
REPRESENTAÇÃO DINÂMICA DE ORDEM REDUZIDA DE CARGAS TIPO MOTOR DE...
106
REPRESENTAÇÃO DINÂMICA DE ORDEM REDUZIDA DE CARGAS TIPO MOTOR DE INDUÇÃO EM SISTEMAS ELÉTRICOS Rafael de Souza Oliveira Azevedo Dissertação de Mestrado apresentada ao Programa de Pós-graduação em Engenharia Elétrica, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Mestre em Engenharia Elétrica. Orientadores: Sebastião Ércules Melo de Oliveira Antônio Carlos Ferreira Rio de Janeiro Setembro de 2011
Transcript of REPRESENTAÇÃO DINÂMICA DE ORDEM REDUZIDA DE CARGAS TIPO MOTOR DE...

REPRESENTAÇÃO DINÂMICA DE ORDEM REDUZIDA DE CARGAS
TIPO MOTOR DE INDUÇÃO EM SISTEMAS ELÉTRICOS
Rafael de Souza Oliveira Azevedo
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Elétrica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Elétrica.
Orientadores: Sebastião Ércules Melo de Oliveira
Antônio Carlos Ferreira
Rio de Janeiro
Setembro de 2011
REPRESENTAÇÃO DINÂMICA DE ORDEM REDUZIDA DE CARGAS
TIPO MOTOR DE INDUÇÃO EM SISTEMAS ELÉTRICOS
Rafael de Souza Oliveira Azevedo
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA
(COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA ELÉTRICA.
Examinada por:
________________________________________________
Prof. Sebastião Ércules Melo de Oliveira, D. Sc.
________________________________________________ Prof. Antônio Carlos Ferreira, Ph. D.
________________________________________________ Prof. Henrique de Oliveira Henriques, D. Sc.
________________________________________________ Prof. Pedro Paulo de Carvalho Mendes, D. Sc.
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2011

iii
Azevedo, Rafael de Souza Oliveira
Representação dinâmica de ordem reduzida de cargas
tipo motor de indução em sistemas elétricos / Rafael de
Souza Oliveira Azevedo. – Rio de Janeiro: UFRJ/COPPE,
2011.
XVI, 90 p.: il.; 29,7 cm.
Orientadores: Sebastião Ércules Melo de Oliveira
Antônio Carlos Ferreira
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Elétrica, 2011.
Referências Bibliográficas: p. 87-90.
1. Equivalente dinâmico. 2. Motor de indução. 3.
Análise modal. I. Oliveira, Sebastião Ércules Melo de et
al. II. Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Elétrica. III. Título.

iv
Ofereço este trabalho
Aos meus pais Dinorá e José Carlos e
À minha irmã Rafaella

v
AGRADECIMENTOS
Meus agradecimentos iniciais são dirigidos aos meus pais, pela educação e pelo
exemplo de vida que me propiciaram.
Agradeço em especial ao professor Sebastião Ércules Melo de Oliveira, pela
proposta do tema e pela orientação de forma dedicada e paciente.
Agradeço ao professor Antônio Carlos Ferreira pela orientação e apoio.
Agradeço ao meu amigo Deilton, que contribuiu de maneira incomparável para
o desenvolvimento deste trabalho.
Agradeço à Lilian, que sempre esteve ao meu lado, me deu forças e nunca me
deixou desistir.
Agradeço a todas as pessoas que contribuíram de alguma maneira para o
desenvolvimento deste trabalho.
E agradeço a Deus por sempre me acompanhar nos momentos difíceis.

vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M. Sc.)
REPRESENTAÇÃO DINÂMICA DE ORDEM REDUZIDA DE CARGAS TIPO
MOTOR DE INDUÇÃO EM SISTEMAS ELÉTRICOS
Rafael de Souza Oliveira Azevedo
Setembro/2011
Orientadores: Sebastião Ércules Melo de Oliveira
Antônio Carlos Ferreira
Programa: Engenharia Elétrica
Este trabalho apresenta uma nova técnica para representação de ordem reduzida
de motores de indução e que se apóia na análise modal. O método utilizado para a
agregação dos motores de indução é apresentado juntamente com resultados de
simulação para comprovação de sua consistência. O conceito de área externa do sistema
elétrico é utilizado na definição da área a ser equivalentada.
Com o objetivo de dar suporte ao trabalho desenvolvido, um sistema industrial
alimentado com tensão de 69kV e com derivações através de transformadores de
potência nas tensões de 13,8kV, 4,16kV e 480V foi utilizado como referência. Este
sistema é composto por cinqüenta e quatro motores de indução trifásicos do tipo gaiola.
O desempenho do método é analisado levando em consideração diferentes tipos
de carga do sistema externo, tais como cargas do tipo impedância constante e tipo motor
equivalente de terceira ordem, em número igual ao de modos retidos na representação
dinâmica. Excelente concordância dos resultados se verifica, inclusive para uma condi-
ção em que dois motores de maior porte não recuperam a operação normal.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
REDUCED ORDER DYNAMIC REPRESENTATION OF INDUCTION MOTOR
LOADS IN ELECTRICAL SYSTEMS
Rafael de Souza Oliveira Azevedo
September/2011
Advisors: Sebastião Ércules Melo de Oliveira
Antônio Carlos Ferreira
Department: Electrical Engineering
The work presents a new technique for reduced order representation of induction
motor that relies on the modal analysis. The method used for induction motor
aggregation is presented with simulation results to prove its accuracy. The concept of
external area of the electric system is utilized for defining the area to be equivalenced.
In order to support the work, a 69 kV industrial supply system that feeds 69 kV,
13.8 kV, 4.16 kV and 480V power transformers was selected as reference. The
complete original system contains fifth-four induction motors of squirrel cage type.
The performance of the method is analyzed taking into account different types of
external system equivalent loads, such as constant impedance and third order induction
motors, in number equal to the modes retained in the dynamic equivalent representation.
Excellent agreement of the results can be observed, including a condition in which two
larger motors do not recover normal operation.

viii
ÍNDICE
LISTA DE FIGURAS .................................................................................................... xi
PRINCIPAIS SÍMBOLOS E VARIÁVEIS ............................................................... xv
1 INTRODUÇÃO ...................................................................................................... 1
1.1- Antecedentes ........................................................................................................ 1
1.2- Motivação ............................................................................................................. 2
1.2.1- Modelos de Motores de Indução ................................................................. 2
1.2.2- Agregação dos Motores de Indução ............................................................ 6
1.3- Objetivo .............................................................................................................. 15
1.4- Resumo ............................................................................................................... 16
2 ANÁLISE MODAL .............................................................................................. 17
2.1- Conceitos Gerais ................................................................................................ 17
2.2- Modos de Oscilação Eletromecânicos .............................................................. 17
2.3- Equações de Estado ........................................................................................... 18
2.4- Equações Dinâmicas .......................................................................................... 21
2.5- Equivalência das Equações Dinâmicas ............................................................ 24
2.6- Resíduo da Função de Transferência .............................................................. 24
2.7- Participação dos Modos de Oscilação ............................................................. 25
2.7.1- Critério da Observabilidade ...................................................................... 25
2.7.2- Critério da Controlabilidade ..................................................................... 25
2.8- Solução das Equações de Estado ...................................................................... 26

ix
3 MODELAGEM DE MOTORES DE INDUÇÃO .............................................. 28
3.1- Introdução .......................................................................................................... 28
3.2- Ordens do Modelo ............................................................................................. 28
3.3- Reduções de Ordem ......................................................................................... 29
3.4- Representação dos Motores de Indução .......................................................... 30
3.5- Motores de Indução de Dupla Gaiola .............................................................. 33
4 ESTUDO REALIZADO ...................................................................................... 36
4.1- Equivalente Dinâmico Definido Através da Análise Modal .......................... 36
4.2- Equações Linearizadas de Desempenho da Área Externa ............................ 38
4.3- Transformação Modal das Equações de Estado ............................................ 43
4.4- Rejeição dos Modos Insignificantes para a Representação Eletromecânica
da Área Externa ........................................................................................................ 44
4.5- Definição dos Parâmetros da Representação Modal Equivalente ................ 47
5 SIMULAÇÕES E RESULTADOS ..................................................................... 51
5.1- Introdução .......................................................................................................... 51
5.2- Principais Características do Sistema Industrial Estudado .......................... 51
5.3- Programa Utilizado ........................................................................................... 52
5.4- Modelagem Computacional do Sistema .......................................................... 53
5.5- Modelagem Computacional do Sistema Equivalentado ................................ 53
5.5.1- Sistema Equivalentado a partir do Modelo de Motores Agregados. ..... 55
5.5.2- Sistema Equivalentado a partir de uma Impedância Constante. .......... 59
5.5.3- Sistema Equivalentado a partir do Modelo de Motores Agregados
Demonstrando a Evolução dos Modos Oscilatórios. ......................................... 64

x
5.5.4- Sistema de Motores Agregados – Outros Casos. ..................................... 67
5.5.4.1 Caso Original x Agregado – Área Interna Composta por Cargas do Tipo Impedância Constante. ............................................................................... 67
5.5.4.2 Caso Original x Agregado – Área Interna Composta por Cargas do Tipo Impedância Constante e com Motores Conectados à Barra 15. ................. 71
5.5.4.3 Caso Original x Agregado – Área Interna Composta por Cargas do Tipo Impedância Constante e com Motores Conectados às Barras 10 e 15. ...... 76
5.5.4.4 Caso Original x Agregado – Instabilidade na Área Interna................ 80
5.5.4.5 Caso Original x Agregado - Estabilidade na Área Interna. ................ 83
6 CONCLUSÕES / RECOMENDAÇÕES ............................................................ 85
7 REFERÊNCIAS BIBLIOGRÁFICAS ............................................................... 87

xi
LISTA DE FIGURAS
Figura 3.1 – Circuito elétrico de um motor de indução de terceira ordem ............. 30
Figura 3.2 – Circuito elétrico do motor de indução de quinta ordem ..................... 35
Figura 4.1 - Sistema elétrico exemplo ......................................................................... 37
Figura 5.1– Diagrama unifilar do sistema industrial estudado ................................ 52
Figura 5.2 – Sistema original implementado no programa MATLAB .................... 53
Figura 5.3 – Área interna e externa do sistema original ........................................... 54
Figura 5.4 – Sistema agregado..................................................................................... 55
Figura 5.5 – Ocorrência de falta trifásica na barra 10 ............................................. 56
Figura 5.6 – Curvas de tensões para os sistemas agregado x original - Modelo
composto por 6 modos oscilatórios.............................................................................. 56
Figura 5.7 – Curvas de fluxo de corrente para sistemas agregado x original -
Modelo composto por 6 modos oscilatórios ................................................................ 57
Figura 5.8 – Curvas da potência ativa na barra 10 para sistemas agregado x
original - Modelo composto por 6 modos oscilatórios ............................................... 58
Figura 5.9 – Curvas da potência reativa na barra 10 para sistemas agregado x
original - Modelo composto por 6 modos oscilatórios ............................................... 58
Figura 5.10 - Curvas do deslizamento do motor de maior potência da barra 10
para sistemas agregado x original - Modelo composto por 6 modos oscilatórios ... 59
Figura 5.11 – Sistema agregado - Modelo composto por impedâncias constantes . 60
Figura 5.12 – Curvas de tensões para sistemas agregado x original - Modelo
impedâncias constantes ................................................................................................ 61
Figura 5.13 – Curvas de fluxo de corrente para sistema agregado x original -
Modelo impedâncias constantes. ................................................................................. 62

xii
Figura 5.14 – Curvas da potência ativa na barra 10 para sistema agregado x
original - Modelo impedâncias constantes ................................................................. 62
Figura 5.15 – Curvas da potência reativa na barra 10 para sistema agregado x
original - Modelo impedâncias constantes ................................................................. 63
Figura 5.16 – Curvas do deslizamento do motor de maior potência da barra 10
para sistema agregado x original - Modelo impedância constante .......................... 64
Figura 5.17 – Curvas da tensão na barra de fronteira para sistema agregado x
original – Efeito da inclusão dos modos oscilatórios ................................................. 65
Figura 5.18 – Curva de corrente total suprida em direção à barra de fronteira -
Sistema original x agregado – Efeito da inclusão dos modos oscilatórios ............... 65
Figura 5.19 – Curva de potência ativa total suprida aos motores na barra 10 -
Sistema original x agregado – Efeito da inclusão dos modos oscilatórios ............... 66
Figura 5.20 – Curva de potência reativa total suprida aos motores na barra 10 -
Sistema original x agregado – Efeito da inclusão dos modos oscilatórios ............... 66
Figura 5.21 – Curva de deslizamento do maior motor na barra 10 - Sistema
original x agregado – Efeito da inclusão dos modos oscilatórios ............................. 67
Figura 5.22 – Sistema original – Área interna com cargas estáticas ....................... 68
Figura 5.23 – Sistema agregado – Área interna com cargas estáticas ..................... 69
Figura 5.24 – Curvas de tensões para sistema agregado x original – Área interna
com cargas estáticas. Tensão na barra de fronteira para curto trifásico na barra 10
........................................................................................................................................ 69
Figura 5.25 – Corrente do sistema externo em direção à barra de fronteira –
Sistemas agregado x original – Área interna com cargas estáticas. Curto 3F na
barra 10. ........................................................................................................................ 70

xiii
Figura 5.26 – Curvas da potência ativa na barra 10 para sistema agregado x
original – Área interna com cargas estáticas – Curto 3F na barra 10. .................... 70
Figura 5.27 – Curvas da potência reativa na barra 10 para sistema agregado x
original – Área interna com cargas estáticas – Curto 3F na barra 10. .................... 71
Figura 5.28 – Sistema original – Área interna com cargas estáticas e motores na
barra 15 ......................................................................................................................... 72
Figura 5.29 – Sistema agregado – Área interna com cargas estáticas e motores na
barra 15 ......................................................................................................................... 72
Figura 5.30 – Ampliação da imagem evidenciando a falta trifásica na barra 15 da
área interna do sistema ................................................................................................ 73
Figura 5.31 – Curvas de tensões para sistema agregado x original - Motores na
barra 15 – Curto trifásico na barra 15. ...................................................................... 74
Figura 5.32 – Curvas de corrente do sistema externo em direção à barra de
fronteira para os sistemas agregado e original - Motores na barra 15 – Curto na
barra 15. ........................................................................................................................ 74
Figura 5.33 – Curvas da potência ativa total consumida pela barra 15 para os
sistemas agregado e original - Motores na barra 15 – Curto na barra 15. ............. 75
Figura 5.34 – Curvas da potência reativa total consumida pela barra 15 para os
sistemas agregado e original - Motores na barra 15 – Curto na barra 15. ............. 75
Figura 5.35 – Curvas do deslizamento do maior motor ligado à barra 15 para os
sistemas agregado e original - Motores na barra 15 – Curto na barra 15. ............. 76
Figura 5.36 – Sistema original - Motores nas barras 10 e 15.................................... 77
Figura 5.37 – Sistema agregado - Motores nas barras 10 e 15 ................................. 77
Figura 5.38 – Curvas da tensão na barra de fronteira para os sistema agregado x
original - Motores nas barras 10 e 15 – curto na barra 15 ....................................... 78
xiv
Figura 5.39 – Curvas de corrente em direção à barra de fronteira para os sistemas
agregado x original - Motores nas barras 10 e 15 – Curto na barra 15 .................. 78
Figura 5.40 – Curvas da potência ativa alimentada pela barra 10 para os sistema
agregado x original - Motores nas barras 10 e 15. Curto trifásico na barra 10. .... 79
Figura 5.41 – Curvas da potência reativa alimentada pela barra 10 para os
sistemas agregado e original - Motores nas barras 10 e 15. Curto trifásico na barra
10. ................................................................................................................................... 79
Figura 5.42 – Curvas do deslizamento do motor de maior potência da barra 10
para os sistemas agregado x original - Motores nas barras 10 e 15 – Curto trifásico
na barra 10. ................................................................................................................... 80
Figura 5.43 – Curvas das tensões na barra de fronteira para os sistema agregado e
original – Reaceleração sem sucesso após curto na barra 10. .................................. 81
Figura 5.44 – Curvas de corrente da barra 3 para a barra 5, para os sistemas
agregado e original – Reaceleração sem sucesso........................................................ 81
Figura 5.45 – Curvas da potência ativa na barra 10 para os sistemas agregado e
original – Reaceleração sem sucesso ........................................................................... 82
Figura 5.46 – Curvas da potência reativa na barra 10 para sistema agregado x
original – Reaceleração sem sucesso ........................................................................... 82
Figura 5.47 – Curvas do deslizamento do motor de maior potência da barra 10
para os sistemas agregado e original – Reaceleração sem sucesso. .......................... 83
Figura 5.48 – Curvas da potência ativa alimentada pela barra 10 para os sistemas
agregado e original – Reaceleração com sucesso. ...................................................... 84
Figura 5.49 – Curvas do deslizamento do motor de maior potência da barra 10
para os sistemas agregado e original - Reaceleração com sucesso. ......................... 84

xv
PRINCIPAIS SÍMBOLOS E VARIÁVEIS
A Matriz de estado
B Matriz de coeficientes para as variáveis de entrada
C Matriz de coeficientes para as variáveis de saída
D Matriz dos termos diretos
)(tX Vetor de variáveis de estado
)(tU Vetor de variáveis de entrada do sistema
)(tY Vetor de variáveis de saída do sistema
Λ Matriz de autovalores
Γ Matriz de autovetores
λ Autovalor
∆ Simbologia para indicação de desvio de variável
TV Tensão no terminal do motor
θ Ângulo de fase da tensão terminal
RE′ Tensão proporcional ao enlace de fluxo do rotor
δ Ângulo da tensão interna do motor
sr Resistência do enrolamento de fase do estator
sx Reatância de dispersão do enrolamento de fase do estator
1Rr Resistência do enrolamento da primeira gaiola do rotor
1Rx Reatância de dispersão do enrolamento da primeira gaiola do rotor
2Rr Resistência do enrolamento da segunda gaiola do rotor
2Rx Reatância de dispersão do enrolamento da segunda gaiola do rotor
mx Reatância de magnetização do enrolamento do estator
xvi
'1Rr Resistência do enrolamento do rotor referida ao estator
'1Rx Reatância de dispersão do enrolamento do rotor referida ao estator
sX Reatância própria do enrolamento de fase do estator
RX Reatância própria do enrolamento de fase do rotor referida ao estator
X ′ Reatância transitória do motor
0T ′ Constante de tempo do enrolamento do rotor
G′ Condutância transitória do motor
B′ Susceptância transitória do motor
H Constante de inércia combinada do motor e da carga mecânica
s Deslizamento do motor com relação ao campo girante do motor
w Velocidade de rotação do rotor
sw Velocidade síncrona do campo girante do enrolamento do estator
MT Conjugado da carga mecânica
ET Conjugado eletromagnético
N Potência aparente
P Potência ativa
Q Potência reativa
MATLAB Matrix Laboratory

1
CAPÍTULO 1
1 INTRODUÇÃO
1.1- Antecedentes
O Brasil apresenta já há algum tempo um crescimento industrial significativo.
Com este crescimento, o aumento da carga a ser atendida pelo sistema elétrico se torna
imprescindível. Afinal, novas indústrias estão em construção e antigas fábricas estão em
processo de expansão. Para o acompanhamento deste crescimento, independente da área
de atuação, o setor industrial necessita cada vez mais de motores, sendo a maioria
destes, motores de indução trifásicos.
A análise do efeito transitório nos sistemas de energia elétrica para estudos de
planejamento, operação e proteção dos sistemas de potência e sistemas industriais, no
seguimento às perturbações resultantes de curto-circuito, redução de carga, alteração
súbita na configuração da rede e outras, apresenta dificuldades em termos da análise
dinâmica das cargas compostas predominantemente por motores de indução, visto que
os mesmos representam a componente de maior peso das cargas dinâmicas de um
sistema elétrico.
No passado, os motores de indução eram representados através de cargas do tipo
impedância constante na análise dinâmica dos sistemas de potência. A razão para esta
simplificação estava na redução do esforço computacional e também no fato que as
análises de curto-circuito desconsideravam as contribuições destes motores para as
correntes de falta. Entretanto, com o avanço da velocidade de atuação dos dispositivos
para interrupção de circuitos, os equipamentos de proteção interrompem presentemente
correntes de falta relativamente maiores com maior rapidez, em intervalos de tempos
menores em que ainda se apresenta relevante a contribuição dos motores de indução
para a corrente de falta. Este fato incentivou uma melhor representação dinâmica dos
motores de indução.
A necessidade de modelagem consistente de determinadas áreas do sistema

