Resumo Álgebra linear
25
Álgebra linear 1 NOTAÇÃO GERAL DE UMA MATRIZ A é uma matriz mxn, m linhas e n colunas e sua representação é a seguinte: Matriz Quadrada É toda a matriz com o mesmo número de linhas e de colunas, nxn. Diz-se que A é uma matriz quadrada de ordem 3. A soma dos elementos da diagonal é chamado de traço. Matriz Simétrica Uma matriz quadrada de ordem n é simétrica quando A = A t (A t significa a matriz transposta de A), os elementos acima da diagonal principal são iguais aos elementos abaixo.
-
Upload
michelihaiduck -
Category
Documents
-
view
1.600 -
download
1
Transcript of Resumo Álgebra linear

Álgebra linear
1 NOTAÇÃO GERAL DE UMA MATRIZ
A é uma matriz mxn, m linhas e n colunas e sua representação é a seguinte:
Matriz Quadrada
É toda a matriz com o mesmo número de linhas e de colunas, nxn.
Diz-se que A é uma matriz quadrada de ordem 3. A soma dos elementos da
diagonal é chamado de traço.
Matriz Simétrica
Uma matriz quadrada de ordem n é simétrica quando A = A t (At significa a
matriz transposta de A), os elementos acima da diagonal principal são iguais aos
elementos abaixo.
Matriz triangular
É uma matriz quadrada onde todos os elementos de um lado da diagonal
principal são nulos. Existem dois tipos de matriz triangular:
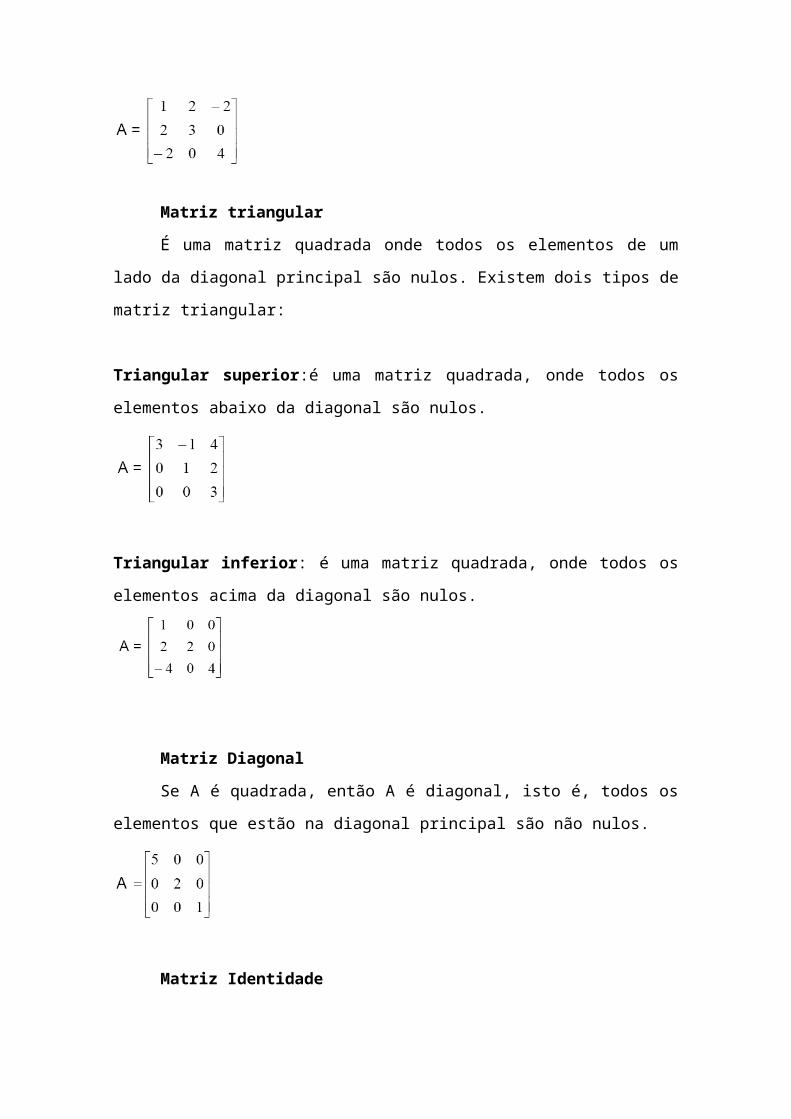
Triangular superior:é uma matriz quadrada, onde todos os elementos abaixo da
diagonal são nulos.
Triangular inferior: é uma matriz quadrada, onde todos os elementos acima da
diagonal são nulos.
Matriz Diagonal
Se A é quadrada, então A é diagonal, isto é, todos os elementos que estão na
diagonal principal são não nulos.
Matriz Identidade
É uma matriz diagonal cujos elementos são todos iguais a um ( = 1). Denotada
por: In.
