Princípios de Controle, UTFPR - dt.fee.unicamp.brvargas/principiosCap13.pdf · Modelagem de...
42
Modelagem de Sistemas de Controle por Espa¸ co de Estados A modelagem por espa¸ co de estados possui diversas vantagens. • Introduz a teoria conhecida como“Controle Moderno”; • Adequada para sistemas de m´ ultiplas entradas e m´ ultiplas sa´ ıdas (MIMO); • Possibilita o projeto de controladores usando t´ ecnicas avan¸ cadas. 1 of 42 B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Transcript of Princípios de Controle, UTFPR - dt.fee.unicamp.brvargas/principiosCap13.pdf · Modelagem de...

Modelagem de Sistemas de Controle por Espaco de
Estados
A modelagem por espaco de estados possui diversas vantagens.
• Introduz a teoria conhecida como“Controle Moderno”;
• Adequada para sistemas de multiplas entradas e multiplas saıdas (MIMO);
• Possibilita o projeto de controladores usando tecnicas avancadas.
1 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Modelagem de Sistemas de Controle por Espaco de
Estados
Algumas definicoes:
• Estado: O estado de um sistema dinamico e o menor conjunto devariaveis (chamadas variaveis de estado) tal que o conhecimento destasvariaveis para t = t0 ,juntamente com a entrada para t ≥ t0, determinacompletamente o comportamento do sistema para qualquer instantet ≥ t0.
• Variaveis de estado: As variaveis de estado de um sistema dinamico saoo menor conjunto de variaveis que determinam o estado do sistemadinamico. Se pelo menos n variaveis x1(t), x2(t), . . . , xn(t) sao necessariaspara descrever completamente o comportamento de um sistema dinamico(tal que uma vez dada a entrada para t ≥ t0 e o estado inicial em t = t0, oestado futuro do sistema esta completamente determinado), entao as taisn variaveis x1(t), x2(t), . . . , xn(t) sao um conjunto de variaveis de estado.
2 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Modelagem de Sistemas de Controle por Espaco de
Estados
• Se n variaveis de estado sao necessarias para descrever completamente ocomportamento de um sistema, entao estas n variaveis de estado podemser consideradas como as n componentes de um vetor x(t). Tal vetor echamado de vetor de estados.
• O espaco n dimensional cujo eixos de coordenadas sao x1, x2, . . . , xn, echamado espaco de estados. Qualquer estado pode ser representado porum ponto no espaco de estados.
3 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Modelagem de Sistemas de Controle por Espaco de
Estados
Trabalhamos nesse curso com o sistema linear na forma
x(t) = Ax(t) + Bu(t) (1)
y(t) = Cx(t) +Du(t), (2)
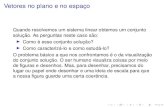
onde A e chamada de matriz de estado, B matriz de entrada, C matriz desaıda e D matriz de transicao direta. Uma representacao do diagrama deblocos deste sistema de equacoes lineares pode ser representado em diagramade blocos, como mostrado na Figura 1.
4 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Figura: Diagrama de blocos de um sistema linear de tempo contınuo representadono espaco de estados.
5 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo
Representar circuito RLC na forma
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) +Du(t)
6 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Relembrando a lei da tensoes de Kirchhoff:
Ldi(t)
dt+ Ri(t) + eo(t) = ei (t) e
Cdeo(t)
dt= i(t)
Denomine x1(t) = i(t) [corrente no Indutor], x2(t) = eo(t) [tensao noCapacitor], u(t) = ei (t) [entrada de tensao] para escrever as duas equacoes:
Lx1(t) + Rx1(t) + x2(t) = u(t) Cx2(t) = x1(t)
7 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Podemos reescrever as duas equacoes anteriores de modo equivalente a:
[x1(t)x2(t)
]
=
[−RL
−1L
0 1C
] [x1(t)x2(t)
]
+
[1L
0
]
u(t) (3)
Se consideramos eo(t) a saıda, entao
y(t) = [0 1]
[x1(t)x2(t)
]
.
