2014).
Os documentos Needell & Tropp (2009) e Davenport, Needell & Wakin (2012)apresentam o equacionamento do CoSaMP, cujo algoritmo é:
a0 ← 0,v ← u,
k ← 0,Begin loop,
k ← k + 1,y ← Φ ∗ v,
Ω← supp(y2s),T ← Ω⋃ supp(ak−1),
b|T ← Φ†Tu,b|T c ← 0,ak ← bs,
v ← u− Φak,Until stop criterion,
(2.21)
onde, Φ é a matriz de entradas, u o vetor de saídas, s spartity level (define o númerode coeficientes), supp comando de organização em magnitude dos valores absolutos, a oscoeficientes considerados e (.)† indica o comando da equação 2.9.
2.4 Definições complementaresAlgumas equações e definições são necessárias para análise dos casos, e estão
apresentados na sequência.
2.4.1 Erro quadrático médio normalizado
A métrica utilizada para comparar dados medidos e calculados, amplamente uti-lizada nas pesquisas, é o erro quadrático médio normalizado (NMSE), apresentado naequação 2.22 conforme Muha et al. (1999, p 2):
NMSE = 10 log
∑Nk=1
[(ymedidoI,k − ymodeladoI,k
)2+(ymedidoQ,k − ymodeladoQ,k
)2]
∑Nk=1
[(ymedidoI,k
)2+(ymedidoQ,k
)2]
, (2.22)
onde yI indica o sinal em fase, yQ indica o sinal em quadratura e N é a quantidade totalde pontos.

34 Capítulo 2. FUNDAMENTAÇÃO TEÓRICA
2.4.2 Eficiência e PAE
Ao longo deste trabalho, o termo eficiência do PA é mencionado, definido pelaequação (CRIPPS, 2006):
η = PoutPDC
, (2.23)
sendo a eficiência (η) definida pela razão entre potência de saída (Pout) e potência dafonte contínua (PDC). O limite inferior a 100% é ocasionado devido as não idealidades doscomponentes do amplificador.
Uma análise de maior detalhe, levando em conta a fonte de alimentação de correntecontínua e a fonte de sinal (Pin), pode ser realizada utilizando a Eficiência de PotênciaAdicionada (PAE) conforme apresenta a equação (CRIPPS, 2006):
PAE = Pout − PinPDC
. (2.24)
2.4.3 Otimização inteira aplicada na redução de coeficientes do modelo
O conceito de otimização inteira aplicada na redução do número de coeficientes édefinido como sendo a atribuição do fator de multiplicação binário em cada coeficientedo modelo. Os coeficientes menos significativos não são eliminados, e sim, atribuídos comvalor zero. Isso permite reduzir o número de coeficientes sem a necessidade de modificar omodelo.
Quando o modelo não é alterado pela redução de coeficientes, a etapa de reordenaçãodas entradas não é necessária ao projetar o DPD, cujo procedimento deve ser alteradocada vez que os coeficientes são calculados, desta maneira o DPD torna-se mais simples ede menor custo computacional.
2.4.4 PSD
A Densidade Espectral de Potência (PSD) é a resposta em frequência de um sinal depotência expresso em unidade de potência por unidade de frequência, (W/Hz ou dBm/Hz).Segundo Haykin (2004, 1.4 - 1.7) a PSD Sx(f) é definida como a transformada de Fourierda função de autocorrelação Rx(τ) conforme equação 2.25, sendo a autocorrelação Rx(τ)a expectativa de duas variáveis aleatórias observadas nos instantes t + τ e t conformeequação 2.26. Para uma função cossenoidal, a autocorrelação Rx(τ) é dada pela equação2.27:
Sx(f) =∫ ∞−∞
Rx(τ)e−j2πfτdτ, (2.25)
Rx(τ) = E[X(tτ )X(t)], (2.26)

2.4. Definições complementares 35
Rx(τ) = A2
2 cos(2πfcτ). (2.27)
2.4.5 ACPR
A Razão de Potência de Canal Adjacente (ACPR) é definida como a razão depotências que ocorre entre as bandas laterais superior e inferior e a banda passante (LEE,1998). O ACPR total pode ser calculado pela expressão (LEE, 1998):
ACPR = PAI + PASPo
, (2.28)
sendo Po a integral da densidade espectral de potência na banda passante do canal, PAI aintegral da densidade espectral de potência na banda adjacente inferior e PAS a integralda densidade espectral de potência na banda adjacente superior ao canal.
É comum a referência de ACPR inferior e superior, ou, a razão de potências entre oscanais adjacentes inferior e superior calculadas de maneira independente entre si, conformemostra as equações 2.29 e 2.30 respectivamente:
ACPRlow = PAIPo
, (2.29)
ACPRupper = PASPo
. (2.30)
O ACPR é uma medida numérica relacionada a interferência de intermodulaçãoque afeta os canais adjacentes e possuem valores limitados por normas regulamentadorasde espectro para comunicação em RF (YAP, 1997, p 175).
2.4.6 EVM
A Magnitude de Vetor de Erro (EVM) é uma figura de mérito utilizada nascomunicações em RF. Expresso em valor RMS ou %, relaciona valores numéricos dadiferença dos símbolos lidos com os símbolos transmitidos através da relação entre potênciasmédias dos símbolos conforme (MCKINLEY et al., 2004):
EVMRMS =
1N
∑Nr=1 |Sideal,r − Smedido,r|2
1N
∑Nr=1 |Sideal,r|2
12
, (2.31)
onde r indica o símbolo medido, S indica o vetor de potência normalizada do símbolo,ideal símbolo transmitido, medido símbolo recebido e N o número total de símbolostransmitidos.

36 Capítulo 2. FUNDAMENTAÇÃO TEÓRICA
2.4.7 Simulação de envoltória
Simuladores de circuitos elétricos são normalmente utilizados para simulaçõesbásicas, sendo as principais: análise CC, CA e transitório. Com o aumento da frequência, aanálise de transitório torna-se bastante exigente computacionalmente devido ao número deamostras necessárias, tornando-se inviável em GHz. Quando há a necessidade de análisescom várias componentes harmônicas, aplicável a circuitos não lineares, a análise EquilíbrioHarmônico (HB) é uma solução viável que fornece resposta no domínio da frequência.Apesar de fornecer informações em diferentes frequências, a simulação HB não apresentaespectro contínuo como uma análise de transitório permite via transformada de Fourier(YAP, 1997).
O espectro contínuo é fornecido utilizando a simulação de envoltória, disponível nossimuladores Cadence Virtuoso e ADS. Realizando a união das simulações de transitório eHB, dados de modulação10 são inseridos em domínio temporal, e para cada amostra, éexecutada uma simulação HB. Esta simulação permite obter as respostas laterais centradasnas harmônicas das simulações HB equivalentes em banda base (análise transitória) comum domínio contínuo em frequência (YAP, 1997).
Os modelos aplicados para modelagem do DPD e PA são baseados na respostaequivalente em banda base dos sinais de entrada e saída do PA e exigem espectro contínuofornecidos pela simulação de envoltória.
2.4.8 Ponto de compressão de 1 dB
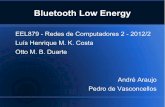
Ponto de compressão de 1 dB de ganho (OCP1dB) é a potência de saída do PA quese desvia no total de 1 dB da característica ideal do amplificador (BRAGA et al., 2012). Acaracterística ideal pode ser representada como uma reta que extrapola a característicalinear do amplificador, conforme mostra a figura 5.
10 Modulação de fase e quadratura.

2.4. Definições complementares 37
Figura 5 – Curva característica de um amplificador com extrapolação da região linear.
1 dB
Pin [dBm]
Pou
t[d
Bm
]
𝑂𝐶𝑃1𝑑𝐵
Fonte: O autor, 2017 (adaptado de Braga et al. (2012, p 23)).


39
3 RESULTADOS
Esta seção apresenta os resultados atingidos separados por cada etapa realizada. Aprimeira é referente ao algoritmo CS implementado no Matlab, a segunda aos resultados daimplementação de linearização em um projeto nos softwares Cadence Virtuoso e ADS, porfim, os resultados obtidos linearizando PAs com os algoritmos de redução de coeficientes.
3.1 Implementação do Amostragem ComprimidaEsse algoritmo possui sua versão computacionalmente eficaz (CoSaMP) conforme
apresentado na equação 2.21. É implementado no software Matlab por meio de uma funçãoque possui os argumentos:
Φ Matriz formada pelas amostras de entradas.
u Vetor de amostras de saída.
s Spartity level (Número de coeficientes).
R Número de repetições (critério de parada do looping).
A função retorna o vetor de coeficientes a com s coeficientes mais significativosdiferentes de zero, e os restantes iguais a zero.
Para validar a funcionalidade do algoritmo e escolha dos parâmetros R e s, sãoutilizados os dados InOutP e InOutM com fatores de truncamento do modelo (M e P )ajustados considerando melhor relação entre baixo erro e exigência computacional. Osdados InOutP possuem fatores de truncamento do modelo MPA ajustados para M = 2 eP = 6 produzindo um total de 108 coeficientes e NMSE de -61,81 dB calculado com 3000amostras. Para os dados InOutM são utilizados M = 7 e P = 4 baseado em SCHUARTZ& LIMA (2016b) e SCHUARTZ & LIMA (2016a). Com 3000 amostras utilizadas nocálculo, apresenta NMSE mínimo igual a -39,78 dB e 368 coeficientes1.
As figuras 6a e 6b são geradas variando os parâmetros s de 1 a 20 e R de 1 a 7aplicando redução de coeficientes com abordagem CoSaMP na modelagem comportamentaldo PA. Independentemente do número de repetições e número de coeficientes, não háconvergência em nenhum dos casos. Tal resultado possivelmente foi acarretado pelo nãocumprimento das hipóteses descritas em Needell & Tropp (2009):
• O nível de dispersão s é fixo.1 Para extração dos coeficientes foi utilizado LS em ambos os casos.

