Realidade Virtual
25
-
Upload
waldir-pimenta -
Category
Documents
-
view
4.951 -
download
0
description
Trabalho da disciplina de Documentação Técnica do primeiro ano do curso de Engenharia da Computação Gráfica e Multimédia. Por Waldir Pimenta, Íris Gonçalves e Gabriel Júlio. Docente: João Nunes.
Transcript of Realidade Virtual


I. ÍNDICE I. Índice .................................................................................................................................2 II. Introdução..........................................................................................................................1 III. RV Imersiva em Ambientes Virtuais.................................................................................2
1. História .....................................................................................................................3 1.1. Origem do Nome .........................................................................................3 1.2. Primeiras Experiências ................................................................................4
a) Engelbart ..................................................................................................4 b) Sutherland ................................................................................................5 c) Outros Marcos Importantes ......................................................................6
1.3. Desenvolvimentos Recentes ........................................................................7 2. Visão Geral ...............................................................................................................8
2.1. Definição .....................................................................................................8 2.2. Tipos de RV.................................................................................................9
3. Sistemas de RV-AVI ..............................................................................................10 3.1 Hardware ....................................................................................................11
a) Dispositivos de Saída de Dados (Ambiente Usuário) .......................11 i. Visão:.................................................................................................11 ii. Audição: ...........................................................................................12 iii. Olfacto e Paladar: ............................................................................12 iv. Dispositivos Físicos:........................................................................13
b) Dispositivos de Entrada de Dados (Usuário Ambiente)....................15 i. Dispositivos de Interação .................................................................15 ii. Dispositivos de Trajectória..............................................................16
3.2. Software.....................................................................................................17 a) Requisitos ...............................................................................................17 b) Exemplos de Softwares ..........................................................................18
i. CDK2 Cyberspace Development Kit 2 .............................................18 ii. REND386 .........................................................................................18 iii. Virtual Reality Studio .....................................................................18 iv. VREAM...........................................................................................18 v. VRML...............................................................................................18
c) VRML – A Internet em 3 Dimensões ....................................................19 4. Aplicações ..............................................................................................................20
4.1. Medicina ....................................................................................................20 4.2. Entretenimento...........................................................................................20 4.3. Ciência e Investigação...............................................................................20 4.4. Educação....................................................................................................20 4.5. Controle da Informação (representação e manipulação) ...........................20
5. Futuro .....................................................................................................................21 IV. Conclusão ........................................................................................................................22 V. Bibliografia......................................................................................................................23

II. INTRODUÇÃO Este trabalho visa dar uma visão geral sobre a realidade virtual, e em particular sobre os sistemas de realidade virtual imersivos em ambientes virtuais. Tais conceitos serão mais à frente definidos em pormenor. A proliferação de informações acerca deste tema prejudicou a linearidade e eficiência da nossa pesquisa, mas depois de alguma análise conseguimos catalogar toda a informação recolhida e apresentá-la do modo mais compacto e simples possível, evidentemente sem (intencional) perda de qualidade. Definimos portanto cinco capítulos básicos, os quais desenvolvemos interiormente com sub capítulos mais específicos. Introduzimos um historial resumido do desenvolvimento da realidade virtual, seguido de uma visão geral sobre os sistemas de RV analisados, incluindo hardware e software, e após um capítulo referente às aplicações práticas, reservámos uma secção dedicada a previsões de desenvolvimentos futuros na área. Pretendemos com este trabalho dar de forma clara e simples uma visão geral mas exacta do que é um sistema de realidade virtual, na vertente específica acima referida.
VVVIIIRRREEE AAA PPPÁÁÁGGGIIINNNAAA
1

III. RV IMERSIVA EM AMBIENTES VIRTUAIS
2

1. História
1.1. Origem do Nome
Em 1973 Myron Krueger criou o termo “realidade artificial” para caracterizar a interacção entre seres humanos e máquinas. O seu objectivo era criar meios pelos quais os seres humanos poderiam participar inteiramente em eventos de computação de um modo tão intenso que seriam aceitos como experiências reais. Ele queria criar uma realidade artificial, um mundo simulado de visões, sons e outras sensações que tornariam totalmente convincentes a experiência desta ilusão para as pessoas que dela participassem. Para ele seria possível criar realidades artificiais onde os seres humanos poderiam participar de corpo inteiro, sem usar qualquer instrumento especial fossem eles sensores ou mostradores, em uma experiência criada por computadores.
“Espaço Cibernético” (cyberspace) foi o termo utilizado por William Gibson em seu livro Neuromancer para designar “uma representação gráfica de dados abstraídos dos bancos de dados de todos os computadores do sistema humano. Uma complexidade impensável. Linhas de luz alinhadas que abrangem o universo não-espaço da mente; nebulosas e constelações infindáveis de dados. Como luzes de cidades, retrocedendo.” (Gibson, 1984). Gibson descreveu uma rede de computadores universal contendo todo tipo de informações, na qual seria possível “entrar” e explorar os dados de forma multisensorial, e onde pessoas com implantes nos seus corpos podiam transmitir informações directamente para o computador. Na verdade, o Espaço Cibernético é uma simulação 4D do espaço-tempo controlada pela interface de RV; é um espaço imaginário. Desde que os sistemas de RV criem o Espaço Cibernético, é possível interagir com tudo e com todos num nível virtual.
No início dos anos da década de 1980, Jaron Lanier, um artista plástico, compositor e pesquisador de informática que não possuía qualquer grau académico, criou o nome “realidade virtual”. Lanier declarou ter gerado este termo para diferenciar as simulações tradicionais por computação dos mundos digitais que ele tentava criar. Na verdade um termo semelhante, nesta mesma época, estava sendo usado pelos físicos para caracterizar as chamadas "partículas virtuais". O termo "realidade virtual" englobava apropriadamente a ideia de podermos interagir com um
mundo que não pode ser detectado naturalmente pelos nossos sentidos físicos mas que se apresenta com um sentido "real" se utilizarmos alguns recursos especiais. O termo é bastante abrangente, e por isto académicos, programadores de software e principalmente pesquisadores procuram definir Realidade Virtual baseados em suas próprias experiências.
3

