Relatório APS 28nov14
62
UNIVERSIDADE PAULISTA – UNIP ENGENHARIA DE CONTROLE E AUTOMAÇÃO Sistemas de Controle e Servomecanismos ATIVIDADES PRÁTICAS SUPERVISIONADAS Esteira transportadora de carga com controle de velocidade SÃO PAULO Novembro/2014 Bruno Maico Moreira Silva A7788G-9 Diego Ferreira Santos B142DC-5 Karina Yoko Makiyama B058AD-0 Rafael Navarro Espinosa A12271-0 Raphael Fernandes Martins B020DJ-4 Reginaldo Argemiro Ferreira dos Santos A824EE-9
-
Upload
diego-ferreira-santos -
Category
Documents
-
view
108 -
download
11
description
Esteira Automatizada
Transcript of Relatório APS 28nov14
UNIVERSIDADE PAULISTA – UNIP
ENGENHARIA DE CONTROLE E AUTOMAÇÃO
Sistemas de Controle e Servomecanismos
ATIVIDADES PRÁTICAS SUPERVISIONADAS
Esteira transportadora de carga com controle de velocidade
SÃO PAULO
Novembro/2014
Bruno Maico Moreira Silva A7788G-9
Diego Ferreira Santos B142DC-5
Karina Yoko Makiyama B058AD-0
Rafael Navarro Espinosa A12271-0
Raphael Fernandes Martins B020DJ-4
Reginaldo Argemiro Ferreira dos Santos A824EE-9

UNIVERSIDADE PAULISTA – UNIP
ENGENHARIA DE CONTROLE E AUTOMAÇÃO
Sistemas de Controle e Servomecanismos
ATIVIDADES PRÁTICAS SUPERVISIONADAS
Esteira transportadora de carga com controle de velocidade
Prof. Rafael Bachega
SÃO PAULO
Novembro/2014
SUMÁRIO
I. INTRODUÇÃO .................................................................................................................... 5
II. OBJETIVO GERAL............................................................................................................ 6
2.1 Objetivos específicos ....................................................................................................... 6
III. PLANO DE AÇÃO ............................................................................................................ 7
IV. CRONOGRAMA ............................................................................................................... 8
V. PESQUISA DE CAMPO E LEVANTAMENTO DE MATERIAIS ......................................... 9
VI. CUSTOS ........................................................................................................................ 17
VII. PROJETOS MECÂNICO E ELÉTRICO ......................................................................... 19
VIII. ASPECTOS TEÓRICOS ............................................................................................... 20
8.1 Torque ........................................................................................................................... 20
8.2 PWM .............................................................................................................................. 21
8.3 Linguagem de programação C ....................................................................................... 22
8.4 Servomotor .................................................................................................................... 22
8.5 Encoder ......................................................................................................................... 23
IX. CÁLCULOS .................................................................................................................... 24
X. AJUSTES, OBSTÁCULOS E SOLUÇÕES ...................................................................... 25
10.1 Projeto mecânico ......................................................................................................... 25
10.2 Componentes eletrônicos ............................................................................................ 25
10.3 Motor e projeto elétrico ................................................................................................ 26
XI. CONCLUSÃO ................................................................................................................ 27
BIBLIOGRAFIA ................................................................................................................... 28
ANEXO I .............................................................................................................................. 30
PROPOSTA 1ª ETAPA ............................................................................................................. 30
PROPOSTA 2ª ETAPA ............................................................................................................. 33
ANEXO II – PROJETO MECÂNICO ..................................................................................... 34
ANEXO III – PROJETO ELÉTRICO ..................................................................................... 39
ANEXO IV – PROGRAMAÇÃO C ........................................................................................ 44
ANEXO V – REGISTROS FOTOGRÁFICOS ....................................................................... 44
5
I. INTRODUÇÃO
Em consonância com o Regimento Geral da UNIP, estabeleceu-se que o
cumprimento das Atividades Práticas Supervisionadas (APS) do segundo semestre de
2014 deverá ser orientado pelo professor Rafael Bachega, que propôs à turma a
continuidade do trabalho com a esteira transportadora por meio de um novo objetivo
(vide objetivo geral), a ser atingido pelos mesmos grupos formados para a primeira
proposta.
O professor Bachega ministra a disciplina Sistemas de Controle e Mecanismos,
cujo objetivo, de acordo com o conteúdo postado no site da UNIP, é “fornecer
conhecimentos teóricos e práticos de sistemas de controle aplicados a processos
físicos (mecânicos, elétricos, químicos)”, discorrendo acerca de temas tais como
compensadores de avanço e atraso de fase e regras de Ziegler-Nichols para sintonia
de controladores PID.
Além dos assuntos associados à disciplina Sistemas de Controle e
Servomecanismos, aplicam-se a este projeto conceitos relacionados a cálculo de
torque de motor, conhecimentos de elementos de máquinas, eletricidade,
decomposição de forças, desenho técnico e Teoria de Controle, entre outros. Também
foram utilizados conhecimentos em Solid Works e AutoCAD para os projetos mecânico
e elétrico, a fim de documentar de que forma poderiam ser articulados e
sistematizados os diversos componentes e os movimentos por estes executados.
Citam-se ainda a pesquisa de matérias-primas e ferramentas, a programação em
linguagem C, o conhecimento e utilização de componentes eletrônicos.
6
II. OBJETIVO GERAL
A partir da esteira construída para o projeto de Engenharia Mecatrônica
Interdisciplinar, implementar um controle que possibilite o ajuste automático do motor a
cada mudança de carga, a fim de se manter a mesma velocidade.
2.1 Objetivos específicos
Elaborar um plano de ação.
Utilizar conhecimentos adquiridos ao longo da graduação a fim de executar
a proposta.
Realizar pesquisas teóricas e de campo.
Desenvolver a contento um trabalho de equipe, contemplando e utilizando
as habilidades de todos os integrantes do grupo.
7
III. PLANO DE AÇÃO
O trabalho executado compreende duas etapas. A primeira diz respeito à
disciplina do professor Felipe, de Engenharia Mecatrônica Interdisciplinar, que propôs
a construção de uma esteira transportadora de carga, etapa cumprida e entregue no
primeiro bimestre.
A etapa seguinte consiste na implementação de um projeto de controle sobre a
esteira da primeira fase, incluindo-se as eventuais adaptações que se fizerem
necessárias.
Inicialmente, o grupo reuniu-se a fim de estabelecer estratégias para a
execução da nova proposta. Propôs-se, na ocasião, a subdivisão do trabalho em três
frentes de atuação: projeto elétrico, projeto mecânico e programação em linguagem C,
processo que resultou da identificação das habilidades e disponibilidade de tempo de
cada um dos componentes do grupo. Delegadas as tarefas, estabeleceu-se o
cronograma de trabalho, com datas e atribuições devidamente contempladas (vide
capítulo 4).
8
IV. CRONOGRAMA
9
V. PESQUISA DE CAMPO E LEVANTAMENTO DE MATERIAIS
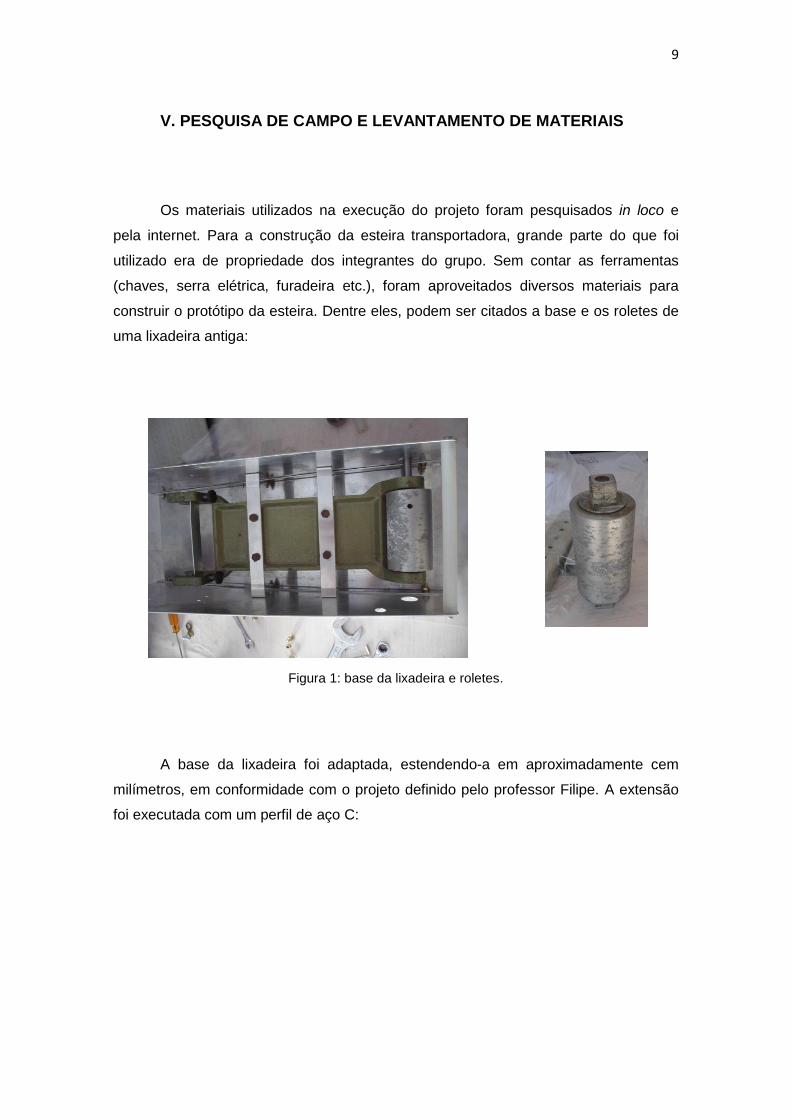
Os materiais utilizados na execução do projeto foram pesquisados in loco e
pela internet. Para a construção da esteira transportadora, grande parte do que foi
utilizado era de propriedade dos integrantes do grupo. Sem contar as ferramentas
(chaves, serra elétrica, furadeira etc.), foram aproveitados diversos materiais para
construir o protótipo da esteira. Dentre eles, podem ser citados a base e os roletes de
uma lixadeira antiga:
Figura 1: base da lixadeira e roletes.
A base da lixadeira foi adaptada, estendendo-a em aproximadamente cem
milímetros, em conformidade com o projeto definido pelo professor Filipe. A extensão
foi executada com um perfil de aço C:
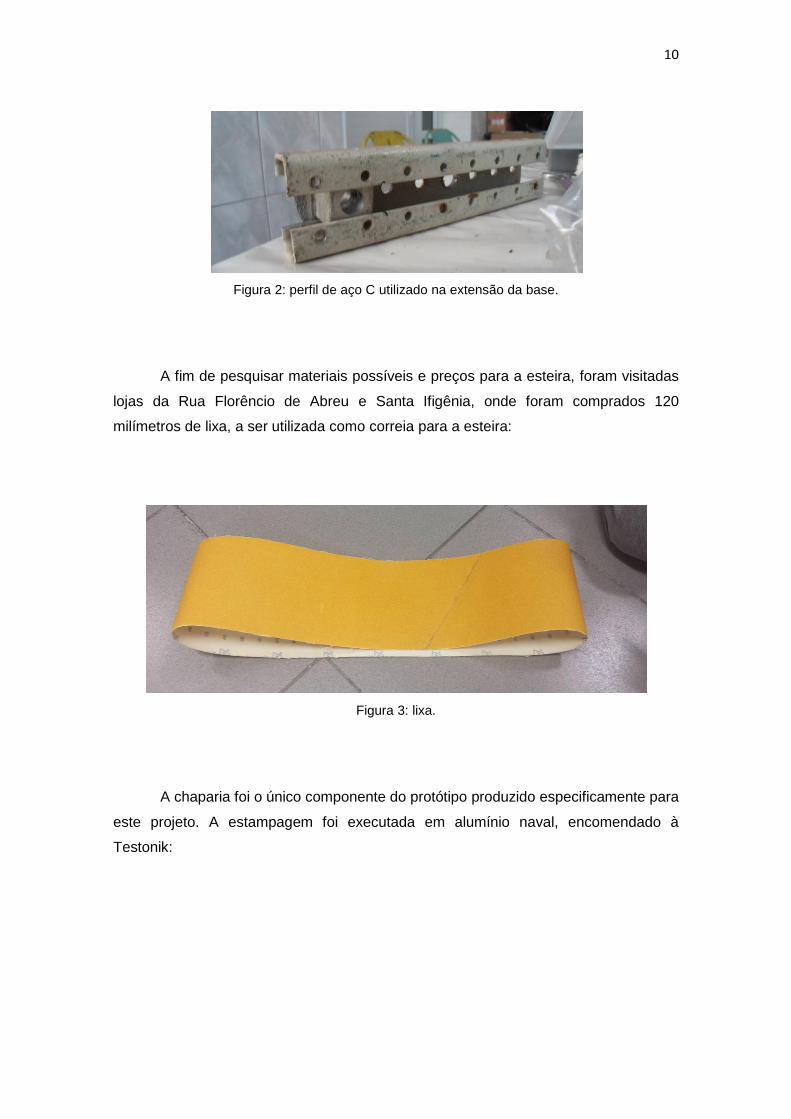
10
Figura 2: perfil de aço C utilizado na extensão da base.
A fim de pesquisar materiais possíveis e preços para a esteira, foram visitadas
lojas da Rua Florêncio de Abreu e Santa Ifigênia, onde foram comprados 120
milímetros de lixa, a ser utilizada como correia para a esteira:
Figura 3: lixa.
A chaparia foi o único componente do protótipo produzido especificamente para
este projeto. A estampagem foi executada em alumínio naval, encomendado à
Testonik:

11
Figura 4: chaparia de alumínio naval.
Figura 5: gravador de PIC.
