
Pontifícia Universidade Católica do Rio Grande do Sul ... · sobre o produto tensorial...
96
Transcript of Pontifícia Universidade Católica do Rio Grande do Sul ... · sobre o produto tensorial...
Pontifícia Universidade Católica do Rio Grande do SulFaculdade de Informática
Pós-Graduação em Ciência da Computação
Uma alternativa à distributividadedo produto clássico de matrizes
sobre o produto tensorial generalizado
Marta Rosecler Bez
Dissertação apresentada como requisitoparcial à obtenção do grau de mestre emCiência da ComputaçãoOrientador: Prof. Dr. Paulo H. L. Fernandes
Porto Alegre, janeiro de 2002

ii

Para Ana, Rosangela, Roberto e Renata, pelo amore apoio incondicional.
iii

iv
AgradecimentosDe tudo o que recebi nesta fase, algumas coisas maravilhosas merecem ser destacadas:
O carinho e amizade sempre constante da minha turma especial: Josyane, Sandra, Garibaldi,Pedrão, Anderson, Ewerton, Carlos, Ricardo, Del�m, Reynaldo - vocês são o máximo.
O apoio do meu orientador: Paulo Fernandes - sei que não fui uma mestranda fácil.A ajuda constante dos professores.O incentivo e carinho permanente da professora Lúcia Gira�a - com quem aprendi muito, apesar
de não ter estado em sala de aula com ela.A amizade e ajuda especial do Guru João Batista, que com paciência não mediu esforços para me
atender, e também pelo incentivo constante.A oportunidade e incentivo recebido por parte da Feevale e em especial dos colegas de trabalho.A ajuda dos amigos que estavam sempre disponíveis, mesmo que eu não pudesse retribuir.O amor de minha mãe e irmãos que compreenderam minhas faltas constantes.A ajuda incondicional recebida de minha irmã Rosangela, ela foi sensacional.O sorriso e carinho muito especial recebidos do Roberto e da Renata que abdicaram de minha
companhia, mesmo muitas vezes contrariados.Vocês são muito especiais para mim.Obrigada.
v

vi

AbstractThe machine�s development and computational�s techniques demand a better analysis and study ofits systems. This kind of research includes performance evaluation. Among the techiques that havebeen used in performance evaluation, the methods based on Markov models have been widely used.However, depending on the model the use of Markov chain requires a transition matrix (in�nitesimalgenerator) that may be so big that it�s not possible to solve it, not even store it.
Stochastic Automata Networks (SAN) emerged as a formalism with many advantages which in-cludes the reduction of memory needs due to the use of tensor format.
SAN consists in a number of rather independent stochastic automata. The only primitives formodelling the dependence among automata are the synchronizing events and functional rates.
When there is no occurrence of functional transitions, we use the classic tensor product and tensorsum (ATC) to solve it. This work presents the ATC properties and its algebric proof. When themodel has functionals elements we use generalized tensor algebra (ATG) to solve it.
The SAN�s cost for resolution are usually very low, except when there are functional transitionsthat create a cycle of dependencies among the model�s automata. In order to resolve this problem,it�s necessary to break this cycle of dependencies through some kind of compatibility between thegeneralized tensor product and the multiplications of matrices.
We prove in this work that this compatibility did not happen in the same way as in classic tensoralgebra, and also this problem can not be solved only by matrix permutations.
Among a variety of permutations that have been tested, some of them generate errors related tomatrix evaluation, making impossible to �nd a compatibility. We put in evidence two experienceswhere the evaluatin are correct, but the matrices elements are in a wrong order.
We conclude stating that it would be possible to �nd out some form of compatibility from thoseinverted matrices. The next step, then, would be the development of an algorithm to achieve suchpermutations and to compare its computational cost to the other SAN solutions.
vii
viii
ResumoA cada dia a evolução de máquinas e técnicas computacionais tem exigido uma melhor análise eacompanhamento de seus sistemas. Nesta área se insere o estudo de avaliação de sistemas. Dentreas técnicas utilizadas para avaliar sistemas, modelos markovianos tem sido muito utilizados e trazemuma série de vantagens. Porém, o grande inconveniente no uso de cadeias de Markov é que a matrizde transição (gerador in�nitesimal) pode ser tão grande que não é possível armazena-la e nem mesmoresolve-la.
Redes de autômatos estocásticos - SAN - surgiu como um formalismo que, apesar de se basearem cadeias de Markov, tem como grande vantagem a redução da carga de memória, pois trabalhacom pequenas matrizes que �cam armazenadas em formato tensorial. SAN consiste de um número deautômatos estocásticos individuais que operam com relativa dependência uns dos outros. As únicasformas de independência são eventos sincronizantes e taxas funcionais.
Quando não existe no modelo a ocorrência de transições funcionais, utiliza-se para a soluçãoa álgebra tensorial clássica - ATC, com seus dois operadores, produto tensorial e soma tensorial.No trabalho são apresentadas as propriedades da álgebra tensorial clássica, bem como suas provasalgébricas. Quando um modelo possui elementos funcionais, a resolução utiliza a álgebra tensorialgeneralizada - ATG, com dois operadores, quais sejam: produto tensorial generalizado e soma tensorialgeneralizada.
O custo de resolução de uma rede de autômatos estocásticos é, via de regra, bastante baixo, excetoquando a existência de transições funcionais cria um ciclo de dependência entre os diversos autômatosdo modelo. Para que seja resolvida uma rede de autômatos estocásticos onde isso ocorre, é necessárioquebrar este ciclo de dependência através de algum tipo de compatibilidade entre o produto tensorialgeneralizado e a multiplicação de matrizes.
Conseguimos, neste trabalho, provar que esta compatibilidade não se veri�ca da mesma forma quena álgebra tensorial clássica. Adicionalmente, simples permutações não resolvem o problema.
Dentre as diversas opções de permutações testadas, grande parte gera erros quanto a avaliação damatriz, o que, por si só, impossibilita a compatibilidade. Dois dos experimentos foram destacados,dentre os poucos em que a avaliação está correta, porém, a ordem dos elementos da matriz estáinvertida.
Concluímos que o fato de conseguirmos inverter os elementos da matriz para a ordem correta,tornaria possível alguma forma de compatibilidade, a partir desta compatibilidade, o próximo passoseria o desenvolvimento de um algoritmo para comparar o custo computacional dessa inversão emrelação a outras soluções de SAN.
ix

x
Sumário
ABSTRACT viiRESUMO ixLISTA DE TABELAS xvLISTA DE FIGURAS xviiLISTA DE SÍMBOLOS E ABREVIATURAS xix
Capítulo 1: Introdução 11.1 Divisão do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Capítulo 2: Avaliação de desempenho 52.1 Modelagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Modelos de simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1.2 Modelos analíticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.3 Formalismos de modelagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Monitoração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Capítulo 3: Redes de autômatos estocásticos 113.1 Autômatos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.1 Eventos locais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.1.2 Eventos sincronizados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.1.3 Transições funcionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Descritor markoviano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2.1 Propriedades das cadeias de Markov . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Soluções numéricas para cadeias de Markov . . . . . . . . . . . . . . . . . . . . . . . . 203.4 Métodos numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.1 Métodos diretos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.4.2 Métodos iterativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Capítulo 4: Álgebra Tensorial 254.1 Álgebra tensorial clássica (ATC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.1.1 Produto tensorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.1.2 Soma tensorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.1.3 Propriedades da soma e do produto tensorial clássico . . . . . . . . . . . . . . . 28
4.2 Álgebra tensorial generalizada (ATG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29xi

4.2.1 Produto tensorial generalizado . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.2.2 Soma tensorial generalizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2.3 Propriedades da soma e do produto tensorial generalizados . . . . . . . . . . . . 33
Capítulo 5: Demonstração algébrica das propriedades 355.1 Produto tensorial clássico ⊗ e soma tensorial clássica ⊕ . . . . . . . . . . . . . . . . . 35
5.1.1 Associatividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.1.2 Distributiva sobre adição clássica . . . . . . . . . . . . . . . . . . . . . . . . . . 375.1.3 Compatibilidade com a multiplicação clássica . . . . . . . . . . . . . . . . . . . 385.1.4 Compatibilidade com a transposição de matrizes . . . . . . . . . . . . . . . . . 395.1.5 Decomposição em fatores normais . . . . . . . . . . . . . . . . . . . . . . . . . . 395.1.6 Distributividade com relação à matriz identidade . . . . . . . . . . . . . . . . . 405.1.7 Comutatividade dos fatores normais . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Produto tensorial generalizado e soma tensorial generalizada . . . . . . . . . . . . . . 435.2.1 Distributividade do produto tensorial generalizado em relação a soma conven-
cional de matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.2.2 Associatividade do produto tensorial generalizado e da soma tensorial generalizada 445.2.3 Distributividade com relação à multiplicação pela matriz identidade . . . . . . 475.2.4 Decomposição em fatores normais I . . . . . . . . . . . . . . . . . . . . . . . . . 495.2.5 Decomposição em fatores normais II . . . . . . . . . . . . . . . . . . . . . . . . 505.2.6 Decomposição em produto tensorial clássico . . . . . . . . . . . . . . . . . . . . 50
Capítulo 6: Compatibilidade do ⊗g com a multiplicação ordinária de matrizes 536.1 Prova da incompatibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.2 Estudo de alternativas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.2.1 Variações da matriz A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.2.2 Variações da matriz B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.2.3 Inversa de IA ou IB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.2.4 Variações da matriz A⊗g IB . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.2.5 Variações da matriz B, aplicado o ⊗g sobre IA . . . . . . . . . . . . . . . . . . 566.2.6 Variações da matriz A⊗g IB . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.2.7 Variações da matriz IA ⊗g B . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.3 As variações analisadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.3.1 Produto de A⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . . . . 586.3.2 Produto de AT ⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . . . 596.3.3 Produto de P (A)⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . . 596.3.4 Produto de P (A)T ⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . 606.3.5 Produto de A⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . . . 616.3.6 Produto de P (A)⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . 626.3.7 Produto de AT ⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . . . 636.3.8 Produto de P (AT )⊗g IB sobre as variações de B . . . . . . . . . . . . . . . . 646.3.9 Produto de A⊗g IB sobre as variações de IA ⊗g B . . . . . . . . . . . . . . . . 646.3.10 Produto de AT ⊗g IB sobre as variações de IA ⊗g B . . . . . . . . . . . . . . . 656.3.11 Produto de P (A)⊗g IB sobre as variações de IA ⊗g B . . . . . . . . . . . . . . 666.3.12 Produto de P (AT )⊗g IB sobre as variações de IA ⊗g B . . . . . . . . . . . . . 67
xii
Capítulo 7: Conclusão 697.1 Prova da incompatibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 707.2 Resultados obtidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.2.1 Produto tensorial generalizado da transposta de A por IB multiplicado peloproduto tensorial generalizado de IA por B . . . . . . . . . . . . . . . . . . . . 70
7.2.2 Produto tensorial generalizado da transposta de A por IB multiplicado peloproduto tensorial generalizado da inversa de IA por B . . . . . . . . . . . . . . 71
7.3 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71REFERÊNCIAS BIBLIOGRÁFICAS 73
xiii
xiv
Lista de Tabelas
2.1 Comparação entre modelos de simulação e modelos analíticos . . . . . . . . . . . . . . 6
xv
xvi

Lista de Figuras
2.1 Formalismos de Modelagem [20]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1 Rede de autômatos estocásticos com eventos locais . . . . . . . . . . . . . . . . . . . . 123.2 Cadeia de Markov referente a SAN da �gura 3.1. . . . . . . . . . . . . . . . . . . . . . 133.3 Rede de autômatos estocásticos com evento sincronizante. . . . . . . . . . . . . . . . . 143.4 Cadeia de Markov referente a �gura 3.3. . . . . . . . . . . . . . . . . . . . . . . . . . . 153.5 Rede de autômatos estocásticos com transições funcionais. . . . . . . . . . . . . . . . . 15
xvii

xviii
Lista de Símbolos e Abreviaturas
CCS Cálculus of Comunicating Systems 8SAN Rede de autômatos estocásticos 11CTMC Cadeias de Markov a escala de tempo continuo 16DTMC Cadeias de Markov a escala de tempo discreto 16ATC Álgebra tensorial clássica 25ATG Álgebra tensorial generalizada 25⊗ Produto tensorial 25⊕ Soma tensorial 25⊗g Produto tensorial generalizado 29⊕g Soma tensorial generalizada 29
xix

xx
Capítulo 1
Introdução
A cada dia pode-se observar a evolução crescente e a complexidade de sistemas, o que tem exigido o de-senvolvimento de ferramentas que permitam a modelagem e a análise do desempenho e con�abilidadedos mesmos.
Outro destaque que tem merecido a atenção da área de computação cientí�ca, tem sido o tamanhodos sistemas, o que tem gerado problemas de grandes proporções, difíceis de serem armazenados etambém de serem resolvidos.
Em função disso, nos últimos anos a modelagem e análise de sistemas tem recebido cada vez maisa atenção por parte de pesquisadores e cientistas que se dispunham, antes de ser implementado ouconstruído �sicamente, a prever o comportamento destes sistemas.
A evolução destes estudos tem sido feita desde 1890, onde iniciaram-se trabalhos com cadeias deMarkov [64]. O primeiro formalismo estudado foi as redes de �las de espera [34], [35], [41]. A partirde 1967, foi possível a generalização das redes de �las de espera [6], [39].
Já na década de 70, estudos mais detalhados provém uma nova solução através do algoritmo conhe-cido como �algoritmo de convolução� [13], [53], [54], através do cálculo da constante de normalizaçãopara compensar a escolha de valores numéricos para as taxas de visita de cada estação.
Grande destaque nos estudos sobre formalismos se deu com o surgimento das redes de Petri [39],[46], [67], por Carl Adam Petri, que variaram desde simples temporizações até mecanismos maisso�sticados [1], [20], [54].
A partir destes estudos surgiram ferramentas baseadas em grafos, como as álgebras, que trabalhamcom uma nova forma que modela o funcionamento (de onde se extrai índices de desempenho) comferramentas fáceis de de�nir e analizar [39].
Grande parte destes formalismos baseia-se em cadeias de Markov [59] para a busca da soluçãoe avaliação destes sistemas, porém, como será visto no decorrer deste trabalho, este tipo de soluçãoapresenta como grande inconveniente a complexidade dos mesmos, tanto a nível de solução quantode armazenamento.
Com a evolução dos sistemas distribuídos, tornaram-se freqüentes problemas práticos de paralelis-mo e sincronismo. Entre as décadas de 80 e 90, surgiu um novo formalismo, de�nido como rede deautômatos estocásticos [20], [21], [22], [59]. Este formalismo baseia-se também em cadeias de Markov,porém, com maior facilidade de manipulação e armazenamento, pois divide o sistema em pequenossubsistemas que interagem entre si [20], [22], [59].
Diversos autores tem escrito sobre redes de autômatos estocásticos [4], [19], [20], [48], [49], [60]como um formalismo que consegue representar um sistema de forma mais compacta que o tradicional(formatos esparsos) [59], bem como, um formalismo que evita o grande problema de armazenamentoe tem um tempo de solução do problema menor.
Este trabalho estuda a base matemática, de um ponto de vista numérico, que fundamenta redes deautômatos estocásticos com o objetivo principal de otimizar a sua solução.
Redes de autômatos estocásticos utilizam-se da álgebra tensorial [20] para a solução de sistemas,tendo sido concentrados estudos principalmente em suas propriedades.
1
A álgebra tensorial divide-se basicamente em álgebra tensorial clássica e álgebra tensorial gene-ralizada, neste segundo caso, trabalhando-se quando o sistema possui elementos funcionais, ou seja,elementos não constantes, que variam de acordo com o estado de cada autômato da rede de autômatosestocásticos.
Muitas das propriedades da álgebra tensorial clássica já foram provadas e estão bem de�nidas[20], [60] e no caso da álgebra tensorial generalizada o mesmo não ocorre. O fato de não seremconhecidas algumas propriedades da álgebra tensorial generalizada, gera a necessidade de transformaros elementos funcionais de uma rede de autômatos estocásticos em constantes, através da propriedadeda decomposição em produto tensorial clássico, que pode ser vista no capítulo 5.
Neste caso, o sistema passa a trabalhar sem funções, pois transforma-se cada função, fazendo comque a matriz seja decomposta em tantos produtos tensoriais quanto o número de linhas da matrizonde será aplicada a função.
Como pode ser visto, isso acarreta em grande prejuízo em termos de processamento. Por is-so, torna-se quase imprescindível a descoberta de novas propriedades para que se possa trabalhardiretamente com as funções, ou seja, com cálculos aplicados de álgebra tensorial generalizada.
Em resumo, todo o problema resolvido pela álgebra tensorial generalizada também pode ser re-solvido pela álgebra tensorial clássica, sem prejuízo do resultado �nal, porém com o agravante deaumentar os custos de processamento [11].
Estudos recentes tem mostrado e provado várias propriedades para a álgebra tensorial generalizada,que tem melhorado em muito o tempo de processamento para a resolução de problemas. A partirdestas provas, alguns problemas podem ser resolvidos sem decompor as funções em novos produtostensoriais, porém para que se possa resolver de fato todos os problemas diretamente com as funções,torna-se necessário a prova da propriedade da compatibilidade do produto tensorial generalizado sobrea multiplicação ordinária de matrizes.
O objetivo do presente trabalho então é estudar, analisar e demonstrar as propriedades da álgebratensorial clássica e generalizada e com base nestas, veri�car possibilidades de aplicar a propriedadeanteriormente citada, já estudada e provada para a álgebra tensorial clássica e ainda não estudadapara a álgebra tensorial generalizada.
Em estudo prévio desenvolvido pela autora do trabalho, foi descoberta a incompatibilidade da apli-cação direta desta propriedade, conforme pode ser observado no capítulo 6. Em função disto, nestaobra serão buscadas alternativas matemáticas para solucionar esta incompatibilidade.
1.1 Divisão do trabalho
Para chegar ao estudo das propriedades da álgebra tensorial, é importante fazer um estudo prévioda evolução da avaliação de desempenho dos sistemas, de toda a teoria que cerca o assunto. Nocapítulo 2, será abordado o tema avaliação de desempenho, a modelagem dos sistemas e técnicasutilizadas para medir e avaliar os sistemas. Será abordado de forma mais criteriosa, a modelagem,e basicamente citada a monitoração (técnica esta, não focalizada pelo trabalho). Entre as formas demodelar sistemas, ênfase será dada a modelos analíticos, pois neles serão aplicados nossos estudos.Conhecer o passado signi�ca �carregar a bagagem� da experiência de anos de pesquisa. O estudo denovas técnicas é gerado a partir de experiências passadas. Formalismos de modelagem são estudadosa décadas, servindo de embasamento para pesquisas e criação do formalismo de redes de autômatosestocásticos. No capítulo 2 apresenta-se um breve histórico do estudo destes formalismos.
Redes de autômatos estocásticos baseiam-se em cadeias de Markov. No capítulo 3, pode serencontrado o estudo de redes de autômatos estocásticos , de�nições básicas e a forma de modelarsistemas a partir destas. Serão apresentados exemplos de autômatos com eventos locais, eventossincronizantes, transições funcionais, bem como uma explicação sobre cada um dos temas abordados.Em seguida é apresentada uma coletânea de informações referentes a cadeias de Markov e o descritormarkoviano. Como, a partir da análise de um sistema gerar o descritor markoviano, utilizado para
2
o cálculo de redes de autômatos estocáticos. A partir do sistema modelado através de cadeias deMarkov, o sistema pode ser resolvido através de equações de sistemas lineares. Estes sistemas sãodividos basicamente entre diretos e indiretos.
No capítulo 4, inicia-se a de�nição de álgebra tensorial clássica e álgebra tensorial generalizada .Apresenta-se os operadores matriciais utilizados, produto tensorial e soma tensorial, bem como suaoperacionalização e exemplos do uso. Também apresenta-se a de�nição de fator normal, de�niçãoesta de grande importância no uso da soma tensorial, tanto clássica quanto generalizada.
Estudar os operadores matriciais nos possibilita contato direto com as propriedades aplicadastanto na álgebra tensorial clássica, quanto na álgebra tensorial generalizada.
No capítulo 5, faz-se a demonstração algébrica das propriedades do produto tensorial e da somatensorial clássica, bem como a demonstração algébrica das propriedades do produto tensorial genera-lizado e da soma tensorial generalizad a. Cada propriedade será estudada e analisada, com o intuitode fundamentar, apresentar a prova de cada uma e abrir perspectivas para o surgimento de novaspropriedades, que em muito poderão auxiliar na simpli�cação da resolução de redes de autômatosestocásticos.
No capítulo 6, com base nas provas apresentadas no capítulo 5, pode ser iniciado o estudo da buscapara a compatibilidade do produto tensorial generalizado com a multiplicação ordinária de matrizes ,sabendo-se que esta não se apresenta da mesma forma que na álgebra tensorial clássica. Primeiroapresenta-se as matrizes bases do estudo (A e B), em seguida, apresenta-se as variações sobre asmesmas, bem como variação sobre a identidade, ou seja, sua transposta. A partir destas variações,serão apresentados estudos realizados sobre cada variação, acompanhada de explicação e justi�cativade cada variação estudada.
A partir dos estudos realizados sobre as matrizes resultantes das multiplicações, no capítulo 7,conclusão, serão tecidas considerações, destacando os resultados mais próximos, ou seja, onde não severi�ca a ocorrência de avaliações erradas sobre as matrizes, para a partir destas solucionar o problemada incompatibilidade que está sendo estudada. Por �nal, apresenta-se idéias para a continuidadefutura deste trabalho.
3