Matriz oposta
A matriz oposta da matriz A é aquela que possui elementos opostos
correspondentes ao da matriz A. Notação: -A
A=|4 321 2 52 6 3|−A=|−4−3−2
−1−2−5−2−6−3|

Matriz simétrica
Uma matriz diz-se simétrica se coincidir com a sua transposta, ou seja: A = AT
A=|5 6−86 4 9
−89 7|Matriz transposta
É o resultado da troca de linhas por colunas em uma determinada matriz, ou seja,
a matriz transposta de uma matriz qualquer M é representada por Mt.
M=| 1 8 4−16 3|M t=|1−1
8 64 3 |
2 OPERAÇÕES COM MATRIZES
Adição e subtração de matrizes
A adição e a subtração de matrizes só pode ocorrer se e somente se as matrizes
forem de mesma ordem, ou seja, tenham o mesmo número de linhas e de colunas.
Temos de exemplo a soma das matrizes A e B de ordem m x n essa soma resultará na
matriz C de ordem m x n.
Analogamente, A – B = C = A + (-B).
Multiplicação por um escalar
Para multiplicar um número k qualquer por uma matriz n×m A, basta multiplicar
cada entrada aij de A por k. Assim, a matriz resultante B será também n×m e bij = k.aij.

Multiplicação de matrizes
Multiplicação de duas matrizes é bem definida apenas se o número de colunas da
matriz da esquerda é o mesmo número de linhas da matriz da direita. Se A é uma matriz
m x n e B é uma matriz n x p, então seu produto AB é a matriz m x p (m linhas e p
colunas) dada por:
3 DETERMINANTE
Esta função permite saber se a matriz tem ou não inversa, pois as que não têm
são precisamente aquelas cujo determinante é igual a 0 (matriz singular).
Determinante de matriz de 1ª ordem
Dada uma matriz quadrada de 1ª ordem A = [a11], chama-se de determinante
associado à matriz A o número real a11.
Notação: det A ou |a11|.
A1 = [3] , det A1 = 3 ou |3| = 3
Determinante de matriz de 2ª ordem
Dada a matriz de ordem 2, por definição, o determinante
de 2ª ordem é dado por:
Exemplo:
det A=¿|1525|=1 X 5−2 X 0=5−0=5¿

Determinante de matriz de 3ª ordem (Regra de Sarrus)
A aplicação da Regra de Sarrus consiste em escrever a matriz seguida da
repetição de suas duas primeiras colunas. Feito esse processo, verifique a presença de
três diagonais principais e três diagonais secundárias.
A =
det A = 2x2x3 + 3x1x2 +5x3x4 -5x2x2 - 2x1x4 - 3x3x3
det A = 12 + 6 + 60 - 20 - 8 - 27 = 23
Determinante de qualquer ordem (Teorema de Laplace)
Para aplicar o Teorema de Laplace faz-se necessário citar algumas definições de
cálculos intermediários:
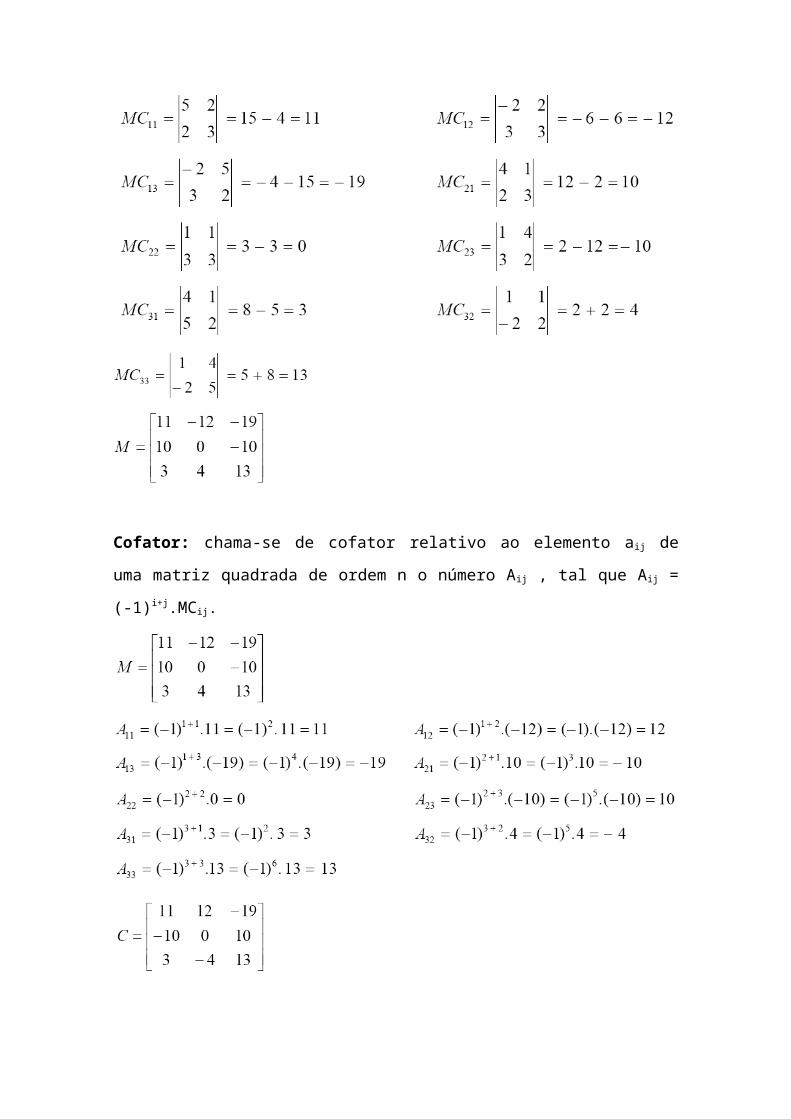
Menor complementar: o menor complementar Dij de um elemento aij de uma matriz
quadrada é o número que se obtém ao calcular o determinante da matriz formada
quando eliminamos a linha i e a coluna j da matriz dada.