2
composto por motores de indução pode existir não em função do interesse direto no
desempenho dinâmico destes, mas sim em razão da contribuição de seu efeito dinâmico
sobre a área do sistema elétrico onde as perturbações serão aplicadas. Assim, a
representação eletromecânica para a área composta por motores de indução, na hipótese
de exigência de maior precisão nos resultados obtidos nos estudos, deve ser feita com o
maior detalhamento possível, utilizando os modelos disponíveis mais representativos.
A representação de ordem reduzida de determinadas áreas do sistema composto
predominantemente por motores de indução dentro do contexto da avaliação do
desempenho dinâmico de um sistema elétrico de potência ou industrial pode ser
bastante vantajosa se um grande número de motores de indução puder ser representado
por um número menor de motores equivalentes. Esta tarefa pode ser denominada como
agregação de motores de indução.
1.2- Motivação
A agregação de motores de indução é um assunto que sempre motivou estudos e
pesquisas. Ao longo das últimas décadas, o conceito de equivalente dinâmico também
se tornou muito atrativo, já que a quantidade de dados necessários para a representação
dos motores de indução em softwares capazes de realizar simulações dinâmicas sempre
foi um problema em termos de memória e processamento computacional. Diferentes
métodos para agregação de motores de indução trifásicos foram apresentados por
pesquisadores e engenheiros, visto que o conceito de representação de diversas
máquinas em um grupo de ordem relativamente menor é muito atrativo em termos
prático e econômico.
A seguir serão analisados alguns trabalhos publicados que tratam dos avanços
relacionados aos métodos para agregação dos motores de indução.
1.2.1- Modelos de Motores de Indução
Quando estudos de estabilidade transitória são realizados para um sistema de
potência, as cargas elétricas devem ser representadas em derivação nos barramentos do
3
sistema. No passado, muitos estudos de estabilidade transitória representavam os
motores de indução utilizando modelos de regime permanente. Esta representação pode,
em alguns casos, fornecer resultados precisos, porém para estudos de característica
transitória, o motor deve ser representado através de equações diferenciais não-lineares,
que descrevem seu comportamento dinâmico com melhor precisão.
A representação das equações dos motores de indução para análise transitória e
para a realização de simulações através de métodos computacionais sempre foi alvo de
estudo dos pesquisadores. No início da década de 70, devido ao desenvolvimento da
tecnologia moderna de semicondutores, a área de aplicação dos motores de indução foi
expandida pela operação dos motores através de variadores de freqüência, Sarkar e Berg
[1], 1970. Vários estudos para análise do transitório do motor operado pelo variador de
freqüência foram realizados e todos faziam uso das equações de Park, equações para a
representação do motor de indução no referencial dos eixos direto (d) e de quadratura
(q).
Com a aplicação dos variadores de freqüência verificou-se a necessidade de
incorporação às equações de modelagem dos motores de indução de termos envolvendo
o produto da corrente pela velocidade de rotor, fazendo com que as equações de
desempenho do motor apresentassem efeito não-linear acentuado resultante da variação
da velocidade.
Um motor trifásico alimentado por um inversor de freqüência variável terá as
tensões de alimentação com um conteúdo substancial de harmônicos. A referência [1]
ressalta que torna-se inconveniente levar em consideração estes harmônicos quando
utilizando as equações de Park. Sendo assim, devido a estas dificuldades, a
representação dos motores de indução através do método trifásico direto demonstra ser
desejável para estes casos.
Outra vantagem na utilização do método direto é que os parâmetros envolvidos
são constantes físicas explícitas do motor. Eles não são convertidos em nenhuma outra
base de referência para a realização dos cálculos. Isto diminui a possibilidade da ocor-
rência de erros.
A solução numérica do conjunto de equações diferenciais não-lineares que
descrevem o comportamento de um motor de indução trifásico é considerada complexa
e difícil devido à ordem das equações. Em função disto, quando possível, o método de

4
linearização é aplicado para solucionar estas equações e auxiliar na interpretação dos
resultados.
Na referência [2], Cathey, Cavin e Ayoub, 1973, o conjunto de equações
diferenciais não-lineares que descreve o comportamento de um equivalente bifásico de
um motor de indução trifásico é linearizado a partir de um ponto nominal arbitrário.
Assumindo que a tensão terminal e a freqüência do sistema podem ser aproximadas
através de um segmento linear para qualquer intervalo de tempo, soluções para as
equações devido a pequenas perturbações são utilizadas para gerar expressões para a
potência ativa e reativa absorvidas/geradas pelo motor durante as condições transitórias.
O resultado do método proposto por este modelo linearizado resultou na
avaliação de potência ativa e de potência reativa requeridas pelo motor de indução sob
condições transitórias. Esta simulação computacional aproximada utilizou um terço do
tempo requerido por uma solução numérica utilizando as equações diferenciais não-
lineares mais gerais.
Na referência [3], Lipo e Plunkett, em 1974, apresentam uma alternativa para a
representação das equações dos motores de indução utilizando a formulação em termos
de variáveis de estado. As equações são organizadas de uma maneira que todo o proce-
dimento de derivação pode ser realizado computacionalmente. Os pólos, zeros e ganhos
das funções de transferência para qualquer par de variáveis de entrada ou saída podem
ser obtidos rapidamente.
A aplicação do conceito de funções de transferência em conjunto com o método
do lugar das raízes tem constituído a metodologia preferida por alguns pesquisadores
para a realização de estudos de controle. Mais a frente, uma atenção maior foi
direcionada para a computação dos pólos da função de transferência das equações
linearizadas dos motores de indução. Tal informação se mostrou útil na análise da
instabilidade dos motores quando são alimentados por variadores de freqüência. Os
pólos do sistema podem ser encontrados facilmente através da matriz dos autovalores
do sistema. Então, os problemas de estabilidade dos motores podem ser investigados de
uma maneira relativamente mais simples.
Novotny e Wouterse [4], em 1976, afirmam que o método de linearização é útil,
porém os resultados dos modelos lineares são de ordem elevada e apresentam restrições,
com visualização complicada dos efeitos no ponto de operação do motor.

5
Os resultados apresentados neste artigo claramente demonstram a importância
das variáveis complexas na análise dinâmica dos motores de indução. Alguns benefícios
em particular: expressões generalizadas para os zeros das funções de transferência, a
forma simples e linear que o deslizamento do motor no ponto de operação apresenta em
relação aos autovalores de sua resposta linearizada e a representatividade de alguns
parâmetros não dimensionais que descrevem a resposta dinâmica do motor de uma
forma generalizada. Estes e outros resultados similares reforçam a simetria do motor de
indução e evidencia a dificuldade de obter estes resultados utilizando o método
tradicional de descrição do desempenho através de variáveis reais.
Como observado, os pesquisadores buscaram ao longo dos anos métodos que
proporcionassem uma simplificação da representação dos motores de indução. Sempre
com o objetivo de tornar o processo de solução de suas equações mais simples para
obter maior agilidade, mantendo a precisão dos resultados. Com isso, critérios para
obter a redução de ordem para as equações não-lineares dos motores de indução são
apresentadas por Sastry e Burridge, 1976, em [5]. Neste artigo, um modelo de ordem
reduzida de uma máquina de indução é estabelecido e analisado utilizando simulação
computacional e análise de autovalores. Este modelo é comparado com a representação
completa da máquina através de simulações das equações não-lineares para a mesma
situação dinâmica.
O modelo completo de um motor de indução do tipo gaiola de esquilo é
apresentado neste trabalho através de cinco equações diferenciais não-lineares, sendo
denominado modelo de 5ª ordem. Destas cinco equações, duas representam o efeito
transitório de estator, duas representam o efeito transitório no rotor e uma representa o
comportamento mecânico do motor, este representado pela equação da velocidade do
rotor da máquina.
Um modelo de ordem reduzida, 3ª ordem, pode ser extraído do modelo acima
referido quando não se considera os transitórios do estator nos estudos dinâmicos. Este
modelo é o denominado modelo simplificado para representação dos motores de
indução do tipo gaiola de esquilo simples.
Na referência [6], em 1982, os autores discutem a representação dos motores de
indução do tipo dupla gaiola. Sendo este tipo de motor representado através de sete
equações diferenciais não-lineares. O acréscimo de duas equações ao modelo de 5ª

6
ordem se deve à utilização da gaiola adicional de partida neste tipo de motor.
Negligenciando os transitórios rápidos devido à gaiola de partida, o modelo
convencional de 7ª ordem para o motor de indução de dupla gaiola pode ser diretamente
reduzido para um modelo de 5ª ordem com uma estrutura diferente do modelo regular
de 5ª ordem para um motor de gaiola simples.
1.2.2- Agregação dos Motores de Indução
Conforme apresentado por Iliceto e Capasso [7], em 1974, é possível observar
que a agregação de motores de indução através do desenvolvimento de uma estrutura
com mesmo desempenho dinâmico é alvo de interesse dos pesquisadores desde o início
da década de 70. Os autores abordam o comportamento dinâmico das cargas compostas
por motores de indução do ponto de vista computacional baseados nas equações gerais
para motores de indução. Estas equações foram deduzidas desconsiderando o fenômeno
transitório resultante das correntes no estator. É realizada uma análise do fenômeno
transitório eletromagnético de grupos de motores de indução para pequenas pertur-
bações, para afundamentos da tensão de alimentação produzidos por faltas no sistema
elétrico de alimentação. O artigo enfatiza a dificuldade na representação matemática de
todo o conjunto de motores de indução, que são numerosos, heterogêneos e estão
espalhados pela rede de distribuição em vários níveis de tensão. O método proposto
pelo artigo indica que os parâmetros dos motores de indução com maior influência no
comportamento transitório das máquinas são a inércia e a constante de tempo do rotor
com o circuito do estator aberto. Foram realizadas simulações considerando um valor
comum para a inércia de um grupo de motores e foi definido um valor equivalente para
a constante de tempo do rotor definido como sendo a média das constantes de tempo
dos motores individuais ponderadas por suas potências unitárias.
Comparado ao método de representação de cargas compostas por motores de
indução através do modelo de impedância constante, o modelo proposto neste artigo
permite uma análise mais precisa dos transitórios eletromecânicos do sistema. Por outro
lado, isto envolve um trabalho maior na coleta de dados dos motores e o processamento
exige um tempo maior para simulação computacional, bastante limitada na época.

7
Na referência [8], Hakin e Berg, em 1976, descrevem um método de represen-
tação de um grupo de motores de indução através de um equivalente único. O modelo
utiliza a representação do circuito equivalente do motor em regime permanente e
considera os efeitos da inércia e da característica da carga mecânica. São feitas
simulações utilizando o modelo proposto e as respostas são comparadas levando em
consideração a representação dos motores individualmente através das equações de
Park. Na análise de desempenho transitório foram consideradas perturbações súbitas e
graduais para ambos os modelos. Para o modelo equivalente único, a premissa básica
utilizada é a condição de potência invariável. Esta condição vai de encontro com o fato
que o conjugado da carga no eixo do motor tem característica exponencial. O processo
utilizado para obter o equivalente único de um grupo de motores partiu da idéia de,
primeiramente, desenvolver o equivalente de dois motores de indução conectados ao
mesmo barramento, ou seja, sob a mesma tensão de alimentação. Para o caso de mais
motores, o método sugere implementar o paralelismo dos motores dois a dois até se
alcançar o equivalente único. O modelo realiza um paralelismo das impedâncias dos
motores. Com relação à agregação da inércia e do conjugado mecânico, para estes
parâmetros são consideradas somas diretas dos parâmetros dos motores individuais. As
potências ativa e reativa que são requisitadas pelo grupo de motores podem ser previstas
utilizando este modelo, que leva em consideração os efeitos de conjugado mecânico e
da inércia. Nos resultados comparando este método com o método de representação
individual dos motores de indução (método exato), as curvas das potências ativas e
reativas apresentam a mesma tendência, porém descolam bastante uma da outra.
Os autores da referência [9], em 1987, investigam o efeito da representação
dinâmica de um grupo de motores de indução através de um ou mais motores. Os
parâmetros desconhecidos dos equivalentes são estimados através do método dos
mínimos quadrados. O artigo define que o primeiro estágio para o processo de agre-
gação de motores é escolher o modelo dinâmico do motor equivalente que refletirá
melhor o comportamento final do grupo de motores. Uma verificação dos resultados das
simulações sugere que seja utilizado o modelo dinâmico de 5ª ordem para a represen-
tação dos motores agregados. A técnica sugerida pelo artigo apresenta resultado satisfa-
tório com relação às características de convergência, estimação dos parâmetros iniciais,
seleção dos fatores de aceleração e também a homogeneidade do grupo de motores. De
acordo com o estudo apresentado no trabalho, um grupo de motores é caracterizado

8
como homogêneo quando a inércia de cada motor é maior que a metade de sua constan-
te de tempo do rotor com o circuito do estator aberto.
2roTH < (1.1)
A metodologia apresentada por Nozari, Kankam e Praice [10], em 1987, sugere
que o grupo de motores de indução que serão representados através de um equivalente
dinâmico utilize não apenas um motor agregado para a representação do grupo.
Dependendo da diversidade da carga, a representação do grupo de motores através de
dois motores agregados demonstra ser superior aos demais métodos já apresentados na
literatura. A carga de um barramento qualquer pode incluir diversos tipos de motores de
indução, cada um apresentando uma característica dinâmica específica e cada um
operando em uma condição de regime permanente distinta. No método proposto pelo
artigo, todos os parâmetros do circuito equivalente do motor de indução na forma de
resistências e reatâncias e a constante de inércia são multiplicados por um coeficiente α,
sendo este igual à potência aparente de cada motor individual dividida pela soma das
potências aparentes dos motores. Em uma metodologia alternativa, o coeficiente α agora
multiplica os parâmetros do motor transformados em admitâncias, enquanto os métodos
propostos anteriormente multiplicavam as impedâncias do circuito equivalente pelo
coeficiente α. O artigo realiza a segregação dos motores baseada nos autovalores do
modelo do motor de indução. O artigo afirma que não é necessária a representação
detalhada do modelo de um motor de indução para representar motores de uma forma
agregada, discordando do proposto no artigo [9]. O artigo em questão utiliza o modelo
dinâmico de 3ª ordem para a representação do motor de indução. O modelo de 3ª ordem
resulta em um par de autovalores complexos estáveis e um autovalor real estável. O par
complexo representa a dinâmica elétrica do circuito do rotor, enquanto o autovalor real
representa o movimento mecânico do motor. O autovalor real deve ser usado para
separar os motores agregados em diferentes grupos. Julgando o desempenho do método
de agregação alternativo apresentado no artigo para agregar motores com características
diferentes em um grupo de motores, o método proposto pelo artigo se mostrou eficaz.
Entretanto, para agrupar motores que possuem características similares, os métodos
anteriores apresentaram o mesmo resultado que o novo método proposto no artigo.
Akbaba e Fakhro [11], em 1992, analisaram a representação dinâmica de um

9
grupo de motores de indução através de um ou mais motores equivalentes para estudo
de estabilidade transitória de sistemas de potência. Considerando o fato de que motores
de indução de grande potência constituem um grande percentual do total de cargas de
um sistema, e que o efeito pelicular possui uma participação considerável no desem-
penho destas máquinas, este efeito é incluído no modelo. Para permitir que o efeito
pelicular fosse incluído no modelo, as reatâncias de dispersão do rotor e do estator
foram separadas e as perdas no cobre foram desconsideradas. O efeito pelicular faz com
que a resistência e a reatância de dispersão do circuito equivalente do rotor variem
significativamente com o escorregamento. Então, com a inclusão deste efeito, o modelo
equivalente do motor ficou sendo representado através de sete parâmetros elétricos ao
invés dos cinco parâmetros convencionais. Segundo o artigo, o critério de
homogeneidade proposto em [9] foi analisado para um grupo de máquinas e ficou
constatado que o critério funciona apenas para o tipo de perturbação no sistema de
potência, que ocorre para uma falta com queda súbita de tensão e com um rápido
estabelecimento da tensão (extinção da falta). Para outros tipos de falta, este critério de
homogeneidade não funciona corretamente. Sendo assim, o artigo propõe um novo
critério de homogeneidade para agrupamento de motores de indução.
O método de agrupamento de motores de indução proposto neste artigo não
apresentou problemas de convergência, do ponto de vista da homogeneidade dos
motores. Este fato representou uma importante vantagem sobre o método apresentado
em [9], cujas simulações apresentaram problemas de convergência para determinados
tipos de falta.
Sriharan, Tan e Ting [12], em 1993, descrevem um modelo linear representando
um grupo de motores de indução. Assumindo que os motores estejam a uma velocidade
constante durante um breve período de tempo seguido por uma perturbação, o modelo é
reduzido ao construir-se um modelo de ordem menor utilizando apenas os autovalores
dominantes do modelo completo. Neste artigo é discutida a escolha dos autovalores que
serão retidos e a precisão do modelo reduzido é obtida com a comparação das respostas
referentes aos passos de integração dos modelos completo e de ordem reduzida. Grupos
de até vinte e nove motores são considerados e é demonstrado que através de modelos
de até um quarto da ordem do modelo completo, respostas com alto índice de precisão
são obtidas. No artigo cada motor de indução é representado pelas quatro primeiras
equações diferenciais lineares porque a velocidade é assumida ser constante. Neste caso

10
os autovalores deste grupo de motores são todos do tipo complexos conjugados e a
escolha dos autovalores dominantes se torna difícil. Sendo assim, um método para a
escolha destes autovalores é determinado levando em consideração a contribuição
destes dentro de um passo de integração. A precisão do modelo de redução é
determinada através da comparação da corrente total absorvida pelos motores de
indução no modelo completo com a corrente absorvida no modelo reduzido. Foram
considerados no estudo diversos grupos de motores e foi constatado que um grupo de
motores de baixa potência, composto por quatorze máquinas, não permite uma grande
redução da ordem do modelo, provavelmente em função dos motores apresentarem uma
grande diferença em suas potências nominais. Pelo contrário, para um grupo de motores
composto por seis máquinas grandes, a ordem do modelo foi reduzida considera-
velmente.
Na referência [13], Taleb, Akbaba e Abdullah, em 1994, utilizam o método de
agregação de motores recorrendo ao teorema de Thévenin juntamente com algumas
características transitórias dos motores de indução para calcular os parâmetros da
máquina equivalente. A resposta dinâmica da máquina resultante difere da soma das
máquinas individuais. Para um grupo de motores de indução diversificado, é necessário
o mínimo de duas máquinas agregadas separadas para representar o desempenho
dinâmico do grupo de máquinas. Para este fim, um índice de classificação para
agrupamento de máquinas foi sugerido. O procedimento começa com a utilização do
modelo dinâmico de 3ª ordem para identificar os parâmetros do motor equivalente. Em
uma análise dos parâmetros dos motores de indução, foi identificado que dois
parâmetros têm um importante papel na determinação da classe do motor, e estes são a
constante de inércia e a resistência do rotor. A combinação destes dois parâmetros irá
gerar um índice de agrupamento para os motores de acordo com a sua classe. O artigo
sugere a análise dos autovalores dos motores como alternativa para determinar o
agrupamento dos mesmos. Os casos estudados pelo artigo demonstram que para uma
ampla diversidade de grupos de motores de indução, o grupo pode ser dividido em
unidades sub-equivalentes. A categorização do grupo é baseada na ordem do índice
criado no artigo. O fator de agrupamento é dependente dos parâmetros dos motores.
Simulações não-lineares e análise de autovalores comparam favoravelmente os
resultados do modelo proposto com o resultado da análise dinâmica considerando o
modelo exato dos motores.