4
Capítulo 2
Avaliação de desempenho
O revolucionário processo de evolução tecnológica tanto a nível de hardware quanto de software temexigido constantes estudos e merecido a atenção de diversas áreas. Dentre estas áreas, destaca-sea avaliação de desempenho, que tem como motivação medir e avaliar um sistema pronto ou a serprojetado.
Existem, basicamente, duas fases utilizadas na técnica de avaliação de desempenho: modelageme monitoração.
2.1 Modelagem
Modelo, segundo uma análise literal da palavra, é a representação simpli�cada de alguma coisa. Podeser de�nido ainda, como uma representação simpli�cada de um sistema, com o propósito de estudaro mesmo. Segundo [45], um modelo é uma réplica ou uma abstração da característica essencial deum processo.
Ummodelo, tratando-se de avaliação de desempenho, é uma visão simpli�cada de um sistema, ondeprocura-se buscar ao máximo a realidade do sistema, de maneira a fornecer, dentro de uma tolerânciaaceitável, diagnósticos precisos do mesmo. Quando um sistema não existe ainda, normalmente ummodelo é a melhor alternativa. Exemplos de modelos podem ser observados em [37].
Um modelo é freqüentemente a única alternativa prática se o sistema ainda não existe ou se énecessário analisar o sistema submetido a uma carga ainda inexistente [58].
No desenvolvimento de um modelo, torna-se necessário:• escolha do nível de abstração que será utilizado para descrever o sistema a ser modelado;• escolha das características do sistema que devem ser incluídas no modelo;• escolha dos índices de desempenho apropriados;• escolha dos valores numéricos como parâmetros do sistema.
Utiliza-se um modelo basicamente de duas maneiras, para simulação ou para resolução analítica [1].2.1.1 Modelos de simulaçãoA simulação pode ser considerada como a reprodução funcional de uma realidade através de ummodelo a ser analisado e avaliado. Ela deve descrever as características funcionais do modelo e contertodos os detalhes relevantes. Simulação é a forma mais popular de avaliar sistemas reais, existegrande facilidade para ser empregada, pois são programas de computador em que as operações ecarga são descritas através de algoritmos apropriados. São implementados em linguagens próprias
5
para as construções destes modelos e os índices de performance são obtidos através da monitoraçãodo programa em execução [1].
A abordagem de simulação proporciona a solução de problemas matemáticos não probabilísticospor reprodução de um processo estocástico que tem momentos ou distribuições de probabilidadesatisfazendo as relações matemáticas do problema não probabilístico [43].
Problemas que desobedecem a soluções diretas por causa do tamanho, complexidade ou estrutura,são frequentemente avaliados através de modelos de simulação [38].
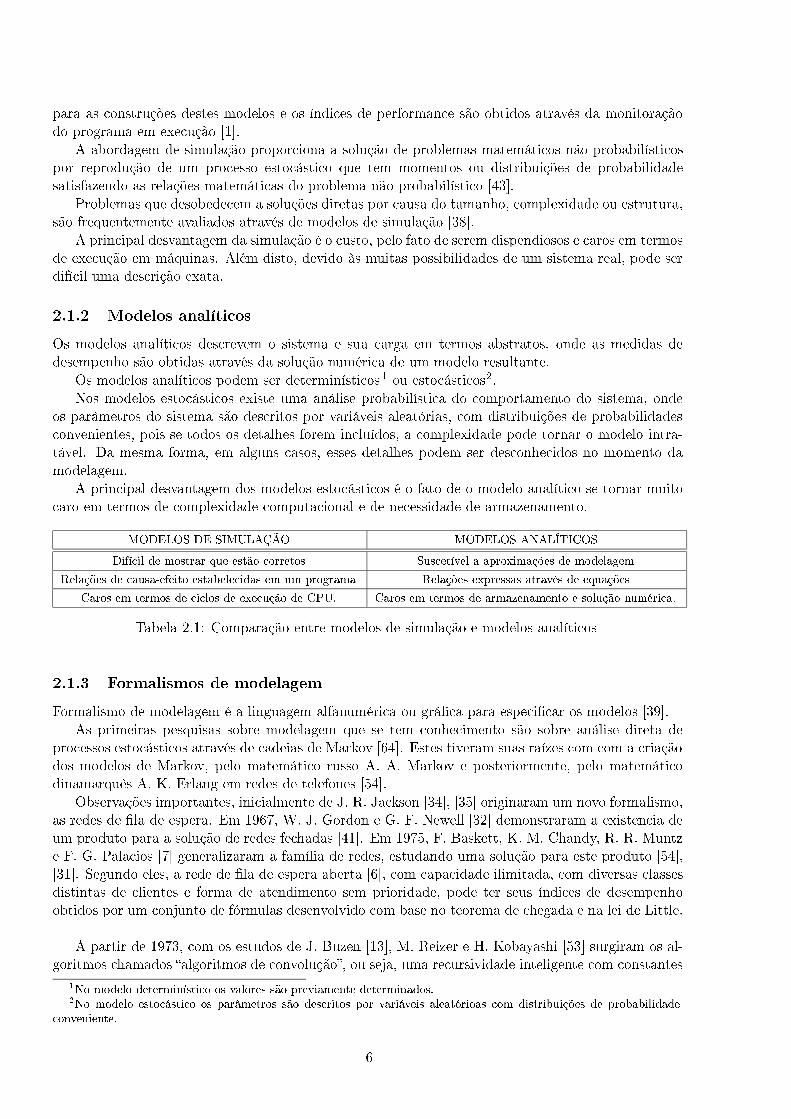
A principal desvantagem da simulação é o custo, pelo fato de serem dispendiosos e caros em termosde execução em máquinas. Além disto, devido às muitas possibilidades de um sistema real, pode serdifícil uma descrição exata.2.1.2 Modelos analíticosOs modelos analíticos descrevem o sistema e sua carga em termos abstratos, onde as medidas dedesempenho são obtidas através da solução numérica de um modelo resultante.
Os modelos analíticos podem ser determinísticos1 ou estocásticos2.Nos modelos estocásticos existe uma análise probabilística do comportamento do sistema, onde
os parâmetros do sistema são descritos por variáveis aleatórias, com distribuições de probabilidadesconvenientes, pois se todos os detalhes forem incluídos, a complexidade pode tornar o modelo intra-tável. Da mesma forma, em alguns casos, esses detalhes podem ser desconhecidos no momento damodelagem.
A principal desvantagem dos modelos estocásticos é o fato de o modelo analítico se tornar muitocaro em termos de complexidade computacional e de necessidade de armazenamento.
MODELOS DE SIMULAÇÃO MODELOS ANALÍTICOS
Difícil de mostrar que estão corretos Suscetível a aproximações de modelagem
Relações de causa-efeito estabelecidas em um programa Relações expressas através de equações
Caros em termos de ciclos de execução de CPU. Caros em termos de armazenamento e solução numérica.
Tabela 2.1: Comparação entre modelos de simulação e modelos analíticos
2.1.3 Formalismos de modelagemFormalismo de modelagem é a linguagem alfanumérica ou grá�ca para especi�car os modelos [39].
As primeiras pesquisas sobre modelagem que se tem conhecimento são sobre análise direta deprocessos estocásticos através de cadeias de Markov [64]. Estes tiveram suas raízes com com a criaçãodos modelos de Markov, pelo matemático russo A. A. Markov e posteriormente, pelo matemáticodinamarquês A. K. Erlang em redes de telefones [54].
Observações importantes, inicialmente de J. R. Jackson [34], [35] originaram um novo formalismo,as redes de �la de espera. Em 1967, W. J. Gordon e G. F. Newell [32] demonstraram a existência deum produto para a solução de redes fechadas [41]. Em 1975, F. Baskett, K. M. Chandy, R. R. Muntze F. G. Palacios [7] generalizaram a família de redes, estudando uma solução para este produto [54],[31]. Segundo eles, a rede de �la de espera aberta [6], com capacidade ilimitada, com diversas classesdistintas de clientes e forma de atendimento sem prioridade, pode ter seus índices de desempenhoobtidos por um conjunto de fórmulas desenvolvido com base no teorema de chegada e na lei de Little.
A partir de 1973, com os estudos de J. Buzen [13], M. Reizer e H. Kobayashi [53] surgiram os al-goritmos chamados �algoritmos de convolução�, ou seja, uma recursividade inteligente com constantes
1No modelo determinístico os valores são previamente determinados.2No modelo estocástico os parâmetros são descritos por variáveis aleatórioas com distribuições de probabilidade
conveniente.
6
de normalizações de incremento da população de clientes. O cálculo dos índices de desempenho obti-dos pelo algoritmo de convolução proposto por Buzen tem por objetivo determinar uma constante denormalização para compensar a escolha de valores numéricos para as taxas de visita de cada estação.
Outros estudos, como os de M. Reiser e S. Lavenberg [53] geraram algoritmos que calculam oequilíbrio das probabilidades dos estados [54]. A análise feita por estes estudiosos evitou o cálculode normalizações constantes, o que se tornou um conceito fundamental na teoria das �las. Umaimplementação deste algoritmo pode ser encontrada na ferramenta de software CQN - Closed QueueingNetworks, desenvolvida e utilizada atualmente no projeto PEPS (Performance Evaluation of ParallelSystems)[51].
Uma diferente aproximação estudada foi a criação do software PANACEA, de J. McKenna, D.Mitra e JK. G. Romakrishnan para a solução de modelos markovianos de redes de �las de esperasigni�cativamente grandes para serem resolvidos com técnicas computacionais simples. Este softwarese propôs a resolver multiclasses, redes de �las abertas, redes de �las fechadas e mistas [54].
Outras abordagens sobre as redes de �las de espera foram buscadas, principalmente devido anecessidade de resolução de problemas mais complexos, porém essas culminaram em simples extensõesdo formalismo de redes de �las de espera.
A partir destas extensões, iniciaram-se novos estudos, em especial mecanismos de sincronismo eparalelismo. Os sistemas baseados nestes mecanismos são, geralmente, difíceis de serem estudados econstruídos, em função da explosão do número de estados do modelo.
Por volta de 1960, foram introduzidas por Carl Adam Petri, as redes de Petri, como uma extensãode autômatos seqüenciais, caracterizando sistemas por meio de transações locais entre os estados,com isso permitindo vencer as limitações dos métodos formais 3 de�nidos por sistemas seqüenciaiscom respeito aos exibidos para os sistemas distribuídos [67].
Rede de Petri é uma ferramenta grá�ca e algébrica que apresenta um bom nível de abstração emcomparação com outros modelos grá�cos [46]. É um modelo do tipo estado-evento, onde cada eventopossui pré-condições que vão pemitir sua ocorrência e pós-condições decorrentes desta, as quais são,por sua vez, pré-condições de outros eventos posteriores.
Uma rede de Petri é vista como um tipo particular de grafo orientado, que permite modelaras propriedades estáticas de um sistema a eventos discretos, constituído de dois tipos de nós: astransições (que correspondem aos eventos que caracterizam as mudanças de estado do sistema), eos lugares (que correspondem as condições que devem ser certi�cadas para os eventos acontecerem),interligados por arcos direcionados ponderados [46].
Rede de Petri [46] é, portanto, um formalismo que permite a modelagem de sistemas dinâmi-cos discretos com grande poder de expressividade, permitindo representar com facilidade todas asrelações de causalidade entre os processos em situação de: seqüencialidade, con�ito, concorrência esincronização.
As redes de Petri podem variar de simples temporizações constantes [63] até mecanismos maisso�sticados, conforme segue:• redes de Petri estocásticas [1]. Um estudo aprofundado e exemplos de redes de Petri estocásticaspode ser encontrado em [8];
• redes de Petri estocásticas generalizadas [1], [54];• redes de Petri de alto nível (redes coloridas) [1], [20];• redes de Petri estocásticas generalizadas superpostas [20].
3Métodos formais e processos algébricos caracterizam sistemas distribuídos de dois níveis: como meio de entendimen-to e, mais recentemente, como uma ferramenta para especi�cação de sistemas distribuídos com projetos bem de�nidosem seus paradigmas e métodos.
7
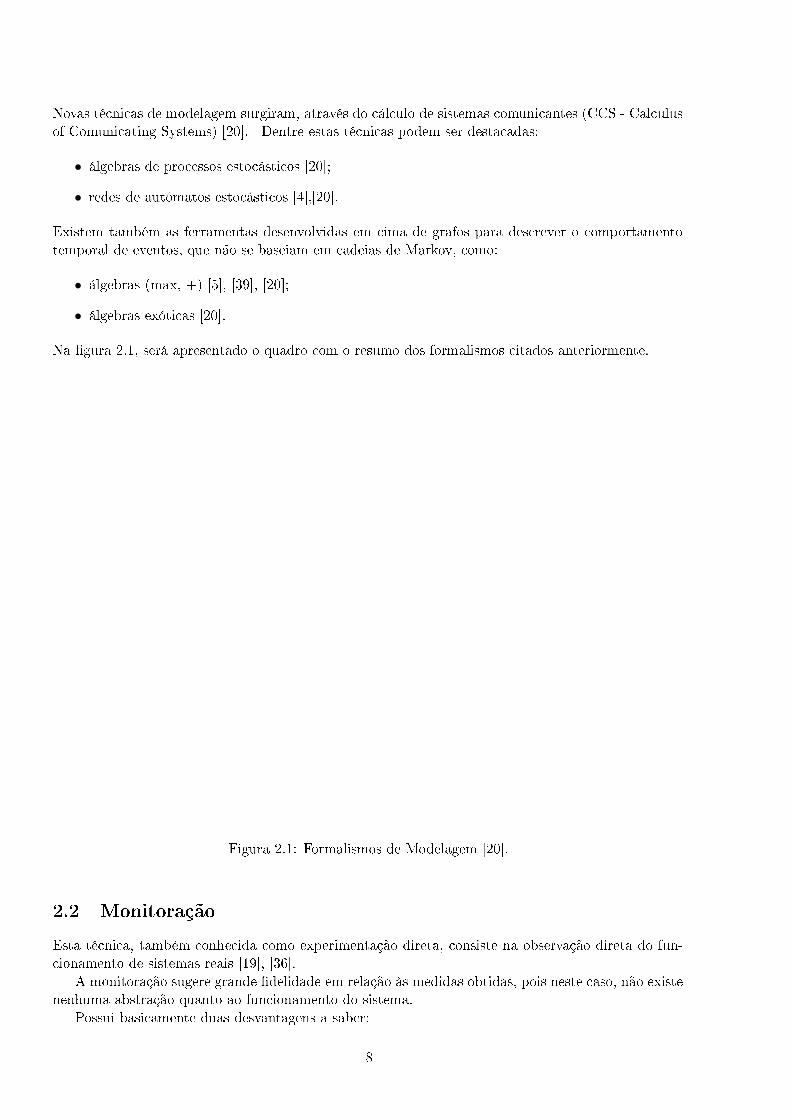
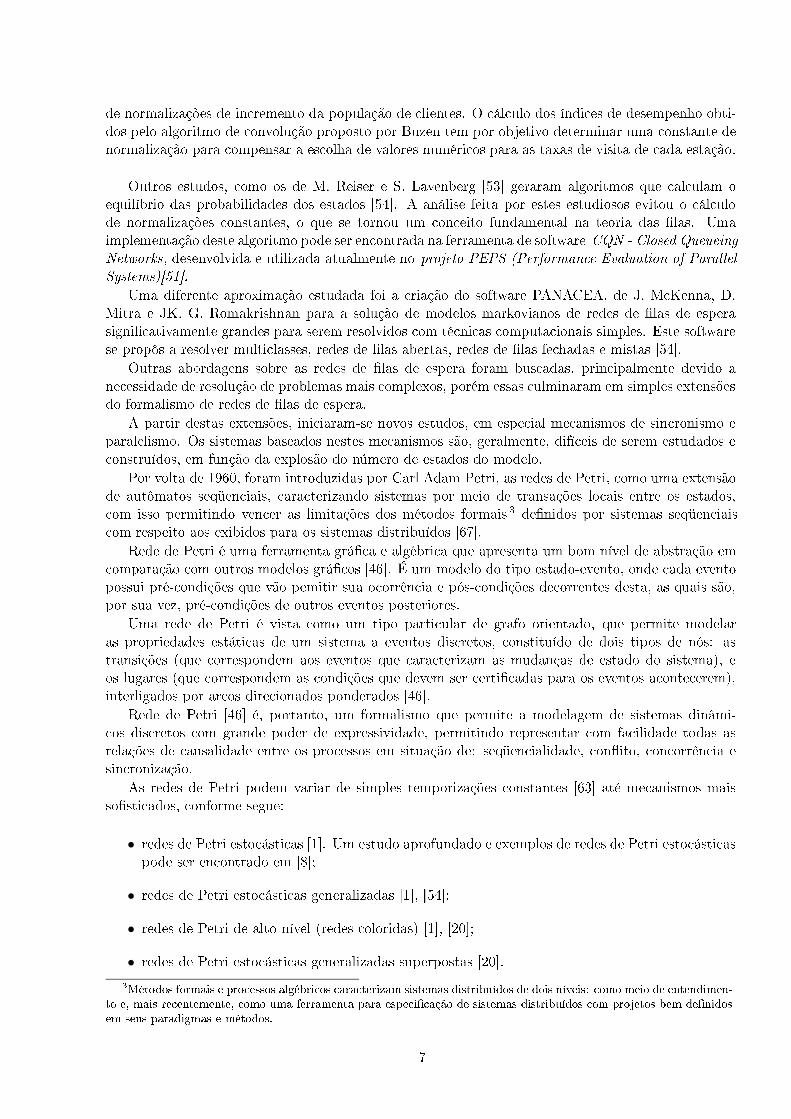
Novas técnicas de modelagem surgiram, através do cálculo de sistemas comunicantes (CCS - Calculusof Comunicating Systems) [20]. Dentre estas técnicas podem ser destacadas:• álgebras de processos estocásticos [20];• redes de autômatos estocásticos [4],[20].
Existem também as ferramentas desenvolvidas em cima de grafos para descrever o comportamentotemporal de eventos, que não se baseiam em cadeias de Markov, como:• álgebras (max, +) [5], [39], [20];• álgebras exóticas [20].
Na �gura 2.1, será apresentado o quadro com o resumo dos formalismos citados anteriormente.
Figura 2.1: Formalismos de Modelagem [20].
2.2 Monitoração
Esta técnica, também conhecida como experimentação direta, consiste na observação direta do fun-cionamento de sistemas reais [19], [36].
A monitoração sugere grande �delidade em relação às medidas obtidas, pois neste caso, não existenenhuma abstração quanto ao funcionamento do sistema.
Possui basicamente duas desvantagens a saber:8
Sensibilidade da técnica de monitoração em relação a quantidade e representatividade das amostrasde funcionamento a serem consideradas. Para o funcionamento desta técnica, faz-se necessário o usode técnicas estatísticas.
E, principalmente a necessidade da existência física e real do sistema que será avaliado. Traz comoconseqüências:• custo e tempo: a implementação de um sistema não estável pode conduzir a grandes alteraçõesou até mesmo a sua perda total. O custo e tempo para a implementação de um sistema, quepode necessitar novos testes, podem atrasar em muito a implantação do sistema de�nitivo.• di�culdade de reprodução: algumas vezes, torna-se necessário repetir um experimento compequenas variações em alguns parâmetros e podem existir estímulos externos que fujam aocontrole da experiência, invalidando qualquer comparação com os resultados anteriores [19].
9

10
Capítulo 3
Redes de autômatos estocásticos
Dentre as técnicas descritas anteriormente, os formalismos mais usados baseiam-se em cadeias deMarkov [58], [60], pois normalmente são menos suscetíveis a erros, demandam menos tempo e possuemuma limitada complexidade matemática. Todavia, o espaço de estados gerados pode ser tão grandeque além do modelo não ser tratável, a matriz de transição 1 é tão grande que não pode ser armazenada.
O formalismo de redes de autômatos estocásticos (SAN) descreve um sistema completo comouma coleção de subsistemas que interagem uns com os outros. Cada um destes subsistemas é descritocomo um autômato estocástico, ou seja, um autômato onde as transições são modeladas por processosestocásticos de tempo contínuo ou discreto [20], [24].
A técnica de redes de autômatos estocásticos proporciona uma metodologia conveniente que com-bina diferentes técnicas de modelagem, de uma forma muito particular para modelagem de processosparalelos, com processos comunicantes e processos concorrentes [47].
Segundo [29], o formalismo de redes de autômatos estocásticos é uma técnica atrativa de modelarsistemas complexos com iteração entre os componentes. Os componentes do sistema são modeladospor simples autômatos e iterações entre estes componentes.
Uma rede de autômatos estocásticos consiste de um número de autômatos estocásticos individuaisque operam com uma relativa independência uns dos outros. Um autômato é representado por umnúmero de estados e as regras que governam a movimentação destes estados [10].
Diz-se, nas de�nições, autômatos estocásticos, porque neles o tempo é tratado como uma variávelaleatória, com o comportamento descrito por um processo estocástico [6] com distribuição exponen-cial2.
Uma variável aleatória é uma regra que atribui um valor numérico para cada possível resultadode um experimento. Denominado um conjunto de n resultados S, pode ser de�nida formalmente umavariável aleatória X como uma função de S nos números reais, ou seja:
X: S -> R logo, X(s) de�ne um número real para o resultado s pertencente a S.A grande vantagem do uso de SAN é a redução de carga de memória para o armazenamento da
matriz de transição da cadeia de Markov, que �ca armazenada em formato tensorial.Uma de�nição formal de redes de autômatos estocásticos, bem como a solução de um modelo
através de SAN, podem ser encontrados em [18] e [65].Para o bom entendimento do formalismo SAN, é necessário conhecer alguns conceitos importantes,
como autômatos, transições locais, transições sincronizadas e transições funcionais, bem como ageração e utilização do descritor markoviano.
1Matriz de transição é o gerador in�nitesimal da cadeia de Markov associada a um modelo original. Mais informaçõespodem ser vistas no capítulo 3, subtítulo 3.2.
2Distribuição exponencial é a distribuição de probabilidade que melhor descreve um processo desconhecido. Estaparte do princípio que cada fenômeno é independente, logo a entropia é a maior possível.
11
3.1 Autômatos
Um autômato [9] é composto por um conjunto de estados e um conjunto de transições entre estesestados. Essas transições podem representar eventos locais, ou seja, um evento local associado a umaúnica transição local e/ou eventos sincronizados, onde exista um evento sincronizante associado a umconjunto de transições locais que devem ser sincronizadas.
Informalmente, pode-se dizer que o estado de uma rede de autômatos estocásticos é de�nido comoa combinação de todos os estados internos de um autômato. Assim, em uma rede constituída de trêsautômatos, cada um com quatro estados locais, existe uma rede de autômatos estocásticos com umtotal de 43 = 64 estados globais diferentes em que, para que se altere o estado global de toda a redede autômatos estocásticos, basta apenas um único autômato alterar o seu estado local.
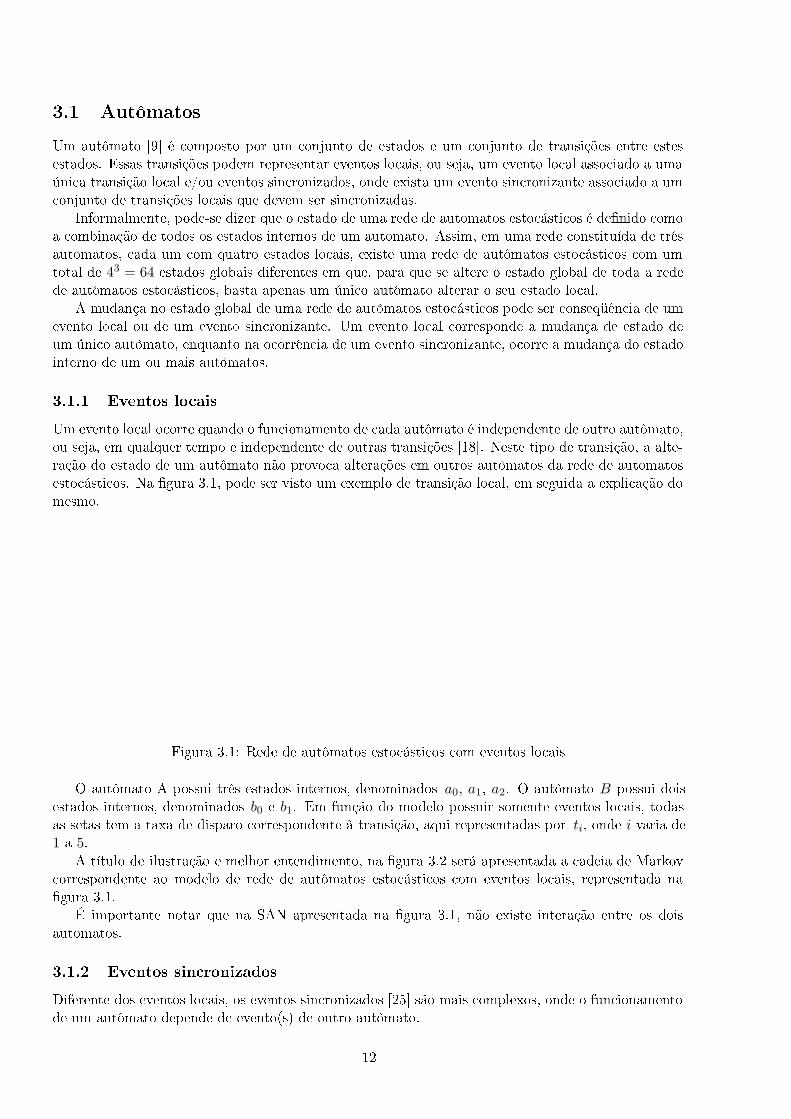
A mudança no estado global de uma rede de autômatos estocásticos pode ser conseqüência de umevento local ou de um evento sincronizante. Um evento local corresponde a mudança de estado deum único autômato, enquanto na ocorrência de um evento sincronizante, ocorre a mudança do estadointerno de um ou mais autômatos.3.1.1 Eventos locaisUm evento local ocorre quando o funcionamento de cada autômato é independente de outro autômato,ou seja, em qualquer tempo e independente de outras transições [18]. Neste tipo de transição, a alte-ração do estado de um autômato não provoca alterações em outros autômatos da rede de autômatosestocásticos. Na �gura 3.1, pode ser visto um exemplo de transição local, em seguida a explicação domesmo.
Figura 3.1: Rede de autômatos estocásticos com eventos locaisO autômato A possui três estados internos, denominados a0, a1, a2. O autômato B possui dois
estados internos, denominados b0 e b1. Em função do modelo possuir somente eventos locais, todasas setas tem a taxa de disparo correspondente à transição, aqui representadas por ti, onde i varia de1 a 5.
A título de ilustração e melhor entendimento, na �gura 3.2 será apresentada a cadeia de Markovcorrespondente ao modelo de rede de autômatos estocásticos com eventos locais, representada na�gura 3.1.
É importante notar que na SAN apresentada na �gura 3.1, não existe interação entre os doisautômatos.3.1.2 Eventos sincronizadosDiferente dos eventos locais, os eventos sincronizados [25] são mais complexos, onde o funcionamentode um autômato depende de evento(s) de outro autômato.
12
Figura 3.2: Cadeia de Markov referente a SAN da �gura 3.1.Um evento sincronizante é associado a um conjunto de transições sincronizadas, onde a taxa de
disparo3 deve ser associada a cada transição sincronizada e a ocorrência de um evento sincronizadose dá simultaneamente em todos os autômatos envolvidos [18].
No processo de sincronização pode ser vista uma relação do tipo mestre-escravo, onde um autômatoé escolhido aleatoriamente como mestre e os demais como escravos.
Neste processo, apenas a taxa de transição não é su�ciente, pois necessita-se do que se chama detripla de sincronização, onde existe um identi�cador do evento sincronizante 4, a taxa de disparo euma probabilidade de ocorrência5. A melhor maneira de entender a tripla de sincronização é atravésda relação mestre-escravo. Supondo que para cada evento sincronizante, um autômato é escolhidocomo mestre, tem-se a seguinte estrutura [20]:• o identi�cador do evento sincronizante aparece nas setas de ligação dos autômatos;• as etiquetas das setas de ligação representam as transições sincronizadas do autômato mestreque apresentam a taxa de disparo correspondente a ocorrência do evento sincronizante foco;• as etiquetas das setas de ligação representam as transições sincronizadas dos autômatos escravosque apresentam taxa igual a um;• as transições associadas a um mesmo evento sincronizante, que tem como origem um mesmoestado local, devem apresentar uma probabilidade de escolha entre si, a soma dessas probabili-dades é obrigatoriamente igual a um;• nos autômatos mestre e escravo, caso haja uma única transição associada ao evento sincroni-zante, a probabilidade p vale um;
3Taxa de disparo: descreve a taxa em que o evento ocorre.4Evento sincronizante: nome necessário para identi�car as transições que podem ser disparadas simultaneamente.5Probabilidade de ocorrência: estabelece a relação entre todas as transições correspondentes a um mesmo evento
que pode ser disparado.
13
• para o autômato mestre, a tripla é escrita sob a forma (s, T, p), onde s é o identi�cador doevento sincronizante, T é a taxa de disparo e p é a probabilidade de ocorrência;• para cada evento escravo, a tripla de sincronização é escrita sob a forma (s, 1, p), onde s é oidenti�cador do evento sincronizante e p é a probabilidade de ocorrência.
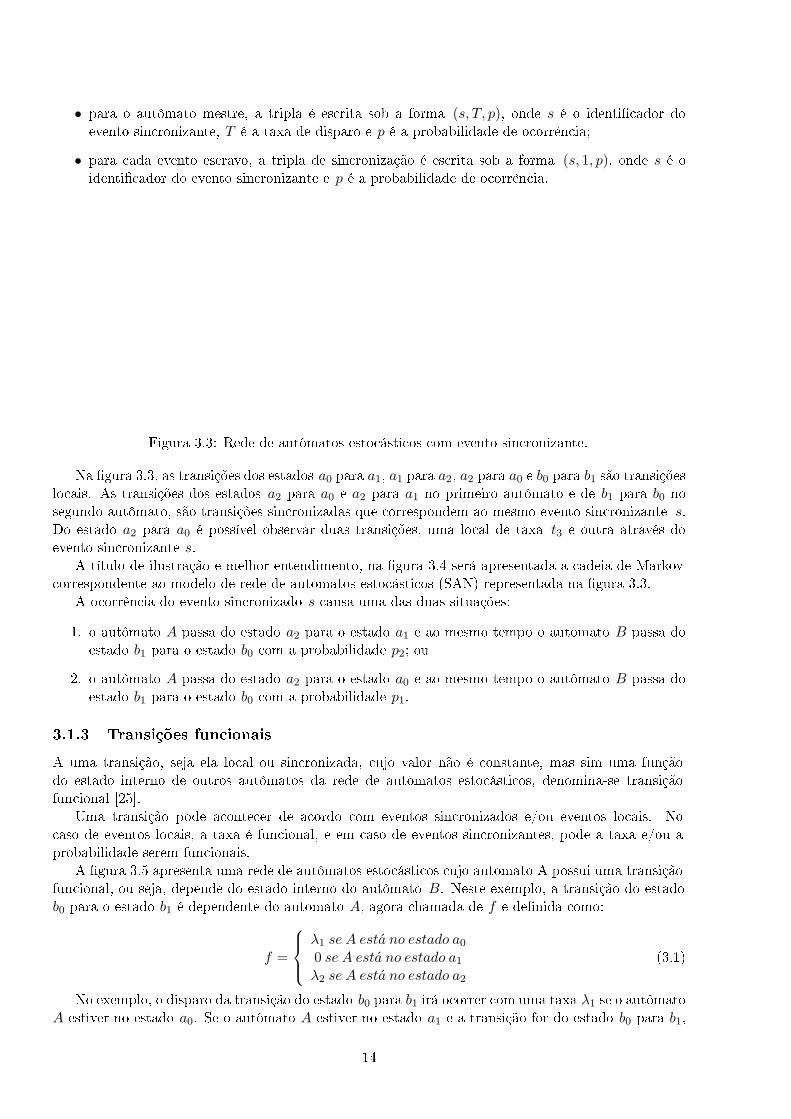
Figura 3.3: Rede de autômatos estocásticos com evento sincronizante.Na �gura 3.3, as transições dos estados a0 para a1, a1 para a2, a2 para a0 e b0 para b1 são transiçõeslocais. As transições dos estados a2 para a0 e a2 para a1 no primeiro autômato e de b1 para b0 no
segundo autômato, são transições sincronizadas que correspondem ao mesmo evento sincronizante s.Do estado a2 para a0 é possível observar duas transições, uma local de taxa t3 e outra através doevento sincronizante s.
A título de ilustração e melhor entendimento, na �gura 3.4 será apresentada a cadeia de Markovcorrespondente ao modelo de rede de autômatos estocásticos (SAN) representada na �gura 3.3.
A ocorrência do evento sincronizado s causa uma das duas situações:1. o autômato A passa do estado a2 para o estado a1 e ao mesmo tempo o autômato B passa do
estado b1 para o estado b0 com a probabilidade p2; ou2. o autômato A passa do estado a2 para o estado a0 e ao mesmo tempo o autômato B passa do
estado b1 para o estado b0 com a probabilidade p1.3.1.3 Transições funcionaisA uma transição, seja ela local ou sincronizada, cujo valor não é constante, mas sim uma funçãodo estado interno de outros autômatos da rede de autômatos estocásticos, denomina-se transiçãofuncional [25].
Uma transição pode acontecer de acordo com eventos sincronizados e/ou eventos locais. Nocaso de eventos locais, a taxa é funcional, e em caso de eventos sincronizantes, pode a taxa e/ou aprobabilidade serem funcionais.
A �gura 3.5 apresenta uma rede de autômatos estocásticos cujo autômato A possui uma transiçãofuncional, ou seja, depende do estado interno do autômato B. Neste exemplo, a transição do estadob0 para o estado b1 é dependente do autômato A, agora chamada de f e de�nida como:
f =
λ1 se A esta no estado a0
0 se A esta no estado a1
λ2 se A esta no estado a2
(3.1)No exemplo, o disparo da transição do estado b0 para b1 irá ocorrer com uma taxa λ1 se o autômato
A estiver no estado a0. Se o autômato A estiver no estado a1 e a transição for do estado b0 para b1,14

Figura 3.4: Cadeia de Markov referente a �gura 3.3.
Figura 3.5: Rede de autômatos estocásticos com transições funcionais.
nada irá ocorrer. De acordo com o formalismo SAN, a expressão matemática para a função pode serescrita como [22]:
f = [λ1 (s+ (A) = a0)] + [λ2 (s+ (A) = a2)] (3.2)Como citado anteriormente, o uso de transições funcionais não se restringe apenas a eventos
locais. De fato, em um evento sincronizado não só a taxa, mas também a probabilidade de ocorrênciade um evento pode ser expressa por uma função. O uso de transições funcionais é um poderosorecurso do formalismo SAN, pois permite escrever uma estrutura extremamente complexa com umformato bastante compacto e simples. O custo computacional para trabalhar com taxas funcionaistem diminuído enormemente com o desenvolvimento de soluções numéricas para modelos de redes deautômatos estocásticos [58].
15
3.2 Descritor markoviano
Um autômato é um modelo matemático de um sistema com entradas e saídas discretas [33]. O sistemapode estar em qualquer uma de um número �nito de con�gurações internas ou estados. Um estadode um sistema sumariza a informação referente a entradas passadas que é necessária para determinaro comportamento do sistema para entradas subseqüentes.
Se for possível representar o comportamento físico de um sistema, descrevendo os diferentes estadosque o mesmo pode ocupar, indicando como ele se move de um estado para o outro e se o tempodispendido em cada estado possui uma distribuição exponencial, pode dizer-se que este é um processode Markov.
Associado a todo o processo de Markov existe um grupo de estados. A evolução deste sistemaentre os estados é representado por transições que ocorrem instantaneamente, em outras palavras, amovimentação de um estado para outro não consome tempo algum. Uma propriedade fundamentalde um sistema de Markov é que a evolução futura do sistema depende somente do estado atual e nãodo passado [59].
Se os espaços de um processo de Markov forem discretos, o processo é chamado de cadeia deMarkov.
Cadeias de Markov são, na realidade, um formalismo de modelagem de sistemas que descreve umsistema com um processo estocástico, onde o sistema modelado é caracterizado pelos seus estados ea forma pela qual eles se alteram.
As cadeias de Markov podem ser compreendidas como uma máquina de estados, que caracterizao funcionamento do sistema pelos estados possíveis que ele pode assumir (nodos) e das transições quepode assumir (arcos).
Segundo a escala de tempo, uma cadeia de Markov pode ser de dois tipos:• Cadeias de Markov a escala de tempo contínuo: neste tipo de modelo as variáveis de estadomudam continuamente no tempo.• Cadeias de Markov a escala de tempo discreto: neste tipo de modelo as variáveis de estadomudam só num conjunto discreto de pontos no tempo (DTMC).
3.2.1 Propriedades das cadeias de MarkovCadeias de Markov são um formalismo para modelar sistemas supondo que:• os estados do sistema são discretos;• a escala de tempo que rege a transição entre estados do sistema pode se dar de forma contínua(CTMC) ou discreta (DTMC);• a transição entre estados do sistema só depende do seu estado atual, não importando por quaisestados o sistema já passou ou irá passar;• a freqüência (CTMC) ou a probabilidade (DTMC) de transição de estados do sistema se dásegundo uma lei exponencial.
Nosso maior interesse neste trabalho é em escala de tempo contínuo, portanto nos deteremos emapresentar o vetor solução das equações para CTMC e a montagem do gerador in�nitesimal.
A representação grá�ca de uma cadeia de Markov é feita por autômatos onde associa-se a cadalugar um estado do sistema e a cada arco uma taxa (CTMC) ou probabilidade (DTMC).
Matematicamente, uma cadeia de Markov é representada por uma matriz de transição de estados,onde:
16

• para CTMC esta matriz de transição é chamada de gerador in�nitesimal (Q) e cada elementonuma linha i e numa coluna j representa a taxa de transição do sistema do estado i para o estadoj, os elementos diagonais de Q representam o ajuste necessário para que a soma dos elementosde cada linha seja igual a zero;• para DTMC esta matriz de transição é chamada de matriz estocástica (P) e a diferença básica éque cada elemento representa a probabilidade de transição entre estados, os elementos diagonaisde P representam o ajuste necessário para que a soma dos elementos de cada linha seja igual aum.
O resultado da análise estacionária de uma cadeia de Markov é expresso pelo vetor de probabilidademarginal dos estados do sistema. Este vetor de�ne qual a probabilidade (estacionária) de cada umdos estados do sistema [64], [59], [58].
Descritor markoviano é, portanto, uma descrição compacta da matriz de transição (gerador in�-nitesimal) da cadeia de Markov associada a um modelo original.
Para obter-se as medidas de desempenho do modelo analisado através da cadeia de Markov po-demos determinar o estado estacionário6 do modelo.
Os resultados estacionários do modelo são obtidos através de um vetor de probabilidade π queassocia uma probabilidade πi (i ∈ {1, 2, ..., n}) a cada um dos n estados da cadeia de Markov. A partirdo vetor π, obtem-se informações sobre o sistema modelado, como o número de tarefas executadas,tempos médios, etc.
Para sistemas em escala contínua de tempo, o vetor π é o vetor solução das equações:
πQ = 0 (3.3)
n∑i=1
πi = 1 (3.4)onde Q é o gerador in�nitesimal da cadeia de Markov [62].O gerador in�nitesimal (Q) é uma matriz quadrada de ordem nQ igual ao número de estados do
autômato.Para melhor entendimento, será utilizada como exemplo a �gura 3.1, apresentada no item 3.1.1.
O autômato A possui três estados, ou seja, nQ = 3. Cada linha e cada coluna de Q é associada aum estado de A, segundo a ordem lexicográ�ca dos estados. A primeira linha e a primeira coluna deQ correspondem ao estado a0, a segunda linha e coluna correspondem ao estado a1 e a terceira, aoestado a2.O elemento qij de Q (i, j = 1, ..., nQ) é a taxa de disparo correspondente a transição do estadoassociado à linha i para o estado associado a linha j, então:• q12 = t1 (transição de a0 para a1);• q13 = 0 (não existe transição de a0 para a2);• q23 = t2 (transição de a1 para a2);• q21 = 0 (não existe transição de a1 para a0);• q31 = t3 (transição de a2 para a0);• q32 = 0 (não existe transição de a2 para a1);
6Proporção de tempo em que a cadeia de Markov permanece em cada um de seus estados sob um tempo �nito.
17