Cofator: chama-se de cofator relativo ao elemento aij de uma matriz quadrada de ordem
n o número Aij , tal que Aij = (-1)i+j.MCij.
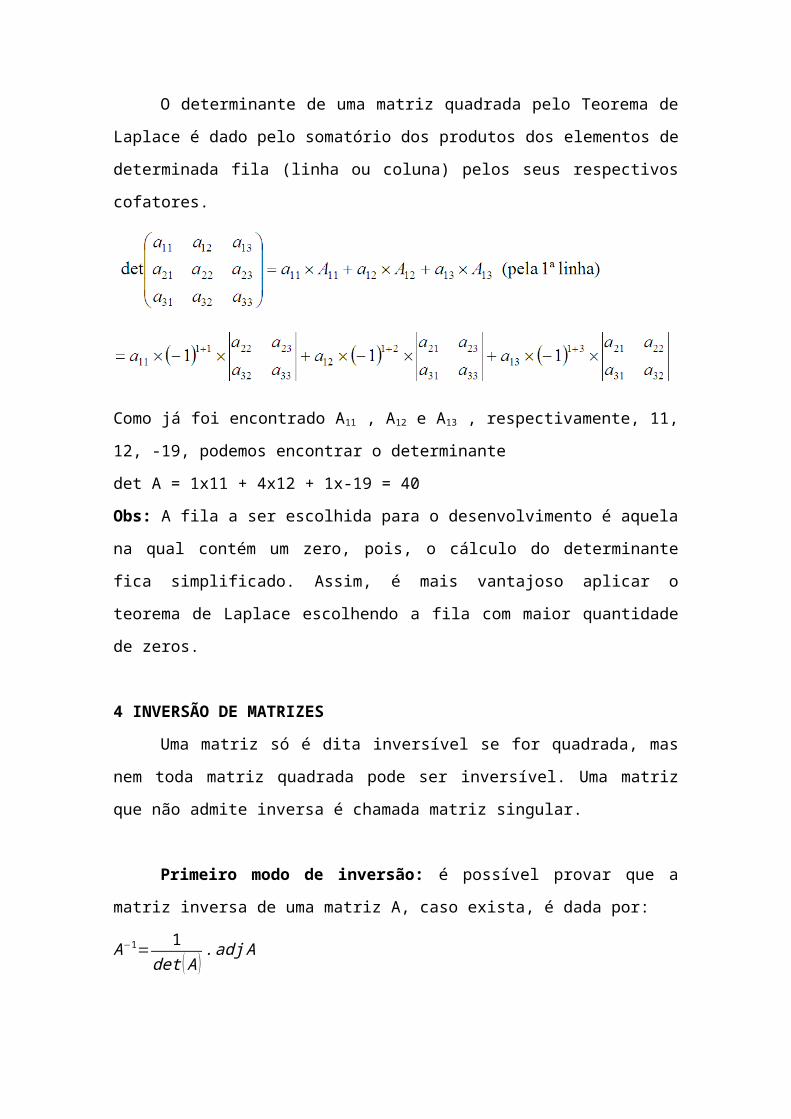
O determinante de uma matriz quadrada pelo Teorema de Laplace é dado pelo
somatório dos produtos dos elementos de determinada fila (linha ou coluna) pelos seus
respectivos cofatores.
Como já foi encontrado A11 , A12 e A13 , respectivamente, 11, 12, -19, podemos
encontrar o determinante
det A = 1x11 + 4x12 + 1x-19 = 40
Obs: A fila a ser escolhida para o desenvolvimento é aquela na qual contém um zero,
pois, o cálculo do determinante fica simplificado. Assim, é mais vantajoso aplicar o
teorema de Laplace escolhendo a fila com maior quantidade de zeros.