40 Capítulo 3. RESULTADOS
• A matriz de amostras Φ tem constante de isometria δ4s ≤ 0, 1.
• O sinal de entrada x é um número complexo e arbitrário.
• O vetor de erro e é um valor arbitrário.
• As amostras possuem o formato u = Φx+ e.
Figura 6 – NMSE em função de s e R aplicando CoSaMP na modelagem comportamentalde PAs.
(a) InOutP
0 2 4 6 8 10 12 14 16 18 20−20
−15
−10
−5
0
5
10
15
20
25
s
NM
SE
[dB
]
NMSE x coeficientes
R = 1R = 2R = 3R = 4R = 5R = 6R = 7
(b) InOutM
0 2 4 6 8 10 12 14 16 18 20−20
−15
−10
−5
0
5
10
15
20
25
30
s
NM
SE
[dB
]
NMSE x coeficientes
R = 1R = 2R = 3R = 4R = 5R = 6R = 7
Fonte: O autor, 2017
Tais hipóteses não foram previamente consideradas por tomar como base a publi-cação Abdelhafiz et al. (2014), onde o algoritmo não é apresentado equacionalmente.
Analisando cada etapa do algoritmo apresentado na equação 2.21, duas modificaçõespodem ser consideradas, apresentadas na sequência como CoSaMP modificado (a) e (b).
3.1.1 CoSaMP modificado a
A etapa que atribui ao vetor a os s maiores coeficientes, a priori mais significativoszerando o restante, ak ← bs é modificada. Ao invés de apenas atribuir os s maiorescoeficientes ao vetor a, a modificação atribui à a os coeficientes recalculados utilizando LS.

3.1. Implementação do Amostragem Comprimida 41
A equação 3.1 apresenta o algoritmo com a modificação apresentada:
a0 ← 0,v ← u,
k ← 0,Begin loop,
k ← k + 1,y ← Φ ∗ v,
Ω← supp(y2s),T ← Ω⋃ supp(ak−1),
b|T ← Φ†Tu,b|T c ← 0,
ak|Ts← Φ†Ts
u,
ak|T cs← 0,
v ← u− Φak,Until stop criterion,
(3.1)
onde Ts indica os s maiores coeficientes de b.
Aplicando a mesma análise realizada anteriormente, as figuras 7a e 7b apresentamos resultados variando os parâmetros s e R para os diferentes dados de teste. Para ocaso InOutP2, a modificação não apresenta convergência. Para o caso InOutM3, ocorreconvergência para todos os valores de R e s, sendo necessário ao mínimo 2 repetições paraobter resultado apresentável, e mesmo havendo a convergência, o NMSE é bastante instávelao utilizar um coeficiente a mais a ou menos. O mínimo valor de NMSE é dependente decada caso (PA e modelo), portanto, não é possível impor um valor mínimo para qualquercaso. Logo, um valor de erro aceitável ao fazer redução do número de coeficientes é quandoeste está próximo ao caso com todos os coeficientes.
3.1.2 CoSaMP modificado b
O CoSaMP seleciona os coeficientes em duas etapas. No primeiro momento, sãoescolhidos 2s coeficientes, realizando a união com os coeficientes da iteração anterior, eno segundo momento, escolhidos os s coeficientes a serem considerados. A modificaçãoapresentada remove a etapa ak ← bs considerando todos os coeficientes do vetor b. Com amodificação, na primeira iteração, o número de coeficientes é controlado, já que a uniãoé realizada com um vetor vazio, e nas próximas iterações o controle não é garantido ouapresenta exatamente o mesmo resultado, portanto, apenas uma iteração é realizada e o
2 O número máximo de coeficientes é metade dos coeficientes do modelo (54 coeficientes neste caso).3 O número máximo de coeficientes para o caso é 184.

42 Capítulo 3. RESULTADOS
Figura 7 – NMSE em função de s e R utilizando modificação a.
(a) InOutP
0 10 20 30 40 50 60−35
−30
−25
−20
−15
−10
s
NM
SE
[dB
]
NMSE x coeficientes
R = 1R = 2R = 3R = 4R = 5R = 6R = 7
(b) InOutM
0 10 20 30 40 50 60 70 80 90 100−35
−30
−25
−20
−15
−10
−5
0
sN
MS
E [d
B]
NMSE x coeficientes
R = 1R = 2R = 3R = 4R = 5R = 6R = 7
Fonte: O autor, 2017
termo 2s é substituído apenas por s 4, onde s é a quantidade de coeficientes que passam aestar armazenados em b. A equação 3.2 apresenta a aplicação das modificações:
a0 ← 0,y ← Φ ∗ u,
T ← supp(ys),b|T ← Φ†Tu,b|T c ← 0.
(3.2)
A função, além de modificada no equacionamento, modifica os parâmetros deentrada e a saída da função. Nos parâmetros de entrada, é retirado o critério de parada dolooping (R), e o retorno da função passa a ser b.
As figuras 8a e 8b apresentam os resultados para os dois PAs. A redução decoeficientes não é eficiente comparada ao OLS na figura 4, no entanto, existe convergênciaem ambos os casos, e estas são estáveis. O formato degrau nas respostas possivelmenteé causado pela maneira como a matriz de entradas está organizada e a ineficiência doalgoritmo. Considerando um exemplo cujo modelo é ajustado para 100 coeficientes e 5destes são significativos para reduzir o erro em 90%, supondo que estes 5 estão separadospor 10 não significativos, o algoritmo não é capaz de escolher em sequência os coeficientesmais significativos sem escolher os 10 menos significativos anteriores, o que faz apresentaro formato degrau.
Comparando o CoSaMP original e as modificações, a modificação b é menos4 Fazendo isso, o algoritmo modificado permite qualquer quantidade de coeficientes até o valor máximo
do modelo.

3.2. Aplicando CoSaMP modificação B para linearizar um PA 43
Figura 8 – NMSE em função do parâmetro s utilizando modificação b.
(a) InOutP
0 20 40 60 80 100 120−65
−60
−55
−50
−45
−40
−35
−30
−25
−20
s
NM
SE
[dB
]
NMSE x coeficientes
(b) InOutM
0 50 100 150 200 250 300 350 400−40
−35
−30
−25
−20
−15
−10
−5
0
s
NM
SE
[dB
]
NMSE x coeficientes
Fonte: O autor, 2017
complexa e mais estável, porém, a modificação a permite menor erro com menos coeficientesno caso específico InOutM. Isso implica que, para um caso aplicável, a modificação a émais eficiente.
3.2 Aplicando CoSaMP modificação B para linearizar um PA
Nesta seção, uma linearização com redução de coeficientes utilizando CoSaMPmodificação b em um modelo de PA é aplicada, baseada no conjunto de dados InOutM,utilizando MPA com fatores de truncamento M = 7 e P = 4. Conforme figura 8b, 250coeficientes apresentam NMSE com resultado satisfatório.
Um resultado satisfatório é escolher a quantidade de coeficientes tal que o NMSEesteja próximo do mínimo atingível pelo modelo ao utilizar todos os coeficientes. Fazendoisso, espera-se máxima redução de ACPR, o que não possui ligação direta com valores deNMSE, principalmente por este chegar à valores distintos para diferentes casos. Da mesmaforma, a redução de ACPR não implica em um valor exato do NMSE na modelagem deum PA.
Por possuir apenas dados medidos, a simulação é realizada seguindo a ordem:
• Um modelo do PA é extraído utilizando modelo MPA e todos os coeficientes sãocalculados utilizando LS.
• Utilizando o modelo do PA, um novo conjunto de dados é calculado e as informaçõesde entrada e saída são invertidas entre si.