1.2. Primeiras Experiências
a) Engelbart No final dos anos que formaram a década de 1950 os poucos computadores que existiam eram equipamentos imensos que ocupavam andares inteiros, super refrigerados, de grandes corporações e centros universitários. Somente os especialistas em linguagens de programação conseguiam ter acesso a estas imensas máquinas que, na verdade, não conseguiam fazer muito mais do que operar enormes conjuntos de números. Não existiam naqueles dias nada semelhante aos familiares PC, os "personal computers" que hoje praticamente fazem parte do nosso dia a dia.
No entanto, um jovem engenheiro electricista, que havia sido técnico de radares da marinha norte-americana, chamado Douglas Engelbart via os computadores de um modo diferente. Engelbart pensava em transformar os computadores de modo que eles pudessem ser usados como ferramentas de exibição digital. Devido à sua experiência com radares, Engelbart sabia que qualquer informação digital poderia ser vista em uma tela. Ele imaginou que a conexão de um computador a uma tela poderia ser muito útil na solução de problemas. Inicialmente, as ideias de Engelbart foram abandonadas mas, no início dos anos que formaram a década de 1960 outras pessoas viram que suas propostas podiam ser úteis. É claro que isso só aconteceu porque, nesse momento, o desenvolvimento tecnológico já mostrava novas
condições de trabalho. A tecnologia de comunicações estava se misturando com a tecnologia gráfica e de computação. Surgiam nesta época os primeiros computadores baseados em transístores, que substituíam as pesadas e imensas válvulas electrónicas como o principal componente dos circuitos. Foi esta mistura que permitiu que computadores mais amigáveis para o usuário fossem colocados no mercado. Esta mudança tecnológica lançou as bases para o surgimento dos computadores PC e os gráficos de computadores. Mais tarde surgiria a realidade virtual.
4

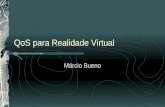
b) Sutherland Em 1962 Ivan Sutherland desenvolveu uma "caneta óptica" com a qual imagens poderiam ser esboçadas em um computador. O primeiro programa feito por Sutherland que permitia a realização de projectos com a ajuda de computador, chamado Sketchpad, permitia que os projectistas usassem computadores para criar projectos de automóveis, cidades e produtos industriais – foi o início dos gráficos computadorizados (computação gráfica). Sutherland tornou-se o precursor da actual indústria de CAD. Como resultado de pesquisas feitas no seu pós-doutorado, Sutherland, em 1965, definiu o chamado "Ultimate Display". O seu objectivo era definir um sistema de interacção pessoa-computador que fosse o mais completo e "intuitivo" possível. Em 1968 Sutherland construiu o primeiro sistema de visualização que possuía senso de orientação do ponto de vista do usuário. Este trabalho estabeleceu as bases de parte da tecnologia que hoje consideramos ser de RV. O objectivo de Sutherland, de estabelecer um "pais das maravilhas matemático" onde pudéssemos fazer experiências irrealizáveis no nosso mundo físico, também ajudou a definir os rumos que foram tomados pela tecnologia de RV.
Ivan Sutherland demonstrando o sistema "Sketchpad" no console do imenso computador TX-2 no MIT em 1963.
No final da década de 1960 os projectistas já estavam operando em tempo real. Por volta de 1970, Sutherland também produziu um primitivo "capacete digital" ("head-mounted display"), um equipamento que permitia que o usuário experimentasse sensações virtuais. A imagem ao lado mostra o equipamento de Sutherland. No entanto, ele era tão pesado que foi apelidado de "espada de Dâmocles" uma vez que o equipamento tinha que ficar suspenso no teto para aliviar seu peso da cabeça do usuário! Em 1968, Ivan Sutherland construiu, na Universidade de Harvard, o primeiro capacete de visualização com imagens geradas por computador, incorporando um sistema de rastreamento da posição da cabeça. Esse trabalho é considerado por muitos como o marco inicial da imersão em ambiente virtual e início da realidade virtual. Sutherland desenvolveu mais tarde o primeiro videocapacete totalmente funcional para gráficos de computador no projecto “The Ultimate Display”. Com o uso deste videocapacete era possível ao usuário ver, através da movimentação de sua cabeça, os diferentes lados de uma estrutura de arame na forma de um cubo flutuando no espaço.
5

c) Outros Marcos Importantes Na mesma época em que Sutherland criava na Universidade de Utah seu videocapacete, Myron Krueger experimentava combinar computadores e sistemas de vídeo, criando Realidade Artificial na Universidade de Wisconsin. Em 1975 Krueger criou o VIDEOPLACE, onde uma câmara de vídeo capturava a imagem dos participantes e projectava-a em 2D numa grande tela. Os participantes podiam interagir uns com os outros e com objectos projectados nessa tela. Essa técnica tornou-se também conhecida como Realidade Virtual de Projecção. Em 1977 e 1982 apareceram as primeiras luvas desenvolvidas respectivamente pelo grupo levado por Dan Sandin, Richard Soyre e Thomas Defanti na Universidade de Illinois e por Thomas Zimmerman para serem acoplados a computadores Em 1982, Thomas Furness demonstrava para a Força Aérea Americana o VCASS (Visually Coupled Airborne Systems Simulator), conhecido como “Super Cockpit” – um simulador que imitava a cabine de um avião. Os videocapacetes integravam a parte de áudio e vídeo. Assim, os pilotos podiam aprender a voar e lutar em trajectórias com 6 graus de liberdade (6DOF), sem decolar verdadeiramente, ficando praticamente isolados do mundo ao seu redor. O VCASS possuía uma alta qualidade de resolução nas imagens e era bastante rápido no rendering de imagens complexas. No entanto apresentava um problema: milhões de dólares eram necessários apenas para o capacete. Através do uso de uma nova tecnologia de visores de cristal líquido (LCD) Michael McGreevy começou a trabalhar no projecto VIVED (Virtual Visual Environment Display) em 1984 na NASA, no qual as imagens seriam estereoscópicas. A resolução das imagens era limitada em comparação ao VCASS mas o custo era bastante atractivo. A parte de áudio e vídeo foi então montada sobre uma máscara de mergulho utilizando dois visores de cristal líquido com pequenos alto-falantes acoplados. Scott Fisher junta-se a esse projecto no ano de 1985 com o objectivo de incluir nele: luvas de dados, reconhecimento de voz, síntese de som 3D, e dispositivos de feedback táctil. Thomas Zimmerman e Jaron Lanier fundam em 1985 a VPL Research que, em 1987, colocou pela primeira vez produtos de realidade virtual no mercado com a comercialização da luva "Data Glove", desenvolvida por Zimmerman e capaz de captar a movimentação e inclinação dos dedos da mão. Em seguida, a empresa também passou a vender um capacete de visualização chamado "Eye Phones". No mesmo ano uma dessas luvas foi comprada para o projecto VIVED. No final de 1986 a equipa da NASA já possuía um ambiente virtual que permitia aos usuários ordenar comandos pela voz, escutar fala sintetizada e som 3D, e manipular objectos virtuais directamente através do movimento das mãos. Em 1989 a AutoDesk apresentava o primeiro sistema de Realidade Virtual baseado num computador pessoal (PC).
6
1975
1977
1982
1984
1987
1989