8 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Circuitos RLC
Para um circuito eletrico RLC, pode-se empregar o seguinte procedimentopara obtencao da representacao em espaco de estados:
1. Escolha cada tensao independente de capacitores e toda correnteindependente de indutor como variaveis de estado;
2. Encontre um conjunto de correntes de malha e expresse as variaveis deestado e suas respectivas derivadas primeiras em termos das correntes demalha;
3. Escreva as equacoes de malha e elimine todas as variaveis, exceto as deestado e suas primeiras derivadas, das equacoes encontradas nos passosanteriores.
9 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Circuitos RLC
Exemplo
Obtenha uma representacao em espaco de estados para o circuito da Figuraabaixo.
10 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Passo 1: Ha um capacitor e um indutor no circuito. Assim a corrente x1 noindutor e a tensao x2 no capacitor serao escolhidas como variaveis de estado.Passo 2: A relacao entre as correntes de malha e as variaveis de estado saodadas por:
x1 = i2 (4)
1
2x2 = i2 − i3 (5)
Passo 3: As equacoes de malha sao:
4i1 − 2i2 = v (6)
2 (i2 − i1) + x1 + x2 = 0 (7)
−x2 + 3i3 = 0 (8)
Eliminando i1, i2 e i3 das equacoes anteriores, segue que:
x1 = 2 (−i2 + i1)− x2 = −x1 +1
2v − x2, (9)
11 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

E
x2 = 2x1 −2
3x2. (10)
Portanto,
[x1x2
]
︸ ︷︷ ︸
x
=
[−1 −12 −2/3
]
︸ ︷︷ ︸
A
[x1x2
]
︸ ︷︷ ︸
x
+
[1/20
]
︸ ︷︷ ︸
B
v . (11)
Considere que a saıda seja a tensao no resistor de 2Ω da malha mais a direita,ou seja,
y = 2i3 =2
3x2, (12)
ou seja,
y =[0 2/3
]
︸ ︷︷ ︸
C
[x1x2
]
︸ ︷︷ ︸
x
+ 0︸︷︷︸
D
v . (13)
Vale lembrar que a forma de representacao em espaco de estados nao e unica.12 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Representacao em Espaco de Estados de Sistemas de
EDO Lineares com derivadas na entrada
Considere um sistema dinamico descrito pela equacao diferencial
(n)y +a1
(n−1)y + · · · an−1y + any = b0
(n)u +b1
(n−1)u + · · ·+ bn−1u + bnu, (14)
ou, equivalentemente, pela funcao de transferencia
T (s) =Y (s)
U(s)=
b0sn + b1s
n−1 + · · ·+ bn−1s + bn
sn + a1sn−1 + · · ·+ an−1s + an(15)
13 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Uma das possıveis representacoes em espaco de estados que pode ser obtida,neste caso, consiste em definir as n variaveis de estado da seguinte forma:
x1 = y − β0u
x2 = x1 − β1u
x3 = x2 − β2u...
xn = xn−1 − βn−1u
onde,β0 = b0
β1 = b1 − a1b0β2 = b2 − a1β1 − a2b0
...βn = bn − a1βn−1 − · · · − an−1β1 − anb0
14 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Com tal escolha, pode-se mostrar que:
x1 = x2 + β1u
x2 = x3 + β2u...
xn−1 = xn + βn−1u
xn = −anx1 − an−1x2 − · · · − a1xn + βnu
Em termos de vetor e matriz, tem-se:
x1x2...
xn−1
xn
︸ ︷︷ ︸
x
=
0 1 0 · · · 00 0 1 · · · 0...
......
......
0 0 0 · · · 1−an −an−1 −an−2 · · · −a1
︸ ︷︷ ︸
A
·
x1x2...
xn−1
xn
︸ ︷︷ ︸
x
+
β1
β2
...βn−1
βn
︸ ︷︷ ︸
B
u
(16)
15 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

y =[1 0 . . . 0
]
x1x2...xn
+ β0u (17)
Em seguida serao vistas algumas outras formas de representacao da Equacao(14) no espaco de estados.