11
Franklin e Morelato [14], em 1994 focalizam o problema de agregação de um
grupo de motores de indução em um único modelo de motor, fazendo com que esta
agregação seja computacionalmente viável para grandes sistemas elétricos. Um novo
método de agregação é proposto baseado nos modelos usuais de motores de indução.
Considerando que o método não utiliza simplificações drásticas, que realiza o manejo
apropriado da carga mecânica do motor e que aplica um tratamento adequado à
constante de inércia equivalente, resulta um modelo que apresenta boa precisão nos seus
resultados. O método de agregação utilizado neste artigo é baseado na teoria do regime
permanente para os modelos de motores de indução. O desempenho em condições
transitórias é representado pelo comportamento do motor durante a sua partida na
tensão nominal. A técnica utilizada para construir o modelo agregado de motores de
indução tomou como premissa a determinação dos seguintes atributos do motor
agregado: Potência elétrica, parâmetros elétricos do circuito equivalente,
escorregamento inicial, características do escorregamento da potência x carga e a
constante de inércia total. Neste artigo é utilizado um modelo para motor de indução de
5ª ordem. O conceito básico utilizado para equivalência dos motores, denominado
invariância de potência, é que a potência ativa absorvida pelos motores individualmente
seja igual à potência ativa absorvida pelo modelo agregado. O mesmo conceito foi
aplicado para a potência reativa. Uma impedância fictícia foi utilizada para representar a
impedância dos estatores dos motores em paralelo com as demais impedâncias
(magnetização e rotor). Técnicas para determinar o escorregamento, a carga mecânica e
a constante de inércia do modelo agregado para motor de indução também foram
apresentadas neste artigo. Mesmo que a técnica de análise tenha sido estabelecida a
partir da utilização da teoria do comportamento estático dos motores, o método de
agregação proposto no artigo apresentou resultados bastante precisos na reprodução do
comportamento dinâmico dos motores originais. A precisão dos resultados apresentados
no artigo pode ser justificada pelos seguintes fatores: o cálculo exato das impedâncias
dos circuitos equivalentes, manejo adequado da carga através do escorregamento dos
motores individuais e a computação precisa da constante de inércia do modelo
agregado.
O método para a determinação dos parâmetros do motor agregado proposto na
referência [15] consiste no paralelismo das impedâncias dos motores individualmente
utilizando como base o fato do escorregamento ser aproximadamente zero para o caso

12
em que os motores operam sem carga e o escorregamento ser unitário no momento da
partida ou durante o teste de rotor bloqueado. A partir destas duas condições são
gerados os novos parâmetros das impedâncias do motor agregado. Para a constante de
inércia do modelo agregado, o artigo utiliza o mesmo método dos artigos [7] e [8].
O modelo utilizado na referência [16] é o mesmo utilizado em [15], porém neste
artigo o modelo agregado é utilizado unicamente na previsão da corrente de partida do
grupo de motores de indução. Desta forma, a metodologia relativa à determinação da
inércia equivalente não pode ser testada em simulações definidas para um período de
0,3 s. Foram realizadas simulações com a ajuda da ferramenta computacional MATLAB
/ SIMULINK.
Suwanwej e Kunakor [17], em 2004, utilizam as mesmas equações para agrega-
ção de motores de indução utilizados nas referências [15] e [16]. Porém, neste caso, o
modelo desenvolvido é agora aplicado no cálculo da contribuição da corrente de curto-
circuito do grupo de motores de indução para diferentes tipos de faltas. As análises e
simulações foram desenvolvidas no software PSCAD/EMTDC. Nos artigos mencio-
nados anteriormente, os modelos de agregação foram aplicados nos estudos de desem-
penho dinâmico de um sistema de potência, em particular em cálculos referentes à
estabilidade transitória. O artigo em questão trata da importância da contribuição do
grupo agregado em caso de faltas do tipo curto-circuito nos estudos dinâmicos em
sistemas de potência, considerando que a contribuição da corrente do grupo de motores
de indução pode resultar em mudança sensível do nível da falta e, possivelmente,
influenciar na especificação dos disjuntores do sistema de proteção. Este artigo apre-
senta simulações para vários tipos de faltas: falta trifásica, falta fase-terra, falta fase-fase
e falta fase-fase-terra.
Louie [18], em 2005, mantém os mesmos conceitos utilizados na referência [15]
para obtenção dos parâmetros do motor agregado. Paralelismo das impedâncias levando
em consideração os pontos de operação sem carga (escorregamento aproximadamente
zero) e rotor bloqueado (escorregamento unitário).
Pedra, Sainz e Córcoles [19], em 2008, defendem que o modelo de gaiola sim-
ples não é a escolha certa para representar motores de indução de gaiola de esquilo nos
estudos dinâmicos. Sendo assim, o artigo sugere que o modelo agregado de um grupo
de motores de indução deve ser baseado no modelo de gaiola dupla. Todos os artigos

13
anteriores tratando da agregação de grupos de motores de indução utilizam o modelo de
gaiola simples. Este trabalho demonstra que o modelo de gaiola simples do motor de
indução do tipo gaiola de esquilo não representa adequadamente o comportamento do
motor desde a condição de partida até a plena carga e apresenta resposta com erro
elevado. O artigo ainda informa que o modelo de gaiola simples pode ser usado apenas
para motor de indução do tipo rotor bobinado. O erro no conjugado de partida devido ao
uso do modelo de gaiola simples aumenta à medida que a potência do motor também
aumenta. De acordo com os resultados dos modelos agregados dos motores de indução
para dupla gaiola, ficou claro que o comportamento dos motores sob diferentes valores
de velocidade não pode ser simulado utilizando o modelo agregado. O modelo de dupla
gaiola deve ser utilizado para obter modelos de agregação realísticos porque o modelo
de gaiola simples apresenta muitos erros. O erro máximo é produzido quando o grupo
de motores agregados possui motores com potência muito diferentes.
Louie [20], em 2006, defende que é muito mais simples representar os motores
de indução em sistemas de potência baseado em suas especificações do que nos
parâmetros dos seus circuitos. O artigo apresenta uma metodologia para agregação de
motores de indução em diferentes barras de um sistema de potência com base em suas
especificações. Os parâmetros dos motores de indução podem ser derivados dos seus
dados de projeto, porém, a maioria dos usuários não tem acesso a estes dados. A
especificação padrão dos motores fornecidos pelos fabricantes está normalmente
disponível. Como esta especificação reflete bem o comportamento dos motores, os
efeitos dos motores individuais no modelo agregado serão determinados a partir destes
dados. No método proposto pelo artigo para a agregação de motores, é assumido que o
número de pólos do motor agregado será igual ao número de pólos do maior motor do
grupo a ser agregado. Para este modelo, o efeito das impedâncias da rede é incluído
explicitamente, já que os motores a serem agregados estão conectados em diferentes
barras do sistema. Com isso, a tensão terminal dos motores é diferente dos valores
nominais de placa devido às quedas de tensão ocasionadas pelas impedâncias da rede.
Antes de agregar os motores, os parâmetros dos mesmos têm que ser modificados de
acordo com a nova tensão terminal dos motores. O método matemático de agregação
das equações dos circuitos equivalentes dos motores segue a mesma linha dos artigos
[15], [16] e [17]. Como os motores de indução que possuem momento de inércia
elevado podem dominar sobre os efeitos causados pelos motores de pequeno e médio

14
porte, o autor sugere que os motores maiores sejam modelados separadamente.
Agregando os motores de potência similares, as representações ficam mais próximas do
caso original. Para os casos onde os motores são de potências muito diferentes, o
agrupamento destes em diferentes grupos baseado em seus tamanhos e a representação
destes grupos através de diferentes equivalentes resultará em melhor representação do
grupo de motores.
Seguindo o mesmo direcionamento da referência [19], Louie, Marti e Dommel
[21], em 2007, apresentam um método de agregação de motores de indução com rotor
de dupla gaiola conectados a uma mesma barra, baseados nos seus circuitos equiva-
lentes para estudos de sistemas de potência. O método utilizado neste artigo para o
modelo do motor agregado é o mesmo utilizado no artigo [15] deste histórico, a dife-
rença estando na consideração de motores de indução de dupla gaiola ao invés de gaiola
simples.
A referência [22] analisa o efeito de modelagem e agregação de cargas estáticas
e tipo motor de indução sobre o desempenho dinâmico dos sistemas de potência, a partir
da definição de um único motor agregado equivalente, como visto da barra de fronteira.
É realizada a comparação do desempenho do sistema para três casos: modelo detalhado
do sistema de potência original, modelo reduzido com as cargas dinâmicas agregadas e
modelo reduzido com a carga convenientemente representada através do modelo de
impedância constante. Resultados das simulações são apresentados para demonstrar a
superioridade da representação das cargas dinâmicas agregadas para os estudos de
pequenas e grandes perturbações. Os resultados incluem a resposta do sistema a
mudanças súbitas de carga, faltas trifásicas e análise de autovalores. A componente
estática representando a agregação das cargas estáticas distribuídas é composta através
da transferência destas cargas para a barra de fronteira do sistema conservando o
módulo da tensão e o valor da potência aparente nas barras dos motores. A componente
dinâmica que representa a agregação das cargas dos motores de indução distribuídos
pelo sistema é obtida incorporando os parâmetros do alimentador no circuito do estator
dos motores correspondentes. Os modelos não-lineares do sistema de potência são
necessários para simular a resposta do sistema devido a grandes perturbações. Modelos
linearizados são convenientes para os casos de estudos dinâmicos associados a pequenas
perturbações. As equações dos motores de indução seguem o modelo das equações de
Park. Assim como em [13], os autovalores da resposta linearizada são calculados para
15
comprovar que a agregação das cargas dinâmicas reduz a ordem do sistema.
O método utilizado por Karakas, Li e Adhiraki [23], em 2009, segue a mesma
linha apresentada em [15]. A inovação apresentada pelo artigo é a realização das
simulações dos modelos desenvolvidos através do software MATLAB, utilizando a
ferramenta SIMULINK.
O método proposto por Hongbin, Qiyu e Xiaohua [24], em 2010, para a
agregação de motores de indução é baseado no modelo matemático de 3ª ordem de
motor de indução. O artigo apresenta motores de indução ligados a diferentes barras,
com tensões distintas, em uma rede de distribuição. O modelo utilizado segue a mesma
filosofia do artigo [15]. A diferença está na comparação dos resultados. O artigo
compara os resultados da agregação com base na identificação do sistema externo. É
feita uma comparação, para o caso de falta trifásica, do comportamento do sistema de
alimentação da rede quando os motores são representados individualmente e para o caso
em que os motores são representados através de um motor agregado.
1.3- Objetivo
O objetivo deste trabalho é apresentar uma nova técnica a ser aplicada à
agregação de motores de indução e que se apóia também na análise modal, como na
referência [25]. O trabalho apresenta e discute o método utilizado para a agregação dos
motores de indução e apresenta resultados de simulação para comprovação da
consistência do método. O conceito de área externa do sistema elétrico de potência ou
industrial é utilizado na definição da área a ser equivalentada.
Com o objetivo de dar suporte ao trabalho desenvolvido, um sistema industrial
alimentado com tensão de 69kV e com derivações através de transformadores de
potência nas tensões de 13,8kV, 4,16kV e 480V foi utilizado como referência. Este
sistema é composto por cinqüenta e quatro motores de indução trifásicos do tipo gaiola
de esquilo. Para suporte às simulações, foi utilizado o software MATLAB.
No presente trabalho, a técnica de agregação de motores utiliza a análise modal
para realizar a redução do sistema externo original que passa a ser composto unicamente
por motores equivalentes. Neste caso, a análise dinâmica do sistema ocorre para
comparação do desempenho de dois sistemas, o primeiro composto por todos os

16
motores de indução originais e o segundo contendo os motores agregados na
representação da área externa. Finalmente, é realizada a comparação do comportamento
dinâmico da área analisada em ambos os sistemas, quando submetido à falta, visando
comprovar a eficiência do método proposto.
O desempenho do modelo é analisado levando em consideração diferentes
configurações de carga do sistema, tais como cargas do tipo impedância constante,
equivalentes de ordem reduzida com o modelo de terceira ordem e até mesmo para uma
condição de instabilidade do sistema.
1.4- Resumo
Para apresentação do conteúdo citado anteriormente, a dissertação de mestrado
foi organizada de modo a considerar as seguintes etapas:
O capítulo 1 apresenta um breve descritivo sobre as características da agregação
de motores de indução trifásicos, mostra como a pesquisa foi direcionada ao longo dos
anos e indica as melhorias obtidas à medida que os recursos computacionais foram
desenvolvidos. São analisados artigos selecionados nos temas diretamente ligados ao
escopo da dissertação.
No capítulo 2 é apresentada a teoria geral da análise modal, bem como o
desenvolvimento de equações matemáticas contendo autovalores e autovetores,
permitindo assim a linearização das variáveis.
O capítulo 3 dedica-se à modelagem dos motores de indução trifásicos, aplica-
ção de conceitos para a escolha da ordem dos modelos de motores e também abrange a
modelagem da rede através da matriz de admitâncias.
No capítulo 4 é realizado o processo de agregação dos motores através das
teorias apresentadas nos capítulos anteriores. É demonstrado o processo de redução de
ordem a partir do método de participação dos modos de oscilação do sistema na
resposta do sistema externo, como vista da barra de fronteira.
No capítulo 5 são apresentados os casos de simulações implementados e a
análise dos resultados obtidos.
O capítulo 6 apresenta as conclusões finais e enumera sugestões de assuntos para
suporte a trabalhos de pesquisa futuros.

17
CAPÍTULO 2
2 ANÁLISE MODAL
2.1- Conceitos Gerais
A análise modal fornece um conjunto importante de informações dinâmicas de
sistemas elétricos, informações tais que são difíceis de serem obtidas por meio de
métodos convencionais como a simulação no tempo e a resposta em freqüência. Estas
informações compreendem os modos de oscilação natural, identificação dos
equipamentos que mais participam destes modos, sensibilidades destes modos em
relação a variações de parâmetros do sistema, etc. Estas informações dinâmicas podem
ser efetivamente utilizadas para analisar os transitórios eletromagnéticos e eletro-
mecânicos que se apresentam em um sistema dinâmico.
Devido à natureza matemática da análise modal e as dificuldades de
implementá-la através de sistemas computacionais, houve no passado uma certa
dificuldade em sua aplicação para a análise de transitórios do sistema. Porém devido à
ocorrência de oscilações pobremente amortecidas ou mesmos instáveis em diversos
sistemas físicos de muito interesse e com o desenvolvimento de diversos programas
computacionais, hoje a análise modal vem sendo utilizada de maneira complementar
para a análise de transitórios.
2.2- Modos de Oscilação Eletromecânicos
Um sistema de potência pode apresentar diversos tipos de oscilações
eletromecânicas [26], [27]. Dentre elas podem-se listar os modos de oscilação
característicos da dinâmica dos sistemas de potência:
- Modo local ou modo máquina-sistema: Este modo de oscilação está
associado às oscilações de uma determinada unidade ou usina geradora em relação ao
resto do sistema.
18
- Modo intermáquinas ou intraplanta: Este modo de oscilação está
associado às oscilações entre as unidades de uma mesma usina.
- Modo multimáquinas ou interplantas: Este modo está associado às
oscilações entre usinas eletricamente próximas.
- Modo interárea: Este modo está associado às oscilações de várias usinas
geradoras de uma mesma área elétrica com relação a outras usinas localizadas em outras
áreas do sistema. Este modo de oscilação ocorre em maiores amplitudes quando existem
dois ou mais grupos de máquinas fortemente acopladas e estes grupos são interligados
por elos de transmissão fracos de corrente alternada.
2.3- Equações de Estado
De uma maneira geral, um sistema é modelado por equações de estado da
seguinte forma:
)()()()(
tBUtAXtXdt
tdX+== & (2.1)
)()()( tDUtCXtY += (2.2)
onde
→)(tX Vetor de variáveis de estado
→A Matriz de estados
→B Matriz de coeficientes para as variáveis de entrada
→C Matriz de coeficientes para as variáveis de saída
→D Matriz dos termos diretos
→)(tU Vetor de variáveis de entrada do sistema
→)(tY Vetor de variáveis de saída do sistema
Para um vetor de variáveis de entrada do sistema 0)( =tU , (2.1) reduz-se a:

19
)()(
tAXdt
tdX= (2.3)
Para o caso particular do sistema ser de primeira ordem, tem-se:
)()(
taxdt
tdx= (2.4)
Cuja solução é:
atketx =)( (2.5)
Derivando (2.5) em relação ao tempo e substituindo em (2.4), obtém-se:
atakedt
tdx=
)( (2.6)
Comprovando desta maneira a solução dada em (2.5).
Generalizando a equação (2.5) para uma solução parcial de um sistema de ordem
n , tem-se:
tii
ietx λΓ=)( (2.7)
Onde
Γ
Γ
Γ
Γ
=Γ
n
i
M
M
2
1
(2.8)
Esta solução é valida se e somente se (2.3) é satisfeita, ou seja, derivando (2.7)
em relação ao tempo e substituindo em (2.3), obtém-se:
∴Γ=Γ ti
tii
ii eAe λλλ

20
iiiA Γ=Γ λ (2.9),
onde iλ e iΓ são denominados autovalor e autovetor à direita de A ,
respectivamente.
Reescrevendo (2.9), obtém-se:
0)( =Γ− ii IA λ (2.10),
onde:
→I Matriz identidade de ordem n .
Para uma solução não trivial )0( ≠Γi do sistema dado em (2.10), tem-se:
0det =−⋅ AIλ (2.11)
A equação (2.11) é chamada de equação característica do sistema.
Então para um sistema de ordem n a solução total do sistema é dada pela
combinação linear das soluções parciais, ou seja:
∑ ∑= =
Γ==n
i
n
i
tiii
iektxtX1 1
)()( λ (2.12),
onde
→ik i-ésima constante.
Conforme demonstrado a seguir, a equação de definição dos autovalores também
pode ser obtida a partir de uma função de transferência.
Aplicando a transformada de Laplace em (2.1), obtém-se:
∴+=− )()()0()( sBUsAXXssX
∴+=− )0()()()( XsBUsXAsI
[ ])0()(()()( 1 XsUBAsIsX +−= − (2.13)
21
Aplicando a transformada de Laplace em (2.2), obtém-se:
)()()( sDUsCXsY += (2.14)
Substituindo-se (2.13) em (2.14), obtém-se:
[ ] )()0()()()( 1 sDUXsBUAsICsY ++−= − (2.15)
Considerando condições iniciais nulas, obtém-se a função de transferência:
[ ]∴
+−==
−
)(
)()(
)(
)()(
1
sU
sUDBAsIC
sU
sYsG
DBAsICsG +−= −1)()( (2.16)
A equação (2.16) pode ser escrita como:
[ ]DB
AI
AsIadjCsG
t
+−⋅
−=
λdet
)()( (2.17)
A partir de (2.17) observa-se que os pólos da função de transferência )(sG são
obtidos quando 0det =−⋅ AIλ . A solução deste determinante fornece os autovalores
do sistema.
2.4- Equações Dinâmicas
Segundo [27], se for admitido que os autovalores (raízes características) de A
são distintos e denotados por nii ,,2,1, K=λ , então existe uma matriz não singular de
ordem n que transforma A em uma matriz diagonalΛ , tal que:

22
=Γ⋅⋅Γ=Λ −
n
i
A
λ
λ
λλ
LL
MOMMMM
LL
MMMOMM
LL
LL
000
000
000
000
2
1
1 (2.18)
A matriz Γ é formada pelos autovetores de A , também chamados de
autovetores à direita, isto é, se iΓ é o autovetor associado com o autovalor iλ , então,
tem-se para ni ,,2,1 L= :
[ ]Tni ΓΓΓΓ=Γ LL21 (2.19)
Uma vez que estes autovetores são independentes, 1−Γ existe.
O autovetor do autovalor iλ é o vetor coluna iΓ (dimensão 1nx ) que satisfaz a
equação matricial:
0)( =Γ−⋅ ii AIλ (2.20)
Pode-se mostrar que os autovalores ou valores característicos da matriz A são as
raízes da equação característica e calculada por:
0det =−⋅ AIλ (2.21)
Os autovalores podem ser reais ou complexos. Se a matriz A é real, como
ocorre em sistemas de potência, os autovalores complexos ocorrem em pares
conjugados. Quando os autovalores são complexos, tanto o autovetor à direita quanto o
autovetor à esquerda serão complexos.
Multiplicando a equação (2.3) por 1−Γ tem-se:
)()( 111 tXAtX ⋅Γ⋅Γ⋅⋅Γ=⋅Γ −−− & (2.22)

23
Com base na equação (2.22), uma vez determinada a matriz Γ dos autovetores,
pode-se considerar uma transformação de variáveis, definida pela equação:
)()(ˆ 1 tXtX ⋅Γ= − (2.23)
Sendo )(ˆ tX um novo vetor de estado relacionado ao vetor de estado original
pela matriz 1−Γ .
A equação (2.22) pode ser escrita como:
)(ˆ)(ˆ tXtX ⋅Λ=& (2.24)
Esta equação é às vezes referida como equação dinâmica na forma canônica,
normalizada ou desacoplada. Nota-se que a taxa de variação de cada nova variável de
estado não é mais uma combinação linear de todas as variáveis de estado, conforme
anteriormente ocorria quando se usava a equação (2.3), o que tornava difícil identificar
os parâmetros que mais influenciavam o comportamento dinâmico do sistema. Agora, a
taxa de variação de cada nova variável de estado é somente afetada pela própria variável
de estado.
Aplicando-se a transformada de Laplace a equação (2.24) tem-se:
)0(ˆ)()(ˆ 1 XsIsX ⋅Λ−= − (2.25)
onde:
−
−
−
−
=Λ− −
n
i
s
s
s
s
sI
λ
λ
λ
λ
1000
01
00
001
0
0001
)(2
1
1
LL
MOMMMM
MM
MMMOMM
LL
LL
(2.26)

24
2.5- Equivalência das Equações Dinâmicas
Seja um sistema representado pelas equações (2.1) e (2.2). Substituindo a
equação (2.23) nestas equações:
)()(ˆ)(ˆ tUBtXAtX ⋅+⋅Γ⋅=⋅Γ & (2.27)
)()(ˆ)( tUDtXCtY ⋅+⋅Γ⋅= (2.28)
E finalmente:
)(ˆ)(ˆ)(ˆ tUBtXtX ⋅+⋅Λ=& (2.29)
)()(ˆˆ)( tUDtXCtY ⋅+⋅= (2.30)
As equações dinâmicas apresentadas acima representadas pelas matrizes
CeBA, e CeB ˆˆ,Λ , são equivalentes se Γ for uma matriz de autovetores não singular
que permita as seguintes igualdades [26]:
Γ⋅⋅Γ=Λ − A1 (2.31)
BB ⋅Γ= −1ˆ (2.32)
CC ⋅Γ=ˆ (2.33)
Neste caso a matriz Γ é chamada de transformação de similaridade.
2.6- Resíduo da Função de Transferência
De acordo com a teoria da equivalência das equações dinâmicas, a função de
transferência obtida através da equação (2.16), para um sistema invariável no tempo,
poderá ser representada da seguinte maneira:
DBsICsG +Λ−= − ˆ)(ˆ)( 1 (2.34)