1.3. Desenvolvimentos Recentes Apesar de todas estas pesquisas, os cientistas, assim como os militares, os empresários e a indústria de entretenimento, queriam mais que isto. Todos queriam interactividade. Esta exigência empurrou a visualização de computadores para o seu limite, a realidade virtual. As notícias divulgadas há cerca de 20 anos sobre progressos científicos que, embora parecessem ficção, certamente modificariam de modo radical as nossas vidas. Mas o anunciado não se transformou em realidade. Para frustração de seus admiradores, as espectaculares promessas divulgadas pelos defensores da realidade virtual não se concretizaram. Praticamente nada foi deixado de concreto, mesmo na área de entretenimento, que nos fizesse usuários da tecnologia de realidade virtual. Muita promessa para nada! Mas será isto mesmo? Será que a realidade virtual está morta? De modo algum. Assim como já aconteceu com diversas outras promessas científicas, a realidade virtual foi lançada no mercado antes da hora. Vendeu-se a ideia de algo para o qual a ciência ainda não tinha soluções triviais e a indústria não tinha condições de fabricar. Hoje a realidade virtual volta a atacar. E agora com o sólido apoio de equipamentos de informática bastante poderosos e disponíveis para aqueles que possuem meios financeiros para adquiri-los. A realidade virtual começa, agora sim, a nascer. Ela não é mais sonho ou ficção. Os equipamentos de informática de hoje não se comparam àqueles que dispúnhamos há 20 anos e as teorias matemáticas capazes de criar a lógica necessária para os programas de realidade virtual começam a tomar corpo. É apenas uma questão de tempo para que sejamos surpreendidos com equipamentos fantásticos de realidade virtual, algo que, certamente, mudará a nossa vida diária. Todos os elementos básicos da RV já existiam antes de 1980 mas foi necessário a criação de computadores de alta performance, com suas poderosas capacidades de renderização de imagens, para fazer isto funcionar. O facto mais importante é que os pesquisadores de RV estão começando a compreender as razões que levavam os usuários da RV a sentirem fadiga e náusea quando utilizavam este tipo de equipamento. Novas medidas estão sendo tomadas para que estes incómodos sejam eliminados. A conscientização de que os empreendimentos da NASA baseavam-se em equipamentos comercializáveis deu início a inúmeros programas de pesquisa em Realidade Virtual no mundo inteiro. Organizações variando de firmas de software até grandes corporações de informática começaram a desenvolver e vender produtos e serviços ligados à Realidade Virtual. A partir daí, o avanço das pesquisas, o elevado interesse industrial, o crescimento das aplicações e um número crescente de usuários vêm provocando um crescimento enorme na demanda de componentes e produtos de realidade virtual e uma redução rápida nos preços, movimentando um mercado multimilionário de crescimento extraordinário.
7

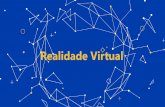
2. Visão Geral 2.1. Definição Podemos dividir a maneira como conhecemos o mundo em duas linhas. Numa delas, as experiências de 1ª pessoa, o indivíduo conhece o mundo como resultado de sua interacção diária com ele. Este tipo de conhecimento é directo, muito frequentemente, inconsciente, ou seja, não sabemos ou não nos apercebemos que sabemos alguma coisa. Na segunda forma, as experiências da 3ª pessoa, nós conhecemos o mundo como ele nos é descrito por alguém. Este conhecimento é objectivo, consciente e explícito, ou seja, sempre sabemos quando estamos adquirindo-o, pois ele nos é ensinado por alguém. Experiências de 1ª pessoa são naturais, privadas e predominam em nosso dia-a-dia na interacção com o mundo. Nesta visão a interacção com um computador é uma experiência de 3ª pessoa. Apesar de podermos manejar o rato e o teclado com um nível de habilidade tal que se torne automático, quando uma informação surge, é como se alguém estiver contando para nós. A ideia de imersão, da Realidade Virtual, é exactamente buscar uma forma de permitir a interacção com uma informação através de uma experiência de 1ª pessoa onde o usuário não tenha que criar metáforas para relacionar o dado da tela com o real e sim possa explorar o dado como se ele de fato existisse. Realidade Virtual (RV) é a forma mais avançada de interface do usuário de computador até agora disponível. Uma definição mais ou menos exacta de realidade virtual é a seguinte: “Um ambiente artificial criado em computador e apresentado ao utilizador de tal modo que pareça um ambiente real.” Isto significa que o usuário pode realizar imersão, navegação e interacção num ambiente de 4 dimensões (3 de espaço e 1 de tempo) gerado por computador, utilizando canais multi-sensoriais, ou seja, o usuário explora e manipula os dados do ambiente virtual usando seus sentidos, e particularmente os movimentos naturais tridimensionais do corpo. Para suportar esse tipo de interacção, o usuário utiliza dispositivos não convencionais como capacete de visualização e controle, luva, e outros. Estes dispositivos dão ao usuário a impressão de que a aplicação está funcionando no ambiente real, através da interpretação das suas acções e tradução, em tempo real, das mesmas em reacções do ambiente, sendo-lhe estas transmitidas através da estimulação adequada dos sentidos que normalmente estariam envolvidos. Deste modo, a realidade virtual permite às pessoas visualizarem, manipularem e interagirem com computadores e dados extremamente complexos de forma simplificada e intuitiva – um novo meio de “estar” e “tocar” em informações: “Virtual Reality is the place where humans and computers make contact.”
sensações
acções
Interface (S)
Sensores (E) Software Utilizador Ambiente
Hardware (Dispositivos E/S)
Fig.1 – Diagrama típico de um sistema de RV
8