16 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Sistemas lineares
No espaco de estados, e possivel determinar G(s) = Y (s)U(s) . Note que
x(t) = Ax(t) + Bu(t) (18)
y(t) = Cx(t) + Du(t) (19)
Aplicando a transformada de Laplace na equacao anterior e considerandocondicoes iniciais nulas, tem-se que
sX (s) = AX (s) + BU(s) (20)
Y (s) = CX (s) + DU(s) (21)
17 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Da primeira equacao, tem-se que
(sI− A)X (s) = BU(s) ⇒ X (s) = (sI − A)−1BU(s) (22)
Substituindo X (s) na segunda equacao, tem-se que
Y (s) =[C(sI− A)−1B+ D
]U(s) (23)
Portanto,Y (s)
U(s)= C(sI− A)−1B+ D = G(s) (24)
Como o termo (sI − A)−1 aparece na expressao de G(s), verifica-se que
G(s) =Q(s)
det (sI− A), (25)
onde Q(s) e um polinomio em s e det(·) e o determinante de uma matriz.Note que os polos de G(s) sao os autovalores de matriz A.
18 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Solucao de Equacoes de Estado Homogeneas
A solucao de uma equacao diferencial homogenea do tipo
x(t) = ax(t), (26)
e dada por
x(t) = eatx(0) (27)
Analogamente para uma equacao de estado homogenea do tipo
x(t) = Ax(t), (28)
tem-se a seguinte solucao:
x(t) = eAtx(0) (29)
19 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

O termo eAt e chamado de matriz exponencial. Pode-se mostrar que
eAt =
∞∑
k=0
Aktk
k!(30)
Algumas propriedades:
•ddteAt = AeAt;
• eAte−At = eA(t−t) = I;• e(A+B)t = eAteBt, se AB = BA;• e(A+B)t 6= eAteBt, se AB 6= BA;• eA(t+τ ) = eAteAτ .
A solucao da equacao de estados homogenea tambem pode ser feitautilizando a transformada de Laplace. Aplicando-se a transformada naequacao x = Ax , verifica-se que
sX(s)− x(0) = AX(s) ⇒ (sI− A)X(s) = x(0) (31)
Portanto,
X(s) = (sI − A)−1
x(0) (32)20 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Aplicando a transformada inversa de Laplace, tem-se:
x(t) = L−1
[
(sI− A)−1
]
x(0) (33)
Portanto, tem-se que:
L−1
[
(sI− A)−1]
= eAt (34)
Exemplo
Considere o sistema linear[x1(t)x2(t)
]
=
[0 −11 −2
] [x1(t)x2(t)
]
com condicoes iniciais x0 = [1 1]′. Determine x(t).
Solucao:
Precisamos determinar eAt para usar a expressao x(t) = eAtx0 .
21 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Note que
(sI − A)−1 =
[s 1−1 s + 2
]−1
=1
(s + 1)2
[s + 2 −11 s
]
Aplicando tecnica de expansao por fracoes parciais chega-se a:
1
(s + 1)2
[s + 2 −11 s
]
⇒ exp(At) =
[(1 + t) exp(−t) −t exp(−t)
t exp(−t) (1− t) exp(−t)
]
Entao[x1(t)x2(t)
]
=
[(1 + t) exp(−t) −t exp(−t)
t exp(−t) (1− t) exp(−t)
] [11
]
=
[exp(−t)exp(−t)
]
22 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Solucao do Sistema Linear
Considere o sistema linear
x(t) = Ax(t) + Bu(t), t ≥ 0.
Dada a condicao inicial x(0) e a entrada u(t) para todo o instante de tempot ≥ 0, a solucao do sistema e:
x(t) = eAtx(0) +
∫ t
0
eA(t−τ )Bu(τ)dτ
Homework:Considere o sistema linear
[x1(t)x2(t)
]
=
[0 −11 −2
] [x1(t)x2(t)
]
+
[10
]
u(t)
com condicoes x0 = [1 1]′ e u(t) = 1, ∀t ≥ 0. Determine x(t).23 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Realimentacao completa de estados
Considere o sistema a controlar representado no espaco de estados por:
x(t) = Ax(t) + Bu(t) (35)
Supondo a existencia de sensores ou medidores de todas as variaveis deestado em x(t) = [x1(t), . . . , xn(t)]
′, podemos entao usar elementosx1(t), . . . , xn(t) para implementar a realimentacao de estados.
• A saıda y(t) = Cx(t) pode ser reescrita com C igual a matriz identidade.Isso significa que y(t) = x(t).