44 Capítulo 3. RESULTADOS
• O modelo do DPD é calculado utilizando CS modificação b com quantidade decoeficientes reduzida.
• Limitando a amplitude da informação inserida no DPD aplicando um ganho menorque 1 comparado a amplitude máxima permitida5, a informação é pré-distorcida.
• A informação pré-distorcida é inserida no modelo do PA, armazenando as informaçõesde entrada e saída.
• O modelo do DPD é novamente extraído com quantidade reduzida de coeficientes.
• Os dados da fonte são pré-distorcidos com o novo modelo, aplicando ganho menorque 1 normalizado na amplitude máxima.
• Os dados pré-distorcidos são inseridos no modelo do PA, e armazenados os dados deentrada e saída do sistema6.
• A potência média do sinal na saída do PA é calculada, e um novo conjunto deinformações in out do modelo do PA é adquirido aplicando um ganho que garantemesma potência na saída do PA, quando este opera sem o DPD.
• Com os dados de saída do PA, com e sem DPD, uma análise é realizada.
Tabela 1 – NMSE calculado nas etapas da linearização do PA.
NMSE [dB]Modelo do PA -45,33
Modelo do DPD 1 -35,12Modelo do DPD 2 -37,31
Fonte: O autor, 2017
Aplicando o procedimento descrito, a tabela 1 apresenta os principais erros adquiri-dos, onde o modelo do PA considera todos os coeficientes do modelo MPA com fatores detruncamento M = 7 e P = 4, e os modelos do DPD 1 e DPD 2 são a primeira e segundaextrações dos coeficientes utilizando CS modificação b, respectivamente. Os valores depotência não estão apresentados devido à normalização das medidas, no entanto, o ajusteé realizado considerando duas casas decimais de potência média medidas em dBm paracomparação entre resposta com e sem DPD, fazendo com que o PA atinja pontos próximosda saturação na primeira modelagem do DPD. Os ganhos do DPD são ajustados paraatingir o ponto ótimo de linearização levando como base o ACPR médio e diferença de0,05 V/V entre primeiro e segundo ganho, sendo o último menor.5 Amplitude máxima é o máximo valor das amostras utilizadas para a extração do modelo, uma vez que
valores superiores extrapolam o modelo.6 Entrada do DPD, e saída do PA. Sendo o sistema apenas formado por um DPD + PA.

3.3. Linearização de um PA utilizando Cadence Virtuoso 45
Figura 9 – Figuras de mérito para a linearização do PA com redução de parâmetrosutilizando CS modificação b.
(a) Resposta do sistema.
0 0.5 1 1.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Tensão de entrada normalizada [V]
Ten
são
de s
aída
nor
mal
izad
a [V
]
Sem DPDCom DPD
(b) PSD do sinal de saída.
−30 −20 −10 0 10 20 30−80
−70
−60
−50
−40
−30
−20
Frequência [MHz]
PS
D [d
Bm
/Hz]
Saída sem DPDSaída com DPD
Fonte: O autor, 2017
A figura 9a apresenta a resposta do sistema com e sem o DPD7, apresentando valoresabsolutos de tensão de saída em função da tensão de entrada com valores normalizados.O aumento de linearidade é significativo mantendo mesma potência média. O resultadotambém é analisado no domínio da frequência e apresentado pela figura 9b, com densidadeespectral de potência equivalente em banda base do sinal modulado emitido pelo PAquando este opera com e sem o DPD. A figura 9b apresenta redução de ACPR em 13,94dB e 12,79 dB nas bandas adjacentes inferior e superior, respectivamente.
3.3 Linearização de um PA utilizando Cadence VirtuosoO Cadence Virtuoso é um simulador de circuitos robusto que permite simulações
complexas, projeto de leiaute e simulações considerando os parasitas dos circuitos, alémde disponibilizar ferramentas como máscaras de algumas normas, cálculos de ACPR eEVM. Realizar uma simulação considerando uma fonte do Cadence Virtuoso é bastantesimples, porém, é necessário distorcer o sinal da fonte, o que torna-se uma tarefa complexahavendo a necessidade de pesquisa e diversos testes.
O simulador possui uma fonte de sinais de RF (rfVsource) que produz símbolosbaseados nas normas disponíveis e algumas modulações. Este sinal produzido é em domíniotemporal e em banda base para realização da simulação de envoltória. Após a simulação sãoarmazenadas as informações no domínio do tempo das tensões na entrada e saída do PAcom valores de fase e quadratura. Existem diferentes formas de realizar este procedimento,mas nesta pesquisa as informações são salvas em arquivos texto com extensão .csv para7 A figura mostra apenas alguns pontos do total de medidas realizadas.

46 Capítulo 3. RESULTADOS
serem lidos pelo Matlab. A figura 10 apresenta o diagrama de uma simulação com o PAutilizando a fonte de sinais do simulador.
Figura 10 – Circuito base de simulação no Cadence Virtuoso.
rfVsource PA Carga
Fonte: O autor, 2017
Além da fonte geradora de sinais modulados, baseada nas normas disponíveis nosimulador, é possível inserir dados modulados baseados por uma outra norma específica nãodisponível no simulador através de arquivos texto (formato .pwl) informando componentesde fase e quadratura em função das amostras de tempo. A leitura dos arquivos texto érealizada através de uma fonte de potência chamada pelo simulador de port. Esta consisteem uma fonte de tensão em série com uma impedância que pode ser controlada paragarantir potência ou tensão conhecidas fornecidas à uma carga perfeitamente casada coma fonte. Em geral a fonte referida é utilizada para realização de simulações que dependemde apenas um tom senoidal controlando amplitude ou potência e frequência. No entanto,entre as diversas opções disponíveis, a fonte permite inserir parâmetros de modulaçãoatravés dos arquivos texto.
A disponibilidade da port em inserir dados modulados por arquivo texto é especifi-camente utilizar normas não disponíveis no simulador, dessa forma permitindo utilizar afunção para inserção de dados distorcidos. A figura 11 apresenta o diagrama de simulaçãocom a inserção de informação através de arquivo texto para uma simulação envoltória. Afonte (port) faz a leitura dos arquivos texto e os insere no PA. Os parâmetros da fonte sãoajustados realizando o casamento de impedância com o PA e ganho de tensão unitáriogarantindo comportamento de uma fonte de tensão ligada diretamente ao PA.
Figura 11 – Circuito de simulação no Cadence Virtuoso com informação de arquivo texto.
PA CargaPort
Fonte: O autor, 2017
Uma primeira simulação é realizada fazendo apenas a leitura da tensão inserida noPA8. O resultado mostrando apenas as 10 primeiras amostras é apresentado na figura 12,apresentando o tempo em função das amostras (figura da esquerda), o valor absoluto detensão em função das amostras (figura central) e tensão em função do tempo (figura da8 Utilizando um PA disponível nas bibliotecas do Cadence Virtuoso.

3.3. Linearização de um PA utilizando Cadence Virtuoso 47
direita). A figura 12 mostra que, ao inserir dados em arquivo texto, o simulador faz umareamostragem modificando a frequência de amostragem nas primeiras amostras9 mantendoa informação em função do tempo (figura da direita). Após aproximadamente 7 amostras,a frequência de amostragem é a mesma inserida pelo arquivo texto com toda a informaçãoreamostrada.
Figura 12 – Diferença entre informação inserida e lida utilizando o Cadence Virtuoso
0 5 100
1
2
3
4
5
6
7x 10
−8
amostra
tem
po [s
]
0 5 100.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
amostra
abs(
tens
ão)
[V]
0 0.5 1
x 10−7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
tempo [s]ab
s(te
nsão
) [V
]
dados lidos (CDS)dados inseridos (Matlab)
Fonte: O autor, 2017
Uma das exigências do modelo utilizado para o DPD é a frequência de amostragemconstante. Para extrair o modelo do PA/DPD, basta apenas utilizar as tensões medidasna entrada e saída do PA desconsiderando as amostras cuja frequência de amostragemnão é constante. Para obter as figuras de resposta inxout do sistema todo, os dadosarmazenados no Matlab (dados da fonte) e das medidas da tensão de saída do PA sãonecessários. Devido à reamostragem realizada pelo simulador, a mesma reamostragemdeve ser realizada na informação da fonte para que cada medida de tensão de saída possaser relacionada com uma tensão de entrada aplicada no mesmo instante de tempo.
Para resolver este problema, é utilizado o diagrama da figura 13. Cada porta (port1e port2 ) recebe 2 arquivos texto, com as tensões de fase e quadratura. A port2 recebe ainformação pré-distorcida e a port1 recebe a informação original. As medidas pós-simulaçãorealizadas são em 3 pontos distintos, ou seja, a tensão de entrada do PA, a tensão de saídado PA, e a tensão na carga ligada diretamente à port1 10. Cada combinação de inxoutapresenta as respostas do DPD, do PA e do sistema.
Considerando os efeitos da simulação, o processo de linearização de um PA noCadence Virtuoso é realizado conforme figura 14. Na primeira etapa (Matlab Etapa 1) osdados são lidos da fonte11 e escritos em 2 arquivos texto com as tensões de fase e quadratura9 Procedimento para garantir convergência.10 Existe um casamento de impedâncias ideal entre todos os componentes do sistema.11 A fonte pode ser rfVsource do Cadence Virtuoso, ou uma informação salva em arquivo .mat.