2.2. Tipos de RV Existem vários tipos de RV, e várias definições, devido à vasta lista de aplicações que a RV abrange. Para simplificar essas definições, separámos os tipos em duas categorias, o tipo de ambiente e o tipo de interacção. O ambiente representado pode portanto ser real (versão virtual de um ambiente real), virtual (mundo virtual imaginário) ou misto (uso de elementos reais e virtuais no mundo representado). Quanto à interacção, definimos 3 níveis: sistemas não imersivos (nos quais o utilizador não interage com o ambiente), sistemas semi-imersivos (nos quais o utilizador pode navegar mas não alterá-lo), e sistemas imersivos (nos quais o utilizador pode navegar e interagir (alterar com as suas acções) com o ambiente. Apresentamos abaixo em forma de tabela uma representação gráfica do que está acima, apresentando exemplos para cada tipo de RV:
InteracçãoAmbiente
Imersivos U A
Semi-Imersivos U A
Não Imersivos U || A
Real
A chamada Telepresença. Ex: recuperação de artefactos arqueológicos submarinos a alta profundidade com robôs telecomandados
Reproduções navegáveis de ambientes reais de difícil ou impossível acesso. Ex: treino de pilotagem de um veículo
Reproduções tridimensionais de ambientes reais de difícil ou impossível acesso. Ex: TAC (Tomografia Axial Computorizada)
Misto
A chamada Realidade Aumentada. Ex: Operação médica robotizada
Modelos navegáveis de ambientes reais alterados. Ex: tour virtual pelo sistema solar
Teste virtual de elementos a ser introduzidos num ambiente real. Ex: Visualização 3D do projecto de um edifício
Virtual
Realidade Virtual no sentido mais puro da palavra. Ex: Espaço Cibernético (Cyberspace)
Reproduções navegáveis de ambientes imaginários ou inacessíveis. Ex: passeio virtual na Terra Média d’O Senhor dos Anéis
Reproduções tridimensionais de ambientes imaginários ou inacessíveis. Ex: aspecto da Terra Pré-Histórica
A nossa escolha recaiu sobre os sistemas de RV imersivos em ambientes virtuais (adiante SRVIAV), por se tratar do tipo de RV mais puro na sua totalidade, e cujo conceito é o mais difundido e apreciado (apesar de não ser o tipo mais usado, por razões meramente económicas). Nas próximas secções analisaremos a pormenor os diferentes aspectos que compõem um SRVIAV.
9

3. Sistemas de RV-AVI
Esquema genérico detalhado de um sistema de RV
10

3.1 Hardware
a) Dispositivos de Saída de Dados (Ambiente Usuário) A maioria das aplicações de RV é baseada no isolamento dos sentidos, para isolar o usuário do mundo real. O hardware de RV estimula principalmente a visão e a audição, enquanto o sentido do tacto está apenas começando a ser explorado.
i. Visão: Os sistemas de RV devem ser estereoscópicos, ou seja, cada olho verá uma imagem ligeiramente diferente, sendo necessário um processo de rendering separado para cada uma das imagens. A Estereoscopia é uma ciência que lida com o facto de que cada um dos olhos humanos, devido à sua localização na face, vê imagens ligeiramente diferentes quando olha para algo. Ao contrário das imagens 3D que apenas dão a noção de profundidade, as imagens estereoscópicas parecem mesmo flutuar no espaço diante da superfície na qual estão apresentadas. Nas imagens estereoscópicas geradas por computador, a quantidade de paralaxe – distância entre imagens esquerda e direita – determina a distância aparente dos objectos virtuais em relação ao observador. O cérebro reúne as duas imagens em uma, sendo que esta parece ter características de profundidade, distância, posição e tamanho. Uma paralaxe menor, por exemplo, resulta na ilusão de que o objecto está distante.
Videocapacete (HMD) O videocapacete (HMD, Head Mounted Display) é o dispositivo de saída de dados que mais isola o usuário do mundo real. Ele é constituído basicamente de duas minúsculas telas de TV e um conjunto de lentes especiais. O videocapacete funciona também como um dispositivo de entrada de dados porque contém sensores de rastreamento que medem a posição e orientação da cabeça transmitindo esses dados para o computador. Consequentemente, o computador gera uma sequência de imagens por quadro,
correspondentes às acções e perspectiva do usuário.
HCD, Head-Coupled Display Este dispositivo basicamente constitui-se de um display montado sobre um braço mecânico com um contrapeso, fazendo com que o display possua peso zero. Sensores ligados ao braço mecânico mais os controles presentes próximos ao display permitem movimentos com 6DOF (Degrees of freedom – graus de liberdade). Além disso, o fato deste dispositivo utilizar sensores de posição mecânicos e não electromagnéticos diminui o tempo de latência das imagens. Devido a essas características e ao seu preço ser inferior ao dos HMDs, são bastante populares entre a comunidade científica.
11