• Se cada uma das variaveis de estado xi (t) for empregada no controleatraves de um ganho ki , havera n ganhos ki , representados pelo vetorK = [k1 · · · kn] que podem ser ajustados para produzir os valores desejadosdos polos de malha fechada atraves da formula
u(t) = Kx(t) + r(t),
no qual r(t) representa a entrada de referencia (pode ser degrau, rampa,senoide, ou outra entrada qualquer).
24 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Com a realimentacao estados, tem-se que:
x = Ax+ B (Kx+ r) = (A+ BK) x+ Br (36)
25 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• No problema de rastreamento consideramos r(t) 6= 0 qualquer (degrau,rampa, etc).
• No problema de regulacao consideramos r(t) = 0 (sempre nulo).
Vamos supor que desejamos trabalhar a regulacao. Disto a equacaocaracterıstica do sistema descrito em (36) e dada por
det (sI− [A+ BK]) (37)
Suponha que desejamos alocar os polos da malha fechada em p1, . . . , pn.Entao
pc(s) = (s − p1) · (s − p2) · · · (s − pn) , (38)
e por isso o vetor K pode ser obtido como
det (sI− [A+ BK]) = (s − p1) · (s − p2) · · · (s − pn) (39)
Se o sistema dinamico x(t) = Ax(t) + Bu(t) e controlavel, entao sempreexiste K = [k1 k2 · · · kn], tal que
det (sI− [A+ BK]) = pc(s)
para qualquer polinomio pc(s) de grau n especificado.26 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Controlabilidade
• Conceito importante: Controlabilidade.
• Dizemos que um sistema linear x(t) = Ax(t) + Bu(t) e controlavel se amatriz
C =[B AB A2B · · · An−1B
]
possui rank(C)=n. Isso significa que todas as linhas de C obrigatoriamentedevem ser linearmente independentes entre si.
Exemplo
Considere o sistema descrito por
x(t) =
0 1 00 0 1−1 −5 −6
x(t) +
101
u(t)
E possıvel alocar os polos de malha fechada do sistema controlado ems = −2 + j4, s = −2− j4 e s = −10? Se sim determine K tal queu(t) = Kx(t) realiza essa tarefa.
27 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Solucao:
O Sistema e controlavel pois n = 3,
C =
1 0 10 1 −7−1 −7 37
e o rank(C)=3 pois todas as linhas de C sao linearmente independentes.Portanto a resposta e sim.
Projeto do controle: defina K = [k1 k2 k3]
A+ BK =
k1 k2 + 1 k30 0 1
k1 − 1 k2− 5 k3− 6
tem-se que:
det (sI− [A+ BK]) =
s −1 00 s −1
1− k1 5− k2 s + 6− k3
= k2 − 6k1 + 5s − 6k1s − k2s + k3s − k1s2 − k3s
2 + 6s2 + s3 + 1
= s3 + (6− k1 − k3) s2 + (5− 6k1 + k3 − k2) s + (1 + k2 − 6k1)
28 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Usando os polos em s = −2 + j4, s = −2− j4 e s = −10 podemos escrever
(s − (−2 + j4))(s − (−2− j4))(s + 10) = s3 + 14s2 + 60s + 200
Logo,
s3 + (6− k1 − k3) s2 + (5− 6k1 + k3 − k2) s + (1 + k2 − 6k1)
= s3 + 14s2 + 60s + 200
Da igualdade acima obtemos (Homework: determine k1, k2, k3)
K = [k1 k2 k3]
29 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Realimentacao de saıda
Considere o sistema a controlar representado no espaco de estados por:
x(t) = Ax(t) + Bu(t) (40)
Suponha que exista somente alguns sensores ou medidores disponıveis. Issoquer dizer que nao temos sensores simultaneamente para x1(t), . . . , xn(t).Equivalentemente, a matriz C e “deitada”, ou seja, rank(C ) e menor que n.Adotamos
u(t) = Fy(t) = FCx(t)
• Problema: determinar F = [f1, . . . , fq] de modo que os polos de malhafechada de A+ BFC satisfacam especificacoes de projeto
30 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Realimentacao de saıda
HomeworkConsidere o sistema linear descrito por
x =
4 2 41 0 00 1 0
x +
100
u
y =
[1 0 10 1 0
]
x
(a) Encontre (se possıvel; se nao for possıvel, justifique) uma realimentacaode estados u = Kx , K ∈ R
1×3, que aloque os autovalores do sistema emmalha fechada A+ BK em −1,−2,−3.(b) Encontre (se possıvel; se nao for possıvel, justifique) uma realimentacaode saıda u = Fy , F ∈ R
1×2, que aloque os autovalores do sistema em malhafechada A+ BFC em −1,−2,−3.
