Processamento Digital de Sinais -...
18
Processamento Digital de Sinais Sistemas Lineares Prof. Dr. Carlos Alberto Ynoguti
-
Upload
nguyennguyet -
Category
Documents
-
view
220 -
download
0
Transcript of Processamento Digital de Sinais -...
Processamento Digital de Sinais
Sistemas Lineares
Prof. Dr. Carlos Alberto Ynoguti
Sinais e Sistemas
Sinal: descrição de como um parâmetro varia com outro.Exemplo: tensão variando com o tempo em um circuito elétrico, brilho variando com a distância em uma imagem.
Sistema: qualquer processo que produz um sinal de saída em resposta a um sinal de entrada. Os sistemas podem ser contínuos ou discretos, dependendo do tipo de sinal que lidam.
Algumas convenções
Sinais contínuos usam parênteses: x(t), X(f)
Sinais discretos usam colchetes: x[n], X[f]
t : tempo contínuo
n : tempo discreto (nT, T:período de amostragem)
letras minúsculas: domínio do tempo
letras maiúsculas: domínio da frequência
Condições para a linearidade
Condições necessárias para que um sistema seja considerado linear:Homogeneidade
Aditividade
Adicionalmente, os sistemas lineares possuem as seguintes propriedades:
Linearidade estática
Fidelidade senoidal
As propriedades abaixo são geralmente encontradas em sistemas lineares, mas podem ser encontradas em qualquer sistema:
Memória
Invariância no tempo
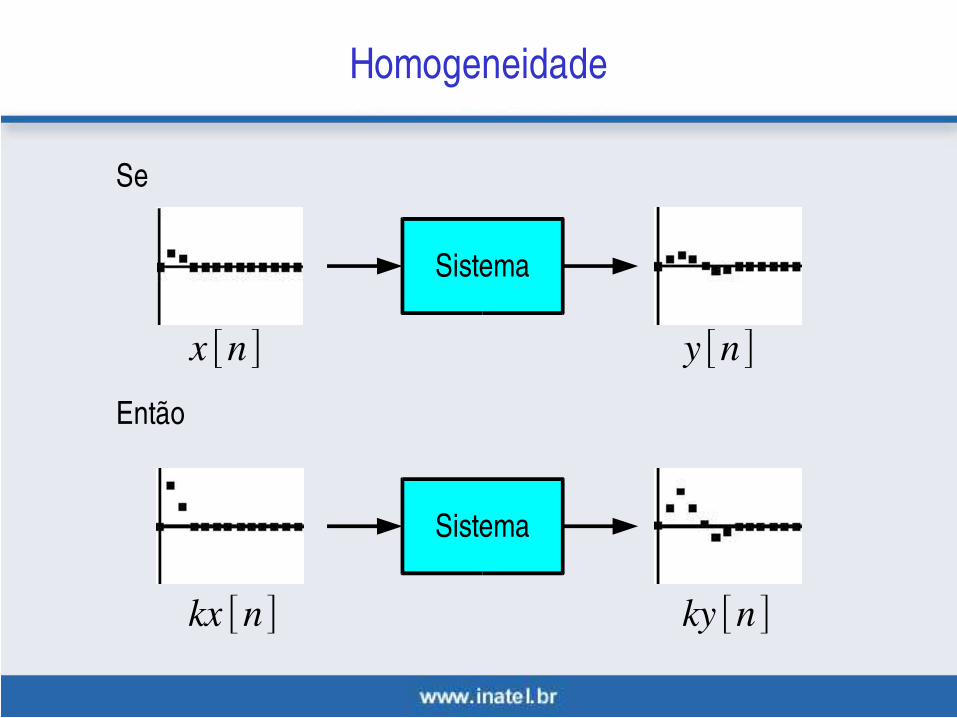
Homogeneidade
Sistema
Sistema
x [n ] y [n ]
kx [n ] ky [n ]
Se
Então
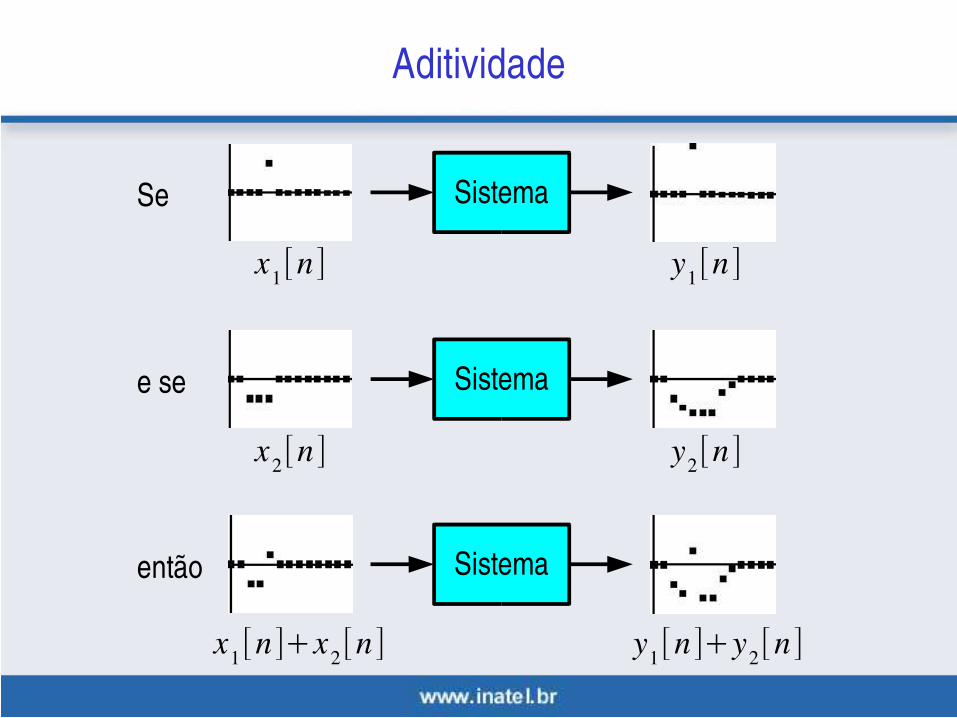
Aditividade
Sistema
Sistema
x1[n] y1[n ]
x1[n ]x2[n ] y1[n ]y2[n ]
Se
então
Sistema
x2[n ] y2[n ]
e se
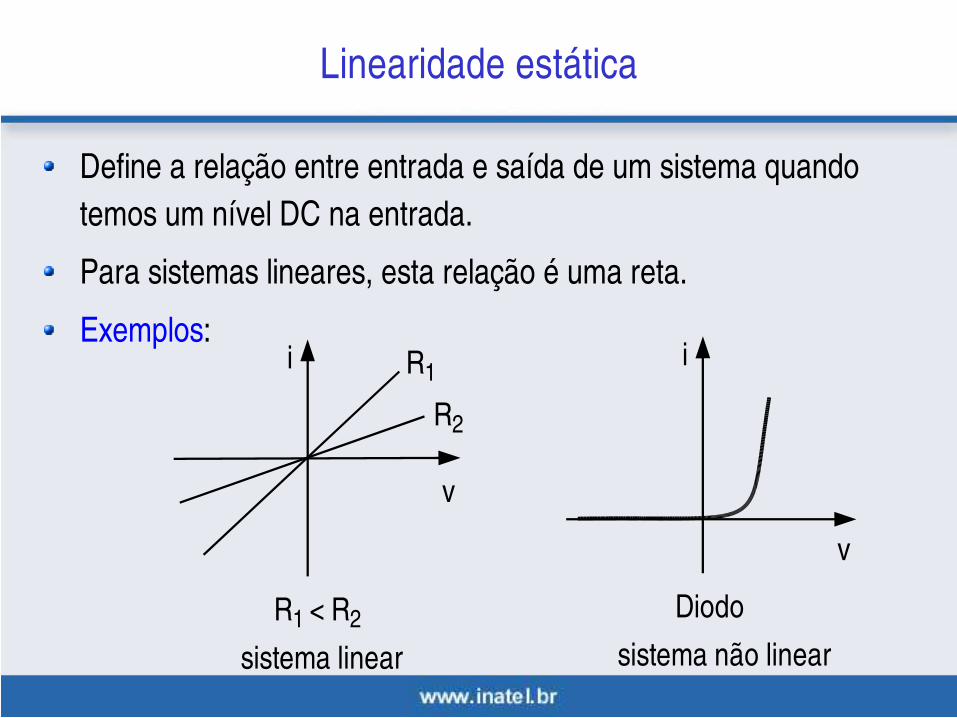
Linearidade estática
Define a relação entre entrada e saída de um sistema quando temos um nível DC na entrada.