ii. Audição: Geralmente os capacetes incluem auscultadores para a reprodução de som 3D. O som 3D, Também conhecido como som binaural, o som 3D tem o objectivo de proporcionar uma sensação de imersão. Da mesma forma que o ser humano possui visão estereoscópica, também possui audição estéreo, e apesar dos sistemas de som 3D funcionarem de maneiras diversas, compartilham o mesmo objectivo: enganar o cérebro – visto que num sistema perfeito de som 3D não é possível diferenciar realidade e simulação: o som pode vir de toda e qualquer direcção. As gravações de som tridimensional baseiam-se em um processo de manipulação auditiva que permite que o artista ou o engenheiro de gravação “posicione” os sons no espaço, controlando sua direcção, distância e profundidade. Os dois ouvidos captam ondas sonoras provenientes de todas as direcções. O formato de concha do ouvido externo capacita-o para o trabalho de colectar ondas sonoras e direccioná-las para os vários caminhos através do canal auditivo. O cérebro então recebe e processa as características deste som para determinar ou localizar o local exacto da fonte sonora. Os sistemas de som 3D duplicam artificialmente os activadores naturais que auxiliam o cérebro a localizar o som, além de recriar electronicamente esses efeitos em tempo-real. Existem diversas placas de som projectadas para trabalhar com conjuntos de ferramentas que constroem mundos em RV. Algumas dessas placas permitem trabalhar com diversas fontes de som simultâneas. O método mais popular para criar e controlar sons é o MIDI (Musical Instrument Digital Interface).
iii. Olfacto e Paladar: Hoje em dia já existem sintetizadores de aromas, e produtos químicos que simulam sabores diversos, mas a sua aplicação na realidade virtual não tem sido levada a cabo, quer pela fraca percentagem que detêm a nível de “input” humano, quer pela necessidade de componentes não electrónicos (químicos, neste caso), que teriam que ser recarregados, ao contrário das imagens, sons e movimento que podem ser gerados electronicamente sem custos que não fossem energéticos.
12

iv. Dispositivos Físicos: Os dispositivos físicos procuram estimular as sensações físicas, como o tacto, tensão muscular e temperatura. Diferente dos dispositivos de saída de visão e audição, os dispositivos físicos requerem uma sofisticada interacção electromecânica com o corpo do usuário. A tecnologia existente actualmente não é capaz de estimular os sentidos físicos com o nível de realismo que atinge os sentidos visuais e auditivos: o problema está além da criação de dispositivos de feedback, pois envolve também a compreensão e simulação das forças apropriadas.
a) Feedback táctil Feedback táctil é o nome dado a sistemas que transmitem sensações que actuam sobre a pele. O feedback táctil deve fornecer não apenas a sensação do toque mas também permitir ao usuário perceber se está tocando uma superfície lisa ou rugosa. Existem actualmente duas diferentes formas de fazer essa simulação táctil: através de pressão de ar e através de vibrações
b) Feedback de força Sistemas que permitem as sensações de pressão ou peso oferecem feedback de força. Uma maneira de construção de um sistema de feedback de força seria através de uma espécie de exoesqueleto mecânico que se encaixa no corpo do usuário, fazendo com que determinados movimentos possam permitir-lhe sentir o peso ou a resistência do material de um objecto no mundo virtual Alguns sistemas transmitem feedback de força apenas para as mãos e braços. Através do uso de pistões, por exemplo, é possível controlar a quantidade de resistência do braço e/ou da mão do usuário. No entanto, este tipo de sistema limita a faixa de possíveis situações de feedback, além de ser demasiadamente caro.
c) Feedback térmico Um tipo de feedback que também pode ser fornecido por um sistema de RV é o feedback térmico. Este feedback poderia ser fornecido, por exemplo, quando o usuário se aproximasse de uma fogueira no mundo virtual. O feedback térmico não é muito utilizado em sistemas de RV devido ao seu alto custo, mas já existem algumas pesquisas neste campo sendo desenvolvidas. Uma dessas pesquisas fez uma empresa do Texas desenvolver um sistema que aquece parte do corpo através de um pequeno dispositivo que reúne um aquecedor, um sensor de temperatura e um inversor de calor (, 1994).
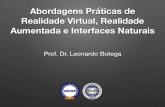
d) Plataformas móveis As plataformas móveis também são consideradas dispositivos de feedback físico, pois fornecem a sensação de movimento. Normalmente são utilizadas em caros videojogos, simuladores de voo e simuladores de movimento. Torna-se pertinente, neste ponto, fazer uma referência ao conceito de graus de liberdade de movimentos (DOF, Degrees of Freedom):
Os graus de liberdade determinam flexibilidade de movimentação e/ou observação de algo. Objectos normalmente possuem 6 (seis) diferentes direcções entre rotações e translações através das quais eles podem se mover no espaço. Isto pode ser observado na imagem. Objectos podem se movimentar para frente ou para trás (eixo X), para cima ou para baixo (eixo Y) ou para esquerda ou direita (eixo Z) – movimentos conhecidos como translação.
13

Adicionalmente, os objectos também podem girar ao redor desses eixos principais, sendo esses movimentos chamados de rotação e conhecidos como: Roll (rotação ao redor de X), Yaw (rotação ao redor de Y) e Pitch (rotação ao redor de Z). Grande parte dos sistemas de RV utiliza dispositivos de entrada de dados que permitem movimentos de até 6DOF, proporcionando uma maior sensação de imersão no mundo virtual.
Fig. 2.1 - Esquema mostrando as diferentes direcções em que um objecto pode mover-se no espaço 3D: três translações e três rotações
Roupa VRML: A roupa para Realidade Virtual é uma indumentária que permita a interacção com o mundo virtual (data suits). A comunicação pode ser realizada de várias maneiras, sendo que o acompanhamento óptico de marcadores vem sendo o mais utilizado.
14