48 Capítulo 3. RESULTADOS
Figura 13 – Circuito de simulação no Cadence Virtuoso considerando a reamostragem.
PA CargaPort2
CargaPort1
Fonte: O autor, 2017
ligadas a uma amostra de tempo. Na primeira simulação, a característica de transferênciado PA é adquirida através das medidas de tensão de entrada e saída salvas em parte real eimaginária através de arquivos .csv posteriormente lidos pelo Matlab. Na segunda etapa doMatlab (Matlab Etapa 2), os dados de entrada e saída do PA são invertidos excluindo asamostras cuja frequência de amostragem não é constante para evitar qualquer problema demodelagem, os fatores de truncamento do modelo são ajustados e extraídos os coeficientesdo DPD. Em Matlab Etapa 3, utilizando os coeficientes e fatores de truncamento da etapaanterior, os dados utilizados na etapa 1 são salvos em arquivos texto para a port1, tambémdistorcidos e salvos em arquivos para port2. A simulação 2 é executada, os dados IN1,IN2 e OUT são salvos em arquivo .csv. A última etapa (Matlab Etapa 4) lê os arquivos.csv, exclui as primeiras amostras, faz a análise de aumento de linearidade e resposta emfrequência da informação.
Figura 14 – Diagrama de simulação completa no Cadence Virtuoso.
PA CargaPort2
CargaPort1
PA CargaPort
Simulação 1
Simulação 2
MatlabEtapa 1
MatlabEtapa 2
MatlabEtapa 3
MatlabEtapa 4
𝐼𝑁 𝑂𝑈𝑇
𝐼𝑁1 𝑂𝑈𝑇
𝐼𝑁2
Fonte: O autor, 2017
Quando o PA amplifica sinal distorcido, novas características de transferênciapodem ser consideradas e, para melhorar o modelo do DPD, uma nova extração decoeficientes para o modelo do PA pode ser realizada.

3.3. Linearização de um PA utilizando Cadence Virtuoso 49
3.3.1 Linearização do PA CMOS_classeAB_reconfiguravel usando todos oscoeficientes do modelo
Para validar o procedimento de linearização no Cadence Virtuoso utilizando o DPDcom todos os coeficientes do modelo MPA, o PA CMOS_classeAB_reconfiguravel no modode maior ganho é excitado com um sinal OFDMA de banda 20 MHz e ganho ajustadopara que o pico de potência atinja ponto próximo de OCP1dB de ganho, ajustado paramaior redução de ACPR. O modelo do PA é extraído na primeira simulação conformefigura 14, e a resposta está apresentada na figura 15a12 com o módulo da tensão de saída(tensão sobre a carga) em função do módulo da tensão na entrada do PA.
O modelo utilizado para extração dos coeficientes é o MPA. Os fatores de trun-camento são escolhidos analisando a figura 15b, onde o NMSE é calculado modelandoa resposta do PA variando os fatores M e P . O PA apresenta uma característica detransferência bem linear e para garantir redução da distorção de intermodulação, o modelodeve ser bastante preciso apresentando baixo NMSE. Como argumentos de escolha dosfatores de truncamento usam-se o erro mínimo atingido e também o custo computacional,garantindo compromisso entre ambos. A capacidade computacional permite P = 10,M = 2, e ao incrementar um fator de memória, deve-se decrementar um de não linearidade.Considerando menor erro e as condições aplicadas, as melhores escolhas são P = 9 eM = 3 ou P = 8 e M = 4. Como na figura 15a a não linearidade é mais significativa paramelhorar o desempenho do PA, então P = 9 e M = 3 é a melhor escolha.
Figura 15 – Resposta do PA e modelo.
(a) OUTxIN
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.5
1
1.5
2
2.5
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do PA
(b) NMSE (M,P)
1 2 3 4 5 6 7 8 9 10−120
−110
−100
−90
−80
−70
−60
−50
−40
−30NMSE(M,P)
P
NM
SE
[dB
]
M = 1M = 2M = 3M = 4M = 5M = 6M = 7
Fonte: O autor, 2017
O procedimento de linearização já mencionado foi aplicado com o modelo do DPDextraído duas vezes. São aplicados ganhos na entrada do DPD para que o PA opere no12 A figura apresenta apenas algumas amostras dos dados lidos.

50 Capítulo 3. RESULTADOS
ponto de melhor linearização13. A potência média do sinal entregue à carga do PA emcascata com o DPD é 8,63 dBm, a potência sem o DPD é ajustada apresentando 8,65dBm. A figura 16a apresenta a diferença de fase entre entrada e saída do sistema com esem o DPD, apresentando compensação de fase. A figura 16b apresenta as curvas inxoutdo sistema com e sem o DPD. Ambas as figuras apresentam aumento de linearidadeconsiderando mesma potência média entregue à carga.
Figura 16 – Resposta do PA com e sem DPD.
(a) Compensação de fase.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
ABS(in) [V]
θ out −
θin
[Rad
]
Diferença de fase IN x OUT
PA com DPDPA sem DPD
(b) Transferência do sistema.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.5
1
1.5
2
2.5
ABS(in) [V]
AB
S(o
ut)
[V]
Comparativo
PA sem DPDPA com DPD
Fonte: O autor, 2017
O aumento de linearidade também é verificado com a redução da densidade espectralde potência nas bandas adjacentes ao canal. A figura 17 ilustra este resultado. A linearizaçãodo PA CMOS_classeAB_reconfiguravel apresentou melhora de 10,08 dB e 9,67 dB nosACPRs inferior e superior, respectivamente.
3.4 Linearização do PA GaN_classeAB utilizando ADS
Para realizar a linearização do PA, primeiro é realizada uma caracterização do PApara obtenção dos seus principais parâmetros (Ganho, OCP1dB e Potência de saturação).
3.4.1 Caracterização do PA GaN_classeAB
A caracterização pode ser realizada através de uma simulação HB variando apotência de entrada. Como este circuito já está ajustado para simulação de envoltória,então a potência de entrada é variada linearmente de 0 a 30 dBm aplicando uma amplitudede modulação variando em escala logarítmica lendo a potência entregue à carga.13 Ganhos ajustados por tentativas baseado em resultados numéricos.

3.4. Linearização do PA GaN_classeAB utilizando ADS 51
Figura 17 – Resposta em frequência do sinal entregue à carga com e sem o DPD.
−40 −30 −20 −10 0 10 20 30 40−110
−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
Frequência [MHz]
PS
D [d
Bm
/Hz]
Saida sem DPDSaida com DPD
Fonte: O autor, 2017
A simulação é realizada e a figura 18 apresenta a característica de transferência doPA, juntamente com a extrapolação da aproximação linear. As características numéricasestão apresentadas na tabela 2 com valores aproximados.
Figura 18 – Característica de transferência do PA.
0 5 10 15 20 25 3020
25
30
35
40
45
Pin [dBm]
Pou
t [dB
m]
Resposta do PAAproximação da região linear
Fonte: O autor, 2017
Tabela 2 – Característica do PA GaN_classeAB.
PSAT 38 dBmOCP1dB 37 dBmGanho 23 dB
Fonte: O autor, 2017
Baseado na tabela 2, a simulação com o sinal OFDMA de 20 MHz é realizadapara obtenção da característica de transferência e escolha dos fatores de truncamento domodelo, ajustando amplitude de entrada para que o ponto máximo seja inferior ao ponto

52 Capítulo 3. RESULTADOS
de OCP1dB devido ao alto efeito de memória do PA ilustrado na figura 19b com dados deentrada e saída invertidos.
A modelagem comportamental direta é realizada variando os fatores M e P domodelo. A figura 19a apresenta os resultados adquiridos. A escolha de menor erro é omaior valor de M e P possível, porém, a capacidade computacional limita a escolha. Bonsvalores de NMSE são obtidos com M = 6 e P = 5 apresentando baixo erro e capacidadecomputacional14 aceitável. A figura 19b apresenta o resultado de modelagem para o DPD15
ilustrando apenas alguns pontos. Utilizando os truncamentos escolhidos, o NMSE atingidoé -39,05 dB.
Figura 19 – NMSE da modelagem inversa do PA no ADS.
(a) Variando M e P .
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6−45
−40
−35
−30
−25
−20
−15
NM
SE
[dB
]
P
M = 1M = 2M = 3M = 4M = 5M = 6M = 7
(b) M = 6 e P = 5.
0 2 4 6 8 10 12 14 16 180
0.5
1
1.5
2
2.5
In [V]
Out
[V]
Dados medidosDados calculados
Fonte: O autor, 2017
3.4.2 Linearização do PA GaN_classeAB usando todos os coeficientes domodelo
Para realizar a distorção do sinal o procedimento tomado está descrito abaixo:
• Um conjunto de dados é inserido no PA para simulação.
• O modelo do PA é extraído utilizando MPA e fatores de truncamento ajustados.
• O sinal é pré-distorcido aplicando-se um ganho em função do máximo ganho aplicávelpara o modelo16.
• Um novo modelo do PA é extraído quando operando com dados pré-distorcidos.14 A capacidade computacional é baseada no tempo dos testes realizados.15 Dados invertidos de entrada e saída do PA.16 O máximo ganho garante a máxima amplitude sem extrapolar o modelo.