Assim, com excessão da diagonal principal, obtem-se todos os elementos de Q. Para a diagonalprincipal, coloca-se os valores de tal forma que a soma dos elementos de cada uma das linhas damatriz seja nula. Para o exemplo anterior tem-se: q11 = −t1, q22 = −t2 e q33 = −t3.A matriz de transição (Q) do autômato equivalente a rede de autômatos estocásticos é dada pelasoma tensorial7 das matrizes de transições locais [19].
Q = Q(1) ⊕Q(2) =
−T1 T1 00 −T2 T2
T3 0 −T3
⊕ ( −T4 T4
T5 −T5
)
Q =
−(T1 + T4) T4
T5 −(T1 + T5)
∣∣∣∣∣ T1 00 T1
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ −(T2 + T5) T4
T5 −(T2 + T5)
∣∣∣∣∣ T2 00 T2
T3 00 T3
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ −(T3 + T4) T4
T5 −(T3 + T5)
No caso de eventos sincronizantes, utiliza-se além da matriz de transições locais, as matrizes re-
presentando cada evento sincronizante, representadas por um par de matrizes para cada autômato.A primeira matriz do par (chamada de matriz positiva) representa a ocorrência de um evento sin-cronizante. O ajuste diagonal correspondente as taxas expressas na primeira matriz será feito pelasegunda matriz (chamada matriz negativa). Na matriz negativa, todos os elementos fora da diagonalprincipal são nulos.
Em uma rede de autômatos estocásticos podem haver três tipos de autômatos:• Um autômato mestre que contém a taxa de disparo do evento sincronizante. A existência de pro-babilidade associada a uma transição tem por efeito da taxa correspondente pela probabilidade.A matriz negativa (ajuste) contém a taxa negativa.• Um ou mais autômatos escravos. As matrizes positivas, neste caso, contém uma taxa de disparoigual a um. A matriz negativa contém uma taxa de disparo igual a um.• Autômatos que não são in�uenciados pelo evento sincronizante. As matrizes positivas e negati-vas são matrizes identidade, pois a ocorrência do evento sincronizante não altera o estado destesautômatos.
O descritor, neste caso, é montado em duas partes, uma correspondendo aos eventos sincronizantese outra aos eventos locais. A parte local é de�nida por uma soma tensorial das matrizes locais decada evento (conforme visto anteriormente). A parte sincronizante (cada um) corresponde a somados produtos tensoriais8 de cada evento sincronizante.
Dependendo da escolha do autômato mestre do evento sincronizante, o autômato apresentadona �gura 3.3 pode ter duas representações diferentes, no entanto, o resultado �nal para a matriz detransição não se altera.
A parte local da rede de autômatos estocásticos da �gura 3.3 é representada por:
Q1 = Q(1)1 ⊕Q
(2)1 =
−T1 T1 00 −T2 T2
T3 0 −T3
⊕ ( −T4 T4
0 0
)7A de�nição de soma tensorial, bem como sua solução, pode ser vista no capítulo 4.8A de�nição de produto tensorial, bem como sua solução pode ser vista no capítulo 4.
18
Q =
−(T1 + T4) T4
0 −T1
∣∣∣∣∣ T1 00 T1
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ −(T2 + T4) T4
0 −T2
∣∣∣∣∣ T2 00 T2
T3 00 T3
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ −(T3 + T4) T4
0 −T3
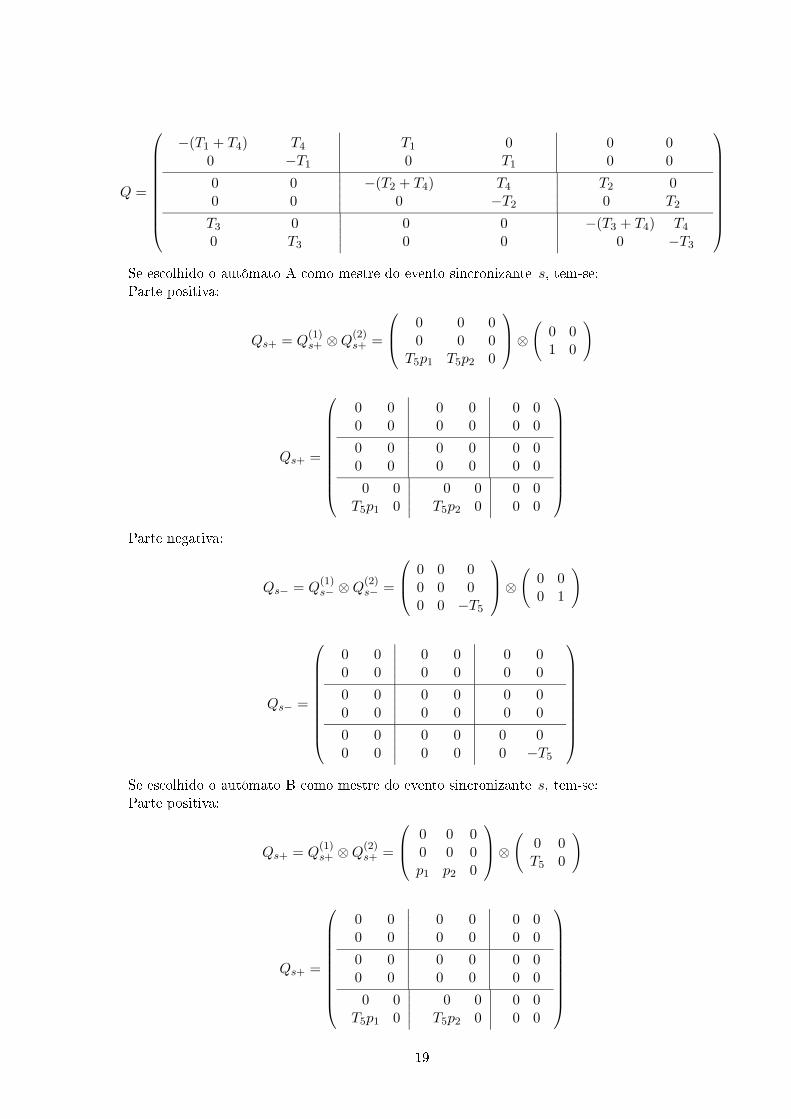
Se escolhido o autômato A como mestre do evento sincronizante s, tem-se:Parte positiva:
Qs+ = Q(1)s+ ⊗Q
(2)s+ =
0 0 00 0 0
T5p1 T5p2 0
⊗ ( 0 01 0
)
Qs+ =
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 0T5p1 0
∣∣∣∣∣ 0 0T5p2 0
∣∣∣∣∣ 0 00 0
Parte negativa:
Qs− = Q(1)s− ⊗Q
(2)s− =
0 0 00 0 00 0 −T5
⊗ ( 0 00 1
)
Qs− =
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 −T5
Se escolhido o autômato B como mestre do evento sincronizante s, tem-se:Parte positiva:
Qs+ = Q(1)s+ ⊗Q
(2)s+ =
0 0 00 0 0p1 p2 0
⊗ ( 0 0T5 0
)
Qs+ =
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 0T5p1 0
∣∣∣∣∣ 0 0T5p2 0
∣∣∣∣∣ 0 00 0
19

Parte negativa:
Qs− = Q(1)s− ⊗Q
(2)s− =
0 0 00 0 00 0 1
⊗ ( 0 00 −T5
)
Qs− =
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 −T5
De onde chega-se ao gerador in�nitesimal do autômato global, dado por:
Q = Q1 +Qs+ +Qs−
Q =
−(T1 + T4) T4
0 −T1
∣∣∣∣∣ T1 00 T1
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ −(T2 + T4) T4
0 −T2
∣∣∣∣∣ T2 00 T2
T3 0T5p1 T3
∣∣∣∣∣ 0 0T5p2 0
∣∣∣∣∣ −(T3 + T4) T4
0 −(T3 + T5)
Um exemplo de modelagem usando o descritor markoviano e sua resolução pode ser encontrada
em [18].Na realidade, as transições funcionais não alteram o descritor, mas exigem o uso da soma e do
produto tensorial generalizado, que serão discutidos no próximo capítulo.
3.3 Soluções numéricas para cadeias de Markov
Dentre os diferentes métodos de resolução do sistema formado pelas equações 3.3 e 3.4, existem osmétodos analíticos e os métodos numéricos [14], [52], [55].
Métodos analíticos de resolução de sistemas de equações lineares são os que fornecem uma soluçãopara o sistema de equações lineares sem que seja necessário sua resolução numérica. A aplicabilidadedestes métodos é reduzida, pois se aplicam somente em alguns tipos de modelos.
Dentre os exemplos de aplicabilidade destes métodos, podem ser citados:• processos de nascimento e morte [64];• soluções a forma produto para redes de �la de espera [36].
Conforme [44], processo de nascimento e morte com número de estados in�nito possui uma soluçãoa forma produto se todas as transições forem descritas por distribuições exponenciais, se a taxade entrada for inferior a capacidade de atendimento e se as taxas de chegada e atendimento foremindependentes da carga.
Nosso interesse se concentra em métodos numéricos para a resolução de sistemas de equaçõeslineares, portanto, ênfase será dada aos mesmos.
20

3.4 Métodos numéricos
Os métodos numéricos de solução de sistemas lineares são classi�cados em dois grupos [59], a saber:• métodos numéricos diretos; e• métodos numéricos iterativos.
3.4.1 Métodos diretosMesmo adotando um critério (rapidez, economia de tempo, segurança na obtenção do resultado) nãose pode garantir, a priori, qual método é o mais e�ciente [3].
Em geral, métodos diretos são apropriados quando o número de estados do sistema modelado nãoé muito grande (na ordem de até um ou poucos milhares de estados) e quando a matriz de transição deestados do sistema não é esparsa. Entretanto, podem ser convenientes se a matriz possuir estruturasespeciais como, por exemplo, matrizes de banda [58]. Neste método os zeros da matriz original sãopreservados e as iterações são conduzidas com a matriz original, tornando os cálculos autocorrigíveis,o que tende a minimizar os erros de arredondamento.
Alguns exemplos de métodos diretos são: eliminação de Gauss [40], [17] e fatorização LU [61].Será apresentado a seguir um exemplo do uso do método de fatorização LU:Seja o sistema linear xM = b.O processo de fatoração para solução deste sistema consiste em decompor a matriz A em um
produto de dois ou mais fatores e, em seguida, resolver uma seqüência de sistemas lineares queconduzirá à solução do sistema linear original.
Uma matriz não singular A é o resultado do produto de duas matrizes,L.U = A
onde L é uma matriz triangular inferior, ou seja, tem somente elementos abaixo da diagonalprincipal e U é uma matriz triangular superior, ou seja, tem somente elementos da diagonal paracima.
Por exemplo, uma matriz A de 4 x 4 elementos, poderia ser vista da seguinte forma:1 0 0 0χ2,1 1 0 0χ3,1 χ3,2 1 0χ4,1 χ4,2 χ4,3 1
.β1,1 β1,2 β1,3 β1,4
0 β2,2 β2,3 β2,4
0 0 β3,3 β3,4
0 0 0 β4,4
=
a1,1 a1,2 a1,3 a1,4
a2,1 a2,2 a2,3 a2,4
a3,1 a3,2 a3,3 a3,4
a4,1 a4,2 a4,3 a4,4
Observação: a diagonal principal da matriz L foi carregada com 1 por opção, pois poderia ter sido
a diagonal da matriz U .Então, o sistema linear, através da decomposição, pode ser resolvido como:
A.u = (L.U).x = L.(U.x) = b
Primeiro sendo resolvido para o vetor y como L.y = b e resolvendo U.x = y.A equação L.y = b pode ser resolvida por substituição direta, como segue:
y1 =b1x11
yi =1x11
b1 − i−1∑j=1
xij .yj
21

onde i = 2, 3, ..., N .Enquanto a equação U.x = y pode ser resolvida por substituição inversa, conforme segue:
xN =yNβNN
xi =1βii
y1 −N∑
j=i+1
βij .xj
onde N − 1, N − 2, ..., 1
Algoritmos para calcular equações através deste método podem ser encontrados em [11], [21], [61].3.4.2 Métodos iterativosOs métodos iterativos são, normalmente, os mais utilizados para a resolução de cadeias de Markov,pois os métodos diretos não são adequados para modelos de sistemas com elevado número de estados,onde a matriz de transição é de ordem muito alta.
Nos métodos iterativos é gerada uma seqüência de valores aproximados π(k) do vetor de probabi-lidades estacionárias que devem convergir para a solução π. Cada iteração dos métodos tem um custoaproximadamente igual ao da multiplicação de um vetor por uma matriz (esparsa) [57]. Portanto, onúmero de iterações é importante para o custo total do algoritmo [58].
Como exemplos de métodos iterativos podem ser citados o método de Jacobi, Gauss-Seidel [61],Arnoldi, GMRES, Sobre-relaxação sucessiva (SOR) e o método da Potência [62], [61].
Foi escolhido, como exemplo de método iterativo, o método da potência para demonstrar o cálculodo vetor de probabilidades estacionárias π. Neste método, a solução é πP (K) e o esquema iterativo éπ(k+1) = π(k)P .
Este é um método conhecido das cadeias de Markov onde o elemento j de π(k) é igual a probabi-lidade do processo estar no estado j no k-ésimo passo.
É um método iterativo onde para sabermos o valor de πn+1 precisamos saber o valor de πn e assimsucessivamente, conforme segue:
π(1) = P.π(0)
π(2) = P.π(1)
π(3) = P.π(2)
... ... ...π(n) = P.π(n−1)
Como todo método iterativo, sua solução é dada através de aproximações constantes. Para saberquando se chegou a uma solução satisfatória, basta calcular a diferença entre as iterações anteriores ea atual. Quando da análise do sistema, de acordo com os dados, o próprio usuário informa a diferençatolerável.
Diz-se que um sistema converge se este segue em direção a solução e que o sistema estagna, quandoem repetidas iterações os valores são os mesmos.
Algoritmos para calcular equações através deste método podem ser encontrados em [61], [62].Na tentativa de acelerar o processo para garantir a solução, ganhando velocidade de processamento,
podemos potencializar a matriz, onde:22
P (2) =⇒ π(2) = π(1)P (2)
π(4) = π(2)P (2)
... . . . ...
P (4) =⇒ π(4) = π(0)P (4)
π(8) = π(4)P (4)
diminuindo-se desta forma consideravelmente o número de iterações.Cabe salientar que em matrizes esparsas a aplicação deste artifício tende a aumentar o número
de elementos não nulos, acarretando em problemas de ocupação de espaço em memória. Nestescasos, só resta a alternativa de fazer multiplicações sucessivas em P, para que a matriz possa serarmazenada, mesmo que com isso gere muitas multiplicações até a convergência, acarretando emmais processamento.
Então, para o método da potência só precisamos, na realidade, de multiplicações de um vetor poruma matriz π(P ) = π1, e como em muitas vezes não necessitamos armazenar os valores intermediários,armazenamos somente um ou poucos vetores, diminuindo em muito a carga de memória.
23
24
Capítulo 4
Álgebra Tensorial
O estudo deste capítulo divide-se basicamente em álgebra tensorial clássica e álgebra tensorial gene-ralizada, aqui representadas por ATC e ATG respectivamente, fundamentais para o entendimentode SAN. Na primeira parte é demonstrada a álgebra tensorial clássica (ATC), sua resolução e prin-cipais propriedades. Na segunda parte é demonstrada a álgebra tensorial generalizada, sua solução eprincipais propriedades.
4.1 Álgebra tensorial clássica (ATC)
A álgebra tensorial clássica não é algo novo, em 1978, Davio já escreveu uma publicação sobre a mesma,no entanto com o nome de Kronecker. A ATC é utilizada quando as transições são constantes. Ela éde�nida por dois operadores matriciais:
1. produto tensorial ⊗2. soma tensorial ⊕
A notação utilizada para álgebra tensorial clássica, neste trabalho, será basicamente:• N representando o conjunto dos números naturais.• R representando o conjunto dos números reais.• [a..b] representando o subconjunto de N que contém todos os valores de a até b, inclusive estes.• [a, b] representando o subconjunto de R que contém as posições da matriz do elemento a e doelemento b, inclusive estes.
• . representando a multiplicação entre os elementos.Será abordado primeiro o produto tensorial clássico, de�nido o fator normal e, em seguida a somatensorial clássica.4.1.1 Produto tensorialO produto tensorial de duas matrizes A e B de dimensões (α1 xα2) e (β1 xβ2) respectivamente, éuma matriz de dimensões (α1β1 xα2β2). Essa matriz pode ser vista como uma matriz constiuídade α1 xα2 blocos, cada um de dimensão β1 xβ2. A de�nição de cada um dos elementos da matrizresultante é feita levando-se em conta a qual bloco o referido elemento pertence e a sua posição internadentro desse bloco [20], [48].
25

Formalmente, o produto tensorial da matriz A de tamanho nAxnA e da matriz B de tamanhonBxnB, denotada A ⊗ B é uma matriz C de tamanho nAnBxnAnB, onde C pode ser decompostaem n2
A blocos de tamanho nBxnB [18], [27].Sejam duas matrizes:
A =
(a1,1 a1,2
a2,1 a2,2
)
B =
b1,1 b1,2 b1,3 b1,4b2,1 b2,2 b2,3 b2,4b3,1 b3,2 b3,3 b3,4
onde:• ai,jebi,j são os elementos das matrizes A e B;• A⊗B é o produto tensorial das matrizes A e B;• A .B é o produto convencional das matrizes A e B.• c[i,k][j,l] é o elemento da i-ésima linha do k-ésimo bloco horizontal e da l-ésima coluna do j-ésimobloco vertical da matriz C.
C = A⊗B e calculado como:
a1,1.b1,1 a1,1.b1,2 a1,1.b1,3 a1,1.b1,4a1,1.b2,1 a1,1.b2,2 a1,1.b2,3 a1,1.b2,4a1,1.b3,1 a1,1.b3,2 a1,1.b3,3 a1,1.b3,4
∣∣∣∣∣∣∣a1,2.b1,1 a1,2.b1,2 a1,2.b1,3 a1,2.b1,4a1,2.b2,1 a1,2.b2,2 a1,2.b2,3 a1,2.b2,4a1,2.b3,1 a1,2.b3,2 a1,2.b3,3 a1,2.b3,4
a2,1.b1,1 a2,1.b1,2 a2,1.b1,3 a2,1.b1,4a2,1.b2,1 a2,1.b2,2 a2,1.b2,3 a2,1.b2,4a2,1.b3,1 a2,1.b3,2 a2,1.b3,3 a2,1.b3,4
∣∣∣∣∣∣∣a2,2.b1,1 a2,2.b1,2 a2,2.b1,3 a2,2.b1,4a2,2.b2,1 a2,2.b2,2 a2,2.b2,3 a2,2.b2,4a2,2.b3,1 a2,2.b3,2 a2,2.b3,3 a2,2.b3,4
A especi�cação de um elemento em particular é su�ciente para especi�car a ocorrência de um
elemento no bloco.A especi�cação de um elemento na matriz pode ser escrita assim:
C[i,k][j,l] = ai,j .bk,l
onde i, j ∈ [1..nA] e k, l ∈ [1..nB].C53 = a2,1b2,3 está posicionado no bloco (2, 1) e a posição interna é 2, 3 do bloco. O produto
tensorial C = A ⊗ B é de�nido algebricamente pela designação do valor ai,j .bk,l ao elemento deposição (k, l) do bloco (i, j).
Quando calculado o produto tensorial de uma matriz quadrada qualquer por uma matriz identi-dade, a esse cálculo dá-se o nome de fator normal. Para esse cálculo existe a possibilidade de doisfatores normais, quais sejam:
A⊗ In e In ⊗An= número de linhas e colunas da matriz.
Seja uma matriz A =
[a1,1 a1,2
a2,1 a2,2
]e uma matriz identidade I3 =
1 0 00 1 00 0 1
:26

O fator normal A⊗ I3 =
a1,1 0 00 a1,1 00 0 a1,1
∣∣∣∣∣∣∣a1,2 0 00 a1,2 00 0 a1,2
a2,1 0 00 a2,1 00 0 a2,1
∣∣∣∣∣∣∣a2,2 0 00 a2,2 00 0 a2,2
O fator normal I3 ⊗A =
a1,1 a1,2
a2,1 a2,2
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ a1,1 a1,2
a2,1 a2,2
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ 0 00 0
∣∣∣∣∣ a1,1 a1,2
a2,1 a2,2
Quando aplicado o produto tensorial de uma matriz identidade por outra matriz identidade, o
resultado é uma matriz identidade de dimensão igual ao produto das dimensões das duas matrizes:In ⊗ Im = Im ⊗ In = In,m
4.1.2 Soma tensorialPara aplicar a soma tensorial a duas matrizes é necessário conhecer o conceito de matriz identidade.Toda e qualquer matriz é identidade quando mi,j = 1 se i = j e mi,j = 0 se i 6= j e a matriz équadrada.
A soma tensorial de duas matrizes A e B é de�nida como a soma convencional dos fatores normaisdas duas matrizes, conforme segue,
A⊕B = (A⊗ IB) + (IA ⊗B)
onde:• AeB são as matrizes quadradas AeB;• A⊗B é o produto tensorial das matrizes AeB;• A⊕B é a soma tensorial das matrizes AeB;• A+B é a soma convencional das matrizes AeB;• IA e IB são as matrizes identidade da mesma ordem que as matrizes AeB respectivamente.
Observações:• A soma tensorial de duas matrizes só pode ser feita em matrizes quadradas.• O operador ⊗ (produto tensorial) tem prioridade sobre o operador ⊕ (soma tensorial) e osdois operadores tem prioridade sobre os operadores tradicionais . (multiplicação) e + (adição)matrizes.
27

Formalmente, a soma tensorial da matriz A, de tamanho nAxnA e a matriz B de tamanho nBxnB,denotada A⊕B é a matriz C, de tamanho nAnB xnAnB, de�nida por A⊗ InB + InA ⊗B, onde InAe InB são matrizes identidades de tamanho nA e nB respectivamente [18], [27].Sejam duas matrizes:
A =
(a1,1 a1,2
a2,1 a2,2
)
B =
b1,1 b1,2 b1,3b2,1 b2,2 b2,3b3,1 b3,2 b3,3
A soma tensorial de AeB é dada por C = A⊕B e é igual a (A⊗ I3) + (I2 ⊗B).
C =
a1,1 0 00 a1,1 00 0 a1,1
∣∣∣∣∣∣∣a1,2 0 00 a1,2 00 0 a1,2
a2,1 0 00 a2,1 00 0 a2,1
∣∣∣∣∣∣∣a2,2 0 00 a2,2 00 0 a2,2
+
b1,1 b1,2 b1,3b2,1 b2,2 b2,3b3,1 b3,2 b3,3
∣∣∣∣∣∣∣0 0 00 0 00 0 0
0 0 00 0 00 0 0
∣∣∣∣∣∣∣b1,1 b1,2 b1,3b2,1 b2,2 b2,3b3,1 b3,2 b3,3
C =
a1,1 + b1,1 b1,2 b1,3b2,1 a1,1 + b2,2 b2,3b3,1 b3,2 a1,1 + b3,3
∣∣∣∣∣∣∣a1,2 0 00 a1,2 00 0 a1,2
a2,1 0 00 a2,1 00 0 a2,1
∣∣∣∣∣∣∣a2,2 + b1,1 b1,2 b1,3
b2,1 a2,2 + b2,2 b2,3b3,1 b3,2 a2,2 + b3,3
Pode ser de�nido algebricamente como c[i,k][j,l] = ai,j .δk,l + bk,l.δi,jonde i, j ∈ [1..nA] , k, l ∈ [1..nB] e δi,j = 1 se i = j e 0 se i 6= j.O operador δi,j também é conhecido como operador delta de Kronecker [15].
4.1.3 Propriedades da soma e do produto tensorial clássicoAs propriedades da álgebra tensorial clássica (ATC) para redes de autômatos estocásticos (SAN)podem ser vistas em [20], [24], [59] e são as seguintes:Associatividade
A⊗ (B ⊗ C) = (A⊗B)⊗ C
A⊕ (B ⊕ C) = (A⊕B)⊕ C
Distributividade sobre adição clássica(A+B)⊗ (C +D) = (A⊗ C) + (B ⊗ C) + (A⊗D) + (B ⊗D)
Compatibilidade com a multiplicação clássica(A.B)⊗ (C.D) = (A⊗ C) . (B ⊗D)
Compatibilidade com a transposição de matrizes28

(A⊗B)T = AT ⊗BT
Compatibilidade com a inversão de matrizes(A⊗B)−1 = A−1 ⊗B−1
Decomposição em fatores normaisA⊗B = (A⊗ IB).(IA ⊗B)
Distributividade com relação à multiplicação pela matriz identidade(A.B)⊗ In = (A⊗ In).(B ⊗ In)
In ⊗ (A.B) = (In ⊗A).(In ⊗B)
Comutatividade dos fatores normais(A⊗ IB).(IA ⊗B) = (IA ⊗B).(A⊗ IB)
No capítulo 5, podem ser acompanhadas as provas algébricas das propriedades citadas anterior-mente.
4.2 Álgebra tensorial generalizada (ATG)
O conceito de ATG é ainda novo, foi introduzida por Plateau [47] e tem sido alvo de muitos estudosem função da possibilidade de ser usada para modelar sistemas complexos como os de paralelismo esincronismo.
O objetivo dessa álgebra é trabalhar com objetos que são funções discretas sobre linhas de umamatriz, ora constantes, ora funções discretas sobre os números reais. Permite trabalhar com um oumais elementos que podem ter avaliações diferentes, conseqüentemente, trabalha-se com uma matrizque pode ter instâncias distintas.
A ATG é considerada uma extensão da ATC e a diferença principal entre as duas é que na ATG éintroduzido o conceito de elementos funcionais. Um elemento funcional é uma função real dos índicesde linha de uma ou mais matrizes. Um elemento funcional b é dito dependente da matriz A se algumíndice de linha da matriz A pertencer a um conjunto de parâmetros desse elemento funcional. Umamatriz que contém pelo menos um elemento funcional dependente da matriz A é dita dependente deA. Os parâmetros de uma matriz são a união dos parâmetros de todos os elementos funcionais. AATG é também de�nida por dois operadores matriciais:
1. produto tensorial ⊗g2. soma tensorial ⊕g
A notação utilizada para álgebra tensorial generalizada neste trabalho acompanha a utilizada para aálgebra tensorial clássica, acrescida das seguintes:• A(B) representando a matriz funcional A que tem como parâmetro a matriz B;• ak representando o índice da linha k da matriz A;• ai,j(B) representando o elemento funcional (i, j) da matriz A(B);• ai,j(bk) representando o elemento funcional (i, j) avaliado pela linha bk;• A(B)⊗g B(A) representando o produto tensorial generalizado entre as matrizes A(B) e B(A);• A(B)⊕g B(A) representando a soma tensorial generalizada entre as matrizes A(B) e B(A).
29

4.2.1 Produto tensorial generalizadoSejam duas matrizes:
A(B) =
(a1,1(B) a1,2(B)a2,1(B) a2,2(B)
)
B(A) =
b1,1(A) b1,2(A) b1,3(A)b2,1(A) b2,2(A) b2,3(A)b3,1(A) b3,2(A) b3,3(A)
Os elementos da matriz A variam em função dos elementos da matriz B e por isso denota-se A(B) eo mesmo ocorre para a matriz B, que denota-se por B(A).
O produto tensorial generalizado é de�nido por C = A(B)⊗g B(A) e calculado como:
C =
a1,1(b1).b1,1(a1) a1,1(b1).b1,2(a1) a1,1(b1).b1,3(a1)a1,1(b2).b2,1(a1) a1,1(b2).b2,2(a1) a1,1(b2).b2,3(a1)a1,1(b3).b3,1(a1) a1,1(b3).b3,2(a1) a1,1(b3).b3,3(a1)
∣∣∣∣∣ a1,2(b1).b1,1(a1) a1,2(b1).b1,2(a1) a1,2(b1).b1,3(a1)a1,2(b2).b2,1(a1) a1,2(b2).b2,2(a1) a1,2(b2).b2,3(a1)a1,2(b3).b3,1(a1) a1,2(b3).b3,2(a1) a1,2(b3).b3,3(a1)
a2,1(b1).b1,1(a2) a2,1(b1).b1,2(a2) a2,1(b1).b1,3(a2)a2,1(b2).b2,1(a2) a2,1(b2).b2,2(a2) a2,1(b2).b2,3(a2)a2,1(b3).b3,1(a2) a2,1(b3).b3,2(a2) a2,1(b3).b3,3(a2)
∣∣∣∣∣ a2,2(b1).b1,1(a2) a2,2(b1).b1,2(a2) a2,2(b1).b1,3(a2)a2,2(b2).b2,1(a2) a2,2(b2).b2,2(a2) a2,2(b2).b2,3(a2)a2,2(b3).b3,1(a2) a2,2(b3).b3,2(a2) a2,2(b3).b3,3(a2)
O produto tensorial generalizado C = A(B)⊗gB(A) é de�nido algebricamente pela atribuição do
valor ai,j(bk).bk,l(ai) ao elemento c[i,k][j,l], i.e.:c[i,k][j,l] = ai,j(bk).bk,l(ai)
onde i, j ∈ [1..nA] e k, l ∈ [1..nB].Exemplo prático C = A(B)⊗g B(A):Sejam duas matrizes:
A(B) =
(a1,1(B) a1,2
a2,1 a2,2
)e B(A) =
b1,1(A) b1,2 b1,3(A)b2,1 b2,2 b2,3b3,1 b3,2(A) b3,3
C =
a1,1(b1).b1,1(a1) a1,1(b1).b1,2 a1,1(b1).b1,3(a1)a1,1(b2).b2,1 a1,1(b2).b2,2 a1,1(b2).b2,3a1,1(b3).b3,1 a1,1(b3).b3,2(a1) a1,1(b3).b3,3
∣∣∣∣∣ a1,2.b1,1(a1) a1,2.b1,2 a1,2.b1,3(a1)a1,2.b2,1 a1,2.b2,2 a1,2.b2,3a1,2.b3,1 a1,2.b3,2(a1) a1,2.b3,3
a2,1.b1,1(a2) a2,1.b1,2 a2,1.b1,3(a2)a2,1.b2,1 a2,1.b2,2 a2,1.b2,3a2,1.b3,1 a2,1.b3,2(a2) a2,1.b3,3
∣∣∣∣∣ a2,2.b1,1(a2) a2,2.b1,2 a2,2.b1,3(a2)a2,2.b2,1 a2,2.b2,2 a2,2.b2,3a2,2.b3,1 a2,2.b3,2(a2) a2,2.b3,3
O exemplo a seguir mostra o uso do produto tensorial generalizado aplicado a duas matrizes com
elementos funcionais, onde, de acordo com a linha da matriz, se tem uma avaliação distinta para oselementos funcionais.
A(B) =
(f 45 8
)⊗g B(A) =
g 7 h5 6 31 i 0
Na matriz A, o valor de f varia de acordo com a posição da matriz B, conforme segue:
f(b1) = −1f(b2) = −2f(b3) = −3
30