25
Ou ainda por:
∑ ∑= = −
⋅=
−=
n
i
n
i i
ii
i
i
s
cb
s
RsG
1 1
ˆˆ)(
λλ (2.35)
Onde iR é a matriz de resíduos de elementos complexos associada ao
autovalor iλ . O resíduo é a medida da sensibilidade do autovalor iλ a uma
realimentação adicionada à função de malha aberta entre )()( sYesU .
2.7- Participação dos Modos de Oscilação
2.7.1- Critério da Observabilidade
Cada autovalor do sistema corresponde a um modo de oscilação. Desta forma, é
possível medir a participação de cada modo de oscilação nas variáveis de saída e que,
para um determinado sistema, podem ser a potência ativa e reativa de um motor. O
conceito de observabilidade está associado a esta análise, que indica o quão observável
é cada modo de oscilação em determinada variável de interesse [26].
Índices de observabilidade podem ser obtidos a partir da matriz C , chamada de
vetor de observabilidade de modo, onde cada elemento ic é o fator de observabilidade
de modo. Cada elemento da matriz C é um número complexo, o qual pode ser
representado por um vetor a partir do módulo e ângulo, os quais podem ser
normalizados para fornecer o mode-shape (visualização da amplitude e fase de um
determinado modo de oscilação) de uma determinada variável de saída associada a um
autovalor específico [26].
2.7.2- Critério da Controlabilidade
Um sistema é controlável quando é possível encontrar um vetor de controle

26
)(tU que, em um tempo específico finito ft , transferirá o sistema de um estado inicial
0X para um estado final fX .
A controlabilidade de um sistema pode ser determinada a partir da matriz B ,
apresentada na equação (2.29), chamada de vetor de controlabilidade de modo, onde
cada elemento ib é chamado de fator de controlabilidade de modo.
Um sistema é completamente controlável quando a matriz B não possui linhas
zeradas. As variáveis de estado correspondentes às linhas zeradas são não controláveis,
ou seja, não é possível influenciá-las através de variáveis de controle.
Os índices de controlabilidade e observabilidade podem ser utilizados para a
determinação dos parâmetros dos sistemas que deverão ser manipulados ou
incrementados com o objetivo de se obter os resultados desejados para a resposta do
sistema [26].
2.8- Solução das Equações de Estado
A partir da equação (2.7), temos:
tii
ietx λΓ=)(ˆ (2.36)
Conclui-se que a resposta modal para cada componente do vetor )(ˆ txi é
independente das outras componentes modais e sua taxa de decaimento com o tempo é
dada pelo autovalor iλ [26]. Outra conclusão importante é que, para que o sistema seja
estável, todos os autovalores devem ser reais negativos ou complexos com parte real
negativa [28].
No caso específico de autovalor complexo, existem na verdade dois autovalores
complexos conjugados como seguem:
iii jw+=αλ e iii jw−=+ αλ 1 (2.37)
O par de pólos complexos conjugados é denominado modo natural de oscilação
27
do sistema. Portanto, para cada par de autovalores complexos conjugados, se iα for
negativo, o sistema terá uma resposta de característica estável. Caso iα seja positivo o
sistema terá um modo oscilatório com amplitude crescente, obtendo assim uma resposta
instável [28].
A parte real dos autovalores iα corresponde ao amortecimento das oscilações e a
parte imaginária iw fornece a freqüência da oscilação.
π2i
i
wf = (2.38)

28
CAPÍTULO 3
3 MODELAGEM DE MOTORES DE INDUÇÃO
3.1- Introdução
Nas simulações de sistemas elétricos de grande porte para estudos de análise
transitória, a representação das cargas assume uma importância considerável. É sabido
que a grande maioria destas cargas é composta por motores de indução, e sendo assim, é
importante incluir suas características de carga com um bom nível de precisão. Muitos
modelos para representação dos transitórios dos motores de indução podem ser
encontrados na literatura. No passado os modelos amplamente utilizados eram do tipo
regime permanente, representando estas cargas através do modelo de impedância
constante, corrente constante, cargas de potência constante, ou até mesmo a combinação
destes modelos. Com o progresso na representação dos motores de indução em estudos
dinâmicos, ficou evidenciado que estes modelos utilizados no passado não devem ser
utilizados nas análises transitórias atuais quando maior precisão for exigida.
Este capítulo descreve os modelos utilizados para representar os motores de
indução no estudo realizado no presente trabalho de pesquisa.
3.2- Ordens do Modelo
O progresso referido acima na representação dos motores de indução aumentou
sobremaneira a quantidade de detalhes que devem ser incluídos no modelo de cada
motor. Como o número de cargas composta por motores de indução em um sistema
elétrico é elevado, torna-se difícil representar todas as máquinas em detalhe para os
sistemas de motores de indução interconectados. Então, representações simplificadas
que prevêem com precisão condizente o comportamento eletromecânico dos motores de
indução são requeridas.
O conjunto de equações que representam as características eletromecânicas dos
29
motores de indução do tipo gaiola de esquilo para a análise dinâmica do mesmo é
dividido da seguinte maneira: duas equações representam o comportamento do motor
com relação ao efeito no rotor, duas equações representam o comportamento do motor
com relação ao efeito no estator e uma equação representa o efeito mecânico do motor
relacionado à velocidade do mesmo. Com isto podemos afirmar que o motor de indução
do tipo gaiola de esquilo pode ser representado dinamicamente através de cinco
equações não-lineares, sendo este modelo chamado de modelo de quinta ordem para
representação de um motor de indução.
O número de equações para a representação do modelo do motor de indução
permanece o mesmo, tanto para o método direto quanto para o método das equações de
Park. Para o método direto, a representação dos parâmetros do rotor e do estator é feita
referenciada aos eixos real e imaginário vinculados ao estator, enquanto que, para a
representação através das equações de Park, são utilizados os eixos direto e de
quadratura girantes na velocidade síncrona.
Na modelagem dos motores de indução, as correntes dos enrolamentos, tensões
ou enlaces de fluxo podem ser escolhidas como sendo as variáveis de estado do modelo.
Neste trabalho foram utilizadas as equações das tensões para a representação dinâmica
dos motores de indução e o deslizamento para a representação do comportamento
mecânico dos mesmos. O conjunto destas equações não-lineares representa seu
comportamento eletromecânico.
3.3- Reduções de Ordem
Krause e Murdoch em [29] desenvolveram um modelo de ordem reduzida que
desconsidera os efeitos transitórios do estator, preservando ainda as características
eletromecânicas e as características de amortecimento das oscilações dos motores de
indução com um alto grau de precisão. Isto equivale a ignorar a componente cc das
correntes do estator causada por variações repentinas na magnitude da tensão no estator.
A componente cc das correntes do estator resulta no decaimento das oscilações do fluxo
de potência ativa e reativa, e do conjugado desenvolvido no período transitório.
Levando-se em consideração que a constante de tempo dos transitórios no estator é
relativamente maior do que seu período de oscilação, esta componente tem um
significado aproximadamente nulo no fluxo de potência e no conjugado do modelo de
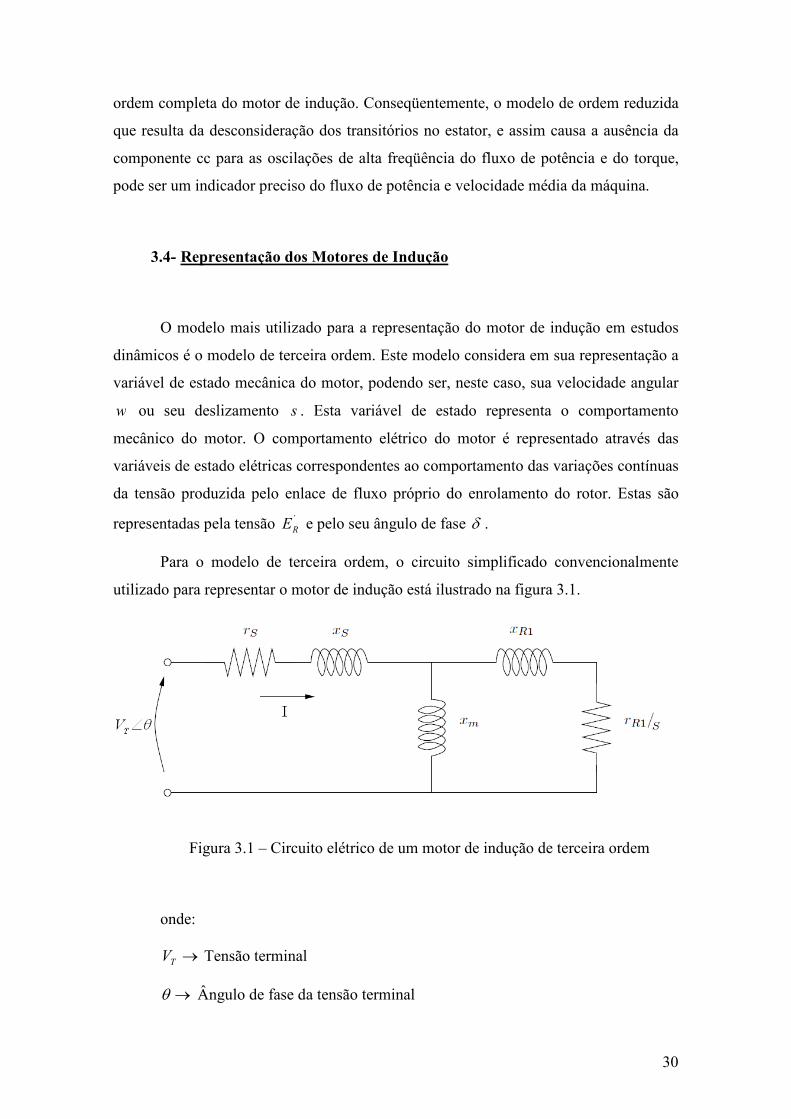
30
ordem completa do motor de indução. Conseqüentemente, o modelo de ordem reduzida
que resulta da desconsideração dos transitórios no estator, e assim causa a ausência da
componente cc para as oscilações de alta freqüência do fluxo de potência e do torque,
pode ser um indicador preciso do fluxo de potência e velocidade média da máquina.
3.4- Representação dos Motores de Indução
O modelo mais utilizado para a representação do motor de indução em estudos
dinâmicos é o modelo de terceira ordem. Este modelo considera em sua representação a
variável de estado mecânica do motor, podendo ser, neste caso, sua velocidade angular
w ou seu deslizamento s . Esta variável de estado representa o comportamento
mecânico do motor. O comportamento elétrico do motor é representado através das
variáveis de estado elétricas correspondentes ao comportamento das variações contínuas
da tensão produzida pelo enlace de fluxo próprio do enrolamento do rotor. Estas são
representadas pela tensão ´RE e pelo seu ângulo de fase δ .
Para o modelo de terceira ordem, o circuito simplificado convencionalmente
utilizado para representar o motor de indução está ilustrado na figura 3.1.
Figura 3.1 – Circuito elétrico de um motor de indução de terceira ordem
onde:
→TV Tensão terminal
→θ Ângulo de fase da tensão terminal

31
→I Corrente do estator
→Sr Resistência do enrolamento de fase do estator
→Sx Reatância de dispersão do enrolamento de fase do estator
→mx Reatância de magnetização do enrolamento do estator
→'1Rx Reatância de dispersão do enrolamento do rotor referida ao estator
→'1Rr Resistência de enrolamento do rotor referida ao estator
→s Deslizamento
As equações são formuladas em termos dos eixos cartesianos (DQ), tendo como
referências o ângulo de uma determinada tensão da rede e a velocidade síncrona sw .
Utilizando sw com referência, as equações da tensão terminal do enrolamento de
estator, com grandezas expressas em por unidade, desprezados os transitórios de estator
e incluídos os transitórios de fluxo concatenado no rotor ψ , são dadas por:
QSDSSDS irv ψ−= (3.1)
DSQSSQS irv ψ+= (3.2)
IrVjiirjvvj STQSDSSQSDSDSQS −=+−+=+− )(ψψ (3.3)
As equações das derivadas de fluxo próprio dos enrolamentos de rotor no
referencial DQ do estator na representação cartesiana são:
'''QRDRR jEEE += (3.4)
onde:
''0
''''''0 )(/).(// QRSQSSDRSDR ETXXXXEXdtdET ωωψ −+−−−= (3.5)
''0
''''''0 )(/).(// DRSDSSQRSQR ETXXXXEXdtdET ωωψ −−−+−= (3.6)

32
Então somando as expressões acima, para IjXEIrV RST'' +=− :
∴−−−+−= ''0
''''''0 /)).((// RSSTSRSR ETjsXIrVXXXEXdtdET ω
∴−+−+−= ''0
''''''''0 /)).((// RSRSRSR ETjsXIjXEXXXEXdtdET ω
∴−−+−= ''0
''''0 ).(/ RSSRR ETjsIXXjEdtdET ω
∴−−+−= ''''0
''0 )()(/ RSRSR EIXXjsETjdtdET ω
IXXjETjsdtdET SRSR )()1(/ '''0
''0 −++−= ω (3.7)
Sendo a equação da corrente de estator dada por:
=+−= )/()( '' jXrEVI SRT ∴+−− )/())((2'2'' XrjXrEV SSRT
))(( ''' jBGEVI RT −−= (3.8),
onde:
→'RE Tensão proporcional ao enlace de fluxo do rotor
→⋅= )/( '1
'0 RSR rwXT Constante de tempo do enrolamento do rotor
→+= mRR xxX '1 Reatância própria do enrolamento do rotor referida ao estator
→+= mSS xxX Reatância própria do enrolamento de fase do estator
→+⋅+= )/( '1
'1
'RmRmS xxxxxX Reatância transitória do motor
→+= )/(2'2' XrrG SS Condutância transitória do motor
→+= )/(2'2'' XrXB S Susceptância transitória do motor
→w Velocidade de rotação do rotor
Para efeito de simplificação, serão adotadas as seguintes variáveis:
)/()'(2'2' XrXXXa SS +−= (3.9)
)/()'(2'2 XrrXXb SSS +−= (3.10)

33
22 bac += (3.11)
)'/(atan)/(atan Xrab S==γ (3.12)
Conforme [30], através da decomposição da equação (3.7) e considerando δ∠= ´´RR EE
e θ∠= TT VV como representações fasoriais destas grandezas, obtêm-se as equações das
derivadas da amplitude ´RE e do ângulo de fase δ , conforme representação abaixo:
))(cos()1(/ '''0 γθδ +−++−= TRR cVEadtdET (3.13)
=dtd /δ ))(sin())/(()/( ''0
'0 γθδω +−−+− RTS ETVcTbs (3.14)
A equação que representa o comportamento mecânico do motor é dada por:
)(2
1Em TT
Hdt
ds−= (3.15)
Onde:
Ss ωω /1−=
→−−−−=2'''''' )sin()cos( RTRTRE EGVEBVEGT θδθδ Conjugado Elétrico
→−= nTm skT )1( Conjugado da carga mecânica
As equações (3.13), (3.14) e (3.15) representam o comportamento
eletromecânico do motor de terceira ordem.
Para a representação do motor de indução através do modelo de primeira ordem,
somente é considerado seu comportamento mecânico, sendo esta única variável de
estado representada através da equação (3.15).
3.5- Motores de Indução de Dupla Gaiola
Nos últimos anos houve um crescimento na utilização de motores de indução de
grande porte e, com isto, surgiram os problemas relativos ao aumento considerável da

34
corrente de partida dos motores de indução, tornando isto um obstáculo na utilização
deste tipo de motor de indução. Com o objetivo de limitar a corrente de partida e ainda
assim conseguir manter o conjugado associado elevado, os motores de indução foram
equipados com uma segunda gaiola, chamada de gaiola de partida.
O motor de indução de gaiola simples, quando considerado o efeito transitório
no estator, é representado dinamicamente por cinco equações não-lineares. Já para o
caso do motor de indução do tipo dupla gaiola, sua representação é feita através de sete
equações não-lineares. Isto ocorre porque o efeito transitório do rotor é representado
através de quatro equações não-lineares, duas para cada eixo d ou q, duas para cada
enrolamento de rotor.
Mesmo assim, a representação mais utilizada para este tipo de motor de indução
apresentada na literatura é usualmente definida através de um modelo de quinta ordem,
.A utilização do modelo de quinta ordem a fim de representar os motores de indução de
grande porte ignora a presença da segunda gaiola do motor. Ainda neste contexto, para
os estudos de estabilidade transitória tornou-se usual a utilização de modelo
simplificado deste modelo de quinta ordem, desconsiderando-se os transitórios de
estator.
A gaiola de partida dos motores de indução de dupla gaiola é desenvolvida com
o objetivo de limitar a corrente de partida e proporcionar conjugado de partida elevado.
Este objetivo é atingido fazendo a resistência da gaiola na partida muito maior do que a
resistência de operação ( )12 RR rr >> e também levando em consideração a reatância de
partida menor que a reatância de operação do motor ( )12 RR xx < . A verificação do
comportamento transitório causado pela presença das duas gaiolas pode ser feita através
da comparação das duas constantes de tempos equivalentes dos enrolamentos do rotor,
1
11
R
RR r
lT = e 2
22
R
RR r
lT = . Sendo 12 RR TT << , os transitórios associados à gaiola de
partida são muito mais rápidos do que os produzidos pela gaiola de operação do motor.
A figura 3.2 representa o circuito elétrico do motor de indução de dupla gaiola.

35
Figura 3.2 – Circuito elétrico do motor de indução de quinta ordem
Neste trabalho não foi levado em consideração o efeito da gaiola de partida nos
estudos dinâmicos. Desta forma, os transitórios mais rápidos foram desprezados, geran-
do assim respostas mais “limpas” para as simulações das perturbações ocorridas na área
interna do sistema. Sendo assim, os motores de indução que integram o sistema elétrico
deste trabalho foram representados através do modelo de terceira ordem, independente
do nível de potência quanto do tipo da gaiola.

36
CAPÍTULO 4
4 ESTUDO REALIZADO
4.1- Equivalente Dinâmico Definido Através da Análise Modal
Este trabalho tem como objetivo apresentar um sistema equivalente para
representação dinâmica simplificada de um grupo de motores de indução trifásicos. A
metodologia aplicada na obtenção deste equivalente foi desenvolvida a partir da
necessidade de consistência na reprodução das componentes modais de resposta da área
externa com importância para o desempenho transitório da área interna de um
determinado sistema elétrico. Sendo:
- Área externa - Área do sistema elétrico composta por motores de indução,
para a qual será desenvolvido o equivalente dinâmico agregado.
- Área interna - Área do sistema elétrico que deseja ser analisada do ponto de
vista dinâmico.
- Barra de fronteira - Barra do sistema elétrico que separa a área externa da área
interna.
A figura 4.1 ilustra a representação genérica do sistema contendo a área externa,
para a qual se deseja definir um sistema equivalente agregado, a área interna, cujo
desempenho transitório é para ser avaliado, as barras terminais referentes aos motores
de indução, cujas tensões e potências complexas são consideradas no estudo e a barra de
fronteira, que é considerada a barra de interligação entre a área externa e a área interna
do sistema elétrico referido.

37
Figura 4.1 - Sistema elétrico exemplo
Para a análise e determinação de um conjunto de motores equivalentes de ordem
reduzida, o primeiro procedimento a ser realizado é a construção da matriz de
admitâncias do sistema elétrico completo, composto pelas áreas interna e externa do
sistema. Com apoio desta matriz, o fluxo de potência do sistema é resolvido e são
determinadas as tensões terminais para cada um dos motores do sistema, assim como as
demais grandezas pertinentes ao estudo.
Ainda, a partir dos resultados obtidos da solução do fluxo de potência, são
definidas as amplitudes e fases das tensões internas e terminais dos motores localizados
na área externa do sistema. Também são armazenadas a amplitude e fase da tensão da
barra de fronteira do sistema.
A representação dinâmica equivalente da área externa é obtida a partir da
eliminação dos modos de oscilação que revelarem efeito desprezível sobre a dinâmica
da área interna (além da barra de fronteira). Esta eliminação pode ser realizada com
base na participação relativa de cada um dos modos de oscilação na composição das
variáveis elétricas de saída associadas à barra de fronteira. A eliminação destes estados
resulta na redução da ordem do sistema externo.