3.4. Linearização do PA GaN_classeAB utilizando ADS 53
• Os dados são pré-distorcidos aplicando ganho em função do máximo ganho aplicávelpara o modelo.
• Uma nova simulação é realizada.
• As informações adquiridas são utilizadas para análise.
Aplicando a linearização descrita acima, na primeira modelagem do DPD o NMSEatingido foi -39,05 dB. Aplicando máximo ganho sem extrapolar o modelo, uma novamodelagem para o DPD foi realizada onde o PA é excitado com sinal distorcido. O novoNMSE foi -42,08 dB com ganho máximo aplicado para simulação. Baseado na potênciamédia do sinal entregue à carga com o DPD, um ganho é aplicado ao sinal na entrada doPA sem o DPD para que a potência média entregue à carga seja a mesma.
A figura 20a apresenta uma comparação das respostas de amplitude com e semDPD do sistema com potência média ajustada. Houve compensação do efeito não lineare de memória com bom resultado. O mesmo acontece com a diferença de fase, havendocompensação quando utilizando o DPD, conforme figura 20b.
Figura 20 – Comparação entre resposta com e sem DPD.
(a) De amplitude.
0 0.5 1 1.50
5
10
15
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.2 0.4 0.6 0.8 1 1.2 1.4−4
−2
0
2
4
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−0.4
−0.2
0
0.2
0.4
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA com DPD
Fonte: O autor, 2017
A figura 21 apresenta a PSD do sinal entregue à carga comparando resposta com esem a presença do DPD. A potência entregue é a mesma, porém, com diferença de ACPRconsiderável. A tabela 3 apresenta os resultados numéricos da modelagem comportamentaldo DPD nas duas iterações, também a potência média entregue à carga e diferença deACPR conforme figura 21. A diferença de ACPR é calculada através das medidas deACPR inferior e superior utilizando canais laterais de largura de banda iguais à 20 MHz ecanal passante de 17,39 MHz, com separação de 20 MHz entre as frequências centrais.

54 Capítulo 3. RESULTADOS
Figura 21 – Resposta em frequência do sinal entregue à carga com e sem o DPD.
−40 −30 −20 −10 0 10 20 30 40−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
Tabela 3 – Resultados numéricos.
NMSE primeira modelagem -39,05 dBNMSE segunda modelagem -42,08 dB
Poutmedia25,07 dBm
Diferença de ACPR low 18,80 dBDiferença de ACPR upper 18,14 dB
Fonte: O autor, 2017
3.5 Linearização de PAs nos simuladores aplicando redução de co-eficientes do modelo
3.5.1 Cadence Virtuoso
Baseado na linearização do PA CMOS_classeAB_reconfiguravel com todos oscoeficientes do modelo MPA ajustado para M = 3 e P = 9, produzindo um total de 468coeficientes e aplicando sinal OFDMA 20 MHz, nesta seção a linearização com redução decoeficientes é utilizada. A escolha do número de coeficientes é baseada no OLS por esteser o mais crítico em processamento computacional e no erro mínimo utilizando todos oscoeficientes do modelo.
3.5.1.1 Utilizando OLS
A primeira etapa para linearização é definir o número de coeficientes a ser utilizado.A escolha é realizada variando a quantidade de coeficientes do modelo utilizando comobase de dados a primeira simulação de caracterização do PA, cujo NMSE mínimo é -73,05dB com todos os coeficientes do modelo ao realizar a modelagem inversa (modelagem doDPD).

3.5. Linearização de PAs nos simuladores aplicando redução de coeficientes do modelo 55
A figura 22 apresenta o NMSE em função do número de coeficientes. A curva pretaapresenta o erro utilizando OLS e a curva vermelha apresenta o erro mínimo com todosos coeficientes. Devido à característica bastante linear do PA o modelo deve ser bastantepreciso. O erro é bastante baixo e praticamente constante a partir de 12 coeficientes.Buscando melhor resultado de linearização serão utilizados 25 coeficientes, gerando NMSEmenor que -61 dB.
Figura 22 – NMSE em função da quantidade de coeficientes utilizando OLS no CadenceVirtuoso.
0 5 10 15 20 25 30−80
−70
−60
−50
−40
−30
−20
−10
0NMSE x Numero de coeficientes
Numero de coeficientes
NM
SE
[dB
]
NMSE OLSNMSE mínimo LS
Fonte: O autor, 2017
A escolha do número de parâmetros realizada é aplicada para linearizar o PACMOS_classeAB_reconfiguravel no Cadence Virtuoso. A extração dos coeficientes érealizada 2 vezes, sendo a primeira com o PA operando sem sinal distorcido e a segundacom o PA operando com sinal distorcido. Os ganhos aplicados são máximos, e a máximaamplitude na primeira modelagem é a mesma já utilizada para linearização com todos oscoeficientes.
A figura 23a apresenta a resposta de amplitude do sistema com e sem o DPD. Osdados de entrada do PA recebem ganho ajustado para que a potência média entregue àcarga seja a mesma nos dois casos. A amplitude de entrada da informação com o DPD énormalizada para melhorar a comparação entre os casos. A figura 23b apresenta respostade fase para o sistema com e sem o DPD.
Por fim, a análise realizada no domínio da frequência está apresentada na figura 24.A curva vermelha apresenta PSD do sinal entregue à carga quando o sistema opera como DPD, e a curva preta quando o sistema opera sem o DPD. Nos dois casos, a potênciamédia entregue à carga é a mesma.
Valores numéricos da simulação completa estão apresentados na tabela 4. É notávelo aumento de precisão de modelagem do DPD quando o PA opera com dados distorcidos

56 Capítulo 3. RESULTADOS
Figura 23 – Comparação entre resposta com e sem DPD usando OLS no Cadence Virtuoso.
(a) De amplitude.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.5
1
1.5
2
2.5
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035−1
0
1
2
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.005 0.01 0.015 0.02 0.025 0.03−0.05
0
0.05
0.1
0.15
ABS(in) [V]θ ou
t − θ
in [R
ad]
Resposta do PA com DPD
Fonte: O autor, 2017
Figura 24 – Resposta em frequência do sinal entregue à carga com e sem o DPD usandoOLS no Cadence Virtuoso.
−40 −30 −20 −10 0 10 20 30 40−110
−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
(segunda modelagem), também as diferenças de APCR do canal adjacente inferior esuperior são apresentados.
3.5.1.2 Utilizando PCA
A escolha do número de coeficientes é baseada na escolha do OLS. A quantidadeé escolhida para obter erro inferior a -61 dB, o que faz manter uma justa comparaçãocom o aumento de linearidade do sistema. Da mesma forma que realizado anteriormente,o conjunto de dados utilizados é da primeira simulação do PA com dados invertidosapresentando NMSE mínimo de -73,05 dB com todos os coeficientes.

3.5. Linearização de PAs nos simuladores aplicando redução de coeficientes do modelo 57
Tabela 4 – Resultados numéricos utilizando OLS no Cadence Virtuoso.
NMSE primeira modelagem -61,22 dBNMSE segunda modelagem -64,58 dB
Poutmedia8,30 dBm
Diferença de ACPR low 10,23 dBDiferença de ACPR upper 9,58 dB
Fonte: O autor, 2017
A figura 25 apresenta o NMSE em função do número de coeficientes comparandoao erro mínimo possível. Nesta figura, todas as possibilidades de coeficientes são calculadasporque o PCA tem exigência computacional bem inferior comparada ao OLS. O erromenor que -61 dB é atingido quando utilizados 120 coeficientes.
Figura 25 – NMSE em função da quantidade de coeficientes utilizando PCA no CadenceVirtuoso.
0 50 100 150 200 250 300 350 400 450 500−80
−70
−60
−50
−40
−30
−20
−10
0NMSE x Numero de coeficientes
Numero de coeficientes
NM
SE
[dB
]
NMSE PCANMSE mínimo LS
Fonte: O autor, 2017
A mesma linearização já realizada é aplicada para redução do número de coeficientesutilizando algoritmo PCA com 120 coeficientes. As figuras 26a e 26b apresentam ascomponentes de amplitude e fase da resposta do sistema com e sem o DPD, sendo que emambos os casos a mesma potência média é entregue à carga.
A figura 27 apresenta a resposta em frequência do sinal entregue à carga compotência média ajustada para ambos os casos, baseada na potência entregue com o DPD.Os dados numéricos das modelagens, potência média e diferença de ACPR dos canaisadjacentes estão apresentados na tabela 5.
3.5.1.3 Utilizando CoSaMP modificação b
A escolha do número de coeficientes para utilizar na linearização do PA é realizadada mesma forma que no PCA. O número de coeficientes é selecionado após atingir -61 dB

58 Capítulo 3. RESULTADOS
Figura 26 – Comparação entre resposta com e sem DPD usando PCA no Cadence Virtuoso.
(a) De amplitude.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.5
1
1.5
2
2.5
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.005 0.01 0.015 0.02 0.025 0.03−1
0
1
2
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.005 0.01 0.015 0.02 0.025 0.03−0.05
0
0.05
0.1
0.15
ABS(in) [V]θ ou
t − θ
in [R
ad]
Resposta do PA com DPD
Fonte: O autor, 2017
Figura 27 – Resposta em frequência do sinal entregue à carga com e sem o DPD usandoPCA no Cadence Virtuoso.
−40 −30 −20 −10 0 10 20 30 40−110
−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
na modelagem comportamental do DPD utilizando dados invertidos.
A figura 28 apresenta o NMSE em função do número de coeficientes. O CoSaMPmodificação b apresenta um formato em degrau a cada quantidade de coeficientes. Issoacaba sendo um problema na utilização deste algoritmo, já que a redução de coeficientes élenta. Além disso, entre as opções na escolha de coeficientes o erro mínimo superior a -61dB é próximo de -55 dB e o erro máximo inferior menor que -70 dB, ou seja, não existeuma quantidade que produza erro próximo do erro esperado.
Para não haver perda de qualidade da modelagem são escolhidos 465 coeficientes,cumprindo NMSE inferior a -61 dB conforme realizado com OLS. Esse caso apresenta erro