Para sistemas lineares, esta relação é uma reta.
Exemplos:
v
i R1
R2
R1 < R2
sistema linear
v
i
Diodosistema não linear
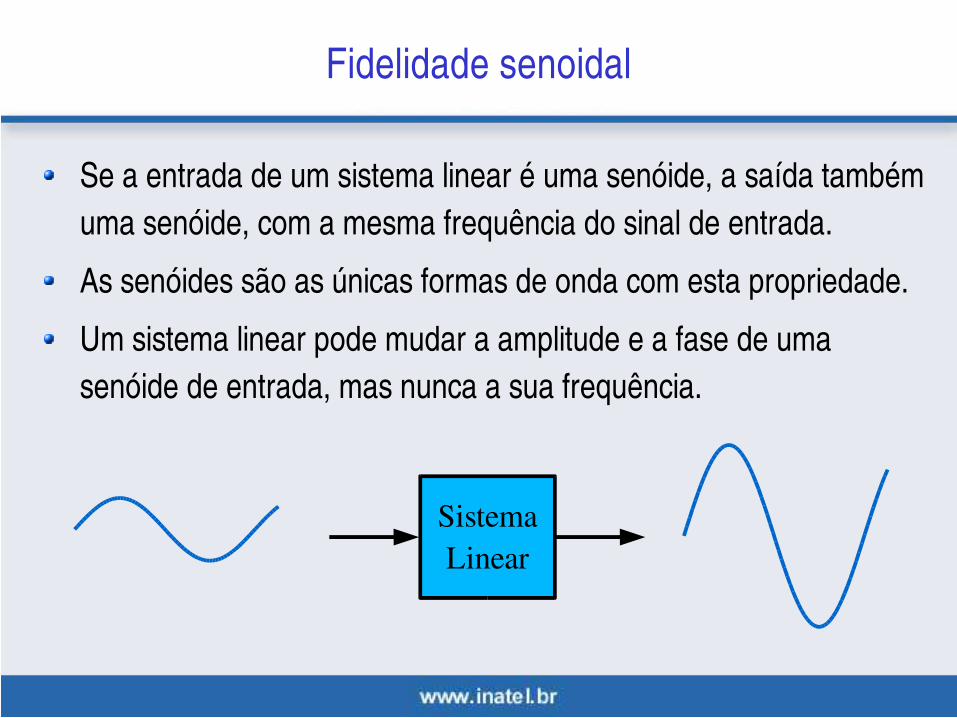
Fidelidade senoidal
Se a entrada de um sistema linear é uma senóide, a saída também uma senóide, com a mesma frequência do sinal de entrada.
As senóides são as únicas formas de onda com esta propriedade.
Um sistema linear pode mudar a amplitude e a fase de uma senóide de entrada, mas nunca a sua frequência.
SistemaLinear
Memória
Nos sistemas sem memória, a saída depende apenas do valor atual da entrada.
Exemplos: resistores.
Nos sistemas com memória, a saída depende não só da entrada, mas também do estado do sistema (saídas anteriores).
Exemplos: capacitores e indutores.
Existem sistemas lineares sem memória (por exemplo amplificadores) e com memória (por exemplo atrasadores).