b) Dispositivos de Entrada de Dados (Usuário Ambiente) São os modos utilizados pelo participante da experiência de RV, para entrar no mundo virtual. Sem o dispositivo de entrada de dados o usuário participa da experiência em RV apenas de forma passiva, sem poder integrar-se na virtualidade. Podem-se dividir esses dispositivos de entrada de dados em duas categorias: dispositivos de interacção (permitem ao usuário a movimentação e manipulação de objectos no mundo virtual); e dispositivos de trajectória (monitoram partes do corpo do usuário, detectando os movimentos, para criar a sensação de presença no mundo/virtual.)
i. Dispositivos de Interacção São vários os tipos de Interacção, sendo que cada um deles possui as suas finalidades. A escolha do dispositivo de interacção mais adequado leva em conta não apenas a finalidade do sistema, mas também o software utilizado, pois a eficiência do sistema vai depender da capacidade do software aproveitar as características do dispositivo. Vejamos, então, alguns dispositivos de interacção disponíveis actualmente:
Luvas de dados (Dataglove) Através das luvas de dados o sistema de RV pode reconhecer os movimentos da mão do usuário que veste a luva. São dispositivos que, através de sensores, detectam e medem as flexões e abduções dos dedos. Os sensores podem ser mecânicos, ópticos ou híbridos. Actualmente, uma única empresa deteve todas as patentes pertinentes. Esta empresa foi à falência.
Dispositivos com 6DOF Os dispositivos de interacção com 6DOF permitem uma movimentação bastante ampla quando utilizados em sistemas de RV. Apesar de parecidos com joysticks, esses dispositivos apresentam uma diferença crucial em relação a estes, pois são capazes de medir a quantidade de força aplicada a eles. Os dispositivos chamados isométricos, ou bolas isométricas, são bastante fáceis de manipular, costumam constituir-se de uma bola sobre uma plataforma com botões (normalmente um deles é utilizado para o reset (reinicialização) do sistema) que são configurados via software.
Rato 3D Alguns ratos 3D, como o GyroPoint Desk pode trabalhar tanto em cima de uma mesa como no ar pois possui um giroscópio e comunicação por rádio com o computador. Outros são capazes de medir a velocidade e força que está sendo aplicada pelo usuário.
Sensores de Entrada Biológicos Sensores de entrada biológicos processam actividades chamadas de indirectas, como comando de voz e sinais eléctricos musculares.
Outros dispositivos de Interacção Existe uma série de diferentes dispositivos de interacção além dos citados acima. Muitos são criados a cada ano, enriquecendo a possibilidade de hardware para RV.
15

ii. Dispositivos de Trajectória Muitos dos dispositivos de interacção mencionados acima contam com um dispositivo responsável pela tarefa de detecção ou rastreamento da trajectória, conhecido como dispositivo de trajectória ou tracking. Os dispositivos de trajectória trabalham baseados na diferença de posição ou orientação em relação a um ponto ou estado de referência. Basicamente existe uma fonte que emite o sinal (que pode estar localizada no dispositivo de interacção), um sensor que recebe este sinal e uma caixa controladora que processa o sinal e faz a comunicação com o computador. A maioria das aplicações que utilizam detecção de trajectória fazem uso de pequenos sensores colocados sobre as partes do corpo ou sobre o objecto (se for o caso), técnica conhecida como tracking activo. Dispositivos de trajectória de dispositivos de interacção com 6DOF utilizam técnicas electromagnéticas, ultra-sónicas, mecânicas ou ópticas para fazer a medida dos movimentos. Como alternativa, o tracking passivo utiliza câmaras ou sensores ópticos ou de inércia para observar o objecto e determinar sua posição e orientação. Ao contrário dos dispositivos que utilizam tracking activo, os dispositivos de tracking passivo utilizam apenas um sensor para rastrear o objecto.
16

3.2. Software
a) Requisitos A maneira mais comum de criar-se imagens gráficas tridimensionais por computador baseia-se no uso dos polígonos. Foi estimado que uma cena realista detalhada requer aproximadamente 80 milhões de polígonos [30]. Para mostrar este mundo virtual a 10 quadros por segundo, por exemplo, seria necessário uma taxa de 800 M de polígonos por segundo, o que está longe da capacidade tecnológica actual. Para se ter uma ideia, as taxas recentes de máquinas Silicon Graphics, com aceleradores gráficos avançados estão em torno de 2 M triângulos por segundo e 600k polígonos por segundo. Um microcomputador PC com acelerador gráfico apresenta um desempenho de dezenas de K polígonos por segundo, enquanto que as estações de trabalho estão na faixa de centenas de K polígonos por segundo. Considerando-se um mundo virtual pouco complexo com cerca de 6000 polígonos e um computador com desempenho de 300.000 polígonos por segundo, então o sistema deverá funcionar com uma taxa de 50 quadros por segundo para mostrar o mundo virtual. Se o mundo virtual for um pouco mais detalhado, com 15.000 polígonos, a taxa cairá para 20 quadros por segundo no mesmo computador. Portanto, para uma taxa mínima de quadros por segundo sempre haverá uma complexidade máxima do mundo virtual. Para realidade virtual estereográfica, haverá a necessidade de 2 cenas (uma para cada olho), o que provocará a queda no desempenho. A nível genérico, o Universo representa o lugar onde ocorrerá a experiência de RV, o lugar a ser modelado. Este Universo contém Objectos que são caracterizados por geometria (formato do objecto), aparência (tamanho, cor, composição, iluminação e sombreamento aplicados à geometria do objecto) e comportamento (reacções do objecto frente a eventos). Estes Objectos são vinculados entre si por hierarquias, ou seja, um Objecto complexo do Universo pode incorporar muitos Objectos. Qualquer objecto é formado por um conjunto de polígonos e suas técnicas de apresentação envolvem conceitos de computação gráfica. Alguns desses conceitos são: perspectiva linear (o tamanho do objecto diminui conforme aumenta a distância do usuário), iluminação (intensidade da luz que incide sobre um objecto), sombreamento (sombra causada pelo posicionamento de um outro objecto entre a fonte de luz e o objecto) e sobreposição (objectos encobrindo outros objectos ou partes deles). Os requisitos básicos de um mundo virtual são:
a) Um sistema de RV deve gerar imagens estereoscópicas animadas suaves para capacetes de visualização (HMD), visando manter a característica de imersão. A taxa ideal da troca de imagens é de 20 quadros por segundo ou mais, para manter a ilusão de movimento. Nota: Filmes projectados para o cinema apresentam aproximadamente 24 quadros por segundo, enquanto os projectados para TV apresentam aproximadamente 30 quadros por segundo. b) Um sistema de RV deve reagir rapidamente às acções do usuário. A resposta do sistema deve apresentar atrasos de imagens iguais ou menores que 100ms;
As características principais de um sistema de realidade virtual estão na portabilidade e na flexibilidade das aplicações.
17