O mesmo é verdade para as funções da matriz B, que variam de acordo com a posição da matrizA, conforme segue:
g(a1) = 3 h(a1) = 5 i(a1) = 2g(a2) = 6 h(a2) = 4 i(a2) = 1
O produto tensorial generalizado de C = A(B)⊗g B(A) será:
C =
f(b1).g(a1) f(b1).7 f(b1).h(a1)f(b2).5 f(b2).6 f(b2).3f(b3).1 f(b3).i(a1) f(b3).0
∣∣∣∣∣∣∣4.g(a1) 4.7 4.h(a1)
4.5 4.6 4.34.1 4.i(a1) 4.0
5.g(a2) 5.7 5.h(a2)5.5 5.6 5.35.1 5.i(a2) 5.0
∣∣∣∣∣∣∣8.g(a2) 8.7 8.h(a2)
8.5 8.6 8.38.1 8.i(a2) 8.0
C =
−3 −7 −5−10 −12 −6−3 −6 0
∣∣∣∣∣∣∣12 28 2020 24 124 8 0
30 35 2025 30 155 5 0
∣∣∣∣∣∣∣48 56 3240 48 248 8 0
4.2.2 Soma tensorial generalizadaPara aplicar a soma tensorial generalizada a duas matrizes, assim como a soma tensorial clássica,utiliza-se o conceito de matriz identidade.
A soma tensorial generalizada de duas matrizes quadradas A e B é de�nida como a soma conven-cional dos fatores normais das duas matrizes, conforme segue:
A(B)⊕g B(A) = (A(B)⊗g IB) + (IA ⊗g B(A))
onde, aproveitam-se as convenções feitas até aqui.
• A soma tensorial generalizada de duas matrizes só pode ser feita em matrizes quadradas.• O operador ⊗g (produto tensorial generalizado) tem prioridade sobre o operador ⊕g (somatensorial generalizada) e os dois operadores tem prioridade sobre os operadores tradicionais .(multiplicação) e + (adição) de duas matrizes.
Sejam duas matrizes:
A(B) =
(a1,1(B) a1,2(B)a2,1(B) a2,2(B)
)B(A) =
b1,1(A) b1,2(A) b1,3(A)b2,1(A) b2,2(A) b2,3(A)b3,1(A) b3,2(A) b3,3(A)
A soma tensorial de A(B) eB(A) é dada por C = A(B)⊕g B(A) e é igual a (A(B)⊗g I3) + (I2⊗g
B(A)).A(B)⊕g B(A) = (A(B)⊗g IB) + (IA ⊗g B(A))
C =
a1,1(b1) + b1,1(a1) b1,2(a1) b1,3(a1)
b2,1(a1) a1,1(b2) + b2,2(a1) b2,3(a1)b3,1(a1) b3,2(a1) a1,1(b3) + b3,3(a1)
∣∣∣∣ a1,2(b1) 0 00 a1,2(b2) 00 0 a1,2(b3)
a2,1(b1) 0 00 a2,1(b2) 00 0 a2,1(b3)
∣∣∣∣ a2,2(b1) + b1,1(a2) b1,2(a2) b1,3(a2)b2,1(a2) a2,2(b2) + b2,2(a2) b2,3(a2)b3,1(a2) b3,2(a2) a2,2(b3) + b3,3(a2)
31

A soma tensorial generalizada A(B) ⊕g B(A) é de�nida algebricamente pela atribuição do valorai,j(bk).δk,l + bk,l(ai).δi,j ao elemento c[i,k][j,l] i.e.:
C[i,k][j,l] = ai,j(bk).δk,l + bk,l(ai).δi,j
onde i, j ∈ [1..nA] , k, l ∈ [1..nB] e δi,j = 1 se i = j e 0 se i 6= j.Exemplo prático:
Sejam duas matrizes:A(B) =
(a1,1(B) a1,2
a2,1 a2,2
)
B(A) =
b1,1(A) b1,2 b1,3(A)b2,1 b2,2 b2,3b3,1 b3,2(A) b3,3
A soma tensorial generalizada de A(B) eB(A) é dada por C = A(B) ⊕g B(A) e é igual a C =
A(B)⊕g B(A) ou (A(B)⊗g I3) + (I2 ⊗g B(A)).
(A(B)⊗g I3) =
a1,1(b1) 0 00 a1,1(b2) 00 0 a1,1(b3)
∣∣∣∣∣∣∣a1,2 0 00 a1,2 00 0 a1,2
a2,1 0 00 a2,1 00 0 a2,1
∣∣∣∣∣∣∣a2,2 0 00 a2,2 00 0 a2,2
(I2 ⊗g B(A)) =
b1,1 b1,2 b1,3b2,1 b2,2 b2,3b3,1 b3,2 b3,3
∣∣∣∣∣∣∣0 0 00 0 00 0 0
0 0 00 0 00 0 0
∣∣∣∣∣∣∣b1,1(a2) b1,2 b1,3(a2)b2,1 b2,2 b2,3b3,1 b3,2(a2) b3,3
C =
a1,1(b1) + b1,1(a1) b1,2 b1,3(a1)
b2,1 a1,1(b2) + b2,2 b2,3b3,1 b3,2(a1) a1,1(b3) + b3,3
∣∣∣∣∣ a1,2 0 00 a1,2 00 0 a1,2
a2,1 0 00 a2,1 00 0 a2,1
∣∣∣∣∣ a2,2 + b1,1(a2) b1,2 b1,3(a2)b2,1 a2,2 + b2,2 b2,3b3,1 b3,2(a2) a2,2 + b3,3
Exemplo prático:
Sejam duas matrizes com elementos funcionais, onde, de acordo com a linha da matriz, se temuma avaliação distinta para os elementos funcionais.
A(B) =
(f 45 8
)⊕g B(A) =
g 7 h5 6 31 i 0
Na matriz A, o valor de f varia de acordo com a posição da matriz B, conforme segue:
f(b1) = −1f(b2) = −2f(b3) = −3
32
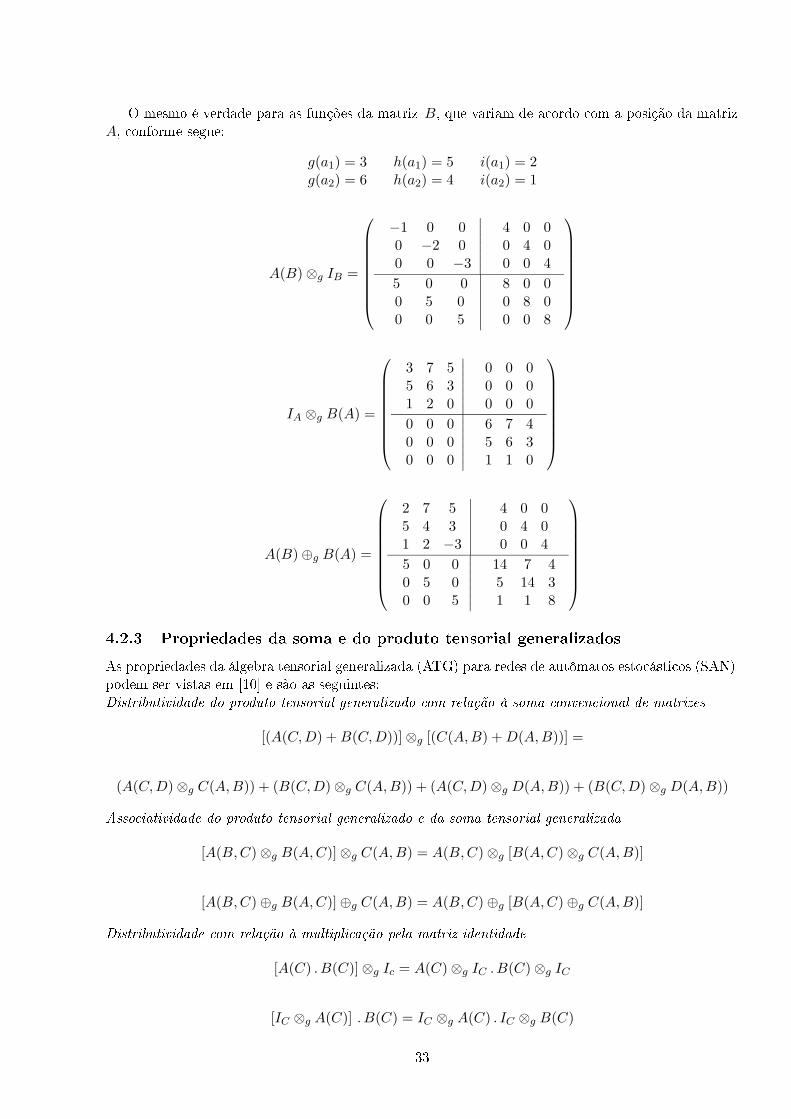
O mesmo é verdade para as funções da matriz B, que variam de acordo com a posição da matrizA, conforme segue:
g(a1) = 3 h(a1) = 5 i(a1) = 2g(a2) = 6 h(a2) = 4 i(a2) = 1
A(B)⊗g IB =
−1 0 00 −2 00 0 −3
∣∣∣∣∣∣∣4 0 00 4 00 0 4
5 0 00 5 00 0 5
∣∣∣∣∣∣∣8 0 00 8 00 0 8
IA ⊗g B(A) =
3 7 55 6 31 2 0
∣∣∣∣∣∣∣0 0 00 0 00 0 0
0 0 00 0 00 0 0
∣∣∣∣∣∣∣6 7 45 6 31 1 0
A(B)⊕g B(A) =
2 7 55 4 31 2 −3
∣∣∣∣∣∣∣4 0 00 4 00 0 4
5 0 00 5 00 0 5
∣∣∣∣∣∣∣14 7 45 14 31 1 8
4.2.3 Propriedades da soma e do produto tensorial generalizadosAs propriedades da álgebra tensorial generalizada (ATG) para redes de autômatos estocásticos (SAN)podem ser vistas em [10] e são as seguintes:Distributividade do produto tensorial generalizado com relação à soma convencional de matrizes
[(A(C,D) +B(C,D))]⊗g [(C(A,B) +D(A,B))] =
(A(C,D)⊗g C(A,B)) + (B(C,D)⊗g C(A,B)) + (A(C,D)⊗g D(A,B)) + (B(C,D)⊗g D(A,B))
Associatividade do produto tensorial generalizado e da soma tensorial generalizada[A(B,C)⊗g B(A,C)]⊗g C(A,B) = A(B,C)⊗g [B(A,C)⊗g C(A,B)]
[A(B,C)⊕g B(A,C)]⊕g C(A,B) = A(B,C)⊕g [B(A,C)⊕g C(A,B)]
Distributividade com relação à multiplicação pela matriz identidade[A(C) . B(C)]⊗g Ic = A(C)⊗g IC . B(C)⊗g IC
[IC ⊗g A(C)] . B(C) = IC ⊗g A(C) . IC ⊗g B(C)
33

Decomposição em fatores normais IA⊗g B(A) = IA ⊗g B(A) . A⊗g IB
Decomposição em fatores normais IIA(B)⊗g B = A(B)⊗g IB . IA ⊗g B
Decomposição em produto tensorial clássicoA⊗g B(A) =
nA∑k=1
lk(A)⊗B(ak)
onde lk(A) é a decomposição em linhas da matriz A, ou seja[∑k
[lk(A)]
]= A
.
34
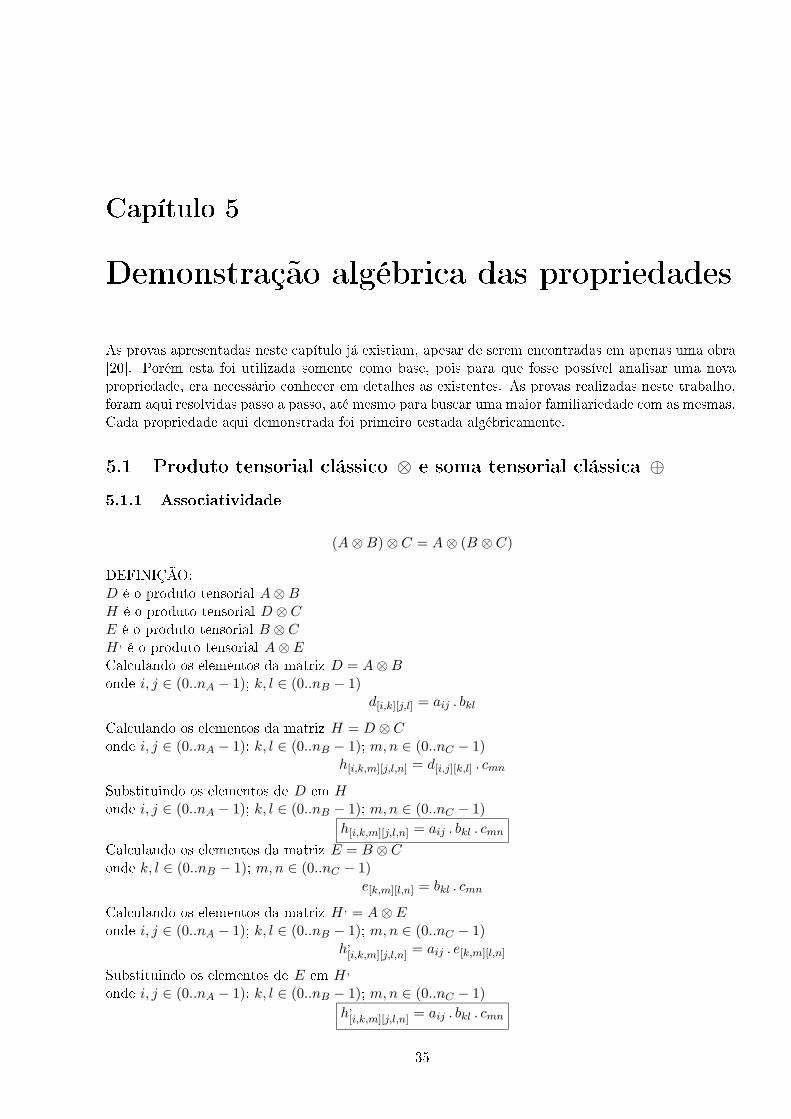
Capítulo 5
Demonstração algébrica das propriedades
As provas apresentadas neste capítulo já existiam, apesar de serem encontradas em apenas uma obra[20]. Porém esta foi utilizada somente como base, pois para que fosse possível analisar uma novapropriedade, era necessário conhecer em detalhes as existentes. As provas realizadas neste trabalho,foram aqui resolvidas passo a passo, até mesmo para buscar uma maior familiariedade com as mesmas.Cada propriedade aqui demonstrada foi primeiro testada algébricamente.
5.1 Produto tensorial clássico ⊗ e soma tensorial clássica ⊕
5.1.1 Associatividade(A⊗B)⊗ C = A⊗ (B ⊗ C)
DEFINIÇÃO:D é o produto tensorial A⊗BH é o produto tensorial D ⊗ CE é o produto tensorial B ⊗ CH , é o produto tensorial A⊗ ECalculando os elementos da matriz D = A⊗Bonde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1)
d[i,k][j,l] = aij . bkl
Calculando os elementos da matriz H = D ⊗ Conde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)
h[i,k,m][j,l,n] = d[i,j][k,l] . cmn
Substituindo os elementos de D em Honde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)
h[i,k,m][j,l,n] = aij . bkl . cmn
Calculando os elementos da matriz E = B ⊗ Conde k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)
e[k,m][l,n] = bkl . cmn
Calculando os elementos da matriz H , = A⊗ Eonde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)
h,[i,k,m][j,l,n] = aij . e[k,m][l,n]
Substituindo os elementos de E em H ,
onde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)h,[i,k,m][j,l,n] = aij . bkl . cmn
35

(A⊕B)⊕ C = A⊕ (B ⊕ C)
DEFINIÇÃO:D é a soma tensorial A⊕BH é a soma tensorial D ⊕ CE é a soma tensorial B ⊕ CH , é a soma tensorial A⊕ ECalculando os elementos da matriz D = A⊕B como A⊗ IB + IA ⊗Bonde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao
d[i,k][j,l] = aij . δkl + δij . bkl
Calculando os elementos da matriz H = D ⊕ Conde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)δ[i,k][j,l] = 1 sse i = j e k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
h[i,k,m][j,l,n] = d[i,k][j,l] . δmn + δ[i,k][j,l] . cmn
Substituindo os elementos de D em H
onde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao ;δ[i,k][j,l] = 1 sse i = j e k = l e 0 senao
h[i,k,m][j,l,n] = (aij . δkl + δij . bkl) . δmn + δ[i,k][j,l] . cmn
De onde fatorando δ[i,k][j,l] teremosh[i,k,m][j,l,n] = (aij . δkl + δij . bkl) . δmn + δij . δkl . cmn
Aplicando a propriedade distributiva das matrizesh[i,k,m][j,l,n] = aij . δkl . δmn + δij . bkl . δmn + δij . δkl . cmn
Calculando os elementos da matriz E = B ⊕ C como B ⊗ IC + IB ⊗ Conde k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
e[k,m][l,n] = bkl . δmn + δkl . cmn
Calculando os elementos da matriz H , = A⊕ Eonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)δi,j = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao ;δ[i,k][j,l] = 1 sse i = j e k = l e 0 senao
h,[i,k,m][j,l,n] = aij . δ[k,m][l,n] + δij . e[k,m][l,n]
Substituindo os elementos de E em H ,
onde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senaoδ[k,m][l,n] = 1 sse k = l em = n e 0 senao
h,[i,k,m][j,l,n] = aij . δ[k,m][l,n] + δij . (bkl . δmn + δkl . cmn)
De onde fatorando δ[k,m][l,n] teremosh,[i,k,m][j,l,n] = aij . δkl . δmn + δij . (bkl . δmn + δkl . cmn)
Aplicando a propriedade distributiva dos escalaresh,[i,k,m][j,l,n] = aij . δkl . δmn + δij . bkl . δmn + δij . δkl . cmn
36

5.1.2 Distributiva sobre adição clássica(A+B)⊗ (C +D) = (A⊗ C) + (B ⊗ C) + (A⊗D) + (B ⊗D)
DEFINIÇÃO:E é a soma A+BF é a soma C +DH é o produto tensorial E ⊗ FW é o produto tensorial A⊗ CX é o produto tensorial B ⊗ CY é o produto tensorial A⊗DZ é o produto tensorial B ⊗DH , é a soma W +X + Y + Z
Calculando os elementos da matriz E = A+Bonde i, j ∈ (0..nA − 1); i, j ∈ (0..nB − 1)
eij = aij + bij
Calculando os elementos da matriz F = C +Donde k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
fkl = ckl + dkl
Calculando os elementos da matriz H = E ⊗ Fonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1); k, l ∈ (0..nD − 1)
h[i,k][j,l] = eij . fkl
Substituindo os elementos de E e F em Honde i, j ∈ (0..nA − 1); i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1); k, l ∈ (0..nD − 1)
h[i,k][j,l] = (aij + bij) . (ckl + dkl)
Aplicando a propriedade distributiva da adição sobre escalaresh[i,k][j,l] = (aij . ckl) + (bij . ckl) + (aij . dkl) + (bij . dkl)
Calculando os elementos da matriz W = A⊗ Conde i, j ∈ (0..nA − 1); k, l ∈ (0..nC − 1)
w[i,k][j,l] = aij . ckl
Calculando os elementos da matriz X = B ⊗ Conde i, j ∈ (0..nB − 1); k, l ∈ (0..nC − 1)
x[i,k][j,l] = bij . ckl
Calculando os elementos da matriz Y = A⊗Donde i, j ∈ (0..nA − 1); k, l ∈ (0..nD − 1)
y[i,k][j,l] = aij . dkl
Calculando os elementos da matriz Z = B ⊗Donde i, j ∈ (0..nB − 1); k, l ∈ (0..nD − 1)
z[i,k][j,l] = bij . dkl
Calculando os elementos da matriz H = W +X + Y + Zonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
h,[i,k][j,l] = w[i,k][j,l] + x[i,k][j,l] + y[i,k][j,l] + z[i,k][j,l]
Substituindo os elementos de W , X, Y , Z em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)h,[i,k][j,l] = (aij . ckl) + (bij . ckl) + (aij . dkl) + (bij . dkl)
37

5.1.3 Compatibilidade com a multiplicação clássica(A .B)⊗ (C .D) = (A⊗ C) . (B ⊗D)
DEFINIÇÃO:E é o produto convencional de A .BF é o produto convencional de C .DH é o produto tensorial E ⊗ FX é o produto tensorial A⊗ CY é o produto tensorial B ⊗DH , é o produto X .Y
Calculando os elementos da matriz E = A .Bonde i, j ∈ (0..nA − 1); i, j ∈ (0..nB − 1)
eij =nA−1∑o=0
(aio . boj)
Calculando os elementos da matriz F = C .Donde k, l ∈ (0..nC − 1); k, l ∈ (0..nD − 1)
fkl =nC−1∑p=0
(ckp . dpl)
Calculando os elementos da matriz H = E ⊗ Fonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
h[i,j][k,l] = eij . fkl
Substituindo os elementos de E e F em Honde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
h[i,k][j,l] =nA−1∑o=0
(aio . boj) .nC−1∑p=0
(ckp . dpl)
Aplicando a generalização da distributividade da adição sobre escalaresh[i,k][j,l] =
∑nA−1
o=0
∑nC−1
p=0 aio . boj . ckp . dpl
Calculando os elementos da matriz X = A⊗ Conde i, j ∈ (0..nA − 1); k, l ∈ (0..nC − 1)
x[i,k][j,l] = aij . ckl
Calculando os elementos da matriz Y = B ⊗Donde i, j ∈ (0..nB − 1); k, l ∈ (0..nD − 1)
x[i,k][j,l] = bij . dkl
Calculando os elementos da matriz H , = X .Yonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
h,[i,k][j,l] =nA−1∑o=0
nC−1∑p=0
x[i,o][j,p] . y[o,k][p,l]
Substituindo os elementos de X e Y em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1); k, l ∈ (0..nD − 1)
h,[i,k][j,l] =nA−1∑o=0
nC−1∑p=0
aip . cko . bpj . dol
Aplicando a comutatividade sobre escalaresh,[i,k][j,l] =
∑nA−1
o=0
∑nC−1
p=0 aip . bpj . cko . dol
38

5.1.4 Compatibilidade com a transposição de matrizes
(A⊗B)T = AT ⊗BT
DEFINIÇÃO:D é o produto tensorial A⊗BH é a transposta (A⊗B)T
E é a transposta ATF é a transposta BT
H , é o produto tensorial AT ⊗BT
Calculando os elementos da matriz D = A⊗Bonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
d[i,k][j,l] = aij . bkl
Calculando os elementos da matriz H = DT
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)h[i,k][j,l] = d[j,l][i,k]
Substituindo os elementos de D em Honde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1)
h[i,k][j,l] = aji . blk
Calculando os elementos da matriz E = AT
onde i, j ∈ (0..nA − 1)eij = aji
Calculando os elementos da matriz F = BT
onde k, l ∈ (0..nB − 1)fkl = blk
Calculando os elementos da matriz H , = E ⊗ Fonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h[i,k][j,l] = eij . fkl
Substituindo os elementos de E e F em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)h,[i,k][j,l] = aji . blk
5.1.5 Decomposição em fatores normais
(A⊗B) = (A⊗ IB) . (IA ⊗B)
DEFINIÇÃO:H é o produto tensorial A⊗BD é o produto tensorial A⊗ IBE é o produto tensorial IA ⊗BH , é o produto de D .E
Calculando os elementos da matriz H = A⊗Bonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h[i,k][j,l] = aij . bkl
39
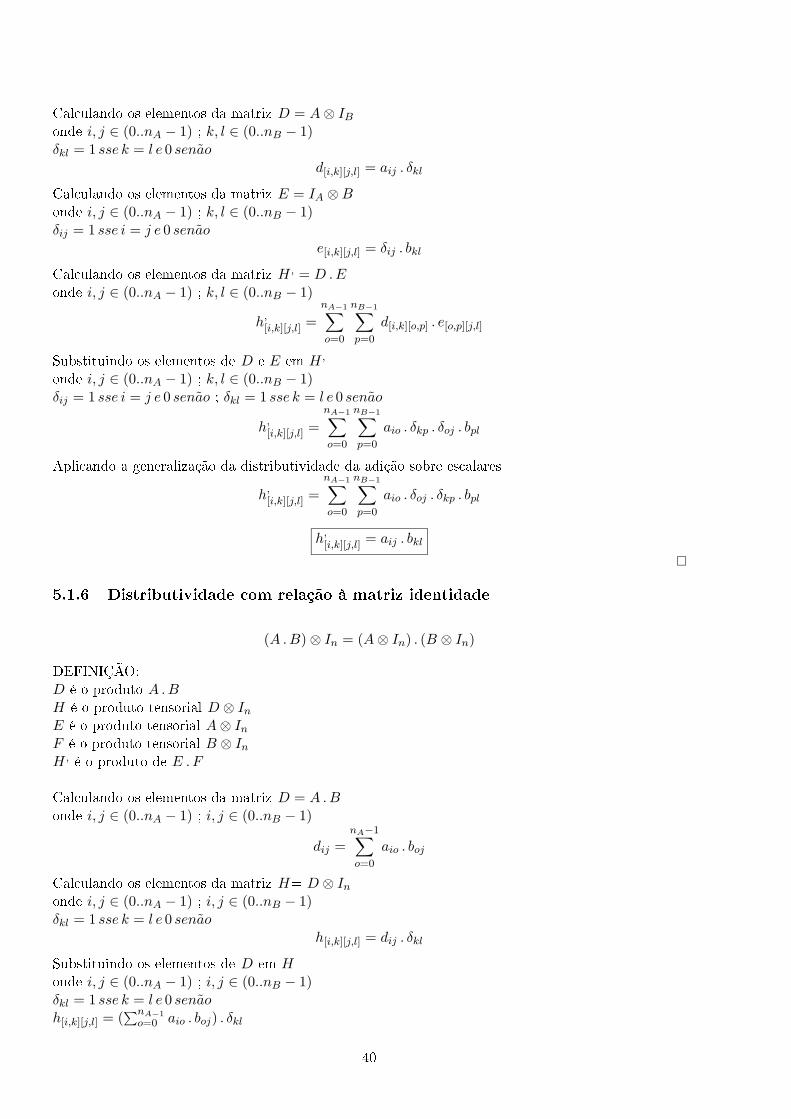
Calculando os elementos da matriz D = A⊗ IBonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
d[i,k][j,l] = aij . δkl
Calculando os elementos da matriz E = IA ⊗Bonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao
e[i,k][j,l] = δij . bkl
Calculando os elementos da matriz H , = D .Eonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
d[i,k][o,p] . e[o,p][j,l]
Substituindo os elementos de D e E em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
aio . δkp . δoj . bpl
Aplicando a generalização da distributividade da adição sobre escalaresh,[i,k][j,l] =
nA−1∑o=0
nB−1∑p=0
aio . δoj . δkp . bpl
h,[i,k][j,l] = aij . bkl
5.1.6 Distributividade com relação à matriz identidade(A .B)⊗ In = (A⊗ In) . (B ⊗ In)
DEFINIÇÃO:D é o produto A .BH é o produto tensorial D ⊗ InE é o produto tensorial A⊗ InF é o produto tensorial B ⊗ InH , é o produto de E .FCalculando os elementos da matriz D = A .Bonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)
dij =nA−1∑o=0
aio . boj
Calculando os elementos da matriz H= D ⊗ Inonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
h[i,k][j,l] = dij . δkl
Substituindo os elementos de D em Honde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senaoh[i,k][j,l] = (
∑nA−1
o=0 aio . boj) . δkl
40