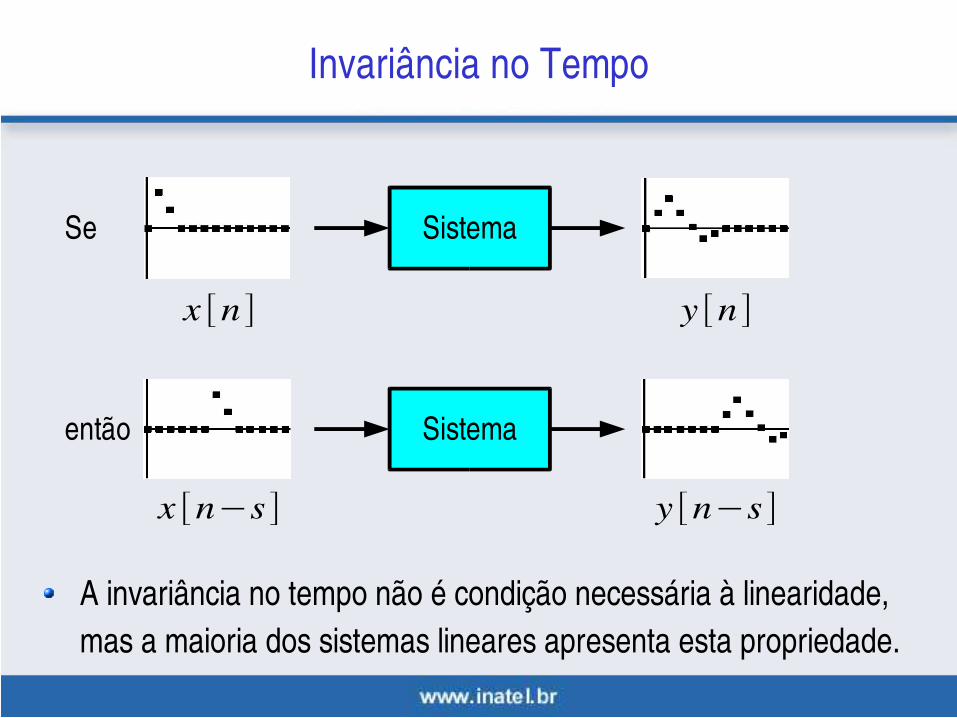
Invariância no Tempo
A invariância no tempo não é condição necessária à linearidade, mas a maioria dos sistemas lineares apresenta esta propriedade.
Sistema
Sistema
x [n ] y [n ]
x [n−s ] y [n−s ]
Se
então
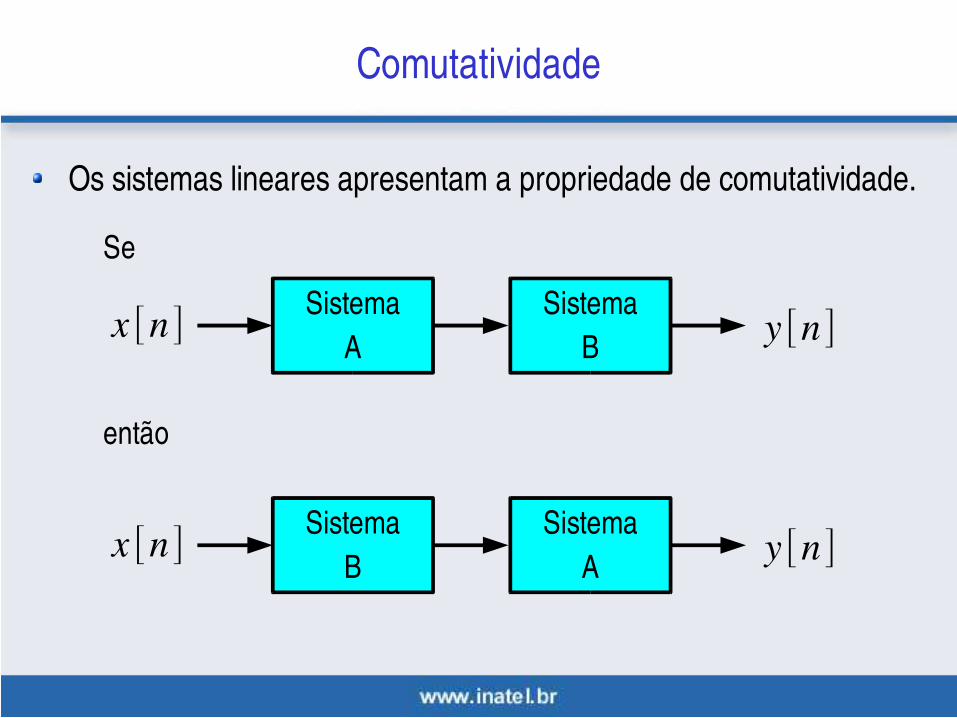
Comutatividade
Os sistemas lineares apresentam a propriedade de comutatividade.