b) Exemplos de Softwares Actualmente, existem diversos softwares para o desenvolvimento da RV, alguns permitem apenas a criação de RV não interactiva; outros permitem a criação de sofisticadas cenas com recursos de interacção através de dispositivos compatíveis. A seguir, vamos examinar rapidamente alguns desses softwares para criação de aplicativos de RV interactiva.
i. CDK2 Cyberspace Development Kit 2 O Cyberspace Development Kit da Autodesk é um software bastante potente. É um conjunto de bibliotecas para programadores C++ que permite interface com os dispositivos mais comuns de RV e geração de imagens em estéreo. Além de poder ser utilizado em diferentes plataformas (Windows, etc.), ainda reconhece arquivos com extensão DXF (modelados em CAD). Suporta uso em rede, com múltiplos usuários.
ii. REND386 Este software foi desenvolvido por Dave Stampe e Bernie Roehl na Universidade de Waterloo no Canadá. É uma ferramenta para programadores, pois exige conhecimentos da linguagem C e de geometria tridimensional. Com o REND386 é possível desenvolver mundos, definir superfícies e atribuir cores. Programado para ser veloz, sua característica de animação permite a sensação virtual de tempo real. É distribuído gratuitamente via FTP pela universidade de Waterloo e actualmente é uma importante ferramenta para o desenvolvimento de RV.
iii. Virtual Reality Studio Desenvolvido por uma empresa europeia de jogos interactivos, o Virtual Reality Studio permite modelar e visualizar paisagens 3D e interagir com objectos 3D animados nos cenários. Este software permite o uso de placas de som para produção de som interactivo e seu preço é directamente proporcional à resolução de suas imagens: baixo.
iv. VREAM A VREAM, Inc. que desenvolveu o VREAM (Virtual Dream) foi a primeira empresa de software de RV que não exigiu habilidades de programação para construir um mundo virtual. O VREAM possui uma boa interface gráfica com o usuário e a capacidade de criar, mudar e apagar objectos, além de suportar som interactivo e imagens em estéreo. O VREAM permite também não só criar mas também visitar e interagir com mundos virtuais em tempo real, usando um rato ou joystick, bem como dispositivos de entrada e saída de dados mais exóticos. Permite também que vários usuários explorem o ambiente ao mesmo tempo. Com ele, é possível caminhar ou voar para qualquer ponto do espaço criado, além dos objectos deste espaço poderem possuir propriedades elásticas e de gravidade embutidas.
v. VRML A VRML é de longe a linguagem de VR mais difundida a nível mundial. Por este motivo, a secção seguinte se destina a uma descrição um pouco mais detalhada da mesma.
18

c) VRML – A Internet em 3 Dimensões VRML (pronuncia-se “vermil”) é a abreviação de Virtual Reality Modeling Language, ou Linguagem para Modelagem em Realidade Virtual. É uma linguagem independente de plataforma que permite a criação de cenários 3D, por onde se pode passear, visualizar objectos por ângulos diferentes e interagir com eles. A linguagem foi concebida para descrever simulações interactivas de múltiplos participantes, em mundos virtuais disponibilizados na Internet e ligados com o WWW (World Wide Web), Apresentada pela primeira vez em 1994 na Conferência Mundial sobre World Wide Web, realizada em Genebra na Suiça, a primeira versão da linguagem não possibilitou muita interacção do usuário com o mundo virtual. Nas versões futuras seriam acrescentadas características como animação, movimentos de corpos, som e interacção entre múltiplos usuários em tempo real. A linguagem tem como objectivo dar o suporte necessário para o desenvolvimento de mundos virtuais tridimensionais multi-usuários na Internet, sem precisar de redes de alta velocidade. O código VRML é um subconjunto do formato de arquivo ASCII do Open Inventor, da Silicon Graphics, com características adicionais para navegação na Web. Esta característica é equivalente às âncoras do HTML, ou seja, pode-se criar âncoras em um ambiente virtual que levem a outros ambientes virtuais. A linguagem trabalha com geometria 3D, permitindo a elaboração de objectos baseados em polígonos, possui alguns objectos predefinidos como cubo, cone, cilindro e esfera, suporta transformações como rotação, translação e escala, permite a aplicação de texturas, luz, sombreamento, etc. Outra característica importante da linguagem é o Nível de Detalhe (LOD, level of detail), que permite o ajustamento da complexidade dos objectos, dependendo da distância do observador. Tudo que se precisa para escrever um código VRML é um editor de textos. Uma vez editados, os arquivos são gravados em formato ASCII com a extensão .wrl. Na verdade, a linguagem apenas descreve como os ambientes tridimensionais devem ser representados. O arquivo não precisa ser compilado. Pode-se, por exemplo, criar um cubo e gravá-lo em um arquivo chamado cubo.wrl. O código VRML para este cubo descreverá as características do ambiente, como coordenadas, luz, cores etc. Os objectos do mundo virtual podem mover-se e responder a eventos baseados no tempo ou em iniciativas do usuário. Além disso, a linguagem permite a utilização de objectos multimédia, como sons e filmes em uma cena 3D. Em resumo, as características do VRML podem ser agrupadas em quatro áreas principais: criação de mundos 3D estáticos e de âncoras para outros ambientes, interacção, animação e comportamento baseado em scripts, e prototipagem de novos objectos VRML.
19

