Relatório - Controle Digital

of 15
-
Upload
jennifer-oliveira -
Category
Documents
-
view
214 -
download
0
Transcript of Relatório - Controle Digital
-
8/16/2019 Relatório - Controle Digital
1/15
-
8/16/2019 Relatório - Controle Digital
2/15
____________________________________________________________ ____________________
I INTRODUÇÃO
Os automóveis possuem um item imprescindível para arantir a seuran!a" con#orto e
estabilidade: o amortecedor$ A #alta dos amortecedores tra%em in&meros transtornos$ Asirreularidades do solo dei'am o carro bastante instável" podendo o motorista perder #acilmente ocontrole nas curvas" pois a inclina!(o do veículo n(o ) compensada$ A aus*ncia do e+uipamento
provoca um e'cesso de vibra!(o +ue passa das rodas para a carroceria do automóvel$O amortecedor e o sistema de suspens(o s(o dois elementos +ue" como rera eral" s(o
considerados como apenas um elemento$ ,a realidade s(o dois componentes totalmentedi#erentes +ue trabal-am em con.unto" um complementando ao outro$A suspens(o mant)m o nível ade+uado da altura e o alin-amento correto do veículo e redu% oe#eito de impacto da estrada$
A suspens(o eralmente ) composta de elementos #le'íveis +ue absorvem os movimentosda roda devido s irreularidades do pavimento$ ara controlar e redu%ir estes movimentosutili%ase um elemento especial na suspens(o" denominado amortecedor$ ste ) instalado entre oc-assi do carro e a roda$ 3uando a roda se movimenta verticalmente por causa das irreularidadesda super#ície da estrada" a -aste do amortecedor tamb)m se movimenta no mesmo sentido 415$
O processo de amortecimento dos impactos se dá do seuinte modo: as molas oscilamcon#orme passaem sobre o obstáculo e repetem a oscila!(o por um certo tempo$ em a
presen!a de amortecedores ade+uados" a absor!(o dessas oscila!7es #icaria con#iada unicamenteaos atritos da suspens(o e era!(o de calor na mola$ 8omo resultado" a roda perderia o contatocom o terreno" c-ocandose com certa viol*ncia 415$
O amortecedor ideal deve transmitir o mínimo possível dos desníveis do terreno carroceria" e manter a roda sempre em contato com o c-(o$ 3uando as irreularidades do soloapresentamse com pouca #re+u*ncia" isto )" s(o distantes entre si" o amortecimento deve ser elevado" de modo a evitar +ue a carroceria continue a oscilar depois de superar o obstáculo$ e"ao contrário" as irreularidades s(o #re+uentes 9a pouca distncia entre si ou devido altavelocidade;" o amortecedor deve ser bastante #le'ível" para impedir +ue contínuas oscila!7esse.am transmitidas carroceria$
8om o aumento da velocidade do veículo e" portanto da #re+u*ncia com +ue as
irreularidades do piso se apresentam s rodas" crescem as #or!as de in)rcia aplicadas s massasn(o suspensas do veículo$
-
8/16/2019 Relatório - Controle Digital
3/15
____________________________________________________________ ____________________
modo a evitar +ue a carroceria continue a oscilar depois de superar o obstáculo= se" ao contrário"as irreularidades s(o #re+uentes 9a pouca distncia entre si ou devido alta velocidade;" oamortecedor deve ser bastante #le'ível" para impedir +ue contínuas oscila!7es se.am transmitidas
carroceria$
>m sistema de controle neste caso ) interessante para compensar as perturba!7es impostas pelo sistema" como tamb)m controlar as variáveis inerentes a ele$ ste deve ser capa% de #ornecer uma saída correta mesmo na presen!a de perturba!7es$ 8onsiderando um sistema deamortecimento automotivo" o controle deve ser capa% de eliminar as perturba!7es oriundas dosdesníveis da pista" atrav)s da escol-a de parmetros tais como o instante de pico e ultrapassaem
percentual ade+uados$