Se
então
SistemaA
x [n ] y [n ]Sistema
B
SistemaB
x [n ] y [n ]Sistema
A
Superposição: o fundamento do PDS
O sinal a ser processado é decomposto em componentes simples,
Cada componente é processada separadamente,
Os resultados são agrupados para compor a saída do sistema.
Esta abordagem é extremamente poderosa, pois permite quebrar um problema extremamente complicado em vários problemas de simples resolução.
A superposição só pode ser aplicada a sistemas lineares, razão pela qual este tipo de sistema é tão importante.
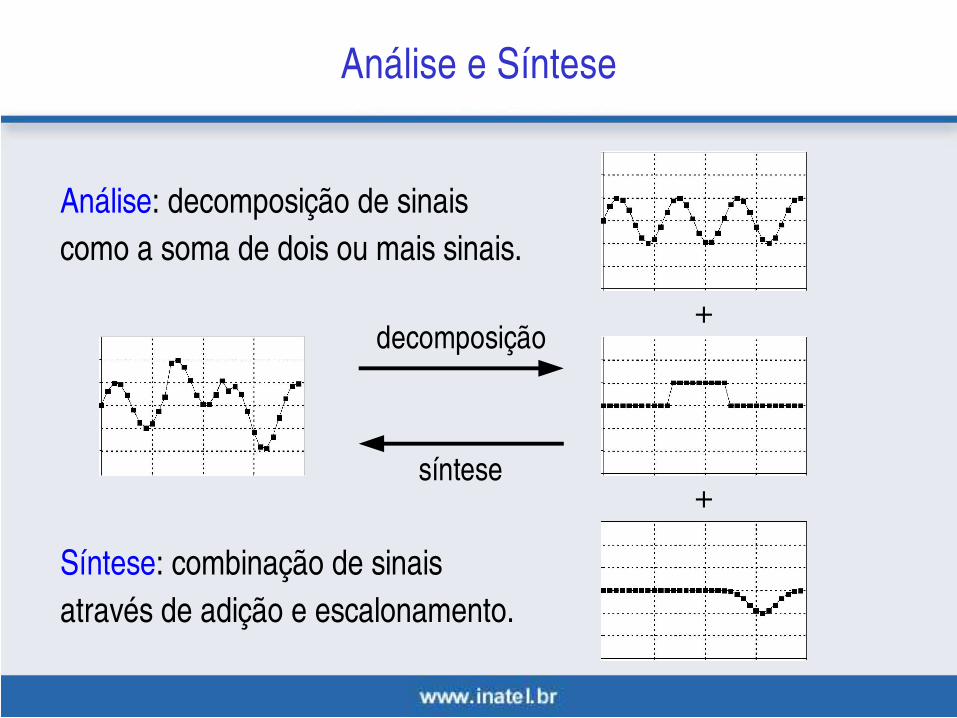
Análise e Síntese
+
+
decomposição
síntese
Síntese: combinação de sinais através de adição e escalonamento.