Cantoneiras de alumínio usadas como acabamento de revestimento de parede
ajudaram a aproximar pequenas distâncias entre as extremidades dos roletes e o perfil
de aço C:
Duas barras cilíndricas de nylon, originalmente aplicadas no distanciamento de
placas isolantes em projetos de média tensão, foram utilizadas para manter a mesma
distância entre as duas extremidades da base de alumínio:
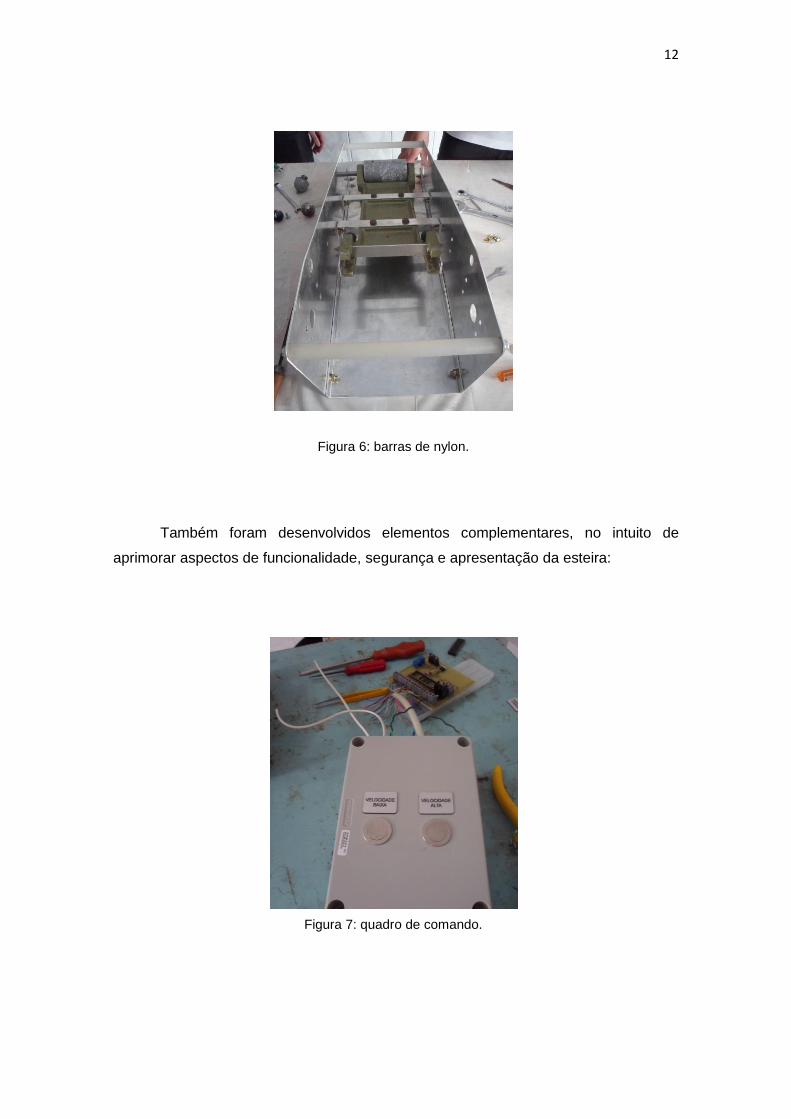
12
Figura 6: barras de nylon.
Também foram desenvolvidos elementos complementares, no intuito de
aprimorar aspectos de funcionalidade, segurança e apresentação da esteira:
Figura 7: quadro de comando.
13
Figura 8: quadro para transporte da alimentação.
Figura 9: tomadas para acoplamento dos quadros de bateria e comando.
14
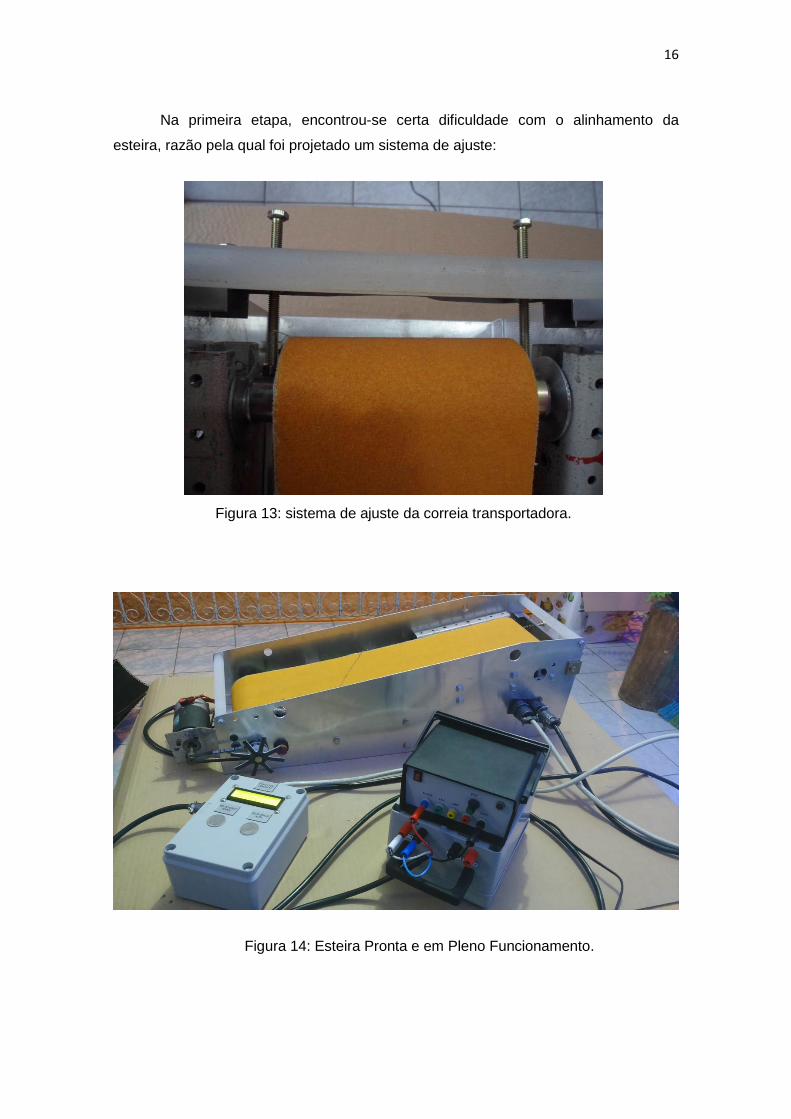
Figura 10: placa soldada, comando/potência com LCD
Com a esteira já construída, o grupo passou a pesquisar um novo motor, dotado de
um encoder, uma vez que aquele usado na esteira original não possui esta
particularidade, além da questão do acoplamento, que seria uma complicação a mais.
Foi comprado então um motor de segunda-mão, do fabricante Electrocraft1. O data-
sheet, contudo, não foi facilmente localizado. Foram feitas pesquisas na internet e
enviado um e-mail para a fábrica, nos Estados Unidos, mas o contato da empresa
informou que se trata de um equipamento já fora de linha. A solução foi trabalhar com
modelos semelhantes e fazer os ajustes de projeto que fossem pertinentes.
1 Modelo do motor: E540. Modelo do encoder: 5640-25-2508/0020-0856-002.

15
Figura 11: motor Electrocraft.
Para acoplar o motor ao restante do protótipo, optou-se por uma polia de
alumínio e uma pequena correia denteada, do fabricante Schneider2:
Figura 12: conjunto de polia e correia.
2 Polia 40 MXL e correia 1000 MXL 25,0, Optibelt.
16
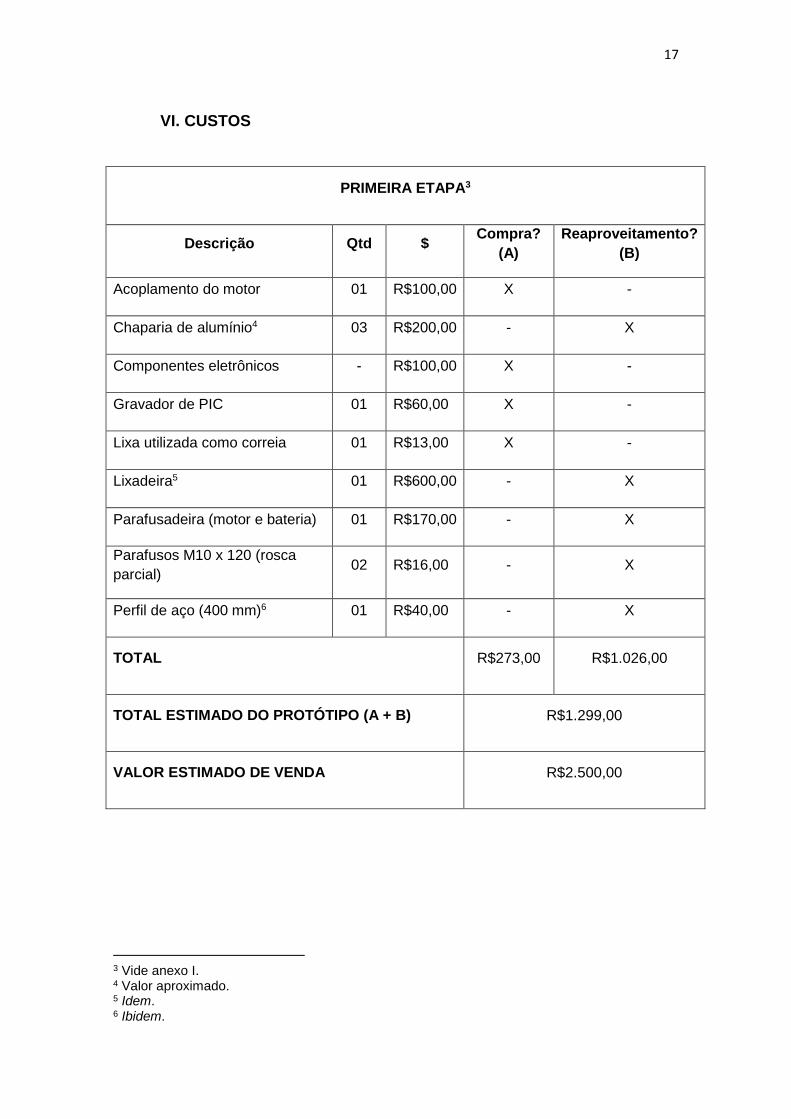
Na primeira etapa, encontrou-se certa dificuldade com o alinhamento da
esteira, razão pela qual foi projetado um sistema de ajuste:
Figura 13: sistema de ajuste da correia transportadora.
Figura 14: Esteira Pronta e em Pleno Funcionamento.
17
VI. CUSTOS
PRIMEIRA ETAPA3
Descrição Qtd $ Compra?
(A)
Reaproveitamento?
(B)
Acoplamento do motor 01 R$100,00 X -
Chaparia de alumínio4 03 R$200,00 - X
Componentes eletrônicos - R$100,00 X -
Gravador de PIC 01 R$60,00 X -
Lixa utilizada como correia 01 R$13,00 X -
Lixadeira5 01 R$600,00 - X
Parafusadeira (motor e bateria) 01 R$170,00 - X
Parafusos M10 x 120 (rosca
parcial) 02 R$16,00 - X
Perfil de aço (400 mm)6 01 R$40,00 - X
TOTAL R$273,00 R$1.026,00
TOTAL ESTIMADO DO PROTÓTIPO (A + B) R$1.299,00
VALOR ESTIMADO DE VENDA R$2.500,00
3 Vide anexo I. 4 Valor aproximado. 5 Idem. 6 Ibidem.
18
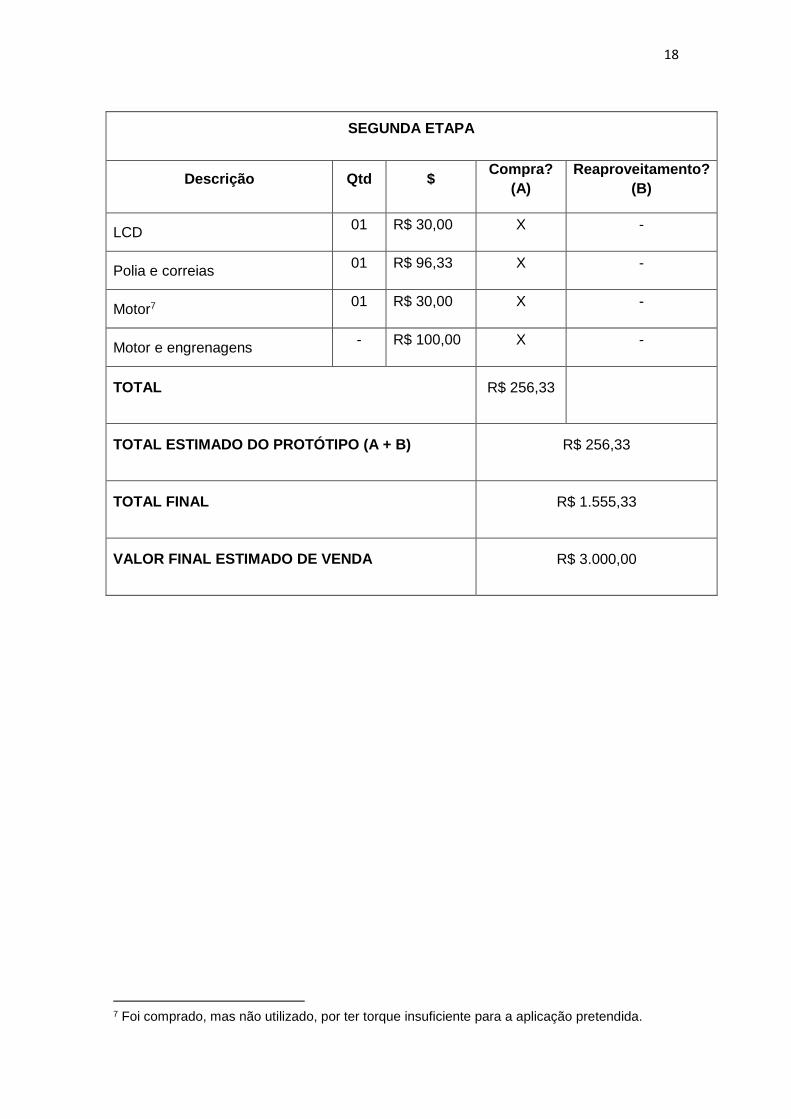
SEGUNDA ETAPA
Descrição Qtd $ Compra?
(A)
Reaproveitamento?
(B)
LCD 01 R$ 30,00 X -
Polia e correias 01 R$ 96,33 X -
Motor7 01 R$ 30,00 X -
Motor e engrenagens - R$ 100,00 X -
TOTAL R$ 256,33
TOTAL ESTIMADO DO PROTÓTIPO (A + B) R$ 256,33
TOTAL FINAL R$ 1.555,33
VALOR FINAL ESTIMADO DE VENDA R$ 3.000,00
7 Foi comprado, mas não utilizado, por ter torque insuficiente para a aplicação pretendida.
19
VII. PROJETOS MECÂNICO E ELÉTRICO
Concomitantemente à pesquisa de campo, foram desenvolvidos os projetos
mecânico e elétrico (vide anexos II e III), respectivamente.
O projeto mecânico foi desenvolvido no software Solid Works, observando-se
os critérios exigidos na proposta de trabalho. A partir das dimensões da base da
lixadeira, projetou-se a esteira com uma extensão para ajuste às medidas requeridas
pelo professor. Finalmente, uma estrutura em alumínio naval (especificação: 3 mm –
ASTM 5052 H34) foi desenhada como suporte a este conjunto.
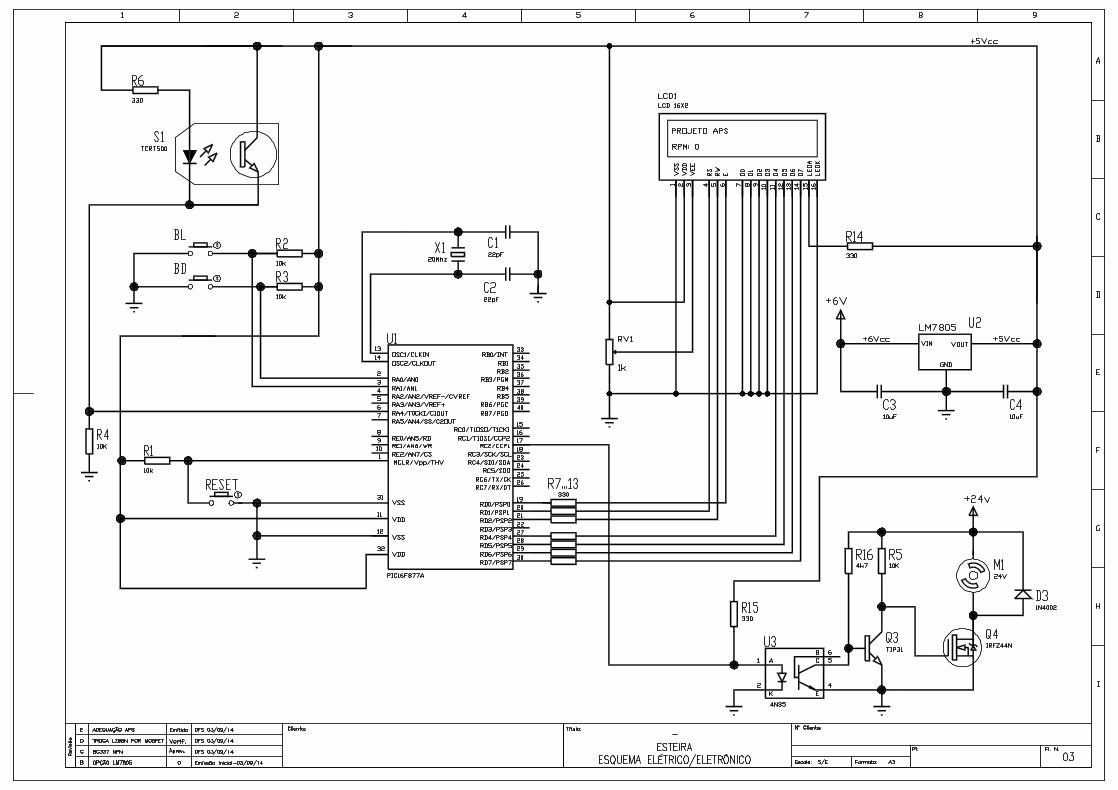
O projeto elétrico foi executado em AutoCAD 2014, obedecendo,
semelhantemente, aos critérios propostos pelo professor. Decidiu-se pela utilização da
placa protoboard devido à facilidade de instalação dos componentes e também seu
manuseio. Em virtude de se utilizar um motor de 9,6 V, optou-se por usar o regulador
de tensão LM7805, que converte a tensão de 7a 12 V para 5 V, utilizado para
alimentar os outros componentes. Para controle do motor, utilizou-se um driver de
modelo L298N, que nada mais é que uma ponte H para rotação e frenagem do motor.
Foi utilizado um PIC 16F877A para controle do motor.
20
VIII. ASPECTOS TEÓRICOS
8.1 Torque
Foi solicitado pelo professor Filipe que os grupos entregassem, em datas por
ele estabelecidas, registros ou informações acerca do andamento das etapas, a fim de
acompanhar a evolução dos projetos. A primeira solicitação dizia respeito ao tipo de
motor escolhido pelo grupo. Com esta orientação, partiu-se para a pesquisa teórica,
quanto ao cálculo do torque do motor.
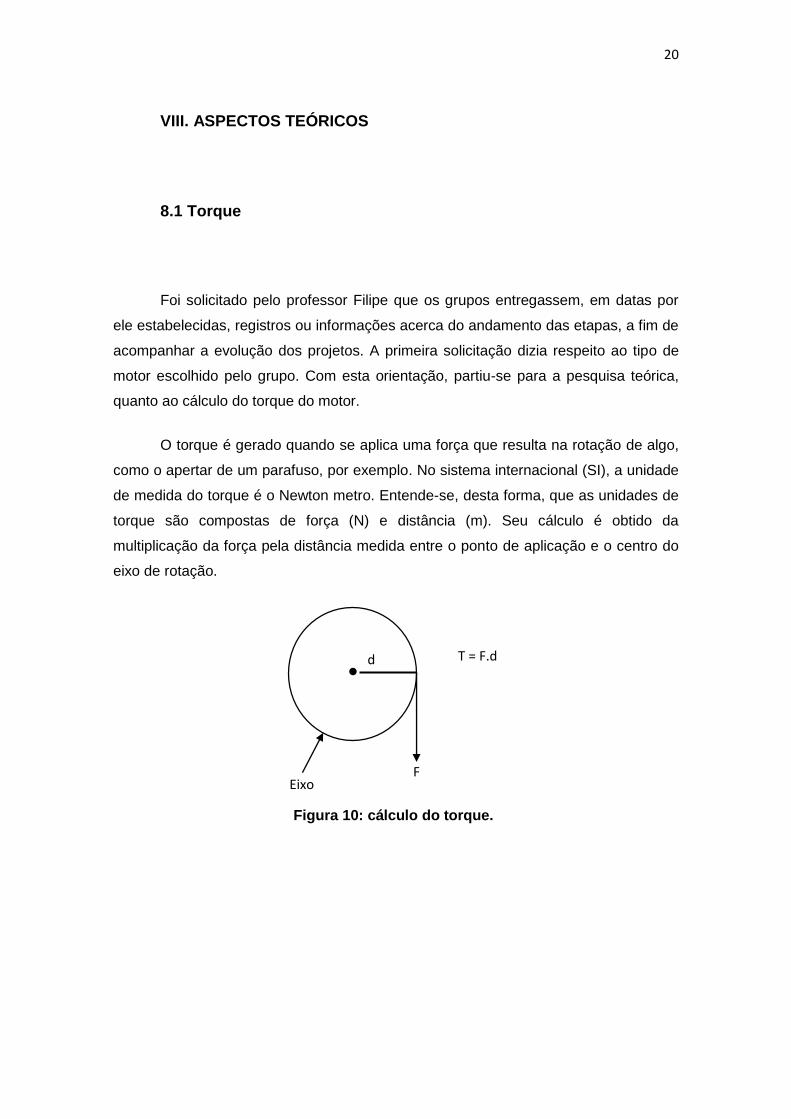
O torque é gerado quando se aplica uma força que resulta na rotação de algo,
como o apertar de um parafuso, por exemplo. No sistema internacional (SI), a unidade
de medida do torque é o Newton metro. Entende-se, desta forma, que as unidades de
torque são compostas de força (N) e distância (m). Seu cálculo é obtido da
multiplicação da força pela distância medida entre o ponto de aplicação e o centro do
eixo de rotação.
Figura 10: cálculo do torque.
T = F.d
Eixo
d
F
21
8.2 PWM
Modulação de Largura de Pulso, mais conhecida como PWM (Pulse Width
Modulation) é uma tecnologia de controle de potência. Tome-se, como exemplo, um
circuito simples, com uma chave, que permite ou interrompe a passagem da corrente
na carga. Neste caso, ou a potência é nula (interruptor aberto) ou é total (fechado).
Uma potência intermediária, de 50%, por exemplo, poderia ser atingida deixando-se a
chave aberta durante a metade do tempo e fechada por tempo igual, controle que
possibilita a variação da tensão média.
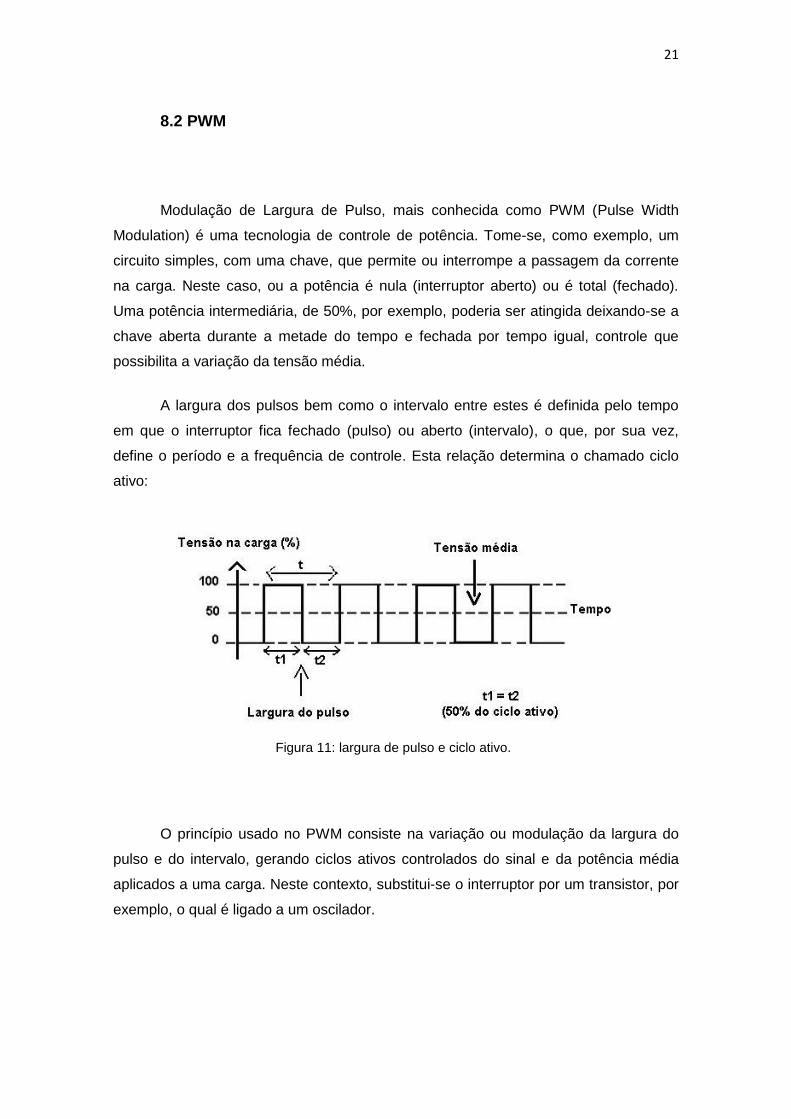
A largura dos pulsos bem como o intervalo entre estes é definida pelo tempo
em que o interruptor fica fechado (pulso) ou aberto (intervalo), o que, por sua vez,
define o período e a frequência de controle. Esta relação determina o chamado ciclo
ativo:
Figura 11: largura de pulso e ciclo ativo.
O princípio usado no PWM consiste na variação ou modulação da largura do
pulso e do intervalo, gerando ciclos ativos controlados do sinal e da potência média
aplicados a uma carga. Neste contexto, substitui-se o interruptor por um transistor, por
exemplo, o qual é ligado a um oscilador.
22
8.3 Linguagem de programação C
Um dos desafios conceituais enfrentados pelo grupo está relacionado à
articulação dos elementos mecânicos e a produção controlada do movimento de tais
elementos. Esta articulação torna-se possível a partir da coordenação entre fatores
mecânicos, elétricos e computacionais, tomando corpo a partir de softwares
específicos, tais como o MpLab, o Protheus e o CCS.
Foi criado então um programa (vide anexo IV) que fizesse a interface entre
mecânica e elétrica e que seria a inteligência do projeto, utilizando-se a chamada
linguagem C. A programação em C é um tipo de linguagem utilizada para descrever
uma sequência lógica de procedimentos (funções) a fim de se resolver determinado
problema. Trata-se de uma linguagem que aproxima os códigos da linguagem humana
aos da máquina. O código gerado é compilado (traduzido), de modo a criar-se um
arquivo executável.
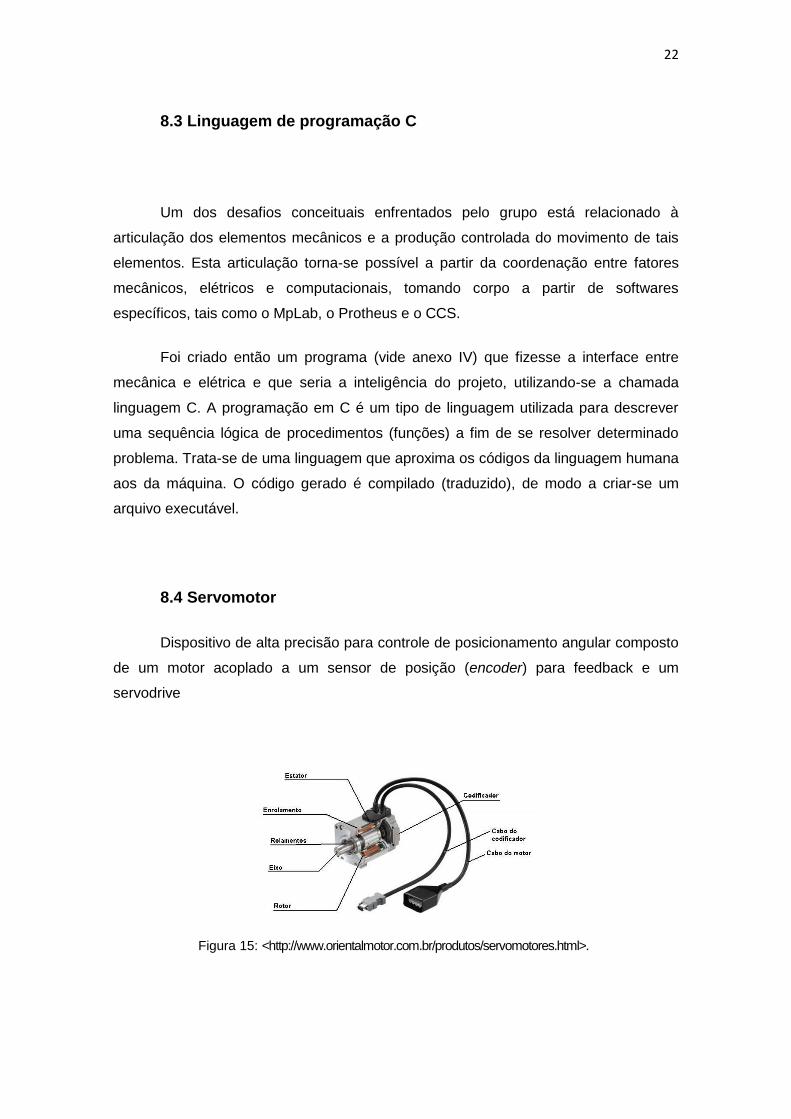
8.4 Servomotor
Dispositivo de alta precisão para controle de posicionamento angular composto
de um motor acoplado a um sensor de posição (encoder) para feedback e um
servodrive
Figura 15: <http://www.orientalmotor.com.br/produtos/servomotores.html>.
23
8.5 Encoder
Dispositivo eletromecânico usado para converter movimentos rotativos ou
deslocamentos lineares do eixo de um motor em impulsos elétricos de onda quadrada,
apresentando a vantagem de fornecer controles precisos em velocidades de rotação
ou linear, posicionamentos angulares, volumes ou vazões de produtos líquidos,
robótica e outras aplicações em processos diversos. Também chamado de “transdutor
de posição angular”, sua utilização estende-se a contadores, tacômetros,
controladores lógicos programáveis ou conversores de frequência para sinais
analógicos.
24
IX. CÁLCULOS
Potência do motor
𝑃𝑡 = 𝐹𝑡 𝑥 𝑉
𝐹𝑡 = 1𝑁
𝑉 = 0,2 𝑚/𝑠
𝑃𝑡 = 0,2𝑊
𝑃 = 𝑃𝑡
𝜂∴ 𝑃 = 0,3𝑊
𝑃 = 𝑈. 𝐼 ∴ 0,3 = 12𝑥𝐼 ∴ 𝐼 = 25𝑚𝐴
Onde:
Pt = potência (W)
Ft = força (N)
V = velocidade (m/s)
I = corrente (mA)
U = tensão (V)
= rendimento
25
X. AJUSTES, OBSTÁCULOS E SOLUÇÕES
Os tópicos a seguir visam descrever algumas das dificuldades encontradas ao
longo da execução do projeto bem como as soluções encontradas para cada caso.
Mesmo sendo impossível abordar todos os percalços enfrentados pelo grupo,
considerou-se interessante e significativo pontuar algumas situações, entendendo-se
que o aprendizado e o sucesso do trabalho também são compostos dos erros, acertos
e da criatividade para solucionar imprevistos.
10.1 Projeto mecânico
Mesmo tendo o desenho do projeto mecânico seguido os procedimentos de
praxe quanto à medição das partes da esteira, ocorreu, no ato da montagem, uma
“folga” em ambos os lados da base onde seria encaixado o rolete superior, problema
que foi sanado aplicando-se outro perfil de aço sobre o perfil já existente, utilizado
como extensão para o rolete superior. Na APS otimizamos a parte mecânica com
ajustes do rolete superior, para evitar a folga e o desnivelamento da correia
transportadora.
10.2 Componentes eletrônicos
Foram usados circuitos integrados, pela quantidade reduzida de componentes
em razão da utilização desses CI’s. Para a ligação desses componentes, necessitou-
se apenas do Data Sheet, o que facilitou tanto no projeto quanto na montagem
eletrônica da esteira. Para a APS otimizamos o quadro de comando, acrescentando o
display de LCD e ligando-o na placa através de um flat cable, isso poupou um valioso
tempo de montagem elétrica, pois não foi necessário a solda de cabos para esta
ligação.
Apesar do funcionamento pleno do circuito o grupo notou que o motor não
correspondeu conforme o esperado, pois o torque do motor está muito baixo. Após
pesquisas o grupo não achou a solução para este problema, porém desconfiamos que
26
seja um problema no circuito, visto que a maior dificuldade para a conclusão da 1ª
etapa foi o acionamento do motor através do Transistor Mosfet, isso pode ter gerado
algum erro no projeto elétrico que gera a queda de tensão ao ligar o motor. Este
problema impossibilitou o funcionamento conforme proposta 1ª etapa, pois com um
torque baixo o motor não foi capaz de reduzir a velocidade da esteira conforme
planejado.
10.3 Motor e projeto elétrico
O CI LN298 não fornecia a potência necessária para acionar o motor. O
dispositivo foi substituído pelo MOSFET IRFZ44N, o optoacoplador 4N35 e o TIP31.
Para a leitura da rotação do motor inicialmente pretendíamos utilizar um servomotor
com encoder acoplado, o motor foi comprado conforme especificações, porém no
decorrer do projeto notamos que o encoder apresentou defeito, por não mandar o sinal
correto de rotação. Com este problema o grupo decidiu por criar o próprio encoder
utilizando um sensor de barreira, fizemos manualmente as hélices que acionam o
sensor e aplicamos na interrupção externa Rb0 do microcontrolador, com isto o
problema do encoder foi resolvido.
Para o novo motor, foi necessário aumentar o diâmetro de um dos furos na
chapa de alumínio, ajustando-a a suas dimensões.
27
XI. CONCLUSÃO
Os desafios propostos ao longo deste semestre responderam a algumas
necessidades e demandas específicas da turma de Engenharia de Controle e
Automação. Dentre elas, enfatizam-se a aplicação prática dos conteúdos apreendidos
até o momento e o desenvolvimento de trabalhos em equipe. Neste tipo de atividade,
o bom resultado implica a boa articulação entre os integrantes do grupo, o que ocorreu
de modo satisfatório.
A pesquisa de campo por materiais compatíveis e também por saberes
complementares é outro aspecto que merece ser ressaltado, não somente por ser uma
etapa de cronograma, mas também e principalmente por garantir maior autonomia de
aprendizado, individual e coletivamente, dentro e fora da sala de aula.
Nas primeiras reuniões sobre a implementação do projeto, o grupo tomou a
decisão de priorizar materiais já existentes, em vez de considerar a hipótese da
usinagem de peças, o que favoreceu o cumprimento de todas as etapas em tempo
hábil, promoveu maior aproveitamento das atividades relacionadas a cada fase do
cronograma e reduziu significativamente o custo final do protótipo.
A quantidade e complexidade das tarefas inerentes à proposta propiciaram
uma experiência valiosa para a formação de todos os integrantes do grupo, tanto do
ponto de vista prático quanto teórico. Foi possível tomar e retomar conhecimentos com
vistas à execução não somente de um produto, mas de todo um processo de
produção, ainda que em proporções muito menores que as da realidade.
Muitas informações ilustradas pelos professores ao longo do curso puderam
ser vivenciadas de forma prática, possibilitando um aprendizado muito concreto e que
proporcionou grande satisfação a todos. Esta pequena noção certamente contribui de
modo positivo para o futuro desempenho profissional daqueles que se envolvem de
fato com projetos desta natureza.
28
BIBLIOGRAFIA
ANTUNES, I. Elementos de máquinas. São Paulo: Érica, 1999.
BOLTON, W. Instrumentação e controle. Curitiba: Hemus, 2002.
BRAGA, Newton. O que é PWM. Disponível em:
<http://www.newtoncbraga.com.br/index.php/robotica/5169-mec071a>. Acesso em: 17
set. 2014.
CÁLCULO com motores. Disponível em:
<http://www.mecatronicaatual.com.br/educacao/1278-clculo-com-motores>. Acesso
em: 17 set. 2014.
CARVALHO, J. L. M. Sistemas de controle automático. Rio de Janeiro: LTC, 2000.
COLLINS, J. Projeto mecânico de elementos de máquinas. Rio de Janeiro: LTC,
2006.
DORF, R. C.; BISHOP, R. H. Sistemas de controle modernos. 11. ed. Rio de
Janeiro: LTC, 2009.
FIGINI, G. Eletrônica industrial: servomecanismos, teoria da regulagem automática.
Curitiba: Hemus, 2002.
MIYAGI, P. E. Controle programável. São Paulo: Edgard Blucher, 2001.
NIEMANN, G. Elementos de máquinas. São Paulo: Edgard Blücher, 1971.
NISE, N. S. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC, 2009.
______. Engenharia de sistemas de controle. 6. ed. Rio de Janeiro: LTC, 2009.
NORTON, R. Projeto de máquinas. Porto Alegre:Bookman, 2005.
OGATA, K. Discrete-time control systems. New Jersey: Prentice Hall, 1995.
______. Engenharia de controle moderno. 4. ed. Rio de Janeiro: Prentice Hall, 2008.
29
PEREIRA, F. Microcontroladores PIC: programação em C. 7. ed. São Paulo: Érica,
2007.
REBOLLO, Carlos. Introdução à linguagem C. Disponível em:
<http://www.cenapad.unicamp.br/servicos/treinamentos/apostilas/apostila_C.pdf>.
Acesso em: 20 set. 2014.
REGIMENTO Geral da UNIP. Disponível em:
<http://www3.unip.br/universidade/regimento.aspx>. Acesso em: 17 nov. 14.
SARKIS, Melconian. Elementos de máquinas. São Paulo: Érica, 2011.
SHIGLEY, J. E. Projeto de engenharia mecânica. Porto Alegre: Bookman, 2006.
SOUZA, D. J. Desbravando o PIC. São Paulo: Érica, 2003.
30
ANEXO I
Proposta 1ª Etapa8
O projeto interdisciplinar tem por objetivo estimular o aluno a articular as
competências e habilidades adquiridas nas unidades curriculares ao longo do curso.
Para tal, propõe-se a seguinte situação-problema:
Montar uma esteira, movida por um mini-motor cc (não pode ser motor de
passo), que deverá deslocar uma massa de 100 gramas, em um percurso de 400
milímetros. A velocidade da esteira deverá ser regulada para atender os seguintes
limites de tempo: na velocidade alta, a esteira deverá deslocar a massa em um tempo
de 8s e na velocidade baixa este tempo deverá ser de 12s. O motor deverá ser
alimentado por bateria ou pilha.
Deverão ser previstos sensores, um para iniciar a esteira quando a massa for
posicionada em frente ao mesmo, e outro que pare a esteira ao término de seu curso,
possibilitando assim a cronometragem dos tempos nos dois casos (velocidades alta e
baixa). Este tempo de contagem deverá ser apresentado num display (LCD ou 7
segmentos).
Critérios para avaliação
O projeto poderá ser realizado em grupo de, no máximo, cinco alunos. A
avaliação do projeto será realizada em três etapas:
Etapa 1 – apresentação da estrutura mecânica: o grupo deverá apresentar
ao professor a estrutura mecânica da esteira. A esteira deve ter o comprimento e a
8 Apresentada pelo professor Filipe, de Engenharia Mecatrônica Interdisciplinar.
31
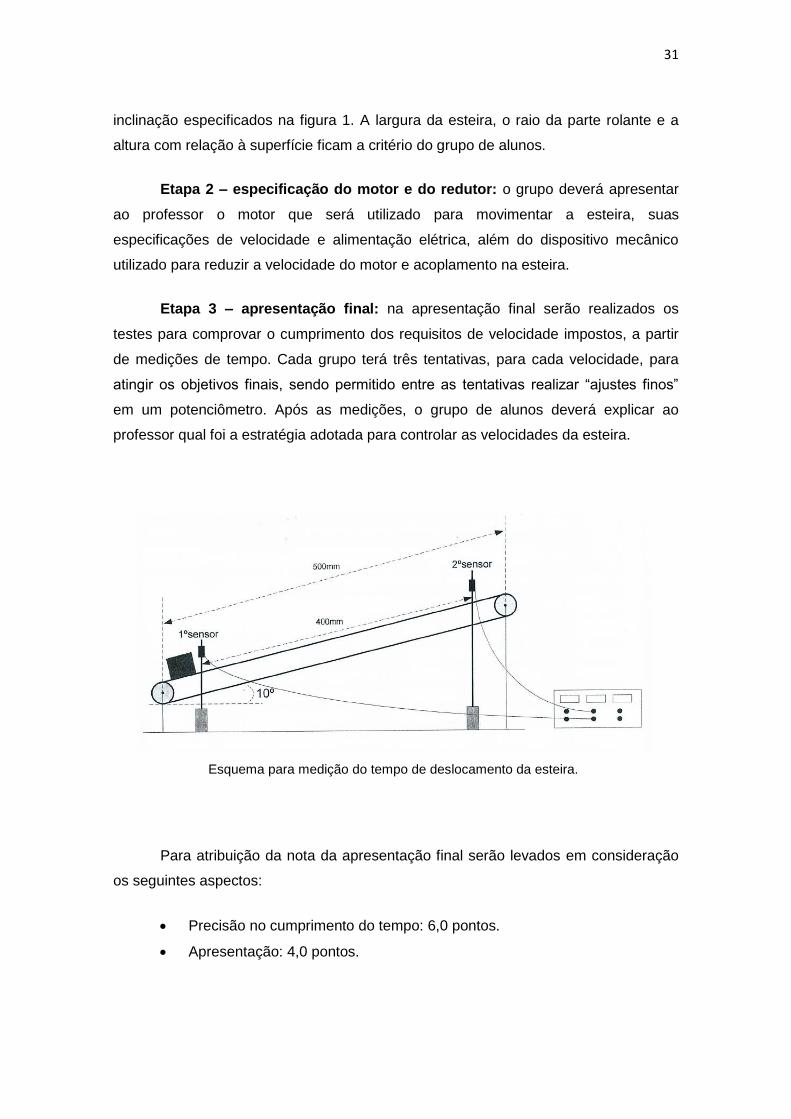
inclinação especificados na figura 1. A largura da esteira, o raio da parte rolante e a
altura com relação à superfície ficam a critério do grupo de alunos.
Etapa 2 – especificação do motor e do redutor: o grupo deverá apresentar
ao professor o motor que será utilizado para movimentar a esteira, suas
especificações de velocidade e alimentação elétrica, além do dispositivo mecânico
utilizado para reduzir a velocidade do motor e acoplamento na esteira.
Etapa 3 – apresentação final: na apresentação final serão realizados os
testes para comprovar o cumprimento dos requisitos de velocidade impostos, a partir
de medições de tempo. Cada grupo terá três tentativas, para cada velocidade, para
atingir os objetivos finais, sendo permitido entre as tentativas realizar “ajustes finos”
em um potenciômetro. Após as medições, o grupo de alunos deverá explicar ao
professor qual foi a estratégia adotada para controlar as velocidades da esteira.
Esquema para medição do tempo de deslocamento da esteira.
Para atribuição da nota da apresentação final serão levados em consideração
os seguintes aspectos:
Precisão no cumprimento do tempo: 6,0 pontos.
Apresentação: 4,0 pontos.
32
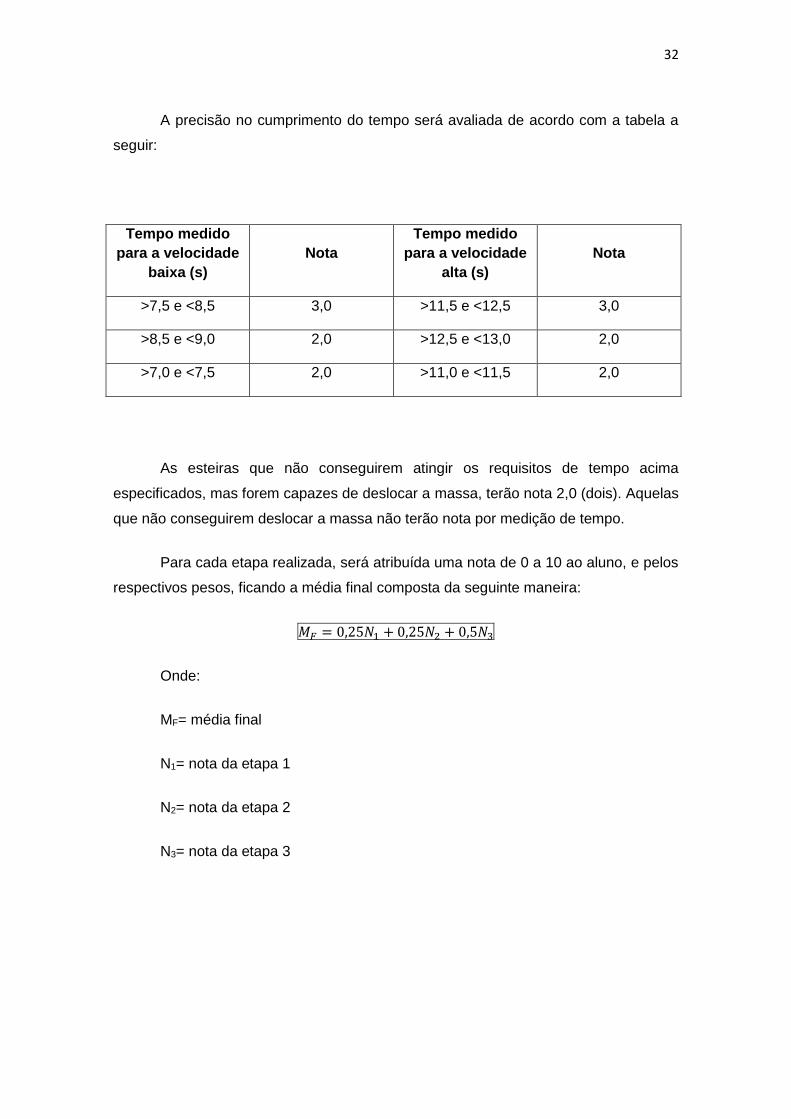
A precisão no cumprimento do tempo será avaliada de acordo com a tabela a
seguir:
Tempo medido
para a velocidade
baixa (s)
Nota
Tempo medido
para a velocidade
alta (s)
Nota
>7,5 e <8,5 3,0 >11,5 e <12,5 3,0
>8,5 e <9,0 2,0 >12,5 e <13,0 2,0
>7,0 e <7,5 2,0 >11,0 e <11,5 2,0
As esteiras que não conseguirem atingir os requisitos de tempo acima
especificados, mas forem capazes de deslocar a massa, terão nota 2,0 (dois). Aquelas
que não conseguirem deslocar a massa não terão nota por medição de tempo.
Para cada etapa realizada, será atribuída uma nota de 0 a 10 ao aluno, e pelos
respectivos pesos, ficando a média final composta da seguinte maneira:
𝑀𝐹 = 0,25𝑁1 + 0,25𝑁2 + 0,5𝑁3
Onde:
MF= média final
N1= nota da etapa 1
N2= nota da etapa 2
N3= nota da etapa 3
33
Proposta 2ª Etapa9
Modificar a esteira da proposta da 1ª Etapa implementando um controle de velocidade, onde quando colocado um peso a mesma deverá manter a velocidade pré-determinada. Este controle poderá ser feito por através de controlador PID ou microcontrolador. O sistema deverá ser provido de um encoder para leitura e apresentação do RPM em um display de LCD.
9 Apresentada pelo professor Rafael Bachega para APS.

34
ANEXO II – PROJETO MECÂNICO
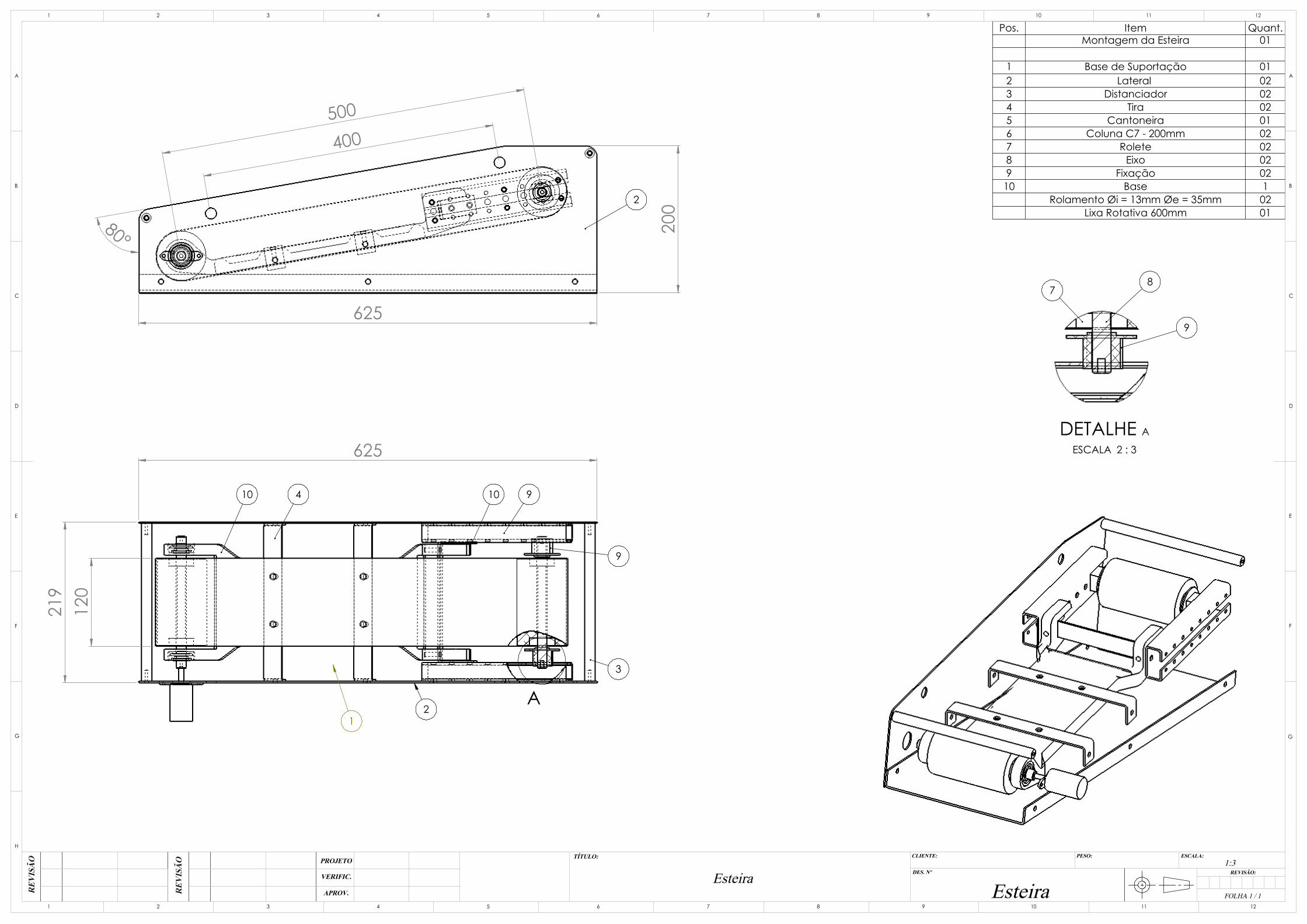
400500
80° 200
625
2
625
219
120
A
9
9
3
10 4
21
10
DETALHE A
ESCALA 2 : 3
9
87
Pos. Item Quant.Montagem da Esteira 01
1 Base de Suportação 012 Lateral 023 Distanciador 024 Tira 025 Cantoneira 016 Coluna C7 - 200mm 027 Rolete 028 Eixo 029 Fixação 0210 Base 1
Rolamento Øi = 13mm Øe = 35mm 02Lixa Rotativa 600mm 01
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
Esteira
PESO: ESCALA:
DES. Nº
TÍTULO:
APROV.
VERIFIC.
PROJETO
9 11 1210
REV
ISÃ
O
REV
ISÃ
O 1:3
FOLHA 1 / 1
Esteira REVISÃO:
CLIENTE:
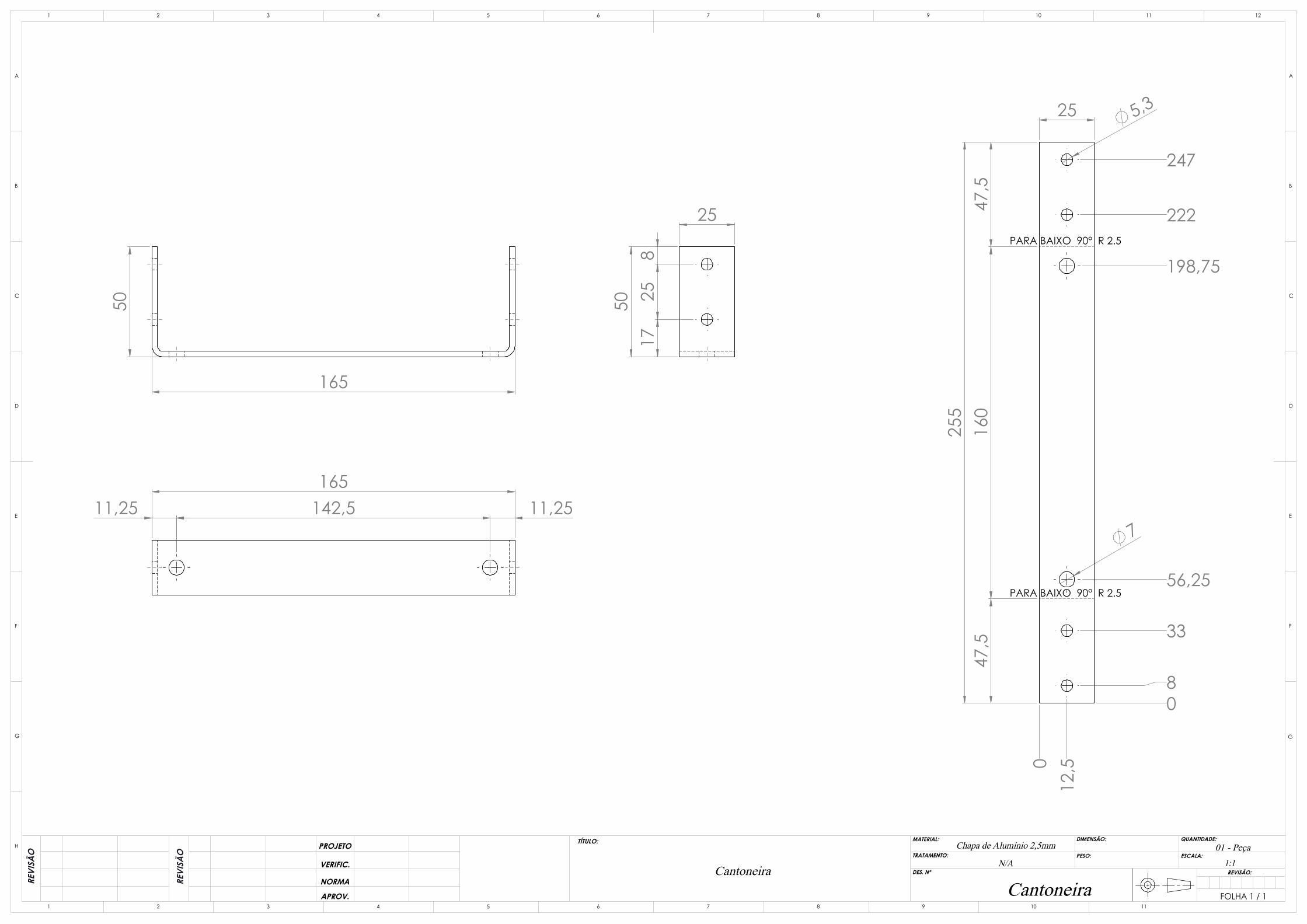
25
255
47,5
160
47,5
5,3
7
08
33
56,25
198,75
222
247
012
,5
PARA BAIXO 90° R 2.5
PARA BAIXO 90° R 2.5
165
50 508
2517
25
16511,25142,511,25
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Chapa de Alumínio 2,5mm
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
1:1N/A
QUANTIDADE:01 - Peça
FOLHA 1 / 1
Cantoneira REVISÃO:
Cantoneira
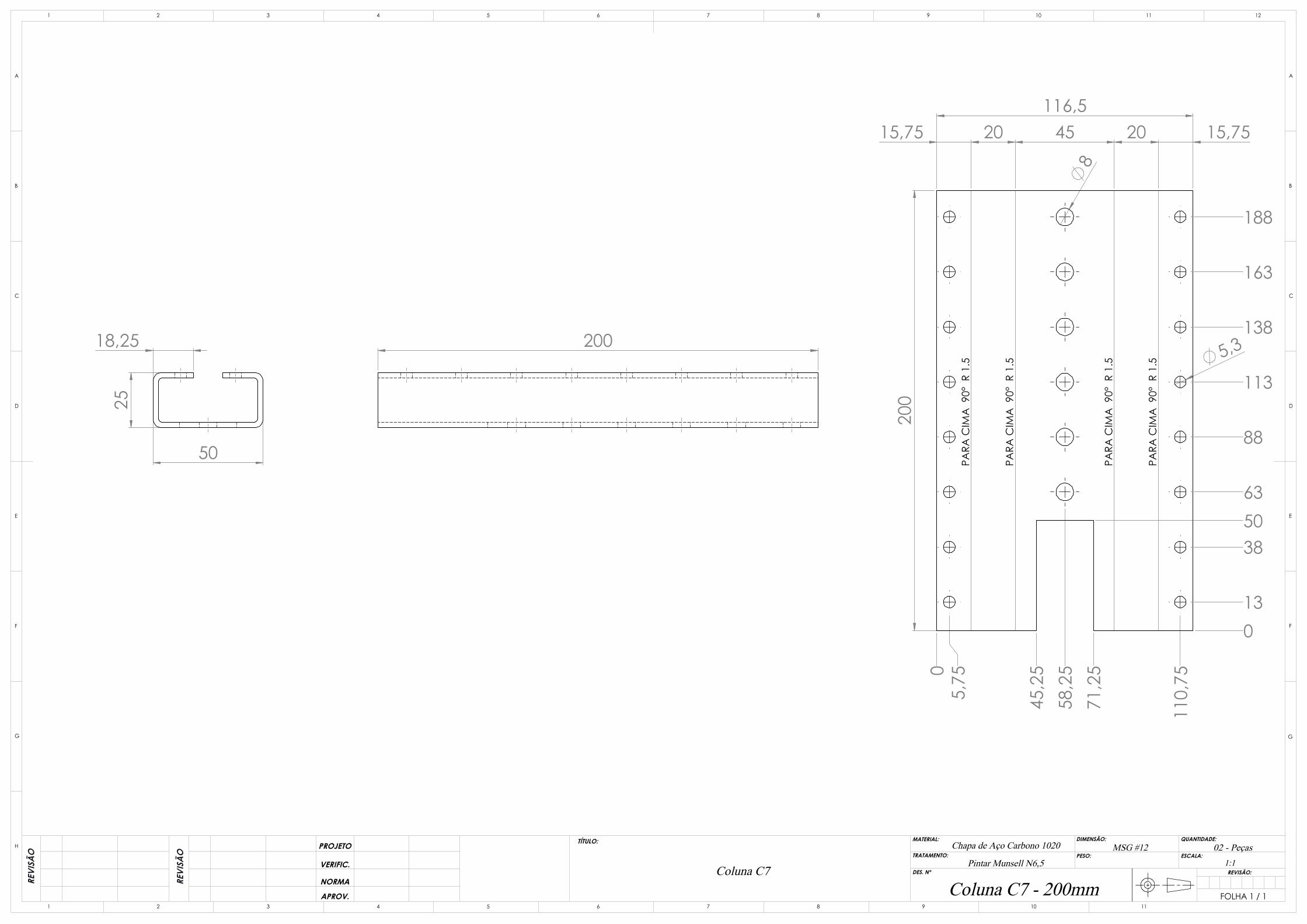
116,515,7520452015,75
200
5,3
8
05,
75
45,2
558
,25
71,2
5
110,
75
013
385063
88
113
138
163
188
PARA
CIM
A 9
0° R
1.5
PARA
CIM
A 9
0° R
1.5
PARA
CIM
A 9
0° R
1.5
PARA
CIM
A 9
0° R
1.5
50
25
18,25 200
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Chapa de Aço Carbono 1020
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
1:1Pintar Munsell N6,5
QUANTIDADE:MSG #12 02 - Peças
FOLHA 1 / 1
Coluna C7 REVISÃO:
Coluna C7 - 200mm
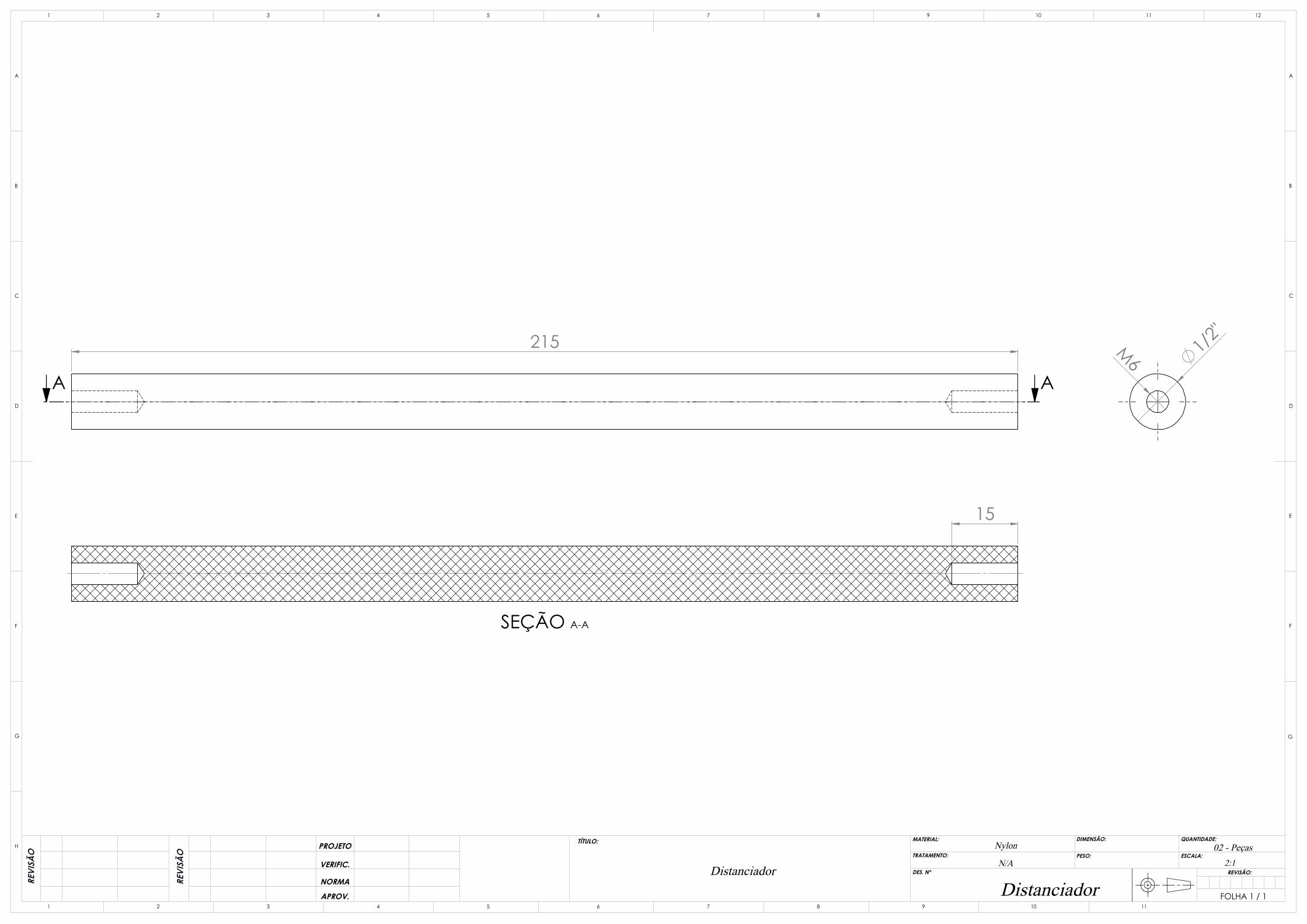
1/2"
M6215
AA
15
SEÇÃO A-A
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Nylon
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
2:1N/A
QUANTIDADE:02 - Peças
FOLHA 1 / 1
Distanciador REVISÃO:
Distanciador
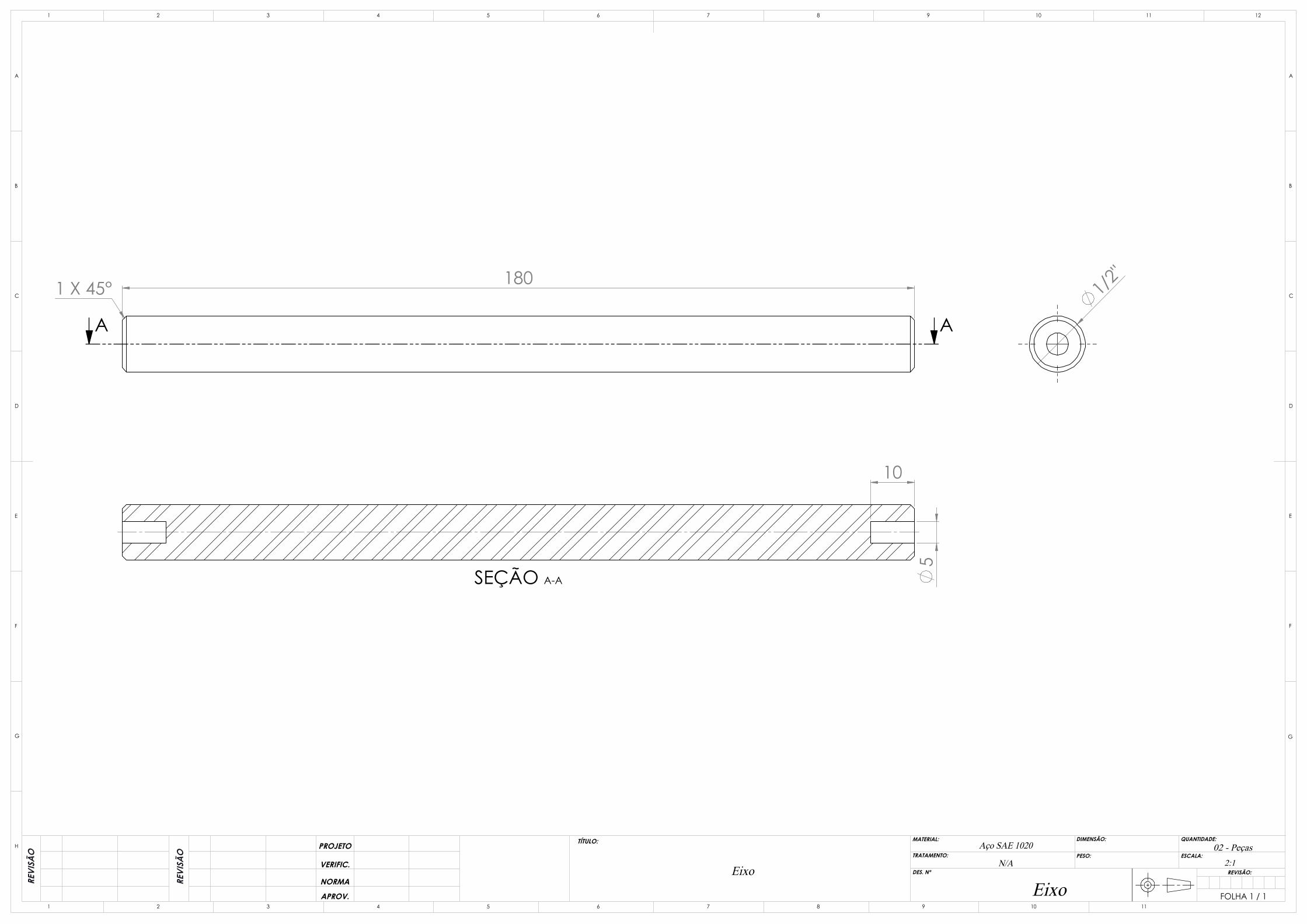
1 X 45° 180
AA
1/2"
10
5
SEÇÃO A-A
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Aço SAE 1020
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
2:1N/A
QUANTIDADE:02 - Peças
FOLHA 1 / 1
Eixo REVISÃO:
Eixo
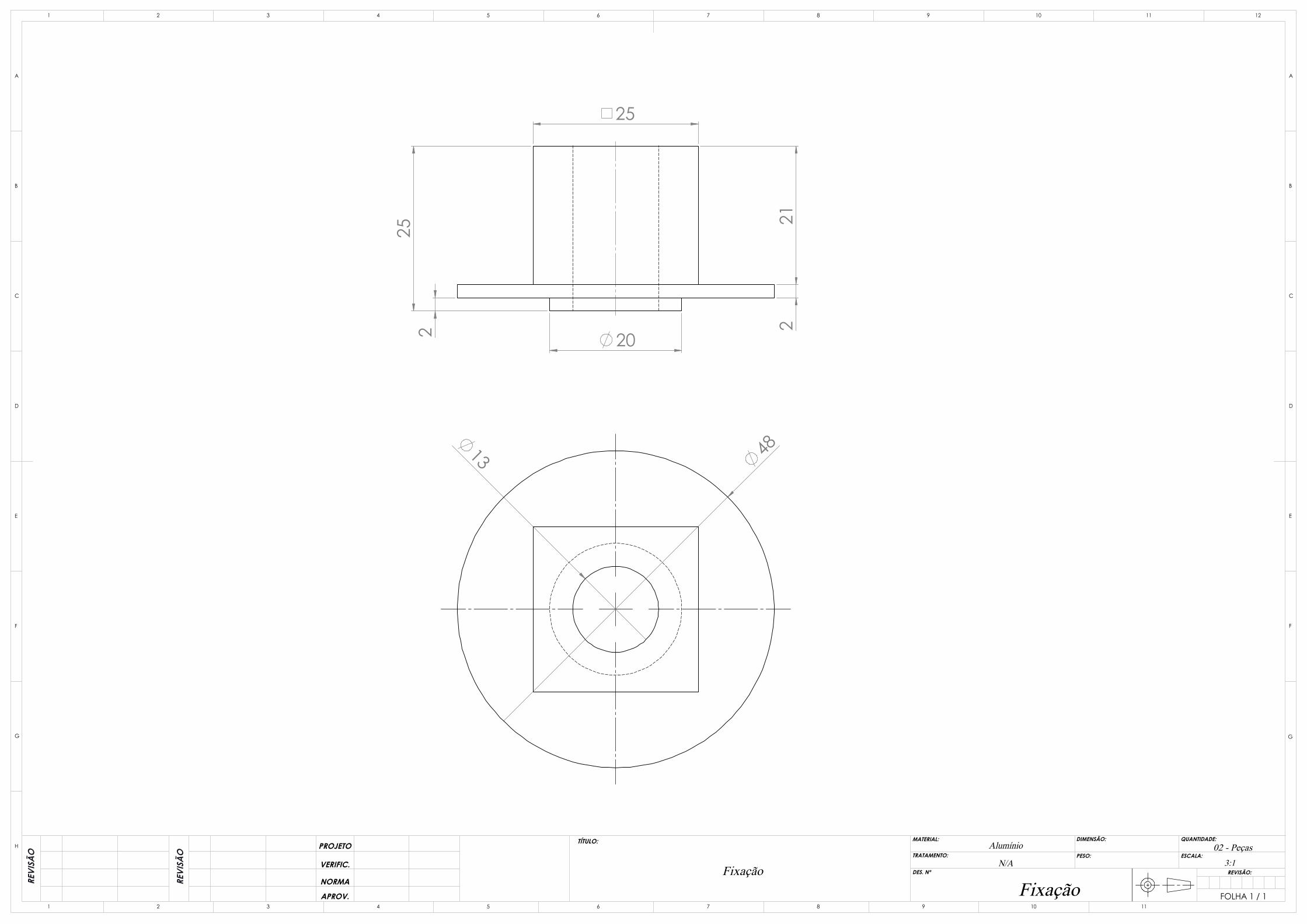
252 2
21
20
25
4813
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Alumínio
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
3:1N/A
QUANTIDADE:02 - Peças
FOLHA 1 / 1
Fixação REVISÃO:
Fixação
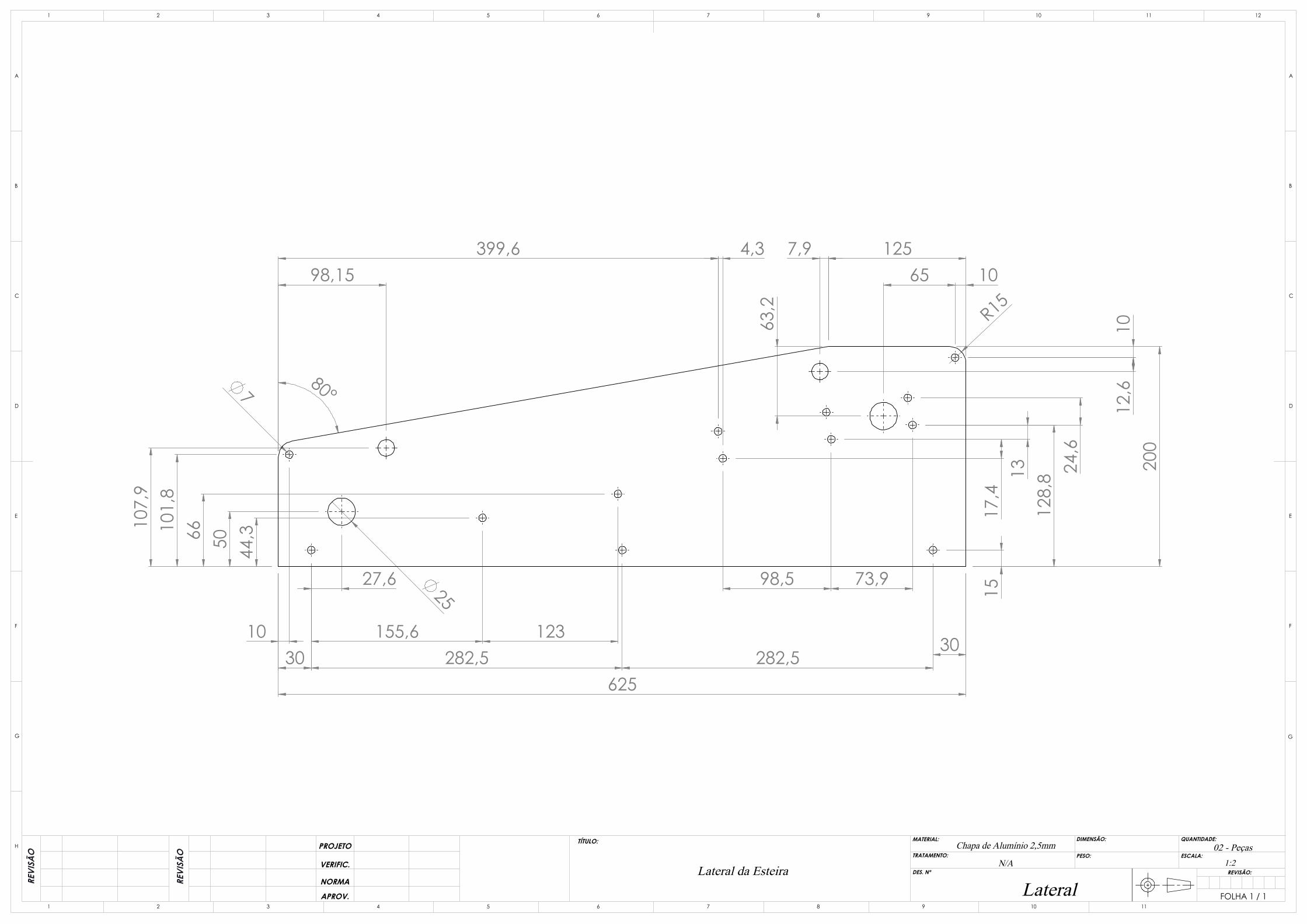
625
200
125
15
30282,5282,530
155,6
27,6
123
50 44,36610
1,8
107,
9
80°
10
98,15399,6 4,3
98,5 73,9
128,
8 24,6
10
10657,9
1317
,4
12,6
63,2
7
25
R15
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Chapa de Alumínio 2,5mm
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
1:2N/A
QUANTIDADE:02 - Peças
FOLHA 1 / 1
Lateral da Esteira REVISÃO:
Lateral
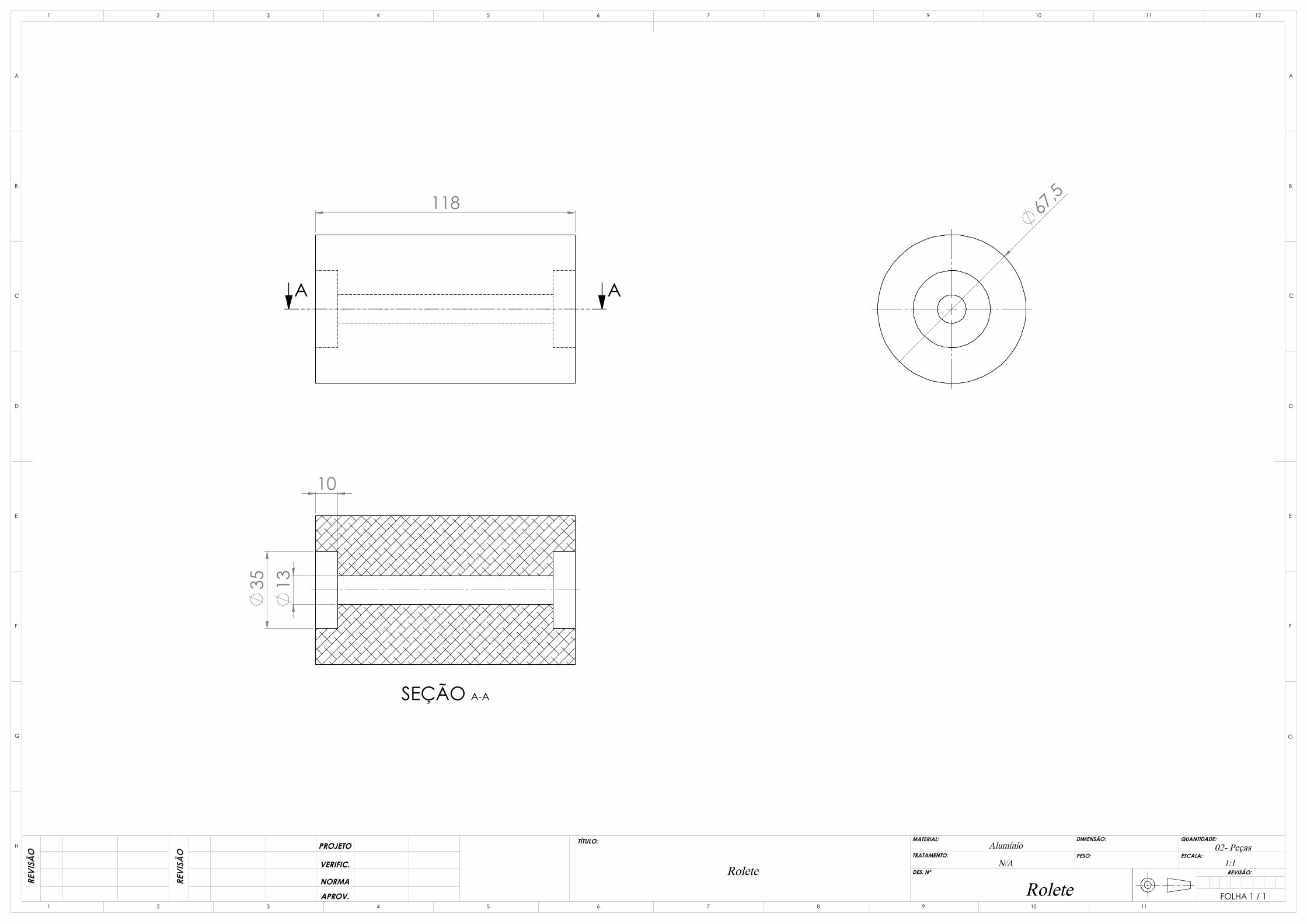
118
AA
67,5
35 13
10
SEÇÃO A-A
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Alumínio
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
1:1N/A
QUANTIDADE:02- Peças
FOLHA 1 / 1
Rolete REVISÃO:
Rolete
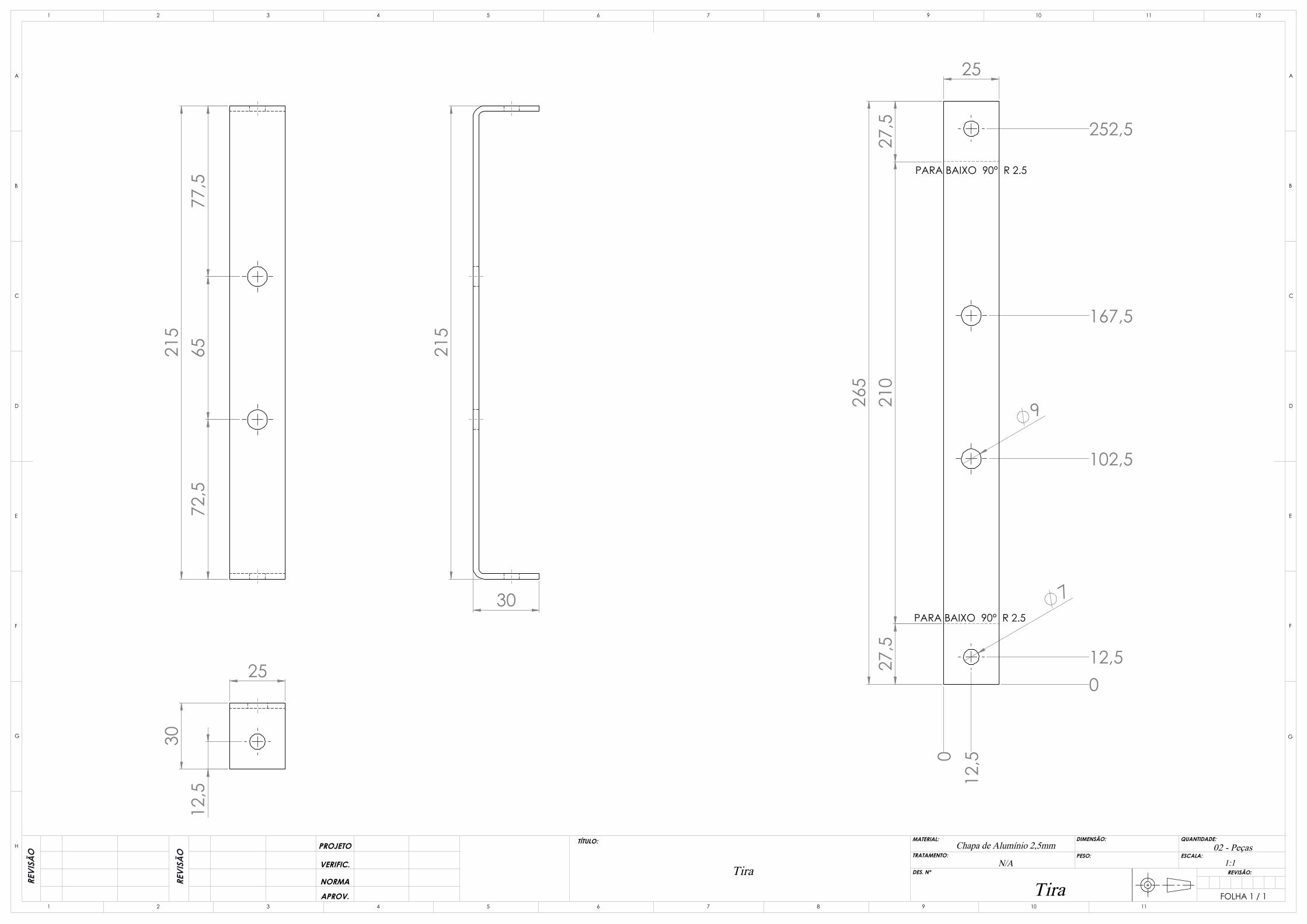
265
27,5
210
27,5
25
9
7
012,5
102,5
167,5
252,5
012
,5
PARA BAIXO 90° R 2.5
PARA BAIXO 90° R 2.5 21
572
,565
77,5
3012
,5
25
30
215
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Chapa de Alumínio 2,5mm
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
1:1N/A
QUANTIDADE:02 - Peças
FOLHA 1 / 1
Tira REVISÃO:
Tira
215
625
25
10
3028
2,5
282,
530
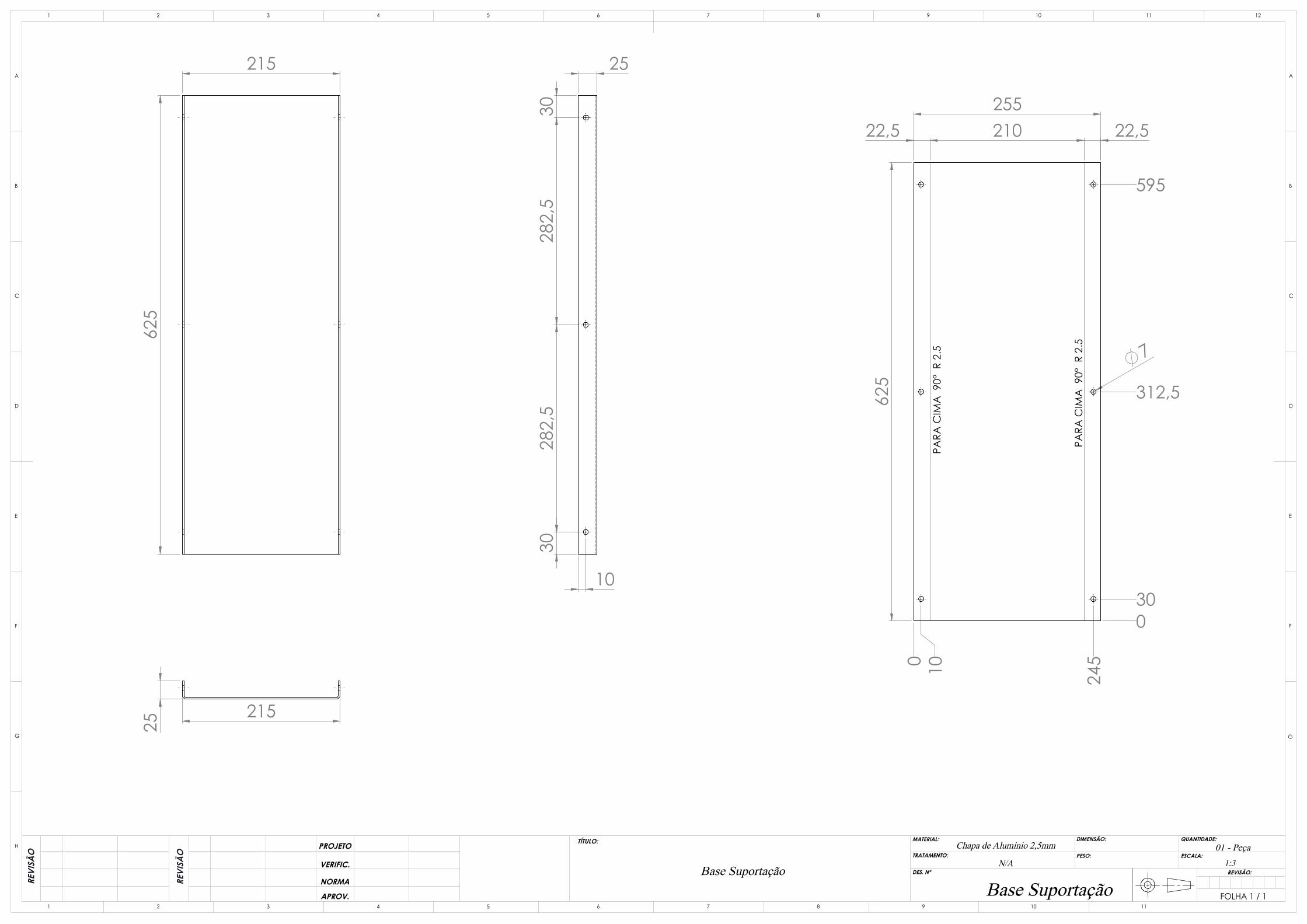
215
25
25522,521022,5
625
7
030
312,5
595
0 10 245
PARA
CIM
A 9
0° R
2.5
PARA
CIM
A 9
0° R
2.5
6
D
C
B
A
E
F
G
H
E
A
B
C
D
F
54321 7 8 9 10 11 12
1 2 3 4 5 6 7 8
G
PESO:Chapa de Alumínio 2,5mm
ESCALA:
DES. Nº
TÍTULO: MATERIAL:
TRATAMENTO:
APROV.
VERIFIC.
PROJETO
9 1110
REVI
SÃO
REVI
SÃO
NORMA
DIMENSÃO:
1:3N/A
QUANTIDADE:01 - Peça
FOLHA 1 / 1
Base Suportação REVISÃO:
Base Suportação

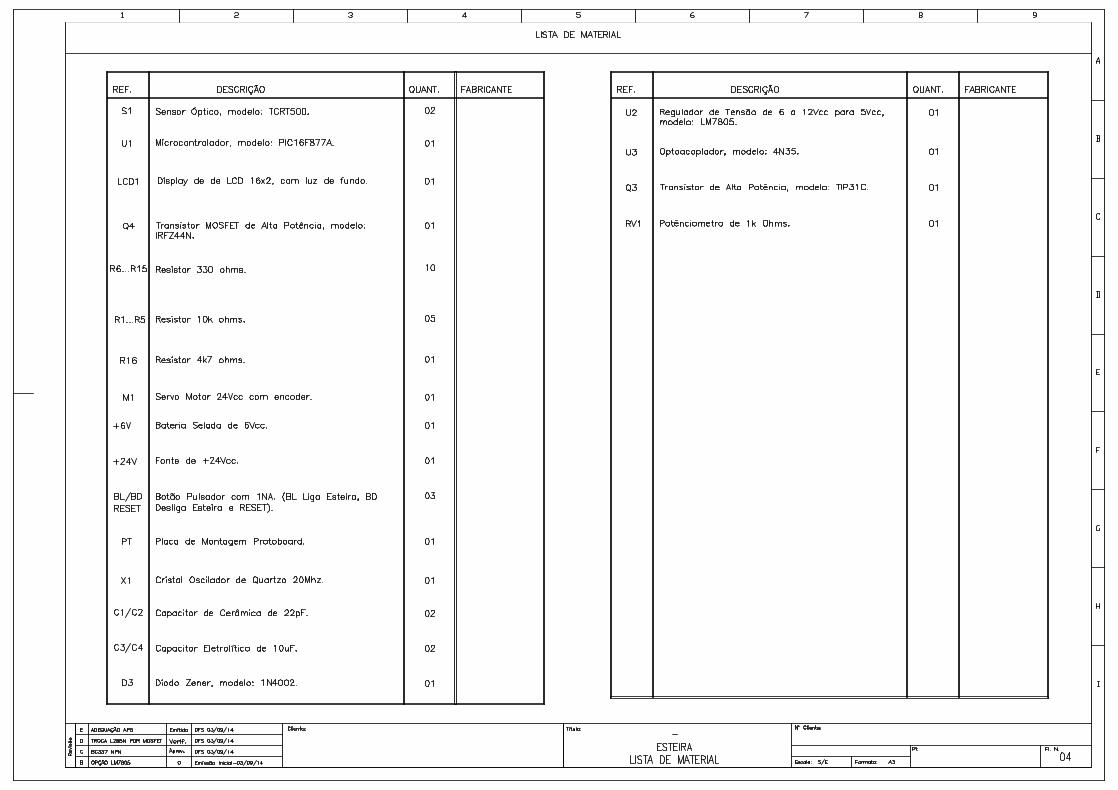
39
ANEXO III – PROJETO ELÉTRICO
44
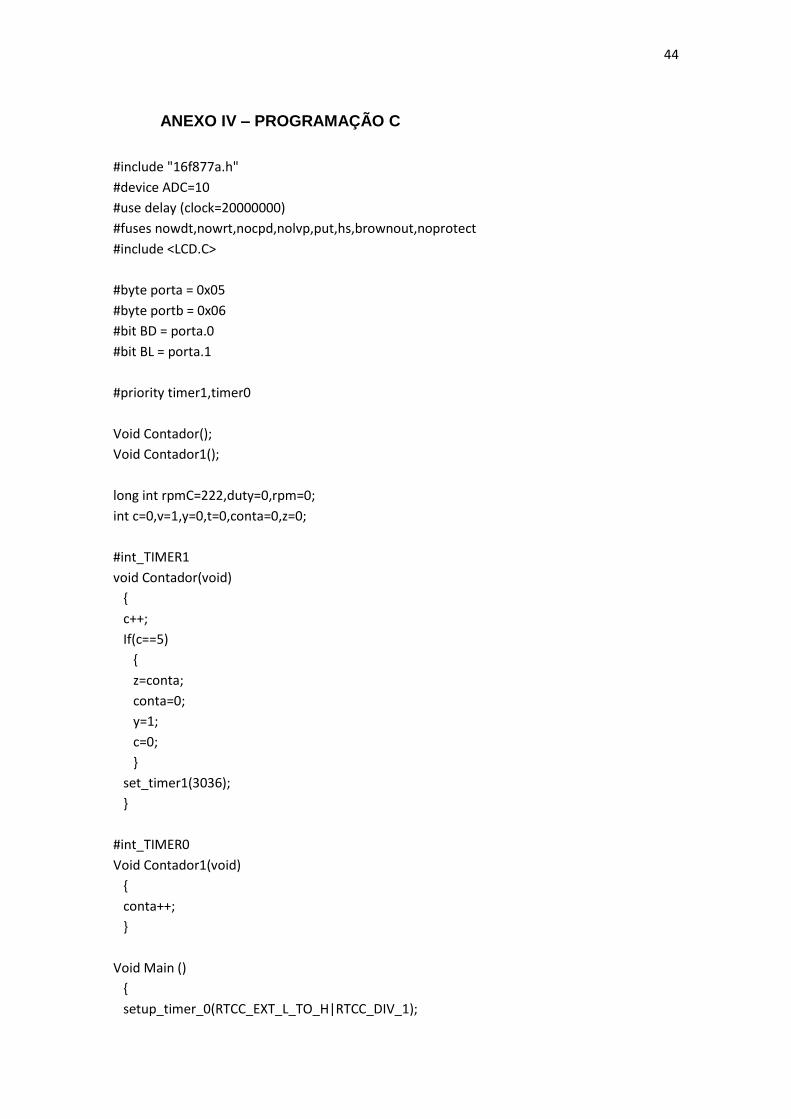
ANEXO IV – PROGRAMAÇÃO C
#include "16f877a.h"
#device ADC=10
#use delay (clock=20000000)
#fuses nowdt,nowrt,nocpd,nolvp,put,hs,brownout,noprotect
#include <LCD.C>
#byte porta = 0x05
#byte portb = 0x06
#bit BD = porta.0
#bit BL = porta.1
#priority timer1,timer0
Void Contador();
Void Contador1();
long int rpmC=222,duty=0,rpm=0;
int c=0,v=1,y=0,t=0,conta=0,z=0;
#int_TIMER1
void Contador(void)
{
c++;
If(c==5)
{
z=conta;
conta=0;
y=1;
c=0;
}
set_timer1(3036);
}
#int_TIMER0
Void Contador1(void)
{
conta++;
}
Void Main ()
{
setup_timer_0(RTCC_EXT_L_TO_H|RTCC_DIV_1);
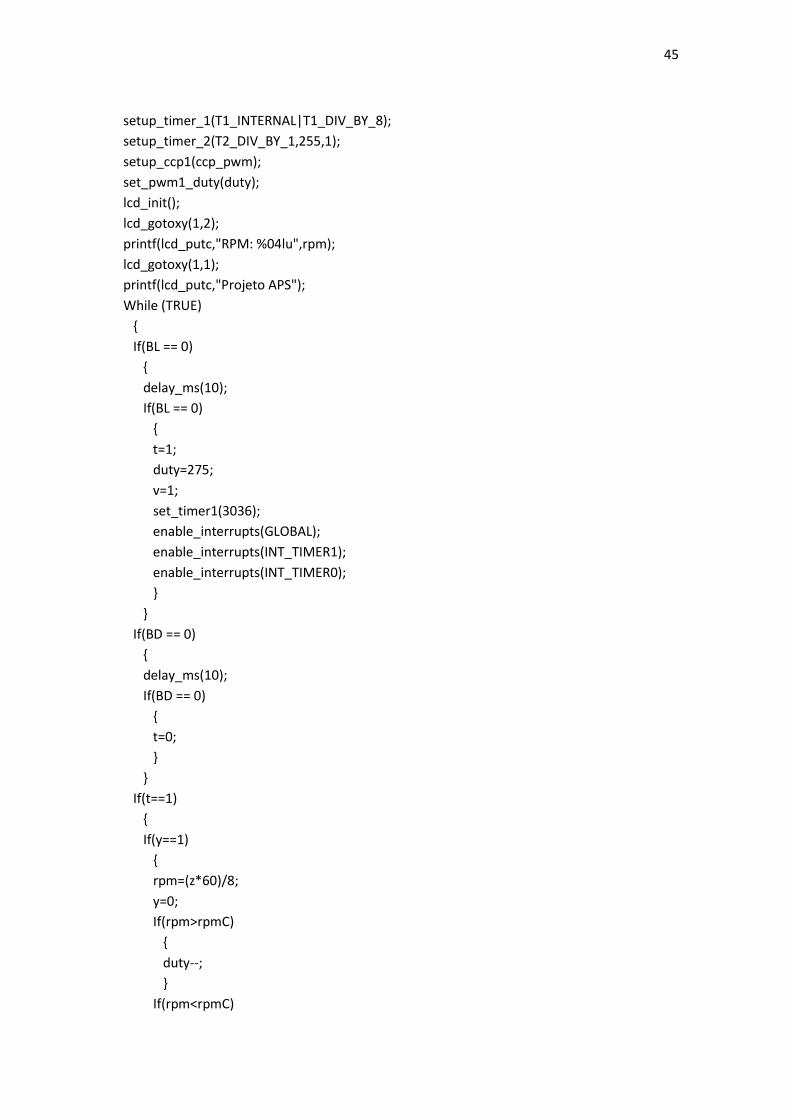
45
setup_timer_1(T1_INTERNAL|T1_DIV_BY_8);
setup_timer_2(T2_DIV_BY_1,255,1);
setup_ccp1(ccp_pwm);
set_pwm1_duty(duty);
lcd_init();
lcd_gotoxy(1,2);
printf(lcd_putc,"RPM: %04lu",rpm);
lcd_gotoxy(1,1);
printf(lcd_putc,"Projeto APS");
While (TRUE)
{
If(BL == 0)
{
delay_ms(10);
If(BL == 0)
{
t=1;
duty=275;
v=1;
set_timer1(3036);
enable_interrupts(GLOBAL);
enable_interrupts(INT_TIMER1);
enable_interrupts(INT_TIMER0);
}
}
If(BD == 0)
{
delay_ms(10);
If(BD == 0)
{
t=0;
}
}
If(t==1)
{
If(y==1)
{
rpm=(z*60)/8;
y=0;
If(rpm>rpmC)
{
duty--;
}
If(rpm<rpmC)
46
{
duty++;
}
}
set_pwm1_duty(duty);
delay_us(5);
lcd_gotoxy(1,2);
printf(lcd_putc,"RPM: %04lu",rpm);
lcd_gotoxy(1,1);
printf(lcd_putc,"Projeto APS");
}
If(t==0)
{
disable_interrupts(GLOBAL);
disable_interrupts(INT_TIMER1);
disable_interrupts(INT_TIMER0);
t=0;
c=0;
conta=0;
rpm=0;
set_pwm1_duty(0);
lcd_gotoxy(1,2);
printf(lcd_putc,"RPM: %04lu",rpm);
lcd_gotoxy(1,1);
printf(lcd_putc,"Projeto APS");
}
}
}

47
ANEXO V – REGISTROS FOTOGRÁFICOS

48
49

50