38
Além de utilizar o procedimento acima para a eliminação dos modos de
oscilação de menor importância, a metodologia apresentada neste trabalho procura
definir um equivalente composto por elementos com a mesma estrutura física e
matemática apresentada pelos motores originais e mesma resposta dinâmica sob
pequenas variações. Os modelos associados serão, portanto, tratados da mesma forma
que os motores originais pelos programas computacionais de análise transitória
existentes.
4.2- Equações Linearizadas de Desempenho da Área Externa
O desempenho da área externa pode ser analisado em função da variação das
potências ativa e reativa dos motores de indução desta área em suas respectivas barras
terminais. Estas variações de potência podem ser expressa em função das variações das
tensões internas destes motores de indução, das variações dos ângulos de fase destas
tensões e também em função dos deslizamentos de rotor dos motores.
As equações das potências elétricas dos motores de indução da área externa em
suas barras terminais podem ser verificadas abaixo:
Potência complexa:
*..
. IVN T=& = ∴−− *'''...
)])([( jBGEVV RTT
∴+=+−+= jQPjBGEVjBGVVN RTTT )(.)(. ''*'.
''*..
&
)90(90)( 0''02'''2' +−∠−∠+−∠−= δθδθ RTTRTT EVBVBEVGVGN& (4.1)
Potência ativa:
)sin()cos( ''''2' δθδθ −+−−= RTRTT EVBEVGVGP (4.2)
Potência Reativa:
)cos()sin( ''''2' δθδθ −−−−= RTRTT EVBEVGVBQ (4.3)

39
A linearização destas equações é obtida aplicando as derivadas parciais das
potências com relação às tensões e ângulos de fase pertinentes. O processo de lineari-
zação da potência ativa e reativa dos motores em suas respectivas barras terminais pode
ser observado a seguir:
Considerando:
P∆ - Vetor dos desvios de potência ativa dos motores da área externa
Q∆ - Vetor dos desvios de potência reativa dos motores da área externa
RE′∆ - Vetor dos desvios das tensões internas dos motores da área externa
δ∆ - Vetor dos desvios dos ângulos das tensões internas dos motores da área
externa
s∆ - Vetor dos desvios dos deslizamentos dos motores da área externa
∆
∆
′∆
⋅
∂∂
∂∂
′∂∂
∂∂
∂∂
′∂∂
=
∆
∆
s
E
s
E
Qs
PP
E
P
Q
P R
R
R δ
δ
δ (4.4)
onde:
xxPP ∆∂∂=∆ ∑ .)/( (4.5)
xxQQ ∆∂∂=∆ ∑ .)/( (4.6)
=∂∂ '/ REP '2''' /)()sin()cos( RTTT EVGPVBVG −=−+−− δθδθ (4.7)
)()cos()sin(/ 2'''''TRTRT VBQEVBEVGP −=−−−−=∂∂ δθδθδ (4.8)
0/ =∂∂ sP (4.9)
=∂∂ '/ REQ '2''' /)()cos()sin( RTTT EVBQVBVG −=−−−− δθδθ (4.10)
)()sin()cos(/ 2'''''TRTRT VGPEVBEVGQ −−=−−−+=∂∂ δθδθδ (4.11)
0/ =∂∂ sQ (4.12)

40
A partir da linearização das equações que definem o comportamento
eletromecânico do motor de indução, apresentas no capítulo 3, obtém-se:
TRR VcEa
dt
EdT ∆+−+∆+−=
∆))(cos(.)1( '
''
0 αθδ
θαθδδαθδ ∆+−+∆+−− ))((sin))(sin( TT cVVc (4.13)
δαθδαθδωδ
∆+−−∆+−−∆−=∆
))(cos())/(())(sin())/(( ''0
''0 RTTRS ETcVVETcs
dt
d
'2''0
''0 ))(sin())/(())(cos())/(( RRRT EETcETcV ∆+−+∆+−+ αθδθαθδ (4.14)
)2/()( HTTdt
sdEM ∆−∆=
∆ (4.15)
onde:
=∆ MT sskTnssnk TM
nT ∆−−=∆− − )]1/()([)1( 010
102 (4.16)
TRRE VEBEGT ∆−−−=∆ ''''' )]sin()cos([ θδθδ ''''' ]2)sin()cos([ RRTT EGEVBVG ∆−−−−+ θδθδ
θθδθδ ∆−+−+ )]cos()sin([ ''''TRTR VEBVEG
δθδθδ ∆−+−− )]cos()sin([ ''''TRTR VEBVEG (4.17)
As expressões gerais para os elementos das matrizes que constituem a resposta
linearizada de um motor de indução em torno de seu ponto de operação podem ser
retiradas das expressões acima. Estas equações podem ser manipuladas para representar,
mais a frente, a linearização das variações das potências ativas e reativas dos motores de
indução em torno do ponto de operação da área externa, considerando apenas as
derivadas parciais de primeira ordem.
As variações das potências ativa e reativa ),( FF QP ∆∆ absorvidas pelo sistema
externo, como vistas da sua barra de fronteira e produzidas por variações na amplitude e
na fase da tensão nesta barra ),( FFV θ∆∆ podem ser expressas em função desta tensão,
em função das variações das tensões terminais e ângulos de fase ),( θ∆∆ TV dos motores
presentes neste sistema e da dinâmica de cada motor representada pelas equações (4.13)
a (4.15). É esta dinâmica que precisa ser determinada para exprimir as variações de
potência ativa e reativa FF QeP ∆∆ em função das variações em FF eV θ∆∆
FF QP ∆∆ , = ),( FF Vf ∆∆θ (4.18)

41
A matriz de admitâncias de barras do sistema externo sendo equivalentado é
fundamental nas relações dinâmicas expressas sumariamente por (4.18). Nesta relação
matricial, se não houve carga motórica ligado à j-ésima barra, está barra poderá ser
eliminada, já que os desvios jP∆ e jQ∆ serão nulos. Se nesta j-ésima barra sem motor
houver carga estática, aí a carga é transformada em impedância constante e integrada à
matriz de admitâncias.
Com base nas expressões apresentadas anteriormente, obtidas através das
equações linearizadas das potências ativa e reativa, e a partir da analogia destas
equações com as equações de estado linearizadas apresentadas no capítulo 2, segue
abaixo:
)()()( tUBtXAtX ⋅+⋅=& (4.19)
)()()( tUDtXCtY ⋅+⋅= (4.20)
A partir das equações de desempenho da área externa podemos definir os vetores
das variáveis de estado, das variáveis de entrada e das variáveis de saída da área externa
composta pelos motores de indução:
∆
∆=
∆
∆=
∆
∆
′∆
=Q
PtY
VtU
s
E
tXT
R
)(;)(;)(θ
δ (4.21)
As matrizes DeCBA ,, definem as equações da área externa para perturbações
aplicadas na barra de fronteira ou na área interna.
A matriz de estados A do sistema externo pode ser definida, para cada motor
nesta área, por:
=
333231
232221
131211
aaa
aaa
aaa
A (4.22)
onde:

42
'011 /)1( Taa +−= (4.23)
))(sin()/( '012 γθδ +−−= TcVa T (4.24)
013 =a (4.25)
=21a '2''0 ))(sin())/(( RRT EETVc ∆+−+ γθδ (4.26)
=22a ))(cos())/(( ''0 γθδ +−− RT ETcV (4.27)
=23a Sω− (4.28)
=31a )2/(]2)sin()cos([ '''' HGEVBVG RTT −−−−− θδθδ (4.29)
)2/()]cos()sin([ ''''32 HVEBVEGa TRTR θδθδ −+−+= (4.30)
=33a )2/()]1/([ 00 HsnTm −− (4.31)
A matriz de coeficientes para as variáveis de entrada B é apresentada abaixo:
=
3231
2221
1211
bb
bb
bb
B (4.32)
onde:
=11b'
0/))((sin TcVT γθδ +−+ (4.33)
=12b'
0/))(cos(. Tc γθδ +−+ (4.34)
=21b ))(cos())/(( ''0 γθδ +−+ RT ETcV (4.35)
=22b ))(())/(( ''0 γθδ +−− sinETc R (4.36)
=31b )2/()]cos()sin([ '''' HVEBVEG TRTR θδθδ −+−− (4.37)
=32b )2/()]()cos([ '''' HsinEBEG RR θδθδ −−−− (4.38)
A matriz dos coeficientes para as variáveis de saída C é apresentada abaixo:
=
232221
131211
ccc
cccC (4.39)
onde:
'11 / REPc ∂∂= '2' /)( RT EVGP −= (4.40)
δ∂∂= /12 Pc )( 2'TVBQ −= (4.41)
0/13 =∂∂= sPc (4.42)
'21 / REQc ∂∂= '2' /)( RT EVBQ −= (4.43)
δ∂∂= /22 Qc )( 2'TVGP −−= (4.44)
0/23 =∂∂= sQc (4.45)

43
Para a matriz dos termos diretos D são apresentadas as seguintes equações:
=
2221
1211
dd
ddD (4.46)
onde:
θ∂∂= /11 Pd = )( 2'TVBQ −− (4.47)
TVPd ∂∂= /12 = TT VGVP '/ + (4.48)
θ∂∂= /21 Qd = 2'TVGP − (4.49)
TVQd ∂∂= /22 = TT VBVQ '/ += (4.50)
4.3- Transformação Modal das Equações de Estado
A transformação modal das equações de estado indicadas anteriormente, para
cada um dos modos naturais do sistema global, vista da barra de fronteira, resulta em
equações desacopladas, na forma:
UBXX II ⋅+⋅Λ= ˆˆ& (4.51)
UDXCY JJIJI .ˆ.ˆ += (4.52)
onde:
→Λ I é o i-ésimo autovalor de A ;
→IB é a i-ésima linha da matriz B ;
→JIC é o elemento de ordem (j,i) da matriz C ;
→JD é a j-ésima linha da matriz D .
Nas equações de estado JIY é a resposta associada ao i-ésimo modo contido nas
variações de potência ativa FP∆ e reativa FQ∆ na barra de fronteira produzida por
variações no ângulo de fase Fθ∆ e na amplitude da tensão FV∆ nesta barra.

44
4.4- Rejeição dos Modos Insignificantes para a Representação
Eletromecânica da Área Externa
A rejeição dos modos de oscilação sem maior importância para a representação
eletromecânica da área externa é o procedimento equivalente ao reconhecimento dos
grupos coerentes. Sendo assim, a definição dos modos importantes a serem retidos na
representação equivalente da área externa pode ser realizada pela verificação da
participação relativa de cada modo na matriz de variáveis de saída do sistema Y da área
externa original.
[ ]
∆
∆⋅
+⋅
−
−
−
⋅
=
∆
∆
)(
)(ˆˆ
)(
1000
000
00)(
10
000)(
1
ˆ
ˆ
2221
1211212
1
2
1
sV
s
DD
DDBB
s
s
s
C
C
Q
Pnn
n
n
nθ
λ
λ
λ
O
∆+Λ−+Λ−+
∆+Λ−+Λ−=∆
∆+Λ−+Λ−+
∆+Λ−+Λ−=∆
=
∑∑∑
∑
)(}.)]/(ˆ.ˆ)/(ˆ.ˆ[
)(}.)]/(ˆ.ˆ)/(ˆ.ˆ[
)(}.)]/(ˆ.ˆ)/(ˆ.ˆ[
)(}.)]/(ˆ.ˆ)/(ˆ.ˆ[
222222
211212
122121
111111
sVDsBCsBC
sDsBCsBCQ
sVDsBCsBC
sDsBCsBCP
Y
JJJIII
JJJIII
JJJIII
JJJIII
θ
θ
(4.53)
onde:
conjugadocomplexoParj
j
IIJ
III
−=Λ
+=Λ
ωα
ωα
→+= IIII jIRBC 11ˆ.ˆ Termo associado à IΛ
O termo associado à matriz dos autovalores IΛ da equação acima contém as N
componentes modais de resposta transitória da área externa. Este termo define também
uma parcela da resposta de regime permanente, sendo a outra parcela da resposta de
regime permanente definida por )(sUD ⋅ .
Pode-se observar a resposta da área externa ao vetor [ ]TsVssU )()()( ∆∆= θ ,
quando é aplicada uma variação do tipo degrau no ângulo da tensão na barra de
fronteira s
sI
θθ
∆=∆ )( e também uma variação do tipo degrau na amplitude da tensão
45
na barra de fronteira s
VsVI
∆=∆ )( .
O mesmo deslocamento nos ângulos da barra de fronteira irá implicar em igual
variação, depois de cessado o regime transitório, dos ângulos de tensão dos rotores dos
motores da área externa. Desta forma, serão mantidas, antes e depois de o regime
transitório, as mesmas defasagens entre os ângulos dos rotores nδδδ ,,, 21 K . Assim, a
potência ativa e reativa na barra de fronteira deverá sofrer apenas variações de regime
transitório quando da aplicação do vetor )(sU acima definido. As amplitudes relativas
dos desvios transitórios de potência ativa e reativa nas barras de fronteira definirão
quais os modos que deverão ser retidos e aqueles que podem ser eliminados na
definição do equivalente modal.
Considerando a aplicação da perturbação definida acima nas expressões dos
desvios das potências ativa e reativa, tem-se:
s
VsBCsBC
ssBCsBCP
JJJIII
JJJIIII
∆⋅Λ−+Λ−
∆⋅Λ−+Λ−=∆
)}/(ˆ.ˆ)/(ˆ.ˆ{
)}/(ˆ.ˆ)/(ˆ.ˆ{
2121
1111
θ
(4.54)
s
VsBCsBC
ssBCsBCQ
JJJIII
JJJIIII
∆⋅Λ−+Λ−
∆⋅Λ−+Λ−=∆
)}/(ˆ.ˆ)/(ˆ.ˆ{
)}/(ˆ.ˆ)/(ˆ.ˆ{
2222
1212
θ
(4.55)
Pode-se definir a variação de potência aparente na barra de fronteira por:
2FN∆ = 2
FP∆ + 2FQ∆ (4.56)
A rejeição dos modos sem maior importância para a resposta linearizada da área
externa pode, portanto, ser feita com base na verificação das amplitudes das variações
da potência aparente FN∆ na barra de fronteira.
As expressões da potência aparente revelam o critério a ser usado para a
eliminação dos modos sem maior efeito no desempenho dinâmico da área externa, como
visto da barra de fronteira. Se um determinado modo não é importante, então as
variações de potência aparente associadas a este modo podem ser desprezadas em

46
comparação com os desvios de potência aparente associados à pelo menos um dos
modos que devem ser retidos pelo equivalente dinâmico.
Desta forma, o seguinte procedimento é utilizado para definição dos modos a
serem rejeitados:
Para cada modo I , observar as respostas de:
2FIN∆ = 2
FIP∆ + 2FIQ∆ em Y para variação do tipo degrau Fθ∆ em U
2
FIN∆ = 2FIP∆ + 2
FIQ∆ em Y para variação do tipo degrau FV∆ em U Considerando a resposta ao degrau, pode ser mostrado que: Para a resposta de IP∆ à variação em θ∆ , tem-se:
∑ −∆=∆ )}(({.{)( IIIt
I tsinQetP i γωθ α + }∑ tJJ
JJeB σ (4.57)
E para a resposta de IQ∆ à variação em V∆ , tem-se:
}/)(sin(.{)( ∑+−∆=∆ tJJIII
tI
JJi eBtQeVtQ σα γω (4.58)
onde:
2´
2´
1´
1´ .. IIIIIII BCouBCjIRK =+= (4.59)
IIIII PRN ωα /)2( += 2/)(2 nIIIIII RIP ωαω +−= (4.60)
22III NPQ += (4.61)
)/tan( III NPa=γ (4.62)
JJJJJJJJ BCB σ/ˆˆ1,,1 ⋅= em (4.57) ou JJJJJJJJ BCB σ/ˆˆ
2,,2 ⋅= em (4.58) (4.63)
Devem ser retidos o modo com maior amplitude IQ , JJB e aqueles que
apresentarem um percentual igual ou superior a uma determinada fração do modo com
maior amplitude na resposta a variações em Fθ∆ e FV∆ .
Os modos retidos irão definir o equivalente dinâmico modal de ordem reduzida.
A definição dos níveis de potência ativa e de potência reativa e da amplitude da
inércia a serem atribuídos à representação equivalente associada a um determinado
modo retido na representação equivalente é, até certo ponto, arbitrária. No entanto, no
presente trabalho, adotou-se, sempre que possível, na ausência de problema de
convergência no processo de determinação dos parâmetros do motor equivalente para os
47
modos retidos, os mesmos fatores de participação IQ , JJB indicados acima.
4.5- Definição dos Parâmetros da Representação Modal Equivalente
Para cada modo equivalente, um motor com estrutura similar à dos motores
originais é definida e carregada, em termos de potências ativa e reativa, sempre que
possível, com parcela da potência total verificada na barra de fronteira. Esta parcela é
fixada no procedimento anteriormente descrito de definição dos modos retidos na
estrutura do equivalente.
Estas mesmas parcelas são utilizadas na alocação das constantes de inércia e dos
conjugados mecânicos dos modos retidos na representação equivalente. Cada motor
equivalente é ligado diretamente à barra de fronteira previamente selecionada.
Cada estrutura equivalente tem, portanto, desempenho linearizado independente
e fixado para as mesmas variações de amplitude e fase da tensão na barra de fronteira de
forma a apresentar a mesma característica de resposta natural (os mesmos autovalores).
A fixação dos mesmos modos (autovalores) retidos na representação equivalente
pode ser feita de forma mais expedida a partir da relação entre os termos da equação
característica de terceira ordem associada a cada motor e os elementos de sua matriz de
estado na resposta vista de sua barra terminal.
As raízes da equação característica de cada motor de indução, com representação
de terceira ordem, possuem três componentes, sendo uma delas real σ e as demais
compostas por um par complexo conjugado ωα j± . Conforme informado
anteriormente, para um sistema ser estável, as componentes reais α e σ de todos os
autovalores devem ser negativas.
Sendo assim, a equação característica dos motores pode ser descrita como:
∴+−−−− )))()(( ωαωασ jsjss
∴+−− )))((( 22 ωασ ss
∴+−− )2)(( 22nsss ωασ
))2()2(( 2223nn sss σωασωσα −+++− (4.64)
onde:
222nωωα =+ (4.65)

48
Conforme demonstrado na equação 2.11, os pólos da função de transferência
G(s) são obtidos quando 0det =−⋅ AIλ . A solução deste determinante fornece os
autovalores do sistema.
Sendo assim, para 0det =−⋅ AIλ tem-se:
0
333231
232221
131211
=
−−−
−−−
−−−
asaa
aasa
aaas
(4.66)
Simplificando a matriz acima para:
013 =a (4.67)
=23a Sω− (4.68)
Obtém-se:
0
0
333231
2221
1211
=
−−−
+−−
−−
asaa
asa
aas
Sω (4.69)
Resolvendo o determinante:
∴−−−++−−− )()()))()(( 33211211323112332211 asaaasaaaasasas SS ωω
∴−−−++−++− )()()))()(( 332112113231123322112211
2 asaaasaaaasaasaas SS ωω
∴−−−+
+−++−++−
)()(
)()((
3321121132
31123322112211332
3322112
22113
asaaasa
aaaaasaaasasaasaas
S
S
ω
ω
∴+−−+
+−+++++−
))
)()((
3321122112321132
31123322113322331122112
3322113
aaasaaaasa
aaaaasaaaaaasaaas
SS
S
ωω
ω
])()(
)()([
332211211232113112
2112323322331122112
3322113
aaaaaaaaa
saaaaaaaaasaaas
S
S
−+−+
−++++++−
ω
ω (4.70)
Supondo 033 =a (apenas para exemplificar), no desenvolvimento de cada motor
agregado, pode-se simplificar a equação acima para:

49
)]()()([ 3211311221123222112
22113 aaaasaaaaasaas SS −+−+++− ωω (4.71)
Estabelecendo a relação entre as raízes da equação característica e os elementos
da matriz de estado de cada motor, tem-se:
)2()( 2211 σα +−=+− aa (4.72)
ασωω 222112322211 +=−+ nS aaaaa (4.73)
2
32113112 )( nS aaaa σωω −=− (4.74)
A partir das equações acima, os motores agregados podem ser definidos na barra
de fronteira. Para isso, a resposta associada a cada modo retido na representação
dinâmica é obtida, a partir da repartição das potências ativa e reativa total absorvida
pelo sistema externo na barra de fronteira pelos diferentes modos retidos.
Como informado anteriormente, o critério para retenção dos modos mais
relevantes é sua participação na resposta de potência ativa e reativa na barra de fronteira
frente à variação degrau de pequena amplitude no módulo e na fase da tensão na barra
de fronteira. Assim, as seguintes grandezas são definidas previamente para cada motor
agregado associado a cada modo retido: constante de inércia, potência ativa e potência
reativa.
Cada motor agregado tem seus parâmetros da representação dinâmica definidos
para resultar na mesma equação característica de terceira ordem dos motores do sistema
externo original do sistema. Seus parâmetros são determinados de forma iterativa para
repartir a potência total injetada pelo sistema externo na barra de fronteira. Neste
processo iterativo as seguintes constantes e variáveis de operação do motor equivalente
associado a um modo retido são determinadas: sXTXXR RSS ,,,, ''0,
As expressões das derivadas parciais das potências ativa e reativa utilizadas na
construção da matriz de estado mostram, portanto, que pode-se obter os parâmetros da
representação equivalente para cada um dos modos retidos. Desta forma, está imposto
que o motor modal tenha, sob pequenos desvios, variações de potência ativa e reativa na
barra de fronteira exatamente igual às componentes modais das variações das potências
ativa e reativa na barra de fronteira do sistema original.
No processo de redução do sistema externo, o efeito das cargas dentro do

50
sistema externo é transferido também para a barra de fronteira (impedâncias para a
terra) e podem ser consideradas como pertencentes ao sistema interno. Entretanto, é
conveniente que elas continuem vinculadas ao sistema externo e sejam alocadas na
barra de fronteira, satisfazendo a condição de balanço de potência e, portanto,
incorporando também o efeito dos modos cuja dinâmica apresente pequena influência
na resposta do sistema externo.
Considere a barra de fronteira e os elementos ligados a ela pertencentes aos
motores modais retidos. Seja FN a potência complexa líquida absorvida pelo sistema
externo na barra de fronteira. Esta potência pode ser dividida, em qualquer proporção
(por exemplo, em função da importância de cada modo), entre os modos retidos, de
forma que, a potência absorvida pela área externa na barra de fronteira será o somatório
das potências distribuídas entre os motores modais.