4 INVERSÃO DE MATRIZES
Uma matriz só é dita inversível se for quadrada, mas nem toda matriz quadrada
pode ser inversível. Uma matriz que não admite inversa é chamada matriz singular.
Primeiro modo de inversão: é possível provar que a matriz inversa de uma
matriz A, caso exista, é dada por:
A−1= 1det ( A )
. adj A
Para inverter a matriz
usada para o cálculo do determinante pelo Teorema de Laplace, calculou-se o menor
complementar, onde encontrou-se
e fazendo o calculo dos cofatores relativos a todos os elementos da matriz A, obte-se
Para encontrar a inversa da matriz A, deve-se fazer o cálculo da matriz adjunta.
Matriz adjunta
É uma matriz quadrada A, denomina-se matriz adjunta de A, a transposta da
matriz dos cofatores de A, isto é, adj C = Ct.
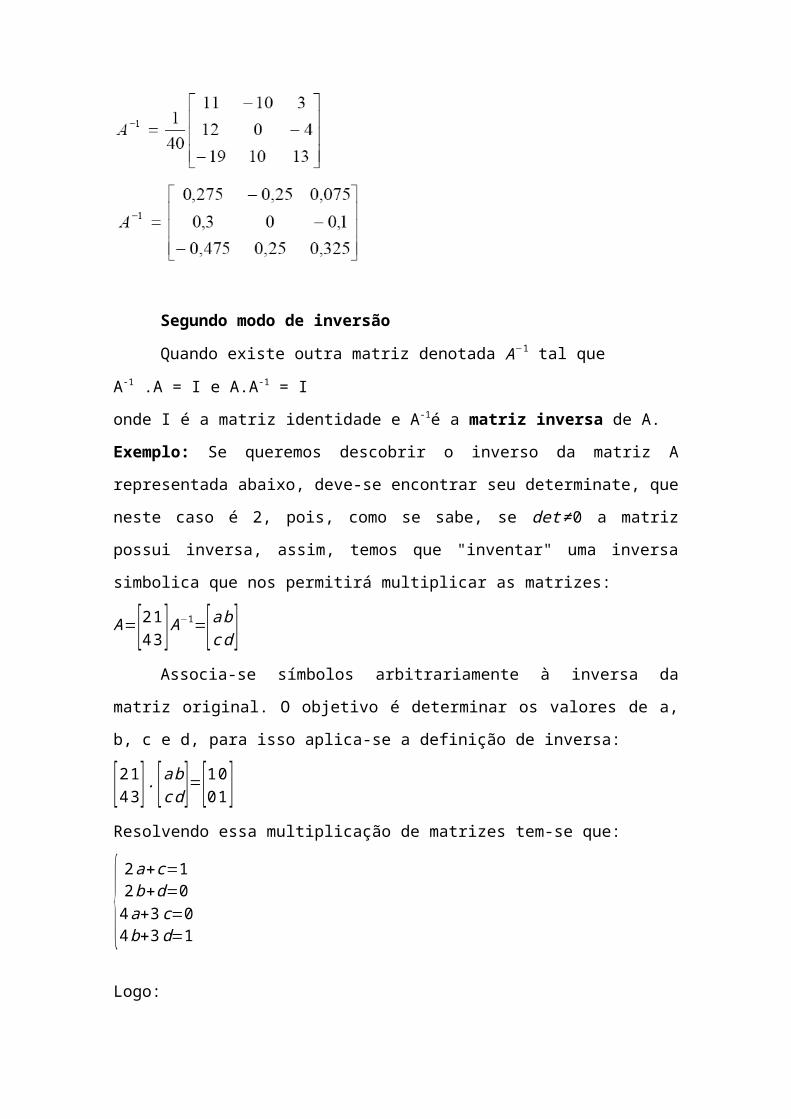
Como o determinante é igual a 40 e A−1= 1det ( A )
. adjunta A, assim
Segundo modo de inversão
Quando existe outra matriz denotada A−1 tal que
A-1 .A = I e A.A-1 = I
onde I é a matriz identidade e A-1é a matriz inversa de A.
Exemplo: Se queremos descobrir o inverso da matriz A representada abaixo, deve-se
encontrar seu determinate, que neste caso é 2, pois, como se sabe, se det ≠ 0 a matriz
possui inversa, assim, temos que "inventar" uma inversa simbolica que nos permitirá
multiplicar as matrizes:
A=[ 214 3]A−1=[ab
c d]Associa-se símbolos arbitrariamente à inversa da matriz original. O objetivo é
determinar os valores de a, b, c e d, para isso aplica-se a definição de inversa:

[2143 ] .[ab
cd ]=[1 00 1]
Resolvendo essa multiplicação de matrizes tem-se que:
{ 2a+c=12 b+d=0
4 a+3c=04 b+3d=1
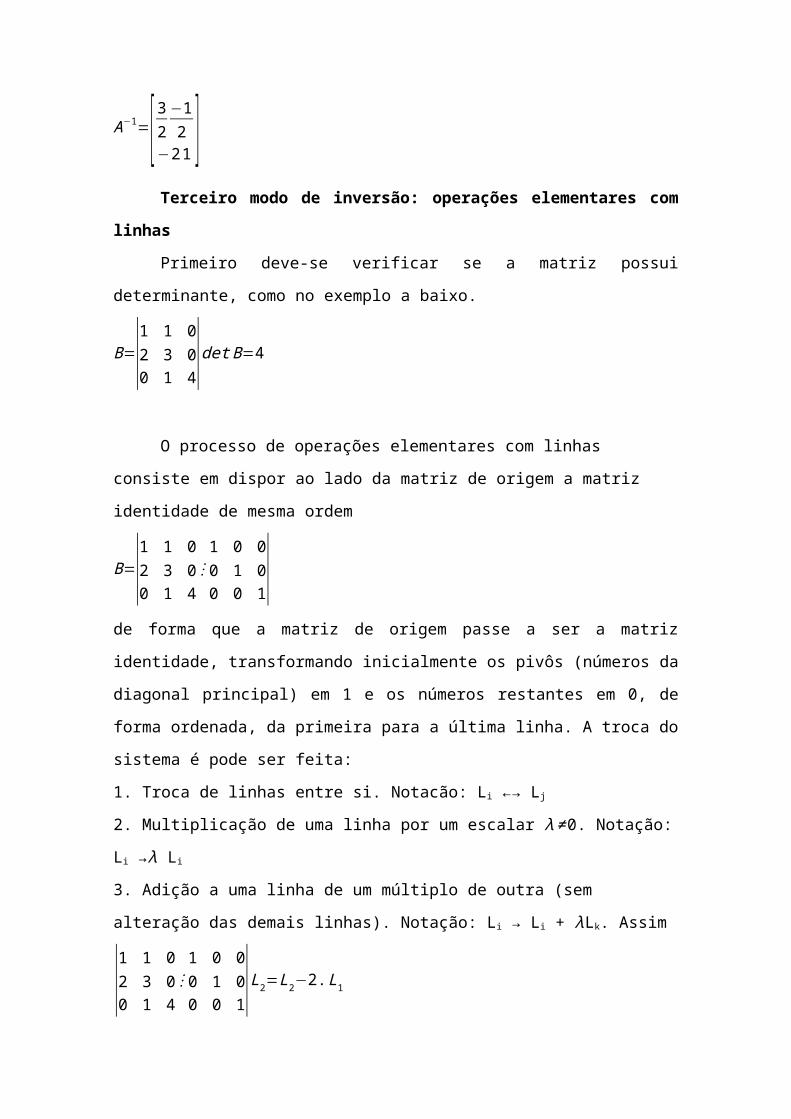
Logo:
A−1=[ 32
−12
−21 ]Terceiro modo de inversão: operações elementares com linhas
Primeiro deve-se verificar se a matriz possui determinante, como no exemplo a
baixo.
B=|1 1 02 3 00 1 4|det B=4
O processo de operações elementares com linhas consiste em dispor ao lado da
matriz de origem a matriz identidade de mesma ordem
B=|1 1 02 3 00 1 4
⋮1 0 00 1 00 0 1|
de forma que a matriz de origem passe a ser a matriz identidade, transformando
inicialmente os pivôs (números da diagonal principal) em 1 e os números restantes em
0, de forma ordenada, da primeira para a última linha. A troca do sistema é pode ser
feita:
1. Troca de linhas entre si. Notacão: Li ←→ Lj
2. Multiplicação de uma linha por um escalar λ ≠ 0. Notação: Li →λ Li
3. Adição a uma linha de um múltiplo de outra (sem alteração das demais linhas).
Notação: Li → Li + λLk. Assim
|1 1 02 3 00 1 4
⋮1 0 00 1 00 0 1|L2=L2−2. L1
|1 1 00 1 00 1 4
⋮1 0 0
−2 1 00 0 1|{L1=L1−L2
L3=L3−L2
|1 0 00 1 00 0 4
⋮3 −1 0
−2 1 02 −1 1|L3=L3 .
14 |1 0 0
0 1 00 0 1
⋮
3 −1 0−2 1 012
−14
14|
B−1| 3 −1 0−2 1 012
−14
14|
5 SISTEMA DE EQUAÇÕES LINEARES
Um conjunto finito de equações lineares é da forma:
é um sistema linear de m equações e n incógnitas.
Este sistema pode ser escrito na forma matricial:
Classificação quanto ao número de solução de um sistema linear
Um sistema linear é classificado de acordo com o número de soluções que
possuir. Este poderá ser um sistema possível e determinado (SPD), um sistema possível
e indeterminado (SPI) ou um sistema impossível (SI).
O SPD é aquele sistema que admite uma única solução (3, 5). O SPI é aquele
sistema que admite mais várias soluções (0, 8), (1, 7), (2, 6),........ O SI é todo sistema
linear que não admite nenhuma solução.