Aplicando a comutatividade sobre escalaresh[i,k][j,l] = δoj .
∑nA−1
o=0 aio . boj
Calculando os elementos da matriz E = A⊗ Inonde i, j ∈ (0..nA − 1) ;δkl = 1 sse k = l e 0 senao
e[i,k][j,l] = aij . δkl
Calculando os elementos da matriz F = B ⊗ Inonde i, j ∈ (0..nB − 1) ;δkl = 1 sse k = l e 0 senao
f[i,k][j,l] = bij . δkl
Calculando os elementos da matriz H ,= E .F
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
e[i,k][o,p] . f[o,p][j,l]
Substituindo os elementos de E e F em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
aip . δkp . bok . δpl
Como δkl = 1 sse k = l , conclui-se que δkl não depende de o:h,[i,k][j,l] =
nA−1∑o=0
aio . boj . δkl
Aplicando a comutatividade sobre escalaresh,[i,k][j,l] = δkl .
∑nA−1
o=0 aio . boj
In ⊗ (A .B) = (In ⊗A) . (In ⊗B)
DEFINIÇÃO:D é o produto A .BH é o produto tensorial In ⊗DE é o produto tensorial In ⊗AF é o produto tensorial In ⊗BH , é o produto de E .FCalculando os elementos da matriz D = A .B
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)
dij =nA−1∑o=0
aio . boj
Calculando os elementos da matriz H= In ⊗Donde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
h,[k,i][l,j] = δkl . dij
Substituindo os elementos de D em H
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
41

h[k,i][l,j] = δkl .∑nA−1
o=0 aio . boj
Calculando os elementos da matriz E = In ⊗Aonde i, j ∈ (0..nA − 1) ;δkl = 1 sse k = l e 0 senao
e[k,i][l,j] = δkl . aij
Calculando os elementos da matriz F = In ⊗Bonde i, j ∈ (0..nB − 1) ;δkl = 1 sse k = l e 0 senao
f[k,i][l,j] = δkl . bij
Calculando os elementos da matriz H ,= E .Fonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
h,[k,i][l,j] =nA−1∑o=0
nB−1∑p=0
e[k,i][o,p] . f[o,p][l,j]
Substituindo os elementos de E e F em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
h,[k,i][l,j] =nA−1∑o=0
nB−1∑p=0
δko . aip . δol . bpj
Como δko . δko = δkl
h,[i,k][j,l] =nA−1∑p=0
aio . boj . δkl
Aplicando a comutatividade sobre escalaresh,[k,i][l,j] = δkl .
∑nA−1
p=0 aio . boj
5.1.7 Comutatividade dos fatores normais(A⊗ IB) . (IA ⊗B) = (IA ⊗B) . (A⊗ IB)
DEFINIÇÃO:D é o produto tensorial A⊗ IBE é o produto tensorial IA ⊗BH é o produto D .EH , é o produto E .DCalculando os elementos da matriz D = A⊗ IBonde i, j ∈ (0..nA − 1)δkl = 1 sse k = l e 0 senao
d[i,k][j,l] = aij . δkl
Calculando os elementos da matriz E = IA ⊗Bonde k, l ∈ (0..nA − 1)δij = 1 sse i = j e 0 senao
e[i,k][j,l] = δij . bkl
Calculando os elementos da matriz H= D .Eonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
42

h[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
d[i,k][o,p] . e[o,p][j,l]
Substituindo os elementos de D e E em Honde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δi,j = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao
h[i,k][j,l] =∑nA−1
o=0
∑nB−1
p=0 aio . δkp . δoj . bpl
Calculando os elementos da matriz H ,= E .Donde i, j ∈ (0..nA − 1); k, l ∈ (0..nB − 1)
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
e[i,k][o,p] . d[o,p][j,l]
Substituindo os elementos de D e E em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δi,j = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao
h,[i,k][j,l] =∑nA−1
o=0
∑nA−1
p=0 δio . bkp . aoj . δpl
5.2 Produto tensorial generalizado e soma tensorial generalizada
5.2.1 Distributividade do produto tensorial generalizado em relação a soma con-vencional de matrizes
[A(C,D) +B(C,D)]⊗g [C(A,B) +D(A,B)] =
A(C,D)⊗g C(A,B) +A(C,D)⊗g D(A,B) +B(C,D)⊗g C(A,B) +B(C,D)⊗g D(A,B)
CONVENÇÕES IMPORTANTES:n =numero de linhas e colunas da matriz.
Esta demonstração so é possivel se nA = nB e se nC = nD.Tanto A quanto B devem se referir ao mesmo espaço de estados para que os elementos avaliados emai sejam automaticamente avaliados em bi.Tanto C quanto D devem se referir ao mesmo espaço de estados para que os elementos avaliados emck sejam automaticamente avaliados em dk.DEFINIÇÃO:E é a soma A(C,D) +B(C,D)F é a soma C(A,B) +D(A,B)H é o produto tensorial generalizado E ⊗g FW é o produto tensorial generalizado A(C,D)⊗g C(A,B)X é o produto tensorial generalizado A(C,D)⊗g D(A,B)Y é o produto tensorial generalizado B(C,D)⊗g C(A,B)Z é o produto tensorial generalizado B(C,D)⊗g D(A,B)H , é a soma W +X + Y + Z
Calculando os elementos da matriz E = A(C,D) +B(C,D)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)
eij(C,D) = aij(C,D) + bij(C,D)
Calculando os elementos da matriz F = C(A,B) +D(A,B)onde k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
43
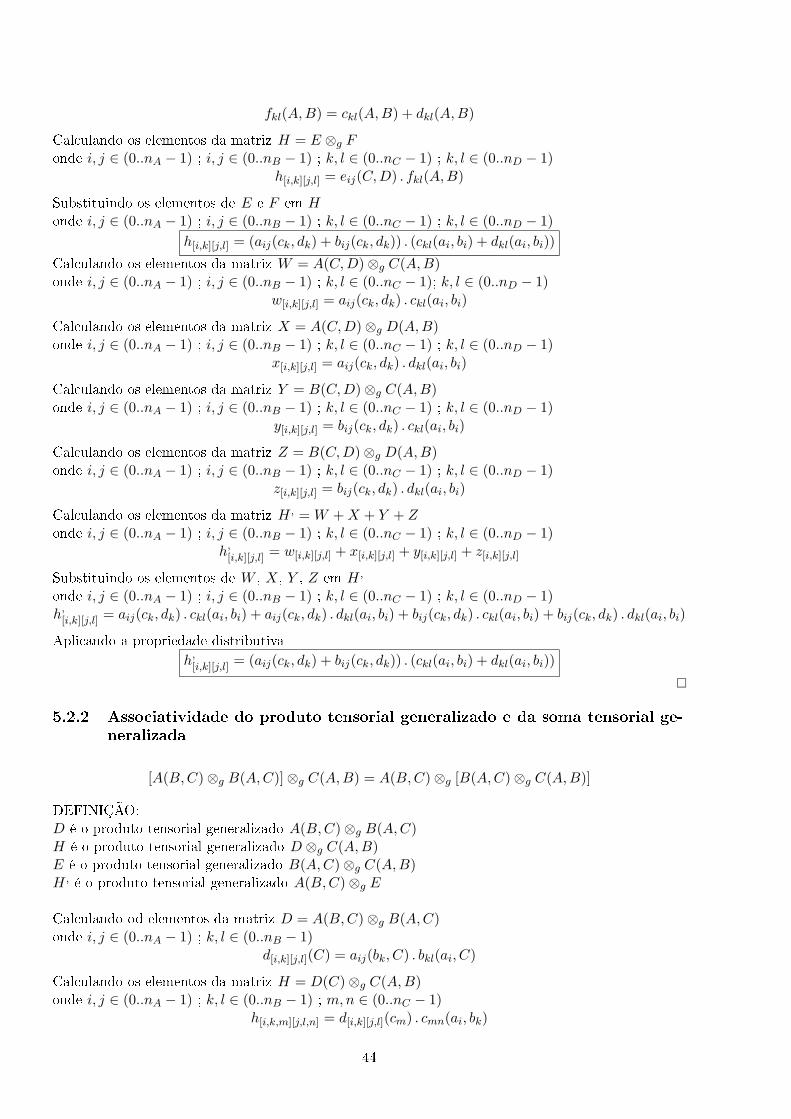
fkl(A,B) = ckl(A,B) + dkl(A,B)
Calculando os elementos da matriz H = E ⊗g Fonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)h[i,k][j,l] = eij(C,D) . fkl(A,B)
Substituindo os elementos de E e F em Honde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
h[i,k][j,l] = (aij(ck, dk) + bij(ck, dk)) . (ckl(ai, bi) + dkl(ai, bi))
Calculando os elementos da matriz W = A(C,D)⊗g C(A,B)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1); k, l ∈ (0..nD − 1)
w[i,k][j,l] = aij(ck, dk) . ckl(ai, bi)
Calculando os elementos da matriz X = A(C,D)⊗g D(A,B)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
x[i,k][j,l] = aij(ck, dk) . dkl(ai, bi)
Calculando os elementos da matriz Y = B(C,D)⊗g C(A,B)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
y[i,k][j,l] = bij(ck, dk) . ckl(ai, bi)
Calculando os elementos da matriz Z = B(C,D)⊗g D(A,B)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
z[i,k][j,l] = bij(ck, dk) . dkl(ai, bi)
Calculando os elementos da matriz H , = W +X + Y + Zonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)
h,[i,k][j,l] = w[i,k][j,l] + x[i,k][j,l] + y[i,k][j,l] + z[i,k][j,l]
Substituindo os elementos de W , X, Y , Z em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1) ; k, l ∈ (0..nD − 1)h,[i,k][j,l] = aij(ck, dk) . ckl(ai, bi) + aij(ck, dk) . dkl(ai, bi) + bij(ck, dk) . ckl(ai, bi) + bij(ck, dk) . dkl(ai, bi)
Aplicando a propriedade distributivah,[i,k][j,l] = (aij(ck, dk) + bij(ck, dk)) . (ckl(ai, bi) + dkl(ai, bi))
5.2.2 Associatividade do produto tensorial generalizado e da soma tensorial ge-neralizada
[A(B,C)⊗g B(A,C)]⊗g C(A,B) = A(B,C)⊗g [B(A,C)⊗g C(A,B)]
DEFINIÇÃO:D é o produto tensorial generalizado A(B,C)⊗g B(A,C)H é o produto tensorial generalizado D ⊗g C(A,B)E é o produto tensorial generalizado B(A,C)⊗g C(A,B)H , é o produto tensorial generalizado A(B,C)⊗g E
Calculando od elementos da matriz D = A(B,C)⊗g B(A,C)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
d[i,k][j,l](C) = aij(bk, C) . bkl(ai, C)
Calculando os elementos da matriz H = D(C)⊗g C(A,B)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)
h[i,k,m][j,l,n] = d[i,k][j,l](cm) . cmn(ai, bk)
44

Substituindo os elementos de D em Honde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)
h[i,k,m][j,l,n] = aij(bk, cm) . bkl(ai, cm) . cmn(ai, bk)
Calculando os elementos da matriz E = B(A,C)⊗g C(A,B)onde k, l ∈ (0..nB − 1); m,n ∈ (0..nC − 1)
e[k,m][l,n](A) = bkl(A, cm) . cmn(A, bk)
Calculando os elementos da matriz H , = A(B,C)⊗g E(A)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)
h,[i,k,m][j,l,n] = aij(bk, cm) . e[k,m][l,n](ai)
Substituindo os elementos de E em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)h,[i,k,m][j,l,n] = aij(bk, cm) . bkl(ai, cm) . cmn(ai, bk)
[A(B,C)⊕g B(A,C)]⊕g C(A,B) = A(B,C)⊕g [B(A,C)⊕g C(A,B)]
DEFINIÇÃO:D é o produto tensorial generalizado A(B,C)⊗g IBE é o produto tensorial generalizado IA ⊗g B(A,C)F é a soma D + EG é o produto tensorial generalizado F (C)⊗g ICU é o produto tensorial generalizado IF ⊗g C(A,B)H é a soma G+ UV é o produto tensorial generalizado B(A,C)⊗g ICW é o produto tensorial generalizado IB ⊗g C(A,B)X é a soma V +WY é o produto tensorial generalizado A(B,C)⊗g IXZ é o produto tensorial generalizado IA ⊗g XH , é a soma Y + Z
Calculando os elementos da matriz D = A(B,C)⊗g IBonde i, j ∈ (0..nA − 1)δkl = 1 sse k = l e 0 senao
d[i,k][j,l](C) = aij(bk, C) . δkl
Calculando os elementos da matriz E = IA ⊗g B(A,C)onde k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao
e[i,k][j,l](C) = δij . bkl(ai, C)
Calculando os elementos da matriz F = D + Eonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
f[i,k][j,l](C) = d[i,k][j,l](C) + e[i,k][j,l](C)
Substituindo os elementos de D e E em Fonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao
f[i,k][j,l](C) = aij(bk, C) . δkl + δij . bkl(ai, C)
Calculando os elementos da matriz G = F (C)⊗g IConde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δmn = 1 ssem = n e 0 senao
45

g[i,k,m][j,l,n] = f[i,k][j,l] . δmn
Substituindo os elementos de F em Gonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
g[i,k,m][j,l,n] = [aij(bk, cm) . δkl + δij . bkl(ai, cm)] . δmn
Aplicando a propriedade distributivag[i,k,m][j,l,n] = aij(bk, cm) . δkl . δmn + δij . bkl(ai, cm) . δmn
Calculando os elementos da matriz U = IF ⊗g C(A,B)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δ[i,k][j,l] = 1 sse i = j e k = l e 0 senao
u[i,k,m][j,l,n] = δ[i,k][j,l] . cmn(ai, bk)
Separando os elementos de δu[i,k,m][j,l,n] = δij . δkl . cmn(ai, bk)
Calculando os elementos da matriz H = G+ Uonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
h[i,k,m][j,l,n] = g[i,k,m][j,l,n] + u[i,k,m][j,l,n]
Substituindo os elementos de G e U em Honde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
h[i,k,m][j,l,n] = aij(bk, cm) . δkl . δmn + δij . bkl(ai, cm) . δmn + δij . δkl . cmn(ai, bk)
Calculando os elementos da matriz V = B(A,C)⊗g IConde k, l ∈ (0..nB − 1)δmn = 1 ssem = n e 0 senao
v[k,m][l,n](A) = bkl(A, cm) . δmn
Calculando os elementos da matriz W = IB ⊗g C(A,B)onde m,n ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
w[k,m][l,n](A) = δkl . cmn(A, bk)
Calculando os elementos da matriz X = V (A) +W (A)onde k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
x[k,m][l,n](A) = v[k,m][l,n](A) + w[k,m][l,n](A)
Substituindo os elementos de V e W em Xonde k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
x[k,m][l,n](A) = bkl(A, cm) . δmn + δkl . cmn(A, bk)
Calculando os elementos da matriz Y = A(B,C)⊗g IXonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao ; δ[k,m][l,n] = 1 sse k = l em = n e 0 senao
y[i,k,m][j,l,n] = aij(bk, cm) . δ[k,m][l,n]
Separando os elementos de δy[i,k,m][j,l,n] = aij(bk, cm) . δkl . δmn
Calculando os elementos da matriz Z = IA ⊗g Xonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)
46

δij = 1 sse i = j e 0 senaoz[i,k,m][j,l,n] = δij . x[k,m][l,n](ai)
Substituindo os elementos de X em Zonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
z[i,k,m][j,l,n] = δij . [bkl(ai, cm) . δmn + cmn(ai, bk)]
Aplicando a propriedade distributivaz[i,k,m][j,l,n] = bkl(ai, cm) . δmn . δij + δkl . cmn(ai, bk) . δij
Calculando os elementos da matriz H , = Y + Zonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)
h,[i,k,m][j,l,n] = y[i,k,m][j,l,n] + z[i,k,m][j,l,n]
Substituindo os elementos de Y e Z em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1) ; m,n ∈ (0..nC − 1)δij = 1 sse i = j e 0 senao ; δkl = 1 sse k = l e 0 senao ; δmn = 1 ssem = n e 0 senao
h,[i,k,m][j,l,n] = aij(bk, cm) . δkl . δmn + bkl(ai, cm) . δmn . δij + δkl . cmn(ai, bk)
Aplicando a propriedade da comutatividadeh,[i,k,m][j,l,n] = aij(bk, cm) . δkl . δmn + δij . bkl(ai, cm) . δmn + δij . δkl . cmn(ai, bk)
5.2.3 Distributividade com relação à multiplicação pela matriz identidade
[A(C) . B(C)]⊗g IC = A(C)⊗g IC . B(C)⊗g IC
DEFINIÇÃO:D é o produto A(C) . B(C)H é o produto tensorial generalizado [A(C) . B(C)]⊗g ICE é o produto tensorial generalizado A(C)⊗g ICF é o produto tensorial generalizado B(C)⊗g ICH , é o produto E .FCalculando os elementos da matriz D = A(C) . B(C)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)
dij(C) =nA−1∑o=0
aio(C) . boj(C)
Calculando os elementos da matriz H = D(C)⊗g IConde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
h[i,k][j,l] = dij(ck) . δkl
Substituindo os elementos de D em Honde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
h =[i,k][j,l]
(∑nA−1o=0 aio(ck) . boj(ck)
). δkl
Calculando os elementos da matriz E = A(C)⊗g IConde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
e[i,k][j,l] = aij(ck) . δkl
47

Calculando os elementos da matriz F = B(C)⊗g IConde i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
f[i,k][j,l] = bij(ck) . δkl
Calculando os elementos da matriz H , = E .Fonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)
h,[i,k][j,n] =nA−1∑o=0
nB−1∑p=0
e[i,k][o,p] . f[o,p][j,l]
Substituindo os elementos de E e F em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1); k, l ∈ (0..nC − 1)
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
aio(ck) . δkp . boj . δpl
Analisando δ onde δkp . δpl = δkl
h,[i,k][j,l] =(∑nA−1
o=0 aio(ck) . boj(ck)). δkl
IC ⊗g [A(C) . B(C)] = IC ⊗g A(C) . IC ⊗g B(C)
DEFINIÇÃO:D é o produto A(C) . B(C)H é o produto tensorial generalizado IC ⊗g DE é o produto tensorial generalizado IC ⊗g A(C)F é o produto tensorial generalizado IC ⊗g B(C)H , é o produto E .FCalculando os elementos da matriz D = A(C) . B(C)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1)
dij(C) =nA−1∑o=0
aio(C) . boj(C)
Calculando os elementos da matriz H = IC ⊗g D(C)onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
h[i,k][j,l] = δkl . dij(ck)
Substituindo os elementos de D em Honde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
h[i,k][j,l] = δkl .(∑nA−1
o=0 aio(ck) . boj(ck))
Calculando os elementos da matriz E = IC ⊗g A(C)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
e[i,k][j,l] = δkl . aij(ck)
Calculando os elementos da matriz F = IC ⊗g B(C)onde i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)δkl = 1 sse k = l e 0 senao
f[i,k][j,l] = δkl . bij(ck)
Calculando os elementos da matriz H , = E .Fonde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)
48

h,[i,k][l,n] =nA−1∑o=0
nB−1∑p=0
e[i,k][o,p] . f[o,p][j,l]
Substituindo os elementos de E e F em H ,
onde i, j ∈ (0..nA − 1) ; i, j ∈ (0..nB − 1) ; k, l ∈ (0..nC − 1)
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
δkp . aio(ck) . δpl . boj
Analisando δ onde δkp . δpl = δkl
h,[i,k][j,l] =
(nA−1∑o=0
aio(ck) . boj(ck)
). δkl
Aplicando a propriedade comutativah,[i,k][j,l] = δkl .
(∑nA−1o=0 aio(ck) . boj(ck)
)
5.2.4 Decomposição em fatores normais I
A⊗g B(A) = IA ⊗g B(A) . A⊗g IB
DEFINIÇÃO:H é o produto tensorial generalizado A⊗g B(A)D é o produto tensorial generalizado IA ⊗g B(A)E é o produto tensorial generalizado A⊗g IBH , é o produto D .E
Calculando os elementos da matriz H = A⊗g B(A)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h[i,k][j,l] = aij . bkl(ai)
Calculando os elementos da matriz D = IA ⊗g B(A)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao
d[i,k][j,l] = δij . bkl(ai)
Calculando os elementos da matriz E = A⊗g IBonde i, j ∈ (0..nB − 1) ; k, l ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
e[i,k][j,l] = aij . δkl
Calculando os elementos da matriz H , = D .Eonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h,[i,k][l,n] =nA−1∑o=0
nB−1∑p=0
d[i,k][o,p] . e[o,p][j,l]
Substituindo os elementos de D e E em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
δio . bkp(ai) . aoj . δpl
De todos os termos do somatório sobre p, somente os termos com p = l poderão ser não nulos, pois otermo δpl somente será igual a 1 se p = l, logo podemos eliminar o somatório em questão, substituindop por l nos demais termos.
49

Um raciocínio análogo pode ser aplicado ao somatório sobre o, que substituirá o por i.h[i,k][j,l] = aij . bkl(ai)
5.2.5 Decomposição em fatores normais II
A(B)⊗g B = A(B)⊗g IB . IA ⊗g B
DEFINIÇÃO:H é o produto tensorial generalizado A(B)⊗g BD é o produto tensorial generalizado A(B)⊗g IBE é o produto tensorial generalizado IA ⊗g BH , é o produto D .E
Calculando os elementos da matroz H = A(B)⊗g Bonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)h[i,k][j,l] = aij(bk) . bkl
Calculando os elementos da matriz D = A(B)⊗g IBonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δkl = 1 sse k = l e 0 senao
d[i,k][j,l] = aij(bk) . δkl
Calculando os elementos da matriz E = IA ⊗g Bonde i, j ∈ (0..nB − 1) ; k, l ∈ (0..nB − 1)δij = 1 sse i = j e 0 senao
e[i,k][j,l] = δij . bkl
Calculando os elementos da matriz H , = D .Eonde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h,[i,k][l,n] =nA−1∑o=0
nB−1∑p=0
d[i,k][o,p] . e[o,p][j,l]
Substituindo os elementos de D e E em H ,
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h,[i,k][j,l] =nA−1∑o=0
nB−1∑p=0
aio(bk) . δkp . δoj . bpl
De todos os termos do somatório sobre p, somente os termos com p = l poderão ser não nulos, pois otermo δpl somente será igual a 1 se p = l, logo podemos eliminar o somatório em questão, substituindop por l nos demais termos.Um raciocínio análogo pode ser aplicado ao somatório sobre o, que substituirá o por i.
h[i,k][j,l] = aij(bk) . bkl
5.2.6 Decomposição em produto tensorial clássico
A⊗g B(A) =nA−1∑o=0
lo(A)⊗g B(ao)
onde lk(A) é a decomposição em linhas da matriz A, ou seja (∑o lo(A)) = A.
DEFINIÇÃO:50

D é o produto tensorial generalizado A⊗g B(A)Ha é o produtro tensorial generalizado lo(A)⊗g B(ao)H , é o produto tensorial generalizado ∑nA−1
o=0 lo(A)⊗g B(ao)
Calculando os elementos da matriz H = A⊗g B(A)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)
h[i,k][j,l] = aij . bkl(ai)
Calculando os elementos da matriz Da = lo(A)⊗g B(ao)onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)δi,o = 1 sse i = o e 0 senao
d[i,k][j,l] = aij . bkl(ai) . δio
A é o somatório em linhas de A.
A =
a b cd e fg h i
l1(A) =
a b c0 0 00 0 0
l2(A) =
0 0 0d e f0 0 0
l3(A) =
0 0 00 0 0g h i
Calculando os elementos da matriz H , =
∑nA−1o=0 aij . bkl(ai) . δioSubstituindo os elementos de cada soma da matriz C:
onde i, j ∈ (0..nA − 1) ; k, l ∈ (0..nB − 1)h,[i,k][j,l] = aij . bkl(ai)
51

52
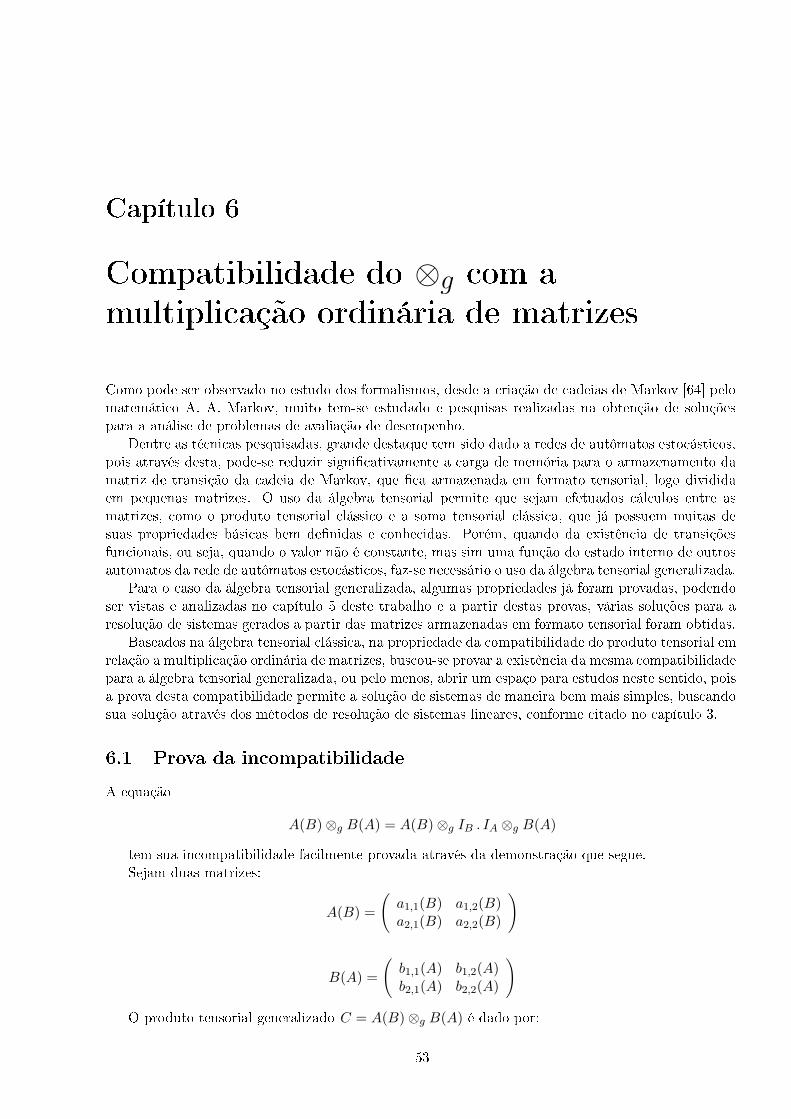
Capítulo 6
Compatibilidade do ⊗g com amultiplicação ordinária de matrizes
Como pode ser observado no estudo dos formalismos, desde a criação de cadeias de Markov [64] pelomatemático A. A. Markov, muito tem-se estudado e pesquisas realizadas na obtenção de soluçõespara a análise de problemas de avaliação de desempenho.
Dentre as técnicas pesquisadas, grande destaque tem sido dado a redes de autômatos estocásticos,pois através desta, pode-se reduzir signi�cativamente a carga de memória para o armazenamento damatriz de transição da cadeia de Markov, que �ca armazenada em formato tensorial, logo divididaem pequenas matrizes. O uso da álgebra tensorial permite que sejam efetuados cálculos entre asmatrizes, como o produto tensorial clássico e a soma tensorial clássica, que já possuem muitas desuas propriedades básicas bem de�nidas e conhecidas. Porém, quando da existência de transiçõesfuncionais, ou seja, quando o valor não é constante, mas sim uma função do estado interno de outrosautômatos da rede de autômatos estocásticos, faz-se necessário o uso da álgebra tensorial generalizada.
Para o caso da álgebra tensorial generalizada, algumas propriedades já foram provadas, podendoser vistas e analizadas no capítulo 5 deste trabalho e a partir destas provas, várias soluções para aresolução de sistemas gerados a partir das matrizes armazenadas em formato tensorial foram obtidas.
Baseados na álgebra tensorial clássica, na propriedade da compatibilidade do produto tensorial emrelação a multiplicação ordinária de matrizes, buscou-se provar a existência da mesma compatibilidadepara a álgebra tensorial generalizada, ou pelo menos, abrir um espaço para estudos neste sentido, poisa prova desta compatibilidade permite a solução de sistemas de maneira bem mais simples, buscandosua solução através dos métodos de resolução de sistemas lineares, conforme citado no capítulo 3.
6.1 Prova da incompatibilidade
A equaçãoA(B)⊗g B(A) = A(B)⊗g IB . IA ⊗g B(A)
tem sua incompatibilidade facilmente provada através da demonstração que segue.Sejam duas matrizes:
A(B) =
(a1,1(B) a1,2(B)a2,1(B) a2,2(B)
)
B(A) =
(b1,1(A) b1,2(A)b2,1(A) b2,2(A)
)
O produto tensorial generalizado C = A(B)⊗g B(A) é dado por:53

C =
a1,1(b1).b1,1(a1) a1,1(b1).b1,2(a1)a1,1(b2).b2,1(a1) a1,1(b2).b2,2(a1)
∣∣∣∣∣ a1,2(b1).b1,1(a1) a1,2(b1).b1,2(a1)a1,2(b2).b2,1(a1) a1,2(b2).b2,2(a1)
a2,1(b1).b1,1(a2) a2,1(b1).b1,2(a2)a2,1(b2).b2,1(a2) a2,1(b2).b2,2(a2)
∣∣∣∣∣ a2,2(b1).b1,1(a2) a2,2(b1).b1,2(a2)a2,2(b2).b2,1(a2) a2,2(b2).b2,2(a2)
O produto de D = A(B)⊗g IB . IA ⊗g B(A) é dado por:
D =
a1,1(b1).b1,1(a1) a1,1(b1).b1,2(a1)a1,1(b2).b2,1(a1) a1,1(b2).b2,2(a1)
∣∣∣∣∣ a1,2(b1).b1,1(a2) a1,2(b1).b1,2(a2)a1,2(b2).b2,1(a2) a1,2(b2).b2,2(a2)
a2,1(b1).b1,1(a1) a2,1(b1).b1,2(a1)a2,1(b2).b2,1(a1) a2,1(b2).b2,2(a1)
∣∣∣∣∣ a2,2(b1).b1,1(a2) a2,2(b1).b1,2(a2)a2,2(b2).b2,1(a2) a2,2(b2).b2,2(a2)
Como pode ser observado, os blocos não diagonais da matriz D, ou seja os elementos do bloco 1,0,
bem como os elementos do bloco 0,1, tem sua avaliação em função de elementos errados da matrizA. Desta forma, não existe compatibilidade do produto tensorial generalizado com a multiplicaçãoordinária de matrizes. A partir desta constatação, serão buscadas alternativas para tornar estapropriedade válida.
6.2 Estudo de alternativas
A partir da incompatibilidade, busca-se uma alternativa para a compatibilidade da multiplicação,tendo por base, permutações genéricas. Dentre as permutações serão utilizadas transposição e asimples inversão de linhas e colunas, como pode ser visto a seguir.
Por simplicidade, nas demonstrações ser�a adotado A(B) como A e B(A) como B, pois todas asmatrizes serão sempre funcionais.6.2.1 Variações da matriz APara �ns de testes, pegou-se a matriz A e aplicou-se a ela permutações, apresentou-se sua transpostae aplicou-se permutação também a esta transposta.
A =
(a1,1(B) a1,2(B)a2,1(B) a2,2(B)
)
Permutação de A: A .[
0 11 0
]:
P (A) =
(a1,2(B) a1,1(B)a2,2(B) a2,1(B)
)
Transposta de A:AT =
(a1,1(B) a2,1(B)a1,2(B) a2,2(B)
)
Permutação de AT : AT .[
0 11 0
]:
P (AT ) =
(a2,1(B) a1,1(B)a2,2(B) a1,2(B)
)
54