51
CAPÍTULO 5
5 SIMULAÇÕES E RESULTADOS
5.1- Introdução
Neste capitulo é apresentado o sistema industrial tomado como exemplo para
estudo de casos e indicada a representação dos componentes/equipamentos que
compõem tal sistema. São descritos também os procedimentos utilizados nas simulações
e apresentados os resultados comparativos de análise de desempenho do método
proposto para redução de ordem.
5.2- Principais Características do Sistema Industrial Estudado
Para este estudo foram utilizados parâmetros reais coletados a partir de um
sistema elétrico industrial de porte médio. O sistema é do tipo radial e sua alimentação é
proveniente de uma subestação de 69kV. A figura 5.1 apresenta um diagrama unifilar
do sistema estudado. O sistema é composto por transformadores abaixadores (69kV –
13,8kV, 13,8kV – 4,16kV e 13,8kV – 480 V), cargas estáticas do tipo impedância
constante e cinqüenta e quatro motores de indução trifásicos.
Os motores de indução estão distribuídos pelo sistema e são alimentados através
das tensões de 13,8kV, 4,16kV e 480V.
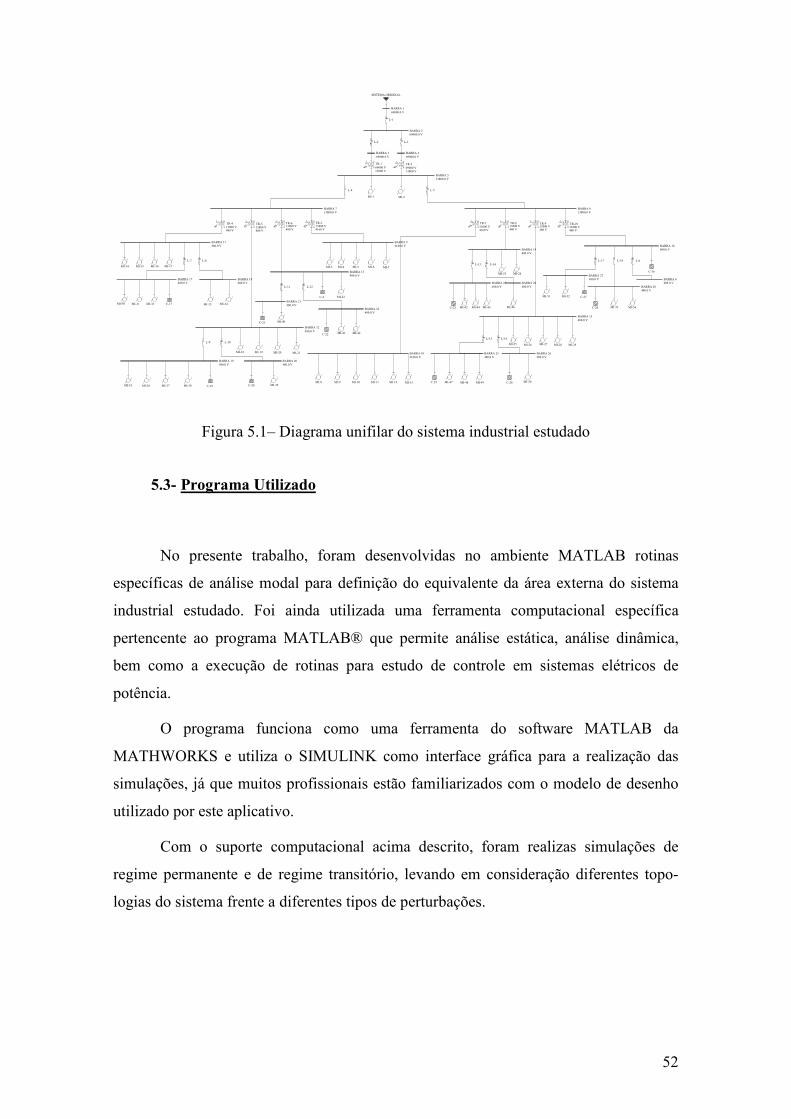
52
SISTEMA ORIGINAL
BARRA 169000.0 V
L-1
BARRA 269000.0 V
L-2 L-3
BARRA 369000.0 V
BARRA 469000.0 V
S
P
TR-169000 V13800 V
S
P
TR-269000 V13800 V
BARRA 513800.0 V
MI-1 MI-2
L-4 L-5
BARRA 713800.0 V
BARRA 813800.0 V
S
P
TR-4.13800 V480 V
S
P
TR-5.13800 V480 V
S
P
TR-6.13800 V480 V
S
P
TR-3.13800 V4160 V
S
P
TR-713800 V4160 V
S
P
TR-813800 V480 V
S
P
TR-913800 V480 V
S
P
TR-1013800 V480 V
BARRA 11480.0 V
MI-14 MI-15 MI-16 MI-17
L-7 L-8
BARRA 17480.0 V
MI-30 MI-31 MI-32 C-17
BARRA 18480.0 V
MI-33 MI-34
BARRA 12480.0 V
MI-21MI-20MI-19MI-18
L-10L-9
BARRA 19480.0 V
MI-35 MI-36 MI-37 MI-38 C-19
BARRA 20480.0 V
C-20 MI-39
BARRA 13480.0 V
MI-22C-4
L-11
BARRA 21480.0 V
MI-40C-21
L-12
BARRA 22480.0 V
C-22 MI-41 MI-42
BARRA 94160.0 V
MI-3 MI-4 MI-5 MI-6 MI-7
BARRA 16480.0 V
L-17 L-18 L-6
C-16
BARRA 6480.0 V
BARRA 28480.0 V
C-28 MI-53 MI-54
BARRA 27480.0 V
MI-51 MI-52 C-27
BARRA 15480.0 V
MI-29MI-28MI-27MI-26MI-25
L-16L-15
BARRA 26480.0 V
MI-50C-26
BARRA 25480.0 V
MI-49MI-48MI-47C-25
BARRA 14480.0 V
MI-24MI-23
L-14L-13
BARRA 24480.0 V
MI-46
BARRA 23480.0 V
MI-45MI-44MI-43C-23
BARRA 104160.0 V
MI-9 MI-10 MI-11 MI-12 MI-13MI-8
Figura 5.1– Diagrama unifilar do sistema industrial estudado
5.3- Programa Utilizado
No presente trabalho, foram desenvolvidas no ambiente MATLAB rotinas
específicas de análise modal para definição do equivalente da área externa do sistema
industrial estudado. Foi ainda utilizada uma ferramenta computacional específica
pertencente ao programa MATLAB® que permite análise estática, análise dinâmica,
bem como a execução de rotinas para estudo de controle em sistemas elétricos de
potência.
O programa funciona como uma ferramenta do software MATLAB da
MATHWORKS e utiliza o SIMULINK como interface gráfica para a realização das
simulações, já que muitos profissionais estão familiarizados com o modelo de desenho
utilizado por este aplicativo.
Com o suporte computacional acima descrito, foram realizas simulações de
regime permanente e de regime transitório, levando em consideração diferentes topo-
logias do sistema frente a diferentes tipos de perturbações.

53
5.4- Modelagem Computacional do Sistema
A figura 5.2 apresenta o circuito real/original inicialmente implementado, onde
todos os dados inseridos no modelo estão em pu, tendo como base a potência aparente
de 100MVA.
Figura 5.2 – Sistema original implementado no programa MATLAB
5.5- Modelagem Computacional do Sistema Equivalentado
Baseado no sistema industrial apresentado foi definida a área interna e a área
externa do sistema. A área interna é aquela que terá seu desempenho dinâmico descrito
neste capítulo e a área externa é a que teve sua estrutura substituída por outra,
equivalente, de dimensão e ordem bem menores. O sistema equivalente é ligado
diretamente à barra de fronteira. A barra cinco do sistema original foi escolhida como
barra de fronteira, já que a mesma é o limite de separação das áreas. Esta divisão está
ilustrada na figura 5.3.

54
Figura 5.3 – Área interna e externa do sistema original
O sistema foi proporcionalmente dividido e a área externa original do sistema
(destacada em vermelho na figura 5.3) ficou composta por vinte e sete motores.
Casualmente, a área interna apresenta também vinte e sete motores conectados a seus
barramentos. Após a realização da análise modal da área externa, o modelo equivalente
desta área foi reduzido à utilização de seis motores para sua representação no sistema.
Os demais modos de oscilação foram descartados através do critério de participação dos
modos. Foram descartados os modos que apresentaram fator de participação abaixo de
10% do máximo fator. A área externa equivalentada é ilustrada na figura 5.4.

55
Figura 5.4 – Sistema agregado
5.5.1- Sistema Equivalentado a partir do Modelo de Motores Agregados.
Neste item são apresentados resultados de comparação do desempenho dinâmico
dos motores do sistema interno, considerado a execução das simulações com o sistema
completo original e com a área externa substituída pela representação com os 6 (seis)
motores equivalentes, um para cada modo linearizado retido. Esta comparação tem
como objetivo comprovar a eficiência do método de agregação dos motores de indução.
Para efeito de análise foi simulada uma falta trifásica na barra 10 localizada na
área interna. Esta barra foi escolhida para a aplicação da falta porque nela estão ligados
os motores de maior potência do sistema elétrico industrial analisado. Na simulação
ficou definida a ocorrência da falta trifásica no instante de tempo igual a 1s com
duração de cinco ciclos, ou seja, a falta é eliminada no instante igual a 1,08333s. A
figura 5.5 ilustra a aplicação desta falta na área interna do sistema.

56
Figura 5.5 – Ocorrência de falta trifásica na barra 10
Para análise do comportamento do sistema interno, foram geradas curvas rela-
tivas a grandezas do sistema que poderiam sofrer maior influência devido à represen-
tação do sistema externo através de um modelo equivalente. Logo, foram realizadas as
simulações do sistema contendo a representação agregada e do sistema original (conten-
do todos os motores) para verificar a equivalência dos dois sistemas. A figura 5.6
apresenta as curvas de tensões na barra 5 para os dois sistemas, permitindo assim uma
comparação do comportamento do sistema agregado em relação ao original. Estas
curvas foram geradas levando em consideração o modelo composto por 6 modos
oscilatórios.
Figura 5.6 – Curvas de tensões para os sistemas agregado x original - Modelo
composto por 6 modos oscilatórios

57
Pode-se notar na figura 5.6 que o modelo agregado dos motores de indução
representa com precisão o comportamento do sistema original diante de tal perturba-
ção. Nota-se na figura 5.6 que o sistema permanece com as tensões inalteradas para a
condição de regime permanente e, sendo assim, o modelo agregado composto por seis
modos oscilatórios comprova a utilidade da análise modal para a geração de um modelo
equivalente que represente, através de um modelo reduzido, os mesmos resultados de
um modelo completo.
Ainda considerando o sistema equivalente composto por 6 modos oscilatórios, a
figura 5.7 apresenta as curvas de fluxo de corrente entre as barras 3 e 5 para os dois
sistemas (sistema agregado e sistema original).
Figura 5.7 – Curvas de fluxo de corrente para sistemas agregado x original -
Modelo composto por 6 modos oscilatórios
Assim como a tensão na barra 5 visualizada na figura 5.6, pode-se observar que
a figura 5.7 apresenta um resultado com a mesma precisão, reafirmando assim o bom
desempenho do modelo agregado quando utilizado para estudo de desempenho
dinâmico do sistema indicado na figura 5.2.
Levando em consideração ainda o modelo composto por 6 modos oscilatórios, as
figuras 5.8 e 5.9 apresentam as curvas de evolução das potências ativa e reativa na barra
10 para os dois sistemas (sistema agregado e sistema original).

58
Figura 5.8 – Curvas da potência ativa na barra 10 para sistemas agregado x
original - Modelo composto por 6 modos oscilatórios
Figura 5.9 – Curvas da potência reativa na barra 10 para sistemas agregado x
original - Modelo composto por 6 modos oscilatórios
Logo, percebe-se nas figuras 5.8 e 5.9 que as potências ativa e reativa na barra
10, barra onde foi aplicada a falta trifásica e que possui os motores de maiores
potências, se comportam de maneira muito próximas para os dois casos (Sistema
Agregado e Original).
Para finalizar a apresentação de grandezas de maior interesse para este caso, é
apresentado na figura 5.10 o comportamento da curva de deslizamento do motor de

59
maior potência localizado na barra 10 do sistema interno. Pode-se comprovar que, assim
como os demais parâmetros apresentados anteriormente, o deslizamento do modelo
agregado representa quase que com perfeição total o comportamento do motor em
comparação com o sistema original, composto por todos os motores de indução do
sistema.
De acordo com os resultados demonstrados no conjunto de figuras apresentadas
e considerando o sistema equivalentado a partir do modelo de motores agregados,
percebe-se que os seis modelos de terceira ordem associados aos motores equivalentes
representam o sistema original com grande precisão. Os resultados indicam grande
fidelidade na reprodução do sistema original em condições de desempenho com grande
conteúdo não-linear.
Figura 5.10 - Curvas do deslizamento do motor de maior potência da barra 10
para sistemas agregado x original - Modelo composto por 6 modos oscilatórios
5.5.2- Sistema Equivalentado a partir de uma Impedância Constante.
Para demonstrar a eficiência do método de agregação de motores através da
análise modal, a área externa neste segundo momento foi representada através de um
modelo de impedância constante. Isto foi feito com o objetivo de ilustrar a participação
progressiva dos modos oscilatórios da área representada pelos motores agregados no
desempenho dinâmico do sistema global e para a ocorrência da mesma perturbação na

60
área interna simulada no caso anterior.
Os modos de oscilação substituídos por cargas do tipo impedância constante
podem ser observados na figura 5.11.
Figura 5.11 – Sistema agregado - Modelo composto por impedâncias constantes
Para análise do comportamento do sistema interno, e como efeito de comparação
com o caso apresentado no item 5.5.1, foram plotadas curvas relativas aos mesmos
parâmetros do sistema. Foi realizada uma comparação do comportamento do sistema
agora representado através do modelo de impedância constante, com o caso original,
contendo todos os motores de indução do sistema. A seguir são apresentadas as curvas
comparativas dos parâmetros do sistema.
A figura 5.12 apresenta as curvas de tensões na barra 5 para os dois sistemas,
permitindo assim uma comparação do comportamento do sistema agregado com
impedâncias constantes em relação ao sistema original.

61
Figura 5.12 – Curvas de tensões para sistemas agregado x original - Modelo
impedâncias constantes
Analisando a figura 5.12 nota-se que para o período transitório, logo após o
período da falta, a curva do modelo agregado referente à tensão na barra 5, conhecida
como barra de fronteira, sofre um descolamento com relação à curva do sistema
original. Já no período de regime estático, ambos os sistemas possuem o mesmo
comportamento, simplesmente porque a configuração pré-falta é a mesma pós-falta.
Portanto, observa-se com este resultado que, em regime dinâmico, o modelo impedân-
cia constante apresenta pouca precisão no processo de avaliação do comportamento real
do sistema.
Ainda, levando em consideração o modelo de impedâncias constantes, a figura
5.13 apresenta as curvas de fluxo de corrente entre as barras 3 e 5 para os dois sistemas
(sistema agregado e sistema original).
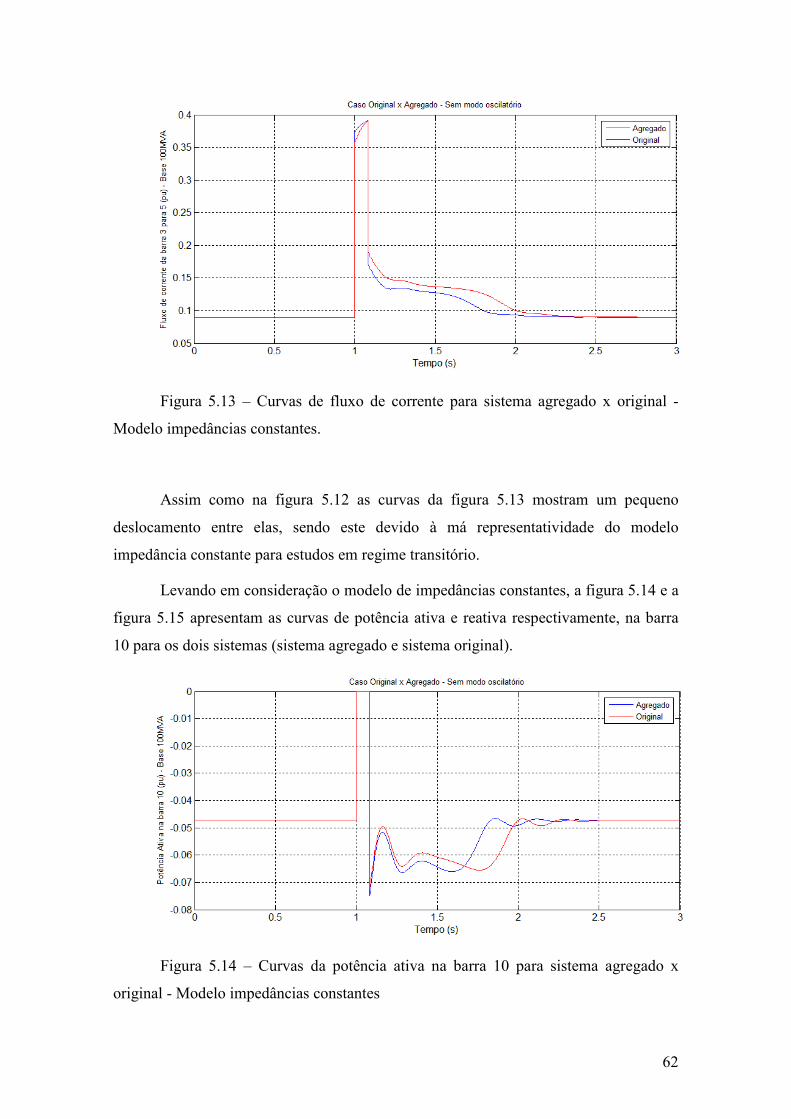
62
Figura 5.13 – Curvas de fluxo de corrente para sistema agregado x original -
Modelo impedâncias constantes.
Assim como na figura 5.12 as curvas da figura 5.13 mostram um pequeno
deslocamento entre elas, sendo este devido à má representatividade do modelo
impedância constante para estudos em regime transitório.
Levando em consideração o modelo de impedâncias constantes, a figura 5.14 e a
figura 5.15 apresentam as curvas de potência ativa e reativa respectivamente, na barra
10 para os dois sistemas (sistema agregado e sistema original).
Figura 5.14 – Curvas da potência ativa na barra 10 para sistema agregado x
original - Modelo impedâncias constantes
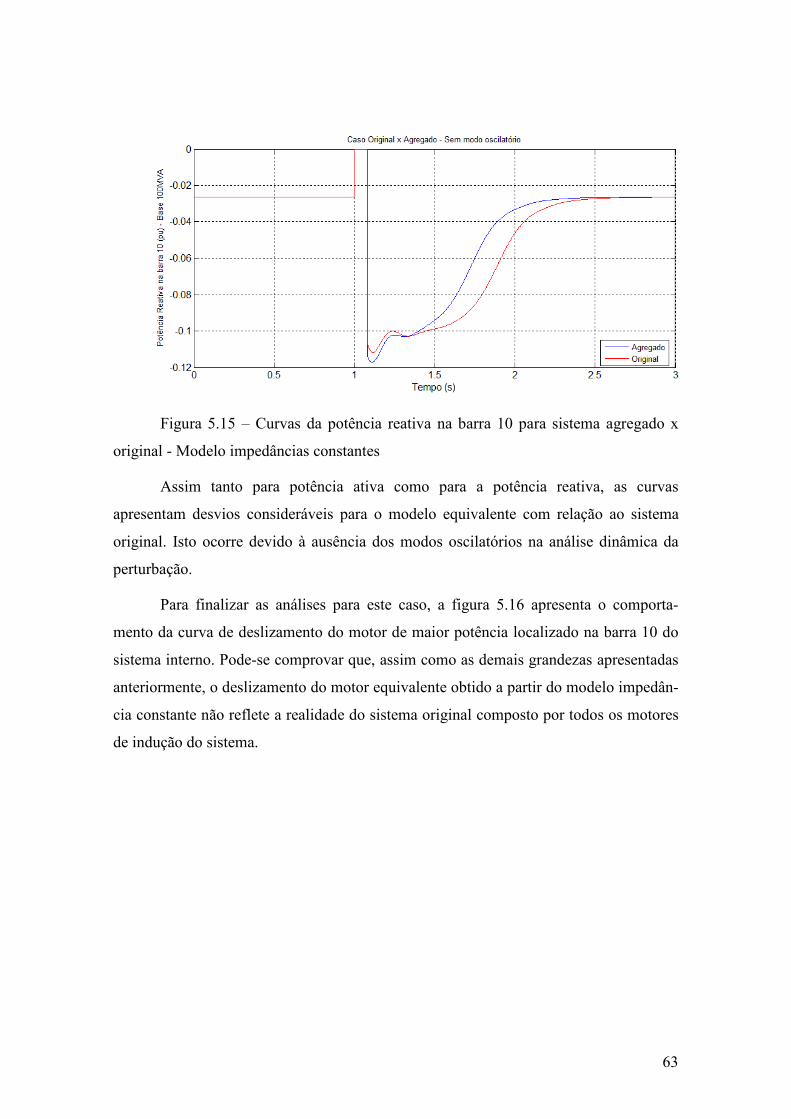
63
Figura 5.15 – Curvas da potência reativa na barra 10 para sistema agregado x
original - Modelo impedâncias constantes
Assim tanto para potência ativa como para a potência reativa, as curvas
apresentam desvios consideráveis para o modelo equivalente com relação ao sistema
original. Isto ocorre devido à ausência dos modos oscilatórios na análise dinâmica da
perturbação.
Para finalizar as análises para este caso, a figura 5.16 apresenta o comporta-
mento da curva de deslizamento do motor de maior potência localizado na barra 10 do
sistema interno. Pode-se comprovar que, assim como as demais grandezas apresentadas
anteriormente, o deslizamento do motor equivalente obtido a partir do modelo impedân-
cia constante não reflete a realidade do sistema original composto por todos os motores
de indução do sistema.