31 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
Conversor DC-DC buckEste conversor e muitıssimo utilizado em aplicacoes de Eletronica. Suacaracterıstica basica e prover na saıda (ou seja em vo(t)) uma tensao inferioraquela da entrada vg (t). Determine a representacao em Espaco de Estados.
32 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
Solucao
O conversor DC-DC opera em dois modos: ON ou OFF. Note na Figura que oDriver envia ao MOSFET um sinal PWM que liga-desliga o MOSFET. Talcomportamento faz o MOSFET atuar como uma chave“fechada”ou“aberta”.
33 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
• CASO 1: MOSFET no modo ON:MOSFET se comporta como chavefechada e o diodo nao conduz. Entaoo circuito do conversor DC-DC buckpode ser reescrito na forma da figuraacima. [Considere sempre iinj(t) = 0].Escreva RON = RL + Rt
34 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
35 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
• CASO 2: MOSFET no modo OFF:MOSFET se comporta como chaveaberta e o diodo conduz. Entao ocircuito do conversor DC-DC buckpode ser reescrito na forma da figuraacima. [Considere sempre iinj(t) = 0].Escreva Roff = RL + Rd
Observacao: Neste Caso 2as equacoes sao as mesmasdo Caso 1, exceto que deve-se fazer alı vg (t) = 0 e tro-car RON por Roff para re-cuperar as expressoes exa-tas para o Caso 2.
36 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
Importante
Observe que obtemos dois sistemas distintos, o primeiro valido para ON e osegundo para OFF. Qual deles devemos adotar?
37 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
• Qual dos sistemas devemos adotar? Resposta: Sistema medio obtido comocombinacao linear de ambos.
Fato: Quando a frequencia do PWM e superior a 10 KHz, a representacaomedia apresenta-se muito adequada para capturar o comportamento real doconversor buck.
0 ≤ δ(t) ≤ 1
δ(t) representa a porcentagem do tempo ON do Duty-cycle do PWM.
38 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Conversor DC-DC buck
Representar media do Conversor DC-DC buck
O sistema medio do conversor buck e
dx(t)
dt= δ(t)[A1x(t) + B1u(t)] + (1 − δ(t))[A2x(t) + B2u(t)]
Lembrando que iinj(t) = 0 e que A1 = A2 temos
dx(t)
dt= A1x(t) + B1Vg (t)δ(t)
y(t) = C1x(t)
Normalmente supomos a entrada Vg (t) um valor constante, entao δ(t) passaa ser a entrada de controle restrita a assumir valores somente no intervalo[0, 1].
39 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exercıcio do conversor DC-DC buck
ExercıcioConsidere o conversor buck da figura acima e adote valores abaixo:
Rt = RL = RC = 1mΩ L = 20mH C = 100µF R = 10Ω Vg (t) = 25V
1. Determine a equacao de espaco de estados do conversor.
2. Determine se o sistema e controlavel.
3. Determine o ganho K = [k1 k2] de modo que a matriz do sistema emmalha fechada A+ BK seja estavel.
40 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exercıcio do conversor DC-DC buck
ExercıcioConsidere o conversor buck da figura acima e adote valores abaixo:
Rt = RL = RC = 0 L = 2H C = 1F R = 2Ω Vg (t) = 4V
(a) Determine a solucao de x(t) considerando x(0) = [0 0]′ e δ(t) = 0.5,∀t ≥ 0.(b) Determine a corrente e tensao do conversor quando o tempo tende ainfinito.
41 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Dica de atividades
Dica
1. Fazer os Exercıcios apresentados no livro K. OGATA,“Engenharia deControle Moderno”.
42 of 42
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil