PROJETO DE UM VARIADOR DE VELOCIDADES...
142
PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO CONTENDO 16 MARCHAS Matheus Fernandes Pinto Projeto de Graduação apresentado ao curso de Engenharia Mecânica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Prof. Armando Carlos de Pina Filho Rio de Janeiro DEZEMBRO DE 2017
Transcript of PROJETO DE UM VARIADOR DE VELOCIDADES...

PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO
CONTENDO 16 MARCHAS
Matheus Fernandes Pinto
Projeto de Graduação apresentado ao curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do título de
Engenheiro.
Orientador: Prof. Armando Carlos de Pina Filho
Rio de Janeiro
DEZEMBRO DE 2017

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia
Mecânica DEM/POLI/UFRJ
PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO
CONTENDO 16 MARCHAS
Matheus Fernandes Pinto
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE ENGENHARIA
MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO
PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO
MECÂNICO.
Aprovado por:
Prof. Armando Carlos de Pina Filho; DSc. (Orientador)
Prof. Fernando Augusto de Noronha Castro Pinto; Dr. Ing.
Prof. Thiago Gamboa Ritto; DSc.
RIO DE JANEIRO, RJ – BRASIL
DEZEMBRO DE 2017

iii
Fernandes Pinto, Matheus
Projeto de um Variador de Velocidades Escalonado Contendo
16 marchas/ Matheus Fernandes Pinto.
– Rio de Janeiro: UFRJ/ Escola Politécnica, 2017.
VII, 142 p.: il.: 29,7 cm.
Orientador: Armando Carlos de Pina Filho
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso
de Engenharia Mecânica, 2017
Referências Bibliográficas: p; 48 - 50.
1. Transmissões Mecânicas 2. Variadores de Velocidades 3. Projeto Mecânico 4. Dimensionamento dos Componentes 5.
Conclusão.
I. Pina Filho, Armando Carlos de II. Universidade Federal do
Rio de Janeiro, Escola Politécnica, Curso de Engenharia
Mecânica. III. Projeto de um Variador de Velocidades.

iv
Agradecimentos
Aos meu pais, que sempre me deram suporte e a melhor educação possível, permitindo
meu ingresso e formação nesta excelente universidade. Com o apoio deles, pude me dedicar
exclusivamente em obter esse diploma e aproveitar as demais oportunidades acadêmicas.
Ao meu orientador Armando Carlos de Pina Filho, com o qual tive a oportunidade de
realizar uma disciplina e um estágio. Suas aulas foram fundamentais para minha formação e
ajudaram a aperfeiçoar meus conhecimentos na área de Projeto de Máquinas. Sempre muito
atencioso e disponível, sua orientação e ajuda nessa reta final foi imprescindível para eu concluir
o curso de Engenharia Mecânica.

v
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO CONTENDO 16 MARCHAS
Matheus Fernandes Pinto
Dezembro/2017
Orientador: Armando Carlos de Pina Filho
Curso: Engenharia Mecânica
O trabalho propõe o projeto de um variador de velocidades, no qual sua utilização deverá
ser em máquinas operatrizes. O variador de velocidades é utilizado entre o motor e máquina,
propriamente dita, de forma a aumentar o número de rotações do equipamento, mantendo o
motor em sua potência e rotação nominal. O variador foi projetado a partir de dados iniciais
reais de potência e rotação mínima e máxima utilizadas na indústria. Foram realizados
cálculos de dimensionamento de elementos de máquina e desenho de conjunto explicitando
cada componente presente neste variador de velocidades, o qual apresenta como vantagens
a facilidade de uso, juntamente com sua robustez e uma maior vida útil. Apesar de não haver
a possibilidade de inversão no sentido de rotação final, isso não compromete sua
funcionalidade.
Palavras-chave: sistema de transmissão, variador de velocidades, máquinas operatrizes,
dimensionamento.

vi
Abstract of Undergraduate Project presented to POLI/ UFRJ as a partial fulfillment of the
requirements for the degree of Engineer.
DESIGN OF A STEPPED VARIABLE SPEED DRIVE
Matheus Fernandes Pinto
December/2017
Advisor: Armando Carlos de Pina Filho
Course: Mechanical Engineering
The work proposes the design of a variable speed drive, in which its use should be in
machine tools. The variable speed drive is used between the motor and the machine, in order
to increase the number of revolutions of the equipment, keeping the motor at its required
power and nominal speed. The drive is designed from the actual initial power, minimum
and maximum rotation data used in the industry. Sizing calculations of machine elements
and assembly design were performed, explaining each component present in this variable
speed drive, which offers the advantages of ease of use along with its robustness and a longer
life. Although there is no possibility of reversal in the direction of final rotation, this does
not compromise its functionality.
Keywords: Transmission system, variable speed drive, machine tools, design

vii
Sumário
1. Introdução ................................................................................................................................. 8
1.1. Objetivo ............................................................................................................................. 8
1.2. Máquinas operatrizes ....................................................................................................... 8
1.3. Abordagem sobre sistemas de variadores de velocidade ................................................ 9
1.3.1. Escalonado ................................................................................................................ 9
1.3.2. Contínuo .................................................................................................................. 11
1.4. Mecanismo de variação de relação de transmissão ....................................................... 12
1.4.1. Manual .................................................................................................................... 12
1.4.2. Automático .............................................................................................................. 12
2. Projeto Mecânico .................................................................................................................... 13
2.1. Metodologia .................................................................................................................... 13
2.2. Dados iniciais ................................................................................................................... 13
2.3. Seleção do Motor ............................................................................................................ 14
2.4. Cálculo das velocidades de saída .................................................................................... 14
2.5. Esquema Cinemático ....................................................................................................... 15
2.6. Diagrama de Germar ....................................................................................................... 16
2.7. Relação de Transmissão .................................................................................................. 16
2.7.1. Correias ................................................................................................................... 16
2.7.2. Engrenagens ............................................................................................................ 17
2.8. Dimensionamento e Seleção das peças .......................................................................... 17
2.8.1. Correias ................................................................................................................... 17
2.8.2. Polias ....................................................................................................................... 19
2.8.3. Engrenagens ............................................................................................................ 20
2.8.4. Eixos ........................................................................................................................ 25
2.8.5. Rolamentos ............................................................................................................. 32
2.8.6. Chavetas .................................................................................................................. 33
2.8.7. Demais componentes ............................................................................................. 38
2.9. Características Fundamentais do projeto ................................................................... 42
3. Manual de Fabricação ............................................................................................................. 43
4. Manual de Montagem ............................................................................................................ 45
5. Conclusão ................................................................................................................................ 47
6. Referências Bibliográficas ....................................................................................................... 48
Apêndice A ...................................................................................................................................... 51
Anexo I - Tabelas ........................................................................................................................... 121
Anexo II – Desenho Técnico 142

8
1. Introdução
1.1. Objetivo
O projeto consiste no desenvolvimento de um variador de velocidade escalonado do tipo chaveta móvel com 16 rotações de saída para o uso em máquinas operatrizes. Para tal, serão usados diversos conhecimentos adquiridos ao longo do curso, como os critérios de dimensionamento de elementos de máquinas, normas e recomendações.
1.2. Máquinas operatrizes
Desde a antiguidade, o homem tem a necessidade de fabricar ferramentas, sejam elas para movimentação, caça, etc. Com a evolução da tecnologia, há a necessidade de melhorar suas ferramentas, ampliando o nível precisão e sua escala de produção. Desta forma criam-se as máquinas operatrizes. Sendo assim pode-se dizer que as máquinas operatrizes evoluem com a evolução do homem. Mas o que seria uma máquina operatriz? Máquina operatriz é uma máquina com a capacidade de fabricação de peças, em
diversos materiais podendo ser metálicas, plásticas, etc. Essa fabricação se deve a movimentação mecânica em um conjunto de ferramentas. A máquina operatriz propicia uma operação mais precisa e uma linha de produção mais veloz. Também chamada de máquina ferramenta. Dentre as máquinas operatrizes, podendo citar as fresadoras, furadeiras, aplainadoras,
retificadoras e o torno mecânico.
Figura 1 - Torno mecânico
Fonte: Direct Industry

9
1.3. Abordagem sobre sistemas de variadores de velocidade
O sistema de variador de velocidade é um conjunto mecânico constituído por diversos
elementos de máquinas. Entre eles, podem-se citar: engrenagens, eixos, mancais de
rolamentos, correias, correntes, dentre outros, nos quais, tem a função de fornecer a
elementos acoplados diferentes velocidades de rotações e torques.
Podendo classificar esse sistema, da figura 2, como escalonado ou contínuo.
Figura 2 – Sistema escalonado e continuo.
Fonte: Oficina Brasil
1.3.1. Escalonado
Em sistemas classificados como escalonado, a variação de relações de
transmissão é feita de forma escalonada (dividida) e com um número finito de
relações. Tais transmissões podem ser realizadas por: correias, correntes ou
engrenagens. Sendo que para cada tipo existe uma especificidade
correspondente.
O variador com polias, é utilizado para transmitir torques de baixa intensidade, relação de transmissão menores que 6, pois sua transmissão se resume apenas pelo atrito. Podem ser utilizados dois tipos de correias, as correias planas que apresentam maior facilidade na mudança de velocidades, como as correias em “V”. A principal funcionalidade da correia é ser o “fusível mecânico”, pois quando houver uma sobrecarga no sistema as correias são o primeiro elemento que se rompem ou desliza na polia protegendo assim outros componentes.

10
Quando houver torque de grandes intensidades, utiliza-se de variadores por engrenagens. Esse tipo de variador consegue garantir uma maior precisão nas rotações, além de transmitir maiores potências. As engrenagens podem ser chamadas de: deslizantes, “loucas”, de substituição ou fixas.
As do tipo deslizante, consideradas as mais comuns, as engrenagens são
deslocadas ao longo do eixo para acoplarem-se a outras engrenagens, mudando assim suas relações de transmissão. Normalmente movimentadas por alavancas, ilustradas na figura 3.
Figura 3- Variador de velocidades tipo bloco deslizante
Fonte: Motor Sport Engineering
As “loucas”, são utilizadas quando necessitam ocupar um menor espaço físico.
Neste tipo, as engrenagens giram livremente em torno de um eixo e funcionam quando solicitadas por uma chaveta móvel.
Existem diversos tipos de chavetas moveis, que são: eixo oco, eixo com ondulação ou eixo maciço acionada por molas. Este projeto, conforme ilustrado na figura 4, será o de eixo maciço acionado por molas.
Vale mencionar que para este tipo a chaveta deve ter um formato que possibilite a inclinação e retorno quando for ultrapassar os cubos.
Figura 4 – Mecanismo de chaveta móvel por molas prato
Fonte: (KOKYUKOKI, K)

11
A caixa Norton é um mecanismo composto de um cone de engrenagens que são acionadas através do posicionamento de uma alavanca, e sua combinação depende do avanço de um sistema com parafuso de rosca quadrada. Um esquema de uma caixa Norton é mostrado abaixo na figura 5.
Figura 5 – Caixa de Norton
Fonte: Ebay
1.3.2. Contínuo
Em sistemas classificados como continuo, CVT (Continuously Variable
Transmissions), a variação de relações de transmissão é feita de forma continua,
“sem pulos”, e com um número infinito de relações. Tais transmissões podem ser
realizadas por: correias, esferas, toroidais, hidrostático ou rolos e pratos. Onde
para sua criação, deve-se variar o diâmetro, que está em contato com o meio de
transmissão, para criar a variação.
Podendo ser exemplificados pelas figuras: 6 e 7.
Figura 6 – CVT por polias variantes
Fonte: Wikicars

12
Figura 7 – CVT Toroidal
Fonte: How Stuff Works
1.4. Mecanismo de variação de relação de transmissão
Todos os tipos de variadores descritos anteriormente, necessitam de mecanismos para
realizar as trocas das relações de transmissão. Essas trocas podem ser feitas por duas
maneiras: manual ou automática.
1.4.1. Manual
Para este mecanismo, manual, a mudança dos pares de engrenagem deve ser
feita pelo operador através de um sistema de alavancas, manivelas, volantes ou
cabos que serão acoplados de acordo com a relação de saída.
Quando existe a necessidade de acoplamento, ou seja, mudança de relação de
transmissão com a máquina parada, chama-se de mudança manual não-
sincronizada. Para o caso da não interrupção da máquina, ela continua a sua
operação, chama-se de mudança manual sincronizada. Neste caso o que permite
essa mudança é o sincronizador.
1.4.2. Automático
Já para o mecanismo, automático, a mudança é realizada sem a interferência de
um operador. Tal mecanismo pode ser um conjunto de engrenagens com um
sistema hidráulico como um conjunto eletro-hidráulico ou eletromagnético.

13
2. Projeto Mecânico
2.1. Metodologia Sendo a Metodologia adotada:
i. Pesquisa bibliográfica sobre variadores de velocidade;
ii. Definir a estrutura básica de um variador escalonado do tipo chaveta móvel identificando seus elementos;
iii. Realização dos cálculos no programa Excel 2016, dimensionando os elementos mecânicos;
iv. Para as peças não-dimensionadas: consultar catálogos, normas e tabelas;
v. Desenhar todas as peças do conjunto no programa SolidWorks 2016 e posteriormente montar o conjunto mecânico;
vi. Representação técnica do conjunto;
vii. Preparação do manual de fabricação e do manual de montagem.
2.2. Dados iniciais O projeto consiste no desenvolvimento de um variador de velocidades escalonado com chaveta móvel de 16 rotações de saída para o uso em máquinas operatrizes. Os requisitos pré-estabelecidos para o variador são os seguintes:
Potência transmitida: 2.5 HP;
Velocidade de rotação de saída mínima: 115 RPM;
Velocidade de rotação de saída máxima: 20600 RPM;
Número de rotações: 16. Esses valores de rotação e potência são habitualmente encontrados em máquinas operatrizes comerciais. Com esses dados, foram possíveis o dimensionamento e a seleção de todos os elementos de máquinas necessários ao projeto. Sendo eles realizados nesta ordem:
I. Seleção do motor;
II. Dimensionamento de polias e correias;
III. Determinação do esquema cinemático;
IV. Escolha das relações de transmissão;
V. Dimensionamento das engrenagens;
VI. Dimensionamento dos eixos;
VII. Seleção dos rolamentos;

14
VIII. Dimensionamento de chavetas;
IX. Seleção das demais peças do variador.
2.3. Seleção do Motor Para a seleção do motor foi levado em conta a potência transmitida desejada (𝑃𝑝𝑟𝑜𝑗),
ou seja, a potência que será fornecida na saída do variador. Além disso, é preciso também considerar as perdas que ocorrem nas correias e nos pares de engrenagens. Por conta disso, a potência necessária para o motor (𝑃𝑚) deverá ser um pouco superior à potência) desejada. Ela pode ser dada pela seguinte equação:
𝑃𝑚 =𝑃𝑝𝑟𝑜𝑗
𝜂=
𝑃𝑝𝑟𝑜𝑗
𝜂𝑐𝑜𝑟𝑟 × 𝜂𝑒𝑛𝑔𝑟𝑘=
2.5
0.96 × 0.982→ 𝑃𝑚 = 2.71 𝐻𝑃
Onde:
𝜂𝑐𝑜𝑟𝑟 é a eficiência da transmissão por correia;
𝜂𝑒𝑛𝑔𝑟 a eficiência de transmissão por engrenagem;
𝑘 o número de pares engrenados. As eficiências foram retiradas da referência (MARCO FILHO). Para isso, foi selecionado um motor elétrico da fabricante WEG. O motor escolhido
foi o WEG W22 IR2 de 3.0 HP de potência e rotação de 1800 RPM, representado na figura
8. Os cálculos realizados para a escolha do motor encontram-se no Apêndice A.
Figura 8 – Motor elétrico WEG W22 IR2
Fonte: WEG
2.4. Cálculo das velocidades de saída
Para a determinação das velocidades ideias de saída do variador, uma serie geométrica é utilizada. Sendo assim a razão geométrica da série é dada pela seguinte fórmula:
𝑛16 = 𝑛1𝑥 𝜑15 → 20600 = 115 × 𝜑15 → 𝜑 = 1.41
Em maquinas universais, a razão geométrica recomendada (RÖGNITZ, H) é 𝜑 =1.41, no qual observa-se igualdade a encontrada pela formula acima.

15
Desse modo, pode-se calcular as outras rotações pela seguinte formula:
𝑛𝑥 = 𝑛1𝑥𝜑𝑥−1 Logo:
𝑛1 = 115
𝑛2 = 𝑛1𝑥𝜑1 = 115 × 1.411 → 𝑛2 = 162.5 𝑛3 = 𝑛1𝑥𝜑2 = 115 × 1.412 → 𝑛3 = 229.7 𝑛4 = 𝑛1𝑥𝜑3 = 115 × 1.413 → 𝑛4 = 324.6 𝑛5 = 𝑛1𝑥𝜑4 = 115 × 1.414 → 𝑛5 = 458.7 𝑛6 = 𝑛1𝑥𝜑5 = 115 × 1.415 → 𝑛6 = 648.3 𝑛7 = 𝑛1𝑥𝜑6 = 115 × 1.416 → 𝑛7 = 916.1
𝑛8 = 𝑛1𝑥𝜑7 = 115 × 1.417 → 𝑛8 = 1294.7 𝑛9 = 𝑛1𝑥𝜑8 = 115 × 1.418 → 𝑛9 = 1829.7 𝑛10 = 𝑛1𝑥𝜑9 = 115 × 1.419 → 𝑛10 = 2585.8
𝑛11 = 𝑛1𝑥𝜑10 = 115 × 1.4110 → 𝑛11 = 3654.4 𝑛12 = 𝑛1𝑥𝜑11 = 115 × 1.4111 → 𝑛12 = 5164.4 𝑛13 = 𝑛1𝑥𝜑12 = 115 × 1.4112 → 𝑛13 = 7298.5
𝑛14 = 𝑛1𝑥𝜑13 = 115 × 1.4113 → 𝑛14 = 10314.4 𝑛15 = 𝑛1𝑥𝜑14 = 115 × 1.4114 → 𝑛15 = 14576.6 𝑛16 = 𝑛1𝑥𝜑15 = 115 × 1.4115 → 𝑛16 = 20600
Sendo essas velocidades teóricas. As velocidades reais serão definidas
posteriormente.
2.5. Esquema Cinemático
O esquema cinemático, figura 9, representa uma visualização do arranjo geométrico que o variador terá ao final do projeto. A partir desse esquema cinemático, pode-se definir quais características principais o variador terá, como a quantidade de eixos, engrenagens, mancais (apoios) e tipos de acoplamentos necessários entre eixos e engrenagens.
Figura 9 – Esquema cinemático

16
2.6. Diagrama de Germar Para a determinação das relações de transmissão foi utilizado o diagrama de
velocidades, conhecido como diagrama de Germar, no qual consiste em um traçado a partir do logaritmo na base ϕ das rotações de saída. Neste diagrama, figura 10, os eixos são expressos no eixo horizontal, enquanto
os logaritmos das rotações são expressos no eixo vertical. As linhas horizontais têm espaçamentos homogêneos que representam o
logaritmo da razão de transmissão. A primeira zona vertical representa o eixo do motor, onde a velocidade é transmitida para o primeiro eixo do variador de velocidades através das polias. Após isso as transmissões são feitas pelas engrenagens passando consecutivamente pelo segundo e terceiro eixo.
Figura 10 – Diagrama de Germar
2.7. Relação de Transmissão
De todas as possíveis combinações dentro do Diagrama de Germar, a que
apresenta o menor erro absoluto entre a velocidade de saída teórica e a real, foram
utilizadas as seguintes relações de transmissão:
2.7.1. Correias
Para o cálculo da transmissão nas polias foi adotada a seguinte equação:
𝑖𝑚𝑜𝑡𝑜𝑟−𝑒𝑖𝑥𝑜 𝐼 = 𝜑Δ = 1.410 → 𝑖𝑚𝑜𝑡𝑜𝑟−𝑒𝑖𝑥𝑜 𝐼 = 1
É recomendado na transmissão por correias que se tenha um 𝑖≤6,0 pois, em valores maiores que esse, começa a ter uma menor área de contato entre a polia e a correia devido à diminuição do ângulo de abraçamento.
13,0014,06
15,1216,18
17,2418,30
19,3620,42
21,4822,54
23,6024,66
25,72
26,7827,8428,90
Log(Motor)φ Log(Eixo 1)φ Log(Eixo 2)φ Log(Eixo 3)φ
Log
da
Ro
taçã
o

17
2.7.2. Engrenagens
Já para a transmissão nas engrenagens:
𝑖1−2 = 𝜑Δ = 1.41−6 → 𝑖1−2 = 0.13
𝑖3−4 = 𝜑Δ = 1.41−5 → 𝑖3−4 = 0.18
𝑖5−6 = 𝜑Δ = 1.412 → 𝑖5−6 = 2.00
𝑖7−8 = 𝜑Δ = 1.413 → 𝑖7−8 = 2.82
𝑖9−10 = 𝜑Δ = 1.415 → 𝑖9−10 = 5.64
𝑖11−12 = 𝜑Δ = 1.413 → 𝑖11−12 = 2.82
𝑖13−14 = 𝜑Δ = 1.411 → 𝑖13−14 = 1.41
𝑖15−16 = 𝜑Δ = 1.41−1 → 𝑖15−16 = 0.71
2.8. Dimensionamento e Seleção das peças
2.8.1. Correias
Para o cálculo das correias, tendo em vista as seguintes características do motor,
Potência de 3HP e uma velocidade de 1800RPM, foram usados os seguintes
fatores do ambiente.
Considerando um ambiente industrial, poeirento, e com uma carga de trabalho
média, foi calculado, Anexo I, que o melhor perfil para essas características era a
correia de seção A (conforme tabela 1) com diâmetro mínimo recomendado de
76mm.
Tabela 1 - Gráficos para determinação da seção das correias A, B, C, D e E (MARCO FILHO)

18
Com essa nova característica, foram possíveis viabilizar o cálculo do
comprimento da correia ideal. (MARCO FILHO)
𝑐𝑒𝑠𝑡 =𝐷𝑚𝑜𝑣𝑖𝑑𝑎 + 𝑑𝑚𝑜𝑡𝑜𝑟𝑎
2+ 𝑑𝑚𝑜𝑣𝑖𝑑𝑎 =
76 + 76
2+ 76 → 𝑐𝑒𝑠𝑡 = 152𝑚𝑚
𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 2 𝑐𝑒𝑠𝑡 +𝜋
2(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 + 𝑑𝑚𝑜𝑡𝑜𝑟𝑎) +
(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 − 𝑑𝑚𝑜𝑡𝑜𝑟𝑎)2
4 𝑐𝑒𝑠𝑡
→ 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 542.76𝑚𝑚
Devido a correia ser um componente padronizado, foi escolhida a
correia da fabricante Continental Contitech, por essa apresentar correias do tipo
V-V com perfil A. Com o valor do comprimento calculado escolhe-se no catálogo
a correia com comprimento superior ao calculado, sendo esse, mínimo de
559mm, logo a correia é classificada como A22.
Com a classificação da correia definida, foi possível calcular a distância
entre os centros das polias, consequentemente, a distância entre o motor e a
caixa de transmissão (MARCO FILHO), que será de:
𝑐𝑟𝑒𝑎𝑙 =𝑘 + √𝑘2 − 32(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 − 𝑑𝑚𝑜𝑡𝑜𝑟𝑎)2
16= 160.12 𝑚𝑚
Com o conjunto destas informações foi facilmente calculado o número
real de correias necessárias para transmitir a potência do motor (MARCO FILHO).
𝑁 =𝑃𝐻𝑃
𝑃𝑐𝑜𝑟𝑟 × 𝐶𝑎=
4.5
1.48 × 1.0→ 𝑁 = 3.05
Como o valor de N deve ser um número inteiro serão utilizadas 4
correias.
Esmiuçadas as informações supramencionadas, foram realizados os
cálculos das cargas de transmissão. Sabendo que 𝐹1 é a força no ramo
tracionado e 𝐹2é a força no ramo frouxo.
𝐹 = √𝐹12 + 𝐹2
2 − 2𝐹1𝐹2 cos 𝛾
𝐹1 − 𝐹2 =𝑃 𝐾1
𝑟𝑚𝑜𝑡𝑜𝑟𝑎 𝑛→ 𝐹1 − 𝐹2 = 312.28
𝐹1
𝐹2= 𝑒𝐾2 →
𝐹1
𝐹2= 25.12
𝐹𝑖 =𝐹1 + 𝐹2
2
Sendo a carga do ramo tracionado de 325.23N e a carga do ramo frouxo
de 12.95N, logo a força sobre o eixo será de 338.18N, em face de uma carga
inicial de 169.09N.

19
2.8.2. Polias
Conhecendo a seção da correia como A22 e diâmetro das polias de 76mm,
através da figura 11 e tabela 2, pode-se determinar as dimensões das polias (PINA
FILHO), mesmo no desenho sendo uma polia de 3 entradas no nosso projeto será de
4 entradas.
Onde:
𝐴𝑛𝑔𝑢𝑙𝑜 = 34°
𝑇 = 9.5𝑚𝑚
𝑆 = 15𝑚𝑚
𝑊 = 13𝑚𝑚
𝑌 = 3𝑚𝑚
𝑍 = 2𝑚𝑚
𝐻 = 13𝑚𝑚
𝐾 = 5𝑚𝑚 𝑋 = 5𝑚𝑚
Figura 11 – Desenho Polia
Fonte: (PINA FILHO)
Tabela 2 - Dimensões dos perfis dos canais (PINA FILHO)

20
2.8.3. Engrenagens
Para determinar os números de dentes de cada engrenagem, foram seguidas
algumas recomendações:
O modulo de cada conjunto de pares engrenados deve ser constante;
Soma de dentes em cada conjunto de pares engrenados deve ser
constante;
A menor engrenagem deve ter no mínimo 18 dentes;
Foi escolhido pelo autor, que as distâncias entre eixos invariáveis, sendo essas
de 145mm pois apresenta uma melhor otimização do trabalho em relação aos
módulos.
Sendo assim, foram realizados os seguintes cálculos:
𝛴 𝑍 =2 𝑑𝑒𝑛𝑡𝑟𝑒 𝑒𝑖𝑥𝑜𝑠
𝑚
Onde:
A distância entre eixo é invariável: 𝑑𝑒𝑛𝑡𝑟𝑒 𝑒𝑖𝑥𝑜𝑠 = 145 𝑚𝑚;
O módulo varia.
Foram testados diversos módulos, mas todos com valor superior a 2,
apresentavam maior número de erros em relação ao teste que será explicado
posteriormente.
Sendo assim foram testados 3 módulos diferentes, sendo eles:
𝑚 = 1; 𝑚 = 1.25; 𝑚 = 2
Logo, com a utilização dos referidos módulos foram gerados os seguintes
cálculos da soma de dentes:
𝛴 𝑍1 =2 × 145
1→ 𝛴 𝑍1 = 290
𝛴 𝑍1.25 =2 × 145
1.25→ 𝛴 𝑍1.25 = 232
𝛴 𝑍2 =2 × 145
2→ 𝛴 𝑍2 = 145
Com os valores encontrados através da soma de dentes e as relações de
transmissão, pode-se calcular o valor de dentes para cada par engrenado.
Sendo o cálculo feito da seguinte fórmula:
𝑍𝑥 =𝛴 𝑍
(𝑖𝑥−𝑦 + 1)
𝑍𝑦 = 𝛴 𝑍 − 𝑍𝑥

21
A partir dessas fórmulas calculam-se os valores virtuais e reais de dentes da
engrenagem, apresentados nas tabelas 3,4 e 5.
𝑚 = 1
Tabela 3 – Cálculo do número de dentes virtuais, reais e relação de transmissão real para m=1
Relação virtual Número dente virtual Número dente real Relação real
0,13 257,66 258
0,12 32,34 32
0,18 246,31 246
0,18 43,69 44
2,00 96,76 97
1,99 193,24 193
2,82 75,87 76
2,82 214,13 214
5,64 43,69 44
5,59 246,31 246
2,82 75,87 76
2,82 214,13 214
1,41 120,17 120
1,42 169,83 170
0,71 169,83 170
0,71 120,17 120
𝑚 = 1.25
Tabela 4– Cálculo do número de dentes virtuais, reais e relação de transmissão real para m=1.25
Relação virtual Número dente virtual Número dente real Relação real
0,13 206,13 206
0,13 25,87 26
0,18 197,05 197
0,18 34,95 35
2,00 77,41 77
2,01 154,59 155
2,82 60,69 61
2,80 171,31 171
5,64 34,95 35
5,63 197,05 197
2,82 60,69 61
2,80 171,31 171
1,41 96,14 96
1,42 135,86 136
0,71 135,86 136
0,71 96,14 96

22
𝑚 = 2
Tabela 5– Cálculo do número de dentes virtuais, reais e relação de transmissão real para m=2
Relação virtual Número dente virtual Número dente real Relação real
0,13 128,83 129
0,12 16,17 16
0,18 123,15 123
0,18 21,85 22
2,00 48,38 48
2,02 96,62 97
2,82 37,93 38
2,82 107,07 107
5,64 21,85 22
5,59 123,15 123
2,82 37,93 38
2,82 107,07 107
1,41 60,09 60
1,42 84,91 85
0,71 84,91 85
0,71 60,09 60
Ressalta-se que a verificação efetuada através do Apêndice A constatou
a largura de dente mínima e com isso quais módulos devem ser adotados em
cada grupamento. Para tanto, foi utilizada a seguinte fórmula padrão, segundo
a referência (MARCO FILHO).:
3 𝑝𝑎𝑠𝑠𝑜 < 𝐹𝑚𝑖𝑛𝑖𝑚𝑎 < 5 𝑝𝑎𝑠𝑠𝑜
𝐹𝑚𝑖𝑛𝑖𝑚𝑎 =𝐹𝑡
𝐾𝑣 𝜎 𝑚 𝐽𝐴𝐺𝑀𝐴
Onde:
𝐹𝑚𝑖𝑛𝑖𝑚𝑎=Face mínima [mm]
𝐹𝑡= Carga Transmitida [N]
𝐾𝑣= Fator Dinâmico
𝜎=Tensão atuante na raiz do dente [MPa]
m=Módulo
𝐽𝐴𝐺𝑀𝐴= Fator de Forma
Para a largura do dente foi adotado o arredondamento do valor de 3 ×
𝑝𝑎𝑠𝑠𝑜, pois todas as larguras de dente mínimas foram inferiores a 3 × 𝑝𝑎𝑠𝑠𝑜.
E através dessa verificação foi constatado que os melhores módulos seriam:
Primeiro conjunto de engrenagens: 𝑚 = 1
Segundo conjunto de engrenagens: 𝑚 = 2

23
Logo os reais números de dentes e relações de transmissão serão
apresentados na tabela 6:
Tabela 6 – Comparação da relação de transmissão teórica e real.
Engrenagem Número dentes 𝒊𝐭𝐞ó𝐫𝐢𝐜𝐨 𝒊𝐫𝐞𝐚𝐥
Z1 258 0,13 0,12
Z2 32
Z3 246 0,18 0,18
Z4 44
Z5 97 2,00 1,99
Z6 193
Z7 76 2,82 2,82
Z8 214
Z9 22 5,64 5,59
Z10 123
Z11 38 2,82 2,82
Z12 107
Z13 60 1,41 1,42
Z14 85
Z15 85 0,71 0,71
Z16 60
Diante disso, as rotações teóricas e reais serão calculadas conforme
fórmula e apresentadas na tabela 7:
𝑛𝑟𝑒𝑎𝑙 = 𝑛𝑚𝑜𝑡𝑜𝑟
1
𝑖𝑝𝑜𝑙𝑖𝑎𝑠
1
𝑖𝑒𝑖𝑥𝑜 𝐼−𝐼𝐼
1
𝑖𝑒𝑖𝑥𝑜 𝐼𝐼−𝐼𝐼𝐼
Onde:
𝑖𝑝𝑜𝑙𝑖𝑎 é a relação de transmissão entre as polias;
𝑖𝑒𝑖𝑥𝑜 𝐼−𝐼𝐼 é a relação de transmissão entre as engrenagens 1-2, 3-4, 5-6,
7-8;
𝑖𝑒𝑖𝑥𝑜 𝐼−𝐼𝐼 é a relação de transmissão entre as engrenagens 9-10, 11-12,
13-14 e 15-16.

24
Tabela 7– Comparação das velocidades de rotação teórica e real.
𝒗𝒆𝒍𝒐𝒄𝒊𝒅𝒂𝒅𝒆 𝒅𝒆 𝒓𝒐𝒕𝒂çã𝒐𝐭𝐞ó𝐫𝐢𝐜𝐨 [rpm] 𝒗𝒆𝒍𝒐𝒄𝒊𝒅𝒂𝒅𝒆 𝒅𝒆 𝒓𝒐𝒕𝒂çã𝒐𝐫𝐞𝐚𝐥 [rpm]
115 114
162,5 162
229,7 227
324,6 321
458,7 451
648,3 639
916,1 906
1294,7 1282
1829,7 1800
2585,8 2596
3654,4 3574
5164,4 5154
7298,5 7104
10314,4 10244
14576,6 14257
20600,0 20559
Com a potência do motor, rotação dos eixos e o número de dentes
definidos, foi calculado no Apêndice A seus resultados e apresentadas suas
características na tabela 8:
Tabela 8 – Propriedades básicas das engrenagens
Engrenagem 𝐷𝑝 [𝑚𝑚] F [𝑚𝑚] 𝑊𝑡 [𝑁] 𝑊𝑟 [𝑁] 𝑛𝑓𝑎𝑑 𝑛𝑑𝑒𝑠 CS
1 258,00 10,00 88,32 32,15 12,46 4,00 32,01
2 32,00 10,00 88,32 32,15 12,46 4,00 32,01
3 246,00 10,00 92,63 33,71 12,25 4,49 31,46
4 44,00 10,00 92,63 33,71 12,25 4,49 31,46
5 97,00 10,00 234,92 85,50 5,40 3,89 13,86
6 193,00 10,00 234,92 85,50 5,40 3,89 13,86
7 76,00 10,00 299,83 109,13 4,23 3,24 10,87
8 214,00 10,00 299,83 109,13 4,23 3,24 10,87
9 44,00 19,00 1429,09 520,15 2,88 1,75 3,70
10 246,00 19,00 1429,09 520,15 2,88 1,75 3,70
11 76,00 19,00 827,37 301,14 5,58 2,79 7,17
12 214,00 19,00 827,37 301,14 5,58 2,79 7,17
13 120,00 19,00 524,00 190,72 9,20 3,87 11,81
14 170,00 19,00 524,00 190,72 9,20 3,87 11,81
15 170,00 19,00 369,88 134,63 12,88 4,55 16,54
16 120,00 19,00 369,88 134,63 12,88 4,55 16,54
25
2.8.4. Eixos
Após o dimensionamento das engrenagens (diâmetros primitivos, larguras da
face do dente e cargas atuantes) pode-se dimensionar os eixos (comprimento,
esforços e diâmetro mínimo)
Para tal, foram seguidas algumas recomendações, segundo a referência (MARCO
FILHO).:
Flecha máxima do eixo não pode exceder 1.2mm;
Torção máxima do eixo não pode exceder 1°;
Fator de segurança inicial de 4.
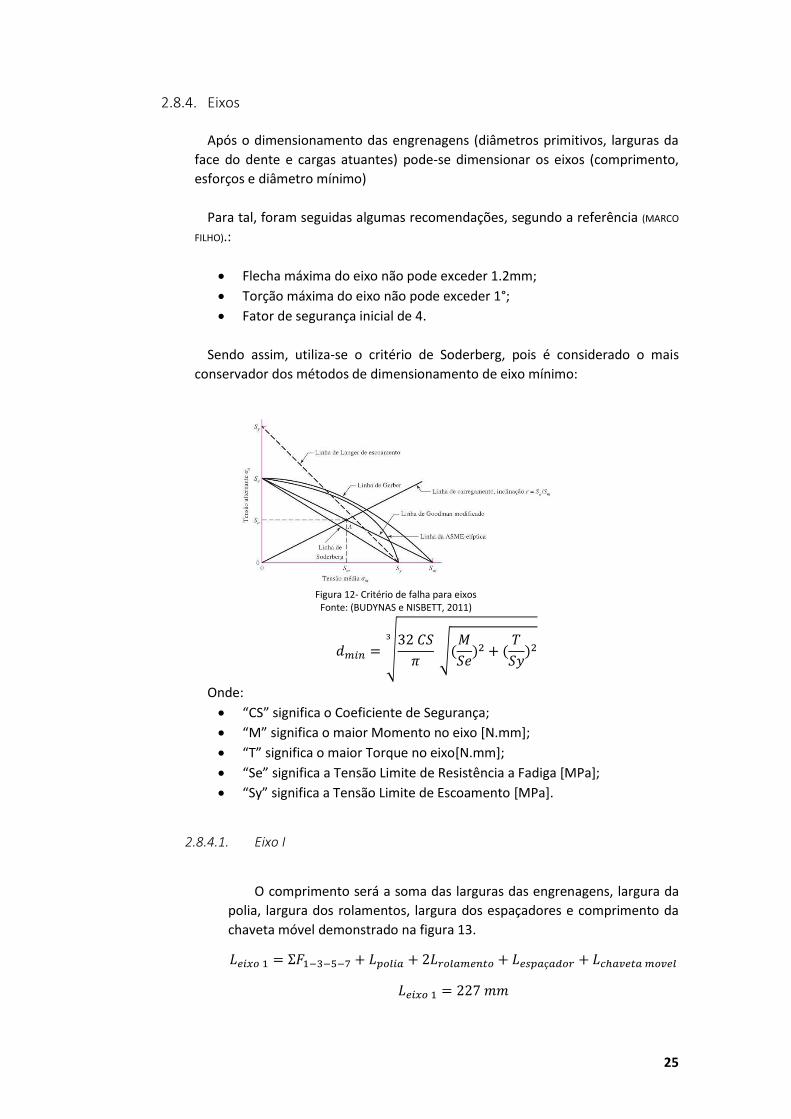
Sendo assim, utiliza-se o critério de Soderberg, pois é considerado o mais
conservador dos métodos de dimensionamento de eixo mínimo:
Figura 12- Critério de falha para eixos
Fonte: (BUDYNAS e NISBETT, 2011)
𝑑𝑚𝑖𝑛 = √32 𝐶𝑆
𝜋 √(
𝑀
𝑆𝑒)2 + (
𝑇
𝑆𝑦)2
3
Onde:
“CS” significa o Coeficiente de Segurança;
“M” significa o maior Momento no eixo [N.mm];
“T” significa o maior Torque no eixo[N.mm];
“Se” significa a Tensão Limite de Resistência a Fadiga [MPa];
“Sy” significa a Tensão Limite de Escoamento [MPa].
2.8.4.1. Eixo I
O comprimento será a soma das larguras das engrenagens, largura da
polia, largura dos rolamentos, largura dos espaçadores e comprimento da
chaveta móvel demonstrado na figura 13.
𝐿𝑒𝑖𝑥𝑜 1 = Σ𝐹1−3−5−7 + 𝐿𝑝𝑜𝑙𝑖𝑎 + 2𝐿𝑟𝑜𝑙𝑎𝑚𝑒𝑛𝑡𝑜 + 𝐿𝑒𝑠𝑝𝑎ç𝑎𝑑𝑜𝑟 + 𝐿𝑐ℎ𝑎𝑣𝑒𝑡𝑎 𝑚𝑜𝑣𝑒𝑙
𝐿𝑒𝑖𝑥𝑜 1 = 227 𝑚𝑚

26
Figura 13- Eixo 1
Nesse eixo, seus elementos serão posicionados como apresentado na
tabela 9:
Tabela 9 – Posição dos elementos, em sua posição central, ao longo do eixo I
Posição
Polia 36,0
Mancal 1 102,5
Engrenagem 7 174,0
Engrenagem 5 184,0
Engrenagem 3 194,0
Engrenagem 1 204,0
Mancal 2 220,5
Tais valores são referentes a posição central do elemento.
Representando-se o diagrama com as forças no eixo 1, figura 14
Figura 14- Diagrama do Eixo 1

27
As reações nos mancais são apresentadas na tabela 10:
Tabela 10 – Forças de reações nos mancais no eixo I
Sobre os mancais
Ra 634,35
Rb 376,62
Ma 21627,73
Mb 0,00
Ta 11393,46
Tb 0,00
Através das posições, foram calculados os diagramas Cortante,
Momento e Torque na figura 15.
Figura 15- Diagrama contendo o Cortante, Momento Fletor e Torque
Com isso, descobre-se o Momento e o Torque máximos atuantes neste
eixo.
𝑀𝑚𝑎𝑥 = 21.6 𝑘𝑁. 𝑚𝑚
𝑇𝑚𝑎𝑥 = 11.4 𝑘𝑁. 𝑚𝑚
Logo pelo critério de Soderberg:
𝑑𝑚𝑖𝑛 = 13.15 𝑚𝑚
Sendo assim pode-se dimensionar o diâmetro nominal com 19mm,
devido a diminuição do rasgo de chaveta, e o diâmetro sobre o mancal de
14mm, pois os mesmos respeitam o valor máximo de flecha e de rotação
máxima.
0,00
5000,00
10000,00
15000,00
20000,00
25000,00
0 20 40 60 80 100 120 140 160 180 200 220M [N.mm] Tx [N.mm]

28
2.8.4.2. Eixo II
O comprimento será a soma das larguras das engrenagens, largura da
polia, largura dos rolamentos, largura dos espaçadores e comprimento da
chaveta móvel demonstrado na figura 16.
𝐿𝑒𝑖𝑥𝑜 2 = Σ𝐹2−4−6−8 + Σ𝐹9−11−13−15 + 2𝐿𝑟𝑜𝑙𝑎𝑚𝑒𝑛𝑡𝑜 + 𝐿𝑒𝑠𝑝𝑎ç𝑎𝑑𝑜𝑟
+ 𝐿𝑒𝑛𝑡𝑟𝑒 𝑒𝑖𝑥𝑜𝑠
𝐿𝑒𝑖𝑥𝑜 2 = 195 𝑚𝑚
Figura 16- Eixo 2
Nesse eixo, seus elementos serão posicionados como apresentado na
tabela 11:
Tabela 11– Posição dos elementos, em sua posição central, ao longo do eixo II
Posição
Mancal 1 8,5
Engrenagem 8 27,0
Engrenagem 6 37,0
Engrenagem 4 47,0
Engrenagem 2 57,0
Anel Pescador 79,5
Engrenagem 15 106,5
Engrenagem 13 125,5
Engrenagem 11 144,5
Engrenagem 9 163,5
Mancal 2 186,5
Tais valores são referentes a posição central do elemento.

29
Representando-se o diagrama com as forças no eixo 2, figura 17
Figura 17- Diagrama Eixo 2
As reações nos mancais são apresentadas na tabela 12:
Tabela 12– Forças de reações nos mancais no eixo II
Sobre os mancais
Ra 482,42
Rb 1356,53
Ma 0,00
Mb 0,00
Ta 0,00
Tb 0,00
Através das posições, foram calculados os diagramas Cortante,
Momento e Torque na figura 18.
Figura 18 - Diagrama contendo o Cortante, Momento Fletor e Torque
Com isso, descobre-se o Momento e o Torque máximos atuantes neste
eixo.
𝑀𝑚𝑎𝑥 = 31. 𝑘𝑁. 𝑚𝑚
𝑇𝑚𝑎𝑥 = 32.1 𝑘𝑁. 𝑚𝑚
0,00
5000,00
10000,00
15000,00
20000,00
25000,00
30000,00
35000,00
0 20 40 60 80 100 120 140 160 180
M [N.mm] Tx [N.mm]

30
Logo pelo critério de Soderberg:
𝑑𝑚𝑖𝑛 = 14.86 𝑚𝑚
Caso realize-se o dimensionamento do diâmetro nominal como de
Soderberg, não será possível respeitar a recomendação de torção máxima
do eixo. Sendo assim pode-se dimensionar o diâmetro nominal com 20mm
e o diâmetro sobre o mancal de 15mm, pois os mesmos respeitam o valor
máximo de flecha e de rotação máxima.
2.8.4.3. Eixo III
O comprimento será a soma das larguras das engrenagens, largura da
polia, largura dos rolamentos, largura dos espaçadores e comprimento da
chaveta móvel demonstrado na figura 19.
𝐿𝑒𝑖𝑥𝑜 3 = Σ𝐹10−12−14−16 + 2𝐿𝑟𝑜𝑙𝑎𝑚𝑒𝑛𝑡𝑜 + 𝐿𝑒𝑠𝑝𝑎ç𝑎𝑑𝑜𝑟 + 𝐿𝑐ℎ𝑎𝑣𝑒𝑡𝑎 𝑚𝑜𝑣𝑒𝑙
+ 𝐿𝑒𝑥𝑡𝑟𝑎
𝐿𝑒𝑖𝑥𝑜 3 = 271 𝑚𝑚
Figura 19- Eixo 3
Nesse eixo, seus elementos serão posicionados como apresentado na
tabela 13:
Tabela 13– Posição dos elementos, em sua posição central, ao longo do eixo III
Posição
Mancal 1 3,5
Engrenagem 16 21,5
Engrenagem 14 40,5
Engrenagem 12 59,5
Engrenagem 10 78,5
Mancal 2 187,5
Tais valores são referentes a posição central do elemento.

31
Representando-se o diagrama com as forças no eixo 3, figura 20
Figura 20-Diagrama Eixo 3
As reações nos mancais são apresentadas na tabela 14:
Tabela 14– Forças de reações nos mancais no eixo III
Sobre os mancais
Ra 340,85
Rb 234,53
Ma 0,00
Mb 0,00
Ta 0,00
Tb 175777,87
Através das posições, foram calculados os diagramas Cortante,
Momento e Torque na figura 21.
Figura 21 - Diagrama contendo o Cortante, Momento Fletor e Torque
0,00
20000,00
40000,00
60000,00
80000,00
100000,00
120000,00
140000,00
160000,00
180000,00
200000,00
0
10
20
30
40
50
60
70
80
90
10
0
11
0
12
0
13
0
14
0
15
0
16
0
17
0
18
0
19
0
20
0
21
0
22
0
23
0
24
0
25
0
26
0
27
0
M [N.mm] Tx [N.mm]
32
Com isso, descobre-se o Momento e o Torque máximos atuantes neste
eixo.
𝑀𝑚𝑎𝑥 = 25.6 𝑘𝑁. 𝑚𝑚
𝑇𝑚𝑎𝑥 = 175.8 𝑘𝑁. 𝑚𝑚
Logo pelo critério de Soderberg:
𝑑𝑚𝑖𝑛 = 17.49 𝑚𝑚
Caso realize o dimensionamento do diâmetro nominal como de
Soderberg, não será possível respeitar a regra do rotacional do eixo. Sendo
assim pode-se dimensionar o diâmetro nominal com 27mm e o diâmetro
sobre o mancal de 25mm, pois os mesmos respeitam o valor máximo de
flecha e de rotação máxima.
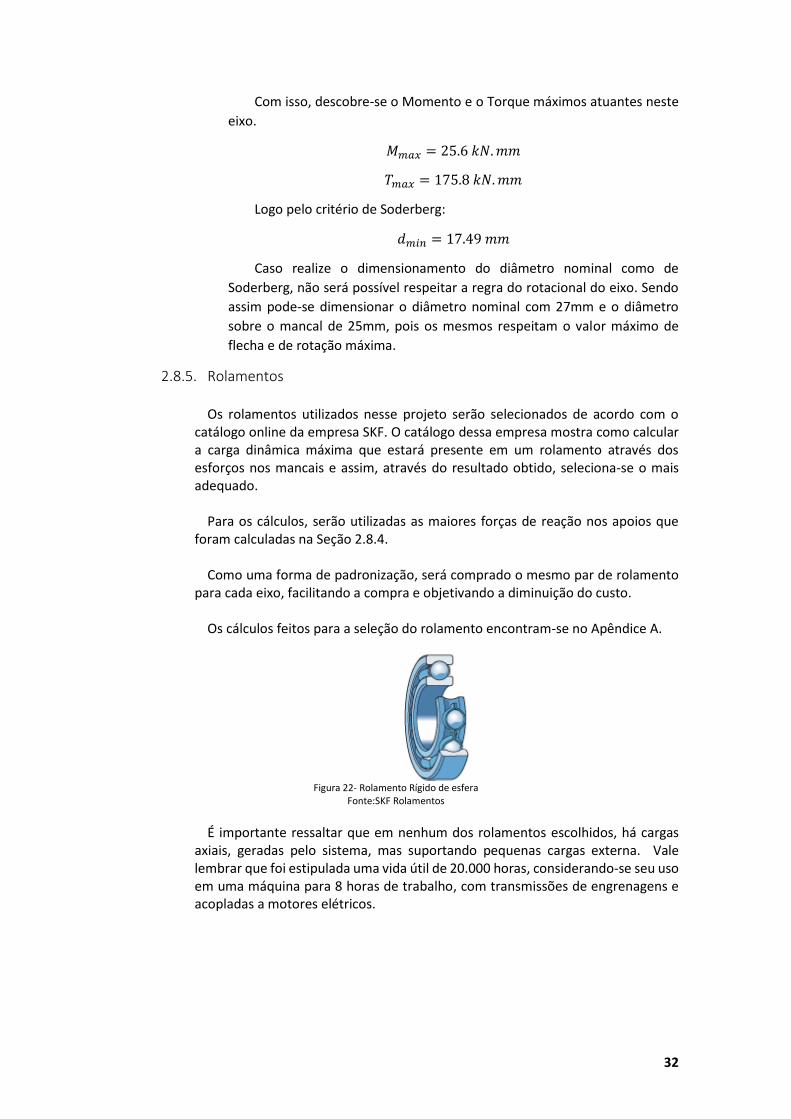
2.8.5. Rolamentos
Os rolamentos utilizados nesse projeto serão selecionados de acordo com o catálogo online da empresa SKF. O catálogo dessa empresa mostra como calcular a carga dinâmica máxima que estará presente em um rolamento através dos esforços nos mancais e assim, através do resultado obtido, seleciona-se o mais adequado.
Para os cálculos, serão utilizadas as maiores forças de reação nos apoios que foram calculadas na Seção 2.8.4.
Como uma forma de padronização, será comprado o mesmo par de rolamento para cada eixo, facilitando a compra e objetivando a diminuição do custo.
Os cálculos feitos para a seleção do rolamento encontram-se no Apêndice A.
Figura 22- Rolamento Rígido de esfera
Fonte:SKF Rolamentos
É importante ressaltar que em nenhum dos rolamentos escolhidos, há cargas axiais, geradas pelo sistema, mas suportando pequenas cargas externa. Vale lembrar que foi estipulada uma vida útil de 20.000 horas, considerando-se seu uso em uma máquina para 8 horas de trabalho, com transmissões de engrenagens e acopladas a motores elétricos.

33
2.8.6. Chavetas
As chavetas são os elementos de máquinas responsáveis pelo acoplamento entre eixos e cubos (no projeto em questão tais elementos serão as polias e as engrenagens). Suas geometrias habituais são retangulares ou semicirculares.
Neste projeto, foram usadas chavetas paralelas que transmitirão o movimento entre os eixos e seu dimensionamento foi através do torque máximo aplicado sobre o eixo que se corresponde a essa chaveta.
2.8.6.1. Chavetas fixas
Para estabelecer as medidas iniciais foi utilizada uma tabela
normalizada para chavetas planas e foi utilizado o catálogo da fabricante Acionac - no Anexo I.
O material escolhido para o dimensionamento das chavetas foi
o mesmo que o dos eixos, qual seja, o aço SAE 1020 recozido. Suas
propriedades podem ser vistas no Apêndice A seção A.8-1.
O comprimento das chavetas, se relaciona com o comprimento
do cubo, sua altura e largura com o diâmetro do eixo, conforme figura
23.
Figura 23- Desenho acoplamento chaveta, eixo, cubo.
Fonte: (PINA FILHO)
Com a definição desses valores e o prévio cálculo dos torques
em seus elementos, foi possível calcular as tensões de cisalhamento, de
compressão e máxima para cada chaveta. Seus cálculos são encontrados
no Apêndice A, seção A.8-1.

34
Sendo apresentados os valores na tabela 15:
Tabela 15 – Forças e Fatores de segurança sobre as chavetas fixas para os seus respectivos comprimentos
Chaveta polia
b x h x L [mm] σ [MPa] 9,49
5 x 5 x 64 τ [MPa] 4,75
σ_max [MPa] 20,28
Chaveta modulo 1
b x h x L [mm] σ [MPa] 32,75
6 x 6 x 40 τ [MPa] 16,37
σ_max [MPa] 119,35
Chaveta modulo 2
b x h x L [mm] σ [MPa] 17,24
6 x 6 x 76 τ [MPa] 8,62
σ_max [MPa] 47,09
2.8.6.2. Chavetas móveis
O mecanismo de chaveta móvel escolhido é composto por
chaveta, molas prato, colar e rolo. Este tipo de transmissão foi definido pelo fato de não existir a necessidade de criação de um eixo vazado (oco), pois a mesma deslizará pelo rasgo de chaveta. Conforme demonstrado na figura 24.
Figura 24- Desenho conjunto chaveta móvel.
Esse mecanismo funciona quando o colar desliza o conjunto e a
chaveta encontra um obstáculo, neste caso as engrenagens. O rolo
funciona como um pivô, fazendo com que a chaveta se incline para a
região interna do rasgo de chaveta, no eixo, fazendo assim as molas
serem comprimidas, forçando assim o retorno a posição de equilíbrio.
Ao ultrapassar a região do obstáculo e posicionar-se na área do
rasgo de chaveta do cubo, as molas tendem a relaxar e a chaveta retorna para sua posição natural, de equilíbrio, acoplando-se a engrenagem.

35
Podendo-se observar pelo desenho de perfil do conjunto da chaveta, nota-se que apresentam uma inclinação em sua superfície inferior pois será esta que devera adentrar na região do rasgo de chaveta para a passagem do cubo, na figura 25.
Figura 25- Desenho conjunto chaveta móvel.
Para reduzir o esforço sobre a chaveta, é comum utilizar mais de
uma chaveta móvel. No projeto foi adotado o uso de quatro chavetas móveis em cada conjunto, para uma resposta mais imediata na passagem das marchas.
Além disso, no projeto existem dois conjuntos de chavetas móveis, um responsável pelo acoplamento das engrenagens do primeiro eixo, e outro pelo acoplamento das engrenagens do terceiro eixo.
O dimensionamento das chavetas foi considerado como chavetas quadradas paralelas, assim como as chavetas fixas no segundo eixo.
Dessa forma:
Primeiro eixo 𝑑1 = 16𝑚𝑚, logo suas características seriam: 𝑏1 = 5𝑚𝑚; ℎ1 = 5𝑚𝑚; 𝑡1 = 3𝑚𝑚
Terceiro eixo 𝑑3 = 27𝑚𝑚 , logo suas características seriam: 𝑏3 = 8𝑚𝑚; ℎ3 = 7𝑚𝑚; 𝑡3 = 4𝑚𝑚
Após as considerações iniciais, foi criado o desenho representado
na figura 26:
Figura 26- Desenho da chaveta móvel

36
Após isso, foi realizado três estudos com auxílio do software SolidWorks 2016, quais foram: tensões de Von Mises, deslocamento resultante e deformação equivalente.
Cabe relembrar que a chaveta móvel do terceiro eixo apresenta o maior comprimento e a maior força de contato, resultando assim no maior esforço. Logo calcula-se os esforços e deslocamentos para essa e consequentemente para a chaveta móvel do primeiro eixo também apresentara resultados satisfatórios.
Reapresentando os dados citados: 𝑙𝑐ℎ𝑎𝑣𝑒𝑡𝑎 𝑚𝑜𝑣𝑒𝑙 2 = 86𝑚𝑚
𝑊𝑡 10 = 1429.09𝑁
A chaveta foi considerada como uma viga engastada na região de contato com as molas e colar e apoiada na região que estaria no contato interno do rasgo da chaveta, com a sua carga posicionada na região de contato. Como visto na Figura 27.
Figura 27- Forças e apoios aplicados sobre a chaveta móvel de maior comprimento

37
Na figura 28, está representado o estudo de Von Mises, onde é possível perceber que a chaveta resiste às tensões.
Figura 28- Estudo de tensões de Von Mises
Na figura 29, está representado o estudo de deslocamento.
Figura 29- Estudo do deslocamento resultante
Na figura 30, está representado o estudo de deformação equivalente.
Figura 30- Estudo da deformação equivalente

38
2.8.7. Demais componentes
Nesta seção serão detalhadas as demais peças presentes no variador que, no entanto, não requerem cálculos para seu dimensionamento. Além disso, também será nessa parte do projeto que serão mencionadas outras características, que não podem ser ignoradas por serem fundamentais para o correto funcionamento da máquina ou para sua inserção no mercado.
2.8.7.1. Anel de retenção
Para fixar o posicionamento da polia movida, presente no eixo I, será
utilizado o anel de retenção como os apresentados na figura 31.
Será necessária 1 unidade do anel de retenção, do qual será selecionado através de catálogos de fabricantes, conforme o diâmetro do local onde será posicionado.
Figura 31– Anel elástico para eixos
Fonte: Emile-Maurin
2.8.7.2. Espaçadores
Para garantir a distância entre as engrenagens dos eixos serão fabricados espaçadores, que se posicionarão ao longo dos eixos, como mostrado na figura 32.
Figura 32– Espaçadores
Fonte: KF Bikes

39
2.8.7.3. Retentores e vedações
Em cada uma das suas tampas, que terão um eixo atravessado, serão
colocados um retentor para vedação, como mostrado na figura 33. Esse retentor servirá para impedir o vazamento de óleo e deve ser selecionado no catálogo do fabricante, conforme o diâmetro do eixo em que será instalado.
Figura 33 – Retentor SKF
Fonte: SKF Retentor
2.8.7.4. Carcaça e tampa
A carcaça a ser fabricada deve ser a mais compacta possível e deverá
estar devidamente vedada para evitar o vazamento de óleo. Para o seu dimensionamento foi utilizada a tabela 40, que informa as espessuras recomendadas para a carcaça de um variador.
A carcaça terá três partições que serão unidas por parafusos. Na
carcaça inferior, o fundo deverá ser nivelado de forma que direcione o óleo para a saída, facilitando o esvaziamento.
Para fechar as regiões abertas da carcaça deverão ser fabricadas
tampas. Na região superior da carcaça haverá uma tampa no local onde será introduzido o óleo lubrificante. Suas dimensões também foram obtidas na tabela 40.
As paredes da caixa serão fundidas em ferro. A espessura recomendada depende de um fator N, calculado da seguinte maneira:
𝑁 =2𝑙 + 𝑏 + ℎ
3
Onde 𝑙 é o comprimento, 𝑏 a largura e ℎ a altura da fundição em metros.
Com todos os elementos principais dimensionados, foram calculadas as dimensões de fundição:
𝑙 = 325 𝑚𝑚 𝑏 = 401 𝑚𝑚 ℎ = 270 𝑚𝑚

40
Então:
𝑁 =2𝑙 + 𝑏 + ℎ
3=
2 × 325 + 401 + 270
3→ 𝑁 = 0.44 𝑚𝑚
De acordo com a tabela 40, Anexo I, para caixas fundidas de ferro com
𝑁 = 0.44 𝑚𝑚,a espessura recomendada é 𝑆 = 8 𝑚𝑚.
2.8.7.5. Parafuso, porca e arruela
Para fixar cada parte da carcaça uma na outra serão usados 4
parafusos M10, sextavados com 28mm de comprimento de rosca.
Para fixar a carcaça na máquina operatriz serão usados 6
parafusos M10, sextavados com 28mm de comprimento de rosca
presos, ainda por porcas.
2.8.7.6. Alavanca
A mudança de velocidade ocorrerá através de duas alavancas, uma para cada conjunto de engrenagens, feito pela chaveta móvel.
As alavancas devem ser giradas até se encaixarem nos locais indicados. O posicionamento correto das engrenagens se dá através de um rebaixo na superfície de contato entre a alavanca e o variador.
Uma mola posicionada dentro da alavanca pressiona uma esfera de modo que ela desce e trava no momento em que encontra o rebaixo e, dessa forma, a posição correta nos pontos desejados é garantida.
Figura 34 –Alavanca e seu modo de operação
Fonte: (RESHETOV, 1979)
Para o primeiro conjunto de engrenagens, a alavanca deve permitir um curso de 50 mm para que ocorra o acoplamento das engrenagens adequadamente. Já para o segundo conjunto de engrenagens a alavanca deve permitir um curso de 86 mm.
41
O braço da alavanca, R, medirá 120mm, portanto o ângulo entre as posições dos rebaixos é dado pela seguinte equação:
𝛼1 = sin−1 (𝐶𝑢𝑟𝑠𝑜1
𝑅) = sin−1 (
50
120) → 𝛼1 = 24.62°
𝛼2 = sin−1 (𝐶𝑢𝑟𝑠𝑜2
𝑅) = sin−1 (
86
120) → 𝛼2 = 45.78°
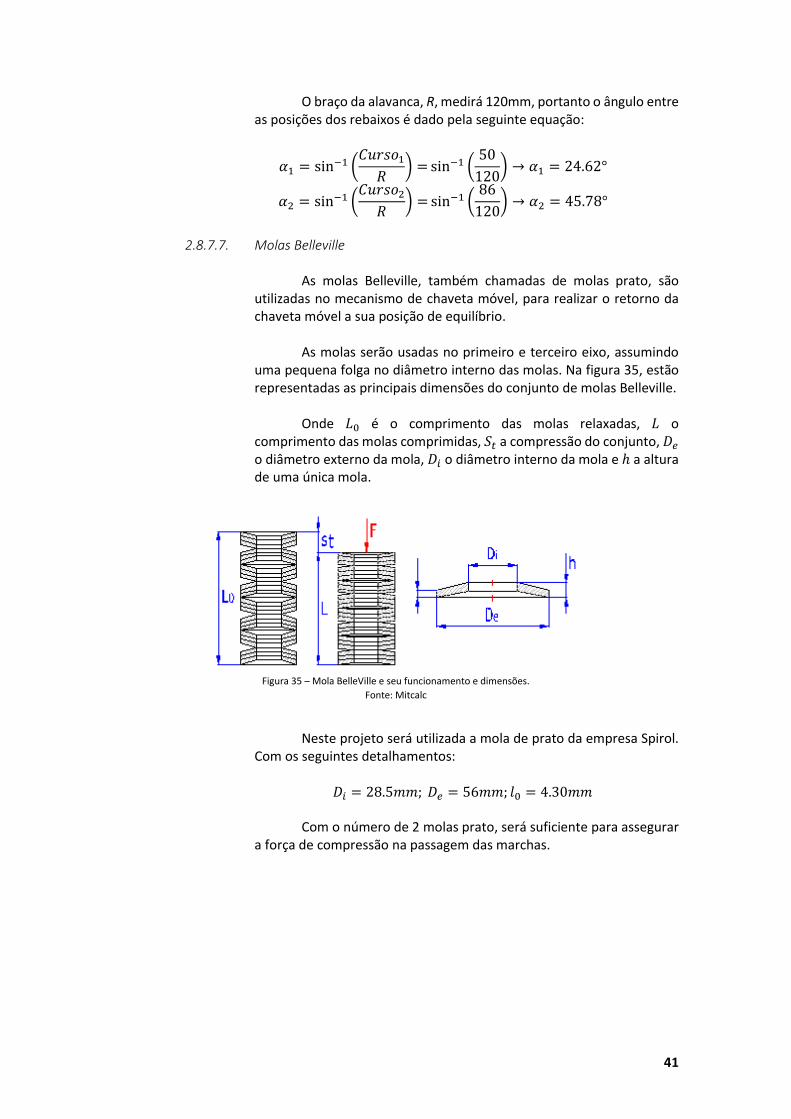
2.8.7.7. Molas Belleville
As molas Belleville, também chamadas de molas prato, são utilizadas no mecanismo de chaveta móvel, para realizar o retorno da chaveta móvel a sua posição de equilíbrio.
As molas serão usadas no primeiro e terceiro eixo, assumindo uma pequena folga no diâmetro interno das molas. Na figura 35, estão representadas as principais dimensões do conjunto de molas Belleville.
Onde 𝐿0 é o comprimento das molas relaxadas, 𝐿 o comprimento das molas comprimidas, 𝑆𝑡 a compressão do conjunto, 𝐷𝑒 o diâmetro externo da mola, 𝐷𝑖 o diâmetro interno da mola e ℎ a altura de uma única mola.
Figura 35 – Mola BelleVille e seu funcionamento e dimensões.
Fonte: Mitcalc
Neste projeto será utilizada a mola de prato da empresa Spirol. Com os seguintes detalhamentos:
𝐷𝑖 = 28.5𝑚𝑚; 𝐷𝑒 = 56𝑚𝑚; 𝑙0 = 4.30𝑚𝑚
Com o número de 2 molas prato, será suficiente para assegurar a força de compressão na passagem das marchas.

42
2.9. Características Fundamentais do projeto
2.9.1. Lubrificação
Para o correto funcionamento e aumento da vida útil dos equipamentos
mecânicos, geralmente, torna-se necessário introduzir algum tipo de
lubrificação nos componentes. No qual o lubrificante forma uma camada entre
as superfícies que as separa com os seguintes objetivos:
Redução do atrito e do desgaste de superfícies com movimento relativo;
Remoção de calor;
Remoção de detritos.
Existem diversas maneiras de se fazer a deposição do lubrificante nas peças,
que são: lubrificação manual, por gotejamento, por banho de óleo, por disco
rotativo e forçada.
Para este projeto foi escolhida a lubrificação por disco rotativo (anel
pescador), figura 36, pois é uma forma bastante simples de se alcançar o objetivo
com baixo custo. Além disso, os rolamentos acabarão sendo lubrificados por
respingo à medida que as engrenagens girarem banhadas em óleo.
Figura 36 – Lubrificação por salpico.
Fonte: (PROVENZA, 1991)
2.9.2. Transporte
Foram rosqueados no topo do variador dois olhais da empresa Rud, como
modelo sendo o VRS-M10, que suportam o peso total do variador, que é de
15kg, para seu transporte.
2.9.3. Fixação
Como o variador trabalhará em altas velocidades e com alto torque, é preciso
que sua fixação seja feita de forma cuidadosa e precisa. Para tanto, o variador deverá ser fixado com seis parafusos sextavados M10 com 28mm de comprimento.

43
3. Manual de Fabricação Nesta parte do trabalho será elaborado um plano de fabricação para cada uma das peças
presentes no projeto, que não serão adquiridas de um fabricante especializado. Para as peças, que serão desenvolvidas em ferro fundido, necessariamente, passarão pelo
mesmo processo, qual seja:
I. Construir modelo de madeira, bipartido, com dimensões calculadas previamente, sendo essas dimensões maiores do que a de projeto, para que haja sobremetal para usinagem, além de um ângulo de 5° de inclinação nas superfícies verticais;
II. Eliminar cantos vivos;
III. Construir o molde, juntamente com o macho (responsável por criar as superfícies internas da peça). Tal procedimento só será necessário caso a peça possua superfícies internas;
IV. Criação dos canais de entrada do ferro fundido e respiros do molde, com a técnica dos cilindros na areia;
V. Encaixar novamente as duas partições;
VI. Fundir o ferro e derramá-lo através do canal de descida;
VII. Esperar o tempo de cura do metal e em seguida, separar ambas as partições;
VIII. Retirar a peça e limpá-la;
IX. Recortar o excesso de metal (do canal de alimentação, do canal de descida e possíveis rebarbas);
X. Levar à fresa para obter dimensões e acabamentos superficiais desejados, principalmente nas superfícies que necessitaram de inclinação;
Dessa forma, é possível notar que ao longo destas etapas, a única variação que ocorre entre
uma peça e outra, além de seus formatos, é a necessidade ou não de se criar e utilizar um macho para produzir superfícies internas.
Já no caso dos componentes principais, produzidos em aço, o desenvolvimento da
fabricação será inteiramente descrito, passo a passo, para cada um deles. Seguem as etapas necessárias para obter as peças demandadas por esse projeto:
Polia
I. Prender a peça com sobremetal de usinagem na placa de três castanhas, centralizar e usinar com a técnica de faceamento;
II. Realizar o furo de centro; III. Inserir o contraponto; IV. Efetuar as marcações; V. Realizar o torneamento cilíndrico externo para obter os diâmetros desejados;
VI. Retirar o contraponto e fazer furo de centro no torno utilizando uma broca presa a um mandril que deve ser fixado no cabeçote móvel;
VII. Substituir a broca por alargador e realizar o alargamento do furo ainda no torno; VIII. Realizar o torneamento cilíndrico interno para obter o diâmetro desejado;
IX. Virar peça; X. Cortar peça nas medidas indicadas de forma que fique com a largura de projeto;
XI. Levar à plaina limadora e abrir rasgo para chaveta.

44
Engrenagens I. Prender a peça com sobremetal de usinagem na placa de três castanhas,
centralizar e usinar com a técnica de faceamento; II. Eliminar o excesso de material fazendo com que a peça fique com a largura de
projeto; III. Realizar o fresamento de canaleta com fresa de topo em ambos os lados; IV. Levar a peça ao torno, prender na placa de três castanhas e centrar; V. Efetuar as marcações;
VI. Realizar o torneamento cilíndrico externo para obter o diâmetro desejado; VII. Retirar o contraponto e inserir broca para produzir o furo de centro;
VIII. Alargar o furo; IX. Realizar o torneamento cilíndrico interno para obter diâmetro desejado; X. Efetuar marcações e conduzir peça à furadeira para abrir os 4 furos distanciados
uniformemente; XI. Realizar a técnica de brochamento para abrir o rasgo da chaveta;
XII. Levar à fresadora e obter o número de dentes do projeto com a fresa, através de um fresamento tangencial de perfil.
Eixo I. Prender a peça com sobremetal de usinagem na placa de três castanhas, centrar
e usinar usando a técnica de faceamento; II. Realizar o furo de centro;
III. Colocar o contraponto; IV. Efetuar as marcações; V. Realizar o torneamento do cilíndrico externo para obter os diâmetros indicados;
VI. Obter chanfros com torneamento cônico externo; VII. Efetuar os sangramentos com bedame;
VIII. Atentar-se aos filetes, não permitindo a formação de cantos vivos; IX. Virar a peça e cortar o excesso de material; X. Efetuar marcações e levar à fresadora para abrir rasgos de chaveta;

45
4. Manual de Montagem
Figura 37 – Conjunto mecânico.
1) Montagem da Árvore de Potência II
a. Realizar o encaixe do primeiro mancal por interferência;
b. Posicionar o espaçador entre o mancal e o segundo bloco de
engrenagens do eixo II;
c. Posicionar a chaveta do segundo bloco de engrenagens;
d. Posicionar as engrenagens na sequência: 9, 11, 13 e 15;
e. Posicionar o espaçador entre o primeiro bloco de engrenagens e o anel
pescador;
f. Posicionar o anel pescador;
g. Posicionar o espaçador entre o anel pescador e o segundo bloco de
engrenagens;
h. Posicionar a chaveta do primeiro bloco de engrenagens;
i. Posicionar as engrenagens na sequência: 2, 4, 6 e 8;
j. Posicionar o espaçador entre o segundo bloco de engrenagens do eixo
II e o mancal;
k. Realizar o encaixe do segundo mancal por interferência.
2) Montagem da Árvore de Potência III
a. Realizar o encaixe do primeiro mancal por interferência;
b. Posicionar o espaçador entre o mancal e o bloco de engrenagens do
eixo III;
c. Posicionar as engrenagens na sequência: 16, 14, 12 e 10;
d. Posicionar a estrutura da chaveta móvel;
e. Realizar o encaixe do segundo mancal por interferência.

46
3) Montagem da Árvore de Potência I
a. Realizar o encaixe do primeiro mancal por interferência;
b. Posicionar o espaçador entre o mancal e o bloco de engrenagens do
eixo I;
c. Posicionar as engrenagens na sequência: 1, 3, 5 e 7;
d. Posicionar a estrutura da chaveta móvel;
e. Realizar o encaixe do segundo mancal por interferência;
f. Posicionar a polia movida.
4) Montagem das Alavancas
a. Posicionar o eixo da alavanca para montagem;
b. Colocar o braço da alavanca,
c. Do outro lado do eixo, deve se posicionar o prato e depois copo, que
deve ser preso pelo pino cônico, já com a mola de fixação e a esfera de
fixação posicionados;
d. Posicionar a alavanca no copo;
e. Na ponta do braço da alavanca, realizar a montagem do encaixe com o
pino cilíndrico.
5) Montagem do Conjunto
a. Posicionar o motor de forma que ele possa ser facilmente conectado
à rede elétrica e aparafusá-lo no chão.
b. Inserir a polia motora no eixo do motor precedida por sua chaveta.
c. Colocar as correias para em sequência posicionar a base da carcaça e
aparafusá-la ao chão de forma que a distância entre os centros das
polias seja garantida.
d. Posicionar as árvores de potência II no local apropriado.
e. Na superfície inferior da carcaça, colocar o bujão de esvaziamento.
f. Posicionar as árvores de potência I e III nos locais apropriados.
g. Introduzir os braços das alavancas.
h. Introduzir a tampa da carcaça.
i. Instalar a vareta de óleo e os mecanismos de alavanca.
j. No topo da partição superior da carcaça, instalar a tampa para
lubrificação e os dois olhais de suspensão.

47
5. Conclusão
Este projeto buscou apresentar os vários tipos de redutores e variadores de velocidade,
e a partir da escolha de um variador, adequado para utilização em máquinas operatrizes,
foram definidos parâmetros iniciais do projeto, afim de atender uma demanda industrial.
Nele, foi realizado o dimensionamento e seleção de diversas peças, assim como suas
características fundamentais. Para comprovação de tal afirmação, foi apresentada a
memória de cálculos e especificações, assim como todos os parâmetros considerados na
fabricação dos elementos. Na sequência, foi desenvolvido um plano de fabricação
generalista para as principais peças e disponibilizado um manual de montagem do
mecanismo.
A maior vantagem deste variador projetado, em relação aos projetados anteriormente,
é sua facilidade de uso, juntamente com sua robustez. Os pares de engrenagens, devido
ao seu contato continuo, não permite grandes choques, fazendo assim o produto
apresentar uma maior vida útil. Além disso, as alavancas são grandes e de fácil manuseio,
com encaixes precisos. Como desvantagem, deve-se apontar que o mesmo não apresenta
inversão de variação no sentido de rotação final, o que não compromete a sua
funcionalidade.
Dessa forma, pode-se afirmar que com o crescimento tecnológico ainda existem
diversos trabalhos a serem feitos e estudados nesta área, sempre buscando o mesmo
objetivo, que é desenvolver variadores que tenham o menor custo e tamanho, porém, ao
mesmo tempo, com o maior número de diferentes operações.

48
6. Referências Bibliográficas
ACHERKAN, H. Machine Tool Design. 3. ed. [S.l.]: Mir Publishers, v. I a IV, 1982.
ARAUJO, A. C. M. D. Notas de Aula de Usinagem. [S.l.]: [s.n.], 2015.
BLACK, P. H. Machine Design. 2. ed. [S.l.]: McGraw Hill, 1955.
BUDYNAS, R. G.; NISBETT, J. K. Elementos de Maquinas Shigley. 8. ed. [S.l.]: Mc Graw Hill,
2011.
CARVALHO, J. R. D.; MORAES, P. Orgãos de Maquinas Dimensionamento. 2. ed. [S.l.]: Livros
Tecnicos e Cientificos Editora S.A..
CONTITECH. Catálogo de Produtos Correias de Transmissão Industrial, 2017. Disponivel em:
<http://www.contitech.com.br/>.
DIRECT Industry. Disponivel em: <http://www.directindustry.com/prod/hwacheon/product-
61452-535635.html>.
EBAY. Disponivel em: <http://www.ebah.com.br/content/ABAAAAh8cAK/trabalho-sobre-
torno?part=2>.
EMILE-MAURIN. Disponivel em: <http://www.emile-maurin.fr/anneau-arret-exterieur-arbre-
inox-din-471-62760/>.
EMILE-MAURIN. Anel Elastico, 2017. Disponivel em: <http://www.emile-maurin.fr/anneau-
arret-exterieur-arbre-inox-din-471-62760/>.
FAIRES, V. M. Elementos Orgânicos de Máquinas. 2. ed. [S.l.]: LTC Editora S.A, v. I e II, 1971.
GROOVER, M. P. Fundamentals of Modern Manufacturing. 4. ed. [S.l.]: Wiley, 2010.
GROTE, K. -H.; FELDHUSEN, J. Dubbel - Taschenbuch für den Maschinenbau. [S.l.]: Springer,
2011.
HALL , H.; LAUGHLIN. Elementos Orgânicos de Máquinas. 2. ed. [S.l.]: McGraw Hill , 1977.
HOW Stuff Works. Disponivel em: <https://auto.howstuffworks.com/>.
JUVINALL, R. C. Fundamentals of Machine Component Design. 1. ed. Singapore: John Wiley &
Sons Inc, 1983.
KF Bikes. Disponivel em: <http://kfbikes.vteximg.com.br/arquivos/ids/169694-1000-
1000/espacador-de-movimento-central-para-bmx.jpg?v=636142980174230000>.
KOKYUKOKI, K. Key-shift transmission. 4702120, 10 jan. 1986.
MARCO FILHO, F. D. Apostila de Elementos de Maquinas. [S.l.]: [s.n.].
MITCALC. Disponivel em: <http://www.mitcalc.com/doc/springs/help/en/springs.htm>.
MOTOR Sport Engineering. Disponivel em:
<http://motorsportengineering.blogspot.com.br/2010/12/basics-of-slidingmesh->.
NBR10067. Princípios gerais de representação em desenho técnico.

49
NBR10126. Cotagem em desenho técnico.
NBR12298. Representação de corte em desenho técnico.
NBR13272. Desenho técnico - Elaboração das listas de itens.
NBR6375. Chavetas Paralelas Retagulares ou Quadradas - Caracteristicas Dimensionais.
NBR8196. Desenho técnico - Emprego de escalas.
OFICINA Brasil. Disponivel em: <http://www.oficinabrasil.com.br/noticia/tecnicas/principio-
de-funcionamento-da-transmissao-continuamente-variavel-cvt>.
ORLOV, P. Fundamentals of Machine Desig. 3. ed. [S.l.]: Mir Publishers, v. I a V, 1982.
PARETO, L. Elementos de Máquina – Formulário Técnico. 1. ed. [S.l.]: Hemus, 1982.
PINA FILHO, A. C. D. Apostila de Desenho Tecnico para Engenharia Mecânica. [S.l.]: [s.n.].
PROVENZA, F. Desenhista de Maquinas. 46. ed. São Paulo: F. Provenza, 1991.
RESHETOV, D. N. Atlad de Construção de Maquinas. [S.l.]: Hemus, v. Primeiro, 1979.
RÖGNITZ, H. Variadores Escalonados de Velocidade de Maquinas Ferramentas. [S.l.]:
Poligono, 1973. 145 p.
ROSSI, M. Máquinas Operatrizes Modernas. [S.l.]: Hoelpi, v. I e II.
RUD. Parafuso Olhal, 2017. Disponivel em: <http://www.rud.com.br/produtos/movimentacao-
amarracao-cargas/olhais-aparafusaveis/starpoint-vrs/>.
SHIGLEY, J. E.; MISCHKE, C. R.; BUDYNAS, R. G. Projeto de Engenharia Mecânica. 7. ed. [S.l.]:
Bookman, 2008.
SILVEIRA, J. L. Notas de Aula de Tecnologia Metalurgica. [S.l.]: [s.n.], 2017.
SKF. SKF Bearing Calculator, 2017. Disponivel em:
<http://webtools3.skf.com/BearingCalc/selectProduct.action>.
SKF. Catalogo Mancal. Disponivel em: <http://www.skf.com/group/products/product-
tables/index.html>.
SKF Retentor. Disponivel em: <http://www.skf.com/group/splash/index.html>.
SKF Rolamento. Disponivel em: <http://www.skf.com/group/splash/index.html>.
SPOTTS, M. F. Design of Machine Elements. 1. ed. [S.l.]: Prentice Hall, 1978.
STEMMER, C. E. Projeto e Construção de Máquinas”. 2. ed. [S.l.]: Editora Globo, 1979.
WEG. Disponivel em: <http://www.weg.net/catalog/weg/BR/pt/Motores-
El%C3%A9tricos/Trif%C3%A1sico---Baixa-Tens%C3%A3o/Uso-Geral/W22/W22-IR2/W22-IR2-3-
cv-4P-90L-3F-220-380-V-60-Hz-IC411---TFVE---B35D/p/12459096 >.
WEG, M. W22 IR2 3 cv 4P 90L 3F 220/380 V 60 Hz IC411 - TFVE - B35D, 2017. Disponivel em:
<http://www.weg.net/catalog/weg/BR/pt/Motores-El%C3%A9tricos/Trif%C3%A1sico---Baixa-
Tens%C3%A3o/Uso-Geral/W22/W22-IR2/W22-IR2-3-cv-4P-90L-3F-220-380-V-60-Hz-IC411---
TFVE---B35D/p/12459096>.

50
WIKICARS. Disponivel em: <http://wikicars.org/en/Continuously_Variable_Transmission>.

51
Apêndice A A.1- Dados do projeto
Potência a ser transmitida: 2.5 HP;
Rotação nominal de entrada: 1735 RPM;
Velocidade mínima de saída: 115 RPM;
Velocidade máxima de saída: 20600 RPM;
Número de rotações de saída: dezesseis (16).
A.2- Seleção do motor Para a seleção do motor foi levado em conta a potência transmitida desejada (𝑃𝑝𝑟𝑜𝑗), ou seja, a potência que será fornecida na saída do variador. Além disso, é preciso também considerar as perdas que ocorrem nas correias e nos engrenamentos. Por conta disso, a potência necessária para o motor (𝑃𝑚) deverá ser um pouco superior à potência) desejada. Ela pode ser dada pela seguinte equação:
𝑃𝑚 =𝑃𝑝𝑟𝑜𝑗
𝜂=
𝑃𝑝𝑟𝑜𝑗
𝜂𝑐𝑜𝑟𝑟 × 𝜂𝑒𝑛𝑔𝑟𝑘=
2.5
0.96 × 0.982→ 𝑃𝑚 = 2.71 𝐻𝑃
Onde: 𝜂𝑐𝑜𝑟𝑟 é a eficiência da transmissão por correia, 𝜂𝑒𝑛𝑔𝑟 a eficiência de transmissão por engrenagem, e 𝑘 o número de engrenamentos. As eficiências foram retiradas da referência [..]. Assim, o motor selecionado no catálogo da fabricante WEG foi um motor W22 IR2 com as seguintes características:
Pot = 3.0 HP
N = 1800 RPM
Número de polos = 4
Frequência = 60 Hz
A.2-1. Cálculo das velocidades de saída A razão geométrica da série é dada pela seguinte fórmula:
𝑛16 = 𝑛1𝑥 𝜑15 → 20600 = 115 × 𝜑15 → 𝜑 = 1.41
Obtém-se φ = 1.41 e, desse modo, pode-se calcular as outras rotações.
𝑛1 = 115 𝑛2 = 𝑛1𝑥𝜑1 = 115 × 1.411 → 𝑛2 = 162.5 𝑛3 = 𝑛1𝑥𝜑2 = 115 × 1.412 → 𝑛3 = 229.7 𝑛4 = 𝑛1𝑥𝜑3 = 115 × 1.413 → 𝑛4 = 324.6 𝑛5 = 𝑛1𝑥𝜑4 = 115 × 1.414 → 𝑛5 = 458.7 𝑛6 = 𝑛1𝑥𝜑5 = 115 × 1.415 → 𝑛6 = 648.3 𝑛7 = 𝑛1𝑥𝜑6 = 115 × 1.416 → 𝑛7 = 916.1
𝑛8 = 𝑛1𝑥𝜑7 = 115 × 1.417 → 𝑛8 = 1294.7 𝑛9 = 𝑛1𝑥𝜑8 = 115 × 1.418 → 𝑛9 = 1829.7 𝑛10 = 𝑛1𝑥𝜑9 = 115 × 1.419 → 𝑛10 = 2585.8
𝑛11 = 𝑛1𝑥𝜑10 = 115 × 1.4110 → 𝑛11 = 3654.4

52
𝑛12 = 𝑛1𝑥𝜑11 = 115 × 1.4111 → 𝑛12 = 5164.4 𝑛13 = 𝑛1𝑥𝜑12 = 115 × 1.4112 → 𝑛13 = 7298.5
𝑛14 = 𝑛1𝑥𝜑13 = 115 × 1.4113 → 𝑛14 = 10314.4 𝑛15 = 𝑛1𝑥𝜑14 = 115 × 1.4114 → 𝑛15 = 14576.6 𝑛16 = 𝑛1𝑥𝜑15 = 115 × 1.4115 → 𝑛16 = 20600
A.2-2. Determinação das relações de transmissão
Relação de Transmissão entre os eixos motor e I por correias:
𝑥 =𝑙𝑜𝑔(𝑛𝑓𝑖𝑛𝑎𝑙) − 𝑙𝑜𝑔(𝑛𝑖𝑛𝑖𝑐𝑖𝑎𝑙)
𝑙𝑜𝑔(𝜑)=
𝑙𝑜𝑔(1800) − 𝑙𝑜𝑔(1800)
𝑙𝑜𝑔(1,41)= 0
𝑖𝑀𝑜𝑡𝑜𝑟− 𝐸𝑖𝑥𝑜 𝐼 = 𝜑0 = 1.410 → 𝑖𝑀𝑜𝑡𝑜𝑟−𝐸𝑖𝑥𝑜 𝐼 = 1 < 6 𝑂𝐾!
Determinação da relação de transmissão para a transmissão por engrenagens:
𝑖1−2 = 𝜑−6 = 1.41−6 → 𝑖1−2 = 0.13 𝑖3−4 = 𝜑−5 = 1.41−5 → 𝑖3−4 = 0.18
𝑖5−6 = 𝜑2 = 1.412 → 𝑖5−6 = 2.00 𝑖7−8 = 𝜑3 = 1.413 → 𝑖7−8 = 2.82
𝑖9−10 = 𝜑5 = 1.415 → 𝑖9−10 = 5.64 𝑖11−12 = 𝜑3 = 1.413 → 𝑖11−12 = 2.82 𝑖13−14 = 𝜑1 = 1.411 → 𝑖13−14 = 1.41
𝑖15−16 = 𝜑−1 = 1.41−1 → 𝑖15−16 = 0.71
53
A.3- Especificação da correia Nessa etapa determinou-se a quantidade, o tipo e o perfil da correia que será utilizada. Além disso, foi calculada a potência de projeto, a distância efetiva entre centros, a carga na transmissão e a carga inicial.
A.3-1. Calculo da Potência de Projeto (PHP): Potência do Motor (P): 3HP Fator de Segurança (FS): 1.4; Devido ao seu trabalho médio Fator Adicional (FAd): 0.1; Ambiente poeirento
𝑃𝐻𝑃 = 𝑃 × (𝐹𝑆 + 𝐹𝐴𝑑) = 3 × (1.4 + 0.1) → 𝑃𝐻𝑃 = 4.5𝐻𝑃
Conforme tabela, para uma potência de projeto de 4.5 HP e uma rotação de 1800 RPM, o perfil mais indicado da correia é o de seção A. Para essa seção, o diâmetro mínimo (dmín) recomendado para a polia menor é: 76 mm.
A.3-2. Fator de correção para o comprimento (𝐹𝐿) Devido à relação de transmissão entre as polias ser igual a 1:
𝑐𝑒𝑠𝑡 =𝐷𝑚𝑜𝑣𝑖𝑑𝑎 + 𝑑𝑚𝑜𝑡𝑜𝑟𝑎
2+ 𝑑𝑚𝑜𝑣𝑖𝑑𝑎 =
76 + 76
2+ 76 → 𝑐𝑒𝑠𝑡 = 152𝑚𝑚
𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 2 𝑐𝑒𝑠𝑡 +𝜋
2(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 + 𝑑𝑚𝑜𝑡𝑜𝑟𝑎) +
(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 − 𝑑𝑚𝑜𝑡𝑜𝑟𝑎)2
4 𝑐𝑒𝑠𝑡
→ 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 542.76𝑚𝑚
De acordo com a tabela 18, Anexo I, a correia com o comprimento primitivo próximo e superior que 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 542.76𝑚𝑚 é a correia A22 fornecida pela Continental com 𝐿𝑟𝑒𝑎𝑙 = 559𝑚𝑚.
Sendo assim o valor encontrado para o 𝐹𝐿 = 0.75.
A.3-3. Determinação do 𝐻𝑃𝑏𝑎𝑠𝑖𝑐𝑜 , 𝐻𝑃𝑎𝑑𝑖𝑐𝑖𝑜𝑛𝑎𝑙, através do Anexo...
𝐻𝑃𝑏𝑎𝑠𝑖𝑐𝑜 = 1.97 𝐻𝑃𝑎𝑑𝑖𝑐𝑖𝑜𝑛𝑎𝑙 = 0
A.3-4. Capacidade de transmissão de uma única correia (𝑃𝑐𝑜𝑟𝑟):
𝑃𝑐𝑜𝑟𝑟 = (𝐻𝑃𝑏𝑎𝑠𝑖𝑐𝑜 + 𝐻𝑃𝑎𝑑𝑖𝑐𝑖𝑜𝑛𝑎𝑙) × 𝐹𝐿 = (1.97 + 0) ∗ 0.75 → 𝑃𝑐𝑜𝑟𝑟 = 1.48
A.3-5. Número de correias (N):
Fator de correção para o arco de contato (Ca):
𝐷𝑚𝑜𝑣𝑖𝑑𝑎 − 𝑑𝑚𝑜𝑡𝑜𝑟𝑎
2=
76 − 76
2= 0 → 𝐶𝑎 = 1.0
Número de correias propriamente dito:

54
𝑁 =𝑃𝐻𝑃
𝑃𝑐𝑜𝑟𝑟 × 𝐶𝑎=
4.5
1.48 × 1.0→ 𝑁 = 3.05
Como o valor de N deve ser um número inteiro adota-se 𝑁 = 4.
A.3-6. Distancia real entre centros (𝑐𝑟𝑒𝑎𝑙):
𝑘 = 4𝐿𝑟𝑒𝑎𝑙 − 2𝜋(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 + 𝑑𝑚𝑜𝑡𝑜𝑟𝑎) = 4 ∗ 559 − 2 𝜋 (76 + 76) → 𝑘 = 1280.96
𝑐𝑟𝑒𝑎𝑙 =𝑘 + √𝑘2 − 32(𝐷𝑚𝑜𝑣𝑖𝑑𝑎 − 𝑑𝑚𝑜𝑡𝑜𝑟𝑎)2
16
=1280.96 + √1280.962 − 32(76 − 76)2
16
→ 𝑐𝑟𝑒𝑎𝑙 = 160.12𝑚𝑚
A.3-7. Cálculo das forças envolvidas na transmissão: A carga na transmissão é dada pela equação:
𝐹 = √𝐹12 + 𝐹2
2 − 2𝐹1𝐹2 cos 𝛾
Onde 𝐹1 é a carga no ramo tensionado, 𝐹2 é a carga no ramo frouxo e 𝛾 é a angulação entre as forças. Sabe-se também que:
𝐾1 = 7120; 𝐾2 =𝜇 𝜃
sin𝜑2
=0.3 × 3.14
sin342
→ 𝐾2 = 3.22
𝐹1 − 𝐹2 =𝑃 𝐾1
𝑟𝑚𝑜𝑡𝑜𝑟𝑎 𝑛=
3 × 7120
(762 ) × 1800
→ 𝐹1 − 𝐹2 = 312.28
𝐹1
𝐹2= 𝑒𝐾2 = 𝑒3.22 →
𝐹1
𝐹2= 25.12
Força média:
𝐹𝑖 =𝐹1 + 𝐹2
2
Logo apresenta-se o resultado em que:
𝐹1 = 325.23 𝑁 𝐹2 = 12.95 𝑁 𝐹 = 312.28 𝑁 𝐹𝑖 = 169.09 𝑁

55
A.4- Especificação das engrenagens Nessa etapa determinou-se a todas as propriedades das dezesseis engrenagens. Que foram definidas pela seguinte estratégia.
𝑑𝑒𝑛𝑡𝑟𝑒 𝑒𝑖𝑥𝑜𝑠 = 145𝑚𝑚
∑ 𝑍 =2 𝑑𝑒𝑛𝑡𝑟𝑒 𝑒𝑖𝑥𝑜𝑠
𝑚
Onde 𝑚 é o modulo das engrenagens.
𝑍𝑖 =∑ 𝑍
𝑖 + 1
𝑍𝑗 = ∑ 𝑍 − 𝑍𝑖
Onde 𝑖 = relação de transmissão no par de engrenagens. Todas as engrenagens apresentam as mesmas especificações de material.
𝐴ç𝑜 𝐴𝐼𝑆𝐼 1030 𝑇&𝑅 205°
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎𝑜 𝑒𝑠𝑐𝑜𝑎𝑚𝑒𝑛𝑡𝑜: 𝑆𝑦 = 648 𝑀𝑃𝑎
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎 𝑡𝑟𝑎çã𝑜: 𝑆𝑢𝑡 = 848 𝑀𝑃𝑎
𝐷𝑢𝑟𝑒𝑧𝑎 𝐵𝑟𝑖𝑛𝑒𝑙𝑙: 𝐻𝐵 = 495
𝐴𝑙𝑜𝑛𝑔𝑎𝑚𝑒𝑛𝑡𝑜 = 17%
𝐹𝑎𝑡𝑜𝑟 𝑑𝑒 𝑆𝑒𝑔𝑢𝑟𝑎𝑛ç𝑎: 𝐶𝑆 = 4
Para a melhor escolha da engrenagem foi realizado o teste com três módulos diferentes que coubessem na mesma distância entre eixos. Sendo assim apresentado com estes resultados:
A.4-1. Engrenagens do primeiro modulo:
Verificação Par-Engrenagem 1/2
Modulo normal (m_n) 1,00 1,25 2,00
Z1 258,00 206,00 129,00
Z2 32,00 26,00 16,00
Diâmetro primitivo (dp) 258,00 257,50 258,00
Velocidade escalar (v) 24,32 24,27 24,32
Efeito Dinâmico (Kv) 0,73 0,73 0,73
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,48033
Carga Transmitida (Ft) 88,32 88,49 88,32
Largura dente mínima (b) 1,56 1,25 0,78
Verificação largura Menor Menor Menor
Verificação Par-Engrenagem 3/4
Modulo normal (m_n) 1,00 1,25 2,00
Z1 246,00 197,00 123,00

56
Z2 44,00 35,00 22,00
Diâmetro primitivo (dp) 44,00 43,75 44,00
Velocidade escalar (v) 4,15 4,12 4,15
Efeito Dinâmico (Kv) 0,85 0,85 0,85
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,49240
Carga Transmitida (Ft) 517,88 520,84 517,88
Largura dente mínima (b) 7,60 6,11 3,80
Verificação largura Menor Menor Menor
Verificação Par-Engrenagem 5/6
Modulo normal (m_n) 1,00 1,25 2,00
Z1 97,00 77,00 48,00
Z2 193,00 155,00 97,00
Diâmetro primitivo (dp) 97,00 96,25 96,00
Velocidade escalar (v) 9,14 9,07 9,05
Efeito Dinâmico (Kv) 0,80 0,80 0,80
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,50020
Carga Transmitida (Ft) 234,92 236,75 237,36
Largura dente mínima (b) 3,61 2,91 1,82
Verificação largura Menor Menor Menor
Verificação Par-Engrenagem 7/8
Modulo normal (m_n) 1,00 1,25 2,00
Z1 76,00 61,00 38,00
Z2 214,00 171,00 107,00
Diâmetro primitivo (dp) 76,00 76,25 76,00
Velocidade escalar (v) 7,16 7,19 7,16
Efeito Dinâmico (Kv) 0,82 0,82 0,82
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,49057
Carga Transmitida (Ft) 299,83 298,84 299,83
Largura dente mínima (b) 4,60 3,67 2,30
Verificação largura Menor Menor Menor
A.4-2. Engrenagens do segundo modulo:
Verificação Par-Engrenagem 9/10
Modulo normal (m_n) 1,00 1,25 2,00
Z1 44,00 35,00 22,00
Z2 246,00 197,00 123,00
Diâmetro primitivo (dp) 44,00 43,75 44,00
Velocidade escalar (v) 1,47 1,46 1,47
Efeito Dinâmico (Kv) 0,91 0,91 0,91

57
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,37913
Carga Transmitida (Ft) 1429,09 1437,25 1429,09
Largura dente mínima (b) 25,70 20,67 12,85
Verificação largura Maior Maior Menor
Verificação Par-Engrenagem 11/12
Modulo normal (m_n) 1,00 1,25 2,00
Z1 76,00 61,00 38,00
Z2 214,00 171,00 107,00
Diâmetro primitivo (dp) 76,00 76,25 76,00
Velocidade escalar (v) 2,54 2,55 2,54
Efeito Dinâmico (Kv) 0,88 0,88 0,88
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,43740
Carga Transmitida (Ft) 827,37 824,65 827,37
Largura dente mínima (b) 13,26 10,57 6,63
Verificação largura Ideal Menor Menor
Verificação Par-Engrenagem 13/14
Modulo normal (m_n) 1,00 1,25 2,00
Z1 120,00 96,00 60,00
Z2 170,00 136,00 85,00
Diâmetro primitivo (dp) 120,00 120,00 120,00
Velocidade escalar (v) 4,02 4,02 4,02
Efeito Dinâmico (Kv) 0,86 0,86 0,86
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,46960
Carga Transmitida (Ft) 524,00 524,00 524,00
Largura dente mínima (b) 8,04 6,43 4,02
Verificação largura Menor Menor Menor
Verificação Par-Engrenagem 15/16
Modulo normal (m_n) 1,00 1,25 2,00
Z1 170,00 136,00 85,00
Z2 120,00 96,00 60,00
Diâmetro primitivo (dp) 120,00 120,00 120,00
Velocidade escalar (v) 4,02 4,02 4,02
Efeito Dinâmico (Kv) 0,86 0,86 0,86
Tensão Atuante (σ) 162,00
Fator Geométrico (J) 0,47575
Carga Transmitida (Ft) 524,00 524,00 524,00
Largura dente mínima (b) 7,94 6,35 3,97
Verificação largura Menor Menor Menor

58
Sendo assim escolhido os valores dos módulos para cada arrumação. Para a primeira estrutura o módulo escolhido foi 1, já para a segunda estrutura o módulo será 2.
A.4-3. O número de dentes e as relações de transmissão estão apresentados abaixo:
Engrenagem Número dentes 𝒊𝐭𝐞ó𝐫𝐢𝐜𝐨 𝒊𝐫𝐞𝐚𝐥
Z1 258 0,13 0,12
Z2 32
Z3 246 0,18 0,18
Z4 44
Z5 97 2,00 1,99
Z6 193
Z7 76 2,82 2,82
Z8 214
Z9 22 5,64 5,59
Z10 123
Z11 38 2,82 2,82
Z12 107
Z13 60 1,41 1,42
Z14 85
Z15 85 0,71 0,71
Z16 60
A.4-4. No conjunto mecânico as relações de transmissão serão:
Marcha real Relação transmissão
1 15,74
2 11,12
3 7,93
4 5,60
5 3,99
6 2,82
7 1,99
8 1,40
9 1,00
10 0,69
11 0,50
12 0,35
13 0,25
14 0,18
15 0,13
16 0,09

59
A.4-5. - Determinação das relações de rotação
𝑛𝑟𝑒𝑎𝑙 = 𝑛𝑚𝑜𝑡𝑜𝑟 ×1
𝑖𝑚𝑜𝑡𝑜𝑟−𝑝𝑜𝑙𝑖𝑎×
1
𝑖𝑒𝑖𝑥𝑜 1−2×
1
𝑖𝑒𝑖𝑥𝑜 2−3
Marcha real Rotação
1 114,34
2 161,81
3 227,02
4 321,28
5 451,24
6 638,59
7 905,61
8 1281,61
9 1800,00
10 2595,73
11 3574,00
12 5153,97
13 7103,74
14 10244,12
15 14256,82
16 20559,38
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Relação transmissão 15,7411,12 7,93 5,60 3,99 2,82 1,99 1,40 1,00 0,69 0,50 0,35 0,25 0,18 0,13 0,09
Relação de transmissão
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Rotação [rpm] 114 162 227 321 451 639 906 1282 1800 2596 3574 5154 7104102441425720559

60
A.4-6. Apresentando os seguintes erros de variação, sendo eles calculados pela seguinte formula:
𝜀 =𝑛𝑟𝑒𝑎𝑙 − 𝑛𝑡𝑒ó𝑟𝑖𝑐𝑜
𝑛𝑟𝑒𝑎𝑙
Marcha Rotação Teórica [rpm] Rotação Real [rpm] Erro
1 115,00 114,34 -0,6%
2 162,52 161,81 -0,4%
3 229,68 227,02 -1,2%
4 324,59 321,28 -1,0%
5 458,72 451,24 -1,7%
6 648,27 638,59 -1,5%
7 916,15 905,61 -1,2%
8 1294,72 1281,61 -1,0%
9 1829,73 1800,00 -1,7%
10 2585,83 2595,73 0,4%
11 3654,36 3574,00 -2,2%
12 5164,43 5153,97 -0,2%
13 7298,50 7103,74 -2,7%
14 10314,42 10244,12 -0,7%
15 14576,59 14256,82 -2,2%
16 20600,00 20559,38 -0,2%
0
5000
10000
15000
20000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Rotação Real [rpm] Rotação Teorica [rpm]

61
A.5- Determinação dos pares engrenados
Todas as engrenagens possuem o mesmo ângulo de pressão e módulos diferentes entre os conjuntos.
ENGRENAMENTO
𝜃 [graus] 20
m 1 [mm] 1
m 2 [mm] 2
Como explicado antes, os módulos serão: O 𝑚1 empregado no pares de engrenagens: 1-2; 3-4; 5-6; 7-8 O 𝑚2 empregado no pares de engrenagens: 9-10; 11-12; 13-14; 15-16 E o mesmo material retirado da tabela da Gerdau:
𝐴ç𝑜 𝐴𝐼𝑆𝐼 1030 𝑇&𝑅 205° 𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎𝑜 𝑒𝑠𝑐𝑜𝑎𝑚𝑒𝑛𝑡𝑜: 𝑆𝑦 = 648 𝑀𝑃𝑎
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎 𝑡𝑟𝑎çã𝑜: 𝑆𝑢𝑡 = 848 𝑀𝑃𝑎
𝐷𝑢𝑟𝑒𝑧𝑎 𝐵𝑟𝑖𝑛𝑒𝑙𝑙: 𝐻𝐵 = 495
𝐴𝑙𝑜𝑛𝑔𝑎𝑚𝑒𝑛𝑡𝑜 = 17%
𝐹𝑎𝑡𝑜𝑟 𝑑𝑒 𝑆𝑒𝑔𝑢𝑟𝑎𝑛ç𝑎: 𝐶𝑆 = 4
A.5-1. Engrenagem 1 e 2
Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
1,56 9,42 15,71
Determinando assim que a largura será:
F [mm] 10,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z1 Z2
Z1 258 Z2 32
dp [mm] 258,00 dp [mm] 32,00
db [mm] 242,44 db [mm] 30,07
de [mm] 260,00 de [mm] 34,00
di [mm] 255,50 di [mm] 29,50
pc [mm] 3,14 pc [mm] 3,14
eg [°] 0,70 eg [°] 5,63
r [mm] 0,17 r [mm] 0,17
Relação de transmissão 0,12
A.5-1.1. Calculo da velocidade

62
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.258 1800
60→ 𝑣 = 24.32 𝑚 𝑠⁄
A.5-1.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2147.62
24.32→ 𝑊𝑡 = 88.32 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 88.32 × tan 20° → 𝑊𝑟 = 32.15 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √32.152 + 88.322 → 𝑊 = 93.99 𝑁
A.5-1.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √24.32→ 𝐾𝑣 = 0.7266
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 25 32 35
150 0,46226 0,472193 0,47645
258 0,470022 0,480333 0,4847516
300 0,47304 0,483498 0,48798
𝐽𝐴𝐺𝑀𝐴 = 0.4803
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
88.32
0.7266 × 10 × 0.4803 × 1
→ 𝜎𝐴𝐺𝑀𝐴 = 25.31 𝑀𝑃𝑎
A.5-1.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:

63
𝐾𝑐 = 0.814
Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
25.31→ 𝑛𝑔 = 16.20
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
16.20
1 × 1.3→ 𝑛 = 12.46
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
25.31 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 19.70
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89)25.31 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 16.80
A.5-1.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎

64
Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
0.12
0.12 ± 1= 0.017
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
88.32
0.7266 × 10 × 258 × 0.017
→ 𝜎𝐻 = −311.3 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
311.33→ 𝑛𝑔 = 5.20
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
5.20
1 × 1.3→ 𝑛 = 4.00
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
311.33 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 4.00

65
A.5-2. Engrenagem 3 e 4 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
7,60 9,42 15,71
Determinando assim que a largura será:
F [mm] 10,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z3 Z4
Z3 246 Z4 44
dp [mm] 246,00 dp [mm] 44,00
db [mm] 231,16 db [mm] 41,35
de [mm] 248,00 de [mm] 46,00
di [mm] 243,50 di [mm] 41,50
pc [mm] 3,14 pc [mm] 3,14
eg [°] 0,73 eg [°] 4,09
r [mm] 0,17 r [mm] 0,17
Relação de transmissão 0,18
A.5-2.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.246 1800
60→ 𝑣 = 23.18 𝑚 𝑠⁄
A.5-2.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2147.62
24.32→ 𝑊𝑡 = 92.63 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 92.63 × tan 20° → 𝑊𝑟 = 33.71 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √33.712 + 92.632 → 𝑊 = 98.57 𝑁
A.5-2.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √23.18→ 𝐾𝑣 = 0.7307
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 35 44 50
150 0,47645 0,484718 0,49023
246 0,483829 0,492404 0,4981212
300 0,48798 0,496728 0,50256

66
𝐽𝐴𝐺𝑀𝐴 = 0.4924
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
92.63
0.7307 × 10 × 0.4924 × 1
→ 𝜎𝐴𝐺𝑀𝐴 = 25.75 𝑀𝑃𝑎
A.5-2.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

67
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
25.75→ 𝑛𝑔 = 15.92
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
15.92
1 × 1.3→ 𝑛 = 12.25
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
25.75 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 19.36
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89)25.75 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 16.51
A.5-2.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191

68
Fator geométrico:
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
0.18
0.18 ± 1= 0.024
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
92.63
0.7307 × 10 × 246 × 0.024
→ 𝜎𝐻 = −277.68 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
311.33→ 𝑛𝑔 = 5.20
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
5.20
1 × 1.3→ 𝑛 = 4.00
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
311.33 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 4.00

69
A.5-3. Engrenagem 5 e 6 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
3,61 9,42 15,71
Determinando assim que a largura será:
F [mm] 10,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z5 Z6
Z5 97 Z6 193
dp [mm] 97,00 dp [mm] 193,00
db [mm] 91,15 db [mm] 181,36
de [mm] 99,00 de [mm] 195,00
di [mm] 94,50 di [mm] 190,50
pc [mm] 3,14 pc [mm] 3,14
eg [°] 1,86 eg [°] 0,93
r [mm] 0,17 r [mm] 0,17
Relação de transmissão 1,99
A.5-3.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.097 1800
60→ 𝑣 = 9.14 𝑚 𝑠⁄
A.5-3.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2147.62
9.14→ 𝑊𝑡 = 234.92 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 234.92 × tan 20° → 𝑊𝑟 = 85.50 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √85.502 + 234.922 → 𝑊 = 249.99 𝑁
A.5-3.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √9.14→ 𝐾𝑣 = 0.8037
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 85 193 300
75 0,48179 0,488697 0,49554
97 0,49286 0,500196 0,507464
100 0,49437 0,501764 0,50909

70
𝐽𝐴𝐺𝑀𝐴 = 0.5002
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
234.92
0.8037 × 10 × 0.5002 × 1
→ 𝜎𝐴𝐺𝑀𝐴 = 58.44 𝑀𝑃𝑎
A.5-3.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

71
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
58.44→ 𝑛𝑔 = 7.01
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
7.01
1 × 1.3→ 𝑛 = 5.40
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
58.44 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 8.53
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89)58.44 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 7.27
A.5-3.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:

72
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
1.99
1.99 ± 1= 0.107
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
234.92
0.8037 × 10 × 97 × 0.107
→ 𝜎𝐻 = −320.6 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
320.6→ 𝑛𝑔 = 5.05
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
5.05
1 × 1.3→ 𝑛 = 3.89
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
320.6 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 3.89

73
A.5-4. Engrenagem 7 e 8 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
4,60 9,42 15,71
Determinando assim que a largura será:
F [mm] 10,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z7 Z8
Z7 76 Z8 214
dp [mm] 76,00 dp [mm] 214,00
db [mm] 71,42 db [mm] 201,09
de [mm] 78,00 de [mm] 216,00
di [mm] 73,50 di [mm] 211,50
pc [mm] 3,14 pc [mm] 3,14
eg [°] 2,37 eg [°] 0,84
r [mm] 0,17 r [mm] 0,17
Relação de transmissão 2,82
A.5-4.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.076 1800
60→ 𝑣 = 7.16 𝑚 𝑠⁄
A.5-4.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2147.62
7.16→ 𝑊𝑡 = 299.83 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 299.83 × tan 20° → 𝑊𝑟 = 109.13 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √109.132 + 299.832 → 𝑊 = 319.07 𝑁
A.5-4.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √7.16→ 𝐾𝑣 = 0.8205
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 85 214 300
75 0,48179 0,49004 0,49554
76 0,482293 0,490566 0,496082
100 0,49437 0,503202 0,50909

74
𝐽𝐴𝐺𝑀𝐴 = 0.4906
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
299.83
0.8205 × 10 × 0.4906 × 1
→ 𝜎𝐴𝐺𝑀𝐴 = 74.49 𝑀𝑃𝑎
A.5-4.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

75
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
74.49→ 𝑛𝑔 = 5.50
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
5.50
1 × 1.3→ 𝑛 = 4.23
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
74.49 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 6.69
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89) 74.49 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 5.71
A.5-4.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:

76
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
2.82
2.82 ± 1= 0.119
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
299.83
0.8205 × 10 × 76 × 0.119
→ 𝜎𝐻 = −384.59 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
384.59→ 𝑛𝑔 = 4.21
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
4.21
1 × 1.3→ 𝑛 = 3.24
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
384.59 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 3.24

77
A.5-5. Engrenagem 9 e 10 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
12,85 18,85 31,42
Determinando assim que a largura será:
F [mm] 19,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z9 Z10
Z9 22 Z10 123
dp [mm] 44,00 dp [mm] 246,00
db [mm] 41,35 db [mm] 231,16
de [mm] 48,00 de [mm] 250,00
di [mm] 39,00 di [mm] 241,00
pc [mm] 6,28 pc [mm] 6,28
eg [°] 8,18 eg [°] 1,46
r [mm] 0,33 r [mm] 0,33
Relação de transmissão 5,59
A.5-5.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.044 639.3
60→ 𝑣 = 1.47 𝑚 𝑠⁄
A.5-5.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2104.66
1.47→ 𝑊𝑡 = 1429.09 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 1429.09 × tan 20° → 𝑊𝑟 = 520.15 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √520.152 + 1429.092 → 𝑊 = 1520.80 𝑁
A.5-5.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √1.47→ 𝐾𝑣 = 0.9053
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 85 123 300
22 0,37792 0,379134 0,38479
22 0,37792 0,379134 0,38479
24 0,38877 0,390094 0,39626

78
𝐽𝐴𝐺𝑀𝐴 = 0.3791
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
1429.09
0.9053 × 19 × 0.3791 × 2
→ 𝜎𝐴𝐺𝑀𝐴 = 109.56 𝑀𝑃𝑎
A.5-5.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

79
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
109.56→ 𝑛𝑔 = 3.74
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
3.74
1 × 1.3→ 𝑛 = 2.88
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
109.56 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 4.55
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89) 109.56 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 3.88
A.5-5.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:

80
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
5.59
5.59 ± 1= 0.136
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
1429.09
0.9053 × 19 × 44 × 0.136
→ 𝜎𝐻 = −710.9 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
710.9→ 𝑛𝑔 = 2.30
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
2.30
1 × 1.3→ 𝑛 = 1.75
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
710.9 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 1.75

81
A.5-6. Engrenagem 11 e 12 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
6,63 18,85 31,42
Determinando assim que a largura será:
F [mm] 19,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z11 Z12
Z11 38 Z12 107
dp [mm] 76,00 dp [mm] 214,00
db [mm] 71,42 db [mm] 201,09
de [mm] 80,00 de [mm] 218,00
di [mm] 71,00 di [mm] 209,00
pc [mm] 6,28 pc [mm] 6,28
eg [°] 4,74 eg [°] 1,68
r [mm] 0,33 r [mm] 0,33
Relação de transmissão 2,82
A.5-6.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.076 639.3
60→ 𝑣 = 2.54 𝑚 𝑠⁄
A.5-6.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2104.66
2.54→ 𝑊𝑡 = 827.37 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 827.37 × tan 20° → 𝑊𝑟 = 301.14 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √301.142 + 827.372 → 𝑊 = 880.47 𝑁
A.5-6.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √2.54→ 𝐾𝑣 = 0.8807
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 85 107 300
38 0,43633 0,437401 0,4468
38 0,43633 0,437401 0,4468
45 0,4501 0,451269 0,46152

82
𝐽𝐴𝐺𝑀𝐴 = 0.4374
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
827.37
0.8807 × 19 × 0.4374 × 2
→ 𝜎𝐴𝐺𝑀𝐴 = 56.52 𝑀𝑃𝑎
A.5-6.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

83
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
56.52 → 𝑛𝑔 = 7.25
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
7.25
1 × 1.3→ 𝑛 = 5.58
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
56.52 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 8.82
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89) 56.52 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 7.52
A.5-6.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:

84
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
2.82
2.82 ± 1= 0.119
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
827.37
0.8807 × 19 × 76 × 0.119
→ 𝜎𝐻 = −447.4 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
447.4→ 𝑛𝑔 = 362
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
2.30
1 × 1.3→ 𝑛 = 2.79
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
447.4 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 2.79

85
A.5-7. Engrenagem 13 e 14 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
4,02 18,85 31,42
Determinando assim que a largura será:
F [mm] 19,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z13 Z14
Z13 60 Z14 85
dp [mm] 120,00 dp [mm] 170,00
db [mm] 112,76 db [mm] 159,75
de [mm] 124,00 de [mm] 174,00
di [mm] 115,00 di [mm] 165,00
pc [mm] 6,28 pc [mm] 6,28
eg [°] 3,00 eg [°] 2,12
r [mm] 0,33 r [mm] 0,33
Relação de transmissão 1,42
A.5-7.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.120 639.3
60→ 𝑣 = 4.02 𝑚 𝑠⁄
A.5-7.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2104.66
4.02→ 𝑊𝑡 = 524.00 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 524.00 × tan 20° → 𝑊𝑟 = 190.72 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √190.722 + 524.002 → 𝑊 = 557.63 𝑁
A.5-7.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √4.02→ 𝐾𝑣 = 0.8564
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 85 85 300
60 0,4696 0,4696 0,48243
60 0,4696 0,4696 0,48243
75 0,48179 0,48179 0,49554

86
𝐽𝐴𝐺𝑀𝐴 = 0.3791
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
524.00
0.8564 × 19 × 0.3791 × 2
→ 𝜎𝐴𝐺𝑀𝐴 = 34.29 𝑀𝑃𝑎
A.5-7.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

87
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
34.29→ 𝑛𝑔 = 11.96
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
11.96
1 × 1.3→ 𝑛 = 9.20
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
34.29 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 14.54
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89) 34.29 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 12.40
A.5-7.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:

88
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
1.42
1.42 ± 1= 0.094
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
524.00
0.8564 × 19 × 120 × 0.094
→ 𝜎𝐻 = −322.4 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
322.4→ 𝑛𝑔 = 5.03
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
5.03
1 × 1.3→ 𝑛 = 3.87
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
322.4 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 3.87

89
A.5-8. Engrenagem 15 e 16 Calculo da largura da engrenagem:
Recomendado Mínimo Máximo
3,97 18,85 31,42
Determinando assim que a largura será:
F [mm] 19,00
Propriedades e dimensionamentos das engrenagens para posterior desenho:
Z15 Z16
Z15 85 Z16 60
dp [mm] 170,00 dp [mm] 120,00
db [mm] 159,75 db [mm] 112,76
de [mm] 174,00 de [mm] 124,00
di [mm] 165,00 di [mm] 115,00
pc [mm] 6,28 pc [mm] 6,28
eg [°] 2,12 eg [°] 3,00
r [mm] 0,33 r [mm] 0,33
Relação de transmissão 0,71
A.5-8.1. Calculo da velocidade
𝑣 =𝜋 𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑣𝑜 𝑛
60=
𝜋 0.170 639.3
60→ 𝑣 = 5.69 𝑚 𝑠⁄
A.5-8.2. Cálculo das forças (tangencial, radial e total)
𝑊𝑡 =𝑃
𝑣=
2104.66
5.69→ 𝑊𝑡 = 369.88 𝑁
𝑊𝑟 = 𝑊𝑡 × tan 𝜃 = 369.88 × tan 20° → 𝑊𝑟 = 134.63 𝑁
𝑊 = √𝑊𝑟2 + 𝑊𝑡
2 = √134.632 + 369.882 → 𝑊 = 393.62 𝑁
A.5-8.3. Tensão Atuante
𝐾𝑣 = √78
78 + √𝑣= √
78
78 + √5.69→ 𝐾𝑣 = 0.8355
Para o cálculo do 𝐽𝐴𝐺𝑀𝐴 utiliza-se uma interpolação:
Pinhão\Coroa 50 60 85
75 0,46668 0,470997 0,48179
85 0,471316 0,475746 0,486822
100 0,47827 0,48287 0,49437

90
𝐽𝐴𝐺𝑀𝐴 = 0.4757
Sendo assim a tensão admitida pela AGMA é:
𝜎𝐴𝐺𝑀𝐴 =𝑊𝑡
𝐾𝑣 𝐹 𝐽𝐴𝐺𝑀𝐴 𝑚=
369.88
0.8355 × 19 × 0.4757 × 2
→ 𝜎𝐴𝐺𝑀𝐴 = 24.49 𝑀𝑃𝑎
A.5-8.4. Critério de Fadiga Para 𝑆𝑢𝑡 ≤ 1400:
𝑆𝑒′ =𝑆𝑢𝑡
2=
848
2 → 𝑆𝑒′ = 424 𝑀𝑃𝑎
Fator de acabamento superficial, como será retificado:
𝑎 = 1.58 ; 𝑏 = −0.085
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 669−0.085 → 𝐾𝑎 = 0.8907
Fator de tamanho e dimensão, como o modulo é 1
𝐾𝑏 = 1 Fator de Confiabilidade, como apresenta 99%:
𝐾𝑐 = 0.814 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Concentração de Tensões, está incluso no 𝐽𝐴𝐺𝑀𝐴. Efeitos diversos:
𝐾𝑓 =2
1 +𝑆𝑒′𝑆𝑢𝑡
=2
1 +424848
→ 𝐾𝑓 = 1.33
Limite de Resistencia a Fadiga:
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.8907 × 1 × 0.814 × 1 × 1.33 × 424
→ 𝑆𝑒 = 409.89 𝑀𝑃𝑎 Conforme tabela ..., Anexo I, para a força motriz uniforme e máquina movida uniforme:
𝐾0 = 1

91
Conforme tabela ..., Anexo 1, para força montagem acurada e largura do dente 𝐹 <50:
𝐾𝑚 = 1.3
Sendo assim, pode-se apresentar os valores de 𝑛𝑔 e 𝑛:
𝑛𝑔 =𝑆𝑒
𝜎𝐴𝐺𝑀𝐴=
409.89
24.49→ 𝑛𝑔 = 16.74
𝑛 =𝑛𝑔
𝐾0 𝐾𝑚=
16.74
1 × 1.3→ 𝑛 = 12.88
Juntamente com seu Fator de Segurança:
𝐶𝑆𝑒𝑠𝑡 =𝑆𝑦
𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
648
24.49 × 1 × 1.3→ 𝐶𝑆𝑒𝑠𝑡 = 20.36
𝐶𝑆𝑑𝑖𝑛 =2 𝑆𝑢𝑡 𝑆𝑒
𝑆(𝑢𝑡+ 𝑆𝑒)𝜎𝐴𝐺𝑀𝐴 𝐾0 𝐾𝑚 =
2 × 848 × 409.89
(848 + 409.89) 24.49 × 1 × 1.3
→ 𝐶𝑆𝑑𝑖𝑛 = 17.36
A.5-8.5. Critério de Desgaste Cálculo da Resistência ao Desgaste Superficial para vida de até 108ciclos:
𝑆𝐶 = 2.76 𝐻𝐵 − 70 = 2.76 × 498 − 70 → 𝑆𝐶 = 1296.2 𝑀𝑃𝑎 Fator de Vida (Ciclos de Vida ≥ 108):
𝐶𝐿 = 1 Fator de Relação de Dureza (Engrenagem dente reto):
𝐶𝐻 = 1 Fator de Temperatura (Temperatura abaixo de 120°C):
𝐶𝑇 = 1 Fator de Confiabilidade (Até 99%):
𝐶𝑅 = 0.8 Sendo assim:
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 𝐶𝐻
𝐶𝑇 𝐶𝑅= 1296.2
1 × 1
1 × 0.8→ 𝑆𝐻 = 1620.25 𝑀𝑃𝑎
Conforme tabela ..., Anexo I, para pinhão e coroa fabricados de aço:
𝐶𝑃 = 191 Fator geométrico:

92
𝐼 =cos 𝜑 sin 𝜑
2
𝑖
𝑖 ± 1=
cos 20° sin 20°
2
0.71
0.71 ± 1= 0.067
Pela Teoria de Hertz:
𝜎𝐻 = −𝐶𝑃√𝑊𝑡
𝐾𝑣 𝐹 𝑑𝑝 𝐼= −191√
369.88
0.8355 × 19 × 170 × 0.067
→ 𝜎𝐻 = −270.2 𝑀𝑃𝑎 Como os valores são iguais:
𝐶0 = 𝐾0 = 1 𝐶𝑚 = 𝐾𝑚 = 1.3
Sendo assim:
𝑛𝑔 =𝑆𝐻
𝜎𝐻=
1620.25
270.2→ 𝑛𝑔 = 5.91
𝑛 =𝑛𝑔
𝐶0 𝐶𝑚=
5.91
1 × 1.3→ 𝑛 = 4.55
Apresentando o seu Fator de Segurança:
𝐶𝑆𝑠𝑢𝑝 =𝑆𝐻
𝜎𝐻 𝐶0 𝐶𝑚=
1620.25
270.2 × 1 × 1.3→ 𝐶𝑆𝑠𝑢𝑝 = 4.55

93
A.6- Determinação dos eixos
Todos os três eixos apresentam o mesmo material retirado da tabela da Gerdau:
𝐴ç𝑜 𝐴𝐼𝑆𝐼 4340 𝑇&𝑅 205°
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎𝑜 𝑒𝑠𝑐𝑜𝑎𝑚𝑒𝑛𝑡𝑜: 𝑆𝑦 = 1675 𝑀𝑃𝑎
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎 𝑡𝑟𝑎çã𝑜: 𝑆𝑢𝑡 = 1875 𝑀𝑃𝑎
𝐷𝑢𝑟𝑒𝑧𝑎 𝐵𝑟𝑖𝑛𝑒𝑙𝑙: 𝐻𝐵 = 520 𝐴𝑙𝑜𝑛𝑔𝑎𝑚𝑒𝑛𝑡𝑜 = 10%
𝑀𝑜𝑑𝑢𝑙𝑜 𝑑𝑒 𝑌𝑜𝑢𝑛𝑔: 𝐸 = 207 𝐺𝑃𝑎
𝑀𝑜𝑑𝑢𝑙𝑜 𝑑𝑒 𝐶𝑖𝑠𝑎𝑙ℎ𝑎𝑚𝑒𝑛𝑡𝑜: 𝐺 = 79.3 𝐺𝑃𝑎 𝐹𝑎𝑡𝑜𝑟 𝑑𝑒 𝑆𝑒𝑔𝑢𝑟𝑎𝑛ç𝑎: 𝐶𝑆 = 4
A.6-1. Eixo 1
Para o Eixo 1, foi adotado os seguintes dados:
Posição
Polia 36,0
Mancal 1 102,5
Engrenagem 7 174,0
Engrenagem 5 184,0
Engrenagem 3 194,0
Engrenagem 1 205,0
Mancal 2 220,5
Dados
comprimento eixo [mm] 227,00
distancia mancal A [mm] 102,50
distância entre mancais [mm] 118,00
distancia engrenagem ao mancal A[mm] 71,50
Polia
Fy [N] 0,00
Fz [N] 325,23
Theta [°] 180,00
diâmetro polia [mm] 76
largura polia [mm] 64
Torque [N.m] 11,393
Engrenagem
Wt [N] 299,83
Wr [N] 109,13
diâmetro engrenagem [mm] 76,00
Torque [N.m] 11,393

94
A.6-1.1. Polia
As equações usadas para o cálculo das forças nos mancais foram:
𝐴𝑦 = (𝐹𝑦 − 𝐹𝑧) sin 𝜃 − 𝐵𝑦
𝐴𝑧 = (𝐹𝑦 + 𝐹𝑧) cos 𝜃 − 𝐵𝑧
𝐵𝑦 =(−𝐹𝑦 + 𝐹𝑧) sin 𝜃 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
𝐵𝑧 =(𝐹𝑦 + 𝐹𝑧) cos 𝜃 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
Formulas para os cálculos dos diagramas:
Cortante:
𝑉𝑦 = 0 ; 𝑥 < 𝑑𝑝𝑜𝑙𝑖𝑎
𝑉𝑦 = −𝐹𝑦 sin 𝜃 ; 𝑑𝑝𝑜𝑙𝑖𝑎 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑦 = 𝐹𝑦 sin 𝜃 + 𝐴𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑦 = −𝐹𝑦 sin 𝜃 + 𝐴𝑦 + 𝐵𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
𝑉𝑧 = 0 ; 𝑥 < 𝑑𝑝𝑜𝑙𝑖𝑎
𝑉𝑧 = −𝐹𝑧 sin 𝜃 ; 𝑑𝑝𝑜𝑙𝑖𝑎 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑧 = 𝐹𝑧 sin 𝜃 + 𝐴𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑧 = −𝐹𝑧 sin 𝜃 + 𝐴𝑧 + 𝐵𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
Momento:
𝑉𝑧 = 0 ; 𝑥 < 𝑑𝑝𝑜𝑙𝑖𝑎
𝑉𝑧 = −𝐹𝑦 sin 𝜃 (𝑥 − 𝑑𝑝𝑜𝑙𝑖𝑎); 𝑑𝑝𝑜𝑙𝑖𝑎 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑦 = 𝐹𝑦 sin 𝜃 (𝑥 − 𝑑𝑝𝑜𝑙𝑖𝑎) + 𝐴𝑦 (𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑦 = 𝐹𝑦 sin 𝜃 (𝑥 − 𝑑𝑝𝑜𝑙𝑖𝑎) + 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) + 𝐵𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
); 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
𝑀𝑧 = 0 ; 𝑥 < 𝑑𝑝𝑜𝑙𝑖𝑎
𝑀𝑧 = −𝐹𝑧 sin 𝜃 (𝑥 − 𝑑𝑝𝑜𝑙𝑖𝑎); 𝑑𝑝𝑜𝑙𝑖𝑎 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑧 = 𝐹𝑧 sin 𝜃 (𝑥 − 𝑑𝑝𝑜𝑙𝑖𝑎) + 𝐴𝑧 (𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑧 = 𝐹𝑧 sin 𝜃 (𝑥 − 𝑑𝑝𝑜𝑙𝑖𝑎) + 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) + 𝐵𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
); 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
Torque:
𝑇𝑥 = 0 ; 𝑥 < 𝑑𝑝𝑜𝑙𝑖𝑎
𝑇𝑥 = 𝑇𝑜𝑟𝑞𝑢𝑒 ; 𝑑𝑝𝑜𝑙𝑖𝑎 ≤ 𝑥

95
Flecha:
A.6-1.2. Engrenagem
As equações usadas para o cálculo das forças nos mancais foram:
𝐴𝑦 = 𝑊𝑟 − 𝐵𝑦
𝐴𝑧 = 𝑊𝑡 − 𝐵𝑧
𝐵𝑦 =𝑊𝑟 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
𝐵𝑧 =𝑊𝑡 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
Formulas para os cálculos dos diagramas:
Cortante:
𝑉𝑦 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑦 = 𝐴𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑉𝑦 = 𝐴𝑦 − 𝑊𝑟 ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑦 = 𝐴𝑦 − 𝑊𝑟 + 𝐵𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
𝑉𝑧 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑧 = 𝐴𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑉𝑧 = 𝐴𝑧 − 𝑊𝑡 ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑧 = 𝐴𝑧 − 𝑊𝑡 + 𝐵𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
Momento:
𝑀𝑦 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑟(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑟(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) + 𝐵𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
≤ 𝑥
𝑀𝑧 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑧 = 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑀𝑧 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑡(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑧 = 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑡(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) + 𝐵𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
≤ 𝑥

96
Flecha:
A.6-1.3. Cálculo das reações sobre os mancais
𝑹𝒂 = √𝐴𝑦𝟐 + 𝐴𝑧
𝟐
𝑹𝒃 = √𝐵𝑦𝟐 + 𝐵𝑧
𝟐
Sobre os mancais
Ra [N] 634,25
Rb [N] 376,62
Ma [N.mm] 21627,73
Mb [N.mm] 0,00
Ta [N.mm] 11393,46
Tb [N.mm] 0,00
A.6-1.4. Calculo Momento máximo
Máximos
Momento [N.mm] 21627,73
Torque [N.mm] 11393,46
A.6-1.5. Diâmetro mínimo
Para 𝑆𝑢𝑡 > 1400:
𝑆𝑒′ = 700 𝑀𝑃𝑎 Fator de acabamento superficial, como será retificado:
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 1875−0.085 → 𝐾𝑎 = 0.833
Fator de tamanho e dimensão/
𝐾𝑏 = (𝑑𝑒𝑖𝑥𝑜
7.62)−0.107 → 𝐾𝑏 = 0.937
Fator de Carregamento (Flexão):

97
𝐾𝑐 = 1.0 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Confiabilidade, no valor de 99%:
𝐾𝑒 = 0.814 Fator de Confiabilidade, com sensibilidade ao entalhe
𝑞 = 0.95 𝐾𝑡 = 1.4
𝐾𝑒 =1
1 + 𝑞 (𝐾𝑡 − 1)=
1
1 + 0.95 (1.4 − 1)→ 𝐾𝑒 = 0.725
Efeitos diversos:
𝐾𝑓 = 1.0
Limite de Resistencia a Fadiga (primário pois não foi utilizado o Fator de Confiabilidade através do entalhe):
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.833 × 0.937 × 1 × 1 × 0.725 × 1 × 700
→ 𝑆𝑒 = 395.73 𝑀𝑃𝑎 Critério de Soderberg:
Eixo:
𝑑 = (32 𝐶𝑆
𝜋 √(
𝑀𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑒)
2
+ (𝑇𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑦)
2
)
13⁄
=
(32 × 4
𝜋 √(
21627.73
395.73)
2
+ (11393.46
1675)
2
)
13⁄
→ 𝑑 = 13.15 𝑚𝑚
Sobre o mancal:
𝑑 = (32 𝐶𝑆
𝜋 √(
𝑀𝐴
𝑆𝑒)
2
+ (𝑇𝐴
𝑆𝑦)
2
)
13⁄
=
(32 × 4
𝜋 √(
21627.73
395.73)
2
+ (11393.46
1675)
2
)
13⁄
→ 𝑑 = 13.15 𝑚𝑚

98
A.6-1.6. Determinação dos diâmetros
Devido a característica do Critério de Soderberg, adotam-se os valores do diâmetro
sobre o mancal de 14mm e sobre o eixo nominal 15mm. Apresentando assim estes
valores:
Valores do eixo
diâmetro nominal [mm] 16,00
θ [°] 0,29
flecha máx. [mm] 0,13
diâmetro mancal [mm] 15,00
A.6-1.7. Máxima tensões sobre o eixo
𝜎𝑎 =32 𝑀𝐴
𝜋 𝑑3=
32 × 21627.73
𝜋 ( 15 )3→ 𝜎𝑎 = 65.27𝑀𝑃𝑎
A.6-1.8. Calculo do fator de segurança real
Para o cálculo do fator de segurança, usa-se o reverso do cálculo de Soderberg:
𝐶𝑆 =𝑑𝑚𝑎𝑛𝑐𝑎𝑙
3 ×𝜋
32
√(𝑀𝑆𝑒
)2 + (𝑇
𝑆𝑦)2
=153 ×
𝜋32
√(21627.73
395.73)2 + (
11393.461675
)2
→ 𝐶𝑆 = 5.98
A.6-1.9. Gráficos do conjunto
Cortante:
Momento:
-350,00
-250,00
-150,00
-50,00
50,00
150,00
250,00
350,00
0 20 40 60 80 100 120 140 160 180 200 220
Vy [N] Vz [N] V [N]

99
Flecha:
-25000,00
-20000,00
-15000,00
-10000,00
-5000,00
0,00
5000,00
10000,00
15000,00
20000,00
25000,00
0 20 40 60 80 100 120 140 160 180 200 220
My [N.mm] Mz [N.mm] M [N.mm]
-0,05
0,00
0,05
0,10
0,15
0,20
0 20 40 60 80 100 120 140 160 180 200 220
f_y [mm] f_z [mm] f [mm]

100
A.6-2. Eixo 2
Para o Eixo 2, foi adotado os seguintes dados:
Posição
Mancal A 8,5
Engrenagem 8 27,0
Engrenagem 6 37,0
Engrenagem 4 47,0
Engrenagem 2 57,0
Anel Pescador 79,0
Engrenagem 15 106,5
Engrenagem 13 125,5
Engrenagem 11 144,5
Engrenagem 9 163,5
Mancal B 186,5
Dados
comprimento eixo [mm] 195,00
distancia mancal A [mm] 8,50
distancia mancal B [mm] 185,50
distancia engrenagem1 ao mancal A [mm] 18,50
distancia engrenagem2 ao mancal B [mm] 155,00
Engrenagens
Torque [N.m] 32,08
Wt 1 [N] 299,83
Wr 1 [N] 109,13
Wt 2 [N] 1429,09
Wr 2 [N] 520,15
diâmetro engrenagem 1 [mm] 214,00
diâmetro engrenagem 2 [mm] 44,00
A.6-2.1. Engrenagem
As equações usadas para o cálculo das forças nos mancais foram:
𝐴𝑦 = 𝑊𝑟 − 𝐵𝑦
𝐴𝑧 = 𝑊𝑡 − 𝐵𝑧
𝐵𝑦 =𝑊𝑟 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
𝐵𝑧 =𝑊𝑡 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠

101
Formulas para os cálculos dos diagramas:
Cortante:
𝑉𝑦 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑦 = 𝐴𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑉𝑦 = 𝐴𝑦 − 𝑊𝑟 ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑦 = 𝐴𝑦 − 𝑊𝑟 + 𝐵𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
𝑉𝑧 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑧 = 𝐴𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑉𝑧 = 𝐴𝑧 − 𝑊𝑡 ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑧 = 𝐴𝑧 − 𝑊𝑡 + 𝐵𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
Momento:
𝑀𝑦 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑟(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑟(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) + 𝐵𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
≤ 𝑥
𝑀𝑧 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑧 = 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑀𝑧 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑡(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑧 = 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑡(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) + 𝐵𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
≤ 𝑥
Flecha:
A.6-2.2. Cálculo das reações sobre os mancais
𝑹𝒂 = √𝐴𝑦𝟐 + 𝐴𝑧
𝟐
𝑹𝒃 = √𝐵𝑦𝟐 + 𝐵𝑧
𝟐
Sobre os mancais
Ra [N] 482,42
Rb [N] 1357,46

102
Ma [N.mm] 0,00
Mb [N.mm 0,00
Ta [N.mm 0,00
Tb [N.mm 0,00
A.6-2.3. Calculo Momento máximo
Máximos
Momento [N.mm] 31221,52
Torque [N.mm] 32081,58
A.6-2.4. Diâmetro mínimo
Para 𝑆𝑢𝑡 > 1400:
𝑆𝑒′ = 700 𝑀𝑃𝑎 Fator de acabamento superficial, como será retificado:
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 1875−0.085 → 𝐾𝑎 = 0.833
Fator de tamanho e dimensão/
𝐾𝑏 = (𝑑𝑒𝑖𝑥𝑜
7.62)−0.107 → 𝐾𝑏 = 0.912
Fator de Carregamento (Flexão):
𝐾𝑐 = 1.0 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Confiabilidade, no valor de 99%:
𝐾𝑒 = 0.814 Fator de Confiabilidade, com sensibilidade ao entalhe
𝑞 = 1 𝐾𝑡 = 1.35
𝐾𝑒 =1
1 + 𝑞 (𝐾𝑡 − 1)=
1
1 + 1 (1.35 − 1)→ 𝐾𝑒 = 0.741
Efeitos diversos:

103
𝐾𝑓 = 1.0
Limite de Resistencia a Fadiga (primário pois não foi utilizado o Fator de Confiabilidade através do entalhe):
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.833 × 0.912 × 1 × 1 × 0.741 × 1 × 700
→ 𝑆𝑒 = 393.80 𝑀𝑃𝑎 Critério de Soderberg:
Eixo:
𝑑 = (32 𝐶𝑆
𝜋 √(
𝑀𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑒)
2
+ (𝑇𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑦)
2
)
13⁄
=
(32 × 4
𝜋 √(
31221.52
393.80)
2
+ (32081.58
1675)
2
)
13⁄
→ 𝑑 = 14.86 𝑚𝑚
A.6-2.5. Determinação dos diâmetros
Devido a característica do Critério de Soderberg, adotam-se os valores do diâmetro
sobre o mancal de 15mm e sobre o eixo nominal 18mm. Apresentando assim estes
valores:
Valores do eixo
diâmetro nominal [mm] 16,00
θ [°] 0.70
flecha máx. [mm] 0,06
diâmetro mancal [mm] 15,00
A.6-2.6. Máxima tensões sobre o eixo
𝜎𝑎 =32 𝑀𝐴
𝜋 𝑑3=
32 × 31221.52
𝜋 ( 15 )3→ 𝜎𝑎 = 77.64 𝑀𝑃𝑎
A.6-2.7. Calculo do fator de segurança real
Para o cálculo do fator de segurança, usa-se o reverso do cálculo de Soderberg:
𝐶𝑆 =𝑑𝑛𝑜𝑚𝑖𝑛𝑎𝑙
3 ×𝜋
32
√(𝑀𝑆𝑒)2 + (
𝑇𝑆𝑦)2
=163 ×
𝜋32
√(31221.52
398.79 )2 + (32081.58
1675)2
→ 𝐶𝑆 = 4.99
A.6-2.8. Gráficos do conjunto

104
Cortante:
Momento:
-1500,00
-1000,00
-500,00
0,00
500,00
1000,00
1500,00
0 20 40 60 80 100 120 140 160 180
Vy [N] Vz [N] V [N]
-5000,00
0,00
5000,00
10000,00
15000,00
20000,00
25000,00
30000,00
35000,00
0 20 40 60 80 100 120 140 160 180
My [N.mm] Mz [N.mm] M [N.mm]

105
Flecha:
-0,04
-0,02
0,00
0,02
0,04
0,06
0 20 40 60 80 100 120 140 160 180
f_y [mm] f_z [mm] f [mm]

106
A.6-3. Eixo 3
Para o Eixo 2, foi adotado os seguintes dados:
Posição
Mancal A 3,5
Engrenagem 16 21,5
Engrenagem 14 40,5
Engrenagem 12 59,5
Engrenagem 10 78,5
Mancal B 187,5
Dados
comprimento eixo [mm] 271,00
distancia mancal A [mm] 3,50
distancia mancal B [mm] 187,50
distancia engrenagem 1 ao mancal A [mm] 75,00
Engrenagens
Torque [N.m] 175,78
Wt 1 [N] 1429,09
Wr 1 [N] 520,15
diâmetro engrenagem 1 [mm] 246,00
A.6-3.1. Engrenagem
As equações usadas para o cálculo das forças nos mancais foram:
𝐴𝑦 = 𝑊𝑟 − 𝐵𝑦
𝐴𝑧 = 𝑊𝑡 − 𝐵𝑧
𝐵𝑦 =𝑊𝑟 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
𝐵𝑧 =𝑊𝑡 𝑑𝑝𝑜𝑙𝑖𝑎−𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑑𝑒𝑛𝑡𝑟𝑒 𝑚𝑎𝑛𝑐𝑎𝑖𝑠
Formulas para os cálculos dos diagramas:
Cortante:
𝑉𝑦 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑦 = 𝐴𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑉𝑦 = 𝐴𝑦 − 𝑊𝑟 ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑦 = 𝐴𝑦 − 𝑊𝑟 + 𝐵𝑦 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
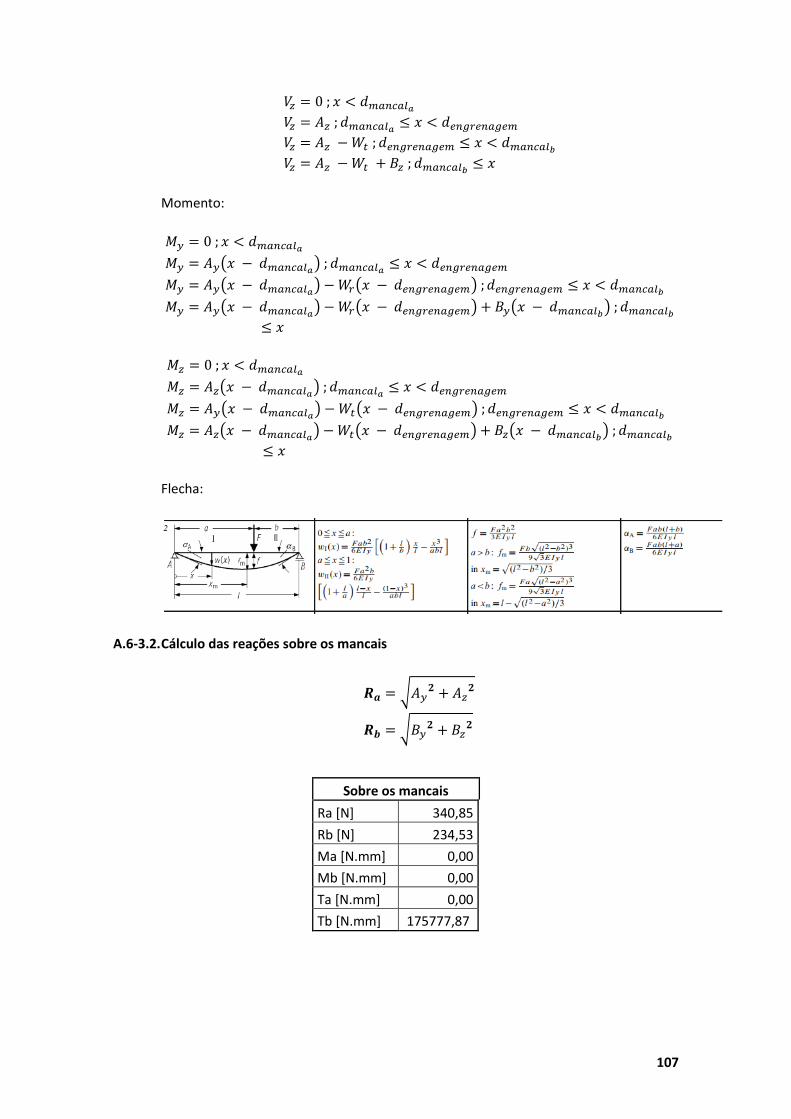
107
𝑉𝑧 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑉𝑧 = 𝐴𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑉𝑧 = 𝐴𝑧 − 𝑊𝑡 ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑉𝑧 = 𝐴𝑧 − 𝑊𝑡 + 𝐵𝑧 ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏≤ 𝑥
Momento:
𝑀𝑦 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑟(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑦 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑟(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) + 𝐵𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
≤ 𝑥
𝑀𝑧 = 0 ; 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
𝑀𝑧 = 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎
≤ 𝑥 < 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚
𝑀𝑧 = 𝐴𝑦(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑡(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) ; 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚 ≤ 𝑥 < 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
𝑀𝑧 = 𝐴𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑎) − 𝑊𝑡(𝑥 − 𝑑𝑒𝑛𝑔𝑟𝑒𝑛𝑎𝑔𝑒𝑚) + 𝐵𝑧(𝑥 − 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
) ; 𝑑𝑚𝑎𝑛𝑐𝑎𝑙𝑏
≤ 𝑥
Flecha:
A.6-3.2. Cálculo das reações sobre os mancais
𝑹𝒂 = √𝐴𝑦𝟐 + 𝐴𝑧
𝟐
𝑹𝒃 = √𝐵𝑦𝟐 + 𝐵𝑧
𝟐
Sobre os mancais
Ra [N] 340,85
Rb [N] 234,53
Ma [N.mm] 0,00
Mb [N.mm] 0,00
Ta [N.mm] 0,00
Tb [N.mm] 175777,87

108
A.6-3.3. Calculo Momento máximo
Máximos
Momento [N.mm] 25563,96
Torque [N.mm] 175777,87
A.6-3.4. Diâmetro mínimo
Para 𝑆𝑢𝑡 > 1400:
𝑆𝑒′ = 700 𝑀𝑃𝑎 Fator de acabamento superficial, como será retificado:
𝐾𝑎 = 𝑎 × 𝑆𝑢𝑡𝑏 = 1.58 × 1875−0.085 → 𝐾𝑎 = 0.833
Fator de tamanho e dimensão/
𝐾𝑏 = (𝑑𝑒𝑖𝑥𝑜
7.62)−0.107 → 𝐾𝑏 = 0.912
Fator de Carregamento (Flexão):
𝐾𝑐 = 1.0 Fator de Temperatura, como está abaixo de 350°C:
𝐾𝑑 = 1 Fator de Confiabilidade, no valor de 99%:
𝐾𝑒 = 0.814 Fator de Confiabilidade, com sensibilidade ao entalhe
𝑞 = 0.95 𝐾𝑡 = 1.6
𝐾𝑒 =1
1 + 𝑞 (𝐾𝑡 − 1)=
1
1 + 0.95 (1.6 − 1)→ 𝐾𝑒 = 0.637
Efeitos diversos:
𝐾𝑓 = 1.0
Limite de Resistencia a Fadiga (primário pois não foi utilizado o Fator de Confiabilidade através do entalhe):
𝑆𝑒 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆𝑒′ = 0.833 × 0.873 × 1 × 1 × 0.637 × 1 × 700
→ 𝑆𝑒 = 324.24 𝑀𝑃𝑎

109
Critério de Soderberg:
Eixo:
𝑑 = (32 𝐶𝑆
𝜋 √(
𝑀𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑒)
2
+ (𝑇𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑦)
2
)
13⁄
=
(32 × 4
𝜋 √(
25563.96
324.24)
2
+ (175777.87
1675)
2
)
13⁄
→ 𝑑 = 17.49 𝑚𝑚
Mancal:
𝑑 = (32 𝐶𝑆
𝜋 √(
𝑀𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑒)
2
+ (𝑇𝑚𝑎𝑥𝑖𝑚𝑜
𝑆𝑦)
2
)
13⁄
=
(32 × 4
𝜋 √(
0
324.24)
2
+ (175777.87
1675)
2
)
13⁄
→ 𝑑 = 16.23 𝑚𝑚
A.6-3.5. Determinação dos diâmetros
Caso adote-se o critério de Soderberg, será apresentado um valor de o ângulo de
rotação do eixo será de 4.20°, sendo assim, superior ao máximo permitido de 1°. Logo
adota-se os valores do diâmetro sobre o mancal de 25mm e sobre o eixo nominal
27mm. Apresentando assim estes valores:
Valores do eixo
diâmetro nominal [mm] 27,00
θ [°] 0,66
flecha max [mm] 0,01
diâmetro mancal [mm] 25,00
θ [°] 0,90
A.6-3.6. Máxima tensões sobre o eixo
𝜎𝑎 =32 𝑀𝑚𝑎𝑥𝑖𝑚𝑜
𝜋 𝑑3=
32 × 25563.96
𝜋 ( 27 )3→ 𝜎𝑎 = 13.23 𝑀𝑃𝑎
A.6-3.7. Calculo do fator de segurança real
Para o cálculo do fator de segurança, usa-se o reverso do cálculo de Soderberg:

110
𝐶𝑆 =𝑑𝑛𝑜𝑚𝑖𝑛𝑎𝑙
3 ×𝜋
32
√(𝑀𝑆𝑒)2 + (
𝑇𝑆𝑦)2
=253 ×
𝜋32
√(25563.96
324.24)2 + (
175777.871675
)2
→ 𝐶𝑆 = 11.69
A.6-3.8. Gráficos do conjunto
Cortante:
Momento:
-300,00
-200,00
-100,00
0,00
100,00
200,00
300,00
400,00
0 10 20 30 40 50 60 70 80 90 100110120130140150160170180190200210220230240250260270
Vy [N] Vz [N] V [N]
-5000,00
0,00
5000,00
10000,00
15000,00
20000,00
25000,00
30000,00
0
10
20
30
40
50
60
70
80
90
10
0
11
0
12
0
13
0
14
0
15
0
16
0
17
0
18
0
19
0
20
0
21
0
22
0
23
0
24
0
25
0
26
0
27
0
My [N.mm] Mz [N.mm] M [N.mm]

111
Flecha:
-0,01
-0,01
0,00
0,01
0,01
0 10 20 30 40 50 60 70 80 90 100110120130140150160170180190200210220230240250260270
f_y [mm] f_z [mm] f [mm]

112
A.7- Rolamentos
A.7-1. Rolamento do Eixo 1
Dados:
Fa [N] 0
Fr [N] 634,25
n [rpm] 1800
D [mm] 15
L_est [h] 20000
R [%] 0,99
A.7-1.1. Especificação do rolamento
𝑃 = 𝑥 𝐹𝑟 + 𝑦 𝐹𝑎 = 1 × 568.54 + 0 × 0 → 𝑃 = 634.25 𝑁
𝐿𝑒𝑠𝑡 = 𝐿𝑒𝑠𝑡 60 𝑛
106=
20000 × 60 × 1800
106→ 𝐿𝑒𝑠𝑡 = 2160 𝑚𝑖𝑙ℎõ𝑒𝑠 𝑑𝑒 𝑟𝑒𝑣
Devido ao rolamento ser do tipo esfera; adota-se o valor de “a” sendo 3:
𝐶𝑒𝑠𝑡 = 𝐿𝑒𝑠𝑡
1𝑎 𝑃 = 2160
13 × 0.63425 → 𝐶𝑒𝑠𝑡 = 8.20 𝑘𝑁
A.7-1.2. Determinação do rolamento
Com os valores calculados busca-se na tabela o rolamento de esfera que apresenta o
valor de “C” mais próximo:
Neste caso foi o com o valor de 𝐶 = 9.95 𝑘𝑁 apresentando consigo os valor de 𝐶0 =
5.4 𝑘𝑁 e 𝑃𝑢 = 0.232.
A.7-1.3. Calculo da vida útil
𝐿10 = (𝐶
𝑃)
𝑎
= (9.95
0.63425)
3
→ 𝐿10 = 3860.89 𝑚𝑖𝑙ℎõ𝑒𝑠 𝑑𝑒 𝑟𝑒𝑣
𝐿10ℎ =𝐿10 × 106
𝑛 60=
3860.89 × 106
1800 × 60→ 𝐿10ℎ = 35748.98 ℎ
A.7-1.4. Resultado oferecido pelo site da SKF

113

114
A.7-2. Rolamento do Eixo 2
Dados:
Fa [N] 0
Fr [N] 1356,54
n [rpm] 639,25
D [mm] 15
L_est [h] 20000
R [%] 0,99
A.7-2.1. Especificação do rolamento
𝑃 = 𝑥 𝐹𝑟 + 𝑦 𝐹𝑎 = 1 × 1356.54 + 0 × 0 → 𝑃 = 1357.46 𝑁
𝐿𝑒𝑠𝑡 = 𝐿𝑒𝑠𝑡 60 𝑛
106=
20000 × 60 × 639.25
106→ 𝐿𝑒𝑠𝑡 = 767 𝑚𝑖𝑙ℎõ𝑒𝑠 𝑑𝑒 𝑟𝑒𝑣
Devido ao rolamento ser do tipo esfera; adota-se o valor de “a” sendo 3:
𝐶𝑒𝑠𝑡 = 𝐿𝑒𝑠𝑡 1𝑎 𝑃 = 767
13 × 1.35746 → 𝐶𝑒𝑠𝑡 = 12.43 𝑘𝑁
A.7-2.2. Determinação do rolamento
Com os valores calculados busca-se na tabela o rolamento de esfera que apresenta o
valor de “C” mais próximo:
Neste caso foi o com o valor de 𝐶 = 14.8 𝑘𝑁 apresentando consigo os valor de 𝐶0 =
9.5 𝑘𝑁 e 𝑃𝑢 = 0.408.
A.7-2.3. Calculo da vida útil
𝐿10 = (𝐶
𝑃)
𝑎
= (14.8
1.35746)
3
→ 𝐿10 = 1296 𝑚𝑖𝑙ℎõ𝑒𝑠 𝑑𝑒 𝑟𝑒𝑣
𝐿10ℎ =𝐿10 × 106
𝑛 60=
1296 × 106
639.25 × 60→ 𝐿10ℎ = 33789.59 ℎ
A.7-2.4. Resultado oferecido pelo site da SKF

115

116
A.7-3. Rolamento do Eixo 3
Dados:
Fa [N] 0
Fr [N] 340,85
n [rpm] 114,34
D [mm] 25
L_est [h] 20000
R [%] 0,99
A.7-3.1. Especificação do rolamento
𝑃 = 𝑥 𝐹𝑟 + 𝑦 𝐹𝑎 = 1 × 340.85 + 0 × 0 → 𝑃 = 340.85 𝑁
𝐿𝑒𝑠𝑡 = 𝐿𝑒𝑠𝑡 60 𝑛
106=
20000 × 60 × 114.34
106→ 𝐿𝑒𝑠𝑡 = 137 𝑚𝑖𝑙ℎõ𝑒𝑠 𝑑𝑒 𝑟𝑒𝑣
Devido ao rolamento ser do tipo esfera; adota-se o valor de “a” sendo 3:
𝐶𝑒𝑠𝑡 = 𝐿𝑒𝑠𝑡 1𝑎 𝑃 = 137
13 × 0.34085 → 𝐶𝑒𝑠𝑡 = 1.76 𝑘𝑁
A.7-3.2. Determinação do rolamento
Com os valores calculados busca-se na tabela o rolamento de esfera que apresenta o
valor de “C” mais próximo:
Neste caso foi o com o valor de 𝐶 = 8.06 𝑘𝑁 apresentando consigo os valor de 𝐶0 =
4.75 𝑘𝑁 e 𝑃𝑢 = 0.212.
A.7-3.3. Calculo da vida útil
𝐿10 = (𝐶
𝑃)
𝑎
= (8.06
0.34085)
3
→ 𝐿10 = 13222.22 𝑚𝑖𝑙ℎõ𝑒𝑠 𝑑𝑒 𝑟𝑒𝑣
𝐿10ℎ =𝐿10 × 106
𝑛 60=
13222 × 106
114.34 × 60→ 𝐿10ℎ = 1927361.52 ℎ
A.7-3.4. Resultado oferecido pelo site da SKF

117

118
A.8- Chavetas
A.8-1. Fixas
Para as chavetas fixas foi usado o seguinte material:
𝐴ç𝑜 𝐴𝐼𝑆𝐼 1020 𝑅𝑒𝑐𝑜𝑧𝑖𝑑𝑜𝑠
𝑅𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑐𝑖𝑎 𝑎𝑜 𝑒𝑠𝑐𝑜𝑎𝑚𝑒𝑛𝑡𝑜: 𝑆𝑦 = 295 𝑀𝑃𝑎
𝐹𝑎𝑡𝑜𝑟 𝑑𝑒 𝑆𝑒𝑔𝑢𝑟𝑎𝑛ç𝑎: 𝐶𝑆 = 4
A.8-1.1. Polia
Para a chaveta na polia foi usado os seguintes valores:
Torque [N.mm] 11393,46
diâmetro [mm] 15,00
Altura [mm] 5,00
Largura [mm] 5,00
Comprimento [mm] 64,00
Sendo assim:
𝑆𝑠𝑦 = 0.577 × 𝑆𝑦 = 0.577 × 295 → 𝑆𝑠𝑦 = 170.22 𝑀𝑃𝑎
𝜎 =4 𝑇
𝑑 𝑡 𝐿=
4 × 11393.46
15 × 5 × 64→ 𝜎 = 9.49 𝑀𝑃𝑎
𝜏 =2 𝑇
𝑑 𝑏 𝐿=
2 × 11393.46
15 × 5 × 64→ 𝜏 = 4.75 𝑀𝑃𝑎
𝜎𝑚𝑎𝑥 = √𝜎2 + 3 𝜏3 = √9.492 + 3 × 4.753 → 𝜎𝑚𝑎𝑥 = 20.28 𝑀𝑃𝑎
𝐶𝑆𝑐𝑜𝑚𝑝 =𝑆𝑦
𝜎=
295
9.49→ 𝐶𝑆𝑐𝑜𝑚𝑝 = 31.07
𝐶𝑆𝑐𝑖𝑠 =𝑆𝑆𝑦
𝜏=
170.22
4.75→ 𝐶𝑆𝑐𝑖𝑠 = 35.86
𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 =𝑆𝑦
𝜎𝑚𝑎𝑥=
295
20.28→ 𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 = 14.55

119
A.8-1.2. Engrenagens no eixo II
A.8-1.2.1. Primeiro grupo de engrenagens
Para a chaveta na polia foi usado os seguintes valores:
Torque [N.mm] 31439,94
diâmetro [mm] 18,00
Altura [mm] 6,00
Largura [mm] 6,00
Comprimento [mm] 40,00
Sendo assim:
𝑆𝑠𝑦 = 0.577 × 𝑆𝑦 = 0.577 × 295 → 𝑆𝑠𝑦 = 170.22 𝑀𝑃𝑎
𝜎 =4 𝑇
𝑑 𝑡 𝐿=
4 × 31439.94
18 × 6 × 40→ 𝜎 = 29.11 𝑀𝑃𝑎
𝜏 =2 𝑇
𝑑 𝑏 𝐿=
2 × 31439.94
18 × 6 × 40→ 𝜏 = 14.56 𝑀𝑃𝑎
𝜎𝑚𝑎𝑥 = √𝜎2 + 3 𝜏3 = √29.112 + 3 × 14.563 → 𝜎𝑚𝑎𝑥 = 100.49 𝑀𝑃𝑎
𝐶𝑆𝑐𝑜𝑚𝑝 =𝑆𝑦
𝜎=
295
29.11→ 𝐶𝑆𝑐𝑜𝑚𝑝 = 10.13
𝐶𝑆𝑐𝑖𝑠 =𝑆𝑆𝑦
𝜏=
170.22
14.56→ 𝐶𝑆𝑐𝑖𝑠 = 11.69
𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 =𝑆𝑦
𝜎𝑚𝑎𝑥=
295
100.49→ 𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 = 2.94

120
A.8-1.2.2. Segundo grupo de engrenagens
Para a chaveta na polia foi usado os seguintes valores:
Torque [N.mm] 31439,94
diâmetro [mm] 18,00
Altura [mm] 6,00
Largura [mm] 6,00
Comprimento [mm] 76,00
Sendo assim:
𝑆𝑠𝑦 = 0.577 × 𝑆𝑦 = 0.577 × 295 → 𝑆𝑠𝑦 = 170.22 𝑀𝑃𝑎
𝜎 =4 𝑇
𝑑 𝑡 𝐿=
4 × 31439.94
18 × 6 × 76→ 𝜎 = 15.32 𝑀𝑃𝑎
𝜏 =2 𝑇
𝑑 𝑏 𝐿=
2 × 31439.94
18 × 6 × 76→ 𝜏 = 7.66 𝑀𝑃𝑎
𝜎𝑚𝑎𝑥 = √𝜎2 + 3 𝜏3 = √15.322 + 3 × 7.663 → 𝜎𝑚𝑎𝑥 = 39.79 𝑀𝑃𝑎
𝐶𝑆𝑐𝑜𝑚𝑝 =𝑆𝑦
𝜎=
295
15.32→ 𝐶𝑆𝑐𝑜𝑚𝑝 = 19.25
𝐶𝑆𝑐𝑖𝑠 =𝑆𝑆𝑦
𝜏=
170.22
7.66→ 𝐶𝑆𝑐𝑖𝑠 = 22.22
𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 =𝑆𝑦
𝜎𝑚𝑎𝑥=
295
39.79→ 𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 = 7.41

121
Anexo I - Tabelas
Tabela 16 – Fator de serviço – FS
Fonte: (MARCO FILHO)
Tabela 17 – Fator adicional a ser aplicado ao fator de serviço
Fonte: (MARCO FILHO)