Sistema normal
Um sistema é normal quando tem o mesmo número de equações, m = n e
determinante diferente de zero.
Tem-se: m = 2, n = 2
det A=¿|1 11 −1|→−1−1=−2 , detA ≠0¿
Conclui-se que o sistema é normal.
Regra de Cramer (matriz quadrada)
É uma das maneiras de resolver um sistema linear, mas só poderá ser utilizada
na resolução de sistemas que o número de equações e o número de incógnitas forem
iguais.
Um sistema linear que possui n equações e n incógnitas pode ser:
Sistema possível e determinado (SPD), se D = det A ≠ 0. Neste caso a solução é
única.
Sistema possível e indeterminado (SPI), se D = Dx1 = Dx2 = Dx3 = .... = Dxn = 0,
para n = 2 e para n ≥ 3, sendo que esta condição só é válida se não temos equações com
coeficientes das incógnitas respectivamente proporcionais e termos independentes não-
proporcionais. Neste caso o sistema apresenta infinitas soluções.
Sistema Impossível (SI), se D = 0 e existe Dx1 ≠ 0, 1 ≤ i ≤ n. Neste caso o
sistema
não tem solução.
Esta regra diz que todo o sistema normal tem uma única solução dada por:
x i=Dxi
D, onde i ∈ { 1, 2, 3, ...,n}, D = det A é o determinante da matriz incompleta
(formada pelos coeficientes das incógnitas do sistema) associada ao sistema e Dxi é o
determinante obtido através da substituição, na matriz incompleta, da coluna i pela
coluna formada pelos termos independentes.

Exemplo
Tem-se que m = n = 2
D=|1 23 −2|=−2−6=−8≠ 0
e, como o sistema é normal, pode-se utilizar a regra de Cramer para resolvê-lo.
Substituindo, na matriz incompleta |1 23 −2|, a coluna C1 pela coluna formada
pelos termos independentes, tem-se:
D x=|3 27 −2|=−6−14=−20. Substituindo, agora, C2 pela coluna dos termos
independentes, tem-se:
D y=|1 33 7|=7−9=−2
Assim, x=Dx
D=−20
−8=5
2y=
D y
D=−2
−8=1
4
Logo, (x, y) = ( 52
,14 ) é a solução do sistema dado (SPD).
Método de Eliminação de Gauss
O princípio fundamental da resolução do sistema pelo Método de Eliminação de
Gauss consiste trocar o sistema inicial por outro sistema equivalente (isto é, com o
mesmo conjunto de soluções), de forma que o novo sistema seja mais adequado para
discussão e resolução. A troca do sistema é baseada nas observações acima e é feita de
forma sistemática.
O processo de Eliminação de Gauss para redução de uma matriz M a uma forma
escada é dada pelo seguinte algoritmo:
1. . Seja c1 a primeira coluna não nula de M, da esquerda para a direita. Se
necessário, troque de linhas para que o elemento da linha 1 e coluna c1 seja não nulo,
isto é, M1c1 ≠ 0. Esse elemento é chamado de pivô.
Fixando a linha 1, anule os elementos abaixo do pivô M1c1 ≠ 0, utilizando as operações
Li→ Li + M ic1
M1 c 1. L1, para i > 1. Chame a nova matriz de M1.
2. . Seja c2 a coluna de M1, contada da esquerda para a direita, onde existem
elementos não nulos a partir da linha 2. Se necessário, troque a linha 2 por alguma
abaixo de forma que M12c2 ≠ 0. Esse é o novo pivô.
Fixando a linha 2, anule os elementos da coluna c2, abaixo da linha 2 (abaixo do pivô).
Chame a nova matriz de M2.
3. . Continue o processo, considerando ck a primeira coluna de Mk-1, contada da
esquerda para a direita, onde existem elementos não nulos a partir da k-ésima linha. Se
necessário, troque a linha k por alguma abaixo, para que Mk-1kck ≠ 0. Esse é o k-ésimo
pivô.
Fixando a linha k, anule os elementos da coluna ck abaixo da linha k, isto é, do k-ésimo
pivô.
4. Este processo termina quando acabam as linhas não nulas ou as colunas.
Exemplo 1
{ 5 x+8 y=3410 x+16 y=50
| 5 810 16
⋮ 3450|L2=L2−2.L1|5 8
0 0⋮ 34−14|0 y=−14 y=∄
Solução impossível (SP)
Exemplo 2
{ x+4 y+6 z=0−3 x−6 y−9 z=0
Como o sistema possui 3 incógnitas e 1 variável que pode variar livremente
(pois não tem a terceira linha de z = z), assim, g=3– 1=2, ou seja, 2 variáveis que
dependem de z.
| 1 4 6−3 −6 −9
⋮ 00|L2=L2 .