II OB+ETIVOS
• ?a%er a modelaem matemática do comportamento do sistema de massa mola eamortecedor=
• ro.etar um controlador @< diital +ue controle a suspens(o automotiva$
III DISCUSSÃO TEÓRICA E RELEV;NCIA DO PROBLEMA
O sistema de suspens(o cont)m um con.unto de pe!as +ue trabal-am em constantemovimento" com o ob.etivo de absorver e acompan-ar as sali*ncias da pista" o#erecendodesempen-o ao automóvel$ >m componente essencial nesse sistema ) o amortecedor$ Oamortecedor tem tr*s #un!7es básicas e distintas: mant)m o contato dos pneus com o solo"controla os movimentos de abertura e #ec-amento das molas e proporciona bene#ícios aocondutor" passaeiros e ao veículo$
O sistema de amortecimento ) de rande importncia no per#eito #uncionamento do carro"sendo assim" o pro.eto de controladores para este tipo de sistema ) essencial para asseurar +ueeste proporcione o aumento da estabilidade e con#orto do veículo" controle da movimenta!(o dasmolas e do veículo$
O sistema de controle consiste em subsistemas e processos 9ou plantas; reunidos com o propósito de controlar as saídas dos processos$ ,a sua #orma mais simples" o sistema supracitado#ornece uma saída ou resposta para uma dada entrada ou estímulo 45$
A -abilidade do controlador @< em controlar rande parte dos processos do tipoindustrial resulta em sua rande aceita!(o nesse meio$ Bais de CDE das mal-as de controle naind&stria utili%am o @< 4F5$ @sso se deve ao #ato de +ue tais controladores mostram um ótimodesempen-o para uma enorme classe de processos$ ?ornecem" tamb)m" um desempen-o robusto
para in&meras condi!7es de opera!(o$ Al)m disso" s(o #áceis de implementar e de simplesentendimento 4D5$
Ao analisar seu #uncionamento" podese a#irmar cateoricamente +ue o pro.eto decontroladores para o sistema de amortecimento" envolve a escol-a de parmetros ade+uados" tais
+uais o instante de pico e a ultrapassaem percentual" para +ue as #uncionalidades deste sistemase.am atendidas na prática$O instante de pico ) o tempo necessário para alcan!ar o primeiro valor de pico 9má'imo;
45$ m termos práticos" este ) o tempo necessário para +ue ocorra a ultrapassaem do setpoint$
-
8/16/2019 Relatório - Controle Digital
4/15
____________________________________________________________ ____________________
A ultrapassaem percentual ) o +uanto a #orma de onda" no instante de pico" ultrapassa o valor deestado estacionário" #inal" e'presso como uma percentaem do valor de estado estacionário 45$m termos práticos a ultrapassaem percentual ) +uanto o controle ultrapassa o seu valor de set
point$ @nicialmente #oi reali%ada a modelaem matemática linear do comportamento do sistema
massa mola e amortecedor" encontrando a #un!(o de trans#er*ncia G(s) $ sta #un!(o possui as
tr*s rande%as +ue envolvem o processo de amortecimento: a massa do veículo 9 M ;" o
coe#iciente de amortecimento viscoso (f v) e a constante elástica da mola 9 K ;$ m
seuida" podese calcular os parmetros necessários para o pro.eto do controlador @
-
8/16/2019 Relatório - Controle Digital
5/15
____________________________________________________________ ____________________
>sando uma tabela +ue relaciona f ( t ) a F (s) " ) aplicado a Irans#ormada de
aplace na e+ua!(o 2$
x (t )→ F (s)
y (t )→Y (s)
dy
dt → sY (s)
d2 y
d t 2 → s ²Y (s )
oo"
F ( s)=kY ( s )+ f v sY ( s )+ Ms ²Y (s)
F ( s)=Y ( s ) [k + f v s+ M s
2
]
G ( s )=Y ( s )
F (s )=
1
k +f v s+ M s2(3)
Adotando como parmetro o automóvel Jol" da marca KolLsGaen" #oram encontrados osvalores de massa e comprimento" como mostrado abai'o:
m=900 kg (4 )
L=3,88m(5)
8onsiderando +ue veículos automotivos possuem +uatro amortecedores" e +ue apenas um#oi utili%ado para os cálculos" temse:
M =900
4
=225kg (6)
-
8/16/2019 Relatório - Controle Digital
6/15
____________________________________________________________ ____________________
Iendo em vista valores comerciais para coe#iciente de amortecimento viscoso 9 f v¿ 4M5
e para constante elástica da mola (k ) 4N5 para automóveis" temse:
k =20000 N
m(7)
f v=3,46 Ns
m (8)
ubstituindo os valores
(4 ) , (5) , (6 ) , (7 )e
(8) na e+ua!(o 9;" obt)mse:
G ( s )= 1
225s2+3,46 s+20000
(9)
O instante de pico #oi calculado utili%ando um carro de comprimento 3,88m uma
velocidade de 100 km /h $ 8onsiderando +ue este se deslo+ue at) no má'imo metade do seu
comprimento após passar por uma irreularidade na pista" o tempo necessário pra +ue o carro
percorra esse deslocamento #oi tomado como o instante de tipo$
T p=0,07 s (10)
@nicialmente" #oi adotado um valor alto para a ultrapassaem percentual" como mostradoabai'o$
%UP=50=500
100
%UP=0,5(11)
-
8/16/2019 Relatório - Controle Digital
7/15
____________________________________________________________ ____________________
Após o pro.eto do controlador este valor #oi sendo alterando at) o mínimo valor possível para +ue" na prática" a resposta do amortecedor n(o oscilasse muito em torno do seu valor de set point" tendo em vista +ue um dos seus ob.etivos ) manter o carro sempre no mesmo nível" como
mostrado nos resultados mais adiante" atrav)s do rá#ico da resposta de tempo$
O valor da ultrapassaem percentual ) dado pela e+ua!(o (12) $
UP=e−ξπ
√ 1−ξ² (12)
ubstituindo (11) na e+ua!(o (12) " obt)mse o #ator de amortecimento" ξ $
ln e=lne−ξπ
√ 1−ξ²
−0,693= −ξπ
√ 1−ξ ²
(−0,693.√ 1−ξ2 )2
=(−ξπ ) ²
0,480 (1−ξ2 )=ξ ² π ²
0,480−0,480 ξ ²−ξ ²π ²=0
−0,480 ξ ²−9,869 ξ ²=−0,480
ξ ²10,278=0,480
ξ ²=0,0467
ξ=0.2155(13)
O instante de pico ) dado pela e+ua!(o (14) $
-
8/16/2019 Relatório - Controle Digital
8/15
____________________________________________________________ ____________________
T p= π
! √ 1−ξ2(14)
ubstituindo (10) e (13 ) na e+ua!(o (14) " ) encontrado o valor da #re+u*ncia
natural" ! $
T p= π
! √ 1−(0,2161 )2
0,07= π ! 0,976
!= π
0,07.0,976
!=45.9593(15)
O tempo de assentamento ) o tempo necessário para +ue as oscila!7es amortecidas do
reime transitório entrem e permane!am no interior de uma #ai'a de valores de "2 em torno
do valor do estado estacionário$ O tempo de assentamento ) dado pela e+ua!(o (16) $
T s= 2π
! √ 1−ξ2(16)
ubstituindo (13) e (15) na e+ua!(o (16) ) encontrado o valor do tempo de
assentamento" T s $
T s= 2π
(45,966 ) √ 1−(0,2161 )2
T s=0,14 s(17)
O tempo de amostraem ) dado pela e+ua!(o (18) :
-
8/16/2019 Relatório - Controle Digital
9/15
____________________________________________________________ ____________________
T =T s
10(18)
ubstituindo (17) na e+ua!(o (18) " ) encontrado o valor do tempo de amostraem"
T $
T =0,14
10
T =0,014 s(19)
#1,2=−ξ ! " $ ! √ 1−ξ
2
#1,2=−(0,2161.45,966)" $(45,966)√ 1−(0,2161 )
2
#1,2=−9.9021 " $ 44.8799
-
8/16/2019 Relatório - Controle Digital
10/15
____________________________________________________________ ____________________
Ao utili%ar o m)todo da imposi!(o de polos" o pró'imo passo seria a trans#orma!(o da
#un!(o de trans#er*ncia G(s) para o domínio de %$ ara isto ) necessário a decomposi!(o de
G(s) em #ra!7es parciais$ ,o entanto as constantes obtidas #oram:
K 1=5 x10−3
K 2,3=−2,47 x10−5
" $ 1,87 x10−8
Observase +ue os valores de K 2 e K 3 #oram comple'os$ ,o entanto" para o
m)todo da imposi!(o de polos" estas constantes devem ser reais$ nt(o o adotado outro m)todo: oB)todo intonia pelo uar das Raí%es$
,ormalmente o a.uste #ino ) manual" e #eito pelo m)todo de tentativa e erro" aplicandouma altera!(o em um dos parmetros do @< e veri#icando o desempen-o do sistema" at) +ue odesempen-o dese.ado se.a obtido$ ara tal ) dese.ado +ue o operador ten-a con-ecimento doe#eito de cada um dos parmetros" sobre o desempen-o do controle" al)m de e'peri*ncia emdi#erentes processos 4C5$
Aora" utili%ando o m)todo com base no luar das raí%es as e+ua!7es (11) e (12)
s(o usadas para calcular os an-os típicos de um controlador @< +uando con-ecida ou estimadaa #un!(o de trans#er*ncia do processo a ser controlado$
s1
G ¿¿
(s1)
(s1)|sin¿¿
K p
=−sin(s
1+G (s1 ) (s1 ))
¿
K d= sin (G ( s1 ) % (s1 ))
|s1||G (s1 ) % (s1)|sin(s1)+
K &
|s1|2(12)
O ob.etivo #undamental deste m)todo ) inserir um polo dominante (s=s1) na #un!(o
de trans#er*ncia de mal-a #ec-ada 4C5$
ara +ue se possa e#etuar o cálculo" um dos tr*s parmetros do controlador precisa ser estimado ou adotado 4105$
-
8/16/2019 Relatório - Controle Digital
11/15
____________________________________________________________ ____________________
A constante de intera!(o K & #oi estipulada em 1000$
-
8/16/2019 Relatório - Controle Digital
12/15
____________________________________________________________ ____________________
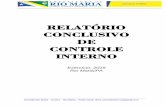
Figura 2: Resposta digital do sistema (sem controlador).
O compensador @< diital +ue controla a suspens(o automotiva atendeu asespeci#ica!7es de ultrapassaem percentual e instante de pico$
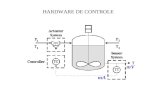
Figura 3: Resposta digital do sistema (com controlador).
O sinal de erro ) a in#orma!(o utili%ada pelo sistema de controle para reular a saída dosistema$ Q a di#eren!a entre a entrada 9re#er*ncia; e a saída 45$ Após o transitório" o sinal deveriaser nulo" sini#icando +ue a saída tornouse iual re#er*ncia$ or)m" devido a aluns #atores"esta condi!(o n(o pde ser atendida no pro.eto proposto$
-
8/16/2019 Relatório - Controle Digital
13/15
____________________________________________________________ ____________________
VI < CONCLUSÃO
O sistema de amortecimento" como visto" ) de rande importncia para o per#eito#uncionamento do carro$ ortanto" o pro.eto de controladores ) essencial para asseurar +ue osistema de suspens(o #uncione de acordo com os parmetros ade+uados de instante de pico eultrapassaem percentual$
Os parmetros inicialmente propostos #oram alcan!ados de #orma satis#atória" atenderamaos re+uisitos de#inidos ao lono da elabora!(o do pro.eto$ A ultrapassaem percentual
encontrada #oi em torno de 48 " como tamb)m o instante de pico #oi apro'imadamente iual a
0,07 s $
A utili%a!(o do software BAIAP #oi essencial" devido ao #ato de proporcionar o corretodimensionamento dos parmetros de controle" #acilitando o pro.eto proposto$
VII REFERÊNCIAS
415 M%n%! 3o %/ot"("3o?
-
8/16/2019 Relatório - Controle Digital
14/15
____________________________________________________________ ____________________
4N5 Con.t%nt" "[email protected]#(% 3% /o!%$
-
8/16/2019 Relatório - Controle Digital
15/15
____________________________________________________________ ____________________
tp = 0.07; % instante de pico
UP = 0.5; % ultrapassagem percentual
Ts = 0.01; %Periodo de amostragem qsi = sqrt (((log(UP))^)!((pi^)" (log(UP))^)) % #ator de amortecimento
$n = pi ! (tpsqrt(1&qsi^)) % #requ'ncia natural
s1 = &(qsi$n)"1i$nsqrt(1 & qsi^) % raes dese*adass = &(qsi$n)&1i$nsqrt(1 & qsi^) % raes dese*adas
num =+0 0 0.00,,-; %umerador e /enominador da uncao de Trans#erencia doProcessoden =+1 0.015 .-;
2 = t#(num3den) % #un4o de trans#er'ncia
6i = 1000;
s = 1;
mod8s1 = a9s (s1); % m:dulo de s1
ang8s1 = angle (s1); % ngulo de s1;
mod828s1 = a9s(( 1!(1))(( num(