3.5. Linearização de PAs nos simuladores aplicando redução de coeficientes do modelo 59
Tabela 5 – Resultados numéricos usando PCA no Cadence Virtuoso.
NMSE primeira modelagem -61,04 dBNMSE segunda modelagem -66,86 dB
Poutmedia8,24 dBm
Diferença de ACPR low 9,77 dBDiferença de ACPR upper 9,37 dB
Fonte: O autor, 2017
Figura 28 – NMSE em função da quantidade de coeficientes utilizando CoSaMP modifica-ção b no Cadence Virtuoso.
0 50 100 150 200 250 300 350 400 450 500−80
−70
−60
−50
−40
−30
−20
−10
0NMSE x Numero de coeficientes
Numero de coeficientes
NM
SE
[dB
]
NMSE CSNMSE mínimo LS
Fonte: O autor, 2017
bem inferior, muito próximo do erro mínimo atingível.
A linearização aplicando redução dos coeficientes utilizando CoSaMP modificaçãob é realizada. Os coeficientes do modelo são extraídos duas vezes com ganhos máximos epotência média ajustada.
A figura 29a apresenta a resposta de amplitude do sistema com e sem o DPD e afigura 29b apresenta a resposta de fase. As figuras são geradas aplicando ganho no sinalde entrada do PA sem o DPD para ajuste de potência média entregue à carga.
A resposta em frequência do sinal entregue à carga pelo sistema quando este operacom e sem o DPD está apresentada na figura 30, com ajuste de potência média. A tabela6 apresenta os resultados numéricos da linearização do PA, apresentando os erros demodelagem do DPD, potência média do sinal entregue à carga e diferenças de ACPR noscanais adjacentes.
3.5.2 Advanced Design System
Baseado na linearização do PA GaN_classeAB com todos os coeficientes, nestaseção a linearização aplicando redução de coeficientes é utilizada. O sinal inserido no PA

60 Capítulo 3. RESULTADOS
Figura 29 – Comparação entre resposta com e sem DPD usando CoSaMP modificação bno Cadence Virtuoso.
(a) De amplitude.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.5
1
1.5
2
2.5
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.005 0.01 0.015 0.02 0.025 0.03−1
0
1
2
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.005 0.01 0.015 0.02 0.025 0.03−0.05
0
0.05
0.1
0.15
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA com DPD
Fonte: O autor, 2017
Figura 30 – Resposta em frequência do sinal entregue à carga com e sem o DPD usandoCoSaMP modificação b no Cadence Virtuoso.
−40 −30 −20 −10 0 10 20 30 40−110
−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
é o mesmo OFDMA com banda de 20 MHz. Os fatores de truncamento do modelo sãoM = 6 e P = 5, produzindo um total de 455 coeficientes.
3.5.2.1 Utilizando OLS
A escolha do número de coeficientes do modelo é realizada variando a quantidadeutilizando os dados da primeira simulação de caracterização do PA, sendo o NMSE mínimo-39,05 dB quando todos os coeficientes do modelo são aplicados na modelagem inversa(modelagem do DPD).
A figura 31 apresenta o NMSE em função do número de coeficientes. A curva preta

3.5. Linearização de PAs nos simuladores aplicando redução de coeficientes do modelo 61
Tabela 6 – Resultados numéricos usando CS modificação b no Cadence Virtuoso.
NMSE primeira modelagem -71,84 dBNMSE segunda modelagem -74,49 dB
Poutmedia8,26 dBm
Diferença de ACPR low 9,57 dBDiferença de ACPR upper 9,69 dB
Fonte: O autor, 2017
é o erro utilizando OLS e a curva vermelha o erro mínimo com todos os coeficientes. Sãoescolhidos 15 coeficientes por apresentar baixo erro e pouca variação após este resultado.
Figura 31 – NMSE em função da quantidade de coeficientes utilizando OLS no ADS.
0 5 10 15 20 25 30−40
−35
−30
−25
−20
−15
−10
−5
0NMSE x Numero de coeficientes
Numero de coeficientes
NM
SE
[dB
]
NMSE OLSNMSE mínimo LS
Fonte: O autor, 2017
O procedimento aplicado para linearização é o mesmo descrito na seção 3.4.2,sendo que o DPD é modelado com redução de coeficientes usando OLS. Todos os ganhosaplicados na linearização são os mesmos feitos para linearização com todos os coeficientes.Na primeira modelagem do DPD, utilizando 15 coeficientes, o NMSE atingido é -34,28 dBe na segunda modelagem -34,60 dB.
A figura 32a apresenta o resultado gráfico do aumento de linearidade e compensaçãode memória na linearização do PA GaN_classeAB, e a figura 32b apresenta o resultadoda compensação de fase entre os sinais inseridos no sistema e entregue à carga com e semo DPD. Os resultados apresentados possuem potência média ajustada.
A figura 33 apresenta a resposta em frequência do sinal entregue à carga pelosistema quando este opera com e sem o DPD e potência média ajustada. A tabela 7apresenta os resultados numéricos atingidos na linearização, sendo as diferenças de ACPRcondizentes com os resultados da figura 33.

62 Capítulo 3. RESULTADOS
Figura 32 – Comparação entre resposta com e sem DPD usando OLS no ADS.
(a) De amplitude.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
5
10
15
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.2 0.4 0.6 0.8 1 1.2 1.4−4
−2
0
2
4
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.5 1 1.5 2 2.5−0.1
0
0.1
0.2
0.3
ABS(in) [V]θ ou
t − θ
in [R
ad]
Resposta do PA com DPD
Fonte: O autor, 2017
Figura 33 – Resposta em frequência do sinal entregue à carga com e sem o DPD usandoOLS no ADS.
−40 −30 −20 −10 0 10 20 30 40−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
3.5.2.2 Utilizando PCA
Baseado na escolha do número de coeficientes realizada para OLS, uma justacomparação é realizada escolhendo a quantidade de coeficientes capaz de produzir o mesmoNMSE. A variação do número de coeficientes é realizada utilizando os mesmos dados enúmero de amostras para todas as possibilidades possíveis.
A figura 34 apresenta o erro em função do número de parâmetros do PCA (curvapreta) comparada ao erro mínimo atingível (curva vermelha) quando utilizando todos oscoeficientes do modelo. Conforme figura 34, um erro de modelagem inferior ao OLS com15 coeficientes é atingido com PCA ao utilizar-se pelo menos 266 coeficientes.

3.5. Linearização de PAs nos simuladores aplicando redução de coeficientes do modelo 63
Tabela 7 – Resultados numéricos usando OLS no ADS.
NMSE primeira modelagem -34,28 dBNMSE segunda modelagem -34,60 dB
Poutmedia25,54 dBm
Diferença de ACPR low 13,85 dBDiferença de ACPR upper 14,77 dB
Fonte: O autor, 2017
Figura 34 – NMSE em função da quantidade de coeficientes utilizando PCA no ADS.
0 50 100 150 200 250 300 350 400 450 500−40
−35
−30
−25
−20
−15
−10
−5
0NMSE x Numero de coeficientes
Numero de coeficientes
NM
SE
[dB
]
NMSE PCANMSE mínimo LS
Fonte: O autor, 2017
Aplicando mesmo procedimento de linearização descrito na seção 3.4.2, com DPDmodelado utilizando PCA na redução de coeficientes, todos os ganhos aplicados são iguaisaos da linearização com todos os coeficientes. O NMSE aplicando redução de coeficientescom PCA é -34,33 dB e -32,24 dB na primeira e segunda modelagem, respectivamente.
As figuras 35a e 35b apresentam um comparativo entre resposta de magnitudee fase do sistema quando este opera com DPD (pontos pretos) e sem o DPD (pontosvermelhos).
A figura 36 apresenta a resposta em frequência do sinal entregue à carga pelosistema com e sem o DPD, sendo a potência média entregue à carga ajustada para ocaso sem o DPD. A tabela 8 apresenta os resultados numéricos da linearização, sendo asdiferenças de ACPR de acordo com a figura 36.
3.5.2.3 Utilizando CoSaMP modificação b
Baseado na escolha do número de coeficientes para OLS, uma justa comparaçãoé realizada escolhendo a quantidade de coeficientes capaz de alcançar mesmo NMSE ouinferior. A variação do número de coeficientes é realizada utilizando os mesmos dados,varrendo todas as possibilidades.