6.2.2 Variações da matriz BPara �ns de testes, pegou-se a matriz B e aplicou-se a ela permutações, apresentou-se sua transpostae aplicou-se permutação também a esta transposta.
B =
(b1,1(A) b1,2(A)b2,1(A) b2,2(A)
)
Permutação de B: B .[
0 11 0
]:
P (B) =
(b1,2(A) b1,1(A)b2,2(A) b2,1(A)
)
Transposta de B:BT =
(b1,1(A) b2,1(A)b1,2(A) b2,2(A)
)
Permutação de BT : BT .
[0 11 0
]:
P (BT ) =
(b2,1(A) b1,1(A)b2,2(A) b1,2(A)
)
6.2.3 Inversa de IA ou IB
Para �ns de testes, usaremos a diagonal invertida da matriz identidade de A e de B, simbolizadasneste trabalho por IA e IB respectivamente.
Como tanto a matriz A quanto a matriz B possuem dois elementos, a transposta da identidadedas mesmas será:
[0 11 0
]
6.2.4 Variações da matriz A⊗g IBCom base nas variações da matriz A, apresentadas no item 6.2.1, apresenta-se as variações possíveisda mesma aplicando-se o produto tensorial generalizado a IB.
A⊗g IB =
a1,1(b1) 0
0 a1,1(b2)
∣∣∣∣∣ a1,2(b1) 00 a1,2(b2)
a2,1(b1) 00 a2,1(b2)
∣∣∣∣∣ a2,2(b1) 00 a2,2(b2)
AT ⊗g IB =
a1,1(b1) 0
0 a1,1(b2)
∣∣∣∣∣ a2,1(b1) 00 a2,1(b2)
a1,2(b1) 00 a1,2(b2)
∣∣∣∣∣ a2,2(b1) 00 a2,2(b2)
P (A)⊗g IB =
a1,2(b1) 0
0 a1,2(b2)
∣∣∣∣∣ a1,1(b1) 00 a1,1(b2)
a2,2(b1) 00 a2,2(b2)
∣∣∣∣∣ a2,1(b1) 00 a2,1(b2)
55
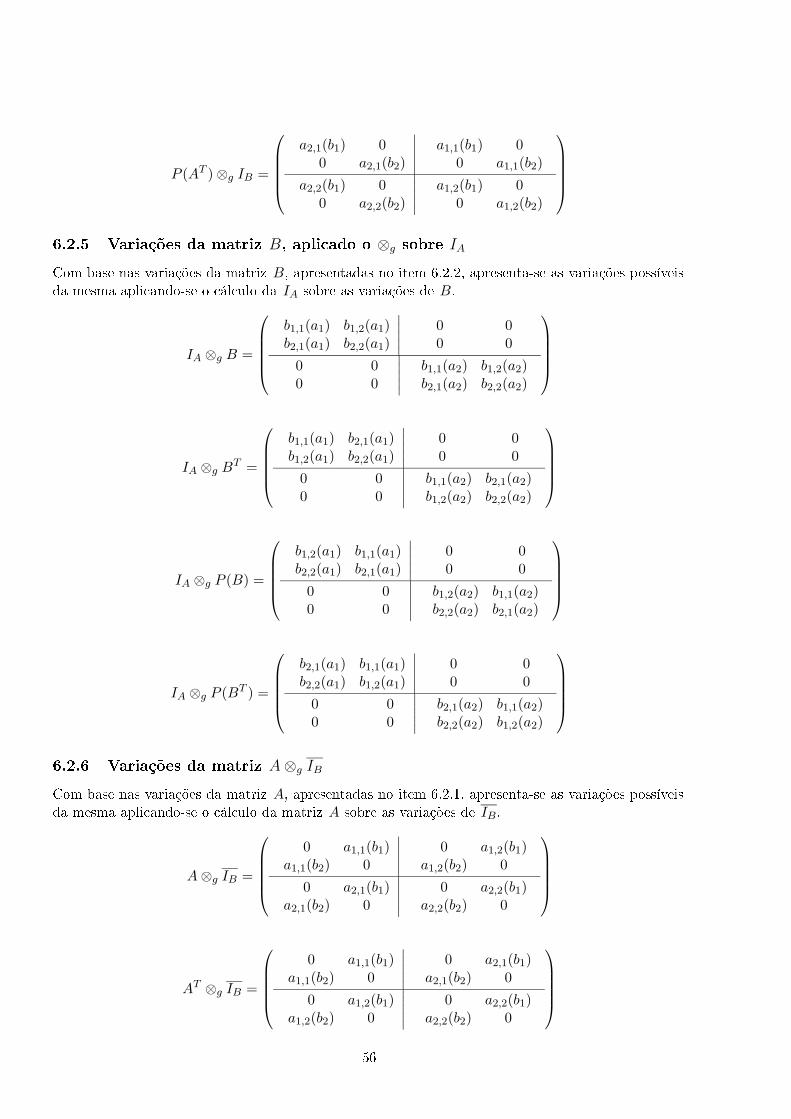
P (AT )⊗g IB =
a2,1(b1) 0
0 a2,1(b2)
∣∣∣∣∣ a1,1(b1) 00 a1,1(b2)
a2,2(b1) 00 a2,2(b2)
∣∣∣∣∣ a1,2(b1) 00 a1,2(b2)
6.2.5 Variações da matriz B, aplicado o ⊗g sobre IACom base nas variações da matriz B, apresentadas no item 6.2.2, apresenta-se as variações possíveisda mesma aplicando-se o cálculo da IA sobre as variações de B.
IA ⊗g B =
b1,1(a1) b1,2(a1)b2,1(a1) b2,2(a1)
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ b1,1(a2) b1,2(a2)b2,1(a2) b2,2(a2)
IA ⊗g BT =
b1,1(a1) b2,1(a1)b1,2(a1) b2,2(a1)
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ b1,1(a2) b2,1(a2)b1,2(a2) b2,2(a2)
IA ⊗g P (B) =
b1,2(a1) b1,1(a1)b2,2(a1) b2,1(a1)
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ b1,2(a2) b1,1(a2)b2,2(a2) b2,1(a2)
IA ⊗g P (BT ) =
b2,1(a1) b1,1(a1)b2,2(a1) b1,2(a1)
∣∣∣∣∣ 0 00 0
0 00 0
∣∣∣∣∣ b2,1(a2) b1,1(a2)b2,2(a2) b1,2(a2)
6.2.6 Variações da matriz A⊗g IBCom base nas variações da matriz A, apresentadas no item 6.2.1, apresenta-se as variações possíveisda mesma aplicando-se o cálculo da matriz A sobre as variações de IB.
A⊗g IB =
0 a1,1(b1)
a1,1(b2) 0
∣∣∣∣∣ 0 a1,2(b1)a1,2(b2) 0
0 a2,1(b1)a2,1(b2) 0
∣∣∣∣∣ 0 a2,2(b1)a2,2(b2) 0
AT ⊗g IB =
0 a1,1(b1)
a1,1(b2) 0
∣∣∣∣∣ 0 a2,1(b1)a2,1(b2) 0
0 a1,2(b1)a1,2(b2) 0
∣∣∣∣∣ 0 a2,2(b1)a2,2(b2) 0
56

P (A)⊗g IB =
0 a1,2(b1)
a1,2(b2) 0
∣∣∣∣∣ 0 a1,1(b1)a1,1(b2) 0
0 a2,2(b1)a2,2(b2) 0
∣∣∣∣∣ 0 a2,1(b1)a2,1(b2) 0
P (AT )⊗g IB =
0 a2,1(b1)
a2,1(b2) 0
∣∣∣∣∣ 0 a1,1(b1)a1,1(b2) 0
0 a2,2(b1)a2,2(b2) 0
∣∣∣∣∣ 0 a1,2(b1)a1,2(b2) 0
6.2.7 Variações da matriz IA ⊗g B
Com base nas variações da matriz IA apresenta-se as variações possíveis da mesma aplicando-se ocálculo da matriz IA sobre as variações da matriz B .
IA ⊗g B =
0 00 0
∣∣∣∣∣ b1,1(a1) b1,2(a1)b2,1(a1) b2,2(a1)
b1,1(a2) b1,2(a2)b2,1(a2) b2,2(a2)
∣∣∣∣∣ 0 00 0
IA ⊗g BT =
0 00 0
∣∣∣∣∣ b1,1(a1) b2,1(a1)b1,2(a1) b2,2(a1)
b1,1(a2) b2,1(a2)b1,2(a2) b2,2(a2)
∣∣∣∣∣ 0 00 0
IA ⊗g P (B) =
0 00 0
∣∣∣∣∣ b1,2(a1) b1,1(a1)b2,2(a1) b2,1(a1)
b1,2(a2) b1,1(a2)b2,2(a2) b2,1(a2)
∣∣∣∣∣ 0 00 0
IA ⊗g P (BT ) =
0 00 0
∣∣∣∣∣ b2,1(a1) b1,1(a1)b2,2(a1) b1,2(a1)
b2,1(a2) b1,1(a2)b2,2(a2) b1,2(a2)
∣∣∣∣∣ 0 00 0
6.3 As variações analisadas
A partir das variações aplicadas nas matrizes A, B e I e também nas variações aplicadas ao produtotensorial generalizado de A⊗g IB e IA⊗gB, buscam-se alternativas para a compatibilidade do produtotensorial generalizado com a multiplicação ordinária de matrizes.
A cada teste demonstrado será apresentada uma explicação que justi�ca a incompatibilidade domesmo. Para melhor entendimento destas explicações, é importante fazer algumas de�nições:
Seja a matriz57

γ ββ γ
∣∣∣∣∣ γ ββ γ
γ ββ γ
∣∣∣∣∣ γ ββ γ
Quando houver referência a elementos não diagonais nos blocos, a referência será feita aos elemen-
tos representados por β e quando houver referência aos elementos diagonais nos blocos, a referênciaserá feita aos elementos representados por γ,
γ ββ γ
∣∣∣∣∣∣∣∣∣∣ γ ββ γ
onde o conjunto dos elementos β e γ representam os blocos diagonais e a parte em branco repre-
senta o que será chamado de blocos não diagonais.6.3.1 Produto de A⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de A ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado àsvariações propostas para a matriz B.
A⊗g IB . IA ⊗g B =
a1,1(b1)b1,1(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b2,2(a1)
∣∣∣∣ a1,2(b1)b1,1(a2) a1,2(b1)b1,2(a2)a1,2(b2)b2,1(a2) a1,2(b2)b2,2(a2)
a2,1(b1)b1,1(a1) a2,1(b1)b1,2(a1)a2,1(b2)b2,1(a1) a2,1(b2)b2,2(a1)
∣∣∣∣ a2,2(b1)b1,1(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b2,2(a2)
No caso da multiplicação A ⊗g IB . IA ⊗g B, pode ser observada a avaliação da matriz A erra-
da nos blocos não diagonais, ou seja nos elementos a1,2(b1)b1,1(a2), a1,2(b1)b1,2(a2), a1,2(b2)b2,1(a2),a1,2(b2)b2,2(a2), do bloco 0,1 e nos elementos a2,1(b1)b1,1(a1), a2,1(b1)b1,2(a1), a2,1(b2)b2,1(a1), a2,1(b2)b2,2(a1)do bloco 1,0.
A⊗g IB . IA ⊗g BT =
a1,1(b1)b1,1(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b2,2(a1)
∣∣∣∣ a1,2(b1)b1,1(a2) a1,2(b1)b2,1(a2)a1,2(b2)b1,2(a2) a1,2(b2)b2,2(a2)
a2,1(b1)b1,1(a1) a2,1(b1)b2,1(a1)a2,1(b2)b1,2(a1) a2,1(b2)b2,2(a1)
∣∣∣∣ a2,2(b1)b1,1(a2) a2,2(b1)b2,1(a2)a2,2(b2)b1,2(a2) a2,2(b2)b2,2(a2)
No caso da multiplicação A⊗g IB . IA⊗g BT , pode ser observado que além da avaliação da matriz
A errada nos blocos não diagonais, também houve uma inversão dos resultados não diagonais de todosos blocos.
A⊗g IB . IA ⊗g P (B) =
a1,1(b1)b1,2(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b2,1(a1)
∣∣∣∣ a1,2(b1)b1,2(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b2,1(a2)
a2,1(b1)b1,2(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b2,1(a1)
∣∣∣∣ a2,2(b1)b1,2(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b2,1(a2)
No caso da multiplicação A ⊗g IB . IA ⊗g P (B), pode ser observado que além da avaliação da
matriz A errada nos blocos não diagonais, também houve uma inversão na horizontal dos resultadosde todos os elementos dos blocos.
A⊗g IB . IA ⊗g P (BT ) =
a1,1(b1)b2,1(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b1,2(a1)
∣∣∣∣ a1,2(b1)b2,1(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b1,2(a2)
a2,1(b1)b2,1(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b1,2(a1)
∣∣∣∣ a2,2(b1)b2,1(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b1,2(a2)
58
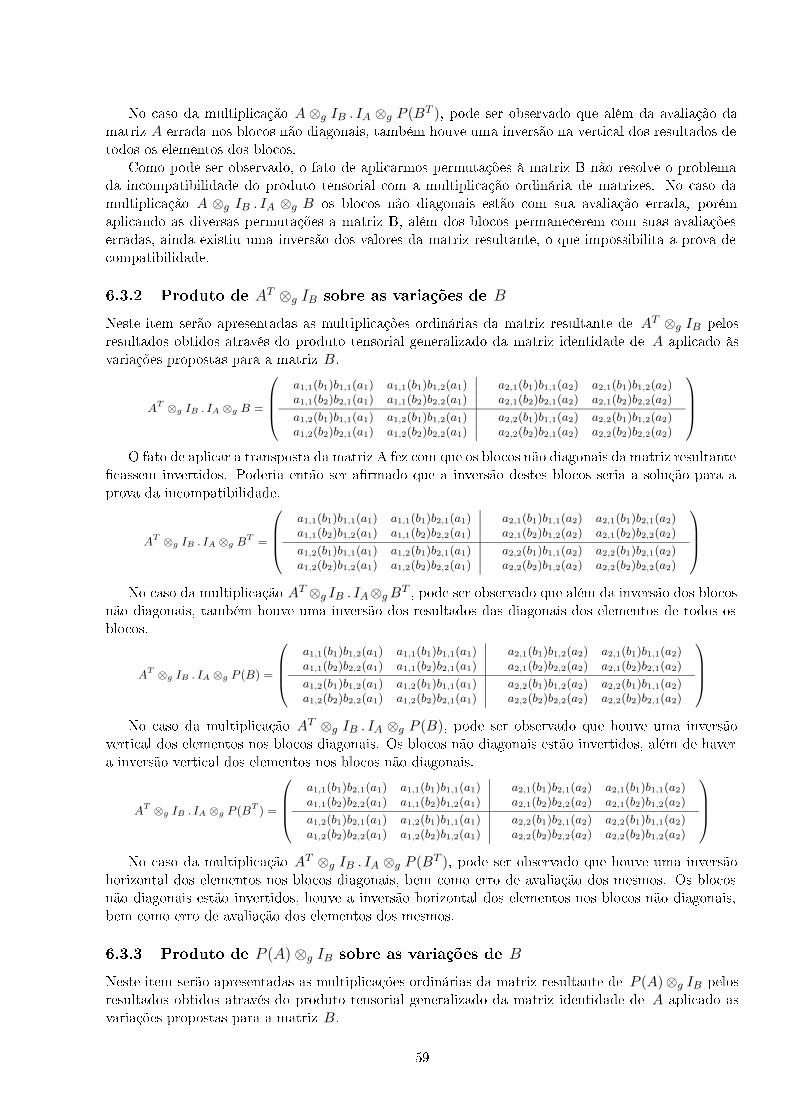
No caso da multiplicação A ⊗g IB . IA ⊗g P (BT ), pode ser observado que além da avaliação damatriz A errada nos blocos não diagonais, também houve uma inversão na vertical dos resultados detodos os elementos dos blocos.
Como pode ser observado, o fato de aplicarmos permutações à matriz B não resolve o problemada incompatibilidade do produto tensorial com a multiplicação ordinária de matrizes. No caso damultiplicação A ⊗g IB . IA ⊗g B os blocos não diagonais estão com sua avaliação errada, porémaplicando as diversas permutações a matriz B, além dos blocos permanecerem com suas avaliaçõeserradas, ainda existiu uma inversão dos valores da matriz resultante, o que impossibilita a prova decompatibilidade.6.3.2 Produto de AT ⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de AT ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado àsvariações propostas para a matriz B.
AT ⊗g IB . IA ⊗g B =
a1,1(b1)b1,1(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b2,2(a1)
∣∣∣∣ a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
a1,2(b1)b1,1(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b2,2(a1)
∣∣∣∣ a2,2(b1)b1,1(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b2,2(a2)
O fato de aplicar a transposta da matriz A fez com que os blocos não diagonais da matriz resultante
�cassem invertidos. Poderia então ser a�rmado que a inversão destes blocos seria a solução para aprova da incompatibilidade.
AT ⊗g IB . IA ⊗g BT =
a1,1(b1)b1,1(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b2,2(a1)
∣∣∣∣ a2,1(b1)b1,1(a2) a2,1(b1)b2,1(a2)a2,1(b2)b1,2(a2) a2,1(b2)b2,2(a2)
a1,2(b1)b1,1(a1) a1,2(b1)b2,1(a1)a1,2(b2)b1,2(a1) a1,2(b2)b2,2(a1)
∣∣∣∣ a2,2(b1)b1,1(a2) a2,2(b1)b2,1(a2)a2,2(b2)b1,2(a2) a2,2(b2)b2,2(a2)
No caso da multiplicação AT ⊗g IB . IA⊗gBT , pode ser observado que além da inversão dos blocos
não diagonais, também houve uma inversão dos resultados das diagonais dos elementos de todos osblocos.
AT ⊗g IB . IA ⊗g P (B) =
a1,1(b1)b1,2(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b2,1(a1)
∣∣∣∣ a2,1(b1)b1,2(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b2,1(a2)
a1,2(b1)b1,2(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b2,1(a1)
∣∣∣∣ a2,2(b1)b1,2(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b2,1(a2)
No caso da multiplicação AT ⊗g IB . IA ⊗g P (B), pode ser observado que houve uma inversão
vertical dos elementos nos blocos diagonais. Os blocos não diagonais estão invertidos, além de havera inversão vertical dos elementos nos blocos não diagonais.
AT ⊗g IB . IA ⊗g P (BT ) =
a1,1(b1)b2,1(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b1,2(a1)
∣∣∣∣ a2,1(b1)b2,1(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b1,2(a2)
a1,2(b1)b2,1(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b1,2(a1)
∣∣∣∣ a2,2(b1)b2,1(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b1,2(a2)
No caso da multiplicação AT ⊗g IB . IA ⊗g P (BT ), pode ser observado que houve uma inversão
horizontal dos elementos nos blocos diagonais, bem como erro de avaliação dos mesmos. Os blocosnão diagonais estão invertidos, houve a inversão horizontal dos elementos nos blocos não diagonais,bem como erro de avaliação dos elementos dos mesmos.6.3.3 Produto de P (A)⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de P (A)⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado asvariações propostas para a matriz B.
59
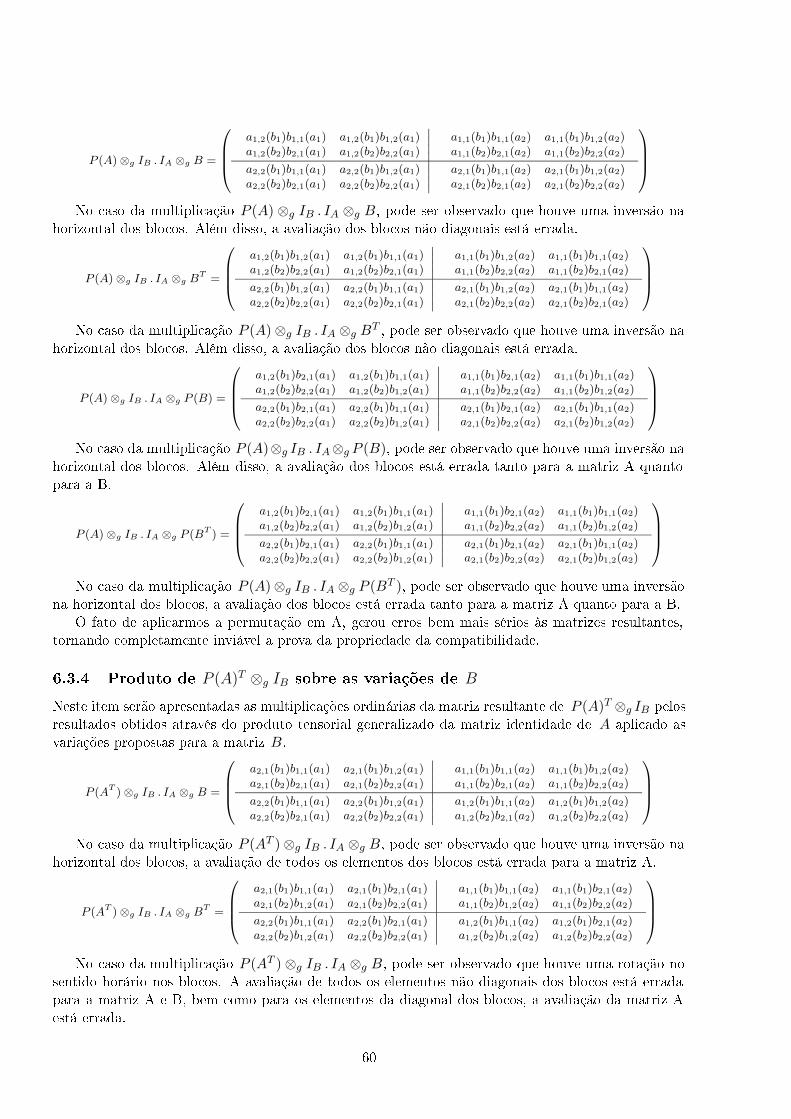
P (A)⊗g IB . IA ⊗g B =
a1,2(b1)b1,1(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b2,2(a1)
∣∣∣∣ a1,1(b1)b1,1(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b2,2(a2)
a2,2(b1)b1,1(a1) a2,2(b1)b1,2(a1)a2,2(b2)b2,1(a1) a2,2(b2)b2,2(a1)
∣∣∣∣ a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
No caso da multiplicação P (A) ⊗g IB . IA ⊗g B, pode ser observado que houve uma inversão na
horizontal dos blocos. Além disso, a avaliação dos blocos não diagonais está errada.
P (A)⊗g IB . IA ⊗g BT =
a1,2(b1)b1,2(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b2,1(a1)
∣∣∣∣ a1,1(b1)b1,2(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b2,1(a2)
a2,2(b1)b1,2(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b2,1(a1)
∣∣∣∣ a2,1(b1)b1,2(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b2,1(a2)
No caso da multiplicação P (A)⊗g IB . IA ⊗g BT , pode ser observado que houve uma inversão na
horizontal dos blocos. Além disso, a avaliação dos blocos não diagonais está errada.
P (A)⊗g IB . IA ⊗g P (B) =
a1,2(b1)b2,1(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b1,2(a1)
∣∣∣∣ a1,1(b1)b2,1(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b1,2(a2)
a2,2(b1)b2,1(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b1,2(a1)
∣∣∣∣ a2,1(b1)b2,1(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b1,2(a2)
No caso da multiplicação P (A)⊗g IB . IA⊗g P (B), pode ser observado que houve uma inversão na
horizontal dos blocos. Além disso, a avaliação dos blocos está errada tanto para a matriz A quantopara a B.
P (A)⊗g IB . IA ⊗g P (BT ) =
a1,2(b1)b2,1(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b1,2(a1)
∣∣∣∣ a1,1(b1)b2,1(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b1,2(a2)
a2,2(b1)b2,1(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b1,2(a1)
∣∣∣∣ a2,1(b1)b2,1(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b1,2(a2)
No caso da multiplicação P (A)⊗g IB . IA ⊗g P (BT ), pode ser observado que houve uma inversão
na horizontal dos blocos, a avaliação dos blocos está errada tanto para a matriz A quanto para a B.O fato de aplicarmos a permutação em A, gerou erros bem mais sérios às matrizes resultantes,
tornando completamente inviável a prova da propriedade da compatibilidade.6.3.4 Produto de P (A)T ⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de P (A)T ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado asvariações propostas para a matriz B.
P (AT )⊗g IB . IA ⊗g B =
a2,1(b1)b1,1(a1) a2,1(b1)b1,2(a1)a2,1(b2)b2,1(a1) a2,1(b2)b2,2(a1)
∣∣∣∣ a1,1(b1)b1,1(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b2,2(a2)
a2,2(b1)b1,1(a1) a2,2(b1)b1,2(a1)a2,2(b2)b2,1(a1) a2,2(b2)b2,2(a1)
∣∣∣∣ a1,2(b1)b1,1(a2) a1,2(b1)b1,2(a2)a1,2(b2)b2,1(a2) a1,2(b2)b2,2(a2)
No caso da multiplicação P (AT )⊗g IB . IA ⊗g B, pode ser observado que houve uma inversão nahorizontal dos blocos, a avaliação de todos os elementos dos blocos está errada para a matriz A.
P (AT )⊗g IB . IA ⊗g BT =
a2,1(b1)b1,1(a1) a2,1(b1)b2,1(a1)a2,1(b2)b1,2(a1) a2,1(b2)b2,2(a1)
∣∣∣∣ a1,1(b1)b1,1(a2) a1,1(b1)b2,1(a2)a1,1(b2)b1,2(a2) a1,1(b2)b2,2(a2)
a2,2(b1)b1,1(a1) a2,2(b1)b2,1(a1)a2,2(b2)b1,2(a1) a2,2(b2)b2,2(a1)
∣∣∣∣ a1,2(b1)b1,1(a2) a1,2(b1)b2,1(a2)a1,2(b2)b1,2(a2) a1,2(b2)b2,2(a2)
No caso da multiplicação P (AT ) ⊗g IB . IA ⊗g B, pode ser observado que houve uma rotação no
sentido horário nos blocos. A avaliação de todos os elementos não diagonais dos blocos está erradapara a matriz A e B, bem como para os elementos da diagonal dos blocos, a avaliação da matriz Aestá errada.
60
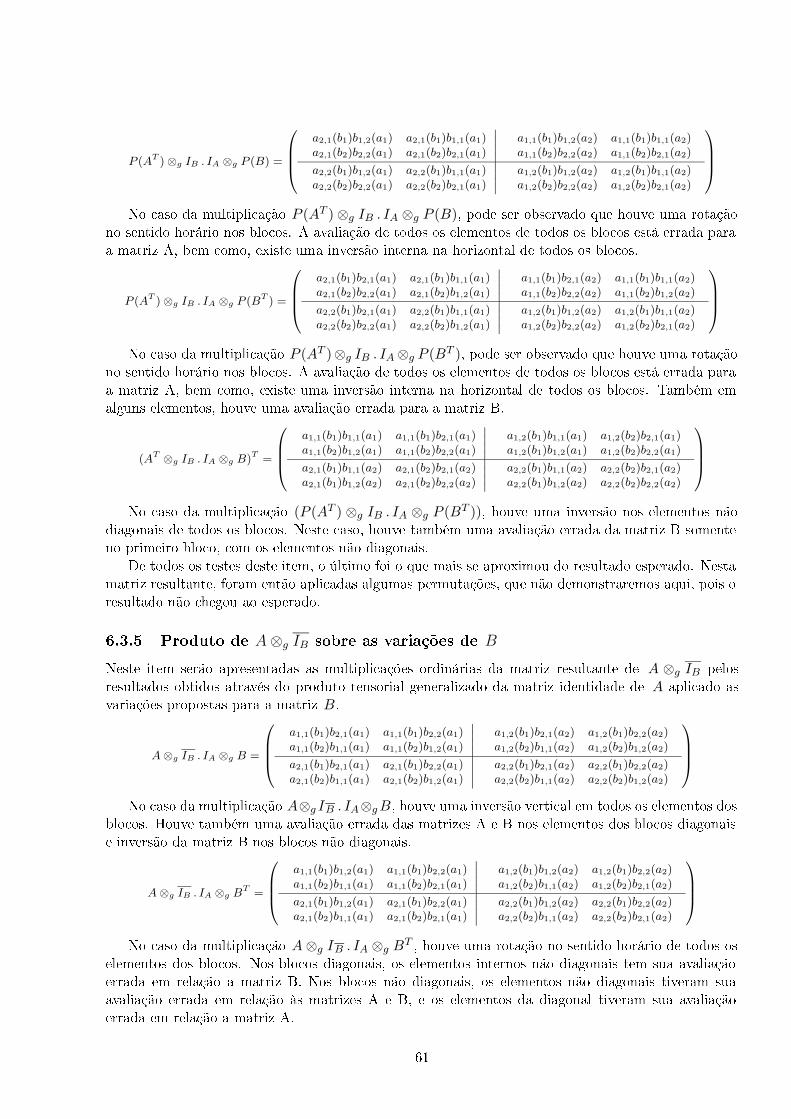
P (AT )⊗g IB . IA ⊗g P (B) =
a2,1(b1)b1,2(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b2,1(a1)
∣∣∣∣ a1,1(b1)b1,2(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b2,1(a2)
a2,2(b1)b1,2(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b2,1(a1)
∣∣∣∣ a1,2(b1)b1,2(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b2,1(a2)
No caso da multiplicação P (AT )⊗g IB . IA ⊗g P (B), pode ser observado que houve uma rotação
no sentido horário nos blocos. A avaliação de todos os elementos de todos os blocos está errada paraa matriz A, bem como, existe uma inversão interna na horizontal de todos os blocos.
P (AT )⊗g IB . IA ⊗g P (BT ) =
a2,1(b1)b2,1(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b1,2(a1)
∣∣∣∣ a1,1(b1)b2,1(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b1,2(a2)
a2,2(b1)b2,1(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b1,2(a1)
∣∣∣∣ a1,2(b1)b1,2(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b2,1(a2)
No caso da multiplicação P (AT )⊗g IB . IA⊗g P (BT ), pode ser observado que houve uma rotação
no sentido horário nos blocos. A avaliação de todos os elementos de todos os blocos está errada paraa matriz A, bem como, existe uma inversão interna na horizontal de todos os blocos. Também emalguns elementos, houve uma avaliação errada para a matriz B.
(AT ⊗g IB . IA ⊗g B)T =
a1,1(b1)b1,1(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b2,2(a1)
∣∣∣∣ a1,2(b1)b1,1(a1) a1,2(b2)b2,1(a1)a1,2(b1)b1,2(a1) a1,2(b2)b2,2(a1)
a2,1(b1)b1,1(a2) a2,1(b2)b2,1(a2)a2,1(b1)b1,2(a2) a2,1(b2)b2,2(a2)
∣∣∣∣ a2,2(b1)b1,1(a2) a2,2(b2)b2,1(a2)a2,2(b1)b1,2(a2) a2,2(b2)b2,2(a2)
No caso da multiplicação (P (AT ) ⊗g IB . IA ⊗g P (BT )), houve uma inversão nos elementos não
diagonais de todos os blocos. Neste caso, houve também uma avaliação errada da matriz B somenteno primeiro bloco, com os elementos não diagonais.
De todos os testes deste item, o último foi o que mais se aproximou do resultado esperado. Nestamatriz resultante, foram então aplicadas algumas permutações, que não demonstraremos aqui, pois oresultado não chegou ao esperado.6.3.5 Produto de A⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de A ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado asvariações propostas para a matriz B.
A⊗g IB . IA ⊗g B =
a1,1(b1)b2,1(a1) a1,1(b1)b2,2(a1)a1,1(b2)b1,1(a1) a1,1(b2)b1,2(a1)
∣∣∣∣ a1,2(b1)b2,1(a2) a1,2(b1)b2,2(a2)a1,2(b2)b1,1(a2) a1,2(b2)b1,2(a2)
a2,1(b1)b2,1(a1) a2,1(b1)b2,2(a1)a2,1(b2)b1,1(a1) a2,1(b2)b1,2(a1)
∣∣∣∣ a2,2(b1)b2,1(a2) a2,2(b1)b2,2(a2)a2,2(b2)b1,1(a2) a2,2(b2)b1,2(a2)
No caso da multiplicação A⊗g IB . IA⊗gB, houve uma inversão vertical em todos os elementos dos
blocos. Houve também uma avaliação errada das matrizes A e B nos elementos dos blocos diagonaise inversão da matriz B nos blocos não diagonais.
A⊗g IB . IA ⊗g BT =
a1,1(b1)b1,2(a1) a1,1(b1)b2,2(a1)a1,1(b2)b1,1(a1) a1,1(b2)b2,1(a1)
∣∣∣∣ a1,2(b1)b1,2(a2) a1,2(b1)b2,2(a2)a1,2(b2)b1,1(a2) a1,2(b2)b2,1(a2)
a2,1(b1)b1,2(a1) a2,1(b1)b2,2(a1)a2,1(b2)b1,1(a1) a2,1(b2)b2,1(a1)
∣∣∣∣ a2,2(b1)b1,2(a2) a2,2(b1)b2,2(a2)a2,2(b2)b1,1(a2) a2,2(b2)b2,1(a2)
No caso da multiplicação A⊗g IB . IA ⊗g BT , houve uma rotação no sentido horário de todos os
elementos dos blocos. Nos blocos diagonais, os elementos internos não diagonais tem sua avaliaçãoerrada em relação a matriz B. Nos blocos não diagonais, os elementos não diagonais tiveram suaavaliação errada em relação às matrizes A e B, e os elementos da diagonal tiveram sua avaliaçãoerrada em relação a matriz A.
61
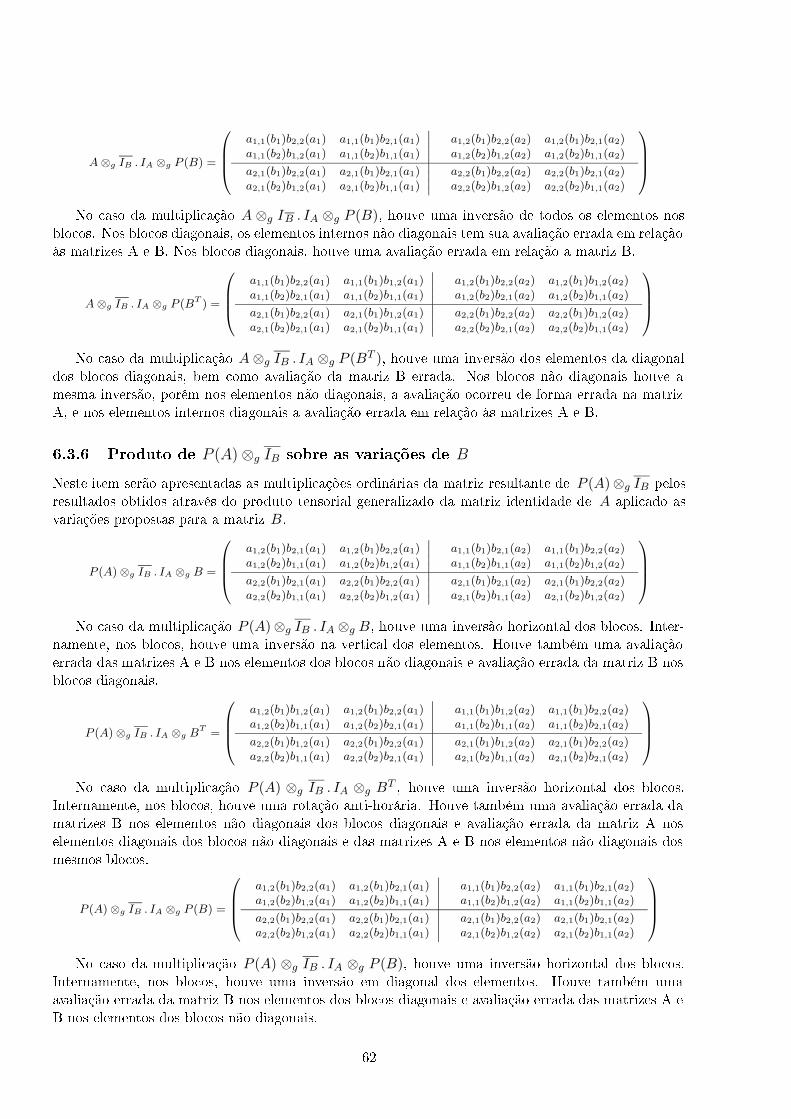
A⊗g IB . IA ⊗g P (B) =
a1,1(b1)b2,2(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b1,1(a1)
∣∣∣∣ a1,2(b1)b2,2(a2) a1,2(b1)b2,1(a2)a1,2(b2)b1,2(a2) a1,2(b2)b1,1(a2)
a2,1(b1)b2,2(a1) a2,1(b1)b2,1(a1)a2,1(b2)b1,2(a1) a2,1(b2)b1,1(a1)
∣∣∣∣ a2,2(b1)b2,2(a2) a2,2(b1)b2,1(a2)a2,2(b2)b1,2(a2) a2,2(b2)b1,1(a2)
No caso da multiplicação A ⊗g IB . IA ⊗g P (B), houve uma inversão de todos os elementos nos
blocos. Nos blocos diagonais, os elementos internos não diagonais tem sua avaliação errada em relaçãoàs matrizes A e B. Nos blocos diagonais, houve uma avaliação errada em relação a matriz B.
A⊗g IB . IA ⊗g P (BT ) =
a1,1(b1)b2,2(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b1,1(a1)
∣∣∣∣ a1,2(b1)b2,2(a2) a1,2(b1)b1,2(a2)a1,2(b2)b2,1(a2) a1,2(b2)b1,1(a2)
a2,1(b1)b2,2(a1) a2,1(b1)b1,2(a1)a2,1(b2)b2,1(a1) a2,1(b2)b1,1(a1)
∣∣∣∣ a2,2(b1)b2,2(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b1,1(a2)
No caso da multiplicação A⊗g IB . IA ⊗g P (BT ), houve uma inversão dos elementos da diagonal
dos blocos diagonais, bem como avaliação da matriz B errada. Nos blocos não diagonais houve amesma inversão, porém nos elementos não diagonais, a avaliação ocorreu de forma errada na matrizA, e nos elementos internos diagonais a avaliação errada em relação às matrizes A e B.6.3.6 Produto de P (A)⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de P (A)⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado asvariações propostas para a matriz B.
P (A)⊗g IB . IA ⊗g B =
a1,2(b1)b2,1(a1) a1,2(b1)b2,2(a1)a1,2(b2)b1,1(a1) a1,2(b2)b1,2(a1)
∣∣∣∣ a1,1(b1)b2,1(a2) a1,1(b1)b2,2(a2)a1,1(b2)b1,1(a2) a1,1(b2)b1,2(a2)
a2,2(b1)b2,1(a1) a2,2(b1)b2,2(a1)a2,2(b2)b1,1(a1) a2,2(b2)b1,2(a1)
∣∣∣∣ a2,1(b1)b2,1(a2) a2,1(b1)b2,2(a2)a2,1(b2)b1,1(a2) a2,1(b2)b1,2(a2)
No caso da multiplicação P (A)⊗g IB . IA ⊗g B, houve uma inversão horizontal dos blocos. Inter-namente, nos blocos, houve uma inversão na vertical dos elementos. Houve também uma avaliação
errada das matrizes A e B nos elementos dos blocos não diagonais e avaliação errada da matriz B nosblocos diagonais.
P (A)⊗g IB . IA ⊗g BT =
a1,2(b1)b1,2(a1) a1,2(b1)b2,2(a1)a1,2(b2)b1,1(a1) a1,2(b2)b2,1(a1)
∣∣∣∣ a1,1(b1)b1,2(a2) a1,1(b1)b2,2(a2)a1,1(b2)b1,1(a2) a1,1(b2)b2,1(a2)
a2,2(b1)b1,2(a1) a2,2(b1)b2,2(a1)a2,2(b2)b1,1(a1) a2,2(b2)b2,1(a1)
∣∣∣∣ a2,1(b1)b1,2(a2) a2,1(b1)b2,2(a2)a2,1(b2)b1,1(a2) a2,1(b2)b2,1(a2)
No caso da multiplicação P (A) ⊗g IB . IA ⊗g BT , houve uma inversão horizontal dos blocos.
Internamente, nos blocos, houve uma rotação anti-horária. Houve também uma avaliação errada damatrizes B nos elementos não diagonais dos blocos diagonais e avaliação errada da matriz A noselementos diagonais dos blocos não diagonais e das matrizes A e B nos elementos não diagonais dosmesmos blocos.
P (A)⊗g IB . IA ⊗g P (B) =
a1,2(b1)b2,2(a1) a1,2(b1)b2,1(a1)a1,2(b2)b1,2(a1) a1,2(b2)b1,1(a1)
∣∣∣∣ a1,1(b1)b2,2(a2) a1,1(b1)b2,1(a2)a1,1(b2)b1,2(a2) a1,1(b2)b1,1(a2)
a2,2(b1)b2,2(a1) a2,2(b1)b2,1(a1)a2,2(b2)b1,2(a1) a2,2(b2)b1,1(a1)
∣∣∣∣ a2,1(b1)b2,2(a2) a2,1(b1)b2,1(a2)a2,1(b2)b1,2(a2) a2,1(b2)b1,1(a2)
No caso da multiplicação P (A) ⊗g IB . IA ⊗g P (B), houve uma inversão horizontal dos blocos.
Internamente, nos blocos, houve uma inversão em diagonal dos elementos. Houve também umaavaliação errada da matriz B nos elementos dos blocos diagonais e avaliação errada das matrizes A eB nos elementos dos blocos não diagonais.
62