32
. L1
|1 4 60 0 0
⋮ 00|→ y= y
x+4 y+6 z=0

x=−4 y−6 z
S= {−4 y−6 z , y , z }
Solução possível e indeterminada (SPI)
6 OPERAÇÕES COM VETORES
Multiplicação de um vetor por um escalar
Multiplicando um vetor por um escalar, por exemplo 2, resultará em outro vetor
cujos elementos foram multiplicados pelo escalar 2.
Exemplo:
v⃗ (2,3 ) .2= v⃗ (4,6 )
Adição de dois vetores
Se adiciona-se mais um vetor, o resultado será a soma dos elementos que
correspondem aos dois vetores:(a11+a12 , a21+a22 ).
Exemplo:
v⃗=(2,3 )+c⃗= (3,4 )= d⃗=(5,7 )
Produto escalar
O produto escalar é o número que é obtido através da soma dos produtos dos
respectivos elementos.
Exemplo:
v⃗=(2,3 ) . c⃗=(3,4 )=6+12=18
7 COMBINAÇÃO LINEAR
Uma das características mais importantes de um espaço vetorial é a obtenção de
"novos vetores" a partir de um conjunto pré fixado de vetores desse espaço. Por
exemplo, ao fixar em R3 o vetor v⃗ = (2, – 1, 3), pode-se obter a partir de v⃗ qualquer
vetor c⃗ do tipo c⃗ = a.u, onde a ∈ R. Assim, uma expressão da forma
a1 . u1+a2 .u2+…+an . un=w, onde a1 , a2 ,…,an são escalares e u1 ,u2 , …, un e w, vetores
do Rn chama-se combinação linear.
Exemplo:
Seja os vetores u⃗=(2 ,−3,2 ) e v⃗=(−1,2,4 )em R3. Escreva o vetor w⃗=(7 ,−11,2) como
combinação linear de u⃗ e v⃗.
v⃗=a1 ( u⃗ )+a2 ( v⃗ )
(7 ,−11,2)=a1 (2 ,−3,2 )+a2 (−1,2,4 )
(7 ,−11,2)=( 2 a1 ,−3 a1 ,2 a1 )+ (−a2 , 2 a2 , 4 a2)
(7 ,−11,2)=( 2 a1−a2 ,−3a1+2 a2 ,2 a1+4 a2)
{ 2 a1−a2=7−3 a1+2a2=−11
2a1+4a2=2
{ 2 a1−a2=72a1+4 a2=2. (−1 ) { 2 a1−a2=7
−2a1−4a2=−2−5 a2=5 a2=−1
2 a1− (−1 )=7a1=3
v⃗=3. (u⃗ )−( v⃗ )
8 DEPENDÊNCIA E INDEPENDÊNCIA LINEAR
Um subconjunto S de um espaço vetorial V diz-se linearmente dependente se
existe um número finito de vetores distintos x1 , x2 ,…, xn, de S e escalares a1 , a2 ,…,an
não todos nulos, tais que
a1 x1+a2 x2+…+an xn=0.
Os elementos de S são linearmente dependentes.
Um subconjunto de S que não é linearmente dependente diz-se linearmente
independente.
No R2
v⃗=( x1 , y1 ) e c⃗=( x2 , y2 )
Se: x1
x2
=y1
y2ou det | x1 y1
x2 , y2|=0 LD
Se: x1
x2
≠y1
y2ou det | x1 y1
x2 , y2|≠ 0 LI
No R3
u⃗=( x1 , y1 , z1 ) e v⃗=( x2, y2 , z2 )
Se: x1
x2
=y1
y2
=z1
z2LD
Se: x1
x2
≠y1
y2
=z1
z2LI
u⃗=( x1 , y1 , z1 ) , v⃗=( x2 , y2 , z2 ) e w⃗=( x3 , y3 , z3 )
|x1 y1 z1
x2 y2 z2
x3 y3 z3|sedet {¿0 LD
≠ 0 LI
Obs: No R2 qualquer conjunto formado por 3 ou mais vetores é LD, no R3 qualquer
conjunto formado por 4 ou mais vetores é LD, ou seja, no Rn qualquer conjunto
formado por (n +1) ou mais vetores é LD.
Exemplo:
{(3 ,−1 ) , (2,4 ) , (0,7 ) }∈R2
É LD, pois o número de vetores é maior que R2 .
9 DISTÂNCIA ENTRE DOIS PONTOS
A distância entre dois pontos, ou distância euclidiana, é obtida mediante o
teorema de Pitágoras para o espaço multidimensional. Esta distância é a medida de
semelhança e pode ser expressa pela distância D entre as extremidades de dois vetores.
A distância euclidiana é calculada com base no teorema de Pitágoras:

|⃗AB|=|B−A|=|( x2− y2 )−( x1− y1 )|d=|( x2− y2 )−( x1− y1)|
d=√( x2− y2)2−( x1− y1 )2
10 BASES ORTOGONAIS BASES ORTONORMAIS E VERSOR
Vetores perpendiculares são também chamados vetores ortogonais e ainda, uma
base β é ortogonal se esta formada por vetores ortogonais entre si: para todo par de
vetores distintos u e v da base β se verifica que u.v = 0.