64 Capítulo 3. RESULTADOS
Figura 35 – Comparação entre resposta com e sem DPD usando PCA no ADS.
(a) De amplitude.
0 0.5 1 1.50
5
10
15
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.2 0.4 0.6 0.8 1 1.2 1.4−4
−2
0
2
4
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.5 1 1.5 2 2.5−1.5
−1
−0.5
0
0.5
ABS(in) [V]θ ou
t − θ
in [R
ad]
Resposta do PA com DPD
Fonte: O autor, 2017
Figura 36 – Resposta em frequência do sinal entregue à carga com e sem o DPD usandoPCA no ADS.
−40 −30 −20 −10 0 10 20 30 40−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
A figura 37 apresenta o erro em função do número de parâmetros do CoSaMPmodificação b (curva preta) comparado ao erro mínimo atingível utilizando todos oscoeficientes. Conforme figura apresentada, são necessários ao menos 405 coeficientes paraatingir a capacidade de modelagem desejada.
As simulações são realizadas conforme procedimento aplicado para os diferentesalgoritmos. O erro da primeira modelagem do DPD é -34,67 dB e da segunda é -31,51 dB.Neste caso específico, realizar apenas uma extração de coeficientes é melhor, no entantoo procedimento é mantido com extração de coeficientes do DPD realizado 2 vezes paramanter comparação dos resultados.

3.5. Linearização de PAs nos simuladores aplicando redução de coeficientes do modelo 65
Tabela 8 – Resultados numéricos usando PCA no ADS.
NMSE primeira modelagem -34,33 dBNMSE segunda modelagem -32,24 dB
Poutmedia25,17 dBm
Diferença de ACPR low 9,28 dBDiferença de ACPR upper 6,31 dB
Fonte: O autor, 2017
Figura 37 – NMSE em função da quantidade de coeficientes utilizando CS modificação bno ADS.
0 50 100 150 200 250 300 350 400 450 500−40
−35
−30
−25
−20
−15
−10
−5
0NMSE x Numero de coeficientes
Numero de coeficientes
NM
SE
[dB
]
NMSE CS modificação BNMSE mínimo LS
Fonte: O autor, 2017
As figuras 38a e 38b apresentam o comparativo entre resposta de magnitude e fasedo sistema quando este opera com e sem DPD nas curvas preta e vermelha, respectivamente.
A figura 39 apresenta a PSD do sinal entregue à carga pelo sistema, comparandomesma potência média com e sem o DPD. Os resultados numéricos estão dispostos natabela 9.
Tabela 9 – Resultados numéricos usando CoSaMP modificação b no ADS.
NMSE primeira modelagem -34,67 dBNMSE segunda modelagem -31,51 dB
Poutmedia25,20 dBm
Diferença de ACPR low 6,61 dBDiferença de ACPR upper 6,06 dB
Fonte: O autor, 2017

66 Capítulo 3. RESULTADOS
Figura 38 – Comparação entre resposta com e sem DPD usando CoSaMP modificação bno ADS.
(a) De amplitude.
0 0.5 1 1.50
5
10
15
ABS(in) [V]
AB
S(o
ut)
[V]
Resposta do sistema
sem DPDCom DPD
(b) De fase.
0 0.2 0.4 0.6 0.8 1 1.2 1.4−4
−2
0
2
4
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA sem DPD
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−1.5
−1
−0.5
0
0.5
ABS(in) [V]
θ out −
θin
[Rad
]
Resposta do PA com DPD
Fonte: O autor, 2017
Figura 39 – Resposta em frequência do sinal entregue à carga com e sem o DPD usandoCoSaMP modificação b no ADS.
−40 −30 −20 −10 0 10 20 30 40−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequência [MHz]
PS
D [d
Bm
/Hz]
Com DPDsem DPD
Fonte: O autor, 2017
3.6 Análise dos resultados
Na sequência, a análise comparativa dos casos estudados é apresentada, subdivididade acordo com a sequência do texto.
Em um primeiro momento, um comparativo entre os diferentes algoritmos baseadosna abordagem do CS é apresentado comparando ao OLS e a linearização do PA pormeio da simulação com Matlab. Na segunda etapa são mostrados os principais resultadosutilizando os algoritmos para redução do número de coeficientes do modelo MPA aplicadosao DPD na linearização do PA no software de simulação Cadence Virtuoso. Na última

3.6. Análise dos resultados 67
parte, é apresentado um comparativo entre a análise de resultados utilizando reduçãode coeficientes no modelo MPA aplicados ao DPD na linearização do PA no software desimulação ADS.
3.6.1 Análise CS
A versão computacionalmente eficaz do CS, chamada de CoSaMP, não apresentouresultado satisfatório. Ao invés de haver uma convergência, aconteceu apenas divergênciapara ambos os casos estudados. Portanto, aplicar CoSaMP para redução do número decoeficientes para os casos estudados é inviável.
A primeira modificação (Modificação a) apresenta melhora significativa no algo-ritmo, sendo que para um caso existe a convergência, e para o outro não. Além disso,mesmo havendo convergência o erro de modelagem comportamental é bastante instável.Estes dois fatos fazem com que a aplicação nos casos estudados neste trabalho não sejapossível.
A segunda modificação (Modificação b) apresenta convergência lenta e em forma dedegraus. O erro baixo, próximo ao erro mínimo aplicado acontece utilizando quantidadesaltas de coeficientes. Isso torna o algoritmo ineficiente quando a exigência é a redução decoeficientes. No entanto, o algoritmo alcança erros próximos do mínimo e é estável, o quepermite a sua aplicação na redução de parâmetros do modelo, com resultados satisfatóriosno aumento da linearidade.
3.6.2 Linearização no Cadence Virtuoso
Com os resultados obtidos no Cadence Virtuoso, a tabela 10 apresenta os principaisresultados para realizar uma comparação considerando os diferentes algoritmos de reduçãode coeficientes.
Tabela 10 – Comparação entre resultados utilizando Cadence Virtuoso.
Sem Redução OLS PCA CoSaMP (B)NMSE de extração 1 [dB] -73,00 -61,22 -61,04 -71,84NMSE de extração 2 [dB] -93,34 -64,58 -66,86 -74,49Diferença de ACPR low [dB] 10,08 10,23 9,77 9,57Diferença de ACPR upper [dB] 9,67 9,58 9,37 9,69Diferença de ACPR média [dB] 9,88 9,91 9,57 9,63Potência média de saída [dBm] 8,65 8,30 8,24 8,26Número de coeficientes 468 25 120 465Redução de coeficientes [%] 0 95 74 1
Fonte: O autor, 2017

68 Capítulo 3. RESULTADOS
Os resultados foram todos obtidos utilizando modelo MPA com fatores de trun-camento ajustados para M = 3 e P = 9. A primeira simulação foi gerada aplicandoamplitude máxima de entrada igual em todos os casos, portanto o erro mínimo de modela-gem comportamental inversa do DPD é -73,00 dB. Utilizando os algoritmos com reduçãodo número de coeficientes, foi considerado, de acordo com a capacidade computacional,que -61 dB para primeira modelagem é aceitável em todos casos.
O melhor caso, em princípio é aplicar todos os coeficientes, o que permite que apotência média final seja maior. A redução de coeficientes implica em perda de qualidade.Como a escolha da quantidade foi realizada para manter qualidade, notavelmente oalgoritmo que melhor gera redução é OLS com significativa diferença comparado aoPCA e CoSaMP modificação b. Resultados de comparação utilizando mesmo número decoeficientes para ambos os algoritmos poderiam ser utilizados, porém, a linearidade e obaixo efeito de memória do PA exigem a precisão de modelagem para observar aumentode linearidade.
3.6.3 Linearização no ADS
Para comparar resultados, os dados da linearização do PA em circuito no ADSestão apresentados na tabela 11 para melhor visualização.
Tabela 11 – Comparação entre resultados utilizando ADS.
Sem Redução OLS PCA CoSaMP (B)NMSE de extração 1 [dB] -39,05 -34,28 -34,33 -34,67NMSE de extração 2 [dB] -42,08 -34,60 -32,24 -31,51Diferença de ACPR low [dB] 18,80 13,85 9,28 6,61Diferença de ACPR upper [dB] 18,14 14,77 6,31 6,06Diferença de ACPR média [dB] 18,47 14,31 7,80 6,34Potência média de saída [dBm] 25,07 25,54 25,17 25,20Número de coeficientes 455 15 266 405Redução de coeficientes [%] 0 97 42 11
Fonte: O autor, 2017
A tabela 11 apresenta os resultados obtidos ao aplicar redução de coeficientesno modelo MPA com fatores de truncamento ajustados para M = 6 e P = 5. Comoeste PA apresenta uma resposta menos linear e efeito mais significativo de memória, aprecisão do modelo não precisa possuir erros na ordem da linearização aplicada no PA doCadence Virtuoso para apresentar aumento na qualidade do sistema. Portanto, os fatoresde truncamento foram ajustados para obter bons resultados considerando capacidadecomputacional com baixo erro.
O melhor resultado esperado deve ser apresentado quando utilizando todos oscoeficientes do modelo, o que não acontece. De fato, este é o melhor resultado se comparando

3.6. Análise dos resultados 69
a redução média na diferença de ACPR. Isso acontece porque a quantidade de coeficientesdo OLS foi escolhido como menor valor aceitável e não para manter alta precisão. Osoutros algoritmos aplicados na redução apresentam resultado inferior conforme previsto.
Apesar da possibilidade em aplicar mesma quantidade de coeficientes para obterresultados, isso é inviável, já que a redução de coeficientes é muito diferente entre os 3algoritmos.
Durante a apresentação dos resultados, nos casos de linearização dos PAs dispostosem softwares, são apresentadas diversas curvas mostrando a diferença entre fase do sinalinserido no PA ou na cascata DPD+PA e o sinal entre à carga. Estes resultados apresentamde forma gráfica a capacidade de compensar o efeito de memória causado pelos circuitosde casamento de impedância do PA. Idealmente após a inserção do DPD a diferença defase deve ser zero, o que não acontece, mas apresenta melhora significativa, apresentadade forma quantitativa através do NMSE.