P (A)⊗g IB . IA ⊗g P (BT ) =
a1,2(b1)b2,2(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b1,1(a1)
∣∣∣∣ a1,1(b1)b2,2(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b1,1(a2)
a2,2(b1)b2,2(a1) a2,2(b1)b1,2(a1)a2,2(b2)b2,1(a1) a2,2(b2)b1,1(a1)
∣∣∣∣ a2,1(b1)b2,2(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b1,1(a2)
No caso da multiplicação P (A) ⊗g IB . IA ⊗g P (BT ), houve uma inversão horizontal dos blocos.
Internamente, nos blocos, houve uma inversão em diagonal dos elementos. Houve também umaavaliação errada da matriz B nos elementos diagonais dos blocos diagonais, avaliação errada dasmatrizes A e B nos elementos diagonais dos blocos não diagonais, bem como uma avaliação erradada matriz A nos elementos não diagonais deste mesmo bloco.
Em todos os experimentos onde foi utilizado P (A) ⊗g IB pode-se observar a avaliação errada depraticamente todos os elementos da matriz resultante, além do mesmo gerar inversões imprevisíveis.6.3.7 Produto de AT ⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de AT ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado asvariações propostas para a matriz B.
AT ⊗g IB . IA ⊗g B =
a1,1(b1)b2,1(a1) a1,1(b1)b2,2(a1)a1,1(b2)b1,1(a1) a1,1(b2)b1,2(a1)
∣∣∣∣ a2,1(b1)b2,1(a2) a2,1(b1)b2,2(a2)a2,1(b2)b1,1(a2) a2,1(b2)b1,2(a2)
a1,2(b1)b2,1(a1) a1,2(b1)b2,2(a1)a1,2(b2)b1,1(a1) a1,2(b2)b1,2(a1)
∣∣∣∣ a2,2(b1)b2,1(a2) a2,2(b1)b2,2(a2)a2,2(b2)b1,1(a2) a2,2(b2)b1,2(a2)
No caso da multiplicação AT ⊗g IB . IA ⊗g B, houve uma inversão dos blocos não diagonais.
Internamente, nos blocos, houve uma avaliação errada da matriz B em todos os elementos da matrizresultante, além de uma inversão na vertical em todos os blocos.
AT ⊗g IB . IA ⊗g BT =
a1,1(b1)b1,2(a1) a1,1(b1)b2,2(a1)a1,1(b2)b1,1(a1) a1,1(b2)b2,1(a1)
∣∣∣∣ a2,1(b1)b1,2(a2) a2,1(b1)b2,2(a2)a2,1(b2)b1,1(a2) a2,1(b2)b2,1(a2)
a1,2(b1)b1,2(a1) a1,2(b1)b2,2(a1)a1,2(b2)b1,1(a1) a1,2(b2)b2,1(a1)
∣∣∣∣ a2,2(b1)b1,2(a2) a2,2(b1)b2,2(a2)a2,2(b2)b1,1(a2) a2,2(b2)b2,1(a2)
No caso da multiplicação AT ⊗g IB . IA ⊗g BT , houve uma inversão dos blocos não diagonais. In-
ternamente, nos blocos, houve uma avaliação errada da matriz B em todos os elementos não diagonaisda matriz resultante, além de uma rotação interna no sentido anti-horário em todos os elementos.
AT ⊗g IB . IA ⊗g P (B) =
a1,1(b1)b2,2(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b1,1(a1)
∣∣∣∣ a2,1(b1)b2,2(a2) a2,1(b1)b2,1(a2)a2,1(b2)b1,2(a2) a2,1(b2)b1,1(a2)
a1,2(b1)b2,2(a1) a1,2(b1)b2,1(a1)a1,2(b2)b1,2(a1) a1,2(b2)b1,1(a1)
∣∣∣∣ a2,2(b1)b2,2(a2) a2,2(b1)b2,1(a2)a2,2(b2)b1,2(a2) a2,2(b2)b1,1(a2)
No caso da multiplicação AT ⊗g IB . IA ⊗g P (B), houve uma inversão dos blocos não diagonais.
Internamente, nos blocos, houve uma avaliação errada da matriz B em todos os elementos da matrizresultante.
AT ⊗g IB . IA ⊗g P (BT ) =
a1,1(b1)b2,2(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b1,1(a1)
∣∣∣∣ a2,1(b1)b2,2(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b1,1(a2)
a1,2(b1)b2,2(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b1,1(a1)
∣∣∣∣ a2,2(b1)b2,2(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b1,1(a2)
No caso da multiplicação AT ⊗g IB . IA ⊗g P (BT ), houve uma inversão dos blocos não diagonais.
Internamente, nos blocos, houve uma inversão nos elementos não diagonais de todos os blocos damatriz. Nos elementos não diagonais de todos os blocos houve uma avaliação errada da matriz B.
Pode ser observado que em todos os experimentos com o resultado de AT ⊗g IB há a inversão doselementos não diagonais de todos os blocos.
63

6.3.8 Produto de P (AT )⊗g IB sobre as variações de B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de P (AT )⊗g IB pelosresultados obtidos através do produto tensorial generalizado da matriz identidade de A aplicado asvariações propostas para a matriz B.
P (AT )⊗g IB . IA ⊗g B =
a2,1(b1)b2,1(a1) a2,1(b1)b2,2(a1)a2,1(b2)b1,1(a1) a2,1(b2)b1,2(a1)
∣∣∣∣ a1,1(b1)b2,1(a2) a1,1(b1)b2,2(a2)a1,1(b2)b1,1(a2) a1,1(b2)b1,2(a2)
a2,2(b1)b2,1(a1) a2,2(b1)b2,2(a1)a2,2(b2)b1,1(a1) a2,2(b2)b1,2(a1)
∣∣∣∣ a1,2(b1)b2,1(a2) a1,2(b1)b2,2(a2)a1,2(b2)b1,1(a2) a1,2(b2)b1,2(a2)
No caso da multiplicação P (AT )⊗g IB . IA⊗gB, houve uma rotação no sentido horário nos blocosda matriz resultante. Internamente, nos blocos, houve uma inversão na vertical dos elementos de
todos os blocos. Houve erro na avaliação em relação a matriz A e da matriz B em todos os elementosda matriz resultante.
P (AT )⊗g IB . IA ⊗g BT =
a2,1(b1)b1,2(a1) a2,1(b1)b2,2(a1)a2,1(b2)b1,1(a1) a2,1(b2)b2,1(a1)
∣∣∣∣ a1,1(b1)b1,2(a2) a1,1(b1)b2,2(a2)a1,1(b2)b1,1(a2) a1,1(b2)b2,1(a2)
a2,2(b1)b1,2(a1) a2,2(b1)b2,2(a1)a2,2(b2)b1,1(a1) a2,2(b2)b2,1(a1)
∣∣∣∣ a1,2(b1)b1,2(a2) a1,2(b1)b2,2(a2)a1,2(b2)b1,1(a2) a1,2(b2)b2,1(a2)
No caso da multiplicação P (AT ) ⊗g IB . IA ⊗g BT , houve uma rotação no sentido horário nos
blocos da matriz resultante. Internamente, nos blocos, houve uma inversão no sentido anti-horáriodos elementos de todos os blocos. Houve erro na avaliação em relação a matriz A nas diagonais detodos os blocos, bem como erro em relação a avaliação da matriz A e a matriz B em todos os elementosnão diagonais da matriz resultante.
P (AT )⊗g IB . IA ⊗g P (B) =
a2,1(b1)b2,2(a1) a2,1(b1)b2,1(a1)a2,1(b2)b1,2(a1) a2,1(b2)b1,1(a1)
∣∣∣∣ a1,1(b1)b2,2(a2) a1,1(b1)b2,1(a2)a1,1(b2)b1,2(a2) a1,1(b2)b1,1(a2)
a2,2(b1)b2,2(a1) a2,2(b1)b2,1(a1)a2,2(b2)b1,2(a1) a2,2(b2)b1,1(a1)
∣∣∣∣ a1,2(b1)b2,2(a2) a1,2(b1)b2,1(a2)a1,2(b2)b1,2(a2) a1,2(b2)b1,1(a2)
No caso da multiplicação P (AT ) ⊗g IB . IA ⊗g P (B), houve uma rotação no sentido horário nos
blocos da matriz resultante. Internamente, nos blocos, houve uma inversão dos elementos diagonaisde todos os blocos. Houve erro na avaliação de todos os elementos em relação as matrizes A e B.
P (AT )⊗g IB . IA ⊗g P (BT ) =
a2,1(b1)b2,2(a1) a2,1(b1)b1,2(a1)a2,1(b2)b2,1(a1) a2,1(b2)b1,1(a1)
∣∣∣∣ a1,1(b1)b2,2(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b1,1(a2)
a2,2(b1)b2,2(a1) a2,2(b1)b1,2(a1)a2,2(b2)b2,1(a1) a2,2(b2)b1,1(a1)
∣∣∣∣ a1,2(b1)b2,2(a2) a1,2(b1)b1,2(a2)a1,2(b2)b2,1(a2) a1,2(b2)b1,1(a2)
No caso da multiplicação P (AT )⊗g IB . IA ⊗g P (BT ), houve uma rotação no sentido horário nos
blocos da matriz resultante. Internamente, nos blocos, houve uma inversão dos elementos diagonaisde todos os blocos. Houve erro na avaliação dos elementos das diagonais de todos os blocos em relaçãoas matrizes A e B e, em relação a matriz A nos elementos não diagonais de todos os blocos.
Em todos os experimentos com o resultado de P (AT ) ⊗g IB há uma rotação no sentido horárioem todos os blocos. Importante observar que, neste caso, todos os experimentos geraram erro deavaliação da matriz A e muitos deles das matrizes A e B.6.3.9 Produto de A⊗g IB sobre as variações de IA ⊗g B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de A ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da inversão da matriz identidade de Aaplicado as variações propostas para a matriz B.
A⊗g IB . IA ⊗g B =
a1,2(b1)b1,1(a2) a1,2(b1)b1,2(a2)a1,2(b2)b2,1(a2) a1,2(b2)b2,2(a2)
∣∣∣∣ a1,1(b1)b1,1(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b2,2(a1)
a2,2(b1)b1,1(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b2,2(a2)
∣∣∣∣ a2,1(b1)b1,1(a1) a2,1(b1)b1,2(a1)a2,1(b2)b2,1(a1) a2,1(b2)b2,2(a1)
64
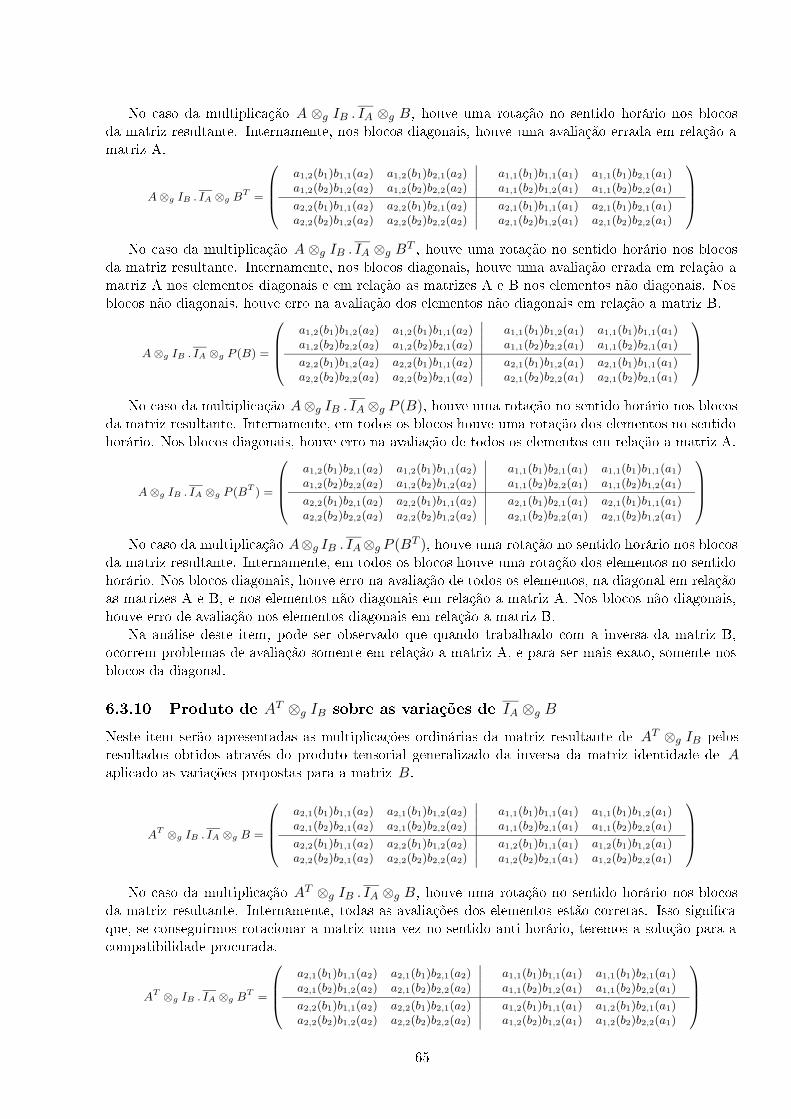
No caso da multiplicação A ⊗g IB . IA ⊗g B, houve uma rotação no sentido horário nos blocosda matriz resultante. Internamente, nos blocos diagonais, houve uma avaliação errada em relação amatriz A.
A⊗g IB . IA ⊗g BT =
a1,2(b1)b1,1(a2) a1,2(b1)b2,1(a2)a1,2(b2)b1,2(a2) a1,2(b2)b2,2(a2)
∣∣∣∣ a1,1(b1)b1,1(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b2,2(a1)
a2,2(b1)b1,1(a2) a2,2(b1)b2,1(a2)a2,2(b2)b1,2(a2) a2,2(b2)b2,2(a2)
∣∣∣∣ a2,1(b1)b1,1(a1) a2,1(b1)b2,1(a1)a2,1(b2)b1,2(a1) a2,1(b2)b2,2(a1)
No caso da multiplicação A ⊗g IB . IA ⊗g BT , houve uma rotação no sentido horário nos blocos
da matriz resultante. Internamente, nos blocos diagonais, houve uma avaliação errada em relação amatriz A nos elementos diagonais e em relação as matrizes A e B nos elementos não diagonais. Nosblocos não diagonais, houve erro na avaliação dos elementos não diagonais em relação a matriz B.
A⊗g IB . IA ⊗g P (B) =
a1,2(b1)b1,2(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b2,1(a2)
∣∣∣∣ a1,1(b1)b1,2(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b2,1(a1)
a2,2(b1)b1,2(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b2,1(a2)
∣∣∣∣ a2,1(b1)b1,2(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b2,1(a1)
No caso da multiplicação A⊗g IB . IA ⊗g P (B), houve uma rotação no sentido horário nos blocos
da matriz resultante. Internamente, em todos os blocos houve uma rotação dos elementos no sentidohorário. Nos blocos diagonais, houve erro na avaliação de todos os elementos em relação a matriz A.
A⊗g IB . IA ⊗g P (BT ) =
a1,2(b1)b2,1(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b1,2(a2)
∣∣∣∣ a1,1(b1)b2,1(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b1,2(a1)
a2,2(b1)b2,1(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b1,2(a2)
∣∣∣∣ a2,1(b1)b2,1(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b1,2(a1)
No caso da multiplicação A⊗g IB . IA⊗g P (BT ), houve uma rotação no sentido horário nos blocos
da matriz resultante. Internamente, em todos os blocos houve uma rotação dos elementos no sentidohorário. Nos blocos diagonais, houve erro na avaliação de todos os elementos, na diagonal em relaçãoas matrizes A e B, e nos elementos não diagonais em relação a matriz A. Nos blocos não diagonais,houve erro de avaliação nos elementos diagonais em relação a matriz B.
Na análise deste item, pode ser observado que quando trabalhado com a inversa da matriz B,ocorrem problemas de avaliação somente em relação a matriz A, e para ser mais exato, somente nosblocos da diagonal.6.3.10 Produto de AT ⊗g IB sobre as variações de IA ⊗g B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de AT ⊗g IB pelosresultados obtidos através do produto tensorial generalizado da inversa da matriz identidade de Aaplicado as variações propostas para a matriz B.
AT ⊗g IB . IA ⊗g B =
a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
∣∣∣∣ a1,1(b1)b1,1(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b2,2(a1)
a2,2(b1)b1,1(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b2,2(a2)
∣∣∣∣ a1,2(b1)b1,1(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b2,2(a1)
No caso da multiplicação AT ⊗g IB . IA ⊗g B, houve uma rotação no sentido horário nos blocos
da matriz resultante. Internamente, todas as avaliações dos elementos estão corretas. Isso signi�caque, se conseguirmos rotacionar a matriz uma vez no sentido anti-horário, teremos a solução para acompatibilidade procurada.
AT ⊗g IB . IA ⊗g BT =
a2,1(b1)b1,1(a2) a2,1(b1)b2,1(a2)a2,1(b2)b1,2(a2) a2,1(b2)b2,2(a2)
∣∣∣∣ a1,1(b1)b1,1(a1) a1,1(b1)b2,1(a1)a1,1(b2)b1,2(a1) a1,1(b2)b2,2(a1)
a2,2(b1)b1,1(a2) a2,2(b1)b2,1(a2)a2,2(b2)b1,2(a2) a2,2(b2)b2,2(a2)
∣∣∣∣ a1,2(b1)b1,1(a1) a1,2(b1)b2,1(a1)a1,2(b2)b1,2(a1) a1,2(b2)b2,2(a1)
65

No caso da multiplicação AT ⊗g IB . IA ⊗g BT , houve uma rotação no sentido horário nos blocosda matriz resultante. Internamente, houve uma avaliação errada em relação a matriz B em todos osblocos nos elementos não diagonais.
AT ⊗g IB . IA ⊗g P (B) =
a2,1(b1)b1,2(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b2,1(a2)
∣∣∣∣ a1,1(b1)b1,2(a1) a1,1(b1)b1,1(a1)a1,1(b2)b2,2(a1) a1,1(b2)b2,1(a1)
a2,2(b1)b1,2(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b2,1(a2)
∣∣∣∣ a1,2(b1)b1,2(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b2,1(a1)
No caso da multiplicação AT ⊗g IB . IA⊗g P (B), houve uma rotação no sentido horário nos blocos
da matriz resultante. Internamente, houve uma inversão na vertical em todos os blocos, de todos oselementos, porém a avaliação dos mesmos está correta.
AT ⊗g IB . IA ⊗g P (BT ) =
a2,1(b1)b2,1(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b1,2(a2)
∣∣∣∣ a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
a2,2(b1)b2,1(a2) a2,2(b1)b1,1(a2)a2,2(b2)b2,2(a2) a2,2(b2)b1,2(a2)
∣∣∣∣ a1,2(b1)b2,1(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b1,2(a1)
No caso da multiplicação AT ⊗g IB . IA ⊗g P (BT ), houve uma rotação no sentido horário nos
blocos da matriz resultante. Internamente, houve também uma rotação no sentido horário de todosos elementos. Ocorreu também uma avaliação errada em relação a matriz B, em todos os blocos, noselementos diagonais.
Deve-se prestar atenção a primeira e terceira multiplicação analisada. Nesta, todos os elementostem sua avaliação correta. No primeiro caso, existe a necessidade de uma rotação anti-horário namatriz resultante para que houvesse algum tipo de compatibilidade. No terceiro caso, além destarotação, também seria necessário uma inversão de colunas.6.3.11 Produto de P (A)⊗g IB sobre as variações de IA ⊗g B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de P (A)⊗g IB pelosresultados obtidos através do produto tensorial generalizado da inversa da matriz identidade de Aaplicado as variações propostas para a matriz B.
P (A)⊗g IB . ⊗g B =
a1,1(b1)b1,1(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b2,2(a2)
∣∣∣∣ a1,2(b1)b1,1(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b2,2(a1)
a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
∣∣∣∣ a2,2(b1)b1,1(a1) a2,2(b1)b1,2(a1)a2,2(b2)b2,1(a1) a2,2(b2)b2,2(a1)
No caso da multiplicação P (A)⊗g IB . IA ⊗g B, houve uma avaliação errada em relação a matriz
A em todos os elementos nos blocos diagonais.
P (A)⊗g IB . IA ⊗g BT =
a1,1(b1)b1,1(a2) a1,1(b1)b2,1(a2)a1,1(b2)b1,2(a2) a1,1(b2)b2,2(a2)
∣∣∣∣ a1,2(b1)b1,1(a1) a1,2(b1)b2,1(a1)a1,2(b2)b1,2(a1) a1,2(b2)b2,2(a1)
a2,1(b1)b1,1(a2) a2,1(b1)b2,1(a2)a2,1(b2)b1,2(a2) a2,1(b2)b2,2(a2)
∣∣∣∣ a2,2(b1)b1,1(a1) a2,2(b1)b2,1(a1)a2,2(b2)b1,2(a1) a2,2(b2)b2,2(a1)
No caso da multiplicação P (A)⊗g IB . IA⊗gBT , houve uma inversão nos elementos não diagonais
em todos os blocos. Nos blocos diagonais, houve uma avaliação errada dos elementos em diagonal emrelação a matriz A e nos elementos não diagonais, avaliação errada em relação as matrizes A e B. Nosblocos não diagonais, houve uma avaliação errada nos elementos não diagonais em relação a matrizB.
P (A)⊗g IB . IA ⊗g P (B) =
a1,1(b1)b1,2(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b2,1(a2)
∣∣∣∣ a1,2(b1)b1,2(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b2,1(a1)
a2,1(b1)b1,2(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b2,1(a2)
∣∣∣∣ a2,2(b1)b1,2(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b2,1(a1)
No caso da multiplicação P (A) ⊗g IB . IA ⊗g P (B), houve uma avaliação errada em relação a
matriz A em todos os elementos nos blocos não diagonais.66