64
Figura 5.16 – Curvas do deslizamento do motor de maior potência da barra 10
para sistema agregado x original - Modelo impedância constante
5.5.3- Sistema Equivalentado a partir do Modelo de Motores Agregados
Demonstrando a Evolução dos Modos Oscilatórios.
Neste sub-item pode ser visualizado o efeito da participação de cada modo osci-
latório na composição do sistema agregado. Como foi dito anteriormente, cada modo
oscilatório foi representado no sistema através de um motor de indução equivalente.
Para exemplificar a participação de cada um dos modos na análise transitória do
sistema, foi simulada a mesma perturbação na área interna do sistema, falta trifásica na
barra 10, para o sistema representado desde a condição do caso anterior, não contendo
nenhum modo de oscilação, até alcançar o modelo agregado completo composto pelos
seis modos oscilatórios.
A figura 5.17 ilustra o efeito progressivo da participação dos modos oscilatórios
do modelo agregado sobre os desvios da tensão na barra de fronteira do sistema.
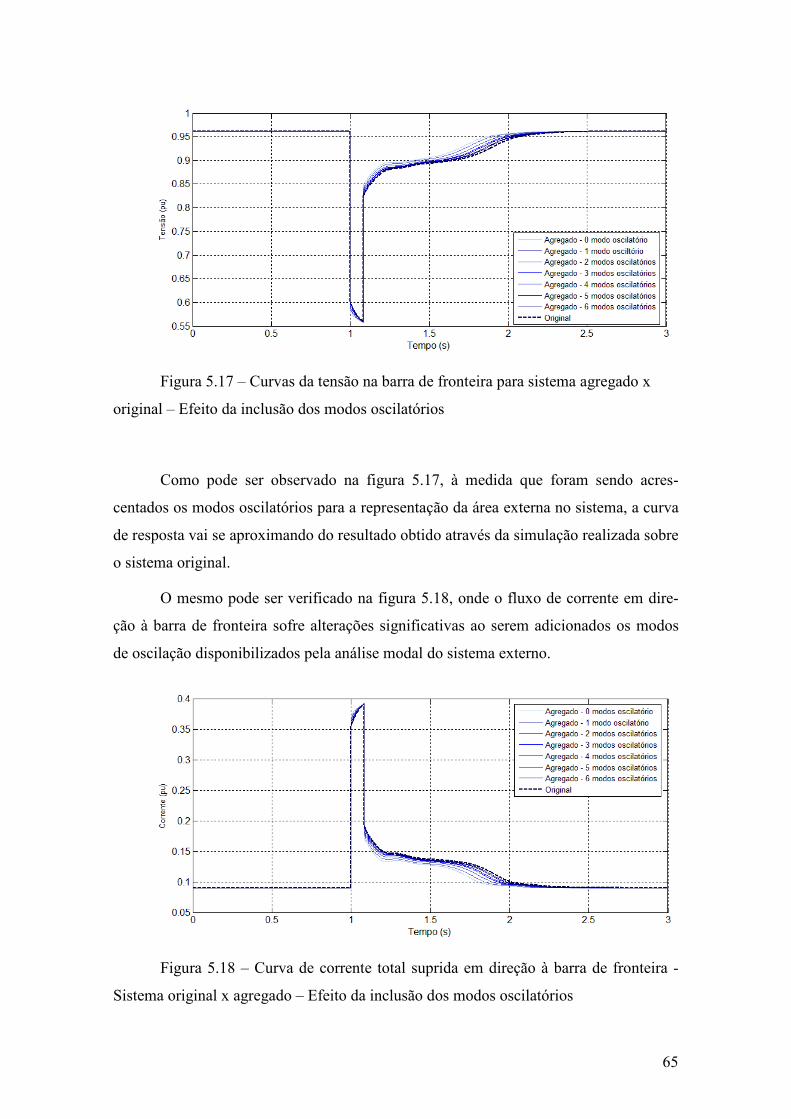
65
Figura 5.17 – Curvas da tensão na barra de fronteira para sistema agregado x
original – Efeito da inclusão dos modos oscilatórios
Como pode ser observado na figura 5.17, à medida que foram sendo acres-
centados os modos oscilatórios para a representação da área externa no sistema, a curva
de resposta vai se aproximando do resultado obtido através da simulação realizada sobre
o sistema original.
O mesmo pode ser verificado na figura 5.18, onde o fluxo de corrente em dire-
ção à barra de fronteira sofre alterações significativas ao serem adicionados os modos
de oscilação disponibilizados pela análise modal do sistema externo.
Figura 5.18 – Curva de corrente total suprida em direção à barra de fronteira -
Sistema original x agregado – Efeito da inclusão dos modos oscilatórios
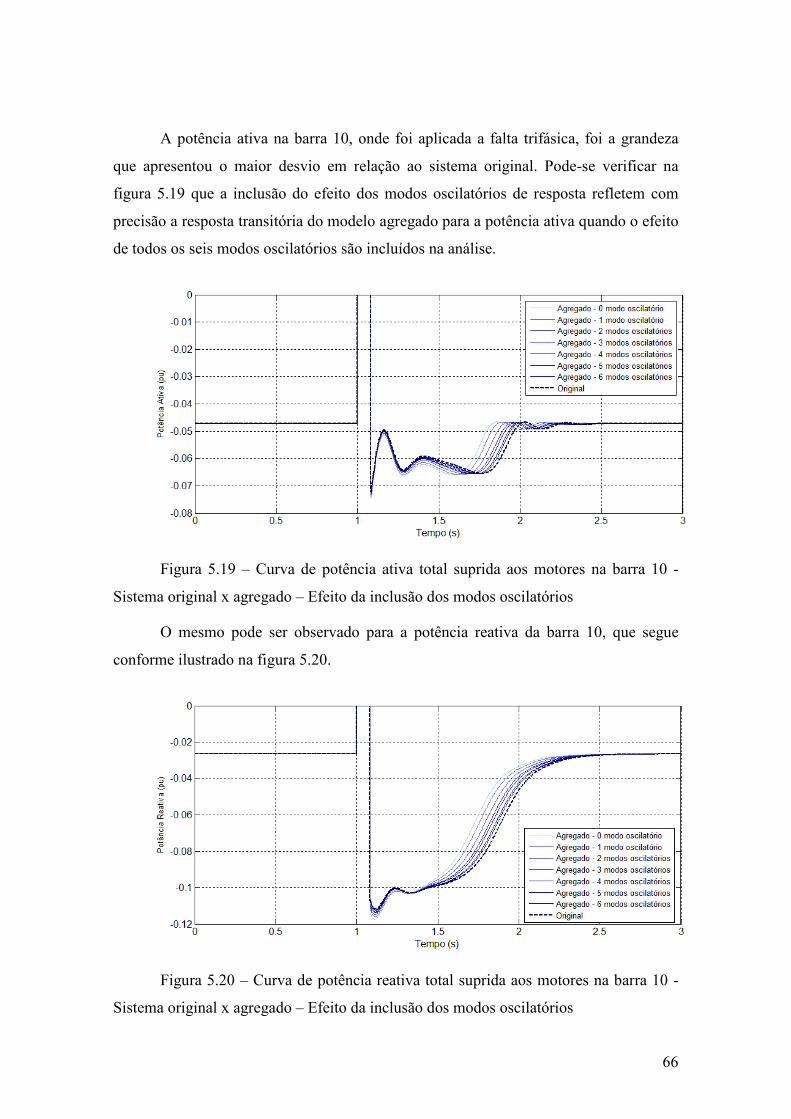
66
A potência ativa na barra 10, onde foi aplicada a falta trifásica, foi a grandeza
que apresentou o maior desvio em relação ao sistema original. Pode-se verificar na
figura 5.19 que a inclusão do efeito dos modos oscilatórios de resposta refletem com
precisão a resposta transitória do modelo agregado para a potência ativa quando o efeito
de todos os seis modos oscilatórios são incluídos na análise.
Figura 5.19 – Curva de potência ativa total suprida aos motores na barra 10 -
Sistema original x agregado – Efeito da inclusão dos modos oscilatórios
O mesmo pode ser observado para a potência reativa da barra 10, que segue
conforme ilustrado na figura 5.20.
Figura 5.20 – Curva de potência reativa total suprida aos motores na barra 10 -
Sistema original x agregado – Efeito da inclusão dos modos oscilatórios
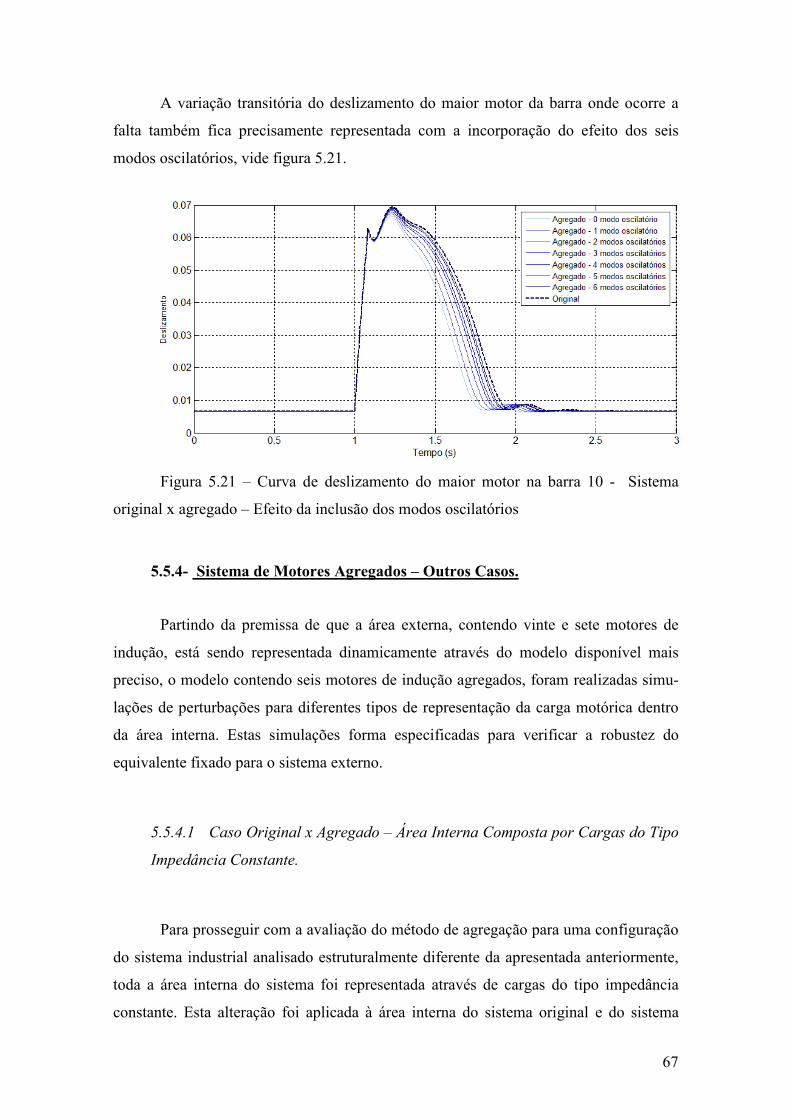
67
A variação transitória do deslizamento do maior motor da barra onde ocorre a
falta também fica precisamente representada com a incorporação do efeito dos seis
modos oscilatórios, vide figura 5.21.
Figura 5.21 – Curva de deslizamento do maior motor na barra 10 - Sistema
original x agregado – Efeito da inclusão dos modos oscilatórios
5.5.4- Sistema de Motores Agregados – Outros Casos.
Partindo da premissa de que a área externa, contendo vinte e sete motores de
indução, está sendo representada dinamicamente através do modelo disponível mais
preciso, o modelo contendo seis motores de indução agregados, foram realizadas simu-
lações de perturbações para diferentes tipos de representação da carga motórica dentro
da área interna. Estas simulações forma especificadas para verificar a robustez do
equivalente fixado para o sistema externo.
5.5.4.1 Caso Original x Agregado – Área Interna Composta por Cargas do Tipo
Impedância Constante.
Para prosseguir com a avaliação do método de agregação para uma configuração
do sistema industrial analisado estruturalmente diferente da apresentada anteriormente,
toda a área interna do sistema foi representada através de cargas do tipo impedância
constante. Esta alteração foi aplicada à área interna do sistema original e do sistema

68
agregado, como pode ser observado através das figuras 5.22 e 5.23. Os únicos motores
que permaneceram no sistema foram os motores de indução conectados à barra de
fronteira. Para este caso de simulação, foram identificadas a potência ativa e a potência
reativa absorvida por cada barra de motor da área interna e foram inseridos estes
mesmos valores em cargas conectadas com representação tipo impedância constante.
Com isto os motores permanecem conectados às barras, porém encontram-se na
condição de impedância fixa.
Figura 5.22 – Sistema original – Área interna com cargas estáticas

69
Figura 5.23 – Sistema agregado – Área interna com cargas estáticas
Para este caso, a especificação da perturbação permanece a mesma aplicada aos
casos descritos anteriormente, ou seja, aplicação de falta trifásica na barra 10.
Na figura 5.24 pode-se observar o comportamento da tensão na barra de
fronteira para o sistema original e agregado com as alterações mencionadas.
Figura 5.24 – Curvas de tensões para sistema agregado x original – Área interna
com cargas estáticas. Tensão na barra de fronteira para curto trifásico na barra 10

70
Já a figura 5.25 ilustra o fluxo de corrente do sistema externo em direção à barra
de fronteira através do equivalente agregado e através do sistema original.
Figura 5.25 – Corrente do sistema externo em direção à barra de fronteira –
Sistemas agregado x original – Área interna com cargas estáticas. Curto 3F na barra 10.
As figuras 5.26 e 5.27 mostram a concordância praticamente total da evolução
da potência ativa e da potência reativa absorvidas pela barra onde a falta trifásica foi
aplicada quando considerando os sistemas agregado e original.
Figura 5.26 – Curvas da potência ativa na barra 10 para sistema agregado x
original – Área interna com cargas estáticas – Curto 3F na barra 10.

71
Figura 5.27 – Curvas da potência reativa na barra 10 para sistema agregado x
original – Área interna com cargas estáticas – Curto 3F na barra 10.
5.5.4.2 Caso Original x Agregado – Área Interna Composta por Cargas do Tipo
Impedância Constante e com Motores Conectados à Barra 15.
No estudo foi estabelecido que a segunda avaliação do comportamento do
sistema devido à representação do mesmo através do modelo agregado de motores de
indução levaria em consideração a aplicação de uma falta trifásica em uma barra
diferente da área interna do sistema e também para uma configuração diferente desta
área.
Sendo assim, para esta avaliação foi aplicada uma falta trifásica na barra 15 da
área interna com os todos os motores desta barra conectados. As figuras 5.28 e 5.29
ilustram os dois casos (Sistema Agregado x Original) contendo esta alteração. Como se
pode observar nas figuras, os motores da barra quinze, agora conectados à mesma, estão
representados no sistema através da cor preta, o que indica que os mesmos estão em
operação no sistema.

72
Figura 5.28 – Sistema original – Área interna com cargas estáticas e motores na
barra 15
Figura 5.29 – Sistema agregado – Área interna com cargas estáticas e motores na
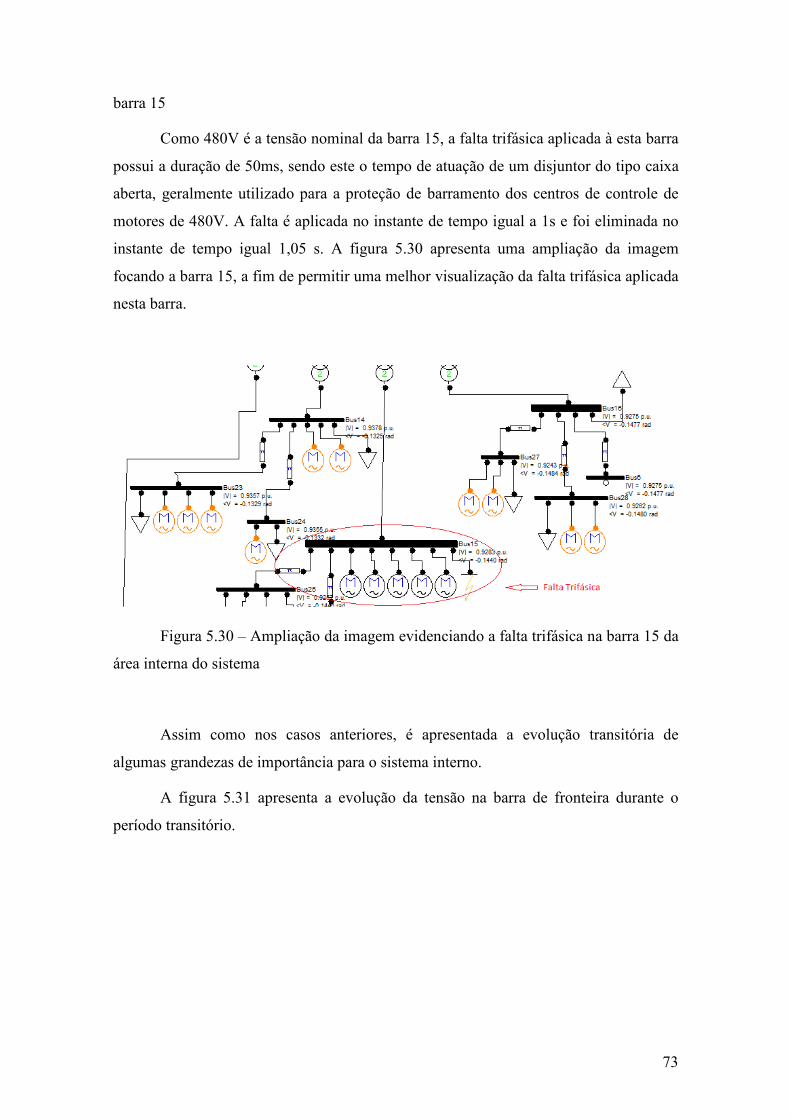
73
barra 15
Como 480V é a tensão nominal da barra 15, a falta trifásica aplicada à esta barra
possui a duração de 50ms, sendo este o tempo de atuação de um disjuntor do tipo caixa
aberta, geralmente utilizado para a proteção de barramento dos centros de controle de
motores de 480V. A falta é aplicada no instante de tempo igual a 1s e foi eliminada no
instante de tempo igual 1,05 s. A figura 5.30 apresenta uma ampliação da imagem
focando a barra 15, a fim de permitir uma melhor visualização da falta trifásica aplicada
nesta barra.
Figura 5.30 – Ampliação da imagem evidenciando a falta trifásica na barra 15 da
área interna do sistema
Assim como nos casos anteriores, é apresentada a evolução transitória de
algumas grandezas de importância para o sistema interno.
A figura 5.31 apresenta a evolução da tensão na barra de fronteira durante o
período transitório.