122
Tabela 18 – Dimensões principais das correias Hi-Power
Fonte: (MARCO FILHO)

123
Tabela 19 – Classificação de HP por correia perfil A
Fonte: (MARCO FILHO)
Tabela 20 – Comprimento primitivo de correias Cotinental Contitech
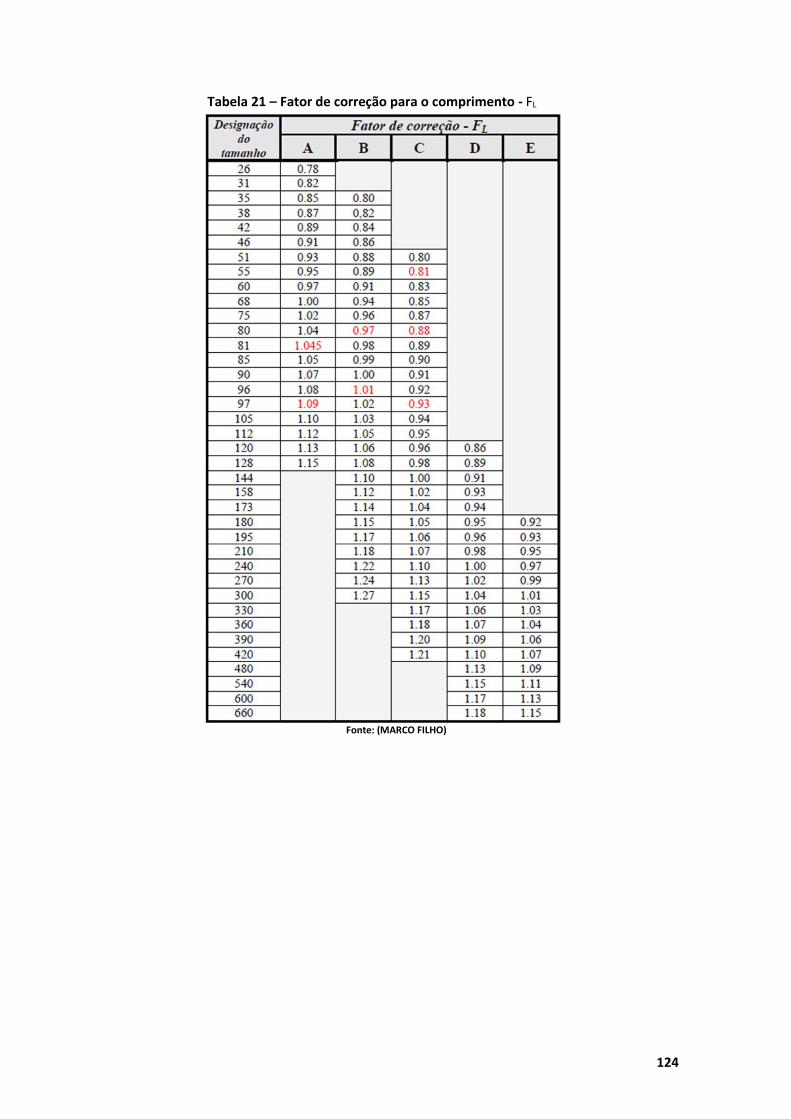
124
Tabela 21 – Fator de correção para o comprimento - FL
Fonte: (MARCO FILHO)

125
Tabela 22 – Fator de correção para o arco de contato – Ca
Fonte: (MARCO FILHO)
Tabela 23- Valores de Fator de forma da AGMA – J (θ = 20º)
Fonte: (MARCO FILHO)

126
Tabela 24 - Valores para o fator de acabamento superficial - ka
Fonte: (MARCO FILHO)
Tabela 25 - Valores para o fator de tamanho e dimensão - kb
Fonte: (MARCO FILHO)

127
Tabela 26 - Valores para o fator de confiabilidade - kc
Fonte: (MARCO FILHO)

128
Tabela 27 - Valores para o fator de correção de sobrecarga - KO
Fonte: (MARCO FILHO)
Tabela 28 - Valores para o fator de distribuição de carga ao longo do dente - Km
Fonte: (MARCO FILHO)
Tabela 29 - Valores para o coeficiente elástico - Cp
Fonte: (MARCO FILHO)
Tabela 30 - Valores para o fator de correção para a vida da engrenagem - CL
Fonte: (MARCO FILHO)

129
Tabela 31 - Valores para o fator de confiabilidade - CR
Fonte: (MARCO FILHO)
Tabela 32 - Valores para o fator de correção de sobrecarga - CO
Fonte: (MARCO FILHO)
Tabela 33 - Valores para o fator de distribuição de carga ao longo do dente - Cm
Fonte: (MARCO FILHO)

130
Tabela 34 - Carta de sensitividade ao entalhe – q
Fonte: (BUDYNAS e NISBETT, 2011)
Tabela 35 – Carta de fatores teóricos de concentração de tensão - Kt
Fonte: (BUDYNAS e NISBETT, 2011)

131
Tabela 36 – Carta de fatores teóricos de concentração de tensão - Kt
Fonte: (BUDYNAS e NISBETT, 2011)
Tabela 37 - Valores para o fator de condições de funcionamento – a3
Fonte: (SKF)

132
Tabela 38 - Valores fator de condição de funcionamento
Fonte: (SKF)
Tabela 39 - Valores fator combinado
Fonte: (MARCO FILHO)

133
Tabela 40 - Valores fator de contaminação
Fonte: (SKF)
Tabela 41 – Gráfico de espessura das paredes de fundição
Fonte: (RESHETOV, 1979)


s em mmForça F em N
2
Valores calculados de acordo com a norma DIN 2092
DESCRIÇÃO: DSC / De x D
i x t / material / acabamento
EXEMPLO: DSC 25 x 12.2 x 0.7 BR
Consulte a página 14 para as Molas Prato de Aço Inoxidável da SPIROL.
CBA
CBA
2 e µ
De
Di
To
ho
ho/t s
tS
tS
tS
ts F
0
Pré-carga, s = 0,15 ho
s = 0,25 ho
s = 0,5 ho
s = 0,75 ho
s = ho
FFF F
-1332-1421-1776
-1147-1911-1384-1441
-957-1531-1595-1228-1535-1619
-1544-1853
12623846542
142269
23237765263
257418
424641
699
9491123
13251194951
9921138
1195988
1291121312491417
12811717329865
1218
1629352974
1238786
1193
9881313
186357
39119
98
192297
58213329178331
324547
775666782778971837714948
713813
912858714
923884917
792
127493749324
815
133539784411683611856
829
81
2463492
14783
214
48155236141249263
245
386
394482439388
348394
516418385432493467487545
197365511
6175343
95461
343453
26242328149285251384257369
4469
12821
7852
16984
1753293
11785
143
137219
263214249269328268223289275235266
283238266
266278
122212299
-6
19836
151222296
4139212
76158137
132194
31437915354832995572
1182261
559196
116
127
1,25
1,17
3,23,23,24,24,24,23,23,24,24,24,25,25,25,24,24,25,25,26,26,2
888888
121212121212
Série
“t” menor que1,25 mm Aço de Alto Carbono
“t” com 1,25 mm ou mais espesso Liga de Aço
R
B
WHV 412 - 544

CBACBA
CBA
CBA
CB
ACBA
2 e µ
De
Di
to
ho
ho/t s
ts
tS
tS
ts F
0
Pré-carga, s = 0,15 ho
s = 0,25 ho
s = 0,5 ho
s = 0,75 ho
s = ho
FFF F
-1388-1666
-1293-1551
-1888-1275-1377-1428-1646-1881-988
-1333-1555-816
-1225-1667
-1412-1468-1834
-1363-1558
-1373-1545
-1386
-1733
-1178-1276-1534
363855131338
181969334519733844
1261165
1319137267462855
1277725984
1921223699
1631453668921
1311268929
132318151976
444855
1284
1189
998
12911423
1115
791885
134314541135
1126
1133
1112
1227
9131419315764
1341411
1483732
1195
1392332838
1287247
794
1419914
11241547291895
1295
998
1278
336768
1316
152291673123279813175793291426578666982155412
139245
745
594791
1514214572
1254413
751
254745
14181531425
1952
1,12
1,141,21
1,37
949811814784787743746
787766
997735
771583646
964
827777
792757797785748
786
934776897782737
142559864
42882614988236859172769485611748884652
234416567779536
93983
814246436576715
548674
98434815
131
457
547156
229
411474689131
716126
317588822452564
186417865342447557765221555765
539
1,15
1,25
1,171,271,32
1,12
496431452
419411
535439392373479523413411
319
382533571442427493
436394443
398427416428
492388488
398
1238432
-2173418
4
137236328311391
12192398
61152215324
451-14226382
66158244313
-5235298361
-14168399
82123255
67
346143174222256367
86169372
85
191362491259
121242451219258315423
419553537
1,11
1,16
1,221,321,111,171,37
1,121,191,251,35
1,211,311,411,44
1,291,62
325246287268258261242314278255228293
262267227198217236335358259268
272275
279263245262268251269287251
249
-14122263-1294
255-15194
141189178226
-5114215-322378
112179114178268-221292232587
136177-15125161197
-2396
239
5772
1624676
19266
95116138159226
581122115785
124239
157
367
15627614617219926596
186249327347
199451
1,17
1,14
1,111,291,391,171,221,42
1,121,341,191,251,311,41
1,271,371,471,481,281,351,67
1,29
1,29
1,38
1,25
1,33
1,17
1,33
1,25
1,25
1,25
1,35
1,151,351,451,551,55
1,451,75
1
1
11,1
1,25
6,26,26,27,27,27,25,25,26,26,26,28,28,28,28,28,26,26,26,26,26,28,28,28,29,29,29,28,28,28,28,2
11,211,211,2
12,512,512,5
141414151515151515151616161818181818181818181818
22,522,522,5
Série

11
CBA
CB
ACB
A
CBA
2 e µ
De
Di
to
ho
ho/t s
ts
tS
tS
ts F
0
Pré-carga, s = 0,15 ho
s = 0,25 ho
s = 0,5 ho
s = 0,75 ho
s = ho
FFF F
-1173-1257
-1556-1834
-1238-1238-1622
-1419-1774
-1415-1583-1676-1282-1282
-1562
-1442
-1923-1153-1442
-1435-1572-1658
-1258-1611-1213-1351-1455
842127912731629
5184635
3821723
1486
35111482
3949859
13422785
7222359
2359
2347
7498884
674719843184
1,15
1,15
98811641221
1356
1265
94711581326
1153
1369111111321194135411111326
1154
118613161238
1128
946
626
9471133
1788
787
528
1478
11781423422765
11441281
9271235
563938
1313864
117711361527318743
1332664981
1392
544717
132523313986
868
6611289239427451266
22462854687
19233249
6148
3363
29973163
83116995187
26774781
1,17
1,65
1,64
1,25
1,671,241,461,69
1,461,66
1,471,721,922,19
1,55
1,541,761,762,211,19
1,822,26
733722837887849949
919
769698837949
878858822
776978783831844
766935742833923865848941
792766785
743669
295466589541655868
1124136
916244459765911432
897154429677
97
734814
472696668964111416837319542865
448565829
964
2748515644
556
17991899
99915342185
681832
16491997
597
231426694292
158725271555
716127735761459
3391
1,17
1,271,351,55
1,151,251,771,27
1,751,851,471,671,87
1,671,821,32
1,95
2,37
1,85
1,82
2,421,471,75
1,952,152,52
397389449475463497565
379451
356472446432515414
397444458512
486
448493464443491444
346
87178233217291399527
5187433
63165319437158296412
13174283365
-9
334394488
63188313179294
4392
168393
98222389
279336486468552863
1432337376
351615
595835
1163435476898
382
128614292227587946
1447919
1213
461731
1864
1784
1,36
1,461,52
1,951,371,421,911,511,75
1,711,89
1,55
1,891,991,591,922,172,272,56
2,15
2,112,292,292,641,76
2,472,79
245232277282
344
232228278312221283282255319254321252282285318255286249276
279
279261251249251251217
37
125113167231
-13
2422384
17625978
173
-794
165222-19
1932352762298
17391
161265-1291
44122231
183
311289353532875226243615225398654645374539694287
649258515812
1313386
919579781824
299464
1139591777
1129
1,381,441,581,541,591,76
1,461,491,971,611,85
1,811,972,141,651,681,97
1,69
2,262,342,64
2,272,522,232,392,392,721,88
2,682,44
2,89
1,14
1,29
1,19
1,25
1,31
1,28
1,12
1,15
1,15
1,55
1,65
1,85
1,75
2,25
1,95
2,25
2,151,852,15
2,452,75
2,45
2,552,552,85
2,25
2,65
11,251,5
1,5
11,251,5
11,251,5
11,251,5
1,251,5
1,7521
1,251,5
1,251,51,5
2
1,252
1,251,5
2
8,28,28,2
12,212,212,212,212,2
12,212,212,214,214,214,214,216,316,316,316,316,312,312,312,314,314,316,316,318,318,318,314,314,314,3
232323232323232525252828282828282828282828
31,531,531,531,531,5
34343434343434
35,535,535,5
Série


Eixo Externo AlturaCódigo Dimenções Modelo Mercado Material
1403 14,00 50,50 46,00 AGGF 02020 ASBRTCS0222 14,73 55,00 6,00 BR NBRAG7286 15,00 21,00 3,00 GR 02589 NBR
6313 15,00 23,00 3,00 GRF 02639 FPM6484 15,00 23,00 3,00 GR 02639 NBR6622 15,00 23,00 3,00 BRF FPM
TCS0223 15,00 24,00 5,00 BRG NBRTCS0224 15,00 24,00 6,00 BR NBR
6320 15,00 24,00 7,00 BRF 00790 FPM6490 15,00 24,00 7,00 BR 00790 NBR
AG7523 15,00 24,00 7,00 BRG 00790/01929 NBRTCS0225 15,00 24,00 7,00 BA 01816 NBRTCS0226 15,00 25,00 4,00 BRG NBRTCS0227 15,00 25,00 4,50 BR NBRTCS0228 15,00 25,00 5,00 BRG NBR
5727 15,00 25,00 6,00 BRG 02454 NBRTCS0136 15,00 25,00 7,00 BRP 02309 ACM
5633 15,00 25,00 5,00/8,00 GAE PUTCS0229 15,00 26,00 7,00 BRG NBRTCS0004 15,00 28,00 6,30 BAG NBR
6342 15,00 28,00 7,00 BAG 00916 NBRTCS0067 15,00 28,00 7,00 BA 00916 NBRAG7509 15,00 29,00 14,50 AGJJF FPM
TCS0230 15,00 30,00 5,00 BRG NBRTCS0231 15,00 30,00 5,00 BRGF FPMTCS0097 15,00 30,00 7,00 BR 01677 NBRTCS0232 15,00 30,00 7,00 BA 01846 NBRTCS0233 15,00 30,00 7,00 BRG 01677 NBRTCS0798 15,00 30,00 8,00 BAG 00766 NBRTCS0813 15,00 30,00 10,00 BRG 01348 NBRAG7648 15,00 30,00 12,50 AGGQ NBRAG7501 15,00 32,00 7,00 BA NBR
TCS0110 15,00 32,00 7,00 BR 01907 NBRTCS0234 15,00 32,00 7,00 BRG 01907 NBRTCS0235 15,00 32,00 7,00 BRGF 01907 FPMTCS0236 15,00 35,00 5,00 BRG NBR
5743 15,00 35,00 7,00 BR 01058 NBRAG7491 15,00 35,00 7,00 BRF 01058 FPMAG7522 15,00 35,00 7,00 BRG 01058 NBR
TCS0814 15,00 35,00 10,00 BRG 01051 NBR9420 15,00 36,00 5,50 AGFL NBR9390 15,00 41,50 5,70 AGFG NBR
TCS0240 15,00 42,00 8,00 BRG NBR6711 15,50 30,80 11,50 AGGQ1 NBR5224 15,80 25,40 5,50 BR NBR1496 15,80 28,60 6,40 BRG NBR9154 15,87 39,70 2,60/3,50 AGGW NBR
TCS0241 15,88 20,65 2,36 GR NBRTCS0242 15,88 31,75 6,35 BAG NBR
9804 15,90 22,20 4,30 BAG 02335 NBR9965 15,90 25,40 4,50 BR 00286 NBR9718 16,00 22,00 3,00/4,00 GAE NBR9720 16,00 22,00 3,00/4,00 AGAO NBR
TCS0794 16,00 22,10 6,40 BAG 01576 NBR
12

Eixo Externo AlturaCódigo Dimenções Modelo Mercado Material
9361 25,00 34,00 5,00 BR NBRTCS0829 25,00 34,00 5,00 BR NBR
9114 25,00 34,00 7,00 BR NBR6220 25,00 35,00 5,00 BRF FPM
TCS0329 25,00 35,00 5,00 GA 02107 NBR6835 25,00 35,00 6,00 BRGF 03025 FPM3110 25,00 35,00 7,00 BA 01543 NBR6219 25,00 35,00 7,00 BR 01543 NBR6325 25,00 35,00 7,00 BRF FPM/INOX6594 25,00 35,00 7,00 BRF 01543 FPM
AG7043 25,00 35,00 7,00 BR HNBRTCS0330 25,00 35,00 7,00 BRG 02802/01543 NBRTCS0757 25,00 35,00 7,00 BR NBRTCS0820 25,00 35,00 7,00 BRGF 02802 FPMTCS0059 25,00 35,00 10,00 BAG 00788 NBR
9157 25,00 35,00 3,80/7,50 AGFY NBR9437 25,00 35,00 4,00/6,70 AGNG NBR/NYLON
AG7671 25,00 35,00 5,00/7,00 GAE 02261 NBRTCS0313 25,00 35,00 6,00/6,50 BRGF FPMAG7467 25,00 35,00 7,00/10,00 GAE PU
4519 25,00 36,00 7,00 BR 01515 NBRTCS0763 25,00 36,00 8,00 AGNA NBR/NYLONTCS0331 25,00 37,00 5,00 BRG NBR
4362 25,00 37,00 6,00 GA PUTCS0332 25,00 37,00 6,00 BRG NBRTCS0333 25,00 37,00 7,00 BRG 01577 NBR
9415 25,00 37,00 8,00 AGNA NBR/NYLONTCS0430 25,00 37,00 6,00/6,50 BRGF FPM
9380 25,00 37,50 6,30 AGNA NBR/NYLON5915 25,00 37,70 4,30/7,50 AGNF NBR/NYLON
TCS0334 25,00 38,00 5,00 GR NBRTCS0335 25,00 38,00 6,00 BA NBRTCS0336 25,00 38,00 6,00 BAF FPM
9936 25,00 38,00 7,00 BRG NBRTCS0337 25,00 38,00 7,00 BRG NBRTCS0338 25,00 38,00 7,00 BRGF FPM
3333 25,00 38,00 8,00 BG 01118 NBRTCS0339 25,00 38,00 8,00 BRG NBR
4173 25,00 38,00 14,50 AGJJF 02797 FPM9393 25,00 38,10 7,00/7,50 BRG NBR9418 25,00 38,20 7,20 AGNA NBR/NYLON
TCS0771 25,00 38,20 10,00 AGNA NBR/NYLON6935 25,00 38,40 12,50 AGNI NBR/NYLON9188 25,00 39,30 12,50 AGNC NBR/NYLON9417 25,00 39,50 8,50 AGNA NBR/NYLON5669 25,00 40,00 5,00 GR 01295 NBR
TCS0340 25,00 40,00 7,00 BRG 02570 NBRTCS0799 25,00 40,00 7,00 BAG 02062 NBRTCS0819 25,00 40,00 7,00 BRGF 02570 FPM
6435 25,00 40,00 8,00 BR 01556 NBR9230 25,00 40,00 8,00 BRG 02233 NBR9407 25,00 40,00 8,00 BROF 02233 FPM9413 25,00 40,00 8,00 AGNA NBR/NYLON
TCS0737 25,00 40,00 8,00 BRG 02712 NBR
19

FOLHA DE DADOSMotor Trifásico de Indução - Rotor de Gaiola
Cliente :
____
Rev. Resumo das modificações Executado Verificado Data
Executor
Verificador Página Revisão
Data 13/11/2017 1 / 1Propriedade de WEG S/A. Proibida a reprodução sem autorização prévia.
Sujeito a alterações sem aviso prévio
Linha do produto : W22 IR2 Trifásico Código do produto : 12459096
CarcaçaPotênciaNúmero de polosFrequênciaTensão nominalCorrente nominalCorrente de partidaIp/InCorrente a vazioRotação nominalEscorregamentoConjugado nominalConjugado de partidaConjugado máximoClasse de isolamentoFator de serviçoMomento de inércia (J)Categoria
: 90L: 2.2 kW (3 HP-cv): 4: 60 Hz: 220/380 V: 8.18/4.74 A: 53.2/30.8 A: 6.5: 4.20/2.43 A: 1735 rpm: 3.61 %: 1.24 kgfm: 195 %: 250 %: F: 1.15: 0.0063 kgm²: N
Tempo de rotor bloqueadoElevação de temperaturaRegime de serviçoTemperatura ambienteAltitudeGrau de proteçãoMétodo de refrigeraçãoForma construtivaSentido de rotação¹Nível de ruído²Método de partidaMassa aproximada³
: 18s (frio) 10s (quente): 80 K: S1: -20°C a +40°C: 1000 m: IP55: IC411 - TFVE: B35D: Ambos: 51.0 dB(A): Partida direta: 25.2 kg
Potência 50% 75% 100% Esforços na fundaçãoRendimento (%) 83.8 84.8 85.1 Tração máxima : 75 kgfCos Φ 0.64 0.76 0.83 Compressão máxima : 100 kgf
Dianteiro TraseiroTipo de mancal : 6205 ZZ 6204 ZZVedação : V'Ring V'RingIntervalo de lubrificação : - -Quantidade de lubrificante : - -Tipo de lubrificante : Mobil Polyrex EM
Observações
Esta revisão substitui e cancela a anterior, a qual deverá sereliminada.(1) Olhando a ponta de eixo dianteira do motor.(2) Medido a 1m e com tolerancia de +3dB(A).(3) Massa aproximada sujeito a alteração após fabricação.(4) Em 100% da carga nominal.
Os valores indicados são valores médios com base emensaios e para alimentação em rede senoidal, sujeitos astolerancias da norma ABNT NBR 17094.

331
507
AA
BB
CORTE A-A
15 16 17
18
19 20 21
22
23
24
25
26
27
28
29
30
3132333435
363738
394041
42
43
44
45
46
47
4849
50
Numero Quantidade Nome do Componente
CORTE B-B
1
2
3
4
5
67
8
9
1011
12
13 14
24,62°
49,25°
515253
54
55
56 57
759
511
Posicionamento Alavanca 1Posicionamento Alavanca 3
Porca SextavadaParafuso SextavadoVareta de medição
Tampa de OleoOlhal de Inçamento
Engrenagem 10Engrenagem 12Engrenagem 14Engrenagem 16
Rolamento SKF 16005Engrenagem 1Engrenagem 3Engrenagem 5Engrenagem 7
Rolo Cilindrico Chaveta Movel Eixo 1Chaveta Movel Eixo 1
Retentor Eixo 1Eixo 1
Chaveta Fixa 5x5x64Polia Movida
Rolamento SKF W6302Belleville Eixo 1
Colar Chaveta Movel Eixo 1Eixo 2
Chaveta Fixa 6x6x40Rolamento SKF 4302ATN9
Engrenagem 8Engrenagem 6Engrenagem 4Engrenagem 2
Engrenagem 15Engrenagem 13Engrenagem 11Engrenagem 9
Chaveta Fixa 6x6x76Colar Chaveta Movel Eixo 3
Chaveta Movel Eixo 3Eixo 3
Retentor Eixo 3Belleville Eixo 3
Rolo Cilindrico Chaveta Movel Eixo 3Encaixe ao Colar da Chaveta Movel
Braço da AlavancaPino Fixação Braço Alavanca
Esfera de PosicionamentoMola de Posicionamento
Parafuso de PosicionamentoCorpo da Alavanca
Eixo da AlavancaPino Fixação Eixo Alavanca e Corpo AlavancaPino de Conexão Corpo e Cabo da Alavanca
Cabo da AlavancaCabeça da Alavanca
Carcaça SuperiorCarcaça Inferior
1141011211112111144111122111211111111114112422111111111111
575655545352515049484746454443424140393837363534333231302928272625242322212019181716151413121110987654321
Data: 11/12 / 2017
Unid.: mm
1° Diedro
Escala: 1:2
Variador de velocidade Conjunto
UFRJProjeto de GraduaçãoProf. Armando C. Pina Filho
Matheus Fernandes Pinto