Uma matriz ortogonal é uma matriz real M cuja inversa coincide com a sua
transposta, isto é:
M-1 = MT, isto é: M. MT = MT.M = I
Uma matriz é ortogonal se e somente se as colunas (ou linhas) são vetores
ortonormais.
Uma base γ é ortonormal se é ortogonal e todo vetor da base é um vetor unitário,
ou seja, fazendo |u⃗|=1, quando isso não acontece, o processo é transformar u⃗, da
seguinte maneira:
versor⇒ v⃗= v⃗|⃗v|
chamado de normalização.
Exemplo:
Seja B {(1,1,1 ) (−2,1,1 ) (0 ,−1,1 ) }.a) B é base ortogonal?
(1,1,1 ) . (−2,1,1 )=0
(1,1,1 ) . (0 ,−1,1 )=0 ∴ é ortogonal
(−2,1,1 ) . (0 ,−1,1 )=0
b) B é uma base ortonormal?
|u⃗|=√12+12+12=√3 ∴ não é ortonormal
Para normalizar cada vetor, utiliza-se a fórmula do versor, afim de obter uma
base ortonormal.
v⃗|v⃗|
=(1,1,1 )√3
=( 1
√3,
1
√3,
1
√3 )

u⃗|u⃗|
=(−2,1,1 )
√ (−2 )2+12+12=(−2
√6,
1
√6,
1
√6 )w⃗
|w⃗|=
(0 ,−1,1 )
√02+12+12=(0 ,
−1
√2,
1
√2 )B'={( 1
√3,
1
√3,
1
√3 ) ,(−2
√6,
1
√6,
1
√6 ) ,(0 ,−1
√2,
1
√2 )}B' é uma base ortonormal do R3
11 AUTOVALORES E AUTOVETORES
O objetivo é determinar uma solução não-trivial para o sistema linear, ou seja,
para que o valor de λ o sistema tem uma solução não nula. Tal solução é chamada de
autovalores da matriz A, que é dada pela equação característica:
|A−λi I|=0
Seja A=|4 −52 −3| a matriz de associação entre duas variáveis, para encontrar os
autovalores da matriz faz-se
|4 −52 −3|−λ[1 0
0 1]=0
|4 −52 −3|−[ λ 0
0 λ]=0
|4−λ −52 −3−λ|=0
(4− λ ) . (−3−λ )−(−5 ) . (2 )=0
−12−4 λ+3 λ+λ2+10=0
λ2−λ−2=0
Os autovalores (raízes características) são obtidos da equação:
λ=−b±√b2−4 ac2 a
λ=1±√ (−1 )2−4 (1 ) (−2 )
2.1
λ=1±√92
λ1=−1 λ2=2
A soma dos autovalores corresponde ao traço e a multiplicação corresponde ao
determinante da matriz A, ou seja, -1 + 2 = 1 = traço da matriz A, (−1 ) . (2 )=−2 =
determinante da matriz A.
O cálculo dos autovetores associados a λ=−1 é dado pela equação característica
dos autovetores que é A . x⃗=λ . x⃗. Existe um vetor x⃗ para cada valor de λ.
|4 −52 −3|.|x1
x2|=(−1 ) .|x1
x2|
{4 x1−5 x2=−x1
2 x1−3 x2=−x2{5 x1−5 x2=02 x1−2x2=0
Este sistema de equações é indeterminado, em virtude de |A−λi I|=0
det [5 −52 −2]=0
ou ainda por x1=x2=0, ou seja, indica que o vetor passa pela origem.
Devido a isso, pode-se atribuir um valor qualquer não nulo a umas das
incógnitas, ( x2=1 ), para se obter o segundo ponto do vetor. Dessa forma tem-se:
5 x1−5.1=0
x1=1, logo o primeiro autovetor é X⃗ 1=|11|Já o segundo autovetor é dado pela outra raiz λ=2:
A . x⃗=λ . x⃗
|4 −52 −3|.|x1
x2|=(2 ) .|x1
x2|
{4 x1−5 x2=2 x1
2 x1−3 x2=2x2{2x1−5 x2=02x1−5 x2=0
tem-se que:
det [2 −52 −5 ]=0.
De forma análoga ao primeiro autovetor, atribui-se um valor para ( x2=1 ), logo:
2 x1−5.1=0
x1=2,5, logo o segundo autovetor é X⃗ 2=|2,51 |
Dessa forma a matriz dos autovetores é X=[1 2,51 1 ]

Portanto, uma base dos autovetores é γ= {(1;1 ) , (2,5 ;1 ) }, mas será que esta base é
ortogonal (u.v = 0)?
Como (1 ;1 ) . (2,5 ;1 )=3,5 ≠ 0, a base dos autovetores não é base ortogonal.