71
CONCLUSÃO
O algoritmo Amostragem Comprimida gerou resultados bastante interessantes, e apriori não esperados. O algoritmo original baseado na literatura apresenta convergência combons resultados, porém para os casos específicos deste trabalho houve apenas divergência.O primeiro objetivo específico foi cumprido com êxito aplicando o algoritmo no Matlab. Pornão apresentar resultado conforme esperado, não havia motivo para aplicá-lo na reduçãode coeficientes do modelo. Possível causa é o não cumprimento de algumas das hipótesesessenciais para a sua validade.
A linearização utilizando o software de simulação de circuitos elétricos de RFCadence Virtuoso foi realizada com êxito. O simulador não foi implementado especificamentepara manter frequência de amostragem constante, o que dificultou o tratamento de dadosdevido à reamostragem. Apesar da dificuldade, a linearização do PA foi realizada combom resultado e cumprido o segundo objetivo específico.
No terceiro objetivo específico, a aplicação de algoritmos para redução de coeficientesfoi realizada, apresentando resultados satisfatórios.
Também foram verificadas as duas possibilidades de modificação do algoritmoCoSaMP (modificação a e b), sendo que tanto o CoSaMP original como as modificaçõesaplicam a otimização inteira na redução dos coeficientes do modelo, o que permite manterinalterada a matriz de entradas sem aplicar nenhuma modificação. A modificação bapresentou convergência estável o que permitiu sua aplicação na redução de coeficientesdo modelo.
Finalmente, o trabalho é concluído comparando as diferentes abordagens conside-radas para redução dos coeficientes nos circuitos de PAs desenvolvidos nos simuladoresCadence Virtuoso e ADS. O OLS mostrou-se o melhor redutor de parâmetros do modelo,reduzindo mais de 95% dos coeficientes e mantendo resultado com erro baixo. Os resultadospara PCA, OLS e CoSaMP modificação b obtiveram resultados conforme esperado, e oCoSaMP original apresentou divergência inesperada.


73
Referências
ABDELHAFIZ, A. et al. Digital predistortion of lte-a power amplifiers usingcompressed-sampling-based unstructured pruning of volterra series. IEEE Transactionson Microwave Theory and Techniques, IEEE, v. 62, n. 11, p. 2583–2593, 2014.Citado 5 vezes nas páginas 21, 30, 32, 33 e 40.
BONFIM, E. J. Modelagem Comportamental De Amplificadores De PotênciaDe Radiofrequência Usando Termos Unidimensionais E Bidimensionais DeSéries De Volterra. Dissertação (Dissertação de Mestrado) — Universidade Federal doParaná, 2016. Citado 4 vezes nas páginas 19, 20, 26 e 28.
BONFIM, E. J.; LIMA, E. G. Um novo modelo com memória baseado em aproximaçõespolinomiais bidimensionais para transmissores de sistemas de comunicações sem fio.XXXIII simpósio Brasileiro de Telecomunicações SBrT2015, SBrT2015, 2015.Citado 4 vezes nas páginas 20, 25, 28 e 29.
BRAGA, J. A. et al. Autoteste e correcção de não-linearidades de circuitos rf. 2012.Citado 2 vezes nas páginas 36 e 37.
CAVALHEIRO, R. A. S.; WEBER, E. D.; LIMA, E. G. Fpga/dsp implementation of afixed-point adaptive algorithm for predistortion of wireless transmitters. Simpósio Sulde Microeletrônica, 29o SIM, p. 1–4, 2014. Citado 3 vezes nas páginas 25, 26 e 27.
CHEN, S.; COWAN, C. F.; GRANT, P. M. Orthogonal least squares learning algorithmfor radial basis function networks. IEEE Transactions on neural networks, IEEE,v. 2, n. 2, p. 302–309, 1991. Citado na página 31.
CRIPPS, S. C. RF power amplifiers for wireless communications. 2nd. ed.Norwood, MA: Artech House, 2006. Citado na página 34.
DAVENPORT, M. A.; NEEDELL, D.; WAKIN, M. B. Cosamp with redundantdictionaries. In: IEEE. Signals, Systems and Computers (ASILOMAR), 2012Conference Record of the Forty Sixth Asilomar Conference on. [S.l.], 2012. p.263–267. Citado na página 33.
FREIRE, L. B. C. Modelagem Comportamental E Pré Distorção Digital DeAmplificadores De Potência Baseadas Em Redes Neurais Com ArquiteturaPerceptron De Três Camadas. Dissertação (Dissertação de Mestrado) — UniversidadeFederal do Paraná, 2015. Citado 2 vezes nas páginas 19 e 20.
GILABERT, P. L. et al. Order reduction of wideband digital predistorters using principalcomponent analysis. In: IEEE. Microwave Symposium Digest (IMS), 2013 IEEEMTT-S International. [S.l.], 2013. p. 1–7. Citado na página 32.
HAYKIN, S. Sistemas de comunicação. [S.l.]: Bookman, 2004. Citado na página 34.
LEE, W. C. Mobile Communications Engineering Theory and Applications.[S.l.]: McGraw-Hill, 1998. Citado na página 35.

74 Referências
MACHADO, C. L. R. Modelagem Comportamental De Amplificadores DePotência Usando Soma De Produtos Entre Filtros Digitais De Resposta AoImpulso Finita E Tabelas De Busca Unidimensionais. Dissertação (Dissertação deMestrado) — Universidade Federal do Paraná, 2016. Citado 4 vezes nas páginas 19, 20,25 e 26.
MATHEWS, V. J.; SICURANZA, G. L. Polynomial signal processing. [S.l.]:Wiley-Interscience, 2000. v. 27. Citado 3 vezes nas páginas 19, 27 e 29.
MCKINLEY, M. D. et al. Evm calculation for broadband modulated signals. In: 64thARFTG Conf. Dig. [S.l.: s.n.], 2004. p. 45–52. Citado na página 35.
MUHA, M. et al. Validation of power amplifier nonlinear block models. In: IEEE.Microwave Symposium Digest, 1999 IEEE MTT-S International. [S.l.], 1999.v. 2, p. 759–762. Citado na página 33.
NEEDELL, D.; TROPP, J. A. Cosamp: Iterative signal recovery from incomplete andinaccurate samples. Applied and Computational Harmonic Analysis, Elsevier,v. 26, n. 3, p. 301–321, 2009. Citado 2 vezes nas páginas 33 e 39.
RAZAVI, B.; BEHZAD, R. RF microelectronics. [S.l.]: Prentice Hall New Jersey, 1998.v. 2. Citado na página 19.
SANTOS, E.; LEITE, B.; MARIANO, A. Multimode 2.4 ghz cmos power amplifier withgain control for efficiency enhancement at power backoff. In: IEEE. Circuits & Systems(LASCAS), 2015 IEEE 6th Latin American Symposium on. [S.l.], 2015. p. 1–4.Citado na página 22.
SANTOS, E. L. d. Amplificador de potência cmos de baixo consumo com controle deganho. 2015. Citado na página 22.
SCHUARTZ, L.; LIMA, E. G. Comparison among algorithms for the identificationof adaptive memory polynomial predistorter models. 30o Simpósio Sul deMicroeletrônica, 30o SIM, Santa Maria, RS, p. 1–4, 2015. Citado 6 vezes nas páginas20, 22, 26, 27, 28 e 29.
. Aproximações polinomiais com memória de complexidade reduzida baseada emmínimos quadrados ortogonais. Revista Jr de Iniciação Científica em CiênciasExatas e Engenharia, ICCEEg, p. 11–16, 2016. Citado 4 vezes nas páginas 20, 22, 29e 39.
. Complexity-reduced polynomial approximations with memory based on theorthogonal least squares. 31o Simpósio Sul de Microeletrônica, 31o SIM, PortoAlegre, RS, p. 1–4, 2016. Citado 7 vezes nas páginas 20, 22, 29, 30, 31, 32 e 39.
SILVA, J. C. da. Modelagem comportamental de amplificadores de potência deRF utilizando redes neurais de ligação funcional com polinômio de Chebyshev.Dissertação (Dissertação de Mestrado) — Universidade Federal do Paraná, 2014. Citado3 vezes nas páginas 19, 20 e 26.
YAP, H.-S. Designing to digital wireless specifications using circuit envelope simulation. In:IEEE. Microwave Conference Proceedings, 1997. APMC’97, 1997 Asia-Pacific.[S.l.], 1997. v. 1, p. 173–176. Citado 2 vezes nas páginas 35 e 36.