4. Aplicações Os SRV-AVI têm aplicações em diversas áreas (de facto em quase todas), podendo facilitar enormemente o uso da tecnologia, tornando a relação homem/tecnologia mais natural e intuitiva, portanto mais fácil e simplificada. A todo momento surgem novas aplicações, em função da demanda e da capacidade criativa das pessoas. Em muitos casos, a realidade virtual vem revolucionando a forma de interacção das pessoas com sistemas complexos tratados com o uso de computadores, propiciando maior desempenho e economizando custos. A maior parte das aplicações práticas da RV-AVI ainda não estão a ser usadas porque a própria tecnologia ainda não se encontra suficientemente desenvolvida (logo barata e universal) Dentre as várias áreas, onde, apesar disso, a realidade virtual já têm actualmente condições de aplicação da RV-AVI, e em certos casos já vem sendo aplicada, pode-se citar as seguintes:
4.1. Medicina: Sensações “artificiais” para desvio da atenção do cérebro para redução da dor em
tratamentos médicos nos quais a anestesia não é aconselhável; Uso do efeito placebo (cura psicológica); Estudos de psicologia e tratamentos de psiquiatria; Tratamento de deficientes; Tratamento de fobias;
4.2. Entretenimento: Jogos; Cinema; Internet; Artes (pintura, escultura, música, etc.; museus de arte virtual) Passeios por mundos virtuais; Sexo virtual.
4.3. Ciência e Investigação: Simulação de entidades físicas não evidenciadas (ex.: buracos negros) Aceleradores virtuais de partículas Experiências virtuais de manipulação de ADN Laboratórios virtuais diversos; Exploração planetária;
4.4. Educação: Ensino de sobredotados; Simulações virtuais de conceitos abstractos;
4.5. Controle da Informação (representação e manipulação): Dados financeiros Cálculos matemáticos complexos Informação digital diversa.
20

5. Futuro Hoje a RV prepara-se para mudar a maneira pela qual interagimos e controlamos os computadores. Assim como aconteceu com a introdução dos computadores há mais de 50 anos, o impacto da RV sobre as nossas vidas ainda são desconhecidos. Teremos RV em cada casa, sala de aula e escritório? Poderemos imergir num mundo gerado por computadores de um modo tão comum quanto assistir um filme? Certas implicações serão imprevisíveis, mas com os dados hoje disponíveis podem-se adiantar algumas linhas que certamente serão seguidas pela Realidade Virtual: Software: Aumento do realismo das sensações; Aumento da precisão temporal e espacial das acções); Hardware: Uso da Nanotecnologia para miniaturização das interfaces (dispositivos cada vez mais pequenos, leves, ergonómicos e confortáveis); Aumento das capacidades de processamento dos computadores (o que permite o acréscimo de qualidade do software); A longo prazo, pode até ser dispensada a interface convencional (externa) a favor de implantes neurais, que transmitiriam (“traduzindo” em impulsos eléctricos os dados enviados pelo computador com tecnologia sem fios) directamente ao cérebro, tal como os sentidos reais fazem. Note-se que desenvolvimentos nessa área já estão a ser feitos, sendo porém necessário algum tempo para que possam estar disponíveis ao público. O que falta então para termos RV nas nossas vidas? Dependendo do que você espera da RV, pode faltar muito. Ainda estamos bastante longe do que vimos no filme Matrix. Estamos muito mais longe ainda de qualquer coisa, ainda que levemente parecida, com o Cyberspace de William Gibson. Embora os avanços sejam significativos, existe algo que precisa ser estudado detalhadamente antes que os processos de realidade virtual façam parte de nossa vida diária: o nosso cérebro.
21

IV. CONCLUSÃO Após a feitura deste trabalho (que se revelou mais longo do que esperávamos, mesmo após restrição do tema devido à vastidão da informação adquirida e adquirível), esperamos ter dado uma ideia consistente sobre a realidade virtual e os seus domínios. Realidade Virtual é a tecnologia que se vai utilizar cada vez mais num futuro próximo. As suas potencialidades são ilimitadas e a utilidade é de tal ordem certamente causará uma revolução social comparável à Revolução Industrial ou à invenção dos computadores. Será uma tecnologia presente em todos os campos, desde a educação, o mundo laboral até ao mundo desportivo. Todas as pessoas, empresas e até mesmo religiões podem tirar vantagens desta tecnologia. Os seus modos de emprego serão muito fáceis e práticos. Será tão fácil trabalhar com a realidade virtual como trabalhar com um telemóvel. O trabalho mais árduo a executar agora é tornar a realidade virtual universal, para que todos possamos usufruir desta tecnologia sem qualquer tipo de restrições e barreiras. É um trabalho complicado e terá que haver um forte investimento por parte de todo o tipo de empresas e até dos próprios governos para o concretizar. Todos estão interessados, já que, a realidade virtual bem aproveitada, todos teremos lucros e todos teremos vantagens. A grande desvantagem desta tecnologia é, para já, o seu custo. Para além de ser necessário um computador muito potente para poder manuseá-la da forma mais proveitosa, também o próprio custo do hardware para a sua utilização o é. Uma desvantagem que com os próximos anos se prevê que vá gradualmente desaparecendo. Como sempre a nossa sociedade irá de certeza ultrapassar mais esta barreira, tal como fizemos a outras comparáveis que nos fizeram frente ao longo dos tempos. Um dia todos teremos acesso á realidade virtual e todos seremos capazes de fazer as coisas mais fantásticas e invulgares. Conseguiremos realizar todos os nossos sonhos, seremos capazes de voar e realizar toda a espécie de proezas sobre-humanas. O possível e o impossível pode acontecer, graças à Realidade Virtual.
22

V. BIBLIOGRAFIA Para o presente trabalho apenas usámos fontes da Internet, apesar de termos encontrado referências sobre livros até mesmo nos sites que encontrámos. No entanto preferimos restringir-nos a fontes electrónicas, por serem mais recentes e actualizáveis. Há no entanto uma palavra a dizer acerca desses sites: é que, num ambiente livre como é a Internet, as violações de direitos de autor são fáceis e não são monitorizadas, pelo que quase a totalidade da maioria dos trabalhos pode ser encontrada noutros, e não há maneira de saber qual é a fonte original; se é que alguma delas o é. Assim, por pura convenção, decidimos referir aqui os que mais diferem entre si, e das várias versões de cada um destes, os que dão mais à autoria do trabalho. Por esta razão, das dezenas de páginas consultadas, só apresentaremos aqui cerca de meia dúzia: http://www.pgie.ufrgs.br/siterv/introducao.htm http://www.dc.ufscar.br/~grv/ http://oficina.cienciaviva.pt/~pw020/g3/index4.htm http://www.dc.ufscar.br/~grv/tutrv/tutrv.htm http://www.on.br/revista_ed_anterior/julho_2004/conteudo/futuro/futuro.html Obs.: Todos os sites foram encontrados em pesquisas no motor de busca Google (www.google.com)
23