P (A)⊗g IB . IA ⊗g P (BT ) =
a1,1(b1)b2,1(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b1,2(a2)
∣∣∣∣ a1,2(b1)b2,1(a1) a1,2(b1)b1,1(a1)a1,2(b2)b2,2(a1) a1,2(b2)b1,2(a1)
a2,1(b1)b2,1(a2) a2,1(b1)b1,1(a2)a2,1(b2)b2,2(a2) a2,1(b2)b1,2(a2)
∣∣∣∣ a2,2(b1)b2,1(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b1,2(a1)
No caso da multiplicação P (A) ⊗g IB . IA ⊗g P (BT ), houve uma rotação no sentido horário em
todos os elementos da matriz. Nos blocos diagonais, houve uma avaliação errada dos elementos nãodiagonais em relação a matriz A e nos elementos diagonais, avaliação errada em relação as matrizesA e B. Nos blocos não diagonais, houve uma avaliação errada nos elementos diagonais em relação amatriz B.6.3.12 Produto de P (AT )⊗g IB sobre as variações de IA ⊗g B
Neste item serão apresentadas as multiplicações ordinárias da matriz resultante de P (AT )⊗g IB pelosresultados obtidos através do produto tensorial generalizado da inversa da matriz identidade de Aaplicado as variações propostas para a matriz B.
P (AT )⊗g IB . IA ⊗g B =
a1,1(b1)b1,1(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b2,2(a2)
∣∣∣∣ a2,1(b1)b1,1(a1) a2,1(b1)b1,2(a1)a2,1(b2)b2,1(a1) a2,1(b2)b2,2(a1)
a1,2(b1)b1,1(a2) a1,2(b1)b1,2(a2)a1,2(b2)b2,1(a2) a1,2(b2)b2,2(a2)
∣∣∣∣ a2,2(b1)b1,1(a1) a2,2(b1)b1,2(a1)a2,2(b2)b2,1(a1) a2,2(b2)b2,2(a1)
No caso da multiplicação P (AT )⊗g IB . IA⊗g B, houve uma avaliação errada em relação a matriz
A em todos os elementos da matriz resultante. Nos blocos não diagonais, houve uma inversão doselementos não diagonais.
P (AT )⊗g IB . IA ⊗g BT =
a1,1(b1)b1,1(a2) a1,1(b1)b1,2(a2)a1,1(b2)b2,1(a2) a1,1(b2)b2,2(a2)
∣∣∣∣ a2,1(b1)b1,1(a1) a2,1(b1)b2,1(a1)a2,1(b2)b1,2(a1) a2,1(b2)b2,2(a1)
a1,2(b1)b1,1(a2) a1,2(b1)b2,1(a2)a1,2(b2)b1,2(a2) a1,2(b2)b2,2(a2)
∣∣∣∣ a2,2(b1)b1,1(a1) a2,2(b1)b2,1(a1)a2,2(b2)b1,2(a1) a2,2(b2)b2,2(a1)
No caso da multiplicação P (AT )⊗g IB . IA⊗gBT , houve uma inversão dos elementos não diagonais
em todos os blocos da matriz resultante, bem como, houve uma avaliação errada em relação a matriz Aem todos os elementos diagonais e em relação as matrizes A e B em todos os elementos não diagonais.
P (AT )⊗g IB . IA ⊗g P (B) =
a1,1(b1)b1,2(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b2,1(a2)
∣∣∣∣ a2,1(b1)b1,2(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b2,1(a1)
a1,2(b1)b1,2(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b2,1(a2)
∣∣∣∣ a2,2(b1)b1,2(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b2,1(a1)
No caso da multiplicação P (AT ) ⊗g IB . IA ⊗g P (B), houve uma avaliação errada em relação a
matriz A em todos os elementos da matriz resultante. Houve também uma inversão de todos oselementos no sentido vertical.
P (AT )⊗g IB . IA ⊗g P (BT ) =
a1,1(b1)b2,1(a2) a1,1(b1)b1,1(a2)a1,1(b2)b2,2(a2) a1,1(b2)b1,2(a2)
∣∣∣∣ a2,1(b1)b2,1(a1) a2,1(b1)b1,1(a1)a2,1(b2)b2,2(a1) a2,1(b2)b1,2(a1)
a1,2(b1)b2,1(a2) a1,2(b1)b1,1(a2)a1,2(b2)b2,2(a2) a1,2(b2)b1,2(a2)
∣∣∣∣ a2,2(b1)b2,1(a1) a2,2(b1)b1,1(a1)a2,2(b2)b2,2(a1) a2,2(b2)b1,2(a1)
No caso da multiplicação P (AT )⊗g IB . IA⊗g (BT ), houve uma inversão dos elementos no sentido
vertical em todos os elementos da matriz resultante. Houve também uma avaliação errada em relaçãoa matriz A em todos os elementos não diagonais e em relação as matrizes A e B, em todos os elementosdiagonais.
67

68

Capítulo 7
Conclusão
Redes de autômatos estocásticos tem sido amplamente estudadas como uma forma de modelar siste-mas, uma maneira e�ciente de representar sistemas com componentes interagindo entre si, como nocaso de sistemas paralelos e sistemas distribuídos. Sistemas modelados através de redes de autômatosestocásticos podem trabalhar com transições funcionais. Em uma rede de autômatos estocásticos comtransições funcionais onde não há ciclo de dependência, o sistema pode ser resolvido através da re-organização de elementos através da propriedade da compatibilidade sobre a multiplicação, conformesegue [24]:
Quando a matriz B possui elementos funcionais dependentes da matriz A, o sistema pode serresolvido através da decomposição:
A⊗g B(A) = [A . Ina ]⊗g [Inb . B(A)] = (Ina ⊗g B(A)) . (A⊗ Inb) (7.1)Quando a matriz A possui elementos funcionais dependentes da matriz B, pode ser resolvido
através da decomposição:
A(B)⊗g B = [A(B) . Ina ]⊗g [Inb . B] = (A(B)⊗g Inb) . (Ina ⊗B) (7.2)No entanto, quando há um ciclo de dependência entre as matrizes, ainda não existe outra solução
senão fatiar os elementos dependentes em diversas matrizes e utilizar a álgebra tensorial clássica pararesolvê-las através da propriedade da decomposição em produto tensorial clássico , ou seja:
A(B)⊗g B(A) =nA−1∑k=0
lk(A(B))⊗g B(ak) (7.3)
Neste caso, o produto tensorial generalizado poderá ser escrito como uma soma ordinária de produtostensoriais.
Por exemplo, a matriz:
A(B)⊗g B(A) =
a11(B).B(a1) a12(B).B(a1) · · · a1nA(B).B(a1)a21(B).B(a2) a22(B).B(a2) · · · a2nA(B).B(a2)... ... . . . ...ana1B(B).(ana) ana2 (B).B(ana) · · · anana (B).B(ana)
poderia ser escrita como a soma dos nA termos de
69
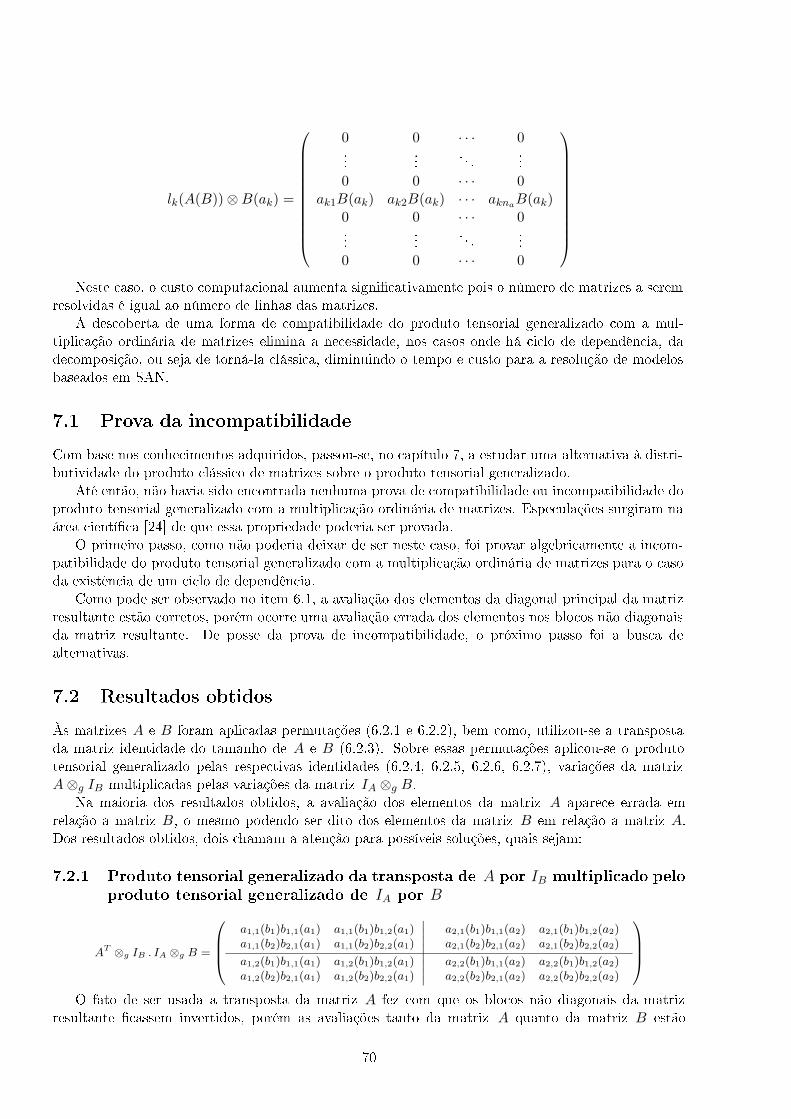
lk(A(B))⊗B(ak) =
0 0 · · · 0... ... . . . ...0 0 · · · 0
ak1B(ak) ak2B(ak) · · · aknaB(ak)0 0 · · · 0... ... . . . ...0 0 · · · 0
Neste caso, o custo computacional aumenta signi�cativamente pois o número de matrizes a serem
resolvidas é igual ao número de linhas das matrizes.A descoberta de uma forma de compatibilidade do produto tensorial generalizado com a mul-
tiplicação ordinária de matrizes elimina a necessidade, nos casos onde há ciclo de dependência, dadecomposição, ou seja de torná-la clássica, diminuindo o tempo e custo para a resolução de modelosbaseados em SAN.
7.1 Prova da incompatibilidade
Com base nos conhecimentos adquiridos, passou-se, no capítulo 7, a estudar uma alternativa à distri-butividade do produto clássico de matrizes sobre o produto tensorial generalizado.
Até então, não havia sido encontrada nenhuma prova de compatibilidade ou incompatibilidade doproduto tensorial generalizado com a multiplicação ordinária de matrizes. Especulações surgiram naárea cientí�ca [24] de que essa propriedade poderia ser provada.
O primeiro passo, como não poderia deixar de ser neste caso, foi provar algebricamente a incom-patibilidade do produto tensorial generalizado com a multiplicação ordinária de matrizes para o casoda existência de um ciclo de dependência.
Como pode ser observado no item 6.1, a avaliação dos elementos da diagonal principal da matrizresultante estão corretos, porém ocorre uma avaliação errada dos elementos nos blocos não diagonaisda matriz resultante. De posse da prova de incompatibilidade, o próximo passo foi a busca dealternativas.
7.2 Resultados obtidos
Às matrizes A e B foram aplicadas permutações (6.2.1 e 6.2.2), bem como, utilizou-se a transpostada matriz identidade do tamanho de A e B (6.2.3). Sobre essas permutações aplicou-se o produtotensorial generalizado pelas respectivas identidades (6.2.4, 6.2.5, 6.2.6, 6.2.7), variações da matrizA⊗g IB multiplicadas pelas variações da matriz IA ⊗g B.Na maioria dos resultados obtidos, a avaliação dos elementos da matriz A aparece errada emrelação a matriz B, o mesmo podendo ser dito dos elementos da matriz B em relação a matriz A.Dos resultados obtidos, dois chamam a atenção para possíveis soluções, quais sejam:7.2.1 Produto tensorial generalizado da transposta de A por IB multiplicado pelo
produto tensorial generalizado de IA por B
AT ⊗g IB . IA ⊗g B =
a1,1(b1)b1,1(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b2,2(a1)
∣∣∣∣ a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
a1,2(b1)b1,1(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b2,2(a1)
∣∣∣∣ a2,2(b1)b1,1(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b2,2(a2)
O fato de ser usada a transposta da matriz A fez com que os blocos não diagonais da matriz
resultante �cassem invertidos, porém as avaliações tanto da matriz A quanto da matriz B estão70
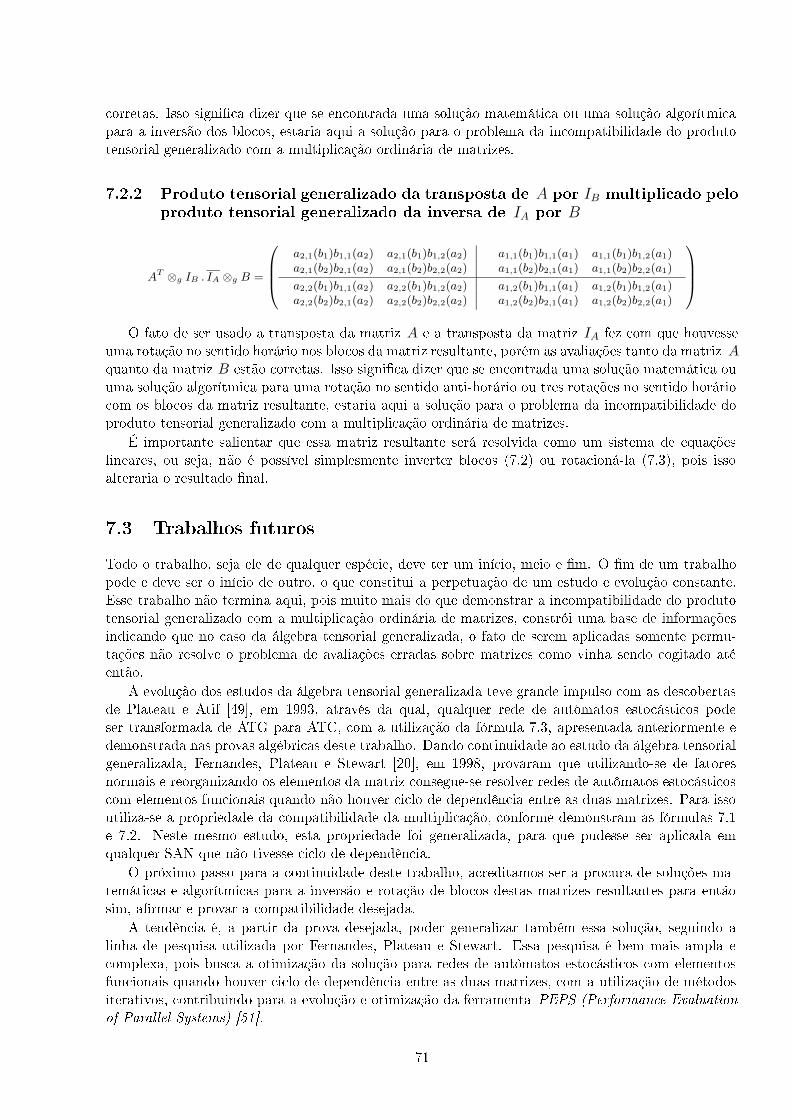
corretas. Isso signi�ca dizer que se encontrada uma solução matemática ou uma solução algorítmicapara a inversão dos blocos, estaria aqui a solução para o problema da incompatibilidade do produtotensorial generalizado com a multiplicação ordinária de matrizes.
7.2.2 Produto tensorial generalizado da transposta de A por IB multiplicado peloproduto tensorial generalizado da inversa de IA por B
AT ⊗g IB . IA ⊗g B =
a2,1(b1)b1,1(a2) a2,1(b1)b1,2(a2)a2,1(b2)b2,1(a2) a2,1(b2)b2,2(a2)
∣∣∣∣ a1,1(b1)b1,1(a1) a1,1(b1)b1,2(a1)a1,1(b2)b2,1(a1) a1,1(b2)b2,2(a1)
a2,2(b1)b1,1(a2) a2,2(b1)b1,2(a2)a2,2(b2)b2,1(a2) a2,2(b2)b2,2(a2)
∣∣∣∣ a1,2(b1)b1,1(a1) a1,2(b1)b1,2(a1)a1,2(b2)b2,1(a1) a1,2(b2)b2,2(a1)
O fato de ser usado a transposta da matriz A e a transposta da matriz IA fez com que houvesse
uma rotação no sentido horário nos blocos da matriz resultante, porém as avaliações tanto da matriz Aquanto da matriz B estão corretas. Isso signi�ca dizer que se encontrada uma solução matemática ouuma solução algorítmica para uma rotação no sentido anti-horário ou três rotações no sentido horáriocom os blocos da matriz resultante, estaria aqui a solução para o problema da incompatibilidade doproduto tensorial generalizado com a multiplicação ordinária de matrizes.
É importante salientar que essa matriz resultante será resolvida como um sistema de equaçõeslineares, ou seja, não é possível simplesmente inverter blocos (7.2) ou rotacioná-la (7.3), pois issoalteraria o resultado �nal.
7.3 Trabalhos futuros
Todo o trabalho, seja ele de qualquer espécie, deve ter um início, meio e �m. O �m de um trabalhopode e deve ser o início de outro, o que constitui a perpetuação de um estudo e evolução constante.Esse trabalho não termina aqui, pois muito mais do que demonstrar a incompatibilidade do produtotensorial generalizado com a multiplicação ordinária de matrizes, constrói uma base de informaçõesindicando que no caso da álgebra tensorial generalizada, o fato de serem aplicadas somente permu-tações não resolve o problema de avaliações erradas sobre matrizes como vinha sendo cogitado atéentão.
A evolução dos estudos da álgebra tensorial generalizada teve grande impulso com as descobertasde Plateau e Atif [49], em 1993, através da qual, qualquer rede de autômatos estocásticos podeser transformada de ATG para ATC, com a utilização da fórmula 7.3, apresentada anteriormente edemonstrada nas provas algébricas deste trabalho. Dando continuidade ao estudo da álgebra tensorialgeneralizada, Fernandes, Plateau e Stewart [20], em 1998, provaram que utilizando-se de fatoresnormais e reorganizando os elementos da matriz consegue-se resolver redes de autômatos estocásticoscom elementos funcionais quando não houver ciclo de dependência entre as duas matrizes. Para issoutiliza-se a propriedade da compatibilidade da multiplicação, conforme demonstram as fórmulas 7.1e 7.2. Neste mesmo estudo, esta propriedade foi generalizada, para que pudesse ser aplicada emqualquer SAN que não tivesse ciclo de dependência.
O próximo passo para a continuidade deste trabalho, acreditamos ser a procura de soluções ma-temáticas e algorítmicas para a inversão e rotação de blocos destas matrizes resultantes para entãosim, a�rmar e provar a compatibilidade desejada.
A tendência é, a partir da prova desejada, poder generalizar também essa solução, seguindo alinha de pesquisa utilizada por Fernandes, Plateau e Stewart. Essa pesquisa é bem mais ampla ecomplexa, pois busca a otimização da solução para redes de autômatos estocásticos com elementosfuncionais quando houver ciclo de dependência entre as duas matrizes, com a utilização de métodositerativos, contribuindo para a evolução e otimização da ferramenta PEPS (Performance Evaluationof Parallel Systems) [51].
71

Igualmente, é uma seqüência natural buscar soluções para que possam ser aplicados métodosdiretos de resolução de sistemas lineares sobre estas matrizes em formato tensorial, por exemplo adecomposição L.U, agilizando e solucionando qualquer tipo de SAN por um outro conjunto de métodosalém dos métodos iterativos já conhecidos.
72
Referências Bibliográ�cas
[1] AJMONE-MARSAN, M.; BALBO, G; CONTE, G. Performance models of multiprocessorsystems. Massachussets Institute of Tecnology. Cambridge: MIT Press Series in ComputerSystems. 1986.
[2] ALEGRETTI, C. G. Avaliação de desempenho de sistema paralelo de malha regularutilizando rede de autômatos estocásticos. Porto Alegre: PUCRS. set/98.
[3] ARRUDA, Z. S. Apostila de cálculo numérico. Novo Hamburgo - Feevale. 1999.[4] ATIF, K. Modélisation du parallélisme et de la synchronisation. INPG, Grenoble, 1993.
(Tese de doutorado).[5] BACCELLI, F.; COHEN, G., OLSDER, G., QUADRAT, J. P. Synchronization and linearity:
an algebra for discrete event systems. John Willey & Sons, 1992.[6] BARRY, N. L. Stochastic modelling - analysis & simulation. New York: McGraw-Hill,
1995.[7] BASKETT, F.; CHANDY, K. M.; MUNTZ, R. R.; PALACIOS, F. G. Open, closed and mixed
networks of queues with di�erent classes of customers. Journal of the ACM. v.22, n.2, p.248-260. Apr. 1975.
[8] BOBBIO, A.; PULIAFITO, A.; TELEK, M.; TRIVEDI, K. S. Recent developments in non-markovian stochastic Petri nets. Torino - Italia.
[9] BOOTH, T. L. Sequential machines and automata theory. New York: University of Con-necticut, 1967.
[10] BUCHHOLZ, P. Equivalence relations for stochastic automata networks. Mineapolis,Minnesota: Second International Workshop on the Numerical Solution of Markov Chains. 1992.Publicado em Stewart 1995. pp. 197-216.
[11] BUCHHOLZ, P.; GIARDO, G.; DONATELLI, S.; KEMPER, P. Complexity of memory - e�cientKronecker operations with applications to the solution of Markov models. Germany. INFORMSJournal on Computing. Summer 2000. v.12, n.3.
[12] BURDEN, R. L.; FAIRES, J. D. Numerical analysis. 6. ed. Califórnia: Brooks, 1997.[13] BUZEN; J. Computational algorithms for closed queueing networks with exponential servers.
Communications of ACM , v. 16, n. 9, 1973, p.527-531.[14] CLAUDIO, D. M.; MARINS, J. M. Cálculo numérico computacional. 2.ed. São Paulo: Atlas,
1994.[15] DAVIO, M. Kronecker products and shu�e algebra. IEEE Trans. on Comp. 1981. p.116-125.
73
[16] DEISSNER, J.; FETTWEIS, G.; FISCHER, J.; HUNOLD, D.; VOIGT, J. A developmentplatform for the design and optimization of mobile radio networks. Dresden, Germany.
[17] DEMMEL, J. W.; ILEATH, M. T.; VORST, I. A. Parallel numerical linear algebra. Cam-bridge. Nov. 1993.
[18] DURBACH, C.; QUESSETTE, F.; TROUBNIKOFF, A. Solving large Markov model basedon stochastic automata network. Versailles, France.
[19] FERNANDES, P.; ALEGRETTI, C. G. P.; JUNGBLUT, R. H. Avaliação de desempenhoatravés de redes de autômatos estocásticos. Porto Alegre: VII ERI - Escola Regional deInformática, 1999. pp. 159-184.
[20] FERNANDES, P. Méthodes numériques pour la solution de systèmes Markoviens àgrand espace d'états. Grenoble: Institut Nationale Polytechnique de Grenoble, Fev. 1998.(Thèse de doctorat).
[21] FERNANDES, P.; PLATEAU, B. Triangular solution of linear systems in tensor product for-mat. The 2nd Workshop on Mathematical (performance) Modelling and Analysis(MAMA 2000). Santa Clara: Jun. 17-18, 2000. pp.41-44.
[22] FERNANDES, P.; PLATEAU, B. Modeling �nite capacity queueing networks with stochasticautomata networks. Fourth International Workshop on Queueing Networks with FiniteCapacity (QNETS 2000). Ilkley, West Yorkshire, UK. 20-21, Jul. 2000. pp. 16/01-16/02.
[23] FERNANDES, P.; PLATEAU, B.; STEWART, W. J. Optimizing tensor product computationsin stochastic automata networks. RAIRO - Operations Research. Paris: Gauthiers-Villars,v. 32, n.3, Jul. 1998. pp.325-351
[24] FERNANDES, P.; PLATEAU, B.; STEWART, W. J. E�cient descriptor - Vector multiplicationin stochastic automata networks. Journal of the ACM. v. 45, n.3, May. 1998. pp.381-414.
[25] FERNANDES, P.; PLATEAU, B.; STEWART, W. J. Numerical issues for stochastic automatanetwoks. Proceedings of the fourth Process Algebras and Performance ModellingWorkshop. Torino, Ed. M. Ribaudo, 1996. pp. 215-234.
[26] FORNEAU, J. M.; QUESSETTE, F. Minnesota: Second International Workshop on theNumerical Solution of Markov Chains. Jan. 1992.
[27] FORNEAU, J. M.; KLOUL, L.; MAKDAD, L.; QUESSETTE, F. A new tool to modelparallel systems and protocols. European Simulation Symposium. Istambul, Turkey. 1994.
[28] FORNEAU, J. M.; QUESSETTE, F. Parametric analysis of stochastic automatanetworks. ISCIS - VIII, Istambul, 1993.
[29] FORNEAU, J. M.; KLOUL, L.; PEKERGIN, N.; QUESSETTE, F.; VEQUE, V. Modellingbu�er admission mechanisms using stochastic automata networks. Les Annales des télécom-munications (CNET, PPUR). Versailles, France. 1994.
[30] GAUTSCHI, W. Numerical analysis - La introduction. Cambridge: Birkhäuser, 1997.[31] GELENBE, E. ; PUJOLLE, G. Introduction to queueing networks. Paris: Ed. Eyrolles. 2.
ed. 1998.[32] GORDON, W. J., NEWELL, G. F. Closed queueing systems with exponential servers. RAIRO
- Operations Research. v. 15, 1967. pp.254-265.74
[33] HOPCROFT, J. E. U. Introduction to automata theory, languages and computation.Addison-Wesly, 1998.
[34] JACKSON, J. R. Networks of waiting lines. RAIRO - Operations Research. v. 5, 1957,pp.518-521.
[35] JACKSON, J. R. Jobshop - like queueing systems. Management Science , v. 10, 1963, pp.131-142.
[36] KLEINROCK, L. Queueing systems - theory and practice. New York: Ed. Wiley - Inters-cience Publication. v.1. 1975.
[37] LAZOWSKA, E. D.; ZAHORJAN, J.; GRAHAM, G. S.; SEVCIK, K. C. Quantitative systemperformance - computer system analysis using queueing networks models. New Jersey:Prentice Hall, 1984.
[38] LAW, A. M.; KELTON, W. D. Simulation modelling & analysis. 2.ed. New York. McGraw-Hill, 1991.
[39] LINDEMANN, C. Performance modelling with deterministic and stochastic Petry nets.New York: Wiley - Interscience Publication. 1998.
[40] McCORMICK, J. M.; SALVADOR, M. G. Métodos numéricos em Fortran. São Paulo:Polígono, 1971.
[41] MENASCÉ, D. A.; ALMEIDA, V. A. F.; DOWDY, L. W. Capacity planning and perfor-mance modelling. New Jersey: Prentice-Hall, 1994.
[42] MOREAUX, P. Structuracion des chaines de Markov des réseaux de Petri stochasti-ques - Décomposition tensorielle et agrégation. Paris: Université Paris Dauphine, 1996.(Thèse de doctorat).
[43] NAYLOR, T. H.; BALINTFY, J. L.; BURDICK, D. S.; CHU K. Técnicas de simulação emcomputadores. São Paulo: Vozes, 1971.
[44] NEUTS, M. F. Stochastic geometric matrices of G/M/1 type and their applications.Marcel Dekker inc. 1989.
[45] PALOMINO, R. C. Uma abordagem para modelagem, análise e controle de sistemas deprodução utilizando redes de Petri. Universidade Federal de Santa Catarina. Florianópolis.Ago. 1995. (Dissertação de Mestrado).
[46] PETERSON, J. L. Petri net theory and the modelling of system. Englewood Cli�s:Prentice-Hall. 1981.
[47] PLATEAU. B. De L�Evaluation du parallélisme et de la synchronisation. Paris-Sud,Orsay, 1984. (Thèse de doctorat).
[48] PLATEAU, B.; FERNANDES, P. Stochastic automata networks (SAN) - modelling andevaluation. Grenoble: Institut National Polytechnique de Grenoble. Mai. 1997.
[49] PLATEAU, B.; ATIF, K. Stochastic automata networks for modelling parallel systems. IEEETransactions on Software Engineering 17. 1991. pp.1093-1108.
[50] PLATEAU, B.; FORNEAU, J. R. A methodology for solving complex Markov models of parallelsystems. Jounal of Parallel and Distributed Computing. v. 12, pp.370-387.
75
[51] PLATEAU, B.; FORNEAU, J. M.; LEE, K.H. PEPS: A package for solving complex Markovmodels of parallel systems. Palma de Majorca, Spain. Proceedings of the 4th Int. Conf. onModelling Techniques and Tools for Computer Performance Evalution. 1998.
[52] PRESS, W. H.; TEUKOLSKY, S. A.; VETTERLING, W. T.; FLANNERY, B. P. NumericalRecipes in C. New York: University of Cambridge, 1992.
[53] REISER M.; LEVENBERG S. Mean-value analysis of closed multichain queueing networks.Journal of the ACM . v.27, n.2. p.313-322. Apr. 1980.
[54] ROBERTAZZI, T. G. Computer networks and systems - queueing theory and perfor-mance evaluation. 2.ed. New York: SUNY Stony Brook, 1994.
[55] RUGGIERO, M. A. G.; LOPES, V. L. R. Cálculo numérico - aspectos teóricos e compu-tacionais. São Paulo: McGraw-Hill, 1988.
[56] SAAD, Y. Iterative methods for sparse linear systems. Boston: PWS Publishing Company,1995.
[57] SCHNEIDER, H.; BARKER, G. P. Matrices and linear algebra. 2.ed. New York: Holt,Rinehart and Winston, 1973.
[58] SOUZA E SILVA, E. A.; MUNTZ, R. R. Métodos computacionais de solução de cadeias deMarkov: aplicações a sistemas de computação e comunicação. Ago. 1992 - Gramado/RS.Porto Alegre: Instituto de Informática da UFRGS.
[59] STEWART, William J. Introduction to the numerical solution of Markov chains . NewJersey: Princeton University, 1994.
[60] STEWART, William J. Computations with Markov chains. The Second International Con-ference on the Numerical Solution of Markov Chains. Kluwer Academic Publishers, 1995.
[61] STEWART, William J. Numerical methods for computing stationary distributions of �nite irre-ducible Markov chains. Advances Computational Probability. Kluwer Academic Publisher.Carolina do Norte, Jul. 1997.
[62] STEWART, William J.; WU, Wei. Numerical experiments with iteration and aggregation forMarkov chains. ORSA Journal on Computing. Carolina do Norte, v. 4, n.3, pp. 336-350.1992.
[63] TAZZA, M. Ein netztheoretisches modell zur quantativen analyse von systemen (Q-modell). München: R. Oldenbourg Verlag, 1985. (Tese de Doutorado).
[64] TRIVEDI, Kichor S. Probability & statistics with reliability, queuing, and computerscience applications. Englewood Cli�s: Prentice-Hall, 1982.
[65] VÈQUE, Véronique; OTHMAN, Jalel B. MRAP: A multiservices resource allocation policy forwireless ATM network. RAIRO - Operations Research. 1998. v. 29, n. 17, 18. pp.2187-2200.
[66] YOUNG, D. M.; GREGORY, R. T. A survey of numerical mathematics. v.1. Mineola:Dover, 1972.
[67] ZOMAIA, A. Y. Parallel and distribuited computing handbook. USA. McGraw-Hill. 1996.
76


