74
Figura 5.31 – Curvas de tensões para sistema agregado x original - Motores na
barra 15 – Curto trifásico na barra 15.
O fluxo de corrente do sistema externo em direção à barra de fronteira é ilus-
trado na figura 5.32, onde percebe-se concordância quase total entre os resultados obti-
dos com o sistema original e com o sistema agregado, apesar da alteração na configu-
ração dinâmica do sistema interno e da alteração do tipo e localização da perturbação.
Figura 5.32 – Curvas de corrente do sistema externo em direção à barra de
fronteira para os sistemas agregado e original - Motores na barra 15 – Curto na barra 15.
Seguem nas figuras 5.33 e 5.34 a evolução das potências ativa e reativa,
respectivamente, absorvidas pela barra 15 durante o período transitório. Mesmo as
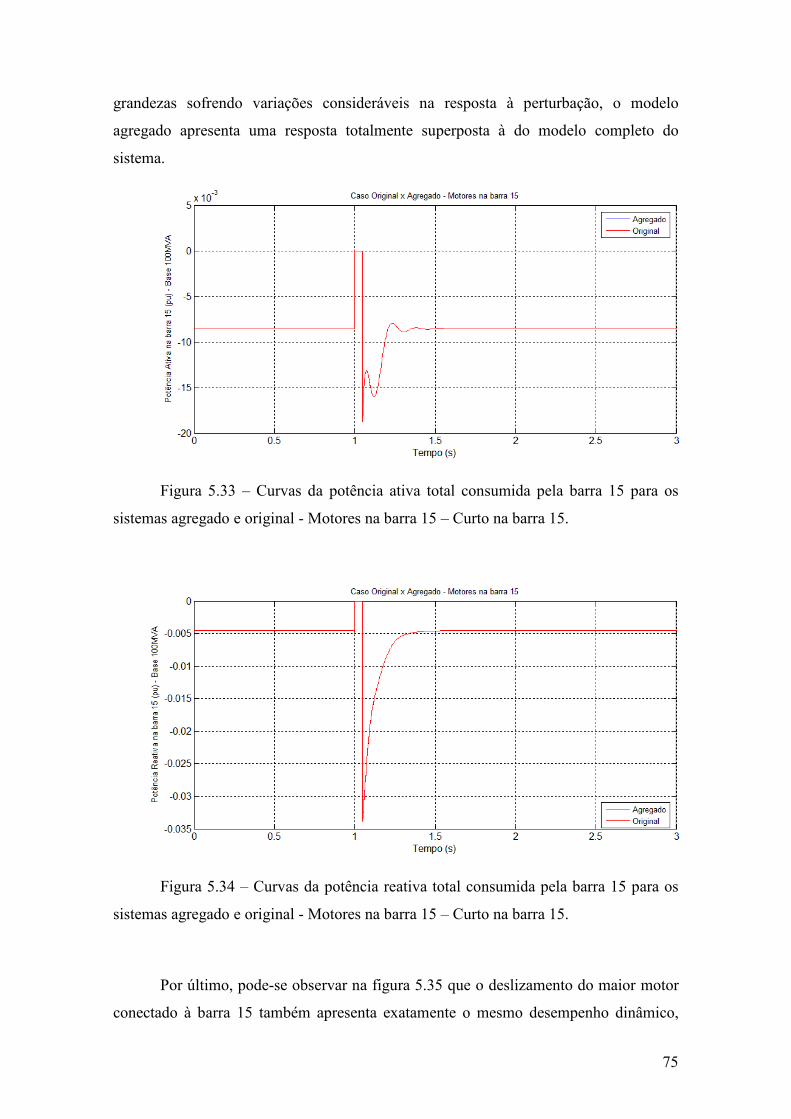
75
grandezas sofrendo variações consideráveis na resposta à perturbação, o modelo
agregado apresenta uma resposta totalmente superposta à do modelo completo do
sistema.
Figura 5.33 – Curvas da potência ativa total consumida pela barra 15 para os
sistemas agregado e original - Motores na barra 15 – Curto na barra 15.
Figura 5.34 – Curvas da potência reativa total consumida pela barra 15 para os
sistemas agregado e original - Motores na barra 15 – Curto na barra 15.
Por último, pode-se observar na figura 5.35 que o deslizamento do maior motor
conectado à barra 15 também apresenta exatamente o mesmo desempenho dinâmico,

76
tanto para o sistema original, quanto para o sistema composto pelos motores agregados.
Figura 5.35 – Curvas do deslizamento do maior motor ligado à barra 15 para os
sistemas agregado e original - Motores na barra 15 – Curto na barra 15.
5.5.4.3 Caso Original x Agregado – Área Interna Composta por Cargas do Tipo
Impedância Constante e com Motores Conectados às Barras 10 e 15.
Como foram observados no caso anterior, os resultados da análise transitória
referente à perturbação na barra 15 ficaram muito próximos quando comparando as
simulações referentes ao sistema original com as simulações incluindo os motores de
indução agregados. Sendo assim, o terceiro caso simulado tem como finalidade analisar
o comportamento transitório dos motores alocados na barra 10 do sistema para a mesma
falta aplicada no caso anterior.
As figuras 5.36 e 5.37 ilustram esta mudança onde, em relação ao caso anterior,
se verifica a inclusão da representação dos motores na barra 10 do sistema (motores
agora na cor preta) e ainda pode-se observar que a falta continua sendo aplicada na
barra 15 de ambos os sistemas, original e agregado.

77
Figura 5.36 – Sistema original - Motores nas barras 10 e 15
Figura 5.37 – Sistema agregado - Motores nas barras 10 e 15

78
A figura 5.38 ilustra o comportamento transitório da tensão na barra de fronteira
como resposta à falta aplicada na barra 15 de ambos os sistemas, original e agregado.
Figura 5.38 – Curvas da tensão na barra de fronteira para os sistema agregado x
original - Motores nas barras 10 e 15 – curto na barra 15
Assim como para a tensão, o fluxo de corrente em direção à barra de fronteira,
ilustrado na figura 5.39, também reproduz, no caso do sistema agregado, o mesmo
comportamento revelado pela resposta do sistema original.
Figura 5.39 – Curvas de corrente em direção à barra de fronteira para os
sistemas agregado x original - Motores nas barras 10 e 15 – Curto na barra 15

79
Quando o curto é aplicado à barra 10, ainda com representação dinâmica apenas
para os motores ligados às barras 10 e 15, as respostas transitórias de potências ativa e
reativa aparecem indicadas nas figuras 5.40 e 5.41 e revelam um comportamento
diferente do relevado para a perturbação na barra 15. Porém os modelos agregado e
original continuam apresentando respostas praticamente coincidentes.
Figura 5.40 – Curvas da potência ativa alimentada pela barra 10 para os sistema
agregado x original - Motores nas barras 10 e 15. Curto trifásico na barra 10.
Figura 5.41 – Curvas da potência reativa alimentada pela barra 10 para os
sistemas agregado e original - Motores nas barras 10 e 15. Curto trifásico na barra 10.

80
Para finalizar a análise de desempenho das grandezas da barra 10, seguem, na
figura 5.42, as curvas de variação no tempo do deslizamento do motor de maior potên-
cia na barra 10, para o sistema original e agregado, face à perturbação na barra 15.
Figura 5.42 – Curvas do deslizamento do motor de maior potência da barra 10
para os sistemas agregado x original - Motores nas barras 10 e 15 – Curto trifásico na
barra 10.
5.5.4.4 Caso Original x Agregado – Instabilidade na Área Interna.
Tendo em vista que todos os casos descritos até aqui apresentaram resposta
convergente a um ponto de operação de regime permanente, no presente caso é
simulada uma condição de perturbação em que o sistema global não converge a um
ponto de operação final, o que levaria a uma situação de desligamento dos motores
envolvidos. Este é o caso mais crítico dentre as contingências simuladas.
Este caso descreve os resultados de simulação de uma falta trifásica na barra 10
localizada na área interna, com duração de 6(seis) ciclos, de forma que os dois motores
de maior potência desta barra não conseguem retornar à operação normal e falham no
processo de reaceleração para retomada do ponto operativo. O resultado da operação
indevida de falha na reaceleração é a presença sustentada de correntes de estator
elevadas nos dois motores. O desempenho revelado pelas simulações do sistema agre-
gado indica, novamente, reprodução extremamente precisa dos resultados relativos à

81
representação do sistema original.
Pode ser observado ainda na figura 5.43, indicativa da evolução da tensão na
barra de fronteira, que o sistema apresenta uma queda de tensão sustentada associada à
reaceleração sem sucesso dos dois motores referidos
Figura 5.43 – Curvas das tensões na barra de fronteira para os sistema agregado
e original – Reaceleração sem sucesso após curto na barra 10.
O comportamento do fluxo de corrente da barra 3 para a barra 5 pode ser
observado na figura 5.44.
Figura 5.44 – Curvas de corrente da barra 3 para a barra 5, para os sistemas
agregado e original – Reaceleração sem sucesso.

82
A figura 5.45 apresenta a potência ativa absorvida pela barra 10. Pode-se
observar que os dois motores que não reaceleram provocam um comportamento não
convergente para a potência absorvida por esta barra, porém as curvas resultantes das
simulações dos sistemas agregado e original permanecem sobrepostas.
Figura 5.45 – Curvas da potência ativa na barra 10 para os sistemas agregado e
original – Reaceleração sem sucesso
O mesmo pode ser observado nas curvas referentes às potências reativas
absorvidas pelos sistemas agregado e original, ambas apresentadas na figura 5.46. Uma
vez que os motores não se liberam do processo de partida, potência reativa elevada
continua sendo absorvida da rede.
Figura 5.46 – Curvas da potência reativa na barra 10 para sistema agregado x
original – Reaceleração sem sucesso

83
A figura 5.47 ilustra a evolução do deslizamento dos dois motores referidos. No
instante 18,5s, o deslizamento referido atinge o valor unitário, significando que o motor
anula sua rotação.
Figura 5.47 – Curvas do deslizamento do motor de maior potência da barra 10
para os sistemas agregado e original – Reaceleração sem sucesso.
5.5.4.5 Caso Original x Agregado - Estabilidade na Área Interna.
Para o caso de insucesso na reaceleração descrito no item anterior, foi utilizado o
modelo de terceira ordem na representação dos dois maiores motores de indução ali-
mentados pela barra 10. Agora a mesma simulação descrita no item 5.5.4.4 é reproduzi-
da, mas o modelo de primeira ordem é fixado na representação dos dois motores
referidos.
A figura 5.48 ilustra a potência ativa absorvida pela barra 10. Nota-se que o
modelo de primeira ordem (incorporando apenas o efeito mecânico da inércia rotórica)
não representa de forma tão precisa quanto o de terceira ordem, o comportamento
dinâmico dos dois motores maiores alimentados pela barra 10. Pelo exame do
deslizamento destes motores, como registrado na figura 5.49, fica evidente que, no caso
da representação de primeira ordem, os motores retornariam à operação normal após a
ocorrência da falta.

84
Figura 5.48 – Curvas da potência ativa alimentada pela barra 10 para os sistemas
agregado e original – Reaceleração com sucesso.
Figura 5.49 – Curvas do deslizamento do motor de maior potência da barra 10
para os sistemas agregado e original - Reaceleração com sucesso.
85
6 CONCLUSÕES / RECOMENDAÇÕES
O objetivo deste trabalho foi desenvolver uma metodologia para a agregação de
motores de indução utilizando como ferramenta a técnica da análise modal. A técnica
proposta teve como objetivo fundamental a análise dos modos de oscilação de um grupo
de motores de indução de uma determinada área de um sistema elétrico e, a partir disto,
a representação deste grupo através de um modelo equivalente. Os dados utilizados
foram obtidos a partir de um sistema industrial real. O equivalente referido foi obtido
através da técnica da análise modal mencionada anteriormente.
De forma a se construir um procedimento para verificação que reproduzisse o
desempenho dos motores representados da forma mais precisa possível, decidiu-se por
utilizar o software MATLAB para a modelagem do sistema. Sua escolha foi influen-
ciada pelo fato de que os motores de indução poderiam ser representados de acordo com
a ordem do modelo escolhido, tendo opções para sua representação em diversas ordens,
dependendo das considerações realizadas. Além disso, o software em questão utiliza
uma interface gráfica bastante conhecida, já que seus modelos são baseados na ferra-
menta MATLAB/Simulink. Este fato tornou a construção e o teste de desempenho do
sistema industrial tarefas relativamente mais simples.
Primeiramente foi realizada a escolha da ordem do modelo dos motores de
indução do sistema industrial em estudo. Sendo assim, para representar estes motores,
decidiu-se utilizar o modelo de terceira ordem, ainda desconsiderando os transitórios de
estator e os efeitos da gaiola de partida, conhecida como gaiola rápida, dos motores de
indução de grande porte.
A segunda etapa do trabalho consistiu na construção do sistema composto pelo
modelo agregado dos motores de indução. Este modelo foi obtido a partir da análise
modal do sistema externo original. Nesta análise foi realizada uma avaliação do nível de
participação dos modos de oscilação presentes nos desvios de potências ativa e reativa
absorvidas pelos motores de indução como vistos da barra de fronteira da área externa
do sistema. Em seguida, são escolhidos os modos de oscilação mais relevantes do
sistema e descartados os demais. Após a escolha dos modos oscilatórios que são sufi-
cientes para representar o sistema completo através de um sistema agregado, cada modo
86
de oscilação remanescente fica sendo representado como um motor de indução.
Estando o sistema agregado definido, é realizada a alteração no sistema original,
transformando a área externa em uma área composta apenas pelos motores de indução
agregados, e estes conectados agora à barra de fronteira do sistema, tendo todos os
motores sido transferidos para uma mesma tensão de alimentação. Com isso é resolvido
novamente o fluxo de potência do sistema e verifica-se que, para o regime permanente,
as tensões nas barras do sistema remanescente permanecem inalteradas com relação ao
sistema original.
A partir dai foram realizadas simulações para análise do desempenho dinâmico
do sistema agregado, considerando-se a aplicação de faltas na área interna do sistema
(área dos motores remanescentes, sem qualquer equivalente), tanto para o sistema
original, quanto para o sistema agregado. Com isto, as respostas do comportamento dos
motores para ambos os casos foram obtidas e comparadas. Foram escolhidas as
variáveis mais significativas para indicação dos efeitos produzidos nos períodos de falta
e pós-falta.
Os resultados apresentados no trabalho mostram que o modelo agregado dos
motores de indução representa com grande precisão o efeito da área externa do sistema
sobre o desempenho dinâmico da área interna sob diferentes graus de modelagem da
carga motórica presente nesta última área e para diferentes posicionamentos das faltas.
Isto ocorre inclusive para o caso apresentado de reaceleração sem sucesso, sendo este o
caso mais crítico que poderia gerar maior divergência entre os modelos. Sendo assim,
pode-se concluir que o equivalente apresentado no trabalho é capaz de reproduzir os
efeitos não lineares associado ao desempenho dos motores de indução sob desvios de
grande amplitude.
Como sugestão para trabalhos de pesquisa futuros e de modo a aperfeiçoar a
metodologia abordada, propõe-se a representação dos motores de indução através de um
modelo de quinta ordem, levando-se em consideração o efeito subtransitório produzido
pela gaiola de partida.

87
7 REFERÊNCIAS BIBLIOGRÁFICAS
[1] SARKAR, A. K., BERG, G. J., “Digital Simulation of Three-Phase Induction
Motors”, IEEE Transactions on Power Apparatus and Systems, vol. PAS-89, no. 6,
pp.1031-1037, July/August 1970.
[2] CATHEY, J. J., CAVIN, R. K., AYOUB, A. K., “Transient Load Model of an
Induction Motor”, IEEE New York PES Winter Meeting, pp.1399-1406,
January/February 1973.
[3] LIPO, T. A., PLUNKETT, A. B., “A Novel Approach to Induction Motor
Transfer Functions”, IEEE Transactions on Power Apparatus and Systems, vol. PAS-
93, no. 5, pp.1410-1418, September/October 1974.
[4] NOVOTNY, D. W., WOUTERSE, J. H., “Induction Machine Transfer
Functions and Dynamic Response by Means of Complex Time Variables”, IEEE
Transactions on Power Apparatus and Systems, vol. PAS-95, no. 4, pp.1325-1335,
July/August 1976.
[5] SASTRY, K. P. R., BURRIDGE, R. E., “Investigation of a Reduced Order
Model for Induction Machine Dynamic Studies”, IEEE Transactions on Power
Apparatus and Systems, vol. PAS-95, no. 3, pp.962-969, May/June 1976.
[6] KHALIL, N. A., TAN, O. T., BARAN, I. U., “Reduced Order Models For
Double-Cage Induction Motors”, IEEE Transactions on Power Apparatus and Systems,
vol. PAS-101, no. 9, pp.3135-3140, September 1982.
[7] ILICETO, F., CAPASSO, A., “Dynamic Equivalents of Asynchronous Motor
Loads in System Stability Studies”, IEEE New York PES Winter Meeting, pp.1650-
1659, January/February 1974.
[8] ABDEL HAKIM, M. M., BERG, G. J., “Dynamic Single-Unit Representation of
Induction Motor Groups”, IEEE Transactions on Power Apparatus and Systems, vol.
PAS-95, no. 1, pp.155-165, January/February 1976.
[9] RAHIM, A. H. M. A., LALDIN, A. R., “Aggregation of Induction Motor Loads
for Transient Stability Studies”, IEEE Transactions on Energy Conversion, vol. EC-2,
no. 1, pp.55-61, March 1987.
[10] NOZARI, F., KANKAM, M. D., PRICE, W. W., “Aggregation of Induction

88
Motors for Transient Stability Load Modeling”, IEEE Transactions on Power Systems,
vol. PWRS-2, no. 4, pp.1096-1103, November 1987.
[11] AKBABA, M., FAKHRO, S. Q., “New Model for Single-Unit Representation of
Induction Motor Loads, Including Skin Effect, for Power System Transient Stability
Studies”, IEE Proceedings-B, vol. 139, no. 6, pp.521-533, November 1992.
[12] SRIHARAN, S., TAN, L. H., TING, H. M., “Reduced Transient Model of a
Group of Induction Motors”, IEEE Transactions on Energy Conversion, vol. 8, no. 4,
pp.769-777, December 1993.
[13] TALEB, M., AKBABA, M., ABDULLAH, E. A., “Aggregation of Induction
Machines for Power System Dynamic Studies”, IEEE Transactions on Power Systems,
vol. 9, no. 4, pp.2042-2048, November 1994.
[14] FRANKLIN, D. C., MORELATO, A., “Improving Dynamic Aggregation of
Induction Motor Models”, IEEE Transactions on Power Systems, vol. 9, no. 4, pp.1934-
1941, November 1994.
[15] KATAOTA, T. K., UCHIDA, H., NISHIKATA, S., KAI, T., FUNABASHI, T.,
“A Method for Aggregation of a Group of Induction Motor Loads”, IEEE International
Conference on Power System Technology – POWERCON, pp.1683-1688, 2000.
[16] PIROMTHUM, P., KUNAKORN, A., “A Study of Starting Current due to a
Group of Induction Motors Using an Aggregation Model”, IEEE Transactions on Power
Systems, vol. 9, no. 4, pp.1934-1941, November 2003.
[17] SUWANWEJ, W., KUNAKORN, A., “Estimation of Short Circuit Current due
to a Group of Induction Motors Using an Aggregation Model”, IEEE International
Conference on Power System Technology – POWERCON, pp.559-563, November
2004.
[18] LOUIE, K. W., “Aggregation of Induction Motors Based on their Equivalent
Circuits under Some Special Operating Conditions”, IEEE CCECE/CCGEI, Saskatoon,
pp.1966-1969, May 2005.
[19] PEDRA, J., SAINZ, L., CÓRCOLES, F., “Study of Aggregate Models for
Squirrel-Cage Induction Motors”, IEEE Transactions on Power Systems, vol. 20, no. 3,
pp.1519-1527, August 2005.
[20] LOUIE, K. W., “Aggregating Induction Motors in a Power System Based on

89
their Standard Specifications”, IEEE International Conference on Power System
Technology – POWERCON, 2006.
[21] LOUIE, K. W., MARTI, J. R., DOMMEL, H. W., “Aggregation of Induction
Motors in a Power System Based on Some Special Operating Conditions”, IEEE
International Conference on Power System Technology – POWERCON, pp.1429-1432,
2007.
[22] ABDALLA, O. H., BAHGAT, M. E., SERAG, A. M., EL-SHARKAWI, M. A.,
“Dynamic Load Modeling and Aggregation in Power System Simulation Studies”,
IEEE International Conference on Power System Technology – POWERCON, pp.270-
276, 2008.
[23] KARAKAS, A., LI, F., ADHIKARI, S., “Aggregation of Multiple Induction
Motors using MATLAB-based Software Package”, IEEE International Conference on
Power System Technology – POWERCON, 2009.
[24] HONGBIN, Z., QIYU, L., XIAOHUA, W., “The Aggregation Method of
Induction Motors with Distribution Network”, IEEE International Conference on Power
System Technology – POWERCON, pp.445-449, 2010.
[25] OLIVEIRA, S.E.M., “Equivalente Dinâmico Modal para Sistemas de Energia
Elétrica”, tese de Doutorado apresentada ao Programa de Engenharia Elétrica da
COPPE/UFRJ, 1985.
[26] MOTTA, D. V. P., “Desempenho Dinâmico de Sistemas Elétricos com
Compensadores Estáticos de Reativos”, Dissertação de Mestrado, COPPE/UFRJ, Abril/
2005.
[27] FIGUEIREDO, E. F., “Modelagem e Efeitos Dinâmicos de Capacitores Séries
Controlados na Estabilidade dos Sistemas de Potência”, Dissertação de Doutorado,
COPPE/UFRJ, Março/ 2006.
[28] MACHOWSKI, J., BIALEK, J.W. and BUMBY, J.R., “Power Systems
Dynamics –Stability and Control”, Second Edition, John Wiley & Sons, 2008.
[29] KRAUSE, P.C., MURDOCH III, A., “Simplified Representation of Induction
Machine Dynamics”, IEEE New York PES Winter Meeting, pp.26-31, January 1975.
[30] AHMED-ZAID, S; TALEB, M; “Structural Modeling of Small and Large
Induction Machines Using Integral Manifolds”, IEEE Transactions on Energy

90
Conversion, Vol. 6, No. 3, pp. 529-535, September 1991.


