Análise: decomposição de sinais como a soma de dois ou mais sinais.
Síntese e Decomposição
Existem inifinitas formas de decompor um sinal, mas apenas uma síntese possível de vários sinais.
Exemplo:
Síntese: 15+25=40
Decomposição: 40 = 39+1
= 38+2
= 30,5+60+10,5
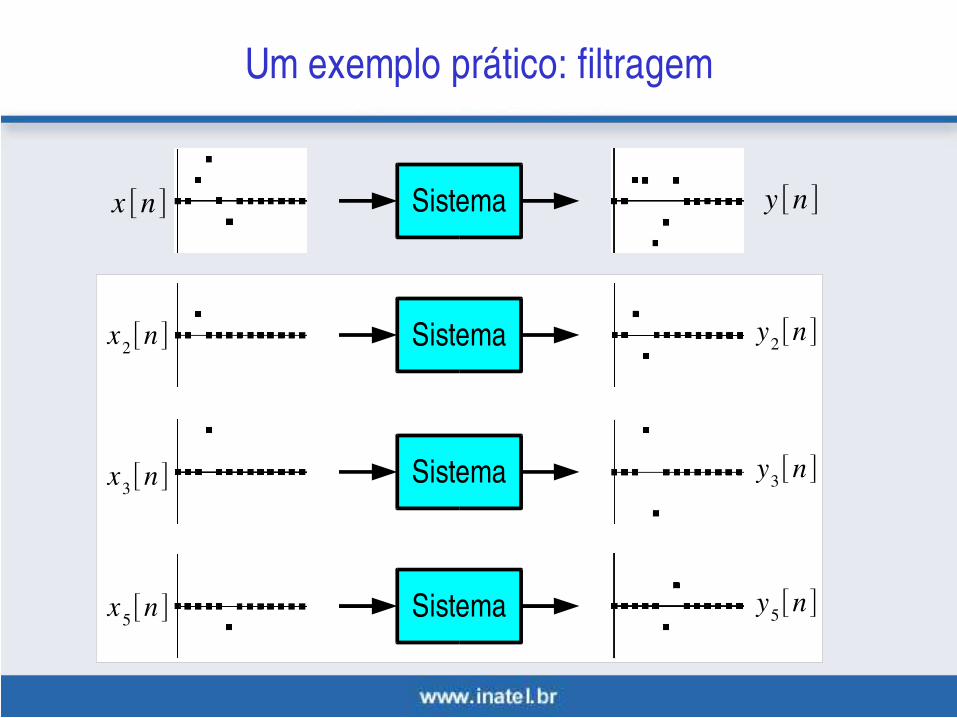
Um exemplo prático: filtragem
Sistema
Sistema
Sistema
Sistema
x [n ] y [n ]
x2[n ]
x3[n]
x5[n ]
y2[n ]
y3[n ]
y5[n ]
Conclusão
Objetivo: substituir um problema complicado por vários problemas simples.
Se a decomposição não simplificar a situação de alguma forma, então não haverá ganho.
Decomposições mais utilizadas:
Impulsos senóides (análise de Fourier)
Wavelets degrau
par/ímpar entrelacada
Decomposição por degraus
Quebra um sinal de N amostras em N componentes
Cada componente é um degrau: as primeiras amostras são nulas, e as demais assumem algum valor constante e não nulo.
A decomposição por degraus caracteriza os sinais pela diferença entre amostras adjacentes.
Caracteriza o modo como os sistemas respondem a mudanças no sinal de entrada
Exemplo: x[n]={1,2,4,3}x[n] = 1u[n] + 1u[n1] + 2u[n2]1u[n3]3u[n4]
Decomposição entrelaçada
Quebra o sinal em dois: Sinal com as amostras de índice ímpar
Sinal com as amostras de índice par
Base para o algoritmo da Fast Fourier Transform (FFT).
Exemplo: x[n] = {3,2,1,5,4,3,6,7,9}
xímpar[n] = {3,1,4,6,9}
xpar[n] = {2,5,3,7}